Embed Size (px)
Citation preview


A propos de L ’Auteur Khamari Ahmed est un ingénieur d’état en automatisme ; diplômé de l’Ecole Nationale des
Ingénieurs et Techniciens d’Algérie ; en outre son diplôme de didactique lui permet d’enseigner
dans une école supérieure l’asservissement, l’électronique digitale et l’analyse numérique.
Dans un souci de perfectionnement il continue à travailler en laboratoire sur son projet de fin
d’étude sur le traitement d’image, l’intelligence artificielle et la programmation en langages
évolués.
Poursuivant ses études aux Etats Unis d’Amérique il obtient un certificat de maîtrise d’anglais
a l’Ecole Berlitz, et un certificat de maîtrise de l’Unix, de l’Open VMS et de l’électronique
sensorielle et le secteur des systèmes.

Je dédie ce travail à tous ceux qui m’ont
soutenu, en premier chef mes parents, à
la femme de ma vie et à tous mes proches.

- 2 - Asservissement linéaire
\
Ce livre est destine aux étudiants qui voudraient parfaire leurs connaissances,il constitue
un instrument de travail afin de développer et de comprendre méthodologiquement
l’Asservissement linéaire par un cheminement efficace et des applications mettant en exergue
l’aspect physique de la chose.
La méthode proposée dans ce livre consiste à exposer les cours en des termes simples et brefs
sans verser dans la littérature ni dans la complexité des termes techniques.
Le choix et la succession des cours obéissent a une stratégie bien définie pour assurer
l’enchaînement de l’information et des idées chez l’étudiant a qui nous conseillons de suivre le
cheminement linéaire des leçons théoriques suivies des exercices d’applications notamment
pour maîtriser la Transformée de Laplace..

- 3 - Asservissement linéaire
1. Rappels Mathématique
I. Définition de la Transformée de Laplace.
II. Applications.
III. Exercices.
IV. Propriétés de la transformée de Laplace.
V. Tableau des transformées de Laplace.
2. Les systèmes linéaires continus
I. Généralités sur les systèmes.
II. Les systèmes linéaires.
III. Les systèmes continue.
IV. Nature des signaux des entrées et des sorties.
3. Méthode d’analyse des systèmes linéaires a une variable
I. Calcule de la réponse d’un système linéaire a une entrée quelconque.
II. Forme générale de la fonction de transfert d’un système linéaire.
III. Réponse temporelle d’un système linéaire.
4. Analyse des systèmes linéaires
I. Analyse transitoire.
II. Analyse harmonique.
III. Exemples des réponses transitoire et de réponse harmoniques.
5. Transformation des schémas fonctionnels
I. Connexion en série.
II. Connexion en parallèle.
III. Connexion en opposition.
IV. Réduction à un système à retour unitaire.
V. Tableau des transformations des schémas fonctionnels.
6. Diagrammes et abaques
I. Diagramme de Bode.
II. Détermination des diagrammes d’amplitude et de phase des différentiels termes.
7. Stabilité des systèmes asservis

- 4 - Asservissement linéaire
I. définition 01 de la stabilité des systèmes asservis.
II. Définition 02.
III. Critère de ROUTH.
8. Précision des systèmes asservis
I. Introduction.
II. Définition de la précision.
III. Rappel mathématique.
IV. La précision statique.
V. La précision dynamique.
9. Exercices.
I. .Exercices+solutions.
II. Quelque Problèmes et Exercices Résolus Des Examens et Des Test
D’Asservissement.
III. Exercices non résolus.
IV. Rappel mathématique utile.

- 5 - Asservissement linéaire

- 6 - Asservissement linéaire
Rappels de mathématique
I. Définition de la transformée de Laplace.
II. Application.
III. Exercices.
IV. Propriétés de la transformée de Laplace.
V. Tableau des transformée de Laplace.

- 7 - Asservissement linéaire
Rappels de mathématique
I. Définition de la transformée de Laplace :
On appelle transformée de Laplace de f et notée F, ou encore Lf, la fonction définie sur
l’ensemble des nombres complexes p tels que Re (P) > a par la formule :
dtetfpF pt∫∞ −=
0)()( …… (1)
Propriétés :
La linéarité de l’intégrale montre que la transformation de Laplace est linéaire :
LgLfgfL βαβα +=+ )( …… (2)
II. Applications :
1. Fonction de HEAVISIDE ou échelon unité :
La fonction constante et égale à 1 n’admet pas de transformée de Laplace puisqu’elle n’est pas
intégrable sur l’intervalle ]-∞, +∞ [ , c’est pourquoi l’on introduit la fonction ε (t) de
HEAVISIDE, ou échelon unité, définie par :
≥<
=0100
)(tsitsi
tε
Donc :
dtetptL pt∫+∞ −==
0)()()( εεε
dtet pt∫+∞ −=
0)(ε
∞+−−= 0][1 pte
p
]10[1−−=
p
D’où pp 1)( =ε

- 8 - Asservissement linéaire
2. Cas de fonction périodique :
Chercher la transformée de Laplace du signale rectangulaire de période T définie par :
≤
∈−
∈
=
otsi
TTtsiE
TtsiE
tf
0
,2
2,0
)(
La formule générale s’écrit :
dtetftLfpF pt∫∞ −==0
)()()(
dtEedtEepFTT
ptT
pt ∫∫ −− −+=2
20
)(
dteEdteEpFTT
ptT
pt ∫∫ −− −=2
20
)(
[ ] [ ]TTptT
pt ePEe
pEpF
2
20)( −− +−=
0
1
t
ε (t)

- 9 - Asservissement linéaire
−+
−−=
−−−22 1)(TppT
Tpee
PEe
pEpF
+−= −− pT
Tpee
pEpF 221)(
22 )1()(
Tpe
PEpF
−−=
III. Exercices :
Calculer les transformées de Laplace de f(t)=cos(wt) et g(t)=sin(wt) sachant que :
−=+=
− )sin()cos()sin()cos(
wtjwtewtjwte
jwt
jwt
On tire :
jeewt
eewtjwtjwt
jwtjwt
2)sin(
2)cos(
−
−
+=
+=
III.1 : F(p)= ?
dteeeewtpF ptjwtjwt
pt −∞+ −∞+ − ∫∫+
==00 2
)cos()(
dteedtee pttjwtpttjwt
∫∫∞+ −−∞+ −
+=00 2
.2.
∫∫+∞ +−+∞ −− +=
0
)(
0
)(
21
21 dtedte tjwptjwp
+∞+−+∞−−
+
−+
−
−=0
)(
0
)(
21
21
jwpe
jwpe tjwptjwp
+
++
−
+=jwpjwp
102110
21

- 10 - Asservissement linéaire
+
+
−
=jwpjwp
1211
21
))((21
jwpjwpjwpjwp
−+++−
=
D’où :
22)(wp
ppF+
=
III.2 : G(p)= ?
dtejeeewtpF pt
jwtjwtpt −∞+ −∞+ − ∫∫
−==
00 2)sin()(
dtjeedt
jee pttjwtpttjwt
∫∫∞+ −−∞+ −
−=00 2
.2.
∫∫+∞ +−+∞ −− −=
0
)(
0
)(
21
21 dte
jdte
jtjwptjwp
+∞+−+∞−−
+
−−
−
−=0
)(
0
)(
21
21
jwpe
jjwpe
j
tjwptjwp
+
+−
−
+=jwpjjwpj
102110
21
+
−
−
=jwpjjwpj
1211
21
))((21
jwpjwpjwpjwp
j −++−+
=
D’où :
22)(wp
wpF+
=

- 11 - Asservissement linéaire
IV. Propriétés des transformées de Laplace :
1. Théorème de la dérivation :
)()( PXtx L→
Pour déterminer la transformée de Laplace de la dérivée de x(t), ou on a :
[ ] )0()()()()(000
xppXdtetxptxedtetx ptptpt −=+=′ ∫∫∞ −∞−∞ −
Finalement :
)0()()( xppXdt
tdxL −=
)0()]0()([)()(2
2
xxppXpdt
tdxdtdL
dttxdL ′−−=
=
D’où : )0()0()()( 22
2
xpxpXpdt
txdL ′−−=
Application: x(t)=ate−
Déterminer [ ])(txL ′
[ ] )0()()( xppXtxL −=′
[ ]
[ ] apa
txL
app
txLdonc
xap
pppXap
pX
+−=′
−+
=′
=+
=⇒+
=
)(
1)(
1)0(;)(1)(
[ ] 1)( −+
=′ app
txL
2. Théorème des transformées de Laplace :
Soit x(t),
L[x(t)]=X(p),

- 12 - Asservissement linéaire
Si )0()()()()( yppYdt
tdyLdt
tdytx −=
⇒=
Selon le théorème de la dérivation :
X(p) = p Y(p) - y(0)
D’où : p
yppXpY )0()()( +=
- 13 - Asservissement linéaire
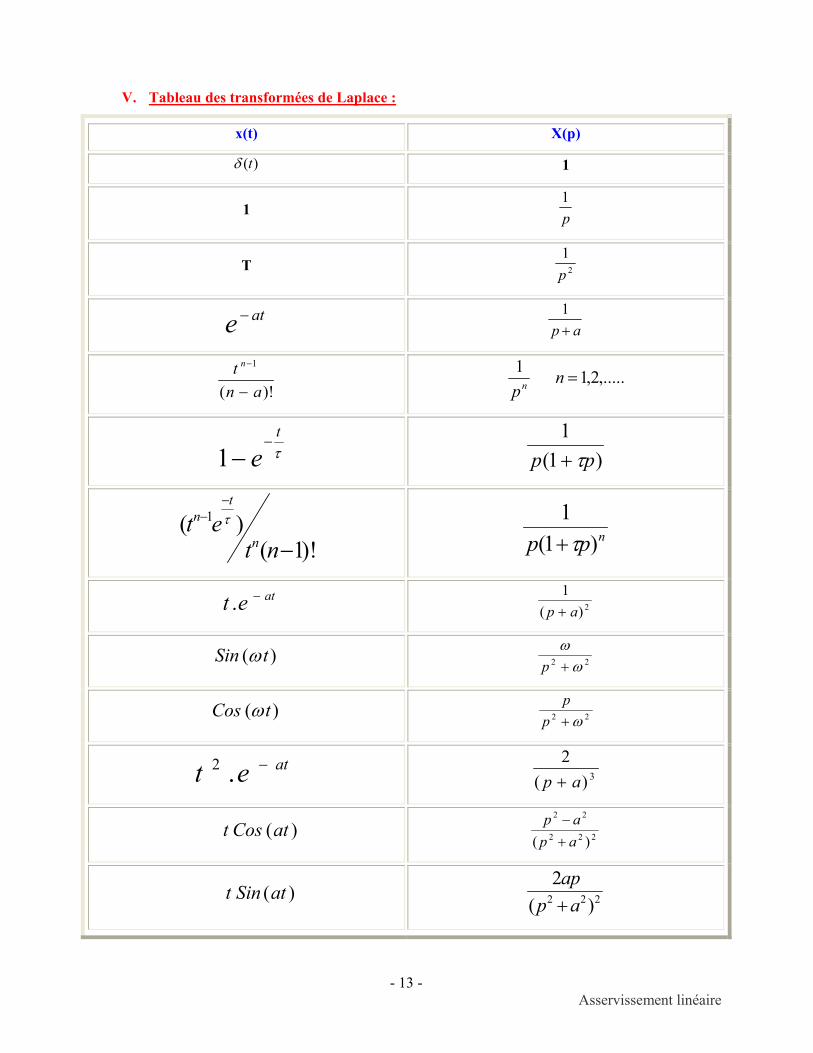
V. Tableau des transformées de Laplace :
x(t) X(p)
)(tδ 1
1 p1
T 2
1p
ate − ap +
1
)!(
1
ant n
−
−
,.....2,11=n
pn
τt
e−
−1 )1(1
pp τ+
)!1()( 1
−
−−
ntet
n
tn τ
npp )1(
1τ+
atet −. 2)(1
ap +
)( tSin ω 22 ωω+p
)( tCos ω 22 ω+pp
atet −.2 3)(
2ap +
)(atCost 222
22
)( apap
+−
)(atSint 222 )(2
apap+

- 14 - Asservissement linéaire
Les systèmes linéaires continus
I. Généralités sur les systèmes.
II. Les systèmes linéaires.
III. Les systèmes continus.
IV. Nature des signaux d’entrée et sortie.

- 15 - Asservissement linéaire
Les systèmes linéaires continus I. Généralités sur les systèmes :
On entend par système un dispositif isolé soumis aux lois de la physique et caractérisé par
certaines grandeurs. Dans les systèmes à une variable, on s’intéresse à la relation entre
l’entrée principale e(t), correspondant à une action extérieure s’exerçant sur le système et
la sortie s(t) caractérisant son état.
L’application des lois de la physique sur le système conduit à l’établissement d’une certaine
relation entre e(t) et s(t).
Les autres grandeurs qui possèdent une action sur le système et qui sont susceptible par
conséquent de modifier la relation existant entre e(t) et s(t) sont appelées entrée parasités
ou perturbations.
La relation entre e(t) et s(t) est schématisée par un dipôle.
L’action extérieure e(t) correspond à l’application au système d’une certaine énergie
caractérisée par deux composantes:
Tension et intensité pour un signal électrique.
Vitesse et force ou couple pour signal mécanique.
Pression et débit pour un signal pneumatique ou hydraulique.
En générale, on représente un système pare un quadripôle.
II. Système linéaire :
Un système physique est linéaire si la relation entre les grandeurs d’entrée et la ou les
grandeurs de sortie est un système d’équations différentielles linéaire.
On supposera dans la suite du cours que les coefficients de ces équations sont constants.
Perturbations
e(t) s(t)

- 16 - Asservissement linéaire
III. Systèmes continus :
Un système physique est dit continu, si toutes les grandeurs qui le caractérisent sont de
nature continue :
L’information que représentent ces grandeurs est disponible à chaque instant et peut prendre
toutes valeurs possibles entre deux limites.
Leur évolution dans le temps est un signal continu au sens mathématique du terme.
On peut donc définir les systèmes continus par opposition aux systèmes discrets, en temps
ou en amplitude, qui sont échantillonnés, quantifies, logique, séquentiels,…
IV. Nature des signaux d’entrées et des sorties :
Les signaux d’entrée et de sortie d’un système sont des fonctions du temps :
Si à chaque instant leur amplitude est parfaitement connues, le signal est dit déterministe
(Ex : échelon unitaire, sinusoïdale,….).
Si par contre à chaque instant on ne connaît pas la probabilité pour le signal d’avoir telle ou
telle amplitude on dit que celui-ci est aléatoire (bruit).

