Embed Size (px)
Citation preview

Projet mécatronique intégrée 5A :
Réalisation d’un tracker
Salem AKKARI
Flavien LUCAS
Etienne GRENIER
Nicolas LUCAS
Yinchao LI
Yihuan SUN
Anthony CARRATALA
5A MCS Année scolaire 2011 – 2012
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 2
Projet mécatronique intégrée 5A :
Réalisation d’un tracker
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 3
Remerciements
Mes vifs remerciements s’adressent dans un premier temps à toute l’équipe pédagogique de
l’école Polytechnique de l’université d’Orléans et les intervenants professionnels respon-
sables de la formation Mécatronique et Conception des Systèmes, pour avoir assuré le suivi
du projet du tracker solaire.
Je remercie également Monsieur Gilles Hivet pour l’aide et les conseils concernant les mis-
sions évoquées dans ce rapport qu’il a apporté à toute l’équipe lors des différents suivis.
Je tiens à remercier tout particulièrement et à témoigner toute ma reconnaissance aux diffé-
rents membres de mon équipe de projet pour leur, soutien, solidarité, professionnalisme et
engagement à la réussite du projet :
Messieurs Lucas Flavien, Carratala Anthony, Sun Yihuan,Li yinchao,Grennier Etienne et
Lucas Nicolas.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 4
Table des matières
Table des matières ................................................................................................... 4
Table des illustrations .............................................................................................. 8
Liste des tableaux ................................................................................................. 11
Glossaire ................................................................................................................. 12
Introduction ............................................................................................................. 14
1 Le business plan ................................................................................................. 15
1.1 Les coûts ............................................................................................................15 1.1.1 Les coûts fixes ........................................................................................................... 15 1.1.2 Les coûts variables .................................................................................................... 15
1.2 Les revenus ........................................................................................................16 1.3 Le coût de production .........................................................................................16 1.4 Le retour sur investissement ...............................................................................17
2 Comment collecter, convertir et renvoyer l’énergie au réseau ........................ 19
2.1 Principe ..............................................................................................................19 2.2 Les modules .......................................................................................................19
2.2.1 Le choix ..................................................................................................................... 19 2.2.2 La technologie ........................................................................................................... 22 2.2.3 Effet de la température .............................................................................................. 24
2.3 Le choix des onduleurs .......................................................................................25 2.4 La protection électrique de la ferme ....................................................................27
2.4.1 Dimensionnement des sectionneurs porte-fusibles ................................................... 29 2.4.2 Dimensionnement des parafoudres ........................................................................... 29 2.4.3 Dimensionnement des diodes de protection ............................................................. 29 2.4.4 Dimensionnement des disjoncteurs ........................................................................... 30
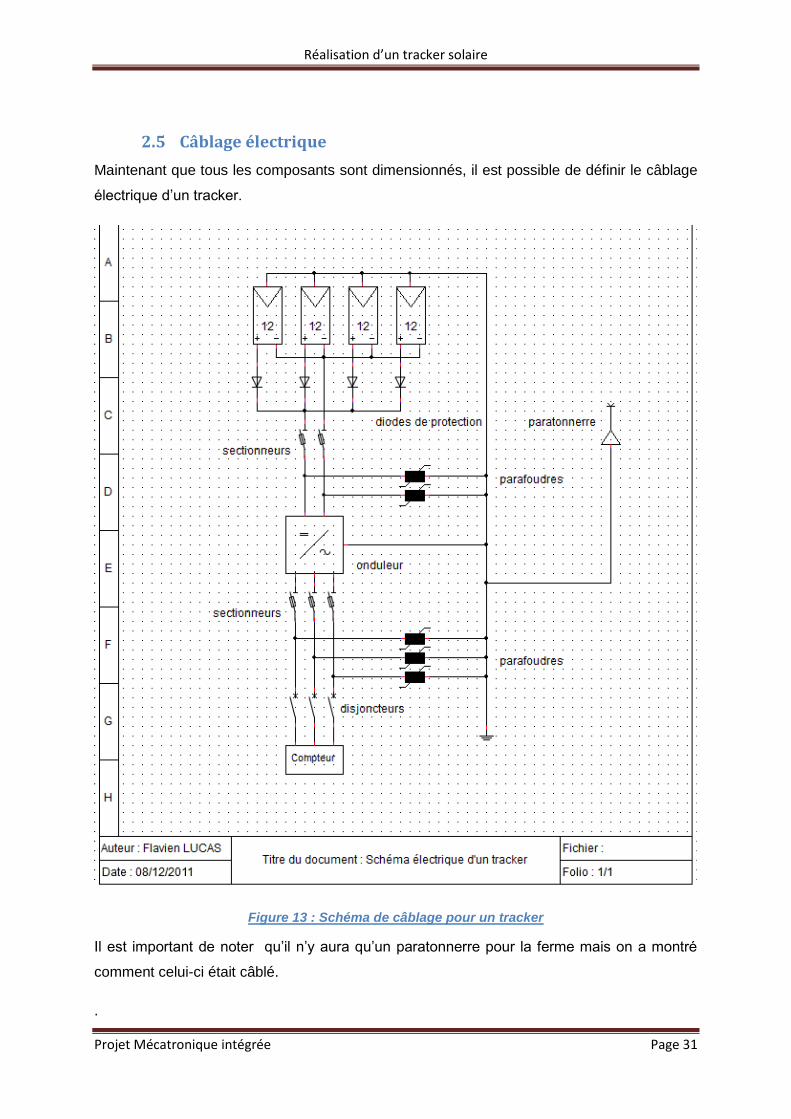
2.5 Câblage électrique ..............................................................................................31
3 Architecture du tracker ....................................................................................... 32
3.1 Choix de l’architecture ........................................................................................32 3.1.1 Type d’architecture .................................................................................................... 32 3.1.2 Type de support ......................................................................................................... 33 3.1.3 Type de panneau ....................................................................................................... 34
3.2 Architecture choisie ............................................................................................35 3.3 Calcul du Beta_min .............................................................................................35
3.3.1 Détermination du Beta_min théorique ....................................................................... 35 3.3.2 Détermination du Beta-min pratique .......................................................................... 37
3.4 Schéma cinématique ..........................................................................................38 3.5 Repères utilisés ..................................................................................................39 3.6 Dimensionnement de l’architecture .....................................................................40
3.6.1 Conception Assistée par Ordinateur .......................................................................... 40 3.6.1 Mat du tracker ............................................................................................................ 41 3.6.2 Support de modules................................................................................................... 41 3.6.3 Résultats .................................................................................................................... 42
3.7 Dimensionnement d’un sous panneau ................................................................43
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 5
3.8 Influence des défauts ..........................................................................................48 3.9 Etude dynamique ................................................................................................52 3.10 Loi entrée-sortie ..................................................................................................61 3.11 Etude par éléments finis .....................................................................................62
4 Position de sécurité ............................................................................................. 65
4.1 Panneau horizontal .............................................................................................65 4.2 Panneau vertical .................................................................................................65
5 Motorisation ......................................................................................................... 67
5.1 Motorisation de l’élévation ..................................................................................67 5.1.1 Hypothèses ................................................................................................................ 69 5.1.2 Paramètres de vérin .................................................................................................. 71 5.1.3 Matrice de choix ......................................................................................................... 73 5.1.4 Avantages d’utiliser un vérin pour motorisation de l’axe d’élévation ......................... 75
5.2 Motorisation de l’azimut ......................................................................................77 5.2.1 Hypothèses ................................................................................................................ 77 5.2.2 Paramètres du moteur de l’azimut ............................................................................. 79 5.2.3 Matrice de choix du moteur ....................................................................................... 83 5.2.4 Le moteur, réducteur choisis ..................................................................................... 83 5.2.5 Un réducteur supplémentaire de roue et vis sans fin ................................................ 85
5.3 L’énergie consomme annuel ...............................................................................87 5.3.1 L’énergie consommé par motorisation de l’axe d’élévation....................................... 87 5.3.2 L’énergie consommé par motorisation de l’axe d’azimut .......................................... 87 5.3.3 L’énergie consommé annuel totalement (150 trackers) ............................................ 87
6 GEMMA de la stratégie ........................................................................................ 88
6.1 Gemma général ..................................................................................................88 6.2 Spécifications GEMMA ......................................................................................88
6.2.1 Cycles importants ...................................................................................................... 88 6.2.2 Les conditions ............................................................................................................ 88 6.2.3 Les étapes ................................................................................................................. 89
6.3 GEMMA sur le cycle de production normale .......................................................89 6.4 GEMMA sur le cycle d’arrêt d’urgence ................................................................91 6.5 FAST et AMDEC sur contraintes liées au vent ....................................................91
6.5.1 Diagramme Fast ........................................................................................................ 91 6.5.2 AMDEC sur les 3 solutions : ...................................................................................... 92
7 Comment assurer la fonction : Suivre le soleil ? .............................................. 94
7.1 Définition des angles d’azimut et élévation .........................................................94 7.2 Diagramme Fast .................................................................................................94 7.3 Connaître la position du soleil .............................................................................96
7.3.1 Diagramme FAST ...................................................................................................... 96 7.3.2 Matrice de choix ......................................................................................................... 96 7.3.3 Solution retenue ......................................................................................................... 97 7.3.4 Domaine de fonctionnement ...................................................................................... 98
7.4 Connaître la position des modules .................................................................... 101 7.4.1 Diagramme FAST .................................................................................................... 101 7.4.2 Matrice de choix pour l’élévation ............................................................................ 101 7.4.3 Matrice de choix pour l’azimut ................................................................................ 102 7.4.4 Solutions retenues ................................................................................................... 102
7.5 Connaître le Nord géographique ....................................................................... 105 7.5.1 Diagramme FAST .................................................................................................... 105 7.5.2 Solution retenue ....................................................................................................... 105
7.6 Connaître l’horizon ............................................................................................ 105
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 6
7.6.1 Diagramme FAST .................................................................................................... 105 7.6.2 Solution retenue ....................................................................................................... 106
7.7 Stratégie de suivi .............................................................................................. 106 7.7.1 Diagramme FAST .................................................................................................... 106 7.7.2 Solution retenue ....................................................................................................... 106
7.8 Stratégie sur les angles à commander .............................................................. 107 7.8.1 Stratégies angulaires ............................................................................................... 107
8 Stratégie de commande des angles ................................................................. 109
8.1 Commande pas à pas ....................................................................................... 110 8.2 Passage de la position de sécurité à la position de travail ................................ 110
8.2.1 Vision globale d’un cycle complet sur la journée ..................................................... 112 8.2.2 Zoom sur le passage de la position de sécurité à la position de travail .................. 113
8.3 Visualisation de la stratégie .............................................................................. 113 8.3.1 Vision globale .......................................................................................................... 113 8.3.2 Zoom de la stratégie ................................................................................................ 114
8.4 Lois « semi » idéales ........................................................................................ 115 8.4.1 Vitesse ..................................................................................................................... 115 8.4.2 Accélération ............................................................................................................. 116 8.4.3 Position .................................................................................................................... 117
8.5 Optimisation : le matin ...................................................................................... 118 8.6 Optimisation lorsque le soleil est au zénith ....................................................... 119 8.7 Modélisation sous Matlab/Simulink de notre système ....................................... 119
8.7.1 Visualisation du schéma bloc de commande .......................................................... 120 8.7.2 Modèle inverse et direct de notre système .............................................................. 120 8.7.3 Modélisation du vérin électromécanique ainsi que sa boucle bas-niveau .............. 121 8.7.4 Bloc variateur + PI ................................................................................................... 123 8.7.5 Modélisation de notre système complet sans correcteur ........................................ 126 8.7.6 Application d’un correcteur ...................................................................................... 127 8.7.7 Passage du modèle au terrain ................................................................................. 133
9 Superviser la ferme ............................................................................................ 134
9.1.1 Diagramme FAST .................................................................................................... 134 9.1.2 Matrice de choix ....................................................................................................... 134 Malgré que la solution de la commande centralisée ressorte, nous allons effectuer une Analyse des modes de défaillances, de leurs effets et de leur criticité................................. 134 9.1.3 AMDEC sur les deux solutions ................................................................................ 134 9.1.4 Solution retenue ....................................................................................................... 136
9.2 Comment assurer la supervision de la ferme? .................................................. 136 9.2.1 L’objectif de la conception de la supervision ........................................................... 136 9.2.2 L’architecture de la supervision sur toute le système .............................................. 137 9.2.3 L’architecture principal du système de la supervision ............................................. 139 9.2.4 Choix du bus de terrain ........................................................................................... 140 9.2.5 L’architecture de la supervision en détail ................................................................ 142
9.3 Modélisation du réseau ..................................................................................... 143
10 Organisation de la ferme ................................................................................. 146
11 Sécurité de la ferme ......................................................................................... 147
12 Cycle de vie de la ferme .................................................................................. 149
12.1 Importation des pièces et matières premières ................................................... 149 12.2 Transport .......................................................................................................... 149 12.3 Montage ........................................................................................................... 150 12.4 Fin de vie .......................................................................................................... 151
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 7
12.5 Rapport ............................................................................................................. 151
Conclusion ............................................................................................................ 155
Annexe A : Analyse de l’existant ........................................................................ 156
12.1 Analyse de l’existant ......................................................................................... 156 12.1.1 Technologie de Tracker ....................................................................................... 156 12.1.2 Actionneurs .......................................................................................................... 157
Annexe B : Analyse du besoin ............................................................................ 158
12.2 Analyse du marché ........................................................................................... 158 12.2.1 Les avantages et inconvénients du photovoltaïque ............................................ 158 12.2.2 Les marchés potentiels ........................................................................................ 159 12.2.3 Les concurrents dans le milieu de la cellule à concentration .............................. 160
12.3 Etude des revenus potentiels ............................................................................ 161
Annexe C : Analyse fonctionnelle ....................................................................... 163
12.3.1 Tracker ................................................................................................................. 163 12.3.2 Cycle de vie du tracker ........................................................................................ 164 12.3.3 Caractérisation des interacteurs .......................................................................... 164 12.3.4 Diagramme des inter-acteurs .............................................................................. 167
12.4 Ferme ............................................................................................................... 185 12.4.1 Bête à cornes ....................................................................................................... 185 12.4.2 Cycle de vie de la ferme ...................................................................................... 186 12.4.3 Caractérisation des intéracteurs .......................................................................... 186
12.5 Tracker de démonstration ................................................................................. 196 12.5.1 Bête à cornes ....................................................................................................... 196 12.5.2 Cycle de vie du tracker de démonstration ........................................................... 196 12.5.3 Caractérisation des inter acteurs ......................................................................... 197 12.5.4 Diagramme des inter acteurs .............................................................................. 199
Annexe D : Simulations par éléments finis du support de modules…………..211
12.6 -1 contact avec le mât, au centre : .................................................................... 211 12.7 -2 contacts avec le mat, proches du milieu : ..................................................... 212 12.8 -2 contacts avec le mat, éloignés : .................................................................... 212 12.9 -3 contacts avec le mat, un au centre et 2 proches du centre : ......................... 213 12.10 -3 contacts avec le mat, un au centre et 2 éloignés : ........................................ 213 12.11 -5 contacts avec le mat, sur tous les points de contact : ................................... 214
Annexe E : Inventaire matériaux ......................................................................... 215
Annexe F : Document SKF pour choix du roulement ........................................ 217
Bibliographie ......................................................................................................... 218
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 8
Table des illustrations
Figure 1 : Schéma du paramétrage et du cône d’incertitude correspondant à l’exigence de
0,5°de précision entre les normales aux modules et les rayons solaires ..............................12
Figure 2 : Schéma de l’Azimuth ............................................................................................13
Figure 3 : Schéma de l’Elévation ..........................................................................................13
Figure 4 : ROI .......................................................................................................................18
Figure 5 : Matrice de choix ...................................................................................................21
Figure 6 : Avantages des cellules multicouches ...................................................................23
Figure 7 : Technologie CPV..................................................................................................24
Figure 8 : Effet de la température sur la caractéristique d’un module ...................................24
Figure 9 : Fonctionnement du MPPT ....................................................................................26
Figure 10 : Zones kérauniques du monde ............................................................................28
Figure 11 : Type de protection suivant le niveau kéraunique ................................................28
Figure 12 : Mise en évidence du courant inverse ..................................................................30
Figure 13 : Schéma de câblage pour un tracker ...................................................................31
Figure 14 Comparaison de l'élévation avec l'éclairement .....................................................36
Figure 15 : Schéma de l’optimisation des dimensions du tracker ..........................................38
Figure 16 : Schéma cinématique du système .......................................................................39
Figure 17 : Figures de rotation de base ................................................................................39
Figure 18 : Graphe des liaisons de l’architecture ..................................................................40
Figure 19 : Représentation du Tracker en position de sécurité .............................................40
Figure 20 : Une des poutres composant le mat ....................................................................41
Figure 21 : Un double caisson à modules .............................................................................42
Figure 22 Position de sécurité et min ..................................................................................43
Figure 23 Longueur tige, c et e en fonction de min .............................................................44
Figure 24 Eléments finis de la bielle .....................................................................................46
Figure 25 : Double compartiment du support de modules .....................................................62
Figure 26 : Positionnement possible des appuis entre le support de module et le mat .........63
Figure 27 :Schéma d’analyse de motorisation ......................................................................67
Figure 28 :Schéma des efforts ..............................................................................................68
Figure 29 :Schéma d’effort uniforme de vent ........................................................................69
Figure 30 : Carte des vents du Maroc ...................................................................................70
Figure 31 : Dimensions du panneau .....................................................................................71
Figure 32 : Schéma mécanique ............................................................................................71
Figure 33 : Schéma des paramètres de calcul ......................................................................72
Figure 34 : Vérin choisi et son variateur ...............................................................................74
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 9
Figure 35 : Graphe de modèle du tracker sous CATIA .........................................................75
Figure 36 : Emplacement du vérin dans le tracker ................................................................75
Figure 37 : Vitesse de rotation du panneau par rapport à l’élevation ....................................76
Figure 38 : Direction du vent (azimut) ...................................................................................77
Figure 39 : Inertie du panneau (azimut) ................................................................................78
Figure 40 : Courbe de vitesse du moteur (azimut) ................................................................80
Figure 41 : Courbe du couple du moteur (10 km/h) ..............................................................81
Figure 42 : Courbe du couple du moteur (100 km/h) ............................................................81
Figure 43 : Courbe de puissance du moteur (azimut) pour vent 10km/h ...............................82
Figure 44 : Courbe de puissance du moteur (azimut)pour vent 100km/h ..............................82
Figure 45 : Variateur + moteur + réducteur ..........................................................................84
Figure 46 : Vitesse moteur en fonction du temps ..................................................................85
Figure 47 : Réducteur de roue et vis .....................................................................................86
Figure 48 : GEMMA général .................................................................................................88
Figure 49 : GEMMA-Cycle de production normale ................................................................90
Figure 50 : GEMMA-Cycle d’arrêt d’urgence ........................................................................91
Figure 51 : Diagramme Fast sur la détection ........................................................................92
Figure 52 Azimut / Jour .......................................................................................................98
Figure 53 Elévation/jour .......................................................................................................99
Figure 54 FAST Position des modules ............................................................................... 101
Figure 55 Elévation mesurée avec notre inclinomètre ....................................................... 102
Figure 56 : Inclinomètre POSITAL ACS CANopen ............................................................. 103
Figure 57 : Codeur incrémental « Leine Linde » ................................................................. 104
Figure 58 : Diagramme Fast Angles ................................................................................... 107
Figure 59 : Plans solaires – Un par mois ............................................................................ 108
Figure 60 : Représentation schématique de la position de sécurité .................................... 111
Figure 61 : Vision globale de notre commande ................................................................... 112
Figure 62 : Visualisation de la position de sécurité à la position de travail .......................... 113
Figure 63 : Visualisation de la commande .......................................................................... 114
Figure 64 : Zoom de la stratégie ......................................................................................... 114
Figure 65 : =f(temps) ........................................................................................................ 116
Figure 66 : =f(temps) ........................................................................................................ 117
Figure 67 : β=f(temps) ........................................................................................................ 117
Figure 68 : Optimisation de la commande le matin ............................................................. 118
Figure 69 : Optimisation de la commande au zénith ........................................................... 119
Figure 70 : Schéma bloc de principe de notre commande .................................................. 120
Figure 71 : Définition des paramètres ................................................................................. 121
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 10
Figure 72 : Modélisation du moteur avec la commande bas niveau .................................... 122
Figure 73 : Le système mécanique ..................................................................................... 123
Figure 74 : Commande bas niveau ..................................................................................... 123
Figure 75 : Réponse à une consigne de 1,5mm sans perturbations ................................... 124
Figure 76 : Visualisation du courant pour une consigne de 1,5mm sans perturbations ....... 125
Figure 77 : Visualisation de la tension pour une consigne de 1,5mm sans perturbations .... 125
Figure 78 : Système complet sans correcteur ..................................................................... 126
Figure 79 : Visualisation de la sortie en fonction de β=0.4° ................................................ 127
Figure 80: Visualisation de l'intensité sans correcteur ........................................................ 127
Figure 81 : Système avec correcteur .................................................................................. 128
Figure 82 : Visualisation de la sortie avec le correcteur pour une consigne β=0.4° ............. 128
Figure 83 : Tension moteur avec le correcteur ................................................................... 129
Figure 84 : Visualisation du courant moteur avec le correcteur ........................................... 129
Figure 85 : Wmot (tr/min)=f(temps) ..................................................................................... 130
Figure 86 : Réponse à une consigne β=0.4° avec une perturbation à 5V ........................... 131
Figure 87 : Tension du moteur à une consigne β=0.4° avec une perturbation ................... 131
Figure 88 : Courant du moteur à une consigne β=0.4° avec une perturbation ................... 132
Figure 89 : La hiérarchie du système .................................................................................. 137
Figure 90 : Architecture des connexions ............................................................................. 138
Figure 91 : L’architecture principal ..................................................................................... 139
Figure 92 : L’architecture de la supervision en détaille ....................................................... 143
Figure 93 : Zones de la ferme et l’armoire de PC industriel ................................................ 144
Figure 94 : Topologie de la zone 3 ..................................................................................... 145
Figure 95 : Positionnement des trackers dans la ferme ...................................................... 146
Figure 96 : Mat situé au niveau du centre de gravité du panneau ....................................... 156
Figure 97 : Mat au centre de gravité avec vérin mécanique ................................................ 156
Figure 98 : Mouvement « azimut » effectué au sol ............................................................. 157
Figure 99 : Carte d’ensoleillement de l’Europe et du Nord de l’Afrique ............................... 161
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 11
Liste des tableaux
Tableau 1 : Les coûts fixes ...................................................................................................15
Tableau 2 : coûts variables ...................................................................................................16
Tableau 3 : Revenus annuels ...............................................................................................16
Tableau 4 : Bilan Coûts/revenus ...........................................................................................17
Tableau 5 : Recherche d’onduleurs ......................................................................................25
Tableau 6 : Matrice de choix .................................................................................................26
Tableau 7 :Tableau des caractéristiques du patin/mono rail MRS45 ....................................46
Tableau 8 Classe de précision du rail ...................................................................................47
Tableau 9 : Performance de vérin et ses critères ..................................................................75
Tableau 10 : Performances et critères du vérin [L4] ............................................................84
Tableau 11 : AMDEC sur les solutions de la détection .........................................................93
Tableau 12 : Domaines de fonctionnement des angles ...................................................... 100
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 12
Glossaire
Cellules photovoltaïques : ce sont des cellules qui captent l’énergie solaire et la trans-
forment en énergie électrique.
Modules photovoltaïques : il s’agit de l’ensemble de cellules photovoltaïques
Panneaux photovoltaïques : Il s’agit d’un ensemble de modules placé sur le tracker.
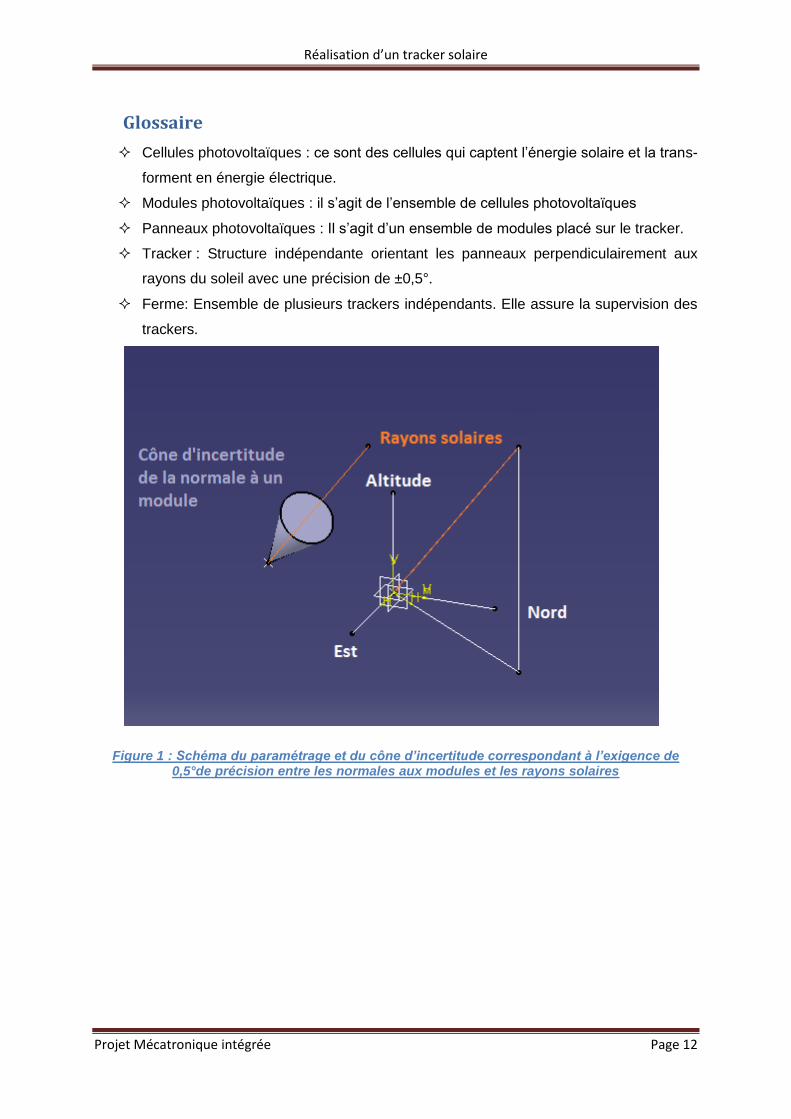
Tracker : Structure indépendante orientant les panneaux perpendiculairement aux
rayons du soleil avec une précision de ±0,5°.
Ferme: Ensemble de plusieurs trackers indépendants. Elle assure la supervision des
trackers.
Figure 1 : Schéma du paramétrage et du cône d’incertitude correspondant à l’exigence de 0,5°de précision entre les normales aux modules et les rayons solaires
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 13
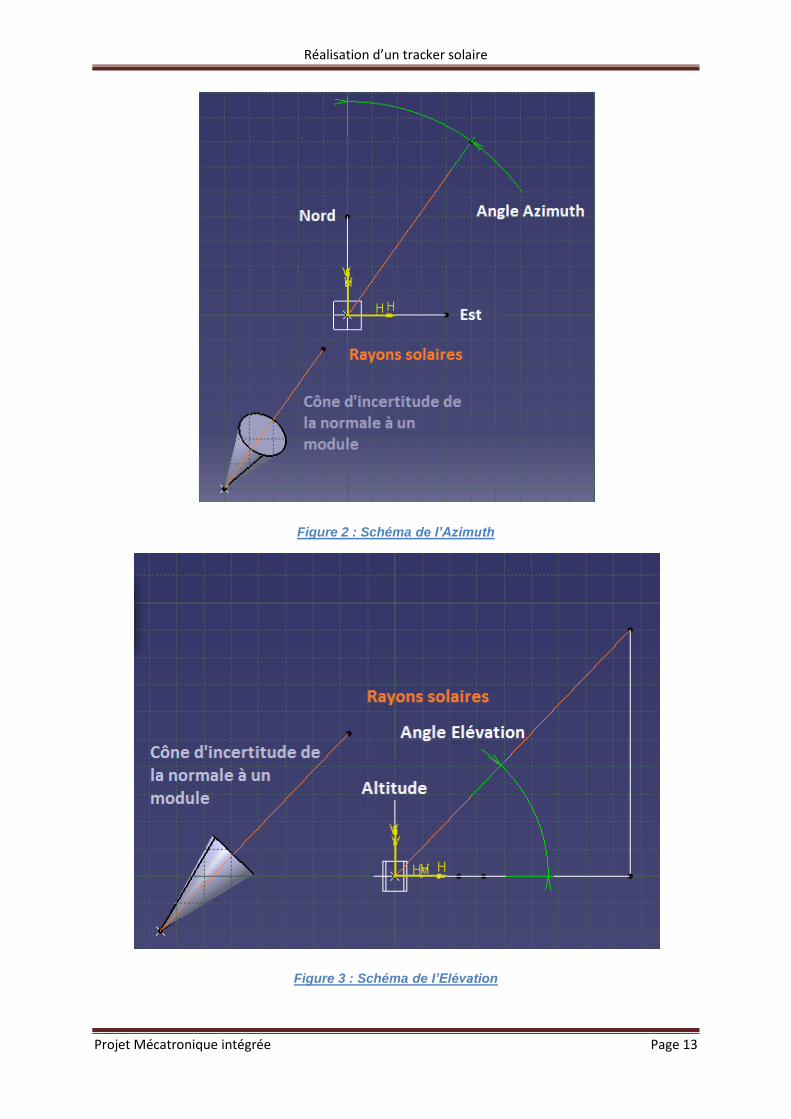
Figure 2 : Schéma de l’Azimuth
Figure 3 : Schéma de l’Elévation
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 14
Introduction
Le projet de mécatronique et conception intégrée consiste à concevoir une ferme
solaire composée de tracker. Le cahier des charges étant fourni et l’objectif était de proposer
un projet viable économiquement avec les meilleures solutions retenues.
Ce rapport présentera l’analyse du besoin, l’analyse de l’existant, les choix effectués
et les critères choisis pour aboutir à la solution.
Seront exposées également la conception préliminaire du tracker aussi bien sur la partie
mécanique, électrique qu’automatique.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 15
1 Le business plan
Le business plan permet de déterminer si le projet est viable et peut servir pour con-
vaincre les investisseurs d’apporter des capitaux dans l’entreprise. C’est pour cela qu’il est
tout particulièrement important de définir les coûts et les revenus que va générer la ferme
solaire.
Le choix a été fait d’investir au Maroc car ce pays offre des garanties sur l’installation de
nouvelles entreprises comme une exonération d’impôts sur les sociétés pendant 5 ans. Par
ailleurs, le solaire est en plein essor. Le Maroc souhaite installer une puissance de 2000MW
en énergie solaire donc de nouveaux projets devraient naître et l’entreprise sera ainsi apte à
construire de nouvelles fermes. Bien que le prix de rachat du kWh soit inférieur au Maroc
qu’en Espagne, l’entreprise s’appuiera sur une main d’œuvre et un coût des terrains environ
10 fois moins cher [1]
1.1 Les coûts
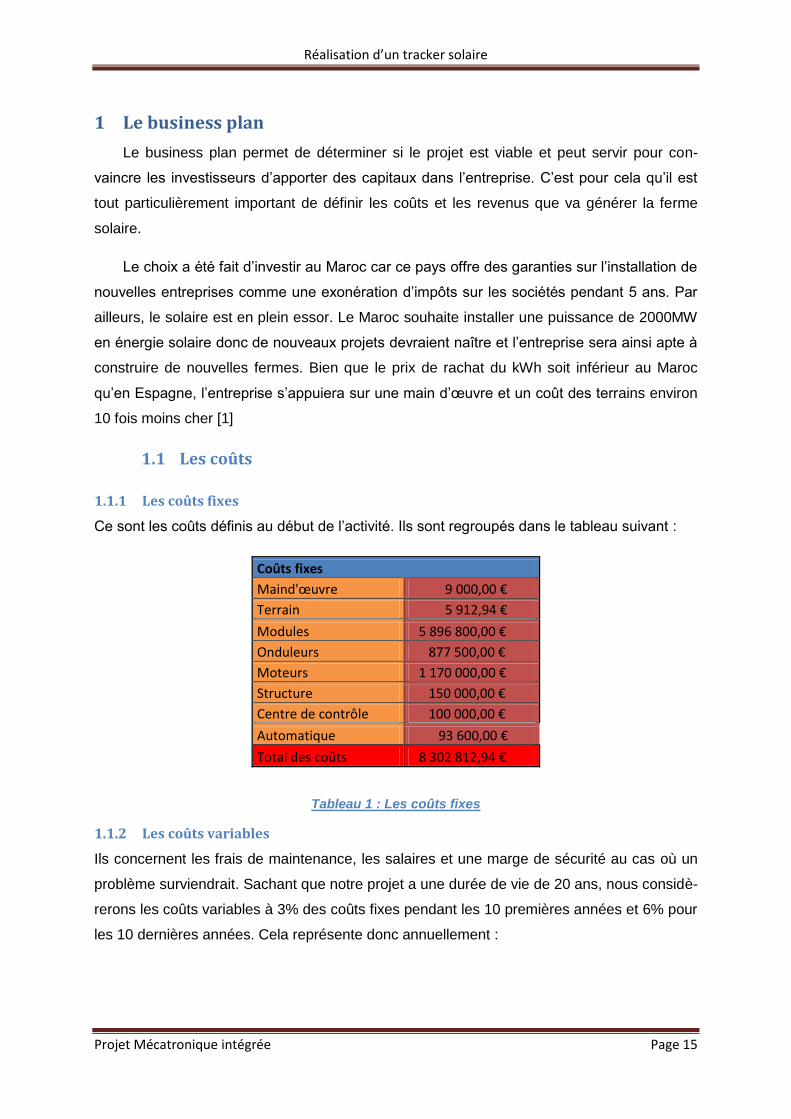
1.1.1 Les coûts fixes
Ce sont les coûts définis au début de l’activité. Ils sont regroupés dans le tableau suivant :
Coûts fixes
Maind'œuvre 9 000,00 €
Terrain 5 912,94 €
Modules 5 896 800,00 €
Onduleurs 877 500,00 €
Moteurs 1 170 000,00 €
Structure 150 000,00 €
Centre de contrôle 100 000,00 €
Automatique 93 600,00 €
Total des coûts 8 302 812,94 €
Tableau 1 : Les coûts fixes
1.1.2 Les coûts variables
Ils concernent les frais de maintenance, les salaires et une marge de sécurité au cas où un
problème surviendrait. Sachant que notre projet a une durée de vie de 20 ans, nous considè-
rerons les coûts variables à 3% des coûts fixes pendant les 10 premières années et 6% pour
les 10 dernières années. Cela représente donc annuellement :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 16
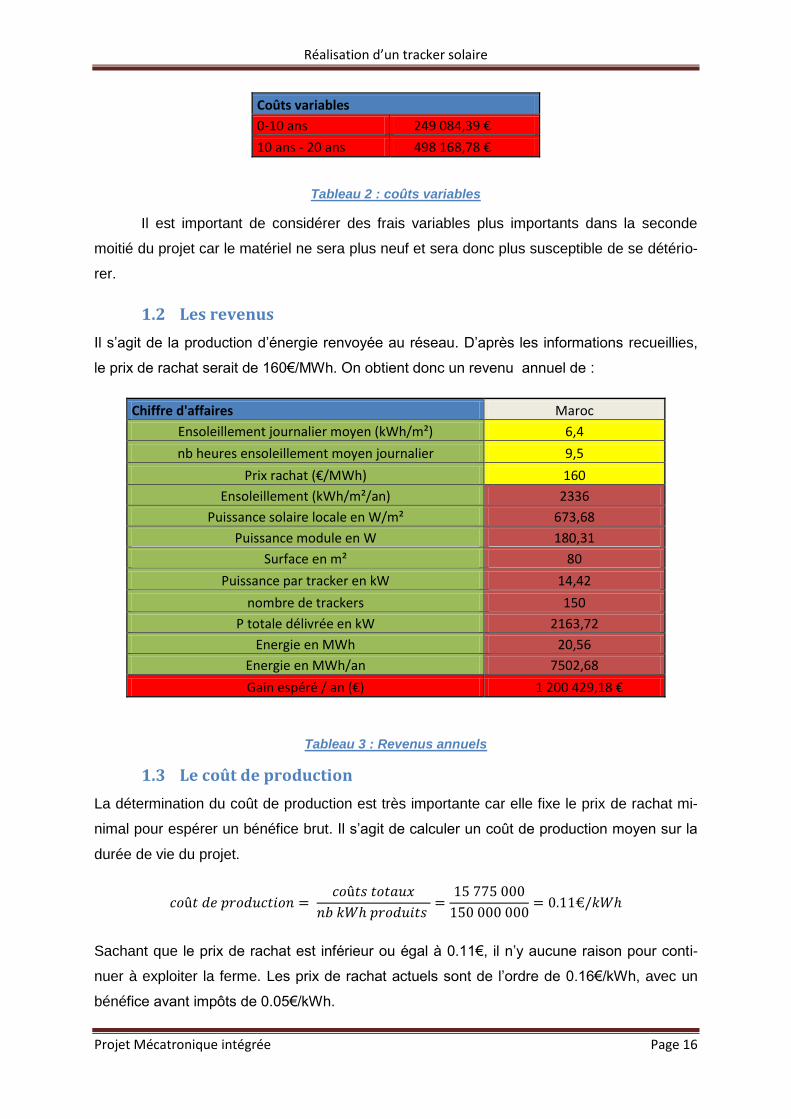
Coûts variables
0-10 ans 249 084,39 €
10 ans - 20 ans 498 168,78 €
Tableau 2 : coûts variables
Il est important de considérer des frais variables plus importants dans la seconde
moitié du projet car le matériel ne sera plus neuf et sera donc plus susceptible de se détério-
rer.
1.2 Les revenus
Il s’agit de la production d’énergie renvoyée au réseau. D’après les informations recueillies,
le prix de rachat serait de 160€/MWh. On obtient donc un revenu annuel de :
Chiffre d'affaires Maroc
Ensoleillement journalier moyen (kWh/m²) 6,4
nb heures ensoleillement moyen journalier 9,5
Prix rachat (€/MWh) 160
Ensoleillement (kWh/m²/an) 2336
Puissance solaire locale en W/m² 673,68
Puissance module en W 180,31
Surface en m² 80
Puissance par tracker en kW 14,42
nombre de trackers 150
P totale délivrée en kW 2163,72
Energie en MWh 20,56
Energie en MWh/an 7502,68
Gain espéré / an (€) 1 200 429,18 €
Tableau 3 : Revenus annuels
1.3 Le coût de production
La détermination du coût de production est très importante car elle fixe le prix de rachat mi-
nimal pour espérer un bénéfice brut. Il s’agit de calculer un coût de production moyen sur la
durée de vie du projet.
Sachant que le prix de rachat est inférieur ou égal à 0.11€, il n’y aucune raison pour conti-
nuer à exploiter la ferme. Les prix de rachat actuels sont de l’ordre de 0.16€/kWh, avec un
bénéfice avant impôts de 0.05€/kWh.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 17
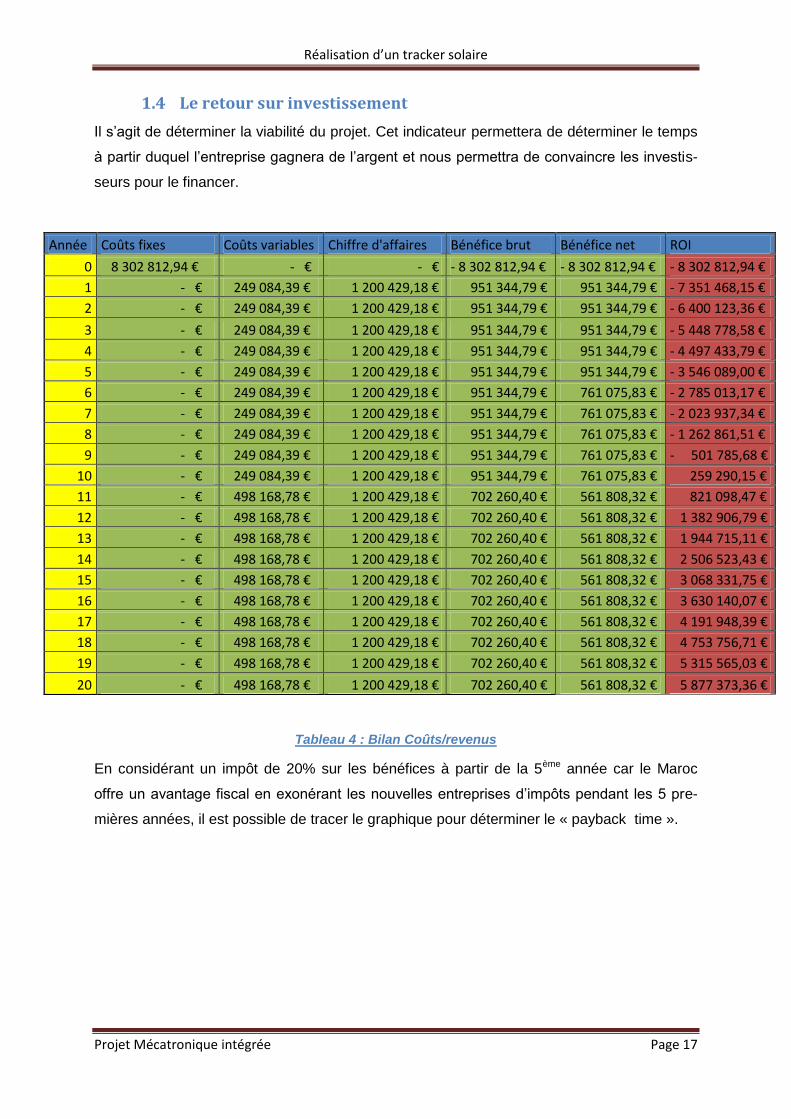
1.4 Le retour sur investissement
Il s’agit de déterminer la viabilité du projet. Cet indicateur permettera de déterminer le temps
à partir duquel l’entreprise gagnera de l’argent et nous permettra de convaincre les investis-
seurs pour le financer.
Tableau 4 : Bilan Coûts/revenus
En considérant un impôt de 20% sur les bénéfices à partir de la 5ème année car le Maroc
offre un avantage fiscal en exonérant les nouvelles entreprises d’impôts pendant les 5 pre-
mières années, il est possible de tracer le graphique pour déterminer le « payback time ».
Année Coûts fixes Coûts variables Chiffre d'affaires Bénéfice brut Bénéfice net ROI
0 8 302 812,94 € - € - € - 8 302 812,94 € - 8 302 812,94 € - 8 302 812,94 €
1 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 951 344,79 € - 7 351 468,15 €
2 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 951 344,79 € - 6 400 123,36 €
3 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 951 344,79 € - 5 448 778,58 €
4 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 951 344,79 € - 4 497 433,79 €
5 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 951 344,79 € - 3 546 089,00 €
6 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 761 075,83 € - 2 785 013,17 €
7 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 761 075,83 € - 2 023 937,34 €
8 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 761 075,83 € - 1 262 861,51 €
9 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 761 075,83 € - 501 785,68 €
10 - € 249 084,39 € 1 200 429,18 € 951 344,79 € 761 075,83 € 259 290,15 €
11 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 821 098,47 €
12 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 1 382 906,79 €
13 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 1 944 715,11 €
14 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 2 506 523,43 €
15 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 3 068 331,75 €
16 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 3 630 140,07 €
17 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 4 191 948,39 €
18 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 4 753 756,71 €
19 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 5 315 565,03 €
20 - € 498 168,78 € 1 200 429,18 € 702 260,40 € 561 808,32 € 5 877 373,36 €
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 18
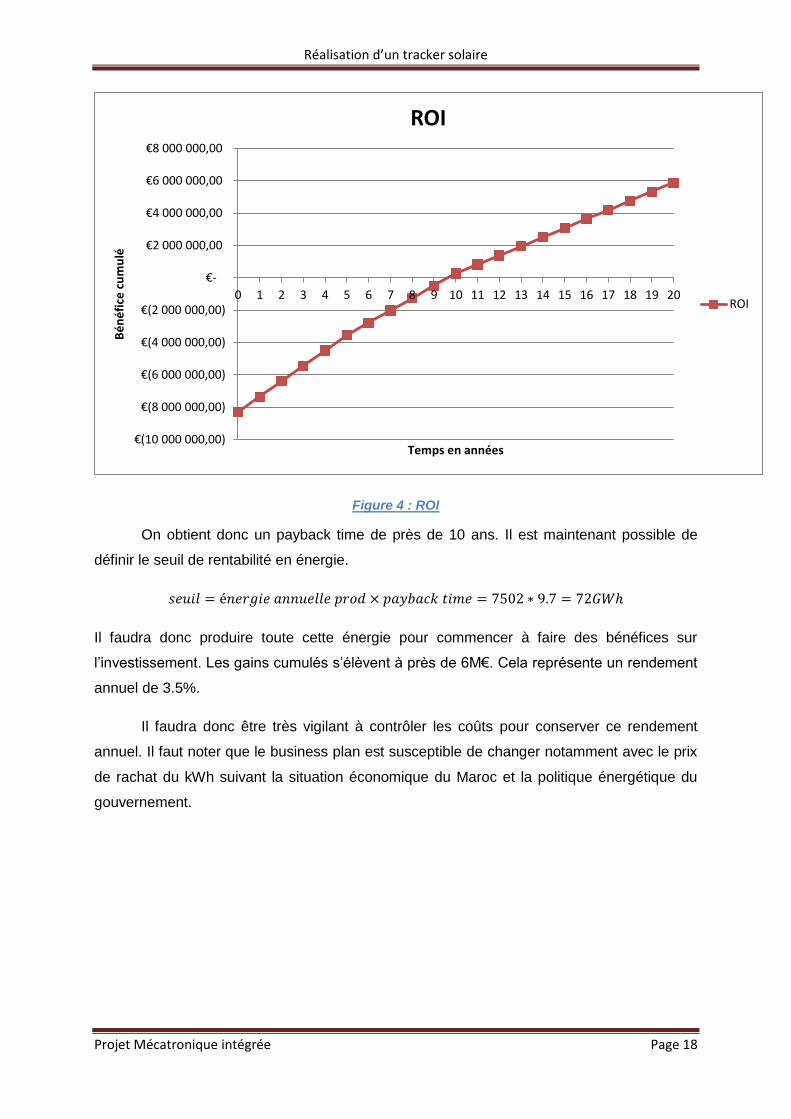
Figure 4 : ROI
On obtient donc un payback time de près de 10 ans. Il est maintenant possible de
définir le seuil de rentabilité en énergie.
Il faudra donc produire toute cette énergie pour commencer à faire des bénéfices sur
l’investissement. Les gains cumulés s’élèvent à près de 6M€. Cela représente un rendement
annuel de 3.5%.
Il faudra donc être très vigilant à contrôler les coûts pour conserver ce rendement
annuel. Il faut noter que le business plan est susceptible de changer notamment avec le prix
de rachat du kWh suivant la situation économique du Maroc et la politique énergétique du
gouvernement.
€(10 000 000,00)
€(8 000 000,00)
€(6 000 000,00)
€(4 000 000,00)
€(2 000 000,00)
€-
€2 000 000,00
€4 000 000,00
€6 000 000,00
€8 000 000,00
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Bé
né
fice
cu
mu
lé
Temps en années
ROI
ROI
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 19
2 Comment collecter, convertir et renvoyer l’énergie au réseau
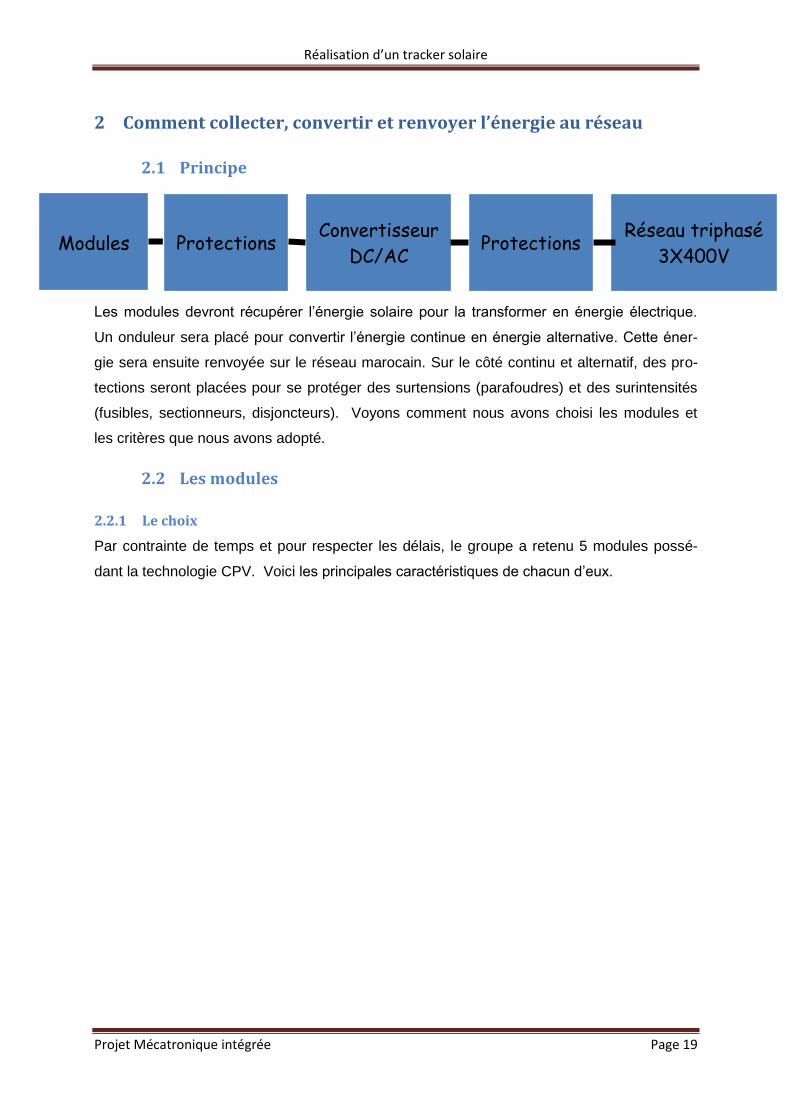
2.1 Principe
Les modules devront récupérer l’énergie solaire pour la transformer en énergie électrique.
Un onduleur sera placé pour convertir l’énergie continue en énergie alternative. Cette éner-
gie sera ensuite renvoyée sur le réseau marocain. Sur le côté continu et alternatif, des pro-
tections seront placées pour se protéger des surtensions (parafoudres) et des surintensités
(fusibles, sectionneurs, disjoncteurs). Voyons comment nous avons choisi les modules et
les critères que nous avons adopté.
2.2 Les modules
2.2.1 Le choix
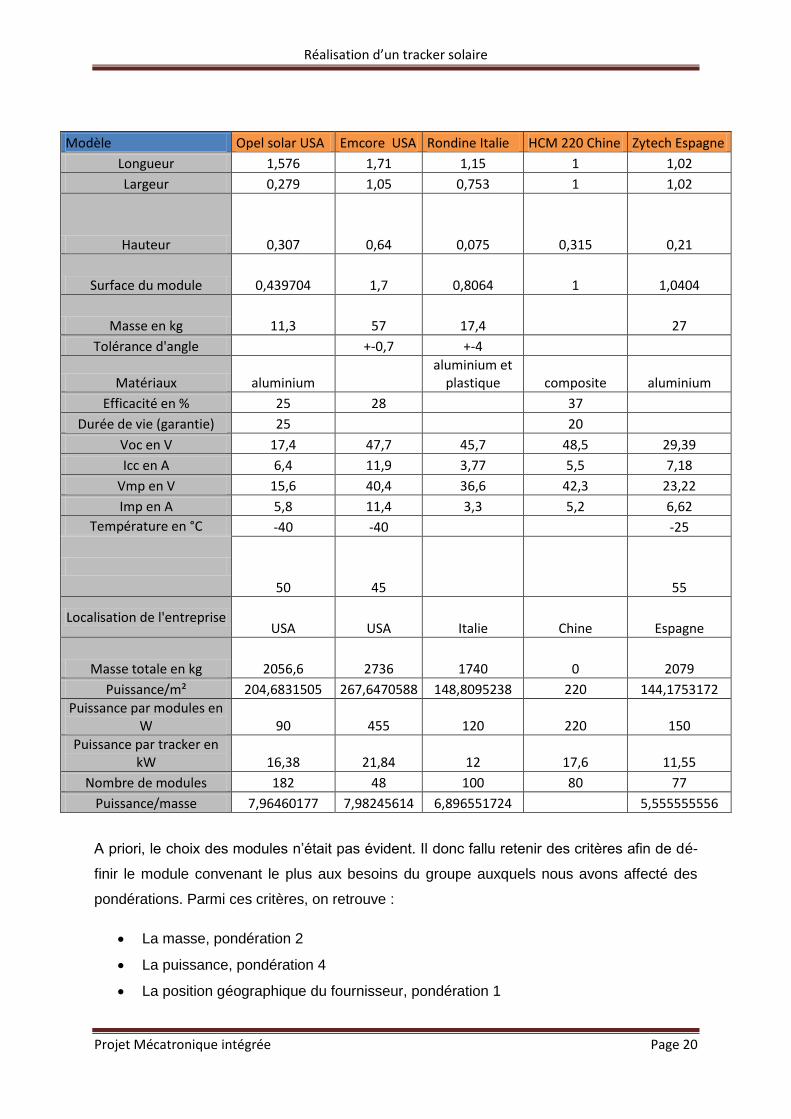
Par contrainte de temps et pour respecter les délais, le groupe a retenu 5 modules possé-
dant la technologie CPV. Voici les principales caractéristiques de chacun d’eux.
Modules Protections Convertisseur
DC/AC Protections
Réseau triphasé
3X400V
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 20
Modèle Opel solar USA Emcore USA Rondine Italie HCM 220 Chine Zytech Espagne
Longueur 1,576 1,71 1,15 1 1,02
Largeur 0,279 1,05 0,753 1 1,02
Hauteur 0,307 0,64 0,075 0,315 0,21
Surface du module 0,439704 1,7 0,8064 1 1,0404
Masse en kg 11,3 57 17,4 27
Tolérance d'angle +-0,7 +-4
Matériaux aluminium aluminium et
plastique composite aluminium
Efficacité en % 25 28 37
Durée de vie (garantie) 25 20
Voc en V 17,4 47,7 45,7 48,5 29,39
Icc en A 6,4 11,9 3,77 5,5 7,18
Vmp en V 15,6 40,4 36,6 42,3 23,22
Imp en A 5,8 11,4 3,3 5,2 6,62
Température en °C -40 -40 -25
50 45 55
Localisation de l'entreprise USA USA Italie Chine Espagne
Masse totale en kg 2056,6 2736 1740 0 2079
Puissance/m² 204,6831505 267,6470588 148,8095238 220 144,1753172
Puissance par modules en W 90 455 120 220 150
Puissance par tracker en kW 16,38 21,84 12 17,6 11,55
Nombre de modules 182 48 100 80 77
Puissance/masse 7,96460177 7,98245614 6,896551724 5,555555556
A priori, le choix des modules n’était pas évident. Il donc fallu retenir des critères afin de dé-
finir le module convenant le plus aux besoins du groupe auxquels nous avons affecté des
pondérations. Parmi ces critères, on retrouve :
La masse, pondération 2
La puissance, pondération 4
La position géographique du fournisseur, pondération 1
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 21
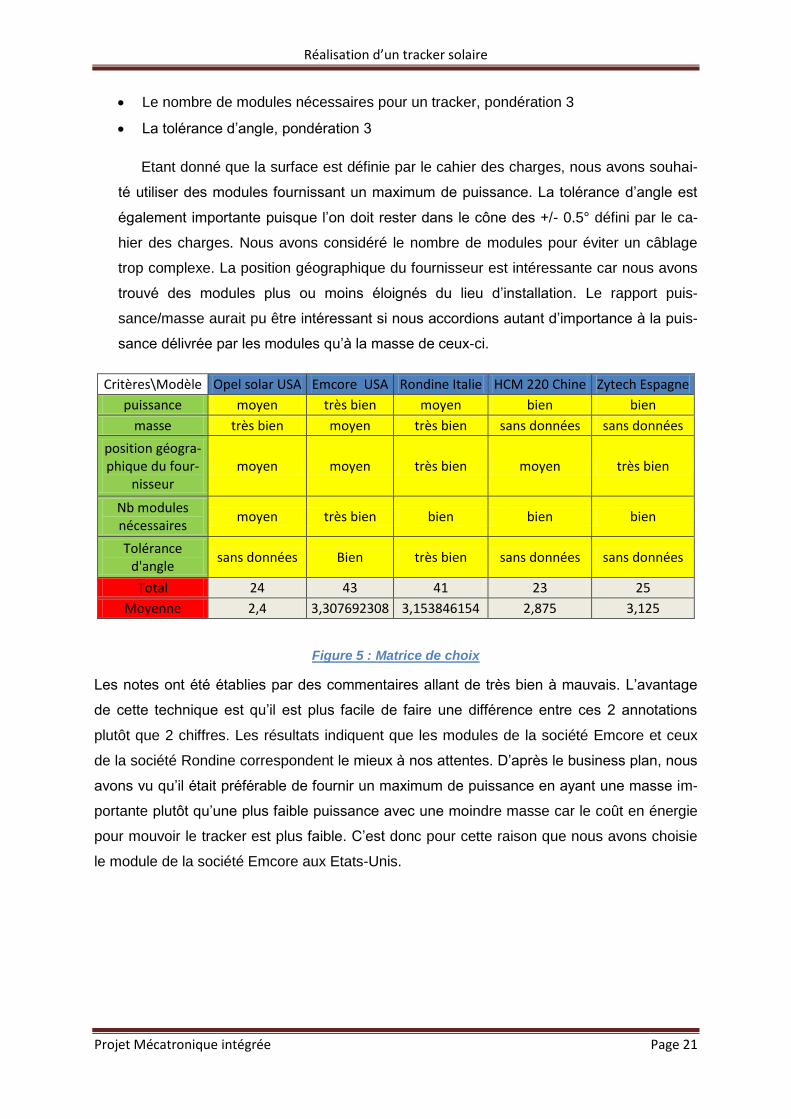
Le nombre de modules nécessaires pour un tracker, pondération 3
La tolérance d’angle, pondération 3
Etant donné que la surface est définie par le cahier des charges, nous avons souhai-
té utiliser des modules fournissant un maximum de puissance. La tolérance d’angle est
également importante puisque l’on doit rester dans le cône des +/- 0.5° défini par le ca-
hier des charges. Nous avons considéré le nombre de modules pour éviter un câblage
trop complexe. La position géographique du fournisseur est intéressante car nous avons
trouvé des modules plus ou moins éloignés du lieu d’installation. Le rapport puis-
sance/masse aurait pu être intéressant si nous accordions autant d’importance à la puis-
sance délivrée par les modules qu’à la masse de ceux-ci.
Critères\Modèle Opel solar USA Emcore USA Rondine Italie HCM 220 Chine Zytech Espagne
puissance moyen très bien moyen bien bien
masse très bien moyen très bien sans données sans données
position géogra-phique du four-
nisseur moyen moyen très bien moyen très bien
Nb modules nécessaires
moyen très bien bien bien bien
Tolérance d'angle
sans données Bien très bien sans données sans données
Total 24 43 41 23 25
Moyenne 2,4 3,307692308 3,153846154 2,875 3,125
Figure 5 : Matrice de choix
Les notes ont été établies par des commentaires allant de très bien à mauvais. L’avantage
de cette technique est qu’il est plus facile de faire une différence entre ces 2 annotations
plutôt que 2 chiffres. Les résultats indiquent que les modules de la société Emcore et ceux
de la société Rondine correspondent le mieux à nos attentes. D’après le business plan, nous
avons vu qu’il était préférable de fournir un maximum de puissance en ayant une masse im-
portante plutôt qu’une plus faible puissance avec une moindre masse car le coût en énergie
pour mouvoir le tracker est plus faible. C’est donc pour cette raison que nous avons choisie
le module de la société Emcore aux Etats-Unis.

