Embed Size (px)
Citation preview

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 1/35
INTERNAL FLOW SYSTEMS
First Edition
Chapter 7
7. Transient Analysis 90
7.1. Introduction 90
7.1.1. Calculation of transients 92
7.2. Definitions 93
7.3. Surge equations and pipeline calculations 967.3.1. Example calculation 97
7.3.2. Effect of friction on long pipelines 98
7.3.3. Inclusion of minor losses in friction calculations 98
7.4. Components and-nodal or junction conditions 98
7.4.1. Constant head reservoir101
7.4.2. Dead end or shut valve 103
7.4.3. Valves 104
7.4.4. Pump 105
7.5. System simulation 1127.5.1. Steady state 113
7.5.2. Validity of calculated results 113
7.6. Causes of Surge 114
7.6.1. Pump failure and start up 114
7.6.2. Valve operation 117
7.6.3. Vapour cavities 117
7.6.4. Free air and gas 117
7.6.5. Turbines and pump - turbines 119
7.6.6. Pipe or component failure 119
7.7. Surge protection or amelioration 121
7.7.1. Increased pump inertia 121
7.7.2. Surge tanks 121
7.7.3. Air vessels 121
7.7.4. Pump valves 121
7.7.5. Flexible tubing 122
7.7.6. Control valve operation 122
7.7.7. Air valves and standpipes 122
7.7.8. Relief and surge suppression valves 123 7.7.9. Rupture discs 123
7.7.10. System operation and design 123
© D.S. Miller

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 2/35
ransient nalysis
ON
This is concerned vlIth th e va:'iation pressures an d 110ws in due io a
event such as th e of a valve or th e loss of power to a pump. Calculations
pressures and flows are more involved than state calculations because the
of th e has to be calculated from the initiation of the transient to the time of
isth e
at v/hich small
th er
01
pressure
Pressure waves travel at
and the fluid or solid.
water and 5000 m/s in steeL
When a
or contracts with the passage
reduces the pressure wave a
over 95 for very flexible tubes such as arteries.
pressure pulses the
system.
fo r thick
so
Concern tranSIent events arises th e
of kinetic energy associated with liquids
of the pressure wave
the of the flow's k.inelic energy into strain energy or vice
, between strain and kinetic
a!:lU!:lh =----,
g
where !5.h is the head rise
a is the pressure wave
t::..U is th e change (m/s)
A simple example 0[ ' a transient is "waterhammer" when a is turned off For
pressure wave 1000 m/s a head rise of 100 m for every metre pe r second veloci
before the event is byequation 7.1. Not unnaturally water supply authorities forbid
the fitting of quick acting valves to pipes connected to their systems in order to prevent
damage.
As an example of th e quantities involved consider water flowing at 4 m/s in th e pipeline
shown in Fig. 7.1. The pipe is 1000 m long, 1 m in diameter an d has a pressure wave velocity
of 1000 m/s. I f the valve at the end of th e pipe is closed instantaneously all the water in th e
pipe will be at rest one second later - th e time taken by the pressure wave travelling at 1000m/s
to reach 1000 m from th e valve. The rate of conversion of kinetic energy into strain energy
over th e one second period is equivalent to a power of :
Power = Y2(mass of water brought to rest)U2
= Y2 ( 1000 X 0.785 X 1000) 4 2 (W)
= 6.3 MW
This has to be compared to the p ower required to pump water along the pIpe against
friction of 0.25 MW.
90 TRANSIENT ANALYSIS
7.1

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 3/35
b) just after valve closesu=o
(:."',..)(m J~ w )... 1000m iL
4 ml' • U 4 mh • - =-:2a) just prior to ' instantaneous' valve closure
64m /s 4m/sIt "_[==3
(note: friction friction ir:cluded th e static pressure, prior a valve closing,
vvould be lovver upstrearrL One second after valve closure static pressure atvalve would a smail residual f low towards th e valve would remain)
. ' instantaneous' valve closure
in the pipe would depend
later sections.
and all th e water being to rest
0.785 "'. 3.1 of water is stored within the
7.1 o f 408 rrL A reduction o f 1
means that half the 3 .14m 3 IS
and the other half bv expansion of
+1Omt;]
E1000 m o........ · · . · . · - . · . - ·· - - · · · · - - - - - . · . ·· - · · - - t r - - · · - - - - - - · __-- I .o-ll
.+4 m/s ..
--- .._- - .. - ~ ~ - ~ ~ ~ ~ - ~ ~ ~ ~ ~ . , - --.-...- - i r
El"vapour pressurea -1 0 m gauge~ _S L
I_J--< 4 m/s - - ._ -
(Note: the top of a pipe an d no t as shown.
pressures th e shape of the cavity has little effect on thepressure rise vvhen the cav1ty
F i ~ L 7.2. System with vapour CC1vity
TRANSIENT ANALYSIS 91

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 4/35
With a pipe on th e downstream side of th e valve in Fig. 7.1, equation 7.1. predicts a head
change of equal magnitude but of opposite sign to that on the upstream side. In reality the
head on the downstream side of th e valve is likely to fall to vapour pressure. On reaching
vapour pressure a vapour filled cavity opens to maintain the pressure local to the valve at
vapour pressure, until th e flow reverses and closes or collapses th e cavity, when a head rise is
again predicted by equation 7.1. Assuming a similar pipe on the downstream as in the
upstream side of th e valve with the addition of a reservoir, as in Fig. 7.2, then the head on the
downstream side of the valve has only to drop about 20 m to reach vapour pressure. When acavity persists for much longer than it takes pressure waves to travel to the reservoir and back
tw o seconds in the present case - the flow can be treated as incompressible (rigid water column
theory) until the cavity collapses. For the situation in Fig. 7.2. th e equation of motion can be
used to find the time for th e head differential acting between the reseryoir and the valve to
arrest the flow. Neglecting friction:
Force = mass X acceleration
pressure X pipe area = density X pipe area X length X acceleration
as pressure = hpg
length X accelerationso h
g
1000 X acceleration-2 0
9.81
acceleration = -0.2 m/s2
Fo r an initial velocity of 4 m/s the time for the flow to come to rest is 20s and an additional
20s before flow into the pipe closes th e cavity.
Formation of a large cavity has the effect of introducing a time delay; in th e present case
40s elapses before a pressure rise occurs compared to 2s if the static pressure on the downstream
side of the valve was sufficient to prevent a cavity opening. In th e frictionless case the
predicted head rise for th e system in Fig. 7.2. is th e same whether a cavity opens or not. When
a cavity opens and th e flow slows down gradually and reverses friction may destroy asignificant amount of the flow's intital kinetic energy, thereby reducing the maximum pressure
rise. In many systems cavities open at high points or at locations remote from the component
responsible for th e transient. Once such a cavity opens events in pipes and components on
either side of the cavity are independent of one another until th e cavity collapses. In this
situation there is a danger that one of the liquid columns will attain a high velocity resulting
in an excessive head rise on collapse of the cavity. When cavities remote from a closed valve
or dead en d collapse the pressure rise is half that predicted by equation 7.1.
One of the dangers of low pressures during a transient is the risk of pipe buckling due to the
ambient pressure being above th e internal pressure. Large pipes and pipes of plastic material
are particularly susceptible to buckling instablilities.
7.1.1. CALCULATION OF TRANSIENTS
Transient analysis, particularly of complex systems, should be approached with caution and
preferably be carried out in conjunction with a specialist. Except for simple systems, recourse
has to be made to computer solutions. A major part of a comprehensive surge program is
concerned with progresssing th e solution from time step to time step and the input and output
of results. Numerical subroutines used to solve th e mathematical models of various parts of a
system usually occupy only a small part of a program, but it is these that take up much of the
computer time. The numerical methods adopted have, therefore, a marked influence on the
cost of analysing a system. However, speed of execution is only one factor; accuracy,
stability and reliability are of equal or greater importance. Extreme precision in numerical
calculations is not usually justified or required, since basic system data is usually only known
to within ten percent. Surge analysis is not particularly demanding mathematically and
relatively simple techniques are often adequate. In a comprehensive surge program it is usually
92 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 5/35
worthwhile to usc comprehensive techniques since the cost of modifying a program after the
programming team has dispersed may be many times the accumulated savings in running costs
of simpler, quicker, but less stable techniques.
Organisations with a particular interest in transient or surge analysis have developed
comprehensive modular surge programs. Systems are represented as multi branch modes
connected together by modules, with each module representing a component such as a pipe, a
valve, a pump or a reservoir. By specifying the modules comprising th e system and to which
nodes they connect, it is possible to simulate many different systems. Whatever the origin of th e
computer program, be it written fo r a particular project or as a general program, it is only an
aid to engineering design an d judgements. The need will always remain for engineers involved
with transient analysis to have a thorough understanding of systems an d how they perform
with varying pressures and flows.
The objectives of this chapter are to define th e terms used in the analysis of piping systems,
to outline ho w calculations are performed an d to indicate why transients occur. The
presentation is aimed at conceptual understanding rather than a rigorous treatment. I t provides
the background fo r assessing th e need to consider a systems transient behaviour, to indicate
what information is required 10 carry out an analysis an d to provide information of use in
interpreting the results of an analysis. To some extent the text reflects the philosophy of th e
computor program used [or the pressure surge service described in the notes at the end of the
chapter, but the background information is common to all surge programs.A recurring problem in transient analysis is checking the of computer programs.
From experience it is often to make a number of simplifications to check important
features of a transient with a desk calculator. The two examples in th e text are confined
cJlculations of a few steps which would normally be contained within a program.
These illustrate an important in checking that for a time period
cqual to th e time for pressure waves to travel along the shortest pipe connected to a
component or series of changes in conditions at the component can be calculated
from a knowledge of the component's time dependent and the known Henv and
head values along the pipes at the start of the time period, without reference to the rest of the
system.
7.2. DEFINITIONS
In most situations the pressure wave 1S much
in licmid density a transient arc
th e c(),'v'erage to without free gas, allc)\\is
motion and so a few specialist terms and
Surge describes all transient events in systems
as a valve closing, a pump or starting, a turbine load
waves involve both a head an d How change.
Mass oscillation or rigid water column theory is head and flows
vary allowing compressibility to be
system isolated from head and now cnanges arc
equations. In cases where only mass oscillations are of interes a
well be
Resonance may be induced when a pcriodic cvent occurs at or ncar lile fundamental or a
harmonic of a system's natural period of oscillation. Usually fo r small the normal
head-flow relationship in part of the system is reversed - a decrease in head associated
with an increase in now. As th e amplitude of the oscillation increases so th e
phemomena until friction limits th e oscillation or the system fails. Other periodic forces may
arise [rom hydraulic machines. An analysis of a system can be carried out using the methods
described in this chapter but resonance as such is not treated.
Cavity Formation is the occurrence of gas an d vapour filled bubbles init
liquid due to aI, ,\\cr;n'! of the static pressure to Of near \'apour pressure. Once vapour pressure is reached,
D'l 'SSlHc is assured to remain constant whilst the cavity grows and contracts, until the
TRANSIENT ANALYSIS 93

