Embed Size (px)
Citation preview
1/30 Présentation
Documents remis au candidat � Le texte du sujet (30 pages numérotées de 1 à 30). � 5 documents réponses (annexes A, B1, B2, C, D) à rendre avec la copie.
Structure de l’épreuve L’épreuve comporte quatre parties indépendantes : � A - Analyse de la gestion des tâches du système ; � B - Synthèse de la commande d’un outil de formage ; � C - Etude du comportement cinématique ; � D - Dimensionnement ; Le candidat traitera chacune des parties (A, B, C et D) sur des copies séparées en indiquant sur chacune d’entre elles le numéro de la partie traitée et en y insérant les documents réponses correspondants. Temps approximatif à consacrer à chaque partie : Partie A et lecture du sujet Partie B Partie C Partie D
45 min. B1 : 45 min B2 : 2h15
45 min. 30 min.
Les réponses finales doivent être encadrées. Les candidats sont invités à formuler toutes les hypothèses qu’ils jugeront nécessaires pour répondre aux questions posées. Si, au cours de l’épreuve, un candidat repère ce qui lui semble être une erreur d’énoncé, il le signale dans sa copie et poursuit sa composition en indiquant les raisons de son initiative.
Protection Ce sujet utilise comme support d’étude un équipement du groupe CGR. Les informations sont utilisées avec la permission du groupe CGR. Chaque photographie et élément de texte extrait de documents CGR dans le présent sujet reste propriété du groupe CGR. L’autorisation d’utilisation de ces informations n’est valable que pour ce sujet de concours.
Notations � La transformée de LAPLACE d’une fonction f de la variable temporelle continue du temps t est notée F de la
variable complexe p associée à la transformée.
� La variable en sortie d’un capteur de mesure x(t) sera notée )t(x�
. � Le torseur cinématique du mouvement d’un solide i par rapport à un solide j sera noté Ci/j .
Les éléments de réduction au point A de ce torseur s’écriront ¯® :{
� jiA
ji
Aji V
C/
// &
&
.
� Le torseur des actions mécaniques transmissibles par une liaison quelconque q entre deux solides i et j sera noté q
ijT o .
Les éléments de réduction au point A de ce torseur s’écriront ¯®
o
oo q
ijA
qij
A
qij M
FT,
&&
.
� Le torseur dynamique d’un ensemble matériel S en mouvement par rapport à un référentiel R sera noté ' /S R .
Les éléments de réduction au point A de ce torseur s’écriront °{ ®G°̄
')&
&/
/, /
S RS R
A S RA
D.
2/30 Présentation
PRÉSENTATION
Le groupe CGR , premier groupe français de fabrication de ressorts à froid (500 personnes), est structuré en trois activités principales : � La branche « ressort industriel » est orientée vers
les industries automobiles, électriques, électroménager, mécaniques.
� La branche « ressort spéciaux » regroupant une division aéronautique et une division petite et moyenne série.
� La branche « formage à froid » tournée vers la production de fils et de tubes formés pour le marché automobile : mécanismes et composants de sièges, crochets d’échappement, bras d’essuyage…
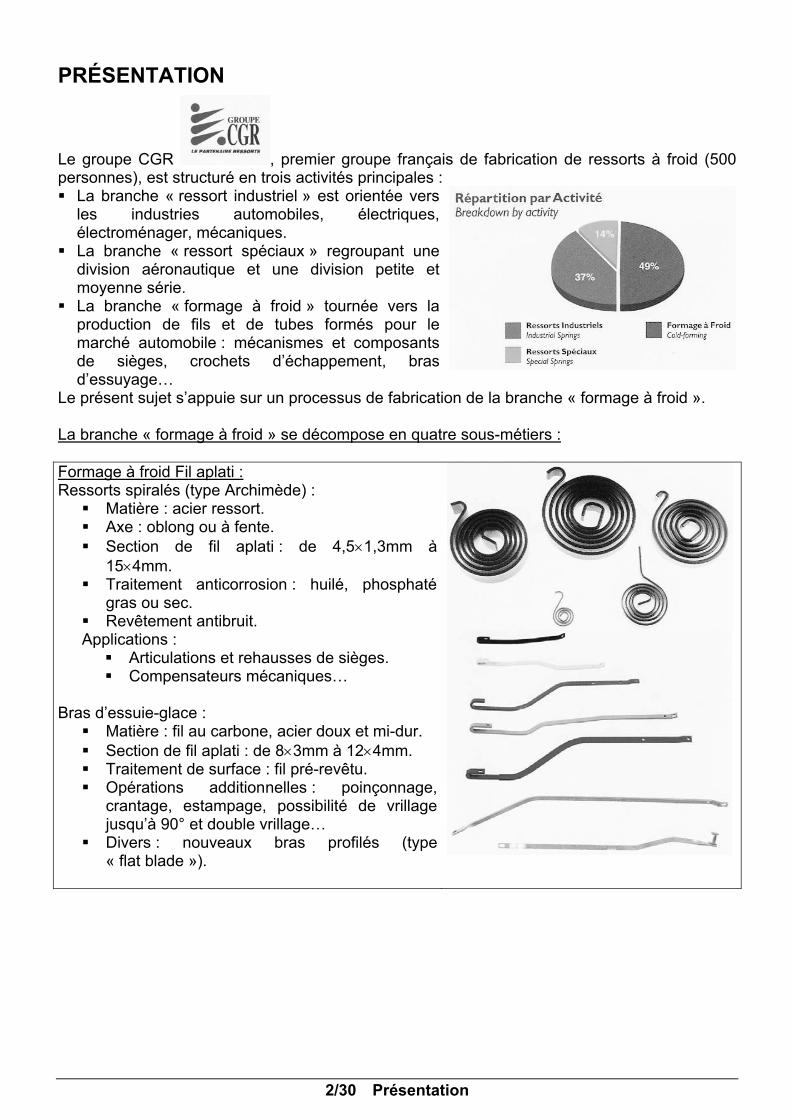
Le présent sujet s’appuie sur un processus de fabrication de la branche « formage à froid ». La branche « formage à froid » se décompose en quatre sous-métiers : Formage à froid Fil aplati : Ressorts spiralés (type Archimède) : � Matière : acier ressort. � Axe : oblong ou à fente. � Section de fil aplati : de 4,5u1,3mm à
15u4mm. � Traitement anticorrosion : huilé, phosphaté
gras ou sec. � Revêtement antibruit. Applications : � Articulations et rehausses de sièges. � Compensateurs mécaniques…
Bras d’essuie-glace : � Matière : fil au carbone, acier doux et mi-dur. � Section de fil aplati : de 8u3mm à 12u4mm. � Traitement de surface : fil pré-revêtu. � Opérations additionnelles : poinçonnage,
crantage, estampage, possibilité de vrillage jusqu’à 90° et double vrillage…
� Divers : nouveaux bras profilés (type « flat blade »).
3/30 Présentation
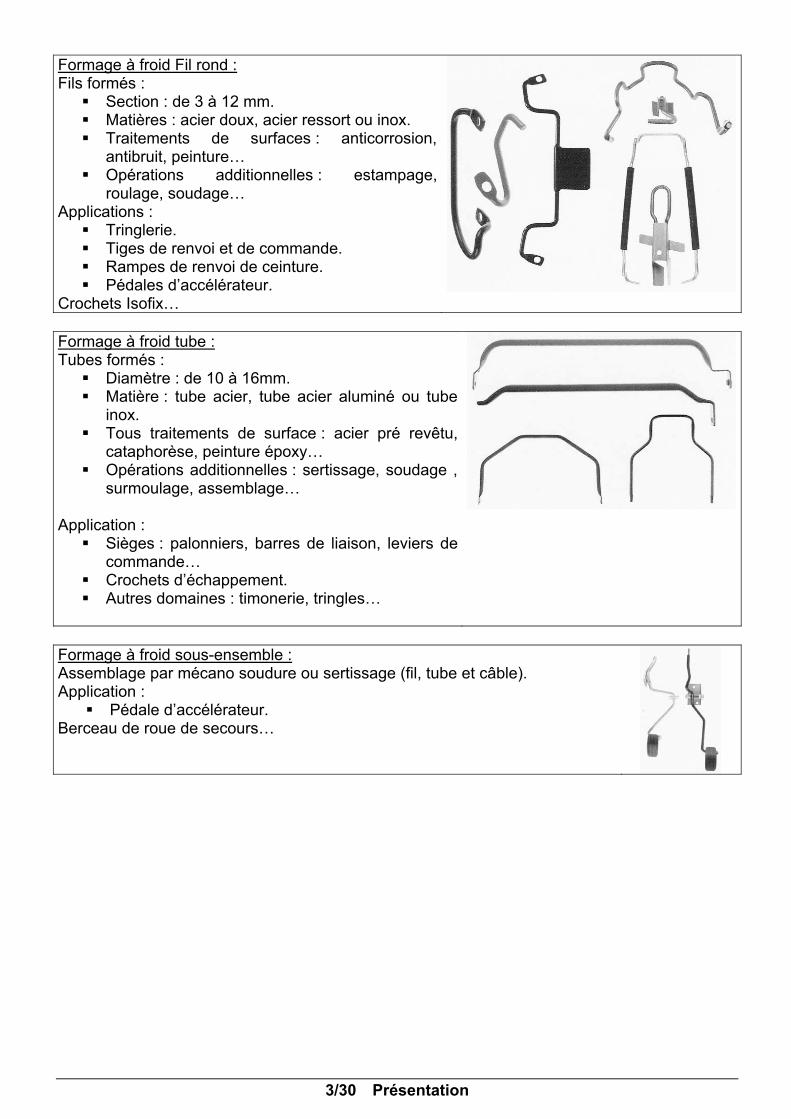
Formage à froid Fil rond : Fils formés : � Section : de 3 à 12 mm. � Matières : acier doux, acier ressort ou inox. � Traitements de surfaces : anticorrosion,
antibruit, peinture… � Opérations additionnelles : estampage,
roulage, soudage… Applications : � Tringlerie. � Tiges de renvoi et de commande. � Rampes de renvoi de ceinture. � Pédales d’accélérateur.
Crochets Isofix… Formage à froid tube : Tubes formés : � Diamètre : de 10 à 16mm. � Matière : tube acier, tube acier aluminé ou tube
inox. � Tous traitements de surface : acier pré revêtu,
cataphorèse, peinture époxy… � Opérations additionnelles : sertissage, soudage ,
surmoulage, assemblage… Application : � Sièges : palonniers, barres de liaison, leviers de
commande… � Crochets d’échappement. � Autres domaines : timonerie, tringles…
Formage à froid sous-ensemble : Assemblage par mécano soudure ou sertissage (fil, tube et câble). Application : � Pédale d’accélérateur.
Berceau de roue de secours…

4/30 Présentation
Le système: Le sujet se propose d’étudier un processus de fabrication de formage à froid de tubes. Ce process, dit machine à coulisseaux multiples (jusqu’à 26 axes indépendants), permet de réaliser des opérations de cambrage, écrasement, poinçonnage (Cf photographies ci-dessous).
Machine à coulisseaux multiples
Chaque axe fait appel à un outillage spécifique (cambrage, écrasement…).
exemple d’outil d’écrasement
Dans cette étude, on se propose : � En partie A - Analyse de la gestion des tâches du système, d’étudier l’organisation
d’ensemble de la machine (séquentialité par outil de description Grafcet) en s’appuyant sur la production d’un renvoi de commande de siège automobile.
� En partie B - Synthèse de la commande d’un outil de formage, d’analyser la commande d’un outil de formage avec une synthèse de correcteur RST après modélisation de l ‘axe.
� En partie C - Etude du comportement cinématique, de vérifier les hypothèses cinématiques prises pour la définition de la commande de l’axe VED.
� En partie D – Dimensionnement, de dimensionner certains éléments de l’axe VP.
5/30 partie A : Analyse fonctionnelle du process
A - ANALYSE DE LA GESTION DES TÂCHES DU SYSTEME Cette machine à coulisseaux multiples est construite autour de trois postes de production :
- Poste releveur (préhension d’un brut dans le magasin, amenage en poste transfert). - Poste transfert (récupération du brut, transfert vers poste outils). - Poste outils (façonnage du brut, éjection produit fini). Ce poste a été volontairement
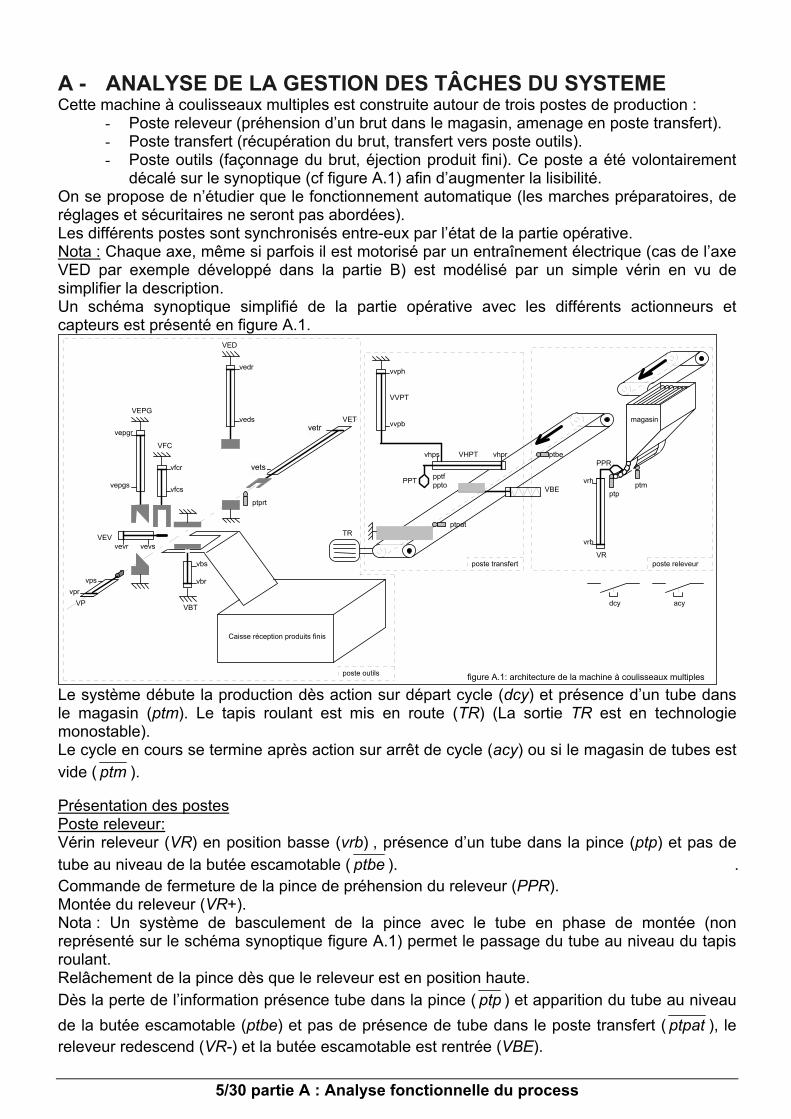
décalé sur le synoptique (cf figure A.1) afin d’augmenter la lisibilité. On se propose de n’étudier que le fonctionnement automatique (les marches préparatoires, de réglages et sécuritaires ne seront pas abordées). Les différents postes sont synchronisés entre-eux par l’état de la partie opérative. Nota : Chaque axe, même si parfois il est motorisé par un entraînement électrique (cas de l’axe VED par exemple développé dans la partie B) est modélisé par un simple vérin en vu de simplifier la description. Un schéma synoptique simplifié de la partie opérative avec les différents actionneurs et capteurs est présenté en figure A.1.
