Embed Size (px)
Citation preview
Traitement du signal
Chapitre 3- Système LIT rationnel
Vahid Meghdadi
ELT2
2012-2013
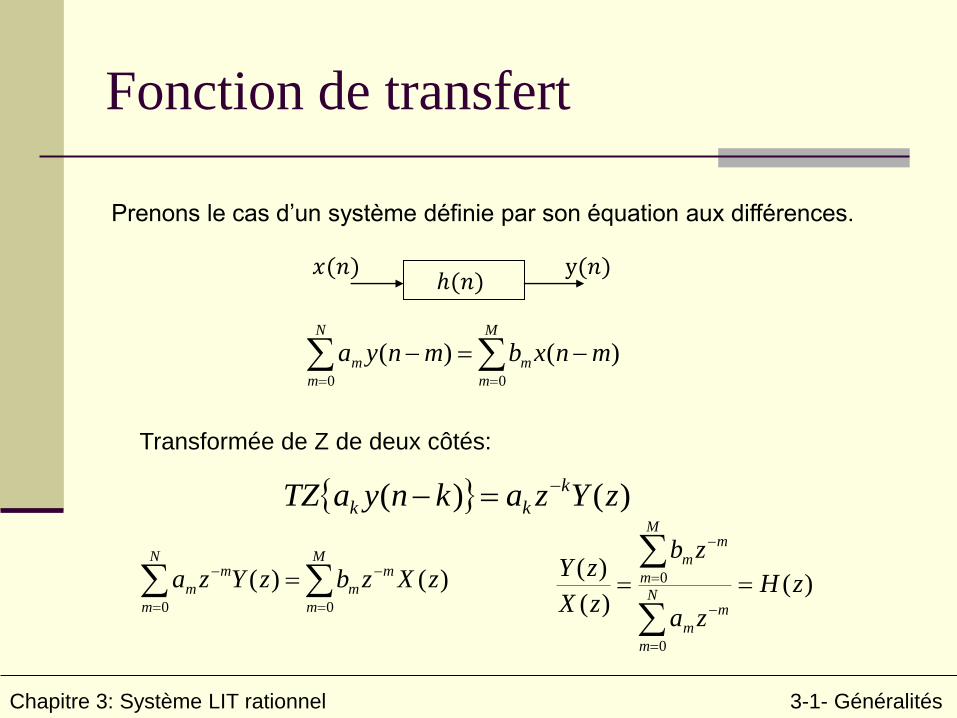
Fonction de transfert
Chapitre 3: Système LIT rationnel 3-1- Généralités
Prenons le cas d’un système définie par son équation aux différences.
ℎ(𝑛) 𝑥(𝑛) y(𝑛)
M
m
m
N
m
m mnxbmnya00
)()(
Transformée de Z de deux côtés:
)()( zYzaknyaTZ k
kk
M
m
m
m
N
m
m
m zXzbzYza00
)()( )()(
)(
0
0 zH
za
zb
zX
zYN
m
m
m
M
m
m
m
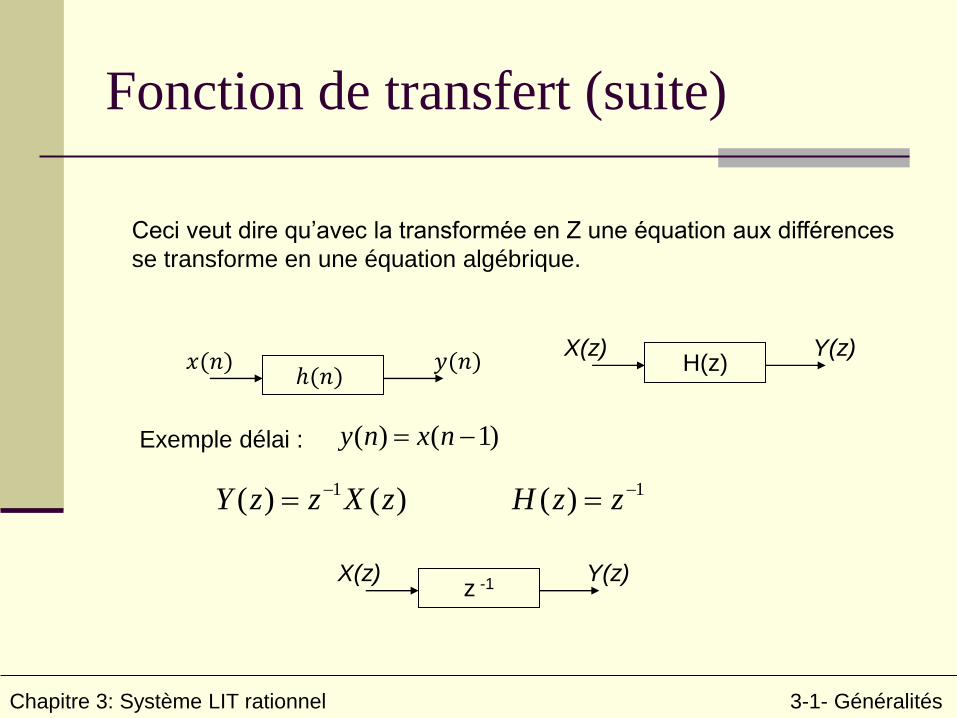
Fonction de transfert (suite)
Ceci veut dire qu’avec la transformée en Z une équation aux différences
se transforme en une équation algébrique.
H(z) X(z) Y(z)
Exemple délai : ( ) ( 1)y n x n
)()( 1 zXzzY 1)( zzH
z -1 X(z) Y(z)
Chapitre 3: Système LIT rationnel 3-1- Généralités
ℎ(𝑛) 𝑥(𝑛) 𝑦(𝑛)
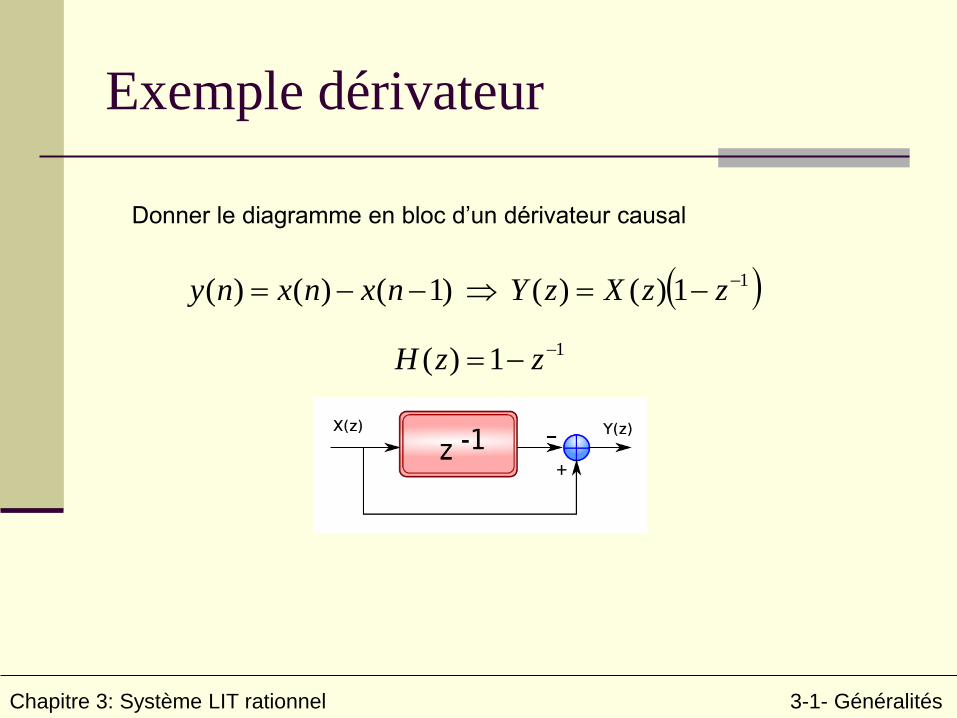
Exemple dérivateur
Donner le diagramme en bloc d’un dérivateur causal
11)()( )1()()( zzXzYnxnxny
11)( zzH
Chapitre 3: Système LIT rationnel 3-1- Généralités
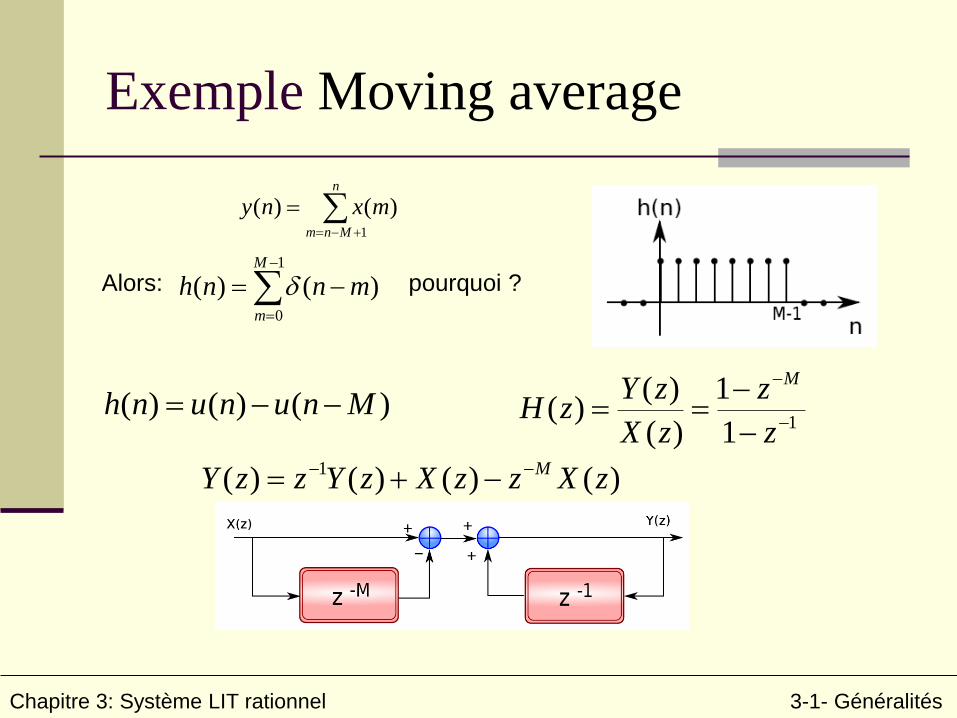
Exemple Moving average
n
Mnm
mxny1
)()(
1
0
)()(M
m
mnnh Alors: pourquoi ?
