Embed Size (px)
Citation preview
VIBRATIONS et ONDES
deuxieme partie
L2 - UE DDPHY231
Universite Joseph Fourier Grenoble I
2007-2008
Beatrice GRENIERCEA/UJF


Table des matieres
1 LES ONDES MECANIQUES 1
1.1 Caracteristiques des ondes mecaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.1 Qu’est-ce qu’une onde ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Les differents types d’ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.3 Fonction d’onde, trains d’ondes et ondes periodiques . . . . . . . . . . . . . . . . . 21.1.4 Forme generale d’une fonction d’onde, onde progressive . . . . . . . . . . . . . . . 41.1.5 Equation d’onde classique pour les ondes a une dimension . . . . . . . . . . . . . . 5
1.2 Analyse de Fourier d’un mouvement ondulatoire . . . . . . . . . . . . . . . . . . . . . . . 61.2.1 Mouvement ondulatoire periodique . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.2 Train d’onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Vitesse de groupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 Equation de propagation dans un milieu continu a une dimension : la corde vibrante . . . 10
1.4.1 Equation de propagation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4.2 Solution de l’equation de propagation a une dimension . . . . . . . . . . . . . . . . 111.4.3 Solutions sinusoıdales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5 Surfaces d’ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.6 Les ondes sonores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.6.1 Equation de propagation a une dimension dans l’air . . . . . . . . . . . . . . . . . 141.6.2 Intensite acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.6.3 Impedance acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.7 Reflexion et transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.7.1 Coefficients de reflexion et de transmission . . . . . . . . . . . . . . . . . . . . . . 211.7.2 Conservation de l’energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.8 Ondes stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.8.1 Ondes stationnaires dans un tuyau sonore . . . . . . . . . . . . . . . . . . . . . . . 231.8.2 Modes propres d’une corde vibrante . . . . . . . . . . . . . . . . . . . . . . . . . . 24

Chapitre 1
LES ONDES MECANIQUES
1.1 Caracteristiques des ondes mecaniques
1.1.1 Qu’est-ce qu’une onde ?
Nous avons etudie dans le chapitre precedent les vibrations d’oscillateurs simples. Il est rare de trou-ver dans la nature des oscillateurs isoles du monde exterieur, aussi le mouvement d’un oscillateur peutinfluencer le milieu environnant, et creer des deformations de celui-ci qui vont se propager de proche enproche, pour former ce qu’on appelle une onde. Ainsi, dans le cas des N oscillateurs couples etudies ala fin du chapitre precedent, une oscillation de la premiere masse pourra gagner de proche en proche lesmasses voisines, creant ainsi une onde de vibrations des masses. De la meme facon, la vibration d’unemembrane de haut parleur va faire vibrer l’air environnant, et les vibrations des tranches d’air vont sepropager de proche en proche pour creer une onde sonore. Nous nous limitons dans ce cours aux ondesmecaniques. Au second semestre seront vues les ondes electro-magnetiques (ondes de champs electriqueset magnetiques oscillants), qui obeissent aussi a une equation d’onde classique. Puis en L3 seront vues lesondes en physique quantique, qui obeissent a une equation d’onde tres differente, qui n’est plus classique.
Definition : Une onde mecanique est un ebranlement qui se propage dans un milieu materiel. Cemilieu est en general elastiquement deformable, c’est-a-dire qu’il reprend sa forme initiale apres avoirsubi une perturbation. Une corde tendue, une peau de tambour ou encore l’air constituent des exemplesde tels milieux a une, deux ou trois dimensions, respectivement. Lorsque ce milieu, initialement au repos,subit a un instant donne une petite deformation locale, le voisinage du point perturbe tend a suivre ladeformation, entraıne son propre voisinage et ainsi de suite : la deformation se propage de proche enproche.
La propagation d’une onde mecanique correspond a une propagation d’energie et de quantite de
mouvement et non pas a un deplacement global de matiere. La matiere ne se deplace que localement,par rapport a sa position “au repos” et ceci quelque soit le type d’onde :
– la chute d’un caillou dans l’eau provoque des vagues qui vont faire monter et descendre un bouchonflottant un peu plus loin a la surface : une partie de l’energie du caillou est communiquee au bouchonpar l’intermediaire de l’onde.
– le mouvement de la membrane d’un haut parleur cree une onde sonore qui se propage dans l’air :une partie de l’energie (d’origine electrique) qui met la membrane en mouvement se propage jusqu’anotre oreille.
– la chute d’un domino peut entrainer une “onde de carambolage” se propageant sur toute une rangeede dominos alignes : l’energie correspondant a la chute du premier domino se propage jusqu’audernier. Ce dernier type d’onde est un peu particulier dans la mesure ou une rangee de dominos neconstitue pas un milieu continu elastiquement deformable.
1
2 CHAPITRE 1. LES ONDES MECANIQUES
1.1.2 Les differents types d’ondes
Il existe deux types d’ondes “pures” :– Onde longitudinale
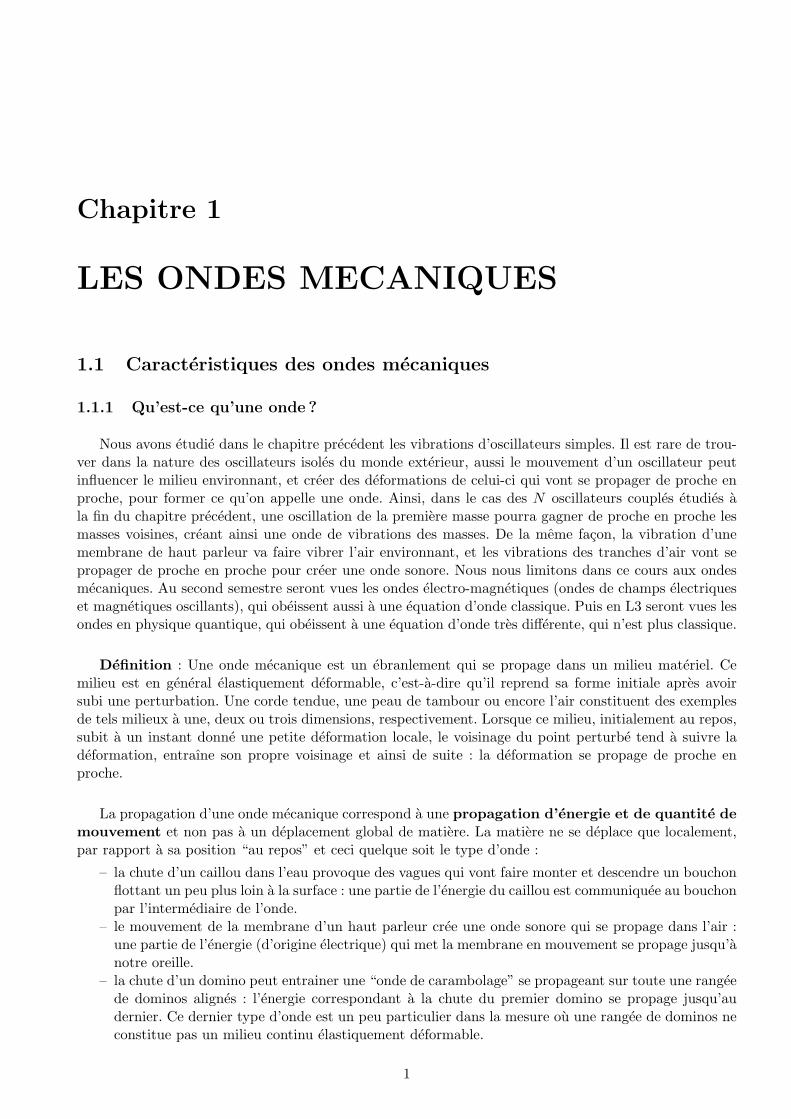
Une onde est dite longitudinale si le deplacement correspondant a la perturbation est parallele a ladirection de propagation de l’onde. C’est le cas pour une onde sonore dans un gaz : si on provoque,a l’aide d’un piston, une surpression dans un tuyau rempli d’air (les vibrations des particules d’air,et donc les variations de densite et de pression, se font dans le sens du tuyau), cette surpression vase propager le long du tuyau comme le montre la figure 1.1.
Fig. 1.1 – Onde de compression dans un tuyau rempli d’air.
– Onde transversale
L’onde, au contraire, est dite transverale si le deplacement correspondant a la perturbation estperpendiculaire a la direction de propagation de l’onde. C’est le cas pour une onde se propageantle long d’une corde tendue ou l’ebranlement de la corde est transversal a la corde et donc a ladirection de propagation de l’onde, comme le montre la figure 1.2.
Fig. 1.2 – Onde se propageant le long d’une corde tendue.
Dans les milieux solides ces deux types d’ondes peuvent etre presents simultanement, c’est le cas parexemple pour les ondes sismiques (onde P, onde longitudinale de pression, se propageant typiquement a5 km/s et onde S, onde de cisaillement transversale, se propageant typiquement a 3 km/s).
Autres types d’ondes
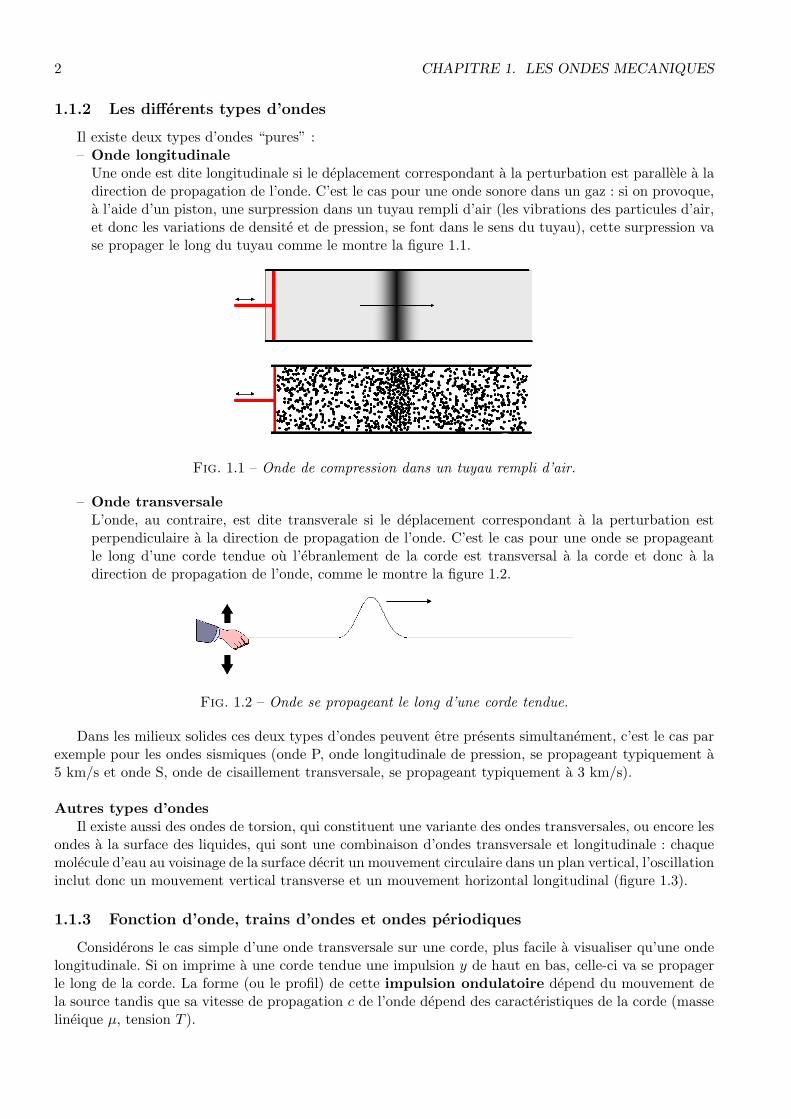
Il existe aussi des ondes de torsion, qui constituent une variante des ondes transversales, ou encore lesondes a la surface des liquides, qui sont une combinaison d’ondes transversale et longitudinale : chaquemolecule d’eau au voisinage de la surface decrit un mouvement circulaire dans un plan vertical, l’oscillationinclut donc un mouvement vertical transverse et un mouvement horizontal longitudinal (figure 1.3).
1.1.3 Fonction d’onde, trains d’ondes et ondes periodiques
Considerons le cas simple d’une onde transversale sur une corde, plus facile a visualiser qu’une ondelongitudinale. Si on imprime a une corde tendue une impulsion y de haut en bas, celle-ci va se propagerle long de la corde. La forme (ou le profil) de cette impulsion ondulatoire depend du mouvement dela source tandis que sa vitesse de propagation c de l’onde depend des caracteristiques de la corde (masselineique µ, tension T ).
1.1. CARACTERISTIQUES DES ONDES MECANIQUES 3
Fig. 1.3 – Onde a la surface de l’eau.
L’onde se propage a la fois dans l’espace et dans le temps, si bien qu’on peut la decrire par une fonc-tion d’onde y(x, t), qui represente le deplacement par rapport a la position d’equilibre du point d’abcissex a l’instant t. Si on gele l’onde a un instant donne t0, alors on obtient la forme de l’onde y(x, t0) enfonction de la position x. Cela revient a prendre une photo de la corde. Si on contraire on observe unpoint particulier de la corde x0 en fonction du temps, alors on obtient le mouvement oscillatoire de cepoint y(x0, t) en fonction du temps. Cela revient a filmer un point de la corde.
Si on imprime a la corde une serie de plusieurs aller-retours de facon periodique, on a creation etpropagation d’un train d’onde de courte duree (figure 1.4).
λc
Fig. 1.4 – Propagation d’un train d’onde sur une corde tendue.
Si l’oscillation de la source est entretenue de facon periodique, on a creation et propagation d’uneonde periodique. En realite le mouvement de la source a forcement un debut et une fin et toute ondeperiodique n’est qu’un train d’onde de tres longue duree.
On voit sur la figure 1.4 que la distance λ qui separe deux maxima d’amplitude de l’onde correspondau temps T = 1/f entre deux oscillations successives. L’onde se deplacant avec la vitesse c on a larelation :
λ = cT =c
f(1.1)
La longueur d’onde λ represente la periodicite spatiale de l’onde, tandis que le temps T representela periodicite temporelle de l’onde. De la meme facon que la pulsation est definie comme ω = 2π/T , ondefinit le nombre d’onde k = 2π/λ. On a donc egalement la relation suivante :
ω = kc (1.2)
Une classe particulierement importante d’ondes periodiques est les ondes sinusoıdales, appeleesaussi ondes harmoniques. Leur forme d’onde a la forme d’une fonction sinus ou cosinus et leur mouvementoscillatoire en fonction du temps a n’importe quelle position est un mouvement simple d’oscillateurharmonique, decrit lui aussi par une fonction sinusoıdale. Ce type d’onde correspond a de nombreusessituations simples rencontrees dans la realite (excepte que les trains d’onde ne sont pas infinis) et constitue