- 17 - Asservissement linéaire
Méthodes d’analyse des systèmes linéaires
a une variable
I. Calcul de la réponse d’un système linéaire a une entrée quelconque.
II. Forme générale de la fonction de transfert d’un système linéaire.
III. Réponse temporelle d’un système linéaire.

- 18 - Asservissement linéaire
Méthodes d’analyse des systèmes linéaires
a une variable I. Calcul de la réponse d’un système linéaire a une entrée quelconque :
1. Notion de fonction de transfert et de schéma fonctionnel :
Pour calculer la réponse s(t) d’un système linéaire a entrée quelconque e(t), on peut applique la
transformée de Laplace a l’équation différentielle linéaire a coefficients liant e(t) et s(t), équation
que l’on peut mettre sous la forme générale suivante :
)()()()()()(0101 te
dttde
dttedts
dttds
dttsd AAABBB m
m
mn
n
n +++=+++ LL …(1)
On suppose jusqu'à l’application au système linéaire de l’entrée e(t), l’entrée et la sortie du
système sont nulles (conditions initiales nulles).
Dans ces conditions
)]([)()]([)(
tsLPSteLPE
==
On a :
)()(
)()(
pSpdt
tsdL
pEpdt
tedL
nn
n
mm
m
=
=
En remplaçant dans (1) e(t), s(t) et leur dérivées successives par leurs transformées de Laplace,
il vient la relation suivante :
)()(01
01 pEpppp
pSBBBAAA
nn
mm
+++
+++=
L
L
On désigne par F(p) et on appelle fonction de transfert du système, le rapport des transformées
de Laplace de la sortis et de l’entrée du système lorsque les conditions initiales sont nulles :
BBBAAA
pppp
pEpSpF n
n
mm
01
01
)()()(
+++
+++==
L
L…(2)
Un système est généralement compose d’éléments ou groupes d’éléments distincts dont chacun
d’eux est un système linéaire représentable lui-même par un dipôle et caractérisé par une certaine
fonction de transfert ; si la grandeur de sorite de chaque élément ou group d’élément suivant le
système, peut être symbolisé par un ensemble de dipôle connectés entre eux qui représentent ce
que l’on appel son schéma fonctionnel.

- 19 - Asservissement linéaire
Le système de la figure suivante permet de commander avec une énergie réduite la vitesse de
rotation ω d’un moteur électrique à courant continu de grande puissance au moyen d’un
potentiomètre alimenté en courant continu; moyennant certaines hypothèses, il existe des relation
linéaire entre la position x du curseur du potentiomètre et de la tension ue entre le curseur et la
masse, entre la tension u de sortie de l’amplification et la tension ue, et entre la vitesse de
rotation ω du moteur et la tension u.
Le système considérer peut donc être symbolise par le schéma fonctionnel suivant :
Représenter un système par un dipôle suppose que la sortie de chaque élément dépend
uniquement de son entrée et de sa fonction de transfert F(p).
Dans ces conditions, la fonction de transfert F(p) d’un système représenté par un schéma
fonctionnel de n dipôles, connectés entre eux est égale aux produit des fonction de transfert
F1(p), F2(p),…, Fn(p) de chacun des éléments, pour chaque dipôle on a en effet :
E1(p)=F1(p) . E(p)
E2(p)=F2(p) . E1(p)
M
S(p)= Fn(p) . En-1(p)
x Ue U ω
xUe
U ω

- 20 - Asservissement linéaire
En multipliant entre eux les premiers et les second membres de ces égalité, il vient :
)()()( pEpFpS ⋅= ........(3)
Avec F(p)=F1(p).F2(p)…Fn(p)
II. Forme générale de la fonction de transfert d’un système linéaire :
Une fonction de transfert F(p) se présente d’après (2) sous la forme du quotient de deux
polynômes en p. Désignons par Zi les racines du numérateur et par Pj celles du dénominateur
de F(p) ; Zi et Pj sont appelés respectivement les zéro et les pôles de F(p) .
En général, F(p) se présente sous la forme générale suivante :
oPsi
Pp
Zp
kpF j
j
i ≠
−∏
−∏
=
1
1)(
.......(4)
Zi et Pj peuvent être nulles, réelles ou imaginaires conjuguées et chacune d’elles peut être d’un
ordre quelconque, on peut donc écrire le numérateur et le dénominateur de F(p) sous la forme
de produits contenant les termes tels que :
( )
):(121
)1:(1
)0:(p
22222 jbapracinep
bap
baa
pracinep
pracine
±−=
++
++
−=+
=
γ
β
α
ττ
On appellera gain de la fonction de transfert F(p) le facteur k
dont l’expression est donnée en (4).
E(p) E1(p) E2(p) E3(p)… En -1(p)F3(p) F2(p) F2(p) F(p) S(p)

- 21 - Asservissement linéaire
III. Réponse temporelle d’un système linéaire :
E(p) désignant la transformée de Laplace de l’entrée e(t) d’un système linéaire de fonction de
transfert F(p), la réponse temporelle s(t) du système est :
[ ]
∫∞+
∞−
−
⋅=
⋅=jc
jc
pt dpepEpFj
ts
pEpFLts
)()(21)(
)()()( 1
π
Si l’on désigne par rj les résidus de la fonction F(p).E(P).ept dp, relatifs aux n pôles p de cette
fonction, la fonction, la réponse s(t) est donnée par l’expression générale :
∑=
=n
1jjr)(ts
que l’on peut mettre sous la forme :
)()(
)(
11
n
1jj
q
1jj rr
tsts
tsq
+=
+= ∑∑+==
Si la sortie d’un système linéaire tend vers zéro lorsque son entrée s’annule, ce qui est la
définition d’un système stable, la partie ∑+=
=n
1jj2 r)(
q
ts de sa réponse s(t) tend vers zéro
quant ∞→t .

- 22 - Asservissement linéaire
Analyse des systèmes linéaires
I. Analyse transitoire.
II. Analyse harmonique.
III. Exemples de réponses transitoires et réponses harmonique.

- 23 - Asservissement linéaire
Analyse des systèmes linéaires
On entend par analyse d’un système la recherche expérimentale et l’étude des propriétés de sa
fonction de transfert.
Il s’agit d’analyse transitoire et de l’analyse harmonique.
Dans l’analyse transitoire, on s’intéresse au régime transitoire de la sortie d’un système au quel
on applique l’un ou l’autre de certains signaux d’entrée typiques (impulsion,échelon unitaire, …)
Dans l’analyse harmonique, on considère les régimes permanents de sortie correspondant à des
entrées variant sinusoïdalement à différentes fréquences.
I. Analyse transitoire :
1. Réponse d’un système linéaire à impulsion unitaire :
Une impulsion unitaire )(tδ peut être définie comme la limite quand A tend vers l’infini, d’une
impulsion d’amplitude A et de durée A1 ce signal est appelé « unitaire » car :
∫+∞
∞−= 1)( dttδ
Il a pour transformée de Laplace :
1)( =∆ p
Donc la transformée de Laplace de la réponse à impulsion unitaire d’un système linéaire de
fonction de transfert F(p) est :
)()( pFpS =
A
A1 t
Figure -1-
δ(t)

- 24 - Asservissement linéaire
2. Réponse d’un système linéaire à un échelon unitaire :
Un échelon unitaire est définie comme la limite lorsque t∆ tend vers zéro du signal représenté
sur la figure suivante :
Ce signal a pour dérivée celui de la figure 1
ppU 1)( =
Il en résulte que la réponse d’un système à impulsion unitaire est la dérivée de sa réponse à un
échelon unitaire, la transformée de Laplace S(p) de la réponse d’un système linéaire de fonction
de transfert F(p) à un échelon unitaire est :
)(1)( pFp
ps ⋅=
Soit
)()( pFpsp =⋅
II. Analyse harmonique :
On va calculer le régime permanent correspondant à une entrée sinusoïdale :
)sin()()( wttute ⋅=
signal d’amplitude unité et de pulsation ω débitant a l’instant t=0 .
la transformée de Laplace de ce signal a pour expression :
22)(ω
ω+
=P
pE
t
Figure -2-
t∆
1

- 25 - Asservissement linéaire
La sortie correspondante d’un système linéaire de fonction de transfert F(p) a pour transformée
de Laplace :
22)()(ω
ω+
⋅=P
pFpS
Il lui correspond un régime permanent harmonique :
rr jjts21
)(1 +=
r j1,et r j2
étant les résidus de E(p).F(p).ept relatifs aux deux pôles de E(p) :
P1=jω
P2=-jω
Ces résidus ont pour expressions :
jejF
jejF
tj
j
tj
j
r
r
2)(
2)(
2
1
ω
ω
ω
ω
−−=
=
La partie réelle de F(jω), qui ne contaient que des puissances paires de ω et sa partie imaginaire qui
ne contient que des puissances imaginaires de ω sont des fonctions respectivement paire et impaire de
ω et les deux nombres complexes F(jω) et F(-jω) sont conjugués.
En les écrivant sous la forme exponentielle :
ϕ
ϕ
ωω
ωωj
j
ejFjF
ejFjF−⋅=−
⋅=
)()(
)()(
Il vient par le régime permanent harmonique :
)sin()()(1 ϕωω +⋅= tjFtS
La réponse permanente à un signal sinusoïdale de pulsation ω, appliqué au temps t=0, est donc un
signal sinusoïdal de même pulsation ω, dont l’amplitude et la phase sont le module et l’argument de la
fonction F(jω) obtenue en remplaçant p par jω dans la fonction de transfert F(p).
Ce résultat montre que la connaissance de la fonction de F(jω), appelée réponse en fréquences du
système est équivalant à celle de sa fonction de transfert, c'est-à-dire qu’elle le caractérise
complètement.
- 26 - Asservissement linéaire
III. Exemples de réponses transitoires et de réponses harmoniques :
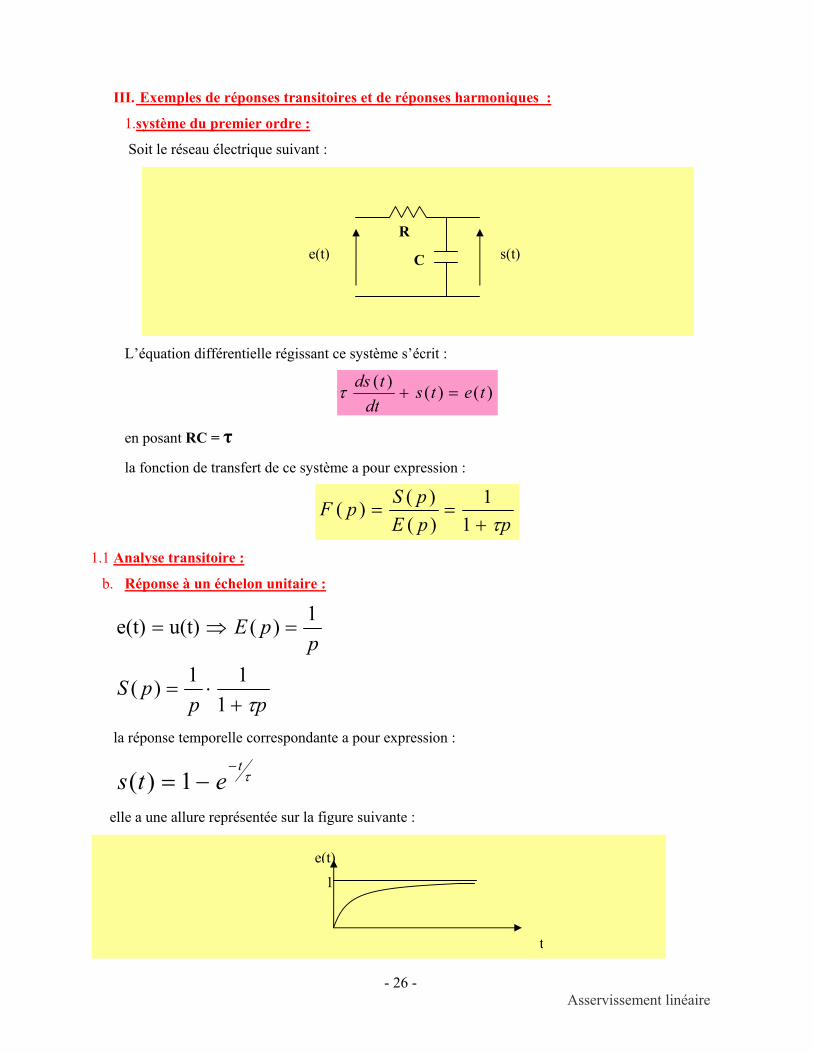
1.système du premier ordre :
Soit le réseau électrique suivant :
L’équation différentielle régissant ce système s’écrit :
)()()( tetsdt
tds=+τ
en posant RC = τ la fonction de transfert de ce système a pour expression :
ppEpSpF
τ+==
11
)()()(
1.1 Analyse transitoire :
b. Réponse à un échelon unitaire :
pppS
ppE
τ+⋅=
=⇒=
111)(
1)( u(t) e(t)
la réponse temporelle correspondante a pour expression :
τt
ets−
−= 1)(
elle a une allure représentée sur la figure suivante :
1
t
e(t)
C s(t) e(t) R

