Embed Size (px)
Citation preview

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
A communication protocol for collaboration among the measurement and control nodes in a decentralized autonomous environment control system of greenhouses Takehiko Hoshi 1, Yasumasa Hayashi 2 and Keiji Shintani 3 1 Tokai University, Japan, [email protected] 2 NI System Inc., Japan 3 Soum Co., Japan Abstract In this paper, we propose a communication protocol named the “Common Corresponding Message” (CCM) to collaborate among the nodes in a decentralized autonomous greenhouse environment control system, which was developed to reduce the installation cost and realize reliable high-performance greenhouse environment control. The developed system is named the “Ubiquitous Environment Control System” (UECS), and consists of nodes in a network. CCM is delivered as a broadcast or unicast UDP packet through the Ethernet, and uses XML to state the apparatus identification, priority, measurement values, control set-points and condition values in each node. The standardized type name in CCM packet description is able to automatically recognize many nodes by different manufacturers as the same type of node. If the nodes correspond to the CCM standard, growers can install their preferred nodes in a greenhouse regardless of the manufacturer. We constructed two trial systems to evaluate the protocol: a time-programmed multi-environment control system and a hydroponic nutrient control system using CCM for collaborating among the nodes. Performances of the systems exceeded the conventional concentrated environment control systems. These results prove that the protocol using CCM for collaboration among the nodes has high performance. Keywords: Embedded microcomputer, Internet, Protected horticulture, Ubiquitous computing,
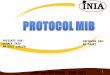
XML Introduction Computerized environment control systems are now considered indispensable for large greenhouses of more than 3,000 m2 floor area in Japan. A decentralized autonomous environment control system was developed to reduce the installation cost and realize a reliable high-performance greenhouse environment control (Hoshi et al. 2004, Hoshi 2007). The developed system is named the “Ubiquitous Environment Control System” (UECS), and consists of nodes in a network. A node that incorporates a low-cost microcomputer board (Fig. 1) into each
Basic I/F
EE
PR
OM
CPUH8/3048F-ONEClock: 20MHzROM: 128kB
RAM: 4kB
Serial I/F
Driver
AD
M232
Reset IC
BUS (16bits)
NetworkControl
RTL8019AS
Ethernet I/F
Surge Protection
BU
S I/F
SR
AM
R1L
P0408C
SP
0.5 –1.0 M
B
Driver
LCD I/FKey and SW I/F Fig. 1 IC chip configuration of the
embedded low-cost microcomputer board for the UECS.
127

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
greenhouse environment measurement and control device (i.e., climate sensors, roof ventilators, heaters, etc.) performs its own measurement and control functions independently. Because each node for measurement and control in the greenhouse environment works autonomously, UECS is more reliable and flexible than conventional environment control systems. Conversely, this advantage means that collaboration among the nodes is difficult. Conventional concentrated environment control systems (e.g., Udink ten Cate et al. 1978, Takakura et al. 1979) and hierarchical distributed environment control systems (e.g., Weaving, 1980) are easier to collaborate whole measurement and control devices in a greenhouse than are decentralized autonomous environment control systems such as the UECS. Therefore, to realize integrated environment control by collaborating nodes, it is necessary to establish a specific communication protocol among the nodes. In this paper, we propose a communication protocol to collaborate among the nodes, and confirm the protocol’s capability by tests on two trial systems. Communication protocol for collaboration Each node in the UECS is connected with the other nodes by 