Embed Size (px)
Citation preview
RÉPUBLIQUE ALGÉRIENNE DÉMOCRATIQUE ET POPULAIRE
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
UNIVERSITÉ DU 20 AOÛT 1955 DE SKIKDA
FFACULTÉ DE TTECHNOLOGIE
DÉPARTEMENT DE GÉNIE ÉLECTRIQUE
Thèse
Présentée pour obtenir le diplôme de
Doctorat en Sciences
Spécialité : Automatique
Par :
Ammar NEÇAIBIA
THEME
Contribution à la commande PIλDµ adaptative
et aux régulateurs auto-ajustables d’ordre fractionnaire
Devant le Jury :
Président Lashab Mohamed Maître de Conférence A, Université de Skikda
Rapporteur Ladaci Samir Professeur, Ecole Nationale Polytechnique de Constantine
Examinateurs Mekhilef Saad Professeur, Université de Malaya, Malaisie
Mansouri Rachid Professeur, Université de Tizi ouzou
Mordjaoui Mourad Maître de Conférence A, Université de Skikda
Mehenaoui Lamine Maître de Conférence A, Université de Skikda
Membre Invité Charef Abdelfatah Professeur, Université Mentouri Constantine
Année : 2016

Dédicace
Je dédie ce travail à toutes les personnes qui m’ont encouragé de prés ou de loin
pour son accomplissement.
A mes chers parents tout en m’inclinant pour leur témoigner mes remerciements
et ma reconnaissance envers les sacrifices et le soutien moral qu’ils m’ont fourni
pendant toute la durée de mes études.
A mes frères et toute ma famille.
A mon encadreur, mes professeurs qui m’ont soutenu tout le long de mes études.
Et enfin à tous mes amis sans exception surtout tous mes collègues de l’URER.MS
qui m’ont accompagné dans mon parcours.
Remerciements
Je tiens à remercier mon directeur de recherche, le Professeur Samir Ladaci,
pour ses conseils et son aide tout le long de mon cheminement dans mon projet. Je
le remercie de m’avoir proposé ce thème et de m’avoir dirigé dans un sujet de re-
cherche dans un domaine très intéressent. Je le remercie tout particulièrement pour
sa confiance et ses conseils.
Ensuite, je suis reconnaissant envers le Professeur Saad Mekhilef, pour son ac-
cueil à l’Université de Malaya en Malaisie, pour son aide, ses conseils, pour sa vision
du projet et pour tout le temps qu’il m’a consacré. J’espère collaborer encore long-
temps avec vous.
Je tiens d’abord à remercier Monsieur Lashab Mohamed, Maitre de Conférences
à l’Université de Skikda, d’avoir accepté la présidence de mon jury de thèse.
Je remercie également Monsieur Mansouri Rachid, professeur à l’Université de
Tizi Ouzou, ansi que Monsieur Merdjaoui Mourad et Monsieur Mehenaoui Lamine,
Maitres de Conférences à l’Université de Skikda, pour avoir accepté d’examiner ce
modeste travail et je remercie également Monsieur Belmaguenai Aissa.
Mes sincères remerciements vont aussi à Monsieur Charef Abdelfatah professeur à
l’Université Mentouri de Constantine, de m’avoir fait l’honneur d’assister à cette
soutenance, et pour ses longues discussions scientifiques.
Mes remerciements vont également à tout le personnel de l’URER.MS, les ensei-
gnants, les chercheurs, le personnel administratif, les doctorants, et aussi tous mes
camarades sans exception.
Finalement, j’exprime ma gratitude envers tous mes amis et ma famille pour leur
support et leur encouragement qui m’ont permis de terminer cette maîtrise.
Résumé
L’objectif de ce travail est de mettre en lumière une des techniques de com-
mande adaptative qui est la commande extrémale. La combinaison de ce type de
commande avec le système fractionnaire lui donne un dégré de liberté additionnel
et par conséquence de meilleurs performances. Un aperçu général sur les techniques
de commande adaptatives est donné, ainsi que les principes de bases du calcul frac-
tionnaire qui sera utilisé le long de ce travail.
Les contributions principales de ce travail se résument dans les points suivants :
– Intégrer l’intégration et la dérivation d’ordre fractionnaire dans les formules
des lois de commande adaptatives par recherche du point extrémal.
– Utilisation de la commande adaptative extrémale pour le réglage des para-
mètres du régulateur PID d’ordre fractionnaire.
En comparant la commande adaptative fractionnaire avec celle a dérivation d’ordre
entier, on remarque qu’il y a une amélioration dans les performances du système
en termes de temps de réponse et stabilité en présence de bruits et perturbation.
Ces arguments sont illustrés par des exemples d’application en simulations à des
processus industriels tels que le système de freinage ABS et le système de panneaux
photovoltaïques.
Table des matières
Dédicace i
Remerciements ii
Résumé iii
1 Introduction Générale 1
2 Systèmes d’ordre fractionnaire 7
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Éléments de base des systèmes d’ordre fractionnaire . . . . . . . . . . 9
2.2.1 Définitions fondamentales . . . . . . . . . . . . . . . . . . . . 9
2.2.1.1 Définition de Riemann-Liouville . . . . . . . . . . . . 9
2.2.1.2 Définition de Caputo . . . . . . . . . . . . . . . . . . 10
2.2.1.3 Définition de Gründwald-Leitnikov . . . . . . . . . . 11
2.2.2 Propriétés des opérateurs d’ordre fractionnaire . . . . . . . . . 11
2.2.3 Approximation numérique des opérateurs d’ordre fractionnaire 12
2.2.3.1 Formules de Riemann-Liouville . . . . . . . . . . . . 13
2.2.3.2 Formules de Gründwald-Leitnikov . . . . . . . . . . . 13
2.2.4 Transformée de Laplace des opérateurs d’ordre fractionnaire . 15
2.2.4.1 Intégrale d’ordre fractionnaire . . . . . . . . . . . . . 15
2.2.4.2 Dérivée d’ordre fractionnaire . . . . . . . . . . . . . 15
2.3 Approximation des systèmes d’ordre fractionnaire . . . . . . . . . . . 16

TABLE DES MATIÈRES v
2.3.1 Approximations utilisant l’expansion des fractions continues
et les techniques d’interpolation . . . . . . . . . . . . . . . . . 17
2.3.1.1 Méthode générale d’approximation des opérateurs
d’ordre fractionnaire . . . . . . . . . . . . . . . . . . 18
2.3.1.2 Méthode de Carlson . . . . . . . . . . . . . . . . . . 18
2.3.1.3 Méthode de Matsuda . . . . . . . . . . . . . . . . . . 19
2.3.2 Approximations utilisant l’ajustement de courbes ou les tech-
niques d’identification . . . . . . . . . . . . . . . . . . . . . . 19
2.3.2.1 Méthode d’Oustaloup . . . . . . . . . . . . . . . . . 20
2.3.3 Méthode de la fonction de singularité de Charef . . . . . . . . 20
2.3.4 Implémentation analogiques . . . . . . . . . . . . . . . . . . . 25
2.3.4.1 Intégration d’ordre fractionnaire . . . . . . . . . . . 25
2.3.4.2 Dérivée d’ordre fractionnaire . . . . . . . . . . . . . 26
2.4 Systèmes de commande d’ordre fractionnaire . . . . . . . . . . . . . . 27
2.4.1 Processus d’ordre fractionnaire . . . . . . . . . . . . . . . . . 27
2.4.2 Fonction de transfert idéale de Bode . . . . . . . . . . . . . . 28
2.4.2.1 Réponse indicielle . . . . . . . . . . . . . . . . . . . 29
2.4.2.2 Réponse fréquentielle . . . . . . . . . . . . . . . . . . 30
2.4.3 Principes de base de la commande d’ordre fractionnaire . . . . 31
2.4.3.1 Action intégrale d’ordre fractionnaire . . . . . . . . . 32
2.4.3.2 Action dérivée d’ordre fractionnaire . . . . . . . . . . 35
2.4.4 Régulateur PID d’ordre fractionnaire . . . . . . . . . . . . . . 35
2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3 Systèmes de commande adaptative et auto-ajustable 38
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2 Historique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Problème de la commande adaptative . . . . . . . . . . . . . . . . . . 42
3.3.1 Description du processus . . . . . . . . . . . . . . . . . . . . . 42
3.3.2 Structures de régulation . . . . . . . . . . . . . . . . . . . . . 43
3.4 Classification des lois de commande adaptative . . . . . . . . . . . . . 43
3.5 Régulateurs adaptatifs déterministes . . . . . . . . . . . . . . . . . . 44
3.5.1 Modèle du processus . . . . . . . . . . . . . . . . . . . . . . . 44
TABLE DES MATIÈRES vi
3.5.2 Poursuite de modèle . . . . . . . . . . . . . . . . . . . . . . . 46
3.5.3 Condition de causalité . . . . . . . . . . . . . . . . . . . . . . 48
3.6 Commande adaptative auto-ajustable . . . . . . . . . . . . . . . . . 50
3.6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.6.2 Commande auto-ajustable indirecte . . . . . . . . . . . . . . . 50
3.6.3 Commande auto-ajustable directe . . . . . . . . . . . . . . . . 51
3.7 Commande adaptative a modèle de référence . . . . . . . . . . . . . . 52
3.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.7.2 Règle de MIT . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.7.3 Adaptation du gain d’anticipation . . . . . . . . . . . . . . . . 55
3.8 Commande adaptative extrémale . . . . . . . . . . . . . . . . . . . . 57
3.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.8.2 Principe de la commande extrémale . . . . . . . . . . . . . . . 58
3.8.2.1 Loi évolutive . . . . . . . . . . . . . . . . . . . . . . 58
3.8.2.2 Fonctionnement de l’algorithme (cas simplifié) . . . . 59
3.8.2.3 Indicateurs de performances . . . . . . . . . . . . . . 60
3.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4 Commande extrémale d’ordre fractionnaire 62
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1.1 Historique de la commande par recherche d’extremum . . . . . 63
4.1.1.1 Développements classiques . . . . . . . . . . . . . . . 63
4.1.1.2 Développements récents . . . . . . . . . . . . . . . . 64
4.1.2 Formulation du problème d’optimisation . . . . . . . . . . . . 65
4.2 Classification des méthodes d’optimisation en temps réel . . . . . . . 69
4.2.1 Optimisation par résolution numérique . . . . . . . . . . . . . 70
4.2.2 Optimisation par commande extrémale . . . . . . . . . . . . . 71
4.3 Classification des méthodes de commande extrémale . . . . . . . . . 73
4.4 Recherche d’extremum d’ordre fractionnaire . . . . . . . . . . . . . . 75
4.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.4.2 Méthode de perturbations . . . . . . . . . . . . . . . . . . . . 75
4.4.3 Méthode de saturation . . . . . . . . . . . . . . . . . . . . . . 77
4.5 Application au système de freinage antiblocage (ABS) . . . . . . . . . 80
TABLE DES MATIÈRES vii
4.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.5.2 Description du problème . . . . . . . . . . . . . . . . . . . . . 82
4.5.3 Modèle de la roue . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.5.4 Résultats et discussion . . . . . . . . . . . . . . . . . . . . . . 86
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5 Commande PIλDµ fractionnaire auto-ajustable basée sur la recherche
d’extrémum 89
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2 Principe de La recherche d’Extrémum à base de perturbation . . . . . 90
5.3 Schéma de réglage PIλDµ basée la recherche d’extremum . . . . . . . 92
5.3.1 Stratégie de commande . . . . . . . . . . . . . . . . . . . . . . 93
5.3.2 Optimisation par l’approche de recherche extrémum . . . . . . 94
5.4 Exemples de simulation . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.4.1 Résultats comparatifs pour F1 . . . . . . . . . . . . . . . . . . 96
5.4.2 Résultats comparatifs pour F2 . . . . . . . . . . . . . . . . . . 99
5.4.3 Résultats comparatifs pour F3 . . . . . . . . . . . . . . . . . . 101
5.4.4 Résultats comparatifs pour F4 . . . . . . . . . . . . . . . . . . 103
5.4.5 Discussion des résultats . . . . . . . . . . . . . . . . . . . . . 106
5.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6 Commande extrémale fractionnaire de systèmes photovoltaïques 110
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
6.2 Modélisation des systèmes photovoltaïques . . . . . . . . . . . . . . . 111
6.2.1 Modélisation d’une cellule photovoltaïque . . . . . . . . . . . . 111
6.2.2 Caractéristiques des panneaux photovoltaïques . . . . . . . . . 112
6.2.3 Modèle de convertisseur DC/DC . . . . . . . . . . . . . . . . . 114
6.3 Poursuite du PPM par la commande extrémale d’ordre fractionnaire . 115
6.4 Résultats et discussion . . . . . . . . . . . . . . . . . . . . . . . . . . 116
6.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Conclusion 125
Bibliographie 128

Table des figures
2.1 Diagramme de Bode de 1/(1 + s/pT )β . . . . . . . . . . . . . . . . . . 22
2.2 Comment choisir les singularités pour l’approximation en maintenant
un écart constant entre la ligne à −20β dB/dec et les lignes droites
en zig-zag. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Réseau équivalent d’un intégrateur d’ordre fractionnaire . . . . . . . . 25
2.4 Réseau équivalent d’un dérivateur d’ordre fractionnaire . . . . . . . . 26
2.5 Boucle idéale de Bode . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.6 Tracé de Bode de la fonction de transfert idéale . . . . . . . . . . . . 29
2.7 Réponse temporelle de la fonction de transfert idéale de Bode. . . . . 30
2.8 Réponse fréquentiel du module de Bode. . . . . . . . . . . . . . . . . 31
2.9 Schéma de principe d’un système en boucle fermée avec actions d’ordre
fractionnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.10 Action intégrale d’ordre fractionnaire d’un signal d’erreur carré et
µ = [0,−0, 2,−0, 5,−1]. . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.11 dsfdsfdsfs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.12 Structure du PIλDµ . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.13 Régulateurs PID et PIλDµ . . . . . . . . . . . . . . . . . . . . . . . . 36
3.1 Schéma de base d’un système adaptatif . . . . . . . . . . . . . . . . . 40
3.2 Classification générale des systèmes de commande adaptative . . . . . 44
3.3 Structure d’un régulateur linéaire général à deux degrés de liberté . . 45
3.4 Schéma synoptique de la commande adaptative à modèle de référence
MRAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53

TABLE DES FIGURES ix
3.5 Schéma de principe de gain d’adaptation anticipation . . . . . . . . . 56
3.6 Commande extrémale implémentée sur un système quadratique . . . 58
4.1 Principe de la commande par recherche d’extremum . . . . . . . . . . 63
4.2 Nombre de publications concernant ESC depuis 1960. . . . . . . . . . 66
4.3 Structure générale des méthodes avec optimisation numérique . . . . 71
4.4 Structure générale des méthodes de commande extrémale . . . . . . . 72
4.5 Les différentes méthodes de la commande extrémale . . . . . . . . . . 74
4.6 Schéma de commande ESC par perturbations. . . . . . . . . . . . . . 76
4.7 Schéma bloc du système sous considération. . . . . . . . . . . . . . . 77
4.8 Schéma dynamique de l’approche extrémale d’ordre fractionnaire. . . 79
4.9 Coefficient de la force de frottement . . . . . . . . . . . . . . . . . . . 81
4.10 Les forces exercées sur la roue. . . . . . . . . . . . . . . . . . . . . . . 84
4.11 Couple de freinage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.12 coefficient de force de frottement (FFC) pour différentes valeurs de
l’action intégrale ordre fractionnaire λ . . . . . . . . . . . . . . . . . 87
4.13 Critères d’erreur quadratique en fonction de l’ordre fractionnaire λ . . 87
4.14 Les sorties pour la valeur «optimale» d’ordre fractionnaire : λ = 0.8 . 88
5.1 Schéma de réglage des paramètres du régulateur PIλDµ fractionnaire
par la recherche extrémale. . . . . . . . . . . . . . . . . . . . . . . . . 92
5.2 Diagramme en blocs du schéma de recherche d’extrémum discret . . . 93
5.3 La réponse du système F1 : (a) Le signal de sortie, (b) Le signal de
commande. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.4 La fonction de coût et les valeurs des paramètres, F1 :(a) kp, ki et kd
(b) les ordres fractionnaires λ, µ (c) la fonction de coût . . . . . . . . 98
5.5 Sensibilité de la fonction coût aux paramètres α et γ pour F1 . . . . . 99
5.6 La réponse du système F2 : (a) Le signal de sortie, (b) Le signal de
commande. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.7 La fonction de coût et les valeurs des paramètres, F2 : (a) kp, ki et
kd ; (b) les ordres fractionnaires λ, µ ; (c) la fonction de coût . . . . . 101
5.8 Sensibilité de la fonction coût aux paramètres α et γ pour F2 . . . . . 102
TABLE DES FIGURES x
5.9 La réponse du système F3 : (a) Le signal de sortie, (b) Le signal de
commande. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.10 La fonction de coût et les valeurs des paramètres, F3 : (a) kp, ki et
kd ; (b) les ordres fractionnaires λ, µ ; (c) la fonction de coût . . . . . 104
5.11 Sensibilité de la fonction coût aux paramètres α et γ pour F3 . . . . . 104
5.12 La réponse du système F4 : (a) Le signal de sortie, (b) Le signal de
commande. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.13 La fonction de coût et les valeurs des paramètres, F4 : (a) kp, ki et
kd ; (b) les ordres fractionnaires λ, µ ; (c) la fonction de coût . . . . . 107
5.14 Sensibilité de la fonction coût aux paramètres α et γ pour F4 . . . . . 108
6.1 Schéma équivalent électrique de la cellule photovoltaïque réelle. . . . 112
6.2 Caractéristiques I(V) et P(V) d’un panneau photovoltaïque. . . . . . 113
6.3 Effet de la température et de l’éclairement sur le panneau photovol-
taïque. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.4 Le schéma de base du convertisseur boost. . . . . . . . . . . . . . . . 114
6.5 L’ensemble du système : panneau PV, convertisseur de Boost, le
contrôleur (FOES) et de la charge. . . . . . . . . . . . . . . . . . . . 115
6.6 Présentation de l’ensemble du système dans Matlab/Simulink. . . . . 117
6.7 La puissance de panneau PV pour différentes valeurs de l’ordre frac-
tionnaire λ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
6.8 Les sorties du panneau PV pour différentes valeurs de l’ordre frac-
tionnaire λ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
6.9 Le critères quadratique d’erreur en fonction de l’ordre fractionnaire λ. 119
6.10 Les sorties PV photovoltaïque pour la valeur «optimale» d’ordre frac-
tionnaire : λ = 0, 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.11 Deux cas de données numeriques . . . . . . . . . . . . . . . . . . . . 121
6.12 MPPT basée sur la méthode proposée (FOES) pour un scénario fixe . 122
6.13 MPPT basée sur la méthode proposée (FOES) pour un scénario va-
riable (réel) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Liste des tableaux
4.1 Avantages et désavantages des catégories de méthodes d’optimisation
en temps réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.2 Paramètres de frottement . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3 Paramètres de la Recherche d’Extrêmum. . . . . . . . . . . . . . . . 85
5.1 Paramétres du PIλDµ et PID avec ES pour la FT F1 . . . . . . . . . 96
5.2 Les paramètres du régulateur de PIλDµ avec différentes valeurs de α
et γ pour F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.3 Paramètres du PIλDµ et PID avec ES pour la FT F2 . . . . . . . . . 99
5.4 Les paramètres du régulateur de PIλDµ avec différentes valeurs de α
et γ pour F2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.5 Paramètres du PIλDµ et PID avec ES pour la FT F3 . . . . . . . . . 102
5.6 Les paramètres du régulateur de PIλDµ avec différentes valeurs de α
et γ pour F3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.7 Paramètres du PIλDµ et PID avec ES pour la FT F4 . . . . . . . . . 105
5.8 Les paramètres du régulateur de PIλDµ avec différentes valeurs de α
et γ pour F4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.1 Caractéristiques électriques du module PV ISOFOTON 75I-12, selon
la fiche technique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.2 Paramètres du Module PV ISOFOTON 75I-12. . . . . . . . . . . . . 123
6.3 Paramètres de la commande extrémale. . . . . . . . . . . . . . . . . . 124
Chapitre 1Introduction Générale
L’évolution technologique incessante que connait le début du 21ème siècle nous
lance dans un univers ou la performance est un objectif de tout moment. Généra-
lement, en Automatique, il ne s’agit plus de déterminer et d’ajuster des stratégies
de commandes adéquates pour maintenir les entrées d’un système à des points de
consigne désirés, mais plutôt de faire fonctionner ces systèmes de façon à optimiser
un critère de performance donné tout en respectant des contraintes de fonctionne-
ment.
Le comportement des systèmes est généralement non-stationnaire mais évolue
dans le temps selon les différentes sources de perturbations internes et externes qui
peuvent se présenter. Dans un tel contexte, il n’existe pas de point de fonctionne-
ment qui minimise un critère de performance du système et qui reste admissible tout
le temps.
Ce challenge de conduite de processus devient encore plus difficile à réaliser quand
on considère le cas des systèmes à modèles inconnus ou dont les paramètres varient
’lentement’ dans le temps. Il devient alors nécessaire de concevoir des lois de com-
mande qui puissent ’s’adapter’ aux variations des données renvoyées en temps réel
par les différents capteurs sur l’évolution des grandeurs mesurées, et qui permettent
d’avoir une idée plus ou moins précise sur le modèle du processus commandé.
Le sujet de cette thèse se place dans ce contexte. Il a pour but d’améliorer les
performances des systèmes de commande adaptative classique par l’introduction des
opérateurs d’ordre fractionnaire dans les algorithmes de contrôle.
2
Commande d’ordre fractionnaire
Le calcul fractionnaire est une généralisation de calcul d’ordre entier, intégral et
différentiel. Avec la croissance en puissance des ordinateurs, le calcul fractionnaire
maintenant est devenu un sujet intéressant de la recherche dans les communautés
scientifiques. Au cours des dernières années, il y a eu un développement considérable
de l’utilisation de calcul fractionnaire dans divers domaines. Avant le 20ème siècle, la
théorie du calcul fractionnaire développé principalement comme un axes purement
théorique des mathématiques utiles uniquement pour les mathématiciens. Oldham
et Spanier (1974) [117] et Podlubny (1999) [144, 143] ont présenté un volume im-
portant de discussions visant ce sujet.
Les champs d’application du calcul fractionnaire évoluent de plus en plus, y com-
pris des domaines tels que, le génie électrique, l’automatisation et l’ingénierie de
contrôle, la robotique, le génie biomédical et plus récemment dans le domaine des
énergies renouvelables [11, 111]. Les principales raisons de cet intérêt croissant pour
les opérateurs et les systèmes de commande fractionnaires sont d’abord leurs bonnes
performances et leur propriété héréditaire et d’autre part les progrès récents de la
science informatique et des outils numériques.
La commande d’ordre fractionnaire (COF) est l’un des domaines qui a attiré beau-
coup d’efforts de recherche avec de nombreux résultats encourageants obtenus tels
que la commande CRONE [125, 129, 127], la commande PIλDµ d’ordre fractionnaire
fractionnaire [144, 200], la commande fractionnaire dans l’espace d’état [174, 149], la
commande optimale d’ordre fractionnaire [132], et la commande adaptative d’ordre
fractionnaire [74, 57]... etc.
Depuis une décennie, en particulier pour la commande adaptative d’ordre frac-
tionnaire, de nombreux chercheurs ont proposé différentes lois de commande telles
que le la commande adaptative a modèle de référence fractionnaire [70, 74, 15, 6, 5],
la commande PID adaptative d’ordre fractionnaire [34, 110], la commande adap-
tative à grand gain d’ordre fractionnaire [79], la commande adaptative fraction-
naire par modes glissants [44], la commande adaptative fractionnaire basée sur la
commande à modèle interne (IMC) [76] et la commande adaptative indirecte par
placement de pôles d’ordre fractionnaire [66].
Commande adaptative
3
L’optimisation des processus est généralement classée en deux familles de mé-
thodes. Premièrement, les méthodes basées sur des modèles, qui utilisent des modèles
du système pour prévoir les conditions de fonctionnement optimales. Puis, les mé-
thodes sans modèle qui présument que la fonction objective est mesurée et pour
lesquels les variables de commandes sont ajustées de manière à orienter le système
vers un fonctionnement optimal par la minimisation (ou la maximisation) d’un cri-
tère bien défini.
Une méthode particulière de l’optimisation en temps réel est celle utilisant la com-
mande adaptative d’extremum. L’origine de cette approche est attribuée à Maurice
Leblanc, ingénieur français du début du XXème siècle. Le problème traite dans Le-
blanc (1922) [81] est celui de la commande de moteurs à courant alternatif. L’auteur
propose de varier l’auto-induction d’un moteur alternatif de manière automatique
pour rendre le courant d’induit maximal. Comme mentionné par Ariyur et Krstic
(2003) [10], cette méthode de commande extrémale représente le premier algorithme
de commande adaptative.
Parmi les approches adaptatives de la régulation nous avons aussi étudié la com-
mande adaptative auto-ajustable qui fait l’objet d’un grand intérêt dans le milieu
industriel vu sa simplicité d’implémentation et son efficacité en pratique. Le principe
de la Commande adaptative indirecte à ajustement automatique repose sur l’iden-
tification d’un modèle du système en ligne et en temps réel. Puis, avec ce nouveau
modèle calculé, le régulateur permettant de satisfaire les spécifications nominales
est de nouveau élaboré [65].
Problématique
Les objectifs principaux de la commande de procédés sont d’assurer le fonctionne-
ment optimal, la stabilité et la performance dynamique des systèmes. Généralement
l’utilisation de modèles dynamiques constitue l’instrument de base à la conception
de régulateurs qui réalisent ces objectifs.
La commande adaptative extrêmale a pour objectif d’amener un système à son
point d’opération optimal en adaptant en ligne les paramètres inconnus d’un mo-
dèle avec une structure connue (ou supposée). Cette technique a connu son essor

4
au cours des années 1950 et 1960 (Sternby [160], 1980 ; (Åström and Wittenmark,
[3]), 1995), mais cette approche a graduellement disparue au profit de la commande
adaptative par modèle de référence (MRAC) [2, 3, 4], principalement par manque
d’outils d’analyse garantissant la stabilité du système en boucle fermée.
Au cours des dernières années, plusieurs équipes de chercheurs ont proposé de nou-
velles approches de commande adaptative par recherche d’extremum. Entre autres,
les travaux de Krstic et al. [62], basés sur la méthode de la moyenne, ainsi que ceux
de Guay et Zhang [50], utilisant sur la méthode de Lyapunov, présentent des résul-
tats intéressants d’optimisation en temps réels.
D’autre part, l’introduction des opérateurs d’ordre fractionnaire dans les systèmes
de commande a permis d’observer une nette amélioration de ces systèmes du point
de vue performances (rapidité, stabilité, robustesse).
Objectifs de la thèse
Le choix des schémas de commande adaptative utilisant des opérateurs ou des
filtres d’ordre fractionnaire est essentiellement motivé par les très bonnes perfor-
mances des systèmes d’ordre fractionnaire relativement à celles des systèmes d’ordre
entier [11, 40].
Notre intérêt sera principalement orienté l’approche de la commande extrêmale qui
est une commande adaptative permettant d’atteindre un optimum de rendement du
processus.
La commande adaptative fractionnaire basée sur la recherche d’un extrémum, sera
développée dans ce manuscrit, et à notre connaissance c’est le premier travail de
recherche consacré à cette technique de commande [109, 108, 113], bien que certains
chercheurs ont commencé depuis à s’y intéresser [90, 18].
La technique d’optimisation par recherche extremum est aussi utilisée pour l’ajuste-
ment en temps réel des paramètres du régulateur PIλDµ adaptatif d’ordre fraction-
naire.
Ces schémas de commande seront validés par des applications en simulations à des
processus industriels pour lesquels une pléthore de stratégies de commande ont déjà
été testées vu l’intérêt qu’il y a à optimiser au mieux leurs performance : il s’ait du
5
système photovoltaïque et du système de freinage ABS.
Il reste à noter que les processus considérés dans ce travail sont le plus souvent
des systèmes SISO, mais les résultats obtenus peuvent être facilement généralisés
aux cas MIMO.
Organisation de la thèse
Le Chapitre 2 présente une brève revue de la littérature liée au calcul fraction-
naire et aux systèmes de commande d’ordre fractionnaire en général. Nous faisons,
dans cette partie, une introduction aux éléments de base du calcul d’ordre fraction-
naire et nous répertorions quelques notions essentielles sur le calcul d’ordre fraction-
naire nécessaires pour la bonne compréhension de notre travail.
Le Chapitre 3 recense les principaux écrits portant sur les systèmes de commande
adaptative et rappelons les différentes méthodes existant dans la littérature. Une
nouvelle approche de la commande adaptative nommée la commande adaptative ex-
trémale présentée dans cette thèse a pour objectif d’amener un système à son point
d’opération optimal en adaptant en ligne les paramètres inconnus d’un modèle avec
une structure connue (ou supposée).
Le Chapitre 4 présente les techniques de commande adaptative par recherche d’ex-
tremum. La première partie de ce chapitre recense les différentes approches de com-
mande par recherche d’extremum et décrit les deux méthodes les plus utilisées dans
la littérature (la commande extrémale par la méthode des perturbations et la com-
mande extrémale par saturation) et contient la description de l’algorithme proposé
dans cette thèse.
Le Chapitre 5 introduit le principe du correcteur PIλDµ adaptatif fractionnaire ba-
sée sur la recherche d’extrémum et qui représente une extension du correcteur PID
adaptatif classique auquel sont rajoutés deux paramètres complémentaires qui sont
l’ordre d’intégration et de dérivation fractionnaires.
Le Chapitre 6 contient les résultats de simulation de l’application de la méthode
adaptative extrémale d’ordre fractionnaire a l’optimisation de la puissance électrique
délivrée par un système photovoltaïque. Ces résultats sont également comparés aux
résultats obtenus pour les différentes valeurs de l’opérateur d’ordre fractionnaire λ.

6
Enfin, nous concluons ce manuscrit par une synthèse des résultats obtenus et des re-
marques d’ordre général et nous proposons quelques perspectives intéressantes pour
la poursuite de nos recherche.
Chapitre 2Systèmes d’ordre fractionnaire
2.1 Introduction 8
2.1 Introduction
Le développement récent de la théorie des systèmes, des moyens informatiques,
des processeurs, et par conséquent de la puissance de calcul ont considérablement
amplifié l’utilisation de cette science pour la commande des processus. L’une des
théories, qui peut être considérée aussi bien ancienne que nouvelle et qui connaît
actuellement une grande popularité dans le milieu des chercheurs dans les sciences
fondamentales et en ingénierie, est celle du calcul d’ordre fractionnaire qui étend la
dérivation et l’intégration aux ordres fractionnaires.
La naissance du calcul d’ordre fractionnaire remonte à l’année 1695 [33], quand
Leibniz a soulevé la question suivante dans une lettre à L’Hôpital, « la signification
des dérivés avec ordre entier (dny(t)
dtn) être généralisée aux dérivées avec des ordres
non entier ? ». L’Hôpital, a soulevé une question en réponse : « Qu’en est-il si l’ordre
sera 12? ». La réponse historique de Leibniz était, « Il mènera à un paradoxe, duquel
un jour des conséquences utiles seront tirées ».
Aujourd’hui, l’intérêt de la dérivation d’ordre fractionnaire ne cesse de grandir,
notamment dans le domaine de l’automatique pour la modélisation, l’identification
et la commande des systèmes. En fait, ce n’est qu’au début des années 1990 que le
régulateur CRONE a été proposé par Oustaloup [125]. En profitant des propriétés
avantageuses des systèmes d’ordre fractionnaire, ce régulateur permettait d’assurer
la robustesse de la commande dans une bande de fréquences donnée. Depuis cette
initiative, la commande d’ordre fractionnaire captiva l’intérêt de beaucoup de cher-
cheurs. En 1999, Podlubny [144] a proposé le régulateur PIλDµ, une généralisation du
correcteur PID classique, comprenant une intégration fractionnaire d’ordre λ et une
dérivation fractionnaire d’ordre µ, élargissant ainsi le champ d’application du calcul
fractionnaire à la théorie de la commande, ce qui a orienté plusieurs chercheurs à un
nouveau axe de recherche qui est le réglage du correcteur PID d’ordre fractionnaire
[98, 195]. L’intérêt porté à ce type de correcteurs, connu pour sa simplicité et son
utilisation fréquente en industrie, est justifié par une meilleure flexibilité due aux
deux paramètres supplémentaires ; l’action d’intégration d’ordre fractionnaire λ et
l’action de différentiation d’ordre fractionnaire µ.

2.2 Éléments de base des systèmes d’ordre fractionnaire 9
2.2 Éléments de base des systèmes d’ordre fraction-
naire
Le calcul d’ordre fractionnaire a été utilisé en mécanique depuis les années 1930
et en électrochimie depuis les années 1960. Dans le domaine de la commande, des
travaux intéressants ont été réalisés par I.A. Brin [16]. Plus tard, plusieurs mathé-
maticiens et physiciens ont étudié les opérateurs différentiels et les systèmes d’ordre
fractionnaire [45, 86, 117, 143, 157].
.
Le calcul fractionnaire est une généralisation de l’intégration et de la différentia-
tion à l’opérateur fondamental d’ordre non entier aDαt où a et t sont les limites de
l’opération. L’opérateur intégro-différentiel continu est noté par :
aDαt =
dα
dtαℜ(α) > 0,
1 ℜ(α) = 0,∫ t
a(dτ)−α ℜ(α) < 0,
(2.1)
où α est l’ordre de l’opération, généralement α ∈ ℜ.
2.2.1 Définitions fondamentales
Il existe plusieurs définitions mathématiques pour l’intégration et la dérivation
d’ordre fractionnaire. Ces définitions ne mènent pas toujours à des résultats iden-
tiques mais sont équivalentes pour un large panel de fonctions (Nous citerons les
définitions de Grünwald-Letnikov, de Caputo et de Riemann-Liouville) [143].
2.2.1.1 Définition de Riemann-Liouville
L’intégrale de Riemann-Liouville est définie ainsi
Définition 1 Soient C et ℜ les anneaux des nombres complexes et réels respective-
ment, ℜ(.) symbolise la partie réelle d’un nombre complexe.
Soient λ ∈ C avec ℜ(λ) > 0, t0 ∈ ℜ et f une fonction localement intégrable définie
sur [t0,+∞).

2.2 Éléments de base des systèmes d’ordre fractionnaire 10
L’intégrale d’ordre λ de f de borne inférieure t0 est définie par
RLIλt0f(t) =
1
Γ(λ)
∫ t
t0
(t− ξ)λ−1f(ξ)d(ξ) (2.2)
avec t ≥ t0 et Γ la fonction gamma d’Euler.
Définition 2 Soient µ ∈ C avec ℜ(µ) > 0, n un entier positif, t0 ∈ ℜ et f une
fonction localement intégrable définie sur [t0,+∞). La dérivée d’ordre µ de f de
borne inférieure t0 est définie par
RLDµt0f(t) =
1
Γ(n− µ)
dn
dtn
∫ t
t0
(t− τ)n−µ−1f(τ)dτ (2.3)
Où le nombre entier n est tel que (n− 1) < µ < n.
Cette dérivée d’ordre fractionnaire peut aussi être définie à partir de l’équation (2.2)
comme suit
RLDµt0f(t) =
dn
dtn
I(n−µ)t0 f(t)
(2.4)
2.2.1.2 Définition de Caputo
Caputo a introduit une autre formulation de la dérivée d’ordre fractionnaire
définie ainsi
CDµf(t) =∆ In−µDnf(t) =
1
Γ(n− µ)
∫ t
0
f (n)(τ)
(t− τ)µ−n+1dτ (2.5)
avec n un entier positif vérifiant l’inégalité n− 1 < µ < n.
Cette définition peut être formulée également en fonction de la définition de Riemann-
Liouville comme suit
RLDµf(t) =C Dµf(t) +
n−1∑
k=0
tk−µ
Γ(k − µ+ 1)f (k)(0+) (2.6)
Ce qui peut être décrit autrement par
CDµf(t) =RL Dµ
(
f(t)−n−1∑
k=0
f (k)(0+)tk
k!
)
(2.7)

2.2 Éléments de base des systèmes d’ordre fractionnaire 11
2.2.1.3 Définition de Gründwald-Leitnikov
La dérivée d’ordre fractionnaire d’ordre µ > 0 de G-L est donnée par
GLDµf(t) =
dµ
dtµf(t) = lim
h→0h−µ
k∑
j=0
(−1)j
µ
j
f(kh− jh) (2.8)
Où h est la période d’échantillonnage et les coefficients
ω(µ)j =
µ
j
=Γ(µ+ 1)
Γ(j + 1)Γ(µ− j + 1)
avec ω(µ)0 =
µ
0
= 1, sont les coefficients du binome suivant
(1− z)µ =∞∑
j=0
(−1)j
µ
j
zj =∞∑
j=0
ω(µ)j zj (2.9)
La définition de Gründwald-Leitnikov de l’intégrale d’ordre fractionnaire est formu-
lée comme suit
GLIλf(t) =GL D−λf(t) = lim
h→0hλ
k∑
j=0
(−1)j
−λ
j
f(kh− jh) (2.10)
Où h est la période d’échantillonnage et les coefficients ω(−λ)j avec ω
(−λ)0 =
−λ
0
=
1, sont les coefficients du binome suivant
(1− z)−λ =
∞∑
j=0
(−1)j
−λ
j
zj =
∞∑
j=0
ω(−λ)j zj (2.11)
2.2.2 Propriétés des opérateurs d’ordre fractionnaire
Les propriétés principales des dérivées et intégrales d’ordre fractionnaire sont les
suivantes :
1. Si f(z) est une fonction analytique de z, alors sa dérivée d’ordre fractionnaire
Dαf(z) est une fonction analytique de z et α.
2.2 Éléments de base des systèmes d’ordre fractionnaire 12
2. Pour α = n, où n est un entier, l’opération Dαf(z) donne le même résultat
que la différentiation classique d’ordre entier n.
3. Pour α = 0 l’opération Dαf(z) est l’opérateur identité D0f(z) = f(z).
4. La différentiation et l’intégration d’ordres fractionnaire sont des opérations
linéaires
Dαaf(z) +Dαbg(z) = aDαf(z) + bDαg(z)
5. La loi additive (propriété du semi-groupe)
DαDβf(z) = DβDαf(z) = Dα+βf(z)
est valable sous certaines contraintes sur la fonction f(z) (voir [143] pour
d’autres propriétés).
2.2.3 Approximation numérique des opérateurs d’ordre frac-
tionnaire
Beaucoup de travaux ont été réalisés sur les approximations numériques des équa-
tions différentielles d’ordre fractionnaire bien que sur la discrétisation des opérateurs
d’ordre fractionnaire [28, 146, 97] ; Diethelm a suggéré dernièrement une méthode ef-
ficace pour l’approximation numérique des équations différentielles d’ordre fraction-
naire [37], basée sur un correcteur-prédicateur de type Adams. Vinagre et al. [178]
ont développé une nouvelle méthode pour la discrétisation des opérateurs d’ordre
fractionnaire en utilisant l’approche de Tustin. Ferdi [47] a proposé une méthode
de calcul de la dérivée et l’intégrale d’ordre fractionnaire par le développement en
séries de puissances et la modélisation du signal.
Pourtant, ces méthodes sont souvent un peu compliquées ou d’ordre élevé pour être
introduites dans un schéma de commande adaptative simple pour commander des
systèmes aux paramètres inconnus ou variants dans le temps. Ceci peut déstabiliser
la boucle de commande, par une variation ordonnée de l’amplitude du signal de
référence, ou pendant la période transitoire.

2.2 Éléments de base des systèmes d’ordre fractionnaire 13
2.2.3.1 Formules de Riemann-Liouville
Nous utiliserons parfois une approximation numérique simple approximation nu-
mérique de l’intégrale de Riemann, basée sur la méthode rectangulaire. Cette ap-
proximation est plus pratique dans des algorithmes sensibles au nombre de calculs
à effectuer.
En mettant,
t = k∆
Où t est le temps actuel, k un entier et ∆ la période d’échantillonnage.
On obtient
Iα0 f(k∆) =∆
Γ(α)
k−1∑
τ=0
(k∆− τ∆)α−1f(τ∆)
=∆α
Γ(α)
k−1∑
τ=0
(k − τ)α−1f(τ∆) (2.12)
Cette méthode présente l’avantage d’être simple mais l’inconvénient d’être trop
consommatrice de mémoire à mesure que la fenêtre temporelle de calcul s’élargit.
Toutefois, nous pouvons remédier à cette contrainte en limitant la "mémoire" de la
dérivée d’ordre fractionnaire, ainsi la valeur initiale sera prise à l’instant t− Tm où
Tm est la longueur prédéfinie de cette mémoire [64].
Ainsi, si Km est le nombre de périodes correspondant au temps Tm (Km = Tm
∆),
l’approximation numérique de l’intégrale d’ordre fractionnaire peut s’écrire
IαTmf(k∆) =
∆α
Γ(α)
k−1∑
τ=k−Km
(k − τ)α−1f(τ∆) (2.13)
2.2.3.2 Formules de Gründwald-Leitnikov
Pour le calcul numérique des intégrales et dérivées d’ordre fractionnaire on peut
utiliser les définitions de G-L des équations (2.10) et (2.8) respectivement.
Pour une fonction causale f(t), et pour t = kh, L’intégrale d’ordre fractionnaire est

2.2 Éléments de base des systèmes d’ordre fractionnaire 14
donnée par [144]
Iλf(kh) = D−λf(kh)
∼= hλk∑
j=0
ω(−λ)j f(kh− jh) (2.14)
Où les coefficients ω(−λ)j sont les coefficients du binome de l’équation (2.11) qui
peuvent être calculés par la formule récurrente suivante, pour j = 1, 2, . . . , k
ω(−λ)0 = 1
et
ω(−λ)j =
(
1− 1− λ
j
)
ω(−λ)j−1 (2.15)
De même pour une fonction causale f(t), et pour t = kh, la dérivée d’ordre frac-
tionnaire est donnée par [143]
Dµf(kh) =dµ
dtµf(t)
∼= h−µk∑
j=0
ω(µ)j f(kh− jh) (2.16)
Où les coefficients ω(µ)j sont les coefficients du binome de l’équation (2.9) qui peuvent
être calculés par la formule récurrente suivante, pour j = 1, 2, . . . , k
ω(µ)0 = 1
et
ω(µ)j =
(
1− 1 + µ
j
)
ω(µ)j−1 (2.17)

2.2 Éléments de base des systèmes d’ordre fractionnaire 15
2.2.4 Transformée de Laplace des opérateurs d’ordre frac-
tionnaire
2.2.4.1 Intégrale d’ordre fractionnaire
Nous commencerons par la transformée de Laplace de l’intégrale d’ordre frac-
tionnaire de Riemann-Liouville d’ordre λ > 0 définie par (2.2), qu’on peut écrire
comme une convolution des fonctions g(t) = tλ−1 et f(t)
Iλf(t) = D−λf(t) =1
Γ(λ)
∫ t
0
(t− τ)λ−1f(τ)dτ = tλ−1 ∗ f(t) (2.18)
La transformée de Laplace de la fonction tλ−1 est
G(s) = L
tλ−1; s
= Γ(λ)s−λ (2.19)
En utilisant la formule de la transformée de Laplace de la convolution on obtient la
transformée de Laplace de l’intégrale de Riemann-Liouville et celle de Gründwald-
Leitnikov
L
Iλf(t)
= s−λF (s) (2.20)
2.2.4.2 Dérivée d’ordre fractionnaire
Nous citons dans ce qui suit la transformée de Laplace des différentes définitions
de la dérivée.
- Dérivée de Riemann-Liouville
LDµf(t) = sµF (s)−n−1∑
k=0
sk[
Dµ−k−1f(t)]
t=0(2.21)
avec n−1 < µ < n. Cette transformée de Laplace de la dérivée de Riemann-Liouville
est bien connue (voir [117, 93]). Mais son applicabilité en pratique est limitée à
cause de l’absence d’interprétation physique des valeurs limites des dérivées d’ordre
fractionnaire pour t = 0.
2.3 Approximation des systèmes d’ordre fractionnaire 16
- Dérivée de Caputo
LDµf(t) = sµF (s)−n−1∑
k=0
sµ−k−1fk(0) (2.22)
avec n− 1 ≤ µ < n.
Il faut mentionner ici que d’un point de vue mathématique pur, il y a différentes
manières d’interpoler entre les intégrales et dérivées multiples d’ordre entier. La
plus connue et la plus étudiée est la définition de Riemann-Liouville des dérivées
d’ordre fractionnaire (voir [117, 154, 93]). L’avantage principal de la définition de
Caputo par rapport à celle de Riemann-Liouville est qu’elle permet de considérer
des conditions initiales conventionnelles faciles à interpréter telles que y(0) = y0,
y′
(0) = y1, etc. De plus, la dérivée de Caputo d’une constante est bornée (égale
à 0), alors que la dérivée de Riemann-Liouville d’une constante n’est pas bornée à
t = 0. La seule exception est quand on prend t = −∞ comme point de départ (limite
inférieure) dans la définition de Riemann-Liouville. Cependant, quand on s’intéresse
à des processus transitoires, on ne peut pas accepter de placer le point de départ à
−∞ ; dans ce cas la définition de Caputo semble être la plus appropriée quand on
la compare aux autres.
- Dérivée de Gründwald-Leitnikov
LDµf(t) = sµF (s) (2.23)
Remarque La résolution des équations différentielles d’ordre fractionnaire avec
la transformée de Laplace se fait de la même manière qu’avec les équations différen-
tielles d’ordre entier.
2.3 Approximation des systèmes d’ordre fraction-
naire
Le problème d’obtention d’un modèle réalisable continu pour un régulateur d’ordre
fractionnaire peut être considéré comme un problème d’obtention d’une approxima-
2.3 Approximation des systèmes d’ordre fractionnaire 17
tion rationnelle de la fonction de transfert irrationnelle, modélisant le régulateur
d’ordre fractionnaire. Parmi plusieurs méthodes mathématiques, deux d’entre elles
[182] sont particulièrement intéressantes dans cet objectif au regard de la théorie de
commande
– Méthodes d’identification fréquentielle ou méthodes d’ajustement de courbes
pour l’obtention d’approximations rationnelles aux réponses fréquentielles ir-
rationnelles caractérisant les systèmes d’ordre fractionnaire.
– Méthode d’expansion de fractions continues (utilisée pour l’évaluation des
fonctions) et méthode d’approximation rationnelle (utilisée dans l’interpola-
tion des fonctions).
Nous allons présenter certaines des plus importantes méthodes des deux catégories,
avec un intérêt particulier à la méthode de la fonction singulière qui sera entièrement
détaillée, car elle a été fréquemment utilisée pour l’implémentation des algorithmes
de commande d’ordre fractionnaire proposés dans ce travail.
2.3.1 Approximations utilisant l’expansion des fractions conti-
nues et les techniques d’interpolation
L’expansion des fractions continues (EFC) est une méthode d’évaluation des
fonctions qui converge souvent beaucoup plus rapidement que le développement
en série de puissances, et converge dans un domaine plus large du plan complexe.
Le résultat de cette approximation pour une fonction irrationnelle G(s), peut être
exprimé sous la forme
G(s) ∼= a0(s) +b1(s)
a1(s) +b2(s)
a2(s)+b3(s)
a3(s)+...
= a0(s) +b1(s)
a1(s)+
b2(s)
a2(s)+
b3(s)
a3(s)+... (2.24)
où ai(s) et bi(s) sont des fonctions rationnelles de la variable s, ou des constantes.
L’application de cette méthode résulte en une fonction rationnelle G(s), qui est une
approximation de la fonction irrationnelle G(s).
D’autre part, pour l’interpolation, les fonctions rationnelles sont parfois supérieures
aux polynômes, car elle permettent de modéliser les fonctions par des pôles.

2.3 Approximation des systèmes d’ordre fractionnaire 18
Ces techniques sont basées sur l’approximation d’une fonction irrationnelle G(s)
par une fonction rationnelle définie par le quotient de deux polynômes de la variable
s
G(s) ∼= Ri(i+1)...(i+m) =Pµ(s)
Qν(s)
=p0 + p1s+ ...pµs
µ
q0 + q1s+ ...qνsν(2.25)
qui passe par les points (si, G(si)), ...(si+m, G(si+m)).
Dans la suite nous présenterons quelques unes des méthodes les plus connues de ce
type.
2.3.1.1 Méthode générale d’approximation des opérateurs d’ordre frac-
tionnaire
En général, une approximation rationnelle de la fonction G(s) = s−α, 0 < α < 1
(Intégration d’ordre fractionnaire dans le domaine de Laplace) peut être obtenue en
réalisant l’EFC des fonctions
Gh(s) =1
(1 + sT )α
Gl(s) =
(
1 +1
s
)α
(2.26)
où Gh(s) est l’approximation pour les hautes fréquences (ωT >> 1), et Gl(s) l’ap-
proximation pour les basses fréquences (ωT << 1).
2.3.1.2 Méthode de Carlson
La méthode proposée par Carlson dans [21], dérivée du processus régulier de New-
ton utilisé pour l’approximation itérative de la racine d’ordre α, peut être considérée
comme appartenant à ce goupe. La méthode se base sur l’hypothèse suivante
(H(s))1/α −G(s) = 0; H(s) = (G(s))α (2.27)
2.3 Approximation des systèmes d’ordre fractionnaire 19
En définissant α = 1q, m = q
2, à chaque itération, partant de la valeur initiale H0(s) =
1, une fonction rationnelle approximée est obtenue sous la forme
Hi(s) = Hi−1(s)(q −m)(Hi−1(s))
2 + (q +m)G(s)
(q +m)(Hi−1(s))2 + (q −m)G(s)(2.28)
2.3.1.3 Méthode de Matsuda
La méthode proposée dans [92] est basée sur l’approximation d’une fonction ir-
rationnelle par une fonction rationnelle obtenue par l’EFC et l’ajustement de la
fonction originale dans un ensemble de points logarithmiquement espacés. En sup-
posant que les points choisis sont sk, k = 0, 1, 2, ..., l’approximation prend la forme
H(s) = a0(s) +s− s0a1+
s− s0a2+
s− s3a3+
... (2.29)
où
ai = vi(si), v0(s) = H(s), vi+1 =s− si
vi(s)− ai(2.30)
2.3.2 Approximations utilisant l’ajustement de courbes ou les
techniques d’identification
En général toutes les méthodes d’identification dans le domaine fréquentiel peuvent
être appliquées pour obtenir une fonction rationnelle, dont la réponse fréquentielle
se rapproche de celle de la foction irrationnelle originale. Par exemple cela peut être
la minimisation de la fonction coût suivante,
J =
∫
W (s)∣
∣
∣G(ω)− G(ω)
∣
∣
∣
2
dω (2.31)
où W (s) est une fonction de pondération, G(ω) la réponse fréquentielle originale, et
G(ω) est la réponse fréquentielle de la fonction rationnelle approximée.

