Embed Size (px)
Citation preview
CAHIER DE TECHNOLOGIE
[Année] 2013
-
2014
2eme
Année Secondaire
R E A L I S E P A R : M R B A D R A S A H B I
COURS ET EXERCICES D’APPLICATION
www.sahbitechnologie.jimdo.com
Section Science
Page-2-
CHAPITRE I : Analyse fonctionnelle d’un système technique
CHAPITRE II : Définition graphique d’un produit
CHAPITRE III : Comportement des matériaux
CHAPITRE IV : Les fonctions logique universelles
CHAPITRE V : Etude des solutions constructives
CHAPITRE VI : Les fonctions électroniques
Page-3-
CHAPITRE I(1)
ANALYSE FONCTIONNELLE D’UN SYSTEME TECHNIQUE
Leçon N°1 : La modélisation d’un système technique « Rappels »
Objectifs :
Identifier la Fonction Globale d’un système technique..
Identifier les fonctions de service qui contribuent à la satisfaction de la FG.
I. Rappel :
1. Définition : Un Système Technique est un ensemble de composants ou constituants liés et organisés
en fonction d’un but à atteindre.
Selon le point de vue concepteur, un système technique est défini par un modèle fonctionnel.
2. Caractéristique : Modéliser un système technique revient à lui donner une représentation
graphique qui met en évidence quatre ensembles d’éléments distinct les un des autres mais cependant il
existe une relation entre eux :
Fonction globale : la fonction globale d’un système technique définit la transformation de la matière
d’œuvre d’un état initial donné à un état final souhaité. Elle est exprimée par un verbe d’action à
l’infinitif.
Le(s) processeur(s) :(ST + Support) qui supporte la fonction globale.
La matière d’œuvre :
- MOE : C’est l’énergie, l’information, ou la matière sur laquelle agit le système.
- MOS : C’est la matière d’œuvre d’entrée plus la valeur ajoutée.
(V.A c’est la modification apportée à la matière d’œuvre après intervention du ST)
Les données de contrôle : Elles représentent les contraintes qui permettent d’enclencher ou de
modifier le fonctionnement du système. On a :
- W (Energies): W.e, Wp, Wm.
- C (Configuration): Programme.
- R (Réglage): Température, vitesse, etc. ….
- E (Exploitation) : données d’exploitation ou des consignes de fonctionnement.
Les sorties secondaires : Elles sont : - Des informations (messages, compte rendus)
- Des nuisances : (Déchets, bruit, chaleur…)
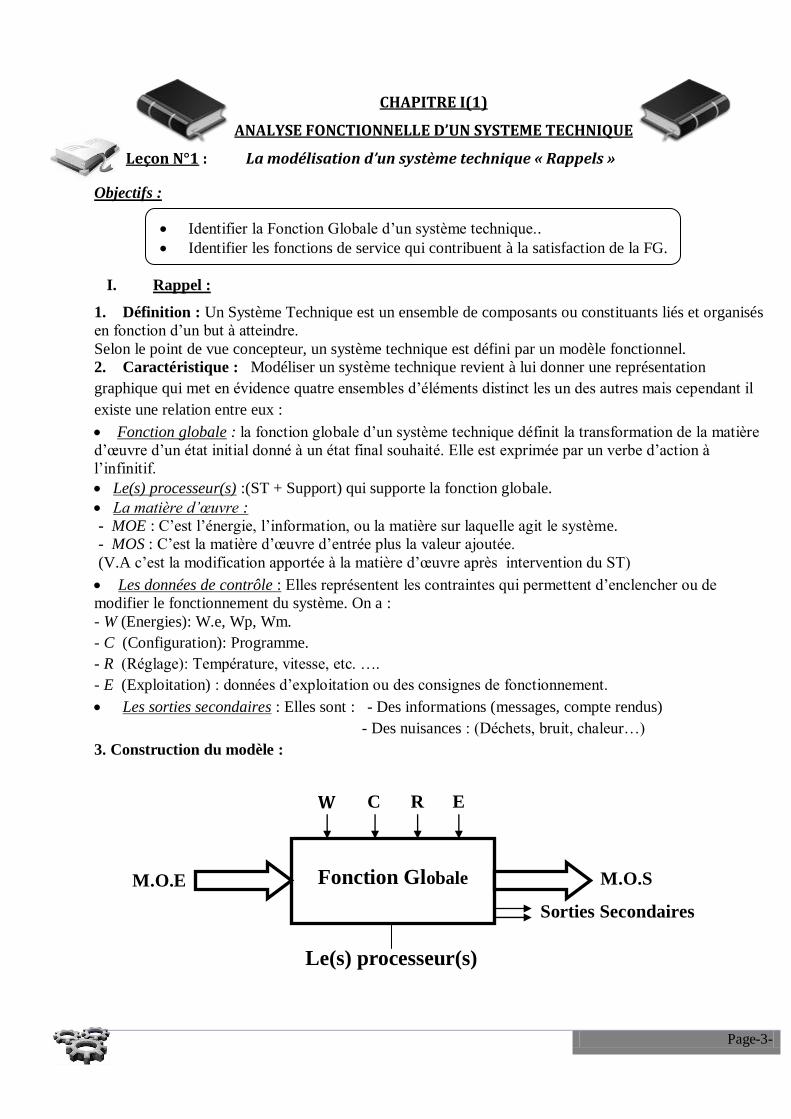
3. Construction du modèle :
A-0
Fonction Globale
W C R E
M.O.E M.O.S
Sorties Secondaires
Le(s) processeur(s)
Page-4-
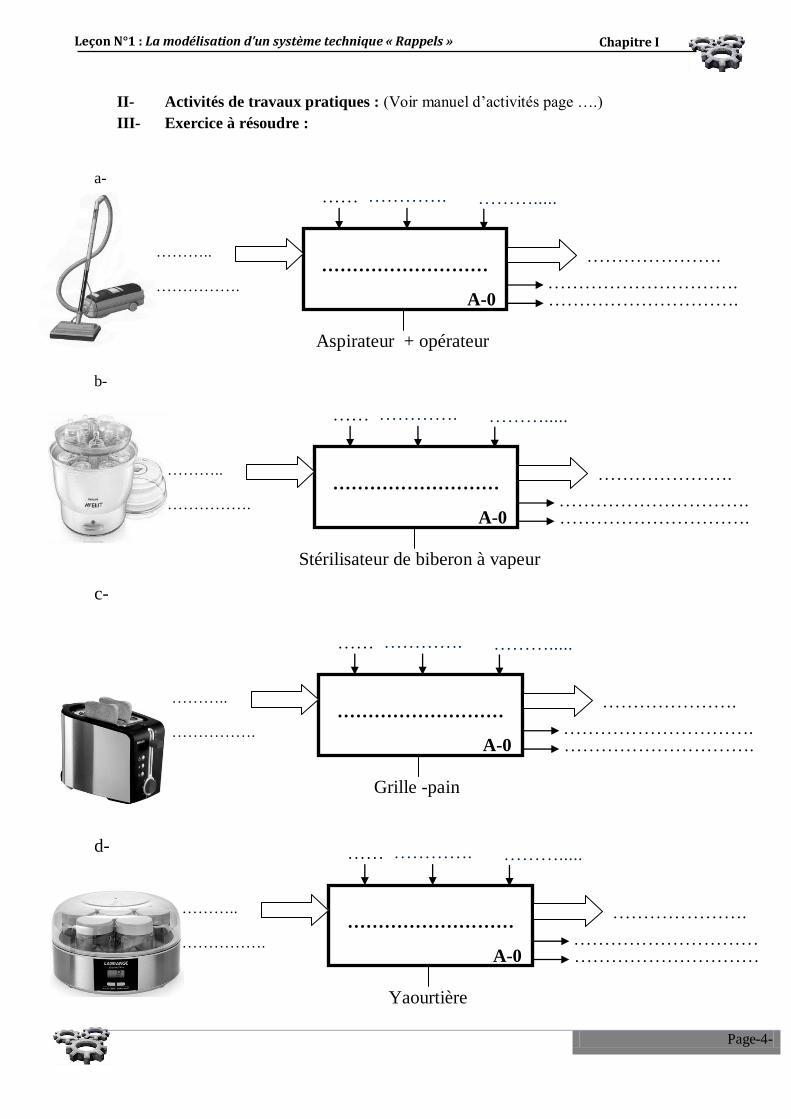
II- Activités de travaux pratiques : (Voir manuel d’activités page ….)
III- Exercice à résoudre :
a-
b-
c-
d-
Stérilisateur de biberon à vapeur
………………………
A-0
A-0
………………….
…………………………. ………………………….
…… …………. ……….....
………..
…………….
Aspirateur + opérateur
………………………
A-0
A-0
………………….
…………………………. ………………………….
…… …………. ……….....
………..
…………….
Grille -pain
………………………
A-0
A-0
………………….
…………………………. ………………………….
…… …………. ……….....
………..
…………….
Yaourtière
………………………
A-0
A-0
………………….
………………………… …………………………
…… …………. ……….....
………..
…………….
Leçon N°1 : La modélisation d’un système technique « Rappels » Chapitre I
Page-5-
Leçon N°2 : L’analyse descendante (SADT)
Objectif :
A partir d’un système technique et / ou de son dossier technique :
Modéliser un système technique.
Analyser le fonctionnement d’un système technique et/ou un sous-système par la méthode SADT.
I – Mise en situation : (Voir Manuel du cours page ……..)
- Activité de découverte : Système << Ascenseur >>
II – Analyse descendante :
1. Denomination:
SADT : Structured Analysis and Desing Technic ou
IDEF0 ( Nom pour les anglais) (en anglais Integration DEfinition for Function modeling).
2- Définition:
La modélisation d’un système dresse l’inventaire de ses relations externes mais ne permet pas une
description approfondie capable de donner une idée claire sur l’agencement des sous-systèmes.
Cette analyse, décrite par un modèle graphique, procède donc par approche descendante d’une
manière que l’on va du plus général, au plus détaillé en s’intéressant aux activités du système ce qui
permet de simplifier la compréhension de système pouvant être très complexe.
Pour cela il faut décomposer la fonction Globale du système en modules fonctionnel (Boite).
Ces modules pouvant être eux-mêmes décomposés progressivement par niveau apportant des
informations supplémentaires et permettant d’identifier les moyens et les activités utilisés pour
réaliser la fonction globale.
On obtient une analyse descendante, hiérarchique, modulaire, structurée.
3- Description de la méthode SADT : (Voir manuel de cours page ….)
4- Représentation graphique :
Cela consiste à détailler le système en le divisant en sous-systèmes. On décompose ainsi le système, en
niveau inférieur (0, 1,2,…). Le niveau 0 contient les boites 1, 2, 3… qui sont elles mêmes décomposé
en boites 31,32, 33… pour la boite 3 et i1, i2, i3… pour la boite i et ainsi de suite en descendant les
niveaux. Pour organiser la décomposition il existe une règle : une boite peut être décomposée et dans
ce cas en minimum 3 autres boites et au maximum 6.
De plus chaque flèche entrant ou sortant de la boite-mère doit se retrouver dans le diagramme enfant
et doit être en relation avec au moins un enfant.
Page-6-
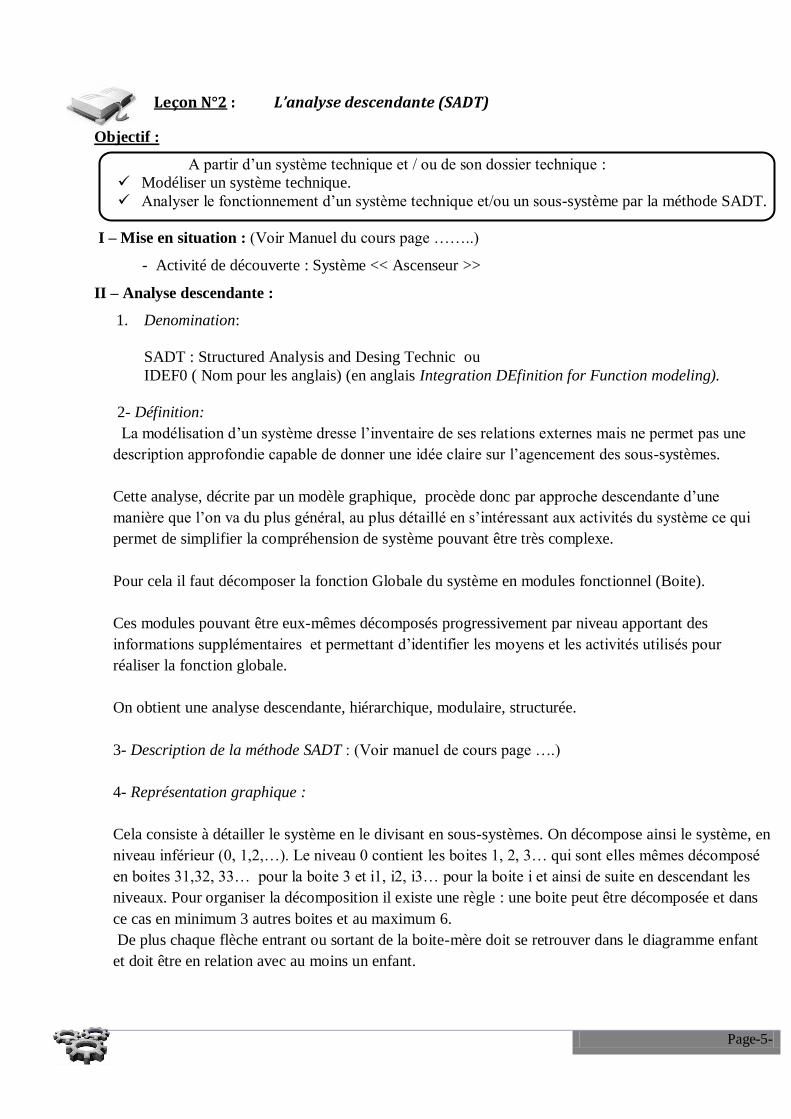
Le diagramme ainsi obtenu ressemble au suivant :
On ne dépasse que très rarement l'analyse de deux niveaux successifs, souvent A-0 puis A0.
III- Activité de travaux pratiques : (Voir manuel d’activités page ….) VI- Exercice à résoudre : (Voir manuel du cours page ….)
Plus Général
Plus détaillé
A0 : Diagramme
enfant de 1er
niveau
A-0 : Boite mère
Fonction
Globale
A-0
A0
Fonction
Globale
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-7-
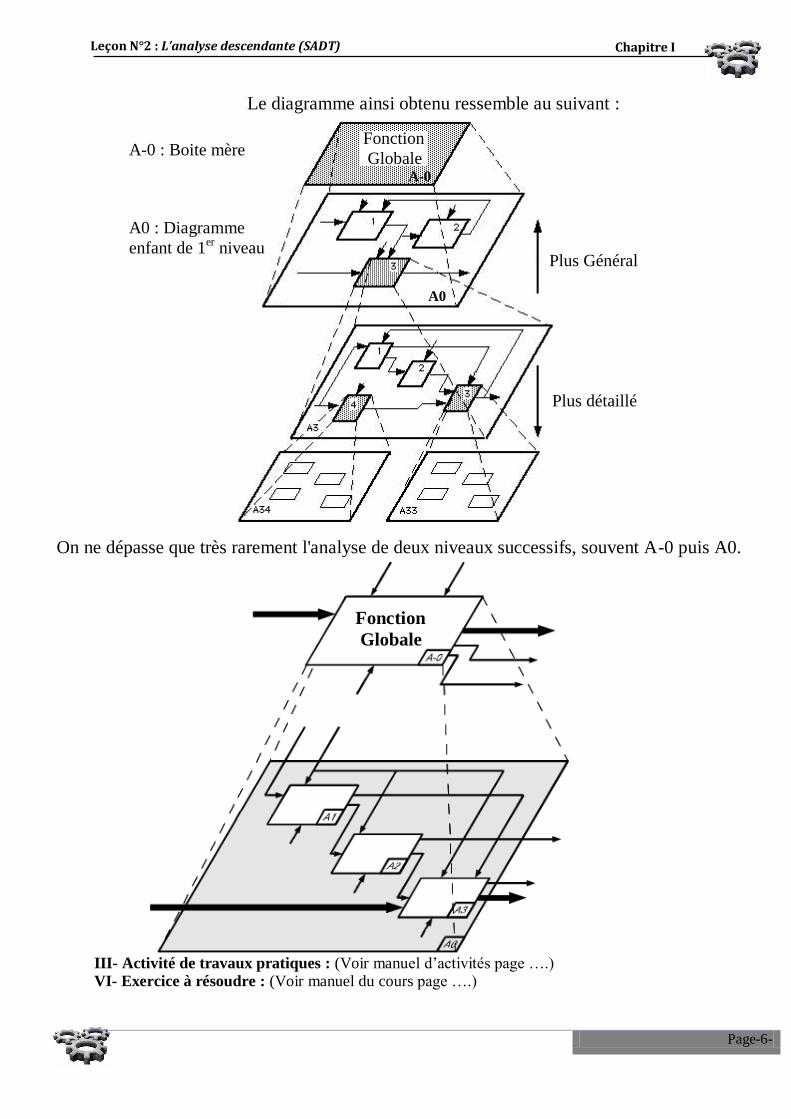
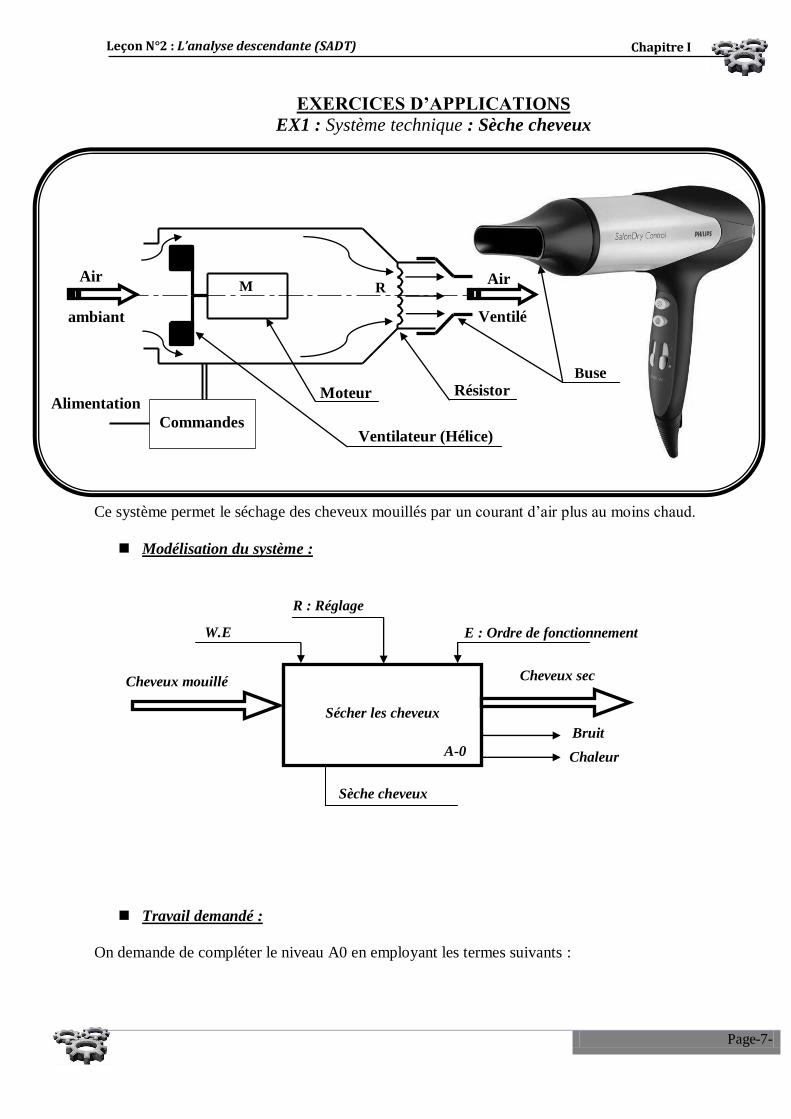
EXERCICES D’APPLICATIONS
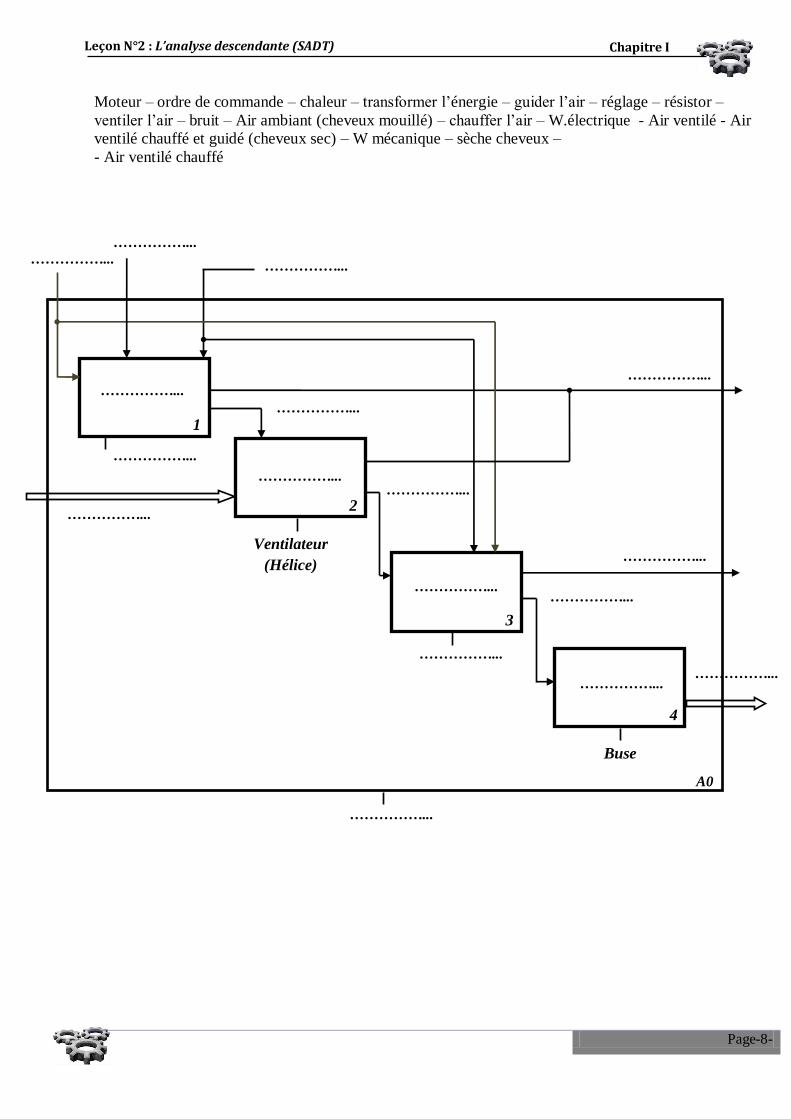
EX1 : Système technique : Sèche cheveux
Ce système permet le séchage des cheveux mouillés par un courant d’air plus au moins chaud.
Modélisation du système :
Travail demandé :
On demande de compléter le niveau A0 en employant les termes suivants :
Commandes
Sécher les cheveux
W.E
R : Réglage
E : Ordre de fonctionnement
Cheveux mouillé Cheveux sec
Bruit
Chaleur
Sèche cheveux
A-0
Buse
M
Alimentation
R
Résistor
Ventilateur (Hélice)
Moteur
Air
ambiant
Air
Ventilé
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-8-
Moteur – ordre de commande – chaleur – transformer l’énergie – guider l’air – réglage – résistor –
ventiler l’air – bruit – Air ambiant (cheveux mouillé) – chauffer l’air – W.électrique - Air ventilé - Air
ventilé chauffé et guidé (cheveux sec) – W mécanique – sèche cheveux –
- Air ventilé chauffé
……………...
A0
Ventilateur
(Hélice)
Buse
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
1
2
3
4
……………...
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-9-
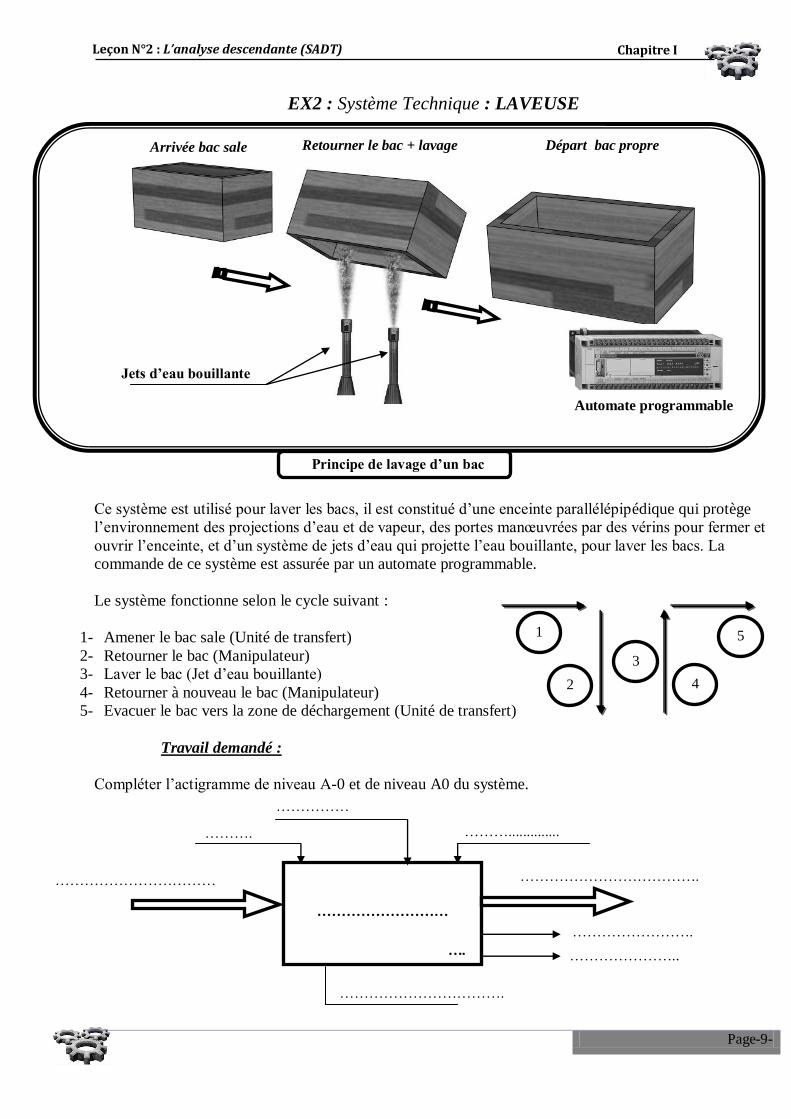
EX2 : Système Technique : LAVEUSE
Ce système est utilisé pour laver les bacs, il est constitué d’une enceinte parallélépipédique qui protège
l’environnement des projections d’eau et de vapeur, des portes manœuvrées par des vérins pour fermer et
ouvrir l’enceinte, et d’un système de jets d’eau qui projette l’eau bouillante, pour laver les bacs. La
commande de ce système est assurée par un automate programmable.
Le système fonctionne selon le cycle suivant :
1- Amener le bac sale (Unité de transfert)
2- Retourner le bac (Manipulateur)
3- Laver le bac (Jet d’eau bouillante)
4- Retourner à nouveau le bac (Manipulateur)
5- Evacuer le bac vers la zone de déchargement (Unité de transfert)
Travail demandé :
Compléter l’actigramme de niveau A-0 et de niveau A0 du système.
Arrivée bac sale
Jets d’eau bouillante
Automate programmable
Retourner le bac + lavage Départ bac propre
Principe de lavage d’un bac
………………………
……….
……………
………..............
…………………………… ……………………………….
…………………….
…………………..
…………………………….
….
1
2
3
4
5
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-10-
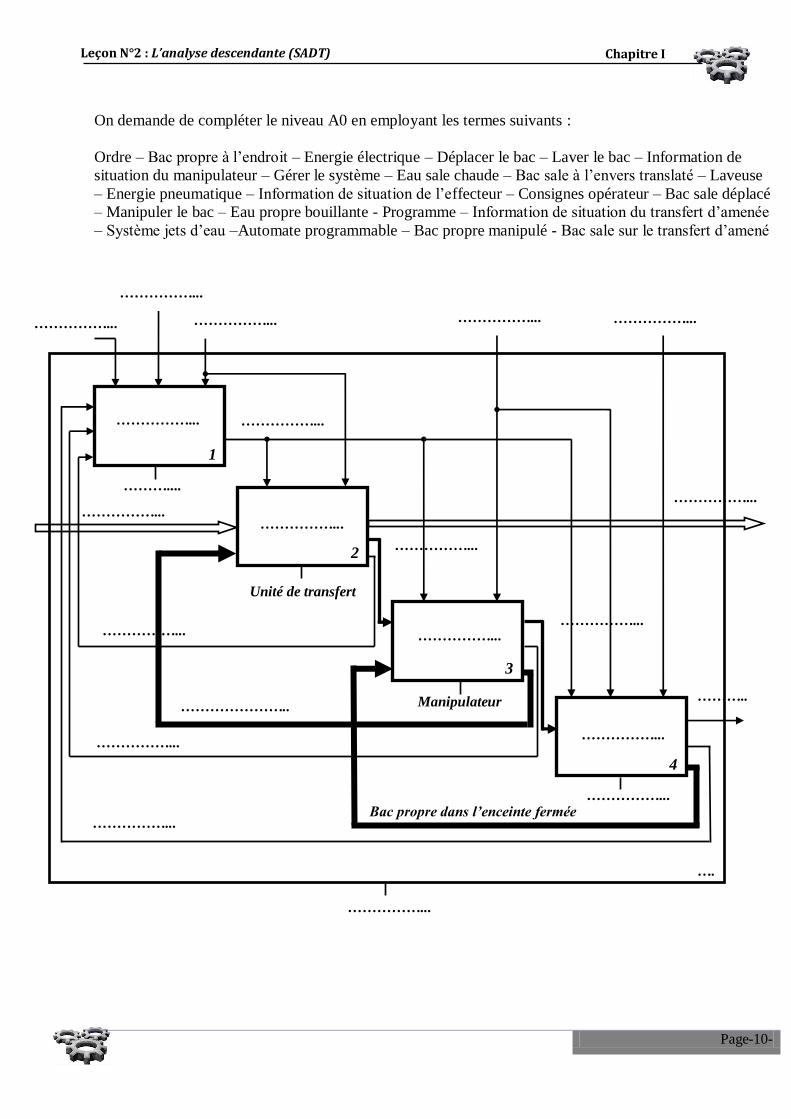
On demande de compléter le niveau A0 en employant les termes suivants :
Ordre – Bac propre à l’endroit – Energie électrique – Déplacer le bac – Laver le bac – Information de
situation du manipulateur – Gérer le système – Eau sale chaude – Bac sale à l’envers translaté – Laveuse
– Energie pneumatique – Information de situation de l’effecteur – Consignes opérateur – Bac sale déplacé
– Manipuler le bac – Eau propre bouillante - Programme – Information de situation du transfert d’amenée
– Système jets d’eau –Automate programmable – Bac propre manipulé - Bac sale sur le transfert d’amené
….
………....
Unité de transfert
Manipulateur
Bac propre dans l’enceinte fermée
……………...
……………...
……………...
……………... ……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
……………...
………..
……………...
……………...
……………...
…………………..