4 CHAPITRE 1. LES ONDES MECANIQUES
la brique de construction pour l’analyse d’onde periodiques plus complexes, comme nous le verrons plustard dans l’analyse de Fourier.
1.1.4 Forme generale d’une fonction d’onde, onde progressive
Une onde est dite progressive lorsque le signal genere en un point se propage indefiniment dans unedirection dans rencontrer d’obstacle.
Considerons une onde progressive a une dimension, periodique ou non, se propageant sans se deformerselon la direction Ox, decrite par la fonction d’onde y(x, t). On cherche a exprimer comment y(x, t) dependplus specifiquement des variables x et t.
x
f (t - x/c)+
x x1 2
instant tinstant t 1 2
Fig. 1.5 – Propagation sans deformation d’une onde progressive f+ a la vitesse c.
On voit, sur la figure 1.5, que l’onde representee par f+(x, t) se propage dans la direction des xcroissants sans se deformer a la condition que y(x1, t1) soit egal a y(x2, t2). Comme l’onde se propage ala vitesse c, on a :
x2 − x1 = c(t2 − t1) ⇔ x2 − ct2 = x1 − ct1 ⇔ t2 − x2/c = t1 − x1/c
De la meme facon, si on considere a present une onde progressive representee par f−(x, t) se propageantdans la direction des x decroissants dans se deformer, alors on aura :
x2 − x1 = −c(t2 − t1) ⇔ x2 + ct2 = x1 + ct1 ⇔ t2 + x2/c = t1 + x1/c
Ainsi, la fonction d’onde y(x, t) correspond a la superposition d’une onde progressive vers la droiteet d’une onde progressive vers la gauche, et doit donc etre de la forme :
y(x, t) = f+(t − x/c) + f−(t + x/c)
ou encore :y(x, t) = g+(x − ct) + g−(x + ct)
f+ ou g+ correspondent a des ondes progressives qui se propagent dans la direction des x positifs,f− ou g− correspondent a des ondes progressives qui se propagent dans la direction des x negatifs. Cesfonctions sont quelconques : il est juste necessaire qu’elles soient deux fois differentiables.
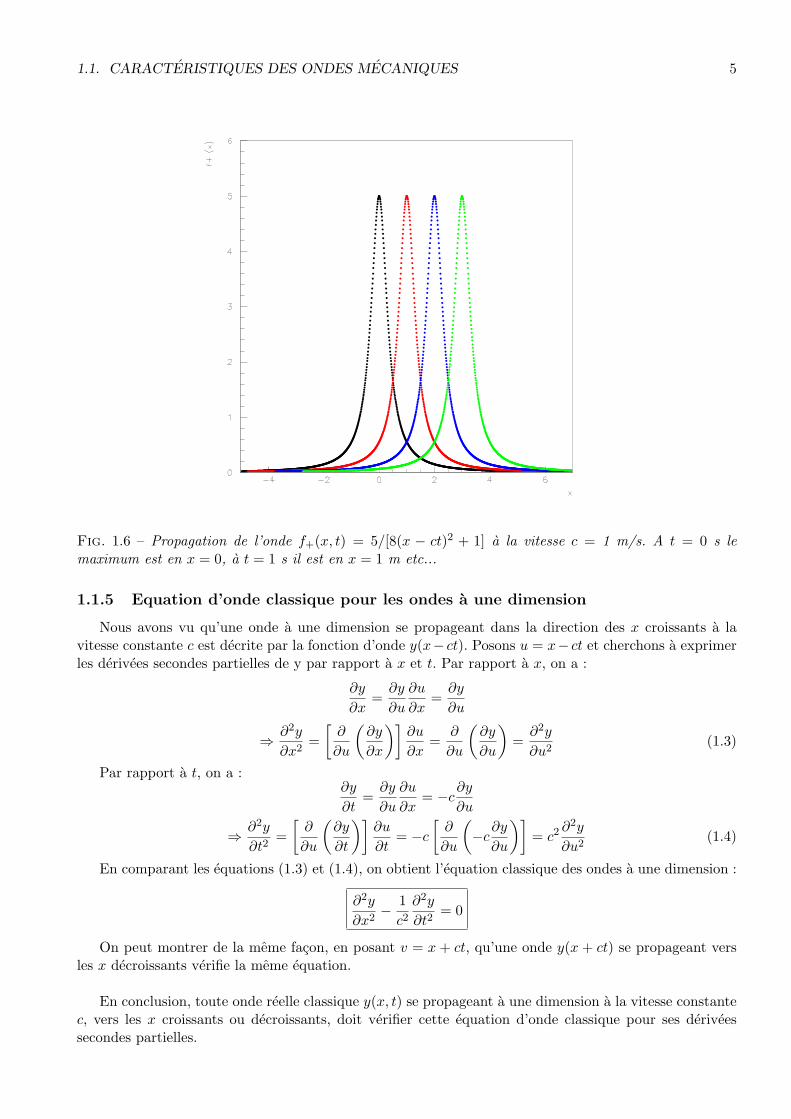
Exemple 1 : soit la fonction f(x) = 5/(8x2 + 1) representant la forme d’une onde a l’instant t = 0, sion veut faire se propager cette onde dans la direction des x positifs avec la vitesse c il suffit de remplacerx par x − ct la fonction d’onde progressive sera alors :
f+(x, t) =5
8(x − ct)2 + 1
si on represente f+(x, t) en fonction de x pour des instants successifs t = 0 s, t = 1 s, t = 2 s, etc ...,on voit la progression de l’onde, illustree par la figure 1.6
Exemple 2 : une onde sinusoıdale se propageant vers les x croissants aura une fonction d’onde dutype : y(x, t) = A cos(ωt − kx + φ) ou A est l’amplitude de l’onde et φ le dephasage.
1.1. CARACTERISTIQUES DES ONDES MECANIQUES 5
Fig. 1.6 – Propagation de l’onde f+(x, t) = 5/[8(x − ct)2 + 1] a la vitesse c = 1 m/s. A t = 0 s lemaximum est en x = 0, a t = 1 s il est en x = 1 m etc...
1.1.5 Equation d’onde classique pour les ondes a une dimension
Nous avons vu qu’une onde a une dimension se propageant dans la direction des x croissants a lavitesse constante c est decrite par la fonction d’onde y(x− ct). Posons u = x− ct et cherchons a exprimerles derivees secondes partielles de y par rapport a x et t. Par rapport a x, on a :
∂y
∂x=
∂y
∂u
∂u
∂x=
∂y
∂u
⇒ ∂2y
∂x2=
[
∂
∂u
(
∂y
∂x
)]
∂u
∂x=
∂
∂u
(
∂y
∂u
)
=∂2y
∂u2(1.3)
Par rapport a t, on a :∂y
∂t=
∂y
∂u
∂u
∂x= −c
∂y
∂u
⇒ ∂2y
∂t2=
[
∂
∂u
(
∂y
∂t
)]
∂u
∂t= −c
[
∂
∂u
(
−c∂y
∂u
)]
= c2 ∂2y
∂u2(1.4)
En comparant les equations (1.3) et (1.4), on obtient l’equation classique des ondes a une dimension :
∂2y
∂x2− 1
c2
∂2y
∂t2= 0
On peut montrer de la meme facon, en posant v = x + ct, qu’une onde y(x + ct) se propageant versles x decroissants verifie la meme equation.
En conclusion, toute onde reelle classique y(x, t) se propageant a une dimension a la vitesse constantec, vers les x croissants ou decroissants, doit verifier cette equation d’onde classique pour ses deriveessecondes partielles.
6 CHAPITRE 1. LES ONDES MECANIQUES
1.2 Analyse de Fourier d’un mouvement ondulatoire
1.2.1 Mouvement ondulatoire periodique
D’apres le theoreme de Fourier (Cf. cours de mathematiques), tout mouvement periodique de periodeT = 2π/ω peut etre exprime comme la superposition de mouvements sinusoıdaux de pulsations ω,2ω, ..., nω, ....
Une onde periodique, qui peut s’ecrire F (t− x/c) ou G(x− ct), est une fonction periodique du tempsen un point fixe de l’espace qui peut s’exprimer sous la forme :
F (t) =a0
2+
∞∑
n=1
[an cos(nωt) + bn sin(nωt)] (1.5)
Les differents termes de pulsation ω, 2ω, ... sont appeles harmoniques. L’harmonique d’ordre 1 (cor-respondant a ω) est appele fondamental.
Les coefficients an et bn sont relies a la fonction F (t) par les relations :
an =2
T
∫ T
0F (t) cos(nωt)dt ; bn =
2
T
∫ T
0F (t) sin(nωt)dt (1.6)
La determination des coefficients an et bn d’une fonction periodique constitue son analyse harmo-
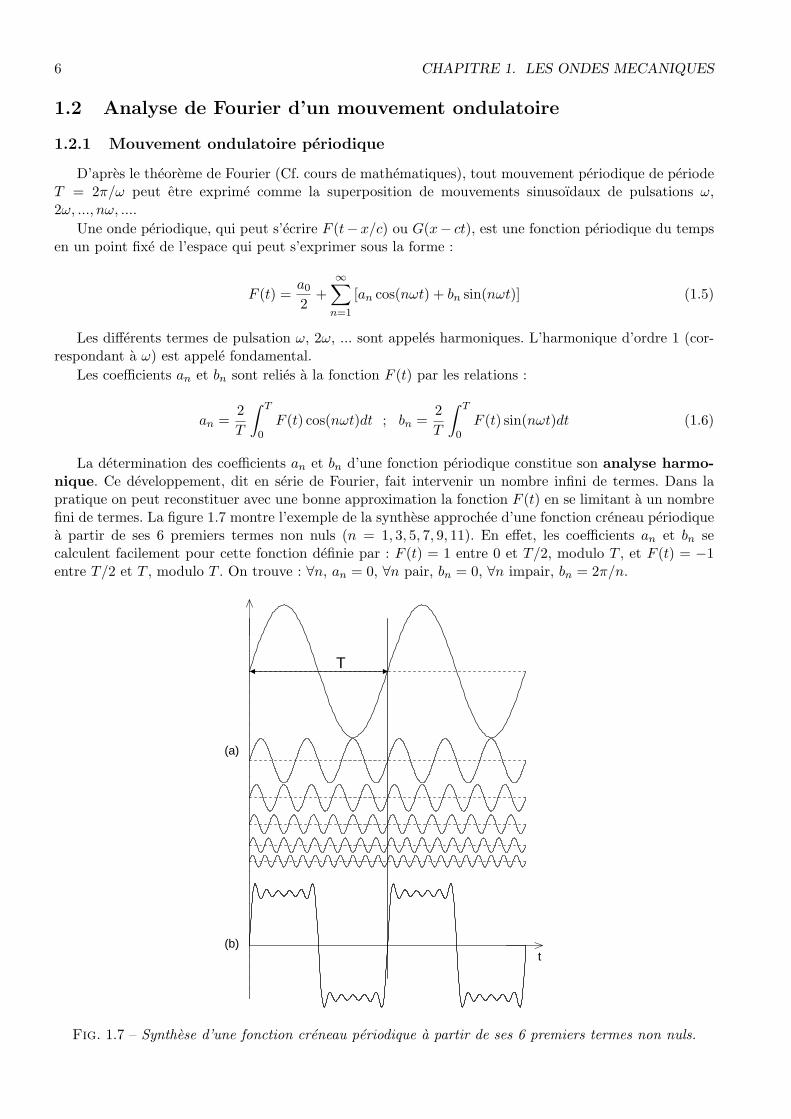
nique. Ce developpement, dit en serie de Fourier, fait intervenir un nombre infini de termes. Dans lapratique on peut reconstituer avec une bonne approximation la fonction F (t) en se limitant a un nombrefini de termes. La figure 1.7 montre l’exemple de la synthese approchee d’une fonction creneau periodiquea partir de ses 6 premiers termes non nuls (n = 1, 3, 5, 7, 9, 11). En effet, les coefficients an et bn secalculent facilement pour cette fonction definie par : F (t) = 1 entre 0 et T/2, modulo T , et F (t) = −1entre T/2 et T , modulo T . On trouve : ∀n, an = 0, ∀n pair, bn = 0, ∀n impair, bn = 2π/n.
T
t
(a)
(b)
Fig. 1.7 – Synthese d’une fonction creneau periodique a partir de ses 6 premiers termes non nuls.

