1. Chapitre II : Thorie des petits signaux27II.1 - Introduction
:Les interactions de rgulation se prsentent sous forme dapparition
ou damplificationdoscillations dans le rseau pouvant engendrer une
instabilit. Par consquent, lanalyse deces phnomnes dinteraction
prend place dans le cadre de la stabilit dynamique, et donc dela
thorie des petits signaux.II.2 - Reprsentation dtat :Le
comportement dynamique dun systme de puissance peut tre dcrit par
un jeu de nquations diffrentielles non-linaires du premier ordre
[SIG05] := (1, , , 1, , , ) = 1, , (13)fi : iime fonction
non-linairexi : iime variable dtatn : nombre de variable dtat -
ordre du systmeuj : jime variable dentrer : nombre de variables
dentret : tempsEn crivant cette quation sous une forme vectorielle
:= (, , )(14)Avec : = |11| = || = |1|f : vecteur de fonctions
non-linairesx : vecteur des variables dtatu : vecteur des variables
dentreSine dpend pas explicitement du temps, alors le systme est
dit autonome := (, ) (15) 2. Chapitre II : Thorie des petits
signauxDe la mme manire, les variables de sortie peuvent tre
exprimes suivant les variablesdtat et les variables dentre : = (, )
(16)28Avec : = |11| = ||y : vecteur des variables de sortieyk :
kime variable de sortieg : vecteur de fonctions non-linairesgk :
kime fonction non-linaireCette reprsentation est la reprsentation
exacte du systme. Elle peut tre utilise parexemple dans le cas de
ltude de stabilit transitoire par traitement numrique.
Cependant,dans le cas de la stabilit dynamique, les perturbations
sont faibles, ce qui permet de linariserle systme.II.3 -
Linarisation du systme :La quasi-totalit des systmes dynamiques
rels possde des caractristiques non-linaires. Lecomportement
dynamique dun systme de puissance peut tre dcrit par un
ensembledquations diffrentielles et algbriques (EDA). Sachant que
le systme de puissance voluegnralement autour dun point de
fonctionnement donn, lors des petites perturbations, il estpossible
de linariser ces EDA autour de ce point.Le point de fonctionnement
normal du systme se dfinit comme un point dquilibre ou unecondition
initiale. Les drives des variables dtat en ce point sont donc gales
zro.De lquation (15), on dduit :0= (0, 0) = 0 (17)x0 : vecteur dtat
initialu0 : vecteur des variables dentre correspondant au point
dquilibreUne perturbation dans le systme peut sexprimer sous la
forme suivante : = 0 + 3. Chapitre II : Thorie des petits signaux29
= 0 + Si une petite perturbation se superpose aux valeurs
dquilibre, lquation scrit := 0+ = [(0 + ), (0 + )] (18)Si cette
dernire est sur lensemble des variables de faible amplitude, les
fonctions non-linairesf(x,u) peuvent sexprimer sous la forme de
sries de Taylor. Si les termes suprieursau premier ordre sont
ngligs, alors nous obtenons pour chaque variable dtat : pour =1, ,
= 0 + = (0, 0) + 1. 1 + + . + 1. 1 + + (19)Lquation prcdente peut
tre mise sous la forme suivante := 11 + + + 11 + + = 1, , (20)Nous
pouvons appliquer les mmes tapes de linarisation sur lquation de la
sortie : = 11 + + +11 + + = 1, , (21)Si le systme fonctionne avec
de petites perturbations au voisinage du point dquilibre,
nouspouvons supposer que toutes les drives premires (, ) sont
constantes dans le domainede fonctionnement [ALK08], [PAS98],
[SNY99], [MEK02].Par consquent, le systme linaris peut tre reprsent
par les deux quations suivantes : = 11 + + + 11 + + = 1, , (22) =
11 + + + 1 1 + + = 1, , (23)En crivant ces deux quations sous forme
matricielle, nous obtenons le modle dtat linairefinal suivant
[INT], [ORT13], [CHE], [BAY] :{ = A. + B. = C. + D. (24) 4.