1
2
3
4
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-11-
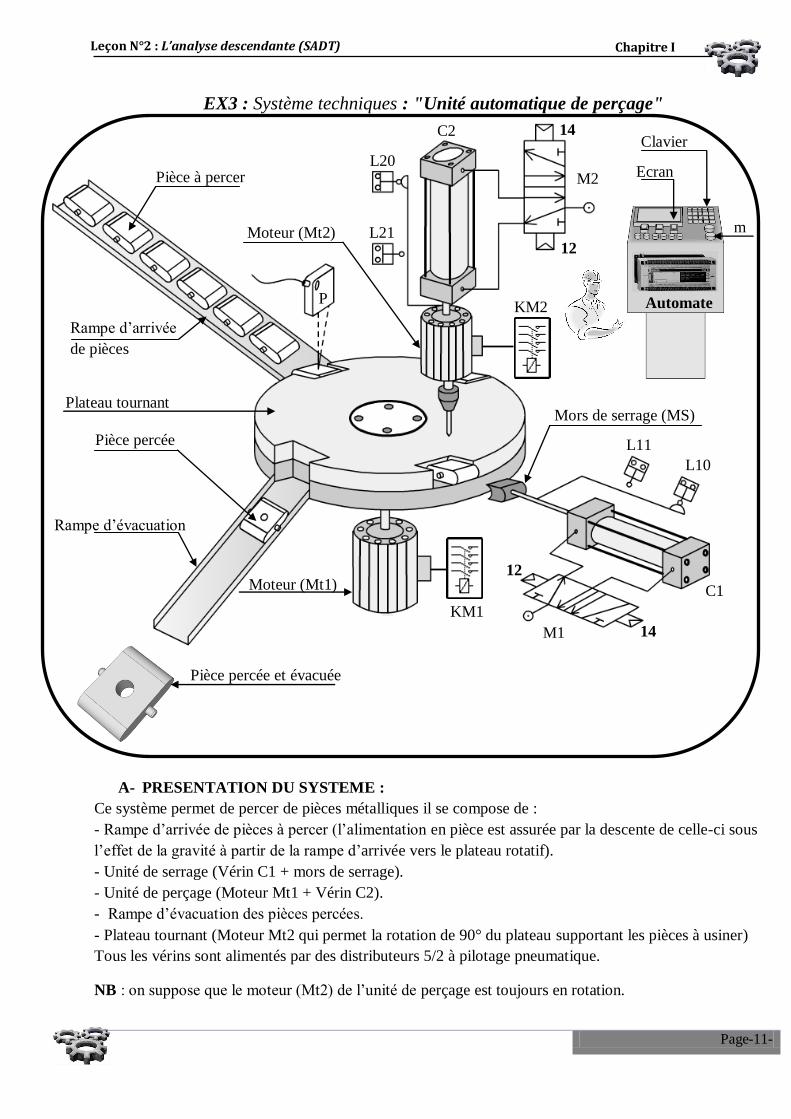
EX3 : Système techniques : "Unité automatique de perçage"
A- PRESENTATION DU SYSTEME :
Ce système permet de percer de pièces métalliques il se compose de :
- Rampe d’arrivée de pièces à percer (l’alimentation en pièce est assurée par la descente de celle-ci sous
l’effet de la gravité à partir de la rampe d’arrivée vers le plateau rotatif).
- Unité de serrage (Vérin C1 + mors de serrage).
- Unité de perçage (Moteur Mt1 + Vérin C2).
- Rampe d’évacuation des pièces percées.
- Plateau tournant (Moteur Mt2 qui permet la rotation de 90° du plateau supportant les pièces à usiner)
Tous les vérins sont alimentés par des distributeurs 5/2 à pilotage pneumatique.
NB : on suppose que le moteur (Mt2) de l’unité de perçage est toujours en rotation.
C1
C2
M2
M1
L20
L21
L11
L10
P KM2
KM1
Moteur (Mt1)
Moteur (Mt2)
Pièce à percer
Pièce percée et évacuée
Mors de serrage (MS) Plateau tournant
Pièce percée
Rampe d’évacuation
Rampe d’arrivée
de pièces
12
14
12
14
Automate
m
Clavier
Ecran
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-12-
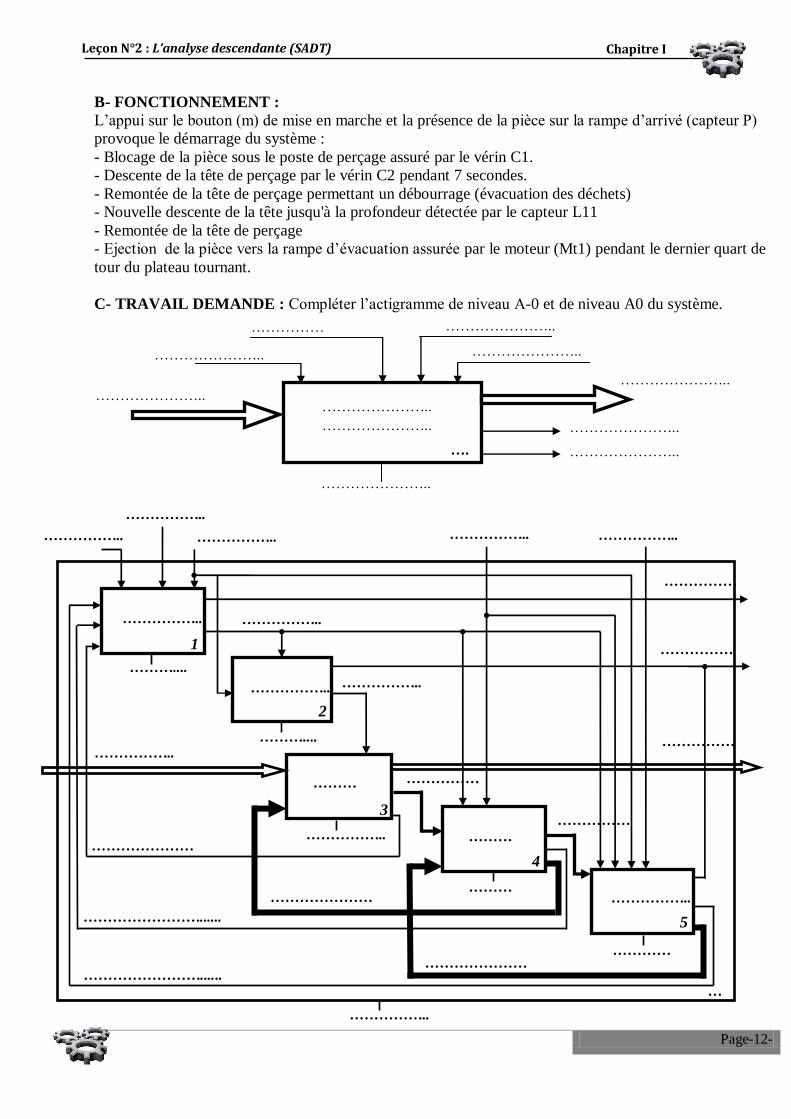
B- FONCTIONNEMENT : L’appui sur le bouton (m) de mise en marche et la présence de la pièce sur la rampe d’arrivé (capteur P)
provoque le démarrage du système :
- Blocage de la pièce sous le poste de perçage assuré par le vérin C1.
- Descente de la tête de perçage par le vérin C2 pendant 7 secondes.
- Remontée de la tête de perçage permettant un débourrage (évacuation des déchets)
- Nouvelle descente de la tête jusqu'à la profondeur détectée par le capteur L11
- Remontée de la tête de perçage
- Ejection de la pièce vers la rampe d’évacuation assurée par le moteur (Mt1) pendant le dernier quart de
tour du plateau tournant.
C- TRAVAIL DEMANDE : Compléter l’actigramme de niveau A-0 et de niveau A0 du système.
…………………..
……………
…………………..
…………………..
………………….. …………………..
…………………..
………………….. …………………..
…………………..
….
…………………..
………....
……………..
.
………
……...
……………..
.
……………..
.
……………..
.
…………………
…………
……………..
.
……………..
.
……………
……...
……………..
.
……………..
.
……………..
.
……………………......
......
……………..
.
……………
…..
……………..
.
…………………
………..
3
4
2
1
……………..
.
……….... ……………..
.
………
……...
………
……...
……………
……...
……………
……...
5
…………
…...
…
…
……………
…..
……………………......
......
…………………
………..
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-13-
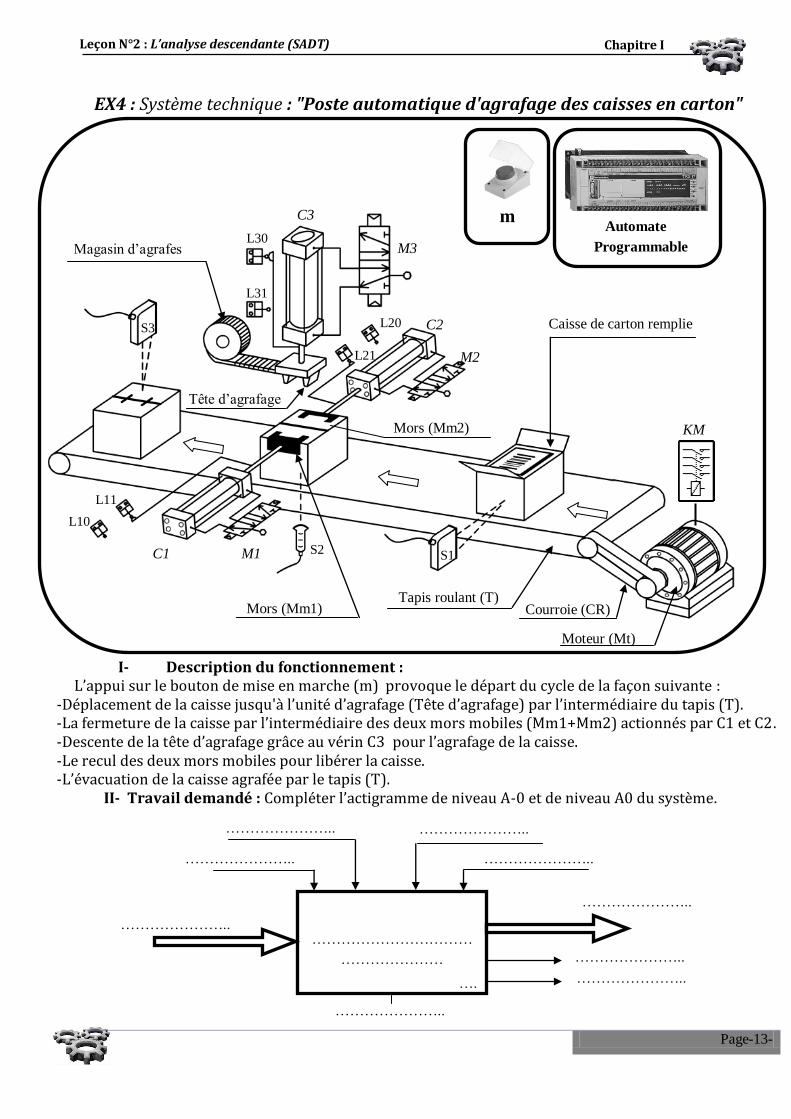
EX4 : Système technique : "Poste automatique d'agrafage des caisses en carton"
I- Description du fonctionnement : L’appui sur le bouton de mise en marche (m) provoque le départ du cycle de la façon suivante : -Déplacement de la caisse jusqu'à l’unité d’agrafage (Tête d’agrafage) par l’intermédiaire du tapis (T). -La fermeture de la caisse par l’intermédiaire des deux mors mobiles (Mm1+Mm2) actionnés par C1 et C2. -Descente de la tête d’agrafage grâce au vérin C3 pour l’agrafage de la caisse. -Le recul des deux mors mobiles pour libérer la caisse. -L’évacuation de la caisse agrafée par le tapis (T).
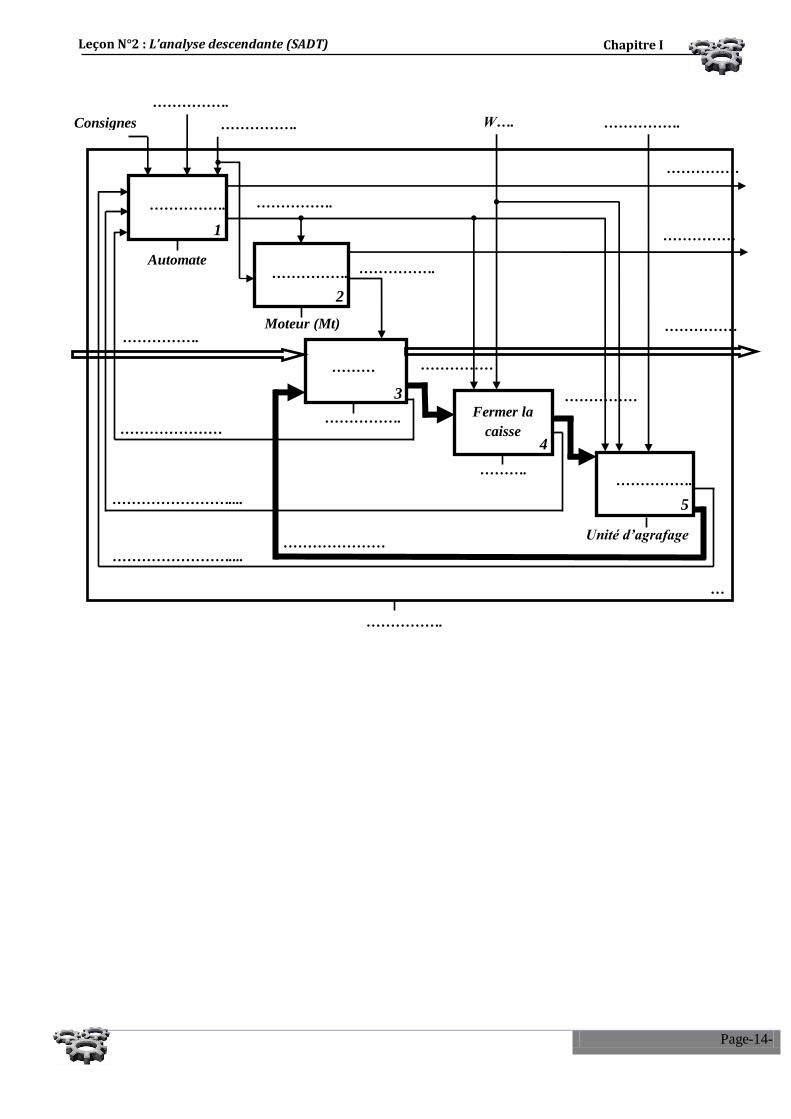
II- Travail demandé : Compléter l’actigramme de niveau A-0 et de niveau A0 du système.
Automate
Programmable
m
Courroie (CR)
C2
M2
L20
L21
C3
M3 L30
L31
C1 M1
L11
L10
S3
S1
Caisse de carton remplie
Mors (Mm2)
Tapis roulant (T) Mors (Mm1)
Magasin d’agrafes
Tête d’agrafage
S2
KM
Moteur (Mt)
…..
……………………………
…………………
…………………..
………………….. …………………..
…………………..
…………………..
…………………..
…………………..
…………………..
…………………..
….
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-14-
Moteur (Mt)
…………….
..
Fermer la
caisse
…………….
..
W…. …………….
..
…………………
…………
…………….
..
…………….
..
……………
……...
…………….
..
Consignes
…………….
..
……………………....
........
…………….
..
……………
…..
…………….
..
3
4
2
1
…………….
..
Automate …………….
..
………
……...
……….
.
……………
……...
……………
……...
5
Unité d’agrafage
…
…
……………
…..
……………………....
........
…………………
………..
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-15-
L31
L30
C3
M3
L21
L20
C2
M2
M1
L10
L11
C1
P
KM
Injecteur (I)
Arrivée du GAZ
Mors de
Transmission par Courroie
Bras poussoir (Bp)
Moteur (Mt)
L12
Tapis roulant
serrage
(Ms)
(T2)
Bouteille de GAZ
Tapis roulant (T1)
S
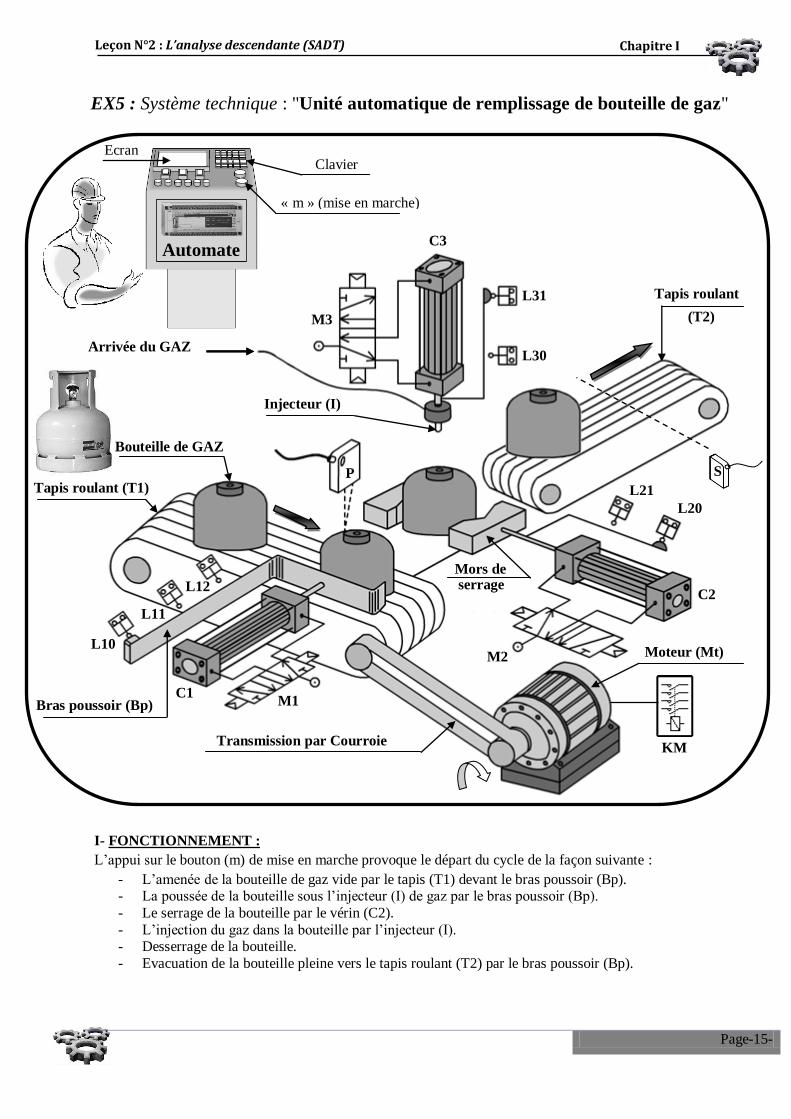
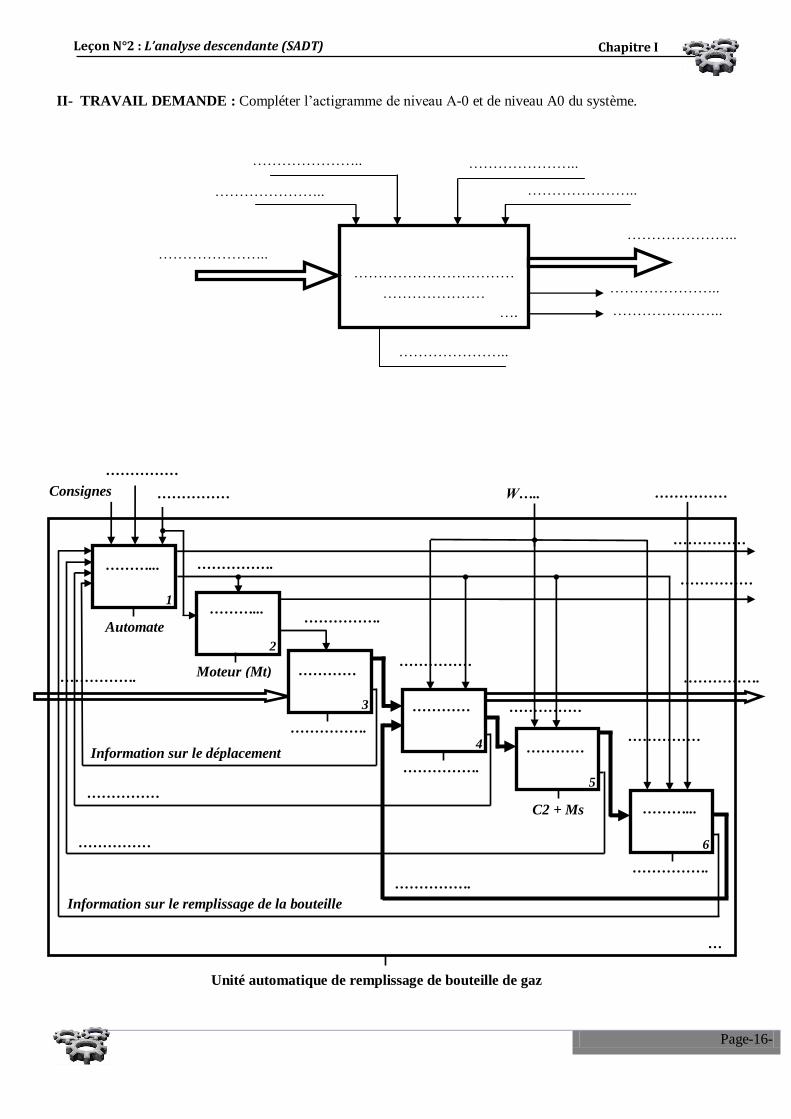
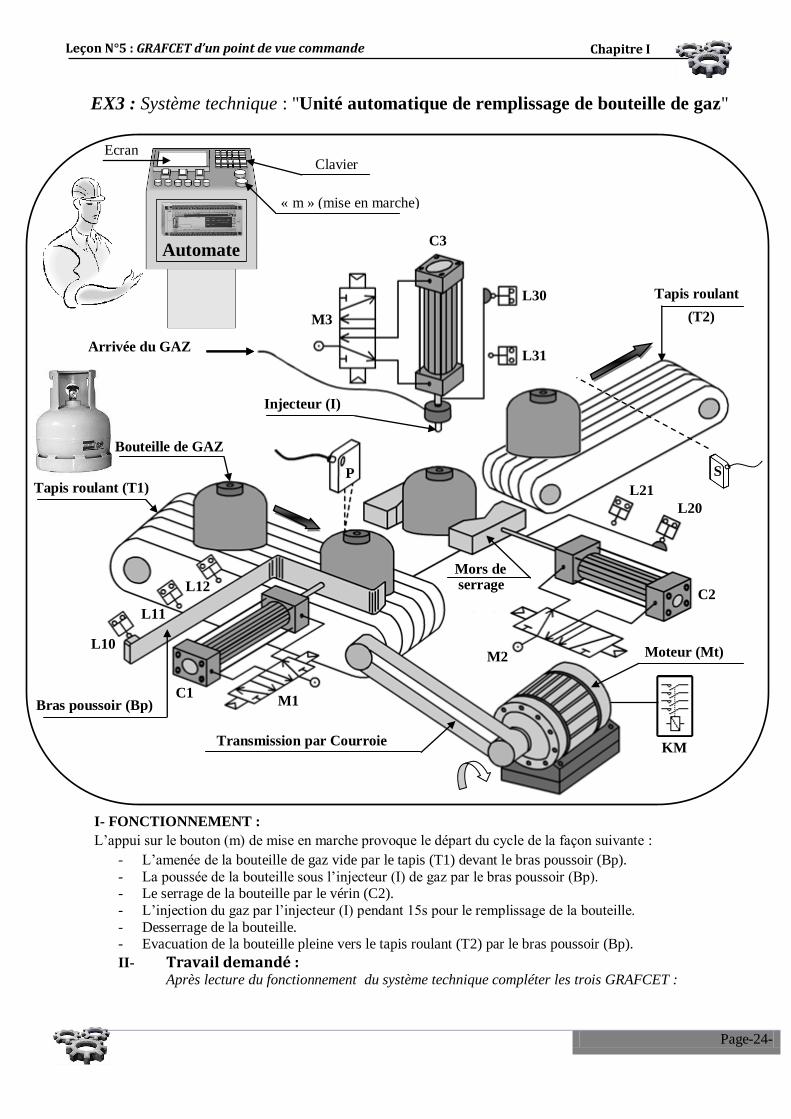
EX5 : Système technique : "Unité automatique de remplissage de bouteille de gaz"
I- FONCTIONNEMENT :
L’appui sur le bouton (m) de mise en marche provoque le départ du cycle de la façon suivante :
- L’amenée de la bouteille de gaz vide par le tapis (T1) devant le bras poussoir (Bp). - La poussée de la bouteille sous l’injecteur (I) de gaz par le bras poussoir (Bp).
- Le serrage de la bouteille par le vérin (C2).
- L’injection du gaz dans la bouteille par l’injecteur (I). - Desserrage de la bouteille.
- Evacuation de la bouteille pleine vers le tapis roulant (T2) par le bras poussoir (Bp).
Automate
Clavier
« m » (mise en marche)
Ecran
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-16-
II- TRAVAIL DEMANDE : Compléter l’actigramme de niveau A-0 et de niveau A0 du système.
…..
……………………………
…………………
…………………..
…………………..
………………….. …………………..
…………………..
…………………..
…………………..
…………………..
………………….. ….
……………
...
1
2
1
2
3
4
5
6
……………
... Consignes W….. ……………
...
……………
...
……………
...
…………….
..
…………
…...
C2 + Ms ………...
…………….
.. …………….
..
…………….
..
…………….
..
Automate
………...
………... …………….
..
…………….
..
…………
…...
…………
…...
…………….
..
Moteur (Mt)
Information sur le déplacement
……………
...
……………
...
Information sur le remplissage de la bouteille
…
……………
...
……………
...
……………
...
Unité automatique de remplissage de bouteille de gaz
Leçon N°2 : L’analyse descendante (SADT) Chapitre I
Page-17-
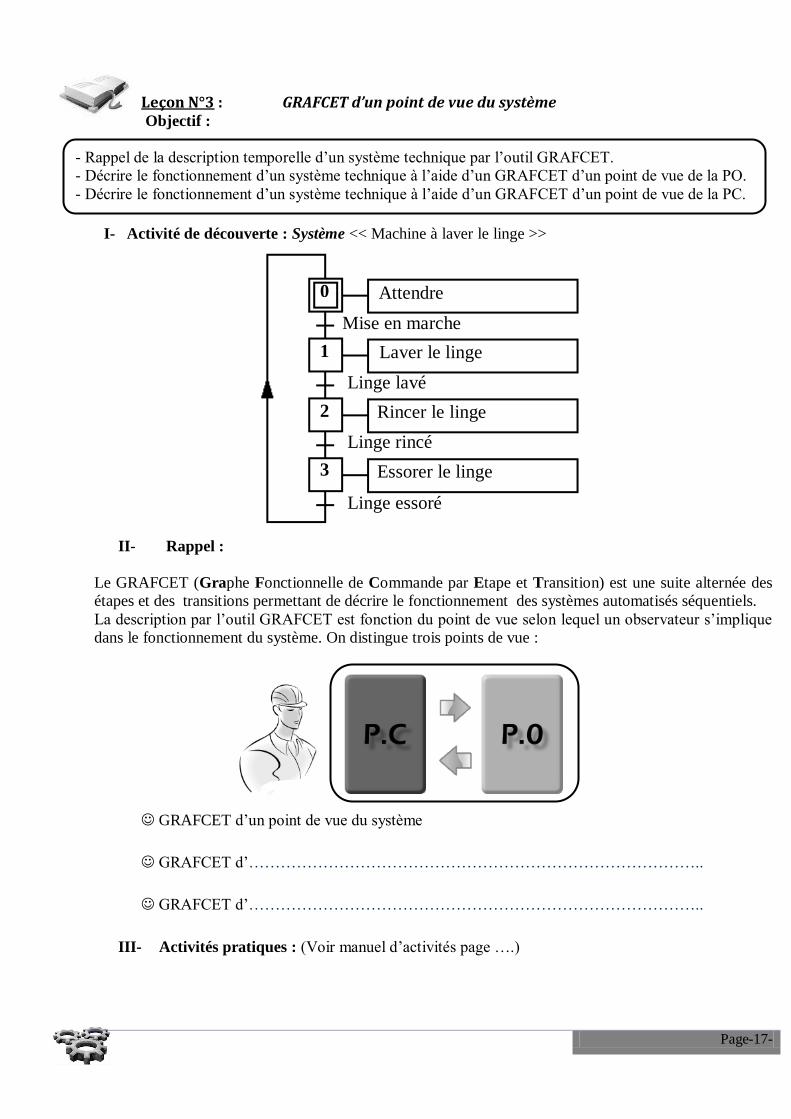
Leçon N°3 : GRAFCET d’un point de vue du système Objectif :
- Rappel de la description temporelle d’un système technique par l’outil GRAFCET.
- Décrire le fonctionnement d’un système technique à l’aide d’un GRAFCET d’un point de vue de la PO.
- Décrire le fonctionnement d’un système technique à l’aide d’un GRAFCET d’un point de vue de la PC.
I- Activité de découverte : Système << Machine à laver le linge >>
II- Rappel :
Le GRAFCET (Graphe Fonctionnelle de Commande par Etape et Transition) est une suite alternée des
étapes et des transitions permettant de décrire le fonctionnement des systèmes automatisés séquentiels.
La description par l’outil GRAFCET est fonction du point de vue selon lequel un observateur s’implique
dans le fonctionnement du système. On distingue trois points de vue :
GRAFCET d’un point de vue du système
GRAFCET d’…………………………………………………………………………..
GRAFCET d’…………………………………………………………………………..
III- Activités pratiques : (Voir manuel d’activités page ….)
0
1
2
Attendre
3
Mise en marche
Laver le linge
Linge lavé
Rincer le linge
Linge rincé
Essorer le linge
Linge essoré
Page-18-
Leçon N°4 : GRAFCET d’un point de vue de la partie opérative (PO) I- Mise en situation :
Activité de découverte : (Voir manuel d’activités page ….)
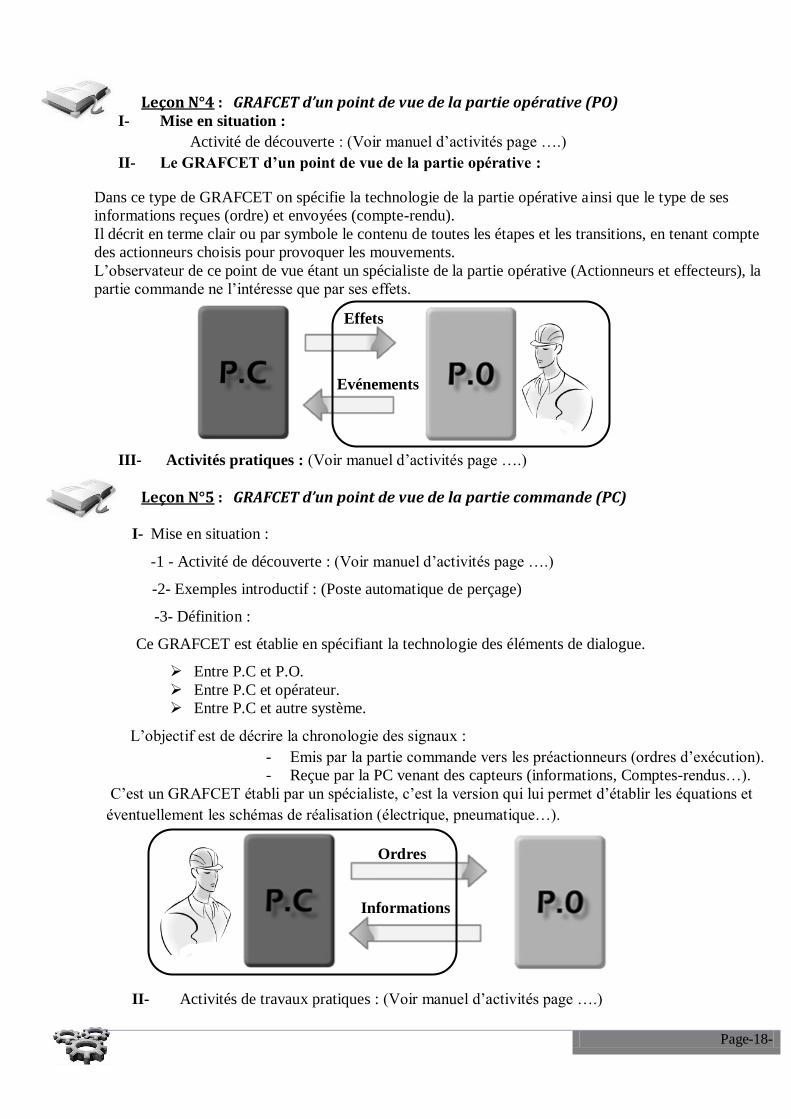
II- Le GRAFCET d’un point de vue de la partie opérative :
Dans ce type de GRAFCET on spécifie la technologie de la partie opérative ainsi que le type de ses
informations reçues (ordre) et envoyées (compte-rendu).
Il décrit en terme clair ou par symbole le contenu de toutes les étapes et les transitions, en tenant compte
des actionneurs choisis pour provoquer les mouvements.
L’observateur de ce point de vue étant un spécialiste de la partie opérative (Actionneurs et effecteurs), la
partie commande ne l’intéresse que par ses effets.
III- Activités pratiques : (Voir manuel d’activités page ….)
Leçon N°5 : GRAFCET d’un point de vue de la partie commande (PC)
I- Mise en situation :
-1 - Activité de découverte : (Voir manuel d’activités page ….)
-2- Exemples introductif : (Poste automatique de perçage)
-3- Définition :
Ce GRAFCET est établie en spécifiant la technologie des éléments de dialogue.
Entre P.C et P.O.
Entre P.C et opérateur.
Entre P.C et autre système.
L’objectif est de décrire la chronologie des signaux :
- Emis par la partie commande vers les préactionneurs (ordres d’exécution).
- Reçue par la PC venant des capteurs (informations, Comptes-rendus…).
C’est un GRAFCET établi par un spécialiste, c’est la version qui lui permet d’établir les équations et
éventuellement les schémas de réalisation (électrique, pneumatique…).
