Embed Size (px)
Citation preview

UNIVERSITÉ DE PAU ET PAYS DE L’ADOUR
COURS DE MASTER 2
Analyse mathématique desphénomènes de propagation d’ondes
HÉLÈNE BARUCQ ; JULIEN DIAZ ; SÉBASTIEN TORDEUX
Projet Magique 3D, INRIA Bordeaux Sud-Ouest
LMA, UMR CNRS 5142, Université de Pau et Pays de l’Adour
2015/2016
Table des matières
1 Le théorème de Hille-Yosida 51.1 Le théorème de Cauchy-Lipschitz-Picard . . . . . . . . . . . . . 5
1.1.1 Cas général . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Cas d’un opérateur linéaire positif . . . . . . . . . . . . . 7
1.2 Enoncé du théorème de Hille-Yosida . . . . . . . . . . . . . . . . 81.3 Unicité de la solution . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Régularisée de Yosida . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Définition et propriété de la régularisée uλ de u . . . . . . . . . . 121.6 Démonstration du théorème de Hille-Yosida dans le cas où u0 ∈
D(A2) et f ∈ C1([0,+∞[, D(A)) . . . . . . . . . . . . . . . . . 141.6.1 Passage à la limite sur uλ pour λ→ 0+ . . . . . . . . . . 14
1.7 Démonstration du théorème de Hille-Yosida dans le cas généraloù u0 ∈ D(A) et f ∈ C1([0,+∞[,H). . . . . . . . . . . . . . . . 18
1.8 Notion de semi-groupe . . . . . . . . . . . . . . . . . . . . . . . 211.9 Exercices du chapitre 1 . . . . . . . . . . . . . . . . . . . . . . . 22
2 Condition aux limites transparentes 272.1 Les Conditions aux limites absorbantes en dimension un . . . . . 272.2 Les couches absorbantes parfaitement adaptées en dimension un . 31
2.2.1 Propagation d’onde en milieu absorbant . . . . . . . . . . 312.2.2 Relation de dispersion et ondes planes pour l’équation des
ondes et dans la PML. . . . . . . . . . . . . . . . . . . . 332.2.3 Construction de couche parfaitement adaptées . . . . . . . 342.2.4 Troncature du domaine . . . . . . . . . . . . . . . . . . . 342.2.5 Etude de réflexion-transmission : PML non bornée . . . . 352.2.6 Etude de réflexion-transmission : PML bornée . . . . . . 372.2.7 Coefficient d’absorption parabolique . . . . . . . . . . . . 38
2.3 Les couches absorbantes parfaitement adaptées en dimension n ≥ 2 392.3.1 Les couches absorbantes de Béranger . . . . . . . . . . . 402.3.2 Relation de dispersion dans le domaine de propagation et
dans la PML . . . . . . . . . . . . . . . . . . . . . . . . 41
2

2.3.3 Etude de réflexion-transmission par ondes planes : PMLnon bornée . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.4 Etude de rélexion-transmission : PML bornée . . . . . . . 442.3.5 Les PML dans toutes les directions d’espace . . . . . . . 462.3.6 PML à profil parabolique . . . . . . . . . . . . . . . . . . 47
2.4 Les Conditions aux limites absorbantes en dimension n ≥ 2 . . . 482.4.1 Présentation de quelques conditions aux limites absorbantes
sur une surface plane . . . . . . . . . . . . . . . . . . . . 482.4.2 Caractère bien posé des CLA d’ordre 1 . . . . . . . . . . 502.4.3 Calcul du coefficient de réflexion . . . . . . . . . . . . . 522.4.4 Conditions aux limites sur une surface sphérique . . . . . 53
2.5 Analyse des conditions de Bayliss et Turkel en dimension 3 . . . . 55
3 Réflexion en elastodynamique 593.1 Eclairage par une onde P d’une surface fixe . . . . . . . . . . . . 593.2 Eclairage d’une surface fixe par une onde S . . . . . . . . . . . . 62
3.2.1 Polarisation suivant e3 . . . . . . . . . . . . . . . . . . . 64
4 L’équation de Helmholtz dans l’espace libre 684.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.2 La condition de radiation de Sommerfeld . . . . . . . . . . . . . 71
4.2.1 Fonction de Green et existence de solution sortante . . . . 714.2.2 Unicité de la solution sortante de l’équation d’Helmholtz . 78
4.3 Le principe d’amplitude limite . . . . . . . . . . . . . . . . . . . 814.4 Le principe d’absorption limite . . . . . . . . . . . . . . . . . . . 854.5 Développement en champ lointain . . . . . . . . . . . . . . . . . 87
5 Equation de Helmholtz en milieu hétérogène et anisotrope 905.1 Milieu anisotrope . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2 Equation de Helmholtz en milieu hétérogène . . . . . . . . . . . . 925.3 Equation de Helmholtz à l’extérieur d’un obstacle borné . . . . . 965.4 Le théorème de prolongement unique . . . . . . . . . . . . . . . 100
5.4.1 Inégalité de Carleman locale . . . . . . . . . . . . . . . . 1005.4.2 Le théorème de prolongement unique . . . . . . . . . . . 101
5.5 Ondes sortantes, ondes entrantes . . . . . . . . . . . . . . . . . . 103
6 Discrétisation par différences finies 1046.1 Rappel sur les différences finies . . . . . . . . . . . . . . . . . . 1046.2 Schéma semi-discrétisé en espace . . . . . . . . . . . . . . . . . 1066.3 Existence et unicité de la solution uh . . . . . . . . . . . . . . . . 106
6.3.1 Stabilité et estimation de la solution . . . . . . . . . . . . 108
3
6.3.2 Convergence du schéma semi-discrétisé . . . . . . . . . . 110
7 Discrétisation par éléments finis 1147.1 Formulation variationnelle approchée (méthode de Galerkine) . . 116
7.1.1 Existence et unicité de la solution . . . . . . . . . . . . . 1177.1.2 Stabilité et estimation de la solution . . . . . . . . . . . . 1187.1.3 Convergence du schéma semi-discrétisé . . . . . . . . . . 120
A Quelques résultats d’analyse fonctionnelle 126A.1 Les opérateurs linéaires non bornés . . . . . . . . . . . . . . . . . 126A.2 Les opérateurs maximaux monotones . . . . . . . . . . . . . . . 129A.3 Continuité, Dérivation dans les espaces de Banach et intégration
dans les espace de Hilbert . . . . . . . . . . . . . . . . . . . . . . 134A.3.1 Notion de continuité dans un espace de Banach . . . . . . 134A.3.2 Notion de dérivation dans un espace de Banach . . . . . . 135A.3.3 Intégration dans un espace de Hilbert . . . . . . . . . . . 135
A.4 L’alternative de Fredholm . . . . . . . . . . . . . . . . . . . . . . 136
B Mise en oeuvre de la méthode des éléments finis 139B.1 Approximation de Galerkin . . . . . . . . . . . . . . . . . . . . . 139B.2 Les élément finis de Lagrange (rappel) . . . . . . . . . . . . . . . 141
B.2.1 Le maillage . . . . . . . . . . . . . . . . . . . . . . . . . 141B.2.2 Construction de l’espace Vh . . . . . . . . . . . . . . . . 147B.2.3 Calcul de la matrice M . . . . . . . . . . . . . . . . . . . 151B.2.4 Calcul de la matrice K . . . . . . . . . . . . . . . . . . . 153B.2.5 Calcul de la matrice B . . . . . . . . . . . . . . . . . . . 155
4
Chapitre 1
Le théorème de Hille-Yosida
Nous donnons ici les outils d’analyse fonctionnelle pour démontrer que l’équa-tion des ondes scalaires est bien posée. Nous avons ici adapté les preuves du cha-pitre VII et X du livre Analyse fonctionnelle : théorie et applications de HainBrézis au cas d’un terme source f(t).
1.1 Le théorème de Cauchy-Lipschitz-PicardLe théorème de Cauchy-Lipschitz-Picard est certainement le résultat le plus
connu portant sur les problèmes en domaine temporel. Nous en rappelons rapide-ment une version linéaire ainsi que sa démonstration
1.1.1 Cas généralThéorème 1.1 Soit H un espace de Hilbert, u0 ∈ H, f ∈ C0([0,+∞[,H) et uneapplication A : H −→ H uniformément Lipschitz. Le problème suivant admet uneunique solution
Chercher u ∈ C1([0,+∞[,H) tel que
du
dt(t) + Au(t) = f(t) ∀t ≥ 0,
u(0) = u0.
(1.1)
Remarque 1.2 Rappelons qu’une application linéaire est uniformément Lipschitzssi
∥Au− Av∥H ≤ L∥u− v∥H ∀u, v ∈ H. (1.2)
5

Démonstration. Soit ϕ : C0([0,+∞[,H) −→ C0([0,+∞[,H) l’application défi-nie par
ϕv(t) = u0 +
∫ t
0
Av(s)ds+
∫ t
0
f(s)ds. (1.3)
Remarquons que u est solution de (1.1) ssi u est point fixe de ϕ.
(i) Pour démontrer l’existence d’une solution de (1.1), nous allons démontrer,pour tout T ≥ 0, l’existence et l’unicité d’un point fixe de ϕ dans l’espace deBanach
XTk = v ∈ C0([0, T ],H) : ∥v∥XT
k< +∞ (1.4)
avec∥v∥XT
k= sup
t∈[0,T ]
∥e−ktv(t)∥H. (1.5)
Comme T est borné, l’application ϕ est bien défini en tant qu’application de XTk
vers XTk . Montrons que ϕ est contractante sur XT
k pour k > L
∥e−kt(ϕu(t)− ϕv(t))∥H = ∥e−kt∫ t
0Au(s)− Av(s)ds∥H
≤ Le−kt∫ t
0ekse−ks∥u(s)− v(s)∥Hds
≤ Le−kt( ∫ t
0eksds
)∥u− v∥XT
k
≤ Lk∥u− v∥XT
k
(1.6)
On peut passer au sup sur t. Il suit
∥ϕu− ϕv∥XTk≤ L
k∥u− v∥XT
k. (1.7)
Comme k > L, l’application ϕ est bien contractante sur XTk . On utilise alors le
théorème de point fixe de Picard
∃!uT ∈ XTk : ϕuT (t) = uT (t) ∀t ∈ [0, T ]. (1.8)
Remarquons que pour T ′ > T > 0, uT ′|[0,T ] ∈ XTk et ϕuT ′(t) = uT ′(t) pour tout
t ∈ [0, T ]. Par unicité, on a l’identité suivante
∀T ′ > T > 0 uT ′(t) = uT (t) ∀t ∈ [0, T ] (1.9)
Il suit que∀T ≥ t uT (t) = ut(t). (1.10)
6

Ceci nous permet de définir la fonction u ∈ C0([0,+∞[,H) définie par
u : [0,+∞[−→ H t 7−→ u(t) = ut(t). (1.11)
(ii) Pour montrer l’unicité, considérons deux solution u et v de (1.1). On acomme u et v sont des points fixes de ϕ
u(t)− v(t) =
∫ t
0
Au(s)− Av(s)ds (1.12)
Il suit
∥u(t)− v(t)∥H ≤ L
∫ t
0
∥u(s)− v(s)∥Hds (1.13)
En notant ψ(t) = exp(−Lt)∫ t
0∥u(s)− v(s)∥Hds, on a l’équation
ψ′(t) ≤ 0, ψ(0) = 0 et ψ(t) ≥ 0 =⇒ ψ(t) = 0. (1.14)
On peut conclure à l’unicité u = v.
1.1.2 Cas d’un opérateur linéaire positifThéorème 1.3 Soit A : H −→ H un opérateur linéaire continu monotone. L’uniquefonction u ∈ C1([0,+∞[,H) telle que
du
dt(t) + Au(t) = f(t) ∀t ≥ 0,
u(0) = u0.
(1.15)
vérifie ∥∥∥u(t)∥∥∥H
≤∥∥∥u0∥∥∥
H+
∫ t
0
∥∥∥f(τ)∥∥∥Hdτ (1.16)
Preuve. La fonction u à valeurs dans H est donnée par la formule de la variationde la constante
u(t) = B(t) u0 +
∫ t
0
B(t− τ)f(τ)dτ (1.17)
avec B ∈ C∞(]−∞,+∞[,L(H))
B(0) = B(t) = exp(−At) =+∞∑n=0
(−1)nAntn
n!(1.18)
7

D’après l’inégalité triangulaire, on a∥∥∥u(t)∥∥∥H
≤∥∥∥B(t)u0∥∥∥
H+
∫ t
0
∥∥∥B(t− τ)f(τ)∥∥∥Hdτ (1.19)
La conclusion suit du lemme suivant qui affirme que B(t) est contractant pour toutt ≥ 0.
Lemme 1.4 Soit A : H −→ H un opérateur linéaire continu monotone et B(t) =exp(−At). Pour tout t ≥ 0, l’opérateur B(t) : H −→ H est contractant
∥B(t)u∥H ≤ ∥u∥H ∀u ∈ H. (1.20)
Preuve. L’application t 7→ B(t) est définie à l’aide d’une série entrière dont lerayon de convergence est infini. Elle est de classe C∞([0,+∞[,L(H)) et vérifie
B(0) = I etdB(t)
dt+ A B(t) = 0 (1.21)
Pour tout v ∈ H indépendant du temps, on a(dBdt
(t)v,B(t)v)H+(AB(t)v,B(t)v
)H= 0 (1.22)
Comme l’opérateur A est monotone. Il suit1
2
d
dt
∥∥∥B(t)v∥∥∥2H≤ 0 (1.23)
On déduit que l’opérateur B(t) est contractant pour tout t ≥ 0∥∥∥B(t)v∥∥∥H≤∥∥∥B(0)v∥∥∥
H≤∥∥∥v∥∥∥
H(1.24)
1.2 Enoncé du théorème de Hille-YosidaDans le cadre des problèmes aux limites le théorème de Cauchy-Lipschitz-
Picard n’est d’aucun secours. La condition (1.2) est beaucoup trop contraignantepour pouvoir s’appliquer.
Le théorème de Hille-Yosida en propose une adaptation permettant de démon-trer l’existence de solution à l’équation de la chaleur ou de l’équation des ondes.
Théorème 1.5 (Hille-Yosida) Soient H un espace de Hilbert, f ∈ C1([0,+∞[,H)et A : D(A) ⊂ H −→ H un opérateur non borné maximal monotone, u0 ∈ D(A).Le problème suivant admet une unique solution
Chercher u ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) tel que
du
dt(t) + Au(t) = f(t) ∀t ≥ 0 et u(0) = u0.
(1.25)
8
D’autre part, on a les inégalités d’énergie
Proposition 1.6 Pour tout t ≥ 0, la solution de (1.25) vérifie
∥u(t)∥H ≤ ∥u0∥H +
∫ t
0
∥f(s)∥Hds,∥∥∥dudt
(t)∥∥∥H≤ ∥Au0∥H + ∥f(0)∥H +
∫ t
0
∥∥∥dfdt(s)∥∥∥Hds,
∥Au(t)∥H ≤ ∥Au0∥H + ∥f(0)∥H + ∥f(t)∥H +
∫ t
0
∥∥∥dfdt(s)∥∥∥Hds.
(1.26)
1.3 Unicité de la solutionSoit u ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) vérifiant
du
dt(t) + Au(t) = 0 ∀t ≥ 0 et u(0) = 0. (1.27)
Pour montrer l’unicité de la solution de (1.25), il nous suffit de montrer que u = 0.Nous avons (du
dt(t), u(t)
)H+ (Au(t), u(t))H = 0 (1.28)
Comme A est monotone on obtient1
2
d
dt(u(t), u(t))H ≤ 0 (1.29)
On peut alors intégrer entre 0 et t, il suit
∥u(t)∥2H ≤ ∥u(0)∥2H = 0. (1.30)
On a donc u = 0.
1.4 Régularisée de YosidaPour montrer l’existence et l’unicité d’une solution de (1.25), on approche ici
l’opérateur non borné A maximal et monotone par un opérateur borné Aλ mono-tone, avec λ > 0 un paramètre destiné à tendre vers 0.
On commence par définir l’opérateur Jλ : H −→ H qui approche l’opérateuridentité
Jλ = (I + λA)−1. (1.31)
D’après la remarque A.16, cet opérateur est bien défini. Son image et son noyausont donnés par
R(Jλ) = D(A), N(Jλ) = 0 (1.32)
9

Lemme 1.7 Les opérateurs Jλ ∈ L(H) et I − Jλ ∈ L(H) sont contractants
∀u ∈ H ∥Jλu∥H ≤ ∥u∥H et ∥u− Jλu∥H ≤ ∥u∥H (1.33)
∀u ∈ D(A) ∥u− Jλu∥H ≤ λ∥Au∥H (1.34)
et Jλ converge fortement vers I
∀u ∈ H limλ→0
Jλu = u dans H. (1.35)
Preuve. Soit u ∈ H et v = Jλu ∈ D(A)
v + λAv = u (1.36)
Il suit comme A est monotone et λ > 0
(v, v)H + λ(Av, v)H = (u, v)H =⇒ (v, v)H ≤ (u, v)H (1.37)
On a d’après l’inégalité de Cauchy-Schwartz
∥v∥H ≤ ∥u∥H c’est à dire ∥Jλu∥H ≤ ∥u∥H (1.38)
D’autre part, on a
∥u− v∥2H = ∥u∥2H − 2(u, v)H + ∥v∥2H (1.39)
En tenant compte de (1.37), on a
∥u− v∥2H = ∥u∥2H − ∥v∥2H ≤ ∥u∥2H (1.40)
C’est à dire∥u− Jλu∥H ≤ ∥u∥H (1.41)
Montrons (1.35) pour u ∈ D(A). Soit v = Jλu
v + λAv = u =⇒ v − u+ λA(v − u) = λAu
=⇒ v − u = Jλ(λAu)
(1.42)
Comme Jλ est contractante on a
∥v − u∥H ≤ λ∥Au∥H ie. ∥Jλu− u∥H ≤ λ∥Au∥H (1.43)
On obtient donc∀u ∈ D(A) lim
λ→0Jλu = u dans H. (1.44)
10

Considérons maintenant u ∈ H. Comme D(A) est dense dans H, il existe uε ∈D(A) tel que ∥uε − u∥H ≤ ε. D’après l’inégalité triangulaire et comme Jλ estcontractante on a
∥Jλu− u∥H = ∥Jλu− Jλuε + Jλuε − uε + uε − u∥H
≤ ∥Jλu− Jλuε∥H + ∥Jλuε − uε∥H + ∥uε − u∥H
≤ ∥Jλuε − uε∥H + 2∥uε − u∥H
≤ ∥Jλuε − uε∥H + 2ε.
(1.45)
On passe alors à la limite-sup et il suit
lim supλ→0
∥Jλu− u∥H ≤ 2ε. (1.46)
Comme cette inégalité est vraie pour tout ε > 0, on peut conclure
lim supλ→0
∥Jλu− u∥H = 0 =⇒ limλ→0
∥Jλu− u∥H = 0. (1.47)
On définit maintenant la régularisée Aλ : H −→ H de A
Aλ = AJλ. (1.48)
Corollaire 1.8 Soit λ > 0 et µ > 0. Soit Jλ,µ = Jλ − Jµ. Pour tout u ∈ H, on a
∥Jλ,µ∥H ≤ 2∥u∥H et limλ,µ→0+
Jλ,µu = 0 ∀u ∈ H. (1.49)∥∥Jλ,µu∥∥H ≤(λ+ µ
) ∥∥Au∥∥H
∀u ∈ D(A) (1.50)
Preuve. D’après l’inégalité triangulaire, on a
∥Jλ,µu∥H ≤ ∥Jλu− u∥H + ∥Jµu− u∥H. (1.51)
Il suit du lemme 1.7 les identités (1.49). Il suit de l’identité u = Jλu + λAJλu =Jµu + µAJµu
Jλ,µu = µ Jµ A u − λ Jλ A u. (1.52)
D’après l’inégalité triangulaire, on a∥∥Jλ,µu∥∥ ≤ µ∥∥Jµ A u
∥∥H
+ λ∥∥Jλ A u
∥∥H. (1.53)
Comme Jλ et Jµ sont contractants, on a∥∥Jλ,µu∥∥ ≤ µ∥∥A u
∥∥H
+ λ∥∥A u
∥∥H. (1.54)
11
Lemme 1.9 Pour tout u ∈ D(A) on a
∥Aλu∥H ≤ ∥Au∥H (1.55)
limλ→0
AJλu = Au dans H. (1.56)
Preuve. La démonstration est basée sur l’identité suivante
AJλv = JλAv ∀v ∈ D(A). (1.57)
On peut alors utiliser le lemme 1.7 pour conclure.
Lemme 1.10 On a Aλ ∈ L(H) et
∥Aλ∥L(H) ≤1
λ(1.58)
Preuve. Soit v ∈ H. De l’identité Jλv + λAJλv = v il suit
(Jλv,AJλv)H + λ(AJλv,AJλv)H = (v,AJλv)H (1.59)
Comme A est monotone et d’après l’inégalité de Cauchy-Schwartz, il suit
λ∥Aλv∥2H ≤ ∥v∥H∥Aλv∥H =⇒ λ∥Aλv∥H ≤ ∥v∥H. (1.60)
Lemme 1.11 L’opérateur Aλ est monotone.
Preuve. Soit u ∈ H. De l’identité u = Jλu+ λAJλu, il suit
(Aλu, u)H = (AJλu, Jλu)H + λ(AJλu,AJλu)H (1.61)
Comme A est monotone et λ > 0, on a
(Aλu, u)H ≥ 0. (1.62)
1.5 Définition et propriété de la régularisée uλ de u
Lors de la dernière section, nous avons approché l’opérateur non borné maxi-mal et monotone A par un opérateur borné et monotone Aλ.
Pour λ > 0, nous introduisons la solution de
duλdt
(t) + Aλuλ(t) = f(t) pour t ≥ 0 et uλ(0) = u0. (1.63)
Nous montrons ici que uλ converge pour λ tendant vers 0 vers une solution de(1.25).
Comme Aλ ∈ L(H) et d’après le théorème de Cauchy-Lipschitz-Picard onintroduit la fonction uλ ∈ C1([0,+∞[,H) qui vérifie (1.63)
12

Lemme 1.12 Pour t ≥ 0 la solution de (1.63) vérifie(i) si u0 ∈ H et f ∈ C0([0,+∞[,H)
∥uλ(t)∥H ≤ ∥u0(t)∥H +
∫ t
0
∥f(s)∥Hds, (1.64)
(ii) si u0 ∈ D(A) et f ∈ C1([0,+∞[,H)∥duλdt
(t)∥H ≤ ∥Au0∥H + ∥f(0)∥H +
∫ t
0
∥dfdt(s)∥Hds,
∥Aλuλ(t)∥H ≤ ∥Au0∥H + ∥f(0)∥H + ∥f(t)∥H +
∫ t
0
∥dfdt(s)∥Hds.
(1.65)
(iii) si u0 ∈ D(A) et f ∈ C0([0,+∞[, D(A))∥duλdt
(t)∥H ≤ ∥Au0∥H + ∥f(t)∥H +
∫ t
0
∥Af(s)∥Hds,
∥Aλuλ(t)∥H ≤ ∥Au0∥H +
∫ t
0
∥Af(s)∥Hds.(1.66)
Preuve. (i) La fonction uλ est donné à l’aide de la formule de la résolvante carl’opérateur Aλ est borné. On déduit de la section 2.107∥∥∥uλ(t)∥∥∥
H≤∥∥∥u0∥∥∥
H+
∫ t
0
∥∥∥f(t− τ)∥∥∥Hdτ (1.67)
(ii) Remarquons ensuite que uλ est C2([0,+∞[,H) et en utilisant la mêmetechnique sur vλ(t) = duλ
dt(t) qui vérifie
dvλdt
(t) + Aλvλ(t) =df
dt(t) pour t ≥ 0 et vλ(0) = −Aλu0 + f(0). (1.68)
il suit
∥duλdt
(t)∥H ≤ ∥Aλu0∥H + ∥f(0)∥H +
∫ t
0
∥dfdt(s)∥Hds ∀t ≥ 0 (1.69)
Comme u0 ∈ D(A), il suit d’après (1.55)
∥duλdt
(t)∥H ≤ ∥Au0∥H + ∥f(0)∥H +
∫ t
0
∥dfdt(s)∥Hds ∀t ≥ 0 (1.70)
On a obtenu la première ligne de (1.65). La deuxième ligne de (1.65) provient del’inégalité triangulaire et de (1.63).
13

(iii) Remarquons ensuite que Aλuλ est C1([0,+∞[,H) et en utilisant la mêmetechnique sur wλ(t) = Aλuλ(t) qui vérifie
dwλ
dt(t) + Aλwλ(t) = Aλf(t) pour t ≥ 0 et wλ(0) = Aλu0. (1.71)
il suit
∥Aλuλ(t)∥H ≤ ∥Aλu0∥H +
∫ t
0
∥Aλf(s)∥Hds ∀t ≥ 0 (1.72)
Comme u0 ∈ D(A) et f ∈ C0([0,+∞[,H), il suit d’après (1.55)
∥Aλuλ(t)∥H ≤ ∥Au0∥H +
∫ t
0
∥Af(s)∥Hds ∀t ≥ 0 (1.73)
On a obtenu la deuxième ligne de (1.66). La première ligne de (1.66) provient del’inégalité triangulaire et de (1.63).
1.6 Démonstration du théorème de Hille-Yosida dansle cas où u0 ∈ D(A2) et f ∈ C1([0,+∞[, D(A))
Dans cette section, nous montrons l’existence de la solutions de (1.25) sousles hypothèses u0 ∈ D(A2) et f ∈ C1([0,+∞[, D(A)).
1.6.1 Passage à la limite sur uλ pour λ→ 0+
Montrons que uλ converge uniformément dans C0([0, T ],H) pour tout T > 0vers une fonction notée u(t). Soient λ > 0 et µ > 0. Il suffit de montrer que uλest de Cauchy dans C0([0, T ],H). D’après (1.63), on a
duλdt
− duµdt
= −Aλuλ − Aµuµ. (1.74)
Il suit(duλdt
− duµdt, uλ − uµ)H = −(Aλuλ − Aµuµ, uλ − uµ)H (1.75)
On utilise alors l’identité u = βAβu+ Jβu avec β = λ et µ1
2
d
dt∥uλ − uµ∥2H = − (Aλuλ − Aµuµ, λAλuλ − µAµuµ)H
− (A(Jλuλ − Jµuµ), Jλuλ − Jµuµ)H.
(1.76)
14

Comme A est monotone on a alors1
2
d
dt∥uλ − uµ∥2H ≤ −(Aλuλ − Aµuµ, λAλuλ − µAµuµ)H
≤(∥Aλuλ∥H + ∥Aµuµ∥H
)(λ∥Aλuλ∥H + µ∥Aµuµ∥H
).
(1.77)D’après le lemme 1.12, on obtient
1
2
d
dt∥uλ(t)− uµ(t)∥2H ≤ 2(λ+ µ)CT ∀t ∈ [0, T ]. (1.78)
avec
CT =(∥Au0∥H + ∥f(0)∥H + ∥f(T )∥H +
∫ T
0
∥∥∥dfdt(s)∥∥∥ds)2 (1.79)
Par intégration il suit
∥uλ − uµ∥2H ≤ 4(λ+ µ)TCT ∀t ∈ [0, T ]. (1.80)
Pour λ→ 0,
uλ converge uniformément pour t ≤ T vers u ∈ C0([0,+∞[,H). (1.81)
Montrons que duλdt
converge uniformément pour t ≤ T vers dudt
. Soit vλ(t) =duλdt(t). La fonction vλ vérifie
dvλdt
(t) + Aλvλ(t) =df
dt(t) pour t ≥ 0
vλ(0) = −Aλu0 + f(0).
(1.82)
On obtient donc en soustrayant l’équation pour vλ et vµd(vλ − vµ)
dt(t) = −Aλvλ(t) + Aµvµ(t) pour t ≥ 0
vλ(0)− vµ(0) = −Aλu0 + Aµu0.
(1.83)
On prend alors le produit scalaire de la première ligne contre vλ − vµ
1
2
d
dt∥vλ − vµ∥2H = (−Aλvλ + Aµvµ, vλ − vµ)H pour t ≥ 0 (1.84)
15

On utilise alors que vβ = Jβvβ + βAβvβ
1
2
d
dt∥vλ − vµ∥2H = −(Aλvλ − Aµvµ, Jλvλ − Jµvµ)H
− (Aλvλ − Aµvµ, λAλvλ − µAµvµ)H pour t ≥ 0 (1.85)
Comme A est monotone et Aβ = AJβ on a
(Aλvλ − Aµvµ, Jλvλ − Jµvµ)H = (A(Jλvλ − Jµvµ), Jλvλ − Jµvµ)H ≥ 0 (1.86)
On a donc d’après l’inégalité de Cauchy-Schwartz
1
2
d
dt∥vλ − vµ∥2H ≤ − (Aλvλ − Aµvµ, λAλvλ − µAµvµ)H
≤(∥Aλvλ∥H + ∥Aµvµ∥H
)(λ∥Aλvλ∥H + µ∥Aµvµ∥H
).
(1.87)Comme u0 ∈ D(A2) et f ∈ C1([0,+∞[, D(A)), on peut alors appliquer le point(iii) du lemme 1.12 à vβ solution de (1.82)
∥Aλvλ∥H ≤ ∥AAλu0∥H + ∥Af(0)∥H +
∫ t
0
∥∥∥dAfdt
(s)∥∥∥H
≤ ∥AAJλu0∥H + ∥Af(0)∥H +
∫ t
0
∥∥∥dAfdt
(s)∥∥∥H
(1.88)
Comme u0 ∈ D(A2), on a d’après l’identité (1.57)
∥Aλvλ∥H ≤ ∥JλAAu0∥H + ∥Af(0)∥H +
∫ t
0
∥∥∥dAfdt
(s)∥∥∥H
(1.89)
Comme d’après le lemme 1.7 Jλ est contractant, il suit que pour t ≤ T
∥Aλvλ∥H ≤ ∥A2u0∥H + ∥Af(0)∥H +
∫ T
0
∥∥∥dAfdt
(s)∥∥∥ds (1.90)
On a donc obtenu que
1
2
d
dt∥vλ − vµ∥2H ≤ 2(λ+ µ)CA
T ∀t ∈ [0, T ]. (1.91)
avec
CAT =
(∥A2u0∥H + ∥Af(0)∥H +
∫ T
0
∥∥∥dAfdt
(s)∥∥∥ds)2 (1.92)
16

On peut alors intégrer entre 0 et t ≤ T
∥vλ(t)− vµ(t)∥2H ≤ 4(λ+ µ)TCAT + ∥vλ(0)− vµ(0)∥2H
≤ 4(λ+ µ)TCAT + ∥Aλu0 − Aµu0∥2H
≤ 4(λ+ µ)TCAT +
∥∥∥AJλu0 − AJµu0
∥∥∥2H
(1.93)
Comme Jβu+ βAβu = u on a
∥vλ(t)− vµ(t)∥2H ≤ 4(λ+ µ)TCAT + ∥λAAλu0 − µAAµu0∥2H
≤ 4(λ+ µ)TCAT + (λ+ µ)2∥A2u0∥2H
(1.94)
Pour λ et µ tendant vers 0
duλdt
= vλ converge uniformément pour t ≤ T dans C0([0, T ],H). (1.95)
Remarque 1.13 C’est ici qu’est intervenu la condition u0 ∈ D(A2) et f ∈ C1([0,+∞[, D(A))
On déduit de (1.81) et (1.95) que u ∈ C1([0,+∞[,H) et
uλ −→λ(t)→0
u(t) etduλdt
(t) −→λ→0
du
dt(t) dans H. (1.96)
Montrons maintenant que Aλuλ(t) converge vers Au(t).
Comme Aλuλ(t) = f(t)− duλdt(t), Aλuλ converge d’après (1.96) dans H. Il suit de
l’identité Aλ = AJλ que
A(Jλuλ(t)) converge dans H. (1.97)
Montrons que Jλuλ(t) converge vers u(t) dans H. Comme Jλ est une contractionon a
∥Jλuλ−u∥H ≤ ∥Jλuλ−Jλu∥H+∥Jλu−u∥H ≤ ∥uλ−u∥H+∥Jλu−u∥H (1.98)
D’après (1.96) et le lemme 1.7, on a
Jλuλ connverge vers u dans H. (1.99)
17

D’après (1.97), (1.99) et comme A est fermé
u(t) ∈ D(A) et Aλuλ(t) converge vers Au(t) dans H pour tout t ≥ 0. (1.100)
On peut alors passer à la limite sur (1.63). D’après (1.96) et (1.100), il existeu ∈ C1([0,+∞[,H) qui vérifie
du
dt(t) + Au(t) = f(t) pour t ≥ 0 et u(0) = u0. (1.101)
On a obtenu le théorème de Hille-Yosida.
Par passage à la limite sur (1.64) et (1.65) il suit (1.26) dans le cas où u0 ∈ D(A2)et f ∈ C1([0,+∞[, D(A)).
1.7 Démonstration du théorème de Hille-Yosida dansle cas général où u0 ∈ D(A) et f ∈ C1([0,+∞[,H).
Rappelons que le théorème 1.5 et la proposition 1.6 ont été démontrés pouru0 ∈ D(A2) et f ∈ C1([0,+∞[, D(A)). l’idée ici est d’approcher u0 ∈ D(A) etf ∈ C1([0,+∞[,H) par
Jλu0 ∈ D(A2) et Jλf ∈ C1([0,+∞[, D(A)). (1.102)
Il existe une fonction wλ ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) qui vérifiedwλ
dt(t) + Awλ(t) = Jλf(t) ∈ C1([0,+∞[, D(A))
wλ(0) = Jλu0 ∈ D(A2).
(1.103)
Pour tout λ > 0 et µ > 0, on ad(wλ − wµ)
dt(t) + A(wλ − wµ)(t) = Jλ,µf(t) pour t ≥ 0
wλ(0)− wµ(0) = Jλ,µu0.
(1.104)
avecJλ,µ = Jλ − Jµ. (1.105)
Montrons que wλ converge uniformément en temps vers une fonction u ∈C0([0,+∞[,H). D’après la proposition 1.6, on a les estimations suivantes
∥wλ(t)− wµ(t)∥H ≤ ∥Jλ,µu0∥H +
∫ T
0
∥Jλ,µf(s)∥Hds ∀t ∈ [0, T ], (1.106)
18