1.2. ANALYSE DE FOURIER D’UN MOUVEMENT ONDULATOIRE 7
De la meme facon, a un instant donne, l’onde G(x− ct) est une fonction periodique de l’espace G(x),de periode λ = 2π/k et donc, en remplacant ω par k, et t par x on a :
G(x) =a′02
+∞
∑
n=1
[
a′n cos(nkx) + b′n sin(nkx)]
(1.7)
avec :
a′n =2
λ
∫ λ
0G(x) cos(nkx)dx ; b′n =
2
λ
∫ λ
0G(x) sin(nkx)dx (1.8)
Le mouvement ondulatoire periodique F (t−x/c), qui est a la fois une fonction periodique de l’espace(periode λ = 2π/k) et du temps (periode T = 2π/ω), peut donc se mettre sous la forme :
F (t − x/c) =a0
2+ a1 cos(ωt − kx) + b1 sin(ωt − kx)
+ a2 cos(2ωt − 2kx) + b2 sin(2ωt − 2kx)
+ a3 cos(3ωt − 3kx) + b3 sin(3ωt − 3kx)
+ ... + an cos(nωt − nkx) + bn sin(nωt − nkx) + ...
c’est donc une superposition de mouvements ondulatoires sinusoıdaux de pulsations ω, 2ω, ..., nω, ...et de longueurs d’onde λ, λ/2, ..., λ/n, ....
Dans la realite, un mouvement ondulatoire strictement periodique n’existe pas : un mouvement reeldoit necessairement comporter un debut et une fin. Si la duree du mouvement est tres grande devant laperiode alors il est possible d’effectuer une analyse harmonique et la decomposition en serie de Fourierconstitue une bonne approximation, dans le cas contraire, on doit remplacer la decomposition en serie deFourier par une decomposition en integrales de Fourier (ou transformation de Fourier). Dans ce cas, lemouvement ondulatoire pourra etre considere comme une somme continue de mouvements ondulatoiressinusoıdaux d’amplitudes A(ω). Cependant, le calcul de A(ω) (ou de A(k), puisque ω = kc) dans le casgeneral sort du cadre de ce cours et nous n’etudierons que l’exemple simple du train d’onde de manierequalitative.
1.2.2 Train d’onde
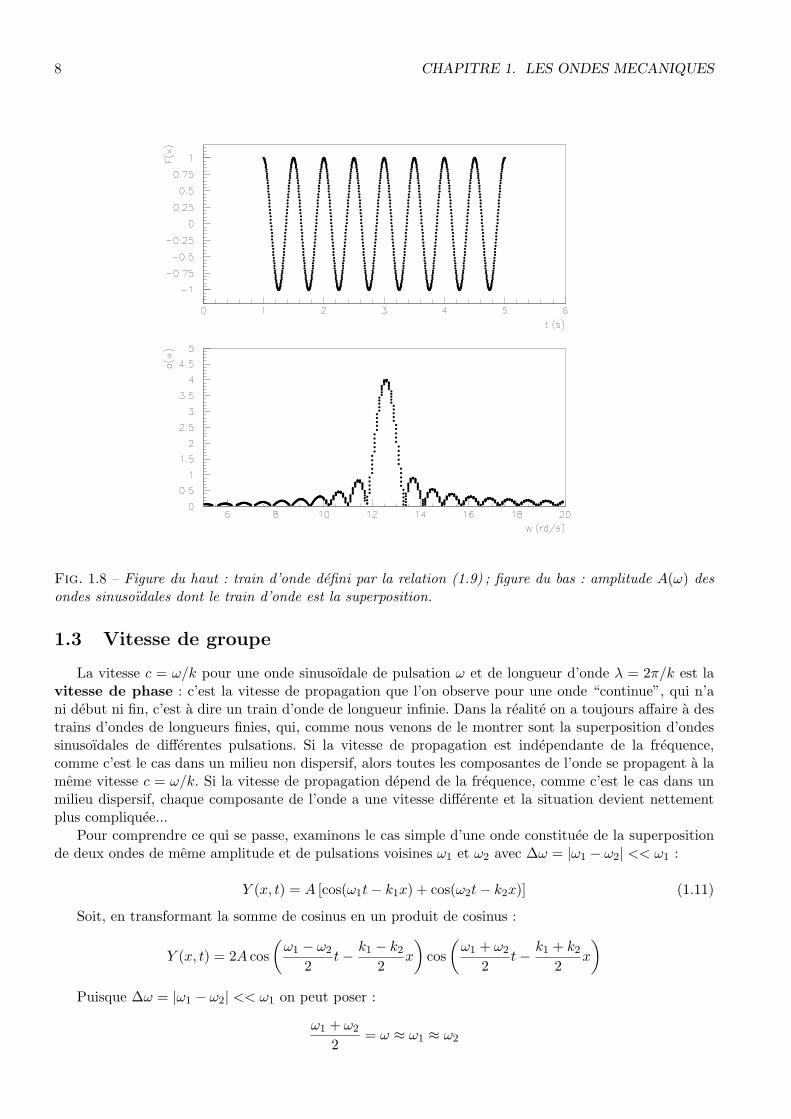
On appelle train d’onde une onde sinusoıdale monochromatique de duree ∆t limite dans le temps, etdonc d’extension ∆x = c∆t limitee dans l’espace. Un exemple de train d’onde, de pulsation ω0 = 4π rd/set de duree ∆t = 4 s, est represente sur la figure 1.8. Il peut etre decrit en x = 0 par la fonction F (t) :
F (t) = cos(4πt) pour 1 < t < 5 s. ; F(t) = 0 sinon (1.9)
On peut montrer que cette onde est la superposition d’une infinite d’ondes sinusoıdales d’amplitudesA(ω) avec des pulsations allant de 0 a l’infini. Cependant, comme le montre la figure 1.8, A(ω) n’estappreciable que pour des valeurs de ω comprises dans un intervalle ∆ω autour de ω0 = 4π tel que :
∆ω ≈ 2π
∆t≈ 2π
4≈ 1.57 rd/s (1.10)
Ce qui est equivalent a dire que A(k) n’est appreciable que pour des valeurs de k comprises dans unintervalle ∆k autour de k0 = ω0/c tel que : ∆k ≈ 2π/(c∆t).
La relation (1.10) indique que, plus le train d’onde est court, plus l’intervalle de pulsations necessairepour le representer devra etre grand, ou encore : plus la region dans laquelle le train d’onde est localiseest petite plus l’intervalle de longueurs d’onde necessaire pour le representer devra etre grand.
8 CHAPITRE 1. LES ONDES MECANIQUES
Fig. 1.8 – Figure du haut : train d’onde defini par la relation (1.9) ; figure du bas : amplitude A(ω) desondes sinusoıdales dont le train d’onde est la superposition.
1.3 Vitesse de groupe
La vitesse c = ω/k pour une onde sinusoıdale de pulsation ω et de longueur d’onde λ = 2π/k est lavitesse de phase : c’est la vitesse de propagation que l’on observe pour une onde “continue”, qui n’ani debut ni fin, c’est a dire un train d’onde de longueur infinie. Dans la realite on a toujours affaire a destrains d’ondes de longueurs finies, qui, comme nous venons de le montrer sont la superposition d’ondessinusoıdales de differentes pulsations. Si la vitesse de propagation est independante de la frequence,comme c’est le cas dans un milieu non dispersif, alors toutes les composantes de l’onde se propagent a lameme vitesse c = ω/k. Si la vitesse de propagation depend de la frequence, comme c’est le cas dans unmilieu dispersif, chaque composante de l’onde a une vitesse differente et la situation devient nettementplus compliquee...
Pour comprendre ce qui se passe, examinons le cas simple d’une onde constituee de la superpositionde deux ondes de meme amplitude et de pulsations voisines ω1 et ω2 avec ∆ω = |ω1 − ω2| << ω1 :
Y (x, t) = A [cos(ω1t − k1x) + cos(ω2t − k2x)] (1.11)
Soit, en transformant la somme de cosinus en un produit de cosinus :
Y (x, t) = 2A cos
(
ω1 − ω2
2t − k1 − k2
2x
)
cos
(
ω1 + ω2
2t − k1 + k2
2x
)
Puisque ∆ω = |ω1 − ω2| << ω1 on peut poser :
ω1 + ω2
2= ω ≈ ω1 ≈ ω2
1.3. VITESSE DE GROUPE 9
De meme, puisque k = ω/c, on a ∆k = |k1 − k2| << k1 et :
k1 + k2
2= k ≈ k1 ≈ k2
et on peut ecrire :
Y (x, t) = 2A cos
(
∆ω
2t − ∆k
2x
)
cos(ωt − kx)
La relation precedente represente une onde sinusoıdale de pulsation ω et de nombre d’onde k dontl’amplitude est modulee par le facteur :
cos
(
∆ω
2t − ∆k
2x
)
(1.12)
Cette modulation se propage a la vitesse :
vg =∆ω
∆k≈ dω
dk
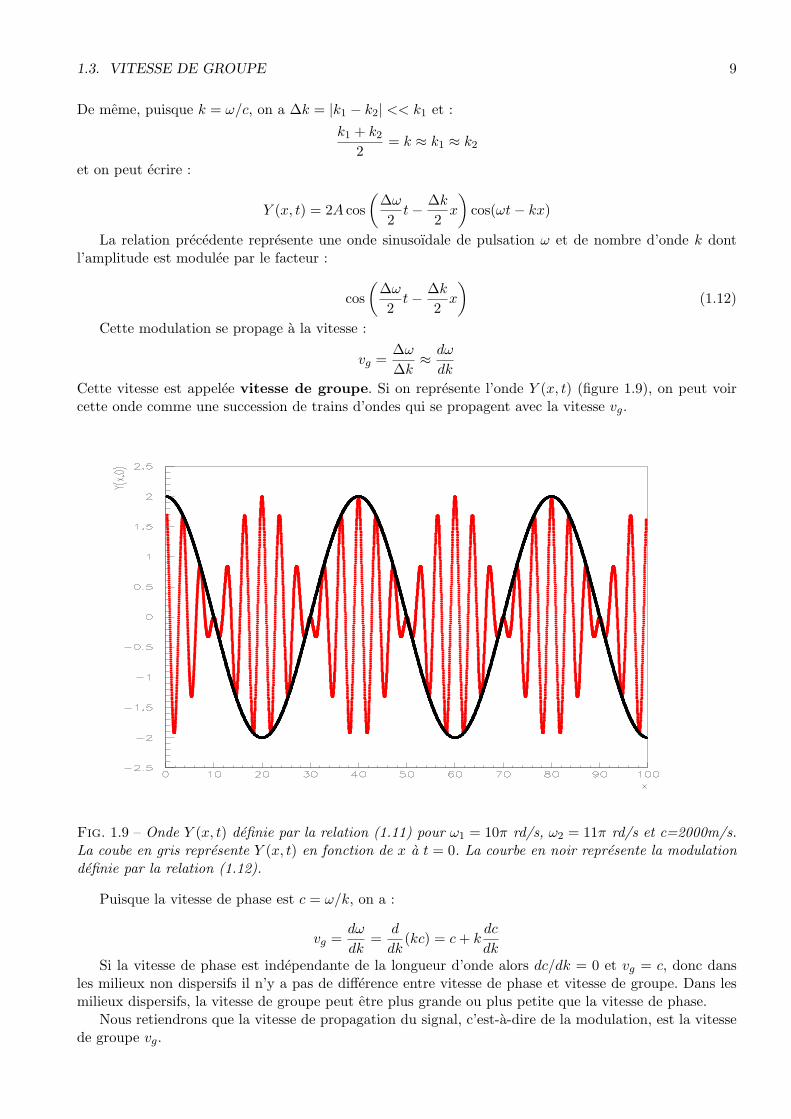
Cette vitesse est appelee vitesse de groupe. Si on represente l’onde Y (x, t) (figure 1.9), on peut voircette onde comme une succession de trains d’ondes qui se propagent avec la vitesse vg.
Fig. 1.9 – Onde Y (x, t) definie par la relation (1.11) pour ω1 = 10π rd/s, ω2 = 11π rd/s et c=2000m/s.La coube en gris represente Y (x, t) en fonction de x a t = 0. La courbe en noir represente la modulationdefinie par la relation (1.12).
Puisque la vitesse de phase est c = ω/k, on a :
vg =dω
dk=
d
dk(kc) = c + k
dc
dkSi la vitesse de phase est independante de la longueur d’onde alors dc/dk = 0 et vg = c, donc dans
les milieux non dispersifs il n’y a pas de difference entre vitesse de phase et vitesse de groupe. Dans lesmilieux dispersifs, la vitesse de groupe peut etre plus grande ou plus petite que la vitesse de phase.
Nous retiendrons que la vitesse de propagation du signal, c’est-a-dire de la modulation, est la vitessede groupe vg.