II- Activités de travaux pratiques : (Voir manuel d’activités page ….)
Effets
Evénements
Ordres
Informations
Page-19-
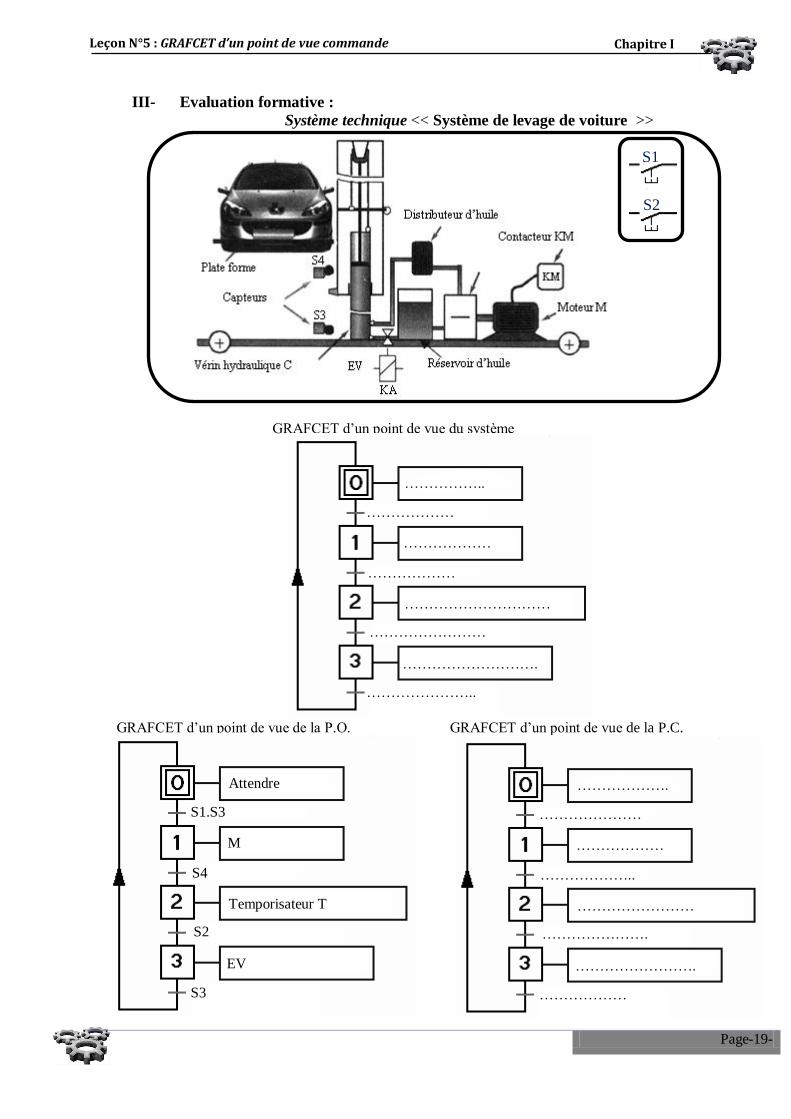
III- Evaluation formative :
Système technique << Système de levage de voiture >>
GRAFCET d’un point de vue de la P.O. GRAFCET d’un point de vue de la P.C.
Attendre
S1.S3
M
Temporisateur T
EV
S4
S2
S3
……………….
…………………
………………
……………………
…………………….
………………..
………………….
………………
GRAFCET d’un point de vue du système
S1
S2
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
……………..
………………
………………
…………………………
……………………….
………………
……………………
…………………..
Page-20-
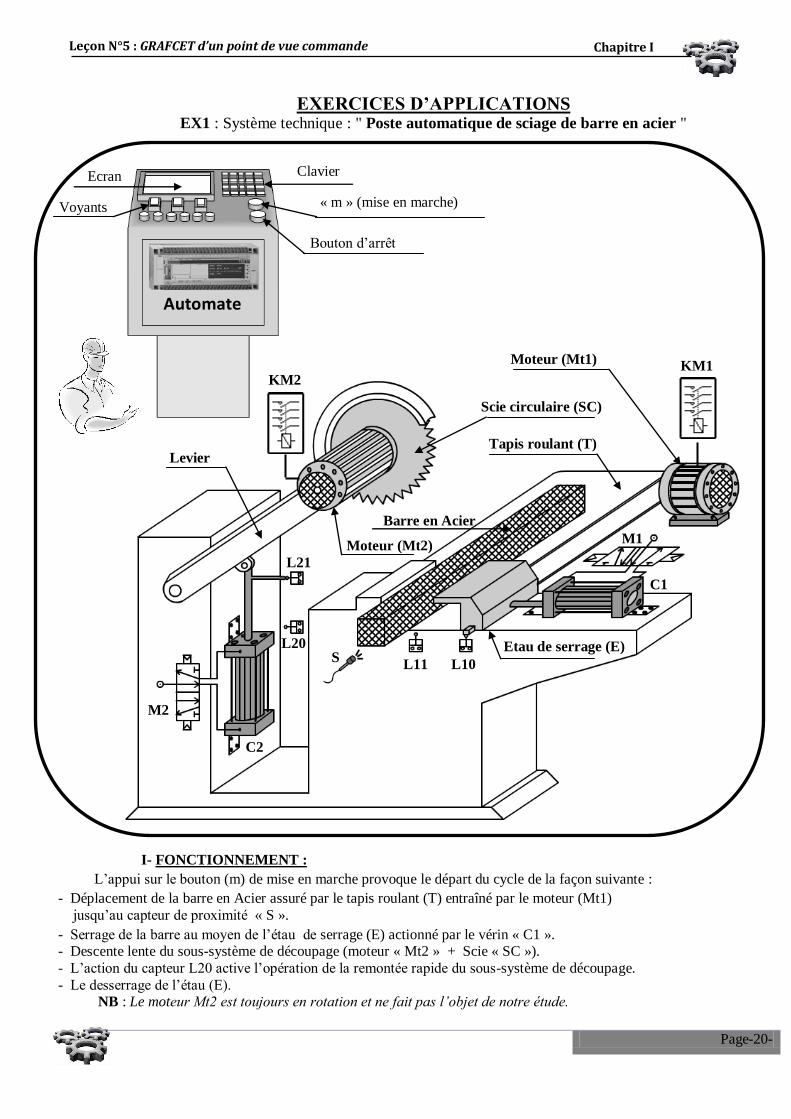
EXERCICES D’APPLICATIONS EX1 : Système technique : " Poste automatique de sciage de barre en acier "
I- FONCTIONNEMENT :
L’appui sur le bouton (m) de mise en marche provoque le départ du cycle de la façon suivante :
- Déplacement de la barre en Acier assuré par le tapis roulant (T) entraîné par le moteur (Mt1)
jusqu’au capteur de proximité « S ».
- Serrage de la barre au moyen de l’étau de serrage (E) actionné par le vérin « C1 ». - Descente lente du sous-système de découpage (moteur « Mt2 » + Scie « SC »).
- L’action du capteur L20 active l’opération de la remontée rapide du sous-système de découpage.
- Le desserrage de l’étau (E). NB : Le moteur Mt2 est toujours en rotation et ne fait pas l’objet de notre étude.
KM1 KM2
C1
C2
M1
M2
Etau de serrage (E)
L10 L11
L21
L20 S
Scie circulaire (SC)
Tapis roulant (T)
Moteur (Mt2)
Moteur (Mt1)
Levier
Barre en Acier
Automate
Clavier
« m » (mise en marche)
Bouton d’arrêt
Ecran
Voyants
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-21-
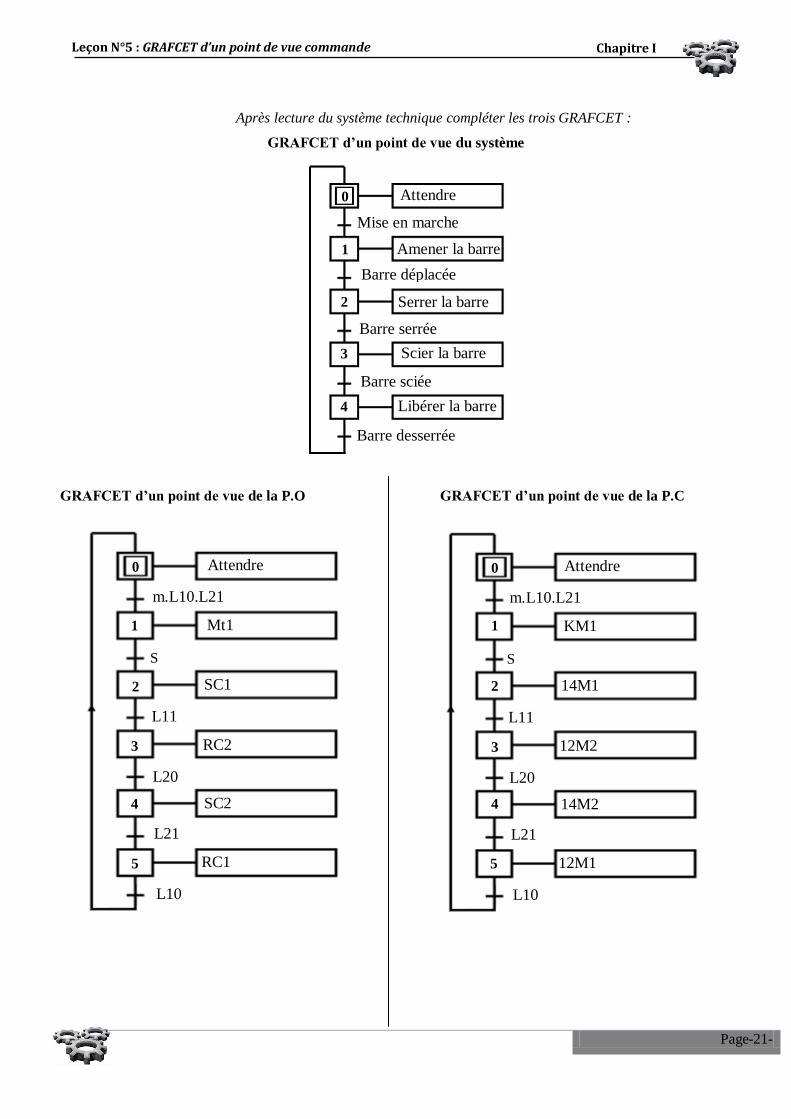
Après lecture du système technique compléter les trois GRAFCET :
GRAFCET d’un point de vue de la P.O GRAFCET d’un point de vue de la P.C
0 0
0
1
GRAFCET d’un point de vue du système
1
2
4
3
2
4
5
3
3
5
Mise en marche
2
1
Attendre
Amener la barre
Barre déplacée
Serrer la barre
Barre serrée
Scier la barre
4
Barre sciée
Libérer la barre
Barre desserrée
Attendre
m.L10.L21
Mt1
RC2
L20
L11
SC1
S
SC2
L21
RC1
L10
Attendre
m.L10.L21
KM1
12M2
L20
L11
14M1
S
14M2
L21
12M1
L10
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-22-
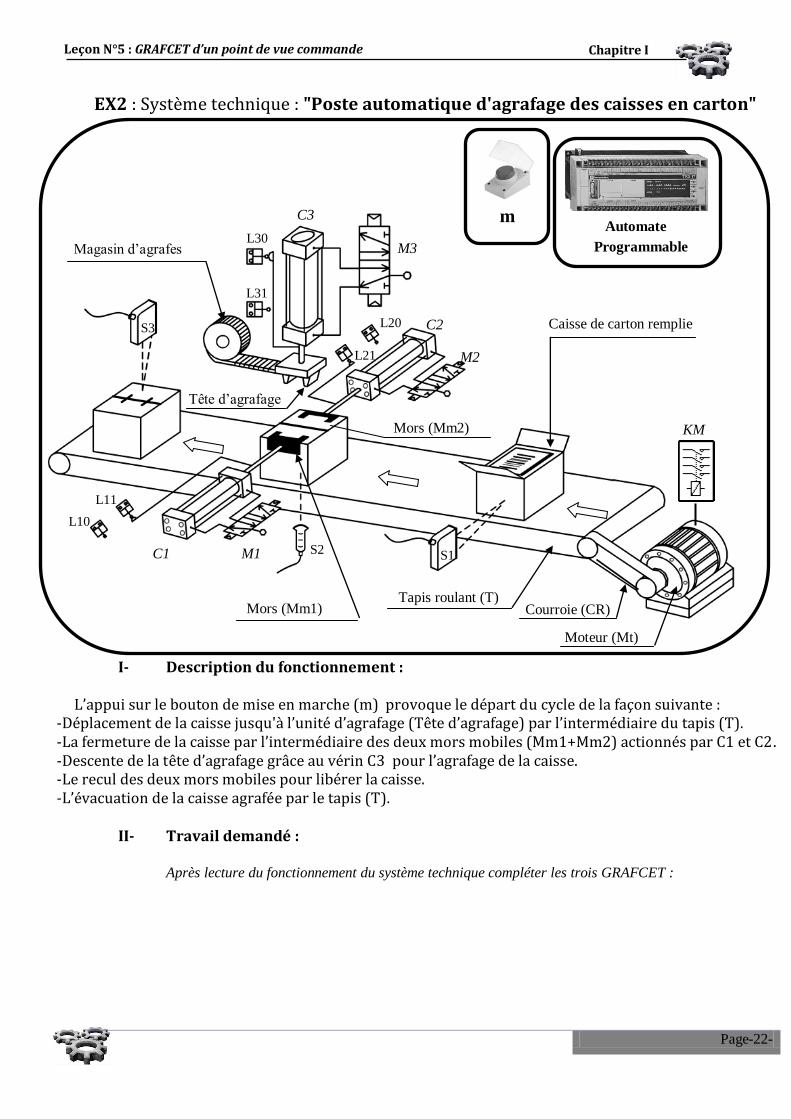
EX2 : Système technique : "Poste automatique d'agrafage des caisses en carton"
I- Description du fonctionnement :
L’appui sur le bouton de mise en marche (m) provoque le départ du cycle de la façon suivante : -Déplacement de la caisse jusqu'à l’unité d’agrafage (Tête d’agrafage) par l’intermédiaire du tapis (T). -La fermeture de la caisse par l’intermédiaire des deux mors mobiles (Mm1+Mm2) actionnés par C1 et C2. -Descente de la tête d’agrafage grâce au vérin C3 pour l’agrafage de la caisse. -Le recul des deux mors mobiles pour libérer la caisse. -L’évacuation de la caisse agrafée par le tapis (T).
II- Travail demandé :
Après lecture du fonctionnement du système technique compléter les trois GRAFCET :
Automate
Programmable
m
Courroie (CR)
C2
M2
L20
L21
C3
M3 L30
L31
C1 M1
L11
L10
S3
S1
Caisse de carton remplie
Mors (Mm2)
Tapis roulant (T) Mors (Mm1)
Magasin d’agrafes
Tête d’agrafage
S2
KM
Moteur (Mt)
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
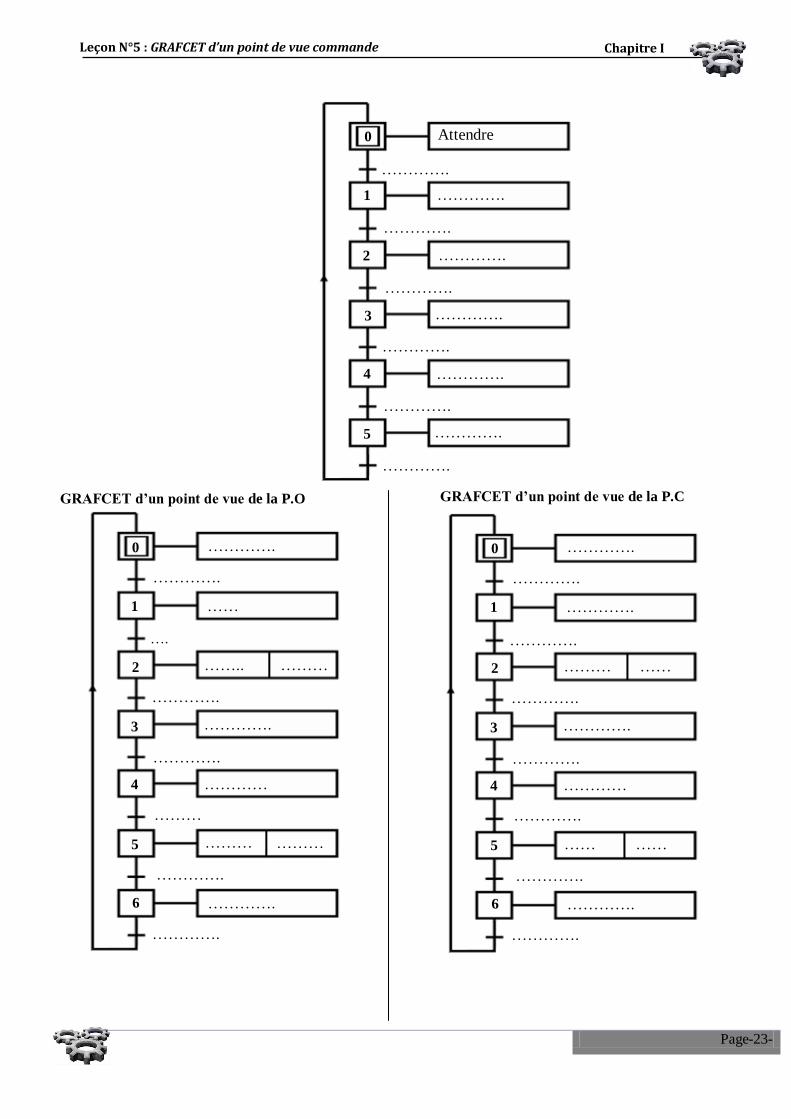
Page-23-
GRAFCET d’un point de vue de la P.O GRAFCET d’un point de vue de la P.C
0
0
1
2
4
3
5
3
………….
2
1
Attendre
………….
………….
………….
………….
………….
………….
4 ………….
………….
………….
………….
………….
……
…….
………….
………….
………….
……..
….
…………
.
………
….
………
………….
………….
………….
5
………
………
………….
6
………….
0
1
2
4
3
5
………….
………….
………….
………….
………….
………….
………
….
………….
…………
.
………….
……
…….
………….
……
…….
……
……
.
………….
6
………….
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-24-
L30
L31
C3
M3
L21
L20
C2
M2
M1
L10
L11
C1
P
KM
Injecteur (I)
Arrivée du GAZ
Mors de
Transmission par Courroie
Bras poussoir (Bp)
Moteur (Mt)
L12
Tapis roulant
serrage
(Ms)
(T2)
Bouteille de GAZ
Tapis roulant (T1)
S
EX3 : Système technique : "Unité automatique de remplissage de bouteille de gaz"
I- FONCTIONNEMENT :
L’appui sur le bouton (m) de mise en marche provoque le départ du cycle de la façon suivante :
- L’amenée de la bouteille de gaz vide par le tapis (T1) devant le bras poussoir (Bp).
- La poussée de la bouteille sous l’injecteur (I) de gaz par le bras poussoir (Bp). - Le serrage de la bouteille par le vérin (C2).
- L’injection du gaz par l’injecteur (I) pendant 15s pour le remplissage de la bouteille.
- Desserrage de la bouteille. - Evacuation de la bouteille pleine vers le tapis roulant (T2) par le bras poussoir (Bp).
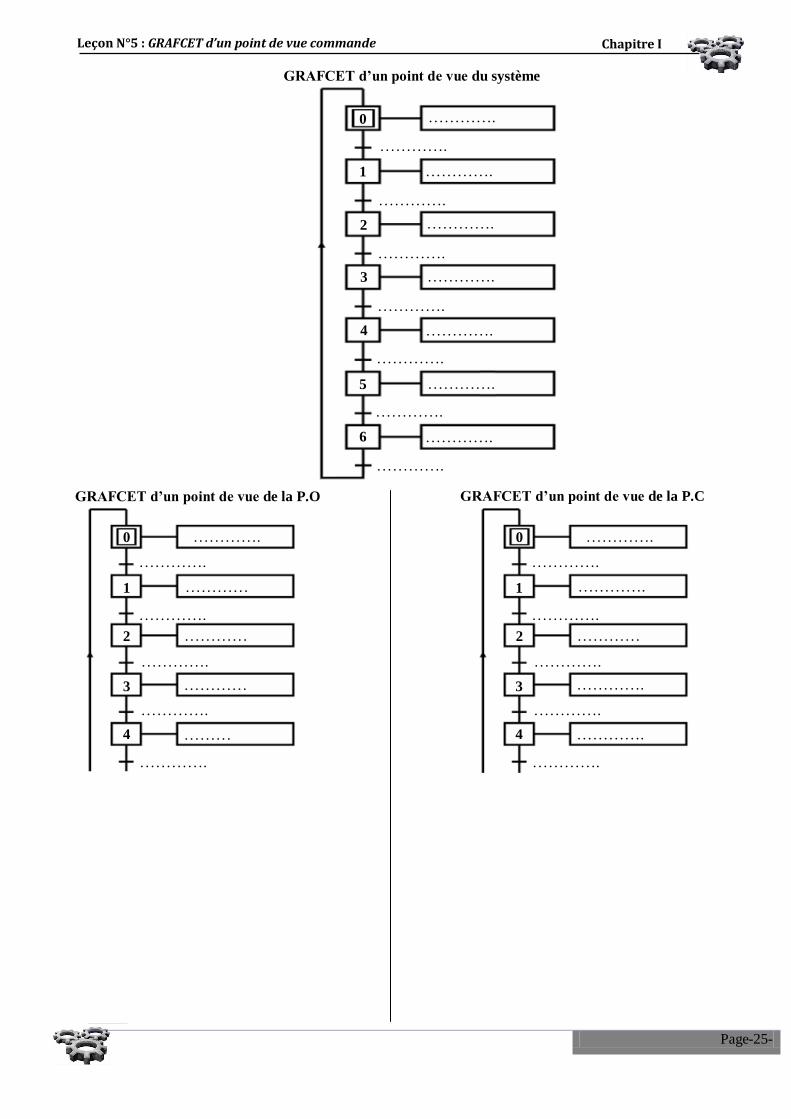
II- Travail demandé : Après lecture du fonctionnement du système technique compléter les trois GRAFCET :
Automate
Clavier
« m » (mise en marche)
Ecran
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-25-
GRAFCET d’un point de vue de la P.O GRAFCET d’un point de vue de la P.C
0
0
1
GRAFCET d’un point de vue du système
2
4
3
5
3
………….
2
1
………….
………….
………….
………….
………….
………….
4 ………….
………….
………….
………….
………….
…………
.
………
….
………….
………….
…………
.
………….
Temporisateur T
RC3
RC2
L20
………….
………….
5
…………
.
SC1
6
L12.S
6 ………….
………….
7
9
………….
t/5/15s
L30
8
RC1
L10
0
1
2
4
3
5
………….
………….
………….
………….
………….
………….
…………
.
………….
T
12M3
12M2
L20
………….
14M1
6
L12.S
7
9
………….
t/5/15s
L30
8
12M1
L10
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-26-
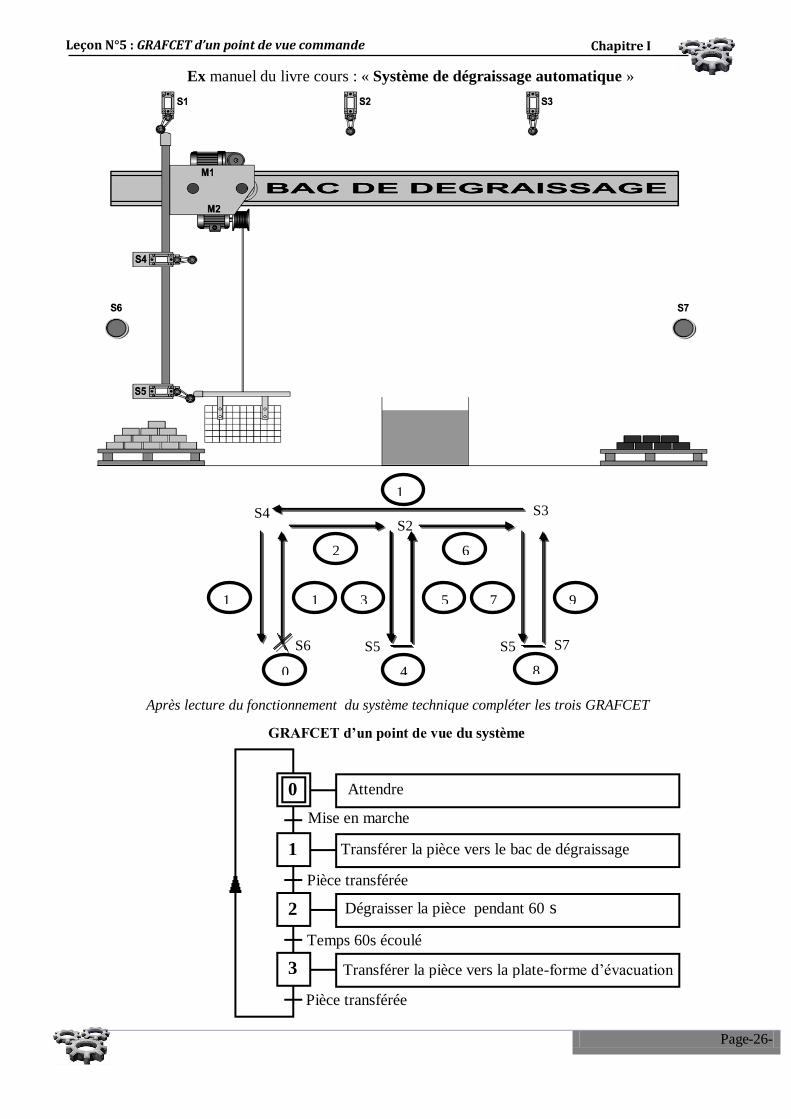
Ex manuel du livre cours : « Système de dégraissage automatique »
Après lecture du fonctionnement du système technique compléter les trois GRAFCET
GRAFCET d’un point de vue du système
0
1
2
Attendre
Mise en marche
Pièce transférée
Transférer la pièce vers le bac de dégraissage
Dégraisser la pièce pendant 60 s
Temps 60s écoulé
Transférer la pièce vers la plate-forme d’évacuation
Pièce transférée
3
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
0
1 1
1
3
2
4
5 7
6
9
8
1
0 S4 S3
S7 S5 S5 S6
S2
Page-27-
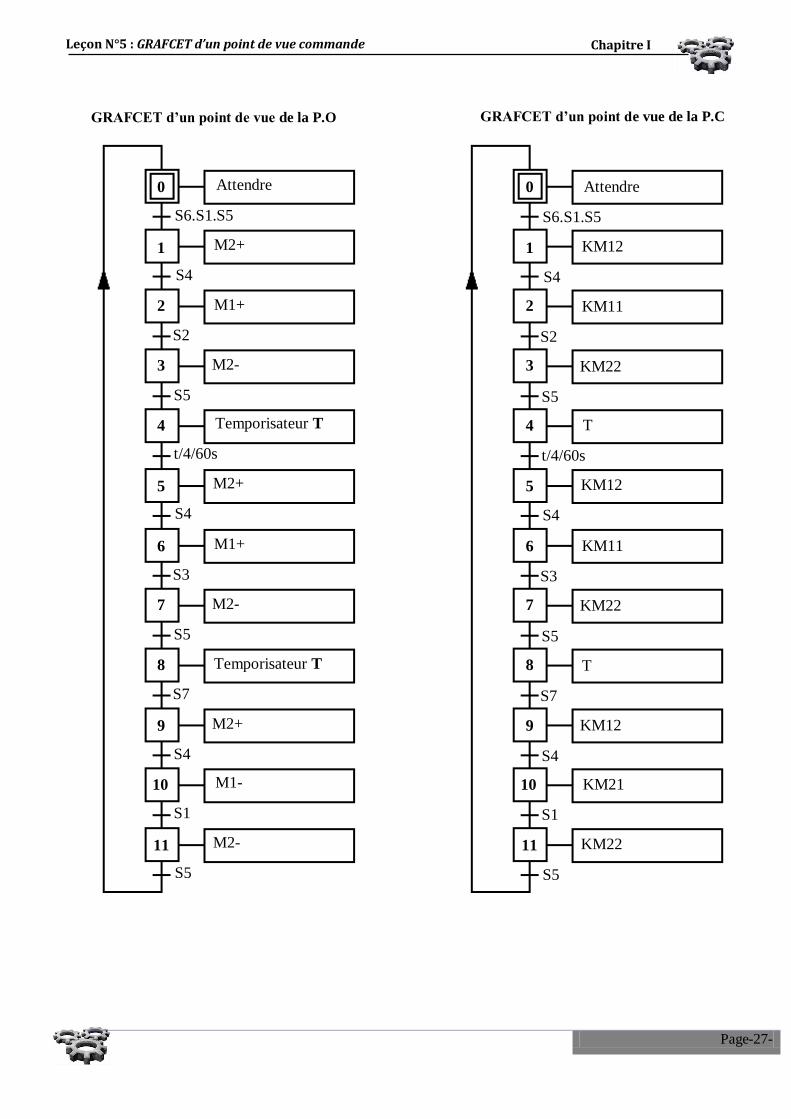
GRAFCET d’un point de vue de la P.O GRAFCET d’un point de vue de la P.C
0
1
2
3
4
5
6
7
8
9
10
11
0
1
2
3
4
5
6
7
8
9
10
11
Attendre
S6.S1.S5
KM12
S4
KM11
S2
KM22
S5
T
t/4/60s
KM12
S4
KM11
S3
KM22
S5
T
S7
KM12
S4
KM21
S1
KM22
S5
Attendre
S6.S1.S5
M2+
S4
M1+
S2
M2-
S5
Temporisateur T
t/4/60s
M2+
S4
M1+
S3
M2-
S5
Temporisateur T
S7
M2+
S4
M1-
S1
M2-
S5
Leçon N°5 : GRAFCET d’un point de vue commande Chapitre I
Page-28-
Rep Nb
1 Corps
Désignation Matière Référence
BORNE REGLABLE
2
3
4
5
1
1
1
1
1
Ecrou moleté
Ecrou Hm,M6
Vis sans tête fendue à téton long-M6-22
Axe
S 235
C35
ETABLISSEMENT
Nom :
Date :
Numéro : 00
Badra Sahbi
Le 20-11-2011
: Taha Hussein
ECHELLE : 1:1
C35
Acier
Acier
NF E 25-401
NF E 27-180
Acier
.
..
. 5
4
.3
2
1
A
A
A-A
CHAPITRE II (2)
DEFINITION GRAPHIQUE D’UN PRODUIT
Leçon N°1 : Le dessin d’ensemble« Rappels »
Objectifs chapitre :
A partir d’un système technique ou d’un sous-système ou d’un mécanisme accompagné de son dossier
technique :
- Lire un dessin d’ensemble.
- Représenter une pièce extraite d’un dessin d’ensemble.
- Identifier les conditions fonctionnelles sur un dessin d’ensemble. - Déterminer et calculer une cote fonctionnelle.
- Placer une cote fonctionnelle sur un dessin de définition.