Le lemme 1.8 nous permet d’écrire
∥Jλ,µu0∥H −→λ,µ→0
0 et ∥Jλ,µf(s)∥H −→λ,µ→0
0 ∀s ∈ [0, T ] (1.107)
D’autre part, l’opérateur Jλ étant contractant, on a
∥Jλ,µf(s)∥H ≤ 2 ∥f(s)∥H (1.108)
En appliquant le théorème de Lebesgues, il suit∫ T
0
∥Jλ,µf(s)∥Hds −→λ,µ→0
0. (1.109)
Grâce à (1.106), (1.107) et (1.109), on obtient que, pour tout T > 0, wλ ∈C0([0,+∞[,H) converge uniformément sur tout intervalle [0, T ] vers u ∈ C0([0,+∞[,H)
wλ(t) −→λ→0+
u(t) dans H. (1.110)
(ii) D’après la proposition (1.26), on a les estimations suivantes
∥dwλ
dt(t)− dwµ
dt(t))∥H ≤ φλ,µ(T ) ∀t ∈ [0, T ] (1.111)
avec
φλ,µ(T ) = ∥AJλ,µu0∥H + ∥Jλ,µf(0)∥H +
∫ T
0
∥∥∥Jλ,µdfdt(s)∥∥∥Hds (1.112)
Comme u0 ∈ D(A) et f(0) ∈ H, et dfdt(s) ∈ H pour tout s ∈ [0, T ] fixé, on a
∥AJλ,µu0∥H = ∥Jλ,µAu0∥H →λ,µ→0+
0,
∥Jλ,µf(0)|H −→λ,µ→0+
0,
∥∥∥Jλ,µdfdt(s)∥∥∥H
−→λ,µ→0+
0.
(1.113)
Comme∥∥∥Jλ,µ df
dt(s)∥∥∥H≤ 2∥∥∥dfdt(s)∥∥∥H
on a d’après le théorème de Lebesgues
∫ T
0
∥∥∥Jλ,µdfdt(s)∥∥∥Hds −→
λ,µ→0+0. (1.114)
19
On a donc obtenuφλ,µ(T ) −→
λ,µ→0+0. (1.115)
On a donc obtenu la convergence uniforme dans H sur tout intervalle [0, T ] dedwλ
dt(t). D’après le point (i), il suit que u ∈ C1([0,+∞[,H) et pour tout t ≥ 0
wλ(t) −→λ→0+
u(t) dans H
dwλ
dt(t) −→
λ→0+
du
dt(t) dans H
(1.116)
(iii) D’après la proposition (1.26), on a les estimations suivantes
∥Awλ(t)− Awµ(t)∥H ≤ φλ,µ(T ) + ∥Jλ,µf(t)∥H (1.117)
Comme f(t) ∈ H à t fixé, on a
∥Jλ,µf(t)|H −→λ,µ→0+
0. (1.118)
Il suit∥Awλ(t)− Awµ(t)∥H −→
λ,µ→0+0. (1.119)
la convergence simple dans H de Awλ(t) vers un élément z(t) ∈ H pour tout t ≥ 0.Comme A est fermé, on a donc obtenu que
u(t) ∈ D(A) et Awλ(t) −→λ→0
Au(t) dans H. (1.120)
Par passage à la limite sur (1.103) il suit que u ∈ C1([0,+∞[,H) vérifie (1.25).dwλ
dt(t) + Awλ(t) = Jλf(t)
wλ(0) = Jλu0.
−→λ→0+
du
dt(t) + Awλ(t) = f(t)
u(0) = u0.
(1.121)
car comme u0 ∈ H et tout t ≥ 0 f(t) ∈ H on a d’après la proposition 1.7
limλ→0+
Jλu0 = u0 et (1.122)
Enfin d’après (1.6), wλ vérifie les inégalités
∥wλ(t)∥H ≤ ∥Jλu0∥H +∫ t
0∥Jλf(s)∥Hds,
∥dwλ
dt(t)∥H ≤ ∥AJλu0∥H + ∥Jλf(0)∥H +
∫ t
0
∥∥∥dJλfdt
(s)∥∥∥Hds,
∥Awλ(t)∥H ≤ ∥AJλu0∥H ++∥Jλf(0)∥H + ∥Jλf(t)∥H +
∫ t
0
∥∥∥dJλfdt
(s)∥∥∥Hds
(1.123)
20

Comme AJλu0 = JλAu0 et dJλfdt
(s) = Jλdfdt(s), le lemme 1.7 nous permet d’écrire
∥wλ(t)∥H ≤ ∥u0∥H +
∫ t
0
∥f(s)∥Hds,∥∥∥dwλ
dt(t)∥∥∥H≤ ∥Au0∥H + ∥f(0)∥H +
∫ t
0
∥∥∥dfdt(s)∥∥∥Hds,
∥Awλ(t)∥H ≤ ∥Au0∥H + ∥f(0)∥H + ∥f(t)∥H +
∫ t
0
∥∥∥dfdt(s)∥∥∥Hds
(1.124)
Par passage à la limite, on obtient (1.26). ceci termine la preuve
1.8 Notion de semi-groupePour f = 0, on a associé à tout u0 ∈ D(A) une solution u ∈ C0([0,+∞[;H)
qui vérifie d’après (??)
∥u(t)∥H ≤ ∥u0∥H, ∀t ≥ 0 (1.125)
Par densité de D(A) et comme toute limite uniforme d’une fonction continue estcontinue, on peut aussi associer à tout u0 ∈ H une solution u ∈ C0([0,+∞[;H)qui vérifie (1.125). L’opérateur qui associe à u0 la fonction u à valeurs dans H estnoté S
S : H 7→ C0([0,+∞[;H) (1.126)
D’autre part, l’opérateur linéaire continue qui à u0 ∈ H associe u(t) pour t ≥ 0est notée St
St : H −→ H (1.127)
On déduit les propriétés de ces opérateurs par densité.
Proposition 1.14 (Propriété élémentaire du semi-groupe de résolution S) (i) Pourtout t ≥ 0, on a
St+s = St Ss dans L(H) (1.128)
S0 = I (1.129)
∥St∥L(H) ≤ 1 (1.130)
(ii) Pour tout n ≥ 0, S est de classe C0([0,+∞[;L(D(An))).
(iii) La fonction t 7→ St est de classeC1([0,+∞[;L(D(A);H)). Plus précisément,on a
∃S′t ∈ L(D(A);H)) tel que ∀u0 ∈ H
∥∥∥S′tu0 −
St+ε − St
εu0
∥∥∥H7−→ε→0+
0 (1.131)
21

et∀u0 ∈ H ∥S′
tu0∥H ≤ ∥Au0∥H (1.132)
(iv) Pour tout n et p ≥ 0. La fonction t 7→ St est de classeCp([0,+∞[;L(D(An+p);D(An))).(v) Dans L(D(A);H), on a les identités suivantes
S′t + St A = 0 et St A = A St. (1.133)
Preuve. à terminer
Remarque 1.15 En général, la fonction t 7→ St n’est pas de classeC1([0,+∞[;L(H)).
Proposition 1.16 (Formule de la résolvante) La solution du problème (??) peuts’écrire sous la forme
u(t) = Stu0 +
∫ t
0
St−sf(s)ds. (1.134)
Remarque 1.17 Cette formule nous permet de définir des solutions faibles denotre problème pour u0 ∈ H et f ∈ C0([0,+∞[;H)
Preuve. à terminer
Nous nous restreignons maintenant au cas où A est autoadjoint et nous nous inté-ressons à notion de solution hyperfaible. Celle-ci est définie par dualité.
à terminer
1.9 Exercices du chapitre 1Exercice. Soient λ ∈ R, A : D(A) ⊂ H −→ H un opérateur non borné tel queA+ λI est maximal monotone, u0 ∈ D(A) et f ∈ C1([0,+∞[,H). Montrer que leproblème suivant admet une unique solution
Chercher u ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) tel que
dudt(t) + Au(t) = 0 ∀t ≥ 0 et u(0) = u0.
(1.135)
Exercice. Soit u0 ∈ D(R) montrer que le problème
Chercher u ∈ C1([0,+∞[, L2(R)) ∩ C0([0,+∞[, H2(R)) tel que
∂u
∂t(x, t)− ∂2u
∂x2(x, t) = 0 pour x ∈ R et t ≥ 0,
u(x, 0) = u0(x) pour x ∈ R.
(1.136)
22
Exercice. Soit u0 ∈ D(]0, L[) montrer que le problème
Chercher u ∈ C1([0,+∞[, L2([0, L])) ∩ C0([0,+∞[, H2([0, L])) tel que
∂u
∂t(x, t)− ∂2u
∂x2(x, t) = 0 pour x ∈ R et t ≥ 0,
u(x, 0) = u0(x) pour x ∈ R,
u(0, t) = u(L, t) = 0 ∀t ≥ 0.
(1.137)Exercice. Soient u0 ∈ D(]0, L[) et f ∈ D([0,+∞[t×Rx). Montrer
∃!u ∈ C1([0,+∞[, L2([0, L])) ∩ C0([0,+∞[, H2([0, L])) tel que
∂u
∂t(x, t)− ∂2u
∂x2(x, t) + u(x, t) = f(x, t) pour x ∈ R et t ≥ 0,
u(x, 0) = u0(x) pour x ∈ R,
∂u
∂x(0, t) =
∂u
∂x(L, t) = 0 ∀t ≥ 0.
(1.138)
Problème Soient u0 ∈ D(R2) et u1 ∈ D(R2). Montrer que le problème
∃!u ∈ C0([0,+∞[, H2(R2)) ∩ C1([0,+∞[, H1(R2)) ∩ C2([0,+∞[, L2(R2))
∂2u
∂t2(x, t)−∆u(x, t) = 0 pour x ∈ R2 et t ≥ 0,
u(x, 0) = u0(x) pour x ∈ R2,
∂u
∂t(x, 0) = u1(x) pour x ∈ R2.
(1.139)
23

1. Mettre ce problème sous la forme
U ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) :
dU
dt+ AU = 0 pour t ≥ 0,
U(0) = U0.
(1.140)
avec
U(t) = (u(t), v(t) = dudt(t))T ,
H = H1(R2)× L2(R2),
D(A) = H2(R2)×H1(R2)
A
uv
=
−v
−∆u
(1.141)
2. Montrer que A+I est monotone et maximal en tant qu’opérateur non bornéde H1(R2)× L2(R2)
3. Montrer (1.139).Problème. Soit u0 ∈ D(A2) et f(t) = 0. On cherche à montrer que la solution ude (1.25) vérifie
u ∈ C0([0,+∞[, D(A2)) ∩ C1([0,+∞[, D(A)) ∩ C2([0,+∞[,H). (1.142)
1. Montrer que l’application u 7→ Au définie un opérateur maximal monotoneA : D(A2) ⊂ D(A) −→ D(A).
2. En déduire
∃!v ∈ C0([0,+∞[, D(A2)) ∩ C1([0,+∞[, D(A))
dvdt(t) + Av(t) = 0 ∀t ≥ 0,
v(0) = u0.
(1.143)
puis que v = u.
24

3. Montrer que u ∈ C2([0,+∞[,H).
Problème. Dans de nombreuses applications, il est trop restrictif de considéreru0 ∈ D(A). Le but de ce problème est de considérer une condition initiale moinsrégulière dans le cas où A est auto-adjoint (ce ne sera jamais le cas pour les équa-tions d’ondes). Soit A est un opérateur maximal, monotone, autoadjoint et u0 ∈ H.On cherche à montrer le résultat suivant
∃!u ∈ C0([0,+∞[,H) ∩ C1(]0,+∞[,H) ∩ C1(]0,+∞[, D(A)) :
du
dt(t) + Au(t) = 0 pour t > 0,
u(0) = u0
(1.144)
et les estimations pour tout t > 0
∥u(t)∥H ≤ ∥u0∥H, ∥dudt
(t)∥H = ∥Au(t)∥H ≤ 1
t∥u0∥H (1.145)
1. Soit w0 ∈ D(A2). Montrer qu’il existe un unique
w ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) :
dw
dt(t) + Aw(t) = 0 pour t > 0,
w(0) = w0
(1.146)
2. Montrer l’identité suivante
1
2∥w(T )∥2 +
∫ T
0
(Aw,w)H =1
2∥w0∥2H (1.147)
3. Montrer l’identité suivante∫ T
0
t∥∥∥dwdt
(t)∥∥∥2Hdt+
1
2
∫ T
0
td
dt(Aw(t),w(t))Hdt = 0 (1.148)
4. en déduire∫ T
0
t∥∥∥dwdt
(t)∥∥∥2Hdt+
T
2(Aw(T ),w(T ))H =
1
2
∫ T
0
(Aw(t),w(t))Hdt (1.149)
25

5. puis
1
2∥w(T )∥2 +
∫ T
0
t∥∥∥dwdt
(t)∥∥∥2Hdt+
T
2(Aw(T ),w(T ))H =
1
2∥w0∥2H (1.150)
6. Montrer que t 7→ ∥dwdt(t)∥H est décroissante.
7. En déduire l’inégalité
∥w(t)∥H ≤ ∥w0∥H, ∥dwdt
(t)∥H = ∥Aw(t)∥H ≤ 1
t∥w0∥H (1.151)
8. Soit wλ la solution du problème
wλ ∈ C1([0,+∞[,H) ∩ C0(]0,+∞[, D(A)) :
dwλ
dt(t) + Awλ(t) = 0 pour t > 0,
wλ(0) = (Jλ)2u0
(1.152)
Soient T1 et T2 > 0. Montrer que (Jλ)2u0 ∈ D(A2) puis montrer à l’aide de 7 quedans H
– wλ converge uniformément sur [0, T2].
–dwλ
dtconverge uniformément sur [T1, T2].
– Awλ(t) converge uniformément sur [T1, T2].9. Montrer l’existence de u vérifiant (1.144).
10. Montrer l’unicité de u.
Problème. Soit f ∈ C0([0,+∞[, D(A)). Montrer∃!u ∈ C1([0,+∞[,H) ∩ C0([0,+∞[, D(A)) tel que
du
dt(t) + Au(t) = f(t) ∀t ≥ 0 et u(0) = 0.
(1.153)
Etablir les estimations suivantes
∥u(t)∥H ≤∫ t
0
∥f(s)∥Hds,∥∥∥dudt
(t)∥∥∥H≤ ∥f(t)∥H +
∫ t
0
∥Af(s)∥Hds,
∥Au(t)∥H ≤∫ t
0
∥Af(s)∥Hds.
(1.154)
26
Chapitre 2
Condition aux limites transparentes
Par nature, le calcul numérique ne peut s’effectuer que sur des domainesbornés en espace (un ordinateur ne peut gérer qu’un nombre fini d’inconnues).Lorsque le domaine physique est non borné (c’est en général le cas pour les pro-blèmes de propagation d’ondes), il faut alors trouver des méthodes pour pouvoireffectuer des calculs sur un sous-domaine borné.
Nous présentons dans ce chapitre deux techniques alternatives permettant derépondre à cette problématique : les conditions aux limites absorbantes ou CLA,les couches absorbantes parfaitement adaptées ou PML (perfectly matched layer).Nous présentons ces deux méthodes en dimension 1 d’espace puis en dimensionsupérieur.
2.1 Les Conditions aux limites absorbantes en di-mension un
Nous considérons une équation d’ondes non-homogène∂2t u(x, t)− ∂2xu(x, t) = f(x, t) pour x ∈ R et t ≥ 0,
u(x, 0) = u0(x) ∂tu(x, 0) = u1(x) pour x ∈ R.
(2.1)
dont les termes sources f : R+ × R −→ R, u0 : R+ −→ R et u1 : R+ −→ Rsont des fonctions de classe C∞ et dont le support sont inclus dans le borné D =]− L,L[ avec L > 0
f(x, t) = 0, u0(x) = 0 et u1(x) = 0 pour x /∈ D et t ≥ 0. (2.2)
27

Hors du support de f , la solution de l’équation des ondes admet une forme propa-gative
u(x, t) = u+(x− t) pour x > L,
u(x, t) = u−(x+ t) pour x < −L(2.3)
Les fonctions u+ et u− sont des fonctions de classe C∞ qui vérifient
u+(s) = 0 pour s ≥ L et u−(s) = 0 pour s ≤ − L. (2.4)
Nous allons fermer le domaine de calcul en modélisant le comportement dela solution pour x > L et x < −L à l’aide de conditions aux limites en espaceposées en x = L et x = −L.
En observant la forme de la solution exacte, voir (2.3), on remarque qu’enx = L et x = −L on a
∂u
∂t(L, t) +
∂u
∂x(L, t) = 0,
∂u
∂t(−L, t)− ∂u
∂x(−L, t) = 0.
(2.5)
On est alors amené à résoudre le problème équivalent
∂2t u(x, t)− ∂2xu(x, t) = f(x, t) pour x ∈ ]− L,L[ et t ≥ 0,
u(x, 0) = u0(x), ∂tu(x, 0) = u1(x) pour x ∈ ]− L,L[
∂u
∂t(L, t) +
∂u
∂x(L, t) = 0,
∂u
∂t(−L, t)− ∂u
∂x(−L, t) = 0 pour t ≥ 0.
(2.6)La restriction de la solution du problème (2.1) à x ∈ [−L,L] vérifie (2.6). Pourmontrer que l’on peut calculer cette restriction en résolvant (2.6) il nous suffit demontrer que ce problème admet une unique solution.
Pour montrer que (2.6) admet une unique solution, nous allons appliquer lethéorème de Hille-Yosida.
Nous commençons par effectuer une réduction d’ordre. Soient v = ∂tu et
28

U = (u, v)T .
∂tu(x, t)− v(x, t) = 0
∂tv(x, t)− ∂2xu(x, t) = f(x, t) pour x ∈ ]− L,L[ et t ≥ 0,
u(x, 0) = u0(x), v(x, 0) = u1(x) pour x ∈ ]− L,L[
v(L, t) +∂u
∂x(L, t) = 0, v(−L, t)− ∂u
∂x(−L, t) = 0 pour t ≥ 0.
(2.7)
Nous avonsdU
dt+ AU = F (2.8)
avec
H = H1(I)× L2(I), (I = [−L,L])
D(A) =(u, v) ∈ H2(I)×H1(I) : v(L) = −dxu(L) et v(−L) = dxu(−L)
,
A
uv
=
−v
−u′′
.(2.9)
Nous allons montrer que A+ I est maximal monotone
(AU,U)H = −(v, u)H1(I) − (u′′, v)L2(I) (2.10)
Par intégration par partie, il suit
(AU,U)H = −(v′, u′)L2(I) − (v, u)L2(I) + (u′, v′)L2(I)
− dxu(L)v(L) + dxu(−L)v(−L). (2.11)
En utilisant que v(L) = −dxu(L) et v(−L) = dxu(−L) on a
(AU,U)H = −(v, u)L2(I) +(v(L)
)2+(v(−L)
)2≥ −(v, u)L2(I). (2.12)
Comme −(v, u)L2(I) ≤ (u, u)H1(I) + (v, v)L2(I). On obtient donc
((A+ I)U,U)H ≥ 0 (A+ I est monotone) (2.13)
29

Montrons maintenant que A + I est maximal. Il faut montrer que le problèmesuivant admet une solution
U ∈ D(A) : AU + 2U = F (2.14)
avec F = (f, g) ∈ H = H1(I)× L2(I). Cette équation s’écrit
u ∈ H2(I) et v ∈ H1(I)
−v + 2u = f ∈ H1(I)
−u′′ + 2v = g ∈ L2(I)
v(L) = −u′(L)
v(−L) = u′(−L)
(2.15)
On peut facilement découpler ce système en éliminant v = 2u− f
u ∈ H2(I)
−u′′ + 4u = 2f + g ∈ L2(I),
u′(L) + 2u(L) = f(L),
u′(−L)− 2u(−L) = −f(−L).
(2.16)
Ce problème admet la formulation variationnelle suivante
u ∈ H1(I) : a(u,w) = l(w) ∀w ∈ H1(I) (2.17)
aveca(u,w) =
∫ L
−L
u′(x)w′(x) + 4u(x)w(x)dx+ 2u(L)w(L) + 2u(−L)w(−L)
l(w) =
∫ L
−L
(2f(x) + g(x)
)w(x)dx+ f(L)w(L) + f(−L)w(L)
(2.18)
30

Le théorème de Lax-Milgram permet de conclure à l’existence et l’uncité de lasolution du problème (2.17).
On peut alors se poser la question de la reconstruction de la solution sur toutR à partir de sa restriction. Elle est basée sur (2.3). Hors de x ∈ [−L,L], u(x, t)est donné si |x| − L > ct par u(x, t) = 0 et sinon par
u(x, t) = u(L, t− x−Lc) pour x > L,
u(x, t) = u(−L, t+ x+Lc) pour x < −L.
(2.19)
Sa simplicité et son efficacité (cette condition est exacte) rend cette conditionaux limites incontournable en dimension 1. Le développement de nouvelles condi-tions transparentes approchées ne peut alors se justifier d’un point de vue pratiquequ’en dimension supérieure ou égale à 2. Toutefois nous allons introduire les PMLen dimension 1 afin de suivre une démarche la plus constructive possible
2.2 Les couches absorbantes parfaitement adaptéesen dimension un
Afin de légèrement simplifier la présentation nous nous limitons à f ≡ 0.Nous cherchons à poser le problème
∂2t u(x, t)− ∂2xu(x, t) = 0 pour x ∈ R et t ≥ 0,
u(x, 0) = u0(x) ∂tu(x, 0) = u1(x) pour x ∈ R,
(2.20)
sur un domaine borné afin de le résoudre numériquement. L’approche adoptée iciconsiste à entourer le domaine de calcul par un matériau absorbant qui modéliserale milieu extérieur.
Nous allons tout d’abord étudier la propagation d’ondes dans les milieux ab-sorbants puis nous présenterons les formulation PML.
2.2.1 Propagation d’onde en milieu absorbantSoit I =]L−, L+[ un intervalle avec L− ∈ R ∪ −∞ et L+ ∈ R ∪ +∞.
Soit σ un scalaire positif. L’équation des ondes amorties est obtenue en remplaçant
31

l’opérateur de dérivée en temps ∂t dans l’équation des ondes par un opérateur dedérivée plus frottement ∂t + σ. Afin de racourcir les écritures nous notons
(∂t + σ)2u = ∂2t u+ 2σ∂tu+ σ2u (2.21)
L’équation des ondes amorties s’écrituσ ∈ C∞(I × R+)
(∂t + σ)2uσ(x, t)− c2∂2xuσ(x, t) = 0 avec x ∈ R et t ≥ 0.
(2.22)
Pour être bien posé cette équation doit être fermée par des conditions initialeset des conditions aux limites en espace (on n’a pas ici unicité de la solution dece problème). Nous considérons cette équation sans ces conditions aux limites etproposons une paramétrisation de l’ensemble de ces solutions par deux fonctionsde la droite réelle (uIIσ,+ et uIIσ,−).
La première étape de la résolution consiste à poser le changement de variable
uσ(x, t) = uIσ(x, t) exp(−σt) (2.23)
La fonction uIσ(x, t) est solution d’une équation des ondes classiqueuIσ ∈ C∞(I × R+)
∂2t uIσ(x, t)− c2∂2xu
Iσ(x, t) = 0 avec x ∈ R et t ≥ 0.
(2.24)
La fonction uIσ peut donc la décomposer en deux termes le premier se propageantdans le sens x-croissant, le second dans le sens x-décroissant
uIσ(x, t) = uIσ,+(x− ct) + uIσ,−(x+ ct). (2.25)
On en déduit que
u(x, t) =(uIσ,+(x− ct) + uIσ,−(x+ ct)
)exp(−σt). (2.26)
La deuxième étape consiste à remarquer qu’une décroissance en temps est équi-valente à une décroissance dans la direction de propagation. Nous effectuonsalors le changement de variable uIσ,+(s) = uIIσ,+(s) exp(−σs
c) et uIσ,−(s) =
uIIσ,−(s) exp(σsc), la fonction u peut s’écrire
uσ(x, t) = uIIσ,+(x− ct) exp(−σxc) + uIIσ,−(x+ ct) exp(
σx
c). (2.27)
32

Nous adoptons afin de les notations suivantesuσ,+(x, t) = uIIσ,+(x− ct) exp(−σx
c),
uσ,−(x, t) = uIIσ,−(x+ ct) exp(σxc).
(2.28)
Remarquons que ces fonctions vérifient(∂t + σ + c∂x
)uσ,+(x, t) = 0,(
∂t + σ − c∂x
)uσ,−(x, t) = 0.
(2.29)
2.2.2 Relation de dispersion et ondes planes pour l’équationdes ondes et dans la PML.
Nous allons nous intéresser à des solutions particulières, appelées ondes planes,de l’équation des ondes
∂2t u(x, t)− ∂2xu(x, t) = 0. (2.30)
et de l’équation des ondes amorties(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0 (2.31)
qui admettent la forme
u(x, t) = exp(iω + kx) et uσ(x, t) = exp(iω + kσx). (2.32)
Afin que ces ondes soient solutions de l’équation des ondes on a les relations dedispersions pour l’équation des ondes
(iω)2 − (ik)2 = 0 ⇐⇒ k = ±ω (2.33)
et l’équation des ondes amorties
(iω + σ)2 − (ikσ)2 = 0 ⇐⇒ kσ = ±
(ω − iσ
). (2.34)
Nous notonsk = ω et kσ =
iω + σ
iωk. (2.35)
A ω fixé, pour chacun des deux modèles nous avons une onde plane se propageantdans le sens x croissant
u(x, t) = exp(iωt− ikx) et uσ(x, t) = exp(iωt− ikσx) (2.36)
et une onde plane se dirigeant dans le sens x décroissant
u(x, t) = exp(iωt+ ikx) et uσ(x, t) = exp(iωt+ ikσx). (2.37)
33

2.2.3 Construction de couche parfaitement adaptéesLa formulation PML consiste à remplacer le milieu de propagation pour |x| >
L par un milieu absorbant.
(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0 pour x < −L et t ≥ 0,
∂2t u(x, t)− ∂2xu(x, t) = 0 pour x ∈]− L,L[ et t ≥ 0,(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0 pour x > L et t ≥ 0,
u(x, 0) = u0(x) ∂tu(x, 0) = u1(x) pour x ∈]− L,L[,
(2.38)
Afin de fermer ce système d’équations il faut y ajouter des conditions de trans-mission à chacune des interfaces. Ces conditions s’écrivent
uσ(L, t) = u(L, t)(∂t + σ
)∂xu(L, t) = ∂t∂xuσ(L, t).
(2.39)
uσ(−L, t) = u(−L, t)
(∂t + σ)∂xuσ(−L, t) = ∂t∂xu(−L, t).(2.40)
La dérivation de ces conditions de transmission s’effectue en minimisant les ré-flexions apparaissant aux interfaces entre le milieu physique et la couche absor-bante.
2.2.4 Troncature du domaineLa solution est atténuée de manière exponentielle à l’intérieur de la couche ab-
sorbante. Il est donc tout à fait raisonnable de fermer à distance finie cette coucheabsorbante par une condition de Dirichlet. Soit Lσ > L la distance de troncature
34

du domaine.
u :]− L,L[×R+ −→ R et uσ :(]− Lσ,−L[∪]L,Lσ[
)× R+ −→ R
∂2t u(x, t)− ∂2xu(x, t) = 0 pour x ∈]− L,L[ et t ≥ 0,(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0 pour |x| > L et t ≥ 0,
(2.41)avec les conditions de transmission
uσ(L, t) = u(L, t)
∂t∂xuσ(L, t) =(∂t + σ
)∂xu(L, t).
(2.42)
uσ(−L, t) = u(−L, t)
∂t∂xuσ(−L, t) =(∂t + σ
)∂xu(−L, t).
(2.43)
les conditions initialesu(x, 0) = u0(x) ∂tu(x, 0) = u1(x) pour x ∈]− L,L[,
uσ(x, 0) = 0 ∂tuσ(x, 0) = 0 pour |x| > L.
(2.44)
et les conditions aux limites en espace
uσ(Lσ, t) = 0 et uσ(−Lσ, t) = 0 pour t ≥ 0. (2.45)
En tronquant le domaine en x = Lσ, on génère une onde réfléchie en x = Lσ.Cette onde sera elle aussi amortie à travers la couche absorbante et ne reviendraqu’avec une faible amplitude en x = L où elle n’engendrera que peu de réflexiondans dans le milieu physique.
2.2.5 Etude de réflexion-transmission : PML non bornéeUne étude par onde plane permet de vérifier le caractère parfaitement adapté
des couches PML. Afin de simplifier la présentation, nous allons considérer un
35
milieu propagatif en x > 0 et une seule couche PML localisée en x < 0.∂2t u(x, t)− ∂2xu(x, t) = 0 pour x ≥ 0,(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0 pour x ≤ 0,
(2.46)
avec les conditions de transmissionu(0, t) = uσ(0, t)(∂t + σ
)∂xu(0, t) = ∂t∂xuσ(0, t).
(2.47)
Nous éclairons le domaine en x = +∞ par une onde incidente d’amplitude 1
exp(iωt+ ikx) (2.48)
A l’interface cette onde se transforme en une onde réfléchie du cÙté x > 0 et uneonde transmise du cÙté x < 0
u(x, t) = exp(iωt+ ikx) +R exp(iωt− ikx),
uσ(x, t) = Tσ exp(iωt+ ikσx)
(2.49)
avec k et σ qui sont définies par
k = ω et kσ =iω + σ
iωk. (2.50)
Nous allons maintenant déterminer les amplitudes des ondes réfléchies et trans-mises R et Tσ à l’aide des conditions de transmission (2.55)
1 +R = Tσ,(iω + σ
)ik −
(iω + σ
)ikR = iω
(ikσ
)Tσ.
(2.51)
La relation (2.50) nous permet de simplifier ce système
Tσ = 1 +R et Tσ = 1−R. (2.52)
On obtien Tσ = 1 et R = 0. On conclut donc que la couche PML ne génèreaucune réflexion et un transmission totale. C’est pourquoi on parle de caractèreparfaitement adapté.
36

2.2.6 Etude de réflexion-transmission : PML bornéeNous avons déjà annoncée qu’en tronquant la PML à distance finie, elle géné-
rait une réflexion de faible amplitude. C’est ce que nous allons vérifier ici. Nousconsidérons une fonction u qui vérifie l’équation d’ondes sur la demi-droite x > 0
∂2t u(x, t)− ∂2xu(x, t) = 0 (2.53)
et sur l’intervalle x ∈ [−Lσ, 0], avec Lσ > 0, la longueur de la PML,(∂t + σ
)2uσ(x, t)− ∂2xuσ(x, t) = 0. (2.54)
A l’interface, la solution vérifie les conditions de transmissionuσ(0, t) = u(0, t)
∂t∂xuσ(0, t) =(∂t + σ
)∂xu(0, t).
(2.55)
La couche absorbante est terminée par une condition de Dirichlet
uσ(−Lσ, t) = 0. (2.56)
Soit ω > 0. Nous considérons encore le cas d’un éclairage par une onde planeincidente d’amplitude 1
exp(iω − ikx). (2.57)
A l’interface cette onde génère une onde réfléchie dans le domaine x > 0 etune onde transmise dans le domaine x < 0 qui va elle-même générer une onderéfléchie en x = −L
u(x, t) = exp(iωt+ ikx)) +R exp(iωt− ikx)
uσ(x, t) = Tσ exp(iωt+ ikσx)) exp(σx) +Rσ exp(iωt− ikσx).
(2.58)
aveck = ω et kσ =
iω + σ
iωk. (2.59)
Les conditions de transmission en x = 0 s’écrivent1 +R = Tσ +Rσ,(iω + σ
)(ik)(
1−R)=(iω)(ikσ
)(Tσ −Rσ
).
(2.60)
37

Ce système se simplifie à l’aide de (2.59)1 +R = Tσ +Rσ,
1−R = Tσ −Rσ.
(2.61)
On a donc Tσ = 1 et R = Rσ. D’autre part en x = −Lσ, la condition aux limitess’écrit
Tσ exp(−ikσLσ) +Rσ exp(ikσLσ) = 0 (2.62)
On obtient alors
Rσ = Tσ exp(−2ikσLσ) = exp(−2ikσLσ). (2.63)
Il suit de (2.59)Rσ = exp(−2ikLσ) exp(−2σLσ). (2.64)
On a donc obtenu
Tσ = 1 et R = Rσ exp(−2σL) exp(−2ikLσ). (2.65)
On vérifie donc bien qu’en fermant la PML on génère une onde réfléchie dontl’amplitude est petite dès que σL est grand.
2.2.7 Coefficient d’absorption paraboliqueLorsque les PML sont discrétisées avec une méthode numérique (éléments
finis, différences finies, . . .) la discrétisation génère des réflexions au niveau duchangement de milieu. C’est pourquoi en pratique, on préfère souvent un coeffi-cient d’absorption dépendant de la variable x au coefficient d’absorption constant.Le profil parabolique, défini ci dessous, est particulièrement efficace en pratique.La fonction σ étant de classe C1 ne génère que peu de réflexions au niveau de ladiscrétisation.
σ(x) = σ0(x−L)2
2, ∀x > L,
= 0, ∀x ∈ [−L,L],
= σ0(x+L)2
2, ∀x < −L.
(2.66)
38