Chapitre II : Thorie des petits signaux30A = | |f1f1x1x nfnfnx1xn|
|f1 1B = | |f1u1| |g1xn gmx1C = | |g1x1gmxn| |D = | |g1g1u1ur
gmu1gmur| |A : matrice des variables dtat de dimension nnx :
vecteur des variables dtat de dimension nB : matrice des variables
dentre de dimension nru : vecteur des variables dentre de dimension
rC : matrice des variables de sortie de dimension mny : vecteur des
variables de sortie de dimension mD : facteur de dpendance des
variables dentre par rapport aux variables de sortie, matricede
dimension mrLe nombre des variables dtat, n, dfinit : la longueur
du vecteur dtat x, le nombre delignes et de colonnes de la matrice
A, le nombre de lignes de la matrice B et le nombre descolonnes de
la matrice C.Le nombre des variables dentre choisies, r, dfinit :
la longueur du vecteur d'entre u et lenombre de colonnes des
matrices B et D.Le nombre des variables de sortie choisies, m,
dfinit : la longueur du vecteur de sortie y etle nombre de lignes
des matrices C et D.La matrice A est appele matrice dtat ou matrice
dvolution, car elle contient la descriptiondu comportement
dynamique du systme. Elle rend compte aussi de lvolution du systme
enrgime libre, c'est--dire commande nulle.La matrice B est appele
matrice dentre ou matrice de commande. Elle rend compte
ducomportement dynamique du systme en rponse une commande.La
matrice C est appele matrice de sortie ou matrice dobservation.
Elle permet de relier lasortie ltat.La matrice D est appele matrice
daction directe qui relie directement la commande lasortie. Elle
est en gnral nulle dans les systmes physiques : le systme est dit
strictementpropre .Nous obtenons ainsi la reprsentation dtat
linarise du systme. Il est alors possible decalculer les valeurs
propres de la matrice dtat et dutiliser les proprits lies
celle-ci[INT], [PAS98], [SNY99], [MEK02]. 5. Chapitre II : Thorie
des petits signaux31II.4 - Analyse du modle linaire :Lanalyse des
valeurs propres et lanalyse modale du systme de puissance linaris
sont desoutils puissants pour tudier les proprits dynamiques du
systme. Lvaluation prcisede la frquence des oscillations
lectromcaniques et de lamortissement de ces oscillationspeut tre
dtermine partir de lanalyse des valeurs propres, lanalyse modale
permet quant elle dobtenir des informations supplmentaires plus
approfondies telles que la nature desmodes (dominants ou non, )
[SIG05].II.4.1 - Analyse des valeurs propres :II.4.1.1 - Valeurs
propres de la matrice dtat A :Aprs avoir tabli le modle dtat
linaire A et ses valeurs propres (mthode indirecte deLiapounov), en
utilisant la transformation de Laplace et depuis le systme (24), il
rsulte lesquations suivantes dans le domaine frquentiel complexe
:{. () (0) = A. () + B. ()() = C. () + D. ()(25)Si (0) = 0, ce
systme peut se reprsenter par le schma bloc ci-dessous :Figure 10 :
Schma bloc du systme (25) [INT], [ALK08], [ORT13], [CHE],
[PAS98]Depuis le systme (25), on obtient la solution explicite de
cet ensemble dquations qui estdonne comme suit : 6. Chapitre II :
Thorie des petits signaux() = (. I A)1. [(0) + B. ()] (26)32Avec :
I : matrice identit dordre n() = (.I A) (.IA)[(0) + B. ()] (27)De
mme, on obtient :() = C. (.IA)(.IA)[(0) + B. ()] + D. () (28)Les
transformes de Laplace, x et y, ont deux composantes : lune
dpendant desconditions initiales et lautre des variables dentre.Les
ples de () et () sont les racines de lquation :(. I A) = 0 (29)Les
valeurs de s satisfaisant cette quation sont les valeurs propres de
la matrice A.Les valeurs sont appeles les valeurs propres du
systme. Elles dfinissent le mouvement dusystme li une frquence
propre.Une valeur propre est caractrise par une frquence
doscillation et un amortissement. Elleest reprsente gnralement par
le nombre complexe suivant [PAS98] : = (30) : partie relle de la
valeur propre (abscisse de convergence) : pulsation propre
doscillation (rad/s)Cette relation est quivalente la relation
dfinissant les valeurs propres dun systme dudeuxime ordre qui est
donne comme suit [MEK02] : = 1 2 (31)n : pulsation naturelle
doscillation (rad/s) : facteur damortissement doscillationUne
matrice dtat de dimension nn est associe n valeurs propres.