2.3 Approximation des systèmes d’ordre fractionnaire 20
2.3.2.1 Méthode d’Oustaloup
La méthode [122, 124, 126] est basée sur l’approximation d’une fonction de la
forme
H(s) = sµ, µ ∈ R+ (2.32)
par une fonction rationnelle
H(s) = CN∏
k=−N
1 + sωk
1 + s
ω′
k
(2.33)
en utilisant l’ensemble des formules de synthèse suivantes
ω′
0 = α−0.5ωu; ω0 = α0.5ωu;ω
′
k+1
ω′
k
=ωk+1
ωk= αη > 1; (2.34)
ω′
k+1
ωk= η > 0;
ωk
ω′
k
= α > 0; N =log(ωN/ω0)
log(αη); µ =
logα
log(αη)
ωu étant le gain fréquentiel unité et la fréquence centrale d’une bande de fréquences
distribuées géométriquement autour. Soit, ωu =√ωhωb, où ωh et ωb sont la haute
et basse fréquence respectivement.
2.3.3 Méthode de la fonction de singularité de Charef
Dans le but d’implémenter des modèles d’ordre fractionnaire dans les schémas de
commande présentés dans ce travail, nous utiliserons la méthode appelée "Méthode
de la fonction de singularité" développée par Charef et al. [26, 164], qui est présentée
dans cette section. La méthode d’approximation sera différente selon que le transfert
d’ordre fractionnaire à approximer soit du premier ou du second ordre
Système du premier ordre fractionnaire
Pour un système d’ordre fractionnaire du premier ordre (single fractal system)
la modélisation se fait sous la forme (2.35)
G(s) =1
(1 + spT)β
(2.35)

2.3 Approximation des systèmes d’ordre fractionnaire 21
on peut réécrire la fonction (2.35) comme suit (voir aussi [24])
G(s) =1
(1 + spT)β
= limN→∞
∏N−1i=0
(
1 + szi
)
∏Ni=0
(
1 + spi
) (2.36)
où (N +1) est le nombre total des singularités qui peut être déterminé par la bande
de fréquences du système.
L’équation (2.36) peut être tronquée à un nombre fini N , et l’approximation devient
G(s) =1
(1 + spT)β
≈∏N−1
i=0
(
1 + szi
)
∏Ni=0
(
1 + spi
) (2.37)
Les pôles et les zéros de la fonction de singularités peuvent être obtenus comme suit
pi = (ab)ip0 i = 1, 2, 3, ..., N (2.38)
zi = (ab)iap0 i = 2, 3, ..., N − 1 (2.39)
avec,
p0 = pT10ǫp20β (2.40a)
a = 10ǫp
10(1−β) (2.40b)
b = 10ǫp10β (2.40c)
β =log(a)
log(ab)(2.40d)
ǫp est l’erreur tolérée en dB.
Système du second ordre fractionnaire
Pour un système de second ordre décrit par l’équation (2.41)
G(s) =1
( s2
ω2n+ 2ξ s
ωn+ 1)β
(2.41)
avec β un nombre réel positif tel que 0 < β < 1, on peut distinguer deux cas
2.3 Approximation des systèmes d’ordre fractionnaire 22
Mod(dB)
3β dB
pT p0 z0 p1 z1 p2 z2
fréquence
−20β dB/dec
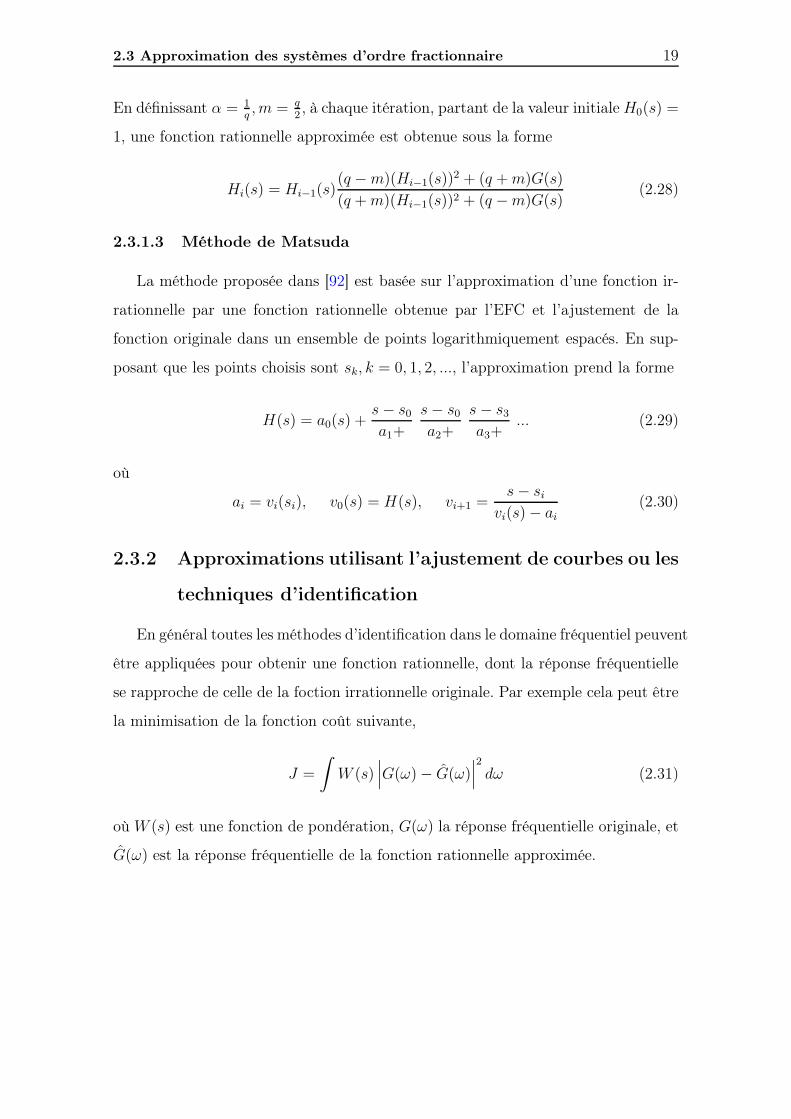
Figure 2.1: Diagramme de Bode de 1/(1 + s/pT )β
avec une pente de −20β dB/dec et son approximation par des lignes droites enzig-zag avec des pentes individuelles de −20 dB/dec et 0 dB/dec.
- Cas où 0 < β < 0.5
On peut exprimer la fonction (2.41) comme suit
Ge(s) =( sωn
+ 1)( sωn+1
)η
( s2
ω2n+ 2α s
ωn+ 1)
(2.42)
avec α = ξβ et η = 1− 2β, ce qui peut aussi être approximé par la fonction,
Ge(s) ≈( sωn
+ 1)
( s2
ω2n+ 2α s
ωn+ 1)
∏N−1i=1 (1 + s
zi)
∏Ni=1(1 +
spi)
(2.43)
Les singularités (pôles pi et zéros zi) sont données par les formules suivantes
pi = (ab)i−1az1 i = 1, 2, 3, ..., N (2.44)
zi = (ab)i−1z1 i = 2, 3, ..., N − 1 (2.45)
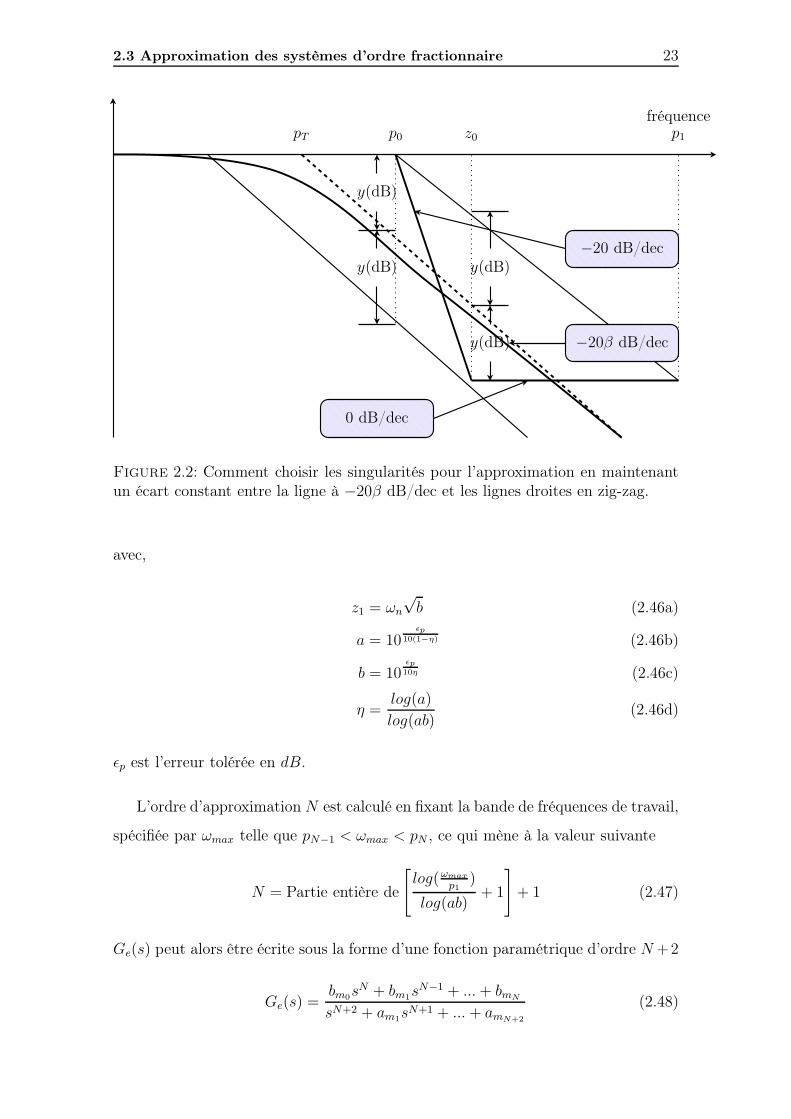
2.3 Approximation des systèmes d’ordre fractionnaire 23
fréquencepT p0 z0 p1
−20 dB/dec
−20β dB/dec
0 dB/dec
y(dB)y(dB)
y(dB)
y(dB)
Figure 2.2: Comment choisir les singularités pour l’approximation en maintenantun écart constant entre la ligne à −20β dB/dec et les lignes droites en zig-zag.
avec,
z1 = ωn
√b (2.46a)
a = 10ǫp
10(1−η) (2.46b)
b = 10ǫp10η (2.46c)
η =log(a)
log(ab)(2.46d)
ǫp est l’erreur tolérée en dB.
L’ordre d’approximation N est calculé en fixant la bande de fréquences de travail,
spécifiée par ωmax telle que pN−1 < ωmax < pN , ce qui mène à la valeur suivante
N = Partie entière de
[
log(ωmax
p1)
log(ab)+ 1
]
+ 1 (2.47)
Ge(s) peut alors être écrite sous la forme d’une fonction paramétrique d’ordre N +2
Ge(s) =bm0s
N + bm1sN−1 + ... + bmN
sN+2 + am1sN+1 + ... + amN+2
(2.48)

2.3 Approximation des systèmes d’ordre fractionnaire 24
Les coefficients amiet bmi
sont calculés à partir des singularités pi, zi ainsi que α et
ωn.
- Pour 0.5 < β < 1
La fonction d’approximation est donnée comme suit
Ge(s) =( sωn
+ 1)
( s2
ω2n+ 2α s
ωn+ 1)( s
ωn+1)η
(2.49)
Où α = ξβ et η = 2β − 1, qui développée comme précédemment avec les valeurs
singulières suivantes
pi = (ab)i−1p1 i = 1, 2, 3, ..., N (2.50)
zi = (ab)i−1ap1 i = 2, 3, ..., N − 1 (2.51)
p1 = ωn
√b (2.52a)
a = 10ǫp
10(1−η) (2.52b)
b = 10ǫp10η (2.52c)
η =log(a)
log(ab)(2.52d)
ǫp est l’erreur tolérée en dB.
Ge(s) peut alors être écrite sous la forme de la fonction paramétrique (2.48).

2.3 Approximation des systèmes d’ordre fractionnaire 25
2.3.4 Implémentation analogiques
2.3.4.1 Intégration d’ordre fractionnaire
L’approximation de l’opérateur intégrateur d’ordre fractionnaire dans une bande
fréquentielle donnée par une fonction rationnelle a la forme (2.37)
HI(s) =KI
sβ=
KI
(1 + sωc)β
≈ KI
∏N−1i=0
(
1 + szi
)
∏Ni=0
(
1 + spi
) (2.53)
La décomposition en éléments simples de la fonction rationnelle approximant l’inté-
grateur d’ordre fractionnaire HI(s) donne
HI(s) =
N∑
i=0
hi
1 + spi
(2.54)
où les hi sont les résidus des pôles donnés par l’équation (2.53).
Cette équation correspond à l’impédance d’un circuit RC du type Forster de 1ère
forme dont le schéma est représenté dans la figure(2.3) [24].
L’impédance de ce circuit est donnée par
R0 R1 Rn
C0 C1 Cn
I(s)
V (s)
Figure 2.3: Réseau équivalent d’un intégrateur d’ordre fractionnaire
Z(s) =N∑
i=0
(
Ri
1 + sRiCi
)
(2.55)
2.3 Approximation des systèmes d’ordre fractionnaire 26
que l’on peut faire correspondre à (2.54) en mettant,
Ri = hi
Ci =1
pihipouri = 0, 1, ..., N (2.56)
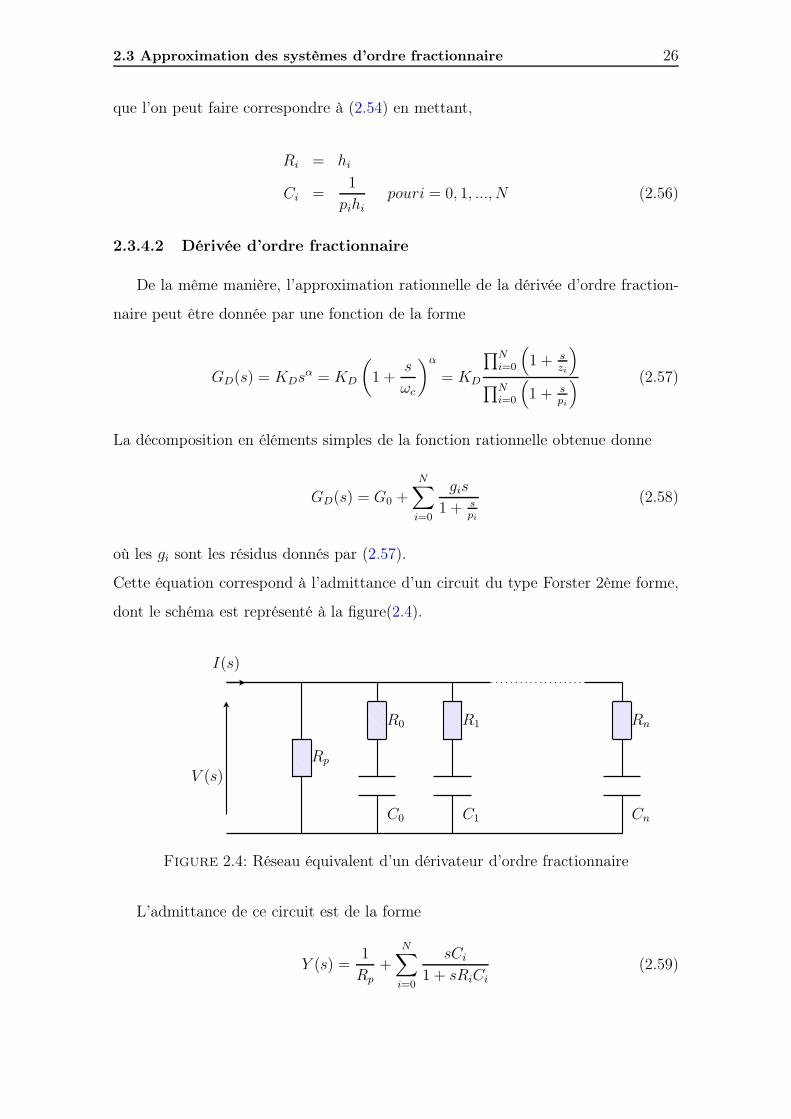
2.3.4.2 Dérivée d’ordre fractionnaire
De la même manière, l’approximation rationnelle de la dérivée d’ordre fraction-
naire peut être donnée par une fonction de la forme
GD(s) = KDsα = KD
(
1 +s
ωc
)α
= KD
∏Ni=0
(
1 + szi
)
∏Ni=0
(
1 + spi
) (2.57)
La décomposition en éléments simples de la fonction rationnelle obtenue donne
GD(s) = G0 +
N∑
i=0
gis
1 + spi
(2.58)
où les gi sont les résidus donnés par (2.57).
Cette équation correspond à l’admittance d’un circuit du type Forster 2ème forme,
dont le schéma est représenté à la figure(2.4).
Rp
R0 R1 Rn
C0 C1 Cn
I(s)
V (s)
Figure 2.4: Réseau équivalent d’un dérivateur d’ordre fractionnaire
L’admittance de ce circuit est de la forme
Y (s) =1
Rp+
N∑
i=0
sCi
1 + sRiCi(2.59)

2.4 Systèmes de commande d’ordre fractionnaire 27
que l’on peut faire correspondre à (2.58) en mettant,
Ci = gi
Ri =1
hiCipouri = 0, 1, ..., N
Rp = G0 (2.60)
2.4 Systèmes de commande d’ordre fractionnaire
2.4.1 Processus d’ordre fractionnaire
L’analyse dans le plan de Bode de plusieurs processus naturels, comme les lignes
de transmission, l’impédance de polarisation dielectrique, les interfaces, le rythme
cardiaque, la densité spectrale des ondes physiques, quelques types de bruit [16, 42,
165], a permis d’observer une pente fractionnaire. Ce type de processus est connu
sous le nom de processus 1/f ou systèmes d’ordre fractionnaire ou encore d’ordre non
entier. L’équation de description dans le domaine fréquentiel peut être approximée
dans le domaine de Laplace comme suit
X(s) =k
(1 + sp)β
(2.61)
Avec
– k gain du système,
– β la puissance d’ordre fractionnaire,
– p pôle d’ordre fractionnaire représentant la fréquence de coupure, 1/p est le
temps de relaxation,
– s opérateur de Laplace.
Les systèmes complexes où la puissance varie d’un nombre réel à un autre peuvent
être représentes par une fonction à pôles multiples avec des puissances d’ordre frac-
tionnaire
X(s) =k
∏ni=1(1 +
spi)βi
0 ≤ βi ≤ 1 (2.62)

2.4 Systèmes de commande d’ordre fractionnaire 28
2.4.2 Fonction de transfert idéale de Bode
Bode a proposé une forme idéale de la fonction de transfert de la boucle de
commande dans son travail sur la conception de feedbacks amplificateurs en 1945
(voir figure(2.5)). Cette fonction de transfert a la forme
L(s) =
(
s
ωc
)α
(2.63)
où ωc est la fréquence de coupure désirée et α la pente de la caractéristique idéale
du gain.
La marge de phase est Φm = π(1+α/2) pour toutes les valeur du gain. La marge de
gain Am est infinie. Les marges de phase constantes 60 , 45 et 30 correspondent
aux pentes α = −1.33, −1.5 et −1.66.
Le tracé de Nyquist pour la fonction de transfert idéale de Bode se réduit à une
ligne droite passant par l’origine avec arg(L(jω)) = απ2.
∑
R(s) Y (s)G0(s) =
Ksα
+
−
Figure 2.5: Boucle idéale de Bode
La fonction de transfert de Bode (2.63) peut être utilisée comme un système de
référence sous la forme suivante
Gc(s) =K
sα +K(0 < α < 2) (2.64)
Go(s) =K
sα(0 < α < 2) (2.65)
où Gc est la fonction de transfert en boucle fermée et Go est la fonction de transfert
en boucle ouverte. Les caractéristiques générales de la fonction de transfert de Bode
sont les suivantes (voir figure(2.6))
2.4 Systèmes de commande d’ordre fractionnaire 29
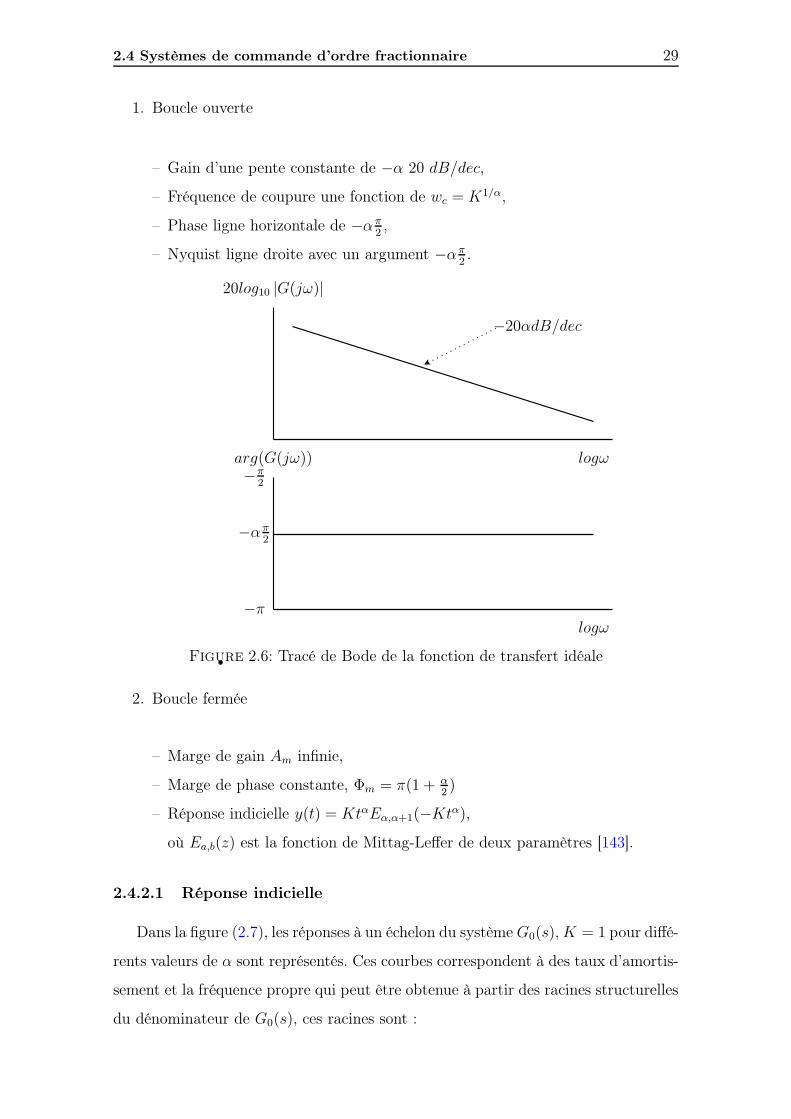
1. Boucle ouverte
– Gain d’une pente constante de −α 20 dB/dec,
– Fréquence de coupure une fonction de wc = K1/α,
– Phase ligne horizontale de −απ2,
– Nyquist ligne droite avec un argument −απ2.
logω
logω
arg(G(jω))
20log10 |G(jω)|
−20αdB/dec
−απ2
−π
−π2
Figure 2.6: Tracé de Bode de la fonction de transfert idéale
2. Boucle fermée
– Marge de gain Am infinie,
– Marge de phase constante, Φm = π(1 + α2)
– Réponse indicielle y(t) = KtαEα,α+1(−Ktα),
où Ea,b(z) est la fonction de Mittag-Leffer de deux paramètres [143].
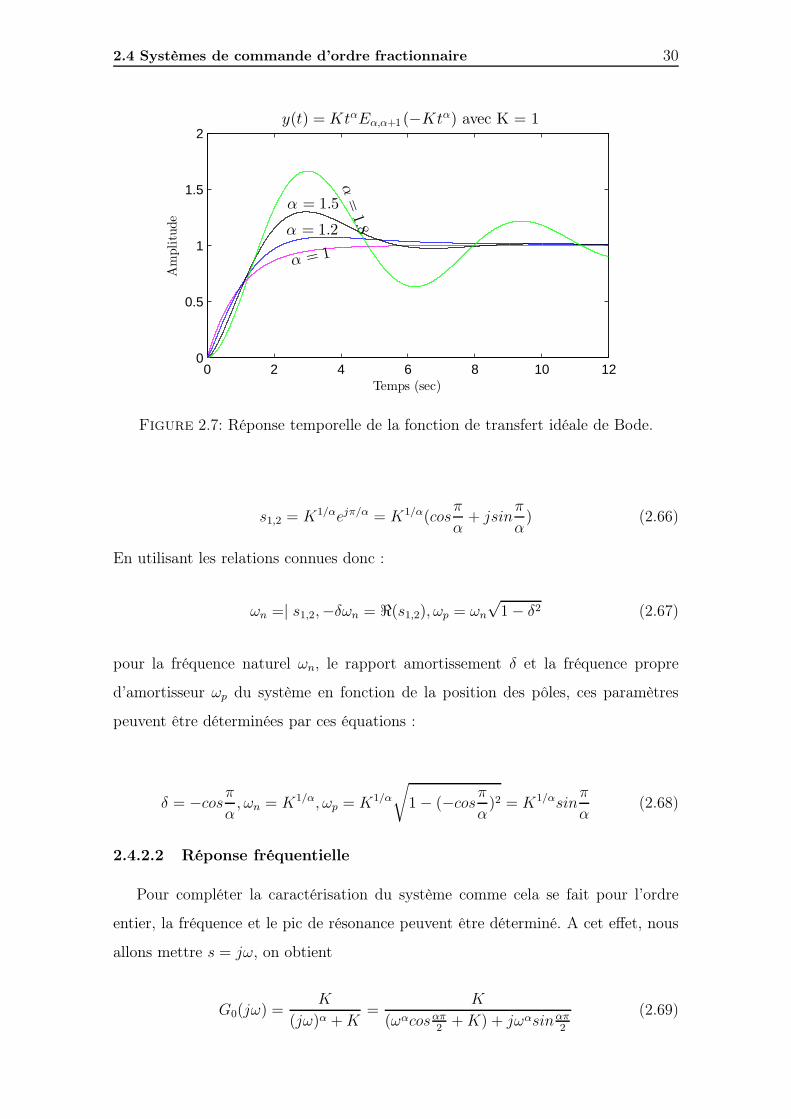
2.4.2.1 Réponse indicielle
Dans la figure (2.7), les réponses à un échelon du système G0(s), K = 1 pour diffé-
rents valeurs de α sont représentés. Ces courbes correspondent à des taux d’amortis-
sement et la fréquence propre qui peut être obtenue à partir des racines structurelles
du dénominateur de G0(s), ces racines sont :
2.4 Systèmes de commande d’ordre fractionnaire 30
0 2 4 6 8 10 120
0.5
1
1.5
2
Temps (sec)
Amplitude
y(t) = KtαEα,α+1 (−Ktα) avec K = 1
α=1.8
α = 1.5
α = 1.2
α = 1
Figure 2.7: Réponse temporelle de la fonction de transfert idéale de Bode.
s1,2 = K1/αejπ/α = K1/α(cosπ
α+ jsin
π
α) (2.66)
En utilisant les relations connues donc :
ωn =| s1,2,−δωn = ℜ(s1,2), ωp = ωn
√1− δ2 (2.67)
pour la fréquence naturel ωn, le rapport amortissement δ et la fréquence propre
d’amortisseur ωp du système en fonction de la position des pôles, ces paramètres
peuvent être déterminées par ces équations :
δ = −cosπ
α, ωn = K1/α, ωp = K1/α
√
1− (−cosπ
α)2 = K1/αsin
π
α(2.68)
2.4.2.2 Réponse fréquentielle
Pour compléter la caractérisation du système comme cela se fait pour l’ordre
entier, la fréquence et le pic de résonance peuvent être déterminé. A cet effet, nous
allons mettre s = jω, on obtient
G0(jω) =K
(jω)α +K=
K
(ωαcosαπ2+K) + jωαsinαπ
2
(2.69)
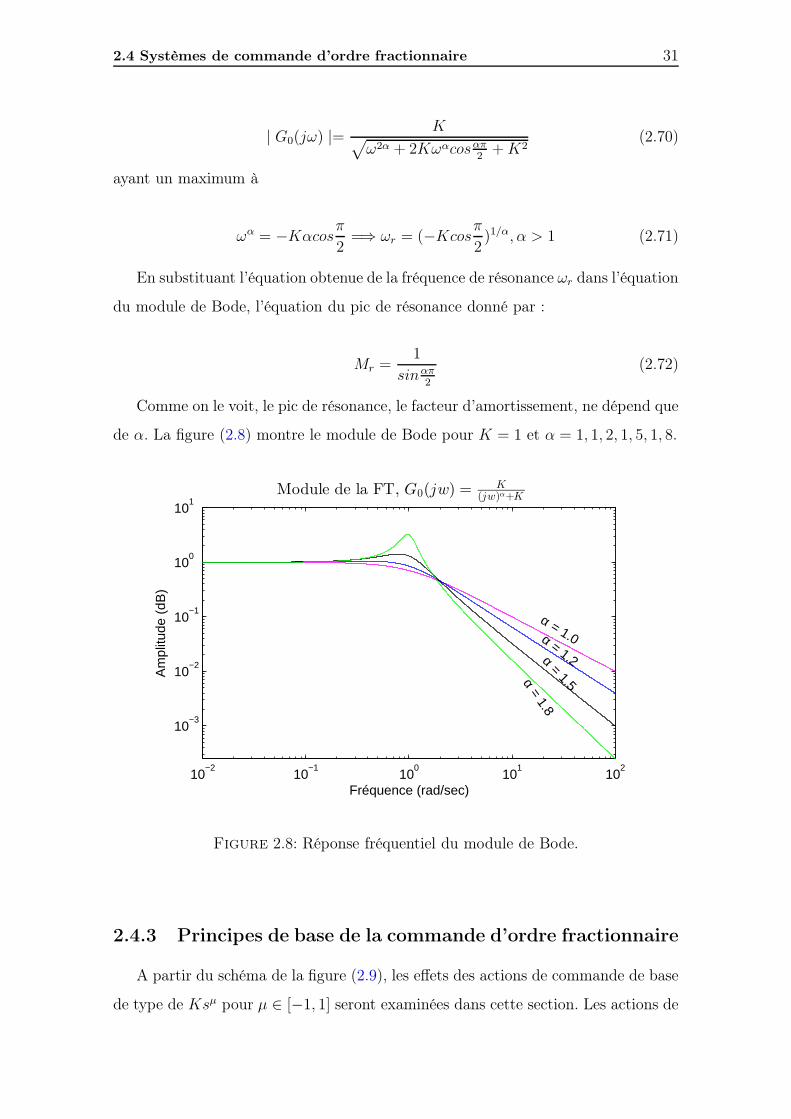
2.4 Systèmes de commande d’ordre fractionnaire 31
| G0(jω) |=K
√
ω2α + 2Kωαcosαπ2+K2
(2.70)
ayant un maximum à
ωα = −Kαcosπ
2=⇒ ωr = (−Kcos
π
2)1/α, α > 1 (2.71)
En substituant l’équation obtenue de la fréquence de résonance ωr dans l’équation
du module de Bode, l’équation du pic de résonance donné par :
Mr =1
sinαπ2
(2.72)
Comme on le voit, le pic de résonance, le facteur d’amortissement, ne dépend que
de α. La figure (2.8) montre le module de Bode pour K = 1 et α = 1, 1, 2, 1, 5, 1, 8.
10−2
10−1
100
101
102
10−3
10−2
10−1
100
101
Module de la FT, G0(jw) =K
(jw)α+K
Fréquence (rad/sec)
Am
plitu
de (
dB)
α = 1.0α = 1.2α = 1.5α = 1.8
Figure 2.8: Réponse fréquentiel du module de Bode.
2.4.3 Principes de base de la commande d’ordre fractionnaire
A partir du schéma de la figure (2.9), les effets des actions de commande de base
de type de Ksµ pour µ ∈ [−1, 1] seront examinées dans cette section. Les actions de
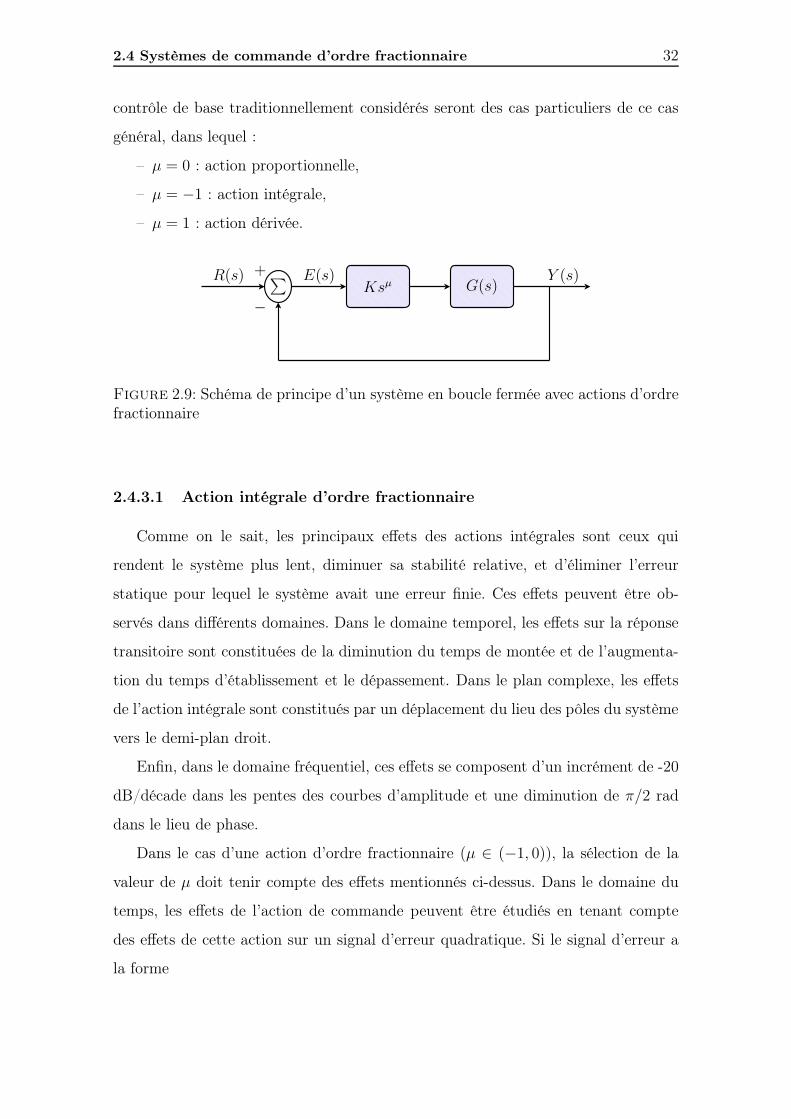
2.4 Systèmes de commande d’ordre fractionnaire 32
contrôle de base traditionnellement considérés seront des cas particuliers de ce cas
général, dans lequel :
– µ = 0 : action proportionnelle,
– µ = −1 : action intégrale,
– µ = 1 : action dérivée.
∑R(s)Ksµ G(s)
Y (s)E(s)+
−
Figure 2.9: Schéma de principe d’un système en boucle fermée avec actions d’ordrefractionnaire
2.4.3.1 Action intégrale d’ordre fractionnaire
Comme on le sait, les principaux effets des actions intégrales sont ceux qui
rendent le système plus lent, diminuer sa stabilité relative, et d’éliminer l’erreur
statique pour lequel le système avait une erreur finie. Ces effets peuvent être ob-
servés dans différents domaines. Dans le domaine temporel, les effets sur la réponse
transitoire sont constituées de la diminution du temps de montée et de l’augmenta-
tion du temps d’établissement et le dépassement. Dans le plan complexe, les effets
de l’action intégrale sont constitués par un déplacement du lieu des pôles du système
vers le demi-plan droit.
Enfin, dans le domaine fréquentiel, ces effets se composent d’un incrément de -20
dB/décade dans les pentes des courbes d’amplitude et une diminution de π/2 rad
dans le lieu de phase.
Dans le cas d’une action d’ordre fractionnaire (µ ∈ (−1, 0)), la sélection de la
valeur de µ doit tenir compte des effets mentionnés ci-dessus. Dans le domaine du
temps, les effets de l’action de commande peuvent être étudiés en tenant compte
des effets de cette action sur un signal d’erreur quadratique. Si le signal d’erreur a
la forme

2.4 Systèmes de commande d’ordre fractionnaire 33
e(t) =N∑
k=0
(−1)ku0(t− kT ), k = 0, 1, 2, ..., N. (2.73)
où u0(t) est l’échelon unitaire, et sa transformée de Laplace est :
E(s) =
N∑
k=0
(−1)ke−kTs
s(2.74)
Donc l’action de commande, comme représenté sur le schéma synoptique de la
figure (2.9), est donnée par :
u(t) = L−1U(s) = L
−1
KN∑
k=0
(−1)ke−kTs
s1−µ
(2.75)
= K
N∑
k=0
(−1)k
Γ(1− µ)(t− kT )−µu0(t− kT ) (2.76)
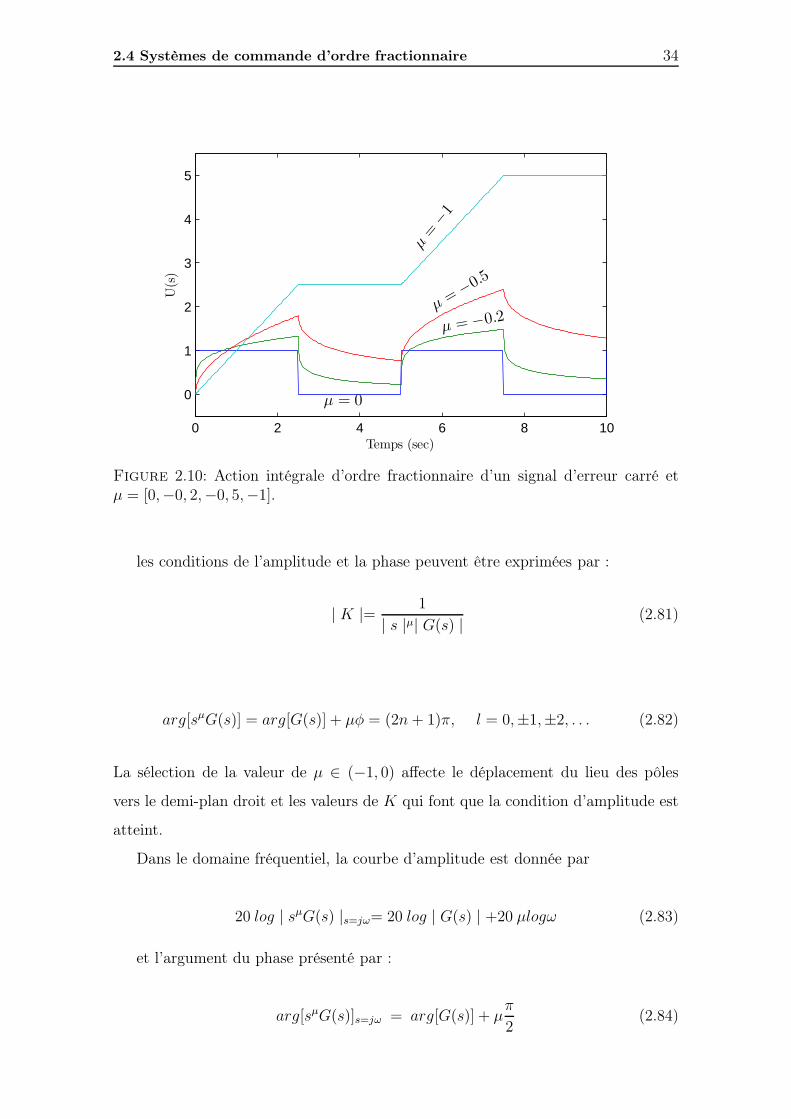
La figure (2.10) illustre la fonction u (t) pour les valeurs µ = 0,−0.2,−0.5,−1 ;
T = 30 ; N = 4. Comme on peut le constater, les effets de l’action de contrôle
sur le signal d’erreur varient entre les effets d’une action proportionnelle (µ = 0,
signal carré) et une action intégrale (µ = −1, les lignes droites courbe). Pour les
valeurs intermédiaires de µ, ls augmentations d’action de commande pour une erreur
constante, qui se traduit par l’élimination de l’erreur l’état d’équilibre, et diminue
lorsque l’erreur est égale à zéro, résultant en un système plus stable. Dans le plan
complexe, le lieu des pôles du système avec l’action de commande est régi par
1 +KsµG(s) = 0 (2.77)
ou par les conditions équivalentes suivantes pour l’amplitude et la phase :
| K |= 1
| s |µ| G(s) | (2.78)
arg[sµG(s)] = (2n+ 1)π, l = 0,±1,±2, . . . (2.79)
En prenant en compte le fait que :
s =| s | ejφ =⇒ sµ =| s |µ ejµφ (2.80)
2.4 Systèmes de commande d’ordre fractionnaire 34
0 2 4 6 8 10
0
1
2
3
4
5
Temps (sec)
U(s)
µ=−
1
µ=−
0.5
µ = −0.2
µ = 0
Figure 2.10: Action intégrale d’ordre fractionnaire d’un signal d’erreur carré etµ = [0,−0, 2,−0, 5,−1].
les conditions de l’amplitude et la phase peuvent être exprimées par :
| K |= 1
| s |µ| G(s) | (2.81)
arg[sµG(s)] = arg[G(s)] + µφ = (2n+ 1)π, l = 0,±1,±2, . . . (2.82)
La sélection de la valeur de µ ∈ (−1, 0) affecte le déplacement du lieu des pôles
vers le demi-plan droit et les valeurs de K qui font que la condition d’amplitude est
atteint.
Dans le domaine fréquentiel, la courbe d’amplitude est donnée par
20 log | sµG(s) |s=jω= 20 log | G(s) | +20 µlogω (2.83)
et l’argument du phase présenté par :
arg[sµG(s)]s=jω = arg[G(s)] + µπ
2(2.84)
2.4 Systèmes de commande d’ordre fractionnaire 35
En faisant varier la valeur de µ entre −1 et 0, il est possible :
• Introduire une augmentation constante dans les pentes de la courbe d’amplitude
qui varie entre −20 dB/dec et 0 dB/dec.
• Introduire un retard constant dans la phase qui varie entre −π/2 rad et 0 rad.
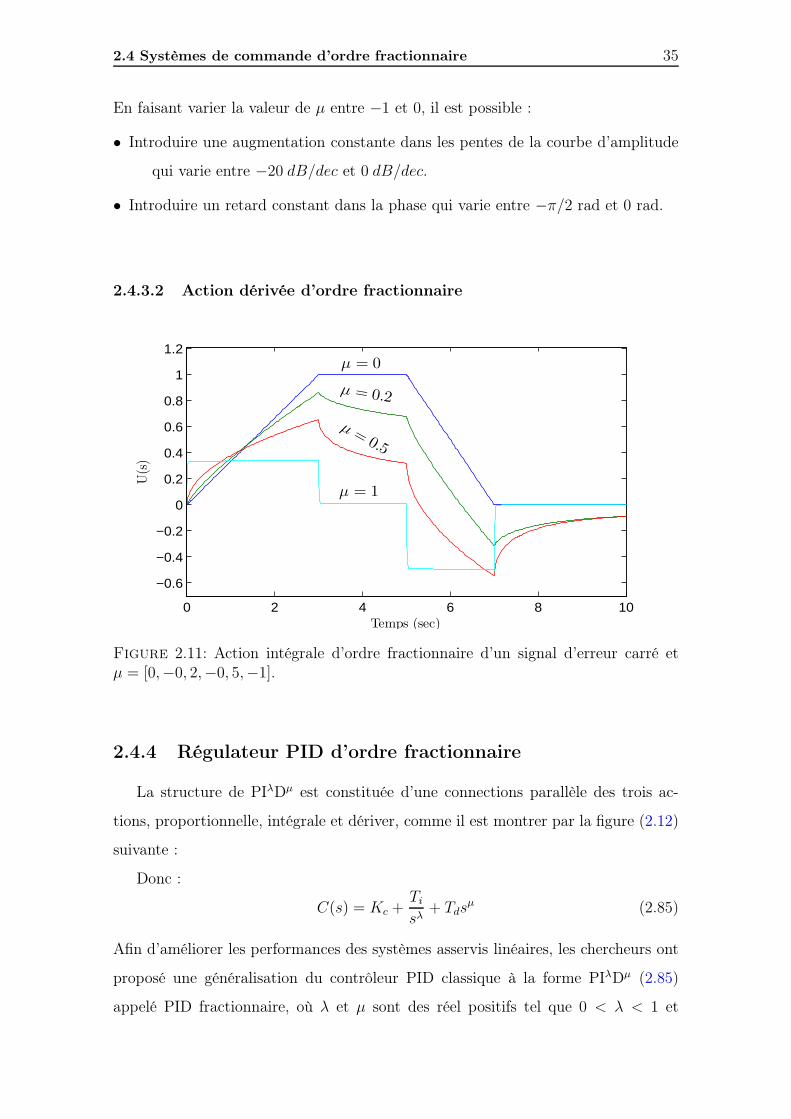
2.4.3.2 Action dérivée d’ordre fractionnaire
0 2 4 6 8 10
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Temps (sec)
U(s)
µ = 1
µ =0.5
µ = 0.2
µ = 0
Figure 2.11: Action intégrale d’ordre fractionnaire d’un signal d’erreur carré etµ = [0,−0, 2,−0, 5,−1].
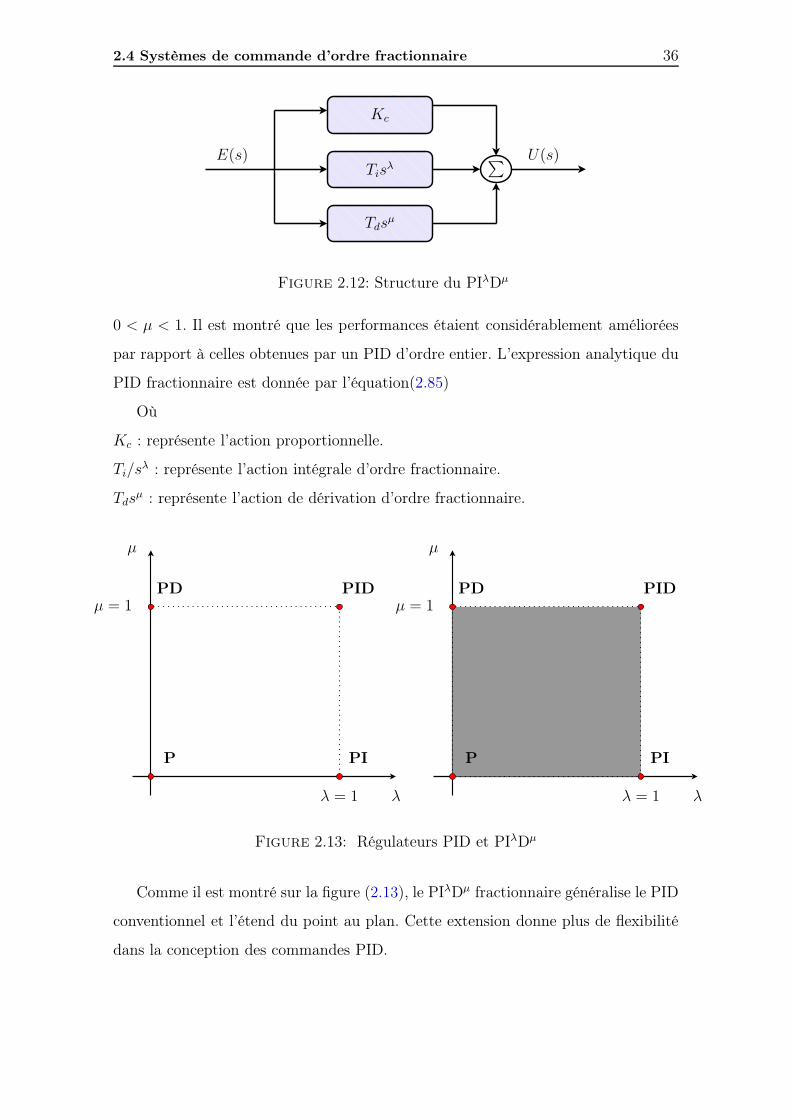
2.4.4 Régulateur PID d’ordre fractionnaire
La structure de PIλDµ est constituée d’une connections parallèle des trois ac-
tions, proportionnelle, intégrale et dériver, comme il est montrer par la figure (2.12)
suivante :
Donc :
C(s) = Kc +Ti
sλ+ Tds
µ (2.85)
Afin d’améliorer les performances des systèmes asservis linéaires, les chercheurs ont
proposé une généralisation du contrôleur PID classique à la forme PIλDµ (2.85)
appelé PID fractionnaire, où λ et µ sont des réel positifs tel que 0 < λ < 1 et
2.4 Systèmes de commande d’ordre fractionnaire 36
Kc
Tisλ
Tdsµ
∑E(s) U(s)
Figure 2.12: Structure du PIλDµ
0 < µ < 1. Il est montré que les performances étaient considérablement améliorées
par rapport à celles obtenues par un PID d’ordre entier. L’expression analytique du
PID fractionnaire est donnée par l’équation(2.85)
Où
Kc : représente l’action proportionnelle.
Ti/sλ : représente l’action intégrale d’ordre fractionnaire.
Tdsµ : représente l’action de dérivation d’ordre fractionnaire.
µ µ
λ λ
PD PID
P PI
PIDPD
P PI
µ = 1 µ = 1
λ = 1 λ = 1
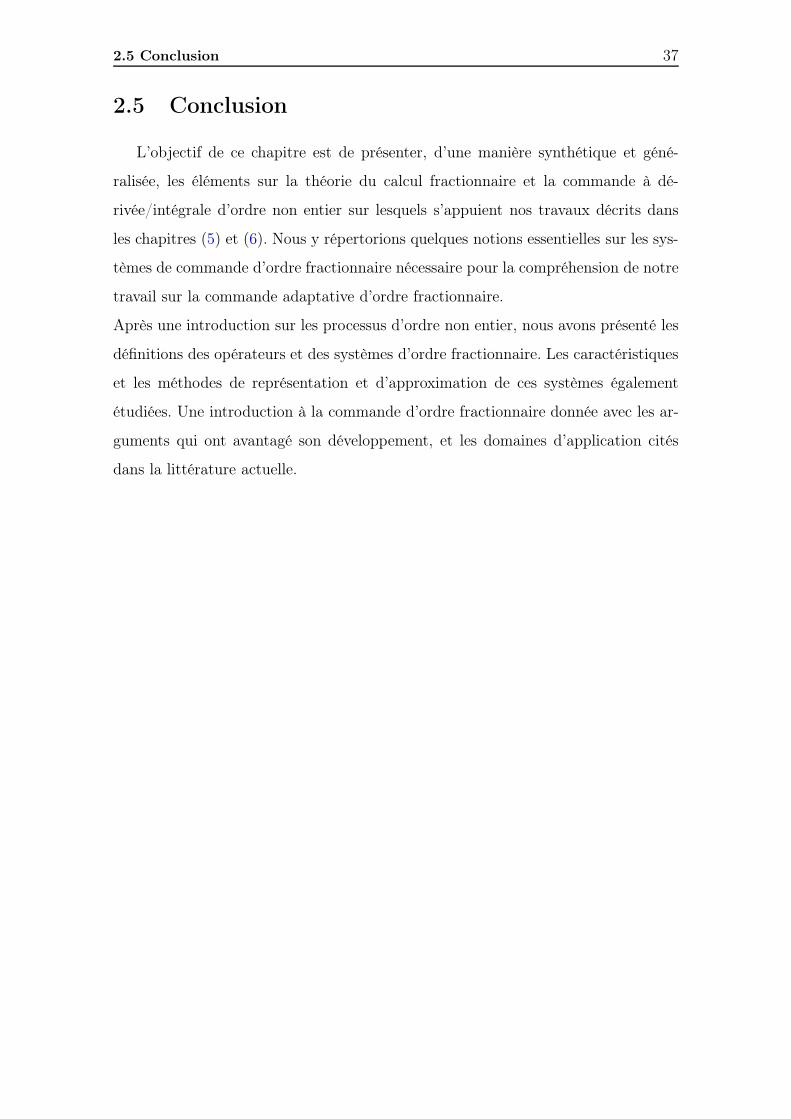
Figure 2.13: Régulateurs PID et PIλDµ
Comme il est montré sur la figure (2.13), le PIλDµ fractionnaire généralise le PID
conventionnel et l’étend du point au plan. Cette extension donne plus de flexibilité
dans la conception des commandes PID.
2.5 Conclusion 37
2.5 Conclusion
L’objectif de ce chapitre est de présenter, d’une manière synthétique et géné-
ralisée, les éléments sur la théorie du calcul fractionnaire et la commande à dé-
rivée/intégrale d’ordre non entier sur lesquels s’appuient nos travaux décrits dans
les chapitres (5) et (6). Nous y répertorions quelques notions essentielles sur les sys-
tèmes de commande d’ordre fractionnaire nécessaire pour la compréhension de notre
travail sur la commande adaptative d’ordre fractionnaire.
Après une introduction sur les processus d’ordre non entier, nous avons présenté les
définitions des opérateurs et des systèmes d’ordre fractionnaire. Les caractéristiques
et les méthodes de représentation et d’approximation de ces systèmes également
étudiées. Une introduction à la commande d’ordre fractionnaire donnée avec les ar-
guments qui ont avantagé son développement, et les domaines d’application cités
dans la littérature actuelle.
Chapitre 3Systèmes de commande adaptative et
auto-ajustable
3.1 Introduction 39
3.1 Introduction
En langage courant, "le mot adapter" signifie changer un comportement du sys-
tème pour se conformer aux nouvelles circonstances [2]. Intuitivement, un contrôleur
adaptatif est donc un dispositif de commande qui peut modifier son comportement
en réponse à des changements dans la dynamique du processus et la présence des
perturbations. Depuis l’évaluation ordinaire tente également de réduire les effets
des perturbations et l’incertitude du système, la question de la différence entre le
contrôle de rétroaction (la commande en boucle fermée) et le contrôle adaptatif se
pose immédiatement. Au fil des ans, il y a eu de nombreuses tentatives pour définir
la commande adaptative formellement.
Lors d’une conférence au début de 1961 [3], une longue discussion a pris fin
avec la suggestion suivante : «Un système adaptatif est un système physique qui
est conçu avec un point de vue adaptatif» Une nouvelle tentative a été faite par un
comité IEEE en 1973. Il a proposé un nouveau vocabulaire fondé sur des notions,
comme le contrôle de l’auto-organisation du système (SOC), paramètre adaptatif,
performance adaptative, et l’apprentissage du système de commande. Cependant,
ces efforts ne sont pas largement acceptés.
Une définition significative de la commande adaptative, permettrait d’analyser le
contrôleur matériel et logiciel et de décider s’il est adaptatif. Cependant, il semble
y avoir un consensus que le système en boucle fermée à gain constant n’est pas un
système adaptatif.
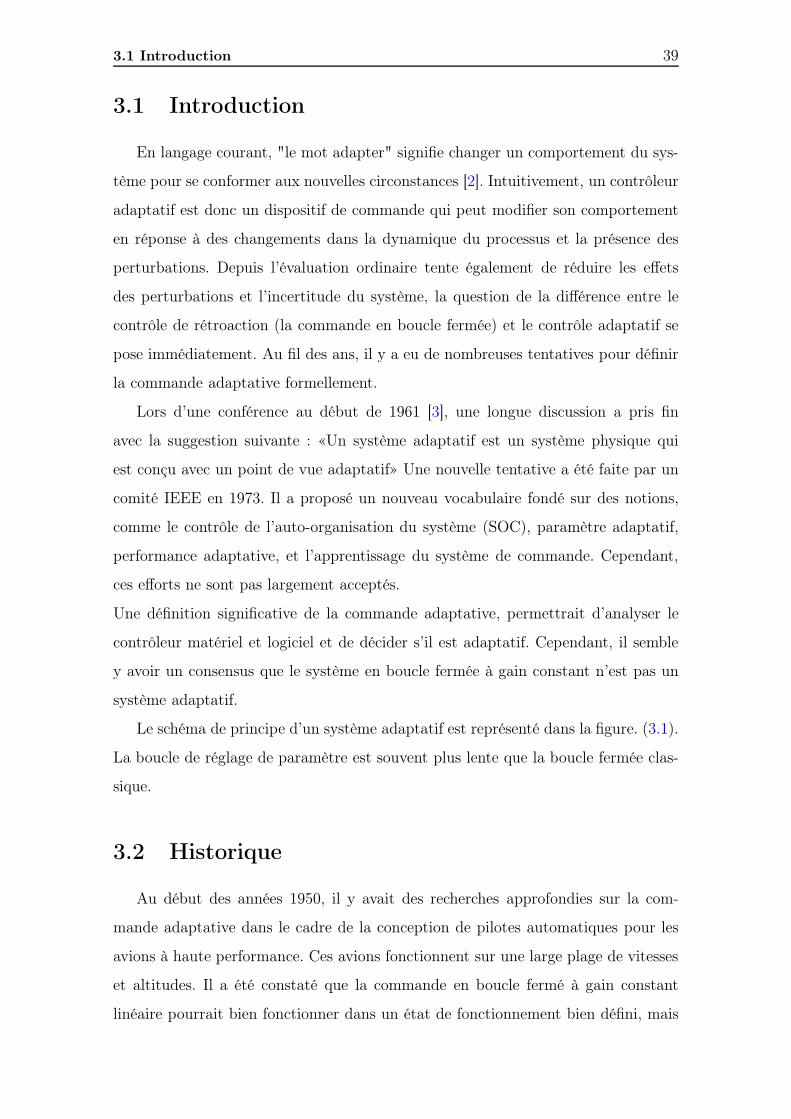
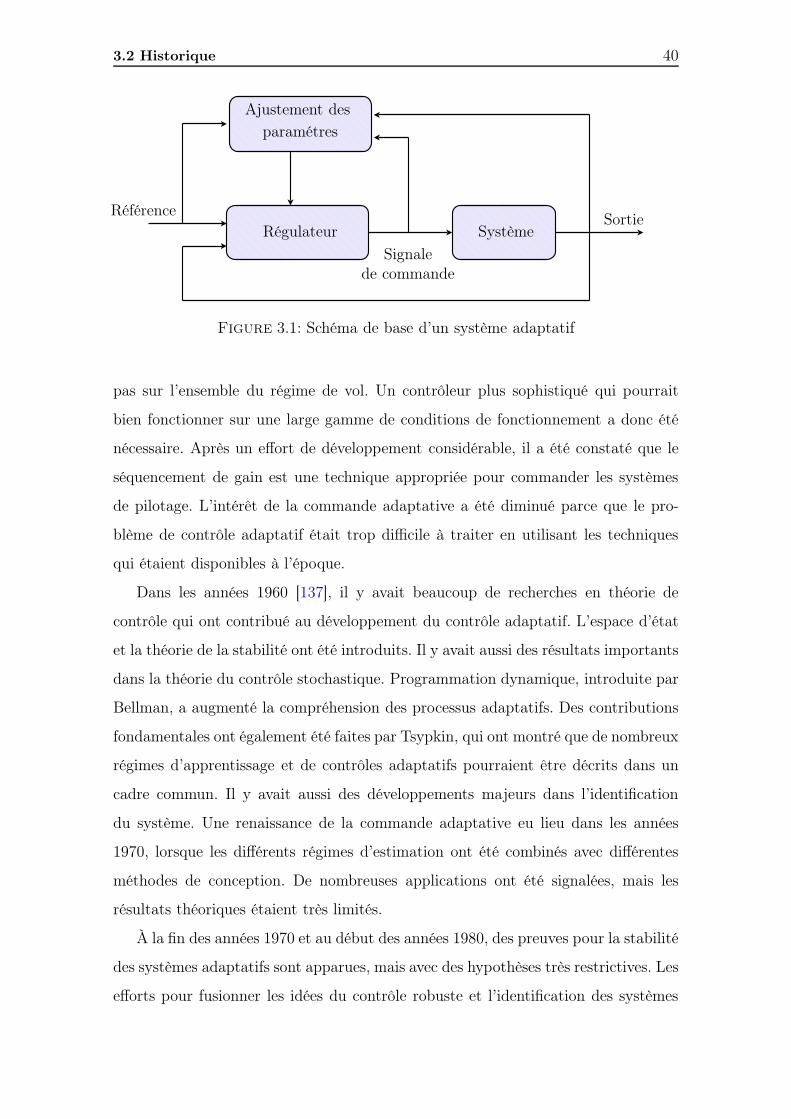
Le schéma de principe d’un système adaptatif est représenté dans la figure. (3.1).
La boucle de réglage de paramètre est souvent plus lente que la boucle fermée clas-
sique.
3.2 Historique
Au début des années 1950, il y avait des recherches approfondies sur la com-
mande adaptative dans le cadre de la conception de pilotes automatiques pour les
avions à haute performance. Ces avions fonctionnent sur une large plage de vitesses
et altitudes. Il a été constaté que la commande en boucle fermé à gain constant
linéaire pourrait bien fonctionner dans un état de fonctionnement bien défini, mais
3.2 Historique 40
Régulateur Système
Ajustement desparamétres
Sortie
Signalede commande
Référence
Figure 3.1: Schéma de base d’un système adaptatif
pas sur l’ensemble du régime de vol. Un contrôleur plus sophistiqué qui pourrait
bien fonctionner sur une large gamme de conditions de fonctionnement a donc été
nécessaire. Après un effort de développement considérable, il a été constaté que le
séquencement de gain est une technique appropriée pour commander les systèmes
de pilotage. L’intérêt de la commande adaptative a été diminué parce que le pro-
blème de contrôle adaptatif était trop difficile à traiter en utilisant les techniques
qui étaient disponibles à l’époque.
Dans les années 1960 [137], il y avait beaucoup de recherches en théorie de
contrôle qui ont contribué au développement du contrôle adaptatif. L’espace d’état
et la théorie de la stabilité ont été introduits. Il y avait aussi des résultats importants
dans la théorie du contrôle stochastique. Programmation dynamique, introduite par
Bellman, a augmenté la compréhension des processus adaptatifs. Des contributions
fondamentales ont également été faites par Tsypkin, qui ont montré que de nombreux
régimes d’apprentissage et de contrôles adaptatifs pourraient être décrits dans un
cadre commun. Il y avait aussi des développements majeurs dans l’identification
du système. Une renaissance de la commande adaptative eu lieu dans les années
1970, lorsque les différents régimes d’estimation ont été combinés avec différentes
méthodes de conception. De nombreuses applications ont été signalées, mais les
résultats théoriques étaient très limités.
À la fin des années 1970 et au début des années 1980, des preuves pour la stabilité
des systèmes adaptatifs sont apparues, mais avec des hypothèses très restrictives. Les
efforts pour fusionner les idées du contrôle robuste et l’identification des systèmes
3.2 Historique 41
sont d’une importance particulière. La question de la nécessité de ces hypothèses
déclencha une nouvelle recherche sur la robustesse du contrôle adaptatif, et sur les
contrôleurs qui sont universellement stabilisant. Des résultats à la fin des années
1980 et au début des années 1990 ont donné de nouvelles perspectives pour la ro-
bustesse des contrôleurs adaptatifs.
Les recherches sur les systèmes non-linéaires ont conduit à une augmentation consi-
dérable de la compréhension de la commande adaptative. Dernièrement, il a égale-
ment été établi que le contrôle adaptatif a des relations solides avec des idées sur
l’apprentissage qui se dessinent dans le domaine de la science informatique.
Il y a eu de nombreuses expériences sur le contrôle adaptatif dans les laboratoires
et l’industrie. Les progrès rapides en microélectronique étaient une forte stimulation.
L’interaction entre la théorie et l’expérimentation ont abouti à un développement
vigoureux dans le domaine. En conséquence, les contrôleurs adaptatifs ont com-
mencé à apparaître dans le commerce dans les années 1980. Ce développement est
maintenant accélèré. Un résultat est que pratiquement tous les contrôleurs à boucle
unique qui sont disponibles dans le commerce permettent aujourd’hui des techniques
adaptatives d’une certaine forme.
La principale raison pour l’introduction du contrôle adaptatif était de pouvoir adap-
ter le régulateur aux changements dans la dynamique des processus et en présence
de perturbation. Il a été constaté que les techniques d’adaptation peuvent également
être utilisées pour fournir le réglage automatique de contrôleurs.
Une approche particulière de l’optimisation en temps réel est celle employant des
techniques de commande adaptative extrémale. Dans Krstić et Wang (2000) [63] la
paternité de cette approche est attribuée à Maurice Leblanc, ingénieur et industriel
français du début du XXième siècle. Le problème traité dans Leblanc (1922) [81] est
celui de la commande des moteurs de locomotives par un courant alternatif. L’auteur
propose de faire varier de manière automatique une auto-induction (self-induction)
pour rendre maximale l’intensité d’un courant induit. Comme souligné par Ariyur
et Krstić (2003) [10], cette méthode de commande extrémale représente le premier
algorithme de commande adaptative.
Au cours des années soixante, les travaux relatifs à la commande adaptative se scin-
dèrent en deux axes de recherche : celui concernant le problème de la stabilisation