Afin de simplifier les écritures on introduit la convention
σ(x) = 0 ∀x ∈ R. (2.67)
Le coefficient d’absorption étant nul aux deux interfaces. On aura alors les deuxconditions de transmission
u(L, t) = uσ(L, t) et ∂xu(L, t) = ∂xuσ(L, t). (2.68)
D’autre part le bon point de vue consiste à utiliser un sytème d’ordre 1 et nond’ordre 2
(∂t + σ(x)
)uσ(x, t)− ∂xvσ(x, t) = 0,
(∂t + σ(x)
)vσ(x, t)− ∂xuσ(x, t) = 0,
uσ(−Lσ, t) = 0 et uσ(Lσ, t) = 0,
uσ(x, 0) = u0(x), ∀x ∈ R,
∂tuσ(x, 0) = u1(x), ∀x ∈ R,
(2.69)
avec u0 et u1 à support dans [−L,L].
2.3 Les couches absorbantes parfaitement adaptéesen dimension n ≥ 2
Une première idée consiste à remplacer le domaine propagatif pour |x| > Lpar une couche absorbante. Cette idée, bien que séduisante, est vouée à l’écheccar elle provoque des réflexions à la frontière entre la couche absorbante et ledomaine physique. Dans les années 90 Alain Bamberger a proposé des couchesabsorbantes parfaitement adaptées qui permettent de ne générer aucune réflexionparasite. C’est cette approche que nous présentons ici.
A partir de la dimension 2, il faut borner le domaine dans plusieurs directionsd’espace. Nous allons tout d’abord borner le domaine dans une direction. Puisnous montrerons comment borner le domaine selon plusieurs directions simulta-nément.
39

2.3.1 Les couches absorbantes de BérangerOn repère le point x par ses coordonnées
x = (x1, x2, · · · , xn) = (x1, x′) avec x′ ∈ Rn−1. (2.70)
On note ∆′ =∑
i=2n ∂2i . On a
∆u(x) = ∂21u(x) + ∆′u(x). (2.71)
On effectue la décomposition suivante de la solution
u = u1 + u′, (2.72)
avec ∂2t u
1 + ∂21u = 0,
∂2t u′ +∆′u = 0
(2.73)
ou de manière équivalente ∂2t u
1 + ∂21u1 = −∂21u′,
∂2t u′ +∆′u′ = −∆′u1.
(2.74)
La première équation peut être interprétée comme une équation d’ondes dans ladirection x avec un terme source. La seconde est une équation de propagationd’ondes dans le plan orthogonal au vecteur unitaire ex avec terme source. PlutÙtque d’introduire un terme d’amortissement dans ces deux équations, Alain Bam-berger a eu l’idée de ne rajouter ce terme que sur la partie en x de ce système. Onaboutit au système PML
(∂t + σ
)2u1σ − ∂21u
1σ = ∂21u
′σ,
∂2t u′σ −∆′u′σ = ∆′u1σ,
(2.75)
avec σ > 0 le paramètre d’absorption.
40

2.3.2 Relation de dispersion dans le domaine de propagation etdans la PML
Nous supposons que la solution admet la forme suivante
u(x, t) = exp(iωt+ ik1x1 + ik′ · x′) (2.76)
et nous cherchons la relation qui relie ω ∈ R+, k1 ∈ R et k′ ∈ Rn−1. Dans ledomaine propagatif, cette onde satisfait
∂2t u(x, t)− ∂21u(x, t)−∆′u(x, t) = 0. (2.77)
On obtient donc(− ω2 + k21 + ∥k′∥2
)exp(iωt+ ik1x1 + ik′ · x′) = 0. (2.78)
On a donc la relation de dispersion pour le domaine propagatif
k21 + ∥k′∥2 = ω2. (2.79)
Ainsi dans le domaine propagatif et à k′ et ω fixé, la solution est décomposée enune onde se dirigeant dans le sens x croissant et une onde se dirigeant dans le sensx décroissant. Dans la suite, on notera k1 le scalaire positif vérifiant (2.79)
exp(iωt− ik1x1 + ik′ · x′) (ondes propagatives sens x croissant),
exp(iωt+ ik1x1 + ik′ · x′) (ondes propagatives sens x décroissant).
(2.80)Dans la couche absorbante, on recherche la solution sous la forme
u(x, t) = exp(iωt+ ikσ,1x1 + ik′ · x′),
u1(x, t) = α1 exp(iωt+ ikσ,1x1 + ik′ · x′),
u′(x, t) = α′ exp(iωt+ ikσ,1x1 + ik′ · x′).
(2.81)
41

Afin d’obtenir la relation de dispersion, on écrit le système PML
u(x, t) = u1(x, t) + u′(x, t),
(∂t + σ
)2u1(x, t)− ∂21u(x, t) = 0,
∂2t u′(x, t)−∆′u(x, t) = 0.
(2.82)
Ceci donne (iω + σ
)2α1 + k2σ,1 = 0,
(iω)2α′ + ∥k′∥2 = 0.
(2.83)
On modifie la première ligne pour obtenir
(iω)2α1 +
(iω)2(iω + σ
)2k2σ,1 = 0,
(iω)2α′ + ∥k′∥2 = 0.
(2.84)
Comme α1 + α′ = 1, il suit la relation de dispersion dans la PML(iω)2
+(iω)2(iω + σ
)2k2σ,1 + ∥k′∥2 = 0. (2.85)
A ω et k′ fixé, on a deux ondes planes amortiesexp(iωt− ikσ,1x1 + ik′ · x′) (propagation dans le sens x1 croissant),
exp(iωt+ ikσ,1x1 + ik′ · x′) (propagation dans le sens x1 décroissant),
(2.86)avec
kσ,1 =(1 +
σ
iω
)k1 (2.87)
le complexe de partie réelle positive et de partie imaginaire négative.
42

2.3.3 Etude de réflexion-transmission par ondes planes : PMLnon bornée
Dans cette section nous montrons que la couche absorbante ne génère aucuneréflexion lorsqu’elle est de longueur infinie. Nous considérons ici une situationsimplifiée. Dans le demi-espace x1 > 0, la fonction u vérifie une équation d’ondes
∂2t u(x, t)− ∂2xu(x, t) = 0 pour x1 > 0. (2.88)
Le demi-espace x1 < 0 est constitué d’une couche absorbante
uσ(x, t) = u1σ(x, t) + u′σ(x, t),(∂t + σ
)2u1σ(x, t)− ∂21uσ(x, t) = 0,
∂2t u′σ(x, t)−∆′uσ(x, t) = 0.
(2.89)
Ces deux domaines sont reliés par la condition de transmissionu(0, x′, t) = uσ(0, x
′, t),
(∂t + σ
)∂xu(0, x
′, t) = ∂t∂xuσ(0, x′, t).
(2.90)
Nous éclairons le demi-espace x1 > 0 par une onde plane incidente de pulsationω se propageant de le sens x1 décroissant
exp(iωt+ ik1x1 + ik′ · x′) pour x1 > 0. (2.91)
Au niveau de l’interface cette onde va se réfléchir et se transmettre pour donnernaissance à une onde réfléchie et à une une onde transmise. La solution dans ledemi-espace x1 > 0 prend la forme
u(x, t) = exp(iωt+ k1x1 + k′ · x′) +R exp(iωt− k1x1 + ik′ · x′). (2.92)
Dans le demi-espace x1 < 0, la solution est seulement constituée par l’onde trans-mise
uσ(x, t) = Tσ exp(iωt− kσ,1x1 + ik′ · x′). (2.93)
Les scalaires k1 > 0 et kσ,1 vérifient
k21 = ω2 − ∥k′∥2 et kσ,1 =iω + σ
iωk1. (2.94)
43

Nous allons déterminer les amplitudes des ondes R et Tσ à l’aide des condi-tions de transmission (2.90). Après avoir divisé par exp(iωt) ces relation s’écrivent
1 +R = Tσ,
(iω + σ
)ik1
(1−R
)=(iω)ikσ,1Tσ.
(2.95)
Il suit gr ?ce à (2.94) 1 +R = Tσ,
1−R = Tσ.
(2.96)
La résolution de ce système fournit Tσ = 1 et R = 0. La couche PML infinie negénère aucune réflexion.
2.3.4 Etude de rélexion-transmission : PML bornéeNous recommençons l’étude précédente dans le cas d’une PML bornée. Nous
considérons une fonction solution (2.88), (2.89) pour x1 > 0, de (2.90) pour x1 ∈[−Lσ, 0] et qui vérifie d’autre part une condition de Dirichlet en x1 = −Lσ
uσ(−Lσ, x′, t) = 0 (2.97)
Le demi-espace x1 > 0 est éclairé par une onde plane se propageant dans le sensx1 décroissant
exp(iωt+ ik1x1 + ik′ · x′) (2.98)
A l’interface avec la PML, cette onde incidente donne naissance à une onde trans-mise et une onde réfléchie qui va elle même se réfléchir en x1 = −L. Dans ledemi espace x1 > 0, nous avons
u(x, t) = exp(iωt+ ik1x1 + ik′ · x′) +R exp(iωt− ik1x1 + ik′ · x′). (2.99)
De même dans la bande x1 ∈ [−Lσ, 0], nous avons
u(x, t) = Tσ exp(iωt+ikσ,1x1+ik′ ·x′)+Rσ,1 exp(iωt−ik1x1+ik′ ·x′) (2.100)
Les conditions de transmission (2.90) s’écrivent alors1 +R = Tσ +Rσ,
(iω + σ
)ik1
(1−R
)=(iω)ikσ,1
(Tσ −Rσ
).
(2.101)
44

On en déduit à l’aide de la relation de dispersion1 +R = Tσ +Rσ,
1−R = Tσ −Rσ.
(2.102)
Il suit Tσ = 1 et R = Rσ. Pour conclure nous relions Tσ et Rσ à l’aide de lacondition de Dirichlet en x = −Lσ.
Tσ exp(iωt− ikσ,1Lσ + ik′ · x′) +Rσ exp(iωt+ ikσ,1Lσ + ik′ · x′) = 0. (2.103)
En divisant par exp(iωt+ ik′ · x′) on a
Tσ exp(−ikσ,1Lσ) +Rσ exp(ikσ,1Lσ) = 0. (2.104)
En tenant compte de kσ,1 = k1
(1 + σ
iω
),il suit
Tσ exp(− ik1Lσ −
k1σLσ
ω
)+Rσ exp
(ik1L+
k1σLσ
ω
)= 0 (2.105)
On a donc obtenu
Rσ = exp(− 2ik1Lσ −
2k1σLσ
ω
)Tσ. (2.106)
On a donc obtenu toutes les amplitudes des ondes planes
Tσ = 1,
R = exp(− 2ik1Lσ
)exp
(− 2k1σLσ
ω
),
Rσ = exp(− 2ik1Lσ
)exp
(− 2k1σLσ
ω
).
(2.107)
On remarque que la réflexion sera d’autant plus faible que le produit σLσ estgrand. D’autre part, le nombre d’ondes k1 ∈ [0, ω] est d’autant plus petit quel’onde est rasante. La formule (2.107) révèle que plus l’onde est rasante plus elleest réfléchie par la PML.
45

2.3.5 Les PML dans toutes les directions d’espaceNous cherchons à calculer les valeurs de la fonction u solution de∂2t u(x, t)−∆u(x, t) = 0 pour x ∈ Rn et t ≥ 0,
u(x, 0) = u0(x) et ∂tu(x, 0) = u1(x) pour x ∈ Rn.
(2.108)
dans le domaineΩ = [−L,L]n (2.109)
entouré par une couche PML Ωσ \ Ω avec
Ωσ = [−Lσ, Lσ]n. (2.110)
Nous allons reformuler ce problème en décomposant sa solution en n fonctions ui
vérifiant u(x, t) = u1(x, t) + · · ·+ un(x, t),
∂2t ui(x, t)− ∂2i u(x, t) = 0, ∀i ∈ [[1, n]],
(2.111)
avecx = (x1, · · · , xn). (2.112)
Dans la PML nous allons ajouter un terme d’absorption à l’équation régissant ui
si |xi| ≥ L. La PML est décomposée en n zones qui se recouvrent
Ωiσ =
x ∈ Ωσ : |xi| > L
. (2.113)
On note Ωi le "complémentaire" de Ωiσ inclus dans le domaine de calcul
Ωi =x ∈ Ωσ : |xi| < L
. (2.114)
L’interface entre Ωiσ et Ωi est notée
Γi =x ∈ Ωσ : |xi| = L
(2.115)
46

Le système PML s’écrit
uσ(x, t) = u1σ(x, t) + · · ·+ unσ(x, t),
∂2t uiσ(x, t)− ∂2i uσ(x, t) = 0, pour x ∈ Ωi,
(∂t + σ
)2uiσ(x, t)− ∂2i uσ(x, t) = 0, pour x ∈ Ωi
σ,
(∂t + σ
)∂iu
iσ|Ωi(x, t) = ∂t∂iu
iσ|Ωi
σ(x, t), pour x ∈ Γi
σ.
(2.116)
La PML est fermée à l’aide d’une condition aux limites par exemple de Dirichlet
uσ(x, t) = 0, pour x ∈ ∂Ωσ. (2.117)
2.3.6 PML à profil paraboliqueC’est la techinque la plus souvent utilisée en pratique. Le bon point de vue est
de revenir à la formulation d’ordre 1 de l’équation des ondes
u(x) = u1(x) + · · ·+ un(x) et v(x) =
v1(x)
· · ·
vn(x)
(2.118)
La formulation PML s’écrit alors(∂t + σ(xi)
)vi(x, t) = ∂xu(x, t), pour x ∈ Rn et t ≥ 0,
(∂t + σ(xi)
)ui(x, t) = ∂xv
i(x, t), pour x ∈ Rn et t ≥ 0.
(2.119)
47

avec σ le profil d’absorption définie par
σ(s) = σ0(s− L)2
L2σ
, ∀s > L,
= 0, ∀s ∈ [−L,L],
= σ0(s+ L)2
L2σ
, ∀s < −L.
(2.120)
La couche PML est fermée par une condition de Dirichlet
uσ(x, t) = 0 sur ∂Ωσ (2.121)
Le profil σ étant régulier aux interfaces de la PML, les fonctions ui et vi sontcontinues.
2.4 Les Conditions aux limites absorbantes en di-mension n ≥ 2
2.4.1 Présentation de quelques conditions aux limites absor-bantes sur une surface plane
En dimensions n, de nombreux auteurs ont dérivé des conditions aux limitesabsorbantes. Nous présentons ici les conditions historiques d’Engquist et Majda []qui ont proposé les conditions aux limites absorbantes suivantes et ont démontrésqu’elles étaient associées à des problèmes bien posés.
∂2t u(x, t)−∆u(x, t) = 0 (2.122)
La condition aux limites absorbantes d’ordre i s’écrit en x = −L(∂1 − ∂x
)iu(−L, x′, t) = 0 (2.123)
La condition aux limites absorbantes d’ordre i s’écrit en x = L(∂1 + ∂x
)iu(L, x′, t) = 0 (2.124)
48

Les conditions absorbante d’ordre 1, 2 et 3 s’écrivent
Ordre 1 :(∂t − ∂1
)u(−L, x′, t) = 0,
Ordre 2 :(∂2t − 2∂1∂t + ∂21
)u(−L, x′, t) = 0,
Ordre 3 :(∂3t − 3∂1∂
2t + 3∂21∂t − ∂31
)u(−L, x′, t) = 0.
(2.125)
En pratique, il n’est pas facile de discrétiser des dérivées partielles d’ordre supé-rieur à 1 en x1. C’est pourquoi, on remplacera les dérivées ∂p1 pour p > 1 à l’aidede l’identité
∂21u(x, t) =(∂2t −∆′
)u(x, t) avec x ∈ Ω et t ≥ 0. (2.126)
Il suit
Ordre 1 :(∂t − ∂1
)u(−L, x2, t) = 0,
Ordre 2 :(2∂2t − 2∂1∂t −∆′
)u(−L, x2, t) = 0,
Ordre 3 :(4∂3t − 4∂1∂
2t − 3∂t∆
′ + ∂1∆′)u(−L, x2, t) = 0.
(2.127)
De même en x1 = −L, on peut réécrire la condition aux limites absorbantes
Ordre 1 :(∂t + ∂1
)u(L, x2, t) = 0,
Ordre 2 :(2∂2t + 2∂1∂t −∆′
)u(L, x2, t) = 0,
Ordre 3 :(4∂3t + 4∂1∂
2t − 3∂t∆
′ − ∂1∆′)u(L, x2, t) = 0.
(2.128)
49

2.4.2 Caractère bien posé des CLA d’ordre 1Soient Ω ⊂ Rn, u0 ∈ D(Ω) et u1 ∈ D(Ω). On considère le problème
Chercher u : Ω× R+ −→ R
∂2t u(x, t)−∆u(x, t) = 0 pour x ∈ Ω et t ≥ 0,
∂u
∂n(x, t) +
∂u
∂t(x, t) = 0, pour x ∈ ∂Ω et t ≥ 0,
u(x, 0) = u0(x), pour x ∈ Ω,
∂u
∂t(x, 0) = u1(x), pour x ∈ Ω.
(2.129)
Nous allons montrer que ce problème admet une unique solution u ∈ C2(R+, L2(Ω))∩C1(R+, H1(Ω)) ∩ C0(R+, H1(∆,Ω)), avec u ∈ H1(∆,Ω)) ssi u ∈ H1(Ω)) et∆u ∈ L2(Ω). Nous notons v(x, t) = ∂tu(x, t). Le vecteur U = (u, v) vérifie
∂tu(x, t)− v(x, t) = 0 et u(x, 0) = u0(x)
∂tv(x, t)−∆u(x, t) = 0 et ∂tv(x, 0) = u1(x).
(2.130)
C’est à dire∂tU(x, t) + AU(x, t) = 0 et U(0) = U0, (2.131)
avec
AU(x, t) =
−v 0
0 −∆u(x, t)
et U0(x) =
u0
v0
. (2.132)
50

Nous posons
H = H1(Ω)× L2(Ω),
D(A) =(u, v) ∈ H1(Ω)×H1(Ω) :
∆u ∈ L2(Ω) et ∂nu(x, t) + v(x, t) = 0 sur ∂Ω.
(2.133)
Il nous suffit de montrer qu’il existe α ∈ R tel que l’opérateurA+αI est maximalet monotone
(i) Trouvons α tel que A+ αI est monotone(AU,U
)H= −
∫Ω
∇v(x) · ∇u(x) + v(x)u(x)dx−∫Ω
∆u(x)v(x)dx. (2.134)
La formule de Green∫Ω
∇v(x) · ∇u(x)dx+∫Ω
∆u(x)v(x)dx =
∫∂Ω
∂nu(x)v(x)dx (2.135)
nous permet d’écrire(AU,U
)H= −
∫∂Ω
v(x)∂nu(x)dx−∫Ω
v(x)u(x)dx. (2.136)
d’où d’après la condition à la limite(AU,U
)H=
∫∂Ω
v2(x)dx−∫Ω
v(x)u(x)dx. (2.137)
On a donc (AU,U
)H≥ −
∫Ω
v(x)u(x)dx. (2.138)
Comme 2ab ≤ a2 + b2, on obtient(AU,U
)H≥ −1
2
∫Ω
u2(x)dx− 1
2
∫Ω
v2(x)dx ≥ −∥u∥2H . (2.139)
Ainsi l’opératuer A+ I est monotone(AU + U,U
)H≥ 0. (2.140)
51
(ii) Montrons que A + I est maximal. Il nous faut démontrer que le problèmesuivant admet une solution u ∈ H1(∆,Ω) et v ∈ H1(Ω) pour tout f ∈ H1(Ω) etg ∈ L2(Ω)
−v(x) + 2u(x) = f(x) pour x ∈ Ω,
−∆u+ 2v(x) = g(x) pour x ∈ Ω,
∂u
∂n(x) + v(x) = 0 pour x ∈ ∂Ω
(2.141)
Nous éliminons v(x) = 2u(x)− f(x)−∆u+ 4u(x) = 2f(x) + g(x) pour x ∈ Ω,
∂u
∂n(x) + 2u(x) = f(x) pour x ∈ ∂Ω
(2.142)
L’existence de la fonction u suit du théorème de Lax-Milgram appliqué à la for-mulation variationnelle : chercher u ∈ H1(Ω) tel que pour tout w ∈ H1(Ω)∫
Ω
∇u(x) · ∇w(x)dx+ 4
∫∂Ω
u(x)w(x)dx =
∫Ω
(2f(x) + g(x)
)w(x)dx.
(2.143)L’opérateur A+ I est donc maximal.
2.4.3 Calcul du coefficient de réflexionComme pour les PML nous effectuons ici une étude par onde plane. Le demi-
espace x1 > 0 est le siège d’un phénomène de propagation d’ondes
∂2t u(x, t)−∆u(x, t) = 0 (2.144)
ou de manière équivalente
∂2t u(x, t)− ∂21u(x, t)−∆′u(x, t) = 0. (2.145)
Ce demi-espace est fermé en x = 0 par les conditions aux limites absorbantesd’Engquist et Majda d’ordre i(
∂t − ∂x
)iu(0, x′, t) = 0. (2.146)
52

Nous éclairons le domaine par une onde plane se propageant dans le sens x-décroissant provenant de x1 = +∞
u(x1, x′, t) = exp
(iωt+ik1x1+ik
′ ·x′)+R exp
(iωt−ik1x1+ik′ ·x′
)(2.147)
La condition de transmission d’Engquist-Majda d’ordre i peut alors s’écrire(iω − ik1
)i+(iω + ik1
)iR = 0. (2.148)
Le coefficient de réflexion prend alors la forme suivante
R = −
(ω − k1
)i(ω + k1
)i . (2.149)
En notant θ ∈ [0, π/2] l’angle d’incidence de l’onde plane (l’angle entre le vecteurk et e1, θ = 0 pour une incidence normale et θ = π
2pour une onde rasante), nous
avonscos(θ) =
k1ω. (2.150)
Il suit
R = −(1− cos(θ)
1 + cos(θ)
)i= − tan2i
(θ2
). (2.151)
Remarquons que le coefficient de réflexion est nul pour les ondes à incidencenormales et 1 pour les ondes rasantes. D’autre part plus l’ordre de la CLA estélevé plus le coefficient de réflexion est petit.
2.4.4 Conditions aux limites sur une surface sphériqueLes conditions aux limites absorbantes d’Engquist et Majda (d’ordre supérieur
ou égal à 2) peuvent poser des problèmes lorsque l’on doit borner le domaine dansplusieurs directions. La présence de coin peut en effet provoquer des instabilitésnumériques.
Une idée naturelle consiste à poser cette condition aux limites sur une sphèrede rayon ρ. C’est cette approche qu’ont développé Bayliss et Turkel [].
Coordonnées polaires et sphériques. En dimension 2, nous notons r ≥ 0 etθ ∈ [0, 2π[ les coordonnées polaires
x1 = r cos(θ) et x2 = r sin(theta) (2.152)
53

Le laplacien en coordonnée polaire s’écrit alors
∆u(x) =(1r∂rr∂ +
1
r2∂2θ
)u(r, θ). (2.153)
En dimension 3, nous notons r ≥ 0, θ ∈ [0, π] et φ ∈ [0, 2π[ les coordonnéessphériques
x1 = r sin(θ) cos(φ), x2 = r sin(θ) sin(φ) et x3 = r cos(θ). (2.154)
Le laplacien en dimension 3 s’écrit
∆u(x) =( 1
r2∂r(r2∂ru
)+
1
r2∆′)(r, θ, φ) (2.155)
avec∆′ =
1
sin(θ)∂θ(sin(θ)∂θu
)+
1
sin2(θ)∂2φu (2.156)
Les conditions aux limites absorbantes de Bayliss et Turkel Elles s’écriventpour x sur la sphère r = ρ et t ≥ 0
L0u =(∂t + ∂r +
n− 1
2ρ
)u(x, t),
Lmu =(∂t + ∂r +
2p
ρ+n− 1
2ρ
)Lm−1u(x, t),
(2.157)
avec m l’ordre de la condition aux limites et n la dimension de l’espace Rn surlequel est posé l’équation des ondes Les deux premières s’écrivent en dimension2
Ordre 0 :(∂t + ∂r +
1
2r
)u(x, t) = 0,
Ordre 1 :(∂t + ∂r +
5
2r
)(∂t + ∂r +
1
2r
)u(x, t) = 0,
(2.158)
et en dimension 3Ordre 0 :
(∂t + ∂r +
1
r
)u(x, t) = 0,
Ordre 1 :(∂t + ∂r +
3
r
)(∂t + ∂r +
1
r
)u(x, t) = 0.
(2.159)
54

2.5 Analyse des conditions de Bayliss et Turkel endimension 3
Nous considérons une solution u de l’équation des ondes
∂2t u(x, t)−∆u(x, t) = f(x) exp(iωt) (2.160)
Résolution de l’équation des ondes harmoniques sur une couronne par sé-paration de variable Nous allons appliquer ici une technique de séparation devariable. Au niveau mathématique, cette technique peut être justifiée à l’aide de lathéorie des opérateur autoadjoints. Nous adoptons le point de vue des praticiensqui permet de mieux faire ressortir les concepts sans s’attarder sur des points pu-rement techniques.
Nous considérons une fonction u(x, t) = w(x) exp(iωt) qui vérifie l’équationdes ondes dans une couronne de la forme
ρmin ≤ r ≤ ρ. (2.161)
La fonction w vérifie
ω2w(r, θ, φ) +1
r2∂r
(r2∂rw(r, θ, φ)
)+
1
r2∆′w(r, θ, φ) = 0. (2.162)
Nous recherchons w sous la forme
w(r, θ, φ) = f(r) Y (θ, φ). (2.163)
Il suitω2r2f(r, θ, φ) + ∂r
(r2∂rf(r)
)f(r)
= −∆′Y (θ, φ)
Y (θ, φ). (2.164)
Le membre de gauche ne dépend pas de θ et φ tandis que le membre de droite nedépend pas de r. C’est pourquoi, ils sont tous les deux constants.
ω2r2f(r, θ, φ) + ∂r
(r2∂rf(r)
)f(r)
= λ (2.165)
et
−∆′Y (θ, φ)
Y (θ, φ)= λ. (2.166)
55

Le couple λ, Y est un mode propre du laplacien transverse −∆′. Il est alors bienconnu que les valeurs propres sont de la forme
λℓ = ℓ(ℓ+ 1) avec ℓ ∈ N. (2.167)
et que l’espace propre associé est de dimension 2ℓ + 1. On utilisera pour repré-senter les fonctions propres les harmoniques sphériques qui forment une base desfonction L2 de la sphère
Yℓ,m(θ, φ) avec ℓ ∈ N et m ∈ [[−ℓ, ℓ]]. (2.168)
Les premières harmoniques sphériques sont données après normalisation
Y 00 (θ, φ) =
12
√1π,
Y −11 (θ, φ) = 1
2
√32π
sin(θ)e−iφ,
Y 01 (θ, φ) =
12
√3πcos(θ),
Y 11 (θ, φ) =
−12
√32π
sin(θ)eiφ,
Y −22 (θ, φ) = 1
4
√152π
sin2 θ e−2iφ,
Y −12 (θ, φ) = 1
2
√152π
sin θ cos θ e−iφ,
Y 02 (θ, φ) =
14
√5π(3 cos2 θ − 1),
Y 12 (θ, φ) =
−12
√152π
sin θ cos θ eiφ,
Y 22 (θ, φ) =
14
√152π
sin2 θ e2iφ.
(2.169)
La partie radiale ne nécessite aucune fonction spéciale. Elle vérifie
ω2r2f(r) + ∂r
(r2∂rf(r)
)f(r)
= ℓ(ℓ+ 1) (2.170)
Cette équation différentielle ordinaire étant d’ordre 2, l’espace vectorielle de cessolutions est d’ordre 2. Il est aussi bien connue que deux solutions sont données
56

par
fℓ,−(r) = rℓ(1rdr)ℓ(exp(iωr)
r
)et fℓ,+(r) = rℓ
(1rdr)ℓ(exp(−iωr)
r
).
(2.171)et sont proportionnelles aux fonction de Hankel demi entière. Dans la couronneρmin < r < ρ, la fonction u(x, t) est donnée par
u(r, θ, φ, t) =+∞∑ℓ=0
ℓ∑m=−ℓ
(αℓ,msℓ(r)Yℓ,m(θ, φ) + βℓ,meℓ(r)Yℓ,m(θ, φ)
). (2.172)
avec
sℓ(r, t) = rℓ(1rdr)ℓ(exp(iωt− iωr)
r
)(2.173)
et
eℓ(r, t) = rℓ(1rdr)ℓ(exp(iωt+ iωr)
r
)(2.174)
La première partie est une onde entrante car elle se propage dans le sens rdécroissant. La deuxième partie est une onde sortante car elle se propage dans lesens r croissant.
Nous développons alors l’ensemble des termes radiaux. On obtienteℓ(r, t) =
ℓ∑p=0
eℓ,pexp(iωr − iωt)
r1+p,
sℓ(r, t) =ℓ∑
p=0
sℓ,pexp(iωr + iωt)
r1+p
(2.175)
Effet de la condition de Bayliss Turkel sur les ondes sortantes. Nous reprenonsla configuration précédente et fermons le domaine à l’aide de la condition auxlimites de Bayliss-Turkel. Nous allons ici étudier l’effet de la condition aux limitesabsorbantes de Bayliss-Turkel sur les termes sortants de (2.172). Commençons parremarquer(
∂t + ∂r
)(exp(iωt− iωr)
rp+1
)= −p+ 1
r
(exp(iωt− iωr)
rp+1
)(2.176)
La condition de Bayliss-Turkel d’ordre 0 appliquée à un terme sortant s’écrit donc
L0
(exp(iωt− iωr)
rp+1
)= −pexp(iωt− iωr)
rp+2. (2.177)
De même pour l’opérateur d’ordre 1, on a
L1
(exp(iωt− iωr)
rp+1
)= (−p)(1− p)
exp(iωt− iωr)
rp+3. (2.178)
57

Puis par récurrence, il suit
Lm
(exp(iωt− iωr)
rp+1
)= (−p)(1− p) · · · (m− p)
exp(iωt− iωr)
rp+2+m. (2.179)
Ainsi nous remarquons que pour p ∈ [[0,m]],
Lm
(exp(iωt− iωr)
rp+1
)= 0. (2.180)
On a doncLm(sℓ) = 0 ∀ℓ ∈ [[0,m]]. (2.181)
L’opérateur absorbant de Bayliss-Turkel d’ordre m est donc transparent pour lesondes sortantes d’ordre inférieure ou égale à m.
58
Chapitre 3
Réflexion en elastodynamique
3.1 Eclairage par une onde P d’une surface fixeNous nous plaçons dans le demi-plan x1 > 0. Ce domaine est régi les équa-
tions de l’élastodynamique linéaire isotrope et est fermé en x1 = 0 par une condi-tion de Dirichlet
u(0, x2, x3) = 0. (3.1)
Une onde P provenant de x1 = +∞ éclaire ce domaine
uP,inc = u exp(iωt+ ik · x). (3.2)
avec ω > 0 et k1 > 0. Cette onde est longitudinale
u = γk (3.3)
et vérifie la relation de dispersion des ondes P
∥k∥2 = ω2
c2P. (3.4)
Quitte à effectuer une rotation, on peut choisir le vecteur d’ondes ortogonal dansle plan orthogonal à (0, 0, 1). C’est à dire
k =
k1
k2
0
. (3.5)
59