- 27 - Asservissement linéaire
Au bout d’un temps assez long pour que la partie transitoire τt
e−
de la réponse puisse être
considérée comme négligeable, le signal de la sortie se trouve pratiquement confondu avec le signal
d’entrée , le signal a alors atteint son régime permanent. Le paramètre τ caractérise la durée du régime
transitoire de la réponse s(t) ; on l’appelle constante de temps du système.
b. Réponse à un signal et)= t u(t) :
pppS
ppE
τ+⋅=
=⇒=
111)(
1)( u(t) e(t)
2
2
D’où
τττ
tetts
−+−=)(
Dont l’allure est la suivante :
Cette réponse comporte un régime permanent s1(t)=t-τ avec lequel elle se confond lorsque la
partie s2(t)= τ e-t/τ devient négligeable.
Comme dans le cas précédant, la durée de ce régime transitoire est caractérisée par le paramètre τ.
1. Réponse harmonique :
La réponse en fréquence du système considéré est le nombre imaginaire :
1)1()( −+= ωτω jjF
0
-τ
τ
e(t)
t
s(t)

- 28 - Asservissement linéaire
2. Système du deuxième ordre:
L’équation reliant e(t) et s(t) est la suivante :
)()()()(
2
2
tetsdt
tsdRC
dttsdLC =++
La fonction de transfert du système s’écrit :
211)(
pLCpRCpF
++=
2.1 Analyse transitoire :
Soit :
)1(1)(
1)( u(t) e(t)
2pLCpRCppS
ppE
++=
=⇒=
L’expression de la réponse temporelle correspondante dépend des racines de l’équation :
012 =++ pRCpLC … (1)
Dans le discriminant ∆ s’écrit :
−=
−=∆
14
4
422
22
LCCRLC
LCCR
Le signe de ∆ dépend de la valeur par rapport a l’unité de 14
22
−LCCR
On pose τ 222
4=
LCCR ; Soit
LCRC
2=τ τ > 0 et LC
n
=2
1
ω .

- 29 - Asservissement linéaire
L’expression du discriminant devient la suivante :
( )14 22 −=∆ τω n
• Si τ < 1
L’équation (1) possède deux racines imaginaires conjuguées et la réponse temporelle est :
( )
+−= −−
ϕωτ ωτ tteAtsn
n 1 21
sin1)(
Avec : ( ) 21
21−
−= τA
Et ( ) ττϕ /21
21 −= arctg
En régime permanent, le signal de sortie et identique au signal d’entrée.
En régime transitoire, la réponse temporelle présente des oscillations est sont allure représentée
sur la figure 3 dépend des paramètres τ etωn .
Pour ωn donnée, l’exponentielle décroît d’autant plus vite que τ est grand ; pour cette raison,
τ est appelé coefficient d’amortissement.
Il est plus commode de faire apparaître τ et ωn dans l’expression de tout terme du second
ordre figurant dans une fonction de transfert, terme de forme :
22222
121 pba
pba
a+
++
+
t
Figure -3-
1
e(t) s(t)

- 30 - Asservissement linéaire
Correspondant a deux racines imaginaires conjuguées –a ± j b.
L’introduction des paramètres τ et ωn dans l’expression précédente revient à poser :
( )( )2
122
21
22baet
ba
an +=
+= ωτ
Un terme du second ordre prend donc finalement la forme :
2121 ppnn ωω
τ++
• Si τ > 1
La réponse du système est apériodique (figure 4)
Si l’on désigne par pp 21, les racines réelles négatives que possède l’équation (1), la réponse
temporelle a pour expression :
tpeBtpeAts 211)( ++=
Avec :
ppp
ppp
BetA21
1
21
2
−
−=
−=
• Si τ = 1
La réponse apériodique est la suivante : ( )ttets nn ωω +−= 11)(
t
Figure -4-
1
e(t) s(t)

- 31 - Asservissement linéaire
2.2.Réponse harmonique :
La réponse en fréquence du système considéré est le nombre imaginaire obtenu en remplaçant p
par jω dans l’expression de sa fonction de transfert :
ωωω
RCjLCjF
+−= 21
1)(
Qui s’écrit en fonction de τ et ωn
ωωτω
ω
nn
jjF
21
1)(
2
2
+−=
- 32 - Asservissement linéaire
Transformation des schémas fonctionnels
I. Connexion en série.
II. Connexion en parallèle.
III. Connexion en opposition parallèle.
IV. Réduction à un système à retour unitaire.
V. Tableau des transformations des schémas fonctionnels

- 33 - Asservissement linéaire
Transformation des schémas fonctionnels
Par définition, un système asservi est un système bouclé, or lors de conception, on considère
fréquemment la chaîne ouvert tout d'abord et chaîne fermée par la suite.
La fonction de transfert des boucles fermées et ouverts sont détermines en considérant les
connexions types des éléments qui constitue le système. La transformation des schémas
fonctionnels est un moyen pour réduire ce dernier en un schémas plus simple ; souvent cette
transformation est nommée forme canonique du schémas fonctionnels.
Il existe trois modes de connexions types des éléments qui constituent le système.
I. Connexion en série :
On appelle connexion en série, un système composé de plusieurs éléments telle que la sorite de
l’un constitue l’entrée du suivant :
De ce schéma fonctionnel on a :
)()(
)(;)()()(;)(
)()(
12
21
21
1 pFpE
pSpFpEpEpF
pEpE
===
)().()()()( 321 pEpFpFpFpS ⋅⋅=
)()()(
pEpSpF =
D’où
)()()()( 321 pFpFpFpF ⋅⋅=
On constate que la fonction de transfert générale représente le produit de toutes les fonctions de
transfert en série, d’où :
∏=
=n
ii pFpF
1
)()(
F1(p) F2(p) F3(p) E(p) E1(p) E2(p) S(p)

- 34 - Asservissement linéaire
II. Connexion en parallèle :
On appelle connexion en parallèle, un système composé de plusieurs éléments telle que l’entrée
d’un élément constitue l’entrée du système et la somme des sorties de tous les éléments constitue
la sortie du système.
)()()(;)()()(;)()()( 332211 pEpFpSpEpFpSpEpFpS ⋅=⋅=⋅=)()()()( 321 pSpSpSpS ++=
)()]()()([)( 321 pEpFpFpFpS ⋅++=
)()()()()()( 321 PFpFpF
pEpSpF ++==
On constate que la fonction de transfert générale est la somme des fonctions de transfert de tous les
éléments :
∑=
=n
ii pFpF
1)()(
III. Connexion en opposition parallèle :
Le schéma fonctionnel d’une telle connexion est :
Fd(p) : Fonction de transfert de la chaîne direct d’action.
Fr(p) : Fonction de transfert de la chaîne de retour ou de réaction.
)()()(;
)()()(
pSpZpF
ppSpF rd ==
ε
E(p) F1(p)
F2(p)
S(P)
Z(p)
ε(p) ±
S1(P) F1(p)
F2(p)
F3(p)
E(p) S2(p)
S3(p)
S(P)

- 35 - Asservissement linéaire
La fonction de transfert de la boucle fermée est équivalente au rapport suivant :
)()()(
pEpSpF f =
[ ][ ]
)()()()()()()()()()()()(
)()()()()()()()(
)()()()()()()()()(
pEpFpSpFpFpSpSpFpFpEpFpS
pZpFpEpFpZpEpFpS
pSpFpZpZpEpppFpS
drd
rdd
rd
d
r
d
⋅=⋅⋅±⋅⋅±⋅=
⋅±⋅=±⋅=
⋅=±=
⋅=ε
ε
)()(1)(
)()(
pFpFpF
pEpS
rd
d
⋅±=
Le signe – indique que la chaîne de retour est positive.
Le signe + indique que la chaîne de retour est négative.
IV. Réduction à un système à retour unitaire :
L’étude de tous les asservissements linéaires à une boucle se ramène à celle des asservissements à
retour unitaire.
On appelle système à retour unitaire un système ou le signal de retour coïncide avec le signal de
sortie : Fr(p)=1
Soit le schéma fonctionnel d’un système à retour non unitaire :
D’où la fonction de transfert en boucle fermée est :
)()(1)()(1 pFpF
pFprd
dfF ⋅+
=
Une transformation du schéma fonctionnel, nous permet de rendre ce système, en un système à
retour unitaire :
E(p) Fd(p)
Fr(p)
S(P)
Z(p)
ε(p) -

- 36 - Asservissement linéaire
La fonction de transfert de ce système en boucle fermée :
)()()()(1
)()(
)()(1)()(
)(1)(
12
2
2
pppFpF
pFp
pFpFpFpF
pFp
FFF
F
ff
rd
df
rd
dr
rf
=
⋅+=
⋅+⋅
⋅=
Il en résulte que les fonctions de transfert des deux schémas sont identiques.
S(P) Fr(p)·Fd(p)
- 1/Fr(p)
E(p)

- 37 - Asservissement linéaire
V. Tableau des transformations des schémas fonctionnels :
Transformation équation Schéma fonctionnel Schéma fonctionnel équivalant
Association d’éléments
en cascade. S(p)=F1(p)·F2(p)·E(p)
Association d’éléments
en parallèle ou en
suppression d’une
boucle d’action.
S(p)=[F1(p)±F2(p)]·E(p)
Elimination d’une
boucle de retour. S(p)=F1(p)·[E(p)±F2(p)·S(p)]
Retrait d’un élément
d’une boucle de retour. S(p)=F1(p)·[E(p)±F2(p)·S(p)]

- 38 - Asservissement linéaire
Diagrammes et Abaques
I. Diagramme de BODE.
II. Détermination des diagrammes d’amplitude et de phase des différents termes.
II.1. Terme k(jω)α
II.2. Terme (1+jωτ)α
II.3. Terme ωω
ωω ε
nn
j21 2
2
+−
- 39 - Asservissement linéaire
Diagrammes et Abaques Ce chapitre a pour objet la représentation de la réponse en fréquences T(jω) en boucle ouverte et F(jω) en
boucle fermée d’un système asservi linéaire au moyen de diagrammes de différents types.
Pratiquement, il est plus intéressant de faire l’étude de la synthèse d’un tel système à partir de T(jω) [le
gain K intervient alors linéairement]. En général, on représente donc la réponse en fréquences en boucle
ouverte :
Les abaques permettent de déterminer graphiquement la réponse en fréquences en boucle fermée F(jω) à
partir de T(jω).
I. Diagramme de BODE :
La représentation dans le plan de BODE d’une réponse en fréquences consiste à tracer séparément, en
fonction de la pulsation ω, le module et l’argument de cette réponse, qui représentent respectivement
l’affaiblissement et le déphasage subis par des signaux sinusoïdaux de différentes pulsations, appliqués à
l’entrée du système qui possède la réponse en fréquence considérée. Une fonction en boucle ouverte se
présente, sous l’une des formes du produit de termes de la forme :
K p α
(1+τp)β
γ
ωωτ
++ 2
2
21nn
pp
α , β , γ étant des nombres entiers, positifs, négatifs ou nuls.
En pratique, on représente en fonction de ω, le module A de T(jω) exprimé en décibels (dB)
soit :
( )ωjTA dB log 1020=
L’argument d’un produit de quantités complexes étant égal à la somme des arguments de chacun des
termes du produit, la courbe arg[T(jω)], encore appelée diagramme des phases.

- 40 - Asservissement linéaire
II. Détermination des diagrammes d’amplitude et de phase des différents termes :
II.1. Terme k(jω)α :
Le diagramme ‘d’amplitude de ce terme est la courbe A(ω) :
αωKA dB log 1020=
soit : ωα log 1020+= KA dBdB
Cette relation montre que la courbe ω10logA est une droite ; il est donc commode de tracer A en
fonction de ω10log , ce qui revient en pratique à tracer A en fonction de ω, les valeurs de ω portées
sur une échelle logarithmiques. A exprimé en dB est porté sur une échelle linéaire et en emploie donc
du papier semi logarithmique.
Ce papier est limité verticalement, a gauche ou a droite par l’axe de graduation de A et
horizontalement, en haut ou en bas par l’axes de graduation des pulsations.
Soulignions que le point ω=0 n’apparaît pas sur le diagramme, puisque l’on représente ω sur une
échelle logarithmique. De plus, la droite A = 0 dB, appelée axe (0 dB) , est généralement distincte de
l’axe des pulsations ω.
Pour une octave, c'est-à-dire pour un intervalle (ω , 2 ω), la pente de la droite A(ω) est :
( )
dB
KKAA
α
αωωα
ωωωω αα
6
2log202log20
log202log20)()2(
1010
1010
≈
==
−=−
Cette droite coupe l’axe (0 dB) en un point ω0 tel que :
K
K
K
11
0log20
0
0
010
=⇒
=⇒
=
α
α
α
ω
ω
ω
Soit :
K αω 10
1=

- 41 - Asservissement linéaire
Enfin pour ω=1
KA
A
dBdB
dB
K
K
=
=
−=
10
1010
log20
1log20log20 α
Si α=0, AdB est une droite horizontale d’ordonnée KdB.
ω0
ω=1
ω
K
0 dB 0
0,110 fαα
ωK
=
AdB
ω0
ω=1
ω
K
0 dB 0
0,110 pαα
ωK
=
AdB
ω
K
0 dB 0
AdB
α=0
ω
α·90˚ φ˚

- 42 - Asservissement linéaire
II.2. Terme (1+jωτ)β :
Considérons le terme (1+jωτ) (β=1) et τ > 0 correspondant à une racine négative p=-1/τ
( ) τωωτ 2211 +=+ j
ωτω
ω
τωτω
→+⇒+∞→
→+⇒→
22
22
1
110
Le diagramme d’amplitude du terme considéré possède deux asymptotes : les droites A=1 et A=ωτ.
La première asymptote est confondue avec l’axe (0 dB) puisque :
dBAdB 01log20 10 ==
La deuxième asymptote est une droite de pente 6dB/octave qui coupe l’axe (0 dB) à la pulsation (appelée
parfois pulsation de cassure) ω = 1/τ (ωτ=1, soit 0dB)
Pour cette pulsation, la courbe réelle d’amplitude possède une ordonnée égale à 3dB c'est-à-dire :
( )
211
111 22
=+=
=+=+τ
ωωτ τω pourj
dBAdB 315.0202log20 10 =×==
dBAdB 3=
Pour les pulsations ω=1/2τ et ω=2/τ, on peut vérifier que ses ordonnées sont supérieures de 1dB à
celles de ses asymptotes.
En effet :
145log20
45
4111
21
10
22
≈=
=+=+⇒→
AdB
τωω
( )0dBasymptotel'à11 rapportpardBdBAdB =
75log20
54112
10
22
≈=
=+=+⇒→
AdB
τωω
( )6dB/octaveasymptotel'à77 rapportpardBdBAdB =
D’une façon générale, un diagramme réduit à ces asymptotes est appelé digramme asymptotique.