ptm
vrb
vrh
VR
figure A.1: architecture de la machine à coulisseaux multiples
VBE
vhpr
vvph
vvpb
vhps
PPT pptopptf
VHPT
VVPT
magasin
ptbe
ptpat
VET
vevsVEV
vevr
vedr
veds
VED
vepgr
vepgs
VEPG
vfcs
vfcr
VFC
ver
ves
VBT
vbs
vbr
VPvpr
vps
Caisse réception produits finis
ptprt
TR
PPR
ptp
poste releveurposte transfert
poste outils
dcy acy
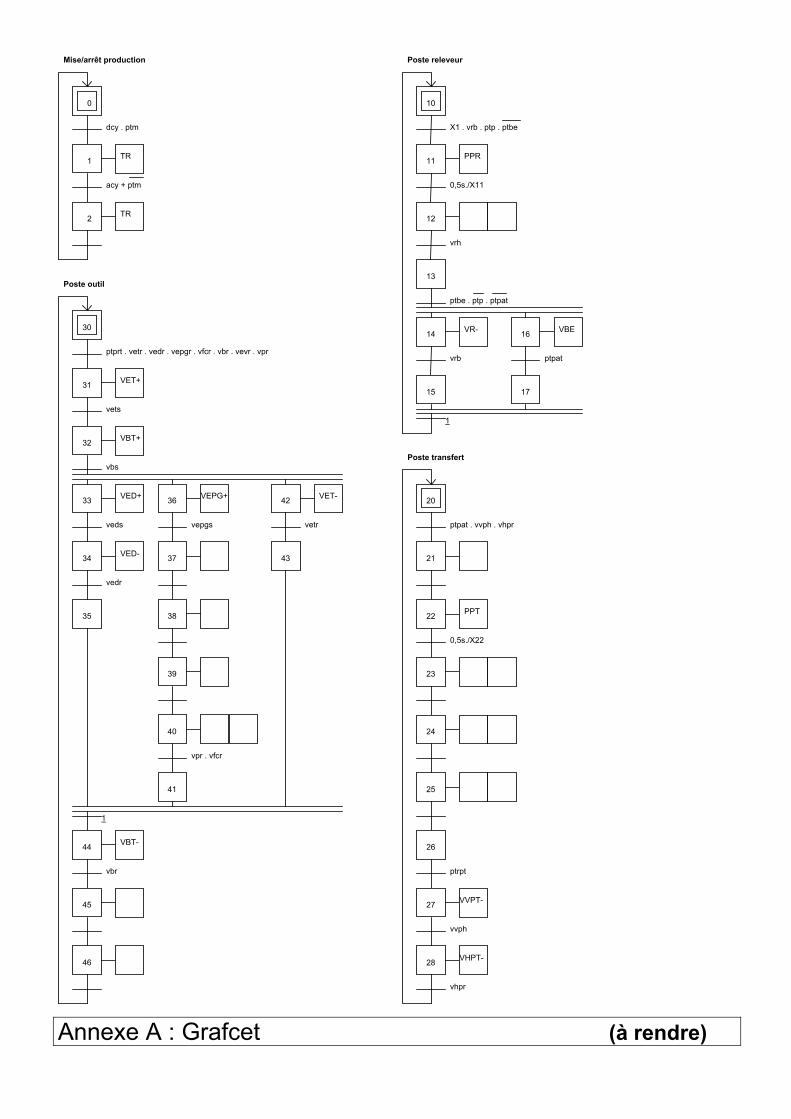
Le système débute la production dès action sur départ cycle (dcy) et présence d’un tube dans le magasin (ptm). Le tapis roulant est mis en route (TR) (La sortie TR est en technologie monostable). Le cycle en cours se termine après action sur arrêt de cycle (acy) ou si le magasin de tubes est vide ( ptm ). Présentation des postes Poste releveur: Vérin releveur (VR) en position basse (vrb) , présence d’un tube dans la pince (ptp) et pas de tube au niveau de la butée escamotable ( ptbe ). . Commande de fermeture de la pince de préhension du releveur (PPR). Montée du releveur (VR+). Nota : Un système de basculement de la pince avec le tube en phase de montée (non représenté sur le schéma synoptique figure A.1) permet le passage du tube au niveau du tapis roulant. Relâchement de la pince dès que le releveur est en position haute. Dès la perte de l’information présence tube dans la pince ( ptp ) et apparition du tube au niveau de la butée escamotable (ptbe) et pas de présence de tube dans le poste transfert ( ptpat ), le releveur redescend (VR-) et la butée escamotable est rentrée (VBE).
vetr
vets
6/30 partie A : Analyse fonctionnelle du process
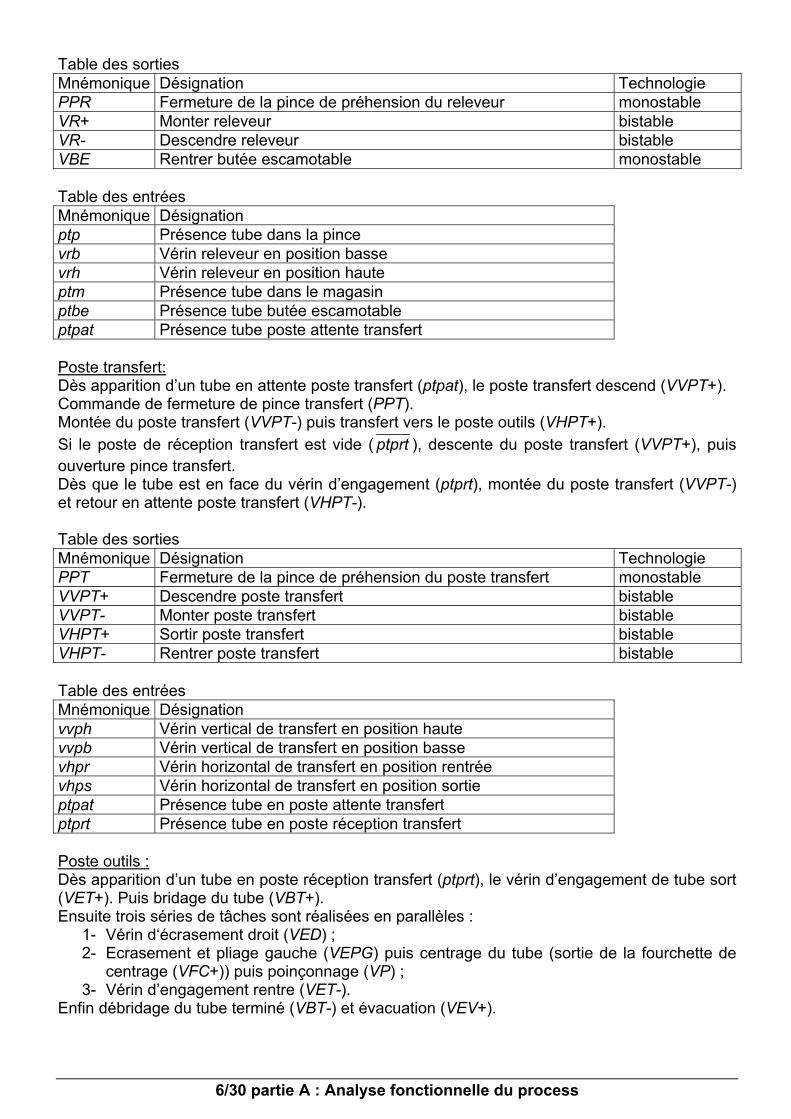
Table des sorties Mnémonique Désignation Technologie PPR Fermeture de la pince de préhension du releveur monostable VR+ Monter releveur bistable VR- Descendre releveur bistable VBE Rentrer butée escamotable monostable Table des entrées Mnémonique Désignation ptp Présence tube dans la pince vrb Vérin releveur en position basse vrh Vérin releveur en position haute ptm Présence tube dans le magasin ptbe Présence tube butée escamotable ptpat Présence tube poste attente transfert Poste transfert: Dès apparition d’un tube en attente poste transfert (ptpat), le poste transfert descend (VVPT+). Commande de fermeture de pince transfert (PPT). Montée du poste transfert (VVPT-) puis transfert vers le poste outils (VHPT+). Si le poste de réception transfert est vide ( ptprt ), descente du poste transfert (VVPT+), puis ouverture pince transfert. Dès que le tube est en face du vérin d’engagement (ptprt), montée du poste transfert (VVPT-) et retour en attente poste transfert (VHPT-). Table des sorties Mnémonique Désignation Technologie PPT Fermeture de la pince de préhension du poste transfert monostable VVPT+ Descendre poste transfert bistable VVPT- Monter poste transfert bistable VHPT+ Sortir poste transfert bistable VHPT- Rentrer poste transfert bistable Table des entrées Mnémonique Désignation vvph Vérin vertical de transfert en position haute vvpb Vérin vertical de transfert en position basse vhpr Vérin horizontal de transfert en position rentrée vhps Vérin horizontal de transfert en position sortie ptpat Présence tube en poste attente transfert ptprt Présence tube en poste réception transfert Poste outils : Dès apparition d’un tube en poste réception transfert (ptprt), le vérin d’engagement de tube sort (VET+). Puis bridage du tube (VBT+). Ensuite trois séries de tâches sont réalisées en parallèles :
1- Vérin d‘écrasement droit (VED) ; 2- Ecrasement et pliage gauche (VEPG) puis centrage du tube (sortie de la fourchette de
centrage (VFC+)) puis poinçonnage (VP) ; 3- Vérin d’engagement rentre (VET-).
Enfin débridage du tube terminé (VBT-) et évacuation (VEV+).
7/30 partie A : Analyse fonctionnelle du process
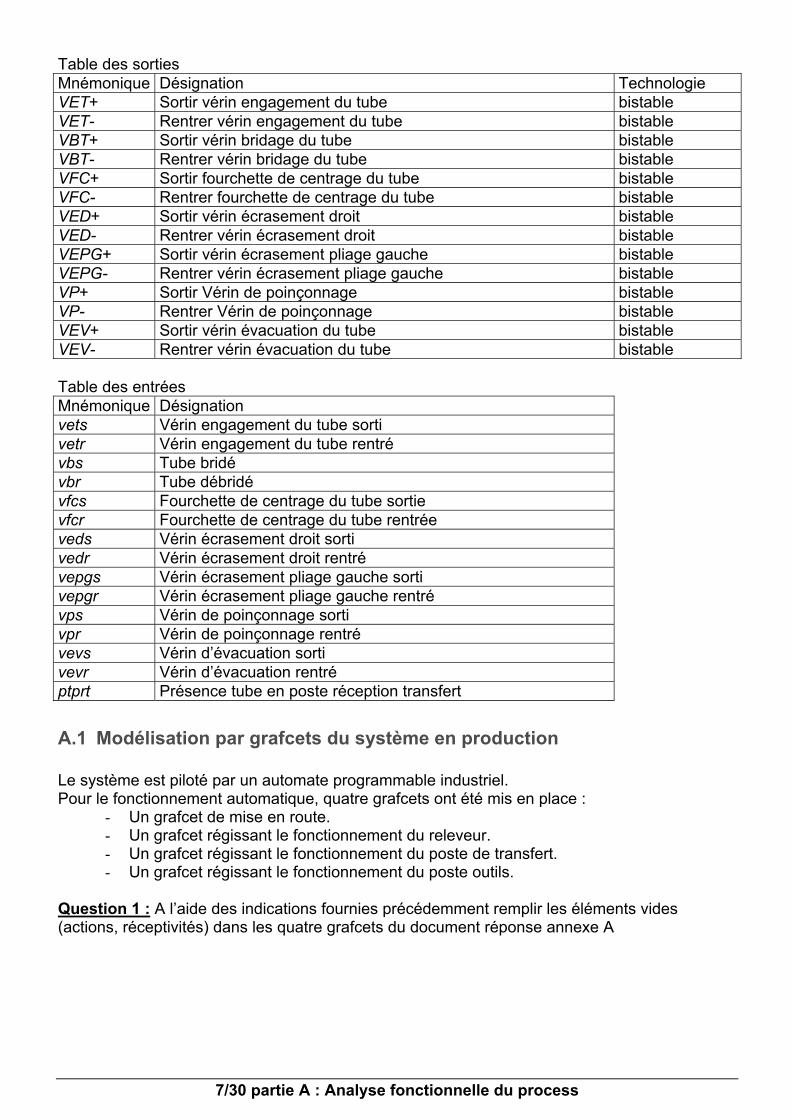
Table des sorties Mnémonique Désignation Technologie VET+ Sortir vérin engagement du tube bistable VET- Rentrer vérin engagement du tube bistable VBT+ Sortir vérin bridage du tube bistable VBT- Rentrer vérin bridage du tube bistable VFC+ Sortir fourchette de centrage du tube bistable VFC- Rentrer fourchette de centrage du tube bistable VED+ Sortir vérin écrasement droit bistable VED- Rentrer vérin écrasement droit bistable VEPG+ Sortir vérin écrasement pliage gauche bistable VEPG- Rentrer vérin écrasement pliage gauche bistable VP+ Sortir Vérin de poinçonnage bistable VP- Rentrer Vérin de poinçonnage bistable VEV+ Sortir vérin évacuation du tube bistable VEV- Rentrer vérin évacuation du tube bistable Table des entrées Mnémonique Désignation vets Vérin engagement du tube sorti vetr Vérin engagement du tube rentré vbs Tube bridé vbr Tube débridé vfcs Fourchette de centrage du tube sortie vfcr Fourchette de centrage du tube rentrée veds Vérin écrasement droit sorti vedr Vérin écrasement droit rentré vepgs Vérin écrasement pliage gauche sorti vepgr Vérin écrasement pliage gauche rentré vps Vérin de poinçonnage sorti vpr Vérin de poinçonnage rentré vevs Vérin d’évacuation sorti vevr Vérin d’évacuation rentré ptprt Présence tube en poste réception transfert
A.1 Modélisation par grafcets du système en production Le système est piloté par un automate programmable industriel. Pour le fonctionnement automatique, quatre grafcets ont été mis en place :
- Un grafcet de mise en route. - Un grafcet régissant le fonctionnement du releveur. - Un grafcet régissant le fonctionnement du poste de transfert. - Un grafcet régissant le fonctionnement du poste outils.
Question 1 : A l’aide des indications fournies précédemment remplir les éléments vides (actions, réceptivités) dans les quatre grafcets du document réponse annexe A
8/30 partie B : automatique
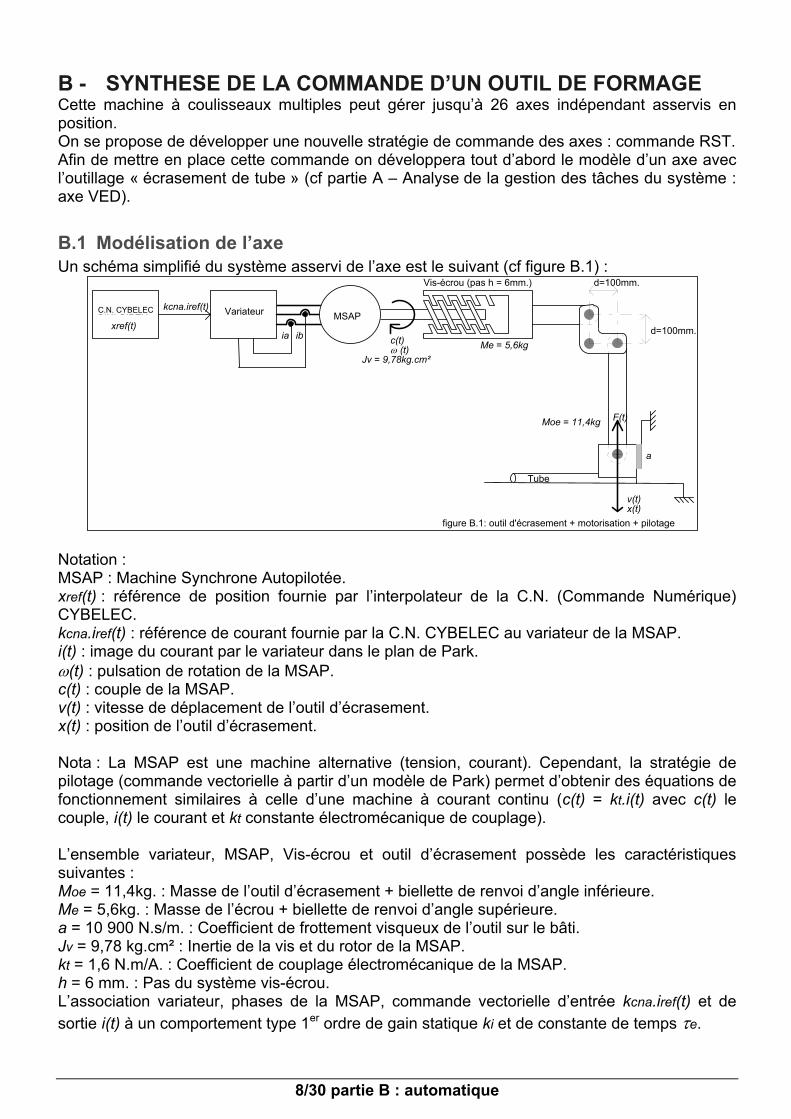
B - SYNTHESE DE LA COMMANDE D’UN OUTIL DE FORMAGE Cette machine à coulisseaux multiples peut gérer jusqu’à 26 axes indépendant asservis en position. On se propose de développer une nouvelle stratégie de commande des axes : commande RST. Afin de mettre en place cette commande on développera tout d’abord le modèle d’un axe avec l’outillage « écrasement de tube » (cf partie A – Analyse de la gestion des tâches du système : axe VED).