3.3 Problème de la commande adaptative 42
de la sortie d’un système dynamique et celui dont l’objectif est l’optimisation d’une
fonction de la sortie d’un système dynamique (Åström, 1995 [3]), (Sternby, 1980
[160]). Dans la première catégorie, la stabilité du schéma de commande adapta-
tive par modèle de référence ("M.R.A.C." pour Model Reference Adaptive Control)
est démontrée par Parks (1966) [137] en utilisant le formalisme des fonctions de
Lyapunov. La seconde catégorie n’a pu, quant à elle, faire l’objet d’une analyse de
stabilité rigoureuse que jusqu’à récemment avec la publication par Krstic et Wang
(2000) d’une preuve formelle de convergence du schéma de commande extrémale par
la méthode des perturbations.
Cette contribution majeure a renouvelé l’intérêt de la communauté automaticienne
pour cette classe de méthodes et stimulé la publication de nombreux travaux portant
autant sur la synthèse de méthodes originales que sur leurs applications.
3.3 Problème de la commande adaptative
Dans cette section, nous formulons le problème de la commande adaptative. Nous
le faisons en donnant le modèle du processus, les structures de régulation, et la façon
d’adapter les paramètres du régulateur.
3.3.1 Description du processus
Les processus seront principalement décrits par une seule entrée linéaire, et une
sortie unique. Dans le temps continu, le processus peut être représenté dans l’espace
d’état sous la forme :
dx
dt= Ax+Bu
y = Cx
(3.1)
La fonction de transfert du processus est représentée par :
Gp(s) =B(s)
A(s)=
b0sm + b1s
m−1 + ...bmsn + a1sn−1 + ...am
(3.2)
3.4 Classification des lois de commande adaptative 43
où s est le variable de la transformée de Laplace. Notez que A, B, et C sont
utilisés pour les matrices ainsi que les polynômes. En général, cela ne créera aucune
confusion. Dans les cas ambigus l’argument sera utilisé dans les polynômes.
3.3.2 Structures de régulation
Le processus est commandé par un contrôleur qui a des paramètres réglables. On
suppose qu’il existe une sorte de procédure de conception qui permet de déterminer
un dispositif de commande qui répond à des critères de conception, si le processus
et son environnement sont connus. Ceci est appelé le problème de conception sous-
jacente. Le problème de commande adaptative est alors de trouver un procédé de
réglage des paramètres du contrôleur lorsque les caractéristiques du processus et de
son environnement sont inconnus ou en évolution.
Dans la commande adaptative directe, les paramètres du régulateur sont modifiés
directement, sans que les caractéristiques du processus et de ses perturbations ne
soient déterminés. Dans les procédés adaptatifs indirects, le modèle de processus et,
éventuellement, les caractéristiques des perturbations sont d’abord déterminées. Les
paramètres du régulateur sont ajustés sur la base de ces informations.
La commande adaptative a été définie comme une commande avec des para-
mètres réglables et un mécanisme pour ajuster les paramètres. La construction d’un
dispositif de commande adaptatif comporte donc les étapes suivantes :
– Caractériser le comportement souhaité du système en boucle fermée.
– Déterminer une loi de commande appropriée avec des paramètres réglables.
– Trouver un mécanisme pour régler les paramètres.
– Mettre en œuvre la loi de commande.
3.4 Classification des lois de commande adaptative
Dans cette section, nous décrivons les types des systèmes adaptatifs : régula-
teurs auto-ajustable (RST), commande adaptative a modèle de référence (MRAC),
séquencement de gain (scheduling gain), gain d’anticipation (feedforward gain), com-
mande duale (Dual control) et commande extrémale adaptative (ESC).
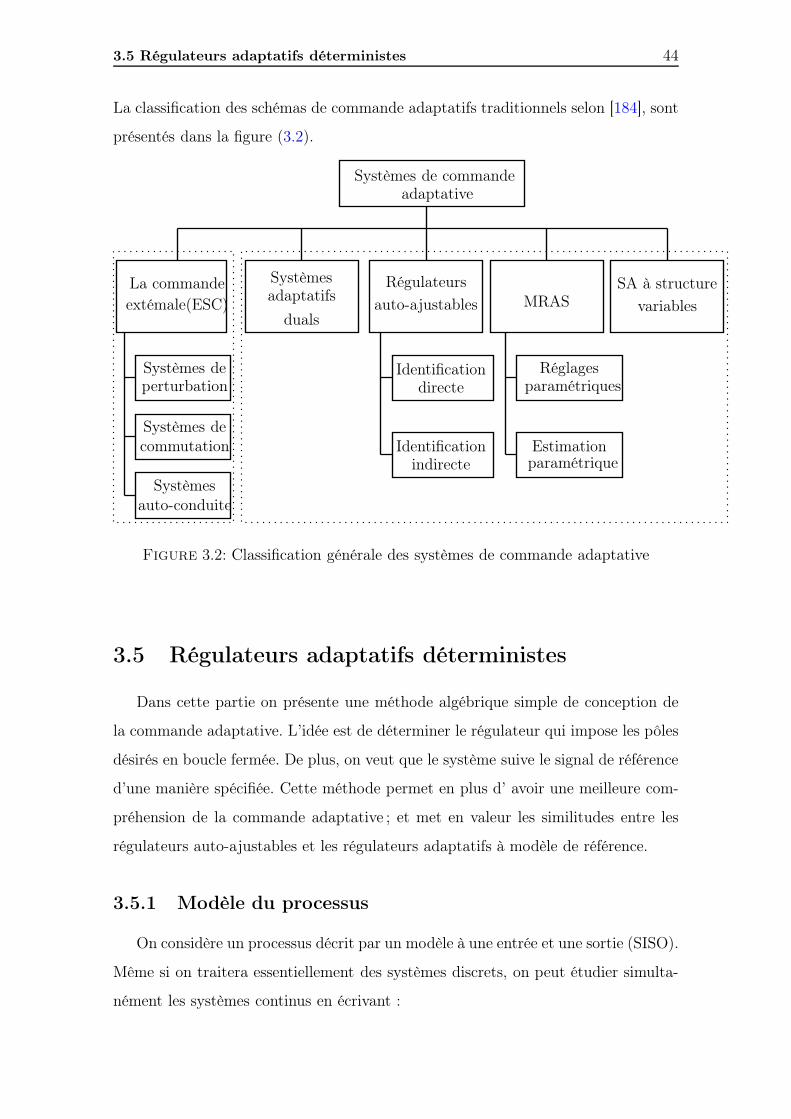
3.5 Régulateurs adaptatifs déterministes 44
La classification des schémas de commande adaptatifs traditionnels selon [184], sont
présentés dans la figure (3.2).
Systèmes de commandeadaptative
Régulateursauto-ajustables
Identificationdirecte
Identificationindirecte
MRAS
Réglagesparamétriques
Estimationparamétrique
SA à structurevariables
La commandeextémale(ESC)
Systèmes deperturbation
Systèmes decommutation
Systèmesauto-conduite
Systèmesadaptatifs
duals
Figure 3.2: Classification générale des systèmes de commande adaptative
3.5 Régulateurs adaptatifs déterministes
Dans cette partie on présente une méthode algébrique simple de conception de
la commande adaptative. L’idée est de déterminer le régulateur qui impose les pôles
désirés en boucle fermée. De plus, on veut que le système suive le signal de référence
d’une manière spécifiée. Cette méthode permet en plus d’ avoir une meilleure com-
préhension de la commande adaptative ; et met en valeur les similitudes entre les
régulateurs auto-ajustables et les régulateurs adaptatifs à modèle de référence.
3.5.1 Modèle du processus
On considère un processus décrit par un modèle à une entrée et une sortie (SISO).
Même si on traitera essentiellement des systèmes discrets, on peut étudier simulta-
nément les systèmes continus en écrivant :
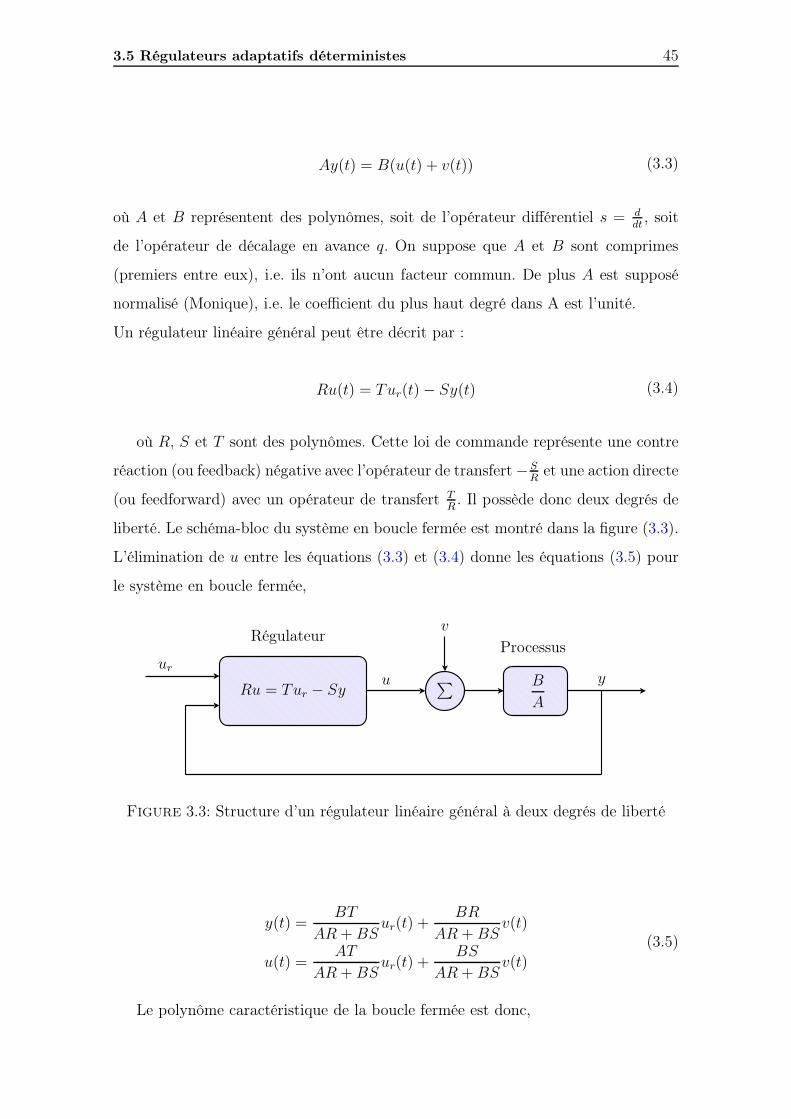
3.5 Régulateurs adaptatifs déterministes 45
Ay(t) = B(u(t) + v(t)) (3.3)
où A et B représentent des polynômes, soit de l’opérateur différentiel s = ddt
, soit
de l’opérateur de décalage en avance q. On suppose que A et B sont comprimes
(premiers entre eux), i.e. ils n’ont aucun facteur commun. De plus A est supposé
normalisé (Monique), i.e. le coefficient du plus haut degré dans A est l’unité.
Un régulateur linéaire général peut être décrit par :
Ru(t) = Tur(t)− Sy(t) (3.4)
où R, S et T sont des polynômes. Cette loi de commande représente une contre
réaction (ou feedback) négative avec l’opérateur de transfert −SR
et une action directe
(ou feedforward) avec un opérateur de transfert TR. Il possède donc deux degrés de
liberté. Le schéma-bloc du système en boucle fermée est montré dans la figure (3.3).
L’élimination de u entre les équations (3.3) et (3.4) donne les équations (3.5) pour
le système en boucle fermée,
Ru = Tur − SyB
A
∑ yuur
vRégulateur
Processus
Figure 3.3: Structure d’un régulateur linéaire général à deux degrés de liberté
y(t) =BT
AR +BSur(t) +
BR
AR +BSv(t)
u(t) =AT
AR +BSur(t) +
BS
AR +BSv(t)
(3.5)
Le polynôme caractéristique de la boucle fermée est donc,
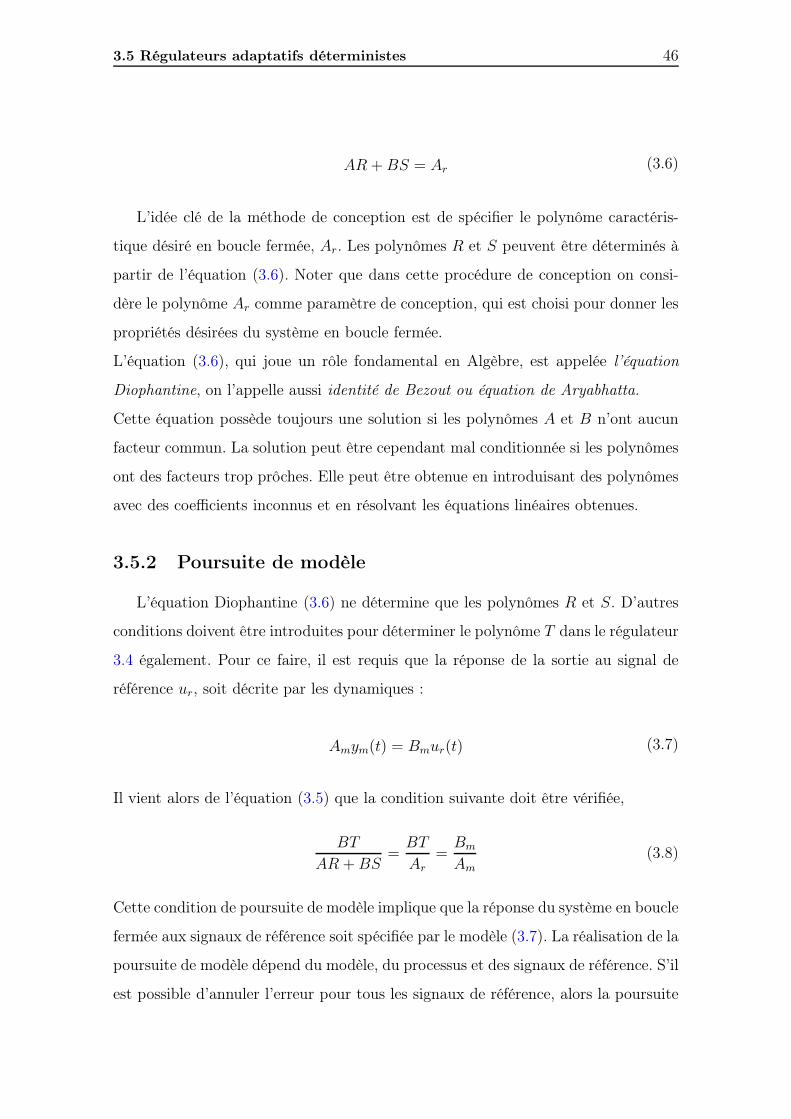
3.5 Régulateurs adaptatifs déterministes 46
AR +BS = Ar (3.6)
L’idée clé de la méthode de conception est de spécifier le polynôme caractéris-
tique désiré en boucle fermée, Ar. Les polynômes R et S peuvent être déterminés à
partir de l’équation (3.6). Noter que dans cette procédure de conception on consi-
dère le polynôme Ar comme paramètre de conception, qui est choisi pour donner les
propriétés désirées du système en boucle fermée.
L’équation (3.6), qui joue un rôle fondamental en Algèbre, est appelée l’équation
Diophantine, on l’appelle aussi identité de Bezout ou équation de Aryabhatta.
Cette équation possède toujours une solution si les polynômes A et B n’ont aucun
facteur commun. La solution peut être cependant mal conditionnée si les polynômes
ont des facteurs trop prôches. Elle peut être obtenue en introduisant des polynômes
avec des coefficients inconnus et en résolvant les équations linéaires obtenues.
3.5.2 Poursuite de modèle
L’équation Diophantine (3.6) ne détermine que les polynômes R et S. D’autres
conditions doivent être introduites pour déterminer le polynôme T dans le régulateur
3.4 également. Pour ce faire, il est requis que la réponse de la sortie au signal de
référence ur, soit décrite par les dynamiques :
Amym(t) = Bmur(t) (3.7)
Il vient alors de l’équation (3.5) que la condition suivante doit être vérifiée,
BT
AR +BS=
BT
Ar=
Bm
Am
(3.8)
Cette condition de poursuite de modèle implique que la réponse du système en boucle
fermée aux signaux de référence soit spécifiée par le modèle (3.7). La réalisation de la
poursuite de modèle dépend du modèle, du processus et des signaux de référence. S’il
est possible d’annuler l’erreur pour tous les signaux de référence, alors la poursuite

3.5 Régulateurs adaptatifs déterministes 47
parfaite du modèle est réalisée.
Maintenant, on discute des conséquences de la condition de la poursuite de mo-
dèle. L’équation (3.8) implique qu’il existe des simplifications des facteurs communs
de BT et Ar. On factorise le polynôme B comme suit,
B = B+B− (3.9)
Où B+ est un polynôme monique dont les racines sont stables et bien amorties
qu’on peut compenser par le régulateur B− correspond aux facteurs instables ou
faiblement amortis. Il s’en suit que B− doit être un facteur de Bm soit,
Bm = B−B′
m(3.10)
Puisque B+ est compensé, il doit être un facteur de Ar. De plus, il vient de l’équa-
tion(3.8) que Am doit aussi être un facteur de Ar. Le polynôme caractéristique de
la boucle fermée prend donc la forme :
Ar = A0AmB+ (3.11)
Puisque B+ est un facteur de B et Ar, il vient de l’équation (3.6) qu’il divise R
aussi, soit
R = R′
B+ (3.12)
et l’équation Diophantine (3.6) est réduite à :
AR′
= B−S = A0Am = A′
r(3.13)
En introduisant les équations (3.9), (3.10) et (3.11) dans l’équation (3.8) on obtient :
T = A0B′
m(3.14)

3.5 Régulateurs adaptatifs déterministes 48
3.5.3 Condition de causalité
Pour obtenir un régulateur causal dans le cas discret ou propre dans le cas
continu, on doit imposer les conditions suivantes :
degS 6 degR
degT 6 degR(3.15)
L’équation Diophantine (3.6) possède plusieurs solutions, car si R0 et S0 sont solu-
tions, alors il en est de même par les polynômes R et S sont solutions, tels que
R = R0 +QB
S = S0 −QA(3.16)
où Q est un polynôme arbitraire. Puisqu’il existe plusieurs solutions, on peut choisir
la solution qui donne le régulateur de plus petit degré. On l’appelle la solution du
degré minimal. Puisque degA > degB, le terme du plus haut degré sur le coté gauche
de l’équation (3.6) est AR. Soit
degR = degAr − degA (3.17)
A cause de l’équation (3.16) il y a toujours une solution telle que degS < degA = n.
On peut donc toujours trouver une solution dans laquelle le degré de S est au
plus égal à degA − 1. Ceci est appelé la solution du degré minimal de l’équation
Diophantine. La condition degS ≤ degR implique alors que
degAr = 2degA− 1 (3.18)
Il vient de l’équation (3.14) que la condition degT ≤ degR implique que
degAm − degB′
m = degA− degB+ (3.19)
En ajoutant degB− aux deux cotés, on trouve que c’est équivalent à degAmdegBm ≥d0 où d0 est le degré relatif du processus.
Cela veut dire dans le cas discret que le temps de retard du modèle doit être au

3.5 Régulateurs adaptatifs déterministes 49
moins égal au temps de retard du processus, ce qui est une condition très naturelle.
En résumé, les conditions de causalité (3.16) peuvent être réécrite ainsi
degAr = 2degA− 1
degAm − dzgBm ≥ degA− dzgB = d0
(3.20)
Il est naturel de choisir une solution dans laquelle le régulateur a le plus petit degré
possible. Dans le cas discret il est aussi raisonnable d’exiger qu’il n’y ait pas de
retard supplémentaire dans le régulateur. Ceci implique que les polynômes R, S et
T doivent avoir le même degré. La procédure de conception obtenue appelée aussi
placement de pôles de degré minimal peut être résumée dans l’algorithme suivant :
Algorithme 1 Placement de pôles de degré minimal
– Données : Polynômes A, B
– Spécifications : Polynômes Am, Bm et Ao
– Conditions de compatibilité :
degAm = degA
degBm = degB
degA0 = degA− degB+ − 1
Bm = B−B′
m
– Etape 1 : Factoriser B tel que B = B+B−, où B+ est monique
– Etape 2 : Trouver une solution R′ et S avec degS < degA à partir de
AR′ +B−S = A0Am
– Etape 3 : partir de R = R′B+ et T = A0B′
m, calculer le signal de commande
en utilisant la loi de commande
Ru = Tur − Sy

3.6 Commande adaptative auto-ajustable 50
3.6 Commande adaptative auto-ajustable
3.6.1 Introduction
Dans le contexte du réglage automatique auto-ajustable (STR), les méthodes
indirectes sont souvent appelées commande auto-ajustable explicite, parce que les
paramètres du processus sont estimés. Par contre, le réglage direct des paramètres
du contrôleur est appelé commande auto-ajustable implicite. Dans les premières
communications sur la commande adaptative directe, cette technique fut souvent
mentionnée comme un contrôleur adaptatif sans identification. Il est commode de
diviser les algorithmes auto-ajustables en direct et indirect, mais cette distinction
ne devrait pas être surestimée. L’idée de base dans les deux types d’algorithmes est
d’identifier certains paramètres liés au processus et/ou les spécifications du système
en boucle fermée.
3.6.2 Commande auto-ajustable indirecte
Estimation
Plusieurs méthodes récursives d’estimation peuvent être utilisées pour estimer
les coefficients des polynômes A et B. Dans la suite, nous allons utiliser l’Estimateur
des moindres carrés récursifs. Le modèle du processus peut être décrit explicitement
comme suit en omettant le bruit v(t) pour simplifier,
y(t) = −a1y(t−1)−a2y(t−2)− ...−any(t−n)+ b0u(t−d0)+ ...+ bmu(t−d0−m).
Noter que le degré du système est max(n; d0+m). Le modèle est linéaire par rapport
aux paramètres et peut être écrit, y(t) = ϕT (t−1)θ, où θT = (a1, a2, ..., an, b0, ..., bm),
et ϕT (t− 1) = (−y(t− 1)...− y(t− n)u(t− d0)...u(t− d0 −m)).
L’estimateur des moindres carrés avec oubli exponentiel est donné par :
θ(t) = θ(t− 1) +K(t)ǫ(t)
ǫ(t) = y(t)− ϕT (t− 1)θ(t− 1)
K(t) = P (t− 1)ϕ(t− 1)(λ+ ϕT (t− 1)P (t− 1)ϕ(t− 1)−1)
P (t) = I −K(t)ϕ(t− 1)P (t− 1)/λ
(3.21)

3.6 Commande adaptative auto-ajustable 51
Si le signal d’entrée du processus est suffisamment excitant et la structure du
modèle estimé est compatible avec le processus, les estimations vont converger à
leurs vraies valeurs. Cela prend max(n;m + d0) périodes d’échantillonnage avant
que le vecteur de régression ne soit défini. Dans le cas déterministe cela prend au
moins n+m+1 autres périodes pour déterminer les n+m+1 paramètres du modèle,
en supposant que l’entrée du processus est suffisamment et continument excitante.
Cela donc prend au moins n +m + 1 +max(n;m + d0) périodes d’échantillonnage
pour que l’algorithme converge.
En combinant l’estimateur des moindres carrés récursifs (MCR) donné par les
équations (3.21) avec la méthode de placement de pôles de degré minimal pour
la conception du régulateur donnée dans l’algorithme 1, on obtient le régulateur
auto-ajustable suivant :
Algorithme 2 Un régulateur auto-ajustable indirecte
– Données : Spécifications sous forme des polynômes Am, Bm et A0.
– Étape 1 : Estimer les coefficients des polynômes A et B dans l’équation (3.3)
en utilisant la méthode des moindres carrés récursifs donnés par (3.21).
– Étape 2 : Appliquer la méthode de placement de pôle à degré minimal donné
par l’algorithme 1 où les polynômes A et B sont les estimations obtenues dans
l’étape 1. Les polynômes R, S et T de la loi de commande sont obtenus.
– Étape 3 : Calculer la variable de commande à partir de l’équation
Ru(t) = Tur(t)− Sy(t)
Répéter les étapes 1, 2 et 3 à chaque période d’échantillonnage. A noter qu’il
existe certaines variantes de l’algorithme qui dépendent de la compensation
des zéros du processus.
3.6.3 Commande auto-ajustable directe
L’avantage des algorithmes directs des régulateurs auto-ajustables par rapport
aux algorithmes indirects est que ces derniers demandent plus de calculs et sont
parfois mal conditionnés par certaines valeurs des paramètres. Dans le cas des régu-
lateurs directs, les calculs de conception sont simplifiés ou carrément éliminés.
3.7 Commande adaptative a modèle de référence 52
L’idée clé de ces régulateurs directs est d’utiliser les équations de conception pour
reparamètriser le modèle en terme des paramètres du régulateur. Cette reparamè-
trisation est aussi une clé pour la compréhension de la relation entre les MRAS et
les régulateurs auto-ajustables.
Considérons un processus décrit par l’équation (3.3) avec v = 0 soit,
Ay(t) = Bu(t) (3.22)
et la réponse désirée donnée par l’équation (3.7),
Amym(t) = Bmur(t) (3.23)
Le modèle du processus va être maintenant reparamètrisé en termes des para-
mètres du régulateur. Pour ce faire, considérons l’équation Diophantine,
A0Am = AR′ +B−S (3.24)
En l’appliquant à y(t) on obtient :
A0Amy(t) = R′Ay(t) +B−Sy(t) = R′Bu(t) +B−Sy(t) (3.25)
Or, on a :
R′B +R′B+B− = RB− (3.26)
3.7 Commande adaptative a modèle de référence
3.7.1 Introduction
L’idée générale derrière la commande adaptative à modèle de référence (MRAC,
également connu comme un système adaptatif à modèle de référence ou MRAS) est
de créer un contrôleur en boucle fermée avec des paramètres qui peuvent être mis à
jour pour modifier la réponse du système. La sortie du système est comparée à une
réponse souhaitée à partir d’un modèle de référence. Les paramètres de commande
sont mise à jour sur la base de cette erreur.
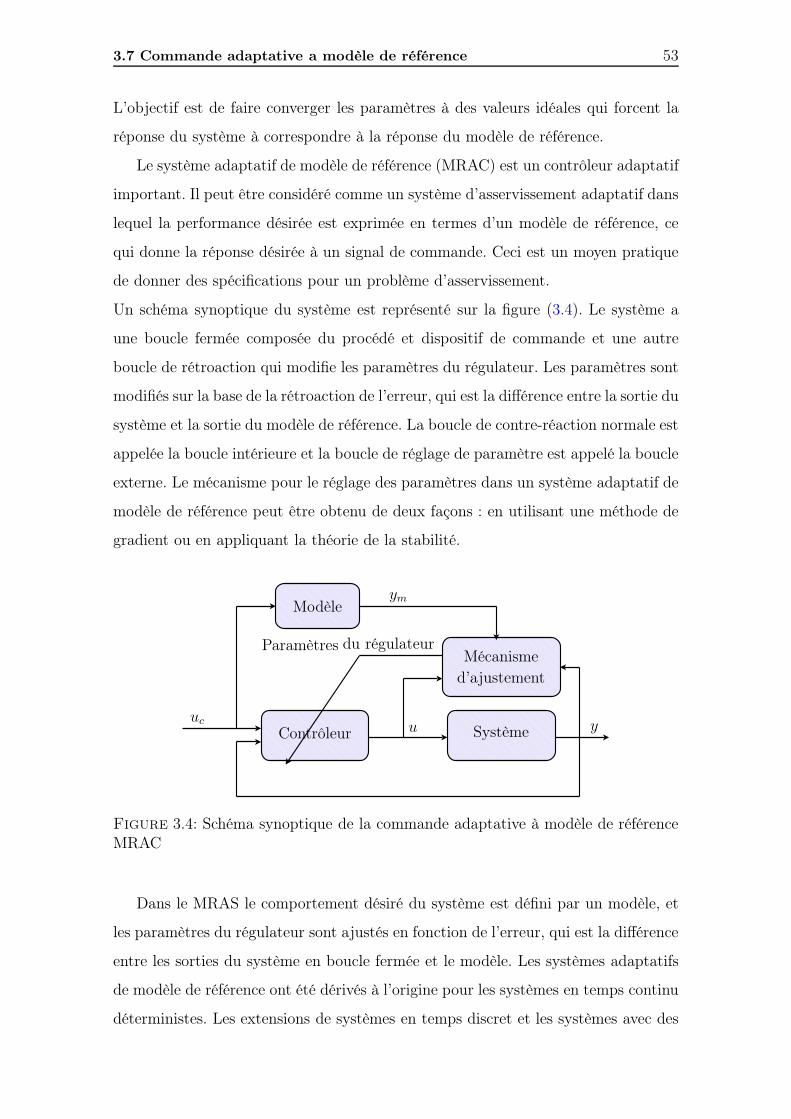
3.7 Commande adaptative a modèle de référence 53
L’objectif est de faire converger les paramètres à des valeurs idéales qui forcent la
réponse du système à correspondre à la réponse du modèle de référence.
Le système adaptatif de modèle de référence (MRAC) est un contrôleur adaptatif
important. Il peut être considéré comme un système d’asservissement adaptatif dans
lequel la performance désirée est exprimée en termes d’un modèle de référence, ce
qui donne la réponse désirée à un signal de commande. Ceci est un moyen pratique
de donner des spécifications pour un problème d’asservissement.
Un schéma synoptique du système est représenté sur la figure (3.4). Le système a
une boucle fermée composée du procédé et dispositif de commande et une autre
boucle de rétroaction qui modifie les paramètres du régulateur. Les paramètres sont
modifiés sur la base de la rétroaction de l’erreur, qui est la différence entre la sortie du
système et la sortie du modèle de référence. La boucle de contre-réaction normale est
appelée la boucle intérieure et la boucle de réglage de paramètre est appelé la boucle
externe. Le mécanisme pour le réglage des paramètres dans un système adaptatif de
modèle de référence peut être obtenu de deux façons : en utilisant une méthode de
gradient ou en appliquant la théorie de la stabilité.
Contrôleur Système
Mécanismed’ajustement
Modèle
uc
ym
y
Paramètres du régulateur
u
Figure 3.4: Schéma synoptique de la commande adaptative à modèle de référenceMRAC
Dans le MRAS le comportement désiré du système est défini par un modèle, et
les paramètres du régulateur sont ajustés en fonction de l’erreur, qui est la différence
entre les sorties du système en boucle fermée et le modèle. Les systèmes adaptatifs
de modèle de référence ont été dérivés à l’origine pour les systèmes en temps continu
déterministes. Les extensions de systèmes en temps discret et les systèmes avec des

3.7 Commande adaptative a modèle de référence 54
perturbations été données plus tard.
3.7.2 Règle de MIT
La règle MIT est l’approche originale du contrôle adaptatif de modèle de réfé-
rence. Le nom est dérivé du fait qu’il a été développé au Laboratoire d’instrumen-
tation (maintenant Laboratoire de Draper) à l’université de M.I.T.(Massachusetts
Institute of Technology). Pour présenter la règle MIT, nous allons considérer un
système en boucle fermée dans laquelle le contrôleur a un paramètre θ réglable.
La réponse en boucle fermée désirée est spécifiée par un modèle dont la sortie est
ym. Soit e l’erreur entre la sortie y du système en boucle fermée et la sortie ym,
du modèle. Une possibilité consiste à ajuster les paramètres de telle sorte que la
fonction de coût soit J minimisée. Pour rendre J petit, il est raisonnable de modifier
les paramètres dans la direction du gradient négatif de J . La commande MRAC
commence par définir l’erreur de suivi, e. Ceci est simplement la différence entre la
sortie du processus et la sortie du modèle de référence :
e = y − ym (3.27)
A partir de cette erreur une fonction de coût (J(θ)) peut être formulée. J est donnée
en fonction de θ, où θ est le paramètre qui sera adapté à l’intérieur de contrôleur. Le
choix de cette fonction de coût permettra ensuite de déterminer comment actualiser
les paramètres. La fonction de coût est :
J(θ) =e2(θ)
2(3.28)
Pour savoir comment mettre à jour le paramètre θ, une équation doit être formée
pour le changement de θ. Si l’objectif est de minimiser ce coût lié à l’erreur, on
doit déplacer le gradient J dans le sens négatif. Ce changement de J est supposée
être proportionnel à la variation de θ. Ainsi, le dérivée de θ est égale à la variation
négative de J . Le résultat de la fonction de coût est représenté par :
dθ
dt= −γ
∂J
∂θ= −γe
∂e
∂θ(3.29)

3.7 Commande adaptative a modèle de référence 55
Cette relation entre le changement de θ et la fonction de coût est connu comme la
règle MIT. La règle MIT est au cœur de la nature adaptative du contrôleur. Notez le
terme souligné dans l’équation ci-dessus intitulée "dérivée de sensibilité". Ce terme
est la dérivée partielle de l’erreur en ce qui concerne θ.
La dérivé partielle dθdt
, qui est appelé la dérivée de la sensibilité du système,
indique comment l’erreur est influencé par le paramètre réglable. Si on suppose que
les modifications des paramètres sont plus lent que les autres variables du système,
alors la dérivée dθdt
peut être évaluée dans l’hypothèse où θ est constant. Il existe de
nombreuses alternatives pour la fonction de coût donnée par l’équation (3.28). Si on
choisit :
J(θ) =|e| (3.30)
La méthode du gradient donne,
dθ
dt= −γ(
∂e
∂θ)sign(e) (3.31)
Le premier MRAS qui fût implémenté était basé sur cette formule. Cependant il
existe beaucoup d’autres possibilités, par exemple
dθ
dt= −γsign(e)(
∂e
∂θ)sign(e) (3.32)
qui est appelée l’algorithme du sign-sign. Une version discrète de cet algorithme
est utilisée en télécommunications, dans laquelle une implémentation simple et des
calculs rapides sont requis.
3.7.3 Adaptation du gain d’anticipation
La constante k pour ce système est inconnue. Toutefois, un modèle de référence
peut être formée avec une valeur de consigne de k, et par l’adaptation d’un gain
à action directe, la réponse du système peut être réalisée pour correspondre à ce
modèle. Le modèle de référence est donc choisi comme le système multiplie par une
constante ko souhaitée. La figure (3.5) représente le problème de réglage du gain
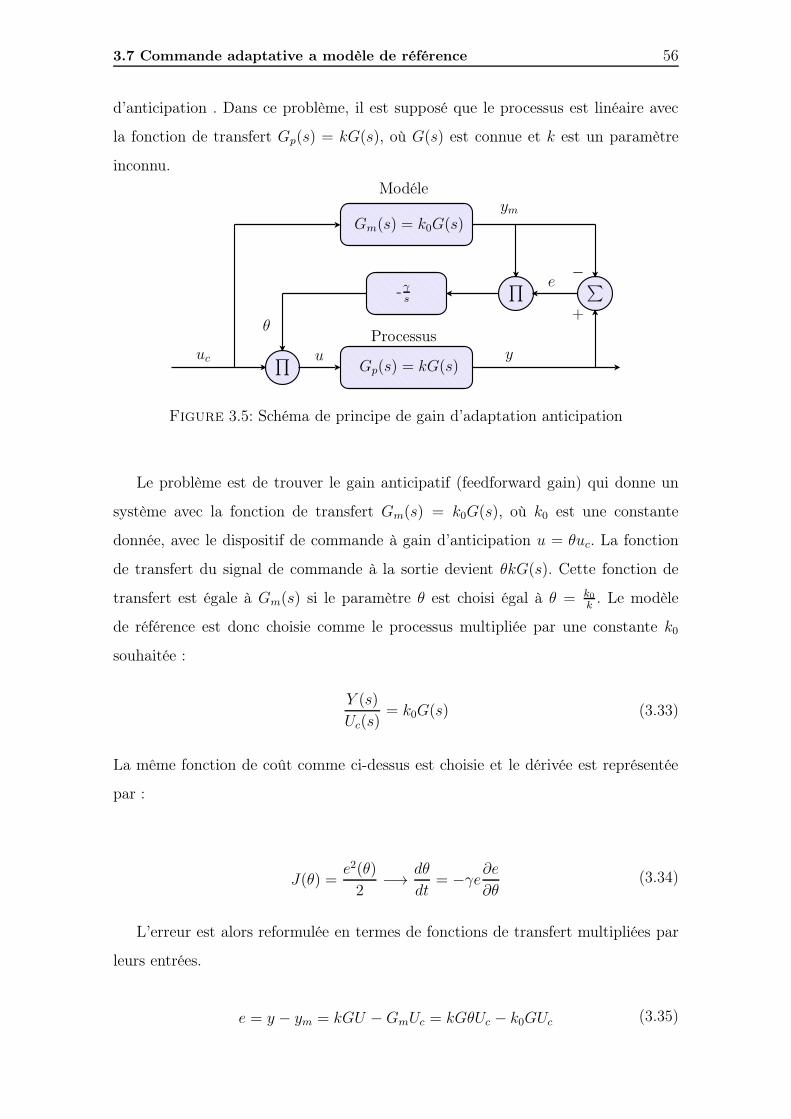
3.7 Commande adaptative a modèle de référence 56
d’anticipation . Dans ce problème, il est supposé que le processus est linéaire avec
la fonction de transfert Gp(s) = kG(s), où G(s) est connue et k est un paramètre
inconnu.
∏
∑∏
Gp(s) = kG(s)
-γs
Gm(s) = k0G(s)
uc y
e
Modéle
θ
u
+
−
ym
Processus
Figure 3.5: Schéma de principe de gain d’adaptation anticipation
Le problème est de trouver le gain anticipatif (feedforward gain) qui donne un
système avec la fonction de transfert Gm(s) = k0G(s), où k0 est une constante
donnée, avec le dispositif de commande à gain d’anticipation u = θuc. La fonction
de transfert du signal de commande à la sortie devient θkG(s). Cette fonction de
transfert est égale à Gm(s) si le paramètre θ est choisi égal à θ = k0k. Le modèle
de référence est donc choisie comme le processus multipliée par une constante k0
souhaitée :
Y (s)
Uc(s)= k0G(s) (3.33)
La même fonction de coût comme ci-dessus est choisie et le dérivée est représentée
par :
J(θ) =e2(θ)
2−→ dθ
dt= −γe
∂e
∂θ(3.34)
L’erreur est alors reformulée en termes de fonctions de transfert multipliées par
leurs entrées.
e = y − ym = kGU −GmUc = kGθUc − k0GUc (3.35)

3.8 Commande adaptative extrémale 57
Comme on voit, cette expression de l’erreur contient le paramètre θ, qui doit
être mis à jour. Pour déterminer la règle de mise à jour, le dérivée de sensibilité est
calculée et mise à jour en termes de la sortie du modèle :
∂e
∂θ= kGUc =
k
k0ym (3.36)
Enfin, la règle MIT est appliquée pour donner une expression à la mise à jour de
θ. Les constantes k et k0 sont combinées en γ.
dθ
dt= −γ
k
k0yme = −γyme (3.37)
Remarque : Il est important de noter que la règle de MIT ne garantit pas
la convergence et la stabilité du système, et la commande MRAC basée
sur la règle MIT est très sensible aux amplitudes des signaux. En général,
le réglage de la valeur de γ est essentiel pour le taux d’adaptation et de
la stabilité du contrôleur .
3.8 Commande adaptative extrémale
3.8.1 Introduction
L’optimisation en temps réel (RO) a pour objectif de faire fonctionner un sys-
tème de façon à optimiser un critère de performance en tout temps et ce, bien que
des changements des conditions fonctionnelles et les perturbations internes et ex-
ternes peuvent apparaître. Pour ce faire, les mesures sont utilisées afin d’observer
ces changements et de répondre ensuite pour maintenir le système à son point de
fonctionnement optimal. La commande extrémale est une classe de méthodes RO
ou le gradient estimé doit converger vers 0.
Les différentes approches de la commande extrémale se classent par la formule du
gradient. Dans la majorité de ces méthodes, une perturbation temporelle périodique
connue est ajoutée à l’entrée du système et une isolation de l’échelle du temps est
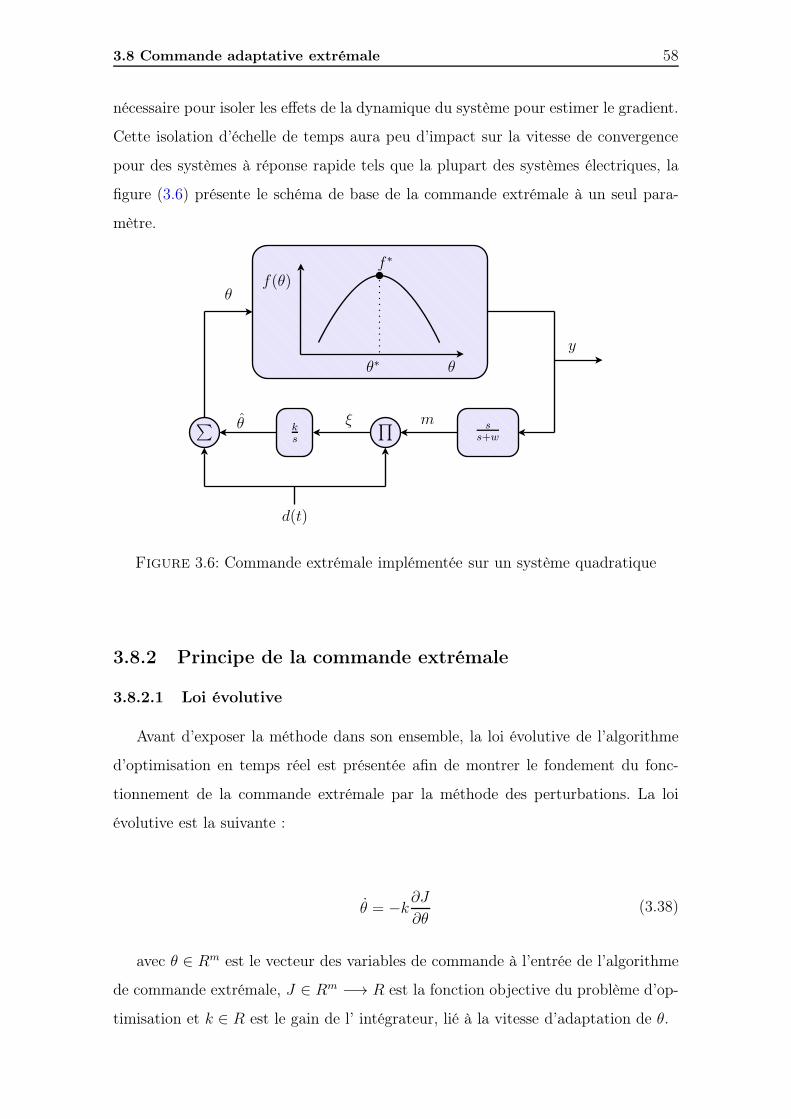
3.8 Commande adaptative extrémale 58
nécessaire pour isoler les effets de la dynamique du système pour estimer le gradient.
Cette isolation d’échelle de temps aura peu d’impact sur la vitesse de convergence
pour des systèmes à réponse rapide tels que la plupart des systèmes électriques, la
figure (3.6) présente le schéma de base de la commande extrémale à un seul para-
mètre.
∑
ks
∏ ss+w
mξθ
d(t)
θθ∗
f(θ)f ∗
y
θ
Figure 3.6: Commande extrémale implémentée sur un système quadratique
3.8.2 Principe de la commande extrémale
3.8.2.1 Loi évolutive
Avant d’exposer la méthode dans son ensemble, la loi évolutive de l’algorithme
d’optimisation en temps réel est présentée afin de montrer le fondement du fonc-
tionnement de la commande extrémale par la méthode des perturbations. La loi
évolutive est la suivante :
θ = −k∂J
∂θ(3.38)
avec θ ∈ Rm est le vecteur des variables de commande à l’entrée de l’algorithme
de commande extrémale, J ∈ Rm −→ R est la fonction objective du problème d’op-
timisation et k ∈ R est le gain de l’ intégrateur, lié à la vitesse d’adaptation de θ.

