Embed Size (px)
Citation preview

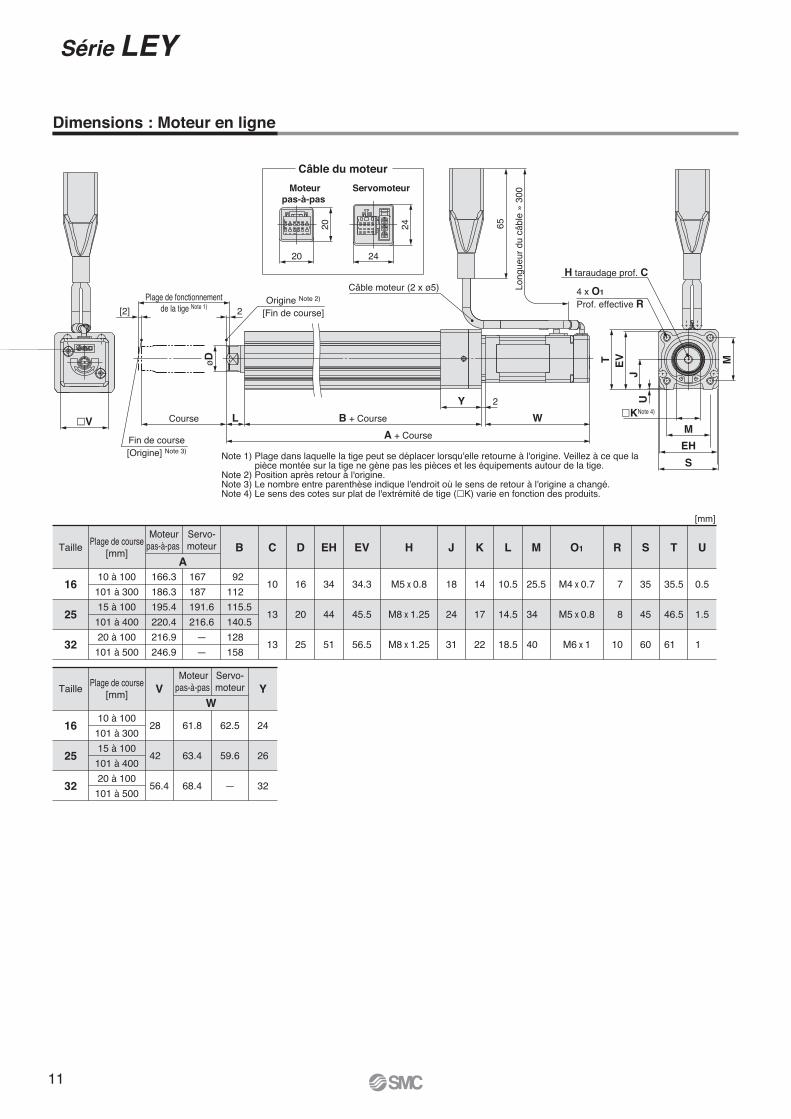
Type tige Série LEY
Grande course :max. 500 mm (LEY32)
Charge latérale finale : 5 fois plus∗
Compatible avec des guides lisses et des guides à billes.Compatible avec la charge du moment et une butée (guides lisses).� Réglage de la vitesse/du positionnement : 64 points max.� Possibilité de choisir entre contrôle de positionnement
ou de poussée. Possibilité de maintenir l'actionneur lors de la poussée de tige sur une pièce, etc.
� Puissances moteur élevées (100/200 W)� Capacité de transfert de vitesse élevée améliorée� Compatible avec une accélération élevée (5 000 mm/s2)� Type à entrées d'impulsions� Avec codeur absolu interne (caractéristiques LECSB)
Nouveau
Nouveau Nouveau
Type tige
Type tige/Type moteur en ligne
Type guidage integréType guidage integré/Type moteur en ligne
NouveauNouveauType tige
Type tige Série LEY
55Type guidage integré Série LEYG
Type guidage integré
Possibilités de montage� Fixation intégrée : 3 sens, montage de la fixation : 3 types� Possibilité de monter un détecteur.� Réglage de la vitesse/du positionnement : 64 points max.� Possibilité de choisir entre contrôle de positionnement ou
de poussée.Possibilité de maintenir l'effort sur l'actionneur pour brider une pièce, etc.
Type
Type
∗ En comparaison au type tige, taille 25 et course 100
Taille : 16, 25, 32
Taille : 16, 25, 32
NouveauNouveau
Type tigeType tige/
Type moteur en ligne
Taille : 25, 32
Moteur pas-à-pas (Servo/24 VDC) TServomoteur (24 VDC)
Servomoteur AC (100/200 W)
Contrôleur Contrôleur
� Type avec entrée de données de positionnement
� 64 points de positionnement� Boîtier de commande, entrées du kit de réglage du contrôleur
� 14 points de positionnement� Paramètrage du tableau decommande
Série LECP6/LECA6
� Contrôleur sans programmationSérie LECP1
� Type à entrées d'impulsions� Codeur absolu
(LECSB)� Fonction de
positionnement intégré (LECSA)
� Contrôleur de servomoteur ACSérie LECSA/LECSB
NouveauNouveau NouveauNouveau
entSA)
ons
Moteur pas-à-pas (Servo/24 VDC) Servomoteur ACCServomoteur (24 VDC)
Actionneur électrique
CAT.EUS100-83C-FR
Série LEY
Racleur
A7.
5∗
A7.
5∗
Série LEY
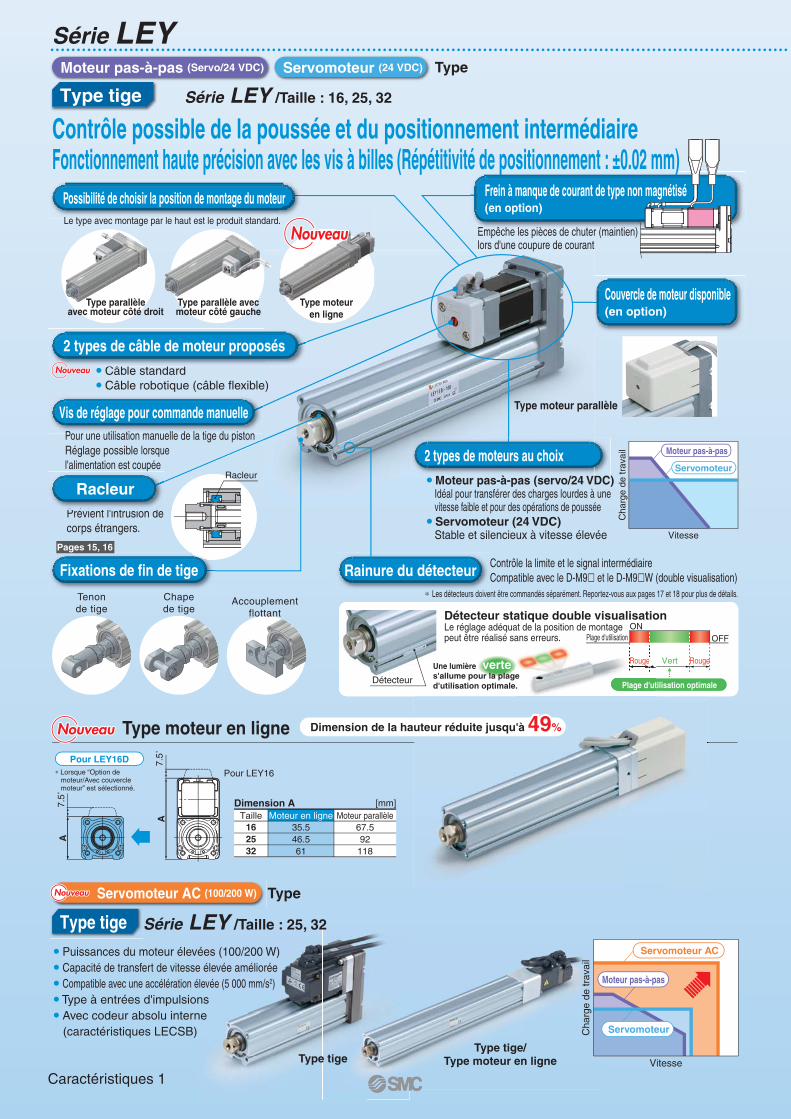
Contrôle possible de la poussée et du positionnement intermédiaireFonctionnement haute précision avec les vis à billes (Répétitivité de positionnement : ±0.02 mm)
Prévient l'intrusion decorps étrangers.
Tenonde tige
Accouplementflottant
Chapede tige
Pour une utilisation manuelle de la tige du pistonRéglage possible lorsquel'alimentation est coupée
Câble standard Câble robotique (câble flexible)
P tili ti ll d l ti d i t
Vis de réglage pour commande manuelle
Câbl d d
2 types de câble de moteur proposés
Type tige Série LEY /Taille : 16, 25, 32
Type tige Série LEY /Taille : 25, 32
Moteur pas-à-pas (servo/24 VDC)Idéal pour transférer des charges lourdes à unevitesse faible et pour des opérations de poussée Servomoteur (24 VDC)Stable et silencieux à vitesse élevée
Empêche les pièces de chuter (maintien)lors d'une coupure de courant
Type parallèleavec moteur côté droit
Type parallèle avecmoteur côté gauche
Type moteuren ligne
Le type avec montage par le haut est le produit standard.
NouveauNouveau
NouveauNouveau
L t t l h t t l d it t d d
Possibilité de choisir la position de montage du moteur
P é i t l'i t i d
Racleur
Fixations de fin de tige
Dimension de la hauteur réduite jusqu'à 49%Type moteur en ligne
∗ Lorsque “Option demoteur/Avec couverclemoteur” est sélectionné.
Pour LEY16D
Pour LEY16
Dimension ATaille Moteur en ligne Moteur parallèle
162532
35.546.561
67.592
118
[mm]
Type moteur parallèle
Type moteur
.
NouveauNouveau
Plage d'utilisation OFFON
Rouge Vert Rouge
Plage d'utilisation optimale
Détecteur statique double visualisationLe réglage adéquat de la position de montagepeut être réalisé sans erreurs.
Contrôle la limite et le signal intermédiaireCompatible avec le D-M9� et le D-M9�W (double visualisation)Rainure du détecteur
∗ Les détecteurs doivent être commandés séparément. Reportez-vous aux pages 17 et 18 pour plus de détails.
Couvercle de moteur disponible(en option)
pp ))
Empêche les pièces de chuter (maintien)
Frein à manque de courant de type non magnétisé(en option)
DC)M à ( / VD
Vitesse
Cha
rge
de tr
avai
l Moteur pas-à-pas
Servomoteur2 types de moteurs au choix
Type tigeType tige/
Type moteur en ligne Vitesse
Cha
rge
de tr
avai
l
Moteur pas-à-pas
Servomoteur AC
Servomoteur
Rougee
Plage d'ut
Puissances du moteur élevées (100/200 W) Capacité de transfert de vitesse élevée améliorée Compatible avec une accélération élevée (5 000 mm/s2) Type à entrées d'impulsions Avec codeur absolu interne (caractéristiques LECSB)
TypeMoteur pas-à-pas (Servo/24 VDC) Servomoteur (24 VDC)
TypeServomoteur AC (100/200 W)NouveauNouveau
Détecteur
Pages 15, 16
Une lumière vertes'allume pour la plaged'utilisation optimale.
Caractéristiques 1
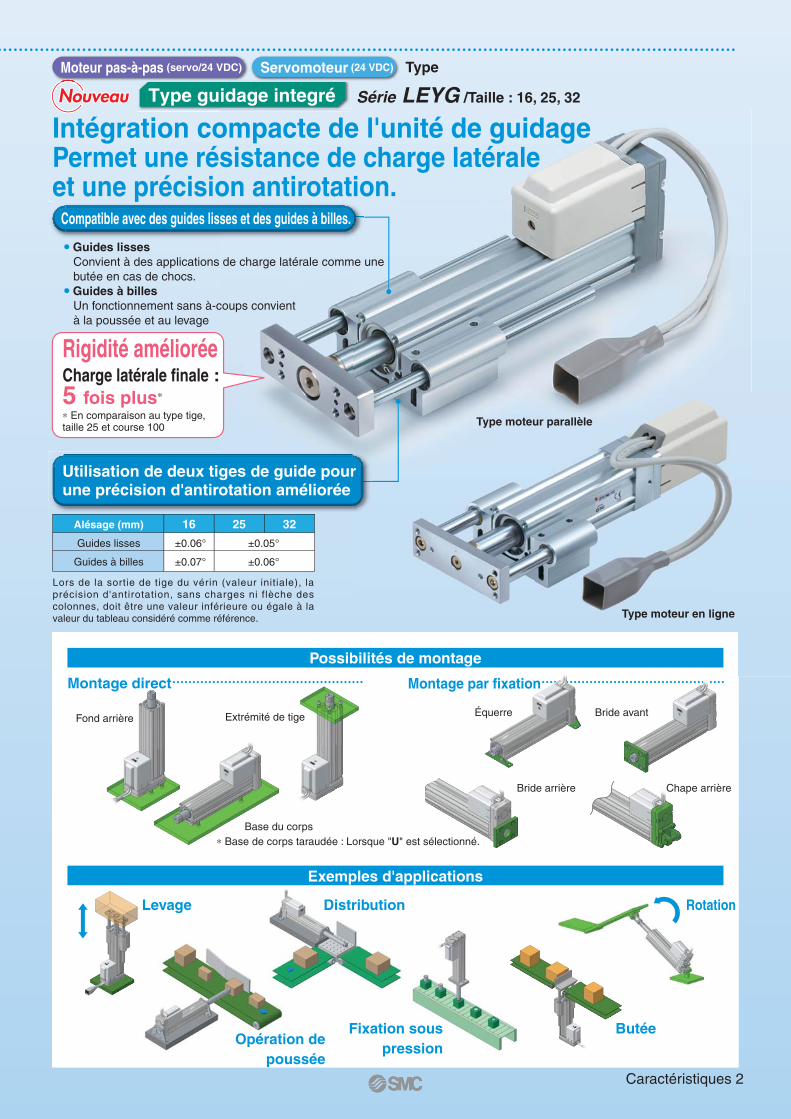
Lors de la sortie de tige du vérin (valeur initiale), la précision d'antirotation, sans charges ni flèche des colonnes, doit être une valeur inférieure ou égale à la valeur du tableau considéré comme référence.
Alésage (mm)
Guides lisses
Guides à billes
16
±0.06°
±0.07°
25
±0.05°
±0.06°
32
Intégration compacte de l'unité de guidagePermet une résistance de charge latéraleet une précision antirotation.
Montage direct
Fond arrière Extrémité de tige
Base du corps
Montage par fixation
Bride arrière Chape arrière
∗ Base de corps taraudée : Lorsque "U" est sélectionné.
Exemples d'applications
Levage Distribution Rotation
NouveauNouveau
Opération depoussée
Fixation souspression
Butée
Rigidité amélioréeCharge latérale finale :5 fois plus∗
∗ En comparaison au type tige,taille 25 et course 100
Utilisation de deux tiges de guide pourune précision d'antirotation améliorée
Type guidage integré Série LEYG /Taille : 16, 25, 32
Guides lissesConvient à des applications de charge latérale comme unebutée en cas de chocs.
Guides à billesUn fonctionnement sans à-coups convient à la poussée et au levage
pCompatible avec des guides lisses et des guides à billes.
Type moteur parallèle
Type moteur en ligne
TypeMoteur pas-à-pas (servo/24 VDC) Servomoteur (24 VDC)
Équerre Bride avant
Possibilités de montage
Caractéristiques 2
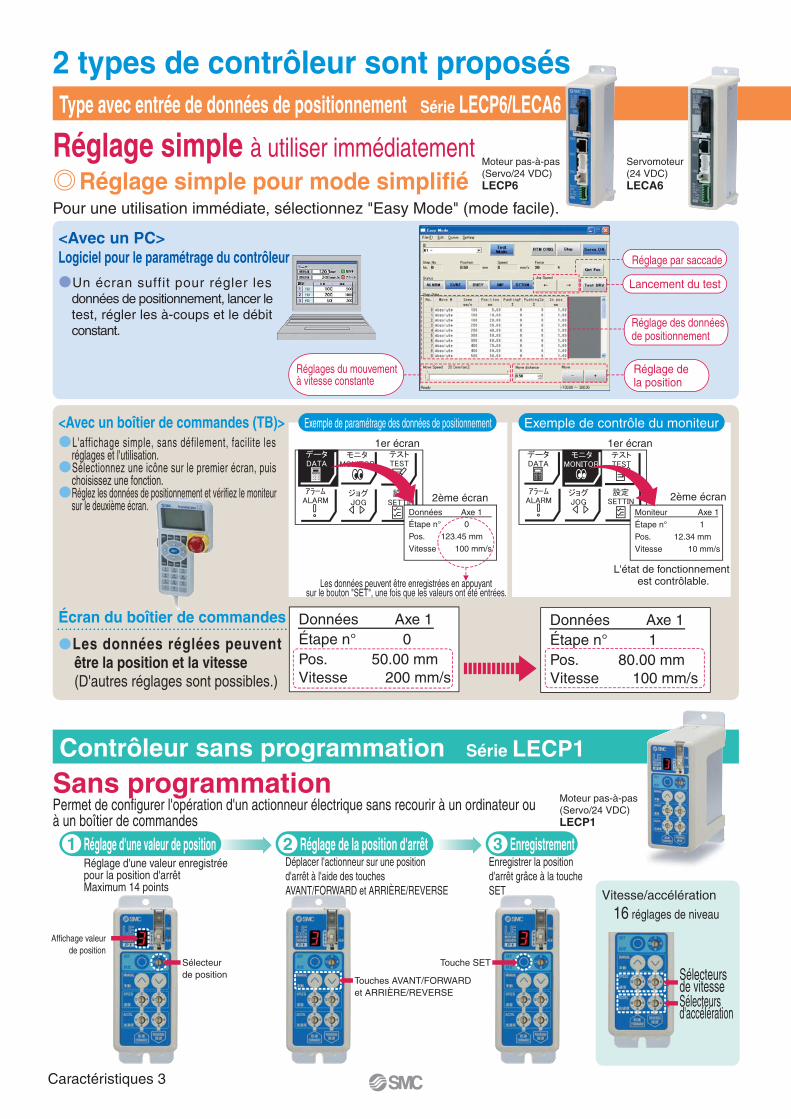
Réglage simple pour mode simplifié
Exemple de paramétrage des données de positionnement
Données Axe 1Étape n° 0
Pos. 123.45 mm
Vitesse 100 mm/s
Moniteur Axe 1
Étape n° 1
Pos. 12.34 mm
Vitesse 10 mm/s
Exemple de contrôle du moniteur
Données Axe 1Étape n° 1Pos. 80.00 mmVitesse 100 mm/s
Données Axe 1Étape n° 0Pos. 50.00 mmVitesse 200 mm/s
Les données peuvent être enregistrées en appuyantsur le bouton "SET", une fois que les valeurs ont été entrées.
L'état de fonctionnement est contrôlable.
1er écran
2ème écran
Sans programmation
<Avec un PC>Logiciel pour le paramétrage du contrôleur
�Un écran suffit pour régler les données de positionnement, lancer le test, régler les à-coups et le débit constant.
Contrôleur sans programmation Série LECP1
LECP6 LECA6
Réglage d'une valeur de position1 Réglage de la position d'arrêt2 Enregistrement3
Sélecteurde position
Touches AVANT/FORWARDet ARRIÈRE/REVERSE
Affichage valeurde position
Touche SET
Permet de configurer l'opération d'un actionneur électrique sans recourir à un ordinateur ouà un boîtier de commandes
Vitesse/accélération
16 réglages de niveau
Sélecteursde vitesseSélecteursd'accélération
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur (24 VDC)
LECP1
Moteur pas-à-pas (Servo/24 VDC)
2 types de contrôleur sont proposésType avec entrée de données de positionnement Série LECP6/LECA6
Réglage simple à utiliser immédiatement
Pour une utilisation immédiate, sélectionnez "Easy Mode" (mode facile).
Réglages du mouvementà vitesse constante
Réglage de la position
Réglage des donnéesde positionnement
<Avec un boîtier de commandes (TB)>
Écran du boîtier de commandes
�L'affichage simple, sans défilement, facilite les réglages et l'utilisation.
�Sélectionnez une icône sur le premier écran, puis choisissez une fonction.
�Réglez les données de positionnement et vérifiez le moniteur sur le deuxième écran.
�Les données réglées peuvent être la position et la vitesse(D'autres réglages sont possibles.)
Réglage d'une valeur enregistrée pour la position d'arrêt Maximum 14 points
Déplacer l'actionneur sur une position d'arrêt à l'aide des touches AVANT/FORWARD et ARRIÈRE/REVERSE
Enregistrer la position d'arrêt grâce à la touche SET
Réglage par saccade
Lancement du test
1er écran
2ème écran
Caractéristiques 3
q w
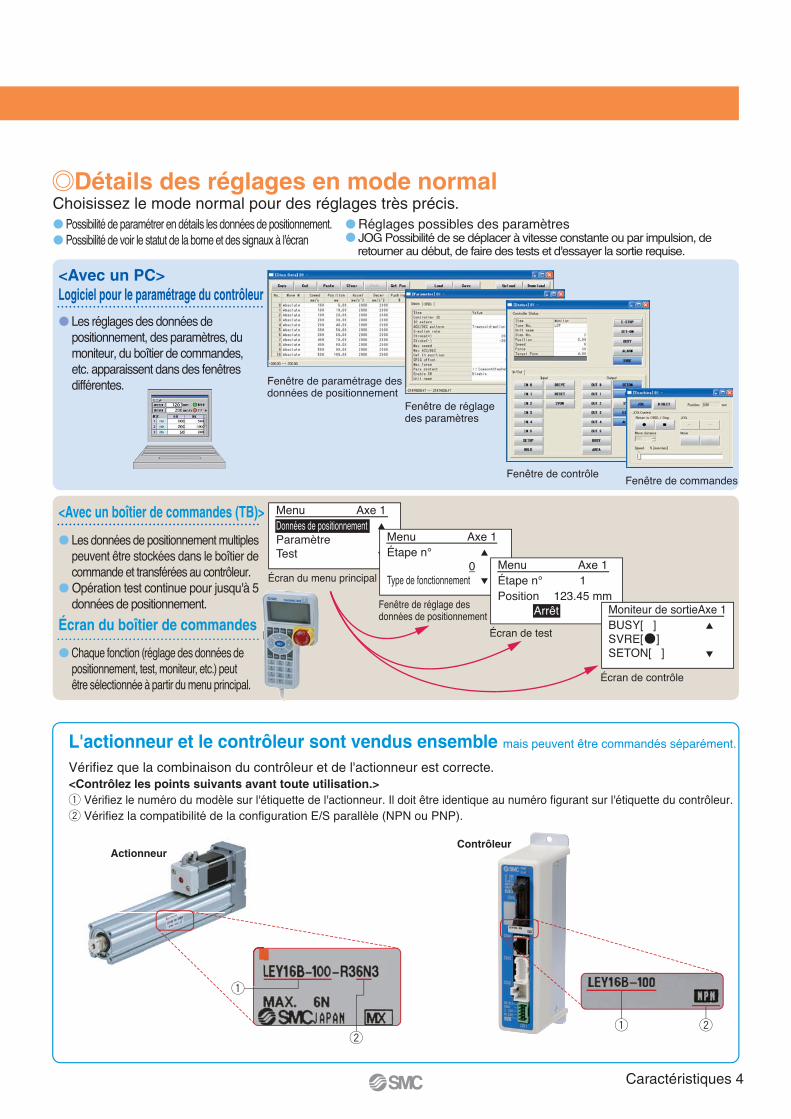
ContrôleurActionneur
w
q
L'actionneur et le contrôleur sont vendus ensemble mais peuvent être commandés séparément.
Vérifiez que la combinaison du contrôleur et de l'actionneur est correcte.<Contrôlez les points suivants avant toute utilisation.>q Vérifiez le numéro du modèle sur l'étiquette de l'actionneur. Il doit être identique au numéro figurant sur l'étiquette du contrôleur.w Vérifiez la compatibilité de la configuration E/S parallèle (NPN ou PNP).
Détails des réglages en mode normalChoisissez le mode normal pour des réglages très précis.� Possibilité de paramétrer en détails les données de positionnement.� Possibilité de voir le statut de la borne et des signaux à l'écran
� Réglages possibles des paramètres� JOG Possibilité de se déplacer à vitesse constante ou par impulsion, de
retourner au début, de faire des tests et d'essayer la sortie requise.
� Les réglages des données de positionnement, des paramètres, du moniteur, du boîtier de commandes, etc. apparaissent dans des fenêtres différentes.
Logiciel pour le paramétrage du contrôleur<Avec un PC>
Fenêtre de paramétrage desdonnées de positionnement
Fenêtre de réglagedes paramètres
Fenêtre de contrôleFenêtre de commandes
<Avec un boîtier de commandes (TB)>
Écran du boîtier de commandes
� Les données de positionnement multiples peuvent être stockées dans le boîtier de commande et transférées au contrôleur.
� Opération test continue pour jusqu'à 5 données de positionnement.
� Chaque fonction (réglage des données de positionnement, test, moniteur, etc.) peut être sélectionnée à partir du menu principal.
Menu Axe 1Étape n° 0 Type de fonctionnement
Menu Axe 1Étape n° 1Position 123.45 mm Arrêt Moniteur de sortie Axe 1
BUSY[ ]SVRE[ ] SETON[ ]
Écran du menu principal
Fenêtre de réglage desdonnées de positionnement
Écran de test
Écran de contrôle
Menu Axe 1Données de positionnementParamètre Test
Caractéristiques 4
Série LECP6/LECA6/LECP1
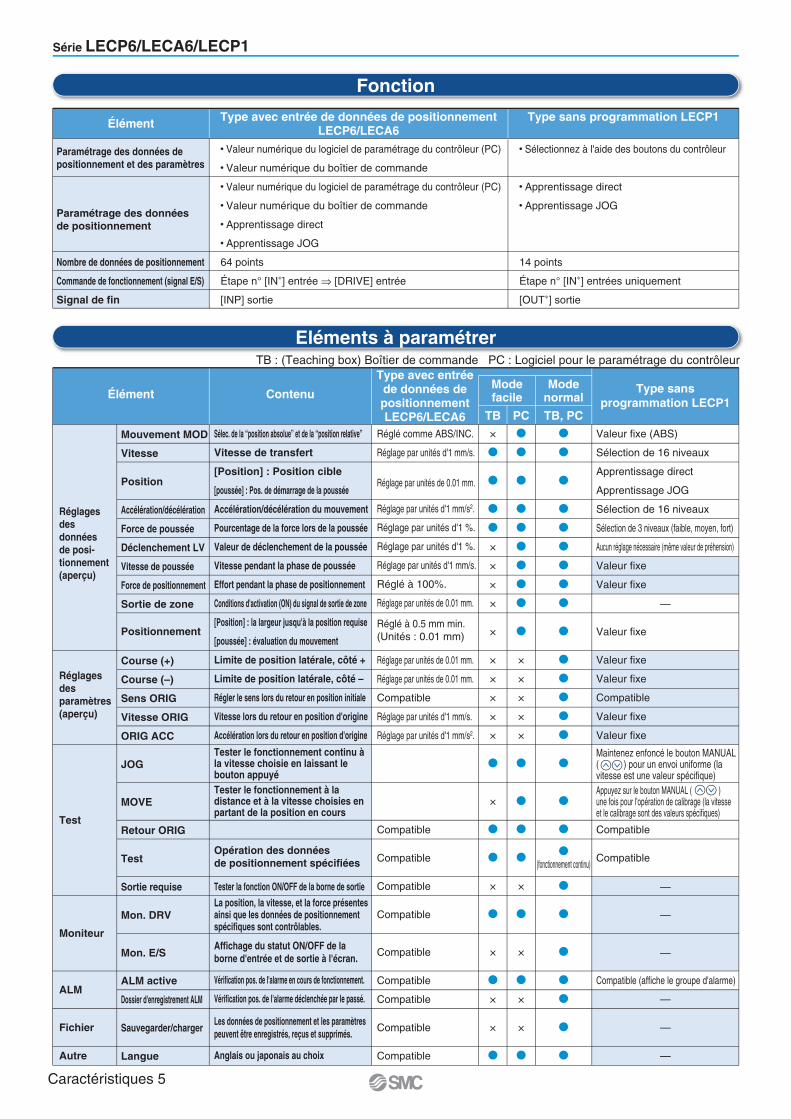
Fonction
Eléments à paramétrer
Nombre de données de positionnement
Commande de fonctionnement (signal E/S)
Signal de fin
� Valeur numérique du logiciel de paramétrage du contrôleur (PC)
� Valeur numérique du boîtier de commande
� Valeur numérique du logiciel de paramétrage du contrôleur (PC)
� Valeur numérique du boîtier de commande
� Apprentissage direct
� Apprentissage JOG
64 points
Étape n° [IN∗] entrée ⇒ [DRIVE] entrée
[INP] sortie
� Sélectionnez à l'aide des boutons du contrôleur
� Apprentissage direct
� Apprentissage JOG
14 points
Étape n° [IN∗] entrées uniquement
[OUT∗] sortie
Paramétrage des données de positionnement
Paramétrage des données de positionnement et des paramètres
TB : (Teaching box) Boîtier de commande PC : Logiciel pour le paramétrage du contrôleur
Élément Type avec entrée de données de positionnementLECP6/LECA6
Type sans programmation LECP1
Mouvement MOD
Vitesse
Position
Accélération/décélération
Force de poussée
Déclenchement LV
Vitesse de poussée
Force de positionnement
Sortie de zone
Positionnement
Course (+)
Course (–)
Sens ORIG
Vitesse ORIG
ORIG ACC
JOG
MOVE
Retour ORIG
Test
Sortie requise
Mon. DRV
Mon. E/S
ALM active
Dossier d'enregistrement ALM
Sauvegarder/charger
Langue
Réglages des données de posi-tionnement (aperçu)
Réglagesdesparamètres(aperçu)
Test
Moniteur
ALM
Fichier
Autre
Sélec. de la “position absolue” et de la “position relative”
Vitesse de transfert
[Position] : Position cible
[poussée] : Pos. de démarrage de la poussée
Accélération/décélération du mouvement
Pourcentage de la force lors de la poussée
Valeur de déclenchement de la poussée
Vitesse pendant la phase de poussée
Effort pendant la phase de positionnement
Conditions d'activation (ON) du signal de sortie de zone
[Position] : la largeur jusqu'à la position requise
[poussée] : évaluation du mouvement
Limite de position latérale, côté +
Limite de position latérale, côté –
Régler le sens lors du retour en position initiale
Vitesse lors du retour en position d'origine
Accélération lors du retour en position d'origine
Opération des données de positionnement spécifiées
Tester la fonction ON/OFF de la borne de sortie
Vérification pos. de l'alarme en cours de fonctionnement.
Vérification pos. de l'alarme déclenchée par le passé.
Anglais ou japonais au choix
Réglé comme ABS/INC.
Réglage par unités d'1 mm/s.
Réglage par unités de 0.01 mm.
Réglage par unités d'1 mm/s2.
Réglage par unités d'1 %.
Réglage par unités d'1 %.
Réglage par unités d'1 mm/s.
Réglé à 100%.
Réglage par unités de 0.01 mm.
Réglé à 0.5 mm min.(Unités : 0.01 mm)
Réglage par unités de 0.01 mm.
Réglage par unités de 0.01 mm.
Compatible
Réglage par unités d'1 mm/s.
Réglage par unités d'1 mm/s2.
Compatible
Compatible
Compatible
Compatible
Compatible
Compatible
Compatible
Compatible
Compatible
×
�
�
��×
×
×
×
×
×
×
×
×
×
�
×
�
�
×
�
×
�×
×
�
��
�
������
�
×
×
×
×
×
�
�
�
�
×
�
×
�×
×
�
��
�
������
�
�����
�
�
�
�
�
�
��
�
�
Valeur fixe (ABS)
Sélection de 16 niveaux
Apprentissage direct
Apprentissage JOG
Sélection de 16 niveaux
Sélection de 3 niveaux (faible, moyen, fort)
Aucun réglage nécessaire (même valeur de préhension)
Valeur fixe
Valeur fixe
Valeur fixe
Valeur fixe
Valeur fixe
Compatible
Valeur fixe
Valeur fixe
Compatible
Compatible
Compatible (affiche le groupe d'alarme)
Élément Contenu
Type avec entréede données depositionnementLECP6/LECA6
Modefacile
TB PC
Modenormal
TB, PC
Type sansprogrammation LECP1
Tester le fonctionnement continu à la vitesse choisie en laissant le bouton appuyéTester le fonctionnement à la distance et à la vitesse choisies en partant de la position en cours
La position, la vitesse, et la force présentes ainsi que les données de positionnement spécifiques sont contrôlables.
Affichage du statut ON/OFF de la borne d'entrée et de sortie à l'écran.
Les données de positionnement et les paramètres peuvent être enregistrés, reçus et supprimés.
�(fonctionnement continu)
—
—
—
—
—
—
—
Appuyez sur le bouton MANUAL ( ) une fois pour l'opération de calibrage (la vitesse et le calibrage sont des valeurs spécifiques)
Maintenez enfoncé le bouton MANUAL ( ) pour un envoi uniforme (la vitesse est une valeur spécifique)
Caractéristiques 5
Page 5
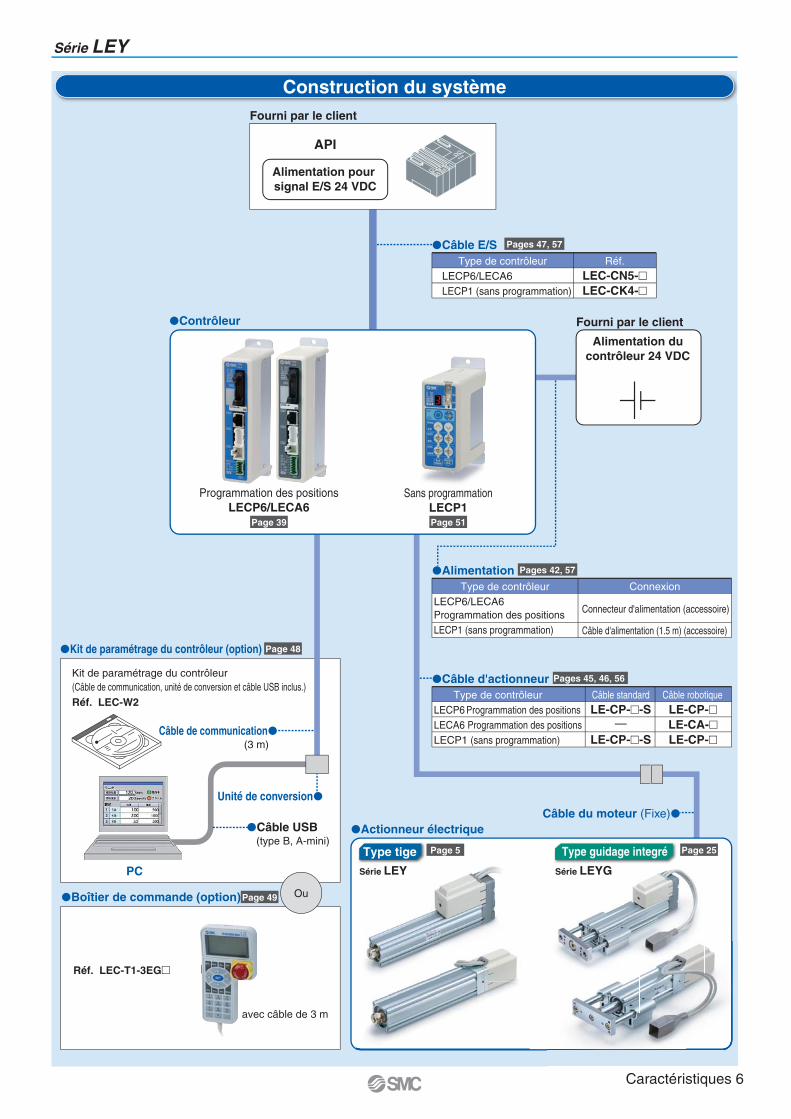
Construction du système
LECP6/LECA6LECP1 (sans programmation)
Réf.LEC-CN5-�LEC-CK4-�
API
Alimentation pour signal E/S 24 VDC
�Câble USB
PC
Câble de communication�(3 m)
Unité de conversion�
(type B, A-mini)
�Boîtier de commande (option)
Réf. LEC-T1-3EG�
avec câble de 3 m
�Kit de paramétrage du contrôleur (option)
Kit de paramétrage du contrôleur(Câble de communication, unité de conversion et câble USB inclus.)Réf. LEC-W2
Ou
Alimentation ducontrôleur 24 VDC
�Actionneur électrique
�Contrôleur
�Câble E/S
Câble du moteur (Fixe)�
Programmation des positionsLECP6/LECA6
Type de contrôleur
LECP6 Programmation des positionsLECA6 Programmation des positionsLECP1 (sans programmation)
LE-CP-�LE-CA-�LE-CP-�
Câble robotiqueLE-CP-�-S
—LE-CP-�-S
Câble standard
�Câble d'actionneurType de contrôleur
LECP6/LECA6Programmation des positionsLECP1 (sans programmation)
Connecteur d'alimentation (accessoire)
Câble d'alimentation (1.5 m) (accessoire)
Connexion
�AlimentationType de contrôleur
Page 39 Page 51
Sans programmationLECP1
Pages 47, 57
Type tige Type guidage integré
Série LEY Série LEYG
Série LEY
Fourni par le client
Fourni par le client
Pages 42, 57
Pages 45, 46, 56
Page 48
Page 49
Page 25
Caractéristiques 6
Temps
Délai de réglage
Temps
Délai deréglageV
itess
e
Vite
sse
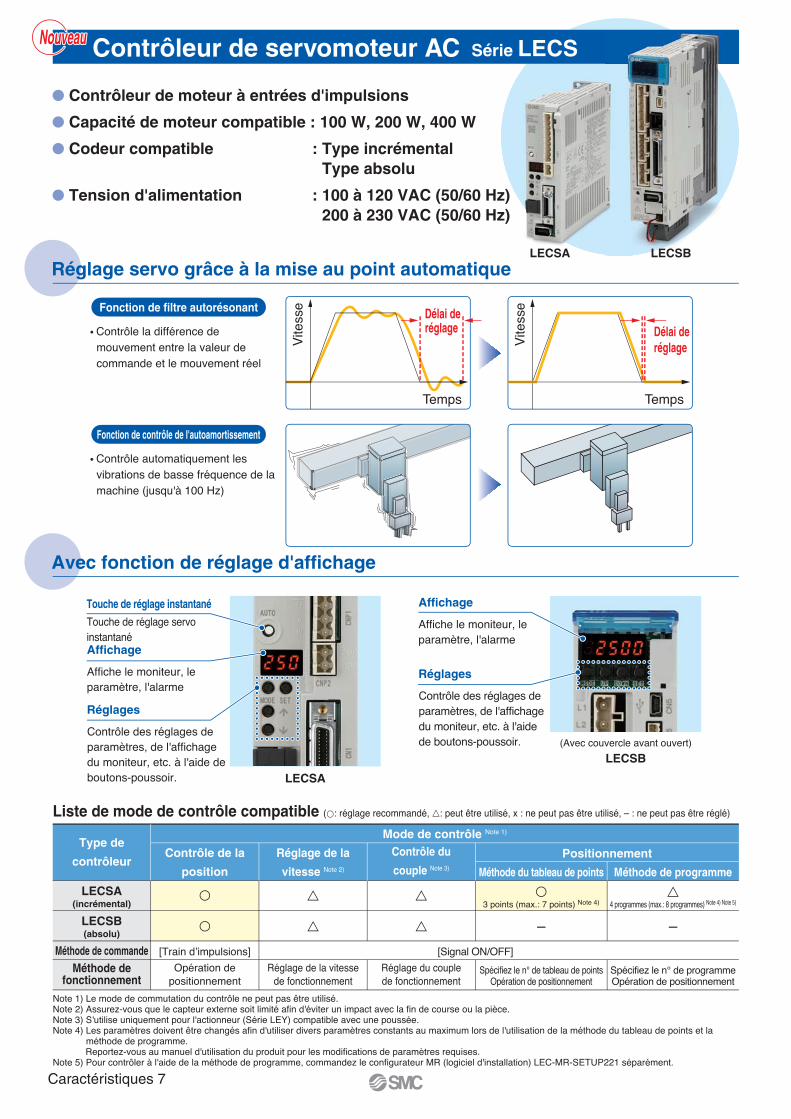
� Contrôle la différence de mouvement entre la valeur de commande et le mouvement réel
� Contrôle automatiquement les vibrations de basse fréquence de la machine (jusqu'à 100 Hz)
Liste de mode de contrôle compatible (�: réglage recommandé, �: peut être utilisé, x : ne peut pas être utilisé, – : ne peut pas être réglé)
LECSA(incrémental)
LECSB(absolu)
Méthode de commandeMéthode de
fonctionnement
[Train d’impulsions]
Opération depositionnement
Réglage de la vitessede fonctionnement
Réglage du couplede fonctionnement
[Signal ON/OFF]
Spécifiez le n° de tableau de pointsOpération de positionnement
Spécifiez le n° de programmeOpération de positionnement
Mode de contrôle Note 1)
Contrôle de la
position
�
�
�
�
�
�
�3 points (max.: 7 points) Note 4)
—
�4 programmes (max.: 8 programmes) Note 4) Note 5)
—
Réglage de la
vitesse Note 2)
Contrôle du
couple Note 3) Méthode du tableau de points
Positionnement
Méthode de programme
Type de
contrôleur
Réglage servo grâce à la mise au point automatique
Avec fonction de réglage d'affichage
Fonction de filtre autorésonant
Fonction de contrôle de l'autoamortissement
Série LECSContrôleur de servomoteur AC
Note 1) Le mode de commutation du contrôle ne peut pas être utilisé.Note 2) Assurez-vous que le capteur externe soit limité afin d'éviter un impact avec la fin de course ou la pièce.Note 3) S'utilise uniquement pour l'actionneur (Série LEY) compatible avec une poussée.Note 4) Les paramètres doivent être changés afin d'utiliser divers paramètres constants au maximum lors de l'utilisation de la méthode du tableau de points et la
méthode de programme.Reportez-vous au manuel d'utilisation du produit pour les modifications de paramètres requises.
Note 5) Pour contrôler à l'aide de la méthode de programme, commandez le configurateur MR (logiciel d'installation) LEC-MR-SETUP221 séparément.
LECSA LECSB
� Contrôleur de moteur à entrées d'impulsions
� Capacité de moteur compatible : 100 W, 200 W, 400 W
� Codeur compatible : Type incrémental Type absolu
� Tension d'alimentation : 100 à 120 VAC (50/60 Hz) 200 à 230 VAC (50/60 Hz)
Touche de réglage servoinstantané
Touche de réglage instantané
Affiche le moniteur, le paramètre, l'alarme
Affichage
Contrôle des réglages deparamètres, de l'affichagedu moniteur, etc. à l'aide deboutons-poussoir.
Réglages
Affiche le moniteur, leparamètre, l'alarme
Affichage
Contrôle des réglages deparamètres, de l'affichagedu moniteur, etc. à l'aidede boutons-poussoir. (Avec couvercle avant ouvert)
Réglages
LECSA
LECSB
NouveauNouveau
Caractéristiques 7
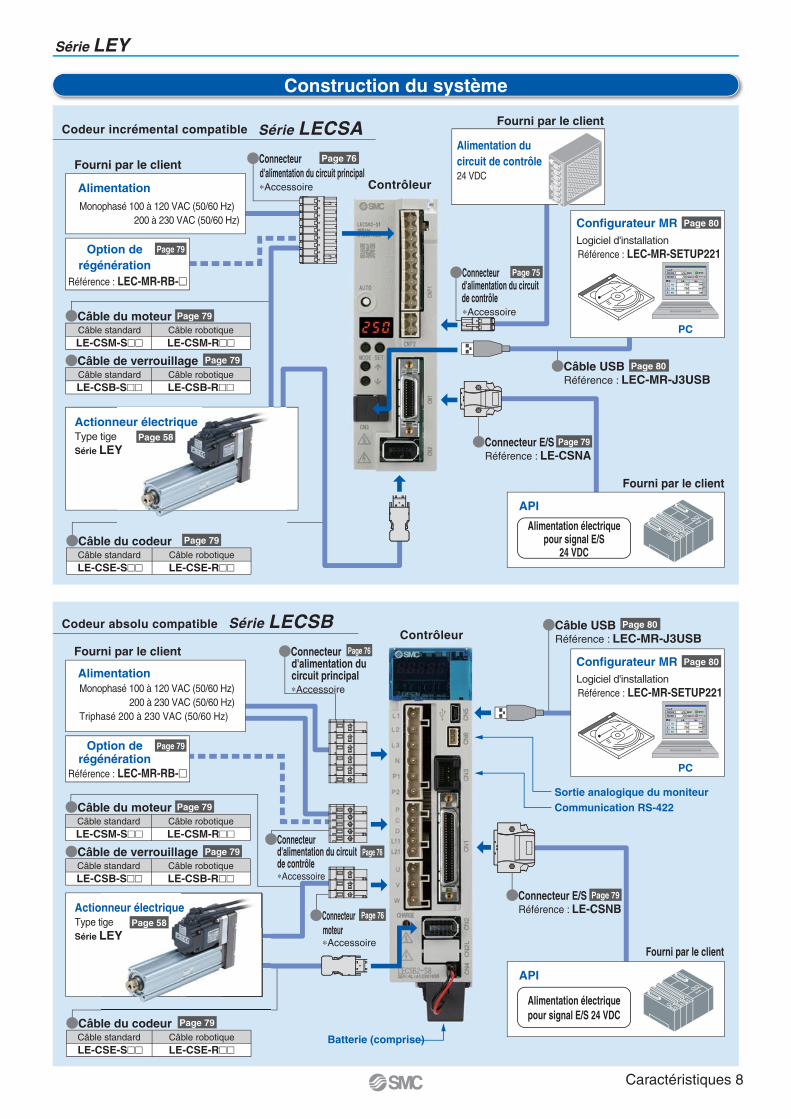
Construction du système
Codeur incrémental compatible Série LECSA
Contrôleur
ContrôleurCodeur absolu compatible Série LECSB
Alimentation électriquepour signal E/S
24 VDC
AlimentationMonophasé 100 à 120 VAC (50/60 Hz)
200 à 230 VAC (50/60 Hz)
Fourni par le client
Sortie analogique du moniteurCommunication RS-422
Batterie (comprise)
Référence : LEC-MR-RB-�
PC
Configurateur MRLogiciel d'installationRéférence : LEC-MR-SETUP221
PC
Configurateur MRLogiciel d'installationRéférence : LEC-MR-SETUP221
Fourni par le client
Fourni par le client
AlimentationMonophasé 100 à 120 VAC (50/60 Hz)
200 à 230 VAC (50/60 Hz)Triphasé 200 à 230 VAC (50/60 Hz)
Fourni par le client
Alimentation ducircuit de contrôle24 VDC
Option derégénération
Référence : LEC-MR-RB-�
Option derégénération
Série LEY
Câble standard Câble robotiqueLE-CSM-S�� LE-CSM-R��
�Câble du moteur
�Connecteur d'alimentation du circuit principal
∗Accessoire
�Connecteur d'alimentation du circuit principal
∗Accessoire
�Connecteur E/SRéférence : LE-CSNA
�Câble USBRéférence : LEC-MR-J3USB
�Connecteur E/SRéférence : LE-CSNB
�Câble USBRéférence : LEC-MR-J3USB
�Connecteur d'alimentation du circuitde contrôle∗Accessoire
�Connecteurd'alimentation du circuit de contrôle∗Accessoire
�Connecteur moteur
∗Accessoire
Câble standard Câble robotiqueLE-CSB-S�� LE-CSB-R��
�Câble de verrouillage
Câble standard Câble robotiqueLE-CSM-S�� LE-CSM-R��
�Câble du moteur
Câble standard Câble robotiqueLE-CSB-S�� LE-CSB-R��
Câble standard Câble robotiqueLE-CSE-S�� LE-CSE-R��
�Câble de verrouillage
�Câble du codeur
�Câble du codeur
Fourni par le client
API
Alimentation électriquepour signal E/S 24 VDC
API
Câble standard Câble robotiqueLE-CSE-S�� LE-CSE-R��
Actionneur électriqueType tigeSérie LEY
Actionneur électriqueType tigeSérie LEY
Page 79
Page 79
Page 79
Page 76
Page 80
Page 75
Page 80
Page 79Page 58
Page 58
Page 79
Page 79
Page 79
Page 79
Page 79
Page 76
Page 76
Page 76
Page 80
Page 80
Page 79
Caractéristiques 8
100 à 400100 à 600100 à 800200 à 1000
300 à 1000300 à 2000300 à 2000
100 à 600100 à 800
200 à 1000
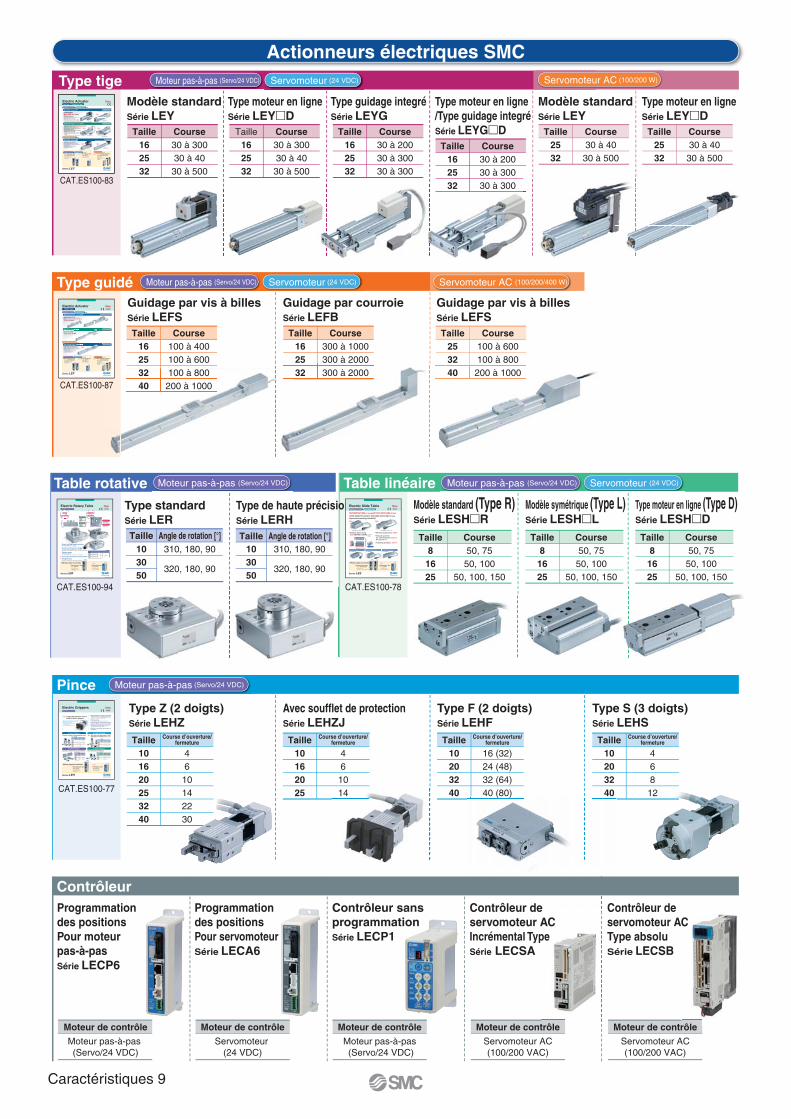
Programmation des positionsPour moteurpas-à-pasSérie LECP6
Programmation des positionsPour servomoteurSérie LECA6
Contrôleur sansprogrammationSérie LECP1
Table linéaire
Contrôleur
Actionneurs électriques SMC
Type guidé
Table rotative
Pince
Type tige
Taille162532
Course30 à 30030 à 4030 à 500
Modèle standardSérie LEY
Taille2532
Course30 à 40
30 à 500
Modèle standardSérie LEY
Taille2532
Course30 à 4030 à 500
Type moteur en ligneSérie LEY�D
Taille162532
Course30 à 20030 à 30030 à 300
Type guidage integréSérie LEYG
Taille162532
Course30 à 30030 à 4030 à 500
Type moteur en ligneSérie LEY�D
Taille162532
Course30 à 20030 à 30030 à 300
Type moteur en ligne/Type guidage integréSérie LEYG�D
Taille16253240
Course Taille162532
Course
Guidage par vis à billesSérie LEFS
Taille253240
Course
Guidage par vis à billesSérie LEFS
Guidage par courroieSérie LEFB
Taille8
1625
Course50, 75
50, 10050, 100, 150
Taille8
1625
Course50, 75
50, 10050, 100, 150
Taille8
1625
Course50, 7550, 100
50, 100, 150
Modèle standard (Type R)Série LESH�R
Modèle symétrique (Type L)Série LESH�L
Type moteur en ligne (Type D)Série LESH�D
Taille103050
Angle de rotation [°]310, 180, 90
320, 180, 90
Taille103050
Angle de rotation [°]310, 180, 90
320, 180, 90
Type standardSérie LER
Type de haute précisionSérie LERH
Moteur de contrôle
Servomoteur (24 VDC)
Moteur de contrôle
Moteur pas-à-pas (Servo/24 VDC)
Moteur de contrôle
Moteur pas-à-pas (Servo/24 VDC)
Moteur de contrôle
Servomoteur AC(100/200 VAC)
Contrôleur deservomoteur ACIncrémental TypeSérie LECSA
Moteur de contrôle
Servomoteur AC(100/200 VAC)
Contrôleur deservomoteur ACType absoluSérie LECSB
Taille10203240
Course d’ouverture/fermeture
16 (32)24 (48)32 (64)40 (80)
Taille10203240
Course d’ouverture/fermeture
468
12
Type F (2 doigts)Série LEHF
Type S (3 doigts)Série LEHS
Taille10162025
Course d’ouverture/fermeture
461014
Avec soufflet de protectionSérie LEHZJ
Taille101620253240
Course d’ouverture/fermeture
4610142230
Type Z (2 doigts)Série LEHZ
CAT.ES100-77
Moteur pas-à-pas (Servo/24 VDC) Servomoteur (24 VDC) Servomoteur AC (100/200 W)
CAT.ES100-83
Moteur pas-à-pas (Servo/24 VDC) Servomoteur (24 VDC) Servomoteur AC (100/200/400 W)
CAT.ES100-87
Moteur pas-à-pas (Servo/24 VDC)
Moteur pas-à-pas (Servo/24 VDC)
CAT.ES100-94
Moteur pas-à-pas (Servo/24 VDC) Servomoteur (24 VDC)
CAT.ES100-78
Rod Type Series LEY
Long stroke:Max. 500 mm (LEY32)
Lateral end load: 5 times moreCompatible with slide-bearing and ball-bushing bearing.Compatible with moment load and stopper (slide bearing).Speed control/Positioning: Max. 64 pointsPositioning and pushing control can beselected.Possible to hold the actuator when pushing the rodto a workpiece, etc.
High output motor (100/200 W)Improved high speed transfer abitityHigh acceleration compatible (5,000 mm/s2)Pulse input typeWith internal absolute encoder(LECSB specifications)
New
New New
Rod Type
Rod Type/In-line Motor Type
Guide Rod TypeGuide Rod Type/In-line Motor Type
NewNewRod Type
Rod Type Series LEY
Guide Rod Type Series LEYG
Guide Rod Type
Mounting variationsDirect mounting: 3 directions, Bracket mounting: 3 typesAuto switch can be mounted.Speed control/Positioning: Max. 64 pointsPositioning and pushing control can be selected.Possible to hold the actuator when pushing the rod to a workpiece, etc.
Type
Type
Compared with rod type, size 25 and 100 stroke
Size: 16, 25, 32
Size: 16, 25, 32
NewNew
Rod TypeRod Type/
In-line Motor Type
Size: 25, 32
Step Motor (Servo/24 VDC) Servo Motor (24 VDC)
AC Servo Motor (100/200 W)
Controller Controller
Step Data Input Type
64 positioning points
Teaching box, controller
setting kit input
14 positioning points
Control panel setting
Series LECP6/LECA6Programless TypeSeries LECP1
Pulse input typeAbsolute encoder(LECSB)Built-in positioning function(LECSA)
AC Servo Motor ControllerSeries LECSA/LECSB
NewNew NewNew
Step Motor (Servo/24 VDC) AC Servo MotorServo Motor (24 VDC)
Electric Actuator
CAT.ES100-83C
Series LEY
Rod Type Series LEY
Long stroke:Max. 500 mm (LEY32)
Lateral end load: 5 times moreCompatible with slide-bearing and ball-bushing bearing.Compatible with moment load and stopper (slide bearing).Speed control/Positioning: Max. 64 pointsPositioning and pushing control can beselected.Possible to hold the actuator when pushing the rodto a workpiece, etc.
High output motor (100/200 W)Improved high speed transfer abitityHigh acceleration compatible (5,000 mm/s2)Pulse input typeWith internal absolute encoder(LECSB specifications)
New
New New
Rod Type
Rod Type/In-line Motor Type
Guide Rod TypeGuide Rod Type/In-line Motor Type
NewNewRod Type
Rod Type Series LEY
Guide Rod Type Series LEYG
Guide Rod Type
Mounting variationsDirect mounting: 3 directions, Bracket mounting: 3 typesAuto switch can be mounted.Speed control/Positioning: Max. 64 pointsPositioning and pushing control can be selected.Possible to hold the actuator when pushing the rod to a workpiece, etc.
Type
Type
Compared with rod type, size 25 and 100 stroke
Size: 16, 25, 32
Size: 16, 25, 32
NewNew
Rod TypeRod Type/
In-line Motor Type
Size: 25, 32
Step Motor (Servo/24 VDC) Servo Motor (24 VDC)
AC Servo Motor (100/200 W)
Controller Controller
Step Data Input Type
64 positioning points
Teaching box, controller
setting kit input
14 positioning points
Control panel setting
Series LECP6/LECA6Programless TypeSeries LECP1
Pulse input typeAbsolute encoder(LECSB)Built-in positioning function(LECSA)
AC Servo Motor ControllerSeries LECSA/LECSB
NewNew NewNew
Step Motor (Servo/24 VDC) AC Servo MotorServo Motor (24 VDC)
Electric Actuator
CAT.ES100-83C
Series LEY
RoHSSlider Type
NewNew
Max. work load: 60 kg
Positioning repeatability: ±0.02 mm
Size 40 added!
Max. stroke: 2000 mm
Transfer speed: 2000 mm/s
Ball Screw Drive Series LEFS
Belt Drive Series LEFB
Size: 16, 25, 32, 40
Size: 16, 25, 32
Ball Screw Drive Series LEFS Size: 25, 32, 40
Controller Controller
Step Data Input Type
64 positioning pointsTeaching box, controller
setting kit input
14 positioning pointsControl panel setting
Series LECP6/LECA6Programless TypeSeries LECP1
Pulse input typeAbsolute encoder
(LECSB)Built-in positioning function
(LECSA)
AC Servo Motor ControllerSeries LECSA/LECSB
NewNew
NewNew
NewNew
Step Motor (Servo/24 VDC) AC Servo Motor Servo Motor (24 VDC)
Type
Type
Step Motor (Servo/24 VDC) Servo Motor (24 VDC)
AC Servo Motor (100/200/400 W)
High output motor (100/200/400 W)Improved high speed transfer abilityHigh acceleration compatible (5,000 mm/s2)Pulse input typeWith internal absolute encoder
(LECSB specifications)
Electric Actuator
CAT.ES100-87C
Series LEF
NewNew
Prevents machining chips, dust, etc.,from getting inside
Prevents spattering of grease, etc.
Sealed-construction dust cover(Equivalent to IP50)
NewNewRoHS
Compact and light, various gripping forces
Gripping force [N]
6 to 14
16 to 40
52 to 130
84 to 210
Compact
2 to 6
3 to 8
11 to 28
—
—
Basic
Stroke/both sides
[mm]
4
6
10
14
22
30
Size
10
16
20
25
32
40
Series LEHZ
Gripping force[N]
3 to 7
11 to 28
48 to 120
72 to 180
Stroke/both sides
[mm]
16 (32)
24 (48)
32 (64)
40 (80)
Size
10
20
32
40
Series LEHF
( ): Long stroke
Gripping force [N]
Basic
2.2 to 5.5
9 to 22
36 to 90
52 to 130
Compact
1.4 to 3.5
7 to 17
—
—
Stroke/diameter
[mm]
4
6
8
12
Size
10
20
32
40
Series LEHS
Series LEHZJGripping force [N]
Basic
6 to 14
16 to 40
Compact
3 to 6
4 to 8
11 to 28
Stroke/both sides
[mm]
4
6
10
14
Size
10
16
20
25
Z Type (2 fingers) ZJ Type (2 fingers)
Long stroke, can hold various types of work pieces. Can hold round work pieces.
F Type (2 fingers) S Type (3 fingers)
With dust cover (Equivalent to IP50)Three types of cover material (Finger portion only)
NewNew
NewNew
NewNew
2-finger type with dust cover is added to electric grippers!
Step Motor (Servo/24 VDC)
Drop prevention function is provided.(Self-lock mechanism is provided for all series.)
Gripping force of the work pieces is maintained when stopped or restarted. The work pieces can be removed by hand.
Energy-saving Power consumption reduced by self-lock mechanism
Compact body sizes and long stroke variationsCan achieve the gripping force equivalent to the widely used air grippers.
Gripping check function is provided. Identify work pieces with different dimensions/detect mounting and removal of the work pieces.
Possible to set position, speed and force. (64 points)
Offering 2 types of controllerStep Data Input Type
64 positioning pointsTeaching box, controller setting kit input
14 positioning pointsControl panel setting
Series LECP6Programless TypeSeries LECP1
Electric Grippers
CAT.ES100-77D
Series LEH
LowprofileLow
profileSpace-savingSpace-saving
H
SizeRotating torque [N·m]
Basic High torque
Max. speed [°/s]
Basic High torque
Positioning repeatability [°]
Basic High torque
10
30
50
0.2
0.8
6.6
0.3
1.2
10
420 280±0.05
(End: ±0.01)
Basic type [mm]
Model
LER10LER30LER50
H42
53
68
High precision type [mm]
Model
LERH10LERH30LERH50
H49
62
78
Possible to set speed, acceleration/deceleration, and position. Max. 64 points
Shock-less/high speed actuationMax. speed: 420°/sec (7.33 rad/sec)
Max. acceleration/deceleration: 3,000°/sec2 (52.36 rad/sec2)
Positioning repeatability: ±0.05°Repeatability at the end: ±0.01° (Pushing control/with external stopper)
Rotation angle320° (310°), 180°, 90°The value indicated in brackets shows the value for the LER10.
Energy-savingAutomatic 40% power reduction after the table has stopped.
Accommodateswiring and piping of work pieces.
Hollow shaft axis
Space-saving
Motor built-in
Value when an external stopper is mounted.