B.1 Modélisation de l’axe Un schéma simplifié du système asservi de l’axe est le suivant (cf figure B.1) :
figure B.1: outil d'écrasement + motorisation + pilotage
kcna.iref(t) Variateur MSAP
ia
C.N. CIBEX
c(t)Z
v(t)x(t)
Tube
xref(t)
Vis-écrou (pas h = 6mm.) d=100mm.
d=100mm.
a
Moe = 11,4kg
ibMe = 5,6kg
Jv = 9,78kg.cm²
F(t)
(t)
Notation : MSAP : Machine Synchrone Autopilotée. xref(t) : référence de position fournie par l’interpolateur de la C.N. (Commande Numérique) CYBELEC. kcna.iref(t) : référence de courant fournie par la C.N. CYBELEC au variateur de la MSAP. i(t) : image du courant par le variateur dans le plan de Park. Z(t) : pulsation de rotation de la MSAP. c(t) : couple de la MSAP. v(t) : vitesse de déplacement de l’outil d’écrasement. x(t) : position de l’outil d’écrasement. Nota : La MSAP est une machine alternative (tension, courant). Cependant, la stratégie de pilotage (commande vectorielle à partir d’un modèle de Park) permet d’obtenir des équations de fonctionnement similaires à celle d’une machine à courant continu (c(t) = kt.i(t) avec c(t) le couple, i(t) le courant et kt constante électromécanique de couplage). L’ensemble variateur, MSAP, Vis-écrou et outil d’écrasement possède les caractéristiques suivantes : Moe = 11,4kg. : Masse de l’outil d’écrasement + biellette de renvoi d’angle inférieure. Me = 5,6kg. : Masse de l’écrou + biellette de renvoi d’angle supérieure. a = 10 900 N.s/m. : Coefficient de frottement visqueux de l’outil sur le bâti. Jv = 9,78 kg.cm² : Inertie de la vis et du rotor de la MSAP. kt = 1,6 N.m/A. : Coefficient de couplage électromécanique de la MSAP. h = 6 mm. : Pas du système vis-écrou. L’association variateur, phases de la MSAP, commande vectorielle d’entrée kcna.iref(t) et de sortie i(t) à un comportement type 1er ordre de gain statique ki et de constante de temps We.
C.N. CYBELEC
9/30 partie B : automatique
B.1.1 Modélisation de la chaîne d ‘énergie variateur + MSAP + vis-écrou + outil d’écrasement La MSAP est pilotée par un variateur avec régulation de courant intégrée. Le système vis-écrou (réversible) à un rendement unitaire avec un pas de vis h = 6mm. Simplification, hypothèses : on considère de faibles déplacements autour de la position d’équilibre (cf figure B.1 : outil d’écrasement + motorisation + pilotage). La vitesse et la position sur l’axe de l’écrou du système vis-écrou sont identiques à la vitesse v(t) et la position x(t) sur l’outil d’écrasement. La masse des flasques du renvoi d’angle est négligeable. Soit le schéma-bloc représentant la chaîne d’énergie d’entrée: référence de courant fournie par la C.N. CYBELEC au variateur de la MSAP : kcna.iref(t) et de sortie la position de l’outil d’écrasement x(t) :
figure B.1.1: Schéma bloc de la partie de la chaîne d'énergie comprenant variateur + MSAP + outil d'écrasement
:kcna.Iref(p)Charge ramenée
I(p) C(p)MSAP
V(p)Vis-écrou
X(p)Variateur
Cr(p)
kveJtr, fr(p)
Afin de simplifier le modèle on choisit de ramener le mécanisme d’écrasement sur l’axe de la MSAP (l’inertie équivalente totale ramenée Jtr correspondra aux masses des biellettes, outil d’écrasement et écrou ramenés au travers du système vis-écrou ; le coefficient de frottement visqueux équivalent fr correspondra au coefficient de frottement visqueux a ramené au travers du système vis-écrou ; le couple résistant cr(t) correspondra à l’effort de l’outil d’écrasement sur le tube F(t)). Question B.1.1.1 Etablir, sans la résoudre, l’équation différentielle reliant le courant i(t) à la référence kcna.iref(t). S’agit-il d’accumulation d’énergie cinétique ou potentielle ? Question B.1.1.2 Donner l’équation littérale reliant le couple c(t) au courant i(t). Comment nomme t-on cette transformation. Question B.1.1.3 Etablir, sans la résoudre, l’équation différentielle reliant la pulsation de rotation Z(t) aux variables de couple c(t) et cr(t). On précisera les solides isolés, les théorèmes utilisés et les hypothèses éventuelles. S’agit-il d’accumulation d’énergie cinétique ou potentielle ?
Question B.1.1.4 Déterminer la valeur numérique de kve = v(t)/Z(t) associée au système vis-écrou. Question B.1.1.5 Donner l’équation, sans la résoudre, donnant x(t) en fonction de v(t). Question B.1.1.6 Déterminer, sous forme littérale, l’inertie équivalente ramenée sur l’arbre de la MSAP Jmr des masses de l’outil d’écrasement + biellette de renvoi d’angle inférieure (masse Moe = 11,4kg.) et de l’écrou + biellette de renvoi d’angle supérieure (masse Me = 5,6kg.) en fonction de Moe, Me et kve. Question B.1.1.7 Déterminer sous forme numérique l’inertie équivalente totale Jtr comprenant l’inertie équivalente ramenée des masses Jmr et l’inertie de la vis et du rotor de la MSAP Jv.
10/30 partie B : automatique
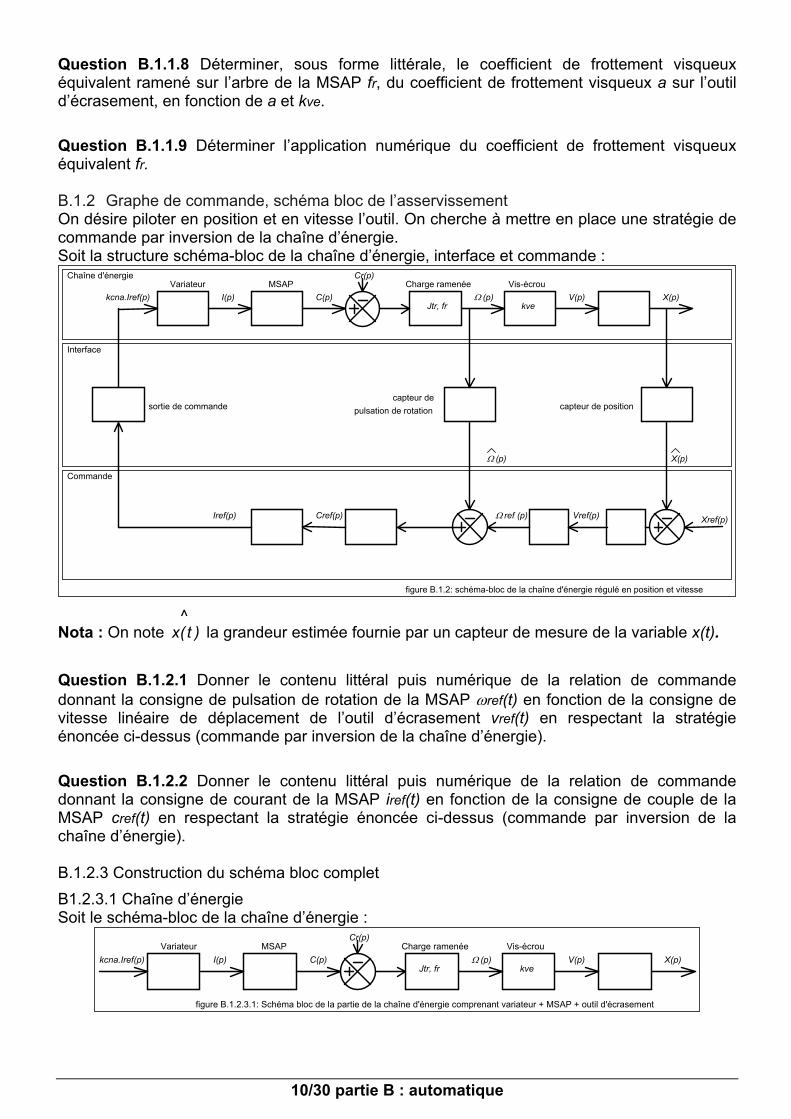
Question B.1.1.8 Déterminer, sous forme littérale, le coefficient de frottement visqueux équivalent ramené sur l’arbre de la MSAP fr, du coefficient de frottement visqueux a sur l’outil d’écrasement, en fonction de a et kve. Question B.1.1.9 Déterminer l’application numérique du coefficient de frottement visqueux équivalent fr. B.1.2 Graphe de commande, schéma bloc de l’asservissement On désire piloter en position et en vitesse l’outil. On cherche à mettre en place une stratégie de commande par inversion de la chaîne d’énergie. Soit la structure schéma-bloc de la chaîne d’énergie, interface et commande :
figure B.1.2: schéma-bloc de la chaîne d'énergie régulé en position et vitesse
Interface
: X(p)
Xref(p)Vref(p)refCref(p) :Iref(p)
Commande
capteur depulsation de rotation capteur de positionsortie de commande
Chaîne d'énergie
kcna.Iref(p)Charge ramenée
I(p) C(p)MSAP
V(p)Vis-écrou
X(p)Variateur
Cr(p)
kve:
Jtr, fr
(p)
(p)
(p)
Nota : On note ^
)t(x la grandeur estimée fournie par un capteur de mesure de la variable x(t). Question B.1.2.1 Donner le contenu littéral puis numérique de la relation de commande donnant la consigne de pulsation de rotation de la MSAP Zref(t) en fonction de la consigne de vitesse linéaire de déplacement de l’outil d’écrasement vref(t) en respectant la stratégie énoncée ci-dessus (commande par inversion de la chaîne d’énergie). Question B.1.2.2 Donner le contenu littéral puis numérique de la relation de commande donnant la consigne de courant de la MSAP iref(t) en fonction de la consigne de couple de la MSAP cref(t) en respectant la stratégie énoncée ci-dessus (commande par inversion de la chaîne d’énergie). B.1.2.3 Construction du schéma bloc complet B1.2.3.1 Chaîne d’énergie Soit le schéma-bloc de la chaîne d’énergie :
kcna.Iref(p)Charge ramenée
I(p) C(p)MSAP
V(p)Vis-écrou
X(p)Variateur
Cr(p)
kve:
figure B.1.2.3.1: Schéma bloc de la partie de la chaîne d'énergie comprenant variateur + MSAP + outil d'écrasement
Jtr, fr(p)
11/30 partie B : automatique
Question B.1.2.3.1.1 Donner sous forme littérale et canonique la transmittance )p(I.k
)p(Irefcna
en
fonction de ki et We.
Question B.1.2.3.1.2 Donner sous forme littérale et canonique la transmittance )p(C)p(: en
fonction de fr et Wm. On posera r
trm
fJ
W .
Question B.1.2.3.1.3 Donner sous forme numérique la transmittance )p(C)p(: .
Question B.1.2.3.1.4 Donner sous forme littérale et canonique la transmittance )p(V)p(X .
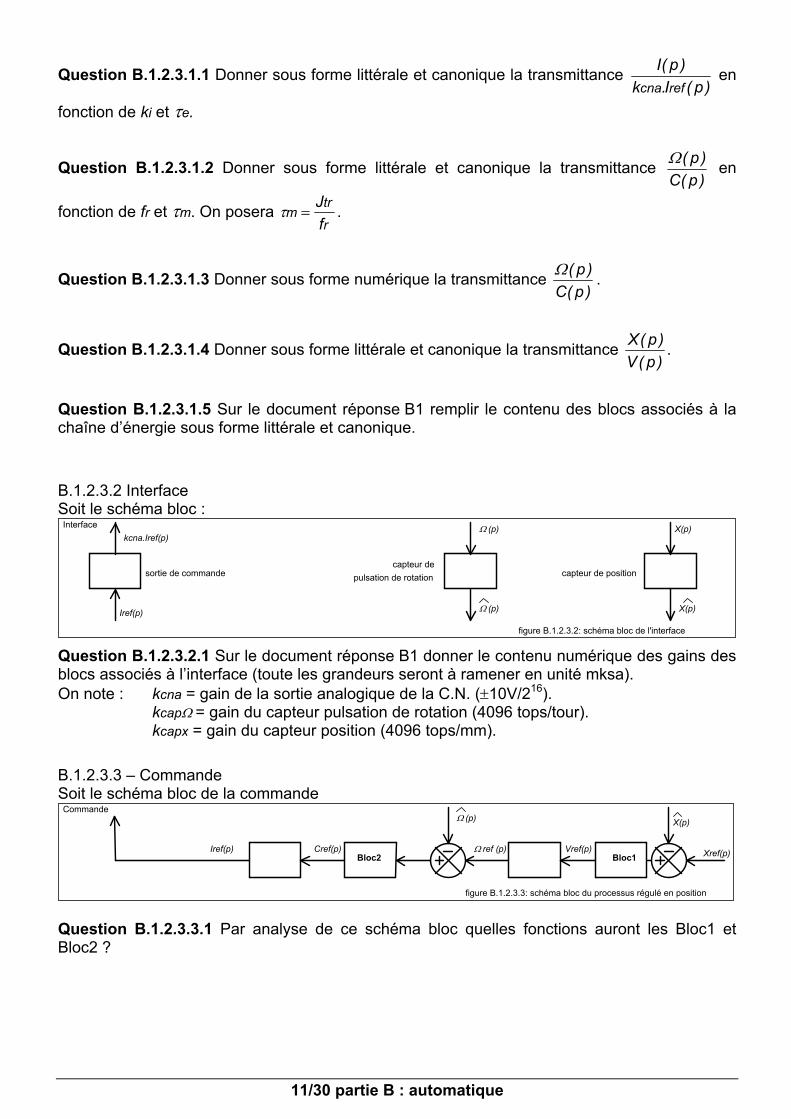
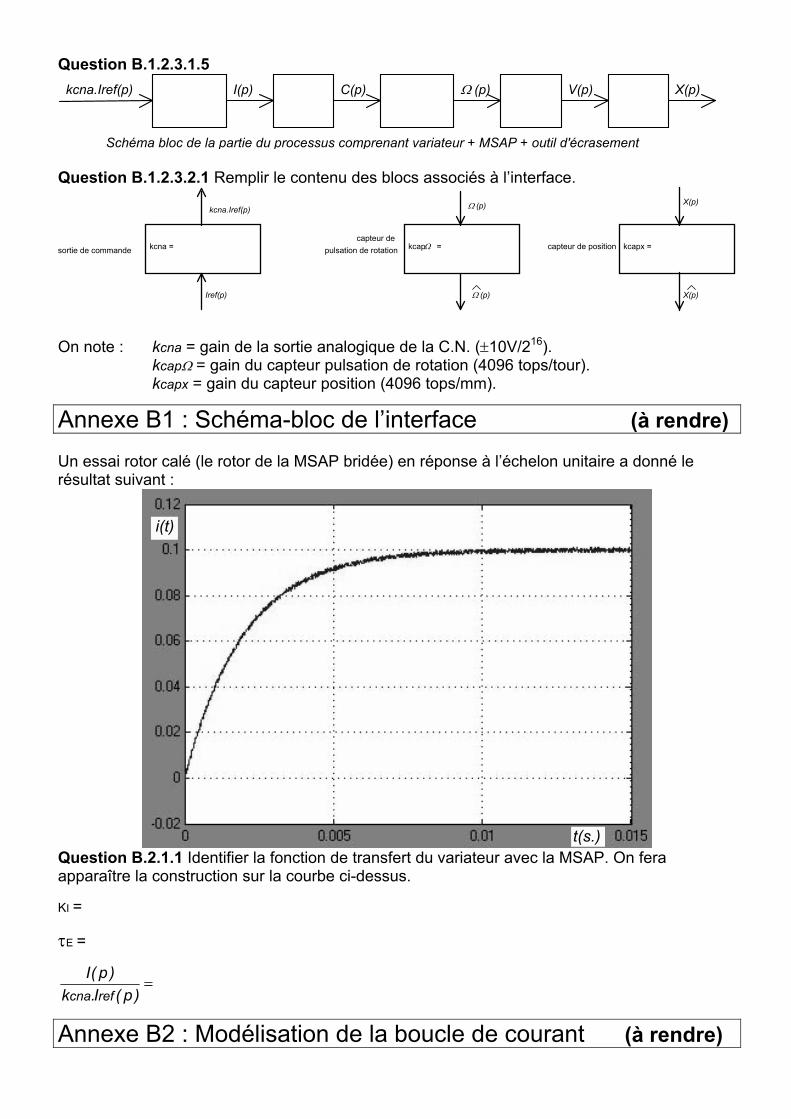
Question B.1.2.3.1.5 Sur le document réponse B1 remplir le contenu des blocs associés à la chaîne d’énergie sous forme littérale et canonique. B.1.2.3.2 Interface Soit le schéma bloc :
Interface
: X(p)
capteur depulsation de rotation capteur de positionsortie de commande
: X(p)
Iref(p)
kcna.Iref(p)
figure B.1.2.3.2: schéma bloc de l'interface
(p)
(p)
Question B.1.2.3.2.1 Sur le document réponse B1 donner le contenu numérique des gains des blocs associés à l’interface (toute les grandeurs seront à ramener en unité mksa). On note : kcna = gain de la sortie analogique de la C.N. (r10V/216).
kcap: = gain du capteur pulsation de rotation (4096 tops/tour). kcapx = gain du capteur position (4096 tops/mm).
