Embed Size (px)
Citation preview
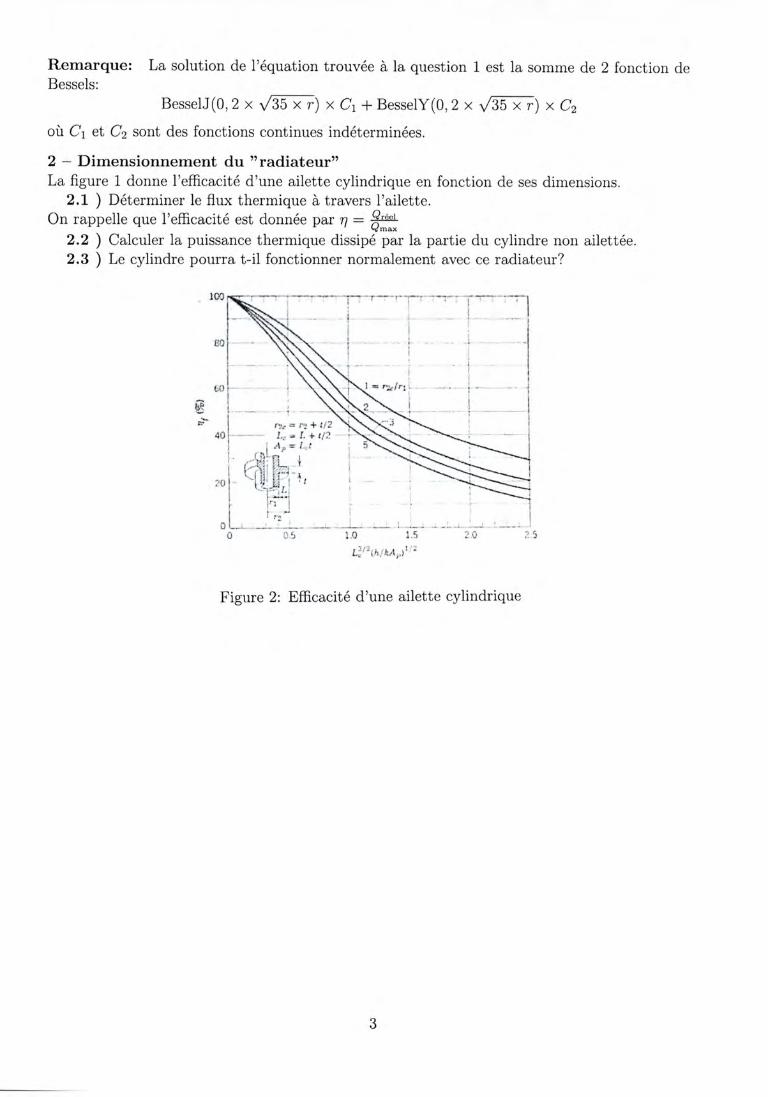
Université Paris-Sud – L3 Physique & Mécanique
Bâtiment 470 – Bureau D211 – 91405 ORSAY CEDEX
http://www.meca.u-psud.fr
ANNALES
LICENCE
PHYSIQUE
&
MECANIQUE
Semestre 6
MATHEMATIQUES
II
Aller sur le site internet de la Licence
Physique & Applications (UE
mutualisée) :
http://hebergement.u-
psud.fr/l3papp/?page_id=39
Toutes les annales sont en ligne.
MECANIQUE
LAGRANGIENNE

Licence L3 de mecanique — Phys M302 Universite Paris Sud 11
Partiel de Mecanique
Octobre 2011
Duree : 3 heures - sans document ni calculatrice.
Les trois parties du probleme sont independantes si l’on prend soin de noter les resultats enoncesdans chacune d’elles pour “passer a la suite”. Dans les equations, les vecteurs sont designes par deslettres en caracteres gras.
1 Question de cours
1.1 Moment d’inertie par rapport a un axe
On considere un cylindre plein, homogene, de hauteur H, de masse volumique ρ, de masse totale M etde rayon R.
Figure 1: (a) Moment d’inertie d’un cylindre plein de rayon R et de hauteur H (homogene).(b) Cylindre roulant sans glisser sur un plan incline d’angle α.
1. Calculer le moment d’inertie IO de ce cylindre par rapport a l’axe Oz (voir figure 1). Le comparerau moment d’inertie d’un disque plat par rapport a un axe perpendiculaire passant par son centre.
2. Donner la formule de Huygens relative au moment d’inertie d’un corps solide entre deux axesparalleles distants de la distance d.
3. En deduire le moment d’inertie IA du cylindre pour un axe de rotation parallele a Oz mais passantpar A (voir figure 1).
1.2 Cylindre roulant sans glisser sur une pente
Le cylindre precedent roule sans glisser sur un plan incline d’angle α.
1. Faire le bilan des forces s’exercant sur le cylindre.
2. En utilisant le theoreme du moment cinetique au point de contact, montrer que l’accelerationangulaire s’ecrit
θ = B sinα
dont on donnera la valeur de la constante B en fonction de g (la constante de gravite), de R et deα. Donner alors l’acceleration en x.
1

2 Le pendule de Foucault
Dans la plupart des problemes ou l’on etudie un systeme mecanique situe dans un laboratoire terrestre,on considere un referentiel lie a la Terre comme galileen, ce qui constitue un excellente approximation.
Il est toutefois des phenomenes inexplicables sous une telle approximation ; parmi eux, tous ceux quiproviennent de la rotation diurne de la Terre sur elle-meme. L’objet du probleme est d’etudier l’un deces phenomenes.
2.1 Prelude
Soient un referentiel galileen R centre en O et R′ un referentiel en mouvement dans R et centre en O′
(voir figure 2). Soit une particule de masse m, situee au point M , se deplacant a la vitesse V dans R.L’acceleration absolue de la particule s’exprime en fonction de l’acceleration relative par la formule :
γ = γ′ + 2ω(t) ∧ (dr′/dt)R′ + (d2OO′/dt2)R + (dω(t)/dt) ∧ r′ + ω(t) ∧ (ω(t) ∧ r′). (2.1)
Figure 2: Definition des referentiels R et R′.
A present, O est le centre de la Terre, Oz l’axe de rotation de la Terre sur elle-meme (de vecteurunitaire ez), de vitesse angulaire ω = ωez avec ω = constante ≈ 2π/(24heures). Le point O′, centre dureferentiel R′, est suppose situe a la surface de la Terre (voir figure 3). On notera g l’acceleration de lapesanteur dans R et g′ sa valeur dans R′.
2.1.1 Fil a plomb
On considere un fil a plomb immobile par rapport a la Terre (masse m situee au point M), suspendu auplafond d’une piece au point A (voir figure 4).
1. Quelle est la valeur de γ′ ?
2. En appliquant deux fois le changement de repere pour la derivee d’un vecteur, montrer que
(d2OO′/dt2)R = ω ∧ (ω ∧OO′) = γO′ . (2.2)
3. Donner l’expression du module γO′ du vecteur γO′ en fonction de ω, OO′ = Rt (rayon de la Terre),et de λ, latitude du point O′ (voir figure 3). Que peut-on dire des valeurs de γO′ a l’equateur etaux poles ?
4. A une latitude autre que celle des poles, montrer que le module du dernier terme de l’equation (2.1)est negligeable devant γO′ .
2
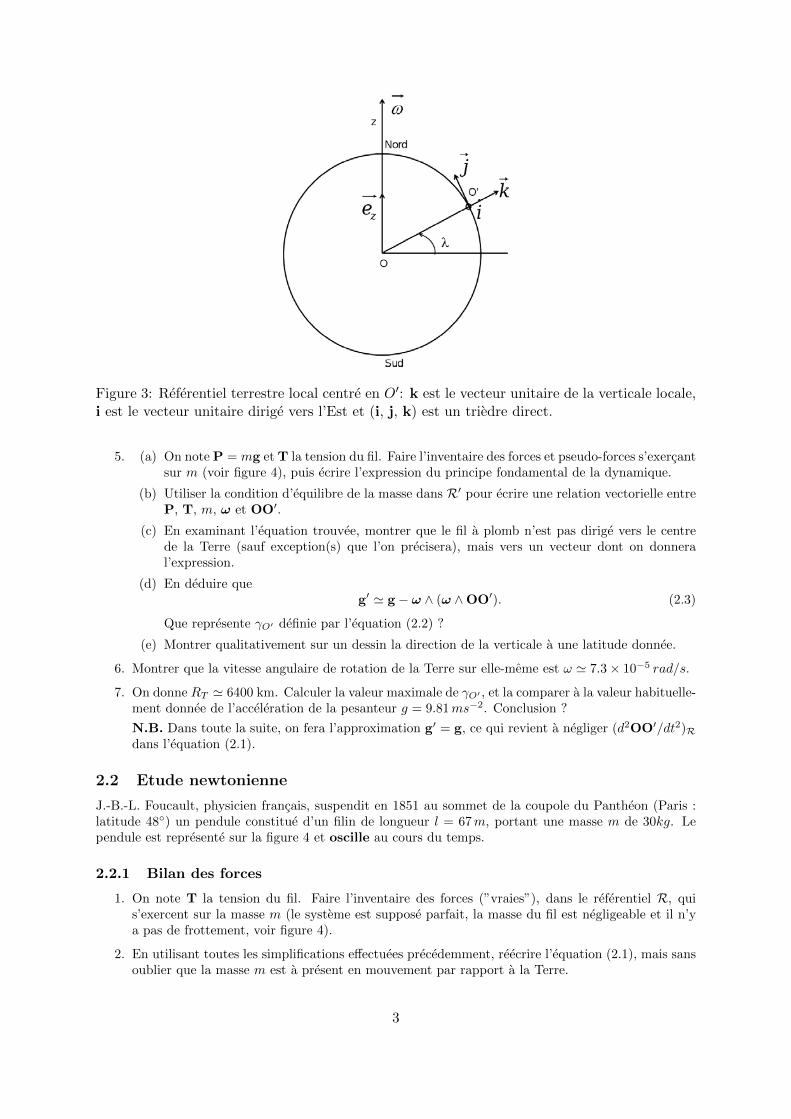
Figure 3: Referentiel terrestre local centre en O′: k est le vecteur unitaire de la verticale locale,i est le vecteur unitaire dirige vers l’Est et (i, j, k) est un triedre direct.
5. (a) On note P = mg et T la tension du fil. Faire l’inventaire des forces et pseudo-forces s’exercantsur m (voir figure 4), puis ecrire l’expression du principe fondamental de la dynamique.
(b) Utiliser la condition d’equilibre de la masse dans R′ pour ecrire une relation vectorielle entreP, T, m, ω et OO′.
(c) En examinant l’equation trouvee, montrer que le fil a plomb n’est pas dirige vers le centrede la Terre (sauf exception(s) que l’on precisera), mais vers un vecteur dont on donneral’expression.
(d) En deduire queg′ ' g − ω ∧ (ω ∧OO′). (2.3)
Que represente γO′ definie par l’equation (2.2) ?
(e) Montrer qualitativement sur un dessin la direction de la verticale a une latitude donnee.
6. Montrer que la vitesse angulaire de rotation de la Terre sur elle-meme est ω ' 7.3× 10−5 rad/s.
7. On donne RT ' 6400 km. Calculer la valeur maximale de γO′ , et la comparer a la valeur habituelle-ment donnee de l’acceleration de la pesanteur g = 9.81ms−2. Conclusion ?
N.B. Dans toute la suite, on fera l’approximation g′ = g, ce qui revient a negliger (d2OO′/dt2)Rdans l’equation (2.1).
2.2 Etude newtonienne
J.-B.-L. Foucault, physicien francais, suspendit en 1851 au sommet de la coupole du Pantheon (Paris :latitude 48) un pendule constitue d’un filin de longueur l = 67m, portant une masse m de 30kg. Lependule est represente sur la figure 4 et oscille au cours du temps.
2.2.1 Bilan des forces
1. On note T la tension du fil. Faire l’inventaire des forces (”vraies”), dans le referentiel R, quis’exercent sur la masse m (le systeme est suppose parfait, la masse du fil est negligeable et il n’ya pas de frottement, voir figure 4).
2. En utilisant toutes les simplifications effectuees precedemment, reecrire l’equation (2.1), mais sansoublier que la masse m est a present en mouvement par rapport a la Terre.
3

Figure 4: Fil a plomb dans le referentiel terrestre local centre en O′.
En deduire l’expression de la force F′ = mγ′ que subit la masse dans le referentiel R′ lie a la Terre,en fonction de g, T, ω et v′ = (dr′/dt)R′ .
Quelle(s) est (sont) la (les) pseudo-force(s) agissant sur la masse m ?
2.2.2 Equations du mouvement
On considere un repere O′x′y′z′ dans R′, defini par les vecteurs unitaires i, j, k, ou k est dirige vers laverticale locale et i vers l’Est (cf. figure 3).
D’autre part, on ne considerera que des mouvements du pendule de faible amplitude autour de saposition d’equilibre stable (ϕ 1). Sous cette approximation, un developpement limite en ϕ que l’on nedemande pas de faire montre que le mouvement de M s’effectue essentiellement dans le plan horizontalx′O′y′, ce qui permettra dans la suite d’en negliger les mouvements verticaux.
1. Faire un developpement limite des composantes dans R′ de la tension T en fonction de x′, y′, z′
et l, en remarquant que T est colineaire au vecteur−−→AM .
En remarquant que T = ||T|| ' mg, exprimer ces composantes sous la forme Tx′ ≈ βx′T, Ty′ ≈βy′T et Tz′ en fonction de m, g, x′, y′ et l. Que vaut la constante β ?
2. Puisque l’on neglige les mouvements verticaux, noter que
v′ ' x′i + y′j
z′ ' 0
On remarquera egalement que ω a une composante nulle.
Calculer alors les composantes suivant i et j de ω ∧ v′ en fonction de ω, x′, y′ et de la latitude λ.
3. En rassemblant les resultats precedents, montrer que les equations du mouvement de M sont
x′ + α2x′ = 2ω sin(λ)y′ (2.4)
y′ + α2y′ = −2ω sin(λ)x′, (2.5)
ou l’on a precisera la valeur de α2 en fonction de g et l.
4. Montrer que, si l’on pose Z = x′ + iy′, elles peuvent etre mises sous la forme :
Z + α2Z + 2iω3Z = 0 (2.6)
ou l’on precisera l’expression de ω3.
4

2.3 Resolution des equations
L’equation (2.6) est une equation differentielle lineaire complexe a coefficients constants. La faconhabituelle de la resoudre est de chercher une solution sous la forme :
Z = exp(iΩt) (2.7)
1. Remplacer Z = exp(iΩt) dans l’equation (2.6) et donner les solutions en Ω.
2. Montrer que ω23 α2 et en deduire que la solution generale de l’equation (2.6) est :
Z(t) = e−iω3t(c1eiαt + c2e
−iαt). (2.8)
3. On choisit les conditions initiales suivantes x′(0) = x′0, y′(0) = 0, x′(0) = y′(0) = 0. Interpreter
ces conditions initiales.
4. Prendre ces conditions et, en faisant l’approximation ω23 α2, montrer que l’expression de Z(t)
devient :Z(t) = x′0e
−iω3t cosαt. (2.9)
5. Si l’on negligeait le terme en ω3, que deviendrait Z(t) ? Interpretation ?
6. En realite, si l’on observe le pendule pesant sur un intervalle de temps long devant la periodeT0 = 2π
√l/g, l’effet de ω3 n’est plus negligeable.
Developper le terme Y (t) = x′0e−iω3t en cosω3t et sinω3t, et interpreter le mouvement de Y (t)
dans le plan complexe.
En particulier, que represente T = 2π/ω3 ?
7. Donner l’expression de T en jours, en fonction de λ.
8. Que vaut T au pole Nord ? a l’equateur ? a Paris (on donne 1/ sin(48) ≈ 1, 35) ?
9. Esquisser deux figures representant le mouvement de la masse a l’interieur du cercle horizontal decentre O′ et de rayon x′0, dans l’hemisphere Nord et dans l’hemisphere Sud.
5
Licence L3 de Mecanique Physique Universite Paris Sud 11
— Phys M302 —
EXAMEN DE SECONDE SESSION DEMECANIQUE LAGRANGIENNE
21 juin 2012
Duree : 3 heures
Les calculatrices et documents ne sont pas autorises.
1 Questions de cours
1. Donner la formule du changement de point pour un solide caracterise par un vecteur
rotation instantane−→Ω par rapport au referentiel R.
2. Rappeler, sans demonstration, la formule reliant la vitesse ~v = d−−→OM/dt d’un point dans le
referentiel R galileen de centre O du laboratoire a la vitesse relative ~v′ = d−−−→OM ′/dt dans
un referentiel R′ de centre O en mouvement par rapport a R avec le (pseudo-)vecteurinstantane de rotation ~Ω.
3. Faire de meme pour l’acceleration ~a dans R et ~a′ dans R′.
4. Definir le Lagrangien d’un systeme holonome a N degres de liberte soumis a des forcesderivant d’un potentiel independant des vitesses generalisees.
5. Donner la forme des equations de Lagrange pour chaque coordonnee generalisee.
6. Definir le moment conjugue d’une coordonnee generalisee. Qu’appelle-t-on variable cy-clique ? Quelle propriete peut-on en deduire ?
7. Donner l’expression generale de la matrice d’inertie d’un solide par rapport a son centrede masse G.
2 Pendule tournant
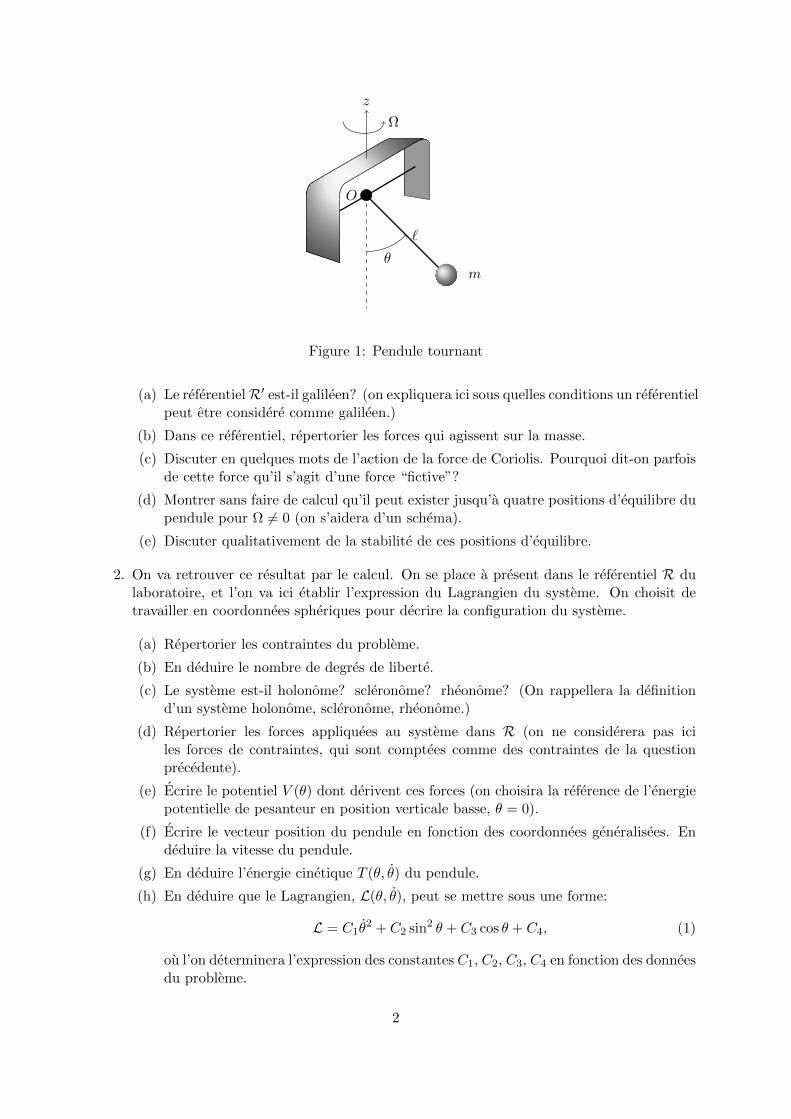
On considere un pendule de longueur ` dont la masse, m, est concentree dans une boule,consideree comme ponctuelle, situee a son extremite basse. Par son extremite haute, le penduleest solidaire d’un cadre qui tourne autour de son diametre vertical (axe Oz = ∆) avec unevitesse angulaire constante Ω. On repere la position de la masse m par l’angle θ qu’elle fait avecl’axe vertical (voir Figure 1).
1. Discussion qualitative sur le systeme. On se place dans le referentiel R′ tournant avec lecadre.
1
O
`
mθ
z
Ω
Figure 1: Pendule tournant
(a) Le referentielR′ est-il galileen? (on expliquera ici sous quelles conditions un referentielpeut etre considere comme galileen.)
(b) Dans ce referentiel, repertorier les forces qui agissent sur la masse.
(c) Discuter en quelques mots de l’action de la force de Coriolis. Pourquoi dit-on parfoisde cette force qu’il s’agit d’une force “fictive”?
(d) Montrer sans faire de calcul qu’il peut exister jusqu’a quatre positions d’equilibre dupendule pour Ω 6= 0 (on s’aidera d’un schema).
(e) Discuter qualitativement de la stabilite de ces positions d’equilibre.
2. On va retrouver ce resultat par le calcul. On se place a present dans le referentiel R dulaboratoire, et l’on va ici etablir l’expression du Lagrangien du systeme. On choisit detravailler en coordonnees spheriques pour decrire la configuration du systeme.
(a) Repertorier les contraintes du probleme.
(b) En deduire le nombre de degres de liberte.
(c) Le systeme est-il holonome? scleronome? rheonome? (On rappellera la definitiond’un systeme holonome, scleronome, rheonome.)
(d) Repertorier les forces appliquees au systeme dans R (on ne considerera pas iciles forces de contraintes, qui sont comptees comme des contraintes de la questionprecedente).
(e) Ecrire le potentiel V (θ) dont derivent ces forces (on choisira la reference de l’energiepotentielle de pesanteur en position verticale basse, θ = 0).
(f) Ecrire le vecteur position du pendule en fonction des coordonnees generalisees. Endeduire la vitesse du pendule.
(g) En deduire l’energie cinetique T (θ, θ) du pendule.
(h) En deduire que le Lagrangien, L(θ, θ), peut se mettre sous une forme:
L = C1θ2 + C2 sin2 θ + C3 cos θ + C4, (1)
ou l’on determinera l’expression des constantes C1, C2, C3, C4 en fonction des donneesdu probleme.
2

(i) Rappeler l’expression des equations d’Euler-Lagrange.
(j) En deduire que l’equation du mouvement du pendule peut se mettre sous la forme:
θ = sin θ (α+ β cos θ) (2)
ou l’on precisera la valeur des constantes α et β en fonction des donnees du probleme.
3. Etude energetique. On notera ω2c = g/`.
(a) En partant de l’expression (1) du Lagrangien, montrer que l’on peut faire apparaıtreun potentiel effectif Veff(θ) en reecrivant le Lagrangien sous la forme:
L = Teff(θ)− Veff(θ),
ou Teff(θ) n’est fonction que de θ.
(b) Reecrire Veff sous la forme Veff = V0 + f(θ) en faisant explicitement apparaıtre lerapport Ω2/ω2
c .
(c) Representer sur un schema, avec des couleurs differentes, pour θ ∈ [−ππ], l’allure deVeff lorsque Ω < ωc, Ω = ωc, Ω > ωc (on indiquera sur le schema le code de couleurchoisi).
(d) En deduire le nombre de positions d’equilibre du pendule en fonction de Ω, leursvaleurs en fonction des donnees du probleme, et on discutera de leur stabilite.
4. Dans cette derniere partie, on va etudier la stabilite des positions d’equilibre en observantle comportement d’une perturbation ε 1 sur la position d’equilibre θeq. On part doncd’une solution de la forme θ(t) = θeq + ε(t). Si la perturbation ε est amplifiee (expo-nentiellement), alors la solution θeq sera instable (la perturbation ne cesse de croıtre, lesysteme s’eloigne exponentiellement vite de sa position d’equilibre, qui est donc instable).Inversement, si la perturbation est exponentiellement amortie au cours du temps, alors laposition d’equilibre est stable (le systeme revient vers sa position d’equilibre meme si onl’en ecarte legerement).
(a) Recrire l’equation du mouvement pour θ(t) = θeq+ε(t) en remarquant que la solutiona l’equilibre est egalement stationnaire (θeq verifie l’equation avec θeq = θeq = 0).On negligera dans cette equation les termes d’ordre ε2 et superieurs.
(b) En remplacant maintenant θeq par chacune des valeurs trouvees precedemment,etablir les equations dynamiques verifiees par ε(t) dans chacun de ces cas. On doitaboutir a des equations de la forme:
ε = λε,
ou α est une constante a determiner, qui pourra etre positive ou negative (ce quiconditionnera le comportement de la perturbation).
(c) Resoudre ces equations pour chacune des positions d’equilibre, et conclure sur cellesqui sont toujours stables (limt→∞ ε(t) = 0 ∀Ω), celles qui sont toujours instables(limt→∞ ε(t) =∞ ∀Ω), et celles qui changent de stabilite lorsque Ω varie.
(d) Tracer le diagramme de bifurcation du systeme dans le plan (Ω, θeq). On representeraen trait plein les positions d’equilibre stables, en trait hachure les positions d’equilibreinstables.
(e) Le cadre est mis en rotation alors que le pendule se trouve immobile en positionverticale basse. Que se passe-t-il lorsque Ω devient legerement superieur a ωc?
3

Licence L3 de Mecanique Physique Universite Paris Sud
— Phys M302 —
PARTIEL DE MECANIQUE LAGRANGIENNE
30 octobre 2012
Duree : 3 heures
Les calculatrices et documents ne sont pas autorises.
1 A propos du systeme Terre-Soleil
On considere le systeme Terre-Soleil et on considere le Soleil immobile dans le referentiel inertielchoisi pour decrire le mouvement de la Terre. On rappelle l’expression de la force d’attractiongravitationnelle:
~F = −G mMr2
~er,
ou m est la masse de la Terre, M la masse du Soleil, r la distance Terre-Soleil, G la constantede gravitation universelle et ~er le vecteur unitaire entre le centre de masse du Soleil et celui dela Terre. Dans tout le probleme, on considerera la Terre comme un point materiel. On donne:
G 6.7× 10−11 S.I.M 2.0× 1030 kgm 6.0× 1024 kg
1. Quelle est la dimension de la constante de gravitation universelle, G, dans le systemed’unites internationales (S.I.)?
2. La force exercee par la Terre sur le Soleil est-elle plus forte, plus faible ou de meme intensiteque la force exercee par le Soleil sur la Terre?
3. Calculer le rapport des accelerations relatives de la Terre et du Soleil, aT /aS . Quelleconclusion peut-on en tirer?
4. Montrer que le moment cinetique, ~J , de la Terre, en mouvement autour du Soleil, seconserve au cours du temps.
5. En deduire que le mouvement se fait necessairement dans un plan, que l’on definira.Comment appelle-t-on ce plan?
6. Donner l’expression du moment cinetique de la Terre en coordonnees polaires.
7. Montrer que si la distance Terre-Soleil varie, alors la vitesse angulaire, ω, a laquelle laTerre tourne autour du Soleil, varie aussi.
8. Quelle est l’aire, dS, couverte par l’orbite terrestre durant un temps dt?
1

r(t)
r(t+ dt)
Soleil
Terre
dS(t)
9. Montrer que les aires couvertes durant des temps egaux sont egales en tout point del’orbite (seconde loi de Kepler).
10. Pourquoi ne peut-on pas ecrire~J = mrv ~ez,
ou v est le module de la vitesse de la Terre ?
11. L’aphelie et le perihelie sont les points de l’orbite ou la Terre est la plus eloignee et la plusproche du soleil, respectivement. Montrer qu’alors, on a bien
~J = mrv ~ez.
12. Peut-on dire de la vitesse de la Terre, a l’aphelie et au perihelie, qu’elle augmente, diminue,ou reste constante quand elle s’ecarte de ces deux points particuliers?
2 Poids apparent du a la rotation de la Terre
1. Questions de cours
(a) Rappeler la formule de changement de referentiels pour la vitesse entre un referentiel(R) galileen centre en O et un referentiel (R′) en mouvement par rapport a (R) etcentre en O′.
(b) Demontrer la formule de changement de referentiels pour l’acceleration:
~a|R =d2−−−→O′M
dt2
∣∣∣∣∣R′
+ 2~Ω ∧ d−−−→O′M
dt
∣∣∣∣∣R′
+d2−−→OO′
dt2
∣∣∣∣∣R
+d~Ω
dt∧−−−→O′M + ~Ω ∧ (~Ω ∧
−−−→O′M),
ou ~Ω(t) est le vecteur instantane de rotation de (R′) par rapport a (R).
(c) Dans l’expression precedente, identifier les accelerations i) relative, ii) d’entraınement,iii) de Coriolis et iv) centripete.
(d) Enoncer le principe fondamental de la dynamique dans (R′).
2. On note R le rayon de la Terre et Ω la vitesse de rotation de la Terre sur son axe propre.
2

O
P
x
y
z
N
S
R
λ
φ
(a) Que vaut Ω?
(b) Montrer que l’acceleration de la pesanteur, sans prise en compte de la rotation de laTerre, vaut:
~g = −GMT
R2~er,
avec ~er le vecteur unitaire radial en coordonnees spheriques et MT la masse de laTerre.
(c) On rappelle que G = 6.7× 10−11 S.I., R = 6 400 km et MT = 6.0× 1024 kg. Quel estl’ordre de grandeur de g?
(d) Montrer que l’acceleration de la pesanteur effective, geff , en tenant compte de larotation de la Terre, en un lieu de latitude λ, peut se mettre sous la forme:
geff
g=
√1− 2α cos2 λ
(1− α
2
),
ou λ est la latitude du lieu. Quelle est l’expression de α en fonction des variables duprobleme?
(e) Quelle est la dimension de α? Montrer que α 1.
(f) Que vaut geffg au pole nord?
(g) Que vaut geffg a Orsay? La latitude d’Orsay est environ λ = 45.
(h) Quelle devrait etre la periode de rotation de la Terre pour que les Equatoriens soientejectes dans l’espace ?
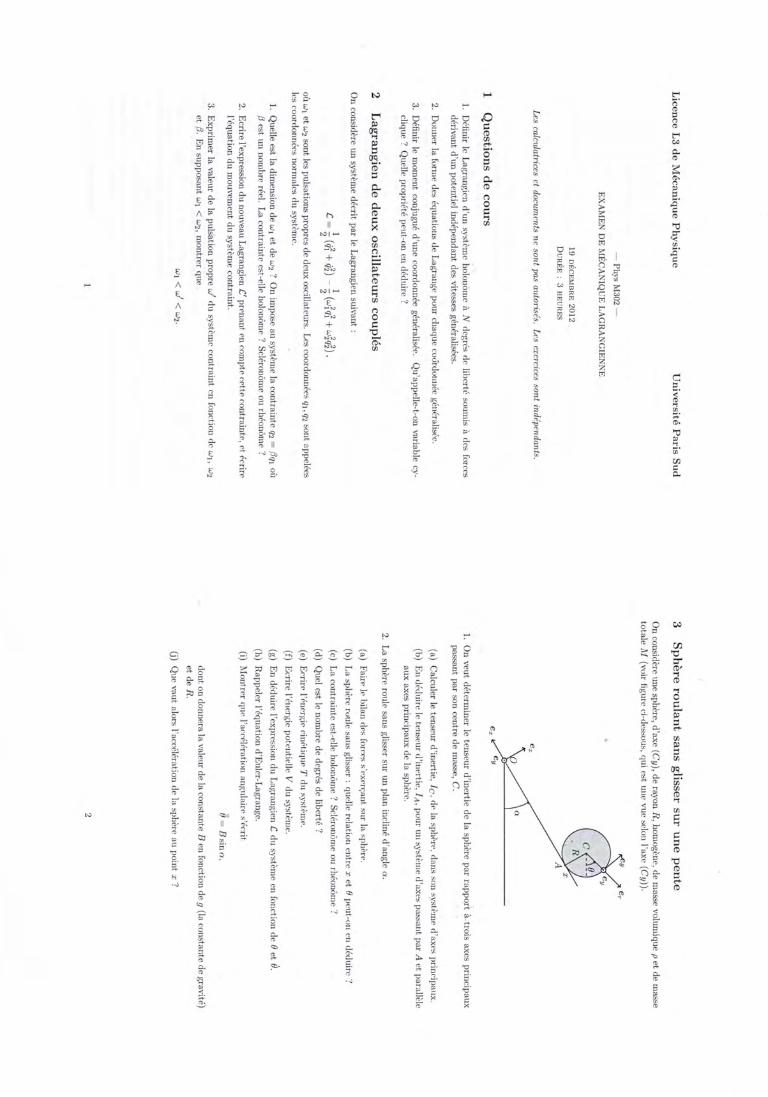
3 Bille roulant sur un cylindre
On pose une bille en haut d’un cylindre horizontal. Elle est evidemment en equilibre instable,et va tomber. Nous allons chercher pour quel angle elle quitte le cylindre. On admet que labille, de masse m, peut etre consideree comme ponctuelle, et qu’elle glisse sans frottement surle cylindre de rayon R. Sa position est reperee par l’angle θ qu’elle fait avec la verticale. Labille est poussee de sa position initiale θ = 0 avec une vitesse v0 infinitesimale.
3

R
θ
er
eθ
1. Rappeler l’expression de la vitesse de la bille en coordonnees polaires.
2. Faire le bilan des forces qui agissent sur la bille.
3. Appliquer le principe fondamental de la dynamique a la bille. Projeter l’equation sur lesaxes ~er et ~eθ, respectivement.
4. En integrant l’equation projetee sur ~eθ, montrer que la vitesse angulaire, θ, peut s’ecrire,en fonction de θ, sous la forme:
θ2 = α(1− cos θ).
Exprimer la constante α en fonction des donnees du probleme.
5. En reportant dans l’equation projetee selon ~er, montrer que la reaction du support peuts’ecrire, en fonction de θ:
T = β(cos θ − 2/3).
Exprimer β en fonction des donnees du probleme.
6. A quel angle (approximatif), θ`, la bille quitte-t-elle le cylindre ?
7. Avec quelle vitesse, v`, la bille quitte-t-elle le cylindre ?
8. Que devient alors sa trajectoire ?
9. Calculer v` pour R = 2.4 m et g ' 10 m·s−2.
θ 0 π24
π12
π8
π6
5π24
π4
7π24
π3
3π8
5π12
11π24
π2
cos θ 1.00 0.991 0.966 0.924 0.866 0.793 0.707 0.609 0.500 0.383 0.259 0.130 0.00
4

