Embed Size (px)
Citation preview
Départements : TIN
Filière : Génie Electrique
Orientation : Systèmes Energétiques
Travail de Bachelor
Etude et modélisation d'une transmission magnétique
pour moteur électrique via une interface en python
Non confidentiel
Étudiant : Andres GIL CLADERA
Travail proposé par : Luc Bossoney
HEIG-VD
Route de Chéseaux 1
1400 Yverdon-les-Bains
Enseignant responsable : Luc Bossoney
Année académique : 2019-2020
Yverdon-les-Bains, le 2 octobre 2020

Etudiant Andres GIL CLADERA
Page 2
Etudiant Andres GIL CLADERA
Page 3
Table des matières
1 INTRODUCTION................................................................................................................... 13
2 ETAT DE L’ART ..................................................................................................................... 14
3 DESCRIPTION DU RÉDUCTEUR ............................................................................................. 17
3.1 DÉFINITION DES COMPOSANTS ..................................................................................................... 17
3.2 PARAMÈTRES DE DESIGN ............................................................................................................. 18
3.2.1 Géométrie et alignement des dents .............................................................................. 18
3.2.2 Variables indépendantes ............................................................................................... 19
3.2.3 Géométrie des aimants.................................................................................................. 20
3.2.4 Paramètres magnétiques .............................................................................................. 21
3.2.5 Variables dépendantes .................................................................................................. 21
3.3 MODES DE FONCTIONNEMENT ET RAPPORT DE RÉDUCTION ............................................................... 24
3.4 ANALYSE DES EFFORTS DANS LE SOLEIL ........................................................................................... 25
3.5 ANALYSE DES EFFORTS DANS L’ANNEAU ......................................................................................... 27
4 ETUDE ANALYTIQUE PRÉLIMINAIRE ..................................................................................... 29
4.1 CONSIDÉRATIONS INITIALES.......................................................................................................... 29
4.2 CIRCUIT MAGNÉTIQUE ................................................................................................................ 29
4.3 CALCUL DU COUPLE ET DE L’INDUCTION ......................................................................................... 33
4.4 LIMITATIONS DU MODÈLE ............................................................................................................ 34
5 UTILISATION DE PYTHON DANS FLUX 3D .............................................................................. 36
5.1 LANGAGE PYFLUX ...................................................................................................................... 36
5.2 SYNTAXE ET MODES D’ÉDITION ..................................................................................................... 36
5.3 MACRO .................................................................................................................................... 39
6 SCRYPT PYFLUX ................................................................................................................... 40
6.1 FICHIER _MAIN.PY .................................................................................................................... 40
6.2 FICHIER 0_FONCTIONS.PY ........................................................................................................ 43
6.2.1 DelGeometry() ............................................................................................................... 43
6.2.2 DelAll() ........................................................................................................................... 43
6.2.3 Extrusion(N,extrusions,regions) ..................................................................................... 44
6.2.4 SetDiscretPoint(discretisation,start_point,stop_point) ................................................. 46
6.2.5 CheckGeometry(T) ......................................................................................................... 46
6.2.6 Fichier DRAW_2D.py ...................................................................................................... 47
6.3 FICHIER 1A_PARAMETRES.PY ................................................................................................... 48
6.4 FICHIER 1B_OUTILS_GEOM.PY ................................................................................................. 51
6.4.1 Variables auxiliaires ....................................................................................................... 51
6.4.2 Les repères ..................................................................................................................... 51
6.4.3 Les transformations ....................................................................................................... 52
6.4.4 La périodicité ................................................................................................................. 53
6.4.5 La nature du système .................................................................................................... 53
6.4.6 Les ensembles mécaniques ............................................................................................ 53
6.4.7 Les régions surfaciques .................................................................................................. 54
Etudiant Andres GIL CLADERA
Page 4
6.4.8 Les régions volumiques .................................................................................................. 54
6.4.9 Le maillage..................................................................................................................... 55
6.5 FICHIER 2_SOLEIL.PY................................................................................................................. 56
6.5.1 Axe du soleil ................................................................................................................... 57
6.5.2 Air entre l’aimant et l’axe .............................................................................................. 59
6.5.3 Aimant du soleil ............................................................................................................. 59
6.5.4 Dents du soleil................................................................................................................ 59
6.5.5 Volume d’air en mouvement autour du soleil ............................................................... 63
6.6 FICHIER 3_PLANETES.PY ........................................................................................................... 64
6.6.1 Axe des planètes ............................................................................................................ 65
6.6.2 Air entre l’aimant et l’axe .............................................................................................. 65
6.6.3 Aimant des planètes ...................................................................................................... 66
6.6.4 Dents des planètes ......................................................................................................... 66
6.6.5 Volume d’air en mouvement autour des planètes ........................................................ 69
6.7 FICHIER 4_RING.PY ................................................................................................................... 70
6.7.1 Dents de l’anneau .......................................................................................................... 70
6.7.2 Aimants de l’anneau ...................................................................................................... 70
6.7.3 Empilage des tôles de l’anneau ..................................................................................... 71
6.7.4 Volume d’air fixe à l’extérieur de l’anneau .................................................................... 73
6.7.5 Air à l’intérieur de l’anneau ........................................................................................... 74
6.8 FICHIER 5_PHYSIQUE.PY ........................................................................................................... 74
6.8.1 Attribution du mailleur relié aux faces .......................................................................... 74
6.8.2 Affectation des matériaux aux régions volumiques ...................................................... 77
6.9 FICHIER 6_SOLVE.PY ................................................................................................................. 79
6.10 MÉTHODOLOGIE POUR L’EXÉCUTION DU SCRIPT .............................................................................. 80
6.11 MACRO .................................................................................................................................... 82
7 SIMULATIONS ..................................................................................................................... 84
7.1 SIMULATION 1A ......................................................................................................................... 84
7.1.1 Description ..................................................................................................................... 84
7.1.2 Couple sur l’ensemble mécanique du soleil ................................................................... 85
7.1.3 Induction dans les parties ferromagnétiques ................................................................ 86
7.1.4 Induction dans l’entrefer ............................................................................................... 87
7.1.5 Calcul du flux de fuite .................................................................................................... 87
7.2 SIMULATION 1B ......................................................................................................................... 92
7.2.1 Description ..................................................................................................................... 92
7.2.2 Couple sur l’ensemble mécanique de l’anneau ............................................................. 93
7.3 SIMULATION 2A ......................................................................................................................... 94
7.3.1 Description ..................................................................................................................... 94
7.3.2 Couple sur l’ensemble mécanique du soleil ................................................................... 94
7.3.3 Induction dans les parties ferromagnétiques ................................................................ 94
7.3.4 Calcul du flux de fuite .................................................................................................... 95
7.4 SIMULATION 2B ......................................................................................................................... 95
7.4.1 Description ..................................................................................................................... 95
Etudiant Andres GIL CLADERA
Page 5
7.4.2 Couple sur l’ensemble mécanique de l’anneau ............................................................. 96
7.5 SIMULATION 3 ........................................................................................................................... 96
7.5.1 Description ..................................................................................................................... 96
7.5.2 Couple sur l’ensemble mécanique du soleil ................................................................... 96
7.6 SIMULATION 4A ......................................................................................................................... 97
7.6.1 Description ..................................................................................................................... 97
7.6.2 Couple sur l’ensemble mécanique du soleil ................................................................... 98
7.6.3 Calcul du flux de fuite .................................................................................................... 98
7.7 SIMULATION 4B À 4D.................................................................................................................. 99
7.7.1 Description ..................................................................................................................... 99
7.7.2 Couple sur l’ensemble mécanique du soleil ................................................................... 99
7.7.3 Induction dans les parties ferromagnétiques ................................................................ 99
7.8 SIMULATION 5 ......................................................................................................................... 100
7.8.1 Description ................................................................................................................... 100
7.8.2 Couple sur l’ensemble mécanique du soleil ................................................................. 100
7.8.3 Induction dans l’entrefer ............................................................................................. 101
8 CONCLUSION ..................................................................................................................... 102
9 BIBLIOGRAPHIE .................................................................................................................. 103
10 LISTE DE FIGURES ........................................................................................................... 104
11 ANNEXES........................................................................................................................ 107
11.1 FICHE TECHNIQUES DES AIMANTS ................................................................................................ 107
11.2 SCRIPT PYTHON ........................................................................................................................ 107

Etudiant Andres GIL CLADERA
Page 6
Etudiant Andres GIL CLADERA
Page 7
Département TIN
Filière Génie électrique
Orientation Systèmes énergétiques
Étudiant Andres Gil Cladera
Enseignant responsable Luc Bossoney
TRAVAIL DE BACHELOR 2019 - 2020
Etude et construction d'une transmission magnétique pour moteur
électrique Domaine de recherche : Electromagnétisme, Simulation, construction mécanique
Institut IESE
Énoncé
L'Institut d'Énergie et Systèmes Électriques (IESE) souhaite dimensionner un réducteur
magnétique de « type planétaire » pour une application didactique, l’objectif pour de futurs
travaux de Bachelor étant d’aboutir à un prototype.
L’objectif proposé dans ce projet est de dimensionner les éléments magnétiques (aimants et
circuit ferromagnétique) de la partie « réducteur » pour obtenir un design optimisé sur la base
d’une géométrie définie préalablement.
Un script en python sera présenté pour réaliser la modélisation et la simulation du réducteur via
la console python du logiciel Flux3D.
Une interface de type formulaire et une bibliothèque de lignes de commande en python seront
également mises en place. Cela permettra de modifier aisément le script python original et de
simuler différentes géométries et configurations par la suite.
Le cahier des charges de la partie réducteur est le suivant :
• Diamètre moteur : 30mm
• Vitesse de sortie moteur : 40'000 rpm
• Couple à l’arbre moteur (continu): 60 mNm
• Couple à l’arbre moteur (max): 120 mNm
• Rapport de réduction : 3
Cahier des charges
Le travail demandé au candidat est divisé de la façon suivante.
• Recherche documentaire
1. Recherche de documentation sur les différentes structures de réducteurs
Etudiant Andres GIL CLADERA
Page 8
Etudiant Andres GIL CLADERA
Page 9
Département TIN
Filière Génie électrique
Orientation Systèmes énergétiques
Étudiant Andres Gil Cladera
Enseignant responsable Luc Bossoney
Travail de Bachelor 2019 – 2020
Etude et modélisation d'une transmission magnétique pour moteur électrique via
une interface en python
__________________________________________________________________________________
Institut d’Energie et systèmes électriques (IESE)
Résumé publiable
L’objectif de ce projet a été de dimensionner les éléments magnétiques (aimants et circuit ferromagnétique) d’un réducteur magnétique à géométrie planétaire pour obtenir un design optimisé.
Un script en PyFlux a été développé pour réaliser la modélisation et la simulation du réducteur via la console python du logiciel Flux3D.
Une interface de type formulaire et une bibliothèque de lignes de commande en python permettent
par la suite de simuler aisément différentes géométries et configurations du réducteur.
Étudiant : Date et lieu : Signature :
Andres Gil Cladera Yverdon, 02.10.2020 ………………………………
Enseignant responsable : Date et lieu : Signature :
Luc Bossoney Yverdon, 02.10.2020
Etudiant Andres GIL CLADERA
Page 10
Préambule
Ce travail de Bachelor (ci-après TB) est réalisé en fin de cursus d’études, en vue de l’obtention du titre
de Bachelor of Science HES-SO en Ingénierie.
En tant que travail académique, son contenu, sans préjuger de sa valeur, n'engage ni la responsabilité
de l'auteur, ni celles du jury du travail de Bachelor et de l'Ecole.
Toute utilisation, même partielle, de ce TB doit être faite dans le respect du droit d’auteur.
HEIG-VD
Le Chef du Département
Etudiant Andres GIL CLADERA
Page 11
Authentification
Le soussigné, Andres GIL CLADERA, atteste par la présente avoir réalisé seul ce travail et n’avoir utilisé
aucune autre source que celles expressément mentionnées.
Yverdon-les-Bains, le 2 octobre 2020
Andres GIL CLADERA