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 6/35
cavity collapses. At a of the
is assumed to when th e a dead end when it s
The of vapour cavities is often th e cause of pressure nses m
Pressure wave All materials are have finite pressure wave
velocities, which means that it is of a influence
those in another sooner than it takes a pressure wave to travel between the two. In surge
analysis the terms " or of " are to some extent
in that th e pressure wave IS a discontinuity. This discontinuity alters the
pressure an d velocity as it passes a point. The pressure an d velocity remain at their ne w values
until the arrival of other pressure waves. A gradual variation of pressure a can be
thought due to a of small pressure waves. Fo r small disturbances
th e pressure
its density, p, an d is given
,.
rneUlurn of the medium an d
vv·here K is the liquids
p is the density of th e
The importance or otherwise of
considering th e change in water volume
modulus of water is 2 X 10 9 N/m 2 so the
change. Clearly changes in density arc not
and a head change of a 100 m can be considered a sTnall
systems when the pressure wave velocity exceedsof 100m is within the design capacity of th e
changes m density
du e to a 100 m
volume
a surge can be shown by
N/m 2 ) head rise. Th e bulk
in 2000 lo r a 10 0 m head
of a few hundred metres
in most
boundariesressure wave velocities are modified as soon as boundaries are
pipe \valls, a free surface, gas bubbles or solid particles.
contracts or when II I internal pressure. This IS
to reducing the bulk modulus and 7.3 to :
a 7.3a
where D is the pipe diameter
t is the wall thickness (m)
E is the Young's modulus of elasticity fo r the pipe material (N/m 2 )
C depends upon Poisson's ratio and th e pipe restraint
Equation 7.3a also includes the effect of pipe restraint on the pressure wave velocity. I t is
usual to carry out check calculations over a range of pressure wave velocities that are larger
than the 10 percent variation due to pipe restraint, so C in equation 7.3a can be se t to unity.
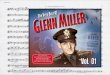
Th e pressure wave velocity in pipes of various materials can be obtained from Fig. 7.3. for
water. Except fo r liquid metals most liquids have pressure wave velocities similar to water. In
calculating the pressure wave velocity in reinforced concrete pipes th e steel reinforcing is
conYerted into an equivalent steel pipe wall thickness an d five percent of the concrete thick-
ness is added to this value.
9.Jc TR.".:-;SIE:\,T ANALYSIS
7.3

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 7/35
steel
1011 f '" "-" I "" I "04: ~VI:::l:::l
~ I,oocr",
i ~ ~ ~ cem,nt
r : - - ~ - - - 0 , I i I ,f p'?----::' _ _ I I -0" I "a ~
,-r·"'J- . - ~1', -"
UJiP
IV0 9 ~ _ _ J I
0.001 _L I I I I0.01 o.
tiD
Fig. 7.3. Pressure wave velocity in pipesfiiled with water
(Kwater = 2070 M N/m 2 )
Non-circular pipes deform more readily under internal pressure to pIpes
an d so have a lower pressure wave velocity. Insufficient data is available on transients in
non-circular culverts commonly used in civil engineering to using lower pressure
wave velocity compared to a circular cross-section.
When small quantities of gas arc
whilst the densi tv remains close to that fo r th e
is to reduce th e pressure wave velocity to
Assuming homogeneous 110w th e pressure 'Nave
th e
well below that of
tends to
predicted f rOlT!
either
pressure IS gIven
Pgag2
PL a(l-a)
where Pg == ai r density
PL , : liquid density
== pressure wave in th e gasg
a = ratio of gas to liquid by volume
On e percent of gas by volume reduces th e pressure wave velocity in water to 120 m/s
; :1 :JJ lcclLO 1400 m/swithout air.
TRANSIENT ANALYSIS 95
7.4