Licence L3 de Mecanique Physique Universite Paris Sud 11
— Phys M302 —
PARTIEL DE MECANIQUE LAGRANGIENNE
31 octobre 2013
Duree : 3 heures
Les calculatrices et documents ne sont pas autorises.
1 Sur un manege
Un homme de masse m se trouve sur la paroi(glissante) d’un manege en rotation a vitesseangulaire constante ~Ω. La paroi en rotationavec le manege fait un angle θ avec la ver-ticale (cf figure ci-contre). Le diametre Ddu manege, au niveau des pieds du passager,est suffisamment grand pour que l’on puissenegliger les dimensions de l’homme par rap-port a celles du manege. On suppose quele referentiel terrestre (R) est galileen et onnotera (R′) le referentiel du manege.
z
Ω
θ
D
Pour les applications numeriques, on prendra m = 80 kg, θ = 10 et D = 20 m. On rappellele developpement limite des fonctions trigonometriques (les angles sont exprimes en radian):
cos θ = 1− θ2/2 +O(θ4),sin θ = θ +O(θ3).tan θ = θ +O(θ3).
1. Questions de cours :
(a) Rappeler la loi de transformation des vitesses lorsqu’on passe d’un referentiel (R)galileen centre en O a un referentiel (R′) en mouvement (quelconque) par rapport a(R) et centre en O′.
(b) On donne la formule generale de changement de referentiels pour l’acceleration:
~a|R =d2−−−→O′M
dt2
∣∣∣∣∣R′
+ 2~Ω ∧ d−−−→O′M
dt
∣∣∣∣∣R′
+d2−−→OO′
dt2
∣∣∣∣∣R
+d~Ω
dt∧−−−→O′M + ~Ω ∧ (~Ω ∧
−−−→O′M),
ou ~Ω(t) est le vecteur instantane de rotation de (R′) par rapport a (R). Identifierles differentes accelerations: relative, d’entraınement, de Coriolis et centripete.
1
(c) Rappeler le principe fondamental de la dynamique dans (R′).
2. En l’absence de frottement, comment est orientee la reaction de la paroi en presence del’homme?
3. Indiquer graphiquement les forces exterieures et inertielles qui s’appliquent a l’hommedans le referentiel (R′) du manege. On ne considerera pas la force de Coriolis.
4. La rotation du manege est telle que l’homme se tient immobile sans effort sur la paroidu manege. Il ne tombe pas! Comment s’ecrit, dans (R′), le principe fondamental de ladynamique?
5. Pour quelle vitesse de rotation Ω0 particuliere cela se produit-il?
6. Calculer Ω0 avec les valeurs du probleme.
7. Quel est alors le poids apparent Papp de l’homme?
8. Calculer Papp.
9. Alors que le manege tourne avec la vitesse Ω0, l’homme laisse par megarde tomber unepiece de monnaie. Decrivez le mouvement de la piece vu par un observateur situe al’exterieur du manege, immobile par rapport a la terre (les frottements de l’air sontnegliges).
10. Decrire qualitativement le mouvement de la piece vu par l’homme. Indiquer sur un schemales forces reelles et inertielles qui s’exercent sur la piece pendant sa chute.
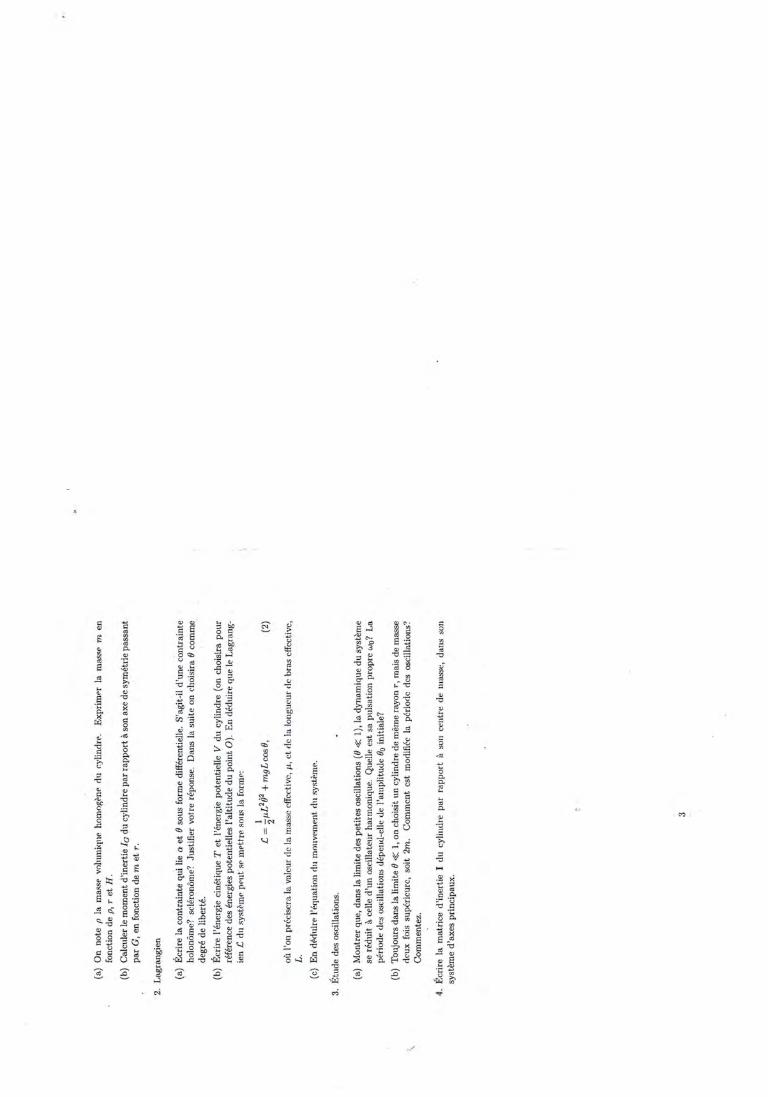
2 L’effet patineur
Un patineur joue de ses bras quand il tourne sur lui meme, en l’air ou sur la glace. Ces effets demanche n’ont pas qu’une finalite artistique. Le patineur applique en fait un principe physiquequi lui permet, d’un mouvement de bras, d’augmenter considerablement sa vitesse de rotationet eventuellement sa note, s’il ne chute pas. Pour se transformer en toupie humaine, le secretdu patineur ne se trouve pas uniquement dans l’action de ses patins. Le patineur ramene lesbras sur son torse au debut de sa rotation. Il les ecarte a nouveau pour freiner son mouvement.
m d
z
Ω
O
d m
Nous allons chercher a comprendre lemecanisme par lequel le patineur augmentesa vitesse angulaire en resserrant les braspres du corps. Nous considerons pour celale systeme modele constitue de deux massesponctuelles m, liees en O par deux bras tele-scopiques de longueur variable d a un cylin-dre d’axe (∆) ≡ (Oz), comme le montre lafigure ci-contre. On neglige la masse du cylin-dre central et des bras devant m.
1. Questions de cours :
2

(a) Rappeler l’expression du moment cinetique d’un point materiel en mouvement derotation par rapport a un axe ∆.
(b) Comment s’ecrit le moment cinetique d’un corps forme de plusieurs points materiels?
(c) Qu’appelle-t-on moment d’inertie d’un corps?
2. Le systeme tourne initialement a vitesse angulaire Ω0 autour de l’axe ∆, les deux massesetant a une distance initiale d0 du cylindre. Calculer le moment cinetique ~J∆0 du systemerepresente sur la figure ci-dessus par rapport a l’axe ∆.
3. Un petit moteur deplace (horizontalement) les bras, amenant les masses a une distancefinale df < d0.
(a) Quel est le nouveau moment cinetique ~J∆f?
(b) Le moment cinetique est-il conserve dans l’operation? Pourquoi?
(c) Exprimer la nouvelle vitesse angulaire, Ωf , en fonction de Ω0, d0 et df .
4. On s’interesse aux variations d’energie cinetique du systeme lors de l’operation.
(a) Que vaut l’energie cinetique du systeme dans le premiere configuration (longueur desbras d0)?
(b) Que vaut l’energie cinetique dans la configuration finale (longueur des bras df )?
(c) L’energie cinetique a-t-elle ete conservee ?
(d) Expliquer pourquoi.
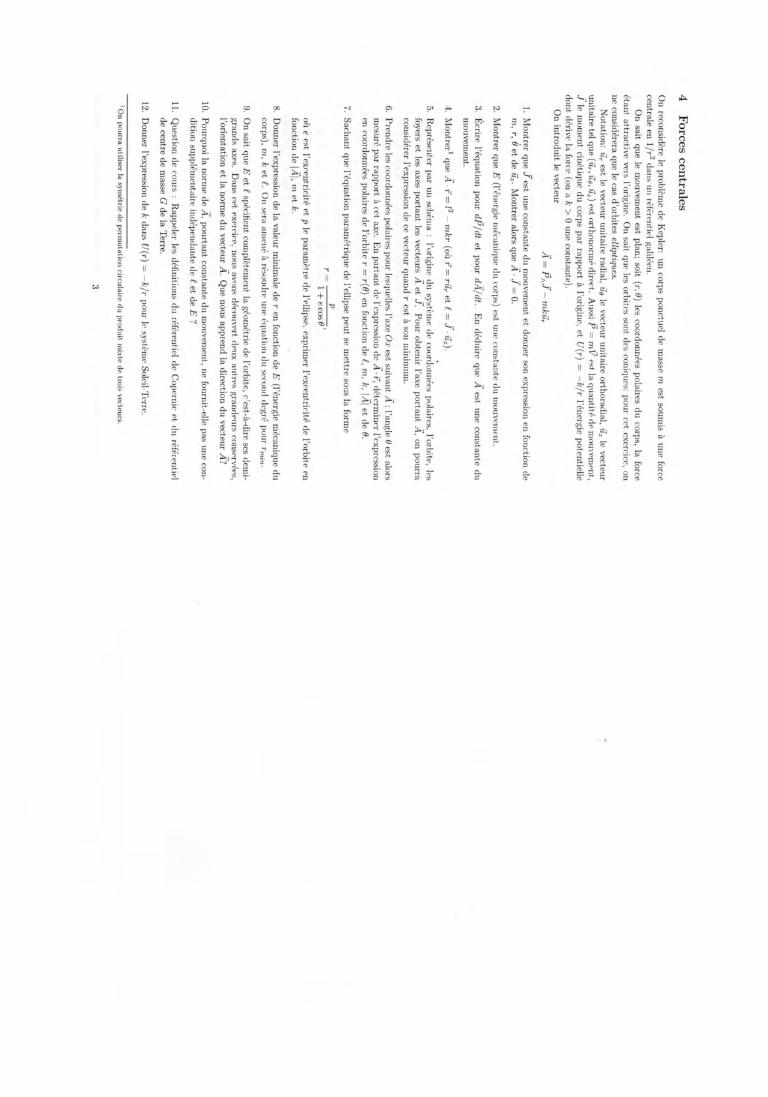
3 Systeme masse-ressort
Pour la mesure de la constante de pesanteur, g, onutilise un ressort a spires jointives de raideur k sus-pendu verticalement par son extremite A. La longueurdu ressort au repos est `0. A l’autre extremite B, onaccroche une masse quasi ponctuelle m. Le ressorts’allonge de la quantite h telle que BO = h. Lalongueur du ressort est alors AO = `. On negligera lamasse du ressort.
On donne k = 30 N ·m−1, `0 = 35 cm.
A A
B
O
`0
m
h
x
~g
1. Le ressort et la masse sont a l’equilibre statique. Comment s’exprime dans ce cas g enfonction de h?
2. Calculer g lorsque m = 200 g et h = 65.4 mm.
3. A partir de la position d’equilibre O prise comme origine, on ecarte la masse m d’unequantite x et on la lache sans vitesse initiale au temps t = 0.
(a) Ecrire l’equation du mouvement de la masse m en lui appliquant le principe fon-damental de la dynamique. On tiendra compte pour cette question de la conditiond’equilibre etablie a la premiere question.
3

(b) En supposant le mouvement harmonique de la forme
x(t) = x0 cosω0t, (1)
donner ω20 en fonction des parametres du probleme. Que representent x0 et ω0?
(c) Exprimer g en fonction de h et ω20 dans le cas ou la masse oscille.
(d) Pour m = 0, 200 kg, on compte pres de 117 allers-retours par minute. En deduire g.
(e) On choisit le point B comme origine des energies potentielles (VB = 0). Montrer queV peut se mettre sous la forme
V =1
2kx2 + V0,
ou V0 est un potentiel constant ne dependant pas de x.
(f) Justifier pourquoi le systeme est conservatif. En deduire que T + V reste constantau cours du mouvement. ou T est l’energie cinetique et V l’energie potentielle. Onposera dans la suite
V ′ = V − V0.
(g) Determiner le maximum de T . Que vaut alors V ′?
(h) Determiner le maximum de V ′. Que vaut alors T?
Annexe
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
x
√x
4
Licence L3 de Mecanique Physique Universite Paris Sud 11
— Phys M302 —
EXAMEN DE MECANIQUE LAGRANGIENNE
Lundi 16 decembre 2013
Duree : 3 heures
Les calculatrices et documents ne sont pas autorises.
1 Questions de cours
1. Rappeler le principe fondamental de la dynamique dans un referentiel galileen et dans unreferentiel non galileen.
2. Rappeler le theoreme du moment cinetique pour un point materiel.
3. Forces centrales : definir ce qu’est une force centrale. Dans le probleme a 2 corps,demontrer que le mouvement du point fictif est plan. Sans demonstration, rappeler quellessont les orbites possibles pour le point fictif, dans le cas d’une force attractive et d’uneforce repulsive.
4. Moments d’inertie
(a) Rappeler la definition du moment d’inertie d’un corps par rapport a un axe : quellessont sa signification physique et sa dimension ?
(b) Calculer le moment d’inertie d’un disque troue (de masse surfacique homogene) parrapport a l’axe Oz.
z
O R1R2
zR1
R2
Vue en perspective (a gauche) et vue de dessus (a droite) du disque troue.
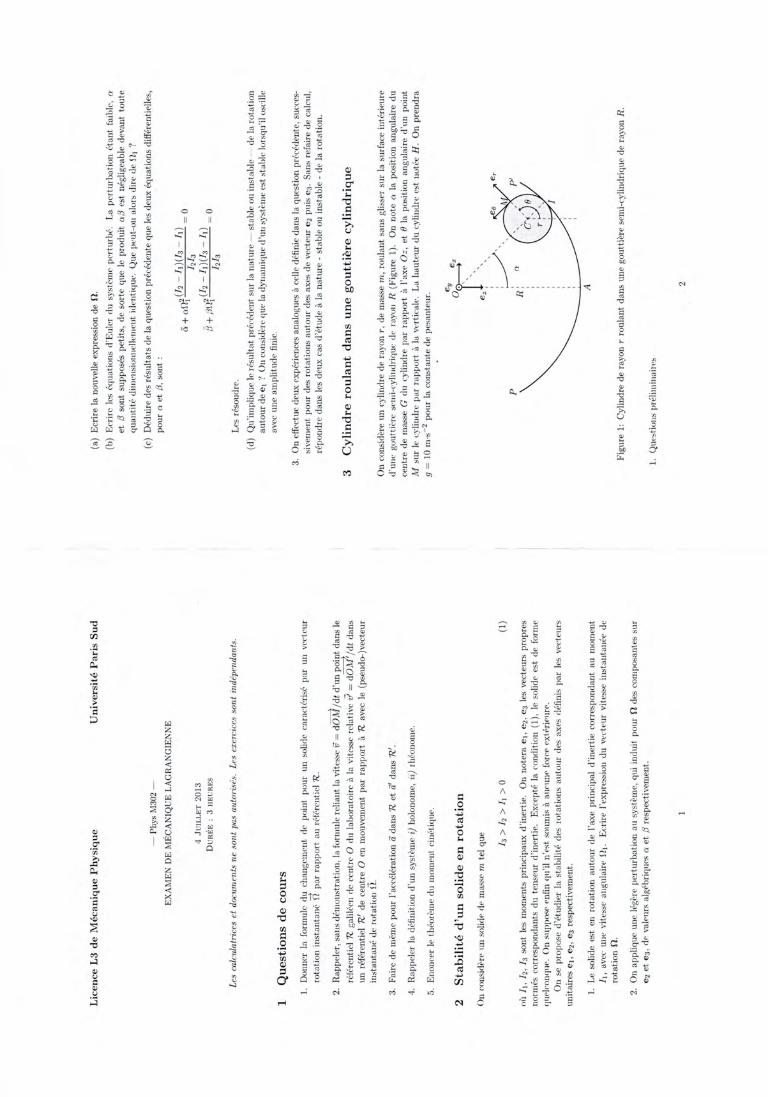
2 L’OVNI tournant
On s’interesse a la mise en rotation rapide d’un OVNI dans l’espace. Cet objet volant estconstitue de deux parties : un corps central entoure de deux satellites. Le corps central estassimilable a une tige de longueur L, de masse M et d’epaisseur negligeable. Les deux satellites
1

(consideres comme ponctuels) sont chacun de masse m, et sont maintenus a une distance ρ pardeux supports de masse negligeable, fixes rigidement a mi-hauteur du corps central.
m
x3
x2
x1
ρ
O
ρ m
On note O le centre de masse de ce systeme, et (x1, x2, x3) le repere lie au solide. x1 estl’axe de symetrie du corps central, x2 l’axe des satellites et x3 l’axe orthogonal au plan (x1, x2).On rappelle les equations d’Euler dans le cas d’une rotation libre :
I1Ω1 − (I2 − I3)Ω2Ω3 = 0
I2Ω2 − (I3 − I1)Ω3Ω1 = 0
I3Ω3 − (I1 − I2)Ω1Ω2 = 0
ou le vecteur instantane de rotation ~Ω = Ω1~e1 + Ω2~e2 + Ω3~e3 est exprime dans le repere lie ausolide, les ~ei etant les vecteurs unitaires dans les trois directions du repere.
1. Calculer la matrice d’inertie IO de l’OVNI par rapport a O dans le repere (x1, x2, x3). Ondetaillera le calcul de chacune des composantes. Montrer que l’ecartement ρ des satellitespermet de distinguer deux configurations selon l’ordre des moments d’inertie principaux :
A : I1 < I2 < I3 pour ρ < ρcB : I2 < I1 < I3 pour ρ > ρc
ou ρc est un ecartement seuil que l’on determinera en fonction de L, m et M . Dans lasuite, on exprimera les moments d’inertie en fonction de m, ρ et ρc.
2. On s’interesse dans un premier temps a la stabilite de la rotation autour de l’axe x1,dans chacune des configurations A et B. Pour cela on considere le vecteur instantane derotation sous la forme
~Ω = Ω0~e1 + ~ω(t),
ou Ω0 est constante et telle que la perturbation ~ω(t) = ω1(t)~e1 + ω2(t)~e2 + ω3(t)~e3 soitd’amplitude tres petite devant Ω0.
(a) Montrer que, au premier ordre en ω, les equations d’Euler conduisent a ω1 =cste,et que les composantes selon x2 et x3 de la perturbation satisfont les equationsdifferentielles :
ω2 +Kω2 = 0ω3 +Kω3 = 0
ou K est une constante que l’on exprimera en fonction de Ω0, ρ et ρc.
2

(b) Integrer ces equations differentielles en distinguant les configurations A et B, etdecrire la trajectoire du vecteur instantane de rotation dans le repere du solide.Preciser la vitesse angulaire de precession Ωp dans le cas de la trajectoire stable.Quelle situation reconnaıt-on pour ρ ρc ? Que vaut alors Ωp ?
(c) Que pensez-vous de la stabilite de la rotation si l’objet disposait de 4 satellites plutotque de 2, disposes symetriquement selon x2 et x3 ?
3. Afin de mettre l’OVNI en rotation rapide a partir d’une faible rotation initiale ~Ωi =Ωi~e1, on peut agir sur l’ecartement des satellites au moyen d’un petit moteur interne, demasse negligeable et place en O. On considere un deplacement amenant les satellites d’unedistance ρi = ρc a ρf = ρc/2. On suppose que ce deplacement s’effectue sans frottement.
(a) Que vaut le moment cinetique du systeme?
(b) Montrer que le moment cinetique se conserve au cours du mouvement.
(c) En deduire la relation Ω = α/ρ2, ou α s’exprime en fonction de ρi et Ωi.
(d) Calculer la vitesse angulaire finale Ωf en fonction de la vitesse angulaire initiale Ωi.
(e) On se place dans le referentiel non galileen lie au solide en rotation. On rappellel’expression des accelerations d’entraınement et de Coriolis :
~γe =d~Ω
dt∧~ρ+ ~Ω∧(~Ω∧~ρ), ~γc = 2~Ω∧
d~ρ
dt.
Calculer le travail des forces d’inertie.
(f) En deduire le travail minimum que doit fournir le moteur pour deplacer les satellites.
(g) On se place maintenant dans le referentiel fixe. Verifier que l’accroissement d’energiecinetique de rotation ∆T = Tf − Ti lors du passage de ρi a ρf correspond bien autravail minimum que doit fournir le moteur.
3 Mouvement bidimensionnel d’une perle
x
y
2a~g
Une perle de masse m glisse sans frottement sur un fil ayant la forme d’une cycloıded’equations :
x = a(θ − sin θ), y = a(1 + cos θ)
ou 0 ≤ θ ≤ 2π.
1. Les coordonnees sont x et y. Quelles sont les contraintes ? Sont-elles holonomes ou non ?Scleronomes ou rheonomes ? Combien de degres de liberte compte le systeme ?
2. Determiner l’energie cinetique T du systeme. Exprimer T en fonction de θ et θ.
3

3. Determiner l’energie potentielle V du systeme. Exprimer V en fonction de θ.
4. Ecrire le Lagrangien.
5. En deduire l’equation du mouvement.
6. Montrer qu’on peut ecrire l’equation du mouvement precedente sous la forme
d2u
dt2+
g
4au = 0
ou u = cos(θ/2) et g la constante de pesanteur. On rappelle que
sin θ = 2 sin(θ/2) cos(θ/2)cos θ = cos2(θ/2)− sin2(θ/2)
= 1− 2 sin2(θ/2)
7. En deduire la solution sous la forme
u = cos(θ/2) = c1 cos(Ω0t) + c2 sin(Ω0t).
Que vaut la periode d’oscillation de la perle en fonction de g et a ? Comment sont fixeesles constantes c1 et c2?
8. Si le systeme etait un pendule simple (avec des petites oscillations), quelle serait salongueur ?
9. A votre avis, pourquoi est-il preferable de construire une horloge dont le balancier decritun mouvement cycloıdal plutot qu’un arc de cercle, comme dans le cas du pendule pesant?
4
THERMIQUE
!! UE couplée avec une autre
matière avant 2014-2015 !!


L3 Physique, Parcours Mecanique Annee 2012-2013
Examen de ThermiqueLe 3 avril 2013 — Duree 3h
Tout documents autorises
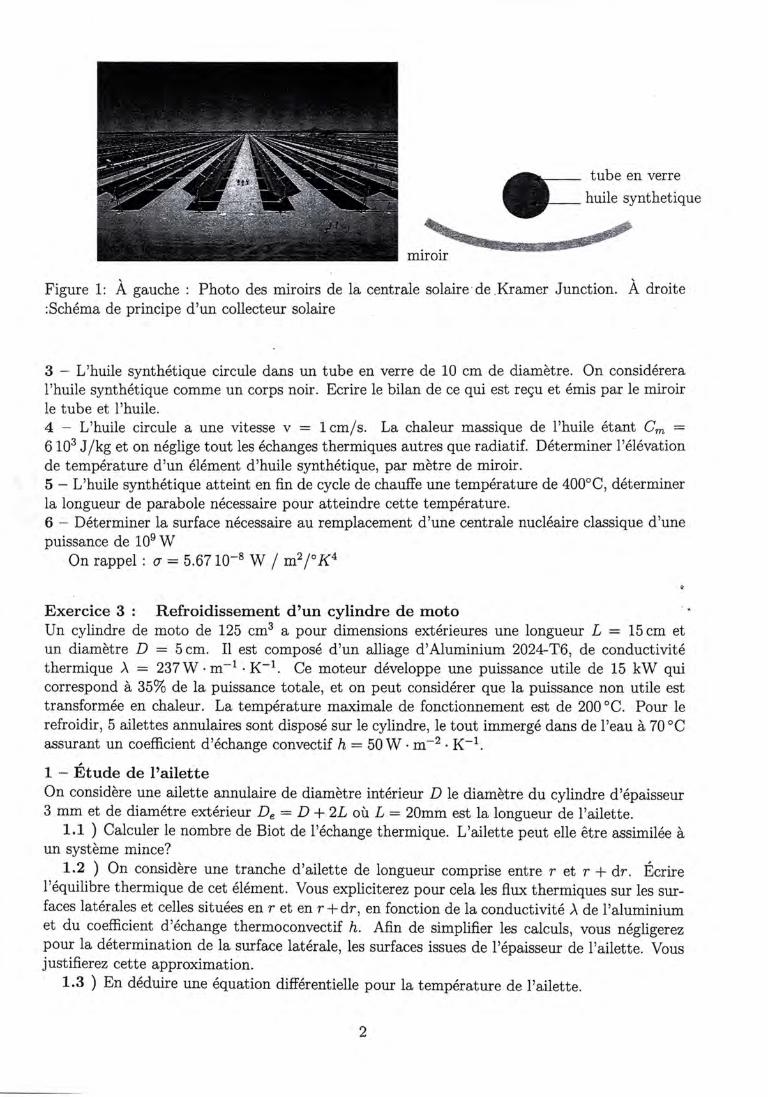
Exercice 1 : Chauffage domestique
On considere une maison modelisee par un parallelepipede rectangle dont on considerera leplancher adiabatique (Q = 0). La maison est de hauteur H = 4 m, de longueur L = 10 m etde largeur l = 6 m et les murs sont en beton d’epaisseur e = 20 cm.On isole les murs en ajoutant 10 cm d’isolant sur la surface exterieure des murs et plafond.Les murs sont perces de fenetres representant 10% de la surface des murs (plafond compris).Les fenetres ont une conductivite thermique λv et une epaisseur ev = 2 cm. Le coefficientd’echange avec les murs ou les fenetres (convection + rayonnement) a l’interieur de la maisonest h = 10W · m−2 C−1. On considere que la temperature de la maison doit etre maintenue a20˚C. Determiner la puissance de la chaudiere pour remplir cette condition lorsque la surfaceexterieure des murs et fenetres est de 5 C.
On donne : λbeton = 2 W·m−1K−1, λisolant = 0.2 W·m−1K−1 et λvitre = 0.7 W·m−1K−1
Exercice 2 : Conduite d’eau chauffee
De facon a recuperer l’energie solaire, on fait circuler de l’eau pressurisee a travers un tubesitue a la focale d’un reflecteur parabolique. L’effet global de cette configuration peut etreapproche comme une condition de chauffage uniforme sur la surface du tube. C’est-a-dire ladensite de flux de chaleur resultant qS vers le fluide peut etre supposee constante le long dela circonference et de l’axe du tube. Considerons un fonctionnement avec un tube de diametreinterieur D = 60 mm lors d’un jour ensoleille pour lequel qS = 2000W/m2. L’eau entre dansle tube avec un debit massique m = 0, 01kg/s et une temperature moyenne T1 = 20 C. Lesproprietes thermophysiques de l’eau (supposees constantes dans l’intervalle de temperatureetudie) sont : ρ = 1000 kg/m3, λ = 0, 65W m−1 C−1, η = 10−3 Pa.s et Cp = 4180 J kg−1K−1
1 – Quelle longueur de tube est necessaire pour obtenir une temperature de sortie T2 = 80 C ?Tracer le profil de temperature de l’eau T(x) le long du tube.2 – Determiner le coefficient d’echange de chaleur par convection entre la surface interieurede la conduite et l’eau a la sortie de la conduite, ou des conditions d’ecoulement pleinementdeveloppe peuvent etre supposees. Quelle est la temperature de la surface Ts de la paroi a lasortie du tube ?3 – En supposant que les conditions hydraulique et thermique sont etablies sur toute la lon-gueur du tube (c’est-a-dire pas d’effet d’entree, donc coefficient d’echange constant), calculerla temperature de surface a l’entree du tube. Tracer le profil de temperature Ts(x) le long dutube (sur la meme figure que celle de la question 1).
1