Etudiant Andres GIL CLADERA
Page 12
Etudiant Andres GIL CLADERA
Page 13
1 Introduction
Le sujet «Etude et construction d'une transmission magnétique pour moteur
électrique» a été proposé comme travail de fin d’études dans le cadre de la formation en Génie
Electrique dans la filière Systèmes Energétiques.
Le sujet original visait la construction du réducteur de manière à ce qu’il puisse être utilisé comme
démonstrateur à des fins académiques. Suite à la fermeture de l’école d’ingénieur en raison de la
pandémie du COVID-19, ce but initial a dû être abandonné. La modélisation via une interface python
a été alors proposée comme alternative.
Le but principal consiste à mettre un outil à disposition pour pouvoir réaliser une étude approfondie
d’un système de transmission magnétique à géométrie planétaire. L’interface python du logiciel
Flux2D/3D sera exploité dans le cadre de ce travail. Une macro en python sera programmée pour
permettre la création et la réédition du model à simuler de manière plus aisée.
Etudiant Andres GIL CLADERA
Page 14
2 Etat de l’art
Les transmissions magnétiques ont été proposées dès le début du 20ème siècle [1].
Le manque de friction entre l’entrée et la sortie du réducteur permet de s’affranchir de la lubrification
et assure l’absence de surchauffe et de vibrations qui pourraient finir par endommager le mécanisme
[2]. « Le jeu présent dans les engrenages mécaniques, ainsi que les variations des efforts dans le temps
se traduisent par une réponse non-linéaire et complexe, telle que des vibrations chaotiques. De plus,
des erreurs de transmission peuvent survenir en raison des phénomènes d'usure et perturber le travail
efficace » [3]
Comme le fait remarquer Oleg Molokanov et Al. [4], les avantages potentiels liés à la transmission sans
contact se traduisent par une plus grand fiabilité et efficacité d’un côté, et par un faible entretien et
faible bruit de l’autre. « La raison pour laquelle ces mécanismes ne sont pas plus répandus se trouve
dans le manque des aimants à haute densité énergétique jusqu’au début des années 1990 ».
Les ferrites sont les aimants les plus répandus et les plus utilisés depuis longtemps. Aujourd’hui, les
aimants fabriqués à la base d’alliages de terres rares comme Nd–Fe–B, AlNiCo ou SmCo permettent
d’obtenir des propriétés magnétiques et thermiques largement meilleures [5]. Pour cette raison, les
transmissions magnétiques connaissent un regain d’intérêt et font l’objet de nombreuses recherches.
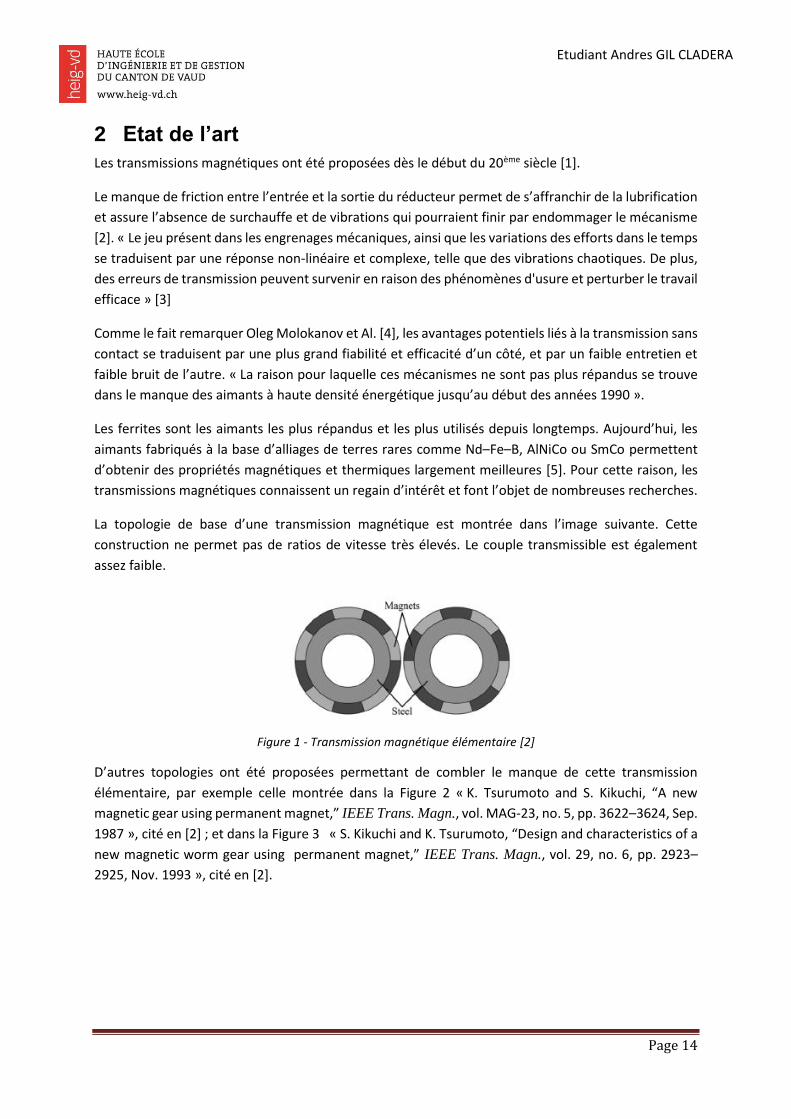
La topologie de base d’une transmission magnétique est montrée dans l’image suivante. Cette
construction ne permet pas de ratios de vitesse très élevés. Le couple transmissible est également
assez faible.
Figure 1 - Transmission magnétique élémentaire [2]
D’autres topologies ont été proposées permettant de combler le manque de cette transmission
élémentaire, par exemple celle montrée dans la Figure 2 « K. Tsurumoto and S. Kikuchi, “A new
magnetic gear using permanent magnet,” IEEE Trans. Magn., vol. MAG-23, no. 5, pp. 3622–3624, Sep.
1987 », cité en [2] ; et dans la Figure 3 « S. Kikuchi and K. Tsurumoto, “Design and characteristics of a
new magnetic worm gear using permanent magnet,” IEEE Trans. Magn., vol. 29, no. 6, pp. 2923–
2925, Nov. 1993 », cité en [2].
Etudiant Andres GIL CLADERA
Page 15
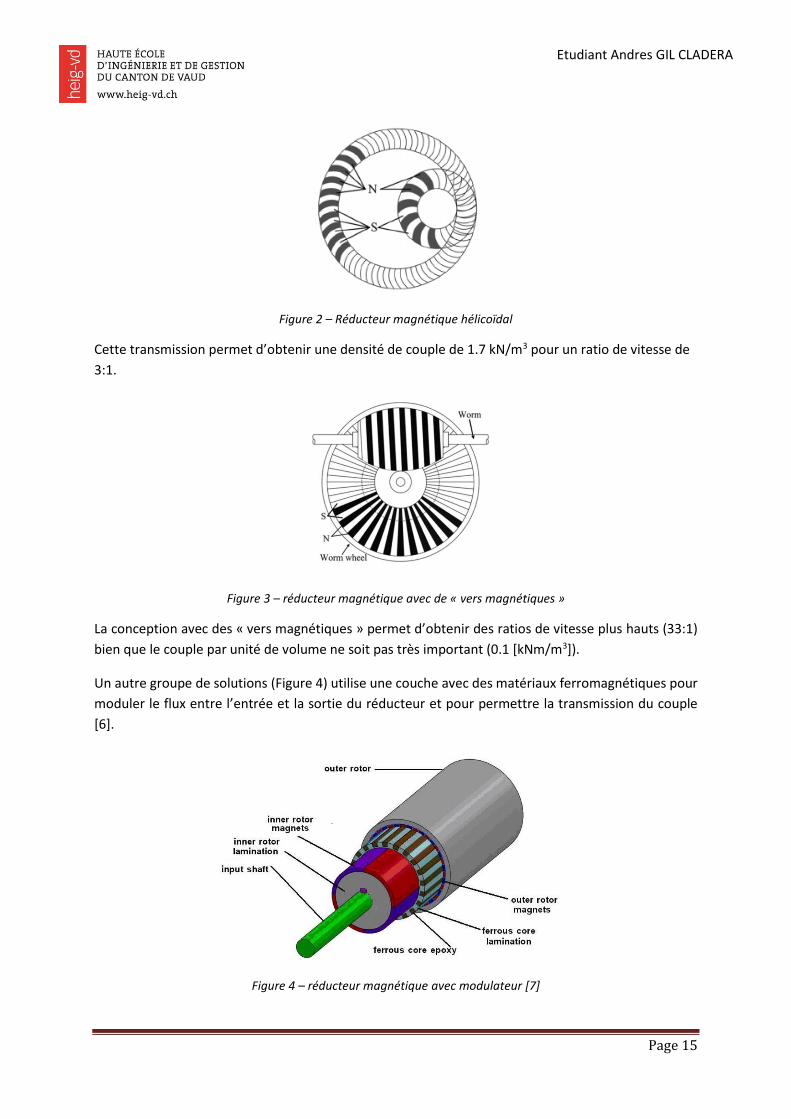
Figure 2 – Réducteur magnétique hélicoïdal
Cette transmission permet d’obtenir une densité de couple de 1.7 kN/m3 pour un ratio de vitesse de
3:1.
Figure 3 – réducteur magnétique avec de « vers magnétiques »
La conception avec des « vers magnétiques » permet d’obtenir des ratios de vitesse plus hauts (33:1)
bien que le couple par unité de volume ne soit pas très important (0.1 [kNm/m3]).
Un autre groupe de solutions (Figure 4) utilise une couche avec des matériaux ferromagnétiques pour
moduler le flux entre l’entrée et la sortie du réducteur et pour permettre la transmission du couple
[6].
Figure 4 – réducteur magnétique avec modulateur [7]
Etudiant Andres GIL CLADERA
Page 16
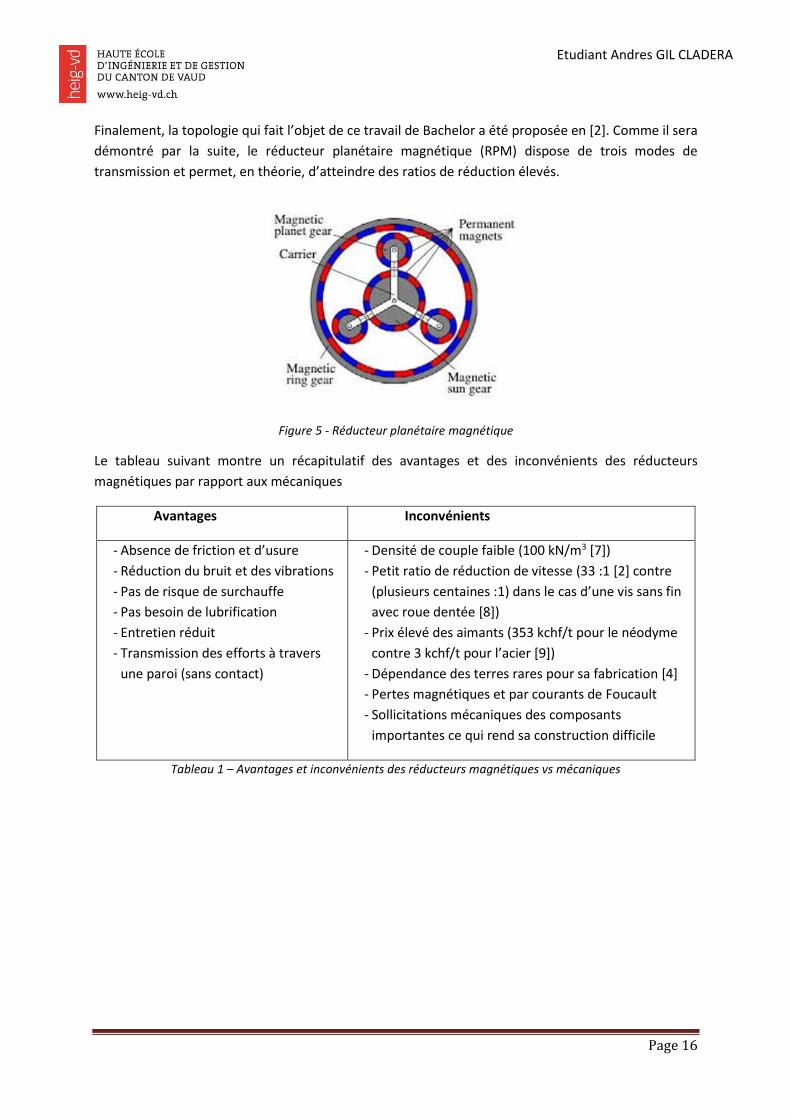
Finalement, la topologie qui fait l’objet de ce travail de Bachelor a été proposée en [2]. Comme il sera
démontré par la suite, le réducteur planétaire magnétique (RPM) dispose de trois modes de
transmission et permet, en théorie, d’atteindre des ratios de réduction élevés.
Figure 5 - Réducteur planétaire magnétique
Le tableau suivant montre un récapitulatif des avantages et des inconvénients des réducteurs
magnétiques par rapport aux mécaniques
Avantages Inconvénients
- Absence de friction et d’usure
- Réduction du bruit et des vibrations
- Pas de risque de surchauffe
- Pas besoin de lubrification
- Entretien réduit
- Transmission des efforts à travers
une paroi (sans contact)
- Densité de couple faible (100 kN/m3 [7])
- Petit ratio de réduction de vitesse (33 :1 [2] contre
(plusieurs centaines :1) dans le cas d’une vis sans fin
avec roue dentée [8])
- Prix élevé des aimants (353 kchf/t pour le néodyme
contre 3 kchf/t pour l’acier [9])
- Dépendance des terres rares pour sa fabrication [4]
- Pertes magnétiques et par courants de Foucault
- Sollicitations mécaniques des composants
importantes ce qui rend sa construction difficile
Tableau 1 – Avantages et inconvénients des réducteurs magnétiques vs mécaniques
Etudiant Andres GIL CLADERA
Page 17
3 Description du réducteur
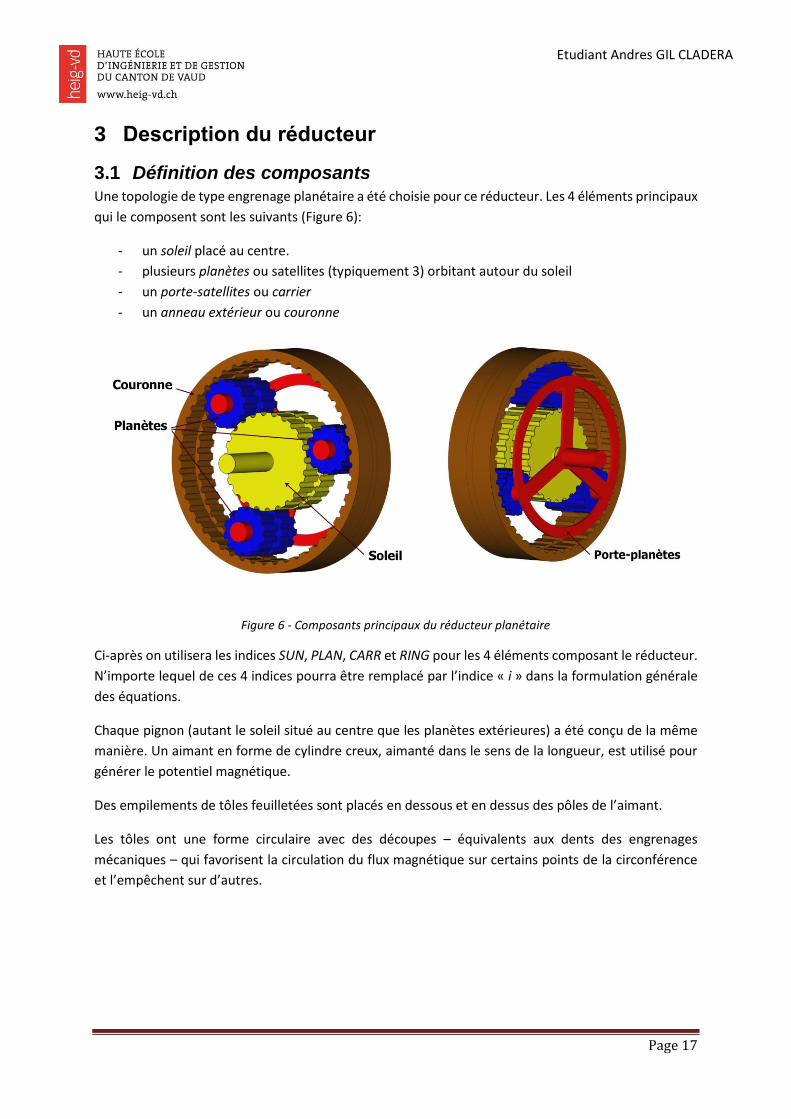
3.1 Définition des composants Une topologie de type engrenage planétaire a été choisie pour ce réducteur. Les 4 éléments principaux
qui le composent sont les suivants (Figure 6):
- un soleil placé au centre.
- plusieurs planètes ou satellites (typiquement 3) orbitant autour du soleil
- un porte-satellites ou carrier
- un anneau extérieur ou couronne
Figure 6 - Composants principaux du réducteur planétaire
Ci-après on utilisera les indices SUN, PLAN, CARR et RING pour les 4 éléments composant le réducteur.
N’importe lequel de ces 4 indices pourra être remplacé par l’indice « i » dans la formulation générale
des équations.
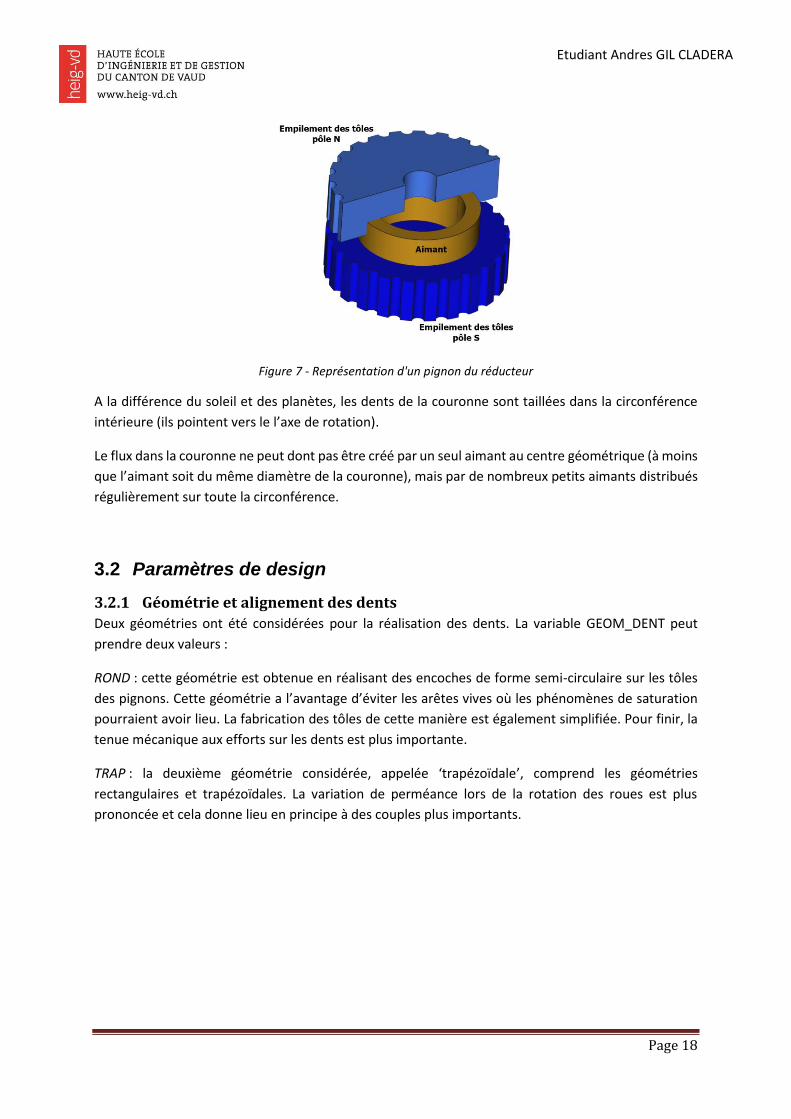
Chaque pignon (autant le soleil situé au centre que les planètes extérieures) a été conçu de la même
manière. Un aimant en forme de cylindre creux, aimanté dans le sens de la longueur, est utilisé pour
générer le potentiel magnétique.
Des empilements de tôles feuilletées sont placés en dessous et en dessus des pôles de l’aimant.
Les tôles ont une forme circulaire avec des découpes – équivalents aux dents des engrenages
mécaniques – qui favorisent la circulation du flux magnétique sur certains points de la circonférence
et l’empêchent sur d’autres.
Etudiant Andres GIL CLADERA
Page 18
Figure 7 - Représentation d'un pignon du réducteur
A la différence du soleil et des planètes, les dents de la couronne sont taillées dans la circonférence
intérieure (ils pointent vers le l’axe de rotation).
Le flux dans la couronne ne peut dont pas être créé par un seul aimant au centre géométrique (à moins
que l’aimant soit du même diamètre de la couronne), mais par de nombreux petits aimants distribués
régulièrement sur toute la circonférence.
3.2 Paramètres de design
3.2.1 Géométrie et alignement des dents
Deux géométries ont été considérées pour la réalisation des dents. La variable GEOM_DENT peut
prendre deux valeurs :
ROND : cette géométrie est obtenue en réalisant des encoches de forme semi-circulaire sur les tôles
des pignons. Cette géométrie a l’avantage d’éviter les arêtes vives où les phénomènes de saturation
pourraient avoir lieu. La fabrication des tôles de cette manière est également simplifiée. Pour finir, la
tenue mécanique aux efforts sur les dents est plus importante.
TRAP : la deuxième géométrie considérée, appelée ‘trapézoïdale’, comprend les géométries
rectangulaires et trapézoïdales. La variation de perméance lors de la rotation des roues est plus
prononcée et cela donne lieu en principe à des couples plus importants.
Etudiant Andres GIL CLADERA
Page 19
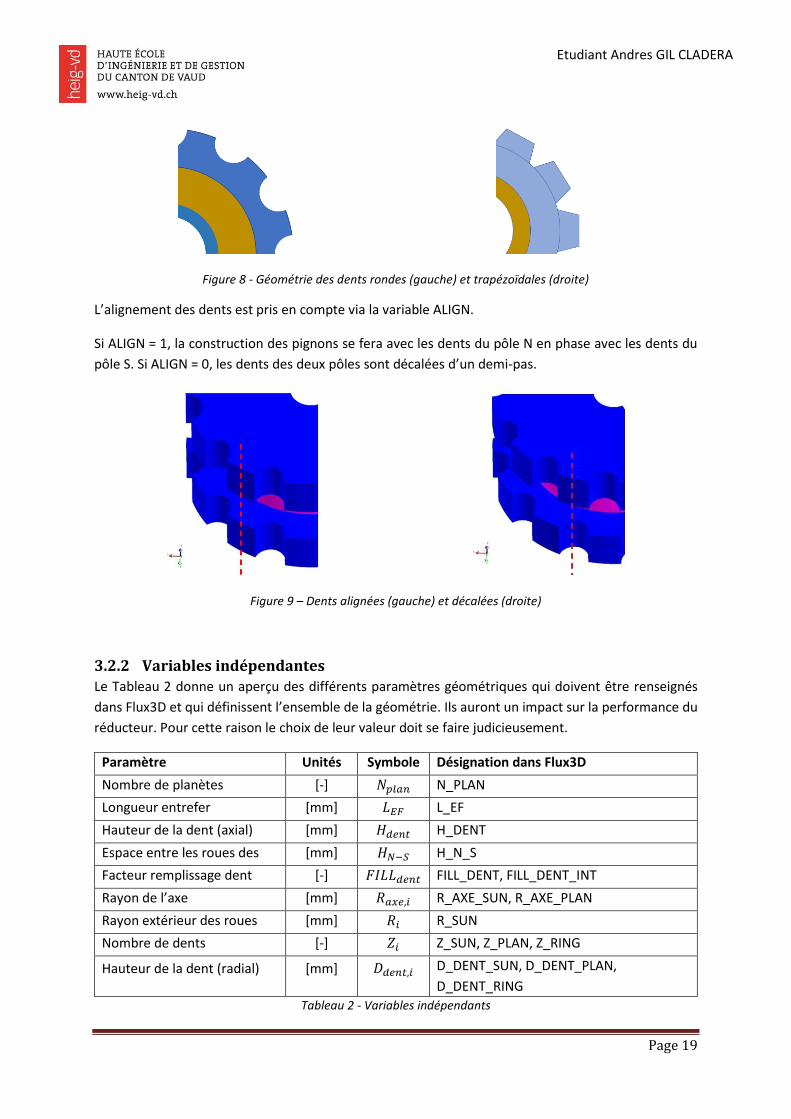
Figure 8 - Géométrie des dents rondes (gauche) et trapézoïdales (droite)
L’alignement des dents est pris en compte via la variable ALIGN.
Si ALIGN = 1, la construction des pignons se fera avec les dents du pôle N en phase avec les dents du
pôle S. Si ALIGN = 0, les dents des deux pôles sont décalées d’un demi-pas.
Figure 9 – Dents alignées (gauche) et décalées (droite)
3.2.2 Variables indépendantes
Le Tableau 2 donne un aperçu des différents paramètres géométriques qui doivent être renseignés
dans Flux3D et qui définissent l’ensemble de la géométrie. Ils auront un impact sur la performance du
réducteur. Pour cette raison le choix de leur valeur doit se faire judicieusement.
Paramètre Unités Symbole Désignation dans Flux3D
Nombre de planètes [-] 𝑁𝑝𝑙𝑎𝑛 N_PLAN
Longueur entrefer [mm] 𝐿𝐸𝐹 L_EF
Hauteur de la dent (axial)
(= Hauteur empilage de tôles)
[mm] 𝐻𝑑𝑒𝑛𝑡 H_DENT
Espace entre les roues des
pôles N et S dans le sens axial
[mm] 𝐻𝑁−𝑆 H_N_S
Facteur remplissage dent [-] 𝐹𝐼𝐿𝐿𝑑𝑒𝑛𝑡 FILL_DENT, FILL_DENT_INT
Rayon de l’axe [mm] 𝑅𝑎𝑥𝑒,𝑖 R_AXE_SUN, R_AXE_PLAN
Rayon extérieur des roues [mm] 𝑅𝑖 R_SUN
Nombre de dents [-] 𝑍𝑖 Z_SUN, Z_PLAN, Z_RING
Hauteur de la dent (radial) [mm] 𝐷𝑑𝑒𝑛𝑡,𝑖 D_DENT_SUN, D_DENT_PLAN,
D_DENT_RING
Tableau 2 - Variables indépendants
Etudiant Andres GIL CLADERA
Page 20
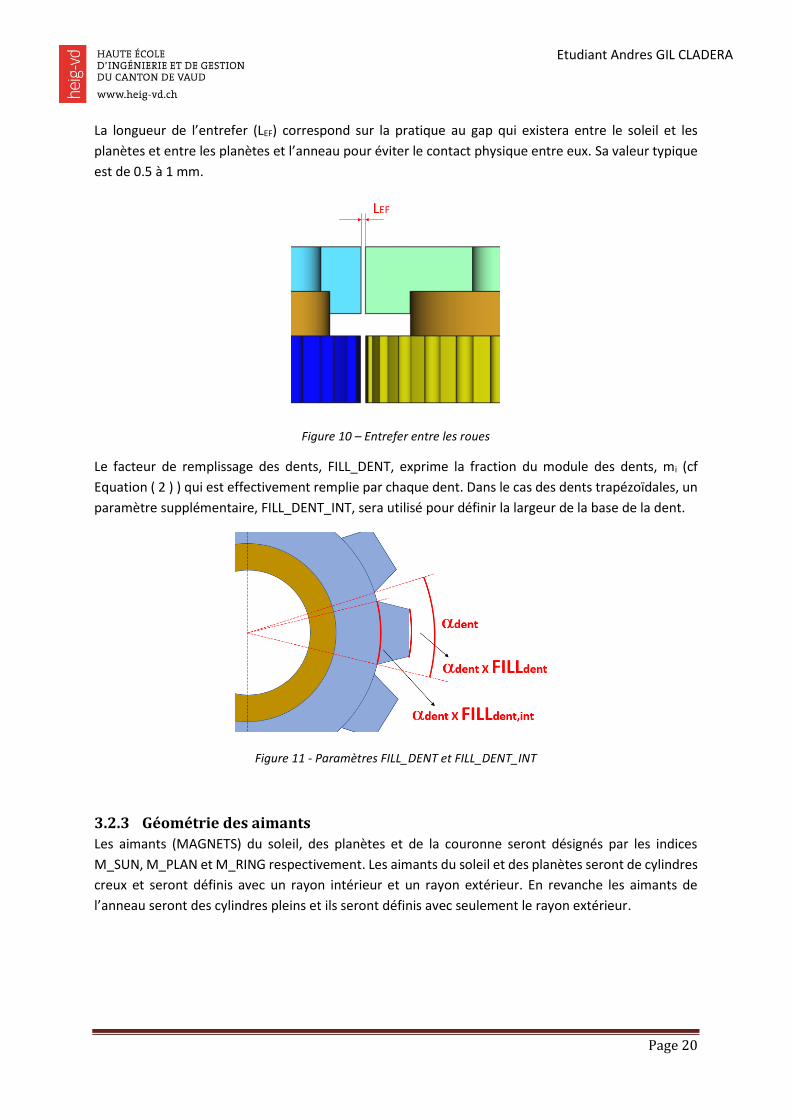
La longueur de l’entrefer (LEF) correspond sur la pratique au gap qui existera entre le soleil et les
planètes et entre les planètes et l’anneau pour éviter le contact physique entre eux. Sa valeur typique
est de 0.5 à 1 mm.
Figure 10 – Entrefer entre les roues
Le facteur de remplissage des dents, FILL_DENT, exprime la fraction du module des dents, mi (cf
Equation ( 2 ) ) qui est effectivement remplie par chaque dent. Dans le cas des dents trapézoïdales, un
paramètre supplémentaire, FILL_DENT_INT, sera utilisé pour définir la largeur de la base de la dent.
Figure 11 - Paramètres FILL_DENT et FILL_DENT_INT
3.2.3 Géométrie des aimants
Les aimants (MAGNETS) du soleil, des planètes et de la couronne seront désignés par les indices
M_SUN, M_PLAN et M_RING respectivement. Les aimants du soleil et des planètes seront de cylindres
creux et seront définis avec un rayon intérieur et un rayon extérieur. En revanche les aimants de
l’anneau seront des cylindres pleins et ils seront définis avec seulement le rayon extérieur.
Etudiant Andres GIL CLADERA
Page 21
Les paramètres géométriques des aimants sont montrés dans le Tableau 3 :
Paramètre Unités Symbole Désignation dans Flux3D
Hauteur de l’aimant [m] 𝐻𝑀𝑖 H_M_SUN, H_M_PLAN, H_M_RING
Rayon extérieur de
l’aimant
[m] 𝑅𝑀𝑖,𝑒𝑥𝑡 R_M_SUN_EXT, R_M_PLAN_EXT, R_M_RING
Rayon intérieur de
l’aimant
[m] 𝑅𝑀𝑖,𝑖𝑛𝑡 R_M_SUN_INT, R_M_PLAN_INT
Tableau 3 - Paramètres géométriques des aimants
3.2.4 Paramètres magnétiques
Les paramètres magnétiques des aimants et des tôles ferromagnétiques à renseigner sont montrés
dans le Tableau 4.
Paramètre Unités Symbole Désignation dans Flux3D
Champ coercitif [kA] 𝐻𝑐𝑖 H_M_SUN, H_M_PLAN, H_M_RING
Induction rémanente [T] 𝐵𝑟 M_Br
Perméabilité relative des
aimants
[-] 𝜇𝑟𝑀 M_mu_r
Perméabilité relative du fer
à l’origine
[-] 𝜇𝑟𝐹 F_mu_r_orig
Aimantation en saturation [T] 𝐽𝑠 F_Js
Tableau 4 - Paramètres magnétiques des aimants
3.2.5 Variables dépendantes
Le réducteur est complètement défini avec les paramètres définis dans les points précédents.
A partir de ces paramètres de base, il existe des contraintes qui vont imposer la valeur des grandeurs
autres composants du réducteur. La première condition qui doit être remplie est :
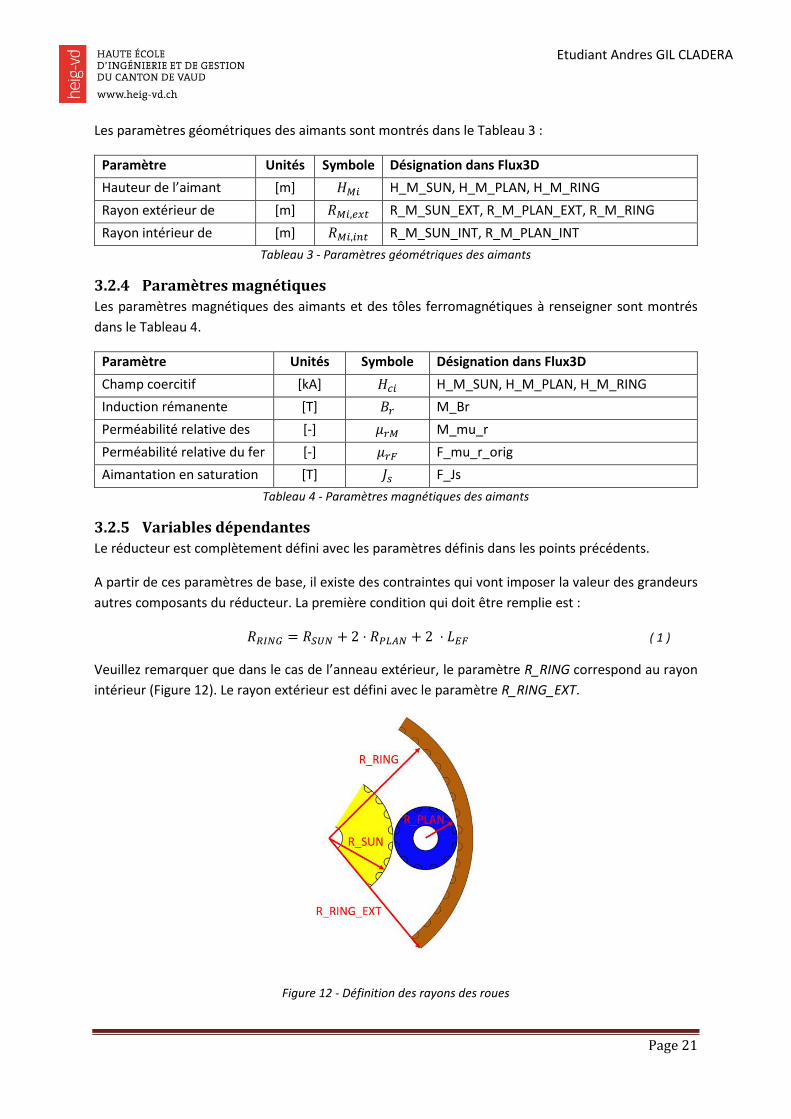
𝑅𝑅𝐼𝑁𝐺 = 𝑅𝑆𝑈𝑁 + 2 ⋅ 𝑅𝑃𝐿𝐴𝑁 + 2 ⋅ 𝐿𝐸𝐹 ( 1 )
Veuillez remarquer que dans le cas de l’anneau extérieur, le paramètre R_RING correspond au rayon
intérieur (Figure 12). Le rayon extérieur est défini avec le paramètre R_RING_EXT.
Figure 12 - Définition des rayons des roues
Etudiant Andres GIL CLADERA
Page 22
La deuxième condition dans ce réducteur impose que le module des dents de chaque roue soit le
même. On définit le module comme la longueur d’arc de circonférence depuis le début d’une dent
jusqu’au début de la suivante.
𝑚𝑖 = 2 ⋅ 𝜋 ⋅ 𝑅𝑖
𝑍𝑖= 𝑐𝑡𝑒 ( 2 )
A partir de l’expression précédente, l’équation ( 1 ) peut également être exprimée en fonction du
nombre de dents 𝑍𝑆𝑈𝑁 , 𝑍𝑃𝐿𝐴𝑁 𝑒𝑡 𝑍𝑅𝐼𝑁𝐺
𝑍𝑅𝐼𝑁𝐺 = 𝑍𝑆𝑈𝑁 + 2 ⋅ 𝑍𝑃𝐿𝐴𝑁 ( 3 )
Etant donné que les rayons des différents pignons et de la couronne sont différents, les pas angulaires,
𝛼𝑖 , du soleil, des planètes et de l’anneau seront aussi différents.
𝛼𝑑𝑒𝑛𝑡,𝑖 =2𝜋
𝑍𝑖 [𝑟𝑎𝑑] ( 4 )
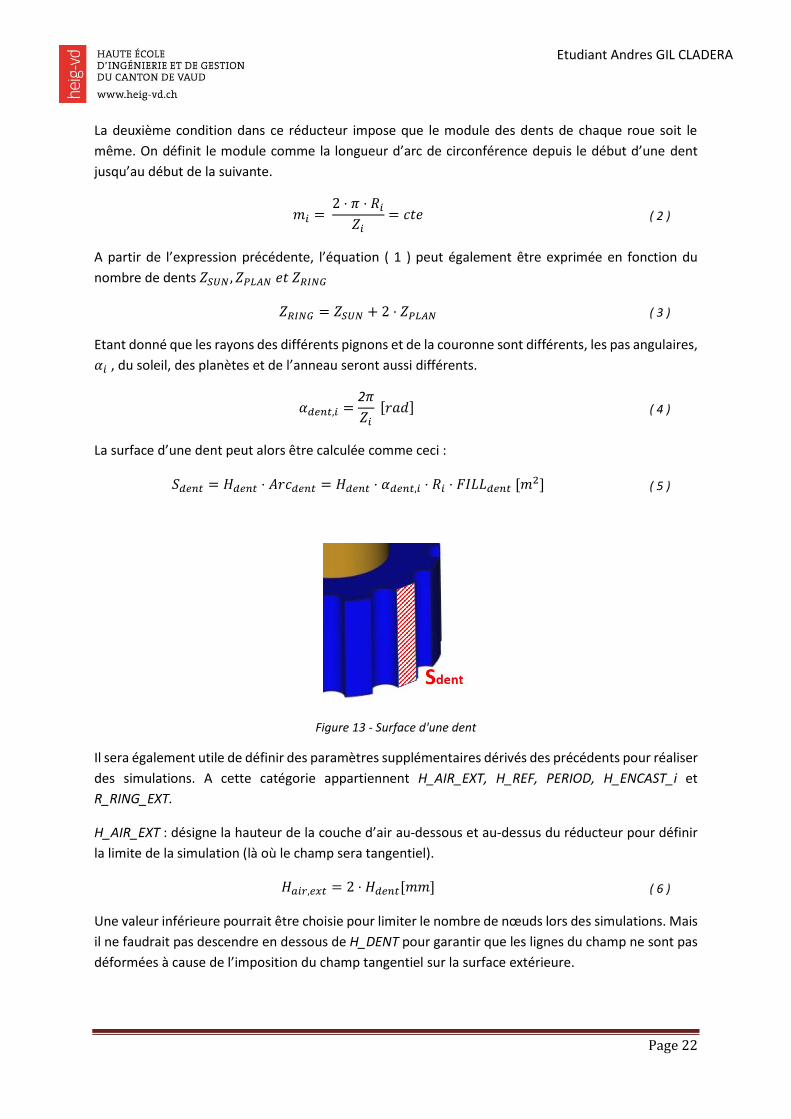
La surface d’une dent peut alors être calculée comme ceci :
𝑆𝑑𝑒𝑛𝑡 = 𝐻𝑑𝑒𝑛𝑡 ⋅ 𝐴𝑟𝑐𝑑𝑒𝑛𝑡 = 𝐻𝑑𝑒𝑛𝑡 ⋅ 𝛼𝑑𝑒𝑛𝑡,𝑖 ⋅ 𝑅𝑖 ⋅ 𝐹𝐼𝐿𝐿𝑑𝑒𝑛𝑡 [𝑚2] ( 5 )
Figure 13 - Surface d'une dent
Il sera également utile de définir des paramètres supplémentaires dérivés des précédents pour réaliser
des simulations. A cette catégorie appartiennent H_AIR_EXT, H_REF, PERIOD, H_ENCAST_i et
R_RING_EXT.
H_AIR_EXT : désigne la hauteur de la couche d’air au-dessous et au-dessus du réducteur pour définir
la limite de la simulation (là où le champ sera tangentiel).
𝐻𝑎𝑖𝑟,𝑒𝑥𝑡 = 2 ⋅ 𝐻𝑑𝑒𝑛𝑡[𝑚𝑚] ( 6 )
Une valeur inférieure pourrait être choisie pour limiter le nombre de nœuds lors des simulations. Mais
il ne faudrait pas descendre en dessous de H_DENT pour garantir que les lignes du champ ne sont pas
déformées à cause de l’imposition du champ tangentiel sur la surface extérieure.
Etudiant Andres GIL CLADERA
Page 23
H_REF : ce paramètre marque la cote (négative) en Z à partir de laquelle Flux va commencer à dessiner
les surfaces de référence de manière à ce que le plan moyen du réducteur se trouve en Z = 0.
𝐻𝑟𝑒𝑓 = −𝐻𝑁−𝑆
2− 𝐻𝑑𝑒𝑛𝑡 − 𝐻𝑎𝑖𝑟,𝑒𝑥𝑡 [𝑚𝑚] ( 7 )
PERIOD : ce paramètre correspond à l’angle entre les centres des 2 planètes par rapport au centre du
soleil. Cet angle définira la périodicité, et don cla portion de secteur circulaire du soleil et de l’anneau
qui seront à dessiner.
𝑃𝐸𝑅𝐼𝑂𝐷 = 360/𝑁𝑝𝑙𝑎𝑛 [°] ( 8 )
H_ENCAST_i : profondeur d’encastrement des aimants dans les empilages de tôles.
𝐻𝑒𝑛𝑐𝑎𝑠𝑡,𝑖 = (𝐻𝑀,𝑖 − 𝐻_𝑁_𝑆)/2 [𝑚𝑚] ( 9 )
R_RING_EXT : rayon extérieur de l’anneau. L’expression pour le calculer sera détaillée au §6.3
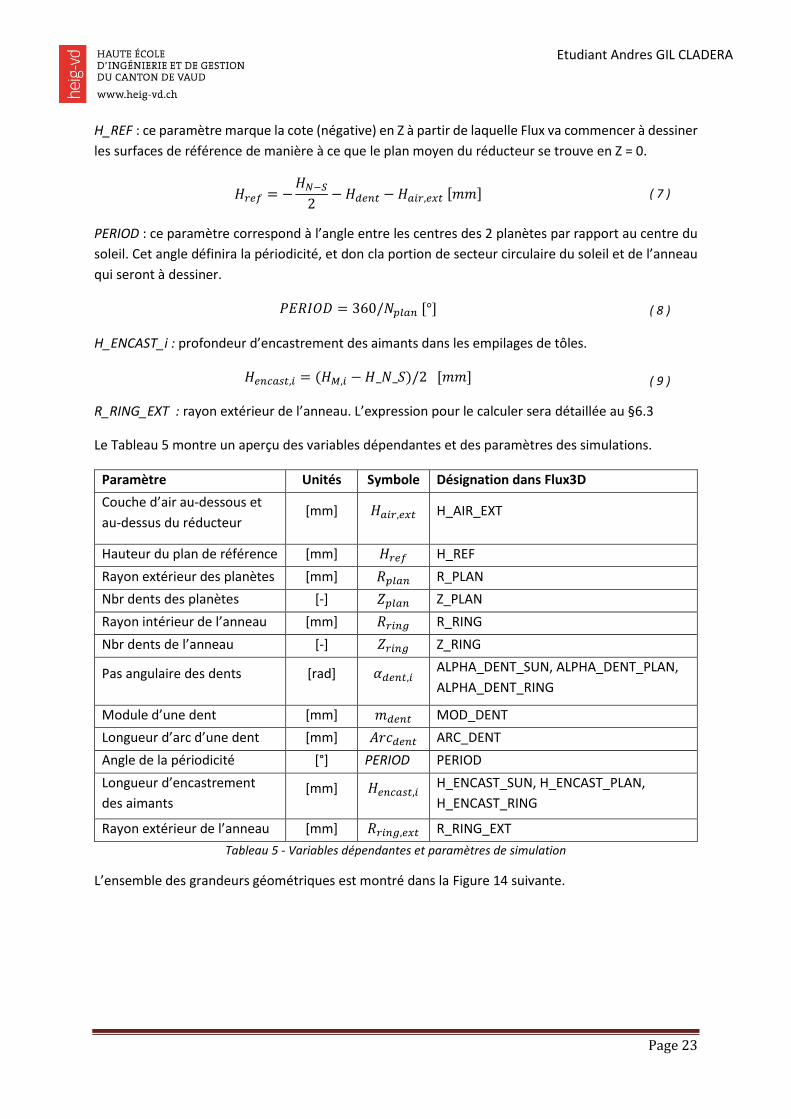
Le Tableau 5 montre un aperçu des variables dépendantes et des paramètres des simulations.
Paramètre Unités Symbole Désignation dans Flux3D
Couche d’air au-dessous et
au-dessus du réducteur [mm] 𝐻𝑎𝑖𝑟,𝑒𝑥𝑡 H_AIR_EXT
Hauteur du plan de référence [mm] 𝐻𝑟𝑒𝑓 H_REF
Rayon extérieur des planètes [mm] 𝑅𝑝𝑙𝑎𝑛 R_PLAN
Nbr dents des planètes [-] 𝑍𝑝𝑙𝑎𝑛 Z_PLAN
Rayon intérieur de l’anneau [mm] 𝑅𝑟𝑖𝑛𝑔 R_RING
Nbr dents de l’anneau [-] 𝑍𝑟𝑖𝑛𝑔 Z_RING
Pas angulaire des dents [rad] 𝛼𝑑𝑒𝑛𝑡,𝑖 ALPHA_DENT_SUN, ALPHA_DENT_PLAN,
ALPHA_DENT_RING
Module d’une dent [mm] 𝑚𝑑𝑒𝑛𝑡 MOD_DENT
Longueur d’arc d’une dent [mm] 𝐴𝑟𝑐𝑑𝑒𝑛𝑡 ARC_DENT
Angle de la périodicité [°] PERIOD PERIOD
Longueur d’encastrement
des aimants [mm] 𝐻𝑒𝑛𝑐𝑎𝑠𝑡,𝑖 H_ENCAST_SUN, H_ENCAST_PLAN,
H_ENCAST_RING
Rayon extérieur de l’anneau [mm] 𝑅𝑟𝑖𝑛𝑔,𝑒𝑥𝑡 R_RING_EXT
Tableau 5 - Variables dépendantes et paramètres de simulation
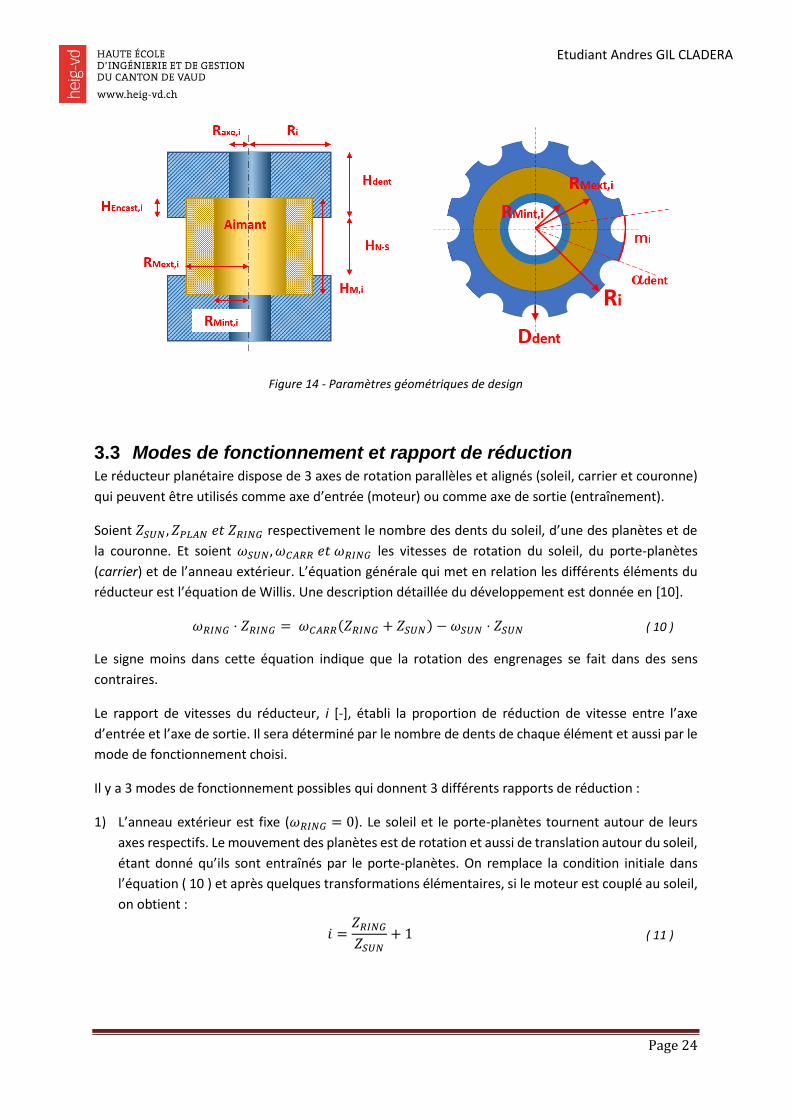
L’ensemble des grandeurs géométriques est montré dans la Figure 14 suivante.
Etudiant Andres GIL CLADERA
Page 24
Figure 14 - Paramètres géométriques de design
3.3 Modes de fonctionnement et rapport de réduction Le réducteur planétaire dispose de 3 axes de rotation parallèles et alignés (soleil, carrier et couronne)
qui peuvent être utilisés comme axe d’entrée (moteur) ou comme axe de sortie (entraînement).
Soient 𝑍𝑆𝑈𝑁 , 𝑍𝑃𝐿𝐴𝑁 𝑒𝑡 𝑍𝑅𝐼𝑁𝐺 respectivement le nombre des dents du soleil, d’une des planètes et de
la couronne. Et soient 𝜔𝑆𝑈𝑁, 𝜔𝐶𝐴𝑅𝑅 𝑒𝑡 𝜔𝑅𝐼𝑁𝐺 les vitesses de rotation du soleil, du porte-planètes
(carrier) et de l’anneau extérieur. L’équation générale qui met en relation les différents éléments du
réducteur est l’équation de Willis. Une description détaillée du développement est donnée en [10].
𝜔𝑅𝐼𝑁𝐺 ⋅ 𝑍𝑅𝐼𝑁𝐺 = 𝜔𝐶𝐴𝑅𝑅(𝑍𝑅𝐼𝑁𝐺 + 𝑍𝑆𝑈𝑁) − 𝜔𝑆𝑈𝑁 ⋅ 𝑍𝑆𝑈𝑁 ( 10 )
Le signe moins dans cette équation indique que la rotation des engrenages se fait dans des sens
contraires.
Le rapport de vitesses du réducteur, i [-], établi la proportion de réduction de vitesse entre l’axe
d’entrée et l’axe de sortie. Il sera déterminé par le nombre de dents de chaque élément et aussi par le
mode de fonctionnement choisi.
Il y a 3 modes de fonctionnement possibles qui donnent 3 différents rapports de réduction :
1) L’anneau extérieur est fixe (𝜔𝑅𝐼𝑁𝐺 = 0). Le soleil et le porte-planètes tournent autour de leurs
axes respectifs. Le mouvement des planètes est de rotation et aussi de translation autour du soleil,
étant donné qu’ils sont entraînés par le porte-planètes. On remplace la condition initiale dans
l’équation ( 10 ) et après quelques transformations élémentaires, si le moteur est couplé au soleil,
on obtient :
𝑖 =𝑍𝑅𝐼𝑁𝐺
𝑍𝑆𝑈𝑁+ 1 ( 11 )
Etudiant Andres GIL CLADERA
Page 25
2) L’axe du soleil est fixe (𝜔𝑆𝑈𝑁 = 0) . Les axes d’entrée et de sortie sont couplés aux axes du porte-
planètes et de l’anneau extérieur respectivement. Si le moteur est couplé à l’axe de l’anneau
extérieur on aura :
𝑖 = 1 +𝑍𝑆𝑈𝑁
𝑍𝑅𝐼𝑁𝐺 ( 12 )
3) Le porte-planètes est fixe (𝜔𝐶𝐴𝑅𝑅 = 0) et le mouvement des planètes est uniquement la rotation.
Le soleil et l’anneau extérieur tournent autour de leurs axes respectifs.
En remplaçant dans l’équation ( 10 ) on obtient
𝑖 =𝑍𝑅𝐼𝑁𝐺
𝑍𝑆𝑈𝑁 ( 13 )
Dans cette étude, seul le mode de fonctionnement 1) sera considéré. Il permet le ratio de réduction le
plus élevé et met en rotation seulement les pièces dont l’inertie est la plus basse (le soleil et les
planètes avec le carrier).
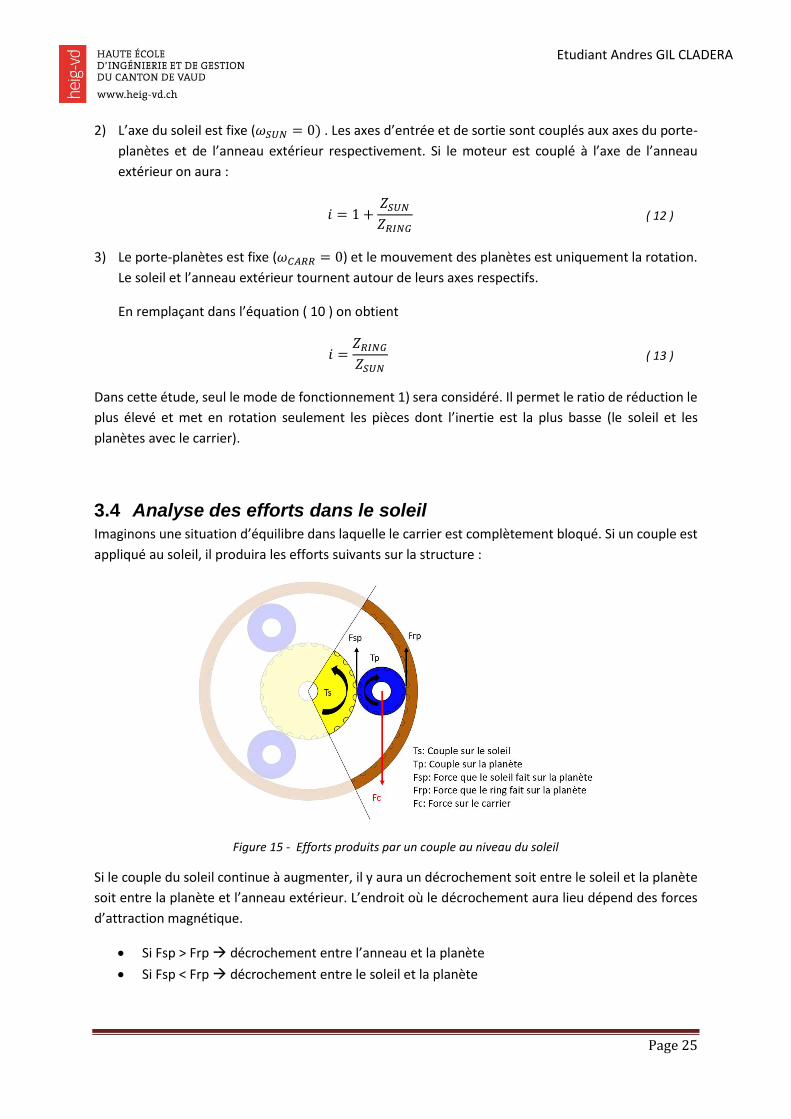
3.4 Analyse des efforts dans le soleil Imaginons une situation d’équilibre dans laquelle le carrier est complètement bloqué. Si un couple est
appliqué au soleil, il produira les efforts suivants sur la structure :
Figure 15 - Efforts produits par un couple au niveau du soleil
Si le couple du soleil continue à augmenter, il y aura un décrochement soit entre le soleil et la planète
soit entre la planète et l’anneau extérieur. L’endroit où le décrochement aura lieu dépend des forces
d’attraction magnétique.
• Si Fsp > Frp → décrochement entre l’anneau et la planète
• Si Fsp < Frp → décrochement entre le soleil et la planète
Etudiant Andres GIL CLADERA
Page 26
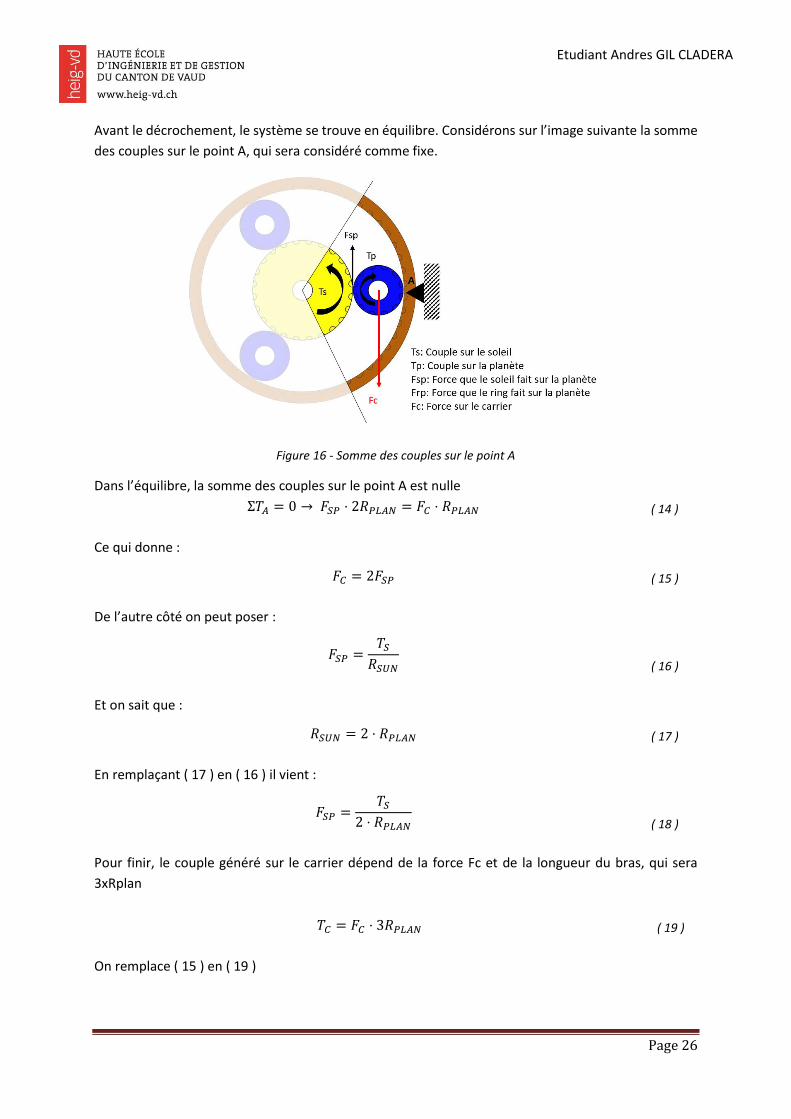
Avant le décrochement, le système se trouve en équilibre. Considérons sur l’image suivante la somme
des couples sur le point A, qui sera considéré comme fixe.
Figure 16 - Somme des couples sur le point A
Dans l’équilibre, la somme des couples sur le point A est nulle
Σ𝑇𝐴 = 0 → 𝐹𝑆𝑃 ⋅ 2𝑅𝑃𝐿𝐴𝑁 = 𝐹𝐶 ⋅ 𝑅𝑃𝐿𝐴𝑁 ( 14 )
Ce qui donne :
𝐹𝐶 = 2𝐹𝑆𝑃 ( 15 )
De l’autre côté on peut poser :
𝐹𝑆𝑃 =𝑇𝑆
𝑅𝑆𝑈𝑁
( 16 )
Et on sait que :
𝑅𝑆𝑈𝑁 = 2 ⋅ 𝑅𝑃𝐿𝐴𝑁 ( 17 )
En remplaçant ( 17 ) en ( 16 ) il vient :
𝐹𝑆𝑃 =𝑇𝑆
2 ⋅ 𝑅𝑃𝐿𝐴𝑁
( 18 )
Pour finir, le couple généré sur le carrier dépend de la force Fc et de la longueur du bras, qui sera
3xRplan
𝑇𝐶 = 𝐹𝐶 ⋅ 3𝑅𝑃𝐿𝐴𝑁 ( 19 )
On remplace ( 15 ) en ( 19 )
Etudiant Andres GIL CLADERA
Page 27
𝑇𝐶 = 2 ⋅ 𝐹𝑆𝑃 ⋅ 3𝑅𝑃𝐿𝐴𝑁 ( 20 )
Et on remplace ( 18 ) en ( 20 )
𝑇𝐶 = 2 ⋅𝑇𝑆
2 ⋅ 𝑅𝑃𝐿𝐴𝑁⋅ 3𝑅𝑃𝐿𝐴𝑁 ( 21 )
Ce qui donne à la fin
𝑻𝑪 = 𝟑 ⋅ 𝑻𝑺 ( 22 )
Le couple sur le carrier, Tc, sera 3 fois le couple sur le soleil, Ts, comme prévu par l’équation de Willis.
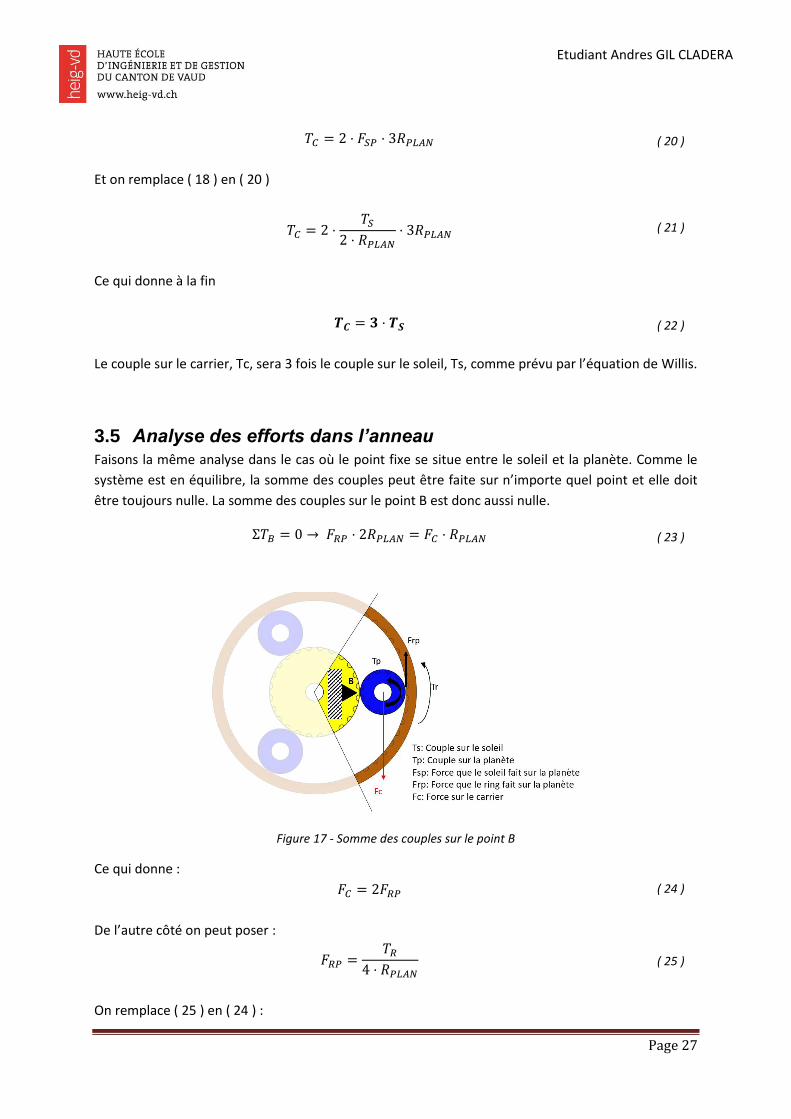
3.5 Analyse des efforts dans l’anneau Faisons la même analyse dans le cas où le point fixe se situe entre le soleil et la planète. Comme le
système est en équilibre, la somme des couples peut être faite sur n’importe quel point et elle doit
être toujours nulle. La somme des couples sur le point B est donc aussi nulle.
Σ𝑇𝐵 = 0 → 𝐹𝑅𝑃 ⋅ 2𝑅𝑃𝐿𝐴𝑁 = 𝐹𝐶 ⋅ 𝑅𝑃𝐿𝐴𝑁 ( 23 )
Figure 17 - Somme des couples sur le point B
Ce qui donne :
𝐹𝐶 = 2𝐹𝑅𝑃 ( 24 )
De l’autre côté on peut poser :
𝐹𝑅𝑃 =𝑇𝑅
4 ⋅ 𝑅𝑃𝐿𝐴𝑁 ( 25 )
On remplace ( 25 ) en ( 24 ) :
Etudiant Andres GIL CLADERA
Page 28
𝐹𝐶 = 2 ⋅𝑇𝑅
4 ⋅ 𝑅𝑃𝐿𝐴𝑁=
𝑇𝑅
2 ⋅ 𝑅𝑃𝐿𝐴𝑁 ( 26 )
Et on remplace ( 26 ) en ( 19 ) :
𝑇𝐶 =𝑇𝑅
2 ⋅ 𝑅𝑃𝐿𝐴𝑁⋅ 3𝑅𝑃𝐿𝐴𝑁 ( 27 )
Ce qui donne à la fin :
𝑻𝑪 =𝟑
𝟐⋅ 𝑻𝑹 ( 28 )
L’équation de Willis anticipe aussi ce résultat dans le cas où le soleil est fixe.
Le couple sur le carrier peut être calculé à l’aide des équations ( 22 ) et ( 28 ). Le couple maximal sera
le plus petit des deux car au-delà de cette valeur, il y aura un décrochement d’un côté ou de l’autre.
Si on égalise ces deux équations, on obtient :
3 ⋅ 𝑇𝑆 =3
2⋅ 𝑇𝑅 → 𝑻𝑹 = 𝟐 ⋅ 𝑻𝑺 ( 29 )
Lors des simulations, il faudrait veiller à ce que le couple PLAN-RING soit au moins le double que le
couple SUN-PLAN pour que le couple au niveau du soleil puisse être transmis au carrier avant qu’il y
ait un décrochement au niveau du RING.
Etudiant Andres GIL CLADERA
Page 29
4 Etude analytique préliminaire
4.1 Considérations initiales Dans ce chapitre une approximation du système réel sera étudiée sur la base d’un modèle simplifié, le
but étant d’anticiper l’ordre de grandeur du couple et de l’induction maximale que nous pouvons
espérer dans le réducteur. Cette étude préliminaire ne peut pas remplacer la simulation postérieure
avec Flux, mais elle permet d’atteindre une compréhension approfondie du système et des paramètres
de design qui ont une plus grande influence sur les résultats finaux.
Le cours de Mécatro1 de la référence [11] établi la formulation nécessaire à la réalisation des calculs.
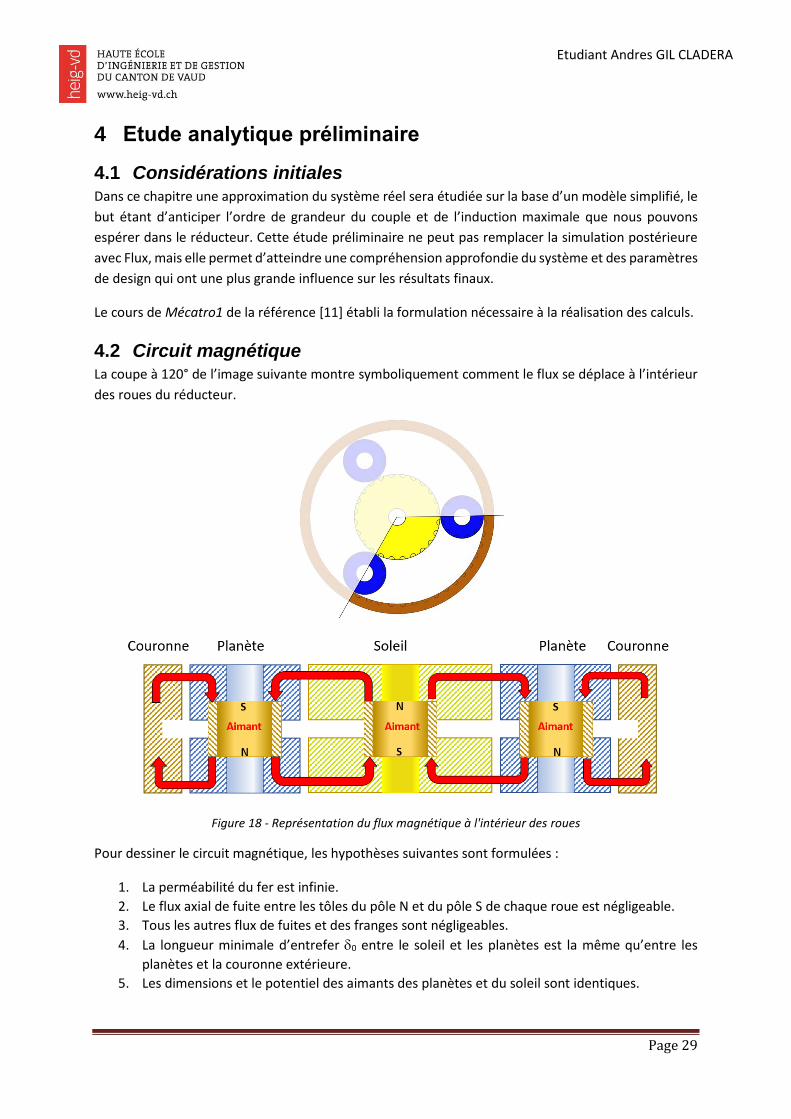
4.2 Circuit magnétique La coupe à 120° de l’image suivante montre symboliquement comment le flux se déplace à l’intérieur
des roues du réducteur.
Figure 18 - Représentation du flux magnétique à l'intérieur des roues
Pour dessiner le circuit magnétique, les hypothèses suivantes sont formulées :
1. La perméabilité du fer est infinie.
2. Le flux axial de fuite entre les tôles du pôle N et du pôle S de chaque roue est négligeable.
3. Tous les autres flux de fuites et des franges sont négligeables.
4. La longueur minimale d’entrefer 0 entre le soleil et les planètes est la même qu’entre les
planètes et la couronne extérieure.
5. Les dimensions et le potentiel des aimants des planètes et du soleil sont identiques.
Etudiant Andres GIL CLADERA
Page 30
6. Les lignes de champs forment des angles droits en suivant le chemin dans l’épaisseur moyenne
des pièces.
7. Les dents des tôles du pôle N et du pôle S sont alignées.
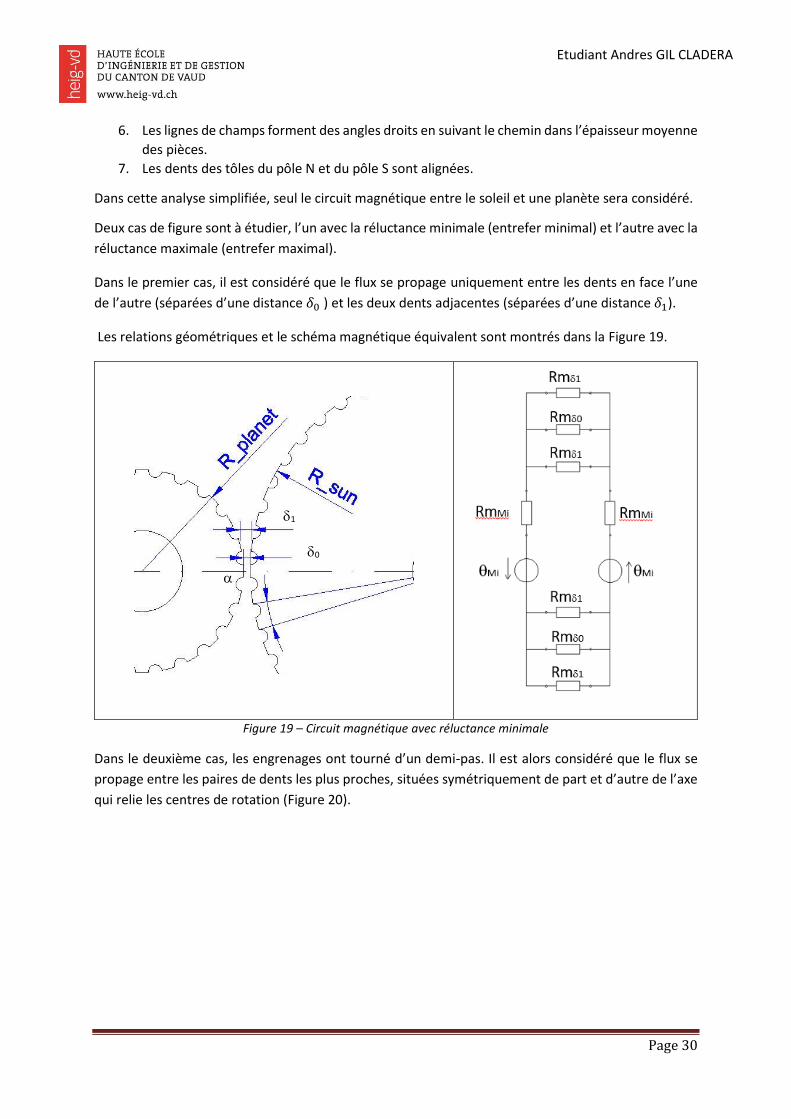
Dans cette analyse simplifiée, seul le circuit magnétique entre le soleil et une planète sera considéré.
Deux cas de figure sont à étudier, l’un avec la réluctance minimale (entrefer minimal) et l’autre avec la
réluctance maximale (entrefer maximal).
Dans le premier cas, il est considéré que le flux se propage uniquement entre les dents en face l’une
de l’autre (séparées d’une distance 𝛿0 ) et les deux dents adjacentes (séparées d’une distance 𝛿1).
Les relations géométriques et le schéma magnétique équivalent sont montrés dans la Figure 19.
Figure 19 – Circuit magnétique avec réluctance minimale
Dans le deuxième cas, les engrenages ont tourné d’un demi-pas. Il est alors considéré que le flux se
propage entre les paires de dents les plus proches, situées symétriquement de part et d’autre de l’axe
qui relie les centres de rotation (Figure 20).
0
1
Etudiant Andres GIL CLADERA
Page 31
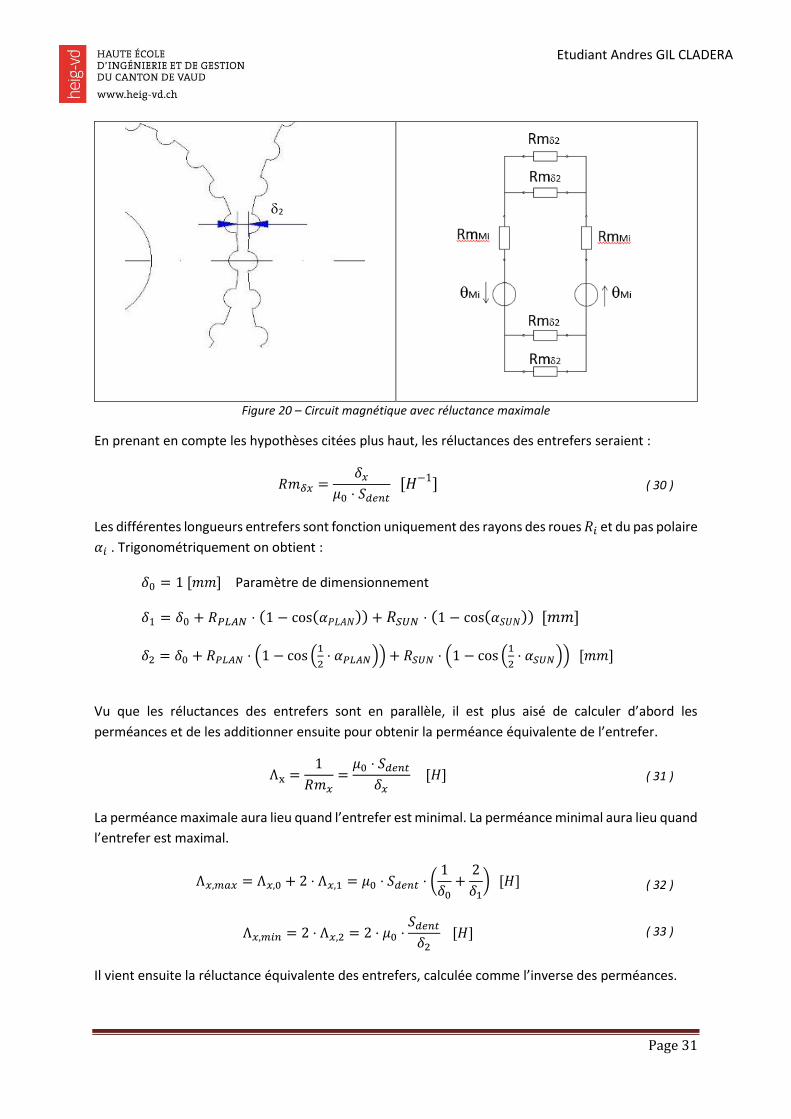
Figure 20 – Circuit magnétique avec réluctance maximale
En prenant en compte les hypothèses citées plus haut, les réluctances des entrefers seraient :
𝑅𝑚𝛿𝑥 =𝛿𝑥
𝜇0 ⋅ 𝑆𝑑𝑒𝑛𝑡 [𝐻−1] ( 30 )
Les différentes longueurs entrefers sont fonction uniquement des rayons des roues 𝑅𝑖 et du pas polaire
𝛼𝑖 . Trigonométriquement on obtient :
𝛿0 = 1 [𝑚𝑚] Paramètre de dimensionnement
𝛿1 = 𝛿0 + 𝑅𝑃𝐿𝐴𝑁 ⋅ (1 − cos(𝛼𝑃𝐿𝐴𝑁)) + 𝑅𝑆𝑈𝑁 ⋅ (1 − cos(𝛼𝑆𝑈𝑁)) [𝑚𝑚]
𝛿2 = 𝛿0 + 𝑅𝑃𝐿𝐴𝑁 ⋅ (1 − cos (1
2⋅ 𝛼𝑃𝐿𝐴𝑁)) + 𝑅𝑆𝑈𝑁 ⋅ (1 − cos (
1
2⋅ 𝛼𝑆𝑈𝑁)) [𝑚𝑚]
Vu que les réluctances des entrefers sont en parallèle, il est plus aisé de calculer d’abord les
perméances et de les additionner ensuite pour obtenir la perméance équivalente de l’entrefer.
Λx =1
𝑅𝑚𝑥=
𝜇0 ⋅ 𝑆𝑑𝑒𝑛𝑡
𝛿𝑥 [𝐻] ( 31 )
La perméance maximale aura lieu quand l’entrefer est minimal. La perméance minimal aura lieu quand
l’entrefer est maximal.
Λ𝑥,𝑚𝑎𝑥 = Λ𝑥,0 + 2 ⋅ Λ𝑥,1 = 𝜇0 ⋅ 𝑆𝑑𝑒𝑛𝑡 ⋅ (1
𝛿0+
2
𝛿1) [𝐻]
Λ𝑥,𝑚𝑖𝑛 = 2 ⋅ Λ𝑥,2 = 2 ⋅ 𝜇0 ⋅𝑆𝑑𝑒𝑛𝑡
𝛿2 [𝐻]
( 32 )
( 33 )
Il vient ensuite la réluctance équivalente des entrefers, calculée comme l’inverse des perméances.
2