B.1.2.3.3 – Commande Soit le schéma bloc de la commande
: X(p)
Xref(p)Vref(p)refCref(p) :Iref(p)
Commande
figure B.1.2.3.3: schéma bloc du processus régulé en position
Bloc1Bloc2
(p)
(p)
Question B.1.2.3.3.1 Par analyse de ce schéma bloc quelles fonctions auront les Bloc1 et Bloc2 ?
12/30 partie B : automatique
Cette structure de commande est une structure simple de correction car elle n’agit que sur l’erreur. La nouvelle structure de pilotage de la C.N. permet d’intégrer des structures de correction de type RST. Ces structures permettent d’agir, à la fois sur l’erreur mais aussi sur la variable à réguler et la consigne de réglage. La synthèse des correcteurs RST consiste donc à rechercher trois polynômes (R(p) = traitement de la grandeur à réguler, S(p) = traitement de l’erreur et T(p) = traitement de la consigne) pour obtenir la transmittance en boucle fermée désirée en asservissement. Dans cette partie on se propose de mettre en place une méthode de synthèse de ce type d’architecture de correcteur.
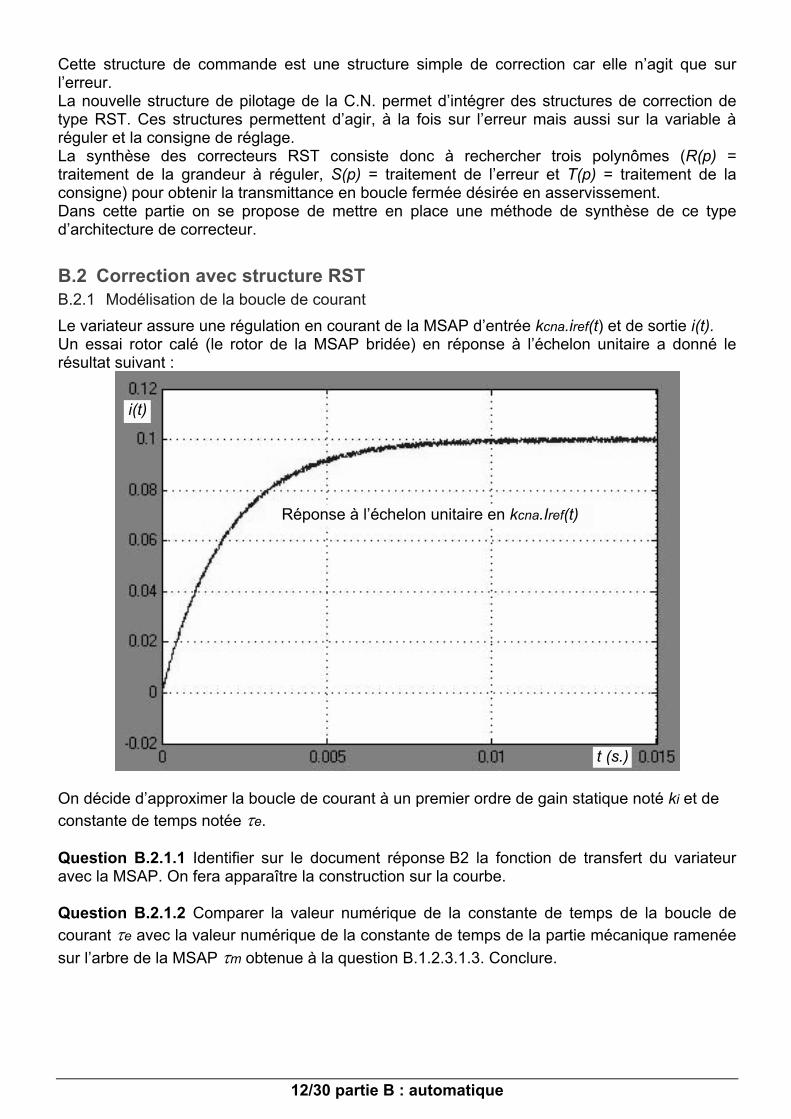
B.2 Correction avec structure RST B.2.1 Modélisation de la boucle de courant Le variateur assure une régulation en courant de la MSAP d’entrée kcna.iref(t) et de sortie i(t). Un essai rotor calé (le rotor de la MSAP bridée) en réponse à l’échelon unitaire a donné le résultat suivant :
On décide d’approximer la boucle de courant à un premier ordre de gain statique noté ki et de constante de temps notée We. Question B.2.1.1 Identifier sur le document réponse B2 la fonction de transfert du variateur avec la MSAP. On fera apparaître la construction sur la courbe. Question B.2.1.2 Comparer la valeur numérique de la constante de temps de la boucle de courant We avec la valeur numérique de la constante de temps de la partie mécanique ramenée sur l’arbre de la MSAP Wm obtenue à la question B.1.2.3.1.3. Conclure.
i(t)
t (s.)
Réponse à l’échelon unitaire en kcna.Iref(t)
13/30 partie B : automatique
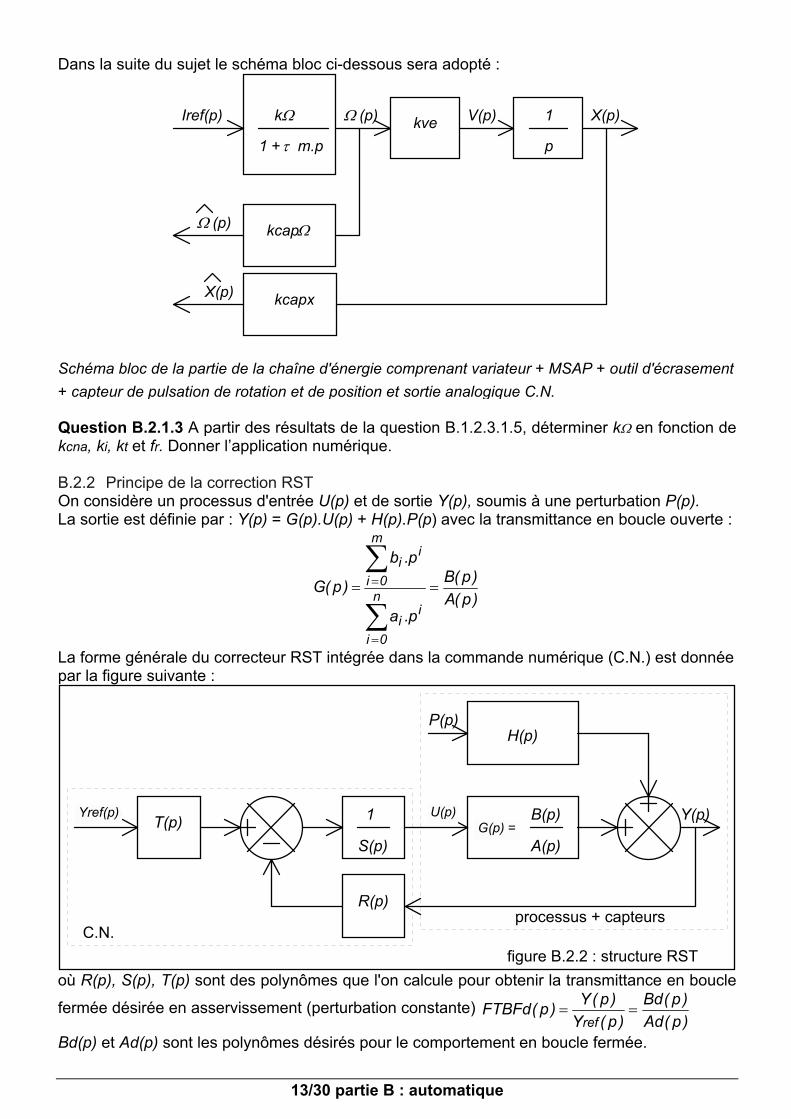
Dans la suite du sujet le schéma bloc ci-dessous sera adopté :
:k
p
1
1 + m.pW
(p) kve V(p) X(p)
Schéma bloc de la partie de la chaîne d'énergie comprenant variateur + MSAP + outil d'écrasement
:
Iref(p)
(p)
X(p)
kcap:
kcapx
:
+ capteur de pulsation de rotation et de position et sortie analogique C.N. Question B.2.1.3 A partir des résultats de la question B.1.2.3.1.5, déterminer k: en fonction de kcna, ki, kt et fr. Donner l’application numérique. B.2.2 Principe de la correction RST On considère un processus d'entrée U(p) et de sortie Y(p), soumis à une perturbation P(p). La sortie est définie par : Y(p) = G(p).U(p) + H(p).P(p) avec la transmittance en boucle ouverte :
)p(A)p(B
p.a
p.b
)p(G n
0i
ii
m
0i
ii
¦
¦
La forme générale du correcteur RST intégrée dans la commande numérique (C.N.) est donnée par la figure suivante :
Y(p)
S(p)
figure B.2.2 : structure RST
Yref(s) T(p)A(p)
B(p)G(s)=
1 U(s)
R(p)
H(p)P(p)
processus + capteursC.N.
où R(p), S(p), T(p) sont des polynômes que l'on calcule pour obtenir la transmittance en boucle
fermée désirée en asservissement (perturbation constante) )p(Ad
)p(Bd)p(Y
)p(Y)p(FTBFdref
Bd(p) et Ad(p) sont les polynômes désirés pour le comportement en boucle fermée.
Yref(p) U(p)G(p) =
14/30 partie B : automatique
Les polynômes seront de la forme : Processus A(p)=a0+a1.p+a2.p²+…+an.pn
B(p)=b0+b1.p+b2.p²+…+bm.pm Correcteur R(p)=r0+r1.p+r2.p ²+…+rj.pj
S(p)=s0+s1.p+s2.p²+…+sk.pk T(p)=t0+t1.p+t2.p²+…+tl.pl
Processus désiré Ad(p)=ad0+ad1.p+ad2.p²+…+ade.pe Bd(p)=bd0+bd1.p+bd2.p²+…+bdf.pf
La perturbation p(t) est considérée comme nulle.
Question B.2.2.1 Déterminer la fonction de transfert en boucle fermée)p(Y
)p(Y)p(FTBFdref
en
fonction de R(p), S(p), T(p), A(p), B(p). Question B.2.2.2 En déduire Bd(p) et Ad(p) en fonction de R(p), S(p), T(p), A(p), B(p). On cherchera donc à déterminer les degrés et les coefficients des polynômes R(p), S(p) et T(p) pour obtenir les performances désirées du système en boucle fermée, en distinguant 3 types de spécification :
x le placement des pôles de la transmittance du système en boucle fermée (choix de la dynamique, gestion de l’effet des pôles sur le dépassement...).
x l'élimination de l'écart statique. x la compensation des zéros de la transmittance en boucle ouverte (suppression du
dépassement généré par les zéros). B.2.3 Placement des pôles : Principe, choix du degré des polynômes Les performances désirées du système en boucle fermée, exprimées en termes de constantes de temps et d'amortissement, sont principalement définies par les pôles de la transmittance du système en boucle fermée (FTBFd(p)). Ces pôles, solutions du dénominateur de cette transmittance, permettent de déterminer les coefficients du polynôme caractéristique de la FTBFd(p) (le dénominateur Ad(p)). Convention de notation : On notera le degré du polynôme A(p) par deg[A(p)]. Question B.2.3.1 Déterminer l’équation de U(p) en fonction de R(p), S(p), T(p), Yref(p) et Y(p) Les transmittances ne peuvent pas être anticipatives (principe de causalité).
Rappel : )p(A)p(B)p(G
Question B.2.3.2 Donner les inéquations reliant les degrés des polynômes :
A(p) avec B(p). S(p) avec R(p). T(p) avec S(p).
Question B.2.3.3 Donner l’équation donnant le degré du polynôme Ad(p) en fonction des degrés des polynômes A(p) et S(p) en faisant intervenir les degrés des polynômes contenus dans l’équation Ad(p) = S(p).A(p) + R(p).B(p) Le nombre d'équations, défini par le nombre de coefficients imposés par le dénominateur en boucle fermée choisie Ad(p), doit être égal au nombre d'inconnues correspondant aux coefficients des polynômes R(p) et S(p) pour obtenir l'unicité de la solution.
15/30 partie B : automatique
Question B.2.3.4 Afin d’assurer l’unicité de la solution, donner l’équation donnant le degré du polynôme Ad(p) en fonction des degrés des polynômes R(p) et S(p) en faisant intervenir le nombre de paramètres à obtenir pour déterminer les polynômes Ad(p), R(p) et S(p).
Question B.2.3.5 Des deux équations précédentes en déduire le degré du polynôme R(p) en fonction du degré du polynôme de A(p) On pose n l’ordre du polynôme A(p). Question B.2.3.6 Déduire, de la relation précédente et de la relation de causalité reliant le degré S(p) au degré de R(p), l’inéquation reliant le degré du polynôme S(p) en fonction du degré du polynôme de A(p) On pose n l’ordre du polynôme A(p). Question B.2.3.7 En déduire l’inéquation reliant le degré du polynôme Ad(p) en fonction du degré du polynôme de A(p) On pose n l’ordre du polynôme A(p). Question B.2.3.8 Montrer que, pour l'ordre minimal du système corrigé, les degrés des polynômes sont (avec n ordre du polynôme A(p)):
n-1 pour R(p). n-1 pour S(p). 2.n-1 pour Ad(p).