)()()( Mnununh 11
1
)(
)()(
z
z
zX
zYzH
M
)()()()( 1 zXzzXzYzzY M
Chapitre 3: Système LIT rationnel 3-1- Généralités
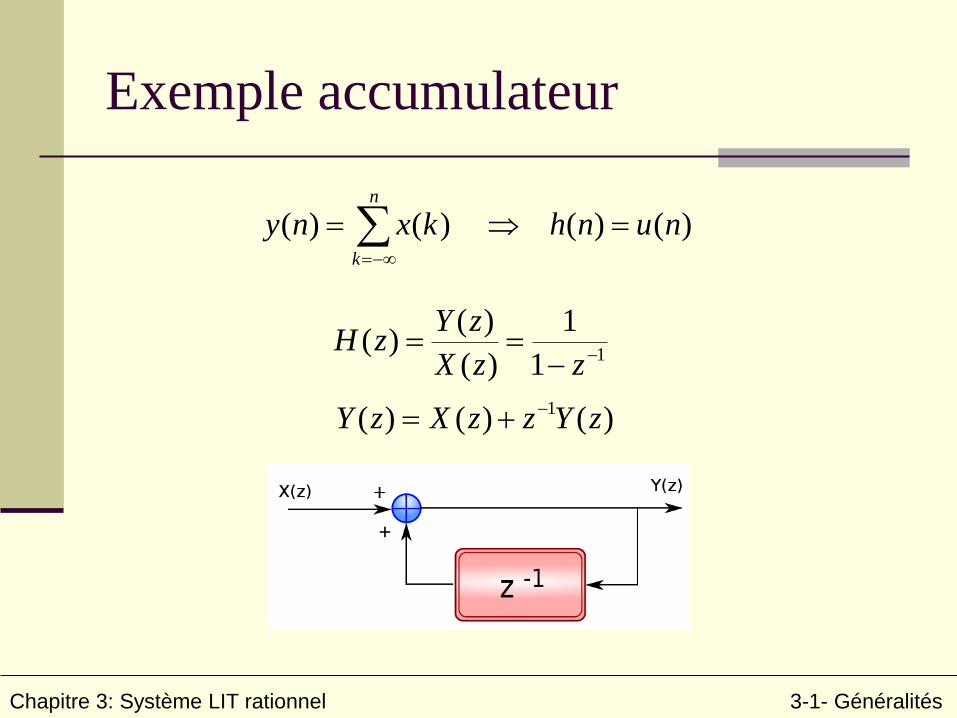
Exemple accumulateur
)()( )()( nunhkxnyn
k
11
1
)(
)()(
zzX
zYzH
)()()( 1 zYzzXzY
Chapitre 3: Système LIT rationnel 3-1- Généralités
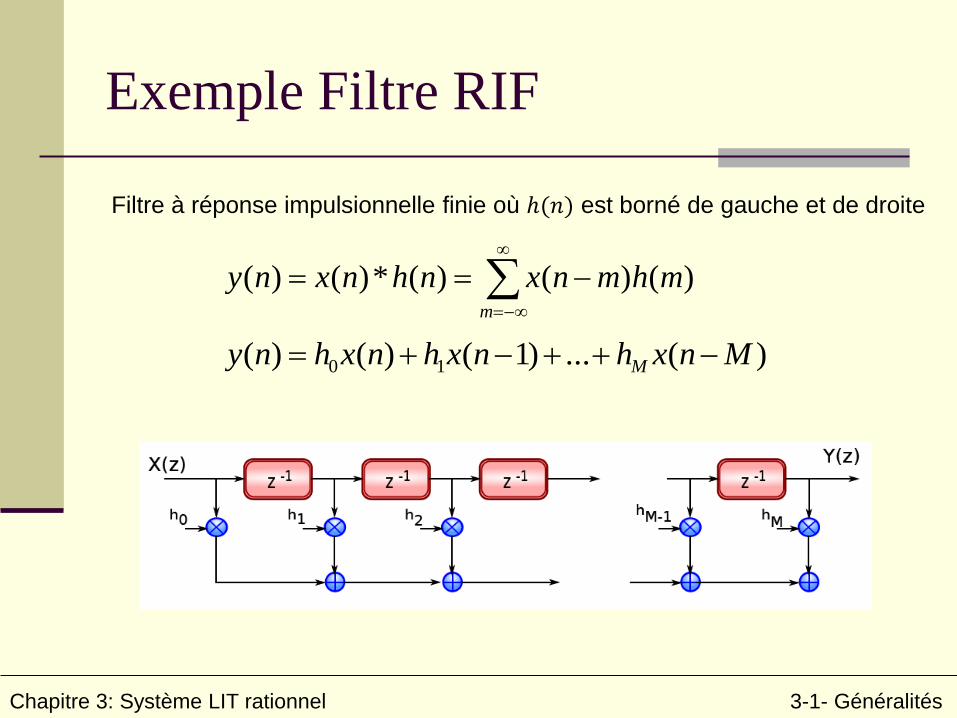
Exemple Filtre RIF
Chapitre 3: Système LIT rationnel 3-1- Généralités
Filtre à réponse impulsionnelle finie où ℎ(𝑛) est borné de gauche et de droite
m
mhmnxnhnxny )()()(*)()(
)(...)1()()( 10 Mnxhnxhnxhny M
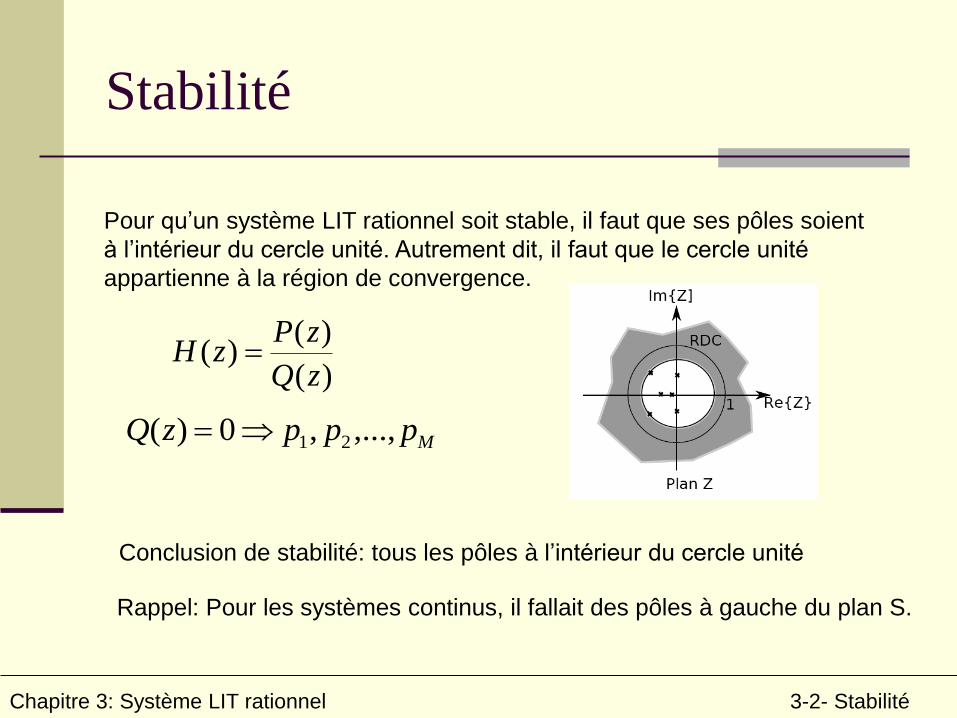
Stabilité
Pour qu’un système LIT rationnel soit stable, il faut que ses pôles soient
à l’intérieur du cercle unité. Autrement dit, il faut que le cercle unité
appartienne à la région de convergence.