RoHS
Offering 2 types of controllerStep Data Input Type
64 positioning pointsTeaching box, controller setting kit input
14 positioning pointsControl panel setting
Series LECP6Programless TypeSeries LECP1
NewNew
NewNewStep Motor (Servo/24 VDC)
Electric Rotary Table
CAT.ES100-94B
Series LER
Compact, Space-saving61% reduction in volume For R/L type
(compared to the SMC conventional products) Reduced cycle time
Maximum pushing force: 180 N
Positioning repeatability: ±0.05 mm
Max. acceleration/deceleration: 5,000 mm/s2
Max. speed: 400 mm/s
New New
Symmetrical Type (L Type) In-line Motor Type (D Type)
36
58.5
124.5 Built-in motor
LESH8 R/L 50 mm stroke
NewNewRoHS
Symmetrical type (L type) and In-line motor type (D type)
newly added to electric slide table basic type (R type).
Improved mounting flexibility!
Offering 2 types of controllerStep Data Input Type
64 positioning pointsTeaching box, controller setting kit input
14 positioning pointsControl panel setting input
Series LECP6/LECA6Programless TypeSeries LECP1
NewNew
Step Motor (Servo/24 VDC) Servo Motor (24 VDC)
Basic Type (R Type)
Series LESH RSymmetrical Type (L Type)
Series LESH LIn-line Motor Type (D Type)
Series LESH D
Electric Slide Table
CAT.ES100-78D
Series LES
Caractéristiques 9

Caractéristiques
Moteur pas-à-pas (Servo/24 VDC)
Actionneur électrique Série LEY
Série
LEY16�
LEY25�
LEY32�
LEY16�A
LEY25�A
LEY25�S
LEY32�S
Course[mm]
50 à 300
50 à 400
50 à 500
50 à 300
50 à 400
30 à 40
30 à 500
Force depoussée
[N]
Chargeverticale
[kg]
38
74
141
122
238
452
189
370
707
30
58
111
35
72
130
131
255
485
157 (197)
308 (385)
588 (736)
2
4
8
8
16
30
11
22
43
2
4
8
3
6
12
8
16
30
9 (12)
19 (24)
37 (46)
Vitesse[mm/s]
15 à 500
8 à 250
4 à 125
18 à 500
9 à 250
5 à 125
24 à 500
12 à 250
6 à 125
15 à 500
8 à 250
4 à 125
18 à 500
9 à 250
5 à 125
900
450
225
1200 (1000)
600 (500)
300 (250)
Pas devis
[mm]
10
5
2.5
12
6
3
16
8
4
10
5
2.5
12
6
3
12
6
3
20 (16)
10 (8)
5 (4)
Répétitivité depositionnement
[mm]
±0.02max.
Page
Page 1
Page
Page 19
Série decontrôleur
SérieLECP6
SérieLECP1
Servomoteur (24 VDC)
Servomoteur AC(100/200 W)
SérieLECA6
Page 58
SérieLECSA
SérieLECSB
Caractéristiques
Moteur pas-à-pas (Servo/24 VDC)
Actionneur électrique Série LEYG
Série
LEYG16�
LEYG25�
LEYG32�
Course[mm]
30 à 200
30 à 300
30 à 300
30 à 200
30 à 300
Force depoussée
[N]
Chargeverticale
[kg]
38
74
141
122
238
452
189
370
707
30
58
111
35
72
130
1.5
3.5
7.5
7
15
29
9
20
41
1.5
3.5
7.5
2
5
11
Vitesse[mm/s]
15 à 500
8 à 250
4 à 125
18 à 500
9 à 250
5 à 125
24 à 500
12 à 250
6 à 125
15 à 500
8 à 250
4 à 125
18 à 500
9 à 250
5 à 125
Pas devis
[mm]
10
5
2.5
12
6
3
16
8
4
10
5
2.5
12
6
3
Série decontrôleurs
SérieLECP6
SérieLECP1
Servomoteur (24 VDC)
LEYG16�A
LEYG25�A
SérieLECA6
Type moteurparallèle
Type moteurparallèle
Type moteuren ligne
Type moteuren ligne
Type moteur parallèle
Type moteur en ligne
Versions de la série
LECP6
LECP1
LECA6
LECSA LECSB
Boîtier decommande
Contrôleur LEC
Type tige
SSType guidage integré∗ ( ) indique une valeur pour laquelle la position de montage "droit" du moteur est sélectionnée.
Page
Page 38
Page 72
Type
Type avec entréede données depositionnement
Série
LECP6
LECA6
Moteurcompatible
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur (24 VDC)
Tensiond'alimentation
24 VDC±10%
Entrée
Entrées/sorties parallèles
11 entrées (isolation du
photocoupleur)
Sortie
13 sorties (isolation du
photocoupleur)
Nombre depoints de
positionnement
64
Type sansprogrammation LECP1 Moteur pas-à-pas
(Servo/24 VDC)24 VDC±10%
6 entrées (isolation du photocoupleur)
6 sorties (isolation du photocoupleur)
14
Type entrée impulsionnelle
(Pour codeur incrémental)LECSA 6 entrées 4 sorties
0 à ±65535(unité de commande
d'impulsions)
Type entrée impulsionnelle
(Pour encodeur absolu)LECSB
Servomoteur AC(100/200 VAC)
100 à120 VAC
(50/60 Hz)200 à
230 VAC(50/60 Hz)
10 entrées 6 sorties0 à ±10000
(unité de commanded'impulsions)
LE
YLE
CSA
/ LEC
SBLE
CA6
/ LEC
P6L
EC
P1
LE
YG
LE
YSé
lect
ion
du m
odèl
eS
ervo
mot
eur (
24 V
DC
)/Mot
eur p
as-à
-pas
(Ser
vo/2
4 V
DC
)S
ervo
mot
eur
AC
Préc
autio
ns s
pécif
ique
sau
pro
duit
Avant-propos 1
Avant-propos 2

Moteur pas-à-pas (Servo/24 VDC)/Servomoteur (24 VDC)
Actionneur électrique/type tige Série LEYSélection du modèle ………………………………………………………………………… Page 1
Pour passer commande …………………………………………………………………… Page 5
Caractéristiques………………………………………………………………………………… Page 7
Construction ……………………………………………………………………………………… Page 9
Dimensions ……………………………………………………………………………………… Page 10
Fixations de montage des accessoires …………………………………………… Page 15
Détecteur…………………………………………………………………………………………… Page 17
Actionneur électrique/type guidage intégré Série LEYGSélection du modèle ………………………………………………………………………… Page 19
Pour passer commande …………………………………………………………………… Page 25
Caractéristiques………………………………………………………………………………… Page 27
Construction ……………………………………………………………………………………… Page 29
Dimensions ……………………………………………………………………………………… Page 30
Bloc de soutien ………………………………………………………………………………… Page 33
Précautions spécifiques au produit ………………………………………………… Page 34
Moteur pas-à-pas (Servo/24 VDC) /Servomoteur (24 VDC) ContrôleurContrôleur à programmation de positions/Série LECP6/LECA6………………… Page 39
Kit de paramétrage du contrôleur/LEC-W2……………………………………… Page 48
Boîtier de commandes/LEC-T1 ……………………………………………………… Page 49
Contrôleur sans programmation/Série LECP1…………………………………… Page 51
Servomoteur AC (100/200 W)
Actionneur électrique/type tige Série LEYSélection du modèle ………………………………………………………………………… Page 58
Pour passer commande …………………………………………………………………… Page 62
Caractéristiques………………………………………………………………………………… Page 63
Construction ……………………………………………………………………………………… Page 64
Dimensions ……………………………………………………………………………………… Page 65
Précautions spécifiques au produit ………………………………………………… Page 69
Contrôleur de servomoteur AC Série LECSA/LECSB ………… Page 72
Précautions spécifiques au produit ………………………………………………… Page 81
Avant-propos 3
Actionneur électrique/à tige
Série LEYSélection du modèle
Moteur pas à pas (Servo/24 VDC) Servomoteur (24 VDC)
T1
a1 a2
L
Vite
sse
: V [m
m/s
]
Durée [s]
T2 T3 T4
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
10
8
6
4
2
00 300200 400100 500 600
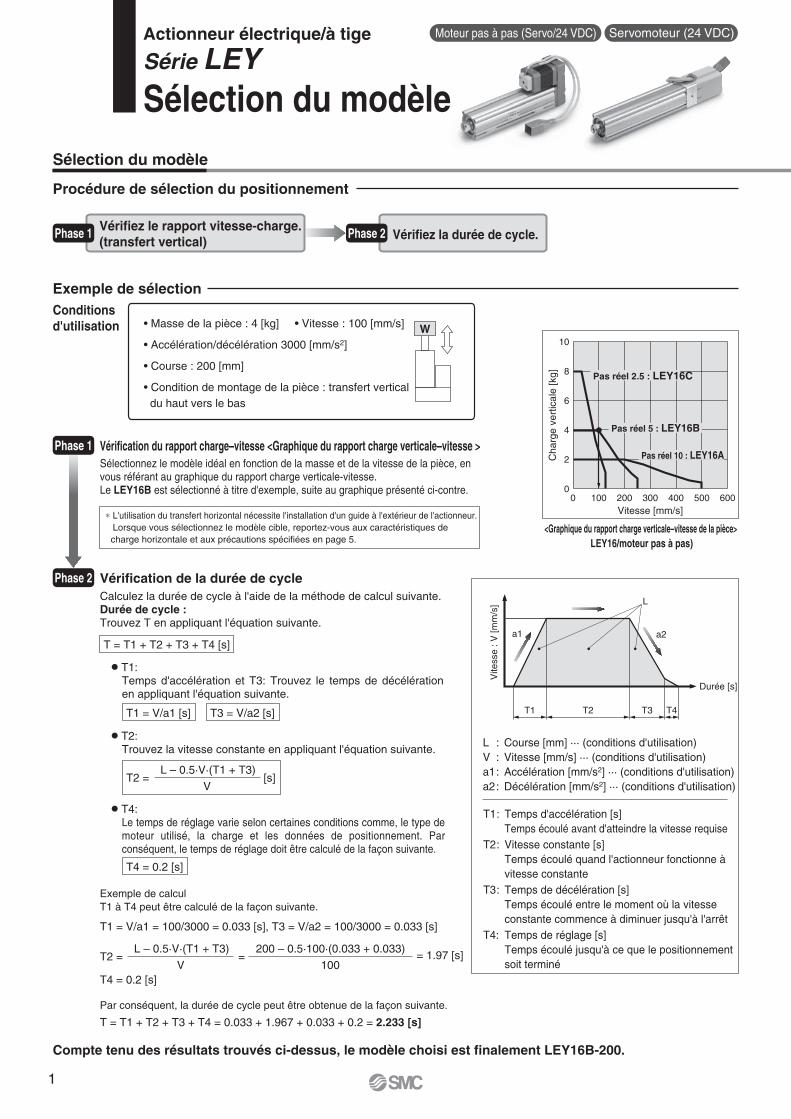
Phase 1 Vérification du rapport charge–vitesse <Graphique du rapport charge verticale–vitesse >
Phase 2 Vérification de la durée de cycle
2]
Conditionsd'utilisation
Exemple de sélection
Phase 1 Vérifiez le rapport vitesse-charge.(transfert vertical)
Phase 2 Vérifiez la durée de cycle.
Durée de cycle :
Le LEY16B
T = T1 + T2 + T3 + T4 [s]
2
2
2.233 [s]
T2 = = V 100
W
<Graphique du rapport charge verticale–vitesse de la pièce> LEY16/moteur pas à pas)
Pas réel 5 : LEY16B
Pas réel 10 : LEY16A
Pas réel 2.5 : LEY16C
∗
Compte tenu des résultats trouvés ci-dessus, le modèle choisi est finalement LEY16B-200.
Sélection du modèle
Procédure de sélection du positionnement
T1 = V/a1 [s] T3 = V/a2 [s]
T2 = [s]V
� T4:
� T2:
� T1:
1
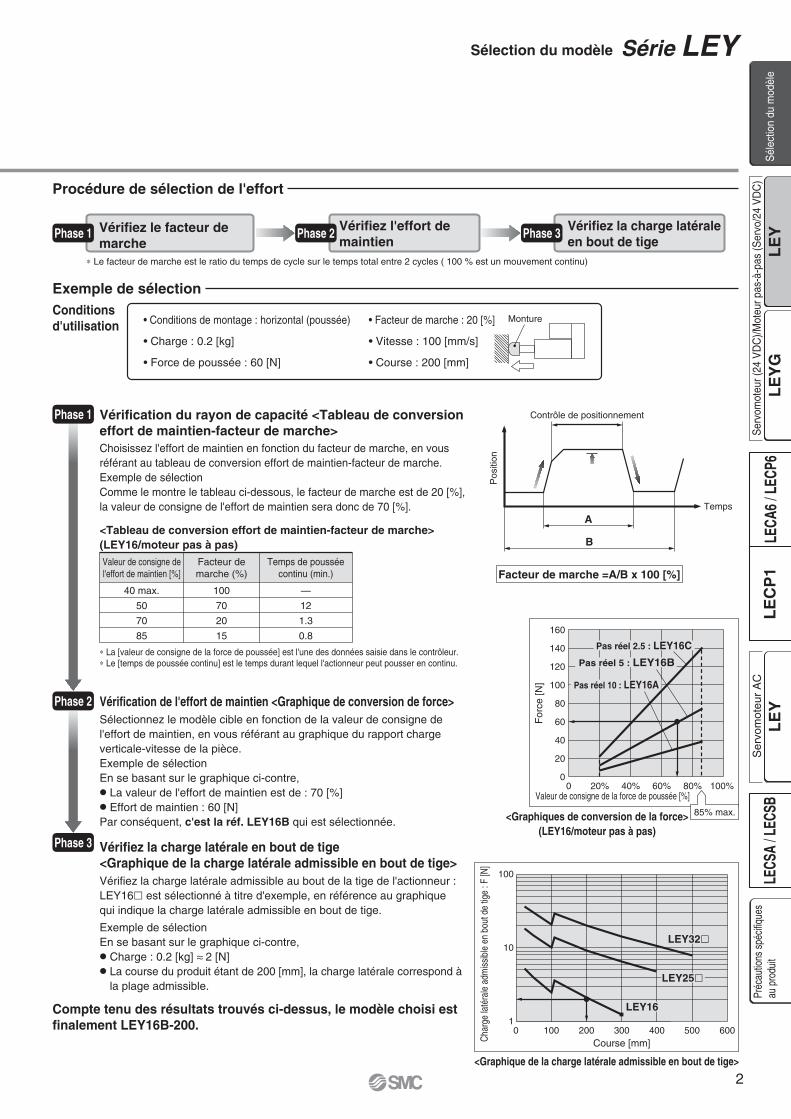
Facteur de marche =A/B x 100 [%]
B
Contrôle de positionnement
A
Pos
ition
Temps
For
ce [N
]
Cha
rge
laté
rale
adm
issi
ble
en b
out d
e tig
e : F
[N]
Valeur de consigne de la force de poussée [%]
160
140
120
100
80
60
40
20
00 60%40% 80%20%
Course [mm]0 100 200 300 400 500 600
100%
100
10
1
<Graphique de la charge latérale admissible en bout de tige>
Phase 1 Vérification du rayon de capacité <Tableau de conversion effort de maintien-facteur de marche>
Phase 2 Vérification de l'effort de maintien <Graphique de conversion de force>
Conditionsd'utilisation
Exemple de sélection
Phase 1 Vérifiez le facteur de marche
Vérifiez la charge latérale en bout de tige
Phase 2 Vérifiez l'effort demaintien
Exemple de sélection
�
� Effort de maintien : 60 [N]c'est la réf. LEY16B
Phase 3 Vérifiez la charge latérale en bout de tige <Graphique de la charge latérale admissible en bout de tige>
LEY16�
Exemple de sélection
� ≈ 2 [N]� La course du produit étant de 200 [mm], la charge latérale correspond à
Exemple de sélection
Phase 3
∗
Monture
∗∗
Valeur de consigne del'effort de maintien [%]
50
85
100
20
15
—
12
Facteur de Temps de poussée
<Graphiques de conversion de la force>(LEY16/moteur pas à pas)
<Tableau de conversion effort de maintien-facteur de marche>(LEY16/moteur pas à pas)
Pas réel 2.5 : LEY16C
Pas réel 5 : LEY16B
Pas réel 10 : LEY16A
LEY32�
LEY25�
LEY16Compte tenu des résultats trouvés ci-dessus, le modèle choisi est finalement LEY16B-200.
Procédure de sélection de l'effort
Sélection du modèle Série LEY
au p
rodu
it
2
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
35
30
25
20
15
10
5
00 300200 400100 500 600
Pas réel 3: LEY25C
Pas réel 6: LEY25B
Pas réel 12: LEY25A
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
50
40
30
20
10
00 300200 400100 500 600
Pas réel 4: LEY32C
Pas réel 8: LEY32B
Pas réel 16: LEY32A
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
14
12
10
8
6
4
2
00 300200 400100 500 600
Pas réel 3: LEY25AC
Pas réel 6: LEY25AB
Pas réel 12: LEY25AA
Cha
rge
vert
ical
e [k
g]Vitesse [mm/s]
10
8
6
4
2
00 300200 400100 500 600
Pas réel 2.5: LEY16AC
Pas réel 5: LEY16AB
Pas réel 10: LEY16AA
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
10
8
6
4
2
00 300200 400100 500 600
Pas réel 2.5: LEY16C
Pas réel 5: LEY16B
Pas réel 10: LEY16A
Char
ge la
téra
le a
dmiss
ible
en
bout
de
tige:
F [N
]
Course [mm]
100
10
10 300200 400100 500 600
LEY32�
LEY16�
LEY25�
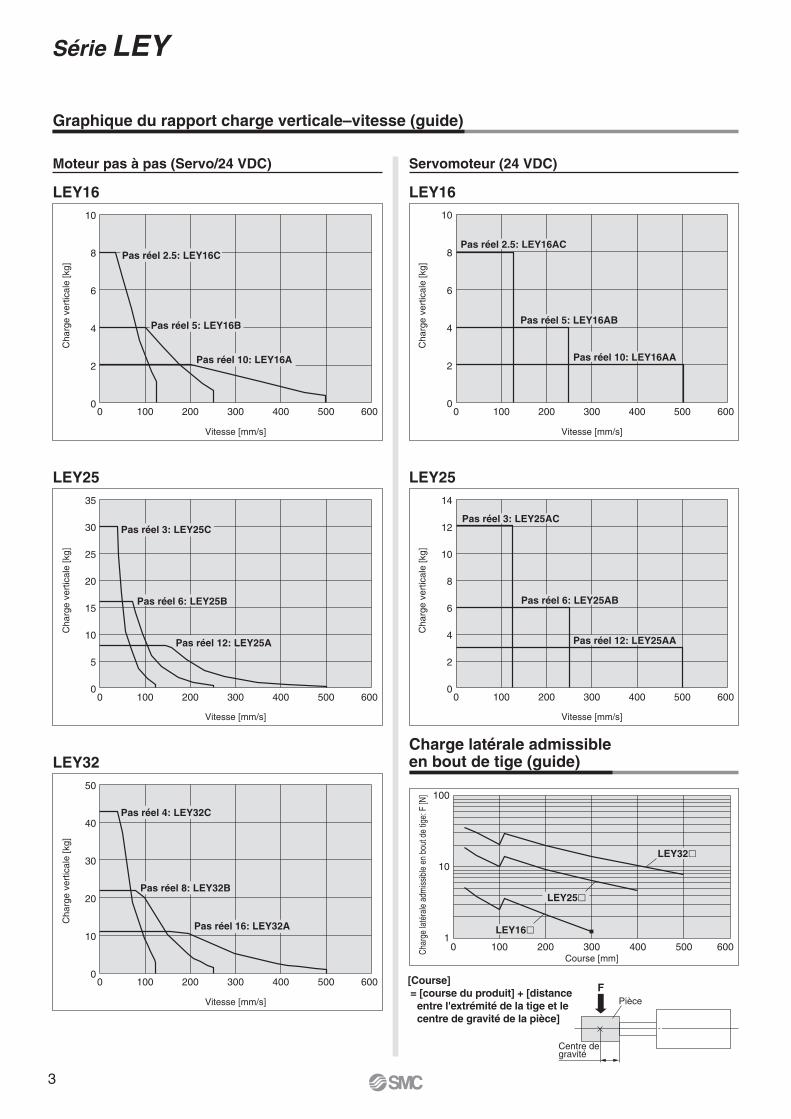
Graphique du rapport charge verticale–vitesse (guide)
Moteur pas à pas (Servo/24 VDC) Servomoteur (24 VDC)
LEY16
LEY25
LEY32
LEY25
LEY16
Charge latérale admissibleen bout de tige (guide)
F
Centre degravité
[Course] = [course du produit] + [distance
entre l'extrémité de la tige et lecentre de gravité de la pièce]
Pièce
Série LEY
3
0
20
40
60
80
100
120
140
40 50 60 70 80 90 100
For
ce [N
]F
orce
[N]
For
ce [N
]
Valeur de consigne de la force de poussée [%]Valeur de consigne de la force de poussée [%]
Valeur de consigne de la force de poussée [%]Valeur de consigne de la force de poussée [%]
Valeur de consigne de la force de poussée [%]
For
ce [N
]
For
ce [N
]
020
40
60
80
100
120
140
160
30 40 50 60 70 80 90
85% max.
0
100
200
300
400
500
30 40 50 60 70 80 90
0
100
200
300
400
500
600
700
800
30 40 50 60 70 80 90
85% max.
0
20
40
60
80
100
120
40 50 60 70 80 90 100
95% max.
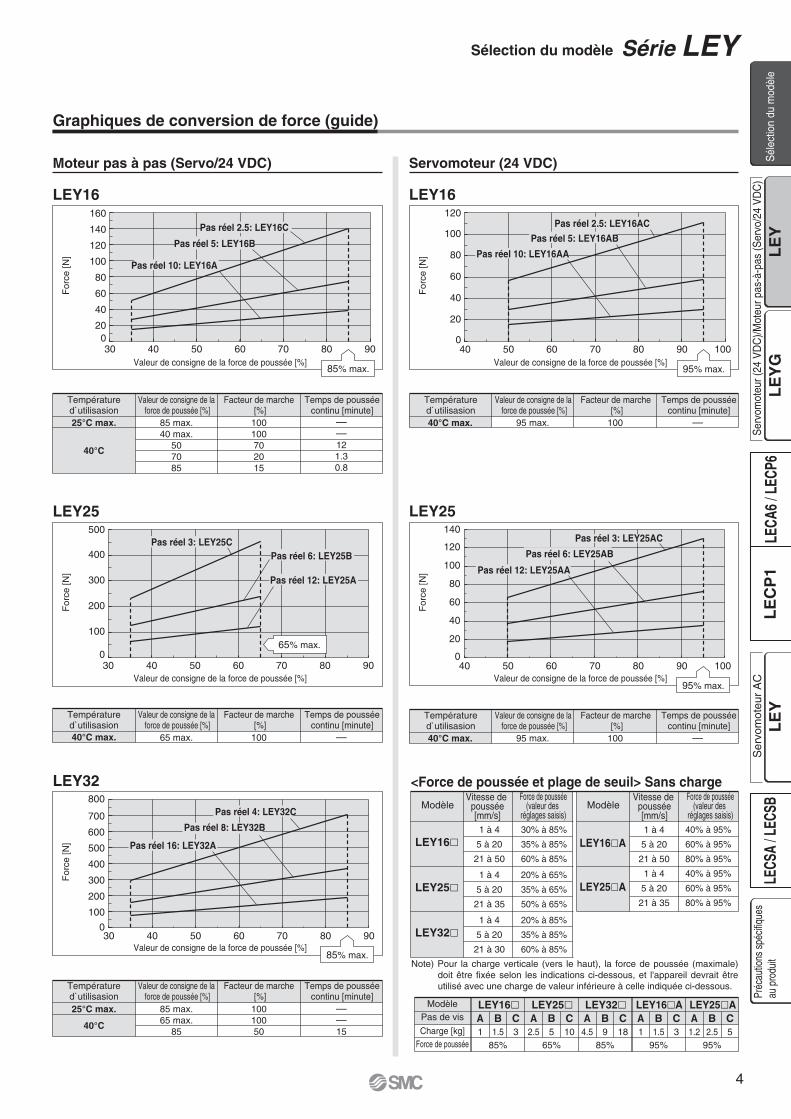
Graphiques de conversion de force (guide)
Moteur pas à pas (Servo/24 VDC) Servomoteur (24 VDC)
LEY16 LEY16
LEY25LEY25
LEY32
95 max. 100 —40°C max.
95 max. 100 —40°C max.65 max. 100 —40°C max.
85 max.65 max.
85
10010050
——15
25°C max.
40°C
Températured`utilisasion
85 max.40 max.
507085
25°C max.
40°C
100100702015
——121.30.8
1 à 4
5 à 20
21 à 50
1 à 4
5 à 20
21 à 35
1 à 4
5 à 20
21 à 30
30% à 85%
35% à 85%
60% à 85%
20% à 65%
35% à 65%
50% à 65%
20% à 85%
35% à 85%
60% à 85%
LEY16�
LEY25�
LEY32�
1 à 4
5 à 20
21 à 50
1 à 4
5 à 20
21 à 35
40% à 95%
60% à 95%
80% à 95%
40% à 95%
60% à 95%
80% à 95%
LEY16�A
LEY25�A
LEY16� LEY25� LEY32� LEY16�A LEY25�A
1 1.585%
3A B C
2.5 565%
10A B C
4.5 985%
18A B C
1 1.595%
3A B C
1.2 2.595%
5A B C
Pas réel 2.5: LEY16C
Pas réel 5: LEY16B
Pas réel 10: LEY16A
Pas réel 3: LEY25CPas réel 6: LEY25B
Pas réel 12: LEY25A
Pas réel 4: LEY32C
Pas réel 8: LEY32B
Pas réel 16: LEY32A
Pas réel 2.5: LEY16AC
Pas réel 5: LEY16AB
Pas réel 10: LEY16AA
Pas réel 3: LEY25AC
Pas réel 6: LEY25AB
Pas réel 12: LEY25AA
95% max.
65% max.
Valeur de consigne de la force de poussée [%]
Facteur de marche [%]
Temps de pousséecontinu [minute]
Températured`utilisasion
Valeur de consigne de la force de poussée [%]
Facteur de marche [%]
Temps de pousséecontinu [minute]
Températured`utilisasion
Valeur de consigne de la force de poussée [%]
Facteur de marche [%]
Temps de pousséecontinu [minute]
Températured`utilisasion
Valeur de consigne de la force de poussée [%]
Facteur de marche [%]
Temps de pousséecontinu [minute]
Températured`utilisasion
Valeur de consigne de la force de poussée [%]
Facteur de marche [%]
Temps de pousséecontinu [minute]
ModèleVitesse de
poussée[mm/s]
Force de poussée(valeur des
réglages saisis)Modèle
Vitesse de poussée[mm/s]
Force de poussée(valeur des
réglages saisis)
<Force de poussée et plage de seuil> Sans charge
ModèlePas de vis
Note) Pour la charge verticale (vers le haut), la force de poussée (maximale) doit être fixée selon les indications ci-dessous, et l'appareil devrait être utilisé avec une charge de valeur inférieure à celle indiquée ci-dessous.
Charge [kg]Force de poussée
Sélection du modèle Série LEY
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
4
q w
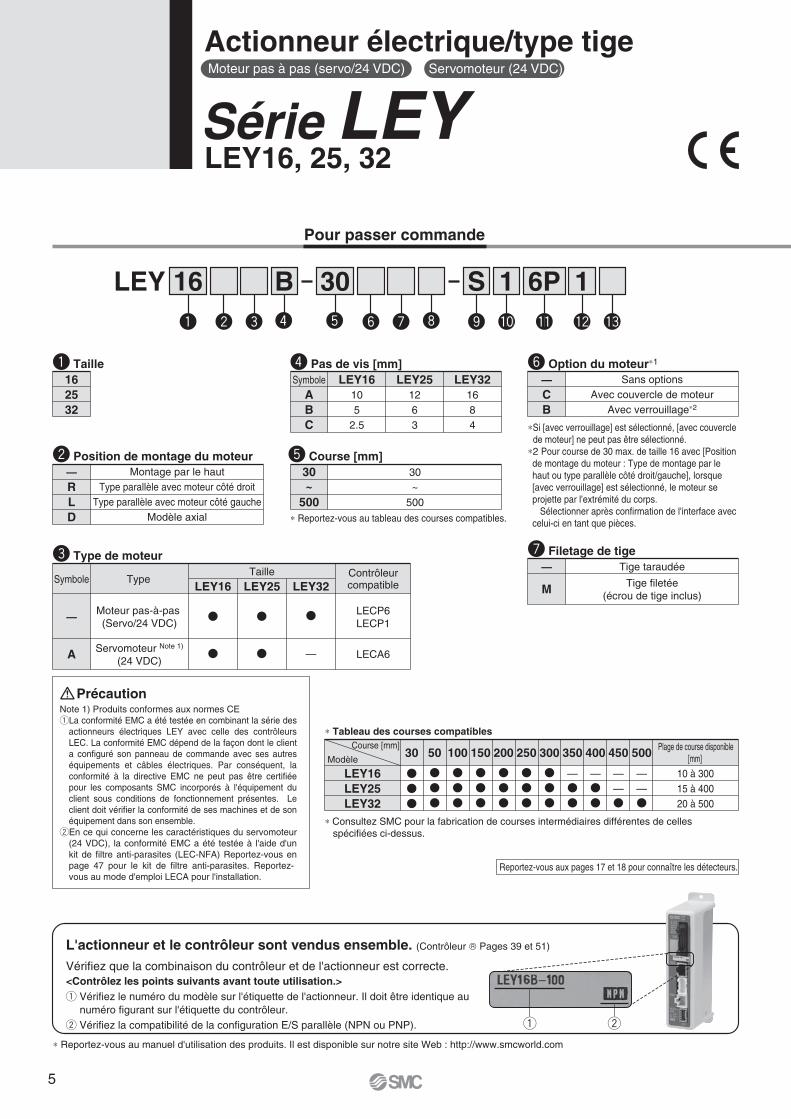
Pour passer commande
Actionneur électrique/type tige
LEY16, 25, 32Série LEY
LEY 16 30B 11 6P
162532
—RLD
Montage par le hautType parallèle avec moteur côté droit
Type parallèle avec moteur côté gaucheModèle axial
ABC
LEY16105
2.5
LEY251263
LEY321684
Symbole
30
500~ ~
∗ Reportez-vous au tableau des courses compatibles.
∗ Tableau des courses compatibles
LEY16LEY25LEY32
���
Course [mm]
Modèle30
���
50
���
100
���
150
���
200
���
250
���
300
—��
350
—��
400
——�
450
——�
500
—CB
Sans optionsAvec couvercle de moteur
Avec verrouillage∗2
—
M
Tige taraudée
Tige filetée(écrou de tige inclus)
30
500
∗Si [avec verrouillage] est sélectionné, [avec couvercle de moteur] ne peut pas être sélectionné.
∗2 Pour course de 30 max. de taille 16 avec [Position de montage du moteur : Type de montage par le haut ou type parallèle côté droit/gauche], lorsque [avec verrouillage] est sélectionné, le moteur se projette par l'extrémité du corps.
Sélectionner après confirmation de l'interface avec celui-ci en tant que pièces.
—
A
�
�
�
�
�
—
Symbole TypeTaille
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur Note 1)
(24 VDC)
Contrôleurcompatible
LECP6LECP1
LECA6
LEY16 LEY25 LEY32
Reportez-vous aux pages 17 et 18 pour connaître les détecteurs.
Sq w e r t y u i o !0 !1 !2 !3
10 à 30015 à 40020 à 500
Plage de course disponible[mm]
∗ Consultez SMC pour la fabrication de courses intermédiaires différentes de celles spécifiées ci-dessus.
q Taille r Pas de vis [mm]
t Course [mm]
y Option du moteur∗1
u Filetage de tige
w Position de montage du moteur
e Type de moteur
Moteur pas à pas (servo/24 VDC) Servomoteur (24 VDC)
Note 1) Produits conformes aux normes CEqLa conformité EMC a été testée en combinant la série des
actionneurs électriques LEY avec celle des contrôleurs LEC. La conformité EMC dépend de la façon dont le client a configuré son panneau de commande avec ses autres équipements et câbles électriques. Par conséquent, la conformité à la directive EMC ne peut pas être certifiée pour les composants SMC incorporés à l'équipement du client sous conditions de fonctionnement présentes. Le client doit vérifier la conformité de ses machines et de son équipement dans son ensemble.
wEn ce qui concerne les caractéristiques du servomoteur (24 VDC), la conformité EMC a été testée à l'aide d'un kit de filtre anti-parasites (LEC-NFA) Reportez-vous en page 47 pour le kit de filtre anti-parasites. Reportez-vous au mode d'emploi LECA pour l'installation.
Précaution
Vérifiez que la combinaison du contrôleur et de l'actionneur est correcte.
L'actionneur et le contrôleur sont vendus ensemble. (Contrôleur ® Pages 39 et 51)
<Contrôlez les points suivants avant toute utilisation.>q Vérifiez le numéro du modèle sur l'étiquette de l'actionneur. Il doit être identique au numéro figurant sur l'étiquette du contrôleur.w Vérifiez la compatibilité de la configuration E/S parallèle (NPN ou PNP).
∗ Reportez-vous au manuel d'utilisation des produits. Il est disponible sur notre site Web : http://www.smcworld.com
5
—D
Montage par visMontage sur rail DIN∗1, 2
—135
Sans câble1.5∗
3∗
5∗
—6N6P1N1P
Sans contrôleur
—1358ABC
Sans câble1.5358∗
10∗
15∗
20∗
∗ Fabriqué sur commande (Câble robotique uniquement) Reportez-vous aux caractéristiques Note 5) en page 7.
∗ Pour la sélection "Sans contrôleur" le câble E/S n'est pas inclus. Reportez-vous à page 47 (LECP6/LECA6) ou page 57 (LECP1) si le câble E/S est requis.
—SR
Sans câbleCâble standard∗2
Câble robotique (câble flexible)—ULFGD
Extrémités taraudées (standard)∗2
Base de corps taraudéeÉquerre
Bride avant∗2
Bride arrière∗2
Chape arrière∗3
Position de montage du moteurTypeSymbole
Parallèle����
�∗4
�
Axial��—�——
∗1 Les fixations sont incluses dans la livraison (non montées).
∗2 Lorsque les types de montage sont [Bride avant], [Bride arrière] ou [Extrémité taraudée] avec porte-à-faux horizontal, utilisez-le avec les courses suivante. · LEY25 : 200 max.· LEY32 : 100 max.
∗3 Dans le cas d'un montage sur [chape arrière], utilisez l'actionneur dans les limites de courses suivantes.· LEY16 : 100 max.· LEY25 : 200 max.· LEY32 : 200 max.
∗4 Bride arrière “G” non disponible avec LEY32.
∗1 Pour plus de détails sur les contrôleurs et les moteurs compatibles, reportez-vous aux contrôleurs compatibles ci-dessous.
∗2 Disponible uniquement pour les moteurs pas-à-pas.
∗1 Disponible uniquement pour les types de contrôleur “6N” et “6P.”
∗2 Le rail DIN n'est pas inclus. Vous devez le commander séparément.
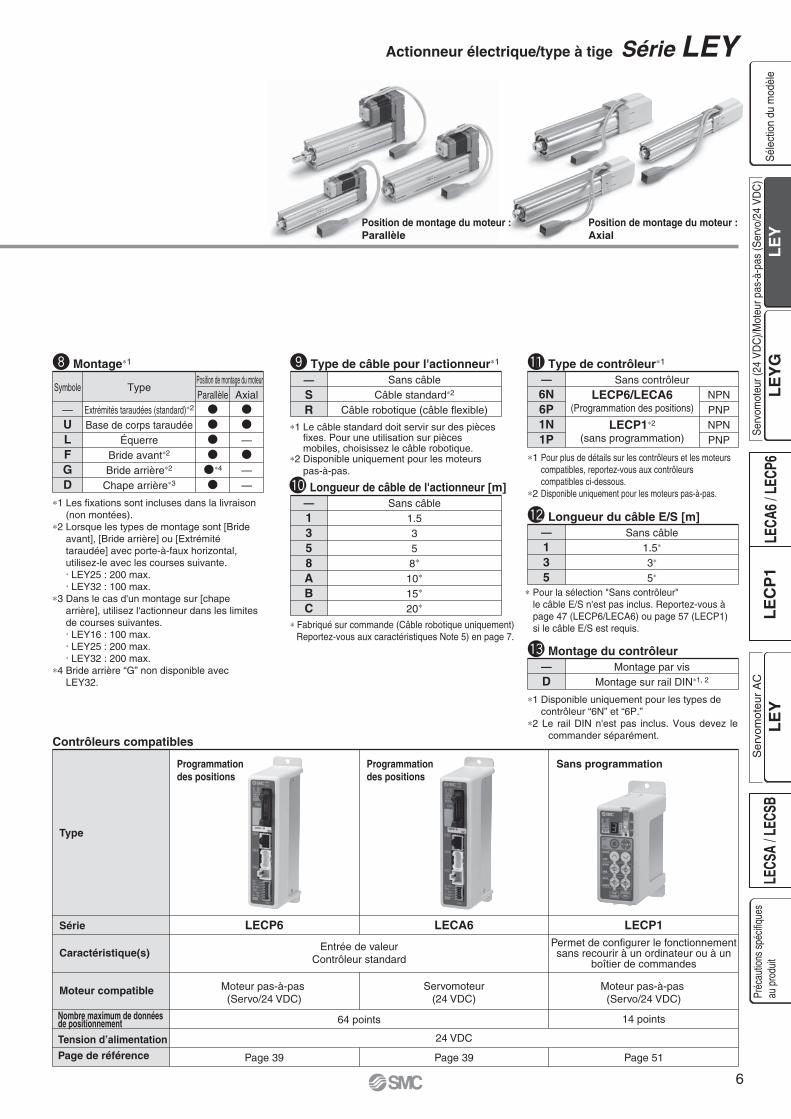
i Montage∗1 o Type de câble pour l'actionneur∗1
!0 Longueur de câble de l'actionneur [m]
!1 Type de contrôleur∗1
!2 Longueur du câble E/S [m]
!3 Montage du contrôleur
Contrôleurs compatibles
Type
Série
Caractéristique(s)
Moteur compatible
LECP6 LECA6
24 VDC
Entrée de valeurContrôleur standard
64 points
LECP1
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur(24 VDC)
Moteur pas-à-pas (Servo/24 VDC)
14 points
Permet de configurer le fonctionnementsans recourir à un ordinateur ou à un
boîtier de commandes
Page 39 Page 39 Page 51
Programmation des positions
Programmation des positions
Sans programmation
Nombre maximum de données de positionnement
Tension d’alimentation
Page de référence
NPNPNPNPNPNP
LECP1∗2
(sans programmation)
LECP6/LECA6(Programmation des positions)
∗1 Le câble standard doit servir sur des pièces fixes. Pour une utilisation sur pièces mobiles, choisissez le câble robotique.
∗2 Disponible uniquement pour les moteurs pas-à-pas.
Position de montage du moteur : Parallèle
Position de montage du moteur : Axial
Actionneur électrique/type à tige Série LEY
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
6
Note 1) Les courses intermédiaires sont produites sur commande.Note 2) Horizontal : valeur maximum de la charge pour le positionnement. Pour l'opération de poussée, la charge maximum est égale à la "charge verticale". Un guide
externe est nécessaire pour supporter la charge. La charge et la vitesse de transfert dépendent de la structure du guide externe.Vertical : la vitesse dépend de la charge. Voir "Sélection du modèle" en page 1.Les chiffres indiqués entre parenthèses correspondent aux valeurs d'accélération et de décélération maximum.Réglez ces valeurs sur 3000 [mm/s2] max.
Note 3) La précision de l'effort de poussée est ±20 % (E.M.).Note 4) La plage de réglage de la "force de poussée" est de 35 % à 85 % pour LEY16, 35 % à 65 % pour LEY25 et de 35 % à 85 % pour LEY32. Il est possible que la
"force de poussée" et le "facteur de marche" changent en fonction de la valeur de consigne. Voir "Sélection du modèle" en page 2.Note 5) La vitesse et la force peuvent changer en fonction de la longueur de câble, de la charge et des conditions de montage. De plus, si la longueur de câble
dépasse de 5 m, il diminuera jusqu'à 10 % tous les 5 mètres. (À 15 m : Réduction pouvant atteindre jusqu'à 20 %)Note 6) C'est la vitesse de poussée admissible. Lors de la poussée de pièces en mouvement, opérez à une valeur inférieure de la charge verticale admissible.Note 7) Résistance aux chocs : aucun dysfonctionnement n'a été observé lors du test de l'actionneur avec un appareil de test de choc dans les sens axial et
perpendiculaire sur la vis principale. (Test réalisé avec l'actionneur à l'état initial.)Résistance aux vibrations : aucun dysfonctionnement lorsque soumis au balayage de fréquence de 45 à 2000 Hz. Test réalisé en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)
Note 8) C'est la puissance (contrôleur inclus) de l'actionneur en service.Note 9) L'alimentation se met en veille (contrôleur inclus) quand l'actionneur s'arrête sur une position prédéfinie alors qu'il est en service. Sauf pendant la phase de
poussée. Note 10) C'est la puissance d'appel (contrôleur inclus) de l'actionneur en service. Nécessaire au dimensionnement de l'alimentation.Note 11) Avec verrouillage uniquement.Note 12) Si l'actionneur est muni d'un verrouillage, vous devez alimenter ce verrouillage avec une alimentation supplémentaire.
Caractéristiques
Modèle
462
14 à 3815 à 500
11174
27 à 748 à 250
50 max.
20308
51 à 1414 à 125
12188
63 à 12218 à 500
305016
126 à 2389 à 2503000
305030
232 à 4525 à 125
203011
80 à 18924 à 500
406022
156 à 37012 à 250
30 max.
406043
296 à 7076 à 125
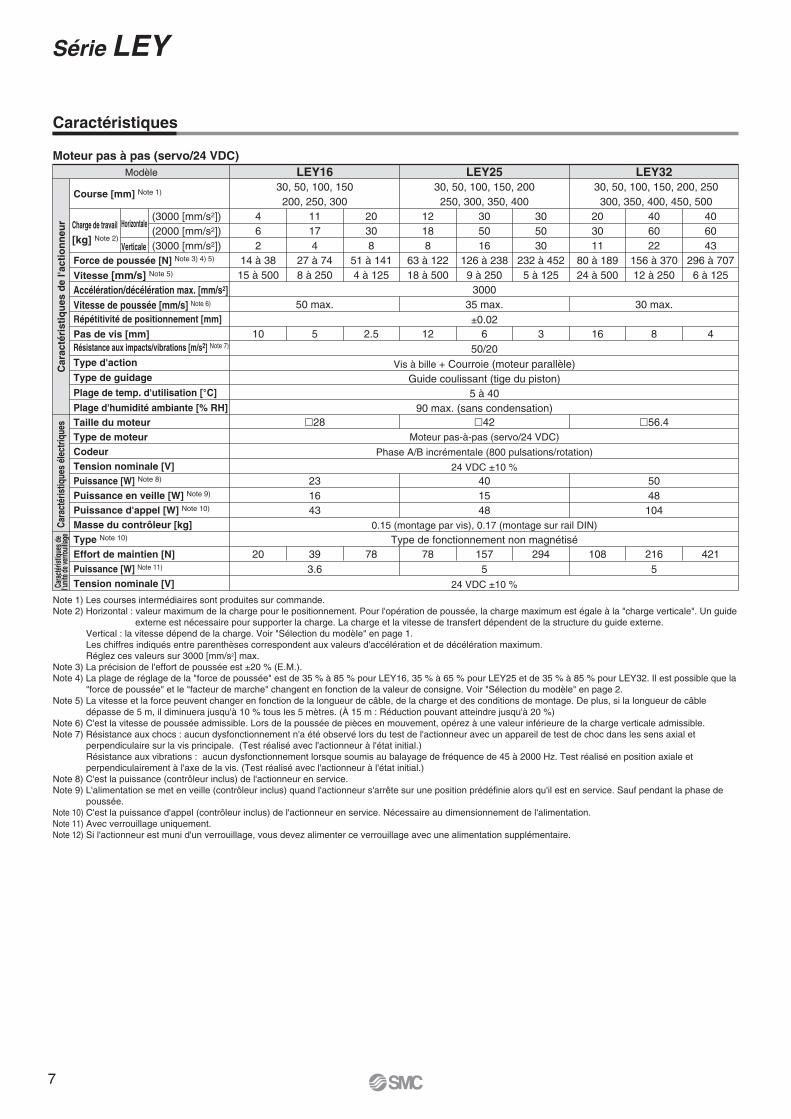
30, 50, 100, 150200, 250, 300
30, 50, 100, 150, 200250, 300, 350, 400
35 max.±0.02
50/20Vis à bille + Courroie (moteur parallèle)
Guide coulissant (tige du piston)5 à 40
90 max. (sans condensation)
30, 50, 100, 150, 200, 250300, 350, 400, 450, 500
LEY16 LEY25 LEY32
Course [mm] Note 1)
Force de poussée [N] Note 3) 4) 5)
Vitesse [mm/s] Note 5)
Accélération/décélération max. [mm/s2]Vitesse de poussée [mm/s] Note 6)
Répétitivité de positionnement [mm]
Pas de vis [mm]Résistance aux impacts/vibrations [m/s2] Note 7)
Type d'action
Type de guidage
Plage de temp. d'utilisation [°C]
Plage d'humidité ambiante [% RH]Taille du moteurType de moteurCodeurTension nominale [V]Puissance [W] Note 8)
Puissance en veille [W] Note 9)
Puissance d'appel [W] Note 10)
Masse du contrôleur [kg]Type Note 10)
Effort de maintien [N]Puissance [W] Note 11)
Tension nominale [V]
Charge de travail
[kg] Note 2)
Horizontale
Verticale
(3000 [mm/s2])(2000 [mm/s2])(3000 [mm/s2])
�28 �42Moteur pas-à-pas (servo/24 VDC)
Phase A/B incrémentale (800 pulsations/rotation)
24 VDC ±10 %
�56.4
10 5 2.5 12 6 3 16 8
231643
401548
0.15 (montage par vis), 0.17 (montage sur rail DIN)
Type de fonctionnement non magnétisé
524 VDC ±10 %
5048104
3.6 5
4
20 39 78 78 157 294 108 216 421
Car
acté
rist
iqu
es d
e l'a
ctio
nn
eur
Cara
ctér
istiq
ues
élec
triqu
esCa
racté
ristiq
ues d
el'u
nité d
e ver
rouil
lage
Moteur pas à pas (servo/24 VDC)
Série LEY
7
Note 1) Les courses intermédiaires sont produites sur commande.
Note 2) Horizontal : valeur maximum de la charge pour le positionnement. Pour l'opération de poussée, la charge maximum est égale à la "charge verticale". Un guide externe est nécessaire pour supporter la charge. La charge et la vitesse de transfert dépendent de la structure du guide externe.
Vertical : Voir "Sélection du modèle" en page 1.Les chiffres indiqués entre parenthèses correspondent aux valeurs d'accélération et de décélération maximum.
Réglez ces valeurs sur 3000 [mm/s2] max.Note 3) La précision de l'effort de poussée est ±20 % (E.M.).Note 4) La plage de réglage de la "force de poussée"
est de 50 % à 95 % pour LEY16A et de 50 % à 95 % pour LEY25A. Il est possible que la "force de poussée" et le "facteur de marche" changent en fonction de la valeur de consigne. Voir "Sélection du modèle" en page 2.
Note 5) C'est la vitesse de poussée admissible. Lors de la poussée de pièces en mouvement, opérez à une valeur inférieure à la charge verticale admissible.
Note 6) Résistance aux chocs : aucun dysfonctionnement n'a été observé lors du test de l'actionneur avec un appareil de test de choc dans les sens axial et perpendiculaire sur la vis principale. (Test réalisé avec l'actionneur à l'état initial.)Résistance aux vibrations : aucun dysfonctionnement lorsque soumis au balayage de fréquence de 45 à 2000 Hz. Test réalisé en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)
Note 7) C'est la puissance (contrôleur inclus) de l'actionneur en service.
Note 8) L'alimentation se met en veille (contrôleur inclus) quand l'actionneur s'arrête sur une position prédéfinie alors qu'il est en service, sauf pendant la phase de poussée.
Note 9) C'est la puissance à l'appel (contrôleur inclus) de l'actionneur en service. Nécessaire au dimensionnement de l'alimentation.
Note 10) Avec verrouillage uniquement.Note 11) Si l'actionneur est muni d'un verrouillage,
vous devez alimenter ce verrouillage avec une alimentation supplémentaire.
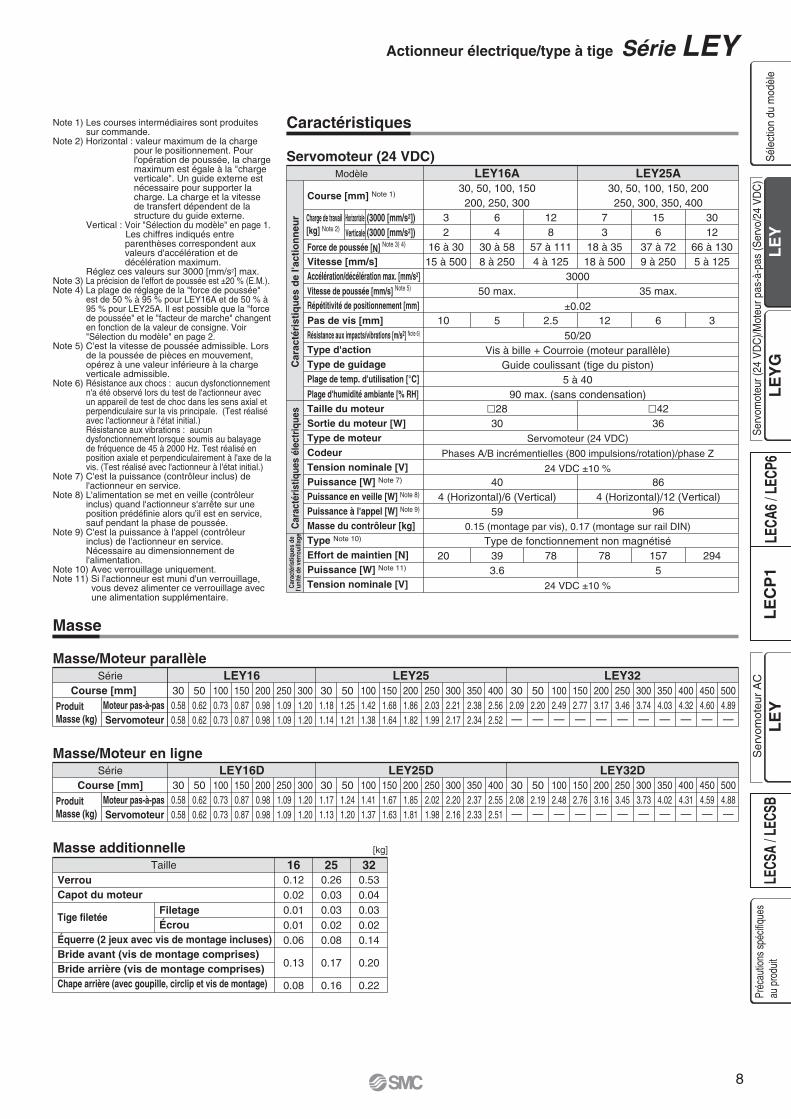
Caractéristiques
Modèle
3012
66 à 1305 à 125
156
37 à 729 à 250
35 max.
6
73
18 à 3518 à 500
128
57 à 1114 à 125
64
30 à 588 à 250
50 max.
32
16 à 3015 à 500
30, 50, 100, 150200, 250, 300
30, 50, 100, 150, 200250, 300, 350, 400
3000
±0.02
50/20Vis à bille + Courroie (moteur parallèle)
Guide coulissant (tige du piston)5 à 40
90 max. (sans condensation)
LEY16A LEY25A
Course [mm] Note 1)
Force de poussée [N] Note 3) 4)
Vitesse [mm/s]Accélération/décélération max. [mm/s2]Vitesse de poussée [mm/s] Note 5)
Répétitivité de positionnement [mm]
Pas de vis [mm]Résistance aux impacts/vibrations [m/s2] Note 6)
Type d'actionType de guidagePlage de temp. d'utilisation [°C]
Plage d'humidité ambiante [% RH]Taille du moteurSortie du moteur [W]Type de moteurCodeurTension nominale [V]Puissance [W] Note 7)
Puissance en veille [W] Note 8)
Puissance à l'appel [W] Note 9)
Masse du contrôleur [kg]Type Note 10)
Effort de maintien [N]Puissance [W] Note 11)
Tension nominale [V]
�2830
�4236
404 (Horizontal)/6 (Vertical)
59
864 (Horizontal)/12 (Vertical)
96
Servomoteur (24 VDC)
Phases A/B incrémentielles (800 impulsions/rotation)/phase Z
24 VDC ±10 %
0.15 (montage par vis), 0.17 (montage sur rail DIN)
Type de fonctionnement non magnétisé
24 VDC ±10 %
3.6 5
3122.5510
157 29478783920
Servomoteur (24 VDC)
Actionneur électrique/type à tige Série LEY
Charge de travail[kg] Note 2)
Horizontale
Verticale
(3000 [mm/s2])(3000 [mm/s2])
Masse
Masse/Moteur parallèleSérie
Moteur pas-à-pas Servomoteur
LEY16 LEY25 LEY32Course [mm]
Masse additionnelleTaille
VerrouCapot du moteur
Tige filetée
Équerre (2 jeux avec vis de montage incluses)Bride avant (vis de montage comprises)Bride arrière (vis de montage comprises)Chape arrière (avec goupille, circlip et vis de montage)
FiletageÉcrou
ProduitMasse (kg)
0.120.020.010.010.06
0.13
0.08
160.260.030.030.020.08
0.17
0.16
250.530.040.030.020.14
0.20
0.22
32[kg]
5004.89—
4004.32—
4504.60—
3003.74—
3504.03—
2003.17—
2503.46—
1002.49—
1502.77—
502.20—
302.09—
4002.562.52
3502.382.34
3002.212.17
2001.861.82
2502.031.99
1001.421.38
1501.681.64
501.251.21
301.181.14
3001.201.20
2000.980.98
2501.091.09
1000.730.73
1500.870.87
300.580.58
500.620.62
Masse/Moteur en ligneSérie
Moteur pas-à-pas Servomoteur
LEY16D LEY25D LEY32DCourse [mm]
ProduitMasse (kg)
5004.88—
4004.31—
4504.59—
3003.73—
3504.02—
2003.16—
2503.45—
1002.48—
1502.76—
502.19—
302.08—
4002.552.51
3502.372.33
3002.202.16
2001.851.81
2502.021.98
1001.411.37
1501.671.63
501.241.20
301.171.13
3001.201.20
2000.980.98
2501.091.09
1000.730.73
1500.870.87
300.580.58
500.620.62
Car
acté
rist
iqu
es d
e l'a
ctio
nn
eur
Car
acté
rist
ique
s él
ectr
ique
sCa
ract
éris
tique
s de
l'uni
té d
e ve
rrou
illag
e
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
8
@8
@5!2!1@6@7
!9
@9 #0
@1
@2
@0
!5
!4
!6
@4
!0u!3@3!2ie!7rtwqyo
!8
#0 @9 @8
#3#4!0
#1 #2
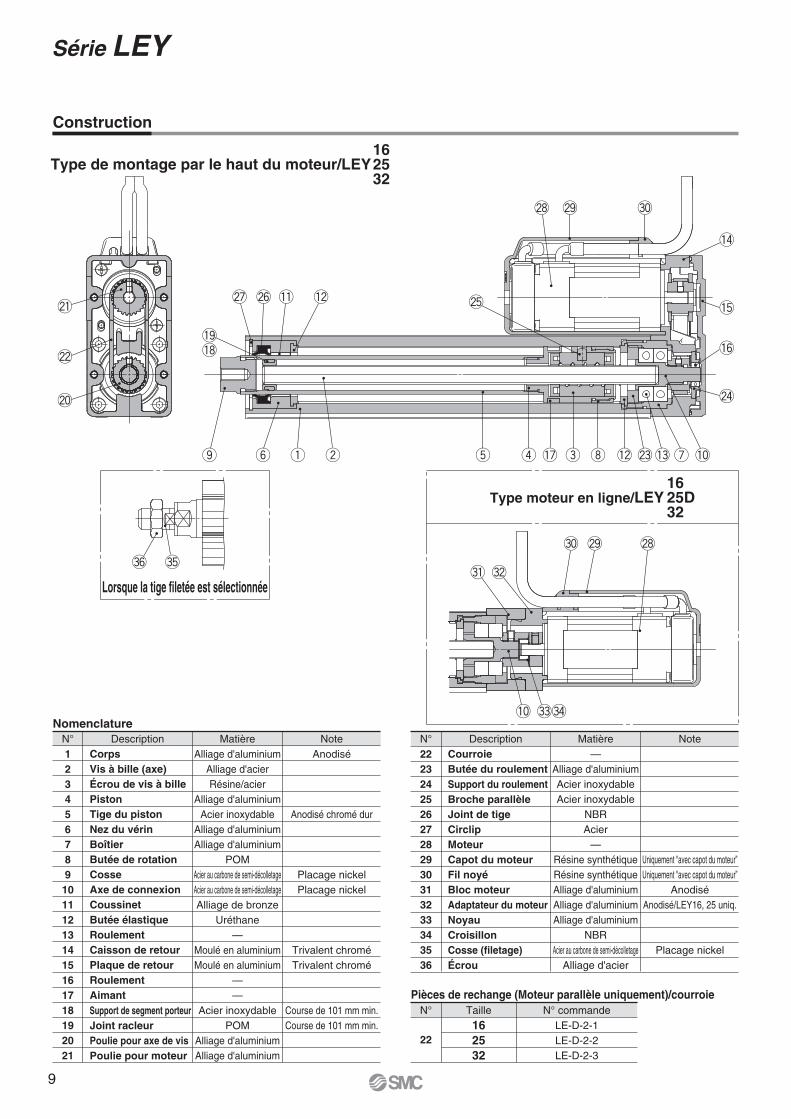
Type moteur en ligne/LEY1625D32
Construction
N° Description Matière Note123456789101112131415161718192021
CorpsVis à bille (axe)Écrou de vis à billePistonTige du pistonNez du vérinBoîtierButée de rotationCosseAxe de connexionCoussinetButée élastiqueRoulementCaisson de retourPlaque de retourRoulementAimantSupport de segment porteurJoint racleurPoulie pour axe de visPoulie pour moteur
Alliage d'aluminiumAlliage d'acierRésine/acier
Alliage d'aluminiumAcier inoxydable
Alliage d'aluminiumAlliage d'aluminium
POMAcier au carbone de semi-décolletageAcier au carbone de semi-décolletageAlliage de bronze
Uréthane—
Moulé en aluminiumMoulé en aluminium
——
Acier inoxydablePOM
Alliage d'aluminiumAlliage d'aluminium
Anodisé
Anodisé chromé dur
Placage nickelPlacage nickel
Trivalent chroméTrivalent chromé
Course de 101 mm min.Course de 101 mm min.
N° Taille
22162532
N° commandeLE-D-2-1LE-D-2-2LE-D-2-3
N° Description Matière Note222324252627282930313233343536
CourroieButée du roulementSupport du roulementBroche parallèleJoint de tigeCirclipMoteurCapot du moteurFil noyéBloc moteurAdaptateur du moteurNoyauCroisillonCosse (filetage)Écrou
—Alliage d'aluminiumAcier inoxydableAcier inoxydable
NBRAcier
—Résine synthétiqueRésine synthétiqueAlliage d'aluminiumAlliage d'aluminiumAlliage d'aluminium
NBRAcier au carbone de semi-décolletage
Alliage d'acier
Uniquement "avec capot du moteur”Uniquement "avec capot du moteur”
AnodiséAnodisé/LEY16, 25 uniq.
Placage nickel
Série LEY
Pièces de rechange (Moteur parallèle uniquement)/courroie
Nomenclature
Type de montage par le haut du moteur/LEY162532
#6 #5
Lorsque la tige filetée est sélectionnée
9
A + Course
B + CourseL
Y
XW
EH
EV
J
M
M
�V
�K Note 4)
H taraudage prof. C
4 x O1 taraudageprof. R
S
UT
M
M
4 x O1 taraudage prof. R
Câble moteur (2 x ø5)
T2
US
1
US
1
T2
65
Long
ueur
du
câbl
e »
300
20
20 24
24
Moteurpas-à-pas
Servomoteur
Câble du moteur
øD
2[2]
Origine Note 2)
[Fin de course]
Fin de course[Origine] Note 3)
Plage de fonctionnementde la tige Note 1)
Course
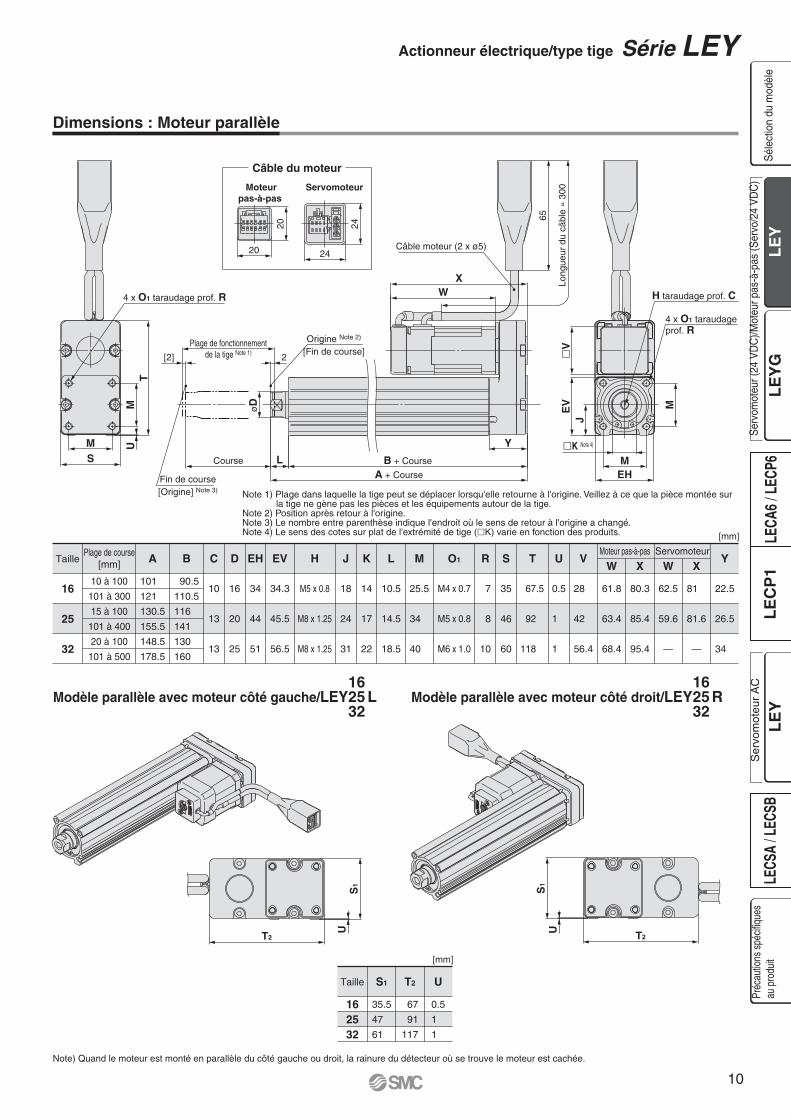
Dimensions : Moteur parallèle
Plage de course[mm]
10 à 100
101 à 300
15 à 100
101 à 400
20 à 100
101 à 500
101
121
130.5
155.5
148.5
178.5
90.5
110.5
116
141
130
160
10
13
13
Taille
[mm]
16
25
32
A B C
16
20
25
D
34
44
51
EH
34.3
45.5
56.5
EV
M5 x 0.8
M8 x 1.25
M8 x 1.25
H
18
24
31
J
14
17
22
K
10.5
14.5
18.5
L
25.5
34
40
M O1
7
8
10
R
35
46
60
S
67.5
92
118
T
0.5
1
1
U
28
42
56.4
V
61.8
63.4
68.4
W
80.3
85.4
95.4
X
62.5
59.6
—
W
81
81.6
—
X
22.5
26.5
34
Y
M4 x 0.7
M5 x 0.8
M6 x 1.0
Actionneur électrique/type tige Série LEY
35.5
47
61
67
91
117
Taille
162532
S1 T2
0.5
1
1
U
[mm]
Moteur pas-à-pas Servomoteur
Note) Quand le moteur est monté en parallèle du côté gauche ou droit, la rainure du détecteur où se trouve le moteur est cachée.