10 CHAPITRE 1. LES ONDES MECANIQUES
1.4 Equation de propagation dans un milieu continu a une dimension :
la corde vibrante
1.4.1 Equation de propagation
On considere une corde tendue horizontalement, de masse negligeable, et on cherche a etablir l’equationde propagation d’une onde le long de cette corde, pour un ebranlement transverval de faible amplitude.Pour cela, considerons un element de corde de longueur dx et de masse µdx (µ etant la masse lineiquede la corde), avec les hypotheses suivantes (voir figure 1.10) :
1. La corde est tendue avec une tension de module constant T0.
2. Le poids de l’element de corde dx est negligeable devant la tension T0.
3. le mouvement a lieu selon la direction Oy, orthogonale a la direction Ox de la corde au repos.
4. les mouvements sont de faibles amplitudes, de sorte que α << 1 ⇒ sinα ≈ tan α ≈ α
y
x
α
T(x + dx)
T (x)
(x)
α (x + dx)
x x + dx
Fig. 1.10 – Element de corde de longueur dx soumis aux forces de tension ~T (x) et ~T (x + dx).
L’equation de la dynamique appliquee a l’element de corde dx nous permet d’ecrire :
µdx∂2y
∂t2~uy = ~T (x) + ~T (x + dx)
Projetons cette equation selon la direction du mouvement Oy :
µdx∂2y
∂t2= −T0 sin[α(x)] + T0 sin[α(x + dx)]
l’hypothese 4. permet d’ecrire :
sin[α(x)] ≈ tan[α(x)] =∂y
∂x|x
sin[α(x + dx)] ≈ tan[α(x + dx)] =∂y
∂x|x+dx
d’ou :
µdx∂2y
∂t2= T0
(
∂y
∂x|x+dx − ∂y
∂x|x
)
= T0∂
∂x
(
∂y
∂x
)
dx = T0∂2y
∂x2dx
puisque :
f(x + dx) − f(x)
dx=
∂f
∂x
On trouve finalement l’equation de propagation :
∂2y
∂t2=
T0
µ
∂2y
∂x2(1.13)