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 22
Ainsi les caractéristiques courant-tension de ce module sont :
Il offre une acceptance d’angle de +/- 0.7° en conservant 90% de ses performances. Cette
performance correspond parfaitement à notre cahier des charges
Ainsi, on peut d’ores et déjà dire qu’il faudra 48 modules par tracker et que la masse totale
des modules sera de 2736kg. Maintenant que les modules ont été choisis, il faut procéder au
choix des onduleurs pour transformer la tension continue en tension alternative.
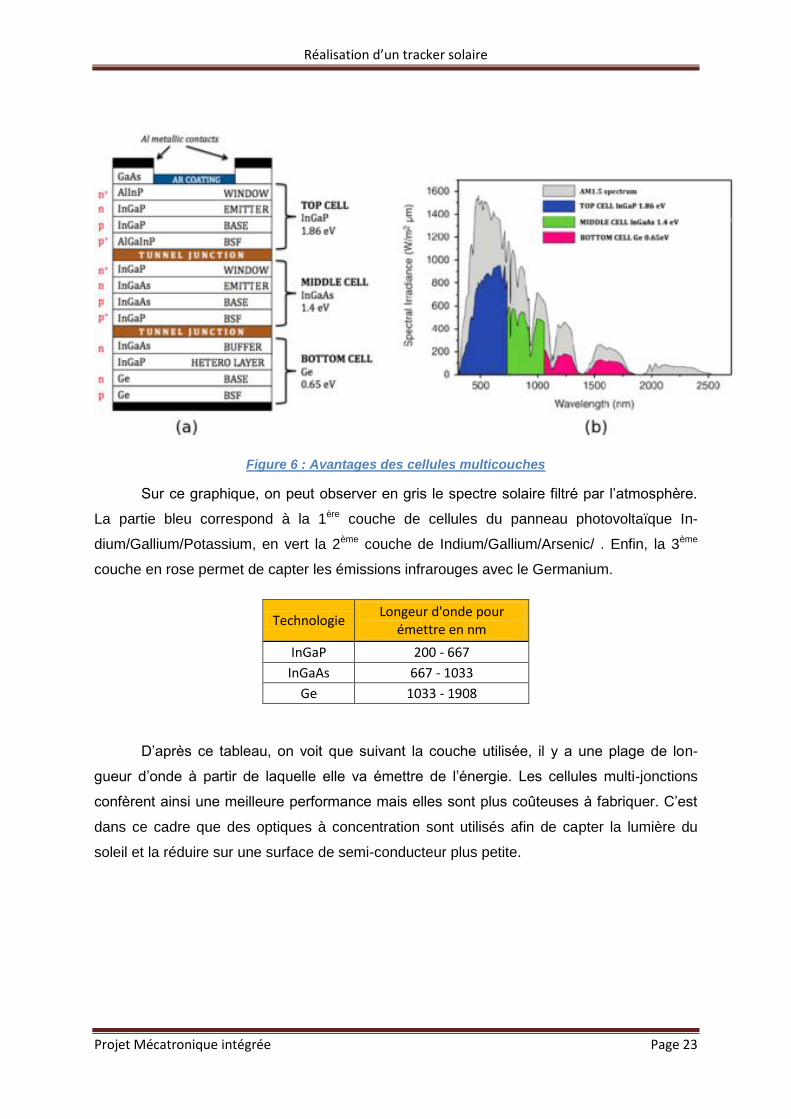
2.2.2 La technologie
Les modules seront de technologie multi-jonction Ge/Ga/As (Germanium, Gallium et
Arsenic). Il y a 3 types de cellules empilés où chacune des couches est destinée à convertir
le spectre du Soleil. Sachant qu’il émet un spectre allant de 0.2µm à 2.5µm, c'est-à-dire de
l’ultraviolet à l’infrarouge avec un pic dans le visible de 0.3µm à 0.8µm, les 3 types de cel-
lules auront pour but de capter tout ce rayonnement.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 23
Figure 6 : Avantages des cellules multicouches
Sur ce graphique, on peut observer en gris le spectre solaire filtré par l’atmosphère.
La partie bleu correspond à la 1ère couche de cellules du panneau photovoltaïque In-
dium/Gallium/Potassium, en vert la 2ème couche de Indium/Gallium/Arsenic/ . Enfin, la 3ème
couche en rose permet de capter les émissions infrarouges avec le Germanium.
Technologie Longeur d'onde pour
émettre en nm
InGaP 200 - 667
InGaAs 667 - 1033
Ge 1033 - 1908
D’après ce tableau, on voit que suivant la couche utilisée, il y a une plage de lon-
gueur d’onde à partir de laquelle elle va émettre de l’énergie. Les cellules multi-jonctions
confèrent ainsi une meilleure performance mais elles sont plus coûteuses à fabriquer. C’est
dans ce cadre que des optiques à concentration sont utilisés afin de capter la lumière du
soleil et la réduire sur une surface de semi-conducteur plus petite.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 24
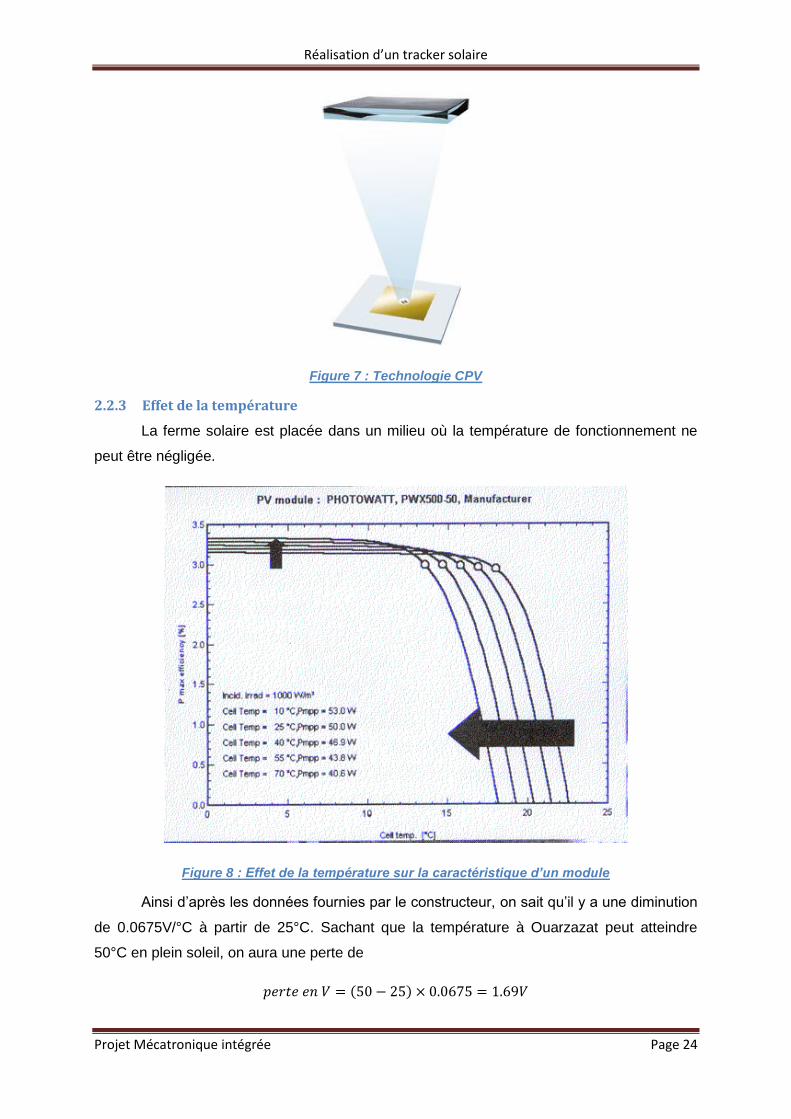
Figure 7 : Technologie CPV
2.2.3 Effet de la température
La ferme solaire est placée dans un milieu où la température de fonctionnement ne
peut être négligée.
Figure 8 : Effet de la température sur la caractéristique d’un module
Ainsi d’après les données fournies par le constructeur, on sait qu’il y a une diminution
de 0.0675V/°C à partir de 25°C. Sachant que la température à Ouarzazat peut atteindre
50°C en plein soleil, on aura une perte de
( )
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 25
En câblant 16 modules en série, la perte devient :
Ces pertes représenteront autant de puissance qui ne pourra être renvoyée sur le réseau. Il
faudra en tenir compte sur la tension d’entrée du convertisseur DC/AC.
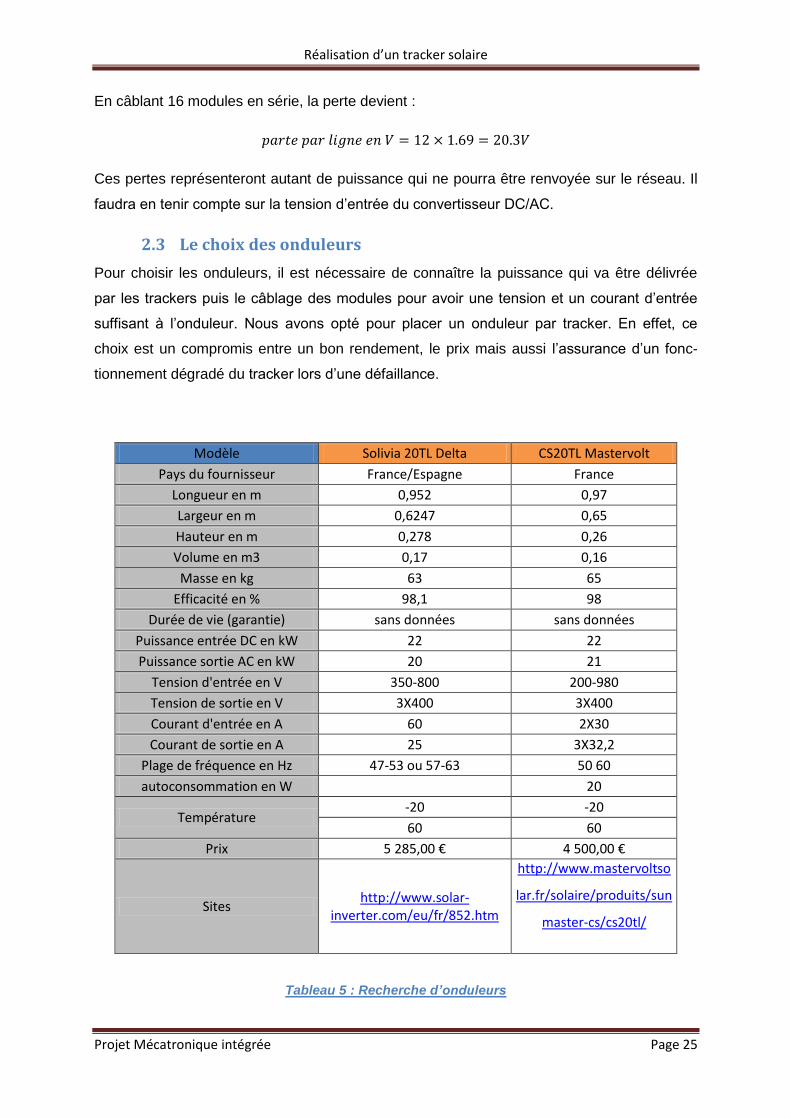
2.3 Le choix des onduleurs
Pour choisir les onduleurs, il est nécessaire de connaître la puissance qui va être délivrée
par les trackers puis le câblage des modules pour avoir une tension et un courant d’entrée
suffisant à l’onduleur. Nous avons opté pour placer un onduleur par tracker. En effet, ce
choix est un compromis entre un bon rendement, le prix mais aussi l’assurance d’un fonc-
tionnement dégradé du tracker lors d’une défaillance.
Modèle Solivia 20TL Delta CS20TL Mastervolt
Pays du fournisseur France/Espagne France
Longueur en m 0,952 0,97
Largeur en m 0,6247 0,65
Hauteur en m 0,278 0,26
Volume en m3 0,17 0,16
Masse en kg 63 65
Efficacité en % 98,1 98
Durée de vie (garantie) sans données sans données
Puissance entrée DC en kW 22 22
Puissance sortie AC en kW 20 21
Tension d'entrée en V 350-800 200-980
Tension de sortie en V 3X400 3X400
Courant d'entrée en A 60 2X30
Courant de sortie en A 25 3X32,2
Plage de fréquence en Hz 47-53 ou 57-63 50 60
autoconsommation en W
20
Température -20 -20
60 60
Prix 5 285,00 € 4 500,00 €
Sites http://www.solar-
inverter.com/eu/fr/852.htm
http://www.mastervoltso
lar.fr/solaire/produits/sun
master-cs/cs20tl/
Tableau 5 : Recherche d’onduleurs
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 26
Les critères retenus pour effectuer ce choix sont :
L’efficacité, pondération 4
Le coût, pondération 3
Le volume, pondération 2
L’efficacité est un critère très important car nous voulons perdre le moins d’énergie possible.
Le coût est également déterminant car le budget de ce projet est limité. Comme nous ne
souhaitons pas avoir trop de surface au sol, nous avons considéré le volume de l’onduleur.
Critères\Modèle Solivia 20TL Delta CS20TL Mastervolt
Efficacité 4 4
Volume 3 3
Coût 3 4
Total 31 34
Tableau 6 : Matrice de choix
D’après la matrice de choix, il en ressort que l’onduleur de Mastervolt CS20TL est le mieux
adapté à notre situation.
Cet onduleur comporte 2 étages :
Recherche du MPPT
Conversion DC/AC
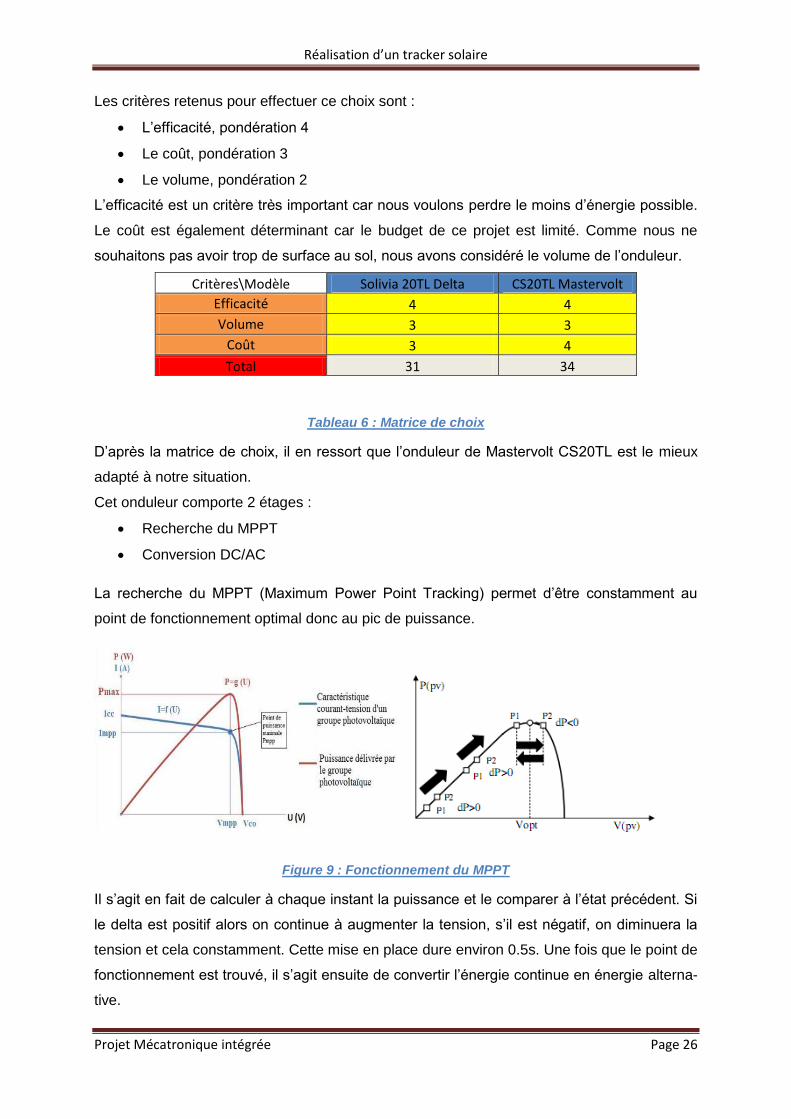
La recherche du MPPT (Maximum Power Point Tracking) permet d’être constamment au
point de fonctionnement optimal donc au pic de puissance.
Figure 9 : Fonctionnement du MPPT
Il s’agit en fait de calculer à chaque instant la puissance et le comparer à l’état précédent. Si
le delta est positif alors on continue à augmenter la tension, s’il est négatif, on diminuera la
tension et cela constamment. Cette mise en place dure environ 0.5s. Une fois que le point de
fonctionnement est trouvé, il s’agit ensuite de convertir l’énergie continue en énergie alterna-
tive.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 27
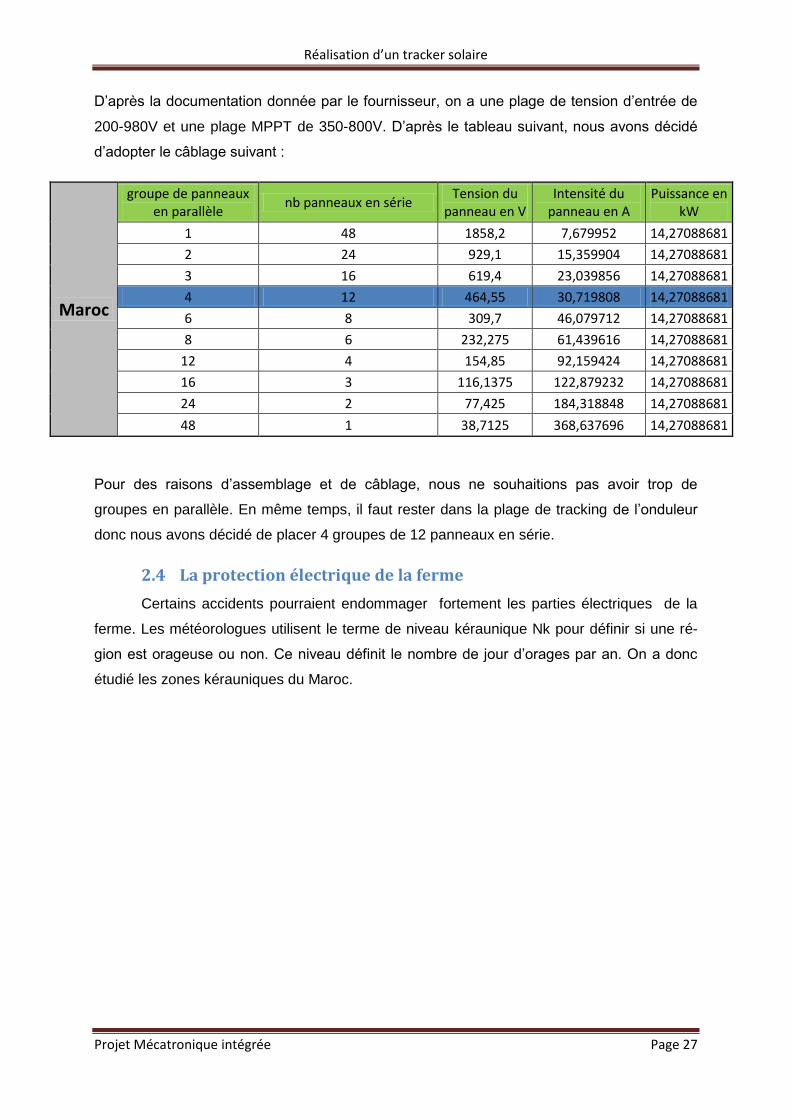
D’après la documentation donnée par le fournisseur, on a une plage de tension d’entrée de
200-980V et une plage MPPT de 350-800V. D’après le tableau suivant, nous avons décidé
d’adopter le câblage suivant :
Maroc
groupe de panneaux en parallèle
nb panneaux en série Tension du
panneau en V Intensité du
panneau en A Puissance en
kW
1 48 1858,2 7,679952 14,27088681
2 24 929,1 15,359904 14,27088681
3 16 619,4 23,039856 14,27088681
4 12 464,55 30,719808 14,27088681
6 8 309,7 46,079712 14,27088681
8 6 232,275 61,439616 14,27088681
12 4 154,85 92,159424 14,27088681
16 3 116,1375 122,879232 14,27088681
24 2 77,425 184,318848 14,27088681
48 1 38,7125 368,637696 14,27088681
Pour des raisons d’assemblage et de câblage, nous ne souhaitions pas avoir trop de
groupes en parallèle. En même temps, il faut rester dans la plage de tracking de l’onduleur
donc nous avons décidé de placer 4 groupes de 12 panneaux en série.
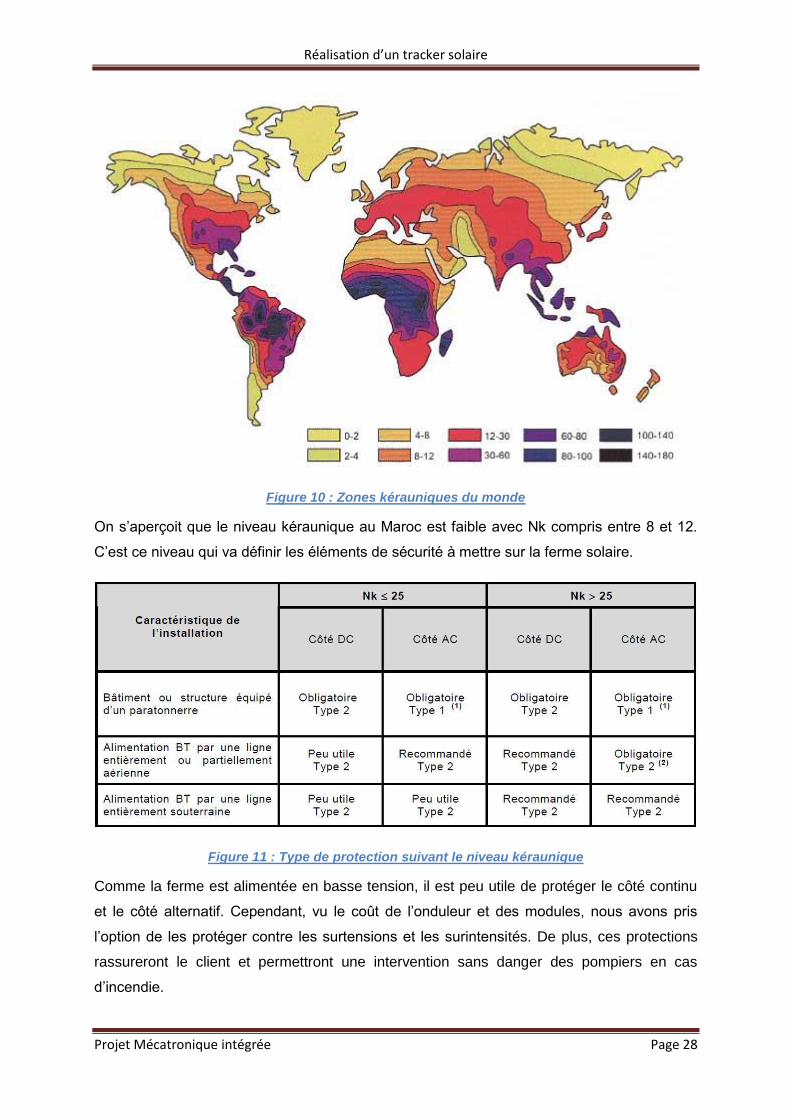
2.4 La protection électrique de la ferme
Certains accidents pourraient endommager fortement les parties électriques de la
ferme. Les météorologues utilisent le terme de niveau kéraunique Nk pour définir si une ré-
gion est orageuse ou non. Ce niveau définit le nombre de jour d’orages par an. On a donc
étudié les zones kérauniques du Maroc.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 28
Figure 10 : Zones kérauniques du monde
On s’aperçoit que le niveau kéraunique au Maroc est faible avec Nk compris entre 8 et 12.
C’est ce niveau qui va définir les éléments de sécurité à mettre sur la ferme solaire.
Figure 11 : Type de protection suivant le niveau kéraunique
Comme la ferme est alimentée en basse tension, il est peu utile de protéger le côté continu
et le côté alternatif. Cependant, vu le coût de l’onduleur et des modules, nous avons pris
l’option de les protéger contre les surtensions et les surintensités. De plus, ces protections
rassureront le client et permettront une intervention sans danger des pompiers en cas
d’incendie.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 29
2.4.1 Dimensionnement des sectionneurs porte-fusibles
Les sectionneurs portes fusibles ont plusieurs utilités. D’une part, ils protègent contre les
surintensités, d’autre part, ils permettent aux secouristes d’avoir une intervention rapide en
cas d’incendie puisqu’ils peuvent être désengagés aisément.
On doit donc dimensionner les fusibles du côté continu et du côté alternatif à la fois pour pro-
téger les modules et l’onduleur. D’après la norme UTE C15-712, les fusibles doivent suppor-
ter :
avec ICC = 59.5A à la sortie de l’ensemble des modules.
Du côté alternatif, on sait que l’onduleur sort un courant de 32.2A par phase donc d’après la
norme, on a :
Il faut également dimensionner les protections pour se protéger des surtensions.
2.4.2 Dimensionnement des parafoudres
Ces parafoudres sont nécessaires pour se protéger des surtensions et donc des coups indi-
rects de la foudre. Le dimensionnement dépend de plusieurs variables dont le niveau kérau-
nique. Calculons d’abord Fv.
( ) ( )
Comme Fv <40 alors le courant maximal admissible doit être de 5kA d’après la norme.
En ce qui concerne la tension, la norme dit que :
Il est important de remarquer que nous n’avons pas pris en compte la température pour les
chutes de tension car nous nous sommes placés dans le cas extrême où la tension est la
plus grande.
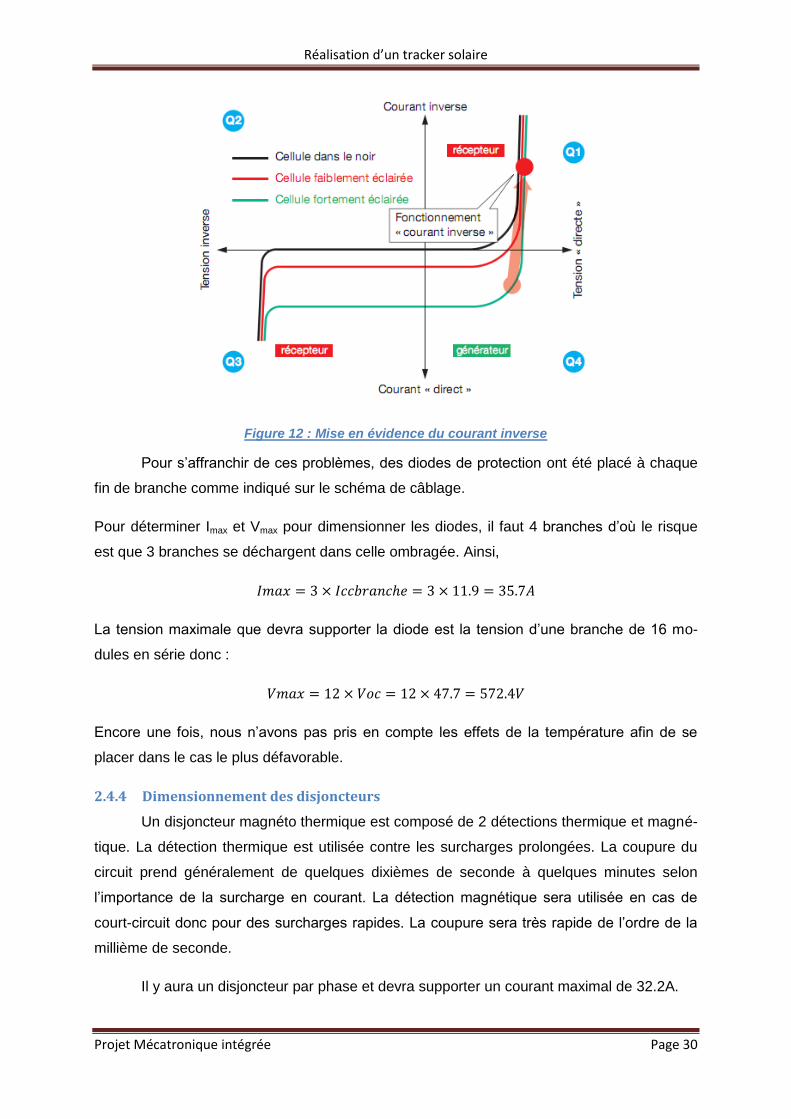
2.4.3 Dimensionnement des diodes de protection
Les modules sont protégés par des diodes by-pass. Cependant, il est nécessaire de
protéger l’ensemble des modules en série par une diode anti-retour. En cas d’ombres sur un
des modules, il faudra s’assurer que les autres modules ne se déchargent pas dans les mo-
dules ombragés.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 30
Figure 12 : Mise en évidence du courant inverse
Pour s’affranchir de ces problèmes, des diodes de protection ont été placé à chaque
fin de branche comme indiqué sur le schéma de câblage.
Pour déterminer Imax et Vmax pour dimensionner les diodes, il faut 4 branches d’où le risque
est que 3 branches se déchargent dans celle ombragée. Ainsi,
La tension maximale que devra supporter la diode est la tension d’une branche de 16 mo-
dules en série donc :
Encore une fois, nous n’avons pas pris en compte les effets de la température afin de se
placer dans le cas le plus défavorable.
2.4.4 Dimensionnement des disjoncteurs
Un disjoncteur magnéto thermique est composé de 2 détections thermique et magné-
tique. La détection thermique est utilisée contre les surcharges prolongées. La coupure du
circuit prend généralement de quelques dixièmes de seconde à quelques minutes selon
l’importance de la surcharge en courant. La détection magnétique sera utilisée en cas de
court-circuit donc pour des surcharges rapides. La coupure sera très rapide de l’ordre de la
millième de seconde.
Il y aura un disjoncteur par phase et devra supporter un courant maximal de 32.2A.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 31
2.5 Câblage électrique
Maintenant que tous les composants sont dimensionnés, il est possible de définir le câblage
électrique d’un tracker.
Figure 13 : Schéma de câblage pour un tracker
Il est important de noter qu’il n’y aura qu’un paratonnerre pour la ferme mais on a montré
comment celui-ci était câblé.
.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 32
3 Architecture du tracker
3.1 Choix de l’architecture
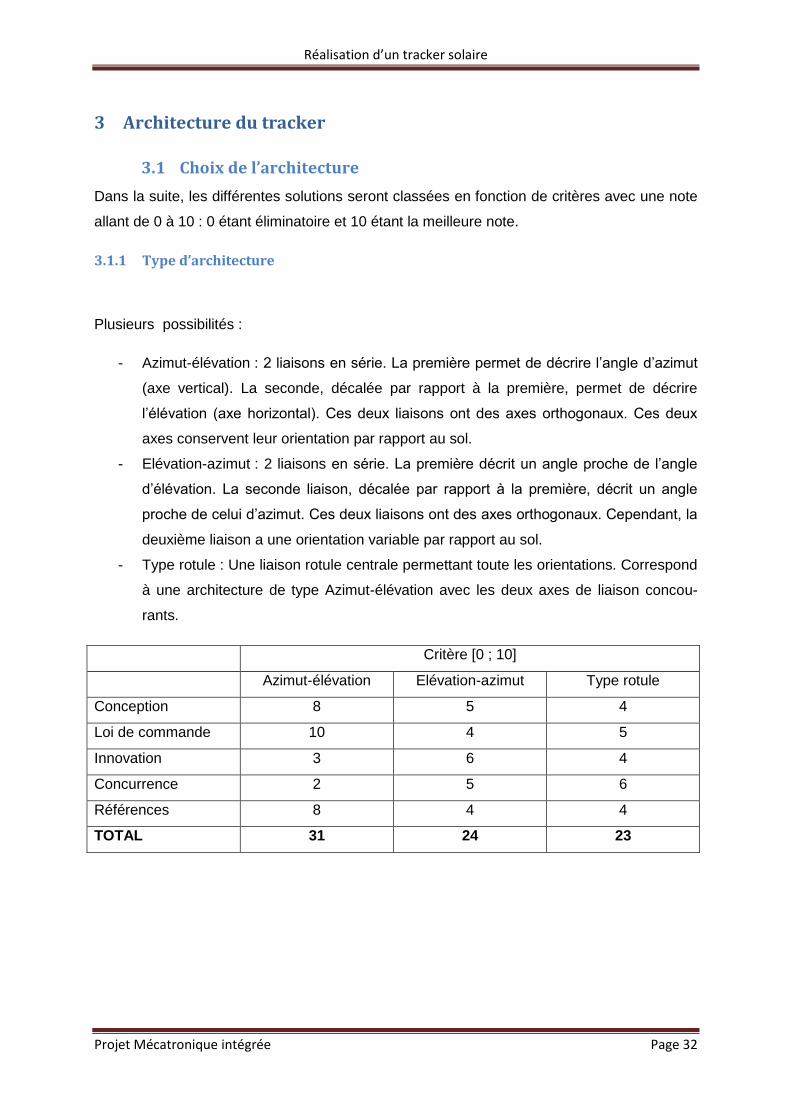
Dans la suite, les différentes solutions seront classées en fonction de critères avec une note
allant de 0 à 10 : 0 étant éliminatoire et 10 étant la meilleure note.
3.1.1 Type d’architecture
Plusieurs possibilités :
- Azimut-élévation : 2 liaisons en série. La première permet de décrire l’angle d’azimut
(axe vertical). La seconde, décalée par rapport à la première, permet de décrire
l’élévation (axe horizontal). Ces deux liaisons ont des axes orthogonaux. Ces deux
axes conservent leur orientation par rapport au sol.
- Elévation-azimut : 2 liaisons en série. La première décrit un angle proche de l’angle
d’élévation. La seconde liaison, décalée par rapport à la première, décrit un angle
proche de celui d’azimut. Ces deux liaisons ont des axes orthogonaux. Cependant, la
deuxième liaison a une orientation variable par rapport au sol.
- Type rotule : Une liaison rotule centrale permettant toute les orientations. Correspond
à une architecture de type Azimut-élévation avec les deux axes de liaison concou-
rants.
Critère [0 ; 10]
Azimut-élévation Elévation-azimut Type rotule
Conception 8 5 4
Loi de commande 10 4 5
Innovation 3 6 4
Concurrence 2 5 6
Références 8 4 4
TOTAL 31 24 23
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 33
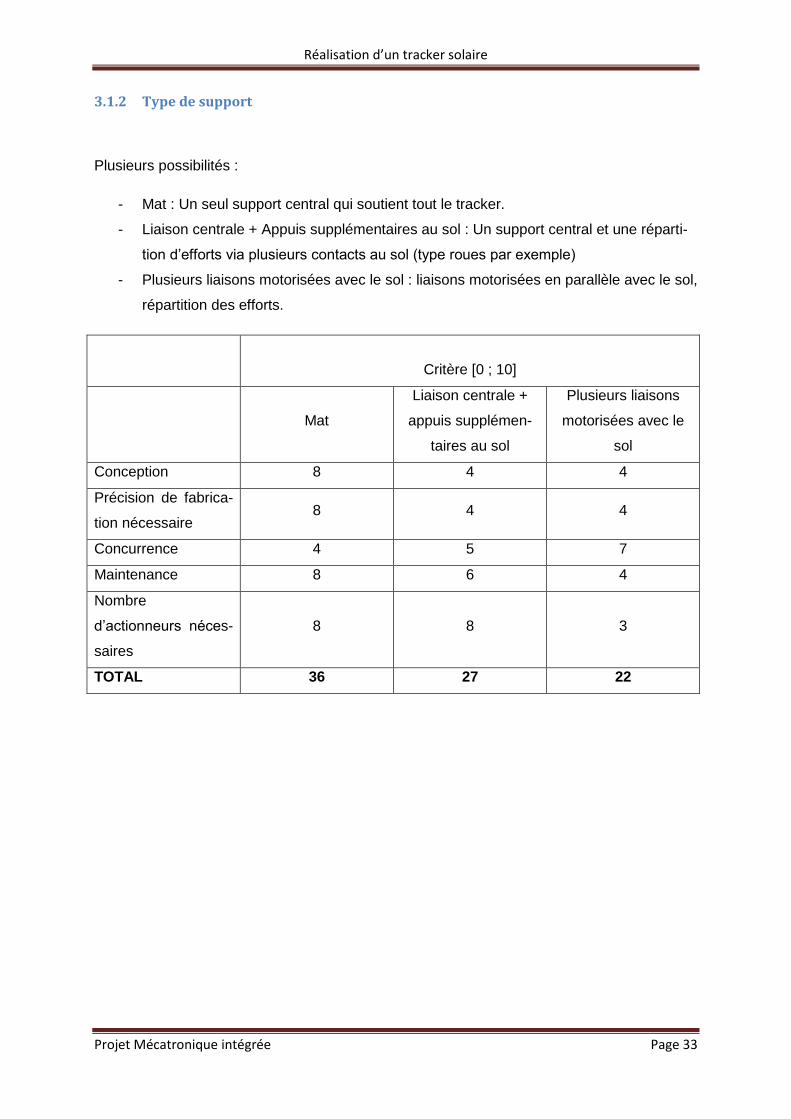
3.1.2 Type de support
Plusieurs possibilités :
- Mat : Un seul support central qui soutient tout le tracker.
- Liaison centrale + Appuis supplémentaires au sol : Un support central et une réparti-
tion d’efforts via plusieurs contacts au sol (type roues par exemple)
- Plusieurs liaisons motorisées avec le sol : liaisons motorisées en parallèle avec le sol,
répartition des efforts.
Critère [0 ; 10]
Mat
Liaison centrale +
appuis supplémen-
taires au sol
Plusieurs liaisons
motorisées avec le
sol
Conception 8 4 4
Précision de fabrica-
tion nécessaire 8 4 4
Concurrence 4 5 7
Maintenance 8 6 4
Nombre
d’actionneurs néces-
saires
8 8 3
TOTAL 36 27 22
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 34
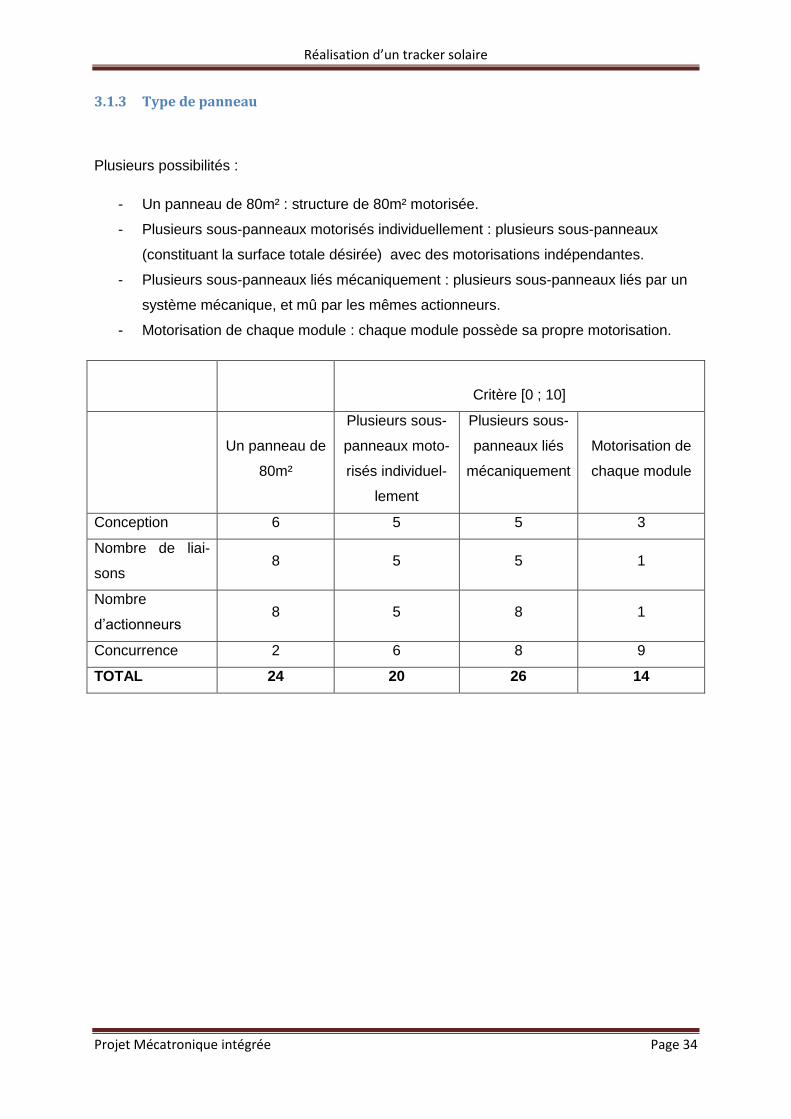
3.1.3 Type de panneau
Plusieurs possibilités :
- Un panneau de 80m² : structure de 80m² motorisée.
- Plusieurs sous-panneaux motorisés individuellement : plusieurs sous-panneaux
(constituant la surface totale désirée) avec des motorisations indépendantes.
- Plusieurs sous-panneaux liés mécaniquement : plusieurs sous-panneaux liés par un
système mécanique, et mû par les mêmes actionneurs.
- Motorisation de chaque module : chaque module possède sa propre motorisation.
Critère [0 ; 10]
Un panneau de
80m²
Plusieurs sous-
panneaux moto-
risés individuel-
lement
Plusieurs sous-
panneaux liés
mécaniquement
Motorisation de
chaque module
Conception 6 5 5 3
Nombre de liai-
sons 8 5 5 1
Nombre
d’actionneurs 8 5 8 1
Concurrence 2 6 8 9
TOTAL 24 20 26 14
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 35
3.2 Architecture choisie
L’architecture retenue est de type azimut-élévation, c'est-à-dire qu’il y a deux liaisons en
série qui vont orienter le panneau respectivement en azimut puis en élévation. Cette archi-
tecture nous donne l’avantage de contrôler directement et indépendamment les deux angles.
De plus, ce système sera conçu autour d’un support unique, et sera constitué de plusieurs
sous-panneaux liés mécaniquement et motorisés par le même actionneur.
La modélisation sous le logiciel de calcul cinématique et dynamique Adams, a permis de
vérifier la faisabilité cinématique du dispositif. De plus, la simulation de l’impact de la force du
vent au moyen de la relation sur la trainée aérodynamique pour un vent de 200km/h permet
de déterminer les efforts dans les liaisons. On sera ainsi en mesure de choisir au mieux
l’architecture qui correspond à nos besoins.
3.3 Calcul du Beta_min
3.3.1 Détermination du Beta_min théorique
Afin d’optimiser la stratégie de fonctionnement, nous avons déterminé un angle d’élévation
minimal à partir duquel le tracking peut commencer. Nous avons fixé un seuil limite :
La puissance des moteurs pour bouger le tracker est de 555W. Il faut donc produire une
puissance de 5.55kW. Sur la surface d’un tracker, cela représente :
Sachant que le module fournit une puissance de 258W/m² sous une irradiance de 1000W/m²
alors pour fournir 69.37W/m², on a :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 36
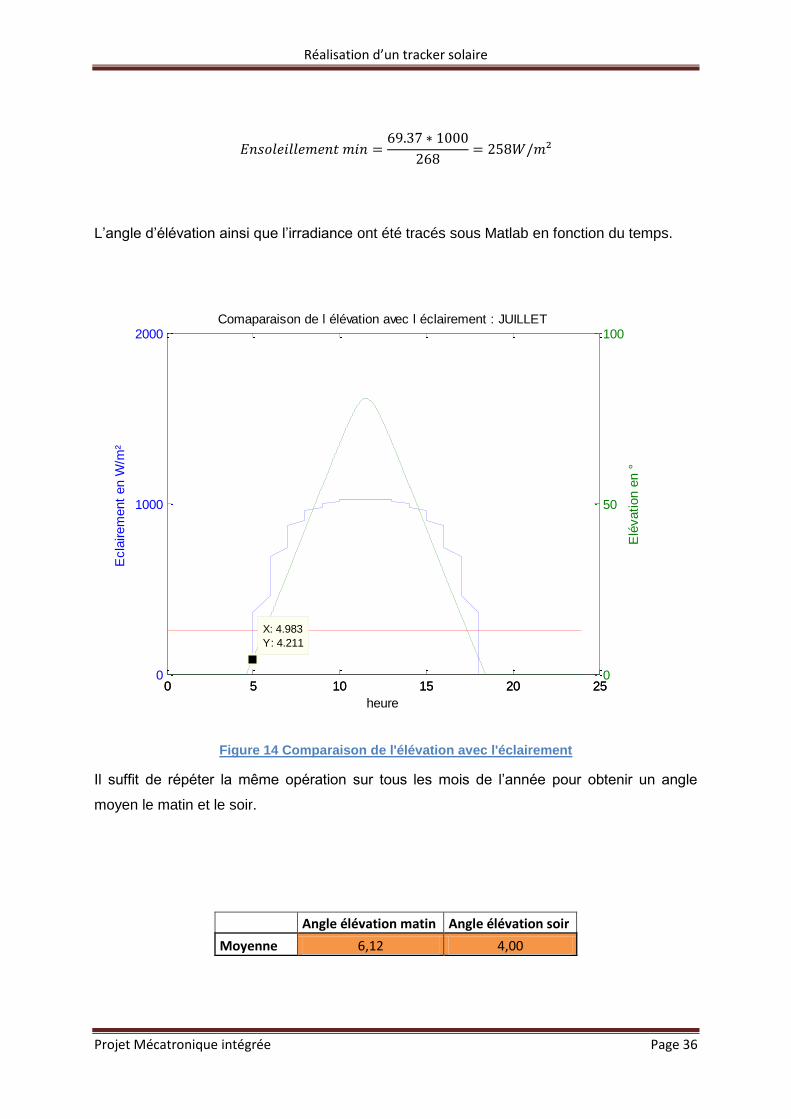
L’angle d’élévation ainsi que l’irradiance ont été tracés sous Matlab en fonction du temps.
Figure 14 Comparaison de l'élévation avec l'éclairement
Il suffit de répéter la même opération sur tous les mois de l’année pour obtenir un angle
moyen le matin et le soir.
Angle élévation matin Angle élévation soir
Moyenne 6,12 4,00
0 5 10 15 20 250
1000
2000
heure
Ecla
irem
ent
en W
/m²
Comaparaison de l élévation avec l éclairement : JUILLET
0 5 10 15 20 250
50
100
X: 4.983
Y: 4.211E
lévation e
n °
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 37
Le tracking pourra commencer à un angle d’élévation de 6° le matin et arrêter le
tracking dès qu’un angle de 4° est atteint le soir.
3.3.2 Détermination du Beta-min pratique
Afin de réduire la surface au sol nécessaire au fonctionnement du tracker, il faut ef-
fectuer son optimisation en fonction de l’élévation minimale à prendre en compte. En effet,
afin de réduire cette surface, il faut faire en sorte que la surface au sol occupée par le tracker
et par l’ombre projetée soit le plus proche possible d’un carré. Le cercle circonscrit à ce carré
représentera la zone balayée par le tracker durant la journée.
De plus, dans l’optique de faire un tracker multi-panneau, il est essentiel de faire un
compromis entre ombre projetée et dimensions du tracker. Le tracker doit lui-même être
proche d’un carré pour limiter les poutres de grandes tailles qui produisent des moments de
flexion dans la liaison principale (azimut).
Une première étape consiste à poser un modèle et les hypothèses. Tout d’abord, un
sous-panneau ne sera constitué que d’une seule rangée de panneaux, et ceux-ci seront pla-
cés avec leur plus petite dimension en hauteur. Ensuite, il faut considérer le panneau en une
seule partie de 80m². En fonction de l’angle d’élévation minimal et de la surface de pan-
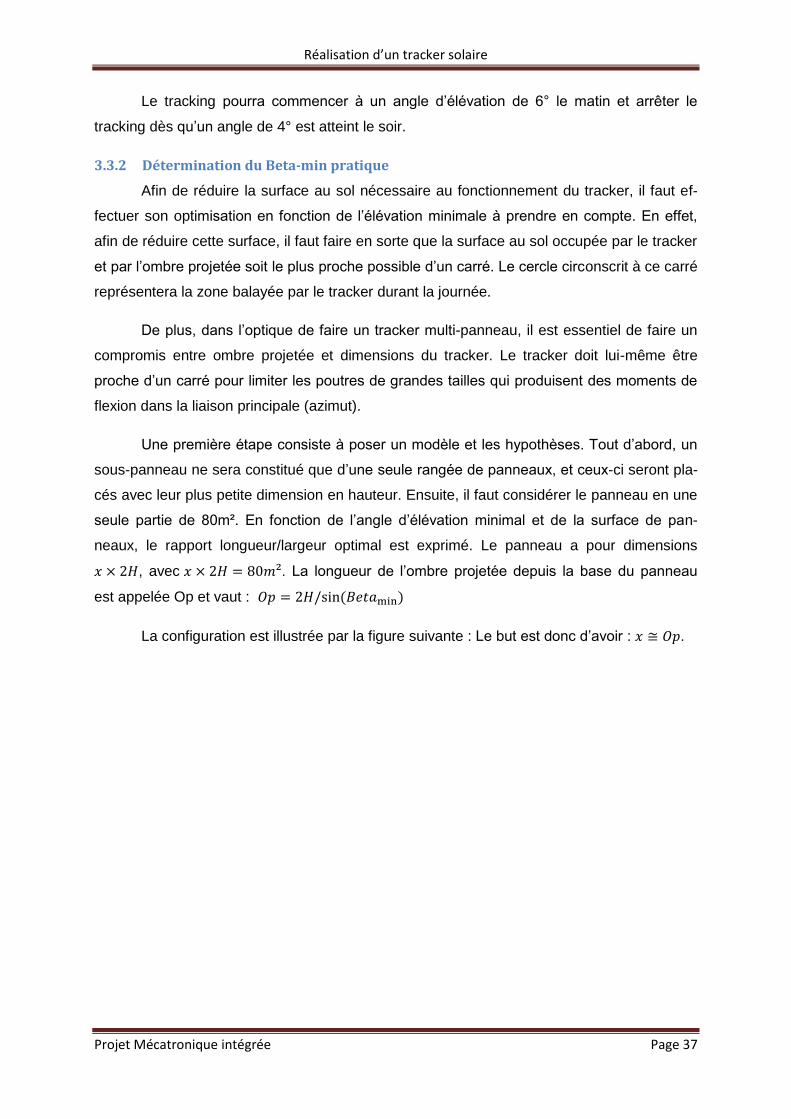
neaux, le rapport longueur/largeur optimal est exprimé. Le panneau a pour dimensions
, avec . La longueur de l’ombre projetée depuis la base du panneau
est appelée Op et vaut : ( )
La configuration est illustrée par la figure suivante : Le but est donc d’avoir : .
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 38
Figure 15 : Schéma de l’optimisation des dimensions du tracker
Dans un second temps, pour différentes valeurs de Beta_min, sont exprimés : le
nombre de sous-panneaux nécessaires, le nombre de modules par sous-panneaux et la lon-
gueur d’un sous-panneau (correspondant à x).
Au final, Beta_min=12°, ce qui correspond à un tracker constitué de 4 sous-panneaux
de 12 modules chacun. x vaut alors 20,4m.
Le tracker aura donc pour dimensions 20,4m x 15,5m.
3.4 Schéma cinématique
Le schéma cinématique équivalent de notre système est le suivant. Notre modèle de-
vra avoir, afin de solliciter les liaisons de manière raisonnables, son centre de gravité aligné
avec l’axe de la liaison pivot verticale (azimut)
L’architecture est donc la suivante :
x
2H
Op
Be-ta_min
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 39
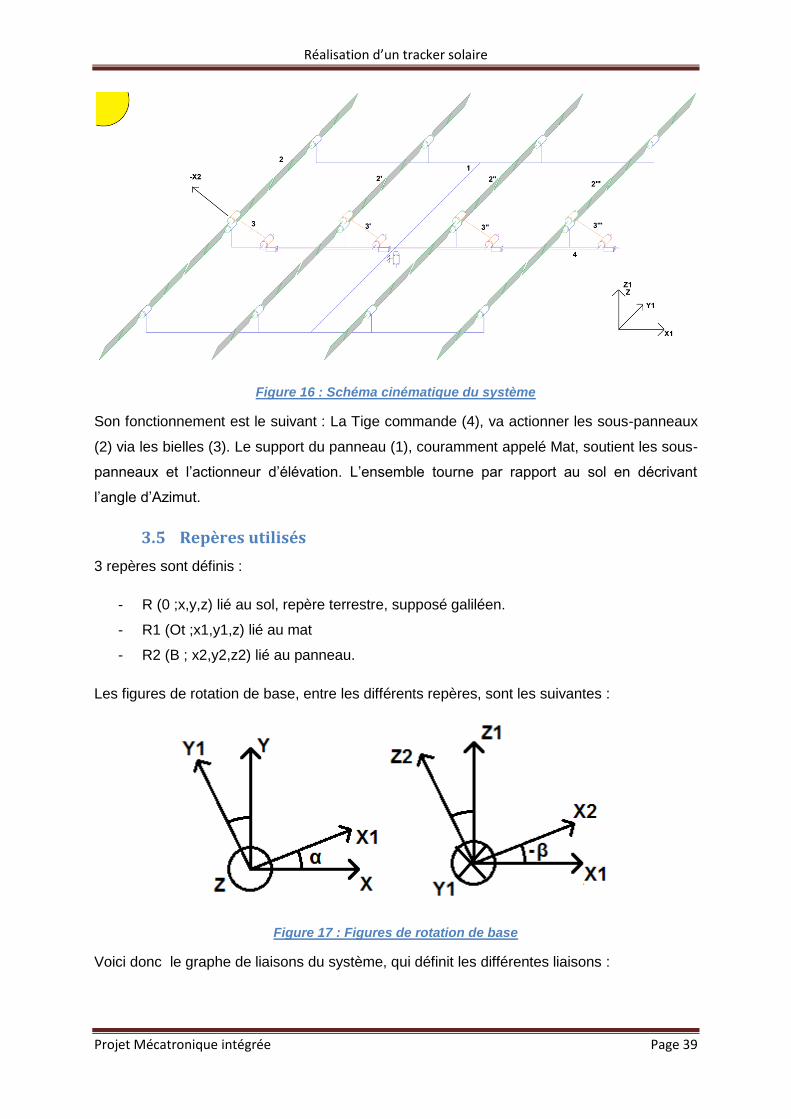
Figure 16 : Schéma cinématique du système
Son fonctionnement est le suivant : La Tige commande (4), va actionner les sous-panneaux
(2) via les bielles (3). Le support du panneau (1), couramment appelé Mat, soutient les sous-
panneaux et l’actionneur d’élévation. L’ensemble tourne par rapport au sol en décrivant
l’angle d’Azimut.
3.5 Repères utilisés
3 repères sont définis :
- R (0 ;x,y,z) lié au sol, repère terrestre, supposé galiléen.
- R1 (Ot ;x1,y1,z) lié au mat
- R2 (B ; x2,y2,z2) lié au panneau.
Les figures de rotation de base, entre les différents repères, sont les suivantes :
Figure 17 : Figures de rotation de base
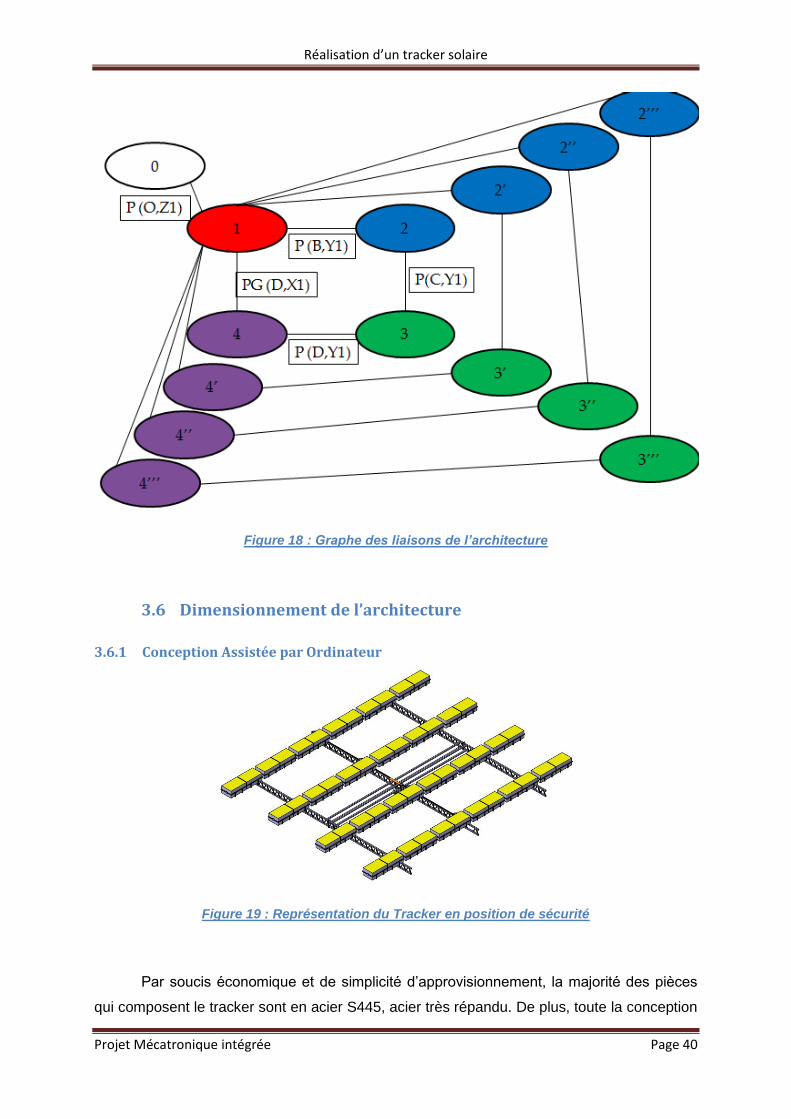
Voici donc le graphe de liaisons du système, qui définit les différentes liaisons :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 40
Figure 18 : Graphe des liaisons de l’architecture
3.6 Dimensionnement de l’architecture
3.6.1 Conception Assistée par Ordinateur
Figure 19 : Représentation du Tracker en position de sécurité
Par soucis économique et de simplicité d’approvisionnement, la majorité des pièces
qui composent le tracker sont en acier S445, acier très répandu. De plus, toute la conception
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 41
s’articule autour d’un équilibrage du tracker. Les masses sont donc réparties symétriquement
par rapport aux axes de rotation.
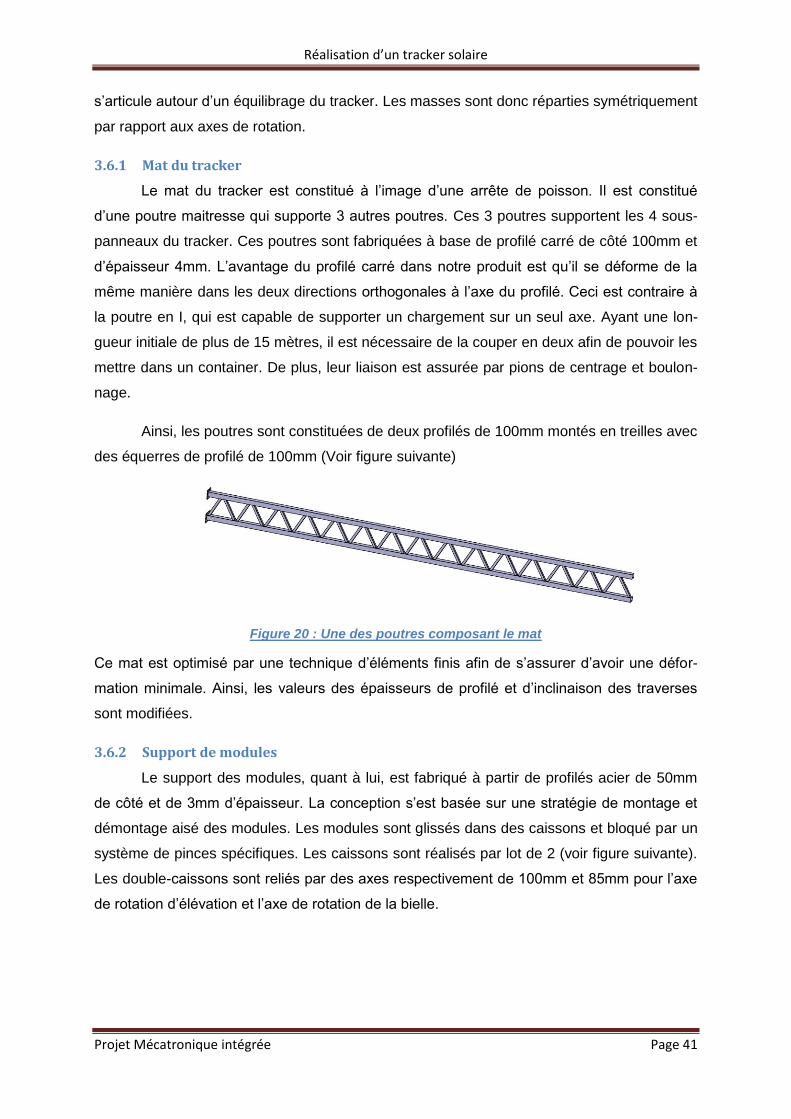
3.6.1 Mat du tracker
Le mat du tracker est constitué à l’image d’une arrête de poisson. Il est constitué
d’une poutre maitresse qui supporte 3 autres poutres. Ces 3 poutres supportent les 4 sous-
panneaux du tracker. Ces poutres sont fabriquées à base de profilé carré de côté 100mm et
d’épaisseur 4mm. L’avantage du profilé carré dans notre produit est qu’il se déforme de la
même manière dans les deux directions orthogonales à l’axe du profilé. Ceci est contraire à
la poutre en I, qui est capable de supporter un chargement sur un seul axe. Ayant une lon-
gueur initiale de plus de 15 mètres, il est nécessaire de la couper en deux afin de pouvoir les
mettre dans un container. De plus, leur liaison est assurée par pions de centrage et boulon-
nage.
Ainsi, les poutres sont constituées de deux profilés de 100mm montés en treilles avec
des équerres de profilé de 100mm (Voir figure suivante)
Figure 20 : Une des poutres composant le mat
Ce mat est optimisé par une technique d’éléments finis afin de s’assurer d’avoir une défor-
mation minimale. Ainsi, les valeurs des épaisseurs de profilé et d’inclinaison des traverses
sont modifiées.
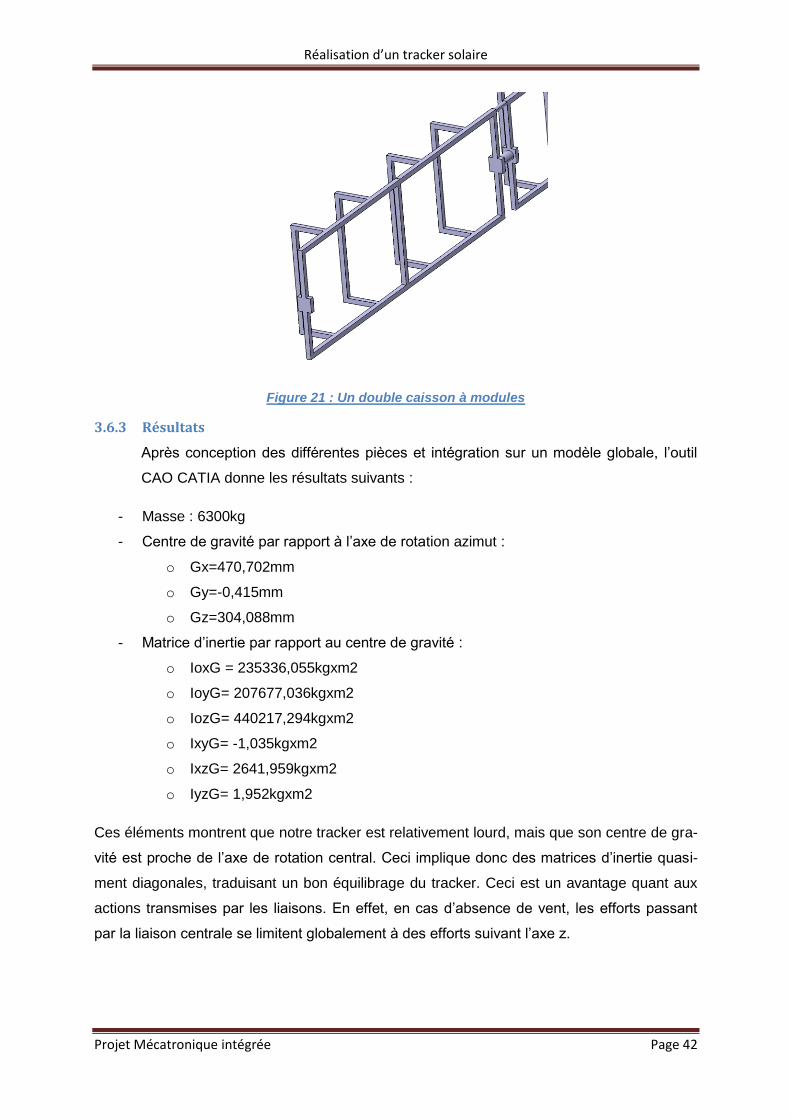
3.6.2 Support de modules
Le support des modules, quant à lui, est fabriqué à partir de profilés acier de 50mm
de côté et de 3mm d’épaisseur. La conception s’est basée sur une stratégie de montage et
démontage aisé des modules. Les modules sont glissés dans des caissons et bloqué par un
système de pinces spécifiques. Les caissons sont réalisés par lot de 2 (voir figure suivante).
Les double-caissons sont reliés par des axes respectivement de 100mm et 85mm pour l’axe
de rotation d’élévation et l’axe de rotation de la bielle.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 42
Figure 21 : Un double caisson à modules
3.6.3 Résultats
Après conception des différentes pièces et intégration sur un modèle globale, l’outil
CAO CATIA donne les résultats suivants :
- Masse : 6300kg
- Centre de gravité par rapport à l’axe de rotation azimut :
o Gx=470,702mm
o Gy=-0,415mm
o Gz=304,088mm
- Matrice d’inertie par rapport au centre de gravité :
o IoxG = 235336,055kgxm2
o IoyG= 207677,036kgxm2
o IozG= 440217,294kgxm2
o IxyG= -1,035kgxm2
o IxzG= 2641,959kgxm2
o IyzG= 1,952kgxm2
Ces éléments montrent que notre tracker est relativement lourd, mais que son centre de gra-
vité est proche de l’axe de rotation central. Ceci implique donc des matrices d’inertie quasi-
ment diagonales, traduisant un bon équilibrage du tracker. Ceci est un avantage quant aux
actions transmises par les liaisons. En effet, en cas d’absence de vent, les efforts passant
par la liaison centrale se limitent globalement à des efforts suivant l’axe z.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 43
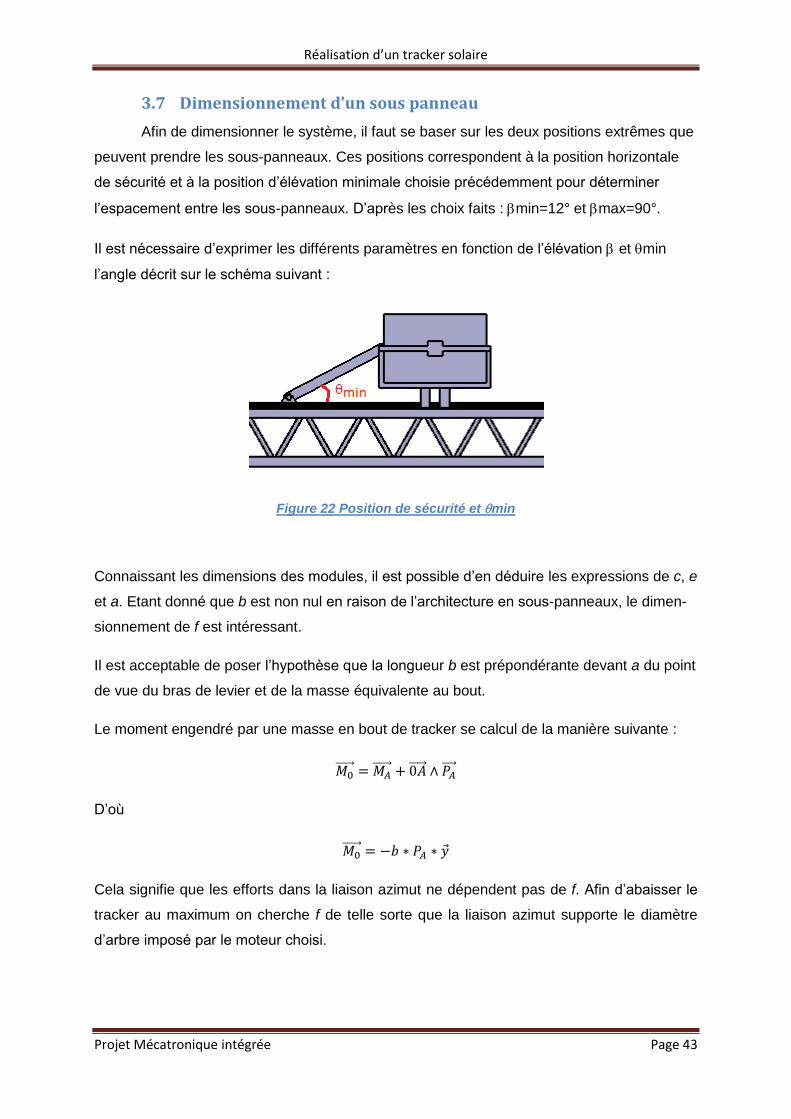
3.7 Dimensionnement d’un sous panneau
Afin de dimensionner le système, il faut se baser sur les deux positions extrêmes que
peuvent prendre les sous-panneaux. Ces positions correspondent à la position horizontale
de sécurité et à la position d’élévation minimale choisie précédemment pour déterminer
l’espacement entre les sous-panneaux. D’après les choix faits : min=12° et max=90°.
Il est nécessaire d’exprimer les différents paramètres en fonction de l’élévation et min
l’angle décrit sur le schéma suivant :
Figure 22 Position de sécurité et min
Connaissant les dimensions des modules, il est possible d’en déduire les expressions de c, e
et a. Etant donné que b est non nul en raison de l’architecture en sous-panneaux, le dimen-
sionnement de f est intéressant.
Il est acceptable de poser l’hypothèse que la longueur b est prépondérante devant a du point
de vue du bras de levier et de la masse équivalente au bout.
Le moment engendré par une masse en bout de tracker se calcul de la manière suivante :
D’où
Cela signifie que les efforts dans la liaison azimut ne dépendent pas de f. Afin d’abaisser le
tracker au maximum on cherche f de telle sorte que la liaison azimut supporte le diamètre
d’arbre imposé par le moteur choisi.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 44
Le choix du moteur en azimut et de l’organe de transmission associé impose d’avoir un dia-
mètre d’arbre du mât en azimut de 324mm. Ce résultat est détaillé dans la partie motorisa-
tion. Or d’après la structure la valeur minimale de f est :
( ) avec 20% de sécurité.
Une analyse par élément finis donne un critère de Mises de 1440 N/m² ce qui est largement
en dessus des caractéristiques du matériau.
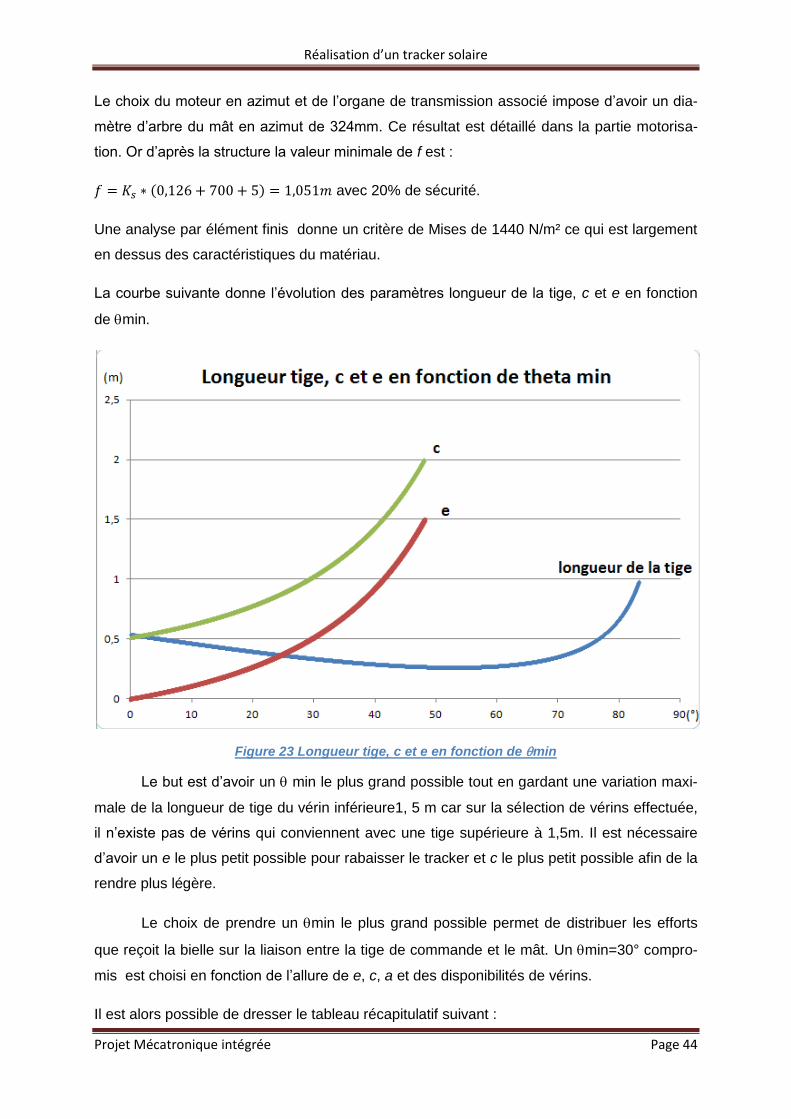
La courbe suivante donne l’évolution des paramètres longueur de la tige, c et e en fonction
de min.
Figure 23 Longueur tige, c et e en fonction de min
Le but est d’avoir un min le plus grand possible tout en gardant une variation maxi-
male de la longueur de tige du vérin inférieure1, 5 m car sur la sélection de vérins effectuée,
il n’existe pas de vérins qui conviennent avec une tige supérieure à 1,5m. Il est nécessaire
d’avoir un e le plus petit possible pour rabaisser le tracker et c le plus petit possible afin de la
rendre plus légère.
Le choix de prendre un min le plus grand possible permet de distribuer les efforts
que reçoit la bielle sur la liaison entre la tige de commande et le mât. Un min=30° compro-
mis est choisi en fonction de l’allure de e, c, a et des disponibilités de vérins.
Il est alors possible de dresser le tableau récapitulatif suivant :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 45
Donnée et expression Valeurs numériques
12°
30°
90°
h’ 0,525m
c= ( )
( )
1,027m
( ) ( )
( ) 0,514m
f 0m
b 0m
1,414m
h’*sin( ) 0,926m
0,489m
Il est vérifiable ainsi que la bielle d’un sous panneau ne va pas entrer en collision avec le
sous-panneau suivant.
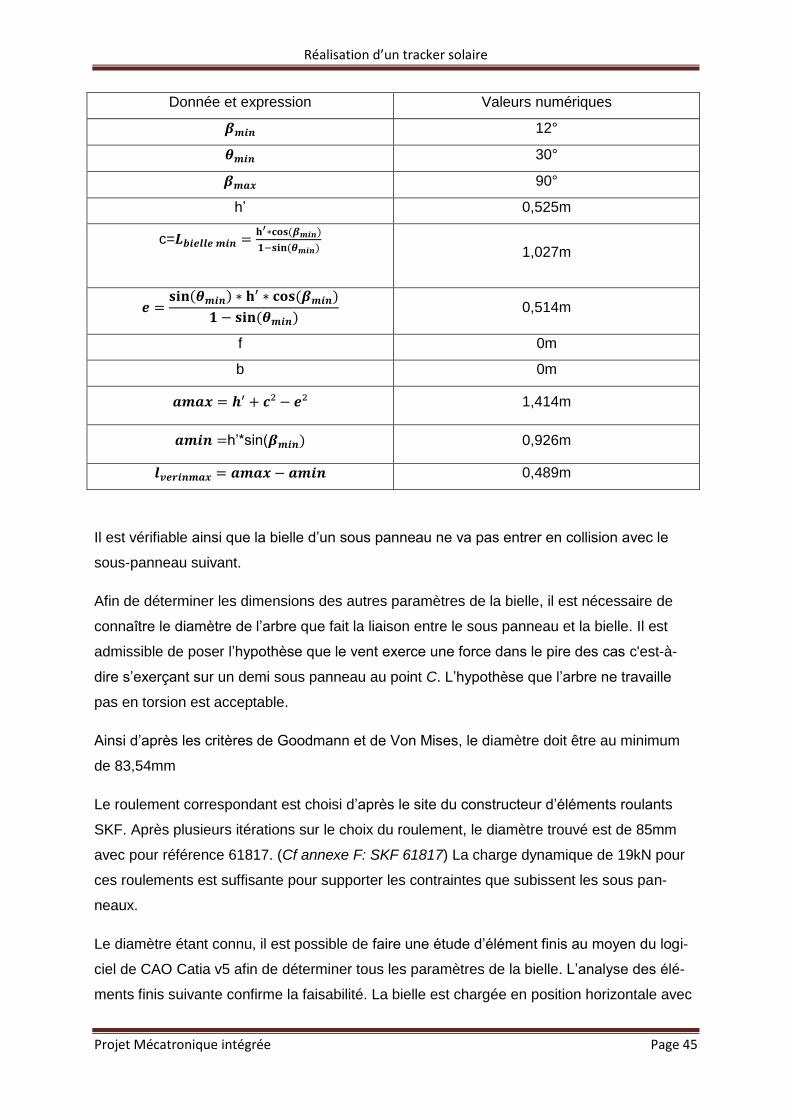
Afin de déterminer les dimensions des autres paramètres de la bielle, il est nécessaire de
connaître le diamètre de l’arbre que fait la liaison entre le sous panneau et la bielle. Il est
admissible de poser l’hypothèse que le vent exerce une force dans le pire des cas c'est-à-
dire s’exerçant sur un demi sous panneau au point C. L’hypothèse que l’arbre ne travaille
pas en torsion est acceptable.
Ainsi d’après les critères de Goodmann et de Von Mises, le diamètre doit être au minimum
de 83,54mm
Le roulement correspondant est choisi d’après le site du constructeur d’éléments roulants
SKF. Après plusieurs itérations sur le choix du roulement, le diamètre trouvé est de 85mm
avec pour référence 61817. (Cf annexe F: SKF 61817) La charge dynamique de 19kN pour
ces roulements est suffisante pour supporter les contraintes que subissent les sous pan-
neaux.
Le diamètre étant connu, il est possible de faire une étude d’élément finis au moyen du logi-
ciel de CAO Catia v5 afin de déterminer tous les paramètres de la bielle. L’analyse des élé-
ments finis suivante confirme la faisabilité. La bielle est chargée en position horizontale avec
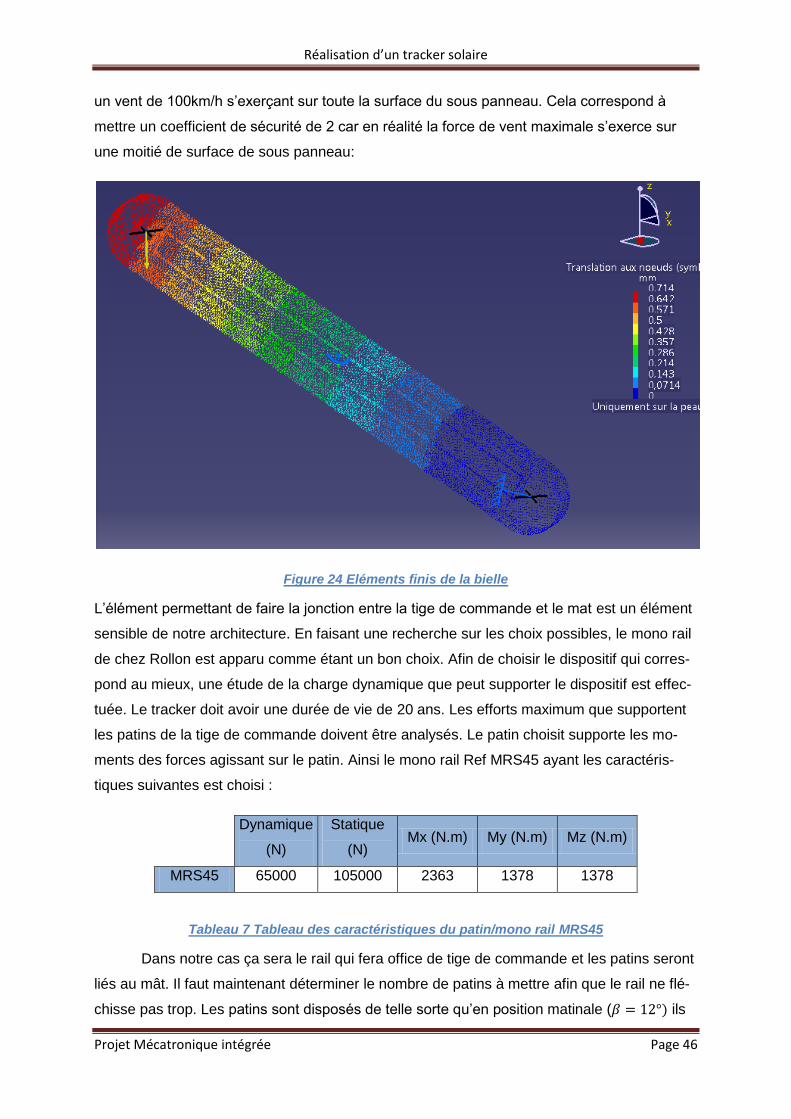
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 46
un vent de 100km/h s’exerçant sur toute la surface du sous panneau. Cela correspond à
mettre un coefficient de sécurité de 2 car en réalité la force de vent maximale s’exerce sur
une moitié de surface de sous panneau:
Figure 24 Eléments finis de la bielle
L’élément permettant de faire la jonction entre la tige de commande et le mat est un élément
sensible de notre architecture. En faisant une recherche sur les choix possibles, le mono rail
de chez Rollon est apparu comme étant un bon choix. Afin de choisir le dispositif qui corres-
pond au mieux, une étude de la charge dynamique que peut supporter le dispositif est effec-
tuée. Le tracker doit avoir une durée de vie de 20 ans. Les efforts maximum que supportent
les patins de la tige de commande doivent être analysés. Le patin choisit supporte les mo-
ments des forces agissant sur le patin. Ainsi le mono rail Ref MRS45 ayant les caractéris-
tiques suivantes est choisi :
Dynamique
(N)
Statique
(N) Mx (N.m) My (N.m) Mz (N.m)
MRS45 65000 105000 2363 1378 1378
Tableau 7 Tableau des caractéristiques du patin/mono rail MRS45
Dans notre cas ça sera le rail qui fera office de tige de commande et les patins seront
liés au mât. Il faut maintenant déterminer le nombre de patins à mettre afin que le rail ne flé-
chisse pas trop. Les patins sont disposés de telle sorte qu’en position matinale ( ) ils
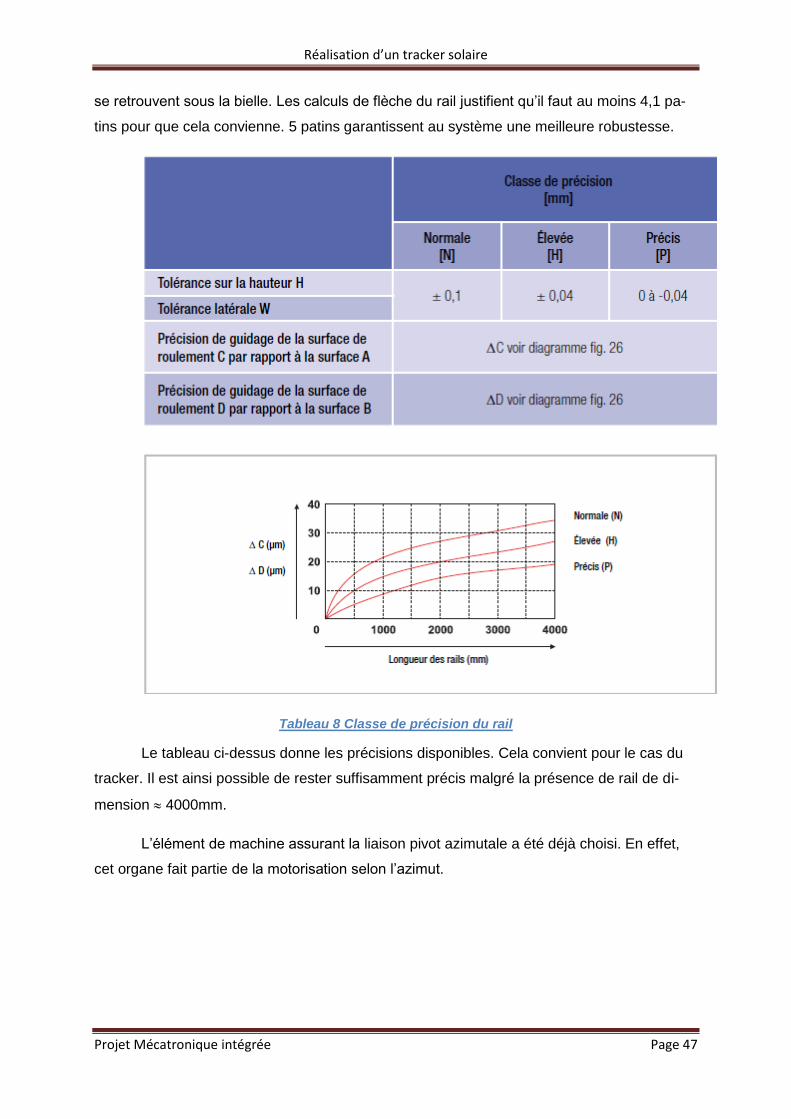
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 47
se retrouvent sous la bielle. Les calculs de flèche du rail justifient qu’il faut au moins 4,1 pa-
tins pour que cela convienne. 5 patins garantissent au système une meilleure robustesse.
Tableau 8 Classe de précision du rail
Le tableau ci-dessus donne les précisions disponibles. Cela convient pour le cas du
tracker. Il est ainsi possible de rester suffisamment précis malgré la présence de rail de di-
mension 4000mm.
L’élément de machine assurant la liaison pivot azimutale a été déjà choisi. En effet,
cet organe fait partie de la motorisation selon l’azimut.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 48
3.8 Influence des défauts
Impact des défauts sur la capacité des sous panneaux à rester dans un cône de tolérance
de 1°
Il faut vérifier que le choix d’un seul actionneur pour commander tout les sous panneaux est
possible. Un inclinomètre est disposé sur un seul sous panneau dit de référence. Une étude
de l’impact de défauts sur la capacité des autres sous panneaux à rester dans un cône de
tolérance de 1° est à mener.
Les défauts peuvent être les suivants :
1- Variation de la longueur de la tige de commande. Ce défaut provient à la fois d’un dé-
faut lié aux déformations de la tige et au défaut de positionnement d’un sous pan-
neau par rapport aux autres
2- Jeu dans la liaison entre la tige de commande et la bielle
3- Variation de la longueur de la bielle
4- Jeu dans la liaison entre la bielle et la tige de commande
5- Variations des dimensions du sous panneau. Ce défaut provient des déformations
que subissent les sous panneaux.
6- Jeu dans la liaison entre le sous panneau et le mât.
7- Variation des longueurs du mât
8- Jeu dans la liaison entre le mât et le bâti
D’après une première étude, il a plus de 8 types de défauts dans notre système. En partant
de l’hypothèse que le le même jeu maximal est attribué à chaque jeu. Et que chaque jeu
peut s’exprimer en degrés.
Soient l’erreur maximale autorisée, N le nombre de défauts possibles et le défaut ad-
missible pour un jeu.
La loi expérimentale suivante traduisant l’impact de chaque jeu sur le jeu global s’écrit de la
sorte :
∑

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 49
Il faut laisser une marge de 90% des 1° de tolérance pour l’établissement de la loi de com-
mande.
Donc
√
Il est intéressant de savoir combien un défaut de d’angle au niveau de la bielle/tige de com-
mande engendre d’erreur angulaire.
( ) ( )
D’où
( ( )
) (
( )
)
Ainsi pour trois couplets de valeurs de et un de :
(°) (°)
12 0,65614944
45 0,025123001
90 0,020833589
Il faut alors déterminer combien un de entraine comme erreur sur la variation
de la longueur x de la tige de commande.
√ ( ( )
√ ( ( ) √ ( ( )
Ainsi pour trois couplets de valeurs de et un de :
(°) (mm)
13 1,17850987

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 50
45 0,388047816
89 0,19127834
Il faut déterminer combien un de entraine comme erreur sur la variation de la
longueur c de la bielle. Ainsi :
( ) ( )
Il est acceptable de poser l’hypothèse qu’une variation de c engendra seulement une varia-
tion de .
Ainsi,
( ( ) ( ))
( )
Ainsi pour trois couplets de valeurs de et un de :
(°) (mm)
12 0,067152223
45 0,265418671
90 0,646906246
Il faut déterminer combien un de entraine comme erreur sur la variation de la
longueur e du mât. Or :
( ) ( )
Il est possible de considérer là aussi que est constant lorsque e varie.
Par conséquent,
( ( ) ( ))
Ainsi pour trois couplets de valeurs de et un de :

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 51
(°) (mm)
12 0,067347148
45 0,228786353
90 0,323453123
Il est nécessaire de déterminer combien un de entraine comme erreur sur la
variation de la longueur h’ du sous panneau. Encore une fois :
( ) ( )
Il est acceptable de considère la aussi que est constant lorsque h’ varie.
D’où,
( ( ) ) (
( )
( ))
Ainsi pour trois couplets de valeurs de et un de :
(°) (mm)
12 0,068860754
45 0,323752289
89 17,89875878
Par conséquent en lorsque est élevé les paramètres jouant beaucoup sur une erreur
d’élévation sont et la longueur de la tige. Par contre lorsque est faible les paramètres
influant sur une erreur d’élévation sont la longueur de la bielle, e et la hauteur du demi sous
panneau.
L’éclairement du soleil est plus fort lorsque l’élévation est proche de 90°. C’est là qu’il est
possible de récupérer le plus d’énergie. Il faut donc assurer le plus de précision.
Il faut alors considérer que les paramètres jouant le plus sur la précision sont la liaison
bielle/mat et la longueur de la tige de commande.
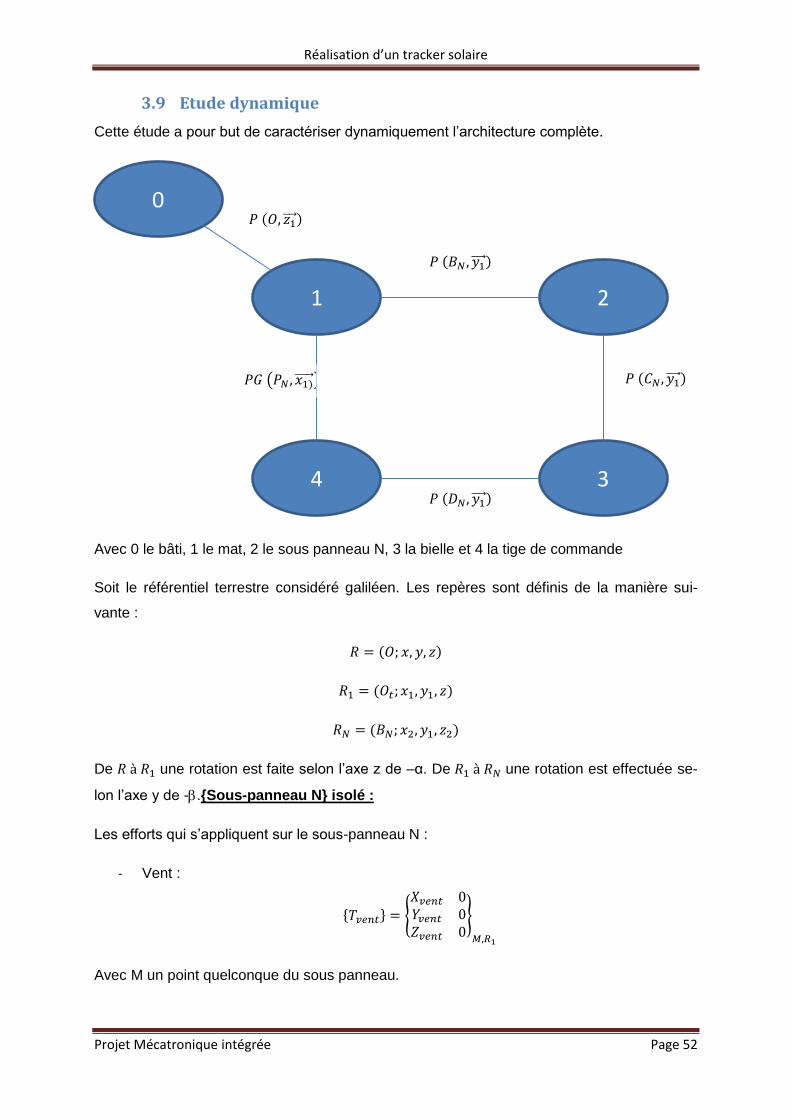
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 52
3.9 Etude dynamique
Cette étude a pour but de caractériser dynamiquement l’architecture complète.
Avec 0 le bâti, 1 le mat, 2 le sous panneau N, 3 la bielle et 4 la tige de commande
Soit le référentiel terrestre considéré galiléen. Les repères sont définis de la manière sui-
vante :
( )
( )
( )
De une rotation est faite selon l’axe z de –α. De une rotation est effectuée se-
lon l’axe y de -.{Sous-panneau N} isolé :
Les efforts qui s’appliquent sur le sous-panneau N :
- Vent :
{ } {
}
Avec M un point quelconque du sous panneau.
1 2
3 4
0
𝑃 (𝐵𝑁 𝑦 )
𝑃 (𝑂 𝑧 )
𝑃 (𝐶𝑁 𝑦 )
𝑃 (𝐷𝑁 𝑦 )
𝑃𝐺 𝑃𝑁 𝑥 )

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 53
Le vent est modélisé par une force s’exerçant sur un coin du sous panneau N. Soit L’ la lon-
gueur du sous panneau N et
( ( ) ( ) )
Ainsi,
{ }
{
( )
( ) ( )
( )
}
La force du vent s’exprime de la façon suivante :
C'est-à-dire que la force du vent s’exerce normalement au sous panneau N.
Par conséquent,
{ }
{
( )
}
- Pesanteur : En supposant que le centre de gravité d’un sous-panneau N se trouve au
niveau de BN.
{ } {
}
- Action du mat sur le sous-panneau N :
{ } {
}
- Action de la bielle sur le sous panneau N :

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 54
{ } {
}
D’après le schéma du dispositif, ( ( ) ( ) )
D’où
{ } {
( )
( ) ( )
( )
}
Or le torseur d’accélération pour le sous panneau N s’exprime de la façon suivante :
{ } {
}
Par conséquent,
{
( )
( ) ( ) ( )
( )
Le sous panneau N ne peut tourner que selon .
Ainsi .
Donc,
{
( )
( ) ( ) ( )
( )

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 55
{Bielle N} isolé :
Hypothèse : L’effet du vent sur la bielle N est négligé :
Pesanteur :
{ } {
}
- Action du sous panneau N sur la bielle N :
{ } {
}
- Action de la tige de commande sur la bielle N :
{ } {
}
Ces torseurs en s’écrivent de la manière suivante :
√
(
( )
)
( )
D’où,
{ }
{
√
(
( )
)
}
D’après le schéma,
√ ( ( )) ( ( ))

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 56
Donc
{ } {
( ( ))
√ ( ( )) ( ( ))
√ ( ( ))
}
Or le torseur d’accélération pour la bielle N s’exprime de la façon suivante :
{ } {
}
Par conséquent,
{
( ( ))
√ ( ( )) ( ( ))
√ ( ( ))
{Tige commande} isolée :
Hypothèse : L’effet du vent sur la tige de commande est négligé
- Pesanteur :
{ } {
}
Hypothèse : Toutes les bielles se comportent de la même façon.
- Action des bielles sur la tige de commande :
{ } {
}
{ } {
}

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 57
{ } {
}
{ } {
}
Hypothèse : Les torseurs des actions mécaniques liés à l’action du mat sur la tige de com-
mande sont identiques mais s’expriment en des points différents.
- Action du mat sur la tige de commande :
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
- Action du vérin sur la tige de commande :
{ } {
}
Les torseurs s’écrivent pour cette pièce en .
D’après le schéma,
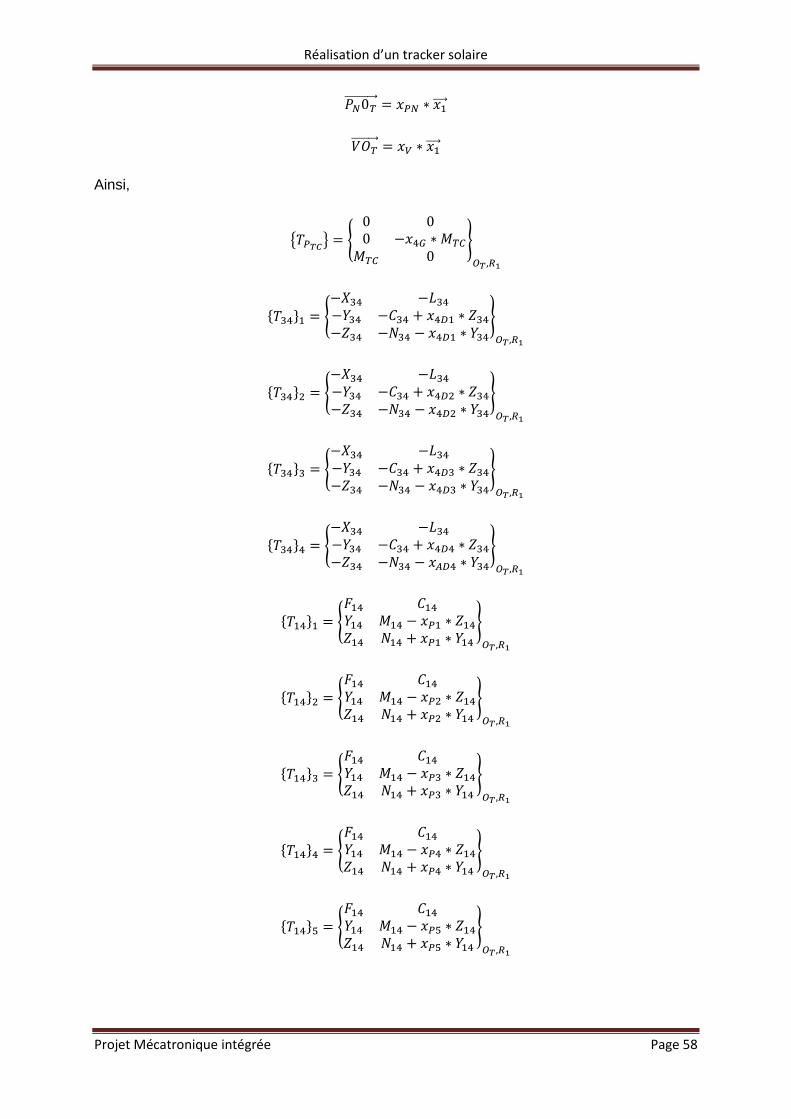
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 58
Ainsi,
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 59
{ } {
}
Or le torseur d’accélération pour la tige de commande s’exprime de la façon suivante :
{ } {
}
Par conséquent,
{
( ) ( )
( ) ( )
On isole le {Mat} :
- Pesanteur :
{ } {
}
- Action du bâti sur le mat :
{ } {
}
- Action de la tige de commande sur le mat :
{ } {
}
{ } {
}

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 60
{ } {
}
{ } {
}
{ } {
}
Les torseurs s’écrivent au point O
D’où
{ } {
}
{ } {
}
{ } {
}
{ } {
}
{ } {
}
Or le torseur d’accélération pour le mat s’exprime de la façon suivante :
{ } {
}