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 8/35
7.3. SURGE EQUATIONS AND PIPELINE CALCULATIONS
The propagation 0 f small amplitude head and flow changes in pipes is described a pair of
partial differential equations which are common to a wide variety of physical phenomena.
Information in the form of surge waves travels along a pipe at the pressure wave velocity,
consequently there is a definite relationship betwecn thc location of the waves in the pipe and
the time since they were generated. This relationship permits the partial differential equations
to be converted to ordinary differential equations and solved using standard finite difference
methods.
n-1 n n+1~ ~ Fig. 1.4. Pipe interior points interior point numbers
The finite difference equations for the labelling system used in Fig. 7.4. arc:
, g , fb.tUn = U -1 --- (h - hI) - . - U 1 IU 11 7.5
n n n- n- n
a 2D
U' = U +g (hi - +1) ---- Un +1 IUn+l1 7.6n n+l - n
a 2D
Note: Values of velocity and head at the end of a time step, Llt, are denoted by U: and h' .
Equations 7.5 and 7.6 are sufficient to solve flmvs in pipes where pressure wave velocities do
not vary with th e static pressure; these include most engineering piping systems.
Adding equations 7.5 and 7.6 gives:
u' = O.SIU 1 +n I n
'-
7.7
equation 7.5 and 7.6 and re-arranging gives:
a ff1t ~[J - U U. -U '= 0.5 Gz .. + -1 n+l) --( n-l l n . l l n+l I U n +1 1) 7.8L
g 2D
I' n· 1
Referring to 7.5., i a surge wave passes point A at time to it arrives at 13 which is f1x
from A at t1 where t]. == t + , At the same time that a surQ:e wave from A arrives at 13 ao u
wave passing C at to will also have arrived at B. Essentially this means that if the conditions at
A an d C are known at to th e conditions at a point B mi d way between them can be calculated
at a ne w time t1 where t1 = to + .6.x/a.
pressure gradient. . . r--: , -- _
time t ) r - - - ~ , -----.,pressure gradient -- , - -______ i time t -1Jt ' - - - - I
I-- j
f. of. .f-+Ax .6.xFig. 1.5. Surge walles
96 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 9/35
From a knowledge of heads and flows at interior points Ax apart along a pipe the heads and
flows at each point Ax/a seconds later can be found. The importance of this lies in th e fact
that th e calculations only make use of th e heads an d flows at to and that when the heads an d
flows have been calculated at t 1 these become the heads and flows at a new t .o
The application of equations 7.7 an d 7.8 is best illustrated by a sample calculation for a
single point along a pipe.
7.3.1. EXAMPLE CALCULATION
Consider th e section of pipe shown in Fig. 7.6. Heads and flows at time t are given fo r th e
interior points and it is required to establish th e heads and flows at points 3 an d 4 one time
step later. The friction coefficient f = 0.015 and the pressure wave velocity is 1000 m/s. For
interior point spacings of 100 m the time increment b.x/a = 0.1 s.
hydraulic gradient
at ti me = t + Athydraulic gradient
at time = t-- .. -r--------J--,~ I• -- 1 .----.-L
h
D = 1.0m & ; =aAt A, =100 m 100 m
I· r= ~ I " .... ·1" ~T= I ~ - - - - - ~ . ~ .-==s=_3----.
' " 2 ""U= 1.1 m/s 3 U= ' .0 m/s 4""= 1.0 m/s 5 ~ U = 1. 0 m/s
h1 =60.19m 17 2 =49.92 =49.85 h4 =49.77
Fig. 7.6. Heads and flows at time t
Interior point 3 - flow and head at t + 1::.t
Equations 7.7 and 7.8 apply
- g fAt
U; 0.5 [U2 + U (h2 IUzl +- )]2D
a f1::.th; 0.5 [h2 + h4 + -i- (U 2 - - ) 1- IU4 1)J
g 2D
substituting
== 1.1 = LO = 1000
'" 60.19 m = 49.85 m 1::.t = 0.10 s
gives:
'= 1.10 , :c= 60.11 lTI.
Interior 4 - flow and head at t + tlt
At time t th e hydraulic between interior 2 an d 5, shown in
Since th e surge wave at 2 cannot affect th e conditions i:,t seconds later at
4 th e now and head at 4 remain the same as frictIOn
case () the 7,7 an 7
r! s u r g e ~
ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 10/35
'7 EFFECT OF F R ; C T ~ O N ON
One of friction that is of inflow or
outf1ow ceases following the closure shown in 7.7.
which has a valve that doses suddenly at t = 0 , the transit time of a wave from the valve
the end of the pipe is 100 seconds, so for 100 seconds the state now
continues into the pipeline. Because of the head loss in a long which is
to be much more than the head rise due to the valve closure, the head within the pipecontinues to rise towards the zero now head. Expansion of the pipe and compression of the
t1uid requires How to continue for several minutes. This storage of t1uid within the IS
referred to as line packing and the reverse effect, line unpacking.
pump shut valve headr -.
I
initial head
rise on
'instantaneous'
closure
valve
L = 100 a
7.:,3.3, Ii\JCLUSI FRiCTION CALCULATIONS
and therefore the ffiction losses.
a
unicated both
be 'distributed'
between calculation points without alteration
points for the effects of friction.
and fully open valves, have losses that are of thesame order or less than the friction losses between interior calculation points. This usually
means that no appreciable errors are involved if the friction coefficient for the pipe is increased
to account fo r minor component losses rather than including them as separated items.
7.4. COMPONENTS AND NODAL OR JUNCTION CONDITIONS
Having established how to calculate heads and velocities in the interior of pipes the nodal or
junction conditions are now considered. A node is a connection point for pipes an d
components, as shown schematically in Fig. 7.8. Fo r each pipe and component connected to a
node equations have to be formulated to calculate the change in heads an d flows, over a time
step, given th e heads an d flows at the start of the time step. Compared to pipes th e time for a
pressure wave to travel through a component is negligibly small, allowing the assumption to be
made that flows into and out of a component are equal. I t also means that a series of
components can be treated as if they are a single component. For calculation purposes, th e
98 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 11/35
M
node node
pipe ~ valve ~ pipe
a) single flow path
..,
:::- ~
pipe
b) 3 leg junction
Fig. 7.8. Nodal connections for pipe and components
basic difference between pipes and components is the time delay between events at one end of
a pipe influencing events at the other end. As this time delay is easily accounted for within a
computer program there is no need to treat pipes in a different manner to components. Within
a program a piping system can be treated as consisting of modules, which represent pipes
and components, an d nodes, which represent th e connections between modules. This is
discussed further in Section 7.5.
Components can be categorised as being mathematically simple or complex. Equations fo r
simple components depend only upon geometric parameters. Simple components include inlets
from reservoirs, changes in cross-sectional area, orifice plates, dead and valves that do no t
operate during a transient. Complex components, of which there must be one or more in a
system in order to initiate a transient, involve dynamic dements. Complex components include
pumps, turbines, surge tanks, surge vessels and valves. In order to find heads and flows in
complex components it is necessary to use numerical techniques to approximate to the
differential equations relating, In the case of a pump, flow, speed and torque.
Equations for all compunents can be reduced to linear equations of the form:
Q "" h'1 + ' I ' +B- j . t :J2"1
where A an d B depend only on conditions known at the start of a time step, Q.' is the flow at
th e end of th e time step an d h; and h; arc th e heads at inlet and outlet of the component at
the end of the time step. Provided equations are available to describe henv heads and flows vary
at the node, then using either equation 7.6. for the left hand end of th e pipe, or eouation 7.5.
f{ ) [ the right hand end 0[' the pipe, heads and flows at a ne w time can be calculated.
TRANSIENT

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 12/35
Several pipes or components may be connected at the junction or node, Fig. 7.9. Since the
Hows in and out must balance, then referring to Fig. 7.9, the equation for a node is:
i = J
L ~ = Oi = 1
where th e convention is How into a node is positive and flow out is negative.
Fig. 7.9. Node with j module connections
Equations 7.5 and 7.6 are more easy to manipulate if re-written in tcrms of now rates.
Substituting U == QlA they become:
,~ = - l gA,- (h n -f i lt
h n-l) -- ~ _ l l ~ - l l 7.9
a 2D A
aA f il l( ) ' =O +,,> 7.10'<-n --n+2 - +1) -- -- ~ + l l ~ + l l
a 2D A
where Q' and h 'relate to the end of the time step.
I t is usually adequate to assume that friction coefficient f has a value appropriate to the
steady state velocity and to use this value throughout an analysis.
Over a time period, ilt, the values of Q and h at to are known and f, D, l::..t, a and g
are constants so putting:
gA7.11
a
_ fl::..tC2 - ~ - 1 + C 1 hn _1 -- ~ _ l l ~ _ 1 1 7.12
2DA
fl::..t7.13C3 = + 1 - C1 hn+l -- ~ + 1 1 ~ + 1 1
2DA
equations 7.9 an d 7.10 become:
for the right hand en d
7.14
and for the left hand end
7.15
Equations 7.14 and 7.15 are linear equations to which form th e equations for any
component can be reduced.
100 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 13/35
" "
h r " - ~ x -.
-~
- -)
" " / " / " / / /
~//
n n+l n+2
0
Fig. 7.10 Reservoir
7.4.1. CONSTANT HEAD RESERVOIR
The equation for node n in Fig. 7.10 is:
h == constant = th e reservoir head hr
Since the left hand end of the pipe is connected to the reservoir, equation 7.15. applies to
node n and interior point 1 and may be substituted by hr giving:
Q ' = C1 h + C3 7.16-n r
To demonstrate the effect of a reservoir on a surge ''lave the head and flow at interior point 1
will be round 2D.t seconds after the situation shown in Fig. 7.11, in which a == 1000 mis,
D.x = 100 ill,.A = 0.785 m 2 , f = 0.015.
Th e steps that would be taken in a computer solution are best illustrated by reference to
Fig. 7 .l2. which shows schematically the paths along which a solution is required.
Fo r this demonstration the head and flow at point 1 are required at system time t + 2 ~ t .It is, therefore, only necessary to know the heads and flows at 0 and 2 at t + D.t.
hydraulic gradienthydraulic grad'
at t + ~ t at t lent1 I l --- - - - - - r-r---L-
steady state hydraulic
30 m gradient
D.x
-'-------lOR- "-- .
3
U ~ 3.0 m/s U= 2.9 m/s U= 2.9 m/s U= 2.9 m/s U= 2.9 m/s'k =30 m h=39.21 m h =38.62 h =37.94 h 37.25
Fig. 7.11. Surge wave interaction with reservoir
TRANSIENT ANALYSIS 101