)(
)()(
zQ
zPzH
MpppzQ ,...,,0)( 21
Conclusion de stabilité: tous les pôles à l’intérieur du cercle unité
Chapitre 3: Système LIT rationnel 3-2- Stabilité
Rappel: Pour les systèmes continus, il fallait des pôles à gauche du plan S.
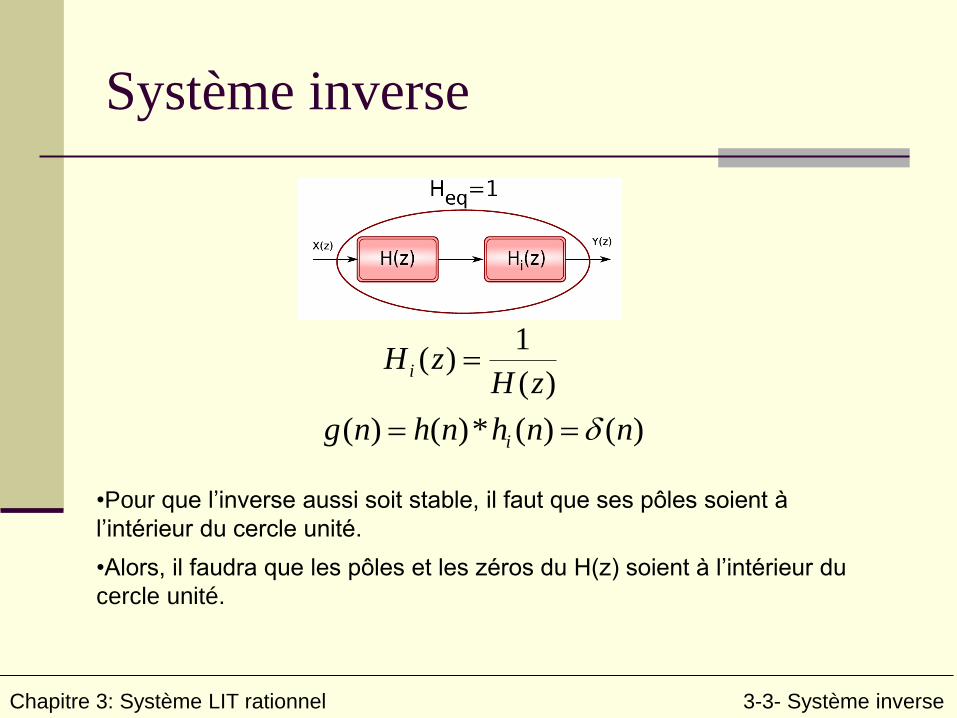
Système inverse
Chapitre 3: Système LIT rationnel 3-3- Système inverse
)(
1)(
zHzH i
)()(*)()( nnhnhng i
•Pour que l’inverse aussi soit stable, il faut que ses pôles soient à
l’intérieur du cercle unité.
•Alors, il faudra que les pôles et les zéros du H(z) soient à l’intérieur du
cercle unité.
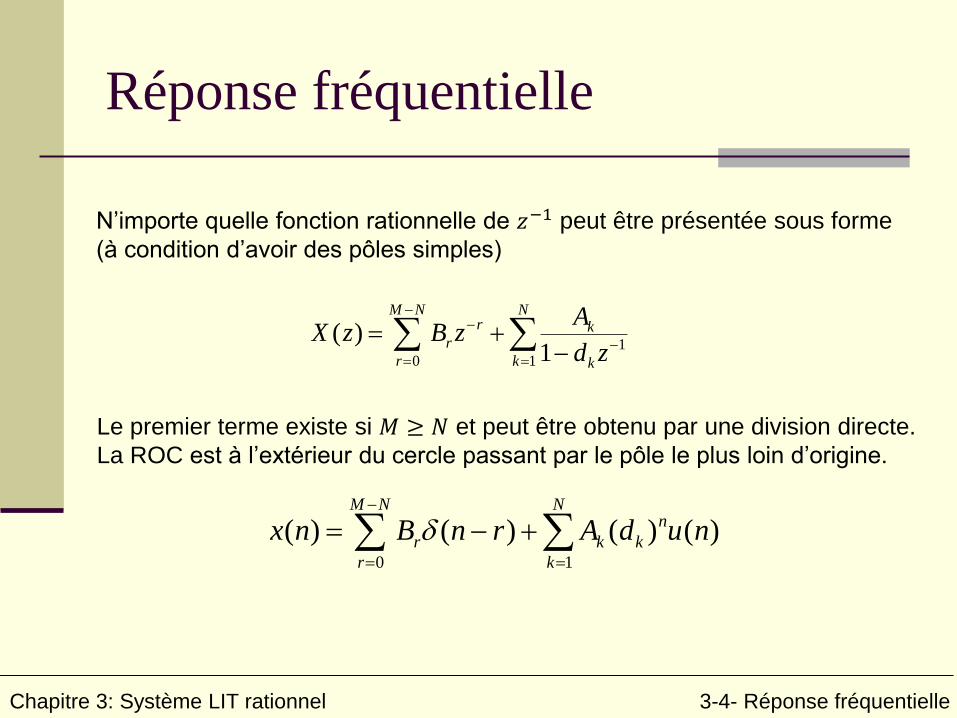
Réponse fréquentielle
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
N’importe quelle fonction rationnelle de 𝑧−1 peut être présentée sous forme
(à condition d’avoir des pôles simples)
10 1
( )1
M N Nr k
r
r k k
AX z B z
d z
Le premier terme existe si 𝑀 ≥ 𝑁 et peut être obtenu par une division directe.
La ROC est à l’extérieur du cercle passant par le pôle le plus loin d’origine.
0 1
( ) ( ) ( ) ( )M N N
n
r k k
r k
x n B n r A d u n
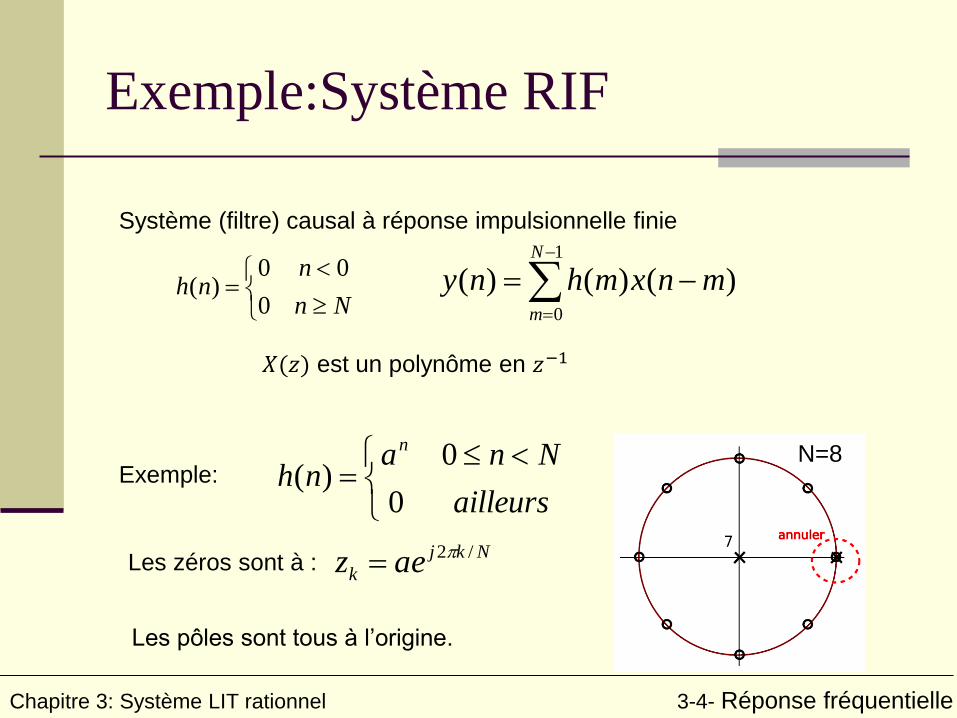
Exemple:Système RIF
Système (filtre) causal à réponse impulsionnelle finie
Nn
nnh
0
00)(
1
0
)()()(N
m
mnxmhny
Exemple:
ailleurs
Nnanh
n
0
0)(
Les zéros sont à : Nkj
k aez /2
N=8
Les pôles sont tous à l’origine.