- 43 - Asservissement linéaire
Le diagramme de phase du terme (1+jωτ) est la courbe :
( )ωτϕ j+= 1arg
Soit ( )ωτϕ arctg=
Quand : o
o
9000
=⇒+∞→
=⇒→
ϕω
ϕω
Pour ω=1/τ 1
1
arctg
arctg
=
⋅=
ϕ
ττ
ϕ
Donc o45=ϕ
On peut vérifier en TD les poins suivants :
ω τ16
1 τ81
τ41
τ21
τ2
τ4
τ8
τ16
φ˚ 3.5˚ 7˚ 14˚ 26.5˚ <26.5˚ <14˚ <7˚ <3.5˚
…<… inférieures à celles du diagramme asymptotique.
On constate donc, que dans un plan semi logarithmique, la courbe est symétrique par rapport au point
(ω=1/τ , φ=90˚ ).
Si l’on considère maintenant le terme à (1-jωτ) avec τ > 0 correspondant à une racine réelle positive
p=1/τ du numérateur de T(p), son module est identique à celui de (1+jωτ).
Son argument est identique en valeur absolue mais de signe opposé à celui de (1+jωτ).
Des termes de la forme :
ωτωτ jet
j −+ 11
11
AdB
ω
0 dB
0
1 dB
3 dB
1 dB
1/2τ
1/τ
2/τ
ω
90˚
φ˚
45˚
1/τ
2/τ
4/τ
1/2τ
1/4τ
14˚
26.5˚
14˚
26.5˚

- 44 - Asservissement linéaire
ont respectivement des modules, exprimés en décibels et arguments identique en valeurs absolus, mais des
signes opposés a ceux de : (1+jωτ) et (1-jωτ). Enfin si β >1, les diagrammes d’amplitude et de phase correspondants sont obtenus par β additions
graphiques d’un terme de l’une des formes mentionnées ci-dessus.
II.3. Terme 1 - ω2/ωn2 + j2ε ω/ωn
:
On a vu que pour les fonctions de transfert de la forme ( )2211 pApA ++ qui possèdent deux racines
conjuguées jbaPjbaP −−=+−= 21 , , qu’il est plus commode d’utiliser la forme suivante :
22
121)( pppFnn ωω
ε++=
avec : ( ) ( ) ( )021
2221
22 >+=+⋅= εωε baetbaa n
d’où :
nn
jjFωωε
ωωω 21)( 2
2
+−=
Le diagramme d’amplitude d’un terme de cette forme est la courbe :
21
22
2
2
10 21log20
+
−=
nndBA ω
ωεωω
2
221
2
2
221
22
2
2
21
00
nnnn
dB
quand
quand A
ωω
ωω
ωωε
ωωω
ω
→
→
+
−⇒+∞→
→⇒→
Ce qui met en évidence l’existence d’une seconde asymptote de pente 12 dB/octave, qui coupe l’axe (0 dB) à
la pulsation ω=ωn.
La courbe réelle dépend du paramètre ε, l’amplitude A passe par un minimum Amin pour une pulsation ωR tel
que :
0=ωd
dAdB
soit pour
( )21
221 εωω −⋅= nR dans le cas ou 1-2ε2 ≥ 0
donc l’existence et la valeur de ωR dépendent de ε.

- 45 - Asservissement linéaire
1ierCas :
7.05.0021 22 <⇒<⇒>− εεε
La valeur du minimum de l’amplitude A est la suivante :
( ) 21
2210min 12log20
−⋅= εεA
si ε est assez petit on a approximativement
εωω 2log20 10min== AetnR
2ieme Cas :
Lorsque ε>0.7 on a AdB est toujours supérieur a (0 dB).
3ieme Cas :
Pour ε=0.7 le minimum a lieu pour la pulsation ω=0.
Représentation de la phase :
( )( ) 2
1
2
)(Re)(Imarg'
−
⋅=
=
n
narctgjFjFarctgumentL
ωω
ωωε
ωω
oo
o
90
180)0(00
==
=→⇒+∞→
→⇒→−
ϕωω
ϕω
ϕω
aonpour
arctgquandquand
n
AdB
0
ε>0.7
ω
0 dB
ωn
ε=0.7
ε<0.7
Amin
12 dB/octave
- 46 - Asservissement linéaire
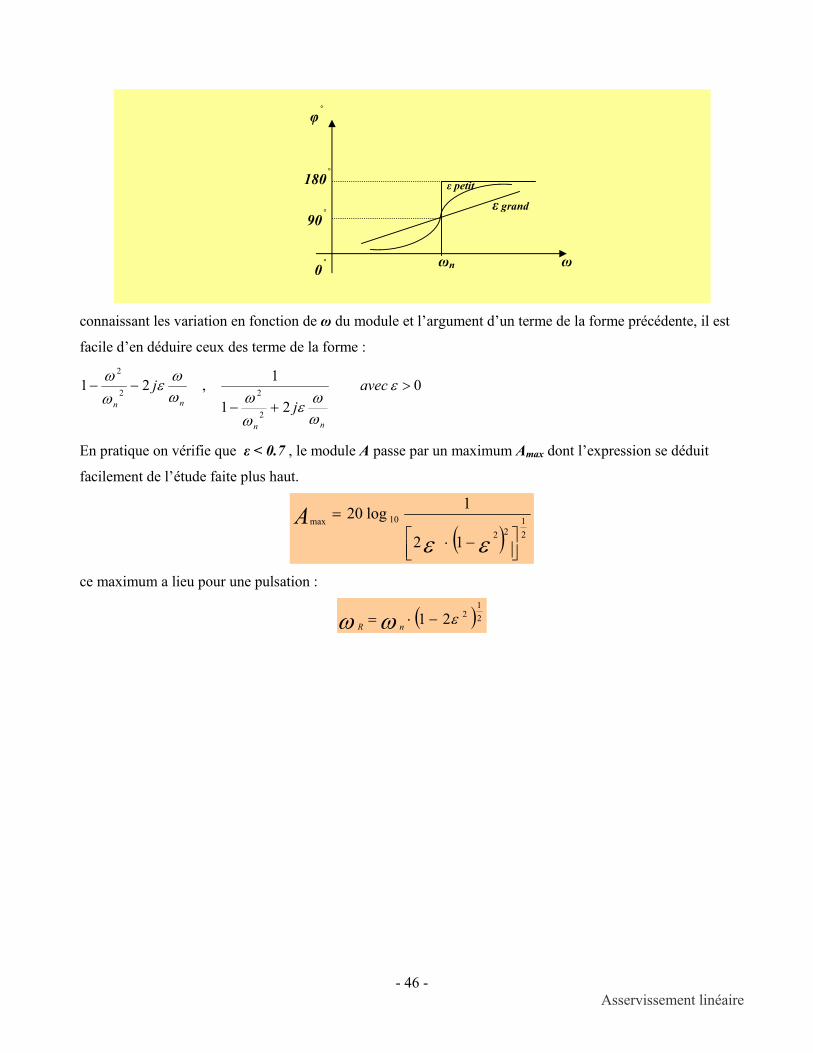
connaissant les variation en fonction de ω du module et l’argument d’un terme de la forme précédente, il est
facile d’en déduire ceux des terme de la forme :
021
1,21
2
22
2
>+−
−− ε
ωωε
ωωω
ωεωω avec
jj
nn
nn
En pratique on vérifie que ε < 0.7 , le module A passe par un maximum Amax dont l’expression se déduit
facilement de l’étude faite plus haut.
( ) 21
22
10max
12
1log20
−⋅
=
εεA
ce maximum a lieu pour une pulsation :
( )21
221 εωω −⋅= nR
180˚
90˚
ω
φ˚
ωn 0˚
ε petit
ε grand

- 47 - Asservissement linéaire
Stabilité des systèmes asservis
I. Définition 01 de la stabilité des systèmes asservis.
II. Définition 02 de la stabilité des systèmes asservis.
III. Critère de ROUTH
- 48 - Asservissement linéaire
Stabilité des systèmes asservis I. Définition 01 La définition générale de la stabilité d’un système asservis linéaire se ramène simplement
aux amplitudes du système de revenir à son état d’équilibre permanent après avoir subi une perturbation.
II. Définition 01 : On dit qu’un système est stable si la réponse à une impulsion unité tend vers zéro quand le
temps tend vers l’infini.
Soit un système décrit par l’équation différentielle suivante :
)()()()()()(0101 te
dttde
dttedts
dttds
dttsd AAABBB m
m
mn
n
n +++=+++ LL … (1)
La solution de cette équation a la forme suivante : s(t)=s1(t) +s2(t)
Où :
s1(t) : est la réponse permanente (l’équation sans second membre).
s2(t) : est la réponse transitoire (l’équation avec second membre).
Le système est stable si :
+∞→=
tts 0)(lim 1
Par conséquent on doit résoudre l’équation suivante :
0)()()(01 =+++ ts
dttds
dttsd BBB n
n
n L ... (2)
Cette équation différentielle a l’équation caractéristique suivante :
0011
1 =++++ −− BBBB pPP n
nn
n L ... (3)
On sait que la solution s(t) est définie à partir de la solution de l’équation (3).
1ierCas : toutes les racines son réelles :
s(t) à la forme suivante :
tpn
tptp neCeCeCts +++= L2121)(
où :
C1, C2,…, Cn : sont des constantes d’intégration.
P1, P2,…, Pn : sont les racines de l’équation caractéristique (3).
Le système est stable
+∞→=⇔
tts 0)(lim 1
Cette condition ce vérifie si tous les Pi sont négatifs. Si au moins il existe un seul Pi positif le système est instable

- 49 - Asservissement linéaire
2ieme Cas : si les racines sont complexes :
P1 = α + jβ
P2 = α - jβ La solution s(t) a la forme suivante :
La réponse du système dépend de α (partie réelle).
Donc le système est stable si les parties réelles des racines de l’équation caractéristique sont négatives.
3ieme Cas : si les racines de l’équation caractéristique sont imaginaires pures P=±jω :
La solution s(t) est un cosinus ou sinus (système juste oscillant) la limite de la stabilité .
4ieme Cas : si les racines sont nulles P=0 :
s(t)=Cte (constante) système astatique .
t
s(t)
t
s(t)
t
Système stable (α < 0)
s(t)
t
Système instable (α > 0)
s(t)
)sin()( ϕβα +⋅= teAts t

- 50 - Asservissement linéaire
Conclusion :
• Un système est stable si toutes les partie réelles des racines de l’équation caractéristique sont
négatives.
• Si au moins l’une des racines de l’équation caractéristique a une partie réelle positive le système
est instable.
III. Critère de ROUTH :
La détermination des racines de l’équation caractéristique n’est toujours pas évidente, surtout dans le cas ou
l’ordre (n) du système est grand. C’est pour cette raison qu’on utilise le critère de ROUTH pour déterminer la
stabilité des systèmes.
Soit l’équation caractéristique du système :
0011
1 =++++ −− AAAA pPP n
nn
n L
On applique la règle de ROUTH, en utilisant une table qu’on appelle table de ROUTH, définie comme suit :
pn An An-2 An-4 … … …
pn-1 An-1 An-3 An-5 … … …
pn-2 C31 C32 C33 … … …
C41 C42 C43 … … …
…
…
…
…
…
…
…
p0 C (n+1) 1 C (n+1) 2 C (n+1) 3 … … …
Où :
CCAACCC
CAACC
AAAAACA
AAAAC
nnnn
n
nnnn
n
nnnn
31
33153142
31
32133141
1
54132
1
32131
;
;
⋅−⋅=
⋅−⋅=
⋅−⋅=
⋅−⋅=
−−−−
−
−−−
−
−−−
Pour que l’équation caractéristique ne possède que des racines a parties réelles négatives, il faut et il suffit
que tous les termes de la première colonne de la table de ROUTH soient du même signe. Le nombre de
changement de signe correspond au nombre de racines à parties réelles positives.
Remarque : Il peut arriver que la première colonne du tableau de ROUTH possède un pivot nul ; on peut
continuer le tableau en remplaçant ce pivot par ε, nombre réel arbitrairement petit, positif ou négatif.
Exemple :
1. Soit l’équation caractéristique :

- 51 - Asservissement linéaire
p3+3p2+6p+4=0
La table de ROUTH s’écrit de la manière suivante :
0;
314
0343
143
0103;3
143
4163
4241
3231
=×−×
=
×−×==
×−×=
CC
CC
Il n’y a aucun changement de signe dans la première colonne de la table de ROUTH, donc le système est
stable.
2. Soit l’équation caractéristique :
p3+2p2+3p+8=0
La table de ROUTH s’écrit de la manière suivante :
0;0;8;242324131
===−= CCCC
On remarque qu’il y’a deux changements de signe dans la première colonne (1, 2,-2, 8) de (2) à (-2) et (-2) à
(8) ; donc le système a deux racines à parties réelles positives (système instable).
P3 1 6 0
P2 3 4 0
P1 C31 C32
p0 C41 C42
P3 1 3 0
P2 2 8 0
P1 C31 C32
p0 C41 C42

- 52 - Asservissement linéaire
Précision des systèmes asservis
I. Introduction.
II. Définition de la précision.
III. Rappel mathématique.
IV. La précision statique.
V. La précision dynamique.