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 14/35
Q= 2.20t+2.6.t
h = 29.33
Q= 2.20 Q= 2.277Q) t + .6.tE
'';:;h= 30 h = 38.62
X ~ /= 2.355 Q== 2.277 Q= 2.277 Q == 2.277
t ~ ____________~ ' ~ ( ____________~ > L ~ _____________ ___
h == 30 h == 39.31 h = 38.62 h = 37.94
o 2 3position
Fig. 7.12. Development of solution
Head and flow at 0 for system time t + .6.t
Equation 7.15 applies with constants C1 and C 3 given by equations 7.11 and 7.13.
gA 0.81 X 0.785-----= 0.0077
a .1000
f .6.tC3 = Ql - C1 hI - _.- Q\IQll
2D A
0.015= 2.277 - 0.0077 X 39.31 - ___ X 0.1 X 2.277 12.771
2XO.785
= l.969
from equation 7.16.
Q ~ = 2.20 m3 /s
Head and flow at interior point 2 at time t + .6.t
Because the surge wave amplitude is reduced by friction as it moves along th e pipc th e
constant values of Q = 2.77 m 3 /s at interior points 1 to 4 in Fig. 7.11 are only approximate.
Taking note of this it is adequate, for present purposes, to take Q2 and h2 at t + .6.t equal to
their values at t.
Head and flow at interior point 1 at time t + 2.6.t
Equations 7.7 and 7.8 apply between 0 and 2. Substituting Q/A = U
I [ gA f.6.t ]Ql = 0.5 Qo + Q2 +- (ho - h2 ) - - (Qo IQo 1 + Q21Q21)
a 2AD
102 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 15/35
substituting
Qo = 2.20 m3 /s Q2 =2.277 A = 0.785 m 2
ho = 30 m h2 = 38.62 a = 1000 m/s
f =0.015 t!1t = O.Is
gIves:
Q;= 2.20 m3 /s h;= 29.33m
The calculated values show that the wave reflected from the reservoir restores the hydraulic
gradient to approximately th e undisturbed state - the difference being due to the reduction in
flow rate, 2.20 m 3 /s compared to 2.35 m 3 /s before the system was disturbed. Consideration
of the physical processes involved confirms that this would be so since, at the instant the wave
reaches the reservoir the head in the pipe exceeds that in the reservoir, there is, therefore, a
head difference which reduces the inflow. The reduction in inflow of 0.1.5 m 3 /s is about twice
the change in flow of 0.08 m 3 /s caused by the wave before it rcached the reservoir. In physical
terms the surge wave caused flovv to be stored in the pipe by compressing the fluid and
expanding the pipe. With the reduction in head this stored now is released. Reflection at a
reservoir of a negative surge wave results in an increase in inl10w from the reservoir to the pipe.
7.4.2. DEAD END OR SHUT VALVE
The equation for a dead end or shut valve, Fig. 7.13., is Q = O. Since the boundary is at the
right hand end equation 7.14 applies so substituting Q= O.
0 = - C1 h; + C2 7.19
This is the linear equation for a dead end. Re-arranging and substituting from equations
7.11 and 7.12 and Q= UA gives:
a U a j:D.th ' := n-l + h -- U IU I 7.20
1 - - n-l -- n-l n-l
g 2gD
n-3 n-2 n - 1 n
Fig. 7.13 Dead end
What happens when a surge wave is reflected by a dead end is shown on Fig. 7.14, where for
simplicity the small effect of friction has been neglected. As would be expected and predicted
by equation 7.20, the incident wave is reflected with a doubling in magnitude. The incident
pressure wave gives the fluid a velocity towards the dead end. When the wave reaches the dead
end an equal pressure rise is required to stop the fluid as was required to set it in rnotioninitially. The pressure wave generated travels back up the pipe bringing the fluid to rest unless
:. l ~ ~ l ' e t s another wave travelling towards the dead end.
TRANSIENT ANALYSIS 103

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 16/35
--
! I---{- - - - - - ~ - - - - - - - ~ 2f::.h- - - - - - : +f::.h
f::.x=af::.tL ____ i t- '1 - ~ - t- ~ --_e- -___ - ~ -----+--. - $ - 1
/ \ / T \ U=o u=ou=f::.hg u=f::.hg u=f::.hg
a a a
a) time t b)timet+f::.t c) time t + 2f::.t
Fig. 7.14. Wave reflection at a dead end
7.4.3. VALVES
The steady state head loss equation from Chapter 14 for valves is assumed to be valid during
a surge. Fo r the notation shown in Fig. 7.15 the valve relationship is:
[ j l
h -h=K-
u d v 2g
On the upstream side of the valve the right hand equation 7.14 applies:
and on the downstream side of the valve the left hand equation 7.15 applies:
The valves loss coefficient variation with time, t, can usually be expressed as one or moreequations of the form:
eat+b = 7.24v
where a and b are constants
hydraulic
gradientt---__
Area = A
.
•
Fig. 7.15. Valve notation
104 TRANSIENT ANALYSIS
7.21
7.22
7.23

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 17/35
From continuity:
C 2 u = Q d = ~ 7.25
A number of techniques of varying sophistication are available for solving the differential
equations arising from th e time dependent quantities in equations 7.21 to 7.25. The result is a
linear equation of th e form:
Q; =Al h{ +A 2 h; +B
7.4.4. PUMP
When considering complex components, such as a pump, it is often more convenient to work
with dimensionless quantities. Usually the design head and flow are selected and all heads and
flows normalised by these reference values. Pump speed and torque are also normalised by
their dcsig11 values.
The pump normalised head H*, flow Q*, speed N* and torque lY1* are given by:
h N 1\:1
I I*=_ Q * = ~ , N*= -, M* 7.26
h Q r N Mr r r
where the subscript r refers to the reference value.
2.81
I H* == 4.5 at Q* == -0.5H* == 3.6 at Q* == -0.7
2 . 4 ~ II
---i
milI
2+1\
I
I
II
1.6
>
..::::
..:::: -I 1.2,.I \ 1"- / ' radial
J:; ~ ~ N=+r--n, .. I"" ..- radial I I0.8 " <: ~ - - r - - - . - - - - - t - j
0.4 I I " "< , - - - ~ -mixed flow
I axial
Io r' \ '< \
-0.4
-1.6 -1.2 -0.8 -0.4 o 0.4 0.8 1.2 1.6 2.0
Q* -= O/Or
Fig. 7.16. Head/flow curves
(The specific speeds are axial 260, mixed flow 150 and radial 35 wherespecific speed N QJf f75 has units of rpm, m3 /s and m)
TRANSIENT ANALYSIS 105

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 18/35
On loss of power supply to a pump an instantaneous torque, equal to the power input, acts
to slow the pump down. The head generated, th e flow and the speed all reduce following power
failure. Th e rate of speed reduction depends on the pump and motor inertia and on the torque
exerted on th e pump impeller by the flow. Without a non-return valve in the pump discharge
the flow through th e pump reverses, usually whilst the pump is still rotating in the forward
direction at up to fifty percent of its original speed. FollO\\-ing loss of power the pump may
operate in three zones;
1. Zone of normal pump operation where flow and speed are positive.
2. Zone of energy dissipation where flow is negative and speed is positive.
3. Zone of turbine operation where speed, and flow are negative.
It is usual to present pump performance in zones 1 and 2 at 100 percent design speed and in
zones 3 at -100 percent design speed. Normalised head/flow and torque/flow curves are sho\\"11 in
Fig. 7.16 and 7.17 respectively for th e + 100% and --100% speed conditions.
To determine the head and flow at any other speed th e homologous pump laws are used.
Fo r a particular pump these laws arc:
N * Q *_1 =_1 and
N 2 '" Q2
'"
7.27
To illustrate the implications of the pump laws if N2 * = 1.0 and N j * = 0.5 and the pump
operates at the same efficiency then the flow would be reduced along the line AB in Fig. 7.18
and the head along BC, to give at C half the flow at a quarter of the head. Along the line OCA
th e efficiency is assumed to remain constant.
2.4 f-------+--
2.0 -"----t------\--t--
1.6
MjMr
mixed flow
r-0.8 - ~ F - - " I . - - - t - ~ -
radial
N= +100%
o - - - - - - - ~ ~ - - - - ~ ~ - - - - - - + _ - - - - ~ - - - - _ r - - - - ~ - - - - - - ~ - - - - ~ ~
- 0 . 4 ~ ~ __ ~ __ ~ ~ ~ ~ ___L__ ~ __ L _ ~ ~ - L - - ~ - - L - ~ - - L - ~ - L - ~ - - - L - - ~-1.6 -1.2 -0.8 -0.4 o 0.4 0.8 1.2 1.6 2.0
Fig. 7.17. Torque/flow curves
(Specific speeds as Fig. 7.16)
106 TRANSIENT ANAL YSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 19/35
1.6
1.4
- r- r-...1.2.......... 1 line of constant efficiency~
'", A
I
- B1.0 ,.......... ~~ ........
0.8, , /
I
" " ' ~ *-.....
r....... ......... J " ~ ~ o ......... (. ~ q ~ "......6 ~ r--.... / ..... '::P* " !\. ~
0.4
-r-- / "'- i'o..4>-* ~ " - ~
q.>I ) ~ ~ _ l ~ I\.--1?*
K. --1?* ~ - 'qe t\. \..2-b
c
" " "'-
C/h 4'* ....... " "" \ \\
L,....-'r-- " ....: ~ O~ " ' \ \ \ 1\ -t-..... ...... ~ " "" ~ 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Q*
Fig. 7.18. Constant efficiency line
I f the homologous pump relationships are used directly, difficulties can arise in manipulating
data within computer programs because head, flow, torque or speed may be zero.
A refinement in th e applications of the pump relationship reduces the four curves for a
pump from Fig. 7.16 and 7.17 to two curves and eliminate the problems with zero or near
zero quantities. The new relationships are:
H*WH = sign of (H*) _I Q*2 + N*2 7.28
M*
WM = sign of (M*) I Q*2 + N*2 7.29
e ta n -I ( ; : )7.30
TRANSIENT ANALYSIS 107
I