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.Note 2) Position après retour à l'origine.Note 3) Le nombre entre parenthèse indique l'endroit où le sens de retour à l'origine a changé.Note 4) Le sens des cotes sur plat de l'extrémité de tige (�K) varie en fonction des produits.
Modèle parallèle avec moteur côté gauche/LEY L162532
Modèle parallèle avec moteur côté droit/LEY R162532
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
10
20
20 24
24
Moteurpas-à-pas
Servomoteur
Câble du moteur
UJ
EVT M
�KNote 4)
M
EH
B + CourseL W
65
Long
ueur
du
câbl
e »
300
�V
Y 2
S
A + Course
øD
H taraudage prof. C
4 x O1
Prof. effective R
Câble moteur (2 x ø5)
2[2]Origine Note 2)
[Fin de course]
Fin de course[Origine] Note 3)
Plage de fonctionnementde la tige Note 1)
Course
Dimensions : Moteur en ligne
Plage de course[mm]
10 à 100
101 à 300
15 à 100
101 à 400
20 à 100
101 à 500
166.3
186.3
195.4
220.4
216.9
246.9
167
187
191.6
216.6
—
—
92
112
115.5
140.5
128
158
10
13
13
Taille
[mm]
16
25
32
CB
16
20
25
D
34
44
51
EH
34.3
45.5
56.5
EV
M5 x 0.8
M8 x 1.25
M8 x 1.25
H
18
24
31
J
14
17
22
K
10.5
14.5
18.5
L
25.5
34
40
M O1
7
8
10
R
35
45
60
S
35.5
46.5
61
T
0.5
1.5
1
U
M4 x 0.7
M5 x 0.8
M6 x 1
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.Note 2) Position après retour à l'origine.Note 3) Le nombre entre parenthèse indique l'endroit où le sens de retour à l'origine a changé.Note 4) Le sens des cotes sur plat de l'extrémité de tige (�K) varie en fonction des produits.
A
Moteurpas-à-pas
Servo-moteur
Plage de course[mm]
10 à 100
101 à 300
15 à 100
101 à 400
20 à 100
101 à 500
Taille
16
25
32
28
42
56.4
V
61.8
63.4
68.4
W
62.5
59.6
—
24
26
32
YMoteur
pas-à-pas Servo-moteur
Série LEY
11
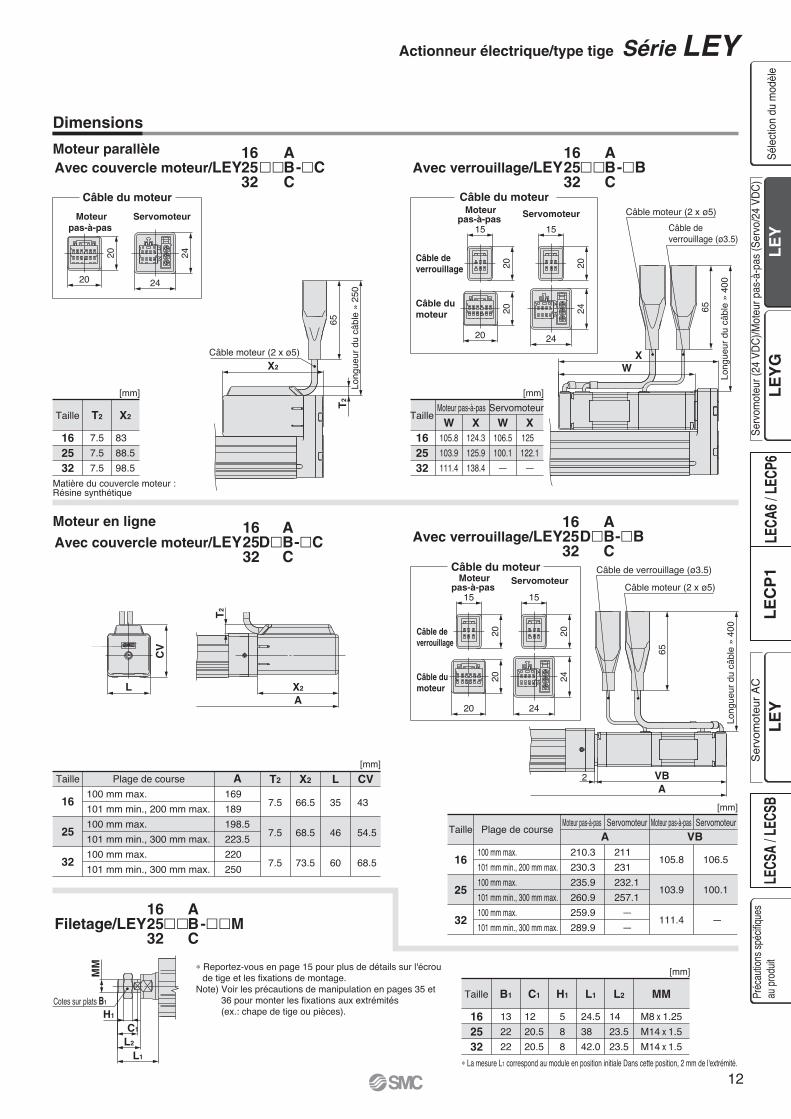
Câble moteur (2 x ø5)
Câble de verrouillage (ø3.5)
65
Long
ueur
du
câbl
e »
400
2 VBA
C1
L2
H1
MM
L1
Cotes sur plats B1
WX
Câble moteur (2 x ø5)
Câble deverrouillage (ø3.5)
65
Long
ueur
du
câbl
e »
400
2020
15
20
20
15
24
24
Moteurpas-à-pas
Câble deverrouillage
Câble dumoteur
Servomoteur
Câble du moteur
X2
T2
Câble moteur (2 x ø5)
65
Long
ueur
du
câbl
e »
250
20
20 24
24
Moteurpas-à-pas
Servomoteur
Câble du moteur
2020
15
20
20
15
24
24
Moteurpas-à-pas
Câble deverrouillage
Câble dumoteur
ServomoteurCâble du moteur
L
CV
X2
T2
A
7.5
7.5
7.5
83
88.5
98.5
Taille
162532
T2 X2
[mm]
Matière du couvercle moteur :Résine synthétique
105.8
103.9
111.4
Taille
162532
W124.3
125.9
138.4
X106.5
100.1
—
W 125
122.1
—
X
[mm]
∗ Reportez-vous en page 15 pour plus de détails sur l'écrou de tige et les fixations de montage.
Note) Voir les précautions de manipulation en pages 35 et 36 pour monter les fixations aux extrémités (ex.: chape de tige ou pièces). 13
22
22
12
20.5
20.5
Taille
162532
B1 C1
5
8
8
H1
24.5
38
42.0
L1
14
23.5
23.5
L2
M8 x 1.25
M14 x 1.5
M14 x 1.5
MM
[mm]
Dimensions
Moteur pas-à-pas Servomoteur
∗ La mesure L1 correspond au module en position initiale Dans cette position, 2 mm de l'extrémité.
Moteur parallèle
7.5
7.5
7.5
100 mm max.
101 mm min., 200 mm max.
100 mm max.
101 mm min., 300 mm max.
100 mm max.
101 mm min., 300 mm max.
66.5
68.5
73.5
Taille Plage de course A169
189
198.5
223.5
220
250
16
25
32
T2 X2
35
46
60
L
43
54.5
68.5
CV[mm]
100 mm max.
101 mm min., 200 mm max.
100 mm max.
101 mm min., 300 mm max.
100 mm max.
101 mm min., 300 mm max.
Taille Plage de courseA VB
210.3
230.3
235.9
260.9
259.9
289.9
Moteur pas-à-pas
211
231
232.1
257.1
—
——
Servomoteur
16
25
32
105.8
103.9
111.4
Moteur pas-à-pas
106.5
100.1
Servomoteur
[mm]
Avec couvercle moteur/LEY �� -�C162532
ABC
Avec verrouillage/LEY �� -�B162532
ABC
Moteur en ligne
Avec couvercle moteur/LEY D� -�C162532
ABC
Avec verrouillage/LEY D� -�B162532
ABC
Filetage/LEY �� -��M162532
ABC
Actionneur électrique/type tige Série LEY
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
12
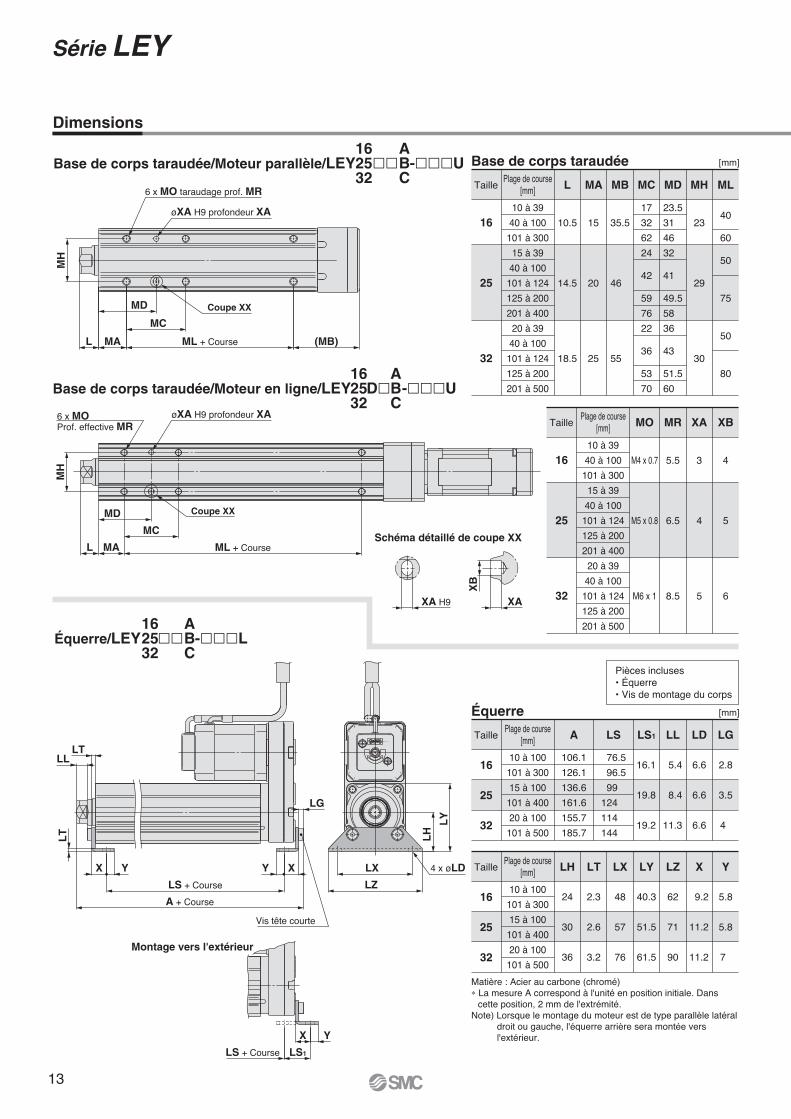
Y Y
LS + Course
A + Course
LTLL
LT
LG
X X
LH
LY
LX
LZ
Vis tête courte
4 x øLD
Coupe XX
6 x MO taraudage prof. MR
øXA H9 profondeur XA
L MA
MC
ML + Course (MB)
MD
MH
Schéma détaillé de coupe XX
XA H9
XB
XA
Montage vers l'extérieur
X Y
LS + Course LS1
Coupe XX
øXA H9 profondeur XA
MD
MC
ML + CourseMAL
6 x MOProf. effective MR
MH
ABC
Équerre/LEY �� -���L162532
Pièces incluses
Dimensions
∗
Plage de courseTaille
16
25
32
2.6
LT
24
LH
48
57
76
LX
51.5
61.5
LY
62
71
90
LZ
9.2
11.2
11.2
X
5.8
5.8
7
Y
Plage de course
106.1
126.1
161.6
155.7
185.7
76.5
96.5
99
124
114
144
5.4
8.4
Taille
16
25
32
A LS LL
16.1
19.8
19.2
LS1
6.6
6.6
6.6
LD
2.8
4
LG
Équerre
Plage de course
46
41
49.5
58
51.5
60
15
20
25
10.5
14.5
18.5
Taille
16
25
32
L MA
46
55
MB
17
62
24
42
59
76
22
70
MC MD
29
MH
40
60
50
75
50
80
ML
Plage de course
4
5
6
M4 x 0.7
M5 x 0.8
M6 x 1
Taille
16
25
32
MO
5.5
6.5
8.5
MR
4
5
XA XB
Base de corps taraudée
Base de corps taraudée/Moteur en ligne/LEY D� -���U162532
ABC
Base de corps taraudée/Moteur parallèle/LEY �� -���U162532
ABC
Série LEY
13
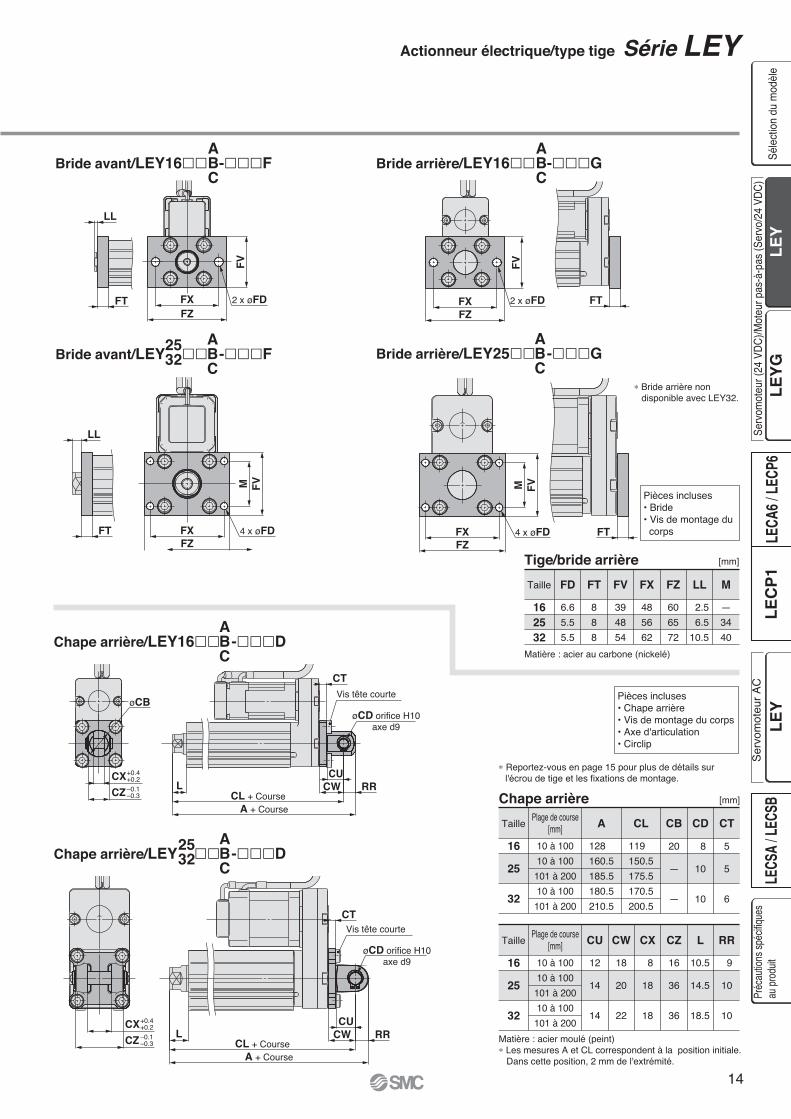
FZFX
M FV
FT4 x øFDFZFX
FVM
FT
LL
4 x øFD
Pièces incluses
2.5
6.5
10.5
—
34
40
162532
LL
60
65
72
FZ
48
56
62
FX
39
48
54
FV
8
8
8
FT
6.6
5.5
5.5
FD M
Tige/bride arrière
Chape arrière/LEY16�� -���DABC
2532Chape arrière/LEY �� -���D
ABC
CURRCWL
CLA
CT
øCD
+0.4+0.2CX–0.1–0.3CZ
FXFZ
FV
FT
LL
2 x øFDFZFX
FV
FT2 x øFD
ACL
CUCW RRL
CT
+0.4+0.2CX–0.1–0.3CZ
øCBøCD
∗
Bride avant/LEY16�� -���FABC
Bride arrière/LEY16�� -���GABC
Bride avant/LEY �� -���F2532
ABC
ABC
Bride arrière/LEY25�� -���G
10 à 100
10 à 100
101 à 200
10 à 100
101 à 200
16
25
32
18
20
22
CW
12
14
14
CU
8
18
18
CX
16
36
36
CZ
10.5
14.5
18.5
L
9
10
10
RR
∗
Pièces incluses
10 à 100
10 à 100
101 à 200
10 à 100
101 à 200
128
160.5
185.5
180.5
210.5
119
150.5
175.5
170.5
200.5
20
—
—
16
25
32
A CL CB
8
10
10
CD
5
5
6
CT
Chape arrière
∗
Actionneur électrique/type tige Série LEY
14
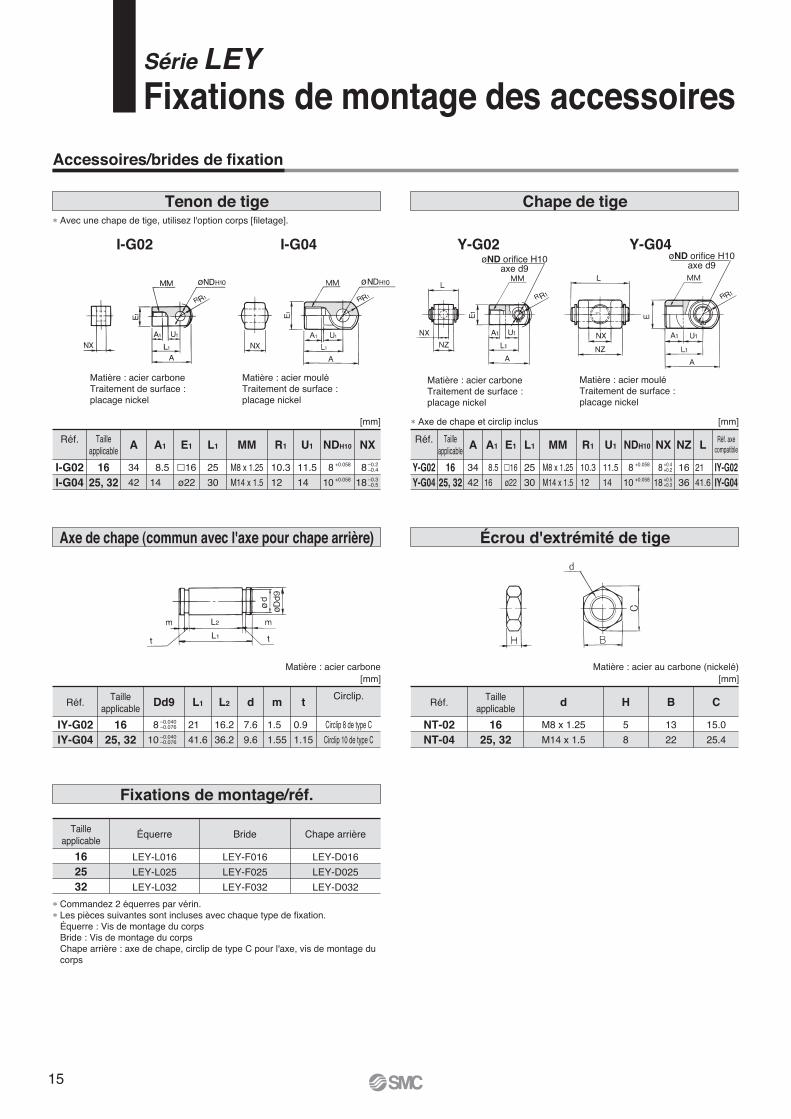
øND orifice H10axe d9
øND orifice H10axe d9
ø ø
ø ø
L2
L1
Accessoires/brides de fixation
I-G02 I-G04 Y-G02 Y-G04
Axe de chape (commun avec l'axe pour chape arrière)
Fixations de montage/réf.
Écrou d'extrémité de tige
Tenon de tige Chape de tige∗ Avec une chape de tige, utilisez l'option corps [filetage].
Circlip 8 de type C
Circlip 10 de type C
Réf.
IY-G02IY-G04
Tailleapplicable
Circlip.
1625, 32
7.6
9.6
d
1.5
1.55
m
0.9
1.15
t
16.2
36.2
L2
21
41.6
L1Dd9
8
10
[mm]
–0.040–0.076
–0.040–0.076
Matière : acier carbone[mm]
Matière : acier au carbone (nickelé)
Matière : acier carboneTraitement de surface : placage nickel
Matière : acier mouléTraitement de surface : placage nickel
Matière : acier carboneTraitement de surface : placage nickel
Matière : acier mouléTraitement de surface : placage nickel
10.3
12
11.5
14
Réf.
I-G02I-G04
Tailleapplicable
1625, 32
R1
M8 x 1.25
M14 x 1.5
MM
25
30
L1
�16
ø22
E1
8.5
14
A1
34
42
A U1
8
10
NDH10 NX
[mm]
+0.058
+0.058
8
18
–0.2–0.4
–0.3–0.5
∗ Axe de chape et circlip inclus
10.3
12
11.5
14
Réf.
Y-G02Y-G04
Réf. axecompatible
IY-G02IY-G04
Tailleapplicable
1625, 32
R1
M8 x 1.25
M14 x 1.5
MM
25
30
L1
�16
ø22
16
36
NZ
21
41.6
LE1
8.5
16
A1
34
42
A U1
8
10
NDH10 NX
[mm]
+0.058
+0.058
8
18
+0.4+0.2
+0.5+0.3
Réf.
NT-02NT-04
Tailleapplicable
1625, 32
15.0
25.4
C
13
22
B
5
8
Hd
M8 x 1.25
M14 x 1.5
∗ Commandez 2 équerres par vérin.∗ Les pièces suivantes sont incluses avec chaque type de fixation.
Équerre : Vis de montage du corpsBride : Vis de montage du corpsChape arrière : axe de chape, circlip de type C pour l'axe, vis de montage du corps
Tailleapplicable
162532
Équerre
LEY-L016
LEY-L025
LEY-L032
Bride
LEY-F016
LEY-F025
LEY-F032
Chape arrière
LEY-D016
LEY-D025
LEY-D032
Série LEYFixations de montage des accessoires
15
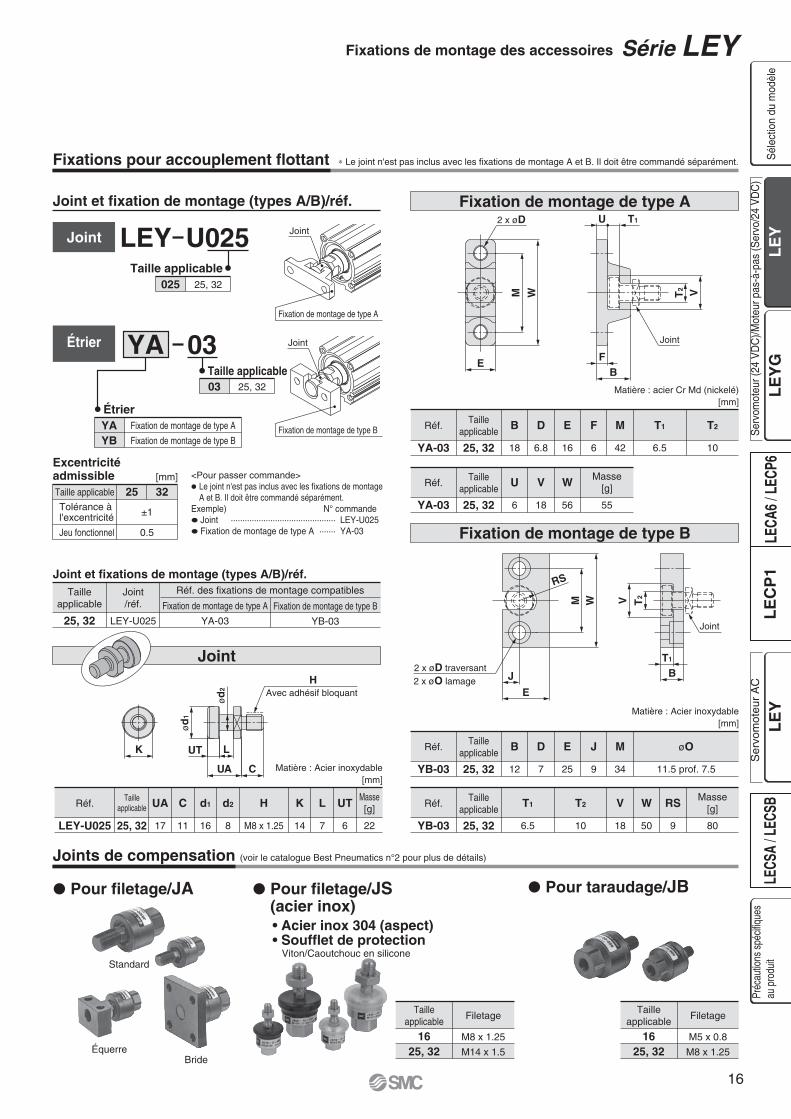
T1U
VT2
FB
Joint
T1
T2V
B
Joint
Joint
Fixation de montage de type A
Joint
Fixation de montage de type B
HAvec adhésif bloquant
C
L
ød
1
UT
UA
ød
2
K
M W
E
2 x øD
RSM W
J
E2 x øO lamage2 x øD traversant
Joint
Fixations pour accouplement flottant ∗ Le joint n'est pas inclus avec les fixations de montage A et B. Il doit être commandé séparément.
Joints de compensation (voir le catalogue Best Pneumatics n°2 pour plus de détails)
Fixation de montage de type A
Fixation de montage de type B
Joint et fixation de montage (types A/B)/réf.
LEY U025
025 25, 32
Excentricitéadmissible [mm]
Taille applicable
� Pour filetage/JA � Pour taraudage/JB
Standard
ÉquerreBride
Joint
YA 0303 25, 32
Taille applicable
Étrier
ÉtrierYAYB
Fixation de montage de type A
Fixation de montage de type B
Taille applicable
Tolérance àl'excentricité
Jeu fonctionnel
25 32
±1
0.5
<Pour passer commande>� Le joint n'est pas inclus avec les fixations de montage
A et B. Il doit être commandé séparément.Exemple) N° commande� Joint ············································· LEY-U025� Fixation de montage de type A ······· YA-03
Réf. des fixations de montage compatibles
Joint et fixations de montage (types A/B)/réf.Taille
applicable
25, 32
Joint/réf.
LEY-U025
Fixation de montage de type A
YA-03
Fixation de montage de type B
YB-03
Matière : Acier inoxydable
Réf.
LEY-U025
Tailleapplicable
25, 32 17
UA
11
C
16
d1
8
d2
14
K
7
L
6
UT
22
Masse[g]
M8 x 1.25
H
[mm]
Matière : acier Cr Md (nickelé)
Réf.
YA-03
Tailleapplicable
25, 32 18
B
6.8
D
16
E
6
F
42
M
6.5
T1
10
T2
[mm]
Réf.
YA-03
Tailleapplicable
25, 32 6
U
18
V
56
W
55
Masse[g]
Matière : Acier inoxydable
Réf.
YB-03
Tailleapplicable
25, 32 12
B
7
D
25
E
9
J
34
M
11.5 prof. 7.5
øO
Réf.
YB-03
Tailleapplicable
25, 32 6.5
T1
10
T2
18
V
50
W
9
RS
80
Masse[g]
[mm]
� Pour filetage/JS(acier inox)
Viton/Caoutchouc en silicone
Tailleapplicable
1625, 32
Filetage
M8 x 1.25
M14 x 1.5
Tailleapplicable
1625, 32
Filetage
M5 x 0.8
M8 x 1.25
Fixations de montage des accessoires Série LEY
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
16
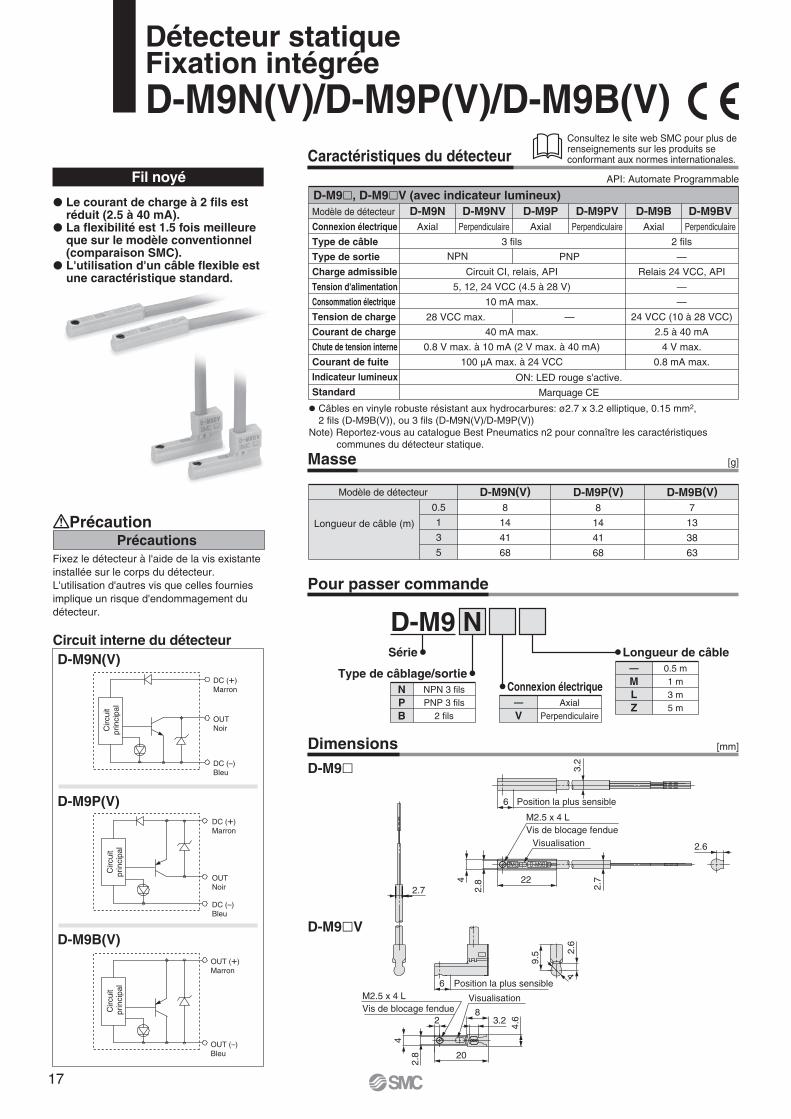
M2.5 x 4 LVis de blocage fendue
Visualisation
2.722
2.6
4
2.8
4
2.6
9.5
Position la plus sensible6M2.5 x 4 LVis de blocage fendue
Visualisation
2
20
83.2
4.6
2.8
4
3.2
6 Position la plus sensible
2.7
DC (+)Marron
OUTNoir
DC (–)Bleu
DC (+)Marron
OUTNoir
DC (–)Bleu
Détecteur statiqueFixation intégréeD-M9N(V)/D-M9P(V)/D-M9B(V)
Circuit interne du détecteurD-M9N(V)
D-M9B(V)
D-M9P(V)
Caractéristiques du détecteur
Masse
Modèle de détecteur
0.5
1
3
5
D-M9N(V)8
14
41
68
D-M9P(V)8
14
41
68
D-M9B(V)7
13
38
63
[g]
Longueur de câble (m)
Fil noyé API: Automate Programmable
Modèle de détecteur
Connexion électrique
Type de câble
Type de sortie
Charge admissible
Tension d'alimentation
Consommation électrique
Tension de charge
Courant de charge
Chute de tension interne
Courant de fuite
Indicateur lumineux
Standard
D-M9NVD-M9N D-M9B D-M9BV
2 fils
—
Relais 24 VCC, API
—
—
24 VCC (10 à 28 VCC)
2.5 à 40 mA
4 V max.
0.8 mA max.
D-M9PVD-M9P
ON: LED rouge s'active.
Marquage CE
3 fils
Circuit CI, relais, API
5, 12, 24 VCC (4.5 à 28 V)
10 mA max.
40 mA max.
0.8 V max. à 10 mA (2 V max. à 40 mA)
100 μA max. à 24 VCC
Axial Perpendiculaire Axial Perpendiculaire Axial Perpendiculaire
NPN PNP
28 VCC max. —
OUT (+)Marron
OUT (–)Bleu
D-M9�, D-M9�V (avec indicateur lumineux)
� Câbles en vinyle robuste résistant aux hydrocarbures: ø2.7 x 3.2 elliptique, 0.15 mm2, 2 fils (D-M9B(V)), ou 3 fils (D-M9N(V)/D-M9P(V)) Note) Reportez-vous au catalogue Best Pneumatics n2 pour connaître les caractéristiques communes du détecteur statique.
Pour passer commande
D-M9�
D-M9�V
� Le courant de charge à 2 fils est réduit (2.5 à 40 mA).
� La flexibilité est 1.5 fois meilleure que sur le modèle conventionnel (comparaison SMC).
� L'utilisation d'un câble flexible est une caractéristique standard.
PrécautionsPrécaution
Dimensions [mm]
Fixez le détecteur à l'aide de la vis existante installée sur le corps du détecteur. L'utilisation d'autres vis que celles fournies implique un risque d'endommagement du détecteur.
Série
NPB
NPN 3 filsPNP 3 fils
2 fils
Type de câblage/sortie
D-M9 N
—V
AxialPerpendiculaire
Connexion électrique
—MLZ
0.5 m1 m3 m5 m
Longueur de câble
Consultez le site web SMC pour plus de renseignements sur les produits se conformant aux normes internationales.
Circ
uit
prin
cipa
lC
ircui
t pr
inci
pal
Circ
uit
prin
cipa
l
17
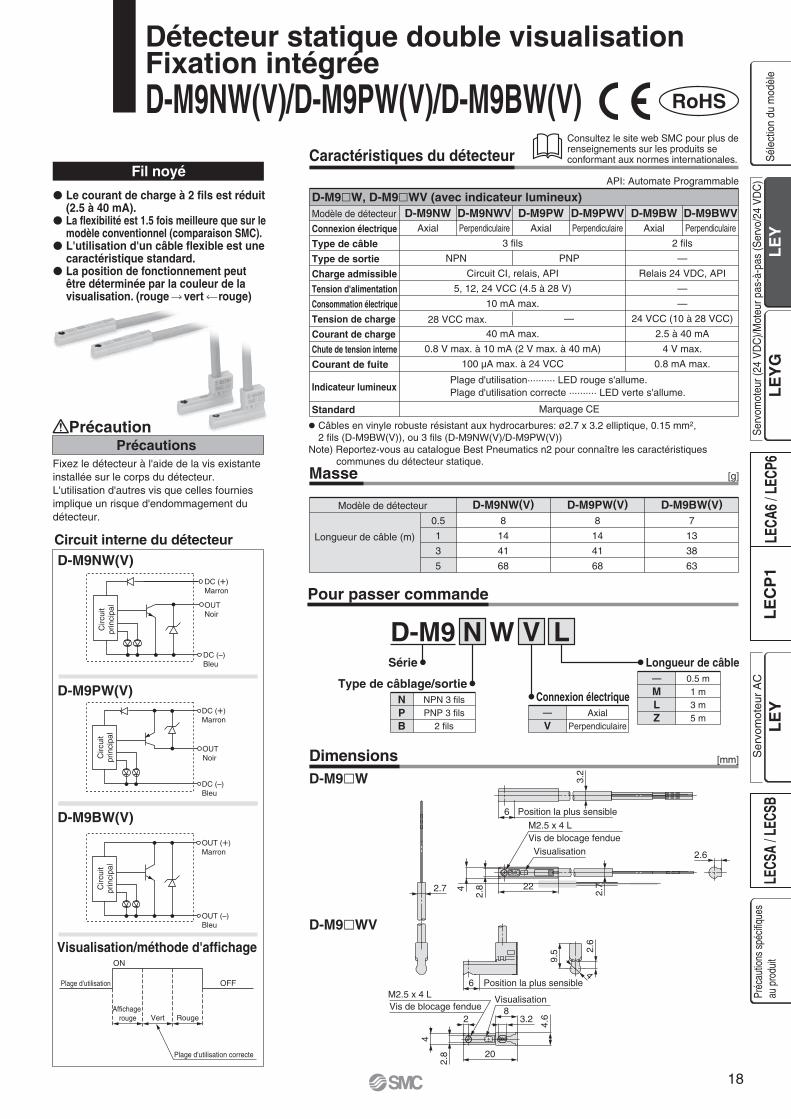
M2.5 x 4 L
Visualisation
2.7224
2.8
3.2
6 Position la plus sensible
4
2.6
9.5
6 Position la plus sensible
2.7
M2.5 x 4 L VisualisationVis de blocage fendue
2.8
4.6
4
20
28
3.2
Vis de blocage fendue
2.6
Caractéristiques du détecteur
Masse
Dimensions
Modèle de détecteur
0.5
1
3
5
D-M9NW(V)8
14
41
68
D-M9PW(V)8
14
41
68
D-M9BW(V)7
13
38
63
Longueur de câble (m)
Fil noyé API: Automate Programmable
Modèle de détecteur
Connexion électrique
Type de câble
Type de sortie
Charge admissible
Tension d'alimentation
Consommation électrique
Tension de charge
Courant de charge
Chute de tension interne
Courant de fuite
Indicateur lumineux
Standard
D-M9NWVD-M9NW D-M9BW D-M9BWV
2 fils
—
Relais 24 VDC, API
—
—
24 VCC (10 à 28 VCC)
2.5 à 40 mA
4 V max.
0.8 mA max.
D-M9PWVD-M9PW
Plage d'utilisation.......... LED rouge s'allume.Plage d'utilisation correcte .......... LED verte s'allume.
3 fils
Circuit CI, relais, API
5, 12, 24 VCC (4.5 à 28 V)
10 mA max.
40 mA max.
0.8 V max. à 10 mA (2 V max. à 40 mA)
100 μA max. à 24 VCC
Marquage CE
Axial Perpendiculaire Axial Perpendiculaire Axial Perpendiculaire
NPN PNP
28 VCC max. —
D-M9�W, D-M9�WV (avec indicateur lumineux)
� Câbles en vinyle robuste résistant aux hydrocarbures: ø2.7 x 3.2 elliptique, 0.15 mm2, 2 fils (D-M9BW(V)), ou 3 fils (D-M9NW(V)/D-M9PW(V)) Note) Reportez-vous au catalogue Best Pneumatics n2 pour connaître les caractéristiques communes du détecteur statique.
� Le courant de charge à 2 fils est réduit (2.5 à 40 mA).
� La flexibilité est 1.5 fois meilleure que sur le modèle conventionnel (comparaison SMC).
� L'utilisation d'un câble flexible est une caractéristique standard.
� La position de fonctionnement peut être déterminée par la couleur de la visualisation. (rouge vert rouge)
D-M9NW(V)
D-M9BW(V)
D-M9PW(V)
OUTNoir
DC (+)Marron
DC (–)Bleu
DC (+)Marron
OUTNoir
DC (–)Bleu
OUT (+)Marron
OUT (–)Bleu
Visualisation/méthode d'affichage
Circuit interne du détecteur
ON
OFFPlage d'utilisation
Plage d'utilisation correcte
Affichage rouge Vert Rouge
D-M9�W
D-M9�WV
Détecteur statique double visualisationFixation intégréeD-M9NW(V)/D-M9PW(V)/D-M9BW(V)
PrécautionsPrécaution
Fixez le détecteur à l'aide de la vis existante installée sur le corps du détecteur. L'utilisation d'autres vis que celles fournies implique un risque d'endommagement du détecteur.
Pour passer commande
Série
NPB
NPN 3 filsPNP 3 fils
2 fils
Type de câblage/sortie
D-M9 N W V L
—V
AxialPerpendiculaire
Connexion électrique
—MLZ
0.5 m1 m3 m5 m
Longueur de câble
Consultez le site web SMC pour plus de renseignements sur les produits se conformant aux normes internationales.
Circ
uit
prin
cipa
lC
ircui
t pr
inci
pal
Circ
uit
prin
cipa
l
[mm]
[g]
RoHS
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
18
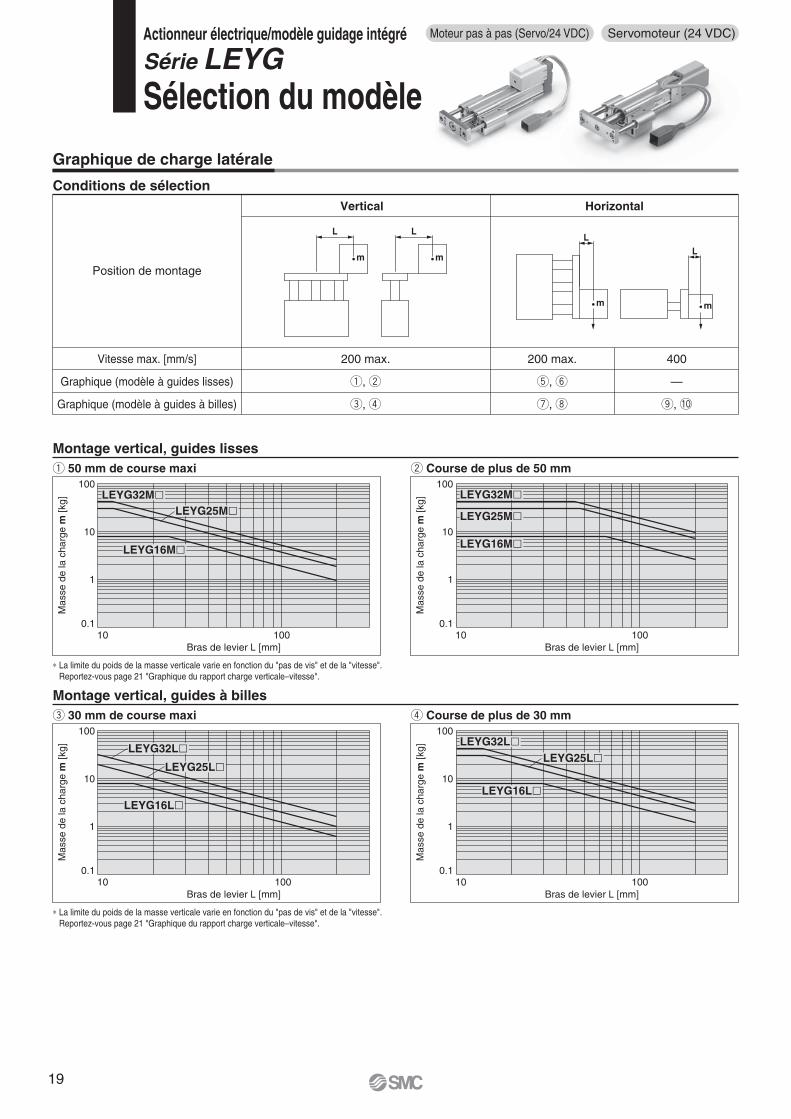
0.1
1
100
10
10 1000.1
1
100
10
10 100
0.1
1
100
10
10 1000.1
1
100
10
10 100
e 30 mm de course maxi
Bras de levier L [mm]
Mas
se d
e la
cha
rge
m [k
g]
Bras de levier L [mm]
Mas
se d
e la
cha
rge
m [k
g]
Bras de levier L [mm]
Mas
se d
e la
cha
rge
m [k
g]
Bras de levier L [mm]
Mas
se d
e la
cha
rge
m [k
g]
Graphique de charge latérale
Conditions de sélection
Position de montage
Vertical Horizontal
Vitesse max. [mm/s]
Graphique (modèle à guides lisses)
Graphique (modèle à guides à billes)
200 max.
q, w
e, r
400
—
o, !0
L L
m mL
m
L
m
200 max.
t, y
u, i
Montage vertical, guides lissesq 50 mm de course maxi w Course de plus de 50 mm
Montage vertical, guides à billesr Course de plus de 30 mm
∗ La limite du poids de la masse verticale varie en fonction du "pas de vis" et de la "vitesse".Reportez-vous page 21 "Graphique du rapport charge verticale–vitesse".
∗ La limite du poids de la masse verticale varie en fonction du "pas de vis" et de la "vitesse".Reportez-vous page 21 "Graphique du rapport charge verticale–vitesse".
LEYG32M�LEYG25M�
LEYG16M�
LEYG32M�
LEYG25M�
LEYG16M�
LEYG32L�
LEYG25L�
LEYG16L�
LEYG32L�LEYG25L�
LEYG16L�
Actionneur électrique/modèle guidage intégré
Série LEYGSélection du modèle
Moteur pas à pas (Servo/24 VDC) Servomoteur (24 VDC)
19
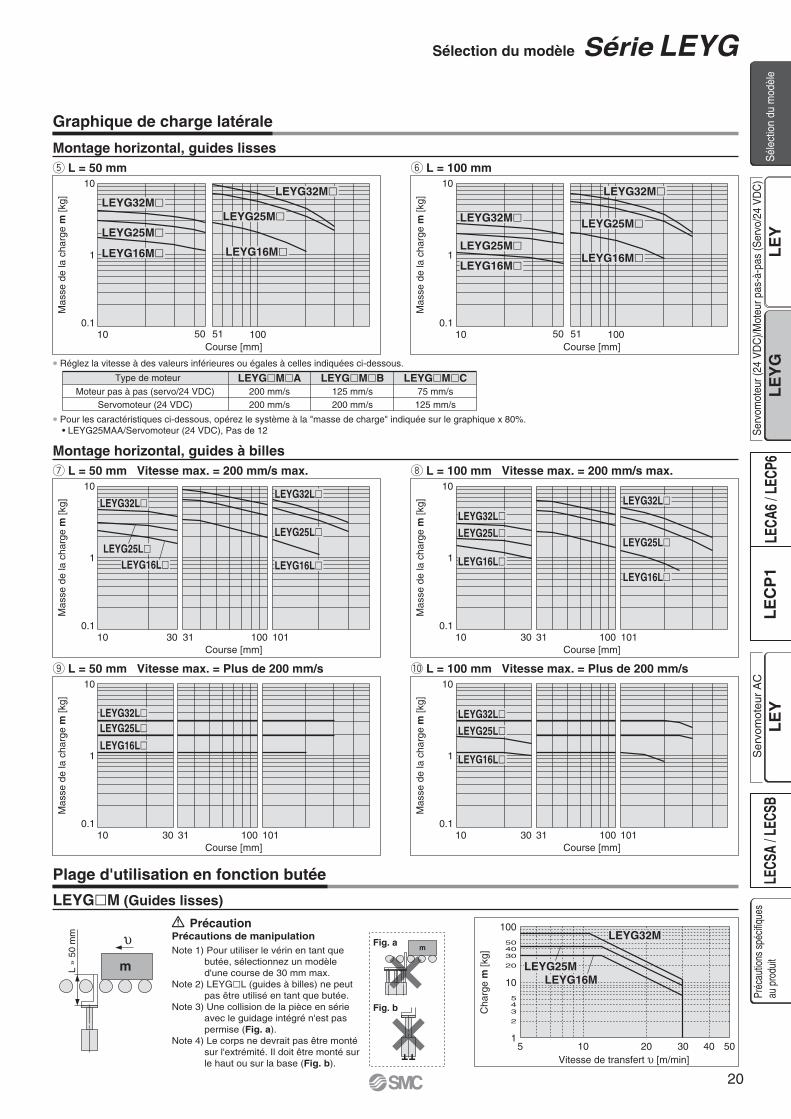
504020 30105
100504030
20
10543
2
1
0.1
1
10
10 10050 51
0.1
1
10
10 10030 10131 10030 10131
10030 10131 10030 10131
0.1
1
10
10 10050 51
0.1
1
10
10
0.1
1
10
100.1
1
10
10
Vitesse de transfert υ [m/min]
Cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
Course [mm]
Mas
se d
e la
cha
rge
m [k
g]
LEYG�M (Guides lisses)
Plage d'utilisation en fonction butée
Montage horizontal, guides lisses
Montage horizontal, guides à billes
Précautions de manipulationNote 1) Pour utiliser le vérin en tant que
butée, sélectionnez un modèle d'une course de 30 mm max.
Note 2) LEYG�L (guides à billes) ne peut pas être utilisé en tant que butée.
Note 3) Une collision de la pièce en série avec le guidage intégré n'est pas permise (Fig. a).
Note 4) Le corps ne devrait pas être monté sur l'extrémité. Il doit être monté sur le haut ou sur la base (Fig. b).
∗ Réglez la vitesse à des valeurs inférieures ou égales à celles indiquées ci-dessous.
∗ Pour les caractéristiques ci-dessous, opérez le système à la "masse de charge" indiquée sur le graphique x 80%.
Graphique de charge latérale
Fig. a
Fig. b
Sélection du modèle Série LEYG
Précaution
L »
50 m
m
m
υ
t L = 50 mm
u L = 50 mm Vitesse max. = 200 mm/s max.
LEYG�M�A200 mm/s200 mm/s
LEYG�M�B125 mm/s200 mm/s
LEYG�M�C75 mm/s
125 mm/s
LEYG32M�LEYG25M�
LEYG16M�
LEYG32M�
LEYG25M�
LEYG16M�
LEYG32L�
LEYG25L�LEYG16L�
y L = 100 mm
LEYG32M� LEYG25M�
LEYG16M�
LEYG32M�
LEYG25M�
LEYG16M�
LEYG32L�
LEYG25L�
LEYG16L�
i L = 100 mm Vitesse max. = 200 mm/s max.
LEYG32L�LEYG25L�
LEYG16L�
LEYG32L�
LEYG25L�
LEYG16L�
o L = 50 mm Vitesse max. = Plus de 200 mm/s
LEYG32L�LEYG25L�LEYG16L�
!0 L = 100 mm Vitesse max. = Plus de 200 mm/s
LEYG32L�LEYG25L�
LEYG16L�
LEYG32M
LEYG25MLEYG16M
m
Type de moteur
Préc
autio
ns s
pécif
ique
sau
pro
duit
20
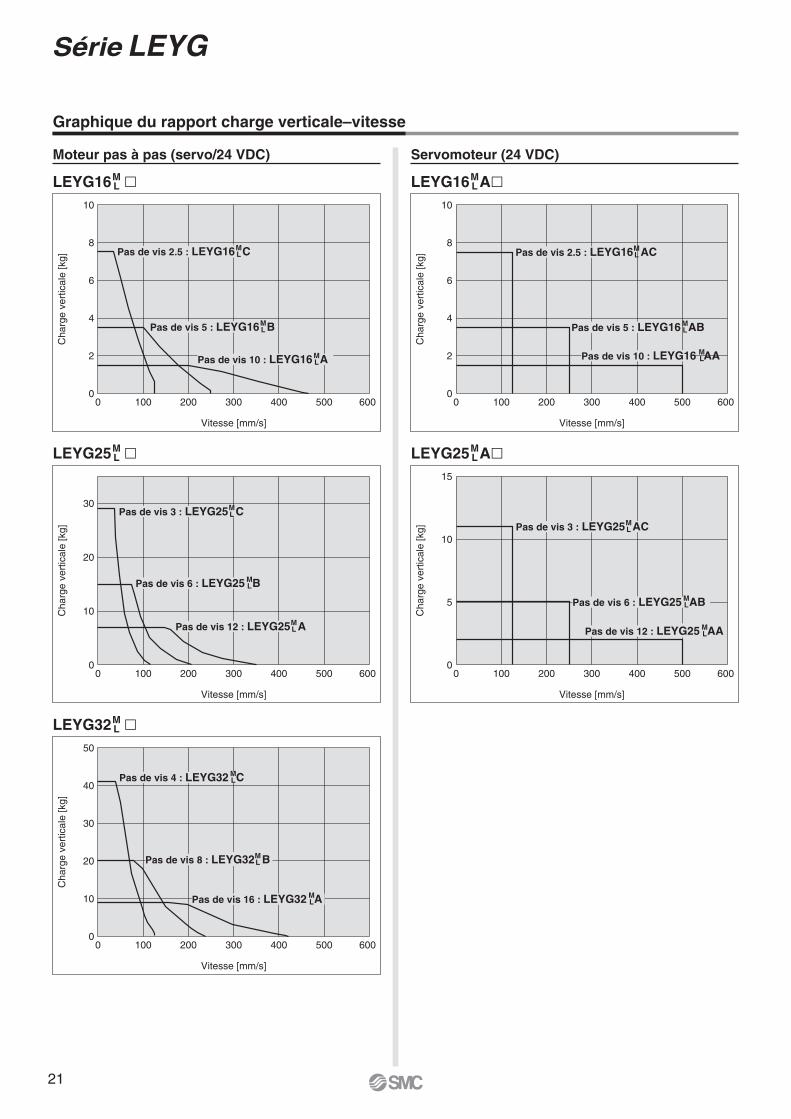
6000 100 200 300 400 500
Vitesse [mm/s]
10
8
6
4
2
0
Cha
rge
vert
ical
e [k
g]
6000 100 200 300 400 500
Vitesse [mm/s]
30
20
10
0
Cha
rge
vert
ical
e [k
g]
6000 100 200 300 400 500
Vitesse [mm/s]
50
40
30
20
10
0
Cha
rge
vert
ical
e [k
g]
6000 100 200 300 400 500
Vitesse [mm/s]
10
8
6
4
2
0
Cha
rge
vert
ical
e [k
g]
6000 100 200 300 400 500
Vitesse [mm/s]
15
10
5
0
Cha
rge
vert
ical
e [k
g]
Graphique du rapport charge verticale–vitesse
Moteur pas à pas (servo/24 VDC)
LEYG16 �ML
Pas de vis 2.5 : LEYG16 CML
Pas de vis 5 : LEYG16 BML
Pas de vis 10 : LEYG16 AML
Pas de vis 3 : LEYG25 CML
Pas de vis 6 : LEYG25 BML
Pas de vis 12 : LEYG25 AML
Pas de vis 2.5 : LEYG16 ACML
Pas de vis 5 : LEYG16 ABML
Pas de vis 10 : LEYG16 AAML
Pas de vis 3 : LEYG25 ACML
Pas de vis 6 : LEYG25 ABML
Pas de vis 12 : LEYG25 AAML
Pas de vis 4 : LEYG32 CML
Pas de vis 8 : LEYG32 BML
Pas de vis 16 : LEYG32 AML
LEYG25 �ML
Servomoteur (24 VDC)
LEYG16 A�ML
LEYG25 A�ML
LEYG32 �ML
Série LEYG
21
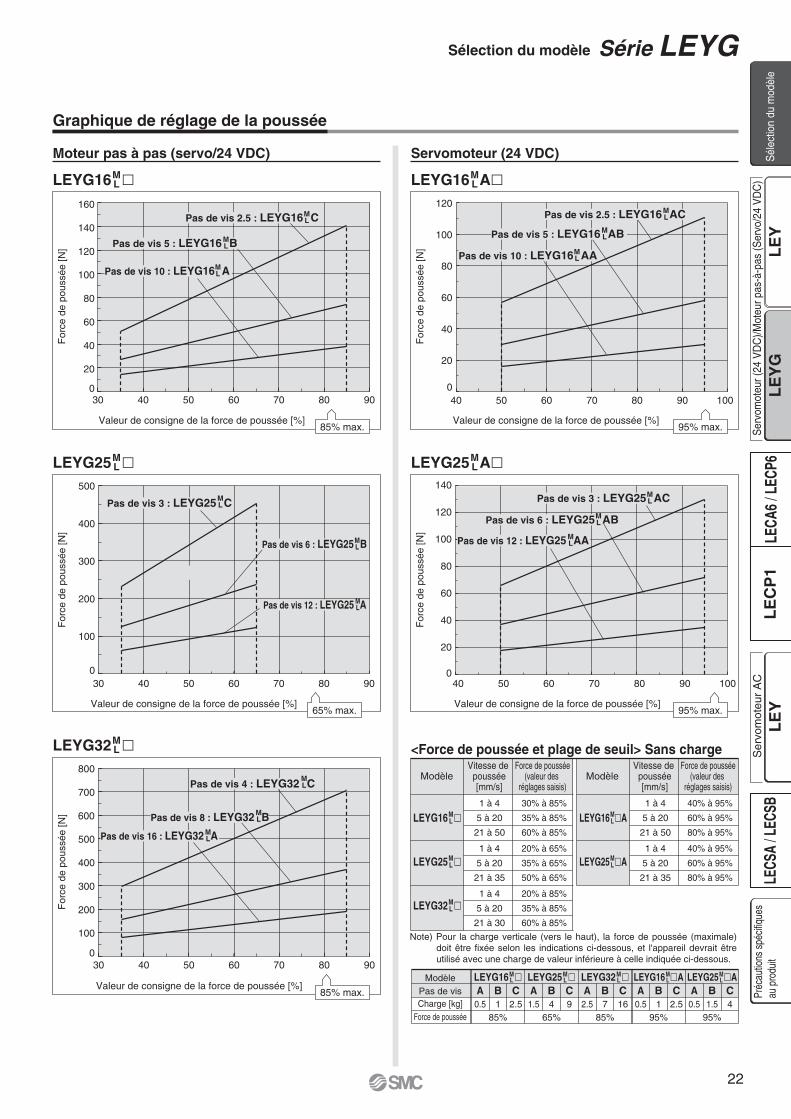
0
20
40
60
80
100
120
140
160
30 40 50 60 70 80 90
0
100
200
300
400
500
30 40 50 60 70 80 90
0
100
200
300
400
500
600
700
800
30 40 50 60 70 80 90
0
20
40
60
80
100
120
40 50 60 70 80 90 100
0
20
40
60
80
100
120
140
40 50 60 70 80 90 100
LEYG16 �ML
LEYG25 �ML
LEYG16 A�ML
LEYG25 A�ML
LEYG32 �ML
Valeur de consigne de la force de poussée [%]
For
ce d
e po
ussé
e [N
]
Valeur de consigne de la force de poussée [%]
For
ce d
e po
ussé
e [N
]
Valeur de consigne de la force de poussée [%]
For
ce d
e po
ussé
e [N
]
Valeur de consigne de la force de poussée [%]F
orce
de
pous
sée
[N]
Valeur de consigne de la force de poussée [%]
For
ce d
e po
ussé
e [N
]
Graphique de réglage de la poussée
Moteur pas à pas (servo/24 VDC) Servomoteur (24 VDC)
85% max.
65% max.
95% max.
95% max.
85% max.
Pas de vis 2.5 : LEYG16 CML
Pas de vis 5 : LEYG16 BML
Pas de vis 10 : LEYG16 AML
Pas de vis 3 : LEYG25 CML
Pas de vis 6 : LEYG25 BML
Pas de vis 12 : LEYG25 AML
Pas de vis 2.5 : LEYG16 ACML
Pas de vis 5 : LEYG16 ABML
Pas de vis 10 : LEYG16 AAML
Pas de vis 3 : LEYG25 ACML
Pas de vis 6 : LEYG25 ABML
Pas de vis 12 : LEYG25 AAML
Pas de vis 4 : LEYG32 CML
Pas de vis 8 : LEYG32 BML
Pas de vis 16 : LEYG32 AML
1 à 4
5 à 20
21 à 50
1 à 4
5 à 20
21 à 35
1 à 4
5 à 20
21 à 30
30% à 85%
35% à 85%
60% à 85%
20% à 65%
35% à 65%
50% à 65%
20% à 85%
35% à 85%
60% à 85%
LEYG16ML �
LEYG25ML �
LEYG32ML �
1 à 4
5 à 20
21 à 50
1 à 4
5 à 20
21 à 35
40% à 95%
60% à 95%
80% à 95%
40% à 95%
60% à 95%
80% à 95%
LEYG16ML�A
LEYG25ML�A
LEYG16ML � LEYG25M
L � LEYG32ML � LEYG16M
L�A LEYG25ML�A
0.5 185%
2.5A B C
1.5 465%
9A B C
2.5 785%
16A B C
0.5 195%
2.5A B C
0.5 1.595%
4A B C
ModèleVitesse de
poussée[mm/s]
Force de poussée(valeur des
réglages saisis)Modèle
Vitesse de poussée[mm/s]
Force de poussée(valeur des
réglages saisis)
<Force de poussée et plage de seuil> Sans charge
ModèlePas de vis
Note) Pour la charge verticale (vers le haut), la force de poussée (maximale) doit être fixée selon les indications ci-dessous, et l'appareil devrait être utilisé avec une charge de valeur inférieure à celle indiquée ci-dessous.