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 61
Par conséquent,
{
∑( )
∑( )
∑(
)
Ainsi la modélisation de toute la dynamique du système est effectuée. Pour résoudre au
mieux ce système il faut passer par une analyse des frottements et des efforts dans les liai-
sons qui se fera lors des phases de tests.
3.10 Loi entrée-sortie
Fermeture de chaîne :
En posant l’équation de fermeture de chaîne sur le dispositif suivant, on peut trouver la loi
d’entrée sortie du système :
( ) √ ( ( ) )
On considère le référentiel terrestre supposé galiléen. Le système {Tracker Solaire}
est soumis à l’action du vent, à la réaction du sol et à l’action de la pesanteur.
Hypothèses:
On considérera que la force du vent est une force s’exerçant dans la position du panneau la
plus défavorable, pour un vent de 100 km/h et s’appliquant normalement à l’arête (haute ou
basse). On considérera que l’action du vent ne s’exerce que sur le panneau comportant les
modules.
Une feuille de calcul sous le logiciel de calcul Matlab a été faite afin d’étudier la loi de sortie
du vérin en fonction des paramètres géométriques. Pour une première itération, on réalise
des simulations en prenant pour hypothèse que l’élévation minimale est nulle ce qui est le
cas le plus défavorable.
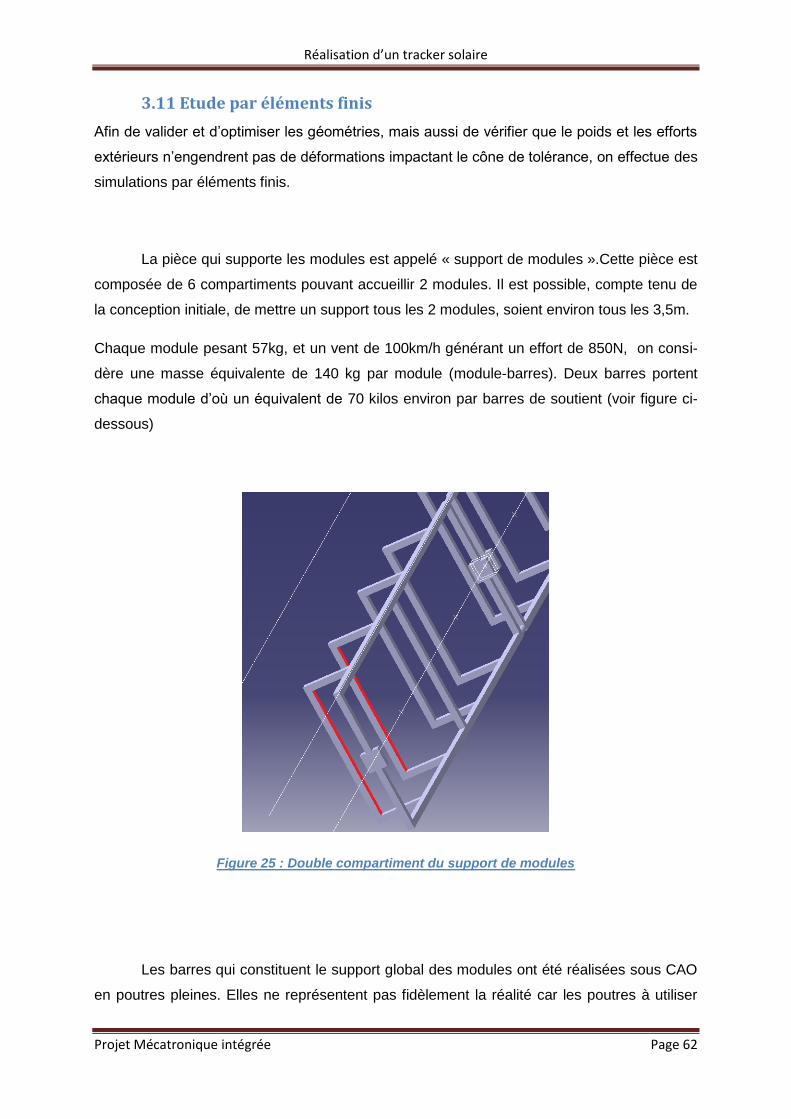
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 62
3.11 Etude par éléments finis
Afin de valider et d’optimiser les géométries, mais aussi de vérifier que le poids et les efforts
extérieurs n’engendrent pas de déformations impactant le cône de tolérance, on effectue des
simulations par éléments finis.
La pièce qui supporte les modules est appelé « support de modules ».Cette pièce est
composée de 6 compartiments pouvant accueillir 2 modules. Il est possible, compte tenu de
la conception initiale, de mettre un support tous les 2 modules, soient environ tous les 3,5m.
Chaque module pesant 57kg, et un vent de 100km/h générant un effort de 850N, on consi-
dère une masse équivalente de 140 kg par module (module-barres). Deux barres portent
chaque module d’où un équivalent de 70 kilos environ par barres de soutient (voir figure ci-
dessous)
Figure 25 : Double compartiment du support de modules
Les barres qui constituent le support global des modules ont été réalisées sous CAO
en poutres pleines. Elles ne représentent pas fidèlement la réalité car les poutres à utiliser
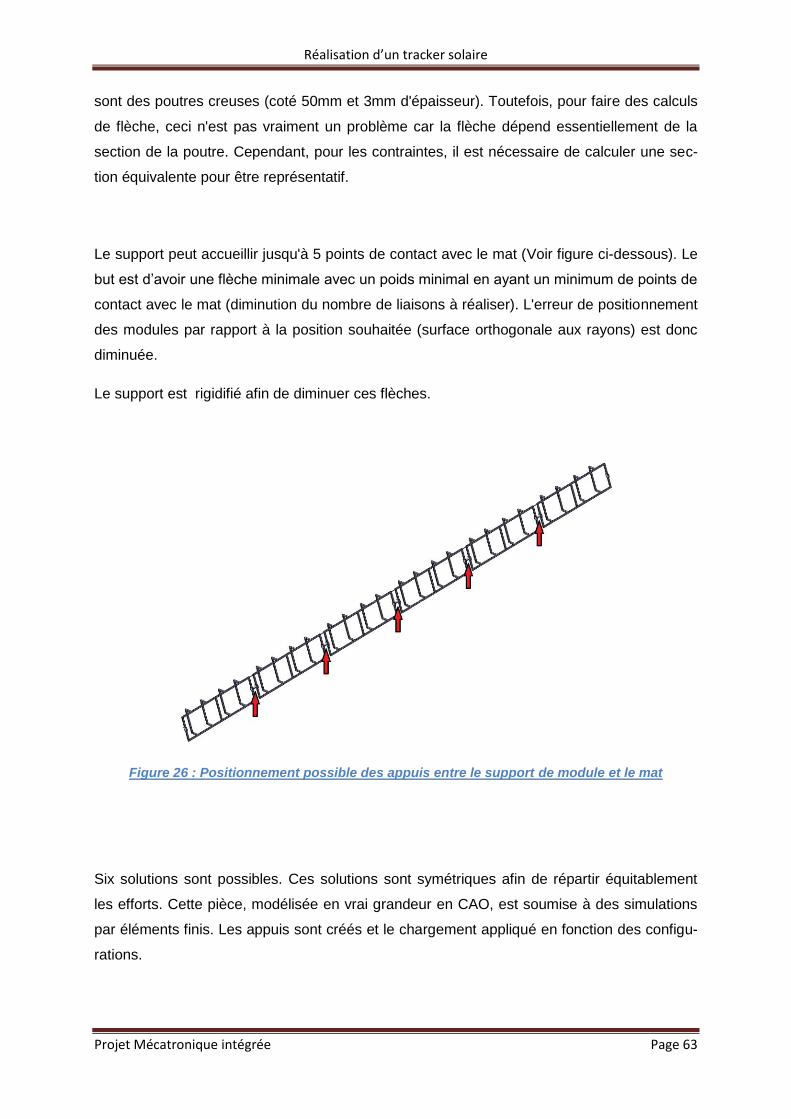
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 63
sont des poutres creuses (coté 50mm et 3mm d'épaisseur). Toutefois, pour faire des calculs
de flèche, ceci n'est pas vraiment un problème car la flèche dépend essentiellement de la
section de la poutre. Cependant, pour les contraintes, il est nécessaire de calculer une sec-
tion équivalente pour être représentatif.
Le support peut accueillir jusqu'à 5 points de contact avec le mat (Voir figure ci-dessous). Le
but est d’avoir une flèche minimale avec un poids minimal en ayant un minimum de points de
contact avec le mat (diminution du nombre de liaisons à réaliser). L'erreur de positionnement
des modules par rapport à la position souhaitée (surface orthogonale aux rayons) est donc
diminuée.
Le support est rigidifié afin de diminuer ces flèches.
Figure 26 : Positionnement possible des appuis entre le support de module et le mat
Six solutions sont possibles. Ces solutions sont symétriques afin de répartir équitablement
les efforts. Cette pièce, modélisée en vrai grandeur en CAO, est soumise à des simulations
par éléments finis. Les appuis sont créés et le chargement appliqué en fonction des configu-
rations.
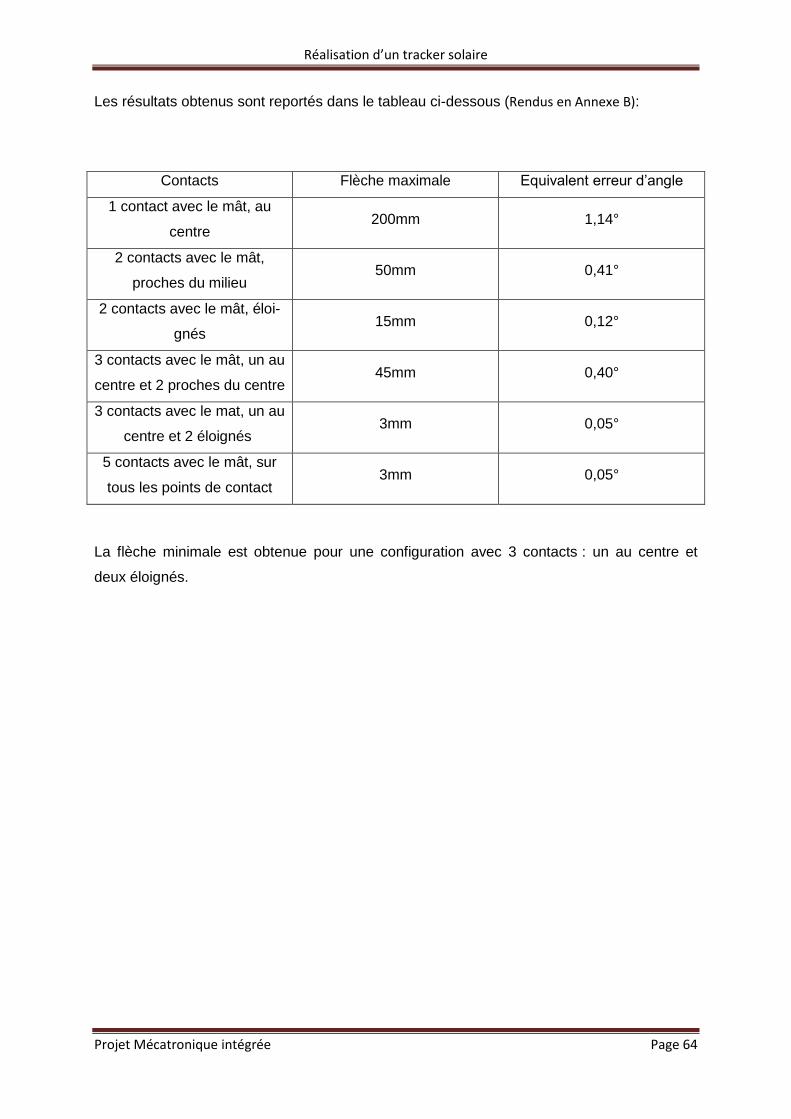
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 64
Les résultats obtenus sont reportés dans le tableau ci-dessous (Rendus en Annexe B):
Contacts Flèche maximale Equivalent erreur d’angle
1 contact avec le mât, au
centre 200mm 1,14°
2 contacts avec le mât,
proches du milieu 50mm 0,41°
2 contacts avec le mât, éloi-
gnés 15mm 0,12°
3 contacts avec le mât, un au
centre et 2 proches du centre 45mm 0,40°
3 contacts avec le mat, un au
centre et 2 éloignés 3mm 0,05°
5 contacts avec le mât, sur
tous les points de contact 3mm 0,05°
La flèche minimale est obtenue pour une configuration avec 3 contacts : un au centre et
deux éloignés.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 65
4 Position de sécurité
Afin de déterminer une position de sécurité, 4 critères de choix ont été utilisés :
- La position de sécurité est fonction de la direction de provenance du vent
- La prise au vent du panneau en position de sécurité avec une direction du vent la
plus défavorable.
- La difficulté de mise en position de sécurité
- La conception supplémentaire spécifique
Deux positions de sécurité possibles ont été étudiées. Ces positions sont des positions sin-
gulières dans l’utilisation du tracker : β=0° ou β=90°. Les cas correspondants aux autres β
peuvent être obtenus par combinaisons des deux autres positions. Ces deux positions sont
donc :
Panneau horizontal (β=90°)
Panneau vertical (β =0°)
Pour l’étude de ces 2 positions, on fait l’hypothèse que le vent est horizontal.
4.1 Panneau horizontal
La position horizontale (élévation à 90°) offre des avantages et des inconvénients :
- Le panneau ne nécessite pas d’orientation spéciale de la liaison azimut afin de résis-
ter au vent de manière optimale.
- En position horizontale, seule la tranche du panneau fait prise au vent, ce qui est mi-
nime comparé aux 80m² de surface disponible.
- En cas de vent, la mise en position de sécurité peut poser quelques problèmes. En
effet, en cas de vent « arrière » (suivant –X1), la force nécessaire afin de mettre le
panneau en position de sécurité est supérieur à l’effort nominal. Cependant, en cas
de vent de face (suivant X1), ce dernier aura tendance à aider le panneau à se
mettre en position de sécurité.
- Afin de mettre le panneau en position horizontale, le vérin devra avoir une course lé-
gèrement plus longue que celle prévue pour son utilisation normale. Toutefois, c’est
la seule chose qui devra être adaptée
4.2 Panneau vertical
La position verticale (élévation à 0°) offre également des avantages et des inconvénients :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 66
- En position vertical, le panneau devra être libre autour de l’axe Z afin de pouvoir se
mettre dans le vent, telle une girouette. Toutefois, en cas de bourrasque de vent,
l’inertie du panneau va l’empêcher de réagir rapidement et celui-ci risque d’être dété-
rioré, voire même détruit.
- En position défavorable (cas de bourrasques), la prise au vent est importante (vent
orthogonal au panneau).
- De la même manière que pour la position horizontale, la mise en position de sécurité
peut être plus ou moins difficile selon la provenance du vent.
- Afin de mettre le panneau en position verticale, il est probablement nécessaire
d’agrandir la course du vérin afin de pouvoir atteindre la position verticale (Elévation
minimum entre 10 et 20 degrés). De plus, le fait de libérer le panneau autour de son
axe d’azimut demande de prévoir un système de débrayage supplémentaire, qui peut
éventuellement entraîner une erreur en azimut. Le fait de libérer les axes d’azimut
crée une insécurité pour le personnel qui pourrait être dans le parc à ce moment-là.
La solution la plus avantageuse qui fut retenue est la position de sécurité horizontale (éléva-
tion à 90°).
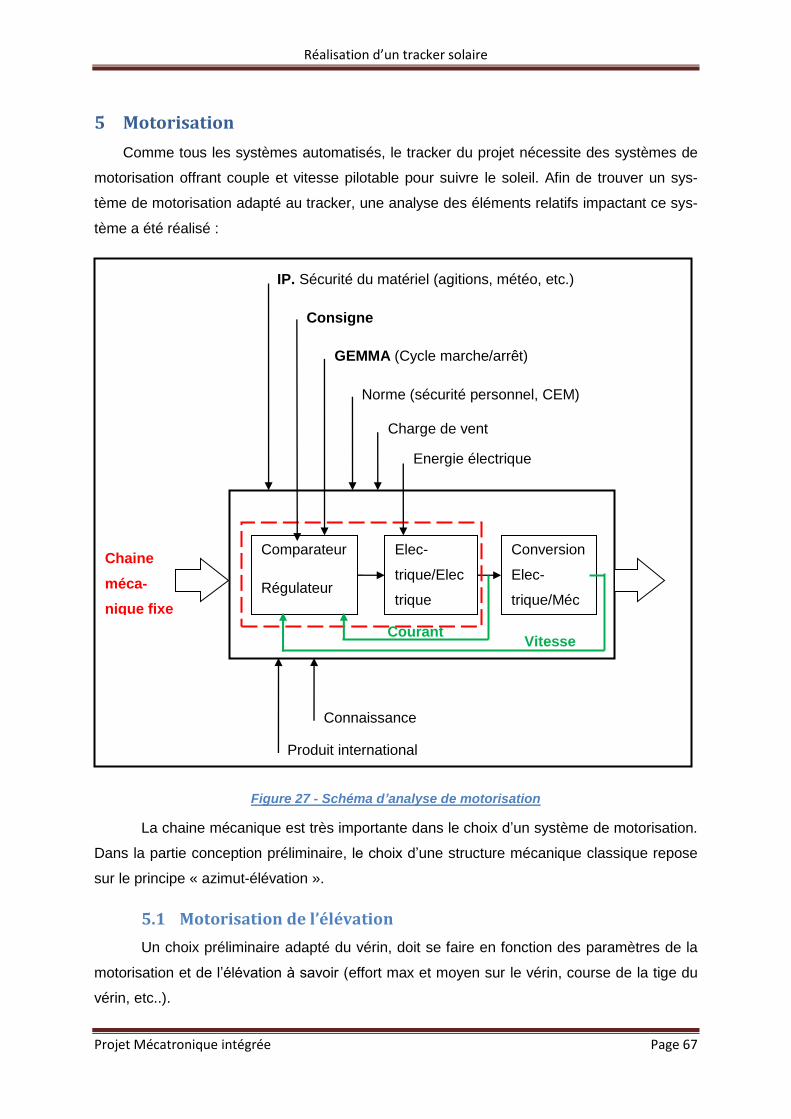
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 67
5 Motorisation
Comme tous les systèmes automatisés, le tracker du projet nécessite des systèmes de
motorisation offrant couple et vitesse pilotable pour suivre le soleil. Afin de trouver un sys-
tème de motorisation adapté au tracker, une analyse des éléments relatifs impactant ce sys-
tème a été réalisé :
Figure 27 - Schéma d’analyse de motorisation
La chaine mécanique est très importante dans le choix d’un système de motorisation.
Dans la partie conception préliminaire, le choix d’une structure mécanique classique repose
sur le principe « azimut-élévation ».
5.1 Motorisation de l’élévation
Un choix préliminaire adapté du vérin, doit se faire en fonction des paramètres de la
motorisation et de l’élévation à savoir (effort max et moyen sur le vérin, course de la tige du
vérin, etc..).
Conversion
Elec-
trique/Méc
Elec-
trique/Elec
trique
Comparateur
Régulateur
Consigne
GEMMA (Cycle marche/arrêt)
Norme (sécurité personnel, CEM)
Charge de vent
Energie électrique
IP. Sécurité du matériel (agitions, météo, etc.)
Chaine
méca-
nique fixe
Connaissance
Produit international
Vitesse Courant
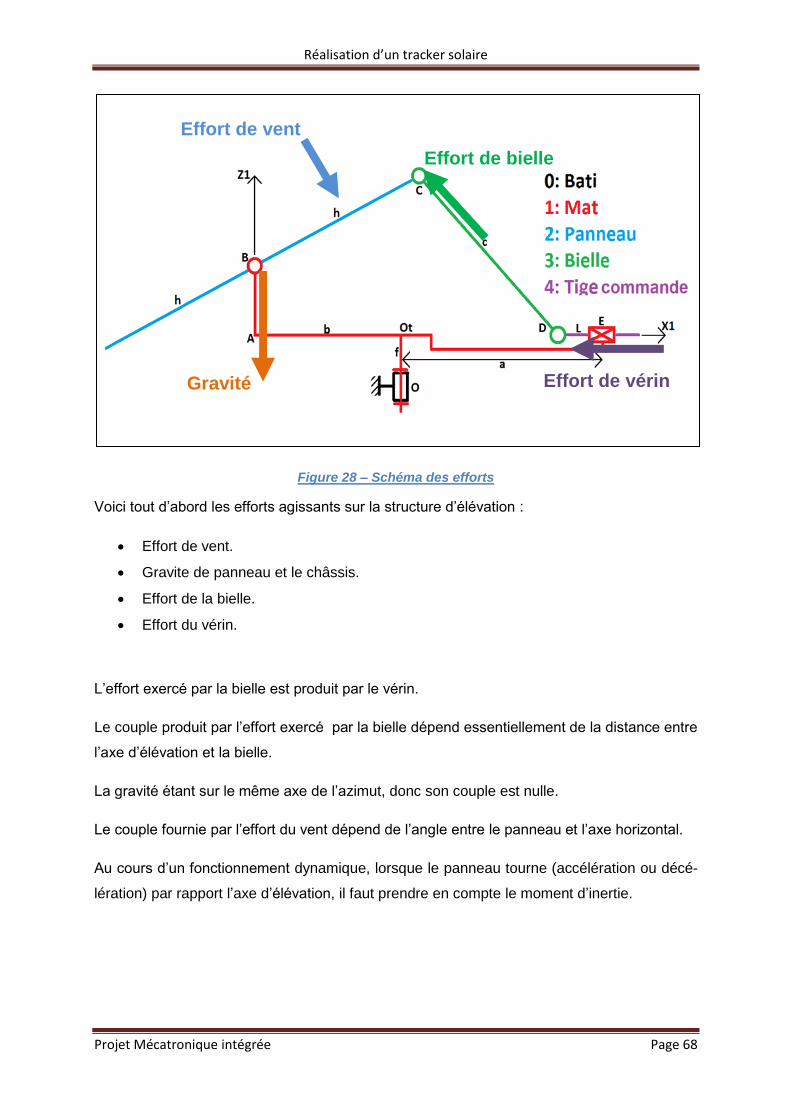
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 68
Figure 28 – Schéma des efforts
Voici tout d’abord les efforts agissants sur la structure d’élévation :
Effort de vent.
Gravite de panneau et le châssis.
Effort de la bielle.
Effort du vérin.
L’effort exercé par la bielle est produit par le vérin.
Le couple produit par l’effort exercé par la bielle dépend essentiellement de la distance entre
l’axe d’élévation et la bielle.
La gravité étant sur le même axe de l’azimut, donc son couple est nulle.
Le couple fournie par l’effort du vent dépend de l’angle entre le panneau et l’axe horizontal.
Au cours d’un fonctionnement dynamique, lorsque le panneau tourne (accélération ou décé-
lération) par rapport l’axe d’élévation, il faut prendre en compte le moment d’inertie.
Gravité
Effort de bielle
Effort de vérin
Effort de vent
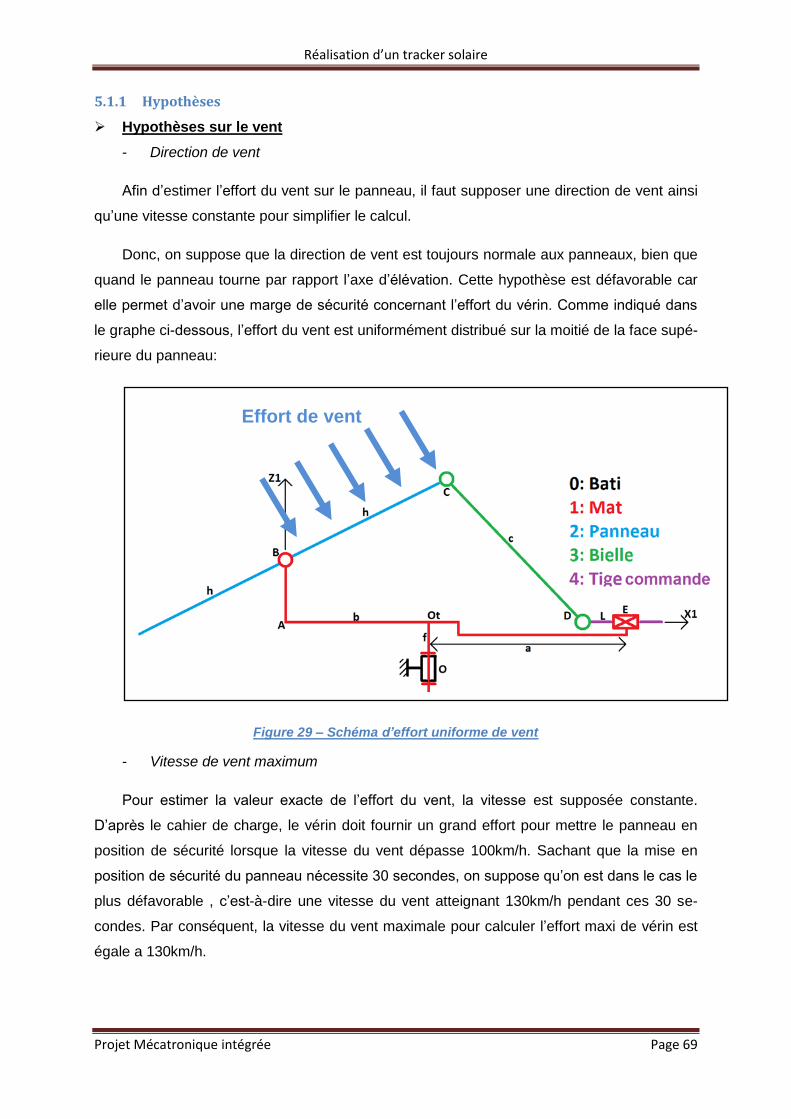
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 69
5.1.1 Hypothèses
Hypothèses sur le vent
- Direction de vent
Afin d’estimer l’effort du vent sur le panneau, il faut supposer une direction de vent ainsi
qu’une vitesse constante pour simplifier le calcul.
Donc, on suppose que la direction de vent est toujours normale aux panneaux, bien que
quand le panneau tourne par rapport l’axe d’élévation. Cette hypothèse est défavorable car
elle permet d’avoir une marge de sécurité concernant l’effort du vérin. Comme indiqué dans
le graphe ci-dessous, l’effort du vent est uniformément distribué sur la moitié de la face supé-
rieure du panneau:
Figure 29 – Schéma d’effort uniforme de vent
- Vitesse de vent maximum
Pour estimer la valeur exacte de l’effort du vent, la vitesse est supposée constante.
D’après le cahier de charge, le vérin doit fournir un grand effort pour mettre le panneau en
position de sécurité lorsque la vitesse du vent dépasse 100km/h. Sachant que la mise en
position de sécurité du panneau nécessite 30 secondes, on suppose qu’on est dans le cas le
plus défavorable , c’est-à-dire une vitesse du vent atteignant 130km/h pendant ces 30 se-
condes. Par conséquent, la vitesse du vent maximale pour calculer l’effort maxi de vérin est
égale a 130km/h.
Effort de vent
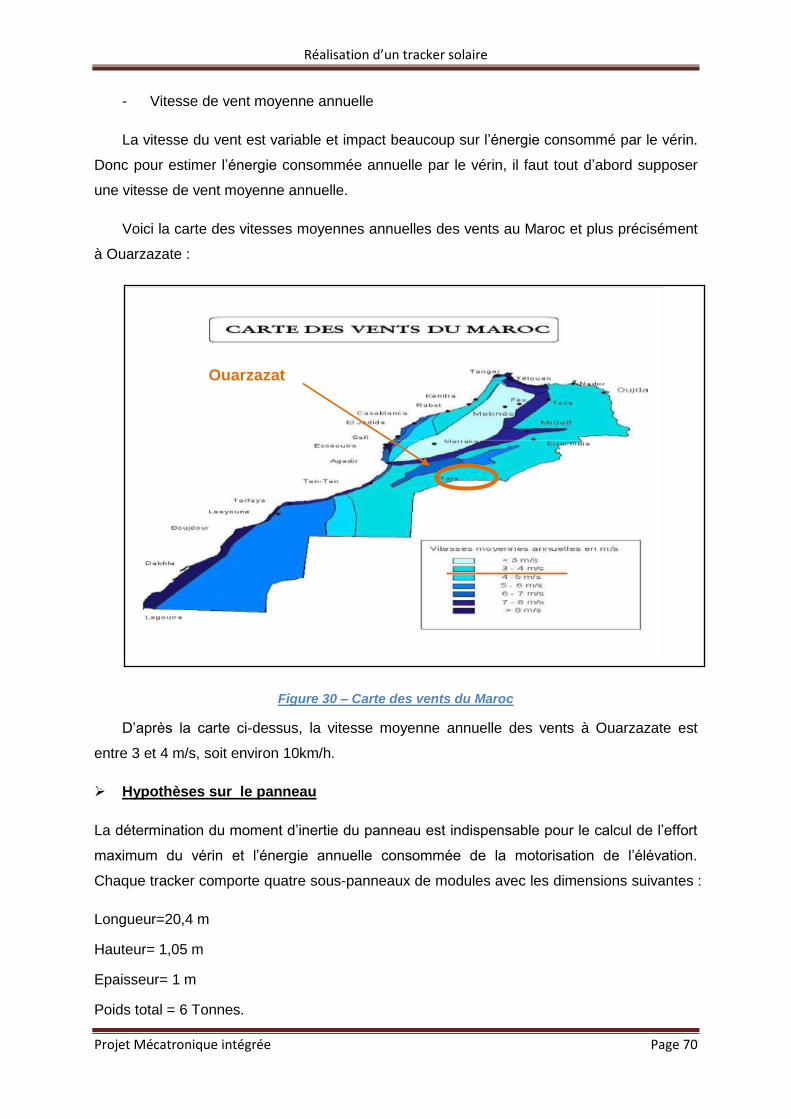
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 70
- Vitesse de vent moyenne annuelle
La vitesse du vent est variable et impact beaucoup sur l’énergie consommé par le vérin.
Donc pour estimer l’énergie consommée annuelle par le vérin, il faut tout d’abord supposer
une vitesse de vent moyenne annuelle.
Voici la carte des vitesses moyennes annuelles des vents au Maroc et plus précisément
à Ouarzazate :
Figure 30 – Carte des vents du Maroc
D’après la carte ci-dessus, la vitesse moyenne annuelle des vents à Ouarzazate est
entre 3 et 4 m/s, soit environ 10km/h.
Hypothèses sur le panneau
La détermination du moment d’inertie du panneau est indispensable pour le calcul de l’effort
maximum du vérin et l’énergie annuelle consommée de la motorisation de l’élévation.
Chaque tracker comporte quatre sous-panneaux de modules avec les dimensions suivantes :
Longueur=20,4 m
Hauteur= 1,05 m
Epaisseur= 1 m
Poids total = 6 Tonnes.
Ouarzazat
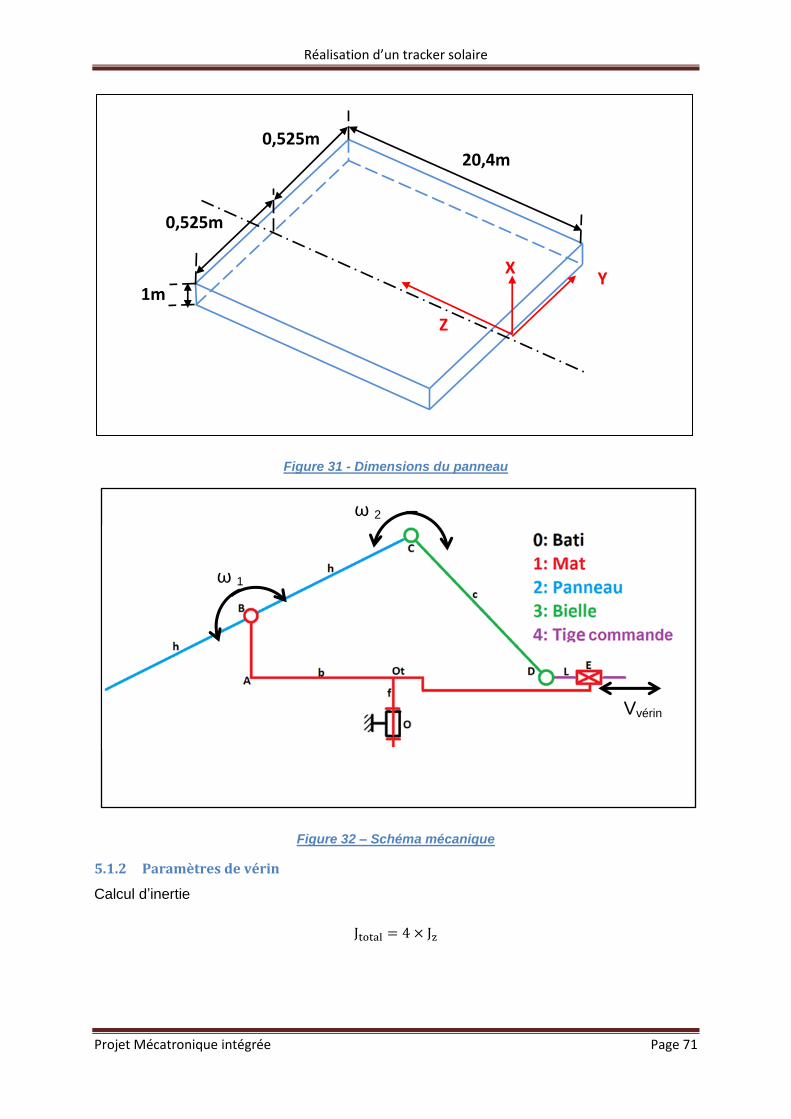
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 71
Figure 31 - Dimensions du panneau
Figure 32 – Schéma mécanique
5.1.2 Paramètres de vérin
Calcul d’inertie
0,525m
0,525m
20,4m
1m
X
Z
Y
ω 1
Vvérin
ω 2
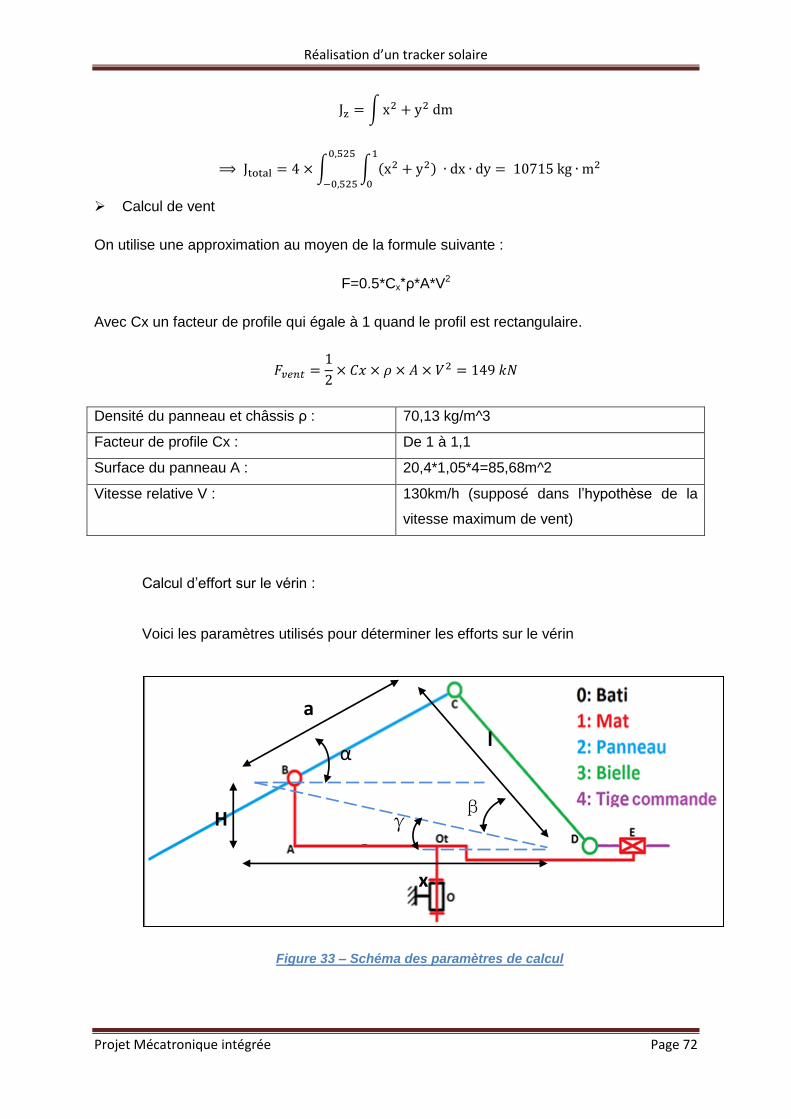
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 72
∫
∫ ∫ ( )
Calcul de vent
On utilise une approximation au moyen de la formule suivante :
F=0.5*Cx*ρ*A*V2
Avec Cx un facteur de profile qui égale à 1 quand le profil est rectangulaire.
Densité du panneau et châssis ρ : 70,13 kg/m^3
Facteur de profile Cx : De 1 à 1,1
Surface du panneau A : 20,4*1,05*4=85,68m^2
Vitesse relative V : 130km/h (supposé dans l’hypothèse de la
vitesse maximum de vent)
Calcul d’effort sur le vérin :
Voici les paramètres utilisés pour déterminer les efforts sur le vérin
Figure 33 – Schéma des paramètres de calcul
α
β γ H
a
l
x

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 73
( )
(
)
( )
( )
(
) ( )
( )
Le choix du vérin prend en compte l’effort du vent à 130km/h.
Le choix du frein prend en considération l’effort du vent de 200km/h car d’après le cahier de
charges, le tracker doit résister à une rafale de 200km/h.
Le calcul de l’énergie consommée annuelle par la motorisation de l’axe de l’élévation est en
fonction de l’effort du vent de 10km/h.
Calcul de la course du vérin :
( ) √
√
La course des vérins standards se situe entre 0 et 1,5m . Pour subvenir au besoin d’une
course supérieure à 1,5m, il faut passer une commande avec notamment un cout plus élève
ainsi qu’une vitesse de sortie plus lente en raison d’un poids plus grand de la tige.
5.1.3 Matrice de choix
Type Course Puissance Normal
Vitesse de tige
Effort normal
Précision de positionnement
Note total
Vérin électrique de 50mm à 1500mm 4 3 3 3 4 62
Vérin hydraulique de 30mm à 900mm 3 4 1 4 2 51
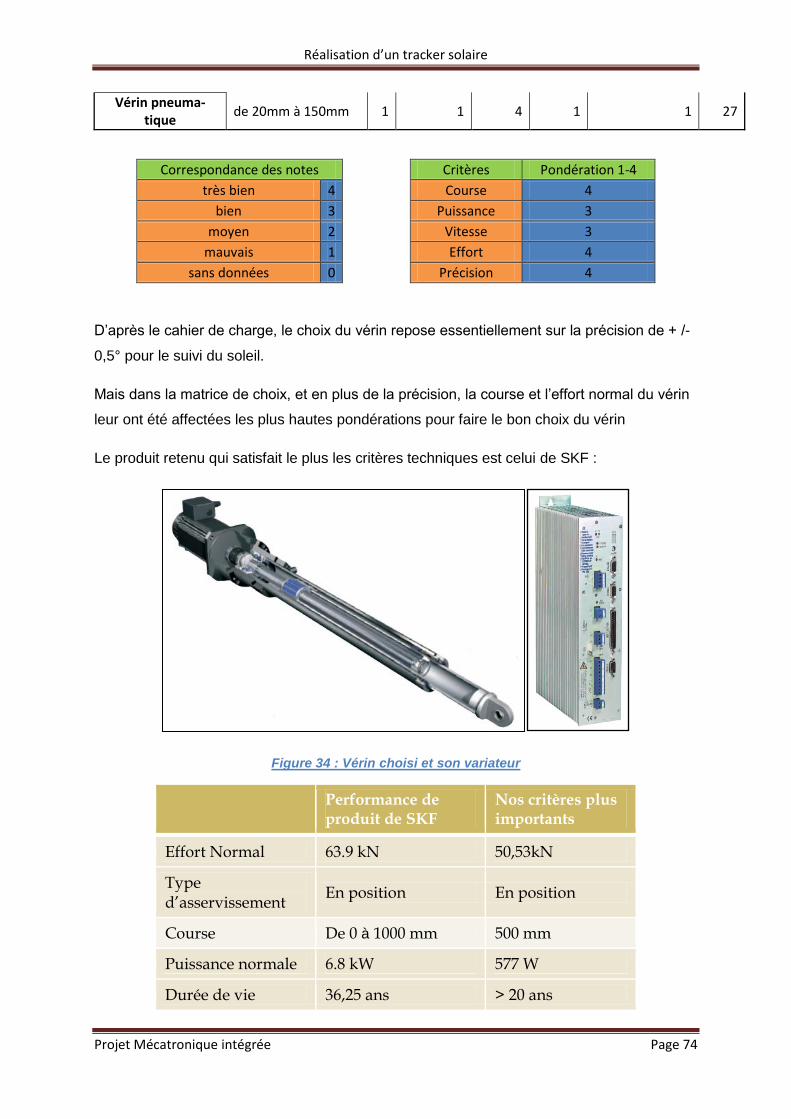
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 74
Vérin pneuma-tique
de 20mm à 150mm 1 1 4 1 1 27
Correspondance des notes
Critères Pondération 1-4
très bien 4
Course 4
bien 3
Puissance 3
moyen 2
Vitesse 3
mauvais 1
Effort 4
sans données 0
Précision 4
D’après le cahier de charge, le choix du vérin repose essentiellement sur la précision de + /-
0,5° pour le suivi du soleil.
Mais dans la matrice de choix, et en plus de la précision, la course et l’effort normal du vérin
leur ont été affectées les plus hautes pondérations pour faire le bon choix du vérin
Le produit retenu qui satisfait le plus les critères techniques est celui de SKF :
Figure 34 : Vérin choisi et son variateur
Performance de produit de SKF
Nos critères plus importants
Effort Normal 63.9 kN 50,53kN
Type d’asservissement
En position En position
Course De 0 à 1000 mm 500 mm
Puissance normale 6.8 kW 577 W
Durée de vie 36,25 ans > 20 ans
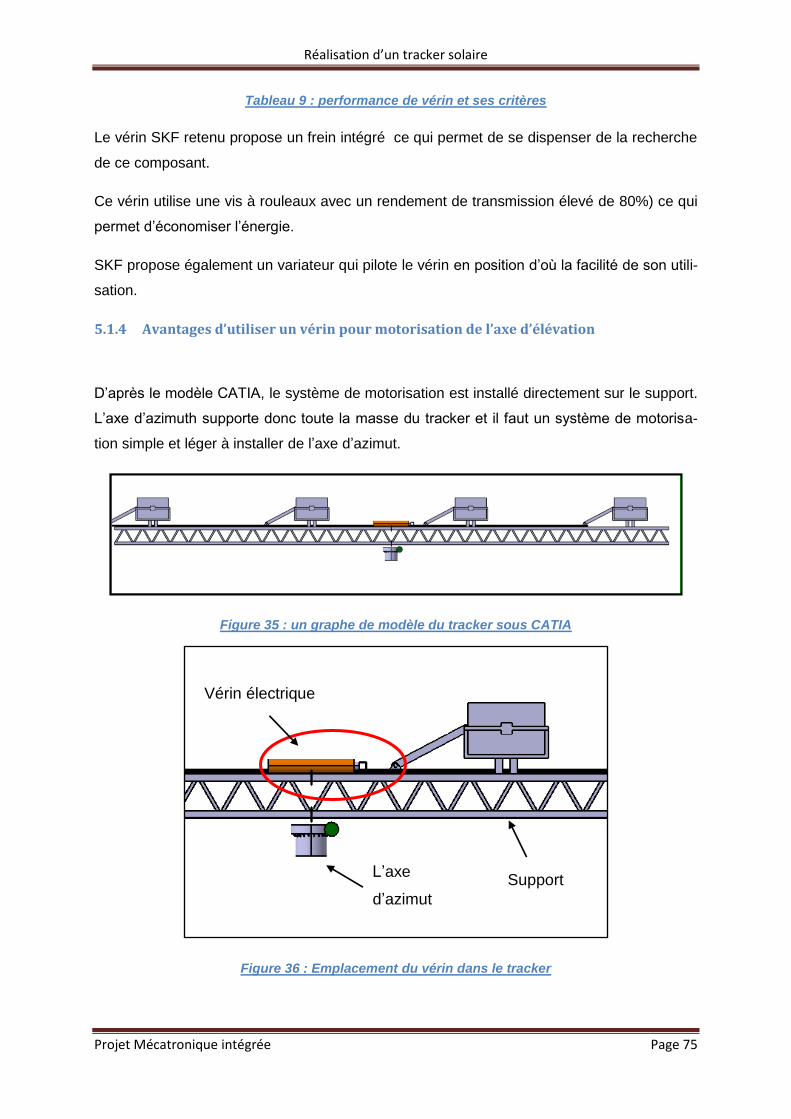
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 75
Tableau 9 : performance de vérin et ses critères
Le vérin SKF retenu propose un frein intégré ce qui permet de se dispenser de la recherche
de ce composant.
Ce vérin utilise une vis à rouleaux avec un rendement de transmission élevé de 80%) ce qui
permet d’économiser l’énergie.
SKF propose également un variateur qui pilote le vérin en position d’où la facilité de son utili-
sation.
5.1.4 Avantages d’utiliser un vérin pour motorisation de l’axe d’élévation
D’après le modèle CATIA, le système de motorisation est installé directement sur le support.
L’axe d’azimuth supporte donc toute la masse du tracker et il faut un système de motorisa-
tion simple et léger à installer de l’axe d’azimut.
Figure 35 : un graphe de modèle du tracker sous CATIA
Figure 36 : Emplacement du vérin dans le tracker
Vérin électrique
Support L’axe
d’azimut
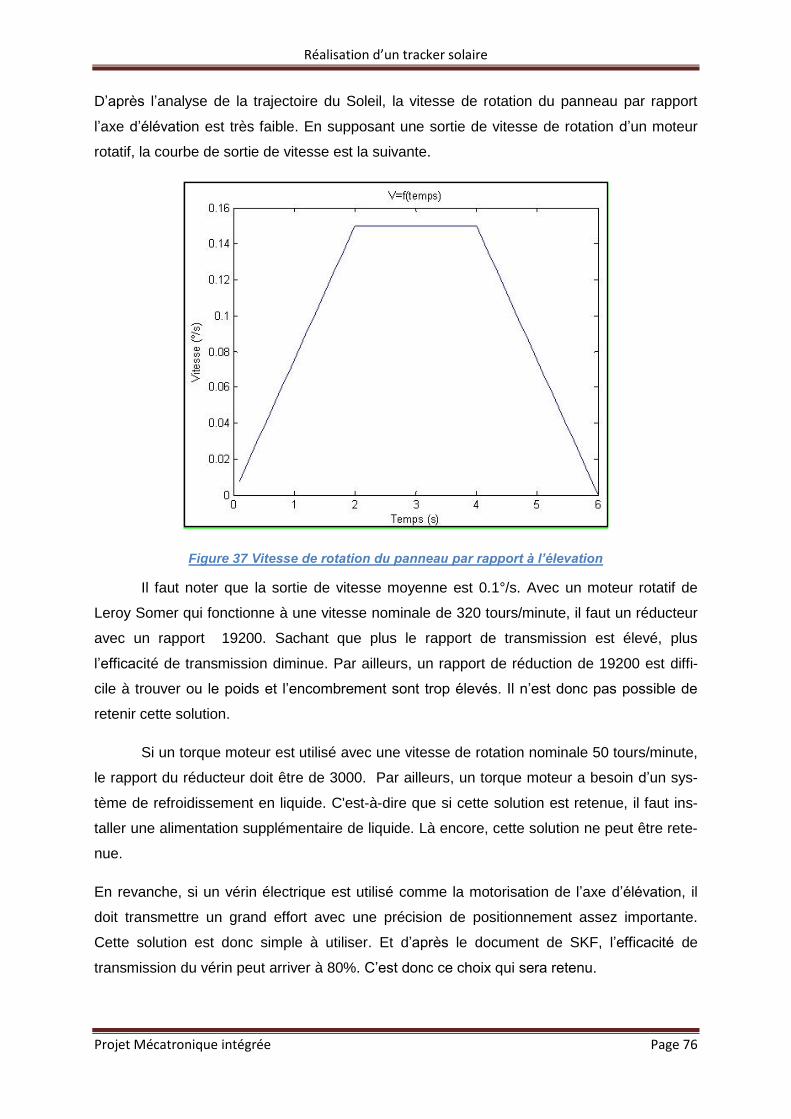
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 76
D’après l’analyse de la trajectoire du Soleil, la vitesse de rotation du panneau par rapport
l’axe d’élévation est très faible. En supposant une sortie de vitesse de rotation d’un moteur
rotatif, la courbe de sortie de vitesse est la suivante.
Figure 37 Vitesse de rotation du panneau par rapport à l’élevation
Il faut noter que la sortie de vitesse moyenne est 0.1°/s. Avec un moteur rotatif de
Leroy Somer qui fonctionne à une vitesse nominale de 320 tours/minute, il faut un réducteur
avec un rapport 19200. Sachant que plus le rapport de transmission est élevé, plus
l’efficacité de transmission diminue. Par ailleurs, un rapport de réduction de 19200 est diffi-
cile à trouver ou le poids et l’encombrement sont trop élevés. Il n’est donc pas possible de
retenir cette solution.
Si un torque moteur est utilisé avec une vitesse de rotation nominale 50 tours/minute,
le rapport du réducteur doit être de 3000. Par ailleurs, un torque moteur a besoin d’un sys-
tème de refroidissement en liquide. C'est-à-dire que si cette solution est retenue, il faut ins-
taller une alimentation supplémentaire de liquide. Là encore, cette solution ne peut être rete-
nue.
En revanche, si un vérin électrique est utilisé comme la motorisation de l’axe d’élévation, il
doit transmettre un grand effort avec une précision de positionnement assez importante.
Cette solution est donc simple à utiliser. Et d’après le document de SKF, l’efficacité de
transmission du vérin peut arriver à 80%. C’est donc ce choix qui sera retenu.
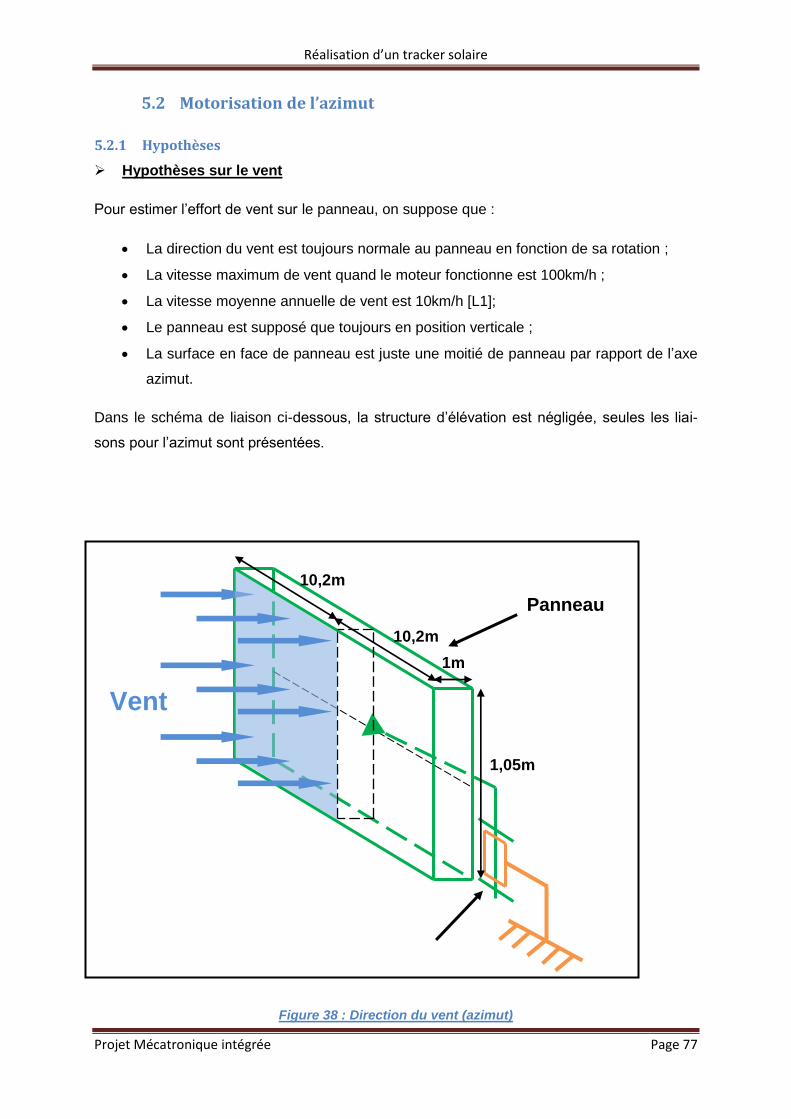
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 77
5.2 Motorisation de l’azimut
5.2.1 Hypothèses
Hypothèses sur le vent
Pour estimer l’effort de vent sur le panneau, on suppose que :
La direction du vent est toujours normale au panneau en fonction de sa rotation ;
La vitesse maximum de vent quand le moteur fonctionne est 100km/h ;
La vitesse moyenne annuelle de vent est 10km/h [L1];
Le panneau est supposé que toujours en position verticale ;
La surface en face de panneau est juste une moitié de panneau par rapport de l’axe
azimut.
Dans le schéma de liaison ci-dessous, la structure d’élévation est négligée, seules les liai-
sons pour l’azimut sont présentées.
Figure 38 : Direction du vent (azimut)
Panneau
Vent
1,05m
10,2m
1m
10,2m
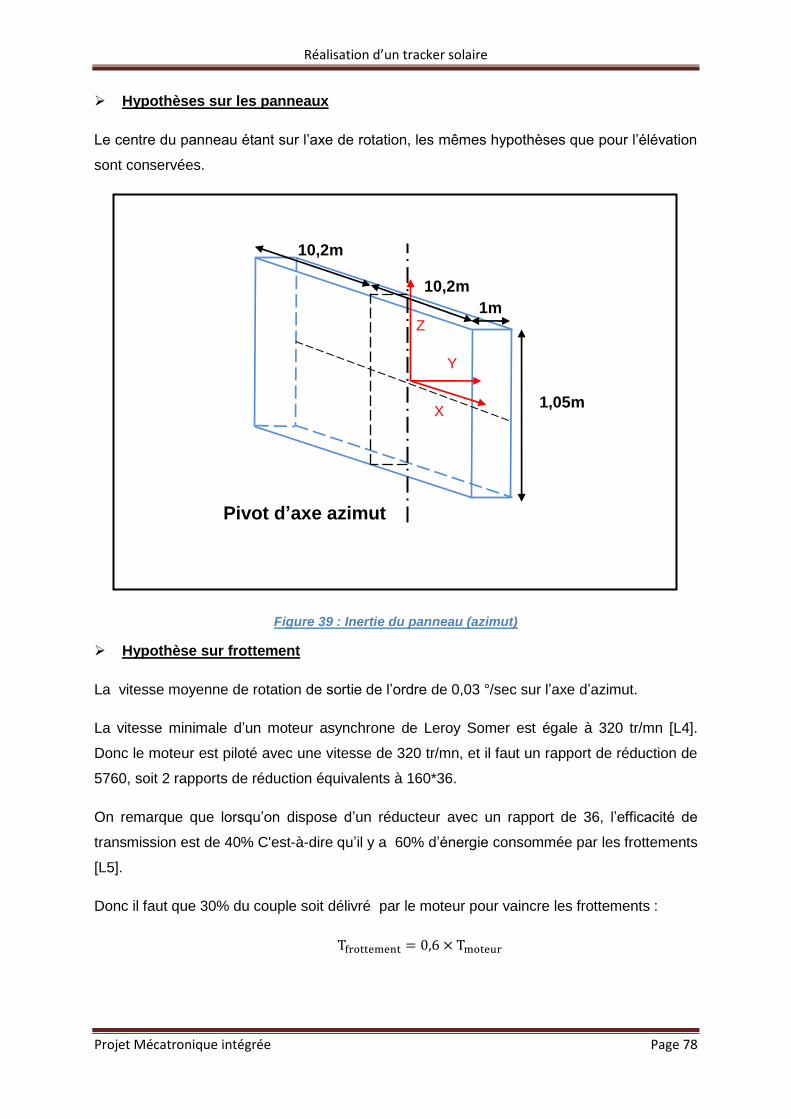
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 78
Hypothèses sur les panneaux
Le centre du panneau étant sur l’axe de rotation, les mêmes hypothèses que pour l’élévation
sont conservées.
Figure 39 : Inertie du panneau (azimut)
Hypothèse sur frottement
La vitesse moyenne de rotation de sortie de l’ordre de 0,03 °/sec sur l’axe d’azimut.
La vitesse minimale d’un moteur asynchrone de Leroy Somer est égale à 320 tr/mn [L4].
Donc le moteur est piloté avec une vitesse de 320 tr/mn, et il faut un rapport de réduction de
5760, soit 2 rapports de réduction équivalents à 160*36.
On remarque que lorsqu’on dispose d’un réducteur avec un rapport de 36, l’efficacité de
transmission est de 40% C'est-à-dire qu’il y a 60% d’énergie consommée par les frottements
[L5].
Donc il faut que 30% du couple soit délivré par le moteur pour vaincre les frottements :
X
Y
Z
1,05m
10,2m
10,2m
Pivot d’axe azimut
1m
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 79
Hypothèses sur temps de marche de moteur :
Temps de marche du moteur la plus élevée.
Accélération et décélération plus petite.
Moment d’inertie du panneau plus petit.
Couple moteur moindre.
Dimensions du moteur pas élevées
Avec une vitesse constante du moteur égale à 320 tr/mn + vitesse constante du panneau,
Le temps de marche du moteur est plus petit
L’angle de rotation du moteur pendant 6s plus petit.
Rapport de réduction plus petit.
Dimensions du réducteur plus petit
Temps de marche de moteur Ti (s) 6
Temps de cycle T (s) 30
5.2.2 Paramètres du moteur de l’azimut
Calcul d’inertie
∫
( ) ∫ ∫ ( )
Le moment d’inertie n’est pas négligeable car lorsque le panneau tourne, sa vitesse de rota-
tion augmente ou diminue.
Calcul du vent
On utilise une approximation au moyen de la formule suivante :
F=(1/2)*Cx*ρ*A*V^2.[L2]
Avec Cx un facteur de profile qui égale à 1 quand le profil est rectangulaire.
.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 80
Densité du panneau ρ : 37,13 kg/m^3
Facteur de profile Cx : De 1 à 1,1
Surface de panneau A : 9,45*8,55=80,8m^2
Vitesse relatif V : 100km/h
Le couple nominal du moteur choisi doit être supérieur au couple calculé en utilisant l’effort
du vent de 100 km/h. Pour le choix du frein du moteur, on utilise la valeur calculée en utili-
sant l’effort du vent de 200 km/h pour assurer la résistance du tracker à une rafale de
200km/h.
Les courbes du couple, vitesse de rotation et puissance
Figure 40 : Courbe de vitesse du moteur (azimut)
La courbe de la vitesse de rotation du moteur de l’axe d’azimut a une forme sinu-
soïdale. Ce type de consigne permet d’atténuer les chocs d’accélération et de décélération
sur le panneau et l’arbre de moteur.
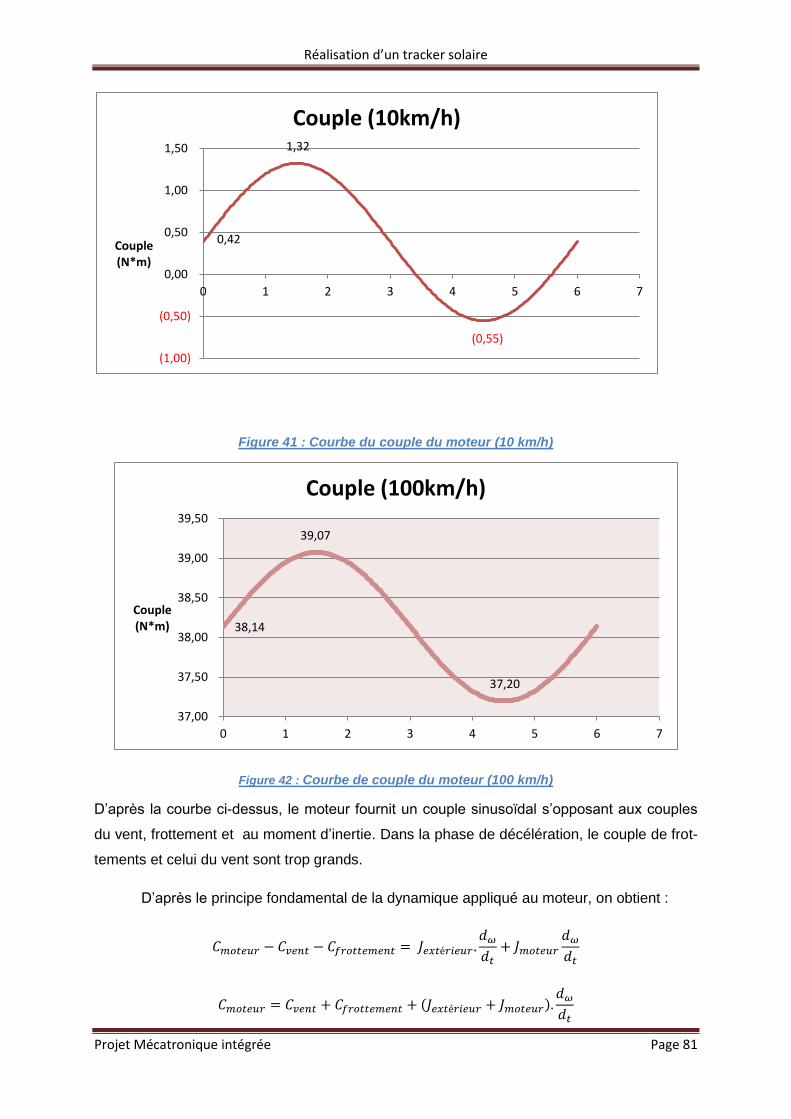
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 81
Figure 41 : Courbe du couple du moteur (10 km/h)
Figure 42 : Courbe de couple du moteur (100 km/h)
D’après la courbe ci-dessus, le moteur fournit un couple sinusoïdal s’opposant aux couples
du vent, frottement et au moment d’inertie. Dans la phase de décélération, le couple de frot-
tements et celui du vent sont trop grands.
D’après le principe fondamental de la dynamique appliqué au moteur, on obtient :
( )
0,42
1,32
(0,55)
(1,00)
(0,50)
0,00
0,50
1,00
1,50
0 1 2 3 4 5 6 7
Couple (N*m)
Couple (10km/h)
38,14
39,07
37,20
37,00
37,50
38,00
38,50
39,00
39,50
0 1 2 3 4 5 6 7
Couple (N*m)
Couple (100km/h)
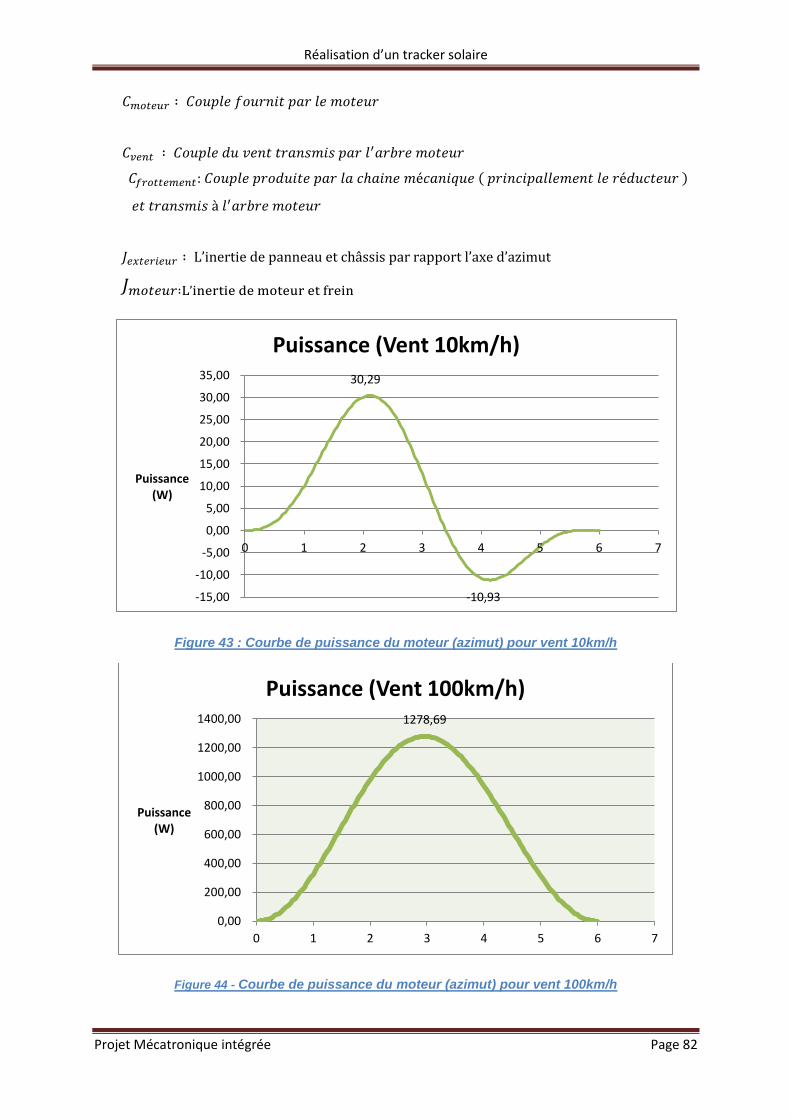
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 82
( )
Figure 43 : Courbe de puissance du moteur (azimut) pour vent 10km/h
Figure 44 - Courbe de puissance du moteur (azimut) pour vent 100km/h
30,29
-10,93 -15,00
-10,00
-5,00
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
0 1 2 3 4 5 6 7
Puissance (W)
Puissance (Vent 10km/h)
1278,69
0,00
200,00
400,00
600,00
800,00
1000,00
1200,00
1400,00
0 1 2 3 4 5 6 7
Puissance (W)
Puissance (Vent 100km/h)
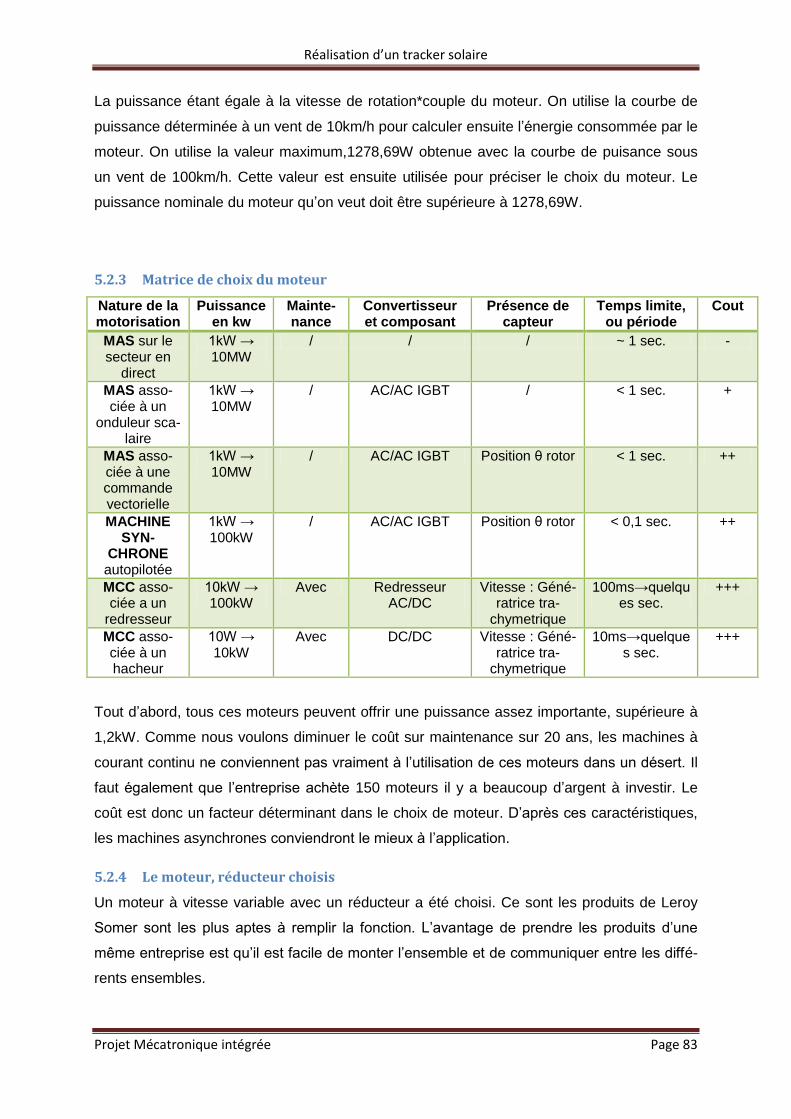
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 83
La puissance étant égale à la vitesse de rotation*couple du moteur. On utilise la courbe de
puissance déterminée à un vent de 10km/h pour calculer ensuite l’énergie consommée par le
moteur. On utilise la valeur maximum,1278,69W obtenue avec la courbe de puisance sous
un vent de 100km/h. Cette valeur est ensuite utilisée pour préciser le choix du moteur. Le
puissance nominale du moteur qu’on veut doit être supérieure à 1278,69W.
5.2.3 Matrice de choix du moteur
Nature de la motorisation
Puissance en kw
Mainte-nance
Convertisseur et composant
Présence de capteur
Temps limite, ou période
Cout
MAS sur le secteur en
direct
1kW → 10MW
/ / / ~ 1 sec. -
MAS asso-ciée à un
onduleur sca-laire
1kW → 10MW
/ AC/AC IGBT / < 1 sec. +
MAS asso-ciée à une commande vectorielle
1kW → 10MW
/ AC/AC IGBT Position θ rotor < 1 sec. ++
MACHINE SYN-
CHRONE autopilotée
1kW → 100kW
/ AC/AC IGBT Position θ rotor < 0,1 sec. ++
MCC asso-ciée a un
redresseur
10kW → 100kW
Avec Redresseur AC/DC
Vitesse : Géné-ratrice tra-
chymetrique
100ms→quelques sec.
+++
MCC asso-ciée à un hacheur
10W → 10kW
Avec DC/DC Vitesse : Géné-ratrice tra-
chymetrique
10ms→quelques sec.
+++
Tout d’abord, tous ces moteurs peuvent offrir une puissance assez importante, supérieure à
1,2kW. Comme nous voulons diminuer le coût sur maintenance sur 20 ans, les machines à
courant continu ne conviennent pas vraiment à l’utilisation de ces moteurs dans un désert. Il
faut également que l’entreprise achète 150 moteurs il y a beaucoup d’argent à investir. Le
coût est donc un facteur déterminant dans le choix de moteur. D’après ces caractéristiques,
les machines asynchrones conviendront le mieux à l’application.
5.2.4 Le moteur, réducteur choisis
Un moteur à vitesse variable avec un réducteur a été choisi. Ce sont les produits de Leroy
Somer sont les plus aptes à remplir la fonction. L’avantage de prendre les produits d’une
même entreprise est qu’il est facile de monter l’ensemble et de communiquer entre les diffé-
rents ensembles.