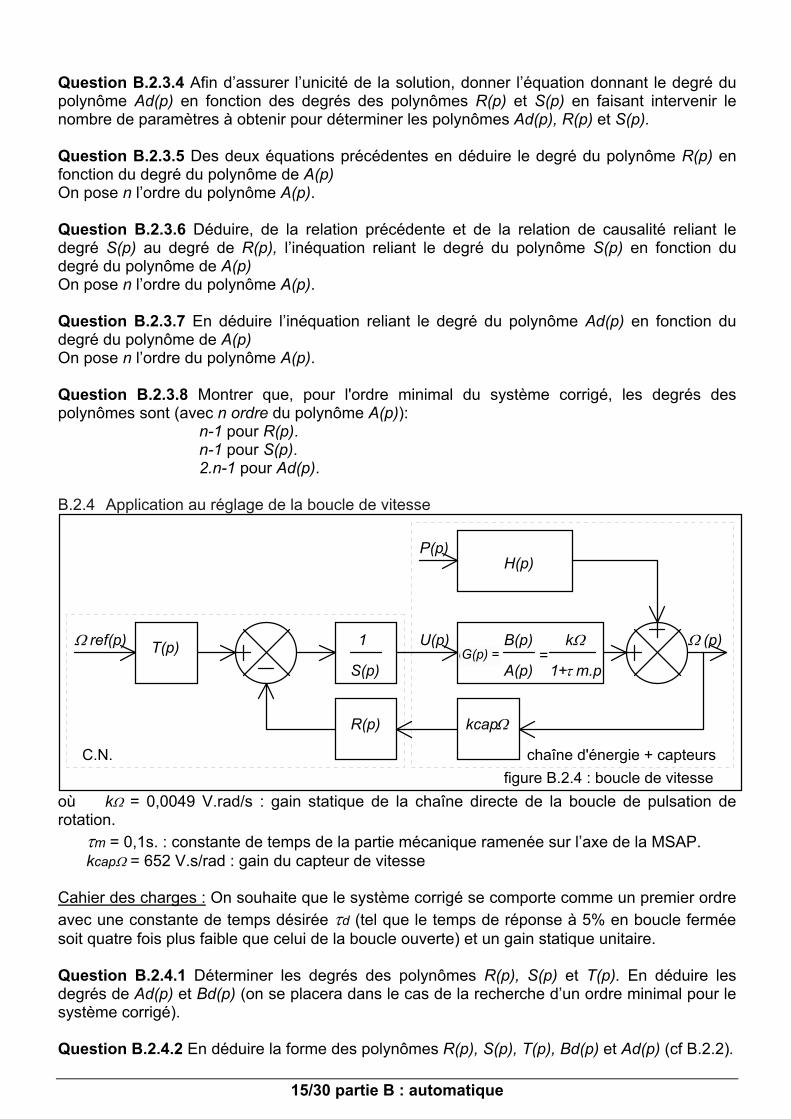
B.2.4 Application au réglage de la boucle de vitesse
(p)
S(p)
figure B.2.4 : boucle de vitesse
ref(p) T(p)A(p)
B(p)G(s)= =
1 U(p)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
::
1+ m.p
k
W
kcap:
:
où k: = 0,0049 V.rad/s : gain statique de la chaîne directe de la boucle de pulsation de rotation.
Wm = 0,1s. : constante de temps de la partie mécanique ramenée sur l’axe de la MSAP. kcap: = 652 V.s/rad : gain du capteur de vitesse
Cahier des charges : On souhaite que le système corrigé se comporte comme un premier ordre avec une constante de temps désirée Wd (tel que le temps de réponse à 5% en boucle fermée soit quatre fois plus faible que celui de la boucle ouverte) et un gain statique unitaire. Question B.2.4.1 Déterminer les degrés des polynômes R(p), S(p) et T(p). En déduire les degrés de Ad(p) et Bd(p) (on se placera dans le cas de la recherche d’un ordre minimal pour le système corrigé). Question B.2.4.2 En déduire la forme des polynômes R(p), S(p), T(p), Bd(p) et Ad(p) (cf B.2.2).
G(p) =
16/30 partie B : automatique
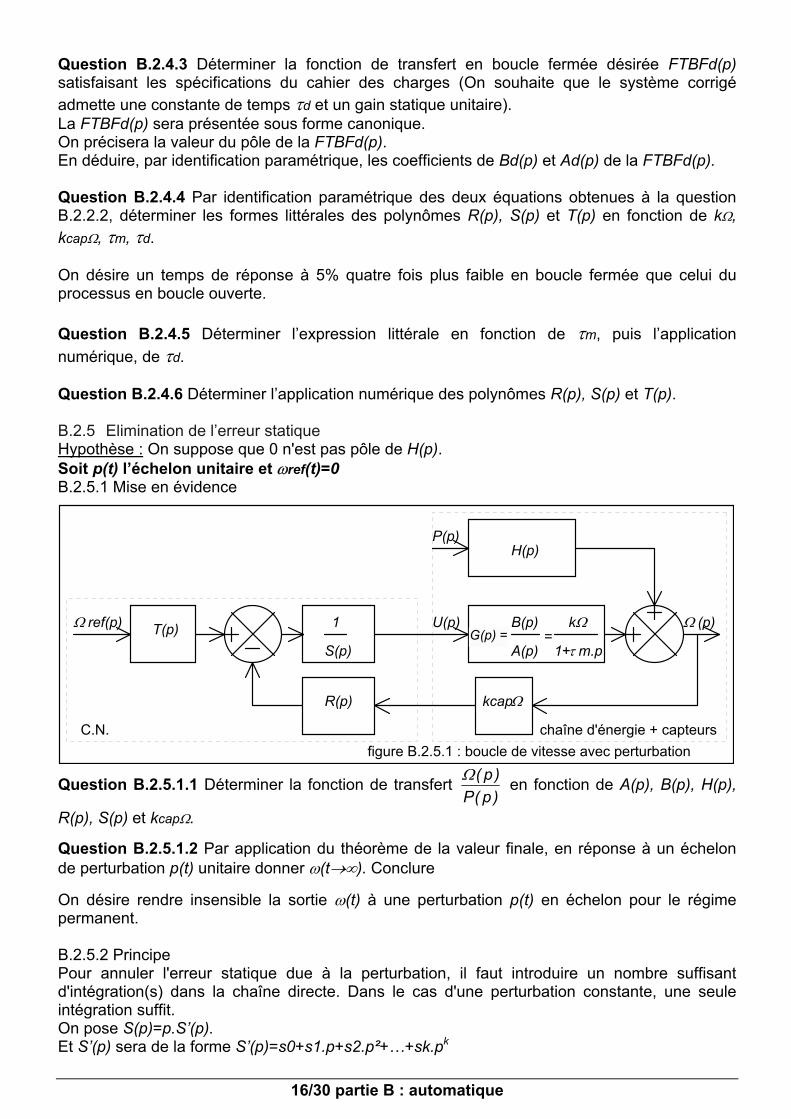
Question B.2.4.3 Déterminer la fonction de transfert en boucle fermée désirée FTBFd(p) satisfaisant les spécifications du cahier des charges (On souhaite que le système corrigé admette une constante de temps Wd et un gain statique unitaire). La FTBFd(p) sera présentée sous forme canonique. On précisera la valeur du pôle de la FTBFd(p). En déduire, par identification paramétrique, les coefficients de Bd(p) et Ad(p) de la FTBFd(p). Question B.2.4.4 Par identification paramétrique des deux équations obtenues à la question B.2.2.2, déterminer les formes littérales des polynômes R(p), S(p) et T(p) en fonction de k:, kcap:, Wm, Wd. On désire un temps de réponse à 5% quatre fois plus faible en boucle fermée que celui du processus en boucle ouverte. Question B.2.4.5 Déterminer l’expression littérale en fonction de Wm, puis l’application numérique, de Wd. Question B.2.4.6 Déterminer l’application numérique des polynômes R(p), S(p) et T(p). B.2.5 Elimination de l’erreur statique Hypothèse : On suppose que 0 n'est pas pôle de H(p). Soit p(t) l’échelon unitaire et Zref(t)=0 B.2.5.1 Mise en évidence
(p)
S(p)
figure B.2.5.1 : boucle de vitesse avec perturbation
ref(p) T(p)A(p)
B(p)G(s)= =
1 U(p)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
::
1+ m.p
k
W
kcap:
:
Question B.2.5.1.1 Déterminer la fonction de transfert )p(P)p(: en fonction de A(p), B(p), H(p),
R(p), S(p) et kcap:. Question B.2.5.1.2 Par application du théorème de la valeur finale, en réponse à un échelon de perturbation p(t) unitaire donner Z(tof). Conclure
On désire rendre insensible la sortie Z(t) à une perturbation p(t) en échelon pour le régime permanent. B.2.5.2 Principe Pour annuler l'erreur statique due à la perturbation, il faut introduire un nombre suffisant d'intégration(s) dans la chaîne directe. Dans le cas d'une perturbation constante, une seule intégration suffit. On pose S(p)=p.S’(p). Et S’(p) sera de la forme S’(p)=s0+s1.p+s2.p²+…+sk.pk
G(p) =
17/30 partie B : automatique
Question B.2.5.2.1 Déterminer la fonction de transfert )p(P)p(: en fonction de R(p), S’(p), kcap:,
H(p), A(p) et B(p). Question B.2.5.2.2 Par application du théorème de la valeur finale, en réponse à un échelon de perturbation unitaire donner Z(tof). Conclure Question B.2.5.2.3 En s’inspirant de la démarche développée dans la partie B.2.3 donner, pour l'ordre minimal du système corrigé, les degrés des polynômes R(p), S’(p) et Ad(p) en fonction du degré de A(p). On pose n l’ordre du polynôme A(p). B.2.5.3 Application à la boucle de vitesse Le processus est le suivant :
(p)
p.S'(p)
figure B.2.5.3 : boucle de vitesse
ref(p) T(p)A(p)
B(p)G(p)= =
1 U(p)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
::
1+ m.p
k
W
kcap:
:
où k: = 0,0049 V.rad/s : gain statique de la chaîne directe de la boucle de pulsation de rotation.
Wm = 0,1s. : constante de temps de la partie mécanique ramenée sur l’axe de la MSAP. kcap: = 652 V.s/rad : gain du capteur de vitesse
Cahier des charges : On souhaite :
� que le système bouclé admette toujours un temps de réponse à 5% en boucle fermée 4 fois plus faible que celui du processus en boucle ouverte.
� un amortissement critique (pas de dépassement de la réponse soumise à un échelon sur l’entrée de consigne Zref(t) tout en optimisant le temps de réponse à 5%). Le système bouclé sera donc composé de pôles réels de constante de temps Wd.
� un écart statique nul en présence d'une consigne et d'une perturbation évoluant en échelon.
� Un gain statique unitaire. Question B.2.5.3.1 A partir des résultats de la question B.2.5.2.3, déterminer numériquement les degrés des polynômes R(p), S(p) et T(p) pour l’ordre minimal du système bouclé et du polynôme T(p). En déduire les degrés de Ad(p) et Bd(p). Question B.2.5.3.2 En déduire la forme des polynômes R(p), S(p), T(p), Bd(p) et Ad(p) (cf. §B.2.2 et §B.2.5.2).
18/30 partie B : automatique
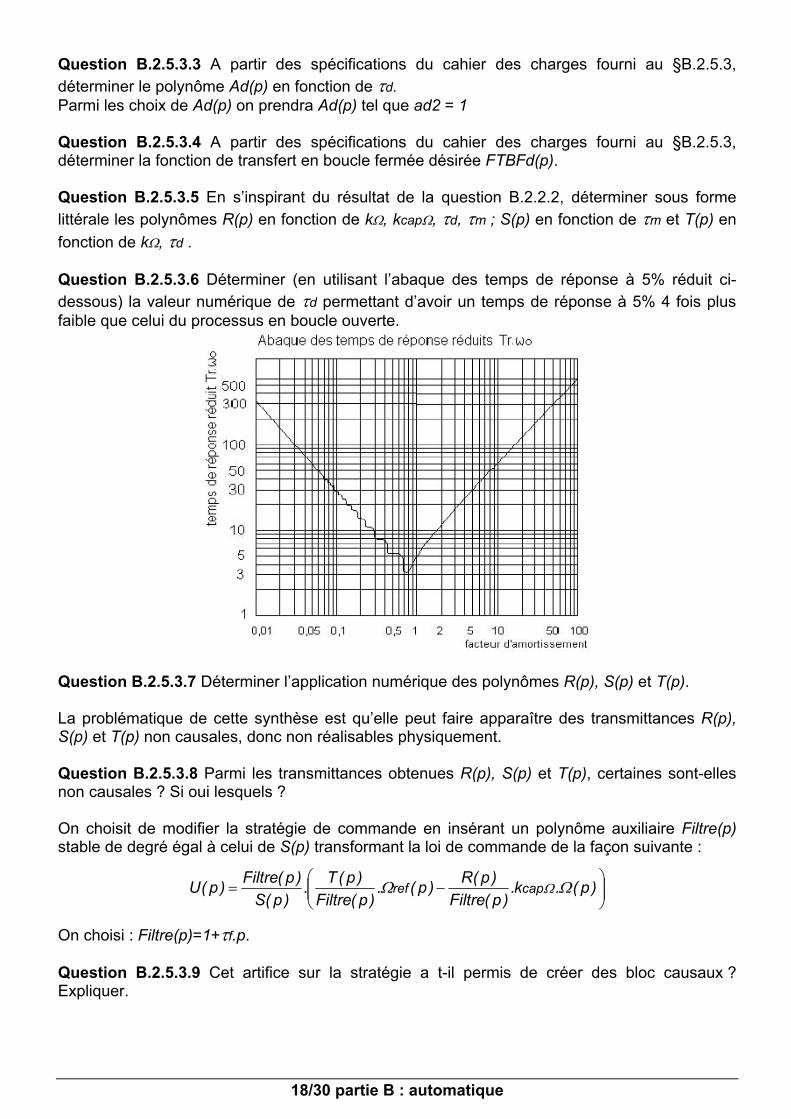
Question B.2.5.3.3 A partir des spécifications du cahier des charges fourni au §B.2.5.3, déterminer le polynôme Ad(p) en fonction de Wd. Parmi les choix de Ad(p) on prendra Ad(p) tel que ad2 = 1 Question B.2.5.3.4 A partir des spécifications du cahier des charges fourni au §B.2.5.3, déterminer la fonction de transfert en boucle fermée désirée FTBFd(p). Question B.2.5.3.5 En s’inspirant du résultat de la question B.2.2.2, déterminer sous forme littérale les polynômes R(p) en fonction de k:, kcap:, Wd, Wm ; S(p) en fonction de Wm et T(p) en fonction de k:, Wd . Question B.2.5.3.6 Déterminer (en utilisant l’abaque des temps de réponse à 5% réduit ci-dessous) la valeur numérique de Wd permettant d’avoir un temps de réponse à 5% 4 fois plus faible que celui du processus en boucle ouverte.
Question B.2.5.3.7 Déterminer l’application numérique des polynômes R(p), S(p) et T(p). La problématique de cette synthèse est qu’elle peut faire apparaître des transmittances R(p), S(p) et T(p) non causales, donc non réalisables physiquement. Question B.2.5.3.8 Parmi les transmittances obtenues R(p), S(p) et T(p), certaines sont-elles non causales ? Si oui lesquels ? On choisit de modifier la stratégie de commande en insérant un polynôme auxiliaire Filtre(p) stable de degré égal à celui de S(p) transformant la loi de commande de la façon suivante :
¸̧¹
·¨̈©
§� )p(.k.
)p(Filtre)p(R)p(.
)p(Filtre)p(T.
)p(S)p(Filtre)p(U capref :: :
On choisi : Filtre(p)=1+Wf.p. Question B.2.5.3.9 Cet artifice sur la stratégie a t-il permis de créer des bloc causaux ? Expliquer.
19/30 partie B : automatique
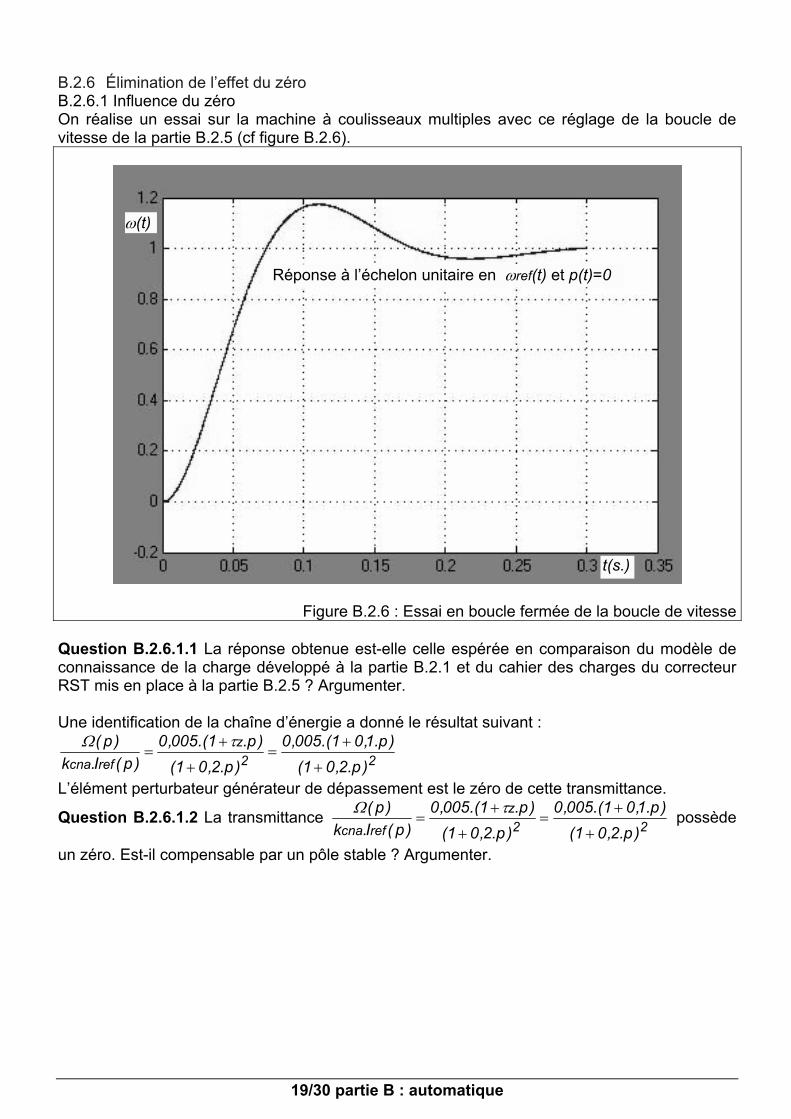
B.2.6 Élimination de l’effet du zéro B.2.6.1 Influence du zéro On réalise un essai sur la machine à coulisseaux multiples avec ce réglage de la boucle de vitesse de la partie B.2.5 (cf figure B.2.6).