Exercice 3 : Eclipse
1 – Calculer l’angle solide sous lequel on voit le soleil depuis la terre. Vous devrez justifierproprement les approximations eventuelles que vous ferez.2 – Sachant que les eclipses totales de Soleil sont possibles, donner une relation entre le diametrede la Lune, du Soleil, et de leur distance a la Terre.3 – Calculer le diametre de la lune.On donne : Rayon de la Terre : RT = 6.4 103 km, Rayon du Soleil : RS = 7 105 km, DistanceTerre Soleil : dT−S = 1.5 108 km, Distance Terre Lune : dT−L = 3, 84 105 km.
Exercice 4 : Temperature dans une voiture
On s’interessera dans un premier temps a l’equilibre thermique de l’atmosphere considereecomme un corps gris isotherme transparent dans le visible (360 nm, 780nm) et avec un coefficientd’emission dans l’infrarouge de 0.9 et parfaitement reflechissante pour les longueurs d’ondesinferieures a 360 nm.1 – On considere le Soleil comme un corps noir a la temperature TS = 5800 K. Determinerl’emittance du Soleil.2 – Determiner l’absorptivite totale de l’atmosphere pour les rayons solaires.3 – En considerant le sol et tout ce qui se trouve dessus (sauf l’atmosphere) comme un corps noir,etablir l’equilibre radiatif de l’atmosphere. On supposera que l’atmosphere a une temperaturehomogene et on negligera son epaisseur. On supposera que la temperature du sol est de 300 K.L’equilibre thermique est il bouleverse si la temperature du sol est de 70 C ?4 – Connaissant l’eclairement de la couche atmospherique (E = 750Wm−2), en deduire satemperature (dans la partie eclairee).
On se propose maintenant de determiner la temperature du toit d’une voiture chauffe parle soleil. On modelise la voiture comme un parallelepipede aplati et on considere que l’interieurest en equilibre radiatif avec le toit, on neglige les effets de bords.5 – Ecrire le bilan radiatif du toit de la voiture.6 – En considerant que la voiture n’affecte pas l’equilibre radiatif de l’atmosphere, etudierl’equilibre radiatif du toit de la voiture. En deduire sa temperature.7 – Qu’est ce qui en pratique limite la temperature ?
On donne : l’emissivite de la carrosserie de la voiture :
ǫ =
0 pour λ < 360 nm0.2 pour 360 ≤ λ ≤ 780 nm0.9 pour λ > 780 nm
Constante de Stefan-Bolztman σ = 5.67 10−8W/(m2K4)
2
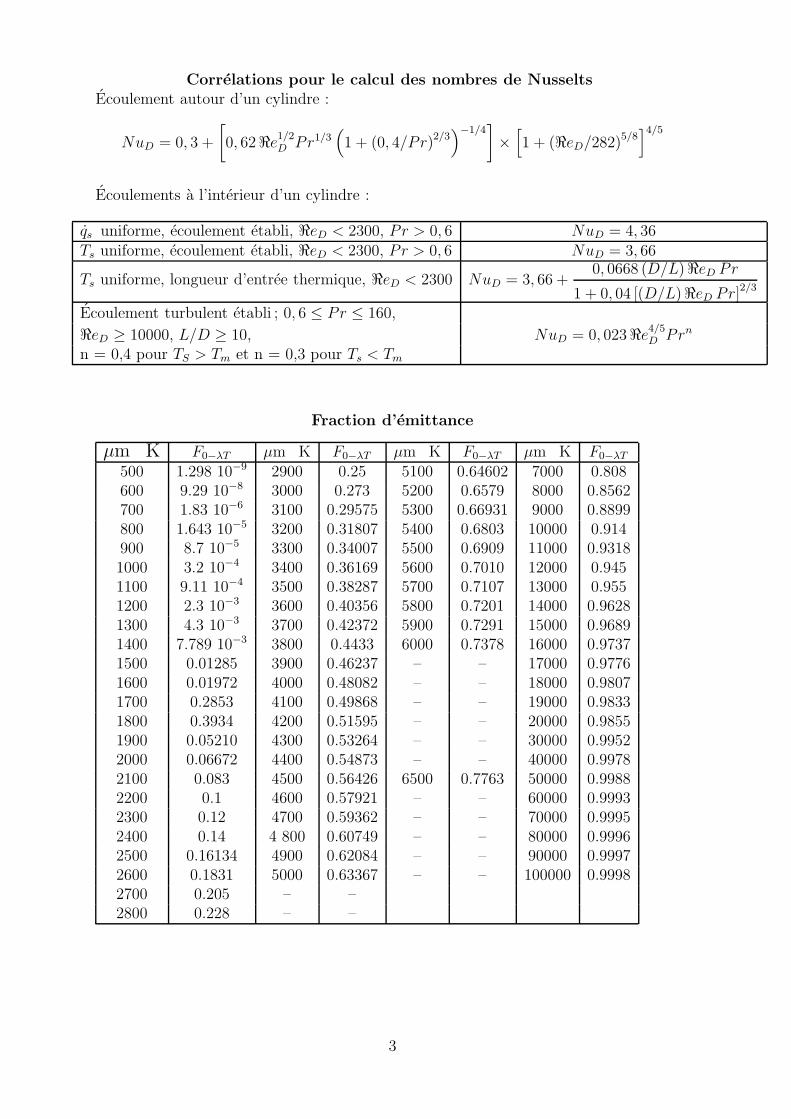
Correlations pour le calcul des nombres de Nusselts
Ecoulement autour d’un cylindre :
NuD = 0, 3 +
[
0, 62ℜe1/2D Pr1/3
(
1 + (0, 4/Pr)2/3)
−1/4]
×
[
1 + (ℜeD/282)5/8
]4/5
Ecoulements a l’interieur d’un cylindre :
qs uniforme, ecoulement etabli, ℜeD < 2300, Pr > 0, 6 NuD = 4, 36Ts uniforme, ecoulement etabli, ℜeD < 2300, Pr > 0, 6 NuD = 3, 66
Ts uniforme, longueur d’entree thermique, ℜeD < 2300 NuD = 3, 66 +0, 0668 (D/L)ℜeD Pr
1 + 0, 04 [(D/L)ℜeD Pr]2/3
Ecoulement turbulent etabli ; 0, 6 ≤ Pr ≤ 160,
ℜeD ≥ 10000, L/D ≥ 10, NuD = 0, 023ℜe4/5D Prn
n = 0,4 pour TS > Tm et n = 0,3 pour Ts < Tm
Fraction d’emittance
µm K F0−λT µm K F0−λT µm K F0−λT µm K F0−λT
500 1.298 10−9 2900 0.25 5100 0.64602 7000 0.808600 9.29 10−8 3000 0.273 5200 0.6579 8000 0.8562700 1.83 10−6 3100 0.29575 5300 0.66931 9000 0.8899800 1.643 10−5 3200 0.31807 5400 0.6803 10000 0.914900 8.7 10−5 3300 0.34007 5500 0.6909 11000 0.93181000 3.2 10−4 3400 0.36169 5600 0.7010 12000 0.9451100 9.11 10−4 3500 0.38287 5700 0.7107 13000 0.9551200 2.3 10−3 3600 0.40356 5800 0.7201 14000 0.96281300 4.3 10−3 3700 0.42372 5900 0.7291 15000 0.96891400 7.789 10−3 3800 0.4433 6000 0.7378 16000 0.97371500 0.01285 3900 0.46237 – – 17000 0.97761600 0.01972 4000 0.48082 – – 18000 0.98071700 0.2853 4100 0.49868 – – 19000 0.98331800 0.3934 4200 0.51595 – – 20000 0.98551900 0.05210 4300 0.53264 – – 30000 0.99522000 0.06672 4400 0.54873 – – 40000 0.99782100 0.083 4500 0.56426 6500 0.7763 50000 0.99882200 0.1 4600 0.57921 – – 60000 0.99932300 0.12 4700 0.59362 – – 70000 0.99952400 0.14 4 800 0.60749 – – 80000 0.99962500 0.16134 4900 0.62084 – – 90000 0.99972600 0.1831 5000 0.63367 – – 100000 0.99982700 0.205 – –2800 0.228 – –
3
Licence L3 MecaniqueHydrodynamique & Thermique - Phys-M335
Universite Paris-Sud 11Annee universitaire 2012-2013
Examen d’Hydrodynamique et ThermiqueLe 2 septembre 2013 — Duree 2h
I Thermique
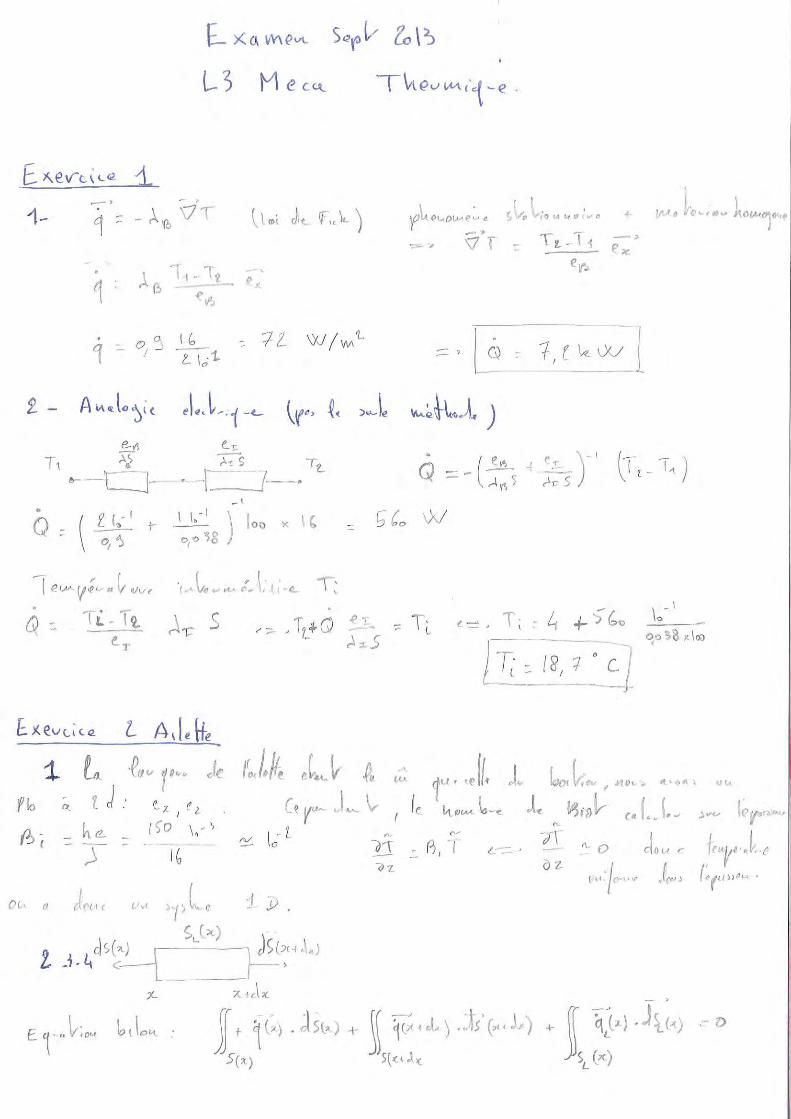
Exercice 1 : Flux thermique a travers un mur par analogie electrique
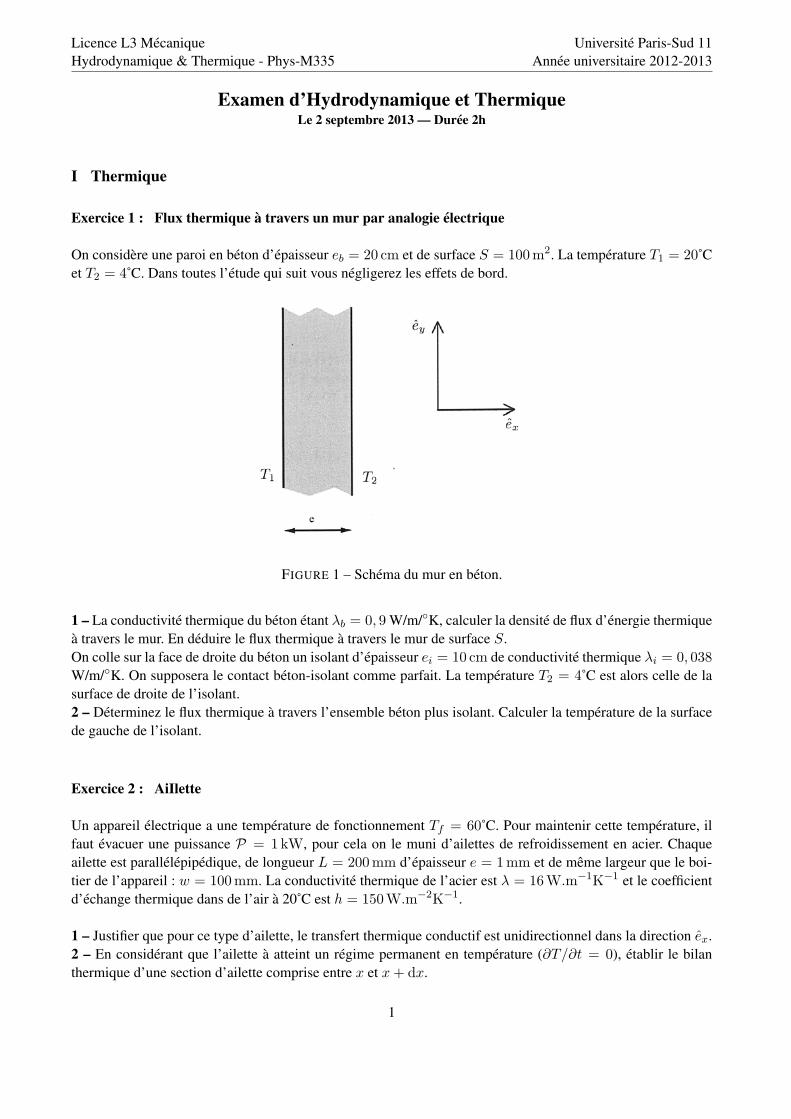
On considere une paroi en beton d’epaisseur eb = 20 cm et de surface S = 100m2. La temperature T1 = 20˚Cet T2 = 4˚C. Dans toutes l’etude qui suit vous negligerez les effets de bord.
FIGURE 1 – Schema du mur en beton.
1 – La conductivite thermique du beton etant λb = 0, 9 W/m/K, calculer la densite de flux d’energie thermiquea travers le mur. En deduire le flux thermique a travers le mur de surface S.On colle sur la face de droite du beton un isolant d’epaisseur ei = 10 cm de conductivite thermique λi = 0, 038
W/m/K. On supposera le contact beton-isolant comme parfait. La temperature T2 = 4˚C est alors celle de lasurface de droite de l’isolant.2 – Determinez le flux thermique a travers l’ensemble beton plus isolant. Calculer la temperature de la surfacede gauche de l’isolant.
Exercice 2 : AiIlette
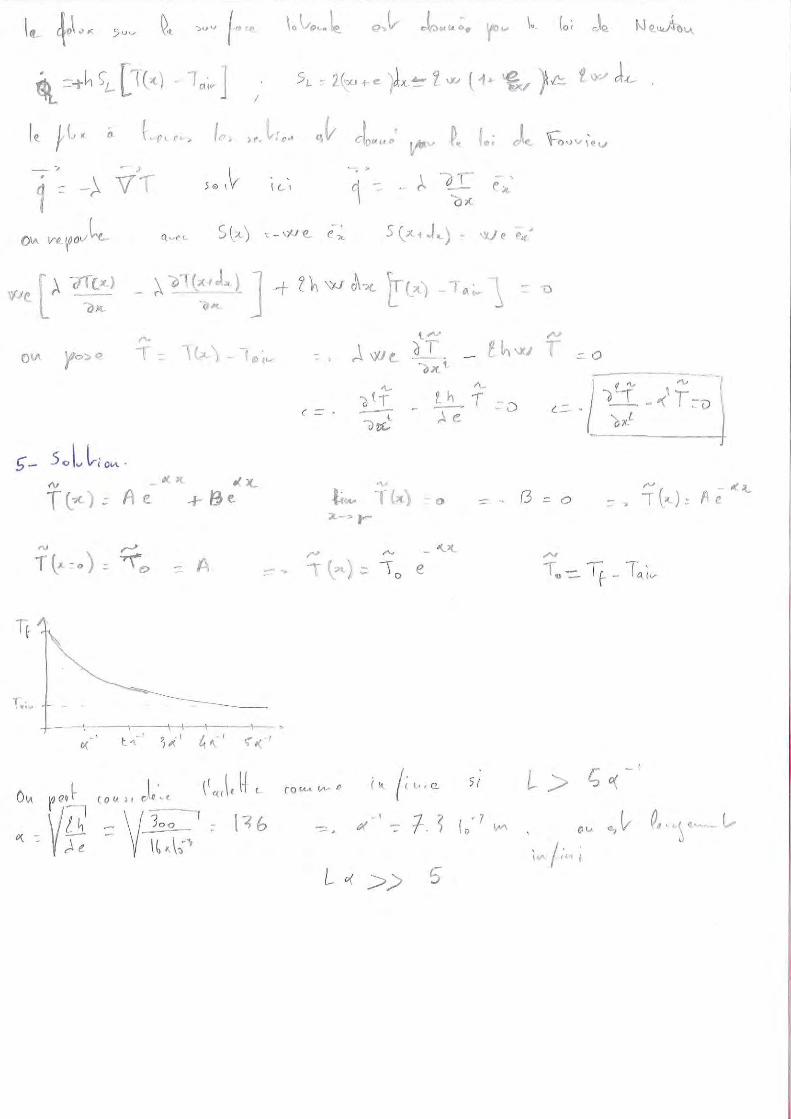
Un appareil electrique a une temperature de fonctionnement Tf = 60˚C. Pour maintenir cette temperature, ilfaut evacuer une puissance P = 1kW, pour cela on le muni d’ailettes de refroidissement en acier. Chaqueailette est parallelepipedique, de longueur L = 200mm d’epaisseur e = 1mm et de meme largeur que le boi-tier de l’appareil : w = 100mm. La conductivite thermique de l’acier est λ = 16W.m−1K−1 et le coefficientd’echange thermique dans de l’air a 20˚C est h = 150W.m−2K−1.
1 – Justifier que pour ce type d’ailette, le transfert thermique conductif est unidirectionnel dans la direction ex.2 – En considerant que l’ailette a atteint un regime permanent en temperature (∂T/∂t = 0), etablir le bilanthermique d’une section d’ailette comprise entre x et x+ dx.
1
Licence L3 MecaniqueHydrodynamique & Thermique - Phys-M335
Universite Paris-Sud 11Annee universitaire 2012-2013
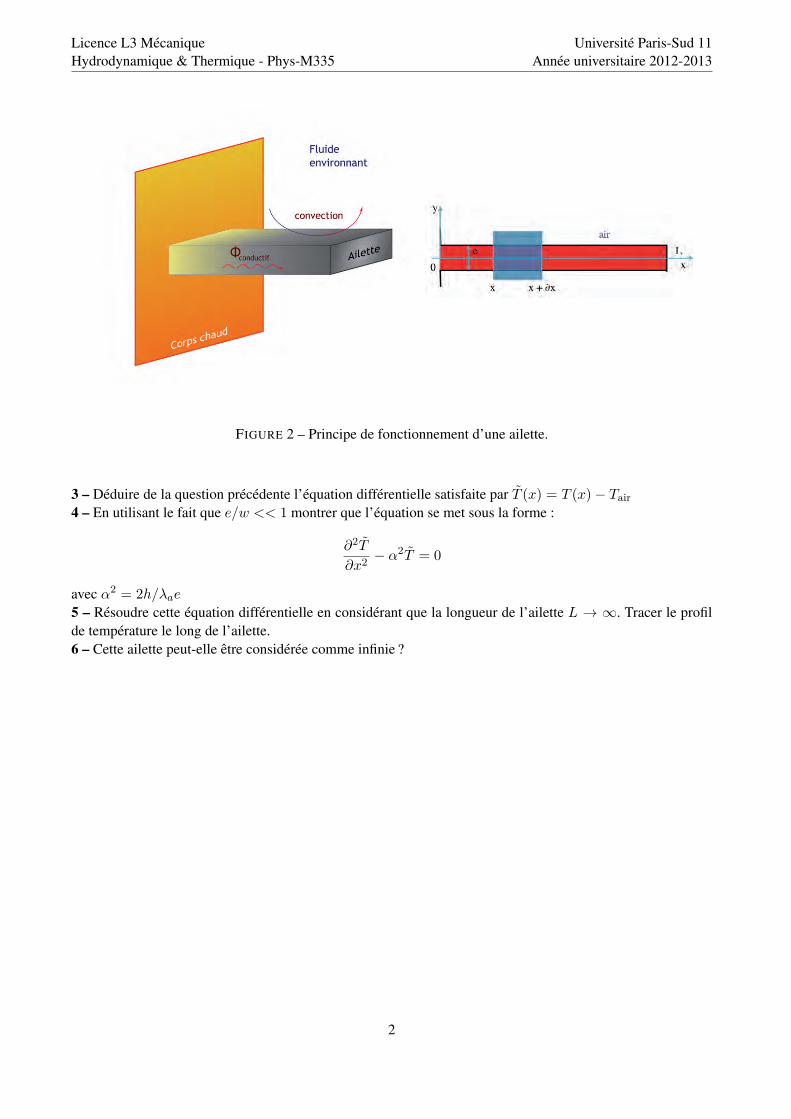
FIGURE 2 – Principe de fonctionnement d’une ailette.
3 – Deduire de la question precedente l’equation differentielle satisfaite par T (x) = T (x)− Tair
4 – En utilisant le fait que e/w << 1 montrer que l’equation se met sous la forme :
∂2T
∂x2− α2T = 0
avec α2 = 2h/λae
5 – Resoudre cette equation differentielle en considerant que la longueur de l’ailette L → ∞. Tracer le profilde temperature le long de l’ailette.6 – Cette ailette peut-elle etre consideree comme infinie ?
2

Licence L3 MecaniqueHydrodynamique & Thermique - Phys-M335
Universite Paris-Sud 11Annee universitaire 2012-2013
II Hydrodynamique
Exercice 3 : Ecoulement le long d’une paroi verticale
Une couche de fluide incompressible, de masse volumique ρ et de viscosite η, s’ecoule au dessus d’un planhorizontal jusqu’a la section S1 ou elle tombe en chute libre sous l’effet de la pesanteur le long de la paroiverticale Π.On admet qu’apres une certaine distance au dela du point O (c’est-a-dire apres la section S2), les perturbationsengendrees dans l’ecoulement paar le changement brusque de direction sont totalement amorties. L’ecoulementy est donc stationnaire et laminaire. Le milieu exterieur est de l’air, de viscosite negligeable, a la pressionatmospherique P0 que l’on considerera comme constante. On considere l’ecoulement 2D selon y et on chercheune solution de la forme −→v = v(x)−→uz .
1. L’ecoulement est-il incompressible ?
2. Ecrire les equations de Navier-Stokes projetees selon x, y et z et verifier que l’ecoulement est bienlaminaire.
3. Quelle est la condition sur la pression a la surface libre ? Quelles sont les conditions aux limites satisfaitespar le champ de vitesse ?
4. Determiner la pression p(x, z) partout dans le fluide.
5. Determiner le champ de vitesse vz(x).
3
Licence L3 MecaniqueHydrodynamique & Thermique - Phys-M335
Universite Paris-Sud 11Annee universitaire 2012-2013
Exercice 4 : Recipient perce
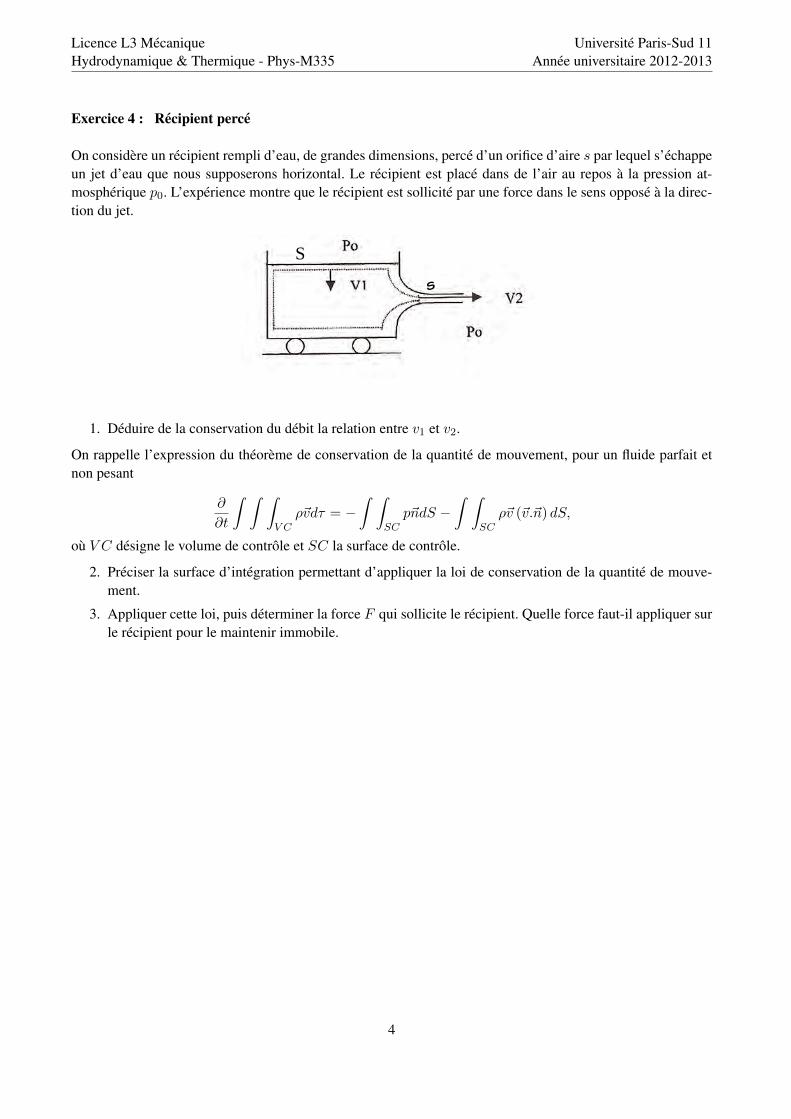
On considere un recipient rempli d’eau, de grandes dimensions, perce d’un orifice d’aire s par lequel s’echappeun jet d’eau que nous supposerons horizontal. Le recipient est place dans de l’air au repos a la pression at-mospherique p0. L’experience montre que le recipient est sollicite par une force dans le sens oppose a la direc-tion du jet.
S
s
1. Deduire de la conservation du debit la relation entre v1 et v2.
On rappelle l’expression du theoreme de conservation de la quantite de mouvement, pour un fluide parfait etnon pesant
∂
∂t
∫ ∫ ∫V C
ρvdτ = −∫ ∫
SCpndS −
∫ ∫SC
ρv (v.n) dS,
ou V C designe le volume de controle et SC la surface de controle.
2. Preciser la surface d’integration permettant d’appliquer la loi de conservation de la quantite de mouve-ment.
3. Appliquer cette loi, puis determiner la force F qui sollicite le recipient. Quelle force faut-il appliquer surle recipient pour le maintenir immobile.
4

Université Paris-Sud Année 2013–2014
Licence 3 Physique - Parcours de Mécanique
UE Transferts thermiques
Examen de thermiqueDocuments de cours et de TD autorisés Calculatrice autorisée
Durée 3 heures
Une attention particulière devra être portée à la rédaction et à la présentation.
Exercice 1 : barreau chauffé par induction
Dans une expérience thermique, on recuit par induction un barreau de cuivre de diamètre d = 1 cmet de longueur L = 10 cm. On refroidit ce barreau dans un courant d’hélium dont la température est77 K. L’écoulement d’hélium est dans la direction perpendiculaire à l’axe du barreau avec une vitessemoyenne d’écoulement u = 54 m · s−1. La température de surface du barreau de cuivre s’établit à 80K.
Les caractéristiques de l’hélium, à la température 78,5 K sont : masse volumique : ρHe = 0, 65 kg ·m−3,viscosité dynamique : µHe = 8, 5.10−6 Pa · s, conductivité thermique : λHe = 0, 06 W ·m−1
·K−1, ca-pacité thermique massique : CpHe
= 5300 J · kg−1·K−1.
Le cuivre a une masse volumique ρCu = 8940 kg ·m−3.Calculer le flux de chaleur par unité de masse (en W · kg−1) emmagasiné par induction dans le
barreau.
Exercice 2 : échangeur
Un échangeur à tubes concentriques et à contre-courant est utilisé pour le refroidissement d’unehuile de lubrification pour un moteur industriel à turbine à gaz. Le débit d’eau de refroidissement àtravers le tube intérieur (Di = 25 mm) est de 0, 2 kg · s−1, tandis que le débit d’huile dans l’anneauextérieur (De = 45 mm) est de 0, 1 kg · s−1. L’huile et l’eau entrent aux températures respectives de100 et 30C. Quel doit être la longueur du tube pour que la température de sortie de l’huile soit de60C ?
Données numériques : coefficient d’échange convectif global : h = 38, 1 W ·m−2·K−1
Cp[ J · kg−1
·K−1] µ[ N ·m−2· s] λ[ W ·m−1
·K−1] Pr
huile à Th = 80C 2131 3, 25.10−2 0,138
eau à Te = 35C 4178 725.10−6 0,625 4,85
Exercice 3 : chauffage d’un local
Comme le montre la figure 1, on considère un local, à une température ambiante Ta, de superficieau sol Sd, et où la dalle (de conductivité λd et d’épaisseur ed) repose sur une couche de béton. Lacouche de béton (conductivité λb et épaisseur eb) est posée sur une conduite d’eau. Bien évidemmentceci est une simplification d’un plancher chauffant dans lequel la conduite d’eau est noyée dans lebéton. L’eau qui circule dans la conduite avec un débit massique m entre à la température Te et sortà la température Ts. On note Cp sa capacité calorifique. L’isolant, d’épaisseur ei et de conductivité λi,est au contact d’une part avec la conduite d’eau et d’autre part avec la terre à la température Ti. Onconsidère que des échanges convectifs ont lieu entre la dalle et le milieu ambiant Ta avec un coefficientde convection est noté hdalle. On considère que l’échange avec l’extérieur se fait à travers une paroi qui
1 / 4
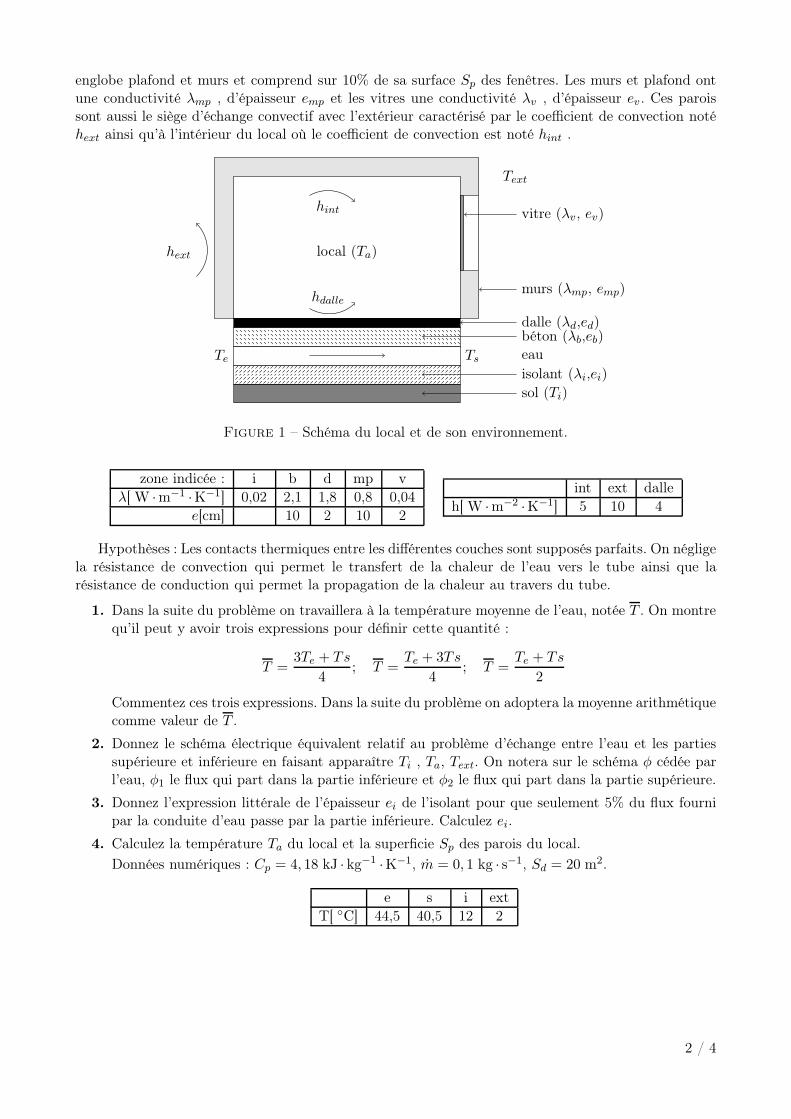
englobe plafond et murs et comprend sur 10% de sa surface Sp des fenêtres. Les murs et plafond ontune conductivité λmp , d’épaisseur emp et les vitres une conductivité λv , d’épaisseur ev . Ces paroissont aussi le siège d’échange convectif avec l’extérieur caractérisé par le coefficient de convection notéhext ainsi qu’à l’intérieur du local où le coefficient de convection est noté hint .
sol (Ti)
isolant (λi,ei)
eauTe Ts
béton (λb,eb)dalle (λd,ed)
murs (λmp, emp)
vitre (λv, ev)
local (Ta)
Text
hint
hext
hdalle
Figure 1 – Schéma du local et de son environnement.
zone indicée : i b d mp v
λ[ W ·m−1·K−1] 0,02 2,1 1,8 0,8 0,04
e[cm] 10 2 10 2
int ext dalle
h[ W ·m−2·K−1] 5 10 4
Hypothèses : Les contacts thermiques entre les différentes couches sont supposés parfaits. On négligela résistance de convection qui permet le transfert de la chaleur de l’eau vers le tube ainsi que larésistance de conduction qui permet la propagation de la chaleur au travers du tube.
1. Dans la suite du problème on travaillera à la température moyenne de l’eau, notée T . On montrequ’il peut y avoir trois expressions pour définir cette quantité :
T =3Te + Ts
4; T =
Te + 3Ts
4; T =
Te + Ts
2
Commentez ces trois expressions. Dans la suite du problème on adoptera la moyenne arithmétiquecomme valeur de T .
2. Donnez le schéma électrique équivalent relatif au problème d’échange entre l’eau et les partiessupérieure et inférieure en faisant apparaître Ti , Ta, Text. On notera sur le schéma φ cédée parl’eau, φ1 le flux qui part dans la partie inférieure et φ2 le flux qui part dans la partie supérieure.
3. Donnez l’expression littérale de l’épaisseur ei de l’isolant pour que seulement 5% du flux fournipar la conduite d’eau passe par la partie inférieure. Calculez ei.
4. Calculez la température Ta du local et la superficie Sp des parois du local.
Données numériques : Cp = 4, 18 kJ · kg−1·K−1, m = 0, 1 kg · s−1, Sd = 20 m2.
e s i ext
T[ C] 44,5 40,5 12 2
2 / 4
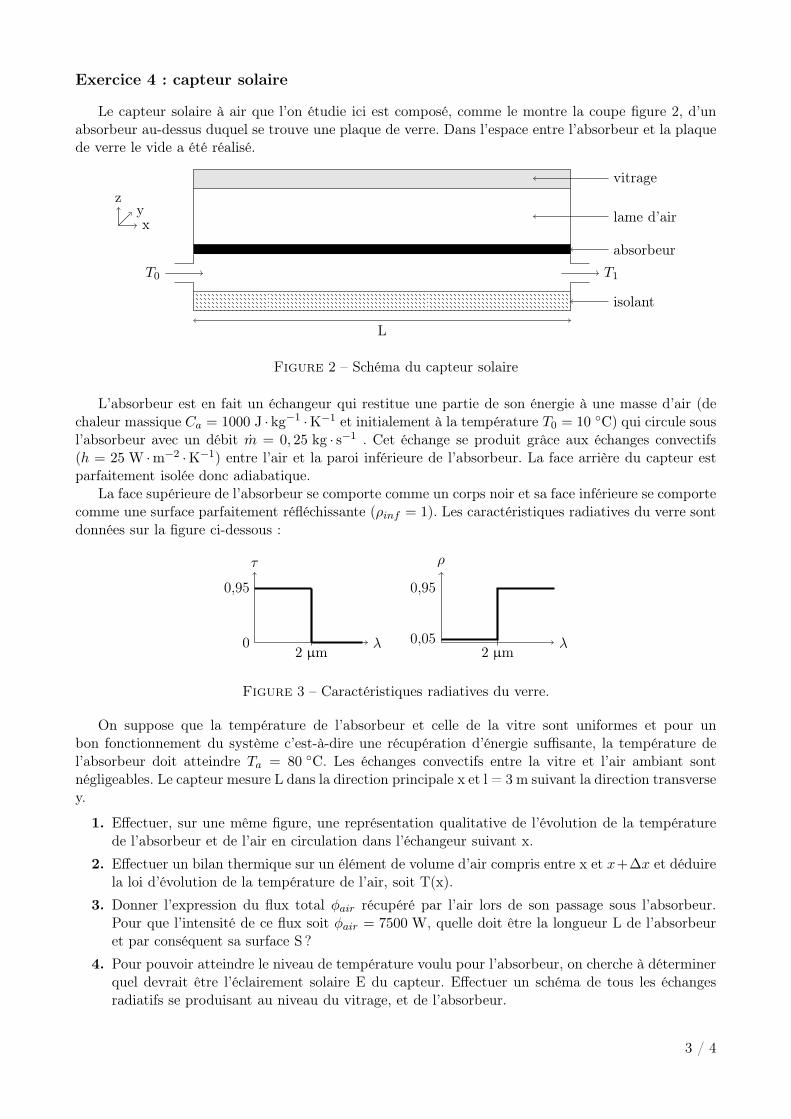
Exercice 4 : capteur solaire
Le capteur solaire à air que l’on étudie ici est composé, comme le montre la coupe figure 2, d’unabsorbeur au-dessus duquel se trouve une plaque de verre. Dans l’espace entre l’absorbeur et la plaquede verre le vide a été réalisé.
vitrage
lame d’air
absorbeur
T0 T1
isolant
L
x
zy
Figure 2 – Schéma du capteur solaire
L’absorbeur est en fait un échangeur qui restitue une partie de son énergie à une masse d’air (dechaleur massique Ca = 1000 J · kg−1
·K−1 et initialement à la température T0 = 10 C) qui circule sousl’absorbeur avec un débit m = 0, 25 kg · s−1 . Cet échange se produit grâce aux échanges convectifs(h = 25 W ·m−2
·K−1) entre l’air et la paroi inférieure de l’absorbeur. La face arrière du capteur estparfaitement isolée donc adiabatique.
La face supérieure de l’absorbeur se comporte comme un corps noir et sa face inférieure se comportecomme une surface parfaitement réfléchissante (ρinf = 1). Les caractéristiques radiatives du verre sontdonnées sur la figure ci-dessous :
λ
τ
2 µm0
0,95
λ
ρ
2 µm0,05
0,95
Figure 3 – Caractéristiques radiatives du verre.
On suppose que la température de l’absorbeur et celle de la vitre sont uniformes et pour unbon fonctionnement du système c’est-à-dire une récupération d’énergie suffisante, la température del’absorbeur doit atteindre Ta = 80 C. Les échanges convectifs entre la vitre et l’air ambiant sontnégligeables. Le capteur mesure L dans la direction principale x et l = 3 m suivant la direction transversey.
1. Effectuer, sur une même figure, une représentation qualitative de l’évolution de la températurede l’absorbeur et de l’air en circulation dans l’échangeur suivant x.
2. Effectuer un bilan thermique sur un élément de volume d’air compris entre x et x+∆x et déduirela loi d’évolution de la température de l’air, soit T(x).
3. Donner l’expression du flux total φair récupéré par l’air lors de son passage sous l’absorbeur.Pour que l’intensité de ce flux soit φair = 7500 W, quelle doit être la longueur L de l’absorbeuret par conséquent sa surface S ?
4. Pour pouvoir atteindre le niveau de température voulu pour l’absorbeur, on cherche à déterminerquel devrait être l’éclairement solaire E du capteur. Effectuer un schéma de tous les échangesradiatifs se produisant au niveau du vitrage, et de l’absorbeur.
3 / 4
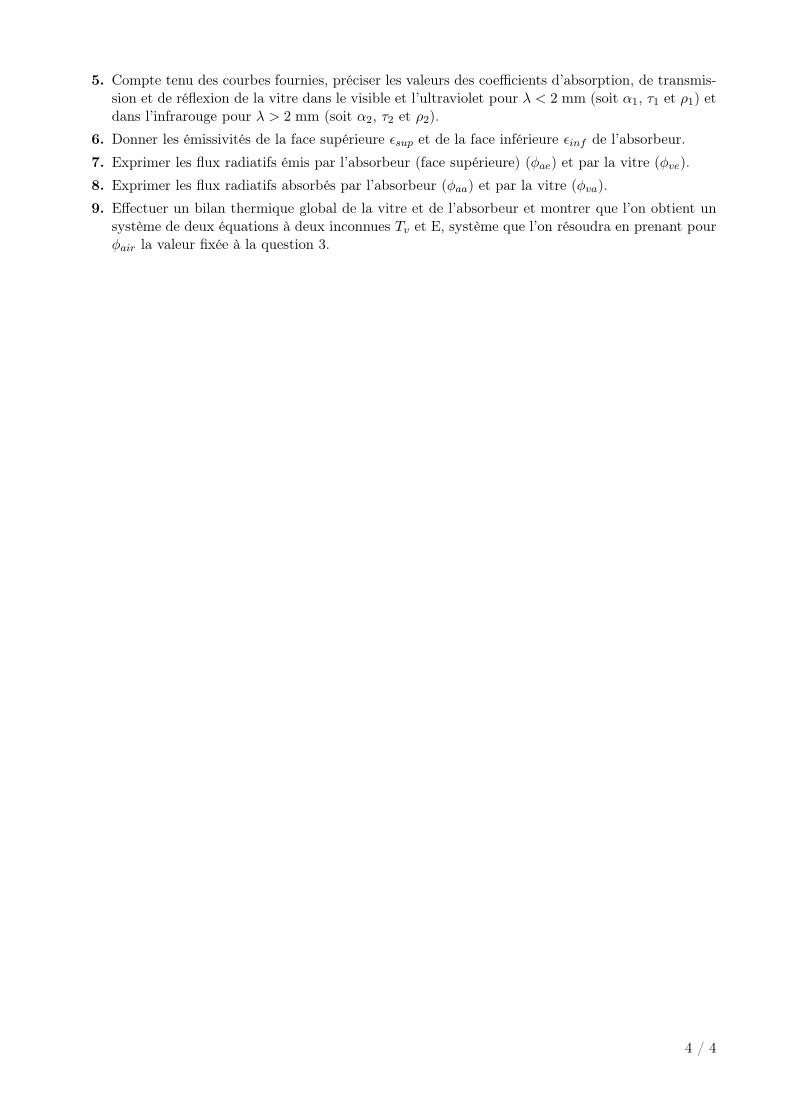
5. Compte tenu des courbes fournies, préciser les valeurs des coefficients d’absorption, de transmis-sion et de réflexion de la vitre dans le visible et l’ultraviolet pour λ < 2 mm (soit α1, τ1 et ρ1) etdans l’infrarouge pour λ > 2 mm (soit α2, τ2 et ρ2).
6. Donner les émissivités de la face supérieure ǫsup et de la face inférieure ǫinf de l’absorbeur.
7. Exprimer les flux radiatifs émis par l’absorbeur (face supérieure) (φae) et par la vitre (φve).
8. Exprimer les flux radiatifs absorbés par l’absorbeur (φaa) et par la vitre (φva).
9. Effectuer un bilan thermique global de la vitre et de l’absorbeur et montrer que l’on obtient unsystème de deux équations à deux inconnues Tv et E, système que l’on résoudra en prenant pourφair la valeur fixée à la question 3.
4 / 4