Etudiant Andres GIL CLADERA
Page 32
𝑅𝑚𝑥,𝑚𝑎𝑥 =1
Λ𝑥,𝑚𝑖𝑛 [𝐻−1]
𝑅𝑚𝑥,𝑚𝑖𝑛 =1
Λ𝑥,𝑚𝑎𝑥 [𝐻−1]
( 34 )
( 35 )
En ce qui concerne les aimants, leur réluctance interne 𝑅𝑚𝑀𝑖 est donnée par l’équation suivante :
𝑅𝑚𝑀𝑖 =𝐿𝑀𝑖
𝜇𝑟𝑀 ⋅ 𝜇0 ⋅ 𝑆𝑀𝑖 [𝐻−1] ( 36 )
Avec
𝜇𝑟𝑀
⋅ 𝜇0
=𝐵𝑟
𝐻𝑐
[𝑇]
[𝑘𝐴𝑚 ]
= [𝐻
𝑚]
Nous pouvons ensuite calculer les réluctances équivalentes minimale et maximale du schéma
magnétique.
𝑅𝑚𝑒𝑞,𝑚𝑖𝑛 = 𝑅𝑚𝑀,𝑆𝑈𝑁 + 𝑅𝑚𝑀,𝑃𝐿𝐴𝑁 + 2 ⋅ 𝑅𝑚𝑥,𝑚𝑖𝑛 [𝐻−1]
𝑅𝑚𝑒𝑞,𝑚𝑎𝑥 = 𝑅𝑚𝑀,𝑆𝑈𝑁 + 𝑅𝑚𝑀,𝑃𝐿𝐴𝑁 + 2 ⋅ 𝑅𝑚𝑥,𝑚𝑎𝑥 [𝐻−1]
( 37 )
( 38 )
Nous avions fait l’hypothèses que les aimants du soleil et des planètes étaient identiques. Leurs
réluctances seront donc les mêmes.
𝑅𝑚𝑀,𝑆𝑈𝑁 = 𝑅𝑚𝑀,𝑃𝐿𝐴𝑁 = 𝑅𝑚𝑀 [𝐻−1] ( 39 )
Les expressions précédentes peuvent alors être simplifiées :
𝑅𝑚𝑒𝑞,𝑚𝑖𝑛 = 2 ⋅ (𝑅𝑚𝑀 + 𝑅𝑚𝑥,𝑚𝑖𝑛) [𝐻−1]
𝑅𝑚𝑒𝑞,𝑚𝑎𝑥 = 2 ⋅ (𝑅𝑚𝑀 + 𝑅𝑚𝑥,𝑚𝑎𝑥) [𝐻−1]
( 40 )
( 41 )
Pour finir, Le potentiel magnétique créé par les deux aimants en série (du soleil et d’une planète) sera :
𝜃 = 2𝐻𝑐𝐿𝑀𝑖 [𝐴] ( 42 )
Etant donnée la symétrie de la pièce, le potentiel de l’aimant du soleil sera réparti sur les 3 planètes.
De la même manière, le potentiel de l’aimant d’une planète sera réparti entre le soleil et l’anneau.
Nous ferons l’hypothèse que la réluctance dans le parcours du flux à travers l’anneau est la même qu’à
travers le soleil. De cette manière on peut considérer que le flux est simplement divisé par 2.
Le potentiel magnétique total sera alors :
𝜃𝑡𝑜𝑡 = (1
3+
1
2) 𝐻𝑐𝐿𝑀𝑖 [𝐴] ( 43 )

Etudiant Andres GIL CLADERA
Page 33
4.3 Calcul du couple et de l’induction Comme expliqué dans le cours Mécatro1 [11], le couple magnétique d’un système réluctant comme
celui-ci peut être déduit sur la base de la variation d’énergie magnétique dans le système en fonction
de la position ou, plus précisément, de l’angle.
L’expression pour le calcul du couple sera :
𝑇𝑖,𝑗 =1
2⋅
ΔΛi,j
Δαi ⋅ θ2 [𝑁𝑚] ( 44 )
En ce qui concerne le flux magnétique il vient :
Φ =θ𝑡𝑜𝑡
𝑅𝑚𝑒𝑞 [𝑊𝑏] ( 45 )
Cette analyse initiale nous permettra d’anticiper l’ordre de grandeur de l’induction et le risque de
saturation magnétique du matériel. Celle-ci apparaîtra en premier lieu aux endroits où la réluctance
est minimale et le flux maximal, à savoir, dans les dents des roues.
Φ[𝑚𝑎𝑥] =θ𝑡𝑜𝑡
𝑅𝑚𝑒𝑞,𝑚𝑖𝑛 [𝑊𝑏] ( 46 )
L’induction maximale peut alors être estimée comme suit :
𝐵𝑚𝑎𝑥 =Φmax
𝑆𝑑𝑒𝑛𝑡 [𝑇] ( 47 )
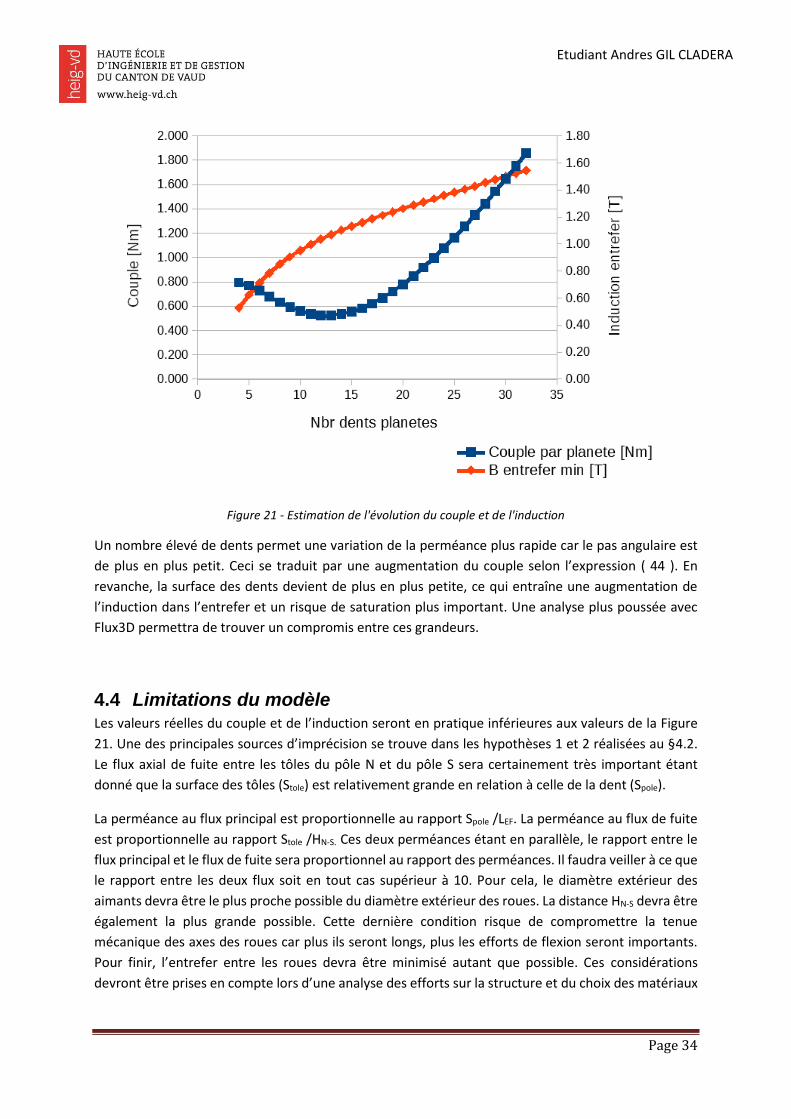
L’évolution du couple et de l’induction dans l’entrefer pour une paire de dents (soleil-planète) a été
calculée selon les considérations précédentes en prenant le nombre de dents du soleil comme variable
indépendante. Une hauteur d’empilage de tôles de 15 mm dans chaque pôle et un rayon de soleil de
30 mm ont été définis. L’entrefer a été fixé à 1 mm.
Etudiant Andres GIL CLADERA
Page 34
Figure 21 - Estimation de l'évolution du couple et de l'induction
Un nombre élevé de dents permet une variation de la perméance plus rapide car le pas angulaire est
de plus en plus petit. Ceci se traduit par une augmentation du couple selon l’expression ( 44 ). En
revanche, la surface des dents devient de plus en plus petite, ce qui entraîne une augmentation de
l’induction dans l’entrefer et un risque de saturation plus important. Une analyse plus poussée avec
Flux3D permettra de trouver un compromis entre ces grandeurs.
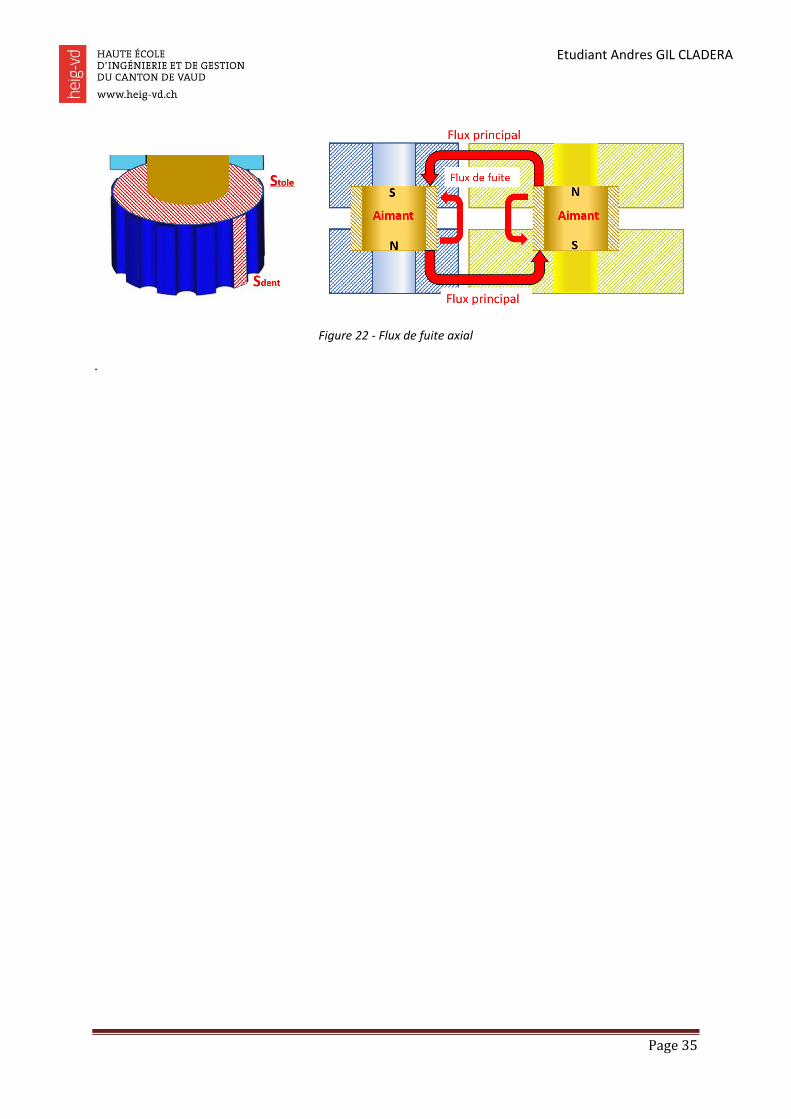
4.4 Limitations du modèle Les valeurs réelles du couple et de l’induction seront en pratique inférieures aux valeurs de la Figure
21. Une des principales sources d’imprécision se trouve dans les hypothèses 1 et 2 réalisées au §4.2.
Le flux axial de fuite entre les tôles du pôle N et du pôle S sera certainement très important étant
donné que la surface des tôles (Stole) est relativement grande en relation à celle de la dent (Spole).
La perméance au flux principal est proportionnelle au rapport Spole /LEF. La perméance au flux de fuite
est proportionnelle au rapport Stole /HN-S. Ces deux perméances étant en parallèle, le rapport entre le
flux principal et le flux de fuite sera proportionnel au rapport des perméances. Il faudra veiller à ce que
le rapport entre les deux flux soit en tout cas supérieur à 10. Pour cela, le diamètre extérieur des
aimants devra être le plus proche possible du diamètre extérieur des roues. La distance HN-S devra être
également la plus grande possible. Cette dernière condition risque de compromettre la tenue
mécanique des axes des roues car plus ils seront longs, plus les efforts de flexion seront importants.
Pour finir, l’entrefer entre les roues devra être minimisé autant que possible. Ces considérations
devront être prises en compte lors d’une analyse des efforts sur la structure et du choix des matériaux
Etudiant Andres GIL CLADERA
Page 35
Figure 22 - Flux de fuite axial
.
Etudiant Andres GIL CLADERA
Page 36
5 Utilisation de Python dans Flux 3D
5.1 Langage PyFlux « Un langage de programmation spécifique est proposé avec Flux pour permettre l’automatisation de
certaines actions récurrentes ou la création de nouvelles fonctionnalités.
Le langage proposé, dénommé PyFlux, est un langage basé sur le langage de programmation Python.
À l’aide de ce langage, l’utilisateur peut :
• d’une part construire et exécuter des fichiers de commande (scripts)
• d’autre part construire, charger et exécuter des macros » [12]
C’est-à-dire qu’il est possible de dessiner et de simuler dans Flux 3D à partir de scripts écrits en PyFlux.
Les différentes entités de Flux sont traitées comme des objets en Python. Il est possible de les
instancier avec un nom, de modifier ou d’afficher leurs attributs ou encore d’appliquer les méthodes
qui leur sont propres.
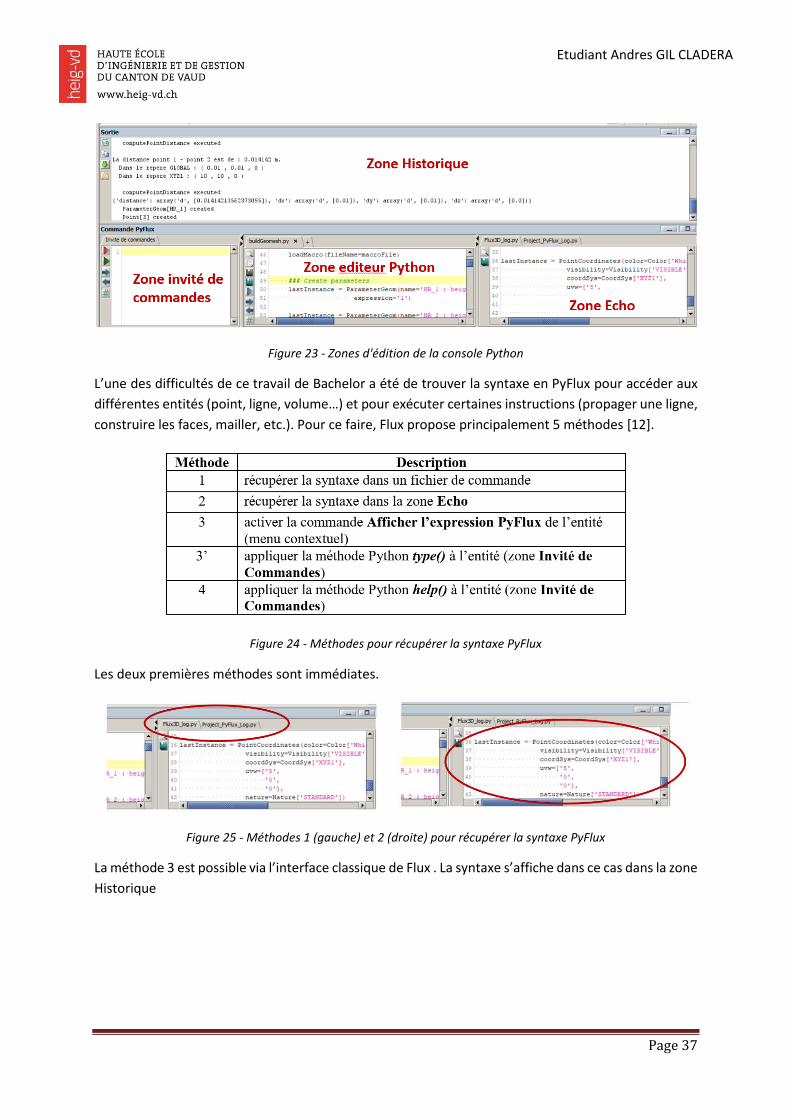
5.2 Syntaxe et modes d’édition L’interface Python de Flux est composée de quatre zones [12] :
Zone historique : Il s’agit d’une fenêtre de sortie à titre informatif. A chaque fois qu’une instruction est
exécutée, que ce soit via l’interface python ou via les commandes habituelles de l’interface de Flux,
elle s’affiche sur cette zone. Elle affiche également des erreurs d’exécution et des avertissements.
La séquences d’instructions de la zone historique reste enregistrée dans 2 fichiers appelés fichier de
commande. Le fichier Flux3D_log.py enregistre la suite d’instructions correspondantes à une session
(jusqu’à la fermeture de Flux). Le fichier Projet_PyFlux_Log.py enregistre la séquence d’instructions
réalisées par l’utilisateur depuis le début jusqu’à la fin d’un projet, même s’il s’est déroulé sur plusieurs
séances.
Zone Echo : similaire à la zone historique, cette fenêtre montre, dans la syntaxe propre de PyFlux, les
instructions qui ont été réalisées. C’est également une fenêtre de sortie Cette fenêtre sera très utile
pour connaître la syntaxe propre à une action et les attributs de chaque objet.
Zone invité de commandes : dans cette zone, il est possible d’écrire une commande en PyFlux et de
l’exécuter ensuite. Il est également possible d’exécuter un script en entier et même un programme
plus complexe avec des appels à d’autres modules ou fonctions. Elle est très utile pour débugger.
Zone éditeur Python : cette zone se comporte comme un véritable éditeur en python. Il est possible
d’exécuter ou d’enregistrer n’importe quel script en Python, ou bien de charger un fichier existant dans
notre pc et de le modifier.
Etudiant Andres GIL CLADERA
Page 37
Figure 23 - Zones d'édition de la console Python
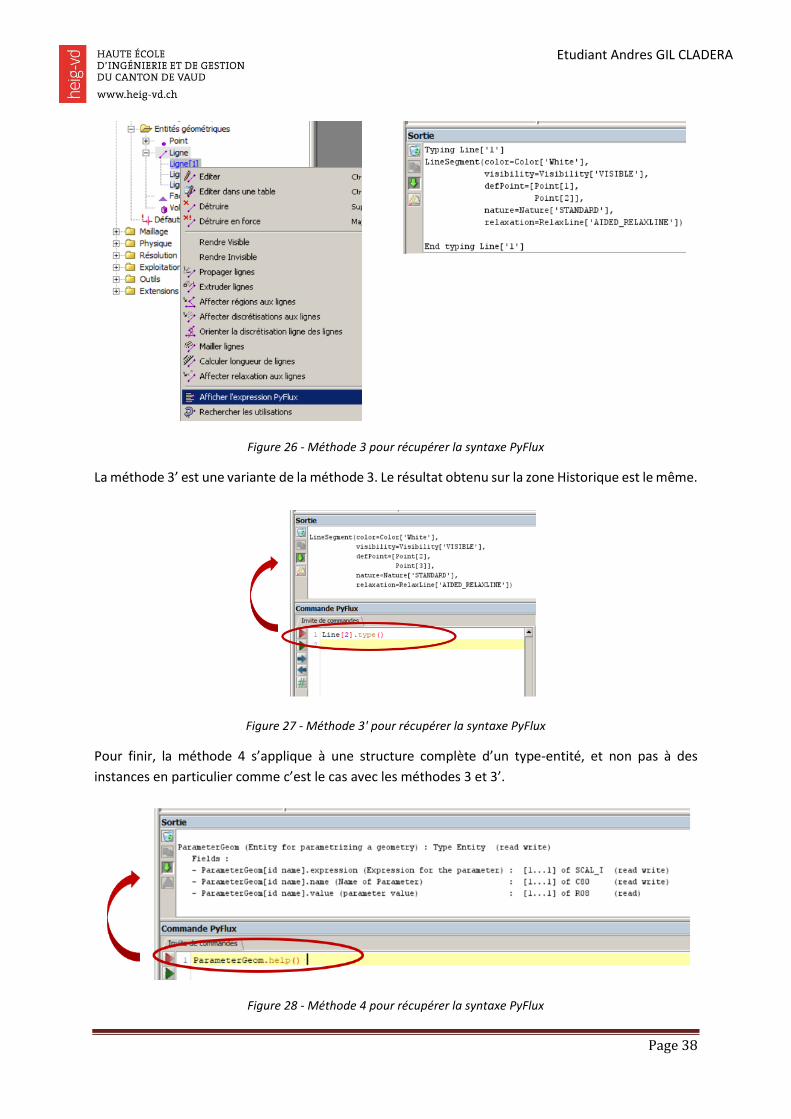
L’une des difficultés de ce travail de Bachelor a été de trouver la syntaxe en PyFlux pour accéder aux
différentes entités (point, ligne, volume…) et pour exécuter certaines instructions (propager une ligne,
construire les faces, mailler, etc.). Pour ce faire, Flux propose principalement 5 méthodes [12].
Figure 24 - Méthodes pour récupérer la syntaxe PyFlux
Les deux premières méthodes sont immédiates.
Figure 25 - Méthodes 1 (gauche) et 2 (droite) pour récupérer la syntaxe PyFlux
La méthode 3 est possible via l’interface classique de Flux . La syntaxe s’affiche dans ce cas dans la zone
Historique
Etudiant Andres GIL CLADERA
Page 38
Figure 26 - Méthode 3 pour récupérer la syntaxe PyFlux
La méthode 3’ est une variante de la méthode 3. Le résultat obtenu sur la zone Historique est le même.
Figure 27 - Méthode 3' pour récupérer la syntaxe PyFlux
Pour finir, la méthode 4 s’applique à une structure complète d’un type-entité, et non pas à des
instances en particulier comme c’est le cas avec les méthodes 3 et 3’.
Figure 28 - Méthode 4 pour récupérer la syntaxe PyFlux
Etudiant Andres GIL CLADERA
Page 39
5.3 Macro Une macro permet de regrouper un ensemble d’instructions de manière à ce que l’utilisateur puisse
les exécuter dans Flux plus rapidement.
L’étude d’un réducteur avec un nombre paramétrable de dents dans les roues ne serait pas possible
sans l’utilisation d’une macro. L’utilisateur serait obligé de redessiner toute la géométrie et le maillage
dans chaque configuration. Un nombre paramétrable de planètes poserait le même problème.
Dans le cas de l’étude du réducteur planétaire, la géométrie est relativement complexe et le nombre
de paramètres élevé. L’usage d’une macro devient alors très intéressant.
L’objectif de ce travail de Bachelor est de développer une macro écrite en PyFlux pour dessiner la
géométrie et pour réaliser le maillage du réducteur planétaire. L’utilisateur aura le choix de paramétrer
le nombre de planètes, le nombre de dents des roues et la géométrie des dents. Deux typologies de
dents seront considérées : trapézoïdale et semi-circulaire. Veuillez noter que les dents carrées sont un
cas particulier de dents trapézoïdales.
La géométrie principale du réducteur devra être également saisie par l’utilisateur, à savoir, le diamètre
des roues, l’épaisseur de l’empilage des tôles, les dimensions des aimants, etc.
Il faudra également définir différentes tailles de nœuds et les attribuer aux volumes au fur et à mesure
que la géométrie est créée, afin de pouvoir éditer le maillage dans chaque partie du réducteur. La
principale difficulté ne se trouve pas dans le dessin de la géométrie, mais dans la gestion automatique
de tous les petits volumes qui seront créés et dont le nombre changera en fonction du nombre de
dents ou des planètes saisis par l’utilisateur.

