Embed Size (px)
Citation preview
T R A N S I T O I R E S D A N S L E S S E R V O M ] ~ C A N I S M E S N O N L I N I ~ A I R E S F I L T R I ~ S
par dulien LOEB Ing6nieur en Chef des T616communications *.
SOMMAIRE. - - Pour calculer les r@imes transitoires des ser~om~canismes non lin~aires comportant un dl~ment filtrant, dans le cas des amortissements [aibles, on indique (en partant de l'dquation [ondamentale des sgstdmes bouclds) rgquation dif/&entielle du ier ordre dormant l'amplitude x et l'gquation dif[&entielle du 2 e ordre donnant l'glon- gation y.
On indique une nouvelle construction qui permet de tracer par points la courbe x(t) et qui donne ainsi un nour crit&ium de stabilitJ des r@imes oscillants stationnaires.
I . ~ I N T R O D U C T I O N .
Un pr6c6dent article [1] a d6crit les r6gimes sta- tionnaires (oscillations autoentretenues ou condi- tions de repos), des servom6canismes non lin6aires comportant un 616ment de filtrage. Ces syst6mes sont caract6ris6s, on l 'a vu, par une fonction de transfert A(x, to) d6finissant la r6ponse, pra t iquement sinu- soidale, de la chalne ouverte h une excitat ion sinu- soidale d 'ampli tude x et de pulsation to.
L 'obje t du pr6sent t ravai l est de calculer, toujours dans l 'hypoth6se du filtrage, le mouvement transi- toire d 'un tel syst~me entre deux oscillations de r6gime stationnaire, ou entre une oscillation de r6gime instable et le repos. Nous aurons ainsi une id6e de la rdponse transitoire d 'un servom6canisme non lin6aire.
2. - - I N T R O D U C T I O N D ' U N A M O R T I S S E M E N T ~ FINI (*).
Nous pouvons, 6tendant ]e r6sultat t rouv6 en [il, d6finir le r6gime transitoire par une pulsation co et un amort issement ~ qui, ici, contrairement h ce qui se passe au voisinage imm6diat d 'un r6gime stationnaire, n 'est pas infiniment petit. Les quanti- t6s x, to et ~ sont toujours reli6es par l '6quation fondamentale des syst6mes boucl6s :
(I) 1 + A (;c, ~ + j to) = 0.
Le mouvement peut ne pas 4tre p6riodique :dans ce cas l '6quation (1) n ' admet que des racines r6elles.
2 . t . - Diagramme de Poincar4 g4n4ralis4.
On connalt, grace h H. PoINcAR G une repr6sen- ta t ion tr6s intuit ive de l '6volution d 'un syst6me r6gi par une 6quation diff6rentielle non lin6aire du 2eordre. (Voir no tamment M~NOnSKI [2].) Si f (y, y', y~', t) ---- 0 est une telle 6quation, on porte y(t) en abscisse et ~(t) en ordonn6e sur un diagramme com- mun6ment appel6 (( diagramme des phases )).
Lorsqu'il s'agit d 'un servom6canisme filtr G on peut 6tendre cette repr6sentat ion aux cas off l 'ordre de l '6quation diff6rentielle, ou, ce qui revient au m4me, le degr6 de l '6quation alg6brique,
l + A (x ,P ) = 0
est sup6rieur h deux. La l imitat ion de notre th6orie aux syst6mes filtr6s nous permet ainsi l 'exploration de syst6mes r6gis par des 6quations de degr6 quel- conque.