Figure B.2.6 : Essai en boucle fermée de la boucle de vitesse Question B.2.6.1.1 La réponse obtenue est-elle celle espérée en comparaison du modèle de connaissance de la charge développé à la partie B.2.1 et du cahier des charges du correcteur RST mis en place à la partie B.2.5 ? Argumenter. Une identification de la chaîne d’énergie a donné le résultat suivant :
22z
refcna )p.2,01()p.1,01.(005,0
)p.2,01()p.1.(005,0
)p(I.k)p(
�
�
�
�
W:
L’élément perturbateur générateur de dépassement est le zéro de cette transmittance.
Question B.2.6.1.2 La transmittance 22z
refcna )p.2,01()p.1,01.(005,0
)p.2,01()p.1.(005,0
)p(I.k)p(
�
�
�
�
W: possède
un zéro. Est-il compensable par un pôle stable ? Argumenter.
Z(t)
t(s.)
Réponse à l’échelon unitaire en Zref(t) et p(t)=0
20/30 partie B : automatique
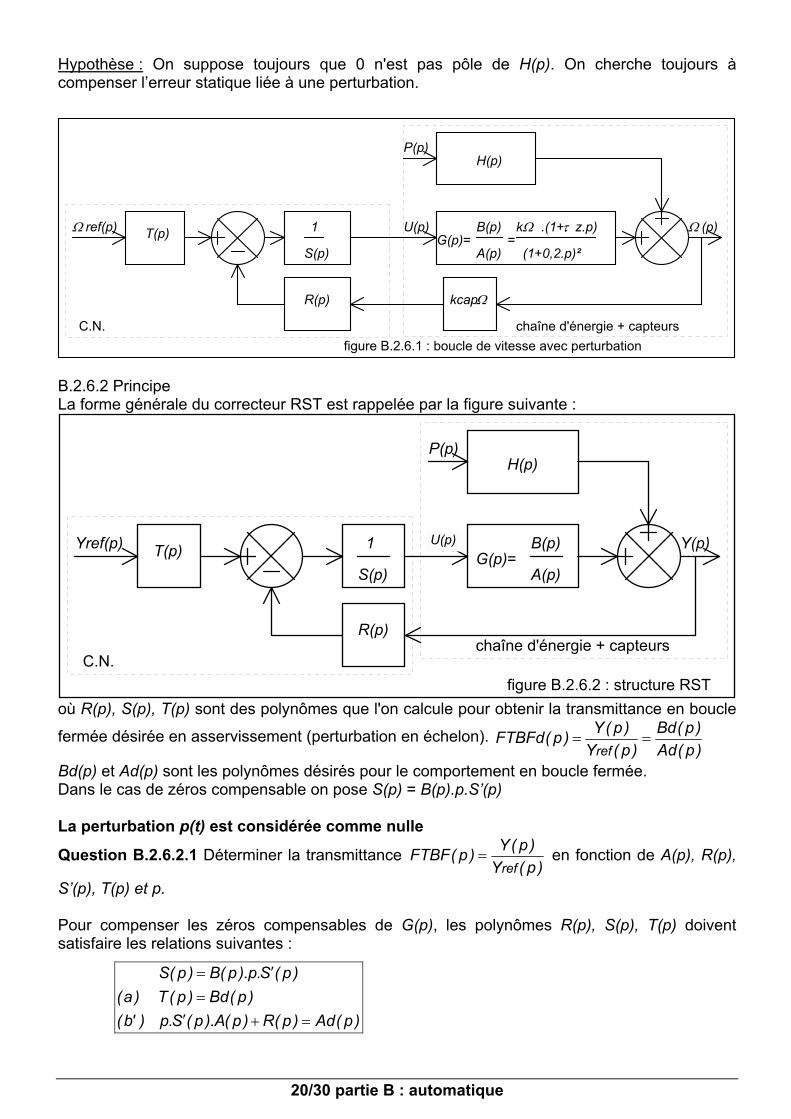
Hypothèse : On suppose toujours que 0 n'est pas pôle de H(p). On cherche toujours à compenser l’erreur statique liée à une perturbation.
(p)
S(p)
figure B.2.6.1 : boucle de vitesse avec perturbation
ref(p) T(p)A(p)
B(p)G(p)= =
1 U(p)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
::
(1+0,2.p)²
kcap:
:k .(1+. z.p)W
B.2.6.2 Principe La forme générale du correcteur RST est rappelée par la figure suivante :
Y(p)
S(p)
figure B.2.6.2 : structure RST
Yref(p) T(p)A(p)
B(p)G(p)=
1 U(s)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
où R(p), S(p), T(p) sont des polynômes que l'on calcule pour obtenir la transmittance en boucle
fermée désirée en asservissement (perturbation en échelon). )p(Ad
)p(Bd)p(Y
)p(Y)p(FTBFdref
Bd(p) et Ad(p) sont les polynômes désirés pour le comportement en boucle fermée. Dans le cas de zéros compensable on pose S(p) = B(p).p.S’(p) La perturbation p(t) est considérée comme nulle
Question B.2.6.2.1 Déterminer la transmittance )p(Y
)p(Y)p(FTBFref
en fonction de A(p), R(p),
S’(p), T(p) et p. Pour compenser les zéros compensables de G(p), les polynômes R(p), S(p), T(p) doivent satisfaire les relations suivantes :
)p(Ad)p(R)p(A).p(S.p)'b()p(Bd)p(T)a(
)p(S.p).p(B)p(S
�c
c
U(p)
21/30 partie B : automatique
Question B.2.6.2.2 En s’inspirant de la démarche développée dans la partie B.2.3 donner, pour l'ordre minimal du système corrigé, les degrés des polynômes R(p), S’(p) et Ad(p) en fonction du degré de A(p). On pose n l’ordre du polynôme A(p) et m l’ordre du polynôme B(p). B.2.6.3 Application à la boucle de vitesse Le processus est le suivant :
(p)
B(p).p.S'(p)
figure B.2.6.3 : boucle de vitesse avec perturbation
ref(p) T(p)A(p)
B(p)G(p)= =
1 U(p)
R(p)
H(p)P(p)
chaîne d'énergie + capteursC.N.
::
(1+0,2.p)²
kcap:
k .(1+ z.p)W
Wz=0,1 s.
:
où k: = 0,005 V.rad/s : gain statique de la chaîne directe de la boucle de pulsation de rotation.
Wz=0,1s. : constante de temps du zéro de la partie mécanique ramenée sur l’axe de la MSAP.
kcap: = 652 V.s/rad : gain du capteur de vitesse
Cahier des charges : On souhaite :
� que le système bouclé admette toujours un temps de réponse à 5% en boucle fermée 4 fois plus faible que celui du processus en boucle ouverte obtenu à la partie §B.2.1.
� un amortissement critique (pas de dépassement de la réponse soumise à un échelon sur l’entrée de consigne Zref(t) tout en optimisant le temps de réponse à 5%). Le système bouclé sera donc composé de pôles réels de constante de temps Wd.
� un écart statique nul en présence d'une consigne et d'une perturbation évoluant en échelon.
� Un gain statique unitaire. Question B.2.6.3.1 Déterminer les degrés des polynômes R(p), S’(p) et T(p). En déduire les degrés de Ad(p) et Bd(p). Question B.2.6.3.2 En déduire la forme des polynômes R(p), S(p), T(p), Bd(p) et Ad(p) (cf §B.2.2 et §B.2.6.2). Question B.2.6.3.3 Déterminer le polynôme Ad(p) en fonction de Wd. Parmi les choix de Ad(p) on prendra Ad(p) tel que ad3 = 1 Question B.2.6.3.4 Déterminer la fonction de transfert en boucle fermée désirée FTBFd(p) en fonction de Wd vérifiant les spécifications. Question B.2.6.3.5 En s’inspirant du résultat de la question B.2.2.2, déterminer sous forme littérale les polynômes R(p) en fonction de kcap:, Wd ; S(p) et T(p) en fonction de Wd .
22/30 partie B : automatique
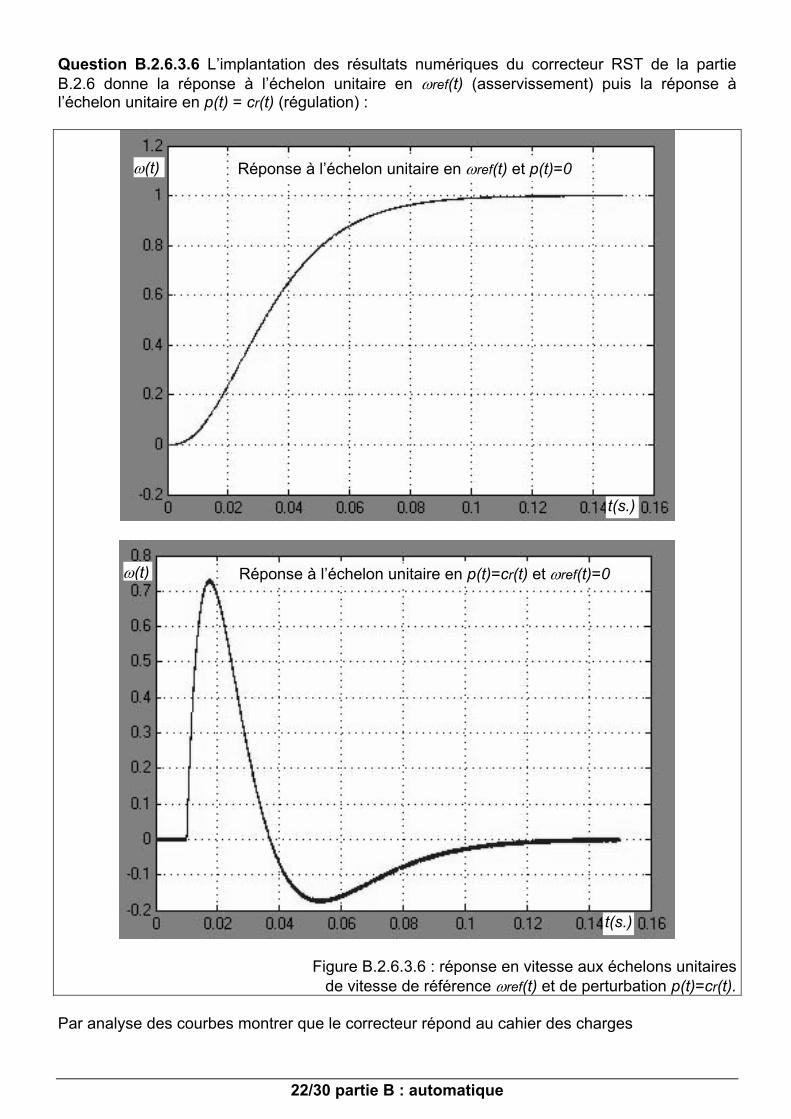
Question B.2.6.3.6 L’implantation des résultats numériques du correcteur RST de la partie B.2.6 donne la réponse à l’échelon unitaire en Zref(t) (asservissement) puis la réponse à l’échelon unitaire en p(t) = cr(t) (régulation) :
Figure B.2.6.3.6 : réponse en vitesse aux échelons unitaires de vitesse de référence Zref(t) et de perturbation p(t)=cr(t).
Par analyse des courbes montrer que le correcteur répond au cahier des charges
Réponse à l’échelon unitaire en Zref(t) et p(t)=0
Réponse à l’échelon unitaire en p(t)=cr(t) et Zref(t)=0 Z(t)
t(s.)
t(s.)
Z(t)
23/30 partie C : Comportement cinématique
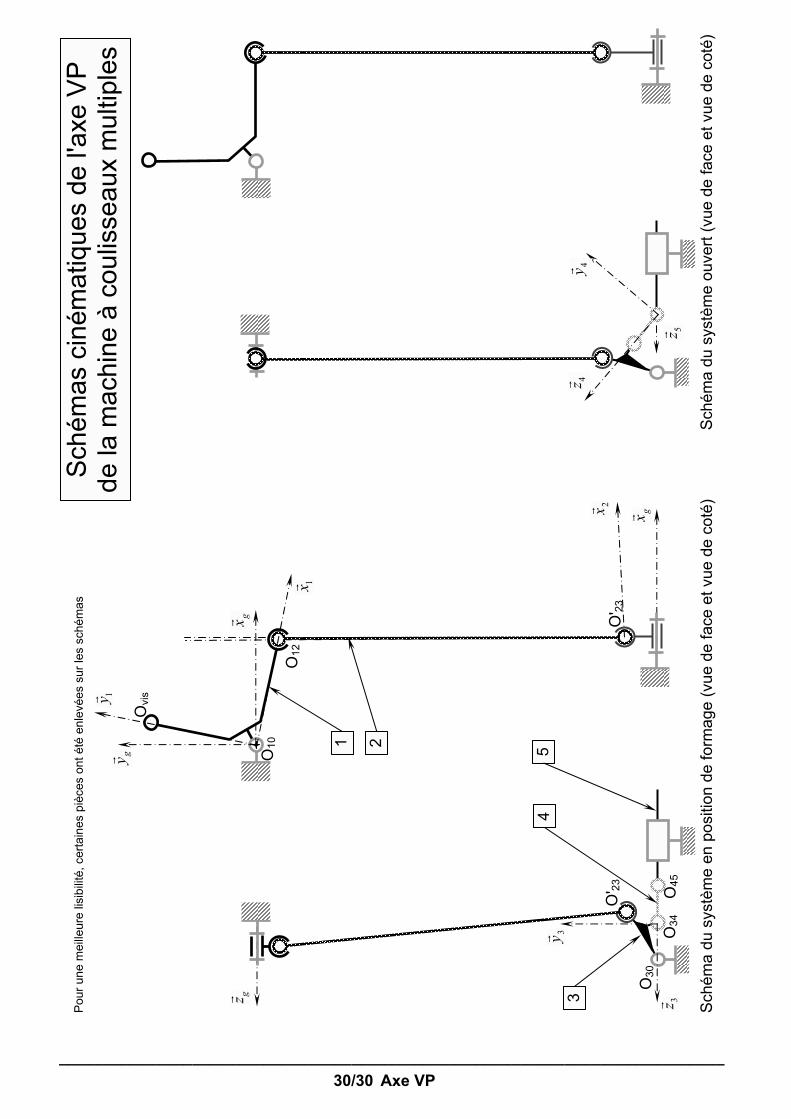
C - ETUDE DU COMPORTEMENT CINÉMATIQUE Nous allons nous intéresser de plus près à 2 axes de la machine à coulisseaux multiples. Nous allons vérifier certaines hypothèses énoncées dans les parties précédentes.
