Embed Size (px)
Citation preview

TP PCSI – CI7_2
OUVRE PORTAIL DOMOTICC
CI7 :Modéliser les actions mécaniques, vérifieret valider des performances statiques des
chaînes de solides.À l’issue des TP ce Centre d’Intérêt, les compétences acquises doivent vous permettre
plus particulièrement de :
– Isoler un solide et effectuer un bilan des AM extérieures ;– Appliquer le PFS, la modélisation des liaisons et des efforts étant donnée, ainsi que le
séquencement des isolements.– Modéliser les AM globales agissant sur un système, la modélisation sous forme de
liaison normalisée étant donnée,– Dans le cas de liaisons non parfaites comportant du frottement : citer et appliquer lois
de Coulomb, efforts globaux ou locaux.– Proposer une démarche d’isolement pour résoudre de manière graphique un problème
de statique plane.– Utiliser la représentation par un cône de frottement pour modéliser les actions de frot-
tement (contact ponctuel) ;– Proposer ou commenter un modèle de liaison associé aux surfaces de contact ;– Identifier et représenter sous forme de schéma blocs les éléments constitutifs d’une
chaîne de transmission d’énergie ;– Valider des performances statiques d’un CdC.
page 1

TP PCSI – CI7_2
Table des matières
1 Définition du modèle numérique CAO 3D 31.1 Paramètres de commande de simulation . . . . . . . . . . . . . . . . . . . . . . 41.2 Prise en compte de la pesanteur . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Prise en compte de l’action du moteur . . . . . . . . . . . . . . . . . . . . . . . 41.4 Calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Détermination expérimentale de la loi liant Creg à F 5
3 Modélisation des actions mécaniques et loi F (Creg) théorique 63.1 Loi du limiteur, liant Creg à Cf , par modèle analytique (donné) . . . . . . . . . 63.2 Loi du mécanisme, liant Cf à F , par simulation CAO . . . . . . . . . . . . . . 6
4 Vérification des résultats : écart réel – modèle 6
5 Vérification du PFS 75.1 Isolement et torseur d’action mécanique . . . . . . . . . . . . . . . . . . . . . . 75.2 Vérification d’équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
page 2

TP PCSI – CI7_2
Problématique
On se propose ici de vérifier que les solides en équilibre de l’ouvre portail satisfont lePrincipe Fondamental de la Statique et déterminer l’action mécanique exercée par le moteurafin de respecter le critère d’effort maximal admissible du cahier des charges du limiteur.
Il s’agira donc plus particulièrement de :– déterminer expérimentalement la loi liant le couple de reglage Creg à l’effort en bout
de vantail F ;– déterminer cette même loi par modélisation mécanique ;– confronter les résultats obtenus par expérience et par simulation ;– vérifier l’équilibre d’une pièce.Il est ainsi question de quantifier les écarts entre le service attendu, le service réalisé et le
service simulé (voir figure 1).
FIGURE 1 – La maîtrise des modèles.
Pour la valeur de l’effort maximal admissible en bout de portail ainsi que le détail dufonctionnement du système, on consultera le cahier des charges du limiteur et celui du sys-tème complet.
1 Définition du modèle numérique CAO 3D
Q 1 : Ouvrir sous SolidWorks la maquette CAO « Domoticc3D.SLDASM » située dans lelecteur réseau de la classe.
Effectuer la construction automatique du mécanisme sous Méca3D, vérifier que les liai-sons conviennent et les adapter si besoin.
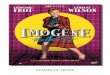
Q 2 : Vérifier la cohérence géométrique du modèle CAO avec le modèle d’étude proposé(voir figure 2).
Vérifier que l’effort résistant F est bien défini et appliqué au bon endroit.
page 3