1.4. EQUATION DE PROPAGATION DANS UN MILIEU CONTINU A UNE DIMENSION : LA CORDE VIBRANTE
Quelle est la dimension du facteur T0/µ ?
T0
µ=
[M ][L][T ]−2
[M ][L]−1=
(
[L]
[T ]
)2
T0/µ est donc le carre d’une vitesse, nous poserons donc
c =
√
T0
µ
c est la vitesse de propagation de l’onde dont l’equation peut s’ecrire de facon generale :
∂2y
∂t2= c2 ∂2y
∂x2(1.14)
1.4.2 Solution de l’equation de propagation a une dimension
Nous avons vu que la forme generale d’une fonction d’onde devait etre :
y(x, t) = F (x − ct) + G(x + ct)
Nous devons donc verifier que y(x, t) est solution de l’equation (1.14).Effectuons le changement de variables :
p = x − ct et q = x + ct
La derivee du deplacement y par rapport a x s’ecrit alors :
∂y
∂x=
∂y
∂p
∂p
∂x+
∂y
∂q
∂q
∂x=
∂y
∂p+
∂y
∂q
et la derivee seconde :∂2y
∂x2=
∂2y
∂p2+ 2
∂2y
∂p∂q+
∂2y
∂q2
De meme par rapport a t :
∂y
∂t=
∂y
∂p
∂p
∂t+
∂y
∂q
∂q
∂t= c
(
−∂y
∂p+
∂y
∂q
)
et :∂2y
∂t2= c2
(
∂2y
∂p2− 2
∂2y
∂p∂q+
∂2y
∂q2
)
En remplacant dans l’equation (1.14) il reste, apres simplifications :
∂2y
∂p∂q= 0
La derivee par rapport a p de ∂y/∂q est nulle ; ∂y/∂q est donc une fonction de q seul :
∂y
∂q= f(q)
y est la primitive de f(q), notee F (q), a laquelle on peut ajouter une constante par rapport a q, c’esta dire une fonction de p seul :
y = F (q) + G(p) = F (x − ct) + G(x + ct)
Un calcul semblable montrerait que toute fonction y = F (t − x/c) + G(t + x/c) convient egalement.
12 CHAPITRE 1. LES ONDES MECANIQUES
1.4.3 Solutions sinusoıdales
Lorsque la source d’une onde, situee en x = 0, est un oscillateur harmonique, son deplacement aucours du temps est de la forme y(0, t) = A cos(ωt − ϕ). L’onde emise dans la direction des x positifs estune fonction f+(t−x/c) qui en x = 0 doit s’identifier au mouvement de la source : f+(t) = A cos(ωt−ϕ).Le deplacement en x est donc :
f+(t − x/c) = y(x, t) = A cos[ω(t − x/c) − ϕ] = A cos[ωt − kx − ϕ] (1.15)
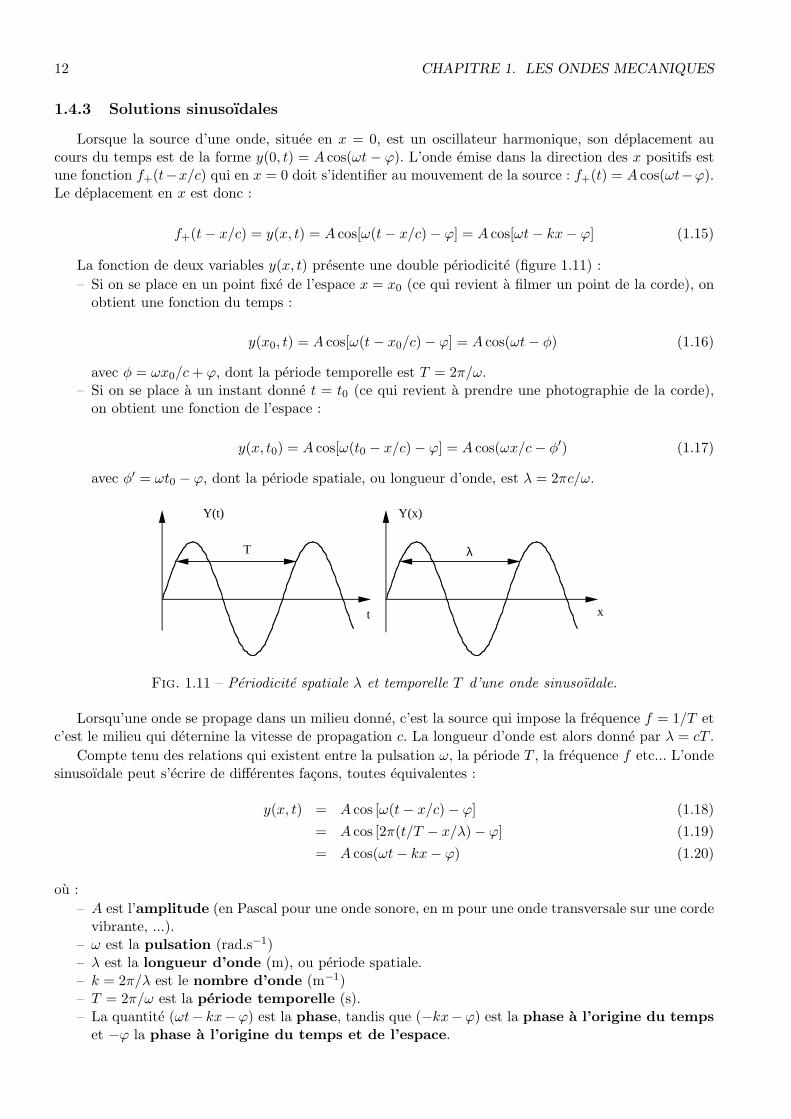
La fonction de deux variables y(x, t) presente une double periodicite (figure 1.11) :
– Si on se place en un point fixe de l’espace x = x0 (ce qui revient a filmer un point de la corde), onobtient une fonction du temps :
y(x0, t) = A cos[ω(t − x0/c) − ϕ] = A cos(ωt − φ) (1.16)
avec φ = ωx0/c + ϕ, dont la periode temporelle est T = 2π/ω.– Si on se place a un instant donne t = t0 (ce qui revient a prendre une photographie de la corde),
on obtient une fonction de l’espace :
y(x, t0) = A cos[ω(t0 − x/c) − ϕ] = A cos(ωx/c − φ′) (1.17)
avec φ′ = ωt0 − ϕ, dont la periode spatiale, ou longueur d’onde, est λ = 2πc/ω.
Y(t)
t
T
Y(x)
x
λ
Fig. 1.11 – Periodicite spatiale λ et temporelle T d’une onde sinusoıdale.
Lorsqu’une onde se propage dans un milieu donne, c’est la source qui impose la frequence f = 1/T etc’est le milieu qui deternine la vitesse de propagation c. La longueur d’onde est alors donne par λ = cT .
Compte tenu des relations qui existent entre la pulsation ω, la periode T , la frequence f etc... L’ondesinusoıdale peut s’ecrire de differentes facons, toutes equivalentes :
y(x, t) = A cos [ω(t − x/c) − ϕ] (1.18)
= A cos [2π(t/T − x/λ) − ϕ] (1.19)
= A cos(ωt − kx − ϕ) (1.20)
ou :
– A est l’amplitude (en Pascal pour une onde sonore, en m pour une onde transversale sur une cordevibrante, ...).
– ω est la pulsation (rad.s−1)– λ est la longueur d’onde (m), ou periode spatiale.– k = 2π/λ est le nombre d’onde (m−1)– T = 2π/ω est la periode temporelle (s).– La quantite (ωt− kx−ϕ) est la phase, tandis que (−kx−ϕ) est la phase a l’origine du temps
et −ϕ la phase a l’origine du temps et de l’espace.

1.5. SURFACES D’ONDES 13
1.5 Surfaces d’ondes
Dans un milieu a trois dimensions, on appelle surface d’onde toute surface dont les points vibrent enphase, c’est-a-dire qui, a un instant donne t0, ont tous la meme phase.
Ondes planes, vecteur d’onde, plan d’onde
Dans le cas d’une onde ou la source est un plan qui oscille (une onde sonore au voisinage de la mem-brane d’un haut-parleur par exemple), l’onde emise se propage dans la direction Ox perpendiculairementau plan source (figure 1.12a) et on a affaire a une onde plane sinusoıdale, d’amplitude constante, quel’on peut ecrire sous la forme :
Y (x, t) = A cos(ωt − kx − ϕ)
plansource
x u
rr
kr
O
M
u
plan d'onde
Surfaces d'onde : sphèresSurfaces d'onde : plans
(a) (b) (c)
Fig. 1.12 – Surfaces d’ondes : a) et b) planes, c) spherique ; orthogonales a la direction de propagation.
Pour une onde plane se propageant dans une direction quelconque ~u de l’espace (reperee par le vecteurunitaire ~u0), on definit le vecteur d’onde :
~k = k~u0 =ω
c~u0
Pour une onde plane sinusoıdale, on a alors la forme generale :
Y (x, y, z, t) = A cos(ωt − ~k.~r − ϕ) = A cos(ωt − kxx − kyy − kzz − ϕ)
si ~k = (kx, ky, kz) et ~r = (x, y, z) dans le repere (0, x, y, z). Si l’on veut que l’onde ne depende que d’uneseule coordonnee d’espace, ce qui est toujours possible pour une onde plane, il faut choisir un des axesdu repere selon la direction de propagation ~u0.
Les surfaces d’onde verifient l’equation :
ωt − ~k.~r − ϕ = Cte (1.21)
Le produit ~k.~r represente la projection du vecteur courant ~r =−−→OM sur la direction de propagation
(parallele au vecteur d’onde ~k). Ce produit est constant si le point M est situe dans un plan perpendi-culaire a la direction de propagation. Les surfaces d’onde sont donc des plans orthogonaux a la directionde propagation ; ceci est illustre par la figure 1.12b.
Si u est l’abcisse d’un plan d’onde selon la direction de propagation, l’equation (1.21) se ramene a :ωt − ku − ϕ = Cte et le plan d’onde se deplace avec la vitesse de phase :
Vφ =du
dt=
d
dt
(
ωt − ϕ − Cte
k
)
=ω
k= c