- 53 - Asservissement linéaire
Précision des systèmes asservis I. Introduction : Rappelons qu’un système asservis doit être non seulement stable mais il doit
répondre aux exigences technologiques telles que la rapidité de la réponse et la précision par
rapport a la valeur souhaitée.
II. Définition de la précision : La précision est la différence entre la valeur souhaitée du réglage
(consigne) et la sortie du système à régler (s(t)).
III. Rappel mathématique :
Théorème des limites : Il est possible d’obtenir les valeurs initiales et finales de s(t) à partir de sa
transformée de Laplace.
a) Valeur initiale :
+∞→→⋅===
ptpsptss
0)]([lim0)(lim)0(
b) Valeur finale :
0)]([lim0)(lim)(
→+∞→⋅===∞
ptpsptss
IV. Précision statique : Soit l’étude de la précision d’un système a retour unitaire :
La précision statique est la différence entre la valeur souhaitée et la valeur de la sortie au régime
permanent.
+∞→+∞→
=−=
tt
ttstes )(lim)]()([lim εε… (1)
Selon le théorème de la valeur finale :
0
)](lim[)(lim
→+∞→
⋅==
pt
ppts εεε… (2)
E(p) F(p)
S(P) ε(p)
-
+
Figure -1-

- 54 - Asservissement linéaire
Remarque : Si la chaîne de retour est une fonction de p la précision statique est évaluée de la même
méthode. La résultat dépend du type d’existence imposé à l’entrée du système.
Le schéma équivalent de la figure -1- est :
)()(1
)()( pEpF
pFpS ⋅+
=
0
)](lim[
→
⋅=
p
pps εε
00)(1
)(lim)](lim[
)(1)()(
)()(1
)()()()()(
→→
+
==⋅=
+=
⋅+
−=−=
pppF
ppEpp
pFpEp
pEpF
pFpEpSpEp
ss εε ε
ε
ε
Exemple :
Soit un système du premier ordre avec une entrée échelon .
kA
pppkpA
pFppE
pApEtAte
pkpF
s
s
+=
→→
+++⋅
=
+
=
=⇒⋅=+
=
1
001
)1(lim
)(1)(lim
)()()(,1
)(
ε
ε ττ
µτ
E(p))(1
)(pF
pF+
S(P)

- 55 - Asservissement linéaire
V. Précision dynamique :
La précision dynamique consiste essentiellement à étudier le régime transitoire de la réponse du système
asservi soumis à une entrée typique.
Contrairement a la précision statique, qui est évaluée lorsque t tend vers ∞+ , la précision dynamique est
déterminée par la fonction εd(t) qui caractérise la différence entre la valeur réelle du signal de sortie s(t) et
celle qui est souhaitée.
)()()( tstst hd −=ε
Exemple :
Système du 1ier ordre avec une entrée échelon.
)1(1
1
11
)(
1)(,
)(1)()()(
)()(.)()(
)()()(
pkpkA
pk
pk
ppS
pkpF
pFpFpEpS
pApEtAtets
tstst
h
hd
ττ
τ
τ
µ
ε
++⋅⋅
=
++
+⋅
=
+=
+⋅
=
=⇒==
−=
tke
kkA
kkAtS τ
+−⋅
+−
+=
1
11)(
+∞→+
==
tk
Atds 1)(lim εε
t
A
kA+1

- 56 - Asservissement linéaire

- 57 - Asservissement linéaire
Série d’exercices Exercice 01 :
Déterminer la solution de l’équation différentielle suivante :
2)0(
1)0(:
)2(sin23)()(
2
2
==
=+
dtyd
etYavec
ttydt
tyd
Exercice 02 :
Déterminer la fonction x(t) et y(t) vérifiant :
2)0(1)0(:
)(sin)()(
)(cos)(2)(
==
+−=
+=
YetXavec
ttxdt
tdy
ttydt
tdx
Je tien a préciser qu’il faut impérativement s’exercer a résoudre beaucoup d’exercices, tout au tend
comprendre les significations physiques
Exercice 03:
Soit le circuit électrique d’un correcteur à retard de phase.
1. Calculer la fonction de transfert du circuit électrique.
2. Ecrire l’équation différentielle de ce circuit.
3. Tracer sans effectuer aucun calcul, la réponse de ce circuit à entrée échelon.
4. Décrire ce circuit par un schéma bloc a boucle .
C y(t) x(t)
R1
R2

- 58 - Asservissement linéaire
Solution de la série d’exercices Exercice 01 :
On appliquant la transformée de Laplace à l’équation différentielle:
2)0()0(1)0(:
)2(sin23)()(
2
2
===
=
+
dtydyetYavec
ttydt
tyd LL
&
On appliquant le théorème de la dérivation, on a :
44 344 21321)(
)4)(1(3
)(1
2)(
432)()1(
43)(2)(
42
23)()0()0()(
222
22
22
22
pBpp
pApppY
pppYp
ppYppYp
ppY
dtdypYpYp
+++
++
=
+=−++
+=+−−
+=+−+
On décompose en éléments simples :
)2sin(21
)sin(3)cos()(
)2sin(21
)sin(3)cos()]([
41
13
1)(
41
11
12)(
41
11)(
114
3)1)(4(
3)42(
2
141
3)4)(1(
3)12(
41)4)(1(3)(
1
222
222
22
222
221
22
21
22
tttty
tttpY
pppppY
pppppY
pppB
pppjp
T
pppjp
T
pT
pT
pppB
L
−+=
−+=
+−
++
+=
+−
++
++
=
+−
+=
−=+−
=++
⋅+±→
=
=+−
=++
⋅+±→
=
++
+=
++=
−

- 59 - Asservissement linéaire
Exercice 02 :
On appliquant la transformée de Laplace à l’équation différentielle:
2)0(1)0(:
)(sin)()(
)(cos)(2)(
==
+−=
+=
YetXavec
ttxdt
tdy
ttydt
tdx
LLL
LLL
On appliquant le théorème de la dérivation, on a :
++−=−
++=−
++−=−
++=−
)2(1
1)(2)(
)1(1
)(21)(
11)()0()(
1)(2)0()(
2
2
2
2
L
L
ppXppY
pppYppX
ppXYppY
pppYXppX
On résolvant le système d’équation on a:
11
24
2)(
11
24
11
)2(4)(
)2()2(
11
)2(241
11
)2(24)(
11
1)2()12(2)(
21
22
212)(
222
2222
2
2
2
2222
22
222
++
++
+=
++
++
=+
++
+=
++
++
++
−=+
++
+−
=
⇒++
++−
=
⇒+
−+
=+−
=
pppppX
ppp
ppppppX
ppp
pppp
ppppppX
ppppppX
ppp
pppY
On appliquant la transformée de Laplace inverse sur X(p) et Y(p) obtenus, on obtient:
)sin(2
1)cos(2)()]([
)sin()sin(2
4)cos()()]([
221
221
tttypY
ttttxpX
L
L
−==
++==
−
−

- 60 - Asservissement linéaire
Exercice 03:
)(1)(
)()(1)()(
2
21
tiRdtiC
ty
tiRdttiC
tiRtx
∫
∫
+=
++=
Application de la transformée de Laplace :
)()(1)(
)()(1)()(
2
21
pIRpICp
pY
pIRpICp
pIRpX
+=
++=
1.
On peut l’écrire sous autre forme :
papbpFdonc
baposeonp
ppF
++
=
==
+
+
=
)()(
1,11
1
)(
α
ατττ
τ
ατατ
C y(t) x(t)
R1
R2
i
[ ]
pppF
RRRCRRposeon
pCRRpCRpF
pIRCp
R
pIRCp
pXpYpF
τατ
ατ
++
=
+=+=
+++
=
++
+
==
11)(
,)(:
1)(1)(
)(1
)(1
)()()(
21
221
21
2
21
2

- 61 - Asservissement linéaire
2. Le circuit est un correcteur à retard de phase.
( )[ ] ( ) )()()()()()(
pYbapXpbpXpY
papbpF
+=+
=++
⋅=
α
α
Donc on aboutit a :
[ ] [ ]
dttdyty
dttdxtx
ba
dttdytya
dttdxtxb
pYppYapXppXb
pyppyapXppXb
LL
)()(1)()(1
1,1
)()()()(
)()(1
)()(1
)()()()(
+=+
==
+=+
+−
=+−
+=+
τα
τ
αττ
αα
αα
αα
Finalement l’équation différentielle est :
)()()()( txdt
tdxtydt
tdy+=+ αττ
3.
papb
pXpY
++
⋅=)(
)()( α
La réponse a un échelon unitaire :
appB
appbpY
ppapb
ppapbpY
pXpapbpY
++
+⋅=
++
=⋅++
⋅=
⋅++
⋅=
αα
ααα
α
43421)(
)()(
)(1)()(
)()()(
La décomposition en éléments simples :
1)(
)(
11
1
)(0
)(
2
1
21
−=−=+
⋅+−→
=
=⋅
==+
⋅→
=
++=
ab
appbap
apT
ab
appbp
pT
apT
pT
pB
αατ
ταααα
- 62 - Asservissement linéaire
te
eL
RRRty
atpYty
apppY
apapppY
apppB
τ
α
α
α
1
11)(
)1(1)]([)(
11)(
11)(
11)(
21
2
1
−⋅
−
++=
−⋅−+==
+−
+=
++
+−=
+−=
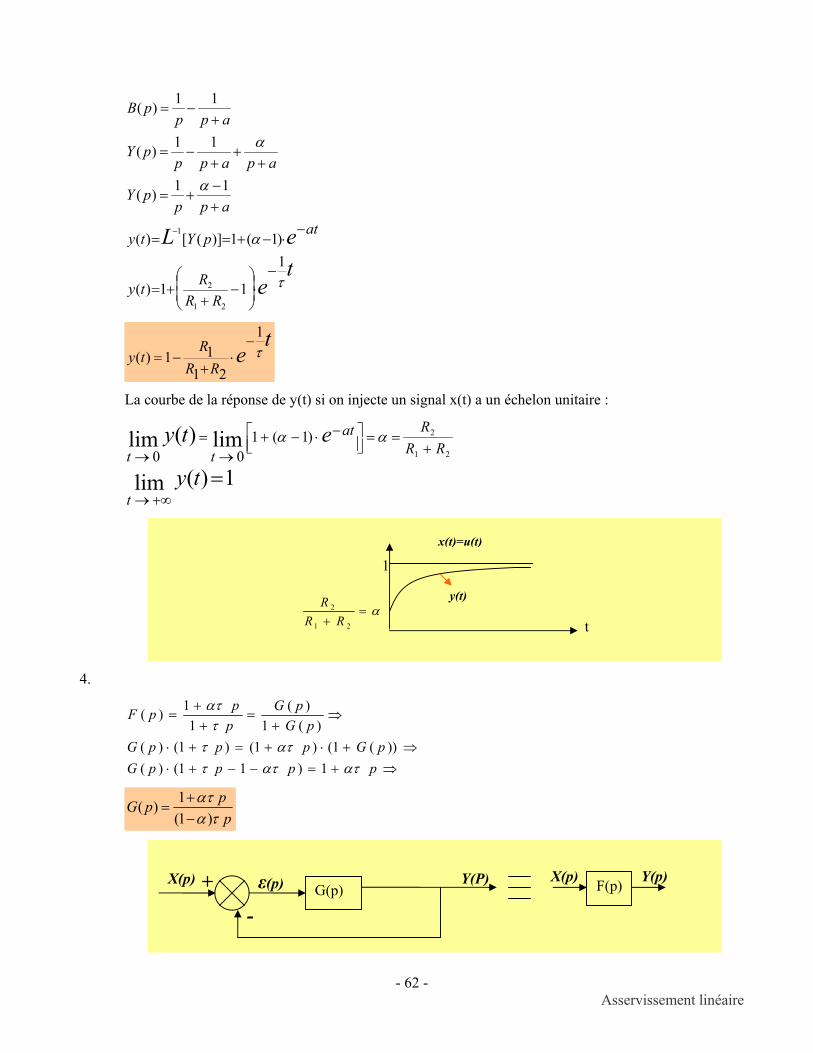
−
te
RRR
ty τ1
2111)(
−⋅
+−=
La courbe de la réponse de y(t) si on injecte un signal x(t) a un échelon unitaire :
1)(lim
lim)(lim21
2)1(100
=+∞→
+==
−⋅−+
→=
→
ty
ety
t
RRRat
ttαα
4.
⇒+=−−+⋅⇒+⋅+=+⋅
⇒+
=+
+=
ppppGpGpppG
pGpG
pppF
ατατταττ
τατ
1)11()())(1()1()1()(
)(1)(
11)(
pppG
ταατ
)1(1)(
−+
=
X(p) G(p)
Y(P) ε(p)
-
+ F(p) X(p) Y(p)
α=+ 21
2
RRR
1
t
y(t)
x(t)=u(t)