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
𝑋(𝑧) est un polynôme en 𝑧−1
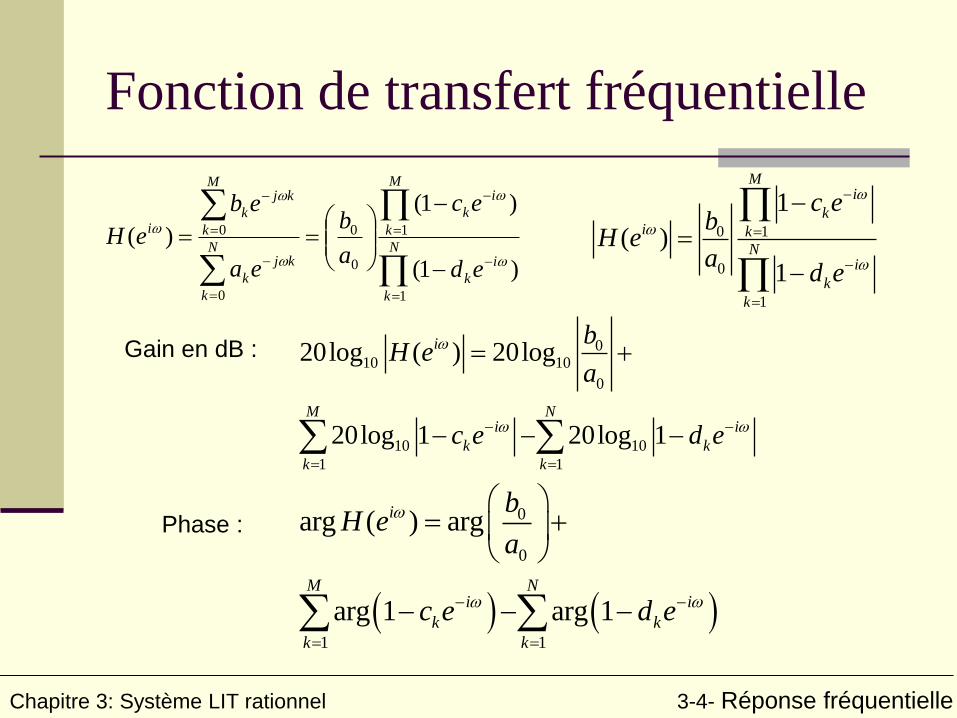
Fonction de transfert fréquentielle
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
N
k
i
k
M
k
i
k
N
k
kj
k
M
k
kj
ki
ed
ec
a
b
ea
eb
eH
1
1
0
0
0
0
)1(
)1(
)(
0 1
0
1
1
( )
1
Mi
ki k
Ni
k
k
c eb
H ea
d e
010 10
0
10 10
1 1
20log ( ) 20log
20log 1 20log 1
i
M Ni i
k k
k k
bH e
a
c e d e
Gain en dB :
0
0
1 1
arg ( ) arg
arg 1 arg 1
i
M Ni i
k k
k k
bH e
a
c e d e
Phase :
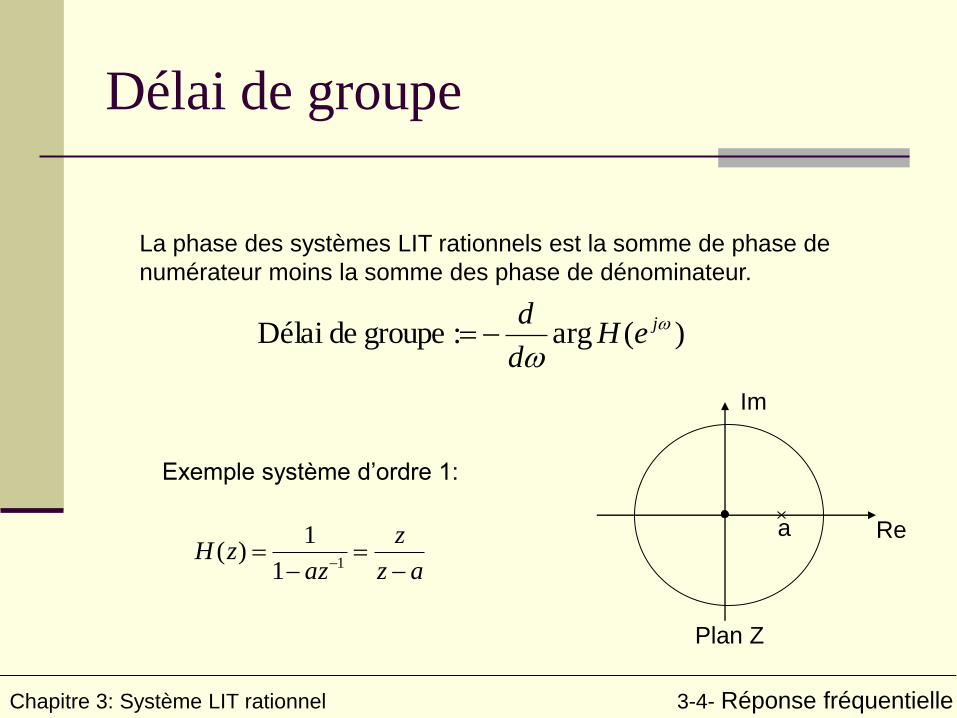
Délai de groupe
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
La phase des systèmes LIT rationnels est la somme de phase de
numérateur moins la somme des phase de dénominateur.
)(arg : groupe de Délai
jeHd
d
Exemple système d’ordre 1:
az
z
azzH
11
1)(
Plan Z
Re
Im
a
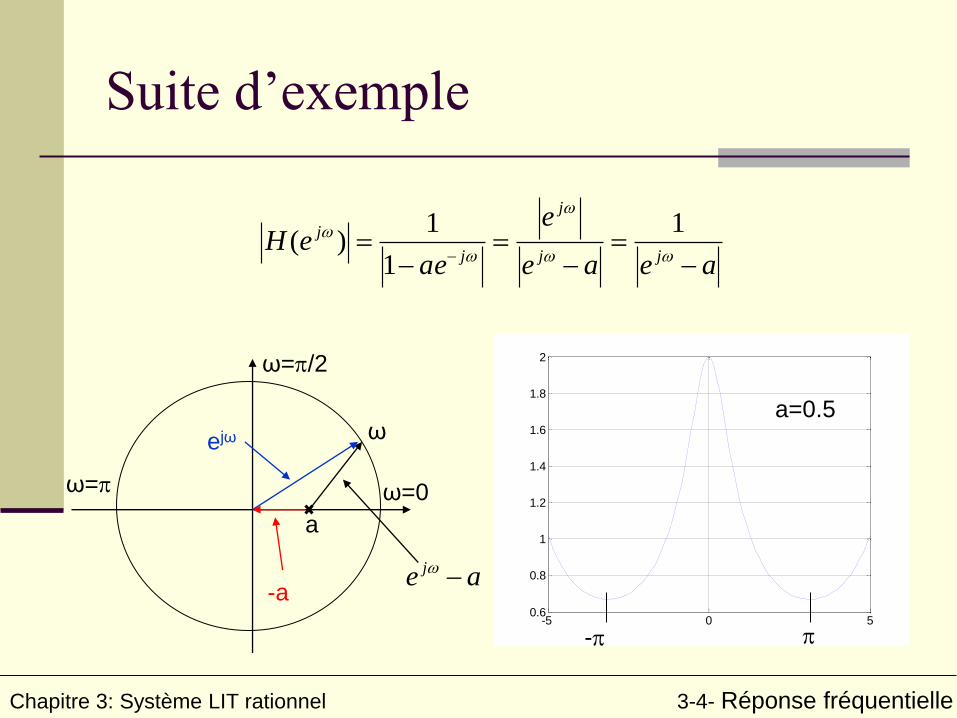
Suite d’exemple
aeae
e
aeeH
jj
j
j
j
1
1
1)(
ω
ω=0
ω=/2
ω=
ae j
-a
a
ejω
-5 0 50.6
0.8
1
1.2
1.4
1.6
1.8
2
-
a=0.5
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
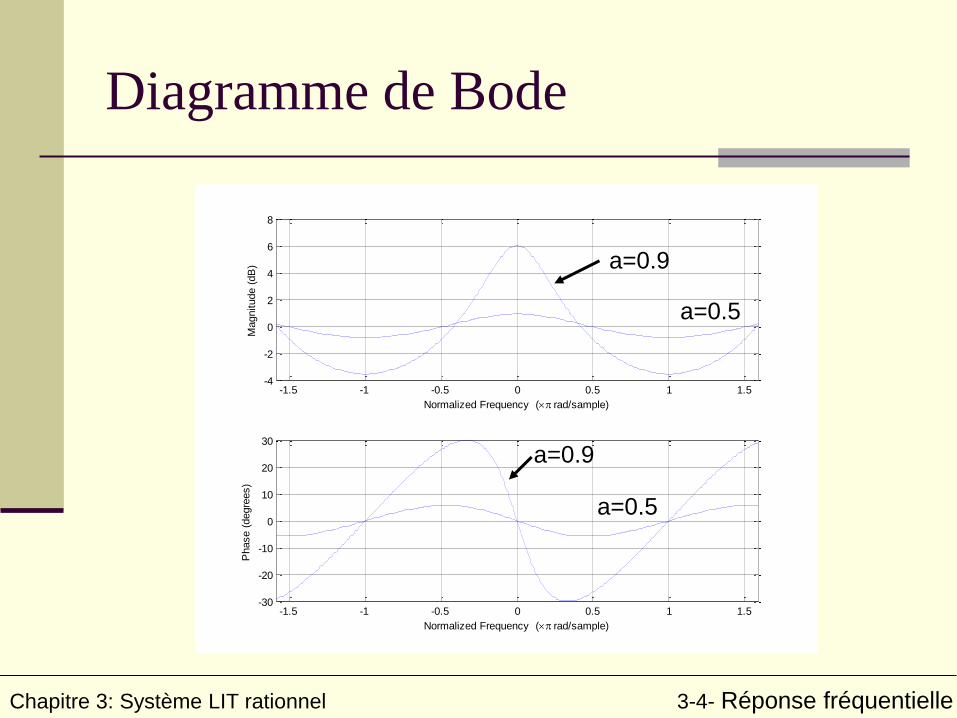
Diagramme de Bode
-1.5 -1 -0.5 0 0.5 1 1.5-30
-20
-10
0
10
20
30
Normalized Frequency ( rad/sample)
Phase (
degre
es)
-1.5 -1 -0.5 0 0.5 1 1.5-4
-2
0
2
4
6
8
Normalized Frequency ( rad/sample)
Magnitude (
dB
) a=0.9
a=0.9
a=0.5
a=0.5