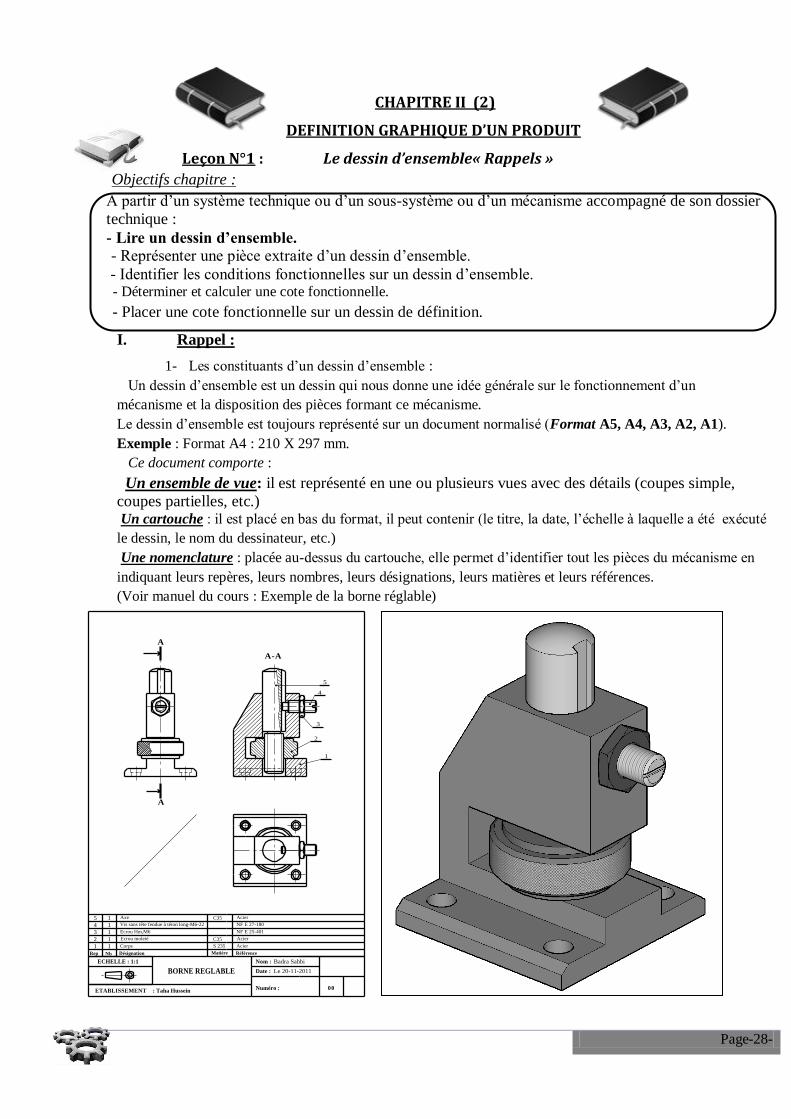
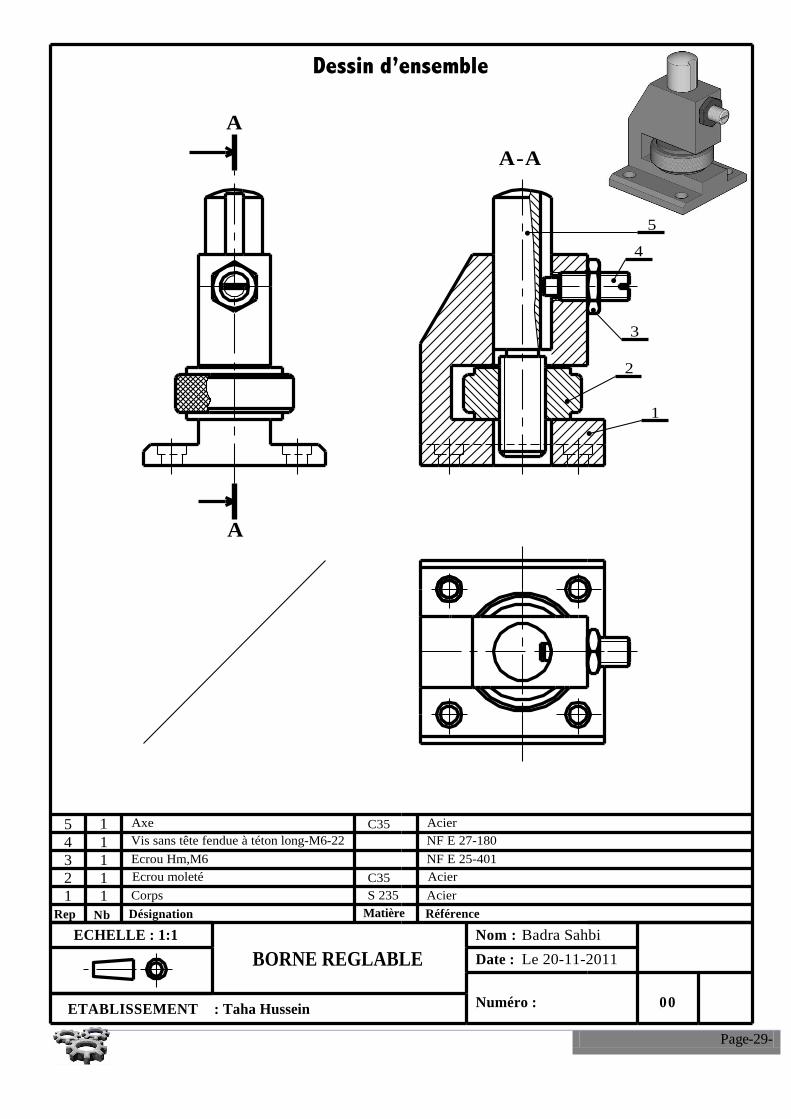
I. Rappel :
1- Les constituants d’un dessin d’ensemble :
Un dessin d’ensemble est un dessin qui nous donne une idée générale sur le fonctionnement d’un
mécanisme et la disposition des pièces formant ce mécanisme.
Le dessin d’ensemble est toujours représenté sur un document normalisé (Format A5, A4, A3, A2, A1).
Exemple : Format A4 : 210 X 297 mm.
Ce document comporte :
Un ensemble de vue: il est représenté en une ou plusieurs vues avec des détails (coupes simple,
coupes partielles, etc.) Un cartouche : il est placé en bas du format, il peut contenir (le titre, la date, l’échelle à laquelle a été exécuté
le dessin, le nom du dessinateur, etc.)
Une nomenclature : placée au-dessus du cartouche, elle permet d’identifier tout les pièces du mécanisme en
indiquant leurs repères, leurs nombres, leurs désignations, leurs matières et leurs références.
(Voir manuel du cours : Exemple de la borne réglable)
Page-29-
Rep Nb
1 Corps
Désignation Matière Référence
BORNE REGLABLE
2
3
4
5
1
1
1
1
1
Ecrou moleté
Ecrou Hm,M6
Vis sans tête fendue à téton long-M6-22
Axe
S 235
C35
ETABLISSEMENT
Nom :
Date :
Numéro : 00
Badra Sahbi
Le 20-11-2011
: Taha Hussein
ECHELLE : 1:1
C35
Acier
Acier
NF E 25-401
NF E 27-180
Acier
.
..
. 5
4
.3
2
1
A
A
A-A
Dessin d’ensemble
Page-30-
2- Analyse du fonctionnement : (Voir manuel du cours)
II. Activités de travaux pratiques :
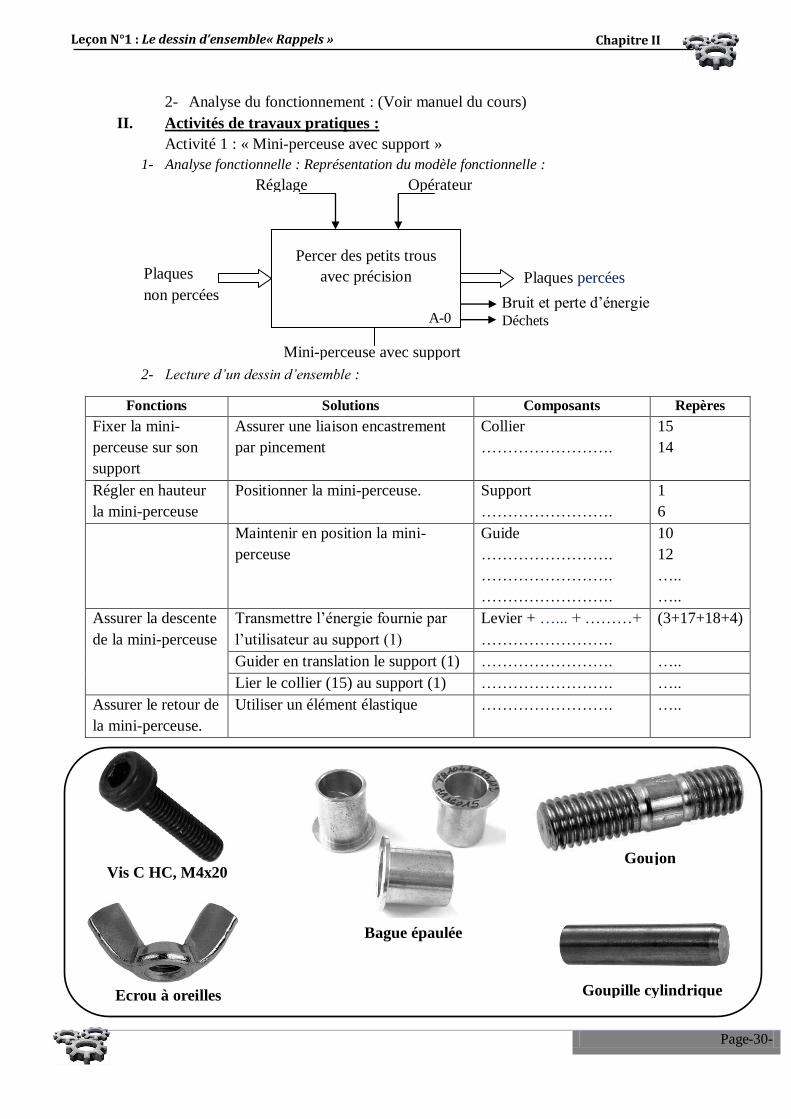
Activité 1 : « Mini-perceuse avec support »
1- Analyse fonctionnelle : Représentation du modèle fonctionnelle :
2- Lecture d’un dessin d’ensemble :
Fonctions Solutions Composants Repères
Fixer la mini-
perceuse sur son
support
Assurer une liaison encastrement
par pincement
Collier
…………………….
15
14
Régler en hauteur
la mini-perceuse
Positionner la mini-perceuse. Support
…………………….
1
6
Maintenir en position la mini-
perceuse
Guide
…………………….
…………………….
…………………….
10
12
…..
…..
Assurer la descente
de la mini-perceuse
Transmettre l’énergie fournie par
l’utilisateur au support (1)
Levier + …... + ………+
…………………….
(3+17+18+4)
Guider en translation le support (1) ……………………. …..
Lier le collier (15) au support (1) ……………………. …..
Assurer le retour de
la mini-perceuse.
Utiliser un élément élastique ……………………. …..
Percer des petits trous
avec précision
Réglage Opérateur
Plaques
non percées Plaques percées
Mini-perceuse avec support
Bruit et perte d’énergie Déchets A-0
Vis C HC, M4x20
Ecrou à oreilles
Bague épaulée
Goujon
Goupille cylindrique
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-31-
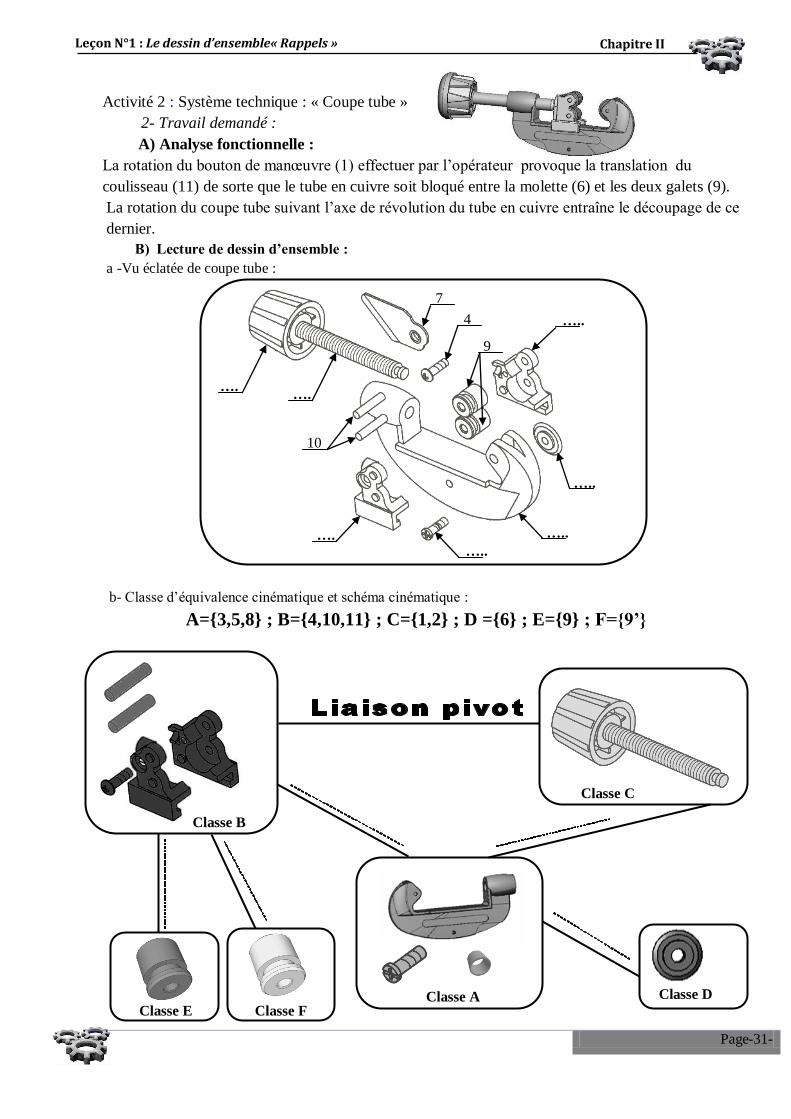
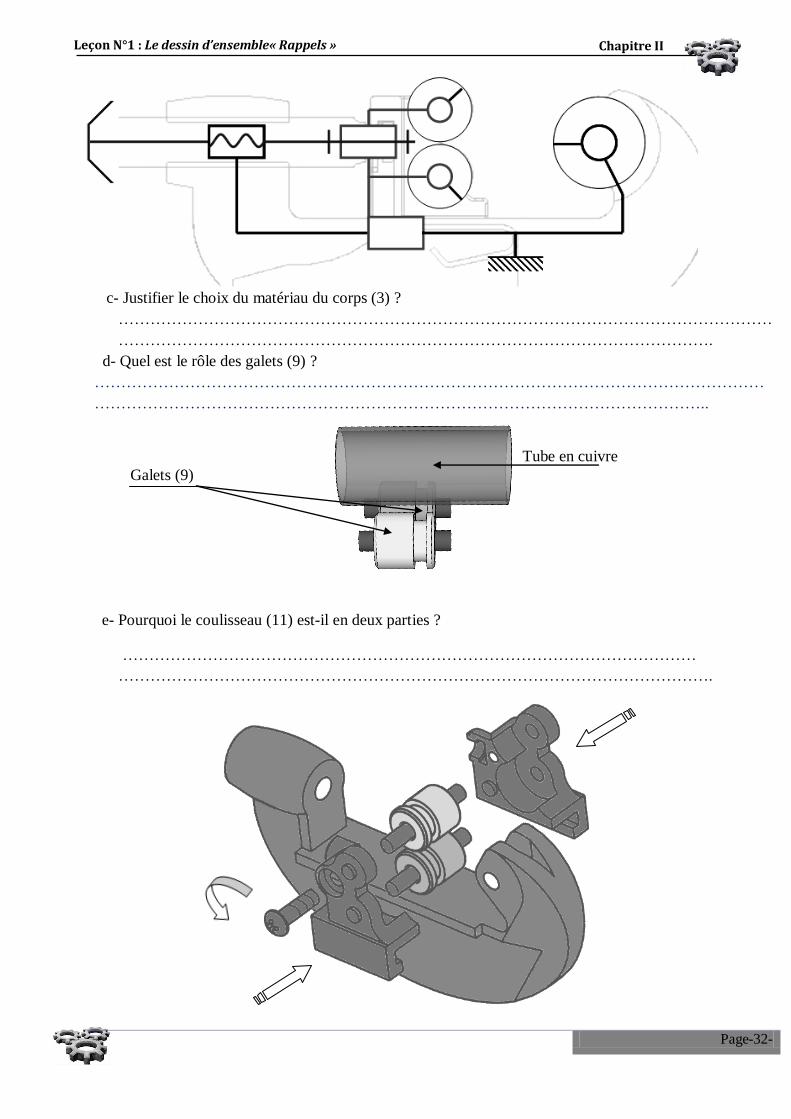
Activité 2 : Système technique : « Coupe tube »
2- Travail demandé :
A) Analyse fonctionnelle :
La rotation du bouton de manœuvre (1) effectuer par l’opérateur provoque la translation du
coulisseau (11) de sorte que le tube en cuivre soit bloqué entre la molette (6) et les deux galets (9).
La rotation du coupe tube suivant l’axe de révolution du tube en cuivre entraîne le découpage de ce
dernier.
B) Lecture de dessin d’ensemble :
a -Vu éclatée de coupe tube :
b- Classe d’équivalence cinématique et schéma cinématique :
A={3,5,8} ; B={4,10,11} ; C={1,2} ; D ={6} ; E={9} ; F={9’}
…. ….
7
4 …..
…..
…..
….. ….
10
9
Classe B
Classe A
Classe C
Classe D Classe E Classe F
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-32-
c- Justifier le choix du matériau du corps (3) ?
……………………………………………………………………………………………………………
………………………………………………………………………………………………….
d- Quel est le rôle des galets (9) ?
………………………………………………………………………………………………………………
……………………………………………………………………………………………………..
e- Pourquoi le coulisseau (11) est-il en deux parties ?
………………………………………………………………………………………………
………………………………………………………………………………………………….
Tube en cuivre
Galets (9)
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-33-
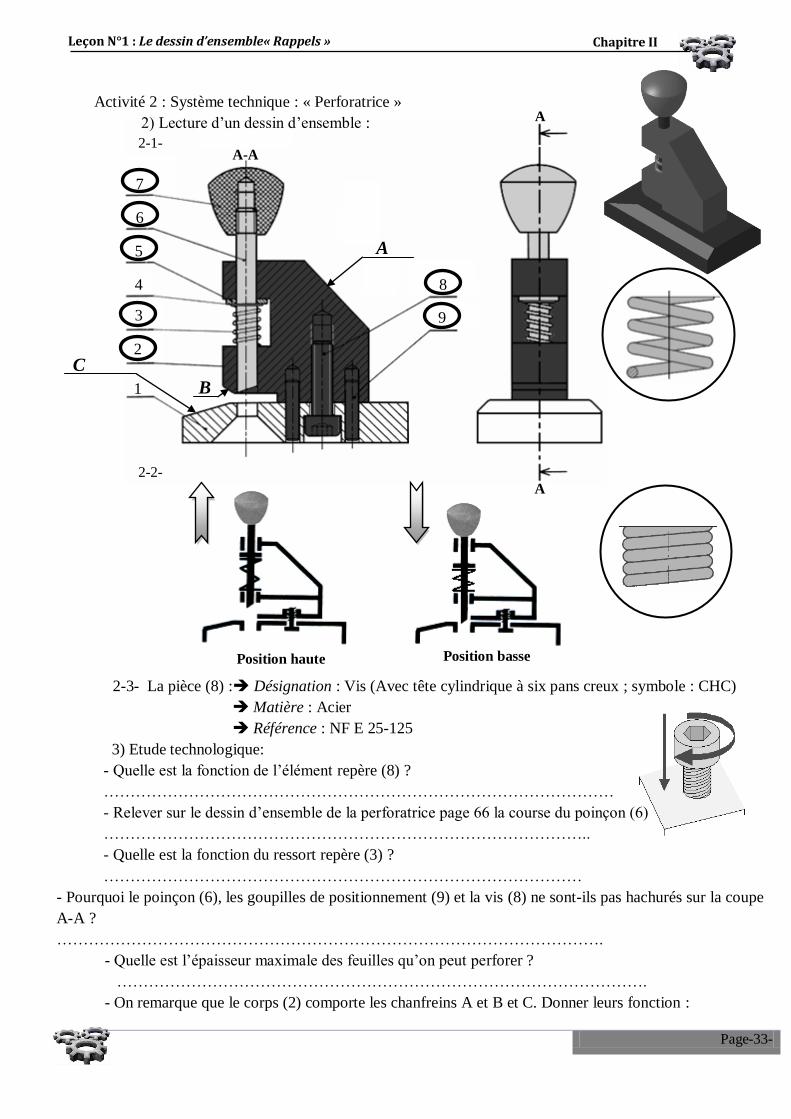
Activité 2 : Système technique : « Perforatrice »
2) Lecture d’un dessin d’ensemble :
2-1-
2-2-
2-3- La pièce (8) : Désignation : Vis (Avec tête cylindrique à six pans creux ; symbole : CHC)
Matière : Acier
Référence : NF E 25-125
3) Etude technologique:
- Quelle est la fonction de l’élément repère (8) ?
……………………………………………………………………………………
- Relever sur le dessin d’ensemble de la perforatrice page 66 la course du poinçon (6)
………………………………………………………………………………..
- Quelle est la fonction du ressort repère (3) ?
………………………………………………………………………………
- Pourquoi le poinçon (6), les goupilles de positionnement (9) et la vis (8) ne sont-ils pas hachurés sur la coupe
A-A ?
………………………………………………………………………………………….
- Quelle est l’épaisseur maximale des feuilles qu’on peut perforer ?
……………………………………………………………………………………….
- On remarque que le corps (2) comporte les chanfreins A et B et C. Donner leurs fonction :
Position haute Position basse
A
C
B
A
A
A-A
1
2
3
4
5
6
7
8
9
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-34-
A : Pour des raisons d’esthétiques et de poids.
B : Pour faciliter l’engagement des feuilles.
C : Pour faciliter l’engagement des feuilles.
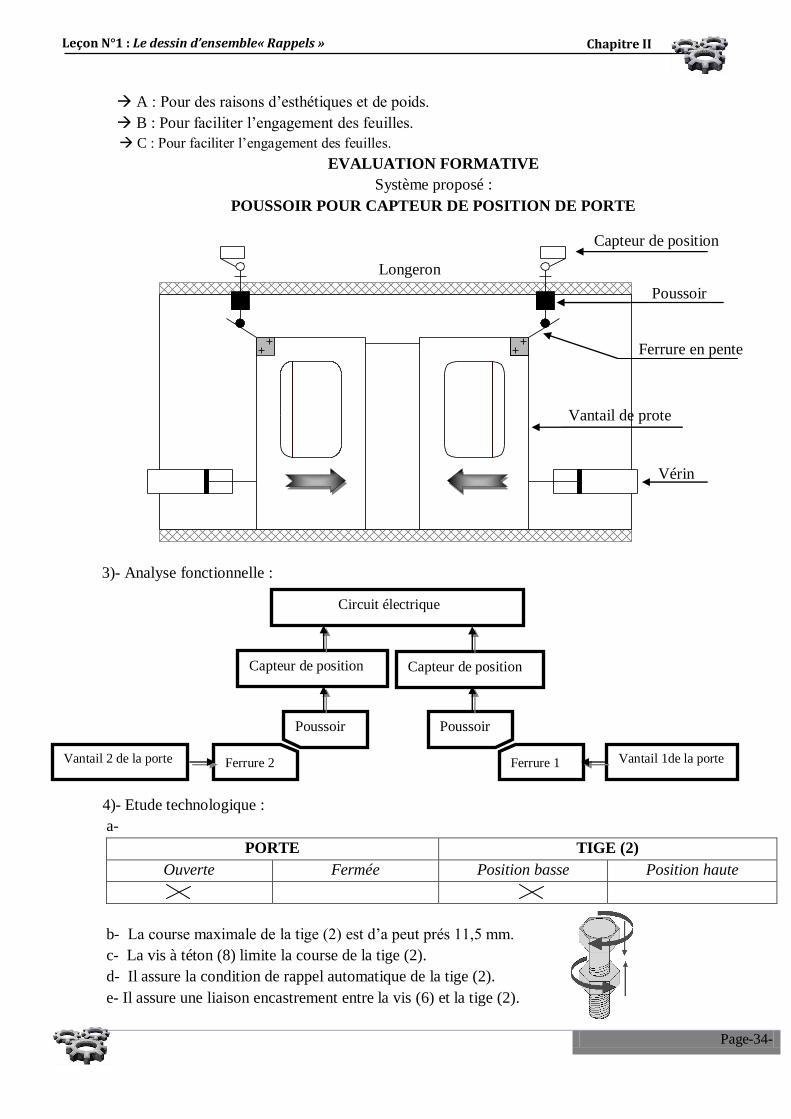
EVALUATION FORMATIVE
Système proposé :
POUSSOIR POUR CAPTEUR DE POSITION DE PORTE
3)- Analyse fonctionnelle :
4)- Etude technologique :
a-
PORTE TIGE (2)
Ouverte Fermée Position basse Position haute
b- La course maximale de la tige (2) est d’a peut prés 11,5 mm.
c- La vis à téton (8) limite la course de la tige (2).
d- Il assure la condition de rappel automatique de la tige (2).
e- Il assure une liaison encastrement entre la vis (6) et la tige (2).
Circuit électrique
Capteur de position
Capteur de position
Vantail 1de la porte Ferrure 1
Poussoir
Ferrure 2
Poussoir
Vantail 2 de la porte
Capteur de position
Poussoir
Ferrure en pente
Vantail de prote
Vérin
Longeron
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-35-
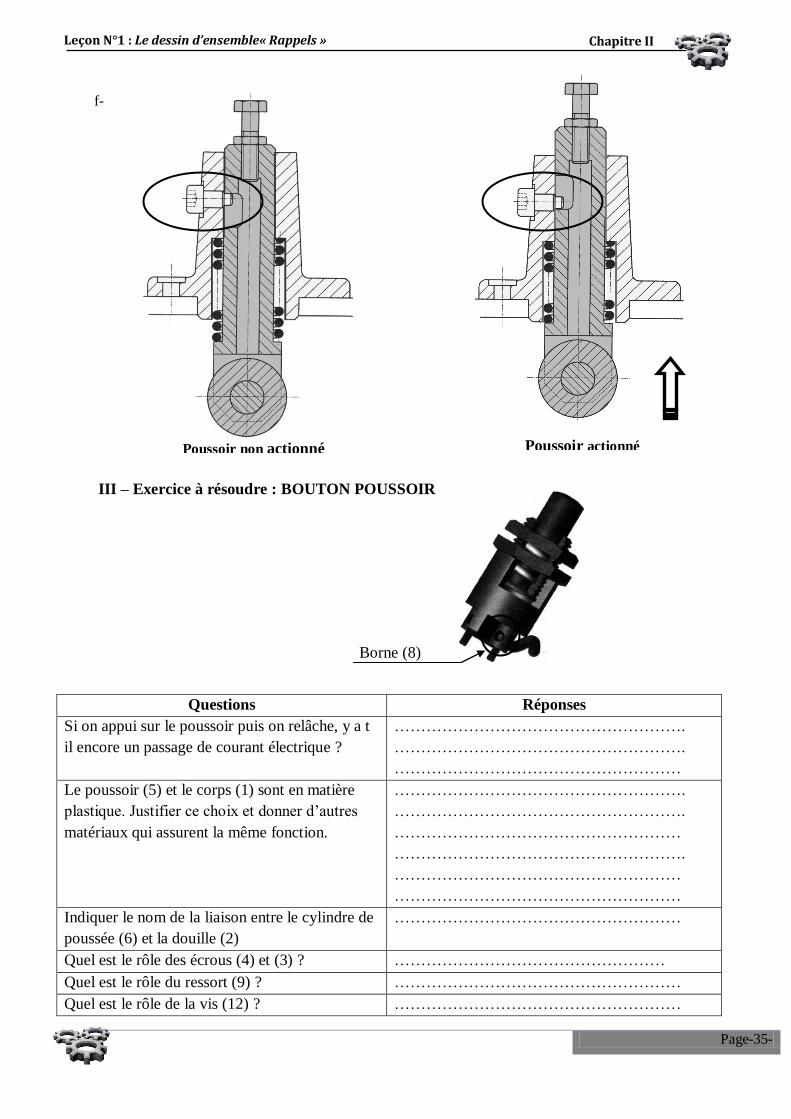
f-
III – Exercice à résoudre : BOUTON POUSSOIR
Questions Réponses
Si on appui sur le poussoir puis on relâche, y a t
il encore un passage de courant électrique ?
……………………………………………….
……………………………………………….
………………………………………………
Le poussoir (5) et le corps (1) sont en matière
plastique. Justifier ce choix et donner d’autres
matériaux qui assurent la même fonction.
……………………………………………….
……………………………………………….
………………………………………………
……………………………………………….
………………………………………………
………………………………………………
Indiquer le nom de la liaison entre le cylindre de
poussée (6) et la douille (2)
………………………………………………
Quel est le rôle des écrous (4) et (3) ? ……………………………………………
Quel est le rôle du ressort (9) ? ………………………………………………
Quel est le rôle de la vis (12) ? ………………………………………………
Poussoir non actionné Poussoir actionné
Borne (8)
Leçon N°1 : Le dessin d’ensemble« Rappels » Chapitre II
Page-36-
0,1
30
0,30,120
0,30,512
Leçon N°2 : La cotation Fonctionnelle
A- Notion de tolérances dimensionnelles :
1- Nécessité des tolérances : (Voir manuel du cours page 62)
L’impossibilité de réaliser des cotes rigoureusement exactes à cause des imperfections dans les
procédés de fabrications des machines, oblige le constructeur à fixer des limites entre lesquelles la
cote devra être réalisée. Ces limites qui sont compatible avec le fonctionnement correct de la pièce
sont : Une cote maximale et une cote minimale.
Cette cote est appelée une cote tolérancée et la distance entre ces limites est appelée tolérance.
Une tolérance est une spécification exprimée en termes d’écarts algébriques admissible entre la
grandeur réelle et la grandeur théorique.
2- Eléments d’une cote tolérancée :
Cote nominale : CN.
Pour alésage (pièce femelle ou contenant)
- cote maximale : CM = CN + ES
- cote minimale : Cm = CN + EI
Pour arbre (pièce male ou contenu)
- cote maximale : CM = CN + es
- cote minimale : Cm = CN + ei
Intervalle de tolérance : IT = CM –Cm ou IT = ES – EI ou IT = es – ei
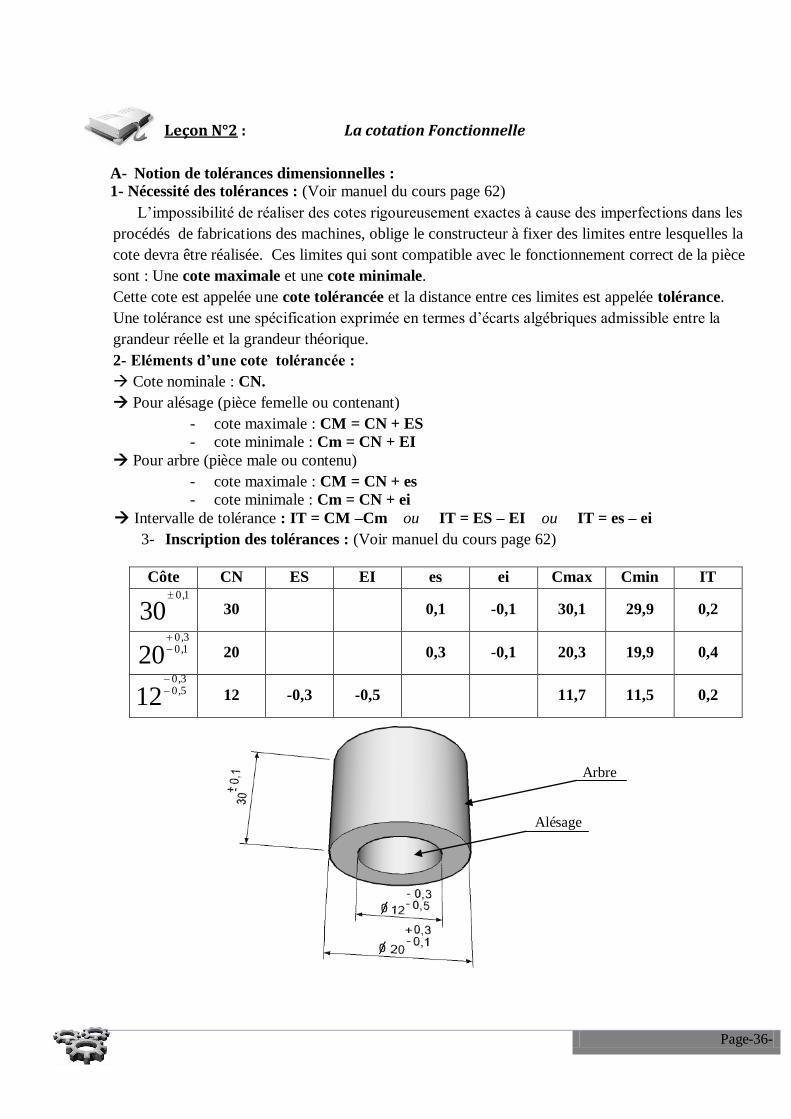
3- Inscription des tolérances : (Voir manuel du cours page 62)
Côte CN ES EI es ei Cmax Cmin IT
30 0,1 -0,1 30,1 29,9 0,2
20 0,3 -0,1 20,3 19,9 0,4
12 -0,3 -0,5 11,7 11,5 0,2
Alésage
Arbre
Page-37-
A- Cotation Fonctionnelle : (Voir manuel du cours page ……..)
I – Activité de découverte : (Voir manuel d’activité page …….)