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 84
Figure 45 : Variateur + moteur + réducteur [L4],[L6]
Les critères importants et les performances correspondant à ce produit sont dans le tableau
suivant :
Performance de produit de LS
Nos critères plus importants
Couple nominal 49,4 N*m 39,07 N*m
Puissance nominal 4 kW 1278W
Type d’asservissement
Vitesse ou couple Vitesse
Tableau 10 : Performances et critères du vérin
Pourquoi les produits de Leroy Somer ont été choisis ? C’est parce que LS propose un en-
semble de produits comprenant les moteurs avec ses variateurs et réducteurs. Le réducteur
proposé par LS a un rendement très élève, soit de 95% à 97%. L’entreprise utilise également
des bus standards pour communiquer entre les éléments : CAN open et PROFIBUS.
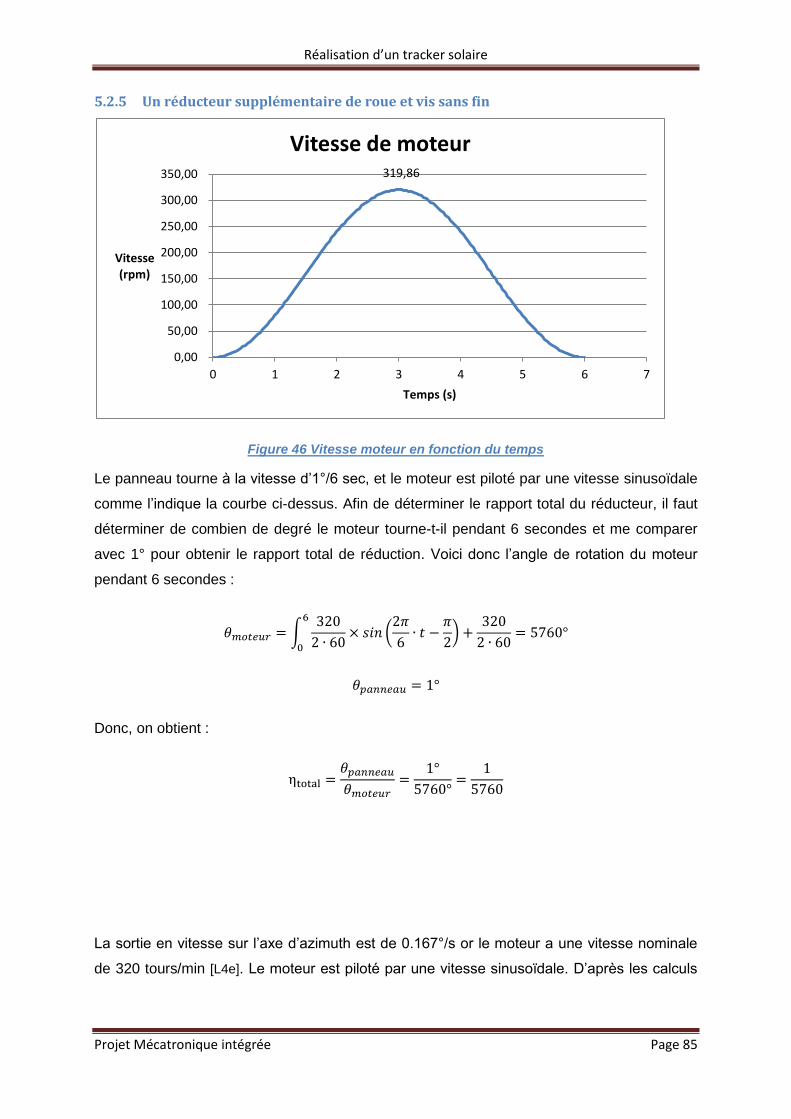
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 85
5.2.5 Un réducteur supplémentaire de roue et vis sans fin
Figure 46 Vitesse moteur en fonction du temps
Le panneau tourne à la vitesse d’1°/6 sec, et le moteur est piloté par une vitesse sinusoïdale
comme l’indique la courbe ci-dessus. Afin de déterminer le rapport total du réducteur, il faut
déterminer de combien de degré le moteur tourne-t-il pendant 6 secondes et me comparer
avec 1° pour obtenir le rapport total de réduction. Voici donc l’angle de rotation du moteur
pendant 6 secondes :
∫
(
)
Donc, on obtient :
La sortie en vitesse sur l’axe d’azimuth est de 0.167°/s or le moteur a une vitesse nominale
de 320 tours/min [L4e]. Le moteur est piloté par une vitesse sinusoïdale. D’après les calculs
319,86
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
0 1 2 3 4 5 6 7
Vitesse (rpm)
Temps (s)
Vitesse de moteur
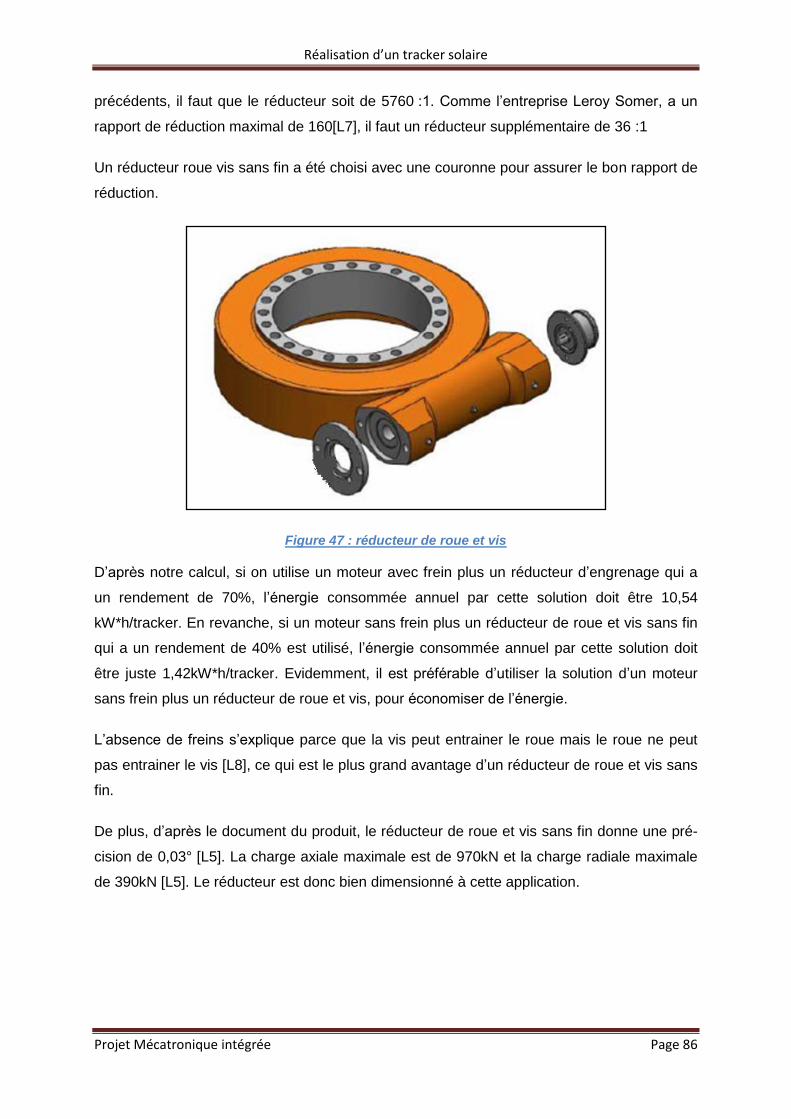
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 86
précédents, il faut que le réducteur soit de 5760 :1. Comme l’entreprise Leroy Somer, a un
rapport de réduction maximal de 160[L7], il faut un réducteur supplémentaire de 36 :1
Un réducteur roue vis sans fin a été choisi avec une couronne pour assurer le bon rapport de
réduction.
Figure 47 : réducteur de roue et vis
D’après notre calcul, si on utilise un moteur avec frein plus un réducteur d’engrenage qui a
un rendement de 70%, l’énergie consommée annuel par cette solution doit être 10,54
kW*h/tracker. En revanche, si un moteur sans frein plus un réducteur de roue et vis sans fin
qui a un rendement de 40% est utilisé, l’énergie consommée annuel par cette solution doit
être juste 1,42kW*h/tracker. Evidemment, il est préférable d’utiliser la solution d’un moteur
sans frein plus un réducteur de roue et vis, pour économiser de l’énergie.
L’absence de freins s’explique parce que la vis peut entrainer le roue mais le roue ne peut
pas entrainer le vis [L8], ce qui est le plus grand avantage d’un réducteur de roue et vis sans
fin.
De plus, d’après le document du produit, le réducteur de roue et vis sans fin donne une pré-
cision de 0,03° [L5]. La charge axiale maximale est de 970kN et la charge radiale maximale
de 390kN [L5]. Le réducteur est donc bien dimensionné à cette application.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 87
5.3 L’énergie consomme annuel
5.3.1 L’énergie consommé par motorisation de l’axe d’élévation
D’après le calcul, la moyenne journalière d’angle d’élévation est de 53,71°. Donc, en utilisant
cet angle, on obtient une moyenne d’énergie consommée par jour égale à 0,03kWh. D’après
la documentation du vérin, la puissance du frein intégré est égale à 2kW. La moyenne
d’énergie consommée journalière est de 0,08kWh. Il en découle que l’énergie annuelle con-
sommée par le moteur d’élévation est de 38.82kWh. Il suffit de procéder au même calcul
pour l’axe d’azimuth.
5.3.2 L’énergie consommé par motorisation de l’axe d’azimut
D’après le calcul, la moyenne journalière d’angle d’élévation est de 180.45°. Donc, en utili-
sant cet angle, on obtient une moyenne d’énergie consommée par jour égale à 0,002kWh.
Comme il y a utilisation d’un réducteur plantaire (roue et vis) pour transmettre la rotation sur
l’axe de moteur à l’axe d’azimut, il n’y a pas besoin d’un frein sur l’axe d’azimut. Il en découle
que l’énergie annuelle consommée par le moteur d’azimuth est de 1.42kWh.
5.3.3 L’énergie consommé annuel totalement (150 trackers)
En sommant l’énergie annuelle consommée par les deux motorisations sur le nombre de
trackers, on obtient :
( )
D’après les calculs effectués précédemment, il est possible de déterminer le rapport énergie
consommé sur énergie produite.
Les moteurs choisis ne consomment pas trop d’énergie par rapport à l’énergie que la ferme
peut produire.
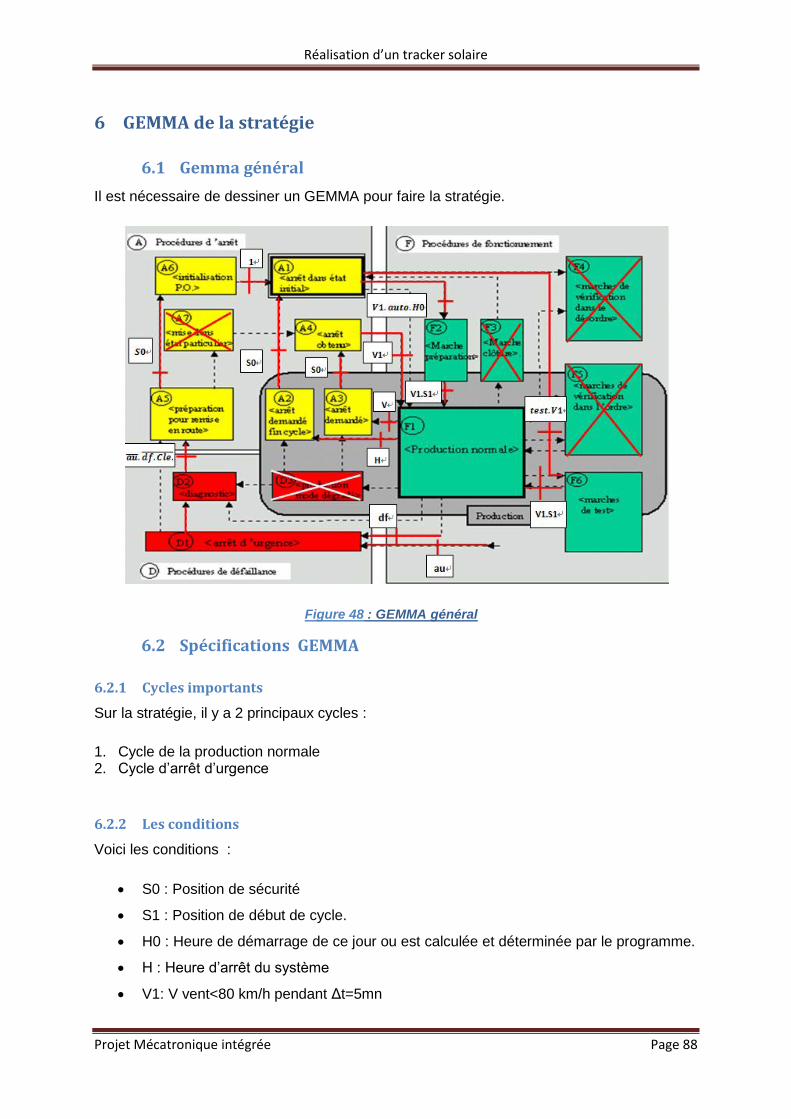
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 88
6 GEMMA de la stratégie
6.1 Gemma général
Il est nécessaire de dessiner un GEMMA pour faire la stratégie.
Figure 48 : GEMMA général
6.2 Spécifications GEMMA
6.2.1 Cycles importants
Sur la stratégie, il y a 2 principaux cycles :
1. Cycle de la production normale 2. Cycle d’arrêt d’urgence
6.2.2 Les conditions
Voici les conditions :
S0 : Position de sécurité
S1 : Position de début de cycle.
H0 : Heure de démarrage de ce jour ou est calculée et déterminée par le programme.
H : Heure d’arrêt du système
V1: V vent<80 km/h pendant Δt=5mn
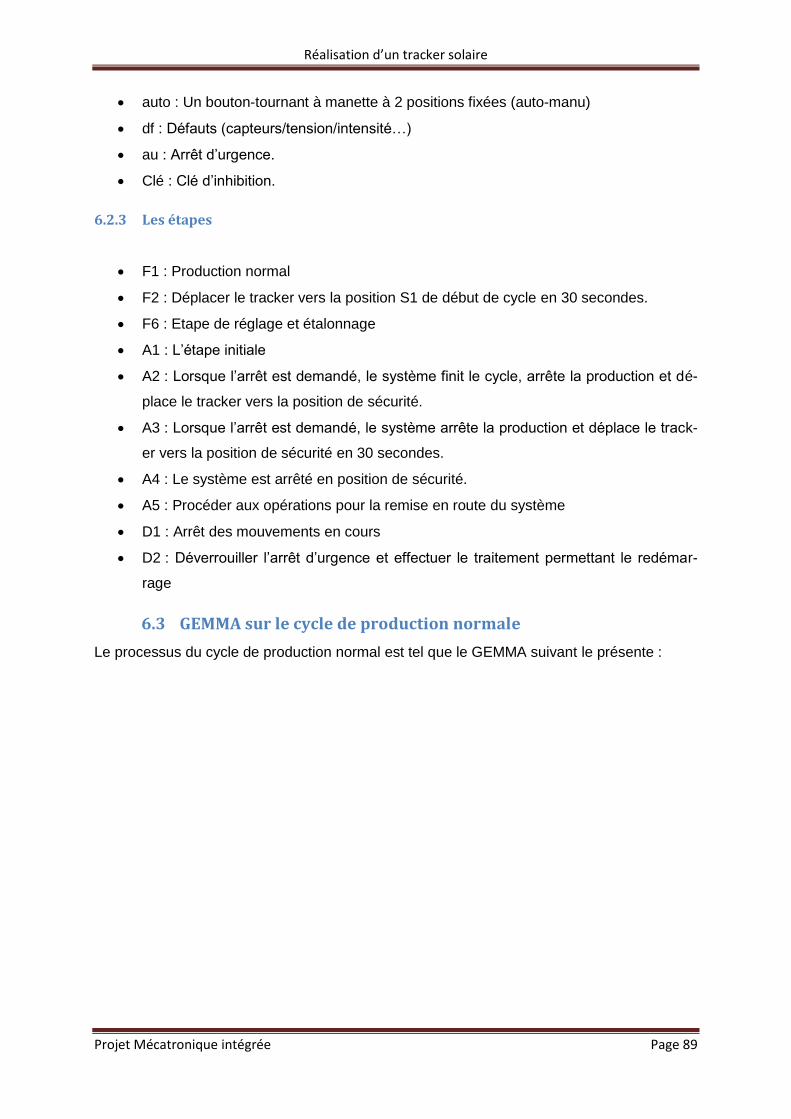
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 89
auto : Un bouton-tournant à manette à 2 positions fixées (auto-manu)
df : Défauts (capteurs/tension/intensité…)
au : Arrêt d’urgence.
Clé : Clé d’inhibition.
6.2.3 Les étapes
F1 : Production normal
F2 : Déplacer le tracker vers la position S1 de début de cycle en 30 secondes.
F6 : Etape de réglage et étalonnage
A1 : L’étape initiale
A2 : Lorsque l’arrêt est demandé, le système finit le cycle, arrête la production et dé-
place le tracker vers la position de sécurité.
A3 : Lorsque l’arrêt est demandé, le système arrête la production et déplace le track-
er vers la position de sécurité en 30 secondes.
A4 : Le système est arrêté en position de sécurité.
A5 : Procéder aux opérations pour la remise en route du système
D1 : Arrêt des mouvements en cours
D2 : Déverrouiller l’arrêt d’urgence et effectuer le traitement permettant le redémar-
rage
6.3 GEMMA sur le cycle de production normale
Le processus du cycle de production normal est tel que le GEMMA suivant le présente :
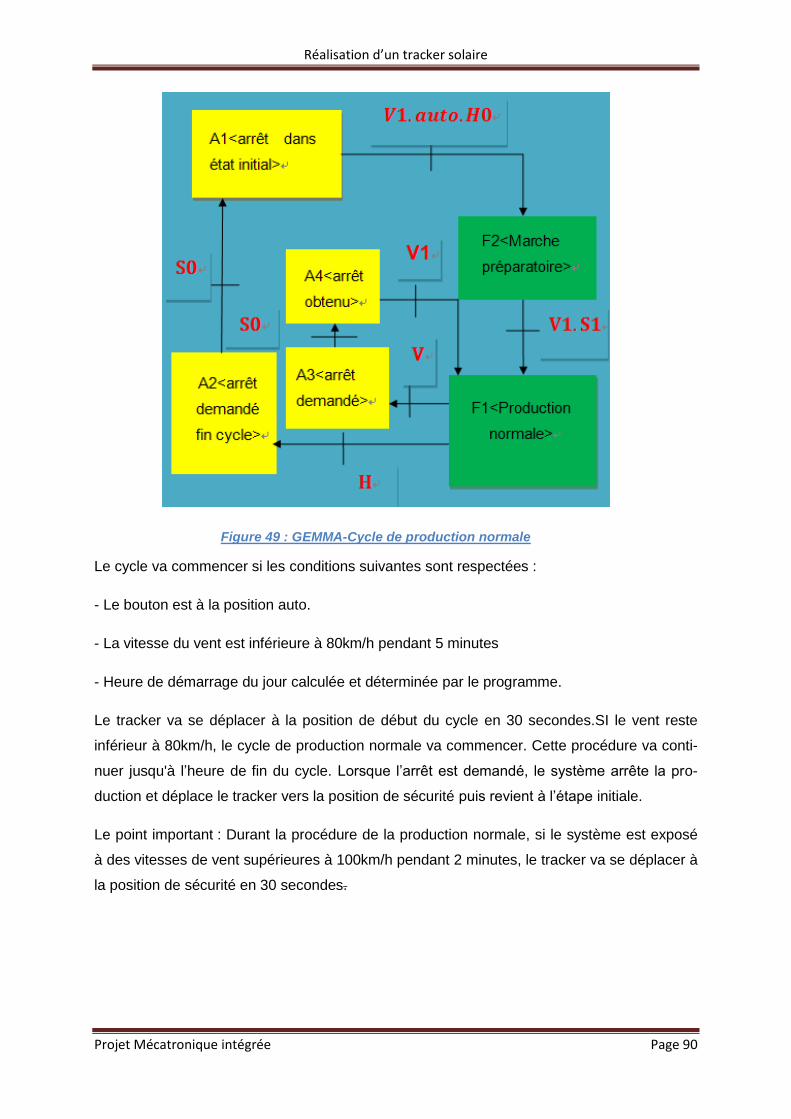
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 90
Figure 49 : GEMMA-Cycle de production normale
Le cycle va commencer si les conditions suivantes sont respectées :
- Le bouton est à la position auto.
- La vitesse du vent est inférieure à 80km/h pendant 5 minutes
- Heure de démarrage du jour calculée et déterminée par le programme.
Le tracker va se déplacer à la position de début du cycle en 30 secondes.SI le vent reste
inférieur à 80km/h, le cycle de production normale va commencer. Cette procédure va conti-
nuer jusqu'à l’heure de fin du cycle. Lorsque l’arrêt est demandé, le système arrête la pro-
duction et déplace le tracker vers la position de sécurité puis revient à l’étape initiale.
Le point important : Durant la procédure de la production normale, si le système est exposé
à des vitesses de vent supérieures à 100km/h pendant 2 minutes, le tracker va se déplacer à
la position de sécurité en 30 secondes.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 91
6.4 GEMMA sur le cycle d’arrêt d’urgence
Le processus du cycle d’arrêt d’urgence est comme le GEMMA ci-dessous :
Figure 50 : GEMMA-Cycle d’arrêt d’urgence
Ce cycle va commencer en conditions d’arrêt d’urgence ou il y a des défauts. Le système va
arrêter les mouvements en cours. Puis, il faut déverrouiller l’arrêt d’urgence et effectuer un
traitement permettant le redémarrage. Lorsque les problèmes sont résolus, le système va se
remettre en position de sécurité.
6.5 FAST et AMDEC sur contraintes liées au vent
Pour éviter de gros dégâts matériels, il faut s’assurer que la détection du vent est fiable. Pour
trouver et choisir la meilleure solution, on a utilisé la méthode FAST et on a fait une AMDEC
sur cette fonction.
6.5.1 Diagramme Fast
Dans un premier temps, on utilise un FAST pour trouver les solutions.
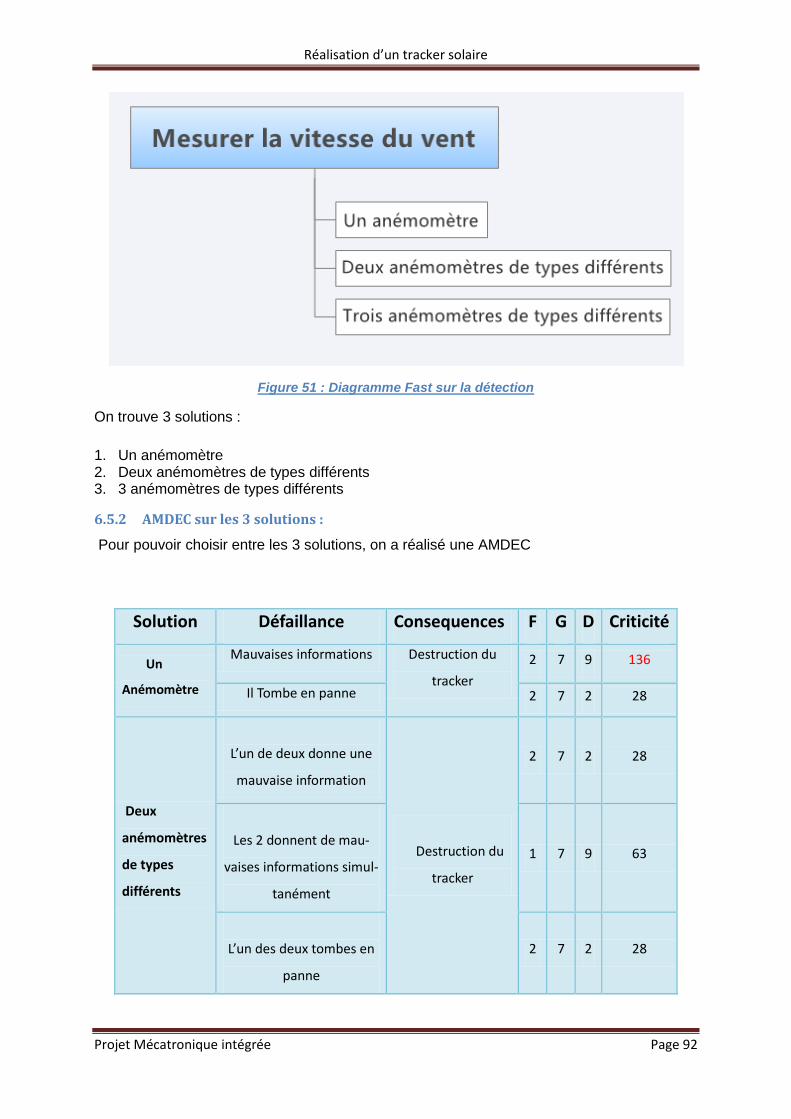
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 92
Figure 51 : Diagramme Fast sur la détection
On trouve 3 solutions :
1. Un anémomètre 2. Deux anémomètres de types différents 3. 3 anémomètres de types différents
6.5.2 AMDEC sur les 3 solutions :
Pour pouvoir choisir entre les 3 solutions, on a réalisé une AMDEC
Solution Défaillance Consequences F G D Criticité
Un
Anémomètre
Mauvaises informations Destruction du
tracker
2 7 9 136
Il Tombe en panne 2 7 2 28
Deux
anémomètres
de types
différents
L’un de deux donne une
mauvaise information
Destruction du
tracker
2 7 2 28
Les 2 donnent de mau-
vaises informations simul-
tanément
1 7 9 63
L’un des deux tombes en
panne
2 7 2 28
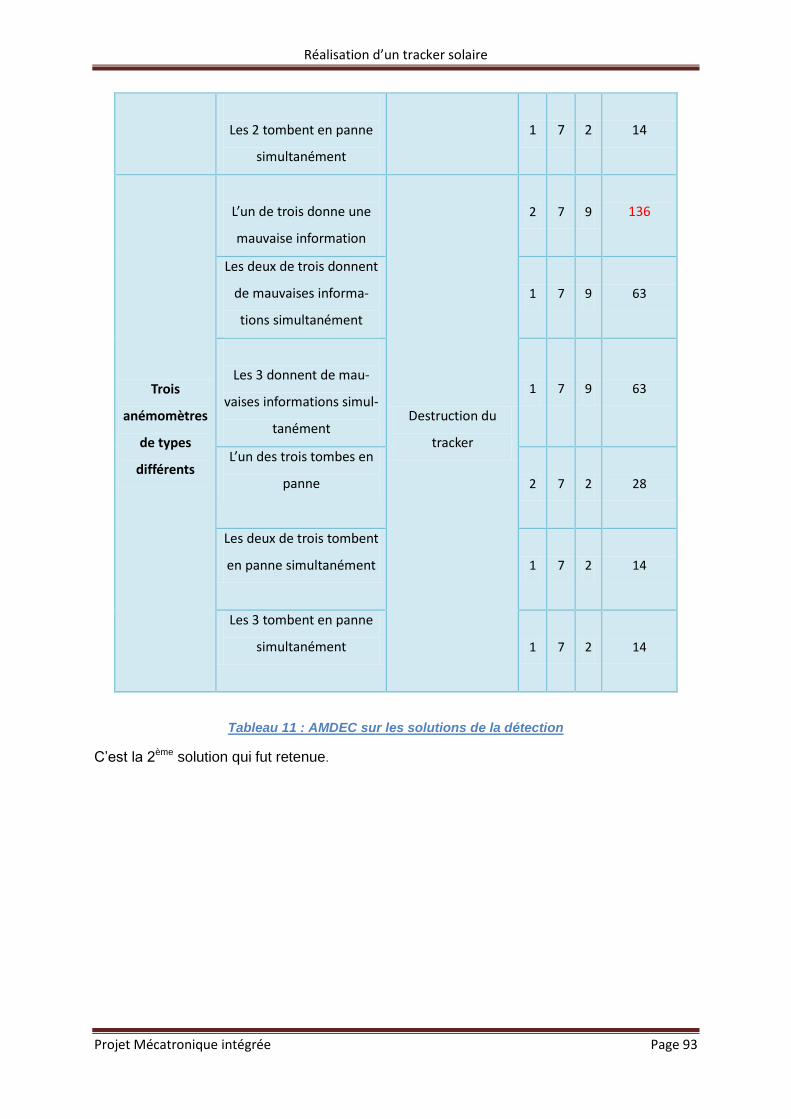
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 93
Les 2 tombent en panne
simultanément
1 7 2 14
Trois
anémomètres
de types
différents
L’un de trois donne une
mauvaise information
Destruction du
tracker
2 7 9 136
Les deux de trois donnent
de mauvaises informa-
tions simultanément
1 7 9 63
Les 3 donnent de mau-
vaises informations simul-
tanément
1 7 9 63
L’un des trois tombes en
panne 2 7 2 28
Les deux de trois tombent
en panne simultanément 1 7 2 14
Les 3 tombent en panne
simultanément 1 7 2 14
Tableau 11 : AMDEC sur les solutions de la détection
C’est la 2ème solution qui fut retenue.
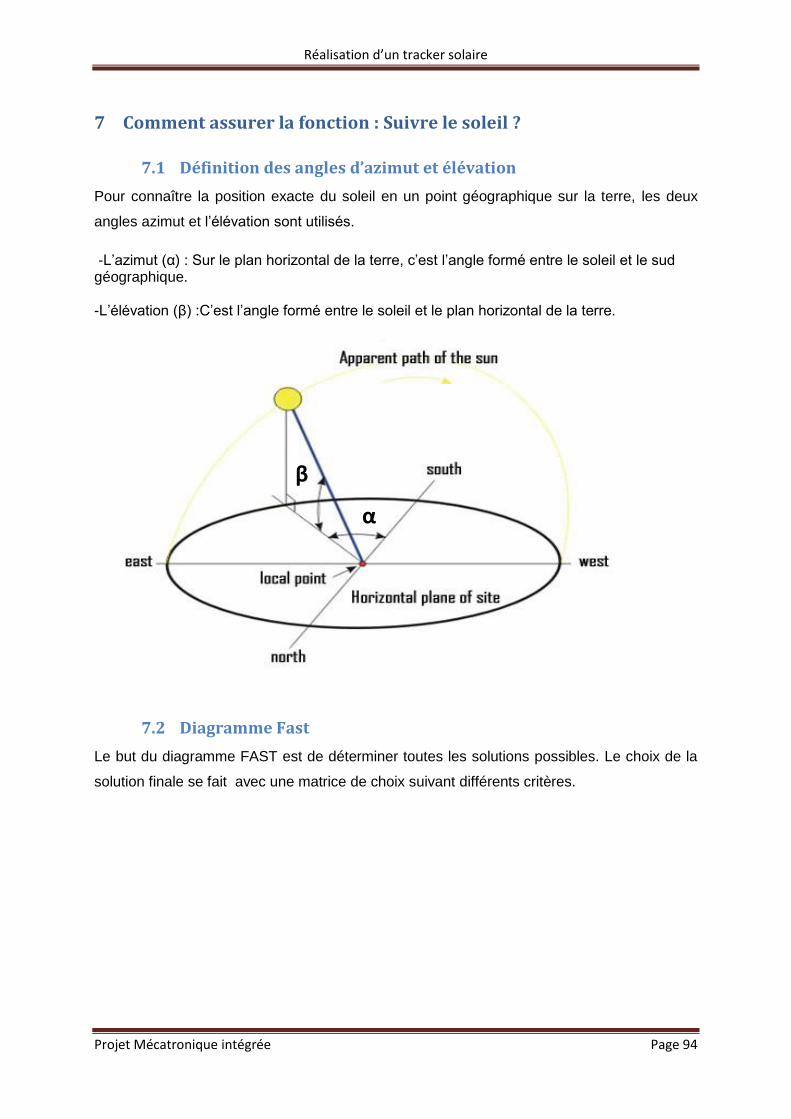
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 94
7 Comment assurer la fonction : Suivre le soleil ?
7.1 Définition des angles d’azimut et élévation
Pour connaître la position exacte du soleil en un point géographique sur la terre, les deux
angles azimut et l’élévation sont utilisés.
-L’azimut (α) : Sur le plan horizontal de la terre, c’est l’angle formé entre le soleil et le sud géographique. -L’élévation (β) :C’est l’angle formé entre le soleil et le plan horizontal de la terre.
7.2 Diagramme Fast
Le but du diagramme FAST est de déterminer toutes les solutions possibles. Le choix de la
solution finale se fait avec une matrice de choix suivant différents critères.
β
α
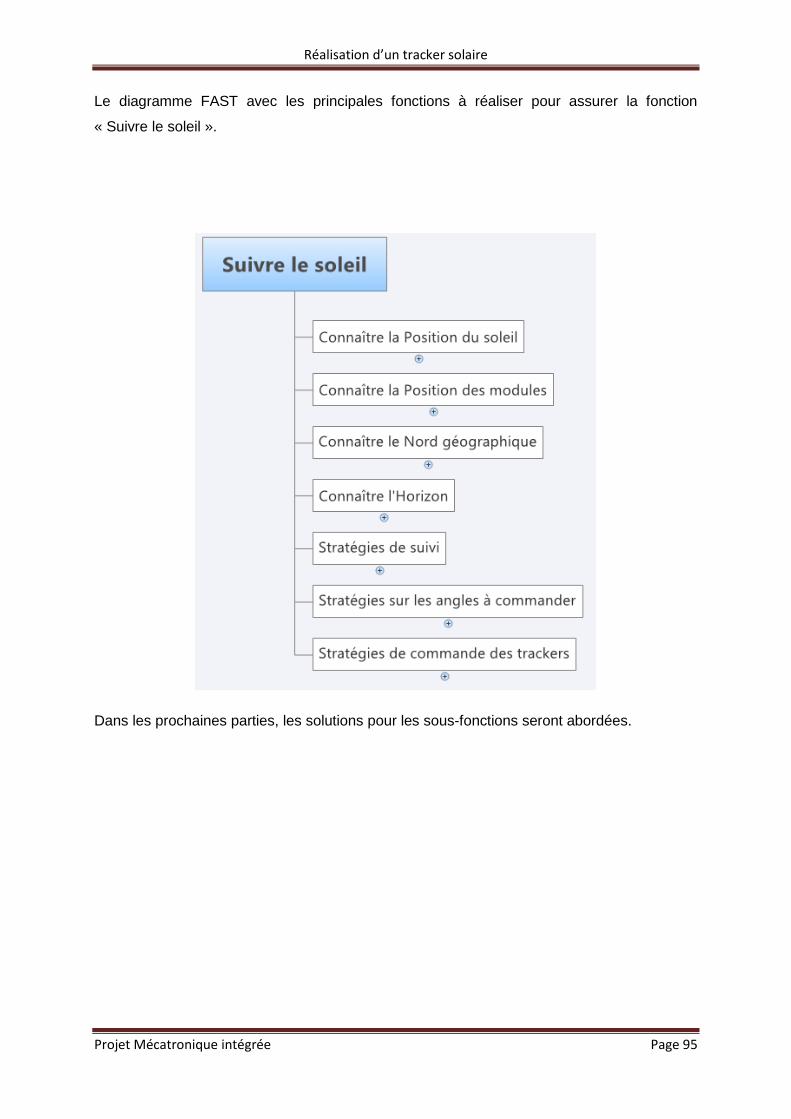
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 95
Le diagramme FAST avec les principales fonctions à réaliser pour assurer la fonction
« Suivre le soleil ».
Dans les prochaines parties, les solutions pour les sous-fonctions seront abordées.
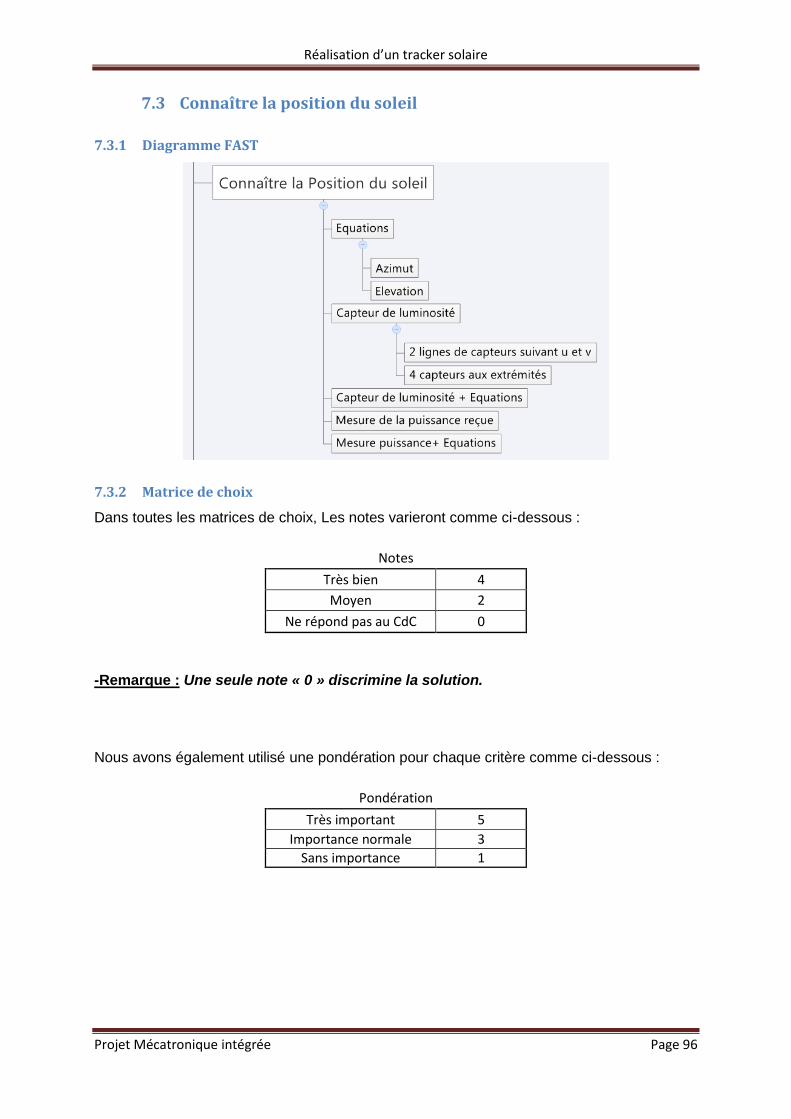
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 96
7.3 Connaître la position du soleil
7.3.1 Diagramme FAST
7.3.2 Matrice de choix
Dans toutes les matrices de choix, Les notes varieront comme ci-dessous :
Notes
Très bien 4
Moyen 2
Ne répond pas au CdC 0
-Remarque : Une seule note « 0 » discrimine la solution.
Nous avons également utilisé une pondération pour chaque critère comme ci-dessous :
Pondération
Très important 5
Importance normale 3
Sans importance 1
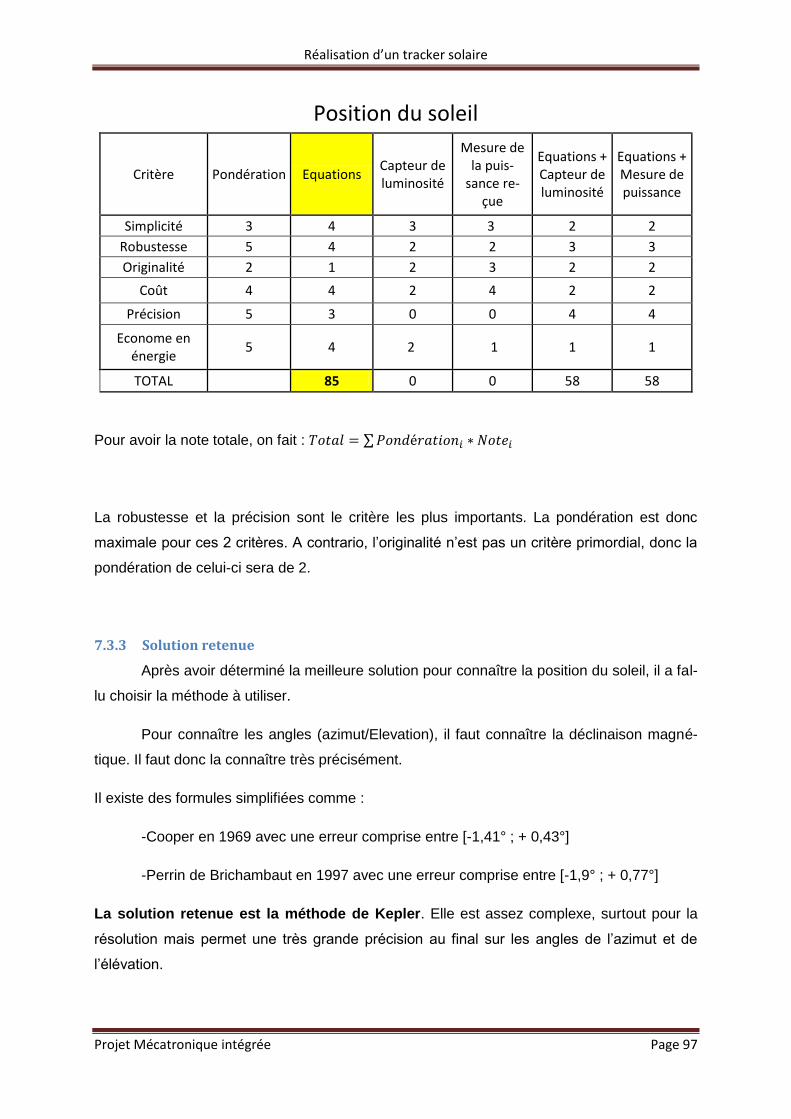
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 97
Position du soleil
Critère Pondération Equations Capteur de luminosité
Mesure de la puis-
sance re-çue
Equations + Capteur de luminosité
Equations + Mesure de puissance
Simplicité 3 4 3 3 2 2
Robustesse 5 4 2 2 3 3
Originalité 2 1 2 3 2 2
Coût 4 4 2 4 2 2
Précision 5 3 0 0 4 4
Econome en énergie
5 4 2 1 1 1
TOTAL 85 0 0 58 58
Pour avoir la note totale, on fait : ∑
La robustesse et la précision sont le critère les plus importants. La pondération est donc
maximale pour ces 2 critères. A contrario, l’originalité n’est pas un critère primordial, donc la
pondération de celui-ci sera de 2.
7.3.3 Solution retenue
Après avoir déterminé la meilleure solution pour connaître la position du soleil, il a fal-
lu choisir la méthode à utiliser.
Pour connaître les angles (azimut/Elevation), il faut connaître la déclinaison magné-
tique. Il faut donc la connaître très précisément.
Il existe des formules simplifiées comme :
-Cooper en 1969 avec une erreur comprise entre [-1,41° ; + 0,43°]
-Perrin de Brichambaut en 1997 avec une erreur comprise entre [-1,9° ; + 0,77°]
La solution retenue est la méthode de Kepler. Elle est assez complexe, surtout pour la
résolution mais permet une très grande précision au final sur les angles de l’azimut et de
l’élévation.
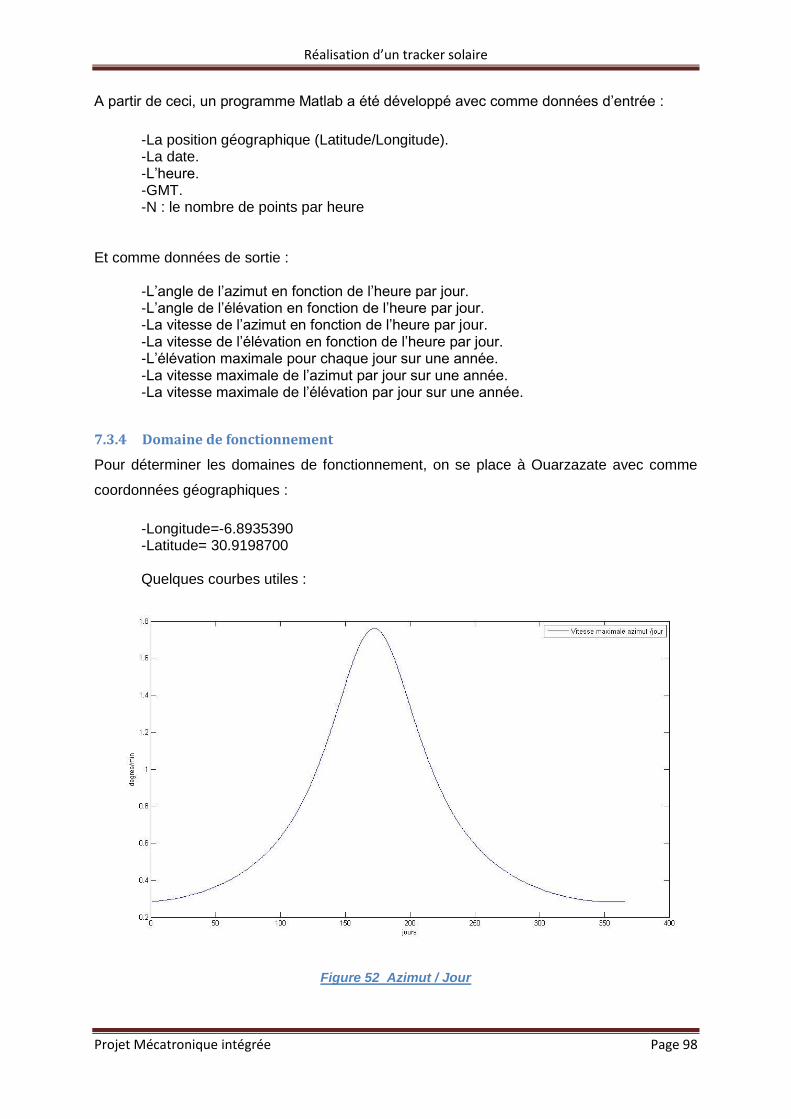
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 98
A partir de ceci, un programme Matlab a été développé avec comme données d’entrée :
-La position géographique (Latitude/Longitude). -La date.
-L’heure. -GMT. -N : le nombre de points par heure
Et comme données de sortie : -L’angle de l’azimut en fonction de l’heure par jour. -L’angle de l’élévation en fonction de l’heure par jour. -La vitesse de l’azimut en fonction de l’heure par jour. -La vitesse de l’élévation en fonction de l’heure par jour. -L’élévation maximale pour chaque jour sur une année. -La vitesse maximale de l’azimut par jour sur une année. -La vitesse maximale de l’élévation par jour sur une année.
7.3.4 Domaine de fonctionnement
Pour déterminer les domaines de fonctionnement, on se place à Ouarzazate avec comme
coordonnées géographiques :
-Longitude=-6.8935390 -Latitude= 30.9198700 Quelques courbes utiles :
Figure 52 Azimut / Jour
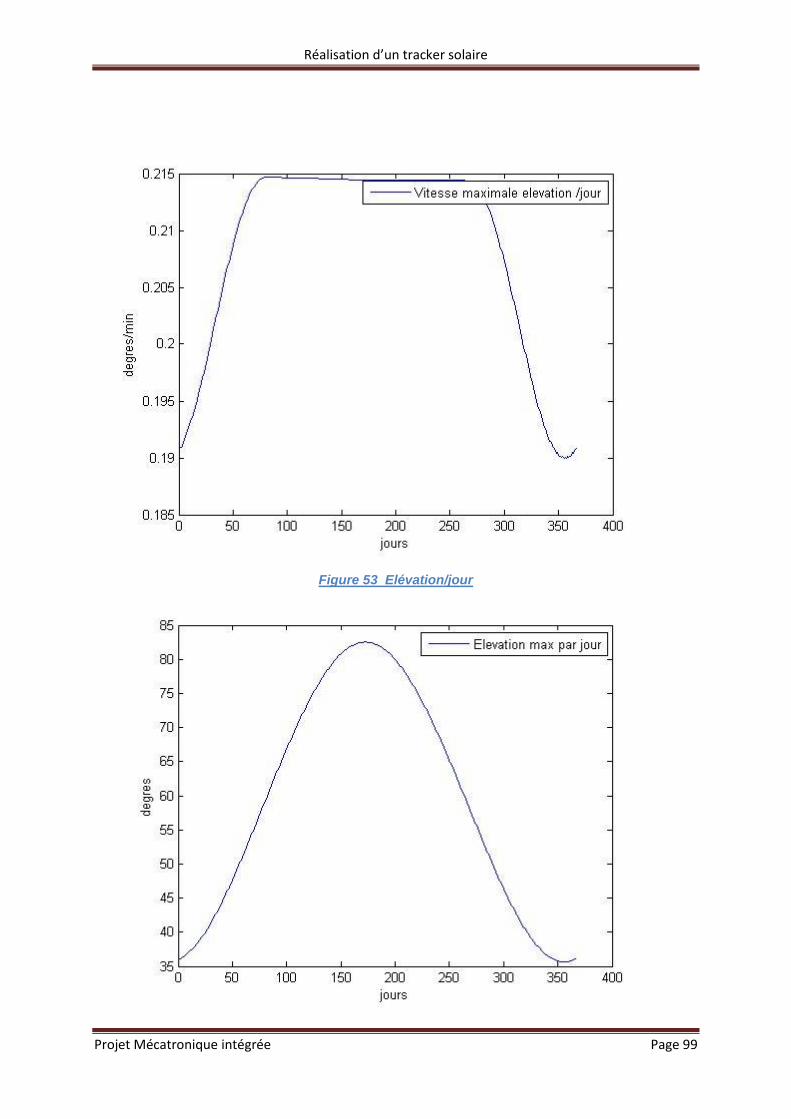
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 99
Figure 53 Elévation/jour
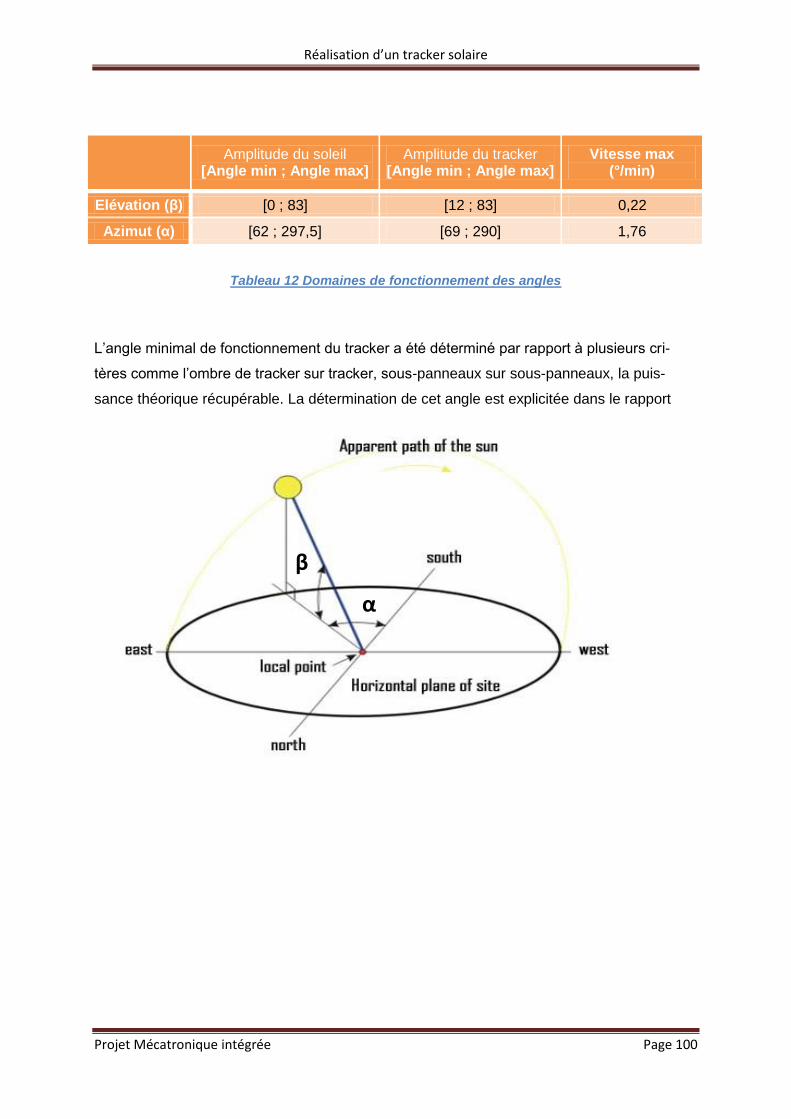
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 100
Tableau 12 Domaines de fonctionnement des angles
L’angle minimal de fonctionnement du tracker a été déterminé par rapport à plusieurs cri-
tères comme l’ombre de tracker sur tracker, sous-panneaux sur sous-panneaux, la puis-
sance théorique récupérable. La détermination de cet angle est explicitée dans le rapport
Amplitude du soleil
[Angle min ; Angle max] Amplitude du tracker
[Angle min ; Angle max] Vitesse max
(°/min)
Elévation (β) [0 ; 83] [12 ; 83] 0,22
Azimut (α) [62 ; 297,5] [69 ; 290] 1,76
β
α
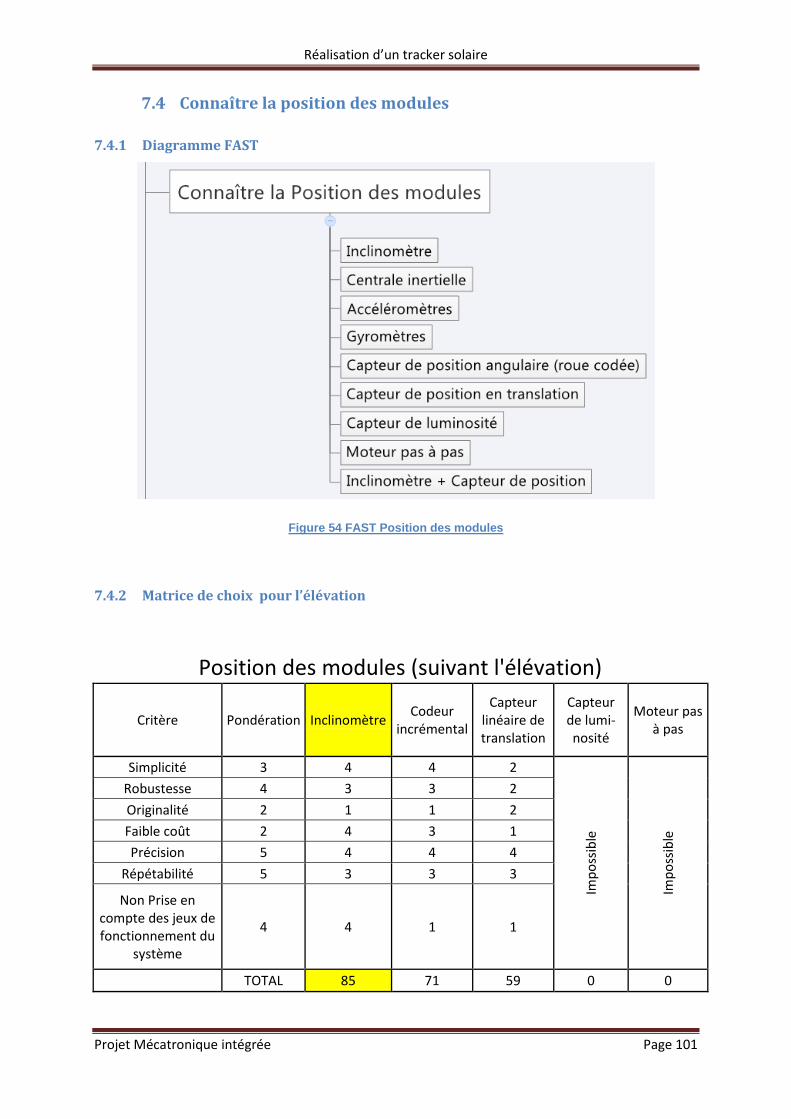
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 101
7.4 Connaître la position des modules
7.4.1 Diagramme FAST
Figure 54 FAST Position des modules
7.4.2 Matrice de choix pour l’élévation
Position des modules (suivant l'élévation)
Critère Pondération Inclinomètre Codeur
incrémental
Capteur linéaire de translation
Capteur de lumi-nosité
Moteur pas à pas
Simplicité 3 4 4 2
Imp
oss
ible
Imp
oss
ible
Robustesse 4 3 3 2
Originalité 2 1 1 2
Faible coût 2 4 3 1
Précision 5 4 4 4
Répétabilité 5 3 3 3
Non Prise en compte des jeux de fonctionnement du
système
4 4 1 1
TOTAL 85 71 59 0 0
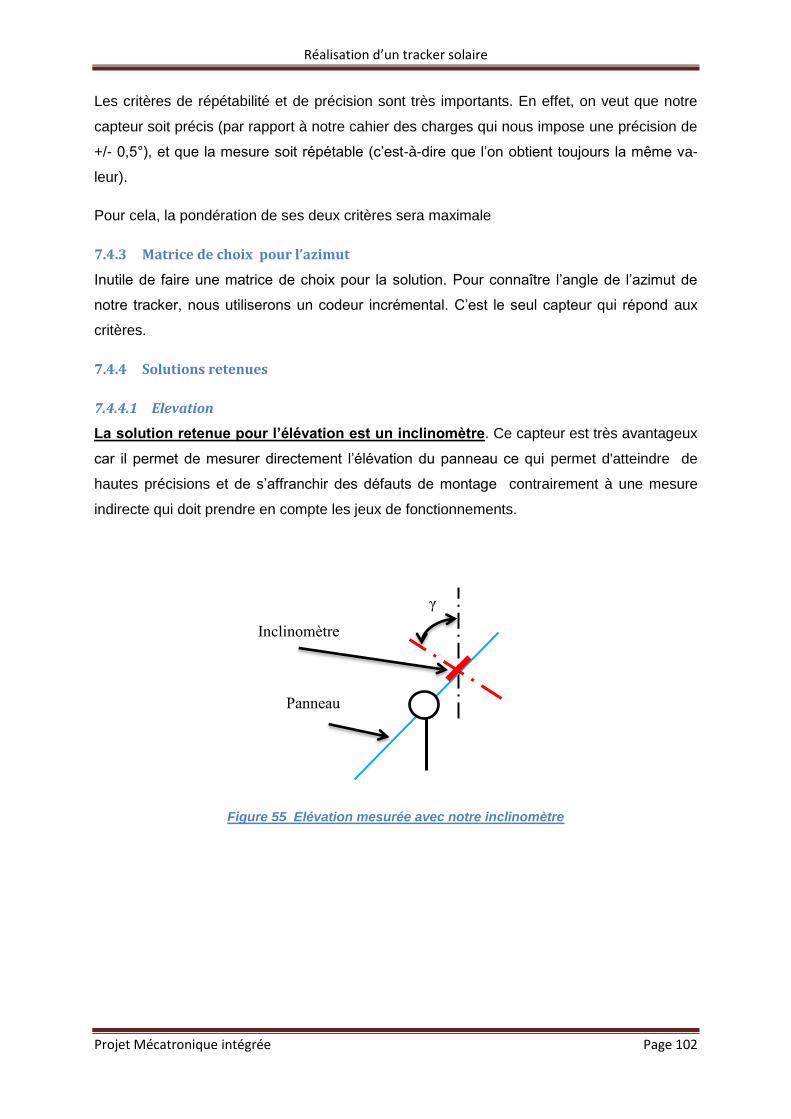
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 102
Les critères de répétabilité et de précision sont très importants. En effet, on veut que notre
capteur soit précis (par rapport à notre cahier des charges qui nous impose une précision de
+/- 0,5°), et que la mesure soit répétable (c’est-à-dire que l’on obtient toujours la même va-
leur).
Pour cela, la pondération de ses deux critères sera maximale
7.4.3 Matrice de choix pour l’azimut
Inutile de faire une matrice de choix pour la solution. Pour connaître l’angle de l’azimut de
notre tracker, nous utiliserons un codeur incrémental. C’est le seul capteur qui répond aux
critères.
7.4.4 Solutions retenues
7.4.4.1 Elevation
La solution retenue pour l’élévation est un inclinomètre. Ce capteur est très avantageux
car il permet de mesurer directement l’élévation du panneau ce qui permet d'atteindre de
hautes précisions et de s’affranchir des défauts de montage contrairement à une mesure
indirecte qui doit prendre en compte les jeux de fonctionnements.
Figure 55 Elévation mesurée avec notre inclinomètre
γ
Inclinomètre
Panneau
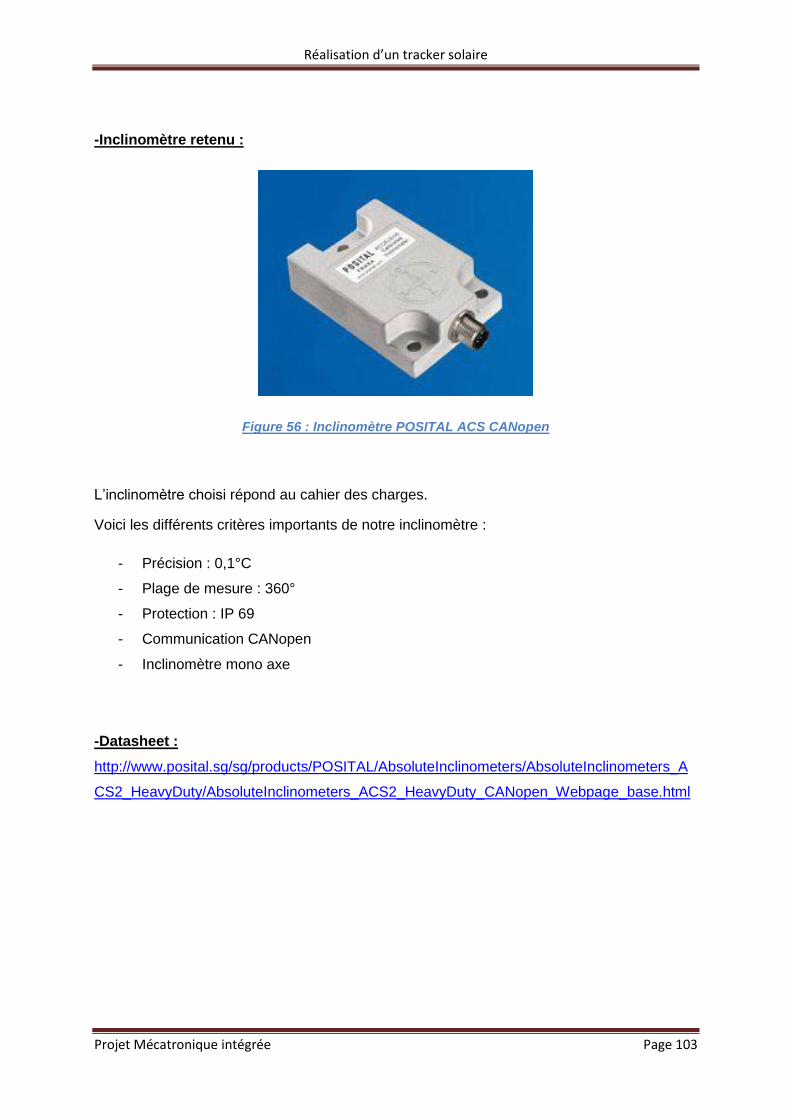
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 103
-Inclinomètre retenu :
Figure 56 : Inclinomètre POSITAL ACS CANopen
L’inclinomètre choisi répond au cahier des charges.
Voici les différents critères importants de notre inclinomètre :
- Précision : 0,1°C
- Plage de mesure : 360°
- Protection : IP 69
- Communication CANopen
- Inclinomètre mono axe
-Datasheet :
http://www.posital.sg/sg/products/POSITAL/AbsoluteInclinometers/AbsoluteInclinometers_A
CS2_HeavyDuty/AbsoluteInclinometers_ACS2_HeavyDuty_CANopen_Webpage_base.html