14 CHAPITRE 1. LES ONDES MECANIQUES
Ondes spheriques
Si la source est une petite sphere dont le volume varie periodiquement, par raison de symetrie, lafonction d’onde ne peut dependre que de la variable r, et l’expression de la phase est donc du type :ωt − kr − ϕ. Dans ce cas les surfaces equiphase verifient :
ωt − kr − ϕ = Cte ⇒ r = Cte
Les surfaces d’onde sont donc des spheres centrees sur la source en r = 0 (figure 1.12c).
A la difference de l’onde plane, l’amplitude d’une onde spherique n’est pas constante car l’energie doitse repartir sur des surfaces de plus en plus grandes lorsque l’onde s’eloigne de la source. En effet, si P0
est la puissance de la source, cette puissance a une distance r doit se repartir sur une surface S = 4πr2.La puissance par unite de surface dP/dS en r sera donc :
dP(r)
dS=
P0
4πr2
Cette puissance par unite de surface, ou intensite, est, comme nous allons le montrer plus loin,proportionnelle au carre de l’amplitude :
dP(r)
dS= αA2 =
P0
4πr2⇒ A(r) = Cte/r
On voit donc que l’amplitude decroıt en 1/r. La forme generale d’une onde spherique est donc :
Y (r, t) =A
rcos(ωt − kr − ϕ) (1.22)
Cependant, a une distance D de la source, grande devant la longueur d’onde, on pourra toujoursapproximer une onde spherique par une onde plane d’amplitude constante sur une distance d << D.
1.6 Les ondes sonores
Les ondes sonores se propagent dans l’air, mais aussi dans les liquides et les solides, donc dans desmilieux a trois dimensions. Cependant on peut restreindre l’etude de l’onde sonore au cas ou celle-ci nedepend que d’une seule variable d’espace : c’est le cas de l’onde plane, se propageant dans une direction.
Si on envoie a un haut-parleur, dont la membrane est plane, un signal electrique tel que cette membranese deplace brutalement vers l’avant, celle-ci va comprimer l’air, engendrant une legere surpression p quiva se propager le long d’un axe x perpendiculaire a la surface de la membrane.
Si la membrane du haut-parleur a maintenant un mouvement d’oscillation periodique, cette oscillationva se propager le long de l’axe x de maniere similaire a l’onde sur la corde avec la meme relation λ = cTentre la distance λ qui separe deux maxima successifs de pression et la vitesse de propagation c.
On aura ainsi engendre une onde plane. Bien entendu ceci ne constitue qu’une approximation valableau voisinage de la membrane : lorsque l’onde s’eloigne, elle se disperse dans tout l’espace et plusieursvariables d’espace sont alors necessaires pour la decrire. Pour eviter ce probleme on pourra considererdes ondes planes se propageant dans un tuyau cylindrique d’axe parallele a la direction de propagation.
1.6.1 Equation de propagation a une dimension dans l’air
Position du probleme
L’etat d’equilibre de l’air est defini par la pression d’equilibre uniforme Patm qui correspond a unemasse volumique d’equilibre ρ0. Nous etudierons la propagation de petites perturbations p par rapport al’equilibre, sous forme d’ondes planes selon la direction Ox :
Ptot = Patm + p(x, t) ; p(x, t) << Patm
La variation de pression p (surpression ou depression) est appelee pression acoustique.

1.6. LES ONDES SONORES 15
Loi de compressibilite
On suppose le gaz parfait et les transformations adiabatiques reversibles de sorte que, pour unetranche de gaz d’epaisseur ∆x et de volume V, on a :
PtotVγ = Cte ⇒ dPtot
Ptot+ γ
dV
V= 0 (1.23)
Le coefficient de compressibilite χ est defini par :
χ = − 1
V
∂V
∂Ptot
Si dV est la variation de volume de la tranche de gaz correspondant a la pression acoustique p(x, t),on peut ecrire :
dPtot = [Patm + p(x, t)] − Patm = p(x, t) << Patm
d’ou :
χ = − 1
V
dV
p(x, t)(1.24)
et d’apres (1.23) :
p(x, t)
Ptot+ γ
dV
V= 0 ⇒ − 1
V
dV
p(x, t)=
1
γPtot
d’ou :
χ =1
γPtot≈ 1
γPatm= Cte
Considerons une tranche d’air de surface S, comprise, a l’equilibre, entre x et x+∆x selon la directionde propagation x (figure 1.13). La face en x subit un deplacement u(x, t) et se trouve en x + u(x, t). Aumeme instant, la face en x+∆x subit un deplacement u(x+∆x, t) et se trouve en x+∆x+u(x+∆x, t).
u(x,t) u(x+∆x,t)
x
x
x+∆x
Fig. 1.13 – Positions d’une tranche d’air a l’equilibre (traits pleins) et hors d’equilibre (traits tiretes).
On suppose ∆x assez petit pour ecrire :
u(x + ∆x, t) − u(x, t) =∂u(x, t)
∂x∆x
L’epaisseur de la tranche varie donc de (∂u/∂x)∆x et son volume de :
dV =∂u(x, t)
∂x∆x S =
∂u(x, t)
∂xV

16 CHAPITRE 1. LES ONDES MECANIQUES
D’apres l’equation (1.24), la pression acoustique p(x, t) est donc reliee au deplacement u(x, t) par :
p(x, t) = − dV
χV= − 1
χ
∂u(x, t)
∂x(1.25)
Principe fondamental de la dynamique
Sur chacune des faces de la tranche d’epaisseur ∆x la pression s’exerce suivant des directions opposeeset la force resultante s’ecrit :
F = SPtot(x, t) − SPtot(x + ∆x, t)
En developpant au premier ordre, sachant que Ptot = Patm + p ou Patm est une constante :
Ptot(x + ∆x, t) − Ptot(x, t) =∂Ptot
∂x∆x =
∂p(x, t)
∂x∆x
La force resultante est :
F = −S∂p
∂x∆x
Cette force est egale au produit de la masse d’air ρ0S∆x par l’acceleration :
F = −S∆x∂p
∂x= ρ0S∆x
∂2u
∂t2
ce qui nous permet d’obtenir une seconde relation :
ρ0∂2u
∂t2= −∂p
∂x(1.26)
Equation de propagation
En derivant l’equation (1.25) par rapport a x, on obtient :
∂p
∂x= − 1
χ
∂2u(x, t)
∂x2
Et en comparant cette equation avec l’equation (1.26), on obtient :
∂2u(x, t)
∂t2=
1
ρ0χ
∂2u(x, t)
∂x2(1.27)
C’est l’equation de propagaiton de l’onde de deplacement longitudinal dans le gaz a la vitesse :
c =
√
1
ρ0χ(1.28)
De la meme facon, on peut trouver, en derivant l’equation (1.25) deux fois par rapport a t :
∂2p(x, t)
∂t2= − 1
χ
∂2
∂t2∂u(x, t)
∂x= − 1
χ
∂
∂x
∂2u(x, t)
∂t2
soit, en comparant cette equation avec l’equation (1.26) :
∂2p(x, t)
∂t2=
1
ρ0χ
∂2p(x, t)
∂x2(1.29)
C’est l’equation de propagation de l’onde de pression longitudinale dans le gaz a la vitesse c =√
1ρ0χ
On pourrait egalement montrer que la densite ρ ou encore la vitesse de deplacement v = ∂u/∂tobeissent a la meme equation.

1.6. LES ONDES SONORES 17
Une onde sonore peut donc etre consideree aussi bien comme une onde de deplacement u(x, t) desmolecules d’air autour de leur position d’equilibre que comme une onde de surpression p(x, t) par rapporta la pression d’equilibre Patm, ou encore de densite ρ(x, t) autour de la densite d’equilibre ρ0, ces troisgrandeurs obeissant a la meme equation de propagation :
∂2u
∂t2− c2 ∂2u
∂x2= 0 (1.30)
Celerite du son
Pour l’air, assimile a un gaz parfait de temperature T et de compressibilite χ = 1/(γPatm), ona ρ0 = M/VM ou M est la masse molaire du gaz et VM = RT/Patm le volume d’une mole (R ≃8.31 m3.Pa.K−1.mol−1), d’ou :
c2 =1
ρ0χ= γPatm
VM
M=
γRT
M
Pour l’air : γ = 1, 4 et M ≈ 29 g.mol−1.
⇒ c(m/s) ≈ 20√
T (K)
Par exemple : dans l’air a 20◦C : c ≃ 20√
293 ≃ 342 m/s.
Une des hypotheses importantes utilisee pour etablir l’equation de propagation et l’expression de lacelerite c est que la surpression p(x, t) (appelee pression acoustique) est tres petite devant la pressionatmospherique Patm. Dans le cas d’un son tres intense, les equations (1.27) et (1.28) ne sont plus valableset on constate que les sons intenses se propagent plus vite que les sons de faible intensite. Par exemple,dans le cas du son au niveau de la gueule d’un canon, la pression acoustique peut depasser la pressionatmospherique et on peut, a une certaine distance, entendre le bruit du canon avant l’ordre de tir.
Domaines de frequences sonores
L’oreille humaine percoit les sons pour des frequences comprises entre 20 Hz et 20 kHz environ,ce domaine pouvant varier d’un individu a l’autre (selon l’age en particulier). Cela correspond a deslongueurs d’ondes λ = c/f avec c = 343 m/s :
17 m ≥ λ ≥ 17 mm
Les ultrasons sont des ondes sonores dont les frequences sont au-dessus du domaine audible humain.Certaines especes animales (insectes par exemple) ont leur maximum de sensibilite a des frequenceselevees atteignant 100 a 200 kHz. Les ultrasons sont utilises en medecine pour les echographies avec desfrequences entre 1 et 5 MHz voire 20 MHz en ophtalmologie.
Les infrasons sont des ondes sonores dont les frequences sont en dessous du domaine audible humain.Il peuvent etre produits avec de grandes intensites lors des seismes et, bien que non audibles par l’oreillehumaine, ils peuvent provoquer des sensations de malaise et d’angoisse.
1.6.2 Intensite acoustique
Pour une onde sonore se propageant selon la direction Ox dans un milieu de densite ρ0 avec la vitesse c,on definit l’intensite acoustique Iac comme la puissance moyenne par unite de surface transportee
par l’onde.
Soit dS une surface elementaire perpendiculaire a la direction de propagation. L’onde sonore met envibration la surface dS. Cette vibration correspond a un deplacement u(x, t) des molecules autour de leur
position d’equilibre. Leur vitesse de deplacement est v(x, t) =∂u(x, t)
∂t(attention a ne pas confondre la
vitesse v(x, t) des molecules et la vitesse c de propagation de l’onde), et la puissance recue vaut :