Charge [kg]Force de poussée
Sélection du modèle Série LEYG
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
22
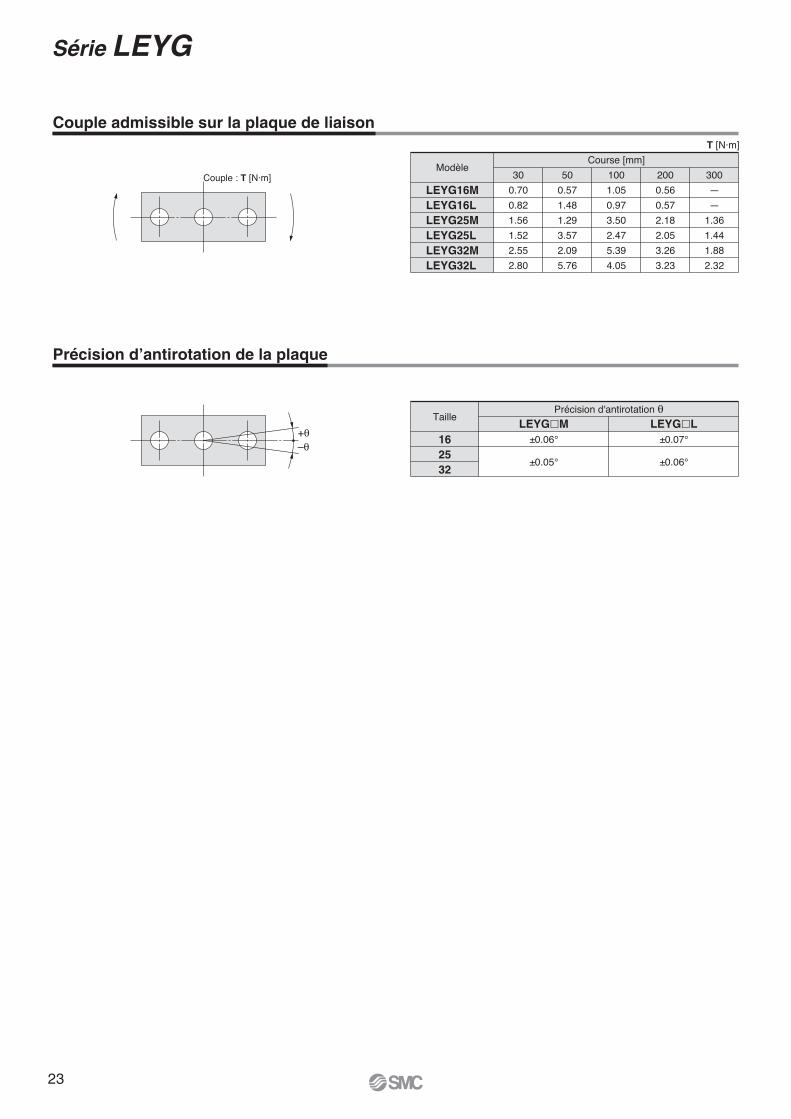
Couple admissible sur la plaque de liaison
Précision d’antirotation de la plaque
Couple : T [N·m]
+θ–θ
Modèle30
0.70
0.82
1.56
1.52
2.55
2.80
LEYG16MLEYG16LLEYG25MLEYG25LLEYG32MLEYG32L
50
0.57
1.48
1.29
3.57
2.09
5.76
100
1.05
0.97
3.50
2.47
5.39
4.05
Course [mm]
200
0.56
0.57
2.18
2.05
3.26
3.23
300
—
—
1.36
1.44
1.88
2.32
T [N·m]
TaillePrécision d'antirotation θ
162532
LEYG�M±0.06°
±0.05°
LEYG�L±0.07°
±0.06°
Série LEYG
23
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
24
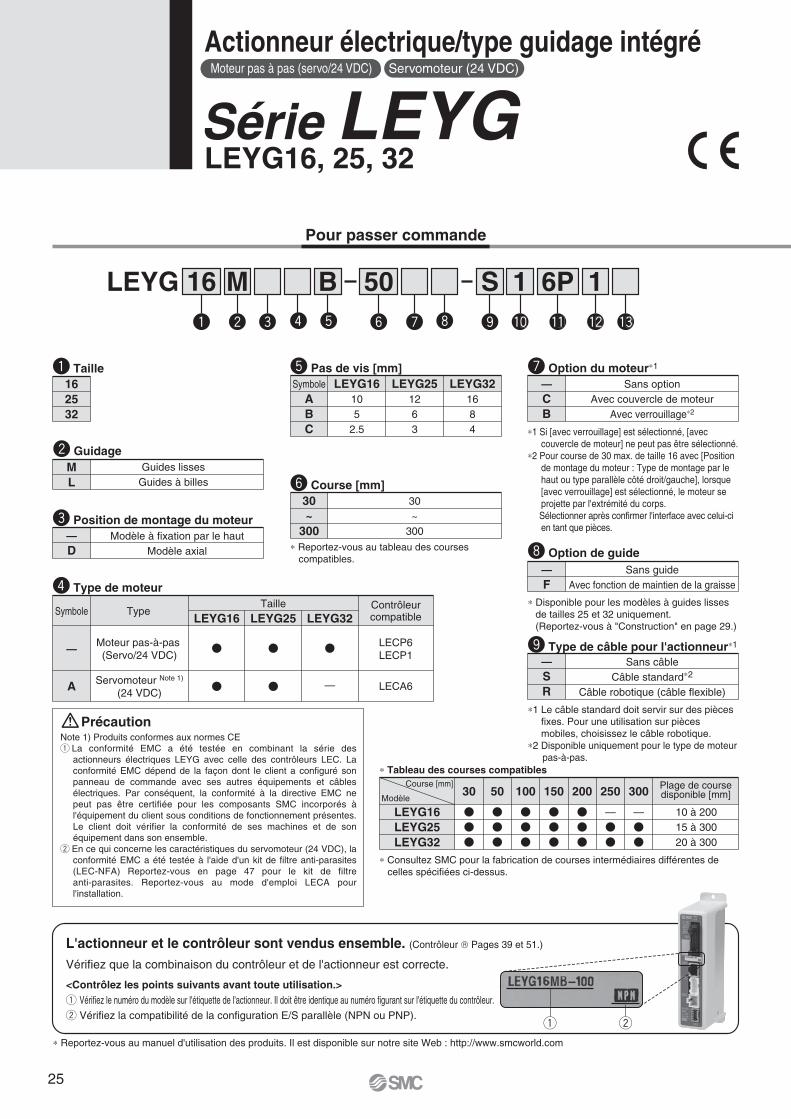
Vérifiez que la combinaison du contrôleur et de l'actionneur est correcte.
L'actionneur et le contrôleur sont vendus ensemble. (Contrôleur ® Pages 39 et 51.)
<Contrôlez les points suivants avant toute utilisation.>q Vérifiez le numéro du modèle sur l'étiquette de l'actionneur. Il doit être identique au numéro figurant sur l'étiquette du contrôleur.w Vérifiez la compatibilité de la configuration E/S parallèle (NPN ou PNP).
q w
Pour passer commande
LEYG16, 25, 32Série LEYG
LEYG 16 50B 11 6P
162532
—D
Modèle à fixation par le hautModèle axial
ML
Guides lissesGuides à billes
ABC
LEYG16105
2.5
LEYG251263
LEYG321684
Symbole
30~
300∗ Reportez-vous au tableau des courses compatibles.
30~
300
—CB
Sans optionAvec couvercle de moteur
Avec verrouillage∗2
∗1 Si [avec verrouillage] est sélectionné, [avec couvercle de moteur] ne peut pas être sélectionné.
∗2 Pour course de 30 max. de taille 16 avec [Position de montage du moteur : Type de montage par le haut ou type parallèle côté droit/gauche], lorsque [avec verrouillage] est sélectionné, le moteur se projette par l'extrémité du corps.
Sélectionner après confirmer l'interface avec celui-ci en tant que pièces.
∗ Reportez-vous au manuel d'utilisation des produits. Il est disponible sur notre site Web : http://www.smcworld.com
M Sq w e r t y u i o !0 !1 !2 !3
q Taille
w Guidage
e Position de montage du moteur
Note 1) Produits conformes aux normes CEq La conformité EMC a été testée en combinant la série des
actionneurs électriques LEYG avec celle des contrôleurs LEC. La conformité EMC dépend de la façon dont le client a configuré son panneau de commande avec ses autres équipements et câbles électriques. Par conséquent, la conformité à la directive EMC ne peut pas être certifiée pour les composants SMC incorporés à l'équipement du client sous conditions de fonctionnement présentes. Le client doit vérifier la conformité de ses machines et de son équipement dans son ensemble.
w En ce qui concerne les caractéristiques du servomoteur (24 VDC), la conformité EMC a été testée à l'aide d'un kit de filtre anti-parasites (LEC-NFA) Reportez-vous en page 47 pour le kit de filtre anti-parasites. Reportez-vous au mode d'emploi LECA pour l'installation.
t Pas de vis [mm]
y Course [mm]
u Option du moteur∗1
∗ Tableau des courses compatibles
LEYG16LEYG25LEYG32
���
Course [mm]
Modèle50
���
30
���
100
���
150
���
200
—
��
250
—
��
300
10 à 20015 à 30020 à 300
Plage de coursedisponible [mm]
∗ Consultez SMC pour la fabrication de courses intermédiaires différentes de celles spécifiées ci-dessus.
Précaution
r Type de moteur
—
A
�
�
�
�
�
—
Symbole TypeTaille
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur Note 1)
(24 VDC)
Contrôleurcompatible
LECP6LECP1
LECA6
LEYG16 LEYG25 LEYG32
—SR
Sans câbleCâble standard∗2
Câble robotique (câble flexible)
—F
Sans guideAvec fonction de maintien de la graisse
∗ Disponible pour les modèles à guides lisses de tailles 25 et 32 uniquement. (Reportez-vous à "Construction" en page 29.)
∗1 Le câble standard doit servir sur des pièces fixes. Pour une utilisation sur pièces mobiles, choisissez le câble robotique.
∗2 Disponible uniquement pour le type de moteur pas-à-pas.
o Type de câble pour l'actionneur∗1
i Option de guide
Actionneur électrique/type guidage intégréMoteur pas à pas (servo/24 VDC)Moteur pas à pas (servo/24 VDC) Servomoteur (24 VDC)
25
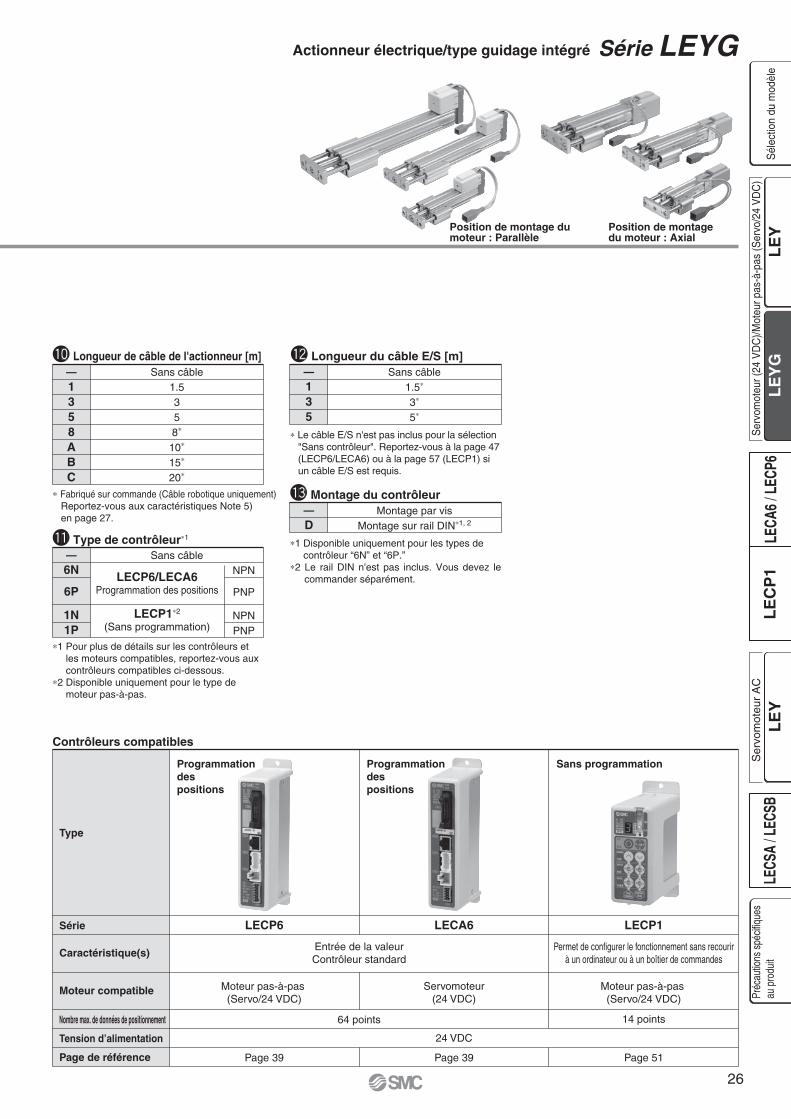
—D
Montage par visMontage sur rail DIN∗1, 2
—135
Sans câble1.5∗
3∗
5∗
—1358ABC
Sans câble1.5358∗
10∗
15∗
20∗
∗ Fabriqué sur commande (Câble robotique uniquement) Reportez-vous aux caractéristiques Note 5) en page 27.
∗1 Disponible uniquement pour les types de contrôleur “6N” et “6P.”
∗2 Le rail DIN n'est pas inclus. Vous devez le commander séparément.
∗ Le câble E/S n'est pas inclus pour la sélection "Sans contrôleur". Reportez-vous à la page 47 (LECP6/LECA6) ou à la page 57 (LECP1) si un câble E/S est requis.
!0 Longueur de câble de l'actionneur [m] !2 Longueur du câble E/S [m]
!3 Montage du contrôleur
∗1 Pour plus de détails sur les contrôleurs et les moteurs compatibles, reportez-vous aux contrôleurs compatibles ci-dessous.
∗2 Disponible uniquement pour le type de moteur pas-à-pas.
!1 Type de contrôleur∗1
Contrôleurs compatibles
Type
Série
Caractéristique(s)
Moteur compatible
LECP6 LECA6
24 VDC
Entrée de la valeurContrôleur standard
64 points
LECP1
Moteur pas-à-pas (Servo/24 VDC)
Servomoteur(24 VDC)
Moteur pas-à-pas (Servo/24 VDC)
14 points
Permet de configurer le fonctionnement sans recourirà un ordinateur ou à un boîtier de commandes
Page 39 Page 39 Page 51
Sans programmationProgrammation des positions
Programmation des positions
Nombre max. de données de positionnement
Tension d’alimentation
Page de référence
Position de montage dumoteur : Parallèle
Position de montagedu moteur : Axial
—6N
6P
1N1P
Sans câbleNPN
PNP
NPNPNP
LECP1∗2
(Sans programmation)
LECP6/LECA6Programmation des positions
Actionneur électrique/type guidage intégré Série LEYG
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
26
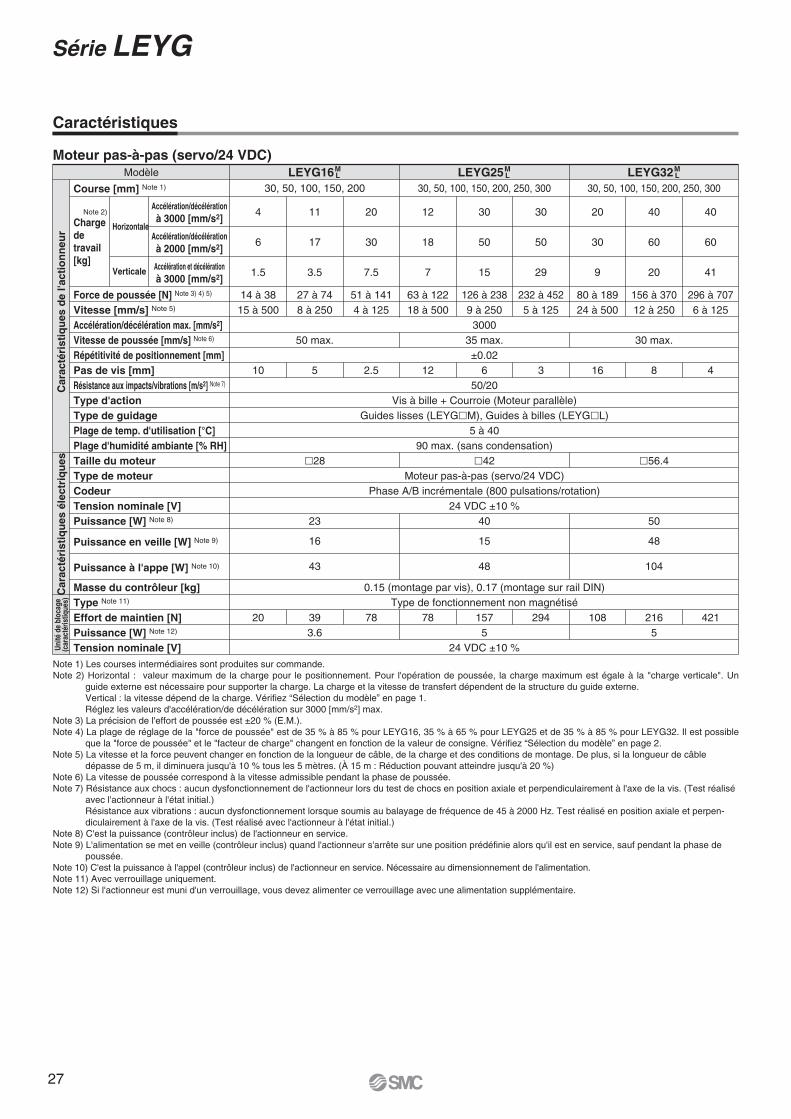
Caractéristiques
4
6
1.5
14 à 3815 à 500
11
17
3.5
27 à 748 à 250
50 max.
20
30
7.5
51 à 1414 à 125
12
18
7
63 à 12218 à 500
30
50
15
126 à 2389 à 2503000
30
50
29
232 à 4525 à 125
20
30
9
80 à 18924 à 500
40
60
20
156 à 37012 à 250
30 max.
40
60
41
296 à 7076 à 125
30, 50, 100, 150, 200 30, 50, 100, 150, 200, 250, 300
35 max.±0.02
50/20Vis à bille + Courroie (Moteur parallèle)
Guides lisses (LEYG�M), Guides à billes (LEYG�L)5 à 40
90 max. (sans condensation)
30, 50, 100, 150, 200, 250, 300
Force de poussée [N] Note 3) 4) 5)
Vitesse [mm/s] Note 5)
Accélération/décélération max. [mm/s2]Vitesse de poussée [mm/s] Note 6)
Répétitivité de positionnement [mm]Pas de vis [mm]Résistance aux impacts/vibrations [m/s2] Note 7)
Type d'actionType de guidagePlage de temp. d'utilisation [°C]Plage d'humidité ambiante [% RH]Taille du moteurType de moteurCodeurTension nominale [V]Puissance [W] Note 8)
Chargede travail[kg]
Horizontale
Verticale
Accélération/décélérationà 3000 [mm/s2]
Accélération/décélérationà 2000 [mm/s2]
Accélération et décélérationà 3000 [mm/s2]
�28 �42Moteur pas-à-pas (servo/24 VDC)
Phase A/B incrémentale (800 pulsations/rotation)24 VDC ±10 %
�56.4
10 5 2.5 12 6 3 16 8
23 40
0.15 (montage par vis), 0.17 (montage sur rail DIN)Type de fonctionnement non magnétisé
524 VDC ±10 %
50
3.6 5
4
20 39 78 78 157 294 108 216 421
Note 1) Les courses intermédiaires sont produites sur commande.Note 2) Horizontal : valeur maximum de la charge pour le positionnement. Pour l'opération de poussée, la charge maximum est égale à la "charge verticale". Un
guide externe est nécessaire pour supporter la charge. La charge et la vitesse de transfert dépendent de la structure du guide externe.Vertical : la vitesse dépend de la charge. Vérifiez “Sélection du modèle” en page 1.Réglez les valeurs d'accélération/de décélération sur 3000 [mm/s2] max.
Note 3) La précision de l'effort de poussée est ±20 % (E.M.).Note 4) La plage de réglage de la "force de poussée" est de 35 % à 85 % pour LEYG16, 35 % à 65 % pour LEYG25 et de 35 % à 85 % pour LEYG32. Il est possible
que la "force de poussée" et le "facteur de charge" changent en fonction de la valeur de consigne. Vérifiez “Sélection du modèle” en page 2.Note 5) La vitesse et la force peuvent changer en fonction de la longueur de câble, de la charge et des conditions de montage. De plus, si la longueur de câble
dépasse de 5 m, il diminuera jusqu'à 10 % tous les 5 mètres. (À 15 m : Réduction pouvant atteindre jusqu'à 20 %)Note 6) La vitesse de poussée correspond à la vitesse admissible pendant la phase de poussée.Note 7) Résistance aux chocs : aucun dysfonctionnement de l'actionneur lors du test de chocs en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé
avec l'actionneur à l'état initial.)Résistance aux vibrations : aucun dysfonctionnement lorsque soumis au balayage de fréquence de 45 à 2000 Hz. Test réalisé en position axiale et perpen-diculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)
Note 8) C'est la puissance (contrôleur inclus) de l'actionneur en service.Note 9) L'alimentation se met en veille (contrôleur inclus) quand l'actionneur s'arrête sur une position prédéfinie alors qu'il est en service, sauf pendant la phase de
poussée.Note 10) C'est la puissance à l'appel (contrôleur inclus) de l'actionneur en service. Nécessaire au dimensionnement de l'alimentation.Note 11) Avec verrouillage uniquement.Note 12) Si l'actionneur est muni d'un verrouillage, vous devez alimenter ce verrouillage avec une alimentation supplémentaire.
Modèle
Course [mm] Note 1)
Car
acté
rist
iqu
es d
e l'a
ctio
nn
eur
Car
acté
rist
iqu
es é
lect
riq
ues
Moteur pas-à-pas (servo/24 VDC)LEYG16M
L LEYG25ML LEYG32M
L
Note 2)
Masse du contrôleur [kg]Type Note 11)
Effort de maintien [N]Puissance [W] Note 12)
Tension nominale [V]
Puissance en veille [W] Note 9)
Puissance à l'appe [W] Note 10)
Unité
de
bloc
age
(car
acté
ristiq
ues)
16
43
15
48
48
104
Série LEYG
27
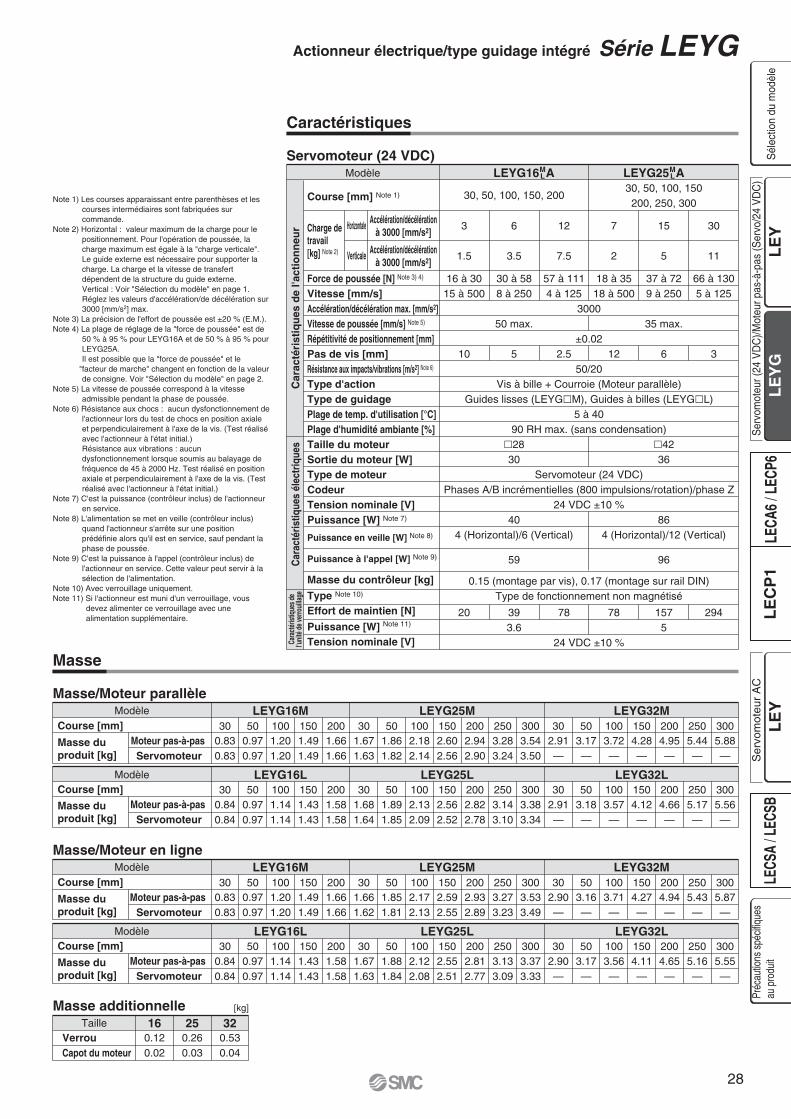
Caractéristiques
Masse
Masse additionnelleTaille
VerrouCapot du moteur
Modèle
30
11
66 à 1305 à 125
15
5
37 à 729 à 250
35 max.
6
7
2
18 à 3518 à 500
12
7.5
57 à 1114 à 125
6
3.5
30 à 588 à 250
50 max.
3
1.5
16 à 3015 à 500
30, 50, 100, 150, 20030, 50, 100, 150200, 250, 300
3000
±0.02
50/20Vis à bille + Courroie (Moteur parallèle)
Guides lisses (LEYG�M), Guides à billes (LEYG�L)5 à 40
90 RH max. (sans condensation)
Force de poussée [N] Note 3) 4)
Vitesse [mm/s]Accélération/décélération max. [mm/s2]Vitesse de poussée [mm/s] Note 5)
Répétitivité de positionnement [mm]Pas de vis [mm]Résistance aux impacts/vibrations [m/s2] Note 6)
Type d'actionType de guidagePlage de temp. d'utilisation [°C]Plage d'humidité ambiante [%]Taille du moteurSortie du moteur [W]Type de moteurCodeurTension nominale [V]Puissance [W] Note 7)
Puissance en veille [W] Note 8)
Puissance à l'appel [W] Note 9)
Masse du contrôleur [kg]
Type Note 10)
Effort de maintien [N]
Puissance [W] Note 11)
Tension nominale [V]
Course [mm] Note 1)
�2830
�4236
404 (Horizontal)/6 (Vertical)
59
864 (Horizontal)/12 (Vertical)
96
Servomoteur (24 VDC)Phases A/B incrémentielles (800 impulsions/rotation)/phase Z
24 VDC ±10 %
0.15 (montage par vis), 0.17 (montage sur rail DIN)Type de fonctionnement non magnétisé
24 VDC ±10 %3.6 5
3122.5510
157 29478783920
Servomoteur (24 VDC)
300.830.83
500.970.97
1001.201.20
1501.491.49
2001.661.66
301.661.62
501.851.81
1002.172.13
1502.592.55
2002.932.89
2503.273.23
3003.533.49
302.90—
503.16—
1003.71—
1504.27—
2004.94—
2505.43—
3005.87—
Modèle
Moteur pas-à-pas Servomoteur
LEYG16M LEYG25M LEYG32MCourse [mm]
Masse/Moteur en ligne
Masse du produit [kg]
0.120.02
160.260.03
250.530.04
32[kg]
Charge detravail[kg] Note 2)
Accélération/décélérationà 3000 [mm/s2]
Accélération/décélérationà 3000 [mm/s2]
Note 1) Les courses apparaissant entre parenthèses et les courses intermédiaires sont fabriquées sur commande.
Note 2) Horizontal : valeur maximum de la charge pour le positionnement. Pour l'opération de poussée, la charge maximum est égale à la "charge verticale". Le guide externe est nécessaire pour supporter la charge. La charge et la vitesse de transfert dépendent de la structure du guide externe.Vertical : Voir "Sélection du modèle" en page 1.Réglez les valeurs d'accélération/de décélération sur 3000 [mm/s2] max.
Note 3) La précision de l'effort de poussée est ±20 % (E.M.).Note 4) La plage de réglage de la "force de poussée" est de
50 % à 95 % pour LEYG16A et de 50 % à 95 % pour LEYG25A.Il est possible que la "force de poussée" et le
"facteur de marche" changent en fonction de la valeur de consigne. Voir "Sélection du modèle" en page 2.
Note 5) La vitesse de poussée correspond à la vitesse admissible pendant la phase de poussée.
Note 6) Résistance aux chocs : aucun dysfonctionnement de l'actionneur lors du test de chocs en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)Résistance aux vibrations : aucun dysfonctionnement lorsque soumis au balayage de fréquence de 45 à 2000 Hz. Test réalisé en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)
Note 7) C'est la puissance (contrôleur inclus) de l'actionneur en service.
Note 8) L'alimentation se met en veille (contrôleur inclus) quand l'actionneur s'arrête sur une position prédéfinie alors qu'il est en service, sauf pendant la phase de poussée.
Note 9) C'est la puissance à l'appel (contrôleur inclus) de l'actionneur en service. Cette valeur peut servir à la sélection de l'alimentation.
Note 10) Avec verrouillage uniquement.Note 11) Si l'actionneur est muni d'un verrouillage, vous
devez alimenter ce verrouillage avec une alimentation supplémentaire.
LEYG16 AML LEYG25 AM
L
300.840.84
500.970.97
1001.141.14
1501.431.43
2001.581.58
301.671.63
501.881.84
1002.122.08
1502.552.51
2002.812.77
2503.133.09
3003.373.33
302.90—
503.17—
1003.56—
1504.11—
2004.65—
2505.16—
3005.55—
Modèle
Moteur pas-à-pas Servomoteur
LEYG16L LEYG25L LEYG32LCourse [mm]
Masse du produit [kg]
300.830.83
500.970.97
1001.201.20
1501.491.49
2001.661.66
301.671.63
501.861.82
1002.182.14
1502.602.56
2002.942.90
2503.283.24
3003.543.50
302.91—
503.17—
1003.72—
1504.28—
2004.95—
2505.44—
3005.88—
Modèle
Moteur pas-à-pas Servomoteur
LEYG16M LEYG25M LEYG32MCourse [mm]
Masse/Moteur parallèle
Masse duproduit [kg]
300.840.84
500.970.97
1001.141.14
1501.431.43
2001.581.58
301.681.64
501.891.85
1002.132.09
1502.562.52
2002.822.78
2503.143.10
3003.383.34
302.91—
503.18—
1003.57—
1504.12—
2004.66—
2505.17—
3005.56—
Modèle
Moteur pas-à-pas Servomoteur
LEYG16L LEYG25L LEYG32LCourse [mm]
Masse du produit [kg]
Horizontale
Verticale
Car
acté
rist
iqu
es d
e l'a
ctio
nn
eur
Car
acté
ristiq
ues
élec
triq
ues
Cara
ctér
istiq
ues d
el'u
nité
de v
erro
uilla
ge
Actionneur électrique/type guidage intégré Série LEYG
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
28
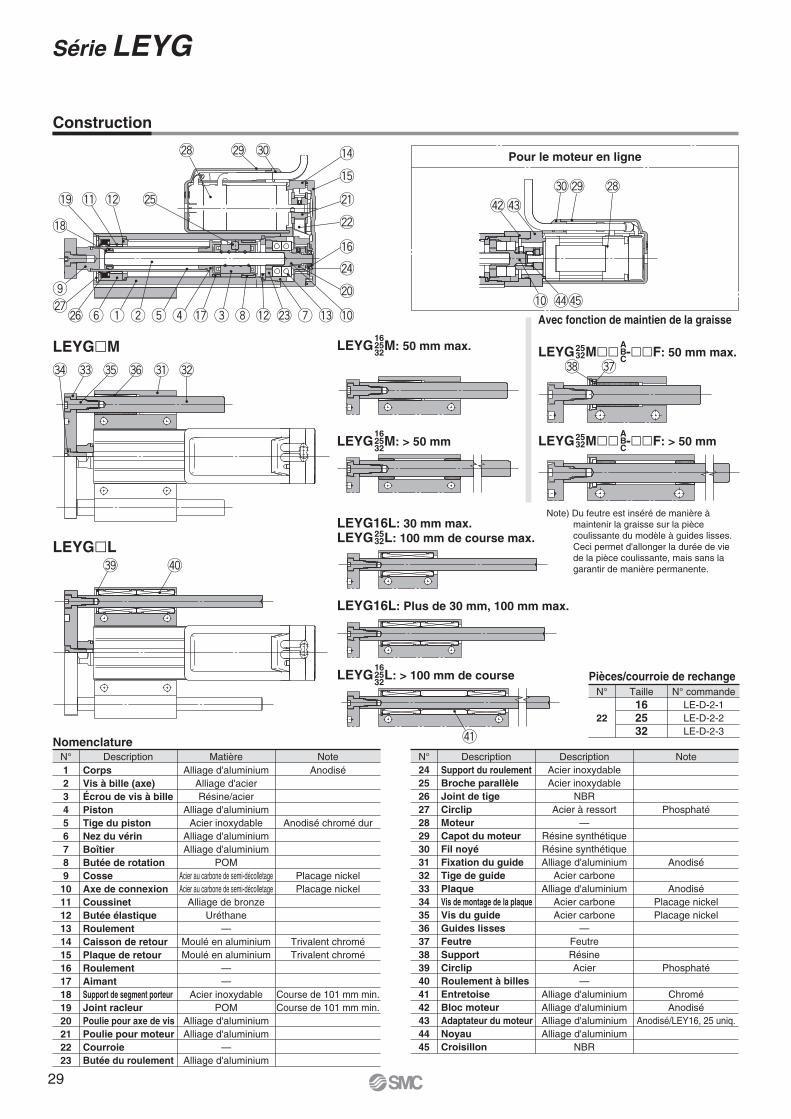
Construction
LEYG�M
LEYG�L
N° Description Matière Note1234567891011121314151617181920212223
CorpsVis à bille (axe)Écrou de vis à billePistonTige du pistonNez du vérinBoîtierButée de rotationCosseAxe de connexionCoussinetButée élastiqueRoulementCaisson de retourPlaque de retourRoulementAimantSupport de segment porteurJoint racleurPoulie pour axe de visPoulie pour moteurCourroieButée du roulement
Alliage d'aluminiumAlliage d'acierRésine/acier
Alliage d'aluminiumAcier inoxydable
Alliage d'aluminiumAlliage d'aluminium
POMAcier au carbone de semi-décolletageAcier au carbone de semi-décolletage
Alliage de bronzeUréthane
—Moulé en aluminiumMoulé en aluminium
——
Acier inoxydablePOM
Alliage d'aluminiumAlliage d'aluminium
—Alliage d'aluminium
Anodisé
Anodisé chromé dur
Placage nickelPlacage nickel
Trivalent chroméTrivalent chromé
Course de 101 mm min.Course de 101 mm min.
NomenclatureN° Description Description Note24252627282930313233343536373839404142434445
Support du roulementBroche parallèleJoint de tigeCirclipMoteurCapot du moteurFil noyéFixation du guideTige de guidePlaqueVis de montage de la plaqueVis du guideGuides lissesFeutreSupportCirclipRoulement à billesEntretoiseBloc moteurAdaptateur du moteurNoyauCroisillon
Acier inoxydableAcier inoxydable
NBRAcier à ressort
—Résine synthétiqueRésine synthétiqueAlliage d'aluminium
Acier carboneAlliage d'aluminium
Acier carboneAcier carbone
—FeutreRésineAcier
—Alliage d'aluminiumAlliage d'aluminiumAlliage d'aluminiumAlliage d'aluminium
NBR
Phosphaté
Anodisé
AnodiséPlacage nickelPlacage nickel
Phosphaté
ChroméAnodisé
Anodisé/LEY16, 25 uniq.
Pour le moteur en ligne!4
!5
@1
@2
!6
@4
@0
!0!3u@3!2ie!7rtwqy@6
#3#4 #5 #6 #1 #8
$1
#7#2
@7o
!8
!9 !1 !2 @5
@8 @9 #0
#9 $0
#0@9 @8
$4$5!0
$2$3
LEYG M: 50 mm max.162532
LEYG M: > 50 mm162532
Avec fonction de maintien de la graisse
LEYG M�� -��F: 50 mm max.2532
ABC
LEYG M�� -��F: > 50 mm2532
ABC
Note) Du feutre est inséré de manière à maintenir la graisse sur la pièce coulissante du modèle à guides lisses.Ceci permet d'allonger la durée de vie de la pièce coulissante, mais sans la garantir de manière permanente.
LEYG16L: Plus de 30 mm, 100 mm max.
LEYG16L: 30 mm max.LEYG L: 100 mm de course max.25
32
LEYG L: > 100 mm de course162532
Série LEYG
N° Taille N° commande
22162532
LE-D-2-1LE-D-2-2LE-D-2-3
Pièces/courroie de rechange
29
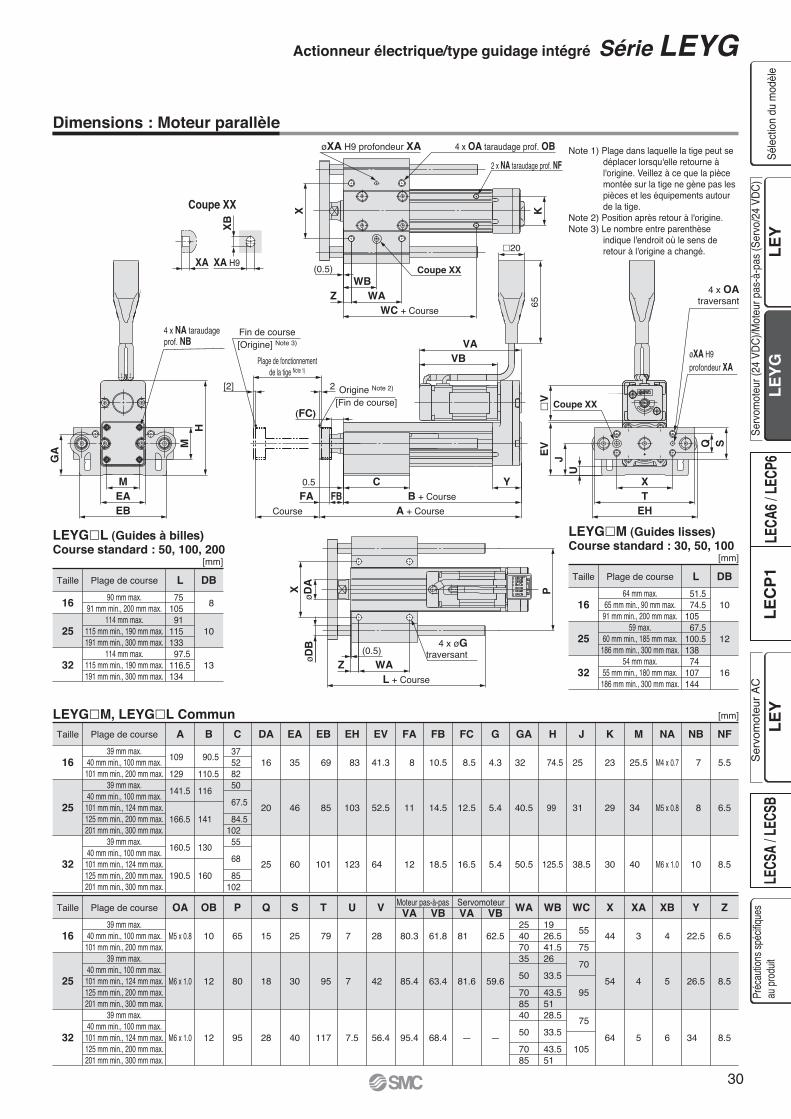
0.5 CFB
VBVA
65
YB + Course
A + Course
FA
�20
4 x øGtraversant
Z WA
X P
øD
AøD
B
L + Course
(0.5)
Coupe XX
XZ
WBWA
WC + Course
K
(0.5)
Coupe XX
XA H9
XB
XA
Coupe XX
EHT
SQ
JU
EV
�V
X
M
M
EB
H
EA
GA
Course
[2] 2
(FC)
4 x OAtraversant
øXA H9profondeur XA
Fin de course[Origine] Note 3)
Plage de fonctionnementde la tige Note 1)
Origine Note 2)
[Fin de course]
4 x NA taraudageprof. NB
Dimensions : Moteur parallèle
LEYG�M, LEYG�L Commun
39 mm max.40 mm min., 100 mm max.
101 mm min., 200 mm max.39 mm max.
40 mm min., 100 mm max.101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
39 mm max.40 mm min., 100 mm max.
101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
16
25
32
Taille Plage de course
109
129
141.5
166.5
160.5
190.5
A
90.5
110.5
116
141
130
160
B
37 52 82 50
67.5
84.5102 55
68
85 102
C
16
20
25
DA
35
46
60
EA
69
85
101
EB
83
103
123
EH
41.3
52.5
64
EV
8
11
12
FA
10.5
14.5
18.5
FB
4.3
5.4
5.4
8.5
12.5
16.5
GFC
74.5
99
125.5
H
32
40.5
50.5
GA
25
31
38.5
J
25.5
34
40
M
23
29
30
K
M4 x 0.7
M5 x 0.8
M6 x 1.0
NA
7
8
10
NB
5.5
6.5
8.5
NF
M5 x 0.8
M6 x 1.0
M6 x 1.0
OA
10
12
12
OB
LEYG�M (Guides lisses)Course standard : 30, 50, 100
64 mm max.65 mm min., 90 mm max.91 mm min., 200 mm max.
59 max.60 mm min., 185 mm max.186 mm min., 300 mm max.
54 mm max.55 mm min., 180 mm max.
186 mm min., 300 mm max.
16
25
32
Taille Plage de course
51.5 74.5105 67.5100.5138 74
107 144
L
10
12
16
DB
LEYG�L (Guides à billes)Course standard : 50, 100, 200
90 mm max.91 mm min., 200 mm max.
114 mm max.115 mm min., 190 mm max.191 mm min., 300 mm max.
114 mm max.115 mm min., 190 mm max.191 mm min., 300 mm max.
16
25
32
Taille Plage de course
75 105 91
115 133 97.5116.5134
L
8
10
13
DB
39 mm max.40 mm min., 100 mm max.
101 mm min., 200 mm max.39 mm max.
40 mm min., 100 mm max.101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
39 mm max.40 mm min., 100 mm max.
101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
16
25
32
Taille Plage de course
65
80
95
P
15
18
28
Q
25
30
40
S
79
95
117
T
7
7
7.5
U
28
42
56.4
V
80.3
85.4
95.4
Moteur pas-à-pas ServomoteurVA
61.8
63.4
68.4
VB
81
81.6
—
VA
62.5
59.6
—
VB25407035
50
708540
50
7085
WA
19 26.541.526
33.5
43.551 28.5
33.5
43.551
WB
55
75
70
95
75
105
WC
44
54
64
X
3
4
5
XA
4
5
6
XB
22.5
26.5
34
Y
6.5
8.5
8.5
Z
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.
Note 2) Position après retour à l'origine.Note 3) Le nombre entre parenthèse
indique l'endroit où le sens de retour à l'origine a changé.
[mm]
[mm]
[mm]
øXA H9 profondeur XA 4 x OA taraudage prof. OB
2 x NA taraudage prof. NF
Actionneur électrique/type guidage intégré Série LEYG
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
30
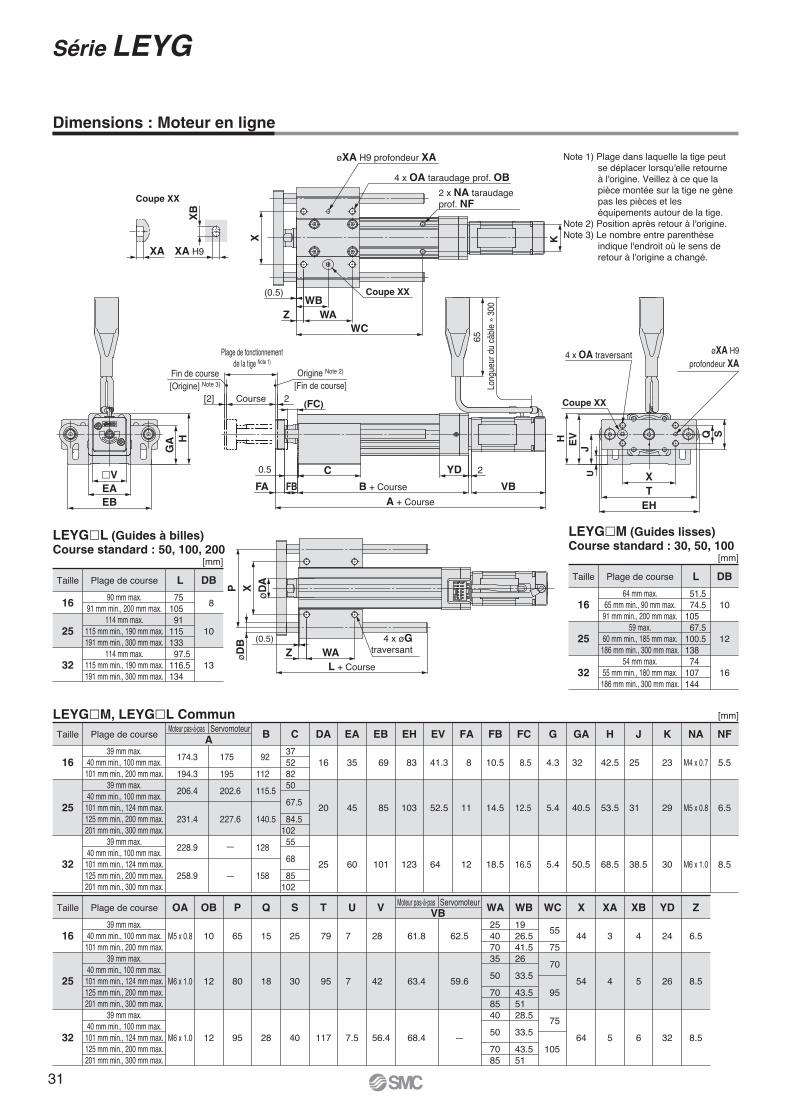
Coupe XX
XA H9
XB
XA
EBEA
GA H
�V
H SQ
EV
JU XT
EH
4 x OA traversant
Coupe XX
KX
WB(0.5)
WAZWC
Coupe XX
øD
BX
øD
A
P
WA(0.5)
ZL + Course
4 x øGtraversant
65
A + Course
VB
2YD
B + Course
2(FC)
FBFA
0.5 C
Course[2]
Long
ueur
du
câbl
e »
300
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.
Note 2) Position après retour à l'origine.Note 3) Le nombre entre parenthèse
indique l'endroit où le sens de retour à l'origine a changé.
Fin de course[Origine] Note 3)
Plage de fonctionnementde la tige Note 1)
Origine Note 2)
[Fin de course]
øXA H9profondeur XA
LEYG�M, LEYG�L Commun
39 mm max.40 mm min., 100 mm max.
101 mm min., 200 mm max.39 mm max.
40 mm min., 100 mm max.101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
39 mm max.40 mm min., 100 mm max.
101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
16
25
32
Taille Plage de courseMoteur pas-à-pas Servomoteur
174.3
194.3
206.4
231.4
228.9
258.9
A
175
195
202.6
227.6
—
—
92
112
115.5
140.5
128
158
B
37 52 82 50
67.5
84.5102 55
68
85102
C
16
20
25
DA
35
45
60
EA
69
85
101
EB
83
103
123
EH
41.3
52.5
64
EV
8
11
12
FA
8.5
12.5
16.5
FC
10.5
14.5
18.5
FB
4.3
5.4
5.4
G
42.5
53.5
68.5
H
32
40.5
50.5
GA
25
31
38.5
J
23
29
30
K
M4 x 0.7
M5 x 0.8
M6 x 1.0
NA
5.5
6.5
8.5
NF
M5 x 0.8
M6 x 1.0
M6 x 1.0
OA
LEYG�M (Guides lisses)Course standard : 30, 50, 100
64 mm max.65 mm min., 90 mm max.91 mm min., 200 mm max.
59 max.60 mm min., 185 mm max.
186 mm min., 300 mm max.54 mm max.
55 mm min., 180 mm max.186 mm min., 300 mm max.
16
25
32
Taille Plage de course
51.5 74.5105 67.5100.5138 74
107 144
L
10
12
16
DB
LEYG�L (Guides à billes)Course standard : 50, 100, 200
90 mm max.91 mm min., 200 mm max.
114 mm max.115 mm min., 190 mm max.191 mm min., 300 mm max.
114 mm max.115 mm min., 190 mm max.191 mm min., 300 mm max.
16
25
32
Taille Plage de course
75 105 91
115 133 97.5116.5134
L
8
10
13
DB
39 mm max.40 mm min., 100 mm max.
101 mm min., 200 mm max.39 mm max.
40 mm min., 100 mm max.101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
39 mm max.40 mm min., 100 mm max.
101 mm min., 124 mm max.125 mm min., 200 mm max.201 mm min., 300 mm max.
16
25
32
Taille Plage de course
10
12
12
OB
65
80
95
P
15
18
28
Q
25
30
40
S
79
95
117
T
7
7
7.5
U
28
42
56.4
Moteur pas-à-pas ServomoteurV
61.8
63.4
68.4
62.5
59.6
—
VB25407035
50
708540
50
7085
1926.541.526
33.5
43.55128.5
33.5
43.551
WBWA
55
75
70
95
75
105
WC
44
54
64
X
3
4
5
XA
4
5
6
XB
24
26
32
YD
6.5
8.5
8.5
Z
[mm]
[mm]
[mm]
øXA H9 profondeur XA
4 x OA taraudage prof. OB2 x NA taraudageprof. NF
Dimensions : Moteur en ligne
Série LEYG
31
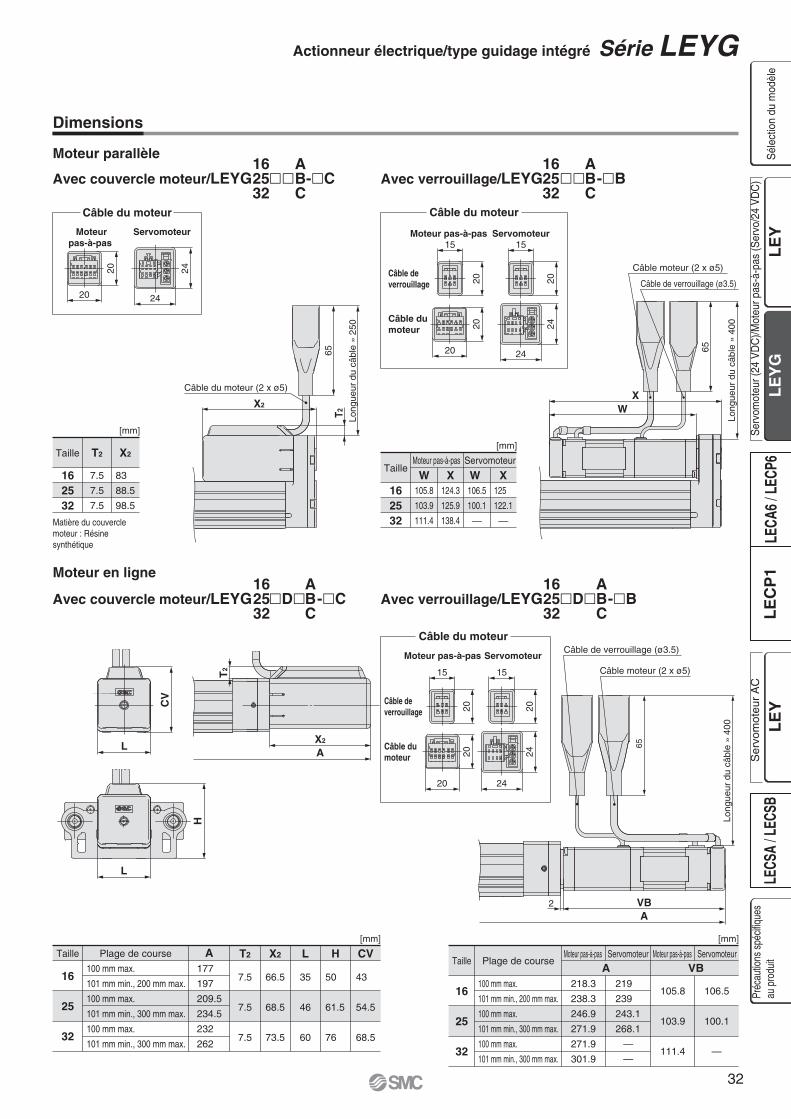
2020
15
20
20
15
24
24
Moteur pas-à-pas
Câble deverrouillage
Câble dumoteur
Servomoteur
Câble du moteur
X2
T2
Câble du moteur (2 x ø5)
65
Long
ueur
du
câbl
e »
250
20
20 24
24
Moteurpas-à-pas
Servomoteur
Câble du moteur
WX
Câble moteur (2 x ø5)
Câble de verrouillage (ø3.5)
65
Long
ueur
du
câbl
e »
400
2020
15
20
20
15
24
24
Moteur pas-à-pas
Câble deverrouillage
Câble dumoteur
Servomoteur
Câble du moteur
L
CV
X2
T2
A
Câble moteur (2 x ø5)
Câble de verrouillage (ø3.5)65
Long
ueur
du
câbl
e »
400
2 VBA
H
L
Avec verrouillage/LEYG �� -�B162532
ABC
7.5
7.5
7.5
83
88.5
98.5
Taille
162532
T2 X2
[mm]
Matière du couvercle moteur : Résine synthétique
105.8
103.9
111.4
Taille
162532
W124.3
125.9
138.4
X106.5
100.1
—
W125
122.1
—
X
[mm]
Dimensions
Moteur pas-à-pas Servomoteur
Moteur parallèle
Moteur en ligne
Avec couvercle moteur/LEYG �D� -�C162532
ABC
Avec verrouillage/LEYG �D� -�B162532
ABC
7.5
7.5
7.5
100 mm max.
101 mm min., 200 mm max.
100 mm max.
101 mm min., 300 mm max.
100 mm max.
101 mm min., 300 mm max.
66.5
68.5
73.5
Taille Plage de course A177
197
209.5
234.5
232
262
16
25
32
T2 X2
35
46
60
L
50
61.5
76
H
43
54.5
68.5
CV[mm]
100 mm max.
101 mm min., 200 mm max.
100 mm max.
101 mm min., 300 mm max.
100 mm max.
101 mm min., 300 mm max.
Taille Plage de courseA VB
218.3
238.3
246.9
271.9
271.9
301.9
Moteur pas-à-pas
219
239
243.1
268.1
—
——
Servomoteur
16
25
32
105.8
103.9
111.4
Moteur pas-à-pas
106.5
100.1
Servomoteur
[mm]
Avec couvercle moteur/LEYG �� -�C162532
ABC
Actionneur électrique/type guidage intégré Série LEYG
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
32
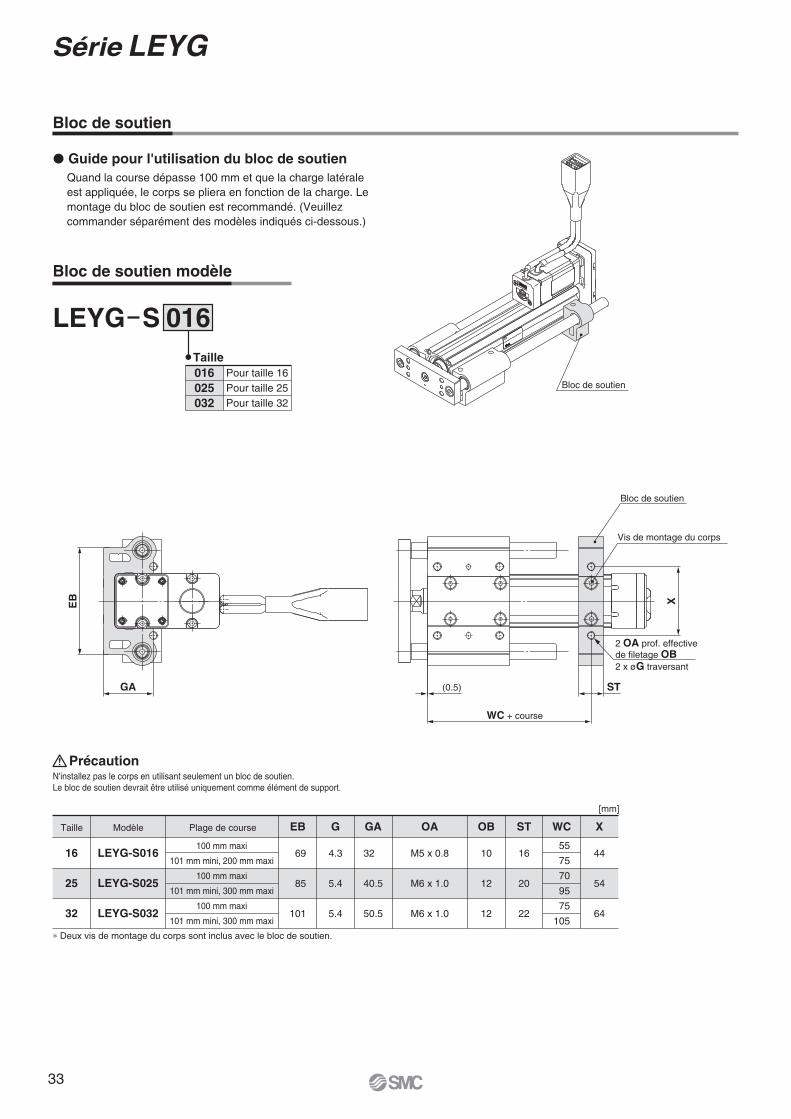
Bloc de soutien
� Guide pour l'utilisation du bloc de soutienQuand la course dépasse 100 mm et que la charge latérale est appliquée, le corps se pliera en fonction de la charge. Le montage du bloc de soutien est recommandé. (Veuillez commander séparément des modèles indiqués ci-dessous.)
∗ Deux vis de montage du corps sont inclus avec le bloc de soutien.
N'installez pas le corps en utilisant seulement un bloc de soutien. Le bloc de soutien devrait être utilisé uniquement comme élément de support.
Précaution
ST(0.5)
XEB
GA
WC + course
Bloc de soutien
Vis de montage du corps
2 OA prof. effective de filetage OB2 x øG traversant
Bloc de soutien
16
25
32
EB G OA
10
12
12
M5 x 0.8
M6 x 1.0
M6 x 1.0
4.3
5.4
5.4
69
85
101
OB
32
40.5
50.5
GA
55
75
70
95
75
105
WC
44
54
64
X
16
20
22
ST
LEYG-S016
LEYG-S025
LEYG-S032
Bloc de soutien modèle
LEYG S 016Taille016025032
Pour taille 16Pour taille 25Pour taille 32
[mm]
100 mm maxi
101 mm mini, 200 mm maxi
100 mm maxi
101 mm mini, 300 mm maxi
100 mm maxi
101 mm mini, 300 mm maxi
Taille Plage de courseModèle
Série LEYG
33
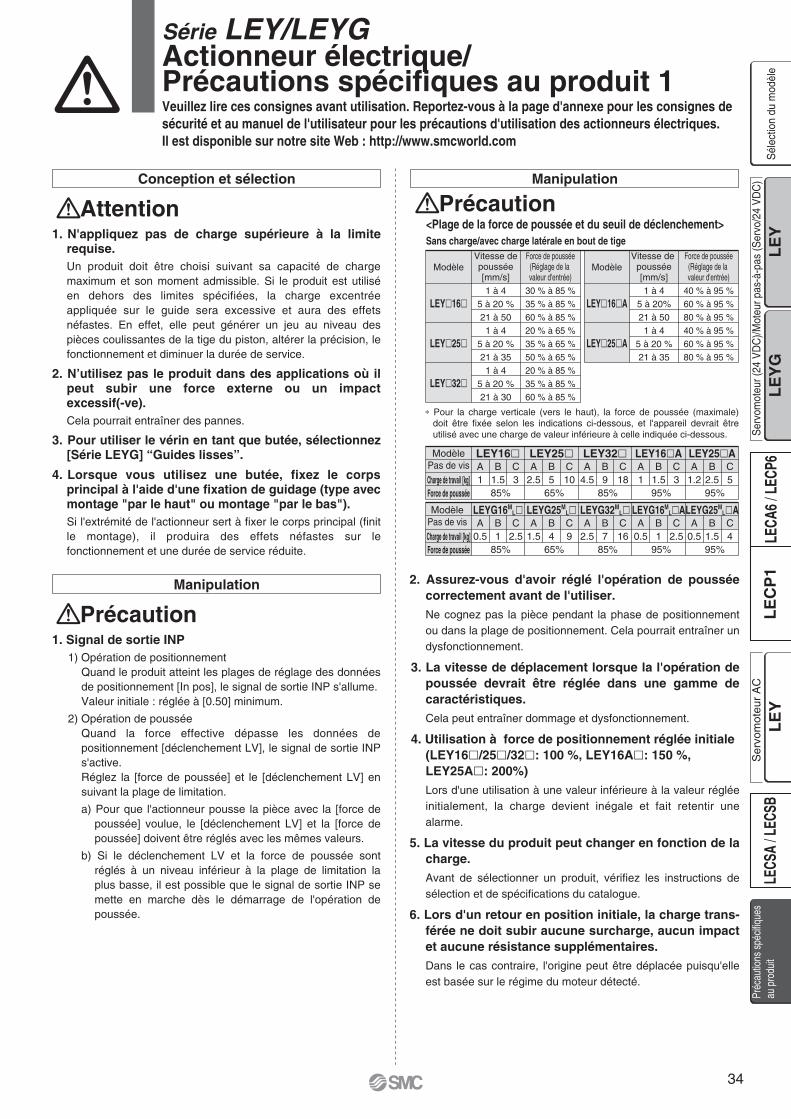
Conception et sélection
Attention1. N'appliquez pas de charge supérieure à la limite
requise.Un produit doit être choisi suivant sa capacité de charge maximum et son moment admissible. Si le produit est utilisé en dehors des limites spécifiées, la charge excentrée appliquée sur le guide sera excessive et aura des effets néfastes. En effet, elle peut générer un jeu au niveau des pièces coulissantes de la tige du piston, altérer la précision, le fonctionnement et diminuer la durée de service.
2. N’utilisez pas le produit dans des applications où il peut subir une force externe ou un impact excessif(-ve).Cela pourrait entraîner des pannes.
3. Pour utiliser le vérin en tant que butée, sélectionnez [Série LEYG] “Guides lisses”.
4. Lorsque vous utilisez une butée, fixez le corps principal à l'aide d'une fixation de guidage (type avec montage "par le haut" ou montage "par le bas").Si l'extrémité de l'actionneur sert à fixer le corps principal (finit le montage), il produira des effets néfastes sur le fonctionnement et une durée de service réduite.
Manipulation
Manipulation
Précaution
2. Assurez-vous d'avoir réglé l'opération de poussée correctement avant de l'utiliser.Ne cognez pas la pièce pendant la phase de positionnement ou dans la plage de positionnement. Cela pourrait entraîner un dysfonctionnement.
3. La vitesse de déplacement lorsque la l'opération de poussée devrait être réglée dans une gamme de caractéristiques.Cela peut entraîner dommage et dysfonctionnement.
4. Utilisation à force de positionnement réglée initiale (LEY16�/25�/32�: 100 %, LEY16A�: 150 %, LEY25A�: 200%)Lors d'une utilisation à une valeur inférieure à la valeur réglée initialement, la charge devient inégale et fait retentir une alarme.
5. La vitesse du produit peut changer en fonction de la charge.Avant de sélectionner un produit, vérifiez les instructions de sélection et de spécifications du catalogue.
6. Lors d'un retour en position initiale, la charge trans-férée ne doit subir aucune surcharge, aucun impact et aucune résistance supplémentaires.Dans le cas contraire, l'origine peut être déplacée puisqu'elle est basée sur le régime du moteur détecté.