- 63 - Asservissement linéaire
Série d’examens d’asservissement
Examen N0 01 Exercice 01(Questions de cours et TP) :
Comment peut-on juger qu’un système est stable ?
Donner les différents critères utilisés pour étudier la stabilité.
Donner la définition de : un capteur, un actionneur, un amplificateur.
Exercice 02 :
Soit le système du 1ier ordre :
• Donner sa réponse s(t), pour une entrée échelon unitaire ;
• Donner l’allure de sa réponse pour un entrée échelon unitaire ;
• Déterminer le temps de réponse ;
• Donner l’équation de ta tangente a l’origine.
Exercice 04:
1. Résoudre l’équation différentielle suivante, en utilisant la transformée de Laplace ;.
ttydt
tdydt
tyd e 225)(21)(8)(2
2−=++
2. A partir de l’équation différentielle suivante :
)3sin(23)(21)(8)(
2
2
ttty
dttdy
dttyd
e ⋅−=++
Déterminer :
• Le gain statique.
• La fréquence propre non amortie.
• Le facteur d’amortissement.
25+p
E(p) S(p)

- 64 - Asservissement linéaire
Problème:
On considère le système asservi représenté dans la Figure -1-, dans le quel on suppose que le moteur est
commandé par l’induit (de résistance r et des self inductance négligeable).
Soit : k : coefficient de couple et force contre électromotrice du moteur.
J1 : le moment d’inertie du rotor ;
f1 : le coefficient de ses frottements visqueux ;
U : la tension appliquée a l’induit du moteur, et i le courant qui le traverse.
L’arbre du moteur, dont la position est repérée par un angle θm entraînée par l’intermédiaire de réducteur
de rapport 1/n et (n>1) une charge mécanique dont la position est repérée par un angle θs.
Im représente le couple délivré par le moteur, et J2 , f2 le moment d’inertie et le coefficient des frottements
visqueux de la charge.
Les potentiomètres supposés linéaire et identique, sont alimentés par une tension E0, leur course et θ0 Є [0,2Π]
I. Représenter le système de la figure -1- par son schéma fonctionnel (tel que G(p) est la fonction de
transfert du moteur+réducteur+charge).
ε U Ue
-E0 +E0
-E0 +E0
θm
θS
A+
-
I
Moteur Comparateur Amplificateur
Potentiomètre de sorite
Potentiomètre d’entrée
Réducteur
Figure -1-
Charge

- 65 - Asservissement linéaire
II. On donne les équations du système en variable de temps
[ ]
+=
+=
+=Γ⇒
⋅+⋅=Γ
Γ++=Γ
⋅=Γ+=
22
1
22
1
22
11
:
)()()(
)()()(1)(
)()()()(
)()()()()(
nf
ff
nJ
JJavec
tftJt
ttftJn
t
ttftJt
tiKttKtirtu
mmm
ssr
rmmm
m
m
θθ
θθ
θθ
θ
&&&
&&&
&&&
&
a) Déterminer la fonction de transfert )(
)()(
pU
pspGθ
=
b) Calculer la constante de temps du système moteur+charge+réducteur.
c) Calculer le gain en amplitude du système.
d) Déterminer la fonction de transfert en boucle ouvert )(
)()(
pe
pspTθ
θ= et la mettre sous la forme
)1()(
ppKpT
τ+′
= tel que K’ et τ >0
e) Construire le diagramme d’amplitude et de phase de T(jω)dans le plan de BODE.
f) Tracer l’allure du lieu de NYQUIST.
g) Déterminer la stabilité du système en utilisant le critère de ROUTH.
h) Calculer les erreurs statiques (stationnaires) du premier, du second ordre et du troisième ordre
E(p)=1/p .
Applications Numériques :
r =500Ω n=200
K=Fem=0.3 MKSA A=218
J1=40g.cm2 E0=50V
J2=0.2Kg.m2
NB : On néglige les coefficients des frottements visqueux.

- 66 - Asservissement linéaire
Examen N0 02 Exercice 01 :
Soit un système décrit par un modèle mathématique, sous forme d’équation différentielle:
1)()( =+ tyty& • Résoudre l’équation différentielle par la méthode de transformation de Laplace ; les conditions
initiales sont nulles.
Exercice 02 :
La réponse d’un système invariant linéaire, initialement on repos, au signal :
)(1)( tuttx e ⋅
−−=
, u(t) : échelon unitaire
ttttty eteete 25.0275.0225,1)( −+−+−−−−= 2 Quelle est la fonction de transfert H(p) ?
3. Quelle est la réponse du système h(t), à une impulsion unitaire?, et tracer son allure.
Exercice 03 :
Soit le système de fonction de transfert :
)5.01)(1()1(5.0)(
ppppG
++−
=
1. mettre le système sous la forme de deux systèmes du 1ier ordre.
2. déterminer et représenter les pôles et les zéros dans le plan complexe.
3. on applique au système une entrée à un échelon unitaire u(t) :
• exprimer y(t) ; et évaluer y(0), et y(t) quand t tend vers l’infinie.
• Etudier la variation de y(t),et représenter graphiquement l’évolution de la sortie.
Exercice 04 :
En utilisant la transformée de la place trouver la solution de l’équation suivante :
)2cos()(3)(2 2
2
ttydt
tyd=+
Avec les conditions initiale suivantes :21)0(,1)0( == yy &
On donne : )sin(1
1,4
)2cos( 2
1
2 tpp
pt LL =
++= −

- 67 - Asservissement linéaire
Exercice 05 :
Tracer le diagramme de Bode en gain et en phase de la fonction de transfert :
2213220)( 2 ++
=pp
pF
On donne : log10 (2)=0.301, log10 (10)=1, log10 (11)=1.041, log10 (220)=2.342.
Exercice 06:
Soit la boucle de transfert du système en boucle fermée :
1. Déterminer la fonction de transfert du système en boucle fermée.
2. calculer K pour que le système en boucle fermée soit stable (critère de ROUTH)
E(p) 23
12 ++ pp
pK
S(P)
Z(p)
ε(p) -

- 68 - Asservissement linéaire
Solution de la série d’examens d’asservissement
Examen N0 01 Exercice 01(Questions de cours et TP) :
Les différents critères utilisés pour étudier la stabilité sont le critère de ROUTH et le lieu de
Nyquist.
Un actionneur : c’est l’élément qui commande le système à asservir, il travail souvent a puissance
élevé.
Un comparateur :c’est un élément très important, il permet d’effectuer une comparaison entre des
tensions d’entrées et de sorties.
Un amplificateur : c’est l’élément souvent utiliser pour Amplifier les tensions de sorites des
comparateurs des système asservis, avec un gain bien déterminer.
Exercice 02 :
•
pppS
ppEtute
12
5)(
1)()()(
⋅+
=⇒
=⇒=
En décomposant S(p) en éléments simples.
−−==⇒
+−=⇒
−=
⋅
+⋅+
−→==
⋅
+⋅
→=
++=
− tpStspp
pS
pppLim
pB
pppLim
pA
pB
pApS
eL 225
25)()(
)2(25
25)(
251
25)2(
2,
251
25
0
2)(
][1
• L’allure se s(t) :
25)(lim,0)(lim
0=
+∞→=
→ts
tts
t
25+p
E(p) S(p)

- 69 - Asservissement linéaire
• Le temps de réponse tr ?
23log5log
53log2
5322
25
25 1
−=⇒
=−⇒−⇒−− ==
rt
tee tt
• Equation de la tangente à l’origine :
ttyxxys
sy
xxxxsxyxy
e
e
5)(5)(505)0(
0025
25)0()0(
0][)()()(
0
0
0000
=⇒=⇒=−+=′
=−−==
⇒=−⋅′=−
Exercice 03:
1. l’équation différentielle :
ttytyty e 225)(21)(8)( −=++ &&& En appliquant la transformée de Laplace on obtient :
)]54([)]54([2)(
)54)(54)(2(25
)2)(2182(
25)(
225)(21)(8)(2
jpC
jpB
pApY
jpjppppppY
PpYppYpYp
−++
+++
+=⇒
++−++=
+++=
+=++
541025)()54(lim
54
541025)()54(lim
54
925)()2(lim
2
jpYjp
jpC
jpYjp
jpB
pYpp
A
−−=⋅−+
+−→=
+−=⋅++
−−→=
=⋅+−→
=
25
t
u(t)=1
s(t)
1

- 70 - Asservissement linéaire
Bien que l’équation donnée ne soit pas linéaire, ou le terme e-2t (comme une équation) n’est pas du
premier degré ; on peut la traiter comme une équation linéaire si on pose arbitrairement x(t)= e-2t , et
si on traite x comme une deuxième variable dépendante, représente le signal d’entrée. Dans ce cas on
résout l’équation :
dnn
dnn
nn
nn
jjbajjP
jjbajjP
ACBCBpAp
pp
pXpppY
ωαξωξω
ωαξωξω
ωξ
ω
ωξ
ω
−−=−−=−−=−−−=
+−=+−=+−=−+−=
−=∆
=++
=++
=++
5421
5421
40
)1(0121
)()121)((
2
1
2
2
22
22
K
(Voire chapitre IV…système du 2ieme ordre pour plus d’explications)
Le système fondamental est :
tjtCtdjtty
tjtCtdjtty
eeee
eeee54)(
54)(
12
11
−−=−=
−=−=
⋅
⋅
ωα
ωα
La solution est :
[ ] [ ] ( ) ( )
)sin()cos()(
)sin()cos()(
)sin()cos()sin()cos()(
2121
2211
ttjBttAty
ttCCjttCCty
tjCtCtjCtCtty
dd
dd
dddd
eeee
e
ωαωαωαωα
ωωωωα
−⋅+−⋅=
−⋅−+−⋅+=
−++−=
Avec les conditions initiales :
dd BBBy
Ay
eeω
ωα 11)0cos(0)0sin(01)0(
00)0(
=⇒=−⋅⋅+−⋅⋅−⇒=
=⇒=
&
Donc la solution )sin(1)( ttty d
d
e ωαω
−⋅=
(Voire chapitre IV…système du 2ieme ordre pour plus d’explications)
)5sin(45
1)( te tty −⋅=

- 71 - Asservissement linéaire
Solution particulière :
tCtytCtytCty eeep24)(,22)(,2)( −⋅⋅=−⋅⋅−=−⋅= &&&
On remplace dans l’équation ttytyty e 225)(21)(8)( −=++ &&& on obtient :
92522529 =⇒−⋅=−⋅ CttC ee
tttytyty eteph2
925)5sin(4
51)()()( −+−⋅=+=
2.
)3sin(23)(21)(8)(
2
2
tttydt
tdydt
tyd
e ⋅−=++
On pose )3sin(21)(
tttx
e ⋅−=
L’équation devient :
)2)...((71)()1
218
211(
)(71)()(
218)(
211
2 pXpYpp
txtytyty
=++
=++ &&&
• Le gain statique : 3
)218()()(
2 =⇒++
= Kpp
KpXpY
c’est le gain statique.
• La fréquence propre non amortie.
L’équation (2) s’écrit sous la forme standard
)(71)121)(( 2
22
2 pXpppYn
n
nn ωω
ωξ
ω⋅=++
Par identification : 21=nω pulsation naturelle non amortie,
51 2 =−= ξωω nd Pulsation naturelle amortie
• Le facteur d’amortissement.
21482 =⇒= ξξωn
C’est le coefficient d’amortissement ,et il est 1<ξ .
- 72 - Asservissement linéaire
Problème:
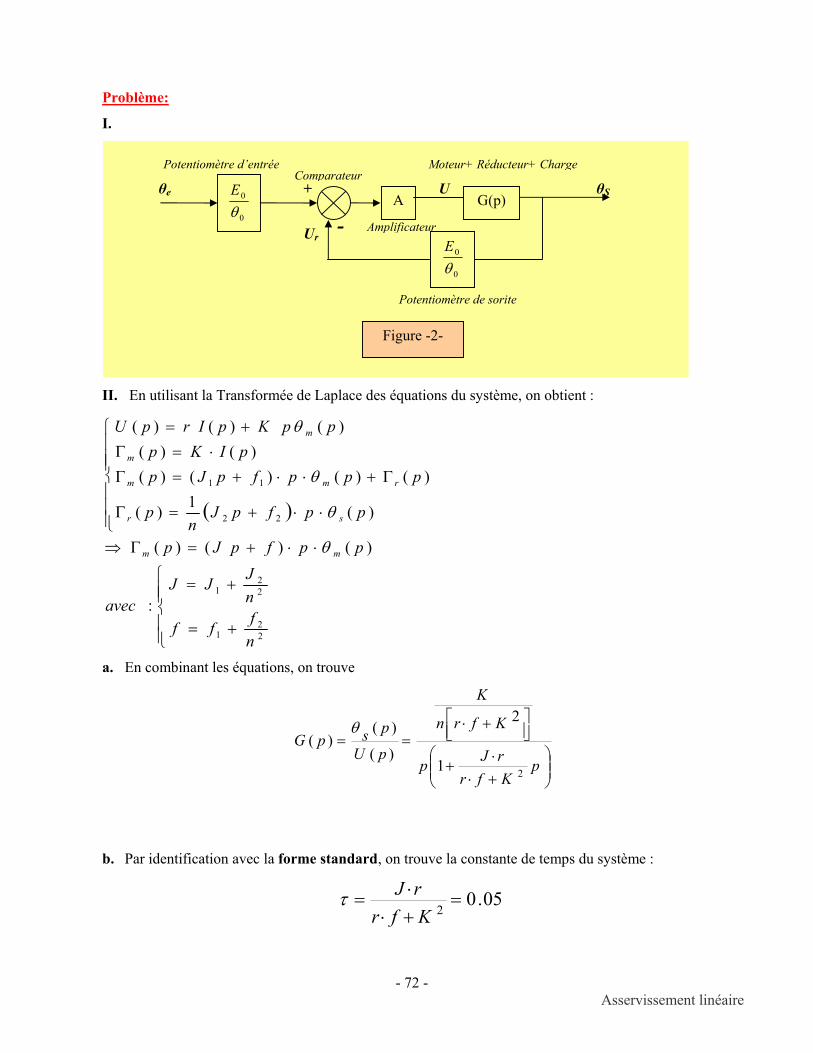
I.
II. En utilisant la Transformée de Laplace des équations du système, on obtient :
( )
+=
+=
⋅⋅+=Γ⇒
⋅⋅+=Γ
Γ+⋅⋅+=Γ⋅=Γ
+=
22
1
22
1
22
11
:
)()()(
)(1)(
)()()()()()(
)()()(
nfff
nJJJ
avec
ppfpJp
ppfpJn
p
pppfpJppIKp
ppKpIrpU
mm
sr
rmm
m
m
θ
θ
θ
θ
a. En combinant les équations, on trouve
+⋅⋅
+
+⋅
==
pKfrrJp
Kfrn
K
pU
pspG
21
2
)(
)()(
θ
b. Par identification avec la forme standard, on trouve la constante de temps du système :
05.02
=+⋅⋅=
KfrrJτ
G(p) 0
0
θE
θe
0
0
θE
θS
- A
U
Ur
+
Potentiomètre d’entrée Moteur+ Réducteur+ Charge
Potentiomètre de sorite
Amplificateur
Comparateur
Figure -2-