10Base-T Ethernet (IEEE 802.3) cables and hubs. In our proposed protocol, the communication message is named the “Common Corresponding Message” (CCM). CCM is delivered as a broadcast or unicast UDP packet through the LAN in the vicinity of greenhouses, and the packet information consists of the measurement and control device identifier, its priority, measurement values, control set-points and condition values in each node, all of which are written in XML (World Wide Web Consortium 2000). The XML tags and attributes in the CCM are shown in Table 1 and Table 2. Table 1 also shows the packet type and port number of the transport layer (the fourth layer) in the OSI reference model. Almost all CCM packets are grouped hierarchically by the greenhouse room, region and order attributes in the XML tag. The microcomputer boards of each node are also incused these attributes. Only the node that these attributes match can receive the CCM packet. However, each attribute having a 0 value indicates a wildcard that enables the packet to be received by all nodes with any number for that attribute. A CCM packet sample is shown in Fig. 2. In this example, the measured inside air temperature is 23.5ºC by the inside climate measurement node in section No. 1 of greenhouse No. 1. The priority attribute means the order of precedence in cases where there is a conflict with packets belonging to the same group; here, the value 15 indicates a standard priority (Table 2). Especially, the type attribute is important to distinguish the type of measurement and control information, as standardized in the UECS consortium (http://www.uecs.info/, verified May 28, 2008). The standardized description enables information sharing between nodes from different manufacturers. If the nodes correspond to the CCM standard, greenhouse growers can install their preferred nodes freely in a greenhouse regardless of the manufacturer. The trigger for the dispatch of the CCM packet can be one of three levels, depending on the importance of the information in the packet (Table 3). The level is named a data sharing level, and described such as A-10S, B-0, C-1, etc. with type attribute name. The traffic of the network can be suppressed by arranging a reasonable level of importance for each packet.
<?xml version=”1.0”?> <UECS>
<DATA type=”inAirTemp” room=”1” region=”1” order=”0” priority=”15”>23.5</DATA>
</UECS>
Fig.2 An example of the CCM packet for transmitting data by the DATA XML tag.
128

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
XM
L a
ttri
bu
te N
ame
Con
ten
tF
orm
atD
escr
ipti
onty
peC
CM
nam
eS
trin
g gr
eate
r th
an 3
cha
ract
ers
A to
ken
for
a di
scri
min
atio
n of
the
othe
r da
taro
omG
reen
hous
e nu
mbe
rIn
tege
r, 0
to 1
6A
gre
enho
use
num
ber
(0: w
ildc
ard
num
ber)
regi
onS
ecti
on n
umbe
rIn
tege
r, 0
to 1
6A
sec
tion
num
ber
in th
e gr
eenh
ouse
(0:
wil
dcar
d nu
mbe
r)or
der
Ref
eren
ce n
umbe
rIn
tege
r, 0
to 3
2A
nod
e re
fere
nce
num
ber
in th
e sa
me
sect
ion
(0: w
ildc
ard
num
ber)
prio
rity
Pri
orit
y nu
mbe
rIn
tege
r, 0
(hi
ghes
t) to
29
(low
est)
Acc
epta
nce
prio
rity
of
the
data
hav
ing
the
sam
e C
CM
nam
e (1
5: s
tand
ard
prio
rity
)pa
geP
age
num
ber
Inte
ger,
1 to
32
A s
peci
fic
page
req
uest
in th
e fu
ll d
atas
etto
tal
Num
ber
of p
age
Inte
ger,
1 to
32
Tot
al p
age
num
ber
of th
e fu
ll d
atas
etN
oS
eria
l num
ber
Inte
ger,
0 to
128
Ord
er in
eac
h da
ta it
emel
emen
tE
lem
ent n
ame
Str
ing
grea
ter
than
3 c
hara
cter
sN
ame
of th
e fu
ncti
onal
com
pone
nt in
a n
ode
cycl
eR
ecor
ding
inte
rval
1s to
59s
or
1m to
59m
or
1h to
24h
Suf
fix
char
acte
r sh
ows
a un
it o
f ti
me
(s: s
econ
ds, m
: min
utes
, h: h
ours
)da
teD
ate
yym
mdd
yy m
eans
und
er 2
dig
it o
f th
e do
min
ical
yea
r, m
m m
eans
mon
th, a
nd d
d m
eans
day
num
ber
tim
eT
ime
of d
ayhh
mm
sshh
mea
ns h
ours
, mm
mea
ns m
inut
es, a
nd s
s m
eans
sec
onds
in th
e da
y
Tab
le 2
. Int
imat
e de
scri
ptio
n of
usi
ng X
ML
att
ribu
tes
in th
e C
CM
pac
kets
.