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 20/35
I
0.4
+0
-0.4 H'--1----+------+------+-----+------- l , , -1
-0.8 '--____- - '_____-" _____- '_____ -'-____---l
?:.'::E,
'"0
ro
;::::::t::
1.2 r-
I
0.8 - -
o 5 3 4
Fig. 7.19. Pump relationships Q*
A typical plot of the new relationship is shown in Fig. 7.19. The curve extends over the
three quadrants in which the pump may operate during a transient. Operation in the fourth
is unusual as power has to be supplied.
Fo r 8 the following ranges have been used:
Q positive, N positive, 0<8<11"/2
Q negative , 11"!2 < e <11" N positive,
Q 11" < 8 < 311"/2
N ne,yative , <8 <211"
The numerical solution method used to calculate pump head, flow, speed an d
torque at a ne w time depends on many factors, such as the accuracy required, the time step
adopted fo r the whole system, th e importance of the pump to the overall transient, whether
the program is developed for a specific type of system or for widely different systems. In the
latter case more than one solution method may be used and additional facilities included, such
as restoration of power part wa y through a transient. The inertia of the pump and motor limits
the rate of change of speed, so it is usual to make simplifications as regards the rate of
of torque over a short time period l:.t.
The instantaneous rate of change in speed is given by:
dN -M_ =_ (rad/s 2 )
dt I
where M is th e instantaneous torque
I is the moment of inertia of the pump and motor.
I f the pump is driven through a gearbox
I=I + I X(Nmotor) 2impeller and shaft motor N--
pump
These definitions assume that pump failure excludes shearing of the drive shaft.
108 TRANSIENT ANALYSIS
7.31

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 21/35
The head generated by a pump is a function of th e flow rate and pump speed, and th e head,
flow and speed depend on time. The rate of change of head with time can be expressed in
terms of partial differential equations which, along with estimates of th e rate of change of
torque with time, allow a linear equation of th e form Q = A 1 hi + A2 h;' + B to be set up.
When a number of pumps operate in parallel, failure of one or more pumps causes the
running pumps to move along their characteristics to lower heads and higher flows. Depending
upon the suction conditions, the running pumps can enter th e region of cavitation in which
further reduction in discharge head has little effect on pump flow. From a knowledge of th e
pump installation and the predicted maximum flow during a surge, the occurrence of
cavitation can be checked against the pump manufacturer's cavitation performance data. When
cavitation is expected modifications to the pump head/flow and head/torque relationship may
be necessary to limit the predicted flow to that appropriate for the pump suction conditions.
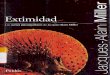
To illustrate pump behaviour during the initial run down following power failure th e results
of a calculation for the pump and system shown in Fig. 7.20 are given. The performance curves
supplied by the pump manufacturer are shown in Fig. 7.21. The design speed is 985 rpm and
the pump and motor inertia is quoted as 16.4 kg m 2 • Th e pipeline is olasiic material wi
relatively low pressure wave velocity of 40 0 m/s.
The pump relationships are:
f I
f I *= where fI r = 32.3 m
lI r
Q * = ~ where ~ = 0.483 /s
~M* = Ai
",1" ' r
GO f ghr !'rIr = N
21T r
Fo r Tly = 0.815 and Ny = 98 5 and fresh water p = 1000 kg/m 3
Ai = 1832 N mr
where p = density of Huid
1'1 = efficiency at reference conditions'I r '
The normalised pump curves from Fig. 7.21 are given in Fig. 7.22. Values
along the curves in Fig. 7.22 arc read of f and used as data.
Th e calculated variations of normalised head, flow and
Fig. 7.23. Following loss of power the head drops
pump reach th e reservoir and return to the pump as
curves in Fig. 7.23 it is evident that the initial rapid
reduction in speed, is accompanied by little change flovv.
pressure waves stabalisc the pump head a relatively small
flow through the pump to reverse. At about O.7s when the
forward speed is in execsss of GO percent of the initial value.
The form of the curves in Fig. 2.23. is common to a -,an
ini tially rapid reduction in head until positive pressure waves return a smoothreduction in speed, an intially slow reduction in flow followed
Drcssurc waves return to the pump.
'I'RI.\NS ANALYSIS 109

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 22/35
- - - - . ~ - - - - - - - - - - - - - - - - - - - - - - - - - - ~ " " " ! ! l ! ! ! a I ! l ! ! ! " " ' " ' " " -
32.3m
40mr - - - - - - - - ~ - - ~ ~ ~ ~ - t J o I o I
reflux valve
Fig. 1.20. Example pump arrangement
60 ---, 100I - ~ - - ~ - - r - T - T-- -140 80
H-r--LJ
I V " - - - ~
. I I '"0 f-----4----t-- ----- 60I· I "H"d ~
--_._-
V L ~ f f ' ~ ~ ' \ ~20 1------- - 40
E--
-,
-0
'")I /
I
10 20
// o 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Flow (m 3 Is)
Fig. 7.21. Pump performance curves
110 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 23/35
0.6 i------+-
0.4 t- I---+---+-----1
I I Q*
I ~ _0.2 r---r ___l__l__ ~ 1ol___L_
o 0.1 0.2 0.3 0.4 0.5 0.6 0.7
1.6
1.4
H*
1.2 /
r -.
1.0
I -- t::-:----- / ~~~ V0.8 L ~g
co
~ n "
0.6 ~ M*- - - - - ~~ \
0.4 I- - -1--- I '
0.2 d ~ ~ - - - : - - - l - - c - = ~ -do
o 0.2 0.4 0.6 0.8 1.0 1.2 1.4
Q*
Fig. 7.22. Normalised curves of head and torque
W 1.0 k t r - ~ - · · - ~ - - + l~ 0.8 ~ - ~ ~ - wj--J
time(s)
Fig. 7.23. Head, flow and speed variation for system of Fig. 7.20
TRANSIENT ANALYSIS III