Lanalyse des valeurspropres permet dobtenir tout dabord la frquence
doscillation et le facteur damortissement.La frquence naturelle
doscillation est donne par la relation suivante : 7. Chapitre II :
Thorie des petits signaux33 = 2(32)Le facteur damortissement
dtermine la dcroissance de lamplitude doscillation. Il estdonn par
la relation suivante : = 2+2 (33)Dans un modle linaire, la solution
des quations linaires du systme dcrit lvolutionexponentielle au
cours du temps de la perturbation. Ainsi, cette solution peut tre
reprsentepar une combinaison de fonctions dexponentielles
reprsentant les caractristiquestemporelles associes chaque valeur
propre i. Les constantes de temps = 1| |caractrisentde faon gnrale
lamortissement du systme. 8. Chapitre II : Thorie des petits
signauxFigure 11 : Reprsentation des points singuliers
correspondant aux six combinaisonspossibles de valeur propre
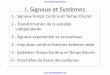
[SIG05]34 9. Chapitre II : Thorie des petits signauxLinterprtation
physique des signaux correspondants aux fonctions dont la forme est
simpleest illustre par la Figure 12 qui reprsente dans le plan
complexe lallure des variations detels signaux en fonction du
temps, suivant la position du point reprsentatif de i.Figure 12 :
Exemple de reprsentation des valeurs propres dans le plan complexe
et analysepar lieu des ples de la stabilit dun systme [ALK08]Dans
lexemple ci-dessus, une valeur propre relle correspond un mode
non-oscillatoire.Si la valeur propre relle est ngative, les
exponentielles apparaissant dans la rponsetemporelle sont des
fonctions dcroissantes du temps. La rapidit de dcroissance est lie
laconstante de temps damortissement. Plus la valeur de labscisse de
convergence est grande,plus la constante de temps est faible et
lamortissement rapide.Par contre, si la valeur propre relle est
positive, le mode prsente une instabilit apriodique.Une valeur
propre complexe, en paire conjugue, correspond un mode
oscillatoire.Si la partie relle de la valeur propre est ngative, le
mode oscillatoire est amorti : il est doncstable. Si la partie
relle de la valeur propre est positive, le mode oscillatoire est
divergent ; ilest donc instable.Cette analyse rvle quil est
possible de dterminer la nature (stable ou instable) dunsystme
linaire partir dune inspection de la position des ples de la
fonction detransfert du systme dans le plan complexe. En outre, la
connaissance de la position des plespeut fournir des renseignements
sur le comportement du systme lors de rgimes transitoirestypiques
tels que la rponse une impulsion, un chelon, .35 10. Chapitre II :
Thorie des petits signauxDes modes instables ou mal amortis peuvent
tre dominants : leurs contributions dterminentalors lallure de la
rponse temporelle globale du systme.Dans les rseaux lectriques, il
est videmment ncessaire que tous les modes du systmesoient stables,
c'est--dire placs dans la partie gauche du plan complexe.Il existe
une solution non-triviale (autre que = 0) pour les valeurs propres
:A. = . (34)36A : matrice nn : vecteur n1Lquation (34) est lquation
caractristique de la matrice A.En la factorisant par , on obtient
:(A . I) = 0 (35)Pour une solution non-triviale, voici le thorme de
Caley-Hamilton [CHE] :(A . I) = 0 (36)Les valeurs propres peuvent
tre relles ou complexes. Si les coefficients de la matrice A