3.8 Commande adaptative extrémale 59
Elle a été initialement introduite comme un problème de commande (Leblanc 1922)
dont la particularité est que le point de consigne pour l’opération du procédé est à
priori inconnu et doit être déterminé par l’algorithme de contrôle. L’idée est d’ajuster
itérativement l’entrée θ du système dans le but d’orienter la sortie vers sa valeur opti-
male. Celle-ci peut être constituée artificiellement par le calcul d’un critère (fonction
objective), vers une productivité maximale par exemple.
3.8.2.2 Fonctionnement de l’algorithme (cas simplifié)
Tout d’abord, une onde d’excitation exogène d(t) perturbe le système afin de cal-
culer numériquement le gradient, (Krstic et Wang 2000) [63]. La variable manipulée
est représentée par :
θ = θ + d(t) (3.39)
avec θ la valeur « moyenne » de la variable de commande à l’entrée de l’algorithme
de commande extrémale (sortie de l’intégrateur utilisé dans l’ algorithme). Le signal
d(t) doit répondre aux critères suivants (Tan et al. 2008) [168] :
∫ T
0
d(t)dt = 0
Pd =1
T
∫ T
0
d2(t)dt > 0
(3.40)
avec Pd puissance du signal. Le rôle de d(t) est de moduler et démoduler le signal, ce
qui permet d’extraire l’information relative au gradient. Dans la littérature (Krstic
1998 [62] ; Wang et al. 1999 [186] ; Chioua et al 2008 [30] ; Deschênes 2012 [35]), les
moyens les plus communs pour la démodulation du signal consistent à multiplier
m(t) par la même onde de perturbation d(t) utilisée pour exciter le système :
d(t) = asin(ωt) (3.41)
avec ω la fréquence angulaire. L’onde d’excitation peut aussi être générée par le
3.8 Commande adaptative extrémale 60
contrôle de mode glissement (sliding mode control) ( Fu et Ozgüner [133] ; Yaodong
et al [194]). La sortie y est donnée par :
y = J(x, θ) (3.42)
avec x ∈ Rn le vecteur des variables d ’état, θ ∈ Rm le vecteur des variables
manipulées et J(x, θ), la fonction objective avec un extremum. Afin de simplifier
l’analyse de la convergence, quelques simplifications sont apportées à y = J(x, θ) :
(1) le vecteur des variables manipulées devient une seule variable manipulée e et (2)
le vecteur x est retiré :
y = J(x, θ) =⇒ f(tθ) (3.43)
On s’attend à ce que f(θ) ait un extremum à θ = θ∗. Alors θ∗ est la valeur opti-
male recherchée pour la variable manipulée à l’entrée de l’algorithme de commande
extrémale.
3.8.2.3 Indicateurs de performances
Ces derniers quantifient les différents aspects de la performance de la commande
extrémale :
– Ts le temps de convergence de l’algorithme,
– D le domaine de convergence (plage de valeurs initiales pour l’entrée permet-
tant à l’ algorithme de converger vers l’optimum),
– v l’écart net maximal à l’optimum (sur une période) en régime permanent sur
la sortie :
|y(t)− y ∗ | 6 v (3.44)
Un petit Ts, un grand D et un petit v sont désirés (Tan et al. 2008). En effet :
– un petit Ts (temps de convergence, ou en anglais « settling time ») : la sortie
de la fonction objective atteint l’optimum plus rapidement,
3.9 Conclusion 61
– un grand D (la plage de valeurs de l’entrée, au temps initial) : augmente la
probabilité que la sortie de la fonction objective atteigne l’optimum,
– un petit v ( l’écart net maximal à l’optimum sur une période) : la variation de
la sortie en régime permanent est plus près de l’optimum.
De ce qui peut être déterminé par l’utilisateur, le résultat de performance de la
commande extrémale dépend notamment des caractéristiques de l’onde d’excitation
(fréquence, amplitude et puissance normalisée), du gain intégrateur (Tan et al. 2008)
et des filtres (passe-haut et passe-bas) utilisés. Ces éléments peuvent être choisis par
l’utilisateur.
Réglages des paramètres de la commande extrémale par la méthode des perturba-
tions :
– types d’onde d’excitation exogène d(t) (notamment sinusoïde et carrée),
– amplitude de l’onde d’excitation exogène a ,
– fréquence de l’onde d’excitation exogène ω,
3.9 Conclusion
Le but de ce chapitre était d’introduire la notion de commande adaptative, pour
décrire certains systèmes adaptatifs, et d’indiquer pourquoi l’adaptation est utile. Un
contrôleur adaptatif a été défini comme une unité de commande avec des paramètres
réglables et un mécanisme pour ajuster les paramètres.
Les principaux éléments sont les mécanismes d’ajustement des paramètres. Quelques
façons de le faire ont été abordés : les régulateur adaptatifs, la commande adaptative
auto-ajustable, la commande adaptative a modèle de référence, et la commande
adaptative extrémale. Ceci nous a permis de présenter les connaissances nécessaires
pour la conception des divers systèmes de commande adaptative.
Chapitre 4Commande extrémale d’ordre fractionnaire
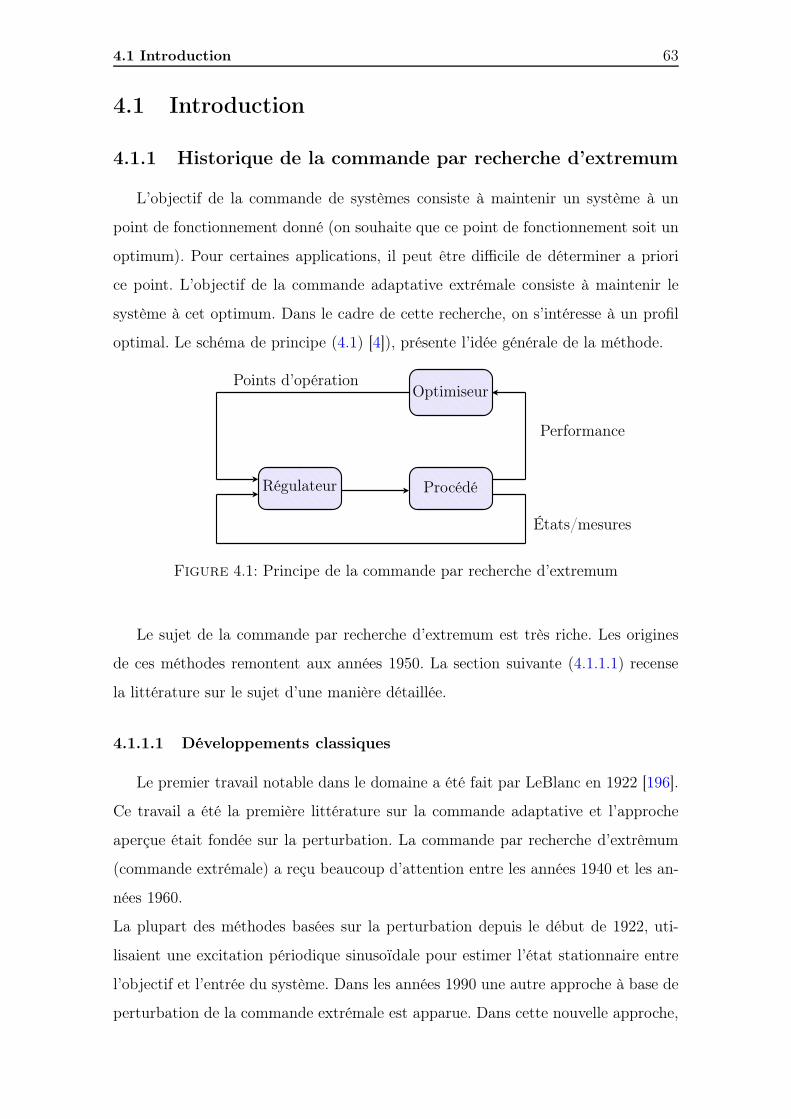
4.1 Introduction 63
4.1 Introduction
4.1.1 Historique de la commande par recherche d’extremum
L’objectif de la commande de systèmes consiste à maintenir un système à un
point de fonctionnement donné (on souhaite que ce point de fonctionnement soit un
optimum). Pour certaines applications, il peut être difficile de déterminer a priori
ce point. L’objectif de la commande adaptative extrémale consiste à maintenir le
système à cet optimum. Dans le cadre de cette recherche, on s’intéresse à un profil
optimal. Le schéma de principe (4.1) [4]), présente l’idée générale de la méthode.
Optimiseur
ProcédéRégulateur
Points d’opération
Performance
États/mesures
Figure 4.1: Principe de la commande par recherche d’extremum
Le sujet de la commande par recherche d’extremum est très riche. Les origines
de ces méthodes remontent aux années 1950. La section suivante (4.1.1.1) recense
la littérature sur le sujet d’une manière détaillée.
4.1.1.1 Développements classiques
Le premier travail notable dans le domaine a été fait par LeBlanc en 1922 [196].
Ce travail a été la première littérature sur la commande adaptative et l’approche
aperçue était fondée sur la perturbation. La commande par recherche d’extrêmum
(commande extrémale) a reçu beaucoup d’attention entre les années 1940 et les an-
nées 1960.
La plupart des méthodes basées sur la perturbation depuis le début de 1922, uti-
lisaient une excitation périodique sinusoïdale pour estimer l’état stationnaire entre
l’objectif et l’entrée du système. Dans les années 1990 une autre approche à base de
perturbation de la commande extrémale est apparue. Dans cette nouvelle approche,
4.1 Introduction 64
un signal aléatoire stochastique peut être utilisé à la place de cette perturbation.
Toujours dans les années 1990, une nouvelle approche appelée commande ex-
trémale à mode glissant a été présentée [60]. Le concept de base est de forcer la
fonction objective à suivre une augmentation/diminution de la fonction temps via
la commande par mode glissant [196]. Après les années 1990 cette approche est de-
venue populaire et avec plusieurs autres publications sur ce sujet [52] et plus tard,
une analyse de la stabilité a été présentée [136].
L’évolution de la commande extrémale peut être divisée en deux grandes périodes :
de 1922 à 2000 et de 2000 jusqu’à maintenant. En d’autres termes, les périodes avant
et après l’article de Wang et Krstic [185] qui a été l’étincelle qui fit redémarrer la
théorie de commande extrémale.
4.1.1.2 Développements récents
Après 2009, une nouvelle approche de la commande extrémale basée sur la mé-
thode d’optimisation de Newton est développée. Cette approche est appelée la com-
mande extrémale (ESC : Extremum seeking control). Dans cette méthode, la dérivée
seconde est nécessaire pour une optimisation des paramètres et la matrice Hessienne
dans le cas de plusieurs paramètres. L’approche de Newton pour le cas d’un para-
mètre a été présentée dans [95, 94, 191]. La dérivée seconde a été calculée en utilisant
un estimateur du gradient, qui fournit la dérivée première et seconde de l’objectif
par rapport à la variable manipulée. Une analyse de la stabilité a également été
présentée.
Une méthode multi-paramètres basée sur l’approche de Newton a été présentée dans
[49]. Dans ce travail, le gradient est estimé en utilisant l’approche du filtrage clas-
sique (HPF, multiplicateur, et LPF). Le signal pour la multiplication est une forme
pondérée du signal de perturbation d’origine comme dans le cas classique tandis
que la matrice Hessienne est calculée à l’aide de filtre passe-bande, mais le signal
multiplication est soigneusement sélectionné pour éliminer les autres dérivées indé-
sirables. L’inverse de la matrice Hessienne est calculé en utilisant une équation de
Riccati. Ce travail comprenait aussi une analyse de la stabilité.
Dans la littérature de nombreuses applications peuvent être trouvées, par exemple
4.1 Introduction 65
la commande du système de freinage (ABS), les véhicules autonomes et les robots
mobiles, l’optimisation du rendement en Bio-traitement, etc... Une application in-
téressante de contrôle orienté, est l’ajustement automatique du PID [59, 58]. Dans
ce travail, les paramètres du régulateur PID sont ajustés en utilisant la méthode
standard des perturbations. L’objectif du régulateur par recherche d’extremum est
de minimiser la fonction de coût de l’erreur quadratique intégrée (ISE) :
y =1
T − t0
∫ T
t0
e2(ues, t)dt (4.1)
où e représente l’erreur entre l’entrée de référence et la sortie du système, et ues
représente l’ajustement des paramètres du régulation PID ([K , Ti, Td]).
Durant les années 1950 et 1960 (bien avant l’émergence de la théorie de la com-
mande adaptative extrémale), les méthodes ESC étaient très populaires parmi les
commandes adaptative offrirent des résultats perceptibles dans des nombreux pro-
blèmes pratiques. Cet intérêt a été rapidement abandonné car aucune analyse précise
de la stabilité ne pouvait être trouvée, malgré tous les efforts dans cette époque.
Plusieurs années plus tard, Krstic et Wang [63] ont fourni la première analyse de
stabilité rigoureuse pour une classe de problèmes de contrôle d’ESC par la théo-
rie de perturbation singulière et la méthode de pondération. Après leur article, la
communauté automatique a montré un intérêt renouvelé dans l’ESC. Comme on
peut le constater dans la Figure 4.2, le nombre de publications sur l’ESC connait
un rebond après l’année 2000. Plus d’informations sur la méthode de commande
extrémale peuvent être trouvés dans le récent article [167].
4.1.2 Formulation du problème d’optimisation
Considérons un procédé opérant avec des valeurs d’entrées u(t) pour lequel cer-
taines mesures Y (t) sont disponibles. Si le procédé répond instantanément aux va-
riations d’entrée, il peut être considéré comme statique et son comportement peut
alors être décrit par la relation :
Y (t) = h(u(t)) (4.2)
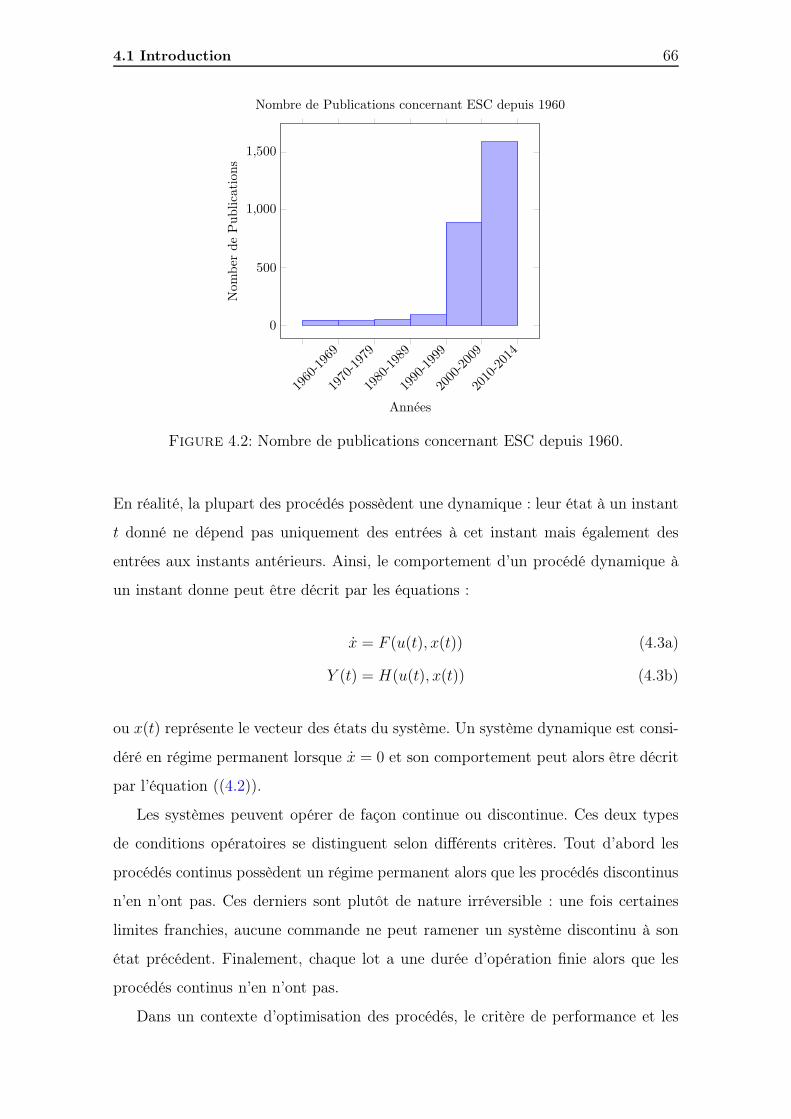
4.1 Introduction 66
1960-1969
1970-1979
1980-1989
1990-1999
2000-2009
2010-2014
0
500
1,000
1,500
Annees
Nomber
dePublications
Nombre de Publications concernant ESC depuis 1960
Figure 4.2: Nombre de publications concernant ESC depuis 1960.
En réalité, la plupart des procédés possèdent une dynamique : leur état à un instant
t donné ne dépend pas uniquement des entrées à cet instant mais également des
entrées aux instants antérieurs. Ainsi, le comportement d’un procédé dynamique à
un instant donne peut être décrit par les équations :
x = F (u(t), x(t)) (4.3a)
Y (t) = H(u(t), x(t)) (4.3b)
ou x(t) représente le vecteur des états du système. Un système dynamique est consi-
déré en régime permanent lorsque x = 0 et son comportement peut alors être décrit
par l’équation ((4.2)).
Les systèmes peuvent opérer de façon continue ou discontinue. Ces deux types
de conditions opératoires se distinguent selon différents critères. Tout d’abord les
procédés continus possèdent un régime permanent alors que les procédés discontinus
n’en n’ont pas. Ces derniers sont plutôt de nature irréversible : une fois certaines
limites franchies, aucune commande ne peut ramener un système discontinu à son
état précédent. Finalement, chaque lot a une durée d’opération finie alors que les
procédés continus n’en n’ont pas.
Dans un contexte d’optimisation des procédés, le critère de performance et les

4.1 Introduction 67
contraintes des procédés en lots peuvent être composés d’une partie associée aux
trajectoires et d’une partie associée au temps final du lot. Les problèmes d’optimi-
sation de procédés discontinus sont des problèmes de nature dynamique pouvant se
formuler comme suit :
minu
J = Φt(x(tf ), tf) +
∫ tf
t0
(Φt(u(t), x(t), t) (4.4)
ou tf est le temps final, et J le critère de performance devant être minimisé.
Pour les procédés continus, comme le temps final n’est pas défini, le problème
d’optimisation est plus souvent considéré en régime permanent : le critère de per-
formance est fonction des valeurs des différentes variables en régime permanent.
Dans ce travail, on s’intéresse à l’optimisation de procédés dynamiques continus et
les différentes méthodes d’optimisation en temps réel présentées ici font référence au
problème d’optimisation statique défini comme suit :
minu
J = Φ(x, u)
s.t F (u, x) = 0
S(u, x) ≤ 0
(4.5)
où J représente le critère de performance devant être minimisé et S, l’ensemble des
contraintes inégalité à respecter. Ainsi, les valeurs des entrées optimales u∗ minimi-
sant la fonction J du problème ((4.5)) sont valides en régime permanent.
Bien que le problème ((4.5)) soit un problème sous contraintes inégalité, il peut être
transformé en un problème sans contraintes par l’utilisation d’une fonction barrière
(Vassiliadis et Floudas, 1997). II prend alors la forme suivante :
minu
JB = Φ(x, u)− ζ∑
i
log(−(Si(u, x)))
s.t F (u, x) = 0
(4.6)
La pénalité logarithmique associée aux contraintes inégalité assure que la solution
de ce problème ne franchisse pas la frontière de la région admissible définie par ces
contraintes inégalité. La distance entre la solution du problème ((4.6)) et la frontière
de la région admissible sera plus ou moins grande selon la valeur du paramètre de

4.1 Introduction 68
réglage ζ .
Les équations ((4.3a)) reliant les entrées u aux sorties Y d’un procédé sont ra-
rement connues de façon exactes mais sont plutôt approximées par un modèle qui a
la forme suivante :
xm = Fm(u(t), xm(t), α, θ) (4.7a)
Ym(t) = Hm(u(t), xm(t), α, θ) (4.7b)
où α, et θ représentent les vecteurs des paramétrés fixes et ajustables du modèle res-
pectivement. Ainsi, le problème d’optimisation à résoudre est défini selon ce modèle
et devient alors :
minu
Jm = Φ(u, xm, α, θ)
s.t Fm(u, xm, α, θ) = 0
Sm(u, xm, α, θ) ≤ 0
(4.8)
Le modèle utilisé dans l’énonce du problème d’optimisation peut prendre la forme
d’un modèle fondamental élaboré à partir des lois fondamentales de la physique ou
celui d’un modèle empirique de type "boite noire" qui tente de reproduire localement
le comportement du procédé. Le problème d’optimisation ((4.8)) peut utiliser l’un
ou l’autre type de modèle ou même les deux a la fois.
De façon générale, les différentes fonctions du problème ((4.8)) peuvent être
détaillées comme suit :
Φm(u, xm, α, θ) = Φp(u, xm, α, θp) + Φb(u, xm, α, θb) (4.9)
Fm(u, xm, α, θ) = Fp(u, xm, α, θp) + Fb(u, xm, α, θb) (4.10)
Sm(u, xm, α, θ) = Sp(u, xm, α, θp) + Sb(u, xm, α, θb) (4.11)
ou les indices p et b représentent les fonctions et paramètres associés aux modèles
fondamentaux et empiriques respectivement.
Rien n’assure que la solution du problème ((4.8)) nous amène a l’optimum réel
du procédé, solution du problème. II existe différentes raisons expliquant la possibi-
4.2 Classification des méthodes d’optimisation en temps réel 69
lité d’une erreur entre les solutions de ces deux problèmes. L’incertitude du modèle,
l’effet sur l’optimum réel de perturbations exogènes ne faisant pas partie des mesures
disponibles et le changement dans le temps de la fonction F décrivant la dynamique
du procédé sont autant de facteurs favorisant l’erreur sur la solution du problème
((4.8)).
Afin que la solution identifiée se rapproche le plus possible du point d’opération
optimal réel, le modèle doit être une représentation adéquate du procédé réel à tout
instant : les paramétres θ sont alors ajustés régulièrement pour que les sorties du
modèle Ym correspondent le plus fidèlement possible aux mesures Y du procédé. Tou-
tefois, comme nous pourrons le constater dans ce chapitre, une bonne identification
des paramétres du modèle ne signifie pas que l’optimum de ce modèle correspondra
à celui du procédé réel.
4.2 Classification des méthodes d’optimisation en
temps réel
Les différentes méthodes d’optimisation en temps réel peuvent être regroupées
en deux catégories selon la façon dont le problème ((4.8)) est résolu. La première
catégorie regroupe les méthodes ou le point d’opération optimal u∗ est obtenu en
résolvant numériquement le problème ((4.8)). Ces méthodes effectuent la mise à
jour des paramétrés du modèle et le calcul du point d’opération optimal de façon
séquentielle. Les méthodes de cette catégorie se distinguent par la façon de mettre
à jour les paramètres du modèle selon la nature des mesures disponibles. Nous
distinguerons ici, les mesures du critère de performance J et des contraintes inégalités
S des autres mesures disponibles que nous désignerons par mesures auxiliaires.
L’autre catégorie de méthodes d’optimisation en temps réel est souvent désignée
dans la littérature sous l’appellation "commande extrémale". Elle regroupe les mé-
thodes où les conditions d’optimalité du problème ((4.8)) sont utilisées pour le suivi
du point optimal en temps réel. Ainsi, le modèle est utilisé pour estimer le gradient∂Jm∂u
et parfois le Hessien ∂2Jm∂2u
. Le problème d’optimisation est alors converti en un
problème de commande où l’information obtenue à l’aide du modèle est utilisée pour
déterminer la loi de commande permettant au système d’évoluer vers l’optimum. Ces
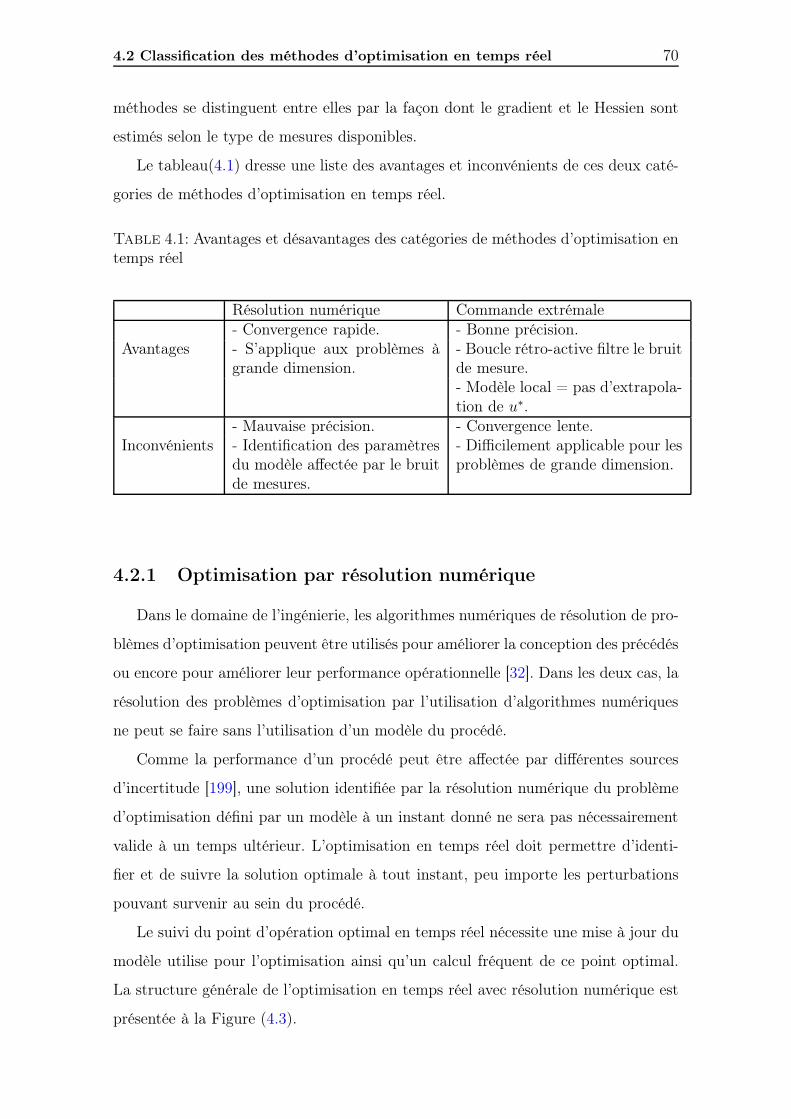
4.2 Classification des méthodes d’optimisation en temps réel 70
méthodes se distinguent entre elles par la façon dont le gradient et le Hessien sont
estimés selon le type de mesures disponibles.
Le tableau(4.1) dresse une liste des avantages et inconvénients de ces deux caté-
gories de méthodes d’optimisation en temps réel.
Table 4.1: Avantages et désavantages des catégories de méthodes d’optimisation entemps réel
Résolution numérique Commande extrémale
Avantages- Convergence rapide. - Bonne précision.- S’applique aux problèmes àgrande dimension.
- Boucle rétro-active filtre le bruitde mesure.- Modèle local = pas d’extrapola-tion de u∗.
Inconvénients- Mauvaise précision. - Convergence lente.- Identification des paramètresdu modèle affectée par le bruitde mesures.
- Difficilement applicable pour lesproblèmes de grande dimension.
4.2.1 Optimisation par résolution numérique
Dans le domaine de l’ingénierie, les algorithmes numériques de résolution de pro-
blèmes d’optimisation peuvent être utilisés pour améliorer la conception des précédés
ou encore pour améliorer leur performance opérationnelle [32]. Dans les deux cas, la
résolution des problèmes d’optimisation par l’utilisation d’algorithmes numériques
ne peut se faire sans l’utilisation d’un modèle du procédé.
Comme la performance d’un procédé peut être affectée par différentes sources
d’incertitude [199], une solution identifiée par la résolution numérique du problème
d’optimisation défini par un modèle à un instant donné ne sera pas nécessairement
valide à un temps ultérieur. L’optimisation en temps réel doit permettre d’identi-
fier et de suivre la solution optimale à tout instant, peu importe les perturbations
pouvant survenir au sein du procédé.
Le suivi du point d’opération optimal en temps réel nécessite une mise à jour du
modèle utilise pour l’optimisation ainsi qu’un calcul fréquent de ce point optimal.
La structure générale de l’optimisation en temps réel avec résolution numérique est
présentée à la Figure (4.3).
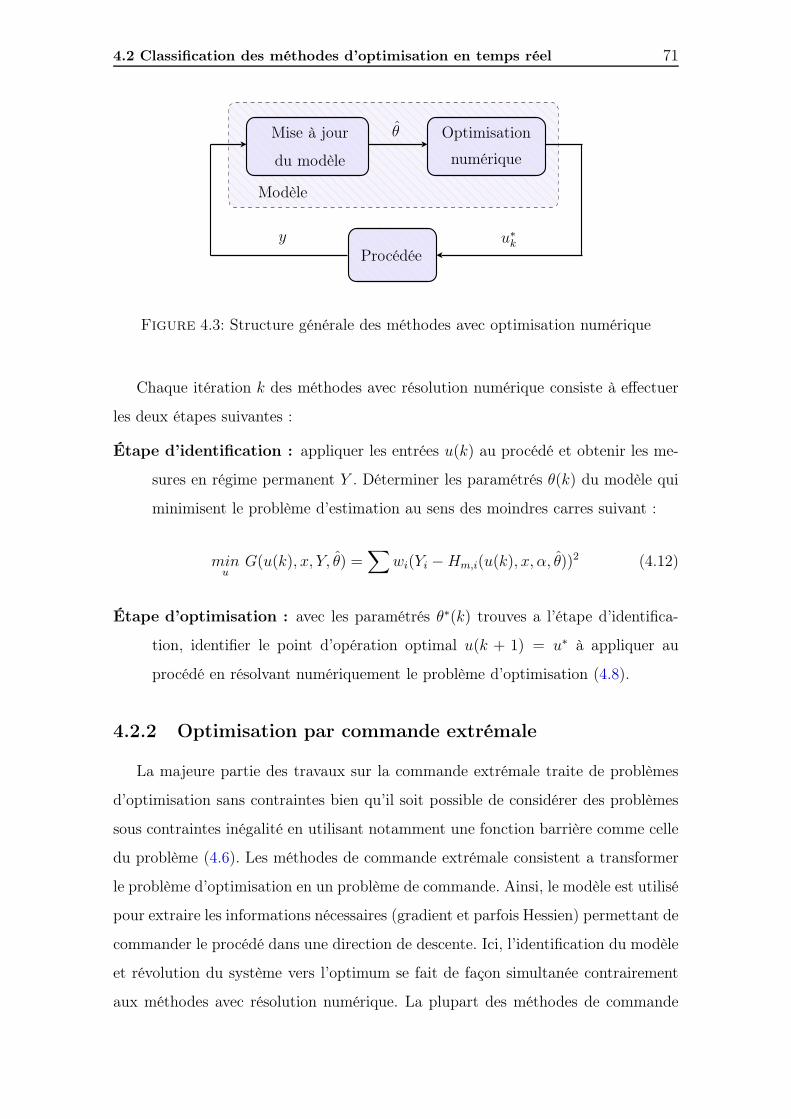
4.2 Classification des méthodes d’optimisation en temps réel 71
Mise à jour
du modèle
Optimisation
numérique
Procédée
Modèle
u∗
ky
θ
Figure 4.3: Structure générale des méthodes avec optimisation numérique
Chaque itération k des méthodes avec résolution numérique consiste à effectuer
les deux étapes suivantes :
Étape d’identification : appliquer les entrées u(k) au procédé et obtenir les me-
sures en régime permanent Y . Déterminer les paramétrés θ(k) du modèle qui
minimisent le problème d’estimation au sens des moindres carres suivant :
minu
G(u(k), x, Y, θ) =∑
wi(Yi −Hm,i(u(k), x, α, θ))2 (4.12)
Étape d’optimisation : avec les paramétrés θ∗(k) trouves a l’étape d’identifica-
tion, identifier le point d’opération optimal u(k + 1) = u∗ à appliquer au
procédé en résolvant numériquement le problème d’optimisation (4.8).
4.2.2 Optimisation par commande extrémale
La majeure partie des travaux sur la commande extrémale traite de problèmes
d’optimisation sans contraintes bien qu’il soit possible de considérer des problèmes
sous contraintes inégalité en utilisant notamment une fonction barrière comme celle
du problème (4.6). Les méthodes de commande extrémale consistent a transformer
le problème d’optimisation en un problème de commande. Ainsi, le modèle est utilisé
pour extraire les informations nécessaires (gradient et parfois Hessien) permettant de
commander le procédé dans une direction de descente. Ici, l’identification du modèle
et révolution du système vers l’optimum se fait de façon simultanée contrairement
aux méthodes avec résolution numérique. La plupart des méthodes de commande
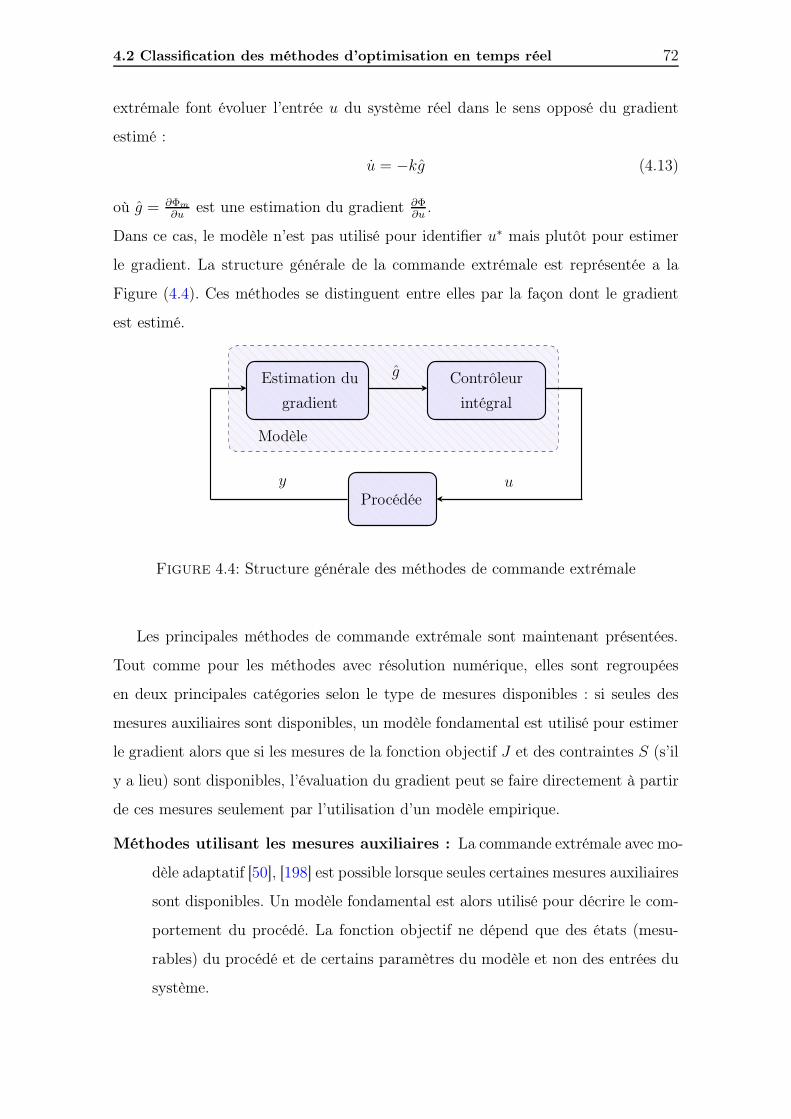
4.2 Classification des méthodes d’optimisation en temps réel 72
extrémale font évoluer l’entrée u du système réel dans le sens opposé du gradient
estimé :
u = −kg (4.13)
où g = ∂Φm
∂uest une estimation du gradient ∂Φ
∂u.
Dans ce cas, le modèle n’est pas utilisé pour identifier u∗ mais plutôt pour estimer
le gradient. La structure générale de la commande extrémale est représentée a la
Figure (4.4). Ces méthodes se distinguent entre elles par la façon dont le gradient
est estimé.
Estimation du
gradient
Contrôleur
intégral
Procédée
Modèle
uy
g
Figure 4.4: Structure générale des méthodes de commande extrémale
Les principales méthodes de commande extrémale sont maintenant présentées.
Tout comme pour les méthodes avec résolution numérique, elles sont regroupées
en deux principales catégories selon le type de mesures disponibles : si seules des
mesures auxiliaires sont disponibles, un modèle fondamental est utilisé pour estimer
le gradient alors que si les mesures de la fonction objectif J et des contraintes S (s’il
y a lieu) sont disponibles, l’évaluation du gradient peut se faire directement à partir
de ces mesures seulement par l’utilisation d’un modèle empirique.
Méthodes utilisant les mesures auxiliaires : La commande extrémale avec mo-
dèle adaptatif [50], [198] est possible lorsque seules certaines mesures auxiliaires
sont disponibles. Un modèle fondamental est alors utilisé pour décrire le com-
portement du procédé. La fonction objectif ne dépend que des états (mesu-
rables) du procédé et de certains paramètres du modèle et non des entrées du
système.
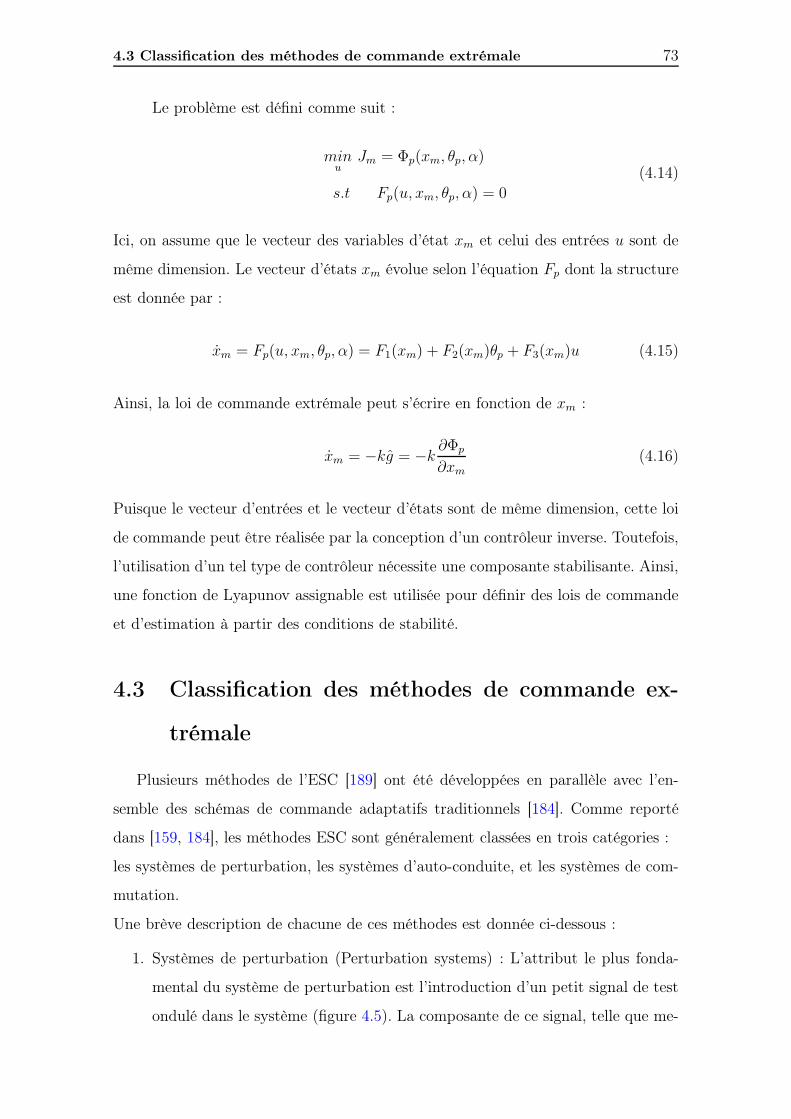
4.3 Classification des méthodes de commande extrémale 73
Le problème est défini comme suit :
minu
Jm = Φp(xm, θp, α)
s.t Fp(u, xm, θp, α) = 0
(4.14)
Ici, on assume que le vecteur des variables d’état xm et celui des entrées u sont de
même dimension. Le vecteur d’états xm évolue selon l’équation Fp dont la structure
est donnée par :
xm = Fp(u, xm, θp, α) = F1(xm) + F2(xm)θp + F3(xm)u (4.15)
Ainsi, la loi de commande extrémale peut s’écrire en fonction de xm :
xm = −kg = −k∂Φp
∂xm
(4.16)
Puisque le vecteur d’entrées et le vecteur d’états sont de même dimension, cette loi
de commande peut être réalisée par la conception d’un contrôleur inverse. Toutefois,
l’utilisation d’un tel type de contrôleur nécessite une composante stabilisante. Ainsi,
une fonction de Lyapunov assignable est utilisée pour définir des lois de commande
et d’estimation à partir des conditions de stabilité.
4.3 Classification des méthodes de commande ex-
trémale
Plusieurs méthodes de l’ESC [189] ont été développées en parallèle avec l’en-
semble des schémas de commande adaptatifs traditionnels [184]. Comme reporté
dans [159, 184], les méthodes ESC sont généralement classées en trois catégories :
les systèmes de perturbation, les systèmes d’auto-conduite, et les systèmes de com-
mutation.
Une brève description de chacune de ces méthodes est donnée ci-dessous :
1. Systèmes de perturbation (Perturbation systems) : L’attribut le plus fonda-
mental du système de perturbation est l’introduction d’un petit signal de test
ondulé dans le système (figure 4.5). La composante de ce signal, telle que me-
4.3 Classification des méthodes de commande extrémale 74
surée à partir de la sortie du système, est multipliée directement par le signal
de test elle-même, ce qui génère une composante moyenne une fois passé à
travers un filtre passe-bas. À la sortie de ce filtre un intégrateur est ajouté
au signal de test ondulé et est introduit dans le système en tant que signal
commande.
La méthode de perturbation mesure effectivement la pente des caractéristiques
du système. Dans l’hypothèse où il existe un maximum ou minimum dans les
caractéristiques de la plante, la méthode de perturbation entraîne le point de
fonctionnement du système près de ce point et établit une stabilité dans le
régime permanent.
y
x
C
R
FPB∫
dt
∼ ∑
⊗
Système de perturbation
y
x
∫
dt
dy/dt
Système auto-conduite
y
x
dy/dt
∫
dt
Système de commutation
Figure 4.5: Les différentes méthodes de la commande extrémale
2. Systèmes de commutation (Switching systems) : L’entrée du système de com-
mutation est alimentée par un intégrateur qui est entraîné par un dispositif
4.4 Recherche d’extremum d’ordre fractionnaire 75
contenant une hystérésis. Cet élément de commutation prend l’entrée à partir
de la sortie dérivé du système de telle sorte que l’action de commutation est
associée à une valeur négative de l’écart.
3. Systèmes d’auto-conduite (Self-driving systems) : Dans un système d’auto-
conduite, la dérivée temporelle du signal de sortie est mesurée et est utilisé
pour exciter l’intégrateur, qui fournit la commande du système nécessaire.
Contrairement au systèmes de commutation ou de perturbation, un système
d’auto-conduite ne nécessite pas de signal externe. Ces systèmes fonctionnent
de manière efficace sur le principe de rétroaction (feedback) positive et sont
utilisés pour produire un signal de commande qui guide le système vers un
optimum (figure 4.5). Les systèmes d’auto-conduits ne peuvent pas être s’auto-
initialiser, ce qui nécessiterait l’initialisation à travers une entrée type échelon
ou un bruit blanc. En outre, de tels systèmes sont susceptibles de s’écarter du
point de fonctionnement optimal par effet de la conduite elle-même dans la
mauvaise direction.
4.4 Recherche d’extremum d’ordre fractionnaire
4.4.1 Introduction
Le premier cas d’utilisation de la technique de commande extrémale (Extremum
Seeking : ES), revient à Leblanc en 1922 avec des applications aux systèmes fer-
roviaires électriques. Dans les années 1950 et 1960, ES a été largement étudiée et
utilisée dans les applications à la fois dans l’ex-Union soviétique [171] et de l’Ouest
[188]. La capacité de cette technique à forcer θ(k) à converger vers un minimum
local θ∗ de J (θ) fit l’objet d’épreuves de stabilité obtenues à la fin des années 1990
[61]. Par la suite, ES est devenue un outil utile pour les applications de temps réel
ainsi qu’un champ actif de la recherche théorique [10].
4.4.2 Méthode de perturbations
Cette méthode de recherche extrêmale trouve la valeur du gradient à l’aide de
filtres et d’une excitation sinusoïdale (Voir la Figure 4.6). Plus précisément, une
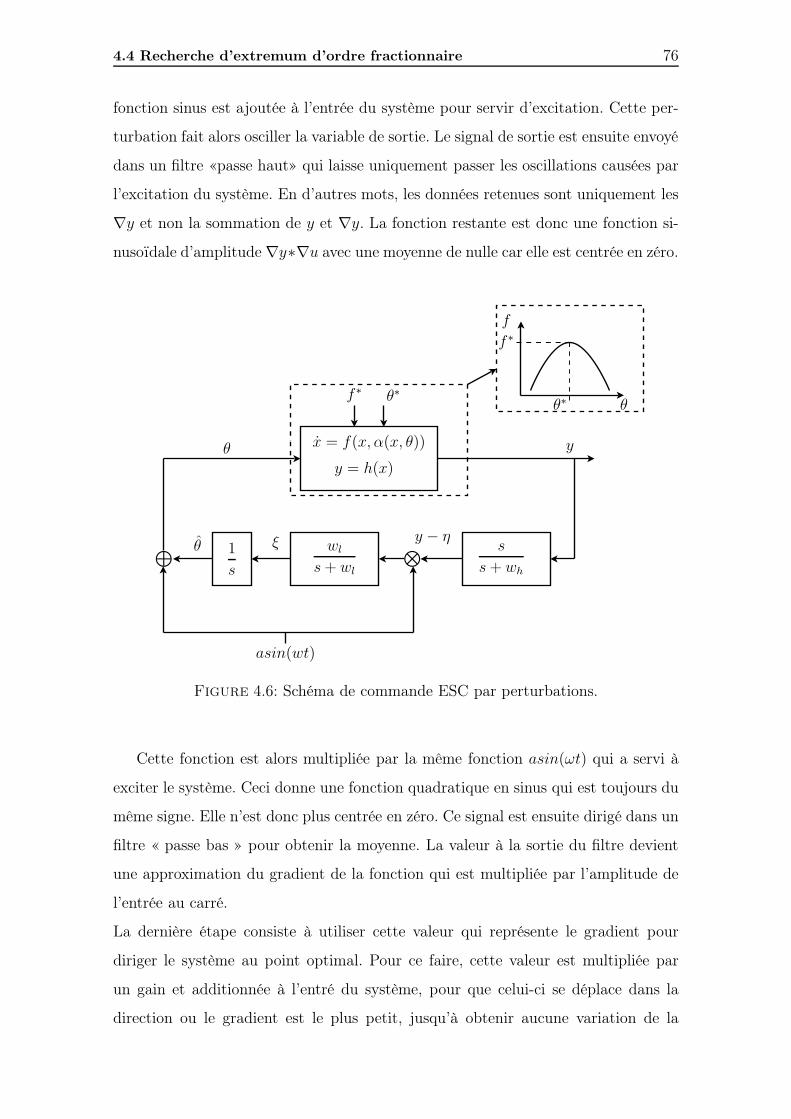
4.4 Recherche d’extremum d’ordre fractionnaire 76
fonction sinus est ajoutée à l’entrée du système pour servir d’excitation. Cette per-
turbation fait alors osciller la variable de sortie. Le signal de sortie est ensuite envoyé
dans un filtre «passe haut» qui laisse uniquement passer les oscillations causées par
l’excitation du système. En d’autres mots, les données retenues sont uniquement les
∇y et non la sommation de y et ∇y. La fonction restante est donc une fonction si-
nusoïdale d’amplitude ∇y∗∇u avec une moyenne de nulle car elle est centrée en zéro.
x = f(x, α(x, θ))
y = h(x)
y
s
s+ wh
⊗
y − ηwl
s+ wl
ξ1
s
⊕
asin(wt)
θ
θ
f ∗ θ∗
f
θθ∗
f ∗
Figure 4.6: Schéma de commande ESC par perturbations.
Cette fonction est alors multipliée par la même fonction asin(ωt) qui a servi à
exciter le système. Ceci donne une fonction quadratique en sinus qui est toujours du
même signe. Elle n’est donc plus centrée en zéro. Ce signal est ensuite dirigé dans un
filtre « passe bas » pour obtenir la moyenne. La valeur à la sortie du filtre devient
une approximation du gradient de la fonction qui est multipliée par l’amplitude de
l’entrée au carré.
La dernière étape consiste à utiliser cette valeur qui représente le gradient pour
diriger le système au point optimal. Pour ce faire, cette valeur est multipliée par
un gain et additionnée à l’entré du système, pour que celui-ci se déplace dans la
direction ou le gradient est le plus petit, jusqu’à obtenir aucune variation de la