Université Paris-Sud Année 2013–2014
Licence 3 Physique - Parcours de Mécanique
UE Transferts thermiques
Examen de thermique - Session 2
Durée 1 heure
Documents de cours non autorisés
Exercice 1 : Bouteille isotherme
On étudie le comportement d’une bouteille contenant un liquide destiné à être maintenu à tempé-rature constante. Pour simplifier l’analyse, on se place en 1D et on considère que la paroi de la bouteilleest assimilée à un mur en aluminium de longueur L = 30 cm, de hauteur H = 20 cm et d’épaisseurealu = 1 mm dont la conductivité thermique est λalu = 240 W ·m−1 ·K−1.
1. Quel est le flux thermique perdu à travers la paroi de la bouteille lorsqu’elle contient du caféchaud (température intérieure de 80C) et que l’environnement extérieur est à 20C ? Quelle estla densité de flux ?
2. Pour réduire les pertes thermiques à travers la paroi en aluminium, on utilise le concept de labouteille isotherme (plus communément appelée thermos) : celle-ci est constitué de deux parois enaluminium séparées par une épaisseur d’air stagnant (eair = 1 cm, λair = 0.024 W ·m−1 ·K−1).En utilisant l’analogie électrique, calculer le flux thermique perdu à travers la paroi de cette nou-velle bouteille (hormis l’épaisseur de l’ensemble, tous les paramètres restent identiques). Préciseraussi la densité de flux. Donner les températures sur les parois intérieures de la bouteille (du côtéde la lame d’air interne). Commenter cette nouvelle solution par rapport à l’ancienne.
Exercice 2 : Etude d’une ailette
On considère une ailette telle que celle représentée sur la figure ci-dessous. La conductivité ther-mique du matériau constitutif de l’ailette est λ. Le périmètre de l’ailette est p, sa section S, sa longueurL. Le coefficient d’échange entre l’ailette et le milieu ambiant à la température T
∞est noté h. Enfin la
température à la base de l’ailette est notée T0. On admet que le flux à l’extrémité de l’ailette est nul.
T0
ailette
2e
L x
h
Figure 1 – Schéma de l’ailette
1. À quelle condition la température de l’ailette peut-elle être considérée comme uniforme sur lasection ?
2. En se plaçant en régime permanent, faire un bilan des flux sur un élément d’ailette compris entrex et x+dx.
3. En déduire l’équation différentielle vérifiée par la température θ(x) = T (x)− T∞
.
1 / 2

4. Résoudre cette équation à l’aide des conditions aux limites et donner la loi d’évolution de latempérature le long de l’ailette suivant x.
5. Que devient cette expression si l’ailette est considérée comme semi-infinie ?
6. Donner l’expression du flux dissipé par l’ailette semi-infinie. Comparer ce flux à celui qui serait"évacué" en l’absence d’ailette. Évaluer alors l’efficacité de l’ailette.
2 / 2
TRAITEMENT DU
SIGNAL




Date : vendredi 13 Juin 2014
Université Paris Sud Durée : 3 heures
Licence de Mécanique-Physique Ce sujet comporte 4 pages
Mécanique
Année 2013-2014 —–
—–
Examen de
Traitement du signal
(Unité d’enseignement PhyM-316)
Aucun document n’est autorisé. L’usage des calculettes est interdit. Il est conseillé de
lire attentivement le sujet avant de commencer. Les réponses devront être soigneusement
argumentées. Les problèmes sont indépendants.
Dans la suite on utilisera la définition suivante pour la fonction notée rB(t) :
rB(t) =
0 si t < −B/21 si − B/2 ≤ t ≤ B/20 si t > B/2
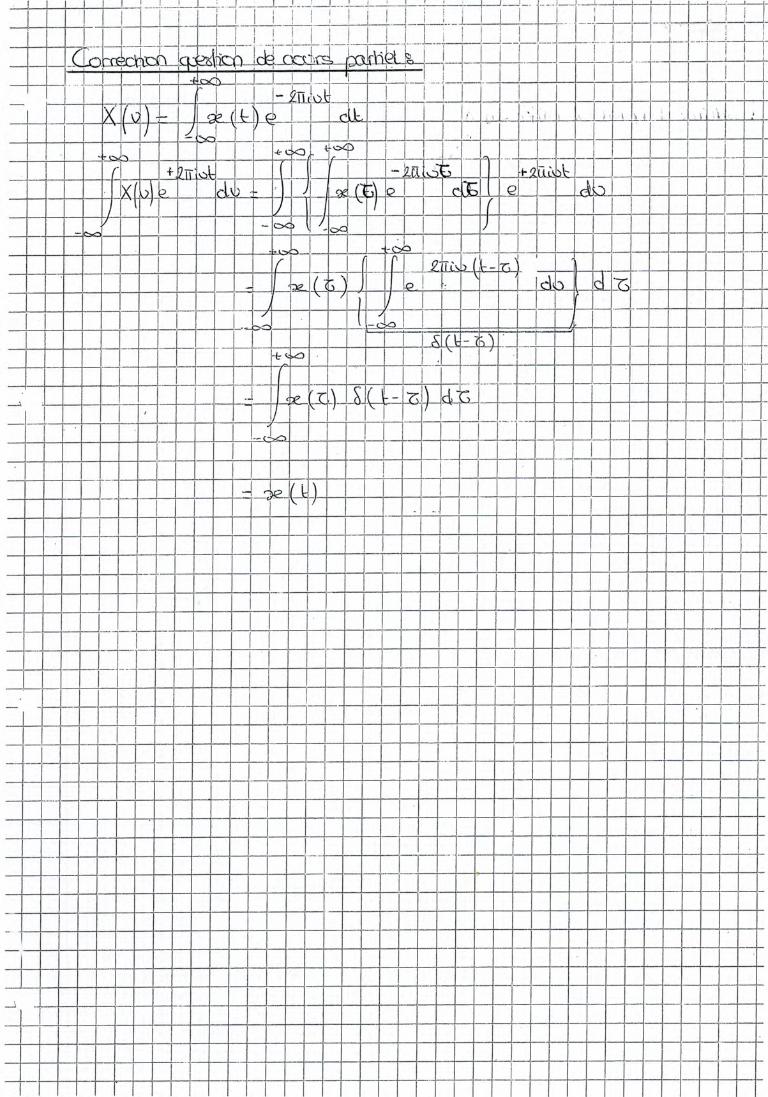
On rappelle les propriétés suivantes entre un signal x(t) et sa transformée de Fourier
X(ν) :
x(t) exp(2πν0t) ⇔ X(ν − ν0)
et
x(t− t0) ⇒ exp(−2πνt0)X(ν)
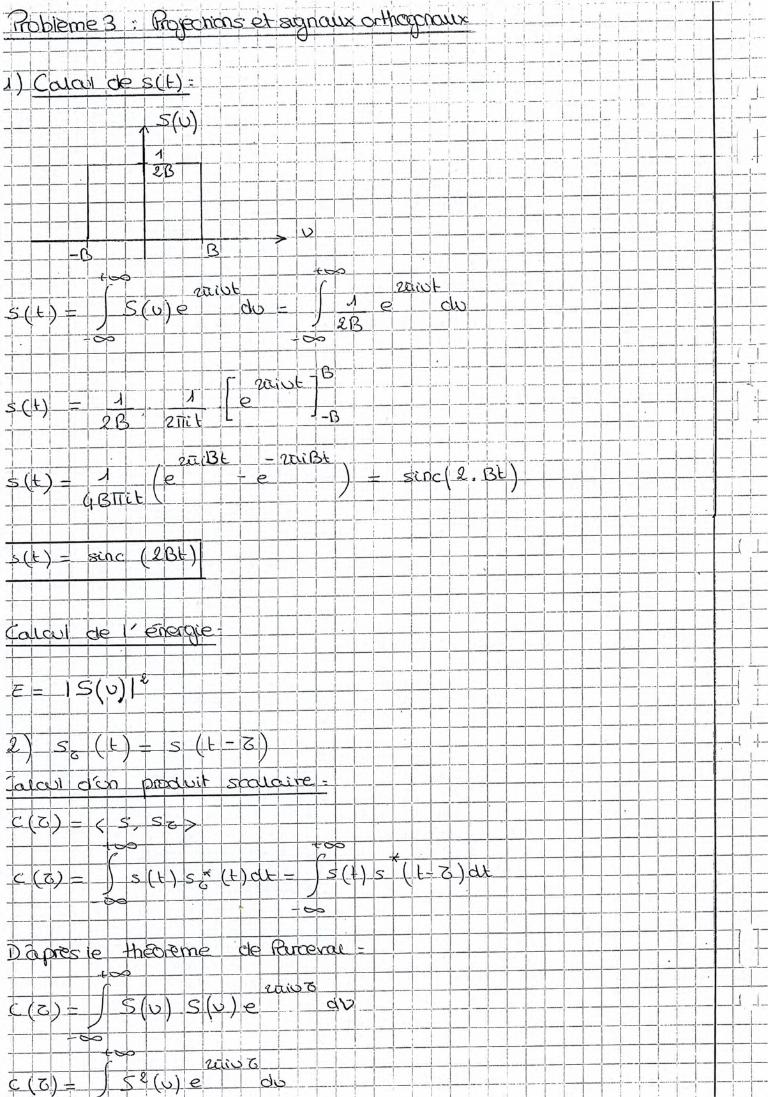
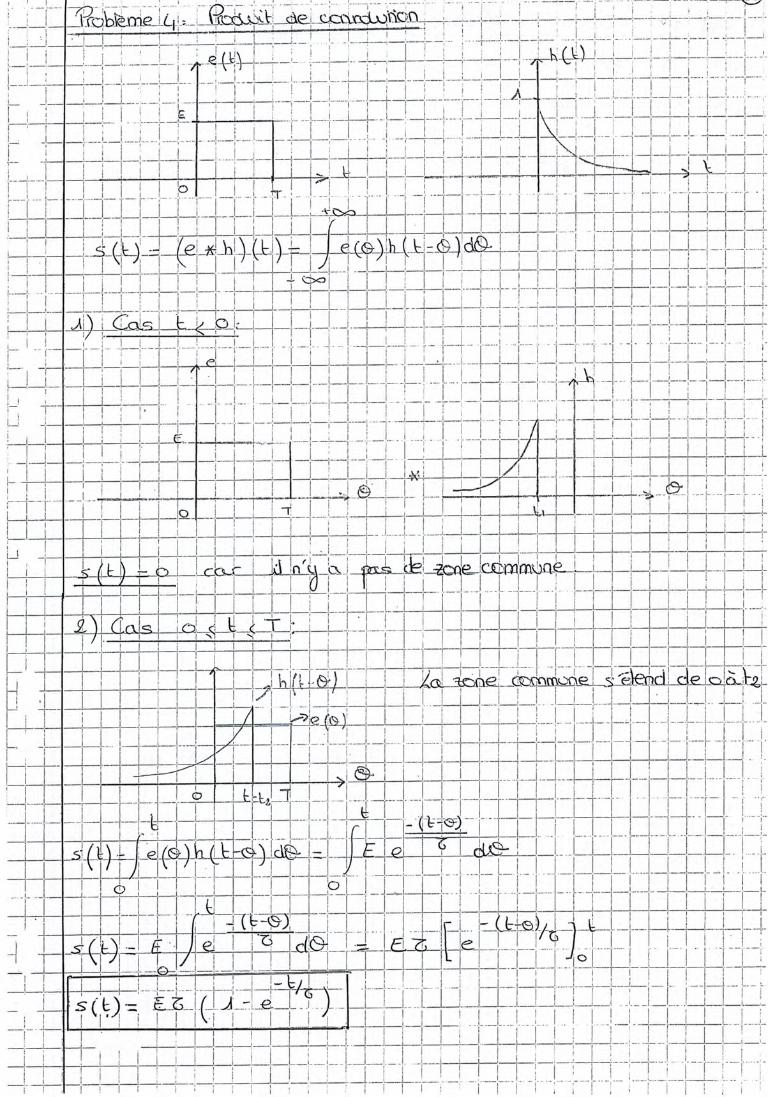
On donne l’expression du produit de convolution de deux fonctions x(t) et h(t) :
y(t) = [x ∗ h](t) =
∫
x(θ)h(t− θ)dθ = [h ∗ x](t) =
∫
h(θ)x(t− θ)dθ
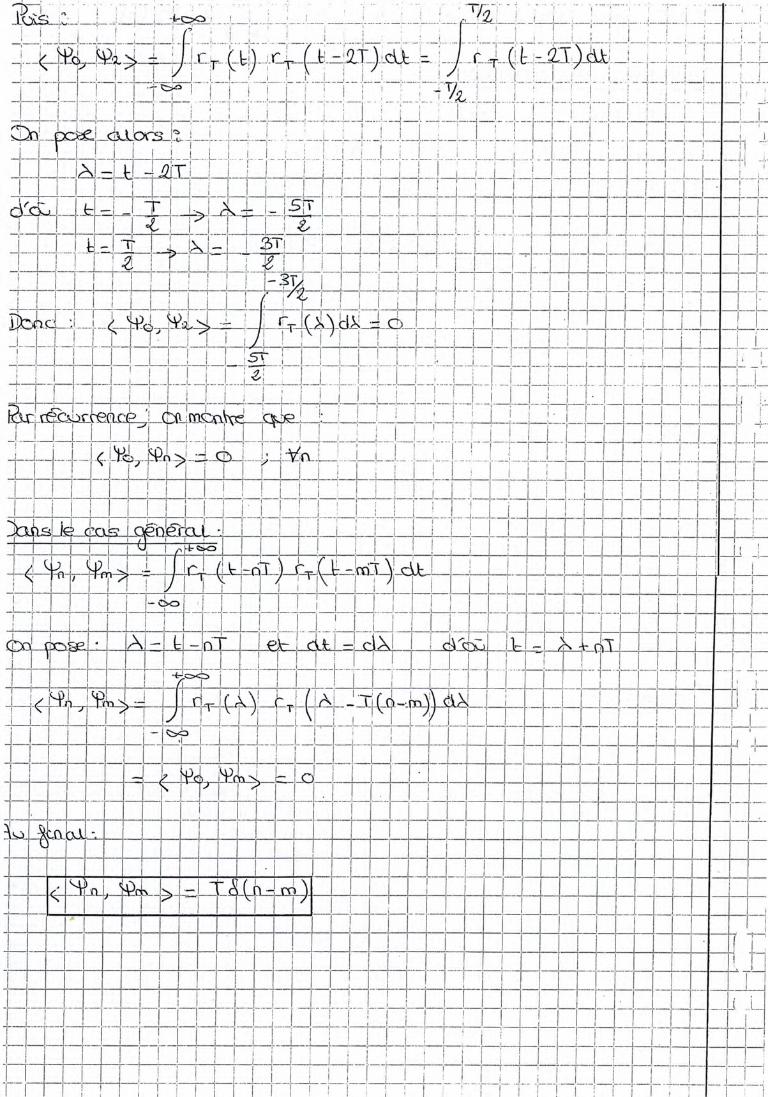
Problème n 1 : Fonctions périodiques et échantillonnage
(a) — Donner, pour des signaux à temps continu, T-périodiques et de puissance finie, l’ex-
pression de leur développement en série de Fourier. Comment s’obtiennent les coefficients
de ce développement ?
(b) — Spectre de ”raies” :
On donne la fonction périodique de période T0, x(t) défini par : x(t) = x(t + T0) et
x(t) = rT (t) avec T < T0.
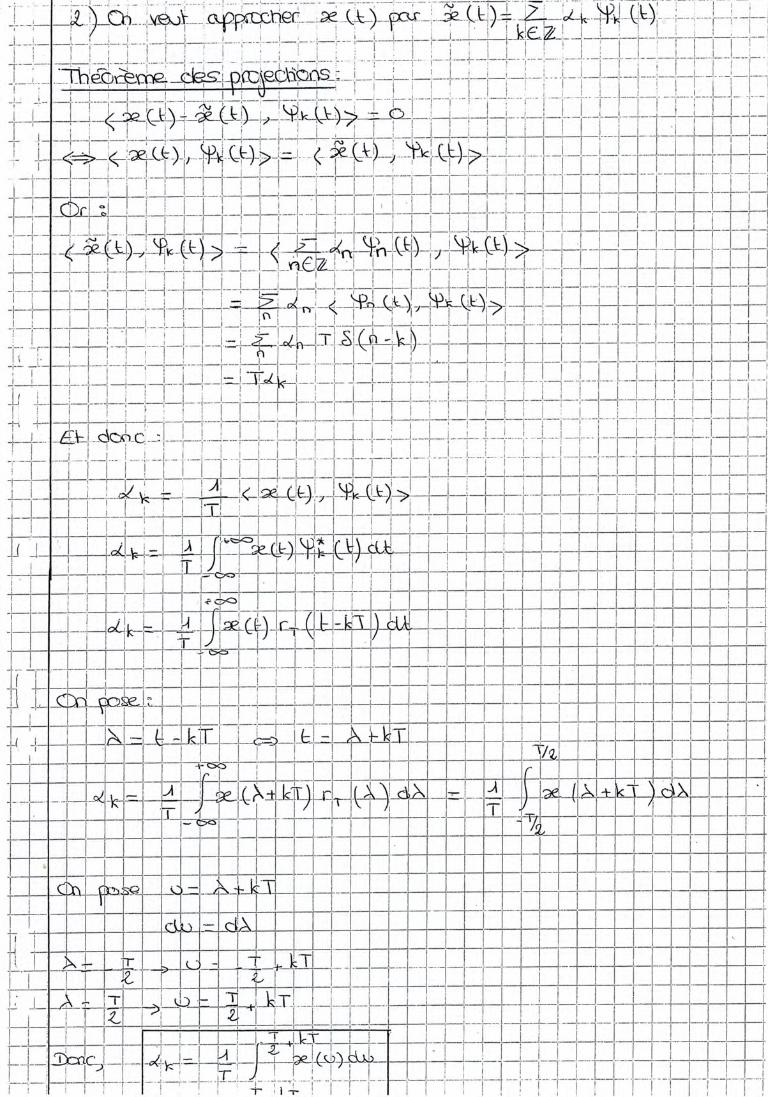
(1)- Donner l’expression de X(ν) en fonction des coefficients de Fourier de x(t) : xn,
puis exprimer les xn en fonction de XT0définie comme la transformée de fourier de x(t)
resteinte à une période que l’on notera xT0.
(2)- Calculer les xn et tracer l’allure de X(ν) la transformé de fourier de x(t).
1

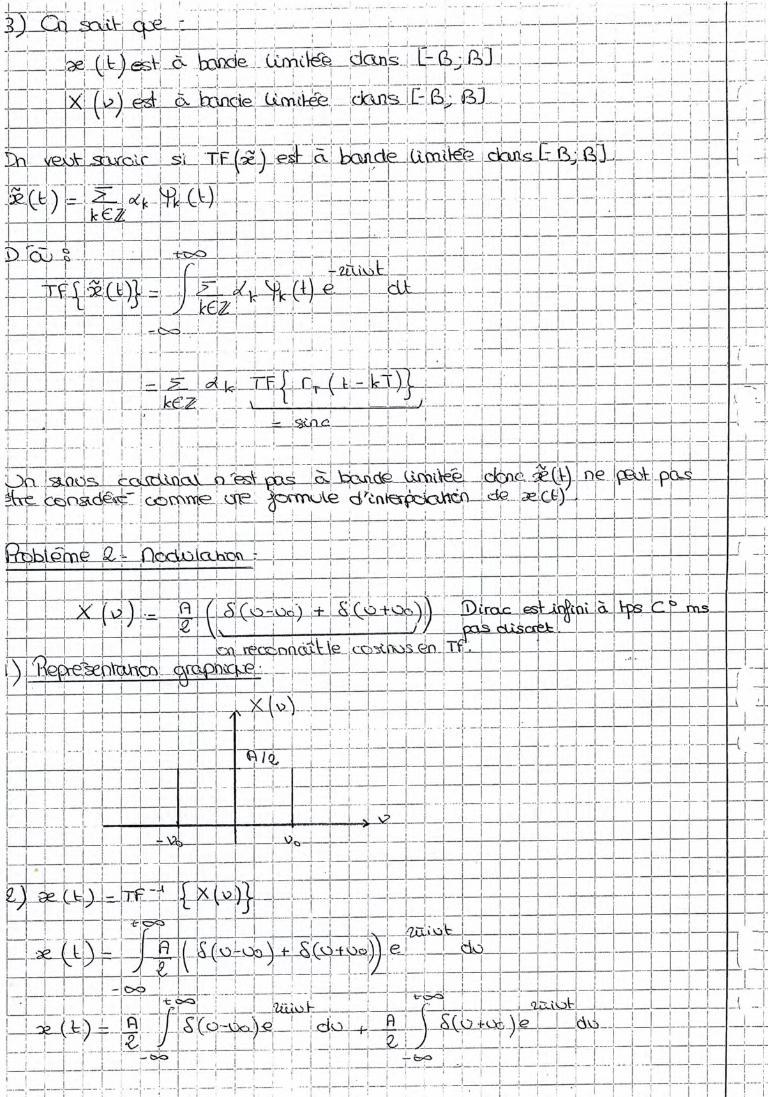
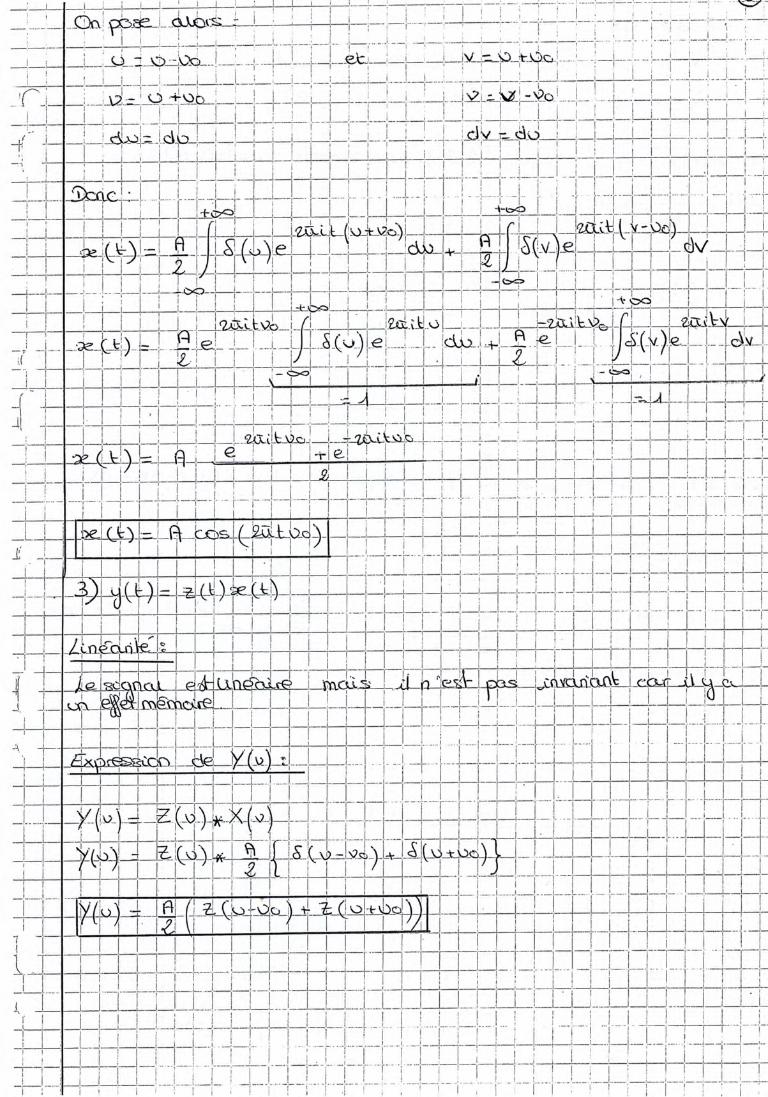
(3) — On considère un second signal m(t) à temps continu, d’énergie finie, et à bande
limitée [-B,B]. Calculer la TF Y (ν) du signal modulé y(t)=m(t)x(t).
(4) — Quelle condition doit vérifier B pour que le spectre de y(t) soit constitué d’une suc-
cession de motifs élémentaires à supports fréquentiels disjoints et limités ? On supposera
cette condition vérifiée par la suite.
(5) — Montrer que le passage de y(t) dans un filtre passe-bas idéal permet de retrouver
m(t) en sortie (démodulation). Ce même principe de démodulation peut-il être appliqué
au signal modulé z(t) = m(t)cos(2πt/T0) ? Le fait que les impulsions constituants x(t)
soient rectangulaires joue-t-il un rôle dans ce cas ?
(c) — Echantillonnage pour des signaux à bande limitée [-B,B] :
Soit x(t) une fonction continue à bande limitée [-B,B]. Soit xe(t) la fonction échantillonnée
de x(t) telle que :
xe(t) = x(t).∑
n∈Z
δ(t− n∆t)
(1) : Que représente ∆t ? Préciser et exprimer ce que l’on nomme les instants d’échan-
tillonnage que l’on notera tn.(2) : Donner l’expression de Xe(ν) la transformée de fourier de xe(t), et en prenant une
forme quelconque pour X(ν) faire un dessin et représenter Xe(ν).(3) : Expliquer en vous appuyant sur le graphique, quel critère faut-il respecter pour éviter
ce qu’on appelle du repliement spectral (ou aliasing). En déduire le critère de Shannon
Nyquist pour les signaux à bande limitée [-B,B].
(4) : Montrer qu’en faisant passer Xe(ν) dans un filtre que l’on explicitera, on retrouve
le théorème d’échantillonnage qui permet de reconstruire x(t) à partir de ses échantillons
x(tn), soit :
x(t) =∑
n∈Z
x(tn)sinc(2B(t− tn))
Problème n 2 : Quizz des téheffes
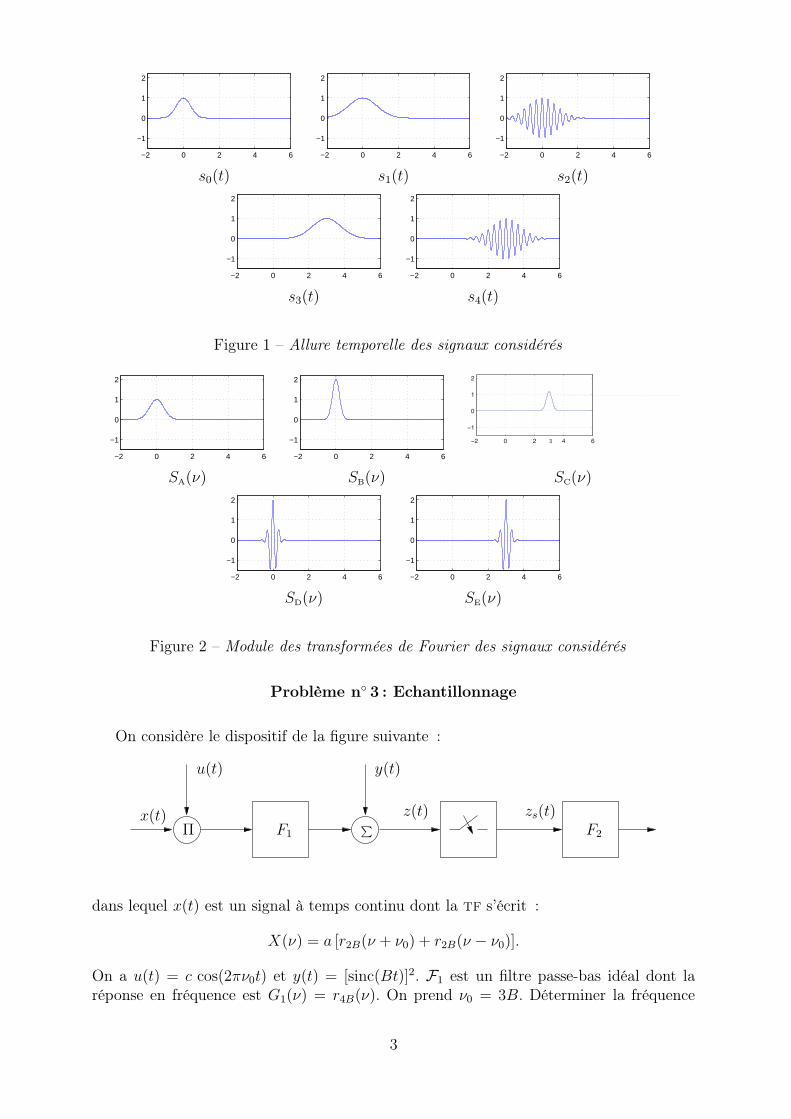
La figure 1 représente l’allure de cinq signaux temporels réels, à temps continu, désignés
par s0(t), . . . , s4(t). Les signaux s1(t) à s4(t) ont été obtenus par des transformations
simples du signal s0(t), telles que translation, dilatation, modulation, etc.
(a) — Identifier ces transformations, c’est-à-dire expliquer comment chacun des signaux
s1(t) à s4(t) a été obtenu à partir de s0(t). Pour chaque signal si(t), on donnera son
expression en fonction d’un autre sj(t). Par exemple, on a s1(t) = s0(t/2). On donne la
transformée de Fourier de x(at), avec a un nombre réel positif :
x(at) ⇒1
aX(ν/a)
avec X(ν) la TF de x(t).
La figure 2 représente, dans un ordre quelconque, des transformées de Fourier
de signaux. On a représenté que le module de ces fonctions, en se limitant à l’intervalle
ν ∈ [−2, +6], ce qui ne veut pas dire que les fonctions considérées soient nécessairement
nulles en dehors de cet intervalle. On sait par ailleurs que SA(ν) est la tf de s0(t).
(b) — Reformer les couples (si(t), Si(ν)), c’est-à-dire retrouver, en le justifiant soigneuse-
ment, les tf des signaux s1(t) à s4(t) dans l’ensemble SB(ν) à SE(ν) (Attention, certaines
TF peuvent ne pas avoir de partenaire ! !).
2
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
s0(t) s1(t) s2(t)
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
s3(t) s4(t)
Figure 1 – Allure temporelle des signaux considérés
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
3
SA(ν) SB(ν) SC(ν)
−2 0 2 4 6
−1
0
1
2
−2 0 2 4 6
−1
0
1
2
SD(ν) SE(ν)
Figure 2 – Module des transformées de Fourier des signaux considérés
Problème n 3 : Echantillonnage
On considère le dispositif de la figure suivante :
x(t)
u(t)
Π F1
y(t)
∑z(t) zs(t)
F2
dans lequel x(t) est un signal à temps continu dont la tf s’écrit :
X(ν) = a [r2B(ν + ν0) + r2B(ν − ν0)].
On a u(t) = c cos(2πν0t) et y(t) = [sinc(Bt)]2. F1 est un filtre passe-bas idéal dont la
réponse en fréquence est G1(ν) = r4B(ν). On prend ν0 = 3B. Déterminer la fréquence
3

d’échantillonnage minimale du signal z(t) permettant de reconstituer ce signal sans dis-
torsion par filtrage passe-bas idéal du signal échantillonné zs(t) par le filtre F2. Quelle doit
être la largeur de bande de ce filtre ? On détaillera chaque étape du calcul (notamment
le calcul de la convolution) et on justifiera la réponse finale.
Problème n 4 : Un signal trapézoïdal
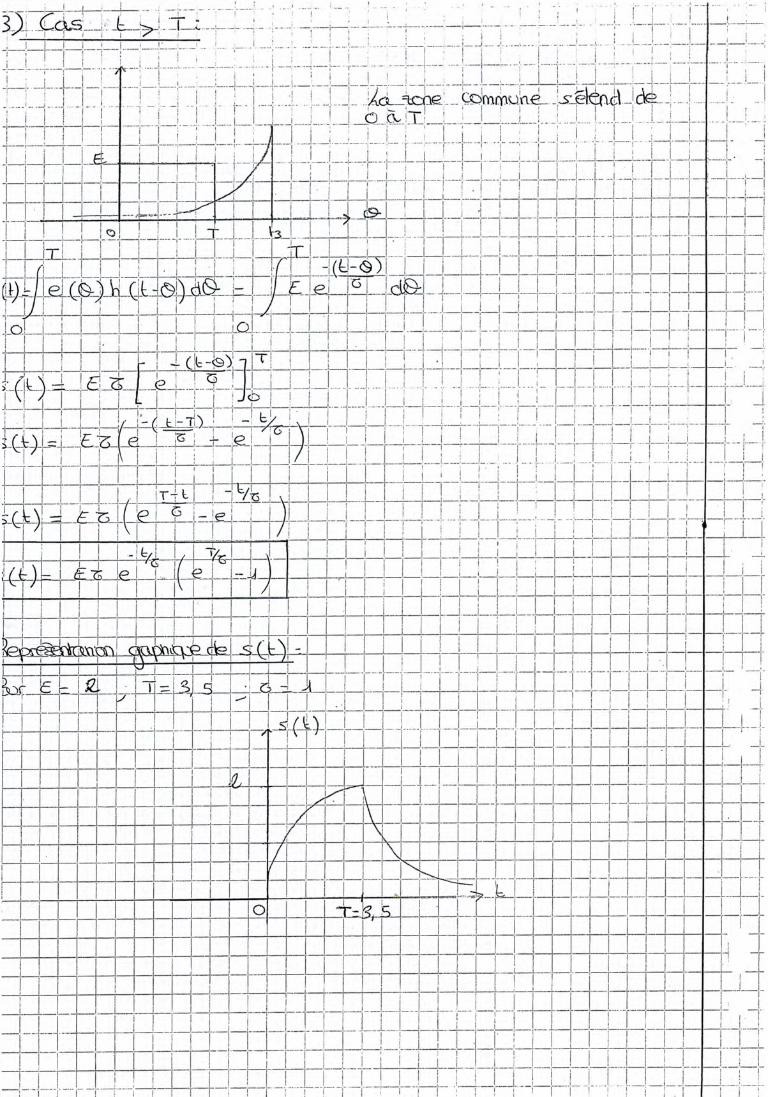
On considère le signal trapézoïdal à temps continu
x(t) =
0 si t /∈ [−b, +b]A si t ∈ [−a, +a], 0 < a < bA (t+ b)/(b− a) si t ∈ [−b, −a]A (b−)/(b− a) si t ∈ [+a, +b] .
(a) — Calculer la dérivée du signal trapézoïdal définit ci dessus.
(b) — On notera r(t,a,b) une fonction rectangle non nulle et égale à l’unité sur [+a, +b](a et b sont des constantes réelles). Exprimer r(t,a,b)en fonction de rb−a(t-α) avec α une
constante fonction de a et b.
Calculer la transformée de Fourier X(ν) de x(t). On donne
TF (x′(t)) = 2 iπ ν TF (x(t)) = 2 iπ ν X(ν)
(c) — Calculer son spectre d’énergie Γx(ν).
—–oOo—–
4
ELASTICITE ET
RHEOLOGIE
!! Nouvelle UE en 2014-2015 :
pas d’annales !!
STRUCTURE ET
PROPRIETES
MECANIQUES DES
SOLIDES
!! Le nom de l’UE a changé :
ancien nom Physique des
Solides !!