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 104
7.4.4.2 Azimut
Figure 57 : Codeur incrémental « Leine Linde »
Le codeur incrémental retenu pour l’azimut est un capteur de la marque « Leine Linde ». Il a
été retenu par rapport aux critères suivants qui répondent au cahier de charges.
- IP 67
- Résolution : 8192 positions par tour (0,044°)
- Précision : +/- 1 position par tour (+/- 0,044°)
- Communication CANopen
-datasheet :
https://docs.google.com/viewer?a=v&pid=gmail&attid=0.1&thid=1342db823168903c&mt=app
lica-
tion/pdf&url=https://mail.google.com/mail/u/0/?ui%3D2%26ik%3D59b19d3866%26view%3Da
tt%26th%3D1342db823168903c%26attid%3D0.1%26disp%3Dsafe%26zw&sig=AHIEtbQ41q
oAPgv7ugrteLcHN643qGFPLw
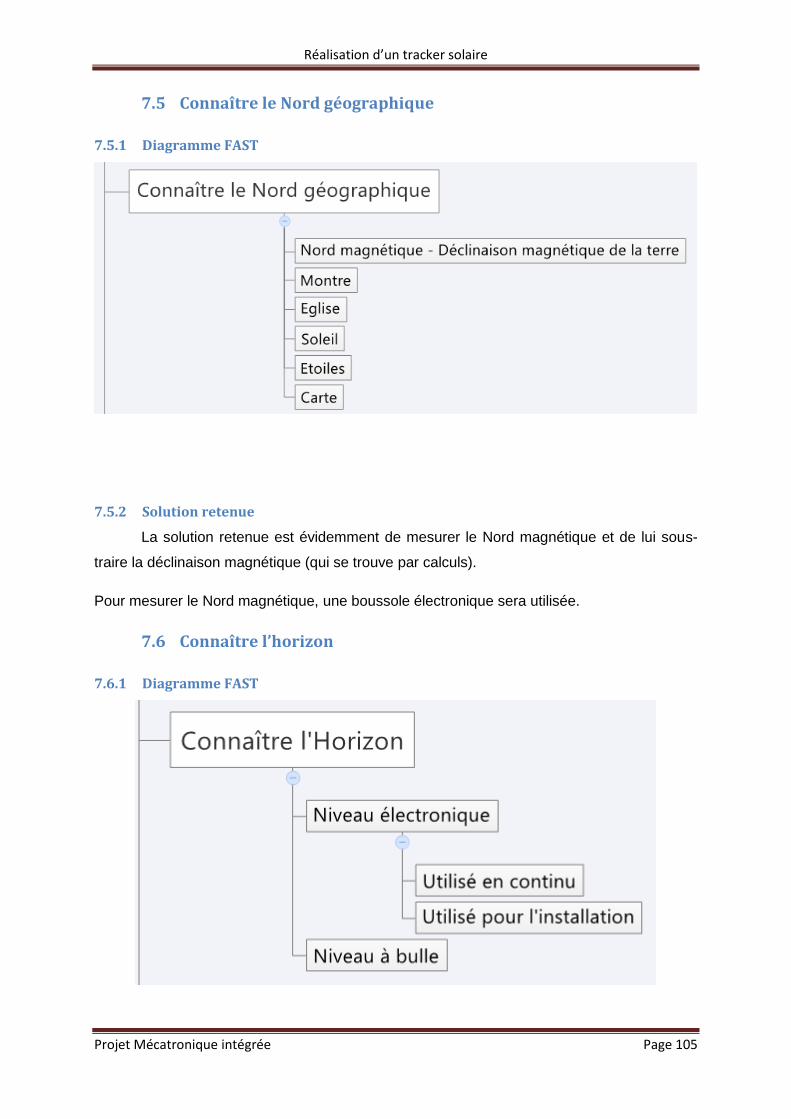
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 105
7.5 Connaître le Nord géographique
7.5.1 Diagramme FAST
7.5.2 Solution retenue
La solution retenue est évidemment de mesurer le Nord magnétique et de lui sous-
traire la déclinaison magnétique (qui se trouve par calculs).
Pour mesurer le Nord magnétique, une boussole électronique sera utilisée.
7.6 Connaître l’horizon
7.6.1 Diagramme FAST
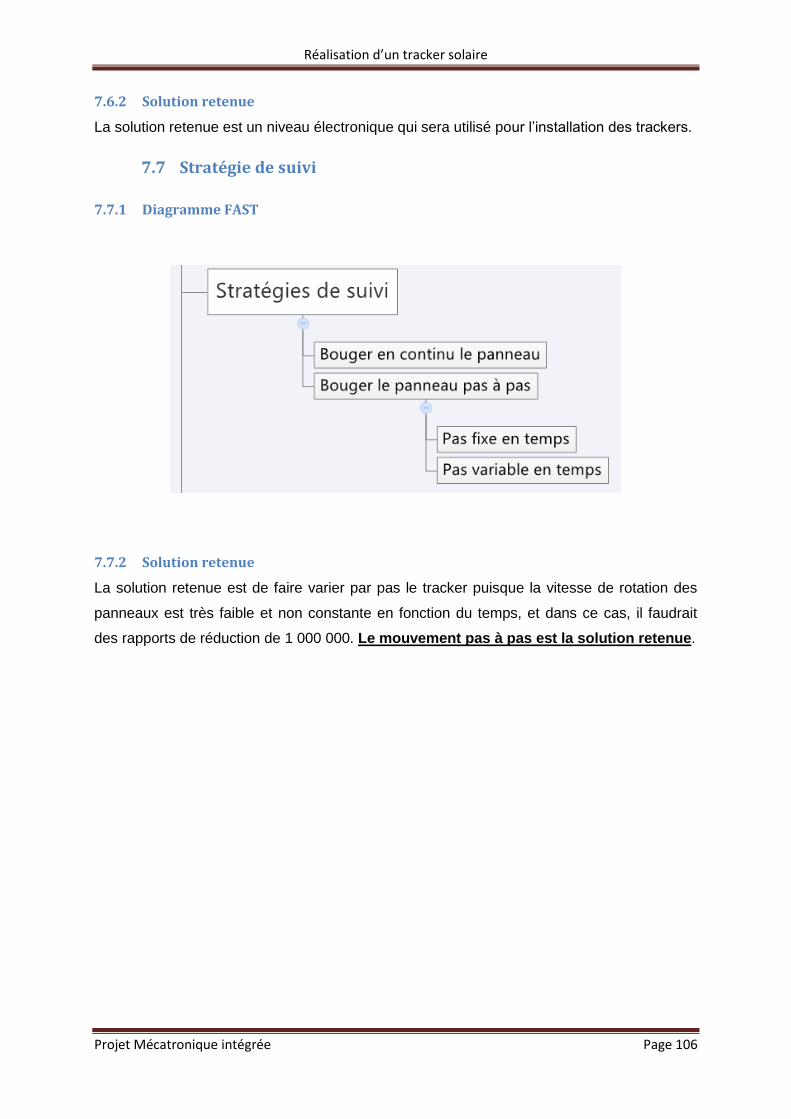
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 106
7.6.2 Solution retenue
La solution retenue est un niveau électronique qui sera utilisé pour l’installation des trackers.
7.7 Stratégie de suivi
7.7.1 Diagramme FAST
7.7.2 Solution retenue
La solution retenue est de faire varier par pas le tracker puisque la vitesse de rotation des
panneaux est très faible et non constante en fonction du temps, et dans ce cas, il faudrait
des rapports de réduction de 1 000 000. Le mouvement pas à pas est la solution retenue.
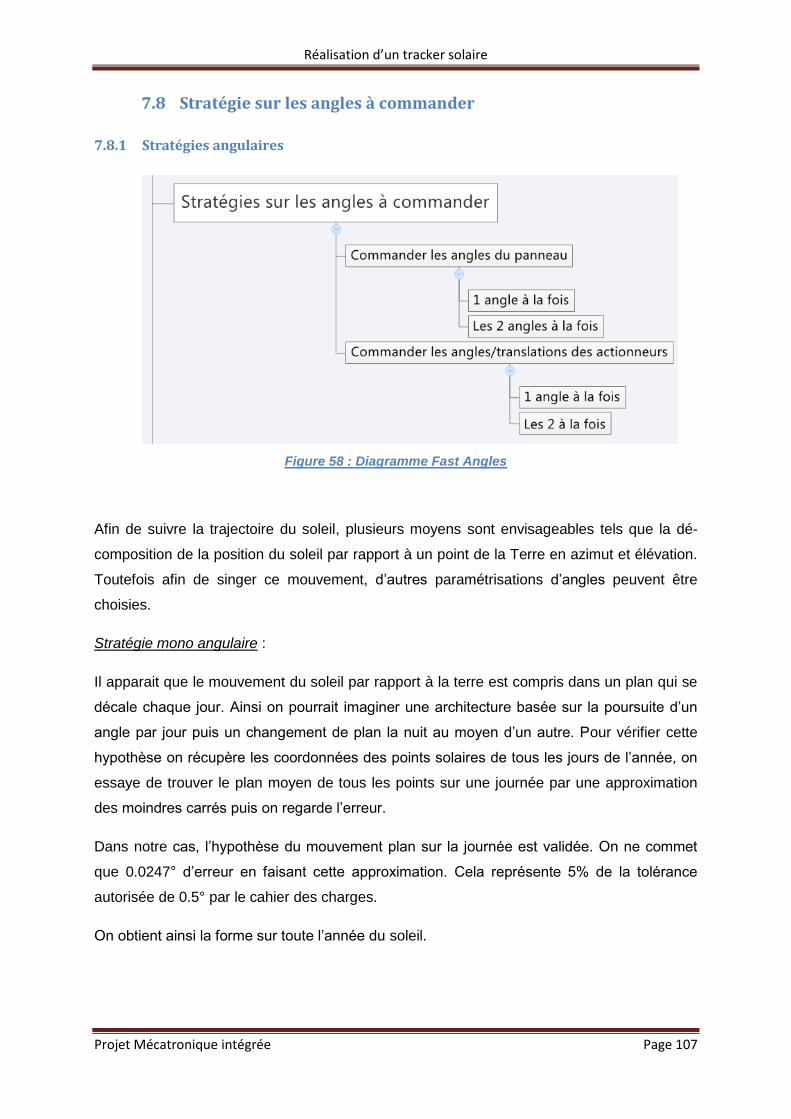
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 107
7.8 Stratégie sur les angles à commander
7.8.1 Stratégies angulaires
Figure 58 : Diagramme Fast Angles
Afin de suivre la trajectoire du soleil, plusieurs moyens sont envisageables tels que la dé-
composition de la position du soleil par rapport à un point de la Terre en azimut et élévation.
Toutefois afin de singer ce mouvement, d’autres paramétrisations d’angles peuvent être
choisies.
Stratégie mono angulaire :
Il apparait que le mouvement du soleil par rapport à la terre est compris dans un plan qui se
décale chaque jour. Ainsi on pourrait imaginer une architecture basée sur la poursuite d’un
angle par jour puis un changement de plan la nuit au moyen d’un autre. Pour vérifier cette
hypothèse on récupère les coordonnées des points solaires de tous les jours de l’année, on
essaye de trouver le plan moyen de tous les points sur une journée par une approximation
des moindres carrés puis on regarde l’erreur.
Dans notre cas, l’hypothèse du mouvement plan sur la journée est validée. On ne commet
que 0.0247° d’erreur en faisant cette approximation. Cela représente 5% de la tolérance
autorisée de 0.5° par le cahier des charges.
On obtient ainsi la forme sur toute l’année du soleil.
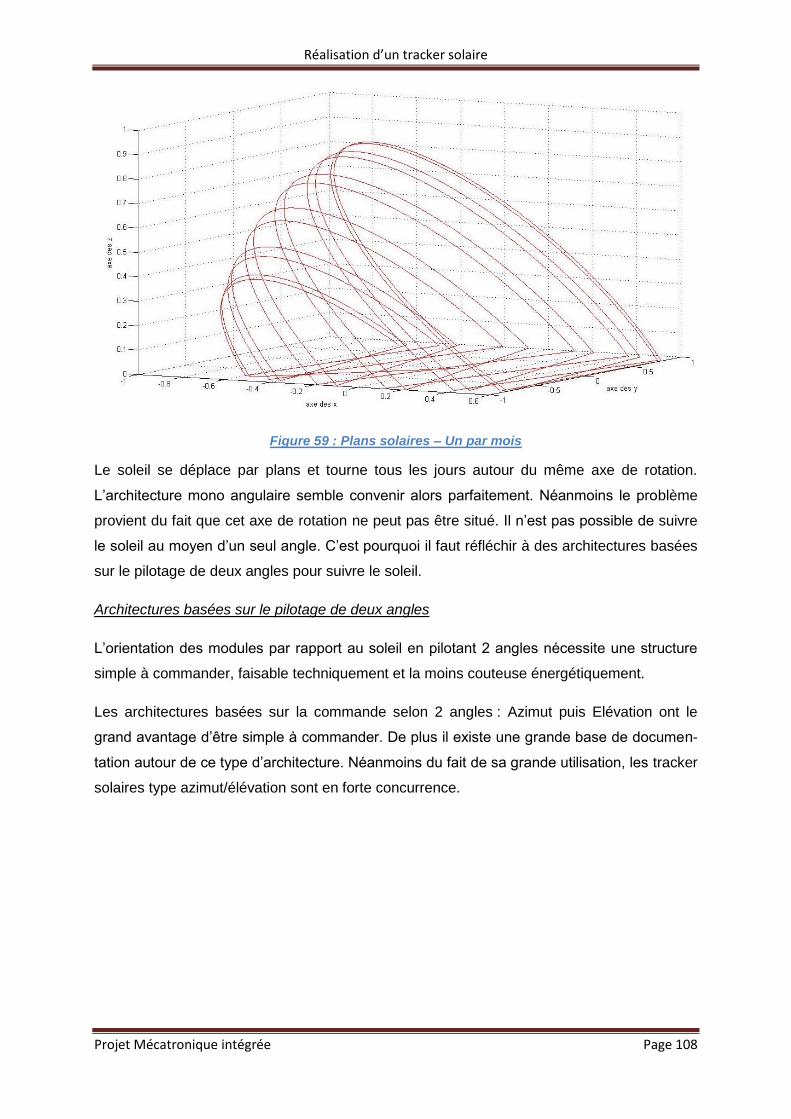
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 108
Figure 59 : Plans solaires – Un par mois
Le soleil se déplace par plans et tourne tous les jours autour du même axe de rotation.
L’architecture mono angulaire semble convenir alors parfaitement. Néanmoins le problème
provient du fait que cet axe de rotation ne peut pas être situé. Il n’est pas possible de suivre
le soleil au moyen d’un seul angle. C’est pourquoi il faut réfléchir à des architectures basées
sur le pilotage de deux angles pour suivre le soleil.
Architectures basées sur le pilotage de deux angles
L’orientation des modules par rapport au soleil en pilotant 2 angles nécessite une structure
simple à commander, faisable techniquement et la moins couteuse énergétiquement.
Les architectures basées sur la commande selon 2 angles : Azimut puis Elévation ont le
grand avantage d’être simple à commander. De plus il existe une grande base de documen-
tation autour de ce type d’architecture. Néanmoins du fait de sa grande utilisation, les tracker
solaires type azimut/élévation sont en forte concurrence.
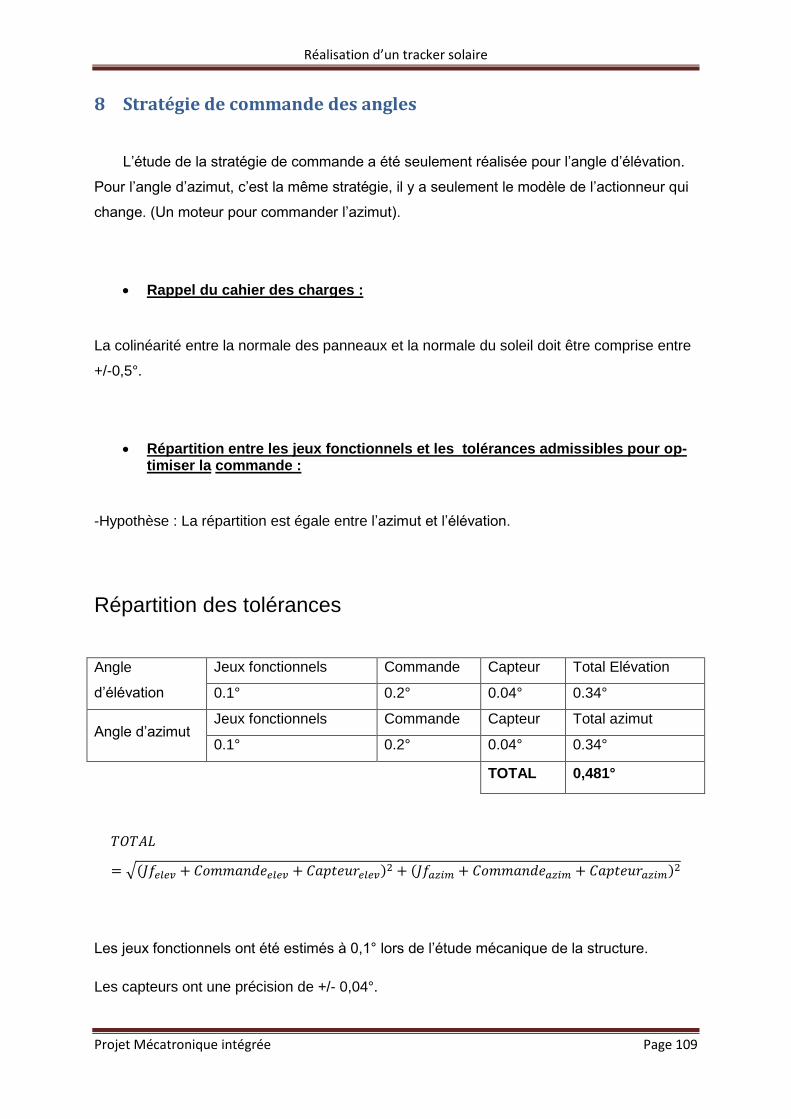
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 109
8 Stratégie de commande des angles
L’étude de la stratégie de commande a été seulement réalisée pour l’angle d’élévation.
Pour l’angle d’azimut, c’est la même stratégie, il y a seulement le modèle de l’actionneur qui
change. (Un moteur pour commander l’azimut).
Rappel du cahier des charges :
La colinéarité entre la normale des panneaux et la normale du soleil doit être comprise entre
+/-0,5°.
Répartition entre les jeux fonctionnels et les tolérances admissibles pour op-timiser la commande :
-Hypothèse : La répartition est égale entre l’azimut et l’élévation.
Répartition des tolérances
Angle
d’élévation
Jeux fonctionnels Commande Capteur Total Elévation
0.1° 0.2° 0.04° 0.34°
Angle d’azimut Jeux fonctionnels Commande Capteur Total azimut
0.1° 0.2° 0.04° 0.34°
TOTAL 0,481°
√( ) ( )
Les jeux fonctionnels ont été estimés à 0,1° lors de l’étude mécanique de la structure.
Les capteurs ont une précision de +/- 0,04°.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 110
Il reste donc 0,2° de marge pour optimiser la commande et ainsi la consommation d’énergie.
8.1 Commande pas à pas
-Rappel :
La commande « pas à pas » a été choisie précédemment par rapport à plusieurs critères
comme l’énergie consommée, les lois à suivre (élévation et azimut du soleil) ainsi que la li-
mite des actionneurs (par rapport à la vitesse).
Dans la partie Actionneurs, une étude a été réalisée concernant l’énergie consommée
entre les deux stratégies.
L’asservissement se fera en tension et non en courant car l’asservissement est de type
« position ».
8.2 Passage de la position de sécurité à la position de travail
- La position de sécurité est : Panneaux à l’horizontal (β=90°) . - La nuit, le tracker vient se mettre en position de sécurité. - Le matin, le tracker vient se mettre en position de travail (β=12°, position minimale de
travail). - En fin de journée, le tracker repasse en position de sécurité.
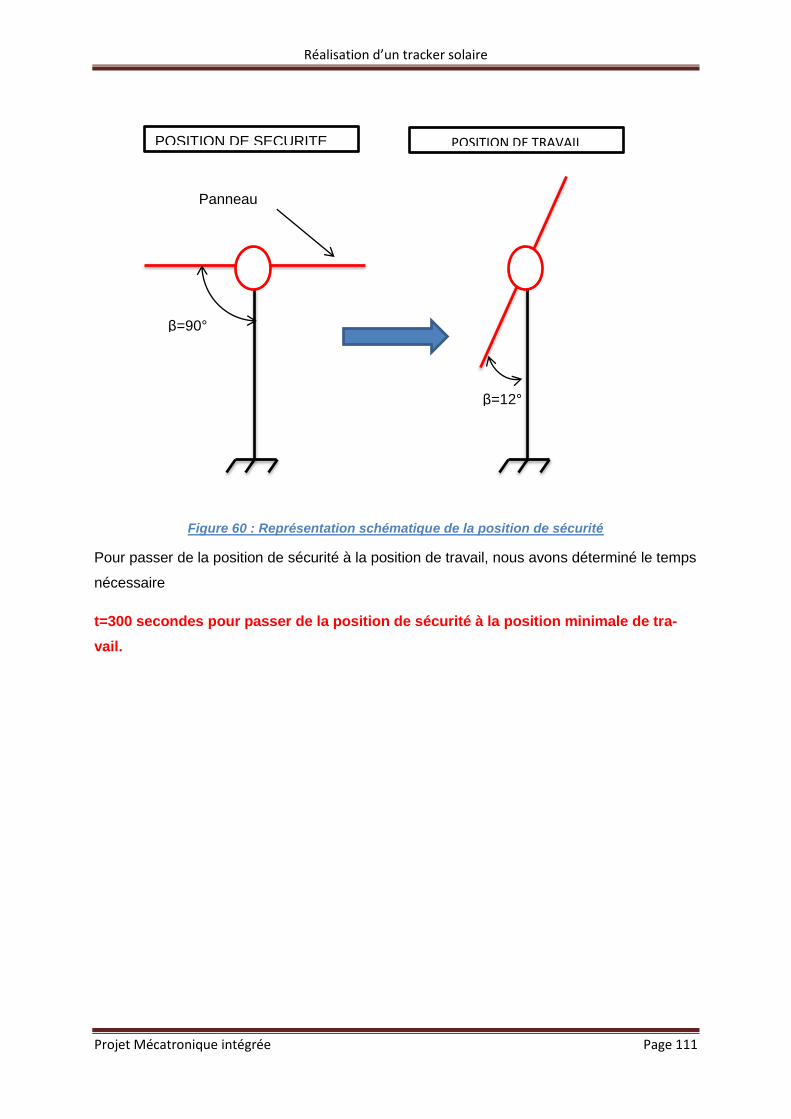
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 111
Figure 60 : Représentation schématique de la position de sécurité
Pour passer de la position de sécurité à la position de travail, nous avons déterminé le temps
nécessaire
t=300 secondes pour passer de la position de sécurité à la position minimale de tra-
vail.
POSITION DE SECURITE POSITION DE TRAVAIL
β=90°
Panneau
β=12°
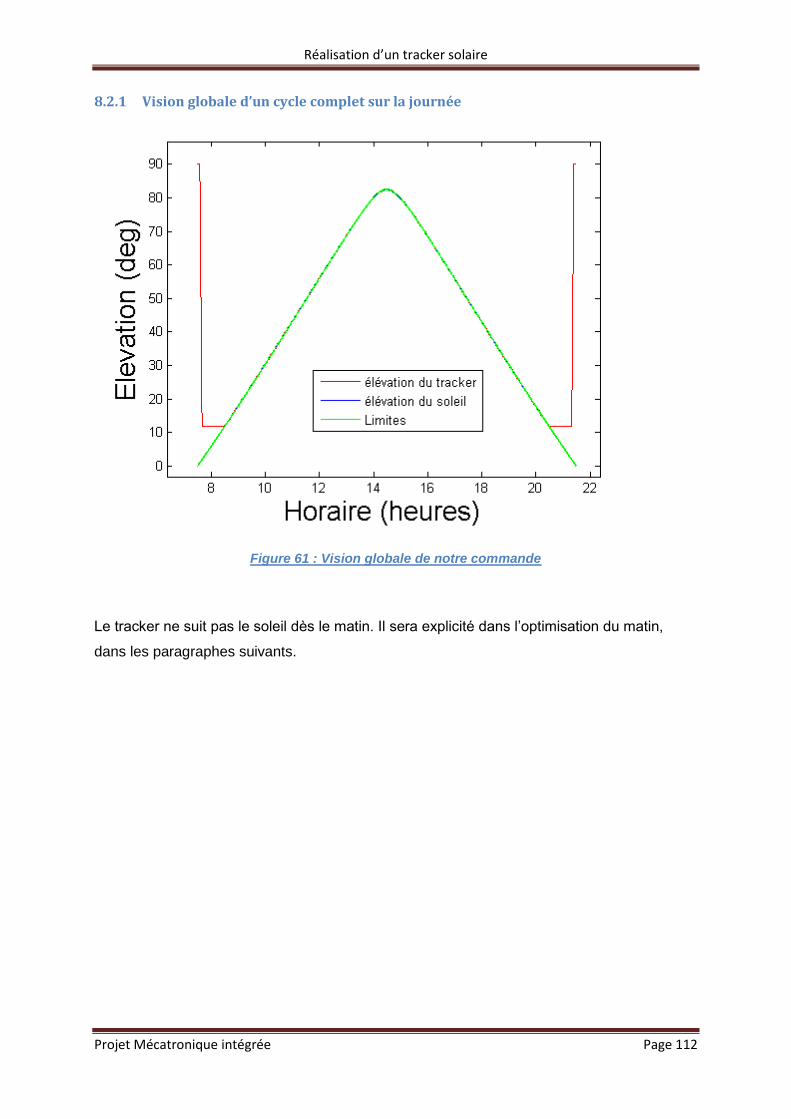
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 112
8.2.1 Vision globale d’un cycle complet sur la journée
Figure 61 : Vision globale de notre commande
Le tracker ne suit pas le soleil dès le matin. Il sera explicité dans l’optimisation du matin,
dans les paragraphes suivants.
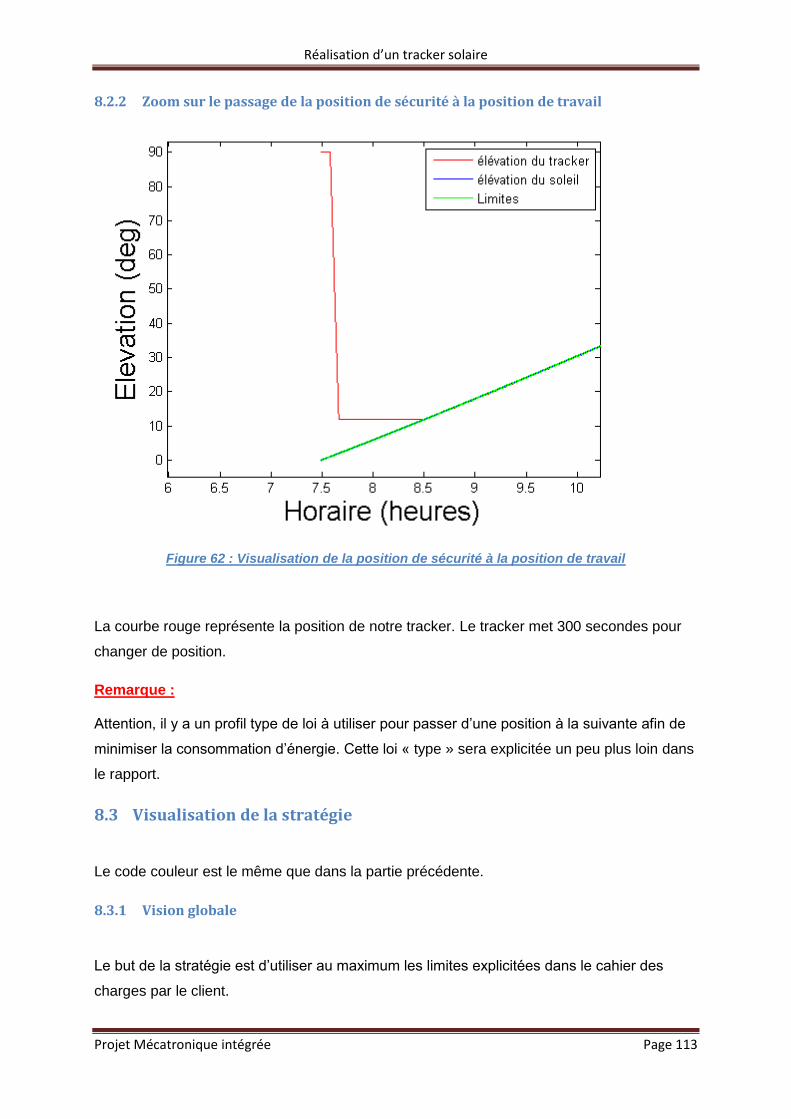
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 113
8.2.2 Zoom sur le passage de la position de sécurité à la position de travail
Figure 62 : Visualisation de la position de sécurité à la position de travail
La courbe rouge représente la position de notre tracker. Le tracker met 300 secondes pour
changer de position.
Remarque :
Attention, il y a un profil type de loi à utiliser pour passer d’une position à la suivante afin de
minimiser la consommation d’énergie. Cette loi « type » sera explicitée un peu plus loin dans
le rapport.
8.3 Visualisation de la stratégie
Le code couleur est le même que dans la partie précédente.
8.3.1 Vision globale
Le but de la stratégie est d’utiliser au maximum les limites explicitées dans le cahier des
charges par le client.
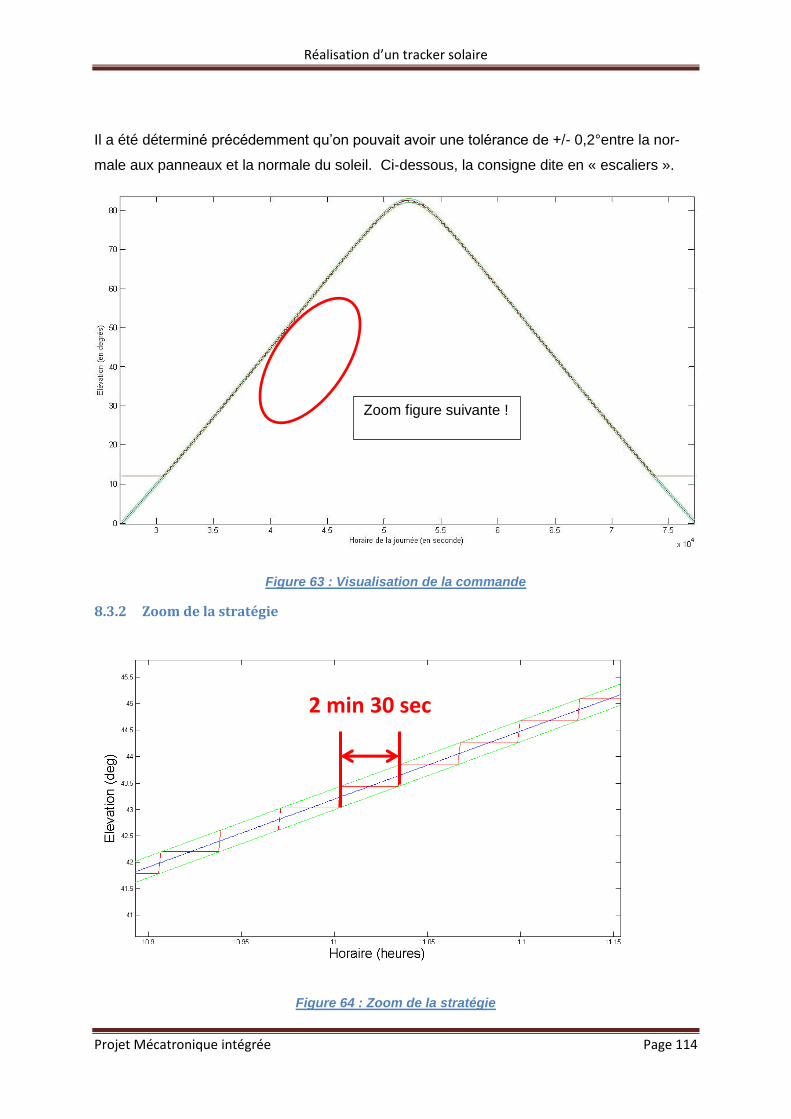
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 114
Il a été déterminé précédemment qu’on pouvait avoir une tolérance de +/- 0,2°entre la nor-
male aux panneaux et la normale du soleil. Ci-dessous, la consigne dite en « escaliers ».
Figure 63 : Visualisation de la commande
8.3.2 Zoom de la stratégie
Figure 64 : Zoom de la stratégie
Zoom figure suivante !
2 min 30 sec
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 115
- Le tracker se repositionne donc tous les 0,4°. - Un repositionnement durera aux alentours de 6 secondes. - Entre chaque repositionnement, il y aura environ 2min 30 qui se seront écoulées.
Remarque : Le changement de position n’est pas un échelon. L’explication de la loi « se-
mi » idéale est détaillée ci-dessous.
8.4 Lois « semi » idéales
Pour minimiser l’énergie consommée, il faut tout d’abord se référer au Principe Fondamental
de la dynamique qui est égal à (En Négligent les frottements):
En admettant que le couple résistant est constant tout au long du repositionnement, pour
minimiser le couple moteur il faut donc minimiser au maximum l’accélération.
8.4.1 Vitesse
Tout d’abord, il faut trouver une loi optimale de vitesse avec un coefficient directeur des
pentes le plus faible possible (l’accélération est la dérivée de la vitesse).
La vitesse aura un palier entre les deux changements afin de ne pas avoir un changement
brusque d’accélération ce qui aura comme effet d’endommager le matériel.
- Remarque : La seule contrainte est un temps de 6 secondes pour un repositionnement de 0,4°.
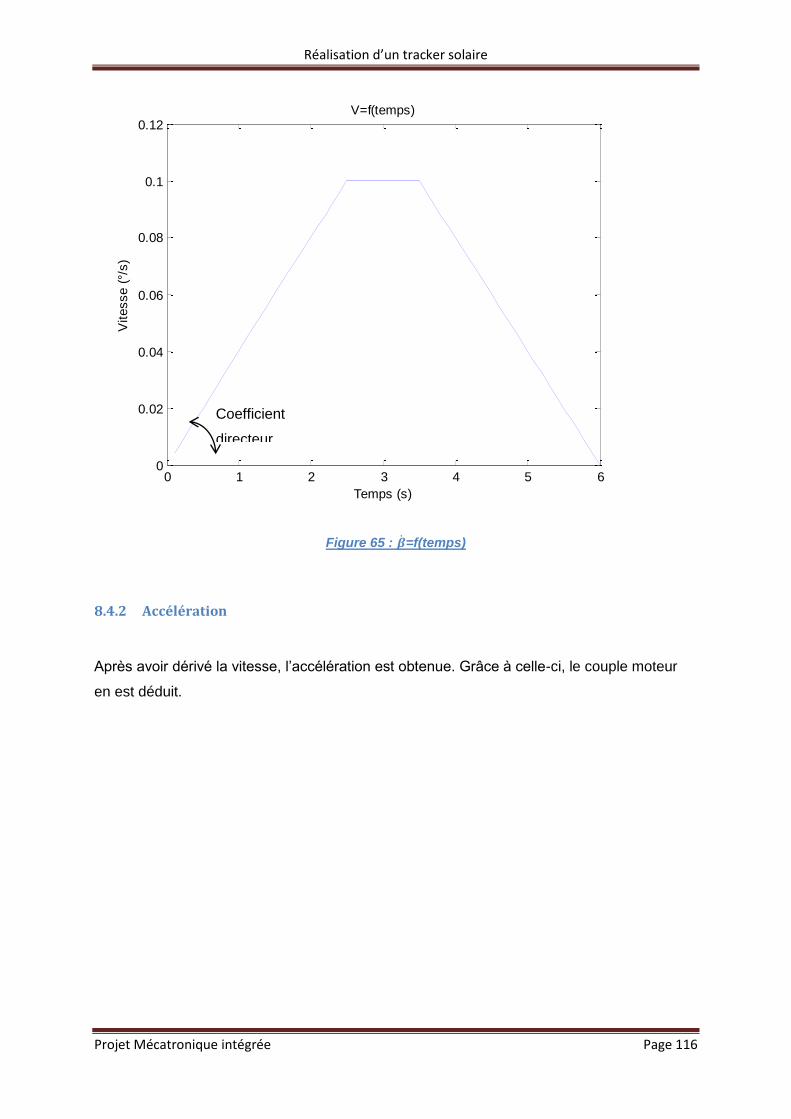
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 116
Figure 65 : =f(temps)
8.4.2 Accélération
Après avoir dérivé la vitesse, l’accélération est obtenue. Grâce à celle-ci, le couple moteur
en est déduit.
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12V=f(temps)
Temps (s)
Vitesse (
°/s)
Coefficient
directeur
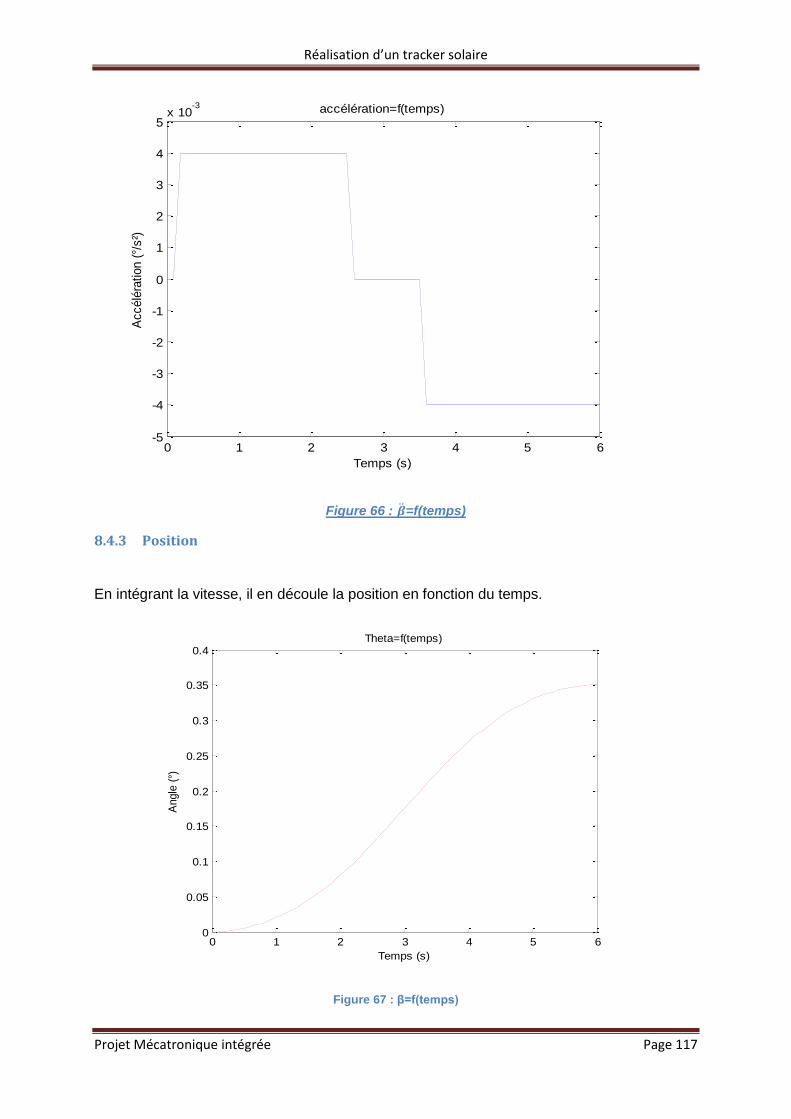
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 117
Figure 66 : =f(temps)
8.4.3 Position
En intégrant la vitesse, il en découle la position en fonction du temps.
Figure 67 : β=f(temps)
0 1 2 3 4 5 6-5
-4
-3
-2
-1
0
1
2
3
4
5x 10
-3 accélération=f(temps)
Temps (s)
Accélé
ration (
°/s²)
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Theta=f(temps)
Temps (s)
Angle
(°)
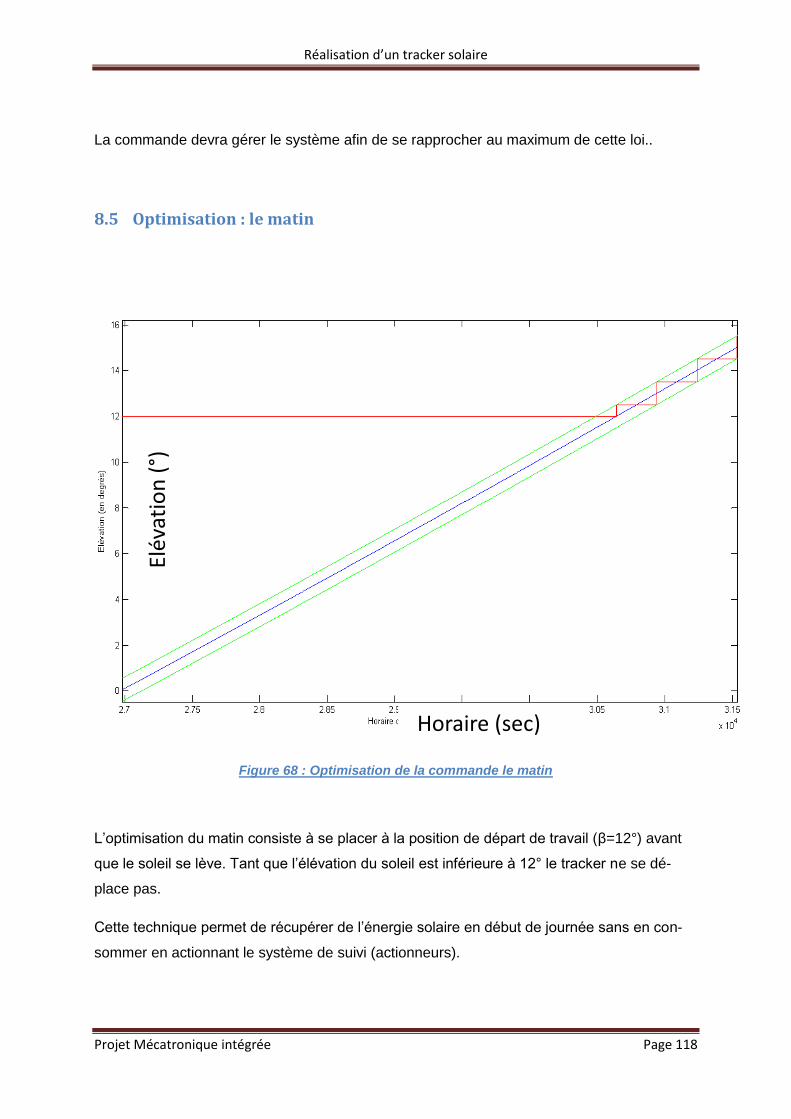
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 118
La commande devra gérer le système afin de se rapprocher au maximum de cette loi..
8.5 Optimisation : le matin
Figure 68 : Optimisation de la commande le matin
L’optimisation du matin consiste à se placer à la position de départ de travail (β=12°) avant
que le soleil se lève. Tant que l’élévation du soleil est inférieure à 12° le tracker ne se dé-
place pas.
Cette technique permet de récupérer de l’énergie solaire en début de journée sans en con-
sommer en actionnant le système de suivi (actionneurs).
Elév
atio
n ( )
Horaire (sec)
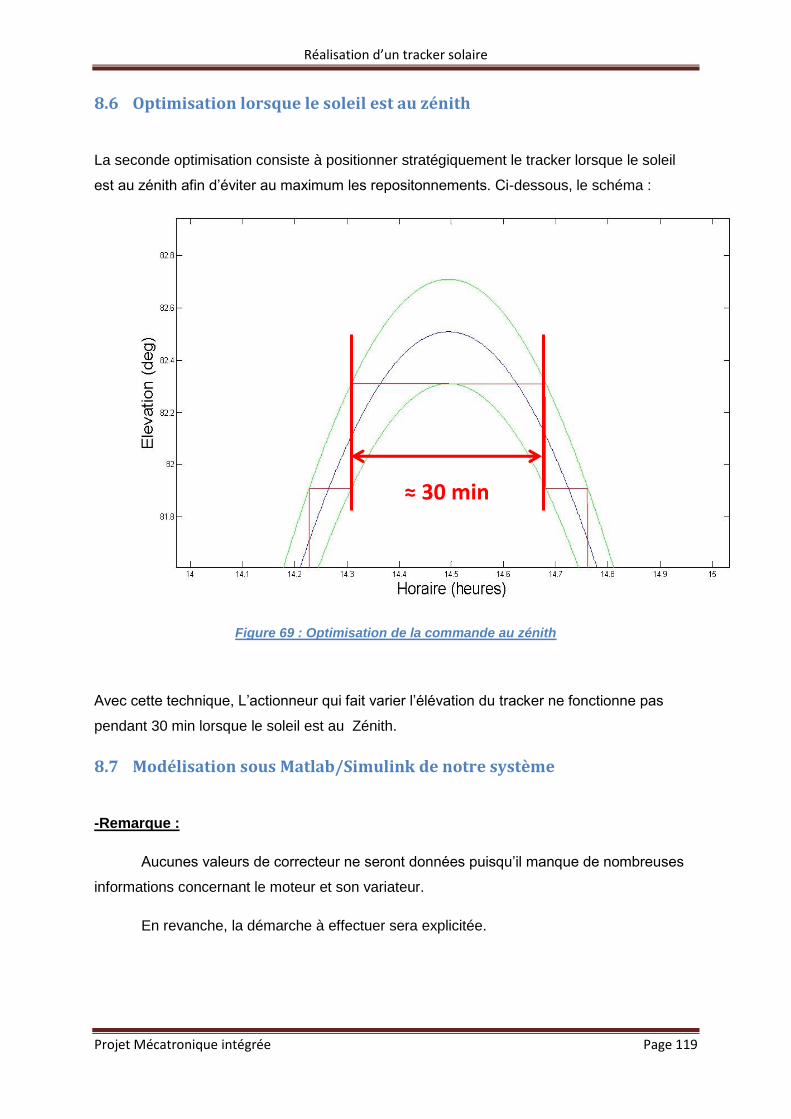
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 119
8.6 Optimisation lorsque le soleil est au zénith
La seconde optimisation consiste à positionner stratégiquement le tracker lorsque le soleil
est au zénith afin d’éviter au maximum les repositonnements. Ci-dessous, le schéma :
Figure 69 : Optimisation de la commande au zénith
Avec cette technique, L’actionneur qui fait varier l’élévation du tracker ne fonctionne pas
pendant 30 min lorsque le soleil est au Zénith.
8.7 Modélisation sous Matlab/Simulink de notre système
-Remarque :
Aucunes valeurs de correcteur ne seront données puisqu’il manque de nombreuses
informations concernant le moteur et son variateur.
En revanche, la démarche à effectuer sera explicitée.
≈ 30 min
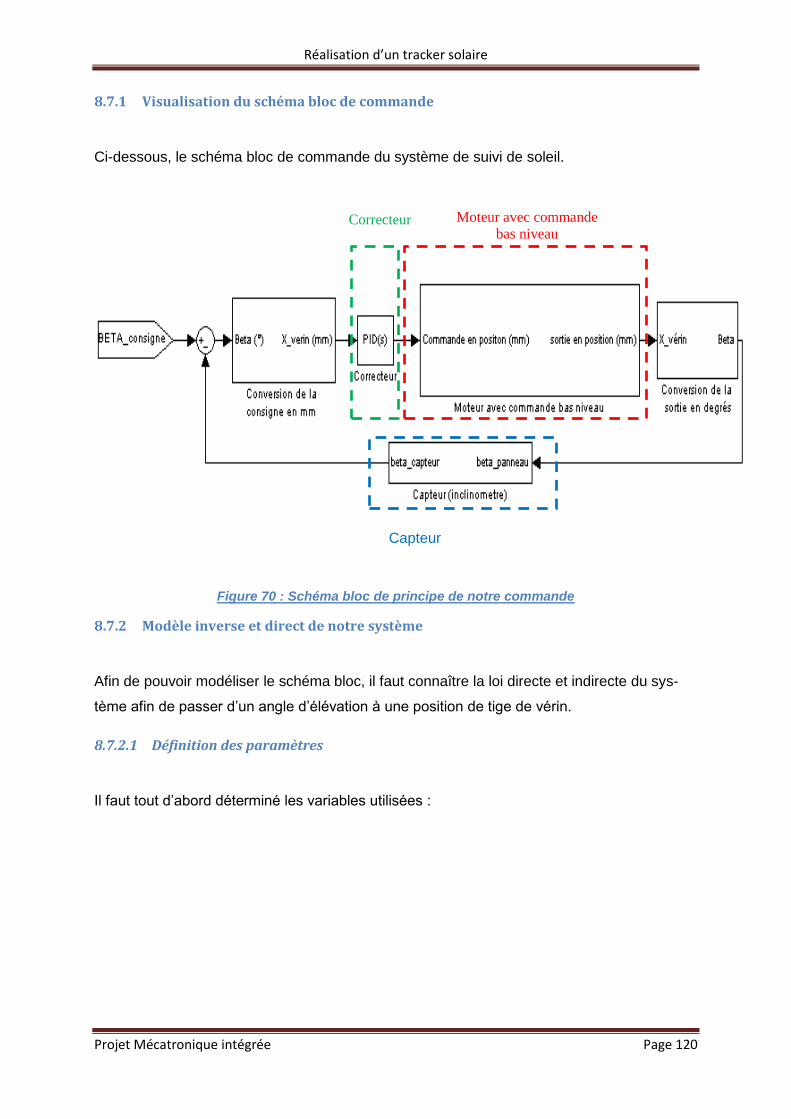
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 120
8.7.1 Visualisation du schéma bloc de commande
Ci-dessous, le schéma bloc de commande du système de suivi de soleil.
Figure 70 : Schéma bloc de principe de notre commande
8.7.2 Modèle inverse et direct de notre système
Afin de pouvoir modéliser le schéma bloc, il faut connaître la loi directe et indirecte du sys-
tème afin de passer d’un angle d’élévation à une position de tige de vérin.
8.7.2.1 Définition des paramètres
Il faut tout d’abord déterminé les variables utilisées :
Capteur
Moteur avec commande
bas niveau Correcteur
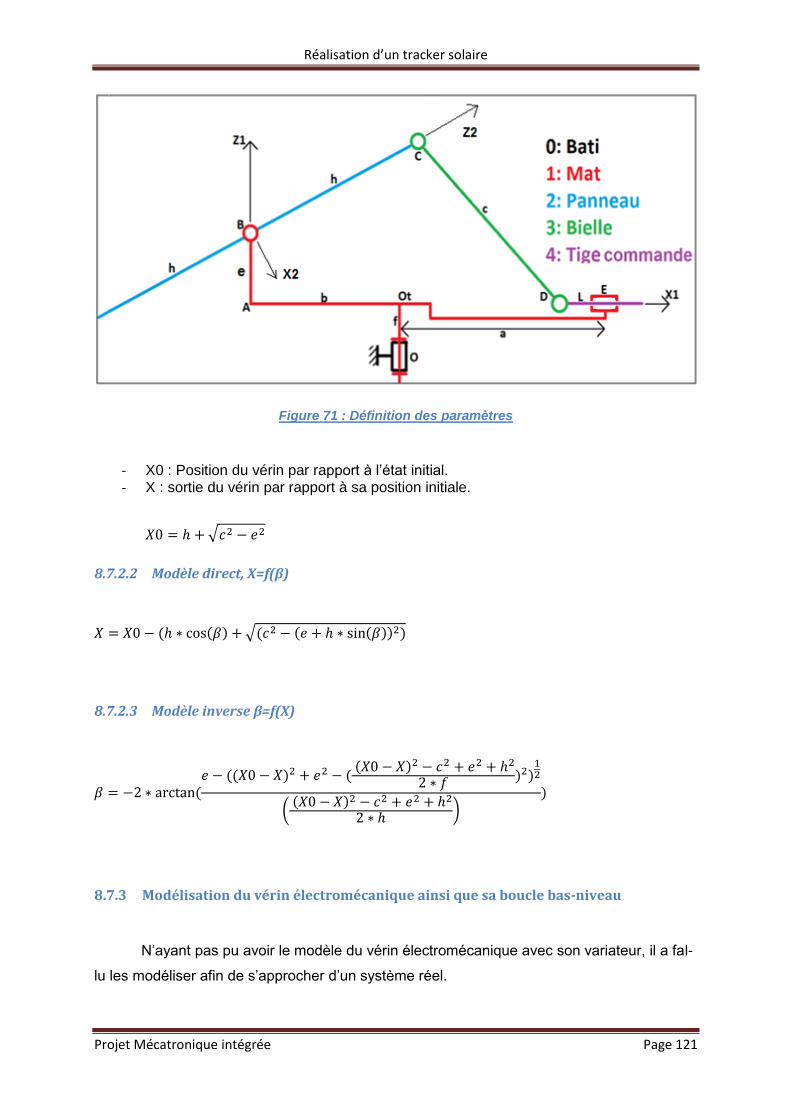
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 121
Figure 71 : Définition des paramètres
- X0 : Position du vérin par rapport à l’état initial. - X : sortie du vérin par rapport à sa position initiale.
√
8.7.2.2 Modèle direct, X=f(β)
( ( ) √( ( ( )) )
8.7.2.3 Modèle inverse β=f(X)
( (( ) (
( )
) )
( ( )
)
)
8.7.3 Modélisation du vérin électromécanique ainsi que sa boucle bas-niveau
N’ayant pas pu avoir le modèle du vérin électromécanique avec son variateur, il a fal-
lu les modéliser afin de s’approcher d’un système réel.
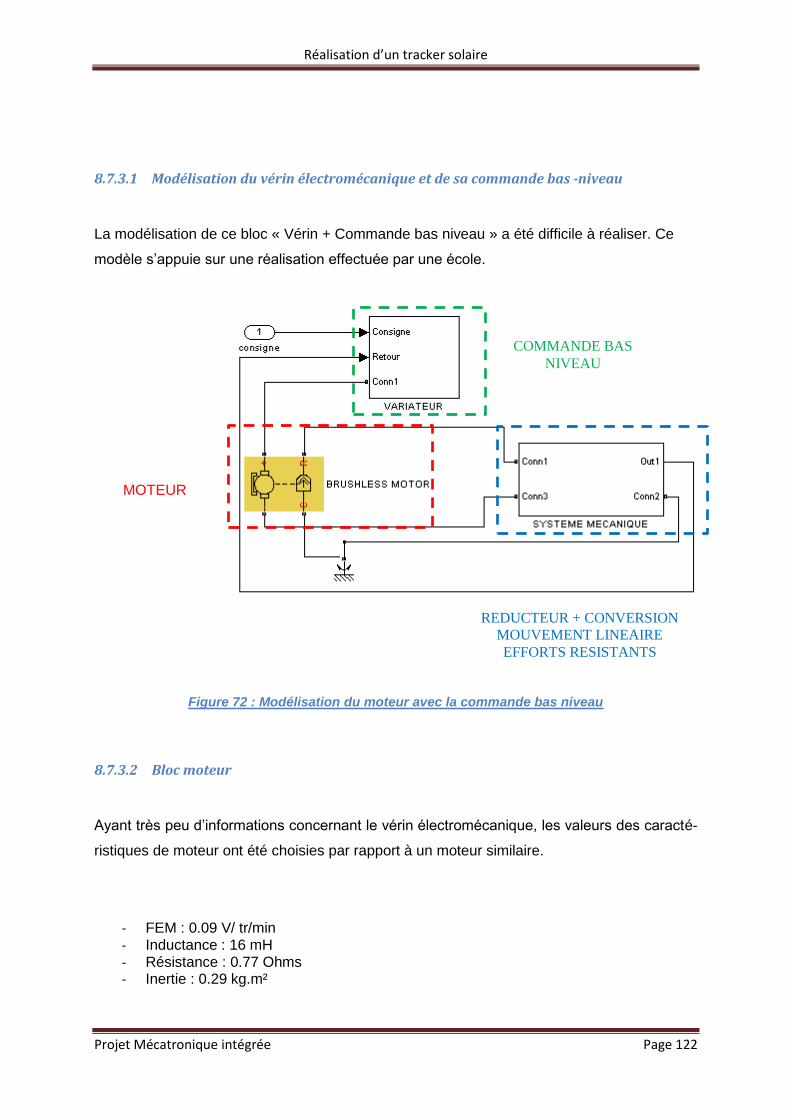
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 122
8.7.3.1 Modélisation du vérin électromécanique et de sa commande bas -niveau
La modélisation de ce bloc « Vérin + Commande bas niveau » a été difficile à réaliser. Ce
modèle s’appuie sur une réalisation effectuée par une école.
Figure 72 : Modélisation du moteur avec la commande bas niveau
8.7.3.2 Bloc moteur
Ayant très peu d’informations concernant le vérin électromécanique, les valeurs des caracté-
ristiques de moteur ont été choisies par rapport à un moteur similaire.
- FEM : 0.09 V/ tr/min - Inductance : 16 mH - Résistance : 0.77 Ohms - Inertie : 0.29 kg.m²
MOTEUR
COMMANDE BAS
NIVEAU
REDUCTEUR + CONVERSION
MOUVEMENT LINEAIRE
EFFORTS RESISTANTS
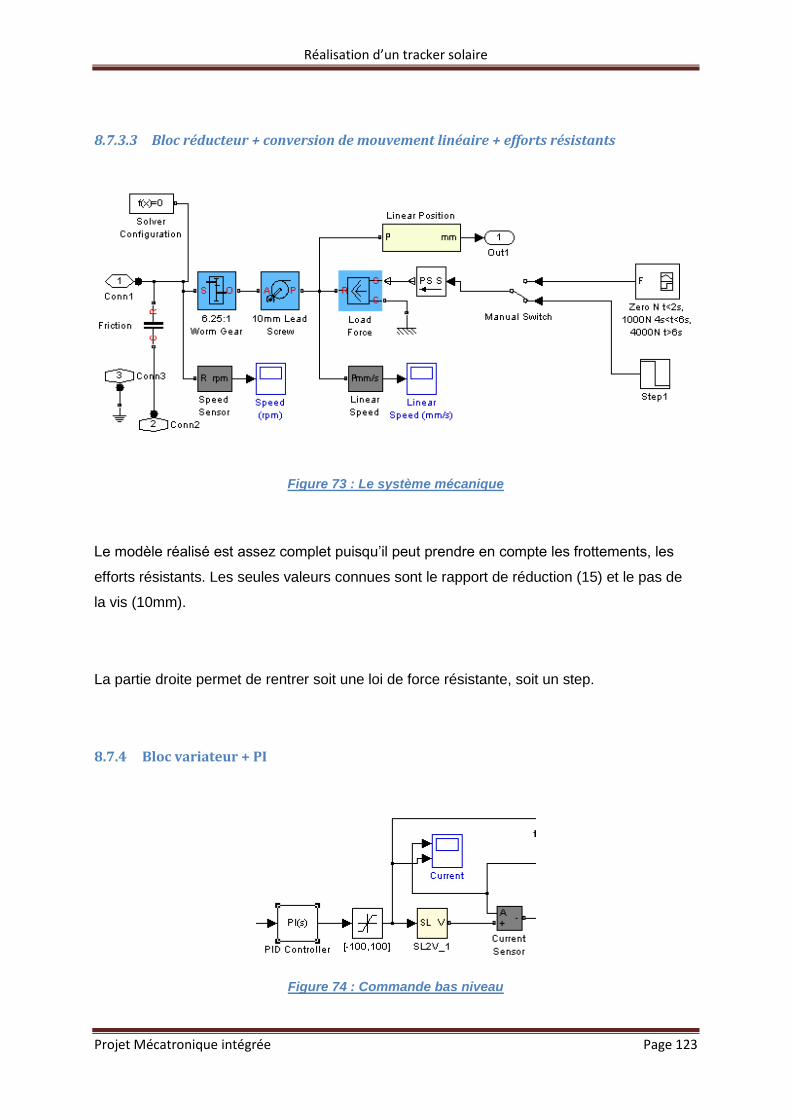
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 123
8.7.3.3 Bloc réducteur + conversion de mouvement linéaire + efforts résistants
Figure 73 : Le système mécanique
Le modèle réalisé est assez complet puisqu’il peut prendre en compte les frottements, les
efforts résistants. Les seules valeurs connues sont le rapport de réduction (15) et le pas de
la vis (10mm).
La partie droite permet de rentrer soit une loi de force résistante, soit un step.
8.7.4 Bloc variateur + PI
Figure 74 : Commande bas niveau
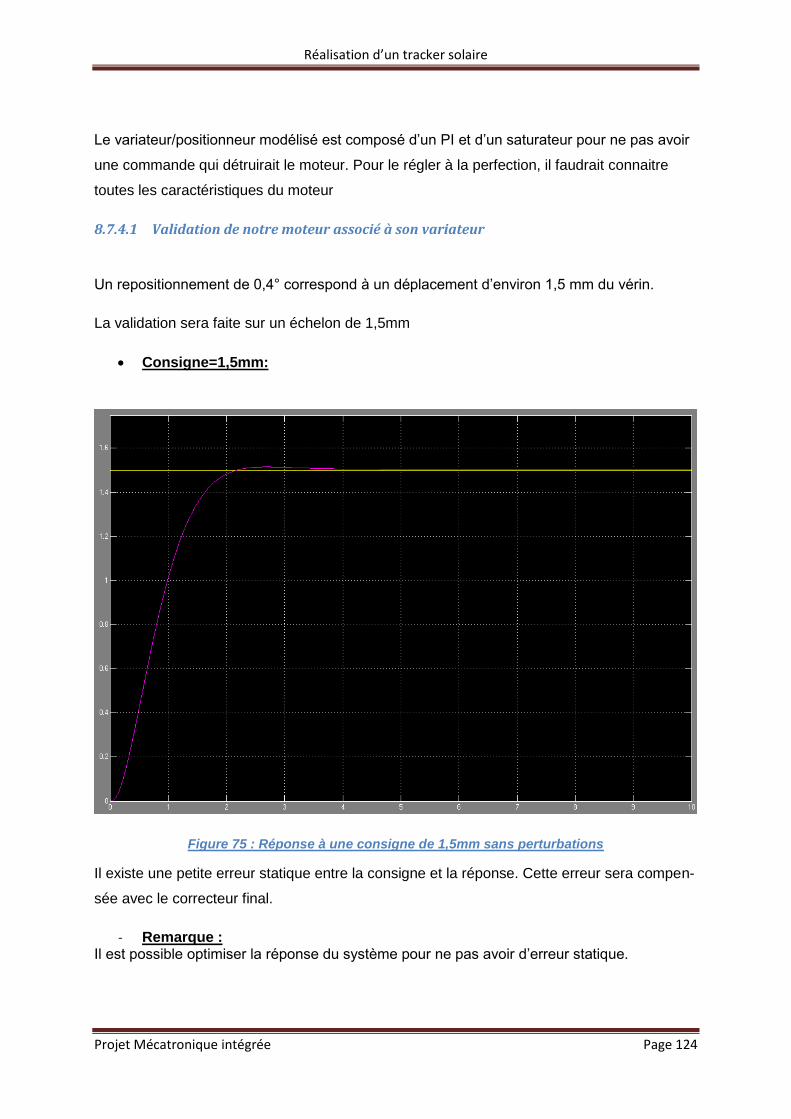
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 124
Le variateur/positionneur modélisé est composé d’un PI et d’un saturateur pour ne pas avoir
une commande qui détruirait le moteur. Pour le régler à la perfection, il faudrait connaitre
toutes les caractéristiques du moteur
8.7.4.1 Validation de notre moteur associé à son variateur
Un repositionnement de 0,4° correspond à un déplacement d’environ 1,5 mm du vérin.
La validation sera faite sur un échelon de 1,5mm
Consigne=1,5mm:
Figure 75 : Réponse à une consigne de 1,5mm sans perturbations
Il existe une petite erreur statique entre la consigne et la réponse. Cette erreur sera compen-
sée avec le correcteur final.
- Remarque : Il est possible optimiser la réponse du système pour ne pas avoir d’erreur statique.
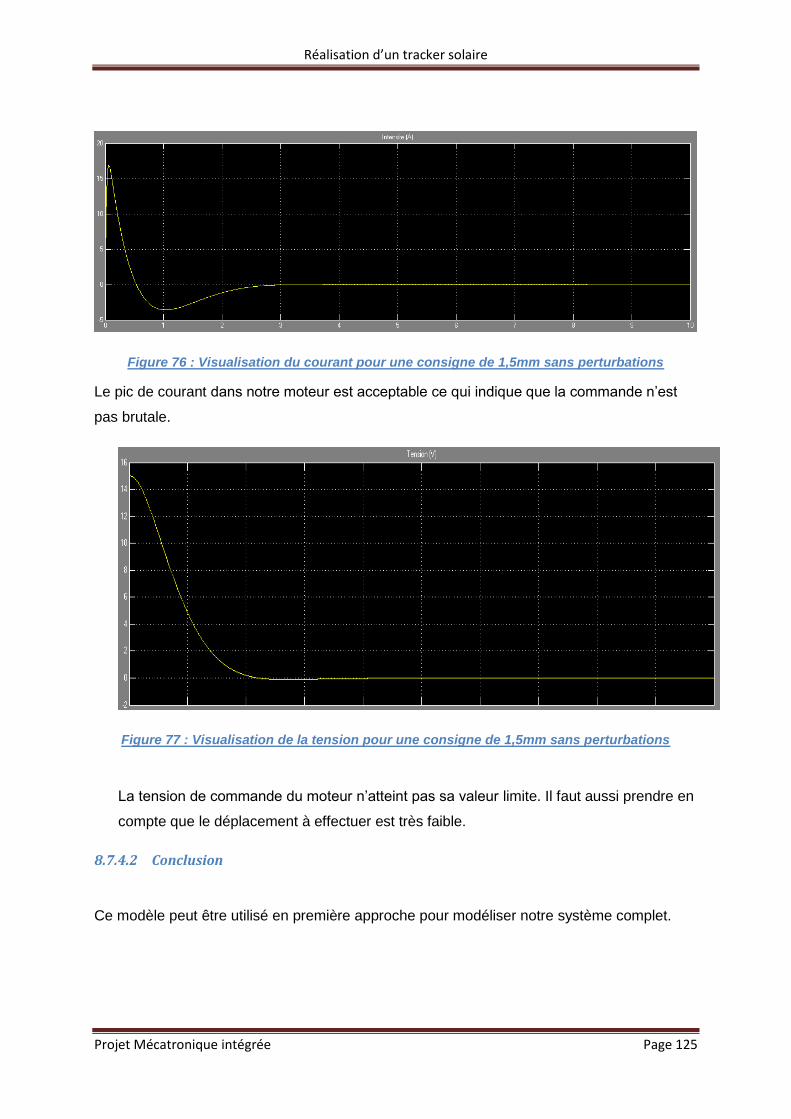
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 125
Figure 76 : Visualisation du courant pour une consigne de 1,5mm sans perturbations
Le pic de courant dans notre moteur est acceptable ce qui indique que la commande n’est
pas brutale.
Figure 77 : Visualisation de la tension pour une consigne de 1,5mm sans perturbations
La tension de commande du moteur n’atteint pas sa valeur limite. Il faut aussi prendre en
compte que le déplacement à effectuer est très faible.
8.7.4.2 Conclusion
Ce modèle peut être utilisé en première approche pour modéliser notre système complet.
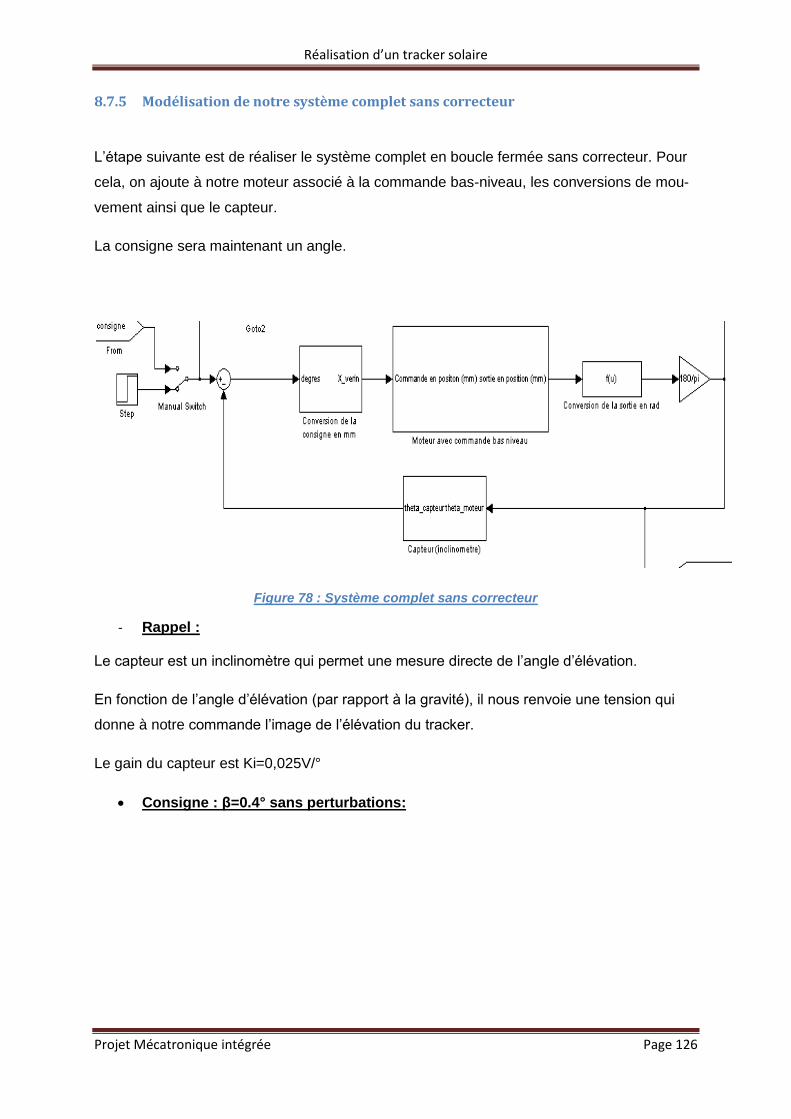
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 126
8.7.5 Modélisation de notre système complet sans correcteur
L’étape suivante est de réaliser le système complet en boucle fermée sans correcteur. Pour
cela, on ajoute à notre moteur associé à la commande bas-niveau, les conversions de mou-
vement ainsi que le capteur.
La consigne sera maintenant un angle.
Figure 78 : Système complet sans correcteur
- Rappel :
Le capteur est un inclinomètre qui permet une mesure directe de l’angle d’élévation.
En fonction de l’angle d’élévation (par rapport à la gravité), il nous renvoie une tension qui
donne à notre commande l’image de l’élévation du tracker.
Le gain du capteur est Ki=0,025V/°
Consigne : β=0.4° sans perturbations:
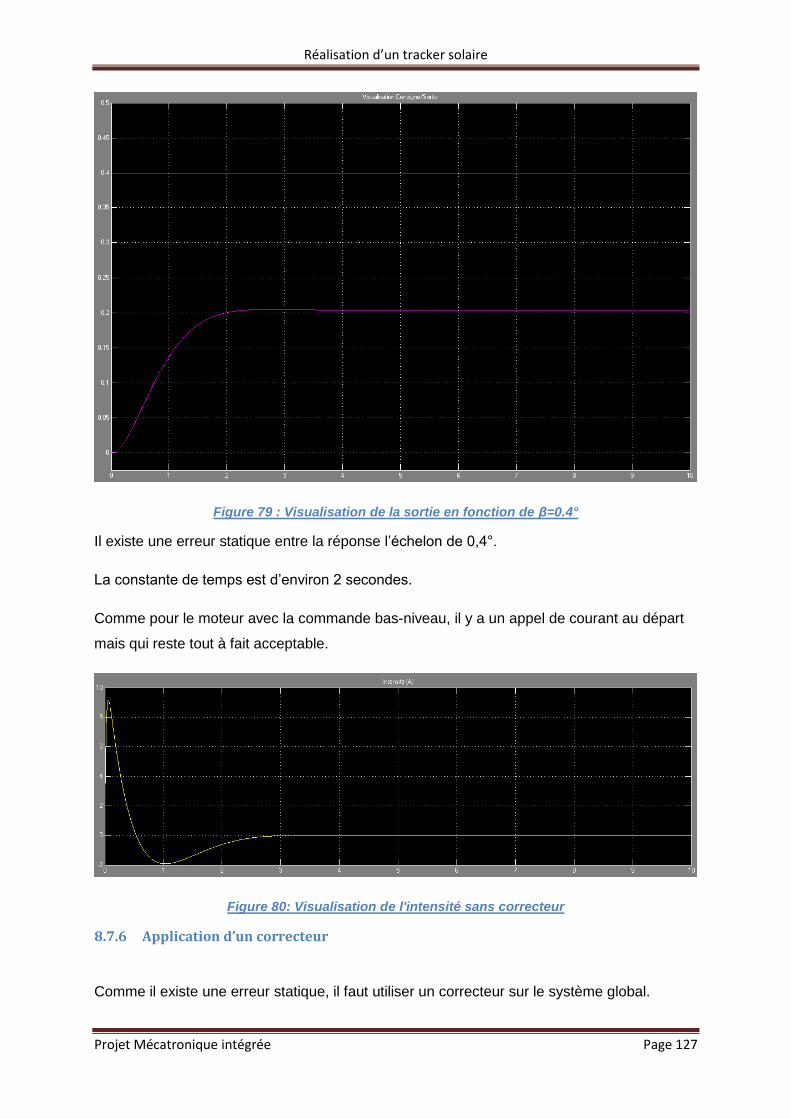
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 127
Figure 79 : Visualisation de la sortie en fonction de β=0.4°
Il existe une erreur statique entre la réponse l’échelon de 0,4°.
La constante de temps est d’environ 2 secondes.
Comme pour le moteur avec la commande bas-niveau, il y a un appel de courant au départ
mais qui reste tout à fait acceptable.
Figure 80: Visualisation de l'intensité sans correcteur
8.7.6 Application d’un correcteur
Comme il existe une erreur statique, il faut utiliser un correcteur sur le système global.
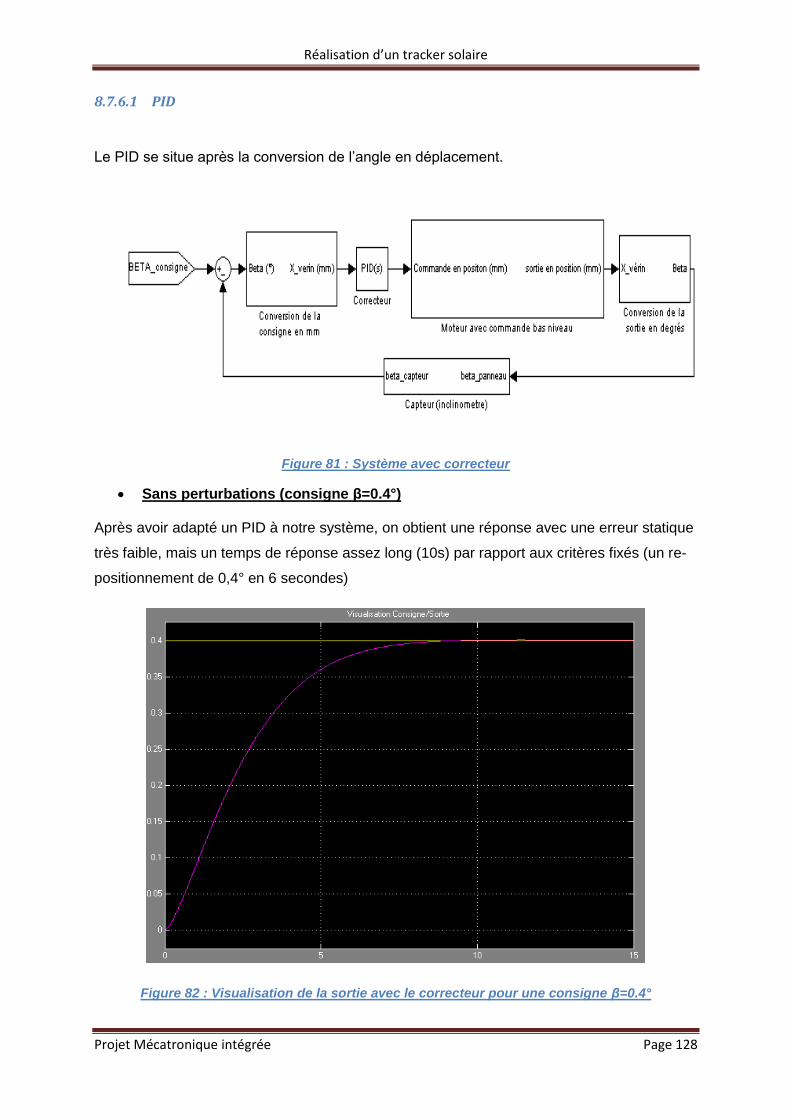
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 128
8.7.6.1 PID
Le PID se situe après la conversion de l’angle en déplacement.
Figure 81 : Système avec correcteur
Sans perturbations (consigne β=0.4°)
Après avoir adapté un PID à notre système, on obtient une réponse avec une erreur statique
très faible, mais un temps de réponse assez long (10s) par rapport aux critères fixés (un re-
positionnement de 0,4° en 6 secondes)
Figure 82 : Visualisation de la sortie avec le correcteur pour une consigne β=0.4°
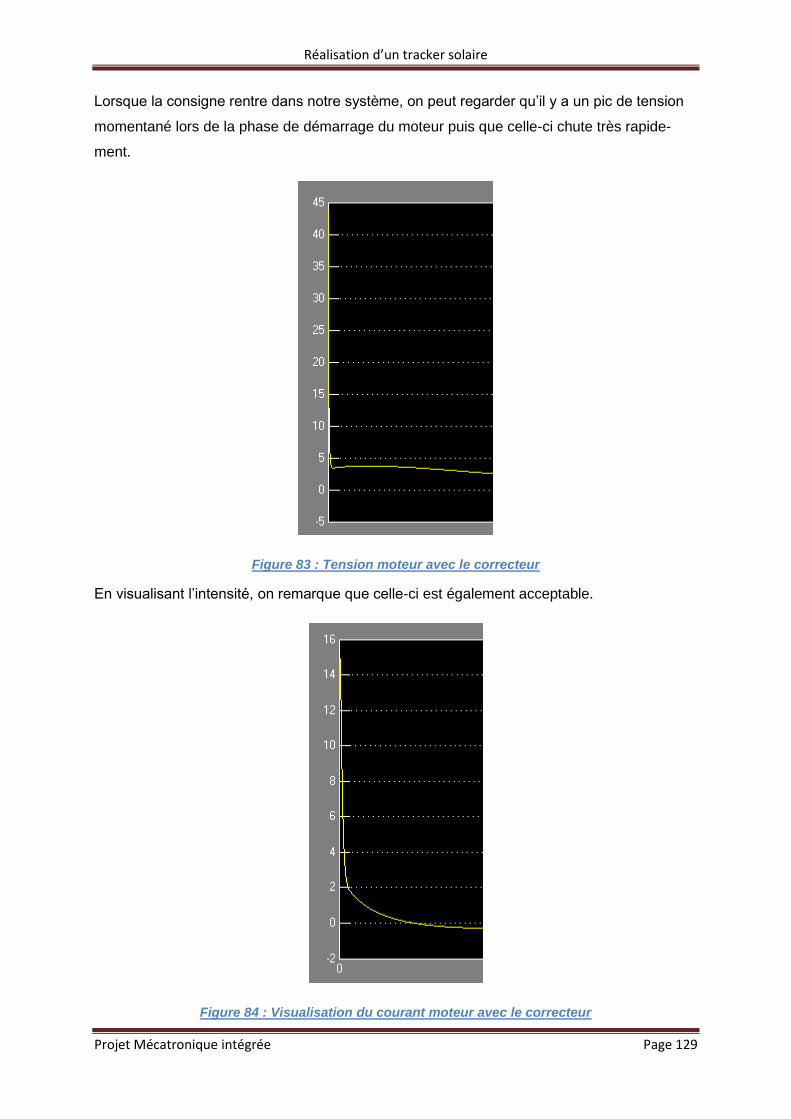
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 129
Lorsque la consigne rentre dans notre système, on peut regarder qu’il y a un pic de tension
momentané lors de la phase de démarrage du moteur puis que celle-ci chute très rapide-
ment.
Figure 83 : Tension moteur avec le correcteur
En visualisant l’intensité, on remarque que celle-ci est également acceptable.
Figure 84 : Visualisation du courant moteur avec le correcteur
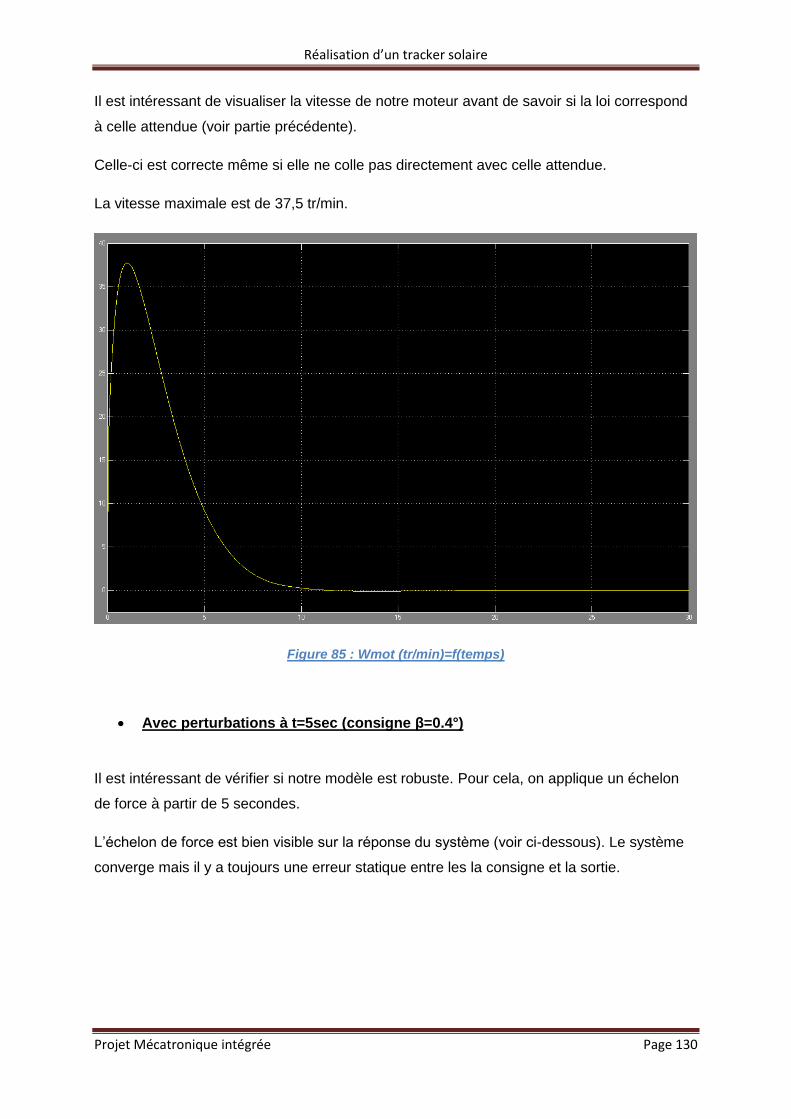
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 130
Il est intéressant de visualiser la vitesse de notre moteur avant de savoir si la loi correspond
à celle attendue (voir partie précédente).
Celle-ci est correcte même si elle ne colle pas directement avec celle attendue.
La vitesse maximale est de 37,5 tr/min.
Figure 85 : Wmot (tr/min)=f(temps)
Avec perturbations à t=5sec (consigne β=0.4°)
Il est intéressant de vérifier si notre modèle est robuste. Pour cela, on applique un échelon
de force à partir de 5 secondes.
L’échelon de force est bien visible sur la réponse du système (voir ci-dessous). Le système
converge mais il y a toujours une erreur statique entre les la consigne et la sortie.
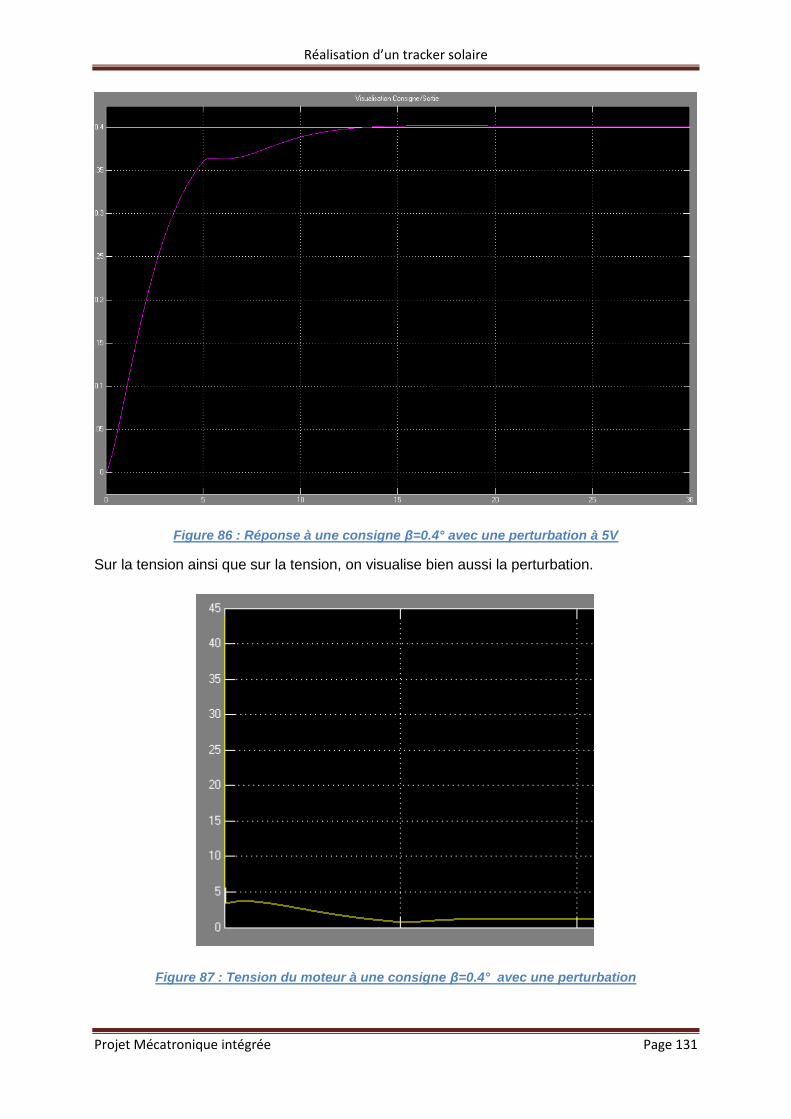
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 131
Figure 86 : Réponse à une consigne β=0.4° avec une perturbation à 5V
Sur la tension ainsi que sur la tension, on visualise bien aussi la perturbation.
Figure 87 : Tension du moteur à une consigne β=0.4° avec une perturbation
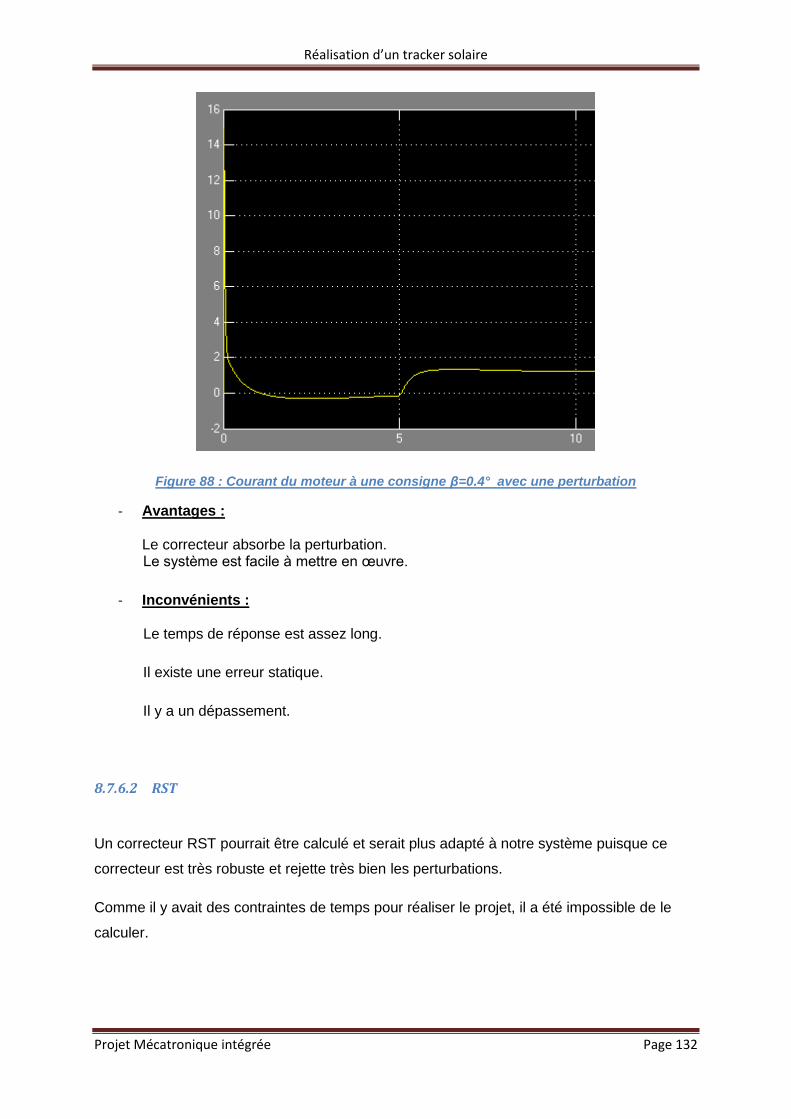
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 132
Figure 88 : Courant du moteur à une consigne β=0.4° avec une perturbation
- Avantages : Le correcteur absorbe la perturbation.
Le système est facile à mettre en œuvre.
- Inconvénients :
Le temps de réponse est assez long.
Il existe une erreur statique.
Il y a un dépassement.
8.7.6.2 RST
Un correcteur RST pourrait être calculé et serait plus adapté à notre système puisque ce
correcteur est très robuste et rejette très bien les perturbations.
Comme il y avait des contraintes de temps pour réaliser le projet, il a été impossible de le
calculer.

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 133
8.7.7 Passage du modèle au terrain
Malgré cette étude qui a démontré que l’on avait un modèle qui répondait à nos critères de
commande, il faut absolument avoir les données du vérin électromécanique avec sa com-
mande bas-niveau pour calculer le correcteur.
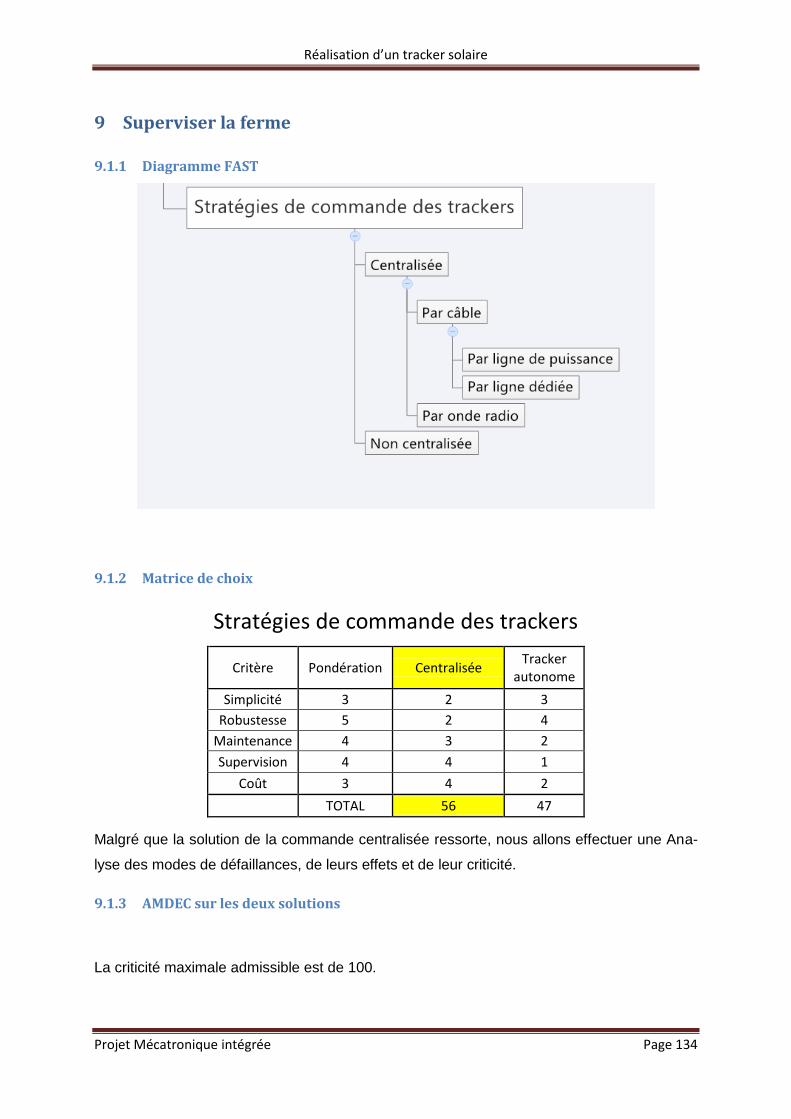