ModèleVitesse depoussée[mm/s]
Force de poussée(Réglage de la valeur d'entrée)
ModèleVitesse de
poussée[mm/s]
Force de poussée(Réglage de la valeur d'entrée)
1 à 45 à 20 %21 à 501 à 4
5 à 20 %21 à 351 à 4
5 à 20 %21 à 30
85%
30 % à 85 %35 % à 85 %60 % à 85 %20 % à 65 %35 % à 65 %50 % à 65 %20 % à 85 %35 % à 85 %60 % à 85 %
LEY�16�
LEY�25�
LEY�32�
<Plage de la force de poussée et du seuil de déclenchement> Sans charge/avec charge latérale en bout de tige
ModèlePas de vis
LEY16�BA C
1.51 365%
BA C52.5 10
85%
BA C94.5 18
95%
BA C1.51 3
95%
BA C2.51.2 5
LEY25� LEY32� LEY16�A LEY25�A
Charge de travail [kg]Force de poussée
85%
ModèlePas de vis
LEYG16ML�
BA C10.5 2.5
65%
BA C41.5 9
85%
BA C72.5 16
95%
BA C10.5 2.5
95%
BA C1.50.5 4
LEYG25ML� LEYG32M
L� LEYG16ML�ALEYG25M
L�A
Charge de travail [kg]Force de poussée
1 à 45 à 20%21 à 501 à 4
5 à 20 %21 à 35
40 % à 95 %60 % à 95 %80 % à 95 %40 % à 95 %60 % à 95 %80 % à 95 %
LEY�16�A
LEY�25�A
Série LEY/LEYGActionneur électrique/Précautions spécifiques au produit 1Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour les consignes de sécurité et au manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
∗ Pour la charge verticale (vers le haut), la force de poussée (maximale) doit être fixée selon les indications ci-dessous, et l'appareil devrait être utilisé avec une charge de valeur inférieure à celle indiquée ci-dessous.
Précaution1. Signal de sortie INP
1) Opération de positionnementQuand le produit atteint les plages de réglage des données de positionnement [In pos], le signal de sortie INP s'allume.Valeur initiale : réglée à [0.50] minimum.
2) Opération de pousséeQuand la force effective dépasse les données de positionnement [déclenchement LV], le signal de sortie INP s'active.Réglez la [force de poussée] et le [déclenchement LV] en suivant la plage de limitation.
a) Pour que l'actionneur pousse la pièce avec la [force de poussée] voulue, le [déclenchement LV] et la [force de poussée] doivent être réglés avec les mêmes valeurs.
b) Si le déclenchement LV et la force de poussée sont réglés à un niveau inférieur à la plage de limitation la plus basse, il est possible que le signal de sortie INP se mette en marche dès le démarrage de l'opération de poussée.
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
34
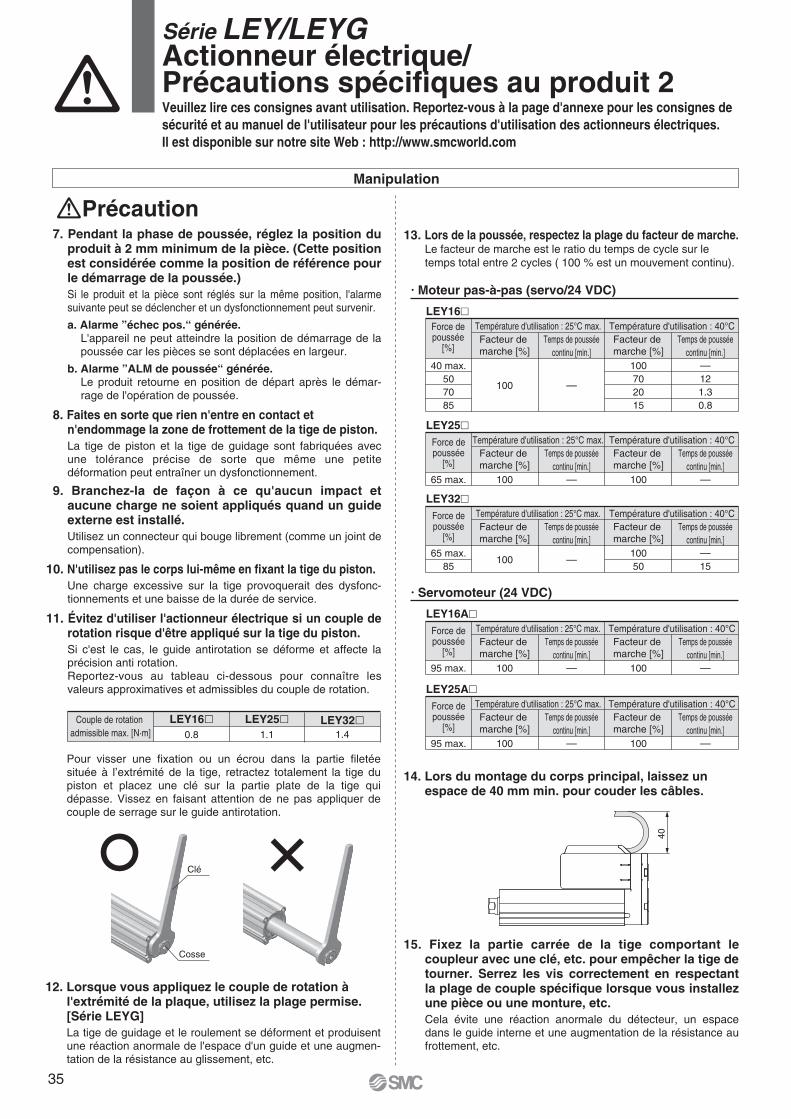
Clé
Cosse
12. Lorsque vous appliquez le couple de rotation à l'extrémité de la plaque, utilisez la plage permise. [Série LEYG]La tige de guidage et le roulement se déforment et produisent une réaction anormale de l'espace d'un guide et une augmen-tation de la résistance au glissement, etc.
13. Lors de la poussée, respectez la plage du facteur de marche.Le facteur de marche est le ratio du temps de cycle sur le temps total entre 2 cycles ( 100 % est un mouvement continu).
14. Lors du montage du corps principal, laissez un espace de 40 mm min. pour couder les câbles.
15. Fixez la partie carrée de la tige comportant le coupleur avec une clé, etc. pour empêcher la tige de tourner. Serrez les vis correctement en respectant la plage de couple spécifique lorsque vous installez une pièce ou une monture, etc.Cela évite une réaction anormale du détecteur, un espace dans le guide interne et une augmentation de la résistance au frottement, etc.
· Moteur pas-à-pas (servo/24 VDC)
Manipulation
Pour visser une fixation ou un écrou dans la partie filetée située à l’extrémité de la tige, retractez totalement la tige du piston et placez une clé sur la partie plate de la tige qui dépasse. Vissez en faisant attention de ne pas appliquer de couple de serrage sur le guide antirotation.
Couple de rotation admissible max. [N·m]
LEY16�0.8
LEY25�1.1
LEY32�1.4
Facteur de marche [%]
Temps de pousséecontinu [min.]
Facteur de marche [%]
Temps de pousséecontinu [min.]
100 —
100702015
—121.30.8
40 max.507085
Force depoussée
[%]
Température d'utilisation : 25°C max. Température d'utilisation : 40°CLEY16�
· Servomoteur (24 VDC)
Facteur de marche [%]
Temps de pousséecontinu [min.]
Facteur de marche [%]
Temps de pousséecontinu [min.]
100 — 100 —95 max.
Force depoussée
[%]
Température d'utilisation : 25°C max. Température d'utilisation : 40°CLEY16A�
Facteur de marche [%]
Temps de pousséecontinu [min.]
Facteur de marche [%]
Temps de pousséecontinu [min.]
100 — 100 —95 max.
Force depoussée
[%]
Température d'utilisation : 25°C max. Température d'utilisation : 40°CLEY25A�
Facteur de marche [%]
Temps de pousséecontinu [min.]
Facteur de marche [%]
Temps de pousséecontinu [min.]
100 —10050
—15
65 max.85
Force depoussée
[%]
Température d'utilisation : 25°C max. Température d'utilisation : 40°CLEY32�
Facteur de marche [%]
Temps de pousséecontinu [min.]
Facteur de marche [%]
Temps de pousséecontinu [min.]
100 — 100 —65 max.
Force depoussée
[%]
Température d'utilisation : 25°C max. Température d'utilisation : 40°CLEY25�
Série LEY/LEYGActionneur électrique/Précautions spécifiques au produit 2Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour les consignes de sécurité et au manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
40
7. Pendant la phase de poussée, réglez la position du produit à 2 mm minimum de la pièce. (Cette position est considérée comme la position de référence pour le démarrage de la poussée.)Si le produit et la pièce sont réglés sur la même position, l'alarme suivante peut se déclencher et un dysfonctionnement peut survenir.
a. Alarme ”échec pos.“ générée.L'appareil ne peut atteindre la position de démarrage de la poussée car les pièces se sont déplacées en largeur.
b. Alarme ”ALM de poussée“ générée.Le produit retourne en position de départ après le démar-rage de l'opération de poussée.
8. Faites en sorte que rien n'entre en contact et n'endommage la zone de frottement de la tige de piston.La tige de piston et la tige de guidage sont fabriquées avec une tolérance précise de sorte que même une petite déformation peut entraîner un dysfonctionnement.
9. Branchez-la de façon à ce qu'aucun impact et aucune charge ne soient appliqués quand un guide externe est installé.Utilisez un connecteur qui bouge librement (comme un joint de compensation).
10. N'utilisez pas le corps lui-même en fixant la tige du piston.Une charge excessive sur la tige provoquerait des dysfonc-tionnements et une baisse de la durée de service.
11. Évitez d'utiliser l'actionneur électrique si un couple de rotation risque d'être appliqué sur la tige du piston.Si c'est le cas, le guide antirotation se déforme et affecte la précision anti rotation.Reportez-vous au tableau ci-dessous pour connaître les valeurs approximatives et admissibles du couple de rotation.
Précaution
35
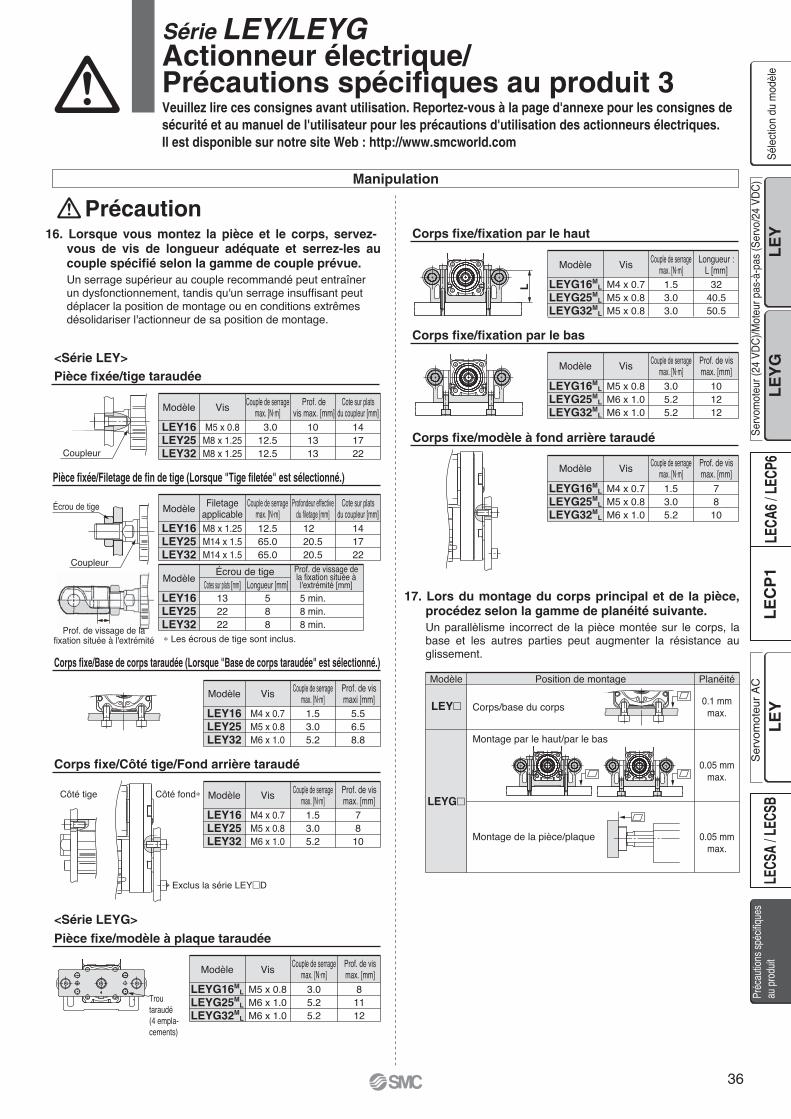
Manipulation
Côté tige Côté fond∗
Modèle
LEY16LEY25LEY32
M4 x 0.7M5 x 0.8M6 x 1.0
1.53.05.2
Vis
5.56.58.8
Couple de serragemax. [N·m]
Prof. de vismaxi [mm]
Modèle
LEY16LEY25LEY32
M4 x 0.7M5 x 0.8M6 x 1.0
1.53.05.2
Vis
7810
Couple de serragemax. [N·m]
Prof. de vismax. [mm]
Corps fixe/Base de corps taraudée (Lorsque "Base de corps taraudée" est sélectionné.)
Corps fixe/Côté tige/Fond arrière taraudé
Pièce fixe/modèle à plaque taraudée
Modèle
LEYG16ML
LEYG25ML
LEYG32ML
81112
Prof. de vismax. [mm]
3.05.25.2
Couple de serragemax. [N·m]
M5 x 0.8M6 x 1.0M6 x 1.0
Vis
Corps fixe/fixation par le bas
Modèle
LEYG16ML
LEYG25ML
LEYG32ML
101212
Prof. de vismax. [mm]
3.05.25.2
Couple de serragemax. [N·m]
M5 x 0.8M6 x 1.0M6 x 1.0
Vis
Corps fixe/modèle à fond arrière taraudé
Modèle
LEYG16ML
LEYG25ML
LEYG32ML
78
10
Prof. de vismax. [mm]
1.53.05.2
Couple de serragemax. [N·m]
M4 x 0.7M5 x 0.8M6 x 1.0
Vis
Trou taraudé(4 empla-cements)
Corps fixe/fixation par le haut
Modèle
LEYG16ML
LEYG25ML
LEYG32ML
3240.550.5
Longueur :L [mm]
1.53.03.0
Couple de serragemax. [N·m]
M4 x 0.7M5 x 0.8M5 x 0.8
Vis
L
Précaution
Coupleur
Prof. de vissage de lafixation située à l'extrémité
Écrou de tige
Pièce fixée/Filetage de fin de tige (Lorsque "Tige filetée" est sélectionné.)
Modèle
LEY16LEY25LEY32
M8 x 1.25M14 x 1.5M14 x 1.5
12.565.065.0
Filetageapplicable
12 20.520.5
141722
Couple de serragemax. [N·m]
Profondeur effectivedu filetage [mm]
Cote sur platsdu coupleur [mm]
Modèle
LEY16LEY25LEY32
5 min.8 min.8 min.
Prof. de vissage dela fixation située àl'extrémité [mm]
588
Longueur [mm]132222
Cotes sur plats [mm]Écrou de tige
∗ Les écrous de tige sont inclus.
∗ Exclus la série LEY�D
Pièce fixée/tige taraudée
Modèle
LEY16LEY25LEY32
M5 x 0.8M8 x 1.25M8 x 1.25
3.012.512.5
Vis
101313
141722
Couple de serragemax. [N·m]
Prof. devis max. [mm]
Cote sur platsdu coupleur [mm]
<Série LEY>
<Série LEYG>
16. Lorsque vous montez la pièce et le corps, servez-vous de vis de longueur adéquate et serrez-les au couple spécifié selon la gamme de couple prévue.Un serrage supérieur au couple recommandé peut entraîner un dysfonctionnement, tandis qu'un serrage insuffisant peut déplacer la position de montage ou en conditions extrêmes désolidariser l'actionneur de sa position de montage.
Série LEY/LEYGActionneur électrique/Précautions spécifiques au produit 3Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour les consignes de sécurité et au manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
Coupleur
Modèle Position de montage Planéité
LEY�
LEYG�
0.1 mmmax.
0.05 mmmax.
0.05 mmmax.
Corps/base du corps
Montage de la pièce/plaque
Montage par le haut/par le bas
17. Lors du montage du corps principal et de la pièce, procédez selon la gamme de planéité suivante.Un parallèlisme incorrect de la pièce montée sur le corps, la base et les autres parties peut augmenter la résistance au glissement.
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
36
Série LEY/LEYGActionneur électrique/Précautions spécifiques au produit 4Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour les consignes de sécurité et au manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
Entretien
Attention1. Coupez l'alimentation pendant une opération
d'entretien et de remplacement.
Suivez le tableau suivant pour effectuer les entretiens.
Vérification de l'aspect extérieur1. Vis desserrées, salissure anormale2. Vérification des défauts et des jonctions de câbles3. Vibration, bruit
Planning approximatif de remplacement de la courroie
Contrôle quotidien avant mise en fonctionnementInspection tous les 6 mois/250 km/5 millions de cycles∗
��
Contrôle visuel—�
Contrôle de courroieFréquence
∗ Choisissez en fonction de ce qui se produit le plus rapidement.
Distance2000 km1000 km500 km
ModèleLEY16�ALEY16�BLEY16�C
ModèleLEY25�ALEY25�BLEY25�C
Distance2500 km1200 km600 km
ModèleLEY32ALEY32BLEY32C
Distance4000 km2000 km1000 km
Il est recommandé de changer la courroie de préférence au bout de 2 ans, ou après la distance parcourue par l'actionneur (voir ci-dessous).
Vérification de la courroieArrêtez immédiatement l'appareil et remplacez la courroie si elle arrive en bas. De plus, vérifiez que l'environnement et les conditions de travail sont en adéquation avec les spécificités du produit.a. Le canevas des dents est usé.
La fibre de canevas s'effiloche. Le caoutchouc s'enlève et la fibre blanchit. La forme des fibres est confuse.
b. Le côté de la courroie se détache ou s'use.Le coin de la courroie s'arrondit et le fil effiloché se décolle.
c. La courroie est coupée partiellement.La courroie est en partie coupée. Un corps étranger (excepté les pièces coupées) pris dans les dents endommage l'appareil.
d. Ligne verticale sur les dents de la courroieDéfaut provoqué par le passage de la courroie sur la bride.
e. Le caoutchouc à l'arrière de la courroie est mou et collant.f. L'arrière de la courroie est fissuré.
37
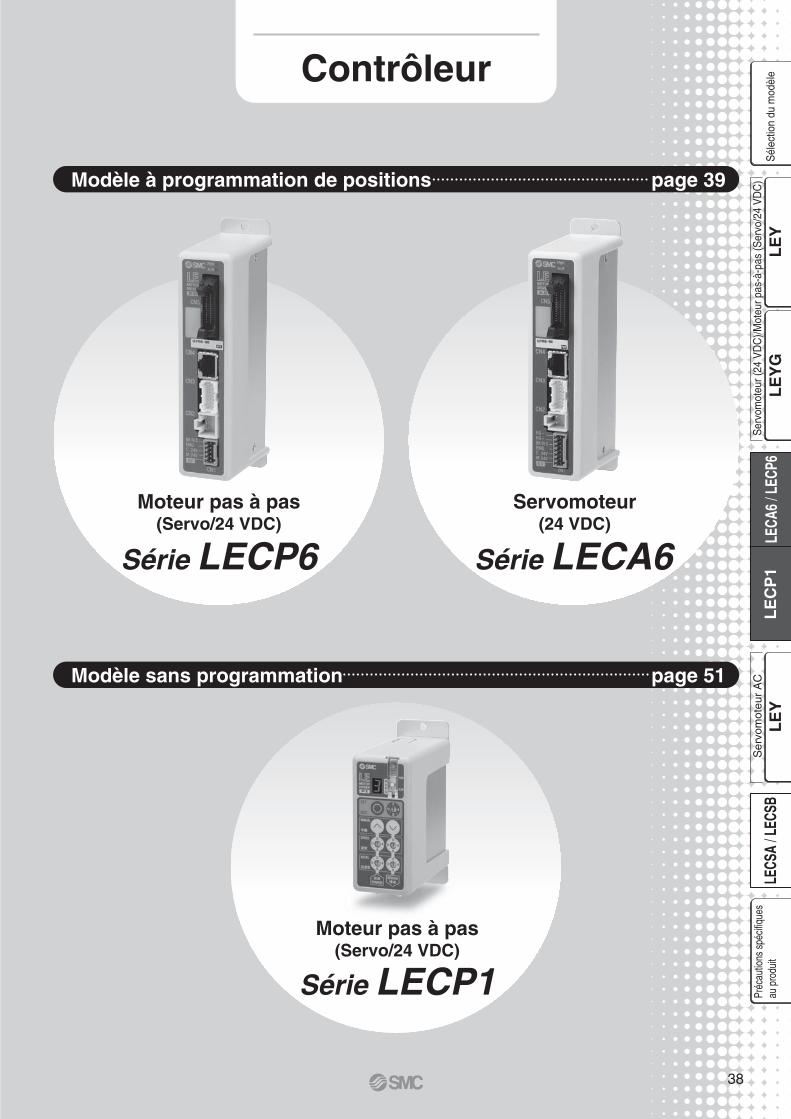
Modèle à programmation de positions page 39
Modèle sans programmation page 51
Contrôleur
Série LECP6
Série LECP1
Moteur pas à pas(Servo/24 VDC)
Moteur pas à pas(Servo/24 VDC)
Série LECA6
Servomoteur(24 VDC)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
38
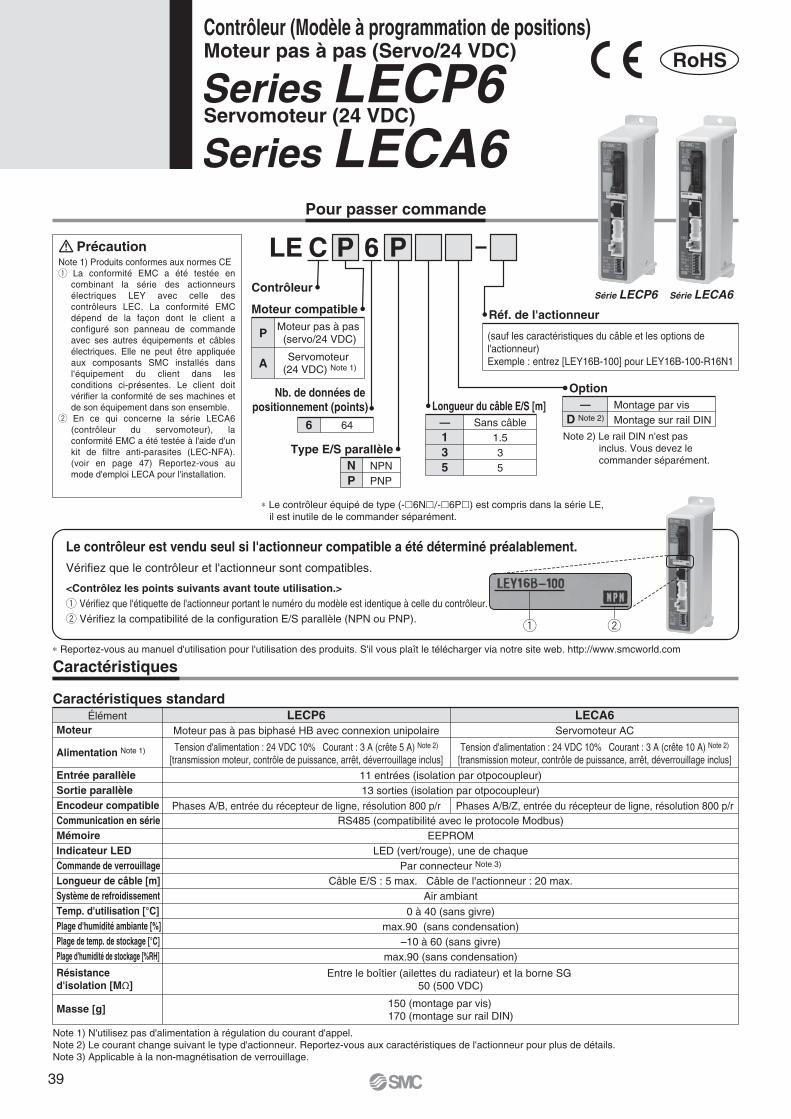
Vérifiez que le contrôleur et l'actionneur sont compatibles.
Le contrôleur est vendu seul si l'actionneur compatible a été déterminé préalablement.
<Contrôlez les points suivants avant toute utilisation.>q Vérifiez que l'étiquette de l'actionneur portant le numéro du modèle est identique à celle du contrôleur.w Vérifiez la compatibilité de la configuration E/S parallèle (NPN ou PNP).
Pour passer commande
Caractéristiques
Série LECP6 Série LECA6
Caractéristiques standardÉlément LECP6 LECA6
Moteur
Alimentation Note 1)
Entrée parallèleSortie parallèleEncodeur compatibleCommunication en sérieMémoireIndicateur LEDCommande de verrouillageLongueur de câble [m]Système de refroidissementTemp. d'utilisation [°C]Plage d'humidité ambiante [%]Plage de temp. de stockage [°C]Plage d'humidité de stockage [%RH]
Masse [g]
Résistance d'isolation [MΩ]
Moteur pas à pas biphasé HB avec connexion unipolaire
Tension d'alimentation : 24 VDC 10% Courant : 3 A (crête 5 A) Note 2)
[transmission moteur, contrôle de puissance, arrêt, déverrouillage inclus]
Servomoteur AC
Tension d'alimentation : 24 VDC 10% Courant : 3 A (crête 10 A) Note 2)
[transmission moteur, contrôle de puissance, arrêt, déverrouillage inclus]
Entre le boîtier (ailettes du radiateur) et la borne SG 50 (500 VDC)
Phases A/B, entrée du récepteur de ligne, résolution 800 p/r Phases A/B/Z, entrée du récepteur de ligne, résolution 800 p/r
150 (montage par vis)170 (montage sur rail DIN)
Note 1) N'utilisez pas d'alimentation à régulation du courant d'appel.Note 2) Le courant change suivant le type d'actionneur. Reportez-vous aux caractéristiques de l'actionneur pour plus de détails.Note 3) Applicable à la non-magnétisation de verrouillage.
11 entrées (isolation par otpocoupleur)13 sorties (isolation par otpocoupleur)
RS485 (compatibilité avec le protocole Modbus)EEPROM
LED (vert/rouge), une de chaquePar connecteur Note 3)
Câble E/S : 5 max. Câble de l'actionneur : 20 max.Air ambiant
0 à 40 (sans givre)max.90 (sans condensation)
–10 à 60 (sans givre)max.90 (sans condensation)
(sauf les caractéristiques du câble et les options de l'actionneur)Exemple : entrez [LEY16B-100] pour LEY16B-100-R16N1
LE C P 6 P
P
A Servomoteur (24 VDC) Note 1)
Moteur pas à pas (servo/24 VDC)
6 64
Nb. de données de positionnement (points)
NP
NPNPNP
Type E/S parallèle
—135
Sans câble1.535
Longueur du câble E/S [m] —D Note 2)
Montage par visMontage sur rail DIN
Option
Réf. de l'actionneurMoteur compatible
Contrôleur
Note 2) Le rail DIN n'est pas inclus. Vous devez le commander séparément.
Note 1) Produits conformes aux normes CEq La conformité EMC a été testée en
combinant la série des actionneurs électriques LEY avec celle des contrôleurs LEC. La conformité EMC dépend de la façon dont le client a configuré son panneau de commande avec ses autres équipements et câbles électriques. Elle ne peut être appliquée aux composants SMC installés dans l'équipement du client dans les conditions ci-présentes. Le client doit vérifier la conformité de ses machines et de son équipement dans son ensemble.
w En ce qui concerne la série LECA6 (contrôleur du servomoteur), la conformité EMC a été testée à l'aide d'un kit de filtre anti-parasites (LEC-NFA). (voir en page 47) Reportez-vous au mode d'emploi LECA pour l'installation.
Précaution
∗ Le contrôleur équipé de type (-�6N�/-�6P�) est compris dans la série LE, il est inutile de le commander séparément.
Series LECA6Servomoteur (24 VDC)Series LECP6Moteur pas à pas (Servo/24 VDC)Contrôleur (Modèle à programmation de positions)
RoHS
∗ Reportez-vous au manuel d'utilisation pour l'utilisation des produits. S'il vous plaît le télécharger via notre site web. http://www.smcworld.com
q w
39
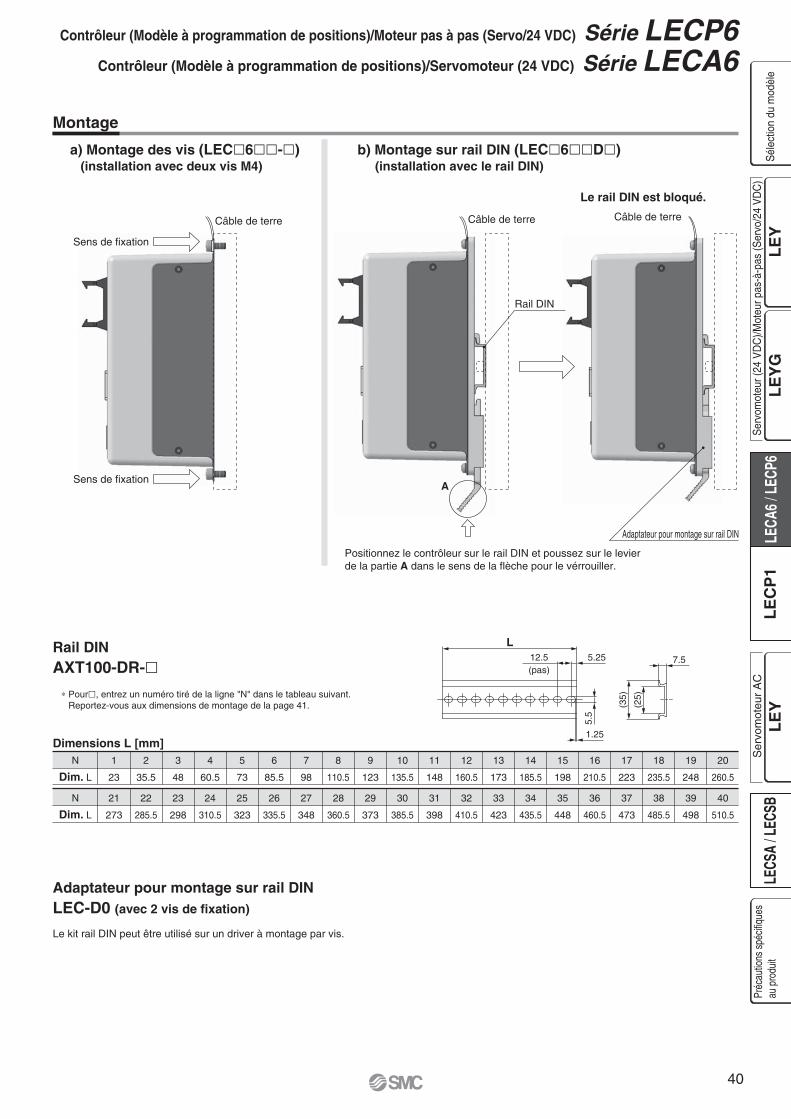
Câble de terre
Rail DIN
Le rail DIN est bloqué.
Sens de fixation
Câble de terre
Rail DINAXT100-DR-�
Adaptateur pour montage sur rail DINLEC-D0 (avec 2 vis de fixation)
Le kit rail DIN peut être utilisé sur un driver à montage par vis.
∗ Pour�, entrez un numéro tiré de la ligne "N" dans le tableau suivant.Reportez-vous aux dimensions de montage de la page 41.
40
510.5
39
498
38
485.5
37
473
36
460.5
35
448
34
435.5
33
423
32
410.5
31
398
30
385.5
29
373
28
360.5
27
348
26
335.5
25
323
24
310.5
23
298
22
285.5
21
273
N
Dim. L
20
260.5
19
248
18
235.5
17
223
16
210.5
15
198
14
185.5
13
173
12
160.5
11
148
10
135.5
9
123
8
110.5
7
98
6
85.5
5
73
4
60.5
3
48
2
35.5
1
23
N
Dim. L
Dimensions L [mm]
7.5
(25)
(35)
Adaptateur pour montage sur rail DIN
L
5.5
5.2512.5(pas)
1.25
Montage
a) Montage des vis (LEC�6��-�) (installation avec deux vis M4)
b) Montage sur rail DIN (LEC�6��D�) (installation avec le rail DIN)
Câble de terre
Positionnez le contrôleur sur le rail DIN et poussez sur le levier de la partie A dans le sens de la flèche pour le vérrouiller.
Sens de fixationA
Contrôleur (Modèle à programmation de positions)/Moteur pas à pas (Servo/24 VDC) Série LECP6Contrôleur (Modèle à programmation de positions)/Servomoteur (24 VDC) Série LECA6
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
40
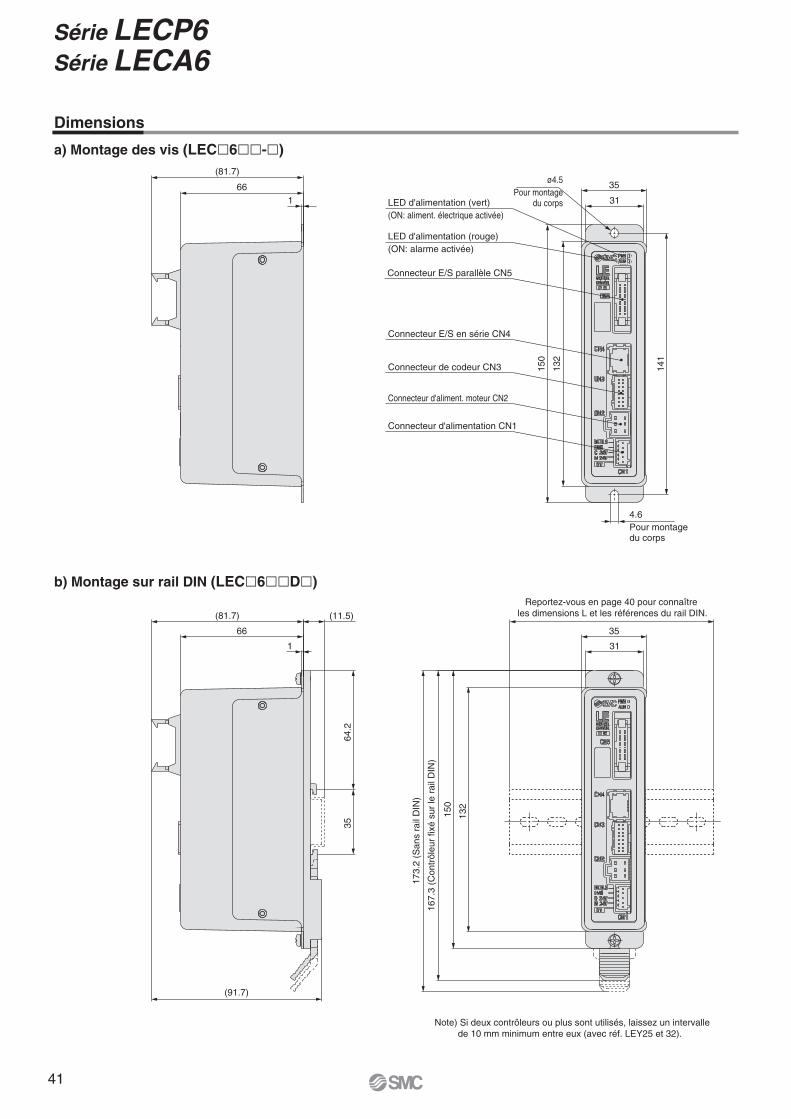
31
150
132
35
141
166
(81.7)
31
35
132
64.2
35
150
1
66
(81.7)
(91.7)
(11.5)
4.6Pour montagedu corps
LED d'alimentation (vert) (ON: aliment. électrique activée)
Connecteur E/S parallèle CN5
Connecteur E/S en série CN4
Connecteur de codeur CN3
Connecteur d'aliment. moteur CN2
Connecteur d'alimentation CN1
LED d'alimentation (rouge) (ON: alarme activée)
167.
3 (C
ontr
ôleu
r fix
é su
r le
rai
l DIN
)
173.
2 (S
ans
rail
DIN
)
ø4.5Pour montage
du corps
Reportez-vous en page 40 pour connaître les dimensions L et les références du rail DIN.
b) Montage sur rail DIN (LEC�6��D�)
Dimensions
a) Montage des vis (LEC�6��-�)
Note) Si deux contrôleurs ou plus sont utilisés, laissez un intervalle de 10 mm minimum entre eux (avec réf. LEY25 et 32).
Série LECP6Série LECA6
41
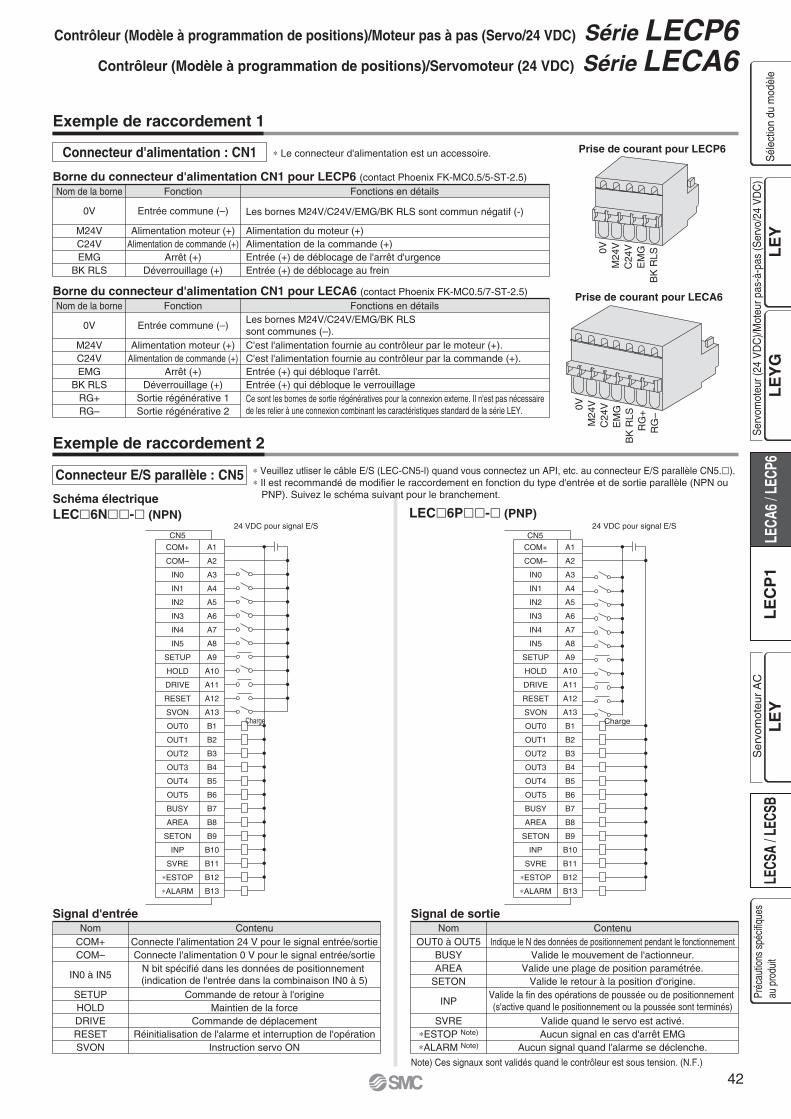
0VM
24V
C24
VE
MG
BK
RLS
RG
+R
G–
0VM
24V
C24
VE
MG
BK
RLS
Prise de courant pour LECP6
Prise de courant pour LECA6
COM+
COM–
IN0
IN1
IN2
IN3
IN4
IN5
SETUP
HOLD
DRIVE
RESET
SVON
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
BUSY
AREA
SETON
INP
SVRE
∗ESTOP
∗ALARM
CN5
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
24 VDC pour signal E/S
COM+
COM–
IN0
IN1
IN2
IN3
IN4
IN5
SETUP
HOLD
DRIVE
RESET
SVON
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
BUSY
AREA
SETON
INP
SVRE
∗ESTOP
∗ALARM
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
CN524 VDC pour signal E/S
Charge Charge
Borne du connecteur d'alimentation CN1 pour LECP6 (contact Phoenix FK-MC0.5/5-ST-2.5)
Borne du connecteur d'alimentation CN1 pour LECA6 (contact Phoenix FK-MC0.5/7-ST-2.5)
Exemple de raccordement 1
Connecteur d'alimentation : CN1 ∗ Le connecteur d'alimentation est un accessoire.
Nom de la borne Fonction Fonctions en détails
0V
M24VC24VEMG
BK RLS
Entrée commune (–)
Alimentation moteur (+)Alimentation de commande (+)
Arrêt (+)Déverrouillage (+)
Alimentation du moteur (+)Alimentation de la commande (+)Entrée (+) de déblocage de l'arrêt d'urgenceEntrée (+) de déblocage au frein
Les bornes M24V/C24V/EMG/BK RLS sont commun négatif (-)
Nom de la borne Fonction Fonctions en détails
0V
M24VC24VEMG
BK RLSRG+RG–
Entrée commune (–)
Alimentation moteur (+)Alimentation de commande (+)
Arrêt (+)Déverrouillage (+)
Sortie régénérative 1Sortie régénérative 2
C'est l'alimentation fournie au contrôleur par le moteur (+).C'est l'alimentation fournie au contrôleur par la commande (+).Entrée (+) qui débloque l'arrêt.Entrée (+) qui débloque le verrouillageCe sont les bornes de sortie régénératives pour la connexion externe. Il n'est pas nécessaire de les relier à une connexion combinant les caractéristiques standard de la série LEY.
Les bornes M24V/C24V/EMG/BK RLS sont communes (–).
Exemple de raccordement 2
Schéma électriqueLEC�6N��-� (NPN) LEC�6P��-� (PNP)
Connecteur E/S parallèle : CN5 ∗ Veuillez utliser le câble E/S (LEC-CN5-l) quand vous connectez un API, etc. au connecteur E/S parallèle CN5.�).∗ Il est recommandé de modifier le raccordement en fonction du type d'entrée et de sortie parallèle (NPN ou
PNP). Suivez le schéma suivant pour le branchement.
Signal d'entréeNom Contenu
COM+COM–
IN0 à IN5
SETUPHOLDDRIVERESETSVON
Connecte l'alimentation 24 V pour le signal entrée/sortieConnecte l'alimentation 0 V pour le signal entrée/sortie
Commande de retour à l'origineMaintien de la force
Commande de déplacementRéinitialisation de l'alarme et interruption de l'opération
Instruction servo ON
N bit spécifié dans les données de positionnement (indication de l'entrée dans la combinaison IN0 à 5)
Signal de sortieNom Contenu
OUT0 à OUT5BUSYAREA
SETON
INP
SVRE∗ESTOP Note)
∗ALARM Note)
Indique le N des données de positionnement pendant le fonctionnementValide le mouvement de l'actionneur.
Valide une plage de position paramétrée.Valide le retour à la position d'origine.
Valide quand le servo est activé.Aucun signal en cas d'arrêt EMG
Aucun signal quand l'alarme se déclenche.
Valide la fin des opérations de poussée ou de positionnement (s'active quand le positionnement ou la poussée sont terminés)
Note) Ces signaux sont validés quand le contrôleur est sous tension. (N.F.)
Contrôleur (Modèle à programmation de positions)/Moteur pas à pas (Servo/24 VDC) Série LECP6Contrôleur (Modèle à programmation de positions)/Servomoteur (24 VDC) Série LECA6
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
42
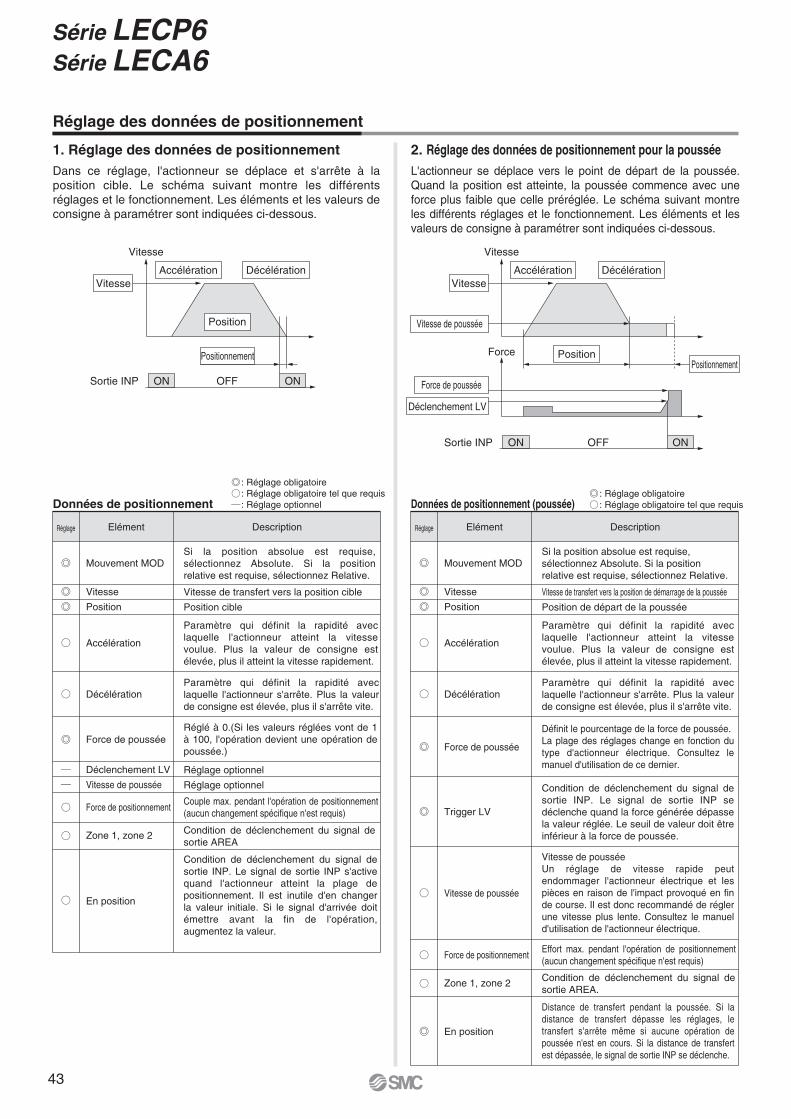
Réglage des données de positionnement
1. Réglage des données de positionnement 2. Réglage des données de positionnement pour la pousséeDans ce réglage, l'actionneur se déplace et s'arrête à la position cible. Le schéma suivant montre les différents réglages et le fonctionnement. Les éléments et les valeurs de consigne à paramétrer sont indiquées ci-dessous.
L'actionneur se déplace vers le point de départ de la poussée. Quand la position est atteinte, la poussée commence avec une force plus faible que celle préréglée. Le schéma suivant montre les différents réglages et le fonctionnement. Les éléments et les valeurs de consigne à paramétrer sont indiquées ci-dessous.
Vitesse
Vitesse
Vitesse de poussée
Force de poussée
Force
Déclenchement LV
Sortie INP OFF
PositionnementPosition
Accélération Décélération
ONON
Vitesse
Vitesse
Sortie INP OFF
Positionnement
Accélération Décélération
ONON
Position
Données de positionnement
: Réglage obligatoire: Réglage obligatoire tel que requis: Réglage optionnel
ElémentRéglage Description
Mouvement MOD
En position
Zone 1, zone 2
Force de positionnement
Déclenchement LV
Vitesse de poussée
Force de poussée
Décélération
Accélération
Vitesse
Position
Si la position absolue est requise, sélectionnez Absolute. Si la position relative est requise, sélectionnez Relative.
Réglé à 0.(Si les valeurs réglées vont de 1 à 100, l'opération devient une opération de poussée.)
Couple max. pendant l'opération de positionnement (aucun changement spécifique n'est requis)
Vitesse de transfert vers la position cible
Réglage optionnel
Condition de déclenchement du signal de sortie AREA
Réglage optionnel
Position cible
Paramètre qui définit la rapidité avec laquelle l'actionneur atteint la vitesse voulue. Plus la valeur de consigne est élevée, plus il atteint la vitesse rapidement.
Paramètre qui définit la rapidité avec laquelle l'actionneur s'arrête. Plus la valeur de consigne est élevée, plus il s'arrête vite.
Condition de déclenchement du signal de sortie INP. Le signal de sortie INP s'active quand l'actionneur atteint la plage de positionnement. Il est inutile d'en changer la valeur initiale. Si le signal d'arrivée doit émettre avant la fin de l'opération, augmentez la valeur.
Données de positionnement (poussée): Réglage obligatoire: Réglage obligatoire tel que requis
Elément Description
Mouvement MOD
En position
Zone 1, zone 2
Force de positionnement
Vitesse de poussée
Trigger LV
Force de poussée
Décélération
Accélération
Vitesse
Position
Si la position absolue est requise, sélectionnez Absolute. Si la position relative est requise, sélectionnez Relative.
Effort max. pendant l'opération de positionnement (aucun changement spécifique n'est requis)
Vitesse de transfert vers la position de démarrage de la poussée
Condition de déclenchement du signal de sortie AREA.
Position de départ de la poussée
Paramètre qui définit la rapidité avec laquelle l'actionneur atteint la vitesse voulue. Plus la valeur de consigne est élevée, plus il atteint la vitesse rapidement.
Paramètre qui définit la rapidité avec laquelle l'actionneur s'arrête. Plus la valeur de consigne est élevée, plus il s'arrête vite.
Condition de déclenchement du signal de sortie INP. Le signal de sortie INP se déclenche quand la force générée dépasse la valeur réglée. Le seuil de valeur doit être inférieur à la force de poussée.
Définit le pourcentage de la force de poussée.La plage des réglages change en fonction du type d'actionneur électrique. Consultez le manuel d'utilisation de ce dernier.
Vitesse de pousséeUn réglage de vitesse rapide peut endommager l'actionneur électrique et les pièces en raison de l'impact provoqué en fin de course. Il est donc recommandé de régler une vitesse plus lente. Consultez le manuel d'utilisation de l'actionneur électrique.
Distance de transfert pendant la poussée. Si la distance de transfert dépasse les réglages, le transfert s'arrête même si aucune opération de poussée n'est en cours. Si la distance de transfert est dépassée, le signal de sortie INP se déclenche.
Réglage
Série LECP6Série LECA6
43
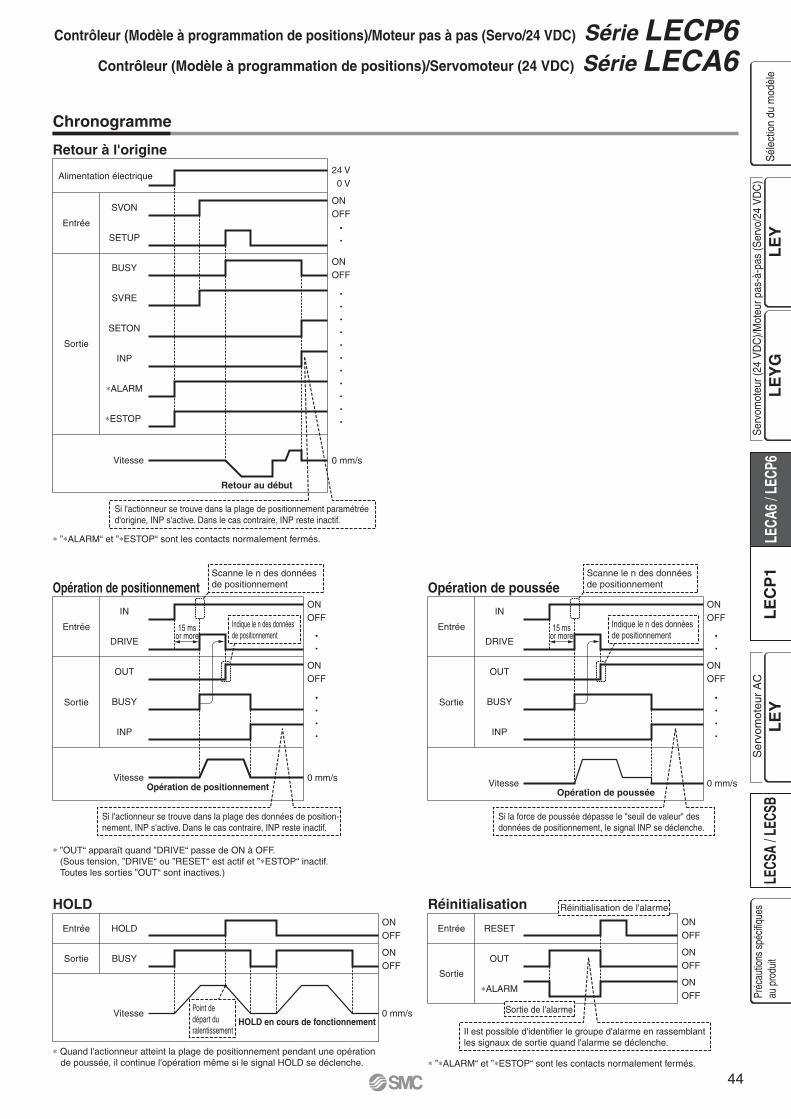
15 msor more
15 msor more
SVON
SETUP
BUSY
SVRE
SETON
INP
∗ALARM
∗ESTOP
24 V 0 V
ONOFF
0 mm/s
ONOFF
IN
DRIVE
OUT
BUSY
INP
ONOFF
0 mm/s
ONOFF
HOLD
BUSY
ONOFF
0 mm/s
ONOFF
IN
DRIVE
OUT
BUSY
INP
ONOFF
0 mm/s
ONOFF
RESET
OUT
∗ALARM
ONOFF
ONOFF
ONOFF
Vitesse
Retour au début
Si l'actionneur se trouve dans la plage de positionnement paramétrée d'origine, INP s'active. Dans le cas contraire, INP reste inactif.
∗ ”∗ALARM“ et ”∗ESTOP“ sont les contacts normalement fermés.
∗ Quand l'actionneur atteint la plage de positionnement pendant une opération de poussée, il continue l'opération même si le signal HOLD se déclenche. ∗ ”∗ALARM“ et ”∗ESTOP“ sont les contacts normalement fermés.
Entrée
Sortie
VitesseOpération de positionnement
∗ ”OUT“ apparaît quand ”DRIVE“ passe de ON à OFF.(Sous tension, ”DRIVE“ ou ”RESET“ est actif et ”∗ESTOP“ inactif.
Toutes les sorties ”OUT“ sont inactives.)
Scanne le n des données de positionnement
Indique le n des données de positionnement
Si l'actionneur se trouve dans la plage des données de position-nement, INP s'active. Dans le cas contraire, INP reste inactif.
Opération de positionnement
Si la force de poussée dépasse le "seuil de valeur" des données de positionnement, le signal INP se déclenche.
Entrée
Sortie
VitesseOpération de poussée
Scanne le n des données de positionnement
Indique le n des données de positionnement
Opération de poussée
Entrée
Sortie
Entrée
Sortie
VitesseHOLD en cours de fonctionnement
Sortie de l'alarme
Réinitialisation de l'alarme
Il est possible d'identifier le groupe d'alarme en rassemblant les signaux de sortie quand l'alarme se déclenche.
Point de départ du ralentissement
HOLD Réinitialisation
Alimentation électrique
Entrée
Sortie
Chronogramme
Retour à l'origine
Contrôleur (Modèle à programmation de positions)/Moteur pas à pas (Servo/24 VDC) Série LECP6Contrôleur (Modèle à programmation de positions)/Servomoteur (24 VDC) Série LECA6
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
44
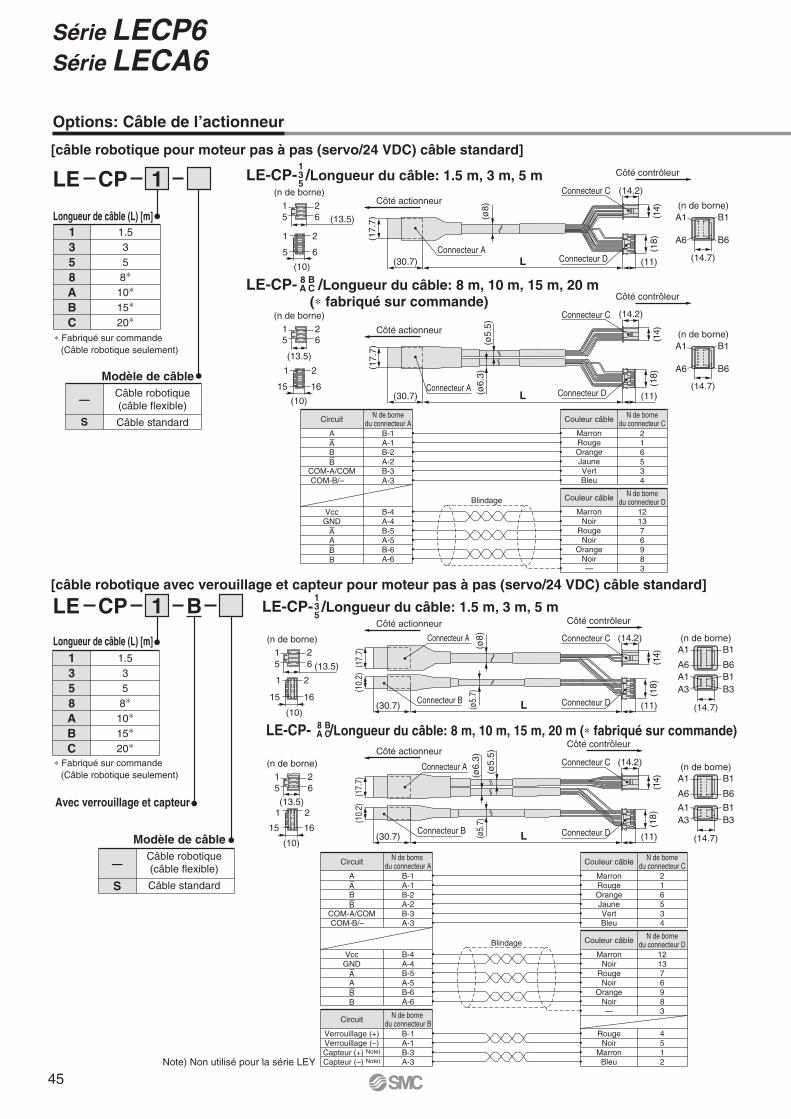
(17.
7)(1
7.7)
(30.7)Connecteur A
L (11)
(30.7) L (11)
(14.2)(n de borne)
(14)
(18)
(14.2)
(14)
(18)
A1 B1
A6 B6
1 25 6
1 2
5 6
(n de borne)
Connecteur C
Connecteur A
(n de borne)
1 25 6
1 2
15 16
Côté contrôleur
A1 B1
A6 B6
(n de borne)
Côté actionneur
Côté actionneur
Côté contrôleur
(13.5)
(10)Connecteur D
Connecteur C
Connecteur D(14.7)
(13.5)
(10)
(14.7)
B1(n de borne)
B6
A1
A6B1B3
A1A3
B1(n de borne)
B6
A1
A6
B1B3
A1A3
(17.
7)(1
0.2)
(30.7) L (11)
(14.2)
(14)
(18)
(17.
7)(1
0.2)
(30.7) L (11)
(14.2)
(14)
(18)
Côté actionneur Côté contrôleur
Côté actionneurCôté contrôleur
(n de borne)
(n de borne)
Connecteur A
Connecteur B
Connecteur A
Connecteur B
Connecteur C
Connecteur D
Connecteur C
Connecteur D
(14.7)
(14.7)
1 25 6
1 2
15 16
(13.5)
(10)
1 25 6
1 2
15 16
(13.5)
(10)
N de bornedu connecteur A
B-1A-1B-2A-2B-3A-3
AABB
COM-A/COMCOM-B/–
B-4A-4B-5A-5B-6A-6
VccGND
AABB
Circuit Couleur câble
MarronRougeOrangeJauneVertBleu
MarronNoir
RougeNoir
OrangeNoir—
N de bornedu connecteur C
Couleur câble N de bornedu connecteur D
216534
121376983
Blindage
N de borne du connecteur A
B-1A-1B-2A-2B-3A-3
AABB
COM-A/COMCOM-B/–
B-1A-1B-3A-3
Verrouillage (+)Verrouillage (–)Capteur (+) Note)
Capteur (–) Note)
B-4A-4B-5A-5B-6A-6
VccGND
AABB
Circuit
N de borne du connecteur BCircuit
Couleur câble
MarronRougeOrangeJauneVertBleu
MarronNoir
RougeNoir
OrangeNoir—
N de bornedu connecteur C
Couleur câble N de bornedu connecteur D
216534
121376983
RougeNoir
MarronBleu
4512
Blindage
Options: Câble de l’actionneur
[câble robotique pour moteur pas à pas (servo/24 VDC) câble standard]
Longueur de câble (L) [m]
∗ Fabriqué sur commande(Câble robotique seulement)
LE-CP- /Longueur du câble: 1.5 m, 3 m, 5 m135
LE-CP- /Longueur du câble: 8 m, 10 m, 15 m, 20 m(∗ fabriqué sur commande)
8A
BC
[câble robotique avec verouillage et capteur pour moteur pas à pas (servo/24 VDC) câble standard]
LE-CP- /Longueur du câble: 1.5 m, 3 m, 5 m135
LE-CP- /Longueur du câble: 8 m, 10 m, 15 m, 20 m (∗ fabriqué sur commande)8A
BC
Avec verrouillage et capteur
Note) Non utilisé pour la série LEY
Série LECP6Série LECA6
LE CP 1
1358ABC
1.5358∗
10∗
15∗
20∗
Modèle de câble
LE CP 1 B
1358ABC
1.5358∗
10∗
15∗
20∗
—Câble robotique(câble flexible)
Câble standard
—
S
S
Longueur de câble (L) [m]
∗ Fabriqué sur commande(Câble robotique seulement)
Modèle de câbleCâble robotique(câble flexible)
Câble standard
(ø5.
5)
(ø6.
3)(ø
5.7)
(ø5.
7)
(ø5.