1/5
Licence de Mécanique – Université Paris XI Année universitaire 2011-2012
Physique du solide – Examen
Durée 3 h
I- Questions de cours
1) Quelle est la dimensionnalité d’une dislocation ? 2) Rappelez les relations géométriques existant entre vecteur de Burgers et vecteurs des lignes des dislocations coin et vis. II- Cohésion dans un cristal ionique : le chlorure de césium
Le chlorure de césium cristallise dans une maille cubique dont le motif est constitué d’un atome de césium placé à l’origine, et d’un atome de chlore placé au centre de la maille. La distance R entre un anion chlorure Cl- et les cations césium Cs+ les plus proches vaut R0 = 3.559 Å à l’équilibre.
1) Déterminer les couches de premiers, deuxièmes et troisièmes voisins autour du chlore dans CsCl, en précisant à chaque fois : - la nature chimique des voisins dans la couche - la distance entre les voisins de la couche et l’atome de chlore central - le nombre total de voisins dans la couche. 2) On appelle −Cl
V le potentiel électrostatique créé au niveau de l’atome de chlore central par
tous les autres ions. Montrer que −ClV se met sous la forme d'une suite, correspondant aux
ions de plus en plus éloignés, sous la forme:
( )∑+∞
=
−=−
00
14 n
nn
ClC
R
eV
πε,
où C0 = 8 (correspondant aux plus proches voisins) et où on déterminera C1 et C2. 3) On donne la valeur de la somme (constante de Madelung) pour CsCl:
( ) 7627.110
=−=∑+∞
=nn
nCα
Calculez la valeur de cette somme en vous limitant à l’ordre n = 2. Obtenez-vous une valeur proche de la constante de Madelung ? Pourquoi ? 4) Par un raisonnement similaire aux questions 1) et 2) on peut montrer que le potentiel électrostatique crée au niveau d’un atome de césium par tous les autres ions s’écrit :
( )∑+∞
=
−−=+
00
14 n
nn
CsC
R
eV
πε
Donnez l’expression de l’énergie électrostatique ( )REEl d’un cristal de CsCl contenant au
total N motifs (1 atome de chlore + 1 atome de césium), en fonction de R. Ce terme est-il un terme d’énergie attractif ou répulsif ? Justifiez votre réponse.

2/5
5) On introduit maintenant un terme d'énergie potentielle répulsive, noté ( ) 8RBRERép = .
Quel est le phénomène physique ainsi traduit ? 6) Définissez l’énergie réticulaire, et calculez-la ensuite pour CsCl en eV/motif. 7) Définissez l’énergie de cohésion, et calculez-la ensuite pour CsCl en eV/motif. Valeurs numériques : - Charge élémentaire : e = 1.6 10-19 C - Permittivité diélectrique du vide : 8.85 10-12 F.m-1 - Constante de Madelung pour la structure type CsCl : α = 1.7627 - Constante du terme de répulsion : B/N = 16.924 keV.Å8/motif - Potentiel de première ionisation du césium : +→CsCs
P = 3.89 eV
- Affinité électronique du chlore : −→ClClE = 3.62 eV
III- Mailles et motifs
On considère les structures suivantes :
(a) (b)
- Structure (a) : des atomes de rhénium (symbole Re) se trouvent aux sommets de la maille, alors que des atomes d’oxygène occupent le milieu de chaque arête. Métrique de la maille : a = b = c, α = β = γ = 90°.
- Structure (b) : des atomes de titane occupent les sommets de la maille ainsi que son centre.
Des atomes d’oxygène se trouvent au quart et aux trois-quarts des diagonales des faces ( )ba, , ainsi qu’au quart et aux trois-quarts du segment reliant le milieu de deux des arêtes parallèles
à c . Métrique de la maille : a = b ≠ c, α = β = γ = 90°. 1) Pour chacune des structures (a) et (b), donnez le réseau de Bravais et le motif en précisant les coordonnées des atomes du motif.
2) Donner la formule chimique de ces composés. Combien y a-t-il de formules chimiques par maille ?
a
b c
a b c
3/5
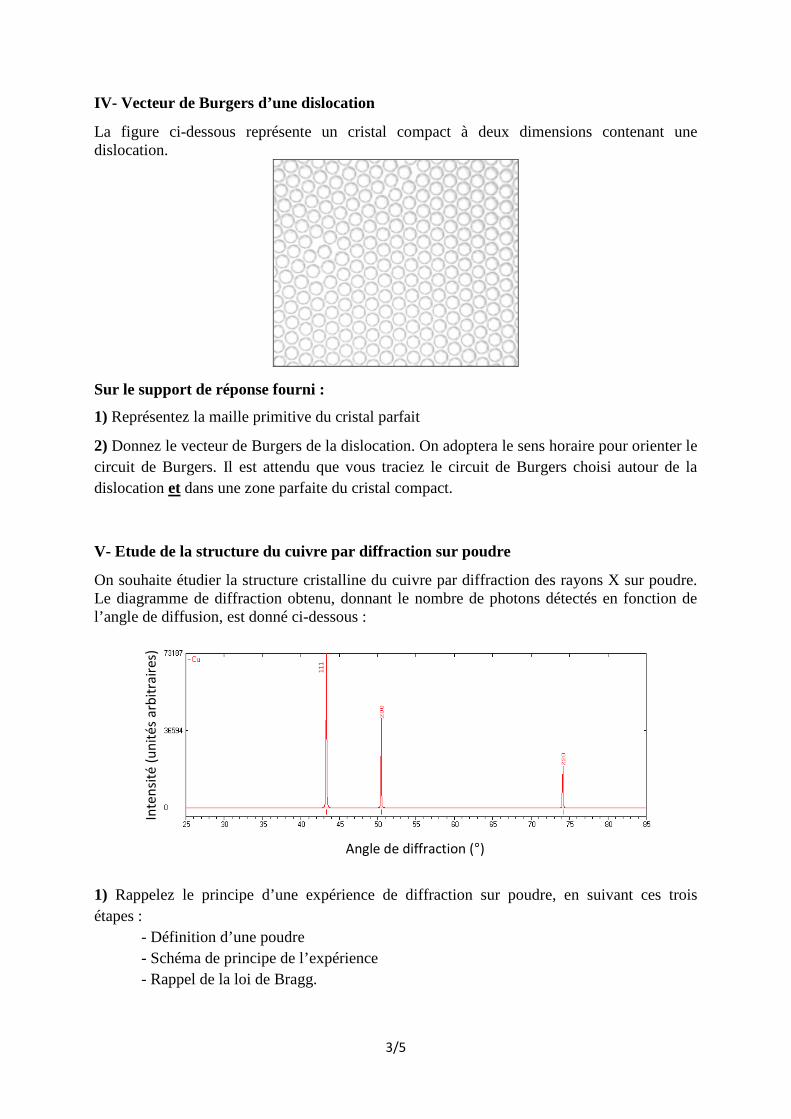
IV- Vecteur de Burgers d’une dislocation
La figure ci-dessous représente un cristal compact à deux dimensions contenant une dislocation.
Sur le support de réponse fourni :
1) Représentez la maille primitive du cristal parfait
2) Donnez le vecteur de Burgers de la dislocation. On adoptera le sens horaire pour orienter le circuit de Burgers. Il est attendu que vous traciez le circuit de Burgers choisi autour de la dislocation et dans une zone parfaite du cristal compact. V- Etude de la structure du cuivre par diffraction sur poudre
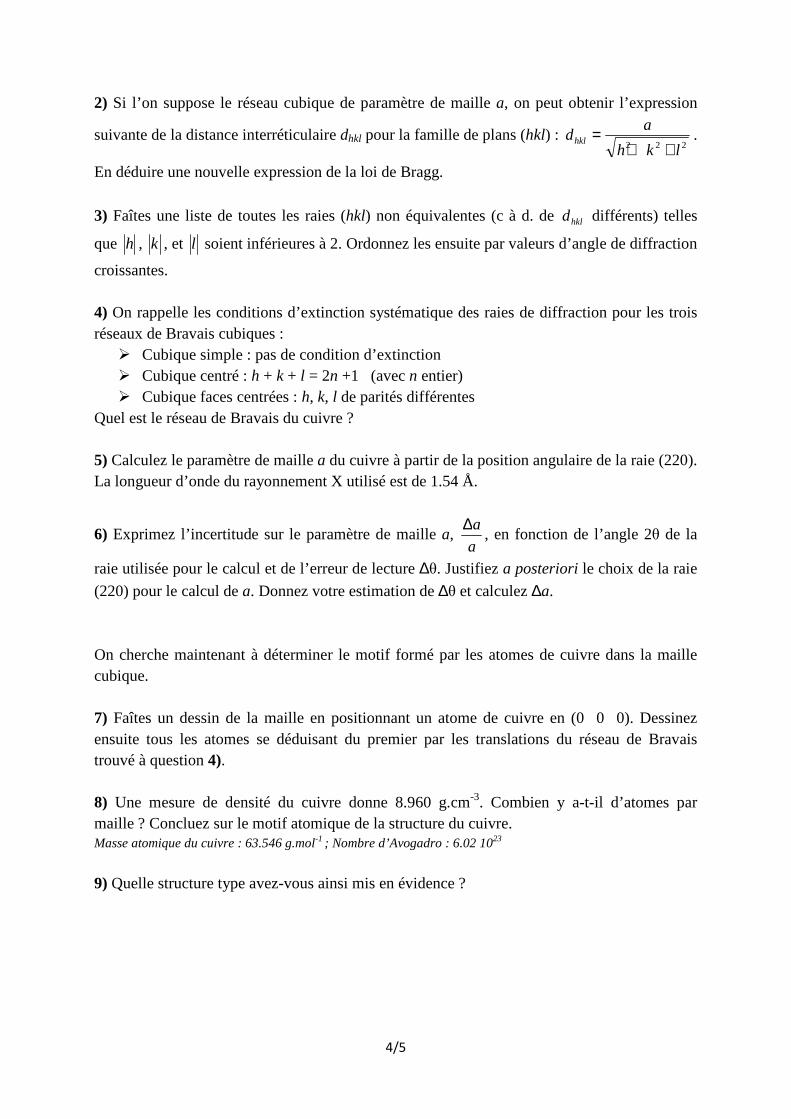
On souhaite étudier la structure cristalline du cuivre par diffraction des rayons X sur poudre. Le diagramme de diffraction obtenu, donnant le nombre de photons détectés en fonction de l’angle de diffusion, est donné ci-dessous :
Inte
nsi
té(u
nit
és
arb
itra
ire
s)
Angle de diffraction (°)
111
1) Rappelez le principe d’une expérience de diffraction sur poudre, en suivant ces trois étapes : - Définition d’une poudre - Schéma de principe de l’expérience - Rappel de la loi de Bragg.
4/5
2) Si l’on suppose le réseau cubique de paramètre de maille a, on peut obtenir l’expression
suivante de la distance interréticulaire dhkl pour la famille de plans (hkl) : 222 lkh
adhkl
++= .
En déduire une nouvelle expression de la loi de Bragg.
3) Faîtes une liste de toutes les raies (hkl) non équivalentes (c à d. de hkld différents) telles
que h , k , et l soient inférieures à 2. Ordonnez les ensuite par valeurs d’angle de diffraction
croissantes. 4) On rappelle les conditions d’extinction systématique des raies de diffraction pour les trois réseaux de Bravais cubiques :
Cubique simple : pas de condition d’extinction Cubique centré : h + k + l = 2n +1 (avec n entier) Cubique faces centrées : h, k, l de parités différentes
Quel est le réseau de Bravais du cuivre ? 5) Calculez le paramètre de maille a du cuivre à partir de la position angulaire de la raie (220). La longueur d’onde du rayonnement X utilisé est de 1.54 Å.
6) Exprimez l’incertitude sur le paramètre de maille a, a
a∆, en fonction de l’angle 2θ de la
raie utilisée pour le calcul et de l’erreur de lecture ∆θ. Justifiez a posteriori le choix de la raie
(220) pour le calcul de a. Donnez votre estimation de ∆θ et calculez ∆a. On cherche maintenant à déterminer le motif formé par les atomes de cuivre dans la maille cubique. 7) Faîtes un dessin de la maille en positionnant un atome de cuivre en (0 0 0). Dessinez ensuite tous les atomes se déduisant du premier par les translations du réseau de Bravais trouvé à question 4). 8) Une mesure de densité du cuivre donne 8.960 g.cm-3. Combien y a-t-il d’atomes par maille ? Concluez sur le motif atomique de la structure du cuivre. Masse atomique du cuivre : 63.546 g.mol-1 ; Nombre d’Avogadro : 6.02 1023
9) Quelle structure type avez-vous ainsi mis en évidence ?
5/5
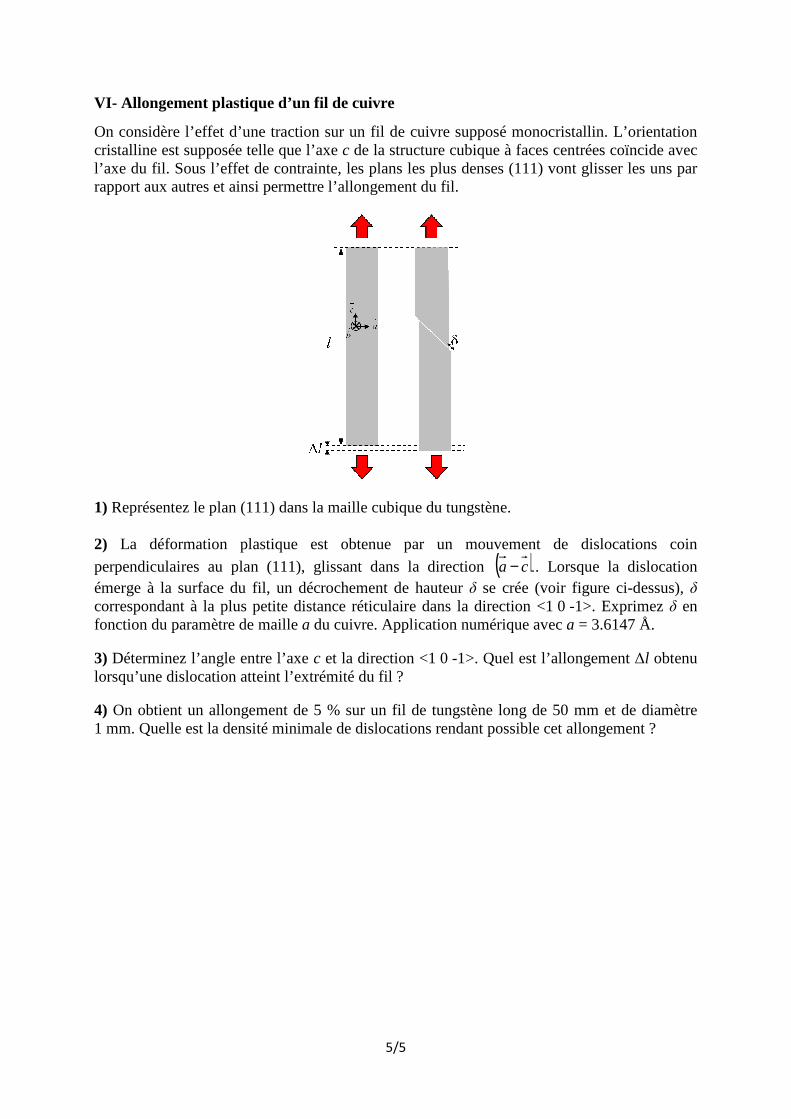
VI- Allongement plastique d’un fil de cuivre
On considère l’effet d’une traction sur un fil de cuivre supposé monocristallin. L’orientation cristalline est supposée telle que l’axe c de la structure cubique à faces centrées coïncide avec l’axe du fil. Sous l’effet de contrainte, les plans les plus denses (111) vont glisser les uns par rapport aux autres et ainsi permettre l’allongement du fil.
1) Représentez le plan (111) dans la maille cubique du tungstène. 2) La déformation plastique est obtenue par un mouvement de dislocations coin
perpendiculaires au plan (111), glissant dans la direction ( )ca− . Lorsque la dislocation émerge à la surface du fil, un décrochement de hauteur δ se crée (voir figure ci-dessus), δ correspondant à la plus petite distance réticulaire dans la direction <1 0 -1>. Exprimez δ en fonction du paramètre de maille a du cuivre. Application numérique avec a = 3.6147 Å. 3) Déterminez l’angle entre l’axe c et la direction <1 0 -1>. Quel est l’allongement ∆l obtenu lorsqu’une dislocation atteint l’extrémité du fil ? 4) On obtient un allongement de 5 % sur un fil de tungstène long de 50 mm et de diamètre 1 mm. Quelle est la densité minimale de dislocations rendant possible cet allongement ?
1/4
Licence de Mécanique – Université Paris XI Année universitaire 2012-2013
Physique du solide – Partiel
Lundi 29 octobre 2012
Durée 2 h – Sans documents – Calculatrice personnelle autorisée
I- Questions de cours
1) Donner la description d’un solide cristallin parfait.
2) Donnez l’expression générale d’un vecteur de translation du réseau dans un cristal de maille cubique à faces centrées.
3) Citez deux types de liaisons pouvant assurer la cohésion dans les solides, en donnant dans chaque cas un exemple de matériau présentant ce type de liaisons.
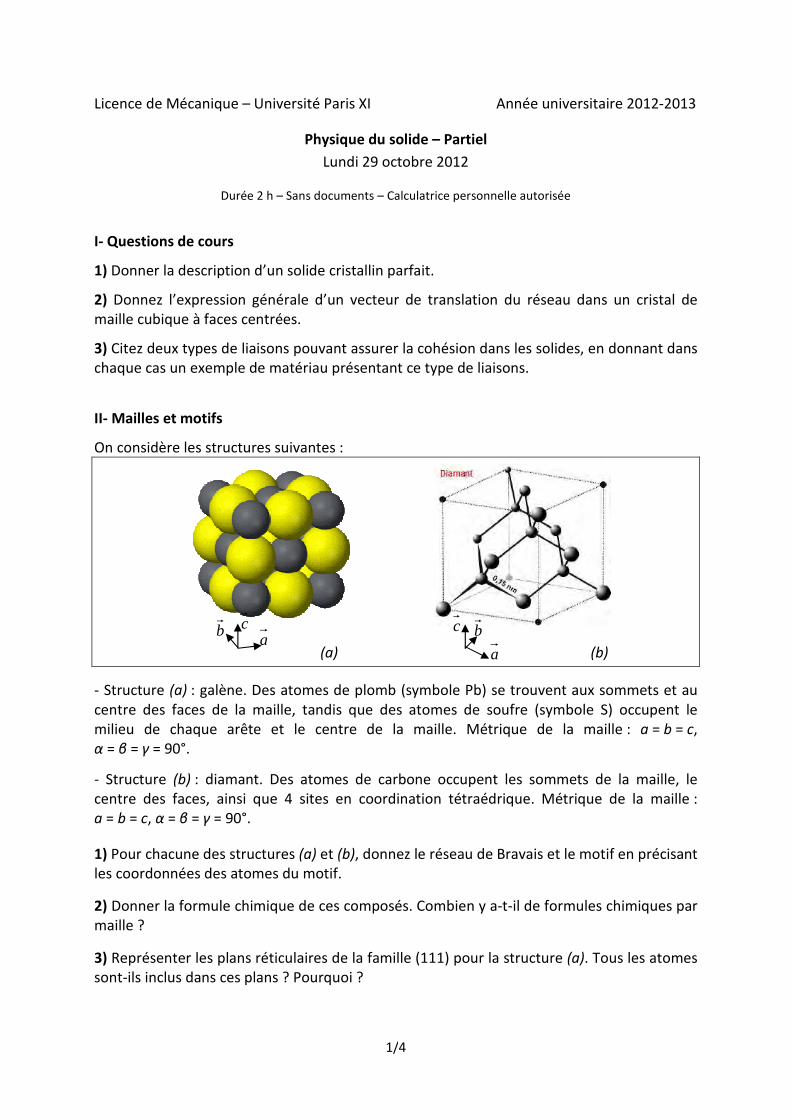
II- Mailles et motifs
On considère les structures suivantes :
(a) (b)
- Structure (a) : galène. Des atomes de plomb (symbole Pb) se trouvent aux sommets et au centre des faces de la maille, tandis que des atomes de soufre (symbole S) occupent le milieu de chaque arête et le centre de la maille. Métrique de la maille : a = b = c, α = β = γ = 90°.
- Structure (b) : diamant. Des atomes de carbone occupent les sommets de la maille, le centre des faces, ainsi que 4 sites en coordination tétraédrique. Métrique de la maille : a = b = c, α = β = γ = 90°.
1) Pour chacune des structures (a) et (b), donnez le réseau de Bravais et le motif en précisant les coordonnées des atomes du motif.
2) Donner la formule chimique de ces composés. Combien y a-t-il de formules chimiques par maille ?
3) Représenter les plans réticulaires de la famille (111) pour la structure (a). Tous les atomes sont-ils inclus dans ces plans ? Pourquoi ?
c b a
a
b c
2/4
III – Plans réticulaires
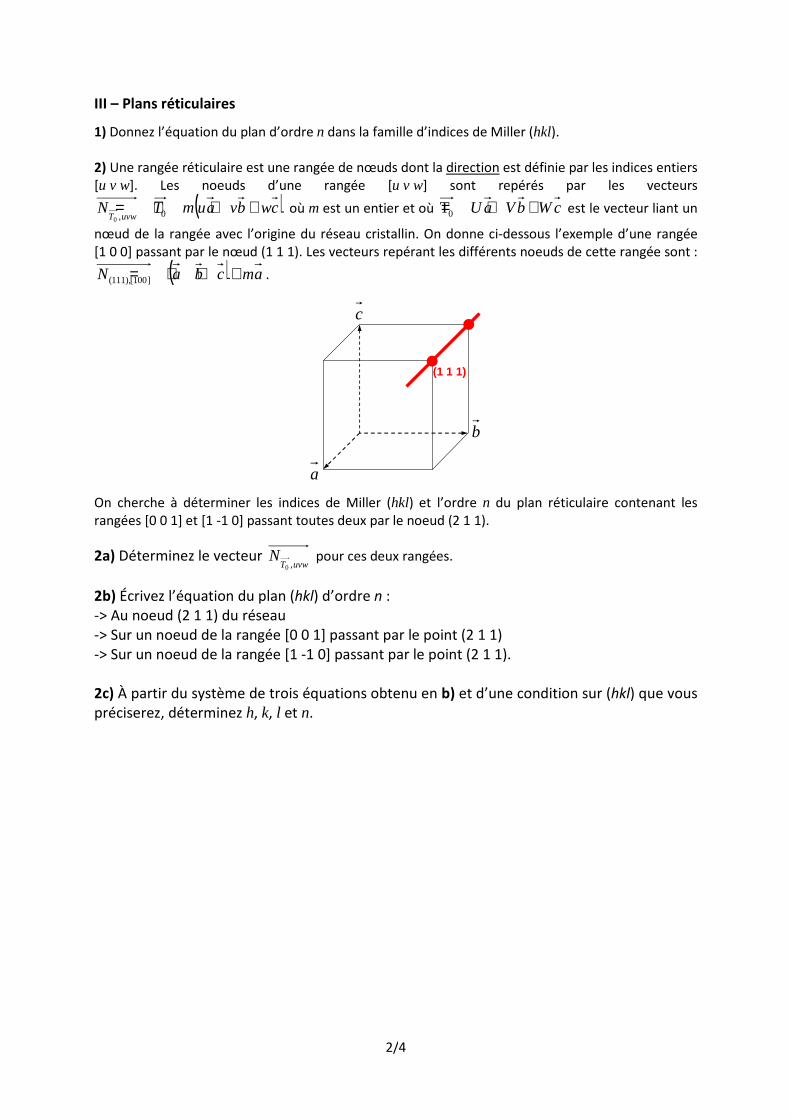
1) Donnez l’équation du plan d’ordre n dans la famille d’indices de Miller (hkl). 2) Une rangée réticulaire est une rangée de nœuds dont la direction est définie par les indices entiers [u v w]. Les noeuds d’une rangée [u v w] sont repérés par les vecteurs
( )cwbvaumTNuvwT
+++= 0,0 où m est un entier et où cWbVaU ++=0T est le vecteur liant un
nœud de la rangée avec l’origine du réseau cristallin. On donne ci-dessous l’exemple d’une rangée [1 0 0] passant par le nœud (1 1 1). Les vecteurs repérant les différents noeuds de cette rangée sont :
( ) amcbaN +++=]100[),111( .
a
b
c
(1 1 1)
On cherche à déterminer les indices de Miller (hkl) et l’ordre n du plan réticulaire contenant les rangées [0 0 1] et [1 -1 0] passant toutes deux par le noeud (2 1 1).
2a) Déterminez le vecteur uvwT
N,0
pour ces deux rangées.
2b) Écrivez l’équation du plan (hkl) d’ordre n : -> Au noeud (2 1 1) du réseau -> Sur un noeud de la rangée [0 0 1] passant par le point (2 1 1) -> Sur un noeud de la rangée [1 -1 0] passant par le point (2 1 1). 2c) À partir du système de trois équations obtenu en b) et d’une condition sur (hkl) que vous préciserez, déterminez h, k, l et n.
3/4
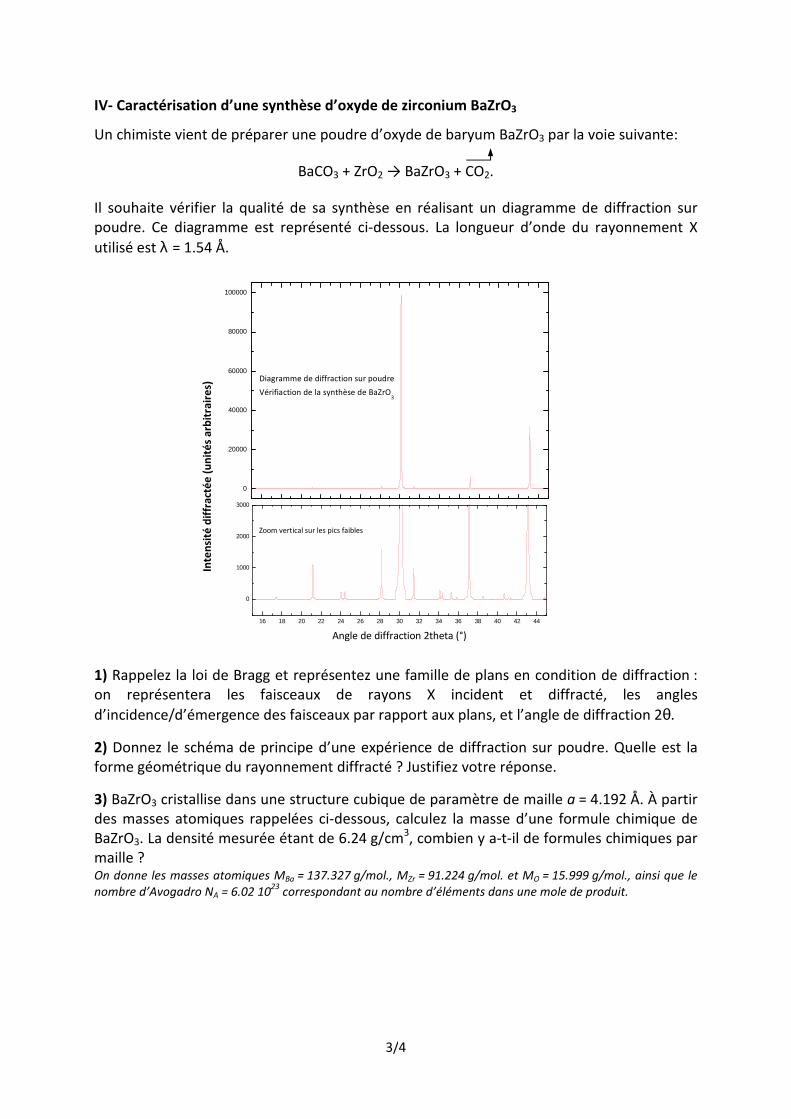
IV- Caractérisation d’une synthèse d’oxyde de zirconium BaZrO3
Un chimiste vient de préparer une poudre d’oxyde de baryum BaZrO3 par la voie suivante:
BaCO3 + ZrO2 → BaZrO3 + CO2.
Il souhaite vérifier la qualité de sa synthèse en réalisant un diagramme de diffraction sur poudre. Ce diagramme est représenté ci-dessous. La longueur d’onde du rayonnement X utilisé est λ = 1.54 Å.
0
20000
40000
60000
80000
100000
Diagramme de diffraction sur poudre
Vérifiaction de la synthèse de BaZrO3
16 18 20 22 24 26 28 30 32 34 36 38 40 42 44
0
1000
2000
3000
Angle de diffraction 2theta (°)
1) Rappelez la loi de Bragg et représentez une famille de plans en condition de diffraction : on représentera les faisceaux de rayons X incident et diffracté, les angles d’incidence/d’émergence des faisceaux par rapport aux plans, et l’angle de diffraction 2θ.
2) Donnez le schéma de principe d’une expérience de diffraction sur poudre. Quelle est la forme géométrique du rayonnement diffracté ? Justifiez votre réponse.
3) BaZrO3 cristallise dans une structure cubique de paramètre de maille a = 4.192 Å. À partir des masses atomiques rappelées ci-dessous, calculez la masse d’une formule chimique de BaZrO3. La densité mesurée étant de 6.24 g/cm3, combien y a-t-il de formules chimiques par maille ? On donne les masses atomiques MBa = 137.327 g/mol., MZr = 91.224 g/mol. et MO = 15.999 g/mol., ainsi que le
nombre d’Avogadro NA = 6.02 1023
correspondant au nombre d’éléments dans une mole de produit.
Inte
nsi
té d
iffr
act
ée
(u
nit
és
arb
itra
ire
s)
Zoom vertical sur les pics faibles
4/4
4) Dans un réseau cubique de paramètre de maille a, les distances interréticulaires dhkl associées aux familles de plans (hkl) sont données par :
222 lkh
adhkl
++=
A quelle(s) famille(s) de plans réticulaires (hikili) correspond(ent) l’angle de diffraction 2θ le plus petit ?
5) Calculez la valeur numérique des 4 premiers angles de diffraction 2θ. Déduisez-en l’indexation de 4 pics de diffraction sur le diagramme présenté page précédente. On présentera les résultats sous forme d’un tableau à trois colonnes : (hkl) // 2θcalculé // 2θobservé. La valeur expérimentale 2θobservé sera donnée avec une précision de 0.5°.
On constate que le diagramme de diffraction mesuré présente plus de pics de diffraction qu’attendu pour un produit BaZrO3 pur. Pour comprendre les pics surnuméraires, l’hypothèse la plus simple consiste à dire que les produits de départ de la synthèse n’ont pas été dosés correctement, et que donc l’un des deux composés BaCO3 ou ZrO2 est toujours présent dans la poudre après réaction.
6) BaCO3 cristallise dans une maille primitive présentant la métrique suivante : a = 5.310 Å, b = 8.904 Å, c = 6.430 Å et α = β = γ = 90°. ZrO2 cristallise dans une maille primitive présentant la métrique suivante : a = 5.149 Å, b = 5.213 Å, c = 5.316 Å, α = γ = 90° et β = 99.23°. Quels sont les réseaux de Bravais associés aux structures de BaCO3 et ZrO2 ?
7) On donne les expressions de dhkl pour BaCO3 et ZrO2 :
[ ]2223
1
+
+
=
c
l
b
k
a
hBaCOdhkl
, [ ]
ββ
ββ 222
2
2
2
22
22
sincos2
sinsin
1
ac
hl
c
l
b
k
a
hZrOdhkl
−++=
On admet que le pic de diffraction le plus intense est le (1 1 1) dans BaCO3, et le (-1 1 1) dans ZrO2. Calculez les angles de diffraction correspondants, 2θ111[BaCO3] et 2θ-111[ZrO2].
8) Concluez quant au dosage des produits de départ pour cette synthèse de BaZrO3.