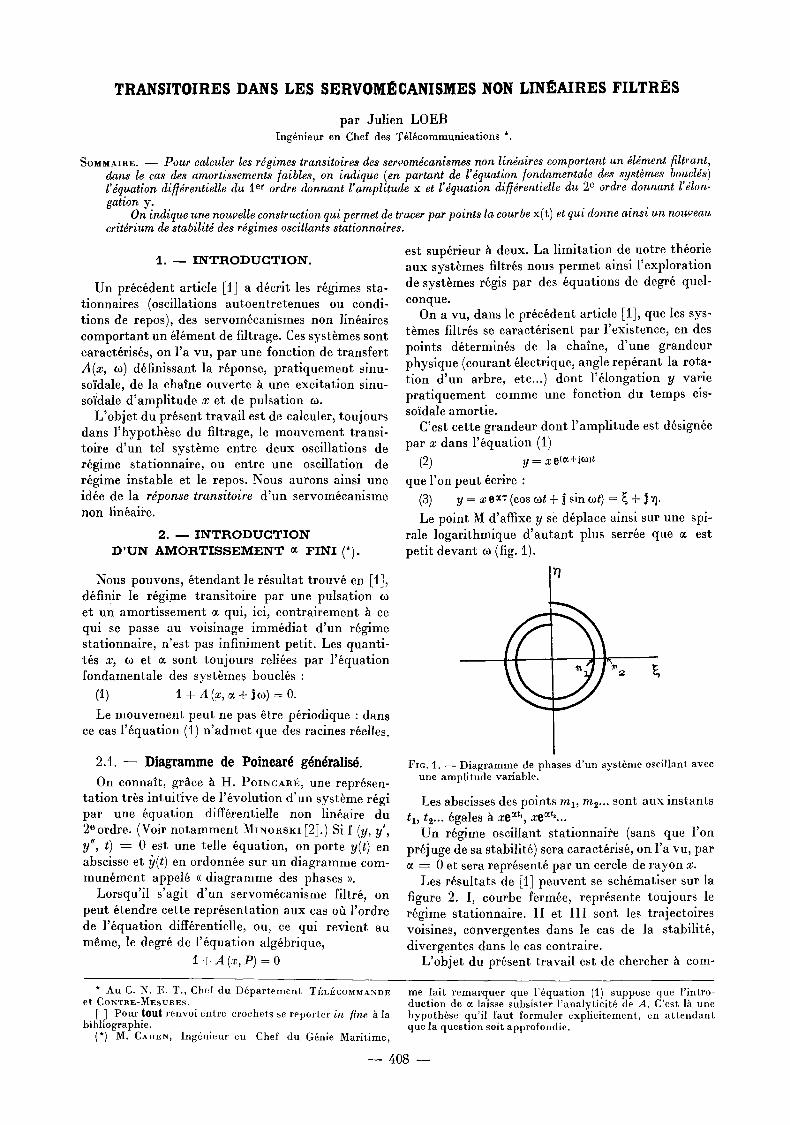
On a vu, dans le pr6c6dent article Ill, que les sys- t6mes filtr6s se caract6risent par l 'existence, en des points d6termin6s de la chaine, d 'une grandeur physique (courant 61ectrique, angle rep6rant la rota- tion d 'un arbre, etc...) dont l'61ongation y varie pra t iquement comme une fonction du temps cis- soidale amortie.
C'est cette grandeur dont l 'ampli tude est d6sign6e par x dans l '6quation (i)
(2) y = xe(r162 ~
que l 'on peut 6crire :
(3) y = x e~v (cos tot + j sin tot) = ~ + j ~.
Le point M d'afl]xe y se d6place ainsi sur une spi- rale logarithmique d 'au tan t plus serr6e que ~ est
I rl
peti t devant to (fig. i).
FIG. 1. -- Diagramme de phases d'un syst6me oscillant avec une amplitude variable.
Les abscisses des points rnl, m 2... sont aux instants tx, t~... 6gales h xe ~t,, xeat~...
Un r6gime oscillant stationnai~e (sans que l 'on pr6juge de sa stabilit6) sera caract6ris6, on l 'a vu, par a = 0 et sera repr6sent6 par un cercle de rayon x.