Etudiant Andres GIL CLADERA
Page 40
6 Scrypt PyFlux
Ce chapitre sert de manuel pour les éventuels futurs utilisateurs. Des extraits du code seront présentés
à titre d’exemple avec les explications nécessaires à leur compréhension, ainsi que pour compléter les
commentaires du code. Les mêmes routines de code se répètent de nombreuses fois. L’utilisateur sera
donc en mesure de les reconnaître et même de les adapter en cas de besoin. Il est important de
mentionner que les instructions qui seront présentées ci-dessous réalisent exactement les mêmes
actions que si elles avaient été exécutées depuis l’interface de Flux. En revanche, le fait de les
répertorier dans un script permet de les exécuter de nombreuses fois plus rapidement. Les boucles for
ou le fait d’identifier certains objets (points, lignes ou surfaces) avec des noms précis permettent
d’automatiser le processus de design et de s’affranchir des manipulations manuelles répétitives et
parfois fastidieuses.
Le code a entièrement été écrit avec le logiciel Notpad++. En principe n’importe quel autre editor de
python pourrait être utilisé pour lire ou pour éditer les fichiers, y compris l’éditeur de Flux.
Note importante : avant de commencer votre projet, il faut que le répertoire de travail saisi dans
l’interface de Flux corresponde au dossier où se trouvent les fichiers .py. Autrement Flux ne trouvera
pas les fichiers lors des différentes appels et il affichera une erreur vous demandant de vérifier le
chemin.
Figure 29 - Dossier dans votre PC (gauche) et répertoire de travail dans Flux (droite)
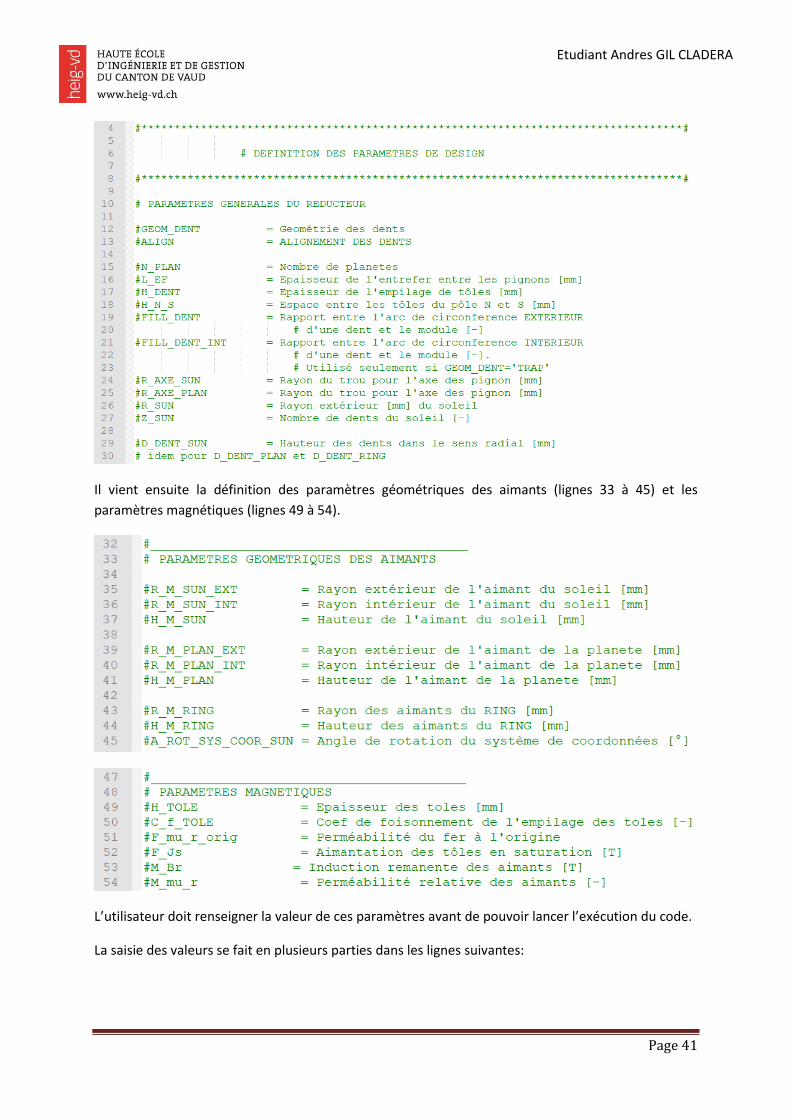
6.1 Fichier _MAIN.py La première ligne du fichier _MAIN.py (et de tous les autres fichiers), doit contenir l’entête obligatoire
qui tient compte de la version de Flux utilisée. Dans ce cas, l’en-tête correspond à la version de 2019 :
Ensuite la définition de chaque paramètre avec les unités correspondantes est donnée en mode de
commentaires (en python les commencent par ‘#’). La définition des variables indépendantes (§3.2.2)
du réducteur est donnée entre les lignes 12 et 30.
Etudiant Andres GIL CLADERA
Page 41
Il vient ensuite la définition des paramètres géométriques des aimants (lignes 33 à 45) et les
paramètres magnétiques (lignes 49 à 54).
L’utilisateur doit renseigner la valeur de ces paramètres avant de pouvoir lancer l’exécution du code.
La saisie des valeurs se fait en plusieurs parties dans les lignes suivantes:
Etudiant Andres GIL CLADERA
Page 42
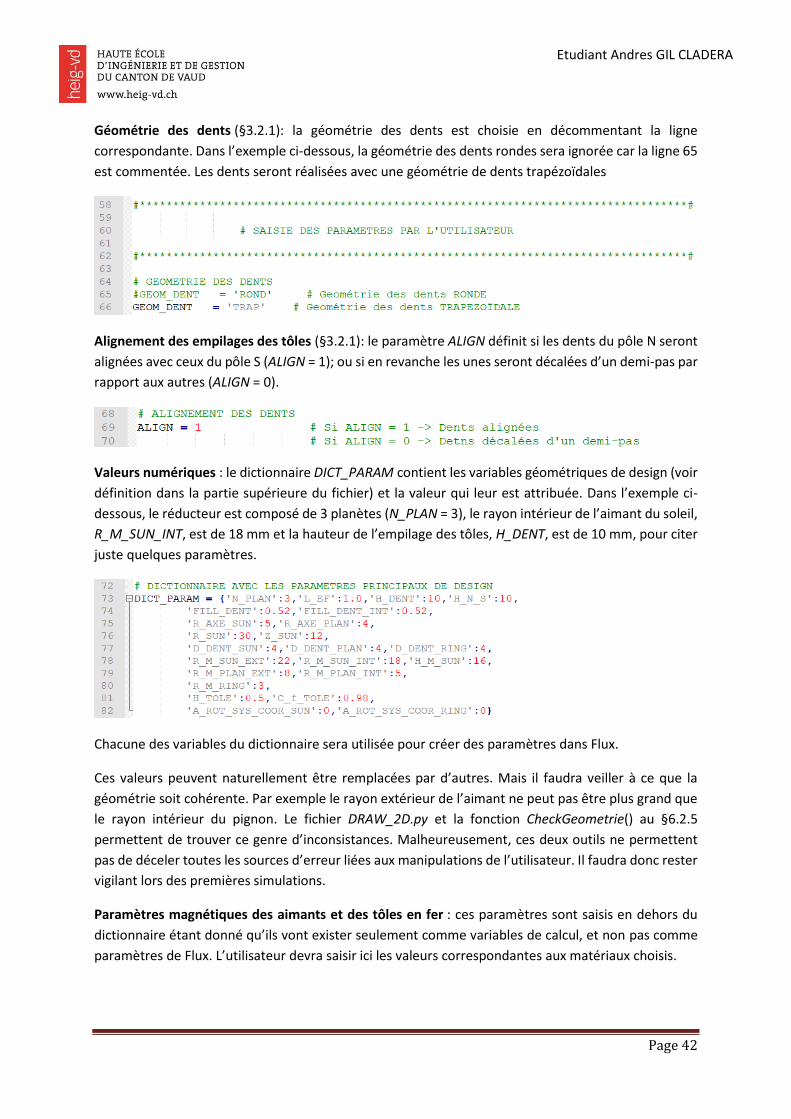
Géométrie des dents (§3.2.1): la géométrie des dents est choisie en décommentant la ligne
correspondante. Dans l’exemple ci-dessous, la géométrie des dents rondes sera ignorée car la ligne 65
est commentée. Les dents seront réalisées avec une géométrie de dents trapézoïdales
Alignement des empilages des tôles (§3.2.1): le paramètre ALIGN définit si les dents du pôle N seront
alignées avec ceux du pôle S (ALIGN = 1); ou si en revanche les unes seront décalées d’un demi-pas par
rapport aux autres (ALIGN = 0).
Valeurs numériques : le dictionnaire DICT_PARAM contient les variables géométriques de design (voir
définition dans la partie supérieure du fichier) et la valeur qui leur est attribuée. Dans l’exemple ci-
dessous, le réducteur est composé de 3 planètes (N_PLAN = 3), le rayon intérieur de l’aimant du soleil,
R_M_SUN_INT, est de 18 mm et la hauteur de l’empilage des tôles, H_DENT, est de 10 mm, pour citer
juste quelques paramètres.
Chacune des variables du dictionnaire sera utilisée pour créer des paramètres dans Flux.
Ces valeurs peuvent naturellement être remplacées par d’autres. Mais il faudra veiller à ce que la
géométrie soit cohérente. Par exemple le rayon extérieur de l’aimant ne peut pas être plus grand que
le rayon intérieur du pignon. Le fichier DRAW_2D.py et la fonction CheckGeometrie() au §6.2.5
permettent de trouver ce genre d’inconsistances. Malheureusement, ces deux outils ne permettent
pas de déceler toutes les sources d’erreur liées aux manipulations de l’utilisateur. Il faudra donc rester
vigilant lors des premières simulations.
Paramètres magnétiques des aimants et des tôles en fer : ces paramètres sont saisis en dehors du
dictionnaire étant donné qu’ils vont exister seulement comme variables de calcul, et non pas comme
paramètres de Flux. L’utilisateur devra saisir ici les valeurs correspondantes aux matériaux choisis.

Etudiant Andres GIL CLADERA
Page 43
Nombre de planètes à dessiner : la variable var_N_PLAN_draw permet de choisir le nombre de
planètes qui seront dessinées. Cette variable doit rester à 1. Ce script est prévu seulement pour
dessiner et simuler un secteur circulaire du soleil et de l’anneau extérieur. La totalité du soleil et de
l’anneau (les 360°) ne sera pas dessinée. Si la valeur de var_N_PLAN_draw est supérieure à 1, les
planètes suivantes seront en effet dessinées, mais les portions de soleil et d’anneaux correspondantes
ne le seront pas. Des erreurs peuvent apparaître lors de la résolution.
A partir d’ici, le fichier _MAIN.py fait appel à d’autres fichiers dans un ordre qui ne doit pas être
modifié. Les chapitres suivants donnent des explications détaillées sur chacun d’entre eux.
6.2 Fichier 0_FONCTIONS.py Les fonctions suivantes ont été définies pour réaliser des tâches répétitives de manière plus aisée et
pour simplifier l’écriture et la lisibilité du code. Quand le fichier est exécuté, les fonctions sont chargées
en mémoire et prêtes à être utilisées lors des appels depuis les différentes parties du code.
6.2.1 DelGeometry()
Cette fonction efface la géométrie de la pièce (volumes, faces, lignes, points et le cas échéant, aussi la
boîte infinie).
Lors de l’écriture du code, la géométrie a été redessinée une infinité de fois pour corriger des erreurs
et pour dépurer le code. Cette fonction s’est alors avérée très utile.
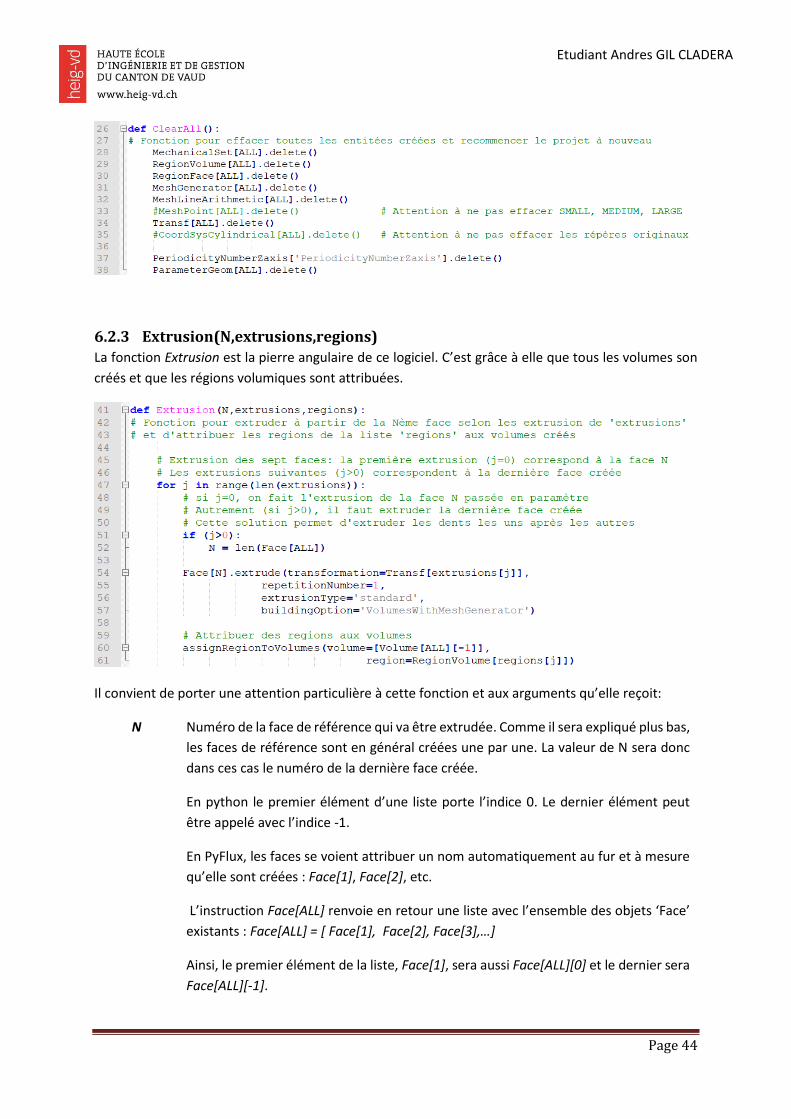
6.2.2 DelAll()
Dans le même contexte que la fonction précédente, DelAll() efface toutes les entités qui ont été créées.
La seule différence entre utiliser cette fonction ou recommencer un nouveau projet se trouve dans les
variables qui sont gardées en mémoire (comme ALIGN ou DICT_PARAM, par exemple).
Etudiant Andres GIL CLADERA
Page 44
6.2.3 Extrusion(N,extrusions,regions)
La fonction Extrusion est la pierre angulaire de ce logiciel. C’est grâce à elle que tous les volumes son
créés et que les régions volumiques sont attribuées.
Il convient de porter une attention particulière à cette fonction et aux arguments qu’elle reçoit:
N Numéro de la face de référence qui va être extrudée. Comme il sera expliqué plus bas,
les faces de référence sont en général créées une par une. La valeur de N sera donc
dans ces cas le numéro de la dernière face créée.
En python le premier élément d’une liste porte l’indice 0. Le dernier élément peut
être appelé avec l’indice -1.
En PyFlux, les faces se voient attribuer un nom automatiquement au fur et à mesure
qu’elle sont créées : Face[1], Face[2], etc.
L’instruction Face[ALL] renvoie en retour une liste avec l’ensemble des objets ‘Face’
existants : Face[ALL] = [ Face[1], Face[2], Face[3],…]
Ainsi, le premier élément de la liste, Face[1], sera aussi Face[ALL][0] et le dernier sera
Face[ALL][-1].
Etudiant Andres GIL CLADERA
Page 45
Le nombre total d’éléments de cette liste peut être obtenu avec l’instruction
len(Face[ALL]).
extrusions Ce paramètre est une liste avec les noms des extrusions qui doivent être réalisées sur
la face N de référence. Cette liste est définie dans le fichier 1b_PARAMETRES.py, dans
les lignes 180 à 186 (§6.4.3).
Vu que chaque surface de référence subit les mêmes extrusions et dans le même
ordre, nous aurions pu nous affranchir de passer cette liste en paramètre à chaque
appel de la fonction. Il a été décidé de la laisser pour que la fonction garde sa
polyvalence.
régions Il s’agit de la liste avec les noms des régions volumiques qui doivent être attribuées
aux volumes nouvellement créés. Chaque région est attribuée au dernier volume
créé. La liste de tous les objets ‘Volume’ de PyFlux est donnée par Volume[ALL]. Le
dernier élément de cette liste, selon la syntaxe de python, est Volume[ALL][-1]
(l’avant dernier serait Volume[ALL][-2], et ainsi de suite).
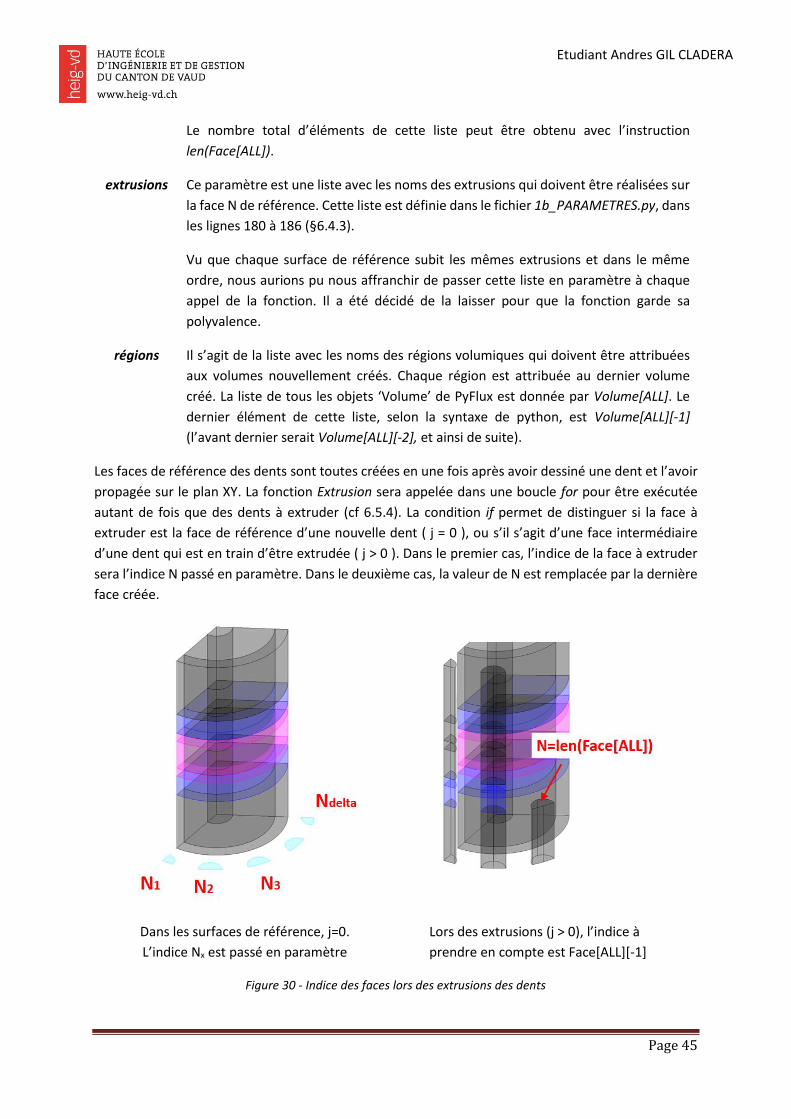
Les faces de référence des dents sont toutes créées en une fois après avoir dessiné une dent et l’avoir
propagée sur le plan XY. La fonction Extrusion sera appelée dans une boucle for pour être exécutée
autant de fois que des dents à extruder (cf 6.5.4). La condition if permet de distinguer si la face à
extruder est la face de référence d’une nouvelle dent ( j = 0 ), ou s’il s’agit d’une face intermédiaire
d’une dent qui est en train d’être extrudée ( j > 0 ). Dans le premier cas, l’indice de la face à extruder
sera l’indice N passé en paramètre. Dans le deuxième cas, la valeur de N est remplacée par la dernière
face créée.
Dans les surfaces de référence, j=0.
L’indice Nx est passé en paramètre
Lors des extrusions (j > 0), l’indice à
prendre en compte est Face[ALL][-1]
Figure 30 - Indice des faces lors des extrusions des dents

Etudiant Andres GIL CLADERA
Page 46
Une fois que la face à extruder est identifiée, elle est extrudée en boucle selon la liste extrusions. Les
points nouvellement créés vont reprendre le même mailleur que les points des faces de référence
grâce à l’attribut : buildingOption = ‘VolumesWithMeshGenerator’.
6.2.4 SetDiscretPoint(discretisation,start_point,stop_point)
Cette fonction attribue le mailleur définit dans la variable discretisation à l’ensemble des points
compris entre le start_point et le stop_point. Cette fonction s’applique uniquement aux points de la
face de référence car, comme expliqué dans la fonction précédente, les points qui sont créés par les
extrusions successives reprennent le même mailleur des points originaux.
6.2.5 CheckGeometry(T)
La validation des données est une pratique courante et nécessaire lorsque qu’un utilisateur doit
introduire la valeur des variables manuellement pour exécuter un programme.
Le but de cette fonction est de vérifier si les paramètres introduits dans le dictionnaire DICT_PARAM
permettent de construire une géométrie cohérente. Plusieurs vérifications sont faites à l’intérieur de
cette fonction.

Etudiant Andres GIL CLADERA
Page 47
La liste des vérifications est loin d’être exhaustive mais elle permet de faire un premier tri et de rejeter
les erreurs repérées les plus fréquemment. D’autres vérifications peuvent être ajoutées par la suite.
Par exemple, il n’est pas contrôlé si les valeurs introduites sont bien des chiffres ou des caractères. Les
utilisateurs devront être attentifs à ce genre de questions élémentaires.
La variable warning renvoyée en retour après l’appel à cette fonction permet de mieux cibler la source
de l’erreur. Si warning vaut 0, la géométrie est à priori réalisable.
6.2.6 Fichier DRAW_2D.py
Dans le même esprit de vérification de la fonction CheckGeometry, le fichier DRAW_2D.py permet de
dessiner la géométrie en 2D sur le plan XY et de mettre ainsi en évidence d’autres possibles sources
d’erreur.
Figure 31 - Exemple géométrie construite avec DRAW_2D.py
A partir de cette construction, il est aisé de modifier les différents paramètres pour voir en temps réel
s’il n’y a pas des conflits entre les lignes.
Quelques exemples d’erreurs de conceptions seraient les suivants :
Etudiant Andres GIL CLADERA
Page 48
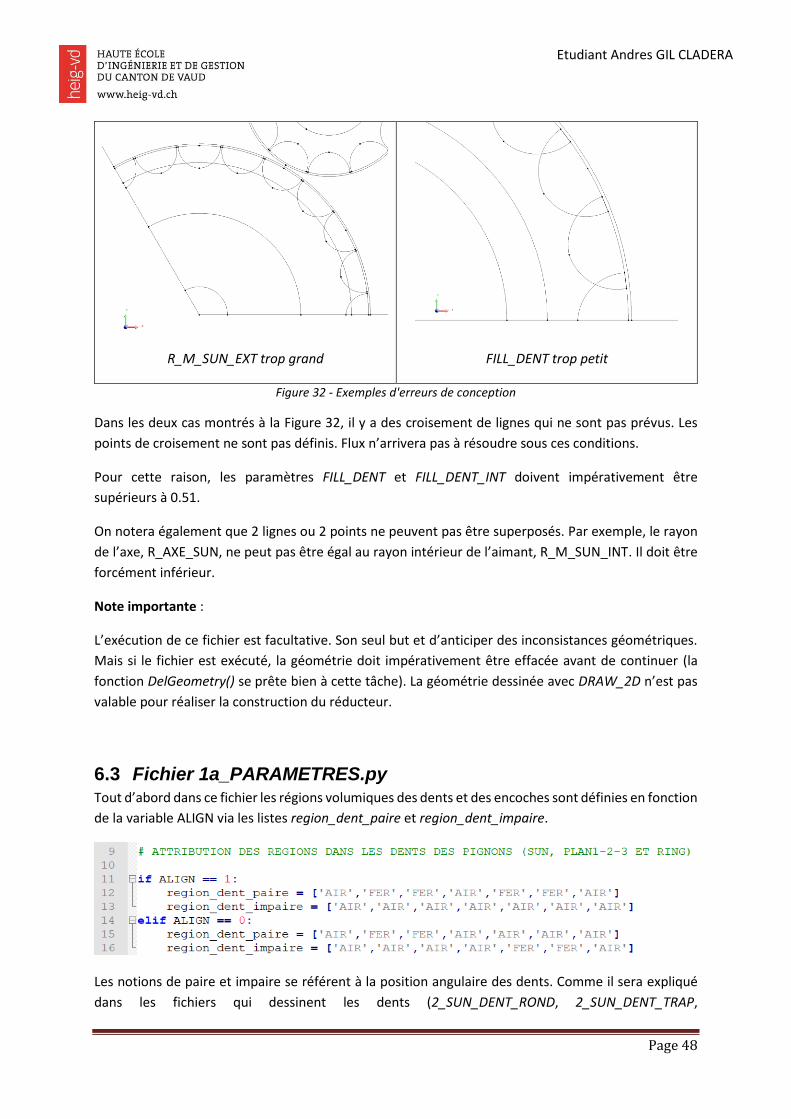
R_M_SUN_EXT trop grand
FILL_DENT trop petit
Figure 32 - Exemples d'erreurs de conception
Dans les deux cas montrés à la Figure 32, il y a des croisement de lignes qui ne sont pas prévus. Les
points de croisement ne sont pas définis. Flux n’arrivera pas à résoudre sous ces conditions.
Pour cette raison, les paramètres FILL_DENT et FILL_DENT_INT doivent impérativement être
supérieurs à 0.51.
On notera également que 2 lignes ou 2 points ne peuvent pas être superposés. Par exemple, le rayon
de l’axe, R_AXE_SUN, ne peut pas être égal au rayon intérieur de l’aimant, R_M_SUN_INT. Il doit être
forcément inférieur.
Note importante :
L’exécution de ce fichier est facultative. Son seul but et d’anticiper des inconsistances géométriques.
Mais si le fichier est exécuté, la géométrie doit impérativement être effacée avant de continuer (la
fonction DelGeometry() se prête bien à cette tâche). La géométrie dessinée avec DRAW_2D n’est pas
valable pour réaliser la construction du réducteur.
6.3 Fichier 1a_PARAMETRES.py
Tout d’abord dans ce fichier les régions volumiques des dents et des encoches sont définies en fonction
de la variable ALIGN via les listes region_dent_paire et region_dent_impaire.
Les notions de paire et impaire se référent à la position angulaire des dents. Comme il sera expliqué
dans les fichiers qui dessinent les dents (2_SUN_DENT_ROND, 2_SUN_DENT_TRAP,

Etudiant Andres GIL CLADERA
Page 49
2_PLAN_DENT_ROND…) la première dent est toujours dessinée sur l’axe OX du repère correspondant.
Il a été choisi que cette position soit paire. Le volume suivante, impair, se trouve alors à un demi-pas
du premier.
Figure 33 - Dents paires et impaires
Quand ALIGN = 1, la région FER_DENT sera affectée aux volumes des positions paires, et ceci dans les
deux empilages de tôles (disons que l’inférieur est le pôle S et le supérieur est le pôle N). Bien entendu,
il y aura de l’air au-dessous des tôles, au-dessus, ainsi qu’entre les deux empilages. En suivant la même
logique, la région AIR sera affectée aux volumes impaires.
Quand ALIGN = 0, la région FER_DENT sera affectée aux volumes des positions paires du premier
empilage de tôles (disons que c’est le pôle S). Les volumes au dessus de ces premiers se verront
attribuer la région AIR car les dents sont décalées.
La deuxième partie de ce fichier crée dans Flux les paramètres correspondantes aux variables définies
dans le fichier _MAIN.py via deux boucles for.
La condition if à l’intérieur de la deuxième boucle for permet d’éviter des erreurs d’exécution. Il peut
arriver que l’on souhaite modifier la valeur d’un paramètre de DICT_PARAM (par exemple le nombre
de dents Z_SUN) après que le fichier 1a_PARAMETRES.py ait été exécuté. Dans ce cas, il y est possible
de réévaluer DICT_PARAM et de relancer l’exécution du fichier 1a_PARAMETRES.py à nouveau (depuis
l’invité de commandes par exemple). Si le paramètre en question existe déjà (ce qui est certainement
Etudiant Andres GIL CLADERA
Page 50
le cas vu que le fichier a été exécuté une fois), la valeur du paramètre sera mise à jour. S’il n’existe pas,
il sera créé avec la dernière valeur saisie.
Plus bas dans le fichier de nombreux autres paramètres dépendants des premiers, seront créés pour
permettre de dessiner et de simuler le réducteur plus facilement.
Par exemple, la couche d’air au-dessous et au-dessus du réducteur, H_AIR_EXT, est définie en fonction
de la hauteur d’un empilage de tôles, H_DENT. De la même manière, on sait que le rayon des planètes
R_PLAN sera la moitié de celui du soleil. L’expression correspondante pour le calculer est déjà indiquée
lors de la création du paramètre.
La liste complète n’est pas citée ici. Le code est donné dans sa totalité en annexe.
En principe l’utilisateur n’est pas amené à modifier aucun des paramètres définis entre les lignes 41 à
128. Eventuellement H_AIR_EXT pourrait être augmentée pour mieux observer les lignes d’induction
dans l’air environnant. Ou encore l’épaisseur (dans le sens radial) de la couronne extérieure,
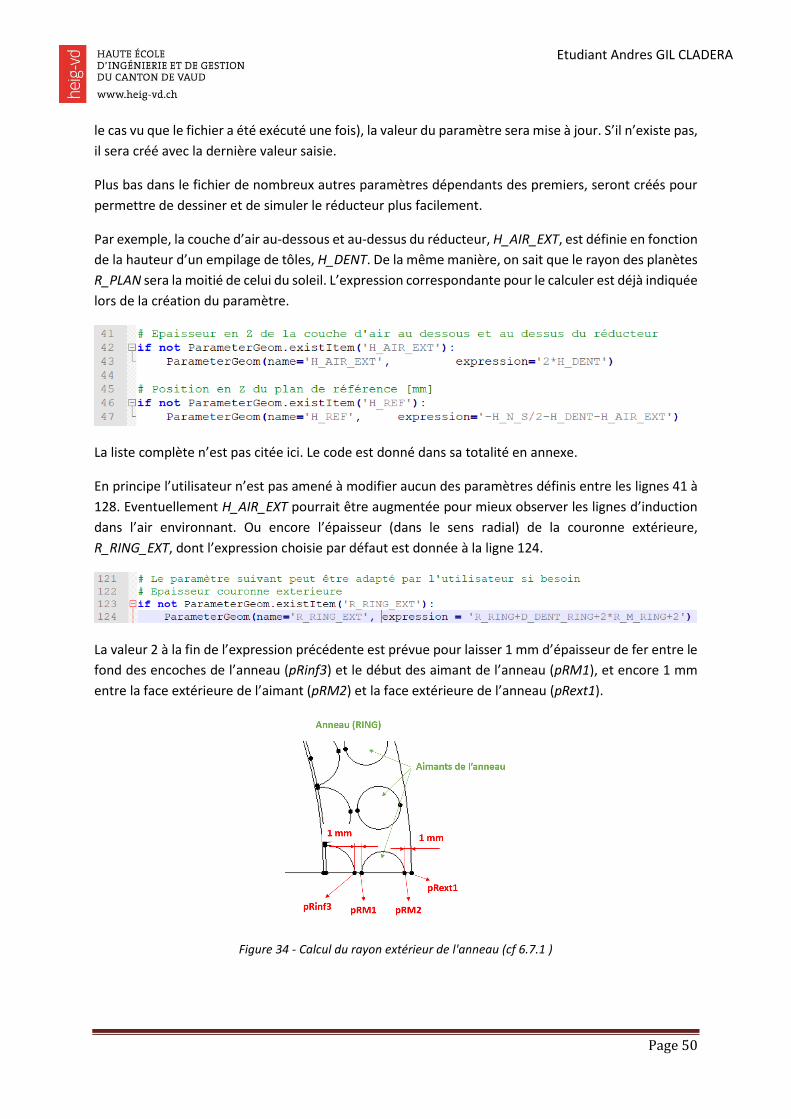
R_RING_EXT, dont l’expression choisie par défaut est donnée à la ligne 124.
La valeur 2 à la fin de l’expression précédente est prévue pour laisser 1 mm d’épaisseur de fer entre le
fond des encoches de l’anneau (pRinf3) et le début des aimant de l’anneau (pRM1), et encore 1 mm
entre la face extérieure de l’aimant (pRM2) et la face extérieure de l’anneau (pRext1).
Figure 34 - Calcul du rayon extérieur de l'anneau (cf 6.7.1 )

Etudiant Andres GIL CLADERA
Page 51
6.4 Fichier 1b_OUTILS_GEOM.py A l’instar du fichier précédant, ce fichier crée automatiquement l’ensemble des outils nécessaires à la
simulation avant de commencer à dessiner les pièces. Les repères, les transformations, la périodicité,
l’application, les ensembles mécaniques, les régions surfaciques et volumiques et le maillage sont
définis ici. La syntaxe correspondante à chacune des foncions propres à PyFlux peut être consultée en
détail aux annexes.
6.4.1 Variables auxiliaires
Dans différentes parties du code il est nécessaire d’utiliser la valeur numérique des paramètres de Flux.
Par exemple il sera nécessaire d’utiliser la valeur numérique du nombre de planètes ou la périodicité
pour créer les transformations. Pour extraire la valeur numérique d’un paramètre, PyFlux prévoit la
syntaxe suivante :
Dans ce cas particulier, et pour éviter des erreurs de casting, la valeur numérique est affectée de la
fonction int() pour assurer que ces variables auxiliaires sont de type entier.
La création d’une variable à partir de la valeur du paramètre permet par la suite de simplifier l’écriture
et améliorer la lisibilité dans les calculs avec plusieurs paramètres.
Le préfixe ‘var_’ est systématiquement ajouté aux noms des variables qui sont extraites à partir de
paramètres dans le but de mieux distinguer l’objet (paramètre dans Flux) de la variable de calcul.
Dans le cas du nombre de planètes, N_PLAN, la valeur aurait pu être extraite directement depuis le
dictionnaire DICT_PARAM selon la syntaxe propre de python comme indiqué ci-après. Mais cette
option n’est pas choisie pour garder la même logique dans tout le code.
Veuillez remarquer que les variables définies au niveau du code restent en mémoire jusqu’à la
fermeture de Flux. Des erreurs d’exécution peuvent apparaître si ceci n’est pas pris en compte.
De la même manière, si la modélisation est réalisée en plusieurs séances, les variables intermédiaires
seront perdues à chaque fermeture du fichier et Flux peut afficher des erreurs lors des exécutions.
6.4.2 Les repères
La rotation en Z du repère est paramétrée via A_ROT_SYS_COOR_. Ceci permet par exemple de
modifier la position du soleil ou d’une planète pour étudier le couple à l’aide d’un capteur. Sur la
pratique cette variable n’a pas été utilisée vu que les simulations ont été faites sur les ensembles
mécaniques.
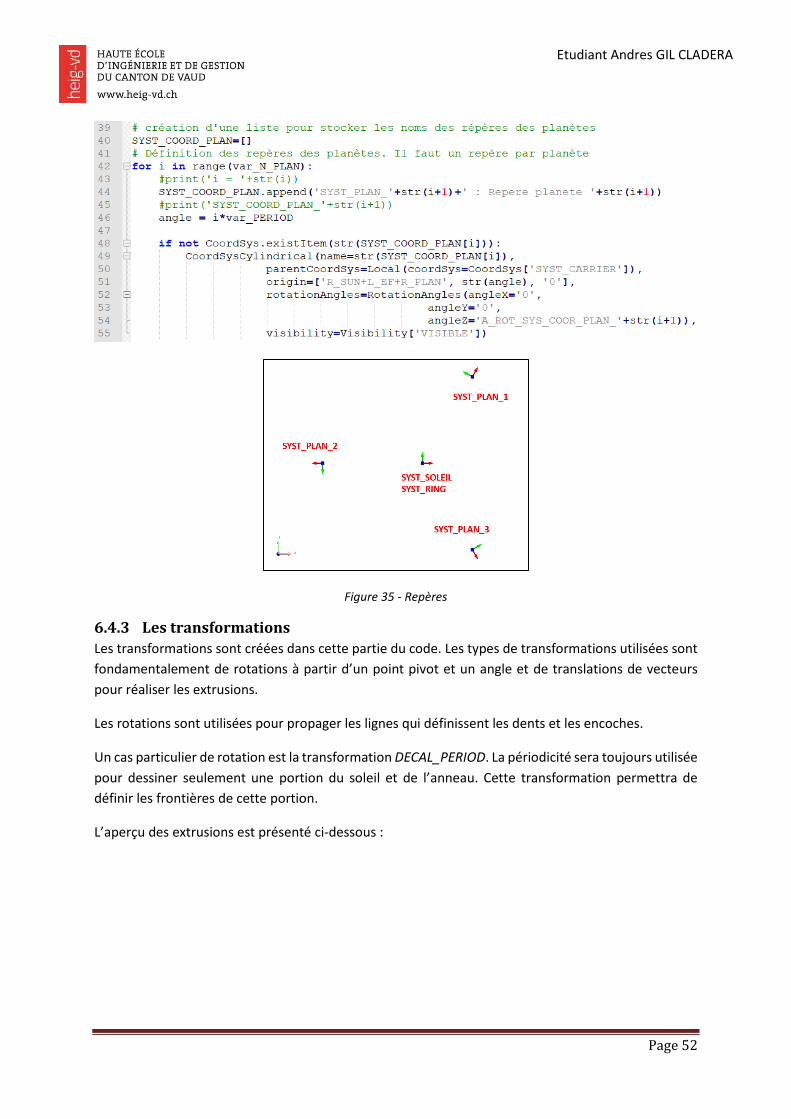
Vu que le nombre de planètes est à choisir par l’utilisateur, la création des répères correspondants est
réalisé à l’intérieur d’une boucle for. Sur la pratique, seulement 1 planète sera dessinée car la variable
var_N_PLAN_draw est laissée à 1, et les repères suivants ne seront pas utilisés.
Etudiant Andres GIL CLADERA
Page 52
Figure 35 - Repères
6.4.3 Les transformations
Les transformations sont créées dans cette partie du code. Les types de transformations utilisées sont
fondamentalement de rotations à partir d’un point pivot et un angle et de translations de vecteurs
pour réaliser les extrusions.
Les rotations sont utilisées pour propager les lignes qui définissent les dents et les encoches.
Un cas particulier de rotation est la transformation DECAL_PERIOD. La périodicité sera toujours utilisée
pour dessiner seulement une portion du soleil et de l’anneau. Cette transformation permettra de
définir les frontières de cette portion.
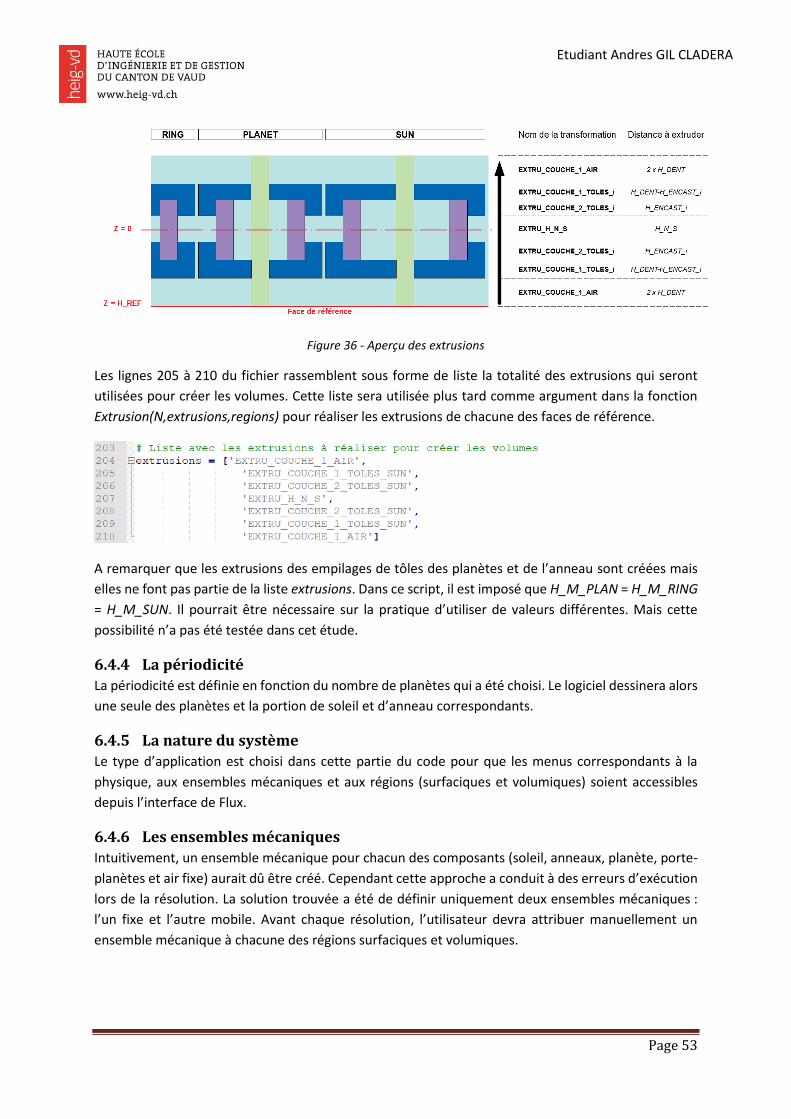
L’aperçu des extrusions est présenté ci-dessous :
Etudiant Andres GIL CLADERA
Page 53
Figure 36 - Aperçu des extrusions
Les lignes 205 à 210 du fichier rassemblent sous forme de liste la totalité des extrusions qui seront
utilisées pour créer les volumes. Cette liste sera utilisée plus tard comme argument dans la fonction
Extrusion(N,extrusions,regions) pour réaliser les extrusions de chacune des faces de référence.
A remarquer que les extrusions des empilages de tôles des planètes et de l’anneau sont créées mais
elles ne font pas partie de la liste extrusions. Dans ce script, il est imposé que H_M_PLAN = H_M_RING
= H_M_SUN. Il pourrait être nécessaire sur la pratique d’utiliser de valeurs différentes. Mais cette
possibilité n’a pas été testée dans cet étude.
6.4.4 La périodicité
La périodicité est définie en fonction du nombre de planètes qui a été choisi. Le logiciel dessinera alors
une seule des planètes et la portion de soleil et d’anneau correspondants.
6.4.5 La nature du système
Le type d’application est choisi dans cette partie du code pour que les menus correspondants à la
physique, aux ensembles mécaniques et aux régions (surfaciques et volumiques) soient accessibles
depuis l’interface de Flux.
6.4.6 Les ensembles mécaniques
Intuitivement, un ensemble mécanique pour chacun des composants (soleil, anneaux, planète, porte-
planètes et air fixe) aurait dû être créé. Cependant cette approche a conduit à des erreurs d’exécution
lors de la résolution. La solution trouvée a été de définir uniquement deux ensembles mécaniques :
l’un fixe et l’autre mobile. Avant chaque résolution, l’utilisateur devra attribuer manuellement un
ensemble mécanique à chacune des régions surfaciques et volumiques.
Etudiant Andres GIL CLADERA
Page 54
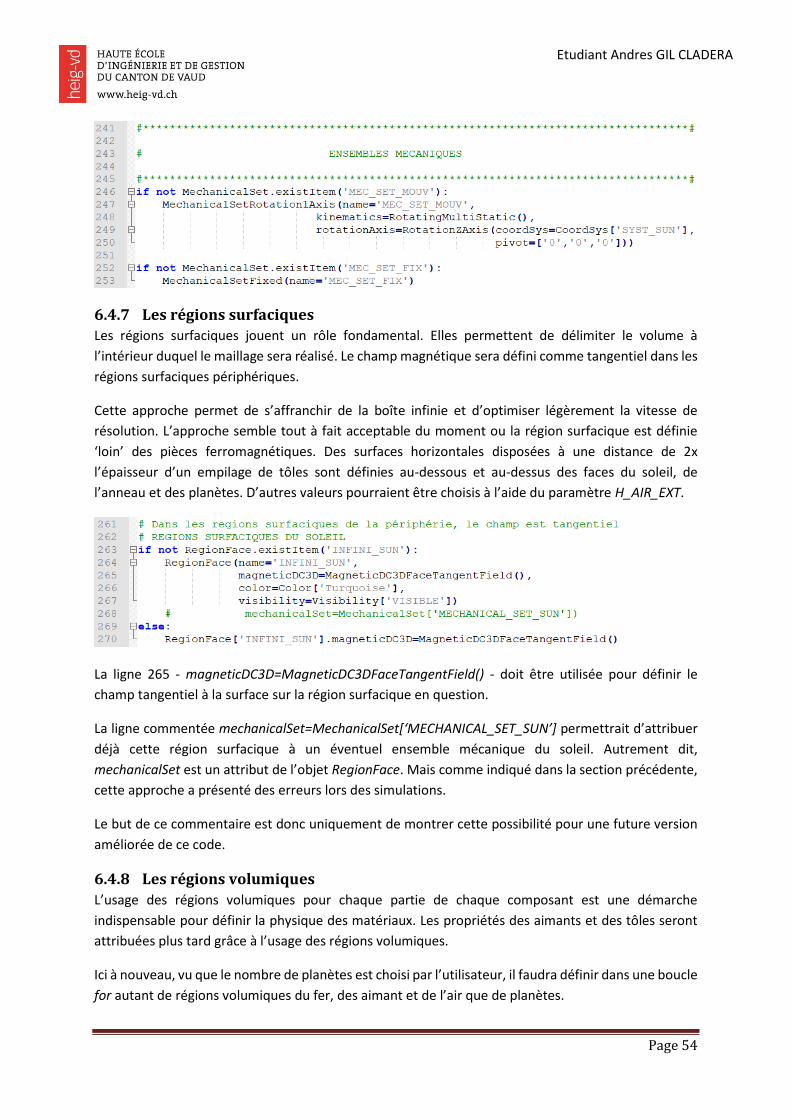
6.4.7 Les régions surfaciques
Les régions surfaciques jouent un rôle fondamental. Elles permettent de délimiter le volume à
l’intérieur duquel le maillage sera réalisé. Le champ magnétique sera défini comme tangentiel dans les
régions surfaciques périphériques.
Cette approche permet de s’affranchir de la boîte infinie et d’optimiser légèrement la vitesse de
résolution. L’approche semble tout à fait acceptable du moment ou la région surfacique est définie
‘loin’ des pièces ferromagnétiques. Des surfaces horizontales disposées à une distance de 2x
l’épaisseur d’un empilage de tôles sont définies au-dessous et au-dessus des faces du soleil, de
l’anneau et des planètes. D’autres valeurs pourraient être choisis à l’aide du paramètre H_AIR_EXT.
La ligne 265 - magneticDC3D=MagneticDC3DFaceTangentField() - doit être utilisée pour définir le
champ tangentiel à la surface sur la région surfacique en question.
La ligne commentée mechanicalSet=MechanicalSet[‘MECHANICAL_SET_SUN’] permettrait d’attribuer
déjà cette région surfacique à un éventuel ensemble mécanique du soleil. Autrement dit,
mechanicalSet est un attribut de l’objet RegionFace. Mais comme indiqué dans la section précédente,
cette approche a présenté des erreurs lors des simulations.
Le but de ce commentaire est donc uniquement de montrer cette possibilité pour une future version
améliorée de ce code.
6.4.8 Les régions volumiques
L’usage des régions volumiques pour chaque partie de chaque composant est une démarche
indispensable pour définir la physique des matériaux. Les propriétés des aimants et des tôles seront
attribuées plus tard grâce à l’usage des régions volumiques.
Ici à nouveau, vu que le nombre de planètes est choisi par l’utilisateur, il faudra définir dans une boucle
for autant de régions volumiques du fer, des aimant et de l’air que de planètes.
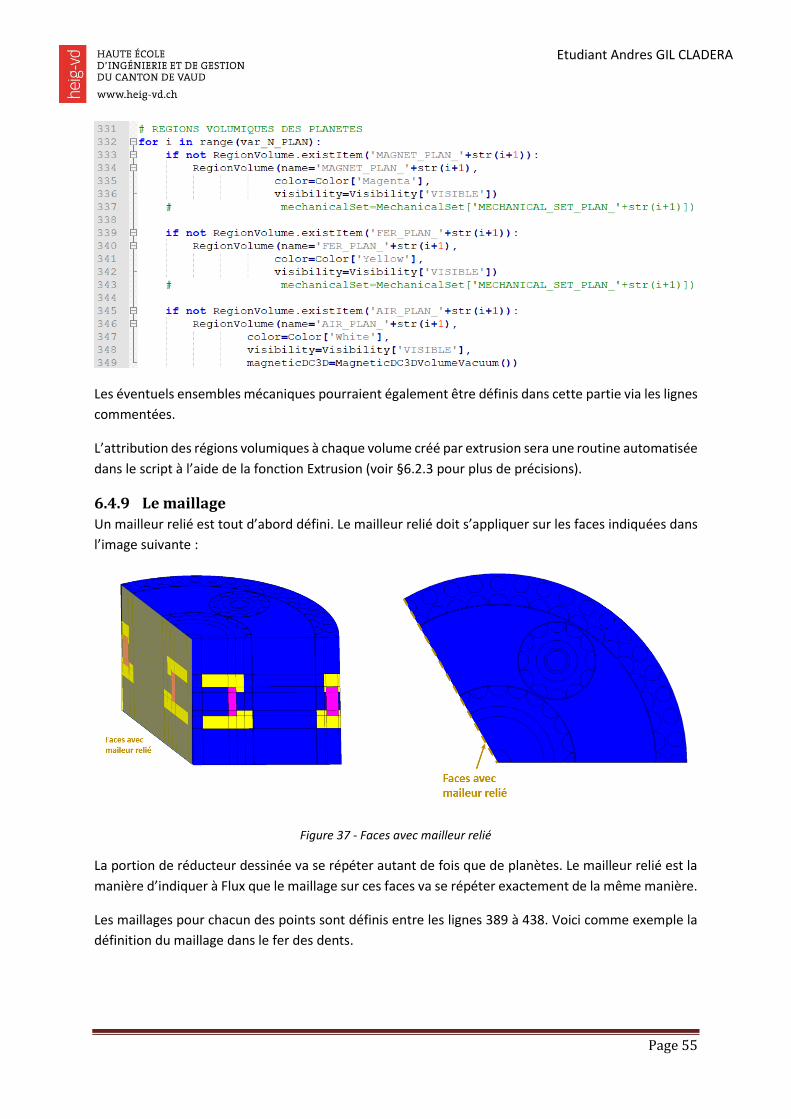
Etudiant Andres GIL CLADERA
Page 55
Les éventuels ensembles mécaniques pourraient également être définis dans cette partie via les lignes
commentées.
L’attribution des régions volumiques à chaque volume créé par extrusion sera une routine automatisée
dans le script à l’aide de la fonction Extrusion (voir §6.2.3 pour plus de précisions).
6.4.9 Le maillage
Un mailleur relié est tout d’abord défini. Le mailleur relié doit s’appliquer sur les faces indiquées dans
l’image suivante :
Figure 37 - Faces avec mailleur relié
La portion de réducteur dessinée va se répéter autant de fois que de planètes. Le mailleur relié est la
manière d’indiquer à Flux que le maillage sur ces faces va se répéter exactement de la même manière.
Les maillages pour chacun des points sont définis entre les lignes 389 à 438. Voici comme exemple la
définition du maillage dans le fer des dents.