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 134
9 Superviser la ferme
9.1.1 Diagramme FAST
9.1.2 Matrice de choix
Stratégies de commande des trackers
Critère Pondération Centralisée Tracker
autonome
Simplicité 3 2 3
Robustesse 5 2 4
Maintenance 4 3 2
Supervision 4 4 1
Coût 3 4 2
TOTAL 56 47
Malgré que la solution de la commande centralisée ressorte, nous allons effectuer une Ana-
lyse des modes de défaillances, de leurs effets et de leur criticité.
9.1.3 AMDEC sur les deux solutions
La criticité maximale admissible est de 100.
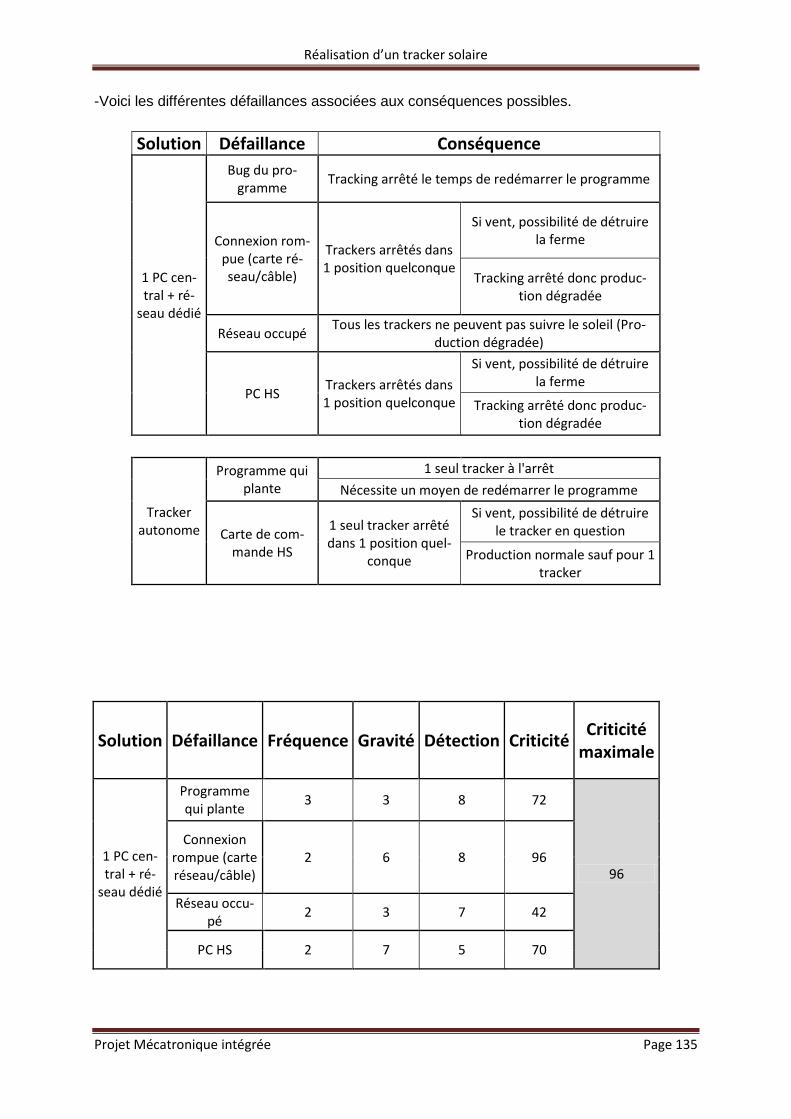
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 135
-Voici les différentes défaillances associées aux conséquences possibles.
Solution Défaillance Conséquence
1 PC cen-tral + ré-
seau dédié
Bug du pro-gramme
Tracking arrêté le temps de redémarrer le programme
Connexion rom-pue (carte ré-seau/câble)
Trackers arrêtés dans 1 position quelconque
Si vent, possibilité de détruire la ferme
Tracking arrêté donc produc-tion dégradée
Réseau occupé Tous les trackers ne peuvent pas suivre le soleil (Pro-
duction dégradée)
PC HS Trackers arrêtés dans 1 position quelconque
Si vent, possibilité de détruire la ferme
Tracking arrêté donc produc-tion dégradée
Tracker autonome
Programme qui plante
1 seul tracker à l'arrêt
Nécessite un moyen de redémarrer le programme
Carte de com-mande HS
1 seul tracker arrêté dans 1 position quel-
conque
Si vent, possibilité de détruire le tracker en question
Production normale sauf pour 1 tracker
Solution Défaillance Fréquence Gravité Détection Criticité Criticité
maximale
1 PC cen-tral + ré-
seau dédié
Programme qui plante
3 3 8 72
96
Connexion rompue (carte réseau/câble)
2 6 8 96
Réseau occu-pé
2 3 7 42
PC HS 2 7 5 70
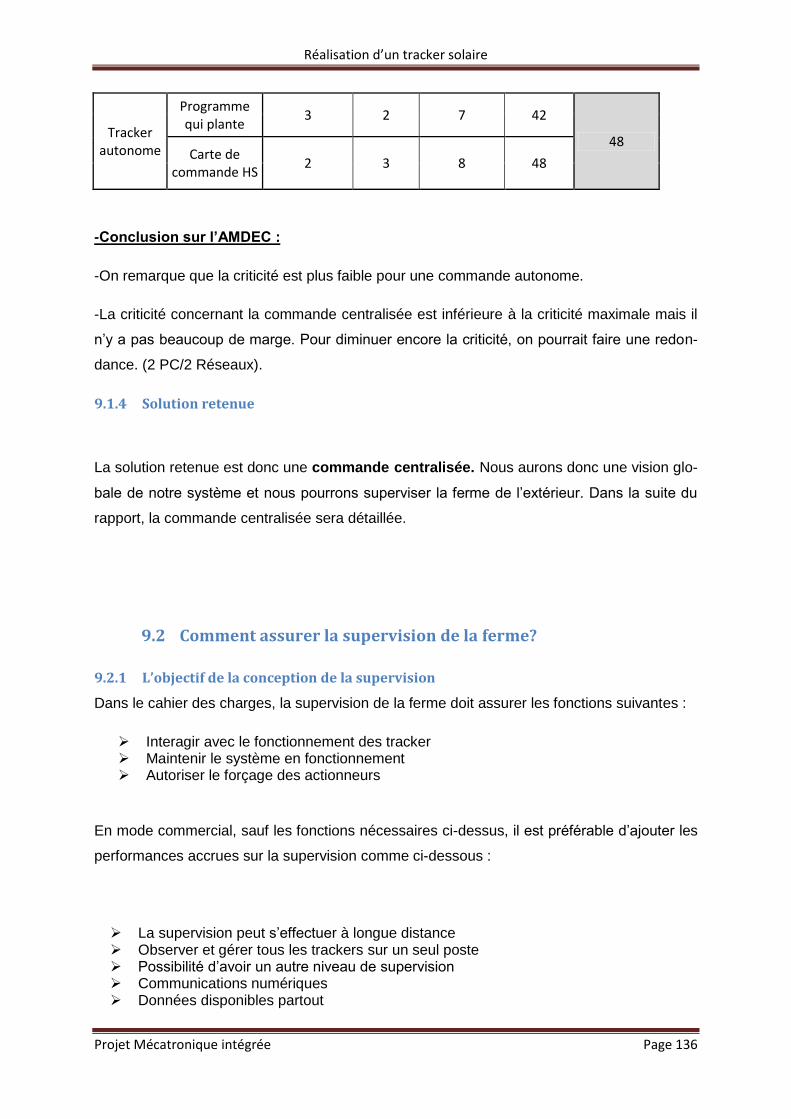
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 136
Tracker autonome
Programme qui plante
3 2 7 42
48 Carte de
commande HS 2 3 8 48
-Conclusion sur l’AMDEC :
-On remarque que la criticité est plus faible pour une commande autonome.
-La criticité concernant la commande centralisée est inférieure à la criticité maximale mais il
n’y a pas beaucoup de marge. Pour diminuer encore la criticité, on pourrait faire une redon-
dance. (2 PC/2 Réseaux).
9.1.4 Solution retenue
La solution retenue est donc une commande centralisée. Nous aurons donc une vision glo-
bale de notre système et nous pourrons superviser la ferme de l’extérieur. Dans la suite du
rapport, la commande centralisée sera détaillée.
9.2 Comment assurer la supervision de la ferme?
9.2.1 L’objectif de la conception de la supervision
Dans le cahier des charges, la supervision de la ferme doit assurer les fonctions suivantes :
Interagir avec le fonctionnement des tracker Maintenir le système en fonctionnement Autoriser le forçage des actionneurs
En mode commercial, sauf les fonctions nécessaires ci-dessus, il est préférable d’ajouter les
performances accrues sur la supervision comme ci-dessous :
La supervision peut s’effectuer à longue distance Observer et gérer tous les trackers sur un seul poste Possibilité d’avoir un autre niveau de supervision Communications numériques Données disponibles partout
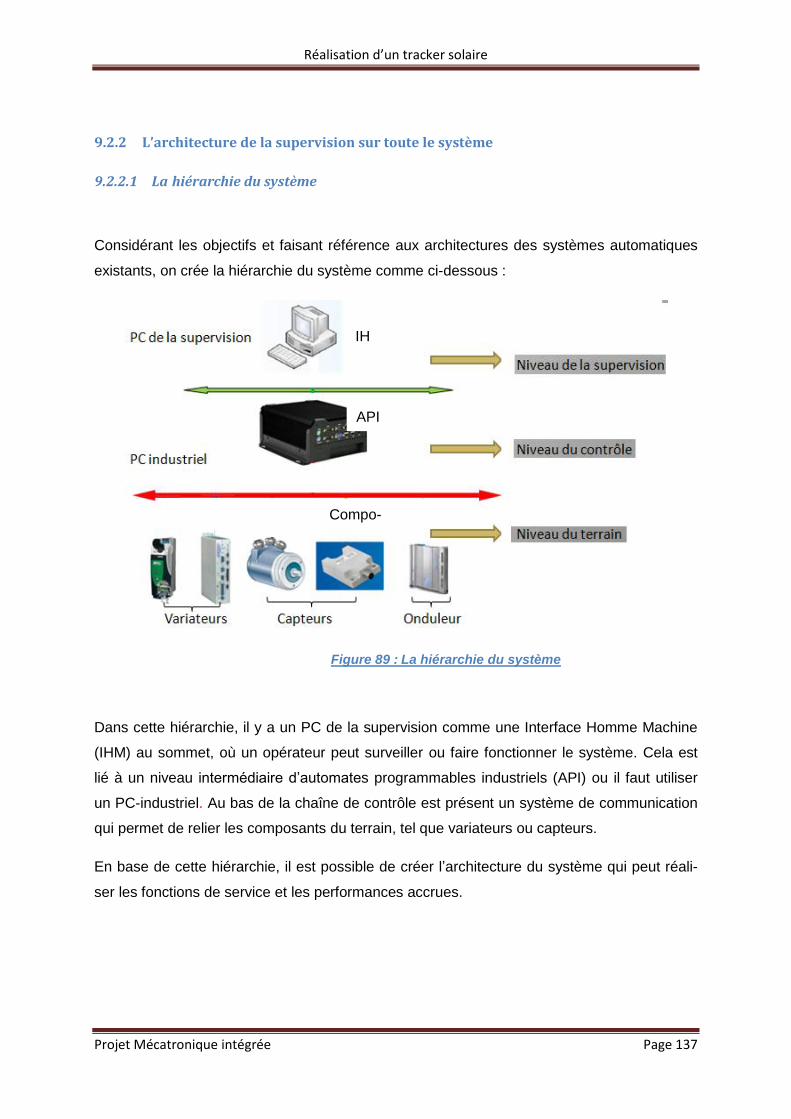
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 137
9.2.2 L’architecture de la supervision sur toute le système
9.2.2.1 La hiérarchie du système
Considérant les objectifs et faisant référence aux architectures des systèmes automatiques
existants, on crée la hiérarchie du système comme ci-dessous :
Figure 89 : La hiérarchie du système
Dans cette hiérarchie, il y a un PC de la supervision comme une Interface Homme Machine
(IHM) au sommet, où un opérateur peut surveiller ou faire fonctionner le système. Cela est
lié à un niveau intermédiaire d’automates programmables industriels (API) ou il faut utiliser
un PC-industriel. Au bas de la chaîne de contrôle est présent un système de communication
qui permet de relier les composants du terrain, tel que variateurs ou capteurs.
En base de cette hiérarchie, il est possible de créer l’architecture du système qui peut réali-
ser les fonctions de service et les performances accrues.
IH
API
Compo-
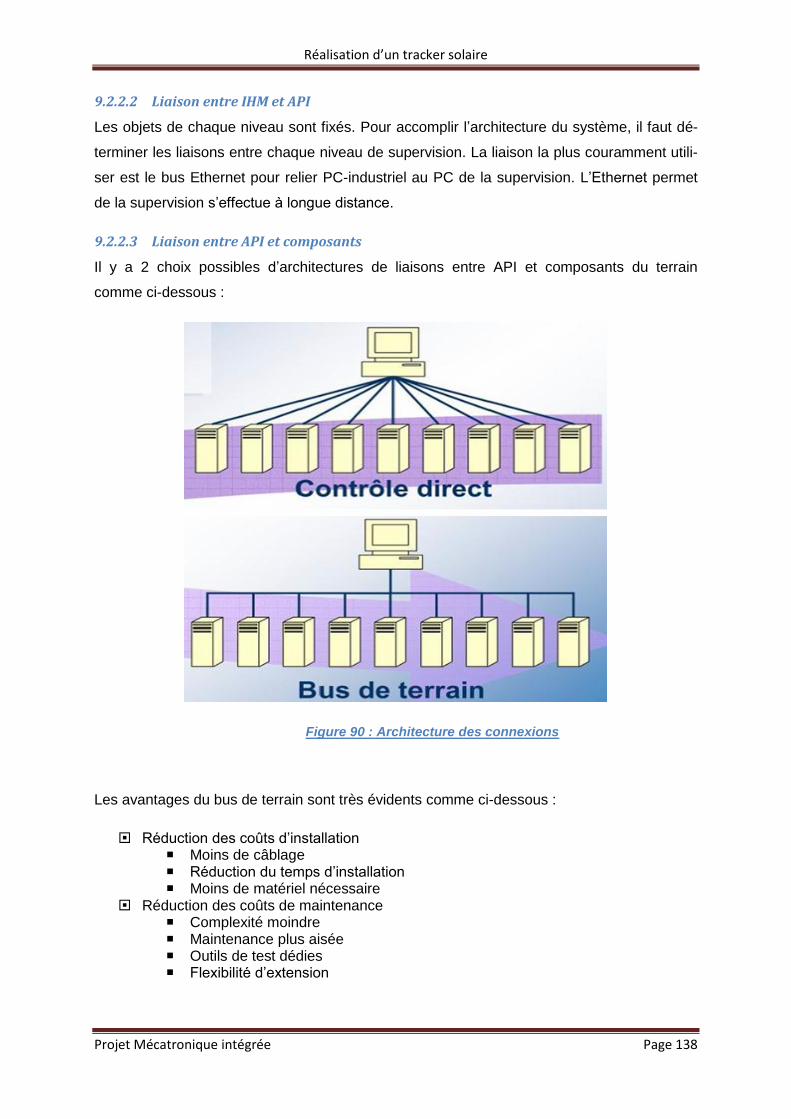
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 138
9.2.2.2 Liaison entre IHM et API
Les objets de chaque niveau sont fixés. Pour accomplir l’architecture du système, il faut dé-
terminer les liaisons entre chaque niveau de supervision. La liaison la plus couramment utili-
ser est le bus Ethernet pour relier PC-industriel au PC de la supervision. L’Ethernet permet
de la supervision s’effectue à longue distance.
9.2.2.3 Liaison entre API et composants
Il y a 2 choix possibles d’architectures de liaisons entre API et composants du terrain
comme ci-dessous :
Figure 90 : Architecture des connexions
Les avantages du bus de terrain sont très évidents comme ci-dessous :
Réduction des coûts d’installation Moins de câblage Réduction du temps d’installation Moins de matériel nécessaire
Réduction des coûts de maintenance Complexité moindre Maintenance plus aisée Outils de test dédies Flexibilité d’extension
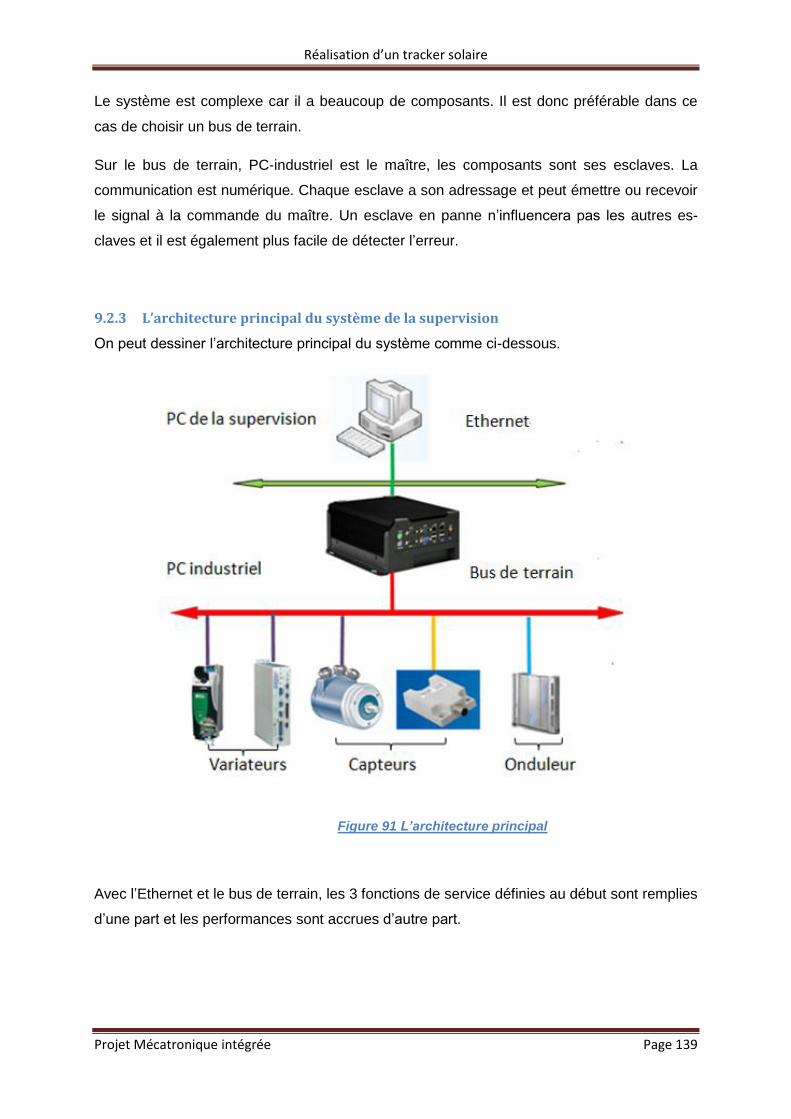
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 139
Le système est complexe car il a beaucoup de composants. Il est donc préférable dans ce
cas de choisir un bus de terrain.
Sur le bus de terrain, PC-industriel est le maître, les composants sont ses esclaves. La
communication est numérique. Chaque esclave a son adressage et peut émettre ou recevoir
le signal à la commande du maître. Un esclave en panne n’influencera pas les autres es-
claves et il est également plus facile de détecter l’erreur.
9.2.3 L’architecture principal du système de la supervision
On peut dessiner l’architecture principal du système comme ci-dessous.
Figure 91 L’architecture principal
Avec l’Ethernet et le bus de terrain, les 3 fonctions de service définies au début sont remplies
d’une part et les performances sont accrues d’autre part.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 140
9.2.4 Choix du bus de terrain
9.2.4.1 Recherche sur les bus de terrain les plus courants
L’architecture principale est fixée. Il faut maintenant choisir les bus de terrain pour accomplir
l’architecture du système.
Il y a plus de 20 bus de terrain. Chaque bus a son domaine d’usage et ses inconvénients.
Des recherches ont été axées sur les bus de terrain les plus courants comme ci-dessous :
CANopen Bus CAN et VAN bus LIN BACnet MODBUS Jbus InterBus Profibus DP Profibus PA FlexRay FIP Worldfip EIBus et KNX Batibus ARCnet bus ASi LonWorks Sercos EtherCAT Powerlink Protocole Dali
D’après les recherches, on trouve que le Profibus-DP et la CANopen sont utilisés pour la commande de capteurs, d'actionneurs ou d'automates programmables par une commande centrale dans l’industrie.
Ces 2 bus de terrain sont très connus et beaucoup utilisées dans l’industrie. Leurs protocoles sont standards. Il est préférable de choisir les composants qui s’adaptent à un de ces 2 types de bus de terrain même si Il y a d’autres bus de terrain spécialement adaptés à la de-mande.
Mais, les caractéristiques intrinsèques comme l’étendue de mesure, la résolution ou la préci-sion des composants sont plus importantes pour ce cas d’étude. En effet, on doit rester dans le cône de 1° pour respecter le cahier des charges donc les instruments de mesure doivent avoir une grande précision.
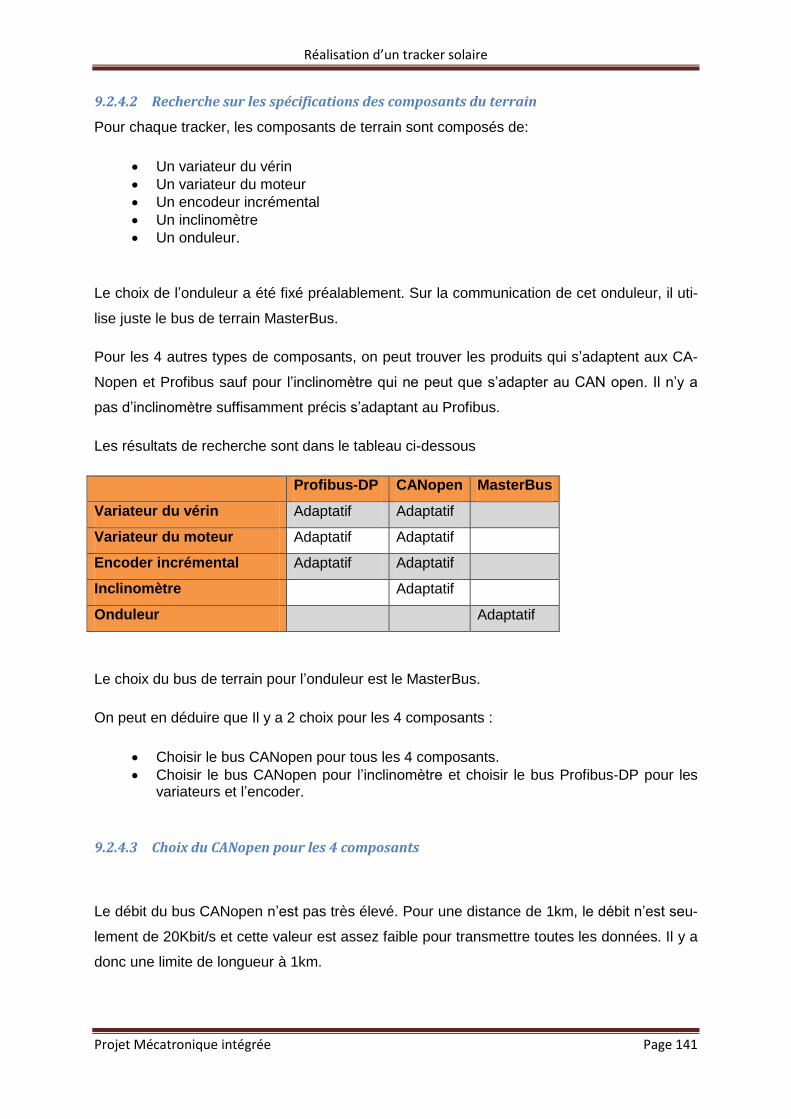
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 141
9.2.4.2 Recherche sur les spécifications des composants du terrain
Pour chaque tracker, les composants de terrain sont composés de:
Un variateur du vérin
Un variateur du moteur
Un encodeur incrémental
Un inclinomètre
Un onduleur.
Le choix de l’onduleur a été fixé préalablement. Sur la communication de cet onduleur, il uti-
lise juste le bus de terrain MasterBus.
Pour les 4 autres types de composants, on peut trouver les produits qui s’adaptent aux CA-
Nopen et Profibus sauf pour l’inclinomètre qui ne peut que s’adapter au CAN open. Il n’y a
pas d’inclinomètre suffisamment précis s’adaptant au Profibus.
Les résultats de recherche sont dans le tableau ci-dessous
Profibus-DP CANopen MasterBus
Variateur du vérin Adaptatif Adaptatif
Variateur du moteur Adaptatif Adaptatif
Encoder incrémental Adaptatif Adaptatif
Inclinomètre Adaptatif
Onduleur Adaptatif
Le choix du bus de terrain pour l’onduleur est le MasterBus.
On peut en déduire que Il y a 2 choix pour les 4 composants :
Choisir le bus CANopen pour tous les 4 composants.
Choisir le bus CANopen pour l’inclinomètre et choisir le bus Profibus-DP pour les variateurs et l’encoder.
9.2.4.3 Choix du CANopen pour les 4 composants
Le débit du bus CANopen n’est pas très élevé. Pour une distance de 1km, le débit n’est seu-
lement de 20Kbit/s et cette valeur est assez faible pour transmettre toutes les données. Il y a
donc une limite de longueur à 1km.
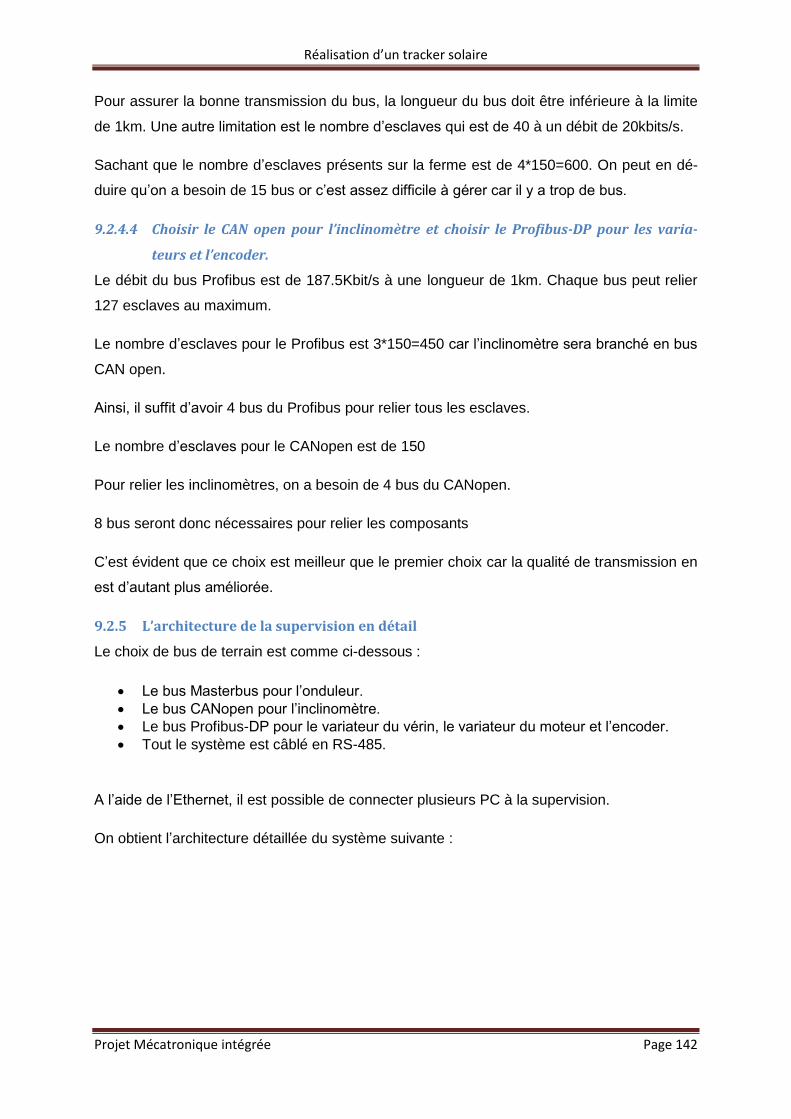
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 142
Pour assurer la bonne transmission du bus, la longueur du bus doit être inférieure à la limite
de 1km. Une autre limitation est le nombre d’esclaves qui est de 40 à un débit de 20kbits/s.
Sachant que le nombre d’esclaves présents sur la ferme est de 4*150=600. On peut en dé-
duire qu’on a besoin de 15 bus or c’est assez difficile à gérer car il y a trop de bus.
9.2.4.4 Choisir le CAN open pour l’inclinomètre et choisir le Profibus-DP pour les varia-
teurs et l’encoder.
Le débit du bus Profibus est de 187.5Kbit/s à une longueur de 1km. Chaque bus peut relier
127 esclaves au maximum.
Le nombre d’esclaves pour le Profibus est 3*150=450 car l’inclinomètre sera branché en bus
CAN open.
Ainsi, il suffit d’avoir 4 bus du Profibus pour relier tous les esclaves.
Le nombre d’esclaves pour le CANopen est de 150
Pour relier les inclinomètres, on a besoin de 4 bus du CANopen.
8 bus seront donc nécessaires pour relier les composants
C’est évident que ce choix est meilleur que le premier choix car la qualité de transmission en
est d’autant plus améliorée.
9.2.5 L’architecture de la supervision en détail
Le choix de bus de terrain est comme ci-dessous :
Le bus Masterbus pour l’onduleur.
Le bus CANopen pour l’inclinomètre.
Le bus Profibus-DP pour le variateur du vérin, le variateur du moteur et l’encoder.
Tout le système est câblé en RS-485.
A l’aide de l’Ethernet, il est possible de connecter plusieurs PC à la supervision.
On obtient l’architecture détaillée du système suivante :
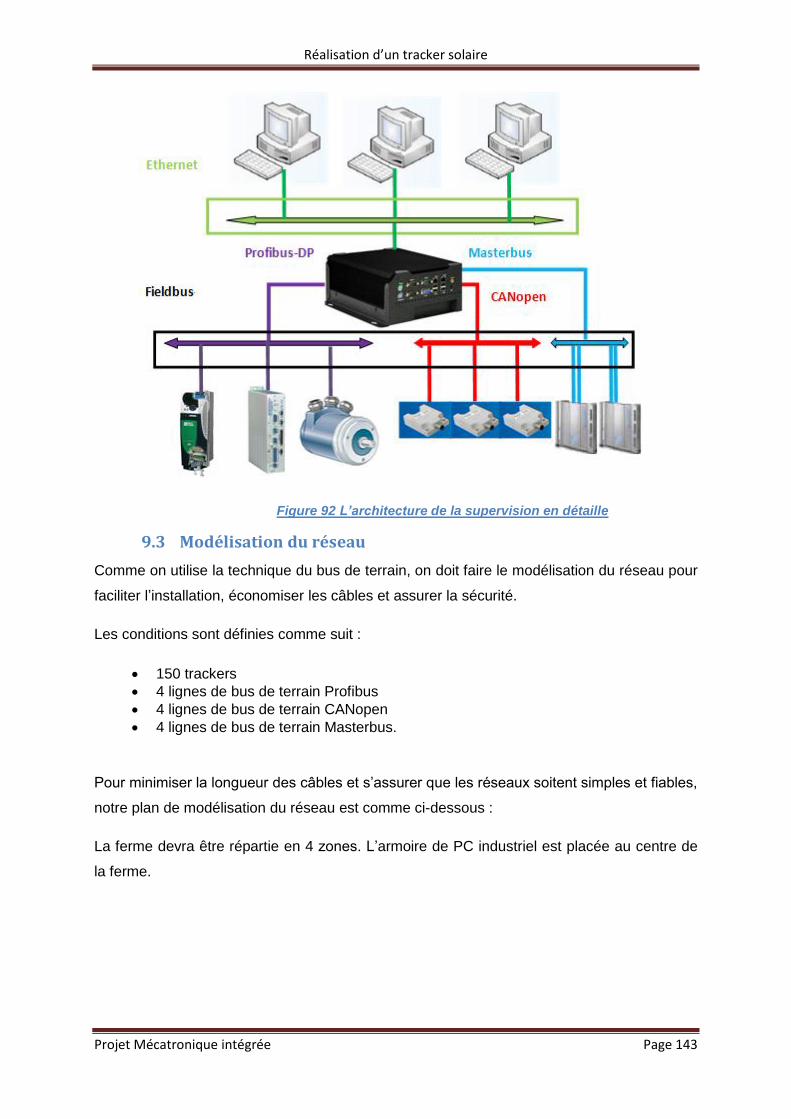
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 143
Figure 92 L’architecture de la supervision en détaille
9.3 Modélisation du réseau
Comme on utilise la technique du bus de terrain, on doit faire le modélisation du réseau pour
faciliter l’installation, économiser les câbles et assurer la sécurité.
Les conditions sont définies comme suit :
150 trackers
4 lignes de bus de terrain Profibus
4 lignes de bus de terrain CANopen
4 lignes de bus de terrain Masterbus.
Pour minimiser la longueur des câbles et s’assurer que les réseaux soitent simples et fiables,
notre plan de modélisation du réseau est comme ci-dessous :
La ferme devra être répartie en 4 zones. L’armoire de PC industriel est placée au centre de
la ferme.
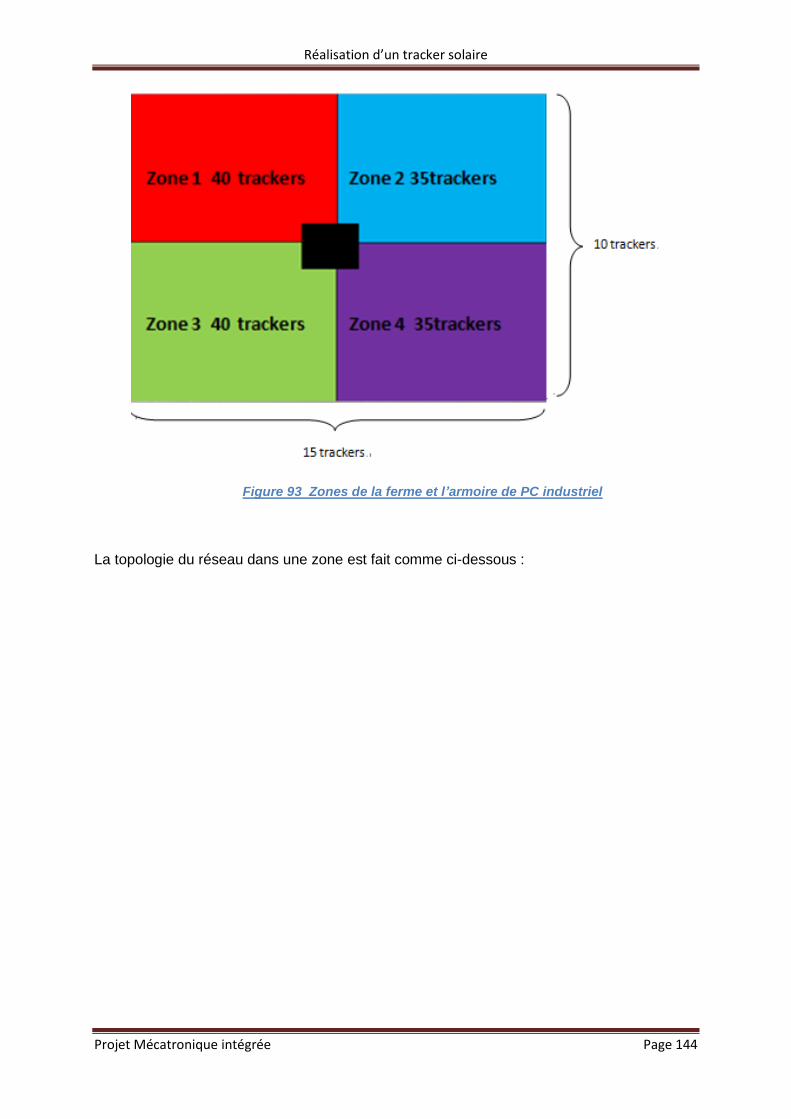
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 144
Figure 93 Zones de la ferme et l’armoire de PC industriel
La topologie du réseau dans une zone est fait comme ci-dessous :
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 145
Figure 94 : Topologie de la zone 3
La longueur maximale d’un bus dans une zone est de
Cette longueur respecte bien la longueur maximale de 1km.
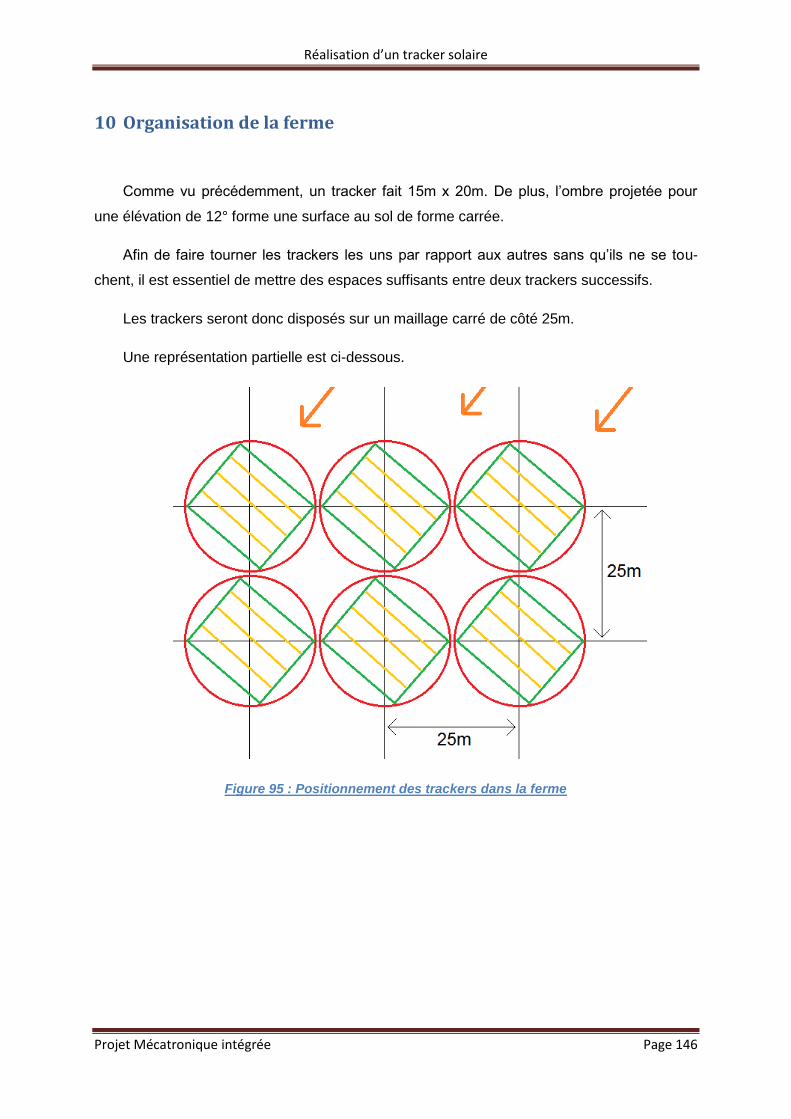
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 146
10 Organisation de la ferme
Comme vu précédemment, un tracker fait 15m x 20m. De plus, l’ombre projetée pour
une élévation de 12° forme une surface au sol de forme carrée.
Afin de faire tourner les trackers les uns par rapport aux autres sans qu’ils ne se tou-
chent, il est essentiel de mettre des espaces suffisants entre deux trackers successifs.
Les trackers seront donc disposés sur un maillage carré de côté 25m.
Une représentation partielle est ci-dessous.
Figure 95 : Positionnement des trackers dans la ferme
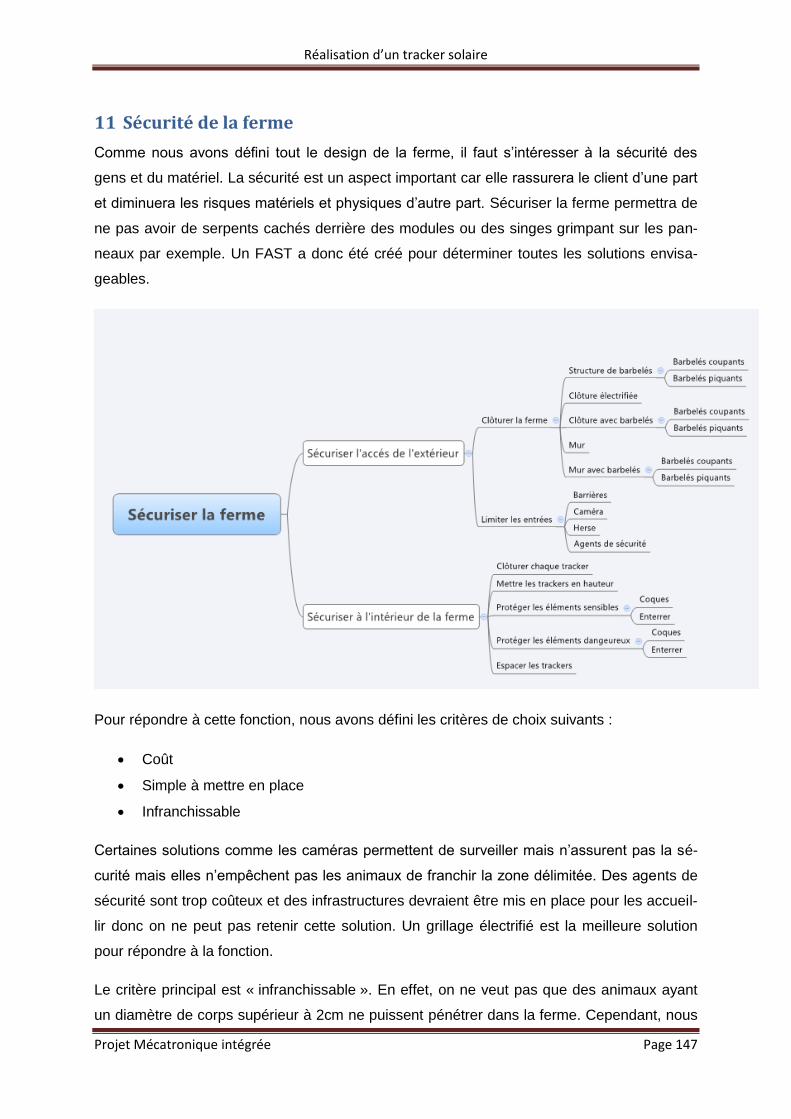
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 147
11 Sécurité de la ferme
Comme nous avons défini tout le design de la ferme, il faut s’intéresser à la sécurité des
gens et du matériel. La sécurité est un aspect important car elle rassurera le client d’une part
et diminuera les risques matériels et physiques d’autre part. Sécuriser la ferme permettra de
ne pas avoir de serpents cachés derrière des modules ou des singes grimpant sur les pan-
neaux par exemple. Un FAST a donc été créé pour déterminer toutes les solutions envisa-
geables.
Pour répondre à cette fonction, nous avons défini les critères de choix suivants :
Coût
Simple à mettre en place
Infranchissable
Certaines solutions comme les caméras permettent de surveiller mais n’assurent pas la sé-
curité mais elles n’empêchent pas les animaux de franchir la zone délimitée. Des agents de
sécurité sont trop coûteux et des infrastructures devraient être mis en place pour les accueil-
lir donc on ne peut pas retenir cette solution. Un grillage électrifié est la meilleure solution
pour répondre à la fonction.
Le critère principal est « infranchissable ». En effet, on ne veut pas que des animaux ayant
un diamètre de corps supérieur à 2cm ne puissent pénétrer dans la ferme. Cependant, nous
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 148
avons pensé aux animaux rampants qui peuvent grimper par-dessus une clôture. C’est donc
dans cette optique que l’équipe s’est orientée vers une clôture électrifiée. Cette solution n’est
pas onéreuse et est simple à mettre en place puisque l’énergie électrique est déjà disponible
sur le site.
Par ailleurs, l’installation d’une clôture autour de la ferme est plus simple à réaliser et moins
coûteuse que de clôturer chaque tracker individuellement. En effet, en clôturant l’ensemble
de la ferme, nous pourrons contrôler plus facilement l’accès des personnes. Cette gestion
des entrées sorties sera facilitée puisqu’elles ne pourront se faire qu’à partir de portiques
dédiés. L’accès à la ferme se fera par badge. Cette option est nécessaire pour ne faire entrer
que les personnes autorisées ou habilitées par l’entreprise.
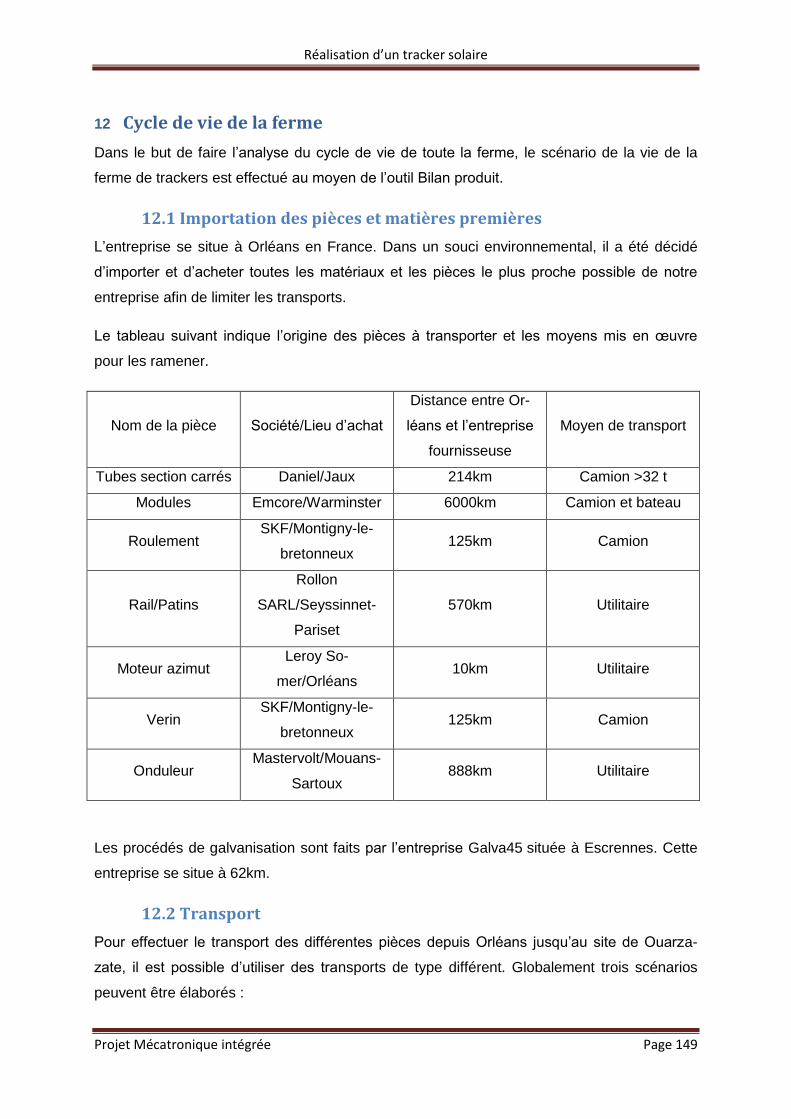
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 149
12 Cycle de vie de la ferme
Dans le but de faire l’analyse du cycle de vie de toute la ferme, le scénario de la vie de la
ferme de trackers est effectué au moyen de l’outil Bilan produit.
12.1 Importation des pièces et matières premières
L’entreprise se situe à Orléans en France. Dans un souci environnemental, il a été décidé
d’importer et d’acheter toutes les matériaux et les pièces le plus proche possible de notre
entreprise afin de limiter les transports.
Le tableau suivant indique l’origine des pièces à transporter et les moyens mis en œuvre
pour les ramener.
Nom de la pièce Société/Lieu d’achat
Distance entre Or-
léans et l’entreprise
fournisseuse
Moyen de transport
Tubes section carrés Daniel/Jaux 214km Camion >32 t
Modules Emcore/Warminster 6000km Camion et bateau
Roulement SKF/Montigny-le-
bretonneux 125km Camion
Rail/Patins
Rollon
SARL/Seyssinnet-
Pariset
570km Utilitaire
Moteur azimut Leroy So-
mer/Orléans 10km Utilitaire
Verin SKF/Montigny-le-
bretonneux 125km Camion
Onduleur Mastervolt/Mouans-
Sartoux 888km Utilitaire
Les procédés de galvanisation sont faits par l’entreprise Galva45 située à Escrennes. Cette
entreprise se situe à 62km.
12.2 Transport
Pour effectuer le transport des différentes pièces depuis Orléans jusqu’au site de Ouarza-
zate, il est possible d’utiliser des transports de type différent. Globalement trois scénarios
peuvent être élaborés :
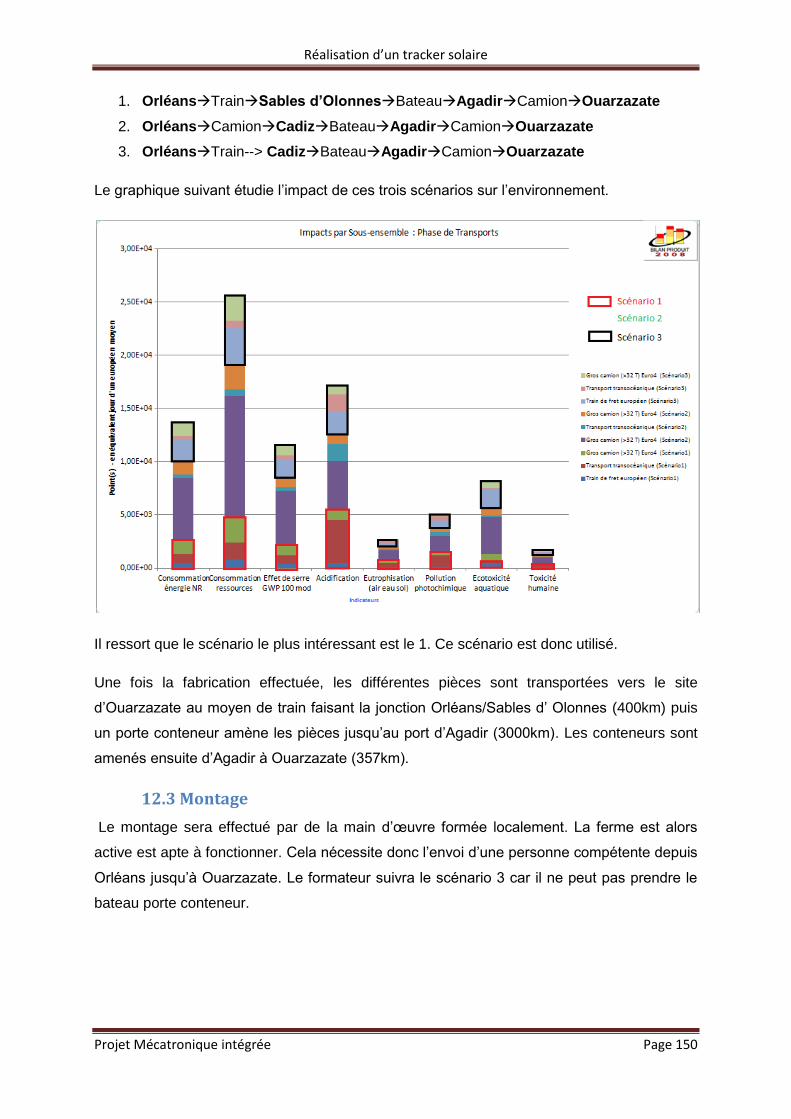
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 150
1. OrléansTrainSables d’OlonnesBateauAgadirCamionOuarzazate
2. OrléansCamionCadizBateauAgadirCamionOuarzazate
3. OrléansTrain--> CadizBateauAgadirCamionOuarzazate
Le graphique suivant étudie l’impact de ces trois scénarios sur l’environnement.
Il ressort que le scénario le plus intéressant est le 1. Ce scénario est donc utilisé.
Une fois la fabrication effectuée, les différentes pièces sont transportées vers le site
d’Ouarzazate au moyen de train faisant la jonction Orléans/Sables d’ Olonnes (400km) puis
un porte conteneur amène les pièces jusqu’au port d’Agadir (3000km). Les conteneurs sont
amenés ensuite d’Agadir à Ouarzazate (357km).
12.3 Montage
Le montage sera effectué par de la main d’œuvre formée localement. La ferme est alors
active est apte à fonctionner. Cela nécessite donc l’envoi d’une personne compétente depuis
Orléans jusqu’à Ouarzazate. Le formateur suivra le scénario 3 car il ne peut pas prendre le
bateau porte conteneur.
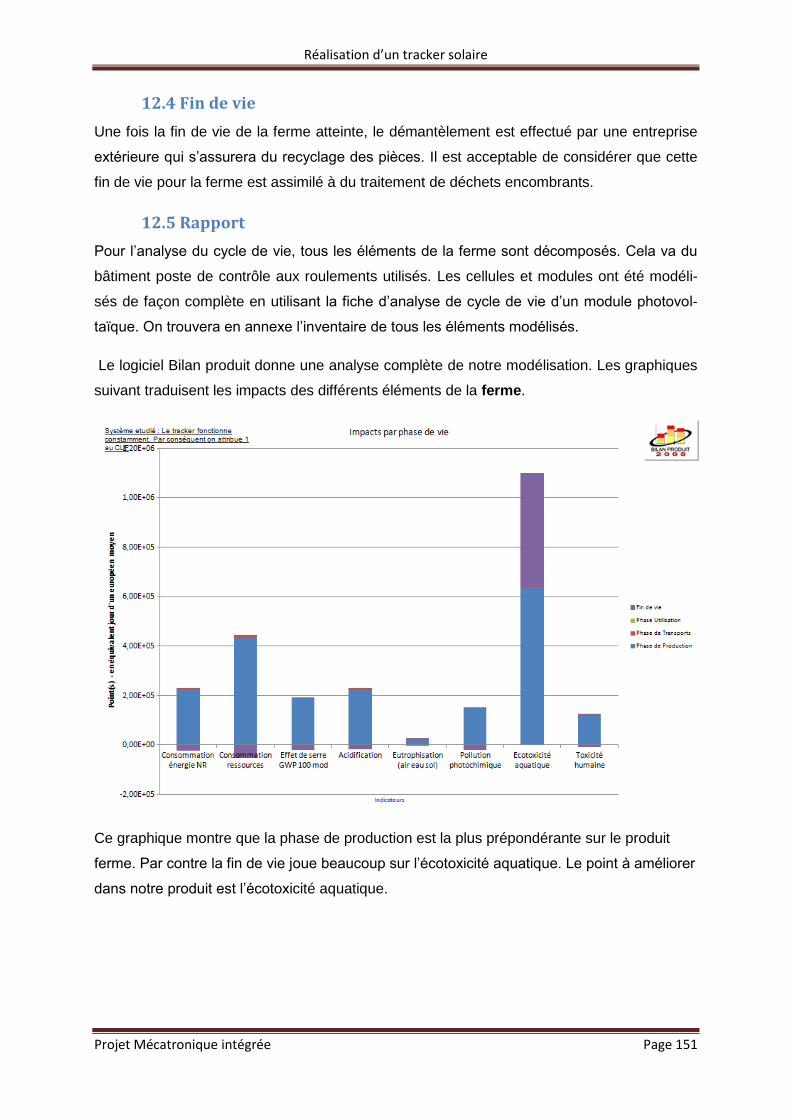
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 151
12.4 Fin de vie
Une fois la fin de vie de la ferme atteinte, le démantèlement est effectué par une entreprise
extérieure qui s’assurera du recyclage des pièces. Il est acceptable de considérer que cette
fin de vie pour la ferme est assimilé à du traitement de déchets encombrants.
12.5 Rapport
Pour l’analyse du cycle de vie, tous les éléments de la ferme sont décomposés. Cela va du
bâtiment poste de contrôle aux roulements utilisés. Les cellules et modules ont été modéli-
sés de façon complète en utilisant la fiche d’analyse de cycle de vie d’un module photovol-
taïque. On trouvera en annexe l’inventaire de tous les éléments modélisés.
Le logiciel Bilan produit donne une analyse complète de notre modélisation. Les graphiques
suivant traduisent les impacts des différents éléments de la ferme.
Ce graphique montre que la phase de production est la plus prépondérante sur le produit
ferme. Par contre la fin de vie joue beaucoup sur l’écotoxicité aquatique. Le point à améliorer
dans notre produit est l’écotoxicité aquatique.
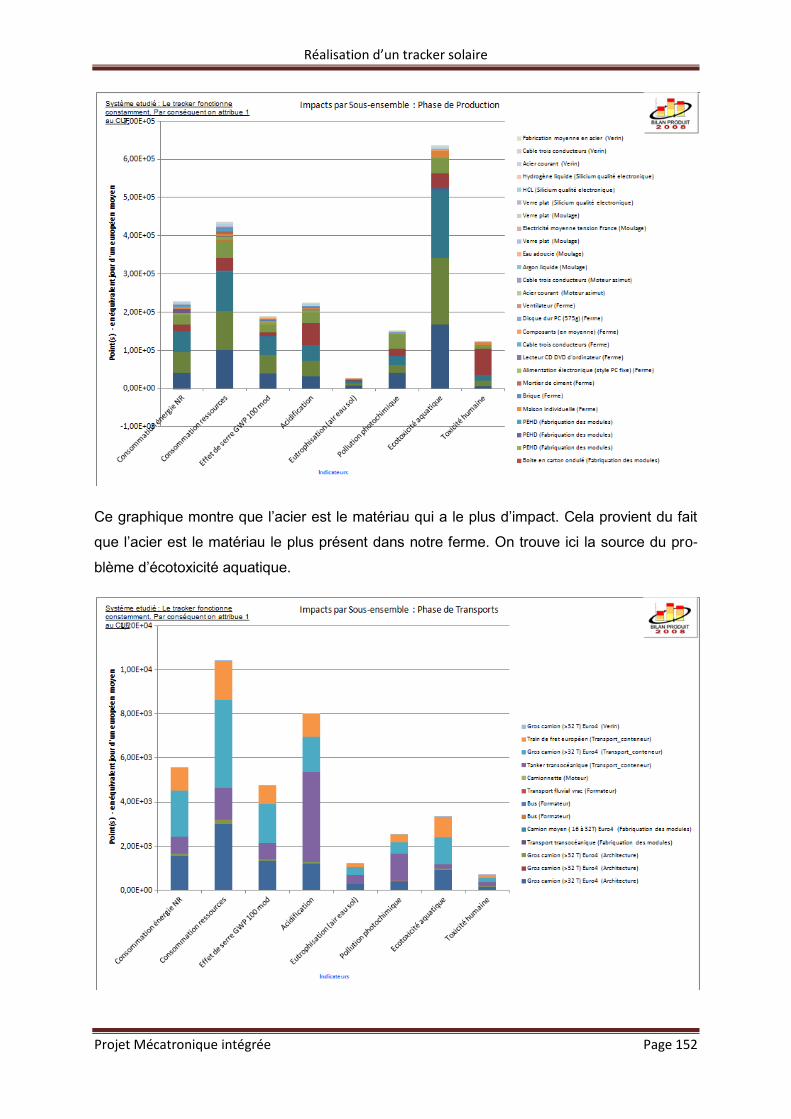
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 152
Ce graphique montre que l’acier est le matériau qui a le plus d’impact. Cela provient du fait
que l’acier est le matériau le plus présent dans notre ferme. On trouve ici la source du pro-
blème d’écotoxicité aquatique.
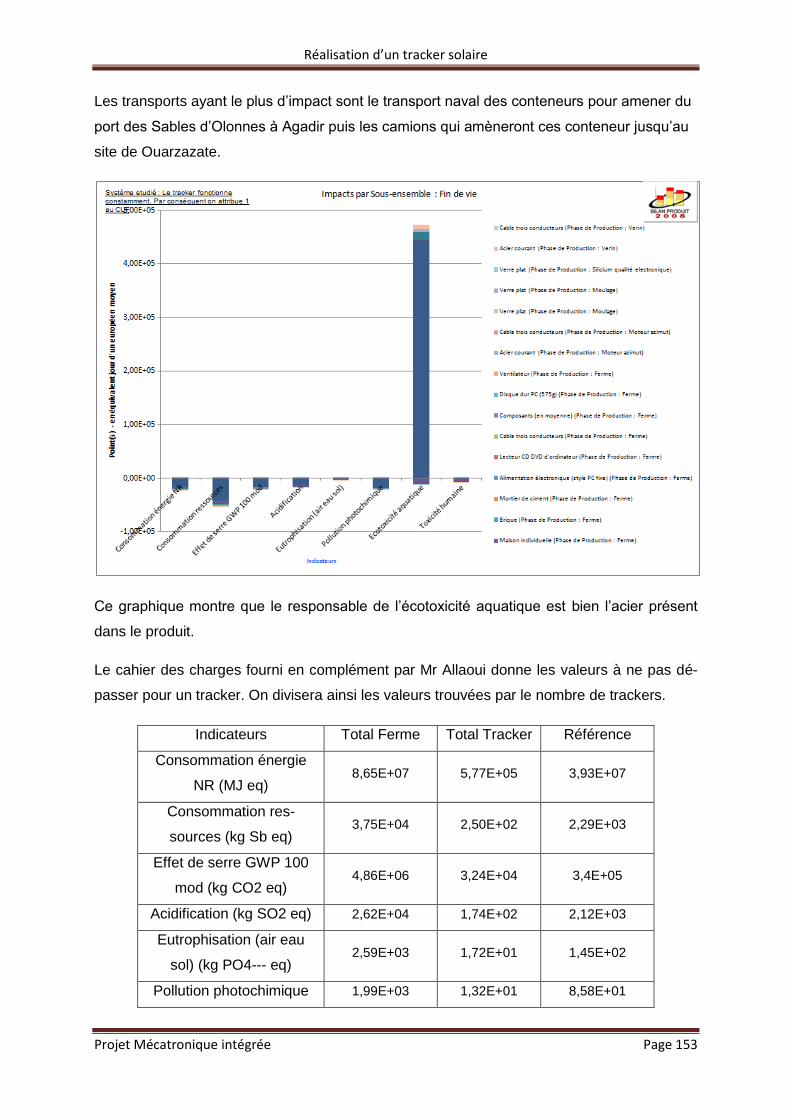
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 153
Les transports ayant le plus d’impact sont le transport naval des conteneurs pour amener du
port des Sables d’Olonnes à Agadir puis les camions qui amèneront ces conteneur jusqu’au
site de Ouarzazate.
Ce graphique montre que le responsable de l’écotoxicité aquatique est bien l’acier présent
dans le produit.
Le cahier des charges fourni en complément par Mr Allaoui donne les valeurs à ne pas dé-
passer pour un tracker. On divisera ainsi les valeurs trouvées par le nombre de trackers.
Indicateurs Total Ferme Total Tracker Référence
Consommation énergie
NR (MJ eq) 8,65E+07 5,77E+05 3,93E+07
Consommation res-
sources (kg Sb eq) 3,75E+04 2,50E+02 2,29E+03
Effet de serre GWP 100
mod (kg CO2 eq) 4,86E+06 3,24E+04 3,4E+05
Acidification (kg SO2 eq) 2,62E+04 1,74E+02 2,12E+03
Eutrophisation (air eau
sol) (kg PO4--- eq) 2,59E+03 1,72E+01 1,45E+02
Pollution photochimique 1,99E+03 1,32E+01 8,58E+01
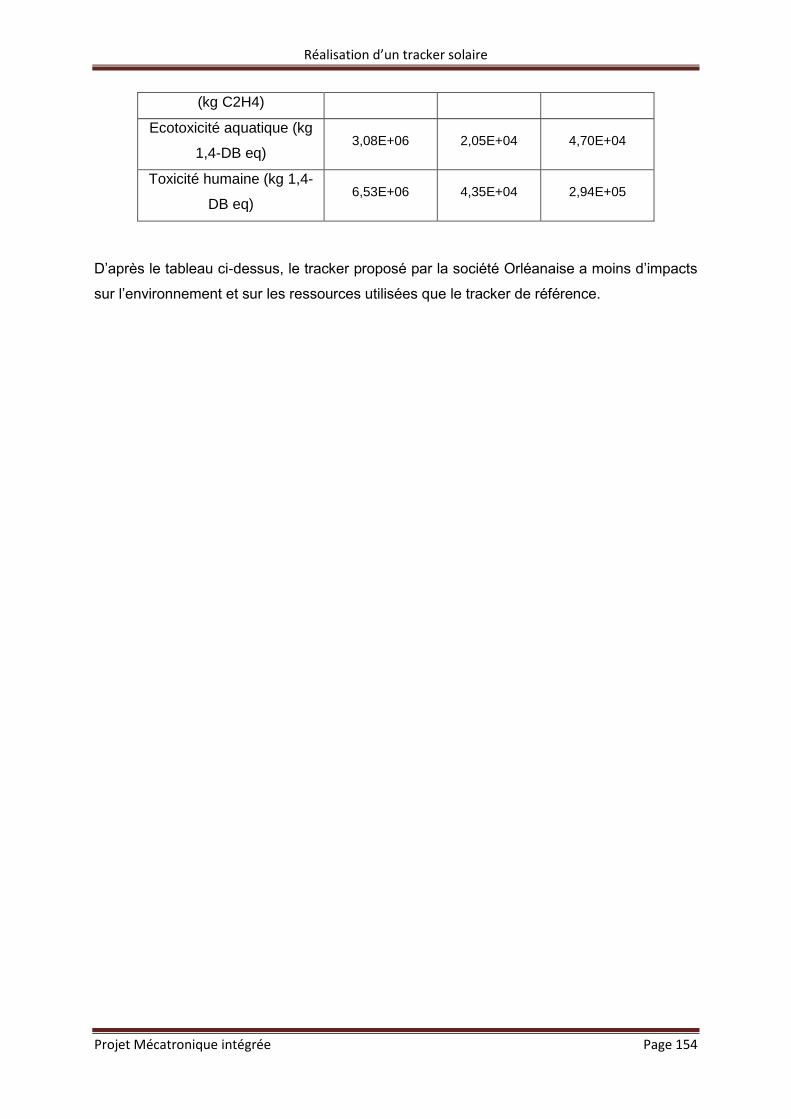
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 154
(kg C2H4)
Ecotoxicité aquatique (kg
1,4-DB eq) 3,08E+06 2,05E+04 4,70E+04
Toxicité humaine (kg 1,4-
DB eq) 6,53E+06 4,35E+04 2,94E+05
D’après le tableau ci-dessus, le tracker proposé par la société Orléanaise a moins d’impacts
sur l’environnement et sur les ressources utilisées que le tracker de référence.

Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 155
Conclusion
A travers ce rapport, nous avons présenté les différentes étapes de conception en
partant de l’analyse du besoin pour déboucher sur la conception détaillée. Avec des choix
innovants et justifiés, nous sommes sûrs de proposer la meilleure solution à notre client.
Nous avons répondu aux besoins du client en respectant scrupuleusement le cahier des
charges. Le business plan indique que le projet est économiquement viable sur 20 ans. Le
rendement proposé devrait inciter les clients à investir dans notre projet.
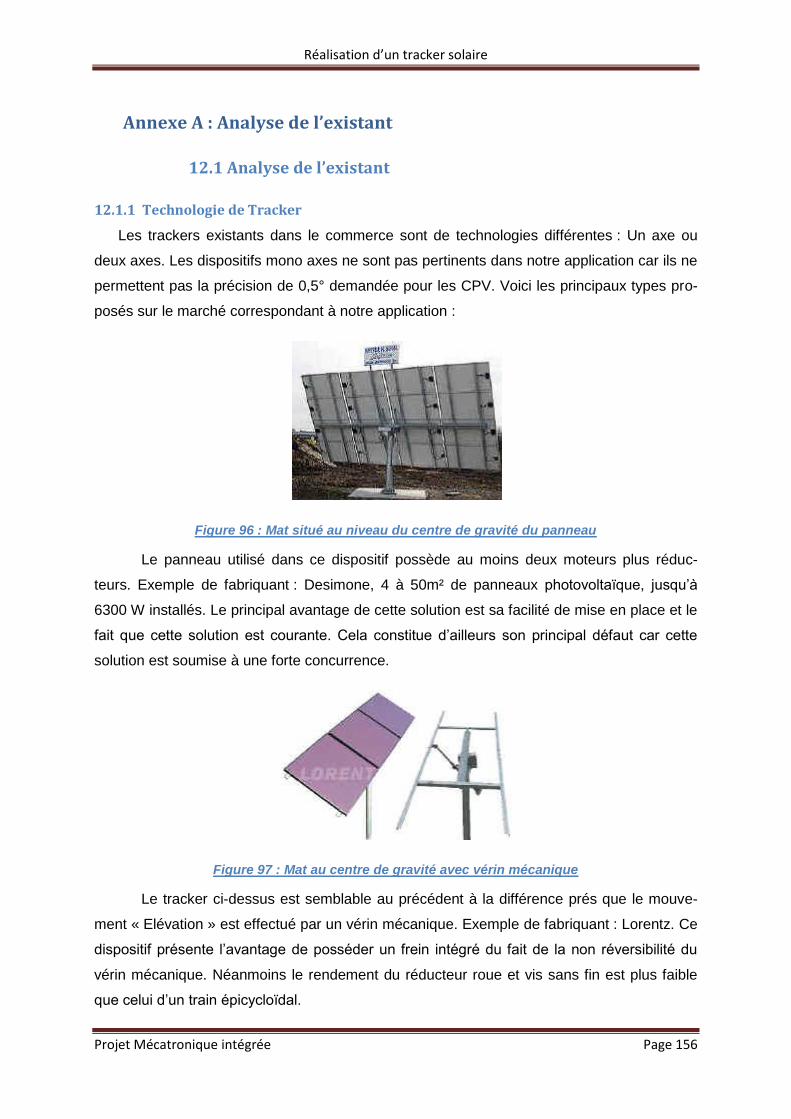
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 156
Annexe A : Analyse de l’existant
12.1 Analyse de l’existant
12.1.1 Technologie de Tracker
Les trackers existants dans le commerce sont de technologies différentes : Un axe ou
deux axes. Les dispositifs mono axes ne sont pas pertinents dans notre application car ils ne
permettent pas la précision de 0,5° demandée pour les CPV. Voici les principaux types pro-
posés sur le marché correspondant à notre application :
Figure 96 : Mat situé au niveau du centre de gravité du panneau
Le panneau utilisé dans ce dispositif possède au moins deux moteurs plus réduc-
teurs. Exemple de fabriquant : Desimone, 4 à 50m² de panneaux photovoltaïque, jusqu’à
6300 W installés. Le principal avantage de cette solution est sa facilité de mise en place et le
fait que cette solution est courante. Cela constitue d’ailleurs son principal défaut car cette
solution est soumise à une forte concurrence.
Figure 97 : Mat au centre de gravité avec vérin mécanique
Le tracker ci-dessus est semblable au précédent à la différence prés que le mouve-
ment « Elévation » est effectué par un vérin mécanique. Exemple de fabriquant : Lorentz. Ce
dispositif présente l’avantage de posséder un frein intégré du fait de la non réversibilité du
vérin mécanique. Néanmoins le rendement du réducteur roue et vis sans fin est plus faible
que celui d’un train épicycloïdal.
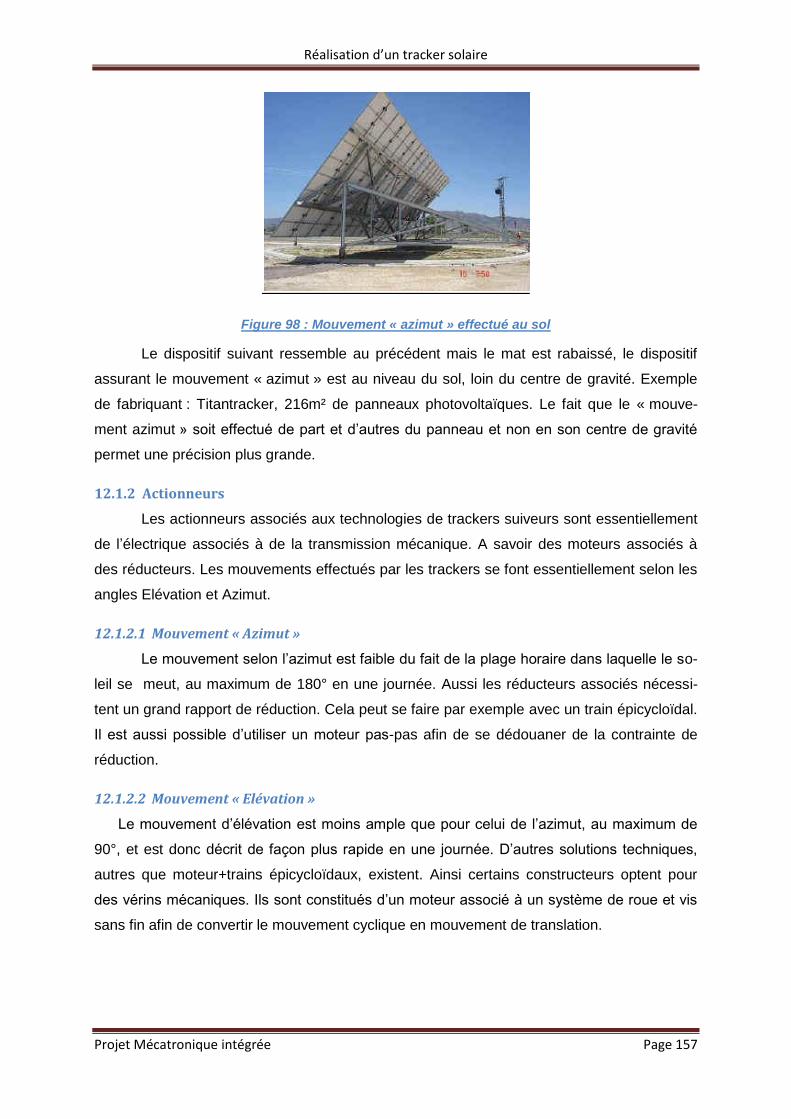
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 157
Figure 98 : Mouvement « azimut » effectué au sol
Le dispositif suivant ressemble au précédent mais le mat est rabaissé, le dispositif
assurant le mouvement « azimut » est au niveau du sol, loin du centre de gravité. Exemple
de fabriquant : Titantracker, 216m² de panneaux photovoltaïques. Le fait que le « mouve-
ment azimut » soit effectué de part et d’autres du panneau et non en son centre de gravité
permet une précision plus grande.
12.1.2 Actionneurs
Les actionneurs associés aux technologies de trackers suiveurs sont essentiellement
de l’électrique associés à de la transmission mécanique. A savoir des moteurs associés à
des réducteurs. Les mouvements effectués par les trackers se font essentiellement selon les
angles Elévation et Azimut.
12.1.2.1 Mouvement « Azimut »
Le mouvement selon l’azimut est faible du fait de la plage horaire dans laquelle le so-
leil se meut, au maximum de 180° en une journée. Aussi les réducteurs associés nécessi-
tent un grand rapport de réduction. Cela peut se faire par exemple avec un train épicycloïdal.
Il est aussi possible d’utiliser un moteur pas-pas afin de se dédouaner de la contrainte de
réduction.
12.1.2.2 Mouvement « Elévation »
Le mouvement d’élévation est moins ample que pour celui de l’azimut, au maximum de
90°, et est donc décrit de façon plus rapide en une journée. D’autres solutions techniques,
autres que moteur+trains épicycloïdaux, existent. Ainsi certains constructeurs optent pour
des vérins mécaniques. Ils sont constitués d’un moteur associé à un système de roue et vis
sans fin afin de convertir le mouvement cyclique en mouvement de translation.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 158
Annexe B : Analyse du besoin
L'énergie photovoltaïque s'inscrit parmi les énergies renouvelables actuellement utili-
sées. Avec l'inflation des produits pétroliers, l'énergie solaire constitue une véritable alterna-
tive pour les pays dépendants du pétrole. De plus, les régions ensoleillées représentent une
grande part de marché car ce sont ces régions qui sont les plus à mêmes de produire de
l'électricité grâce aux modules solaires.
Par ailleurs, certains pays ne sont pas uniformément électrifiés et la seule alternative
pour eux est d'utiliser des centrales solaires. Moins coûteuses que des éoliennes, les fermes
solaires sont de plus en plus développées. C'est dans ce contexte que l'entreprise souhaite
vendre une ferme solaire dans le Maghreb.
D’après le cahier des charges fourni, nous devrons orienter les modules perpendicu-
lairement aux rayons du soleil avec une précision de 1° (+/-0.5°). Les trackers devront fonc-
tionner avec des vents de 100km/h et il devra se placer dans une position de sécurité avec
des vents de 200km/h. Le système sera « supervisable » tout en ayant un coût raisonnable.
12.2 Analyse du marché
12.2.1 Les avantages et inconvénients du photovoltaïque
Les forces du photovoltaïque sont :
De reposer sur des technologies microélectronique et couches minces, en conser-
vant une bonne marge de progrès et d’innovations.
De pouvoir s’intégrer un peu partout, pour fournir sur place de petites puissances.
D’être un générateur simple et très fiable. L’entretien concerne essentiellement la
batterie. Ainsi une très grande partie des bouées et balises maritimes est passée au
photovoltaïque. Contrairement à toutes les solutions utilisées auparavant (diesel,
piles, éoliennes) aucune énergie de secours n’est prévue, la fiabilité du fonctionne-
ment dépassant 99,9%
de pouvoir s’intégrer facilement, sans gênes particulières (bruit, esthétique si certains
progrès sont réalisés.) Il se substitue notamment à des toits ou façade, comme élé-
ment de bâtiment en verre produisant de l’énergie
d’avoir un potentiel illimité. 5% de la surface des déserts suffiraient pour alimenter la
planète entière.
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 159
Plus que le prix du kWh, c’est le coût de la substitution à une autre solution qui est important.
Le photovoltaïque se substitue à la création d’un réseau électrique et est moins cher en zone
rurale que ce réseau. Il se substitue au toit classique, qui vient en diminution du coût.
Les faiblesses du photovoltaïque sont :
Le développement du photovoltaïque est rapide, mais représente encore peu de
chose dans le bilan énergétique mondial.
Le stockage est le maillon faible. La solution est d’allonger la durée de vie des batte-
ries pour la rendre proche de celle des modules. Le temps de retour énergétique de
la batterie est un autre point faible. Le module rembourse en 2 à 4 ans l’énergie dé-
pensée pour sa fabrication. En revanche, le temps de retour des batteries est de 2 à
4 ans, soit équivalent sinon supérieure à la durée de vie de certaines batteries.
La R&D se focalise sur le module, et a ainsi longtemps ignoré le stockage. Energie
durablement la plus chère par kWh, produisant et stockant du courant continu, le
photovoltaïque est tributaire du développement d’équipements en courant continu à
très faible consommation. Ce développement sera lent et aujourd’hui est à peine
amorcé.
Le photovoltaïque est sans concurrence pour fournir une faible énergie. Il faut donc
répondre aux besoins de manière individuelle, en multipliant les générateurs. Ceci est
plus facile en terrain vierge, où une nouvelle approche est possible.
Les problèmes non techniques, l’adaptation aux usagers, les limites de fourniture
d’énergie qui sont liées notamment à la météo, la modification des approches clas-
siques bouleversent tellement les habitudes que seules des crises, pétrolières par
exemple, accélèrent les adaptations nécessaires.
12.2.2 Les marchés potentiels
Les perspectives à long terme pourraient être vues comme sans limite:
Marché captif du tiers-monde, qui atteindra environ 4 milliards d’habitants d’ici 30 ans.
Marché de toits photovoltaïques, qui pourraient devenir le toit standard à terme, équipant chaque nouvelle maison pour contribuer à respecter le protocole de Kyoto.
Dans le domaine de l’énergie, les débats sont concentrés surtout sur les générateurs de
fortes puissances, où l’on retrouve les centrales hydrauliques, fuel, turbine à gaz, et même
les fermes d’éoliennes. Toutes supposent l’existence d’un réseau, souvent fort coûteux au
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 160
demeurant. Le photovoltaïque couvre, sans concurrent sinon les piles à combustibles, le
domaine de puissance situé entre les petits générateurs diesels de quelques kW et les piles
chimiques de quelques watts.
12.2.3 Les concurrents dans le milieu de la cellule à concentration
12.2.3.1 La cellule à concentration
Dans un module solaire photovoltaïque, le composant le plus cher est, de loin, la cel-
lule photovoltaïque. En intercalant un dispositif concentrateur entre le soleil et la cellule, on
peut utiliser une surface de cellule beaucoup plus petite, et ainsi utiliser des cellules à ren-
dement très supérieur, avec des valeurs oscillant typiquement entre 30 et 40 %.
La concentration est obtenue par un système de miroirs paraboliques ou de lentilles de
Fresnel, comme sur les phares d'automobiles. Le rapport de concentration peut atteindre
voire dépasser 1000.
Il faut que la lumière concentrée tombe bien sur la cellule, et non à côté : un tel panneau ne
fonctionne correctement qu'avec un dispositif de "tracking", pour rester en permanence per-
pendiculaire aux rayons du soleil. Favorable au rendement (il augmente la production d'envi-
ron la moitié sur une journée), ce type de dispositif a l'inconvénient d'accroître la complexité
et la maintenance.
Il faut ensuite évacuer la chaleur excessive, préjudiciable au rendement des cellules et sur-
tout à leur durée de vie: sans dispositif de refroidissement, ces dernières fondraient.
12.2.3.2 Les entreprises Françaises sur le marché
- Le constructeur Français Soitec a créé sa filiale de panneaux photovoltaïques à con-
centration (CPV) : Concentrix Solar. Il a commencé à installer des fermes de pan-
neaux photovoltaïques équipées de systèmes de tracking basés sur des cellules à
concentration. Soitec a inauguré, en septembre 2010, sa première centrale en
Afrique du sud. Concentrix Solar s'emploie également au développement d'un autre
projet de ferme solaire de 50 MW dans la province du Cap-Ouest.
Le fonctionnement de ces trackers est basé sur un système 2 axes perpendiculaires
montés sur un mat. L’avantage du système est qu’il ne demande que très peu de
maintenance grâce à sa grande résistance aux fortes températures.
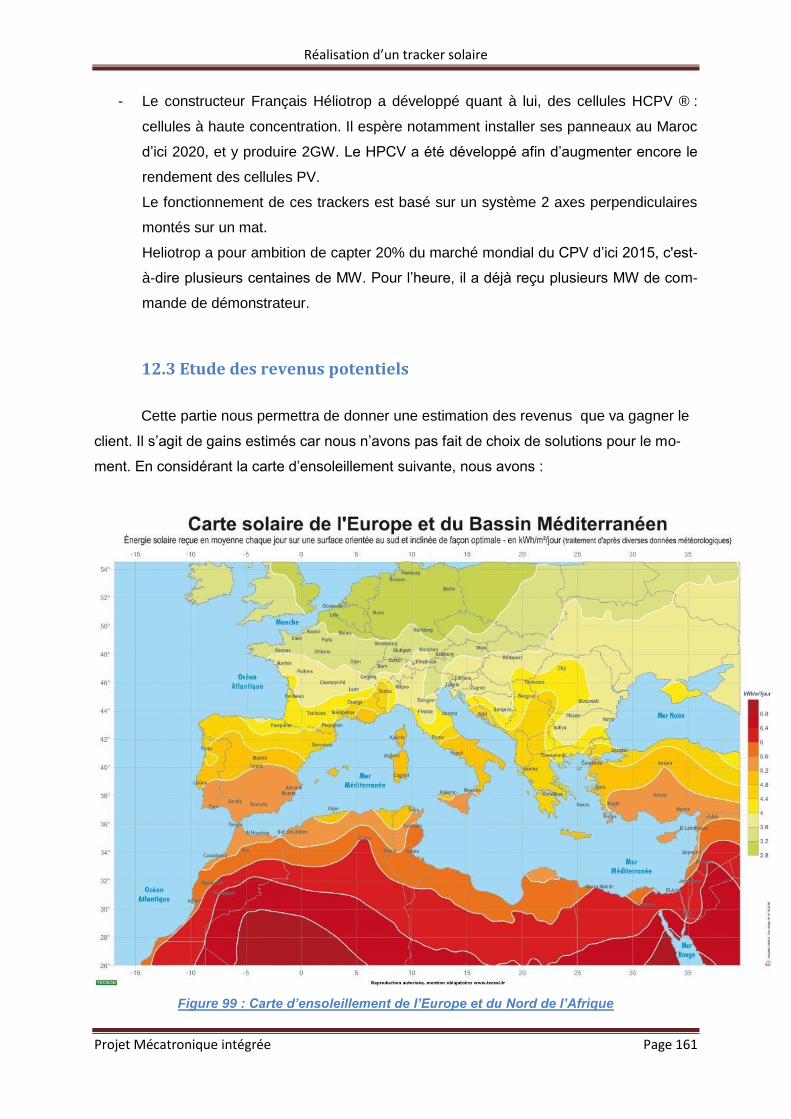
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 161
- Le constructeur Français Héliotrop a développé quant à lui, des cellules HCPV ® :
cellules à haute concentration. Il espère notamment installer ses panneaux au Maroc
d’ici 2020, et y produire 2GW. Le HPCV a été développé afin d’augmenter encore le
rendement des cellules PV.
Le fonctionnement de ces trackers est basé sur un système 2 axes perpendiculaires
montés sur un mat.
Heliotrop a pour ambition de capter 20% du marché mondial du CPV d’ici 2015, c'est-
à-dire plusieurs centaines de MW. Pour l’heure, il a déjà reçu plusieurs MW de com-
mande de démonstrateur.
12.3 Etude des revenus potentiels
Cette partie nous permettra de donner une estimation des revenus que va gagner le
client. Il s’agit de gains estimés car nous n’avons pas fait de choix de solutions pour le mo-
ment. En considérant la carte d’ensoleillement suivante, nous avons :
Figure 99 : Carte d’ensoleillement de l’Europe et du Nord de l’Afrique
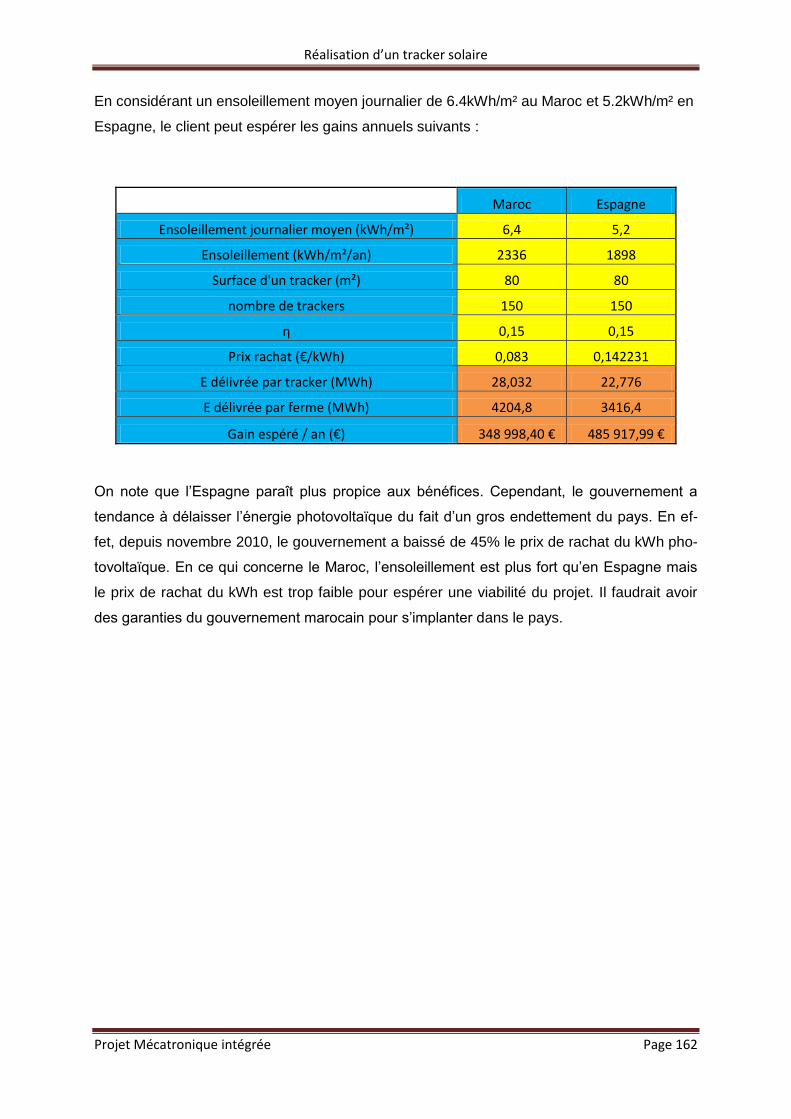
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 162
En considérant un ensoleillement moyen journalier de 6.4kWh/m² au Maroc et 5.2kWh/m² en
Espagne, le client peut espérer les gains annuels suivants :
Maroc Espagne
Ensoleillement journalier moyen (kWh/m²) 6,4 5,2
Ensoleillement (kWh/m²/an) 2336 1898
Surface d'un tracker (m²) 80 80
nombre de trackers 150 150
η 0,15 0,15
Prix rachat (€/kWh) 0,083 0,142231
E délivrée par tracker (MWh) 28,032 22,776
E délivrée par ferme (MWh) 4204,8 3416,4
Gain espéré / an (€) 348 998,40 € 485 917,99 €
On note que l’Espagne paraît plus propice aux bénéfices. Cependant, le gouvernement a
tendance à délaisser l’énergie photovoltaïque du fait d’un gros endettement du pays. En ef-
fet, depuis novembre 2010, le gouvernement a baissé de 45% le prix de rachat du kWh pho-
tovoltaïque. En ce qui concerne le Maroc, l’ensoleillement est plus fort qu’en Espagne mais
le prix de rachat du kWh est trop faible pour espérer une viabilité du projet. Il faudrait avoir
des garanties du gouvernement marocain pour s’implanter dans le pays.
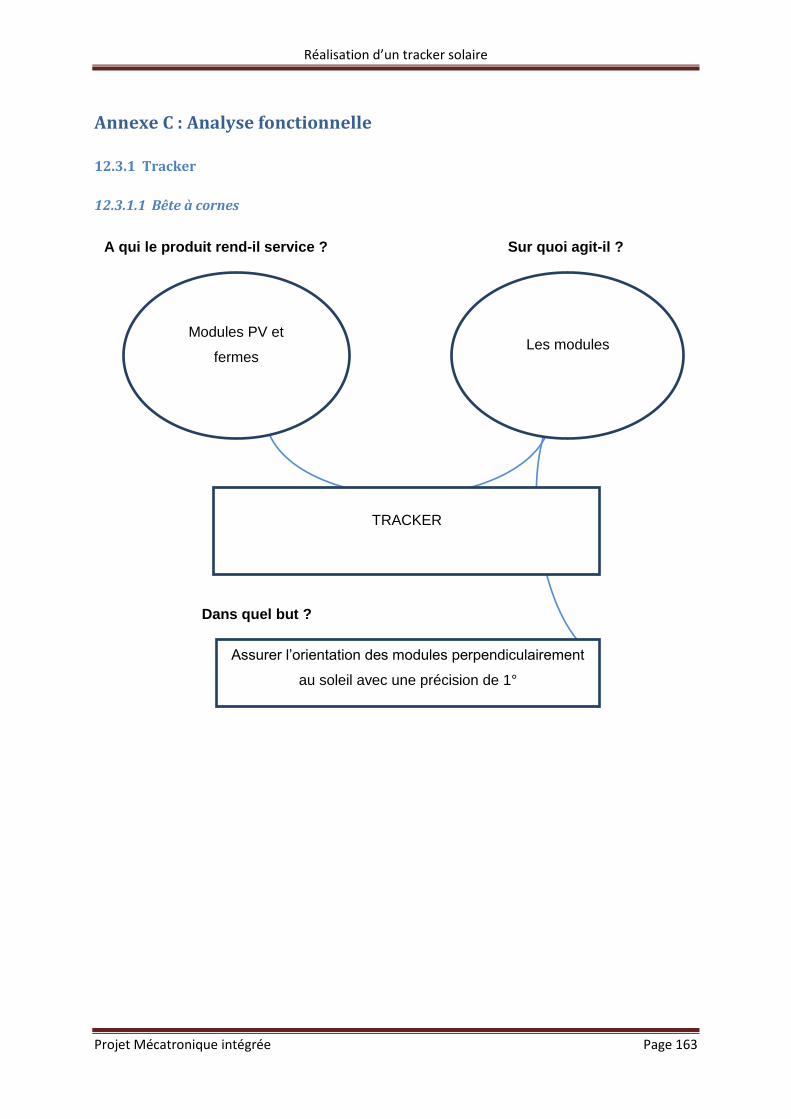
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 163
Annexe C : Analyse fonctionnelle
12.3.1 Tracker
12.3.1.1 Bête à cornes
Dans quel but ?
A qui le produit rend-il service ? Sur quoi agit-il ?
Modules PV et
fermes Les modules
TRACKER
Assurer l’orientation des modules perpendiculairement
au soleil avec une précision de 1°
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 164
12.3.2 Cycle de vie du tracker
Nous avons défini le cycle de vie du tracker afin de voir toutes les fonctions que le produit
devra remplir dans toutes ses phases de vie.
Fabrication
Montage
Transport
Montage
Mise en fonctionnement
Utilisation normale
Démontage-remplacement
Recyclage
12.3.3 Caractérisation des interacteurs
Il s’agit de caractériser les interacteurs afin d’être d’accord sur les différents termes utilisés.
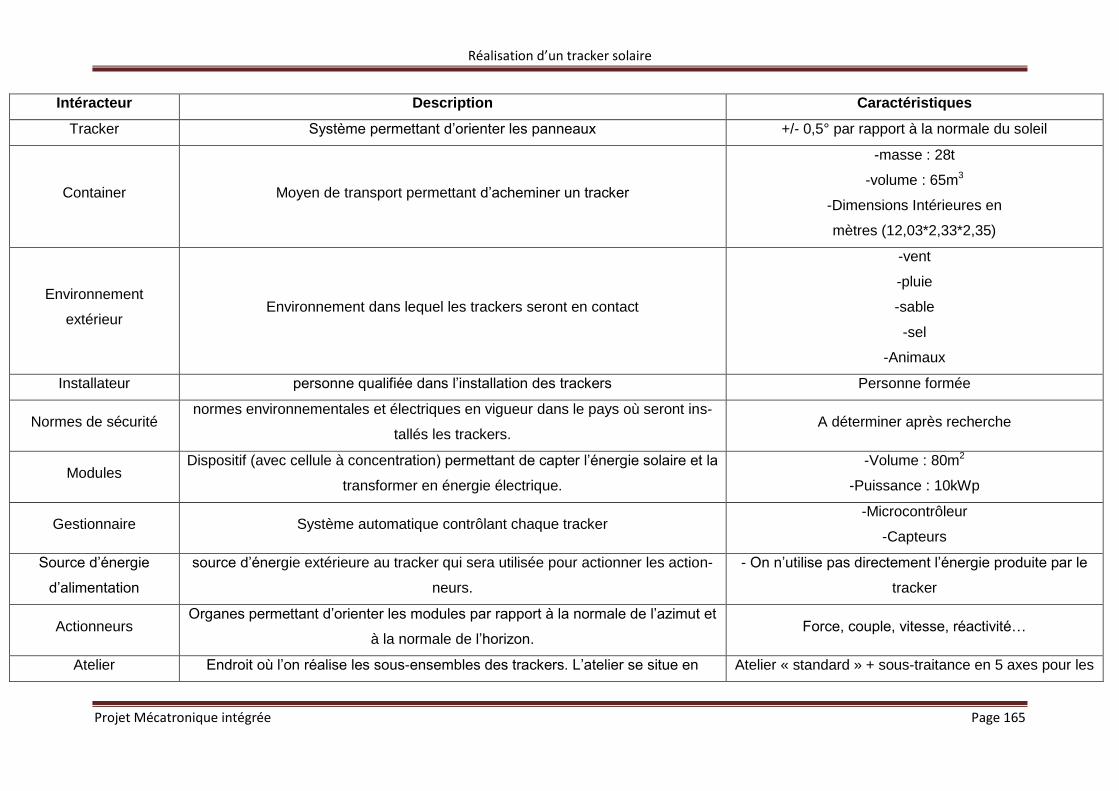
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 165
Intéracteur Description Caractéristiques
Tracker Système permettant d’orienter les panneaux +/- 0,5° par rapport à la normale du soleil
Container Moyen de transport permettant d’acheminer un tracker
-masse : 28t
-volume : 65m3
-Dimensions Intérieures en
mètres (12,03*2,33*2,35)
Environnement
extérieur Environnement dans lequel les trackers seront en contact
-vent
-pluie
-sable
-sel
-Animaux
Installateur personne qualifiée dans l’installation des trackers Personne formée
Normes de sécurité normes environnementales et électriques en vigueur dans le pays où seront ins-
tallés les trackers. A déterminer après recherche
Modules Dispositif (avec cellule à concentration) permettant de capter l’énergie solaire et la
transformer en énergie électrique.
-Volume : 80m2
-Puissance : 10kWp
Gestionnaire Système automatique contrôlant chaque tracker -Microcontrôleur
-Capteurs
Source d’énergie
d’alimentation
source d’énergie extérieure au tracker qui sera utilisée pour actionner les action-
neurs.
- On n’utilise pas directement l’énergie produite par le
tracker
Actionneurs Organes permettant d’orienter les modules par rapport à la normale de l’azimut et
à la normale de l’horizon. Force, couple, vitesse, réactivité…
Atelier Endroit où l’on réalise les sous-ensembles des trackers. L’atelier se situe en Atelier « standard » + sous-traitance en 5 axes pour les
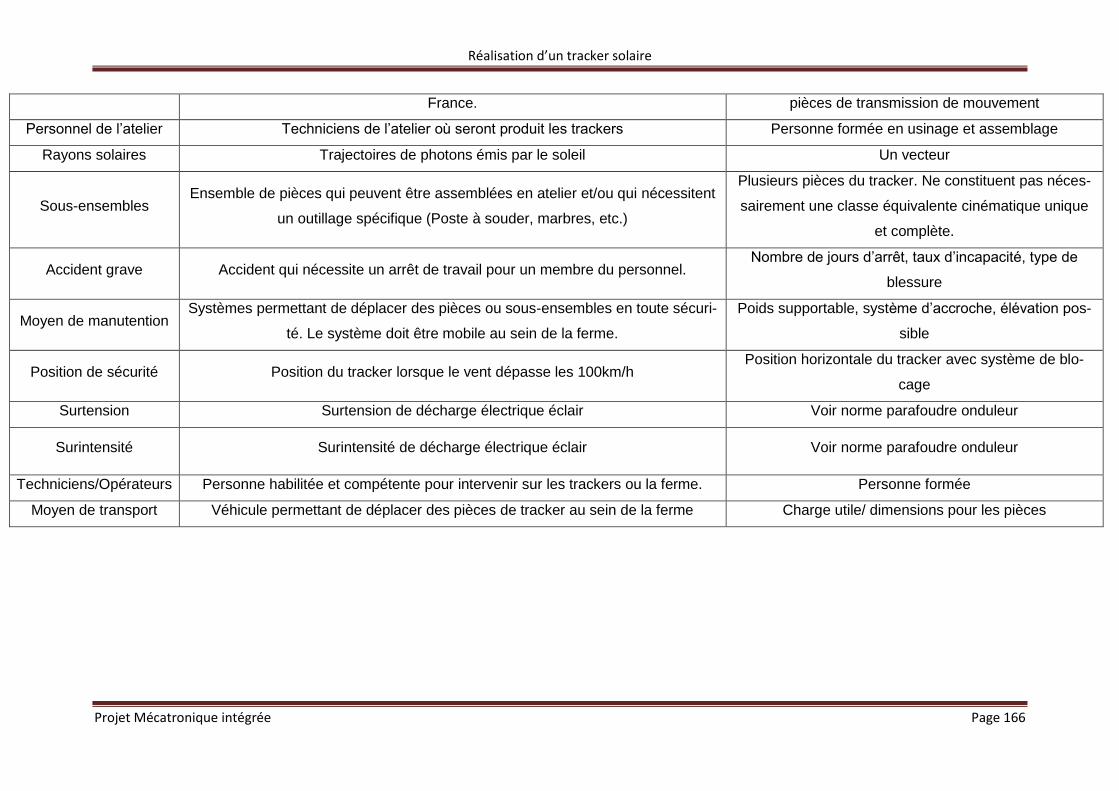
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 166
France. pièces de transmission de mouvement
Personnel de l’atelier Techniciens de l’atelier où seront produit les trackers Personne formée en usinage et assemblage
Rayons solaires Trajectoires de photons émis par le soleil Un vecteur
Sous-ensembles Ensemble de pièces qui peuvent être assemblées en atelier et/ou qui nécessitent
un outillage spécifique (Poste à souder, marbres, etc.)
Plusieurs pièces du tracker. Ne constituent pas néces-
sairement une classe équivalente cinématique unique
et complète.
Accident grave Accident qui nécessite un arrêt de travail pour un membre du personnel. Nombre de jours d’arrêt, taux d’incapacité, type de
blessure
Moyen de manutention Systèmes permettant de déplacer des pièces ou sous-ensembles en toute sécuri-
té. Le système doit être mobile au sein de la ferme.
Poids supportable, système d’accroche, élévation pos-
sible
Position de sécurité Position du tracker lorsque le vent dépasse les 100km/h Position horizontale du tracker avec système de blo-
cage
Surtension Surtension de décharge électrique éclair Voir norme parafoudre onduleur
Surintensité Surintensité de décharge électrique éclair Voir norme parafoudre onduleur
Techniciens/Opérateurs Personne habilitée et compétente pour intervenir sur les trackers ou la ferme. Personne formée
Moyen de transport Véhicule permettant de déplacer des pièces de tracker au sein de la ferme Charge utile/ dimensions pour les pièces
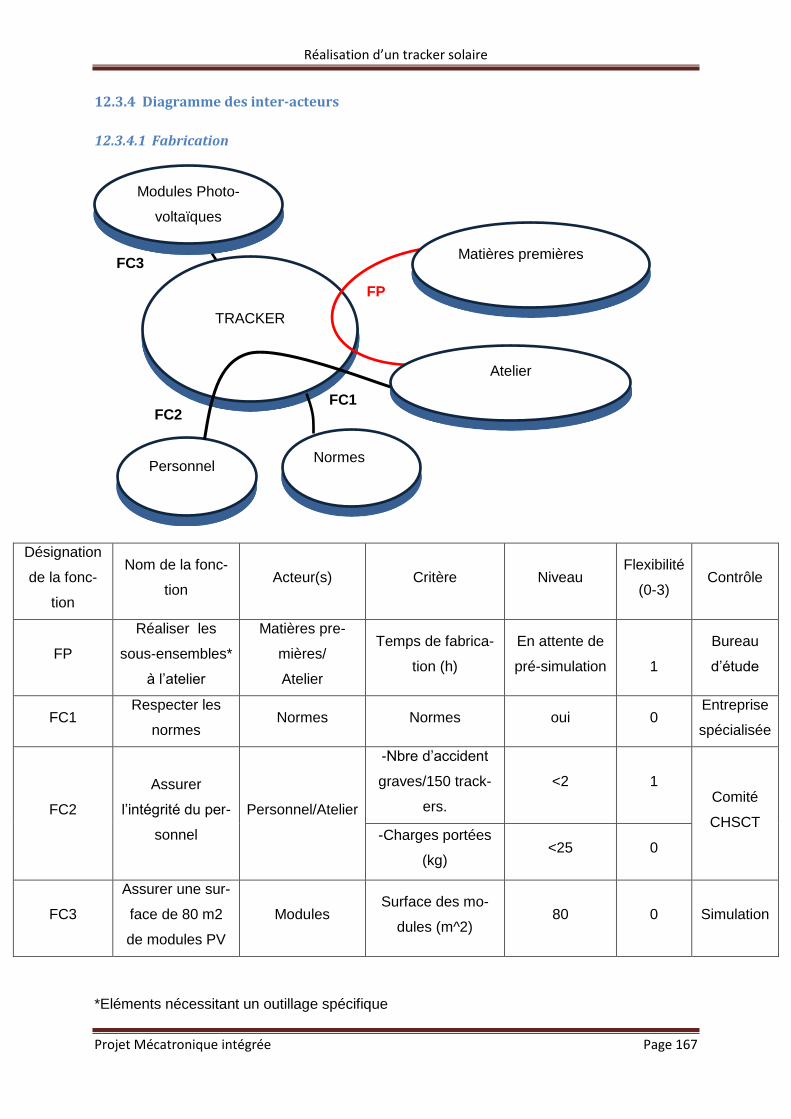
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 167
12.3.4 Diagramme des inter-acteurs
12.3.4.1 Fabrication
Désignation
de la fonc-
tion
Nom de la fonc-
tion Acteur(s) Critère Niveau
Flexibilité
(0-3) Contrôle
FP
Réaliser les
sous-ensembles*
à l’atelier
Matières pre-
mières/
Atelier
Temps de fabrica-
tion (h)
En attente de
pré-simulation
1
Bureau
d’étude
FC1 Respecter les
normes Normes Normes oui 0
Entreprise
spécialisée
FC2
Assurer
l’intégrité du per-
sonnel
Personnel/Atelier
-Nbre d’accident
graves/150 track-
ers.
<2 1 Comité
CHSCT -Charges portées
(kg) <25 0
FC3
Assurer une sur-
face de 80 m2
de modules PV
Modules Surface des mo-
dules (m^2) 80 0 Simulation
*Eléments nécessitant un outillage spécifique
TRACKER
Personnel Normes
FC1 FC2
Atelier
Matières premières
Modules Photo-
voltaïques
FC3
FP
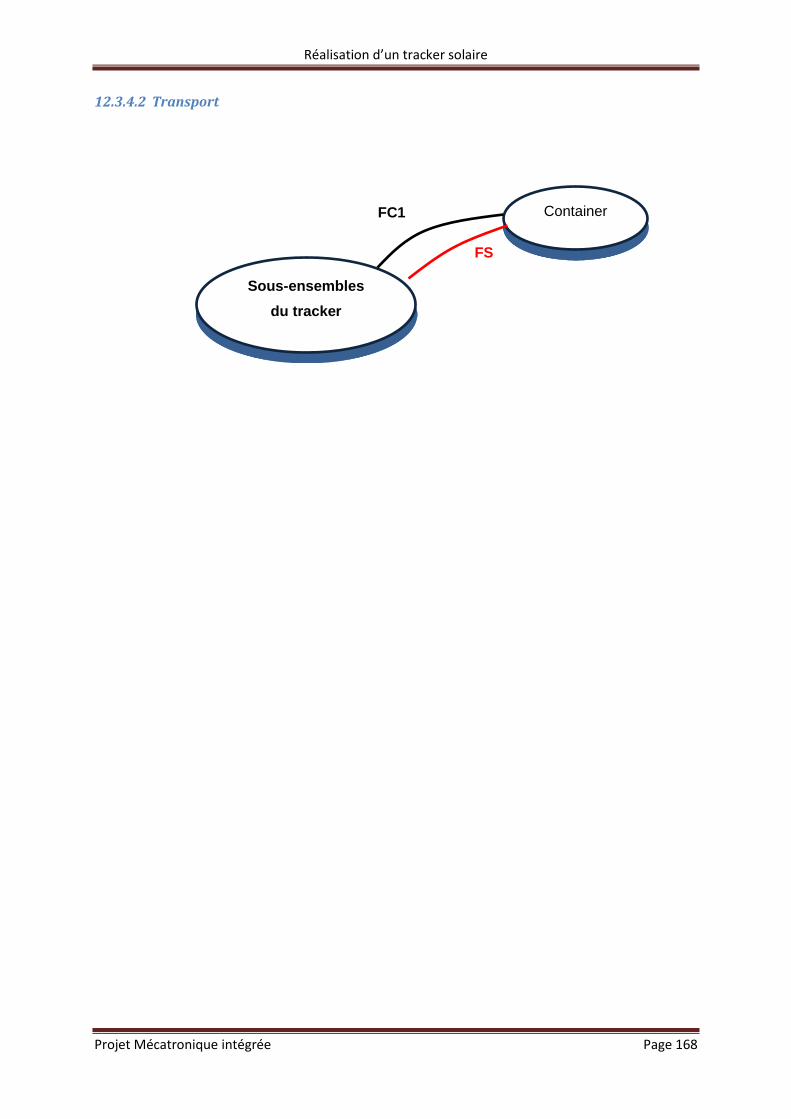
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 168
12.3.4.2 Transport
Sous-ensembles
du tracker
FC1 Container
FS
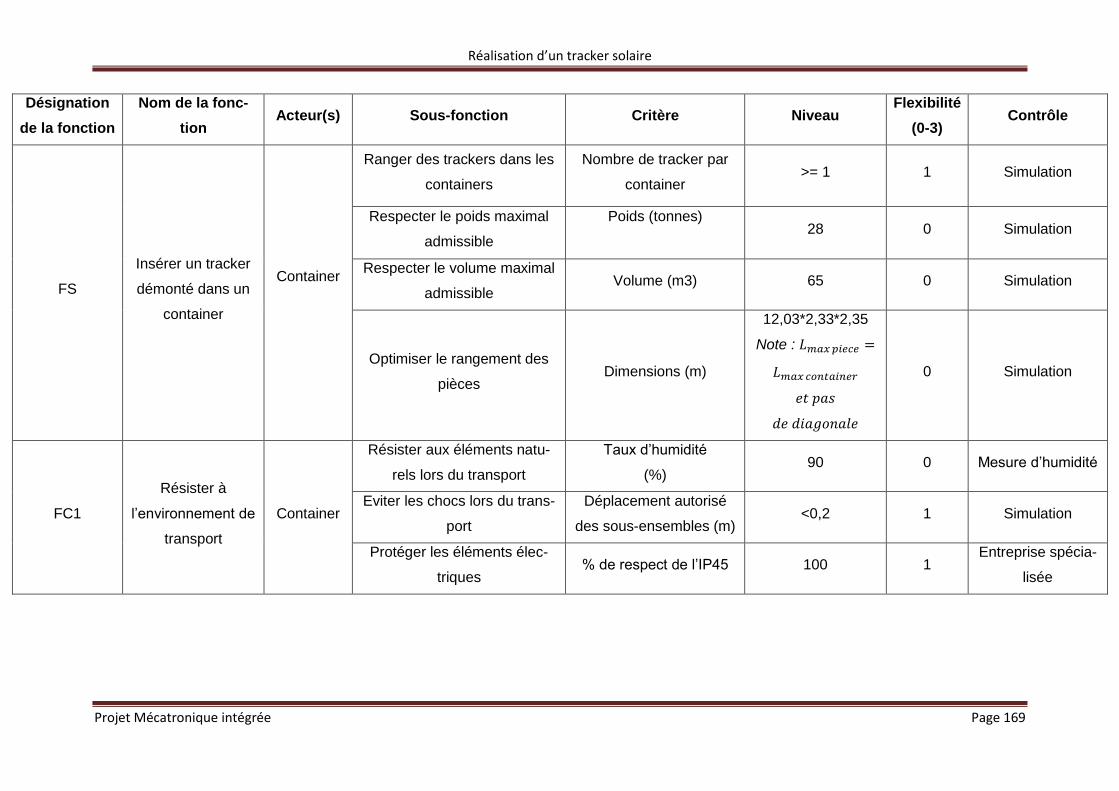
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 169
Désignation
de la fonction
Nom de la fonc-
tion Acteur(s) Sous-fonction Critère Niveau
Flexibilité
(0-3) Contrôle
FS
Insérer un tracker
démonté dans un
container
Container
Ranger des trackers dans les
containers
Nombre de tracker par
container >= 1 1 Simulation
Respecter le poids maximal
admissible
Poids (tonnes)
28 0 Simulation
Respecter le volume maximal
admissible Volume (m3) 65 0 Simulation
Optimiser le rangement des
pièces Dimensions (m)
12,03*2,33*2,35
Note :
0 Simulation
FC1
Résister à
l’environnement de
transport
Container
Résister aux éléments natu-
rels lors du transport
Taux d’humidité
(%) 90 0 Mesure d’humidité
Eviter les chocs lors du trans-
port
Déplacement autorisé
des sous-ensembles (m) <0,2 1 Simulation
Protéger les éléments élec-
triques % de respect de l’IP45 100 1
Entreprise spécia-
lisée
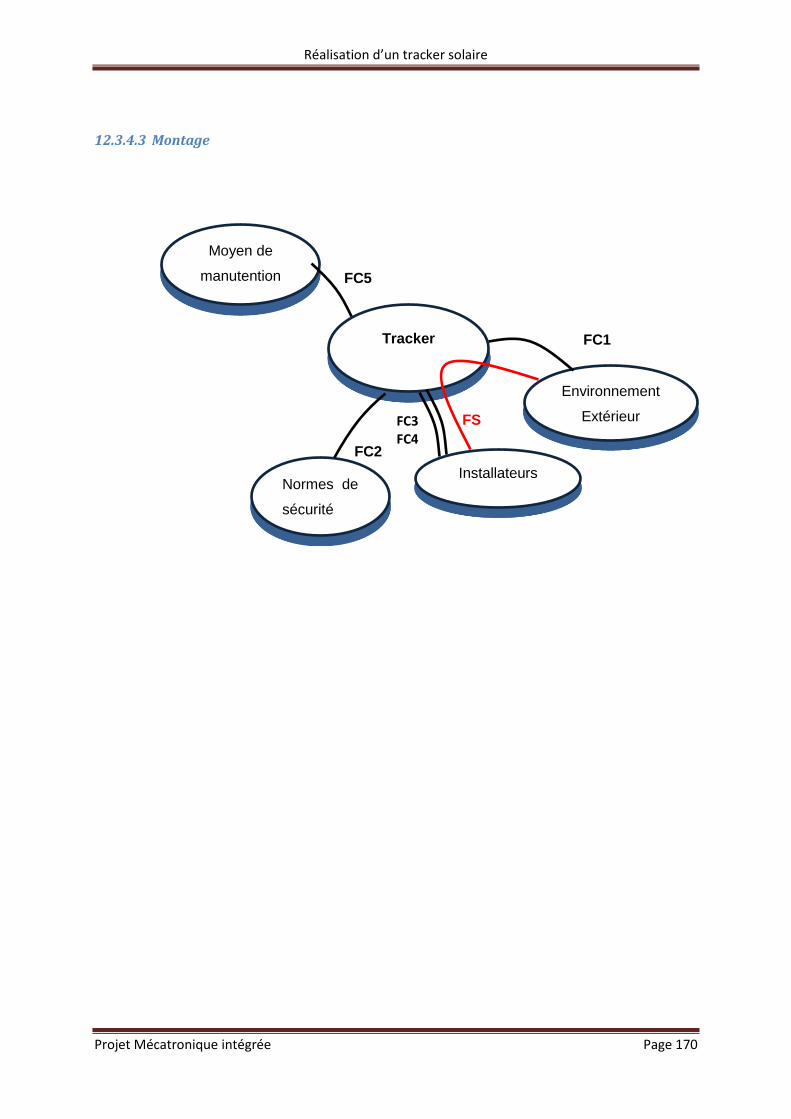
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 170
12.3.4.3 Montage
Tracker
Normes de
sécurité
Installateurs
Environnement
Extérieur
FC1
FS
FC2
FC3 FC4
Moyen de
manutention FC5
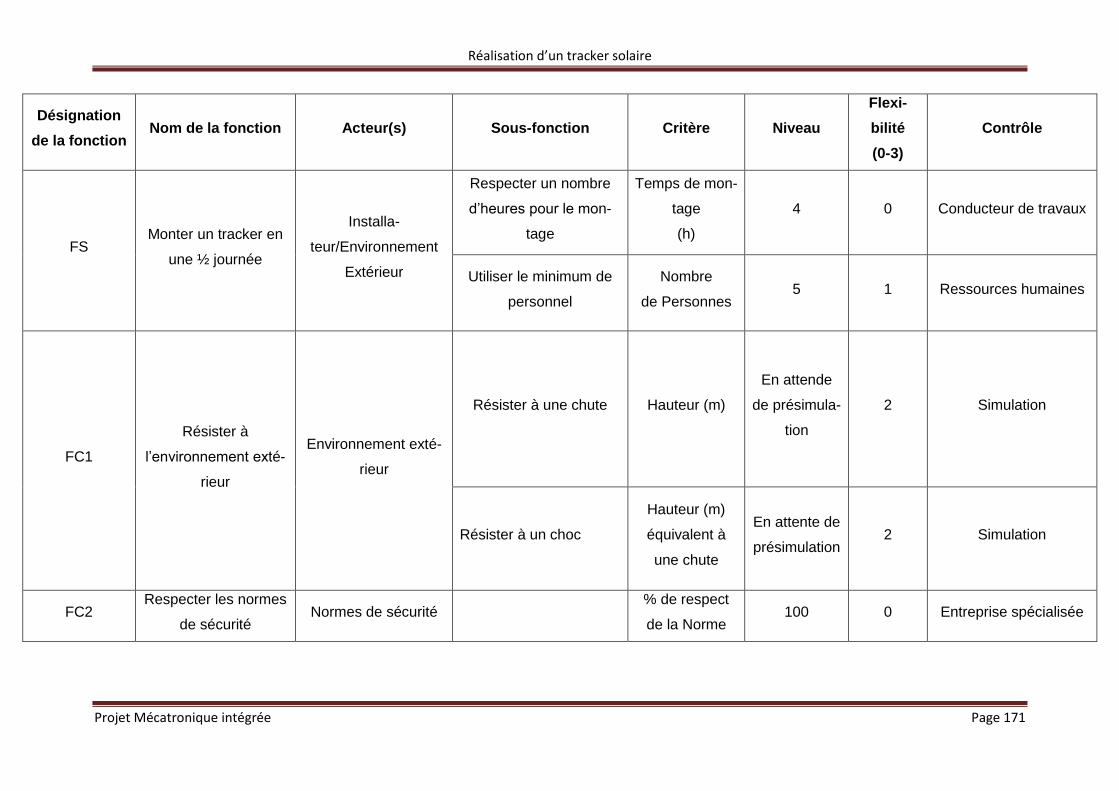
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 171
Désignation
de la fonction Nom de la fonction Acteur(s) Sous-fonction Critère Niveau
Flexi-
bilité
(0-3)
Contrôle
FS Monter un tracker en
une ½ journée
Installa-
teur/Environnement
Extérieur
Respecter un nombre
d’heures pour le mon-
tage
Temps de mon-
tage
(h)
4 0 Conducteur de travaux
Utiliser le minimum de
personnel
Nombre
de Personnes 5 1 Ressources humaines
FC1
Résister à
l’environnement exté-
rieur
Environnement exté-
rieur
Résister à une chute Hauteur (m)
En attende
de présimula-
tion
2 Simulation
Résister à un choc
Hauteur (m)
équivalent à
une chute
En attente de
présimulation 2 Simulation
FC2 Respecter les normes
de sécurité Normes de sécurité
% de respect
de la Norme 100 0 Entreprise spécialisée
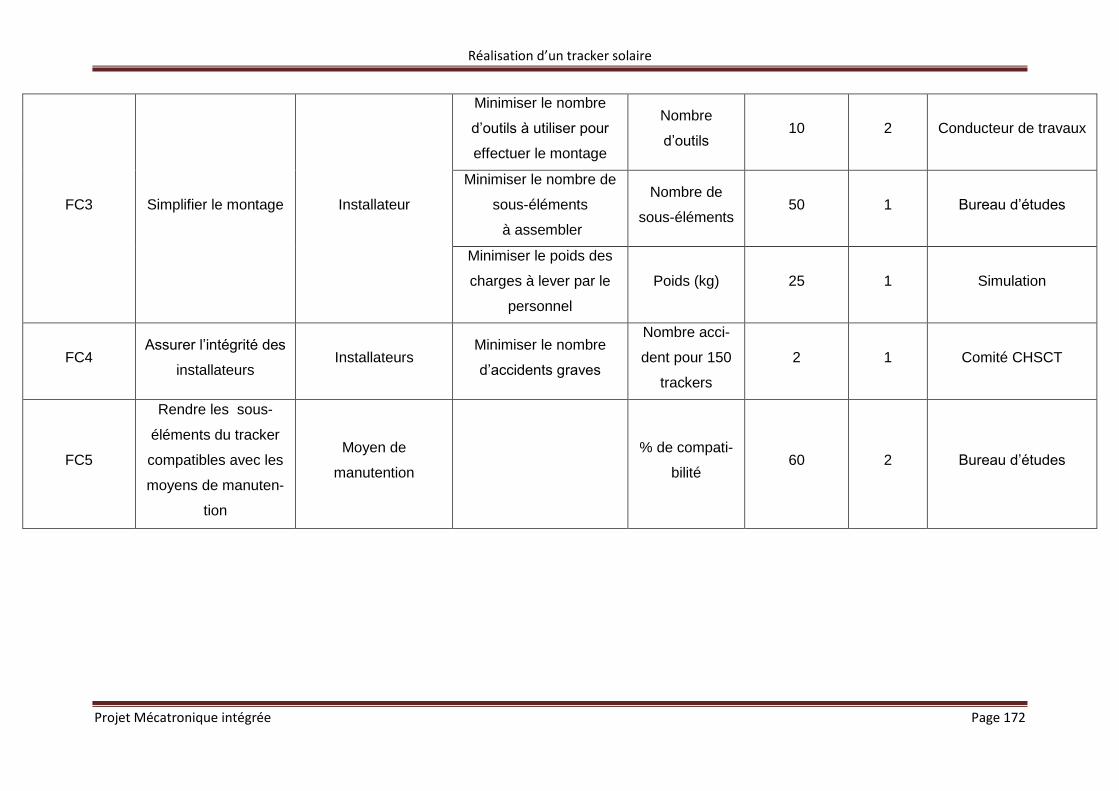
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 172
FC3 Simplifier le montage Installateur
Minimiser le nombre
d’outils à utiliser pour
effectuer le montage
Nombre
d’outils 10 2 Conducteur de travaux
Minimiser le nombre de
sous-éléments
à assembler
Nombre de
sous-éléments 50 1 Bureau d’études
Minimiser le poids des
charges à lever par le
personnel
Poids (kg) 25 1 Simulation
FC4 Assurer l’intégrité des
installateurs Installateurs
Minimiser le nombre
d’accidents graves
Nombre acci-
dent pour 150
trackers
2 1 Comité CHSCT
FC5
Rendre les sous-
éléments du tracker
compatibles avec les
moyens de manuten-
tion
Moyen de
manutention
% de compati-
bilité 60 2 Bureau d’études
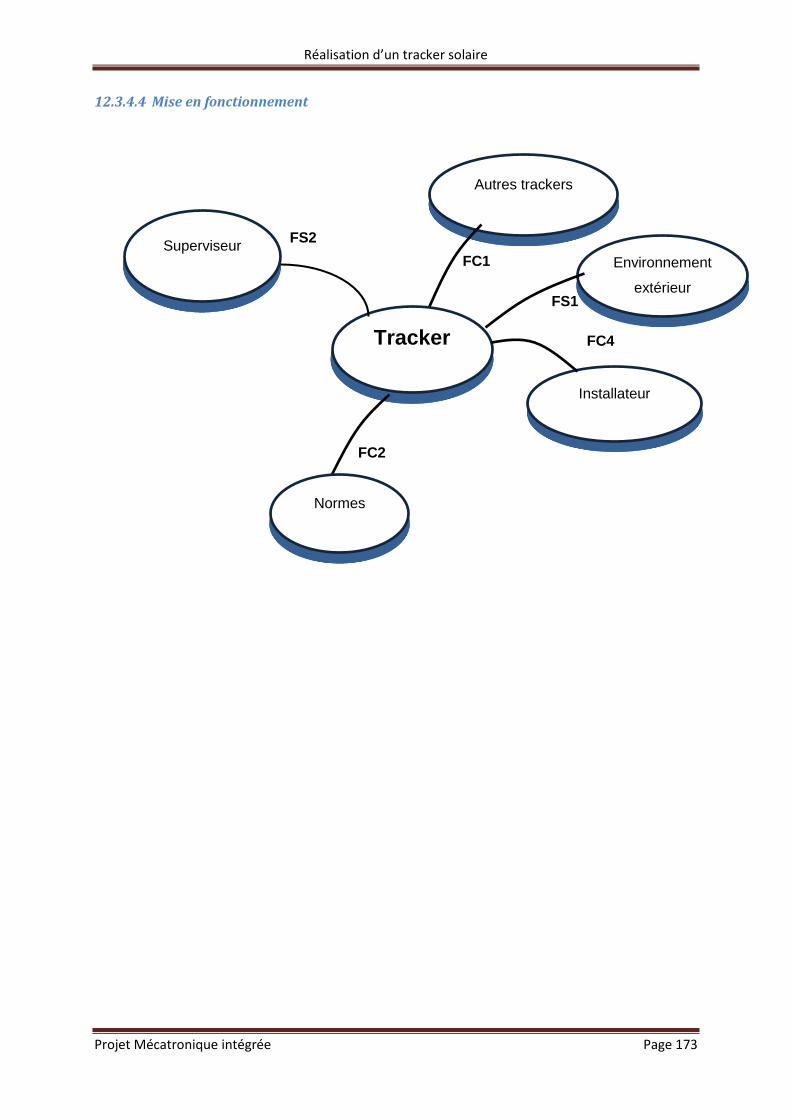
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 173
12.3.4.4 Mise en fonctionnement
Tracker
Autres trackers
Superviseur
Installateur
FC4
FC1
FC2
Environnement
extérieur FS1
Normes
FS2
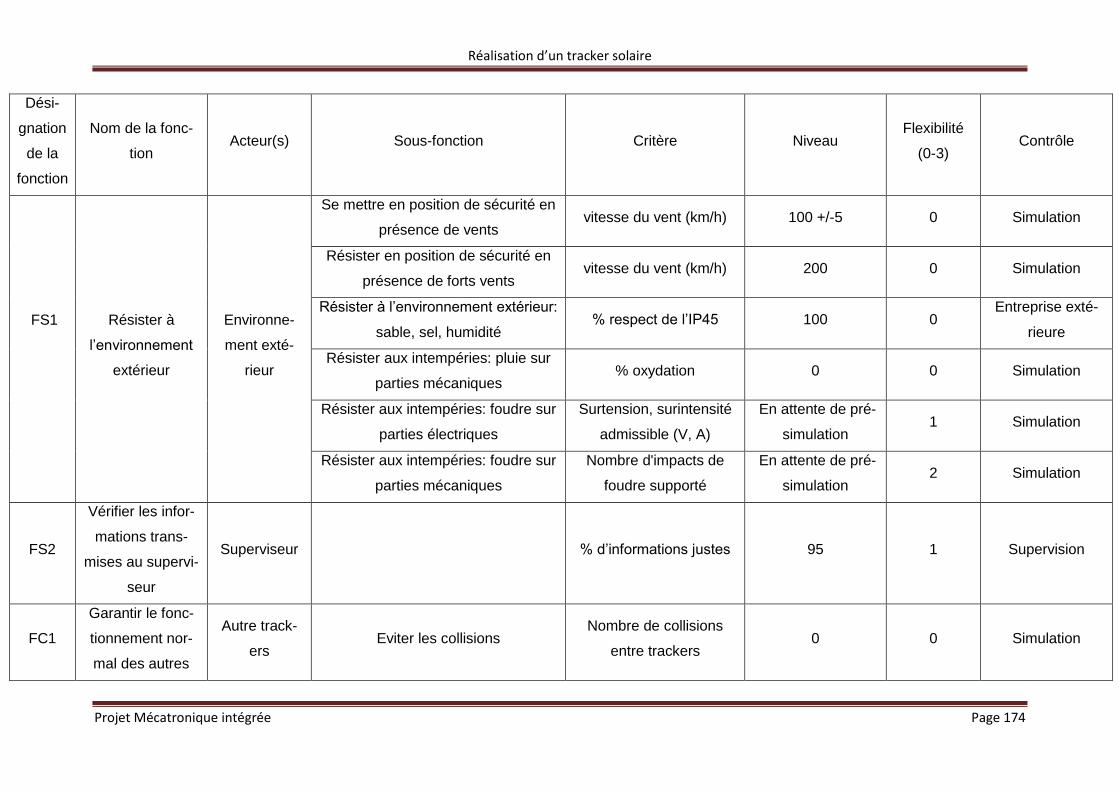
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 174
Dési-
gnation
de la
fonction
Nom de la fonc-
tion Acteur(s) Sous-fonction Critère Niveau
Flexibilité
(0-3) Contrôle
FS1
Résister à
l’environnement
extérieur
Environne-
ment exté-
rieur
Se mettre en position de sécurité en
présence de vents vitesse du vent (km/h) 100 +/-5 0 Simulation
Résister en position de sécurité en
présence de forts vents vitesse du vent (km/h) 200 0 Simulation
Résister à l’environnement extérieur:
sable, sel, humidité % respect de l’IP45 100 0
Entreprise exté-
rieure
Résister aux intempéries: pluie sur
parties mécaniques % oxydation 0 0 Simulation
Résister aux intempéries: foudre sur
parties électriques
Surtension, surintensité
admissible (V, A)
En attente de pré-
simulation 1 Simulation
Résister aux intempéries: foudre sur
parties mécaniques
Nombre d'impacts de
foudre supporté
En attente de pré-
simulation 2 Simulation
FS2
Vérifier les infor-
mations trans-
mises au supervi-
seur
Superviseur
% d’informations justes 95 1 Supervision
FC1
Garantir le fonc-
tionnement nor-
mal des autres
Autre track-
ers Eviter les collisions
Nombre de collisions
entre trackers 0 0 Simulation
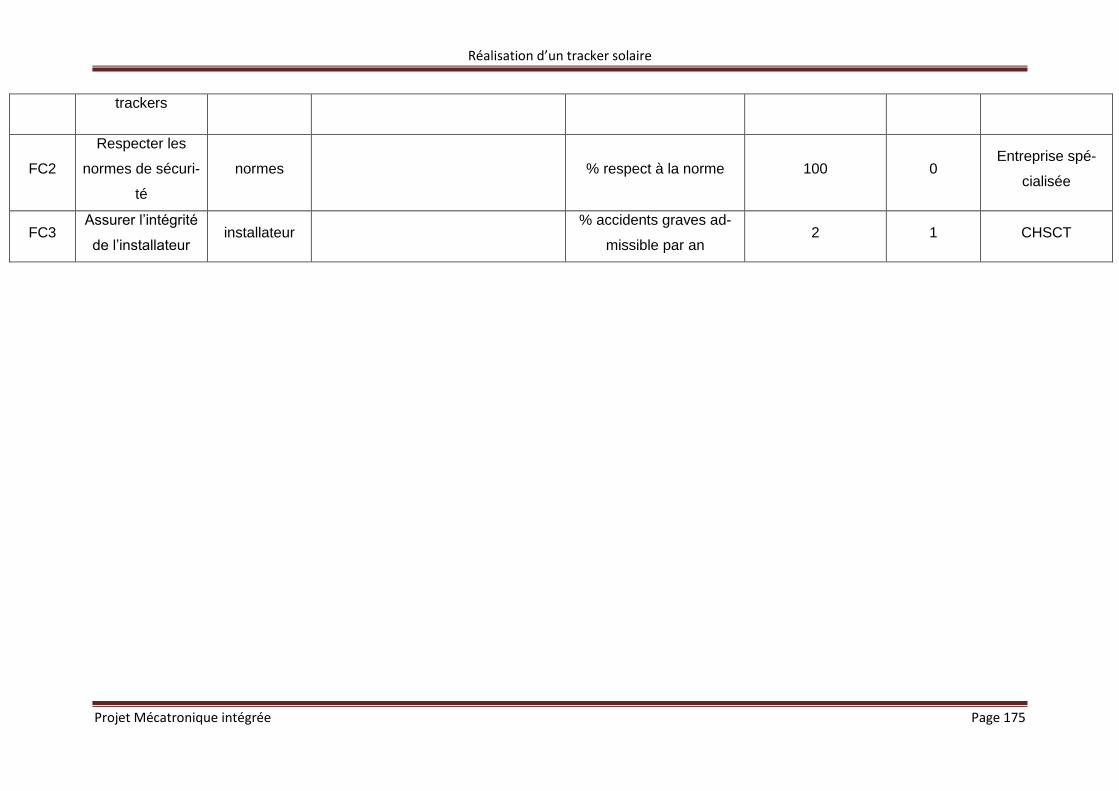
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 175
trackers
FC2
Respecter les
normes de sécuri-
té
normes % respect à la norme 100 0 Entreprise spé-
cialisée
FC3 Assurer l’intégrité
de l’installateur installateur
% accidents graves ad-
missible par an 2 1 CHSCT
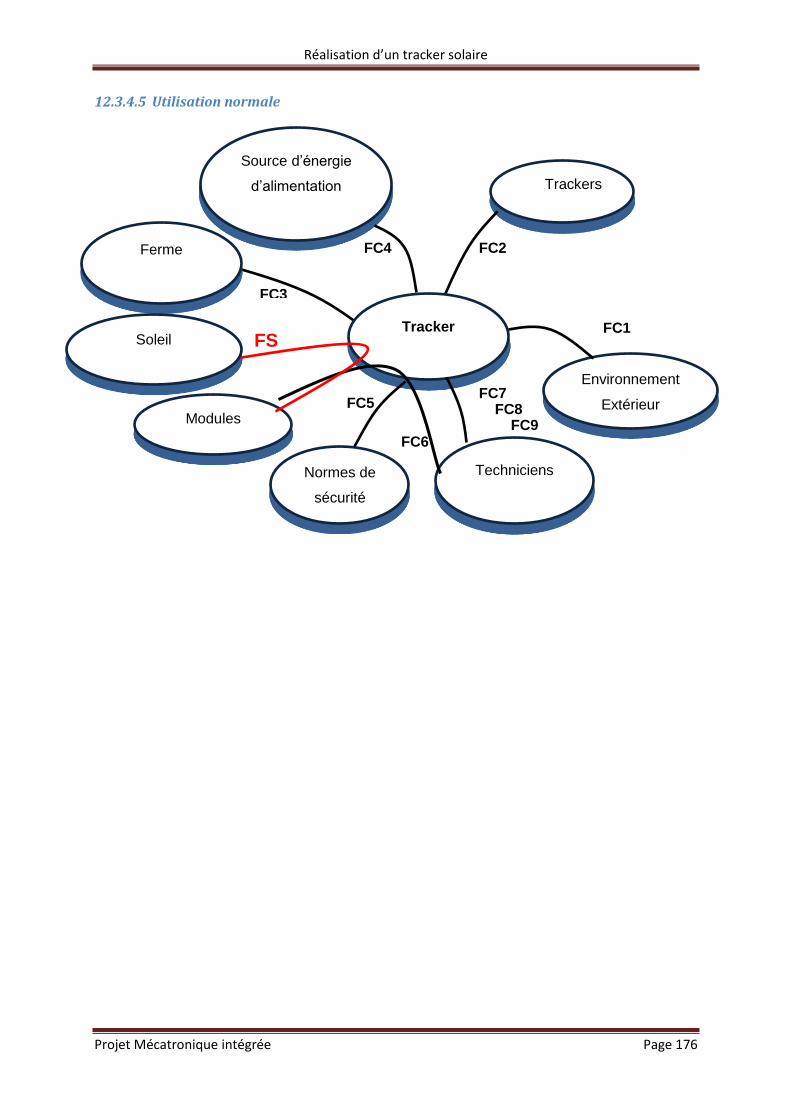
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 176
12.3.4.5 Utilisation normale
Tracker
Source d’énergie
d’alimentation
Ferme
Trackers
Soleil
Normes de
sécurité
Techniciens
Environnement
Extérieur Modules
FC1
FC2 FC4
FC5
FS
FC6
FC3
FC7 FC8
FC9
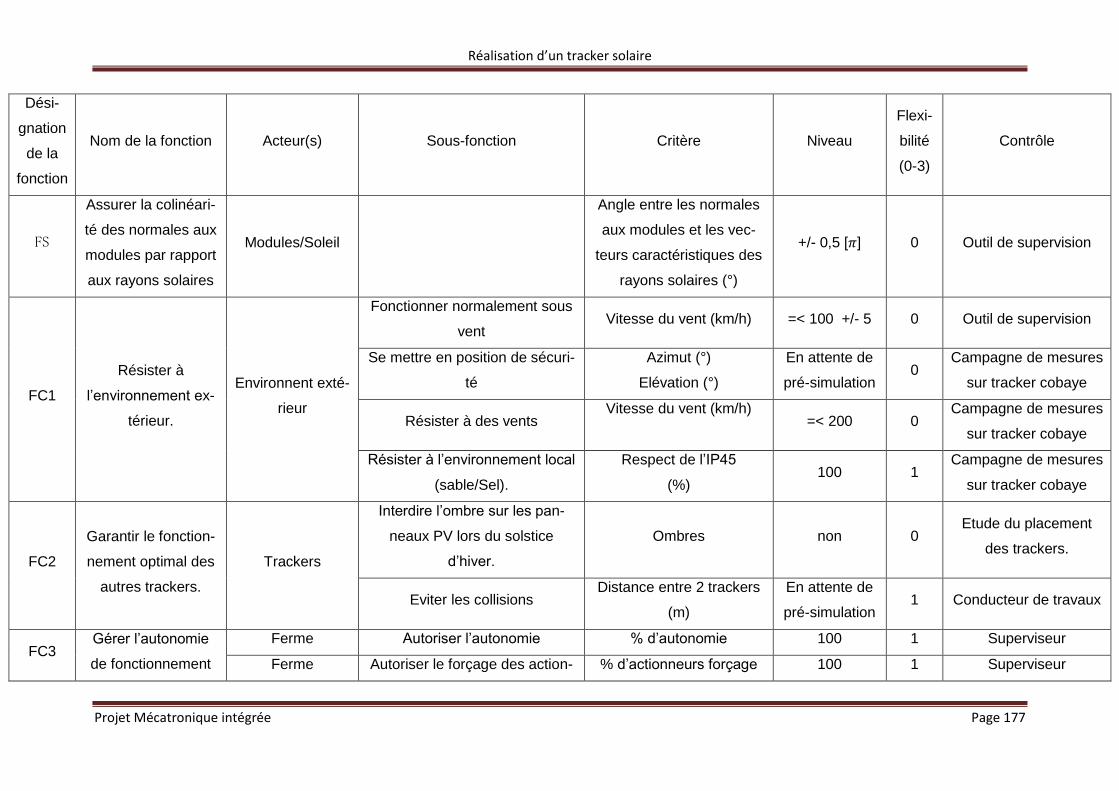
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 177
Dési-
gnation
de la
fonction
Nom de la fonction Acteur(s) Sous-fonction Critère Niveau
Flexi-
bilité
(0-3)
Contrôle
FS
Assurer la colinéari-
té des normales aux
modules par rapport
aux rayons solaires
Modules/Soleil
Angle entre les normales
aux modules et les vec-
teurs caractéristiques des
rayons solaires (°)
+/- 0,5 [ ] 0 Outil de supervision
FC1
Résister à
l’environnement ex-
térieur.
Environnent exté-
rieur
Fonctionner normalement sous
vent Vitesse du vent (km/h) =< 100 +/- 5 0 Outil de supervision
Se mettre en position de sécuri-
té
Azimut (°)
Elévation (°)
En attente de
pré-simulation 0
Campagne de mesures
sur tracker cobaye
Résister à des vents Vitesse du vent (km/h)
=< 200 0
Campagne de mesures
sur tracker cobaye
Résister à l’environnement local
(sable/Sel).
Respect de l’IP45
(%) 100 1
Campagne de mesures
sur tracker cobaye
FC2
Garantir le fonction-
nement optimal des
autres trackers.
Trackers
Interdire l’ombre sur les pan-
neaux PV lors du solstice
d’hiver.
Ombres non 0 Etude du placement
des trackers.
Eviter les collisions Distance entre 2 trackers
(m)
En attente de
pré-simulation 1 Conducteur de travaux
FC3 Gérer l’autonomie
de fonctionnement
Ferme Autoriser l’autonomie % d’autonomie 100 1 Superviseur
Ferme Autoriser le forçage des action- % d’actionneurs forçage 100 1 Superviseur
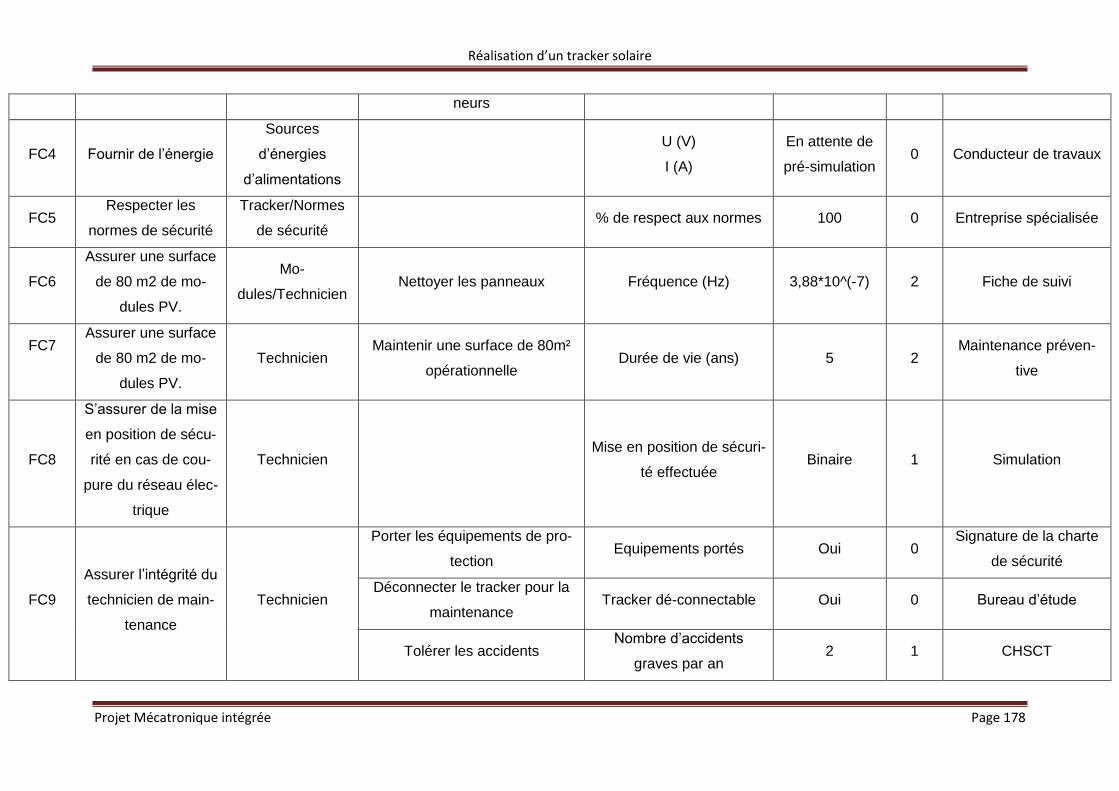
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 178
neurs
FC4 Fournir de l’énergie
Sources
d’énergies
d’alimentations
U (V)
I (A)
En attente de
pré-simulation 0 Conducteur de travaux
FC5 Respecter les
normes de sécurité
Tracker/Normes
de sécurité % de respect aux normes 100 0 Entreprise spécialisée
FC6
Assurer une surface
de 80 m2 de mo-
dules PV.
Mo-
dules/Technicien Nettoyer les panneaux Fréquence (Hz) 3,88*10^(-7) 2 Fiche de suivi
FC7
Assurer une surface
de 80 m2 de mo-
dules PV.
Technicien Maintenir une surface de 80m²
opérationnelle Durée de vie (ans) 5 2
Maintenance préven-
tive
FC8
S’assurer de la mise
en position de sécu-
rité en cas de cou-
pure du réseau élec-
trique
Technicien Mise en position de sécuri-
té effectuée Binaire 1 Simulation
FC9
Assurer l’intégrité du
technicien de main-
tenance
Technicien
Porter les équipements de pro-
tection Equipements portés Oui 0
Signature de la charte
de sécurité
Déconnecter le tracker pour la
maintenance Tracker dé-connectable Oui 0 Bureau d’étude
Tolérer les accidents Nombre d’accidents
graves par an 2 1 CHSCT
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 179
-Hiérarchisation des fonctions : Il faut comparer toutes les fonctions entre elles pour déterminer les fonctions principales. -Exemple : On compare la fonction FS-1 et FS-2. Si la fonction FS-1 est légèrement supérieure à la fonction FS-2, on lui attribue une note de 1. Lorsque l’on a comparé toutes les fonctions avec FS-1, on compte le nombre de points que l’on a attribué à FS-1. On fait de même pour toutes les fonctions.
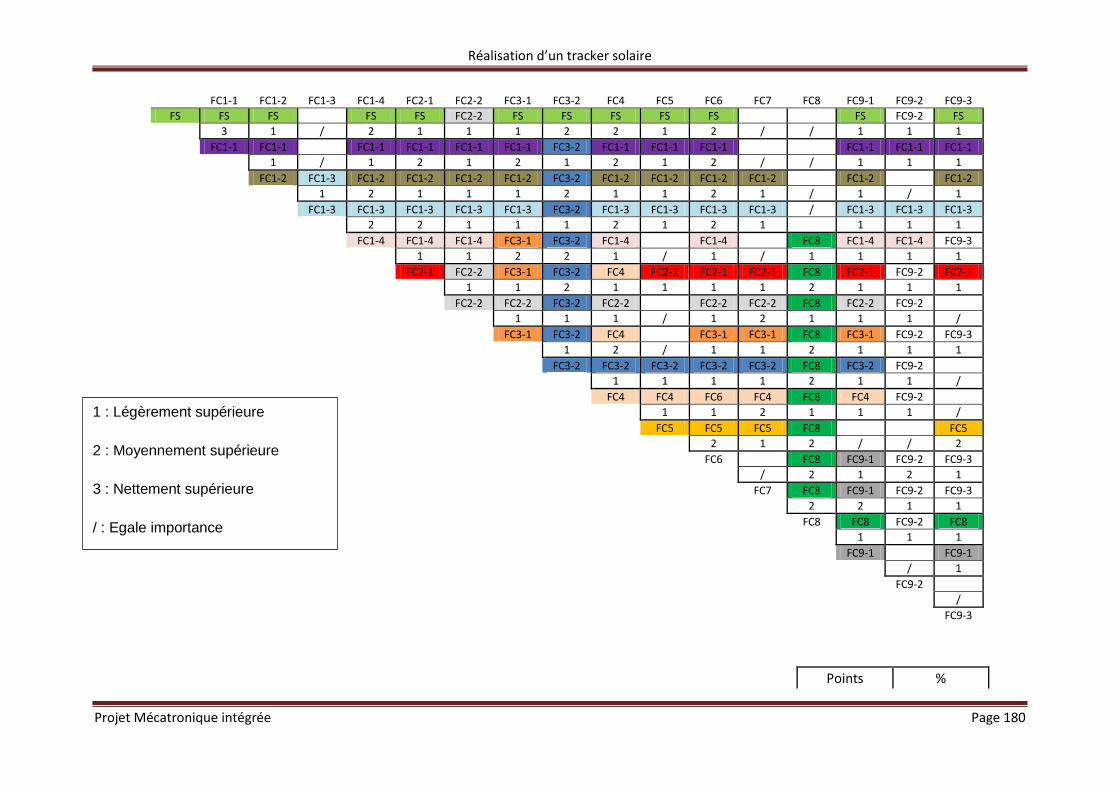
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 180
Points %
FC1-1 FC1-2 FC1-3 FC1-4 FC2-1 FC2-2 FC3-1 FC3-2 FC4 FC5 FC6 FC7 FC8 FC9-1 FC9-2 FC9-3
FS FS FS FS FS FC2-2 FS FS FS FS FS FS FC9-2 FS
3 1 / 2 1 1 1 2 2 1 2 / / 1 1 1
FC1-1 FC1-1 FC1-1 FC1-1 FC1-1 FC1-1 FC3-2 FC1-1 FC1-1 FC1-1 FC1-1 FC1-1 FC1-1
1 / 1 2 1 2 1 2 1 2 / / 1 1 1
FC1-2 FC1-3 FC1-2 FC1-2 FC1-2 FC1-2 FC3-2 FC1-2 FC1-2 FC1-2 FC1-2 FC1-2 FC1-2
1 2 1 1 1 2 1 1 2 1 / 1 / 1
FC1-3 FC1-3 FC1-3 FC1-3 FC1-3 FC3-2 FC1-3 FC1-3 FC1-3 FC1-3 / FC1-3 FC1-3 FC1-3
2 2 1 1 1 2 1 2 1 1 1 1
FC1-4 FC1-4 FC1-4 FC3-1 FC3-2 FC1-4 FC1-4 FC8 FC1-4 FC1-4 FC9-3
1 1 2 2 1 / 1 / 1 1 1 1
FC2-1 FC2-2 FC3-1 FC3-2 FC4 FC2-1 FC2-1 FC2-1 FC8 FC2-1 FC9-2 FC2-1
1 1 2 1 1 1 1 2 1 1 1
FC2-2 FC2-2 FC3-2 FC2-2 FC2-2 FC2-2 FC8 FC2-2 FC9-2
1 1 1 / 1 2 1 1 1 /
FC3-1 FC3-2 FC4 FC3-1 FC3-1 FC8 FC3-1 FC9-2 FC9-3
1 2 / 1 1 2 1 1 1
FC3-2 FC3-2 FC3-2 FC3-2 FC3-2 FC8 FC3-2 FC9-2
1 1 1 1 2 1 1 /
FC4 FC4 FC6 FC4 FC8 FC4 FC9-2
1 1 2 1 1 1 /
FC5 FC5 FC5 FC8 FC5
2 1 2 / / 2
FC6 FC8 FC9-1 FC9-2 FC9-3
/ 2 1 2 1
FC7 FC8 FC9-1 FC9-2 FC9-3
2 2 1 1
FC8 FC8 FC9-2 FC8
1 1 1
FC9-1 FC9-1
/ 1
FC9-2
/
FC9-3
1 : Légèrement supérieure
2 : Moyennement supérieure
3 : Nettement supérieure
/ : Egale importance
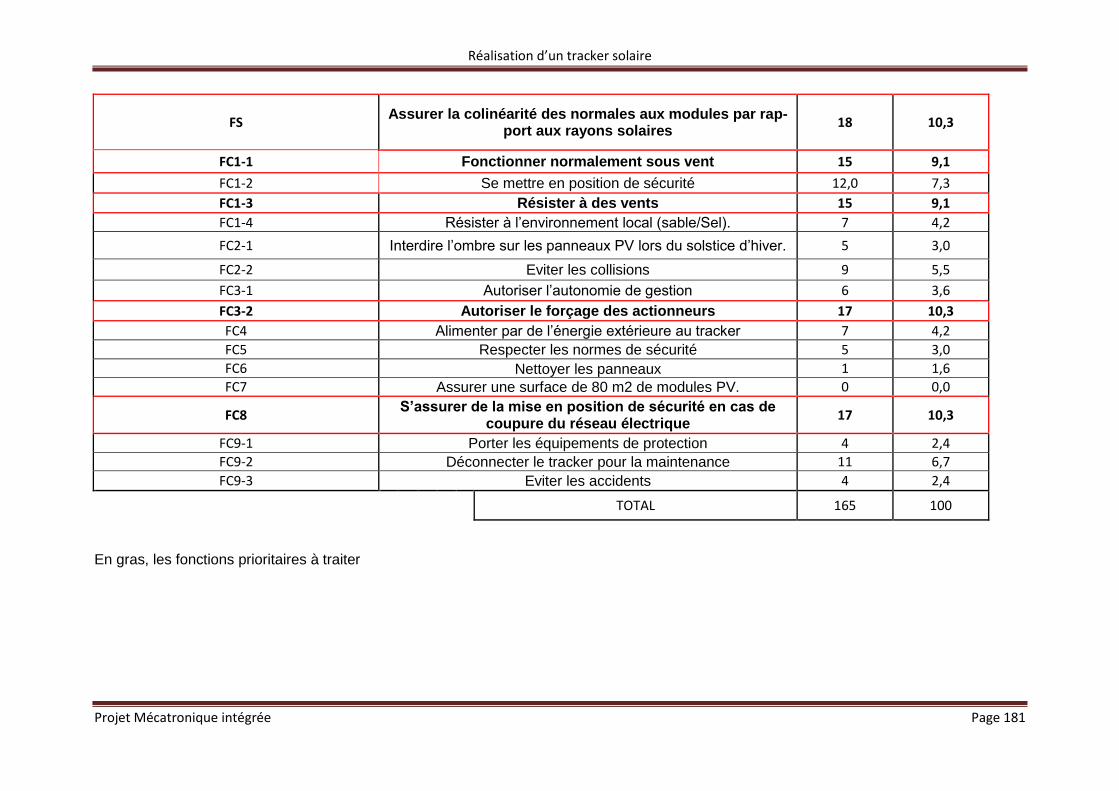
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 181
FS Assurer la colinéarité des normales aux modules par rap-
port aux rayons solaires 18 10,3
FC1-1 Fonctionner normalement sous vent 15 9,1
FC1-2 Se mettre en position de sécurité 12,0 7,3
FC1-3 Résister à des vents 15 9,1
FC1-4 Résister à l’environnement local (sable/Sel). 7 4,2
FC2-1 Interdire l’ombre sur les panneaux PV lors du solstice d’hiver. 5 3,0
FC2-2 Eviter les collisions 9 5,5
FC3-1 Autoriser l’autonomie de gestion 6 3,6
FC3-2 Autoriser le forçage des actionneurs 17 10,3
FC4 Alimenter par de l’énergie extérieure au tracker 7 4,2
FC5 Respecter les normes de sécurité 5 3,0
FC6 Nettoyer les panneaux 1 1,6
FC7 Assurer une surface de 80 m2 de modules PV. 0 0,0
FC8 S’assurer de la mise en position de sécurité en cas de
coupure du réseau électrique 17 10,3
FC9-1 Porter les équipements de protection 4 2,4
FC9-2 Déconnecter le tracker pour la maintenance 11 6,7
FC9-3 Eviter les accidents 4 2,4
TOTAL 165 100
En gras, les fonctions prioritaires à traiter
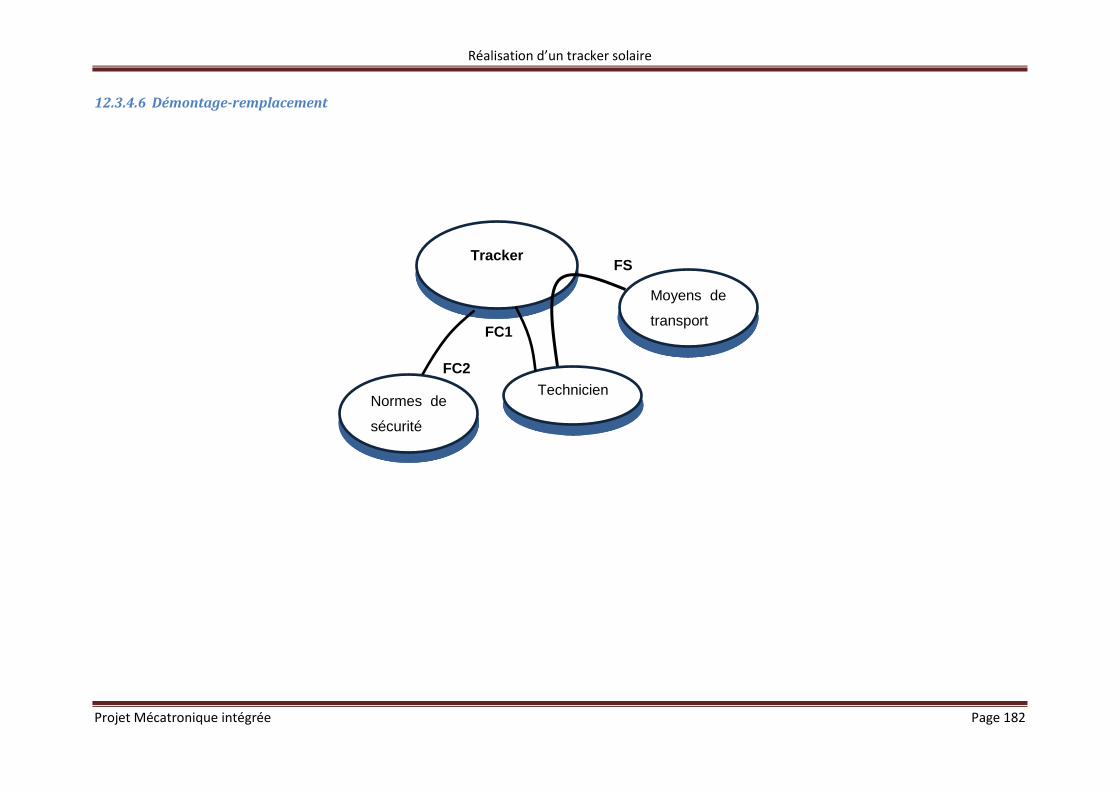
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 182
12.3.4.6 Démontage-remplacement
Tracker
Normes de
sécurité
Technicien
FC2
FC1
Moyens de
transport
FS
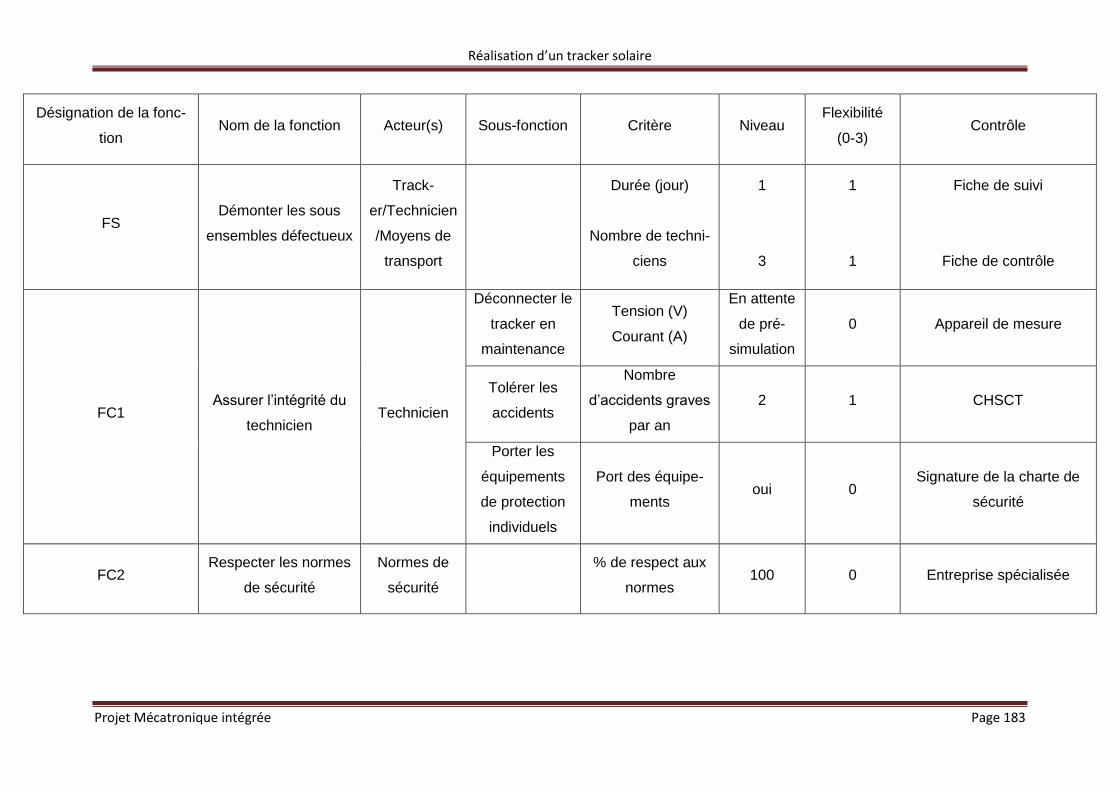
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 183
Désignation de la fonc-
tion Nom de la fonction Acteur(s) Sous-fonction Critère Niveau
Flexibilité
(0-3) Contrôle
FS Démonter les sous
ensembles défectueux
Track-
er/Technicien
/Moyens de
transport
Durée (jour)
Nombre de techni-
ciens
1
3
1
1
Fiche de suivi
Fiche de contrôle
FC1 Assurer l’intégrité du
technicien Technicien
Déconnecter le
tracker en
maintenance
Tension (V)
Courant (A)
En attente
de pré-
simulation
0 Appareil de mesure
Tolérer les
accidents
Nombre
d’accidents graves
par an
2 1 CHSCT
Porter les
équipements
de protection
individuels
Port des équipe-
ments oui 0
Signature de la charte de
sécurité
FC2 Respecter les normes
de sécurité
Normes de
sécurité
% de respect aux
normes 100 0 Entreprise spécialisée
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 184
12.3.4.7 Recyclage
Désignation
de la fonction
Nom de
la fonc-
tion
Acteur(s) Sous-
fonction Critère Niveau
Flexibilité
(0-3) Contrôle
FP Recycler
le tracker