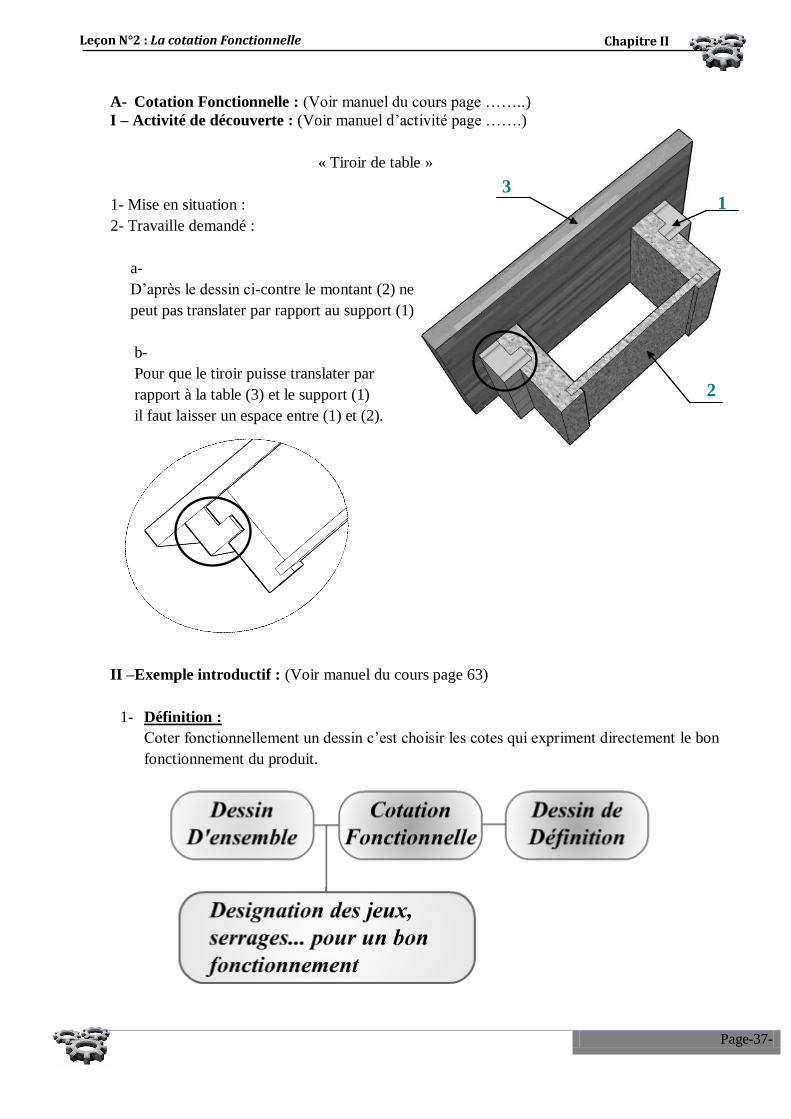
« Tiroir de table »
1- Mise en situation :
2- Travaille demandé :
a-
D’après le dessin ci-contre le montant (2) ne
peut pas translater par rapport au support (1)
b-
Pour que le tiroir puisse translater par
rapport à la table (3) et le support (1)
il faut laisser un espace entre (1) et (2).
II –Exemple introductif : (Voir manuel du cours page 63)
1- Définition :
Coter fonctionnellement un dessin c’est choisir les cotes qui expriment directement le bon
fonctionnement du produit.
3 1
2
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-38-
Jb
Ja
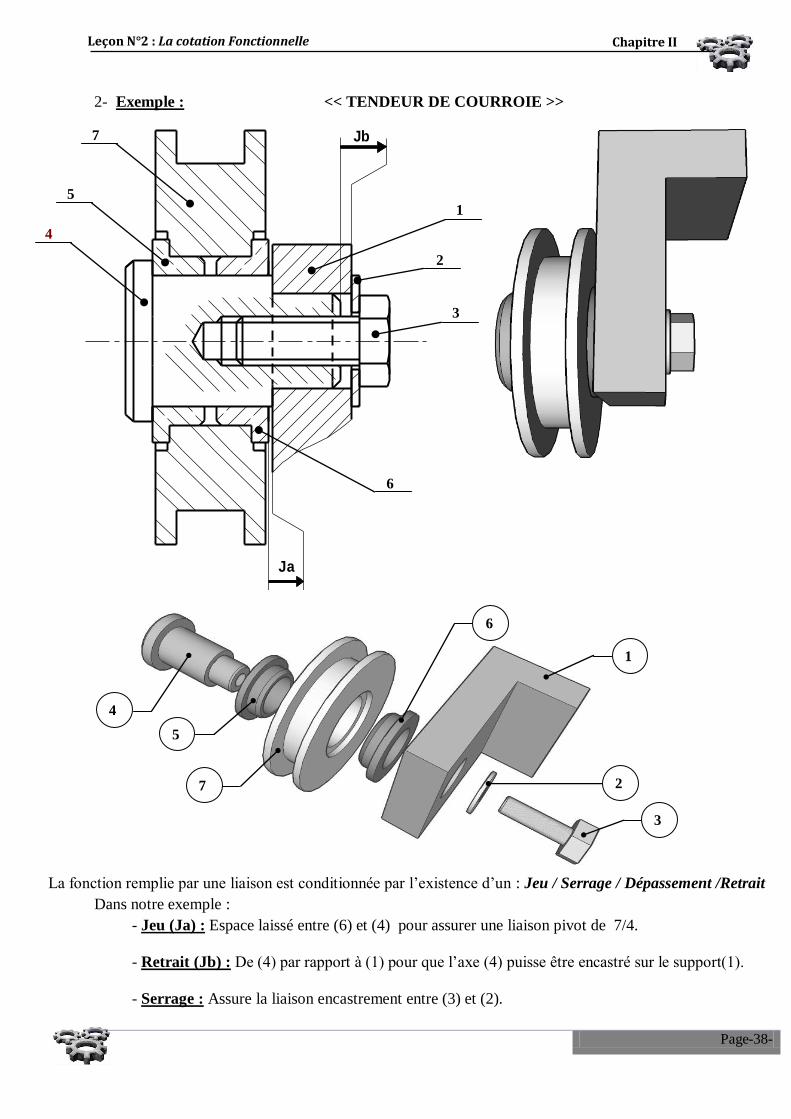
2- Exemple : << TENDEUR DE COURROIE >>
La fonction remplie par une liaison est conditionnée par l’existence d’un : Jeu / Serrage / Dépassement /Retrait
Dans notre exemple :
- Jeu (Ja) : Espace laissé entre (6) et (4) pour assurer une liaison pivot de 7/4.
- Retrait (Jb) : De (4) par rapport à (1) pour que l’axe (4) puisse être encastré sur le support(1).
- Serrage : Assure la liaison encastrement entre (3) et (2).
3
1
2
6
5
7
4
4
5
7
6
1
2
3
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-39-
Ja
Jb
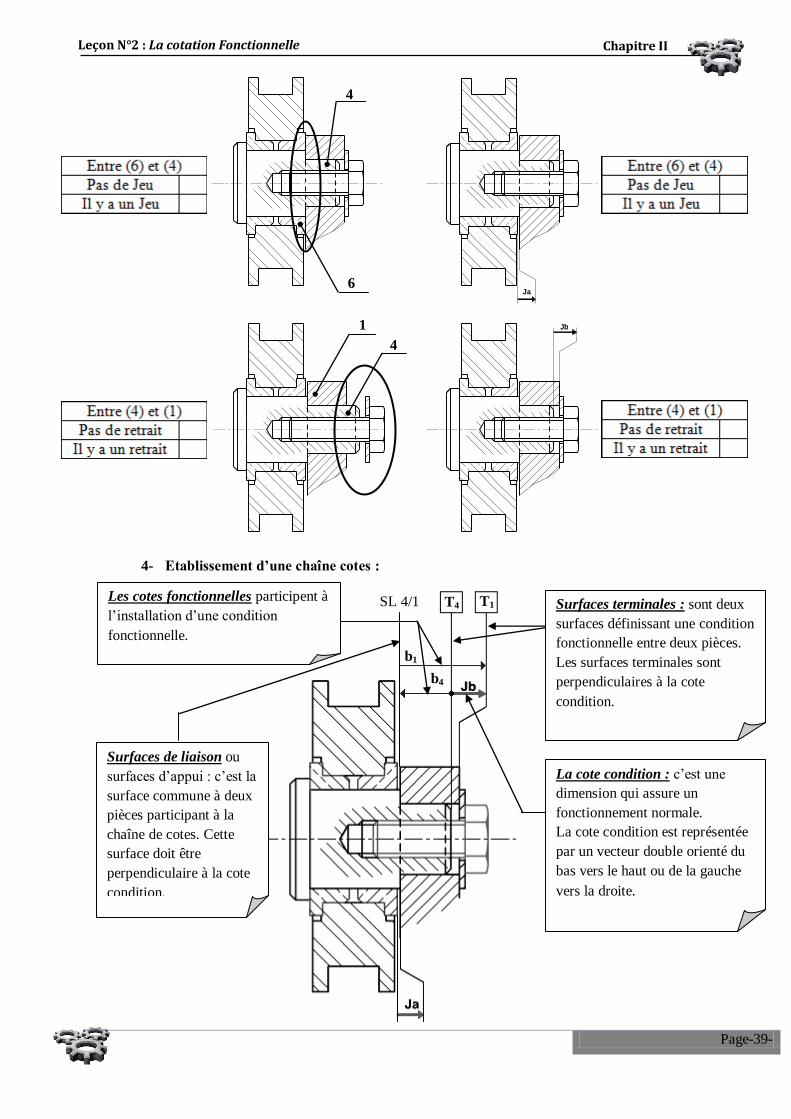
4- Etablissement d’une chaîne cotes :
4
6
4
1
Leçon N°2 : La cotation Fonctionnelle Chapitre II
T1 T4 Surfaces terminales : sont deux
surfaces définissant une condition
fonctionnelle entre deux pièces.
Les surfaces terminales sont
perpendiculaires à la cote
condition.
La cote condition : c’est une
dimension qui assure un
fonctionnement normale.
La cote condition est représentée
par un vecteur double orienté du
bas vers le haut ou de la gauche
vers la droite.
Surfaces de liaison ou
surfaces d’appui : c’est la
surface commune à deux
pièces participant à la
chaîne de cotes. Cette
surface doit être
perpendiculaire à la cote
condition.
Les cotes fonctionnelles participent à
l’installation d’une condition
fonctionnelle.
SL 4/1
b1
b4
Page-40-
1 4bJ b b 1 4 minbJ Max b Max b
1 4min minbJ b b Max
0,10,4
4 14b
0,10, 414
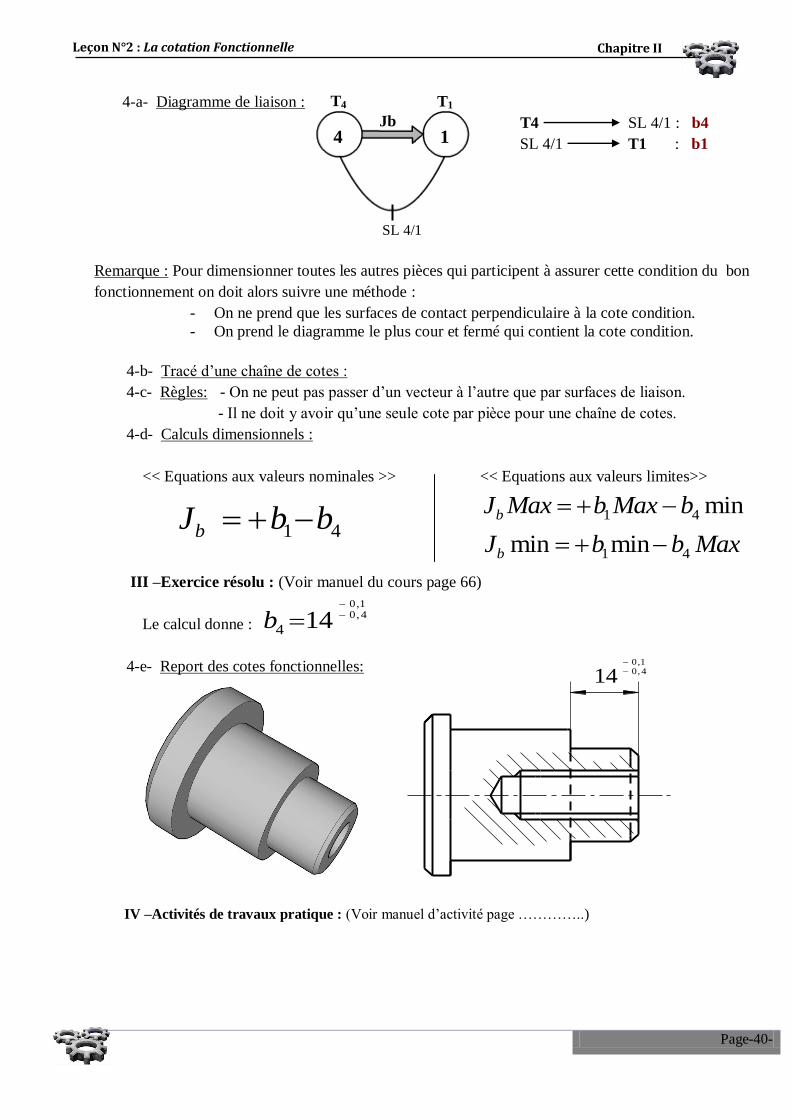
4-a- Diagramme de liaison :
T4 SL 4/1 : b4
SL 4/1 T1 : b1
Remarque : Pour dimensionner toutes les autres pièces qui participent à assurer cette condition du bon
fonctionnement on doit alors suivre une méthode :
- On ne prend que les surfaces de contact perpendiculaire à la cote condition.
- On prend le diagramme le plus cour et fermé qui contient la cote condition.
4-b- Tracé d’une chaîne de cotes :
4-c- Règles: - On ne peut pas passer d’un vecteur à l’autre que par surfaces de liaison.
- Il ne doit y avoir qu’une seule cote par pièce pour une chaîne de cotes.
4-d- Calculs dimensionnels :
<< Equations aux valeurs nominales >> << Equations aux valeurs limites>>
III –Exercice résolu : (Voir manuel du cours page 66)
Le calcul donne :
4-e- Report des cotes fonctionnelles:
IV –Activités de travaux pratique : (Voir manuel d’activité page …………..)
T4 T1
Jb 4 1
SL 4/1
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-41-
1;2;10;20 min83
2.00
05.0
aaaa Max
Rep Nb
1 Mors mobile
Désignation
SERRE-JOINT DE MINUISIER
2
3
4
5
1
1
1
1
1
Mors fixe
Piston
Vis de manoeuvre
Guide
ETABLISSEMENT
Nom :
Date :
Numéro : 00
Badra Sahbi
Le 04-01-2012
: Lycée Taha Houssein
6 1 Tige de manoeuvre
7 2 Bague
8 1 Vis de pression
ECHELLE :
9 1 Rivet
10 1 Rivet
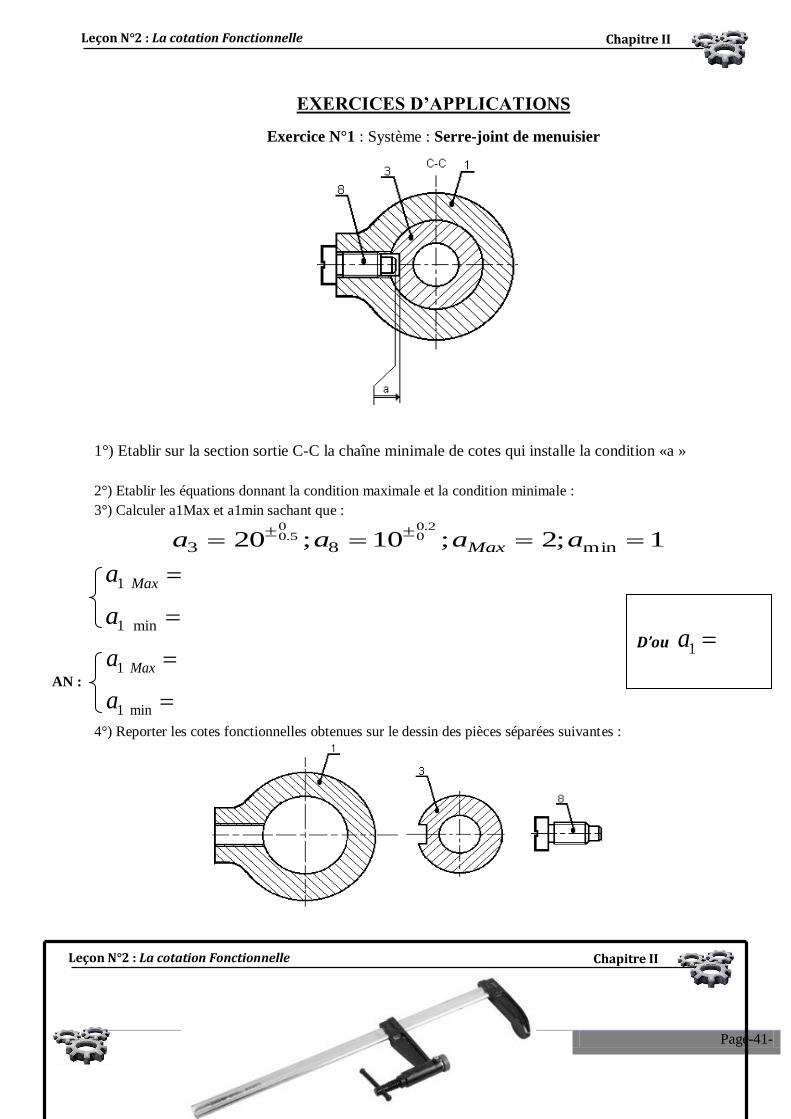
EXERCICES D’APPLICATIONS
Exercice N°1 : Système : Serre-joint de menuisier
1°) Etablir sur la section sortie C-C la chaîne minimale de cotes qui installe la condition «a »
2°) Etablir les équations donnant la condition maximale et la condition minimale :
3°) Calculer a1Max et a1min sachant que :
4°) Reporter les cotes fonctionnelles obtenues sur le dessin des pièces séparées suivantes :
1
1 min
Maxa
a
1
1 min
Maxa
a
1a
D’ou
AN :
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-42-
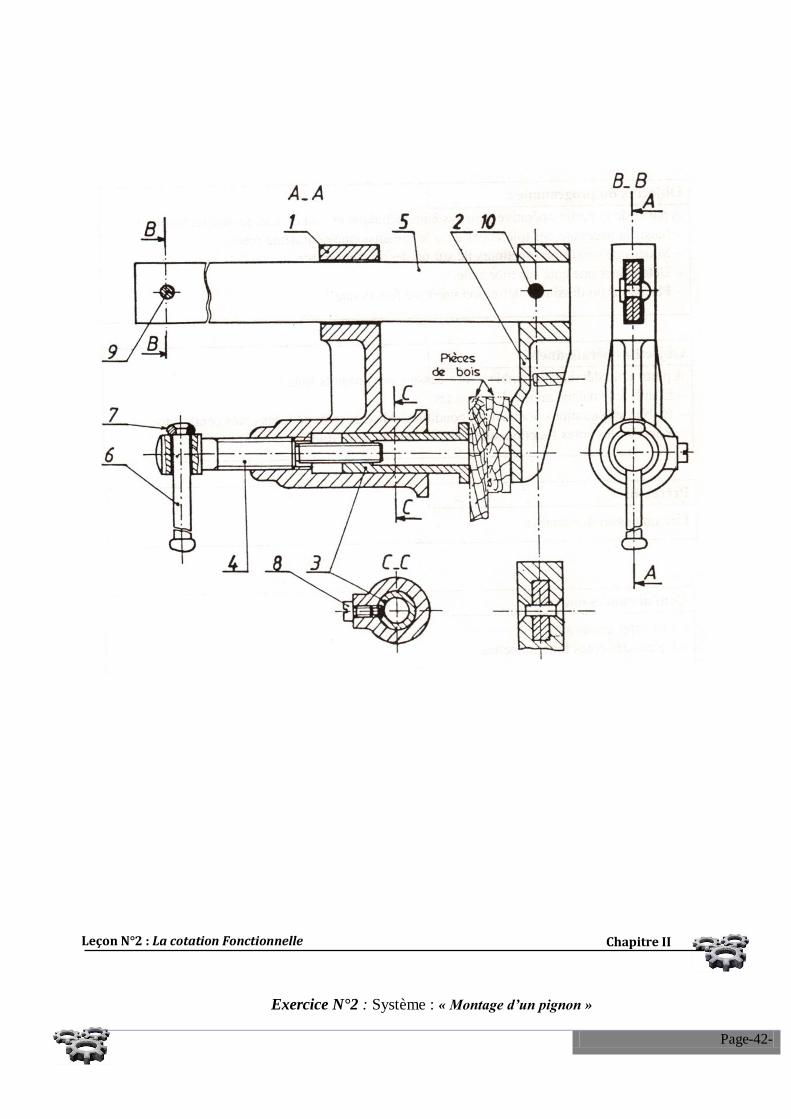
Exercice N°2 : Système : « Montage d’un pignon »
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-43-
0.120
a
b
A
A
A-A
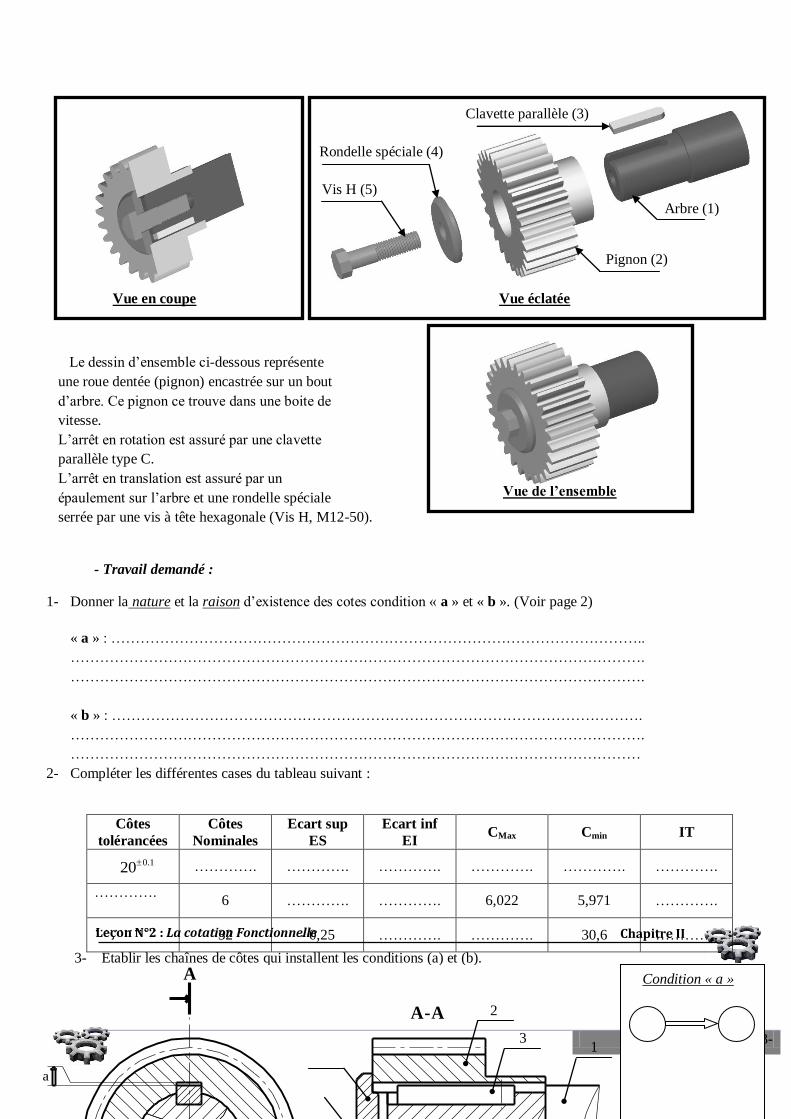
Le dessin d’ensemble ci-dessous représente
une roue dentée (pignon) encastrée sur un bout
d’arbre. Ce pignon ce trouve dans une boite de
vitesse.
L’arrêt en rotation est assuré par une clavette
parallèle type C.
L’arrêt en translation est assuré par un
épaulement sur l’arbre et une rondelle spéciale
serrée par une vis à tête hexagonale (Vis H, M12-50).
- Travail demandé :
1- Donner la nature et la raison d’existence des cotes condition « a » et « b ». (Voir page 2)
« a » : ………………………………………………………………………………………………..
……………………………………………………………………………………………………….
……………………………………………………………………………………………………….
« b » : ……………………………………………………………………………………………….
……………………………………………………………………………………………………….
………………………………………………………………………………………………………
2- Compléter les différentes cases du tableau suivant :
Côtes
tolérancées
Côtes
Nominales
Ecart sup
ES
Ecart inf
EI CMax Cmin IT
…………. …………. …………. …………. …………. ………….
………….
6 …………. …………. 6,022 5,971 ………….
………….
32 - 0,25 …………. …………. 30,6 ………….
Condition « a »
1 3
2
3- Etablir les chaînes de côtes qui installent les conditions (a) et (b).
Vue en coupe
Vue de l’ensemble
Vue éclatée
Vis H (5)
Rondelle spéciale (4)
Clavette parallèle (3)
Pignon (2)
Arbre (1)
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-44-
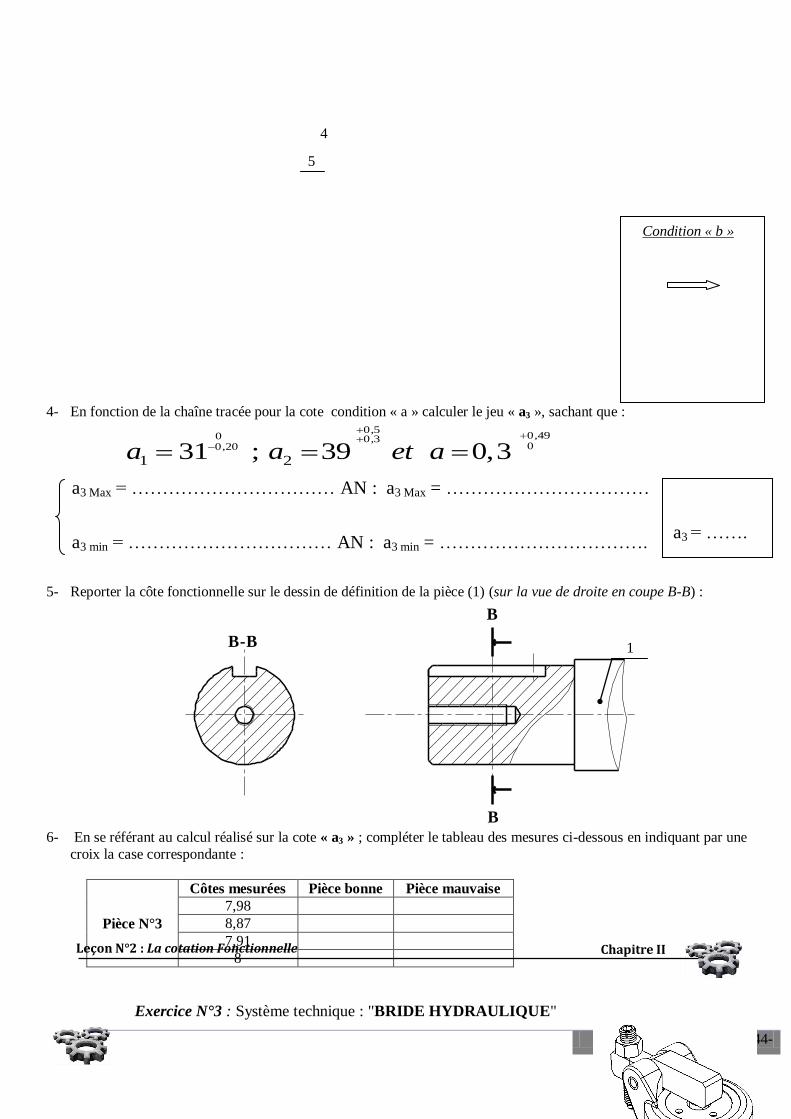
0,50,490 0,300,20
1 231 ; 39 0,3a a et a
B-B
B
B
4- En fonction de la chaîne tracée pour la cote condition « a » calculer le jeu « a3 », sachant que :
5- Reporter la côte fonctionnelle sur le dessin de définition de la pièce (1) (sur la vue de droite en coupe B-B) :
6- En se référant au calcul réalisé sur la cote « a3 » ; compléter le tableau des mesures ci-dessous en indiquant par une
croix la case correspondante :
Pièce N°3
Côtes mesurées Pièce bonne Pièce mauvaise
7,98
8,87
7,91
8
Exercice N°3 : Système technique : "BRIDE HYDRAULIQUE"
Condition « b »
4
5
1
a3 Max = …………………………… AN : a3 Max = ……………………………
a3 min = …………………………… AN : a3 min = …………………………….
a3 = …….
Leçon N°2 : La cotation Fonctionnelle Chapitre II
Page-45-
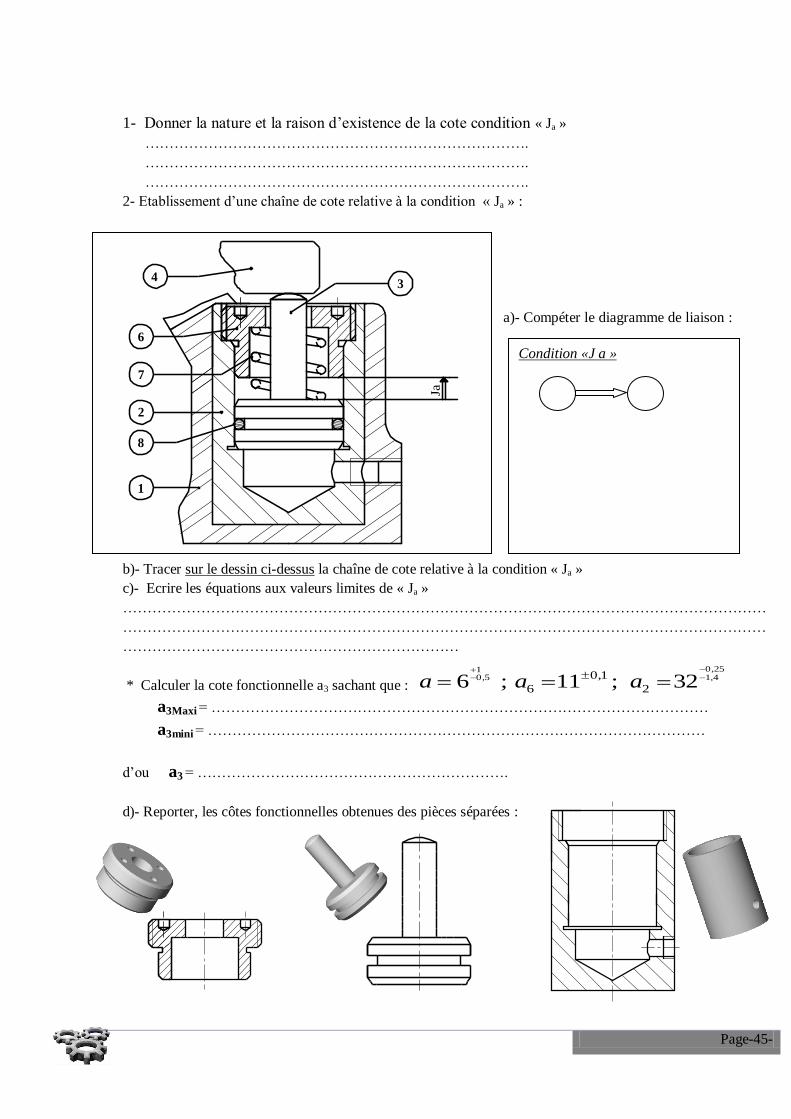
1- Donner la nature et la raison d’existence de la cote condition « Ja »
…………………………………………………………………….
…………………………………………………………………….
…………………………………………………………………….
2- Etablissement d’une chaîne de cote relative à la condition « Ja » :
a)- Compéter le diagramme de liaison :
b)- Tracer sur le dessin ci-dessus la chaîne de cote relative à la condition « Ja »
c)- Ecrire les équations aux valeurs limites de « Ja »
……………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………
……………………………………………………………
* Calculer la cote fonctionnelle a3 sachant que :
a3Maxi = …………………………………………………………………………………………
a3mini = …………………………………………………………………………………………
d’ou a3 = ……………………………………………………….
d)- Reporter, les côtes fonctionnelles obtenues des pièces séparées :
Condition «J a »
0,2510,5 1,40,1
6 26 ; 11 ; 32a a a
Ja
3
6
7
2
8
1
4
Page-46-
Leçon N°3 : Le dessin de définition (Rappels)
Objectif :
Un dessin de définition a pour objectif d’exprimer les exigences auxquelles doit répondre la pièce
représentée. Il doit donc être parfaitement clair, c'est-à-dire :
Complet évitant toute interprétation ou déduction ;
Facile à lire (choix judicieux des vues et leur nombre) ;
Ne contenir que les spécifications fonctionnelles indispensables, avec de tolérances aussi peu
élevées que possible.