18 CHAPITRE 1. LES ONDES MECANIQUES
dPac = Fv(x, t) = p(x, t)dS∂u(x, t)
∂t
L’intensite acoustique vaut alors :
Iac =< dPac/dS >=< pv(x, t) >
Pour une onde sonore progressive vers les x croissants on a : u(x, t) = f(t − x/c) = f(q)
∂u(x, t)
∂t=
∂f
∂q
∂q
∂t=
∂f
∂q
de meme :∂u(x, t)
∂x=
∂f
∂q
∂q
∂x= −1
c
∂f
∂q
⇒ ∂u(x, t)
∂x= −1
c
∂u(x, t)
∂t
Donc d’apres (1.25) et (1.28), pour une onde sonore se propageant dans un gaz de densite ρ0 :
p(x, t) = − 1
χ
∂u(x, t)
∂x=
1
cχ
∂u(x, t)
∂t= ρ0cv(x, t) (1.31)
d’ou l’expression de l’intensite acoustique :
Iac =< pv >= ρ0c < v2 >=< p2 >
ρ0c=
p2eff
ρ0c(1.32)
ou p2eff =< p2 > est le carre de la pression efficace, definie comme la valeur moyenne du carre de la
pression. Pour une onde de pression sinusoıdale d’amplitude p0 : p2eff =
p02 . L’intensite Iac s’exprime en
Watt/m2
Remarque : pour une onde progressive vers les x negatifs (appelee aussi onde regressive) u(x, t) =g(t + x/c) on a :
∂u(x, t)
∂x=
1
c
∂u(x, t)
∂tet donc p(x, t) = −ρ0cv(x, t) (1.33)
ce qui conduit a la meme expression pour l’intensite acoustique.
Echelle de mesure des sons
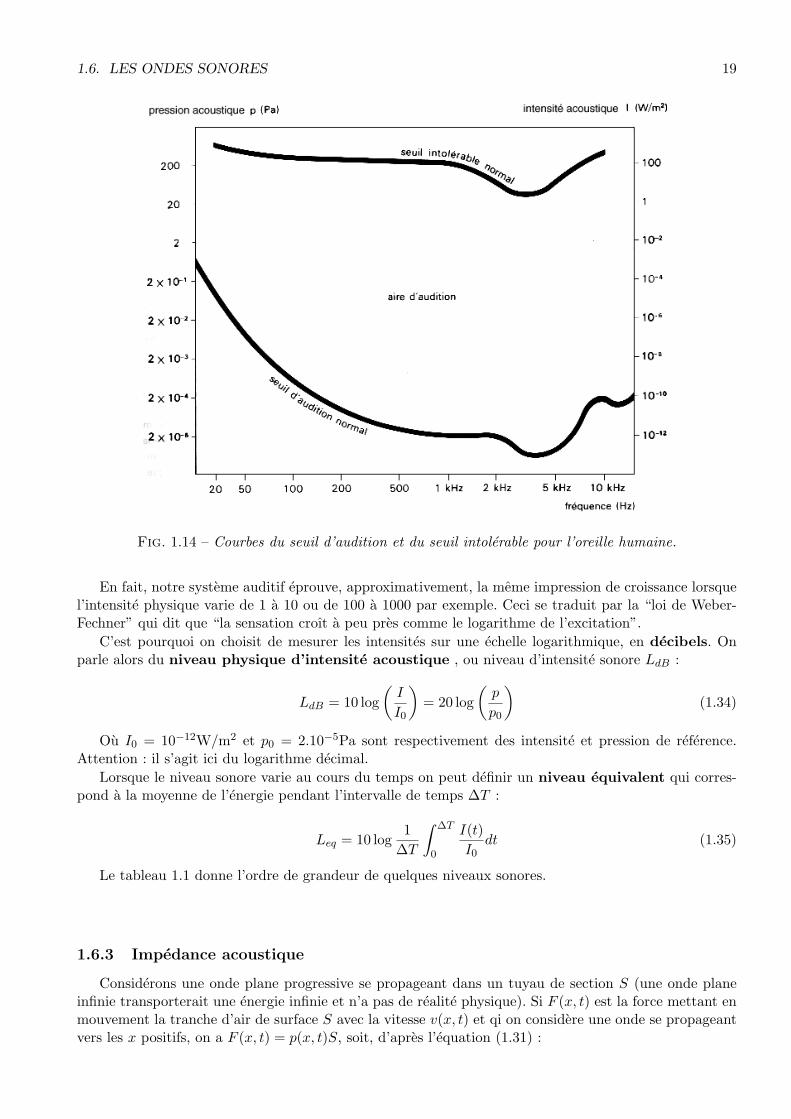
La perception du son par le systeme auditif depend des caracteristiques physiques des sons. Un sond’intensite trop faible n’est pas percu, tandis qu’un son trop fort peut provoquer une douleur, voireune destruction de l’appareil auditif. Il existe donc des limites d’intensite en dehors desquelles l’ecouteest impossible. De plus, ces limites dependent fortement de la frequence des sons : les frequences tropbasses (infrasons) de meme que les frequences trop elevees (ultrasons) ne sont pas percues. Pour une“oreille moyenne”, les courbes du seuil d’audition et du seuil intolerable sont representees en fonctionde la frequence sur la figure 1.14 (resultat de l’examen d’un grand nombre de sujets “acoustiquementnormaux” entre 18 et 25 ans).
On peut voir sur ces courbes qu’il existe entre les surpressions p comprises entre le seuil d’audition et leseuil intolerable pour l’oreille humaine un rapport pmax/pmin ≈ 107. La gamme de variation de la pressionacoustique est donc tres grande, bien que p reste toujours tres inferieure a la pression atmospherique :pmax(x, t) ≃ 500 Pa << Patm = 105 Pa.
L’intensite etant proportionnelle au carre de la pression, il en resulte que la gamme des intensitesaudibles s’etend sur 14 decades : Imax/Imin ≈ 1014 !
1.6. LES ONDES SONORES 19
Fig. 1.14 – Courbes du seuil d’audition et du seuil intolerable pour l’oreille humaine.
En fait, notre systeme auditif eprouve, approximativement, la meme impression de croissance lorsquel’intensite physique varie de 1 a 10 ou de 100 a 1000 par exemple. Ceci se traduit par la “loi de Weber-Fechner” qui dit que “la sensation croıt a peu pres comme le logarithme de l’excitation”.
C’est pourquoi on choisit de mesurer les intensites sur une echelle logarithmique, en decibels. Onparle alors du niveau physique d’intensite acoustique , ou niveau d’intensite sonore LdB :
LdB = 10 log
(
I
I0
)
= 20 log
(
p
p0
)
(1.34)
Ou I0 = 10−12W/m2 et p0 = 2.10−5Pa sont respectivement des intensite et pression de reference.Attention : il s’agit ici du logarithme decimal.
Lorsque le niveau sonore varie au cours du temps on peut definir un niveau equivalent qui corres-pond a la moyenne de l’energie pendant l’intervalle de temps ∆T :
Leq = 10 log1
∆T
∫ ∆T
0
I(t)
I0dt (1.35)
Le tableau 1.1 donne l’ordre de grandeur de quelques niveaux sonores.
1.6.3 Impedance acoustique
Considerons une onde plane progressive se propageant dans un tuyau de section S (une onde planeinfinie transporterait une energie infinie et n’a pas de realite physique). Si F (x, t) est la force mettant enmouvement la tranche d’air de surface S avec la vitesse v(x, t) et qi on considere une onde se propageantvers les x positifs, on a F (x, t) = p(x, t)S, soit, d’apres l’equation (1.31) :

20 CHAPITRE 1. LES ONDES MECANIQUES
Niveau d’intensite Source sonore Intensite Pression(dB) (W/m2) (Pa)
200 Record mondial pour un son continu (1998). 108 2.105
140 Seuil intolerable. 100 200
120 Reacteur d’avion a 10 m. 1 20
100 Marteau-piqueur a 2 m. 10−2 2
80 Rue bruyante. 10−4 0.2
60 Conversation vive. 10−6 2.10−2
40 Conversation normale. 10−8 2.10−3
20 Studio d’enregistrement. 10−10 2.10−4
10 Laboratoire d’acoustique. 10−11 6.10−5
0 Seuil d’audition. 10−12 2.10−5
Tab. 1.1 – Ordre de grandeur de quelques niveaux sonores.
F (x, t) = p(x, t)S = ρ0cv(x, t)S
On definit alors l’impedance acoustique du tuyau de section S comme la quantite :
Zac =1
S2
F (x, t)
v(x, t)(1.36)
On a alors, pour une onde se propageant vers les x positifs :
Zac =ρ0c
S(1.37)
On remarque que :
– Pour une onde regressive g(t + x/c), on aurait, d’apres la relation (1.33) : Zac = −ρ0c/S– Du fait de la relation de proportionalite entre force et vitesse pour une onde purement progressive
(ou purement regressive), l’impedance acoustique est une constante appelee “impedance iterative”.Mais ce n’est pas le cas pour un melange d’ondes progressive et regressive.
– L’impedance acoustique n’a pas la meme dimension que l’impedance mecanique definie par Zmeca =force/vitesse, on a : [Zac] = [Zmeca]/[L4]
La puissance acoustique instantanee transportee par l’onde progressive est :
Pac = Fv = pSv = ρ0cSv2 =p2
ρ0cS
on peut, en comparant avec l’expression de la puissance electrique :
Pelec = UI = ZI2 =U2
Z
faire les analogies suivantes :
I ↔ Sv
U ↔ p
Z =Pelec
I2↔ Zac =
Pac
(Sv)2=
pvS
(Sv)2=
p
Sv=
ρ0c
S
Cette analogie explique le facteur 1/S2 entre les impedances mecanique ou electrique et acoustique.

1.7. REFLEXION ET TRANSMISSION 21
1.7 Reflexion et transmission
Nous allons examiner maintenant la transmission et la reflexion d’une onde u(x, t) se propageant selonl’axe Ox vers les x positifs, a la frontiere x = 0 entre deux milieux (figure 1.15). Le nombre d’onde etl’impedance valent respectivement :
k1 et Z1 pour l’onde incidente du cote x < 0,
k1 et −Z1 pour l’onde reflechie du cote x < 0,
k2 et Z2 pour l’onde transmise du cote x > 0,
0
direction de propagation
x
onde incidente ui onde transmise u
onde reflechie ur
t
k 1 1Z 2k 2Z
Fig. 1.15 – Transmission et reflexion d’une onde u(x, t) se propageant selon l’axe Ox.
1.7.1 Coefficients de reflexion et de transmission
Soient R et T les coefficients de reflexion et de transmission. Si on prend le cas d’une onde incidentesinusoıdale d’amplitude A, on a pour les deplacements des ondes incidente (i), reflechie (r) et transmise(t) : uα(x, t) = Re(uα) ou α = i, r, et t, respectivement, et ou uα sont les deplacements complexes quis’ecrivent :
ui(x, t) = Aej(ωt−k1x)
ur(x, t) = RAej(ωt+k1x)
ut(x, t) = TAej(ωt−k2x)
De meme, pour les vitesses, on a vα(x, t) = Re(vα) avec :
vi(x, t) = jωAej(ωt−k1x)
vr(x, t) = jωRAej(ωt+k1x)
vt(x, t) = jωTAej(ωt−k2x)
Par continuite, on doit avoir, en x = 0, pour le deplacement :
ui(0, t) + ur(0, t) = ut(0, t) ⇒ 1 + R = T (1.38)
et pour la force :
Fi(0, t) + Fr(0, t) = Ft(0, t)
ce qui se reecrit, d’apres la relation (1.36) :
Z1S2vi(0, t) − Z1S
2vr(0, t) = Z2S2vt(0, t) ⇒ Z1(1 − R) = Z2T (1.39)
Le systeme d’equations :
1 + R = T
Z1(1 − R) = Z2T