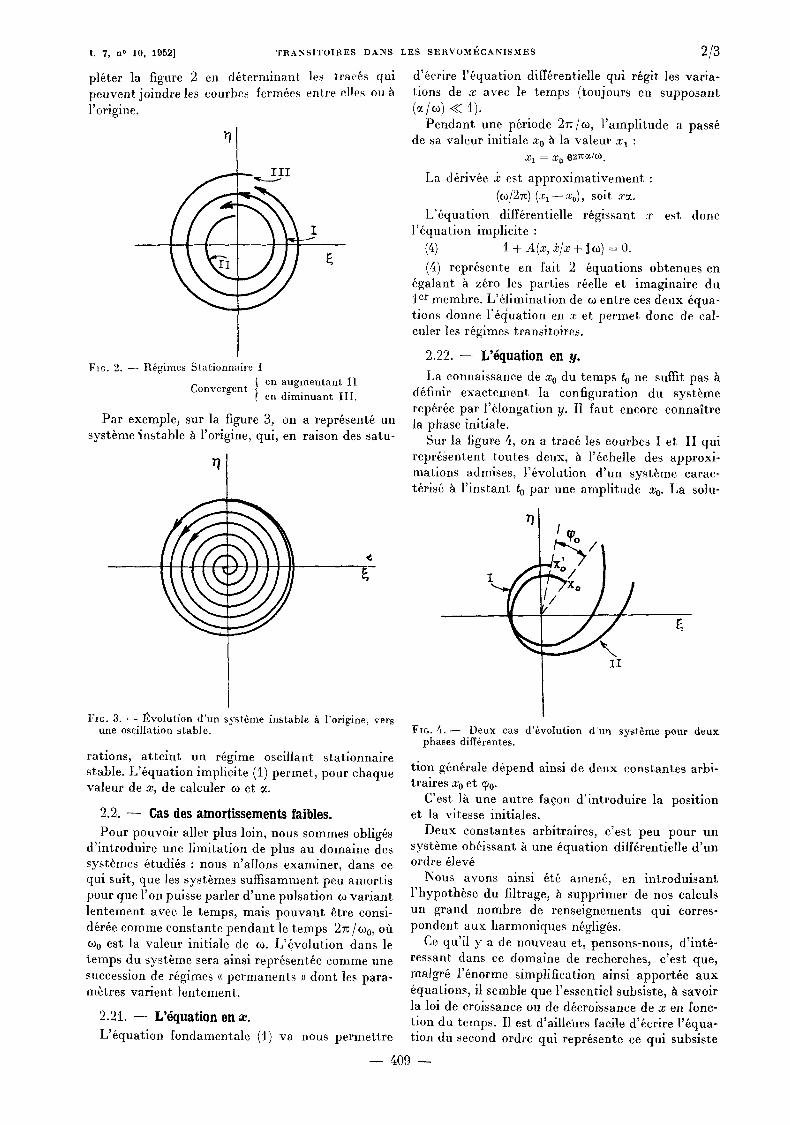
Les r6sultats de [1] peuvent se sch6matiser sur la figure 2. I, courbe ferm6e, repr6sente toujours le r6gime stationnaire. II et I I I sont les trajectoires voisines, convergentes dans le cas de la stabilit6, divergentes dans le cas contraire.
L 'obje t du pr6sent travail est de chercher h corn-
* Au C. N. E. T., Chef du D6partement TELI~COMMANDE et CONTRE-MEsURES.
[ ] Pour tout renvoi entre crochets se reporter in fine a la bibliographie.
(*) M. CAHEN, Ing6nieur eu Chef du G6nie Maritime,
me fait remarquer que l'6quation (1) suppose que l'intro- duction de :r laisse subsister l'analyticit6 de A. C'est laune hypoth6se qu'il faut formuler explicitement, en attendant que la question soit approfondie.
- - 408 - -
t. 7, n o 10, 1952]
pl6ter la figure 2 en d6terminant les trac6s qui peuvent joindre les eourbes ferm6es entre elles ou h l'origine.
Fro. 2. - - t l6gimes Sta t ionnai re I
~ en a u g m e n t a n t I I Convergent
cn d i m i n u a n t I I I .
Par exemple, sur la figure 3, on a repr6sent6 un syst~me ~nstable ~ l'origine, qui, en raison des satu-
Fin. 3. - - /~volution d ' u n sys t6me ins table h l 'origine, vers tree oscillation s table .
rations, a t te lnt un r6gime oscillant statlonnaire stable. L '6quat ion implicite (1) permet, pour chaque valeur de x, de calculer to et ~.
2.2. ~ Cas des a m o r t i s s e m e n t s faibles.