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 24/35
Fig. 7.20 is a close representation of an ai r or surge vessel following a pump. The assumption
is often made that for such an arrangement the pump's reflux valve closes immediately
following power failure. Calculations can then proceed without regard to th e pump run-down.
As th e example indicates this is a valid assumption since the pump is isolated within one
second, which is very short compared to events in the downstream section of a system. The
rapid fall-off in flow shown in Fig. 7.23 presents severe problems in regard to the operation of
th e re nux valve. This is considered further in Section 7.7.
7.5. SYSTEM SIMULATION
By representing a system as a number of modules, representing pipes and components,
connected together at nodes, a wide variety of systems can be simulated. This flexibilty has to
be paid for in increased computing time compared to a program in which assumptions are
made about the arrangement of th e system, but it is justified since extra programming for ne w
systems is minimised.
To illustrate the module and node concept th e system in Fig. 7.24. has been converted to
schematic representation in Fig. 7.25.
reservoir
air vessel
cont ro l /reservoir
valves ~ reservoirumpvalve ' - ~ n m
Fig. 7.24 System fo r simulation
Module Type
2· Pipeline
Type 10·pump11 - control valve12 - reservoir16 - air vessel
module node 20 - reflux valve
~ O " m b *
Fig. 7.25. Node and module representation of system in Fig. 7.24
112 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 25/35
At system specification time details of the modules in th e system have to be provided along
with information concerning the node connections.
In the previous section both simple and complex boundary or nodal conditions were shown
to give rise to equations of th e form Q' = A 1 hi + A 2 h; + B. Similar equations can be
generated fo r all other system components, such as air valves, turbines, ai r vessels and fo r any
vapour cavities that form.
At the node the head, h d ' is the same fo r all modules connected to the node and theno e
flows in and out of the node are equal, so fo r a node with j modules connected to it .
i= j
2:(4=0 i = 1
Substituting n'. = A I . h;. + A2 ·h 2' . + B.X-z lIZ 1 Z
o =Al lhJ '1+A21hr :ode+Bl
+ A12 h 12 + A22 h ~ o d e + B2 7.32
+ + -+
+ A j h {j + A2i h ~ o d e + Bj
I t is possible to obtain a direct solution to equation 7.32 for some nodes, but in the more
general case a simultaneous solution has to be made for a number of nodes. The linear
equations [or a number of nodes form what is known as a sparse matrix, as many of the
coefficients are zero. Adequate numerical techniques arc available to obtain efficient and
reliable solutions to sparse matrices to yield the heads from which the nodal Hows may be
calculated.
7.5.1. STEADY STATE
Before a surge calculation can start steady state heads, /lows and component conditions
must be set either from a prior analysis or [rom actual measurements. A possible but expensive
solution fo r the steady state is to use the fo r transients to analyse a start up surge
which damps to the steady state. A more is to have the facility to replace
all pipes with equivalent losses, so time delays are eliminated and this, combined with
restrictions on the changes permitted during a time step, rapid convergence to the steady
state. An approach with much merit is to carry out a hand calculation of the steady state and
feed the values in as programme data. This approach at least ensures that the system is not
analysed before some time is spent in understanding it.
7.5.2. VALIDITY OF CALCULATED RESULTS
The test of a mathematical model is whether it predicts type behaviour adequately. Most
aspects of surge are understood and well formulated mathematical models predict the first and
most important part of a surge. As the surge progresses it is usually found that heads in the
prototype decay much than those predicted by the mathematical model, although the
timing of events may still be predicted reasonably well. A number of reasons fo r thehi"hl'r than predicted decay rates have been postulated but await experimental confirmation,
:-n:rih' because it is not considered important.
TRANSIENT ANALYSIS 11.3

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 26/35
Failure to predict system behaviour is usually associated with unkno\'ms such as air in the
system or malfunctioning or misunderstanding of th e actions of components such as reflux
valves.
In the case of complex flow situations, such as in large steam turbine condensers,v·,;hich
require a mathematical model representing multiple vapour cavities, air release from solution,
ai r injection, several states of tube draining, multiple cavity collapses and other factors,
verification of a mathematical model is extremely difficult and only likely following a major
plant failure.
7.S. CAUSES OF SURGE
In this section a number of important causes of surge are brei fly outlined. Surges are associated
with:
1. Pump failure or start up .
2. Valve operation.
3. Vapour cavities.
4. Free ai r and gas.
5. Turbine load acceptance, load rejection and governing.
6. A pipe or component failure.
7.6.1. PUMP FAILURE AND START UP
Single, parallel and series operations of pumps and a wide variety of system layouts prevent
general predictions about system behaviour following pump failure. :Four simple situations that
illustrate a number of important aspects of surges due to pumps are considered:
1. Low friction, low head systems..
2. Low friction, medium and high head systems.
3. Medium to high friction, medium to high head systems.
4. Condenser systems.
Usually axial Dow pumps are used on low head systems, mixed flow pumps on medium head
systems and radial flow pumps on high head systems.
motor
pump p"mPH b
Fig. 7.26. Axial flow pump applications
al flow drains back through pump on pump trip
b) vacuum valve is opened on pump tr ip to de-prime the syphon
114 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 27/35
1. Lo w friction, High head systems - Fig . 7.26
Drainage, water transfer in treatment works and irrigation are typical lo w head, low friction
systems. Axial How pumps have low resistance to reverse flow so head rises are not a problem
following power failure except when a reflux valve with a poor dosing action is fitted. Due to
the high reverse flow that can occur and lo w system design pressure, extreme caution is
required if a reHux valve is installed. Reverse pump speeds can be very high with axial How
pumps so a check should be made that reverse speeds do not exceed the manufacturer's
recommended values. Axial How pumps require large starting torques and have a high
shut-off head compared to their duty head. When th e pipeline is not designed for the full
shut-off head the start up time should be sufficiently long to prevent th e full shut-off head
being reached. In cases where a syphon system is used the sequence for priming th e system and
starting the pump requires careful consideration in case the pump is started with significant
backflow.
2. Low friction, medium and high head systems
The important features of pump behaviour following loss of power are shown by the results
of the example in Section 7.4.4. and Fig. 7.23. Once rarcfication waves originating at the
pump are reflected as positive waves from the reservoir or surge vessel and return to the pump
the flow decreases rapidly. Without a valve on the discharge, the sequence of events is now
reversal followed by speed reversal whilst th e head remains fairly constant. With increasing
reverse speed the pump begins to generate head, a radial no w pump may generate almost the
same head running in reverse as in the forward direction and act in a similar manner to a
closing valve. I f the reduction in How is rapid, excessive heads can occur.
An extreme case of a short outlet pipe is parallel operation of several pumps with one
failing. With a large installation, such as a power station cooling water system, it is often
impractical to isolate th e failing pump by closing the discharge valve before the pump reaches
steady state reverse now and speed appropriate to the combined characteristics of all the
pumps. Closing of the discharge valve is usually programmed to meet the major failure
condition, which is usually all pumps failing. Short duration low t10ws to the plant are
tolerable because of thermal inertia in th e condensers. So provided the failed pump's valve
closes in a reasonable time, reverse flow through the failed pump is no t important. A check
should always be made to establish that the reverse speed is within the limits set by the pump
and motor manufacturers.
3. Medium to high frietion, medium to high head systems - I<'ig. 7.27.
Fluid inertia in a long system is very much greater than the inertia of the pump. What happens
following power failure is dictated more by the elevation or the pipeline relative to the pump's
inlet reservoir and the pipeline outlet rather than by th e characteristics of the pump.
Following loss of power, rarcfication waves travel along th e pipeline. As the waves move
along the pipe they enter lower head regions. The actual location of minimum static head
depends upon the pipeline profile, the initial velocity, the pump inertia and the pressure
wave velocity. A typical envelope of minimum heads is shown in Fig. 7.27. In this case vapour
head is reached near the centre of th e pipeline over a length of pipe with no distinct high
point. 0 rten the location at which cavitites will form can be identified by studying the pipeline
profile. When this is so, approximate analytic solution can bc obtained which are useful in
checking computer solutions.
At the deign stage careful consideration should be given to the location of control and shut
uf f valves and to their operating times. Where practical, valves arc best located close to the pump
but this may not always be possible. Up io a closed valve the system may be subject to the,hut \'alve head of the pump plus any surge head. In addition to surges arising from pump
Icdure and valve operatiull, a pump starting on a system with a shut valve, remote from the
TRANSIENT A ~ A L YSIS 115