4.4 Recherche d’extremum d’ordre fractionnaire 77
sortie. Cette position correspond à la valeur minimale du système.
4.4.3 Méthode de saturation
Un nouveau système de commande robuste pour une classe des systèmes dyna-
miques linéaires de premier ordre est basée sur l’approche proposée par Carnevale
et al. [22] appelé la commande extrémale dynamique ’Dynamic Extremum Seeking’,
dont l’objectif est d’utiliser un signal de référence pour un système dynamique de
telle sorte qu’une fonction inconnue du coût de sa sortie est minimisée ou maximisée.
Nous abordons le problème pour trouver le minimum global d’une fonction sta-
tique inconnue g(.) : R → R dont l’entrée est affectée par une perturbation t → d(t)
comme le montre la figure (4.7). Comme dans [22], nous supposons que la carte g(.)
vérifie l’hypothèse suivante.
∑
ǫy = −y + θθ
d
ug
y
++
ygg(y + d)
Figure 4.7: Schéma bloc du système sous considération.
Hypothèse 1 : La fonction inconnue g(.) : R → R est localement lipschitzienne
et localement bornée.
Dans la synthèse de problème de l’Extremum Seeking considéré comme nous
supposons pour exploiter un signal de sondage θ qui est contraint d’agir sur la
fonction g(.) par l’intermédiaire d’un système dynamique scalaire ayant la forme
simplifiée suivante :
ǫ y = −y + θ (4.17)
où ǫ est un scalaire positif. L’entrée et la sortie de la fonction statique g(.) sont
supposées être deux signaux mesurables, comme représenté sur la figure (4.7) ce qui

4.4 Recherche d’extremum d’ordre fractionnaire 78
correspond à :
ug(t) = y(t) + d(t)
yg(t) = g (y(t) + d(t)) (4.18)
Comme dans le système de commande d’ordre entier initiale proposée dans [22],
il y a certaines conditions de bornitude sur le signal de perturbation d excitant la
fonction g(.) devant être remplies, comme indiqué dans l’hypothèse 2.
Hypothèse 2 : La perturbation d(.) est bornée et a sa dérivée temporelle bornée
aussi, à savoir il existe des nombres positifs d et dd tels que |d(t)| ≤ d, ˙d(t) ≤ dd
pour tout t ≥ 0.
La stratégie de commande implique également l’attribution de deux lois de re-
cherche d’extrêmum θ, en supposant que les signaux de l’équation (4.18) sont dis-
ponibles. De plus, il faut faire une hypothèse forte capable d’obtenir une dérivée
idéal de l’entrée et la sortie de la fonction inconnue g(.), c’est-à-dire nous supposons
connaître :
z1(t) = ug(t) = y(t) + d(t),
z2(t) = yg(t) =∂g (y(t) + d(t))
∂y
(
y(t) + d(t))
(4.19)
Il est clair que dans la mise en oeuvre pratique, nous allons utiliser des approxima-
tions des signaux présentés dans l’équation (4.19)
. Le schéma de commande proposé est obtenu par l’introduction de l’opérateur
d’ordre fractionnaire 1/sλ au schéma de commande initial de Carnevale et al. [22].
Comme représenté dans la figure (4.8). La fonction inconnue est g(.), et les entrées
de cette dernière sont la sortie du système linéaire dynamique du premier ordre y et
le signal de perturbation d.
Le paramètre ǫ > 0, régle la vitesse de convergence de y à δkθ, où δk > 0 est le
gain statique du système linéaire. La sortie d’une saturation unitaire est alimentée
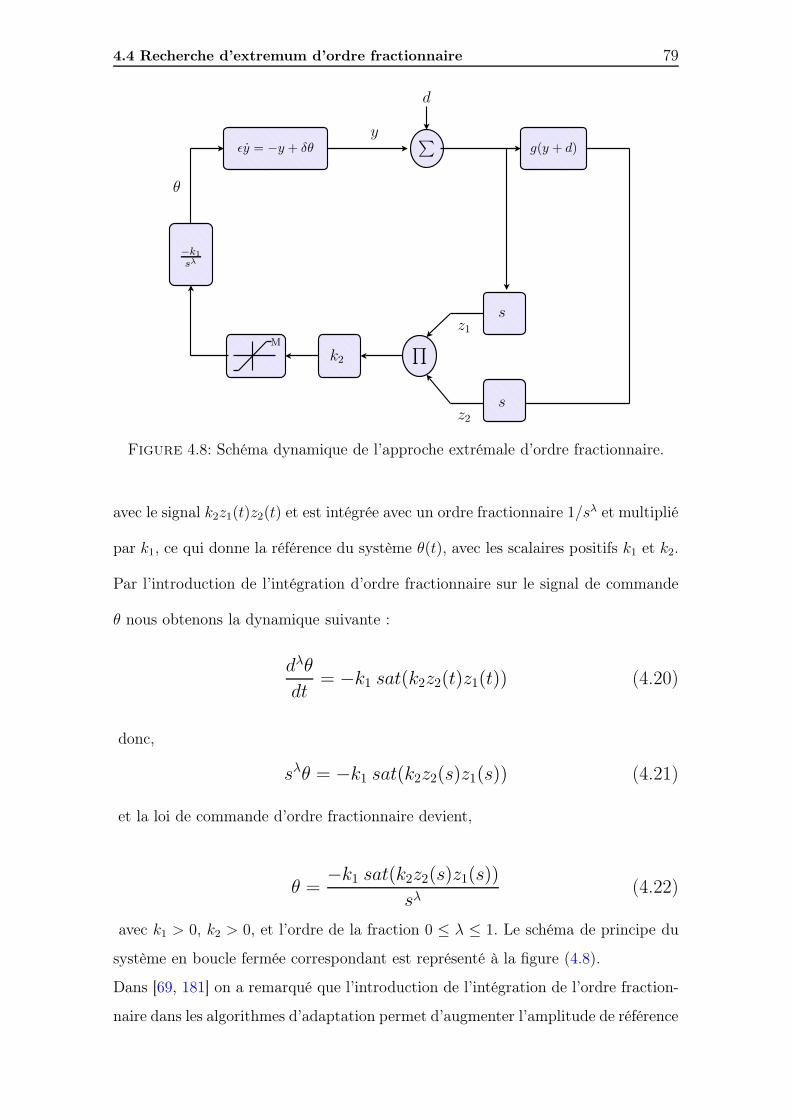
4.4 Recherche d’extremum d’ordre fractionnaire 79
∏
s
s
k2M
−k1sλ
ǫy = −y + δθ∑
d
θ
g(y + d)y
z1
z2
Figure 4.8: Schéma dynamique de l’approche extrémale d’ordre fractionnaire.
avec le signal k2z1(t)z2(t) et est intégrée avec un ordre fractionnaire 1/sλ et multiplié
par k1, ce qui donne la référence du système θ(t), avec les scalaires positifs k1 et k2.
Par l’introduction de l’intégration d’ordre fractionnaire sur le signal de commande
θ nous obtenons la dynamique suivante :
dλθ
dt= −k1 sat(k2z2(t)z1(t)) (4.20)
donc,
sλθ = −k1 sat(k2z2(s)z1(s)) (4.21)
et la loi de commande d’ordre fractionnaire devient,
θ =−k1 sat(k2z2(s)z1(s))
sλ(4.22)
avec k1 > 0, k2 > 0, et l’ordre de la fraction 0 ≤ λ ≤ 1. Le schéma de principe du
système en boucle fermée correspondant est représenté à la figure (4.8).
Dans [69, 181] on a remarqué que l’introduction de l’intégration de l’ordre fraction-
naire dans les algorithmes d’adaptation permet d’augmenter l’amplitude de référence
4.5 Application au système de freinage antiblocage (ABS) 80
pour laquelle la stabilité en boucle fermée est maintenue. En fait, pour cet objectif
de commande stable, il vaut mieux choisir le paramètre de régulation k2 assez petit.
C’est pourquoi nous pouvons stabiliser la boucle de commande adaptative en utili-
sant intégration d’ordre fractionnaire où la loi de commande entier échoue.
Remarque 1 : La sélection de θ comme mentionné dans l’équation (4.22) garan-
tit que θ ≤ k1sλ
, une propriété intéressante du signal de sondage car il évite l’excitation
dynamique à haute fréquence. De plus, chaque fois que cela est nécessaire, la mé-
thode permet de répondre aux contraintes de la saturation des dispositifs physiques
[111].
4.5 Application au système de freinage antiblocage
(ABS)
4.5.1 Introduction
Les systèmes de freinage antiblocage (ABS) sont un outil important dans l’indus-
trie automobile. Elles permettent l’arrêt immédiat du véhicule effectuer des virages
plus sûrs lorsque les roues sont empêchées de blocage. La conception de l’ABS a été
initialement proposée pour traiter le freinage sur des surfaces glissantes, c’est-à-dire
empêcher le blocage et le dérapage des roues [187, 83]. Le but principal de cette
recherche est de satisfaire l’augmentation de la sécurité, l’efficacité et les exigences
d’une conduite sûre.
Des progrès importants ont été réalisés par l’introduction et le développement de
systèmes de sécurité active comme les systèmes de freinage antiblocage, le système
(ABS) est largement utilisé dans les automobiles.
Dans une situation de freinage d’urgence les roues d’un véhicule ont tendance
à verrouiller rapidement, ce qui augmente le taux de glissement longitudinal du
véhicule. Le taux de glissement, lors du freinage, est définie comme la différence
entre la vitesse du véhicule et la vitesse circonférentielle du pneu, divisée par la
vitesse du véhicule [80].
Lorsque le verrouillage de la roue est total (β = 1), le contrôle de la direction du
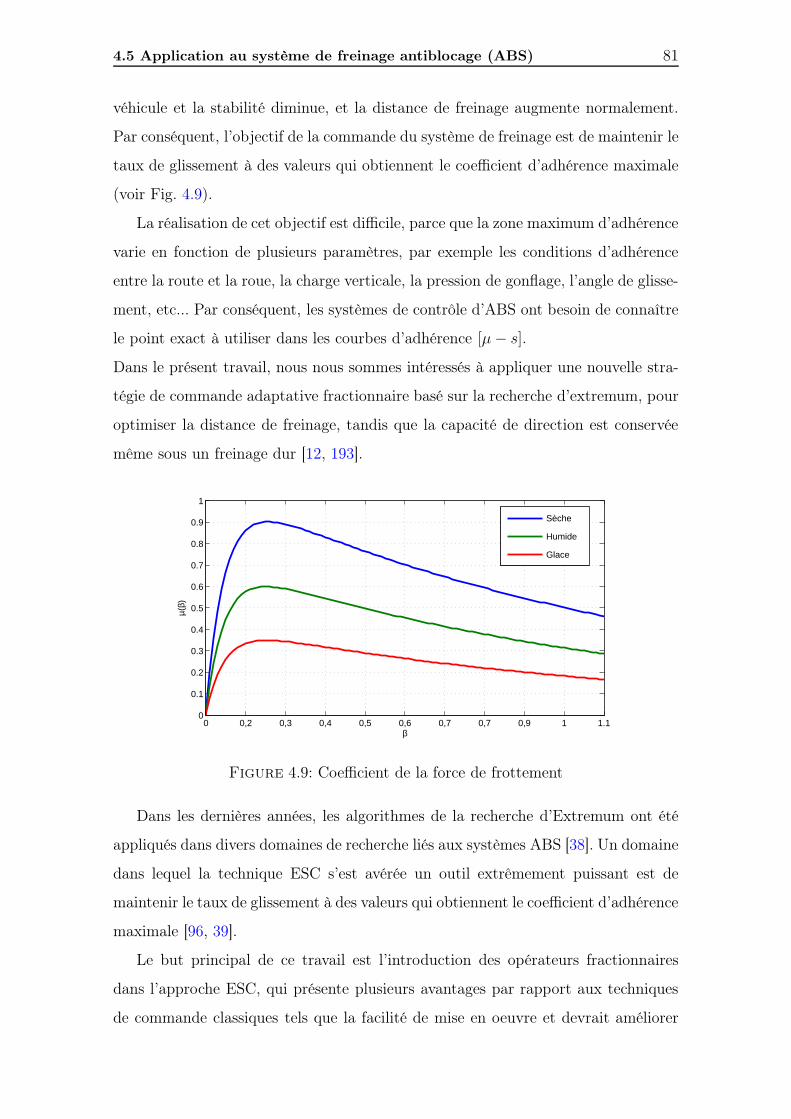
4.5 Application au système de freinage antiblocage (ABS) 81
véhicule et la stabilité diminue, et la distance de freinage augmente normalement.
Par conséquent, l’objectif de la commande du système de freinage est de maintenir le
taux de glissement à des valeurs qui obtiennent le coefficient d’adhérence maximale
(voir Fig. 4.9).
La réalisation de cet objectif est difficile, parce que la zone maximum d’adhérence
varie en fonction de plusieurs paramètres, par exemple les conditions d’adhérence
entre la route et la roue, la charge verticale, la pression de gonflage, l’angle de glisse-
ment, etc... Par conséquent, les systèmes de contrôle d’ABS ont besoin de connaître
le point exact à utiliser dans les courbes d’adhérence [µ− s].
Dans le présent travail, nous nous sommes intéressés à appliquer une nouvelle stra-
tégie de commande adaptative fractionnaire basé sur la recherche d’extremum, pour
optimiser la distance de freinage, tandis que la capacité de direction est conservée
même sous un freinage dur [12, 193].
0 0,2 0,3 0,4 0,5 0,6 0,7 0,7 0,9 1 1.10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
β
µ(β)
Sèche
Humide
Glace
Figure 4.9: Coefficient de la force de frottement
Dans les dernières années, les algorithmes de la recherche d’Extremum ont été
appliqués dans divers domaines de recherche liés aux systèmes ABS [38]. Un domaine
dans lequel la technique ESC s’est avérée un outil extrêmement puissant est de
maintenir le taux de glissement à des valeurs qui obtiennent le coefficient d’adhérence
maximale [96, 39].
Le but principal de ce travail est l’introduction des opérateurs fractionnaires
dans l’approche ESC, qui présente plusieurs avantages par rapport aux techniques
de commande classiques tels que la facilité de mise en oeuvre et devrait améliorer
4.5 Application au système de freinage antiblocage (ABS) 82
l’efficacité d’utilisation du système ABS sous la présence des perturbations et des
incertitudes. La mise en oeuvre du système ABS à l’aide de la commande extrémale
d’ordre fractionnaire atteint ces deux objectifs clés d’importance vitale.
L’idée de l’algorithme de recherche extrémale d’ordre fractionnaire (ESFO) a
été également introduite par Malek et al. [90] avec une configuration différente,
basée sur le régime perturbé ES, montrant des résultats intéressants sur les systèmes
solaire. Cette étude propose une méthode de commande robuste qui combine de la
commande fractionnaire et la recherche extrémale pour contrôler le glissement en cas
de freinage d’urgence, et permettra d’assurer la stabilité du système de commande
en boucle fermée à des variations brusques et rapide des conditions extérieures.
4.5.2 Description du problème
En raison de la non-linéarité de la dynamique et la présence de l’incertitude dans
les systèmes de freinage, la conception de l’ABS est difficile. Le caractère de la force
de frottement agissant sur les pneus a un maximum pour permettre un patinage
des roues non nulle et diminue lorsque le glissement augmente. Les systèmes ABS
standard applique la pression de freinage d’une façon rapide et intermittente. Dans
certaines d’entre eux, l’objectif de l’action intermittente est de "chercher" le maxi-
mum de la caractéristique de frottement.
Dans ce travail, nous étudions la conception d’ABS par des systèmes de recherche
extrémale adaptative d’ordre fractionnaire ; notre objectif est de concevoir un algo-
rithme de commande pour le couple de freinage pour obtenir un maximum de force
de frottement sans connaître au préalable le glissement optimal. Le modèle de la
roue est présenté par Ariyur et Krstic (chap.6 de [10]).

4.5 Application au système de freinage antiblocage (ABS) 83
4.5.3 Modèle de la roue
Considérons le modèle d’une seule roue représenté dans la figure 4.10. La dyna-
mique de la roue sont donnés par l’équation suivante
mx1 = −Nµ(β)
Ix2 = −Bx2 +NRµ(β)− u (4.23)
Où x1 est la vitesse linéaire et x2 est la vitesse angulaire Ω de la roue, m est la
masse, N = mg est le poids de la roue, R est le rayon de la roue, I est le moment
d’inertie de la roue, Bx2 est le couple de frottement de freinage, u est le couple de
freinage, µ(β) est le coefficient de force de frottement et le patinage des roues, β est
définie comme suit :
β(x1, x2) =x1 −Rx2
x1(4.24)
Pour le cas d’un freinage Rx2 < x1.
Le coefficient de la force de friction µ(β) est illustré à la Figure 4.9 à partir duquel
on voit qu’il existe un optimum µ∗ à β∗.
Afin de formuler ce problème sous forme d’une recherche extrémale, nous intro-
duisons une constante (qui est inconnue) β0 et définissons β = β − β0. L’équation
régissant β est :
˙β = β =
(
Rx2
x12+
mR2
Ix1
)
x1 +RB
Ix1x2 +
R
Ix1u (4.25)
Comme x1 est mesurable par un accéléromètre, il est facile de voir que la commande
en boucle fermée est simple :
u = −k0Ix1
R(β − β0)−Bx2 −
Ix2
x1x1 −mRx1 (4.26)
Où k0 est une constante positive, et stabilise l’équilibre β0 du système (4.25) de façon
exponentielle, donnant ˙β = k0β. Notez que dans la commande u nous n’imposons
pas la connaissance de la fonction µ(β).
Afin de maximiser la force de frottement Nµ est de maximiser µ(β). Nous pouvons
définir la sortie du système (4.25) en tant que y = µ(β) et maximiser y. Si µ(β)
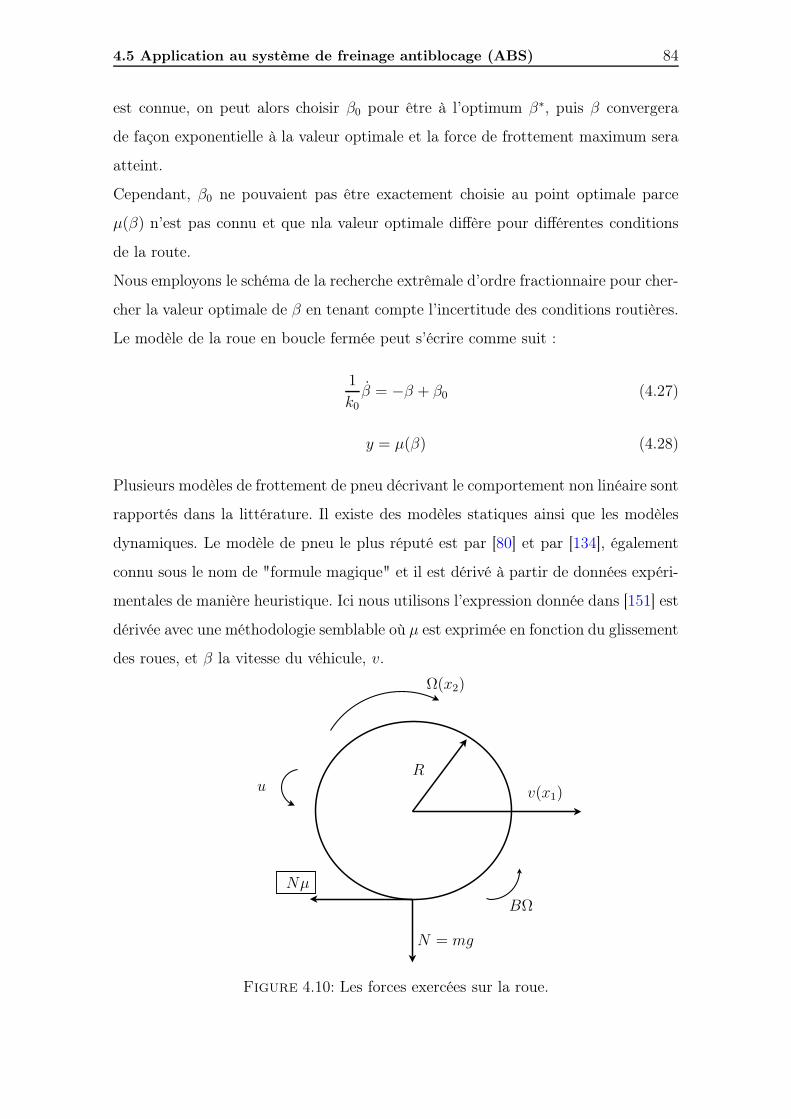
4.5 Application au système de freinage antiblocage (ABS) 84
est connue, on peut alors choisir β0 pour être à l’optimum β∗, puis β convergera
de façon exponentielle à la valeur optimale et la force de frottement maximum sera
atteint.
Cependant, β0 ne pouvaient pas être exactement choisie au point optimale parce
µ(β) n’est pas connu et que nla valeur optimale diffère pour différentes conditions
de la route.
Nous employons le schéma de la recherche extrêmale d’ordre fractionnaire pour cher-
cher la valeur optimale de β en tenant compte l’incertitude des conditions routières.
Le modèle de la roue en boucle fermée peut s’écrire comme suit :
1
k0β = −β + β0 (4.27)
y = µ(β) (4.28)
Plusieurs modèles de frottement de pneu décrivant le comportement non linéaire sont
rapportés dans la littérature. Il existe des modèles statiques ainsi que les modèles
dynamiques. Le modèle de pneu le plus réputé est par [80] et par [134], également
connu sous le nom de "formule magique" et il est dérivé à partir de données expéri-
mentales de manière heuristique. Ici nous utilisons l’expression donnée dans [151] est
dérivée avec une méthodologie semblable où µ est exprimée en fonction du glissement
des roues, et β la vitesse du véhicule, v.
Ω(x2)
uR
v(x1)
BΩ
N = mg
Nµ
Figure 4.10: Les forces exercées sur la roue.

4.5 Application au système de freinage antiblocage (ABS) 85
Pour les simulations, nous utilisons une fonction simple qui correspond qualita-
tivement µ(β) dans la figure (4.9) :
µ(β) =[
C1
(
1− e−C2β − C3β)]
e−C4βν (4.29)
Cette fonction a un maximum à β = β∗, dont la valeur est µ(β∗) = µ∗. La
simulation fait pour β∗ = 0.25 et µ∗ = 0.6, les paramètres de la roue sont choisis
comme : m = 100kg, B = 0.01 et les conditions initiales sont : la vitesse linéaire
x1(0) = 120km/hr, la vitesse angulaire x2(0) = 400/3.7, ce qui rend β(0) = 0.
Lorsque les paramètres sont spécifiés pour différentes surfaces de la roue. Voir tableau
(4.2) [151]. Les paramètres dans (4.29) indiquent ce qui suit :
– C1 : la valeur maximale de la courbe de frottement.
– C2 : la forme de la courbe de frottement.
– C3 : la différence de la courbe de frottement entre la valeur maximale et la
valeur à β = 1.
– C4 : la valeur de l’humidité est dans la gamme de 0, 02− 0, 04s/m.
Remarque 2 : les paramètres C1···4 sont choisis à partir de la table (4.2) pour
l’asphalte mouillé comme état de la surface.
Les conditions de surface C1 C2 C3
Asphalte, sec 1.029 17.16 0, 523asphalte, humide 0, 857 33, 822 0, 347
Béton, sec 1, 1973 25, 168 0, 5373Pavés sec 1, 3713 6, 4565 0, 6691
Pavés mouillés 0, 4004 33, 708 0, 1204neige 0, 1946 94, 129 0, 0646glace 0, 05 306, 39 0
Table 4.2: Paramètres de frottement
Paramètre Description ValeurK1 Mise à jour du gain de gradient 1 16K2 Mise à jour de gain de gradient gain 2 1M Saturation Min/Max 0.01
Table 4.3: Paramètres de la Recherche d’Extrêmum.
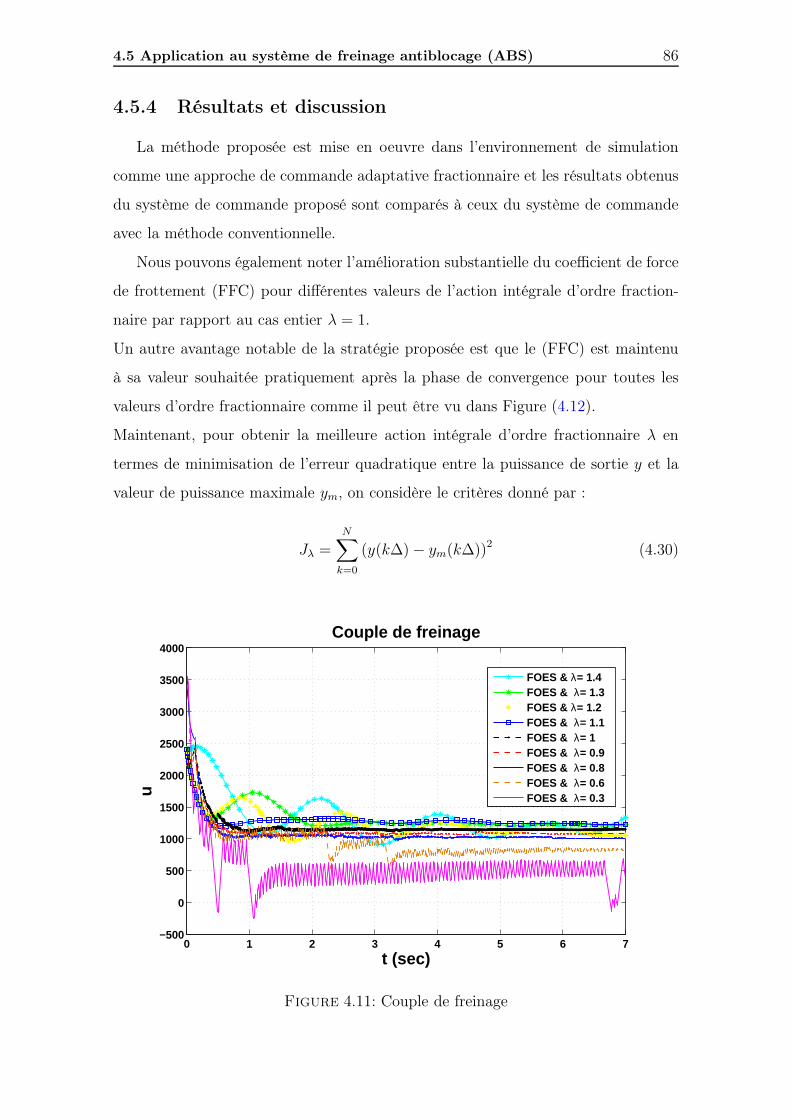
4.5 Application au système de freinage antiblocage (ABS) 86
4.5.4 Résultats et discussion
La méthode proposée est mise en oeuvre dans l’environnement de simulation
comme une approche de commande adaptative fractionnaire et les résultats obtenus
du système de commande proposé sont comparés à ceux du système de commande
avec la méthode conventionnelle.
Nous pouvons également noter l’amélioration substantielle du coefficient de force
de frottement (FFC) pour différentes valeurs de l’action intégrale d’ordre fraction-
naire par rapport au cas entier λ = 1.
Un autre avantage notable de la stratégie proposée est que le (FFC) est maintenu
à sa valeur souhaitée pratiquement après la phase de convergence pour toutes les
valeurs d’ordre fractionnaire comme il peut être vu dans Figure (4.12).
Maintenant, pour obtenir la meilleure action intégrale d’ordre fractionnaire λ en
termes de minimisation de l’erreur quadratique entre la puissance de sortie y et la
valeur de puissance maximale ym, on considère le critères donné par :
Jλ =N∑
k=0
(y(k∆)− ym(k∆))2 (4.30)
0 1 2 3 4 5 6 7−500
0
500
1000
1500
2000
2500
3000
3500
4000
t (sec)
u
Couple de freinage
FOES & λ= 1.4FOES & λ= 1.3FOES & λ= 1.2FOES & λ= 1.1FOES & λ= 1FOES & λ= 0.9FOES & λ= 0.8FOES & λ= 0.6FOES & λ= 0.3
Figure 4.11: Couple de freinage
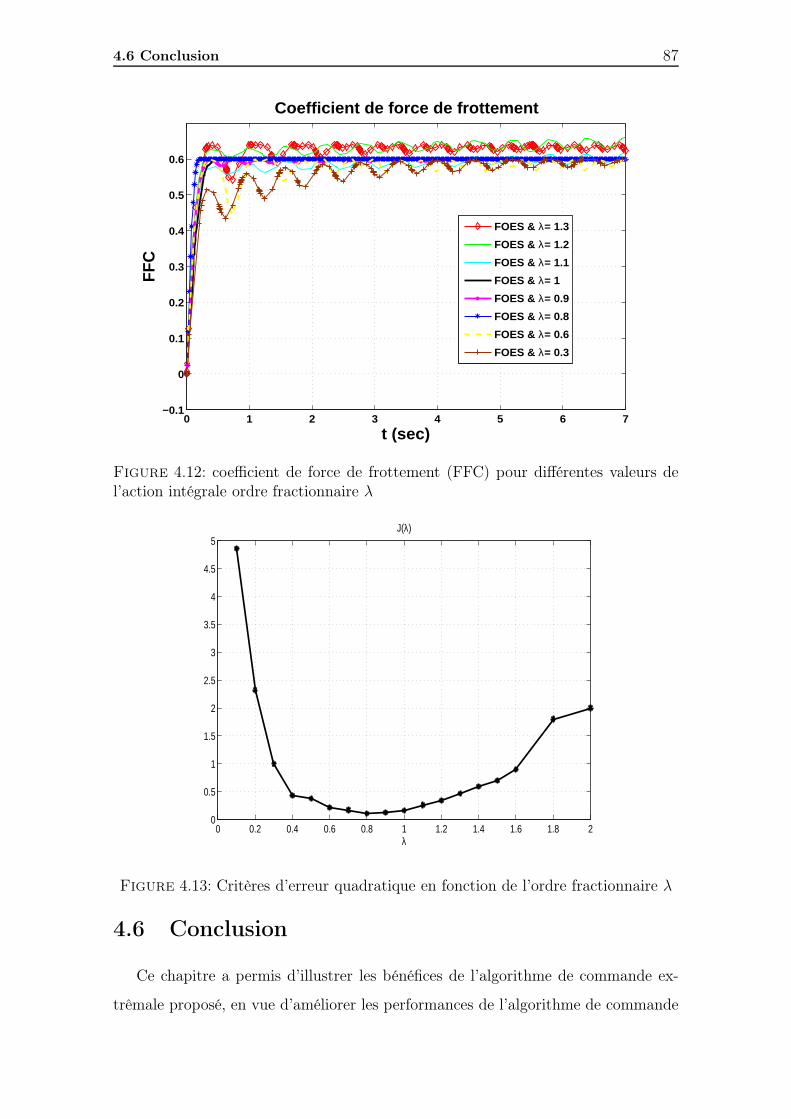
4.6 Conclusion 87
0 1 2 3 4 5 6 7−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t (sec)
FFC
Coefficient de force de frottement
FOES & λ= 1.3
FOES & λ= 1.2
FOES & λ= 1.1
FOES & λ= 1
FOES & λ= 0.9
FOES & λ= 0.8
FOES & λ= 0.6
FOES & λ= 0.3
Figure 4.12: coefficient de force de frottement (FFC) pour différentes valeurs del’action intégrale ordre fractionnaire λ
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5J(λ)
λ
Figure 4.13: Critères d’erreur quadratique en fonction de l’ordre fractionnaire λ
4.6 Conclusion
Ce chapitre a permis d’illustrer les bénéfices de l’algorithme de commande ex-
trêmale proposé, en vue d’améliorer les performances de l’algorithme de commande
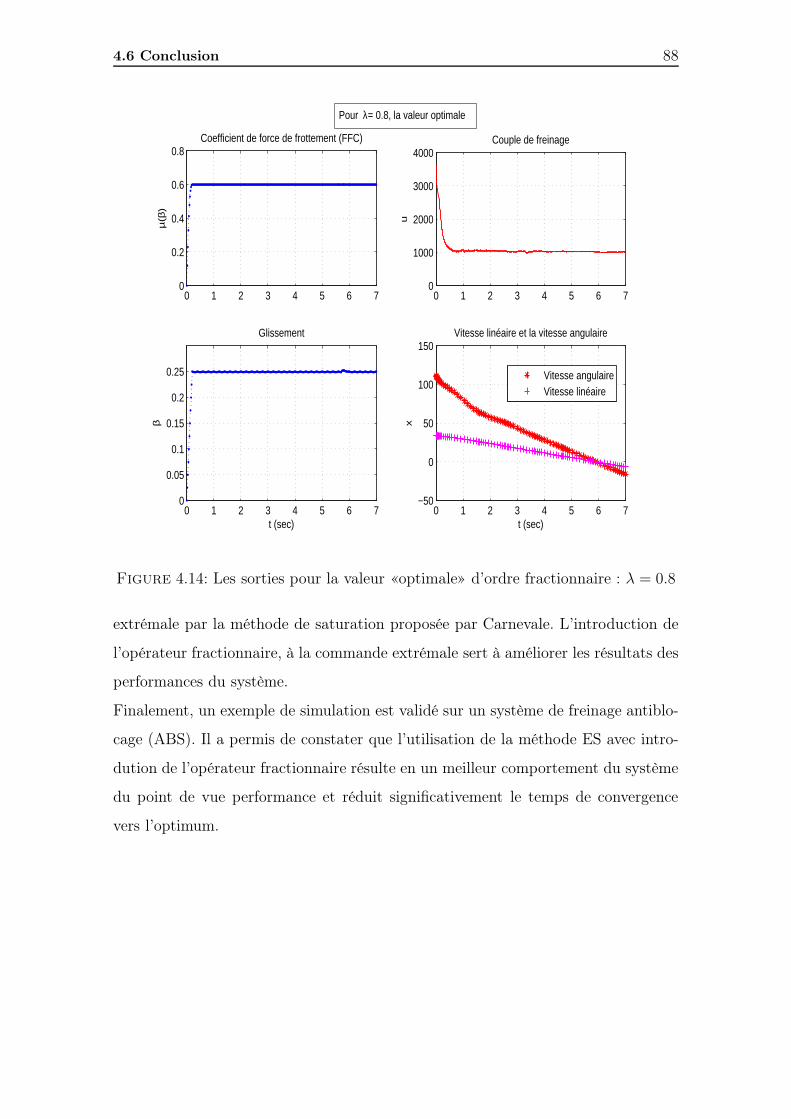
4.6 Conclusion 88
0 1 2 3 4 5 6 70
1000
2000
3000
4000
u
Couple de freinage
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8µ
(β)
Coefficient de force de frottement (FFC)
0 1 2 3 4 5 6 70
0.05
0.1
0.15
0.2
0.25
t (sec)
β
Glissement
0 1 2 3 4 5 6 7−50
0
50
100
150
t (sec)
x
Vitesse linéaire et la vitesse angulaire
Vitesse angulaireVitesse linéaire
Pour λ= 0.8, la valeur optimale
Figure 4.14: Les sorties pour la valeur «optimale» d’ordre fractionnaire : λ = 0.8
extrémale par la méthode de saturation proposée par Carnevale. L’introduction de
l’opérateur fractionnaire, à la commande extrémale sert à améliorer les résultats des
performances du système.
Finalement, un exemple de simulation est validé sur un système de freinage antiblo-
cage (ABS). Il a permis de constater que l’utilisation de la méthode ES avec intro-
dution de l’opérateur fractionnaire résulte en un meilleur comportement du système
du point de vue performance et réduit significativement le temps de convergence
vers l’optimum.
Chapitre 5Commande PIλDµ fractionnaire
auto-ajustable basée sur la recherche
d’extrémum
5.1 Introduction 90
5.1 Introduction
Les régulateurs PID fractionnaire (PIλDµ) ne sont pas couramment utilisés dans
l’industrie par rapport au PID classique. La raison principale est que le réglage des
paramètres du régulateur fractionnaire reste un problème ouvert.
La contribution principale dans ce travail réside dans l’introduction des opérateurs
d’ordre fractionnaire dans un schéma classique de recherche d’extrémum pour l’ajus-
tement des paramètres au ’mieux’ possible.
Nous proposons de généraliser une méthode classique de réglage PID basée sur l’ap-
proche Extremum Seeking (ES) pour le réglage des paramètres de régulateur PIλDµ,
en employant une intégration et une différentiation d’ordre fractionnaire dans la
stratégie de réglage des paramètres des actions de commande, afin d’atteindre des
performances optimales.
La recherche d’Extrémum est une méthode qui ne se base pas sur le modèle du
système pour le réglage en ligne des paramètres en minimisent une fonction de coût
qui reflète la performance du régulateur. L’avantage principal de ce procédé est
qu’il peut être appliqué dans les cas où il n’y a aucune connaissance du modèle du
procédé.
5.2 Principe de La recherche d’Extrémum à base de
perturbation
Un signal d’excitation est superposé au signal de commande dans le but d’extraire
l’information relative au gradient voir la figure (4.6). On notera que pour cette
classe de commandes extrémales, une mesure de la fonction objective est supposée
disponible (y = J(x, θ)) avec x −→ Rn vecteur des variables d’état, 0 −→ R
n vecteur
des variables manipulées et J : Rn −→ Rn −→ R la fonction objective (continue
suffisamment dérivable). Un filtre passe-haut de fréquence de coupure wh isole les
variations de la variable optimisée de sa valeur moyenne. L’état représentant le filtre
passe-haut est note η. Ce signal est ensuite module par une perturbation identique à
celle ajoutée à la commande. Un filtre passe-bas de fréquence de coupure wl et dont
la sortie est notée ξ, réduit le niveau d’oscillation du signal résultant ξ =dJ
dθsoit le

5.2 Principe de La recherche d’Extrémum à base de perturbation 91
gradient recherché. Finalement, un régulateur à action intégrale de gain k conduit
ce gradient estimé à zéro. Le schéma de commande s’écrit :
θ = −kξ, θ = θ + a sin(ωt)) (5.1a)
ξ = −ωξ + ωl(y − η)a sin(ωt) (5.1b)
η = −ωhη + ωhy (5.1c)
La valeur des états en régime permanent est obtenue en utilisant la condition d’équi-
libre x = f(x, θ) = 0 est notée x = 1. La fonction objective en régime permanent
s’écrit donc, y = J(l(θ), θ). Soient les variables d’écart par rapport a l’optimum
recherche,
θ = θ − θ∗ (5.2a)
y = y − y∗ (5.2b)
η = η − y∗ (5.2c)
où y∗ est la valeur minimale de la fonction objective à l’équilibre de y obtenue pour
θ = θ∗. En supposant que x soit en régime permanent, le régime moyen pour les
trois états (θ, ξ et η) est obtenu en prenant la moyenne du membre de droite des
équations (5.1a) a (5.1c) sur l’intervalle [0,−2π
ω]. Les états moyens sont notes (.)a.
Le système moyenne s’écrit [56]
d
dt
θa
ξa
ηa
=
−kξa
−ωlξa + ωlω
2πa∫ 2π
ω
0ν(θ) sin(ωt))dt
−ωhηa + ωhω
2π
∫ 2πω
0ν(θ)dt
(5.3)
avec θ = θa + a sin(ωt)
Cette méthode d’optimisation est facilement transposable au cas multivariable en
utilisant les propriétés orthogonales des fonctions sinusoïdales. Pour ce faire, chacune
des entrées est additionnée à une fonction de la forme a sin(2nω) où n représente
le numéro de l’entrée. Après le filtre «passe haut », le signal de sortie est divisé en
n branches. Chacune des branches est multipliée par la même fonction qui lui était
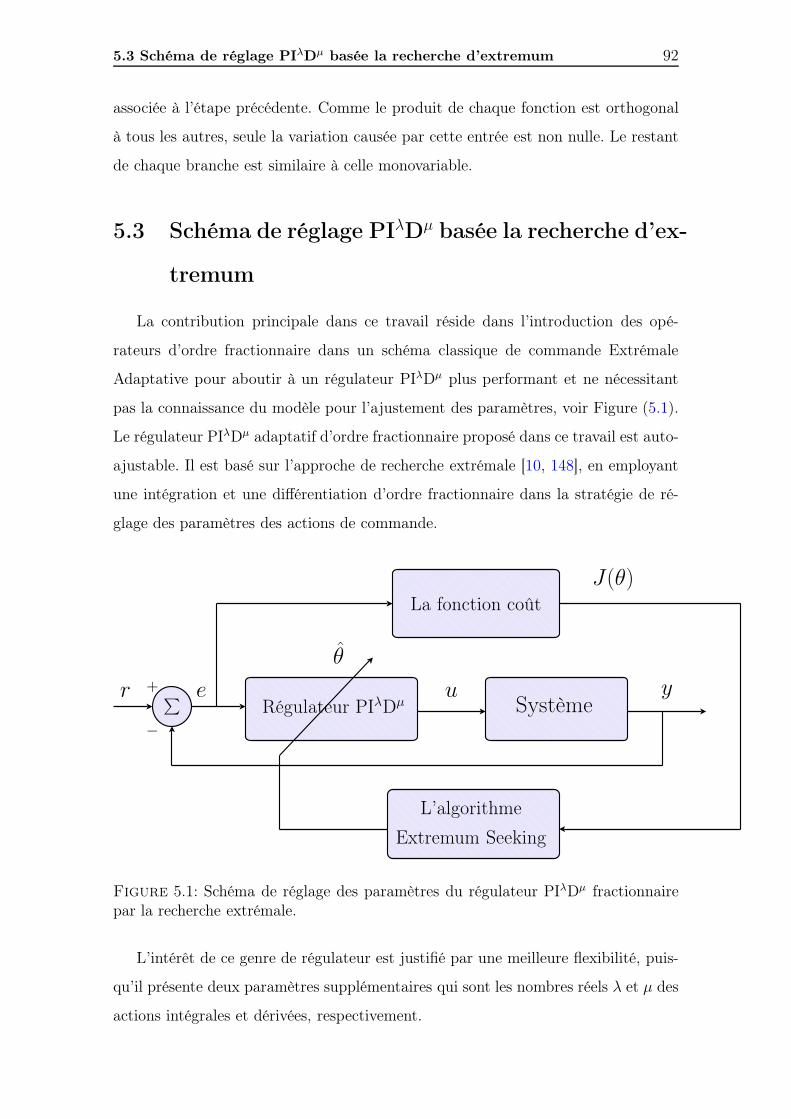
5.3 Schéma de réglage PIλDµ basée la recherche d’extremum 92
associée à l’étape précédente. Comme le produit de chaque fonction est orthogonal
à tous les autres, seule la variation causée par cette entrée est non nulle. Le restant
de chaque branche est similaire à celle monovariable.
5.3 Schéma de réglage PIλDµ basée la recherche d’ex-
tremum
La contribution principale dans ce travail réside dans l’introduction des opé-
rateurs d’ordre fractionnaire dans un schéma classique de commande Extrémale
Adaptative pour aboutir à un régulateur PIλDµ plus performant et ne nécessitant
pas la connaissance du modèle pour l’ajustement des paramètres, voir Figure (5.1).
Le régulateur PIλDµ adaptatif d’ordre fractionnaire proposé dans ce travail est auto-
ajustable. Il est basé sur l’approche de recherche extrémale [10, 148], en employant
une intégration et une différentiation d’ordre fractionnaire dans la stratégie de ré-
glage des paramètres des actions de commande.
∑
−
+
Régulateur PIλDµ Système
L’algorithme
Extremum Seeking
La fonction coût
r e u y
θ
J(θ)
Figure 5.1: Schéma de réglage des paramètres du régulateur PIλDµ fractionnairepar la recherche extrémale.
L’intérêt de ce genre de régulateur est justifié par une meilleure flexibilité, puis-
qu’il présente deux paramètres supplémentaires qui sont les nombres réels λ et µ des
actions intégrales et dérivées, respectivement.
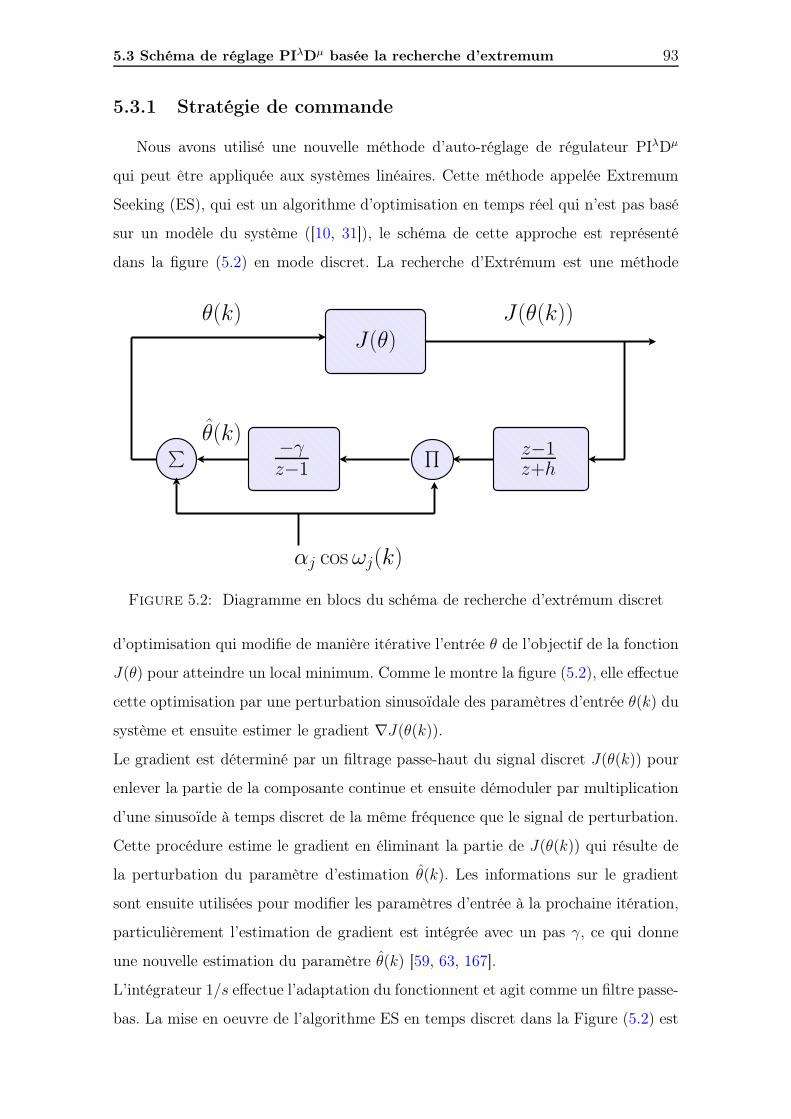
5.3 Schéma de réglage PIλDµ basée la recherche d’extremum 93
5.3.1 Stratégie de commande
Nous avons utilisé une nouvelle méthode d’auto-réglage de régulateur PIλDµ
qui peut être appliquée aux systèmes linéaires. Cette méthode appelée Extremum
Seeking (ES), qui est un algorithme d’optimisation en temps réel qui n’est pas basé
sur un modèle du système ([10, 31]), le schéma de cette approche est représenté
dans la figure (5.2) en mode discret. La recherche d’Extrémum est une méthode
∏∑
J(θ)θ(k) J(θ(k))
z−1z+h
−γz−1
θ(k)
αj cosωj(k)
Figure 5.2: Diagramme en blocs du schéma de recherche d’extrémum discret
d’optimisation qui modifie de manière itérative l’entrée θ de l’objectif de la fonction
J(θ) pour atteindre un local minimum. Comme le montre la figure (5.2), elle effectue
cette optimisation par une perturbation sinusoïdale des paramètres d’entrée θ(k) du
système et ensuite estimer le gradient ∇J(θ(k)).
Le gradient est déterminé par un filtrage passe-haut du signal discret J(θ(k)) pour
enlever la partie de la composante continue et ensuite démoduler par multiplication
d’une sinusoïde à temps discret de la même fréquence que le signal de perturbation.
Cette procédure estime le gradient en éliminant la partie de J(θ(k)) qui résulte de
la perturbation du paramètre d’estimation θ(k). Les informations sur le gradient
sont ensuite utilisées pour modifier les paramètres d’entrée à la prochaine itération,
particulièrement l’estimation de gradient est intégrée avec un pas γ, ce qui donne
une nouvelle estimation du paramètre θ(k) [59, 63, 167].
L’intégrateur 1/s effectue l’adaptation du fonctionnent et agit comme un filtre passe-
bas. La mise en oeuvre de l’algorithme ES en temps discret dans la Figure (5.2) est
5.3 Schéma de réglage PIλDµ basée la recherche d’extremum 94
donnée par [31] :
ξ(k) = −hξ(k − 1) + J (θ(k − 1)) (5.4)
θi(k + 1) = θi(k)− γiαi cos(ωik) [J (θ(k))− (1− h)ξ(k)] (5.5)
θi(k + 1) = θi(k + 1) + αi cos(ωi(k + 1)) (5.6)
où ξ(k) est un scalaire et l’indice i indique la ieme entrée du vecteur θ. γi est le gain
d’adaptation et αi sont les amplitudes de la perturbation.
Les valeurs des paramètres α, γ et la forme de la fonction objectif J(θ) à minimiser,
agissent sur la stabilité et la convergence du système, comme indiqué par [59].
La fréquence de modulation ωi est choisie tel que ωi = aiπ, où a satisfait 0 < a < 1.
Le système d’adaptation contient un filtre passe-haut donnée par (z − 1)/(z + h)
tel que 0 < h < 1 et une fréquence de coupure bien en dessous de la fréquence de
modulation ωi.
5.3.2 Optimisation par l’approche de recherche extrémum
Dans cette approche, un critère quadratique de l’intégrale de l’erreur (ISE) est
choisie comme une fonction objective de coût. IL est défini comme suit :
J (θ) =1
T − t0
∫ T
t0
e2 (t, θ) dt (5.7)
où l’erreur e(t, θ) est la différence entre la référence et le signal de sortie du système
en boucle fermée,
e(t, θ) = r(t)− y(t, θ) (5.8)
et le vecteur θ contient les cinq paramètres de PIλDµ fractionnaire ci-dessous :
θ = [kp, ki, kd, λ, µ] (5.9)
Avec deux paramètres supplémentaires qui sont l’inégal et la dérivés ordres fraction-
naire λ et µ, relativement au problème de régulateur PID classique original avec
l’algorithme de l’Extremum Seeking [59].
La fonction objective J(θ) définie dans l’équation (5.7) est basée sur l’erreur dans