Etudiant Andres GIL CLADERA
Page 56
Un seul mailleur de ligne est utilisé pour les lignes lEmec8 et lEmec9. Vu qu’elles sont loin des
interactions SUN-PLAN et PLAN-RING, ces lignes peuvent être maillées plus grossièrement, ce qui se
traduit par un nombre de nœuds notamment inférieur dans la région AIR_EXT.
La taille du maillage est systématiquement définie par rapport à la profondeur de l’encoche d’une
dent, D_DENT. Cette grandeur se prête bien à être utilisée comme valeur de référence vu que les
variations de flux les plus importantes auront lieu dans les dents et dans l’entrefer qui les sépare.
Rien n’empêche en revanche de modifier ces valeurs directement dans le script, ou postérieurement
via l’interface de Flux, par d’autres qui seraient plus adaptées.
Figure 38 - Exemple de comment éditer le maillage dans la région des aimants
Le maillage des points est attribué au fur et à mesure qu’ils sont créés dans chacun des différents
fichiers. En revanche, le mailleur relié sera défini dans le fichier 5_PHISIQUE.py via un algorithme de
recherche en fonction des coordonnées des différentes faces.
6.5 Fichier 2_SOLEIL.py Une fois que les différents outils géométriques ont été créés et que les différentes variables et
fonctions sont stockées dans la mémoire de Flux, la construction géométrique peut commencer.
Pour rappel, la géométrie dessinée avec DRAW_2D.py doit impérativement être effacée avant de
dessiner le tout premier point.
Les parties les plus importantes de ce fichier sont expliquées en détail ci-dessous. Veuillez remarquer
que les figures avec les indications des points créés correspondent à une vue en 2D uniquement sur le
plan XY. Les volumes et les extrusions ont été cachés pour améliorer la lisibilité.
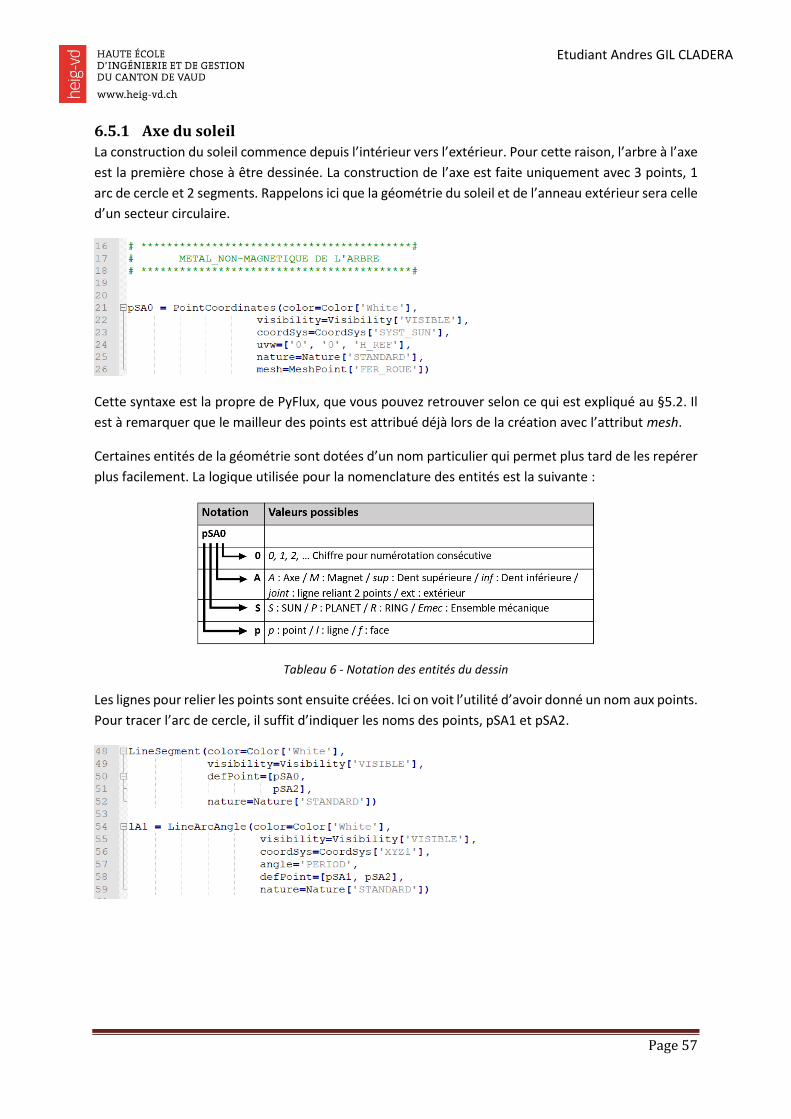
Etudiant Andres GIL CLADERA
Page 57
6.5.1 Axe du soleil
La construction du soleil commence depuis l’intérieur vers l’extérieur. Pour cette raison, l’arbre à l’axe
est la première chose à être dessinée. La construction de l’axe est faite uniquement avec 3 points, 1
arc de cercle et 2 segments. Rappelons ici que la géométrie du soleil et de l’anneau extérieur sera celle
d’un secteur circulaire.
Cette syntaxe est la propre de PyFlux, que vous pouvez retrouver selon ce qui est expliqué au §5.2. Il
est à remarquer que le mailleur des points est attribué déjà lors de la création avec l’attribut mesh.
Certaines entités de la géométrie sont dotées d’un nom particulier qui permet plus tard de les repérer
plus facilement. La logique utilisée pour la nomenclature des entités est la suivante :
Tableau 6 - Notation des entités du dessin
Les lignes pour relier les points sont ensuite créées. Ici on voit l’utilité d’avoir donné un nom aux points.
Pour tracer l’arc de cercle, il suffit d’indiquer les noms des points, pSA1 et pSA2.

Etudiant Andres GIL CLADERA
Page 58
Figure 39 - Dessin de l'axe
Il est important de remarquer l’ordre dans lequel les points aux extrémités ont été introduits dans la
fonction LineArcAngle, d’abord pSA1 et après pSA2. Pour Flux, les angles sont positifs dans le sens
trigonométrique, c’est-à-dire dans le sens contraire aux aiguilles de la montre. Si les points avaient été
introduits à l’inverse, l’arc de cercle aurait eu la courbure dans le sens contraire.
Quant toutes les lignes créées définissent une face, la routine à exécuter est la suivante :
D’abord les faces sont créées avec l’instruction buildFaces(). Seul une face sera créée et Flux lui
attribuera un indice automatiquement. Vu qu’il s’agit de la dernière face créée, elle peut être repérée
avec la syntaxe suivante : Face[ALL][-1].
L’attribut region peut ensuite être modifié. Dans ce cas, il s’agit de la face horizontale extérieure du
réducteur, sur laquelle le mailleur à champ tangentiel a été défini dans le fichier 1b_OUTILS_GEOM.py.
Lors de l’extrusion de cette face, les volumes créés ensuite appartiendront tous à la région volumique
de l’air du soleil.
La liste regions = [‘AIR_SUN’,’AIR_SUN’,’AIR_SUN’,‘AIR_SUN’,‘AIR_SUN’,‘AIR_SUN’,’AIR_SUN’] contient
les noms des régions volumiques à attribuer lors de chacune des 7 extrusions.
Pour être rigoureux, ces volumes devraient appartenir au matériel non-ferromagnétique de l’arbre.
Etant donné que ce matériel n’est pas encore connu (il sera déterminé lors d’une analyse des efforts
sur la structure), il est remplacé ici par de l’air. L’erreur commise est négligeable. L’intensité du champ
est très faible dans cette zone et la perméabilité relative d’un métal non-ferromagnétique est proche
de celle de l’air.
Pour finir, à la ligne 71, la dernière face créée lors de la dernière extrusion appartient forcement à la
face horizontale extérieure du réducteur, dont le mailleur à champ tangentiel est à nouveau défini.
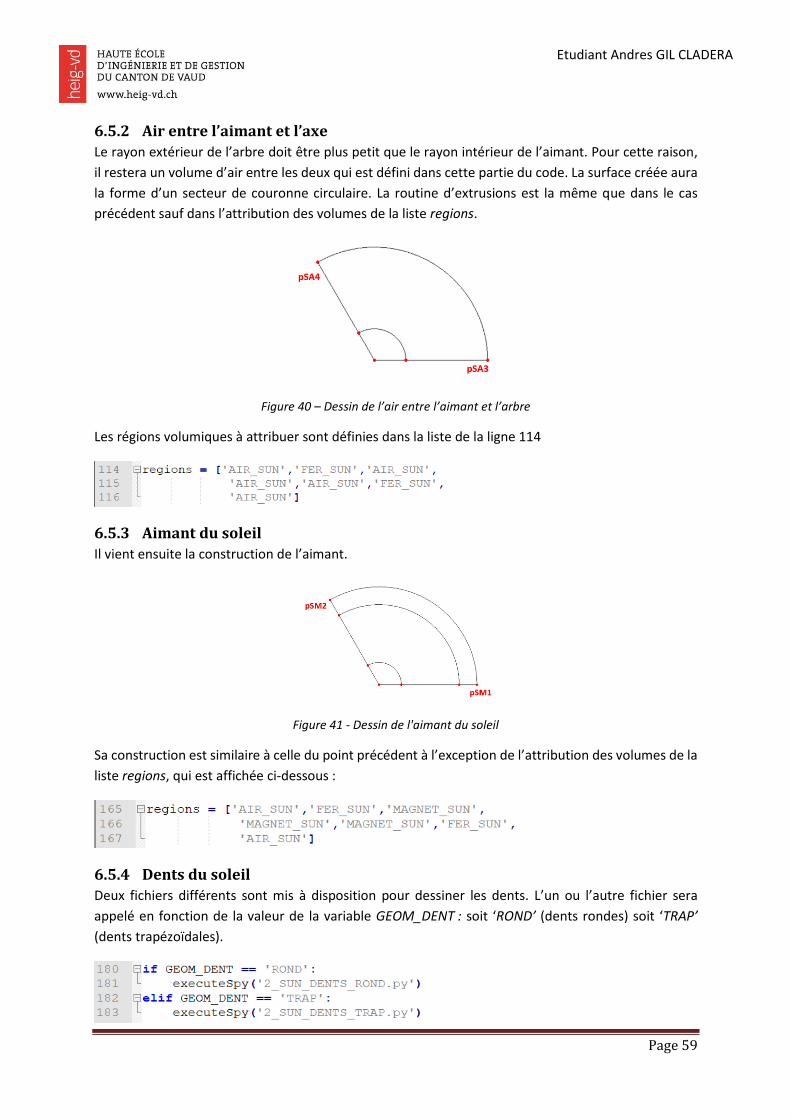
Etudiant Andres GIL CLADERA
Page 59
6.5.2 Air entre l’aimant et l’axe
Le rayon extérieur de l’arbre doit être plus petit que le rayon intérieur de l’aimant. Pour cette raison,
il restera un volume d’air entre les deux qui est défini dans cette partie du code. La surface créée aura
la forme d’un secteur de couronne circulaire. La routine d’extrusions est la même que dans le cas
précédent sauf dans l’attribution des volumes de la liste regions.
Figure 40 – Dessin de l’air entre l’aimant et l’arbre
Les régions volumiques à attribuer sont définies dans la liste de la ligne 114
6.5.3 Aimant du soleil
Il vient ensuite la construction de l’aimant.
Figure 41 - Dessin de l'aimant du soleil
Sa construction est similaire à celle du point précédent à l’exception de l’attribution des volumes de la
liste regions, qui est affichée ci-dessous :
6.5.4 Dents du soleil
Deux fichiers différents sont mis à disposition pour dessiner les dents. L’un ou l’autre fichier sera
appelé en fonction de la valeur de la variable GEOM_DENT : soit ‘ROND’ (dents rondes) soit ‘TRAP’
(dents trapézoïdales).
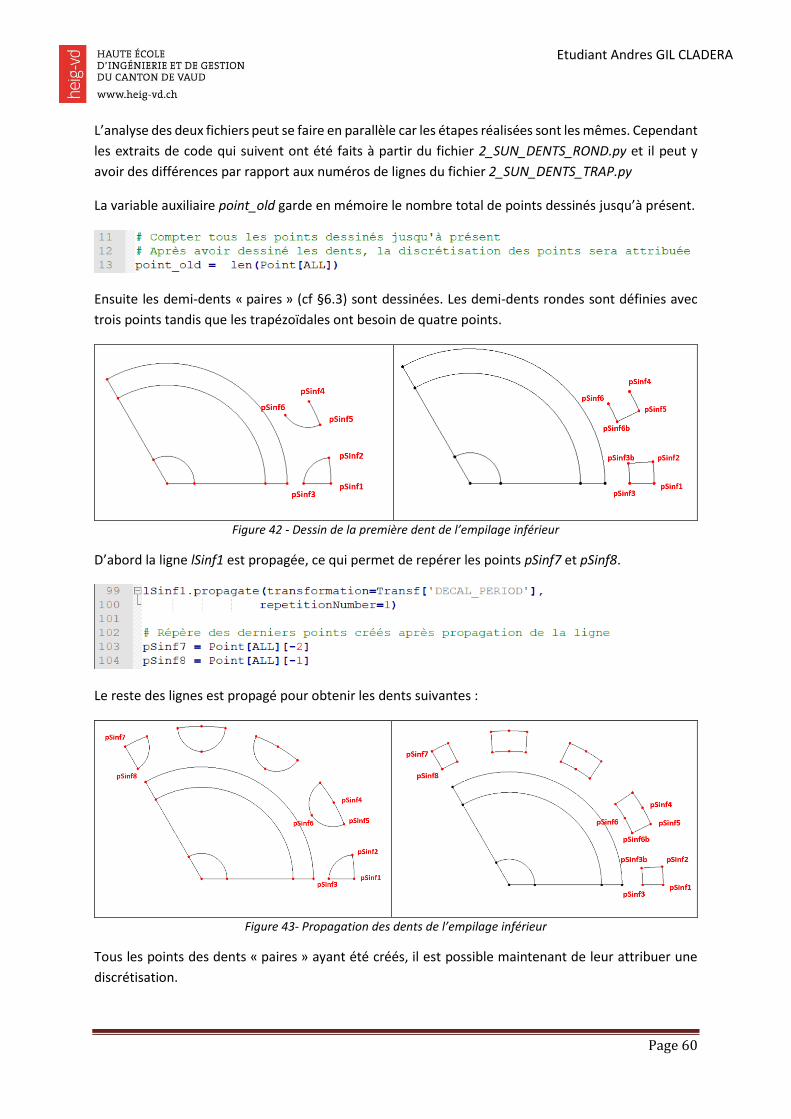
Etudiant Andres GIL CLADERA
Page 60
L’analyse des deux fichiers peut se faire en parallèle car les étapes réalisées sont les mêmes. Cependant
les extraits de code qui suivent ont été faits à partir du fichier 2_SUN_DENTS_ROND.py et il peut y
avoir des différences par rapport aux numéros de lignes du fichier 2_SUN_DENTS_TRAP.py
La variable auxiliaire point_old garde en mémoire le nombre total de points dessinés jusqu’à présent.
Ensuite les demi-dents « paires » (cf §6.3) sont dessinées. Les demi-dents rondes sont définies avec
trois points tandis que les trapézoïdales ont besoin de quatre points.
Figure 42 - Dessin de la première dent de l’empilage inférieur
D’abord la ligne lSinf1 est propagée, ce qui permet de repérer les points pSinf7 et pSinf8.
Le reste des lignes est propagé pour obtenir les dents suivantes :
Figure 43- Propagation des dents de l’empilage inférieur
Tous les points des dents « paires » ayant été créés, il est possible maintenant de leur attribuer une
discrétisation.

Etudiant Andres GIL CLADERA
Page 61
La fonction SetDiscretPoint est alors appelée (§6.2.4). Elle reçoit les paramètres suivants : le nom de la
discrétisation (dans ce cas il s’agit du FER), l’indice du point initial, qui avait été stocké dans la variable
auxiliaire point_old, et l’indice du dernier point créé qui correspond logiquement à la longueur de la
liste de tous les points existants, len(Point[ALL]).
La routine pour l’extrusion des faces est un peu différente dans le cas des dents. Le nombre de faces
créées lors de l’exécution de buildFaces() ne sera pas égal à 1, comme dans les cas précédents, mais
égal au nombre de dents de tout le secteur circulaire. Pour cela, il faut connaître le nombre de faces
qui seront créées. Cette valeur sera stockée dans la variable delta.
Les régions volumiques dans cet ensemble de dents correspondront à celles définies dans la liste
region_dent_paire.
La région surfacique avec champ tangentiel à la surface, INFINI_SUN, est attribuée aux delta dernières
faces créées, qui se trouveront dans la partie inférieure du réducteur
Pour finir, une boucle for exécute l’extrusion des faces de chaque dent. Dans la même boucle, la région
surfacique INFINI_SUN est attribuée aux dernières faces créées, qui se trouveront dans la partie
supérieure du réducteur.
Ensuite les dents impaires sont créés et propagées.
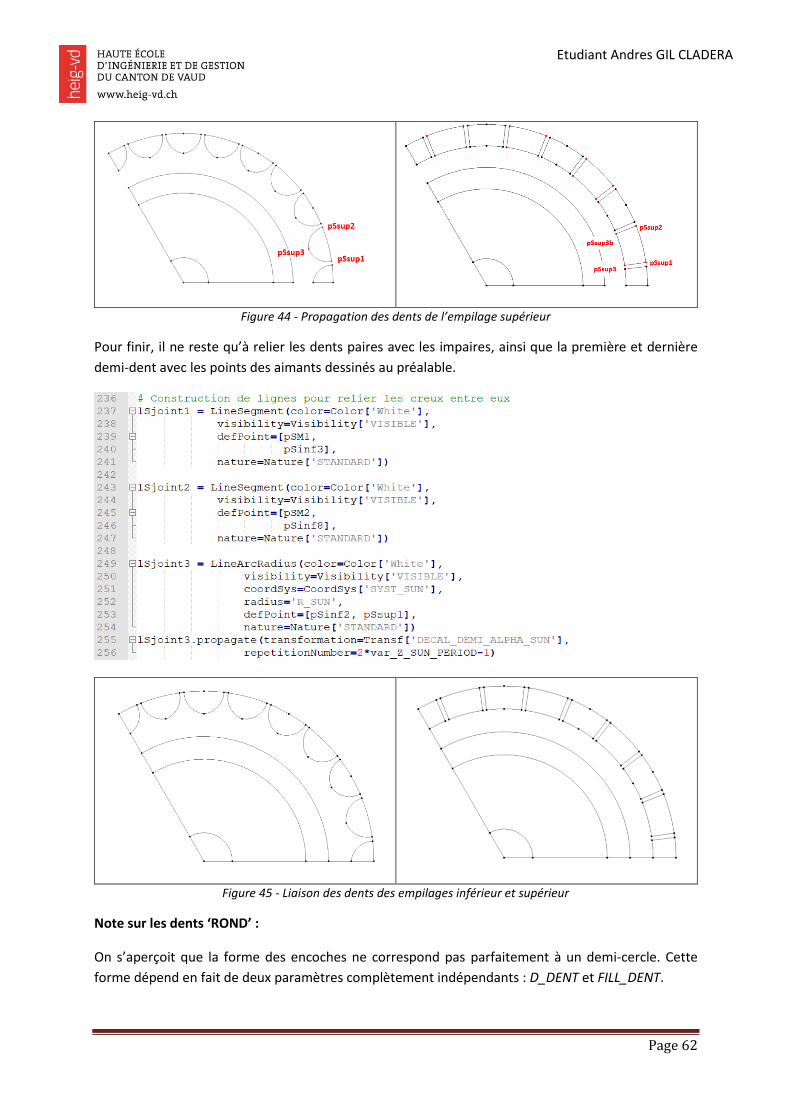
Etudiant Andres GIL CLADERA
Page 62
Figure 44 - Propagation des dents de l’empilage supérieur
Pour finir, il ne reste qu’à relier les dents paires avec les impaires, ainsi que la première et dernière
demi-dent avec les points des aimants dessinés au préalable.
Figure 45 - Liaison des dents des empilages inférieur et supérieur
Note sur les dents ‘ROND’ :
On s’aperçoit que la forme des encoches ne correspond pas parfaitement à un demi-cercle. Cette
forme dépend en fait de deux paramètres complètement indépendants : D_DENT et FILL_DENT.
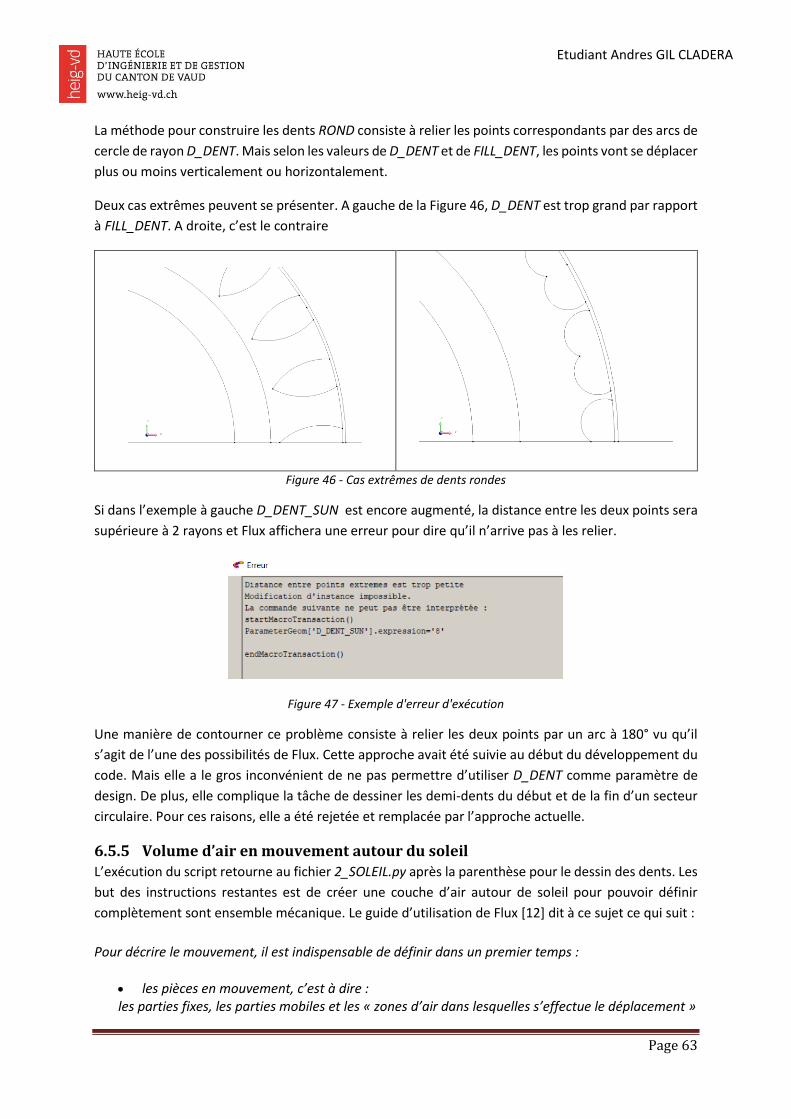
Etudiant Andres GIL CLADERA
Page 63
La méthode pour construire les dents ROND consiste à relier les points correspondants par des arcs de
cercle de rayon D_DENT. Mais selon les valeurs de D_DENT et de FILL_DENT, les points vont se déplacer
plus ou moins verticalement ou horizontalement.
Deux cas extrêmes peuvent se présenter. A gauche de la Figure 46, D_DENT est trop grand par rapport
à FILL_DENT. A droite, c’est le contraire
Figure 46 - Cas extrêmes de dents rondes
Si dans l’exemple à gauche D_DENT_SUN est encore augmenté, la distance entre les deux points sera
supérieure à 2 rayons et Flux affichera une erreur pour dire qu’il n’arrive pas à les relier.
Figure 47 - Exemple d'erreur d'exécution
Une manière de contourner ce problème consiste à relier les deux points par un arc à 180° vu qu’il
s’agit de l’une des possibilités de Flux. Cette approche avait été suivie au début du développement du
code. Mais elle a le gros inconvénient de ne pas permettre d’utiliser D_DENT comme paramètre de
design. De plus, elle complique la tâche de dessiner les demi-dents du début et de la fin d’un secteur
circulaire. Pour ces raisons, elle a été rejetée et remplacée par l’approche actuelle.
6.5.5 Volume d’air en mouvement autour du soleil
L’exécution du script retourne au fichier 2_SOLEIL.py après la parenthèse pour le dessin des dents. Les
but des instructions restantes est de créer une couche d’air autour de soleil pour pouvoir définir
complètement sont ensemble mécanique. Le guide d’utilisation de Flux [12] dit à ce sujet ce qui suit :
Pour décrire le mouvement, il est indispensable de définir dans un premier temps :
• les pièces en mouvement, c’est à dire : les parties fixes, les parties mobiles et les « zones d’air dans lesquelles s’effectue le déplacement »

Etudiant Andres GIL CLADERA
Page 64
L’entrefer L_EF est la distance minimale entre le soleil et une planète. Entre les deux, il y a un volume
d’air extérieur AIR_EXT. L’épaisseur de la couche d’air appartenant à l’ensemble mécanique du soleil
sera de 1/3*L_EF. L’épaisseur correspondante à la couche d’air appartenant à l’ensemble mécanique
de la planète sera aussi 1/3*L_EF. Le tiers restant appartiendra au volume d’air extérieur, qui sera fixe.
Pour cette raison, la coordonnée u des points pEmec1 et pEmec2 est L_EF/3. Veuillez remarquer que
ces points appartiennent au repère fixe de l’air extérieur.
L’image suivante affiche les noms des principaux points et lignes utilisés pour construire le soleil.
Figure 48 - Ensemble de points et lignes de construction du soleil (dents rondes)
6.6 Fichier 3_PLANETES.py A la différence du soleil du (§6.5) ou de l’anneau extérieur (§6.7), où seulement un secteur circulaire
est dessiné, la planète est dessinée en entier sur 360°. L’axe et l’aimant seront donc de cercles
complets. Et la totalité des dents et non-pas de demi-dents sera représentée.
Une autre particularité est que le nombre de planètes est à choisir par l’utilisateur. Le dessin avec Flux
est réalisé à l’intérieur d’une boucle for.
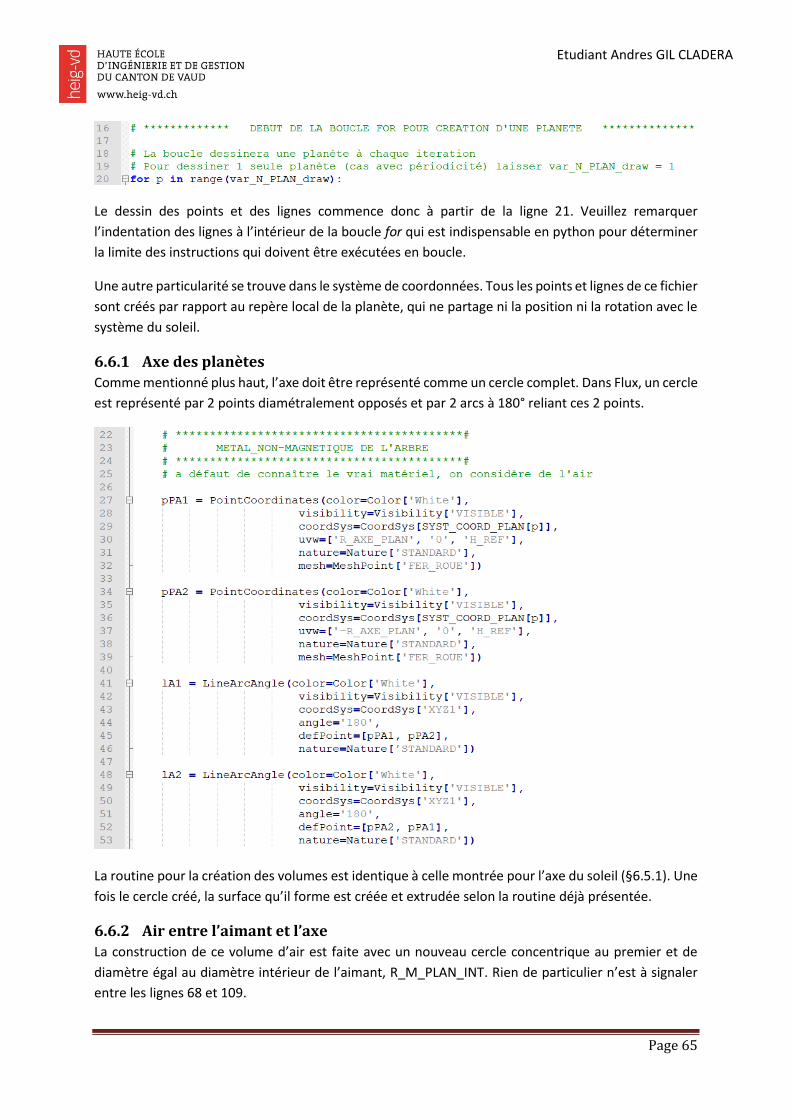
Etudiant Andres GIL CLADERA
Page 65
Le dessin des points et des lignes commence donc à partir de la ligne 21. Veuillez remarquer
l’indentation des lignes à l’intérieur de la boucle for qui est indispensable en python pour déterminer
la limite des instructions qui doivent être exécutées en boucle.
Une autre particularité se trouve dans le système de coordonnées. Tous les points et lignes de ce fichier
sont créés par rapport au repère local de la planète, qui ne partage ni la position ni la rotation avec le
système du soleil.
6.6.1 Axe des planètes
Comme mentionné plus haut, l’axe doit être représenté comme un cercle complet. Dans Flux, un cercle
est représenté par 2 points diamétralement opposés et par 2 arcs à 180° reliant ces 2 points.
La routine pour la création des volumes est identique à celle montrée pour l’axe du soleil (§6.5.1). Une
fois le cercle créé, la surface qu’il forme est créée et extrudée selon la routine déjà présentée.
6.6.2 Air entre l’aimant et l’axe
La construction de ce volume d’air est faite avec un nouveau cercle concentrique au premier et de
diamètre égal au diamètre intérieur de l’aimant, R_M_PLAN_INT. Rien de particulier n’est à signaler
entre les lignes 68 et 109.