5)(ø
6.3)
(ø8)
(ø8)
45
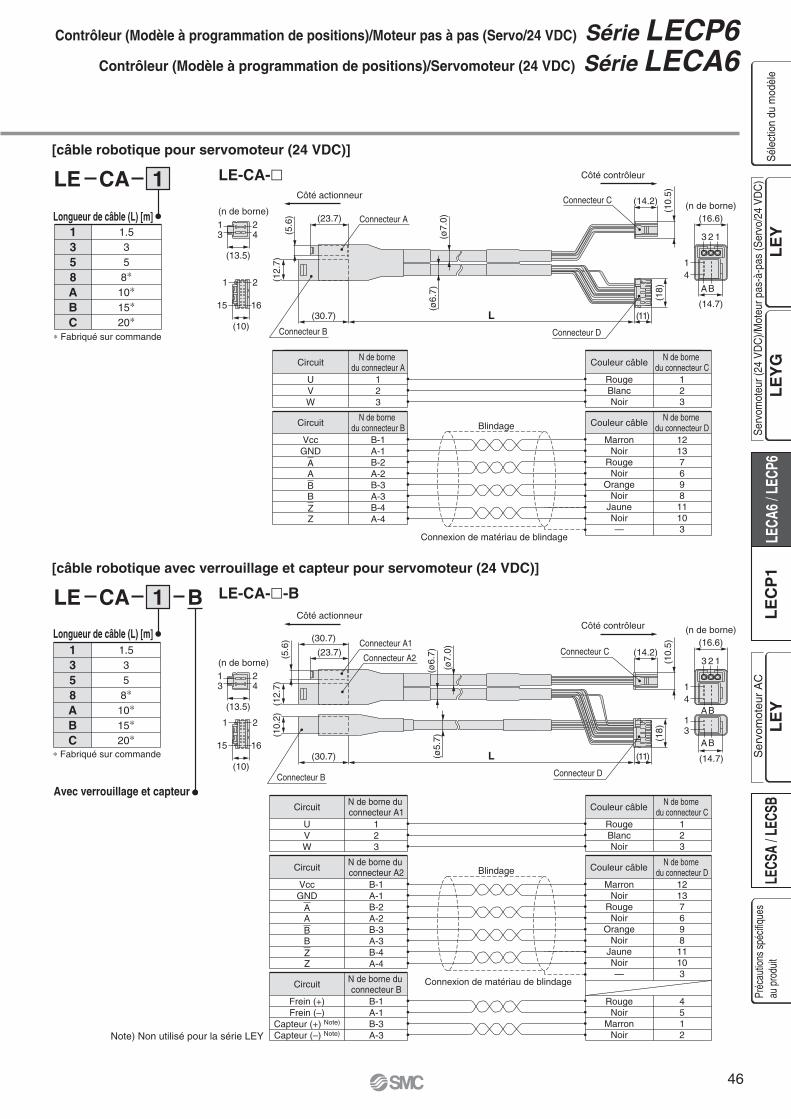
(ø7.
0)(ø
6.7)
(ø7.
0)
(ø6.
7)(ø
5.7)
(16.6)(23.7)
(30.7) (11)L
3
1
2 1
(14.7)
4
A(1
2.7)
(5.6
)
(14.2)
(10.
5)(1
8)
13
24
1 2
15 16
(13.5)
(10)
B
(16.6)(23.7)
(30.7)
(30.7) (11)L
3
1
2 1
4
13
(12.
7)(1
0.2)
(5.6
)
(14.2)
(10.
5)(1
8)
13
24
1 2
15 16
(13.5)
(10)
AB
AB
(14.7)
LE-CA-�
[câble robotique avec verrouillage et capteur pour servomoteur (24 VDC)]
LE-CA-�-B
Côté contrôleur
Côté actionneur(n de borne)
(n de borne)
Connecteur B
Connecteur A
Connecteur C
Connecteur D
Côté contrôleurCôté actionneur
(n de borne)
(n de borne)
Connecteur B
Connecteur A1Connecteur C
Connecteur D
Connecteur A2
Longueur de câble (L) [m]
Longueur de câble (L) [m]
∗ Fabriqué sur commande
∗ Fabriqué sur commande
Avec verrouillage et capteur
N de borne du connecteur A
123
UVW
Circuit Couleur câble
RougeBlancNoir
N de borne du connecteur C
123
N de borne du connecteur B
B-1A-1B-2A-2B-3A-3B-4A-4
VccGND
AABBZZ
Circuit Couleur câble
MarronNoir
RougeNoir
OrangeNoir
JauneNoir—
N de borne du connecteur D
12137698
11103
Blindage
Connexion de matériau de blindage
N de borne du connecteur A1
123
UVW
Circuit
N de borne du connecteur B
B-1A-1B-3A-3
Frein (+)Frein (–)
Capteur (+) Note)
Capteur (–) Note)
Circuit
Couleur câble
RougeBlancNoir
N de borne du connecteur C
123
N de borne du connecteur A2
B-1A-1B-2A-2B-3A-3B-4A-4
VccGND
AABBZZ
Circuit Couleur câble
MarronNoir
RougeNoir
OrangeNoir
JauneNoir—
N de borne du connecteur D
12137698
11103
RougeNoir
MarronNoir
4512
Blindage
Connexion de matériau de blindage
Note) Non utilisé pour la série LEY
[câble robotique pour servomoteur (24 VDC)]
LE CA 1
LE CA 1 B
1358ABC
1.5358∗
10∗
15∗
20∗
1358ABC
1.5358∗
10∗
15∗
20∗
Contrôleur (Modèle à programmation de positions)/Moteur pas à pas (Servo/24 VDC) Série LECP6Contrôleur (Modèle à programmation de positions)/Servomoteur (24 VDC) Série LECA6
Préc
autio
ns s
pécif
ique
sau
pro
duit
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
e
46
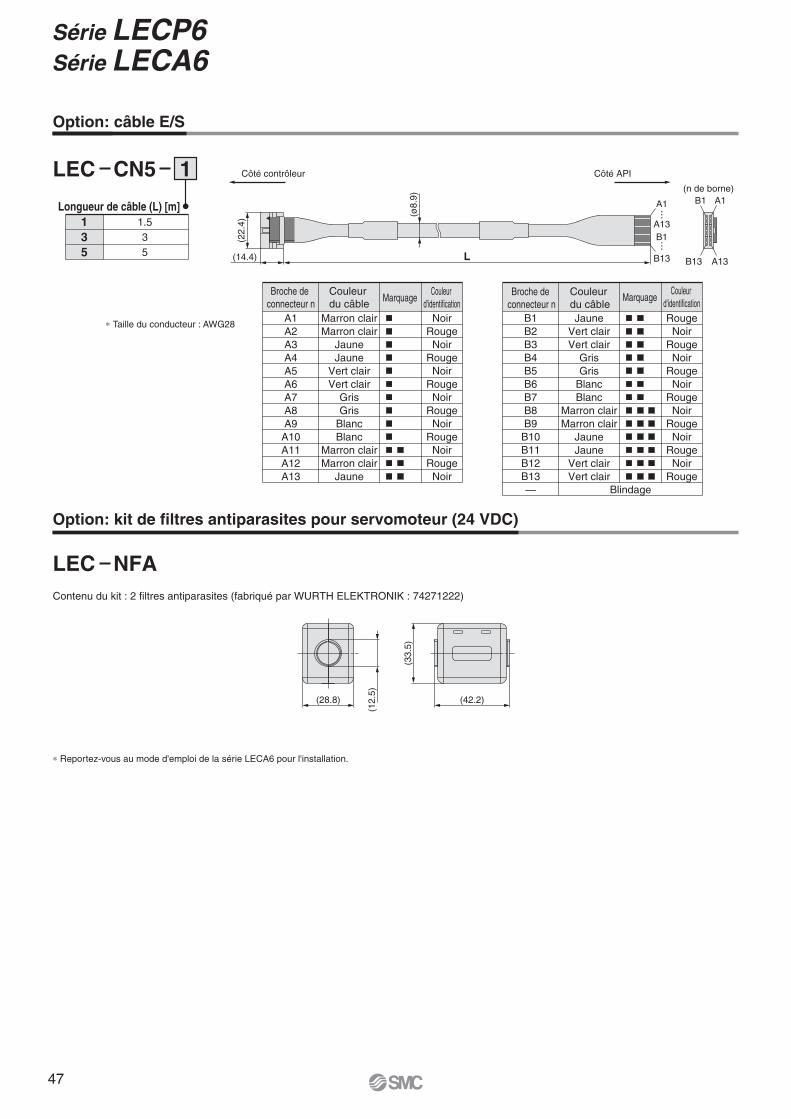
(22.
4)
(14.4) L
B1 A1
B13 A13
A1
B13
A13B1
Côté contrôleur Côté API
(ø8.
9)
(n de borne)
∗ Taille du conducteur : AWG28A1
Marron clairMarron clair
JauneJaune
Vert clairVert clair
GrisGris
BlancBlanc
Marron clairMarron clair
Jaune
NoirRouge
NoirRouge
NoirRouge
NoirRouge
NoirRouge
NoirRouge
Noir
Couleur d'identificationMarquage
Couleur du câble
Broche de connecteur n
A2A3A4A5A6A7A8A9A10A11A12A13
—
JauneVert clairVert clair
GrisGris
BlancBlanc
Marron clairMarron clair
JauneJaune
Vert clairVert clair
RougeNoir
RougeNoir
RougeNoir
RougeNoir
RougeNoir
RougeNoir
RougeBlindage
B1B2B3B4B5B6B7B8B9B10B11B12B13
Couleur du câble
Broche de connecteur n
Couleur d'identificationMarquage
Option: câble E/S
Option: kit de filtres antiparasites pour servomoteur (24 VDC)
Série LECP6Série LECA6
LEC NFA
∗ Reportez-vous au mode d'emploi de la série LECA6 pour l'installation.
Contenu du kit : 2 filtres antiparasites (fabriqué par WURTH ELEKTRONIK : 74271222)
(42.2)(28.8)
(33.
5)
(12.
5)
LEC CN5 1
Longueur de câble (L) [m]135
1.535
47
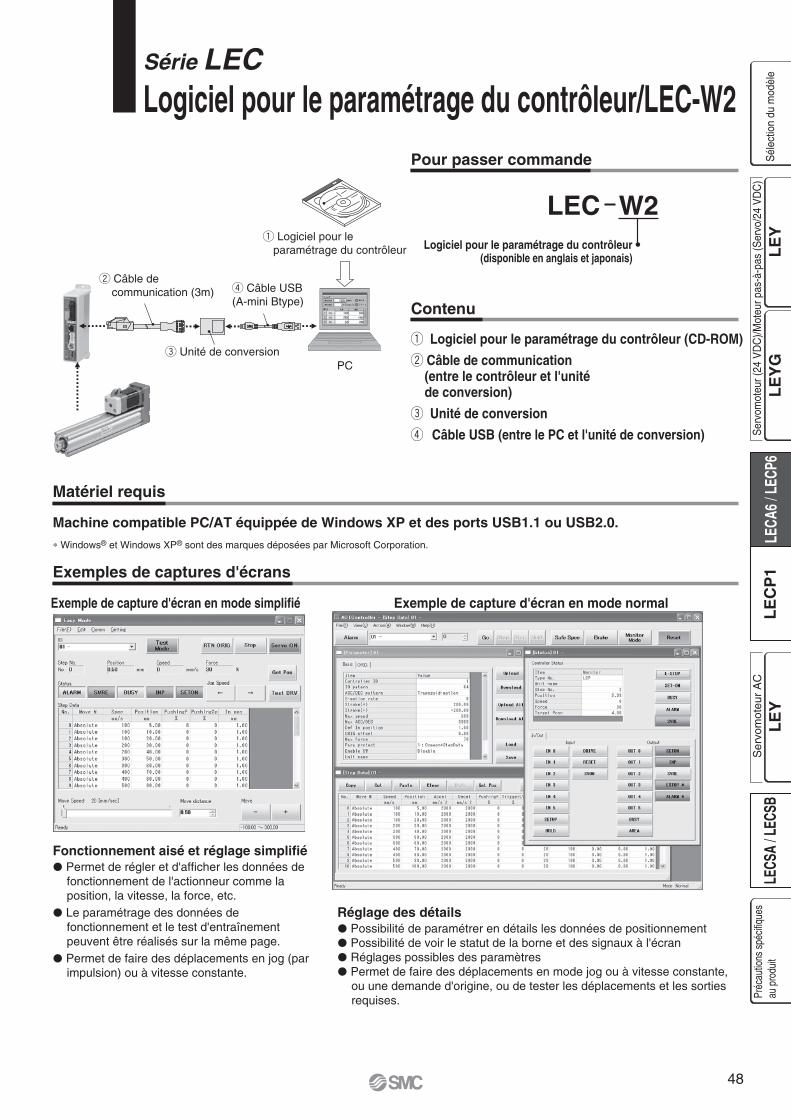
PC
HRS
W2
e Unité de conversion
q Logiciel pour le paramétrage du contrôleur
w Câble de communication (3m) r Câble USB
(A-mini Btype)
Exemple de capture d'écran en mode simplifié Exemple de capture d'écran en mode normal
LEC
Série LECLogiciel pour le paramétrage du contrôleur/LEC-W2
Pour passer commande
Logiciel pour le paramétrage du contrôleur(disponible en anglais et japonais)
Contenu
q Logiciel pour le paramétrage du contrôleur (CD-ROM)
w Câble de communication (entre le contrôleur et l'unité de conversion)
e Unité de conversion
r Câble USB (entre le PC et l'unité de conversion)
Exemples de captures d'écrans
∗ Windows® et Windows XP® sont des marques déposées par Microsoft Corporation.
Matériel requis
Machine compatible PC/AT équippée de Windows XP et des ports USB1.1 ou USB2.0.
Fonctionnement aisé et réglage simplifié� Permet de régler et d'afficher les données de
fonctionnement de l'actionneur comme la position, la vitesse, la force, etc.
� Le paramétrage des données de fonctionnement et le test d'entraînement peuvent être réalisés sur la même page.
� Permet de faire des déplacements en jog (par impulsion) ou à vitesse constante.
Réglage des détails� Possibilité de paramétrer en détails les données de positionnement� Possibilité de voir le statut de la borne et des signaux à l'écran� Réglages possibles des paramètres� Permet de faire des déplacements en mode jog ou à vitesse constante,
ou une demande d'origine, ou de tester les déplacements et les sorties requises. Pr
écau
tions
spé
cifiq
ues
au p
rodu
itS
ervo
mot
eur (
24 V
DC
)/Mot
eur p
as-à
-pas
(Ser
vo/2
4 V
DC
)S
ervo
mot
eur
AC
Sél
ectio
n du
mod
èle
48

Commutateur de marche(en option)
Bouton d'urgence
Caractéristiques
Elément
Commutateur
Longueur du câble [m]
Classe de protection
Température d'utilisation [°C]
Plage d'humidité ambiante [%RH]
Masse [g]
Commutateur de marche et commutateur d'arrêt (en option)
3
IP64 (sauf connecteur)
5 à 50
max.90 (sans condensation)
350 (sauf câble)
Description
Pour passer commande
Fonctions standard
Option
Série LEC
3 GCommutateur de marche
SAucunAvec commutateur de marche
—Longueur du câble [m]
3 3
G Avec commutateur d'arrêt
∗ Commutateur interlock pour la fonction test par à-coups
Langues initialesJ Japonais
Anglais
Note) Conforme à CE ∗ La conformité EMC du boîtier de commandes a uniquement été testée avec un contrôleur LECP6 et
un actionneur compatible.
Fonction
Données de positionn.
Jog
Test
Moniteur
Alarme
Réglage TB
Description
Réglage des données de positionnement
vitesse et la force
positionnement et sélection d'éléments pour la fonction affichage
MenuDonnéesMoniteurA-coupsTestAlarmeRéglage TB
JogRetour à l'origineDéplacement par impulsion
TestFonctionnement par étape
Affichage de l'alarme activeRéinitialisation de l'alarme
Reconnexion
Elément paramétré
DonnéesN des données de positionnement
MoniteurAffichage du n de l'étape
Organigramme du menu
RoHS
49
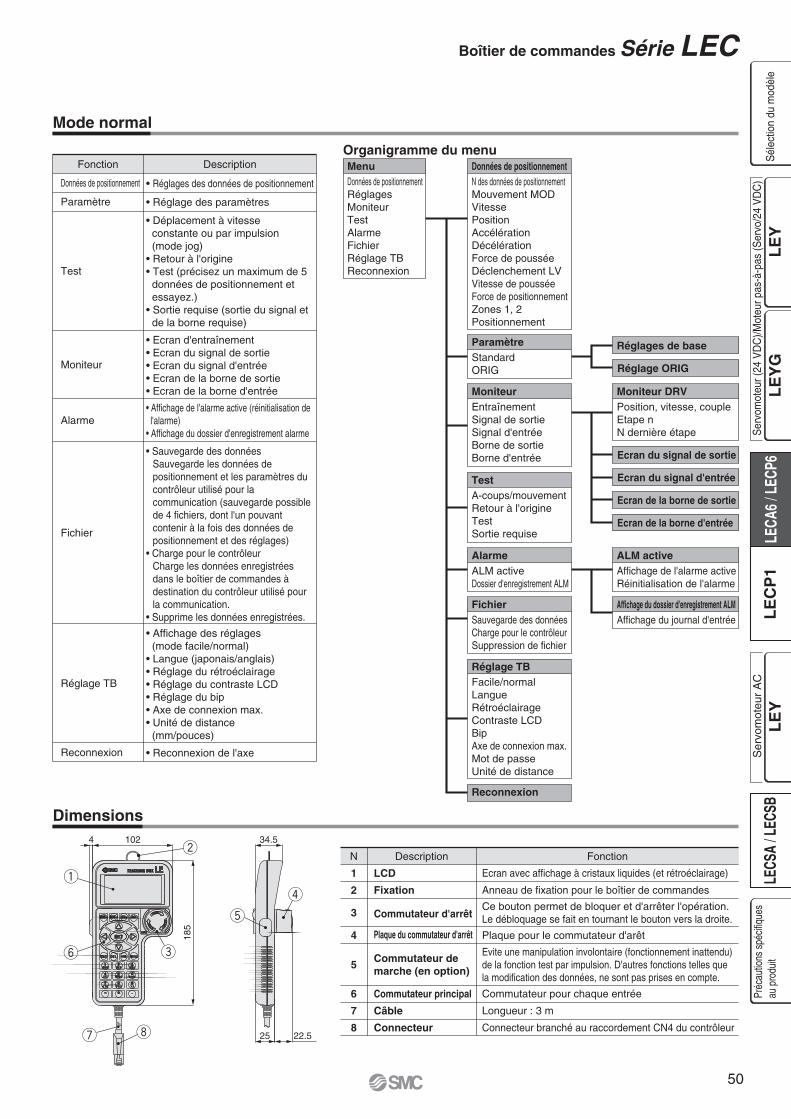
185
1024
25 22.5
34.5w
q
r
t
y e
iu
Boîtier de commandes Série LEC
Mode normal
Fonction
Données de positionnement
Paramètre
Test
Moniteur
Alarme
Fichier
Réglage TB
Reconnexion
Description
Réglages des données de positionnement
constante ou par impulsion (mode jog)
données de positionnement et
positionnement et les paramètres du contrôleur utilisé pour la
positionnement et des réglages)
destination du contrôleur utilisé pour la communication.
MenuDonnées de positionnementRéglagesMoniteurTestAlarmeFichierRéglage TBReconnexion
Données de positionnementN des données de positionnement
VitessePositionAccélérationDécélérationForce de poussée
Vitesse de pousséeForce de positionnement
Positionnement
Paramètre
Moniteur DRV
N dernière étape
ALM active
Affichage du dossier d'enregistrement ALM
Moniteur
Borne de sortie
Test
Test
Alarme
Réglage TB
Rétroéclairage
BipAxe de connexion max.Mot de passe
Reconnexion
Réglages de base
Réglage ORIG
Ecran du signal de sortie
Ecran du signal d'entrée
Ecran de la borne de sortie
Ecran de la borne d'entrée
Fichier
Organigramme du menu
Dimensions
N
1
2
3
4
5
6
7
8
LCD
Fixation
Commutateur d'arrêt
Plaque du commutateur d'arrêt
Commutateur de marche (en option)
Commutateur principal
Câble
Connecteur
FonctionDescription
au p
rodu
it
50
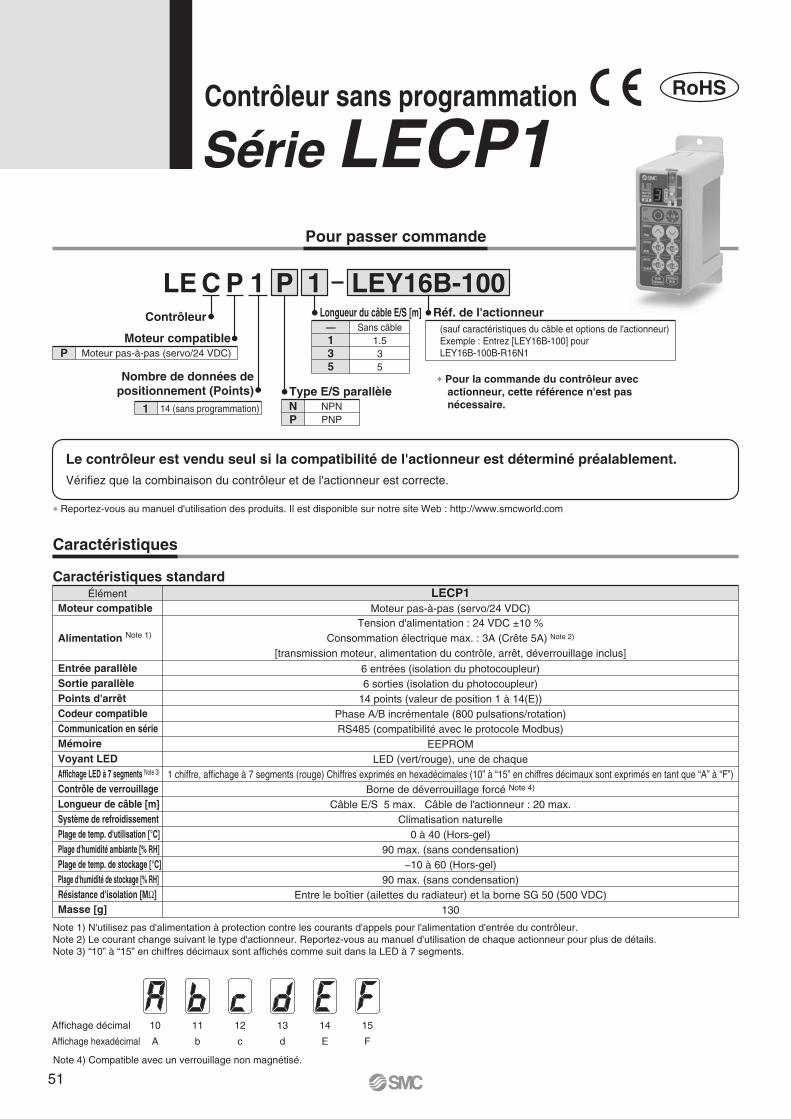
Contrôleur sans programmation
Série LECP1RoHS
C 1LE P 1PContrôleur
Moteur compatibleP Moteur pas-à-pas (servo/24 VDC)
Nombre de données depositionnement (Points)
1 14 (sans programmation)
Type E/S parallèleNP
NPNPNP
Longueur du câble E/S [m]—135
Sans câble1.535
Réf. de l'actionneur(sauf caractéristiques du câble et options de l'actionneur)Exemple : Entrez [LEY16B-100] pour LEY16B-100B-R16N1
∗ Pour la commande du contrôleur avec actionneur, cette référence n'est pas nécessaire.
Pour passer commande
Vérifiez que la combinaison du contrôleur et de l'actionneur est correcte.
Le contrôleur est vendu seul si la compatibilité de l'actionneur est déterminé préalablement.
Caractéristiques
Caractéristiques standardÉlément LECP1
Moteur compatible
Alimentation Note 1)
Entrée parallèleSortie parallèlePoints d'arrêtCodeur compatibleCommunication en sérieMémoireVoyant LEDAffichage LED à 7 segments Note 3)
Contrôle de verrouillageLongueur de câble [m]Système de refroidissementPlage de temp. d'utilisation [°C]Plage d'humidité ambiante [% RH]Plage de temp. de stockage [°C]Plage d'humidité de stockage [% RH]Résistance d'isolation [MΩ]Masse [g]
Moteur pas-à-pas (servo/24 VDC)Tension d'alimentation : 24 VDC ±10 %
Consommation électrique max. : 3A (Crête 5A) Note 2)
[transmission moteur, alimentation du contrôle, arrêt, déverrouillage inclus]
6 entrées (isolation du photocoupleur)6 sorties (isolation du photocoupleur)
14 points (valeur de position 1 à 14(E))Phase A/B incrémentale (800 pulsations/rotation)RS485 (compatibilité avec le protocole Modbus)
EEPROMLED (vert/rouge), une de chaque
1 chiffre, affichage à 7 segments (rouge) Chiffres exprimés en hexadécimales (10” à “15” en chiffres décimaux sont exprimés en tant que “A” à “F”)Borne de déverrouillage forcé Note 4)
Câble E/S 5 max. Câble de l'actionneur : 20 max.Climatisation naturelle
0 à 40 (Hors-gel)90 max. (sans condensation)
−10 à 60 (Hors-gel)90 max. (sans condensation)
Entre le boîtier (ailettes du radiateur) et la borne SG 50 (500 VDC)130
Note 1) N'utilisez pas d'alimentation à protection contre les courants d'appels pour l'alimentation d'entrée du contrôleur.Note 2) Le courant change suivant le type d'actionneur. Reportez-vous au manuel d'utilisation de chaque actionneur pour plus de détails.Note 3) “10” à “15” en chiffres décimaux sont affichés comme suit dans la LED à 7 segments.
Note 4) Compatible avec un verrouillage non magnétisé.
Affichage décimal
Affichage hexadécimal
10
A
11
b
12
c
13
d
14
E
15
F
∗ Reportez-vous au manuel d'utilisation des produits. Il est disponible sur notre site Web : http://www.smcworld.com
LEY16B-100
51
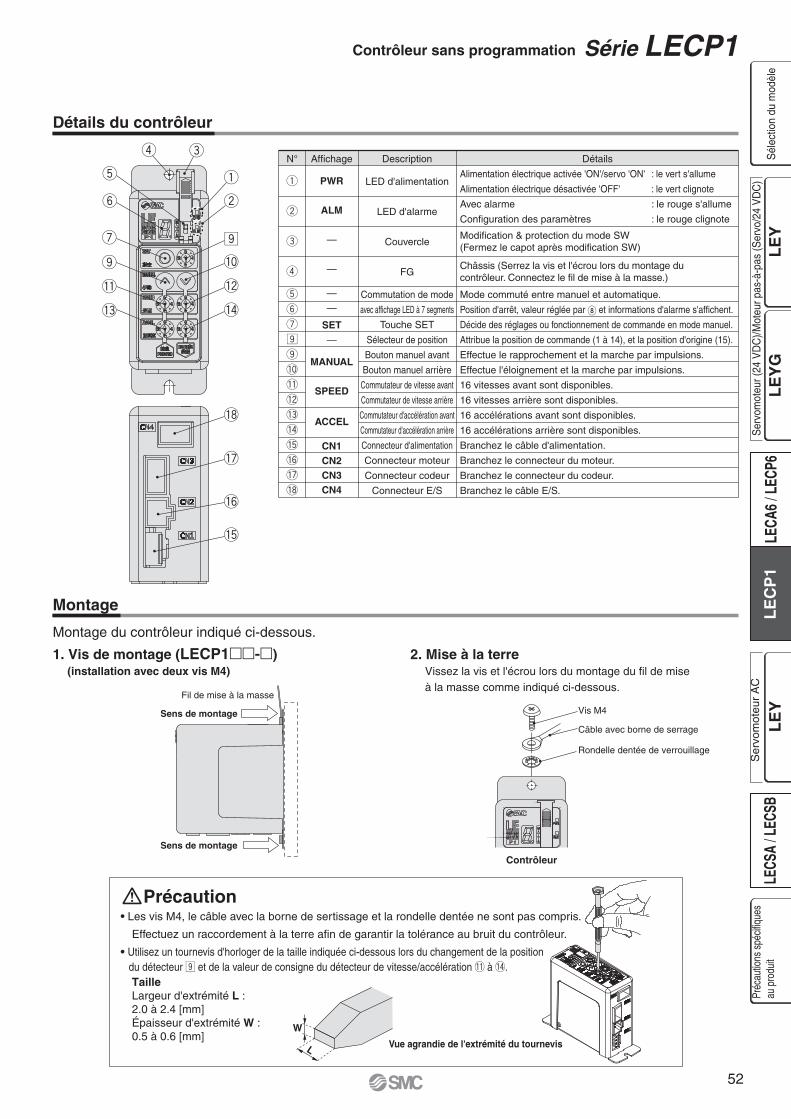
er
t
y
u .
o !0
!1 !2
!3 !4
!5
!6
!7
!8
L
W
Vue agrandie de l'extrémité du tournevis
Sens de montage
Sens de montage
Fil de mise à la masse
Vis M4
Câble avec borne de serrage
Rondelle dentée de verrouillage
Contrôleur
q
w
Détails du contrôleur
Affichage
PWR
ALM
—
—
—
—
SET—
MANUAL
SPEED
ACCEL
CN1CN2CN3CN4
Description
LED d'alimentation
LED d'alarme
Couvercle
FG
Commutation de mode
avec affichage LED à 7 segments
Touche SET
Sélecteur de position
Bouton manuel avant
Bouton manuel arrière
Commutateur de vitesse avant
Commutateur de vitesse arrière
Commutateur d'accélération avant
Commutateur d'accélération arrière
Connecteur d'alimentation
Connecteur moteur
Connecteur codeur
Connecteur E/S
Détails
Alimentation électrique activée 'ON'/servo 'ON' : le vert s'allume
Alimentation électrique désactivée 'OFF' : le vert clignote
Avec alarme : le rouge s'allume
Configuration des paramètres : le rouge clignote
Mode commuté entre manuel et automatique.
Position d'arrêt, valeur réglée par � et informations d'alarme s'affichent.
Décide des réglages ou fonctionnement de commande en mode manuel.
Attribue la position de commande (1 à 14), et la position d'origine (15).
Effectue le rapprochement et la marche par impulsions.
Effectue l'éloignement et la marche par impulsions.
16 vitesses avant sont disponibles.
16 vitesses arrière sont disponibles.
16 accélérations avant sont disponibles.
16 accélérations arrière sont disponibles.
Branchez le câble d'alimentation.
Branchez le connecteur du moteur.
Branchez le connecteur du codeur.
Branchez le câble E/S.
N°
q
w
e
r
t
y
u
.
o
!0
!1
!2
!3
!4
!5
!6
!7
!8
Modification & protection du mode SW (Fermez le capot après modification SW)
Châssis (Serrez la vis et l'écrou lors du montage du contrôleur. Connectez le fil de mise à la masse.)
Montage
Montage du contrôleur indiqué ci-dessous.
1. Vis de montage (LECP1��-�)(installation avec deux vis M4)
2. Mise à la terreVissez la vis et l'écrou lors du montage du fil de miseà la masse comme indiqué ci-dessous.
PrécautionLes vis M4, le câble avec la borne de sertissage et la rondelle dentée ne sont pas compris.
Effectuez un raccordement à la terre afin de garantir la tolérance au bruit du contrôleur.
Utilisez un tournevis d'horloger de la taille indiquée ci-dessous lors du changement de la position du détecteur . et de la valeur de consigne du détecteur de vitesse/accélération !1 à !4.
TailleLargeur d'extrémité L :2.0 à 2.4 [mm]Épaisseur d'extrémité W :0.5 à 0.6 [mm]
Contrôleur sans programmation Série LECP1
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
52
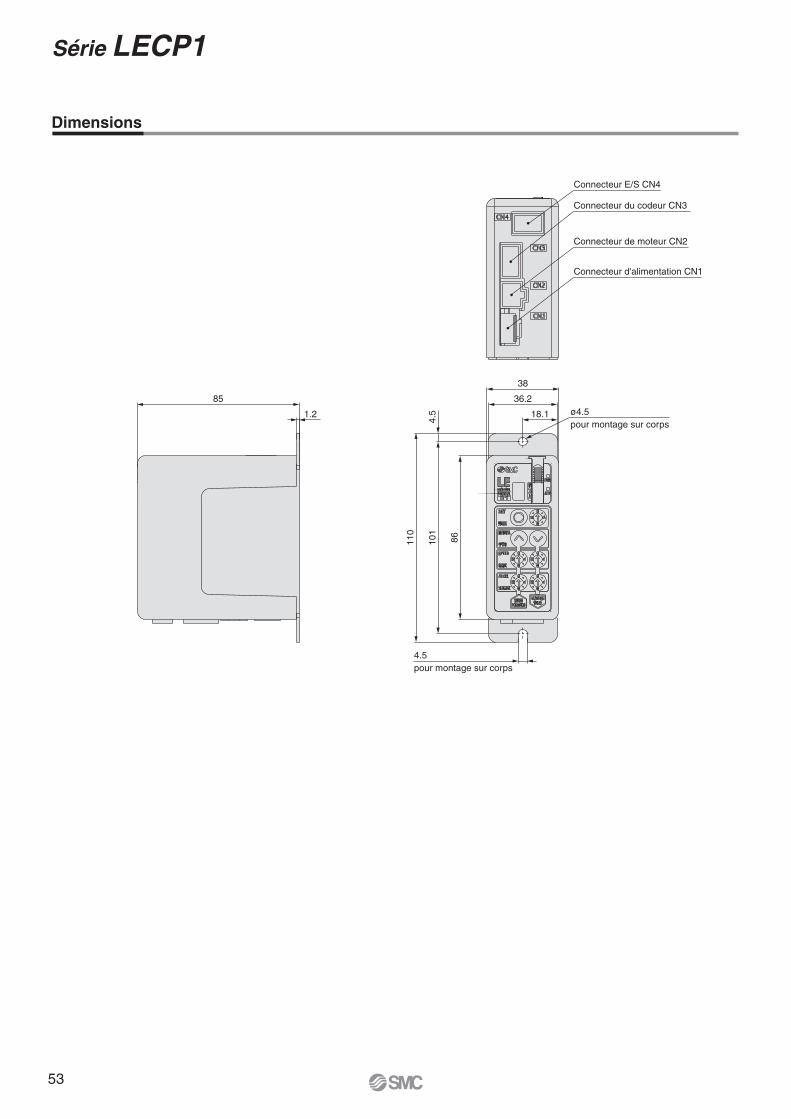
ø4.5pour montage sur corps10
1
110
86
38
4.5pour montage sur corps
36.2
18.1
85
1.2
4.5
Connecteur E/S CN4
Connecteur d'alimentation CN1
Connecteur du codeur CN3
Connecteur de moteur CN2
Dimensions
Série LECP1
53
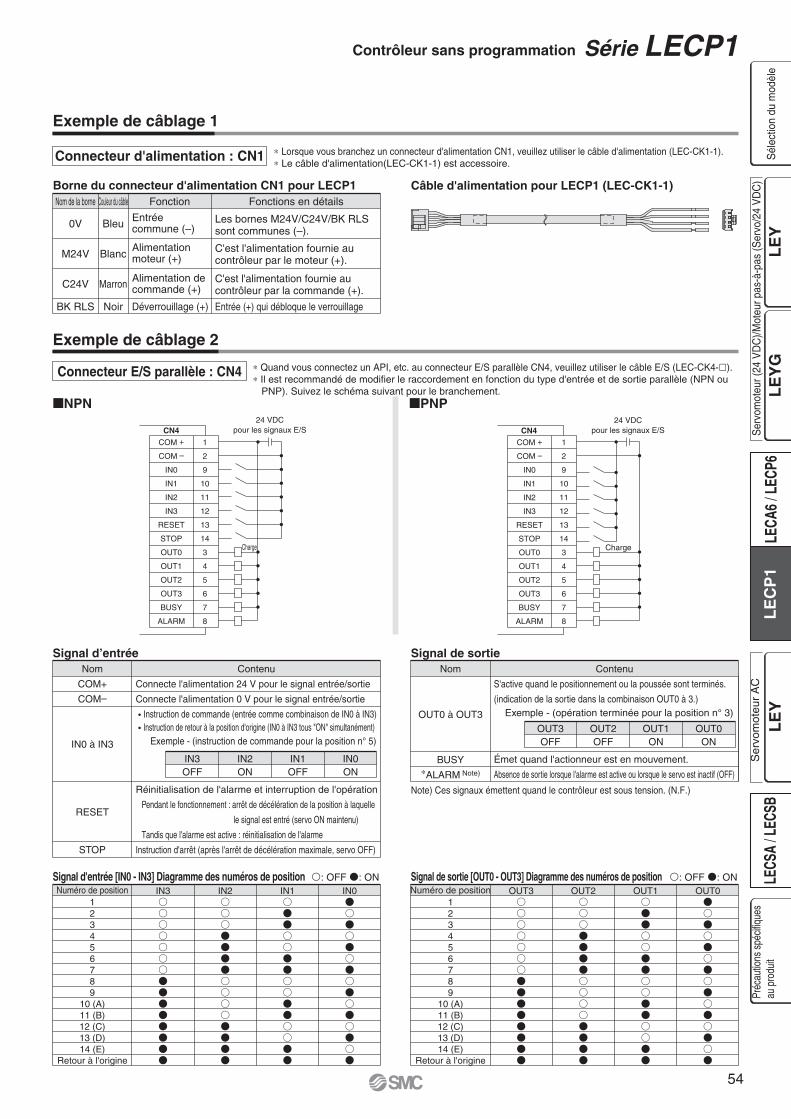
1
2
9
10
11
12
13
14
3
4
5
6
7
8
1
2
9
10
11
12
13
14
3
4
5
6
7
8
COM +
COM –
IN0
IN1
IN2
IN3
RESET
STOP
OUT0
OUT1
OUT2
OUT3
BUSY
ALARM
CN424 VDC
pour les signaux E/S
Charge
COM +
COM –
IN0
IN1
IN2
IN3
RESET
STOP
OUT0
OUT1
OUT2
OUT3
BUSY
ALARM
CN424 VDC
pour les signaux E/S
Charge
Câble d'alimentation pour LECP1 (LEC-CK1-1)
∗ Lorsque vous branchez un connecteur d'alimentation CN1, veuillez utiliser le câble d'alimentation (LEC-CK1-1).∗ Le câble d'alimentation(LEC-CK1-1) est accessoire.
Exemple de câblage 1
Connecteur d'alimentation : CN1
NPN PNP
Exemple de câblage 2
Connecteur E/S parallèle : CN4 ∗ Quand vous connectez un API, etc. au connecteur E/S parallèle CN4, veuillez utiliser le câble E/S (LEC-CK4-�).∗ Il est recommandé de modifier le raccordement en fonction du type d'entrée et de sortie parallèle (NPN ou
PNP). Suivez le schéma suivant pour le branchement.
Les bornes M24V/C24V/BK RLS sont communes (–).
C'est l'alimentation fournie au contrôleur par le moteur (+).
C'est l'alimentation fournie au contrôleur par la commande (+).
Nom de la borne Couleur du câble Fonction Fonctions en détails
0V
M24V
C24V
BK RLS
Bleu
Blanc
Marron
Noir
Entrée commune (–)
Alimentation moteur (+)
Alimentation de commande (+)
Déverrouillage (+) Entrée (+) qui débloque le verrouillage
Nom
COM+
COM–
IN0 à IN3
RESET
STOP
Connecte l'alimentation 24 V pour le signal entrée/sortie
Connecte l'alimentation 0 V pour le signal entrée/sortie
� Instruction de commande (entrée comme combinaison de IN0 à IN3) � Instruction de retour à la position d'origine (IN0 à IN3 tous "ON" simultanément) Exemple - (instruction de commande pour la position n° 5)
Réinitialisation de l'alarme et interruption de l'opération
Pendant le fonctionnement : arrêt de décélération de la position à laquelle
le signal est entré (servo ON maintenu)
Tandis que l'alarme est active : réinitialisation de l'alarme
Instruction d'arrêt (après l'arrêt de décélération maximale, servo OFF)
Contenu
IN0ON
IN1OFF
IN3OFF
IN2ON
Nom
OUT0 à OUT3
BUSY∗ALARM Note)
S'active quand le positionnement ou la poussée sont terminés.
(indication de la sortie dans la combinaison OUT0 à 3.) Exemple - (opération terminée pour la position n° 3)
Émet quand l'actionneur est en mouvement.
Absence de sortie lorsque l'alarme est active ou lorsque le servo est inactif (OFF)
Note) Ces signaux émettent quand le contrôleur est sous tension. (N.F.)
Contenu
OUT0ON
OUT1ON
OUT3OFF
OUT2OFF
Signal d’entrée
Numéro de position123456789
10 (A)11 (B)12 (C)13 (D)14 (E)
Retour à l'origine
IN3 IN2 IN1 IN0Signal d'entrée [IN0 - IN3] Diagramme des numéros de position �: OFF �: ON
Numéro de position123456789
10 (A)11 (B)12 (C)13 (D)14 (E)
Retour à l'origine
OUT3 OUT2 OUT1 OUT0Signal de sortie [OUT0 - OUT3] Diagramme des numéros de position �: OFF �: ON
Signal de sortie
Borne du connecteur d'alimentation CN1 pour LECP1
Contrôleur sans programmation Série LECP1
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
54
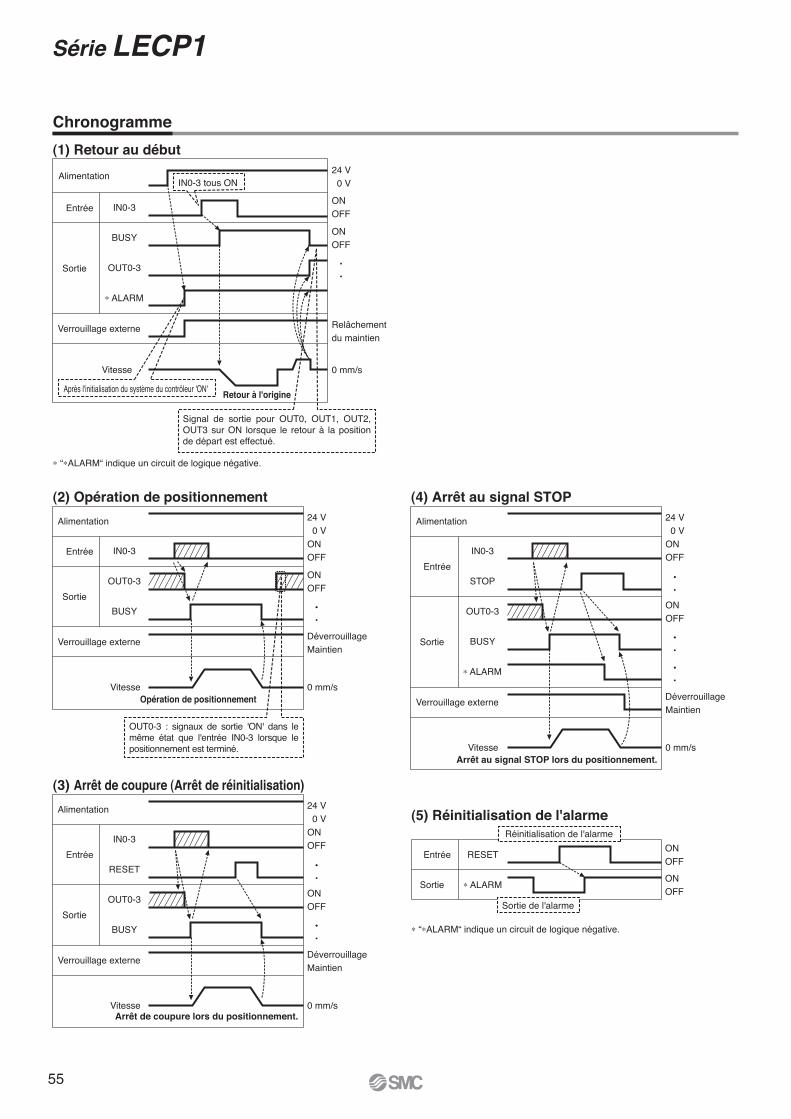
Alimentation
IN0-3
BUSY
OUT0-3
∗ ALARM
Entrée
Sortie
Verrouillage externe
Vitesse
Retour à l'origine
24 V 0 V
24 V 0 V
DéverrouillageMaintien
ONOFF
0 mm/s
ONOFF
Relâchementdu maintien
IN0-3
OUT0-3
BUSY
Entrée
Alimentation
Sortie
Verrouillage externe
VitesseOpération de positionnement
ONOFF
0 mm/s
ONOFF
Signal de sortie pour OUT0, OUT1, OUT2, OUT3 sur ON lorsque le retour à la position de départ est effectué.
Après l'initialisation du système du contrôleur 'ON'
∗ “∗ALARM“ indique un circuit de logique négative.
∗ “∗ALARM“ indique un circuit de logique négative.
OUT0-3 : signaux de sortie 'ON' dans le même état que l'entrée IN0-3 lorsque le positionnement est terminé.
24 V 0 V
DéverrouillageMaintien
IN0-3
RESET
OUT0-3
BUSY
Entrée
Alimentation
Sortie
Verrouillage externe
VitesseArrêt de coupure lors du positionnement.
ONOFF
0 mm/s
ONOFF
24 V 0 V
DéverrouillageMaintien
IN0-3
STOP
OUT0-3
BUSY
∗ ALARM
Entrée
Alimentation
Sortie
Verrouillage externe
VitesseArrêt au signal STOP lors du positionnement.
ONOFF
0 mm/s
ONOFF
RESET
∗ ALARM
Entrée
Sortie
ONOFF
ONOFF
Sortie de l'alarme
Réinitialisation de l'alarme
IN0-3 tous ON
Chronogramme
(1) Retour au début
(2) Opération de positionnement
(3) Arrêt de coupure (Arrêt de réinitialisation)
(4) Arrêt au signal STOP
(5) Réinitialisation de l'alarme
Série LECP1
55
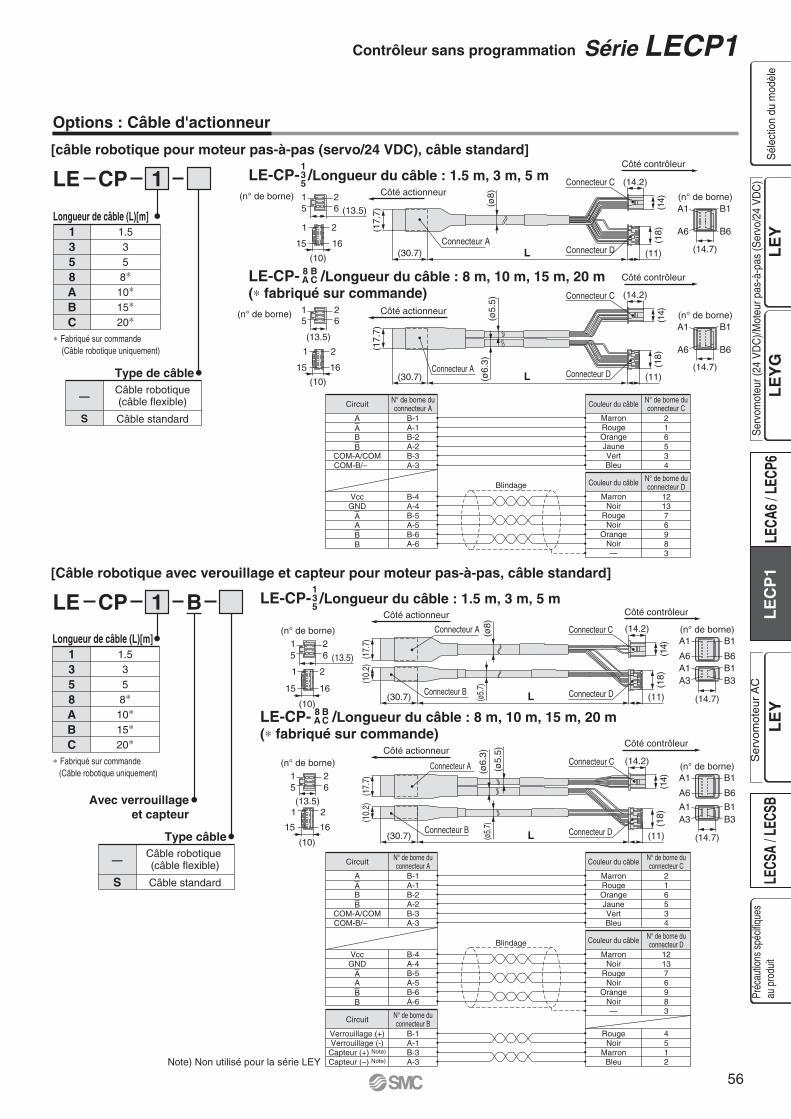
(17.
7)(1
7.7)
(30.7)Connecteur A
L (11)
(30.7) L (11)
(14.2)
(n° de borne)
(14)
(18)
(14.2)
(14)
(18)
A1 B1
A6 B6
1 25 6
1 2
15 16
(ø8) (n° de borne)
Connecteur C
Connecteur A
(ø5.
5)(ø
6.3)
(n° de borne) 1 25 6
1 2
15 16
Côté contrôleur
A1 B1
A6 B6
(n° de borne)
Côté actionneur
Côté actionneur
Côté contrôleur
(13.5)
(10)Connecteur D
Connecteur C
Connecteur D(14.7)
(13.5)
(10)
(14.7)
B1(n° de borne)
B6
A1
A6B1B3
A1A3
B1(n° de borne)
B6
A1
A6
B1B3
A1A3
(ø8)
(ø5.
7)
(17.
7)(1
0.2)
(30.7) L (11)
(14.2)
(14)
(18)
(ø5.
5)
(ø6.
3)(ø
5.7)
(17.
7)(1
0.2)
(30.7) L (11)
(14.2)
(14)
(18)
Côté actionneur Côté contrôleur
Côté actionneurCôté contrôleur
(n° de borne)
(n° de borne)
Connecteur A
Connecteur B
Connecteur A
Connecteur B
Connecteur C
Connecteur D
Connecteur C
Connecteur D
(14.7)
(14.7)
1 25 6
1 2
15 16
(13.5)
(10)
1 25 6
1 2
15 16
(13.5)
(10)
[Câble robotique avec verouillage et capteur pour moteur pas-à-pas, câble standard]
Note) Non utilisé pour la série LEY
Options : Câble d'actionneur
[câble robotique pour moteur pas-à-pas (servo/24 VDC), câble standard]
LE CP 1
Longueur de câble (L)[m]1358ABC
1.5358∗
10∗
15∗
20∗
∗ Fabriqué sur commande (Câble robotique uniquement)
Type de câble
—Câble robotique(câble flexible)
Câble standardS
LE-CP- /Longueur du câble : 1.5 m, 3 m, 5 m135
LE-CP- /Longueur du câble : 8 m, 10 m, 15 m, 20 m(∗ fabriqué sur commande)
8A
BC
N° de borne duconnecteur A
B-1A-1B-2A-2B-3A-3
AABB
COM-A/COMCOM-B/–
B-4A-4B-5A-5B-6A-6
VccGND
AABB
Circuit Couleur du câble
MarronRougeOrangeJauneVertBleu
MarronNoir
RougeNoir
OrangeNoir—
N° de borne duconnecteur C
Couleur du câble N° de borne duconnecteur D
216534
121376983
Blindage
LE CP 1 B
Longueur de câble (L)[m]
Avec verrouillageet capteur
1358ABC
1.5358∗
10∗
15∗
20∗
∗ Fabriqué sur commande (Câble robotique uniquement)
Type câble
—
S
Câble robotique (câble flexible)
Câble standard
N° de borne duconnecteur A
B-1A-1B-2A-2B-3A-3
AABB
COM-A/COMCOM-B/–
B-1A-1B-3A-3
Verrouillage (+)Verrouillage (-)
Capteur (+) Note)
Capteur (–) Note)
B-4A-4B-5A-5B-6A-6
VccGND
AABB
Circuit
N° de borne duconnecteur BCircuit
Couleur du câble
MarronRougeOrangeJauneVertBleu
MarronNoir
RougeNoir
OrangeNoir—
N° de borne duconnecteur C
Couleur du câble N° de borne duconnecteur D
216534
121376983
RougeNoir
MarronBleu
4512
Blindage
LE-CP- /Longueur du câble : 1.5 m, 3 m, 5 m135
LE-CP- /Longueur du câble : 8 m, 10 m, 15 m, 20 m (∗ fabriqué sur commande)
8A
BC
Contrôleur sans programmation Série LECP1
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
56
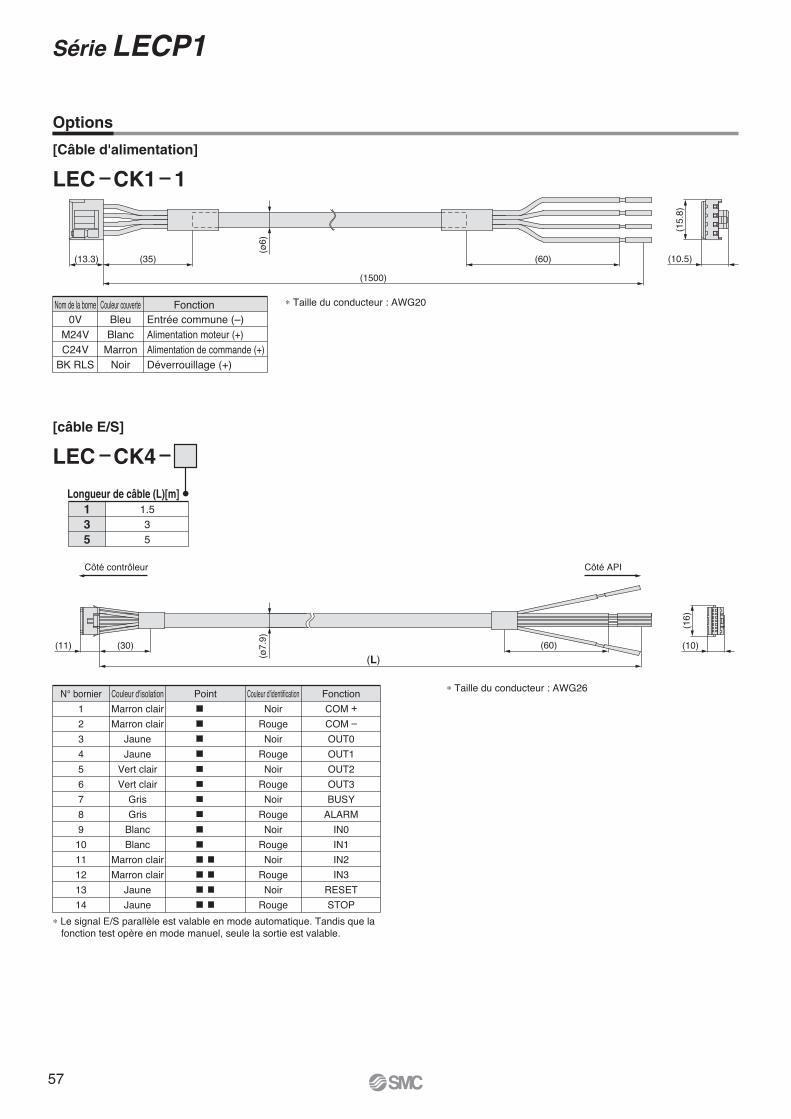
(10.5)
(15.
8)
∗ Taille du conducteur : AWG20
∗ Taille du conducteur : AWG26
LEC CK4
Options
[câble E/S]
LEC CK1 1
[Câble d'alimentation]
(13.3) (35) (60)
(1500)
Nom de la borne Couleur couverte Fonction0V
M24VC24V
BK RLS
BleuBlanc
MarronNoir
Entrée commune (–)Alimentation moteur (+)Alimentation de commande (+)Déverrouillage (+)
Longueur de câble (L)[m]135
1.535
(10)(11) (30) (60)
(16)
(L)
Côté contrôleur Côté API
(ø7.
9)(ø
6)
Couleur d'identification
Noir
Rouge
Noir
Rouge
Noir
Rouge
Noir
Rouge
Noir
Rouge
Noir
Rouge
Noir
Rouge
Fonction
COM +
COM –
OUT0
OUT1
OUT2
OUT3
BUSY
ALARM
IN0
IN1
IN2
IN3
RESET
STOP
∗ Le signal E/S parallèle est valable en mode automatique. Tandis que la fonction test opère en mode manuel, seule la sortie est valable.
PointCouleur d'isolation
Marron clair
Marron clair
Jaune
Jaune
Vert clair
Vert clair
Gris
Gris
Blanc
Blanc
Marron clair
Marron clair
Jaune
Jaune
N° bornier
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Série LECP1
57
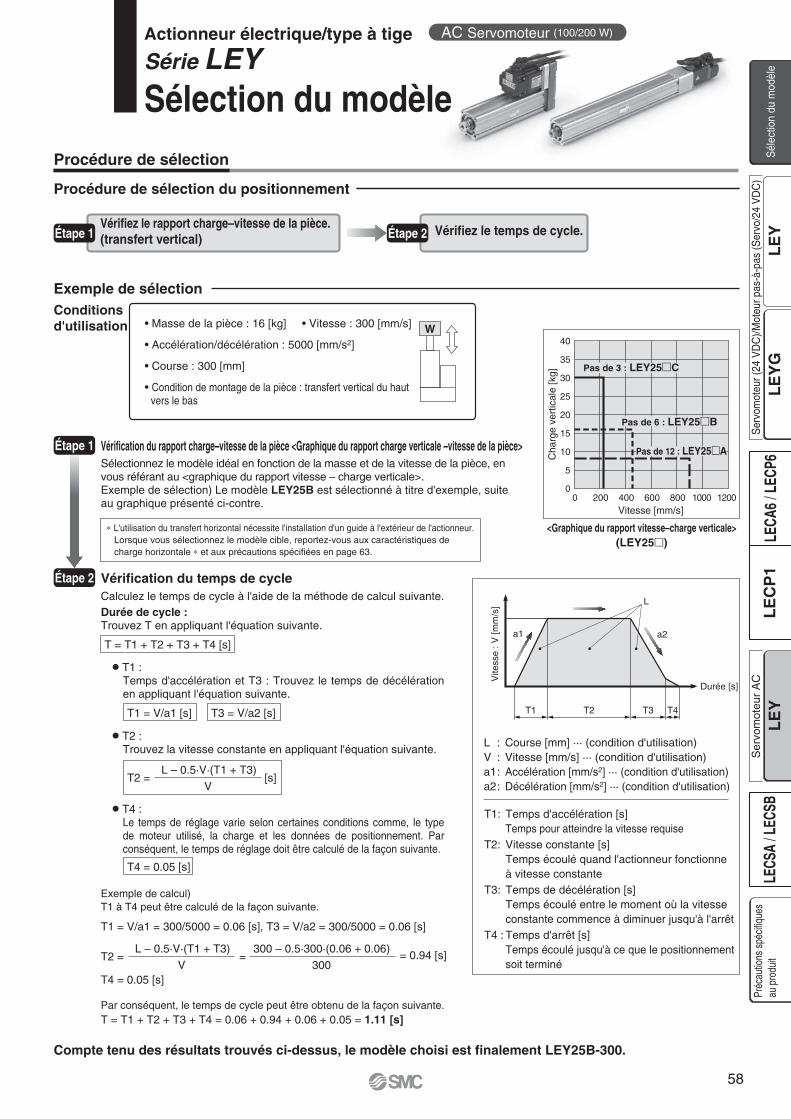
0
5
10
15
20
25
30
35
40
0 200 400 600 800 1000 1200Vitesse [mm/s]
Cha
rge
vert
ical
e [k
g]
Pas de 12 : LEY25�A
Pas de 6 : LEY25�B
Pas de 3 : LEY25�C
<Graphique du rapport vitesse–charge verticale>(LEY25�)
AC Servomoteur (100/200 W)
T1
a1 a2
L
Vite
sse
: V [m
m/s
]
Durée [s]
T2 T3 T4
Procédure de sélection
W
Actionneur électrique/type à tige
Série LEYSélection du modèle
Étape 1 Vérification du rapport charge–vitesse de la pièce <Graphique du rapport charge verticale –vitesse de la pièce>
Étape 2 Vérification du temps de cycle
2]
vers le bas
Conditionsd'utilisation
Exemple de sélection
Étape 1Vérifiez le rapport charge–vitesse de la pièce.(transfert vertical) Étape 2 Vérifiez le temps de cycle.
Durée de cycle :
LEY25B
T = T1 + T2 + T3 + T4 [s]
a1 : 2
a2 : 2
soit term
1.11 [s]
T2 = = V 300
∗
∗
Compte tenu des résultats trouvés ci-dessus, le modèle choisi est finalement LEY25B-300.
Procédure de sélection du positionnement
T1 = V/a1 [s] T3 = V/a2 [s]
T2 = [s]V
� T4 :
� T2 :
� T1 :
Ser
vom
oteu
r A
C
58
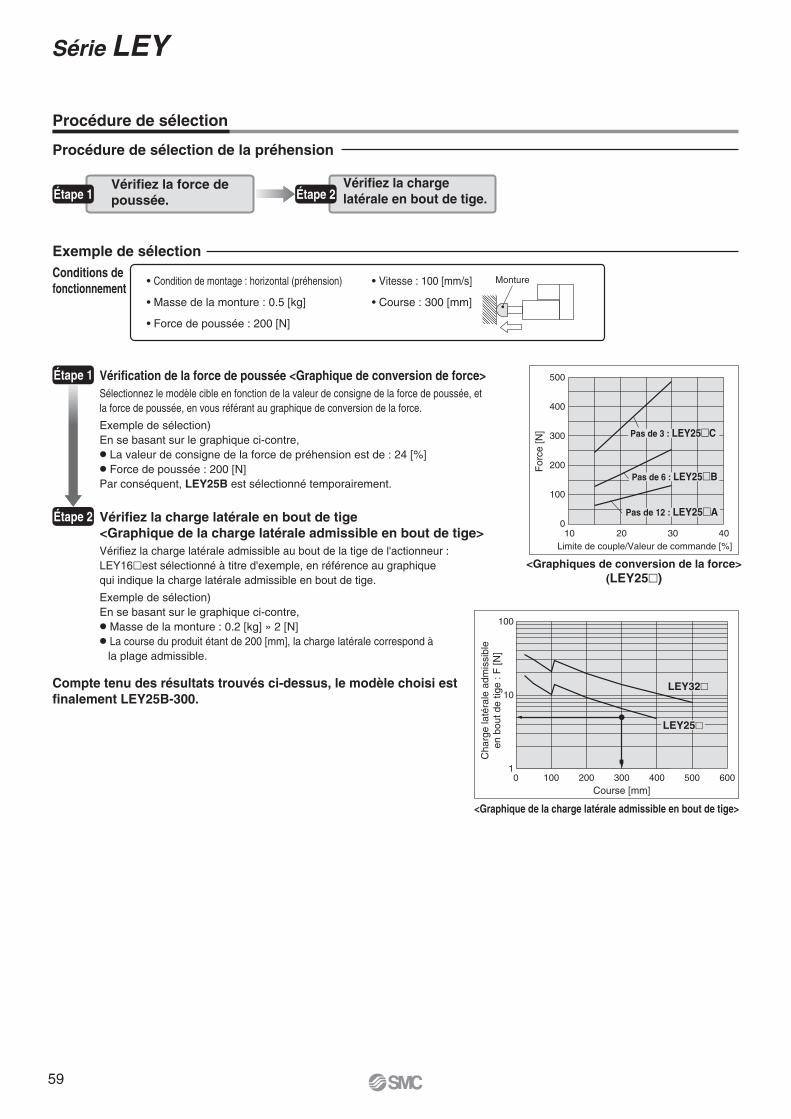
Course [mm]0 100 200 300 400 500 600
100
10
1
Limite de couple/Valeur de commande [%]
500
400
300
200
100
02010 4030
Pas de 3 : LEY25�C
Pas de 6 : LEY25�B
Pas de 12 : LEY25�A
For
ce [N
]
Cha
rge
laté
rale
adm
issi
ble
en b
out d
e tig
e : F
[N]
<Graphique de la charge latérale admissible en bout de tige>
Procédure de sélection de la préhension
Vérifiez la charge latérale en bout de tige.Étape 1
Vérifiez la force de poussée. Étape 2
<Graphiques de conversion de la force>(LEY25�)
LEY32�
LEY25�
Procédure de sélection
Conditions defonctionnement
Exemple de sélection
MontureCondition de montage : horizontal (préhension) Vitesse : 100 [mm/s]
Étape 1 Vérification de la force de poussée <Graphique de conversion de force>Sélectionnez le modèle cible en fonction de la valeur de consigne de la force de poussée, et
Exemple de sélection)En se basant sur le graphique ci-contre,� La valeur de consigne de la force de préhension est de : 24 [%]� Force de poussée : 200 [N]Par conséquent, LEY25B
Étape 2 Vérifiez la charge latérale en bout de tige <Graphique de la charge latérale admissible en bout de tige>Vérifiez la charge latérale admissible au bout de la tige de l'actionneur : LEY16�est sélectionné à titre d'exemple, en référence au graphique
Exemple de sélection)En se basant sur le graphique ci-contre,� » 2 [N]� La course du produit étant de 200 [mm], la charge latérale correspond à
Compte tenu des résultats trouvés ci-dessus, le modèle choisi estfinalement LEY25B-300.