sontrels (cas des systmes physiques et donc des grands rseaux
lectriques), les valeurscomplexes sont conjugues. Une matrice et sa
transpose ont les mmes valeurs propres.II.4.1.2 - Vecteurs propres
associs une valeur propre :Le modle linaire dun systme de puissance
peut tre reprsent par un modle dtat dcritpar le systme (24). Pour
chaque valeur propre i, le vecteur i satisfaisant lquation (34)
estle vecteur propre droite de A associ la valeur propre i. Ces
vecteurs peuvent tre calculspar les quations suivantes :A. = . = 1,
, (37)i : iime valeur propre - toutes les valeurs propres tant
supposes distinctesi : iime vecteur propre droite de A associ iDe
mme, le vecteur i satisfait lquation : . A = . = 1, , (38)i : iime
vecteur propre gauche de A associ i 11. Chapitre II : Thorie des
petits signauxPour une matrice dtat de dimension nn :Le vecteur
propre droite est un vecteur colonne de dimension n1 :T: matrice nn
(42)37 = |1|Le vecteur propre gauche est un vecteur ligne de
dimension 1n : = |1 |Les vecteurs propres gauche et droite
correspondant aux diffrentes valeurs propres sontorthogonaux. La
relation caractristique entre les vecteurs propres gauche et droite
estdtermine par leur produit matriciel.Le produit matriciel entre
deux vecteurs propres, gauche et droite, associs deux
valeurspropres diffrentes vaut zro :. = 0 (39)Par contre, lorsque
les deux vecteurs propres, gauche et droite, correspondent la
mmevaleur propre, leur produit matriciel normalis vaut un :. = 1 =
(40)II.4.1.3 - Matrices modales :Lensemble des vecteurs propres,
droite, du systme forme la matrice modale droite,donn : = |1 | :
matrice nn (41)Le vecteur propre droite i montre linfluence
relative de chaque variable dtat dans unmode excit donn. Ainsi,
pour un vecteur propre droite complexe, lamplitude relative
deslments du vecteur indique le degr de participation des variables
dtat au mode considr.Quant la phase des lments du vecteur, elle
donne le dphasage des variables dtat dans lemode donn [ALK08],
[PAS98], [SNY99].De mme, la matrice modale gauche est forme de
lensemble des vecteurs propres gauche : = |1T T| 12. Chapitre II :
Thorie des petits signauxEn ce qui concerne le vecteur propre
gauche i, il dtermine lensemble des variables dtatparticipant
relativement la composition du iime mode. Il indique galement la
contributionde chaque variable dtat dans lvolution du mode
considr.Dans le plan complexe, le diagramme reprsentant les
composantes dun vecteur propre droite i relatives aux diffrentes
variables dtat est appel le mode shape .Dans un systme de puissance
multi-machines, le mode shape indique la faon dont lesgnrateurs
oscillent les uns par rapport aux autres. Les deux cas limites tant
: les oscillationscohrentes et les oscillations en opposition de
phase. Ainsi, les modes shapes du systmepeuvent identifier les
groupes cohrents des gnrateurs. En outre, le mode shape
peutconfirmer le type de chaque mode.38Posons [ORT13], [PAS98],
[SNY99] :1000 = |000000000| : matrice diagonale de dimension nn
dont les lments diagonaux sont 1, , Il est alors possible dcrire
:A. = . (43)Or : . = ISoit : = 1 (44)La matrice carre est bien
inversible : donc -1 existe.1. A. = (45)La rponse libre est donne
par := A. (46)Soit la variable z telle que : = . (47)Depuis les
quations (46) et (47), on obtient : 13. Chapitre II : Thorie des
petits signaux=1 . (0). (54)=1 . C . (56)39 = A. . (48)= 1. A. .