Pour pouvoir aller plus loin, nous sommes oblig6s d ' introduire une l imitation de plus au domaine des syst~mes 6tudi6s : nous n'allons examiner, dans ce qui suit, que les syst~mes suffisamment peu amortis pour que l 'on puisse parler d 'une pulsation 6) variant lentement avec le temps, mais pouvant ~tre consi- d6r6e comme constante pendant le temps 2n/~o0, off (% est la valeur initiale de co. L'6volution dans le temps du syst~me sera ainsi repr6sent6e comme une succession de r6gimes (( permanents ), dont les para- m~tres var ient lentement.
2 .2 i . - - L'~quat ion en x.
L'6quation fondamentale (1) v a n o u s permettre
TRANSITOIRES DANS LE$ SERVOMI~CANISMES 2/3
d'6crire l '6quation diff6rentielle qui r6git les varia- tions de x avec le temps (toujours en supposant (~/~) << 1).
Pendant une p6riode 2n/to, l 'ampli tude a pass6 de sa valeur initiale Xo h la valeur xl :
Xl = X0 {~27~/~.
La d6riv6e ~ est approximat ivement : (r (x,--Xo) , soit x~.
L '6quation diff6rentielle r6gissant x est done l '6quation implicite :
(4) I + d (x, .~/x + j e o) = 0.
(6) repr6sente en fait 2 6quations obtenues en 6galant h z6ro les parties r6elle et imaginaire du Ier membre. L'61imination de 6) entre ces deux 6qua- tions donne l '6~uation eli x et permet donc de cal- culer les r6gimes transitoires.
2.22. - - L'dquation en y .
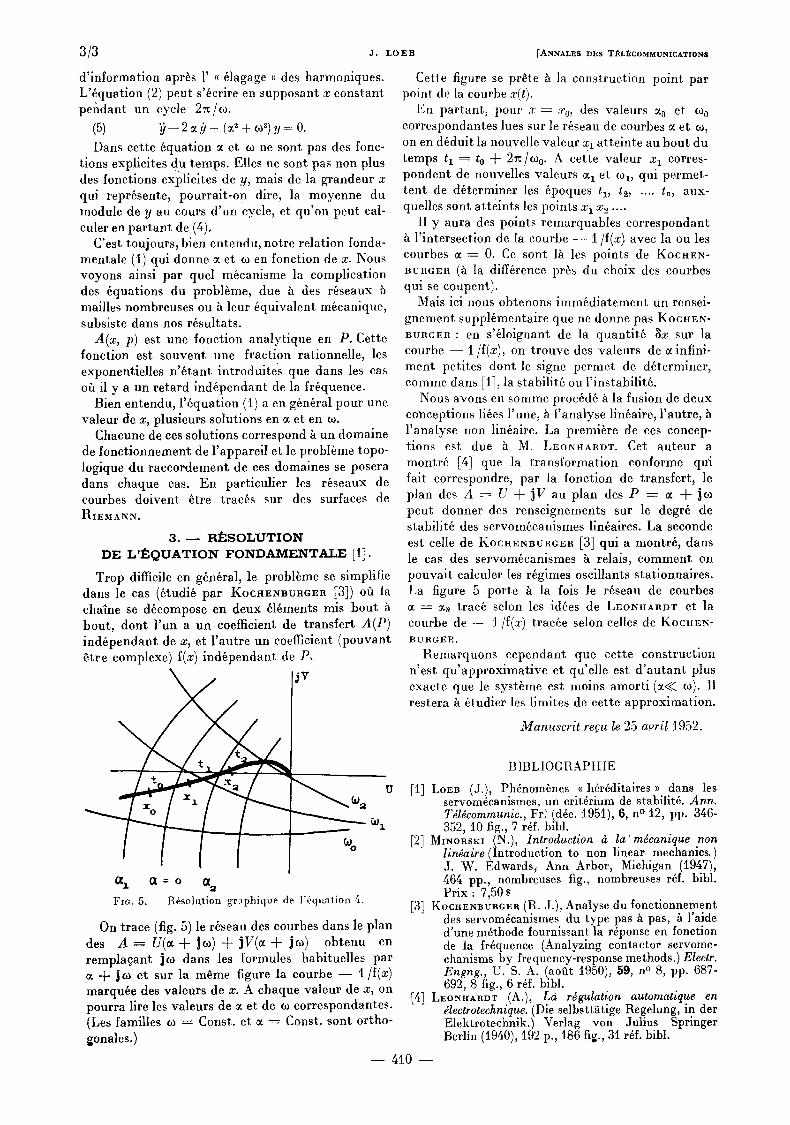
La connaissance de x 0 du temps t o ne suffit pas h d6finir exactement la configuration du syst~me rep6r6e par l'61ongation y. I1 faut encore connaltre la phase initiale.