Série LEY
59
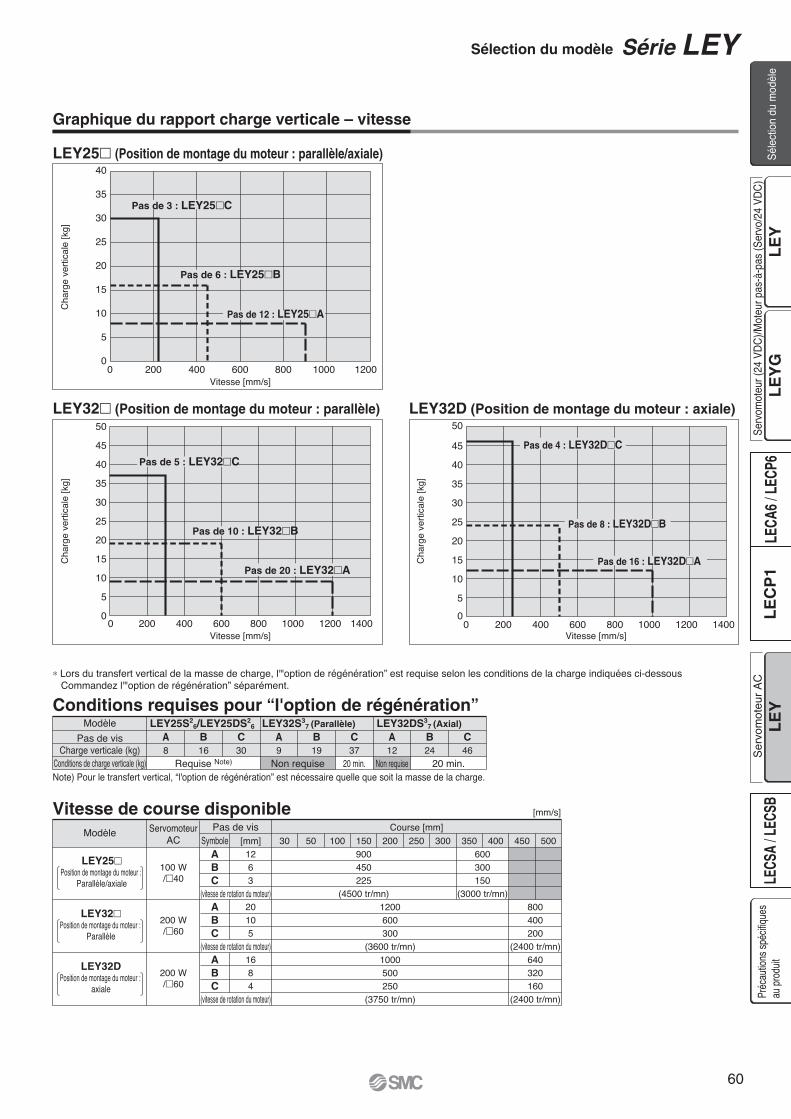
0
5
10
15
20
25
30
35
40
0 200 400 600 800 1000 1200
Pas de 6 : LEY25�B
Pas de 3 : LEY25�C
0
5
10
15
20
25
30
35
40
45
50
0 200 400 600 800 1000 1200 1400
Pas de 20 : LEY32�A
Pas de 5 : LEY32�C
Pas de 10 : LEY32�B
0
5
10
15
20
25
30
35
40
45
50
0 200 400 600 800 1000 1200 1400
Pas de 4 : LEY32D�C
Pas de 8 : LEY32D�B
Pas de 16 : LEY32D�A
Pas de 12 : LEY25�A
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
Cha
rge
vert
ical
e [k
g]
Vitesse [mm/s]
Graphique du rapport charge verticale – vitesse
LEY25� (Position de montage du moteur : parallèle/axiale)
LEY32� (Position de montage du moteur : parallèle) LEY32D (Position de montage du moteur : axiale)
Conditions requises pour “l'option de régénération”
Note) Pour le transfert vertical, “l'option de régénération” est nécessaire quelle que soit la masse de la charge.
∗ Lors du transfert vertical de la masse de charge, l'"option de régénération” est requise selon les conditions de la charge indiquées ci-dessous Commandez l'"option de régénération” séparément.
Modèle
Pas de vis
LEY25S26/LEY25DS2
6
Charge verticale (kg)Conditions de charge verticale (kg)
8 16 30A B C
Requise Note)
LEY32S37 (Parallèle)
9 19 37A B C
Non requise 20 min.
LEY32DS37 (Axial)
12 24 46A B C
Non requise 20 min.
Vitesse de course disponibleModèle Servomoteur
ACPas de vis Course [mm]
(vitesse de rotation du moteur)
(vitesse de rotation du moteur)
(vitesse de rotation du moteur)
Symbole [mm]
LEY25�Position de montage du moteur :
Parallèle/axiale
100 W/�40
ABC
ABC
ABC
1263
20105
1684
900450225
(4500 tr/mn)
600300150
(3000 tr/mn)1200600300
(3600 tr/mn)1000500250
(3750 tr/mn)
800400200
(2400 tr/mn)640320160
(2400 tr/mn)
[mm/s]
LEY32�Position de montage du moteur :
Parallèle
200 W/�60
LEY32DPosition de montage du moteur :
axiale
200 W/�60
30 50 100 150 200 250 300 350 400 450 500
Sélection du modèle Série LEY
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
60
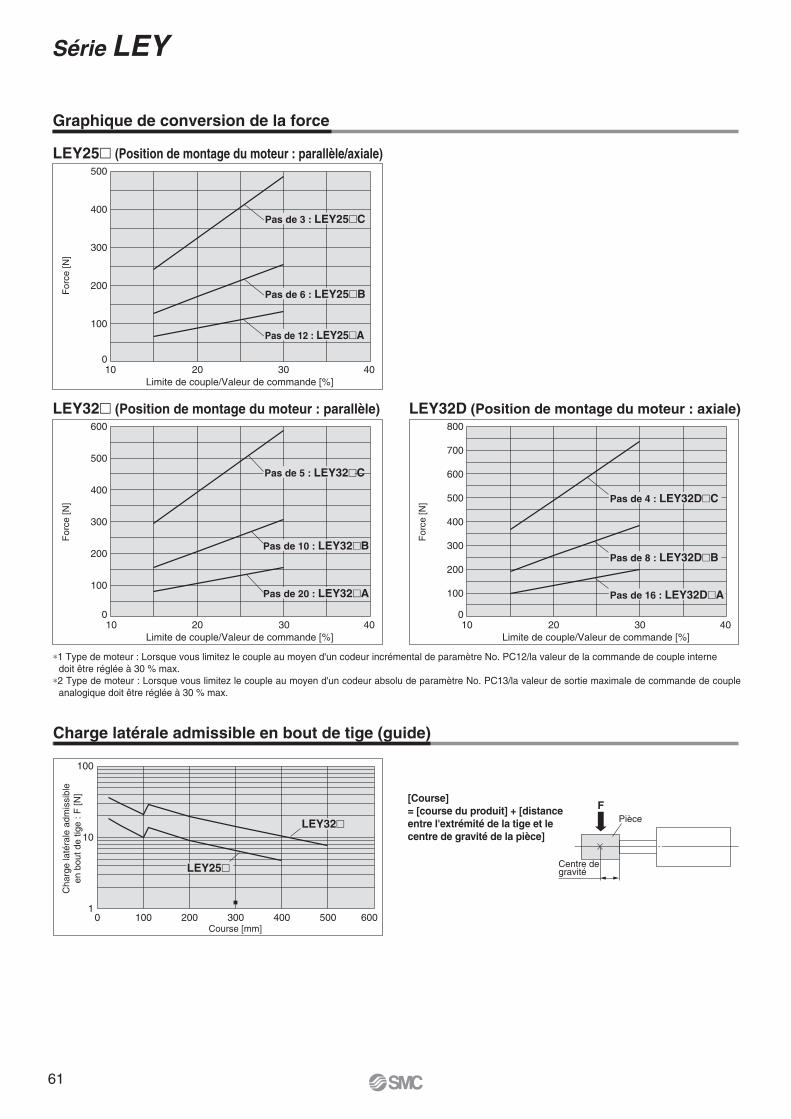
100
10
10 300200 400100 500 600
LEY32�
LEY25�
Limite de couple/Valeur de commande [%]
500
400
300
200
100
02010 4030
Limite de couple/Valeur de commande [%]
800
700
600
500
400
300
200
100
02010 4030
Limite de couple/Valeur de commande [%]
600
500
400
300
200
100
02010 4030
Pas de 3 : LEY25�C
Pas de 5 : LEY32�C
Pas de 10 : LEY32�B
Pas de 20 : LEY32�A
Pas de 6 : LEY25�B
Pas de 12 : LEY25�A
Pas de 4 : LEY32D�C
Pas de 8 : LEY32D�B
Pas de 16 : LEY32D�A
For
ce [N
]F
orce
[N]
For
ce [N
]
Cha
rge
laté
rale
adm
issi
ble
en b
out d
e tig
e : F
[N]
Course [mm]
Charge latérale admissible en bout de tige (guide)
LEY25� (Position de montage du moteur : parallèle/axiale)
LEY32D (Position de montage du moteur : axiale)LEY32� (Position de montage du moteur : parallèle)
∗1 Type de moteur : Lorsque vous limitez le couple au moyen d'un codeur incrémental de paramètre No. PC12/la valeur de la commande de couple interne doit être réglée à 30 % max.
∗2 Type de moteur : Lorsque vous limitez le couple au moyen d'un codeur absolu de paramètre No. PC13/la valeur de sortie maximale de commande de couple analogique doit être réglée à 30 % max.
Graphique de conversion de la force
F
Centre degravité
[Course] = [course du produit] + [distanceentre l'extrémité de la tige et lecentre de gravité de la pièce]
Pièce
Série LEY
61
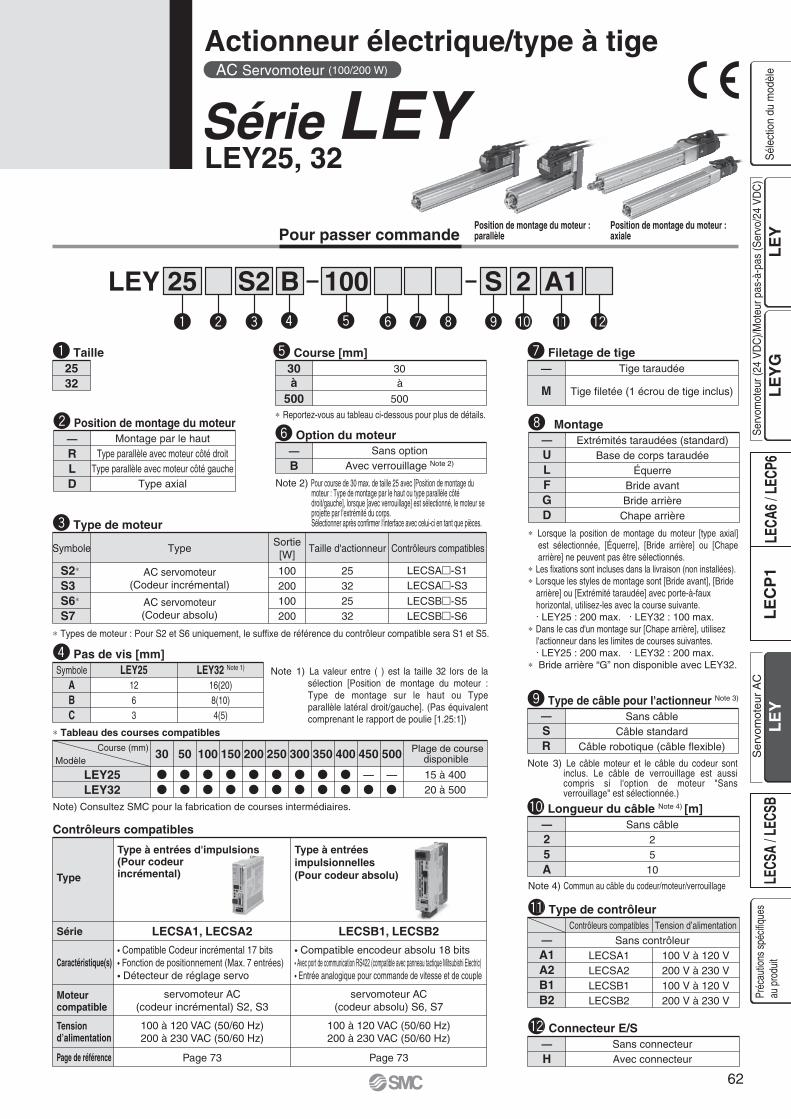
i
Contrôleurs compatibles
Type
Série
Caractéristique(s)
Moteurcompatible
LECSA1, LECSA2
� Compatible Codeur incrémental 17 bits� Fonction de positionnement (Max. 7 entrées)� Détecteur de réglage servo
LECSB1, LECSB2
servomoteur AC(codeur incrémental) S2, S3
servomoteur AC(codeur absolu) S6, S7
� Compatible encodeur absolu 18 bits� Avec port de communication RS422 (compatible avec panneau tactique Mitsubishi Electric)� Entrée analogique pour commande de vitesse et de couple
100 à 120 VAC (50/60 Hz)200 à 230 VAC (50/60 Hz)
100 à 120 VAC (50/60 Hz)200 à 230 VAC (50/60 Hz)
Type à entrées d'impulsions(Pour codeur incrémental)
Type à entréesimpulsionnelles(Pour codeur absolu)
Tensiond’alimentation
Page 73 Page 73Page de référence
Position de montage du moteur : parallèle
Position de montage du moteur : axiale
—SR
Sans câbleCâble standard
Câble robotique (câble flexible)
Note 3) Le câble moteur et le câble du codeur sont inclus. Le câble de verrouillage est aussi compris si l'option de moteur "Sans verrouillage" est sélectionnée.)
o Type de câble pour l'actionneur Note 3)
—25A
Sans câble2510
Note 4) Commun au câble du codeur/moteur/verrouillage
!0 Longueur du câble Note 4) [m]
—H
Sans connecteurAvec connecteur
!2 Connecteur E/S
—A1A2B1B2
Sans contrôleur
!1 Type de contrôleur
LECSA1LECSA2LECSB1LECSB2
100 V à 120 V200 V à 230 V100 V à 120 V200 V à 230 V
Tension d’alimentationContrôleurs compatibles
LEY 25 100B 2 A1
2532
∗ Tableau des courses compatibles
LEY25LEY32
Course (mm)Modèle
30 50 100 150 200 250 300 350 400
—
450
—
500
Sq w e r t y u o !0 !1 !2
15 à 40020 à 500
Plage de coursedisponible
Note) Consultez SMC pour la fabrication de courses intermédiaires.
q Taille30
500∗ Reportez-vous au tableau ci-dessous pour plus de détails.
30
500
t Course [mm]
Note 2) Pour course de 30 max. de taille 25 avec [Position de montage du moteur : Type de montage par le haut ou type parallèle côté droit/gauche], lorsque [avec verrouillage] est sélectionné, le moteur se projette par l'extrémité du corps. Sélectionner après confirmer l'interface avec celui-ci en tant que pièces.
—B
Sans optionAvec verrouillage Note 2)
y Option du moteur
—
M
Tige taraudée
Tige filetée (1 écrou de tige inclus)
u Filetage de tige
—RLD
Montage par le hautType parallèle avec moteur côté droit
Type parallèle avec moteur côté gaucheType axial
w Position de montage du moteur—ULFGD
Extrémités taraudées (standard)Base de corps taraudée
ÉquerreBride avantBride arrière
Chape arrière
∗ Lorsque la position de montage du moteur [type axial] est sélectionnée, [Équerre], [Bride arrière] ou [Chape arrière] ne peuvent pas être sélectionnés.
∗ Les fixations sont incluses dans la livraison (non installées).∗ Lorsque les styles de montage sont [Bride avant], [Bride
arrière] ou [Extrémité taraudée] avec porte-à-faux horizontal, utilisez-les avec la course suivante. · LEY25 : 200 max. · LEY32 : 100 max.
∗ Dans le cas d'un montage sur [Chape arrière], utilisez l'actionneur dans les limites de courses suivantes.· LEY25 : 200 max. · LEY32 : 200 max.
∗ Bride arrière “G” non disponible avec LEY32.
i Montage
S2
Note 1) La valeur entre ( ) est la taille 32 lors de la sélection [Position de montage du moteur : Type de montage sur le haut ou Type parallèle latéral droit/gauche]. (Pas équivalent comprenant le rapport de poulie [1.25:1])
ABC
LEY251263
LEY32 Note 1)
16(20)8(10)4(5)
Symbole
r Pas de vis [mm]
S2∗
S3S6∗
S7
100200100200
25322532
Symbole Type Taille d'actionneur Contrôleurs compatibles
Ser
vom
oteu
r A
C
Sortie[W]
AC servomoteur(Codeur incrémental)
AC servomoteur(Codeur absolu)
e Type de moteur
LECSA�-S1LECSA�-S3
LECSB�-S5LECSB�-S6
AC Servomoteur (100/200 W)
Actionneur électrique/type à tige
∗ Types de moteur : Pour S2 et S6 uniquement, le suffixe de référence du contrôleur compatible sera S1 et S5.
LEY25, 32Série LEY
Pour passer commande
à à
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
62
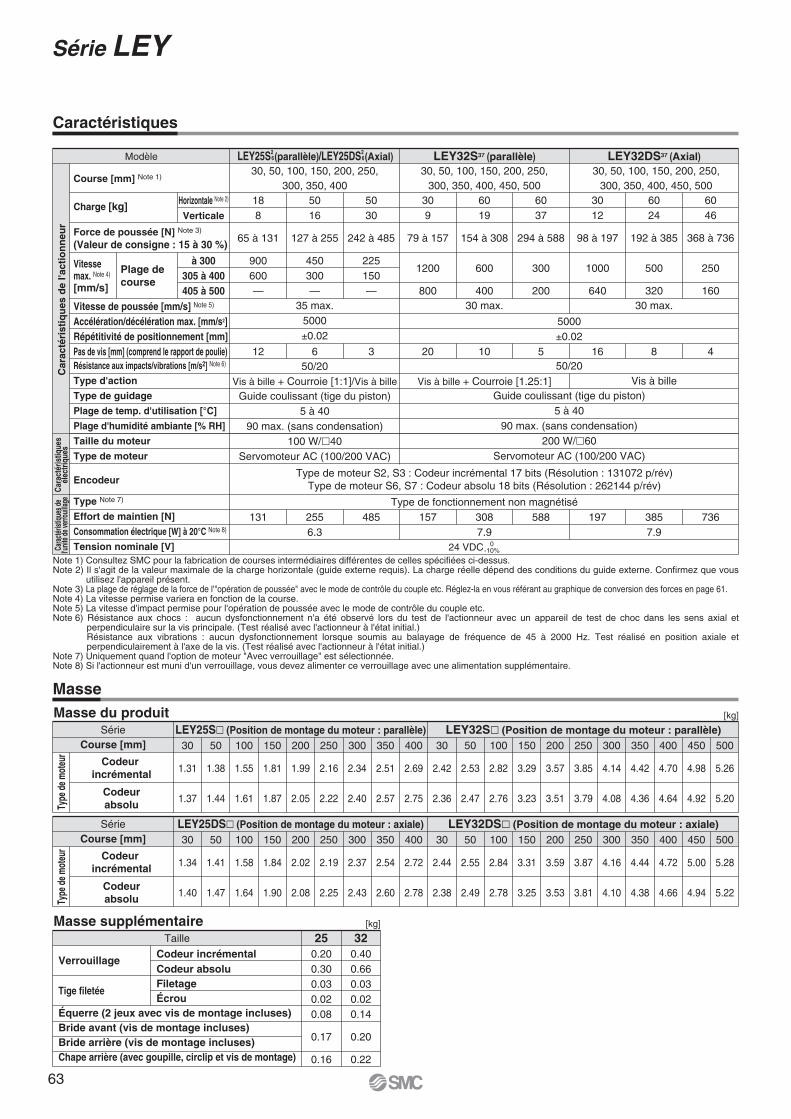
Note 1) Consultez SMC pour la fabrication de courses intermédiaires différentes de celles spécifiées ci-dessus.Note 2) Il s'agit de la valeur maximale de la charge horizontale (guide externe requis). La charge réelle dépend des conditions du guide externe. Confirmez que vous
utilisez l'appareil présent.Note 3) La plage de réglage de la force de l'"opération de poussée" avec le mode de contrôle du couple etc. Réglez-la en vous référant au graphique de conversion des forces en page 61.Note 4) La vitesse permise variera en fonction de la course.Note 5) La vitesse d'impact permise pour l'opération de poussée avec le mode de contrôle du couple etc.Note 6) Résistance aux chocs : aucun dysfonctionnement n'a été observé lors du test de l'actionneur avec un appareil de test de choc dans les sens axial et
perpendiculaire sur la vis principale. (Test réalisé avec l'actionneur à l'état initial.)Résistance aux vibrations : aucun dysfonctionnement lorsque soumis au balayage de fréquence de 45 à 2000 Hz. Test réalisé en position axiale et perpendiculairement à l'axe de la vis. (Test réalisé avec l'actionneur à l'état initial.)
Note 7) Uniquement quand l'option de moteur "Avec verrouillage" est sélectionnée.Note 8) Si l'actionneur est muni d'un verrouillage, vous devez alimenter ce verrouillage avec une alimentation supplémentaire.
Masse
Modèle
188
65 à 131
900600—
5016
127 à 255
450300—
35 max.5000±0.02
5030
242 à 485
225150—
309
79 à 157
1200
800
6019
154 à 308
600
40030 max.
6037
294 à 588
300
200
3012
98 à 197
1000
640
6024
192 à 385
500
32030 max.
6046
368 à 736
250
160
30, 50, 100, 150, 200, 250,300, 350, 400
30, 50, 100, 150, 200, 250,300, 350, 400, 450, 500
30, 50, 100, 150, 200, 250,300, 350, 400, 450, 500
LEY25S2 6(parallèle)/LEY25DS2
6(Axial) LEY32S37 (parallèle) LEY32DS37 (Axial)
Course [mm] Note 1)
Vitesse de poussée [mm/s] Note 5)
Accélération/décélération max. [mm/s2]Répétitivité de positionnement [mm]Pas de vis [mm] (comprend le rapport de poulie)Résistance aux impacts/vibrations [m/s2] Note 6)
Type d'action
Type de guidage
Plage de temp. d'utilisation [°C]
Plage d'humidité ambiante [% RH]
Taille du moteur
Type de moteur
Encodeur
Type Note 7)
Effort de maintien [N]
Consommation électrique [W] à 20°C Note 8)
Tension nominale [V]
Charge [kg] Horizontale Note 2)
Verticale
Plage decourse
à 300305 à 400405 à 500
12 650/20
Vis à bille + Courroie [1:1]/Vis à bille
Guide coulissant (tige du piston)5 à 40
90 max. (sans condensation)100 W/�40
Servomoteur AC (100/200 VAC)
3 20 10
Vis à bille + Courroie [1.25:1]
5 16
5000±0.02
50/20
Guide coulissant (tige du piston)5 à 40
90 max. (sans condensation)200 W/�60
Servomoteur AC (100/200 VAC)
8
Vis à bille
4
131 2556.3
485 157Type de fonctionnement non magnétisé
3087.9
Type de moteur S2, S3 : Codeur incrémental 17 bits (Résolution : 131072 p/rév)Type de moteur S6, S7 : Codeur absolu 18 bits (Résolution : 262144 p/rév)
24 VDC
588 197 3857.9
736
Type
de m
oteu
rTy
pe d
e mot
eur
0-10%
Série
Codeur incrémental
Codeurabsolu
LEY25S� (Position de montage du moteur : parallèle) LEY32S� (Position de montage du moteur : parallèle)Course [mm] 30 50 100 150 200 250 300 350 400 30 50 100 150 200 250 300 350 400 450 500
Série
Codeur incrémental
Codeurabsolu
LEY25DS� (Position de montage du moteur : axiale) LEY32DS� (Position de montage du moteur : axiale)Course [mm] 30 50 100 150 200 250 300 350 400 30 50 100 150 200 250 300 350 400 450 500
1.31
1.37
1.38
1.44
1.55
1.61
1.81
1.87
1.99
2.05
2.16
2.22
2.34
2.40
2.51
2.57
2.69
2.75
2.42
2.36
2.53
2.47
2.82
2.76
3.29
3.23
3.57
3.51
3.85
3.79
4.14
4.08
4.42
4.36
4.70
4.64
4.98
4.92
5.26
5.20
1.34
1.40
1.41
1.47
1.58
1.64
1.84
1.90
2.02
2.08
2.19
2.25
2.37
2.43
2.54
2.60
2.72
2.78
2.44
2.38
2.55
2.49
2.84
2.78
3.31
3.25
3.59
3.53
3.87
3.81
4.16
4.10
4.44
4.38
4.72
4.66
5.00
4.94
5.28
5.22
Force de poussée [N] Note 3)
(Valeur de consigne : 15 à 30 %)
Vitesse max. Note 4)
[mm/s]
[kg]Masse du produit
Taille 25 32
Verrouillage
Tige filetée
Équerre (2 jeux avec vis de montage incluses)Bride avant (vis de montage incluses)Bride arrière (vis de montage incluses)Chape arrière (avec goupille, circlip et vis de montage)
Codeur incrémentalCodeur absoluFiletageÉcrou
0.200.300.030.020.08
0.17
0.16
0.400.660.030.020.14
0.20
0.22
[kg]Masse supplémentaire
Caractéristiques
Car
acté
rist
iqu
es d
e l'a
ctio
nn
eur
Cara
ctér
istiq
ues
élec
triqu
esCa
racté
ristiq
ues d
el'u
nité d
e ver
rouil
lage
Série LEY
63
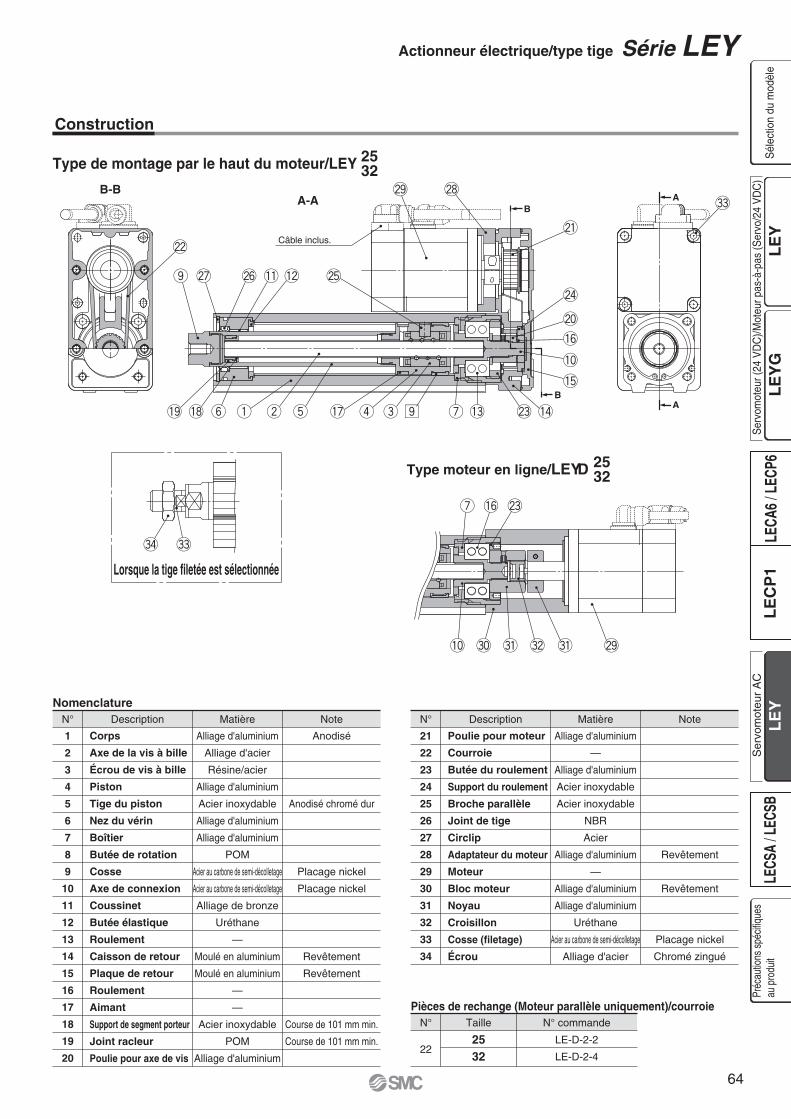
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
!0 #0 #1 #2 #1 @9
!6u @3
N° Description Matière Note
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Corps
Axe de la vis à bille
Écrou de vis à bille
Piston
Tige du piston
Nez du vérin
Boîtier
Butée de rotation
Cosse
Axe de connexion
Coussinet
Butée élastique
Roulement
Caisson de retour
Plaque de retour
Roulement
Aimant
Support de segment porteur
Joint racleur
Poulie pour axe de vis
Alliage d'aluminium
Alliage d'acier
Résine/acier
Alliage d'aluminium
Acier inoxydable
Alliage d'aluminium
Alliage d'aluminium
POM
Acier au carbone de semi-décolletage
Acier au carbone de semi-décolletage
Alliage de bronze
Uréthane
—
Moulé en aluminium
Moulé en aluminium
—
—
Acier inoxydable
POM
Alliage d'aluminium
Anodisé
Anodisé chromé dur
Placage nickel
Placage nickel
Revêtement
Revêtement
Course de 101 mm min.
Course de 101 mm min.
N° Taille
222532
N° commande
LE-D-2-2
LE-D-2-4
N° Description Matière Note
21
22
23
24
25
26
27
28
29
30
31
32
33
34
Poulie pour moteur
Courroie
Butée du roulement
Support du roulement
Broche parallèle
Joint de tige
Circlip
Adaptateur du moteur
Moteur
Bloc moteur
Noyau
Croisillon
Cosse (filetage)
Écrou
Alliage d'aluminium
—
Alliage d'aluminium
Acier inoxydable
Acier inoxydable
NBR
Acier
Alliage d'aluminium
—
Alliage d'aluminium
Alliage d'aluminium
Uréthane
Acier au carbone de semi-décolletage
Alliage d'acier
Revêtement
Revêtement
Placage nickel
Chromé zingué
Pièces de rechange (Moteur parallèle uniquement)/courroie
Nomenclature
A
A
B
B
A-A
Câble inclus.
B-B#3
!9 !8 y q w t !7 r e . u !3
#4 #3
@3 !4
!5
!0
!6
@0
@1
@8@9
@5!2!1@6@7o
@2
2532
Lorsque la tige filetée est sélectionnée
D 2532
@4
Construction
Type de montage par le haut du moteur/LEY
Type moteur en ligne/LEY
Actionneur électrique/type tige Série LEY
64
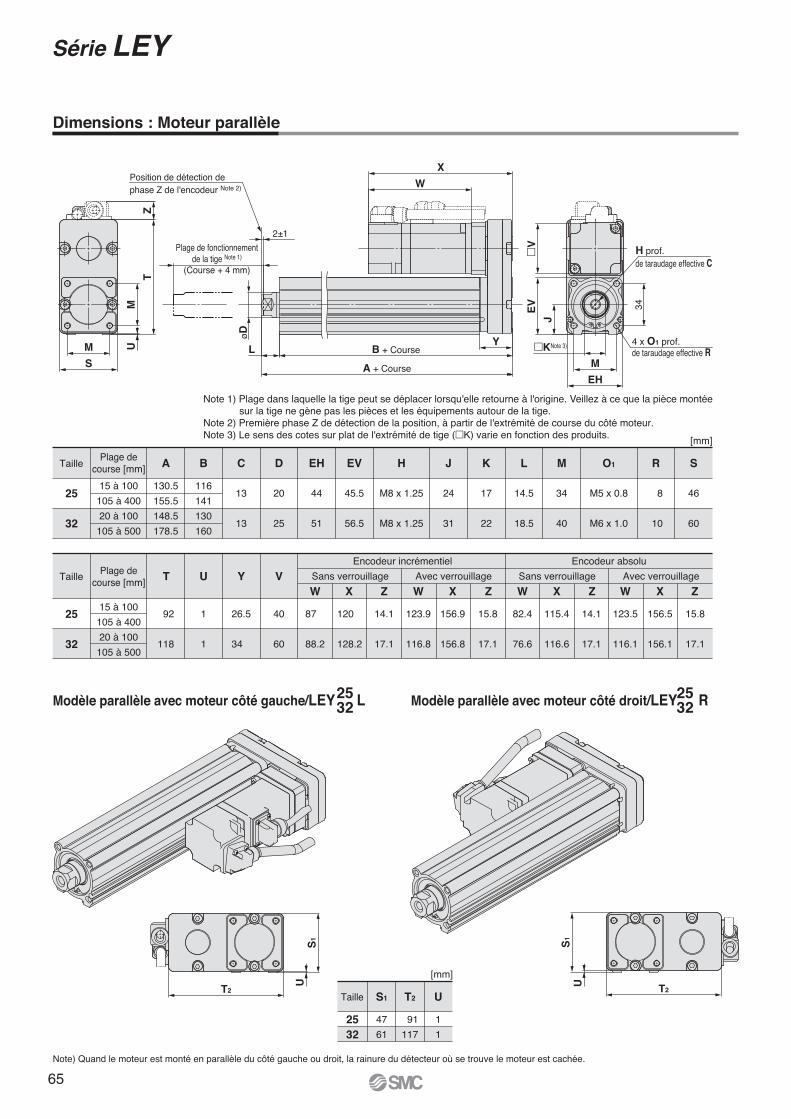
T2
US
1
US
1
T2
Dimensions : Moteur parallèle
Modèle parallèle avec moteur côté gauche/LEY L2532 Modèle parallèle avec moteur côté droit/LEY R25
32
Plage decourse [mm]
15 à 100
105 à 400
20 à 100
105 à 500
130.5
155.5
148.5
178.5
116
141
130
160
13
13
Taille
[mm]
25
32
A B C
20
25
D
44
51
EH
45.5
56.5
EV
M8 x 1.25
M8 x 1.25
H
24
31
J
17
22
K
14.5
18.5
L
34
40
M O1
8
10
R
46
60
S
M5 x 0.8
M6 x 1.0
Taille
25
32
92
118
T
1
1
U
40
60
V
26.5
34
Y
Série LEY
47
61
91
117
Taille
2532
S1 T2
1
1
U
[mm]
Note) Quand le moteur est monté en parallèle du côté gauche ou droit, la rainure du détecteur où se trouve le moteur est cachée.
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.Note 2) Première phase Z de détection de la position, à partir de l'extrémité de course du côté moteur.Note 3) Le sens des cotes sur plat de l'extrémité de tige (�K) varie en fonction des produits.
Plage de fonctionnementde la tige Note 1)
(Course + 4 mm)
Position de détection dephase Z de l'encodeur Note 2)
34
2±1
�V
EV
J
�KNote 3)
EH
M
W
M YUM
TZ
S
X
L
H prof.de taraudage effective C
B + Course
A + Course
4 x O1 prof.de taraudage effective R
øD
Plage decourse [mm]
15 à 100
105 à 400
20 à 100
105 à 500
87
88.2
120
128.2
123.9
116.8
156.9
156.8
82.4
76.6
115.4
116.6
123.5
116.1
156.5
156.1
Sans verrouillage Avec verrouillage Sans verrouillage
Encodeur incrémentiel Encodeur absolu
Avec verrouillage
W
14.1
17.1
Z
14.1
17.1
Z
15.8
17.1
Z
15.8
17.1
ZX W X W X W X
65
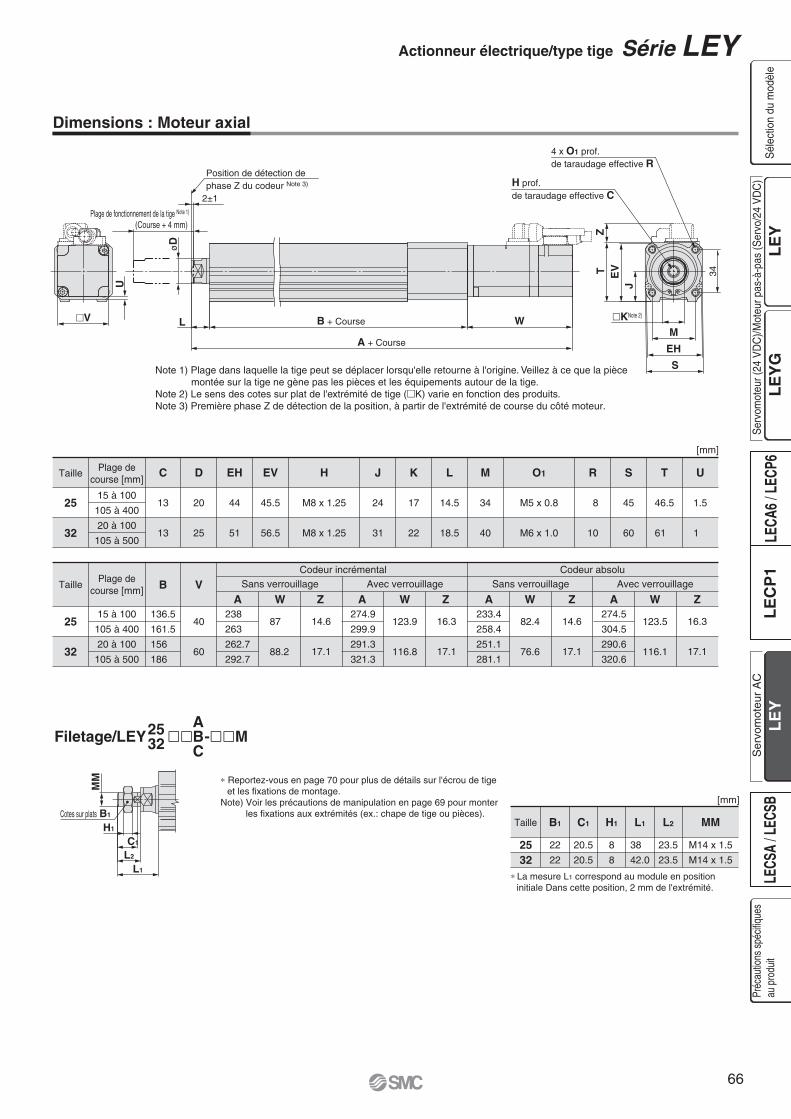
L
øD
B + Course
A + Course
W
Position de détection dephase Z du codeur Note 3)
Plage de fonctionnement de la tige Note 1)
(Course + 4 mm)
C1
L2
H1
MM
L1
Cotes sur plats B1
J
T EV
S
EH
M�KNote 2)
34
4 x O1 prof.de taraudage effective R
H prof.de taraudage effective C
Z
�V
UDimensions : Moteur axial
13
13
Taille
[mm]
25
32
Note 1) Plage dans laquelle la tige peut se déplacer lorsqu'elle retourne à l'origine. Veillez à ce que la pièce montée sur la tige ne gène pas les pièces et les équipements autour de la tige.Note 2) Le sens des cotes sur plat de l'extrémité de tige (�K) varie en fonction des produits.Note 3) Première phase Z de détection de la position, à partir de l'extrémité de course du côté moteur.
C
20
25
D
44
51
EH
45.5
56.5
EV
M8 x 1.25
M8 x 1.25
H
24
31
J
17
22
K
14.5
18.5
L
34
40
M
M5 x 0.8
M6 x 1.0
O1
8
10
R
45
60
S
46.5
61
T
1.5
1
U
Plage decourse [mm]
15 à 100
105 à 400
20 à 100
105 à 500
Taille
25
32
Plage decourse [mm]
15 à 100
105 à 400
20 à 100
105 à 500
136.5
161.5
156
186
B
40
60
V
Filetage/LEY �� -��M2532
ABC
∗ Reportez-vous en page 70 pour plus de détails sur l'écrou de tige et les fixations de montage.
Note) Voir les précautions de manipulation en page 69 pour monter les fixations aux extrémités (ex.: chape de tige ou pièces).
22
22
20.5
20.5
Taille
2532
B1 C1
8
8
H1
38
42.0
L1
23.5
23.5
L2
M14 x 1.5
M14 x 1.5
MM
[mm]
∗ La mesure L1 correspond au module en position initiale Dans cette position, 2 mm de l'extrémité.
2±1
Sans verrouillage Avec verrouillage Sans verrouillageCodeur incrémental Codeur absolu
Avec verrouillage
87
88.2
123.9
116.8
82.4
76.6
123.5
116.1
238
263
262.7
292.7
A W274.9
299.9
291.3
321.3
A W233.4
258.4
251.1
281.1
A W274.5
304.5
290.6
320.6
A W
14.6
17.1
Z
16.3
17.1
Z
14.6
17.1
Z
16.3
17.1
Z
Actionneur électrique/type tige Série LEY
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
it
66
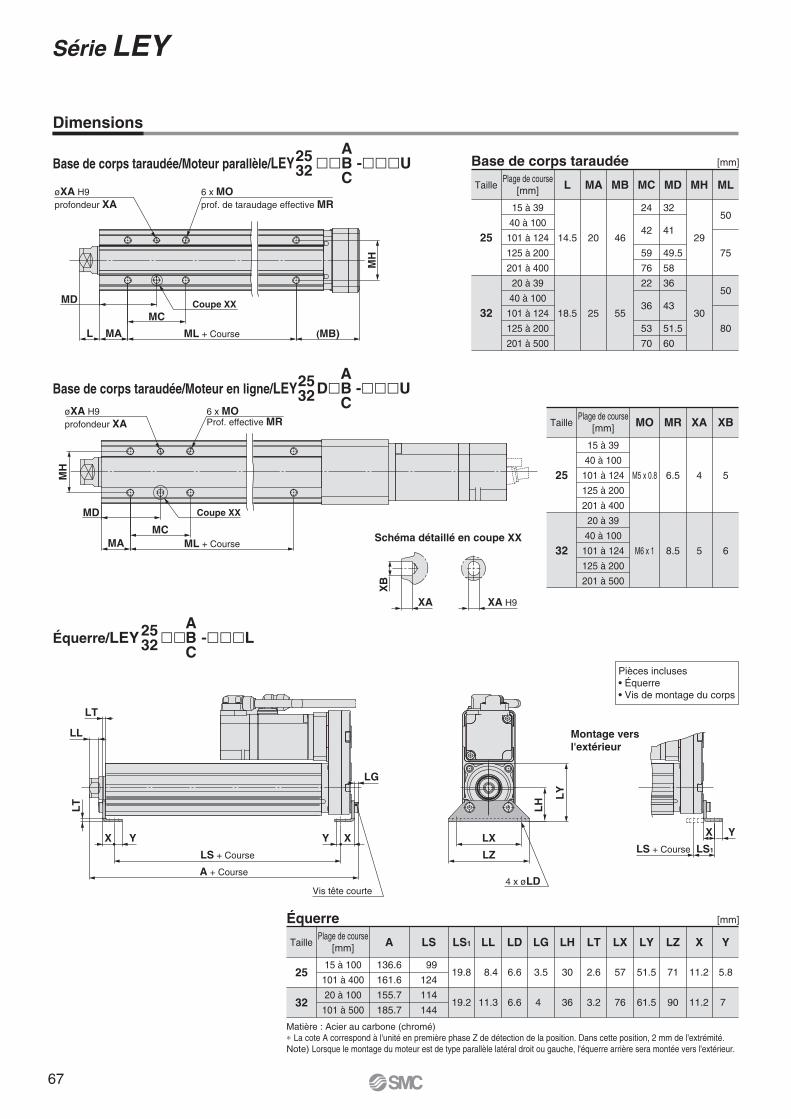
Y Y
LS + Course
A + Course
LT
LL
LT
LG
X X
Vis tête courte
Coupe XX
6 x MOprof. de taraudage effective MR
øXA H9profondeur XA
L MA
MC
ML + Course (MB)
MD
MH
Montage versl'extérieur
X Y
LS + Course LS1
Coupe XX
øXA H9profondeur XA
MD
MCML + CourseMA
6 x MOProf. effective MR
MH
LH L
Y
LX
LZ
4 x øLD
Schéma détaillé en coupe XX
XA H9
XB
XA
Dimensions
Base de corps taraudée/Moteur parallèle/LEY �� -���U2532
ABC
ABC
Pièces incluses
Plage de course
15 à 39
40 à 100
101 à 124
125 à 200
201 à 400
20 à 39
40 à 100
101 à 124
125 à 200
201 à 500
32
41
49.5
58
36
43
51.5
60
20
25
14.5
18.5
Taille
25
32
L MA
46
55
MB
24
42
59
76
22
36
53
70
MC MD
29
30
MH
50
75
50
80
ML
Plage de course
15 à 39
40 à 100
101 à 124
125 à 200
201 à 400
20 à 39
40 à 100
101 à 124
125 à 200
201 à 500
5
6
M5 x 0.8
M6 x 1
Taille
25
32
MO
6.5
8.5
MR
4
5
XA XB
Base de corps taraudée
Équerre/LEY �� -���L2532
Base de corps taraudée/Moteur en ligne/LEY D� -���U2532
ABC
Plage de course
15 à 100
101 à 400
20 à 100
101 à 500
136.6
161.6
155.7
185.7
99
124
114
144
8.4
11.3
Taille
25
32
A LS LL
19.8
19.2
LS1
6.6
6.6
LD
3.5
4
LG
Équerre
∗
2.6
3.2
30
36
57
76
51.5
61.5
71
90
11.2
11.2
5.8
7
LTLH LX LY LZ X Y
Série LEY
67
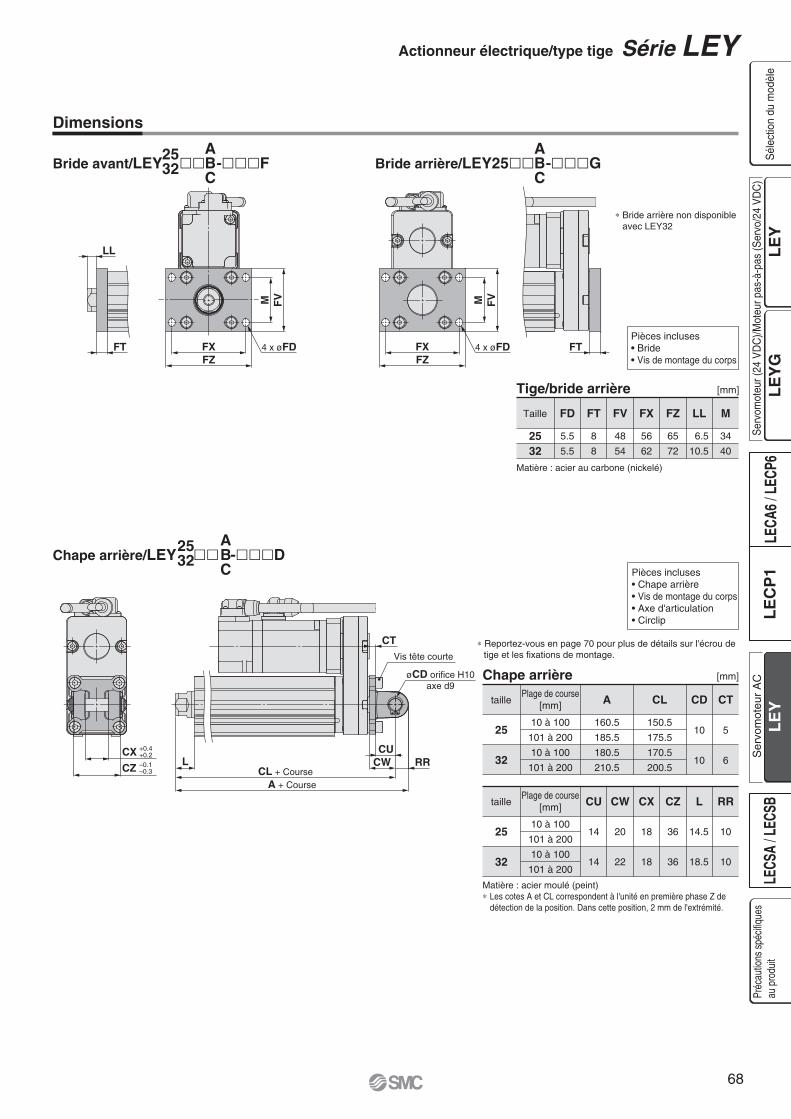
[mm]
Plage de course[mm]
10 à 100
101 à 200
10 à 100
101 à 200
160.5
185.5
180.5
210.5
150.5
175.5
170.5
200.5
taille
25
32
A CL
10
10
CD
5
6
CT
Chape arrière
Chape arrière/LEY �� -���D2532
ABC
Plage de course[mm]
10 à 100
101 à 200
10 à 100
101 à 200
taille
25
32
20
22
CW
18
18
CX
36
36
CZ
14.5
18.5
L
10
10
RR
Matière : acier moulé (peint)∗ Les cotes A et CL correspondent à l'unité en première phase Z de
détection de la position. Dans cette position, 2 mm de l'extrémité.
14
14
CU
Pièces incluses
Vis de montage du corps
Pièces incluses
Vis de montage du corps
6.5
10.5
34
40
Taille
2532
LL
65
72
FZ
56
62
FX
48
54
FV
8
8
FT
5.5
5.5
FD M
[mm]
Matière : acier au carbone (nickelé)
Tige/bride arrière
∗ Reportez-vous en page 70 pour plus de détails sur l'écrou de tige et les fixations de montage.
Bride avant/LEY �� -���F2532
ABC
ABC
Bride arrière/LEY25�� -���G
∗avec LEY32
FZFX
FVM
FT
LL
4 x øFDFZFX
M FV
FT4 x øFD
CURRCWL
CL + CourseA + Course
CTVis tête courte
øCD orifice H10axe d9
+0.4 +0.2CX –0.1 –0.3CZ
Dimensions
Actionneur électrique/type tige Série LEY
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
itS
élec
tion
du m
odèl
e
68
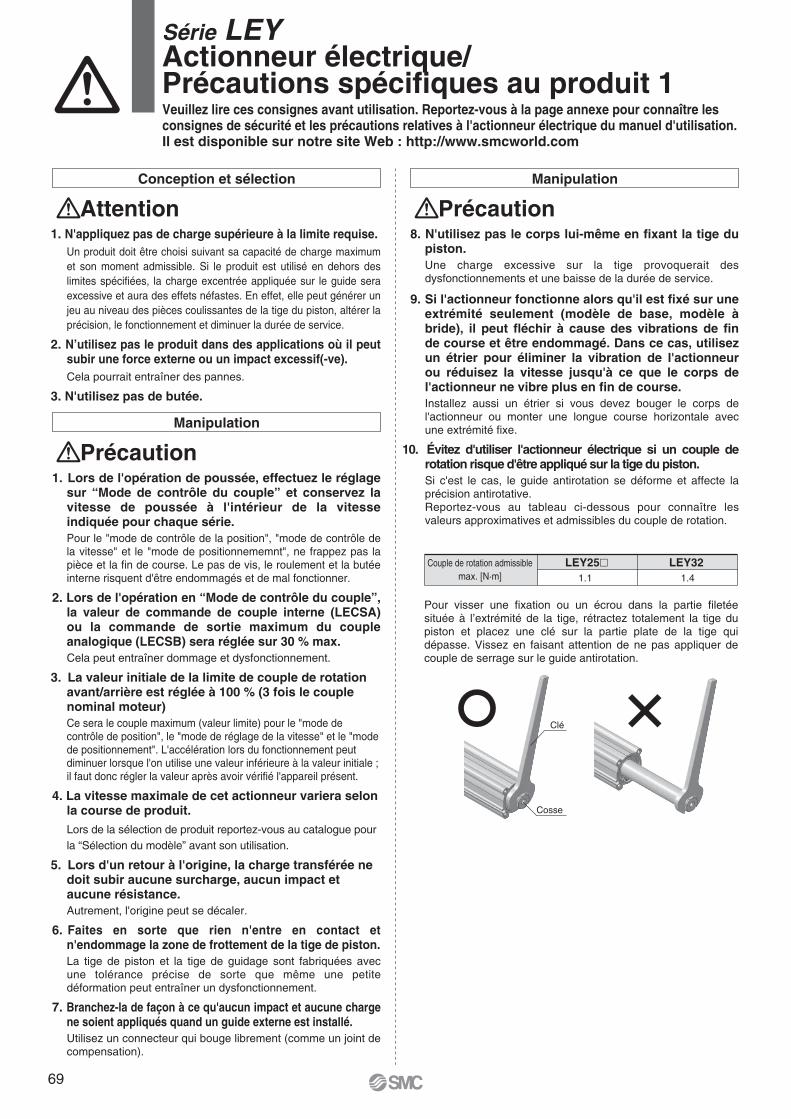
Conception et sélection
Attention1. N'appliquez pas de charge supérieure à la limite requise.
Un produit doit être choisi suivant sa capacité de charge maximum et son moment admissible. Si le produit est utilisé en dehors des limites spécifiées, la charge excentrée appliquée sur le guide sera excessive et aura des effets néfastes. En effet, elle peut générer un jeu au niveau des pièces coulissantes de la tige du piston, altérer la précision, le fonctionnement et diminuer la durée de service.
2. N’utilisez pas le produit dans des applications où il peut subir une force externe ou un impact excessif(-ve).Cela pourrait entraîner des pannes.
3. N'utilisez pas de butée.
Manipulation
Précaution1. Lors de l'opération de poussée, effectuez le réglage
sur “Mode de contrôle du couple” et conservez la vitesse de poussée à l'intérieur de la vitesse indiquée pour chaque série.Pour le "mode de contrôle de la position", "mode de contrôle de la vitesse" et le "mode de positionnememnt", ne frappez pas la pièce et la fin de course. Le pas de vis, le roulement et la butée interne risquent d'être endommagés et de mal fonctionner.
2. Lors de l'opération en “Mode de contrôle du couple”, la valeur de commande de couple interne (LECSA) ou la commande de sortie maximum du couple analogique (LECSB) sera réglée sur 30 % max.Cela peut entraîner dommage et dysfonctionnement.
3. La valeur initiale de la limite de couple de rotation avant/arrière est réglée à 100 % (3 fois le couple nominal moteur)Ce sera le couple maximum (valeur limite) pour le "mode de contrôle de position", le "mode de réglage de la vitesse" et le "mode de positionnement". L'accélération lors du fonctionnement peut diminuer lorsque l'on utilise une valeur inférieure à la valeur initiale ; il faut donc régler la valeur après avoir vérifié l'appareil présent.
4. La vitesse maximale de cet actionneur variera selon la course de produit.Lors de la sélection de produit reportez-vous au catalogue pour la “Sélection du modèle” avant son utilisation.
5. Lors d'un retour à l'origine, la charge transférée ne doit subir aucune surcharge, aucun impact et aucune résistance.Autrement, l'origine peut se décaler.
6. Faites en sorte que rien n'entre en contact et n'endommage la zone de frottement de la tige de piston.La tige de piston et la tige de guidage sont fabriquées avec une tolérance précise de sorte que même une petite déformation peut entraîner un dysfonctionnement.
7. Branchez-la de façon à ce qu'aucun impact et aucune charge ne soient appliqués quand un guide externe est installé.Utilisez un connecteur qui bouge librement (comme un joint de compensation).
Manipulation
Précaution8. N'utilisez pas le corps lui-même en fixant la tige du
piston.Une charge excessive sur la tige provoquerait des dysfonctionnements et une baisse de la durée de service.
9. Si l'actionneur fonctionne alors qu'il est fixé sur une extrémité seulement (modèle de base, modèle à bride), il peut fléchir à cause des vibrations de fin de course et être endommagé. Dans ce cas, utilisez un étrier pour éliminer la vibration de l'actionneur ou réduisez la vitesse jusqu'à ce que le corps de l'actionneur ne vibre plus en fin de course.Installez aussi un étrier si vous devez bouger le corps de l'actionneur ou monter une longue course horizontale avec une extrémité fixe.
10. Évitez d'utiliser l'actionneur électrique si un couple de rotation risque d'être appliqué sur la tige du piston.Si c'est le cas, le guide antirotation se déforme et affecte la précision antirotative.Reportez-vous au tableau ci-dessous pour connaître les valeurs approximatives et admissibles du couple de rotation.
Pour visser une fixation ou un écrou dans la partie filetée située à l’extrémité de la tige, rétractez totalement la tige du piston et placez une clé sur la partie plate de la tige qui dépasse. Vissez en faisant attention de ne pas appliquer de couple de serrage sur le guide antirotation.
Couple de rotation admissiblemax. [N·m]
LEY25�1.1
LEY321.4
Série LEYActionneur électrique/Précautions spécifiques au produit 1Veuillez lire ces consignes avant utilisation. Reportez-vous à la page annexe pour connaître les consignes de sécurité et les précautions relatives à l'actionneur électrique du manuel d'utilisation.Il est disponible sur notre site Web : http://www.smcworld.com
Clé
Cosse
69
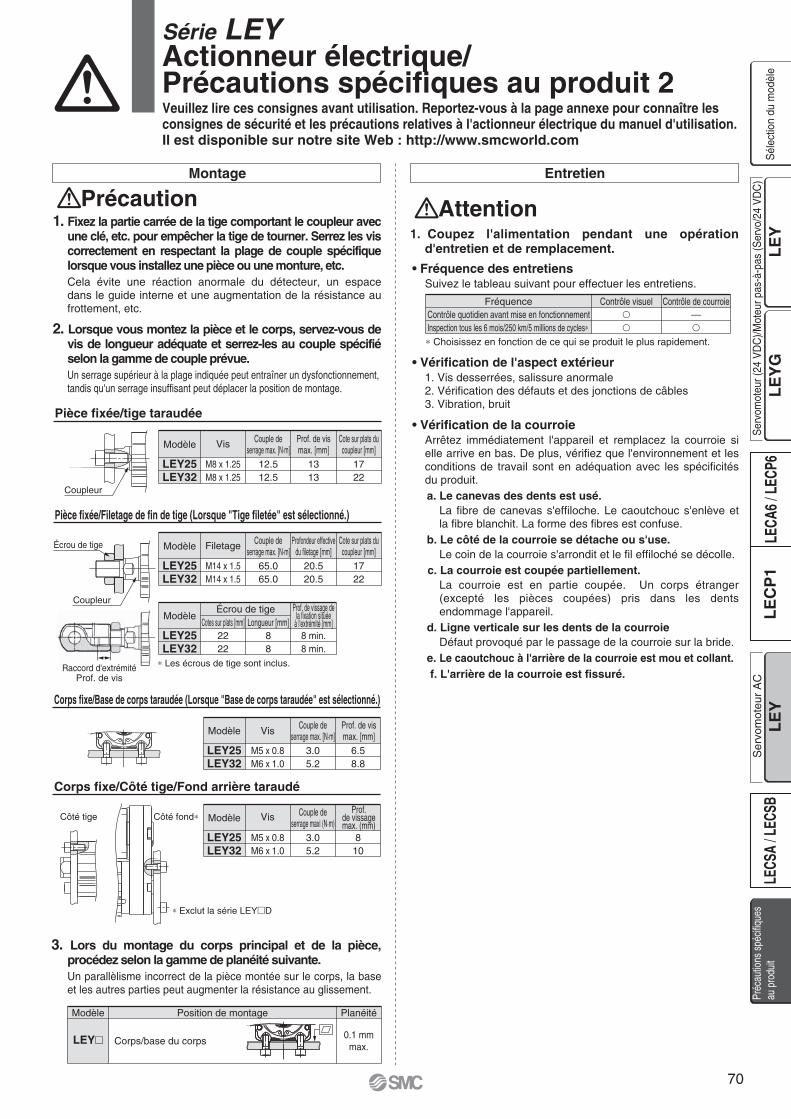
Côté tige Côté fond∗
Entretien
Attention1. Coupez l'alimentation pendant une opération
d'entretien et de remplacement.
Suivez le tableau suivant pour effectuer les entretiens.
1. Vis desserrées, salissure anormale2. Vérification des défauts et des jonctions de câbles3. Vibration, bruit
Vérification de la courroieArrêtez immédiatement l'appareil et remplacez la courroie si elle arrive en bas. De plus, vérifiez que l'environnement et les conditions de travail sont en adéquation avec les spécificités du produit.
La fibre de canevas s'effiloche. Le caoutchouc s'enlève et la fibre blanchit. La forme des fibres est confuse.
Le coin de la courroie s'arrondit et le fil effiloché se décolle.
La courroie est en partie coupée. Un corps étranger (excepté les pièces coupées) pris dans les dents endommage l'appareil.
Défaut provoqué par le passage de la courroie sur la bride.e.
Modèle
LEY25LEY32
M5 x 0.8M6 x 1.0
3.05.2
Vis
6.58.8
Couple deserrage max. [N·m]
Prof. de vismax. [mm]
Modèle
LEY25LEY32
M5 x 0.8M6 x 1.0
3.05.2
Vis
810
Couple deserrage maxi (N·m)
Prof.de vissagemax. (mm)
Montage
Précaution
Contrôle quotidien avant mise en fonctionnementInspection tous les 6 mois/250 km/5 millions de cycles∗
��
Contrôle visuel—�
Contrôle de courroieFréquence
∗ Choisissez en fonction de ce qui se produit le plus rapidement.
Coupleur
Coupleur
Raccord d'extrémitéProf. de vis
Écrou de tige
1.
Cela évite une réaction anormale du détecteur, un espace dans le guide interne et une augmentation de la résistance au frottement, etc.
2.
Un serrage supérieur à la plage indiquée peut entraîner un dysfonctionnement, tandis qu'un serrage insuffisant peut déplacer la position de montage.