(49)De lquation (45), on en dduit := . (50)Cette dernire quation a
lavantage sur lquation (45) de voir une matrice diagonale.Elle
reprsente n quations du premier ordre non-couples := . = 1, ,
(51)Ces quations ont pour solution avec (0), valeur initiale de zi
: () = (0). (52)Or : () = . ()Soit :() = [1 ]. |1()()| (53)Donc,
depuis lquation (52) :() = Do :() = 1. () = . ()Et donc : () = . ()
(55)Pour = 0 : (0) = . (0) partir de lquation (54) :() = 14.
Chapitre II : Thorie des petits signaux40Ci : produit scalaire .
(0)La rponse temporelle de la iime variable dtat est donne par : ()
= 1. C1. 1 + + . C. (57)Lquation prcdente donne lexpression de la
rponse libre dans le temps suivant les valeurspropres et les
vecteurs propres. Ainsi, la rponse libre est donne par une
combinaisonlinaire de n modes dynamiques correspondant aux n
valeurs propres de la matrice dtat. Leproduit scalaire C = . (0)
reprsente lamplitude dexcitation du iime mode. Lacaractristique
temporelle dun mode correspondant une valeur propre i est donne par
. Une valeur propre relle ngative correspond un mode
non-oscillatoire. Une valeurpropre relle positive reprsente une
instabilit apriodique. Les valeurs de C et lesvecteurs propres
associs aux valeurs propres relles sont aussi rels. Les valeurs
propres complexes viennent par paires, et chaque paire correspond
unmode doscillation. Les valeurs de C et des vecteurs propres sont
telles que ()soitrelle tout instant t.Par exemple : ( + ). () + (
). (+) a la forme . ( + )La partie relle de la valeur propre donne
lamortissement.La partie imaginaire donne la pulsation
doscillation.Une partie relle ngative reprsente une oscillation
amortie, alors quune partie rellepositive reprsente une oscillation
damplitude croissante et donc une instabilit.II.4.2 - Analyse
modale :Comme nous lavons vu, les valeurs propres du systme
dterminent les caractristiquesdynamiques du systme (frquences et
facteurs damortissement), ainsi que ltat de stabilitdu
systme.Lanalyse des vecteurs propres, qui dcoule de lanalyse des
valeurs propres, peut aussifournir dautres informations
importantes.Lorsquune instabilit ou un mode mal amorti prend
naissance dans un systme de puissance,il est trs intressant
dexaminer les points suivants : les variables dtat lies aux modes
dominants les lments du systme permettant dagir efficacement pour
le stabiliser 15. Chapitre II : Thorie des petits signaux les
groupes cohrents de gnrateurs prsentant des oscillations couples
les signaux les plus efficaces appliquer aux contrleurs les
paramtres des contrleurs ralisant un meilleur amortissement.Nous
voyons donc ici que les valeurs propres de la matrice dtat nous
permettent didentifierles diffrents modes doscillation prsents dans
le rseau [PAS98], [SNY99], [MEK02].II.5 - Commandabilit et
observabilit :Le systme a t reprsent prcdemment par lquation (24)
:41{= A. + B. = C. + D. En utilisant la variable z dfinie par
lquation (47), on obtient :{ = A. . + B. = C. . + D. (58)Ces
quations peuvent tre rcrites sous une forme plus classique :{= A. +
B. = C . + D. (59)Avec les matrices Bm et Cm dfinies par = 1. et =
. .En examinant lquation (59), si la iime ligne de la matrice Bm
est compose de valeurs nulles,alors les entres nont aucune action
sur le iime mode. Dans un tel cas, le iime mode est
ditincommandable.Toujours depuis lquation (59), on peut observer
que la iime colonne de la matrice Cm montresi la variable zi
intervient sur les variables de sortie. Si les valeurs de ce
vecteur colonne sontnulles, le mode correspondant est
inobservable.La matrice Bm, de dimension nr, est appele matrice de
commandabilit. Llment Bm(i,j)de la matrice Bm est le facteur de
commandabilit du mode i par le signal .La matrice Cm, de dimension
mn, est appele matrice dobservabilit. Llment Cm(j,i) dela matrice
Cm est le facteur dobservabilit du mode i par le signal .II.6 -
Forme des modes et sensibilit :On a vu prcdemment, quations (53) et
(55), que la rponse du systme est donne par : 16. Chapitre II :
Thorie des petits signauxx(t) = . z(t) = [1 2 ]. z(t) (60)42Z(t)= .