22 CHAPITRE 1. LES ONDES MECANIQUES
permet de tirer R et T sous la forme :
R =Z1 − Z2
Z1 + Z2(1.40)
T =2Z1
Z1 + Z2(1.41)
Remarque : Ces coefficients de reflexion et de transmission ne s’appliquent qu’au cas ou une ondeacoustique passe d’un milieu a un autre dans un tuyau de section constante. En effet, on a suppose quele section etait la meme de part et d’autre de x = 0 dans l’equation (1.39).
1.7.2 Conservation de l’energie
La loi de conservation de l’energie implique que la somme algebrique de la puissance incidente Pi etde la puissance reflechie Pr doit etre egale a la puissance transmise Pt :
Pi + Pr = Pt
Si on se place en x = 0, a la frontiere entre les deux milieux, on a, pour une surface commune S :
Pi = Fi(0, t)vi(0, t) = Z1S2v2
i (0, t)
Pr = Fr(0, t)vr(0, t) = −Z1S2v2
r (0, t) = −Z1S2R2v2
i (0, t)
Pt = Ft(0, t)vt(0, t) = Z2S2v2
t (0, t) = Z2S2T 2v2
i (0, t)
D’ou les relations :
Pr = −R2Pi = −(
Z1 − Z2
Z1 + Z2
)2
Pi (1.42)
Pt =Z2
Z1T 2Pi =
4Z1Z2
(Z1 + Z2)2Pi (1.43)
La puissance reflechie est affectee d’un signe negatif car elle se propage dans le sens des x negatifs.
Examinons les deux cas limites :
- tuyau ferme en x = 0 : dans ce cas Z2 → ∞ (puisque la section dans le milieu n 2 est nulle) etPr = −Pi, Pt = 0. La puissance de l’onde est entierement reflechie.
- tuyau ouvert en x = 0 : dans ce cas Z2 → 0 (puisque la section dans le milieu n 2 est infinie). Laencore on a Pr = −Pi, Pt = 0. La puissance de l’onde est la encore entierement reflechie.
Dans les deux cas precedents il n’y a pas de puissance transmise. Ce resultat, assez intuitif pour lecas du tuyau ferme, l’est moins pour le cas du tuyau ouvert. En fait, si l’on veut qu’un son “sorte” d’untuyau dans lequel il se propage il faut realiser une adaptation d’impedance entre la valeur Z1 = ρ0c/S1
a l’interieur du tuyau et la valeur Z2 ≈ 0 a l’exterieur, pour cela on evase la sortie du tuyau : unprofil exponentiel constitue la meilleure solution pour une transmission maximale de la puisssance. Ceciexplique la forme des trompettes, trombones, tubas et autres helicons pour lesquels le son est cree par lavibration des levres de l’instrumentiste a une extremite et doit imperativement sortir par l’autre (ce n’estpas le cas pour les flutes, hautbois... pour lesquels le son est produit par des biseaux ou des anches).
Remarque : Pour ces deux cas limites le coefficient de reflexion vaut R = 1 pour le tuyau ouvert(reflexion sans changement de signe) et R = −1 pour le tuyau ferme (reflexion avec changement de signe).Par contre le coefficient de transmission T n’a pas de sens pour ces cas limites puisqu’il n’y a plus detuyau au-dela de x = 0.

1.8. ONDES STATIONNAIRES 23
1.8 Ondes stationnaires
Dans les exemples precedants on a, dans la region de l’espace x < 0, superposition d’une onde incidenteet d’une onde reflechie :
ui(x, t) = Aej(ωt−k1x)
ur(x, t) = RAej(ωt+k1x)
Nous n’etudierons que les cas simples ou l’onde est entierement reflechie, avec ou sans changementde signe (|R| = 1) : c’est le cas pour une onde sonore se propageant dans un tuyau ouvert (R = 1) ouferme (R = −1), pour un ebranlement se propageant sur une corde dont l’extremite est fixee (R = −1)ou entierement libre (R = 1).
1.8.1 Ondes stationnaires dans un tuyau sonore
Cas ou l’onde est entierement reflechie sans changement de signe
On a dans ce cas :
u(x, t) = ui(x, t) + ur(x, t) = Aejωt[
e−jk1x + ejk1x]
= 2A cos(k1x)ejωt
Nous obtenons donc pour le deplacement reel :
u(x, t) = Re(u) = 2A cos(k1x) cos(ωt)
Cette fonction ne represente pas une onde qui se propage mais une onde stationnaire qui s’exprimecomme le produit d’une amplitude variable avec x par une fonction du temps.
Cas ou l’onde est entierement reflechie avec changement de signe
On a dans ce cas :
u(x, t) = ui(x, t) + ur(x, t) = Aejωt[
e−jk1x − ejk1x]
= −2jA sin(k1x)ejωt
Nous obtenons donc pour le deplacement reel :
u(x, t) = Re(u) = 2A sin(k1x) sin(ωt) (1.44)
On a de nouveau une onde stationnaire.
Examinons la variation de l’amplitude avec x pour ce deuxieme cas (figure 1.16). L’equation (1.44)se reecrit :
u(x, t) = 2A sin(2πx/λ) sin(ωt)
. L’amplitude est donc :– nulle pour x = Nλ/2 avec N entier : ces points sont appeles nœuds de vibrations.– maximale pour x = (N + 1/2)λ/2 avec N entier : ces points sont appeles ventres de vibrations.
Si maintenant on place une seconde surface immobile parfaitement rigide en x = −L on aura en plusla condition u(−L, t) = 0 quelque soit t, ce qui impose :
sin2πL
λ= 0 ⇒ λ =
2L
n
La presence de ce second obstacle, qui delimite une region finie de l’espace, a pour effet essentiel dequantifier les longueurs d’ondes : seules les ondes stationnaires ayant des longueurs d’onde λn = 2L/n,ou n est un nombre entier, peuvent s’etablir dans ce milieu.

24 CHAPITRE 1. LES ONDES MECANIQUES
λ / 2
V V V
N N
x
Fig. 1.16 – Ondes stationnaires par composition d’une onde sinusoıdale incidente avec une onde si-nusoıdale reflechie sur une paroi fixe.
La relation λ = c/f impose egalement une quantification des frequences
λn =2L
n⇒ fn = n
c
2L(1.45)
Ces frequences sont les frequences propres qui correspondent aux modes propres de vibrationdu milieu.
Dans le cas d’un milieu a une dimension, comme un tuyau sonore, les frequences propres sont desmultiples de la plus basse frequence, appelee frequence fondamentale, ces frequences multiples de lafrequence fondamentale sont appelees harmoniques.
En conclusion, pour un tuyau sonore ferme a ses deux extremites, l’expression du deplacement pourle mode n est donne par la relation (1.44), avec :
λn =2L
n; ωn = n
πc
L
d’ou :
un(x, t) = 2An sin(nπx
L
)
sin
(
nπct
L
)
(1.46)
1.8.2 Modes propres d’une corde vibrante
Les vibrations d’une corde etant plus faciles a visualiser que les vibrations de l’air dans un tuyau,nous allons etudier plus en detail les modes propres d’une corde vibrante de longueur L, fixee a ses deuxextremites.
Cette situation correspond aux conditions Y (0, t) = Y (−L, t) = 0 ou Y (x, t) represente le deplacementtransverse de la corde. Elle est analogue au cas du tuyau ferme a ses deux extremites, et la fonction Yn(x, t)correspondant a la frequence propre fn est donc (voir relation (1.46)) :
Yn(x, t) = 2An sin(nπx
L
)
sin
(
nπct
L
)
Si on met en mouvement la corde dans un de ces modes propres elle restera dans ce mode, si on meten mouvement la corde de maniere quelconque, son mouvement sera une combinaison lineaire de modespropres du type :
Y (x, t) =∑
n
Yn(x, t) =∑
n
an sin(nπx
L
)
sin
(
nπct
L
)
(1.47)
ou an = 2An represente l’amplitude du mode n.

1.8. ONDES STATIONNAIRES 25
Calculons maintenant l’energie d’une corde vibrante dont le mouvement est donne par la rela-tion (1.47). Cette energie peut se mettre sous la forme :
W =∑
n
Wn
ou Wn est l’energie correspondant au mode n.L’element de corde compris entre x et x+dx peut etre considere, pour le mode n, comme un oscillateur
harmonique de masse dm = µdx, d’amplitude : An(x) = an sin(nπx/L) et de pulsation ωn = nπc/L sonenergie est donc :
dWn =1
2dmω2
nA2n =
1
2µ
(nπc
L
)2a2
n sin2(nπx
L
)
dx
L’energie totale pour le mode n s’obtient en integrant sur la longueur de la corde :
Wn =
∫ L
0dWn =
1
2µ
(nπc
L
)2a2
n
∫ L
0sin2
(nπx
L
)
dx
Soit, en transformant sin2 α en (1 − cos 2α)/2 :
Wn =1
4µ
(nπc
L
)2a2
n
[∫ L
0dx −
∫ L
0cos
(
2nπx
L
)
dx
]
La premiere integrale vaut L et la seconde integrale est nulle, il reste donc :
Wn =µn2π2c2a2
n
4L
Et l’energie totale de la corde sera donnee par :
W =∑
n
Wn =∑
n
µn2π2c2a2n
4L
En remarquant que µc2 = T0, cette energie peut encore s’ecrire :
W =∑
n
Wn =T0π
2
4L
∑
n
n2a2n (1.48)
On remarque que, a amplitude egale, le mode n de pulsation ωn = nπc/L (ou de frequence fn = nc/2L)contient n2 fois plus d’energie que le mode fondamental de frequence f1 = c/2L.
Les cordes vibrantes sont essentiellement utilisees pour produire des sons musicaux lorsqu’elles sontpincees (guitare), frottees (violon) ou frappees (piano). D’apres ce calcul d’energie, on comprend bienque la note principale produite par une corde sera sa note fondamentale (qui coute moins d’energie). Lescordes elles memes ne sont pas capables de mettre directement l’air en mouvement pour produire uneonde sonore d’intensite suffisante, c’est pourquoi elles sont toujours couplees a une caisse de resonancea laquelle elles transmettent leur energie afin que celle-ci soit rayonnee sous forme d’ondes sonores (uneautre solution consiste a transformer leur mouvement en un signal electrique amplifiable a volonte commedans les guitares electriques). Cependant on peut considerer que l’intensite des sons emis est a peu presproportionnelle a l’energie W qui, d’apres (1.48), est elle meme proportionnelle a T0/L. Pour un instru-ment possedant plusieurs cordes de longueurs egales, celles-ci devront donc avoir des tensions voisinespour un bon equilibre d’intensite entre les basses et les aigues. Dans ces conditions, pour obtenir desfrequences fondamentales differentes il faut faire varier la masse lineique µ selon la loi :
f =c
2L=
1
2L
√
T0
µ⇒ µ =
T0
4L
1
f2
Ainsi, la corde de Mi grave (f = 82.5 Hz) d’une guitare, doit avoir une masse lineique environ 16 foisplus elevee que la corde de Mi aigue (f = 330 Hz).
![4. Physique des Ondes - cours-examens.orgcours-examens.org/.../News/D2-4-VO-[4]-Ondes-Intro.pdf · Vibrations et Ondes – V_2016 – Ch 4 : Ondes-Notions générales – JF – p](https://img.pdfslide.fr/doc/110x75/5b99783909d3f26e678c41c3/4-physique-des-ondes-cours-4-ondes-intropdf-vibrations-et-ondes-v2016.jpg)




