Tracker/Entreprise
de recyclage
% de maté-
riaux recy-
clables
60 3
Compte ren-
du entreprise
extérieure
Tracker
FP
Entreprise de
recyclage
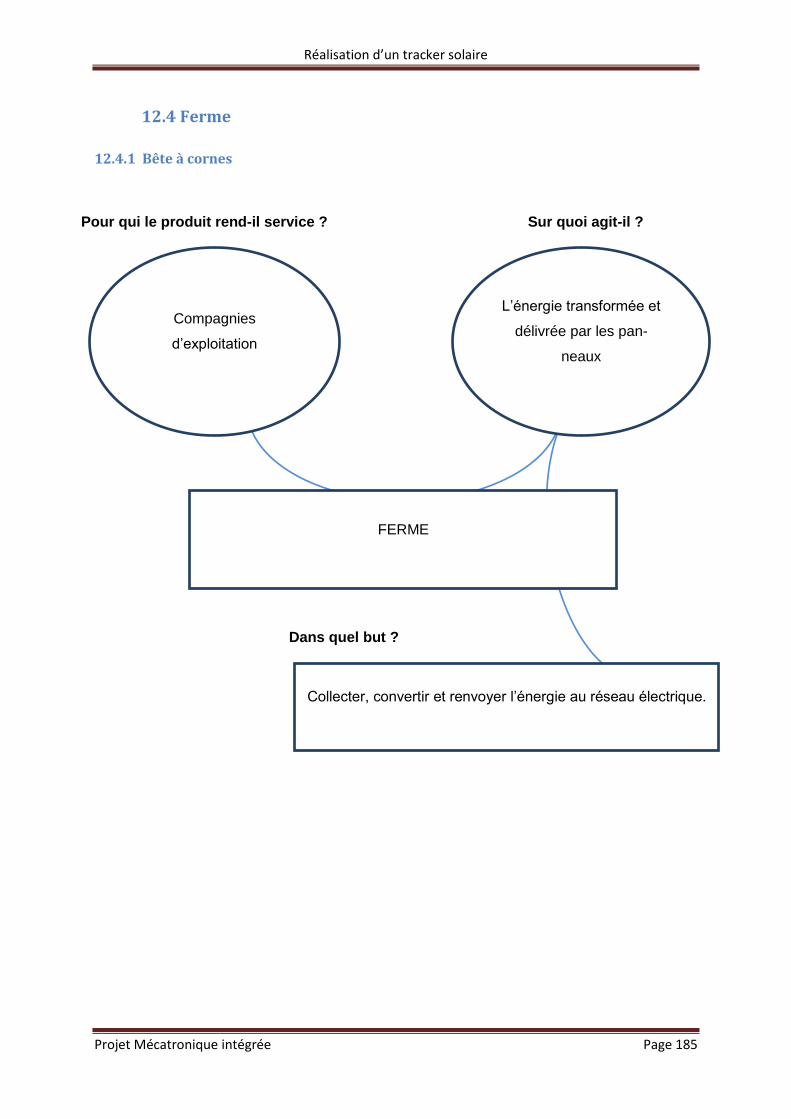
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 185
12.4 Ferme
12.4.1 Bête à cornes
Pour qui le produit rend-il service ? Sur quoi agit-il ?
Compagnies
d’exploitation
L’énergie transformée et
délivrée par les pan-
neaux
FERME
Collecter, convertir et renvoyer l’énergie au réseau électrique.
Dans quel but ?
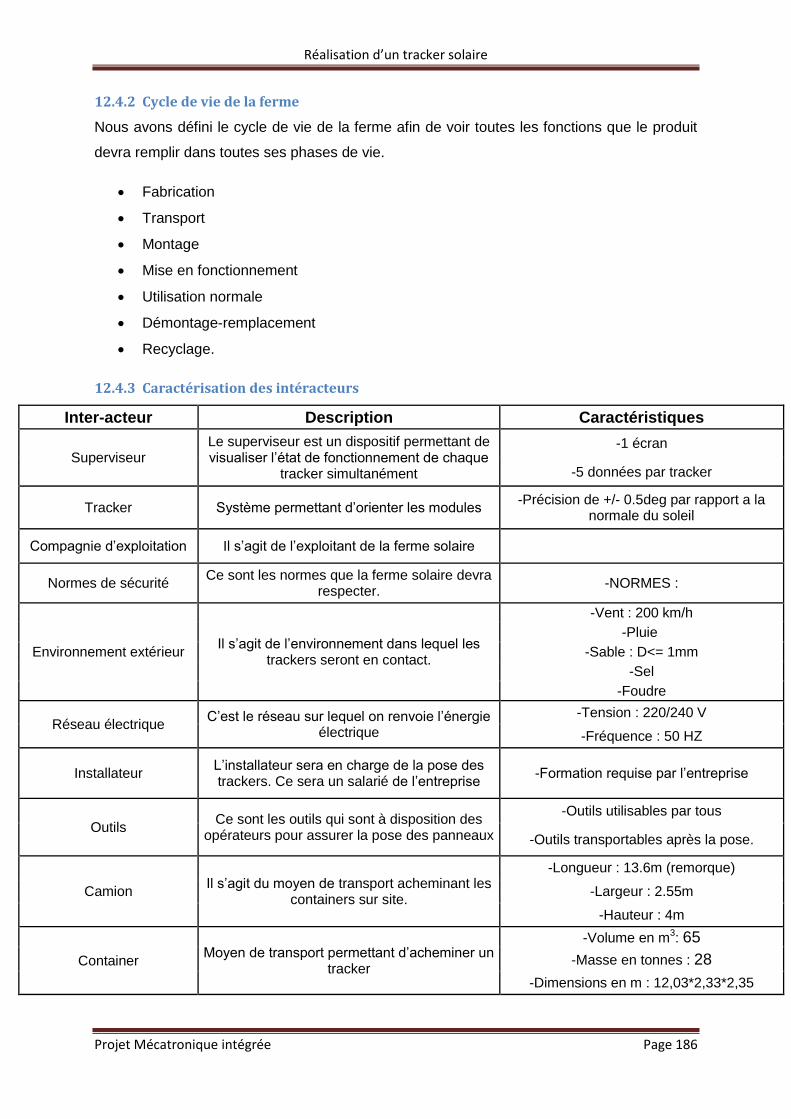
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 186
12.4.2 Cycle de vie de la ferme
Nous avons défini le cycle de vie de la ferme afin de voir toutes les fonctions que le produit
devra remplir dans toutes ses phases de vie.
Fabrication
Transport
Montage
Mise en fonctionnement
Utilisation normale
Démontage-remplacement
Recyclage.
12.4.3 Caractérisation des intéracteurs
Inter-acteur Description Caractéristiques
Superviseur Le superviseur est un dispositif permettant de visualiser l’état de fonctionnement de chaque
tracker simultanément
-1 écran
-5 données par tracker
Tracker Système permettant d’orienter les modules -Précision de +/- 0.5deg par rapport a la
normale du soleil
Compagnie d’exploitation Il s’agit de l’exploitant de la ferme solaire
Normes de sécurité Ce sont les normes que la ferme solaire devra
respecter. -NORMES :
Environnement extérieur Il s’agit de l’environnement dans lequel les
trackers seront en contact.
-Vent : 200 km/h
-Pluie
-Sable : D<= 1mm
-Sel
-Foudre
Réseau électrique C’est le réseau sur lequel on renvoie l’énergie
électrique
-Tension : 220/240 V
-Fréquence : 50 HZ
Installateur L’installateur sera en charge de la pose des trackers. Ce sera un salarié de l’entreprise
-Formation requise par l’entreprise
Outils Ce sont les outils qui sont à disposition des
opérateurs pour assurer la pose des panneaux
-Outils utilisables par tous
-Outils transportables après la pose.
Camion Il s’agit du moyen de transport acheminant les
containers sur site.
-Longueur : 13.6m (remorque)
-Largeur : 2.55m
-Hauteur : 4m
Container Moyen de transport permettant d’acheminer un
tracker
-Volume en m3: 65
-Masse en tonnes : 28
-Dimensions en m : 12,03*2,33*2,35
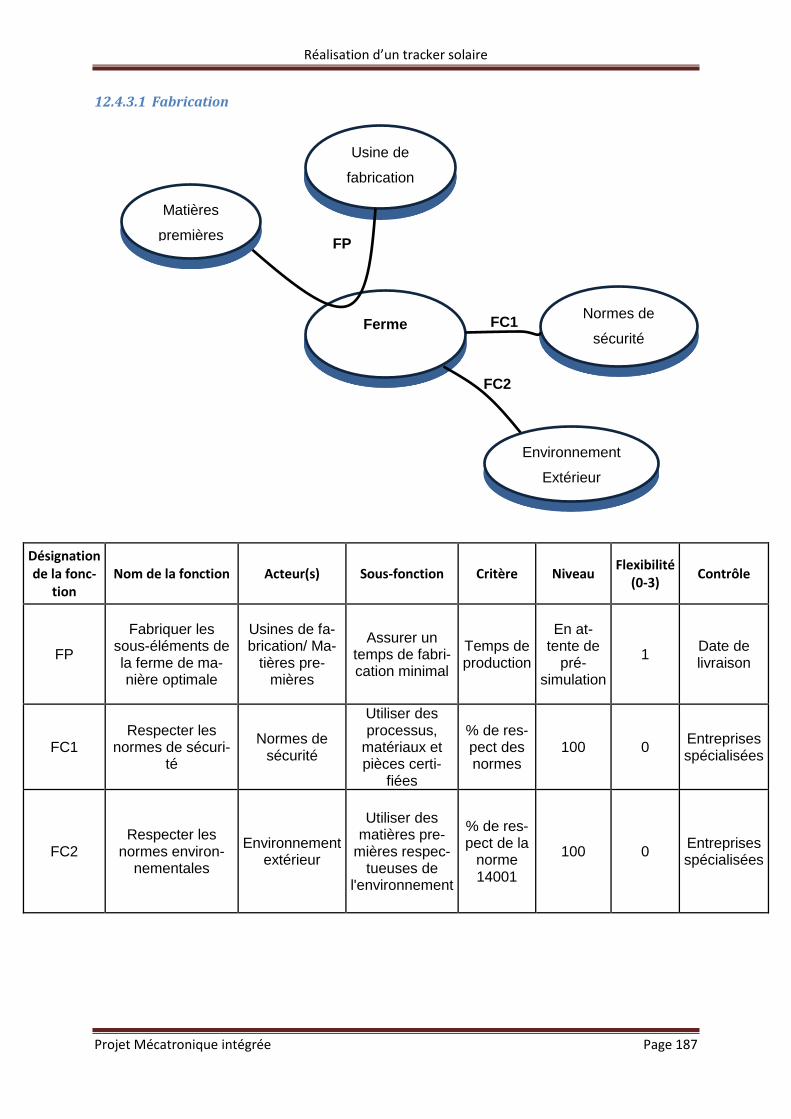
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 187
12.4.3.1 Fabrication
Désignation de la fonc-
tion Nom de la fonction Acteur(s) Sous-fonction Critère Niveau
Flexibilité (0-3)
Contrôle
FP
Fabriquer les sous-éléments de la ferme de ma-nière optimale
Usines de fa-brication/ Ma-
tières pre-mières
Assurer un temps de fabri-cation minimal
Temps de production
En at-tente de
pré-simulation
1 Date de livraison
FC1 Respecter les
normes de sécuri-té
Normes de sécurité
Utiliser des processus,
matériaux et pièces certi-
fiées
% de res-pect des normes
100 0 Entreprises spécialisées
FC2 Respecter les
normes environ-nementales
Environnement extérieur
Utiliser des matières pre-
mières respec-tueuses de
l'environnement
% de res-pect de la
norme 14001
100 0 Entreprises spécialisées
Ferme
Usine de
fabrication
Environnement
Extérieur
Normes de
sécurité
FP
FC1
FC2
Matières
premières
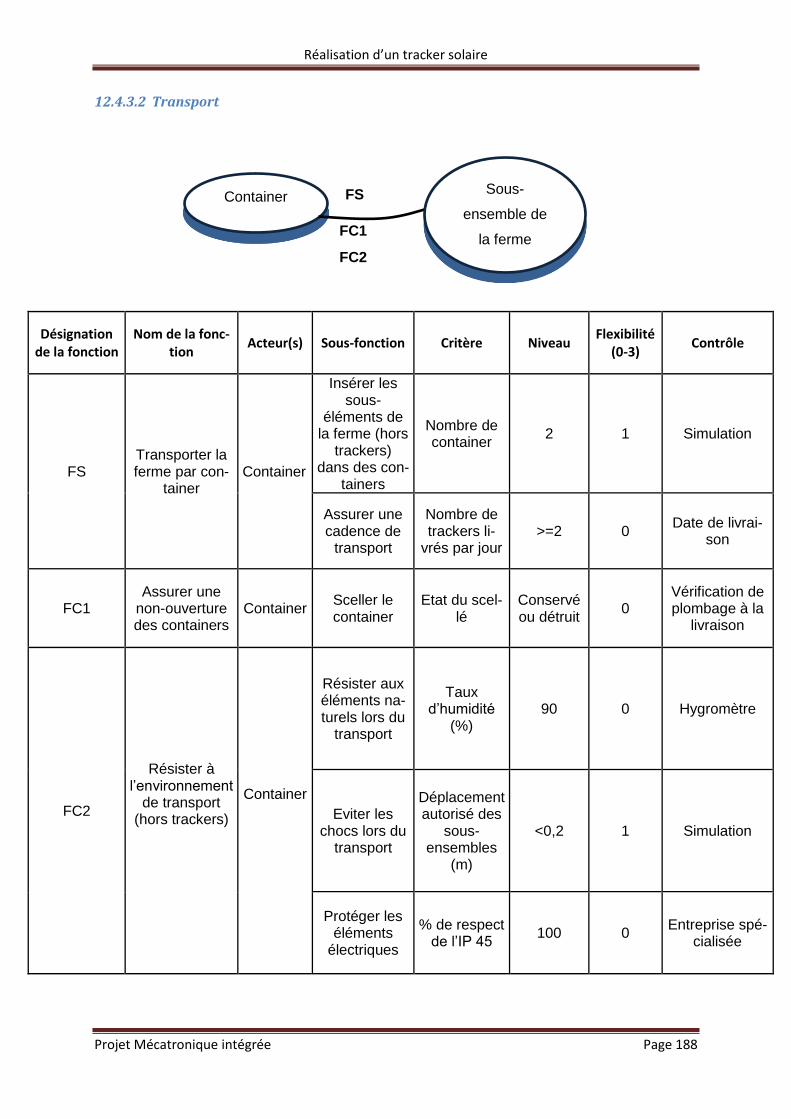
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 188
12.4.3.2 Transport
Désignation de la fonction
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(0-3) Contrôle
FS Transporter la ferme par con-
tainer Container
Insérer les sous-
éléments de la ferme (hors
trackers) dans des con-
tainers
Nombre de container
2 1 Simulation
Assurer une cadence de
transport
Nombre de trackers li-
vrés par jour >=2 0
Date de livrai-son
FC1 Assurer une
non-ouverture des containers
Container Sceller le container
Etat du scel-lé
Conservé ou détruit
0 Vérification de plombage à la
livraison
FC2
Résister à l’environnement
de transport (hors trackers)
Container
Résister aux éléments na-turels lors du
transport
Taux d’humidité
(%) 90 0 Hygromètre
Eviter les chocs lors du
transport
Déplacement autorisé des
sous-ensembles
(m)
<0,2 1 Simulation
Protéger les éléments
électriques
% de respect de l’IP 45
100 0 Entreprise spé-
cialisée
Container FS
FC1
Sous-
ensemble de
la ferme
FC2
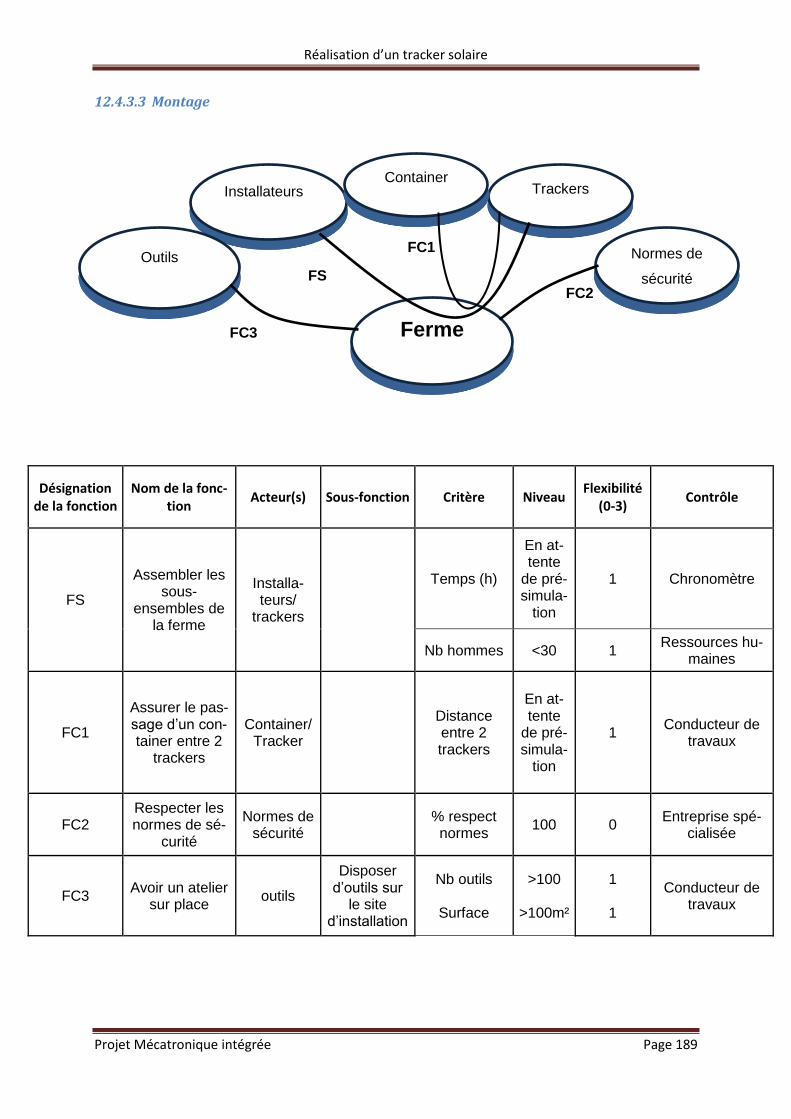
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 189
12.4.3.3 Montage
Désignation de la fonction
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(0-3) Contrôle
FS
Assembler les sous-
ensembles de la ferme
Installa-teurs/
trackers
Temps (h)
En at-tente
de pré-simula-
tion
1 Chronomètre
Nb hommes <30 1 Ressources hu-
maines
FC1
Assurer le pas-sage d’un con-tainer entre 2
trackers
Container/ Tracker
Distance entre 2 trackers
En at-tente
de pré-simula-
tion
1 Conducteur de
travaux
FC2 Respecter les normes de sé-
curité
Normes de sécurité
% respect normes
100 0 Entreprise spé-
cialisée
FC3 Avoir un atelier
sur place outils
Disposer d’outils sur
le site d’installation
Nb outils
Surface
>100
>100m²
1
1
Conducteur de travaux
Ferme
Installateurs
Outils
Trackers
FC1
FS
Normes de
sécurité
Container
FC2
FC3
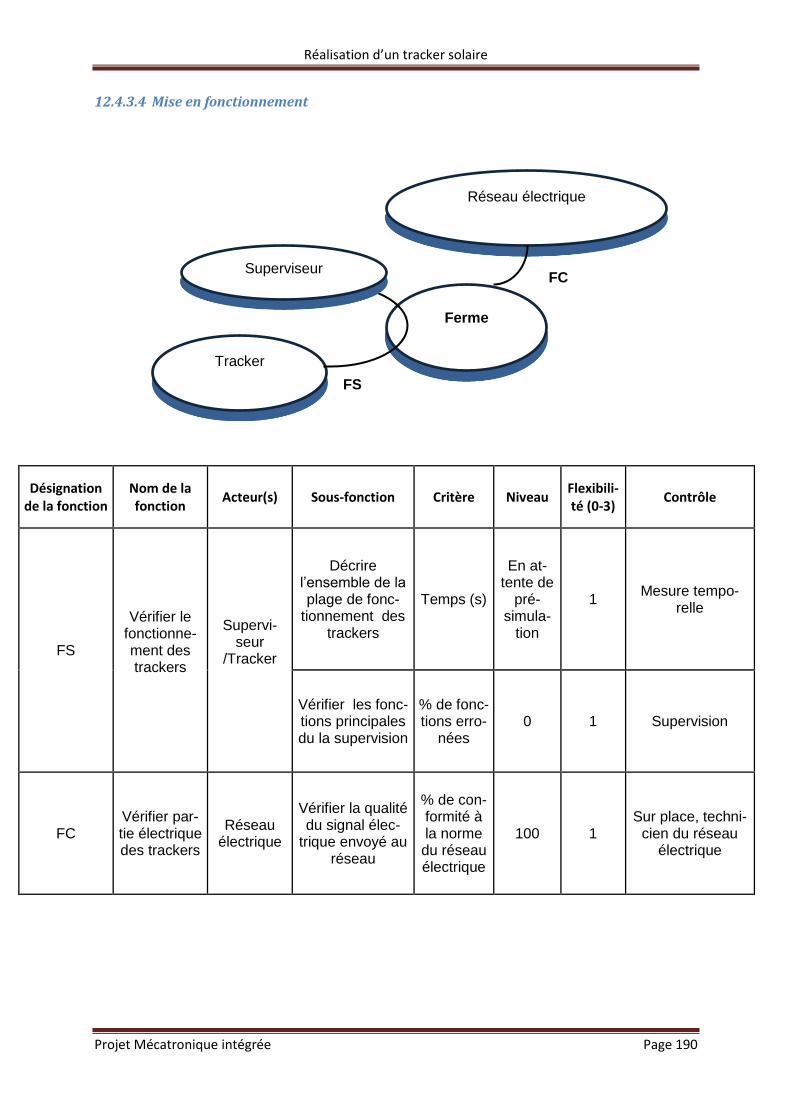
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 190
12.4.3.4 Mise en fonctionnement
Désignation de la fonction
Nom de la fonction
Acteur(s) Sous-fonction Critère Niveau Flexibili-té (0-3)
Contrôle
FS
Vérifier le fonctionne-ment des trackers
Supervi-seur
/Tracker
Décrire l’ensemble de la plage de fonc-
tionnement des trackers
Temps (s)
En at-tente de
pré-simula-
tion
1 Mesure tempo-
relle
Vérifier les fonc-tions principales du la supervision
% de fonc-tions erro-
nées 0 1 Supervision
FC Vérifier par-tie électrique des trackers
Réseau électrique
Vérifier la qualité du signal élec-
trique envoyé au réseau
% de con-formité à la norme du réseau électrique
100 1 Sur place, techni-
cien du réseau électrique
Ferme
Tracker
Réseau électrique
FC
FS
Superviseur
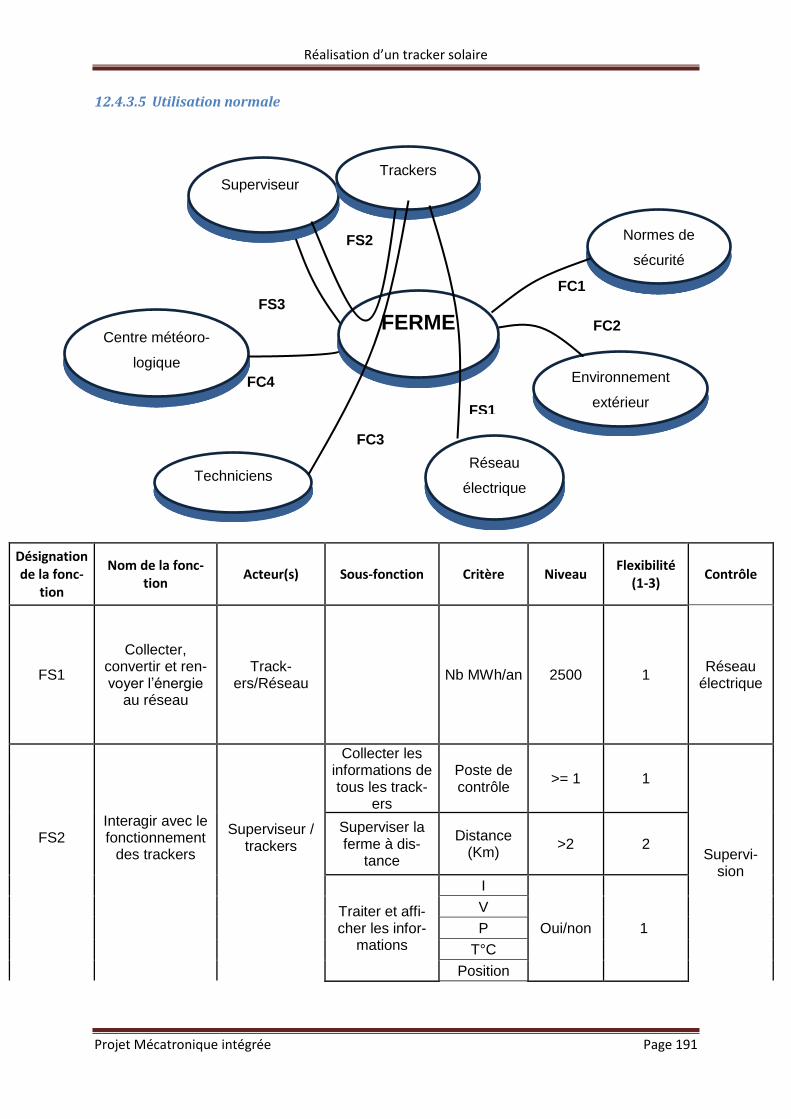
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 191
12.4.3.5 Utilisation normale
Désignation de la fonc-
tion
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(1-3) Contrôle
FS1
Collecter, convertir et ren-voyer l’énergie
au réseau
Track-ers/Réseau
Nb MWh/an 2500 1 Réseau
électrique
FS2
Interagir avec le fonctionnement
des trackers
Superviseur / trackers
Collecter les informations de tous les track-
ers
Poste de contrôle
>= 1 1
Supervi-sion
Superviser la ferme à dis-
tance
Distance (Km)
>2 2
Traiter et affi-cher les infor-
mations
I
Oui/non 1
V
P
T°C
Position
FERME
Superviseur
Réseau
électrique
Environnement
extérieur
Techniciens
FC2
FS2
FS1
Normes de
sécurité
Trackers
FC1
FC3
FS3
Centre météoro-
logique
FC4
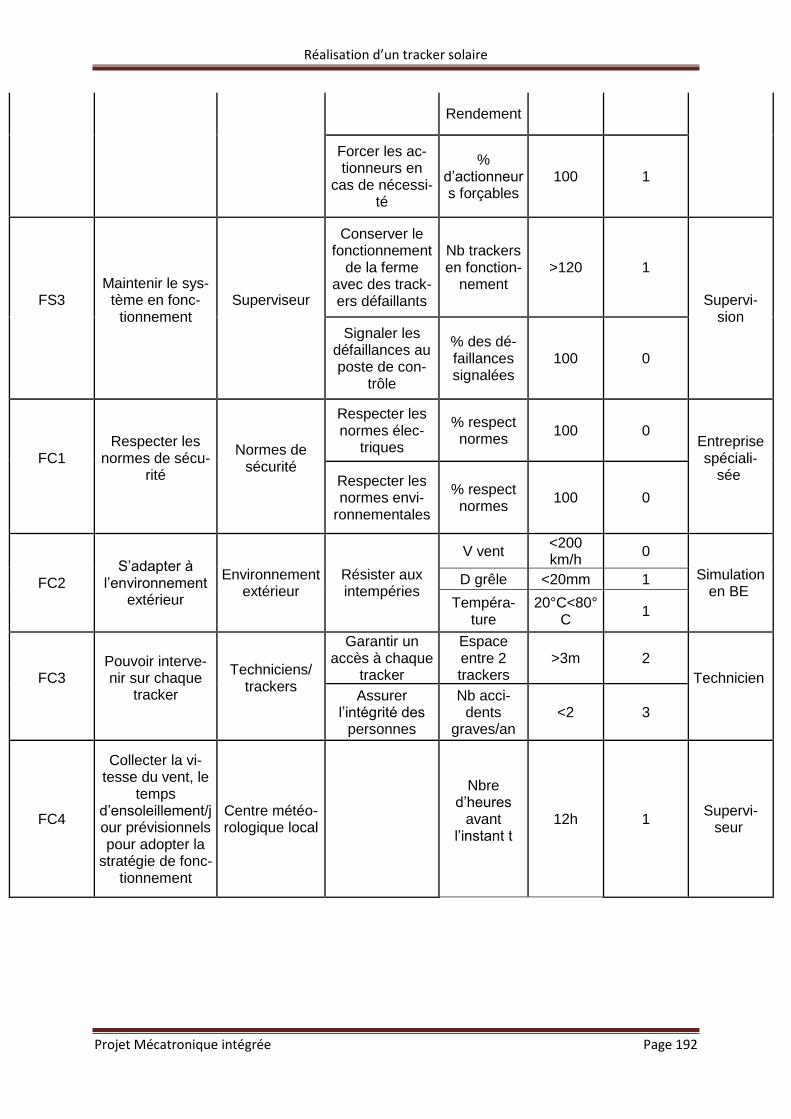
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 192
Rendement
Forcer les ac-tionneurs en
cas de nécessi-té
% d’actionneurs forçables
100 1
FS3
Maintenir le sys-tème en fonc-
tionnement
Superviseur
Conserver le fonctionnement
de la ferme avec des track-ers défaillants
Nb trackers en fonction-
nement >120 1
Supervi-sion
Signaler les défaillances au poste de con-
trôle
% des dé-faillances signalées
100 0
FC1
Respecter les normes de sécu-
rité
Normes de sécurité
Respecter les normes élec-
triques
% respect normes
100 0 Entreprise spéciali-
sée
Respecter les normes envi-
ronnementales
% respect normes
100 0
FC2 S’adapter à
l’environnement extérieur
Environnement extérieur
Résister aux intempéries
V vent <200 km/h
0
Simulation en BE
D grêle <20mm 1
Tempéra-ture
20°C<80°C
1
FC3
Pouvoir interve-nir sur chaque
tracker
Techniciens/ trackers
Garantir un accès à chaque
tracker
Espace entre 2 trackers
>3m 2
Technicien Assurer
l’intégrité des personnes
Nb acci-dents
graves/an <2 3
FC4
Collecter la vi-tesse du vent, le
temps d’ensoleillement/jour prévisionnels pour adopter la
stratégie de fonc-tionnement
Centre météo-rologique local
Nbre d’heures
avant l’instant t
12h 1 Supervi-
seur
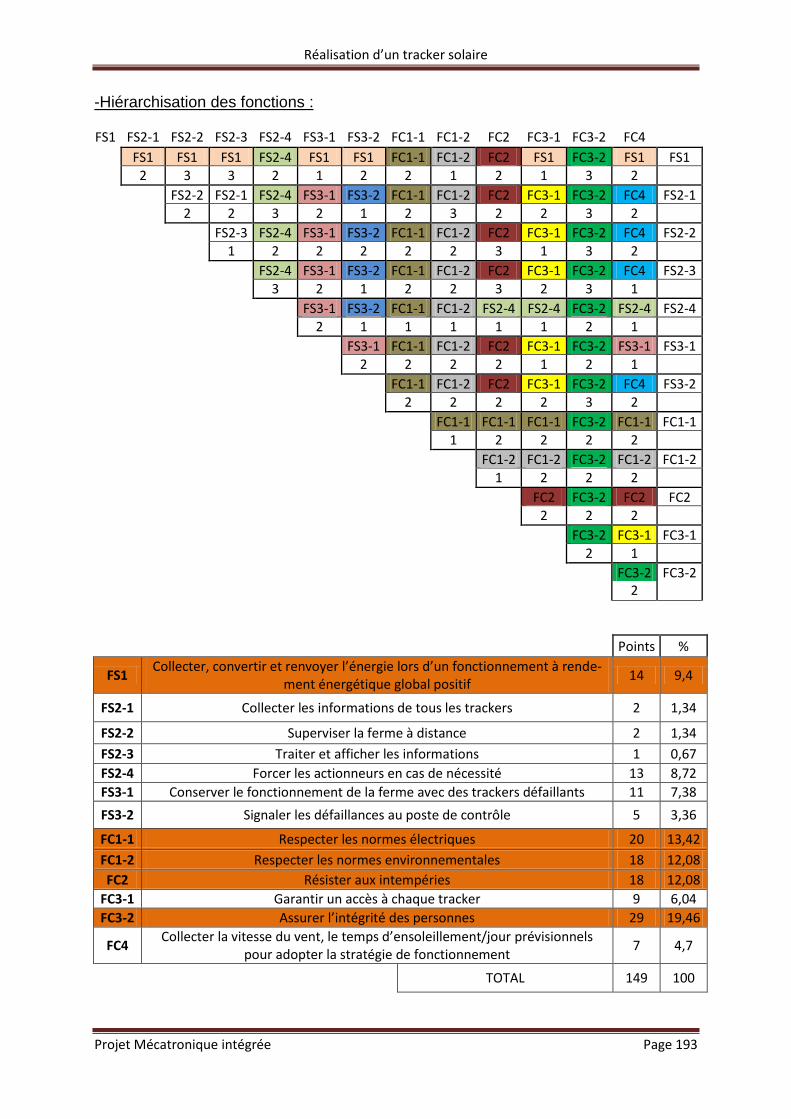
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 193
-Hiérarchisation des fonctions : FS1 FS2-1 FS2-2 FS2-3 FS2-4 FS3-1 FS3-2 FC1-1 FC1-2 FC2 FC3-1 FC3-2 FC4
FS1 FS1 FS1 FS2-4 FS1 FS1 FC1-1 FC1-2 FC2 FS1 FC3-2 FS1 FS1
2 3 3 2 1 2 2 1 2 1 3 2
FS2-2 FS2-1 FS2-4 FS3-1 FS3-2 FC1-1 FC1-2 FC2 FC3-1 FC3-2 FC4 FS2-1
2 2 3 2 1 2 3 2 2 3 2
FS2-3 FS2-4 FS3-1 FS3-2 FC1-1 FC1-2 FC2 FC3-1 FC3-2 FC4 FS2-2
1 2 2 2 2 2 3 1 3 2
FS2-4 FS3-1 FS3-2 FC1-1 FC1-2 FC2 FC3-1 FC3-2 FC4 FS2-3
3 2 1 2 2 3 2 3 1
FS3-1 FS3-2 FC1-1 FC1-2 FS2-4 FS2-4 FC3-2 FS2-4 FS2-4
2 1 1 1 1 1 2 1
FS3-1 FC1-1 FC1-2 FC2 FC3-1 FC3-2 FS3-1 FS3-1
2 2 2 2 1 2 1
FC1-1 FC1-2 FC2 FC3-1 FC3-2 FC4 FS3-2
2 2 2 2 3 2
FC1-1 FC1-1 FC1-1 FC3-2 FC1-1 FC1-1
1 2 2 2 2
FC1-2 FC1-2 FC3-2 FC1-2 FC1-2
1 2 2 2
FC2 FC3-2 FC2 FC2
2 2 2
FC3-2 FC3-1 FC3-1
2 1
FC3-2 FC3-2
2
Points %
FS1 Collecter, convertir et renvoyer l’énergie lors d’un fonctionnement à rende-
ment énergétique global positif 14 9,4
FS2-1 Collecter les informations de tous les trackers 2 1,34
FS2-2 Superviser la ferme à distance 2 1,34
FS2-3 Traiter et afficher les informations 1 0,67
FS2-4 Forcer les actionneurs en cas de nécessité 13 8,72
FS3-1 Conserver le fonctionnement de la ferme avec des trackers défaillants 11 7,38
FS3-2 Signaler les défaillances au poste de contrôle 5 3,36
FC1-1 Respecter les normes électriques 20 13,42
FC1-2 Respecter les normes environnementales 18 12,08
FC2 Résister aux intempéries 18 12,08
FC3-1 Garantir un accès à chaque tracker 9 6,04
FC3-2 Assurer l’intégrité des personnes 29 19,46
FC4 Collecter la vitesse du vent, le temps d’ensoleillement/jour prévisionnels
pour adopter la stratégie de fonctionnement 7 4,7
TOTAL 149 100
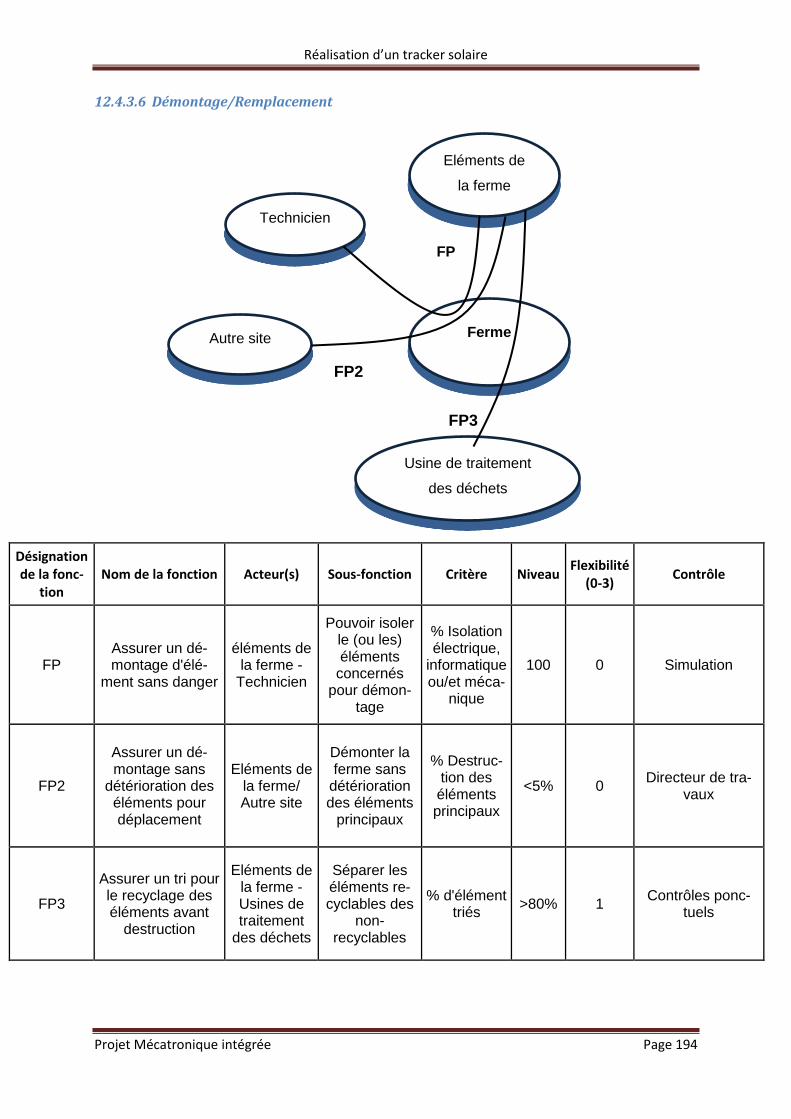
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 194
12.4.3.6 Démontage/Remplacement
Désignation de la fonc-
tion Nom de la fonction Acteur(s) Sous-fonction Critère Niveau
Flexibilité (0-3)
Contrôle
FP Assurer un dé-montage d'élé-
ment sans danger
éléments de la ferme -
Technicien
Pouvoir isoler le (ou les) éléments
concernés pour démon-
tage
% Isolation électrique,
informatique ou/et méca-
nique
100 0 Simulation
FP2
Assurer un dé-montage sans
détérioration des éléments pour déplacement
Eléments de la ferme/ Autre site
Démonter la ferme sans
détérioration des éléments
principaux
% Destruc-tion des éléments principaux
<5% 0 Directeur de tra-
vaux
FP3
Assurer un tri pour le recyclage des éléments avant
destruction
Eléments de la ferme - Usines de traitement
des déchets
Séparer les éléments re-cyclables des
non-recyclables
% d'élément triés
>80% 1 Contrôles ponc-
tuels
Ferme
Technicien
Eléments de
la ferme
Autre site
Usine de traitement
des déchets
FP
FP3
FP2
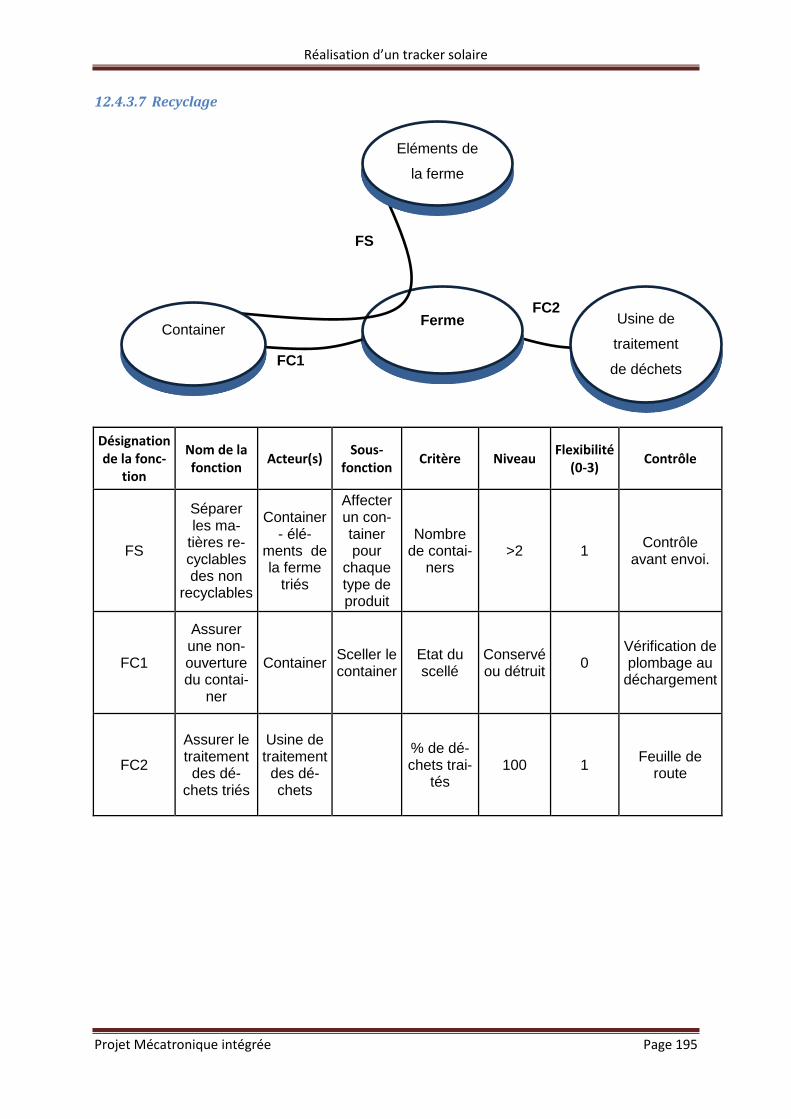
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 195
12.4.3.7 Recyclage
Désignation de la fonc-
tion
Nom de la fonction
Acteur(s) Sous-
fonction Critère Niveau
Flexibilité (0-3)
Contrôle
FS
Séparer les ma-
tières re-cyclables des non
recyclables
Container - élé-
ments de la ferme
triés
Affecter un con-tainer pour
chaque type de produit
Nombre de contai-
ners >2 1
Contrôle avant envoi.
FC1
Assurer une non-ouverture du contai-
ner
Container Sceller le container
Etat du scellé
Conservé ou détruit
0 Vérification de plombage au
déchargement
FC2
Assurer le traitement des dé-
chets triés
Usine de traitement
des dé-chets
% de dé-chets trai-
tés 100 1
Feuille de route
Ferme
FC1
Container
Eléments de
la ferme
FS
Usine de
traitement
de déchets
FC2
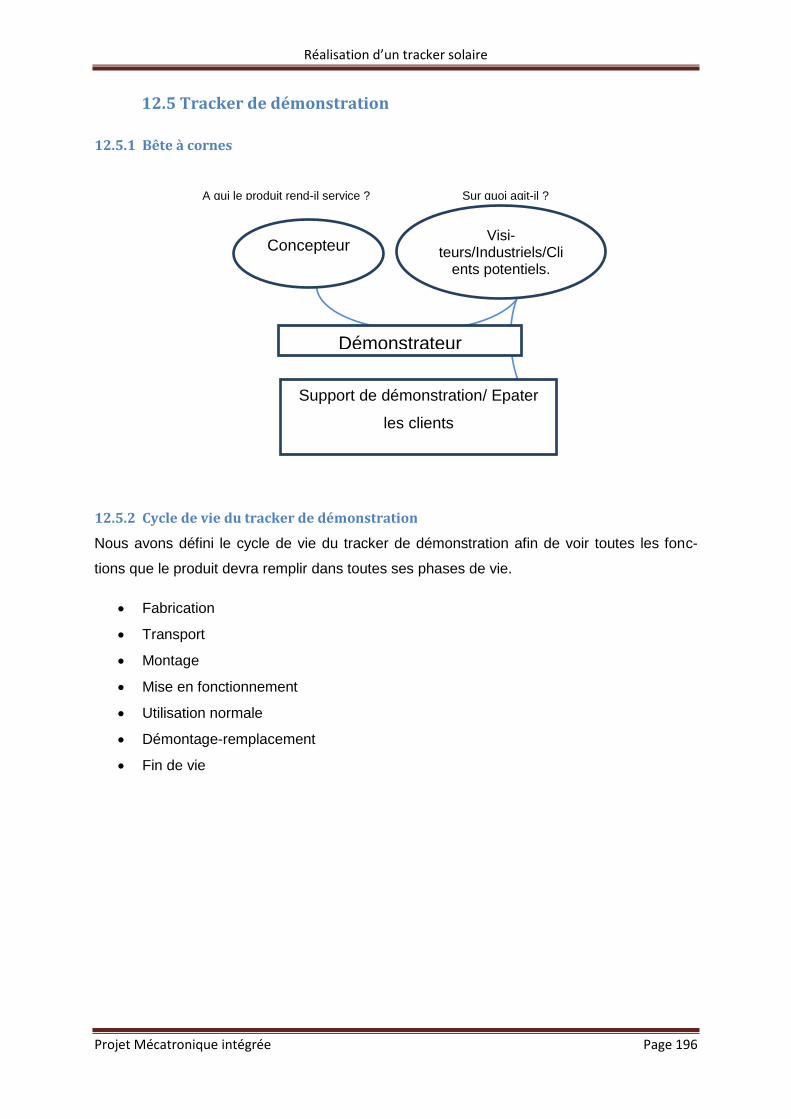
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 196
12.5 Tracker de démonstration
12.5.1 Bête à cornes
12.5.2 Cycle de vie du tracker de démonstration
Nous avons défini le cycle de vie du tracker de démonstration afin de voir toutes les fonc-
tions que le produit devra remplir dans toutes ses phases de vie.
Fabrication
Transport
Montage
Mise en fonctionnement
Utilisation normale
Démontage-remplacement
Fin de vie
A qui le produit rend-il service ? Sur quoi agit-il ?
Concepteur Visi-
teurs/Industriels/Clients potentiels.
Démonstrateur
Support de démonstration/ Epater
les clients
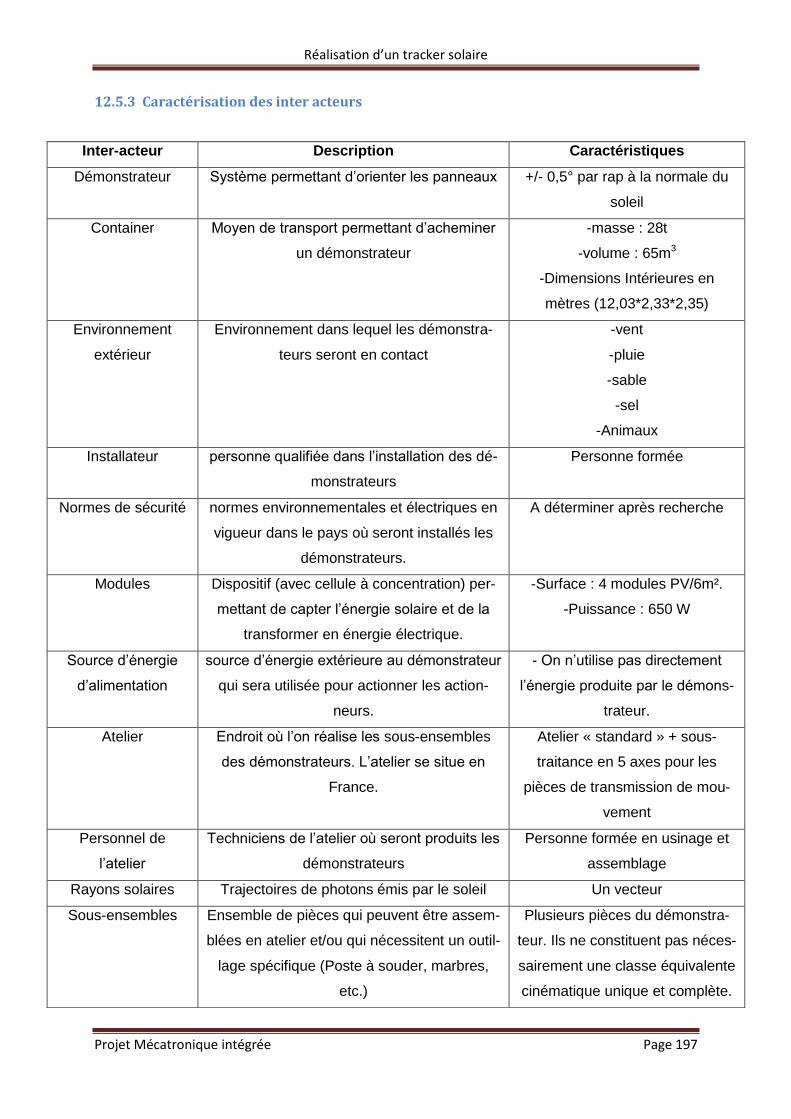
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 197
12.5.3 Caractérisation des inter acteurs
Inter-acteur Description Caractéristiques
Démonstrateur Système permettant d’orienter les panneaux +/- 0,5° par rap à la normale du
soleil
Container Moyen de transport permettant d’acheminer
un démonstrateur
-masse : 28t
-volume : 65m3
-Dimensions Intérieures en
mètres (12,03*2,33*2,35)
Environnement
extérieur
Environnement dans lequel les démonstra-
teurs seront en contact
-vent
-pluie
-sable
-sel
-Animaux
Installateur personne qualifiée dans l’installation des dé-
monstrateurs
Personne formée
Normes de sécurité normes environnementales et électriques en
vigueur dans le pays où seront installés les
démonstrateurs.
A déterminer après recherche
Modules Dispositif (avec cellule à concentration) per-
mettant de capter l’énergie solaire et de la
transformer en énergie électrique.
-Surface : 4 modules PV/6m².
-Puissance : 650 W
Source d’énergie
d’alimentation
source d’énergie extérieure au démonstrateur
qui sera utilisée pour actionner les action-
neurs.
- On n’utilise pas directement
l’énergie produite par le démons-
trateur.
Atelier Endroit où l’on réalise les sous-ensembles
des démonstrateurs. L’atelier se situe en
France.
Atelier « standard » + sous-
traitance en 5 axes pour les
pièces de transmission de mou-
vement
Personnel de
l’atelier
Techniciens de l’atelier où seront produits les
démonstrateurs
Personne formée en usinage et
assemblage
Rayons solaires Trajectoires de photons émis par le soleil Un vecteur
Sous-ensembles Ensemble de pièces qui peuvent être assem-
blées en atelier et/ou qui nécessitent un outil-
lage spécifique (Poste à souder, marbres,
etc.)
Plusieurs pièces du démonstra-
teur. Ils ne constituent pas néces-
sairement une classe équivalente
cinématique unique et complète.
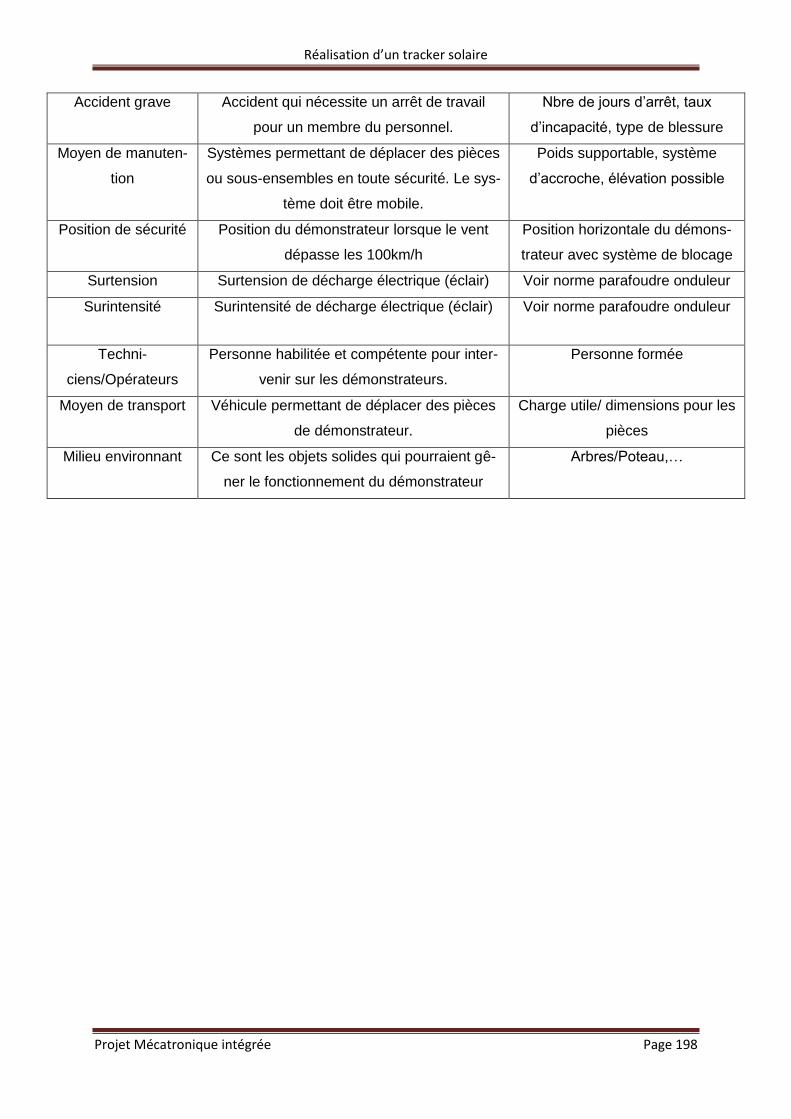
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 198
Accident grave Accident qui nécessite un arrêt de travail
pour un membre du personnel.
Nbre de jours d’arrêt, taux
d’incapacité, type de blessure
Moyen de manuten-
tion
Systèmes permettant de déplacer des pièces
ou sous-ensembles en toute sécurité. Le sys-
tème doit être mobile.
Poids supportable, système
d’accroche, élévation possible
Position de sécurité Position du démonstrateur lorsque le vent
dépasse les 100km/h
Position horizontale du démons-
trateur avec système de blocage
Surtension Surtension de décharge électrique (éclair) Voir norme parafoudre onduleur
Surintensité Surintensité de décharge électrique (éclair) Voir norme parafoudre onduleur
Techni-
ciens/Opérateurs
Personne habilitée et compétente pour inter-
venir sur les démonstrateurs.
Personne formée
Moyen de transport Véhicule permettant de déplacer des pièces
de démonstrateur.
Charge utile/ dimensions pour les
pièces
Milieu environnant Ce sont les objets solides qui pourraient gê-
ner le fonctionnement du démonstrateur
Arbres/Poteau,…
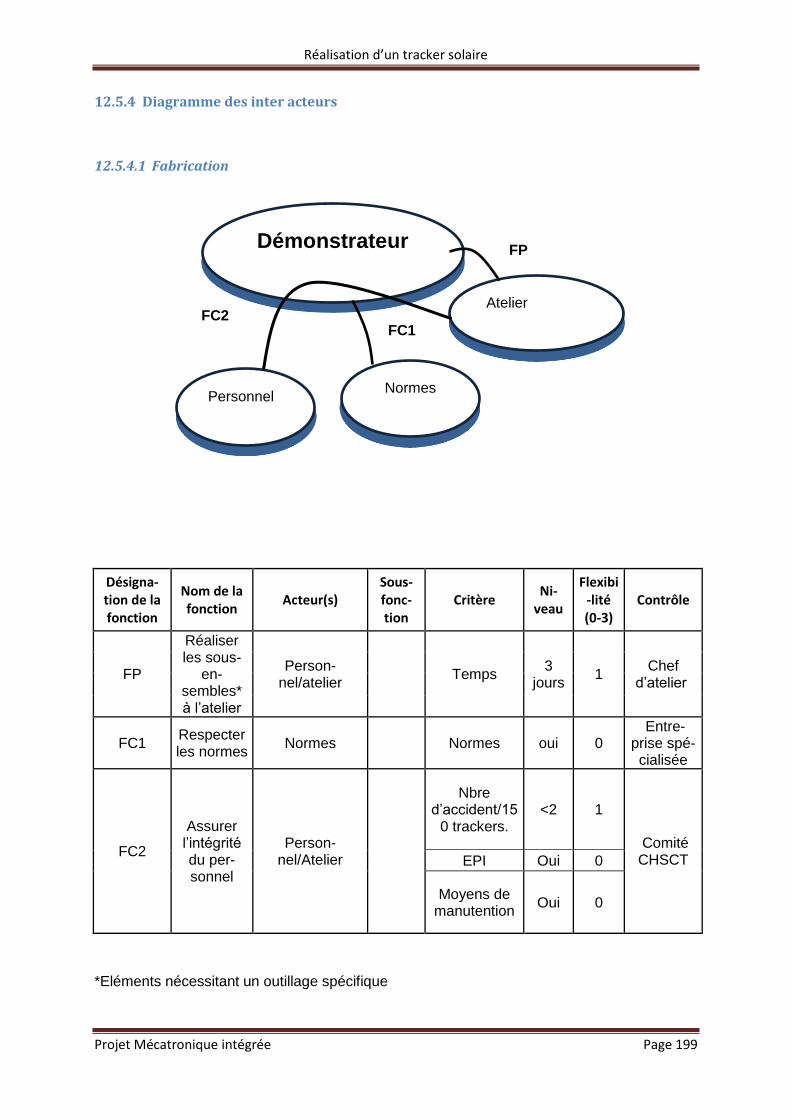
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 199
12.5.4 Diagramme des inter acteurs
12.5.4.1 Fabrication
Désigna-tion de la fonction
Nom de la fonction
Acteur(s) Sous-fonc-tion
Critère Ni-
veau
Flexibi-lité (0-3)
Contrôle
FP
Réaliser les sous-
en-sembles* à l’atelier
Person-nel/atelier
Temps 3
jours 1
Chef d’atelier
FC1 Respecter les normes
Normes Normes oui 0 Entre-
prise spé-cialisée
FC2
Assurer l’intégrité du per-sonnel
Person-nel/Atelier
Nbre d’accident/15
0 trackers. <2 1
Comité CHSCT EPI Oui 0
Moyens de manutention
Oui 0
*Eléments nécessitant un outillage spécifique
Démonstrateur
Personnel Normes
Atelier
FP
FC1 FC2
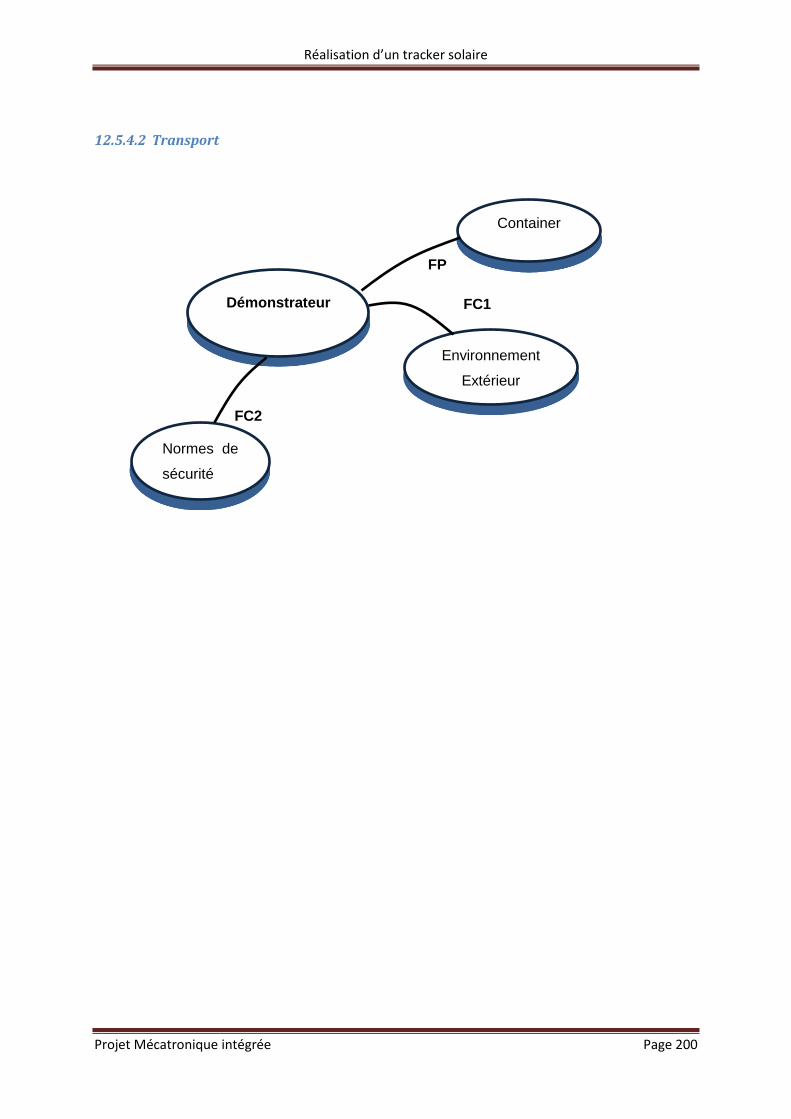
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 200
12.5.4.2 Transport
Démonstrateur
Normes de
sécurité
Environnement
Extérieur
FC1
FC2
Container
FP
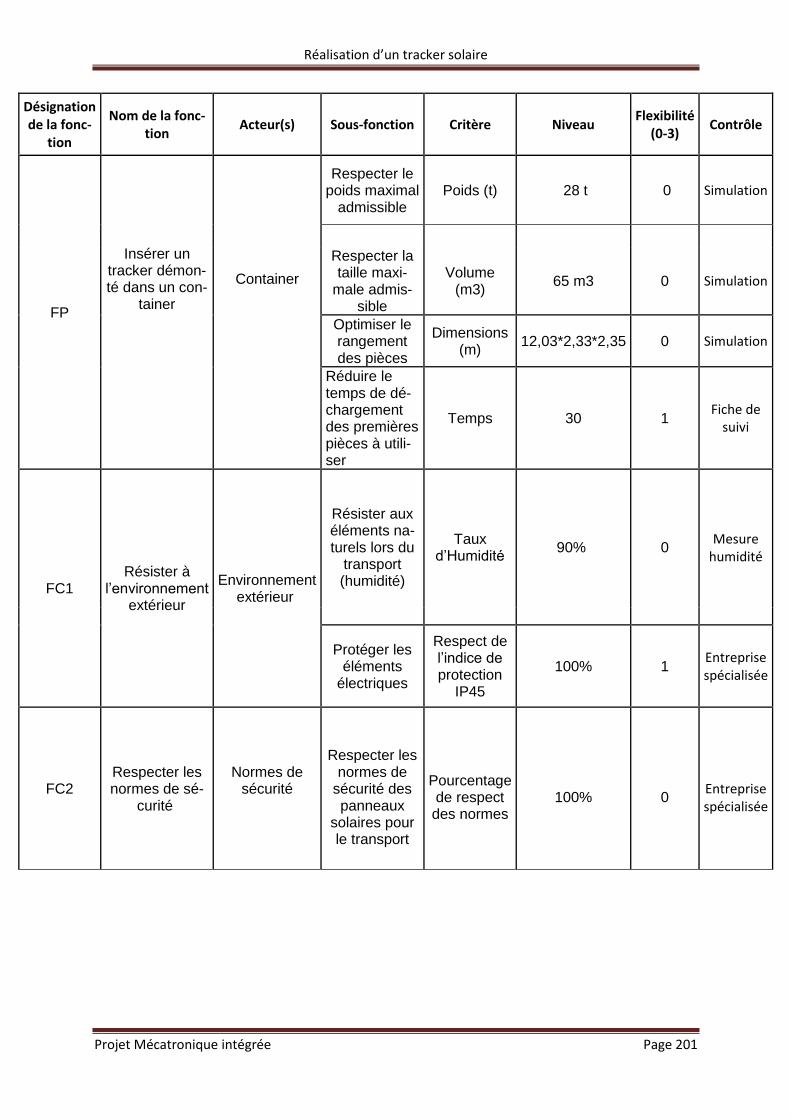
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 201
Désignation de la fonc-
tion
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(0-3) Contrôle
FP
Insérer un tracker démon-té dans un con-
tainer
Container
Respecter le poids maximal
admissible Poids (t) 28 t 0 Simulation
Respecter la taille maxi-
male admis-sible
Volume (m3)
65 m3 0 Simulation
Optimiser le rangement des pièces
Dimensions (m)
12,03*2,33*2,35 0 Simulation
Réduire le temps de dé-chargement des premières pièces à utili-ser
Temps 30 1 Fiche de
suivi
FC1 Résister à
l’environnement extérieur
Environnement extérieur
Résister aux éléments na-turels lors du
transport (humidité)
Taux
d’Humidité
90%
0
Mesure
humidité
Protéger les éléments
électriques
Respect de l’indice de protection
IP45
100% 1 Entreprise spécialisée
FC2 Respecter les normes de sé-
curité
Normes de sécurité
Respecter les
normes de sécurité des panneaux
solaires pour le transport
Pourcentage de respect des normes
100%
0
Entreprise spécialisée
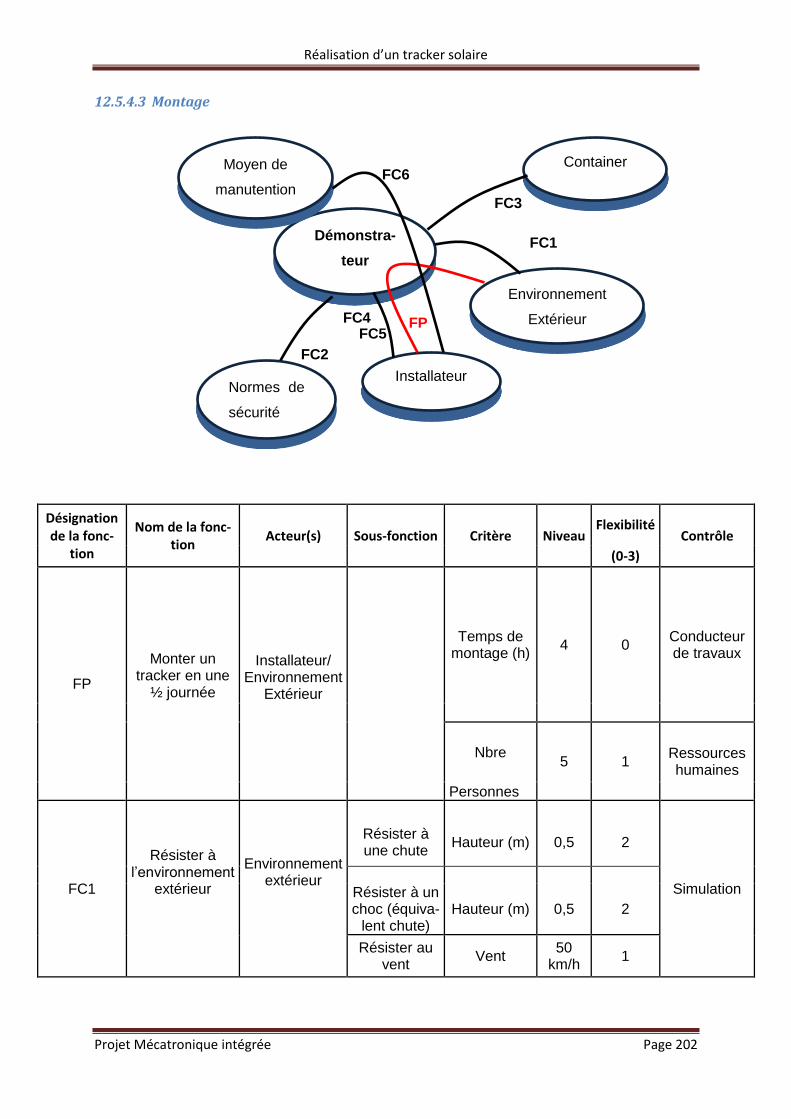
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 202
12.5.4.3 Montage
Désignation de la fonc-
tion
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
Contrôle
(0-3)
FP
Monter un tracker en une
½ journée
Installateur/ Environnement
Extérieur
Temps de montage (h)
4 0 Conducteur de travaux
Nbre 5 1
Ressources humaines
Personnes
FC1
Résister à l’environnement
extérieur
Environnement extérieur
Résister à une chute
Hauteur (m)
0,5
2
Simulation
Résister à un choc (équiva-
lent chute) Hauteur (m) 0,5 2
Résister au vent
Vent 50
km/h 1
Démonstra-
teur
Normes de
sécurité
Installateur
Environnement
Extérieur
FC1
FP
FC2
Container
FC3
FC4
Moyen de
manutention FC6
FC5
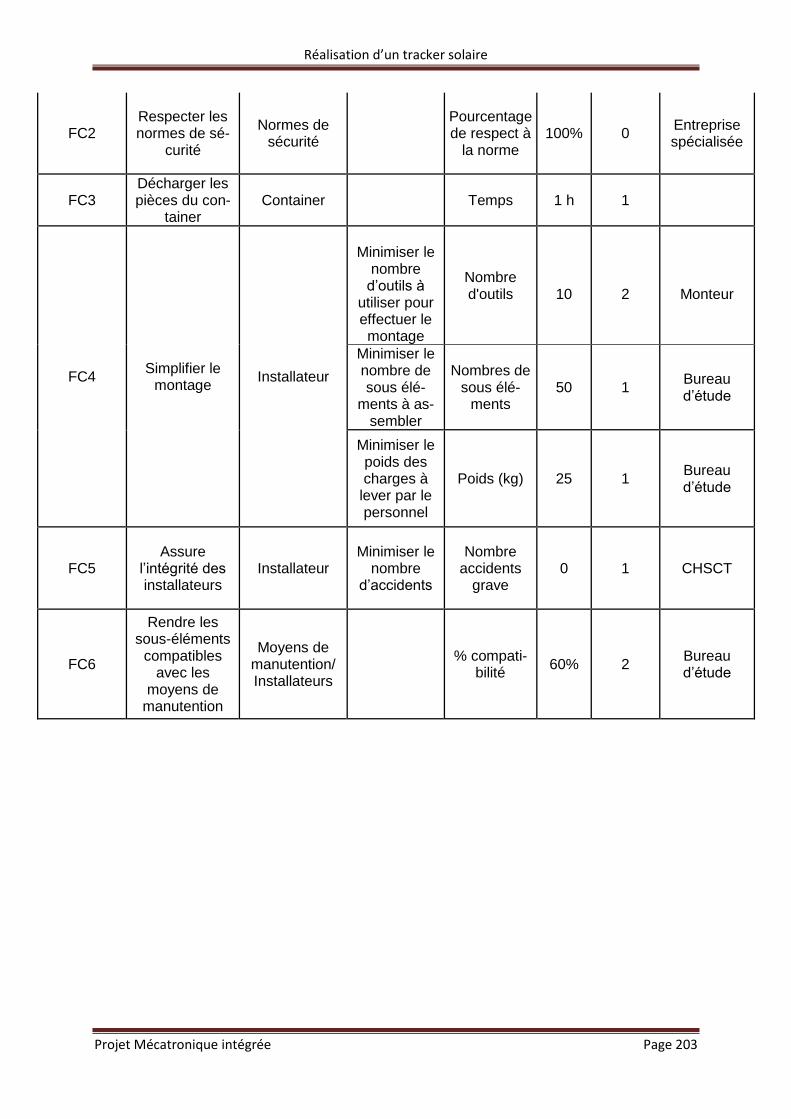
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 203
FC2 Respecter les normes de sé-
curité
Normes de sécurité
Pourcentage de respect à
la norme 100% 0
Entreprise spécialisée
FC3 Décharger les pièces du con-
tainer Container
Temps 1 h 1
FC4 Simplifier le
montage Installateur
Minimiser le
nombre d’outils à
utiliser pour effectuer le montage
Nombre d'outils
10
2
Monteur
Minimiser le nombre de sous élé-
ments à as-sembler
Nombres de sous élé-
ments 50 1
Bureau d’étude
Minimiser le poids des charges à
lever par le personnel
Poids (kg) 25 1 Bureau d’étude
FC5 Assure
l’intégrité des installateurs
Installateur Minimiser le
nombre d’accidents
Nombre accidents
grave 0 1 CHSCT
FC6
Rendre les sous-éléments
compatibles avec les
moyens de manutention
Moyens de manutention/ Installateurs
% compati-
bilité 60% 2
Bureau d’étude
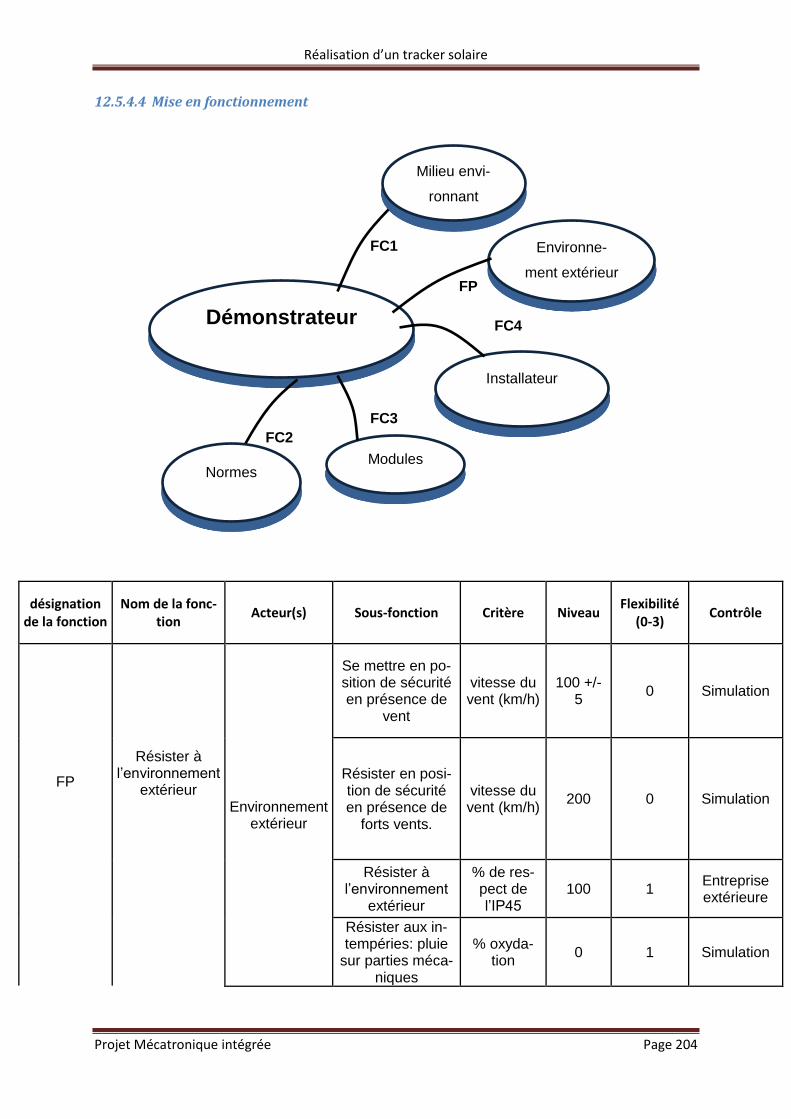
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 204
12.5.4.4 Mise en fonctionnement
désignation de la fonction
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(0-3) Contrôle
FP
Résister à l’environnement
extérieur
Environnement extérieur
Se mettre en po-sition de sécurité en présence de
vent
vitesse du vent (km/h)
100 +/- 5
0 Simulation
Résister en posi-tion de sécurité en présence de
forts vents.
vitesse du vent (km/h)
200 0 Simulation
Résister à l’environnement
extérieur
% de res-pect de l’IP45
100 1 Entreprise extérieure
Résister aux in-tempéries: pluie
sur parties méca-niques
% oxyda-tion
0 1 Simulation
Démonstrateur
Milieu envi-
ronnant
Normes Modules
Installateur
FC4
FC1
FC2
Environne-
ment extérieur FP
FC3
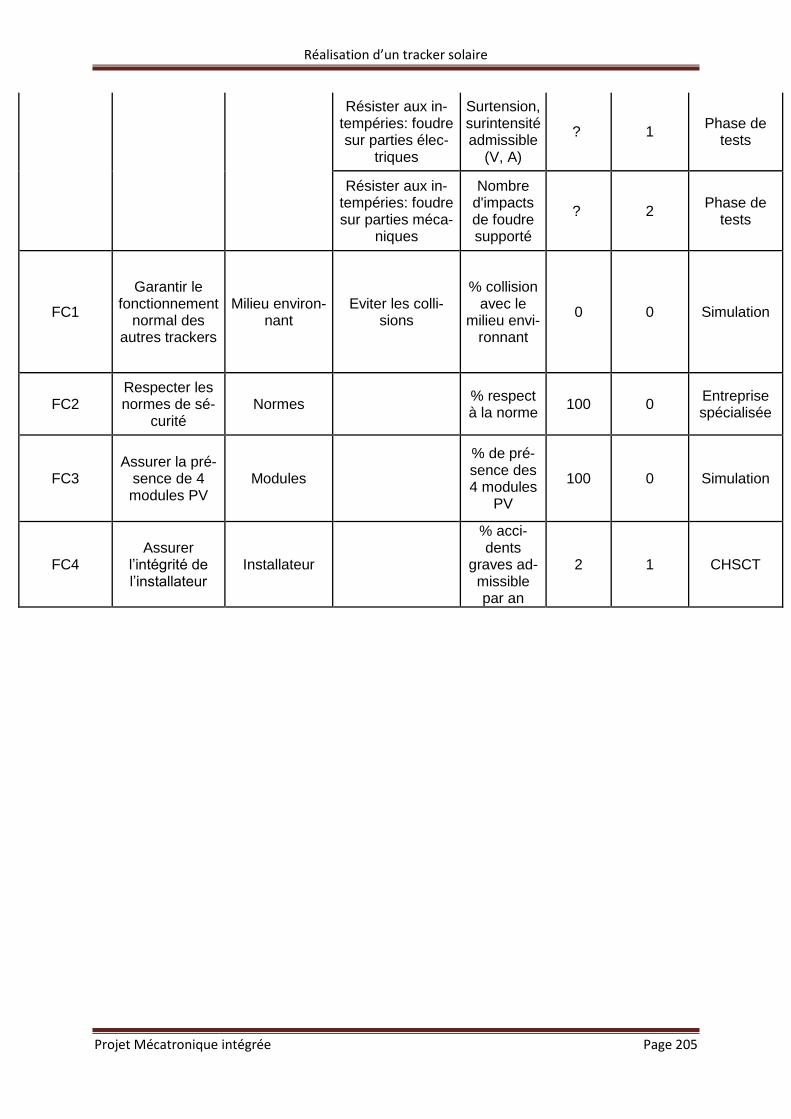
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 205
Résister aux in-tempéries: foudre sur parties élec-
triques
Surtension, surintensité admissible
(V, A)
? 1 Phase de
tests
Résister aux in-tempéries: foudre sur parties méca-
niques
Nombre d'impacts de foudre supporté
? 2 Phase de
tests
FC1
Garantir le fonctionnement
normal des autres trackers
Milieu environ-nant
Eviter les colli-sions
% collision avec le
milieu envi-ronnant
0 0 Simulation
FC2 Respecter les normes de sé-
curité Normes
% respect à la norme
100 0 Entreprise spécialisée
FC3 Assurer la pré-
sence de 4 modules PV
Modules
% de pré-sence des 4 modules
PV
100 0 Simulation
FC4 Assurer
l’intégrité de l’installateur
Installateur
% acci-dents
graves ad-missible par an
2 1 CHSCT
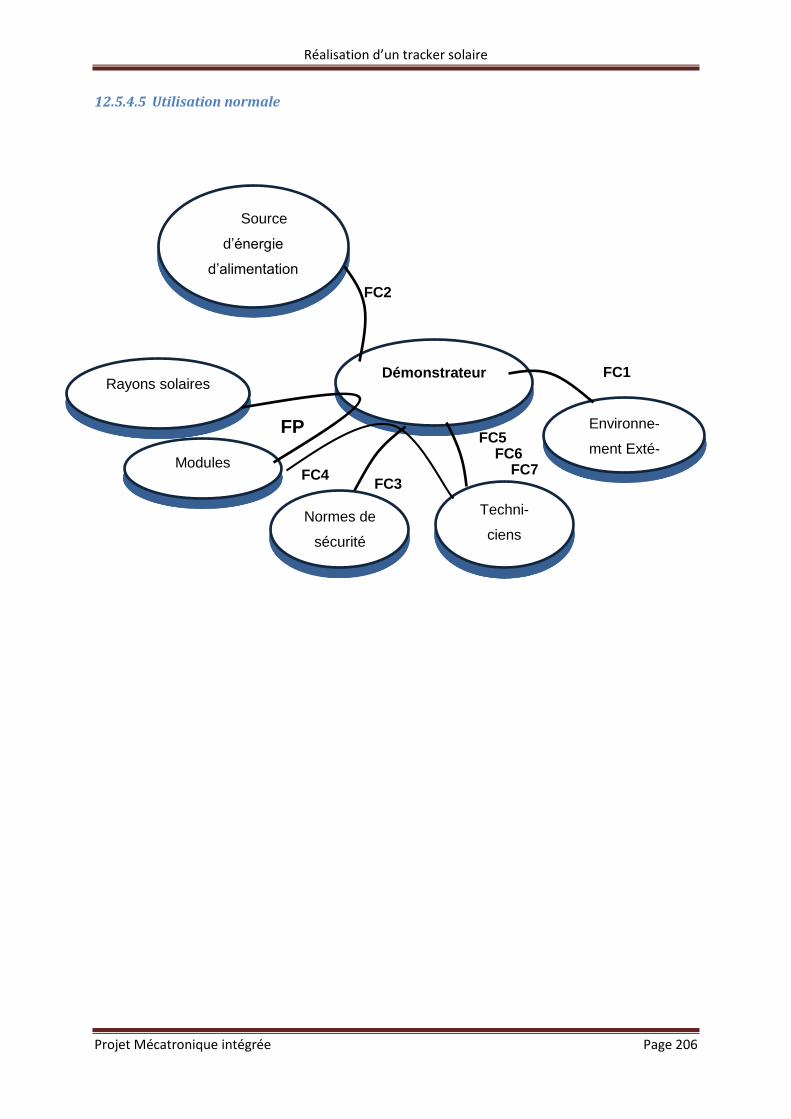
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 206
12.5.4.5 Utilisation normale
Démonstrateur
Source
d’énergie
d’alimentation
Rayons solaires
Normes de
sécurité
Techni-
ciens
Environne-
ment Exté-Modules
FC1
FC2
FC3
FP
FC4
FC5 FC6
FC7
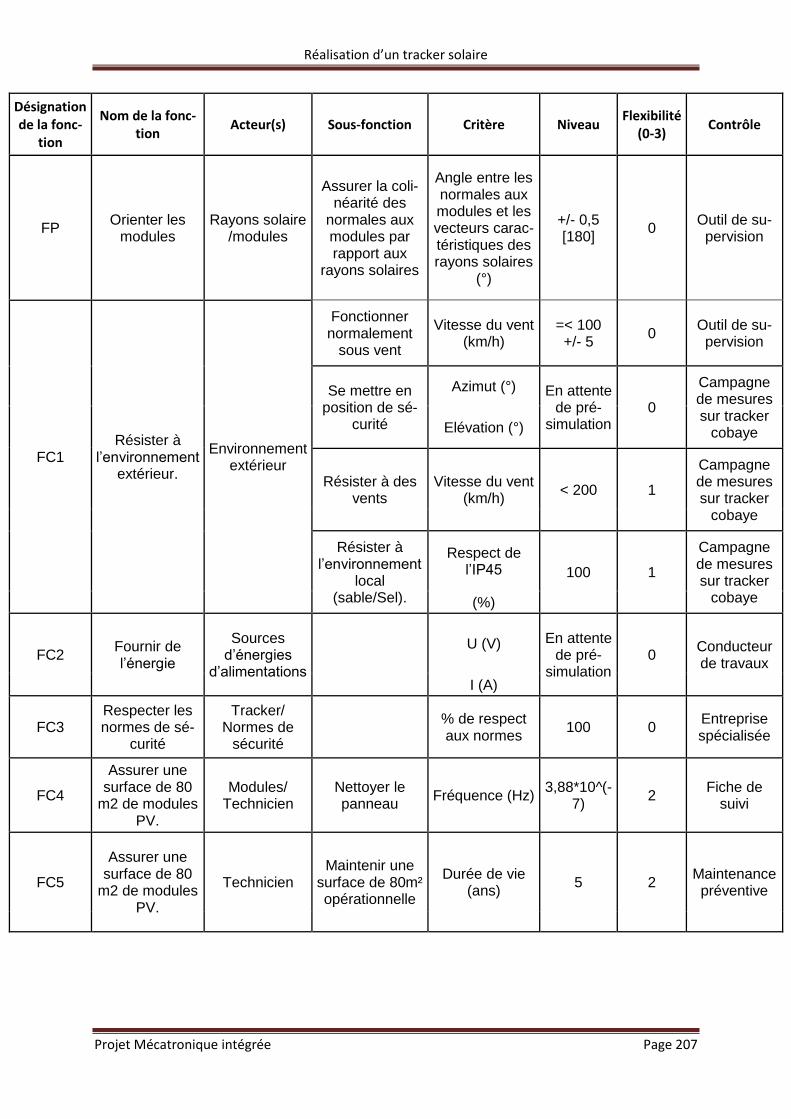
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 207
Désignation de la fonc-
tion
Nom de la fonc-tion
Acteur(s) Sous-fonction Critère Niveau Flexibilité
(0-3) Contrôle
FP Orienter les
modules Rayons solaire
/modules
Assurer la coli-néarité des
normales aux modules par rapport aux
rayons solaires
Angle entre les normales aux modules et les vecteurs carac-téristiques des rayons solaires
(°)
+/- 0,5 [180]
0 Outil de su-pervision
FC1 Résister à
l’environnement extérieur.
Environnement extérieur
Fonctionner normalement
sous vent
Vitesse du vent (km/h)
=< 100 +/- 5
0 Outil de su-pervision
Se mettre en position de sé-
curité
Azimut (°) En attente de pré-
simulation 0
Campagne de mesures sur tracker
cobaye Elévation (°)
Résister à des vents
Vitesse du vent (km/h)
< 200 1
Campagne de mesures sur tracker
cobaye
Résister à l’environnement
local (sable/Sel).
Respect de l’IP45 100 1
Campagne de mesures sur tracker
cobaye (%)
FC2 Fournir de l’énergie
Sources d’énergies
d’alimentations
U (V) En attente de pré-
simulation 0
Conducteur de travaux
I (A)
FC3 Respecter les normes de sé-
curité
Tracker/ Normes de
sécurité
% de respect aux normes
100 0 Entreprise spécialisée
FC4
Assurer une surface de 80
m2 de modules PV.
Modules/ Technicien
Nettoyer le panneau
Fréquence (Hz) 3,88*10^(-
7) 2
Fiche de suivi
FC5
Assurer une surface de 80
m2 de modules PV.
Technicien Maintenir une
surface de 80m² opérationnelle
Durée de vie (ans)
5 2 Maintenance préventive
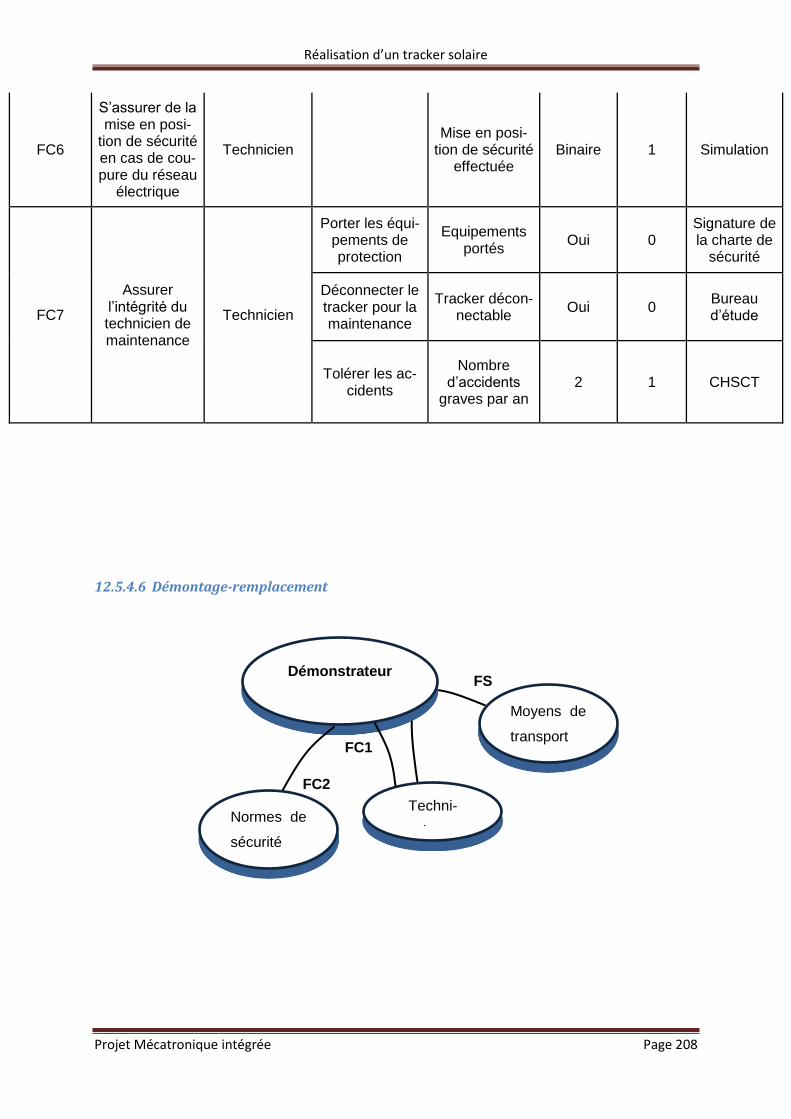
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 208
FC6
S’assurer de la mise en posi-
tion de sécurité en cas de cou-pure du réseau
électrique
Technicien Mise en posi-
tion de sécurité effectuée
Binaire 1 Simulation
FC7
Assurer l’intégrité du technicien de maintenance
Technicien
Porter les équi-pements de protection
Equipements portés
Oui 0 Signature de la charte de
sécurité
Déconnecter le tracker pour la maintenance
Tracker décon-nectable
Oui 0 Bureau d’étude
Tolérer les ac-cidents
Nombre d’accidents
graves par an 2 1 CHSCT
12.5.4.6 Démontage-remplacement
Démonstrateur
Normes de
sécurité
Techni-
ciens
FC2
FC1
Moyens de
transport
FS
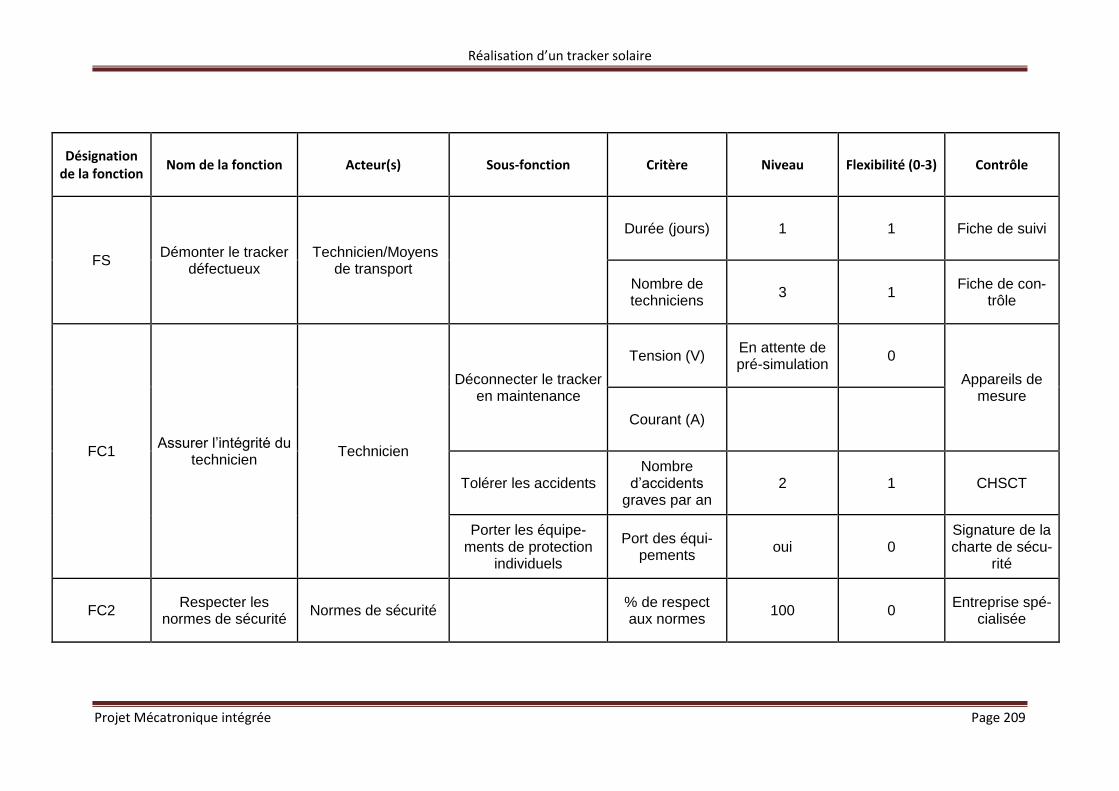
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 209
Désignation de la fonction
Nom de la fonction Acteur(s) Sous-fonction Critère Niveau Flexibilité (0-3) Contrôle
FS Démonter le tracker
défectueux Technicien/Moyens
de transport
Durée (jours) 1 1 Fiche de suivi
Nombre de techniciens
3 1 Fiche de con-
trôle
FC1 Assurer l’intégrité du
technicien Technicien
Déconnecter le tracker en maintenance
Tension (V) En attente de pré-simulation
0
Appareils de mesure
Courant (A)
Tolérer les accidents Nombre
d’accidents graves par an
2 1 CHSCT
Porter les équipe-ments de protection
individuels
Port des équi-pements
oui 0 Signature de la charte de sécu-
rité
FC2 Respecter les
normes de sécurité Normes de sécurité
% de respect aux normes
100 0 Entreprise spé-
cialisée
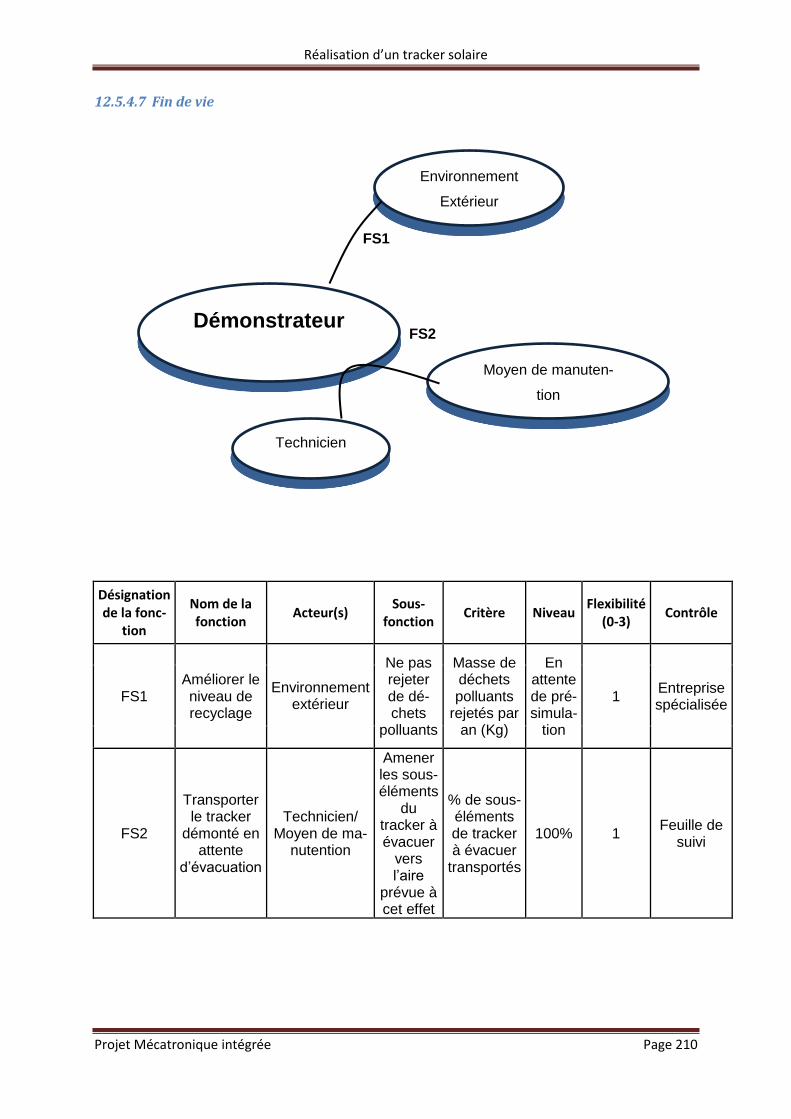
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 210
12.5.4.7 Fin de vie
Désignation de la fonc-
tion
Nom de la fonction
Acteur(s) Sous-
fonction Critère Niveau
Flexibilité (0-3)
Contrôle
FS1 Améliorer le niveau de recyclage
Ne pas rejeter de dé-chets
polluants
Masse de déchets polluants
rejetés par an (Kg)
En attente de pré-simula-
tion
1 Entreprise spécialisée
Environnement extérieur
FS2
Transporter le tracker
démonté en attente
d’évacuation
Technicien/ Moyen de ma-
nutention
Amener les sous-éléments
du tracker à évacuer
vers l’aire
prévue à cet effet
% de sous-éléments de tracker à évacuer
transportés
100% 1 Feuille de
suivi
Démonstrateur
Environnement
Extérieur
Moyen de manuten-
tion
FS2
FS1
Technicien
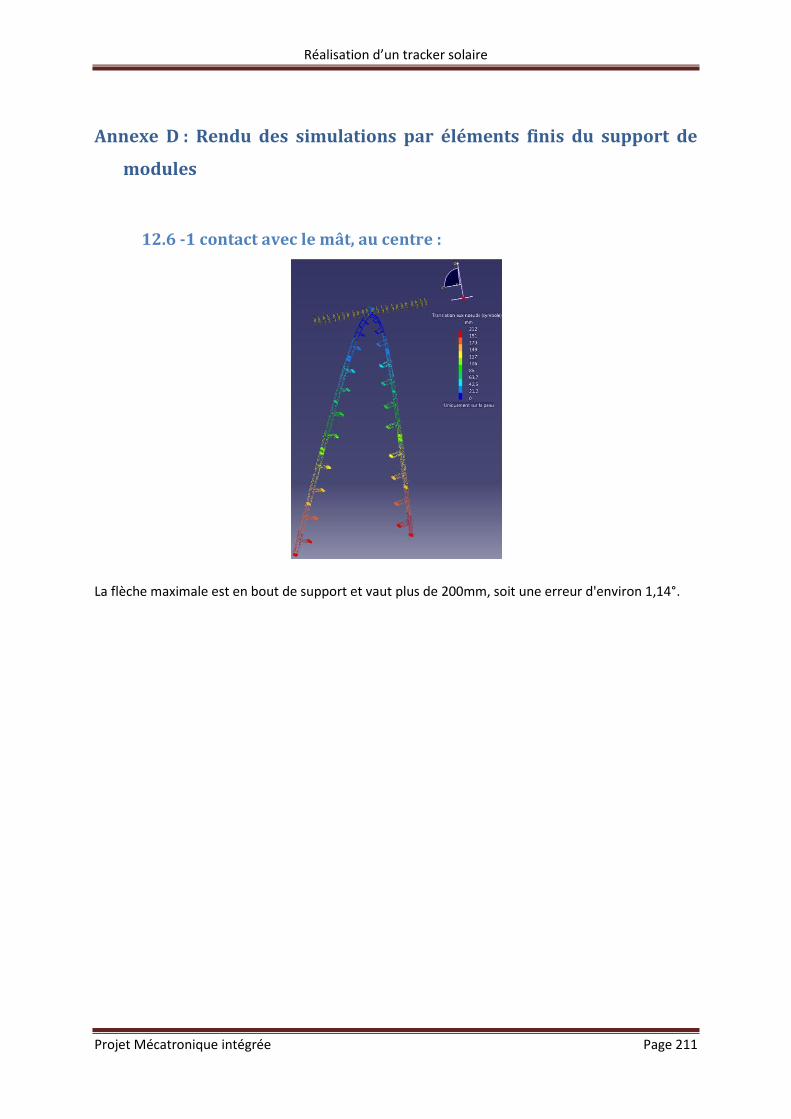
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 211
Annexe D : Rendu des simulations par éléments finis du support de
modules
12.6 -1 contact avec le mât, au centre :
La flèche maximale est en bout de support et vaut plus de 200mm, soit une erreur d'environ 1,14°.
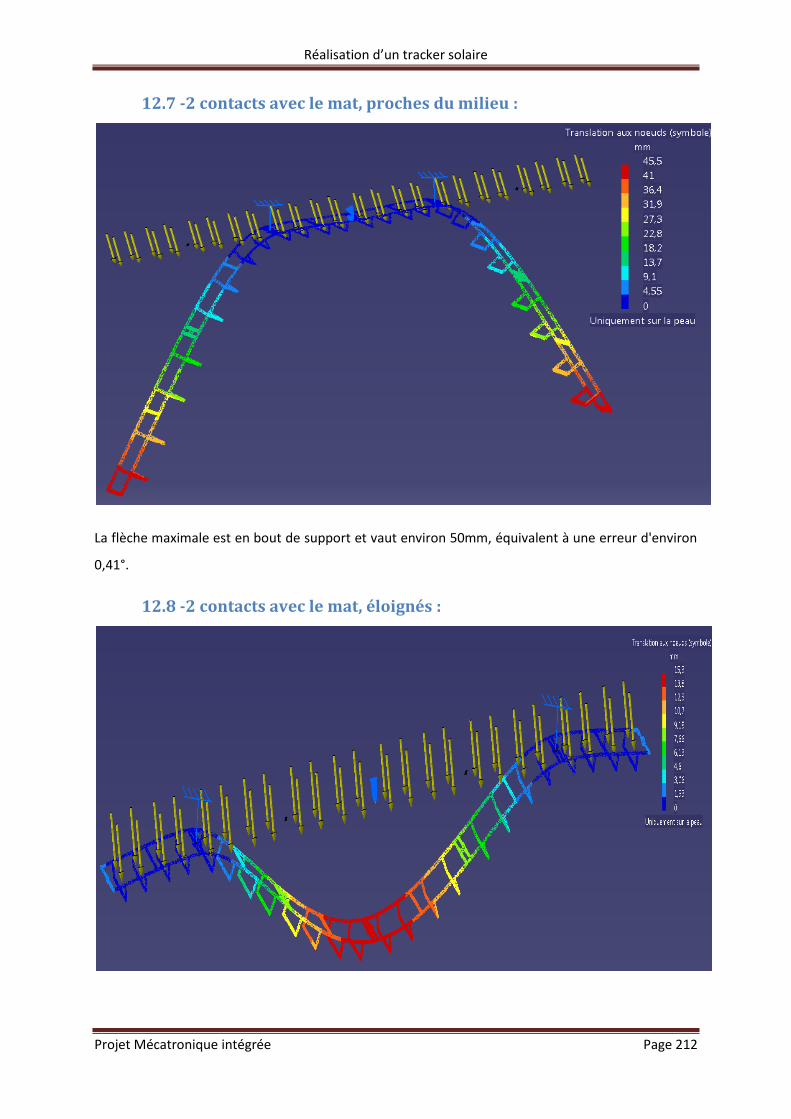
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 212
12.7 -2 contacts avec le mat, proches du milieu :
La flèche maximale est en bout de support et vaut environ 50mm, équivalent à une erreur d'environ
0,41°.
12.8 -2 contacts avec le mat, éloignés :
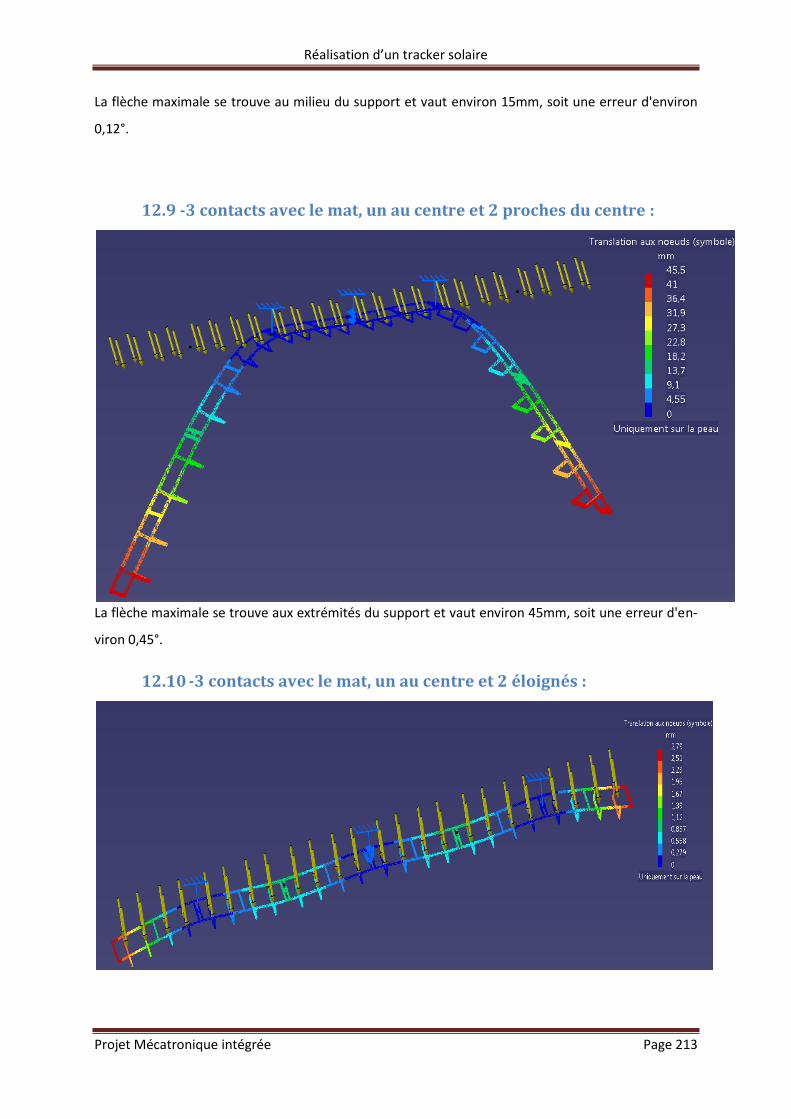
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 213
La flèche maximale se trouve au milieu du support et vaut environ 15mm, soit une erreur d'environ
0,12°.
12.9 -3 contacts avec le mat, un au centre et 2 proches du centre :
La flèche maximale se trouve aux extrémités du support et vaut environ 45mm, soit une erreur d'en-
viron 0,45°.
12.10 -3 contacts avec le mat, un au centre et 2 éloignés :
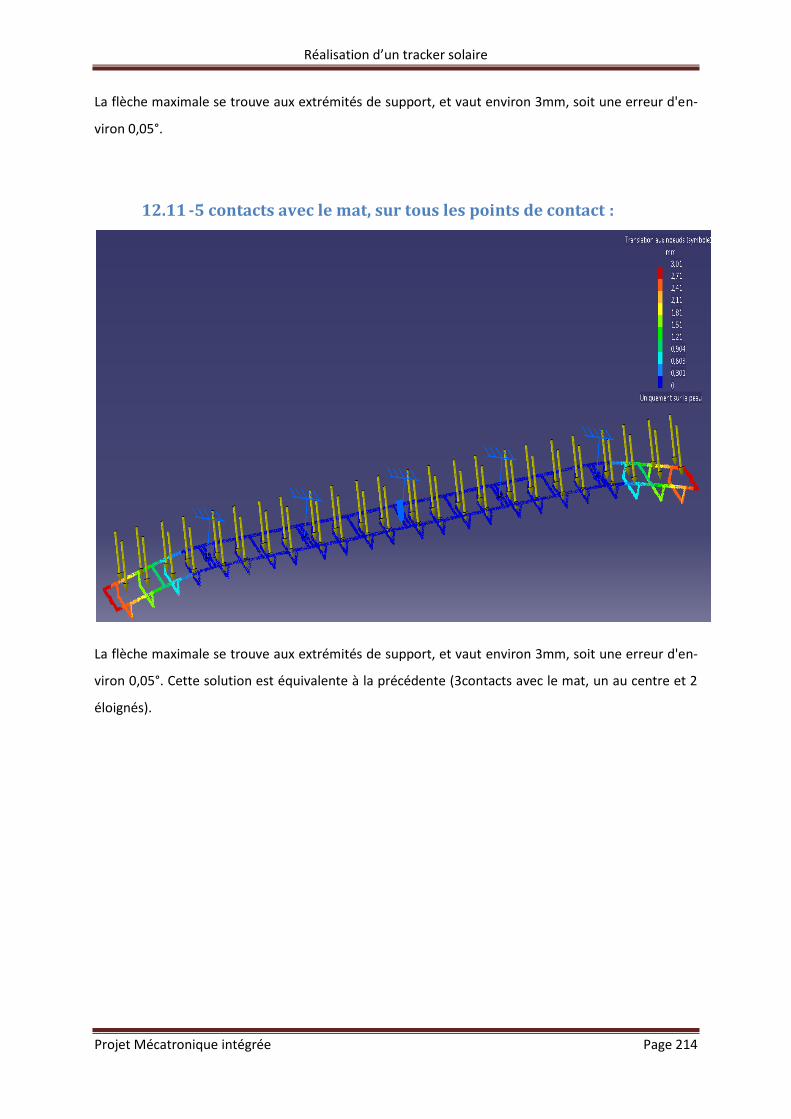
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 214
La flèche maximale se trouve aux extrémités de support, et vaut environ 3mm, soit une erreur d'en-
viron 0,05°.
12.11 -5 contacts avec le mat, sur tous les points de contact :
La flèche maximale se trouve aux extrémités de support, et vaut environ 3mm, soit une erreur d'en-
viron 0,05°. Cette solution est équivalente à la précédente (3contacts avec le mat, un au centre et 2
éloignés).
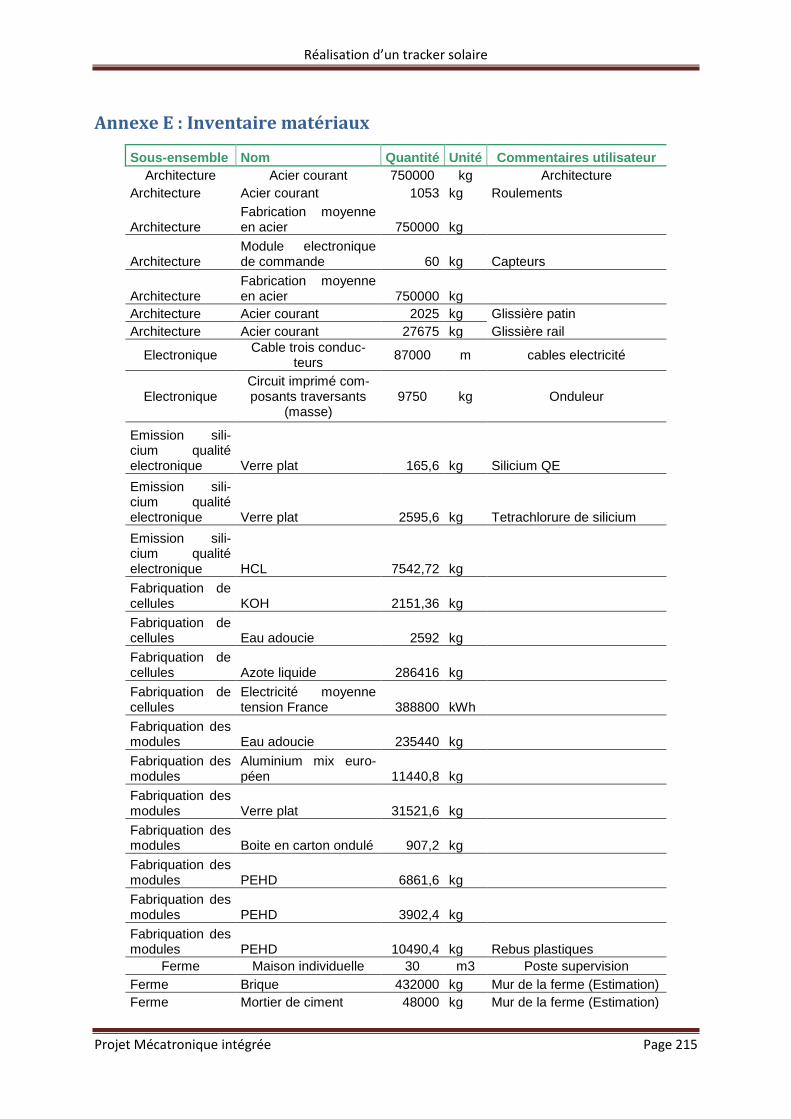
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 215
Annexe E : Inventaire matériaux
Sous-ensemble Nom Quantité Unité Commentaires utilisateur
Architecture Acier courant 750000 kg Architecture
Architecture Acier courant 1053 kg Roulements
Architecture Fabrication moyenne en acier 750000 kg
Architecture Module electronique de commande 60 kg Capteurs
Architecture Fabrication moyenne en acier 750000 kg
Architecture Acier courant 2025 kg Glissière patin
Architecture Acier courant 27675 kg Glissière rail
Electronique Cable trois conduc-
teurs 87000 m cables electricité
Electronique Circuit imprimé com-posants traversants
(masse) 9750 kg Onduleur
Emission sili-cium qualité electronique Verre plat 165,6 kg Silicium QE
Emission sili-cium qualité electronique Verre plat 2595,6 kg Tetrachlorure de silicium
Emission sili-cium qualité electronique HCL 7542,72 kg
Fabriquation de cellules KOH 2151,36 kg
Fabriquation de cellules Eau adoucie 2592 kg
Fabriquation de cellules Azote liquide 286416 kg
Fabriquation de cellules
Electricité moyenne tension France 388800 kWh
Fabriquation des modules Eau adoucie 235440 kg
Fabriquation des modules
Aluminium mix euro-péen 11440,8 kg
Fabriquation des modules Verre plat 31521,6 kg
Fabriquation des modules Boite en carton ondulé 907,2 kg
Fabriquation des modules PEHD 6861,6 kg
Fabriquation des modules PEHD 3902,4 kg
Fabriquation des modules PEHD 10490,4 kg Rebus plastiques
Ferme Maison individuelle 30 m3 Poste supervision
Ferme Brique 432000 kg Mur de la ferme (Estimation)
Ferme Mortier de ciment 48000 kg Mur de la ferme (Estimation)
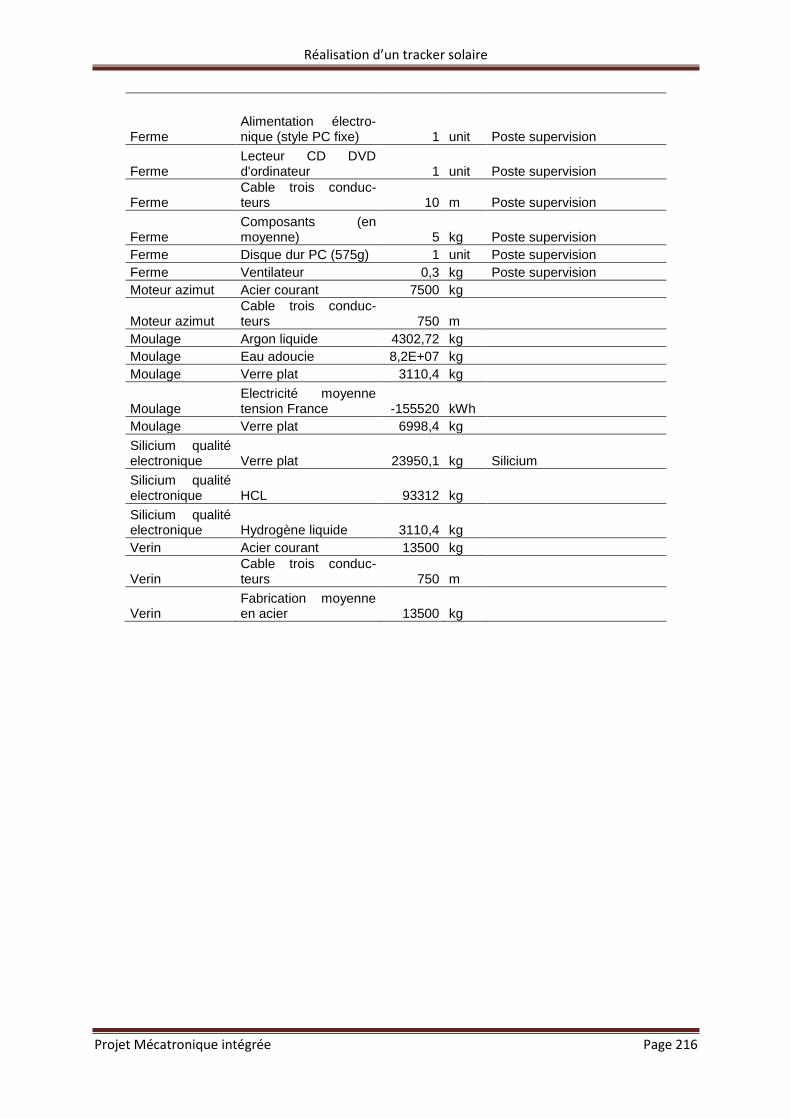
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 216
Ferme Alimentation électro-nique (style PC fixe) 1 unit Poste supervision
Ferme Lecteur CD DVD d'ordinateur 1 unit Poste supervision
Ferme Cable trois conduc-teurs 10 m Poste supervision
Ferme Composants (en moyenne) 5 kg Poste supervision
Ferme Disque dur PC (575g) 1 unit Poste supervision
Ferme Ventilateur 0,3 kg Poste supervision
Moteur azimut Acier courant 7500 kg
Moteur azimut Cable trois conduc-teurs 750 m
Moulage Argon liquide 4302,72 kg
Moulage Eau adoucie 8,2E+07 kg
Moulage Verre plat 3110,4 kg
Moulage Electricité moyenne tension France -155520 kWh
Moulage Verre plat 6998,4 kg
Silicium qualité electronique Verre plat 23950,1 kg Silicium
Silicium qualité electronique HCL 93312 kg
Silicium qualité electronique Hydrogène liquide 3110,4 kg
Verin Acier courant 13500 kg
Verin Cable trois conduc-teurs 750 m
Verin Fabrication moyenne en acier 13500 kg
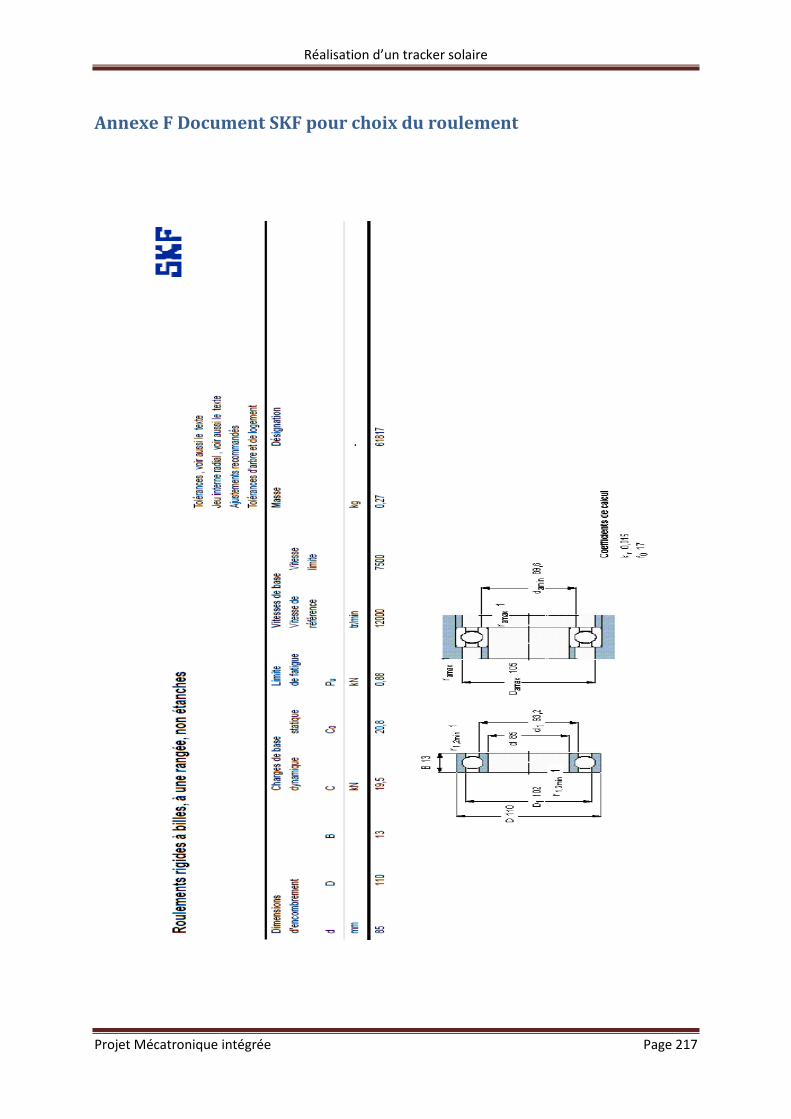
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 217
Annexe F Document SKF pour choix du roulement
Réalisation d’un tracker solaire
Projet Mécatronique intégrée Page 218
Bibliographie
- Fonction : Suivre le soleil
http://www.limsi.fr/Individu/bourdin/master/Calculs_astronomiques_simples.pdf
http://www.sunearthtools.com/dp/tools/pos_sun.php?lang=fr
http://www.heliodon.net/downloads/Beckers_2010_Helio_006_fr.pdf
http://www.heliodon.net/downloads/Beckers_2010_Helio_007_fr.pdf
http://star.gs/cgi-bin/wsune.htm
http://www.sensel-measurement.com/es-261-servo-inclinometre-haute-precision-p-
485.html?osCsid=bb97ea8f7dd64adecf88709cfddf1355




