I- Rappel :
Définition : (Voir manuel du cours page 70)
Le dessin de définition est un moyen de communication entre concepteur (dessinateur) et réalisateur
« cahier des charges ».
C’est aussi le dessin d’une pièce isolée du mécanisme dont le rôle est essentiellement de montrer les
surfaces fonctionnelles, il nous renseigne donc sur la forme, la matière et les dimensions d’une pièce.
La méthode à suivre est la suivante :
Etape 1 : Décoder les formes générales de la pièce :
-Mettre en évidence les formes générales d’une pièce (colorier la pièce concernée sur les
différentes vues ou elle apparaît. (Voir manuel du cours page 71)
Etape 2 : Choisir les vues principales
-Choisir les vues les plus représentatives et comportant le moins de parties cachées.
Etape 3 : Représenter la pièce :
-Il faut construire des volumes et non des contours (Parallélépipède, cylindre, sphère, …)
-Toutes les vues doivent être conduites simultanément pour éviter les risques d’oublis et de confusion.
-Effectuer des opérations booléennes appliquées aux volumes élémentaires tel que la soustraction
(retranchement), l’addition (réunion), et quelquefois l’intersection.
(Voir manuel du cours page 72-73)
Etape 4 : Mentionner les spécifications fonctionnelles :
Par la cotation afin de spécifier les dimensions des différentes surfaces de la pièce avec plus de
précision qu’un simple relevé. (Voir manuel du cours page 75)
Page-47-
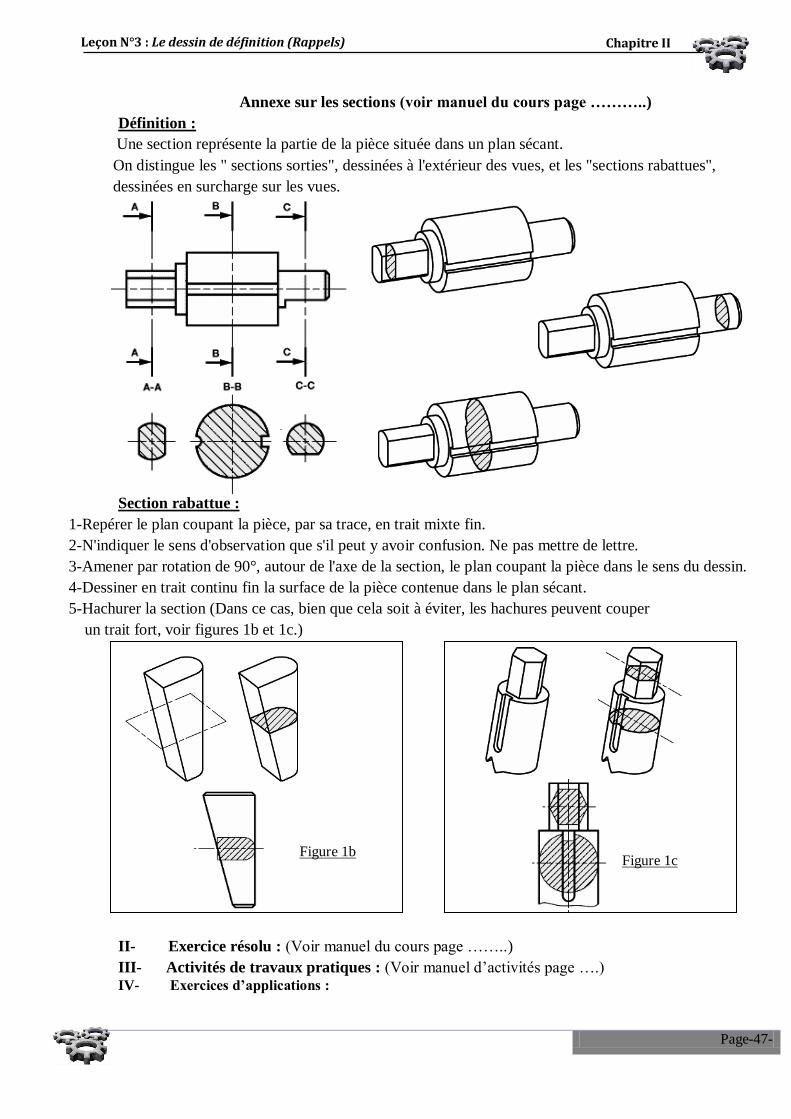
Annexe sur les sections (voir manuel du cours page ………..)
Définition :
Une section représente la partie de la pièce située dans un plan sécant.
On distingue les " sections sorties", dessinées à l'extérieur des vues, et les "sections rabattues",
dessinées en surcharge sur les vues.
Section rabattue :
1-Repérer le plan coupant la pièce, par sa trace, en trait mixte fin.
2-N'indiquer le sens d'observation que s'il peut y avoir confusion. Ne pas mettre de lettre.
3-Amener par rotation de 90°, autour de l'axe de la section, le plan coupant la pièce dans le sens du dessin.
4-Dessiner en trait continu fin la surface de la pièce contenue dans le plan sécant.
5-Hachurer la section (Dans ce cas, bien que cela soit à éviter, les hachures peuvent couper
un trait fort, voir figures 1b et 1c.)
II- Exercice résolu : (Voir manuel du cours page ……..)
III- Activités de travaux pratiques : (Voir manuel d’activités page ….) IV- Exercices d’applications :
Figure 1b Figure 1c
Leçon N°3 : Le dessin de définition (Rappels) Chapitre II
Page-48-
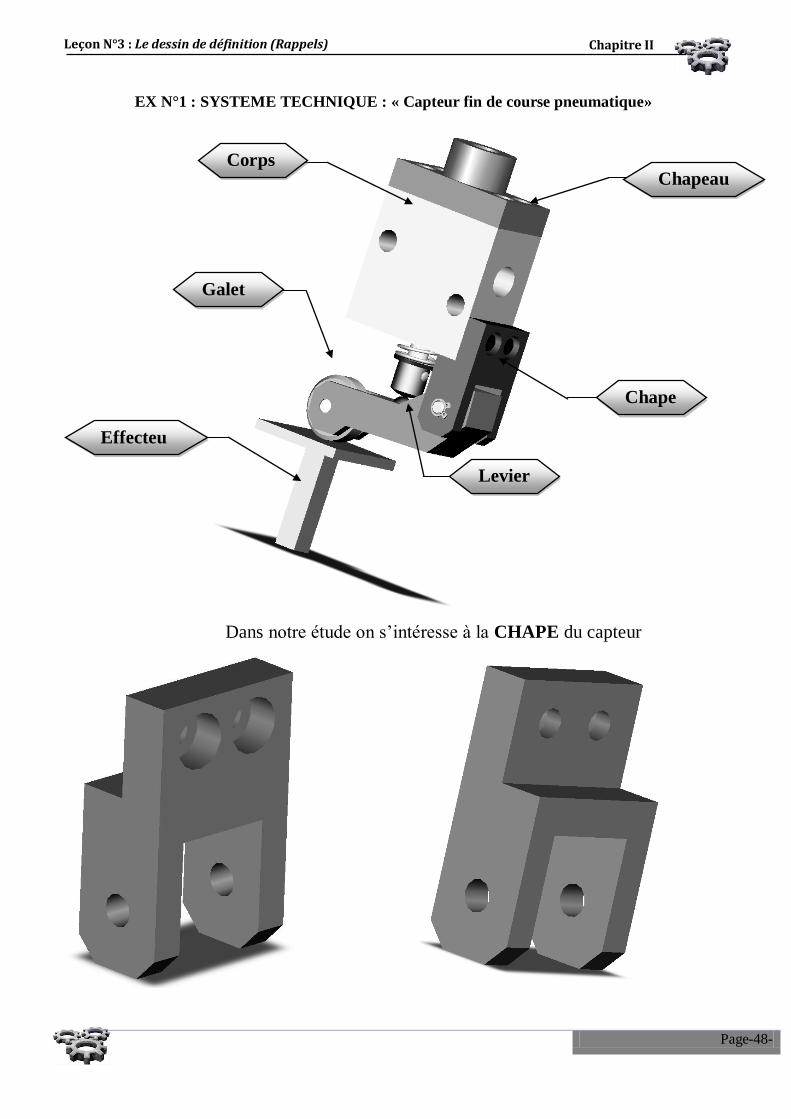
EX N°1 : SYSTEME TECHNIQUE : « Capteur fin de course pneumatique»
Dans notre étude on s’intéresse à la CHAPE du capteur
Chapeau
Chape
Corps
Galet
Effecteu
r Levier
Leçon N°3 : Le dessin de définition (Rappels) Chapitre II
Page-49-
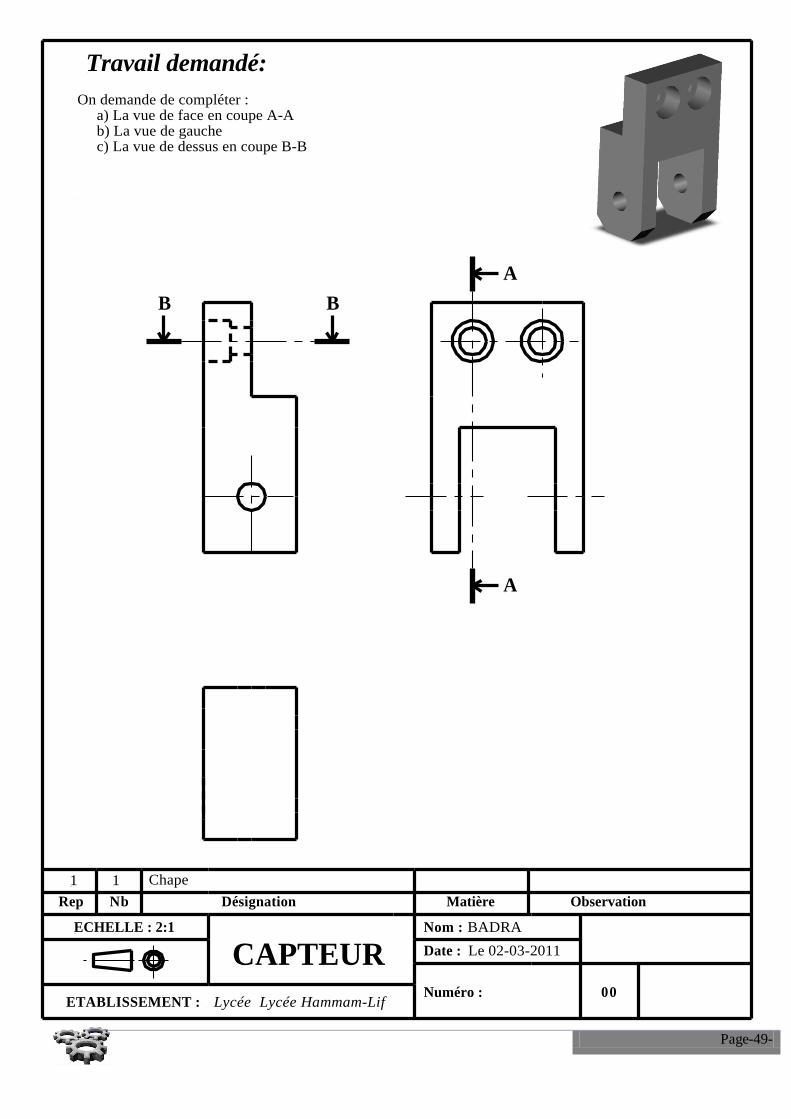
Rep Nb
Chape
Désignation Matière Observation
Nom :
Date :
Numéro : 00
Le 02-03-2011
ECHELLE : 2:1
ETABLISSEMENT :
11
Lycée Lycée Hammam-Lif
CAPTEURBADRA
On demande de compléter : a) La vue de face en coupe A-A b) La vue de gauche c) La vue de dessus en coupe B-B
Travail demandé:
A
A
BB
Page-50-
Rep Nb
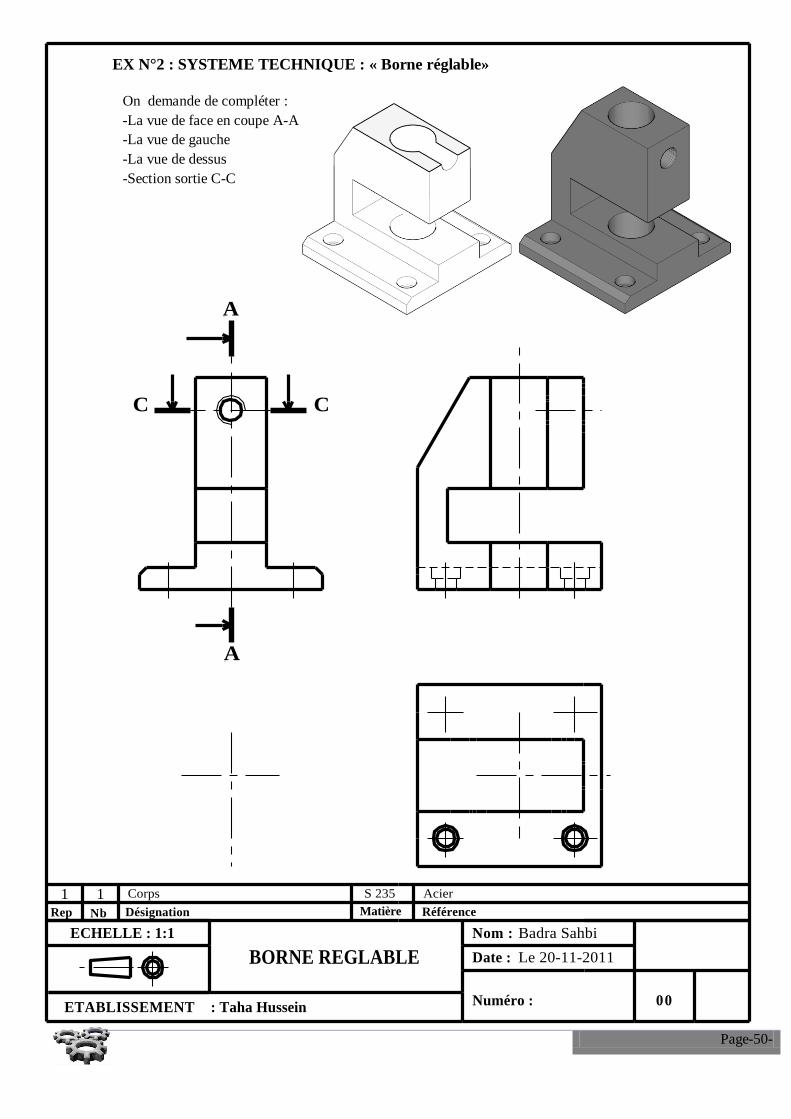
1 Corps
Désignation Matière Référence
BORNE REGLABLE
1 S 235
ETABLISSEMENT
Nom :
Date :
Numéro : 00
Badra Sahbi
Le 20-11-2011
: Taha Hussein
ECHELLE : 1:1
Acier
A
A
CC
On demande de compléter :
-La vue de face en coupe A-A
-La vue de gauche
-La vue de dessus
-Section sortie C-C
EX N°2 : SYSTEME TECHNIQUE : « Borne réglable»

Page-51-
1F 2F
1 0( )l L L
( ).F pente l
l
1F2F
Al Cu Fel l l
CHAPITRE III(3)
COMPORTEMENT DES MATERIAUX
« Rappels sur les sollicitations simples »
A- La traction :
Définition : Une pièce est sollicitée à la traction lorsqu'elle est soumise à deux forces directement
opposées qui tendent à l'allonger.
Bilan des Forces :
On a et sont les efforts appliqués respectivement sur cette éprouvette. Sous l'action de
ces deux forces, l’éprouvette tend à s’allongée.
Déformation :
C’est l’allongement ( )
Type de sollicitation : Traction
Retenons :
-- Une pièce est sollicitée à la traction lorsqu'elle est soumise à l'action de deux efforts
directement opposés qui tendent à l'allonger.
-- Les allongements d'une pièce sollicitée à la traction sont proportionnels aux charges.
-- La valeur de l’allongement d’une pièce soumise à la traction dépend de la nature du matériau de la pièce
sollicitée.
Exemple :
Fer
Cuivre
Aluminium
Page-52-
1F 2F
1F2F 3F
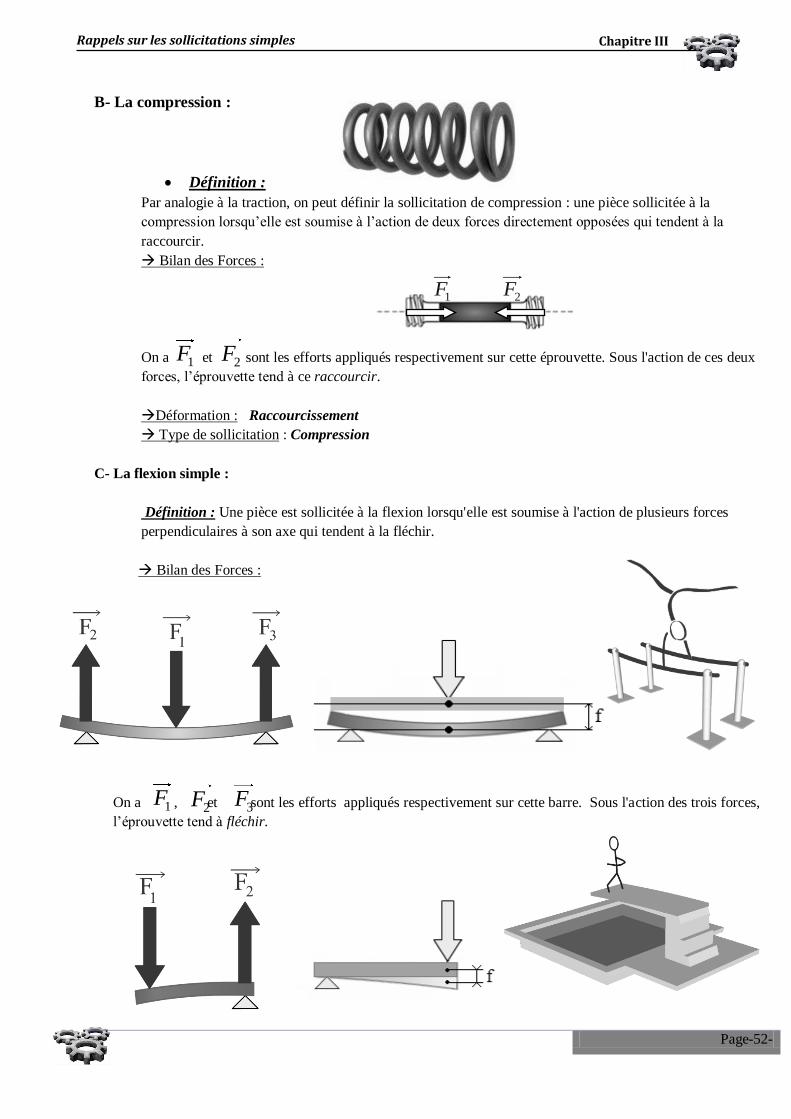
B- La compression :
Définition :
Par analogie à la traction, on peut définir la sollicitation de compression : une pièce sollicitée à la
compression lorsqu’elle est soumise à l’action de deux forces directement opposées qui tendent à la
raccourcir.
Bilan des Forces :
On a et sont les efforts appliqués respectivement sur cette éprouvette. Sous l'action de ces deux
forces, l’éprouvette tend à ce raccourcir.
Déformation : Raccourcissement
Type de sollicitation : Compression
C- La flexion simple :
Définition : Une pièce est sollicitée à la flexion lorsqu'elle est soumise à l'action de plusieurs forces
perpendiculaires à son axe qui tendent à la fléchir.
Bilan des Forces :
On a , et sont les efforts appliqués respectivement sur cette barre. Sous l'action des trois forces,
l’éprouvette tend à fléchir.
1F 2F
Rappels sur les sollicitations simples Chapitre III

Page-53-
( ).F pente f
Al Cu Fef f f
1F 2F On a , sont les efforts appliqués sur cette planche. Sous l’action des deux forces elle tend à fléchir.
Déformation : Flèche (f)
Type de sollicitation : Flexion
Retenons :
-- Une pièce est sollicitée à la flexion simple lorsqu'elle est soumise à l'action de plusieurs forces
perpendiculaire à sont axe qui tendent à la fléchir.
-- La déformation de flexion d'une pièce sollicitée à la flexion est proportionnelle aux charges.
-- La valeur de la flèche d’une pièce soumise à la flexion simple dépend de la nature de son matériau.
Exemple :
D- La torsion :
Définition :
Une pièce est sollicitée à la torsion lorsqu'elle est soumise à l'action de deux moments de torsion opposés
(deux couples de forces opposé : les forces sont situés dans un plan perpendiculaire à l'axe de la pièce) qui
tendent à la tordre.
Bilan des Forces :
Fer
Cuivre
Aluminium
Rappels sur les sollicitations simples Chapitre III
Page-54-
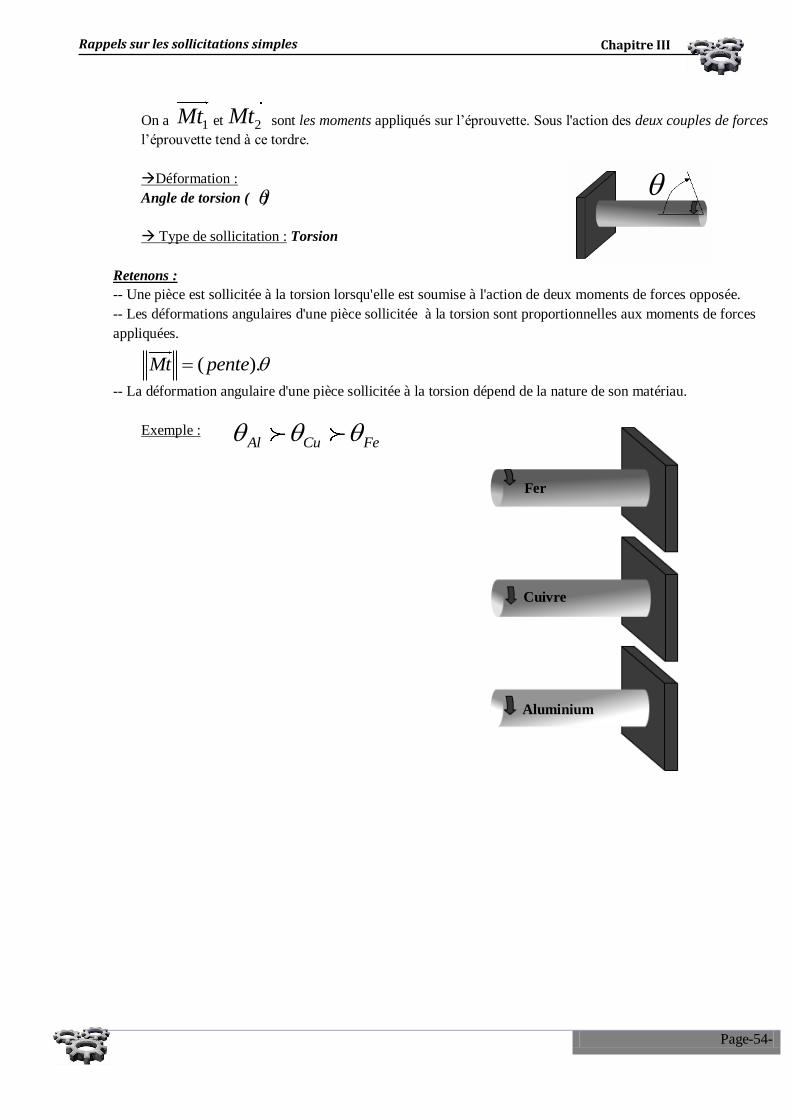
( ).Mt pente
Al Cu Fe
1Mt 2Mt
On a et sont les moments appliqués sur l’éprouvette. Sous l'action des deux couples de forces
l’éprouvette tend à ce tordre.
Déformation :
Angle de torsion ( )
Type de sollicitation : Torsion
Retenons :
-- Une pièce est sollicitée à la torsion lorsqu'elle est soumise à l'action de deux moments de forces opposée.
-- Les déformations angulaires d'une pièce sollicitée à la torsion sont proportionnelles aux moments de forces
appliquées.
-- La déformation angulaire d'une pièce sollicitée à la torsion dépend de la nature de son matériau.
Exemple :
Fer
Cuivre
Aluminium
Rappels sur les sollicitations simples Chapitre III
Page-55-
COMPORTEMENT DES MATERIAUX : GENERALITES
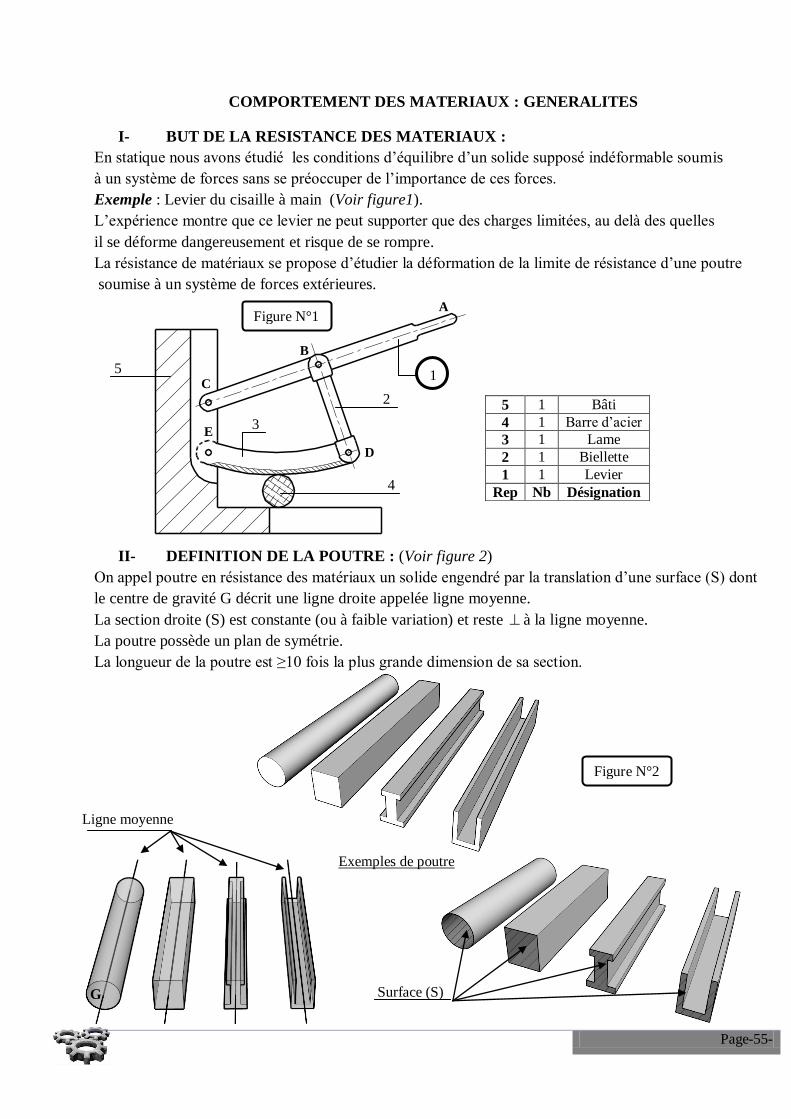
I- BUT DE LA RESISTANCE DES MATERIAUX :
En statique nous avons étudié les conditions d’équilibre d’un solide supposé indéformable soumis
à un système de forces sans se préoccuper de l’importance de ces forces.
Exemple : Levier du cisaille à main (Voir figure1).
L’expérience montre que ce levier ne peut supporter que des charges limitées, au delà des quelles
il se déforme dangereusement et risque de se rompre.
La résistance de matériaux se propose d’étudier la déformation de la limite de résistance d’une poutre
soumise à un système de forces extérieures.
II- DEFINITION DE LA POUTRE : (Voir figure 2)
On appel poutre en résistance des matériaux un solide engendré par la translation d’une surface (S) dont
le centre de gravité G décrit une ligne droite appelée ligne moyenne.
La section droite (S) est constante (ou à faible variation) et reste à la ligne moyenne.
La poutre possède un plan de symétrie.
La longueur de la poutre est ≥10 fois la plus grande dimension de sa section.
5 1 Bâti
4 1 Barre d’acier
3 1 Lame
2 1 Biellette
1 1 Levier
Rep Nb Désignation
C
B
A
D
E
2
3
4
5
Figure N°1
Figure N°2
Ligne moyenne
G
Exemples de poutre
1
Surface (S)
Page-56-
/opérateur LevierAF F
BF
CF
AF
df
dS
df
N
EF
DF
EF
DF
III- HYPOTHESE SUR LE MATERIAUX DE LA POUTRE.
- Homogénéité : La poutre étudiée est faite d’un matériau de même construction physique et chimique.
- Isotropie : En chaque point et dans toutes les directions autour de ce point, la poutre a les mêmes propriétés
mécaniques.
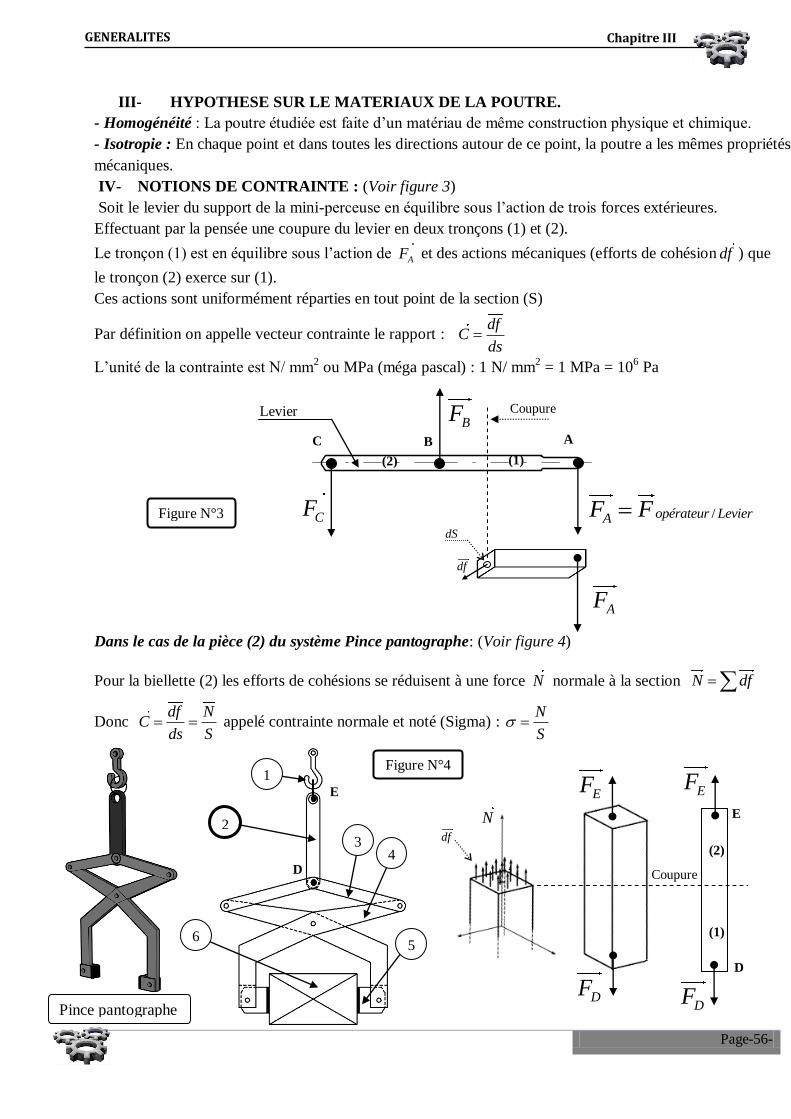
IV- NOTIONS DE CONTRAINTE : (Voir figure 3)
Soit le levier du support de la mini-perceuse en équilibre sous l’action de trois forces extérieures.
Effectuant par la pensée une coupure du levier en deux tronçons (1) et (2).
Le tronçon (1) est en équilibre sous l’action de AF et des actions mécaniques (efforts de cohésion df ) que
le tronçon (2) exerce sur (1).