TP PCSI – CI7_2
O
CA
B
Vantail 2
y1→
x1→
x2→
x3→
x4→
y2→
y3→
y4→
Bras de poussée 4Bras motorisé 3
Pilier 1
D
F→
FIGURE 2 – Modèle d’étude mécanique proposé.
Il est maintenant nécessaire de vérifier et compléter le modèle Méca3D :– déterminer les paramètres de commande de la simulation,– modéliser les actions mécaniques extérieures à prendre en compte.
1.1 Paramètres de commande de simulation
Q 3 : Par une mesure sur le système réel, évaluer la variation d’angle du bras moteurlors de l’ouverture du vantail.
En déduire les paramètres de commande dans Meca3D : vitesse de rotation d’entrée etdurée de simulation.
1.2 Prise en compte de la pesanteur
Q 4 : Ajouter l’action de la pesanteur sur la ou les pièce(s) que vous jugerez pertinente(s)dans le modèle Meca3D.
On portera une attention particulière à l’orientation de la gravité et l’on vérifiera la vali-dité des actions mécaniques introduites en contrôlant les propriétés de l’effort.
1.3 Prise en compte de l’action du moteur
Pour ouvrir le vantail, le moteur électrique doit exercer une action mécanique de main-tien, qui est l’inconnue recherchée du problème de statique des solides.
Q 5 : Quel type d’action mécanique le moteur exerce-t-il sur le bras moteur ?Entre quelles pièces ou dans quelle liaison du modèle cette action doit-elle s’exercer ?
page 4

TP PCSI – CI7_2
Il est donc nécessaire d’introduire dans le modèle méca3D un "couple moteur inconnu".Q 6 : Ajouter cette action mécanique dans le modèle numérique.
1.4 Calcul
Q 7 : Lancer la simulation.
2 Détermination expérimentale de la loi liant Creg à F
L’ouvre-portail doit être équipé du dynamomètre comme le montre la figure 3.
FIGURE 3 – Montage avec dynamomètre.
Le capteur de position angulaire du bras moteur doit être démonté (figure 5) de façon àpermettre l’accès à la vis (référencée [33] sur le dessin technique) pour regler le couple Creg.
Q 8 : Proposer et mettre en œuvre un protocole expérimental permettant d’obtenir la loide l’effort en bout de portail F (en position quasi fermée) en fonction du couple de reglageCreg. On prendra Creg dans l’intervalle [0; 50 N.m], on travaillera en phase d’ouverture et l’on re-portera les valeurs dans un tableur.
Q 9 : Conclure vis à vis de la problématique : quel couple de réglage faut-il imposer ?Effectuer ce réglage sur le système réel et le valider.
page 5

TP PCSI – CI7_2
FIGURE 4 – Mécanisme en utilisation nor-male.
FIGURE 5 – Mécanisme configuré pour lamanipulation.
3 Modélisation des actions mécaniques et loi F (Creg) théo-rique
L’objectif ici est de vérifier les résultats expérimentaux précédents à l’aide d’une simu-lation sous Solidworks et Méca3D pour la position correspondant à la configuration de lamaquette.
3.1 Loi du limiteur, liant Creg à Cf , par modèle analytique (donné)
Q 10 : Par un procédé au choix, mesurer et/ou calculer la valeur numérique de l’angleque fait le vantail par rapport au support dans la position des essais précédents (mesure audegré près).
Déterminer les valeurs numériques de tous les paramètres qui interviennent dans les re-lations liant le couple de reglage Creg et le couple de frottement Cf par le modèle proposédans le cahier des charges du limiteur.
Q 11 : À l’aide des relations du modèle proposé dans le cahier des charges du limiteur,calculer le couple Cf correspondant à l’effort maximal admissible de 150 N .
3.2 Loi du mécanisme, liant Cf à F , par simulation CAO
Q 12 : Relever la valeur du couple moteur correspondant à l’angle pour lequel l’étudeexpérimentale a été menée.
L’action de la pesanteur influe-t-elle sur le couple moteur ? Vérifier par simulation dumodèle Méca3d.
4 Vérification des résultats : écart réel – modèle
Q 13 : Confronter les résultats obtenus par approche expérimentale et par modélisation.Conclure.
page 6

TP PCSI – CI7_2
5 Vérification du PFS
5.1 Isolement et torseur d’action mécanique
Q 14 : Effectuer le bilan de toutes les actions mécaniques extérieures auxquelles est sou-mis le bras moteur On précisera pour chacune le type d’action mécanique (effort, moment ;axe...) et on précisera la forme du torseur d’action mécanique associé.
Effectuer ces isolements sous Meca3D et vérifier les résultats.
5.2 Vérification d’équilibre
Q 15 : Mesurer sous Méca3D toutes les composantes de chaque action mécanique exté-rieure au bras moteur et préciser ainsi les torseurs d’action mécanique associés.
Vérifier que le bras moteur en équilibre vérifie bien le PFS.
page 7