Tout en ne perdant aucune généralité, nous fixons en raison de la linéarité γ = 1.l’onde incidente prend la forme
uP,inc =
k1
k2
0
exp(iωt+ ik1x1 + ik2x2). (3.6)
Cette onde incidente va donner premièrement naissance à une onde plane P réflé-chie
uP,ref = R
−k1
k2
0
exp(iωt− ik1x1 + ik2x2) (3.7)
avec R un coefficient de réflexion. Deuxièmement, elle se transformera en uneonde S
uS,ref =
uS,1
uS,2
uS,3
exp(iωt− ikS,1x1 + ik2x2) (3.8)
avec uS un vecteur transverse uS,1kS,1+u2k2 = 0 et kS,1 ∈ R qui vérifie la relationde dispersion
(kS,1)2
+(k2)2
=ω2
c2Sie.(kS,1)2
=(k1)2
+ω2
c2S− ω2
c2P(3.9)
60
Remarquons que 0 < k1 < kS,1 car 0 < cS < cP . L’onde totale est donnée par
u(x1, x2, x3) =
k1
k2
0
exp(iωt+ ik1x1 + ik2x2)
+ R
−k1
k2
0
exp(iωt− ik1x1 + ik2x2)
+
uS,1
uS,2
uS,3
exp(iωt− ikS,1x1 + ik2x2) (3.10)
La condition aux limites u(0, x2, x3) = 0 va nous permettre d’obtenir R et uS .Elle s’écrit
(
k1
k2
0
+ R
−k1
k2
0
+
uS,1
uS,2
uS,3
)exp(iωt+ ik2x2) = 0 (3.11)
C’est à dire
k1 −RPk1 + uS,1 = 0
k2 +RPk2 + uS,2 = 0
uS,3 = 0
(3.12)
61
Comme l’onde S est transversale on a (uS,1, uS,2, 0)·(−kS,1, k2, 0) = 0. Par consé-quent on obtient
uS = RS
k2
kS,1
0
(3.13)
avec RS ∈ R un coefficient de réflexion. Le système (3.12) s’écrit alorsk1 −RPk1 +RSk2 = 0,
k2 +RPk2 +RSk1 = 0,
(3.14)
c’est à dire 1−RP +RS
k2k1
= 0
1 +RP +RSkS,1k2
= 0.
(3.15)
La résolution de ce système fournitRP = 1− 2k22
k1kS,1 + k22,
RS = − 2k2k1kS,1k1 + k22
.
(3.16)
3.2 Eclairage d’une surface fixe par une onde SNous nous plaçons dans le demi-plan x1 > 0. Ce domaine est régi les équa-
tions de l’élastodynamique linéaire isotrope et est fermé en x1 = 0 par une condi-tion de Dirichlet
u(0, x2, x3) = 0. (3.17)
Une onde S est transversale provenant de x1 = +∞ éclaire ce domaine
uP,inc = u exp(iωt+ ik1x1 + ik2x2). (3.18)
avec ω > 0 et k1 > 0. Cette onde est longitudinale
u · k = 0 (3.19)
62
et vérifie la relation de dispersion des ondes P
k21 + k22 =ω2
c2P. (3.20)
L’onde incidente peut être vue comme une combinaison linéaire de deux ondestransversales
0
0
1
exp(iωt+ ik1x1 + ik2x2). (3.21)
et −k2
k1
0
exp(iωt+ ik1x1 + ik2x2). (3.22)
En traitant successivement ces deux polarisations, on aura traiter l’ensemble descas possibles.
63
3.2.1 Polarisation suivant e3Nous traitons ici le cas d’une onde incidente de la forme (3.21). Cette onde
peut donner naissance à une onde P réfléchie et une onde S réfléchie.
u(x, t) =
0
0
1
exp(iωt+ ikS,1x1 + ik2x2)
RP
−kP,1
k2
0
exp(iωt− ikP,1x1 + ik2x2)
+
RS
k2
kS,1
0
+
0
0
RS,3
exp(iωt− ikS,1x1 + ik2x2). (3.23)
, il est facile de voir que l’onde S se réfléchit sans aucune conversion
u(x, t) =
0
0
1
exp(iωt+ ik1x1 + ik2x2)
+
0
0
−1
exp(iωt− ik1x1 + ik2x2). (3.24)
64
On peut alors mener une étude de réflexion transmission pour chacune de cesdeux ondes planes.
Eclairage par uIS,inc
Cette onde incidente va donner premièrement naissance à une onde plane Sréfléchie
uS,ref =
R
−k2
−k1
0
+
0
0
u′3
exp(iωt− ik1x1 + ik2x2) (3.25)
avec R un coefficient de réflexion. Elle va d’autre part générée une onde P réflé-chie de vecteur d’ondes
kP =
−kP,1
k2
0
(3.26)
avec kP,1 ∈ R qui vérifie la relation de dispersion
(kP,1)2
+(k2)2
=ω2
c2Pc’est à dire
(kP,1)2
= k21 +ω2
c2P− ω2
c2S. (3.27)
L’étude n’est pas la même suivant que
k21 >ω2
c2S− ω2
c2Pou k21 <
ω2
c2S− ω2
c2P. (3.28)
Dans le premier cas, l’onde P réfléchie est une onde progressive
uP,ref (x, t) = RP
−kP,1
k2
0
exp(iωt− ikP,1x1 + ik2x2) (3.29)
avec kP,1 =√k21 − ω2
c2P− ω2
c2S. Remarquons que 0 < kP,1 < k1 car 0 < cS < cP .
65
Dans le deuxième cas, l’onde P réfléchie est une onde évanescente
uP,ref (x, t) = RP
ik′P,1
k2
0
exp(iωt− k′P,1x1 + ik2x2) (3.30)
avec k′P,1 =√
ω2
c2S− ω2
c2P− k21. L’onde totale est donnée par
u(x1, x2, x3) =
−k2
k1
0
exp(iωt+ ik1x1 + ik2x2)
+(R
−k2
−k1
0
+
0
0
uS,3
)exp(iωt− ik1x1 + ik2x2)
+ RP
−kP,1
k2
0
exp(iωt− ikP,1x1 + ik2x2) (3.31)
La condition de Dirichlet s’écrit
−k2 −Rk2 −RPkP,1 = 0
k1 −Rk1 +RPk2 = 0
uP,3 = 0
(3.32)
66
C’est à dire
1 +R +RPkP,1k2
= 0
1−R +RPk2k1
= 0
uP,3 = 0
(3.33)
La résolution de ce système fournitR =
k1kP,1 − k22k1kP,1 + k22
,
RP = − 2k2k1kP,1k1 + k22
.
(3.34)
67
Chapitre 4
L’équation de Helmholtz dansl’espace libre
4.1 IntroductionDans ce premier chapitre consacré aux phénomènes de propagation d’ondes
établis, nous nous plaçons dans l’espace libre (ceci permet un exposé un peumoins technique des résultats à l’aide des fonctions de Green). Nous notons le d’alembertien :
v(x, t) = −∆v(x, t) +1
c2∂2v
∂t2(x, t). (4.1)
Nous nous intéressons aux problèmes de D’Alembert
v(x, t)(x, t) = f(x, t) ∀x ∈ R3 et t ∈ R (4.2)
dont les solutions et les termes sources ont une dépendance temporelle harmo-nique
v(x, t) = ℜ(uk(x) exp(−iωt)
),
g(x, t) = ℜ(f(x) exp(−iωt)
).
(4.3)
Les deux fonctions uk : R3 −→ C et f : R3 −→ C sont appelées les phaseursde la solution et du terme source. Ils sont reliés par l’équation de Helmholtz quiprend la forme
−∆uk(x)− k2uk(x) = f(x) avec k =ω
c. (4.4)
68

Privé de ses conditions initiales, le problème de d’Alembert est mal posé : il n’y aplus unicité de sa solution. En effet, les ondes planes sont solutions de l’équationdes ondes homogène (k ∈ R3 avec ∥k∥ = ω
c)
u(x, t) = cos(k · x− ωt). (4.5)
De même, le problème de Helmholtz est lui aussi mal posé. Il est facile de construiredes solutions homogènes en considérant les phaseurs des ondes planes
uk(x) = exp(ik · x). (4.6)
D’autre part, il n’y a pas génériquement existence de solutions dans l’espace deSobolev H1(R3) mais seulement dans un espace beaucoup plus grand : l’espacedes fonctions localement H1
H1loc(R3) =
u : R3 −→ C : φu ∈ H1(R3) ∀φ ∈ D(R3)
. (4.7)
Dans ce chapitre, nous montrons comment il est possible de définir de manièrenaturelle une solution dite sortante de l’équation de Helmholtz en s’appuyant surdes arguments physiques. Nous présentons plus particulièrement les bases mathé-matiques de cette théorie sous trois points de vue équivalents : la condition deradiation de Sommerfeld, le principe d’amplitude limite, le principe d’absorptionlimite.
La condition de radiation de Sommerfeld Cette approche consiste à garantirl’unicité de la solution de l’équation de Helmholtz en imposant à l’infini à lasolution de l’équation de Helmholtz la condition d’ondes sortantes ou de radiationde Sommerfeld qui s’écrit
∫∥x∥=R
∣∣uk(x)∣∣2dsx = OR→+∞
(1),
∫∥x∥=R
∣∣(∂r − ik)uk(x)∣∣2dsx = O
R→+∞
( 1
R2
).
(4.8)
Formellement, ces deux conditions consistent à assurer que la solution admet lecomportement suivant à l’infini
uk(x) = u∞(x
∥x∥)exp(i∥k∥∥x∥)
4π∥x∥+ o
∥x∥→+∞(
1
∥x∥). (4.9)
En domaine temporel, cette expression devient
v(x, t) = ℜ(u∞(
x
∥x∥)exp(i∥k∥∥x∥ − iωt)
4π∥x∥+ o
∥x∥→+∞(
1
∥x∥)). (4.10)
69

Cette expression correspond à une onde sphérique se déplaçant à la vitesse c > 0dans le sens ∥x∥ croissant.
Le but de la section 4.2 est de démontrer le théorème suivant
Théorème 4.1 Pour tout f ∈ L2(R3) à support compact, il existe une uniquefonction uk ∈ H1
loc(R3) qui vérifie la condition de radiation de Sommerfeld (4.8)et l’équation de Helmholtz
−∆uk(x)− k2uk(x) = f(x), ∀x ∈ R3. (4.11)
Le principe d’amplitude limite Cette approche consiste à étudier le comporte-ment en temps long de la solution du problème
− ∆v(x, t) +1
c2∂2v
∂t2(x, t) = g(x, t), pour x ∈ R3 et t ≥ 0,
v(x, 0) = 0, pour x ∈ R3,
∂tv(x, 0) = 0, pour x ∈ R3,
(4.12)
pour un terme source ayant une dépendance temporelle harmoniqueg(x, t) = ℜ
(f(x) exp(−iωt)
)∀t ≥ 0,
g(x, t) = ∀t < 0.
(4.13)
avec ω = kc et f ∈ L2(R3) à support compact. Cette approche sélectionnera lasolution sortante en introduisant de la causalité.
La section 4.3 donnera un cadre mathématique à cette approche. On y démon-trera le théorème suivant
Théorème 4.2 On a
limt→+∞
∥∥∥v(x, t)−ℜ(uk(x) exp(−iωt)
)∥∥∥L6(R3)
= 0. (4.14)
avec uk : R3 −→ C la fonction définie par le théorème 4.1.
70

Le principe d’absorption limite Cette technique consiste à introduire un pe-tit paramètre d’absorption ε > 0. On définit alors la solution variationnelle del’équation coercive
Trouver uk+iε ∈ H1(R3) tel que :
−∆uk+iε(x) − (k + iε)2uk+iε(x) = f(x)
(4.15)
On fait alors tendre le coefficient d’absorption ε vers 0+ pour définir la solutionsortante de l’équation de Helmholtz. Du point de vue physique cette techniqueconsiste à introduire le phaseur de la solution du problème d’ondes amorties
−∆v(x, t) +1
c2∂2v
∂t2(x, t) +
2ε
c
∂v
∂t(x, t) + ε2v(x, t) = g(x, t) (4.16)
Le terme de frottement introduit alors de la causalité et permet de sélectionner lesondes sortantes. L’objectif de la section 4.4 est de donner un cadre mathématiqueà ce principe en démontrant le résultat suivant
Théorème 4.3 On a
limε→0+
∥∥∥uk+iε − uk
∥∥∥L6(R3)
= 0 (4.17)
avec uk : R3 −→ C la fonction définie par le théorème 4.1.
4.2 La condition de radiation de Sommerfeld
4.2.1 Fonction de Green et existence de solution sortanteDans cette section nous démontrons l’existence d’une solution sortante de
l’équation de Helmholtz à l’aide des fonctions de Green.
Lemme 4.4 Si u et ∆u sont dans L2loc(R3) alors u est dans H1
loc(R3)
Démonstration :
Soit B la boule de rayon R et B′ la boule de rayon 2R. Par densité, il suffit demontrer qu’il existe une constante C > 0 tel que pour
∥∇u∥L2(B) ≤ C(∥u∥L2(B′) + ∥∆u∥L2(B′)
), ∀u ∈ D(R3). (4.18)
71

Soit χ une fonction ∈ D(R3) tel que χ(x) = 1 dans B et χ(x) = 0 hors de B′
décroissante suivant r. D’après l’identité de Green, on a∫R3
∥∇χu∥2dx = −∫R3
∆(χu) χudx, ∀χ ∈ D(R3) (4.19)
On peut alors évaluer le terme à la droite de l’égalité en développant le laplacien
∆(χu) = χ∆u + 2 ∇χ · ∇u+ u∆χ. (4.20)
Il suit que
χ∆(χu) = χ2∆u + 2 ∇χ · ∇(χu) +(χ∆χ− 2∇χ · ∇χ
)u. (4.21)
On peut alors injecter cette dernière expression dans (4.19)∫R3
∥∇χu∥2dx = −∫R3
χ2u∆u + 2 ∇χ · ∇(χu)u
+(χ∆χ− 2∇χ · ∇χ
)u2dx, ∀χ ∈ D(R3) (4.22)
Comme ∥χ∥L∞(R3) = 1, on obtient
∥∇χu∥2L2(R3) ≤ ∥u∥L2(B′) ∥∆u∥L2(B′)
+ 2 C1 ∥∇χu∥B′ ∥u∥L2(B′) + C2 ∥u∥2L2(B′). (4.23)
avec C1 = ∥∇χ∥L∞(R3) et C2 = ∥∆χ∥L∞(R3). Comme ab ≤ a2+b2
2, on a
∥∇χu∥2L2(R3) ≤∥∇χu∥2L2(R3)
2
+(12+ 2 C2
1 + C2
)∥u∥2L2(B) +
∥∆u∥2L2(B)
2. (4.24)
Il suit que
∥∇χu∥2L2(R3)
2≤(12+ 2 C2
1 + C2
)∥u∥2L2(B′) +
∥∆u∥2L2(B′)
2. (4.25)
Comme χ = 1 dans B, il suit
∥∇u∥L2(B) ≤ ∥∇χu∥L2(R.3) (4.26)
On déduit (4.18). Ceci termine la preuve de la proposition.
72
Pour tout k ∈ C, on introduit la fonction Gk : R3 \ 0 −→ C
Gk(x) =exp(ik∥x∥)
4π∥x∥(4.27)
Lemme 4.5 Pour tout k ∈ C, la fonction Gk est une solution fondamentale del’opérateur −∆− k2, ie.
−∆Gk − k2Gk = δ(x) dans D′(R3) (4.28)
Démonstration :
Remarquons tout d’abord que Gk est un élément de D′(R3) car Gk ∈ L1loc(R3).
Soit Φ ∈ D(R3). Nous raisonnons au sens des distrbutions⟨∆Gk + k2Gk,Φ
⟩R3
=
∫R3
Gk(x)(∆Φ(x) + k2Φ(x)
)dx
= limε→0
Iε
(4.29)
avec Iε donné par
Iε =
∫∥x∥>ε
Gk(x)(∆Φ(x) + k2Φ(x)
)dx. (4.30)
D’après la formule de Green, on a
Iε =
∫∥x∥>ε
Gk(x)(∆Φ(x) + k2Φ(x)
)dx
=
∫∥x∥>ε
(∆Gk(x) + k2Gk(x)
)Φ(x)dx
+
∫∥x∥=ε
Gk(x)∂Φ
∂r(x)− ∂Gk
∂r(x)Φ(x)dsx
(4.31)
Il ne nous reste plus qu’à évaluer la dernière ligne car ∆Gk(x) + k2Gk(x) = 0hors de l’origine. Comme Φ est C∞, on a
Φ(x) = Φ(0) + O∥x∥→0
(∥x∥) et ∂rΦ(x) = O∥x∥→0
(1). (4.32)
De même, la fonction de Green vérifie
Gk(x) = O∥x∥→0
(1
∥x∥) et ∂rGk(x) =
1
4π∥x∥2+ O
∥x∥→0(
1
∥x∥). (4.33)
73
Il suitIε = −
∫∥x∥=ε
Φ(0)
4π∥x∥2dsx +
∫∥x∥=ε
O∥x∥→0
(1
∥x∥)dsx
= −Φ(0) + oε→0
(1)
(4.34)
Ainsi, on a ⟨∆Gk + k2Gk,Φ
⟩= −Φ(0) (4.35)
Ceci termine la preuve.
Proposition 4.6 Soient k ∈ R et f ∈ L2(R3) à support compact. La fonctionuk(x) = Gk ∗ f(x) vérifie
uk ∈ H1loc(R3),
−∆uk(x) − k2 uk(x) = f(x) ∀x ∈ R3,
∫∥x∥=R
|uk(x)|2dsx = OR→+∞
(1),
∫∥x∥=R
|(∂r − ik)uk(x)|2dsx = OR→+∞
(1
R2).
(4.36)
Démonstration :
Par définition, la fonction uk : R3 −→ C est donnée par
uk(x) = Gk ∗ f(x) =
∫R3
exp(ik∥x− y∥)4π∥x− y∥
f(y)dy. (4.37)
La théorie de la convolution dans D′(R3) nous permet d’obtenir que uk est unesolution de l’équation de Helmholtz inhomogène
−(∆+ k2)(Gk ∗ f)(x) = −(∆Gk +k2Gk) ∗ f(x) = δ ∗ f(x) = f(x). (4.38)
Nous remarquons aussi que uk ∈ H2loc(R3) d’après le lemme 4.4. Comme le sup-
port de f est borné, il existe un réel positif ρ tel que la boule de rayon ρ contiennele support de f . Pour tout y dans le support de f et pour tout x tel que ∥x∥ > 2ρ,on a
∥x− y∥ ≥ ∥x∥ − ∥y∥ ≥ ∥x∥2
+∥x∥2
− ∥y∥ ≥ ∥x∥2
+2ρ
2− ρ ≥ ∥x∥
2. (4.39)
74

En majorant l’expression (4.37), il suit∣∣∣uk(x)∣∣∣ ≤ 1
2π∥x∥
∫R3
∣∣f(y)∣∣dy (4.40)
On intègre cette expression sur la sphère de rayon R∫∥x∥=R
∣∣∣uk(x)∣∣∣2dsx ≤ 1
π
(∫R3
∣∣f(y)∣∣dy)2 = OR→+∞
(1). (4.41)
De même, on a pour ∥x∥ > 2ρ
∇uk(x) =∣∣∣ ∫
R3
exp(ik∥x− y∥)4π
x− y
∥x− y∥2(ik − 1
∥x− y∥
)f(y)dy (4.42)
∂ruk(x) =
∫R3
exp(ik∥x− y∥)4π
x− y
∥x− y∥2x
∥x∥
(ik− 1
∥x− y∥
)f(y)dy (4.43)
∂ruk(x)− ikuk(x) =
∫R3
exp(ik∥x− y∥)4π
x− y
∥x− y∥3· x
∥x∥f(y)dy
+
∫R3
exp(ik∥x− y∥)4π∥x− y∥
(1− x− y
∥x− y∥· x
∥x∥
)ikf(y)dy.
(4.44)Il suit l’inégalité
∣∣∂ruk(x)− ikuk(x)∣∣∣ ≤
∫R3
|f(y)|4π∥x− y∥2
dy
+ k
∫R3
|f(y)|4π∥x− y∥
(1− x− y
∥x− y∥· x
∥x∥
)dy.
(4.45)Nous remarquons alors que
1− x− y
∥x− y∥· x
∥x∥=( x
∥x∥− x− y
∥x− y∥
)· x
∥x∥(4.46)
Il suit d’après l’inégalité de Cauchy-Schwartz∣∣∣1− x− y
∥x− y∥· x
∥x∥
∣∣∣ ≤∥∥∥ x
∥x∥− x− y
∥x− y∥
∥∥∥ (4.47)
Comme
x
∥x∥− x− y
∥x− y∥=(∥x− y∥ − ∥x∥
∥x− y∥
) x
∥x∥+
y
∥x− y∥(4.48)
75
on a ∣∣∣1− x− y
∥x− y∥· x− y
∥x∥
∣∣∣ ≤∣∣∣∥x− y∥ − ∥x∥
∥x− y∥
∣∣∣∥x∥∥x∥+
∥y∥∥x− y∥
(4.49)
D’où d’après l’inégalité triangulaire, on obtient∣∣∣1− x− y
∥x− y∥· x
∥x∥
∣∣∣ ≤ ∥y∥∥x− y∥
∥x∥∥x∥
+∥y∥
∥x− y∥≤ 2
∥y∥∥x− y∥
. (4.50)
On déduit de (4.39) et (4.45) que
∣∣∂ruk(x)− ikuk(x)∣∣∣ ≤
∫R3
(1 + 2k∥y∥)|f(y)|4π∥x− y∥2
dy (4.51)
On déduit de (4.39)∣∣∂ruk(x)− ikuk(x)∣∣∣ ≤
(∫R3
(1 + 2k∥y∥)|f(y)|π
dy) 1
∥x∥2(4.52)
En intégrant sur la sphère de rayon R, on a∫∥x∥=R
∣∣∣(∂r − ik)uk(x)∣∣∣2 dsx ≤ 4
πR2
(∫R3
|f(y)|dy)2(
1 +kρ
2
)2= O
R→+∞(1
R2).
(4.53)
Pour déterminer le cadre fonctionnelle de la fonction uk, nous avons besoind’un résultat classique de la théorie du potentiel newtonien.
Proposition 4.7 Soient G0(x) =1
4π∥x∥, H0(x) =
1
4π∥x∥2et g ∈ L2(R3) à
support compact. Les fonction wg : R3 −→ C et hg : R3 −→ C définies par
wg(x) = G0 ∗ g(x) et hg = H0 ∗ g (4.54)
vérifie wg ∈ L6(R3), hg ∈ L2(R3) et
−∆wg(x) = g(x) ∀x ∈ R3 et ∇wg = −hg. (4.55)
76

Démonstration :
C’est un résultat classique de la théorie du potentiel newtonien dont on rappelleune preuve directe.
D’après la proposition 4.5, la fonction G0 est une solution fondamentale dulaplacien. D’autre part, on a ∇G0 = −H0. Il suit que wg = G0 ∗ g vérifie (4.55).Montrons maintenant que wg est dans L6(R3) Soit χ ∈ C∞(R3) une fonction quivaut 1 au voisinage de 0 et 0 au voisinage de l’infini. Remarquons que d’aprèsl’inégalité de convolution de Young (g ∈ L1(R3) car g ∈ L2(R3) et g à supportcompact.
(χG0) ∗ g ∈ L6(R3) car χG0 ∈ L32 (R3) et g ∈ L2(R3), (4.56)
((1− χ)G0) ∗ g ∈ L6(R3) car (1− χ)G0 ∈ L6(R3) et g ∈ L1(R3). (4.57)
On en déduit que wg = χG0 ∗ g + ((1− χ)G0) ∗ g est dans L6(R3).De même, on a hg ∈ L2(R3) car
(χH0) ∗ g ∈ L2(R3) car χH0 ∈ L1(R3) et g ∈ L2(R3), (4.58)
((1− χ)H0) ∗ g ∈ L2(R3) car (1− χ)H0 ∈ L2(R3) et g ∈ L1(R3). (4.59)
Ceci termine la preuve.
Proposition 4.8 La fonction uk = Gk ∗ f est dans l’espace
uk ∈ H1loc(R3), uk ∈ L6(R3) et ∇uk ∈ L2(R3). (4.60)
avec uk(x) = uk(x) exp(−ik∥x∥)
Démonstration :
Une borne supérieure de (4.37) est donnée par∣∣∣uk(x)∣∣∣ ≤∫R3
∣∣f(y)∣∣4π∥x− y∥
dy = w|f |(x) (4.61)
On déduit de la proposition 4.7 que uk ∈ L6(R3). Comme −∆uk − k2uk = fdans R3, il suit qu’à la fois uk et ∆uk sont dans L2
loc(R3). On déduit du lemme 4.4que uk ∈ H1
loc(R3).Nous remarquons que
exp(ikr) ∇uk(x) = ∇uk − ik uk(x)x
∥x∥. (4.62)
77
Cette expression se calcule à l’aide des formules de représentation
uk(x) =
∫R3
Gk(x− y) f(y) et ∇uk(x) =
∫R3
∇Gk(x− y) f(y).
(4.63)
∇Gk(x) =exp(ikr)
4π
( 1
∥x∥2+
ik
∥x∥
) x
∥x∥(4.64)
il suit queexp(ikr)∇uk(x) =
∫R3
exp(ik∥x− y∥)4π∥x− y∥2
x− y
∥x− y∥f(y)dy
− ik
∫R3
exp(ik∥x− y∥)4π∥x− y∥
( x− y
∥x− y∥− x
∥x∥
)f(y)dy.
(4.65)En majorant, on obtient
∥∇uk(x)∥ =
∫R3
|f(y)|4π∥x− y∥2
dy
+ k
∫R3
|f(y)|4π∥x− y∥
∥∥∥ x− y
∥x− y∥− x
∥x∥
∥∥∥dy. (4.66)
On déduit alors de (4.50) que
∥∇uk(x)∥ =
∫R3
(1 + 2 k ∥y∥) |f(y)|4π∥x− y∥2
dy = H0 ∗ g (4.67)
avec g(y) = (1 + 2k∥y∥) |f(y)| et H0(x) =1
4π∥x∥2 . Comme f est un élément deL2(R3) à support compact, g est aussi à support compact dans L2(R3). D’après laproposition 4.7 il suit que ∇uk ∈ L2(R3).
4.2.2 Unicité de la solution sortante de l’équation d’HelmholtzL’unicité de la solution sortante de l’équation provient du Théorème de Rel-
lich :
Théorème 4.9 (Théorème de Rellich sur tout R3) Soit k > 0. Si uk ∈ L2loc(R3)
78

vérifie
−∆uk(x) − k2 uk(x) = 0 ∀x ∈ R3,
∫∥x∥=R
|uk(x)|2dsx = OR→+∞
(1),
∫∥x∥=R
|(∂r − ik)uk(x)|2dsx = OR→+∞
(1
R2).
(4.68)
alors la fonction uk est identiquement nulle.
Démonstration :
Remarquons tout d’abord que uk ∈ H1loc(R3) d’après le lemme 4.4. D’autre part,
ses trois dérivées partielles vérifient
∂iuk ∈ L2loc(R3) et ∆∂iuk + k2∂iuk = 0. (4.69)
D’après le lemme 4.4, il suit que ∂iuk ∈ H1loc(R3). Ainsi uk est un élément de
H2loc(R3). On a d’après la formule de Green∫∥x∥<R
|∇uk(x)|2 +∆uk(x)uk(x)dx =
∫∥x∥=R
uk(x)∂ruk(x)dsx. (4.70)
Il suit∫∥x∥<R
|∇uk(x)|2−k2|uk(x)|2 =∫∥x∥=R
uk(x)(∂r−ik)uk(x)+ik|uk(x)|2dsx.
(4.71)On note uk : R3 −→ C la fonction définie par
uk(x) =uk(x)
exp(ik∥x∥). (4.72)
Il suit de l’identité ∇uk + ikuker = exp(−ik∥x∥)∇uk que∫∥x∥<R
|∇uk+ikuker|2−k2|uk|2dx =
∫∥x∥=R
∂rukuk + ik|uk|2dsx. (4.73)
Ceci se simplifie en∫∥x∥<R
|∇uk|2 + ik(uk∂ruk − uk∂ruk
)dx =
∫∥x∥=R
∂rukuk + ik|uk|2dsx.
(4.74)
79

En prenant la partie imaginaire, on a
0 =
∫∥x∥=R
uk∂ruk − uk∂ruk + 2ik|uk|2dsx (4.75)
On déduit alors que∫∥x∥<R
ik(uk∂ruk − uk∂ruk)dx = 2k2∫∥x∥<R
|uk|2dx (4.76)
et par conséquent∫∥x∥<R
|∇uk|2 + 2k2|uk|2dx =
∫∥x∥=R
∂rukuk + ik|uk|2dsx (4.77)
En prenant la partie imaginaire de cette expression, on obtient
k
∫∥x∥=R
|uk(x)|2dsx = −ℑ(∫
∥x∥=R∂ruk(x)uk(x)
)dsx (4.78)
D’après le théorème de Cauchy-Schwartz, on a
k ∥uk∥2L2(∥x∥=R) ≤ ∥∂ruk∥L2(∥x∥=R) ∥uk∥L2(∥x∥=R) (4.79)
et par conséquent
∥uk∥L2(∥x∥=R) ≤∥∂ruk∥L2(∥x∥=R)
k. (4.80)
Comme uk(x) = exp(−ik∥x∥)uk(x), on déduit alors des conditions de radiationde Sommerfeld que
∥∂ruk∥L2(∥x∥=R) = ∥∂ruk − ikuk∥L2(∥x∥=R) = OR→+∞
(1
R) (4.81)
et d’après (4.80)
∥uk∥L2(∥x∥=R) = OR→+∞
(1
R). (4.82)
En remarquant que d’après le théorème de Cauchy-Shcwartz et (4.81) et (4.82)∫∥x∥=R
∂rukuk + ik|uk|2 dsx = OR→+∞
(1
R2) (4.83)
on peut alors passer à la limite sur (4.77)∫R3
|∇uk|2 + 2k2|uk|2dx = 0. (4.84)
Il suit que uk et par conséquent uk s’annulent sur tout R3.
80
4.3 Le principe d’amplitude limiteLe problème (5.13) est bien posé d’après le théorème de Hille-Yoshida. Nous
allons étudier le comportement en temps long de sa solution par l’intermédiaired’une expression basée sur les fonctions de Green.
Lemme 4.10 Une solution fondamentale du d’alembertien = 1c2
∂2
∂t2−∆ est la
distribution G de D′(R3 × R) est définie par
⟨G,Φ⟩ = c
∫ ∞
0
(∫∥x∥=cτ
Φ(x, τ)
4π∥x∥dsx
)dτ. (4.85)
Démonstration :
Le d’alembertien au sens des distributions de G est calculé par dualité⟨G,Φ⟩R4 = ⟨G,Φ⟩R3
= c
∫ ∞
0
(∫∥x∥=ct
Φ(x, t)
4π∥x∥dsx
)dt
(4.86)
Il peut aussi être décomposé de la manière suivante
∆Φ =1
c2∂2tΦ− 1
r2∂r
(r2∂rΦ
)− 1
r2∆Γ. (4.87)
D’après la formule de Green sur la sphère, on a∫∥x∥=ct
∆ΓΦ(x, τ)
4π∥x∥3dsx =
∫∥x∥=cτ
Φ(x, τ)
4π∥x∥3∆Γ(1)dsx = 0. (4.88)
Soit Φ(r, t) la valeur moyenne de Φ sur la sphère de rayon r
Φ(r, t) =1
4π
∫ π
0
∫ 2π
0
Φ(r, θ, φ, t) sin(θ)dθdφ. (4.89)
On a
1
c2
∫∥x∥=cτ
∂2tΦ(x, t)
4π∥x∥dsx =
∫ π
0
∫ 2π
0
∂2tΦ(cτ, θ, φ, τ)
4π
τ
csin(θ)dθdφ∫
∥x∥=cτ
∂2rΦ(x, t)
4π∥x∥dsx =
∫ π
0
∫ 2π
0
∂2rΦ(cτ, θ, φ, τ)
4πcτ sin(θ)dθdφ∫
∥x∥=cτ
2∂rΦ(x, t)
4π∥x∥2dsx =
∫ π
0
∫ 2π
0
2∂rΦ(cτ, θ, φ, τ)
4πsin(θ)dθdφ.
(4.90)
81
On peut alors commuter l’intégrale et la dérivée seconde
1
c2
∫∥x∥=cτ
∂2tΦ(x, t)
4π∥x∥dsx =
τ
c∂2tΦ(cτ, τ),∫
∥x∥=cτ
∂2rΦ(x, t)
4π∥x∥dsx = cτ∂2rΦ(cτ, τ),∫
∥x∥=cτ
2∂rΦ(x, t)
4π∥x∥2dsx = 2∂rΦ(cτ, τ).
(4.91)
En sommant ces trois expressions, il suit∫∥x∥=cτ
Φ(x, t)
4π∥x∥dsx =
τ
c
∂2Φ
∂t2(cτ, τ)− cτ
∂2Φ
∂r2(cτ, τ)− 2
∂Φ
∂r(cτ, τ)dτ.
(4.92)On obtient
⟨G,Φ⟩R4 =
∫ ∞
0
τ∂2Φ
∂t2(cτ, τ)− c2τ
∂2Φ
∂r2(cτ, τ)− 2c
∂Φ
∂r(cτ, τ)dτ. (4.93)
Le calcul de cette intégrale s’effectue en introduisant la fonction
Ψ(r, t) =r
c
∂Φ
∂t(r, t)− Φ(r, t)− r
∂Φ
∂r(r, t) (4.94)
qui vérifie
d
dτ
(Ψ(cτ, τ)
)= τ
∂2Φ
∂t2(cτ, τ)− c2τ
∂2Φ
∂r2(cτ, τ)− 2c
∂Φ
∂r(cτ, τ). (4.95)
Ainsi il suit ⟨G,Φ⟩R3 =
[Ψ(cτ, τ)
]τ=+∞
τ=0= −Ψ(0, 0)
= Φ(0, 0) = Φ(0, 0).
(4.96)
C’est à direG(x, t) = δx δt dans D′(R3 × R). (4.97)
Lemme 4.11 L’unique solution de (5.13) est donnée par
u(x, t) =
∫∥x−y∥<ct
g(y, t− ∥x−y∥c
)
4π∥x− y∥dy (4.98)
82
Démonstration :
L’unique solution de (5.13) est donnée par
u(x, t) = G ∗ g(x, t) (4.99)
Le produit de convolution au sens des distributions est défini par
< G ∗ g, φ >R4 = ⟨G⊗ g, ψ⟩R4×R4 avec ψ(x, t,y, τ) = φ(x+ y, t+ τ)(4.100)
C’est à dire< G ∗ g, φ >R4 = c
∫ +∞
0
(∫∥x∥=ct
∫R4 g(y, τ)φ(x+ y, t+ τ)dydτ
4π∥x∥dsx
)dt
= c
∫R4
∫ +∞
0
(∫∥x∥=ct
g(y, τ)φ(x+ y, t+ τ)
4π∥x∥dsx
)dtdydτ
(4.101)On effectue alors le changement de variable
x′ = x+ y, t′ = t+ τ, y′ = y, ρ = ct. (4.102)
On obtient< G ∗ g, φ >R4 =
∫R4
∫ +∞
0
(∫∥x−y∥=ρ
g(y, t− ρc)φ(x, t)
4π∥x− y∥dsx
)dρdydt
=
∫R4
∫ +∞
0
(∫∥x−y∥=ρ
g(y, t− ∥x−y∥c
)φ(x, t)
4π∥x− y∥dsx
)dρdydt
(4.103)On remarque alors que∫ +∞
0
(∫∥x−y∥=ρ
ϕ(x,y, t)dsx
)dρ =
∫R3
ϕ(x,y, t)dx. (4.104)
Il suit< G ∗ g, φ >R4 =
∫R4
∫R3
g(y, t− ∥x−y∥c
)φ(x, t)
4π∥x− y∥dxdydt
=
∫R4
(∫R3
g(y, t− ∥x−y∥c
)
4π∥x− y∥dy)φ(x, t)dxdt
(4.105)
D’où G ∗ g est donnée par
G ∗ g(x) =
∫R3
g(y, t− ∥x−y∥c
)
4π∥x− y∥dy. (4.106)
Enfin que g(x, t) = 0 pour tout t < 0, on obtient (4.98).
83