1/5
Licence de Mécanique – Université Paris XI Année universitaire 2012-2013
Physique du solide – Examen
Mardi 18 décembre 2012
Durée 3 h – Sans documents – Calculatrice personnelle autorisée
I- Question de cours
Donnez un exemple de défaut cristallin : - ponctuel - linéaire
Dans le dernier cas, citer une propriété physique du cristal qui dépend de façon cruciale de la présence de ces défauts. II- Cohésion dans un cristal de gaz rare : le néon
En dessous de 24.6 K, le néon cristallise dans une maille cubique à faces centrées, avec un motif constitué d’un atome de néon. La cohésion du cristal est due aux forces attractives de Van Der Waals-London. On donne ci-dessous l’expression de l’énergie potentielle du cristal de néon :
[ ]
−
=6
2
12
1421
RRNUTot
σασαε ,
où R est la distance entre atomes de néon premiers voisins, et où α1, α2, σ et ε sont des constantes positives. N est le nombre total d’atomes constituant le cristal.
1) Rappelez la signification physique des termes en 1/R12 et 1/R6 dans l’expression (1).
2) Déterminez la distance entre deux atomes de néon premiers voisins à l’équilibre, notée R0. Vous donnerez une expression de R0 dépendant des paramètres α1, α2 et σ. Application numérique avec α1 = 12.13, α2 = 14.45, et σ = 2.74 Å.
3) Rappelez la définition de l’énergie de cohésion d’un cristal. Donnez ensuite l’expression de l’énergie de cohésion du néon cristallin Ecoh en fonction de N, R0, α1, α2, σ et ε. Calculer Ecoh en eV/atome sachant que ε = 5 10-22 J. On rappelle également la valeur de la charge élémentaire : e = 1.6 10-19 C.
4) Représentez la maille du cristal de néon, en indiquant le paramètre de maille a et la distance entre plus proches atomes de néon, R0. Donnez l’expression reliant a et R0, puis calculez la valeur numérique de a.
5) Quelle est la multiplicité de la maille cubique à faces centrées ?
6) Quelle est la particularité de l’empilement des atomes de néon dans la structure considérée ici ? Quelle autre structure permettrait d’obtenir un empilement similaire des atomes de néon ?
(1)
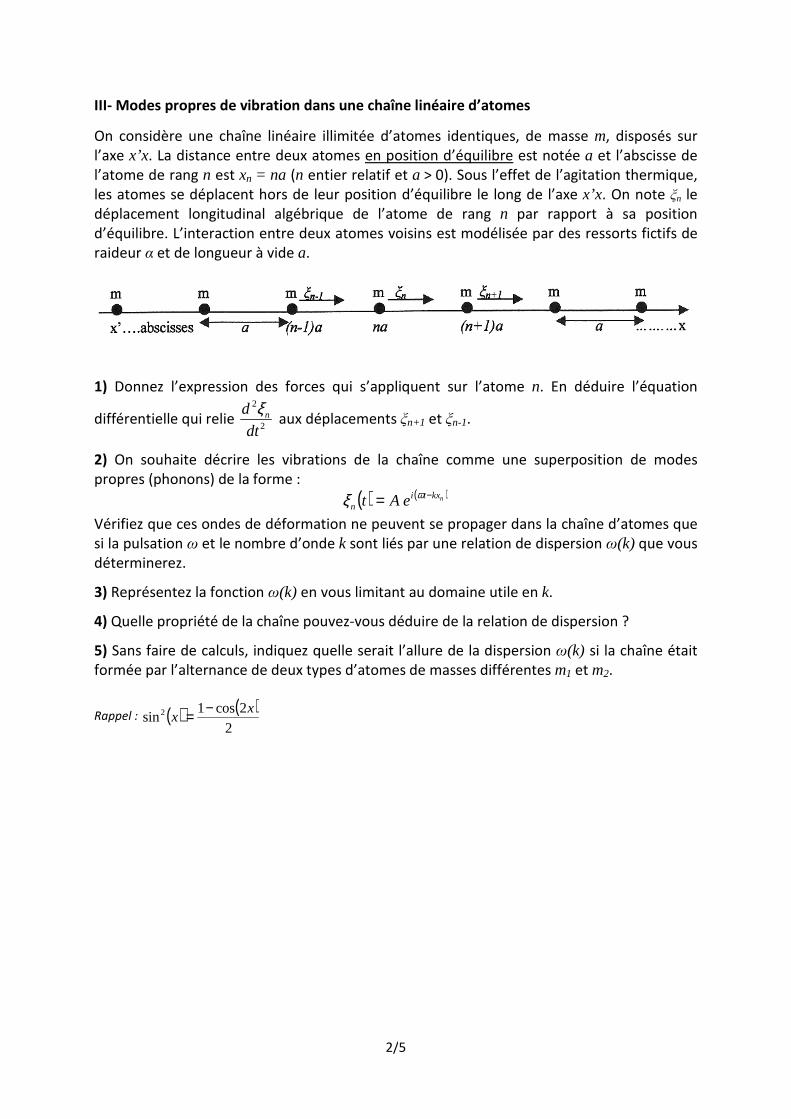
2/5
III- Modes propres de vibration dans une chaîne linéaire d’atomes
On considère une chaîne linéaire illimitée d’atomes identiques, de masse m, disposés sur l’axe x’x. La distance entre deux atomes en position d’équilibre est notée a et l’abscisse de l’atome de rang n est xn = na (n entier relatif et a > 0). Sous l’effet de l’agitation thermique, les atomes se déplacent hors de leur position d’équilibre le long de l’axe x’x. On note ξn le déplacement longitudinal algébrique de l’atome de rang n par rapport à sa position d’équilibre. L’interaction entre deux atomes voisins est modélisée par des ressorts fictifs de raideur α et de longueur à vide a.
1) Donnez l’expression des forces qui s’appliquent sur l’atome n. En déduire l’équation
différentielle qui relie 2
2
dt
d nξ aux déplacements ξn+1 et ξn-1.
2) On souhaite décrire les vibrations de la chaîne comme une superposition de modes propres (phonons) de la forme :
( ) ( )nkxtin eAt −= ωξ
Vérifiez que ces ondes de déformation ne peuvent se propager dans la chaîne d’atomes que si la pulsation ω et le nombre d’onde k sont liés par une relation de dispersion ω(k) que vous déterminerez.
3) Représentez la fonction ω(k) en vous limitant au domaine utile en k.
4) Quelle propriété de la chaîne pouvez-vous déduire de la relation de dispersion ?
5) Sans faire de calculs, indiquez quelle serait l’allure de la dispersion ω(k) si la chaîne était formée par l’alternance de deux types d’atomes de masses différentes m1 et m2.
Rappel : ( ) ( )2
2cos1sin 2 x
x−=
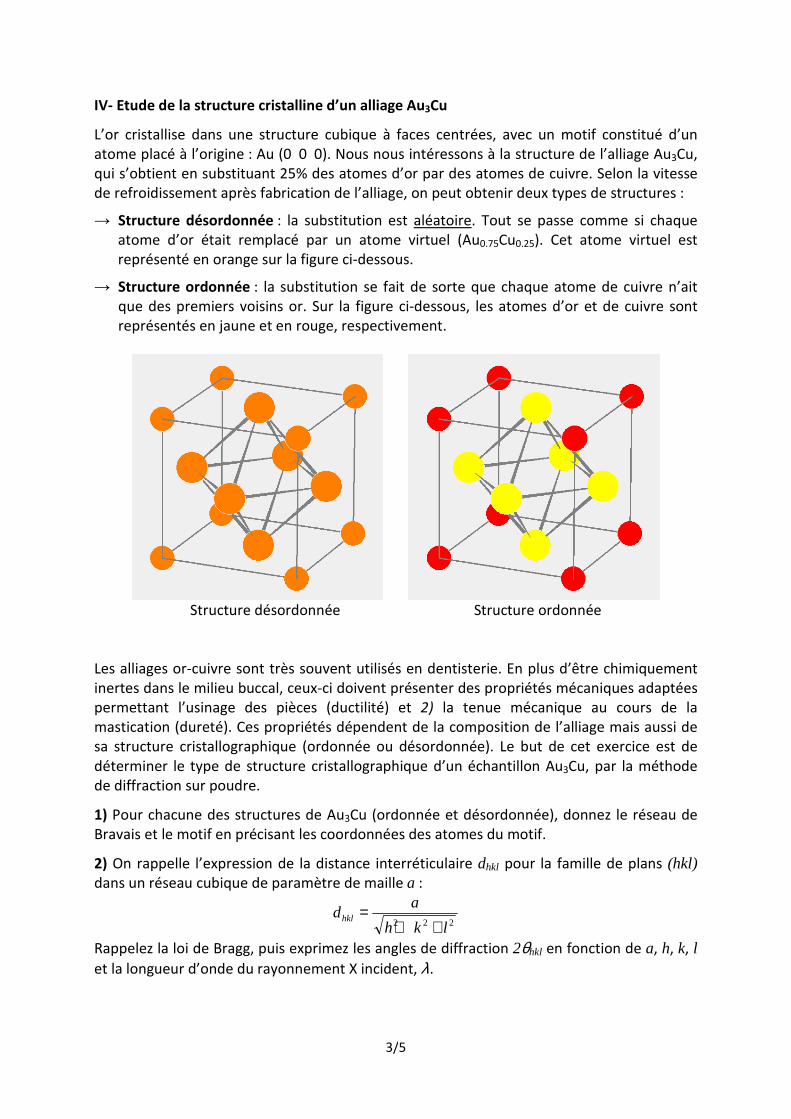
3/5
IV- Etude de la structure cristalline d’un alliage Au3Cu
L’or cristallise dans une structure cubique à faces centrées, avec un motif constitué d’un atome placé à l’origine : Au (0 0 0). Nous nous intéressons à la structure de l’alliage Au3Cu, qui s’obtient en substituant 25% des atomes d’or par des atomes de cuivre. Selon la vitesse de refroidissement après fabrication de l’alliage, on peut obtenir deux types de structures :
→ Structure désordonnée : la substitution est aléatoire. Tout se passe comme si chaque atome d’or était remplacé par un atome virtuel (Au0.75Cu0.25). Cet atome virtuel est représenté en orange sur la figure ci-dessous.
→ Structure ordonnée : la substitution se fait de sorte que chaque atome de cuivre n’ait que des premiers voisins or. Sur la figure ci-dessous, les atomes d’or et de cuivre sont représentés en jaune et en rouge, respectivement.
Structure désordonnée Structure ordonnée
Les alliages or-cuivre sont très souvent utilisés en dentisterie. En plus d’être chimiquement inertes dans le milieu buccal, ceux-ci doivent présenter des propriétés mécaniques adaptées permettant l’usinage des pièces (ductilité) et 2) la tenue mécanique au cours de la mastication (dureté). Ces propriétés dépendent de la composition de l’alliage mais aussi de sa structure cristallographique (ordonnée ou désordonnée). Le but de cet exercice est de déterminer le type de structure cristallographique d’un échantillon Au3Cu, par la méthode de diffraction sur poudre.
1) Pour chacune des structures de Au3Cu (ordonnée et désordonnée), donnez le réseau de Bravais et le motif en précisant les coordonnées des atomes du motif.
2) On rappelle l’expression de la distance interréticulaire dhkl pour la famille de plans (hkl) dans un réseau cubique de paramètre de maille a :
222 lkh
adhkl
++=
Rappelez la loi de Bragg, puis exprimez les angles de diffraction 2θhkl en fonction de a, h, k, l et la longueur d’onde du rayonnement X incident, λ.
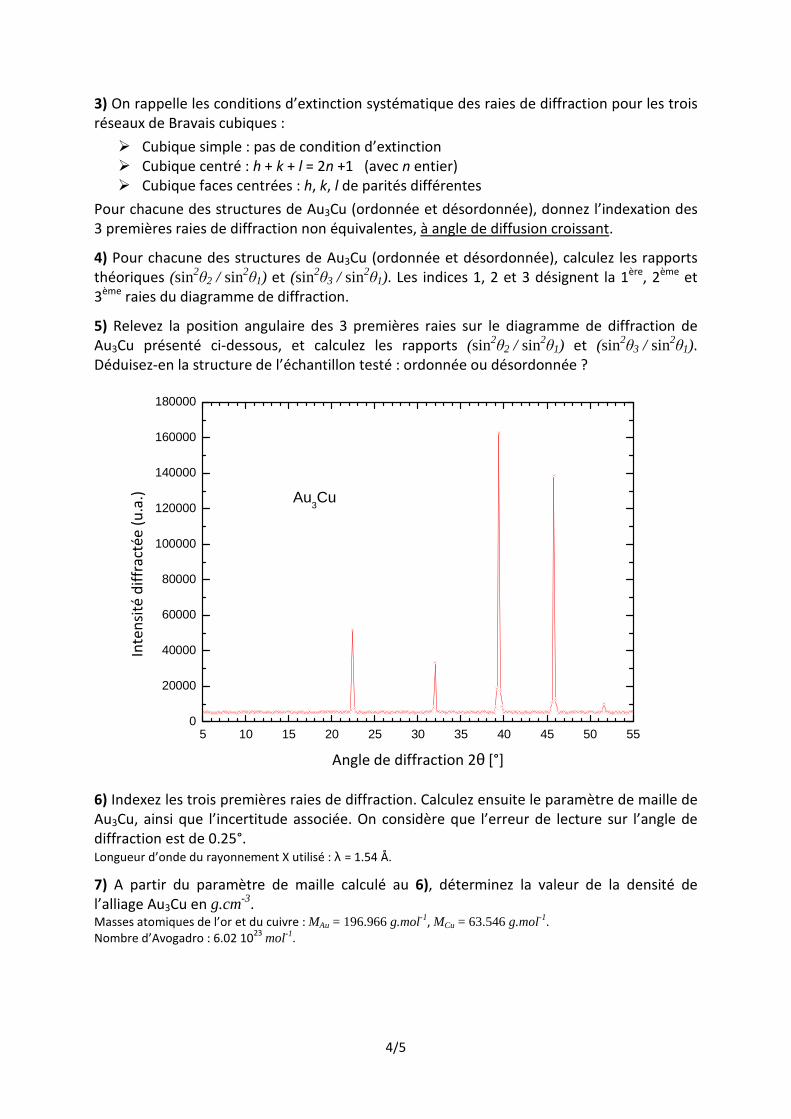
4/5
3) On rappelle les conditions d’extinction systématique des raies de diffraction pour les trois réseaux de Bravais cubiques :
Cubique simple : pas de condition d’extinction Cubique centré : h + k + l = 2n +1 (avec n entier) Cubique faces centrées : h, k, l de parités différentes
Pour chacune des structures de Au3Cu (ordonnée et désordonnée), donnez l’indexation des 3 premières raies de diffraction non équivalentes, à angle de diffusion croissant.
4) Pour chacune des structures de Au3Cu (ordonnée et désordonnée), calculez les rapports théoriques (sin2
θ2 / sin2θ1) et (sin2
θ3 / sin2θ1). Les indices 1, 2 et 3 désignent la 1ère, 2ème et
3ème raies du diagramme de diffraction.
5) Relevez la position angulaire des 3 premières raies sur le diagramme de diffraction de Au3Cu présenté ci-dessous, et calculez les rapports (sin2
θ2 / sin2θ1) et (sin2
θ3 / sin2θ1).
Déduisez-en la structure de l’échantillon testé : ordonnée ou désordonnée ?
5 10 15 20 25 30 35 40 45 50 550
20000
40000
60000
80000
100000
120000
140000
160000
180000
Au3Cu
Inte
nsi
té d
iffr
acté
e (u
.a.)
Angle de diffraction 2θ [°] 6) Indexez les trois premières raies de diffraction. Calculez ensuite le paramètre de maille de Au3Cu, ainsi que l’incertitude associée. On considère que l’erreur de lecture sur l’angle de diffraction est de 0.25°. Longueur d’onde du rayonnement X utilisé : λ = 1.54 Å.
7) A partir du paramètre de maille calculé au 6), déterminez la valeur de la densité de l’alliage Au3Cu en g.cm-3. Masses atomiques de l’or et du cuivre : MAu = 196.966 g.mol-1, MCu = 63.546 g.mol-1. Nombre d’Avogadro : 6.02 1023 mol-1.
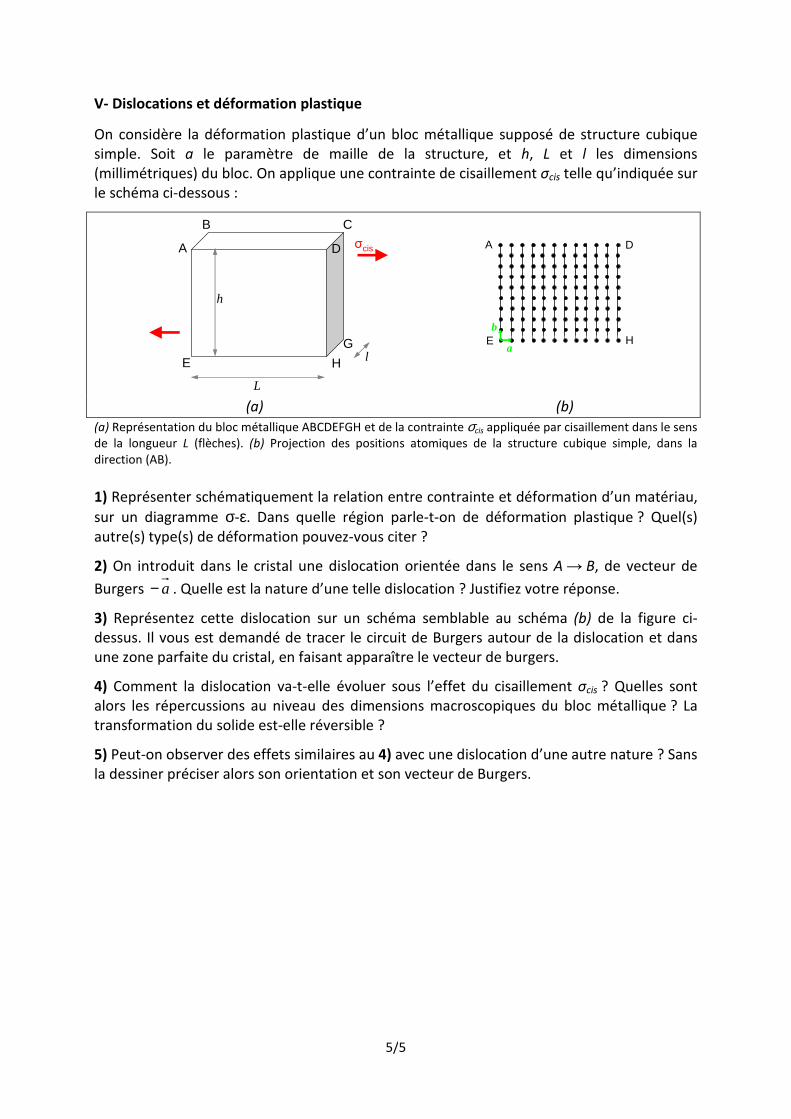
5/5
V- Dislocations et déformation plastique
On considère la déformation plastique d’un bloc métallique supposé de structure cubique simple. Soit a le paramètre de maille de la structure, et h, L et l les dimensions (millimétriques) du bloc. On applique une contrainte de cisaillement σcis telle qu’indiquée sur le schéma ci-dessous :
A
B C
D
HE
G
σcis
h
L
l
E
A D
Ha
b
(a) (b)
(a) Représentation du bloc métallique ABCDEFGH et de la contrainte σcis appliquée par cisaillement dans le sens de la longueur L (flèches). (b) Projection des positions atomiques de la structure cubique simple, dans la direction (AB).
1) Représenter schématiquement la relation entre contrainte et déformation d’un matériau, sur un diagramme σ-ε. Dans quelle région parle-t-on de déformation plastique ? Quel(s) autre(s) type(s) de déformation pouvez-vous citer ?
2) On introduit dans le cristal une dislocation orientée dans le sens A → B, de vecteur de
Burgers a− . Quelle est la nature d’une telle dislocation ? Justifiez votre réponse.
3) Représentez cette dislocation sur un schéma semblable au schéma (b) de la figure ci-dessus. Il vous est demandé de tracer le circuit de Burgers autour de la dislocation et dans une zone parfaite du cristal, en faisant apparaître le vecteur de burgers.
4) Comment la dislocation va-t-elle évoluer sous l’effet du cisaillement σcis ? Quelles sont alors les répercussions au niveau des dimensions macroscopiques du bloc métallique ? La transformation du solide est-elle réversible ?
5) Peut-on observer des effets similaires au 4) avec une dislocation d’une autre nature ? Sans la dessiner préciser alors son orientation et son vecteur de Burgers.
1/3
Licence de Mécanique – Université Paris XI Année universitaire 2013-2014
Physique du solide – Partiel
Mardi 29 octobre 2013
Durée 2h00 – Sans documents – Calculatrice personnelle autorisée
I- Questions de cours (4.5 pts)
1) Citez les 3 principaux états thermodynamiques de la matière. Pour chacun d’entre eux, donnez l’ordre de grandeur des distances interatomiques.
2) Représentez de manière schématique : a- Le diagramme de contrainte-déformation d’un matériau fragile. b- Le diagramme de contrainte-déformation d’un matériau ductile.
3) Citez 3 types de liaisons chimiques, en donnant dans chaque cas un exemple de matériau présentant ce type de liaisons. Classez ensuite les 3 types de liaisons choisis par ordre décroissant de la force de liaison.
4) Dans quel cadre peut-on modéliser une liaison chimique par un ressort ? II- Dimensionnement d’un câble métallique (3 pts)
Dans cet exercice, on cherche à déterminer le diamètre minimum minD d’un fil de fer
capable de supporter une charge de 10 kg sans se déformer plastiquement :
La rigidité C du fer constituant le fil est égale à 24.1010 Pa. Sa dureté L est de 5.107 Pa.
1) La force zumgP s’exerce à l’extrémité du fil du fait de la présence de la charge.
Donnez l’expression de la contrainte de traction uniaxiale correspondante, , en fonction de m , g et du diamètre du fil D .
2) Déterminez alors l’expression de minD à partir des données du problème. Application
numérique. Constante du champ de gravitation terrestre : g = 9.81 m.s
-2.
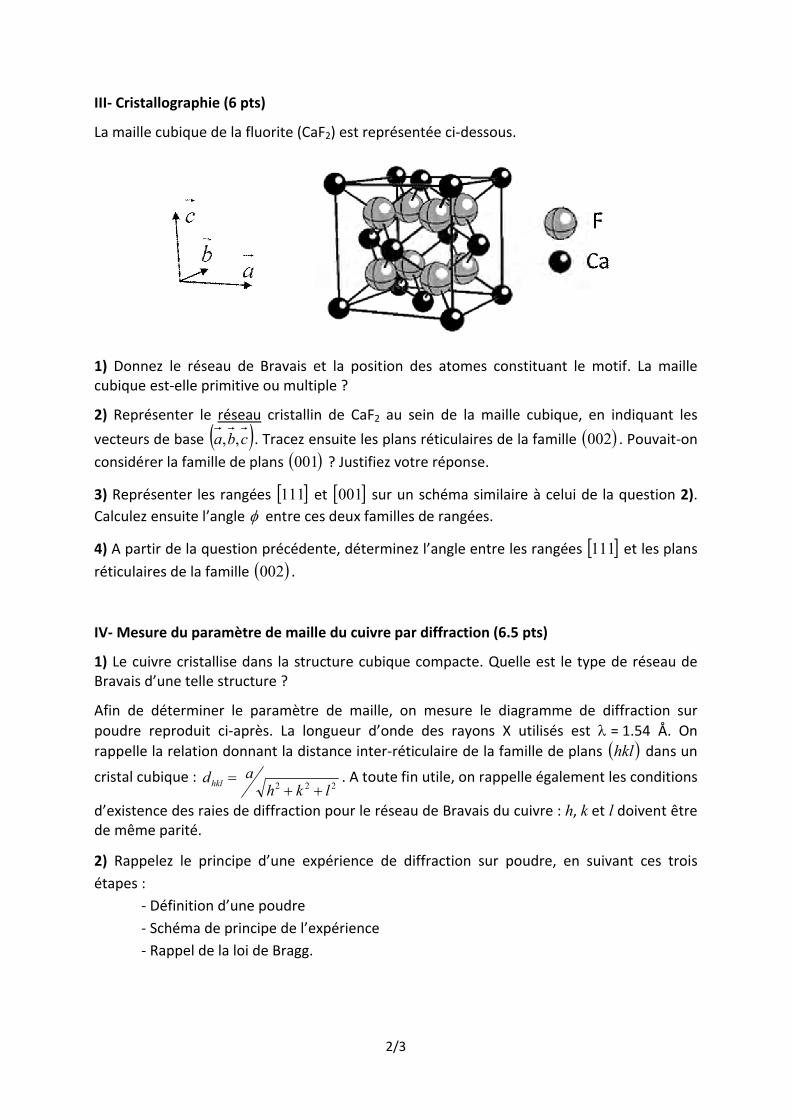
2/3
III- Cristallographie (6 pts)
La maille cubique de la fluorite (CaF2) est représentée ci-dessous.
1) Donnez le réseau de Bravais et la position des atomes constituant le motif. La maille cubique est-elle primitive ou multiple ?
2) Représenter le réseau cristallin de CaF2 au sein de la maille cubique, en indiquant les
vecteurs de base cba ,, . Tracez ensuite les plans réticulaires de la famille 002 . Pouvait-on
considérer la famille de plans 001 ? Justifiez votre réponse.
3) Représenter les rangées 111 et 001 sur un schéma similaire à celui de la question 2).
Calculez ensuite l’angle entre ces deux familles de rangées.
4) A partir de la question précédente, déterminez l’angle entre les rangées 111 et les plans
réticulaires de la famille 002 .
IV- Mesure du paramètre de maille du cuivre par diffraction (6.5 pts)
1) Le cuivre cristallise dans la structure cubique compacte. Quelle est le type de réseau de Bravais d’une telle structure ?
Afin de déterminer le paramètre de maille, on mesure le diagramme de diffraction sur
poudre reproduit ci-après. La longueur d’onde des rayons X utilisés est = 1.54 Å. On
rappelle la relation donnant la distance inter-réticulaire de la famille de plans hkl dans un
cristal cubique : 222 lkh
adhkl
. A toute fin utile, on rappelle également les conditions
d’existence des raies de diffraction pour le réseau de Bravais du cuivre : h, k et l doivent être de même parité.
2) Rappelez le principe d’une expérience de diffraction sur poudre, en suivant ces trois
étapes :
- Définition d’une poudre
- Schéma de principe de l’expérience
- Rappel de la loi de Bragg.
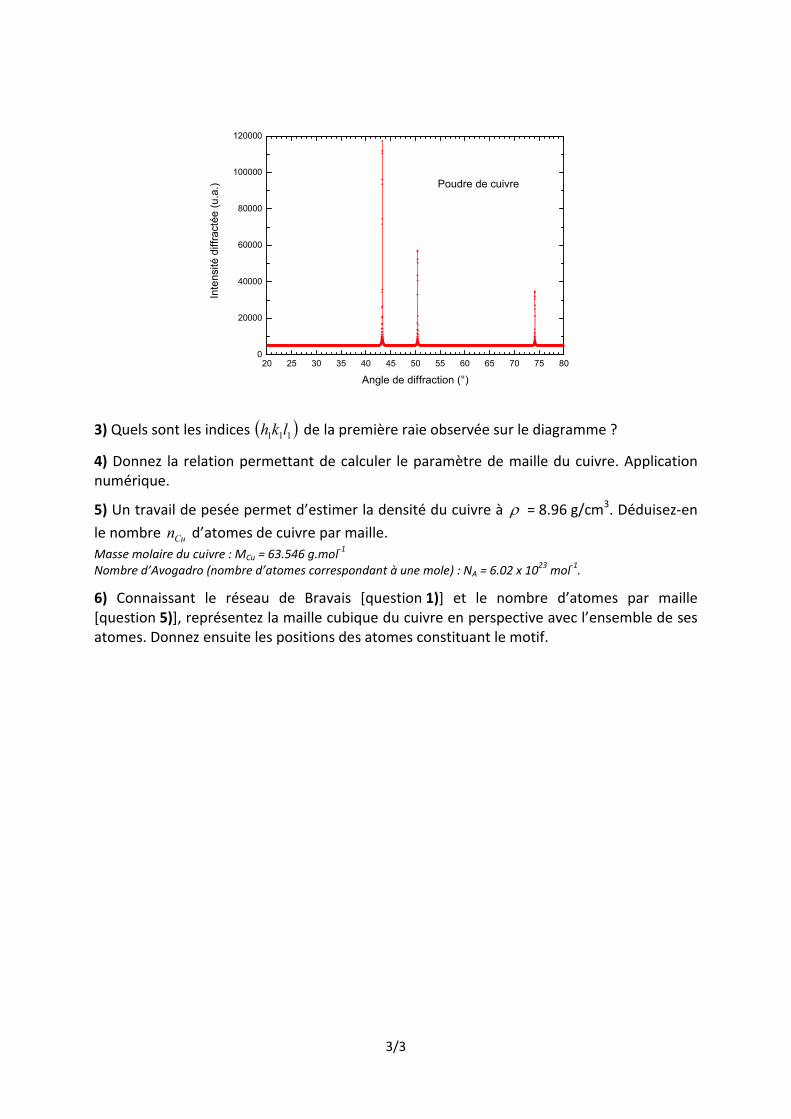
3/3
20 25 30 35 40 45 50 55 60 65 70 75 800
20000
40000
60000
80000
100000
120000
Inte
nsi
té d
iffra
cté
e (
u.a
.)
Angle de diffraction (°)
Poudre de cuivre
3) Quels sont les indices 111 lkh de la première raie observée sur le diagramme ?
4) Donnez la relation permettant de calculer le paramètre de maille du cuivre. Application numérique.
5) Un travail de pesée permet d’estimer la densité du cuivre à = 8.96 g/cm3. Déduisez-en
le nombre Cun d’atomes de cuivre par maille.
Masse molaire du cuivre : MCu = 63.546 g.mol-1
Nombre d’Avogadro (nombre d’atomes correspondant à une mole) : NA = 6.02 x 10
23 mol
-1.
6) Connaissant le réseau de Bravais [question 1)] et le nombre d’atomes par maille [question 5)], représentez la maille cubique du cuivre en perspective avec l’ensemble de ses atomes. Donnez ensuite les positions des atomes constituant le motif.

1/5
Licence de Mécanique – Université Paris XI Année universitaire 2013-2014
Physique du solide – Examen
Jeudi 19 décembre 2013
Durée 3h00 – Sans documents – Calculatrice personnelle autorisée
I- Question de cours
1) Rappelez les relations géométriques existant entre le vecteur de Burgers et les vecteurs des lignes de dislocation coin et vis. II- Etude d’un empilement hexagonal compact.
On rappelle ci-dessous la maille cristallographique de la structure hexagonale compacte, obtenue par l’empilement alternatif de plans denses de type « A » et de type « B ». Le réseau de Bravais est hexagonal primitif, le motif étant formé de deux atomes métalliques M placés en (0 0 0) et (⅔ ⅓ ½).
Dans cet exercice, nous cherchons à décrire la structure hexagonale obtenue en empilant des sphères dures de rayon R . 1) Parmi les sphères représentées dans la maille cristallographique ci-dessus, lesquelles sont en contact direct avec la sphère d’indice 0 placée à l’origine ? 2) Déduisez-en une expression des paramètres de maille a et c en fonction du rayon R des
sphères dures, puis calculez le rapport a
c .
3) Calculez la compacité C de la structure hexagonale compacte (rapport du volume occupé par les sphères sur le volume total).
A
A
B
0 1
2 3
4
5 6
7 8
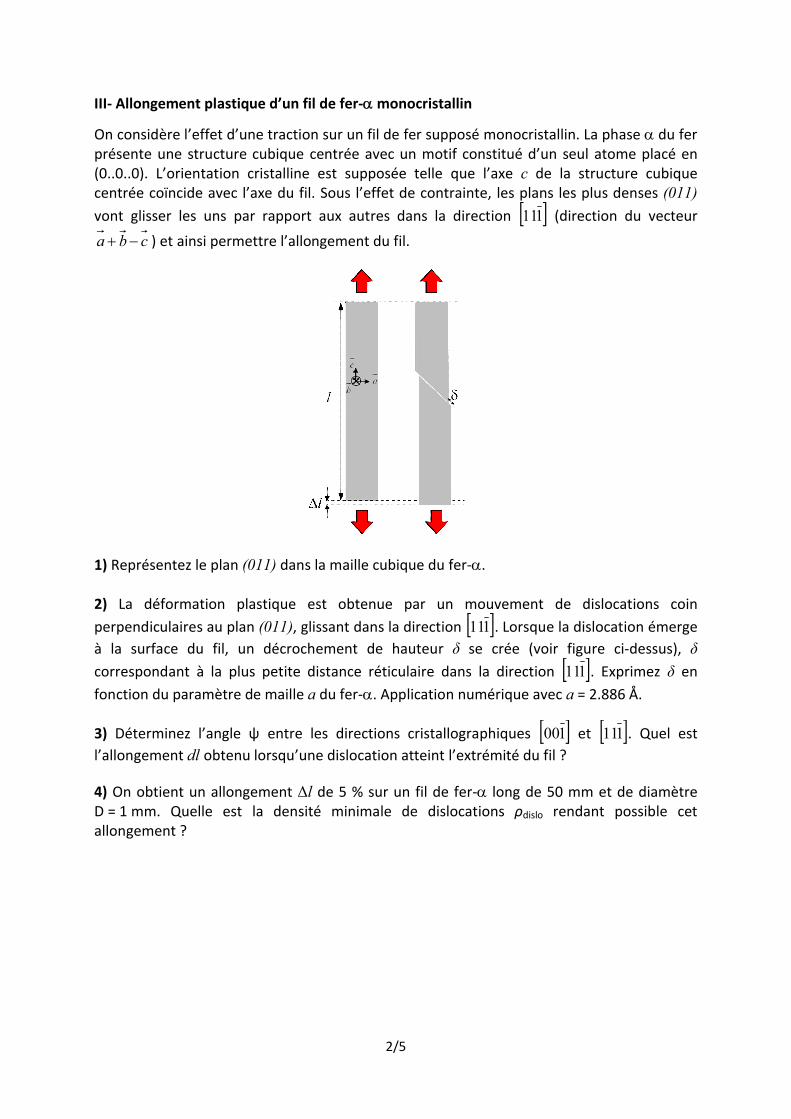
2/5
III- Allongement plastique d’un fil de fer- monocristallin
On considère l’effet d’une traction sur un fil de fer supposé monocristallin. La phase du fer présente une structure cubique centrée avec un motif constitué d’un seul atome placé en (0..0..0). L’orientation cristalline est supposée telle que l’axe c de la structure cubique centrée coïncide avec l’axe du fil. Sous l’effet de contrainte, les plans les plus denses (011)
vont glisser les uns par rapport aux autres dans la direction 111 (direction du vecteur
cba ) et ainsi permettre l’allongement du fil.
1) Représentez le plan (011) dans la maille cubique du fer-. 2) La déformation plastique est obtenue par un mouvement de dislocations coin
perpendiculaires au plan (011), glissant dans la direction 111 . Lorsque la dislocation émerge
à la surface du fil, un décrochement de hauteur δ se crée (voir figure ci-dessus), δ
correspondant à la plus petite distance réticulaire dans la direction 111 . Exprimez δ en
fonction du paramètre de maille a du fer-. Application numérique avec a = 2.886 Å.
3) Déterminez l’angle ψ entre les directions cristallographiques 100 et 111 . Quel est
l’allongement dl obtenu lorsqu’une dislocation atteint l’extrémité du fil ?
4) On obtient un allongement Δl de 5 % sur un fil de fer- long de 50 mm et de diamètre D = 1 mm. Quelle est la densité minimale de dislocations ρdislo rendant possible cet allongement ?