Typ
e of
CC
MX
ML
tag
nam
eE
ssen
tial
XM
L a
ttri
bu
tes
Tag
con
ten
tD
escr
ipti
onP
ack
et t
ype
Por
t n
o.D
ata
requ
est
RE
QU
ES
Tty
pe, r
oom
, reg
ion,
ord
erR
eque
st to
sen
d th
e da
taU
DP
uni
cast
1652
0D
ata
tran
smis
sion
DA
TA
type
, roo
m, r
egio
n, o
rder
, pri
orit
yD
ata
valu
eT
rans
mit
a d
ata
UD
P b
road
cast
/uni
cast
1652
0S
earc
hing
for
dat
a se
rver
SE
AR
CH
type
, roo
m, r
egio
n, o
rder
Sea
rch
for
the
node
s ha
ving
the
data
U
DP
bro
adca
st16
521
Dat
a se
rver
ans
wer
SE
RV
ER
type
, roo
m, r
egio
n, o
rder
, pri
orit
yIP
add
ress
Ans
wer
of
the
IP a
ddre
ss o
f no
de h
avin
g th
e da
ta
UD
P b
road
cast
1652
1T
ime
requ
est o
f th
e la
test
dat
a R
EQ
LA
ST
RC
Dty
pe, r
oom
, reg
ion,
ord
erR
eque
st to
ans
wer
of
the
tim
e of
obt
aine
d th
e la
test
dat
aU
DP
uni
cast
1652
2T
ime
of th
e la
test
dat
a ob
tain
edL
AS
TR
CD
type
, roo
m, r
egio
n, o
rder
Dat
e an
d ti
me
Ans
wer
of
the
date
and
tim
e of
obt
aine
d th
e la
test
dat
aU
DP
uni
cast
1652
2R
ecor
d da
ta r
eque
stC
OL
LE
CT
type
, roo
m, r
egio
n, o
rder
, dat
e, ti
me
Req
uest
to a
nsw
er o
f th
e re
cord
dat
a at
the
spec
ific
tim
eU
DP
uni
cast
1652
2R
ecor
d da
ta a
nsw
erR
EC
OR
Dty
pe, r
oom
, reg
ion,
ord
er, d
ate,
tim
eD
ata
valu
eA
nsw
er o
f th
e re
cord
dat
a at
the
spec
ific
tim
eU
DP
uni
cast
1652
2N
ode
scan
NO
DE
SC
AN
Req
uest
to r
eply
all
of
the
acti
ve n
odes
UD
P b
road
cast
/uni
cast
1652
9N
OD
ES
ub ta
gsA
nsw
er o
f th
e no
de d
escr
ipti
on
NA
ME
Nod
e na
me
Nam
e of
the
node
VE
ND
ER
Ven
der's
nam
eN
ame
of th
e m
anuf
actu
rer
ST
DV
ER
vers
ion
num
ber
vers
ion
of th
e U
EC
SIP
IP a
ddre
ssIP
add
ress
of
the
node
CC
M li
st r
eque
stC
CM
SC
AN
page
Req
uest
to r
epor
t of
havi
ng d
ata
list
in th
e no
deU
DP
uni
cast
1652
9C
CM
NU
Mpa
ge, t
otal
Num
ber
of C
CM
sN
umbe
r of
CC
M ta
gsC
CM
No,
ele
men
t, ro
om, r
egio
n, o
rder
, pri
ority
Nam
e of
CC
MN
ame
(typ
e) o
f a
CC
MR
ecor
d C
CM
list
req
uest
RC
DS
CA
Npa
geR
eque
st to
rep
ort o
f ha
ving
rec
ord
data
list
in th
e no
deU
DP
uni
cast
1652
9R
CD
NU
Mpa
ge, t
otal
Num
ber
of r
ecor
dsN
umbe
r of
RC
DL
IST
tags
RC
DL
IST
No,
roo
m, r
egio
n, o
rder
, cyc
leN
ame
of C
CM
Nam
e (t
ype)
of
a C
CM
hav
ing
reco
rd d
ata
Tab
le 1
. Def
init
ion
of X
ML
tags
and
att
ribu
tes
in th
e C
CM
pac
kets
of
the
UE
CS
.