- 73 - Asservissement linéaire
c. le gain en amplitude du système :
[ ] 601
2)( =+⋅
=Kfrn
KA pG
d. la fonction de transfert en boucle ouvert du potentiomètre de sortie
0
0
)(
)(
θθE
ps
prU=
La fonction de transfert en boucle ouvert de l’asservissement est la suivante :
)()(
)(
)(
)()( pG
ps
prUA
pe
pspT ⋅⋅==θθ
θ
+⋅⋅
++⋅⋅⋅= ⋅
⋅
pKfrrJpKfrn
EKApT
2
2
1
1)(0
0
θ
Si on pose :
20
0
2Kfr
rJKfrnEKAk et
+⋅
⋅+⋅⋅⋅=′ =
⋅
τ
θ
( )pppT
pK
rJp
EApTKn
pour
05.0191.28)(
1
1)(
2
22 0
+=
⇒
⋅
+
⋅= ⋅Π⋅⋅
⇒Π=θ
e. le diagramme d’amplitude et de phase de T(jω)dans le plan de BODE.
( )ωωω
jjjT
05.0191.28)(
+=
( ) 110
11010 1log20log20)(log20 −− ++== τωωω jKjTAdB Tel que K=28.91 et τ=0.05
Vous notez que nous avons deux terme, l’un et de la forme Kωα et l’autre de la forme (1+jωτ)β.
C’est plus pratique de faire l’étude séparer des deux termes et leurs tracés puis faire la somme de ces deux
tracés; mais on peut aussi faire l’étude des deux termes simultanément.
(Voire chapitre VI…Détermination des diagrammes d’amplitude et de phase des différents
termes… pour plus d’explications)

- 74 - Asservissement linéaire
L’étude du terme K(jω)-1 tel que K=28.91
ωω
ωω
log22.29log
loglog201log20
1010
101010
−=−=
−=−=
dBdB
dB
K
KK
AA
octavedBdBAdBAA /6)()2()( −=−= ωωω
Cette droite coupe l’axe (0dB) en un point ω0=K=28,91
Pour ω=1, AdB=KdB.
φ=-90
L’étude du terme (1+jωτ)-1 tel que τ=0.05
octavedbAA
dBaxelavecconfondueasymptotedBA
j
dB
ieredB
dBA
/6)(log2010
0'10110
1log20)1(log20
1022
22
2210
110
−=⇒−→⇒→+⇒→
→=⇒→+⇒→
+−=+= −
ωωτωττωω
τωω
τωωτ
2ieme
asymptote qui coupe l’axe (0dB) à la pulsation de cassure ω=1/τ =20.
La pulsation réelle égale à 3dB.
Le diagramme de phase du terme (1+jωτ)-1 est la courbe :
( )ωτϕ j+−= 1arg
Soit ( )ωτϕ arctg−=
Quand : o
o
9000−=⇒+∞→
=⇒→
ϕω
ϕω
Pour ω=1/τ 1
1
arctg
arctg
−=
⋅−=
ϕ
ττ
ϕ
Donc o45−=ϕ

- 75 - Asservissement linéaire
f. Tracer l’allure du lieu de NYQUIST.
ω
-90˚
-180˚ -135˚
-45˚
-φ˚
ω0=20
ω=1
ω
K
0 dB 0
AdB
-6dB/octave=0dB-6dB
20
-12dB/octave=-6dB-6dB
AdB(T(jω))=AdB(|Kjω-1|)+ AdB(|1+jωτ|-1)
Arg(T(jω))=Arg(|Kjω-1|)+ Arg(|1+jωτ|-1)
ImT(jω) , φ°
ReT(jω) , φ° 0
0°
-90°
-180°
-270°
-
+
0°
+90°
+270°
+180°
∞+
∞−
+360°
-360°

- 76 - Asservissement linéaire
g. La stabilité du système en utilisant le critère de ROUTH.
Nous avons la fonction de transfert, de la quelle on détermine l’équation caractéristique
pppD +×= − 22105)( On forme le tableau de ROUTH
(Voire chapitre VII ; Stabilité des systèmes asservis ; Critère de ROUTH; pour plus d’explications)
On ne trouve pas de changement de signe dans la colonne du tableau, alors le système est stable.
h. Calcule des erreurs statiques (stationnaires) du premier, du second ordre et du troisième ordre. si
E(p)=1/p .
• L’erreur statistique du 1ier ordre : 01
)(10lim)(
)(10lim =
⋅
+→=
⋅
+→=
ppTp
ppE
pTp
psε
• L’erreur statistique du 2ieme ordre :
VppT
p
ppE
pTp
ps2
2 1046.31)(10
lim)()(10
lim −×≈
⋅
+→=
⋅
+→=ε
• L’erreur statistique du 3ieme ordre :
+∞→
⋅
+→=
⋅
+→=
31
)(10lim)(
)(10lim
ppTp
ppE
pTp
psε

- 77 - Asservissement linéaire
Examen N0 02 : Exercice 01 :
• Par application direct de la transformée de Laplace sur l’équation différentielle:
)1(1)(
1)()(
1)()()()(
léquation de Linéarité.)()0()()(
+=⇒
=+⇒
=+=+⇒
=−=
pppY
ppYppY
tytytyty
nullesIClesavecppYyppYty
LLLL
L
&&
L&
Par la décomposition en éléments simples on obtient :
−−==⇒
+−=⇒
−=
⋅
+⋅+
−→==
⋅
+⋅
→=
++=
− tpYtFpp
pY
pppLim
pB
pppLim
pA
pB
pApY
eL 1)()(1
11)(
111
1)1(1
,111
1
0
1)(
][1
Exercice 02 :
La réponse d’un système invariant linéaire, initialement En repos, au signal :
( ) ( )22 25.0
275.0
11
1225.1)()(
)1(1
111)()(
][
][
++
++
+−
+−==
+=
+−==
ppppptypY
pppptxpX
L
L
1. Par simplification on trouve :
2
222
2
)2)(1(55
)1(1
)2()1(55
)()()(
++++
=
+
++++
==pppp
pp
ppppp
pXpYpH
2. Par la décomposition en éléments simple de H(p) en trouve :
[ ]
)2()(
:)()()()()()()(
)2(1
11
)2)(1(55)(
][1
1
1
22
2
tttth
diracdeimpultiontqueteltpavecpHppHth
pppppppH
ee
LLL−⋅+−=
==
⋅=⇒
++
+=
++++
=
−− δδδδ
- 78 - Asservissement linéaire
Exercice 03 :
1.
pB
pA
ppppG
5.011
)5.01)(1()1(5.0)(
++
+=
++−
=
Par la décomposition en éléments simple, on obtient :
pppG
pp
Limp
Bp
pLim
pA
pB
pApG
5.0123
12)(
25.01
)1(5.0
1,
23
1)1(5.0
2
5.011)(
+−
+=⇒
=
+
−⋅
−→=−=
+
−⋅
−→=
++
+=
2. Les pôles et les zéros :
-2pet -1ppôles,deux 0p) 0.5(1et 0p)(10D(p)pôles Les1pzéros,un0p)-(10.50N(p)zéros
)()()(
==⇒=+=+→=⇒+=⇒=⋅→=⇒
=
LespDpNpG
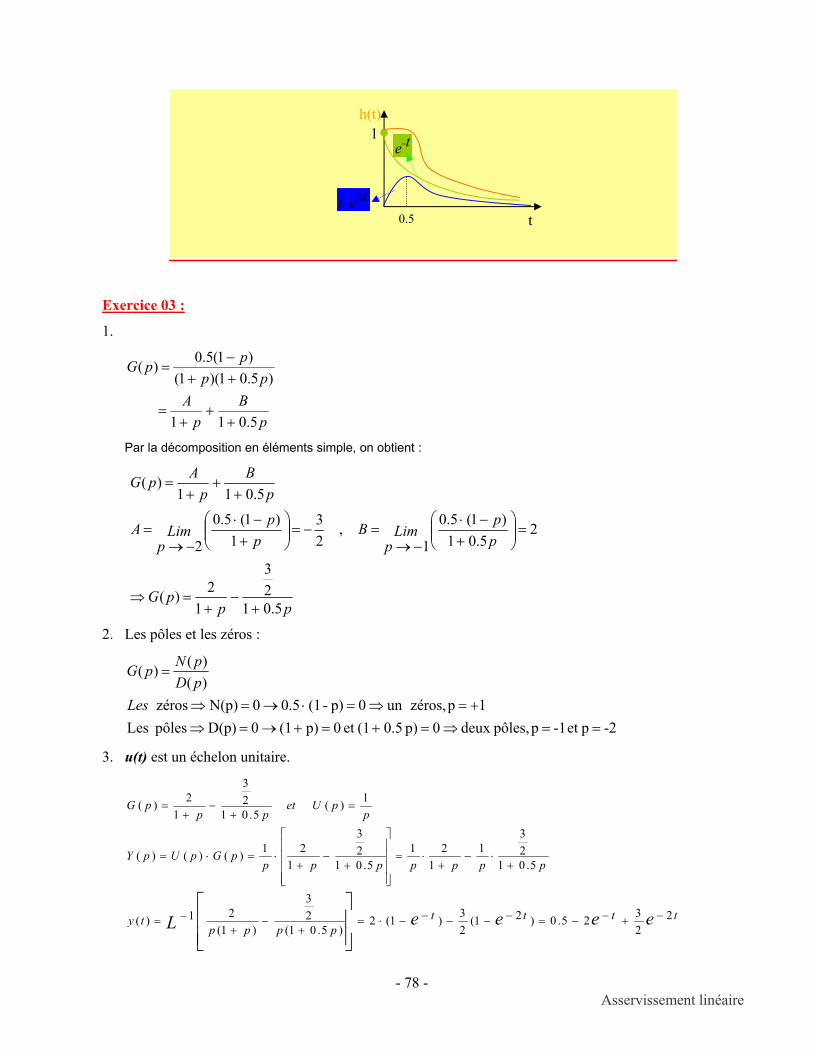
3. u(t) est un échelon unitaire.
ttttpppp
ty
ppppppppGpUpY
ppUet
pppG
eeeeL 22325.0)21(
23)1(2
)5.01(23
)1(21)(
5.0123
11
215.01
23
121)()()(
1)(5.01
23
12)(
−+−−=−−−−−⋅=+
−+
−=
+⋅−
+⋅=
+−
+⋅=⋅=
=+
−+
=
1
0.5 t
h(t)
tet 2−⋅
te−

- 79 - Asservissement linéaire
•
5.0)(
02325.0)0(
022325.0)(
=∞
=+−=
≥−+−−=
y
y
tpourttty ee
•
17.0)4.0(40.0)5.1ln(02320)(
−≈≈=⇒=−−−⇒=
ytttty ee&
La réponse varie d’abord d’une pente négative puis sur l’évolution normale.
Exercice 04 :
[ ] [ ] [ ]
3212
)32)(3()(
312)()32(
21
)()0()0()()()2cos()(3)(2
)2cos()(3)(2
222
22
22
2
2
++
+++
=⇒
+=−−+⇒
−−=−−==+⇒
=+
pp
ppp
pY
pp
ppYp
ppYpyyppyptyavecttyty
ttydt
tyd
LLL &&&&&
On décompose le 1ier élément de Y (p).
On pose
)32)(4()34()43()2()2(
324)32)(3( 22
23
2222 +++++++++
=+
++
++
=++ pp
BDpCApDBpCAp
DpCp
BpApp
p
Par identification :
=
=
=
−=
⇒
=+=+
=+=+
0520
51
033143
0202
D
C
B
A
BDCA
DBCA
0.5
0.4
t
y(t)
-0.17