3/5
IV- Potentiel interatomique et vibrations dans le chlorure de césium
Le chlorure de césium cristallise dans une maille cubique primitive dont le motif est constitué d’un cation de césium Cs+ placé à l’origine, et d’un anion de chlore Cl- placé au centre de la maille. On donne ci-dessous l’expression du potentiel interatomique dans ce cristal :
8
0
2
4 R
B
R
eRU
,
où R est la distance entre ions Cs+/Cl- premiers voisins, e la charge élémentaire, 0 la
permittivité diélectrique du vide. et B sont des constantes positives. 1) Rappelez la nature de chacun des termes de la somme, et leur origine physique. 2) Donnez une représentation schématique du potentiel interatomique dans le chlorure de césium en fonction de R.
3) Déterminez la distance entre les ions Cs+/Cl- premiers voisins à l’équilibre, notée 0R . Vous
donnerez une expression de 0R dépendant des paramètres e , 0 , et B . Application
numérique avec e = 1.6 10-19 C, 0 = 8.8542 10-12 F.m-1, = 1.7627, et B = 22.923 keV.Å8.
Reportez l’abscisse 0R sur le graphe de la question 2).
4) Déduisez de la question précédente la valeur du paramètre de maille a de CsCl. 5) En utilisant un développement limité à l’ordre 2, déterminez une expression simplifiée de
RU autour de 0R , notée RUapprox . Vous mettrez cette expression sous la forme
2021 RRCCRUapprox , en donnant toutes les justifications nécessaires. Quel est le
signe des constantes C1 et C2 ?
Rappel – Développement limité à l’ordre n de la fonction f(x) autour de x0 :
...!
...!2
''' 0
0)(
2
00
000 n
n
xxn
xfxx
xfxxxfxfxf
6) Comment appelle-t-on l’approximation réalisée au 5) ? Quelle est la condition de sa validité ?

4/5
7) Déterminez la force qui dérive du potentiel RUapprox , c’est à dire la force qui s’exerce sur
un atome atome placé à la distance R de son premier voisin. Quel type de force trouvez-vous ? Commentez.
Rappel – Expression du gradient en coordonnées sphériques :
uf
ru
f
ru
r
frfgrad r
sin
11,,
8) On applique une pression hydrostatique (isotrope) sur le cristal de chlorure de césium. A cause de la compression subie, la nouvelle distance entre premiers voisins, R’, est inférieure de 0.05% par rapport à R0. Calculez l’augmentation de l’énergie potentielle d’un atome de la structure faisant suite à cette compression. 9) Quel comportement observera-t-on une fois la pression relâchée ? Quel est le type de comportement mécanique correspondant ? On souhaite maintenant étudier les modes de vibration longitudinaux se propageant suivant
la direction cristallographique 111 de la structure CsCl. On simplifie le problème en
considérant une chaîne linéaire d’atomes sur laquelle cations Cs+ et anions Cl- sont alternés. La chaîne a une structure de période p , avec 2 atomes par période. Les forces de rappel
entre ions Cs+/Cl- premiers voisins sont modélisées par des ressorts de raideur et de
longueur à vide 2
p . Les masses des ions Cs+ et Cl- sont notées Csm et Clm respectivement.
Sont étudiés les déplacements des ions parallèles à l’axe xx' . Au sein de la maille d’indice n, on note un et vn les déplacements longitudinaux algébriques des atomes de césium et de chlore, respectivement.
10) Exprimez p en fonction du paramètre de maille a de CsCl. Calculez ensuite sa valeur
numérique.

5/5
11) Donnez l’expression de la force CsF qui s’applique sur l’atome de césium au sein de la
maille d’indice n. Ecrivez ensuite le principe fondamental de la dynamique pour cet atome. 12) Faites le même travail qu’en 11) pour l’atome de chlore. Vous obtenez alors un système de 2 équations liant les déplacements des atomes de césium et de chlore. 13) On cherche des solutions prenant la forme d’ondes planes progressives :
Déplacement des atomes de césium : knptin eutu
0
Déplacement des atomes de chlore : knptin evtv
0
Montrez que ces ondes ne peuvent se propager dans la chaîne d’atomes que si la pulsation ω et le nombre d’onde k sont reliés par l’équation suivante :
0cos122 224 kpmmmm ClCsClCs
14) Justifiez que seules 2 relations de dispersion k peuvent satisfaire à l’équation
démontrée en question 13). 15) On se place dans le cas où le nombre d’onde k est très petit devant 1. On obtient les alors ces deux relations de dispersion :
Cl
Cl
mm
mmk
Cs
Cs 22
1
Cl
mm
pkk
Cs
2222
2
En substituant les expressions ci-dessus dans le système d’équations établi à la question 13),
déterminez la relation entre les amplitudes de déplacement 0u et 0v dans les deux cas
suivants :
Déplacements liés au mode de vibration de pulsation 1 et de nombre d’onde k = 0.
Déplacements liés au mode de vibration de pulsation 2 et de nombre d’onde k = 0.
16) D’après vous, lequel de ces deux modes 0,1 k ou 0,2 k rend possible la
propagation du son dans CsCl ? Justifiez votre réponse.
METHODES
NUMERIQUES
Partiel de Methodes Numeriques
Duree : 3 heures - Sans document
Jeudi 27 octobre 2011
1 Methode de Horner1. Soit le polynome P(x) = 4x3 − 7x2 + 3x − 5. Calculer, par la methode de
Horner, sa valeur au point x0 = 2, ainsi que celle de sa derivee
2. Factoriser par la methode de Horner le polynome P(x) = 3x3−9x2−18x+24.
3. Rappeler le schema iteratif de la methode de Newton-Raphson pour resoudref (x) = 0. On cherche une valeur approchee de f (x) = x3 − 7x + 1 = 0 parcette methode. La valeur initiale choisie est x0 = 0, 5. Au moyen de lamethode de Horner, calculer les termes x1, x2 et x3 de la suite xn genereepar ce schema iteratif.
2 La methode de Newton comme une methode depoint fixe
Donner le developpement de Taylor, au deuxieme ordre, de g(xn) autour de α,point fixe de la fonction g(x). α est racine de la fonction f(x).Quel est le schema iteratif de la methode du point fixe ? Que devient ce developpementen se placant dans le cas ou g′(α) = 0 ? Quelle relation peut-on en deduire entrel’erreur d’ordre n+1 et celle d’ordre n. Quel est l’ordre de convergence ? Cal-culer :
limn→∞
α − xn+1
(α − xn)2
Rappeler le schema iteratif de la methode de Newton reliant xn+1 a xn pour lafonction f(x) ? Que devient-il en supposant que xn+1 satisfait aussi le schemaiteratif du point fixe. Calculer alors g′(xn), puis limn→∞ g′(xn).
1
L3 de Mecanique-Physique Universite Paris-Sud 11
3 Recherche de racines par la methode du point fixeLa fonction f (x) = x3 + 4x2 − 10 a une racine dans l’intervalle [1, 2] qui vautα ≈ 1, 36. On construit les trois problemes au point fixe a partir de f (x) afin dedeterminer precisement α :
1. x = g1(x) = x − x3 + 4x2 − 10
2. x = g3(x) = 12
√10 − x3
Indiquer lesquels permettent de calculer precisement α.
4 Construction d’une suite pour l’acceleration de laconvergence
Soit une suite xn∞n=0 convergent lineairement vers α, racine d’une fonction f(x).
On note ∆xn = xn+1 − xn et de maniere recursive : ∆kxn = ∆(∆k−1xn) pour n ≥ 2.Quelle est l’expression de ∆2xn ?On cherche a construire la suite xn
∞n=0 qui convergerait plus rapidement vers α.
Pour cela, on suppose que xn+2 − α, xn+1 − α, xn − α sont de meme signe et que nest suffisamment grand afin de pouvoir ecrire que :
xn+1 − α
xn − α≈
xn+2 − α
xn+1 − α
A partir de cette approximation, exprimer α en fonction de xn+2, xn+1, xn. La suitexn sera definie par le schema iteratif ainsi trouve.Reprendre l’expression precedente de xn et l’exprimer en fonction de xn, ∆2xn etde (∆xn)2
2 / 2

Examen de Methodes NumeriquesDuree : 3 heures - Sans document
Jeudi 15 decembre 2011
1 Calcul de polynome d’interpolations de Lagrange
Donner l’expression generale du polynome de Lagrange Pn(x) qui interpole lafonction f (x) aux points (x0, x1, x2, x3). Calculer le polynome de Lagrange Pn(x)
qui interpole la fonction f (x) =1
1 + x2 aux points (x0, x1, x2, x3) = (0, 1, 3, 5).Calculer Pn(4) et comparer avec f (4).
2 Formule de Newton d’interpolation aux differences di-visees
La formule de Newton d’interpolation aux differences finies peut s’ecrire de faconsimple dans le cas de nœuds x0, x1, x2, . . . , xn equi-repartis. On pose h = x j+1 − x j
pour chaque i = 0, 1, 2, . . . , n − 1. On considere x tel que x = x0 + sh. ExprimerPn(x) = Pn(x0+sh) en fonction de h et des differences divisees f [x0, x1, x2, . . . , xn].
Utiliser le coefficient Cks :
s!k!(s − k)!
.
Puis l’on utilise l’operateur difference, note ∆ et defini par
∆yk = yk+1 − yk
∆nyk = ∆n−1yk+1 − ∆n−1yk
On peut representer xk, yk,∆yk,∆2yk,∆
3yk, . . . sous la forme d’une table (cf. tableau 1).L’operateur difference permet d’ecrire
f [x0, x1] =f (x1) − f (x0)
x1 − x0=
1h
∆ f (x0)
Exprimer f [x0, x1, x2] au moyen de l’operateur ∆ f (x0), puis f [x0, x1, x2, x3] etgeneraliser a f [x0, x1, x2, . . . , xn]. En deduire la nouvelle expression de Pn(x) =
Pn(x0 + sh).Ecrire la table correspondant a f (x) = tan x pour x allant de 0, 7 a 0, 76 par pas
de h = 0, 02. Puis, calculer, a partir de la table precedemment etablie, la valeur def (0, 71) pour k = 3. Comparer avec tan 0, 71.
1

L3 de Physique - Mecanique Universite Paris-Sud 11
Table 1:
xk yk ∆yk ∆2yk ∆3yk
x0 y0x1 y1 ∆y0x2 y2 ∆y1 ∆2y0x3 y3 ∆y2 ∆2y1 ∆3y0. . .
3 Calcul d’une integrale par les methodes des trapezes etde Simpson
Que doivent valoir h et n, respectivement le pas et le nombre de sous intervalles
de l’intervalle d’integration, si l’on veut calculer l’integrale∫ π
0sin(x)dx par la
methode de Simpson par morceau avec une precision de 2.10−5 ? Que doiventvaloir h et n si l’on utilise la methode des trapezes par morceau ?
Methode de Richardson d’estimation de l’erreur
Dans les methodes des trapezes et de Simpson , l’integrale I( f ) a calculer s’obtientsuivant une formule du type : I( f ) = In + E( f ), ou In est l’ ’integrale numerique” etE( f ) l’erreur. n est le nombre de sous intervalles de l’intervalle d’integration. Onconstate que l’erreur est de la forme :
E( f ) = I( f ) − In ≈c
np .
On fait le passage de n a 2n. Exprimer : I( f ) − I2n. En deduire une relation entreI( f )− I2n et I( f )− In, puis une expression de I( f ). Celle-ci sera notee : R2n. Elle estgeneralement une estimation plus precise de I( f ) que I2n. Afin d’estimer la validitede cette approximation, calculer : R2n − I2n en fonction de I2n et In.A.N. : Utiliser la methode des trapezes pour calculer la valeur de l’integrale :
I( f ) =
∫ 1
0e−x2
dx
Calculer T2 et T4. p = 2 et n = 2. Calculer I( f ) ≈ R4, puis I( f ) − T4.
Formule de Simpson par morceau
I( f ) =
∫ b
af (x)dx =
h3
f (a) + 2n/2−1∑
j=1
f (x2 j) + 4n/2∑j=1
f (x2 j+1) + f (b)
− (b − a)180
h4 f ”(ζ)
2 / 2
Examen de Methodes Numeriques
Duree : 3 heures - Sans document
mercredi 19 decembre 2012
1 Polynomes de LagrangeSoit la fonction f (x) = 1
x+2 . Afin d’evaluer la valeur de f (x) en x = 2, on interpolela fonction aux points (x0, x1, x2) = (1, 3, 4). Calculer le polynome de Lagrange Pn(x)correspondant. Quel est son degre ? Calculer Pn(2) par la methode de Horner et compareravec f (2).
2 Methode de NelvilleOn utilise la methode de Nelville pour approximer la valeur de f (x) = tan x en x = 0, 71a partir de l’interpolation aux nœuds x0 = 0, 7, x1 = 0, 72, x2 = 0, 74 et x3 = 0, 76.
Soit la fonction f (x) definie aux points x0, x1, x2, . . . , xk ; soit xi et x j deux points parmieux. Le polynome P(x) defini par
P(x) =(x − x j)Q(x) − (x − xi)R(x)
(xi − x j)
est le polynome de Lagrange qui interpole f (x) aux points x0, x1, x2, . . . , xk ; Q(x) =
P0 1 ... j−1 j+1...k et R(x) = P0 1 ...i−1 i+1...k , i.e. que Q(x) et R(x) interpolent f (x) aux pointsx0, x1, x2, . . . , xk sauf aux points x j et xi respectivement. Donner la table que l’on peutgenerer a partir de ces polynomes d’interpolation. Puis calculer les elements de cettetable. Comparer le resultat obtenu grace a cette table avec la valeur de tan 0, 71.
3 Formule de Newton d’interpolation aux differences di-visees
La vitesse d’un vehicule v(x) est mesuree a differentes distances x (cf. tableau 1). Oncherche alors a evaluer la vitesse a mi-parcours.
Pour cela, on utilise la formule de Newton d’interpolation aux differences divisees.La formule de Newton d’interpolation aux differences finies peut s’ecrire de facon simpledans le cas de nœuds x0, x1, x2, . . . , xn equi-repartis. On pose h = x j+1 − x j pour chaquei = 0, 1, 2, . . . , n − 1. On considere x tel que x = x0 + sh. Exprimer Pn(x) = Pn(x0 + sh)
1

L3 de Physique-Mecanique Universite Paris-Sud 11
Table 1:
x 0 50 100 150 200 250v(x) 0 60 80 110 90 0
en fonction de h et des differences divisees f [x0, x1, x2, . . . , xn]. Utiliser le coefficient
Cks :
s!k!(s − k)!
.
Puis l’on utilise l’operateur difference, note ∆ et defini par
∆yk = yk+1 − yk
∆2yk = ∆(∆yk) = ∆(yk+1 − yk) = ∆yk+1 − ∆yk
∆nyk = ∆n−1yk+1 − ∆n−1yk
On peut representer xk, yk,∆yk,∆2yk,∆
3yk, . . . sous la forme d’une table (cf. tableau 2).Representer la table correspondant aux valeurs du tableau 1
L’operateur difference permet d’ecrire
f [x0, x1] =f (x1) − f (x0)
x1 − x0=
1h
∆ f (x0)
Exprimer f [x0, x1, x2] au moyen de l’operateur ∆ f (x0), puis f [x0, x1, x2, x3] et generalisera f [x0, x1, x2, . . . , xn]. En deduire la nouvelle expression de Pn(x) = Pn(x0 + sh).
Calculer, a partir de la table precedemment etablie, la valeur de v(x) pour x = 125.
Table 2:
xk yk ∆yk ∆2yk ∆3yk
x0 y0
x1 y1 ∆y0
x2 y2 ∆y1 ∆2y0
x3 y3 ∆y2 ∆2y1 ∆3y0
. . .
2 / 2

L3 de Physique – Mecanique
Partiel de Methodes Numeriques
Duree : 3 heures - Sans document
mardi 28 octobre 2013
1 Methode de Horner
1. Soit le polynome de P1(x) = 6x4 − 3x2 + 10x + 2. Calculer sa valeur, ainsique celle de sa derivee, au point x0 = −3.
2. Factoriser par la methode de Horner les deux polynomes suivants :
(a) P2(x) = x4 − 7x3 + 7x2 + 15x
(b) P3(x) = x4 + 4x3 − 25x2 − 88x− 60
3. Rappeler le schema iteratif de la methode du point fixe. On cherche une valeurapprochee du point fixe de
P4(x) = −x2
3+ x+ 1
par cette methode. La valeur initiale choisie est x0 = 1,0. Au moyen de lamethode de Horner, calculer les termes x1, x2, x3 et x4 de la suite xngeneree par ce schema iteratif 1. Puis calculer P4(x4). Commenter.
2 Convergence dans la methode du point fixe
Soit g(x) ayant pour point fixe α et deux fois continument derivable dans l’inter-valle [a, b]. On suppose que g(x) est telle que pour tout x ∈ [a, b], alors g(x) ∈ [a, b],et telle que g′(α) 6= 0. On suppose de plus qu’il existe un reel k < 1 tel que
|g′(x)| ≤ k, pour tout x ∈ [a, b]
Rappeler le schema iteratif de la methode du point fixe. Soit x0 ∈ [a, b]. Que peut-ondire alors de la suite xn∞n=0 generee par ce schema iteratif ? Exprimer α− xn+1 aumoyen du theoreme de la valeur moyenne. Calculer
limn→+∞
α− xn+1
α− xnQuel est l’ordre de convergence vers le point fixe de cette suite ?
1. Faire les calculs avec 4 chiffres apres la virgule
1

L3 de Physique – Mecanique Universite Paris-Sud
3 La methode de Newton comme une methode de
point fixe
Rappeler le schema iteratif de la methode de Newton reliant xn+1 a xn pour lafonction f(x) ? Que devient-il en supposant que xn+1 satisfait aussi le schema iteratifdu point fixe pour la fonction g(x). Calculer alors g′(xn), puis limn→∞ g′(xn). Quevaut g′(α) — ou α est le point fixe de g(x) ?
4 Convergence lineaire et quadratique
Soit les deux suites xn∞n=0 et xn∞n=0 tendant toutes les deux vers l = 0,la premiere lineairement et la seconde quadratiquement, chacune avec la memeconstante d’erreur de convergence c = 0,5. Donner l’expression de l’erreur d’ordren + 1 en fonction de celle d’ordre n pour chacune de ces deux suites. Soit x0 et x0,leur premier terme, tels que |x0| = |x0| = 1. Quelle est, pour chacune de ces deuxsuites, la relation reliant l’erreur d’ordre n a x0 et x0, respectivement. Que vautchacune de ces erreurs si n = 6 ?
5 Construction d’un probleme au point fixe pour
la recherche d’une racine
Afin de trouver la racine α l’equation f(x) = 0, on utilise la methode du pointfixe appliquee a la fonction g(x) de la forme
g(x) = x− φ(x).f(x).
On souhaite que la convergence soit quadratique. Quelle condition doit verifier g(x)pour cela ? Quelle condition cela impose-t-il a φ(x) ? En deduire l’expression de φ(x)et un schema iteratif pour generer une suite xn∞n=0 convergeant vers α — ou α estle point fixe de g(x).
2 / 2
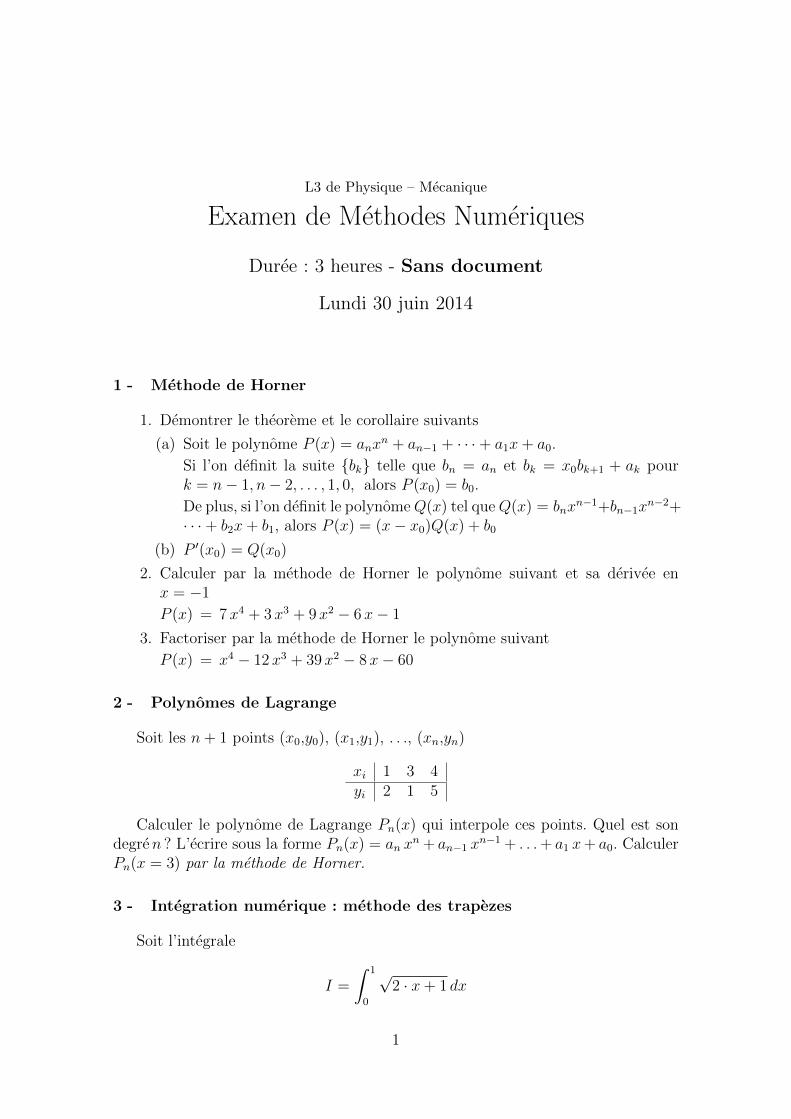
L3 de Physique – Mecanique
Examen de Methodes Numeriques
Duree : 3 heures - Sans document
Lundi 30 juin 2014
1 - Methode de Horner
1. Demontrer le theoreme et le corollaire suivants
(a) Soit le polynome P (x) = anxn + an−1 + · · ·+ a1x+ a0.
Si l’on definit la suite bk telle que bn = an et bk = x0bk+1 + ak pourk = n− 1, n− 2, . . . , 1, 0, alors P (x0) = b0.
De plus, si l’on definit le polynomeQ(x) tel queQ(x) = bnxn−1+bn−1x
n−2+· · ·+ b2x+ b1, alors P (x) = (x− x0)Q(x) + b0
(b) P ′(x0) = Q(x0)
2. Calculer par la methode de Horner le polynome suivant et sa derivee enx = −1
P (x) = 7x4 + 3x3 + 9x2 − 6x− 1
3. Factoriser par la methode de Horner le polynome suivant
P (x) = x4 − 12x3 + 39x2 − 8x− 60
2 - Polynomes de Lagrange
Soit les n+ 1 points (x0,y0), (x1,y1), . . ., (xn,yn)
xi 1 3 4yi 2 1 5
Calculer le polynome de Lagrange Pn(x) qui interpole ces points. Quel est sondegren ? L’ecrire sous la forme Pn(x) = an x
n + an−1 xn−1 + . . .+ a1 x+ a0. Calculer
Pn(x = 3) par la methode de Horner.
3 - Integration numerique : methode des trapezes
Soit l’integrale
I =
∫ 1
0
√2 · x+ 1 dx
1

L3 de Physique – Mecanique Universite Paris-Sud
1. Rappeler la formule des trapezes par morceaux pour calculer l’integrale
∫ b
a
f(x)dx
sur n sous-intervalles de [a, b]. On pose h =(b− a)
n.
2. Evaluer numeriquement l’integrale I par la methode des trapezes avec n = 4.
3. L’erreur En dans la methode des trapezes a pour expression sur l’intervalle[a, b]
|En| =
∣∣∣∣(b− a)h2
12f ′′(ξ)
∣∣∣∣ ,ou ξ est dans l’intervalle ]a, b[.
Comment est majoree l’erreur En sur l’intervalle considere ? Combien de sous-intervalles n faut-il choisir afin que l’erreur En soit inferieure a 10−4 ?
4 - Utilisation de la methode de Newton pour la division
Dans certains ordinateurs, s’il existe des circuits effectuant l’addition, la sous-traction et la multiplication, il n’y en a pas pour effectuer la division. Cette derniereest alors effectuee par une methode numerique.
On souhaite effectuer l’operation a/b, qui est alors realisee par la multiplicationa ∗ 1/b, ou b est obtenu par la methode de Newton. Pour determiner 1/b, on cherchela racine de la fonction :
f(x) = b− 1
x, ou b est suppose strictement positif
Que vaut la racine α de cette fonction ? Rappeler le schema iteratif de la methodede Newton. Quelle est son expression dans le cas present ?
Afin de s’assurer que ce schema iteratif converge, on etudie l’erreur relative definiepar
Rel(xn) =α− xnα
dont on peut demontrer qu’elle verifie
Rel(xn+1) = [Rel(xn)]2
Comment doit-etre majoree Rel(x0) afin que la convergence soit assuree ? En deduirealors un encadrement de la valeur initiale x0.
2 / 2
EXPERIENCES
NUMERIQUES
POUR LA PHYSIQUE

Universite Paris-Sud Annee 2011-12
Licence 3 de Mecanique Physique
Experiences Numeriques pour la Physique
Examen
Mardi 10 avril 2012 - Duree : 3 heures
Tous documents autorises. Acces internet interditLes resultats (code Matlab et figures) devront etre rendus sous forme imprimee, en men-
tionnant sur chaque feuille votre numero d’anonymat, SANS faire figurer votre nom.
1 Exercices de base
1. Ecrire une fonction res = testprod(a,b,c) qui renvoie 1 si les nombres a, b, c verifientune des relations a× b = c, a× c = b ou b× c = a, et qui renvoie 0 dans le cas contraire.Donner deux exemples illustrant le bon fonctionnement de la fonction.
2. Dans le plan (x, y), representer l’onde dont l’amplitude est donnee par :
A(x, y) = exp(−By2) cos(kx),
avec B = 0.2, k = 1, pour x ∈ [0, 10] et y ∈ [0, 10].
3. Donner les lignes de code permettant de calculer le nombre
P = 2∞∏k=1
(2k)2
(2k)2 − 1= 2× 4
3× 16
15× . . .
lorsque le produit est effectuee sur les 500 premiers termes de la suite.
2 Pendule amorti
On considere un pendule, constitue d’une masse m suspendue a un fil de longueur L. On noteθ l’angle entre le pendule et la verticale. En presence d’un frottement de type visqueux, lemouvement est regi par l’equation differentielle
mLd2θ
dt2+ γ
dθ
dt+mg sin θ = 0.
On prendra m = 0.1 Kg, L = 20 cm, γ = 0.02 uSI, et g = 9.8 m s−2. En utilisant le solveurd’equation differentielle ode45, integrer cette equation et tracer θ(t) pour t ∈ [0, 10] s, enprenant comme condition initiale θ(0) = 1 rad, dθ/dt(0) = 0.
1

3 Rebond d’une bille
On souhaite visualiser la trajectoire d’une bille qui rebondit de facon elastique sur le sol. Onnote (x, z) le plan vertical, avec le sol situe en z = 0, et la gravite est ~g = −g~ez. Entre 2rebonds successifs, la position de la bille est donnee par
x(t) = uxt
z(t) = uzt−1
2gt2,
avec ux > 0 et uz > 0 les composantes selon x et z de la vitesse initiale (uz est la vitesse dela bille au moment ou elle quitte le sol). Dans ces equations, le temps t est compte depuis lemoment du dernier rebond.
Ecrire un programme Matlab realisant une animation de la trajectoire de la bille sur 10rebonds. La bille sera representee par le symbole o.
4 Marcheur aleatoire auto-bloquant (le ”serpent”)
On considere un marcheur aleatoire sur un reseau carre 2D. On represente l’espace par unematrice carree m(i, j), avec i, j = 1..100. Les elements de matrice sont initialement tousnuls, et l’on met un 1 sur les cases successivement occupees par le marcheur. Initialement,on positionne le marcheur au milieu du domaine (c’est-a-dire m(50, 50) = 1). A chaque pasde temps, le marcheur se deplace d’une case en haut, ou en bas, ou a droite, ou a gauche,avec une probabilite 1/4. On simule l’avancee du marcheur jusqu’a ce que celui-ci entre encollision avec la trace qu’il a laissee derriere lui, ou bien jusqu’a ce qu’il atteigne les frontieresdu domaines.
Ecrire le code Matlab permettant de realiser cette marche aleatoire auto-bloquante, eteffectuer quelques realisations (donner quelques figures imprimees du resultat).
Quelle est la longueur de la marche en moyenne ? Quelle est la plus longue marche quevous pouvez obtenir ?
2

Licence 3 Mecanique Universite Paris-Sud
Partiel : Experiences numeriques pour la physique
Vendredi 5 avril 2013
Duree : 3 heures - Tous documents autorises.
Transcrire les codes numeriques dans un document imprimable, inclure les figures,
ajouter des commentaires et repondre aux questions du partiel.
1 Exercices de base
1.1 Pythagore
Ecrire une fonction res=pythagore(a,b,c) qui renvoie 1 si les nombres a, b, c verifient larelation a2 + b2 = c2 (a une precision pres), et qui renvoie 0 dans le cas contraire. Donner 2exemples illustrant le bon fonctionnement de la fonction.
1.2 Calcul d’une suite
Donner les lignes de code permettant de calculer le nombre suivant :
P = 2∞∏k=1
(2k)2
(2k)2 − 1= 2× 4
3× 16
15× · · ·
lorsque le produit est effectue sur les 100 premiers termes de la suite.
1.3 Onde attenuee
Dans le plan (x, y), representer l’onde dont l’amplitude est donnee par :
A(x, y) = exp(−By2) cos(kx),
avec B = 0.2, k = 1, pour x ∈ [0, 10] et y ∈ [0, 10]. Ajouter le nom des axes, un titre et unelegende.
1.4 Catenoide
Ecrire une fonction catenoide.m qui trace la surface parametrique
x = cosh(u) cos(v)
y = cosh(u) sin(v)
z = u
avec u ∈ [−1, 1] et v ∈ [0, 2π]. Faire une figure et y ajouter le nom des axes, un titre et unelegende.
1
2 Marcheurs anisotropes en 2D
Nous souhaitons etudier le phenomene de diffusion anisotrope en 2 dimensions dans le planxOy. La position d’un seul marcheur est donnee par ses coordonnees x(t), y(t) au cours dutemps discretise. Tous les marcheurs demarrent de l’origine x = y = 0.
L’anisotropie est prise en compte en definissant des pas de longueur differente en x et eny : la longueur maximale du pas en x sera 1, celle du pas en y sera a.
2.1 Quelques marcheurs
1. Programmer une fonction marchAnisotrope.m qui prend comme valeurs d’entree lefacteur d’anisotropie a entre la direction Oy et Ox et le nombre de pas N d’une marchealeatoire et qui renvoie les coordonnees de la marche x et y sous forme de vecteurscolonnes de N points.
2. Calculer et afficher 3 marches aleatoires de N = 1000 pas sur le meme graphique (enlignes continues de couleur bleu, rouge et vert). Faire varier le facteur d’anisotropie.Ajouter le nom des axes, un titre et une legende pour chaque marcheur.
2.2 Etude statistique
1. Programmer une fonction marchAnisotropeStat.m qui calculeM marches (ou marcheurs)de N pas avec le facteur d’anisotropie a entre la direction Oy et Ox.
2. Calculer M = 1000 marcheurs de N = 100 pas. Faire le dessin en y indiquant le nomdes axes, un titre et une legende.
3. Faire une animation dans laquelle on suit les positions des M marcheurs au cours dutemps. Commenter.
4. Calculer la position moyenne en Ox et en Oy ainsi que l’ecart quadratique suivant Oxet celui suivant Oy obtenus en moyennant sur l’ensemble des particules. Mettre enevidence l’existence de 2 coefficients de diffusion Dx et Dy.
2
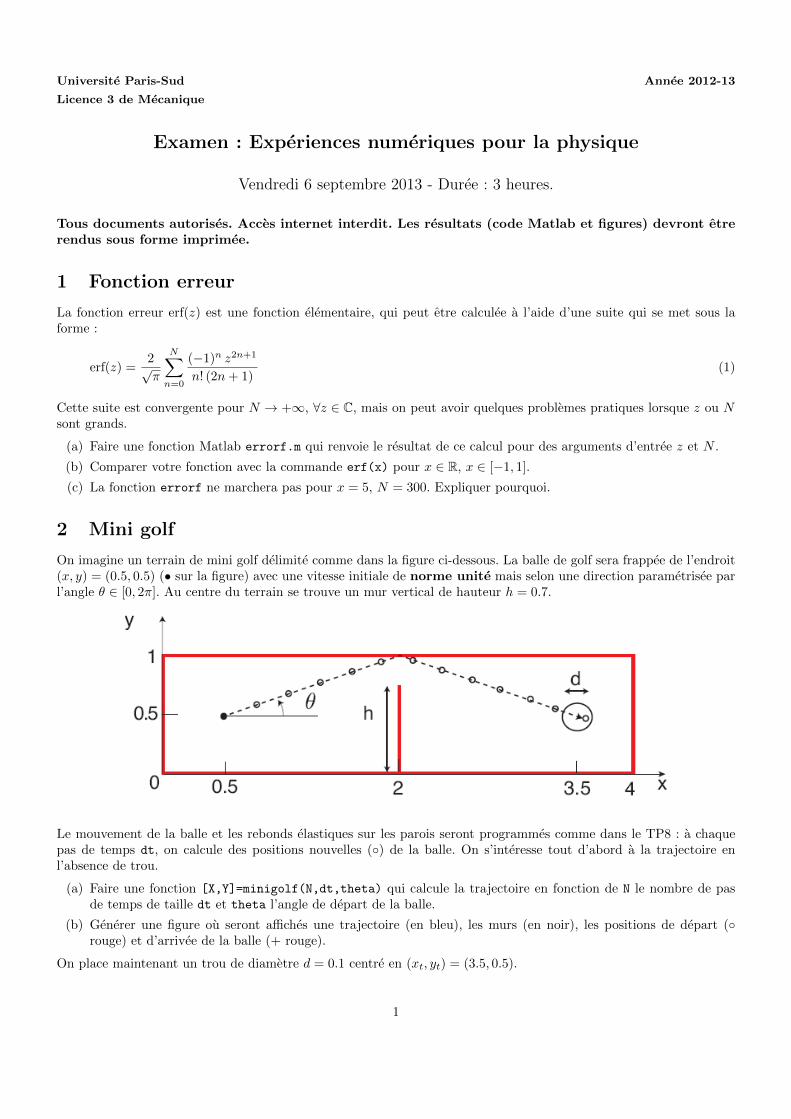
Universite Paris-Sud Annee 2012-13
Licence 3 de Mecanique
Examen : Experiences numeriques pour la physique
Vendredi 6 septembre 2013 - Duree : 3 heures.
Tous documents autorises. Acces internet interdit. Les resultats (code Matlab et figures) devront etrerendus sous forme imprimee.
1 Fonction erreur
La fonction erreur erf(z) est une fonction elementaire, qui peut etre calculee a l’aide d’une suite qui se met sous laforme :
erf(z) =2√π
N∑n=0
(−1)n z2n+1
n! (2n+ 1)(1)
Cette suite est convergente pour N → +∞, ∀z ∈ C, mais on peut avoir quelques problemes pratiques lorsque z ou Nsont grands.
(a) Faire une fonction Matlab errorf.m qui renvoie le resultat de ce calcul pour des arguments d’entree z et N .
(b) Comparer votre fonction avec la commande erf(x) pour x ∈ R, x ∈ [−1, 1].
(c) La fonction errorf ne marchera pas pour x = 5, N = 300. Expliquer pourquoi.
2 Mini golf
On imagine un terrain de mini golf delimite comme dans la figure ci-dessous. La balle de golf sera frappee de l’endroit(x, y) = (0.5, 0.5) (• sur la figure) avec une vitesse initiale de norme unite mais selon une direction parametrisee parl’angle θ ∈ [0, 2π]. Au centre du terrain se trouve un mur vertical de hauteur h = 0.7.
Le mouvement de la balle et les rebonds elastiques sur les parois seront programmes comme dans le TP8 : a chaquepas de temps dt, on calcule des positions nouvelles () de la balle. On s’interesse tout d’abord a la trajectoire enl’absence de trou.
(a) Faire une fonction [X,Y]=minigolf(N,dt,theta) qui calcule la trajectoire en fonction de N le nombre de pasde temps de taille dt et theta l’angle de depart de la balle.
(b) Generer une figure ou seront affiches une trajectoire (en bleu), les murs (en noir), les positions de depart (rouge) et d’arrivee de la balle (+ rouge).
On place maintenant un trou de diametre d = 0.1 centre en (xt, yt) = (3.5, 0.5).
1