Modèle
LEY25LEY32
M8 x 1.25M8 x 1.25
12.512.5
Vis
1313
1722
Couple deserrage max. [N·m]
Prof. de vismax. [mm]
Cote sur plats ducoupleur [mm]
Modèle
LEY25LEY32
M14 x 1.5M14 x 1.5
65.065.0
Filetage
20.520.5
1722
Couple deserrage max. [N·m]
Profondeur effectivedu filetage [mm]
Cote sur plats ducoupleur [mm]
Modèle
LEY25LEY32
8 min.8 min.
Prof. de vissage dela fixation située
à l'extrémité [mm]88
Longueur [mm]2222
Cotes sur plats [mm]Écrou de tige
∗ Les écrous de tige sont inclus.
∗ Exclut la série LEY�D
Modèle Position de montage Planéité
LEY� 0.1 mmmax.
Corps/base du corps
3.
Un parallèlisme incorrect de la pièce montée sur le corps, la base et les autres parties peut augmenter la résistance au glissement.
Série LEY
Ser
vom
oteu
r A
CPr
écau
tions
spé
cifiq
ues
au p
rodu
itS
élec
tion
du m
odèl
eS
ervo
mot
eur (
24 V
DC
)/Mot
eur p
as-à
-pas
(Ser
vo/2
4 V
DC
)
70
71
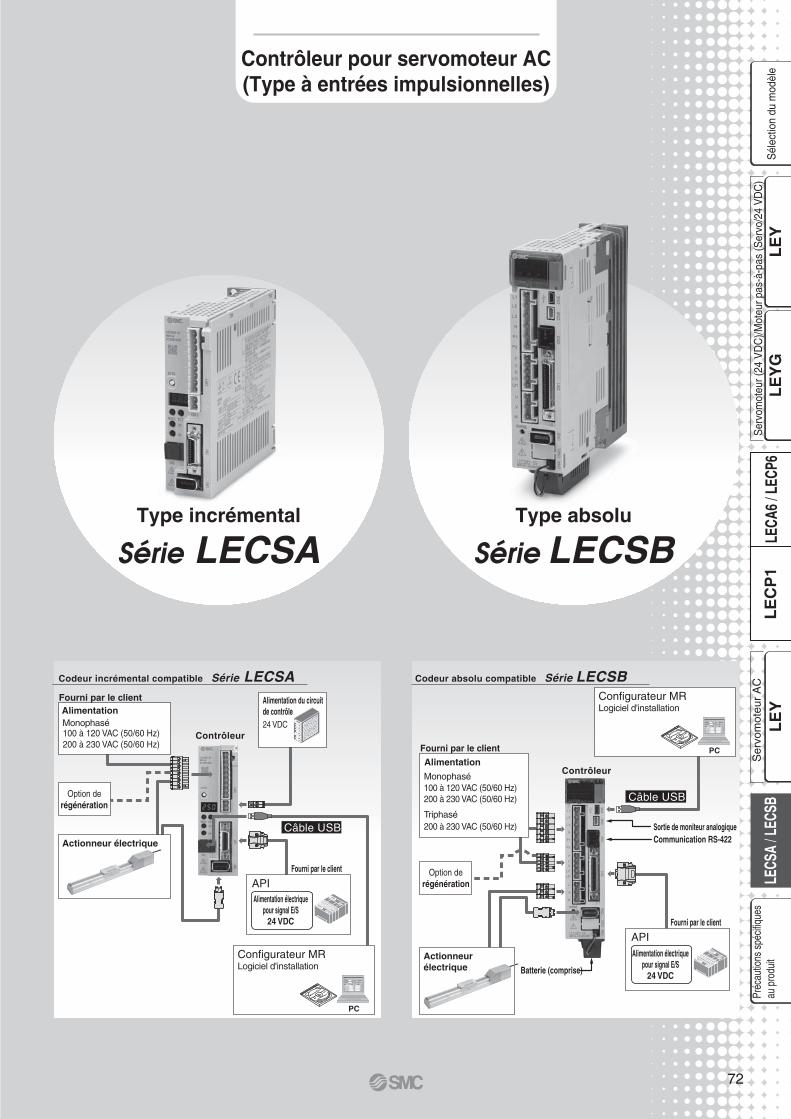
Codeur incrémental compatible Série LECSA
Contrôleur
Contrôleur
Codeur absolu compatible Série LECSB
API
Actionneur électrique
AlimentationMonophasé100 à 120 VAC (50/60 Hz)200 à 230 VAC (50/60 Hz)
Fourni par le client
Sortie de moniteur analogiqueCommunication RS-422
Batterie (comprise)
PC
Configurateur MRLogiciel d'installation
Fourni par le client
APIFourni par le client
Actionneurélectrique
Alimentation
Monophasé100 à 120 VAC (50/60 Hz)200 à 230 VAC (50/60 Hz)
Triphasé200 à 230 VAC (50/60 Hz)
Fourni par le client
Alimentation du circuitde contrôle24 VDC
Option derégénération
Option derégénération
Câble USB
Câble USB
PC
Configurateur MRLogiciel d'installation
Alimentation électriquepour signal E/S
24 VDC
Alimentation électriquepour signal E/S
24 VDC
Série LECSA Série LECSB
Contrôleur pour servomoteur AC(Type à entrées impulsionnelles)
Type absoluType incrémental
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
72
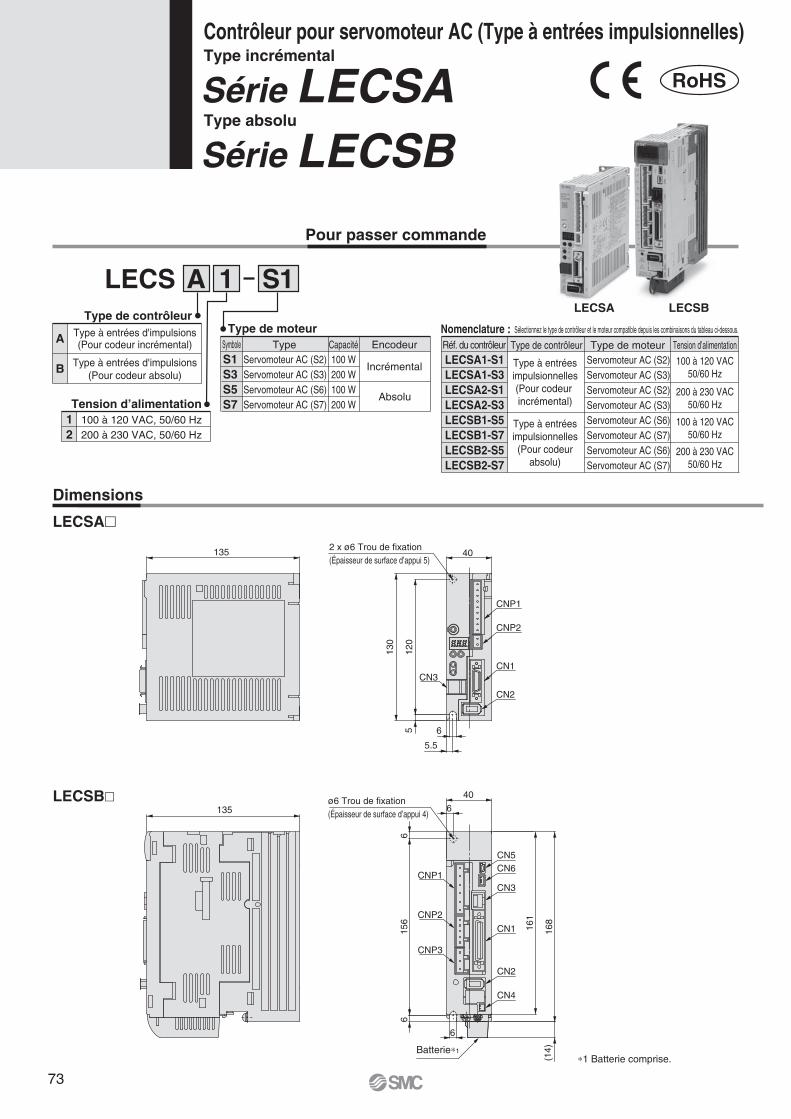
Pour passer commande
Série LECSBType absoluSérie LECSAType incrémentalContrôleur pour servomoteur AC (Type à entrées impulsionnelles)
Dimensions
LECSA�
LECSB�
LECS 1A S1Type de contrôleur
Type de moteur
Tension d’alimentation
S1S3S5S7
TypeServomoteur AC (S2)Servomoteur AC (S3)Servomoteur AC (S6)Servomoteur AC (S7)
Capacité100 W200 W100 W200 W
Encodeur
Incrémental
Absolu
SymboleSélectionnez le type de contrôleur et le moteur compatible depuis les combinaisons du tableau ci-dessous.Nomenclature :
LECSA1-S1LECSA1-S3LECSA2-S1LECSA2-S3LECSB1-S5LECSB1-S7LECSB2-S5LECSB2-S7
Type de contrôleur Type de moteur
Type à entréesimpulsionnelles(Pour codeur incrémental)
Type à entréesimpulsionnelles(Pour codeur
absolu)
Servomoteur AC (S2)Servomoteur AC (S3)Servomoteur AC (S2)Servomoteur AC (S3)Servomoteur AC (S6)Servomoteur AC (S7)Servomoteur AC (S6)Servomoteur AC (S7)
Tension d’alimentation
100 à 120 VAC50/60 Hz
200 à 230 VAC50/60 Hz
100 à 120 VAC50/60 Hz
200 à 230 VAC50/60 Hz
Réf. du contrôleurA
B Type à entrées d'impulsions(Pour codeur absolu)
Type à entrées d'impulsions(Pour codeur incrémental)
12
100 à 120 VAC, 50/60 Hz200 à 230 VAC, 50/60 Hz
6
5.5
5
130
120
40135 2 x ø6 Trou de fixation(Épaisseur de surface d’appui 5)
∗1 Batterie comprise.
ø6 Trou de fixation(Épaisseur de surface d’appui 4)
CN3
CNP3
CNP2
CNP1
CN2
CN1
CN3
Batterie∗1
CN1
CN2
CN4
CN6CN5
CNP2
CNP1
(14)
156
66
6
161
168
40
135
LECSA LECSB
6
RoHS
73
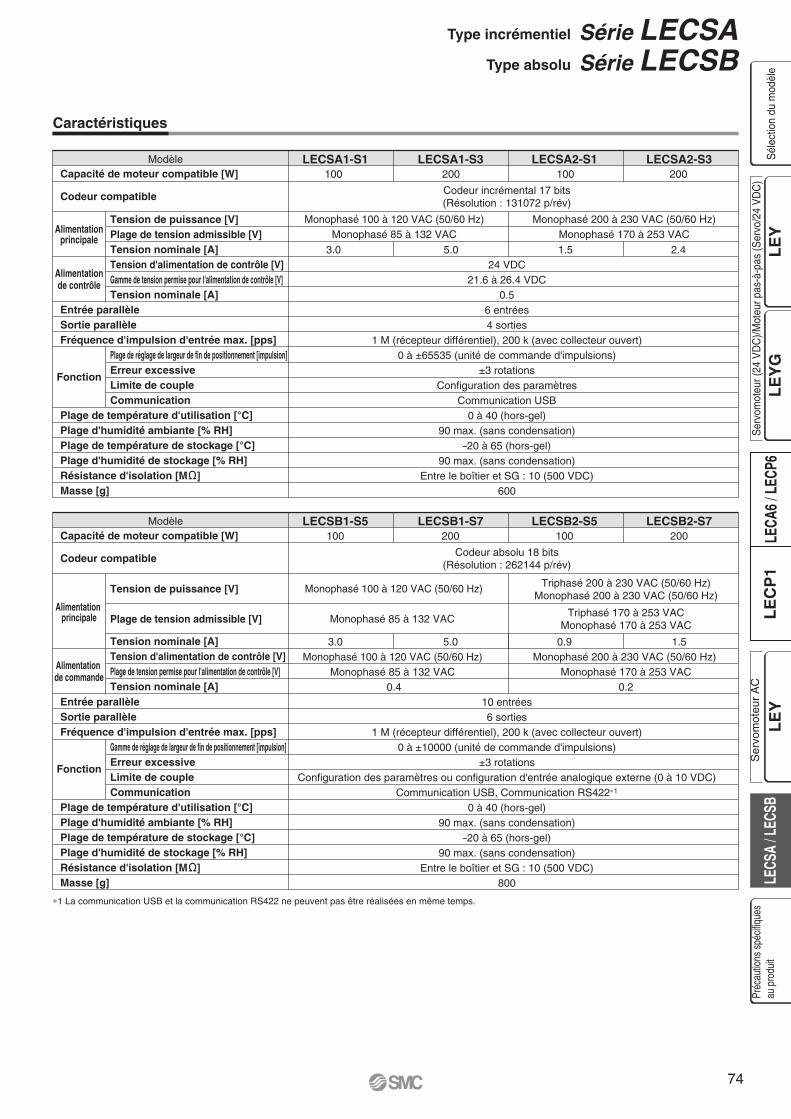
ModèleCapacité de moteur compatible [W]
Codeur compatible
Tension de puissance [V]Plage de tension admissible [V]Tension nominale [A]Tension d'alimentation de contrôle [V]Gamme de tension permise pour l'alimentation de contrôle [V]Tension nominale [A]
Plage de réglage de largeur de fin de positionnement [impulsion]Erreur excessiveLimite de coupleCommunication
Entrée parallèleSortie parallèleFréquence d'impulsion d'entrée max. [pps]
Plage de température d'utilisation [°C]Plage d'humidité ambiante [% RH]Plage de température de stockage [°C]Plage d'humidité de stockage [% RH]Résistance d'isolation [M ]Masse [g]
Alimentationprincipale
Fonction
Alimentationde contrôle
LECSA1-S1100
3.0
LECSA1-S3200
5.0
Monophasé 100 à 120 VAC (50/60 Hz)Monophasé 85 à 132 VAC
LECSA2-S1100
1.524 VDC
21.6 à 26.4 VDC0.5
6 entrées4 sorties
1 M (récepteur différentiel), 200 k (avec collecteur ouvert)0 à ±65535 (unité de commande d'impulsions)
±3 rotationsConfiguration des paramètres
Communication USB0 à 40 (hors-gel)
90 max. (sans condensation)–20 à 65 (hors-gel)
90 max. (sans condensation)Entre le boîtier et SG : 10 (500 VDC)
600
LECSA2-S3200
2.4
Monophasé 200 à 230 VAC (50/60 Hz)Monophasé 170 à 253 VAC
Codeur incrémental 17 bits(Résolution : 131072 p/rév)
ModèleCapacité de moteur compatible [W]
Codeur compatible
Tension de puissance [V]
Plage de tension admissible [V]
Tension nominale [A]Tension d'alimentation de contrôle [V]Plage de tension permise pour l'alimentation de contrôle [V]Tension nominale [A]
Gamme de réglage de largeur de fin de positionnement [impulsion]Erreur excessiveLimite de coupleCommunication
Entrée parallèleSortie parallèleFréquence d'impulsion d'entrée max. [pps]
Plage de température d'utilisation [°C]Plage d'humidité ambiante [% RH]Plage de température de stockage [°C]Plage d'humidité de stockage [% RH]Résistance d'isolation [M ]Masse [g]
Alimentation principale
Fonction
Alimentation de commande
LECSB1-S5100
3.0
LECSB1-S7200
5.0
Monophasé 100 à 120 VAC (50/60 Hz)
Monophasé 85 à 132 VAC
LECSB2-S5100
0.9
10 entrées6 sorties
1 M (récepteur différentiel), 200 k (avec collecteur ouvert)0 à ±10000 (unité de commande d'impulsions)
±3 rotationsConfiguration des paramètres ou configuration d'entrée analogique externe (0 à 10 VDC)
Communication USB, Communication RS422∗1
0 à 40 (hors-gel)90 max. (sans condensation)
–20 à 65 (hors-gel)90 max. (sans condensation)
Entre le boîtier et SG : 10 (500 VDC)800
Monophasé 100 à 120 VAC (50/60 Hz) Monophasé 85 à 132 VAC
0.4
Monophasé 200 à 230 VAC (50/60 Hz) Monophasé 170 à 253 VAC
0.2
LECSB2-S7200
1.5
Triphasé 200 à 230 VAC (50/60 Hz)Monophasé 200 à 230 VAC (50/60 Hz)
Triphasé 170 à 253 VACMonophasé 170 à 253 VAC
Codeur absolu 18 bits(Résolution : 262144 p/rév)
∗1 La communication USB et la communication RS422 ne peuvent pas être réalisées en même temps.
Caractéristiques
Type incrémentiel Série LECSAType absolu Série LECSB
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
74
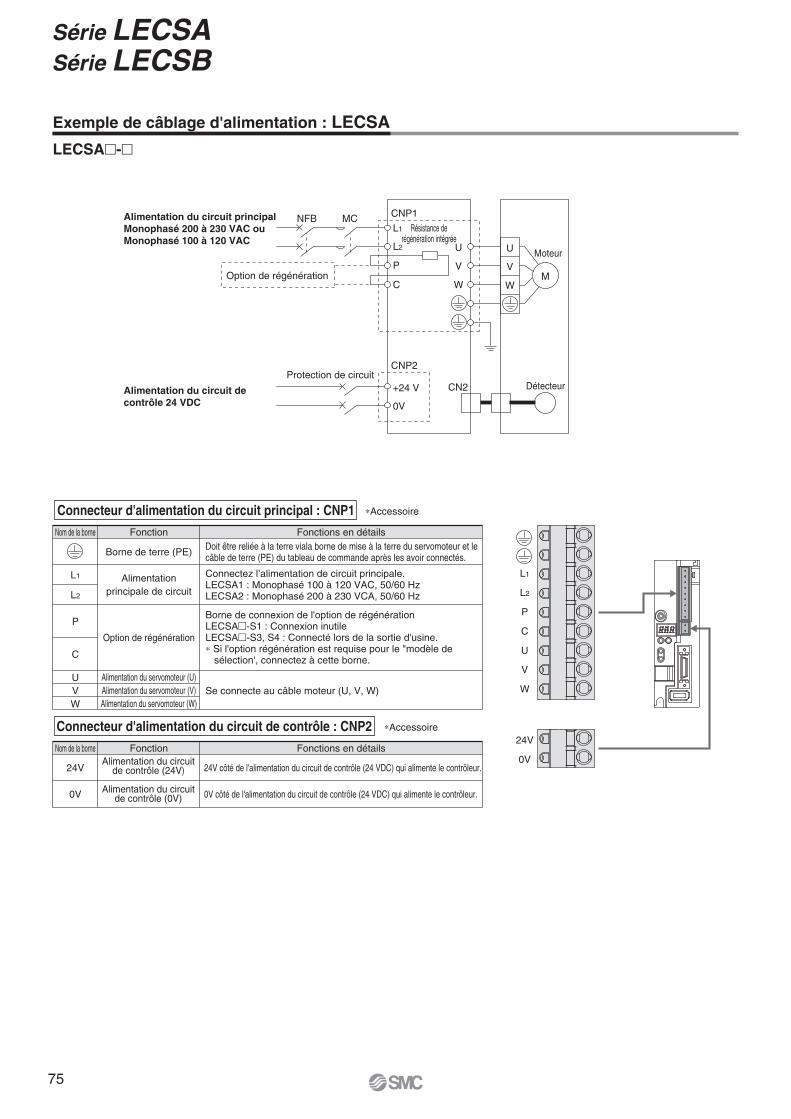
Exemple de câblage d'alimentation : LECSA
LECSA�-�
L1
L2
P
C
U
V
W
24V
0V
Alimentation du circuit principalMonophasé 200 à 230 VAC ouMonophasé 100 à 120 VAC
Alimentation du circuit decontrôle 24 VDC
L1
CNP1NFB MCRésistance de
régénération intégrée
Option de régénération
CN2
L2
P
U
V
W
U MoteurV
WM
C
+24 V
CNP2
0V
DétecteurProtection de circuit
Nom de la borne Fonction Fonctions en détails
L1
L2
P
C
UVW
Alimentationprincipale de circuit
Option de régénération
Alimentation du servomoteur (U)Alimentation du servomoteur (V)Alimentation du servomoteur (W)
Borne de terre (PE)
Connectez l’alimentation de circuit principale.LECSA1 : Monophasé 100 à 120 VAC, 50/60 HzLECSA2 : Monophasé 200 à 230 VCA, 50/60 Hz
Borne de connexion de l'option de régénérationLECSA�-S1 : Connexion inutileLECSA�-S3, S4 : Connecté lors de la sortie d'usine.∗ Si l'option régénération est requise pour le "modèle de sélection', connectez à cette borne.
Se connecte au câble moteur (U, V, W)
Doit être reliée à la terre viala borne de mise à la terre du servomoteur et lecâble de terre (PE) du tableau de commande après les avoir connectés.
Nom de la borne Fonction Fonctions en détails
24V
0V
Alimentation du circuitde contrôle (24V)
Alimentation du circuitde contrôle (0V)
24V côté de l'alimentation du circuit de contrôle (24 VDC) qui alimente le contrôleur.
0V côté de l'alimentation du circuit de contrôle (24 VDC) qui alimente le contrôleur.
Connecteur d'alimentation du circuit principal : CNP1 ∗Accessoire
Connecteur d'alimentation du circuit de contrôle : CNP2 ∗Accessoire
Série LECSASérie LECSB
75
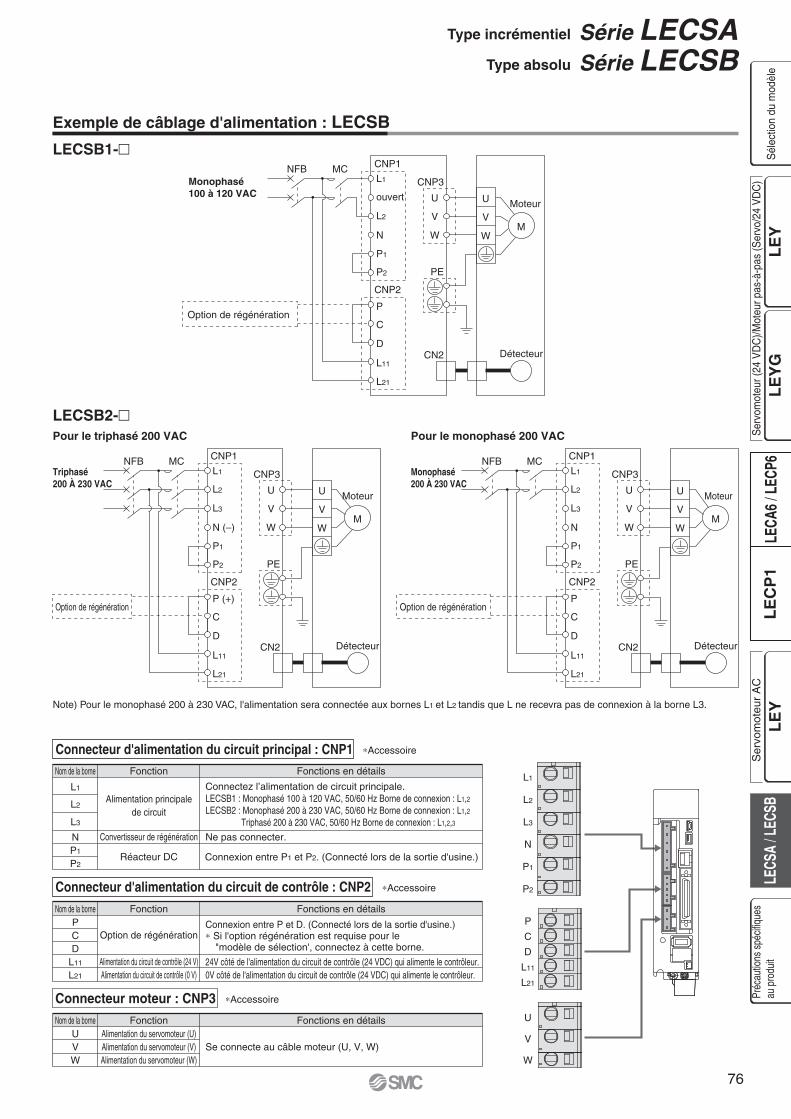
L1
L2
L3
N
P1
P2
P
C
D
L11
L21
Exemple de câblage d'alimentation : LECSB
LECSB1-�
U
V
W
LECSB2-�Pour le triphasé 200 VAC
Triphasé200 À 230 VAC
L1
CNP1NFB MCCNP3
PE
CN2
L2
P1
P2
L3
U
V
W
U MoteurV
WM
N (–)
P (+)
CNP2
C
L21
D
L11
Pour le monophasé 200 VAC
Note) Pour le monophasé 200 à 230 VAC, l'alimentation sera connectée aux bornes L1 et L2 tandis que L ne recevra pas de connexion à la borne L3.
Détecteur
Monophasé200 À 230 VAC
L1
CNP1NFB MCCNP3
PE
CN2
L2
P1
P2
L3
U
V
W
U MoteurV
WM
N
P
CNP2
C
L21
D
L11Détecteur
Monophasé100 à 120 VAC
L1
CNP1NFB MCCNP3
PE
CN2
ouvert
P1
P2
L2
U
V
W
U MoteurV
WM
N
P
CNP2
C
L21
D
L11Détecteur
Option de régénération
Option de régénération Option de régénération
Connecteur d'alimentation du circuit principal : CNP1Nom de la borne Fonction Fonctions en détails
L1
L2
L3
NP1
P2
PCD
L11
L21
Alimentation principalede circuit
Convertisseur de régénération
Réacteur DC
Option de régénération
Alimentation du circuit de contrôle (24 V)Alimentation du circuit de contrôle (0 V)
Connectez l’alimentation de circuit principale.LECSB1 : Monophasé 100 à 120 VAC, 50/60 Hz Borne de connexion : L1,2LECSB2 : Monophasé 200 à 230 VAC, 50/60 Hz Borne de connexion : L1,2
Triphasé 200 à 230 VAC, 50/60 Hz Borne de connexion : L1,2,3
Ne pas connecter.
Connexion entre P1 et P2. (Connecté lors de la sortie d'usine.)
Connexion entre P et D. (Connecté lors de la sortie d'usine.)∗ Si l'option régénération est requise pour le "modèle de sélection', connectez à cette borne.
Nom de la borne Fonction Fonctions en détails
∗Accessoire
Connecteur d'alimentation du circuit de contrôle : CNP2 ∗Accessoire
24V côté de l'alimentation du circuit de contrôle (24 VDC) qui alimente le contrôleur.0V côté de l'alimentation du circuit de contrôle (24 VDC) qui alimente le contrôleur.
UVW
Alimentation du servomoteur (U)Alimentation du servomoteur (V)Alimentation du servomoteur (W)
Se connecte au câble moteur (U, V, W)
Nom de la borne Fonction Fonctions en détails
Connecteur moteur : CNP3 ∗Accessoire
Type incrémentiel Série LECSAType absolu Série LECSB
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
76
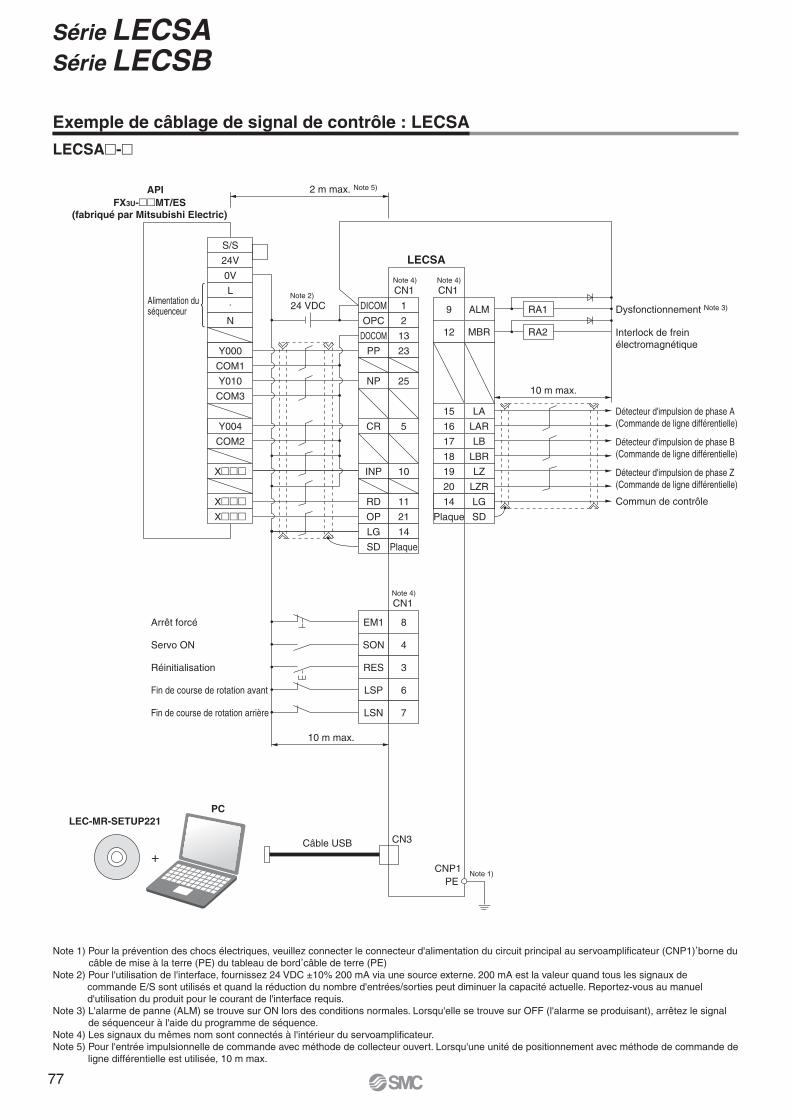
Exemple de câblage de signal de contrôle : LECSA
LECSA�-�
Note 1) Pour la prévention des chocs électriques, veuillez connecter le connecteur d'alimentation du circuit principal au servoamplificateur (CNP1),borne du
câble de mise à la terre (PE) du tableau de bord,câble de terre (PE)
Note 2) Pour l'utilisation de l'interface, fournissez 24 VDC ±10% 200 mA via une source externe. 200 mA est la valeur quand tous les signaux de commande E/S sont utilisés et quand la réduction du nombre d'entrées/sorties peut diminuer la capacité actuelle. Reportez-vous au manuel d'utilisation du produit pour le courant de l'interface requis.
Note 3) L'alarme de panne (ALM) se trouve sur ON lors des conditions normales. Lorsqu'elle se trouve sur OFF (l'alarme se produisant), arrêtez le signal de séquenceur à l'aide du programme de séquence.
Note 4) Les signaux du mêmes nom sont connectés à l'intérieur du servoamplificateur.Note 5) Pour l'entrée impulsionnelle de commande avec méthode de collecteur ouvert. Lorsqu'une unité de positionnement avec méthode de commande de
ligne différentielle est utilisée, 10 m max.
CN3
CNP1
Alimentation du séquenceur
PE
S/S
24V
0V
L.
N
S/SY000
COM1
Y010
COM3
COM2
X���
X���X���
Y004
LECSA
DICOM
OPC
DOCOM
PP
NP
CR
RD
LG
SD
INP
OP
Câble USB
10 m max.
2 m max. Note 5)
10 m max.
PCLEC-MR-SETUP221
Note 1)
1
2
13
23
25
5
11
14
Plaque
10
21
9
12
15
Plaque
20
ALM
EM1Arrêt forcé
Servo ON
Réinitialisation
Fin de course de rotation avant
Fin de course de rotation arrière
8
SON 4
RES 3
LSP 6
LSN 7
MBR
LA
16 LAR
17 LB
18 LBR
19 LZ
SD
LZR
14 LG
Dysfonctionnement Note 3)
Interlock de freinélectromagnétique
Détecteur d'impulsion de phase A(Commande de ligne différentielle)
Détecteur d'impulsion de phase B(Commande de ligne différentielle)
Détecteur d'impulsion de phase Z(Commande de ligne différentielle)
Commun de contrôle
RA1
RA2
+
FX3U-��MT/ES(fabriqué par Mitsubishi Electric)
API
24 VDCNote 2)
CN1Note 4) Note 4)
CN1
Note 4)
CN1
Série LECSASérie LECSB
77
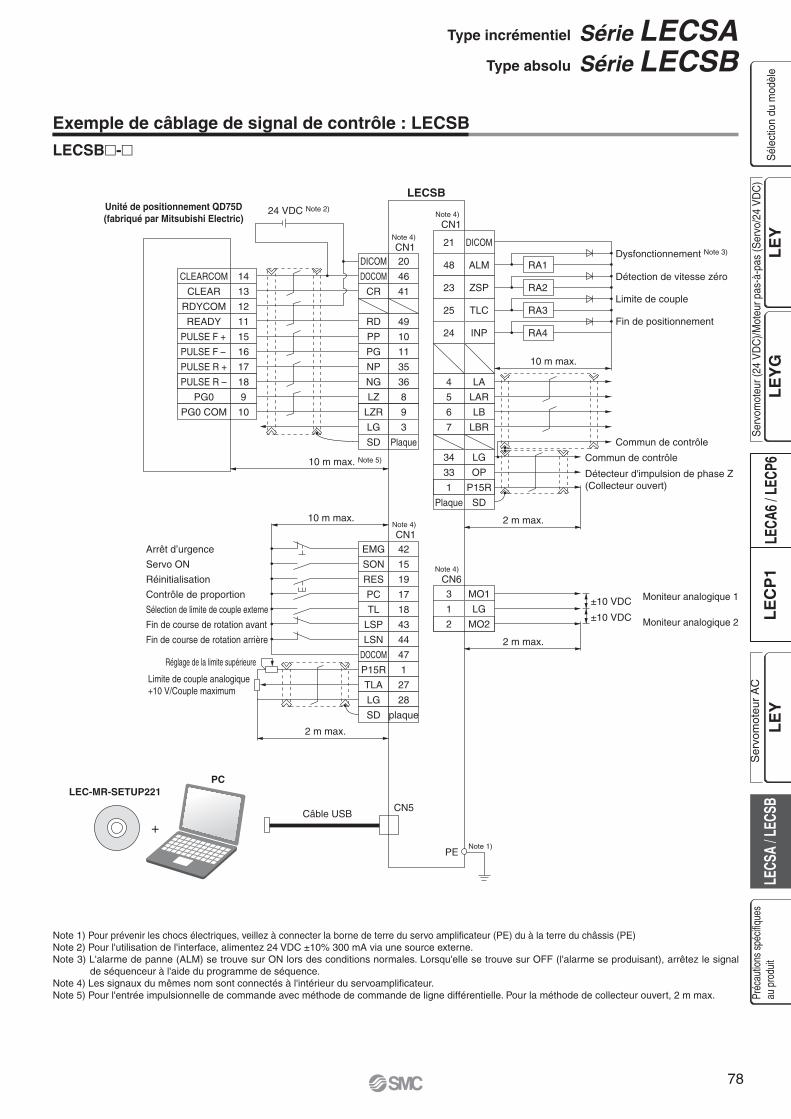
Exemple de câblage de signal de contrôle : LECSB
LECSB�-�
Note 1) Pour prévenir les chocs électriques, veillez à connecter la borne de terre du servo amplificateur (PE) du à la terre du châssis (PE)Note 2) Pour l'utilisation de l'interface, alimentez 24 VDC ±10% 300 mA via une source externe.Note 3) L'alarme de panne (ALM) se trouve sur ON lors des conditions normales. Lorsqu'elle se trouve sur OFF (l'alarme se produisant), arrêtez le signal
de séquenceur à l'aide du programme de séquence.Note 4) Les signaux du mêmes nom sont connectés à l'intérieur du servoamplificateur.Note 5) Pour l'entrée impulsionnelle de commande avec méthode de commande de ligne différentielle. Pour la méthode de collecteur ouvert, 2 m max.
Unité de positionnement QD75D(fabriqué par Mitsubishi Electric)
CN5
PE
CLEARCOM
CLEAR
RDYCOM
READY
PULSE F +
PULSE F –
S/S
PG0
PG0 COM
LECSB
24 VDC Note 2)
DICOM
DOCOM
CR
PP
NG
LG
LZ
SD
Câble USB
2 m max.
10 m max.
10 m max. Note 5)
2 m max.
10 m max.
Note 1)
20
46
41
10
PG 11
NP 35
36
3
LZR 9
8
Plaque
21
48
Plaque
33
DICOM
EMGArrêt d’urgence
Servo ON
Réinitialisation
Contrôle de proportion
Sélection de limite de couple externe
Fin de course de rotation avant
Fin de course de rotation arrière
Limite de couple analogique+10 V/Couple maximum
Réglage de la limite supérieure
42
SON 15
RES 19
PC 17
TL 18
LSP 43
LSN 44
DOCOM 47
P15R 1
TLA 27
LG 28
SD plaque
ALM
23 ZSP
25 TLC
24 INP
4 LA
5 LAR
6 LB
7 LBR
SD
OP
34 LG
1 P15R
Dysfonctionnement Note 3)
Détection de vitesse zéro
Limite de couple
Fin de positionnement
Détecteur d'impulsion de phase Z(Collecteur ouvert)
Commun de contrôle
Commun de contrôle
RA1
RA2
RA3
2 m max.
1 LG
3 MO1
2 MO2 Moniteur analogique 2
Moniteur analogique 1
±10 VDC
±10 VDC
RA4
PULSE R +
PULSE R –
14
13
12
11
15
16
10
9
17
18
RD 49
+
PCLEC-MR-SETUP221
CN1Note 4)
CN1Note 4)
CN1Note 4)
CN6Note 4)
Type incrémentiel Série LECSAType absolu Série LECSB
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
78
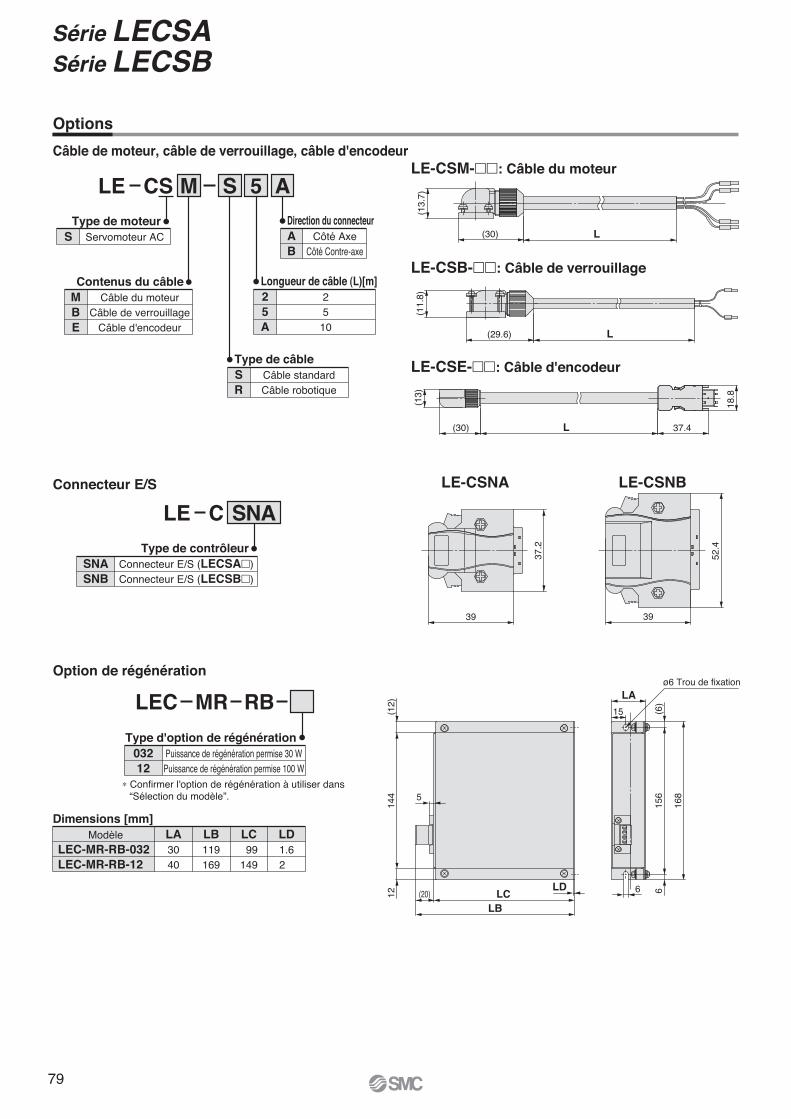
Options
Câble de moteur, câble de verrouillage, câble d'encodeur
Connecteur E/S
LE-CSM-��: Câble du moteur
LE-CSB-��: Câble de verrouillage
LE-CSE-��: Câble d'encodeur
LE-CSNA
Type de câble
Contenus du câbleMBE
Câble du moteurCâble de verrouillage
Câble d'encodeur
Type de moteurS Servomoteur AC
SR
Câble standardCâble robotique
Direction du connecteurAB
Côté AxeCôté Contre-axe
Longueur de câble (L)[m]25A
2510
SNASNB
Connecteur E/S (LECSA�)Connecteur E/S (LECSB�)
Type de contrôleur
03212
Puissance de régénération permise 30 WPuissance de régénération permise 100 W
Modèle
Type d'option de régénération
(13.
7)
(30) L
(29.6)
(11.
8)
L
18.8
37.4(1
3)(30) L
15 (6)
(12)
144
12
156
168
66
5
LA
(20)
ø6 Trou de fixation
LE-CSNB
39
52.4
LE CS M S 5 A
Option de régénération
LEC MR RB
LE C SNA
LEC-MR-RB-032LEC-MR-RB-12
LA3040
LB119169
LC 99149
LD1.62
Dimensions [mm]
∗ Confirmer l'option de régénération à utiliser dans “Sélection du modèle”.
LDLC
LB
39
37.2
Série LECSASérie LECSB
79
Options
Câble USB (3 m) pour le logiciel de configuration
Batterie
LEC MR J3USB
LEC MR J3BAT
Ordinateur compatible
Matériel requis
Lorsque vous utilisez Configurator MR (logiciel de configuration), utilisez un ordinateur compatible IBM PC/AT qui satisfasse aux conditions d'utilisation suivantes.
Configurator MR (logiciel de configuration, version japonaise)
LEC MR SETUP221∗ MRZJW3-SETUP221 fabriqué par Mitsubishi Electric.
Reportez-vous au site Web de Mitsubishi Electric pour en savoir plus sur le milieu d'utilisation et les mises à jour.
Note 1) Windows, Windows Vista, Windows 7 sont des marques déposées par Microsoft Corporation aux États-Unis et dans d’autres pays.Note 2) Ce logiciel peut ne pas fonctionner sur des systèmes non cités.Note 3) Non compatible avec Windows 64 bits® XP et Windows Vista 64 bits®.
Équipement
Note 1)Note 2)Note 3)
PCEspace HDdisponible
Système d'exploitation
Interface decommunication
Affichage
Configurator MR (logiciel de configuration)LEC-MR-SETUP221
130 MB min.
Windows®98, Windows®Me, Windows®2000 Professionnel,Windows®XP Édition familiale ou professionnelle,
Windows Vista® familiale basique/premium,Commerciale/Ultime/EnterpriseWindows®7 Débutant/Familiale
Premium/Professionnel/Ultime/EnterpriseIBM PC/AT compatible PC (version japonaise)
Résolution 1024 x 768 et autresDoit pouvoir afficher une couleur haute définition (16 bits).
Standard
Utiliser le port USB
Standard
Standard
Standard
LEC-MR-J3USB
Clavier
Souris
Imprimante
Câble de communication
Type incrémentiel Série LECSAType absolu Série LECSB
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Préc
autio
ns s
pécif
ique
sau
pro
duit
Sél
ectio
n du
mod
èle
Ser
vom
oteu
r A
C
80
Conception et sélection
Attention1. Vérifiez que vous utilisez la tension préconisée.
Si ce n'est pas la cas, un dysfonctionnement ou une panne peuvent survenir. Si la tension appliquée est inférieure à la tension préconisée, il est possible que la charge reste immobile suite à une chute de tension interne dans le contrôleur. Verifiez la tension avant l'utilisation.
2. Utilisez le produit dans les plages d’utilisation spécifiéespour éviter tout risque d'incendie, de dysfonctionnement ou de panne de l'actionneur. Verifiez les caractéristiques avant l'utilisation.
3. Installez un circuit d'arrêt d'urgence à l'extérieur du boîtier de protection.Installez un circuit d'arrêt d'urgence à l'extérieur du boîtier de protection pour qu'il arrête immédiatement le système et coupe l'alimentation.
4. Installez un système de secours préalable, en équipant les appareils d'une structure multi-couches ou d'un système de sûreté intégré pour éviter des dommages dus à une panne ou à un dysfonctionnement du contrôleur et des appareils périphériques.
5. Si le personnel est en danger à cause d'une produc-tion de chaleur anormale, d'une fumée ou d'un début d'incendie, etc. du contrôleur et des appareils périphériques, coupez immédiatement le courant qui alimente le produit et le système.
Manipulation
Attention1. Ne touchez pas l'intérieur du contrôleur et des appa-
reils périphériques.Vous pourriez vous électrocuter ou endommager le contrôleur.
2. N'utilisez pas le produit avec les mains mouillées.Vous pourriez vous électrocuter.
3. N'utilisez pas le produit s'il est endommagé ou s'il manque des composants.Vous pourriez vous électrocuter, provoquer un incendie ou vous blesser dans le cas contraire.
4. Utilisez uniquement la combinaison recommandée entre l'actionneur électrique et le contrôleur.Dans le cas contraire, vous pourriez endommager l'un comme l'autre.
5. Faites attention à ne pas être entraîné ou frappé par la pièce lorsque l'actionneur est en mouvement.Vous pourriez vous blesser.
6. Ne branchez pas l'alimentation et n'allumez pas l'appareil sans avoir préalablement vérifié que la zone de déplacement de la pièce est en sécurité.Le mouvement de la pièce peut entraîner un accident.
7. Ne touchez pas l'appareil quand il est en service, ni même juste après son utilisation car il peut être très chaud.La température élevée pourrait vous brûler.
8. Dans le cadre d'une installation, d'un raccordement ou d'un entretien, vérifiez la tension à l'aide d'un testeur pendant plus de cinq minutes après la mise hors tension de l'appareil.Vous pourriez vous électrocuter, provoquer un incendie ou vous blesser dans le cas contraire.
Manipulation
Attention9. L'électricité statique peut provoquer des dysfonc-
tionnements ou endommager le contrôleur. Ne touchez pas le contrôleur quand il est sous tension.Si vous devez toucher le contrôleur lors d'une opération de maintenance, prenez les mesures nécessaires pour éliminer l'électricité statique.
10. N’utilisez pas le produit dans un milieu où de la pous-sière, des produits chimiques ou de l'huile sont conte-nus dans l'air.Ceci peut provoquer un défaut ou un dysfonctionnement.
11. N'utilisez pas le produit dans un milieu exposé à des champs magnétiques.Ceci peut provoquer un défaut ou un dysfonctionnement.
12. N'installez pas le produit dans un environnement soumis à des gaz inflammables, explosifs et corrosifs.Cela pourrait provoquer un incendie, une explosion et de la corrosion.
13. Ne soumettez pas l'appareil à une chaleur irradiante provenant d'une forte source de chaleur (ex.: chaudière, rayons directs du soleil, etc.).Le contrôleur ou ses périphériques pourraient tomber en panne.
14. N'utilisez pas le produit dans un milieu sujet à des cycles thermiques.Le contrôleur ou ses périphériques pourraient tomber en panne.
15. N'utilisez pas le produit dans un milieu exposé à des surtensions.Si le produit est utilisé à proximité d'unités génératrices de surten-sions (ex.: élévateurs, fours à induction à haute fréquence, moteurs, etc.), son circuit interne peut être détérioré ou endommagé. Évitez les sources de surtension et les croisements de lignes.
16. N'installez pas le produit dans un milieu exposé à des vibrations et des impacts.Ceci peut provoquer un défaut ou un dysfonctionnement.
17. Lorsqu'une charge génératrice de surtensions, telle qu'un relais ou un électrodistributeur, est entraînée directement, utilisez un appareil avec un dispositif de protection intégré contre les surtensions.
Installation
Attention1. Installez le contrôleur et ses périphériques sur un
équipement ignifugé.Une installation proche d'un matériau inflammable (ou directement dessus) peut provoquer un incendie.
2. N'installez pas l'appareil dans un milieu exposé à des vibrations et des impacts.Ceci peut provoquer un défaut ou un dysfonctionnement.
3. Le contrôleur doit être fixé verticalement sur une paroi verticale.Ne couvrez pas l'ouverture d'échappement du contrôleur.
4. Installez le contrôleur et ses périphériques sur une surface plane.Si la surface de montage est déformée ou irrégulière, une force excessive peut être appliquée sur le boîtier et poser des problèmes.
Série LECSA/LECSBPrécautions spécifiques au produit 1Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour connaître les consignes de sécurité, et le manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
81
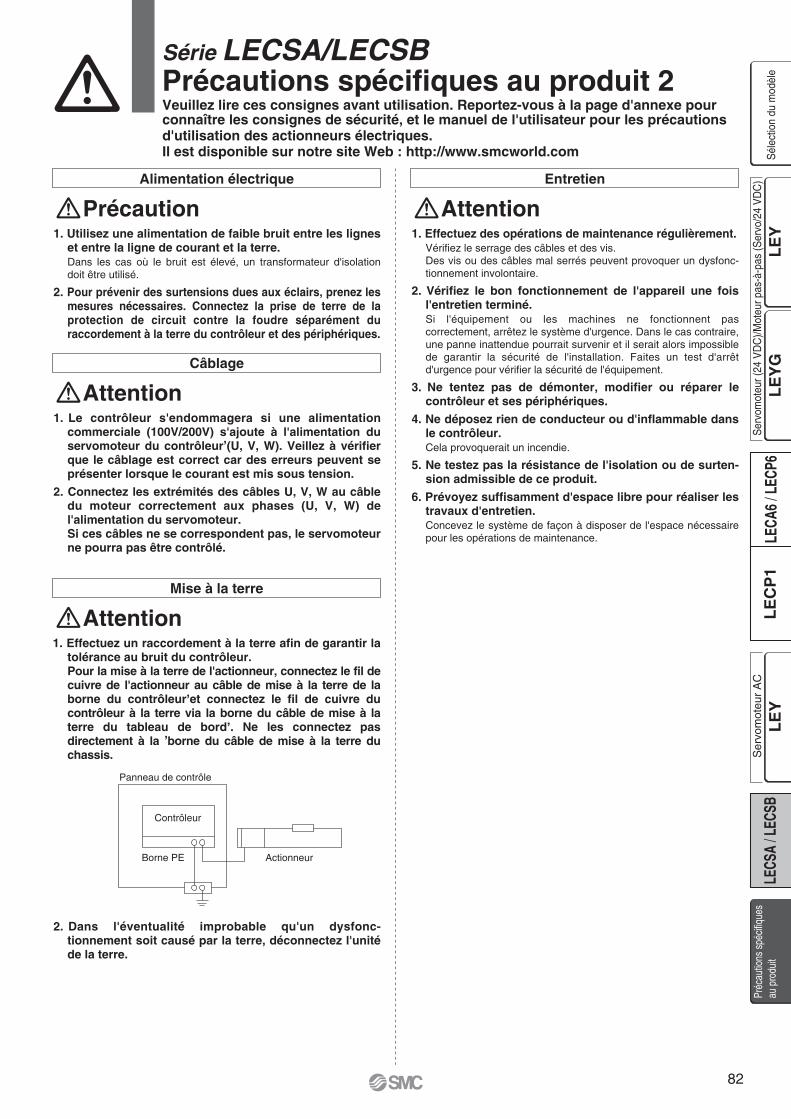
Entretien
Attention1. Effectuez des opérations de maintenance régulièrement.
Vérifiez le serrage des câbles et des vis.Des vis ou des câbles mal serrés peuvent provoquer un dysfonc-tionnement involontaire.
2. Vérifiez le bon fonctionnement de l'appareil une fois l'entretien terminé.Si l'équipement ou les machines ne fonctionnent pas correctement, arrêtez le système d'urgence. Dans le cas contraire, une panne inattendue pourrait survenir et il serait alors impossible de garantir la sécurité de l'installation. Faites un test d'arrêt d'urgence pour vérifier la sécurité de l'équipement.
3. Ne tentez pas de démonter, modifier ou réparer le contrôleur et ses périphériques.
4. Ne déposez rien de conducteur ou d'inflammable dans le contrôleur.Cela provoquerait un incendie.
5. Ne testez pas la résistance de l'isolation ou de surten-sion admissible de ce produit.
6. Prévoyez suffisamment d'espace libre pour réaliser les travaux d'entretien.Concevez le système de façon à disposer de l'espace nécessaire pour les opérations de maintenance.
Alimentation électrique
Précaution1. Utilisez une alimentation de faible bruit entre les lignes
et entre la ligne de courant et la terre.Dans les cas où le bruit est élevé, un transformateur d'isolation doit être utilisé.
2. Pour prévenir des surtensions dues aux éclairs, prenez les mesures nécessaires. Connectez la prise de terre de la protection de circuit contre la foudre séparément du raccordement à la terre du contrôleur et des périphériques.
Câblage
Attention1. Le contrôleur s'endommagera si une alimentation
commerciale (100V/200V) s'ajoute à l'alimentation du servomoteur du contrôleur
,(U, V, W). Veillez à vérifier
que le câblage est correct car des erreurs peuvent se présenter lorsque le courant est mis sous tension.
2. Connectez les extrémités des câbles U, V, W au câble du moteur correctement aux phases (U, V, W) de l'alimentation du servomoteur.Si ces câbles ne se correspondent pas, le servomoteur ne pourra pas être contrôlé.
Mise à la terre
Attention1. Effectuez un raccordement à la terre afin de garantir la
tolérance au bruit du contrôleur.Pour la mise à la terre de l'actionneur, connectez le fil de cuivre de l'actionneur au câble de mise à la terre de la borne du contrôleur,et connectez le fil de cuivre du contrôleur à la terre via la borne du câble de mise à la terre du tableau de bord,. Ne les connectez pas directement à la
,borne du câble de mise à la terre du
chassis.
2. Dans l'éventualité improbable qu'un dysfonc-tionnement soit causé par la terre, déconnectez l'unité de la terre.
Contrôleur
Panneau de contrôle
Borne PE Actionneur
Série LECSA/LECSBPrécautions spécifiques au produit 2Veuillez lire ces consignes avant utilisation. Reportez-vous à la page d'annexe pour connaître les consignes de sécurité, et le manuel de l'utilisateur pour les précautions d'utilisation des actionneurs électriques.Il est disponible sur notre site Web : http://www.smcworld.com
Ser
vom
oteu
r (24
VD
C)/M
oteu
r pas
-à-p
as (S
ervo
/24
VD
C)
Ser
vom
oteu
r A
CS
élec
tion
du m
odèl
ePr
écau
tions
spé
cifiq
ues
au p
rodu
it
82
Lithuania +370 5 2308118 www.smclt.lt [email protected] +31 (0)205318888 www.smcpneumatics.nl [email protected] +47 67129020 www.smc-norge.no [email protected] +48 (0)222119616 www.smc.pl [email protected] +351 226166570 www.smc.eu [email protected] +40 213205111 www.smcromania.ro [email protected] +7 8127185445 www.smc-pneumatik.ru [email protected] +421 (0)413213212 www.smc.sk [email protected] +386 (0)73885412 www.smc.si [email protected] +34 902184100 www.smc.eu [email protected] +46 (0)86031200 www.smc.nu [email protected] +41 (0)523963131 www.smc.ch [email protected] +90 212 489 0 440 www.smcpnomatik.com.tr [email protected] UK +44 (0)845 121 5122 www.smcpneumatics.co.uk [email protected]
Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.SMC CORPORATION Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: 03-5207-8249 FAX: 03-5298-5362
1st printing QQ printing QQ 00 Printed in Spain
Austria +43 (0)2262622800 www.smc.at [email protected] +32 (0)33551464 www.smcpneumatics.be [email protected] +359 (0)2807670 www.smc.bg [email protected] Croatia +385 (0)13707288 www.smc.hr [email protected] Republic +420 541424611 www.smc.cz [email protected] Denmark +45 70252900 www.smcdk.com [email protected] Estonia +372 6510370 www.smcpneumatics.ee [email protected] +358 207513513 www.smc.fi [email protected] +33 (0)164761000 www.smc-france.fr [email protected] +49 (0)61034020 www.smc-pneumatik.de [email protected] +30 210 2717265 www.smchellas.gr [email protected] +36 23511390 www.smc.hu [email protected] +353 (0)14039000 www.smcpneumatics.ie [email protected] +39 0292711 www.smcitalia.it [email protected] +371 67817700 www.smclv.lv [email protected]
SMC Corporation (Europe)
1. La compatibilité du produit est sous la responsabilité de la personne qui a conçu le système et qui a défini ses caractéristiques.Etant donné que les produits mentionnés sont utilisés dans certaines conditions, c'est la personne qui a conçu le système ou qui en a déterminé les caractéristiques (après avoir fait les analyses et tests requis) qui décide de la compatibilité de ces produits avec l'installation. Les performances et la sécurité exigées par l'équipement seront de la responsabilité de la personne qui a déterminé la compatibilité du système. Cette personne devra réviser en permanence le caractère approprié de tous les éléments spécifiés en se reportant aux informations du dernier catalogue et en tenant compte de toute éventualité de défaillance de l'équipement pour la configuration d'un système.
2. Seules les personnes formées convenablement pourront intervenir sur les équipements ou machines.Le produit présenté ici peut être dangereux s'il fait l'objet d'une mauvaise manipulation. Le montage, le fonctionnement et l'entretien des machines ou de l'équipement, y compris de nos produits, ne doivent être réalisés que par des personnes formées convenablement et expérimentées.
3. Ne jamais tenter de retirer ou intervenir sur le produit ou des machines ou équipements sans s'être assuré que tous les dispositifs de sécurité ont été mis en place.1. L'inspection et l'entretien des équipements ou machines ne devront être effectués
qu'une fois que les mesures de prévention de chute et de mouvement non maîtrisé des objets manipulés ont été confirmées.
2. Si un équipement doit être déplacé, assurez-vous que toutes les mesures de sécurité indiquées ci-dessus ont été prises, que le courant a été coupé à la source et que les précautions spécifiques du produit ont été soigneusement lues et comprises.
3. Avant de redémarrer la machine, prenez des mesures de prévention pour éviter les dysfonctionnements malencontreux.
4. Contactez SMC et prenez les mesures de sécurité nécessaires si les produits doivent être utilisés dans une des conditions suivantes : 1. Conditions et plages de fonctionnement en dehors de celles données dans les
catalogues, ou utilisation du produit en extérieur ou dans un endroit où le produit est exposé aux rayons du soleil.
2. Installation en milieu nucléaire, matériel embarqué (train, navigation aérienne, véhicules, espace, navigation maritime), équipement militaire, médical, combustion et récréation, équipement en contact avec les aliments et les boissons, circuits d'arrêt d'urgence, circuits d'embrayage et de freinage dans les applications de presse, équipement de sécurité ou toute autre application qui ne correspond pas aux caractéristiques standard décrites dans le catalogue du produit.
3. Equipement pouvant avoir des effets néfastes sur l'homme, les biens matériels ou les animaux, exigeant une analyse de sécurité spécifique.
4. Lorsque les produits sont utilisés en système de vérrouillage, préparez un circuit de style double vérrouillage avec une protection mécanique afin d'eviter toute panne. Vérifiez périodiquement le bon fonctionnement des dispositifs.
Attention
Garantie limitée et clause limitative de responsabilité/clauses de conformité Le produit utilisé est soumis à la "Garantie limitée et clause limitative de responsabilité" et aux "Clauses de conformité".Veuillez les lire attentivement et les accepter avant d'utiliser le produit.
1. Ce produit est prévu pour une utilisation dans les industries de fabrication.Le produit, décrit ici, est conçu en principe pour une utilisation inoffensive dans les industries de fabrication. Si vous avez l'intention d'utiliser ce produit dans d'autres industries, veuillez consulter SMC au préalable et remplacer certaines spécifications ou échanger un contrat au besoin. Si quelque chose semble confus, veuillez contacter votre succursale commerciale la plus proche.
Précaution
Garantie limitée et clause limitative de responsabilité1. La période de garantie du produit s'étend sur un an en service ou un an et demi après livraison
du produit.∗2)
Le produit peut également tenir une durabilité spéciale, une exécution à distance ou des pièces de rechange. Veuillez demander l'avis de votre succursale commerciale la plus proche.
2. En cas de panne ou de dommage signalé pendant la période de garantie, période durant laquelle nous nous portons entièrement responsable, votre produit sera remplacé ou les pièces détachées nécessaires seront fournies. Cette limitation de garantie s'applique uniquement à notre produit, indépendamment de tout autre dommage encouru, causé par un dysfonctionnement de l'appareil.
3. Avant d'utiliser les produits SMC, veuillez lire et comprendre les termes de la garantie, ainsi que les clauses limitatives de responsabilité figurant dans le catalogue pour tous les produits particuliers.
∗2) Les ventouses sont exclues de la garantie d'un an.Une ventouse étant une pièce consommable, elle est donc garantie pendant un an à compter de sa date de livraison. Ainsi, même pendant sa période de validité, la limitation de garantie ne prend pas en charge l'usure du produit causée par l'utilisation de la ventouse ou un dysfonctionnement provenant d'une détérioration d'un caoutchouc.
Clauses de conformité1. L'utilisations des produits SMC avec l'équipement de production pour la fabrication des
armes de destruction massive (ADM) ou d'autre type d'arme est strictement interdite .
2. Les exportations des produits ou de la technologie SMC d'un pays à un autre sont déterminées par les directives de sécurité et les normes des pays impliqués dans la transaction. Avant de livrer les produits SMC à un autre pays, assurez-vous que toutes les normes locales d'exportation sont connues et respectées.
Ces consignes de sécurité ont été rédigées pour prévenir des situations dangereuses pour les personnes et/ou les équipements. Ces instructions indiquent le niveau de risque potentiel à l'aide d'étiquettes"Précaution", "Attention" ou"Danger.“ Elles sont toutes importantes pour la sécurité et doivent être appliquées, en plus des Normes Internationales (ISO/IEC)∗1), à tous les textes en vigueur à ce jour.
∗1) ISO 4414 : Fluides pneumatiques – Règles générales relatives aux systèmes. ISO 4413 : Fluides hydrauliques – Règles générales relatives aux systèmes. IEC 60204-1 : Sécurité des machines – Matériel électrique des machines. (1ère partie : recommandations générales) ISO 10218-1 : Manipulation de robots industriels - Sécurité. etc.
Précaution indique un risque potentiel de faible niveau qui, s'il est ignoré, pourrait entraîner des blessures mineures ou peu graves.
Attention indique un risque potentiel de niveau moyen qui, s'il est ignoré, pourrait entraîner la mort ou des blessures graves.
Précaution:
Attention:
Danger :Danger indique un risque potentiel de niveau fort qui, s'il est ignoré, pourrait entraîner la mort ou des blessures graves.
Consignes de sécurité
Consignes de sécurité Lisez les "Précautions d'utilisation des Produits SMC" (M-E03-3) avant toute utilisation.





