Sur la figure 6, on a trac6 les courbes I et II qui repr6sentent toutes deux, h l'6chelle des approxi- mations admises, l '6volution d 'un syst~me carac- t6ris6 h l ' instant t o par une ampli tude x0. La solu-
jx/;•/-%/ I
I I
Fro. 4 . - Deux cas d'6votution d'un syst4me pour deux phases diff6rentes.
t ion g6n6rale d6pend alnsi de deux constantes arbi- traires x 0 et T0.
C'est lh une autre fa~on d ' introduire la position et la vitesse initiales.
Deux constantes arbitraires, c 'est peu pour un syst~me ob~issant h une ~quation diff6rentielle d 'un ordre 61ev6
Nous avons ainsi 4t6 amen6, en in t roduisant l 'hypoth~se du filtrage, h supprimer de nos calculs un grand nombre de renseignements qui corres- pondent aux harmoniques n6glig6s.
Ce qu'il y a de nouveau et, pensons-nous, d ' int& ressant dans ce domaine de recherches, c 'est que, malgr6 l '6norme simplification ainsi apport6e aux 6quations, il semble que l'essentiel subsiste, h savoir la loi de croissance ou de d6croissance de x en fonc- tion du temps. I1 est d'aillehrs facile d'$crire l '6qua- tion du second ordre qui repr6sente ce qui subsiste
409
3/3
d ' information apr~s l' (( 61agage ~) des harmoniques. L'6quation (2) peut s'6crire en supposant x constant pendant un cycle 2z~/o~.
(5) ~- - 2 ~ ~) + (~ + to~) y = 0.
Dans cette 6quation ~r et to ne sont pas des fonc- tions explicites du temps. Elles ne sont pas non plus des fonctions explicites de y, mais de la grandeur x qui repr6sente, pourrai t -on dire, la moyenne du module de y au cours d 'un cycle, et qu 'on peut cal- culer en par tant de (6).
C'est toujours, bien entendu, notre relation fonda- mentale (1) qui donne m et to en fonction de x. Nous voyons ainsi par quel m@anisme la complication des 6quations du probl~me, due h des r6seaux h mailles nombreuses ou h leur 6quivalent m6canique, subsiste dans nos r6sultats.
A(x, p) est une fonction analytique en P. Cette fonction est souvent une fraction rationnelle, les exponentielles n '6 tant introduites que dans les cas off il y a un retard ind6pendant de la fr6quence.
Bien entendu, l '6quation (1) a en g6n6ral pour une valeur de x, plusieurs solutions en ~ et en to.
Chacune de ces solutions correspond h un domaine de fonct lonnement de l 'appareif et le probl~me topo- logique du raccordement de ces domaines se posera dans chaque cas. En partlculier les r6seaux de courbes doivent ~tre trac6s sur des surfaces de Pt lEMANN.
3 . - R~SOLUTION DE L ' l k Q U A T I O N F O N D A M E N T A L E [ I ] .
Trop difficile en g6n6ral, le probl~me se simplifie dans le cas (6tudi6 par Kocn~.~nURGra [3]) off la chalne se d6compose en deux 616ments mis bout bout, dont l 'un a un coefficient de t ransfer t A(P) ind6pendant de x, et l 'autre un coefficient (pouvant ~tre complexe) f(x) ind6pendant de P,
jV /
J. LOEB [ANNALES DES TI~L1~COMMUNICATIONG
Cette figure se prate h la construction point par point de la eourbe x(t).