CC
M li
st
Rec
ord
data
list
1652
9
1652
9
1652
9
UD
P u
nica
st
UD
P u
nica
st
UD
P u
nica
st
Nod
e in
form
atio
n
Lev
elO
pti
ons
(tri
gger
of
dat
a sh
are)
Pac
ket
typ
eD
escr
ipti
onA
-1S
: eve
ry 1
sec
ond,
-10
S: e
very
10
sec.
, -1M
: eve
ry 1
min
ute
UD
P b
road
cast
Asy
nchr
onou
s da
ta s
hari
ngB
-0: d
ata
requ
est C
CM
pac
ket r
ecei
ved,
-1:
-0
plus
dat
a ch
ange
dU
DP
bro
adca
stT
imel
y da
ta s
hari
ngC
-0: d
ata
requ
est C
CM
pac
ket r
ecei
ved,
-1:
-0
plus
dat
a ch
ange
dU
DP
uni
cast
Tim
ely
and
clos
ed d
ata
shar
ing
Tab
le3.
Dat
a sh
arin
g le
vels
am
ong
the
UE
CS
nod
es in
the
Dat
a tr
ansm
issi
on ty
pe o
f th
e C
CM
pac
kets
.
129

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
Verification test systems and methods The communication software based on the proposed protocol was implemented on a microcomputer board (Fig. 1) as firmware with other UECS library software. The software, named “Embedded Operating Library for Ubiquitous-control System (EOLUS),” was developed using Cygwin ver. 2.457.2.2, Eclipse ver. 3.0.2, Eclipse-CDT ver. 2.0.2, gcc ver. 3.4.3, binutilis ver. 2.15 and openTCP ver.1.0.4. We set up two different systems to confirm the node collaboration. One system was a time-programmed multi-environment control system and the other was a hydroponic nutrient control system. The EOLUS and measurement control software for each greenhouse environment measurement and control device was installed on each microcomputer board. We employed a total of 19 nodes for the tests. In the first system, the test for forced operations and time-programmed multi-environment control using CCM was performed. A remote control switch node and a program controller node (Fig. 3) were manufactured for remote control of many nodes in a greenhouse. All of the nodes had three states in their operation: an autonomic control state, a remote control state, and a remote operation state. When no specific CCM packet for remote control or remote operation was received, the node operated autonomously according to the embedded measurement and control software. If specific CCM packets were received, the node then operated according to the packets’ forced operation orders or control set-points. The remote control CCM packets were sent as orders of the program controller nodes and application software in the PCs, and the valid time for receiving a packet was 3 minutes. The remote operation CCM packets were sent as orders of the remote control switch nodes, and their valid time was 3 seconds, and the priority of the packets was higher than that of the remote control CCM packets. This system has been in the testing stage at a tomato production greenhouse (floor area: 1,782 m2) since Dec. 19, 2007. In the test, 16 sets of different manufacturer’s nodes were connected through the LAN (Fig. 4). The program controller node functions as the commander, and the system works as a time-programmed multi-environment control system.
Fig. 3 Exterior views of the trial manufactured remote control switch node (left) and the
program controller node (right).