x(t) = [1T nT]T. x(t) (61)Les variables x1, , xn sont les variables
dtat dorigine reprsentant les performancesdynamiques du systme. Les
variables z1, , zn sont les variables dtat transformes tellesque
chaque variable reprsente une seule et unique valeur
propre.Lquation (60) montre que le vecteur propre de droite donne
la forme du mode, c'est--direlactivit relative des variables dtat
lorsquun mode est excit. Ainsi, le degr dactivit dela variable dtat
xk pour le iime mode est fourni par llment ki du vecteur propre
droite .Les normes des lments de i donnent ltendue de lactivit des
'n' variables dtat pour leiime mode, et les angles de ces lments
donnent les dplacements de phase des variablesdtat par rapport au
mode.Lquation (61) montre que le vecteur propre gauche i donne
quelle combinaison desvariables dtat dorigine active le iime mode
uniquement.Ainsi, le kime lment du vecteur propre droite quantifie
lactivit de la variable xk pourle iime mode, alors que le kime
lment du vecteur propre gauche pse la contribution decette activit
sur le iime mode.Maintenant, il sagit dexaminer la sensibilit des
valeurs propres aux lments de la matricedtat.Pour cela, il est
possible dutiliser lquation (37) :A. i = i . i i = 1, , nSoit akj
lment de la matrice A se situant la kime ligne et jime colonne. En
diffrenciantlexpression prcdente :Aakj. i + A iakj= iakj. i + i .
iakj(62)En multipliant les deux termes de lgalit par , et en
rappelant que i . i = 1 et quei . (A i . I) = 0 : 17. Chapitre II :
Thorie des petits signaux43iakj= ik. ji (63)Ainsi, la sensibilit de
la valeur propre llment akj de la matrice dtat est gale auproduit
de llment du vecteur propre de gauche ik par llment du vecteur
propre dedroite ji.Les concepts de commandabilit, dobservabilit et
de sensibilit peuvent tre appliqus parexemple afin de dterminer
linfluence quaurait linsertion dans le rseau dun dispositifFACTS ce
sur chaque mode doscillation.II.7 - Facteurs de participation
:L'approche standard, habituellement employe pour valuer la
participation dune variabledtat xk dans le iime mode, tudie les
lments correspondants du vecteur propre droite i.Bien que cette
mthode soit simple employer, elle prsente un dfaut trs srieux,
savoirles valeurs numriques des lments des vecteurs propres droite
dpendent des units desvariables dtat correspondantes. Il est donc
difficile de comparer les valeurs obtenues pourdes variables dtat
diffrentes. Par consquent, cette mthode est seulement exploitable
pourdes variables dtat ayant les mmes units et jouant les mmes
rles.Rappelons quun vecteur propre droite i mesure linfluence
relative de chaque variabledtat xk dans un iime mode et quun
vecteur propre gauche i indique la contribution delactivit de xk
dans le iime mode. Par consquent, une "quantit" caractristique dun
modedonn peut tre obtenue par produit, lment par lment, dun vecteur
propre droite et dunvecteur propre gauche correspondant. Cette
quantit, appele le facteur de participation, estcalcule par la
relation suivante :Pki = ki . ik (64)Il permet de mesurer la
participation relative de la kime variable dtat au iime
modedoscillation, et vice-versa.Alors que ki mesure lactivit de xk
dans le iime mode doscillation et que ik pse lacontribution de son
activit sur ce mode, le facteur de participation mesure
laparticipation "nette" ou effective.Le produit des lments des
vecteurs propres de gauche et de droite rend le facteur
departicipation sans dimension, c'est--dire indpendant du choix des