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
Conclusion
Un pôle près du cercle unité génère
• un pic sur le
• au même endroit une variation de phase importante
• et au même moment, un délai de groupe important
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
)( jeH
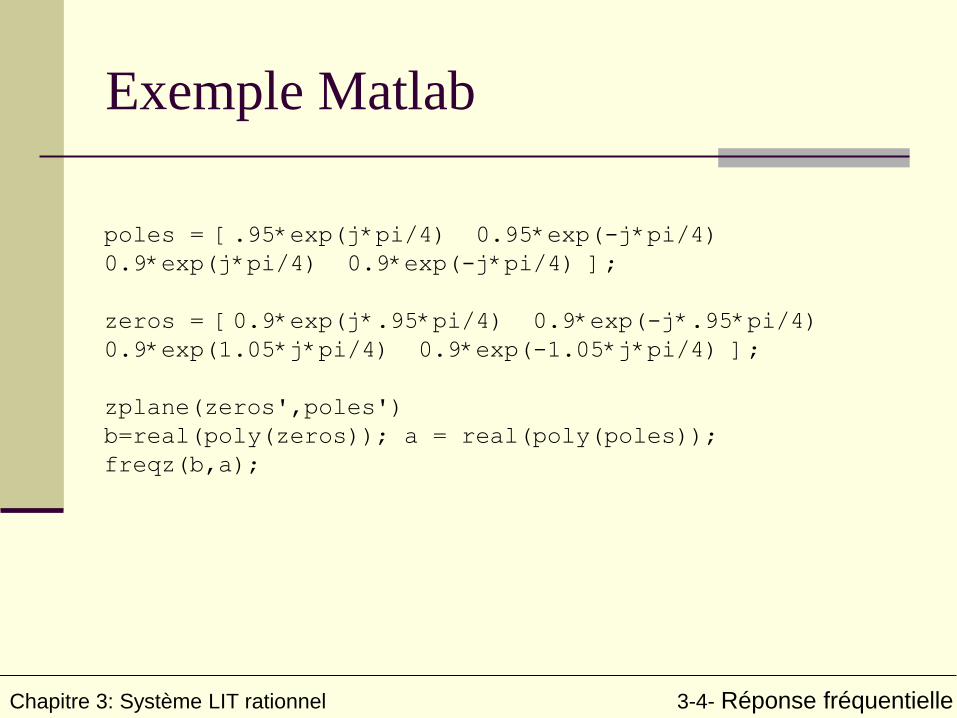
Exemple Matlab
poles = [.95*exp(j*pi/4) 0.95*exp(-j*pi/4)
0.9*exp(j*pi/4) 0.9*exp(-j*pi/4) ];
zeros = [0.9*exp(j*.95*pi/4) 0.9*exp(-j*.95*pi/4)
0.9*exp(1.05*j*pi/4) 0.9*exp(-1.05*j*pi/4) ];
zplane(zeros',poles')
b=real(poly(zeros)); a = real(poly(poles));
freqz(b,a);
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
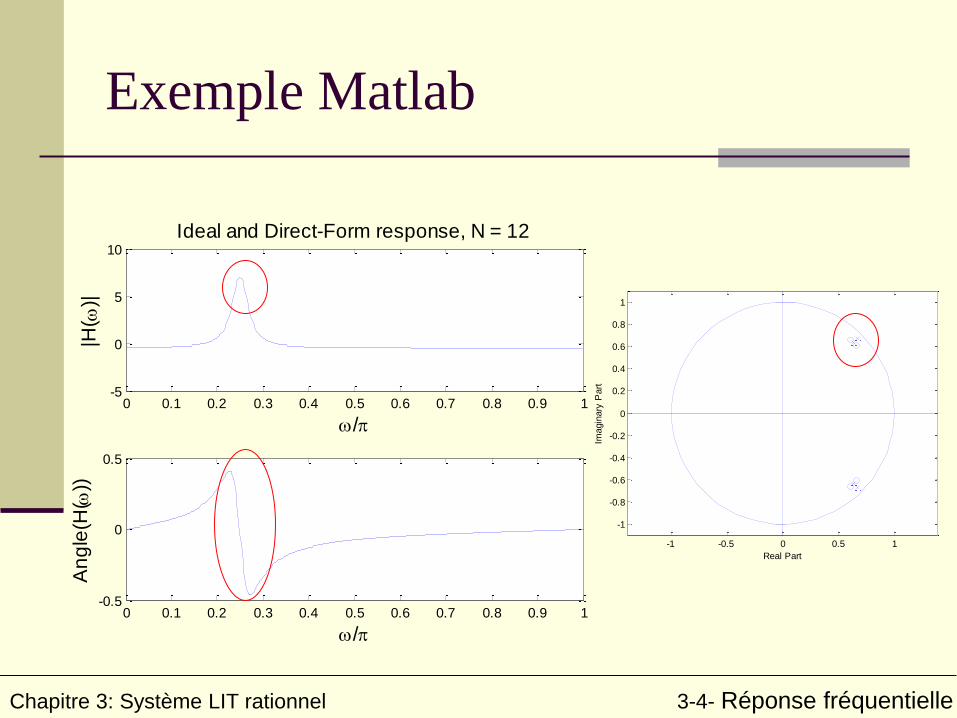
Exemple Matlab
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
Ideal and Direct-Form response, N = 12
|H(
)|
/
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
An
gle
(H(
))
/
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
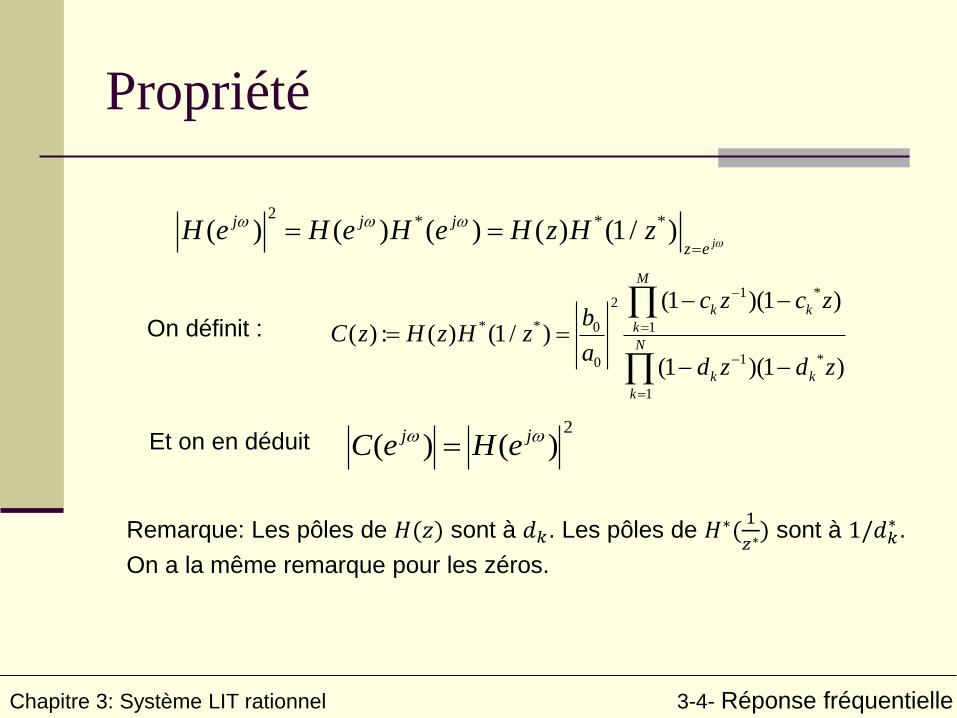
Propriété
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
2* * *( ) ( ) ( ) ( ) (1 / )
j
j j j
z eH e H e H e H z H z
On définit :
1 *2
* * 0 1
1 *0
1
(1 )(1 )
( ) : ( ) (1 / )
(1 )(1 )
M
k k
k
N
k k
k
c z c zb
C z H z H za
d z d z
Et on en déduit 2
)()( jj eHeC
Remarque: Les pôles de 𝐻(𝑧) sont à 𝑑𝑘. Les pôles de 𝐻∗(1
𝑧∗) sont à 1/𝑑𝑘
∗ .