5.4 Exemples de simulation 95
l’intervalle de temps [t0, T ]. En réglant t pour approximer le temps Tpeak auquel la
réponse indicielle du système en boucle fermée atteint le premier pic, la fonction de
coût J(θ) met à zéro la pondération effectivement sur la partie initiale transitoire
de la réponse. Par conséquent, le dispositif de commande est réglé afin de minimiser
l’erreur au-delà de la période Tpeak sans contraintes sur la partie initiale transitoire.
La structure du système de commande est représenté sur la figure (5.1) [110].
5.4 Exemples de simulation
Pour mettre en évidence l’efficacité de ce type de commande, nous nous pro-
posons d’étudier quelques exemples d’applications. Nous appliquons la stratégie de
réglage ES pour le PID fractionnaire proposé aux trois modèles de systèmes propo-
sés dans [88, 53, 59] et nous comparons ses performances à celles obtenues pour le
régulateur PID d’ordre entier classique utilisant la même méthode adaptative ES.
Rappelons que Killingsworth et Krstić (2006) ont comparé le réglage de PID clas-
sique appliqué à ces modèles, avec les méthodes de réglage suivante l’IFT (Iterative
Feedback Tuning), ZN (Ziegler-Nichols) et IMC (Internal Model Control) trouvés
dans [51, 88], et ont montré sa supériorité en ce qui concerne la performance et
vitesse de convergence.
Ces différentes stratégies de réglage sont appliquées aux systèmes :
F1(s) =1
1 + 20se−5s (5.10)
F2(s) =1
1 + 20se−20s (5.11)
F3(s) =1
(1 + 10s)8(5.12)
F4(s) =1− 5s
(1 + 10s)(1 + 20s)(5.13)
Notez que F1 et F2 ont des retards, F3 a un pôle multiple, et F4 est à phase non
minimale.
Nous appliquons ES pour l’auto-réglage du PIλ Dµ à (5.10)-(5.13) afin de faciliter la
comparaison avec les résultats obtenus avec le PID d’ordre entier trouvés dans [59]
avec la même méthode de réglage (ES).
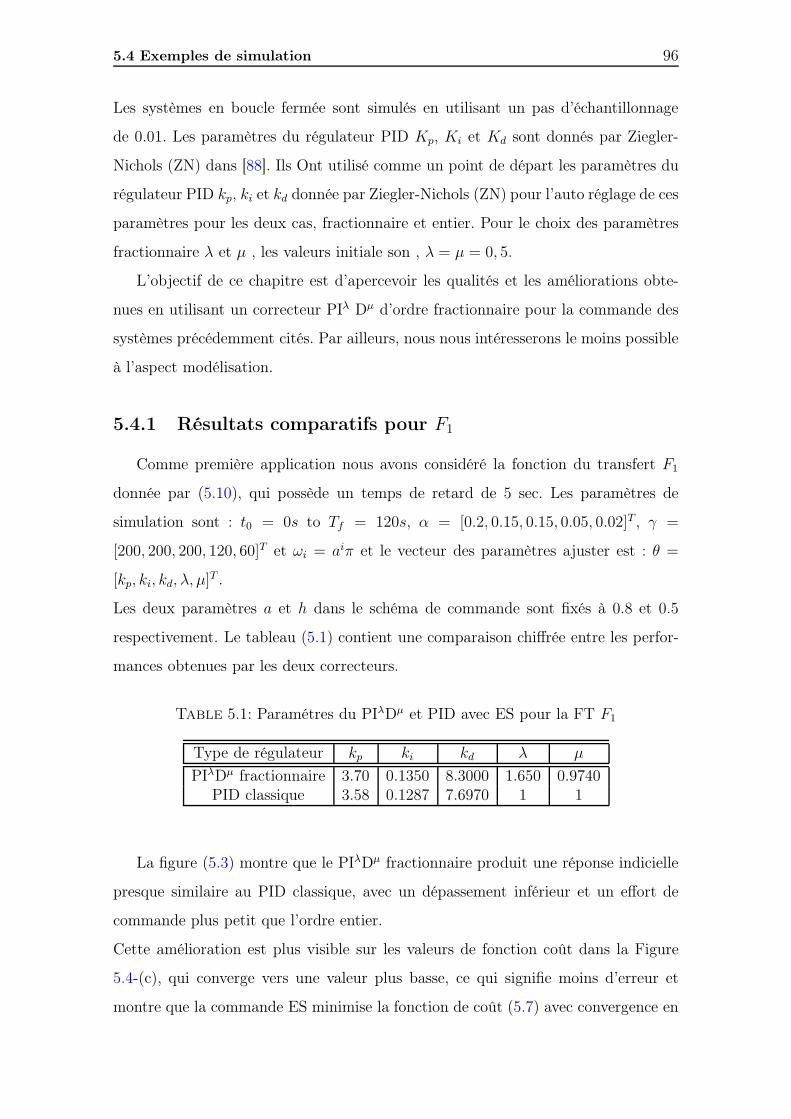
5.4 Exemples de simulation 96
Les systèmes en boucle fermée sont simulés en utilisant un pas d’échantillonnage
de 0.01. Les paramètres du régulateur PID Kp, Ki et Kd sont donnés par Ziegler-
Nichols (ZN) dans [88]. Ils Ont utilisé comme un point de départ les paramètres du
régulateur PID kp, ki et kd donnée par Ziegler-Nichols (ZN) pour l’auto réglage de ces
paramètres pour les deux cas, fractionnaire et entier. Pour le choix des paramètres
fractionnaire λ et µ , les valeurs initiale son , λ = µ = 0, 5.
L’objectif de ce chapitre est d’apercevoir les qualités et les améliorations obte-
nues en utilisant un correcteur PIλ Dµ d’ordre fractionnaire pour la commande des
systèmes précédemment cités. Par ailleurs, nous nous intéresserons le moins possible
à l’aspect modélisation.
5.4.1 Résultats comparatifs pour F1
Comme première application nous avons considéré la fonction du transfert F1
donnée par (5.10), qui possède un temps de retard de 5 sec. Les paramètres de
simulation sont : t0 = 0s to Tf = 120s, α = [0.2, 0.15, 0.15, 0.05, 0.02]T , γ =
[200, 200, 200, 120, 60]T et ωi = aiπ et le vecteur des paramètres ajuster est : θ =
[kp, ki, kd, λ, µ]T .
Les deux paramètres a et h dans le schéma de commande sont fixés à 0.8 et 0.5
respectivement. Le tableau (5.1) contient une comparaison chiffrée entre les perfor-
mances obtenues par les deux correcteurs.
Table 5.1: Paramétres du PIλDµ et PID avec ES pour la FT F1
Type de régulateur kp ki kd λ µ
PIλDµ fractionnaire 3.70 0.1350 8.3000 1.650 0.9740PID classique 3.58 0.1287 7.6970 1 1
La figure (5.3) montre que le PIλDµ fractionnaire produit une réponse indicielle
presque similaire au PID classique, avec un dépassement inférieur et un effort de
commande plus petit que l’ordre entier.
Cette amélioration est plus visible sur les valeurs de fonction coût dans la Figure
5.4-(c), qui converge vers une valeur plus basse, ce qui signifie moins d’erreur et
montre que la commande ES minimise la fonction de coût (5.7) avec convergence en
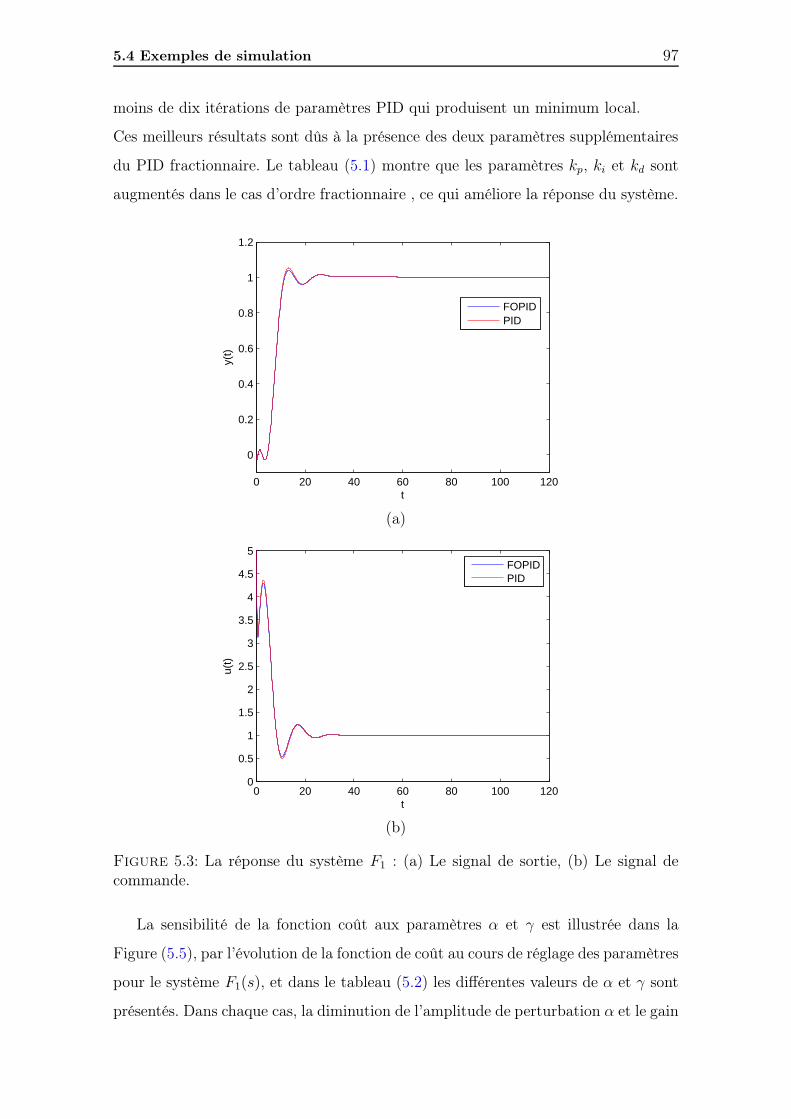
5.4 Exemples de simulation 97
moins de dix itérations de paramètres PID qui produisent un minimum local.
Ces meilleurs résultats sont dûs à la présence des deux paramètres supplémentaires
du PID fractionnaire. Le tableau (5.1) montre que les paramètres kp, ki et kd sont
augmentés dans le cas d’ordre fractionnaire , ce qui améliore la réponse du système.
0 20 40 60 80 100 120
0
0.2
0.4
0.6
0.8
1
1.2
t
y(t)
FOPIDPID
(a)
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
t
u(t)
FOPIDPID
(b)
Figure 5.3: La réponse du système F1 : (a) Le signal de sortie, (b) Le signal decommande.
La sensibilité de la fonction coût aux paramètres α et γ est illustrée dans la
Figure (5.5), par l’évolution de la fonction de coût au cours de réglage des paramètres
pour le système F1(s), et dans le tableau (5.2) les différentes valeurs de α et γ sont
présentés. Dans chaque cas, la diminution de l’amplitude de perturbation α et le gain
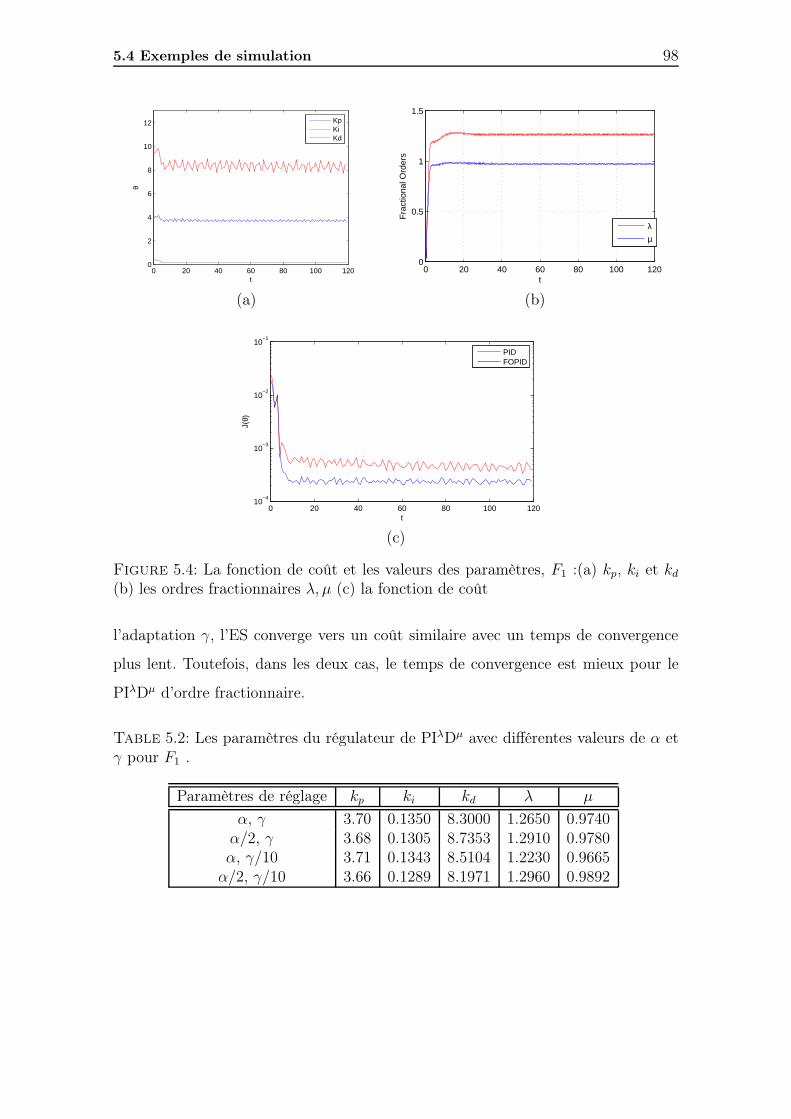
5.4 Exemples de simulation 98
0 20 40 60 80 100 1200
2
4
6
8
10
12
θ
t
KpKiKd
0 20 40 60 80 100 1200
0.5
1
1.5
t
Fra
ctio
nal O
rder
s
λµ
(a) (b)
0 20 40 60 80 100 12010
−4
10−3
10−2
10−1
J(θ)
t
PIDFOPID
(c)
Figure 5.4: La fonction de coût et les valeurs des paramètres, F1 :(a) kp, ki et kd(b) les ordres fractionnaires λ, µ (c) la fonction de coût
l’adaptation γ, l’ES converge vers un coût similaire avec un temps de convergence
plus lent. Toutefois, dans les deux cas, le temps de convergence est mieux pour le
PIλDµ d’ordre fractionnaire.
Table 5.2: Les paramètres du régulateur de PIλDµ avec différentes valeurs de α etγ pour F1 .
Paramètres de réglage kp ki kd λ µ
α, γ 3.70 0.1350 8.3000 1.2650 0.9740α/2, γ 3.68 0.1305 8.7353 1.2910 0.9780α, γ/10 3.71 0.1343 8.5104 1.2230 0.9665α/2, γ/10 3.66 0.1289 8.1971 1.2960 0.9892
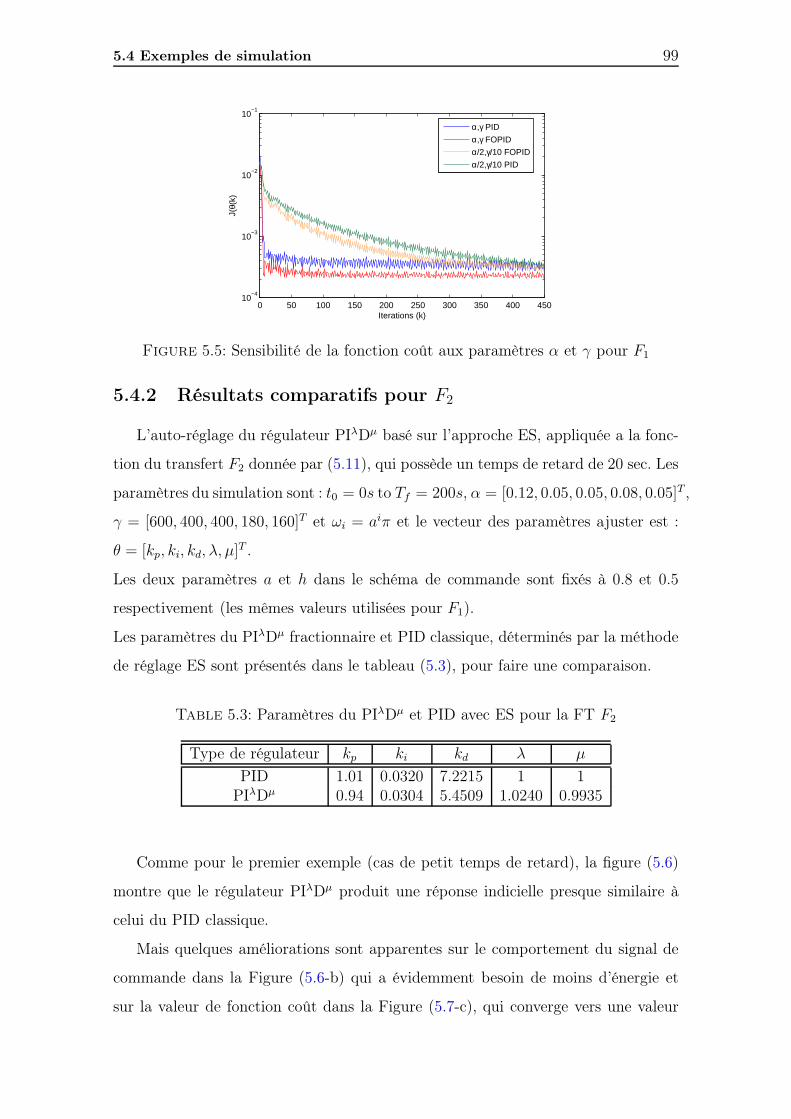
5.4 Exemples de simulation 99
0 50 100 150 200 250 300 350 400 45010
−4
10−3
10−2
10−1
J(θ(
k)
Iterations (k)
α,γ PID
α,γ FOPID
α/2,γ/10 FOPID
α/2,γ/10 PID
Figure 5.5: Sensibilité de la fonction coût aux paramètres α et γ pour F1
5.4.2 Résultats comparatifs pour F2
L’auto-réglage du régulateur PIλDµ basé sur l’approche ES, appliquée a la fonc-
tion du transfert F2 donnée par (5.11), qui possède un temps de retard de 20 sec. Les
paramètres du simulation sont : t0 = 0s to Tf = 200s, α = [0.12, 0.05, 0.05, 0.08, 0.05]T ,
γ = [600, 400, 400, 180, 160]T et ωi = aiπ et le vecteur des paramètres ajuster est :
θ = [kp, ki, kd, λ, µ]T .
Les deux paramètres a et h dans le schéma de commande sont fixés à 0.8 et 0.5
respectivement (les mêmes valeurs utilisées pour F1).
Les paramètres du PIλDµ fractionnaire et PID classique, déterminés par la méthode
de réglage ES sont présentés dans le tableau (5.3), pour faire une comparaison.
Table 5.3: Paramètres du PIλDµ et PID avec ES pour la FT F2
Type de régulateur kp ki kd λ µ
PID 1.01 0.0320 7.2215 1 1PIλDµ 0.94 0.0304 5.4509 1.0240 0.9935
Comme pour le premier exemple (cas de petit temps de retard), la figure (5.6)
montre que le régulateur PIλDµ produit une réponse indicielle presque similaire à
celui du PID classique.
Mais quelques améliorations sont apparentes sur le comportement du signal de
commande dans la Figure (5.6-b) qui a évidemment besoin de moins d’énergie et
sur la valeur de fonction coût dans la Figure (5.7-c), qui converge vers une valeur
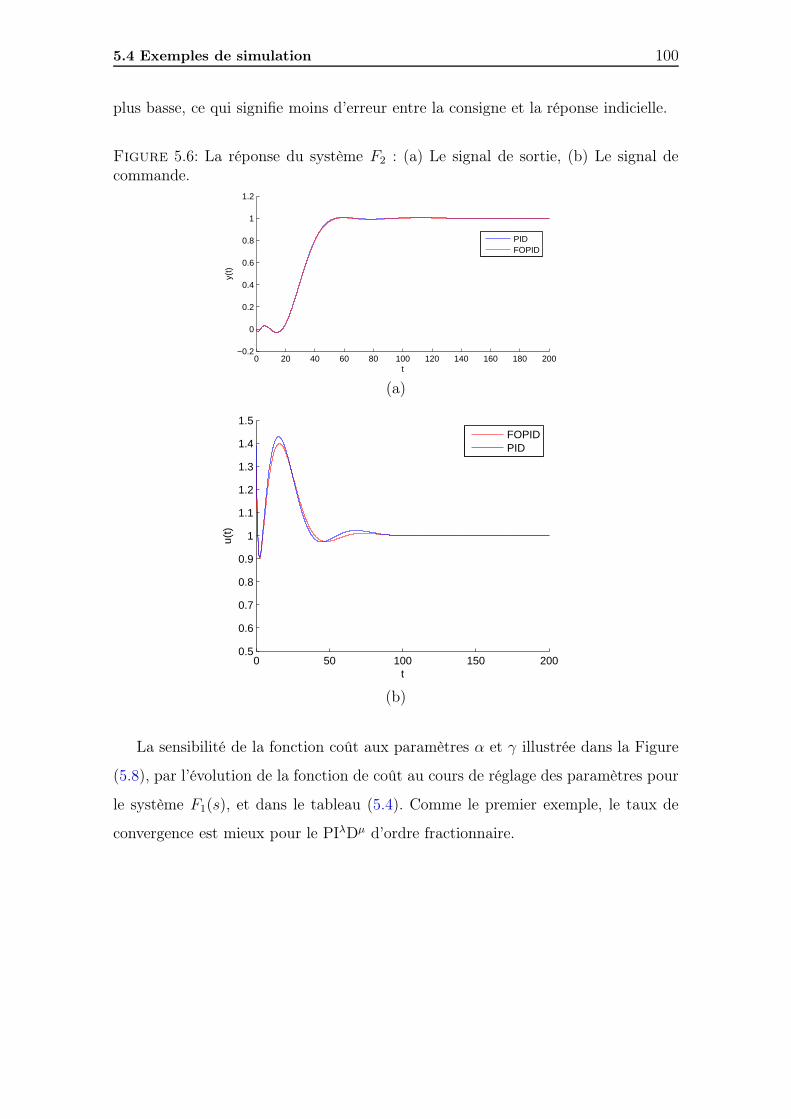
5.4 Exemples de simulation 100
plus basse, ce qui signifie moins d’erreur entre la consigne et la réponse indicielle.
Figure 5.6: La réponse du système F2 : (a) Le signal de sortie, (b) Le signal decommande.
0 20 40 60 80 100 120 140 160 180 200−0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
y(t)
PIDFOPID
(a)
0 50 100 150 2000.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
t
u(t)
FOPIDPID
(b)
La sensibilité de la fonction coût aux paramètres α et γ illustrée dans la Figure
(5.8), par l’évolution de la fonction de coût au cours de réglage des paramètres pour
le système F1(s), et dans le tableau (5.4). Comme le premier exemple, le taux de
convergence est mieux pour le PIλDµ d’ordre fractionnaire.
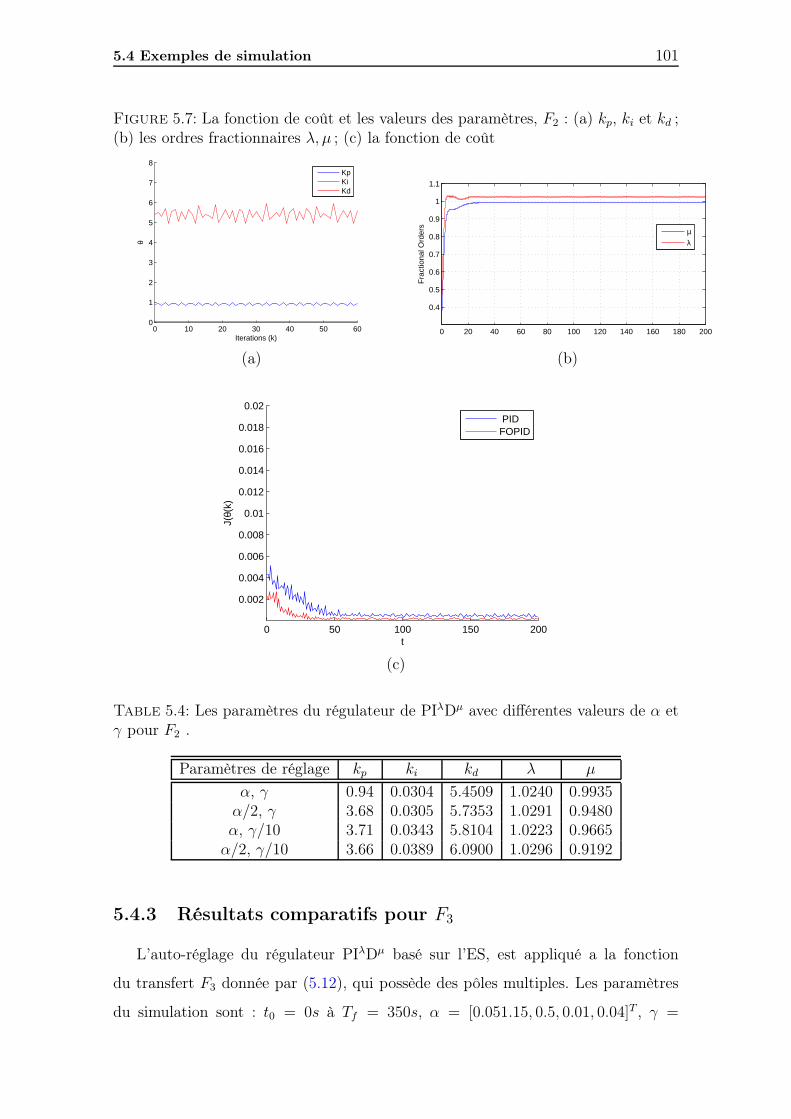
5.4 Exemples de simulation 101
Figure 5.7: La fonction de coût et les valeurs des paramètres, F2 : (a) kp, ki et kd ;(b) les ordres fractionnaires λ, µ ; (c) la fonction de coût
0 10 20 30 40 50 600
1
2
3
4
5
6
7
8
θ
Iterations (k)
KpKiKd
0 20 40 60 80 100 120 140 160 180 200
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
Fra
ctio
nal O
rder
s
µλ
(a) (b)
0 50 100 150 200
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
J(θ(
k)
t
PIDFOPID
(c)
Table 5.4: Les paramètres du régulateur de PIλDµ avec différentes valeurs de α etγ pour F2 .
Paramètres de réglage kp ki kd λ µ
α, γ 0.94 0.0304 5.4509 1.0240 0.9935α/2, γ 3.68 0.0305 5.7353 1.0291 0.9480α, γ/10 3.71 0.0343 5.8104 1.0223 0.9665α/2, γ/10 3.66 0.0389 6.0900 1.0296 0.9192
5.4.3 Résultats comparatifs pour F3
L’auto-réglage du régulateur PIλDµ basé sur l’ES, est appliqué a la fonction
du transfert F3 donnée par (5.12), qui possède des pôles multiples. Les paramètres
du simulation sont : t0 = 0s à Tf = 350s, α = [0.051.15, 0.5, 0.01, 0.04]T , γ =
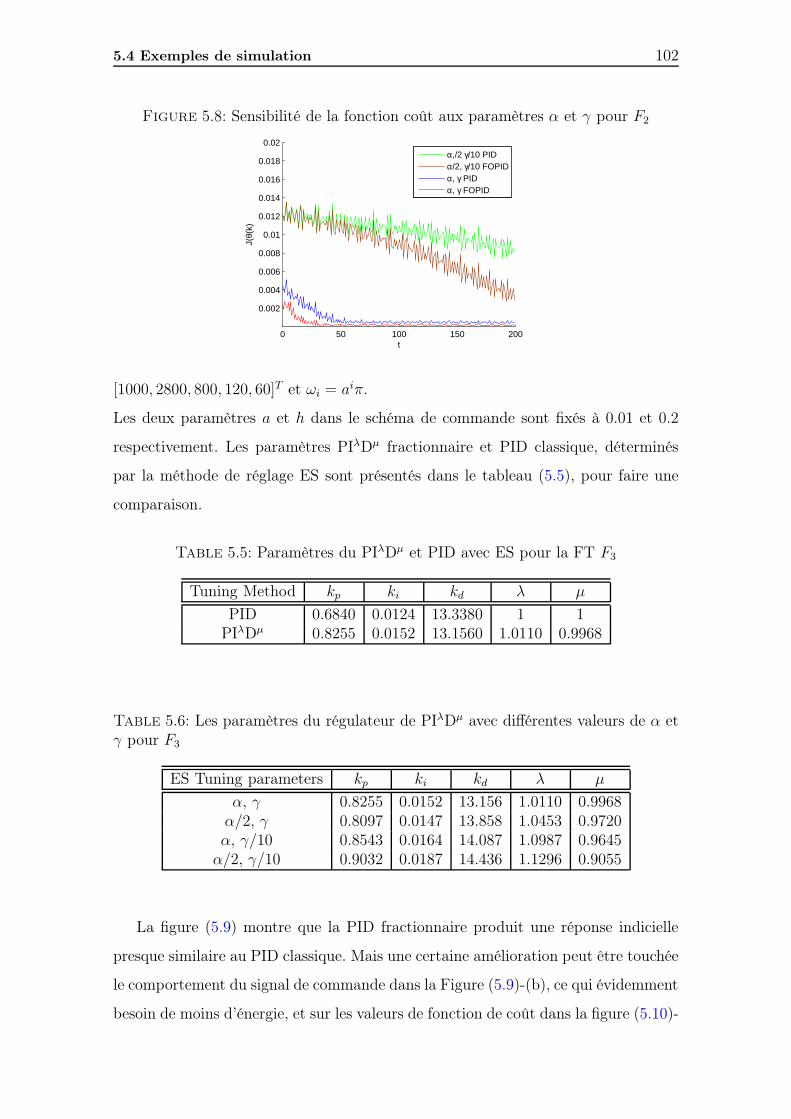
5.4 Exemples de simulation 102
Figure 5.8: Sensibilité de la fonction coût aux paramètres α et γ pour F2
0 50 100 150 200
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
J(θ(
k)
t
α,/2 γ/10 PIDα/2, γ/10 FOPIDα, γ PIDα, γ FOPID
[1000, 2800, 800, 120, 60]T et ωi = aiπ.
Les deux paramètres a et h dans le schéma de commande sont fixés à 0.01 et 0.2
respectivement. Les paramètres PIλDµ fractionnaire et PID classique, déterminés
par la méthode de réglage ES sont présentés dans le tableau (5.5), pour faire une
comparaison.
Table 5.5: Paramètres du PIλDµ et PID avec ES pour la FT F3
Tuning Method kp ki kd λ µ
PID 0.6840 0.0124 13.3380 1 1PIλDµ 0.8255 0.0152 13.1560 1.0110 0.9968
Table 5.6: Les paramètres du régulateur de PIλDµ avec différentes valeurs de α etγ pour F3
ES Tuning parameters kp ki kd λ µ
α, γ 0.8255 0.0152 13.156 1.0110 0.9968α/2, γ 0.8097 0.0147 13.858 1.0453 0.9720α, γ/10 0.8543 0.0164 14.087 1.0987 0.9645α/2, γ/10 0.9032 0.0187 14.436 1.1296 0.9055
La figure (5.9) montre que la PID fractionnaire produit une réponse indicielle
presque similaire au PID classique. Mais une certaine amélioration peut être touchée
le comportement du signal de commande dans la Figure (5.9)-(b), ce qui évidemment
besoin de moins d’énergie, et sur les valeurs de fonction de coût dans la figure (5.10)-
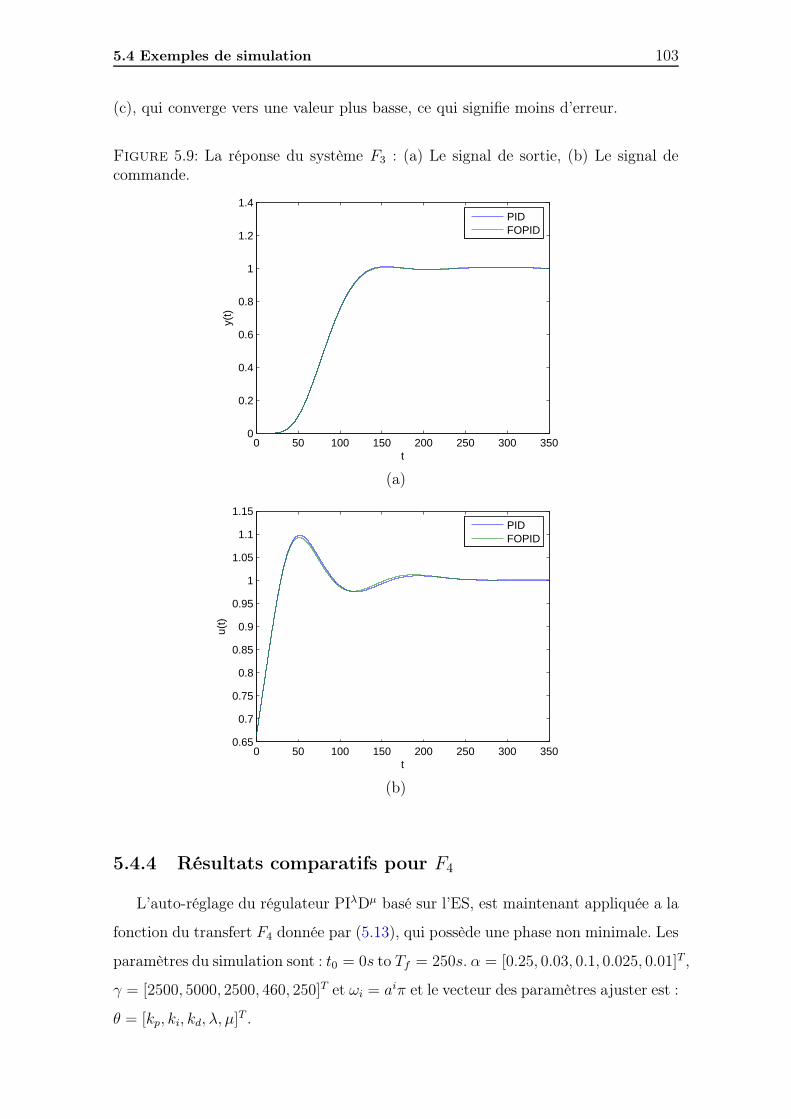
5.4 Exemples de simulation 103
(c), qui converge vers une valeur plus basse, ce qui signifie moins d’erreur.
Figure 5.9: La réponse du système F3 : (a) Le signal de sortie, (b) Le signal decommande.
0 50 100 150 200 250 300 3500
0.2
0.4
0.6
0.8
1
1.2
1.4
t
y(t)
PIDFOPID
(a)
0 50 100 150 200 250 300 3500.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
t
u(t)
PIDFOPID
(b)
5.4.4 Résultats comparatifs pour F4
L’auto-réglage du régulateur PIλDµ basé sur l’ES, est maintenant appliquée a la
fonction du transfert F4 donnée par (5.13), qui possède une phase non minimale. Les
paramètres du simulation sont : t0 = 0s to Tf = 250s. α = [0.25, 0.03, 0.1, 0.025, 0.01]T ,
γ = [2500, 5000, 2500, 460, 250]T et ωi = aiπ et le vecteur des paramètres ajuster est :
θ = [kp, ki, kd, λ, µ]T .
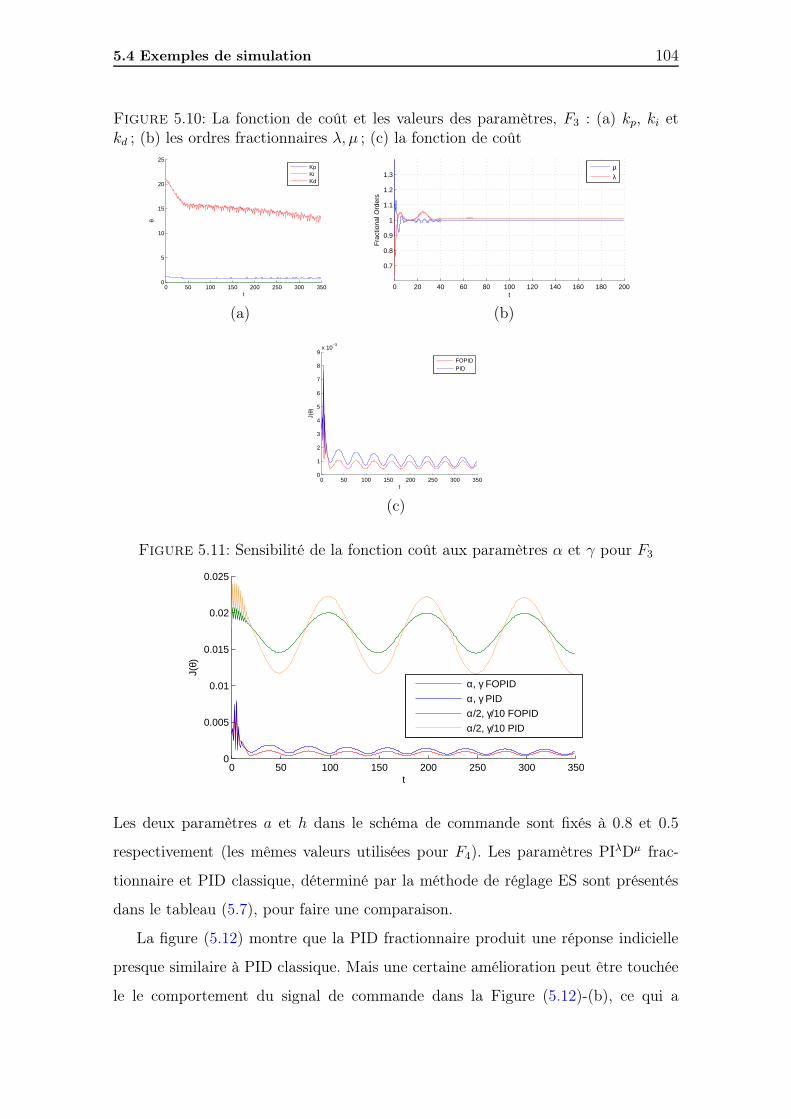
5.4 Exemples de simulation 104
Figure 5.10: La fonction de coût et les valeurs des paramètres, F3 : (a) kp, ki etkd ; (b) les ordres fractionnaires λ, µ ; (c) la fonction de coût
0 50 100 150 200 250 300 3500
5
10
15
20
25
θ
t
KpKiKd
0 20 40 60 80 100 120 140 160 180 200
0.7
0.8
0.9
1
1.1
1.2
1.3
t
Fra
ctio
nal O
rder
s
µλ
(a) (b)
0 50 100 150 200 250 300 3500
1
2
3
4
5
6
7
8
9x 10
−3
J(θ)
t
FOPIDPID
(c)
Figure 5.11: Sensibilité de la fonction coût aux paramètres α et γ pour F3
0 50 100 150 200 250 300 3500
0.005
0.01
0.015
0.02
0.025
J(θ)
t
α, γ FOPID
α, γ PID
α/2, γ/10 FOPID
α/2, γ/10 PID
Les deux paramètres a et h dans le schéma de commande sont fixés à 0.8 et 0.5
respectivement (les mêmes valeurs utilisées pour F4). Les paramètres PIλDµ frac-
tionnaire et PID classique, déterminé par la méthode de réglage ES sont présentés
dans le tableau (5.7), pour faire une comparaison.
La figure (5.12) montre que la PID fractionnaire produit une réponse indicielle
presque similaire à PID classique. Mais une certaine amélioration peut être touchée
le le comportement du signal de commande dans la Figure (5.12)-(b), ce qui a
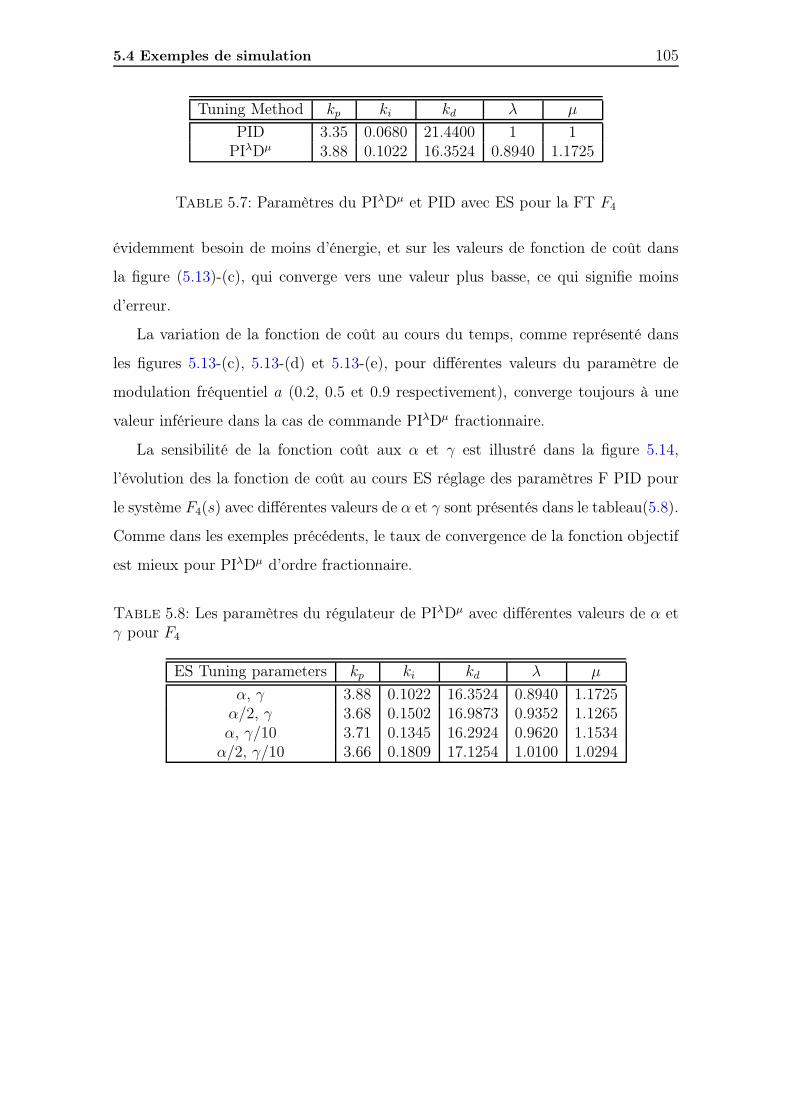
5.4 Exemples de simulation 105
Tuning Method kp ki kd λ µ
PID 3.35 0.0680 21.4400 1 1PIλDµ 3.88 0.1022 16.3524 0.8940 1.1725
Table 5.7: Paramètres du PIλDµ et PID avec ES pour la FT F4
évidemment besoin de moins d’énergie, et sur les valeurs de fonction de coût dans
la figure (5.13)-(c), qui converge vers une valeur plus basse, ce qui signifie moins
d’erreur.
La variation de la fonction de coût au cours du temps, comme représenté dans
les figures 5.13-(c), 5.13-(d) et 5.13-(e), pour différentes valeurs du paramètre de
modulation fréquentiel a (0.2, 0.5 et 0.9 respectivement), converge toujours à une
valeur inférieure dans la cas de commande PIλDµ fractionnaire.
La sensibilité de la fonction coût aux α et γ est illustré dans la figure 5.14,
l’évolution des la fonction de coût au cours ES réglage des paramètres F PID pour
le système F4(s) avec différentes valeurs de α et γ sont présentés dans le tableau(5.8).
Comme dans les exemples précédents, le taux de convergence de la fonction objectif
est mieux pour PIλDµ d’ordre fractionnaire.
Table 5.8: Les paramètres du régulateur de PIλDµ avec différentes valeurs de α etγ pour F4
ES Tuning parameters kp ki kd λ µ
α, γ 3.88 0.1022 16.3524 0.8940 1.1725α/2, γ 3.68 0.1502 16.9873 0.9352 1.1265α, γ/10 3.71 0.1345 16.2924 0.9620 1.1534α/2, γ/10 3.66 0.1809 17.1254 1.0100 1.0294
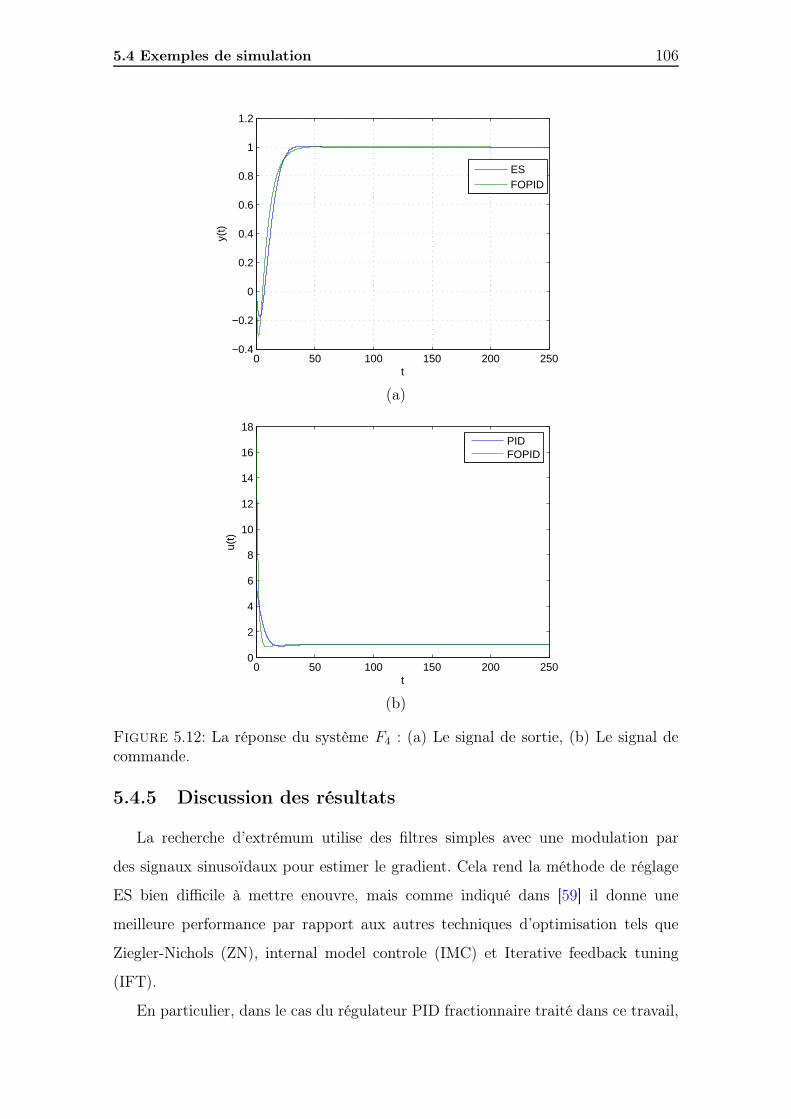
5.4 Exemples de simulation 106
0 50 100 150 200 250−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
y(t)
ESFOPID
(a)
0 50 100 150 200 2500
2
4
6
8
10
12
14
16
18
t
u(t)
PIDFOPID
(b)
Figure 5.12: La réponse du système F4 : (a) Le signal de sortie, (b) Le signal decommande.
5.4.5 Discussion des résultats
La recherche d’extrémum utilise des filtres simples avec une modulation par
des signaux sinusoïdaux pour estimer le gradient. Cela rend la méthode de réglage
ES bien difficile à mettre enouvre, mais comme indiqué dans [59] il donne une
meilleure performance par rapport aux autres techniques d’optimisation tels que
Ziegler-Nichols (ZN), internal model controle (IMC) et Iterative feedback tuning
(IFT).
En particulier, dans le cas du régulateur PID fractionnaire traité dans ce travail,
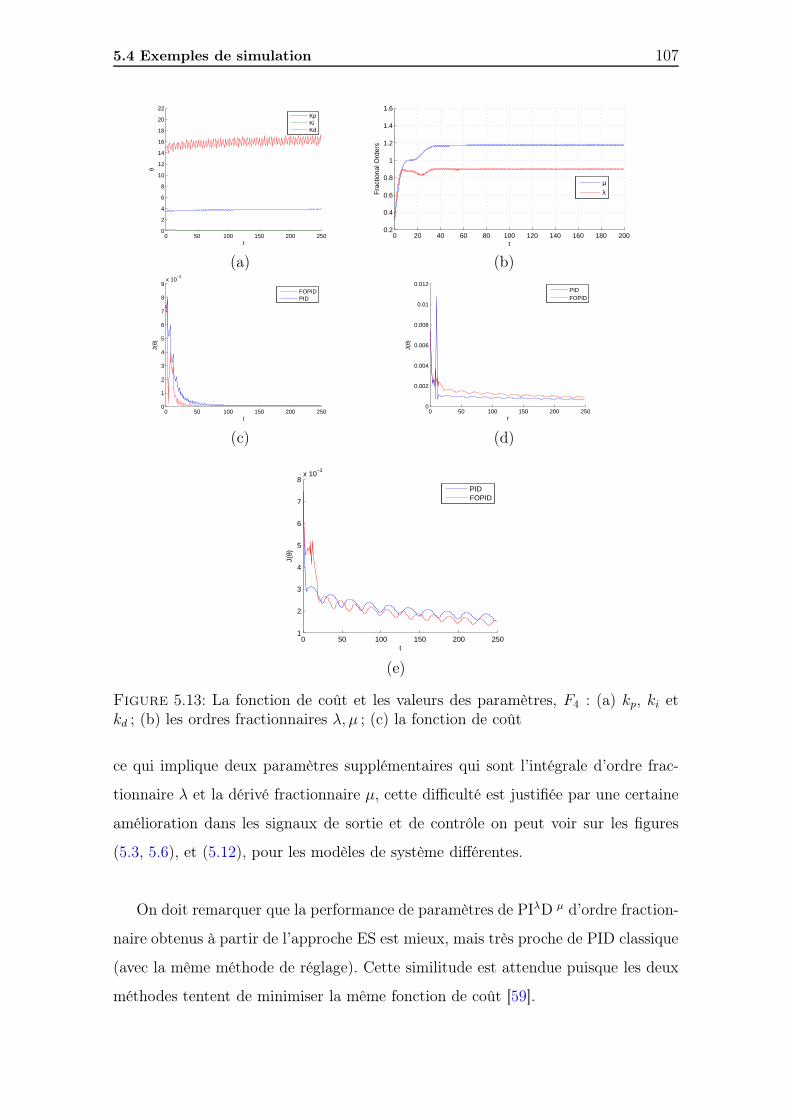
5.4 Exemples de simulation 107
0 50 100 150 200 2500
2
4
6
8
10
12
14
16
18
20
22
θ
t
KpKiKd
0 20 40 60 80 100 120 140 160 180 2000.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Fra
ctio
nal O
rder
s
t
µλ
(a) (b)
0 50 100 150 200 2500
1
2
3
4
5
6
7
8
9x 10
−3
J(θ)
t
FOPIDPID
0 50 100 150 200 2500
0.002
0.004
0.006
0.008
0.01
0.012
J(θ)
t
PIDFOPID
(c) (d)
0 50 100 150 200 2501
2
3
4
5
6
7
8x 10
−3
J(θ)
t
PIDFOPID
(e)
Figure 5.13: La fonction de coût et les valeurs des paramètres, F4 : (a) kp, ki etkd ; (b) les ordres fractionnaires λ, µ ; (c) la fonction de coût
ce qui implique deux paramètres supplémentaires qui sont l’intégrale d’ordre frac-
tionnaire λ et la dérivé fractionnaire µ, cette difficulté est justifiée par une certaine
amélioration dans les signaux de sortie et de contrôle on peut voir sur les figures
(5.3, 5.6), et (5.12), pour les modèles de système différentes.
On doit remarquer que la performance de paramètres de PIλD µ d’ordre fraction-
naire obtenus à partir de l’approche ES est mieux, mais très proche de PID classique
(avec la même méthode de réglage). Cette similitude est attendue puisque les deux
méthodes tentent de minimiser la même fonction de coût [59].
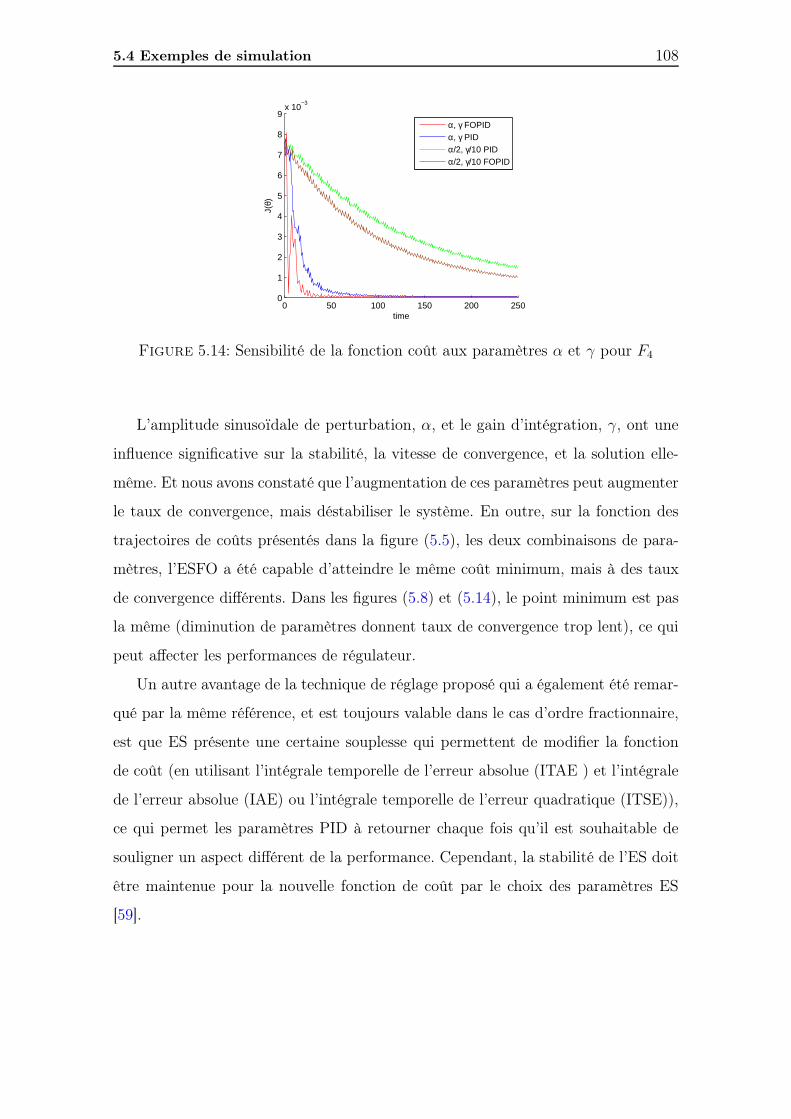
5.4 Exemples de simulation 108
0 50 100 150 200 2500
1
2
3
4
5
6
7
8
9x 10
−3
J(θ)
time
α, γ FOPIDα, γ PIDα/2, γ/10 PIDα/2, γ/10 FOPID
Figure 5.14: Sensibilité de la fonction coût aux paramètres α et γ pour F4
L’amplitude sinusoïdale de perturbation, α, et le gain d’intégration, γ, ont une
influence significative sur la stabilité, la vitesse de convergence, et la solution elle-
même. Et nous avons constaté que l’augmentation de ces paramètres peut augmenter
le taux de convergence, mais déstabiliser le système. En outre, sur la fonction des
trajectoires de coûts présentés dans la figure (5.5), les deux combinaisons de para-
mètres, l’ESFO a été capable d’atteindre le même coût minimum, mais à des taux
de convergence différents. Dans les figures (5.8) et (5.14), le point minimum est pas
la même (diminution de paramètres donnent taux de convergence trop lent), ce qui
peut affecter les performances de régulateur.
Un autre avantage de la technique de réglage proposé qui a également été remar-
qué par la même référence, et est toujours valable dans le cas d’ordre fractionnaire,
est que ES présente une certaine souplesse qui permettent de modifier la fonction
de coût (en utilisant l’intégrale temporelle de l’erreur absolue (ITAE ) et l’intégrale
de l’erreur absolue (IAE) ou l’intégrale temporelle de l’erreur quadratique (ITSE)),
ce qui permet les paramètres PID à retourner chaque fois qu’il est souhaitable de
souligner un aspect différent de la performance. Cependant, la stabilité de l’ES doit
être maintenue pour la nouvelle fonction de coût par le choix des paramètres ES
[59].