Lemme 4.12 La solution du problème (5.13) est donnée par
u(x, t) = ℜ(uk(x) exp(−iωt)
)+ r(x, t). (4.107)
avec uk(x) =
∫R3
f(y) exp(ik∥x− y∥)4π∥x− y∥
dy,
∣∣∣r(x, t)∣∣∣ ≤∫∥x−y∥>ct
∣∣f(y)∣∣4π∥x− y∥
dy
(4.108)
Démonstration :
Il nous faut tenir compte ici de la forme particulière du terme source
g(y, t) = ℜ(f(y) exp(−iωt)
). (4.109)
Il suit d’après le lemme 4.11u(x, t) = ℜ
(exp(−iωt)
∫∥y−x∥<ct
f(y) exp(ik∥x− y∥)4π∥x− y∥
dy)
= ℜ(exp(−iωt) uk(x)
)+ r(x, t)
(4.110)
avec
r(x, t) = ℜ(exp(−iωt)
∫∥y−x∥>ct
f(y) exp(ik∥x− y∥)4π∥x− y∥
dy). (4.111)
Cette dernière fonction peut être majorée par∣∣∣r(x, t)∣∣∣ =
∫∥y−x∥>ct
|f(y)|4π∥x− y∥
dy. (4.112)
Ceci termine la preuve.
On est en mesure de démontrer le principe d’amplitude limite
Théorème 4.13 On a
limt→+∞
∥u(x, t)−ℜ(exp(−iωt) uk(x))∥L6(R3) = 0 (4.113)
84
Démonstration :
Il nous suffit de montrer
limt→+∞
∥r(·, t)∥L6(R3) = 0 (4.114)
On remarque tout d’abord que∣∣∣r(x, t)∣∣∣ ≤ w|f |(x) ∀x ∈ R3 et ∀t > 0 (4.115)
avec w|f | défini par (4.54) qui vérifie d’après le lemme 4.7,∥∥∥w|f |
∥∥∥L6(R3)
< +∞. (4.116)
D’autre part comme f est à support compact, on a
∀x ∈ R3 ∃tx > 0 ∀y /∈ B(x, ctx) f(y) = 0. (4.117)
Il suit que pour tout x ∈ R3 et pour t > tx
r(x, t) = 0. (4.118)
Ainsi, la fonction r(x, t) converge simplement pour t tendant vers l’infini. On peutalors appliquer le théorème de Lebesgues.
4.4 Le principe d’absorption limiteProposition 4.14 Soient k, ε > 0 et f : une fonction de classe L2(R3) à supportcompact. La fonction
uk+iε = Gk+iε ∗ f =
∫Γ
exp((ik − ε
)∥x− y∥)f(y)
4π∥x− y∥dsy (4.119)
est l’unique élément de H1(R3) vérifiant
−∆uk+iε(x)− (k + iε)2uk+iε(x) = f(x). (4.120)
Démonstration :
D’après le lemme 4.5, Gk+iε est une fonction de Green de −∆ − (k + iε)2. Lafonction uk+iε = Gk+iε ∗ f est solution de
∆uk+iε(x) + (k + iε)2 uk+iε(x) =(∆Gk+iε + (k + iε)2 Gk+iε
)∗ f(x)
= −δ ∗ f(x) = −f(x).(4.121)
85
Pour ∥x∥ > 2r (support(f) ⊂ B(0, r)), on a d’après (4.39)
∥x− y∥ ≥ ∥x∥2. (4.122)
En majorant l’expression (4.119), il suit qu’au voisinage de l’infini∣∣∣uk+iε(x)∣∣∣ ≤
exp(− ε∥x∥2
)
2π∥x∥
∫R3
∣∣f(y)∣∣dy (4.123)
Il suit que la fonction uk+iε est donc dans L2(R3). On agit de même pour le gra-dient. On a
∇uk(x) = (∇Gk+iε) ∗ f (4.124)
Comme ∇Gk+iε est exponentiellement décroissant uk+iε is H1(R3).
On est en mesure de démontrer le théorème 4.3 :
Démonstration :
nous remarquons tout d’abord que
Gk+iε(x)−Gk(x) =exp (ik∥x∥)4π ∥x∥
(exp(−ε∥x∥)− 1
)(4.125)
Il suit que
uk+iε(x)− uk(x) = (Gk+iε −Gk) ∗ f(x)
=
∫R3
exp (ik∥x− y∥)4π∥x− y∥
(exp(−ε∥x∥)− 1
)f(y)dy (4.126)
On peut alors passer à la valeur absolue et majorer∣∣∣uk+iε(x)− uk(x)∣∣∣ ≤
∫R3
|f(y)|4π∥x− y∥
∣∣∣ exp(−ε∥x− y∥)− 1∣∣∣dy (4.127)
Comme 0 ≤ exp(−ε∥x − y∥) ≤ 1 on a∣∣∣ exp(−ε∥x − y∥) − 1
∣∣∣ ≤ 1 et parconséquent ∣∣∣uk+iε(x)− uk(x)
∣∣∣ ≤ w|f |(x) (4.128)
avec w|f | la fonction définit par (4.54) du lemme 4.7.
D’autre part on a pour tout x ∈ R3 et y ∈ supp(f) ⊂ B(0, ρ))∣∣∣ exp(−ε(∥x− y∥))− 1∣∣∣ ≤
∣∣∣ exp(−ε(∥x∥ − r))− 1∣∣∣ (4.129)
86
Il suit de (4.127)∣∣∣uk+iε(x)− uk(x)∣∣∣ ≤ w|f |(x)
∣∣∣ exp(−ε(∥x∥ − r))− 1∣∣∣ (4.130)
Comme w|f | ∈ L6(R3) et que le terme de droite de (4.130) tend simplement vers0 presque partout pour ε tendant vers 0, il suit du théorème de Lebesgues
limε→0
∥∥∥uk − uk+iε
∥∥∥L6(R3)
= 0. (4.131)
4.5 Développement en champ lointainNous rappelons que f est une fonction de L2(Ω) à support compact dans la
boule de centre ρ
Théorème 4.15 On a le développement suivant au voisinage de l’infini
uk(x) =exp(ik∥x∥)
4π∥x∥
(u∞(x) + ε(x)
)(4.132)
avec
x =x
∥x∥et u∞(x) =
∫R3
exp (−ikx · y) f(y) dy. (4.133)
et
|ε(x)| ≤ 2ρ+ 4kρ2
∥x∥
∫Ω
|f(y)|dy, for ∥x∥ ≥ 2ρ. (4.134)
Démonstration :
Soit
ε(x) =4π∥x∥
exp(ik∥x∥)uk(x) − u∞(x) (4.135)
Il nous faut montrer que ε tend vers 0 pour x tendant vers +∞. Comme uk =Gk ∗ f , on a
ε(x) =
∫R3
( ∥x∥∥x− y∥
exp(ik(∥x− y∥ − ∥x∥)− exp (−ikx · y))f(y) dy
(4.136)
87

Ceci peut se réécrire en ε(x) = ε1(x) + ε2(x) avecε1(x) =
∫R3
∥x∥∥x− y∥
(exp(ik(∥x− y∥ − ∥x∥)− exp (−ikx · y)
)f(y) dy
ε2(x) =
∫R3
exp (−ikx · y)( ∥x∥∥x− y∥
− 1)f(y) dy
(4.137)Pour tout ∥x∥ ≥ 2ρ et ∥y∥ ≤ ρ, on a ∥x−y∥ ≥ ∥x∥−∥y∥ ≥ ρ et par conséquent
∥x∥∥x− y∥
≤ ∥x− y∥+ ∥y∥∥x− y∥
≤ 1 +∥y∥
∥x− y∥≤ 1 +
ρ
ρ= 2. (4.138)
D’autre part, on aA =
∣∣∣ exp(ik(∥x− y∥ − ∥x∥)− exp (−ikx · y)∣∣∣
≤∣∣∣ exp(ik(∥x− y∥ − ∥x∥+ x · y)− 1
∣∣∣(4.139)
Comme pour tout λ ∈ R, | exp(iλ)− 1| ≤ |λ|, on a
A ≤ k∣∣∣∥x− y∥ − ∥x∥+ x · y
∣∣∣ (4.140)
Comme ∥x− y∥2 = ∥x∥2 − 2x · y + ∥y∥2, il suit que
∥x− y∥2 =(∥x∥ − x · y
)2+ ∥y∥2 − (x · y)2 (4.141)
D’où, on a∣∣∣∣∥x− y∥2 −(∥x∥ − x · y
)2∣∣∣∣ ≤ ∥y∥2 + ∥x∥2∥y∥2 ≤ 2∥y∥2 ≤ 2ρ2 (4.142)
D’autre part, pour ∥x∥ ≥ 2ρ et ∥y∥ ≤ ρ, on a ∥y∥ ≤ ∥x∥2∣∣∣∥x− y∥ + ∥x∥ − x · y
∣∣∣ ≥ ∥x∥ − ∥y∥+ ∥x∥ − ∥x∥ ∥y∥ ≥ ∥x∥ (4.143)
Par conséquent, on a
A ≤ k
∣∣∣∣∥x− y∥2 −(∥x∥ − x · y
)2∣∣∣∣∣∣∣∥x− y∥ +(∥x∥ − x · y
)∣∣∣ ≤ 2kρ2
∥x∥(4.144)
88
On déduit donc que
|ε1(x)| ≤ 4kρ2
∥x∥
∫R3
|f(y)| dy pour ∥x∥ ≥ 2ρ. (4.145)
De même, on a ∣∣ε2(x)∣∣ ≤∫R3
∣∣∣ ∥x∥∥x− y∥
− 1∣∣∣ |f(y)| dy (4.146)
Pour ∥x∥ ≥ 2ρ et ∥y∥ ≤ ρ, on a∣∣∣ ∥x∥∥x− y∥
− 1∣∣∣ =
∥x∥ − ∥x− y∥∥x− y∥
≤ ∥y∥∥x∥2
≤ 2ρ
∥x∥(4.147)
Il suit que
|ε2(x)| ≤ 2ρ
∥x∥
∫R3
|f(y)| dy pour ∥x∥ ≥ 2ρ. (4.148)
Ainsi ε(x) = ε1(x) + ε2(x) vérifie
|ε(x)| ≤ 2ρ+ 4kρ2
∥x∥
∫R3
|f(y)| dy pour ∥x∥ ≥ 2ρ. (4.149)
Ceci termine la preuve.
89
Chapitre 5
Equation de Helmholtz en milieuhétérogène et anisotrope
5.1 Milieu anisotropeL’équation de Helmholtz anisotrope s’écrit
−∇ · (A∇uk,A)− k2uk,A = −f (5.1)
avec A une matrice carré 3 par 3 symétrique définie positive.Comme A est symétrique définie positive, on peut construire en diagonalisant
A une matrice A12 symétrique définie positive qui vérifie
A = A12 A
12 . (5.2)
Nous considérons alors le changement de variables
A12y = x, uk,AA(y) = uk,A(A
12y) et f(y) = f(A
12y) (5.3)
On parle de transformation de Il’in. On a alors
∆uk,A(y) + k2 uk,A(y) = −f(y). (5.4)
On déduit alors que la manière naturelle de définir les solutions sortantes consisteà traduire les conditions aux limites de Sommerfeld
uk,A(y) = OR→+∞
(1
∥y∥),
∇uk,A(y) ·y
∥y∥− ikuk,A(y) = O
R→+∞
( 1
∥y∥2).
(5.5)
90

dans les coordonnées originalesuk,A(x) = O
∥x∥→+∞(
1
∥A− 12x∥
),
(A
12∇uk,A(x)
)·( A− 1
2x
∥A− 12x∥
)− ikuk,A(x) = O
∥x∥→+∞
( 1
∥A− 12x∥2
).
(5.6)
Par équivalence de norme, on a
∥x∥ = Θ∥x∥→+∞
(∥A− 12x∥) (5.7)
D’autre part, comme(A
12∇uk,A(x)
)·( A− 1
2x
∥A− 12x∥
)=(∇uk,A(x)
)·( x
∥A− 12x∥
)= ∂ruk,A(x)
∥x∥∥A− 1
2x∥.
(5.8)il suit les conditions de Sommerfeld anisotrope
uk,A(x) = O∥x∥→+∞
(1
∥x∥),
∥x∥∥A− 1
2x∥∂ruk,A(x)− ikuk,A(x) = O
∥x∥→+∞
( 1
∥x∥2).
(5.9)
D’autre part la fonction de Green de cette équation est donnée par
Gk,A(x) =exp(ik∥A− 1
2x∥)4π∥A− 1
2x∥. (5.10)
On déduit aussi du chapitre précédent les résultats suivants
Théorème 5.1 Pour tout f ∈ L2(R3) à support compact, il existe une uniquefonction uk,A ∈ H1
loc(R3) qui vérifie les conditions de radiation de Sommerfeldanisotrope (5.9) et l’équation de Helmholtz anisotrope
−∇ · (A∇uk,A)(x)− k2uk,A(x) = f(x), ∀x ∈ R3. (5.11)
Cette solution est donnée par
uk,A = Gk,A ∗ f. (5.12)
91

Théorème 5.2 (Le principe d’amplitude limite en milieu anisotrope) Soit vA lasolution du problème posé pour x ∈ R3 et t ≥ 0
− ∇ · (A∇vA)(x, t) +1
c2∂2vA∂t2
(x, t) = ℜ(f(x) exp(−iωt)
),
vA(x, 0) = 0,
∂tvA(x, 0) = 0,
(5.13)
avec ω = kc et f ∈ L2(R3) à support compact. On a
limt→+∞
∥∥∥vA(x, t)−ℜ(uk,A(x) exp(−iωt)
)∥∥∥L6(R3)
= 0. (5.14)
avec uk,A : R3 −→ C la fonction définie par le théorème 5.1.
Théorème 5.3 (Le principe d’absorption limite en milieu anisotrope) Soit ε >0. Soit uk+iε,A la fonction de H1(R3) qui vérifie
−∇ · (A∇uk+iε,A)(x) − (k + iε)2uk+iε,A(x) = f(x) (5.15)
On alimε→0+
∥∥∥uk+iε,A − uk,A
∥∥∥L6(R3)
= 0 (5.16)
avec uk,A : R3 −→ C la fonction définie par le théorème 5.1.
5.2 Equation de Helmholtz en milieu hétérogèneSoit Ω un ensemble compact de frontière régulière de R3. Soit f ∈ L2(R3)
une fonction à support inclus dans Ω. Soit k : R3 −→ R une fonction de classeC∞ dont la valeur est k0 hors de Ω.
Nous nous intéressons à la résolution du problème de Helmholtz inhomogène
−∆uk(x)− k2(x)uk(x) = f(x) ∀x ∈ R3 (5.17)
avec uk ∈ L2loc(R3) une fonction vérifiant la condition de radiation de Sommerfeld
∫∥x∥=R
∣∣uk(x)∣∣2dsx = OR→+∞
(1),
∫∥x∥=R
∣∣(∂ruk(x)− ik0uk(x)∣∣2dsx = O
R→+∞
( 1
R2
).
(5.18)
92

Nous notons S0 l’opérateurL2(Ω) −→ L2(Ω)h 7−→ u0 (5.19)
qui associe à h ∈ L2(R3) à support borné dans Ω (cet espace peut être identi-fié à L2(Ω)) la restriction à Ω de la solution sortante du problème de Helmholtzhomogène
−∆u(x)− k20u(x) = h(x) ∀x ∈ R3. (5.20)
En remarquant que uk vérifie
−∆uk(x)− k20uk(x) = f(x) + (k2(x)− k20) uk(x) (5.21)
La fonction uk est solution de l’équation de point fixe posé dans L2(Ω)
uk = Gk0 ∗[f + (k2 − k20)uk
](5.22)
Il suit que la restriction uk à Ω de uk vérifie l’équation de point fixe
uk = S0f + S0
[(k2 − k20)uk
](5.23)
C’est un problème qui relève de l’alternative de Fredholm, voir Annexe A.4. Pourdémontrer que cette équation définit de manière unique uk ∈ L2(Ω), il nous suffitd’après l’alternative de Fredholm de démontrer les deux propositions suivantes
Proposition 5.4 L’opérateur K défini parK : L2(Ω) −→ L2(Ω)
v −→ S0
[(k2 − k20)v
] (5.24)
est un opérateur compact
Démonstration :
Pour démontrer que cet opérateur linéaire est compact, il suffit de démontrer queson image est incluse dans H1(Ω) qui est un ensemble compact de L2(Ω).
Par définition, la fonction Kv est la restriction de la solution u sortante du pro-blème de Helmholtz
−∆u(x) − k20u(x) =(k2(x)− k20
)v(x), sur R3. (5.25)
Comme v ∈ L2(Ω), on a d’après la proposition 4.8 que u ∈ H1loc(R3). Par consé-
quent, Kv est un élément de H1(Ω).
93

Proposition 5.5 L’opérateur I −K est injectif.
Démonstration :
Soit w ∈ L2(Ω) une fonction qui vérifie
w − Kw = 0. (5.26)
Par définition, cette fonctionw est la restriction à Ω de la solution solution sortantev ∈ H1
loc(R3)
−∆v(x) − k20v(x) =(k2(x)− k20
)w(x), sur R3. (5.27)
Comme, w = v sur Ω, cette fonction vérifie
−∆v(x) − k2(x) v(x) = 0, sur R3. (5.28)
muni des conditions de radiation
∫∥x∥=R
∣∣v(x)∣∣2dsx = OR→+∞
(1),
∫∥x∥=R
∣∣(∂r − ik0)v(x)∣∣2dsx = O
R→+∞
( 1
R2
).
(5.29)
Montrons que v∞(x) = 0. D’après la formule de Green sur la boule de rayon R,on a ∫
∥x∥<R∥∇v∥2 − k2(x)|v(x)|2dx =
∫∥x∥=R
∂rv(x)v(x)dsx (5.30)
On peut alors prendre la partie imaginaire de cette expression0 = ℑ
(∫∥x∥=R
∂rv(x)v(x)dsx
)= ℑ
(∫∥x∥=R
(∂r − ik0
)v(x)v(x)dsx
)+ k0
∫∥x∥=R
|v(x)|2dx
(5.31)Par passage à la limite, et d’après les conditions de radiation et le développementen champ lointain, on a
0 = k0
∫S1
|v∞(x)|2dx (5.32)
94

Il suit que v∞(x) = 0.
Montrons que v ∈ H1(R3). Comme v ∈ L6(R3), la fonction v est L2 sur touteboule de rayon R > 0. Au voisinage de l’infini, comme v∞ = 0, on a d’après laproposition 4.15
|v(x)| = O∥x∥→+∞
(1
∥x∥2) (5.33)
Ainsi, la fonction v est L2 au voisinage de l’infini. Il suit que v ∈ L2(R3). D’autrepart, cette fonction admet le cadre fonctionnel proposition 4.8,
exp(ik0∥x∥)∇(exp(−ik0∥x∥)v(x)
)= ∇v(x)− ik0v(x)
x
∥x∥∈ L2(R3).
(5.34)Comme v ∈ L2(R3), il suit que ik0v(x) x
∥x∥ ∈ L2(R3). D’où, on déduit que ∇v ∈L2(R3).
Concluons en montrant que v = 0 sur R3. Comme v ∈ H1(R3),∫∥x∥<R
|∇v(x)|2 − k2|v(x)|2 =∫∥x∥=R
v(x)(∂r − iα)v(x) + iα|v(x)|2dsx.
(5.35)On note vα : R3 −→ C, avec α = supx∈R3 |k(x)|, la fonction définie par
vα(x) =v(x)
exp(iα∥x∥). (5.36)
Il suit de l’identité ∇vα + iαvα−→e r = exp(−iα∥x∥)∇v que∫
∥x∥<R|∇vα+iαvαer|2−k2|vα|2dx =
∫∥x∥=R
∂rvαvα + iα|vα|2dsx. (5.37)
Ceci se simplifie en∫∥x∥<R
|∇vα|2+iα(vα∂rvα−vα∂rvα
)+(α2−k2)|vα|2dx =
∫∥x∥=R
∂rvαvα + iα|vα|2dsx.
(5.38)En prenant la partie imaginaire, on a
0 =
∫∥x∥=R
vα∂rvα − vα∂rvα + 2iα|vα|2dsx (5.39)
On déduit alors que∫∥x∥<R
iα(vα∂rvα − vα∂rvα)dx = 2α2
∫∥x∥<R
|vα|2dx (5.40)
95

et par conséquent∫∥x∥<R
|∇vα|2+(3α2−k2
)|vα|2dx =
∫∥x∥=R
∂rvαvα + iα|vα|2dsx (5.41)
On peut alors exprimer le membre de droite en fonction de w∫∥x∥<R
|∇vα|2+(3α2−k2
)|vα|2dx =
∫∥x∥=R
(∂rw−ik0w
)w + ik0|w|2dsx
(5.42)On peut alors prendre la partie réelle puis passer à la limite R → +∞ grâce auxconditions de radiation∫
R3
|∇vα|2 +(3α2 − k2
)|vα|2dx = 0. (5.43)
Comme 3α2 − k2(x) ≥ 2α2, on a que∫R3
|∇vα|2 + 2α2 |vα|2dx = 0. (5.44)
Il suit vα = 0 et par conséquent v = 0. Il suit que la restriction w de v à Ω estidentiquement nulle.
5.3 Equation de Helmholtz à l’extérieur d’un obs-tacle borné
Dans cette section, on considère le problème de diffraction d’ondes par unobstacle borné Ω′. Soit Ω′ ⊂ R3, un domaine compact (fermé et borné) de frontière∂Ω régulière. On note Ω = R3 \ Ω′ sont complémentaire.
L’objet de cette section est de démontrer le théorème
Théorème 5.6 Soit f une fonction de L2(R3) à support compact dans Ωρ
Ωρ =x ∈ Ω
∣∣∣ ∥x∥ ≤ ρ
(5.45)
Il existe un unique uk ∈ H1loc(R3) tel que
−∆uk(x)− k2uk(x) = f(x) pour x ∈ Ω,
uk(x) = 0 pour x ∈ ∂Ω,
(5.46)
96
muni de la condition de radiation de Sommerfeld
∫∥x∥=R
∣∣uk(x)∣∣2dsx = OR→+∞
(1),
∫∥x∥=R
∣∣(∂r − ik0)uk(x)∣∣2dsx = O
R→+∞
( 1
R2
).
(5.47)
Démonstration :
La première étape consiste à écrire ce problème sous la forme d’une alternative deFredholm.
Etape 1. Mise sous la forme d’un problème de Fredholm La solution du pro-blème de Helmholtz uk se décompose sous la forme
uk(x) = θ(x)uk(x) +(1− θ(x)
)uk(x) (5.48)
avec θ : R3 −→ R une fonction de classe C∞(R3) qui vérifie :
θ(x) = 0, pour ∥x∥ ≤ ρ
2et θ(x) = 0, pour ∥x∥ ≥ ρ (5.49)
La fonction θuk est la solution sortante du problème de Helmholtz posé dans l’es-pace libre
−(∆ + k2)θ(x)uk(x) = θ(x)f(x)− guk(x) (5.50)
avecgu(x) = 2∇θ(x) · ∇u(x) + u(x)∆θ(x) (5.51)
Il suit que θuk peut être exprimé à l’aide de la fonction de Green
θuk = Gk ∗[θf − guk
]avec Gk(x) =
exp(ik∥x∥)4π∥x∥
. (5.52)
De même, la restriction à Ωρ de la fonction (1 − θ)uk est l’unique solution duproblème de Laplace-Dirichlet posé en domaine borné
−∆[(1− θ
)uk
]=(1− θ
)f + guk
+ k2(1− θ)uk, dans Ωρ
uk = 0 pour ∥x∥ = ρ
uk(x) = −Gk ∗[θf − guk
](x) pour x ∈ ∂Ω
(5.53)
97

Il suit que(1− θ
)uk est donné par(
1− θ)uk = R
[Gk ∗
[guk
− θf]; (1− θ)f + guk
+ k2(1− θ)uk
](5.54)
avec R : H12 (∂Ω)× L2(Ωρ) −→ H1(Ωρ) l’application qui à (g, h) ∈ H
12 (∂Ω)×
L2(Ωρ) associe l’unique solution la solution v ∈ H10 (Ω) de
−∆v = h dans Ωρ,
v = g pour x ∈ ∂Ω,
v(x) = 0 pour ∥x∥ = ρ,
(5.55)
Il suit de (5.52) et (5.54) l’identité posé sur Ωρ
uk =(Gk ∗
[θf − guk
])+R
[Gk ∗
[guk
− θf]; (1− θ)f + guk
+ k2(1− θ)uk
]. (5.56)
Ceci peut se mettre sous la forme d’une alternative de Fredholm
uk +Kuk = F dans H1(Ωρ) (5.57)
avec K : H1(Ωρ) −→ H1(Ωρ)
u 7−→ Ku =(Gk ∗ gu
)∣∣∣Ωρ
−R[Gk ∗ gu; gu + k2(1− θ)u
](5.58)
et F = Gk ∗ θf +R[−Gk ∗ θf ; (1− θ)f
]∈ H1(Ωρ).
Etape 2. Montrons qu’il existe une unique fonction uk ∈ H1(Ωρ) solution duproblème (5.57). Il nous suffit de montrer les deux points suivant et d’utiliser l’al-ternative de Fredholm (annexe A.4)
L’opérateur K : H1(Ωρ) −→ H1(Ωρ) est compact : D’après la théorie de régula-rité des solutions des problèmes au Laplacien. la solution du problème (??) estdans H2(Ωρ) car la frontière ∂Ωρ = ∂Ω ∪ ∥x∥ = ρ de Ωρ est régulière. Ilsuit que l’image de R est incluse dans H2(Ωρ) qui est un sous-espace compact deH1(Ωρ). Par conséquent, l’opérateur R est compact.
98
L’opérateur I +K est injectif Soit u une fonction de H1(Ωρ) qui vérifie
u + Gk ∗ gu∣∣∣Ωρ
−R[Gk ∗ gu; gu + k2(1− θ)u
]= 0. (5.59)
On prolonge u ∈ H1(Ωρ) à tout R3 en une fonction u ∈ H1loc(Ω) définie par
u = u dans Ωρ et u = Gk ∗ gu (5.60)
On a la décomposition u = u1|Ωρ + u2 avec u1 la solution sortante de l’équationde Helmholtz
−∆u1 − k2u1 = gu (5.61)
et u2 ∈ H1(Ωρ) la solution sortante du problème de Laplace
−∆u2 = −gu − k2(1− θ)u dans Ωρ,
u2 = −u1 sur ∂Ω,
u2 = 0 pour ∥x∥ = ρ.
(5.62)
Il suit que la fonction u vérifie−∆u− k2u = 0 dans Ωρ,
u = 0 sur ∂Ω,
(5.63)
Il suit sue (1− θ)u vérifie
−∆(1− θ)u = −gu − k2(1− θ)u dans Ωρ,
(1− θ)u = 0 sur ∂Ω,
(1− θ)u = 0 pour ∥x∥ = ρ.
(5.64)
En comparant (??) et (??), il suit par unicité du problème de Dirichlet Laplaceque u2 = (1− θ)u.
99
On en déduit que u est une solution sortante de l’équation de Helmholtz ho-mogène
−∆u(x)− k2u(x) = 0 pour x ∈ Ω,
u(x) = 0 pour x ∈ ∂Ω,
(5.65)
muni de la condition de radiation de Sommerfeld
∫∥x∥=R
∣∣u(x)∣∣2dsx = OR→+∞
(1),
∫∥x∥=R
∣∣(∂r − ik)u(x)∣∣2dsx = O
R→+∞
( 1
R2
).
(5.66)
D’autre part, cette fonction est donnée au voisinage de l’infini par champlointain,il suit donc que u admet un développement en champ lointain. Montrons queu∞ = 0.
D’après la formule de Green appliqué sur le domaine Ω, on a∫Ω
∥∇u(x)∥2 − k2 |u(x)|2dx =
∫∥x∥=R
∂u
∂r(x)u(x)dsx
=
∫∥x∥=R
(∂u∂r
(x)− iku(x))u(x)dsx +
∫∥x∥=R
|u(x)|2dsx (5.67)
On peut alors prendre la partie imaginaire de cette expression et passer à la limiteR → +∞
0 =
∫∥x∥=1
|u∞(x)|2dsx (5.68)
Il suit que u ∈ H1(Ω)
5.4 Le théorème de prolongement unique
5.4.1 Inégalité de Carleman localeSoit O un ouvert de Rn. On note O sa fermeture. Soit Ψ : Rn −→ R une
fonction de classe C∞ qui vérifie ∇Ψ = 0 sur O. On note Φβ , avec β > 0 unparamètre, la fonction
Φβ =− exp(βΨ)
β. (5.69)
100

Théorème 5.7 (Inégalité de Carleman) Il existe des C > 0, β > 0 et γ0 > 0tels que pour tout γ > γ0 et u ∈ C∞
0 (O)
γ3∥ exp(γΦβ)u∥L2(O) + γ∥ exp(γΦβ)∇u∥L2(O) ≤ C∥ exp(γΦβ)∆u∥L2(O).(5.70)
5.4.2 Le théorème de prolongement uniqueLemme 5.8 Soient x0 ∈ Rn et r > 0
u ∈ C∞(B(x0, 3r))
∆u(x) + k2u(x) = 0 dans B(x0, 3r)
u(x) = 0 dans B(x0, r)
=⇒ u = 0 dans B(x0, 2r) (5.71)
Preuve. Soit χ une fonction de troncature χ ∈ C∞(Rn) qui vérifie χ(x) = f(∥x−x0∥), f(t) = 1 pour t ≤ 2r et f(t) = 0 pour t ≥ 3r. Soit
O = x ∈ Rn : r ≤ ∥x− x0∥ ≤ 3r,
O′ = x ∈ Rn : r ≤ ∥x− x0∥ ≤ 2r,
O′′ = x ∈ Rn : 2r ≤ ∥x− x0∥ ≤ 3r.
(5.72)
On applique l’inégalité de Carleman à χu avec Ψ(x) = ∥x−x0∥22
dont le gradientne s’annule qu’en 0 hors du support de u. Il existe des C > 0, β > 0 et γ0 > 0tels que pour tout γ > γ0 et u ∈ C∞
0 (O)
γ3∥ exp(γΦβ)χu∥L2(O)+γ∥ exp(γΦβ)∇(χu)∥L2(O) ≤ C∥ exp(γΦβ)∆(χu)∥L2(O).(5.73)
Nous manipulons le second membre afin de faire disparaître les dérivées secondes
∆(χu) = (∆χ)u+ 2(∇χ) · (∇u) + χ(∆u)
= (∆χ)u+ 2(∇χ) · (∇u)− k2χu.
(5.74)
101