En partant , pour x = x0, des vaIeurs % et too correspondantes ]ues sur le r6seau de courbes ~ et to, on en d6duit la nouvelle valeur xl at teinte au bout du temps t 1 = t o + 2x/too. A cette valeur x 1 corres- pondent de nouve]les ~r cq et r qui permet- tent de d6terminer los 6poques t~, t2, .... t**, aux- quelles sont atteints les points x 1 x 2 ....
II y aura des points remarquables correspondant l ' intersection de la courbe - - ]/f(x> avec la ou les
courbes ~ = 0. Ce sont lh les points de KOCHEN" BURGER (a la diff6rence pr6s du choix des courbes qui se coupent).
Mais ici nous obtenons imm6diatement un rensei- gnement suppl6mentaire que ne donne pas KOCUEN- BURGER : en s'61oignant de la quanti t6 ~x sur la courbe - - 1/f(x), on t rouve des valeurs de 0r ment petites dont le signe permet de d6terminer, comme dans []], la stabilit6 ou l 'instabilit6.
Nous avons en somme proc6d6 h la fusion de deux conceptions li6es l 'une, h l 'analyse lin6aire, l 'autre, h l 'anaIyse non ]in6aire. La premi6re de ces concep- tions est due h M. LEONItARDT. Cet auteur a montr6 [4] que la t ransformation conforme qui fair correspondre, par la fonction de transfert , le plan des A ~ U + jV au plan des P = ~ + jto peut donner des renseignements sur le degr6 de stabilit6 des servom6canismes lin6aires. La seconde est celle de KOCH~NBURGnn [3] qui a montr6, dans le cas des servom6canismes h relais, comment on pouvai t calculer les r6gimes oscillants stationnaires. La figure 5 porte h la fois le r6seau de courbes
= ~n trac6 selon les id6es de LEO~UABDT et la courbe de - - ~/f(x) trac6e selon celles de KOCn~N- BUHGEE.
Remarquons cependant que cet te construction n'est qu 'approximat ive et qu'elle est d ' au tan t plus exaete que le syst~me est moins amorti (~<< co). II restera h 6tudier les llmites de cette approximation.
Manuscrh re~u le 25 avril ~952.
%
Fla. 5 . - l~6solution graphique de l '6quation ,,.
On trace (fig. 5) le r6seau des courbes dans le plan des A = U ( ~ + ] c 0 ) + j V ( ~ + jo~) obtenu en rempla~ant j o dans les formules habituelles par
-]- jto et sur la mgme figure la courbe - - 1/f(x) marqu6e des valeurs de x. A chaque valeur de x, on pourra lire les valeurs de ~ et de to correspondantes. (Les familles to ----- Const. et ~ = Const. sont ortho- gonales.)
BIBLIOGRAPHIE
[1] LOEB (J.), Ph6nom~nes cc h6r6ditaires )~ dans les servom~canismes, un crit6rium de stabilits Ann. T~Igcommunic., Ft. ~ (d6e. i951), 6, n ~ i2, pp. 346- 352, l0 fig., 7 %f. bibl.
[2] MINORSKI (N.), Introduction d~ la'm~canique non lingaire (Introduction to non linear mechanics.) J. W. Edwards, Ann Arbor, Michigan (1947), 464 pp., nombreuses fig., nombreuses r6f. bibl. Prix : 7,50 $
[3] KOCHENBURGER (R. J.), Analyse du fonctionnement des servom6canismes du type pas ~ pas, h l'aide d'une m6thode fournissant la r6ponse en fonction de la fr6quence (Analyzing contactor servome- chanisms by frequency-response methods.) Electr. Engng., U. S. A. (aofit J950), 59, n ~ 8, pp. 687- 692, 8 fig., 6 %f. bibl.
[4] LEONI~ARDT (A.), La rdgulation automatique en ~lectrotechnique. (Die selbsttatige Regelung, in der Elektrotechnik.) u "con Julius Springer Berlin (1940), 192 p., 186 fig., 31%f. bibl.
- - 4 t O - -





