Ces actions sont uniformément réparties en tout point de la section (S)
Par définition on appelle vecteur contrainte le rapport : df
Cds
L’unité de la contrainte est N/ mm2 ou MPa (méga pascal) : 1 N/ mm
2 = 1 MPa = 10
6 Pa
Dans le cas de la pièce (2) du système Pince pantographe: (Voir figure 4)
Pour la biellette (2) les efforts de cohésions se réduisent à une force N normale à la section N df
Donc df N
Cds S
appelé contrainte normale et noté (Sigma) : N
S
C B A
Figure N°3
(2) (1)
Levier Coupure
Coupure
1
3 4
2
5
E
D
6
Figure N°4
Pince pantographe
(1)
(2)
E
D
GENERALITES Chapitre III
Page-57-
1F 2F
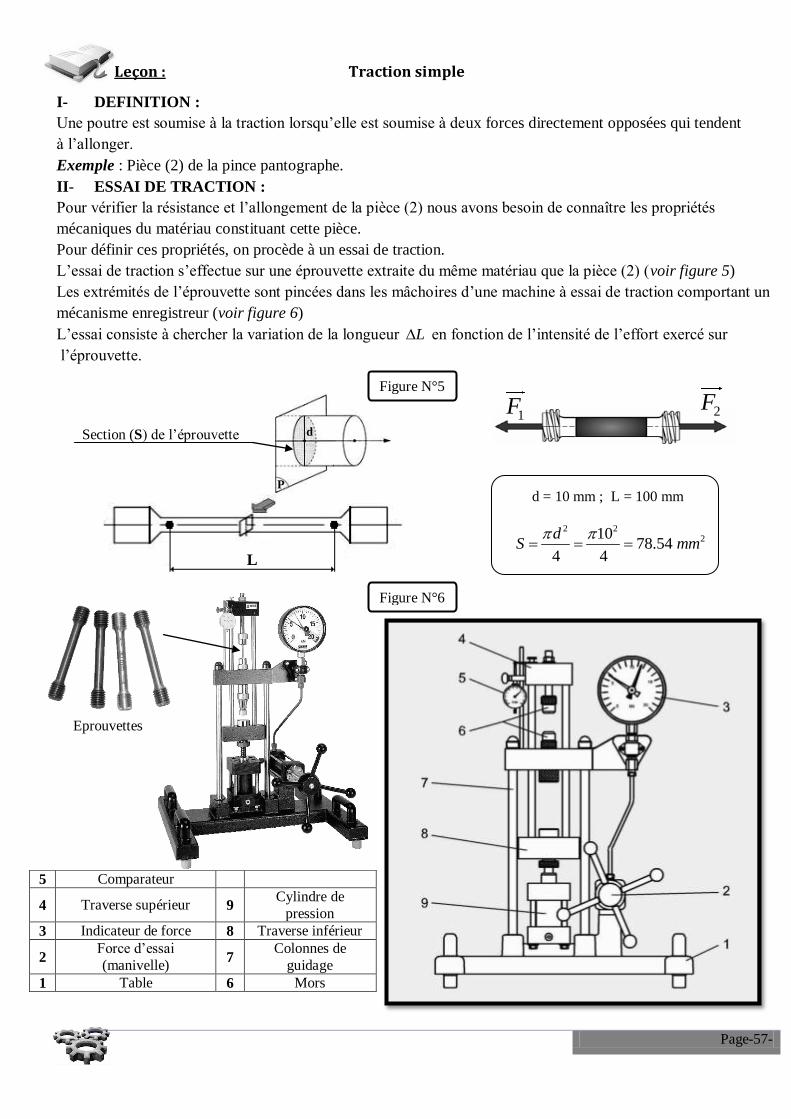
I- DEFINITION :
Une poutre est soumise à la traction lorsqu’elle est soumise à deux forces directement opposées qui tendent
à l’allonger.
Exemple : Pièce (2) de la pince pantographe.
II- ESSAI DE TRACTION :
Pour vérifier la résistance et l’allongement de la pièce (2) nous avons besoin de connaître les propriétés
mécaniques du matériau constituant cette pièce.
Pour définir ces propriétés, on procède à un essai de traction.
L’essai de traction s’effectue sur une éprouvette extraite du même matériau que la pièce (2) (voir figure 5)
Les extrémités de l’éprouvette sont pincées dans les mâchoires d’une machine à essai de traction comportant un
mécanisme enregistreur (voir figure 6)
L’essai consiste à chercher la variation de la longueur L en fonction de l’intensité de l’effort exercé sur
l’éprouvette.
5 Comparateur
4 Traverse supérieur 9 Cylindre de
pression
3 Indicateur de force 8 Traverse inférieur
2 Force d’essai
(manivelle) 7
Colonnes de
guidage
1 Table 6 Mors
Section (S) de l’éprouvette
P
L
d
Figure N°5
Figure N°6
Eprouvettes
d = 10 mm ; L = 100 mm
2 2210
78.544 4
dS mm
Leçon : Traction simple
Page-58-
( )L mm
( )F KN
arg
'
Ch e F
Section de l éprouvetteS
L
L
.E
225000Re 318.3 /
78.54
FeN mm
S
235000R 445.63 /
78.54
Frr N mm
S
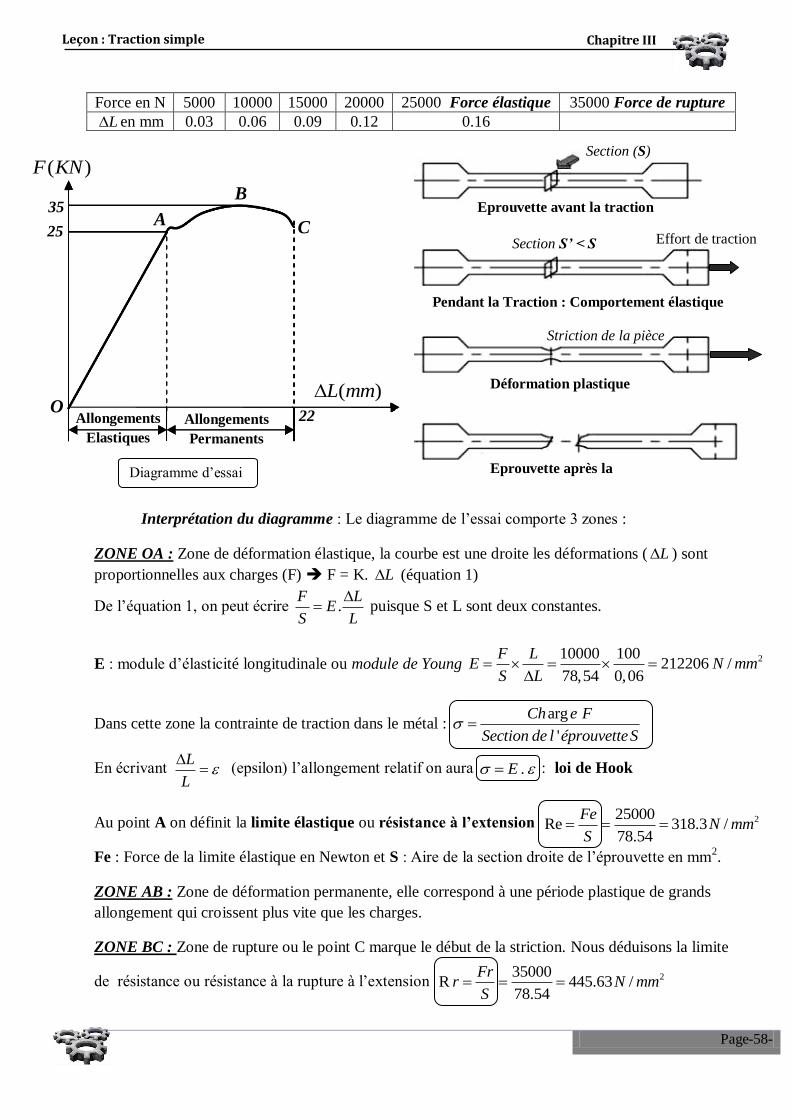
Force en N 5000 10000 15000 20000 25000 Force élastique 35000 Force de rupture
L en mm 0.03 0.06 0.09 0.12 0.16
Interprétation du diagramme : Le diagramme de l’essai comporte 3 zones :
ZONE OA : Zone de déformation élastique, la courbe est une droite les déformations ( L ) sont
proportionnelles aux charges (F) F = K. L (équation 1)
De l’équation 1, on peut écrire .F L
ES L
puisque S et L sont deux constantes.
E : module d’élasticité longitudinale ou module de Young 210000 100
212206 /78,54 0,06
F LE N mm
S L
Dans cette zone la contrainte de traction dans le métal :
En écrivant (epsilon) l’allongement relatif on aura : loi de Hook
Au point A on définit la limite élastique ou résistance à l’extension
Fe : Force de la limite élastique en Newton et S : Aire de la section droite de l’éprouvette en mm2.
ZONE AB : Zone de déformation permanente, elle correspond à une période plastique de grands
allongement qui croissent plus vite que les charges.
ZONE BC : Zone de rupture ou le point C marque le début de la striction. Nous déduisons la limite
de résistance ou résistance à la rupture à l’extension
Section (S)
Eprouvette avant la traction
Effort de traction
Pendant la Traction : Comportement élastique
Section S’ < S
Striction de la pièce
Déformation plastique
Eprouvette après la
rupture
A
B
C
O
25
35
22 Allongements
Elastiques
Allongements
Permanents
Diagramme d’essai
Leçon : Traction simple Chapitre III
Page-59-
Lu L
L
22
100
EF
DF
2
2
Re 318159 /
2
140017,5 / Donc la condition de résistance est vérifiée
80
FRpe Rpe avec Rpe N mm
S s
FN mm
S
Fr : Force de rupture en Newton et S : Aire de la section droite de l’éprouvette en mm2.
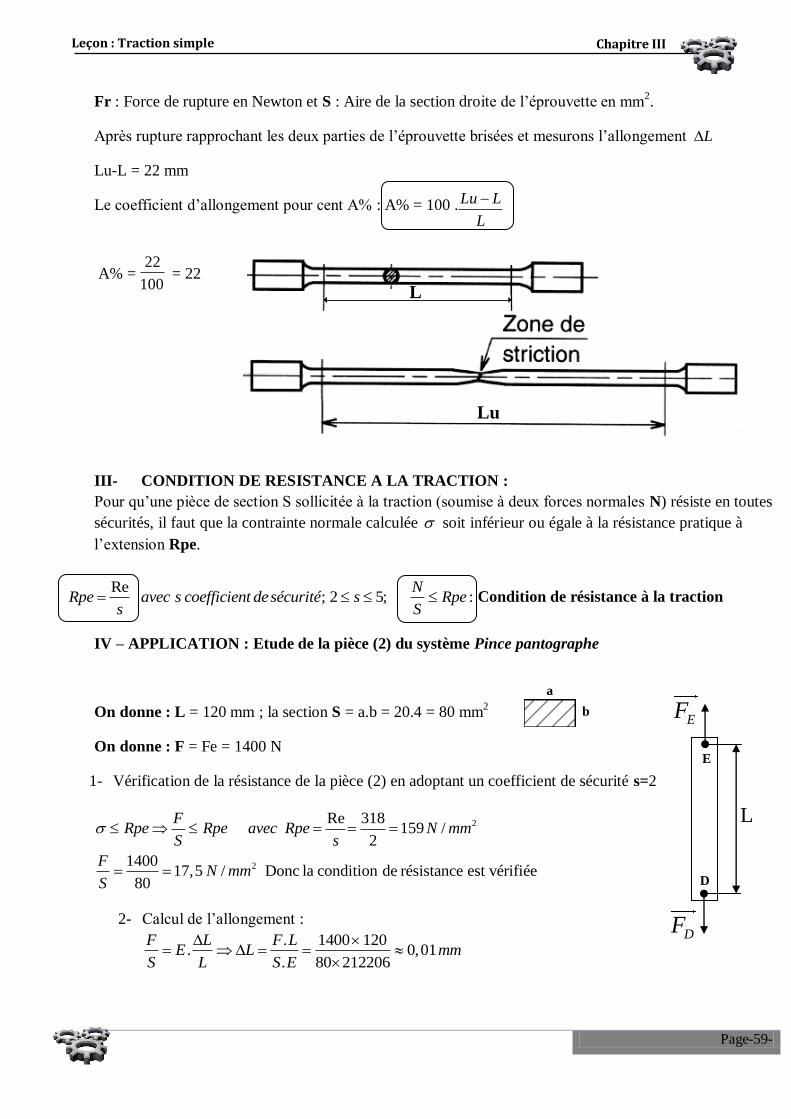
Après rupture rapprochant les deux parties de l’éprouvette brisées et mesurons l’allongement L
Lu-L = 22 mm
Le coefficient d’allongement pour cent A% : A% = 100 .
A% = = 22
III- CONDITION DE RESISTANCE A LA TRACTION :
Pour qu’une pièce de section S sollicitée à la traction (soumise à deux forces normales N) résiste en toutes
sécurités, il faut que la contrainte normale calculée soit inférieur ou égale à la résistance pratique à
l’extension Rpe.
Re; 2 5; :
NRpe avec s coefficient desécurité s Rpe
s S Condition de résistance à la traction
IV – APPLICATION : Etude de la pièce (2) du système Pince pantographe
On donne : L = 120 mm ; la section S = a.b = 20.4 = 80 mm2
On donne : F = Fe = 1400 N
1- Vérification de la résistance de la pièce (2) en adoptant un coefficient de sécurité s=2
2- Calcul de l’allongement :
. 1400 120. 0,01
. 80 212206
F L F LE L mm
S L S E
L
Lu
a
D
b
E
L
Leçon : Traction simple Chapitre III
Page-60-
Exercice d’application
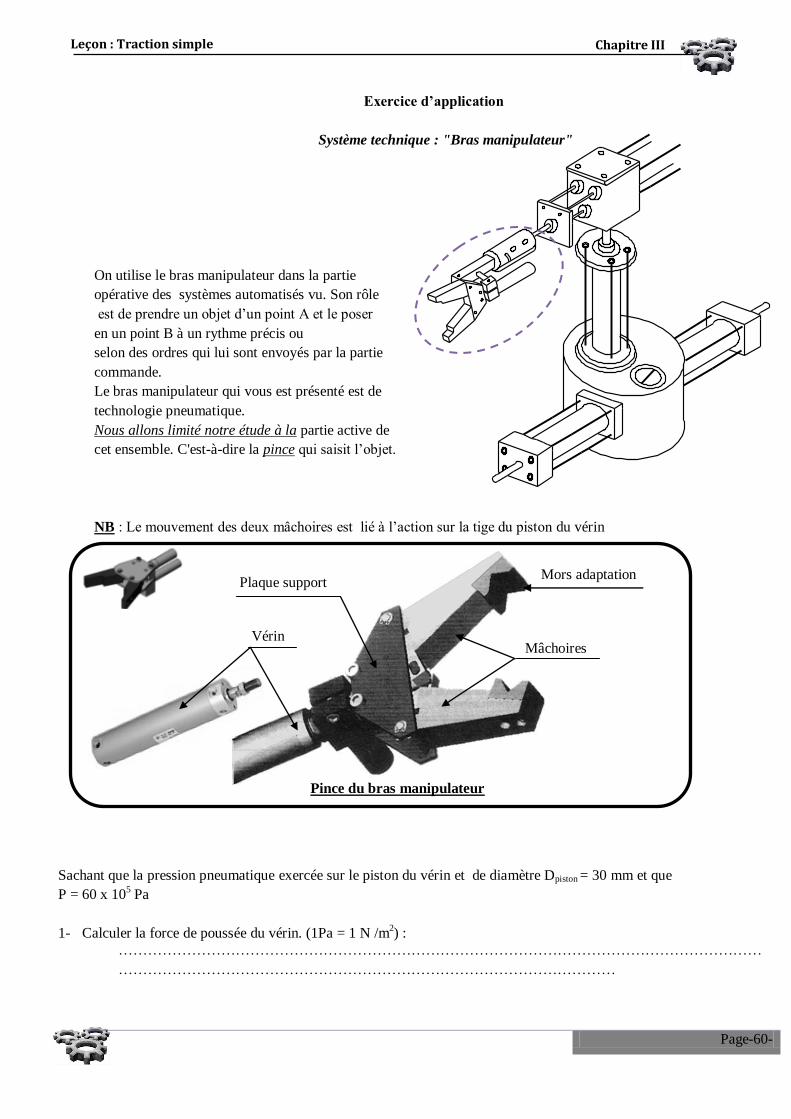
Système technique : "Bras manipulateur"
On utilise le bras manipulateur dans la partie
opérative des systèmes automatisés vu. Son rôle
est de prendre un objet d’un point A et le poser
en un point B à un rythme précis ou
selon des ordres qui lui sont envoyés par la partie
commande.
Le bras manipulateur qui vous est présenté est de
technologie pneumatique.
Nous allons limité notre étude à la partie active de
cet ensemble. C'est-à-dire la pince qui saisit l’objet.
NB : Le mouvement des deux mâchoires est lié à l’action sur la tige du piston du vérin
Sachant que la pression pneumatique exercée sur le piston du vérin et de diamètre Dpiston = 30 mm et que
P = 60 x 105 Pa
1- Calculer la force de poussée du vérin. (1Pa = 1 N /m2) :
……………………………………………………………………………………………………………………
…………………………………………………………………………………………
Vérin
Plaque support
Mâchoires
Mors adaptation
Pince du bras manipulateur
Leçon : Traction simple Chapitre III
Page-61-
F
S
F
epe
RR
S
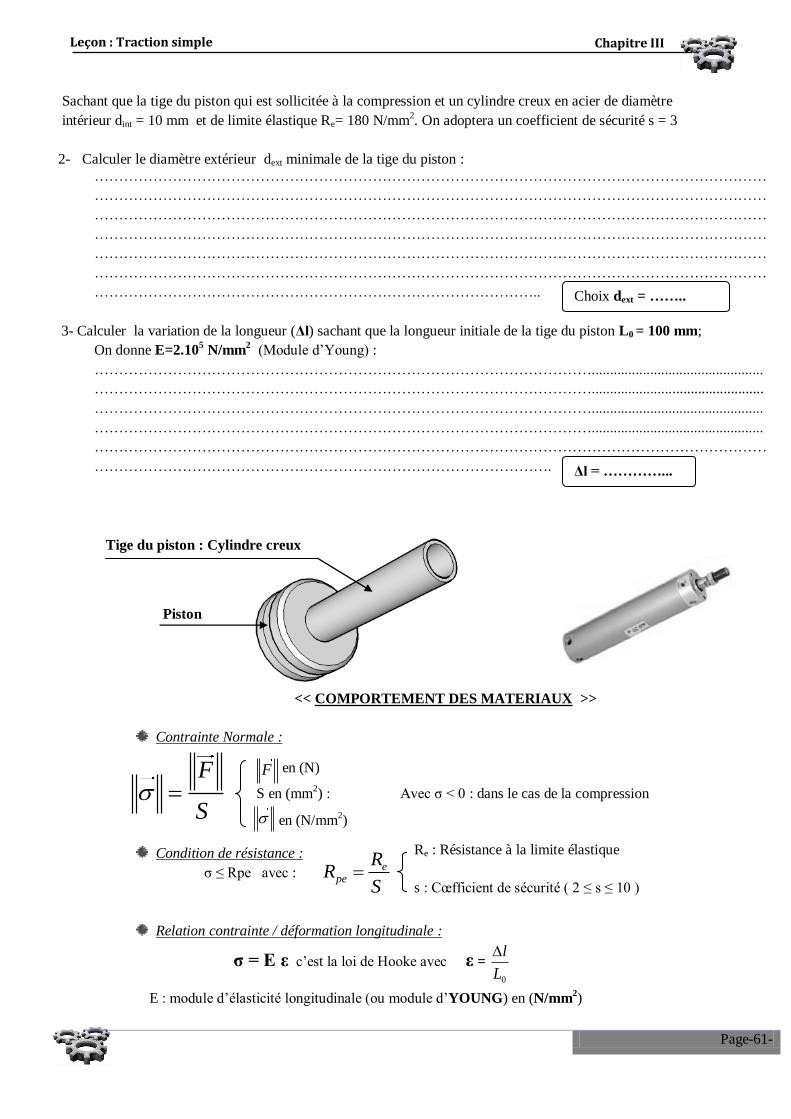
Sachant que la tige du piston qui est sollicitée à la compression et un cylindre creux en acier de diamètre
intérieur dint = 10 mm et de limite élastique Re= 180 N/mm2. On adoptera un coefficient de sécurité s = 3
2- Calculer le diamètre extérieur dext minimale de la tige du piston :
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………………
………………………………………………………………………………..
3- Calculer la variation de la longueur (Δl) sachant que la longueur initiale de la tige du piston L0 = 100 mm;
On donne E=2.105 N/mm
2 (Module d’Young) :
…………………………………………………………………………………………...............................................
…………………………………………………………………………………………...............................................
…………………………………………………………………………………………...............................................
…………………………………………………………………………………………...............................................
…………………………………………………………………………………………………………………………
………………………………………………………………………………….
<< COMPORTEMENT DES MATERIAUX >>
Contrainte Normale :
Condition de résistance :
σ ≤ Rpe avec :
Relation contrainte / déformation longitudinale :
σ = E ε c’est la loi de Hooke avec ε =
0
l
L
E : module d’élasticité longitudinale (ou module d’YOUNG) en (N/mm2)
Choix dext = ……..
Δl = …………...
Tige du piston : Cylindre creux
Piston
en (N)
S en (mm2) : Avec σ < 0 : dans le cas de la compression
en (N/mm2)
Re : Résistance à la limite élastique
s : Cœfficient de sécurité ( 2 ≤ s ≤ 10 )
Leçon : Traction simple Chapitre III
Page-62-
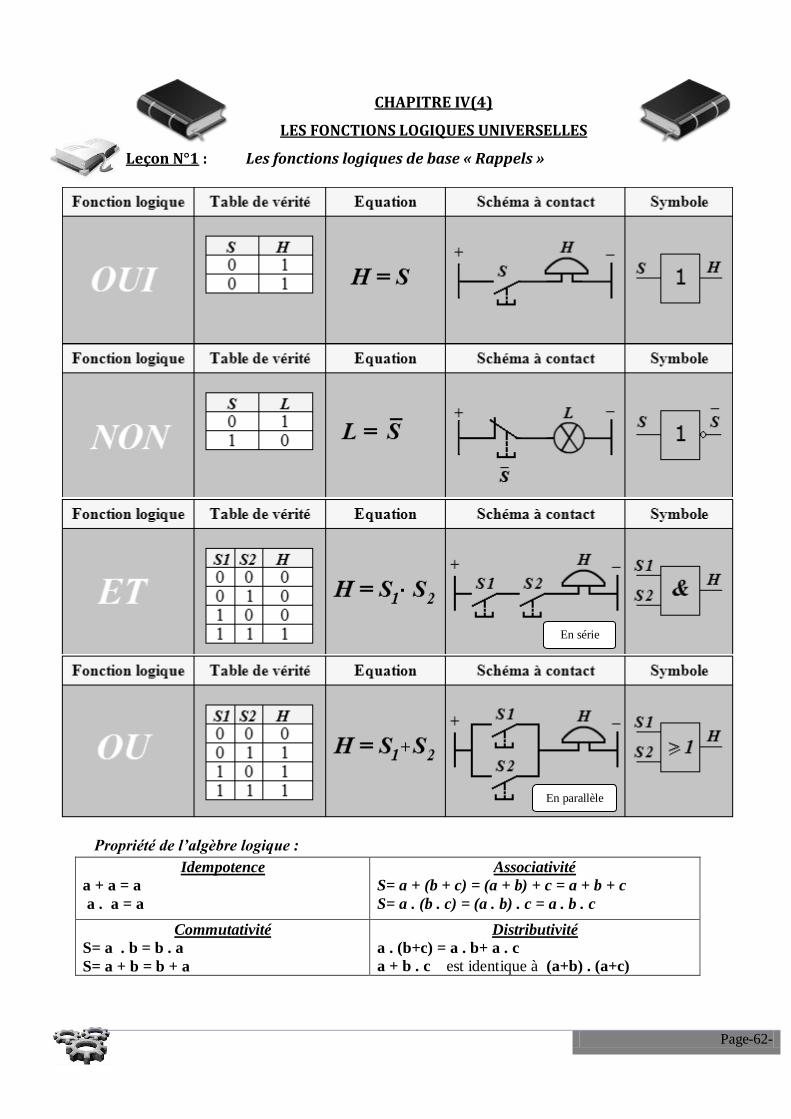
CHAPITRE IV(4)
LES FONCTIONS LOGIQUES UNIVERSELLES
Leçon N°1 : Les fonctions logiques de base « Rappels »
Propriété de l’algèbre logique :
Idempotence
a + a = a
a . a = a
Associativité
S= a + (b + c) = (a + b) + c = a + b + c
S= a . (b . c) = (a . b) . c = a . b . c
Commutativité
S= a . b = b . a
S= a + b = b + a
Distributivité
a . (b+c) = a . b+ a . c
a + b . c est identique à (a+b) . (a+c)
En série
En parallèle
Page-63-
1 2 1. 2S S S S
1. 2 1 2S S S S
1 2H S S
1| 2H S S
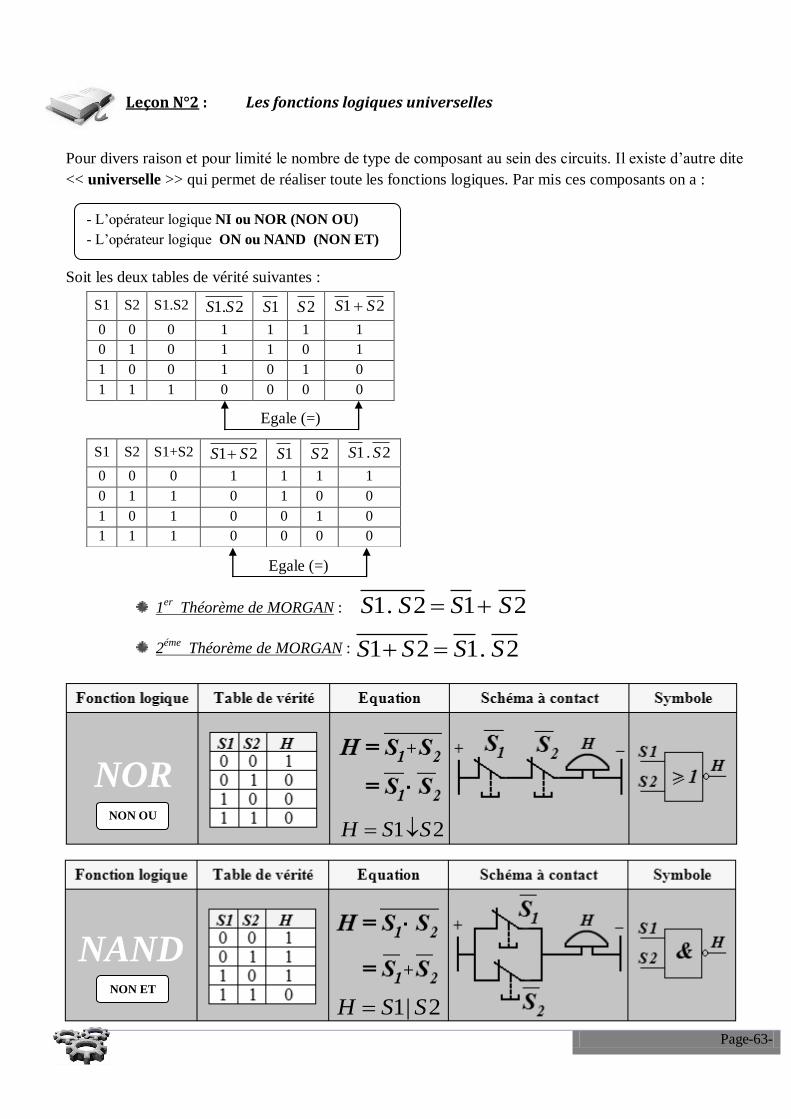
Leçon N°2 : Les fonctions logiques universelles
Pour divers raison et pour limité le nombre de type de composant au sein des circuits. Il existe d’autre dite
<< universelle >> qui permet de réaliser toute les fonctions logiques. Par mis ces composants on a :
Soit les deux tables de vérité suivantes :
1er
Théorème de MORGAN :
2éme
Théorème de MORGAN :
S1 S2 S1.S2 1. 2S S 1S 2S 1 2S S
0 0 0 1 1 1 1
0 1 0 1 1 0 1
1 0 0 1 0 1 0
1 1 1 0 0 0 0
S1 S2 S1+S2 1 2S S 1S 2S 1 . 2S S
0 0 0 1 1 1 1
0 1 1 0 1 0 0
1 0 1 0 0 1 0
1 1 1 0 0 0 0
- L’opérateur logique NI ou NOR (NON OU)
- L’opérateur logique ON ou NAND (NON ET)
Egale (=)
Egale (=)
NOR
NAND
NON OU
NON ET
Page-64-
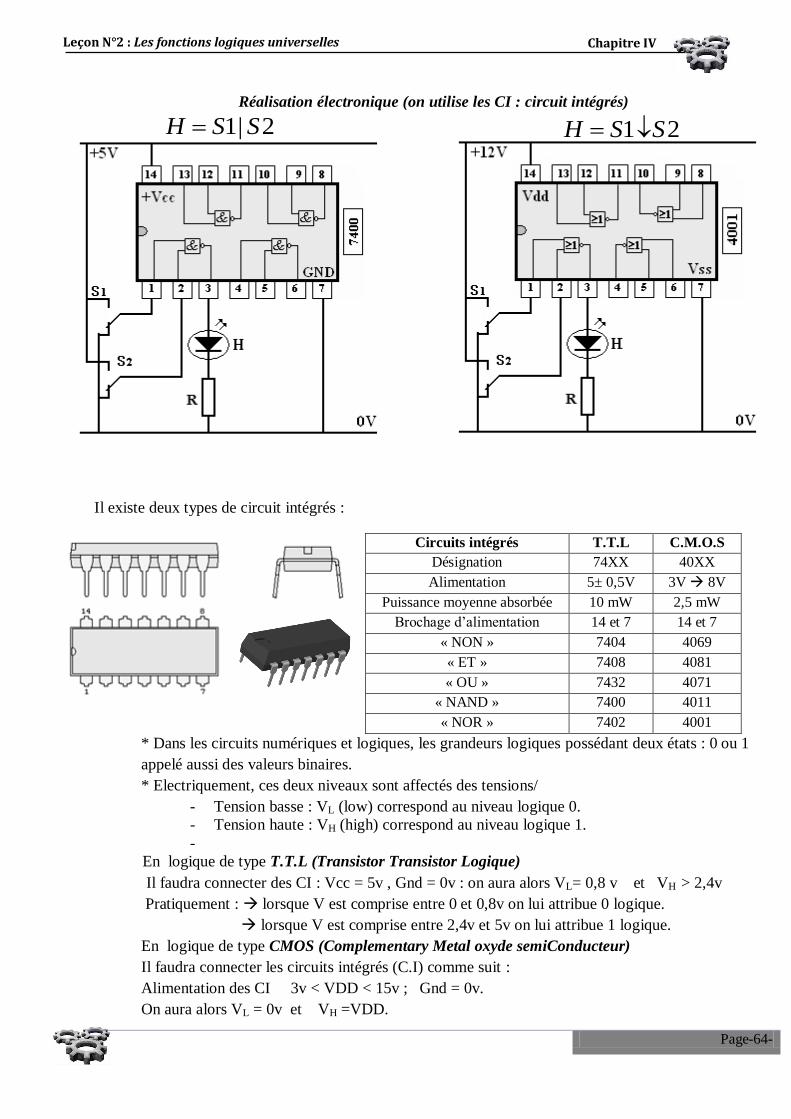
1| 2H S S 1 2H S S
Réalisation électronique (on utilise les CI : circuit intégrés)
Il existe deux types de circuit intégrés :
* Dans les circuits numériques et logiques, les grandeurs logiques possédant deux états : 0 ou 1
appelé aussi des valeurs binaires.
* Electriquement, ces deux niveaux sont affectés des tensions/
- Tension basse : VL (low) correspond au niveau logique 0.
- Tension haute : VH (high) correspond au niveau logique 1.
-
En logique de type T.T.L (Transistor Transistor Logique)
Il faudra connecter des CI : Vcc = 5v , Gnd = 0v : on aura alors VL= 0,8 v et VH > 2,4v
Pratiquement : lorsque V est comprise entre 0 et 0,8v on lui attribue 0 logique.
lorsque V est comprise entre 2,4v et 5v on lui attribue 1 logique.
En logique de type CMOS (Complementary Metal oxyde semiConducteur)
Il faudra connecter les circuits intégrés (C.I) comme suit :
Alimentation des CI 3v < VDD < 15v ; Gnd = 0v.
On aura alors VL = 0v et VH =VDD.