Il suit de l’inégalité triangulaire (C est une constante générique)
γ3∥ exp(γΦβ)χu∥L2(O) + γ∥ exp(γΦβ)∇(χu)∥L2(O)
≤ C∥ exp(γΦβ)(∆χ)u∥L2(O) + C∥ exp(γΦβ)(∇χ) · (∇u)∥L2(O)
+ C∥ exp(γΦβ)χu∥L2(O). (5.75)
Pour γ suffisamment grand le troisième terme du second membre peut être abosbépar le premier membre de l’inégalité. D’autre part les deux autres termes ont unsupport inclus dans O′′. On a donc
γ3∥ exp(γΦβ)χu∥L2(O) + γ∥ exp(γΦβ)∇(χu)∥L2(O)
≤ C∥ exp(γΦβ)u∥L2(O′′) + C∥ exp(γΦβ)(∇u)∥L2(O′′). (5.76)
Comme O′ ⊂ O et χu = u dans O, il vient
γ3∥ exp(γΦβ)u∥L2(O′) + γ∥ exp(γΦβ)∇u∥L2(O′)
≤ C∥ exp(γΦβ)u∥L2(O′′) + C∥ exp(γΦβ)(∇u)∥L2(O′′). (5.77)
Par définition la fonction Φβ vérifie
exp(γΦβ(x′)) ≤ exp(γΦβ(x
′′)) ∀x′ ∈ O′ et x′′ ∈ O′′. (5.78)
On a donc
γ3∥u∥L2(O′) + γ∥∇u∥L2(O′) ≤ C∥u∥L2(O′′) + C∥∇u∥L2(O′′). (5.79)
Il ne nous reste plus qu’à passer à la limite γ → +∞ pour obtenir u = 0 dans O′′.
Lemme 5.9 Soient Ω un ouvert connexe et O ⊂ Ω un ouvert. Si u ∈ C∞(Ω)vérifie
∆u+ ω2u = 0 dans Ω et u = 0 dans O (5.80)
alors u = 0 dans Ω.
Preuve. On munit Ω de la topologie induite par la topologie usuelle. L’ensembleF = supp(u) ∩ Ω est un fermé. Son complémentaire A = Ω \ F est ouvert.
Supposons que la frontière de F est non vide. Nous considérons un point y ∈Ω de la frontière de F . Comme Ω est ouvert il existe R > 0 tel que
B(y, 3R) ⊂ Ω (5.81)
D’autre part comme y n’est pas dans l’intérieur de F il existe x0 ∈ A tel que
x0 ∈ B(y,R). (5.82)
102
Enfin, A etant ouvert, il existe r ∈ [0, R] tel que
B(x0, r) ⊂ A. (5.83)
L’ensemble A étant disjoint de F qui contient tous les x tels que u(x) = 0, on a
u(x) = 0 ∀x ∈ B(x0, r) (5.84)
Soit p le plus grand entier qui vérifie 2p r ≤ R. Nous pouvons alors appliquer pfois le lemme 5.8. Il suit que
u(x) = 0 dans B(x0, 2p+1r) ⊃ B(x0, R). (5.85)
Ainsi Comme y ∈ B(x0, R), u = 0 dans un voisinage de y et par conséquenty /∈ F . Ceci est impossible.
La frontière de F est vide et donc F est ouvert. L’ensemble F = Ω est unouvert et un fermé de Ω connexe. Le support de u est donc vide.
5.5 Ondes sortantes, ondes entrantes
103
Chapitre 6
Discrétisation par différences finies
Par souci de simplicité on se limitera dans cette section à l’étude de l’équa-tion des ondes en dimension 1. L’extension aux dimensions supérieures ne posecependant pas de difficultés particulières. On supposera de plus que le milieu esthomogéne (c =cte) et infini. On s’intéresse donc au calcul numérique de u solu-tion de l’équation :
∂2u
∂t2− c2
∂2u
∂x2= 0, x ∈ IR, t ∈ [0, T ]
u(x, t = 0) = u0(x), x ∈ IR
du
dt(x, t = 0) = u1(x), x ∈ IR.
(6.1)
6.1 Rappel sur les différences finiesOn considère une fonction f : IR 7→ IR, qu’on suppose suffisamment régulière
(au moins de classe C2) et on divise IR en intervalles de longueur h (qu’on appellele pas de discrétisation). On cherche à calculer f ′ aux points xj = jh. Un premierchoix consiste à calculer
f ′h(xj) =
f(xj+1)− f(xj)
h(schéma décentré à droite)
ou
f ′h(xj) =
f(xj)− f(xj−1)
h(schéma décentré à gauche).
La différence entre f ′(xj) et f ′h(xj) est appelée erreur de consistance, elle peut
être calculée simplement à l’aide de développements de Taylor. Il existe en effet
104

ξj ∈ [xj ; xj+1] tel que :
f(xj+1) = f(xj) + hf ′(xj) +h2
2f ′′(ξj),
donc
f ′h(xj) =
f(xj+1)− f(xj)
h= f ′(xj) +
h
2f ′′(ξj)
(on obtient évidemment un résultat similaire pour le schéma décentré à droite).L’erreur de consistance des deux schémas précédents est donc d’ordre un.
Si la fonction f posséde plus de regularité (au moins C3), on peut utiliser unschéma centré, plus précis :
f ′h(xj) =
f(xj+1)− f(xj−1)
2h.
On montre que ce schéma est d’ordre deux en utilisant un développement de Tay-lor d’ordre plus élevé :
f(xj+1) = f(xj) + hf ′(xj) +h2
2f ′′(xj) +
h3
6f (3)(ξ+j ), (ξ+j ∈ [xj ; xj+1])
f(xj−1) = f(xj)− hf ′(xj) +h2
2f ′′(xj)−
h3
6f (3)(ξ−j ), (ξ−j ∈ [xj−1 ; xj]).
On a alors
f ′(xj) = f ′h(xj) +
h2
12
(f (3)(ξ+j ) + f (3)(ξ−j )
).
Si f est au moins C4, on peut calculer sa dérivée seconde en utilisant un schémacentré d’ordre deux :
f ′′h (xj) =
f(xj+1)− 2f(xj) + f(xj−1)
h2.
On vérifie que (exercice) :
f ′′(xj) = f ′′h (xj) +
h2
24
(f (4)(ξ+j ) + f (4)(ξ−j )
).
avec ξ+j ∈ [xj ; xj+1] et ξ−j ∈ [xj−1 ; xj].
105
6.2 Schéma semi-discrétisé en espaceOn approche (u(xj, t))j∈ZZ par (uh,j(t))j∈ZZ, solution du schéma :
d2uh,jdt2
− c2uh,j+1 − 2uh,j + uh,j−1
h2= 0,
uh(0) = u0h,
duhdt
(0) = u1h.
(6.2)
Le plus souvent, les conditions initiales seront approchées par u0h,j = u0(xj) etu1h,j = u1(xj), mais on peut également choisir par exemple
u0j =
∫ xj+h/2
xj−h/2
u0(ξ)dξ, et u1j =∫ xj+h/2
xj−h/2
u1(ξ)dξ.
uh(t) n’étant pas une fonction, l’espace L2 n’est évidemment pas adapté àl’étude de ses propriétés. Nous considérerons l’espace
L2h = uh = (uh,j)j∈ZZ |
∑j
|uh,j| < +∞
muni de la norme∥uh∥ = h
∑j
|uh,j|
et du produit scalaire(uh, vh) = h
∑j
uhvh.
et supposerons que les conditions initiales sont dans L2h.
Nous introduisons également l’opérateur Ah, défini par :
(Ahuh)i = −uh,j+1 − 2uh,j + uh,j−1
h2,
On vérifie facilement que si uh ∈ L2h alors Ahuh ∈ L2
h.
6.3 Existence et unicité de la solution uhOn supposera ici que le milieu est homogéne : cj =cste= c. L’existence et
l’unicité de uh peut être démontrée simplement grâce à la transformée de Fourierdiscrète :
106

Soit Kh = [−π/h ; π/h], on appelle transformation de Fourier discréte l’opé-rateur Fh défini par :
Fh : L2h 7→ L2(Kh)
uh → uh = Fh(uh)
uh(k) =h√2π
∑j
uh,je−ikxj
(6.3)
(uh(k) est la transformée discréte de uh). Rappelons que Fh est un isomorphismeet que
uh,j =1√2π
∫Kh
uh(k)eikxjdk.
On vérifie facilement que
Fh(Ahuh) =4
h2sin2 kh
2uh.
En effet :
Fh(Ahuh) = − 1
h√2π
∑j
(uh,j+1 − 2uh,j + uh,j−1) e−ikxj ,
de plus :∑j
uh,j+1e−ikxj =
∑j
uh,je−ikxj−1 et
∑j
uh,j−1e−ikxj =
∑j
uh,je−ikxj+1 ,
donc
Fh(Ahuh) = − 1
h√2π
∑j
uh,j(e−ikxj+1 − 2e−ikxj + e−ikxj−1
)= − 1
h√2π
∑j
uh,je−ikxj
(eikh − 2 + e−ikh
)=
4
h2sin2 kh
2
1√2π
∑j
huh,je−ikxj .
107

Si uh est solution de (B.1), uh est donc solution de :
d2uhdt2
+4c2
h2sin2 kh
2uh = 0,
uh,j(0) = u0j ,
duh,jdt
(0) = u1j .
(6.4)
C’est une équation différentielle ordinaire qui posséde une et une seule solution.Cette solution s’écrit :
uh(k, t) = u0h cos(ωht) +u1hωh
sin(ωht), avec ω2h =
4c2
h2sin2 kh
2.
Nous avons démontré l’unicité de la solution de (B.1), pour pouvoir démontrerson existence, il nous reste à vérifier que uh est bien dans L2(Kh). Pour cela nousutiliserons l’inégalité | sin(ωht)| ≤ ωht :
∥uh(k, t)∥ ≤ ∥u0h∥+ t∥u1h∥.
Les conditions initiales étant supposées dans L2h, leur transformée de Fourier dis-
créte est dans L2(Kh) et ∥uh(k, t)∥ ≤ ∞. uh est donc bien dans L2(Kh). Nouspouvons alors utiliser le fait que Fh est un isomorphisme pour vérifier que uh estdans L2
h.
6.3.1 Stabilité et estimation de la solutionDans cette section, nous nous intéressons à l’étude du comportement de uh au
cours du temps et en particulier à sa stabilité.
Définition 6.1 uh sera dite solution stable de (B.1) s’il existe C et α ∈ IR+ indé-pendants de t tels que :
∥uh(t))∥ ≤ C(1 + tα)
(ce qui revient à dire que uh ne croît pas exponentiellement vite avec le temps).
Nous supposerons que les conditions initiales discrétes sont telles que
∥u0h∥ ≤ C|u0∥ et ∥u1h∥ ≤ C|u1∥,∀h
Par la transformation de Fourier discréte
Cette démonstration n’est valable que pour c constante et pour un milieu infini.Fh étant une isométrie, on a
∥uh(k, t)∥ = ∥uh(k, t)∥ ≤ ∥u0h∥+ t∥u1h∥ = ∥u0h∥+ t∥u1h∥ ≤ C∥u0∥+ Ct∥u1∥.
108

Par technique d’énergie
On multiplie la première équation de (B.1) parduhdt
, pour obtenir :(d2uhdt2
,duhdt
)+ c2
(Ahuh,
duhdt
)= 0,
on vérifie que (exercice) :
(Ahuh, vh) =∑j
uj+1 − ujh
vj+1 − vjh
et on pose ah(uh, vh) = (Ahuh, vh). ah est une forme bilinéaire symétrique etpositive. On a donc :(
d2uhdt2
,duhdt
)+ c2ah
(uh,
duhdt
)= 0.
De plus(d2uhdt2
,duhdt
)=
1
2
d
dt
∥∥∥∥duhdt∥∥∥∥2 et ah
(uh,
duhdt
)=
1
2
d
dtah (uh, uh) .
On a donc
dEh
dt= 0, avec Eh(t) =
1
2
(∥∥∥∥duhdt∥∥∥∥2 + ah (uh, uh)
).
La quantité Eh est positive et est appelée “énergie”. Comme elle est constante, ona :
Eh(t) = Eh(0) =1
2
(∥∥∥∥duhdt (0)∥∥∥∥2 + ah (uh(0), uh(0))
)=
1
2
(∥∥u1h∥∥2 + ah(u0h, u
0h
)).
On en déduit (en utilisant la positivité de ah (uh, vh)) que∥∥∥∥duhdt∥∥∥∥2 ≤ Eh(0).
Cette inégalité ne nous donne qu’une borne de la dérivée de uh. Pour obtenir uneborne de uh, nous utiliserons :
uh(t) = uh(0) +
∫ t
0
duhdt
(s)ds
109

soit
∥uh(t)∥ ≤ ∥uh(0)∥+∥∥∥∥∫ t
0
duhdt
(s)ds
∥∥∥∥ .On vérifie ensuite que∥∥∥∥∫ t
0
duhdt
(s)ds
∥∥∥∥ ≤∫ t
0
∥∥∥∥duhdt (s)ds∥∥∥∥ ≤
∫ t
0
√Eh(0) ≤ t
√Eh(0)
donc∥uh∥ ≤ C∥u0h∥+ Ct
√Eh(0).
Pour borner ∥uh∥ par une constante indépendante de h, il nous faut une hypothèsesupplémentaire sur les conditions initiales : nous supposerons qu’elles sont tellesque
ah(u0h, u
0h) ≤ Ca(u0, u0) = C
∫IR
∇u0 · ∇u0.
Comme ∥u0h∥ ≤ C∥u0∥ et ∥u1h∥ ≤ C∥u1∥, on a
∥uh∥ ≤ C∥u0∥+ Ct√E(0).
6.3.2 Convergence du schéma semi-discrétiséOn note uh la fonction de L2
h définie par
uh,j(t) = uj(xj, t).
On cherche à évaluer l’erreur d’approximation du schéma :
eh(t) = uh(t)− uh(t) ∈ L2h
Théorème 6.2 Si les conditions initiales sont approchées par u0h,j = u0(xj) etu1h,j = u1(xj), alors :
∥eh(t)∥ ≤ Cth2∥∥∥∥∂4u∂x4
∥∥∥∥L1(0,T ;L2(IR)
Démonstration :
110

1. On montre que uh est solution de
d2uhdt2
+ c2Ahuh = c2εh,
uh,j(0) = u0(xj),
duh,jdt
(0) = u1(xj).
(6.5)
avec
εh,j =∂2u
∂x2− uh,j+1 − 2uh,j + uh,j−1
h2,
l’erreur de consistance du schéma.
Démonstration :
Par définition uh vérifie
d2uh,jdt2
(t) =d2u
dt2(xj, t) = c2
d2u
dx2(xj, t),
donc
d2uh,jdt2
(t) + c2(Ahuh)i = c2d2u
dx2(xj, t) + c2(Ahuh)i = c2εh,i.
Le démonstration des deux dernières égalités de (B.5) est évidente, d’aprèsla définition de uh.
2. On vérifie ensuite que l’erreur est solution du schéma :
d2ehdt2
+ c2Aheh = c2εh,
eh(0) = u0h − u0h,
dehdt
(0) = u1h − u1h.
(6.6)
Il suffit pour cela de soutraire (B.4) à (B.1).
3. On montre que√Eh(t) ≤
√Eh(0) + C
∫ t
0
∥ε(s)∥ds, avec
Eh(t) =1
2
(∥∥∥∥dehdt∥∥∥∥2 + ah (eh, eh)
)
111

Démonstration :
On multiplie la première équation de (6.6) pardehdt
pour obtenir
dEh
dt=
(εh,
dehdt
)≤ ∥εh∥
∥∥∥∥dehdt∥∥∥∥ ≤ ∥εh∥C
√Eh(t).
De plusdEh
dt= 2√Eh(t)
d√Eh
dt:
2d√Eh
dt≤ C∥εh∥ =⇒
√Eh(t) ≤
√Eh(0) + C
∫ t
0
∥ε(s)∥ds.
4. On en déduit que :
∥eh(t)∥ ≤ ∥eh(0)∥+ Ct√Eh(0) + Ct
∫ t
0
∥ε(s)∥ds
Démonstration :
On a
eh(t) = eh(0) +
∫ t
0
dehdt
(s)ds
et
∥eh(t)∥ ≤ ∥eh(0)∥+∥∥∥∥∫ t
0
dehdt
(s)ds
∥∥∥∥ =⇒ ∥eh(t)∥ ≤ ∥eh(0)∥+∫ t
0
∥∥∥∥dehdt (s)∥∥∥∥ ds.
On a également∥∥∥∥dehdt (s)∥∥∥∥ ≤
√Eh(s) ≤
√Eh(0) + C
∫ s
0
∥ε(τ)∥dτ,
soit ∥∥∥∥dehdt (s)∥∥∥∥ ≤
√Eh(0) + C
∫ t
0
∥ε(τ)∥dτ, ∀s ≤ t
et
∥eh(t)∥ ≤ ∥eh(0)∥+ Ct√Eh(0) + Ct
∫ t
0
∥ε(s)∥ds.
112

5. Il reste ensuite à établir que :∫ t
0
∥εh(s)∥ds ≤ Ch2∥∥∥∥∂4u∂x4
∥∥∥∥L1(0,t;L2(IR)
.
Démonstration :
En utilisant en développement de Taylor avec reste intégral on vérifie que :
uh,j+1(t)− 2uh,j(t) + uh,j−1(t)
h2=∂2u
∂x2(x, t) +
1
6h2
∫ xj+1
xj
(xj+1 − ξ)3∂4u
∂x4(ξ, t)dξ
− 1
6h2
∫ xj−1
xj
(xj−1 − ξ)3∂4u
∂x4(ξ, t)dξ
Donc
|εh,j(t)| ≤ 1
6h2
∫ xj+1
xj
|xj+1 − ξ|3∣∣∣∣∂4u∂x4
(ξ, t)
∣∣∣∣ dξ + 1
6h2
∫ xj
xj−1
|xj−1 − ξ|3∣∣∣∣∂4u∂x4
(ξ, t)
∣∣∣∣2 dξ≤ h
6
∫ xj+1
xj−1
∣∣∣∣∂4u∂x4(ξ, t)
∣∣∣∣ dξpuis, par Cauchy-Schwarz :
|εh,j(t)| ≤ h
6
√∫ xj+1
xj−1
dξ
√∫ xj+1
xj−1
∣∣∣∣∂4u∂x4(ξ, t)
∣∣∣∣2 dξ≤ h
32
6
√∫ xj+1
xj−1
∣∣∣∣∂4u∂x4(ξ, t)
∣∣∣∣2 dξPar définition de la norme L2
h :
∥εh∥2(t) = h∑j
|εh,j(t)|2 ≤∑j
h4
6
∫ xj+1
xj−1
∣∣∣∣∂4u∂x4(ξ, t)
∣∣∣∣2 dξ ≤ Ch4∥∥∥∥∂4u∂x4
(., t)
∥∥∥∥2L2(IR)
On en déduit facilement l’inégalité annoncée. 6. On a donc :
∥eh(t)∥ ≤ ∥eh(0)∥+ Ct√Eh(0) + Cth2
∥∥∥∥∂4u∂x4
∥∥∥∥L1(0,t;L2(IR))
.
D’après les hypothèses sur les conditions initiales on vérifie que ∥eh(0)∥ =0, ∥deh
dt(0)∥ = 0 et
√Eh(0) = 0.
113
Chapitre 7
Discrétisation par éléments finis
Les solution des équations d’ondes que nous avons étudiées aux chapitres pré-cédents appartiennent à des espaces de dimension infinie, en espace et en temps.Pour pouvoir simuler numériquement des phénomènes de propagation d’ondesdans des milieux complexes, il est nécessaire d’approcher ces solutions par deséléments d’ensemble fini car un ordinateur ne peut faire des calculs que sur unnombre finis d’inconnues. De nombreuses techniques sont à notre disposition pourréaliser cette approximation. Parmi elles, les plus fréquemment utilisées sont les-méthodes de Différences Finies, les méthodes d’Éléments Finis, les méthodes deVolume Finis et les méthodes de Galerkine Discontinu (qui sont une généralisa-tion des méthodes de Volumes Finis). Nous nous intéressons dans ce chapitre àla discrétisation en espace par des méthodes d’éléments finis, le cas de la discré-tisation en temps (par une méthode de différences finies) sera traité au chapitresuivant.
Nous considérerons ici l’équation des ondes acoustiques dans un domaineborné Ω ⊂ Rd (d=1,2 ou 3) de frontière régulière ∂Ω = Γ1 ∪Γ2. Γ1 représente unobstacle ou un bord réfléchissant, modélisé par une condition de Neuman. Γ2 estune frontière artificielle utilisée pour simuler un espace infini, modélisé par unecondition de Sommerfeld. On peut éventuellement avoir Γ1 = ∅ ou Γ2 = ∅ (voirFigs. 7.1, 7.2 et 7.3). Nous avons choisi de considérer une condition de Neumannhomogène sur Γ1 mais les résultats présentés ci-dessous peuvent être généralisés(avec quelques adaptations) au cas de conditions de Dirichlet ou à des conditionsnon homogènes.
114

Γ2
Γ1
Ω
FIGURE 7.1 – Diffrac-tion par un obstacle cir-culaire.
Γ1
Ω
FIGURE 7.2 – Propaga-tion dans un domaineborné (Γ2 = ∅).
Γ2
Ω
FIGURE 7.3 – Propaga-tion dans un domaine in-fini (Γ1 = ∅).
1
µ(x)
∂2u
∂t2(x, t)− div
(1
ρ(x)∇u(x, t)
)= f(x, t), x ∈ Ω, t ∈]0, T [
∇u(x, t) · n = 0, x, t ∈]0, T [∈ Γ1
∂u
∂t(x, t) + c(x)∇u(x, t) · n = 0, x ∈ Γ2, t ∈]0, T [
u(x, t = 0) = u0(x),du
dt(x, t = 0) = u1(x), x ∈ Ω.
(7.1)
Les paramètres physiques µ et ρ sont supposés bornés, strictement positifs et ap-partiennent à L∞(Ω). En pratique, on les suppose en général constants (ou po-lynomiaux) par morceaux et le maillage est alors construit de telle sorte que cesparamètres soient constants par éléments. Les données initiales sont telles queu0 ∈ H1(Ω) et u1 ∈ L2(Ω) et la source telle que f ∈ C0(]0, T [, L2(Ω).
Le problème (7.1) admet alors une unique solution u ∈ C0(]0, T [, H1(Ω) ∩C2(]0, T [, L2(Ω)) qui est également solution du problème variationnel
d2
dt2
∫Ω
1
µu v +
d
dt
∫Γ2
1√µρ
u v +
∫Ω
1
ρ∇u · ∇v =
∫Ω
f v, (7.2)
pour v(., t) ∈ H1(Ω), avec les conditions initiales
u(x, t = 0) = u0(x),du
dt(x, t = 0) = u1(x), x ∈ Ω.
115
Pour pouvoir calculer une solution approchée de ce problème, posé dans l’es-pace de dimension infinie H1(Ω), nous allons maintenant nous placer dans unespace de dimension finie et dériver une formulation variationnelle approchée.
7.1 Formulation variationnelle approchée (méthodede Galerkine)
Nous noterons Vh l’espace d’approximation utilisé. Cet espace est obtenu àpartir d’un maillage Th du domaine Ω et h designe le diamètre du plus petit élé-ment de Th (voir annexe B). En général, la dimension N de Vh vérifie N ≈ C/hd.Bien évidemment, l’espace Vh doit se rapprocher de l’espace original V = H1(Ω)quand h diminue. Dans le cas des éléments finis classiques (méthode de Galerkinecontinu), Vh est un sous-ensemble de V = H1(Ω) et la propriété “Vh se rapprochede V quand h diminue” se traduit par
limh→0
infvh∈Vh
∥v − vh∥V = 0, v ∈ V. (7.3)
D’autres méthodes, comme les méthodes de Galerkine discontinues, ont laparticularité d’utiliser des espaces Vh non inclus dans V . Il n’est alors plus pos-sible d’utiliser la norme ∥v − vh∥V et la propriété précédente se réécrit
limh→0
infvh∈Vh
∥v − vh∥V+Vh= 0, v ∈ V.
Nous supposons ici que Vh ⊂ V et nous cherchons uh ∈ Vh, solution de laformulation variationnelle approchée de (7.2)
d2
dt2
∫Ω
1
µuhvh +
d
dt
∫Γ2
1√µρ
uhvh +
∫Ω
1
ρ∇uh · ∇vh =
∫Ω
f vh, ∀vh ∈ Vh(7.4)
avec les conditions initiales :
uh(x, t = 0) = u0h(x),duhdt
(x, t = 0) = u1h(x), x ∈ Ω.
Les données initiales u0h et u1h sont des approximations dans Vh de u0 et de u1.Nous préciserons par la suite les conditions que ces approximations doivent véri-fier.
Il nous faut maintenant répondre aux trois questions suivantes.1. Le problème (7.4) admet-il une unique solution ?2. Si oui, cette solution est-elle stable et peut-on contrôler son comportement
au cours du temps en fonction des données initiale ?3. Cette solution converge-t-elle vers la solution (7.1) et peut-on estimer cette
convergence en fonction de h ?
116

7.1.1 Existence et unicité de la solutionPour montrer l’existence et l’unicité de la solution de (7.4), le plus simple est
de réécrire ce système sous forme matricielle. Comme Vh est de dimension finieN on peut utiliser (ϕh,i)1≤i≤N , une de ses bases et écrire uh sous la forme
uh(t) =N∑i=1
Uh,i(t)ϕh,i.
Le problème (7.4) peut alors s’écrire sous la forme d’un système linéaire :Mh
d2Uh(t)
dt2+ Ch
dUh(t)
dt+KhUh(t) = Fh
Uh(0) = U0h ,
dUh
dt(0) = U1
h .
(7.5)
avec Uh(t) le vecteur de composantes Uh,i(t), U0h et U1
h les vecteurs des compo-santes de u0h et u1h dans la base ϕh et
Mh,i,j =
∫Ω
1
ρϕh,iϕh,j, Ch,i,j =
∫Γ2
1√µρϕh,iϕh,j, Kh,i,j =
∫Ω
1
ρ∇ϕh,i·∇ϕh,j et Fh,i =
∫Ω
fϕh,i.
Proposition 7.1 Mh est symétrique définie positive, Ch et Kh sont symétriquespositives.
Démonstration :
La symétrie est évidente. Il reste à montrer que U thMhUh > 0, U t
hChUh ≥ 0 etU thKhUh ≥ 0 pour tout Uh non nul. On a
(MhUh)i =N∑j=1
Mh,i,jUh,j =N∑j=1
∫Ω
1
ρϕh,iϕh,jUh,j =
∫Ω
1
ρϕh,iuh,
donc
U thMhUh =
N∑i=1
Uh,i (MhUh)i =N∑i=1
∫Ω
1
ρUh,iϕh,iuh =
∫Ω
1
ρu2h > 0
si uh (donc Uh) est non nul.
On montre de même que :
U thChUh =
∫Γ2
1√µρu2h ≥ 0 et U t
hKhUh =
∫Ω
1
ρ∥∇uh∥2 ≥ 0.
117

La matrice Mh étant symétrique définie positive, elle est inversible et le sys-tème (7.5) s’écrit
d2Uh(t)
dt2+M−1
h ChdUh(t)
dt+M−1
h KhUh(t) =M−1h Fh
Uh(0) = U0h ,
dUh
dt(0) = U1
h .
(7.6)
En posant Yh(t) =dUh(t)
dton obtient le système différentiel ordinaire du premier
ordre :
dYh(t)
dt+M−1
h ChYh(t) +M−1h KhUh(t) =M−1
h Fh
Yh(t) =dUh(t)
dt
Uh(0) = U0h , Yh(0) = U1
h ,
(7.7)
qui admet une et une seule solution.
7.1.2 Stabilité et estimation de la solutionPour simplifier la présentation, nous supposerons dans cette section que f = 0.
Nous procéderons en trois étapes :1. On montre la décroissance en temps d’une énergie.2. On en déduit que la norme L2 de la dérivée en temps de la solution est
bornée par la norme des conditions initiales.3. On conclut que la norme L2 de la solution est bornée par une fonction li-
néaire en temps et par la norme des conditions initiales.
1. En choisissant vh =duh(t)
dtdans (7.2), on obtient (exercice)
1
2
d
dt
∫Ω
(1õ
duhdt
(t)
)2
+1
2
d
dt
∫Ω
∥∥∥∥ 1√ρ∇uh(t)
∥∥∥∥2 = −∫Γ2
1√ρµ
(duhdt
(t)
)2
≤ 0.
L’énergie
Eh(t) =1
2
∫Ω
(1õ
duhdt
(t)
)2
+1
2
∫Ω
∥∥∥∥ 1√ρ∇uh(t)
∥∥∥∥2vérifie donc
dEh(t)
dt≤ 0.
118

2. On en déduit∥∥∥∥duhdt (t)∥∥∥∥2 ≤ CEh(t) ≤ CEh(0) ≤ C
(∥∥u1h∥∥2L2(Ω)+∥∥u0h∥∥2H1(Ω)
).
Pour obtenir une borne indépendante de h, on supposera que les conditionsinitiales sont choisies de telle sorte que
limh→0
||u0h − u0||V et limh→0
||u1h − u1||L2(Ω).
Alors, pour h suffisamment petit,
∥u0 − u0h∥H1(Ω) ≤ ∥u0∥H1(Ω) et ∥u1 − u1h∥L2(Ω) ≤ ∥u1∥L2(Ω).
Donc
∥u0h∥H1(Ω) ≤ ∥u0 − u0h∥H1(Ω) + ∥u0∥H1(Ω) ≤ C∥u0∥H1(Ω).
On montre de même que
∥u1h∥L2(Ω) ≤ C∥u1∥L2(Ω).
Finalement ∥∥∥∥duhdt (t)∥∥∥∥2 ≤ C
(∥∥u1∥∥2L2(Ω)
+∥∥u0∥∥2
H1(Ω)
).
3. Cette inégalité ne nous donne qu’une borne de la dérivée de uh. Pour obtenirune borne de uh, nous utiliserons :
uh(t) = uh(0) +
∫ t
0
duhdt
(s)ds
soit
∥uh(t)∥ ≤ ∥uh(0)∥+∥∥∥∥∫ t
0
duhdt
(s)ds
∥∥∥∥ .On vérifie ensuite que∥∥∥∥∫ t
0
duhdt
(s)ds
∥∥∥∥ ≤∫ t
0
∥∥∥∥duhdt (s)ds∥∥∥∥ ≤
∫ t
0
√Eh(0) ≤ t
√Eh(0)
donc∥uh∥ ≤ C∥u0h∥+ Ct
√Eh(0).
119
Pour borner ∥uh∥ par une constante indépendante de h, il nous faut unehypothèse supplémentaire sur les conditions initiales : nous supposeronsqu’elles sont telles que
ah(u0h, u
0h) ≤ Ca(u0, u0) = C
∫IR
∇u0 · ∇u0.
Comme ∥u0h∥ ≤ C∥u0∥ et ∥u1h∥ ≤ C∥u1∥, on a
∥uh∥ ≤ C∥u0∥+ Ct√E(0).
∥uh(t)∥2 ≤ C∥∥u0∥∥2
L2(Ω)+ Ct
√∥u1∥2L2(Ω) + ∥u0∥2H1(Ω).
7.1.3 Convergence du schéma semi-discrétiséOn supposera ici que Γ2 = ∅ et que les conditions initiales et la fonction source
sont telles que u ∈ C2(0, T ;H1(Ω)) et uh ∈ C2(0, T ;Vh).
Comme toute fonction vh ∈ Vh est aussi dans H1(Ω), on a, d’après (7.2) :
d2
dt2
∫Ω
uvh +
∫Ω
c2∇u · ∇vh =
∫Ω
f vh, ∀vh ∈ Vh
Il est donc évident que :
d2
dt2
∫Ω
(u− uh)vh +
∫Ω
c2∇(u− uh) · ∇vh = 0, ∀vh ∈ Vh (7.8)
avec les conditions initiales :
(u−uh)(x, t = 0) = (u0−u0h)(x),d(u− uh)
dt(x, t = 0) = (u1−u1h)(x), x ∈ Ω.
Si nous pouvions choisir vh = u − uh, nous aurions presque immédiatement uneestimation de l’erreur, malheureusement, u − uh /∈ Vh. Nous allons donc utiliserune fonction intermédiaire wh ∈ Vh bien chosie et étudier séparément les normes∥u− wh∥ et ∥wh − uh∥. Nous conclurons à l’aide de l’inégalité
∥u− uh∥ ≤ ∥u− wh∥+ ∥wh − uh∥.
1. Choix de la fonction wh.Nous posons wh = Phu, où Ph est l’opérateur défini par :
Ph : V → Vh
u 7→ Phu, tel que a(Phu− u, v) = 0, ∀vh ∈ Vh
(7.9)
120

aveca(u, v) =
∫Ω
u v +
∫Ω
c2∇u · ∇v
L’existence et l’unicité de Pu sont garanties par la coercivité et la continuitéde a. Si on avait considéré des conditions aux limites de Dirichlet sur lafrontière Γ on aurait pu choisir
a(u, v) =
∫Ω
c2∇u · ∇v.
2. Estimation de ∥Phu− u∥Lemme 7.2 On a
∥Phu− u∥H1(Ω) ≤ C infv∈Vh
∥u− vh∥H1(Ω)
Démonstration :
Comme Ph ∈ Vh, on a a(Phu − u, Phu) = a(Phu − u, vh) = 0, donca(Phu− u, Phu− u) = a(Phu− u, vh − u). En utilisant la continuité et lacoercivité de a, on montre que :
C1∥Phu−u∥2H1(Ω) ≤ a(Phu−u, Phu−u) = a(Phu−u, vh−u) ≤ C2∥Phu−u∥H1(Ω)∥vh−u∥H1(Ω).
Comme la seconde inégalité est vraie pour tout vh, on a
∥Phu− u∥H1(Ω) ≤C2
C1
infv∈Vh
∥vh − u∥H1(Ω)
Dans le cas particulier des éléments finis P k, on obtient une estimation plusprécise en utilisant le lemme suivant (admis).
Lemme 7.3 Si l’espace Vh est construit par une méthode d’éléments finiPk, on a
infvh∈Vh
∥vh − u∥H1(Ω) ≤ Chk|u|k+1,Ω
etinf
vh∈Vh
∥vh − u∥L2(Ω) ≤ Chk+1|u|k+1,Ω
on a alors :∥Phu− u∥H1(Ω) ≤ Chk|u|k+1,Ω.
On obtient des estimations similaires sur les dérivées première et secondepar rapport au temps en remarquant que Ph(∂tu) = ∂tPh(u).
Pour obtenir une estimation en norme L2 nous utiliserons les lemmes sui-vants :
121