units. 18. Chapitre II : Thorie des petits signauxAinsi, le facteur
de participation peut fournir des informations fines sur le problme
: ilreprsente une mesure relative de la participation de la kime
variable dtat dans le iime mode,et vice-versa.Etant donn que les
matrices modales, droite et gauche, et sont inverses, le facteur
departicipation est donc une grandeur sans dimension. Ceci veut
dire que le facteur departicipation, au contraire du vecteur propre
droite, est indpendant des units des variablesdtat.Depuis lquation
(63), il apparait que le facteur de participation Pki correspond la
sensibilitde la valeur propre llment diagonal akk de la matrice
dtat A :Pki = i44akk(65)Les facteurs de participation fournissent
donc la participation relative des variables dtat surles diffrents
modes. Et par consquent, de connatre quelles sont les variables
dtat les plusimpliques dans chaque mode doscillation.Ils pourront
donc tre utiliss pour la caractrisation des diffrents modes
doscillation :P1iPniP= |P1 Pn | avec = || = |1i . i1ni . in| (66)ki
: lment de la kime ligne et de la iime colonne de la matrice modale
ik : lment de la iime ligne et de la kime colonne de la matrice
modale Dans la matrice de participation P, comme le montre lquation
(66), la jime colonne indiquecomment un jime mode participe
relativement lvolution des variables dtat du systme,tandis que la
iime ligne indique comment les diffrents modes participent
relativement lvolution de la iime variable dtat. = [p11 p1m pn1
pnm]x1xn(67)1 Une autre proprit intressante du facteur de
participation pij sinterprte souvent comme lasensibilit du jime
mode aux changements des termes diagonaux aii de la matrice dtat A
dusystme. 19. Chapitre II : Thorie des petits signauxPour les tudes
de stabilit aux petites perturbations, linfluence dune
sourcedamortissement appliqu un gnrateur peut tre dtermine par les
facteurs departicipation, comme suit : Si, pour nimporte quel mode,
le facteur de participation correspondant la vitesse dugnrateur est
nul, lintroduction dune source damortissement au gnrateur
nauraaucun effet sur le mode. Si le facteur de participation est
rel positif, lajout damortissement ce gnrateur45augmentera
lamortissement du mode. En revanche, si le facteur de participation
est rel ngatif, lamortissement ajout augnrateur rduira
lamortissement du mode.Les facteurs de participation, par leur
proprit de pouvoir dterminer les variables dtatresponsables des
modes indsirables, peuvent tre employs pour trouver les points les
plusefficaces pour installer des contrleurs de stabilisation.La
matrice de participation peut montrer aisment les variables dtat
les plus impliques dansle mode indsirable : les termes de la
matrice P de plus grande amplitude de la colonnerelative au mode
considr indiqueront la participation en question.II.8 - Rsidus
:Lefficacit du signal dentre dun contrleur de stabilisation ou
lemplacement optimal dece dernier dans un systme de puissance
multimachines peuvent tre identifis par la mthodedes rsidus. Cette
mthode est drive de la relation entre la fonction de transfert et
le modledtat.Le modle dtat dun systme reprsente la fois les
proprits dentre/sortie du systme etle comportement interne du
systme. linverse, la fonction de transfert du systme neconcerne que
la relation entre-sortie du systme.Pour dterminer la relation entre
la fonction de transfert et le modle dtat, nous prenons lesquations