130

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
The second system, a hydroponic nutrient control system, was developed to test peer-to-peer communication using the CCM handshake. A nutrient maker node and nutrient bed nodes were manufactured. The system was able to connect one nutrient supply node to a maximum of seven nutrient bed nodes (Fig. 5). The nutrient maker node supplied specific nutrient solutions during negotiations with the nutrient bed nodes and monitored for problems in the hydroponic nutrient control system. The nutrient bed node controlled the hydroponic cultivation environment, and also processed crop cultivation information such as the following: days after planting, preferred nutrient compositions of each growth stage, etc. Three kinds of data transmission CCM packet were designed to avoid demand conflicts between the nutrient
Nutrient bed
node #1
Cultivation Bed
Buffer Tank
Bed Temp. Tank temp.Water Lev.pHE.C.
Nutrient bed
node #2
Cultivation Bed
Buffer Tank
Bed Temp. Tank temp.Water Lev.pHE.C.
Nutrient bed
node #7
Cultivation Bed
Buffer Tank
Bed Temp. Tank temp.Water Lev.pHE.C.
Nutrient maker node
Mixer P P P P
Concentration stock tanks
Water
Water temp.
Solar rad.Air temp.
Nutrient pipeline
Ethernet
Fig. 5 The UECS nodes in the test of the hydroponic nutrient control system.
Program controller node
Remote control switch node (No.1)
Outside climate measurement node (air temp., humid. and rain)
Remote control switch node (No.2)
Remote control switch node (No.3)
Outside climate measurement node
(wind and radiation)
Side ventilator node (East)
Side ventilator node (North)
Side ventilator node (South)
Side ventilator node (West)
Curtain open/close node
Roof ventilator node
Air heater with CO2
enrichment node (A)Air heater node (B)
Inside climate measurement node (A)
Inside climate measurement node (B)
Ethernet
Fig. 4 The UECS nodes in the test for forced operations and time-programmed multi-environment control using the CCM.
131

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
bed nodes. An example sequence of a CCM exchange by data handshake is shown in Fig. 6. One nutrient maker node and two nutrient bed nodes were installed in a greenhouse to test the system. Each nutrient bed node was attached to a deep-flow technique (DFT) type hydroponic cultivation bed (1.2 m wide x 1.8 m length). A spinach cultivation test was performed from June 16 to July 6 in 2007.
Results and discussion All nodes that were programmed as measurement control modes of the three states were confirmed to perform their prescribed operation in the greenhouse. For example, we could operate the roof ventilator manually after setting the remote control switch node connected to any greenhouse LAN connector, and the roof ventilator node returned to autonomous control using its control set-point within 3 seconds when the remote control switch node was disconnected. Because the remote control switch node was of a convenient size, it was easy to check and adjust the measurement and control devices anywhere only connected to the LAN. Furthermore, the corroboration environment control of all measurement control nodes by mechanisms of the CCM and program controller node functioned satisfactorily. The program controller node delivered the CCM packets for remote operation orders and control set-points, and each node worked according to these (Fig. 7). Figure 7 also shows that the dehumidification control for operation three times per day by cooperation of the air heater nodes and roof ventilator node was confirmed. If the program controller node stopped the CCM packet transmission due to failure or power-off, all nodes returned automatically to the autonomic control state after 3 minutes. UECS was able to complete triple fail-safe control by the communication protocol. The result showed that the programmed multi-environment control system by UECS was superior to the conventional control system in reliability. The nutrient maker node was able to handle any conflicting demands for nutrient supply from the hydroponic cultivation bed nodes by the exchange of CCM packets. In the test period, hydroponic nutrient solution was supplied a total of 12 times through the node collaboration, and the spinach on two cultivation beds grew normally (Fig. 8).
Nutrient supply to #2
Time course
Nutrient bed node #2 Nutrient maker node
I’m serving the node #1.
I’m free.
I accept the node #2 demand.
I set your nutrient composition.
I start to supply.I start watchdog timer to avoid flood.
I’ve stopped to supply and the watchdog.I’m free.
I want to supply nutrient.I’m waiting.
I request to supply nutrient.
The nutrient composition is 1:2:1:3.
I’m ready, and start to supply nutrient..
Stop to supply nutrient.