Lemme 7.4 (Aubin-Nitsche). Pour tout u ∈ H1(Ω), on a
∥Phu−u∥L2(Ω) ≤ C∥Phu−u∥H1(Ω) supg∈L2(Ω)
(1
∥g∥L2(Ω)
infv∈Vh
∥vh − ϕg∥H1(Ω)
)
où ϕg est solution du problème adjoint défini par :Trouver ϕg ∈ V tel que
a(v, ϕg) = (g, v)L2(Ω), ∀v ∈ H1(Ω).
Démonstration :
Par définition de la norme dans L2(Ω),
∥Phu− u∥L2(Ω) = supg∈L2(Ω)
|(g, Phu− u)L2(Ω)|∥g∥L2(Ω)
,
de plus
(g, Phu−u) = a(Phu−u, ϕg) = a(Phu−u, ϕg−vh) ≤ C∥Phu−u∥H1(Ω)∥ϕg−vh∥H1(Ω).
Définition 7.5 Le problème adjoint est dit régulier si, pour tout g ∈ L2(Ω),ϕg ∈ H2(Ω) et s’il existe C > 0 tel que
∥ϕg∥H2(Ω) ≤ C∥g∥L2(Ω)
Lemme 7.6 Si le problème adjoint est régulier, on a, pour tout u ∈ H1(Ω)
∥Phu− u∥L2(Ω) ≤ Ch∥Phu− u∥H1(Ω).
Démonstration :
D’après le lemme 7.3, comme ϕg ∈ H2(Ω), on a
infv∈Vh
∥vh − ϕg∥H1(Ω) ≤ Ch|ϕg|2,Ω ≤ Ch∥g∥L2(Ω).
En utilisant 7.4, on obtient le résultat annoncé.
3. Estimation de ∥uh − Phu∥ En remplaçant u− uh par u− Phu+ Phu− uhdans (7.8), on obtient :
d2
dt2
∫Ω
(Phu− uh)vh +
∫Ω
c2∇(Phu− uh) · ∇vh =d2
dt2
∫Ω
(u− Phu)vh +
∫Ω
c2∇(u− Phu) · ∇vh.
122

Soit, par définition de Ph
d2
dt2
∫Ω
(Phu− uh)vh +
∫Ω
c2∇(Phu− uh) · ∇vh =d2
dt2
∫Ω
(Phu− u)vh +
∫Ω
(Phu− u)vh.
On choisit ensuite vh =∂(Phu− uh)
∂t:
1
2
d
dt
∫Ω
(∂(Phu− uh)
∂t
)2
+1
2
d
dt
∫Ω
∥c∇(Phu− uh)∥2 =∫Ω
∂2(Phu− u)
∂t2∂(Phu− uh)
∂t+
∫Ω
(Phu− u)∂(Phu− uh)
∂t.
Le terme de gauche est en fait la dérivée en temps des normes∥∥∥∂(Phu−uh)
∂t
∥∥∥2L2(Ω)
et ∥c∇(Phu− uh)∥2L2(Ω), mais pas de la norme L2 (ni a fortiori de la normeH1) de Phu−uh. Nous allons donc ajouter la dérivée en temps de ∥Phu− uh∥2L2(Ω)
de chaque côté de l’égalité 1 :
1
2
d
dt
[∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
+ ∥Phu− uh∥2L2(Ω) + ∥c∇(Phu− uh)∥2L2(Ω)
]≤
∫Ω
∂2(Phu− u)
∂t2∂(Phu− uh)
∂t+
∫Ω
(Phu− u)∂(Phu− uh)
∂t+
1
2
d
dt∥Phu− uh∥2L2(Ω) .
Nous majorons maintenant les trois termes du second membre de cette équa-tion :
–∫Ω
∂2(Phu− u)
∂t2∂(Phu− uh)
∂t≤∥∥∥∥∂2(Phu− u)
∂t2
∥∥∥∥L2(Ω)
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥L2(Ω)
≤ 1
2
[∥∥∥∥∂2(Phu− u)
∂t2
∥∥∥∥2L2(Ω)
+
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
];
–∫Ω
(Phu− u)∂(Phu− uh)
∂t≤ ∥Phu− u∥L2(Ω)
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥L2(Ω)
≤ 1
2
[∥Phu− u∥2L2(Ω) +
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
];
1. Si nous avions considéré des conditions de Dirichlet, il aurait suffit d’utiliser l’inégalité dePoincaré.
123
–1
2
d
dt∥Phu− uh∥2L2(Ω) =
∫Ω
(Phu− uh)∂(Phu− uh)
∂t
≤ ∥Phu− uh∥L2(Ω)
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥L2(Ω)
≤ 1
2
[∥Phu− uh∥2L2(Ω) +
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
];
Soit
1
2
d
dt
[∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
+ ∥Phu− uh∥2L2(Ω) + ∥c∇(Phu− uh)∥2L2(Ω)
]≤
1
2
[3
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
+ ∥Phu− uh∥2L2(Ω) + ∥Phu− u∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2
∥∥∥∥2L2(Ω)
].
En posant
E(t) =
∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥2L2(Ω)
+ ∥Phu− uh∥2L2(Ω) + ∥c∇(Phu− uh)∥2L2(Ω) ,
on vérifie que
dE
dt≤ C
[E(t) + ∥Phu− u∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2
∥∥∥∥2L2(Ω)
].
En intégrant cette inégalité par rapport au temps, on obtient :
E(t) ≤ E(0) + C
∫ t
0
E(s)ds+ C
∫ t
0
[∥(Phu− u)(s)∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2(s)
∥∥∥∥2L2(Ω)
]ds
≤ C
∫ t
0
E(s)ds+ E(0) + C
∫ T
0
[∥(Phu− u)(s)∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2(s)
∥∥∥∥2L2(Ω)
]ds.
Nous pouvons maintenant appliquer le lemme de Gronwall :
E(t) ≤
(E(0) + C
∫ T
0
[∥(Phu− u)(s)∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2(s)
∥∥∥∥2L2(Ω)
]ds
)eCt.
D’après les résultats obtenus précédemment :∫ T
0
[∥(Phu− u)(s)∥2L2(Ω) +
∥∥∥∥∂2(Phu− u)
∂t2(s)
∥∥∥∥2L2(Ω)
]ds ≤ Ch2k+2|u|k+1,Ω
124

donc
E(t) ≤ CE(0) + Ch2k+2|u|k+1,Ω.
Nous supposerons que les conditions initiales sont approchées de telle sorteque E(0) ≤ Ch2k+2, alors E(t) ≤ Ch2k+2 et
–∥∥∥∥∂(Phu− uh)
∂t
∥∥∥∥L2(Ω)
≤ Chk+1
– ∥Phu− uh∥L2(Ω) ≤ Chk+1
– ∥Phu− uh∥H1(Ω) ≤ Chk+1
4. Estimation de ∥u− uh∥. On déduit des résultats précédents que
–∥∥∥∥∂(u− uh)
∂t
∥∥∥∥L2(Ω)
≤ Chk+1
– ∥u− uh∥L2(Ω) ≤ Chk+1
– ∥u− uh∥H1(Ω) ≤ Chk.
125
Annexe A
Quelques résultats d’analysefonctionnelle
A.1 Les opérateurs linéaires non bornésDans cette section, H et H′ désignent deux espace de Hilbert.
Définition A.1 On dit que l’application A : D(A) ⊂ H −→ H′ un opérateurlinéaire non borné ssi
(i) Le domaine de définition D(A) de A est un sous-espace vectoriel de H(ii) L’image R(A) de A est incluse dans H′
(iii) L’application A est linéaire
A(u+ λv) = Au+ λAv pour tout u, v ∈ D(A) et λ ∈ R. (A.1)
Définition A.2 Le graphe G(A) d’un opérateur non borné A : D(A) ⊂ H −→ H′
est défini par
G(A) = (u, v) ∈ H× H′ : u ∈ D(A) et v = Au. (A.2)
Dans la suite, nous munissons H× H′ de du produit scalaire et de la norme
uu′
,vv′
H×H′
=√(u, v)H + (u′, v′)2H′ ,
∥∥∥∥∥∥∥∥uu′
∥∥∥∥∥∥∥∥H×H′
=√∥u∥2H + ∥u′∥2H′
(A.3)
126

Définition A.3 Soit A : D(A) ⊂ H −→ H′ un opérateur linéaire non borné Ondit que l’opérateur est fermé ssi son graphe est un sous-espace fermé de H× H′.
Dit autrement, A est fermé ssi pour toute suite un ∈ D(A) vérifiant
∃u ∈ H, v ∈ H′ unH−→ u et Aun
H′−→ u′ (A.4)
on au ∈ D(A) et Au = u′. (A.5)
Dit encore autrement, l’opérateur linéaire non borné A : D(A) ⊂ H −→ H′ estfermé ssi D(A) muni du produit scalaire (u, v)D(A) = (u, v)H + (Au,Av)H′ estun espace de Hilbert.
Définition A.4 On dit que A : H −→ H′ est un opérateur linéaire borné ssi c’estune application linéaire continue de H vers H′.
Proposition A.5 Les opérateurs linéaires bornés sont des opérateurs linéairesnon bornés fermés.
Preuve. Soit A : H −→ H′ un opérateur linéaire borné. Soit (un)n∈N une suited’éléments de H vérifiant
∃u ∈ H, v ∈ H′ unH−→ u et Aun
H′−→ u′ (A.6)
Comme D(A) = H et comme A est borné, il suit
u ∈ D(A) et u′ = Au. (A.7)
Exemple A.6 1. Les opérateurs de dérivation u(x) 7→ u(p)(x), p ≥ 1, dedomaine Hp(R), sont des opérateurs non bornés de L2(R). Ces opérateurssont fermés car Hp(R) est un espace de Hilbert muni de la norme
∥u∥L2(R) + ∥u(p)∥L2(R). (A.8)
2. Les opérateurs de dérivation u(x) 7→ u(p)(x), p ≥ 1, de domaine D(R),sont des opérateurs non bornés deL2(R). Ces opérateurs ne sont pas ferméscar D(R) n’est pas complet muni de la norme (A.8).
3. Nous notons par ℓ2 l’ensemble des suite de carré sommable
ℓ2 =(un) ∈ RN :
∑n
u2n <∞
(A.9)
127

Soit (βn)n∈N une suite qui vérifie
limn→+∞
βn = +∞ (A.10)
L’opérateur, de domaine
ℓ2β =(un) ∈ ℓ2 :
+∞∑n=0
β2nu
2n < +∞
,
défini par(un) 7−→ (βnun) (A.11)
est un opérateur linéaire non borné fermé de ℓ2.
4. Considéré sur l’ensemble des suites presque nulles
D =(un) ∈ RN : ∃N > 0 ∀n ≥ N un = 0
(A.12)
l’opérateur (un)n∈N 7→ (βnun)n∈N est un opérateur linéaire non borné deℓ2. Cet opérateur n’est pas fermé car D n’est pas complet pour la norme
∥u∥ℓ2β =
√√√√+∞∑n=1
(1 + β2n) u
2n (A.13)
Définition A.7 Soit A : D(A) ⊂ H −→ H′ un opérateur linéaire non bornéinjectif. L’inverse A−1 : R(A) ⊂ H′ −→ H de A est l’opérateur qui associe àu′ ∈ R(A) l’unique u ∈ D(A) qui vérifie
Au = u′. (A.14)
Proposition A.8 Soit A : D(A) ⊂ H −→ H′ est un opérateur linéaire ferménon borné injectif d’image R(A). Son inverse A−1 : R(A) ⊂ H′ −→ H est unopérateur linéaire non borné fermé.
Preuve. On remarque que G(A−1) = i(G(A)) avec i l’application continue in-versible.
i : H× H′ −→ H′ × H (u, u′) 7−→ (u′, u) (A.15)
Le graphe de A étant fermé, il en est de même pour celui de A−1.
Définition A.9 Soient A : D(A) : H −→ H′ et B : D(B) : H −→ H′ deuxopérateurs linéaires non bornés. L’opérateur A + B, de domaine de définitionD(A+ B) = D(A) ∩D(B), est défini par :
(A+ B)u = Au + Bu ∀u ∈ D(A+ B). (A.16)
128

Proposition A.10 Si A : D(A) : H −→ H′ est fermé et B : H −→ H′ est bornéalors A+ B est fermé.
Preuve. On remarque tout d’abord que D(A + B) = D(A). Soit un ∈ D(A) quivérifie
∃u ∈ H, u′ ∈ H′ unH−→ u et (A+ B)un
H′−→ u′. (A.17)
Comme B est continue, on aBun
H′−→ Bu. (A.18)
Il suit que
∃u ∈ H, u′ ∈ H′ unH−→ u et Aun
H′−→ u′ − Bu. (A.19)
Comme A est fermé, on a
u ∈ D(A) et Au = u′ − Bu. (A.20)
C’est à direu ∈ D(A+ B) et (A+ B)u = u′. (A.21)
Il suit que A+ B est fermé.
Remarque A.11 Si A et B sont des opérateurs non bornés fermés. L’opérateurA+B ne sont pas nécessairement fermés. En effet Soient A : H1(R) ⊂ L2(R) −→L2(R) et B : H1(R) ⊂ L2(R) −→ L2(R) définis par
Au =du
dx+ u et Bu =
du
dx(A.22)
L’opérateur A+ B : H1(R) ⊂ L2(R) −→ L2(R)
(A+ B)u = u (A.23)
n’est pas fermé car H1(R) n’est pas fermé pour la norme ∥u∥L2(R) + ∥u∥L2(R).
A.2 Les opérateurs maximaux monotonesDans la dernière section, nous nous sommes intéressés aux opérateurs non
bornés. Nous nous intéressons ici plus particulièrement à une classe plus petited’opérateurs qui interviennent dans le théorème de Hille-Yoshida.
Dans cette section H désigne un espace de Hilbert.
129
Définition A.12 Soit A : D(A) ⊂ H −→ H un opérateur linéaire non borné.
(i) L’opérateur A est monotone ssi (Au, u)H ≥ 0 pour tout u ∈ D(A).
(ii) L’opérateur A est maximal ssi pour tout f ∈ H il existe u ∈ D(A) tel queAu+ u = f.
Proposition A.13 Si A est maximal monotone alors son domaine est dense dansH.
Preuve. Soit f ∈ H orthogonal à tous les éléments de D(A). Montrons que f estnul. Comme A est maximal, il existe u ∈ D(A) qui vérifie u + Au = f. Comme(f, u)H = 0, on a (u, u)H + (Au, u)H = 0. Comme A est monotone (Au, u)H ≥ 0, ilsuit que (u, u)H = puis u = 0 et par conséquent f = 0.
Proposition A.14 Si A est monotone alors l’opérateur I + λA avec λ > 0 estinjectif.
Preuve. Pour tout u ∈ ker(I + λA), on a
u+ λAu = 0 ⇐⇒ (Au+ λu, u)H = 0 ⇐⇒ (u, u)H + λ(Au, u)H = 0.
Ces deux termes étant positifs, il suit (u, u)H et donc u = 0.
Proposition A.15 Si A est monotone, on a les équivalences suivantes
R(I + A) = H ⇐⇒ R(I + λA) = H pour un λ > 0
⇐⇒ R(I + λA) = H pour tout λ > 0.
(A.24)
Preuve. Il suffit de montrer que siR(I+λ0A) = H avec λ0 > 0 alorsR(I+λA) =H pour tout λ ∈]0, 2λ0[.
Il nous faut trouver u qui vérifie Au+ λu = f ou de manière équivalente
u+ λ0Au+ (λ− λ0)Au = f ⇐⇒ u+ λ0Au = f − (λ− λ0)Au (A.25)
C’est à dire
u+ λ0Au = f − λ− λ0λ0
(I + λ0A
)u+
λ− λ0λ0
u (A.26)
D’après la proposition A.14, l’opérateur A+λ0I est bijectif. On obtient l’équationde point fixe
u = F (u) :=λ− λ0λ0
u + (I + λ0A)−1f − λ− λ0
λ(I + λ0A)
−1u (A.27)
130

qui admet une unique solution si F est contractante. Il nous suffit donc de montrerque
∃α < 1
∣∣∣∣λ− λ0λ0
∣∣∣∣ ∥u− (I + λ0A)−1u∥H ≤ α∥u∥H. (A.28)
Soit f = (I + λ0A)−1u et g = u− f. On a
f + λ0Af = u =⇒ (f, f)H + λ0(Af, f)H = (u, f)H. (A.29)
Comme A est monotone, il suit
(f, f)H ≤ (u, f)H (A.30)
D’autre part, on a
∥u− f∥2H = (f − u, f − u)H = (u, u)H − 2(u, f)H + (f, f)H. (A.31)
D’après (A.30), on a
∥u− f∥2H ≤ (u, u)H − (f, f)H ≤ (u, u)H = ∥u∥H. (A.32)
Il suit par inégalité triangulare
∥u− (I + λ0A)−1u∥H = ∥u− f∥H ≤ ∥u∥H (A.33)
Comme 0 < λ < 2λ0, on a ∣∣∣∣λ− λ0λ0
∣∣∣∣ < 1 (A.34)
L’application F est donc contractante.
Corollaire A.16 Si A est maximal monotone alors, pour tout λ > 0, I + λA estbijectif de D(A) vers H .
Preuve. L’injectivité et la surjectivité proviennent des propositions A.14 et A.15.
Proposition A.17 Si A est maximal monotone et λ > 0 alors (I +λA)−1 : H −→H est borné et
∥(I + λA)−1∥L(H) ≤ 1. (A.35)
Preuve. Il nous suffit de montrer l’inégalité (A.35). Pour tout f ∈ H et u = (I +λA)−1f , on a
∥u∥2H ≤ (u, u)H + λ(Au, u)H = (f, u)H ≤ ∥f∥H∥u∥H (A.36)
Il suit∥(I + λA)−1f∥H = ∥u∥H ≤ ∥f∥H. (A.37)
131

Proposition A.18 Si A est maximal et monotone alors A est fermé.
Preuve. D’après la proposition A.17, (I + A)−1 est borné. Son inverse I + A estdonc fermé d’après la proposition A.8. Il en est donc de même pour A = (I+A)−1
d’après la proposition A.10.
Exemple A.19 L’opérateur suivant est maximal monotone
H2(R) ⊂ L2(R) −→ L2(R)
u 7−→ − d2udx2
(A.38)
Cet opérateur est monotone car par intégration par partie on a(− d2u
dx2, u)L2(R)
=(dudx,du
dx
)L2(R)
. (A.39)
Montrons maintenant que A est maximal. Soit f ∈ L2(R). D’après le théorèmede Lax-Milgram, il existe u ∈ H1(R) qui vérifie pour tout v ∈ H1(R)(du
dx,dv
dx
)L2(R)
+(u, v)L2(R)
=(f, v)L2(R)
. (A.40)
En prenant v ∈ D(R), il suit que u vérifie au sens des distributions
−d2u
dx2+ u = f. (A.41)
Par conséquent, on ad2u
dx2= −f + u ∈ L2(R) et donc u ∈ H2(R). On conclut
donc à la maximalité.
Exemple A.20 L’opérateur suivant est maximal monotone
H2D([0, L]) ⊂ L2([0, L]) −→ L2([0, L])
u 7−→ −u′′(A.42)
avecH2
D([0, L]) = u ∈ H2([0, L]) : u(0) = u(L) = 0 (A.43)
132

La monotone suit d’une intégration par partie :(− d2u
dx2, u)L2([0,L])
=(dudx,du
dx
)L2([0,L])
≥ 0 ∀u ∈ H2D([0, L]). (A.44)
D’après le théorème de Lax-Milgram, il existe u ∈ H10 (R) qui vérifie pour tout
v ∈ H10 ([0, L])(du
dx,dv
dx
)L2([0,L])
+(u, v)L2([0,L])
=(f, v)L2([0,L])
. (A.45)
En prenant v ∈ D(]0, L[), il suit que u vérifie au sens des distributions
−d2u
dx2+ u = f. (A.46)
Par conséquent, on ad2u
dx2= −f + u ∈ L2([0, L]) et donc u ∈ H2
D([0, L]). Onconclut donc à la maximalité.
Exemple A.21 On démontre de manière analogue que l’opérateur suivant estmaximal monotone
H2N([0, L]) ⊂ L2([0, L]) −→ L2([0, L])
u 7−→ −u′′(A.47)
avecH2
N([0, L]) = u ∈ H2([0, L]) : u′(0) = u′(L) = 0. (A.48)
Exemple A.22 L’opérateur suivant n’est pas monotone
H2([0, L]) ⊂ L2([0, L]) −→ L2([0, L])
u 7−→ −u′′(A.49)
Soit u(x) = x2 (− d2u
dx2, u)L2(R)
= −∫ L
0
2 x2 dx < 0 (A.50)
133

Exemple A.23 Soit
H20 ([0, L]) = u ∈ H2([0, L]) : u(0) = u(L) = 0 et u′(0) = u′(L) = 0 (A.51)
Montrer que l’opérateur suivant n’est pas maximal
H20 ([0, L]) ⊂ L2([0, L]) −→ L2([0, L])
u 7−→ −u′′(A.52)
L’opérateur u 7→ − d2udx2 + u est bijectif de H2
D([0, L]) vers L2([0, L]). CommeH2
0 ([0, L]) est strictement inclus dans H2D([0, L]), l’image de l’opérateur u 7→
− d2udx2 + u de domaine H2
0 ([0, L]) est strictement inclus dans L2([0, L]).
A.3 Continuité, Dérivation dans les espaces de Ba-nach et intégration dans les espace de Hilbert
A.3.1 Notion de continuité dans un espace de BanachSoit f : I −→ V une application allant d’un intervalle I ⊂ R vers V un espace
de Banach
I = [a, b] ou ]a, b[ ou [a, b[ ou ]a, b] avec R ∪ −∞ ∋ a < b ∈ R ∪ +∞(A.53)
On dit que f est continue en t ∈ I si
limε→0
f(t+ ε) = f(t) dans V (A.54)
C’est à direlimε→0
∥f(t+ ε)− f(t)∥V = 0. (A.55)
On note alors l’ensemble des fonctions continues sur I à valeur dans V
C0(I,V) (A.56)
Remarque A.24 Bien entendu, un espace de Hilbert est un espace de Banach.Rappelons aussi que l’ensemble des applications linéaires entre deux espace deHilbert est aussi un espace de Banach.
134

Exemple 1. Soit H un espace de Hilbert. Soit A un opérateur linéaire borné. Onnote B : R −→ L(H), avec L(H) l’ensemble des applications allant de H vers H,défini par
B(t) =+∞∑n=0
(−1)nAntn
n!(A.57)
Il suit à l’aide de l’inégalité triangulaire que
∥B(t)∥L(H) = exp(−At) ≤+∞∑n=0
∥A∥nL(H)|t|n
n!= exp(∥A∥L(H)|t|) (A.58)
où l’espace L(H) a été muni de la norme d’opérateur
∥A∥L(H) = supv∈H
∥Av∥H∥v∥H
(A.59)
D’autre part, comme B(t+ s) = B(t)B(s) il suit
B(t+ ε)− B(t) = B(t)(B(ε)− I
)(A.60)
Il suit que
∥B(t+ ε)− B(t)∥L(H) ≤ ∥B(t)∥L(H)∥B(ε)− I∥L(H) (A.61)
Par inégalité triangulaire, on a
∥B(ε)−I∥L(H) =∥∥∥ +∞∑
n=1
(−1)nAnεn
n!
∥∥∥L(H)
≤+∞∑n=1
∥A∥nL(H)|ε|n
n!= exp(∥A∥|ε|)−1
(A.62)On déduit que
∥B(t+ ε)− B(t)∥L(H) ≤(exp(∥A∥|ε|)− 1
)exp(∥A∥ |t|) −→
ε→00 (A.63)
L’opérateur B(t) est donc de classe C0(R,L(H)).
Exemple 2. Multiplication par un opérateur borné à faire
A.3.2 Notion de dérivation dans un espace de Banach
A.3.3 Intégration dans un espace de HilbertNous ne cherchons pas ici à définir une intégrale générale de fonctions à va-
leurs dans un espace de Hilbert. Pour le cas général, on pourra se référer auxouvrages portant sur l’intégrale de Bochner.
135
Une des méthodes particulièrement simple pour définir l’intégrale d’une fonc-tion à valeur dans un espace de Hilbert est basé sur le théorème de Riesz.
Considérons une fonction f ∈ C0(I,H) avec I = [a, b], a < b, un intervalle deR. On définit φf =
∫If(t)dt comme l’unique élément de H qui vérifie pour tout
v ∈ H
(φf , v)H =
∫I
(f(t), v)Hdt (A.64)
Lemme A.25 L’application v 7→∫I(f(t), v)H est une forme linéaire continue
preuve.
A.4 L’alternative de FredholmSoit H un espace de Hilbert et K : H −→ H un opérateur compact. Soit
S : H −→ H l’opérateur linéaire u 7→ u+Ku.
L’objet de cette section est de démontrer le théorème suivant
Théorème A.26 L’opérateur S est injectif si et seulement si il est surjectif.
Nous allons ici seulement démontrer que l’injectivité implique la surjectivité, carcela sera le seul résultat utilisé par la suite. La réciproque nécessite un petit déve-loppement sur les opérateurs adjoints.
Proposition A.27 Si S = I + K est injectif alors S est un opérateur à imagefermé
Démonstration :
Soit un une suite de H tel que vn = Suu converge vers v dans H .
vn = un +Kun (A.65)
Montrons que un est borné. On raisonne par l’absurde. Supposons que l’on peutextraire de un une sous-suite uσn qui vérifie
limn→+∞
∥uσn∥ = +∞. (A.66)
Considérons la suite un = uσn/∥uσn∥ qui vérifie
∥un∥ = 1 et un +Kun =vn
∥un∥. (A.67)
136

On peut extraire de un une sous-suite uσn qui converge faiblement vers u et tel queuσn + Kuσn converge fortement vers 0. Comme K est compact Kuσn convergefortement vers Ku. Ainsi, uσn = uσn + Kuσn − Kuσn converge fortement vers−Ku. Par unicité de la limite faible, on a u +Ku = 0. Il suit que u = 0. Impos-sible car uσn est de norme 1 et ne peut pas converger fortement vers 0. Ceci estimpossible.
Montrons que un converge vers u ∈ H et concluons. Comme un est borné. Onpeut extraire une sous suite uσn faiblement convergente vers u ∈ H . Comme Kest compact, Kuσn converge fortement vers Ku. ainsi un = un + Kun − Kunconverge fortement et donc faiblement vers v−Ku. Par unicité de la limite faible,il suit que u = v−Ku. C’est à dire v = u+Ku et par conséquent que v est dansl’image de S.
Dans la suite nous notons Rn l’image de Sn, c’est à dire le sous espace vectorielde H
Rn =f = Snu with u ∈ H
(A.68)
Proposition A.28 Si S = I +K est injectif alors– soit S est surjectif– soit la suite de sous-ensemble Rn est strictement décroissante (Rn+1 ⊂ Rn
and Rn+1 = Rn)
Démonstration :
Pour tout f ∈ Rn+1, il existe x ∈ H tel que f = Sn+1x = Sny avec y = Sx. Ilsuit que f ∈ Rn. Ainsi, Rn+1 ⊂ Rn.
Pour conclure, il nous suffit de montrer que si S n’est pas surjectif alors Rn+1 =Rn. Nous raisonnons par l’absurde et supposons que Rn+1 = Rn Comme S n’estpas surjectif, on a R1 = H . Par conséquent, il existe x ∈ H \ R1. Le vecteury = Snx est dans Rn. Comme Rn = Rn+1, c’est aussi un élément de Rn+1. C’està dire y = Sn+1z avec z ∈ H et par conséquent
Snx = Sn+1z c’est à dire Sn(x− Sz) = 0. (A.69)
Comme S est injectif, Sn l’est aussi. Ainsi, on a x = Sz et par conséquent x ∈ R1.Ceci est impossible.
Proposition A.29 Si S = I +K est injectif alors S est surjectif.
Démonstration :
On raisonne par l’absurde : nous supposons que S n’est pas surjectif. D’après la
137

proposition A.28, la suite Rn est strictement décroissante. Comme Sn = I +Kn
avec Kn un opérateur compact donné par
Kn =n∑
p=1
Cnp K
p avec Cnp =
n!
p!(n− p)!. (A.70)
D’après la poposition A.27, Rn = R(Sn) est fermé.Il existe donc une suite zn ∈ Rn ∩ (Rn+1)
⊥ tel que ∥zn∥ = 1. On a d’après lethéorème de Pythagore
∥w − zn∥2 = ∥w∥2 + ∥zn∥2 ≥ 1 pour tout w ∈ Rn+1. (A.71)
Comme la suite zn est borné, il existe une extraction strictement croissante σ telque zσn converge faiblement vers z dansH . CommeK est compact, la suiteKzσn
converge fortement vers Kv dans H .
Kzσn −Kzσn+1 = (I +K)zσn − (I +K)zσn+1 + zσn+1 − zσn (A.72)
Comme (I + K)zσn ∈ Rσn+1, (I + K)zσn+1 ∈ Rσn+1+1 ⊂ Rσn+1 and zσn+1 ∈Rσn+1 , il suit que (I +K)zσn − (I +K)zσn+1 + zσn+1 ∈ Rσn+1. D’après (A.71),on a
∥Kzσn+1 −Kzσn∥ ≥ 1. (A.73)
Ceci est impossible car la suite Kzσn est de Cauchy.
138
Annexe B
Mise en oeuvre de la méthode deséléments finis
B.1 Approximation de GalerkinDans cette section, nous cherchons la solution du problème :
Trouver u(t) ∈ H1(Ω) tel que, pour tout v ∈ H1(Ω), on ait
d2
dt2
∫Ω
u(t)v +d
dt
∫Γa
c2(x)vu(t) +
∫Ω
c2(x)∇u(t) · ∇v +∫Γd
c2(x)v∇u(t) · n = 0
u(0) = u0
du
dt(0) = u1.
(B.1)L’inconvénient de cette formulation est que l’espace H1(Ω) est un espace de di-mension infinie, peu pratique à utiliser numériquement. Nous utiliserons donc unefamille de sous-espaces vectoriels Vh ⊂ H1(Ω), de dimension finie Nh qui ap-proche H1(Ω) au sens suivant :
limh→0
infvh∈Vh
∥v − vh∥H1(Ω) = 0, ∀v ∈ H1(Ω).
Nous donnerons des exemples d’espace Vh dans la section B. Pour le momentnous précisons seulement que h est un paramètre destiné à tendre vers 0 et quelimh→0
Nh = +∞.
139