On a la même remarque pour les zéros.
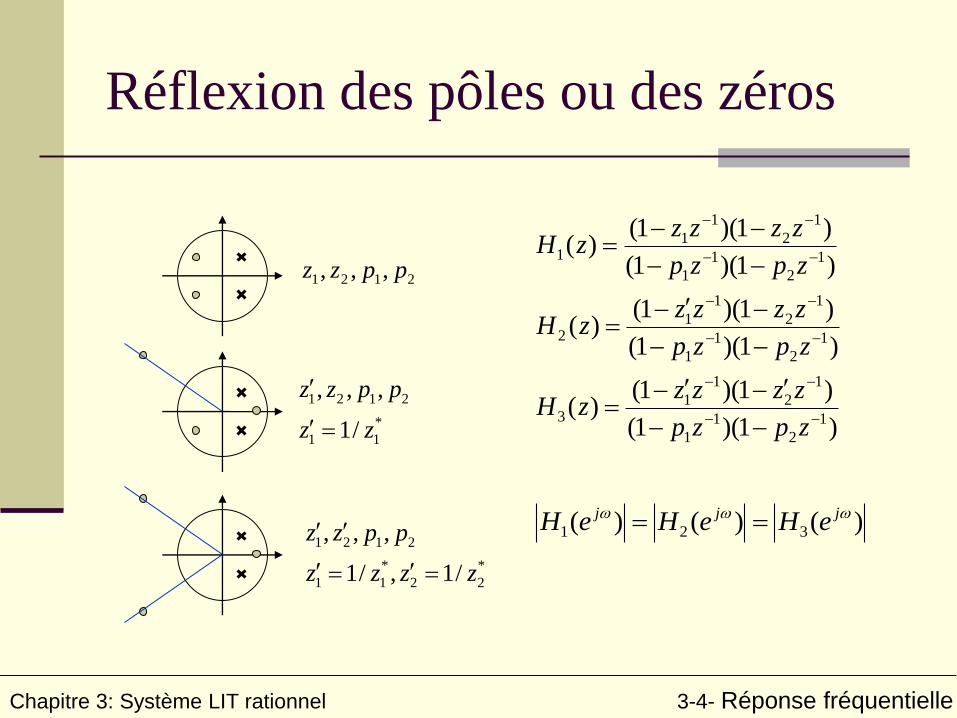
Réflexion des pôles ou des zéros
Chapitre 3: Système LIT rationnel 3-4- Réponse fréquentielle
2121 ,,, ppzz
1 2 1 2
*
1 1
, , ,
1/
z z p p
z z
1 2 1 2
* *
1 1 2 2
, , ,
1/ , 1/
z z p p
z z z z
)1)(1(
)1)(1()(
)1)(1(
)1)(1()(
)1)(1(
)1)(1()(
1
2
1
1
1
2
1
13
1
2
1
1
1
2
1
12
1
2
1
1
1
2
1
11
zpzp
zzzzzH
zpzp
zzzzzH
zpzp
zzzzzH
)()()( 321
jjj eHeHeH
Filtre passe-tout
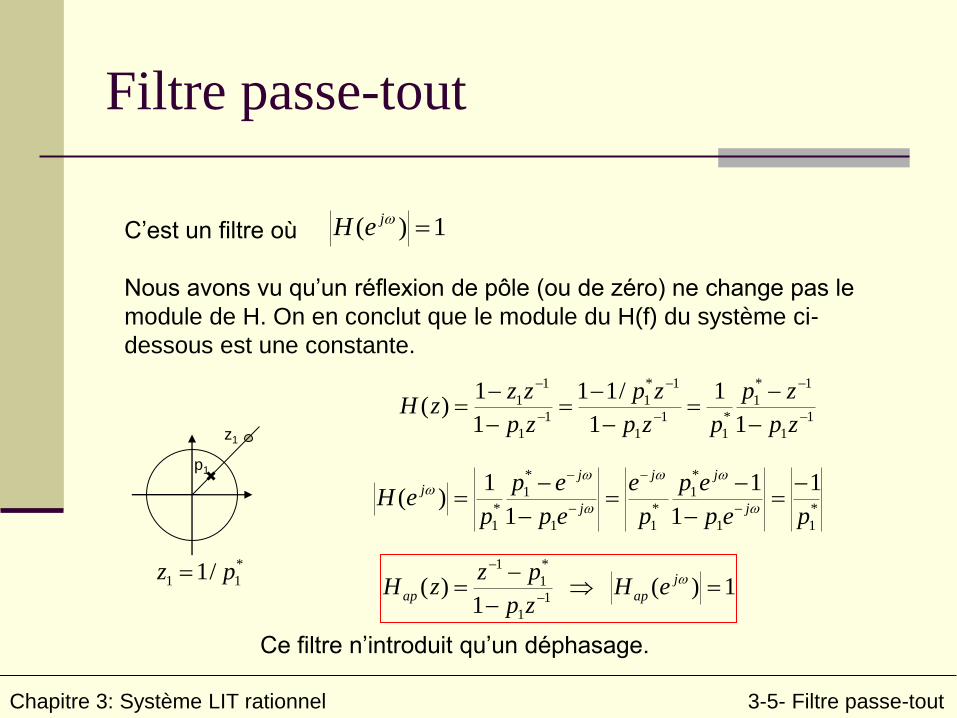
C’est un filtre où
Nous avons vu qu’un réflexion de pôle (ou de zéro) ne change pas le
module de H. On en conclut que le module du H(f) du système ci-
dessous est une constante.
1)( jeH
z1
p1
*
11 /1 pz
1
1
1*
1
*
1
1
1
1*
1
1
1
1
1
1
1
1
/11
1
1)(
zp
zp
pzp
zp
zp
zzzH
*
11
*
1
*
11
*
1
*
1
1
1
1
1
1)(
pep
ep
p
e
ep
ep
peH
j
jj
j
jj
1)( 1
)(1
1
*
1
1
j
apap eHzp
pzzH
Ce filtre n’introduit qu’un déphasage.
Chapitre 3: Système LIT rationnel 3-5- Filtre passe-tout
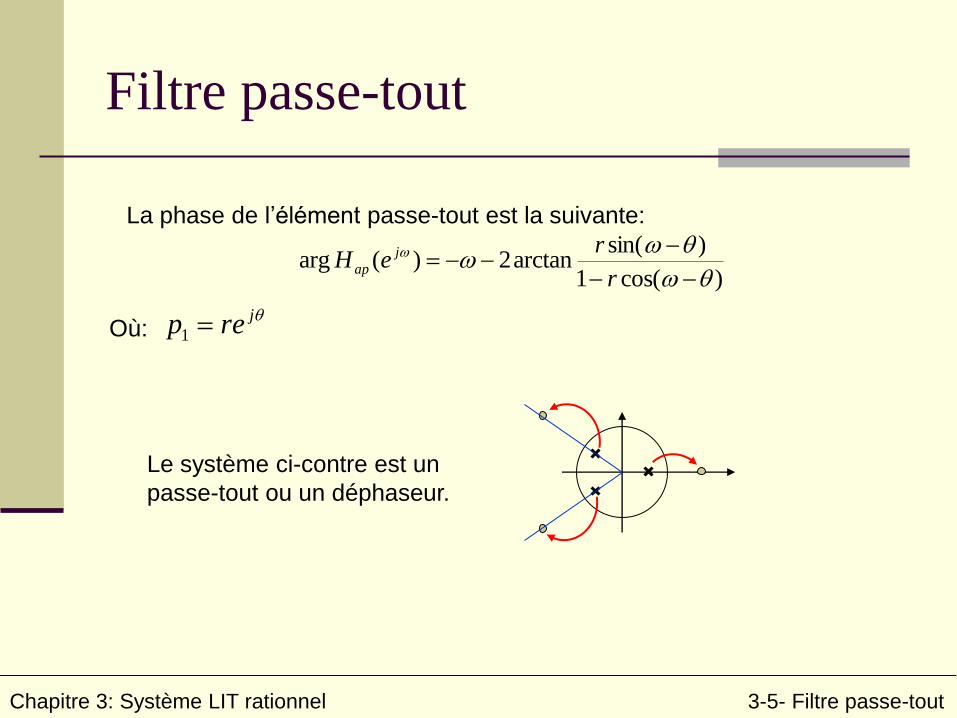
Filtre passe-tout
La phase de l’élément passe-tout est la suivante:
)cos(1
)sin(arctan2)(arg
r
reH j
ap
Où: jrep 1
Le système ci-contre est un
passe-tout ou un déphaseur.