5.5 Conclusion 109
5.5 Conclusion
Dans ce chapitre, nous avons introduit la commande extrémale comme une ap-
proche efficace pour optimiser le réglage des paramètres du régulateurs PIλDµ frac-
tionnaire, celui-ci étant une généralisation du correcteur PID classique avec deux
paramètres complémentaires qui sont l’ordre d’intégration et de dérivation.
Ces derniers, ont été approximés par une fonction rationnelle par la méthode de
Charef. Cette méthode proposée est utilisé, pour faire converger les cinq paramètres
du régulateur PID d’ordre fractionnaire, par la minimisation d’un critère intégral
donné (ISE) qui caractérise le comportement souhaité du système en boucle fermée.
Cette méthode de réglage est démontrée par des systèmes typique, et cherche les
paramètres qui donnent des performances meilleures ou comparables à la méthode
réglage conventionnelle (d’ordre entier). De plus, ES fournit des résultats favorables,
en présence d’actions d’ordre fractionnaire.
La méthode ES donc, a un avantage pour le réglage de PIλDµ fractionnaire. En outre,
la fonction de coût peut être choisie pour refléter les caractéristiques de performance
souhaitées.
Chapitre 6Commande extrémale fractionnaire de
systèmes photovoltaïques
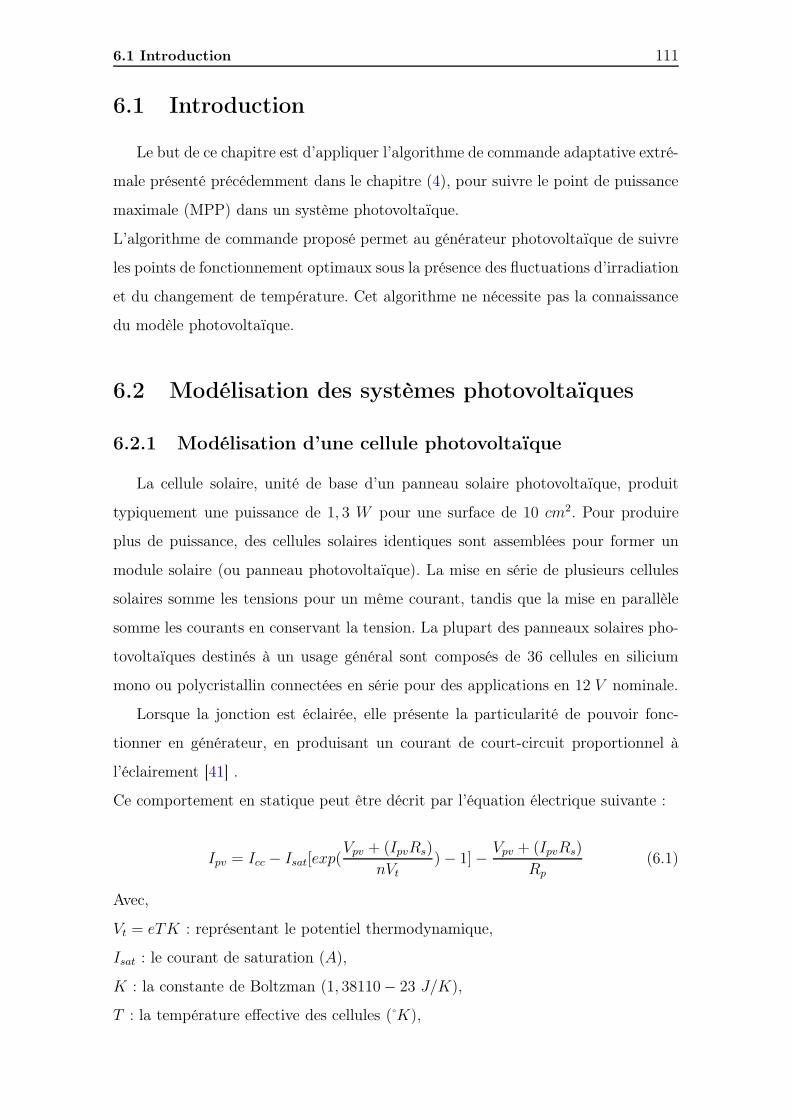
6.1 Introduction 111
6.1 Introduction
Le but de ce chapitre est d’appliquer l’algorithme de commande adaptative extré-
male présenté précédemment dans le chapitre (4), pour suivre le point de puissance
maximale (MPP) dans un système photovoltaïque.
L’algorithme de commande proposé permet au générateur photovoltaïque de suivre
les points de fonctionnement optimaux sous la présence des fluctuations d’irradiation
et du changement de température. Cet algorithme ne nécessite pas la connaissance
du modèle photovoltaïque.
6.2 Modélisation des systèmes photovoltaïques
6.2.1 Modélisation d’une cellule photovoltaïque
La cellule solaire, unité de base d’un panneau solaire photovoltaïque, produit
typiquement une puissance de 1, 3 W pour une surface de 10 cm2. Pour produire
plus de puissance, des cellules solaires identiques sont assemblées pour former un
module solaire (ou panneau photovoltaïque). La mise en série de plusieurs cellules
solaires somme les tensions pour un même courant, tandis que la mise en parallèle
somme les courants en conservant la tension. La plupart des panneaux solaires pho-
tovoltaïques destinés à un usage général sont composés de 36 cellules en silicium
mono ou polycristallin connectées en série pour des applications en 12 V nominale.
Lorsque la jonction est éclairée, elle présente la particularité de pouvoir fonc-
tionner en générateur, en produisant un courant de court-circuit proportionnel à
l’éclairement [41] .
Ce comportement en statique peut être décrit par l’équation électrique suivante :
Ipv = Icc − Isat[exp(Vpv + (IpvRs)
nVt)− 1]− Vpv + (IpvRs)
Rp(6.1)
Avec,
Vt = eTK : représentant le potentiel thermodynamique,
Isat : le courant de saturation (A),
K : la constante de Boltzman (1, 38110− 23 J/K),
T : la température effective des cellules ( K),
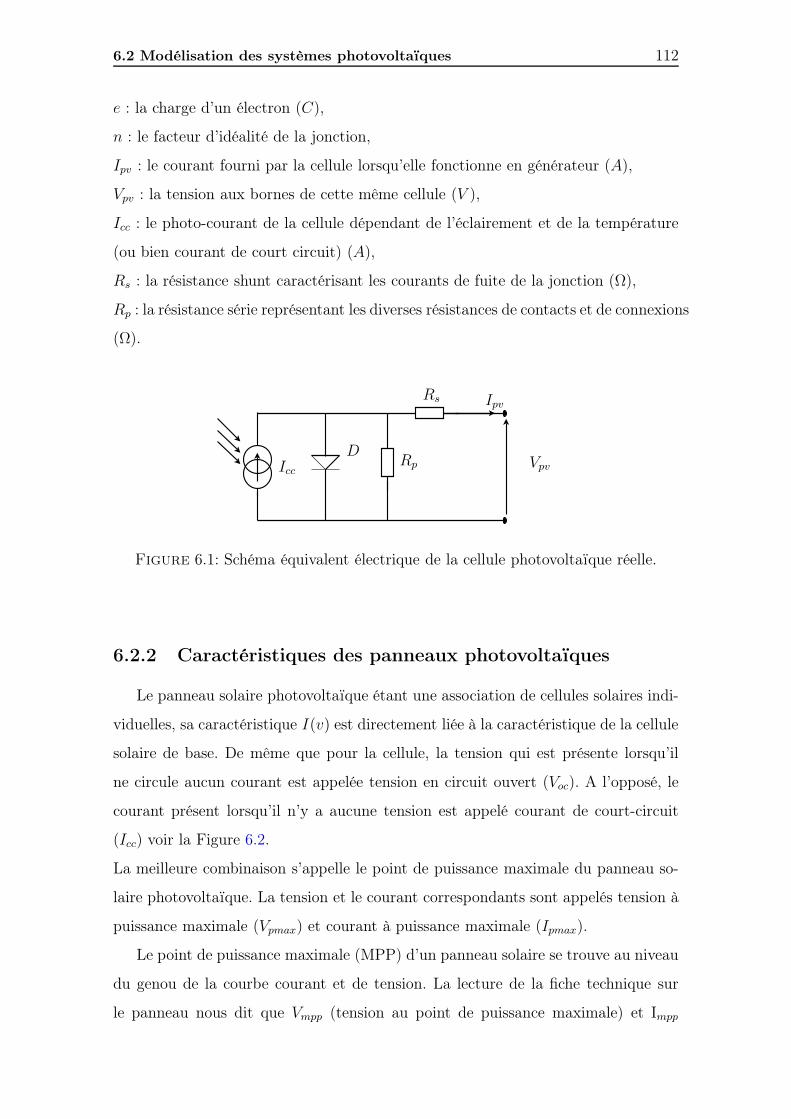
6.2 Modélisation des systèmes photovoltaïques 112
e : la charge d’un électron (C),
n : le facteur d’idéalité de la jonction,
Ipv : le courant fourni par la cellule lorsqu’elle fonctionne en générateur (A),
Vpv : la tension aux bornes de cette même cellule (V ),
Icc : le photo-courant de la cellule dépendant de l’éclairement et de la température
(ou bien courant de court circuit) (A),
Rs : la résistance shunt caractérisant les courants de fuite de la jonction (Ω),
Rp : la résistance série représentant les diverses résistances de contacts et de connexions
(Ω).
DIcc
Rs
Rp Vpv
Ipv
Figure 6.1: Schéma équivalent électrique de la cellule photovoltaïque réelle.
6.2.2 Caractéristiques des panneaux photovoltaïques
Le panneau solaire photovoltaïque étant une association de cellules solaires indi-
viduelles, sa caractéristique I(v) est directement liée à la caractéristique de la cellule
solaire de base. De même que pour la cellule, la tension qui est présente lorsqu’il
ne circule aucun courant est appelée tension en circuit ouvert (Voc). A l’opposé, le
courant présent lorsqu’il n’y a aucune tension est appelé courant de court-circuit
(Icc) voir la Figure 6.2.
La meilleure combinaison s’appelle le point de puissance maximale du panneau so-
laire photovoltaïque. La tension et le courant correspondants sont appelés tension à
puissance maximale (Vpmax) et courant à puissance maximale (Ipmax).
Le point de puissance maximale (MPP) d’un panneau solaire se trouve au niveau
du genou de la courbe courant et de tension. La lecture de la fiche technique sur
le panneau nous dit que Vmpp (tension au point de puissance maximale) et Impp
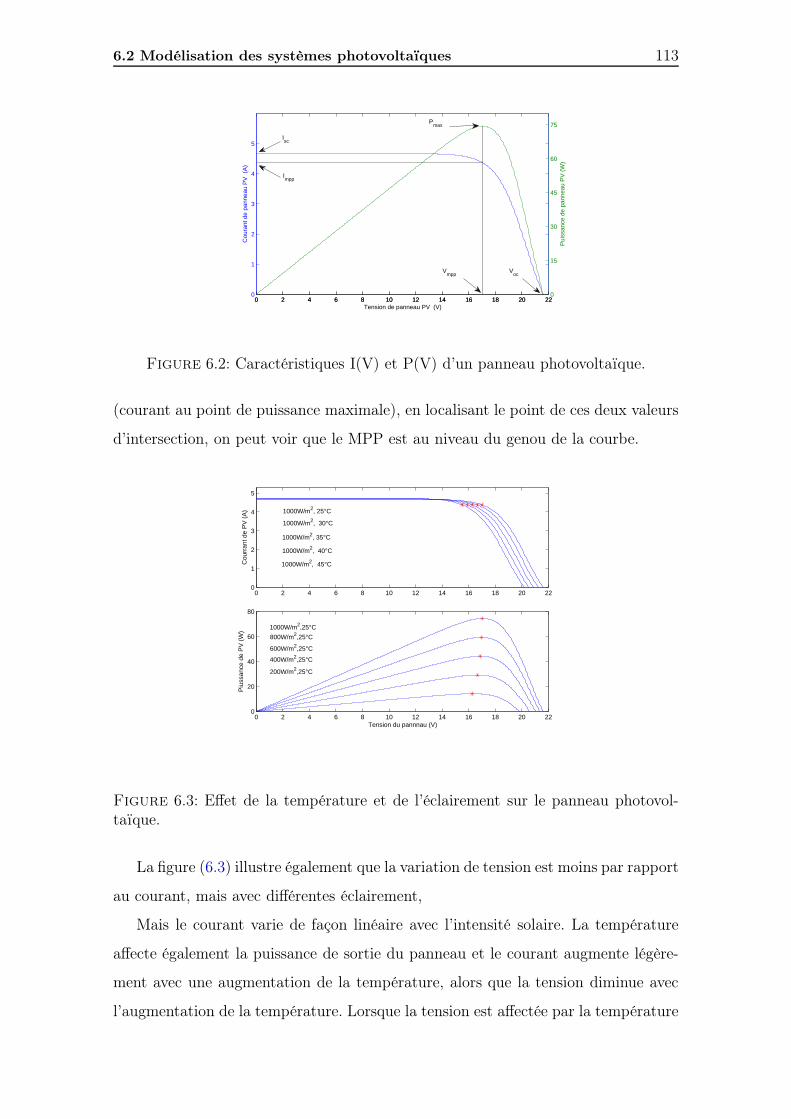
6.2 Modélisation des systèmes photovoltaïques 113
0 2 4 6 8 10 12 14 16 18 20 220
1
2
3
4
5
Cou
rant
de
pann
eau
PV
(A
)
Tension de panneau PV (V)
Pmax
Isc
Impp
Vmpp
Voc
0 2 4 6 8 10 12 14 16 18 20 220
15
30
45
60
75
Pui
ssan
ce d
e pa
nnea
u P
V (
W)
Figure 6.2: Caractéristiques I(V) et P(V) d’un panneau photovoltaïque.
(courant au point de puissance maximale), en localisant le point de ces deux valeurs
d’intersection, on peut voir que le MPP est au niveau du genou de la courbe.
0 2 4 6 8 10 12 14 16 18 20 220
20
40
60
80
Tension du pannnau (V)
Piu
ssan
ce d
e P
V (
W) 1000W/m2,25°C
800W/m2,25°C
600W/m2,25°C
400W/m2,25°C
200W/m2,25°C
0 2 4 6 8 10 12 14 16 18 20 220
1
2
3
4
5
Cou
rran
t de
PV
(A
) 1000W/m2, 25°C
1000W/m2, 30°C
1000W/m2, 35°C
1000W/m2, 40°C
1000W/m2, 45°C
Figure 6.3: Effet de la température et de l’éclairement sur le panneau photovol-taïque.
La figure (6.3) illustre également que la variation de tension est moins par rapport
au courant, mais avec différentes éclairement,
Mais le courant varie de façon linéaire avec l’intensité solaire. La température
affecte également la puissance de sortie du panneau et le courant augmente légère-
ment avec une augmentation de la température, alors que la tension diminue avec
l’augmentation de la température. Lorsque la tension est affectée par la température
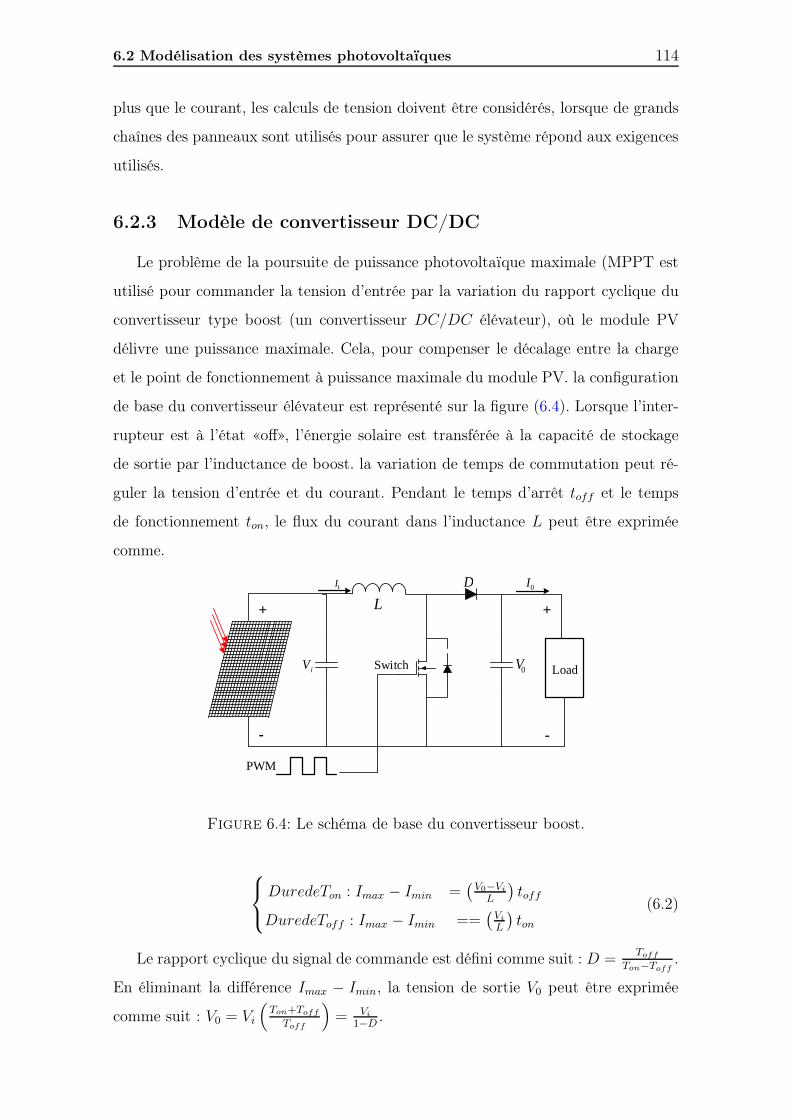
6.2 Modélisation des systèmes photovoltaïques 114
plus que le courant, les calculs de tension doivent être considérés, lorsque de grands
chaînes des panneaux sont utilisés pour assurer que le système répond aux exigences
utilisés.
6.2.3 Modèle de convertisseur DC/DC
Le problème de la poursuite de puissance photovoltaïque maximale (MPPT est
utilisé pour commander la tension d’entrée par la variation du rapport cyclique du
convertisseur type boost (un convertisseur DC/DC élévateur), où le module PV
délivre une puissance maximale. Cela, pour compenser le décalage entre la charge
et le point de fonctionnement à puissance maximale du module PV. la configuration
de base du convertisseur élévateur est représenté sur la figure (6.4). Lorsque l’inter-
rupteur est à l’état «off», l’énergie solaire est transférée à la capacité de stockage
de sortie par l’inductance de boost. la variation de temps de commutation peut ré-
guler la tension d’entrée et du courant. Pendant le temps d’arrêt toff et le temps
de fonctionnement ton, le flux du courant dans l’inductance L peut être exprimée
comme.
Load
+
-
iV 0VSwitch
LI
L
D
+
-
0I
PWM
Figure 6.4: Le schéma de base du convertisseur boost.
DuredeTon : Imax − Imin =(
V0−Vi
L
)
toff
DuredeToff : Imax − Imin ==(
Vi
L
)
ton(6.2)
Le rapport cyclique du signal de commande est défini comme suit : D =Toff
Ton−Toff.
En éliminant la différence Imax − Imin, la tension de sortie V0 peut être exprimée
comme suit : V0 = Vi
(
Ton+Toff
Toff
)
= Vi
1−D.
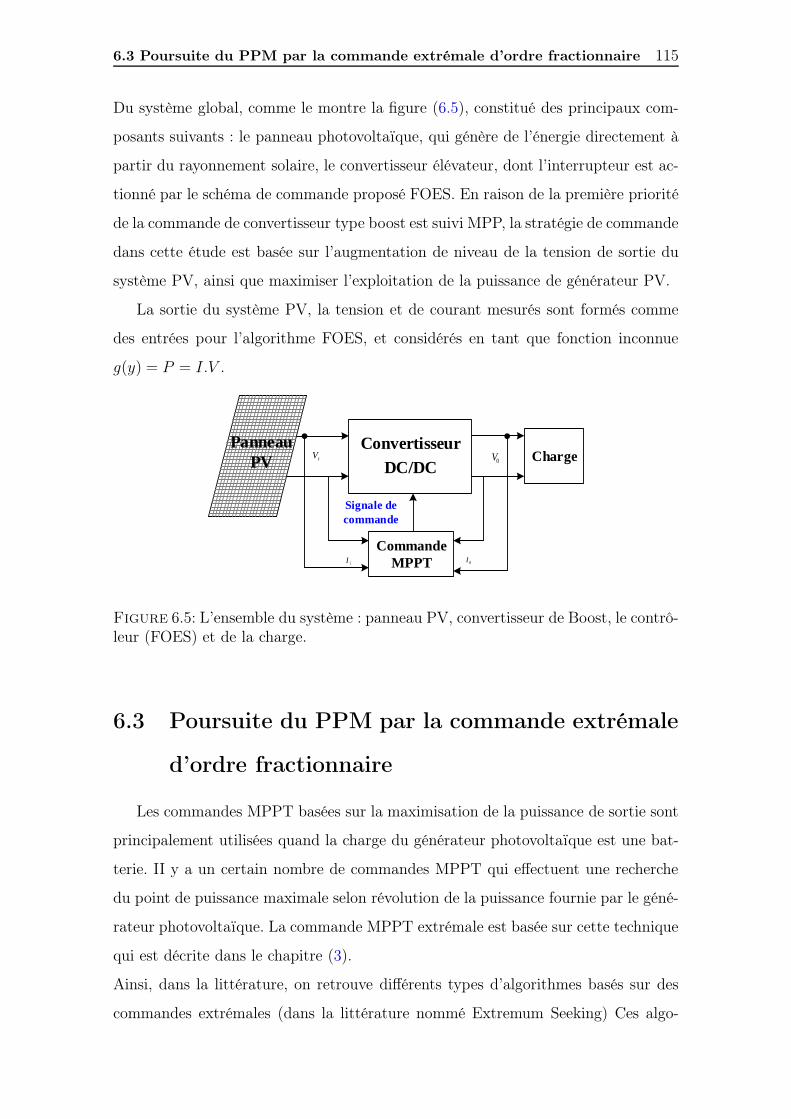
6.3 Poursuite du PPM par la commande extrémale d’ordre fractionnaire 115
Du système global, comme le montre la figure (6.5), constitué des principaux com-
posants suivants : le panneau photovoltaïque, qui génère de l’énergie directement à
partir du rayonnement solaire, le convertisseur élévateur, dont l’interrupteur est ac-
tionné par le schéma de commande proposé FOES. En raison de la première priorité
de la commande de convertisseur type boost est suivi MPP, la stratégie de commande
dans cette étude est basée sur l’augmentation de niveau de la tension de sortie du
système PV, ainsi que maximiser l’exploitation de la puissance de générateur PV.
La sortie du système PV, la tension et de courant mesurés sont formés comme
des entrées pour l’algorithme FOES, et considérés en tant que fonction inconnue
g(y) = P = I.V .
ConvertisseurDC/DC
PanneauPV
CommandeMPPT
Charge
Signale de commande
iV0V
iI 0I
Figure 6.5: L’ensemble du système : panneau PV, convertisseur de Boost, le contrô-leur (FOES) et de la charge.
6.3 Poursuite du PPM par la commande extrémale
d’ordre fractionnaire
Les commandes MPPT basées sur la maximisation de la puissance de sortie sont
principalement utilisées quand la charge du générateur photovoltaïque est une bat-
terie. II y a un certain nombre de commandes MPPT qui effectuent une recherche
du point de puissance maximale selon révolution de la puissance fournie par le géné-
rateur photovoltaïque. La commande MPPT extrémale est basée sur cette technique
qui est décrite dans le chapitre (3).
Ainsi, dans la littérature, on retrouve différents types d’algorithmes basés sur des
commandes extrémales (dans la littérature nommé Extremum Seeking) Ces algo-
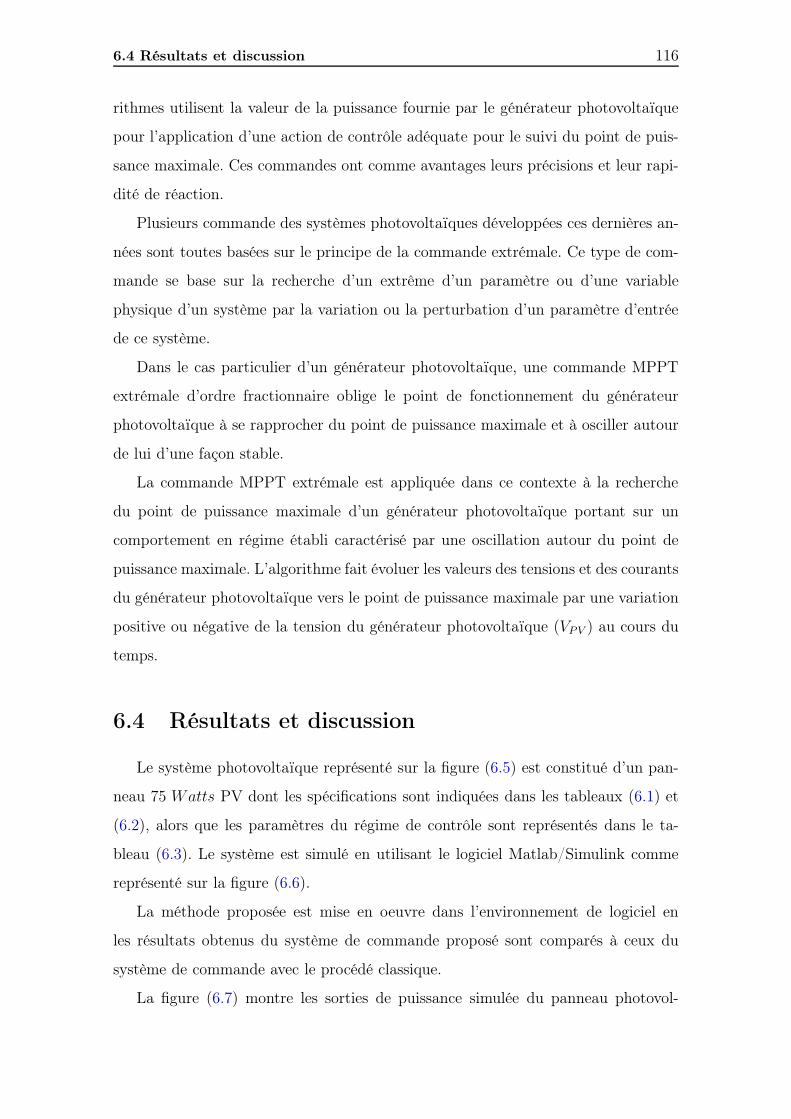
6.4 Résultats et discussion 116
rithmes utilisent la valeur de la puissance fournie par le générateur photovoltaïque
pour l’application d’une action de contrôle adéquate pour le suivi du point de puis-
sance maximale. Ces commandes ont comme avantages leurs précisions et leur rapi-
dité de réaction.
Plusieurs commande des systèmes photovoltaïques développées ces dernières an-
nées sont toutes basées sur le principe de la commande extrémale. Ce type de com-
mande se base sur la recherche d’un extrême d’un paramètre ou d’une variable
physique d’un système par la variation ou la perturbation d’un paramètre d’entrée
de ce système.
Dans le cas particulier d’un générateur photovoltaïque, une commande MPPT
extrémale d’ordre fractionnaire oblige le point de fonctionnement du générateur
photovoltaïque à se rapprocher du point de puissance maximale et à osciller autour
de lui d’une façon stable.
La commande MPPT extrémale est appliquée dans ce contexte à la recherche
du point de puissance maximale d’un générateur photovoltaïque portant sur un
comportement en régime établi caractérisé par une oscillation autour du point de
puissance maximale. L’algorithme fait évoluer les valeurs des tensions et des courants
du générateur photovoltaïque vers le point de puissance maximale par une variation
positive ou négative de la tension du générateur photovoltaïque (VPV ) au cours du
temps.
6.4 Résultats et discussion
Le système photovoltaïque représenté sur la figure (6.5) est constitué d’un pan-
neau 75 Watts PV dont les spécifications sont indiquées dans les tableaux (6.1) et
(6.2), alors que les paramètres du régime de contrôle sont représentés dans le ta-
bleau (6.3). Le système est simulé en utilisant le logiciel Matlab/Simulink comme
représenté sur la figure (6.6).
La méthode proposée est mise en oeuvre dans l’environnement de logiciel en
les résultats obtenus du système de commande proposé sont comparés à ceux du
système de commande avec le procédé classique.
La figure (6.7) montre les sorties de puissance simulée du panneau photovol-
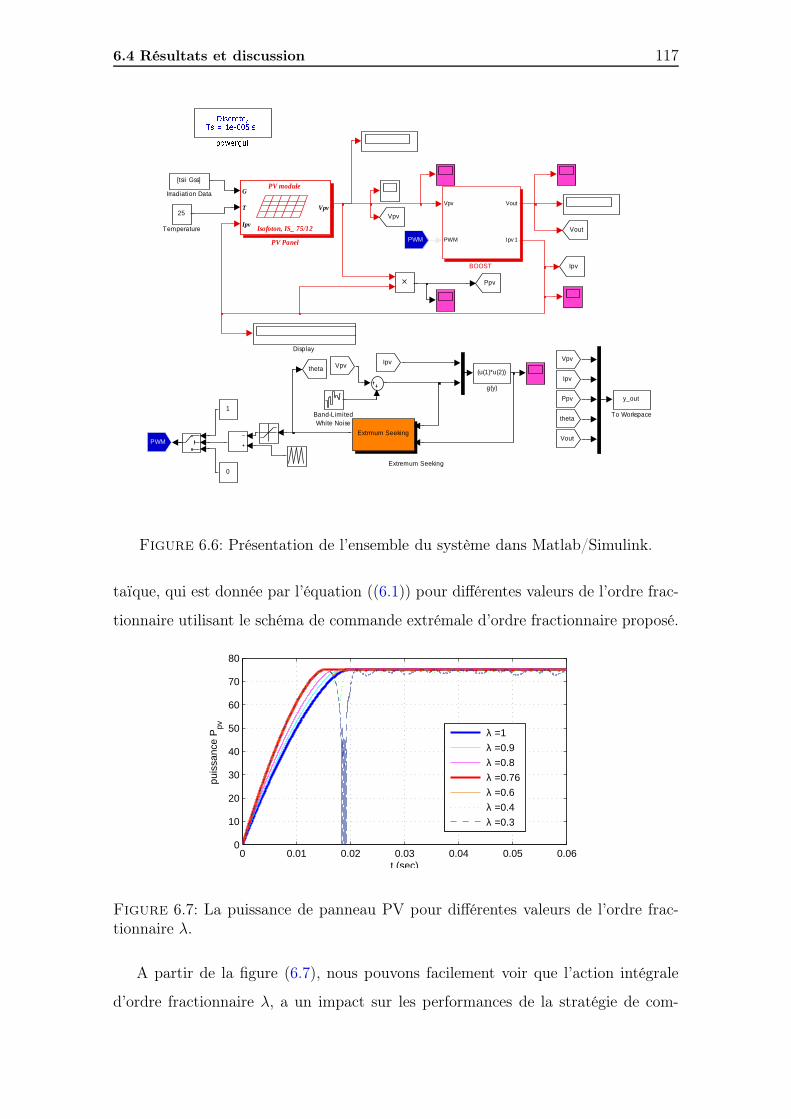
6.4 Résultats et discussion 117
Extremum Seeking
(u(1)*u(2))
g(y)
y_out
To Workspace
25
Temperature
Extrmum Seeking
G
T
Ipv
Vpv
PV module
Isofoton, IS_ 75/12
PV Panel
[tsii Gss]
Irradiation Data
Vout
theta
Ipv
Ppv
Vpv
PWM
theta
Ppv
Vpv
Ipv
Ipv
PWM
Vout
Vpv
Display
0
1Band-LimitedWhite Noise
Vpv
PWM
Vout
Ipv 1
BOOST
Figure 6.6: Présentation de l’ensemble du système dans Matlab/Simulink.
taïque, qui est donnée par l’équation ((6.1)) pour différentes valeurs de l’ordre frac-
tionnaire utilisant le schéma de commande extrémale d’ordre fractionnaire proposé.
0 0.01 0.02 0.03 0.04 0.05 0.060
10
20
30
40
50
60
70
80
t (sec)
puis
sanc
e P
pv
λ =1
λ =0.9
λ =0.8
λ =0.76
λ =0.6
λ =0.4
λ =0.3
Figure 6.7: La puissance de panneau PV pour différentes valeurs de l’ordre frac-tionnaire λ.
A partir de la figure (6.7), nous pouvons facilement voir que l’action intégrale
d’ordre fractionnaire λ, a un impact sur les performances de la stratégie de com-
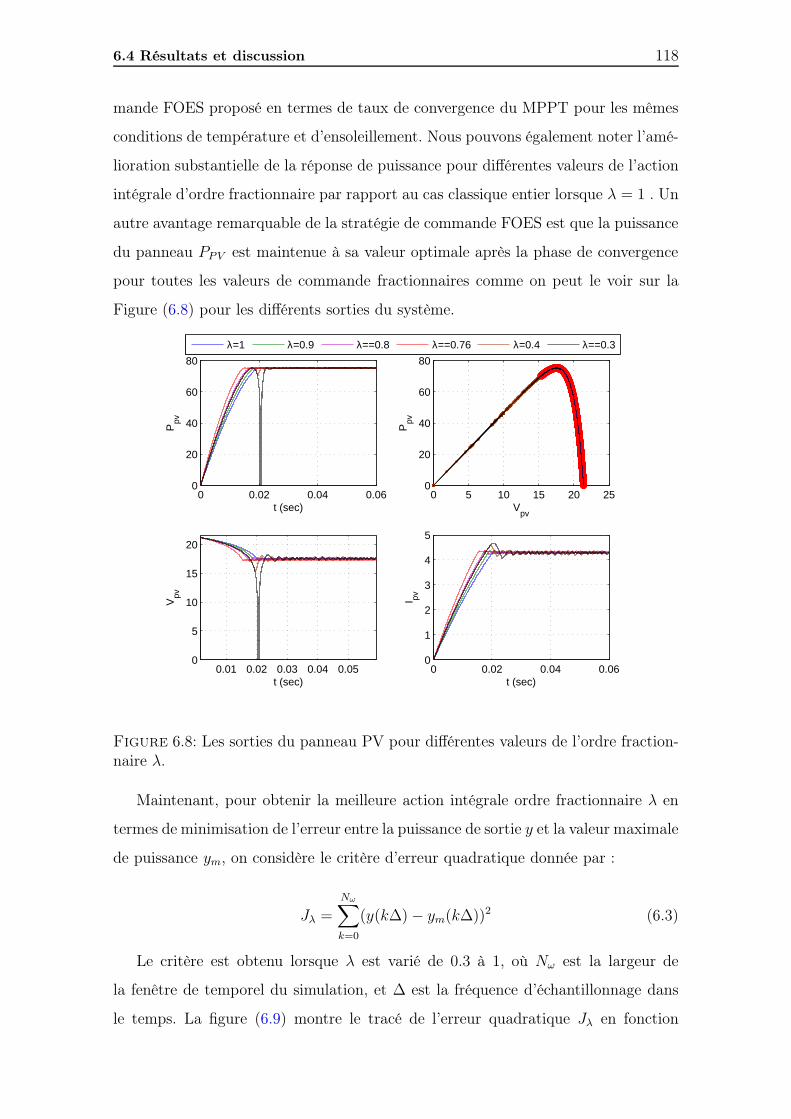
6.4 Résultats et discussion 118
mande FOES proposé en termes de taux de convergence du MPPT pour les mêmes
conditions de température et d’ensoleillement. Nous pouvons également noter l’amé-
lioration substantielle de la réponse de puissance pour différentes valeurs de l’action
intégrale d’ordre fractionnaire par rapport au cas classique entier lorsque λ = 1 . Un
autre avantage remarquable de la stratégie de commande FOES est que la puissance
du panneau PPV est maintenue à sa valeur optimale après la phase de convergence
pour toutes les valeurs de commande fractionnaires comme on peut le voir sur la
Figure (6.8) pour les différents sorties du système.
0 0.02 0.04 0.060
20
40
60
80
t (sec)
Ppv
0 5 10 15 20 250
20
40
60
80
Vpv
Ppv
0.01 0.02 0.03 0.04 0.050
5
10
15
20
t (sec)
Vpv
0 0.02 0.04 0.060
1
2
3
4
5
t (sec)
I pv
λ=1 λ=0.9 λ==0.8 λ==0.76 λ=0.4 λ==0.3
Figure 6.8: Les sorties du panneau PV pour différentes valeurs de l’ordre fraction-naire λ.
Maintenant, pour obtenir la meilleure action intégrale ordre fractionnaire λ en
termes de minimisation de l’erreur entre la puissance de sortie y et la valeur maximale
de puissance ym, on considère le critère d’erreur quadratique donnée par :
Jλ =
Nω∑
k=0
(y(k∆)− ym(k∆))2 (6.3)
Le critère est obtenu lorsque λ est varié de 0.3 à 1, où Nω est la largeur de
la fenêtre de temporel du simulation, et ∆ est la fréquence d’échantillonnage dans
le temps. La figure (6.9) montre le tracé de l’erreur quadratique Jλ en fonction
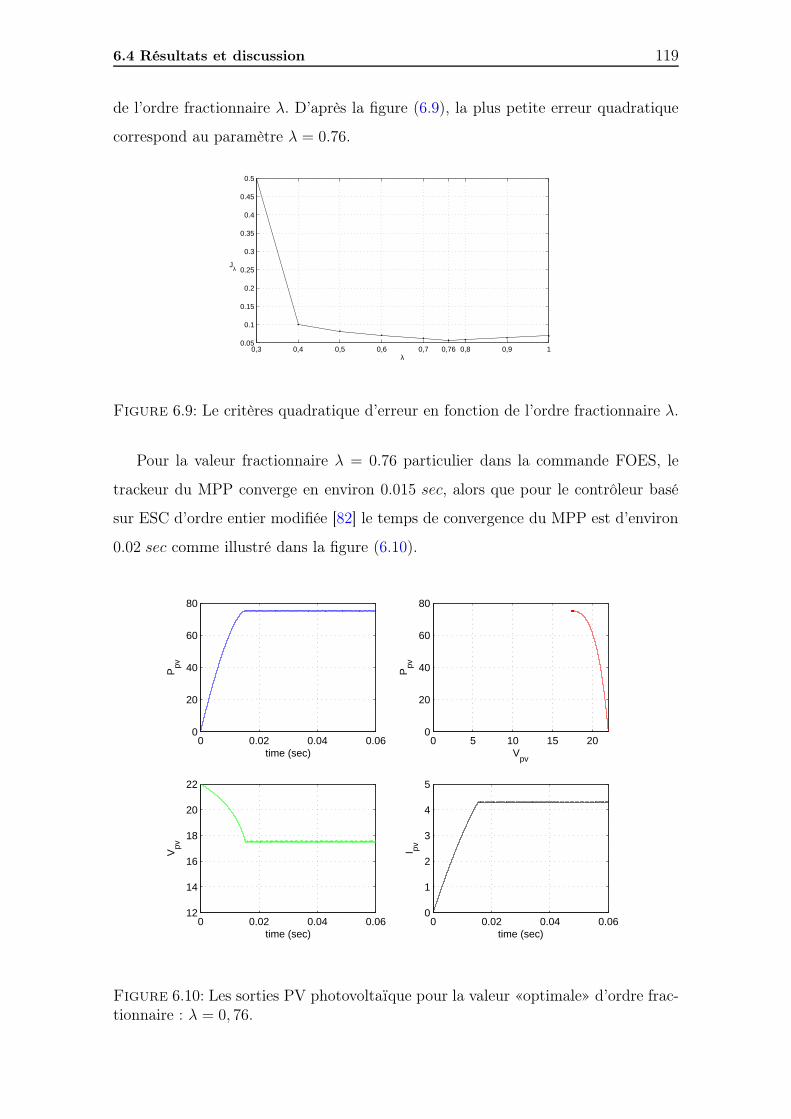
6.4 Résultats et discussion 119
de l’ordre fractionnaire λ. D’après la figure (6.9), la plus petite erreur quadratique
correspond au paramètre λ = 0.76.
0,3 0,4 0,5 0,6 0,7 0,76 0,8 0,9 10.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
λ
Jλ
Figure 6.9: Le critères quadratique d’erreur en fonction de l’ordre fractionnaire λ.
Pour la valeur fractionnaire λ = 0.76 particulier dans la commande FOES, le
trackeur du MPP converge en environ 0.015 sec, alors que pour le contrôleur basé
sur ESC d’ordre entier modifiée [82] le temps de convergence du MPP est d’environ
0.02 sec comme illustré dans la figure (6.10).
0 0.02 0.04 0.060
20
40
60
80
time (sec)
Ppv
0 5 10 15 200
20
40
60
80
Vpv
Ppv
0 0.02 0.04 0.0612
14
16
18
20
22
time (sec)
Vpv
0 0.02 0.04 0.060
1
2
3
4
5
time (sec)
I pv
Figure 6.10: Les sorties PV photovoltaïque pour la valeur «optimale» d’ordre frac-tionnaire : λ = 0, 76.
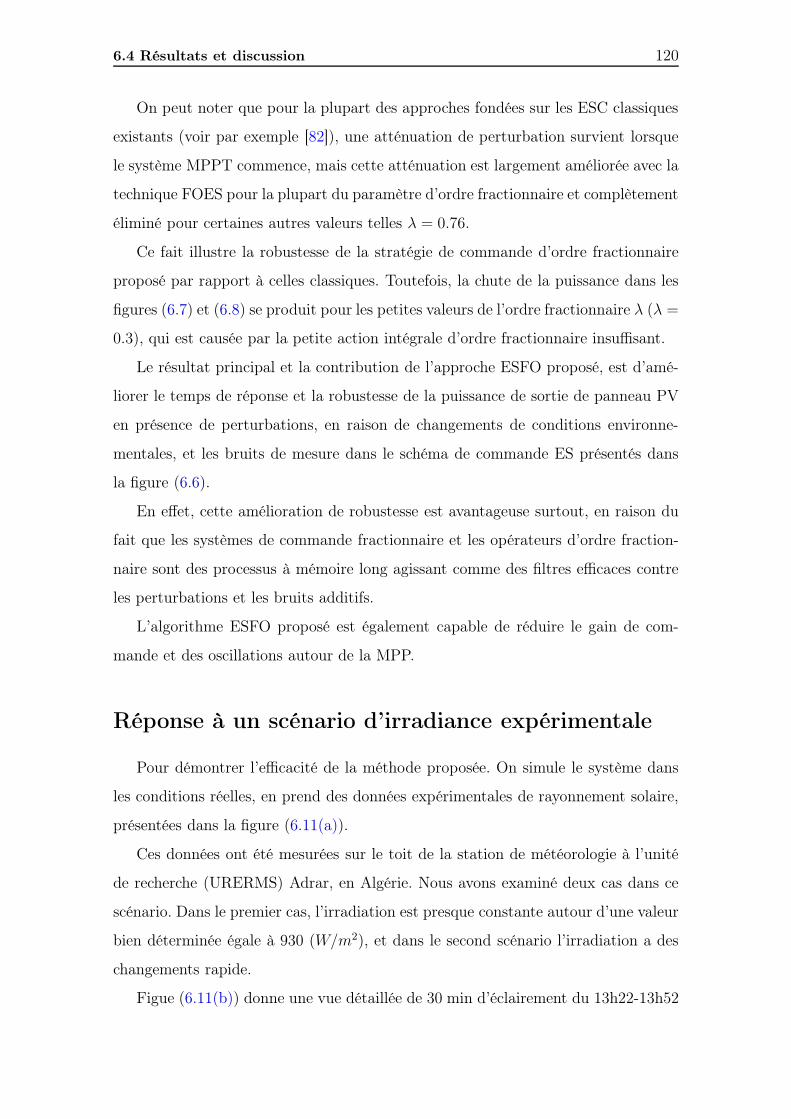
6.4 Résultats et discussion 120
On peut noter que pour la plupart des approches fondées sur les ESC classiques
existants (voir par exemple [82]), une atténuation de perturbation survient lorsque
le système MPPT commence, mais cette atténuation est largement améliorée avec la
technique FOES pour la plupart du paramètre d’ordre fractionnaire et complètement
éliminé pour certaines autres valeurs telles λ = 0.76.
Ce fait illustre la robustesse de la stratégie de commande d’ordre fractionnaire
proposé par rapport à celles classiques. Toutefois, la chute de la puissance dans les
figures (6.7) et (6.8) se produit pour les petites valeurs de l’ordre fractionnaire λ (λ =
0.3), qui est causée par la petite action intégrale d’ordre fractionnaire insuffisant.
Le résultat principal et la contribution de l’approche ESFO proposé, est d’amé-
liorer le temps de réponse et la robustesse de la puissance de sortie de panneau PV
en présence de perturbations, en raison de changements de conditions environne-
mentales, et les bruits de mesure dans le schéma de commande ES présentés dans
la figure (6.6).
En effet, cette amélioration de robustesse est avantageuse surtout, en raison du
fait que les systèmes de commande fractionnaire et les opérateurs d’ordre fraction-
naire sont des processus à mémoire long agissant comme des filtres efficaces contre
les perturbations et les bruits additifs.
L’algorithme ESFO proposé est également capable de réduire le gain de com-
mande et des oscillations autour de la MPP.
Réponse à un scénario d’irradiance expérimentale
Pour démontrer l’efficacité de la méthode proposée. On simule le système dans
les conditions réelles, en prend des données expérimentales de rayonnement solaire,
présentées dans la figure (6.11(a)).
Ces données ont été mesurées sur le toit de la station de météorologie à l’unité
de recherche (URERMS) Adrar, en Algérie. Nous avons examiné deux cas dans ce
scénario. Dans le premier cas, l’irradiation est presque constante autour d’une valeur
bien déterminée égale à 930 (W/m2), et dans le second scénario l’irradiation a des
changements rapide.
Figue (6.11(b)) donne une vue détaillée de 30 min d’éclairement du 13h22-13h52
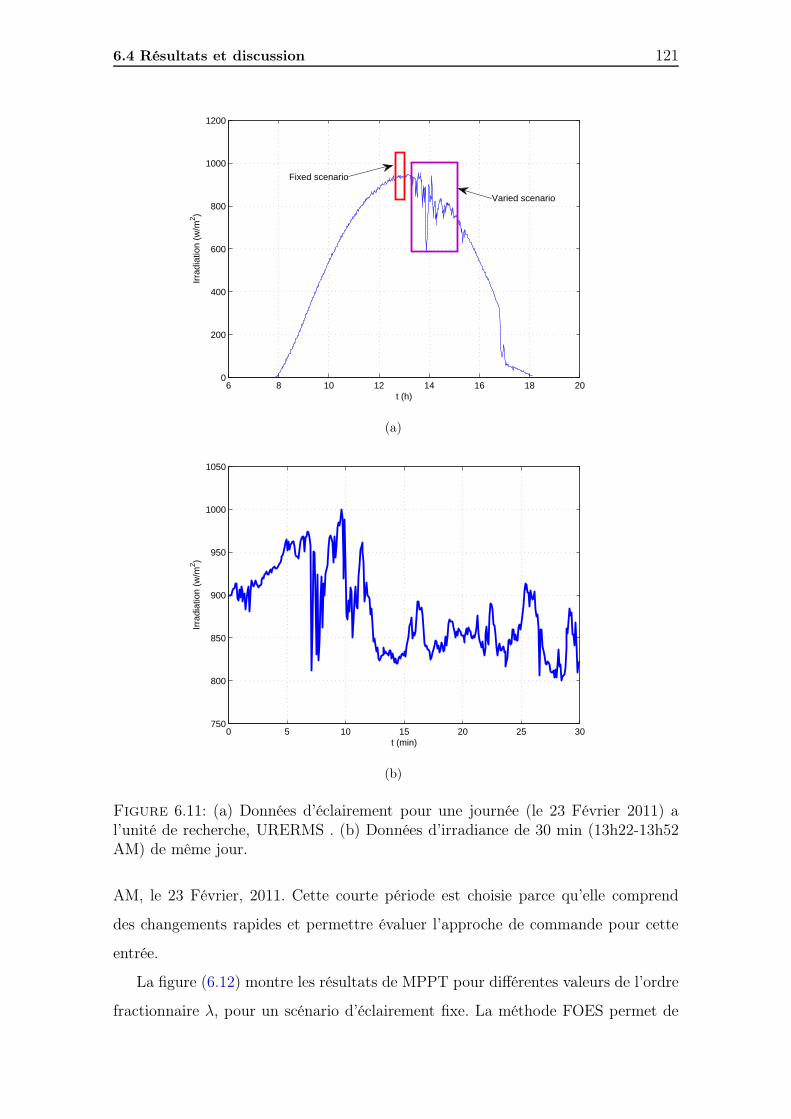
6.4 Résultats et discussion 121
6 8 10 12 14 16 18 200
200
400
600
800
1000
1200
t (h)
Irra
diat
ion
(w/m
2 )
Fixed scenario
Varied scenario
(a)
0 5 10 15 20 25 30750
800
850
900
950
1000
1050
t (min)
Irra
diat
ion
(w/m
2 )
(b)
Figure 6.11: (a) Données d’éclairement pour une journée (le 23 Février 2011) al’unité de recherche, URERMS . (b) Données d’irradiance de 30 min (13h22-13h52AM) de même jour.
AM, le 23 Février, 2011. Cette courte période est choisie parce qu’elle comprend
des changements rapides et permettre évaluer l’approche de commande pour cette
entrée.
La figure (6.12) montre les résultats de MPPT pour différentes valeurs de l’ordre
fractionnaire λ, pour un scénario d’éclairement fixe. La méthode FOES permet de
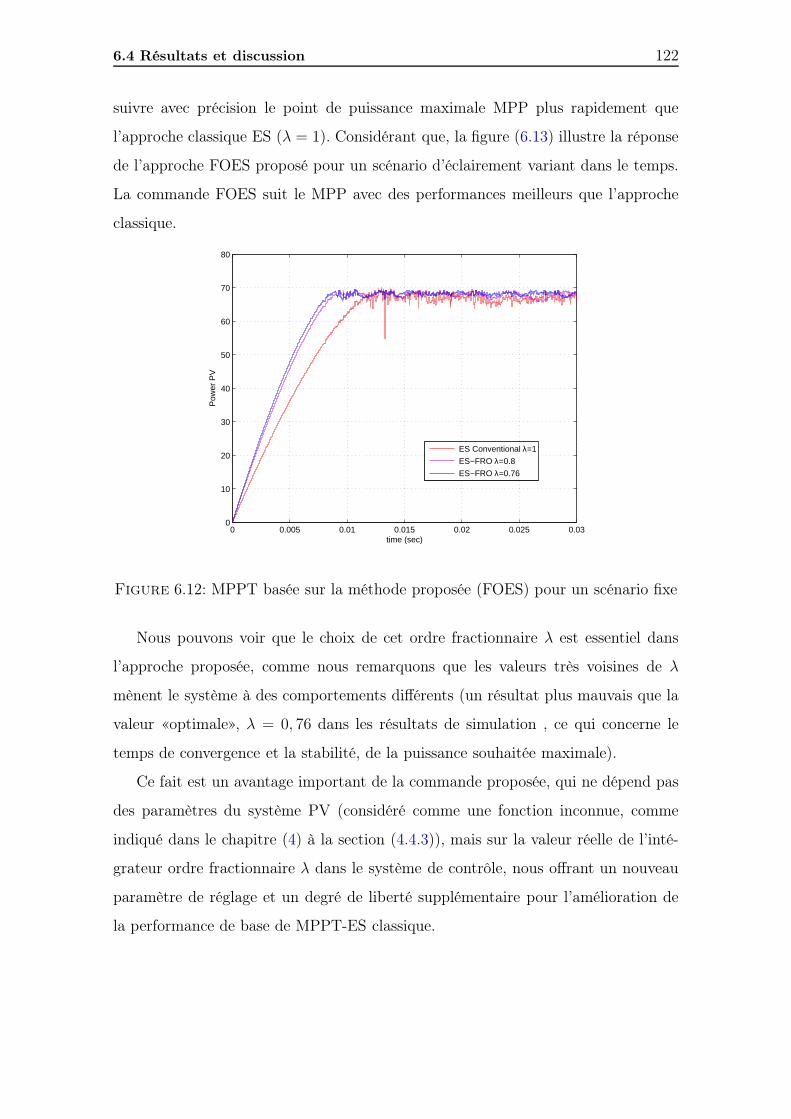
6.4 Résultats et discussion 122
suivre avec précision le point de puissance maximale MPP plus rapidement que
l’approche classique ES (λ = 1). Considérant que, la figure (6.13) illustre la réponse
de l’approche FOES proposé pour un scénario d’éclairement variant dans le temps.
La commande FOES suit le MPP avec des performances meilleurs que l’approche
classique.
0 0.005 0.01 0.015 0.02 0.025 0.030
10
20
30
40
50
60
70
80
time (sec)
Pow
er P
V
ES Conventional λ=1
ES−FRO λ=0.8
ES−FRO λ=0.76
Figure 6.12: MPPT basée sur la méthode proposée (FOES) pour un scénario fixe
Nous pouvons voir que le choix de cet ordre fractionnaire λ est essentiel dans
l’approche proposée, comme nous remarquons que les valeurs très voisines de λ
mènent le système à des comportements différents (un résultat plus mauvais que la
valeur «optimale», λ = 0, 76 dans les résultats de simulation , ce qui concerne le
temps de convergence et la stabilité, de la puissance souhaitée maximale).
Ce fait est un avantage important de la commande proposée, qui ne dépend pas
des paramètres du système PV (considéré comme une fonction inconnue, comme
indiqué dans le chapitre (4) à la section (4.4.3)), mais sur la valeur réelle de l’inté-
grateur ordre fractionnaire λ dans le système de contrôle, nous offrant un nouveau
paramètre de réglage et un degré de liberté supplémentaire pour l’amélioration de
la performance de base de MPPT-ES classique.
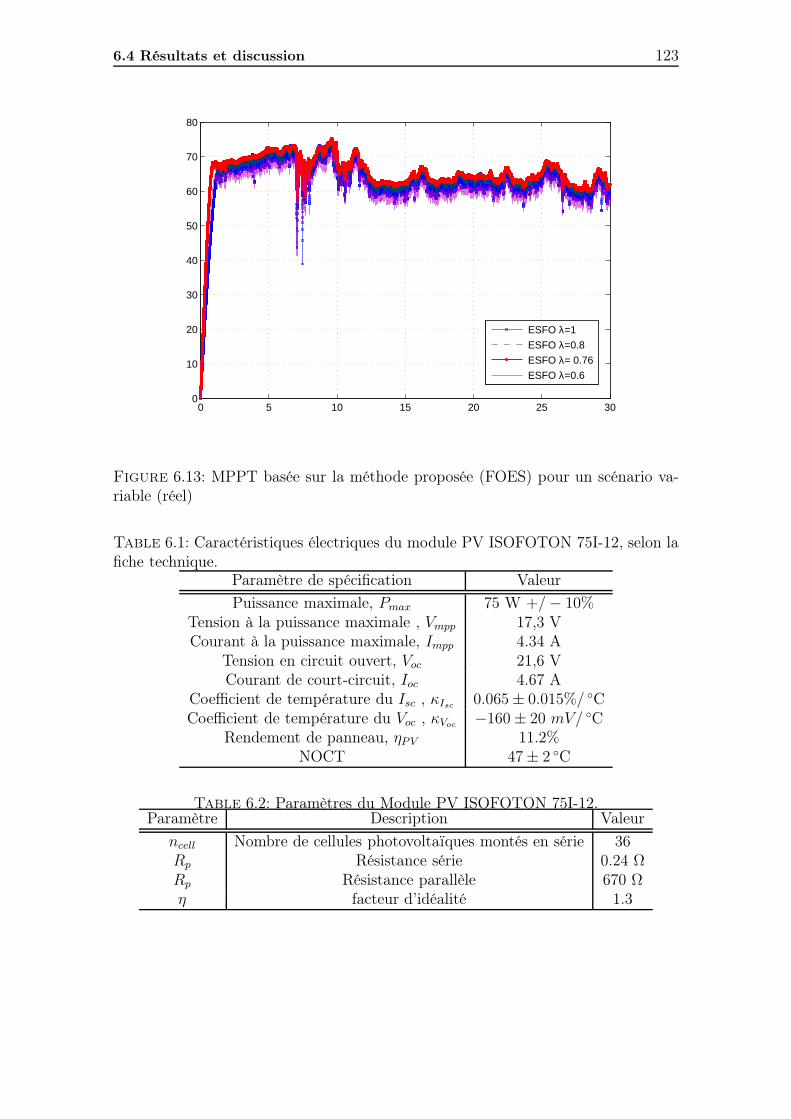
6.4 Résultats et discussion 123
0 5 10 15 20 25 300
10
20
30
40
50
60
70
80
ESFO λ=1
ESFO λ=0.8
ESFO λ= 0.76
ESFO λ=0.6
Figure 6.13: MPPT basée sur la méthode proposée (FOES) pour un scénario va-riable (réel)
Table 6.1: Caractéristiques électriques du module PV ISOFOTON 75I-12, selon lafiche technique.
Paramètre de spécification ValeurPuissance maximale, Pmax 75 W +/− 10%
Tension à la puissance maximale , Vmpp 17,3 VCourant à la puissance maximale, Impp 4.34 A
Tension en circuit ouvert, Voc 21,6 VCourant de court-circuit, Ioc 4.67 A
Coefficient de température du Isc , κIsc 0.065± 0.015%/ CCoefficient de température du Voc , κVoc
−160± 20 mV/ CRendement de panneau, ηPV 11.2%
NOCT 47± 2 C
Table 6.2: Paramètres du Module PV ISOFOTON 75I-12.Paramètre Description Valeur
ncell Nombre de cellules photovoltaïques montés en série 36Rp Résistance série 0.24 ΩRp Résistance parallèle 670 Ωη facteur d’idéalité 1.3
6.5 Conclusion 124
Table 6.3: Paramètres de la commande extrémale.Paramètre Description Valeur
k1 Mise à jour du gain de gradient 1 4k2 Mise à jour du gain de gradient 2 2M Saturation Max/Min ±0.2
6.5 Conclusion
Ce chapitre présente l’application de la commande extrémale d’ordre fraction-
naire sur le système photovoltaïque, pour atteindre le point maximum de puissance
optimale. L’introduction de l’opérateur fractionnaire, à la commande extrémale sert
à améliorer les résultats de système, en approchant du point optimal. Les paramètres
de l’algorithme proposé, sont auto-ajustables, de tel sorte que le système de com-
mande devient capable de réduire le gain de commande et le niveau d’oscillation
autour du MPP, et améliorer l’efficacité du système de contrôle.
Nous montrons que l’algorithme FOES proposé converge vers l’optimum plus rapi-
dement que pour l’approche classique (l’ordre entier) et les résultats des simulations
numériques montrent l’efficacité du système à trouver l’optimum global avec succès
dans divers cas.
Le schéma de contrôle proposé est meilleure que celui de l’ES classique, parce qu’il
offre un paramètre de réglage supplémentaire qui est l’opérateur d’ordre fraction-
naire, permettant plus de performance et robustesse contre les perturbations et le
bruit.
Conclusion Générale et Perspectives
Conclusion Générale
L’objectif de ce travail de recherche était d’étendre l’application de la commande
adaptative, par l’introduction des opérateurs d’ordre fractionnaire, et d’élargir cette
théorie de commande naissante, en ouvrant de nouveaux horizons pour le dévelop-
pement de la commande adaptative. Pour cela, nous avons développé et appliqué
un algorithme original de commande adaptative extrémale d’ordre fractionnaire en
deux façons différent.
Cette thèse peut se décomposer en deux travaux principaux :
– Introduire les opérateurs fractionnaires sur une approche de commande adap-
tative appelée « Extremum Seeking Control ».
– Proposer un algorithme d’auto-réglage des paramètres du régulateur PIλDµ
par l’approche adaptative extrémale.
Dans le premier travail nos contributions apparaissent à partir du troisième cha-
pitre par l’introduction des opérateurs d’ordre fractionnaire dans le schéma de com-
mande extrêmale (ESC). Nous avons alors, voulu immerger des opérateurs d’ordre
fractionnaire dans la structure du régulateur adaptatif extrémal.
En effet, l’intégration d’ordre fractionnaire permettent d’augmenter la rapidité de
convergence de l’algorithme, et agissent dans la boucle de commande comme des
filtres qui diminuent l’effet des bruits et les fluctuations des signaux de perturba-
tion. C’est ainsi que nous avons proposé un nouveau schéma de commande adapta-
6.5 Conclusion 126
tive d’ordre fractionnaire : par l’introduction d’une intégration d’ordre fractionnaire
dans la loi de commande ESC.
Nous avons pu montrer par des exemples de simulation que l’ordre λ de l’intégration
agit comme un nouveau paramètre de réglage, permettant d’améliorer le compor-
tement du processus et d’élargir le domaine de stabilité en réduisant l’amplitude
nécessaire du gain d’adaptation γ.
Des résultats de simulation ont également confirmé que l’utilisation de la méthode
ES avec optimisation de l’opérateur fractionnaire résulte en un meilleur résultat
du point de vu performance et réduit significativement le temps de convergence à
l’optimum.
Le deuxième travail consiste à utiliser le même principe de recherche d’extrêmum
mais d’une façonne différente. Nous proposons de généraliser une méthode classique
de réglage PIλDµ basée sur l’approche Extremum Seeking (ES), en employant la
dérivée et l’intégrale d’ordre fractionnaire dans la stratégie de commande pour le
réglage des paramètres de régulateur PIλDµ, afin d’atteindre des performances op-
timales.
L’ES est une méthode qui ne se base pas sur le modèle du système pour le réglage
en ligne des paramètres en minimisant une fonction coût qui soit le reflet de la per-
formance du régulateur.
Nous sommes donc arrivés à la conclusion que la nouvelle commande adaptative
extrémale d’ordre fractionnaire était la mieux indiquée pour la commande d’un sys-
tème dynamique à paramètres variables. Toutes les simulations ont été effectuées à
partir du logiciel Simulink de Matlab.
Perspectives ...
Les perspectives de ce travail sont très prometteuses et pourrait donner lieu à
des études complémentaires dans plusieurs directions :
– Généraliser les résultats obtenus au cas des systèmes multi-variables (MIMO).
– Proposer d’autres schémas pour la commande extrémale d’ordre fractionnaire
basée sur d’autres approches classiques.
– Étudier l’application des algorithmes proposés à des processus d’ordre frac-
6.5 Conclusion 127
tionnaire.
– Implémentation des algorithmes de commande proposée sur des systèmes réels,
notamment pour l’application sur les systèmes photovoltaïques.
Bibliographie
[1] K.J. Åström. Analysis of Rohrs counter examples to adaptive control. Decision
and Control, 1983. The 22nd IEEE Conference on, 22 :982–987, 1983.
[2] K.J. Åström and B. Wittenmark. Adaptive Control. dec 1994.
[3] K.J. Åström and B. Wittenmark. A survey of adaptive control applications. In
IEEE Conference on Decisions and Control, volume 1, pages 649 –654, 1995.
[4] K.J. Åström and B. Wittenmark. Adaptive Control : Second Edition. Courier
Corporation, 2013.
[5] M. Abedini, M.A. Nojoumian, H. Salarieh, and A. Meghdari. Model reference
adaptive control in fractional order systems using discrete-time approximation
methods. Nonlinear Sci. Numer. Simul., 25 :27–40, 2015.
[6] N. Aguila-Camacho and M.A. Duarte-Mermoud. Fractional adaptive control
for an automatic voltage regulator. ISA Trans., 52 :807–815, 2013.
[7] M.A. Al-Alaoui. Novel IIR differentiator from the Simpson Integration rule.
IEEE Trans. on Circuits and Systems I : Fundamental Theory and Applica-
tions, 41(2) :186–187, 1994.
[8] M.A. Al-Alaoui. A class of second-order integrators and low-pass differen-
tiators. IEEE Trans. on Circuits and Systems I : Fundamental Theory and
Applications, 42(4) :220–223, 1995.
[9] M.A. Al-Alaoui. Filling the gap between the bilinear and the backward dif-
ference transforms : An interactive design approach. International Journal of
Electrical Engineering Education, 34(4) :331–337, 1997.
BIBLIOGRAPHIE 129
[10] K.B. Ariyur and M.Krstic. Real-Time Optimization by Extremum-Seeking
Control. John Wiley & Sons, 2003.
[11] M. Axtell and E.M. Bise. Fractional calculus applications in control systems.
Proc. IEEE 1990 National Aerospace and Electronics Conference, pages 563–
566, New York, USA, 1990.
[12] A.A. Ayman, El-S. Zeidan, A. Hamed, and F. Salem. An Antilock-Braking
Systems (ABS) Control : A Technical Review. Intelligent Control and Auto-
mation, 02(03) :186–195, August 2011.
[13] R.L. Bagley and R.A. Calico. Fractional-order state equations for the control
of viscoelastic damped structures. J. Guidance, Control and Dynamics,
14(2) :304–311, 1991.
[14] R.S. Barbosa, J.A. T. Machado, and I.M. Ferreira. A fractional calculus pers-
pective of pid tuning. Proc. DETC’03, ASME 2003 Design Engineering Tech-
nical Conferences and computers and Information in Engineering Conference,
Chicago, Illinois USA, 2003.
[15] Y. Bensafia and S. Ladaci. Adaptive control with fractional order reference
model. Int. J. Sci. Tech. Automat Control Comput. Eng., 5(2) :1614–1623,
2011.
[16] I.A. Brin. On the stability of certain systems with distributed and lumped
parameters. Automat. Remote Control, 23 :798–807, 1962.
[17] S.L. Brunton, C.W. Rowley, S.R. Kulkarni, and C. Clarkson. Maximum Power
Point Tracking for Photovoltaic Optimization Using Ripple-Based Extremum
Seeking Control. IEEE Transactions on Power Electronics, 25(10) :2531–2540,
oct 2010.
[18] S. Zhong C. Yin, Y.Q. Chenb. Fractional-order sliding mode based extremum
seeking control of a class of nonlinear systems. Automatica, 50(12) :3173–3181,
2014.
[19] M. Caputo. Linear Models of Dissipation whose Q is almost Frequency
Independent-II. Geophysical Journal International, 13(5) :529–539, 1967.
[20] M. Caputo and F. Mainardi. A new dissipation model based on memory
mechanism. Pure and Appl. Geophysics, 91(8) :134–147, 1971.
BIBLIOGRAPHIE 130
[21] G.E. Carlson and C.A. Halijak. Approximation of fractional capacitors
(1/s)1/n by regular newton process. IRE Transactions on Circuit Theory,
11(2) :210–213, 1964.
[22] D. Carnevale, A. Astolfi, C. Centioli, S. Podda, V. Vitale, and L. Zaccarian. A
new extremum seeking technique and its application to maximize RF heating
on FTU. Fusion Engineering and Design, 84(2-6) :554–558, jun 2009.
[23] Y. Chang and S. Moura. PI Tuning via Extremum Seeking Methods for Cruise
Control. Control of Advanced Powertrain Systems, 2006.
[24] A. Charef. Modelling and Analog Realization of the Fundamental Linear
Fractional Order Differential Equation. Nonlinear Dynamics, 46 :195–210,
2006.
[25] A. Charef, A. Djouambi, and H. Sun. Fractional order feedback control sys-
tems. Proceedings of the 4th J.I.E.E.E.C, Jordanie, Avril, 2001.
[26] A. Charef, H.H. Sun, Y.Y. Tsao, and B. Onaral. Fractal system as represented
by singularity function. IEEE Trans. On Automatic Control, 37 :1465–1470,
Sept. 1992.
[27] Y.Q. Chen, L. Kevin, and L. Moore. Discretization schemes for fractional-
order differentiators and integrators. IEEE Trans. on Circuits and Systems I.
Fundamental Theory and Applications, 49(3) :363–367, 2002.
[28] Y.Q. Chen and B.M. Vinagre. A new IIR-type digital fractional order diffe-