(24) pour un systme monovariable (Single Input - Single Output
system), et nousconsidrons la fonction de transfert entre les
variables y et u.Supposons que D = 0, les quations dtat scrivent
comme suit :x = A. x + B. u (68)y = C. x (69)La fonction de
transferty(s)u(s)scrit de la faon suivante : 20. Chapitre II :
Thorie des petits signaux=1 = Ri46() = y(s)u(s)= C. (sI A)1. B
(70)Pour un systme en boucle ouverte, la fonction G(s) peut tre
dcompose en lmentssimples comme suit :() = R1(ss1 )+ R2(ss2)+ +
Rn(s sn )= Ri(ssi )ni(si )ni=1 (71)O :s : oprateur de Laplaces1,
s2,,sn : ples de G(s) - les valeurs propres du systmeRi : rsidu de
G(s) au ple siLe rsidu peut sexprimer par la relation suivante :Ri
= CiiB (72)Daprs cette relation, nous remarquons que le rsidu Ri
pour un mode i donn mesure lasensibilit de ce mode un signal de
contre-raction sortie-entre. Ainsi, les rsidus peuventdterminer les
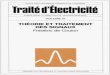
modes les plus affects par un signal de retour.La Figure 13 montre
un systme G(s) quip dun contrleur H(s) en contre-raction defonction
de transfert.Lorsquon ferme la boucle par un rgulateur H(s), les
valeurs propres du systme initial G(s)vont se dplacer. Le
dplacement de ces valeurs propres peut tre calcul par
lquationsuivante :i = RiH(i) (73)Cette quation montre que le
dplacement des valeurs propres, cr par le contrleur,
estproportionnel aux amplitudes des rsidus correspondants.Figure 13
: Lensemble systme-contrleur en boucle ferme 21. Chapitre II :
Thorie des petits signauxPour un systme multivariables, linfluence
du mme contrleur H(s), (sans se soucier de sastructure et de ses
paramtres) peut tre tudie en diffrents emplacements. Si le
rsidu,associ un mode i donn, est calcul pour chaque emplacement, le
rsidu le plus levindique donc lemplacement le plus efficace du
contrleur. De mme, en changeant le signaldentre du contrleur,
diffrentes valeurs des rsidus vont tre obtenues. Par consquent,
lersidu le plus lev indique le signal dentre le plus efficace.47
22. Chapitre II : Thorie des petits signauxII.9 - Conclusion :Dans
ce chapitre, nous avons prsent la modlisation du systme de
puissance pour lestudes de la stabilit aux petites perturbations.
Nous avons aussi prsent la linarisation dusystme avec lanalyse
modale du modle linaire du systme.Les points dtude principaux de ce
chapitre sont prsents ci-dessous :- Le systme de puissance est
souvent soumis des petites perturbations qui seproduisent
continuellement sous linfluence de faibles variations de charges et
dessources. Ces perturbations sont considres comme suffisamment
petites pourpermettre de linariser les quations du modle gnral du
systme. La reprsentationdtat du systme est ensuite dduite.- La
stabilit du systme est uniquement dfinie par le lieu des ples, dans
le plan48complexe, de sa fonction de transfert.- Lanalyse modale du
systme donne des informations importantes concernant
lescaractristiques des modes doscillations, les variables dtat
participant lvolutionde ces modes, .La thorie des petits signaux
nous fournit donc des outils dtude des phnomnesdinteraction de
rgulation. Les valeurs propres de la matrice dtat, provenant de
lareprsentation linarise du systme, fournissent un outil dtude de
ces oscillations en termesde frquence et damortissement. De plus,
lutilisation de proprits lies ces valeurspropres permet, entre
autres, de mesurer la participation des diffrentes variables dtat
chaque mode doscillation.