Etudiant Andres GIL CLADERA
Page 66
6.6.3 Aimant des planètes
A l’instar du paragraphe précédent, la construction de l’aimant ne revêt pas de difficulté particulière.
A la fin de ces trois étapes, l’allure de la planète est la suivante :
Figure 49 - Allure de la planète: axe et aimant
6.6.4 Dents des planètes
La construction des dents des planètes se fait dans des fichiers différents selon la géométrie de celles-
ci.
D’abord les points des encoches de la denture inférieure sont crées.
Ensuite les lignes sont tracées pour former les demi-dents.
Figure 50 - Dessin de la première dent de l’empilage inférieur
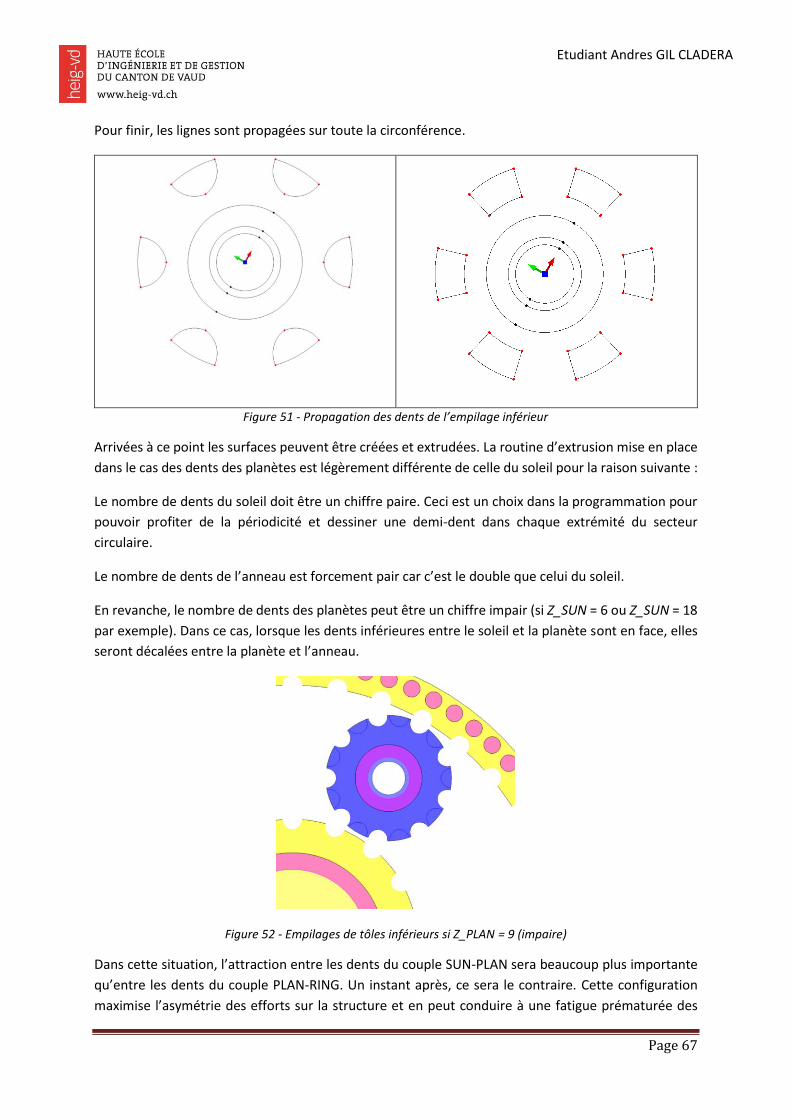
Etudiant Andres GIL CLADERA
Page 67
Pour finir, les lignes sont propagées sur toute la circonférence.
Figure 51 - Propagation des dents de l’empilage inférieur
Arrivées à ce point les surfaces peuvent être créées et extrudées. La routine d’extrusion mise en place
dans le cas des dents des planètes est légèrement différente de celle du soleil pour la raison suivante :
Le nombre de dents du soleil doit être un chiffre paire. Ceci est un choix dans la programmation pour
pouvoir profiter de la périodicité et dessiner une demi-dent dans chaque extrémité du secteur
circulaire.
Le nombre de dents de l’anneau est forcement pair car c’est le double que celui du soleil.
En revanche, le nombre de dents des planètes peut être un chiffre impair (si Z_SUN = 6 ou Z_SUN = 18
par exemple). Dans ce cas, lorsque les dents inférieures entre le soleil et la planète sont en face, elles
seront décalées entre la planète et l’anneau.
Figure 52 - Empilages de tôles inférieurs si Z_PLAN = 9 (impaire)
Dans cette situation, l’attraction entre les dents du couple SUN-PLAN sera beaucoup plus importante
qu’entre les dents du couple PLAN-RING. Un instant après, ce sera le contraire. Cette configuration
maximise l’asymétrie des efforts sur la structure et en peut conduire à une fatigue prématurée des
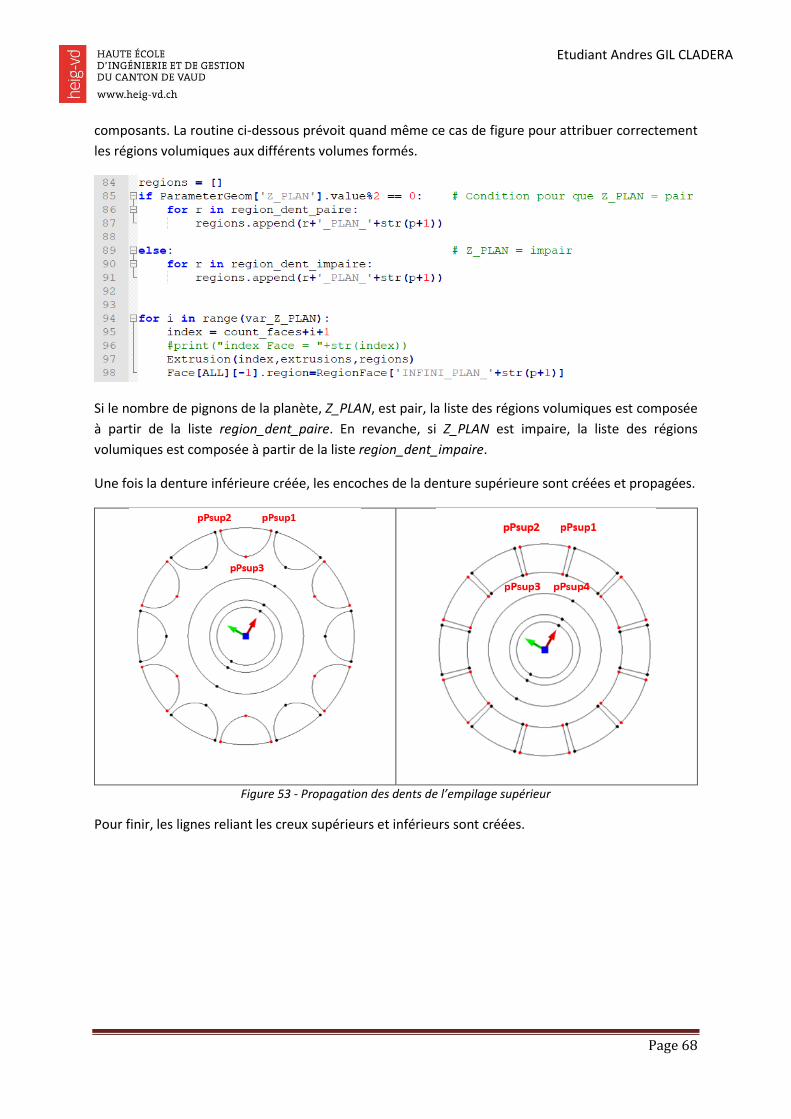
Etudiant Andres GIL CLADERA
Page 68
composants. La routine ci-dessous prévoit quand même ce cas de figure pour attribuer correctement
les régions volumiques aux différents volumes formés.
Si le nombre de pignons de la planète, Z_PLAN, est pair, la liste des régions volumiques est composée
à partir de la liste region_dent_paire. En revanche, si Z_PLAN est impaire, la liste des régions
volumiques est composée à partir de la liste region_dent_impaire.
Une fois la denture inférieure créée, les encoches de la denture supérieure sont créées et propagées.
Figure 53 - Propagation des dents de l’empilage supérieur
Pour finir, les lignes reliant les creux supérieurs et inférieurs sont créées.
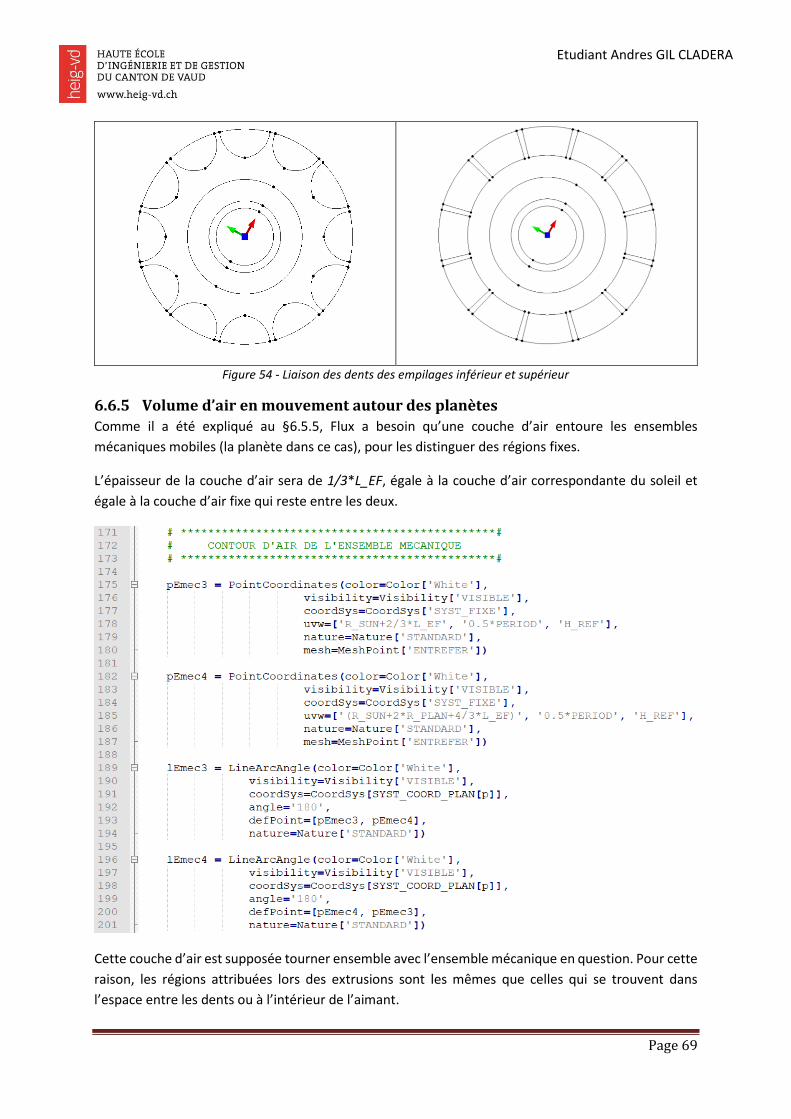
Etudiant Andres GIL CLADERA
Page 69
Figure 54 - Liaison des dents des empilages inférieur et supérieur
6.6.5 Volume d’air en mouvement autour des planètes
Comme il a été expliqué au §6.5.5, Flux a besoin qu’une couche d’air entoure les ensembles
mécaniques mobiles (la planète dans ce cas), pour les distinguer des régions fixes.
L’épaisseur de la couche d’air sera de 1/3*L_EF, égale à la couche d’air correspondante du soleil et
égale à la couche d’air fixe qui reste entre les deux.
Cette couche d’air est supposée tourner ensemble avec l’ensemble mécanique en question. Pour cette
raison, les régions attribuées lors des extrusions sont les mêmes que celles qui se trouvent dans
l’espace entre les dents ou à l’intérieur de l’aimant.

Etudiant Andres GIL CLADERA
Page 70
6.7 Fichier 4_RING.py L’anneau extérieur présente deux différences fondamentales par rapport au soleil et aux planètes.
D’un côté ses dents sont taillées dans la surface intérieure. De l’autre côté, il est difficile de trouver un
aimant cylindrique creux de la taille de l’anneau extérieur (sauf s’il s’agit d’une application
miniaturisée). Pour cela, le script prévoit de nombreux petits aimants cylindriques pleins encastrés
dans les empilages des tôles de l’anneau.
6.7.1 Dents de l’anneau
La construction de l’anneau extérieur commence de manière inverse au soleil et à la planète. Les dents
sont créées tout d’abord, vu qu’elles se trouvent plus proches de l’origine. Ici, à nouveau, deux fichiers
différents sont appelés, en fonction de si la géométrie des dents est ronde ou trapézoïdale.
Le détail de ces deux fichiers ne sera pas montré ici étant donné sa ressemblance avec les fichiers
correspondants des planètes. La seule particularité à noter vient du fait que le profil des dents n’est
pas convexe mais concave. Lors de la construction des lignes, il faut prendre ce détail en compte pour
introduire les noms des points à relier dans l’ordre correct, comme expliqué au §6.5.1.
6.7.2 Aimants de l’anneau
Il semble difficile de trouver dans un catalogue un aimant cylindrique, d’une seule pièce et avec les
mêmes dimensions que l’anneau extérieur à moins qu’il ne soit fait sur mesure. L’approche suivi pour
les aimants de l’anneau extérieur consiste donc à utiliser de petits aimants cylindriques placés faces à
chaque dent et à chaque encoche. Une variante à étudier, en vue d’une future réalisation du réducteur,
serait de supprimer les aimants en face de chaque encoche pour réduire le prix du réducteur :
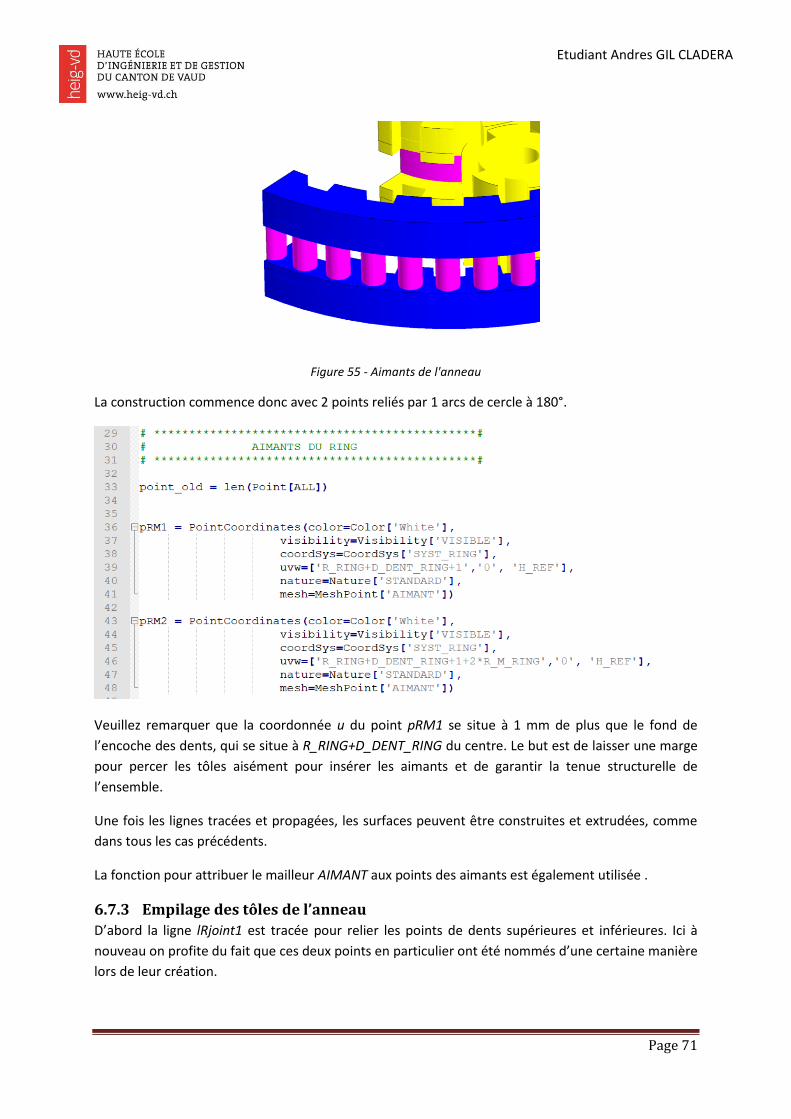
Etudiant Andres GIL CLADERA
Page 71
Figure 55 - Aimants de l'anneau
La construction commence donc avec 2 points reliés par 1 arcs de cercle à 180°.
Veuillez remarquer que la coordonnée u du point pRM1 se situe à 1 mm de plus que le fond de
l’encoche des dents, qui se situe à R_RING+D_DENT_RING du centre. Le but est de laisser une marge
pour percer les tôles aisément pour insérer les aimants et de garantir la tenue structurelle de
l’ensemble.
Une fois les lignes tracées et propagées, les surfaces peuvent être construites et extrudées, comme
dans tous les cas précédents.
La fonction pour attribuer le mailleur AIMANT aux points des aimants est également utilisée .
6.7.3 Empilage des tôles de l’anneau
D’abord la ligne lRjoint1 est tracée pour relier les points de dents supérieures et inférieures. Ici à
nouveau on profite du fait que ces deux points en particulier ont été nommés d’une certaine manière
lors de leur création.
Etudiant Andres GIL CLADERA
Page 72
Un demi cercle de rayon R_RING_EXT définit la limite extérieure de l’anneau. Veuillez vous référer au
§6.3 pour les indications concernant la valeur de ce paramètre. Le mailleur des points est donné
directement lors de la création. La fonction SetDiscretPoint n’est pas utilisée ici vu qu’il ne s’agit que
de 2 points.
Pour finir, 4 segments viennent fermer les espaces dans le sens radial. Ces lignes ne reçoivent pas une
notation particulière puisqu’elles ne seront plus référencées dans le code.
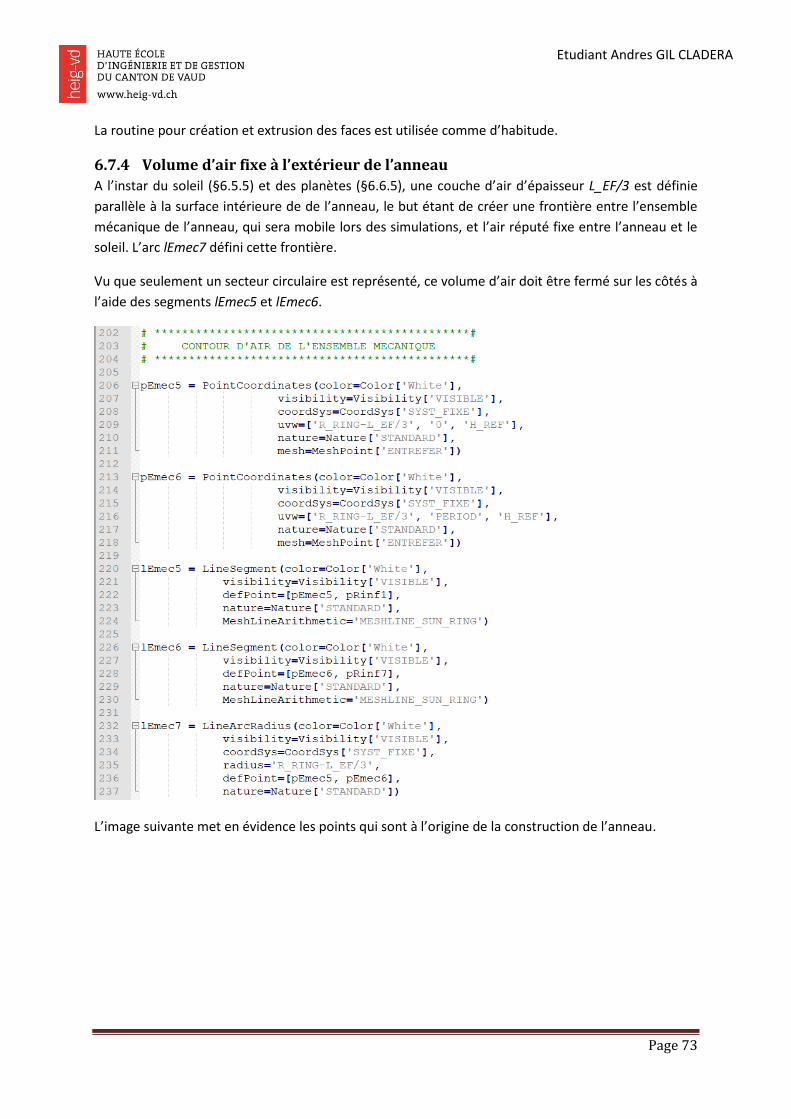
Etudiant Andres GIL CLADERA
Page 73
La routine pour création et extrusion des faces est utilisée comme d’habitude.
6.7.4 Volume d’air fixe à l’extérieur de l’anneau
A l’instar du soleil (§6.5.5) et des planètes (§6.6.5), une couche d’air d’épaisseur L_EF/3 est définie
parallèle à la surface intérieure de de l’anneau, le but étant de créer une frontière entre l’ensemble
mécanique de l’anneau, qui sera mobile lors des simulations, et l’air réputé fixe entre l’anneau et le
soleil. L’arc lEmec7 défini cette frontière.
Vu que seulement un secteur circulaire est représenté, ce volume d’air doit être fermé sur les côtés à
l’aide des segments lEmec5 et lEmec6.
L’image suivante met en évidence les points qui sont à l’origine de la construction de l’anneau.

Etudiant Andres GIL CLADERA
Page 74
Figure 56 - Points de construction de l'anneau pour une géométrie trapézoïdale
6.7.5 Air à l’intérieur de l’anneau
Les dernières lignes du fichier RING.py construisent le volume d’air qui rempli l’intérieur du réducteur.
Pour cette raison la région volumique AIR_EXT, définissant l’air fixe, est utilisée lors des extrusions.
.
6.8 Fichier 5_PHYSIQUE.py Ce fichier regroupe l’ensemble des commandes pour réaliser 2 tâches concrètes :
1) Attribution du mailleur relié aux faces concernées
2) Affectation des matériaux aux régions volumiques
6.8.1 Attribution du mailleur relié aux faces
Lors des extrusions, Flux attribue un indice aux faces créées selon une logique qui n’a pas pu être
complètement déchiffrée. Par exemple, un cercle extrudé dans Flux donne lieu à 3 nouvelles faces, en
plus de celle de la base qui a été utilisée pour l’extrusion. La face horizontal supérieure semble recevoir
toujours le dernier indice. En revanche, il n’est pas clair quelle parmi les deux faces verticales aura un
indice avant l’autre.
Ceci représente un problème quand on veut attribuer le mailleur relié aux faces verticales créées lors
des extrusions des aimants, du fer, de l’air, etc. Des erreurs d’exécution ont lieu si le mailleur relié est
attribué aux faces erronées.
Pour cette raison, un algorithme a été développé pour identifier les faces selon ses coordonnées. Il
faut définir les coordonnées d’un point appartenant à la face en question pour que Flux l’identifie de
manière univoque. Un point ne peut appartenir qu’à une seule face, sauf s’il s’agit d’une arête ou d’un
sommet. Dans cet algorithme, le centre géométrique de chaque face est ciblé.

Etudiant Andres GIL CLADERA
Page 75
Dans la première partie du fichier, de nombreuses variables auxiliaires sont définies à partir des valeurs
numériques des paramètres créées dans Flux.
Les coordonnées des faces sont données dans un système cylindrique. La première coordonnée, X,
définit le rayon. La deuxième coordonnée, Y, correspond à un angle. Elle sera constante et égale à
l’angle PERIOD. La troisième coordonnée, Z, correspond à la distance verticale.
Les coordonnées X de chaque face sont définies à l’aide des variables auxiliaires et stockées dans la
liste CoordX.
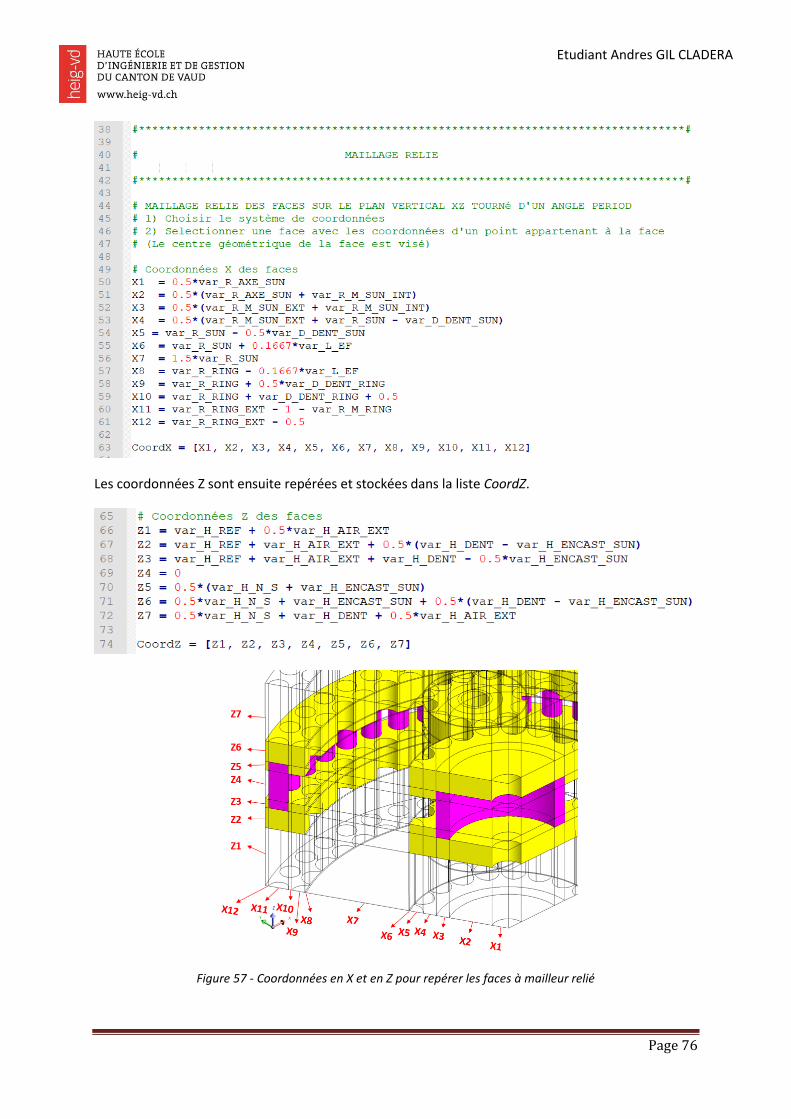
Etudiant Andres GIL CLADERA
Page 76
Les coordonnées Z sont ensuite repérées et stockées dans la liste CoordZ.
Figure 57 - Coordonnées en X et en Z pour repérer les faces à mailleur relié
Etudiant Andres GIL CLADERA
Page 77
Deux boucles for imbriquées permettent de parcourir toutes les faces concernées et de leur attribuer
le mailleur relié.
Pour finir, la face courbe de la surface extérieure de l’anneau est aussi sélectionnée via de coordonnées
pour lui imposer un champ tangentiel à la surface avec la région surfacique INFINI_RING.
6.8.2 Affectation des matériaux aux régions volumiques
Le gestionnaire de matériaux de Flux donne accès à une large base de données des différents
matériaux.
Figure 58 - Importation du gestionnaire de matériaux
Les valeurs numériques des propriétés magnétiques des tôles et des aimants ont été attribuées dans
le fichier _MAIN.py. Ces valeurs sont reprises via les variables correspondantes pour la création des
matériaux.
En ce qui concerne les tôles, les efforts sur les pièces en rotation seront certainement très sévères et
ils vont restreindre le choix à des aciers de hautes performances mécaniques en dépit des
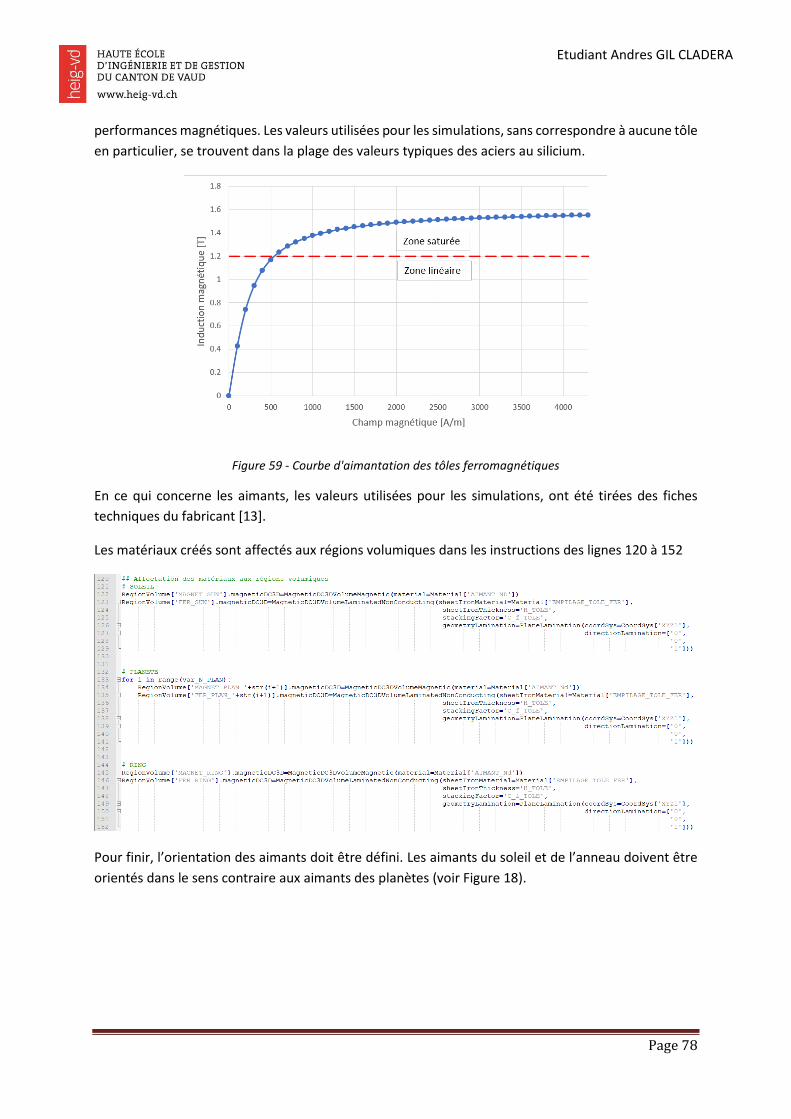
Etudiant Andres GIL CLADERA
Page 78
performances magnétiques. Les valeurs utilisées pour les simulations, sans correspondre à aucune tôle
en particulier, se trouvent dans la plage des valeurs typiques des aciers au silicium.
Figure 59 - Courbe d'aimantation des tôles ferromagnétiques
En ce qui concerne les aimants, les valeurs utilisées pour les simulations, ont été tirées des fiches
techniques du fabricant [13].
Les matériaux créés sont affectés aux régions volumiques dans les instructions des lignes 120 à 152
Pour finir, l’orientation des aimants doit être défini. Les aimants du soleil et de l’anneau doivent être
orientés dans le sens contraire aux aimants des planètes (voir Figure 18).
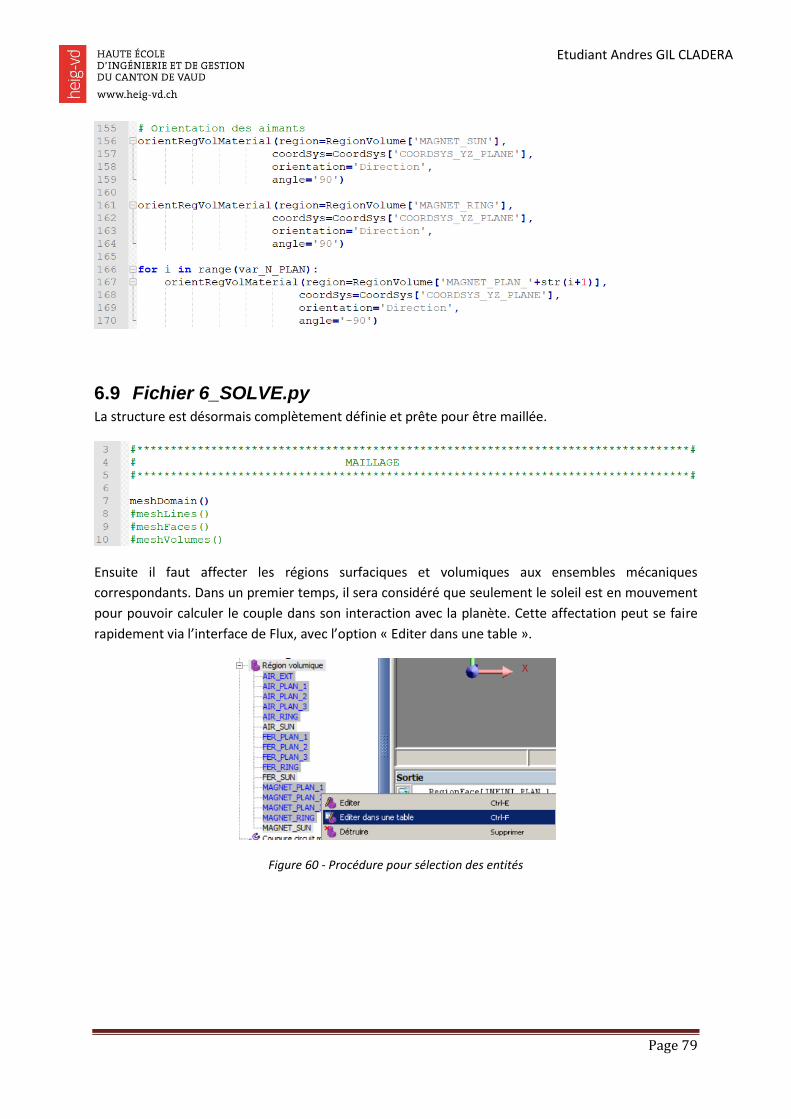
Etudiant Andres GIL CLADERA
Page 79
6.9 Fichier 6_SOLVE.py La structure est désormais complètement définie et prête pour être maillée.
Ensuite il faut affecter les régions surfaciques et volumiques aux ensembles mécaniques
correspondants. Dans un premier temps, il sera considéré que seulement le soleil est en mouvement
pour pouvoir calculer le couple dans son interaction avec la planète. Cette affectation peut se faire
rapidement via l’interface de Flux, avec l’option « Editer dans une table ».
Figure 60 - Procédure pour sélection des entités
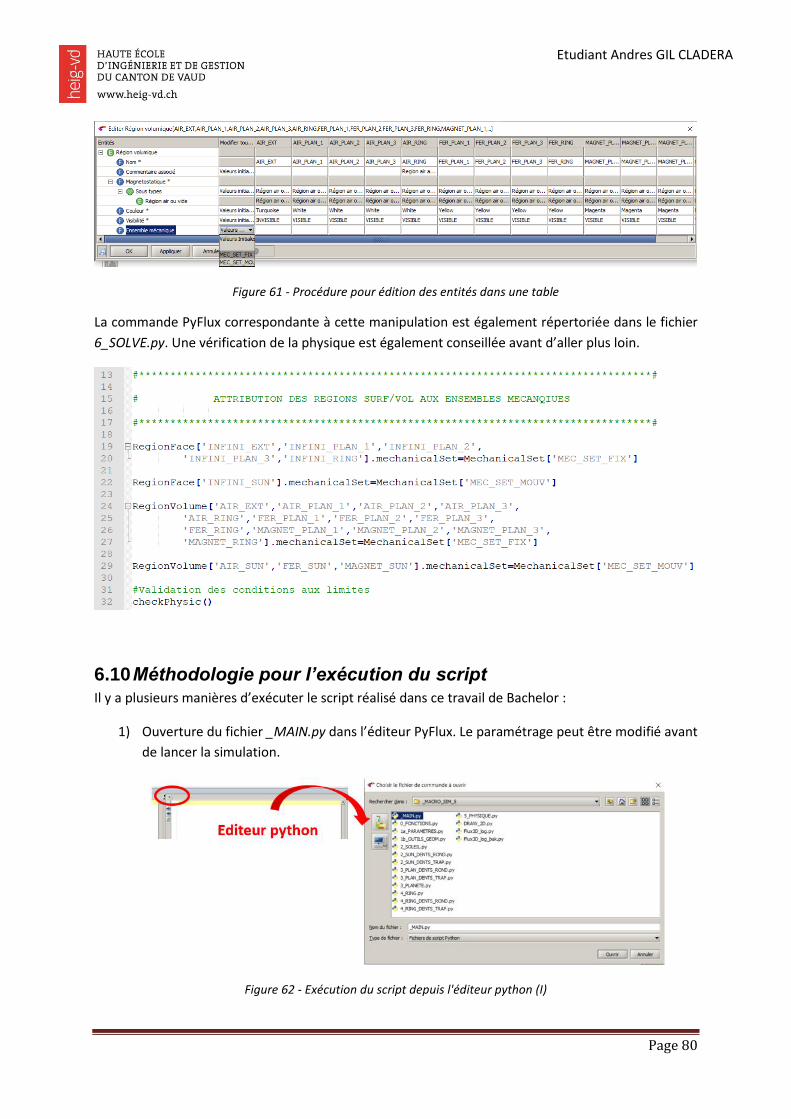
Etudiant Andres GIL CLADERA
Page 80
Figure 61 - Procédure pour édition des entités dans une table
La commande PyFlux correspondante à cette manipulation est également répertoriée dans le fichier
6_SOLVE.py. Une vérification de la physique est également conseillée avant d’aller plus loin.
6.10 Méthodologie pour l’exécution du script Il y a plusieurs manières d’exécuter le script réalisé dans ce travail de Bachelor :
1) Ouverture du fichier _MAIN.py dans l’éditeur PyFlux. Le paramétrage peut être modifié avant
de lancer la simulation.
Figure 62 - Exécution du script depuis l'éditeur python (I)
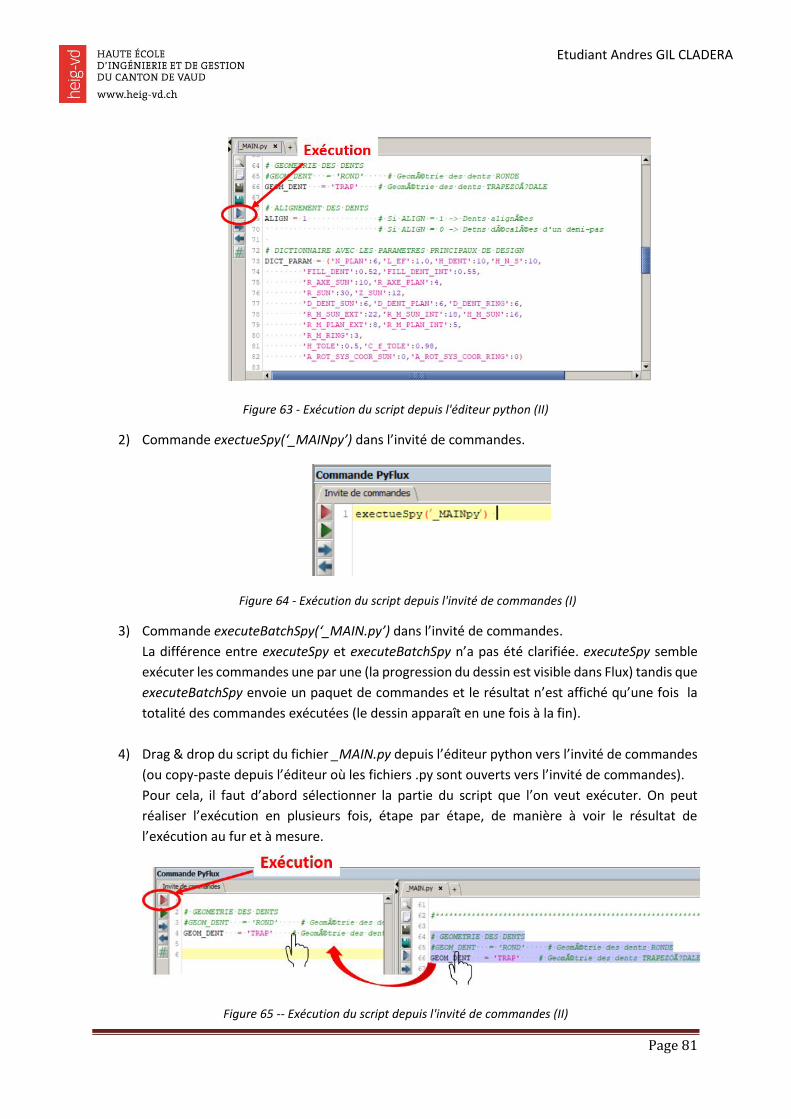
Etudiant Andres GIL CLADERA
Page 81
Figure 63 - Exécution du script depuis l'éditeur python (II)
2) Commande exectueSpy(‘_MAINpy’) dans l’invité de commandes.
Figure 64 - Exécution du script depuis l'invité de commandes (I)
3) Commande executeBatchSpy(‘_MAIN.py’) dans l’invité de commandes.
La différence entre executeSpy et executeBatchSpy n’a pas été clarifiée. executeSpy semble
exécuter les commandes une par une (la progression du dessin est visible dans Flux) tandis que
executeBatchSpy envoie un paquet de commandes et le résultat n’est affiché qu’une fois la
totalité des commandes exécutées (le dessin apparaît en une fois à la fin).
4) Drag & drop du script du fichier _MAIN.py depuis l’éditeur python vers l’invité de commandes
(ou copy-paste depuis l’éditeur où les fichiers .py sont ouverts vers l’invité de commandes).
Pour cela, il faut d’abord sélectionner la partie du script que l’on veut exécuter. On peut
réaliser l’exécution en plusieurs fois, étape par étape, de manière à voir le résultat de
l’exécution au fur et à mesure.
Figure 65 -- Exécution du script depuis l'invité de commandes (II)
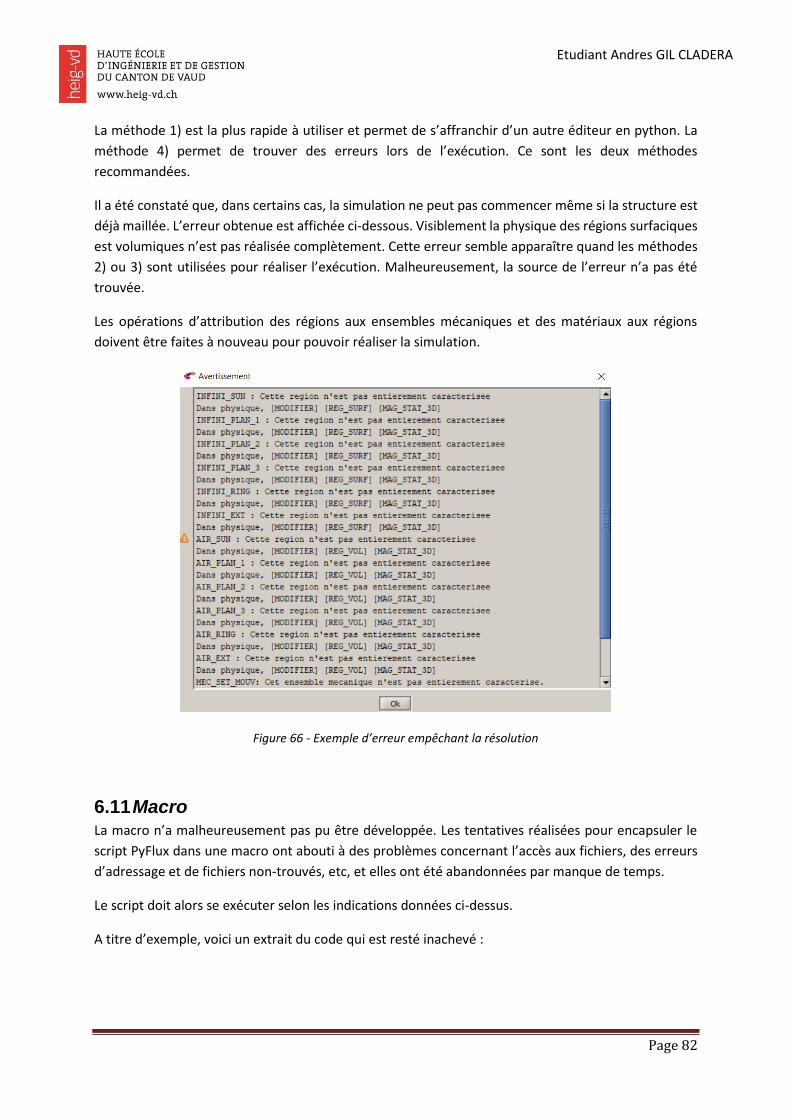
Etudiant Andres GIL CLADERA
Page 82
La méthode 1) est la plus rapide à utiliser et permet de s’affranchir d’un autre éditeur en python. La
méthode 4) permet de trouver des erreurs lors de l’exécution. Ce sont les deux méthodes
recommandées.
Il a été constaté que, dans certains cas, la simulation ne peut pas commencer même si la structure est
déjà maillée. L’erreur obtenue est affichée ci-dessous. Visiblement la physique des régions surfaciques
est volumiques n’est pas réalisée complètement. Cette erreur semble apparaître quand les méthodes
2) ou 3) sont utilisées pour réaliser l’exécution. Malheureusement, la source de l’erreur n’a pas été
trouvée.
Les opérations d’attribution des régions aux ensembles mécaniques et des matériaux aux régions
doivent être faites à nouveau pour pouvoir réaliser la simulation.
Figure 66 - Exemple d’erreur empêchant la résolution
6.11 Macro La macro n’a malheureusement pas pu être développée. Les tentatives réalisées pour encapsuler le
script PyFlux dans une macro ont abouti à des problèmes concernant l’accès aux fichiers, des erreurs
d’adressage et de fichiers non-trouvés, etc, et elles ont été abandonnées par manque de temps.
Le script doit alors se exécuter selon les indications données ci-dessus.
A titre d’exemple, voici un extrait du code qui est resté inachevé :
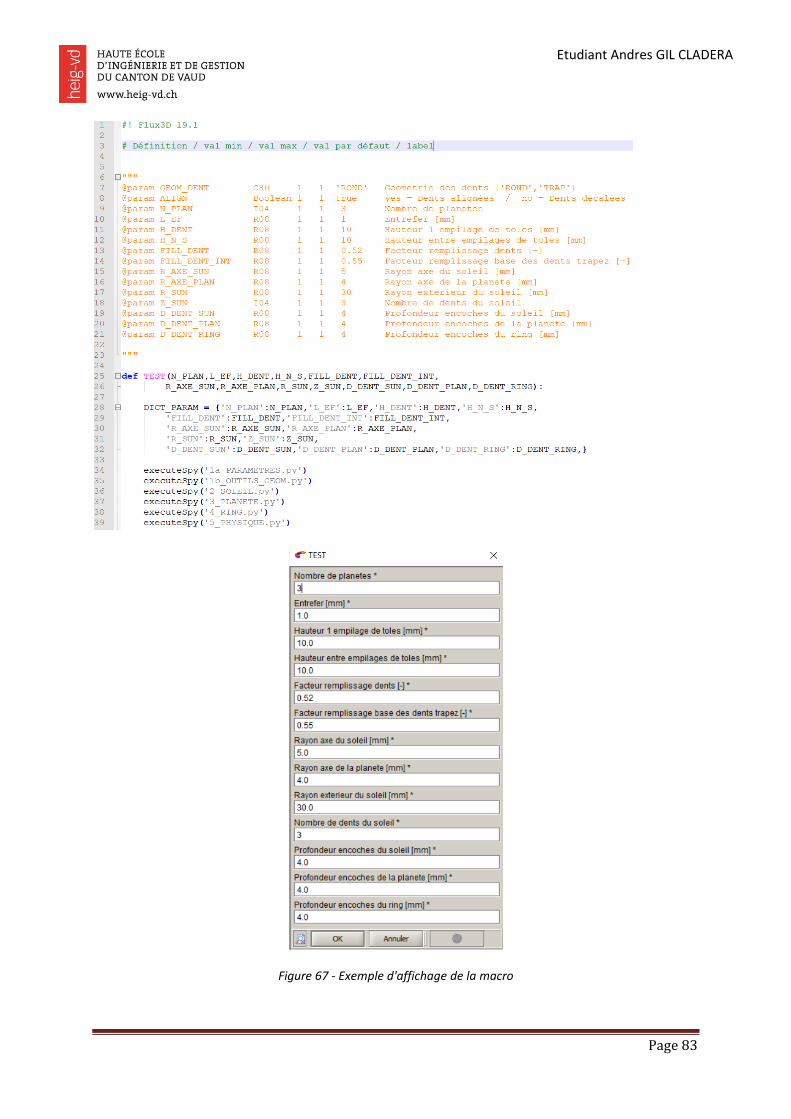
Etudiant Andres GIL CLADERA
Page 83
Figure 67 - Exemple d'affichage de la macro
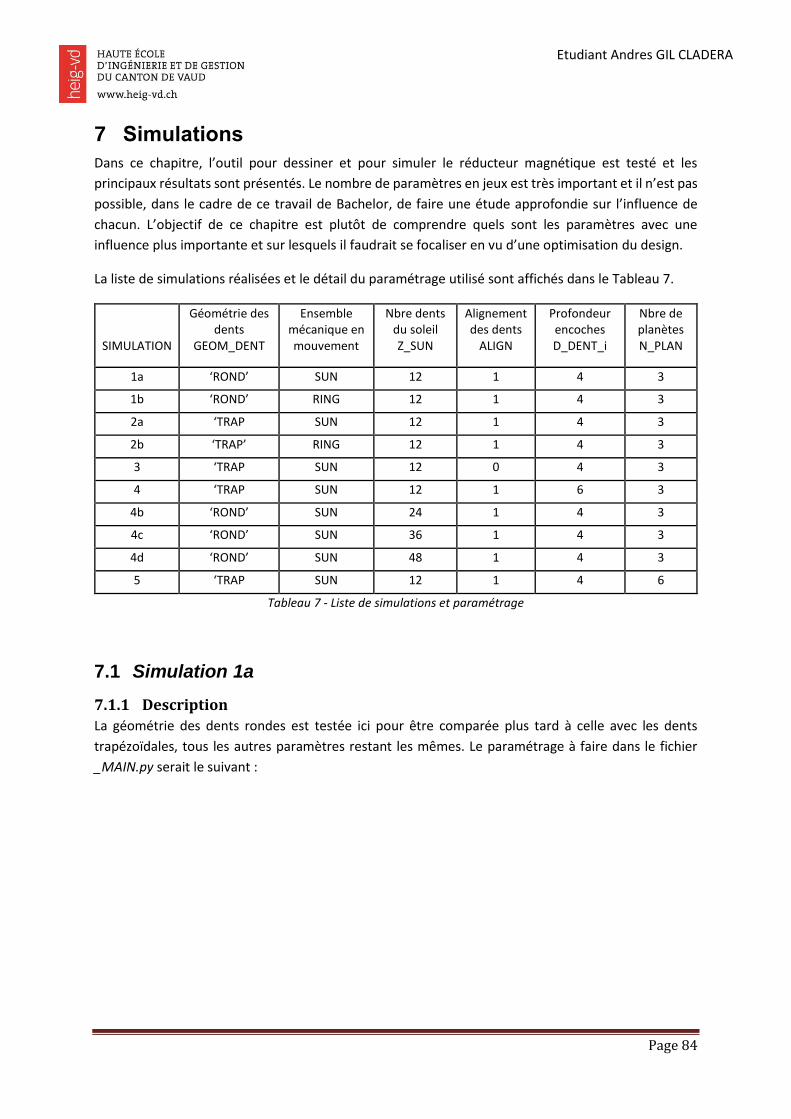
Etudiant Andres GIL CLADERA
Page 84
7 Simulations
Dans ce chapitre, l’outil pour dessiner et pour simuler le réducteur magnétique est testé et les
principaux résultats sont présentés. Le nombre de paramètres en jeux est très important et il n’est pas
possible, dans le cadre de ce travail de Bachelor, de faire une étude approfondie sur l’influence de
chacun. L’objectif de ce chapitre est plutôt de comprendre quels sont les paramètres avec une
influence plus importante et sur lesquels il faudrait se focaliser en vu d’une optimisation du design.
La liste de simulations réalisées et le détail du paramétrage utilisé sont affichés dans le Tableau 7.
SIMULATION
Géométrie des dents
GEOM_DENT
Ensemble mécanique en mouvement
Nbre dents du soleil Z_SUN
Alignement des dents
ALIGN
Profondeur encoches D_DENT_i
Nbre de planètes N_PLAN
1a ‘ROND’ SUN 12 1 4 3
1b ‘ROND’ RING 12 1 4 3
2a ‘TRAP SUN 12 1 4 3
2b ‘TRAP’ RING 12 1 4 3
3 ‘TRAP SUN 12 0 4 3
4 ‘TRAP SUN 12 1 6 3
4b ‘ROND’ SUN 24 1 4 3
4c ‘ROND’ SUN 36 1 4 3
4d ‘ROND’ SUN 48 1 4 3
5 ‘TRAP SUN 12 1 4 6
Tableau 7 - Liste de simulations et paramétrage
7.1 Simulation 1a
7.1.1 Description
La géométrie des dents rondes est testée ici pour être comparée plus tard à celle avec les dents
trapézoïdales, tous les autres paramètres restant les mêmes. Le paramétrage à faire dans le fichier
_MAIN.py serait le suivant :