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 28/35
----steady state grad ient
.--.-----.-L
/
/
vapour head
//'
- - -_ . -""";---/
/
envelope of minimum heads
Fig. 7.27. Typical rising main system
pump, may experience an excessive head rise. The magnitude of this head rise is greatly
influenced the ratio of time for pressure waves to travel to the valve and back to th e pump
and the time the pump takes to increase speed from that sufficient to open th e ret1ux valve up
to full speed. I f the pump start up is long compared to th e wave travel time, head rise above
shut valve head will be small, but if it is less than the wave travel time, th e excess head may
approach th e shut-valve head.
An example of where installing equipment to give a slow pump start up is th e most
economic solution is on large pressurised fire fighting mains. Normally system pressure is
maintained by a small pump, but on opening of a hydrant th e system pressure falls an d
activates th e main pumps. At th e hydrant flexible hoses are connected, which may only be
partially filled with water, so that if th e main pumps accelerated rapidly up to full speed they
could induce high velocities in the system before th e pressure increases in the hose. I f system
velocities exceed about 1 mis, th e pressure rise is likely to burst th e hose. Depending on the
length of th e system, start up times of 30 seconds or more may be appropriate.
4. Condenser and heat exchanger systems - Fig. 7.28
Condenser and heat exchanger systems have a number of high points where cavities can be
expected since steady state pressures at these points are near or below atmospheric. Following
loss of power to a pump, vapour pressure is reached almost immediately following th e arrival
of rarefication waves at the condenser or heat exchanger.
There are usually a number of heat exchangers - in a large petro-chemical plant 20 is not
uncommon - supplied two or more pumps. In this situation complex interactions occur
between cavities in different parts of a plant. These can cause concentration of flow into
particular cavities resulting in higher heads with the maximum head rise occurring on the
second or third cavity growth an d collapse cycle.
steady state hydraulic
gradient
waves
vapour head
outlet weir
pump
Fig. 7.28. Condenser and heat """"""'. . systems
116 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 29/35
-----
7.6.2. VALVE OPERATION - FIG. 7.29
Closure of a control valve in a pipeline causes a pressure rise upstream an d reduction in
pressure downstream. On th e upstream side the head rise will approach -a!::..u/g if the valve
closes in a time less than that fo r surge waves to travel upstream an d be reflected back to th e
valve. On the downstream side a cavity will form if th e vapour head is reached followed by a
head rise of aUd/g, where Ud is th e velocity at the time of vapour cavity collapse. Under
conditions when part of the liquid in the downstream pipe is lost, or delayed opening of ai r
valves occurs close to the valve, the downstream water column may reach a velocity in excess
of the original pipeline velocity. I f this happens the maximum pressure rise may take place on
th e downstream side of the valve.
steady state hydraulic
,,,d;oot __________ . _ __
L_ . - I fhead rise---------- - - ~ ~ ~/ /
head drop
Fig. 7.29. Operation of a valve in a pipeline
7.6.3. VAPOUR CAVITIES
Vapour caVItIes resulting from a dynamic event elsewhere in a system cause more surge
problems than any other phenomena. Cavities form du e to pump failure upstream or a valve
closing upstream or a valve opening downstream, or because positive surge waves are reflected as
rarefication waves. Cavities may also form in a high part of a system when the outlet pipe is
higher than the vapour pressure, or because of heat transfer or because th e fluid is supersaturated.
Supercavitation at valves and other components may involve large cavities that can collapse if
now conditions are changed.
As a cavity head rise equal to a!::..U/2g occurs unless th e collapse is at a dead end
when it s amplitude is twice this value.
7.6.4. FREE AIR AND GAS
There are seldom advantages in free gas through system when it is operating
under conditions. During a transient, frec gas may reduce pressure rises or it ma y cause
excessive pressures. In the discussion that follows th e term air is used although it applies
equally to other gases, except when the gas can condense at the heads and temperatures
existing during a transient.
th e pressure wave velocity. Since pressureree air introduces
rises are proportional to th e pressure wave velocity the presence of all' is beneficial
it is distributed or in such a manner as to reduce th e effective pressure wave
pressure contains about 2 a i r
th e causes bubbles at large
on th e
11

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 30/35
gas in usually not important, if air release is confined to a limited volume of water, say in a heat
exchanger. In cases where the pressure in a long length of pipe is lowered to vapour pressure
sufficient air may be released to attentuate surges. It should be noted that th e pressure wave
velocity may fall to a relatively low value as the static pressure approaches the vapour pressure
but it increases rapidly as th e static pressure rises. Positive waves cause an increase in the
pressure wave velocities as the air is compressed and re-dissolved.
Three basic types of problems arise due to air:
1. Sudden accelerations due to air pockets moving into a low static pressure region.
2. Air release during filling of a system.
3. Columns of water separated by air being accelerated and then decelerated due to another
transient event.
1. Sudden accelerations due to air pockets
Transients caused by sudden accelerations due to air pockets are usually confined to large civil
engineering structures, fluid machines and partially open valves. A typical situation is shown in
Fig. 7.30 of an air pocket moving through a system until it reaches a gate structure at the
outlet into a reservoir. Once the front of th e ai r pocket begins to escape up the gate channel a
large head differential - in terms of air velocity head - exists. As the ai r pocket in the tunnel
contracts water moves in to take its place and there is an abrupt pressure rise as the water
slows down. Spectacular water ejections can occur and in extreme cases severe damage may
result.
In the cases of turbines and pumps a large air pocket can cause a sudden change in head.
Shock loading of the machine and head fluctuations may result.
Sources of air are residual ai r from filling th e system, vortices and ai r entrainment at inlet,
excessive downs urge in surge chambers, operation of air valves during a surge.
air pocket accelerating
2. Air release - F'ig. 7.3l.
Because of the large density difference between ai r and water a much greater volume flow rate of
ai r ca n pass through an orifice compared to water for a given pressure differential. I f the water
is allowed to reach a velocity VI whilst expelling air the sudden reduction in liquid velocity as
the air is finally expelled will cause a head rise approachinlK VI - V 2 )/2g. Air release is a greater
problem with low head systems since their design head ~ ~ y be well below the head rise due
to air release. Large cooling water systems are particularly vulnerable to poor filling techniques
because of their low design heads, less than 50 m in many instances.
air pocket air valve
Fig. 7.30 Acceleration
due to air pocket
gate shaft--- 'lI"! -eservoir
a)
- - * ig. 7.31. Air release -- -- ---V - . - · - -1- . . . . - V2. 1 Ia) air venting
b) instant last air escapesb)
- head rise a(Vl -V2)/2g
118 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 31/35
~
On firefighting systems it ma y be necessary to drain the sprinkler and water monitor ends of
the system to prevent freezing. On repriming of th e system excessive pressures ca n be
generated if water columns are allowed to reach to o high a velocity before the water reaches
the sprinklers or monitors.
If air release valves are fitted - either manual or automatic - they should limit the rate of air'
release to give water velocities of less than 0.3 mls unless there are good reasons for rapid air
release. Many smaller installations do not require air release valves as the pump can deliver a
useful flow even if there is air in the system, and velocities are sufficient to carry any air
through the system. If , however, th e system is heavily throttled downstream of where air ma y
collect careful venting is usually essential. Pipelines subject to corrosion should be laid so as to
prevent air pockets forming.
air pocket
~ .-r-r-r"J7 7 ~ J pu m p
Fig. 7.32. Separated water columns
3. Separated water columns
A typical situation of two water columns separated by an air pocket is shown in Fig. 7.32. On
start up the full pump head is available to accelerate a short water column. I f the pocket is
very small the first column will not reach a high velocity before the ai r pocket is compressed,
putting up the head on the pump an d accelerating the second column. At the other extreme, if
the air pocket is very large it will slowly be compressed and accelerate the second column with
little excess pressure. In between the two extremes are a range of air pocket sizes that give rise
to large pressure rises. A particularly dangerous situation is if the air pocket is under a
vacuum so that its contents have little mass to absorb and transmit energy to the secondcolumn.
Whcn two or more ai r pockets are involved interactions can occur leading to higher local
surges.
7.6.5. TURBINES AND PUMP - TURBINES
Compared to a pump the mathematical model of a turbine is more complex because variable
blade angles are involved along with equations for the governor. Other components in hydro-
power systems do not differ greatly from pump systems except that complex surge chamber
arrangements may be used. As turbines are associated with large capital projects extensive
studies of the machine and system interactions are justified, and are not considered further in
the present work.
7.6.6. PIPE OR COMPONENT FAILURE - FIG. 7.33
On failure of a pipeline or component an instantaneous drop on head gives rise to rarefication
waves, as indicated on Fig. 7.33. As waves travel along the pipe they may lower the static
pressure to the vapour pressure. Pressure rises due to cavities that form and collapse ma y
cause further failures, for instance failure or a pipeline at an earthquake fault line may result
in pipe bursts many kilometers from the faultline.
Longitudinal cracks can propogate over considerable distances if the pressure wave velocity
in the liquid is less than half the radial pressure wave velocity in the pipe material. Only when
the pressure wave velocity in the fluid exceeds half that in the pipe material can the staticpressure ahead of the crack be reduced by flow escaping through the crack. Flanged or
,tif:ening rings present a barrier to crack propogation.
TRANSIENT A1\!\LYSIS 11 9