Chapitre 3: Système LIT rationnel 3-5- Filtre passe-tout
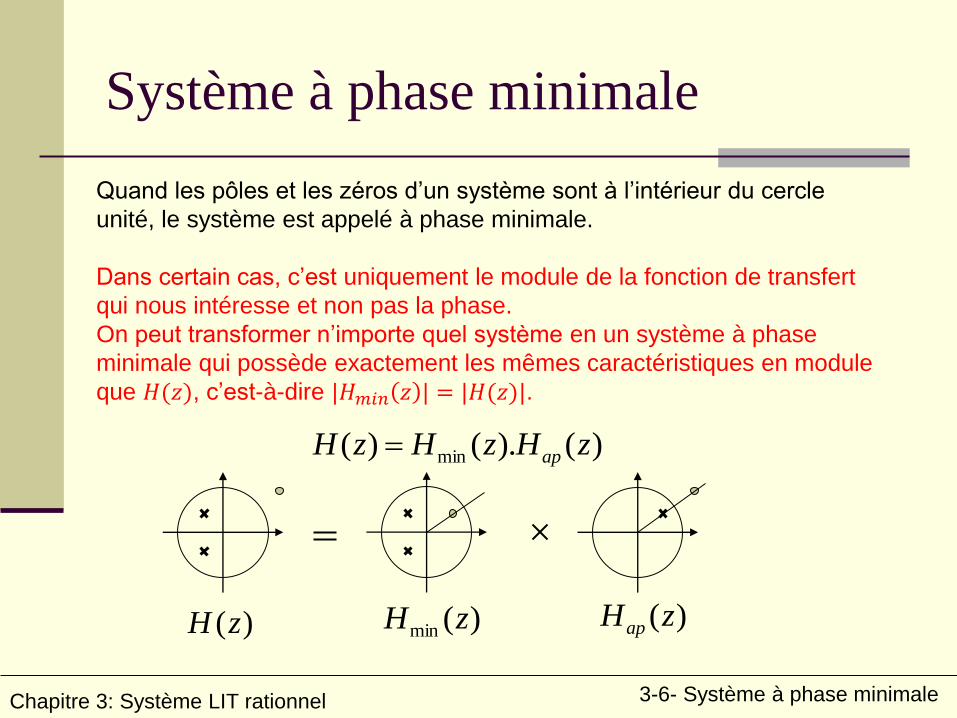
Système à phase minimale
Quand les pôles et les zéros d’un système sont à l’intérieur du cercle
unité, le système est appelé à phase minimale.
Dans certain cas, c’est uniquement le module de la fonction de transfert
qui nous intéresse et non pas la phase.
On peut transformer n’importe quel système en un système à phase
minimale qui possède exactement les mêmes caractéristiques en module
que 𝐻(𝑧), c’est-à-dire |𝐻𝑚𝑖𝑛 𝑧 | = |𝐻(𝑧)|.
)().()( min zHzHzH ap
)(zH )(min zH )(zHap
Chapitre 3: Système LIT rationnel 3-6- Système à phase minimale
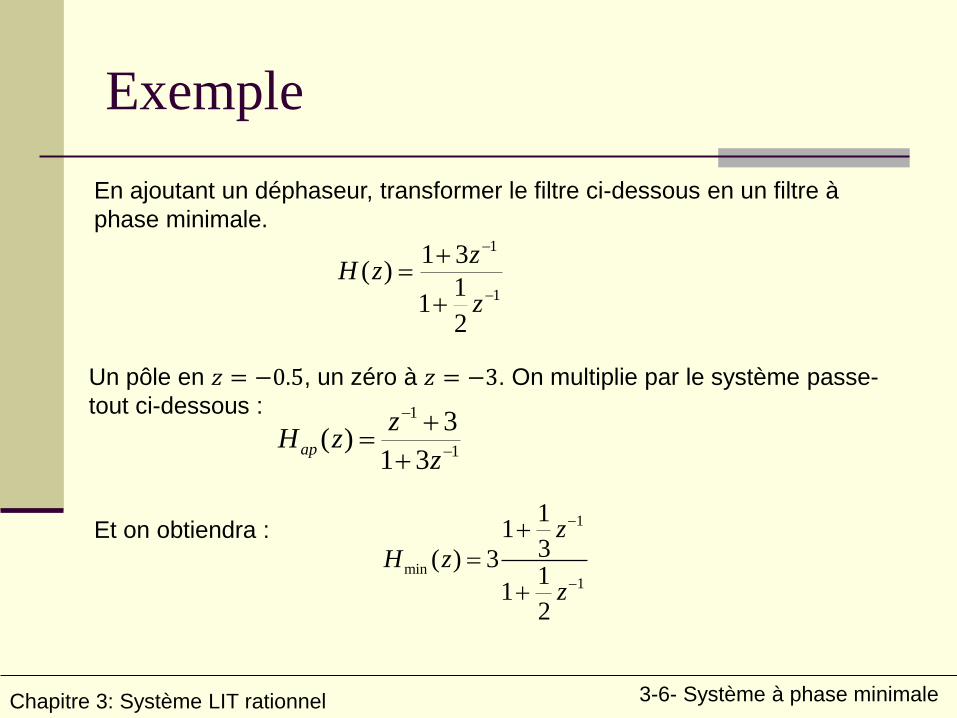
Exemple
Chapitre 3: Système LIT rationnel 3-6- Système à phase minimale
En ajoutant un déphaseur, transformer le filtre ci-dessous en un filtre à
phase minimale.
1
1
2
11
31)(
z
zzH
Un pôle en 𝑧 = −0.5, un zéro à 𝑧 = −3. On multiplie par le système passe-
tout ci-dessous :
1
1
31
3)(
z
zzHap
Et on obtiendra : 1
min1
11
3( ) 31
12
z
H z
z
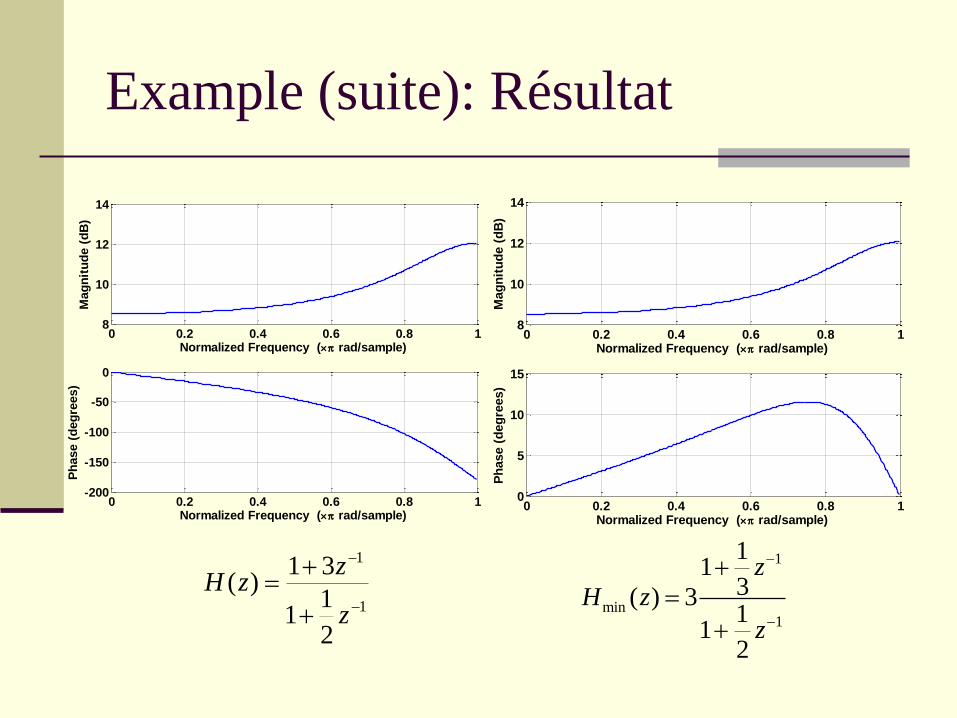
Example (suite): Résultat
0 0.2 0.4 0.6 0.8 1-200
-150
-100
-50
0
Normalized Frequency ( rad/sample)
Ph
ase (
deg
rees)
0 0.2 0.4 0.6 0.8 18
10
12
14
Normalized Frequency ( rad/sample)
Mag
nit
ud
e (
dB
)
0 0.2 0.4 0.6 0.8 10
5
10
15
Normalized Frequency ( rad/sample)
Ph
ase (
deg
rees)
0 0.2 0.4 0.6 0.8 18
10
12
14
Normalized Frequency ( rad/sample)
Mag
nit
ud
e (
dB
)
1
1
2
11
31)(
z
zzH
1
min1
11
3( ) 31
12
z
H z
z
Application
On n’a pas de solution stable pour égaliser un système possédant des
zéros à l’extérieur du cercle unité.
Si l’égalisation en amplitude est suffisante dans l’application en main
(comme pour les applications audio), on peut effectuer cette égalisation.