Nous cherchons maintenant uh(t) ∈ Vh tel que, pour tout vh ∈ Vh, on ait :
d2
dt2
∫Ω
uh(t)vh +d
dt
∫Γa
c2(x)vhuh(t) +
∫Ω
c2(x)∇uh(t) · ∇vh = 0
uh(0) = u0h ∈ Vh
duhdt
(0) = u1h ∈ Vh,
(B.2)
où u0h et u1h sont des approximations respectives de u et de v au sens :
limh→0
∥u0 − u0h∥H1(Ω) et limh→0
∥u1 − u1h∥L2(Ω).
Nous notons (ϕi)i=1,Nhune base de Vh et (αi(t))i=1,Nh
les composantes de uh(t)dans cette base :
uh(t) =
Nh∑i=1
αi(t)ϕi.
Remarquons maintenant que chercher uh(t) solution de (B.2) pour tout v ∈ Vhest équivalent a chercher uh(t) solution de (B.2) pour tout v ∈ (ϕi)i=1,Nh
. Leproblème s’écrit alors :
Trouver (αi(t))i=1,Nhtel que, pour tout j = 1, Nh, on ait
d2
dt2
∫Ω
Nh∑i=1
αi(t)ϕiϕj +d
dt
∫Γa
c2(x)
Nh∑i=1
αi(t)ϕiϕj +
∫Ω
c2(x)∇
(Nh∑i=1
αi(t)ϕi
)· ∇ϕj = 0
Nh∑i=1
αi(0)ϕi = u0h
Nh∑i=1
dαi
dt(0)ϕi = u1h,
(B.3)
140
ce qui peut se réécrire :
Nh∑i=1
d2αi(t)
dt2
∫Ω
ϕiϕj
Nh∑i=1
dαi(t)
dt
∫Γa
c2(x)ϕiϕj +
Nh∑i=1
αi(t)
∫Ω
c2(x)∇ϕi · ∇ϕj = 0
Nh∑i=1
αi(0)ϕi = u0h
Nh∑i=1
dαi
dt(0)ϕi = u1h.
(B.4)Nous pouvons alors définir le vecteur U(t) = (αi(t) ainsi que les matrices
M =
(∫Ω
ϕiϕj
)i,j
, B =
(∫Γa
c2(x)ϕiϕj
)i,j
et K =
(∫Ω
c2(x)∇ϕi · ∇ϕj
)i,j
,
respectivement appelées matrices de masse, de frontière et de raideur pour obtenirle système différentiel ordinaire :
Md2U
dt2+B
dU
dt+KU = 0
U(0) = u0h
dU
dt(0) = u1h.
(B.5)
Nous allons maintenant nous intéresser au choix des espaces Vh.
B.2 Les élément finis de Lagrange (rappel)Il existe de nombreuses façons de construire une famille d’espace Vh. Nous
nous intéressons ici à la méthode des éléments finis, et plus particulièrement auxéléments finis de Lagrange.
B.2.1 Le maillageDéfinition B.1 Un maillage Th du domaine Ω est une partition de Ω en Lh poly-èdres convexes (Kl)l=1,Lh
(des segments en 1D, généralement des triangles ou desrectangles en 2D, des tétraèdres ou des hexaèdres en 3D), d’intérieur non vide et
tels queKl ∩
Km= ∅.
141
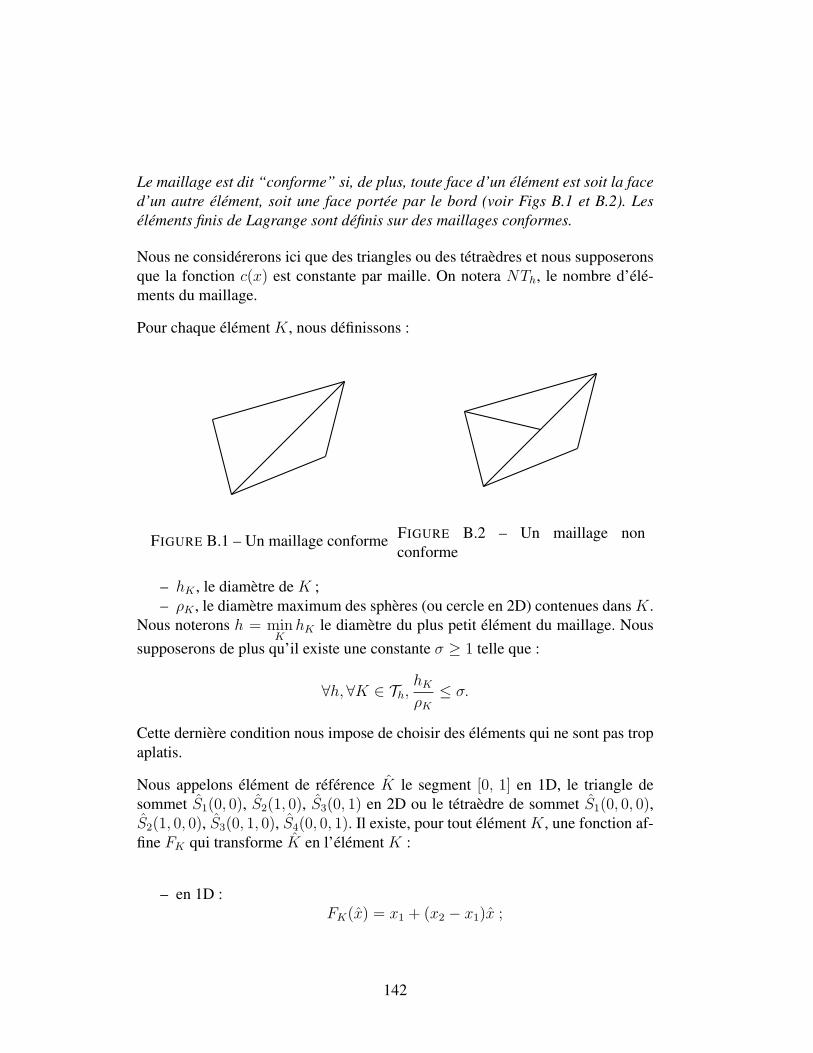
Le maillage est dit “conforme” si, de plus, toute face d’un élément est soit la faced’un autre élément, soit une face portée par le bord (voir Figs B.1 et B.2). Leséléments finis de Lagrange sont définis sur des maillages conformes.
Nous ne considérerons ici que des triangles ou des tétraèdres et nous supposeronsque la fonction c(x) est constante par maille. On notera NTh, le nombre d’élé-ments du maillage.
Pour chaque élément K, nous définissons :
FIGURE B.1 – Un maillage conforme FIGURE B.2 – Un maillage nonconforme
– hK , le diamètre de K ;– ρK , le diamètre maximum des sphères (ou cercle en 2D) contenues dans K.
Nous noterons h = minK
hK le diamètre du plus petit élément du maillage. Noussupposerons de plus qu’il existe une constante σ ≥ 1 telle que :
∀h, ∀K ∈ Th,hKρK
≤ σ.
Cette dernière condition nous impose de choisir des éléments qui ne sont pas tropaplatis.
Nous appelons élément de référence K le segment [0, 1] en 1D, le triangle desommet S1(0, 0), S2(1, 0), S3(0, 1) en 2D ou le tétraèdre de sommet S1(0, 0, 0),S2(1, 0, 0), S3(0, 1, 0), S4(0, 0, 1). Il existe, pour tout élément K, une fonction af-fine FK qui transforme K en l’élément K :
– en 1D :FK(x) = x1 + (x2 − x1)x ;
142

– en 2D :
FK(x, y) =
x1
y1
+
x2 − x1 x3 − x1
y2 − y1 y3 − y1
x
y
;
– en 3D :
FK(x, y, z) =
x1
y1
z1
+
x2 − x1 x3 − x1 x4 − x1
y2 − y1 y3 − y1 y4 − y1
z2 − z1 z3 − z1 z4 − z1
x
y
z
.
où xi, yi, zi sont les coordonnées du sommet Si de l’élémentK (voir Figures B.3, B.4et B.5). Cette fonction peut s’écrire sous forme matricielle
FK(x) = AKx+ bK
et son jacobien vérifie :
JFK= AK et |JFK
| = | det(AK)|.
Il nous reste encore à déterminer les degrés de liberté du maillage. Pour cela nousdéfinissons d’abord les degrés de liberté sur l’élément de référence :
– en dimension 1, les degrés de liberté de l’élément fini de Lagrange Pk sontles points de coordonnées
xi =i− 1
k, i = 1..k + 1;
– en dimension 1, les degrés de liberté de l’élément fini de Lagrange Pk sontles points de coordonnées
(xi, yj) =
(i− 1
k,j − 1
k
)|xi + yj ≤ 1, i, j = 1..k + 1;
– en dimension 1, les degrés de liberté de l’élément fini de Lagrange Pk sontles points de coordonnées
(xi, yj, zl) =
(i− 1
k,j − 1
k,l − 1
k
)| xi + yj + zl ≤ 1, i, j, l = 1..k + 1.
143
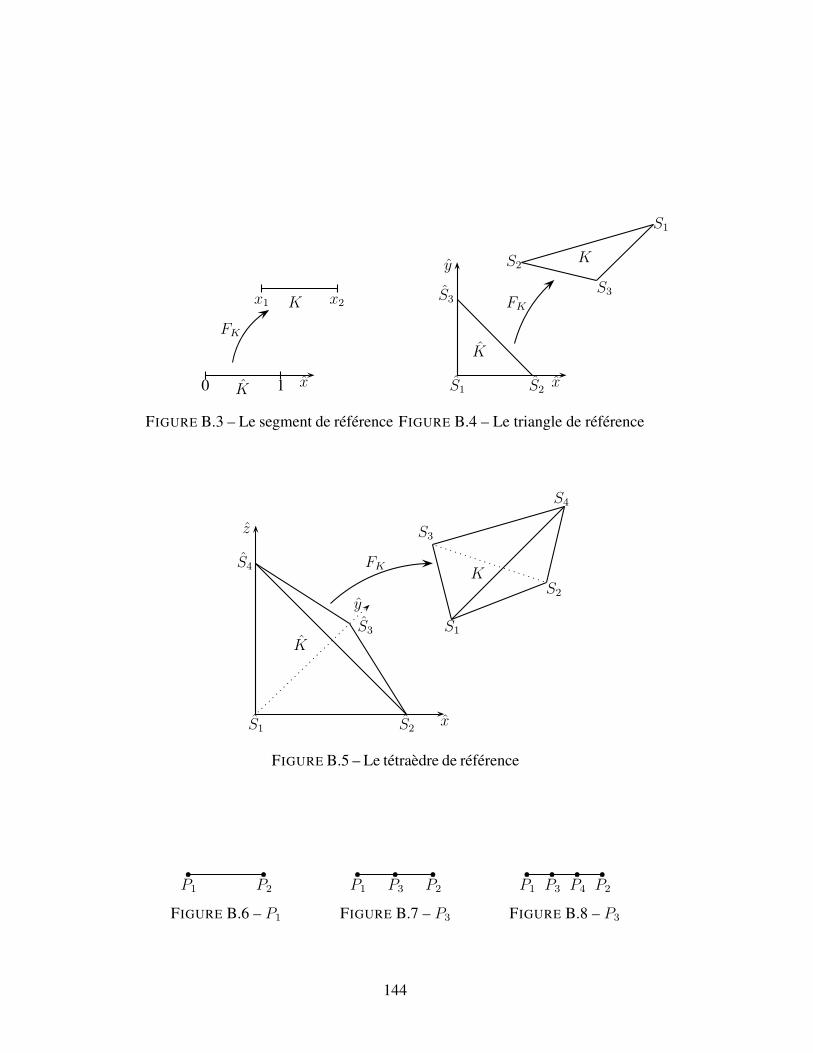
x0 1
x1 x2
FK
K
K
FIGURE B.3 – Le segment de référence
x
y
S1
S3
S2
S1
S3
S2
FK
K
K
FIGURE B.4 – Le triangle de référence
S1
S4
S2
S3 S1
S3
S2
S4
x
z
y
FK
K
K
FIGURE B.5 – Le tétraèdre de référence
b b
P1 P2
FIGURE B.6 – P1
b b b
P1 P2P3
FIGURE B.7 – P3
b b b b
P1 P3 P4 P2
FIGURE B.8 – P3
144
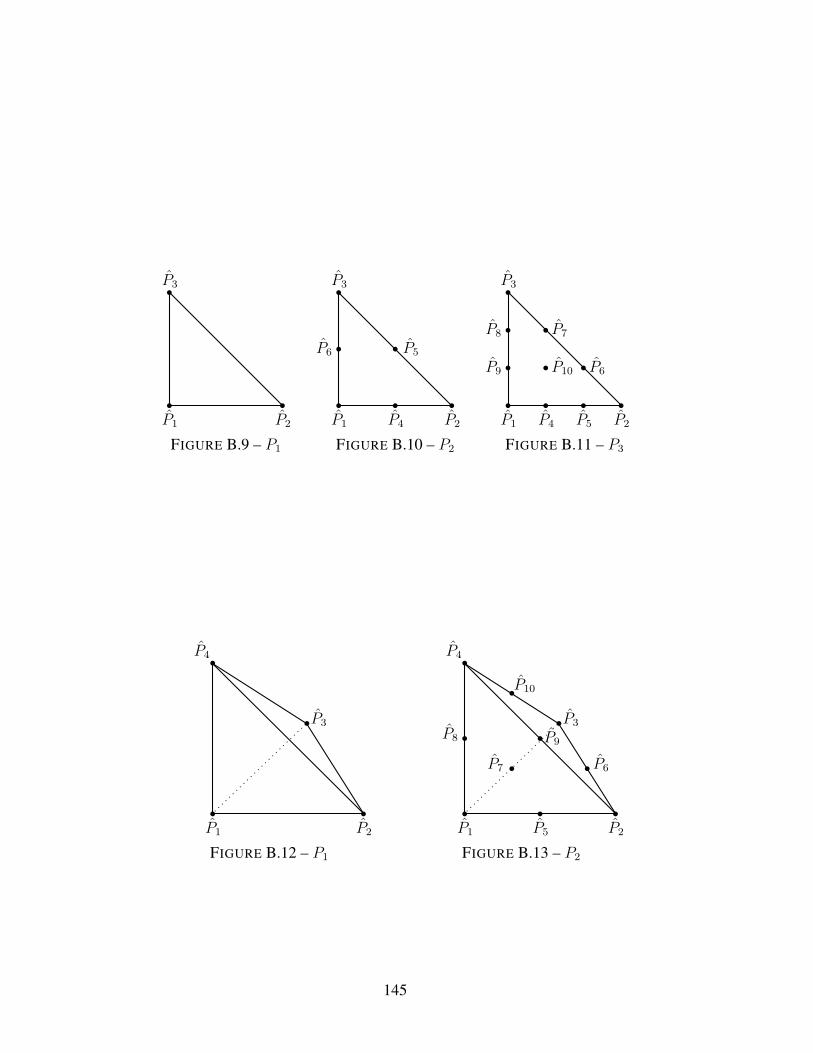
b
b
b
P1 P2
P3
FIGURE B.9 – P1
b
b
b
b
b
b
P1 P2
P3
P4
P6 P5
FIGURE B.10 – P2
b
b
bb b
b
b
b b
b
P1 P2
P3
P4 P5
P9
P8
P6
P7
P10
FIGURE B.11 – P3
b
b
b
b
P1
P4
P2
P3
FIGURE B.12 – P1
b
b
b
b
b
b b
b
b
b
P1
P4
P2
P3
P5
P6P7
P8 P9
P10
FIGURE B.13 – P2
145
On notera Nk le nombre de degrés de liberté de K.Les degrés de liberté de l’élément K sont alors les images par FK des degrés
de liberté de K. Nous noterons NPh le nombre de degrés de liberté associés aumaillage Th
Pour la prise en compte des conditions aux bords (le calcul de la matrice B),nous avons également besoin de connaître les faces (ou les arêtes) appartenant àla frontière absorbante Γa. L’ensemble de ces faces est noté Fh, et pour chaqueface F de Fh, il existe une fonction affine GF transformant la face de référence F(en 2D le segment [0, 1], en 2D le triangle S1S2S3) en la face F .
– en 2D :
GF (x) =
x1
y1
+
x2 − x1
y2 − y1
x ;
– en 3D :
GF (x, y) =
x1
y1
z1
+
x2 − x1 x3 − x1
y2 − y1 y3 − y1
z2 − z1 z3 − z1
x
y
.
où xi, yi, zi sont les coordonnées du sommet Si de la face F . Nous notons de plusNFh le nombre de faces de Bh et NP F le nombre de degrés de liberté par face.
En pratique, un maillage est caractérisé par (au moins) trois données :
1. les coordonnées des sommets et des degrés de liberté de tous les éléments.Dans le cas des éléments finis Pk, la connaissance des sommets est suffi-sante puisque nous pouvons déterminer les coordonnées des degrés de li-berté à partir de la fonction FK ;
2. la connectique de chaque élément, c’est-à-dire le numéro des sommets etdes degrés de liberté appartenant à l’élément. Par exemple, sur la figure B.14,le triangle 2 a pour degrés de liberté les noeuds 5, 2, 3 (les sommets), 7, 8et 9. Profitons de cet exemple pour rappeler la différence entre numérota-tion locale et globale : le premier degré de liberté du triangle 2 (local) estle cinquième degré de liberté du maillage (global). Nous noterons lgK,i lafonction qui permet de déterminer la numérotation globale du i-ème degréde liberté de l’élément K ;
146

3. les faces appartenant au bord du domaine, leur connectique et le type decondition de bord. Nous noterons lgfF,i la fonction qui permet de détermi-ner la numérotation globale du i-ème degré de liberté de la face F .
b
b
b
b
b
b
6
b 7b 8
b 8
b9
b10
b 11
b12
1 2
34
5
1
4 2
3
FIGURE B.14 – Numérotation des éléments et des degrés de liberté
B.2.2 Construction de l’espace VhNous allons maintenant construire une base de l’espace Vh. Remarquons tout
d’abord que, Vh étant un sous-espace vectoriel de H1(Ω), les fonctions de Vhdoivent être continues sur Ω. Comme nous utilisons des éléments finis P k, nouscherchons des fonctions polynômiales de degré k par élément :
Vh = vh ∈ C0(Ω), vh|K ∈ P k(K)∀K ∈ Th.
Une base de cet espace est donnée par les fonctions (ϕi)i=1,NPhqui vérifient
ϕi(Pj) = δij, ∀i, j = 1..NPh
ϕi|K ∈ P k(K)∀K ∈ Th∀i = 1..NPh
Cet espace est donc de dimension NPh et toute fonction vh de Vh vérifie
vh(x) =
NPh∑i=1
vh(Pi)ϕi(x),
147

1
Pi
FIGURE B.15 – La fonction ϕi et son support
ce qui montre que les composantes de vh dans cette base coïncident avec ses de-grés de liberté.
Remarquons que le support de la fonction ϕi est uniquement constitué des élé-ments contenant le point Pi (voir figure B.15, dans le cas P 1, en dimension 2).Autrement dit les seules fonctions de base non nulles sur un élément K sont lesfonctions associées aux degrés de liberté de l’élément K. Cette propriété va nouspermettre de définir les fonctions de base élément par élément à partir de fonctionsde base ϕi définies sur l’élement de référence K.
Les fonctions de base ϕi sont définies par :ϕi(Pj) = δij, ∀i, j = 1..Nk
ϕi ∈ P k(K), ∀i = 1..Nk
En 1D, les fonctions de base P 1 sont données par (voir Fig. B.16) :
ϕ1(x) = 1− x
ϕ2(x) = x
148
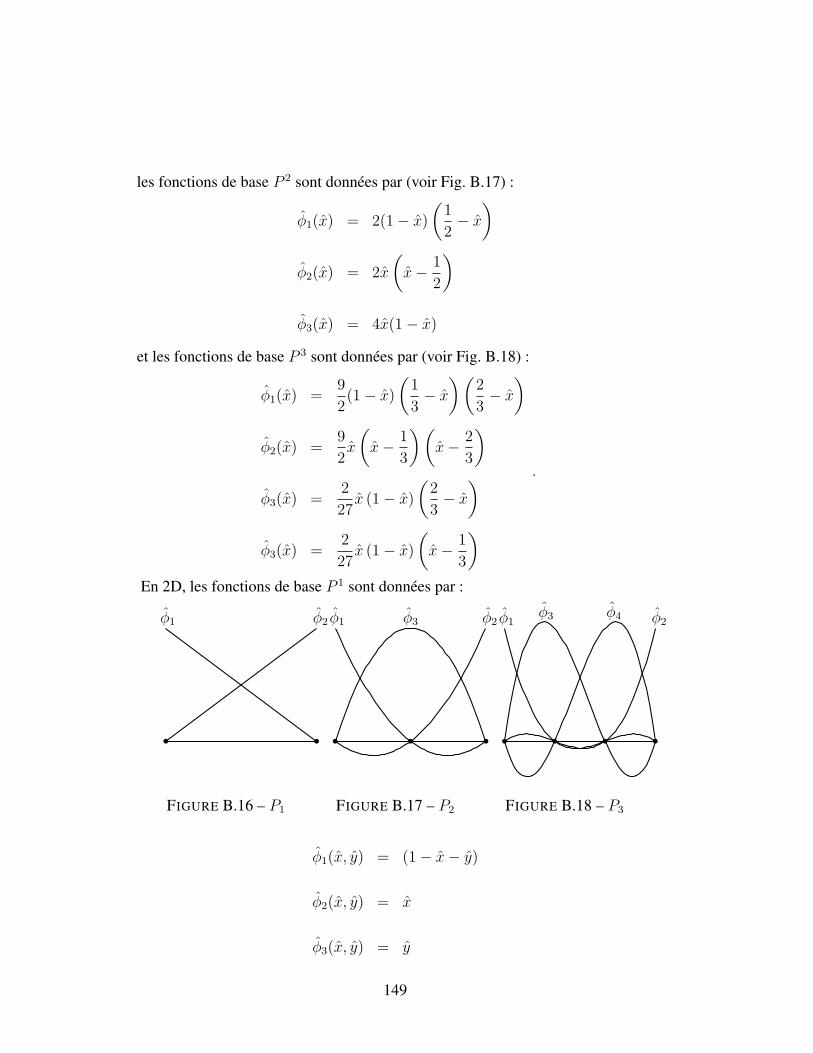
les fonctions de base P 2 sont données par (voir Fig. B.17) :
ϕ1(x) = 2(1− x)
(1
2− x
)ϕ2(x) = 2x
(x− 1
2
)ϕ3(x) = 4x(1− x)
et les fonctions de base P 3 sont données par (voir Fig. B.18) :
ϕ1(x) =9
2(1− x)
(1
3− x
)(2
3− x
)ϕ2(x) =
9
2x
(x− 1
3
)(x− 2
3
)ϕ3(x) =
2
27x (1− x)
(2
3− x
)ϕ3(x) =
2
27x (1− x)
(x− 1
3
).
En 2D, les fonctions de base P 1 sont données par :
b b
ϕ1 ϕ2
FIGURE B.16 – P1
b b b
ϕ1 ϕ3 ϕ2
FIGURE B.17 – P2
b b b b
ϕ1ϕ3 ϕ4 ϕ2
FIGURE B.18 – P3
ϕ1(x, y) = (1− x− y)
ϕ2(x, y) = x
ϕ3(x, y) = y
149
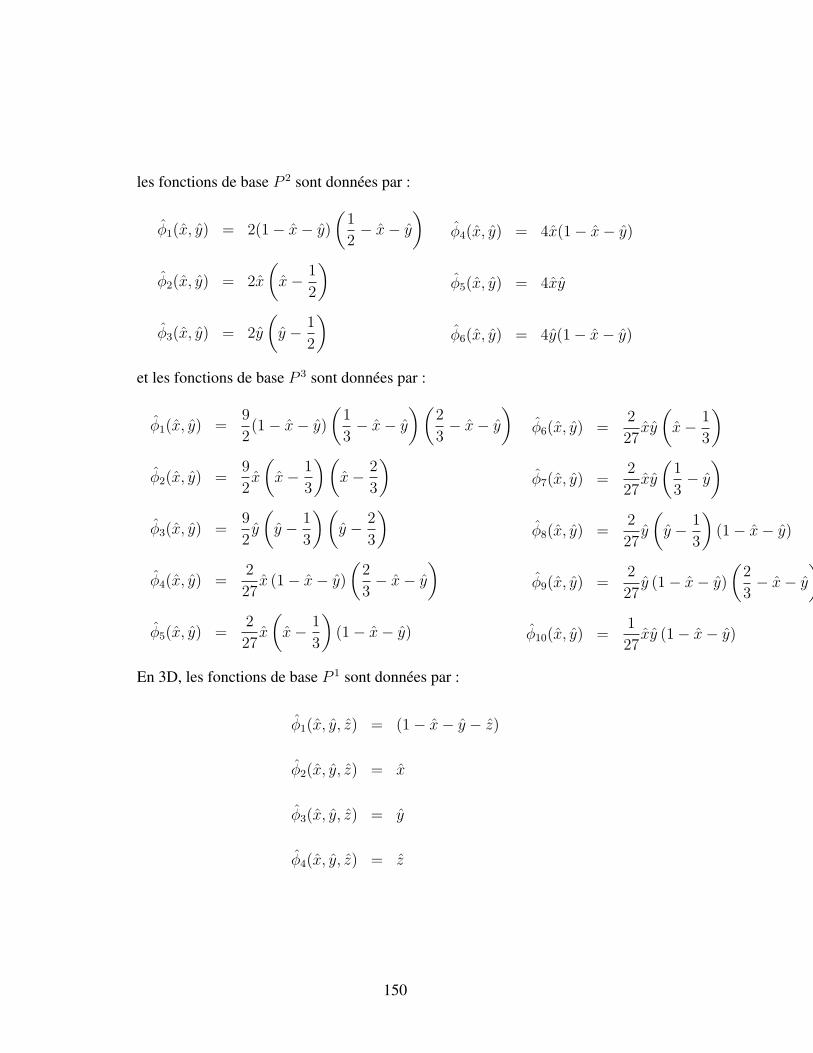
les fonctions de base P 2 sont données par :
ϕ1(x, y) = 2(1− x− y)
(1
2− x− y
)ϕ2(x, y) = 2x
(x− 1
2
)ϕ3(x, y) = 2y
(y − 1
2
)
ϕ4(x, y) = 4x(1− x− y)
ϕ5(x, y) = 4xy
ϕ6(x, y) = 4y(1− x− y)
et les fonctions de base P 3 sont données par :
ϕ1(x, y) =9
2(1− x− y)
(1
3− x− y
)(2
3− x− y
)ϕ2(x, y) =
9
2x
(x− 1
3
)(x− 2
3
)ϕ3(x, y) =
9
2y
(y − 1
3
)(y − 2
3
)ϕ4(x, y) =
2
27x (1− x− y)
(2
3− x− y
)ϕ5(x, y) =
2
27x
(x− 1
3
)(1− x− y)
ϕ6(x, y) =2
27xy
(x− 1
3
)ϕ7(x, y) =
2
27xy
(1
3− y
)ϕ8(x, y) =
2
27y
(y − 1
3
)(1− x− y)
ϕ9(x, y) =2
27y (1− x− y)
(2
3− x− y
)ϕ10(x, y) =
1
27xy (1− x− y)
En 3D, les fonctions de base P 1 sont données par :
ϕ1(x, y, z) = (1− x− y − z)
ϕ2(x, y, z) = x
ϕ3(x, y, z) = y
ϕ4(x, y, z) = z
150

les fonctions de base P 2 sont données par :
ϕ1(x, y, z) = 2(1− x− y − z)
(1
2− x− y − y
)ϕ2(x, y, z) = 2x
(x− 1
2
)ϕ3(x, y, z) = 2y
(y − 1
2
)ϕ4(x, y, z) = 2z
(z − 1
2
)
ϕ5(x, y, z) = 4x(1− x− y − z)
ϕ6(x, y, z) = 4xy
ϕ7(x, y, z) = 4y(1− x− y − z)
ϕ8(x, y, z) = 4z(1− x− y − z)
ϕ9(x, y, z) = 4xz
ϕ10(x, y, z) = 4yz.
Nous noterons Np, le nombre de degrés de liberté sur l’élément de référence.
Les fonctions de base globales ϕi sont alors définies à l’aide des fonctions FK :ϕi|K = ϕj F−1
K , avec j tel que i = lgj,K , si Pi ∈ K
ϕi|K = 0 si Pi /∈ K
B.2.3 Calcul de la matrice MIntéressons-nous d’abord au calcul de la matrice M de terme général
Mij =
∫Ω
ϕiϕj =∑K∈Th
∫K
ϕiϕj.
La première idée pour calculer cette matrice est, pour i et j fixés, de parcourirl’ensemble des éléments de Th :
• pour i = 1, NPh
• pour j = 1, NPh
• M(i, j) = 0
• pour l = 1, NTh
151

• si Pi ∈ Kl et Pj ∈ Kl alors
• M(i, j) =M(i, j) +∫Klϕiϕj
• finsi
• finpour
• finpour
• finpour
Cet algorithme présente plusieurs inconvénients :
1. il faut parcourir trois boucles de grande taille : NPh ×NPh ×NTh ;
2. il faut à chaque fois savoir si les degrés de liberté Pi et Pj appartiennent àKl ;
3. le calcul de∫Klϕiϕj n’est pas simple à implémenter.
Remarquons tout d’abord, que si Pi et Pj appartiennent à l’élément K, alors ilexiste deux degrés de liberté PI et PJ sur l’élément de référence K tels quelgK,I = i et lgK,J = j et∫
K
ϕiϕj =
∫K
ϕI F−1K ϕJ F−1
K =
∫K
| det JFK|ϕI ϕJ = | detAK |
∫K
ϕI ϕJ
Le calcul de∫Kϕiϕj se déduit donc simplement du calcul de la matrice M de
terme général Mi,j =∫Kϕiϕi et nous utiliserons l’algorithme de calcul suivant :
• pour i = 1..Np
• pour j = 1..Np
• M(i, j) =∫Kϕiϕj
• finpour
• finpour
• M=0
• pour l = 1..NTh
• Calcul de | detAKl|
• pour I = 1..Np
• pour J = 1..Np
• i=lg(l,I), j=lg(l,J)
• M(i, j) =M(i, j) + | detAKl|M(I, J)
• finpour
• finpour
152

• finpour
Ce nouvel algorithme a plusieurs avantages :
1. il suffit de calculer les intégrales une fois sur l’élément de référence ;
2. on ne parcourt que les degrés de liberté nécessaires au calcul de M , il n’y aque NTh × Np × Np itérations ;
3. on déduit facilement la numérotation globale à partir de la numérotationlocale grâce à la fonction lg.
B.2.4 Calcul de la matrice KComme pour le calcul de M , nous décomposons l’intégrale sur Ω en une
somme d’intégrales sur les éléments
Ki,j =∑K∈Th
c2(K)
∫K
∇ϕi · ∇ϕj =∑K∈Th
c2(K)
∫K
∇ϕTi ∇ϕj.
Pour le calcul de∫K∇ϕT
i ∇ϕj nous utiliserons à nouveau le fait que, si Pi et Pj
appartiennent à l’élément K, alors
ϕi|K = ϕI F−1K et ϕj|K = ϕJ F−1
K
avec I et J tels que lgK,I = i et lgK,J = j. Nous en déduisons les relations
∇ϕi|K = J−TFK
∇ϕI F−1K et ∇ϕj|K = J−T
FK∇ϕJ F−1
K
puis,∫K
∇ϕTi ∇ϕj =
∫K
(A−TK ∇ϕIF−1
K )TA−TK ∇ϕJF−1
K = | detAK |∫K
∇ϕTI A
−1K A−T
K ∇ϕJ .
Contrairement à ce nous avions obtenu pour le calcul de M , l’intégrale sur l’élé-ment de référence dépend de l’élément K (à cause de la matrice A−1
K A−TK ). Ce-
pendant, en posant CK = A−1K A−T
K , on vérifie facilement que, en dimension 2,
∇ϕTI A
−1K A−T
K ∇ϕJ = CK1,1
∂ϕI
∂x
∂ϕJ
∂x+CK
1,2
(∂ϕI
∂x
∂ϕJ
∂y+∂ϕI
∂y
∂ϕJ
∂x
)+CK
2,2
∂ϕI
∂y
∂ϕJ
∂y
(on obtient un résultat similaire en dimension 3). On a alors∫K
∇ϕTi ∇ϕj = | detAK |
(CK
1,1
∫K
∂ϕI
∂x
∂ϕJ
∂x+ CK
1,2
∫K
(∂ϕI
∂x
∂ϕJ
∂y+∂ϕI
∂y
∂ϕJ
∂x
)+ CK
2,2
∫K
∂ϕI
∂y
∂ϕJ
∂y
).
153

La matrice K peut donc être calculée à partir des trois matrices locales Kxx, Kxy
et Kyy de termes généraux respectifs∫K
∂ϕI
∂x
∂ϕJ
∂x,
∫K
(∂ϕI
∂x
∂ϕJ
∂y+∂ϕI
∂y
∂ϕJ
∂x
)et∫K
∂ϕI
∂y
∂ϕJ
∂y
et nous utiliserons l’algorithme de calcul suivant :
• pour i = 1..Np
• pour j = 1..Np
• Kxx(i, j) =
∫K
∂ϕi
∂x
∂ϕj
∂x
• Kxy(i, j) =
∫K
(∂ϕi
∂x
∂ϕj
∂y+∂ϕi
∂y
∂ϕj
∂x
)
• Kyy(i, j) =
∫K
∂ϕi
∂y
∂ϕj
∂y
• finpour
• finpour
• K=0
• pour l = 1..NTh
• Calcul de | detAKl| et CKl
• pour I = 1..Np
• pour J = 1..Np
• i=lg(l,I), j=lg(l,J)
• K(i, j) = K(i, j) + c2(K)| detAKl|CKl(1, 1)Kxx(I, J)
• K(i, j) = K(i, j) + c2(K)| detAKl|CKl(1, 2)Kxy(I, J)
• K(i, j) = K(i, j) + c2(K)| detAKl|CKl(2, 2)Kyy(I, J)
• finpour
• finpour
• finpour
154

B.2.5 Calcul de la matrice B
Bi,j =
∫Γa
c2(x)ϕiϕj =∑F∈Γh
c2(F )
∫F
ϕiϕj
Si Pi et Pj appartiennent à la face F , alors
ϕi|F = ϕI G−1F et ϕj|F = ϕJ G−1
F
avec I et J tels que lgfF,I = i et lgfF,J = j. On a alors∫F
ϕiϕj =
∫F
(ϕI ϕJ) G−1F .
Rappelons que∫F
f G−1F =
∫F
∥G′F∥f (en 2D) et
∫F
f G−1F =
∫F
∥∥∥∥∂GF
∂x∧ ∂GF
∂y
∥∥∥∥ f (en 3D).
On a donc
∫F
ϕiϕj =
∥∥∥∥∥∥∥∥∥x2 − x1
y2 − y1
∥∥∥∥∥∥∥∥∥∫F
ϕI ϕJ (en 2D) et∫F
ϕiϕj =
∥∥∥∥∥∥∥∥∥∥∥∥∥
x2 − x1
y2 − y1
z2 − z1
∧
x3 − x1
y3 − y1
z3 − z1
∥∥∥∥∥∥∥∥∥∥∥∥∥∫F
ϕI ϕJ (en 3D)
et nous utiliserons l’algorithme de calcul suivant :• pour i = 1..Np
• pour j = 1..Np
• B(i, j) =
∫F
ϕiϕj
• finpour• finpour• K=0• pour l = 1..NFh
• Calcul de n =
∥∥∥∥∥∥∥∥∥x2 − x1
y2 − y1
∥∥∥∥∥∥∥∥∥ ou n =
∥∥∥∥∥∥∥∥∥∥∥∥∥
x2 − x1
y2 − y1
z2 − z1
∧
x3 − x1
y3 − y1
z3 − z1
∥∥∥∥∥∥∥∥∥∥∥∥∥155

• pour I = 1..NFp
• pour J = 1..NFp
• i=lgf(l,I), j=lgf(l,J)
• B(i, j) = B(i, j) + c2(F )nB(I, J)
• finpour
• finpour
• finpour
156