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 32/35
--
steady state hydraulic gradient
vapour head
break
Fig. 7.33. Pipeline break
steady state hydraulic
gradient
a) simple
b) one-way
Fig. 7.34. Surge tanks
air supply
a) b) c)
Fig. 7.35.a) simple air vesselb) throttled lossc) high reverse flow loss
120 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 33/35
7.7. SURGE PROTECTION OR AMELIORATION
Penalties are involved, both financial and engineering, if surge protection is required.
In the extreme, failure of a surge protection system may cause larger surges than if no
protection was fitted. The first requirement is that the protection method adopted be safe.
The second requirement is that it will work. The latter requirement ma y seem elementary but
in many instances operation is infrequent and maintenance is minimal or non-existant. To
meet the required reliability expensive solutions, such as surge shafts may be more appropriate
than a cheaper solution, such as relief valves with their attendant maintenance problems.
Since surge pressures are related to velocities an increase in pipe size usually reduces surge
pressures. Using a larger pipe size is seldom economic.
7.7.1. INCREASED PUMP INERTIA
In cases where th e margin between the design pressure and predicted posItIve or negative
pressures is not too an increase in a pump's moment of inertia, by adding a flywheel, can
provide a safe solution. Penalties il'l.dude power losses in windage and a higher rated starting
system. A flywheel is not effective if the pump shaft or if the pump suddenly becomes
or if massive of air causes the pump to suddenly
Flywheels may be essential to maintain a flow whilst remedial action is taken to shut dovvn
a reactor or a chemical process.
7.7.2. SURGE TANKS -, FIG. 7.34
Except where the local topology is suitable, surge tanks arc an solution for pump
installations. Correctly sized and fitted with restrictions at outlet are very effective and
safe. One-way surge tanks, that do not use the full pump head, can be useful, but if they are
required to prevent negative pressures a careful analysis of their response is necessary.
7.7.3. AI R VESSELS - FIG. 1.35
enclosed an d energy stored in a cornpressed gas allows air vessels to be
made much smaller than surge tanks. They a
keep water levels within limits. surge vessels arc not
flow out of the vessel but in order to limit pressure rises upsurge a higher
reverse flow loss. In many installations the inertia of the column between the
the vessel is sufficient to limit the vessels effect in of steeD fronted
surge waves. This means that if the surge vessel is
valve must be prevented.
7.7.4. PUMP VALVES
headeJlux or valves arc
systems a certain amount of in the of the valves is acceptable but on low head
systems it may be disastrous. On important systems the flow time of the pumps
should be calculated and the valve manufacturer's obtained that a proposed valve
will dose before a specified reverse 11ov\/ is established. Since in many cases the
pipework is than the pump discharge flange, the size of the valve may be chosen to
the dosing ormance.
In section 7.4.4. the results of a calculation for pump run-down arc plotted in Fig. 7.23.
The How/time curve shows the flow to reach zero in 0.75. A typical pipe to pump outlet Bange
diameter ratio is 0.7. Using this ratio and assuming a tilting disc check valve with auxiliary
spring, the disc would remain open until the flow to about 20 percent of design.
Referring toFig.
7.23. the time between thevalve disc
to move and the start of
n : \C lSC now is of the order of 0.1s. In this case substantial reverse flow would be established
the \ ~ l h e sbmmecl closed.
TRANSIENT ANALYSIS 121

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 34/35
On larger installations, or where the liquid contains solids, th e pump discharge valve win
usually be programmed to close in a pre-determined manner. I3utterl1y and other valves are
usually closed rapidly for about 70 percent - to the kink in th e curves on Fig. 14.19 an d then
slowly. An estimate fo r th e closing sequence is made fo r a knowledge of similar systems an d
then refined by a full surge analysis. With parallel operation of pumps an d pipelines closing
times are a compromise between a number of conflicting requirements.
I f a foot valve is fitted to th e pump suction the pump should be capable of \vithstanding
th e full surge pressure.
7.7.5. FLEXIBLE TUBING
On small systems flexible tubes that reduce the pressure wave velocity to a lo w value can be
used to reduce surge pressures.
The usual assumption that the transfer of kinetic energy to strain energy or vice-versa is a
lo w loss process does not apply to flexible hoses. Rubber and particularly thermo-plastic hoses
absorb significant amounts of energy. Where flexible hoses are used for surge protection their
fatigue life should be considered as cyclic pressures may have to be restricted to a small
percentage of th e ultimate bursting pressure of a ne w hose.
1.7.6. CONTROL VALVE OPERATION
Programmed closing of a valve will reduce the maxim um head provided the valve's operating
time is longer than th e wave travel time to and back from a reservoir or component. As th e loss
coefficient against valve opening curves in Chapter ] 4 show, the first part of th e closing
operation has little effect on the valve's loss coefficient. Initial closing should be rapid followed
by a closing sequence which makes full use of rarcfication waves returning to the upstream
side and positive waves returning to the downstream side. By neglecting friction a closing
sequence can easily be worked out to minimise the maximum head. This would then he
checked using th e full calculation procedure.
When rapid valve operation is essential, such as a rire tanker loading, it may be
necessary to provide a dump tank close to a valve. Liquid is diverted into the dump tank until
th e main liquid column is brought to rest.
7.7.7. AIR VALVES AND STANDPIPES
Air valves provide a very effective and, sometimes, the only economic method of surge controL
Equally can be very troublesome when malfunction. An air valve ma y vent air or it
may le t air in or it may fulfill botb functIOns. Combined inlet and vent valves should have very
much lower to inflow capacity if air to ac t as a
cushion. Precautions should be taken Air valves arc not sui table forpipelines carrying sewage or sludge.
The location of valves is important i f they are to be effective. Venting under static conditions is
taken care of by appropriate pipe slopes with valves at high points. Under flow conditions
velocities of a fraction of a metre per second are sufficient to carry ai r past most valves, so ai r
not vented under static conditions or air that enters during operation is unlikely to be vented.
Float and other types of air valves have opening times that are slow compared to changes in
pressure during surges. I f a pipeline cannot withstand significant negative pressure it may be
necessary to install special valves or to use other methods to prevent pressures falling below
ambient.
Condenser and heat exchanger systems are often protected using air valves on the outlet
side of condensers and heat exchangers. On large power station cooling water systems the
problems of obtaining suitable valves to pass large volumes of atmospheric air has made th e use
of compressed air bottles attractive. Sufficient air to suppress a major surge is stored m
bottles and released into the system when pressures drop below a pre-determined value.
122 TRANSIENT ANALYSIS

7/28/2019 Transient DS Miller
http://slidepdf.com/reader/full/transient-ds-miller 35/35
On multiple heat exchanger systems and systems where standpipes can be erected above the
hydraulic gradient, simple standpipes may provide an acceptable system. The effect of a
standpipe is to prevent pressure falling below atmospheric at th e standpipe. By locating
standpipes close to high points, such as heat exchangers, the growth of vapour cavities can be
limited.
Standpipes should not normally be connected to the to p of a pipe, because air entering th e
vent is likely to eject water from the vent. Water ejection from standpipes can be expected
during transients. Standpipes located immediately after partially closed valves or orifice plates
see a reduced static pressure which must be allowed for in calculating the water height in th events.
When a number of pumps are used to supply cooling water to a multiple condenser and heat
exchanger system, it is usual to expect th e plant to continue operating following failure of up
to half the running pumps. If , following failure of a limited number of pumps, air valves open
on high condensers and heat exchangers, th e ai r may break the syphon on these condensers
and heat exchangers. With a reduced number of pumps operating it may not be possible to re-
prime the high parts of the so th e plant has to be shut down. This problem can
be overcome if action is taken at th e design stage.
7.7.8. RELIEF AND SURGE SUPPRESSION VALVES
A wide range of relief valves are manufactured. In assessing a valve's suitability it is necessary
to consider it s reliability, its of operation compared to th e rate of change of pressures
within th e and its flow capacity, particularly if cavitation can occur.
valves around pumps, either head or controlled, an d small by-passes around
control valves J1 T some of th e means of reducing surges using valves.
7.7.9. RUPTURE DISCS
used to protect against a local catastrophic event o[ very infrequent
failure of a heat exchanger tube allowing high pressure, high
or gas to escape into the cooling water side. Unless isolated major damage
into other narts of system.
O. SYSTEM OPE AND DESIGN
to be Depending on the
fault or a lightning strike need not require
in opening contactors can be built into
on hack up electrical systems is often
trol of surges. At th e design stage m,myavoided. For interlocks to
surge is still in progrcssQ
equipment to deal with the loss of power there is a
pumps in an d out. This design
maintained and that the
limits. In some cases a
slow valve operation or variable pumps as
better solution. refers to th e part of th e valve stroke when it
This may be limited less than 10 of the total stroke.
be fo r the design of a
achieved expensive surge protection