Hd(z) Egaliseur
Hc(z)
s(n) sc(n)
)()()( min zHzHzH apd )(
1)(
min zHzHc
1)()( zHzH cd
Chapitre 3: Système LIT rationnel 3-6- Système à phase minimale
Propriété
Chapitre 3: Système LIT rationnel 3-6- Système à phase minimale
)().()( min zHzHzH ap
)(arg)(arg)(arg min
j
ap
jj eHeHeH
La phase de l’élément passe-tout est toujours négative, ce qui explique le
nom du système à phase minimale.
Le système à phase minimale produit un délai de groupe minimal par
rapport à tous les systèmes ayant le même module de la fonction de
transfert.
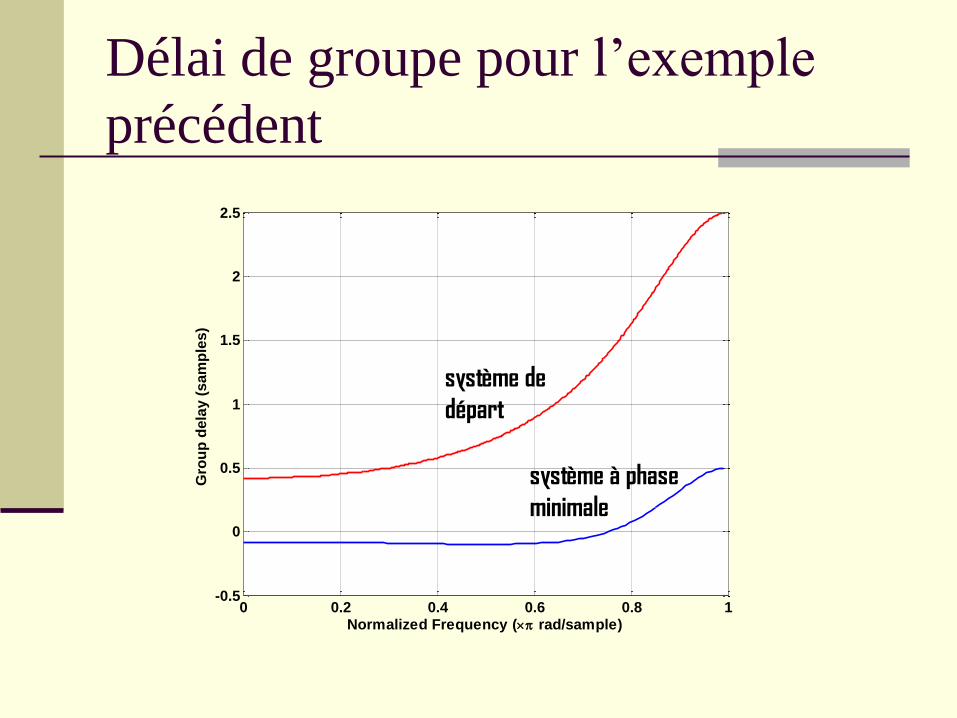
Délai de groupe pour l’exemple
précédent
0 0.2 0.4 0.6 0.8 1-0.5
0
0.5
1
1.5
2
2.5
Normalized Frequency ( rad/sample)
Gro
up
dela
y (
sam
ple
s)
système dedépart
système à phaseminimale
Exercice
Soit le filtre défini par la relation 𝑦 𝑛 = 𝑥 𝑛 + 𝑎𝑦(𝑛 − 10) , où 0 < 𝑎 <1.
1. Donner l’expression de sa réponse impulsionnelle
2. Donner l’expression de sa réponse en fréquence.
3. Tracer son diagramme pôles-zéros
4. Donner une structure d’implantation.
Donner la transformé en Z de la séquence suivante : Est-ce un système à
phase minimale ?
1( ) [ ( ) ( 10)]
2
n
x n u n u n
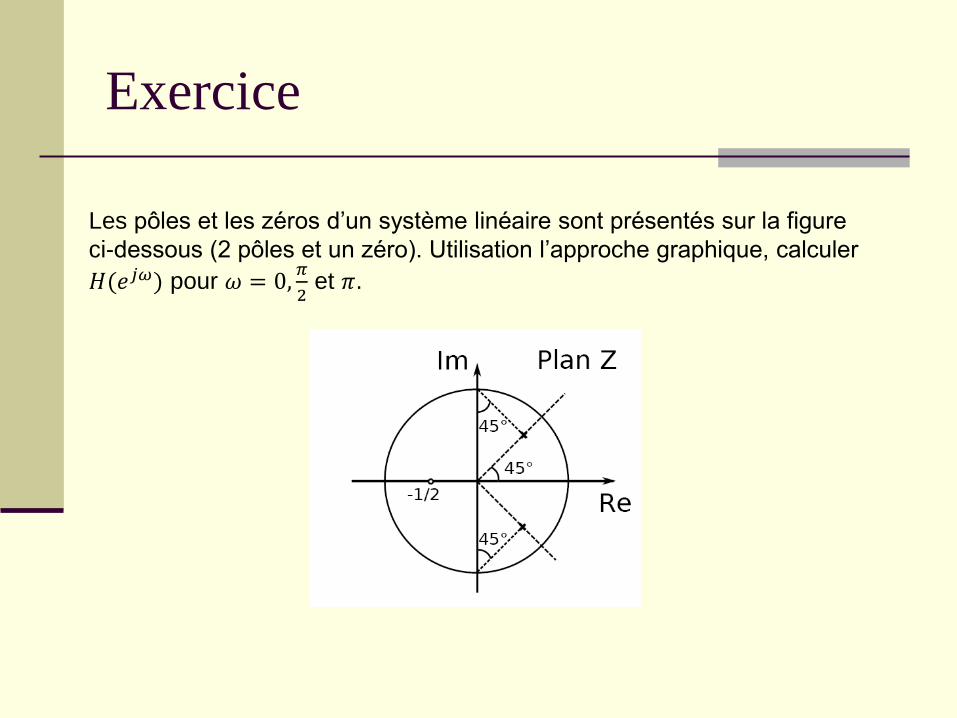
Exercice
Les pôles et les zéros d’un système linéaire sont présentés sur la figure
ci-dessous (2 pôles et un zéro). Utilisation l’approche graphique, calculer
𝐻(𝑒𝑗𝜔) pour 𝜔 = 0,𝜋
2 et 𝜋.
Exercice
Tracer la région de convergence pour la transformée de Z suivante :
11
1/ 3 1/ 4( )
1 1 21
2
H zz
z
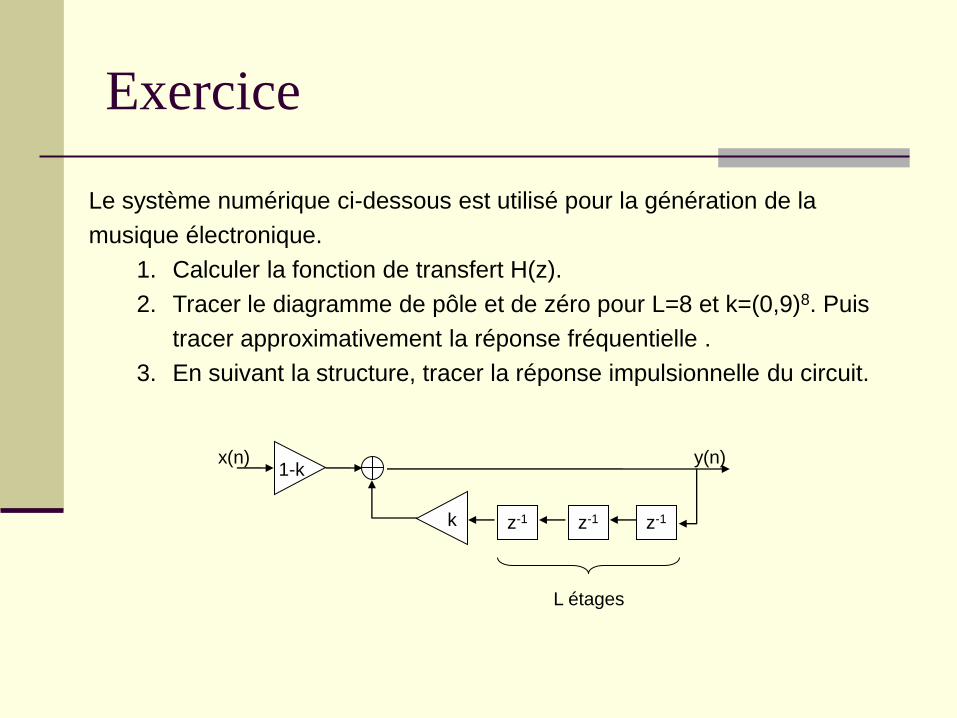
Exercice
Le système numérique ci-dessous est utilisé pour la génération de la
musique électronique.
1. Calculer la fonction de transfert H(z).
2. Tracer le diagramme de pôle et de zéro pour L=8 et k=(0,9)8. Puis
tracer approximativement la réponse fréquentielle .
3. En suivant la structure, tracer la réponse impulsionnelle du circuit.
1-k
k z-1 z-1 z-1
L étages
x(n) y(n)





