(c) Trouver une condition qui permet de detecter l’arrivee de la balle dans ce trou. Si cette condition est satisfaite,on reduit la vitesse de la balle a zero pour qu’elle y reste.
(d) Generer une figure ou seront affiches une trajectoire gagnante (en bleu), les murs (en noir), les positions dedepart ( rouge) et d’arrivee de la balle (+ rouge) et le trou ( noir).
3 Etude d’une reaction chimique autocatalytique
Nous etudions la cinetique d’une reaction chimique qui implique 6 especes differentes (A,B,X, Y,D,E). Ci-dessous lareaction et le systeme d’equations differentielles ordinaires (EDO) qui controlent la cinetique
A → XB +X → Y +D
2X + Y → 3XX → E
⇒
A = −k1AB = −k2BXX = k1A− k2BX + k3X
2Y − k4XY = k2BX − k3X2Y
D = k2BX
E = k4X
Dans les EDO, les lettres A,B,X, Y,D,E, designent des concentrations. Pour simplifier le probleme, on supposeraque ki = 1 , ∀i = 1, .., 4. On supposera aussi que l’on arrive a maintenir la concentration en A = A0 et B = B0
constant au cours du temps. De cette maniere, on n’a plus besoin de considerer les premiere et deuxieme equations.On s’interessera plus particulierement a l’evolution de X et Y et pour cela, les concentrations E et D ne sont pasimportantes : elles apparaissent comme des produits supplementaires, mais elles n’influencent pas la dynamique de Xet Y . En resulte le systeme :
X = A0 − (1 +B0)X +X2Y
Y = B0X −X2Y(2)
qui sera a resoudre a l’aide de Matlab. Nous fixons A0 = 1, B0 = 5.
1. Ecrire le/les programmes qui vous permettent d’integrer ce systeme d’EDO, pour un temps t ∈ [0, 50] partantd’une condition initiale X(0) = 1, Y (0) = 0.2.
2. Afficher l’evolution X(t), Y (t) en fonction du temps. Ajouter le nom des axes et une legende qui permet dedifferencier X de Y .
3. Commenter l’allure des courbes. Qualifieriez-vous la dynamique comme stationnaire, periodique ou chaotique ?
2

Universite Paris-Sud Annee 2013-14
Licence 3 de Mecanique Physique
Experiences Numeriques pour la Physique
Examen
Vendredi 5 septembre 2014 - Duree : 3 heures
Tous documents autorises. Acces internet interdit
Les resultats (code Matlab et figures) devront etre rendus sous forme imprimee, en men-tionnant sur chaque feuille votre numero d’anonymat, SANS faire figurer votre nom.
1 Exercices de base
1. Ecrire une fonction res = testprod(a,b,c) qui renvoie 1 si les nombres a, b, c verifientune des relations a× b = c, a× c = b ou b× c = a, et qui renvoie 0 dans le cas contraire.Donner deux exemples illustrant le bon fonctionnement de la fonction.
2. Dans le plan (x, y), representer l’onde dont l’amplitude est donnee par :
A(x, y) = exp(−By2) cos(kx),
avec B = 0.2, k = 1, pour x ∈ [0, 10] et y ∈ [0, 10].
3. Donner les lignes de code permettant de calculer le nombre
P = 2∞
∏
k=1
(2k)2
(2k)2 − 1= 2×
4
3×
16
15× . . .
lorsque le produit est effectue avec les 500 premiers termes.
2 Pendule amorti et non amorti
On considere un pendule, constitue d’une masse m suspendue a un fil de longueur L. On noteθ l’angle entre le pendule et la verticale. En presence d’un frottement de type visqueux, lemouvement est regi par l’equation differentielle
mLd2θ
dt2+ γ
dθ
dt+mg sin θ = 0.
On prendra m = 0.1 kg, L = 20 cm, γ = 0.02 USI, et g = 9.81 m s−2.
1. Ecrire l’equation differentielle ordinaire (EDO) d’ordre 2 comme un systeme de 2 EDOd’ordre 1 que l’on pourra resoudre avec Matlab. Demander de l’aide si vous restez bloque
sur cette etape de l’exercice.
1

2. Integrer ce systeme et tracer θ(t) et dθ/dt pour t ∈ [0, 10] s, en prenant comme conditioninitiale θ(0) = 1 rad, dθ/dt(0) = 0 rad·s−1.
3. Tracer le portrait de phase: dθdt en fonction de θ(t).
4. Tracer ensuite l’energie mecanique totale Em(t) = 1
2mL2(dθ/dt)2 +mgL(1 − cos θ) en
fonction du temps. Que pensez-vous du resultat ?
5. Refaire l’etude pour γ = 0 USI. Commenter.
3 Croissance dendritique a partir d’une graine centrale
Nous souhaitons simuler l’electrodeposition (voir figure 1) a l’aide de l’algorithme de DLA.Pour reproduire l’experience, nous allons faire pousser l’agregat a partir d’un germe central.
11’
2 2’
3’
3 4’
4
Germe au centre
1 2 3 4
1’ 2’ 3’ 4’
Conditions périodiques
sur toutes les parois
Figure 1: Agregat de Cuivre obtenu par electrodeposition : (gauche) photographie d’uneexperience, (droite) calcul avec Matlab et conditions aux limites periodiques.
1. On represente l’agregat par une matrice. Comment devra-t-on initialiser cette matrice ?
2. Ecrire le code Matlab permettant de suivre la position d’un marcheur decrite par descoordonnees x,y entieres, sachant qu’il ne pourra bouger que dans 4 directions (N-E-S-O).
3. Pour eviter que l’algorithme se coince, on fera en sorte que les parois soient des paroisperiodiques. Par exemple, si un marcheur sort par le haut, il rentrera par le bas, etc.
4. Ecrire le code Matlab permettant de suivre la position de M marcheurs.
5. Faire grandir l’agregat dans une boıte de taille modeste pour ne pas surcharger l’ordinateur.Exporter une image de l’agregat obtenu en utilisant la commande colormap(flipud(gray))).
2

Universite Paris-Sud Annee 2013-14
Licence 3 de Mecanique Physique
Experiences Numeriques pour la Physique
Examen
Vendredi 5 septembre 2014 - Duree : 3 heures
Tous documents autorises. Acces internet interdit
Les resultats (code Matlab et figures) devront etre rendus sous forme imprimee, en men-tionnant sur chaque feuille votre numero d’anonymat, SANS faire figurer votre nom.
1 Exercices de base
1. Ecrire une fonction res = testprod(a,b,c) qui renvoie 1 si les nombres a, b, c verifientune des relations a× b = c, a× c = b ou b× c = a, et qui renvoie 0 dans le cas contraire.Donner deux exemples illustrant le bon fonctionnement de la fonction.
2. Dans le plan (x, y), representer l’onde dont l’amplitude est donnee par :
A(x, y) = exp(−By2) cos(kx),
avec B = 0.2, k = 1, pour x ∈ [0, 10] et y ∈ [0, 10].
3. Donner les lignes de code permettant de calculer le nombre
P = 2∞
∏
k=1
(2k)2
(2k)2 − 1= 2×
4
3×
16
15× . . .
lorsque le produit est effectue avec les 500 premiers termes.
2 Pendule amorti et non amorti
On considere un pendule, constitue d’une masse m suspendue a un fil de longueur L. On noteθ l’angle entre le pendule et la verticale. En presence d’un frottement de type visqueux, lemouvement est regi par l’equation differentielle
mLd2θ
dt2+ γ
dθ
dt+mg sin θ = 0.
On prendra m = 0.1 kg, L = 20 cm, γ = 0.02 USI, et g = 9.81 m s−2.
1. Ecrire l’equation differentielle ordinaire (EDO) d’ordre 2 comme un systeme de 2 EDOd’ordre 1 que l’on pourra resoudre avec Matlab. Demander de l’aide si vous restez bloque
sur cette etape de l’exercice.
1
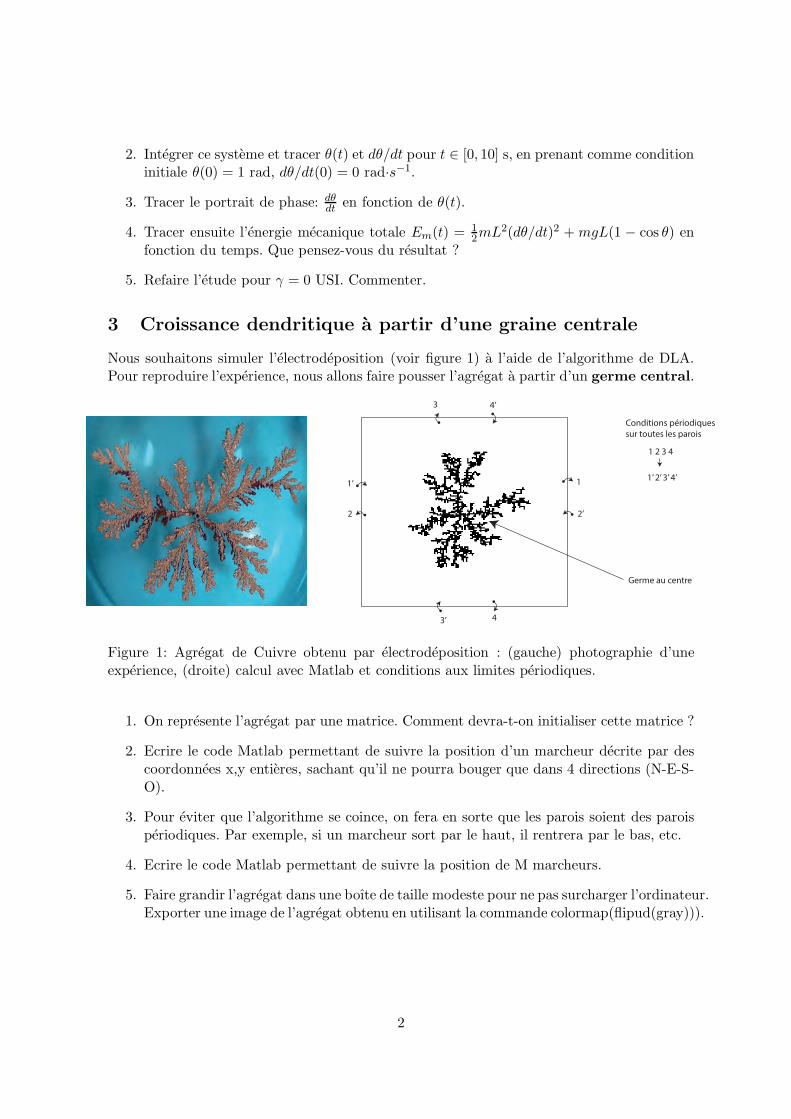
2. Integrer ce systeme et tracer θ(t) et dθ/dt pour t ∈ [0, 10] s, en prenant comme conditioninitiale θ(0) = 1 rad, dθ/dt(0) = 0 rad·s−1.
3. Tracer le portrait de phase: dθdt en fonction de θ(t).
4. Tracer ensuite l’energie mecanique totale Em(t) = 1
2mL2(dθ/dt)2 +mgL(1 − cos θ) en
fonction du temps. Que pensez-vous du resultat ?
5. Refaire l’etude pour γ = 0 USI. Commenter.
3 Croissance dendritique a partir d’une graine centrale
Nous souhaitons simuler l’electrodeposition (voir figure 1) a l’aide de l’algorithme de DLA.Pour reproduire l’experience, nous allons faire pousser l’agregat a partir d’un germe central.
11’
2 2’
3’
3 4’
4
Germe au centre
1 2 3 4
1’ 2’ 3’ 4’
Conditions périodiques
sur toutes les parois
Figure 1: Agregat de Cuivre obtenu par electrodeposition : (gauche) photographie d’uneexperience, (droite) calcul avec Matlab et conditions aux limites periodiques.
1. On represente l’agregat par une matrice. Comment devra-t-on initialiser cette matrice ?
2. Ecrire le code Matlab permettant de suivre la position d’un marcheur decrite par descoordonnees x,y entieres, sachant qu’il ne pourra bouger que dans 4 directions (N-E-S-O).
3. Pour eviter que l’algorithme se coince, on fera en sorte que les parois soient des paroisperiodiques. Par exemple, si un marcheur sort par le haut, il rentrera par le bas, etc.
4. Ecrire le code Matlab permettant de suivre la position de M marcheurs.
5. Faire grandir l’agregat dans une boıte de taille modeste pour ne pas surcharger l’ordinateur.Exporter une image de l’agregat obtenu en utilisant la commande colormap(flipud(gray))).
2
GEOPHYSIQUE
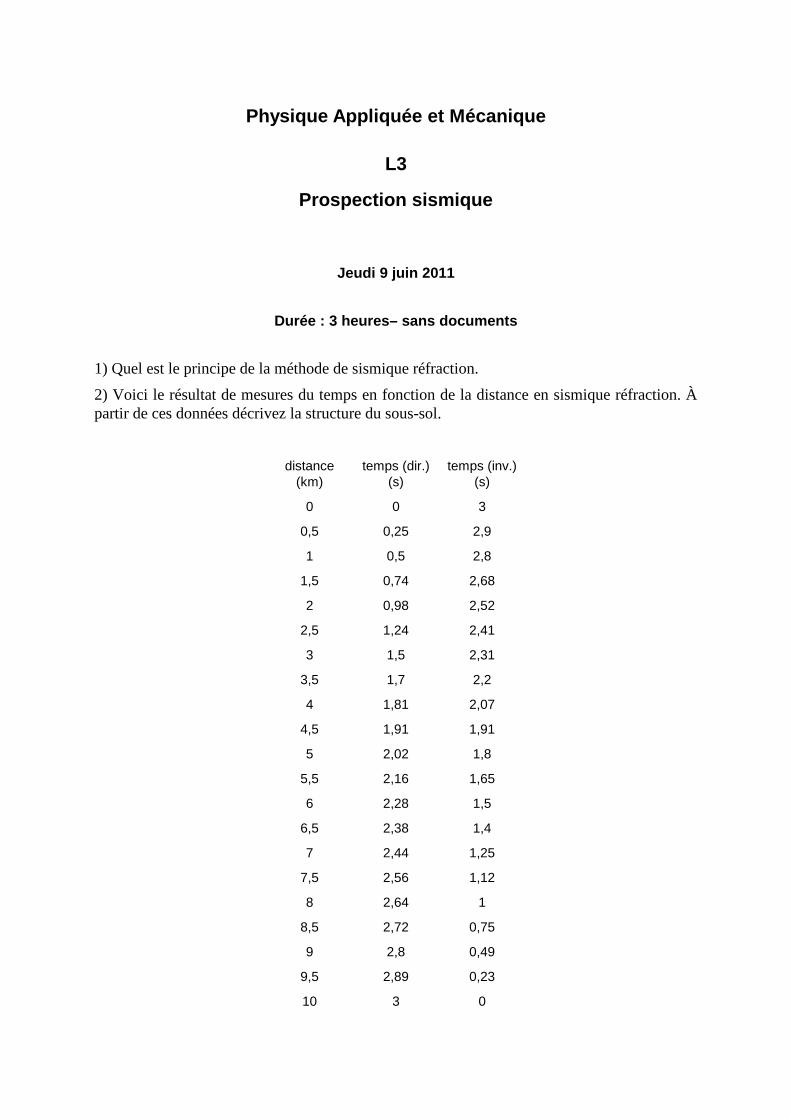
Physique Appliquée et Mécanique
L3
Prospection sismique
Jeudi 9 juin 2011
Durée : 3 heures– sans documents
1) Quel est le principe de la méthode de sismique réfraction.
2) Voici le résultat de mesures du temps en fonction de la distance en sismique réfraction. À partir de ces données décrivez la structure du sous-sol.
distance (km)
temps (dir.) (s)
temps (inv.) (s)
0 0 3
0,5 0,25 2,9
1 0,5 2,8
1,5 0,74 2,68
2 0,98 2,52
2,5 1,24 2,41
3 1,5 2,31
3,5 1,7 2,2
4 1,81 2,07
4,5 1,91 1,91
5 2,02 1,8
5,5 2,16 1,65
6 2,28 1,5
6,5 2,38 1,4
7 2,44 1,25
7,5 2,56 1,12
8 2,64 1
8,5 2,72 0,75
9 2,8 0,49
9,5 2,89 0,23
10 3 0
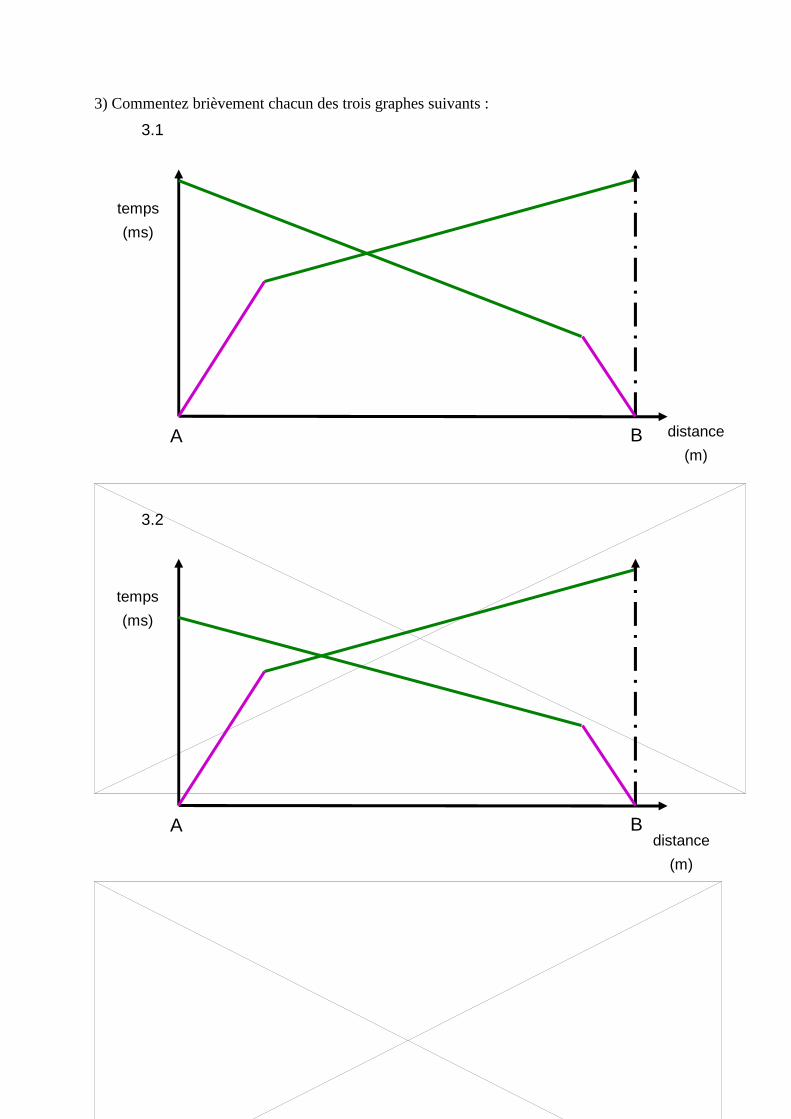
3) Commentez brièvement chacun des trois graphes suivants :
3.1
3.2
temps
(ms)
distance
(m) B A
temps
(ms)
distance
(m)
B A
3.3
4) Quelles sont :
4.1 les limites de la méthode de sismique réfraction ;
4.2 les domaines d’application de cette méthode de prospection sismique ?
temps
(ms)
B A distance
(m)
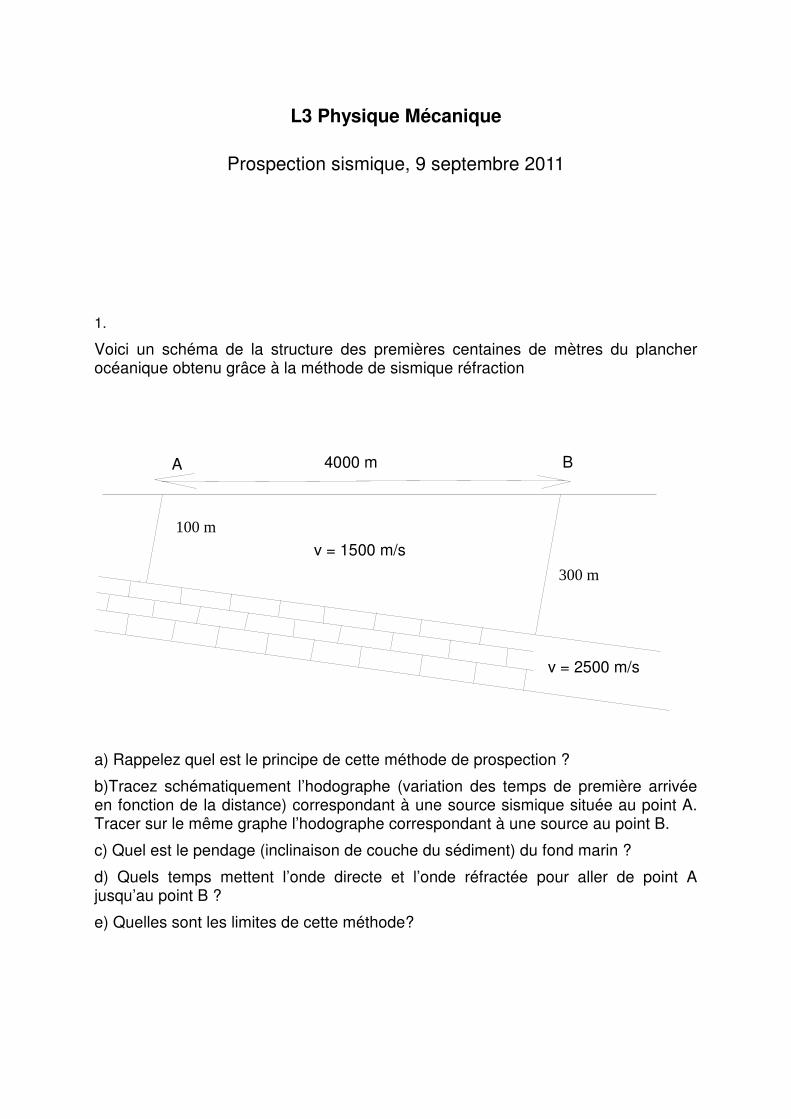
L3 Physique Mécanique
Prospection sismique, 9 septembre 2011
1.
Voici un schéma de la structure des premières centaines de mètres du plancher océanique obtenu grâce à la méthode de sismique réfraction
a) Rappelez quel est le principe de cette méthode de prospection ?
b)Tracez schématiquement l’hodographe (variation des temps de première arrivée en fonction de la distance) correspondant à une source sismique située au point A. Tracer sur le même graphe l’hodographe correspondant à une source au point B.
c) Quel est le pendage (inclinaison de couche du sédiment) du fond marin ?
d) Quels temps mettent l’onde directe et l’onde réfractée pour aller de point A jusqu’au point B ?
e) Quelles sont les limites de cette méthode?
v = 2 5 0 0 m / s
v = 1 5 0 0 m / s
A B 4 0 0 0 m
100 m
300 m
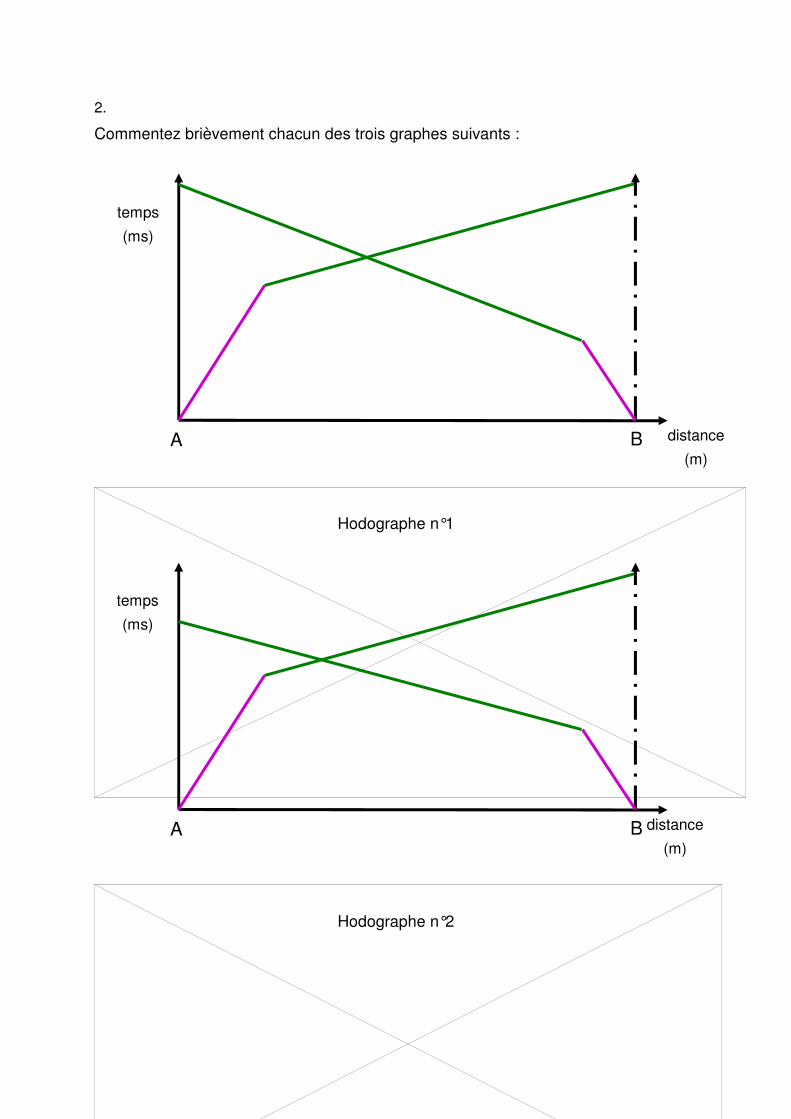
2.
Commentez brièvement chacun des trois graphes suivants :
Hodographe n°1
Hodographe n°2
temps
(ms)
distance
(m)
B A
temps
(ms)
distance
(m)
B A
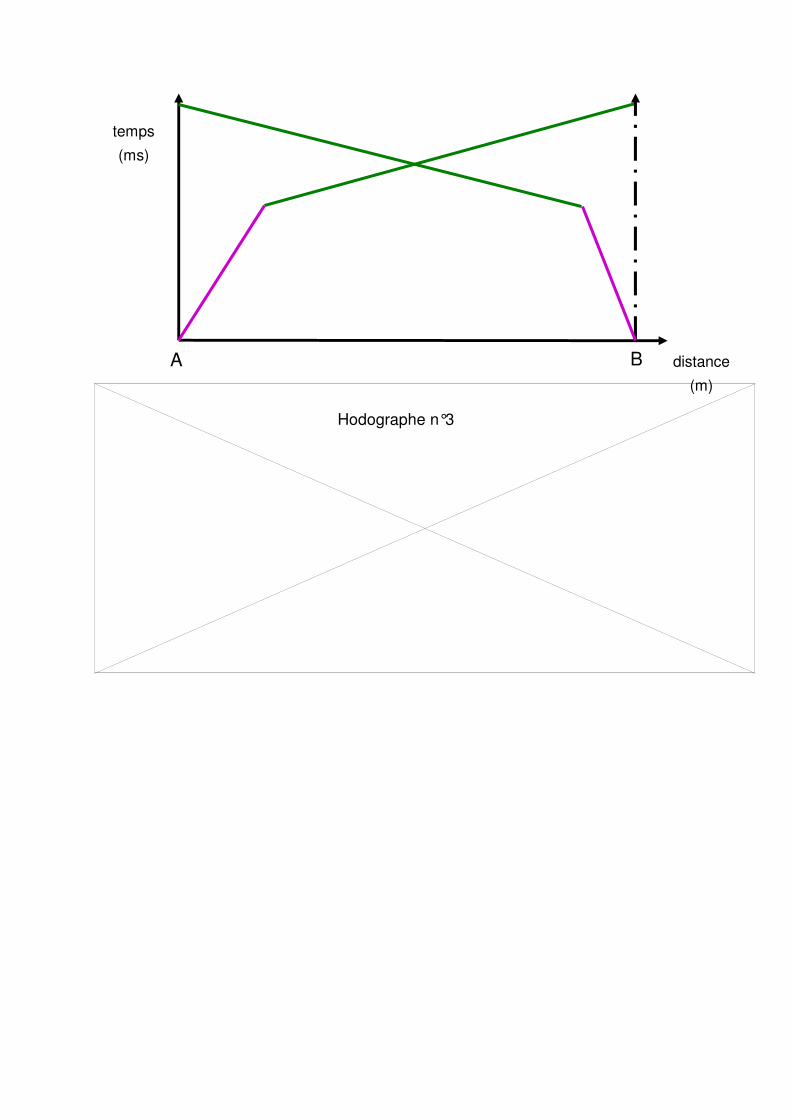
Hodographe n°3
temps
(ms)
B A distance
(m)
ANGLAIS
1
L3 PMEC S6 2ème session – Anglais
Prepare an oral presentation of the following article with:
1. an introduction
2. a summary
3. a personal commentary
4. a conclusion
Preparation: 1 hour
Presentation: 10 min
Conversation with the examiner: 10 min
Climate change is a 'big business opportunity
for the UK'
UK's first national adaption plan sets out economic opportunities of increasingly more
extreme weather, as well as the risks
The Guardian, Monday 1 July 2013
Climate change is a big business opportunity for the UK as it and countries around the world are
increasingly hit by extreme weather, according to a government report published on Monday. The
UK's first national adaptation plan sets out the risks to the UK, from floods to water shortages to
higher food prices, as well as the economic opportunities.
"The UK is already one of the global leaders in this industry of the future and this market [for climate
adaptation] is expected to grow by 5% or more year on year," said environment secretary Owen
Paterson. "As the world's climate changes, Britain's expertise in areas such as weather forecasting,
flood modelling, infrastructure and insurance are already coming to the fore to prepare us for the kinds
of events we might see more often." The adaptation sector is currently valued at about £66bn a year,
according to the Department for Environment, Food and Rural Affairs (Defra).
"Our agriculture continues to innovate, using advanced breeding techniques to produce new crops that
can thrive even when the weather seems to be against us. Looking ahead, genetic modification has the
potential to make further crop improvements," said Paterson. "Managing our natural resources in
innovative ways, is backed by the kind of world class science and engineering skills that we can be
proud equip the UK to succeed in the global race."
The report cites the example of the 2011 floods that devastated Thailand, which is now developing its
flood and water management. "This is a high-value business opportunity (approx £1.9bn)," the report
said. "The government promotes and supports UK companies to access these opportunities."
However, environmental campaigners criticised ministers. "Only this government could regard the
impact of global warming as a business opportunity, with ministers now advising companies on how
to turn a profit from something most people regard as a profound threat to our collective well-being,"
said Jim Footner, head of campaigns at Greenpeace. "The coalition should be creating the conditions
that would make British industry a world-leading power in high-tech renewable energy technologies:
instead ministers are green-lighting a new fossil fuel era."
2
The report also list the many risks posed to the UK by climate change and lists scores of planning and
development actions that need to be taken to ensure the energy, water, health, travel and business
sectors are able to function in the future. The greatest risks identified are from increased flooding and
also water shortages, as rainfall is expected to become more intense as the climate warms.
"The cost of expected annual damage to residential properties alone from tidal and river flooding in
England and Wales is projected to increase from £640m at present to over £1.1bn by the 2020s," said
the report, which also sets out the flood risk to power plants, roads and railways, schools, emergency
services and hospitals.
The government cut flood defence spending by over 25% year on year in 2010 but has now pledge to
restore and increase funding from 2015. Today's report highlights the effect on mental health of
floodings, which are frequently both emotionally and financially traumatic. Sewer overflows are also
identified as a risk: beaches have already become more polluted after recent wet weather washed more
untreated seawage into the sea.
The converse of intensifying rain is periods of drought, and the report states that by the 2050s between
27 million and 59 million people in the UK could be living in areas affected by water shortages. The
report emphasises the use of water efficient toilets and taps.
The report identifies a wide range of other risks, such as increased food poisoning in warmer weather.
It says information is lacking on the impact of more severe and frequent heatwaves on cities and the
impact of greater UV sunlight exposure on cancer rates. Another risk is to Wi-Fi internet access and
other communications because higher temperatures can reduce the range of wireless communications,
rainstorms can impact the reliability of the signal, and drier summers and wetter winters may cause
greater subsidence, damaging masts and underground cables.
The report also looks at the risk to the UK from climate change impacts abroad. It cited PWC research
on international threats and opportunities from climate change: "The threats associated with climate
change internationally can be an order of magnitude larger than domestic threats, in particular for
businesses [with international supply chains] and food imports."
Paterson said: "Even when extreme weather hits abroad we feel the effects at home. For example,
harvest failures abroad push up food prices here – a worrying prospect for hard-pressed families."
The report was published on the same day that William Hague's new climate envoy, Rear Admiral
Neil Morisetti, said global warming poses as grave a threat to the UK's security and economic
resilience as terrorism and cyber-attacks.
Paterson said: "The government cannot act alone. That is why I'm delighted that we have worked so
closely with so many experts from outside government – from industry, from local government and
from civil society." However, organisations will report their future progress on adaptation only on a
voluntary basis.
Andrew Brown, head of sustainability at Anglian Water said: "The services we provide are vital for
people's health and wellbeing as well as a thriving economy. This report is a welcome call to action for
everyone in the UK to think about how they can prepare and make sure that we can continue to grow
and thrive, whatever the future holds."
Guy Shrubsole at Friends of the Earth said: "This programme looks worryingly like the government is
washing its hands of taking proper responsibility – lumping cash-strapped councils and individuals
with more of the burden instead. The coalition must do more to bail out the water, but it also needs to
fix the roof by working harder to prevent climate change in the first place."