Etudiant Andres GIL CLADERA
Page 85
7.1.2 Couple sur l’ensemble mécanique du soleil
Flux réalise le calcul du couple sur l’ensemble mécanique en prenant en compte qu’une partie de la
géométrie n’est pas dessinée mais qu’elle existe réellement. C’est-à-dire, même s’il n’y a qu’une
planète dessinée, Flux donne la valeur du couple des trois planètes sur l’ensemble mécanique.
La procédure pour l’obtention de la courbe dans Flux est indiquée dans l’image suivante :
Figure 68 - Obtention de la courbe du couple sur l'ensemble mécanique
Dans le cas de la simulation 1a, l’ensemble mécanique est le soleil. Le couple utile du réducteur dans
l’axe de sortie, au niveau du carrier, sera donc 3 fois supérieur à celui donné par Flux (cf 3.3)
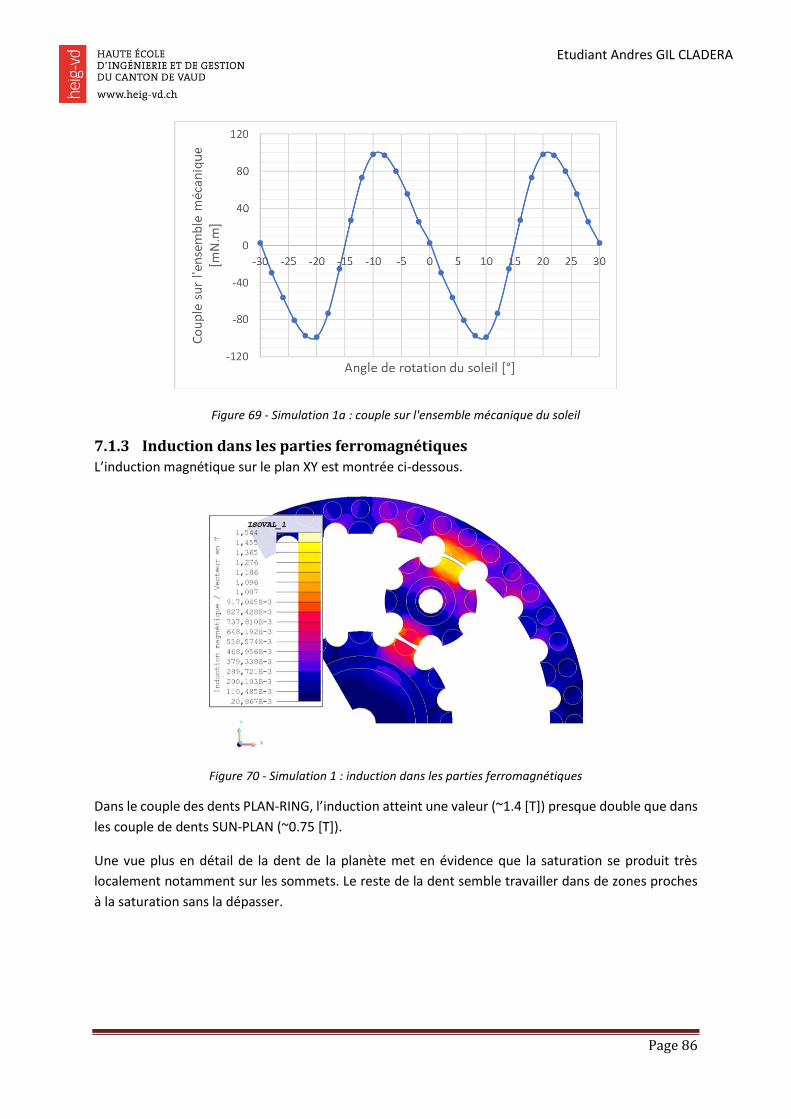
Etudiant Andres GIL CLADERA
Page 86
Figure 69 - Simulation 1a : couple sur l'ensemble mécanique du soleil
7.1.3 Induction dans les parties ferromagnétiques
L’induction magnétique sur le plan XY est montrée ci-dessous.
Figure 70 - Simulation 1 : induction dans les parties ferromagnétiques
Dans le couple des dents PLAN-RING, l’induction atteint une valeur (~1.4 [T]) presque double que dans
les couple de dents SUN-PLAN (~0.75 [T]).
Une vue plus en détail de la dent de la planète met en évidence que la saturation se produit très
localement notamment sur les sommets. Le reste de la dent semble travailler dans de zones proches
à la saturation sans la dépasser.

Etudiant Andres GIL CLADERA
Page 87
Figure 71 - Simulation 1a: saturation locale de la dent
7.1.4 Induction dans l’entrefer
L’entrefer moyen dans le couple PLAN-RING est inférieur à celui du couple SUN-PLAN étant donné que
la courbure de la face extérieure de la dent de la planète épouse la courbure de la face intérieure de
la dent de l’anneau. Tandis que dans le couple de dents SUN-PLAN, les deux courbures ont des signes
opposés. De plus, comme il sera démontré au §7.1.5, le flux de fuite dans la surface des tôles
intérieures à l’aimant du soleil est une source importante de pertes. Ces deux raisons peuvent
expliquer cette différence importante dans l’induction des deux entrefers.
Figure 72 - Induction dans l’entrefer SUN-PLAN (gauche) et PLAN-RING (droite)
7.1.5 Calcul du flux de fuite
Le dégradé de couleurs de la Figure 73 montre une induction au delà de la saturation dans l’empilage
des tôles du soleil et de la planète, à l’intérieur de l’aimant
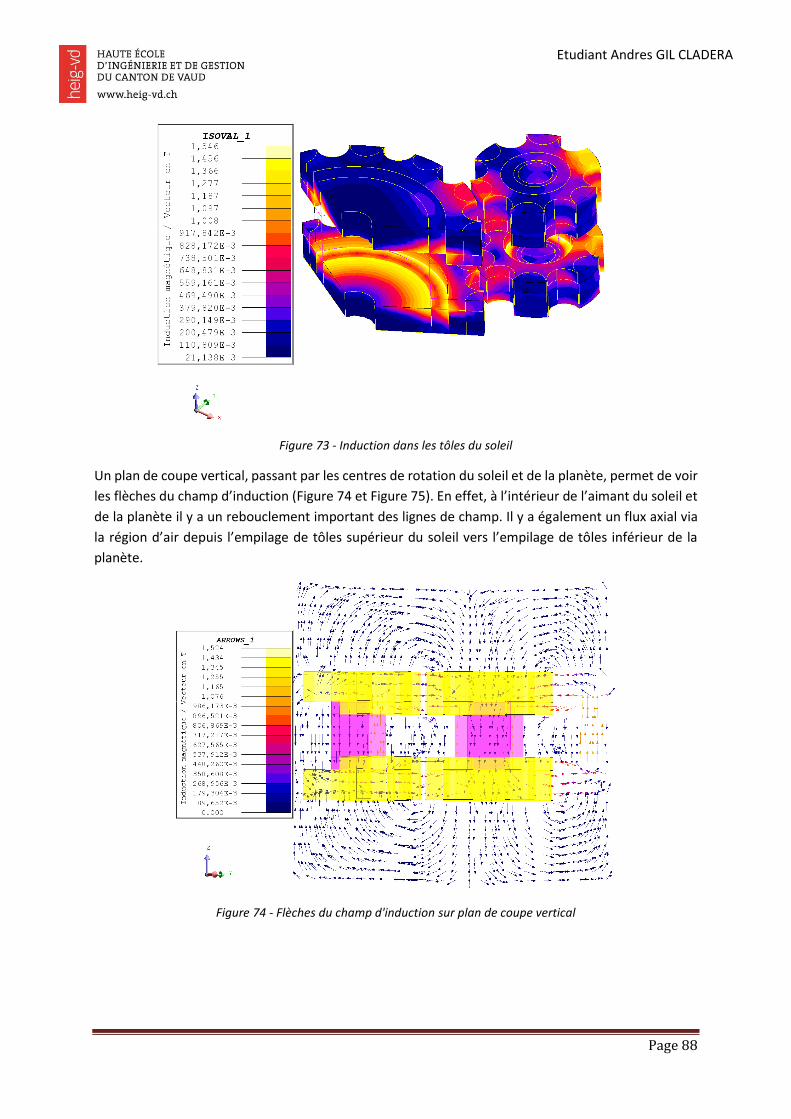
Etudiant Andres GIL CLADERA
Page 88
Figure 73 - Induction dans les tôles du soleil
Un plan de coupe vertical, passant par les centres de rotation du soleil et de la planète, permet de voir
les flèches du champ d’induction (Figure 74 et Figure 75). En effet, à l’intérieur de l’aimant du soleil et
de la planète il y a un rebouclement important des lignes de champ. Il y a également un flux axial via
la région d’air depuis l’empilage de tôles supérieur du soleil vers l’empilage de tôles inférieur de la
planète.
Figure 74 - Flèches du champ d'induction sur plan de coupe vertical
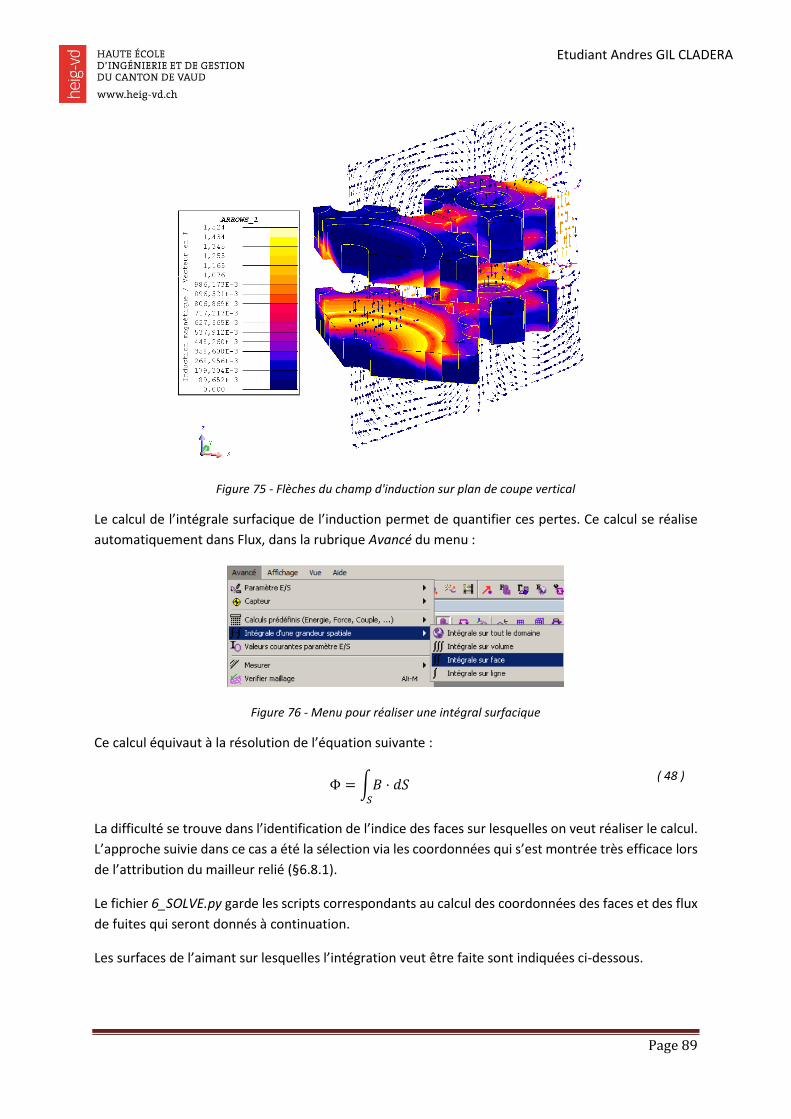
Etudiant Andres GIL CLADERA
Page 89
Figure 75 - Flèches du champ d'induction sur plan de coupe vertical
Le calcul de l’intégrale surfacique de l’induction permet de quantifier ces pertes. Ce calcul se réalise
automatiquement dans Flux, dans la rubrique Avancé du menu :
Figure 76 - Menu pour réaliser une intégral surfacique
Ce calcul équivaut à la résolution de l’équation suivante :
Φ = ∫𝐵 ⋅ 𝑑𝑆𝑆
( 48 )
La difficulté se trouve dans l’identification de l’indice des faces sur lesquelles on veut réaliser le calcul.
L’approche suivie dans ce cas a été la sélection via les coordonnées qui s’est montrée très efficace lors
de l’attribution du mailleur relié (§6.8.1).
Le fichier 6_SOLVE.py garde les scripts correspondants au calcul des coordonnées des faces et des flux
de fuites qui seront donnés à continuation.
Les surfaces de l’aimant sur lesquelles l’intégration veut être faite sont indiquées ci-dessous.