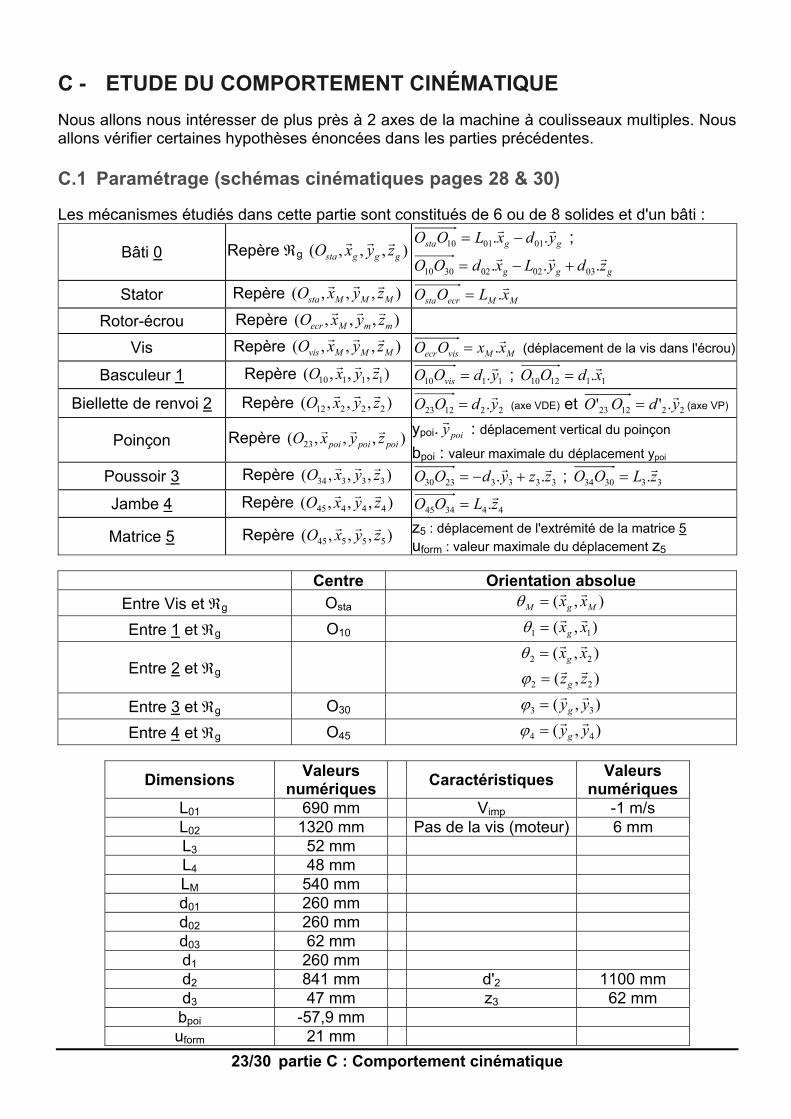
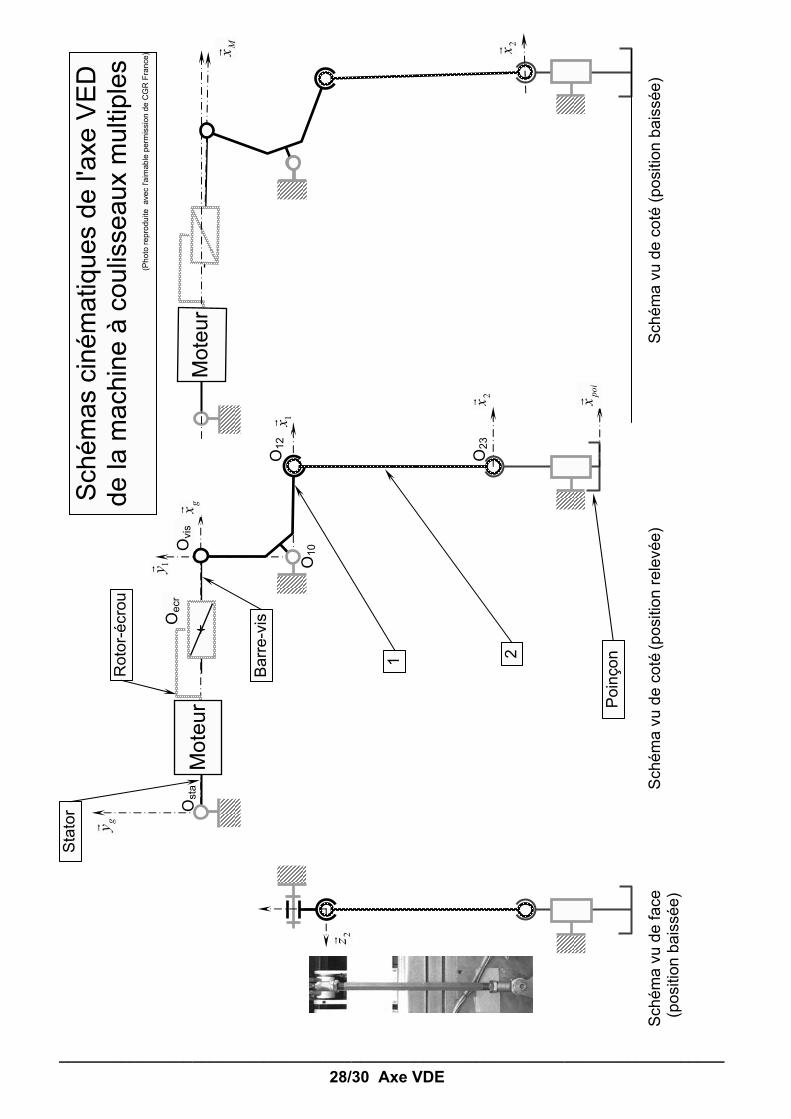
C.1 Paramétrage (schémas cinématiques pages 28 & 30) Les mécanismes étudiés dans cette partie sont constitués de 6 ou de 8 solides et d'un bâti :
Bâti 0 Repère �g ),,,( gggsta zyxO &&& ggsta ydxLOO &&.. 010110 � ;
ggg zdyLxdOO &&&... 0302023010 ��
Stator Repère ),,,( MMMsta zyxO &&&MMecrsta xLOO &
.
Rotor-écrou Repère ),,,( mmMecr zyxO &&&
Vis Repère ),,,( MMMvis zyxO &&&MMvisecr xxOO &
. (déplacement de la vis dans l'écrou)
Basculeur 1 Repère ),,,( 11110 zyxO &&& 1110 .ydOO vis&
; 111210 .xdOO &
Biellette de renvoi 2 Repère ),,,( 22212 zyxO &&& 221223 .ydOO & (axe VDE) et 221223 .'' ydOO &
(axe VP)
Poinçon Repère ),,,( 23 poipoipoi zyxO &&& ypoi. poiy& : déplacement vertical du poinçon
bpoi : valeur maximale du déplacement ypoi Poussoir 3 Repère ),,,( 33334 zyxO &&& 33332330 .. zzydOO &&
�� ; 333034 .zLOO &
Jambe 4 Repère ),,,( 44445 zyxO &&& 443445 .zLOO &
Matrice 5 Repère ),,,( 55545 zyxO &&& z5 : déplacement de l'extrémité de la matrice 5 uform : valeur maximale du déplacement z5
Centre Orientation absolue
Entre Vis et �g Osta ),( MgM xx && T
Entre 1 et �g O10 ),( 11 xxg&&
T
Entre 2 et �g ),( 22 xxg
&& T
),( 22 zzg&&
M
Entre 3 et �g O30 ),( 33 yyg&&
M
Entre 4 et �g O45 ),( 44 yyg&&
M
Dimensions Valeurs numériques
Caractéristiques Valeurs numériques
L01 690 mm Vimp -1 m/s L02 1320 mm Pas de la vis (moteur) 6 mm L3 52 mm L4 48 mm LM 540 mm d01 260 mm d02 260 mm d03 62 mm d1 260 mm d2 841 mm d'2 1100 mm d3 47 mm z3 62 mm bpoi -57,9 mm uform 21 mm
24/30 partie C : Comportement cinématique
C.2 Vérification d'hypothèses sur la modélisation de l’axe VED Dans la partie B, nous avons étudié la commande de l'axe VED en effectuant certaines hypothèses comme celle d'un comportement purement en translation de l’outil d’écrasement et de la biellette de renvoi d’angle inférieure (Cf figure B.1). Pour vérifier certaines hypothèses, nous allons reprendre la modélisation en réalisant un schéma cinématique plus précis de l'axe VED. C.2.1 Modélisation cinématique de l'axe VED : partie moteur (Annexe C) Question C.2.1.1 Compléter le schéma cinématique en proposant une modélisation cinématique du moteur électrique. Question C.2.1.2 Au point Osta, une liaison pivot est proposée. Justifier la présence de cette liaison dans le fonctionnement du système. Question C.2.1.3 Au point Ovis, une liaison pivot est proposée. Justifier la présence de cette liaison dans le fonctionnement du système. Question C.2.1.4 Conclure sur le mouvement de l'axe du moteur de commande. Pour connaître l'influence de la rotation de l'axe (Osta, Ovis), nous allons chercher à calculer la valeur maximale de l’angle de cette rotation. Nous ferons l'hypothèse que les liaisons sont parfaites. Question C.2.1.5 Calculer les 2 relations de fermeture géométrique reliant les angles
);( MgM xx && T , );( 11 xxg
&& T et la longueur de sortie de la vis par rapport au rotor-écrou xM, ainsi
que les autres dimensions.
Question C.2.1.6 Si on note )( MM xLX � et en éliminant 1T , en déduire une relation entre X et MT .
Question C.2.1.7 Si on note ij tel que L01
(L012 � d01
2) cosM ainsi que Msin
)( 201
201
01 � dL
d ,
résoudre l'équation précédente afin de donner )cos( MT �M en fonction X. La loi de X est directement déterminable à partir de la connaissance de la loi de Mx et donc de la commande du moteur.
Question C.2.1.8 Sur l'annexe C, tracer la courbe de )cos( MT �M en fonction de X , sur l'intervalle [690mm ; 720mm] (fonctionnement normal). Conclure alors sur l'influence de la rotation MT de l'axe du moteur. C.2.2 Modélisation cinématique de l'axe VED : partie biellette de renvoi Pour pouvoir écraser le tube efficacement, il faut disposer d'une certaine vitesse au niveau du poinçon afin d'obtenir suffisamment d'énergie à l'impact. La norme de cette vitesse étant connue (Vimp), nous allons chercher la vitesse de commande de déplacement de la biellette de renvoi. On suppose qu'au démarrage gM xxxxx &&&&&
321 et que ypoi = 0 (poinçon relevé).
Question C.2.2.1 Déterminer la direction du vecteur vitesse gOV �� /112
& à tout instant t.
Question C.2.2.2 En déduire la direction du vecteur vitesse gOV �� /212
& à tout instant t.
25/30 partie C : Comportement cinématique
Question C.2.2.3 Déterminer la direction du vecteur vitesse �
&�V O23 �3 /�g
à tout instant t.
Question C.2.2.4 En déduire la direction du vecteur vitesse �
&�V O23 �2 /�g
à tout instant t.
Question C.2.2.5 A l'aide du schéma cinématique de la page 28, justifier que la rotation 2M de la biellette 2 est nulle, à tout instant t.
Question C.2.2.6 A l'aide d'une fermeture géométrique, établir les relations entre les angles 1T et 2T et ypoi à tout instant t. (ypoi égal à 0 en position relevée).
Question C.2.2.7 Montrer que ��
&�V O12 �1/�g
d1.T$
1 .&�y 1 à tout instant t.
Question C.2.2.8 Déduire des questions précédentes la norme de la pulsation de rotation 2
$
T de la biellette 2 dans le plan );( gg yx && en fonction des angles 1T et 2T , des dimensions et de la
vitesse de rotation 1
$
T , à tout instant t.
Question C.2.2.9 Déduire des questions précédentes la norme de la vitesse de translation poiy$
de la biellette 2 au point O23, en fonction des angles 1T et 2T , des dimensions et de la vitesse
de rotation 1
$
T , à tout instant t.
Question C.2.2.10 En éliminant 2T dans l'expression précédente, déterminer la valeur à donner
à 1
$
T en fin de course, c'est-à-dire q� 101T , imppoi Viy )(max$
et ypoi(max) = bpoi.
On prendra Vimp = -1m.s-1, d1 = 260mm, d2 = 841mm et bpoi = -57,9mm.
On suppose désormais que la valeur de 1
$
T , calculée en fin de course, est maximale
( MAX1
$
T ) et égale à -4 rad.s-1.
Question C.2.2.11 En déduire la norme de la vitesse maximale de translation de la vis par rapport au rotor-écrou.
Question C.2.2.12 En éliminant 2T dans l'expression de la question C.2.2.8, calculer la valeur
maximale de 2
$
T . On montre en poursuivant les calculs que la norme la valeur maximale de l'accélération
2
$$
T est voisine de 0,5 rad.s-2.
Question C.2.2.13 Calculer la valeur maximale de 2T et conclure sur l'hypothèse faite dans la partie B sur l'effet négligeable de la rotation de la biellette 2 sur la dynamique du système.
26/30 partie D : Dimensionnement
D - DIMENSIONNEMENT (ANNEXE D) Nous allons désormais nous intéresser à l’effort à appliquer pour déformer le tube en tonneau, afin de dimensionner correctement le moteur de commande mais aussi de dimensionner correctement certaines pièces de l'axe VP. La puissance fournie doit essentiellement servir à la déformation du tube. L'axe VP a pour fonction de réaliser une forme d'amarrage sur l'extrémité du tube comme représentée sur la figure D.1. Le procédé retenu consiste à écraser le tube suivant son axe pour provoquer son gonflement en forme de tonneau.
Figure D.1 : Mise en forme par déformation axiale
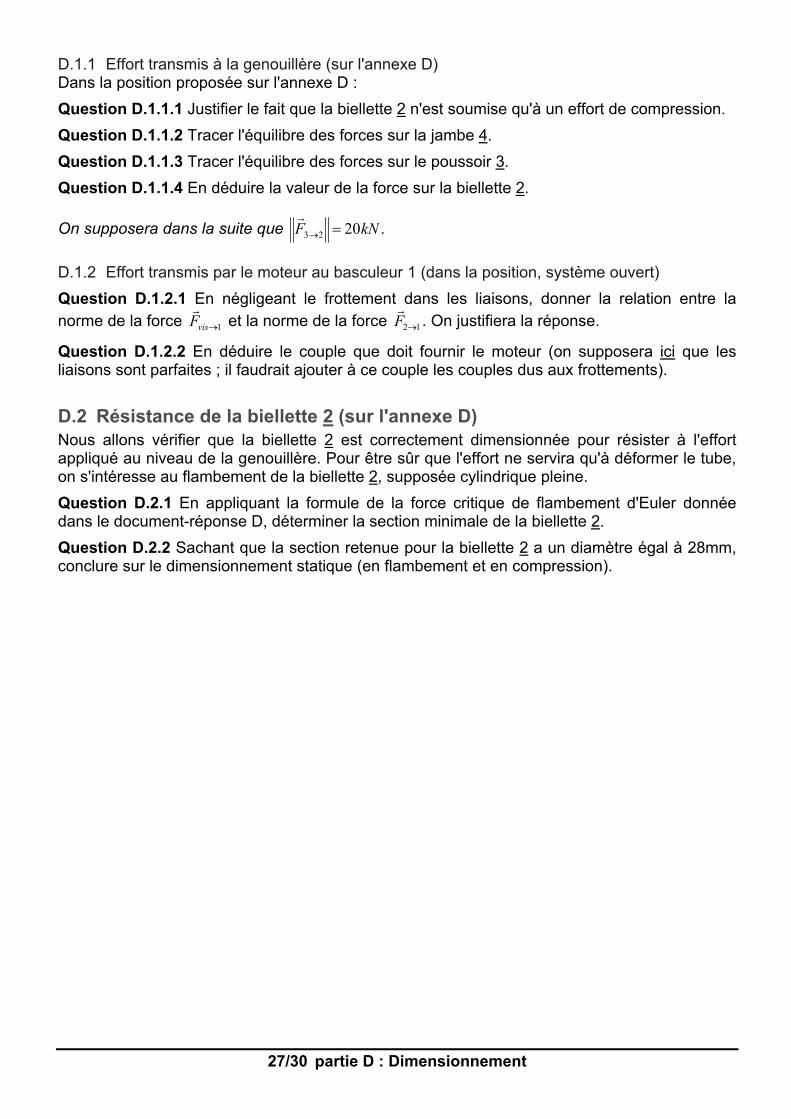
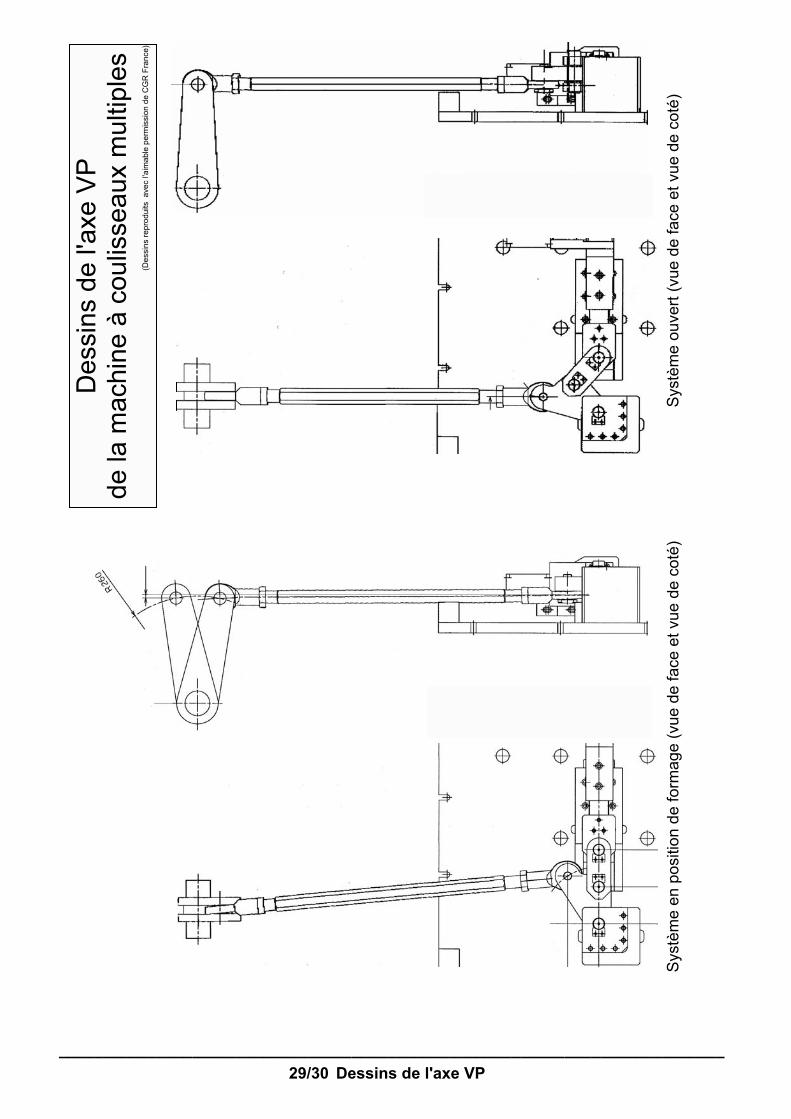
Le tube étant maintenu par ailleurs, la matrice de l'axe VP vient écraser lentement l’extrémité de ce tube avec un système de genouillère (figure D.2). Ce système (schéma cinématique page 28) transforme le déplacement d'entrée en une translation d’axe horizontal. Connaissant la profondeur d’écrasement du tube (uform), on cherche à déterminer le déplacement à commander au niveau du moteur en utilisant la connaissance des mouvements simples de certaines pièces et de la conservation de la longueur de la biellette 2.