rentiator. Signal Processing, 83 :2359–2365, 2003.
[29] Y.Q. Chen, B.M. Vinagre, and I. Podlubny. Continued Fraction Expansion
Approaches to Discretizing Fractional Order Derivatives - an Expository Re-
view. Nonlinear Dynamics, 38 :155–170, 2004.
[30] M. Chioua, B. Srinivasan, M. Guay, and M. Perrier. Dependence of the Error
in the Optimal Solution of Perturbation-Based Extremum Seeking Methods
on the Excitation Frequency. The Canadian Journal of Chemical Engineering,
85(4) :447–453, may 2008.
[31] J.Y. Choi, M. Krstic, K.B Ariyur, and J.S.Lee. Extremum Seeking Control for
Discrete-Time Systems. IEEE Transactions on Automatic Control, 47 :318–
323, 2002.
BIBLIOGRAPHIE 131
[32] C.R. Cutler and R.T. Perry. Real time optimization with multivariable control
is required to maximize profits, 1983.
[33] L. Debnath. A brief historical introduction to fractional calculus. International
Journal of Mathematical Education in Science and Technology, 35(4) :487–501,
2004.
[34] H. Delavari, R. Ghaderi, N.A. Ranjbar, S.H. Hosseinia, and S. Momani. In
4th IFAC Workshop Fractional Differentiation and its Applications, FDA’10,
vol. 4, Badajoz, Spain, October 1820.
[35] J.S. Deschenes. Demodulation considerations in extremum seeking control
loops. In 2012 American Control Conference (ACC), pages 3389–3395. IEEE,
jun 2012.
[36] K. Diethelm. An Algorithm for the Numerical Solution of Differential Equa-
tions of Fractional Order. Electronic Trans. On Numerical Analysis, 5 :1–6,
1997.
[37] K. Diethelm, N.J. Ford, and A.D. Freed. A predictor-corrector approach for
numerical solution of fractional differential equations. Nonlinear Dynamics,
29 :3–22, 2002.
[38] E. Dincmen. Adaptive extremum seeking scheme for ABS control. In 2014
13th International Workshop on Variable Structure Systems (VSS), pages 1–6.
IEEE, June 2014.
[39] E. Dincmen, B.A. Guvenc, and T. Acarman. Extremum-Seeking Control of
ABS Braking in Road Vehicles With Lateral Force Improvement. IEEE Tran-
sactions on Control Systems Technology, 22(1) :230–237, January 2014.
[40] M. Djeghader and S. Ladaci. Commande PIλ Adaptative d’Ordre Fraction-
naire Vectorielle Sans Capteur de la Vitesse d’une Machine Asynchrone. In
The First International Conference on Electrical Engineering and Control Ap-
plications, ICEECA’2012, Khenchela, Algeria - November 20-22, mar 2012.
[41] A. Durgadevi, S. Arulselvi, and S.P. Natarajan. Photovoltaic modeling and
its characteristics. In 2011 International Conference on Emerging Trends in
Electrical and Computer Technology, pages 469–475. IEEE, mar 2011.
BIBLIOGRAPHIE 132
[42] P. Duta and P.M. Horn. Low frequency fluctuations in solids : 1/f noise.
Review of modern physics, 53(3), July 1981.
[43] J.T. Edwards, N.J. Ford, and A.C. Simpson. The numerical solution of linear
multi-term fractional differential equations : systems of equations. Journal of
Computational and Applied Mathematics, 148 :401–418, 2002.
[44] M.O. Efe. Fractional Fuzzy Adaptive Sliding-Mode Control of a 2-DOF Direct-
Drive Robot Arm. IEEE Transactions on Systems, Man, and Cybernetics-Part
B : Cybernetics, 38(6) :1561–1570, 2008.
[45] A.M.A. El-Sayed and F.M. Gaafar. Fractional calculus and some interme-
diate physical processes. Applied Mathematics and Computation, 144 :117–126,
2003.
[46] A. Erdélyi. Higher transcendental functions, volume 3. Mc Graw-Hill, New
York, 1955.
[47] Y. Ferdi. Computation of fractional order derivative and integral via power
series expansion and signal modelling. Nonlinear Dynamics, 46 :1–15, 2006.
[48] Ch. Friedrich. Relaxation and retardation functions of the maxwell model with
fractional derivatives. Rheol. Acta., 30 :151–158, 1991.
[49] A. Ghaffari, M. Krstić, and D. Nešić. Multivariable Newton-based extremum
seeking. Automatica, 48 :1759–1767, 2012.
[50] M. Guay and T. Zhang. Adaptive extremum seeking control of nonlinear
dynamic systems with parametric uncertainties, 2003.
[51] H. Halmarsson, M. Gevers, S.Gunnarsson, and O. Lequin. Iterative feedback
tuning : theory and applications. IEEE Control Systems Magazine, 18(4) :26–
41, 1998.
[52] I. Haskara, U. Ozguner, and J. Winkelman. Extremum Control for Opti-
mal Operating Point Determination and Set Point Optimization Via Sliding
Modes. Journal of Dynamic Systems, Measurement, and Control, 122(4) :719,
December 2000.
[53] W.K. Ho, Y. Hong, A. Hansson, H. Hjalmarsson, and J.W. Deng. Relay
auto-tuning of PID controllers using iterative feedback tuning. Automatica,
39(1) :149–157, jan 2003.
BIBLIOGRAPHIE 133
[54] C. Hwang and Y.C. Cheng. A numerical algorithm for stability testing of
fractional delay systems. Automatica, 42 :825–831, 2006.
[55] G.D. Kaloyanov and Z.M. Dimitrova. Theoritical-experimental determination
of the region of applicability of the system pi(i) controller-noninteger order
as tatic object. Izvestiya Vysshykh Utchebnykh Zavedehii, Elektromekhanika,
2 :65–72, 1992.
[56] H.K. Khalil. Nonlinear Systems. Prentice Hall, 2002.
[57] K. Khettab, Y. Bensafia, and S. Ladaci. Fuzzy adaptive control enhancement
for non-affine systems with unknown control gain sign. In Proceedings of the
16th IEEE Int. Conference on Sciences and Techniques of Automatic control
and computer engineering, STA’2015, Monastir, Tunisia, December 21-23,,
volume 16, pages 616–621. IEEE, 2015.
[58] N.J. Killingsworth and M. Krstić. Auto-tuning of PID controllers via extre-
mum seeking. Proceedings of the 2005, American Control Conference, 2005.,
2005.
[59] N.J. Killingsworth and M. Krstić. PID tuning using extremum seeking : online,
model-free performance optimization. Control Systems, IEEE, 26(1) :70–79,
2006.
[60] S.K. Korovin and V.I. Utkin. Using sliding modes in static optimization and
nonlinear programming. Automatica, 10(5) :525–532, September 1974.
[61] M. Krstic. Design and stability analysis of extremum seeking feedback for
general nonlinear systems. In Proceedings of the 36th IEEE Conference on
Decision and Control, volume 2, pages 1743–1748. IEEE, 1997.
[62] M. Krstić, J. W. Modestino, and H. Deng. Stabilization of Nonlinear Uncertain
Systems. Springer-Verlag New York, Inc., Secaucus, NJ, USA, 1st edition,
1998.
[63] M. Krstić and H.H. Wang. Stability of extremum seeking feedback for general
nonlinear dynamic systems, 2000.
[64] S. Ladaci. Contribution à la Commande Adaptative d’Ordre Fractionnairee.
Thèse de Doctorat, Université Mentouri Constantine, Département d’Electro-
nique, 2007.
BIBLIOGRAPHIE 134
[65] S. Ladaci, F. Azzaza, K. Arbatni, and A. Charef. Commande auto-ajustable
à modèle fractionnaire d’un bras artificiel. Proc. SNAS’02 Séminaire National
d’Automatique et des Systèmes, Annaba, Algérie, 27-28 Octobre., 2002.
[66] S. Ladaci and Y. Bensafia. Indirect fractional order pole assignment based
adaptive control. Engineering Science and Technology, an International Jour-
nal, 19(-) :518–530, 2016.
[67] S. Ladaci, N. Boulbir, R. Sassi, and A. Arhab. Commande adaptative robuste
avec feedforward. Proc. CNIE’02 Premières Journées d’Electronique, C.U.
Bordj Bou Arriridj, Algérie, Avril, 2004.
[68] S. Ladaci and A. Charef. Commande adaptative à modèle de référence d’ordre
fractionnaire d’un bras artificiel. Communication Sciences & Technologie,
1 :50–52, 2002.
[69] S. Ladaci and A. Charef. Mit adaptive rule with fractional order integra-
tion. Proc. CESA’2003 IMACS Multi-conference Computational Engineering
in Systems Applications, Lille-France, July 9-11, 2003.
[70] S. Ladaci and A. Charef. Model reference adaptive control with fractional
derivative. Proc. CISTEMA’2003 Conference Internationale sur les systèmes
de Télécommunication d’Electronique Médicale et d’Automatique, Université
Aboubekr Blkaid, Tlemcen, Algérie, 27–29 septembre, 2003.
[71] S. Ladaci and A. Charef. Commande adaptative robuste avec feedforward
d’ordre fractionnaire. Proc. CMGE’04 Conférence Maghrébine sur le Génie
Electrique, Constantine, Algérie, Avril, 2004.
[72] S. Ladaci and A. Charef. Fractional adaptive control. Proc. CGE’03 Confé-
rence sur le Génie Electrique, EMP, Alger, Algérie, 15–16 Février, 2004.
[73] S. Ladaci and A. Charef. An adaptive fractional piλdµ controller. Proc. TMCE
2006, Sixth International Symposium on Tools and Methods of Competitive
Engineering, Ljubljana, Slovenia, April 18–22, 2006.
[74] S. Ladaci and A. Charef. On fractional adaptive control. Nonlinear Dynamics,
43(4) :365–378, Springer, Mars 2006.
[75] S. Ladaci, A. Charef, and A. Bennia. Loi de commande adaptative m.i.t.
avec intégration d’ordre fractionnaire. Proc. CNIE’02 Conférence Nationale
BIBLIOGRAPHIE 135
d’Ingénierie Electrique, pages 392–395, USTO, Oran, Algérie, 15–16 Décembre,
2002.
[76] S. Ladaci, J. J. Loiseau, and A. Charef. Adaptive Internal Model Control
with fractional order parameter. International Journal of Adaptive Control
and Signal Processing, 24(11) :944–960, nov 2010.
[77] S. Ladaci, J.J. Loiseau, and A. Charef. Stability analysis of fractional adap-
tive high-gain controllers for a class of linear systems. Proc. The 32nd Annual
Conference of the IEEE Industrial Electronics Society, IECON’06, Conserva-
toire National des Arts & Metiers - Paris - France, November 7 - 10, 2006.
[78] S. Ladaci, J.J. Loiseau, and A. Charef. Using fractional order filter in adap-
tive control of noisy plants. Proc. ICAMEM 2006, The third International
Conference on Advances in Mechanical Engineering And Mecanics, Hamma-
met, Tunisia, December, 2006.
[79] S. Ladaci, J.J. Loiseau, and A. Charef. Fractional order adaptive high-gain
controllers for a class of linear systems. Communications in Nonlinear Science
and Numerical Simulation, 13(4) :707–714, July 2008.
[80] J.R. Layne, K.M. Passino, and S. Yurkovich. Fuzzy learning control for anti-
skid braking systems. In [1992] Proceedings of the 31st IEEE Conference on
Decision and Control, pages 2523–2528. IEEE, 1992.
[81] M. Leblanc. Sur l’electrification des chemins de fer au moyen de courants
alternatifs de frequence elevee. . Revue Generale de l’Electricite., (17) :8,
1980.
[82] P. Lei, Y. Li, and J.E. Seem. Sequential ESC-based global MPPT control for
photovoltaic array with variable shading. . IEEE Transactions on Sustainable
Energy, 2(3) :348–358, 2011.
[83] W.K. Lennon and K.M. Passino. Intelligent control for brake systems. IEEE
Transactions on Control Systems Technology, 7(2) :188–202, March 1999.
[84] R. Leyva, C. Alonso, I. Queinnec, A. Cid-Pastor, D. Lagrange, and
L. Martinez-Salamero. MPPT of photovoltaic systems using extremum -
seeking control. IEEE Transactions on Aerospace and Electronic Systems,
42(1) :249–258, jan 2006.
BIBLIOGRAPHIE 136
[85] Y. Li, A.R. Mario, G.T.C. Chiu, . L.G. Mongeau, and In.Su. Paek. Extremum
seeking control of a tunable thermoacoustic cooler. IEEE Transactions on
Control Systems Technology, 13 :527–536, 2005.
[86] C.F. Lorenzo and T.T. Hartley. Variable order and Distributed order Fractio-
nal Operators. Nonlinear Dynamics, 29 :57–98, 2002.
[87] C.H. Lubich. Discretized fractional calculus. SIAM Journal of Mathematical
Analysis, 17(3) :704–719, 1986.
[88] O. Lequinvand M. Geversvand M. Mossberg Magnus, E. Bosmans, and
L. Triest. Iterative feedback tuning of PID parameters : comparison with
classical tuning rules. Control Engineering Practice, 11(9) :1023–1033, sep
2003.
[89] A. Makroglou, R.K. Miller, and S. Skaar. Computational results for a feedback
control for rotating viscoelastic beam. J. Guidance, Control and Dynamics,
17(1) :84–90, 1994.
[90] H. Malek, S. Dadras, and Y.Q. Chen. An Improved Maximum Power Point
Tracking Based on Fractional Order Extremum Seeking Control in Grid-
Connected Photovoltaic (PV) Systems. In Volume 4 : 18th Design for Ma-
nufacturing and the Life Cycle Conference ; 2013 ASME/IEEE International
Conference on Mechatronic and Embedded Systems and Applications, page
V004T08A024. ASME, August 2013.
[91] B. Mandelbrot. The fractal geometry of nature. Freeman, San Francisco, CA,
1982.
[92] K. Matsuda and H. Fujii. H∞ optimized wave-absorbing control : Analyti-
cal and experimental results. Journal of guidance, Control and Dynamics,
16(6) :1146–1153, 1993.
[93] K.S. Miller and B. Ross. An Introduction to the Fractional Calculus and
Fractional Differential Equations. Wiley, New York, USA, 1993.
[94] W.H. Moase, C. Manzie, and J.M. Brear. Newton-like extremum-seeking part
I : Theory. In Proceedings of the IEEE Conference on Decision and Control,
pages 3839–3844, 2009.
BIBLIOGRAPHIE 137
[95] W.H. Moase, C. Manzie, and J.M. Brear. Newton-like extremum-seeking for
the control of thermoacoustic instability. IEEE Transactions on Automatic
Control, 55 :2094–2105, 2010.
[96] A. Mohammadi, D. Nesic, and C. Manzie. Emulation design for a class of
extremum seeking controllers : Case studies in ABS design and spark timing
calibration. In 2013 Australian Control Conference, pages 276–281. IEEE,
November 2013.
[97] S. Momani and K. Al-Khaled. Numerical solutions for systems of fractional
differential equations by the decomposition method. Applied Mathematics and
Computation, 162 :1351–1365, 2005.
[98] C.A. Monje, A.J. Calderon, B.M. Vinagre, Y.Q. Chen, and V. Feliu. On frac-
tional piλ controllers : Some tuning rules for robustness to plant uncertainties.
Nonlinear Dynamics, 38 :369–381, 2004.
[99] G. Montseny. Représentation diffusive. Hermès Science, Paris, France, 2005.
[100] A.S. Morse. Recent problems in parameter adaptive control, pages 254–264.
Outils et Modèles Mathématiques pour l’Automatique, l’Analyse de Systèmes
et le Traitement du Signal. ED. I.D. Landau, CNRS 3, Paris, France, 1983.
[101] A.S. Morse. Simple algorithms for adaptive stabilization. Lecture Notes in
Control and Information Sciences, 105 :254–264, 1988.
[102] F. Naceri and L. Abida. A novel robust adaptive control algorithm for ac
drives. Computers and Electrical Engineering, 29 :523–534, 2003.
[103] F. Naceri, N. Lakhdari, and S. Sellami. Théorie de la Commande Adaptative.
Batna University Press, Algérie, 1998.
[104] M. Nakagawa and K. Sorimachi. Basic characteristics of a fractance device.
IEICE Trans. Fundamentals, E75-A(12) :1814–1819, 1992.
[105] M. García-Fi nana and L.M. Cruz-Orive. Fractional trend of the variance in
cavalieri sampling. Image analysis and stereology, 19(2) :71–79, 2000.
[106] K.S. Narendra. The maturing of adaptive control. Lecture Notes in Control
and Information Systems, 160 :3–36, 1991.
[107] K.S. Narendra and A.M. Annaswamy. Stable Adaptive Systems. Prentice-Hall,
Englewood Cliffs, N.J., 1989.
BIBLIOGRAPHIE 138
[108] A. Necaibia, N. Boutasseta, and S. Ladaci. Auto-tuning of fractional PID
controllers using extremum seeking. In 3rd International Conference on Sys-
tems and Processing Information, ICSIP’2013, Guelma, Algeria, May 12–14,
2013.
[109] A. Necaibia and S. Ladaci. Fractional Control Based Integration of MPPT for
Photovoltaic Arrays. In First International Conference on Electrical Enginee-
ring and Control Applications, ICEECA’2012, Khenchela, Algeria - November
20–22, 2012.
[110] A. Neçaibia and S. Ladaci. Self-tuning fractional order piλdµ controller based
on extremum seeking approach. IJAAC, 8(2) :99–121, 2014.
[111] A. Neçaibia, S. Ladaci, A. Charef, and J.J Loiseau. Fractional order extremum
seeking approach for maximum power point tracking of photovoltaic panels.
Frontiers in Energy, 9 :43–53, 2015.
[112] A. Necaibia, S. Ladaci, and S. Mekhilef. ABS control via Fractional Order Ex-
tremum Seeking approach. In 2014 15th International Conference on Sciences
and Techniques of Automatic Control and Computer Engineering (STA), pages
475–481. IEEE, dec 2014.
[113] A. Necaibia, A. Charef S. Ladaci, and J.J. Loiseau. Fractional Order Ex-
tremum Seeking Control. In 22nd Mediterranean Conference on Control and
Automation, MED’14, Palermo, Italy on June 16-19, pages 459–462. IEEE,
2014.
[114] R.R. Nigmatullin and A. LeMéhauté. The geometrical and physical meaning
of the fractional integral with complex exponent. International Journal of
Science Georesources, 1(8) :2–9, 2004.
[115] T.F. Nonnenmacher and W.G. Glöckle. A fractional model for mechanical
stress ralaxation. Philosophical Magazine Lett., 64(2) :89–93, 1991.
[116] K. Ogata. Modern Control Engineering. 3 ed. Prentice Hall International,
London, 1974.
[117] K.B. Oldham and J. Spanier. Fractional Calculus. Academic Press, New York,
1974.
BIBLIOGRAPHIE 139
[118] K.B. Oldham and C.G. Zoski. Analogue instrumentation for processing pola-
rographic data. J. Electroanal. Chem., 157 :27–51, 1983.
[119] P.V. Osburn, H.P. Whitaker, and A. Kezer. New developments in the design of
adaptive control systems. Technical Report No 61–39, Institute of Aeronautical
Sciences, February 1961.
[120] P. Ostalczyk. Fundamental properties of the fractional-order discrete-time
integrator. Signal Processing, 83 :2367–2376, 2003.
[121] A. Oustaloup. Fractional order sinusoidal oscilators : Optimization and their
use in highly linear FM modulators. IEEE Transactions on Circuits and Sys-
tems, 28(10) :1007–1009, 1981.
[122] A. Oustaloup. Systèmes asservis linéaires d’ordre fractionnaire. Masson. Paris,
1983.
[123] A. Oustaloup. From fractality to non integer derivation through recursivity,
a property common to these two concepts : A fundamental idea for a new
process control strategy. Proc. 12th IMACS World Congr., Paris, France July
18-22, 1988.
[124] A. Oustaloup. La commande CRONE. Hermès. Paris, 1991.
[125] A. Oustaloup. La dérivation non entière. Hermès. Paris, 1995.
[126] A. Oustaloup, F. Levron, F. Nanot, and B. Mathieu. Frequency band complex
non integer differentiator : Characterization and synthesis. IEEE Transactions
on Circuits and Systems I : Fundamental Theory and Applications, 47(1) :25–
40, 2000.
[127] A. Oustaloup and B. Mathieu. La commande CRONE : du scalaire au multi-
variable. Hermès. Paris, 1999.
[128] A. Oustaloup, B. Mathieu, and P. Lanusse. The CRONE control of resonant
plants : Application to flexible transmission. European Journal of Control,
1(2) :113–121, 1995.
[129] A. Oustaloup, X. Moreau, and M. Nouillant. The CRONE suspension. Control
Engineering Practice, 4(8) :1101–1108, 1996.
[130] A. Oustaloup, B. Orosni, P. Melchior, and H. Linarès. Path planning by
fractional differentiation. Robotica, 21 :59–69, 2003.
BIBLIOGRAPHIE 140
[131] A. Oustaloup, J. Sabatier, and P. Lanusse. From fractal robustness to CRONE
control. Fractional Calculus & and Applied Analysis, 2(1) :1–30, 1999.
[132] N. Özdemir and D. Karadeniz P. Agrawal, B.B. Iskender. Fractional optimal
control of a 2-dimensional distributed system using eigenfunctions. Nonlinear
Dyn., 2008.
[133] U. Ozguner. Smooth extremum-seeking control via second order sliding mode.
In Proceedings of the 2003 American Control Conference, 2003., volume 4,
pages 3248–3253. IEEE, 2003.
[134] Pacejka, H.B., and R.S. Sharp. Shear Force Development by Pneumatic Tyres
in Steady State Conditions : A Review of Modelling Aspects. Vehicle System
Dynamics, 20(3-4) :121–175, January 1991.
[135] J. Padovan and J.T. Sawicki. Nonlinear Vibrations of Fractionally Damped
Systems. Nonlinear Dynamics, 16 :321–336, 1998.
[136] Y. Pan, Ü. Özgüner, and T. Acarman. Stability and performance improve-
ment of extremum seeking control with sliding mode. International Journal
of Control, 76(9-10) :968–985, January 2003.
[137] P. Parks.
[138] I. Petrás. The fractional order controllers : Methods for their synthesis and
application. Journal of Electrical Engineering, 50(9-10) :284–288, 1999.
[139] I. Petrás, Y.Q. Chen, and B.M. Vinagre. A robust stability test procedure for
a class of uncertain lti fractional order systems. Proceedings of the Interna-
tional Carpathian Conference ICCC’2002, pages 247–251, Malenovice, Czech
Republic, May 27-30, 2002.
[140] I. Petrás, I. Podlubny, P. O’Leary, and L. Dorcak. Analogue fractional-order
controllers : Realization, tuning and implementation. Proc. International Car-
pathian Control Conference ICCC’2001, pages 9–14, Krynica, Poland, 2001.
[141] I. Petrás, B.N. Vinagre, L. Dorcak, and V. Feliu. Fractional digital control of
a heat solid : Experimental results. Proc. International Carpathian Control
Conference ICCC’2002, Malenovice, Czech Republic, May 27-30, 2002.
BIBLIOGRAPHIE 141
[142] I. Podlubny. The Laplace transform method for linear differential equations
of the fractional order. Technical Report UEF-02-94, Inst. Exp. Phys. Slovak
Academy of Sciences. Kosice, Slovak Republic, 1994.
[143] I. Podlubny. Fractional Differential Equations. Academic Press. San Diego,
1999.
[144] I. Podlubny. Fractional order systems and piλdµ controllers. IEEE Transac-
tions on Automatic Control, 44(1) :208–214, 1999.
[145] I. Podlubny. Fractional-order Systems and fractional-Order Controllers. Tech-
nical Report UEF-03-94, Inst. Exp. Phys. Slovak Academy of Sciences. Kosice,
Slovak Republic, November 1994.
[146] I. Podlubny, I. Petrás, B.M. Vinagre, P. O’leary, and L. Dorcak. Analogue
Realisations of fractional-Order Controllers. Nonlinear Dynamics, 29 :281–
296, 2002.
[147] V. Pommier, R. Musset, P. Lanusse, and A. Oustaloup. Study of two ro-
bust controls for an hydraulic actuator. Proceedings of the European Control
Conference, Cambridge, EUCA, 2003.
[148] D. Popovic, M. Jankovic, S. Manger, and A.R. Teel. Extremum seeking me-
thods for optimization of variable cam timing engine operation. American
Control Conference, pages 3136–3141, Denver, CO., 2003.
[149] K. Rabah, S. Ladaci, and M. Lashab. State feedback with fractional piλdµ
control structure for genesio-tesi chaos stabilization. 16th International Confe-
rence on Sciences and Techniques of Automatic control and computer engi-
neering, STA’2015„ pages 328–333, Monastir, Tunisia, December 21-23, 2015.
IEEE.
[150] H.-F. Raynaud and A. Zergaïnoh. State-space representation of fractional
order controllers. Automatica, 36 :1017–1021, 2000.
[151] J. Reimpell, J.Betzler, and M. Burckhardt. Fahrwerktechnik. Radschlupf-
Regelsysteme. Number v. 12 in Vogel-Fachbuch : KFZ-Technik. Vogel Bu-
chverl., 1993.
BIBLIOGRAPHIE 142
[152] B. Ross(Editor). Fractional Calculus and its applications, volume 457 of Lec-
ture Notes in Mathematics [Proc. Int. Conf. held at Univ. of New Haven, USA,
1974]. Springer-Verlag, Berlin, 1975.
[153] E.P. Ryan. Universal W1,∞-tracking for a class of nonlinear systems. Systems
& Control Letters, 18 :201–210, 1992.
[154] S.G. Samko, A.A. Kilbas, and O.I. Marichev. Fractional Integrals and Deri-
vatives : Theory and Applications. Gordon and Breach, 1987.
[155] S. Sastry and M. Bodson. Adaptive Control : Stability, Convergence and Ro-
bustness. Prentice-Hall, Englewood Cliffs, N.J., 1989.
[156] J.T. Sawicky and J. Padovan. Analogue Realisations of fractional-Order
Controllers. Journal of the Franklin Institute, 336 :423–433, 1999.
[157] H.M. Srivastava and R.K. Saxena. Operators of fractional integration and
their applications. Applied Mathematics and Computation, 118 :1–52, 2001.
[158] A.A. Stanislavsky. Probability interpretationof the integral of fractional order.
Theoritical an Mathematical Physics, 138(3) :418–431, 2004.
[159] J. Sternby. A Review of Extremum Control. 1979.
[160] J. Sternby. Extremum control systems ? ?an area for adaptive control ? Joint
Automatic Control Conference, 17 :8, 1980.
[161] J.I. Suárez, B.M. Vinagre, and Y.Q. Chen. Spacial path tracking of autono-
mous industrial vehicle using fractional order controllers. Proceedings of the
11th Conference on advanced robotics. IEEE, pages 405–410, Coimbra, 2003.
[162] H. Sun, A.A. Abdelwahab, and B. Onaral. Linear Approximation of Transfer
Function with a Pole of Fractional Power. IEEE Trans. Automatic Control,
29(5) :441–444, Mai 1984.
[163] H. Sun and A. Charef. Fractal System-A time domain Approach. Annals of
Biomedical Engineering, 18 :597–621, 1990.
[164] H. Sun, A. Charef, Y.Y. Tsao, and B. Onaral. Analysis of polarization dyna-
mics by singularity decomposition method. Annals of Biomedical Engineering,
20(3) :321–335, May 1992.
[165] H. Sun and B. Onaral. A unified approach to represent metal electrode inter-
face. IEEE Trans. Biomed. Eng., 31 :399–406, July 1984.
BIBLIOGRAPHIE 143
[166] E. Tajahuerce, G. Saavedra, W.D. Furlan, E.E. Sicre, and P. Andrés. White-
light optical implementation of the fractional Fourier transform with adjus-
table order control. Applied optics, 39(2) :238–245, 2000.
[167] Y. Tan, W.H. Moase, C. Manzie, Nes D., and I.M.Y. Mareels. Extremum
seeking from 1922 to 2010. Control Conference (CCC), 2010 29th Chinese,
pages 14–26, 2010.
[168] Y. Tan, D. Nešić, and I. Mareels. On the choice of dither in extremum seeking
systems : A case study. Automatica, 44(5) :1446–1450, may 2008.
[169] G. Tao. Real-Time Optimization by Extremum-Seeking Control [Book Re-
view]. Control Systems, IEEE, 24(2), 2004.
[170] S. Torsten and S. Petre. System Identification. Prentice-Hall, 1989.
[171] John Truxal. Computers in Automatic Control Systems. Proceedings of the
IRE, 49(1) :305–312, January 1961.
[172] C.-C. Tseng. Design of fractional order digital FIR differentiator. Signal
Processing Letters, 8(3) :77–79, 2001.
[173] C.-C. Tseng, S.-C. Pei, and S.-C. Hsia. Computation of fractional derivatives
using fourier transform digital FIR differentiator. Signal Processing, 80 :151–
159, 2000.
[174] R. Mansouri U.M. Al-Saggaf, I.M. Mehedi and M. Bettayeb. State feedback
with fractional integral control design based on the Bode’s ideal transfer func-
tion. International Journal of Systems Science, 2015.
[175] D. Valério. Fractional Robust System Control. PhD thesis, Universidade Téc-
nica de Lisboa, 2005.
[176] A. VanDerZiel. On the noise spectra of semiconductor noise and of flicker
effects. Physica, 16 :359–372, 1950.
[177] B.M. Vinagre. Modelado y control de sistemas dinámicos caraterizados por
ecuaciones íntegro-diferenciales de orden fraccional. PhD thesis, Universidad
Nacional de Educación a Distancia, Madrid, 2001.
[178] B.M. Vinagre, Y.Q. Chen, and I. Petrás. Two direct Tustin discretization
methods for fractional-order differentiator/integrator. Journal of the Franklin
Institute, 340 :349–362, 2003.
BIBLIOGRAPHIE 144
[179] B.M. Vinagre, I. Petrás, P. Merchan, and L. Dorcak. Two digital realisation
of fractional controllers : Application to temperature control of a solid. Proc.
European Control Conference (ECC2001), pages 1764–1767, Porto, Portugal,
2001.
[180] B.M. Vinagre, I. Petrás, I. Podlubny, and Y.Q. Chen. Stability of fractional-
order model reference adaptive control. Proceedings of the MTNS’2002 (Open
problems book), pages 118–121, Notre Dame, USA, August 12-16, 2002.
[181] B.M. Vinagre, I. Petrás, I. Podlubny, and Y.Q. Chen. Using Fractional Order
Adjustment Rules and Fractional Order Reference Models in Model-Reference
Adaptive Control. Nonlinear Dynamics, 29 :269–279, 2002.
[182] B.M. Vinagre, I. Podlubny, A. Hernandez, and V. Feliu. Some approximations
of fractional order operators used in control theory and applications. Fractional
Calculus & Applied Analysis, 3(3) :231–248, 2000.
[183] B.M. Vinagre, I. Podlubny, A. Hernandez, and V. Feliu. On realisation of frac-
tional order controllers. Proc. Conférence Internationale Francophone d’Au-
tomatique (CIFA2000), Lille, France, Juillet 2000.
[184] B. Vladimír, B. Joseph, F. Jaromír, and M. Jirí. Digital self-tuning controllers :
algorithms, implementation and applications. 2005.
[185] H.H. Wang and M. Krstić. Extremum seeking for limit cycle minimization.
IEEE Transactions on Automatic Control, 45(12) :2432–2437, 2000.
[186] J. Wang and R.L. Bras. Ground heat flux estimated from surface soil tempe-
rature. Journal of hydrology, 216 :214–226, 1999.
[187] P.E. Wellstead and N.B.O.L. Pettit. Analysis and redesign of an antilock
brake system controller. IEE Proceedings - Control Theory and Applications,
144(5) :413–426, September 1997.
[188] J H (Ed) Westcott. An Exposition Of Adaptive Control : J H (Ed) Westcott :
9780080096599 : Amazon.com : Books.
[189] J.H. Westcott, Imperial College of Science, and Technology. An exposition
of adaptive control : proceedings of a symposium held at the Imperial College
of Science and Technology, London, 1961. Symposium Publications Division,
Pergamon Press, 1962.
BIBLIOGRAPHIE 145
[190] S. Westerlund. Capacitor theory. IEEE Trans. Dielectrics Electron. Insulation,
1 :826–839, 1994.
[191] C. Manzie W.H. Moase and J.M. Brear. Newton-like extremum-seeking part
II : Simulations and experiments. In Proceedings of the IEEE Conference on
Decision and Control, pages 3845–3850, 2009.
[192] J.C. Willems and C.I. Byrnes. Global adaptive stabilization in the absence of
information of the sign of the high frequency gain. Lecture Notes in Control
and Information Science, 62 :49–57, 1984.
[193] Z. Xiu-qin, Y. Bo, Y. Chao, and X. Guan-neng. Research on ABS of Multi-axle
Truck Based on ADAMS/Car and Matlab/Simulink. Procedia Engineering,
37 :120–124, 2012.
[194] Y.Pan, K.D. Kumar, and G. Liu. Extremum Seeking Control with Second-
Order Sliding Mode. SIAM Journal on Control and Optimization, 50(6) :3292–
3309, jan 2012.
[195] C.C. Yu. Autotuning of PID Controllers. Advances in Industrial Control.
Springer-Verlag, 1999.
[196] C. Zhang and R. Ordó nez. Extremum-Seeking Control and Applications : A
Numerical Optimization-Based Approach. Springer Science & Business Media,
2011.
[197] C. Zhang and R. Ordó nez. Advances in industrial control. Springer-Verlag
London Ltd. cop., London, New York, 2012.
[198] T. Zhang, M. Guay, and D. Dochain. Adaptive extremum seeking control of
continuous stirred-tank bioreactors. AIChE Journal, 49(1) :113–123, January
2003.
[199] Y. Zhang and J. Fraser Forbes. Extended design cost : A performance criterion
for real-time optimization systems. Computers and Chemical Engineering,
24 :1829–1841, 2000.
[200] J. Zhong and L. Li. IEEE Transactions On Control Systems Technology.





