Etudiant Andres GIL CLADERA
Page 90
Figure 77 - Surfaces de calcul de l'intégral surfacique
L’algorithme correspondant est détaillé aux lignes 165 au 182 du fichier 6_SOLVE.py. Les faces
recherchées sont sélectionnées via leur coordonnées (lignes 175 et 176). Le calcul de l’intégral
surfacique est ensuite réalisé (lignes 179 à 182) et affiché sur la fenêtre Historique (ligne 185).
D’abord, l’intégrale surfacique de l’induction de l’aimant sur les faces en contact avec le fer est calculée
dans Flux ( gauche). Il vient ensuite le calcul de l’intégrale surfacique de l’induction sur la surface de
l’empilage de tôles inférieur, qui représente le flux qui se reboucle sans passer par les dents ( droite).
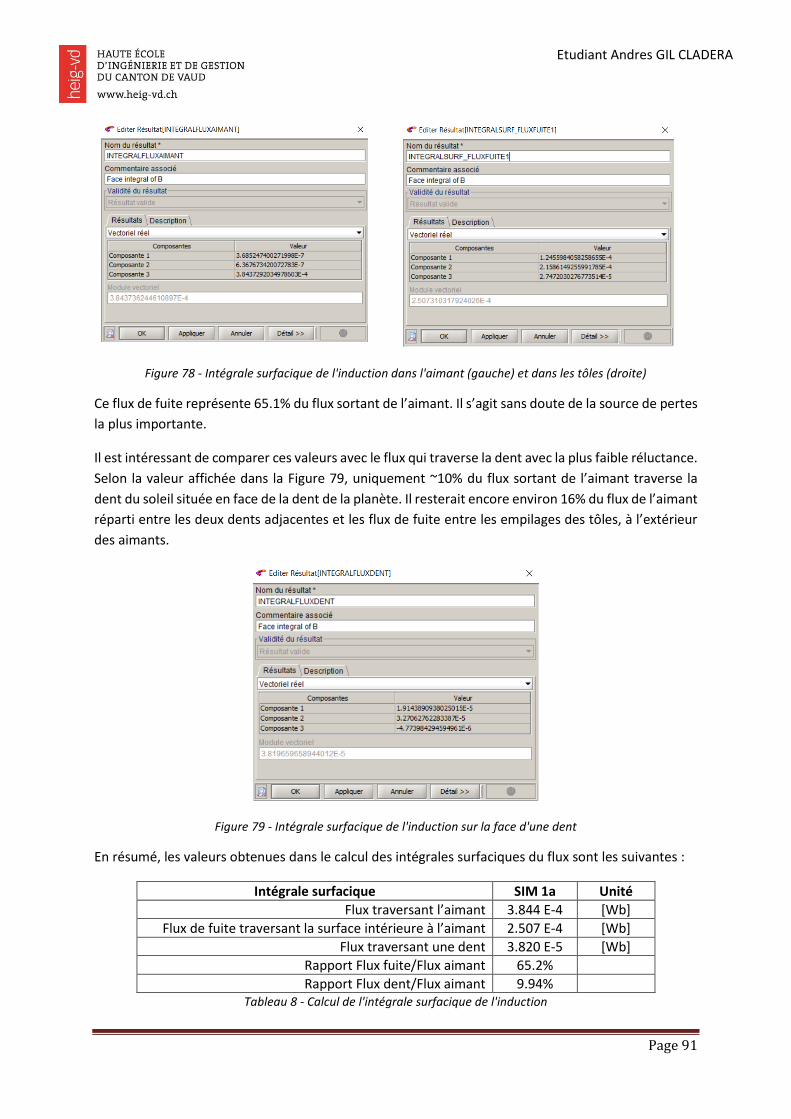
Etudiant Andres GIL CLADERA
Page 91
Figure 78 - Intégrale surfacique de l'induction dans l'aimant (gauche) et dans les tôles (droite)
Ce flux de fuite représente 65.1% du flux sortant de l’aimant. Il s’agit sans doute de la source de pertes
la plus importante.
Il est intéressant de comparer ces valeurs avec le flux qui traverse la dent avec la plus faible réluctance.
Selon la valeur affichée dans la Figure 79, uniquement ~10% du flux sortant de l’aimant traverse la
dent du soleil située en face de la dent de la planète. Il resterait encore environ 16% du flux de l’aimant
réparti entre les deux dents adjacentes et les flux de fuite entre les empilages des tôles, à l’extérieur
des aimants.
Figure 79 - Intégrale surfacique de l'induction sur la face d'une dent
En résumé, les valeurs obtenues dans le calcul des intégrales surfaciques du flux sont les suivantes :
Intégrale surfacique SIM 1a Unité
Flux traversant l’aimant 3.844 E-4 [Wb]
Flux de fuite traversant la surface intérieure à l’aimant 2.507 E-4 [Wb]
Flux traversant une dent 3.820 E-5 [Wb]
Rapport Flux fuite/Flux aimant 65.2%
Rapport Flux dent/Flux aimant 9.94% Tableau 8 - Calcul de l'intégrale surfacique de l'induction
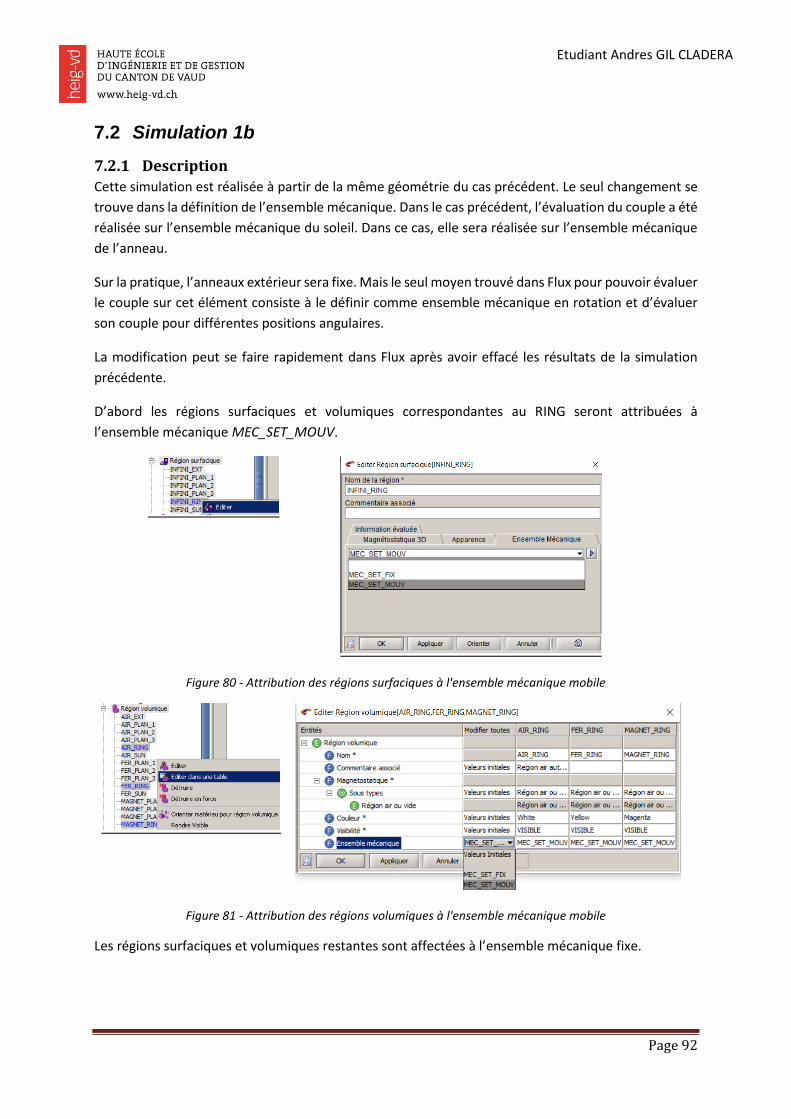
Etudiant Andres GIL CLADERA
Page 92
7.2 Simulation 1b
7.2.1 Description
Cette simulation est réalisée à partir de la même géométrie du cas précédent. Le seul changement se
trouve dans la définition de l’ensemble mécanique. Dans le cas précédent, l’évaluation du couple a été
réalisée sur l’ensemble mécanique du soleil. Dans ce cas, elle sera réalisée sur l’ensemble mécanique
de l’anneau.
Sur la pratique, l’anneaux extérieur sera fixe. Mais le seul moyen trouvé dans Flux pour pouvoir évaluer
le couple sur cet élément consiste à le définir comme ensemble mécanique en rotation et d’évaluer
son couple pour différentes positions angulaires.
La modification peut se faire rapidement dans Flux après avoir effacé les résultats de la simulation
précédente.
D’abord les régions surfaciques et volumiques correspondantes au RING seront attribuées à
l’ensemble mécanique MEC_SET_MOUV.
Figure 80 - Attribution des régions surfaciques à l'ensemble mécanique mobile
Figure 81 - Attribution des régions volumiques à l'ensemble mécanique mobile
Les régions surfaciques et volumiques restantes sont affectées à l’ensemble mécanique fixe.
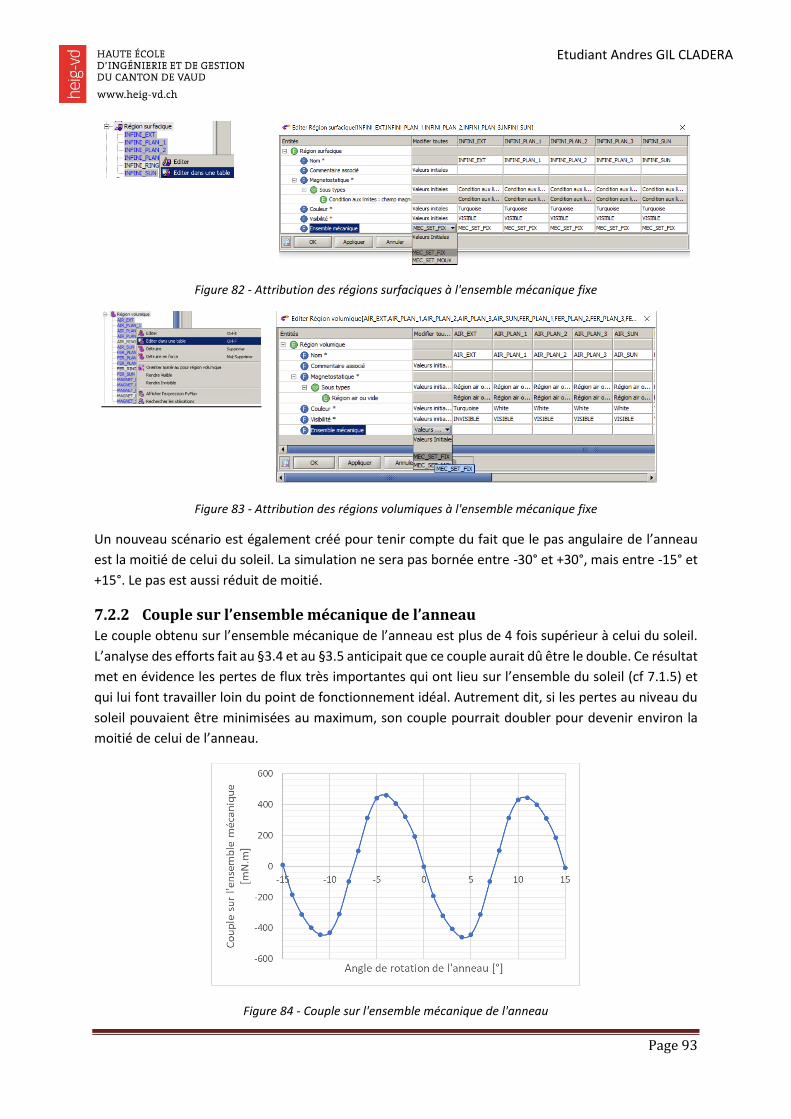
Etudiant Andres GIL CLADERA
Page 93
Figure 82 - Attribution des régions surfaciques à l'ensemble mécanique fixe
Figure 83 - Attribution des régions volumiques à l'ensemble mécanique fixe
Un nouveau scénario est également créé pour tenir compte du fait que le pas angulaire de l’anneau
est la moitié de celui du soleil. La simulation ne sera pas bornée entre -30° et +30°, mais entre -15° et
+15°. Le pas est aussi réduit de moitié.
7.2.2 Couple sur l’ensemble mécanique de l’anneau
Le couple obtenu sur l’ensemble mécanique de l’anneau est plus de 4 fois supérieur à celui du soleil.
L’analyse des efforts fait au §3.4 et au §3.5 anticipait que ce couple aurait dû être le double. Ce résultat
met en évidence les pertes de flux très importantes qui ont lieu sur l’ensemble du soleil (cf 7.1.5) et
qui lui font travailler loin du point de fonctionnement idéal. Autrement dit, si les pertes au niveau du
soleil pouvaient être minimisées au maximum, son couple pourrait doubler pour devenir environ la
moitié de celui de l’anneau.
Figure 84 - Couple sur l'ensemble mécanique de l'anneau
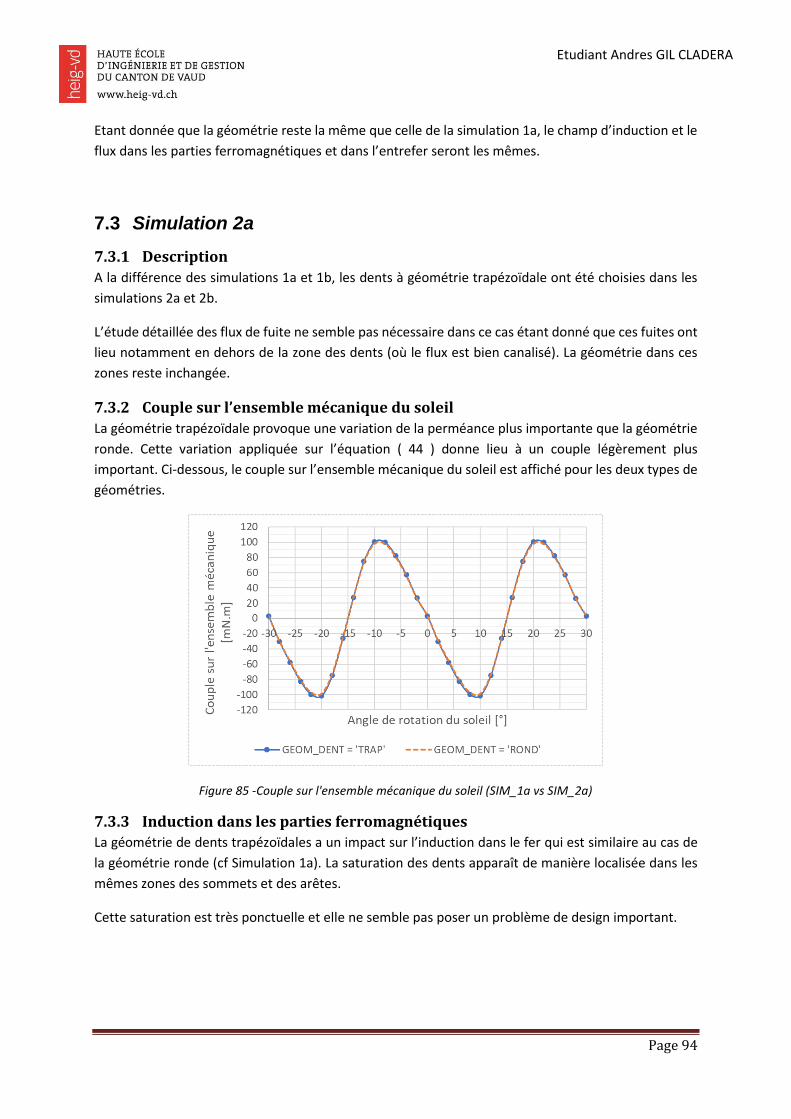
Etudiant Andres GIL CLADERA
Page 94
Etant donnée que la géométrie reste la même que celle de la simulation 1a, le champ d’induction et le
flux dans les parties ferromagnétiques et dans l’entrefer seront les mêmes.
7.3 Simulation 2a
7.3.1 Description
A la différence des simulations 1a et 1b, les dents à géométrie trapézoïdale ont été choisies dans les
simulations 2a et 2b.
L’étude détaillée des flux de fuite ne semble pas nécessaire dans ce cas étant donné que ces fuites ont
lieu notamment en dehors de la zone des dents (où le flux est bien canalisé). La géométrie dans ces
zones reste inchangée.
7.3.2 Couple sur l’ensemble mécanique du soleil
La géométrie trapézoïdale provoque une variation de la perméance plus importante que la géométrie
ronde. Cette variation appliquée sur l’équation ( 44 ) donne lieu à un couple légèrement plus
important. Ci-dessous, le couple sur l’ensemble mécanique du soleil est affiché pour les deux types de
géométries.
Figure 85 -Couple sur l'ensemble mécanique du soleil (SIM_1a vs SIM_2a)
7.3.3 Induction dans les parties ferromagnétiques
La géométrie de dents trapézoïdales a un impact sur l’induction dans le fer qui est similaire au cas de
la géométrie ronde (cf Simulation 1a). La saturation des dents apparaît de manière localisée dans les
mêmes zones des sommets et des arêtes.
Cette saturation est très ponctuelle et elle ne semble pas poser un problème de design important.
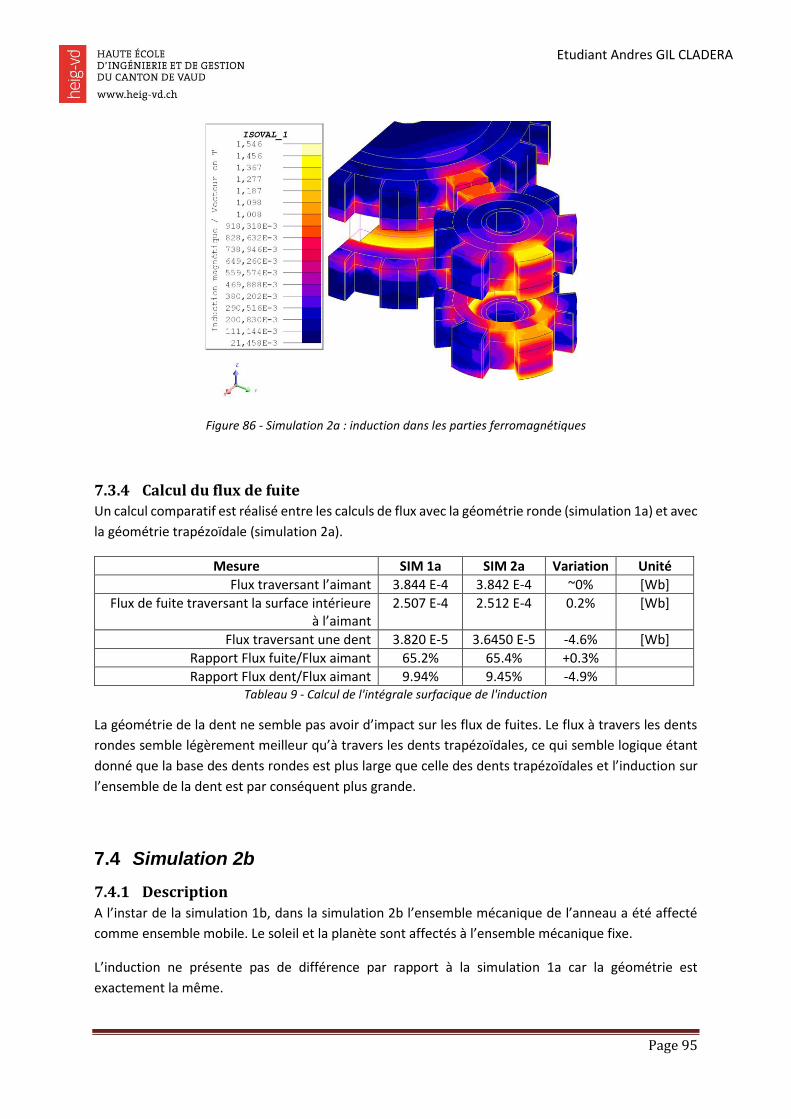
Etudiant Andres GIL CLADERA
Page 95
Figure 86 - Simulation 2a : induction dans les parties ferromagnétiques
7.3.4 Calcul du flux de fuite
Un calcul comparatif est réalisé entre les calculs de flux avec la géométrie ronde (simulation 1a) et avec
la géométrie trapézoïdale (simulation 2a).
Mesure SIM 1a SIM 2a Variation Unité
Flux traversant l’aimant 3.844 E-4 3.842 E-4 ~0% [Wb]
Flux de fuite traversant la surface intérieure à l’aimant
2.507 E-4 2.512 E-4 0.2% [Wb]
Flux traversant une dent 3.820 E-5 3.6450 E-5 -4.6% [Wb]
Rapport Flux fuite/Flux aimant 65.2% 65.4% +0.3%
Rapport Flux dent/Flux aimant 9.94% 9.45% -4.9% Tableau 9 - Calcul de l'intégrale surfacique de l'induction
La géométrie de la dent ne semble pas avoir d’impact sur les flux de fuites. Le flux à travers les dents
rondes semble légèrement meilleur qu’à travers les dents trapézoïdales, ce qui semble logique étant
donné que la base des dents rondes est plus large que celle des dents trapézoïdales et l’induction sur
l’ensemble de la dent est par conséquent plus grande.
7.4 Simulation 2b
7.4.1 Description
A l’instar de la simulation 1b, dans la simulation 2b l’ensemble mécanique de l’anneau a été affecté
comme ensemble mobile. Le soleil et la planète sont affectés à l’ensemble mécanique fixe.
L’induction ne présente pas de différence par rapport à la simulation 1a car la géométrie est
exactement la même.
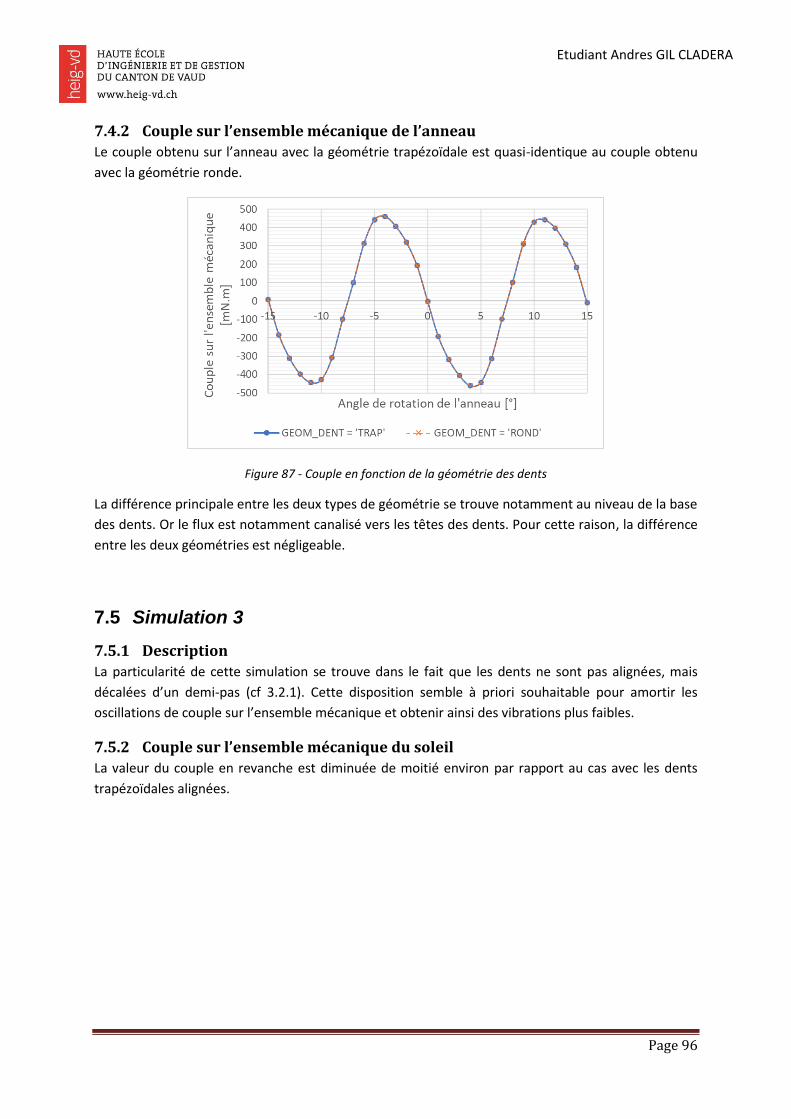
Etudiant Andres GIL CLADERA
Page 96
7.4.2 Couple sur l’ensemble mécanique de l’anneau
Le couple obtenu sur l’anneau avec la géométrie trapézoïdale est quasi-identique au couple obtenu
avec la géométrie ronde.
Figure 87 - Couple en fonction de la géométrie des dents
La différence principale entre les deux types de géométrie se trouve notamment au niveau de la base
des dents. Or le flux est notamment canalisé vers les têtes des dents. Pour cette raison, la différence
entre les deux géométries est négligeable.
7.5 Simulation 3
7.5.1 Description
La particularité de cette simulation se trouve dans le fait que les dents ne sont pas alignées, mais
décalées d’un demi-pas (cf 3.2.1). Cette disposition semble à priori souhaitable pour amortir les
oscillations de couple sur l’ensemble mécanique et obtenir ainsi des vibrations plus faibles.
7.5.2 Couple sur l’ensemble mécanique du soleil
La valeur du couple en revanche est diminuée de moitié environ par rapport au cas avec les dents
trapézoïdales alignées.
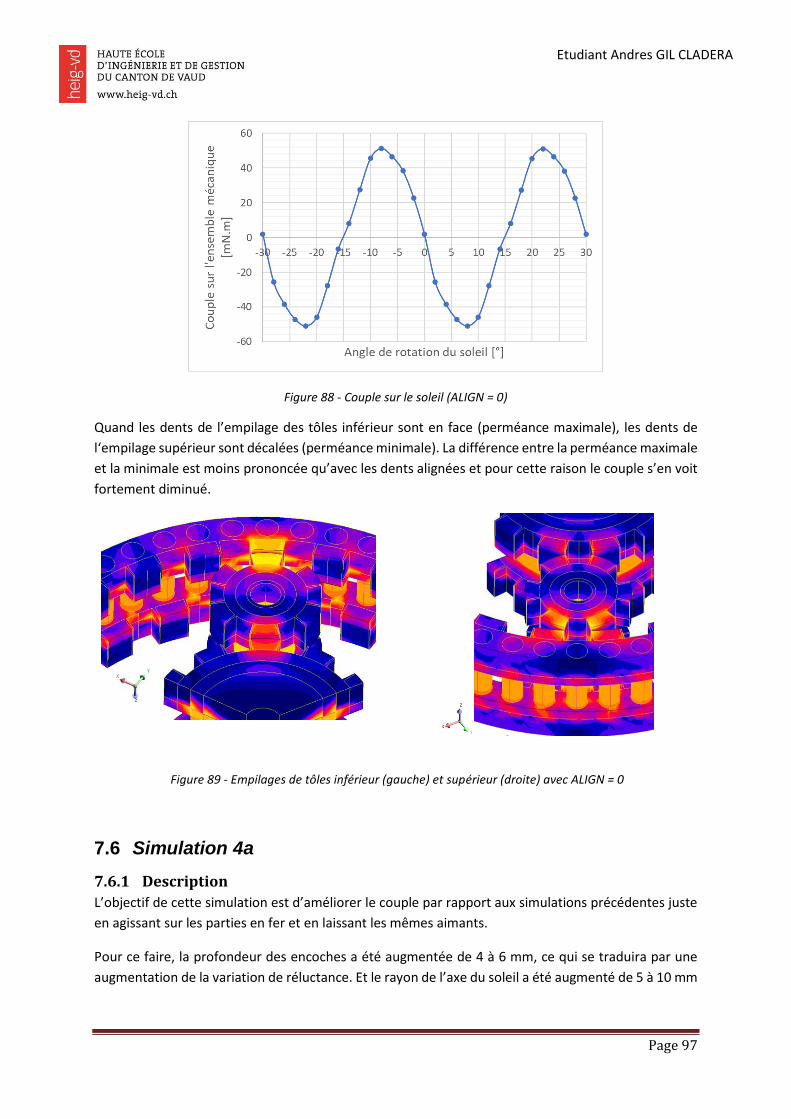
Etudiant Andres GIL CLADERA
Page 97
Figure 88 - Couple sur le soleil (ALIGN = 0)
Quand les dents de l’empilage des tôles inférieur sont en face (perméance maximale), les dents de
l‘empilage supérieur sont décalées (perméance minimale). La différence entre la perméance maximale
et la minimale est moins prononcée qu’avec les dents alignées et pour cette raison le couple s’en voit
fortement diminué.
Figure 89 - Empilages de tôles inférieur (gauche) et supérieur (droite) avec ALIGN = 0
7.6 Simulation 4a
7.6.1 Description
L’objectif de cette simulation est d’améliorer le couple par rapport aux simulations précédentes juste
en agissant sur les parties en fer et en laissant les mêmes aimants.
Pour ce faire, la profondeur des encoches a été augmentée de 4 à 6 mm, ce qui se traduira par une
augmentation de la variation de réluctance. Et le rayon de l’axe du soleil a été augmenté de 5 à 10 mm
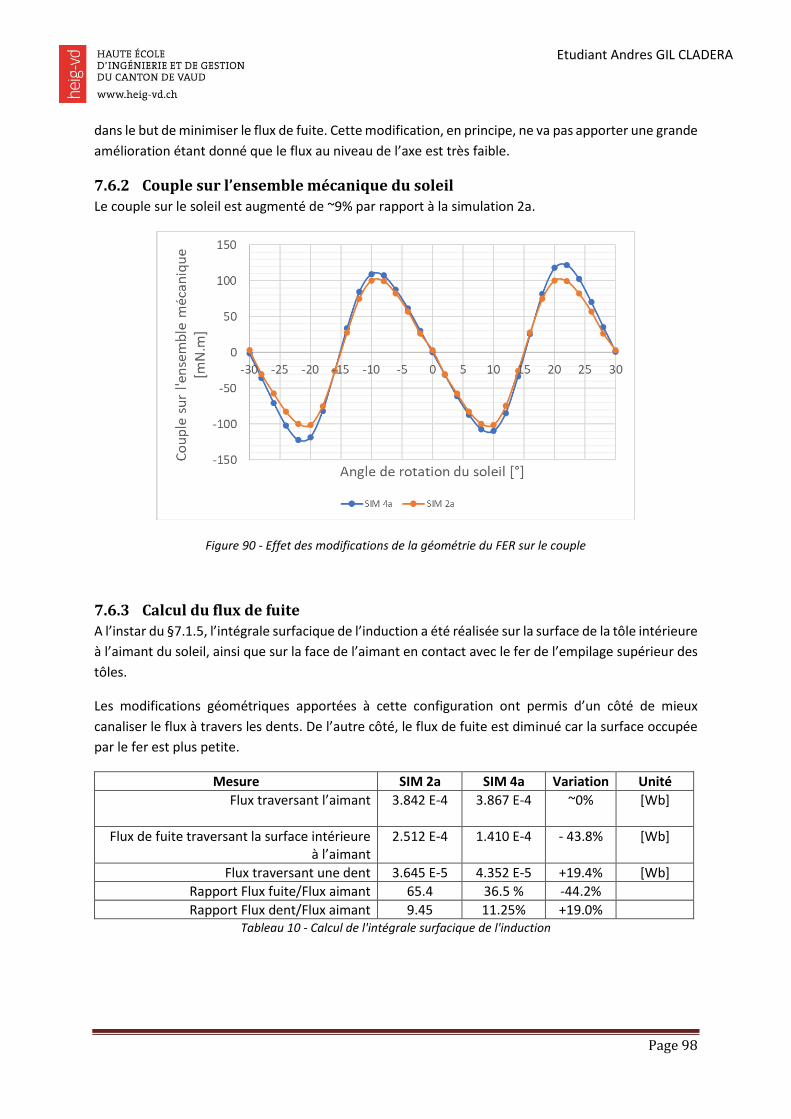
Etudiant Andres GIL CLADERA
Page 98
dans le but de minimiser le flux de fuite. Cette modification, en principe, ne va pas apporter une grande
amélioration étant donné que le flux au niveau de l’axe est très faible.
7.6.2 Couple sur l’ensemble mécanique du soleil
Le couple sur le soleil est augmenté de ~9% par rapport à la simulation 2a.
Figure 90 - Effet des modifications de la géométrie du FER sur le couple
7.6.3 Calcul du flux de fuite
A l’instar du §7.1.5, l’intégrale surfacique de l’induction a été réalisée sur la surface de la tôle intérieure
à l’aimant du soleil, ainsi que sur la face de l’aimant en contact avec le fer de l’empilage supérieur des
tôles.
Les modifications géométriques apportées à cette configuration ont permis d’un côté de mieux
canaliser le flux à travers les dents. De l’autre côté, le flux de fuite est diminué car la surface occupée
par le fer est plus petite.
Mesure SIM 2a SIM 4a Variation Unité
Flux traversant l’aimant 3.842 E-4 3.867 E-4
~0% [Wb]
Flux de fuite traversant la surface intérieure à l’aimant
2.512 E-4 1.410 E-4 - 43.8% [Wb]
Flux traversant une dent 3.645 E-5 4.352 E-5 +19.4% [Wb]
Rapport Flux fuite/Flux aimant 65.4 36.5 % -44.2%
Rapport Flux dent/Flux aimant 9.45 11.25% +19.0% Tableau 10 - Calcul de l'intégrale surfacique de l'induction
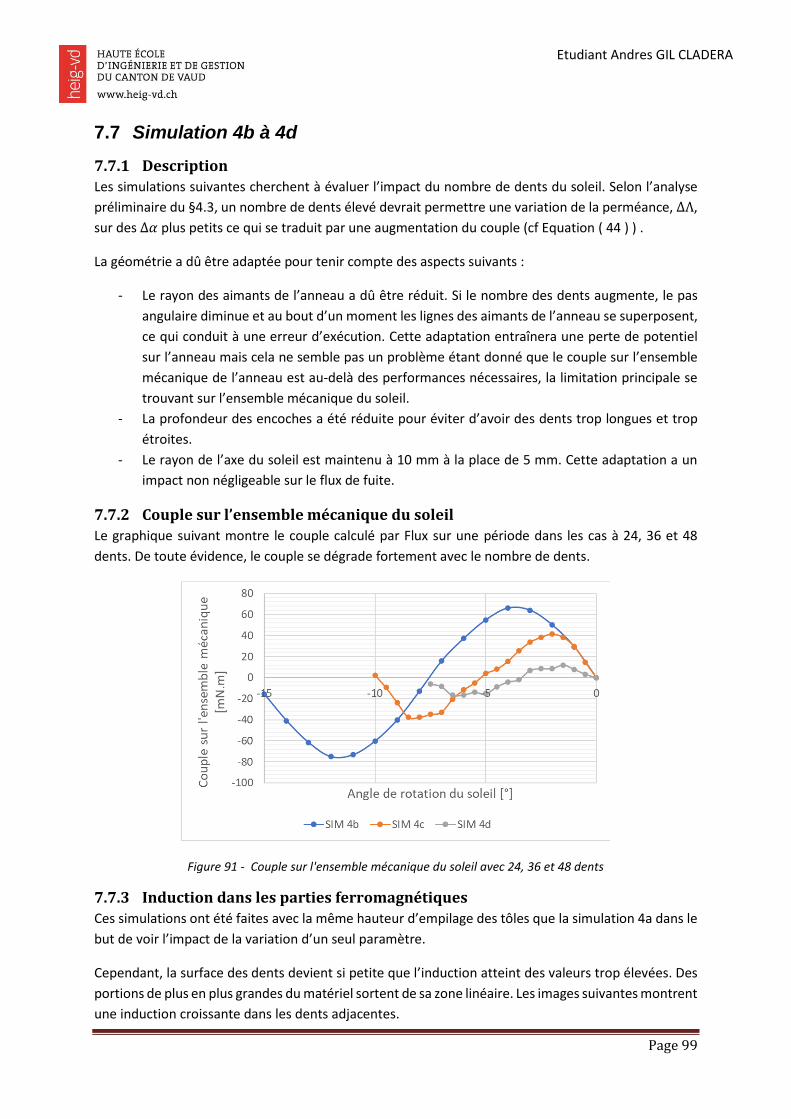
Etudiant Andres GIL CLADERA
Page 99
7.7 Simulation 4b à 4d
7.7.1 Description
Les simulations suivantes cherchent à évaluer l’impact du nombre de dents du soleil. Selon l’analyse
préliminaire du §4.3, un nombre de dents élevé devrait permettre une variation de la perméance, ΔΛ,
sur des Δ𝛼 plus petits ce qui se traduit par une augmentation du couple (cf Equation ( 44 ) ) .
La géométrie a dû être adaptée pour tenir compte des aspects suivants :
- Le rayon des aimants de l’anneau a dû être réduit. Si le nombre des dents augmente, le pas
angulaire diminue et au bout d’un moment les lignes des aimants de l’anneau se superposent,
ce qui conduit à une erreur d’exécution. Cette adaptation entraînera une perte de potentiel
sur l’anneau mais cela ne semble pas un problème étant donné que le couple sur l’ensemble
mécanique de l’anneau est au-delà des performances nécessaires, la limitation principale se
trouvant sur l’ensemble mécanique du soleil.
- La profondeur des encoches a été réduite pour éviter d’avoir des dents trop longues et trop
étroites.
- Le rayon de l’axe du soleil est maintenu à 10 mm à la place de 5 mm. Cette adaptation a un
impact non négligeable sur le flux de fuite.
7.7.2 Couple sur l’ensemble mécanique du soleil
Le graphique suivant montre le couple calculé par Flux sur une période dans les cas à 24, 36 et 48
dents. De toute évidence, le couple se dégrade fortement avec le nombre de dents.
Figure 91 - Couple sur l'ensemble mécanique du soleil avec 24, 36 et 48 dents
7.7.3 Induction dans les parties ferromagnétiques
Ces simulations ont été faites avec la même hauteur d’empilage des tôles que la simulation 4a dans le
but de voir l’impact de la variation d’un seul paramètre.
Cependant, la surface des dents devient si petite que l’induction atteint des valeurs trop élevées. Des
portions de plus en plus grandes du matériel sortent de sa zone linéaire. Les images suivantes montrent
une induction croissante dans les dents adjacentes.
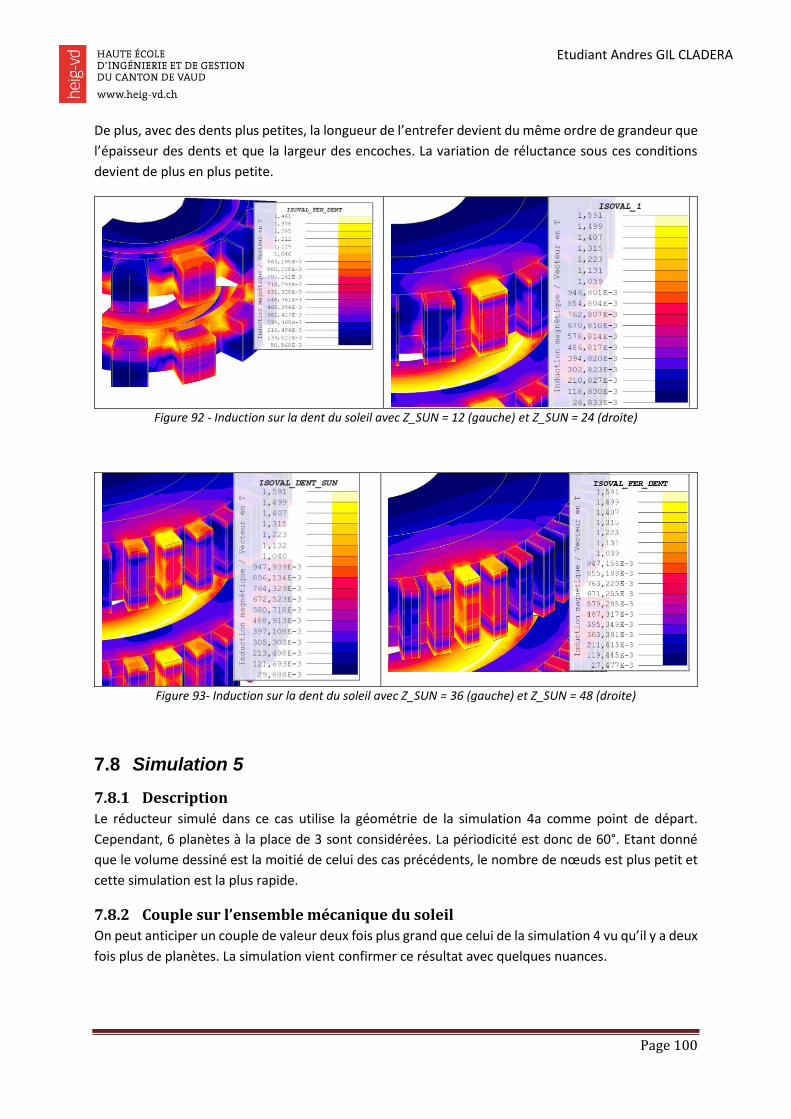
Etudiant Andres GIL CLADERA
Page 100
De plus, avec des dents plus petites, la longueur de l’entrefer devient du même ordre de grandeur que
l’épaisseur des dents et que la largeur des encoches. La variation de réluctance sous ces conditions
devient de plus en plus petite.
Figure 92 - Induction sur la dent du soleil avec Z_SUN = 12 (gauche) et Z_SUN = 24 (droite)
Figure 93- Induction sur la dent du soleil avec Z_SUN = 36 (gauche) et Z_SUN = 48 (droite)
7.8 Simulation 5
7.8.1 Description
Le réducteur simulé dans ce cas utilise la géométrie de la simulation 4a comme point de départ.
Cependant, 6 planètes à la place de 3 sont considérées. La périodicité est donc de 60°. Etant donné
que le volume dessiné est la moitié de celui des cas précédents, le nombre de nœuds est plus petit et
cette simulation est la plus rapide.
7.8.2 Couple sur l’ensemble mécanique du soleil
On peut anticiper un couple de valeur deux fois plus grand que celui de la simulation 4 vu qu’il y a deux
fois plus de planètes. La simulation vient confirmer ce résultat avec quelques nuances.

Etudiant Andres GIL CLADERA
Page 101
Figure 94 - Couple sur le soleil avec 3 et 6 planètes
Le couple maximal n’est pas tout à fait le double. Les flux de fuite sont plus importants avec 6 planètes
alors que le potentiel des aimants reste le même. Pour cette raison, le couple obtenu cette fois est un
peu inférieur au double.
7.8.3 Induction dans l’entrefer
Pour la même raison exposée au paragraphe précédent, l’induction dans l’entrefer se voit diminué si
on la compare avec celle de la simulation 1a (3 planètes). La géométrie des dents dans les deux cas
n’est pas la même. Mais cette différence à elle toute seule ne justifie cette baisse dans l’induction.
Figure 95 - Induction dans l'entrefer
Etudiant Andres GIL CLADERA
Page 102
8 Conclusion
Une revue de l’état de l’art a été réalisée. La géométrie du réducteur ayant été choisie au préalable,
une analyse simplifiée du circuit magnétique a été réalisée dans le but d’atteindre une compréhension
approfondie du problème et des paramètres de design avec une plus grande influence sur le couple et
sur l’induction. Ensuite, un script en PyFlux a été développé pour construire le réducteur dans Flux
après le renseignement de quelques paramètres de design. Pour finir, l’outil développé a été testé en
faisant plusieurs simulations. Les performances du script ont été prouvées et il a été constaté le large
spectre de possibilités offertes par le langage PyFlux.
Le but principal de ce travail de Bachelor, à savoir, l’étude et la conception d’une transmission
magnétique pour moteur électrique via une interface en python, semble avoir été atteint en tout cas
en partie. La méthodologie pour analyser les performances magnétiques du réducteur est documentée
et mise en pratique.
Les résultats obtenus dans les simulations permettent de tirer quelques conclusions concernant le
design du réducteur :
- Le flux de fuite à l’intérieur des aimants peut être minimisé avec des encoches plus profondes
et avec des rayons d’axe plus proches du rayon intérieur de l’aimant.
- Idéalement, il faudrait un aimant plus épais, dont la taille serait aussi proche que possible de
la taille des pignons.
- Pour finir, la géométrie des dents ne semble pas introduire de grosses différences au niveau
du couple.
Une analyse complète d’un réducteur et de ses caractéristiques devrait aborder de nombreux autres
sujets qui restent en dehors du cadre de ce travail de Bachelor, par exemple l’analyse des contraintes
mécaniques sur la structure et sur les paliers ou encore l’analyse des courants de Foucault dans les
parties ferromagnétiques.
L’outil développé, à savoir, le script PyFlux, remplit sa fonction de manière satisfaisante. La macro (cf
§6.11) peut encore être finalisée pour faciliter la saisie et l’exécution. L’option avec différentes
profondeurs d’encastrement des aimants peut également être testée et mise au point.
De manière plus générale, la réalisation de ce travail a demandé la mise en œuvre des connaissances
acquises pendant la réalisation des études, notamment dans le domaine de la mécatronique et de la
simulation de circuits électromagnétiques. Les compétences dans la programmation en PyFlux ont dû
être développées.
Yverdon-les-Bains, 02.10.2020
GIL CLADERA Andres
Etudiant Andres GIL CLADERA
Page 103
9 Bibliographie
[1] C. G. Armstrong, «Power-transmitting device». Brevet US687292A, 1901.
[2] C.-C. Huang, M.-C. Tsai, D. G. Dorrell et B.-J. Lin, «Development of a Magnetic Planetary
Gearbox,» IEEE TRANSACTIONS ON MAGNETICS, VOL. 44, NO. 3, 2008.
[3] A. Syta, J. Jonak, Ł. Jedliński et G. Litak, «Failure diagnosis of a gear box by recurrences,» Vibration
and Acoustics, 2012.
[4] O. Molokanov, P. Dergachev, S. Osipkin et P. Kurbatov, «Study on Cogging Torque in Coaxial
Planetary,» Department of Electrical and Electronic Apparatus, Moscow Power Engineering
Institute, Moscow, Russia, 2016.
[5] L. Bossoney, «Les matérieux en système électromécaniques,» Haute Ecole d'Ingénierie et de
Gestion de Vaud, Yverdon-les-Bains, 2010.
[6] K. Atallah et D. Howe, «A Novel High-Performance Magnetic Gear,» IEEE TRANSACTIONS ON
MAGNETICS, VOL. 37, NO. 4, JULY 2001, 2001.
[7] A. S. Abdel-Khalik, A. S. Elshebeny et S. Ahmed, «Design and Evaluation of a Magnetic Planetary,»
International Symposium on Power Electronics,, 2010.
[8] «Wikipedia,» [En ligne]. Available: https://fr.wikipedia.org/wiki/Engrenage. [Accès le 04 05
2020].
[9] «https://tradingeconomics.com/commodities,» [En ligne]. [Accès le 03 05 2020].
[10] R. B. Martínez, «DISEÑO DEL CONJUNTO EJEACOPLAMIENTO-REDUCTORA,» Universidada
Politécnica de Cartagena, 2010.
[11] L. Bossoney, «Mécatronique I - conversion électomécanique,» Haute Ecole d'Ingénierie et de
Gestion de Vaud, Yverdon-les-Bains, 2010.
[12] Altair, «Guide d'utilisation Flux - Volume 1, 2 et 3,» C:\Program
Files\Altair\2019\flux\Flux\DocExamples\UserGuide\Francais.
[13] «https://www.magfine.it/it/,» [En ligne]. Available: https://www.magfine.it/it/. [Accès le 03 05
2020].
[14] «https://www.supermagnete.ch/,» [En ligne]. Available: https://www.supermagnete.ch/. [Accès
le 03 06 2020].
Etudiant Andres GIL CLADERA
Page 104
10 Liste de figures
Figure 1 - Transmission magnétique élémentaire [2] ............................................................................................ 14
Figure 2 – Réducteur magnétique hélicoïdal ......................................................................................................... 15
Figure 3 – réducteur magnétique avec de « vers magnétiques » .......................................................................... 15
Figure 4 – réducteur magnétique avec modulateur [7] ........................................................................................ 15
Figure 5 - Réducteur planétaire magnétique ........................................................................................................ 16
Figure 6 - Composants principaux du réducteur planétaire .................................................................................. 17
Figure 7 - Représentation d'un pignon du réducteur ............................................................................................. 18
Figure 8 - Géométrie des dents rondes (gauche) et trapézoïdales (droite) ........................................................... 19
Figure 9 – Dents alignées (gauche) et décalées (droite) ....................................................................................... 19
Figure 10 – Entrefer entre les roues ...................................................................................................................... 20
Figure 11 - Paramètres FILL_DENT et FILL_DENT_INT .......................................................................................... 20
Figure 12 - Définition des rayons des roues........................................................................................................... 21
Figure 13 - Surface d'une dent .............................................................................................................................. 22
Figure 14 - Paramètres géométriques de design................................................................................................... 24
Figure 15 - Efforts produits par un couple au niveau du soleil ............................................................................. 25
Figure 16 - Somme des couples sur le point A ....................................................................................................... 26
Figure 17 - Somme des couples sur le point B ....................................................................................................... 27
Figure 18 - Représentation du flux magnétique à l'intérieur des roues ................................................................ 29
Figure 19 – Circuit magnétique avec réluctance minimale ................................................................................... 30
Figure 20 – Circuit magnétique avec réluctance maximale .................................................................................. 31
Figure 21 - Estimation de l'évolution du couple et de l'induction .......................................................................... 34
Figure 22 - Flux de fuite axial ................................................................................................................................ 35
Figure 23 - Zones d'édition de la console Python .................................................................................................. 37
Figure 24 - Méthodes pour récupérer la syntaxe PyFlux ....................................................................................... 37
Figure 25 - Méthodes 1 (gauche) et 2 (droite) pour récupérer la syntaxe PyFlux ................................................. 37
Figure 26 - Méthode 3 pour récupérer la syntaxe PyFlux ...................................................................................... 38
Figure 27 - Méthode 3' pour récupérer la syntaxe PyFlux ..................................................................................... 38
Figure 28 - Méthode 4 pour récupérer la syntaxe PyFlux ...................................................................................... 38
Figure 29 - Dossier dans votre PC (gauche) et répertoire de travail dans Flux (droite) ......................................... 40
Figure 30 - Indice des faces lors des extrusions des dents ..................................................................................... 45
Figure 31 - Exemple géométrie construite avec DRAW_2D.py .............................................................................. 47
Figure 32 - Exemples d'erreurs de conception ....................................................................................................... 48
Figure 33 - Dents paires et impaires ...................................................................................................................... 49
Figure 34 - Calcul du rayon extérieur de l'anneau (cf 6.7.1 ) ................................................................................. 50
Figure 35 - Repères ................................................................................................................................................ 52
Figure 36 - Aperçu des extrusions ......................................................................................................................... 53
Figure 37 - Faces avec mailleur relié ..................................................................................................................... 55
Figure 38 - Exemple de comment éditer le maillage dans la région des aimants ................................................. 56
Figure 39 - Dessin de l'axe ..................................................................................................................................... 58
Figure 40 – Dessin de l’air entre l’aimant et l’arbre .............................................................................................. 59
Figure 41 - Dessin de l'aimant du soleil ................................................................................................................. 59
Figure 42 - Dessin de la première dent de l’empilage inférieur ............................................................................. 60
Etudiant Andres GIL CLADERA
Page 105
Figure 43- Propagation des dents de l’empilage inférieur .................................................................................... 60
Figure 44 - Propagation des dents de l’empilage supérieur .................................................................................. 62
Figure 45 - Liaison des dents des empilages inférieur et supérieur ....................................................................... 62
Figure 46 - Cas extrêmes de dents rondes ............................................................................................................. 63
Figure 47 - Exemple d'erreur d'exécution .............................................................................................................. 63
Figure 48 - Ensemble de points et lignes de construction du soleil (dents rondes) ............................................... 64
Figure 49 - Allure de la planète: axe et aimant ..................................................................................................... 66
Figure 50 - Dessin de la première dent de l’empilage inférieur ............................................................................. 66
Figure 51 - Propagation des dents de l’empilage inférieur ................................................................................... 67
Figure 52 - Empilages de tôles inférieurs si Z_PLAN = 9 (impaire) ........................................................................ 67
Figure 53 - Propagation des dents de l’empilage supérieur .................................................................................. 68
Figure 54 - Liaison des dents des empilages inférieur et supérieur ....................................................................... 69
Figure 55 - Aimants de l'anneau ........................................................................................................................... 71
Figure 56 - Points de construction de l'anneau pour une géométrie trapézoïdale ................................................ 74
Figure 57 - Coordonnées en X et en Z pour repérer les faces à mailleur relié ....................................................... 76
Figure 58 - Importation du gestionnaire de matériaux ......................................................................................... 77
Figure 59 - Courbe d'aimantation des tôles ferromagnétiques ............................................................................. 78
Figure 60 - Procédure pour sélection des entités .................................................................................................. 79
Figure 61 - Procédure pour édition des entités dans une table ............................................................................. 80
Figure 62 - Exécution du script depuis l'éditeur python (I) .................................................................................... 80
Figure 63 - Exécution du script depuis l'éditeur python (II) ................................................................................... 81
Figure 64 - Exécution du script depuis l'invité de commandes (I) .......................................................................... 81
Figure 65 -- Exécution du script depuis l'invité de commandes (II) ....................................................................... 81
Figure 66 - Exemple d’erreur empêchant la résolution ......................................................................................... 82
Figure 67 - Exemple d'affichage de la macro ........................................................................................................ 83
Figure 68 - Obtention de la courbe du couple sur l'ensemble mécanique ............................................................. 85
Figure 69 - Simulation 1a : couple sur l'ensemble mécanique du soleil ................................................................ 86
Figure 70 - Simulation 1 : induction dans les parties ferromagnétiques ............................................................... 86
Figure 71 - Simulation 1a: saturation locale de la dent ........................................................................................ 87
Figure 72 - Induction dans l’entrefer SUN-PLAN (gauche) et PLAN-RING (droite)................................................. 87
Figure 73 - Induction dans les tôles du soleil ......................................................................................................... 88
Figure 74 - Flèches du champ d'induction sur plan de coupe vertical ................................................................... 88
Figure 75 - Flèches du champ d'induction sur plan de coupe vertical ................................................................... 89
Figure 76 - Menu pour réaliser une intégral surfacique ........................................................................................ 89
Figure 77 - Surfaces de calcul de l'intégral surfacique .......................................................................................... 90
Figure 78 - Intégrale surfacique de l'induction dans l'aimant (gauche) et dans les tôles (droite) ......................... 91
Figure 79 - Intégrale surfacique de l'induction sur la face d'une dent .................................................................. 91
Figure 80 - Attribution des régions surfaciques à l'ensemble mécanique mobile ................................................. 92
Figure 81 - Attribution des régions volumiques à l'ensemble mécanique mobile ................................................. 92
Figure 82 - Attribution des régions surfaciques à l'ensemble mécanique fixe ...................................................... 93
Figure 83 - Attribution des régions volumiques à l'ensemble mécanique fixe ...................................................... 93
Figure 84 - Couple sur l'ensemble mécanique de l'anneau ................................................................................... 93
Figure 85 -Couple sur l'ensemble mécanique du soleil (SIM_1a vs SIM_2a) ......................................................... 94
Figure 86 - Simulation 2a : induction dans les parties ferromagnétiques ............................................................. 95
Figure 87 - Couple en fonction de la géométrie des dents .................................................................................... 96
Figure 88 - Couple sur le soleil (ALIGN = 0) ............................................................................................................ 97
Figure 89 - Empilages de tôles inférieur (gauche) et supérieur (droite) avec ALIGN = 0 ....................................... 97
Figure 90 - Effet des modifications de la géométrie du FER sur le couple ............................................................. 98
Etudiant Andres GIL CLADERA
Page 106
Figure 91 - Couple sur l'ensemble mécanique du soleil avec 24, 36 et 48 dents .................................................. 99
Figure 92 - Induction sur la dent du soleil avec Z_SUN = 12 (gauche) et Z_SUN = 24 (droite) ............................ 100
Figure 93- Induction sur la dent du soleil avec Z_SUN = 36 (gauche) et Z_SUN = 48 (droite) ............................. 100
Figure 94 - Couple sur le soleil avec 3 et 6 planètes ............................................................................................ 101
Figure 95 - Induction dans l'entrefer ................................................................................................................... 101
Etudiant Andres GIL CLADERA
Page 107
11 Annexes
11.1 Fiche techniques des aimants
11.2 Script python MAIN.py
0_FONCTIONS.py
1a_PARAMETRES.py
1b_PARAMETRES.py
2_SOLEIL.py
2_SUN_DENTS_ROND.py
2_SUN_DENTS_TRAP.py
3_PLANETE.py
3_PLAN_DENTS_ROND.py
3_PLAN_DENTS_TRAP.py
4_RING.py
4_RING_DENTS_ROND.py
4_RING_DENTS_TRAP.py
5_PHYSIQUE.py
6_SOLVE.py
DRAW_2D.py