Figure D.2 : Système de genouillère
D.1 Vérification de l'effort maximum transmis Nous allons vérifier que l'effecteur est correctement dimensionné pour exercer l'effort nécessaire attendu au niveau de la genouillère.
uform
27/30 partie D : Dimensionnement
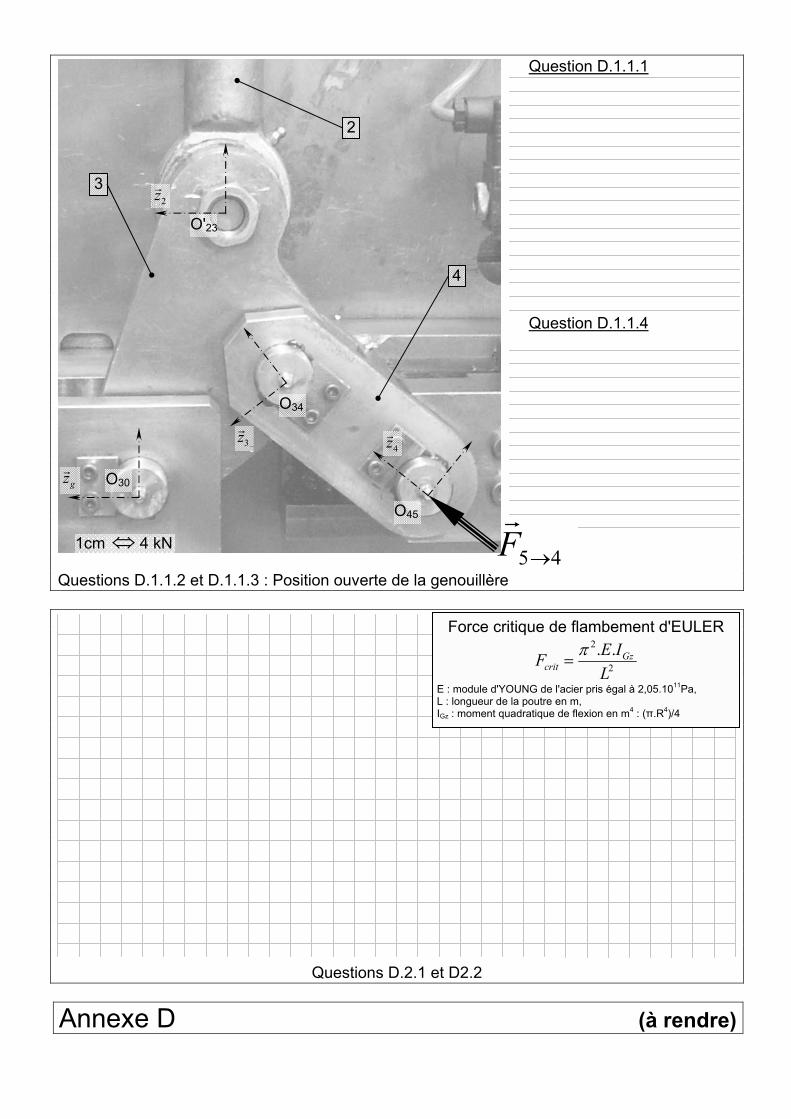
D.1.1 Effort transmis à la genouillère (sur l'annexe D) Dans la position proposée sur l'annexe D : Question D.1.1.1 Justifier le fait que la biellette 2 n'est soumise qu'à un effort de compression. Question D.1.1.2 Tracer l'équilibre des forces sur la jambe 4. Question D.1.1.3 Tracer l'équilibre des forces sur le poussoir 3. Question D.1.1.4 En déduire la valeur de la force sur la biellette 2. On supposera dans la suite que
��
&�F 3o2 20kN .
D.1.2 Effort transmis par le moteur au basculeur 1 (dans la position, système ouvert) Question D.1.2.1 En négligeant le frottement dans les liaisons, donner la relation entre la norme de la force 1ovisF
& et la norme de la force 12oF
&. On justifiera la réponse.
Question D.1.2.2 En déduire le couple que doit fournir le moteur (on supposera ici que les liaisons sont parfaites ; il faudrait ajouter à ce couple les couples dus aux frottements).
D.2 Résistance de la biellette 2 (sur l'annexe D) Nous allons vérifier que la biellette 2 est correctement dimensionnée pour résister à l'effort appliqué au niveau de la genouillère. Pour être sûr que l'effort ne servira qu'à déformer le tube, on s'intéresse au flambement de la biellette 2, supposée cylindrique pleine. Question D.2.1 En appliquant la formule de la force critique de flambement d'Euler donnée dans le document-réponse D, déterminer la section minimale de la biellette 2. Question D.2.2 Sachant que la section retenue pour la biellette 2 a un diamètre égal à 28mm, conclure sur le dimensionnement statique (en flambement et en compression).
S
chém
a vu
de
face
Sch
éma
vu d
e co
té (p
ositi
on re
levé
e)
S
chém
a vu
de
coté
(pos
ition
bai
ssée
)
(po
sitio
n ba
issé
e)
1 2
Poi
nçon
Sch
émas
cin
émat
ique
s de
l'ax
e V
ED
de
la m
achi
ne à
cou
lisse
aux
mul
tiple
s
(Pho
to re
prod
uite
ave
c l'a
imab
le p
erm
issi
on d
e C
GR
Fra
nce)
___________________________________________________________________________
28/30 Axe VDE
Ost
a O
ecr
Sta
tor
Rot
or-é
crou
Ovi
s
Bar
re-v
isO
12
O10
O23
��&� x 1
�&� x 2 poi
x&
&� x g
Mx&
�&� y 1
&� y g
�&� x 2
Mot
eur
Mot
eur
2z&
Sys
tèm
e en
pos
ition
de
form
age
(vue
de
face
et v
ue d
e co
té)
Sys
tèm
e ou
vert
(vue
de
face
et v
ue d
e co
té)
Des
sins
de
l'axe
VP
de la
mac
hine
à c
oulis
seau
x m
ultip
les
(D
essi
ns re
prod
uits
ave
c l'a
imab
le p
erm
issi
on d
e C
GR
Fra
nce)
___________________________________________________________________________
29/30 Dessins de l'axe VP
Pou
r une
mei
lleur
e lis
ibilit
é, c
erta
ines
piè
ces
ont é
té e
nlev
ées
sur l
es s
chém
as
S
chém
a du
sys
tèm
e en
pos
ition
de
form
age
(vue
de
face
et v
ue d
e co
té)
S
chém
a du
sys
tèm
e ou
vert
(vue
de
face
et v
ue d
e co
té)
Sch
émas
cin
émat
ique
s de
l'ax
e V
P
de
la m
achi
ne à
cou
lisse
aux
mul
tiple
s
___________________________________________________________________________
30/30 Axe VP
3
O30
4 5
O34
O
45��&� z 3
�&� y 3
&� z g
O' 23
�&� z 5
�&� z 4�&� y 4
1 2
Ovi
s
O12
O10
O' 23
�&� x g
&� y g
�&� x 1
�&� y 1
�&� x 2
&� x g
0
dcy . ptm
TR
acy + ptm
1
Mise/arrêt production
TR2
30
ptprt . vetr . vedr . vepgr . vfcr . vbr . vevr . vpr
VET+
vets
31
VBT+
vbs
32
VED+
veds
33
Poste outil
vepgs
36 VEPG+
34
1
37VED-
vedr
35
39
40
vpr . vfcr
41
VET-
vetr
42
43
VBT-
vbr
44
45
46
38
10
X1 . vrb . ptp . ptbe
PPR
0,5s./X11
11
vrh
12
ptbe . ptp . ptpat
13
VR-
vrb
14
Poste releveur
ptpat
16 VBE
15
1
17
20
ptpat . vvph . vhpr
21
PPT
0,5s./X22
22
23
24
Poste transfert
25
ptrpt
26
vvph
27 VVPT-
VHPT-
vhpr
28
Annexe A : Grafcet (à rendre)
Question B.1.2.3.1.5 :I(p) C(p)kcna.Iref(p) (p) V(p) X(p)
Schéma bloc de la partie du processus comprenant variateur + MSAP + outil d'écrasement Question B.1.2.3.2.1 Remplir le contenu des blocs associés à l’interface.
: X(p)
capteur depulsation de rotation capteur de positionsortie de commande
: X(p)
Iref(p)
kcna.Iref(p)
kcna = kcap =: kcapx =
(p)
(p)
On note : kcna = gain de la sortie analogique de la C.N. (r10V/216). kcap: = gain du capteur pulsation de rotation (4096 tops/tour). kcapx = gain du capteur position (4096 tops/mm).
Annexe B1 : Schéma-bloc de l’interface (à rendre) Un essai rotor calé (le rotor de la MSAP bridée) en réponse à l’échelon unitaire a donné le résultat suivant :
Question B.2.1.1 Identifier la fonction de transfert du variateur avec la MSAP. On fera apparaître la construction sur la courbe ci-dessus. KI =
WE =
)p(I.k
)p(Irefcna
Annexe B2 : Modélisation de la boucle de courant (à rendre)
i(t)
t(s.)
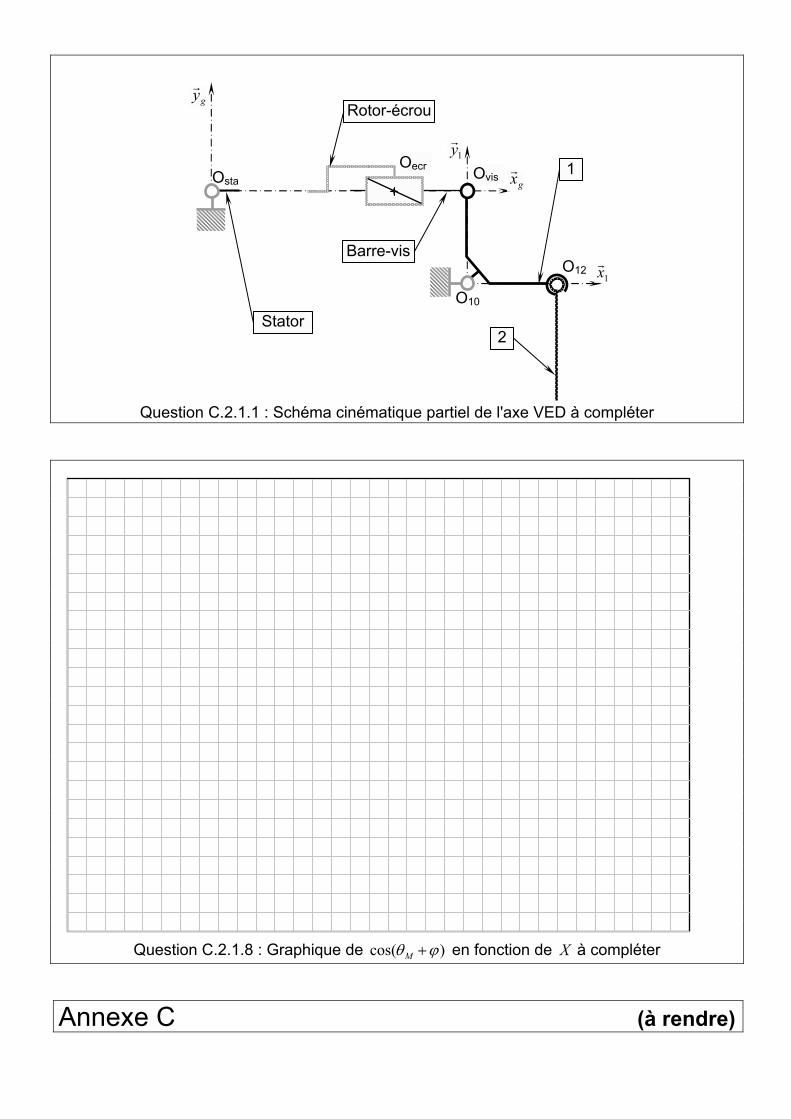
Question C.2.1.1 : Schéma cinématique partiel de l'axe VED à compléter
Question C.2.1.8 : Graphique de )cos( MT �M en fonction de X à compléter
Annexe C (à rendre)
1 OstaOecr
Stator
Rotor-écrou
Ovis
Barre-visO12
O10
��&�x 1
&�x g
�&�y 1
&�y g
2
Question D.1.1.1 Question D.1.1.4
Questions D.1.1.2 et D.1.1.3 : Position ouverte de la genouillère
Questions D.2.1 et D2.2
Annexe D (à rendre)
O'23
O30
4z&
3
4
O34
O45
2
2z&
gz&
3z&
Force critique de flambement d'EULER
2
2 ..L
IEF Gzcrit
S
E : module d'YOUNG de l'acier pris égal à 2,05.1011Pa, L : longueur de la poutre en m, IGz : moment quadratique de flexion en m4 : (ʌ.R4)/4
�&�F 5o4
1cm � 4 kN
![Industrie de 2019 - Statistiques // Luxembourg · 6r]ldoyhuvlfkhuxqjvqxpphu pdwulfxoh qdwlrqdo 1dph ghv 8qwhuqhkphqv .rqwdnwshuvrqhq ( pdlo vev#vwdwhf hwdw ox 7ho )d[ 6wuxnwxuhooh](https://img.pdfslide.fr/doc/110x75/60414299298cf2748f02f0ba/industrie-de-2019-statistiques-luxembourg-6rldoyhuvlfkhuxqjvqxpphu-pdwulfxoh.jpg)



