Time course
Type attribute name(Data sharing level):aNBreqnb(B-1): nutrient requestaNBreqspt(B-1): nutrient composition
Type attribute name(Data sharing level):aNMcond(A-1S): maker condition
Fig.6 An example sequence of the data handshake to supply nutrient between the nutrient bed node #2 and the nutrient maker node.
132

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
These results prove that the CCM protocol for collaboration among the UECS nodes has high performance. All measurement and control information are transmitted through the LAN, and therefore we are able to obtain a system operation log simply by connecting to a PC with packet capture software. Because the CCM packets are described in XML, The XML and Web application software systems (e.g., Hoshi et al., 2003) are easy to link the UECS using the CCM packets.
10
15
20
Air
tem
per
atu
re (
C)
Time of day on Feb. 14, 2008 (h)
Air temp. (West)Air temp. (East)Heating setpointVentilating setpoint
0 3 6 9 12 15 18 21 24
30
60
90
R.H
. (%
)
Relative humidity (West)Relative humidity (East)
0
2000
4000
(pp
m)
CO2 concentration
0
0.8
(W m
-2)
Solar radiation
0
100
(%)
Roof ventilator open
0
100
(%)
Curtain openHeater operation (West)Heater operation (East)
Fig. 7 Time courses of measurement, control and set-point values on the programmed multi-environment control system on Feb. 14, 2008.
Fig.8 A spinach cultivation test of the hydroponic nutrient control system.
A white cube box under the bed is the nutrient bed node.
133

IAALD AFITA WCCA2008 WORLD CONFERENCE ON AGRICULTURAL INFORMATION AND IT
Acknowledgement We express our thanks to Mr. Masahiro Hiraki, Agribest Co., and Mr. Kazuo Tsuchiya, Taiyo Kogyou Co., for permitting us to use the test greenhouses and hydroponic cultivation systems, and Dr. Hidehito Kurosaki, NIVTS for permitting us to use the CCM packet monitor software. The work was supported in part by a research project for utilizing advanced technologies in Agricultural, Forestry and Fisheries under Grant No. 1652, Agricultural, Forestry and Fisheries Research Council. References Hoshi, T., T. Suzuki, E. Shiozawa, and T. Kameoka (2003) Proposed XML-based plant
production information exchange standard for EDI (in Japanese and English abstract), Agricultural Information Research, 12(4): 327-336.
Hoshi, T., Y. Hayashi, and H. Uchino (2004) Development of a decentralized, autonomous greenhouse environment control system in a ubiquitous computing and Internet environment, Proceedings of the Joint AFITA/WCCA.: 490-495, Bangkok, Thailand. August 9-12, 2004.
Hoshi, T. (2007) Development of a Ubiquitous Environment Control Technology (in Japanese), Journal of the Japanese Society of Agricultural Machinery, 69(1): 8-12.
Takakura, T., M. Okada, H. Shimaji, and M. Nara (1979) Development of a microcomputer-based multi-variable control system for greenhouses (in Japanese), Journal of Agricultural Meteorology, 35(2): 97-102.
Udink ten Cate, A.J., G.P.A. Bot, and van Dixhoorn (1978) Computer control of greenhouse climates, Acta Horticulturae, 87: 265-272.
Weaving, G.S. (1980) A distributed microprocessor system for environmental monitoring and control in greenhouses, the Agricultural Engineer, 35(2): 44-46.
World Wide Web Consortium (2000) Extensible Markup Language XML 1.0 Specifications, Iunivers.Com: 1-164, Available at http://www.w3.org/XML/ (verified May 28, 2008).
134





![Dynamic Host Configuration Protocol DHCP [RFC 2131 - 1997 ] · 2016-12-04 · Dynamic Host Configuration Protocol DHCP [RFC 2131 - 1997 ] 2 ... Source Destination Protocol Info 0.0.0.0](https://img.pdfslide.fr/doc/110x75/5f4bcafcc73ffb6385247ba9/dynamic-host-configuration-protocol-dhcp-rfc-2131-1997-2016-12-04-dynamic.jpg)