- 80 - Asservissement linéaire
Donc :
23
121
235
645
1)(
3212
3252
451
)(
222
222
+⋅+
+⋅+
+⋅−=
⇒++
++
⋅+
+
⋅−=
pp
pp
ppY
pp
p
p
p
ppY
D’où :
⋅+
⋅+⋅−== − tttpYty L 2
3sin6
123cos
56)2cos(
51)]([)( 1
Exercice 05 :
Le tracer de Bode (en gain et en phase) :
( )ωωω
ω
ωωωωω
jFjFjF
jF
jjjjjF
32
1
)()(
)(
1111
211
10
1111
21122
220)(
⋅=
+
+
=
+
+⋅
=
Amplitude AFdB
ωω
ωωω
ωωωωω
ωω
jjF
jjFjFavec
jFjFjFjFjF
jFjFAdB
1111
1)(,
211
1)(,10)(
|)(|log20|)(|log20|)(|log20|)(||)(|
|)(|log20))((
321
31021011032
110
+=
+==
−−=
⋅
=
L’étude du terme (1+jωτ)-1 tel que τ=0.5
octavedbAA
dBaxelavecconfondueasymptotedBA
j
dB
ieredB
dBA
/6)(log2010
0'10110
1log20)1(log20
1022
22
2210
110
−=⇒−→⇒→+⇒→
→=⇒→+⇒→
+−=+= −
ωωτωττωω
τωω
τωωτ
2ieme
asymptote qui coupe l’axe (0dB) à la pulsation de cassure ω=1/τ =2 rd/s.
La pulsation réelle égale à 3dB.
Le diagramme de phase du terme (1+jωτ)-1 est la courbe :
( )ωτϕ j+−= 1arg
Soit ( )ωτϕ arctg−=
Quand : o
o
9000−=⇒+∞→
=⇒→
ϕω
ϕω

- 81 - Asservissement linéaire
Pour ω=1/τ 1
1
arctg
arctg
−=
⋅−=
ϕ
ττ
ϕ
Donc o45−=ϕ
L’étude du terme (1+jωτ)-1 tel que 111
=τ
octavedbAA
dBaxelavecconfondueasymptotedBA
j
dB
ieredB
dBA
/6)(log2010
0'10110
1log20)1(log20
1022
22
2210
110
−=⇒−→⇒→+⇒→
→=⇒→+⇒→
+−=+= −
ωωτωττωω
τωω
τωωτ
2ieme
asymptote qui coupe l’axe (0dB) à la pulsation de cassure ω=1/τ =11 rd/s.
La pulsation réelle égale à 3dB.
Le diagramme de phase du terme (1+jωτ)-1 est la courbe :
( )ωτϕ j+−= 1arg
Soit ( )ωτϕ arctg−=
Quand : o
o
9000−=⇒+∞→
=⇒→
ϕω
ϕω
Pour ω=1/τ 1
1
arctg
arctg
−=
⋅−=
ϕ
ττ
ϕ
Donc o45−=ϕ

- 82 - Asservissement linéaire
Exercice 06:
1. Détermination de la fonction de transfert du système en boucle fermée.
E(p) Fd(p)
Fr(p)
S(P)
Z(p)
ε(p) -
AdB
AdB(T(jω))=AdB(|10|)+ AdB(|1+jωτ|-1)+ AdB(|1+jωτ|-1)
ω
-90˚
-180˚ -135˚
-45˚
-φ˚
ω=11
ω=2
ω
20
0 dB 0
11
-12dB/octave=-6dB-6dB
AdB(T(jω))=AdB(|10|)+ AdB(|1+jωτ|-1)+ AdB(|1+jωτ|-1)
2
E(p) 23
12 ++ pp
pK
S(P)
Z(p)
ε(p) -

- 83 - Asservissement linéaire
D’où la fonction de transfert en boucle fermée est :
Kppppp
Kpppp
pppK
pppFpF
pFp
F
F
Bf
rd
dBf
+++=
+++=
++⋅+
++=⋅+
=
23)(
)23(23
11
231
)()(1)()(
23
2
2
2
2. La valeur de K pour que le système en boucle fermée soit stable :
0;
36
033
63
0103;3
63
123
4241
3231
==−
×−×−
=
×−×=
−=
×−×=
CC
CC
KK
KK
KK
Rappelant que Pour que l’équation caractéristique ne possède que des racines a parties réelles négatives, il
faut et il suffit que tous les termes de la première colonne de la table de ROUTH soient du même signe. Le
nombre de changement de signe correspond au nombre de racines à parties réelles positives.
Alors pour Il n’y aurai aucun changement de signe dans la première colonne de la table de ROUTH, qui donc
un système est stable. Il faut que 6-K > 0 et K > 0, alors 0<K<6 ; en autre terme il faut que ] [6,0∈K pour
que ce système soit stable.
P3 1 2 0
P2 3 K 0
P1 C31 C32
p0 C41 C42
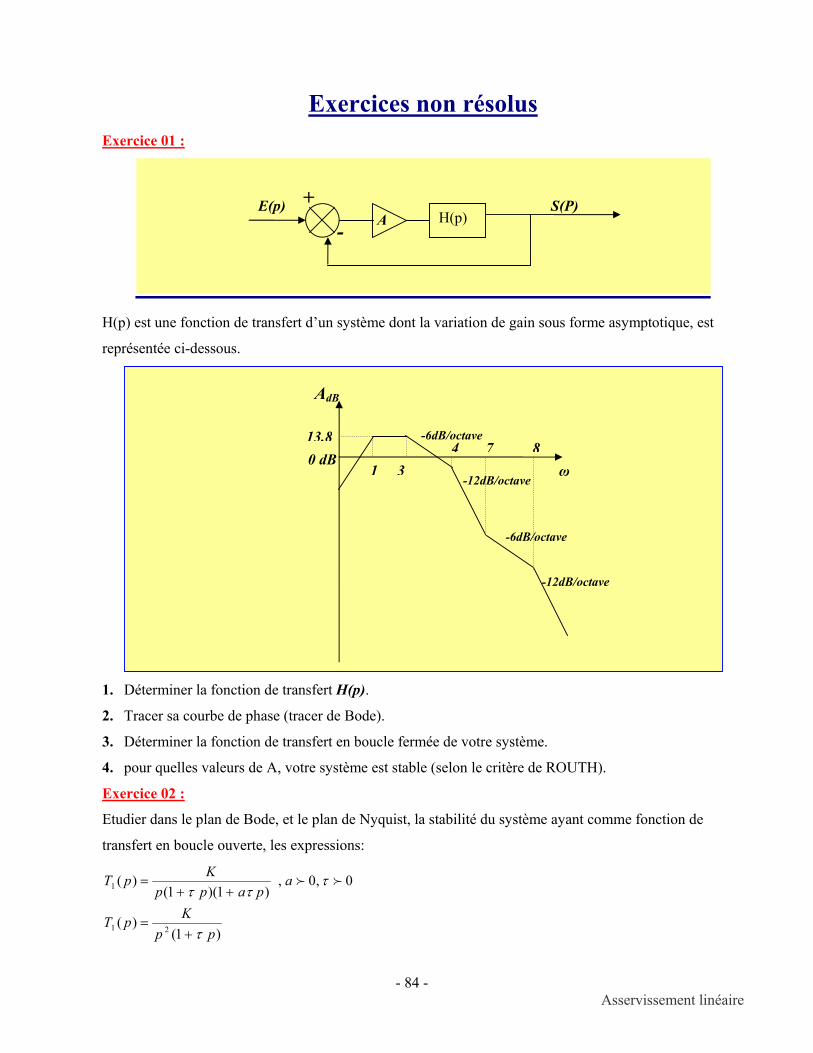
- 84 - Asservissement linéaire
Exercices non résolus Exercice 01 :
H(p) est une fonction de transfert d’un système dont la variation de gain sous forme asymptotique, est
représentée ci-dessous.
1. Déterminer la fonction de transfert H(p).
2. Tracer sa courbe de phase (tracer de Bode).
3. Déterminer la fonction de transfert en boucle fermée de votre système.
4. pour quelles valeurs de A, votre système est stable (selon le critère de ROUTH).
Exercice 02 :
Etudier dans le plan de Bode, et le plan de Nyquist, la stabilité du système ayant comme fonction de
transfert en boucle ouverte, les expressions:
)1()(
0,0,)1)(1(
)(
21
1
ppKpT
apapp
KpT
τ
τττ
+=
++= ff
AdB
ω
13.80 dB
1 34 7 8
-6dB/octave
-6dB/octave
-12dB/octave
-12dB/octave
E(p) H(p)
S(P)
-
+ A
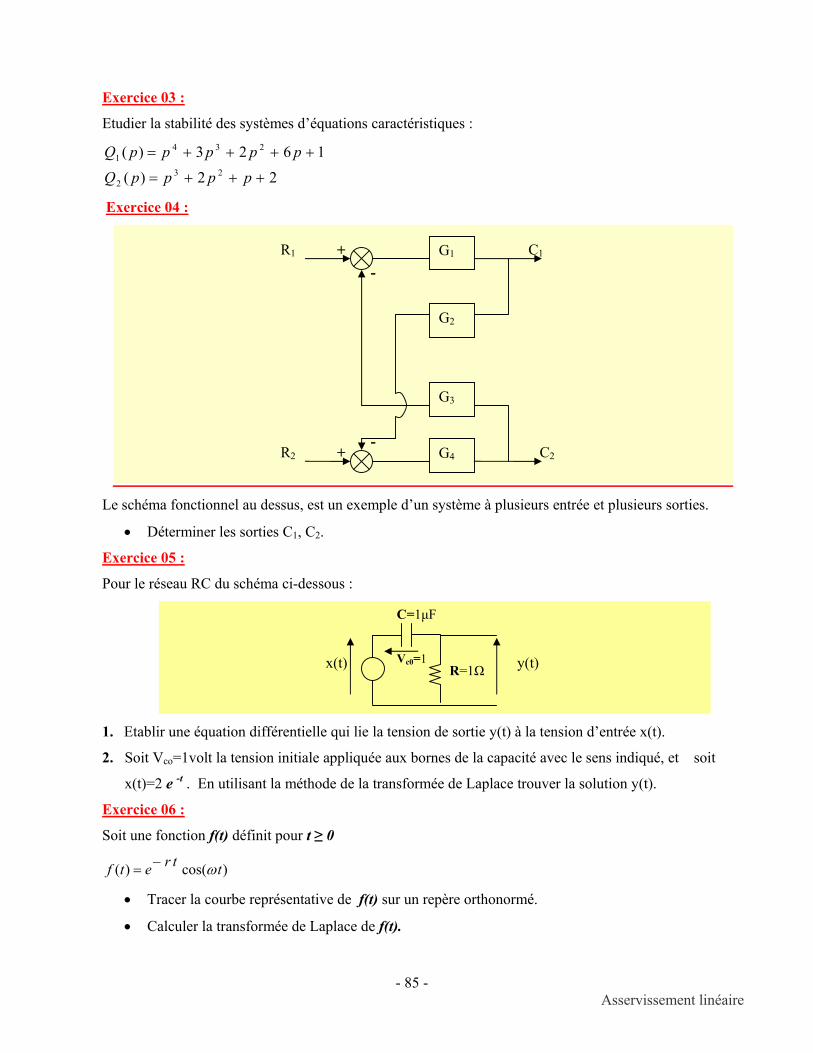
- 85 - Asservissement linéaire
Exercice 03 :
Etudier la stabilité des systèmes d’équations caractéristiques :
22)(
1623)(23
2
2341
+++=
++++=
ppppQ
pppppQ
Exercice 04 :
Le schéma fonctionnel au dessus, est un exemple d’un système à plusieurs entrée et plusieurs sorties.
• Déterminer les sorties C1, C2.
Exercice 05 :
Pour le réseau RC du schéma ci-dessous :
1. Etablir une équation différentielle qui lie la tension de sortie y(t) à la tension d’entrée x(t).
2. Soit Vco=1volt la tension initiale appliquée aux bornes de la capacité avec le sens indiqué, et soit
x(t)=2 e -t . En utilisant la méthode de la transformée de Laplace trouver la solution y(t).
Exercice 06 :
Soit une fonction f(t) définit pour t ≥ 0
)cos()( ttretf ω−=
• Tracer la courbe représentative de f(t) sur un repère orthonormé.
• Calculer la transformée de Laplace de f(t).
C=1µF
y(t) x(t) R=1Ω Vc0=1
G2
G3
G4
G1
R2
R1
C2
C1
- +
+
-

- 86 - Asservissement linéaire
Exercice 07 :
Calculer la fonction de transfert du circuit suivant :
----------------------------------0000----0000----0000----0000----0000----------------------------------
Rappel mathématique Utile :
Equation différentielle 0)()()( =++ tyctybtya &&&
Equation Caractéristique 02 =++ crbra
acb 42 −=∆
0=∆0f∆0p∆
βα jr ±=2,1
abr
2−
= abr 22,1
∆±−=
( ))sin()cos()( tttty e βθβλα += ( )µλ += ttrty e)( trtrty ee 21)( ⋅⋅= + µλ
- 87 - Asservissement linéaire
A propos de L ’Auteur
Khamari Ahmed est un ingénieur d’état en automatisme ; diplômé de
l’Ecole Nationale des Ingénieurs et Techniciens d’Algérie ; en outre son
diplôme de didactique lui permet d’enseigner dans une école supérieure
l’asservissement, l’électronique digitale et l’analyse numérique.
Dans un souci de perfectionnement il continue à travailler en laboratoire sur
son projet de fin d’étude sur le traitement d’image, l’intelligence artificielle
et la programmation en langages évolués.
Poursuivant ses études aux Etats Unis d’Amérique il obtient un certificat de
maîtrise d’anglais a l’Ecole Berlitz, et un certificat de maîtrise de l’Unix, de
l’Open VMS et de l’électronique sensorielle et le secteur des systèmes.