Circuits intégrés T.T.L C.M.O.S
Désignation 74XX 40XX
Alimentation 5± 0,5V 3V 8V
Puissance moyenne absorbée 10 mW 2,5 mW
Brochage d’alimentation 14 et 7 14 et 7
« NON » 7404 4069
« ET » 7408 4081
« OU » 7432 4071
« NAND » 7400 4011
« NOR » 7402 4001
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-65-
aa a a a a
a
b
a ba b a b
a
b
a
b. .a b a b a b
a| .a a a a a
a
b
a b. .a b a b
a
b
a
b.a b a b a b
b
a
b
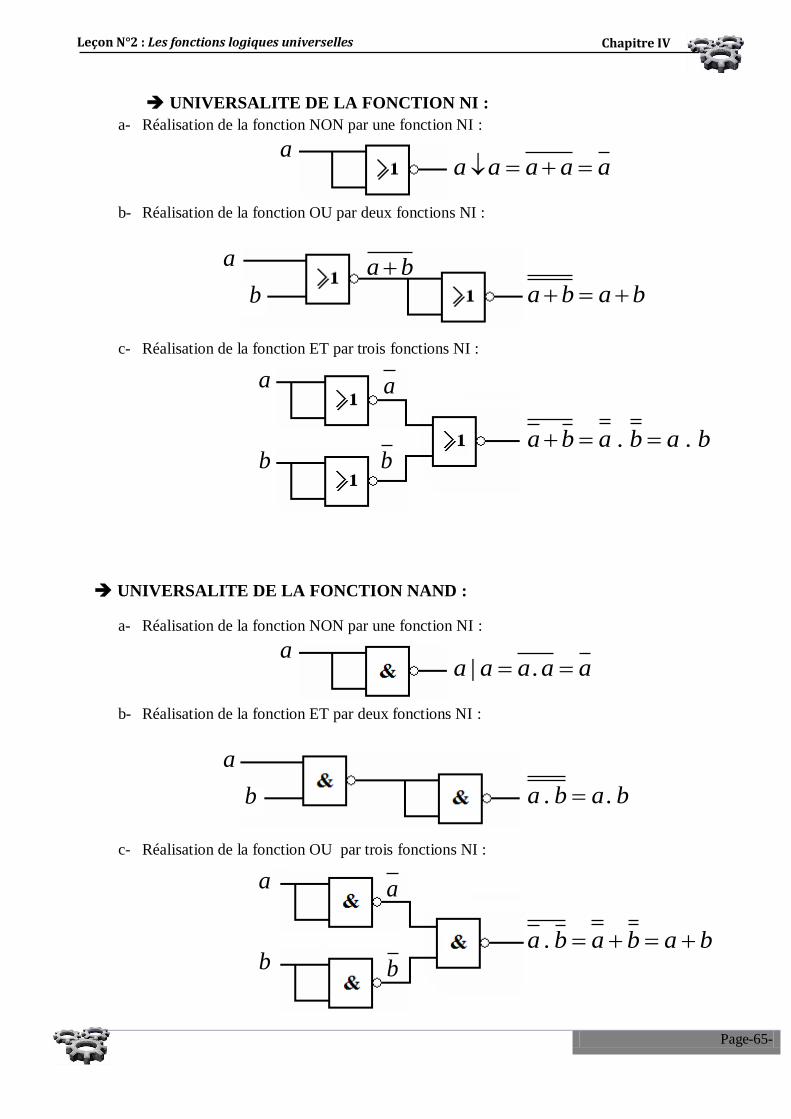
UNIVERSALITE DE LA FONCTION NI :
a- Réalisation de la fonction NON par une fonction NI :
b- Réalisation de la fonction OU par deux fonctions NI :
c- Réalisation de la fonction ET par trois fonctions NI :
UNIVERSALITE DE LA FONCTION NAND :
a- Réalisation de la fonction NON par une fonction NI :
b- Réalisation de la fonction ET par deux fonctions NI :
c- Réalisation de la fonction OU par trois fonctions NI :
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-66-
a a a a a
0 0a a a
0a a a
|1 .1a a a
| |1a a a
.a b a b a b
| .a b a b a b
| .a a a a a
RELATIONS :
EXERCICES D’APPLICATIONS
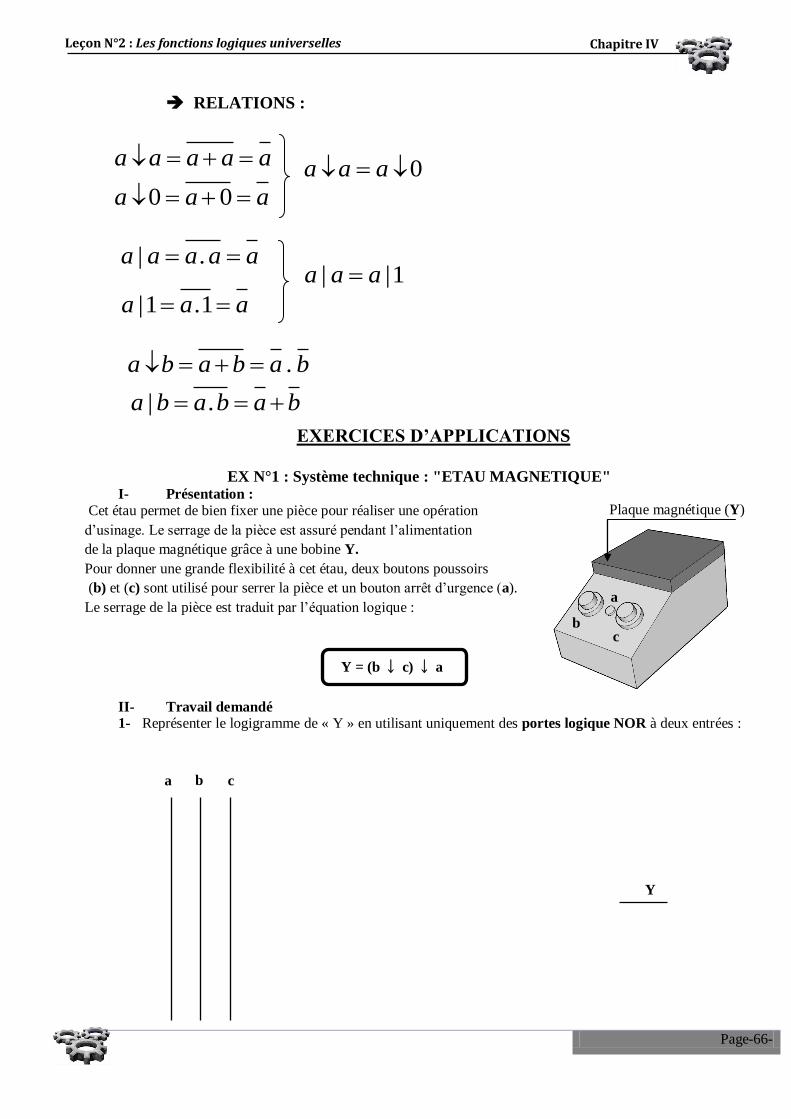
EX N°1 : Système technique : "ETAU MAGNETIQUE" I- Présentation :
Cet étau permet de bien fixer une pièce pour réaliser une opération
d’usinage. Le serrage de la pièce est assuré pendant l’alimentation
de la plaque magnétique grâce à une bobine Y.
Pour donner une grande flexibilité à cet étau, deux boutons poussoirs
(b) et (c) sont utilisé pour serrer la pièce et un bouton arrêt d’urgence (a).
Le serrage de la pièce est traduit par l’équation logique :
Y = (b ↓ c) ↓ a
II- Travail demandé 1- Représenter le logigramme de « Y » en utilisant uniquement des portes logique NOR à deux entrées :
a b c
Y
Plaque magnétique (Y)
b c
a
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-67-
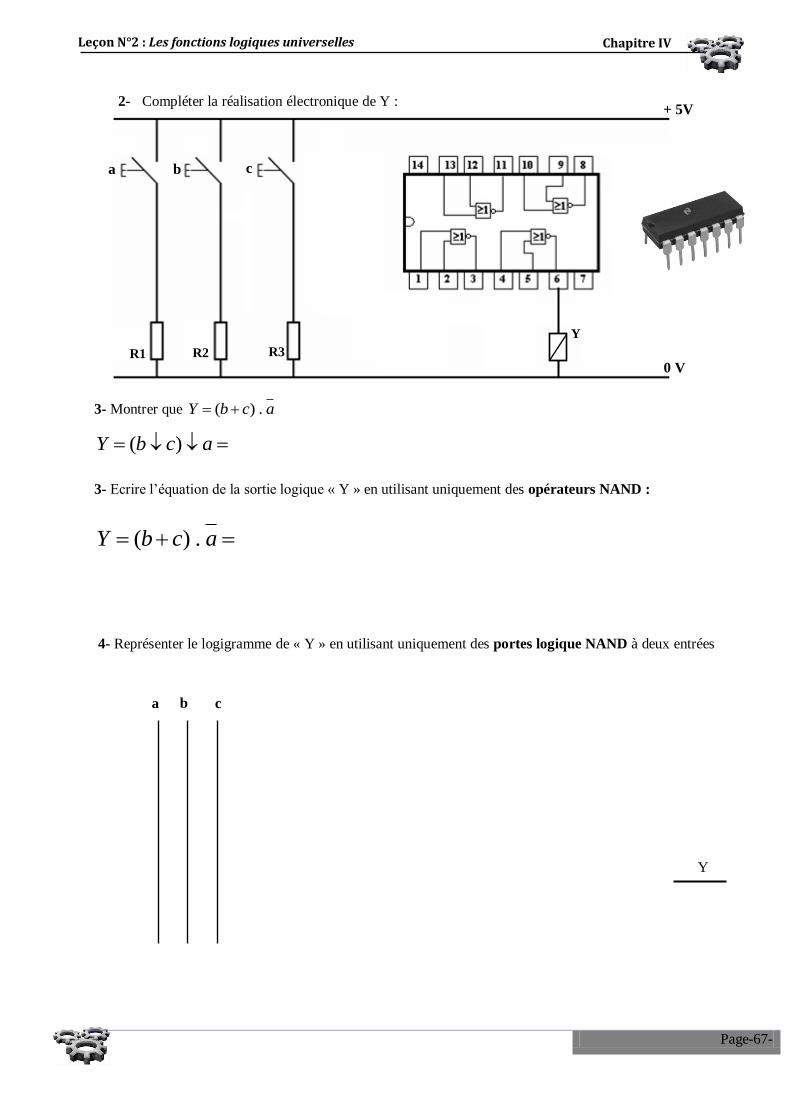
2- Compléter la réalisation électronique de Y :
3- Montrer que ( ) .Y b c a
( )Y b c a
3- Ecrire l’équation de la sortie logique « Y » en utilisant uniquement des opérateurs NAND :
( ) .Y b c a
4- Représenter le logigramme de « Y » en utilisant uniquement des portes logique NAND à deux entrées
+ 5V
a b c
R1 R2 R3
0 V
Y
a b c
Y
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-68-
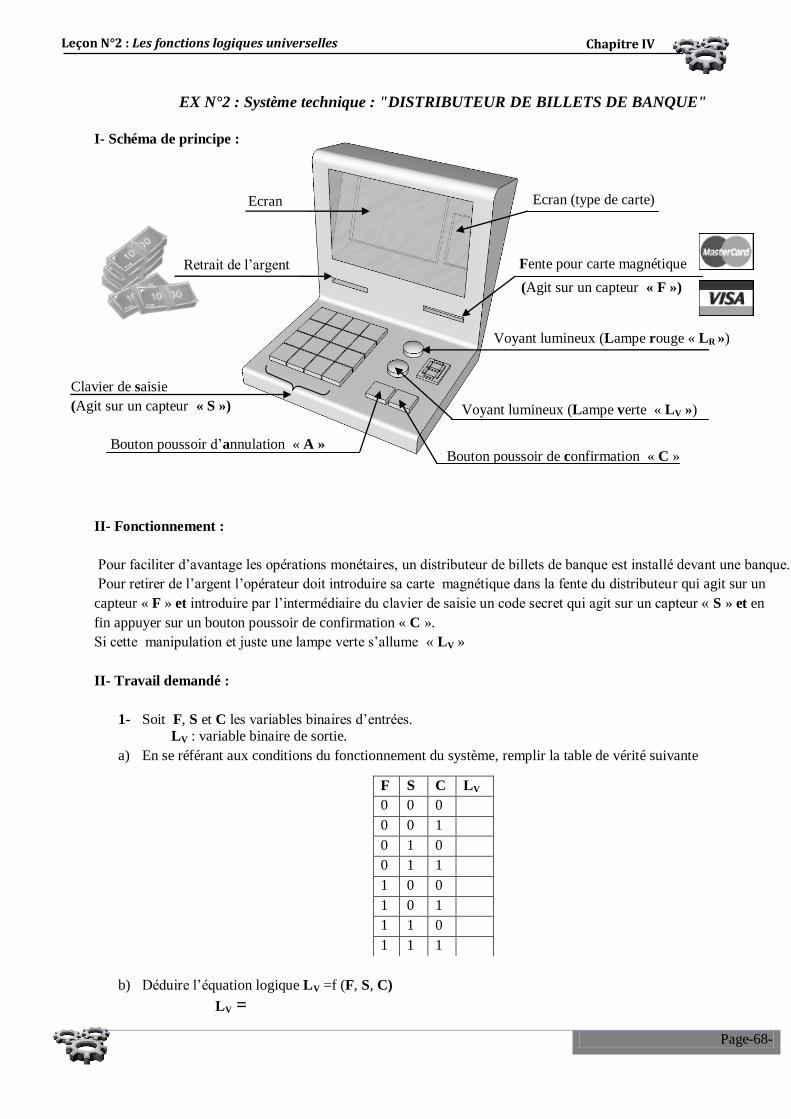
EX N°2 : Système technique : "DISTRIBUTEUR DE BILLETS DE BANQUE"
I- Schéma de principe :
II- Fonctionnement :
Pour faciliter d’avantage les opérations monétaires, un distributeur de billets de banque est installé devant une banque.
Pour retirer de l’argent l’opérateur doit introduire sa carte magnétique dans la fente du distributeur qui agit sur un
capteur « F » et introduire par l’intermédiaire du clavier de saisie un code secret qui agit sur un capteur « S » et en
fin appuyer sur un bouton poussoir de confirmation « C ».
Si cette manipulation et juste une lampe verte s’allume « LV »
II- Travail demandé :
1- Soit F, S et C les variables binaires d’entrées. LV : variable binaire de sortie.
a) En se référant aux conditions du fonctionnement du système, remplir la table de vérité suivante
b) Déduire l’équation logique LV =f (F, S, C)
LV =
F S C LV
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Fente pour carte magnétique
(Agit sur un capteur « F »)
Retrait de l’argent
Ecran Ecran (type de carte)
Voyant lumineux (Lampe rouge « LR »)
Voyant lumineux (Lampe verte « LV »)
Bouton poussoir de confirmation « C » Bouton poussoir d’annulation « A »
Clavier de saisie
(Agit sur un capteur « S »)
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-69-
. ( )RL F S C
( . ) .Lv F S C
. ( )RL F S C
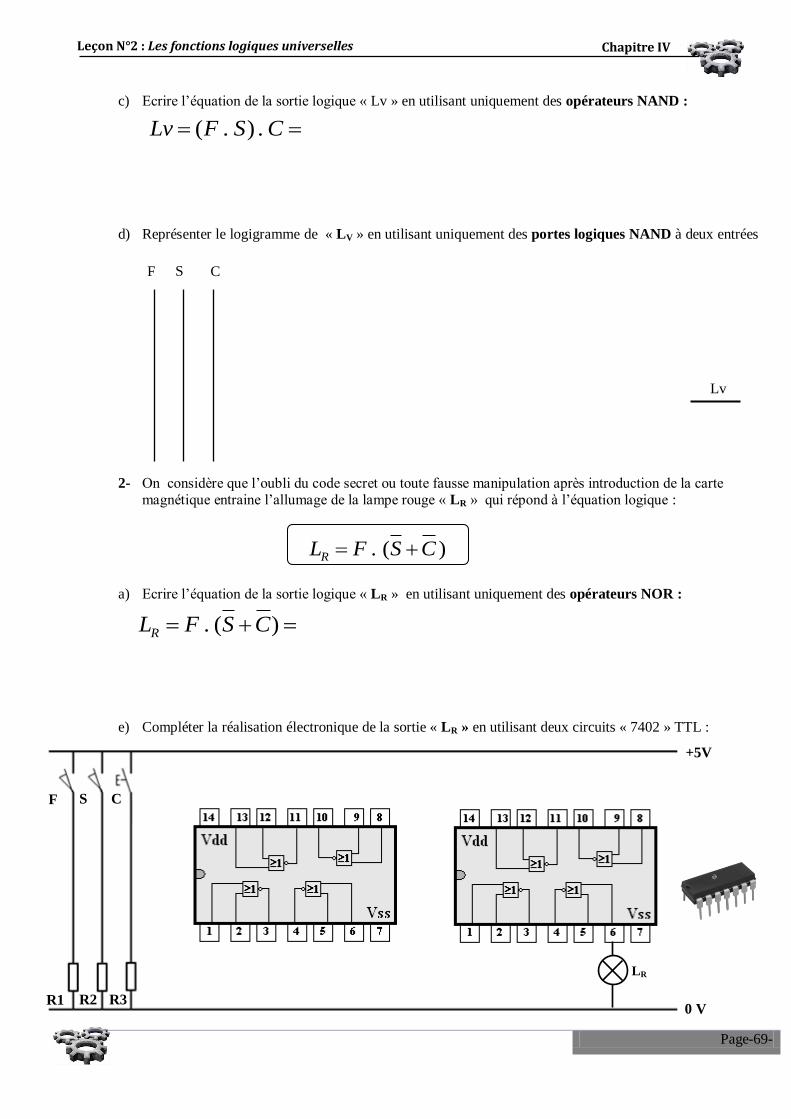
c) Ecrire l’équation de la sortie logique « Lv » en utilisant uniquement des opérateurs NAND :
d) Représenter le logigramme de « LV » en utilisant uniquement des portes logiques NAND à deux entrées
2- On considère que l’oubli du code secret ou toute fausse manipulation après introduction de la carte magnétique entraine l’allumage de la lampe rouge « LR » qui répond à l’équation logique :
a) Ecrire l’équation de la sortie logique « LR » en utilisant uniquement des opérateurs NOR :
e) Compléter la réalisation électronique de la sortie « LR » en utilisant deux circuits « 7402 » TTL :
+5V
0 V
F S C
R1 R3 R2
F S C
Lv
LR
Leçon N°2 : Les fonctions logiques universelles Chapitre IV
Page-70-
Leçon N°3 : La fonction mémoire
I- Mise en situation : (Voir manuel du cours page ………)
1)- Activité de découverte : (Voir manuel d’activité page ………)
2)- Exemple introductif : « Perceuse sensitive »
3)- Mise en évidence de la fonction mémoire :
II- Etude de la fonction mémoire : (Voir manuel du cours page ………...)
1- Généralités : 2- Différents types de mémoires :
III- Activités pratiques : (Voir manuel d’activité page ………..)
IV- Exercices d’application :
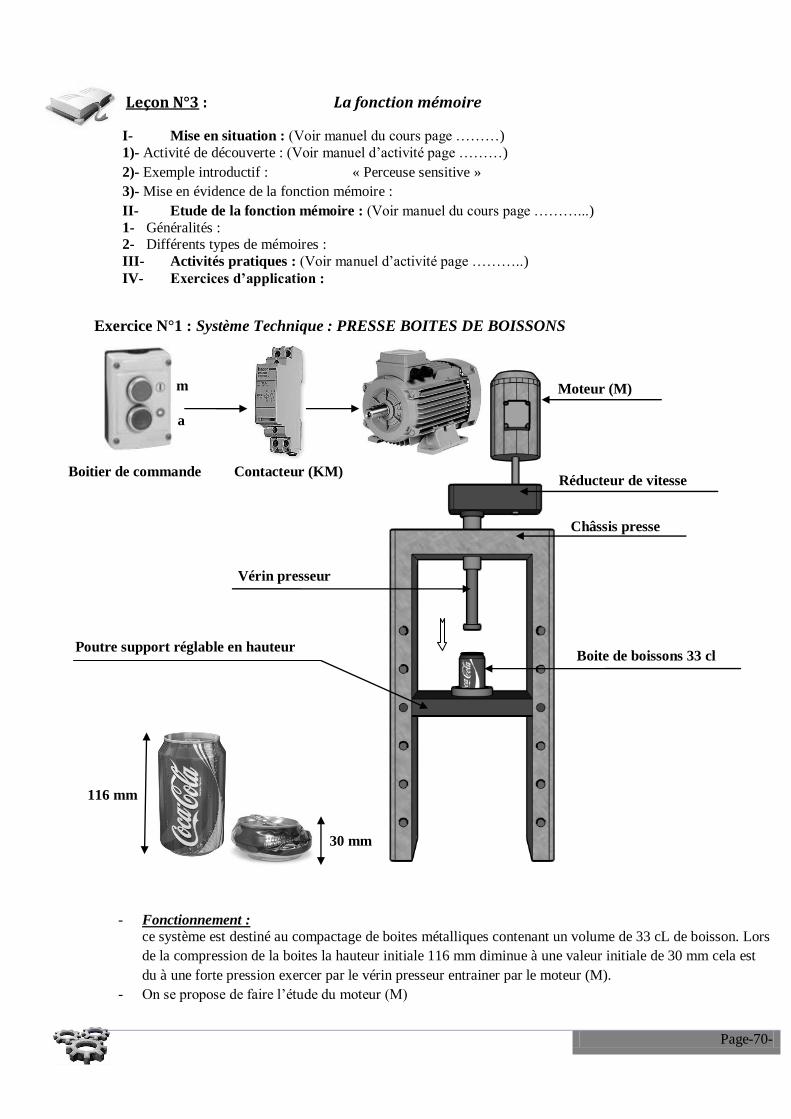
Exercice N°1 : Système Technique : PRESSE BOITES DE BOISSONS
- Fonctionnement : ce système est destiné au compactage de boites métalliques contenant un volume de 33 cL de boisson. Lors
de la compression de la boites la hauteur initiale 116 mm diminue à une valeur initiale de 30 mm cela est
du à une forte pression exercer par le vérin presseur entrainer par le moteur (M).
- On se propose de faire l’étude du moteur (M)
Contacteur (KM) Boitier de commande
Moteur (M)
Réducteur de vitesse
Boite de boissons 33 cl
Vérin presseur
Poutre support réglable en hauteur
Châssis presse
116 mm
m
a
30 mm
Page-71-
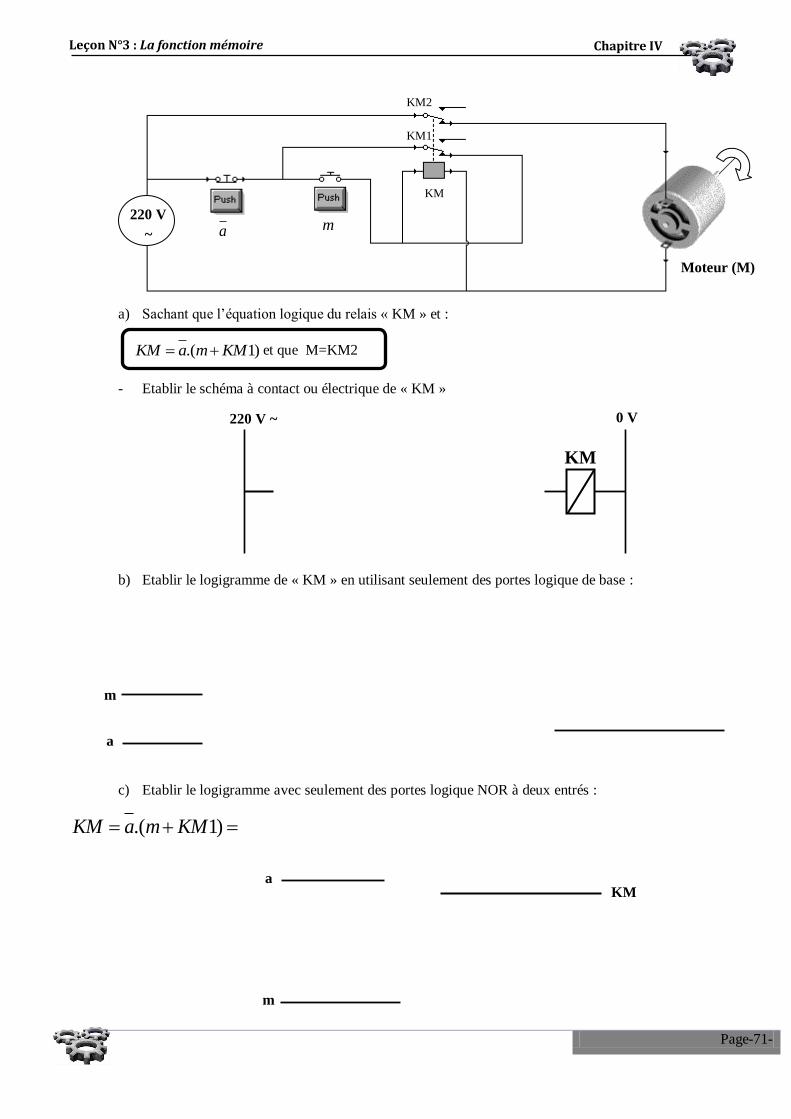
.( 1)KM a m KM
.( 1)KM a m KM
a m
a) Sachant que l’équation logique du relais « KM » et :
et que M=KM2
- Etablir le schéma à contact ou électrique de « KM »
b) Etablir le logigramme de « KM » en utilisant seulement des portes logique de base :
c) Etablir le logigramme avec seulement des portes logique NOR à deux entrés :
KM
m
a
220 V ~ 0 V
a
m
KM
Moteur (M)
KM
KM2
KM1
220 V
~
Leçon N°3 : La fonction mémoire Chapitre IV
Page-72-
.( 1)KM a m KM
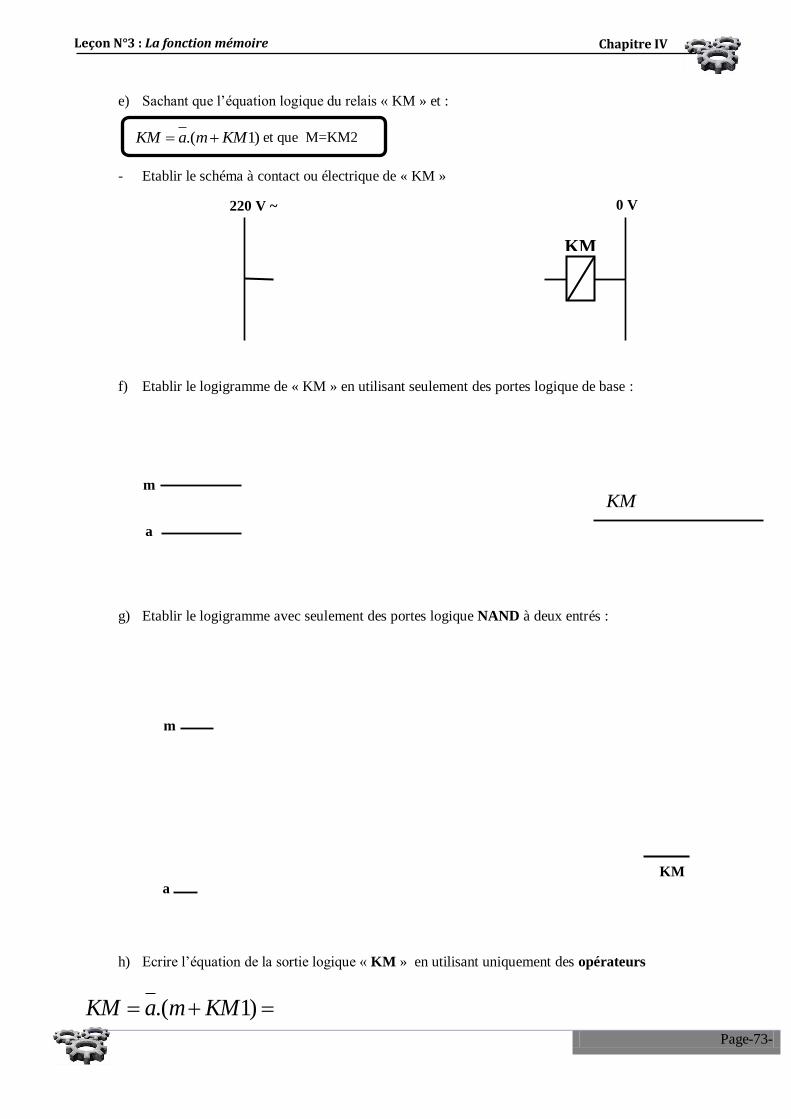
d) Ecrire l’équation de la sortie logique « KM » en utilisant uniquement des opérateurs NAND :
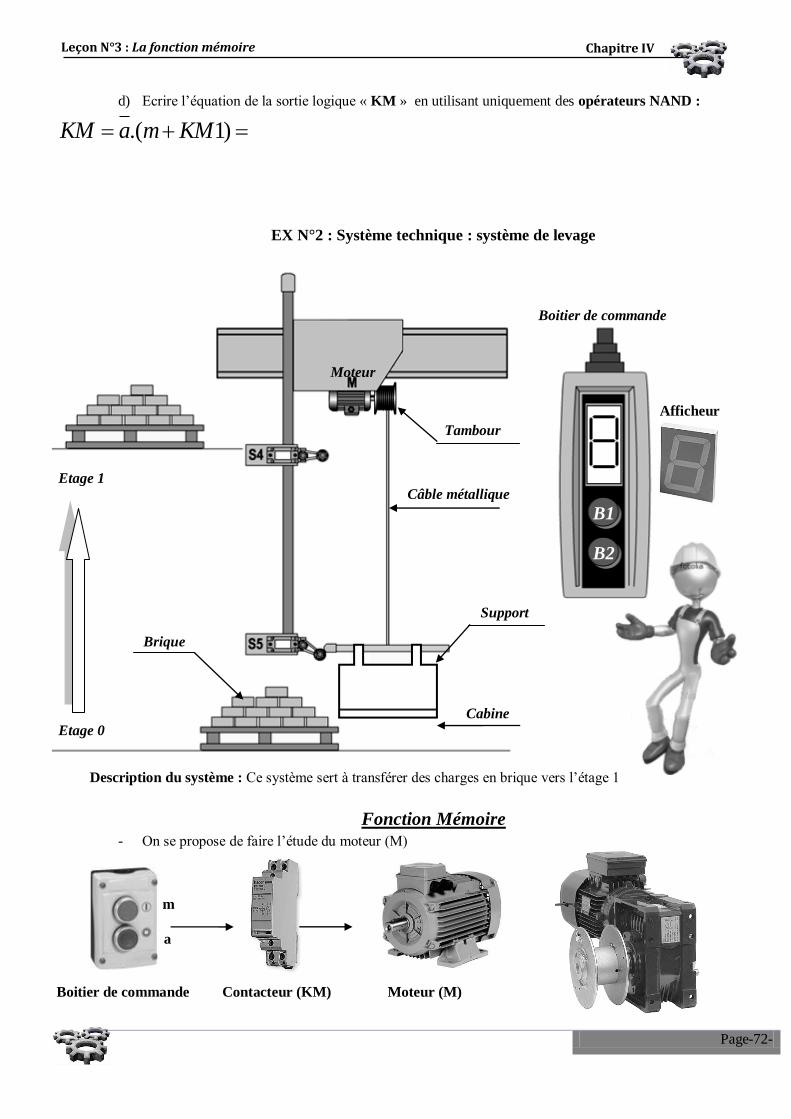
EX N°2 : Système technique : système de levage
Description du système : Ce système sert à transférer des charges en brique vers l’étage 1
Fonction Mémoire
- On se propose de faire l’étude du moteur (M)
B1
B2
Boitier de commande
Brique
Etage 0
Etage 1
Afficheur
Câble métallique
Support
Tambour
Moteur
Cabine
m
a
Contacteur (KM) Boitier de commande Moteur (M)
Leçon N°3 : La fonction mémoire Chapitre IV
Page-73-
.( 1)KM a m KM
KM
.( 1)KM a m KM
e) Sachant que l’équation logique du relais « KM » et :
et que M=KM2
- Etablir le schéma à contact ou électrique de « KM »
f) Etablir le logigramme de « KM » en utilisant seulement des portes logique de base :
g) Etablir le logigramme avec seulement des portes logique NAND à deux entrés :
h) Ecrire l’équation de la sortie logique « KM » en utilisant uniquement des opérateurs
KM
m
a
220 V ~ 0 V
m
a
KM
Leçon N°3 : La fonction mémoire Chapitre IV
Page-74-
CHAPITRE V(5)
ETUDES DES SOLUTIONS CONSTRUCTIVES
Leçon : Les solutions constructives
Objectif :
A partir d’un système technique ou d’un sous-système ou d’un mécanisme accompagné de son dossier
technique :
- Identifier les composants d’un mécanisme sur matériel ou dossier.
- Identifier les mobilités relatives aux composants d’un mécanisme.
- Identifier les composants technologiques dans une liaison. - Compléter la représentation d’un dessin d’ensemble d’un mécanisme
- Exploiter l’outil informatique.
I- Activité de découverte :
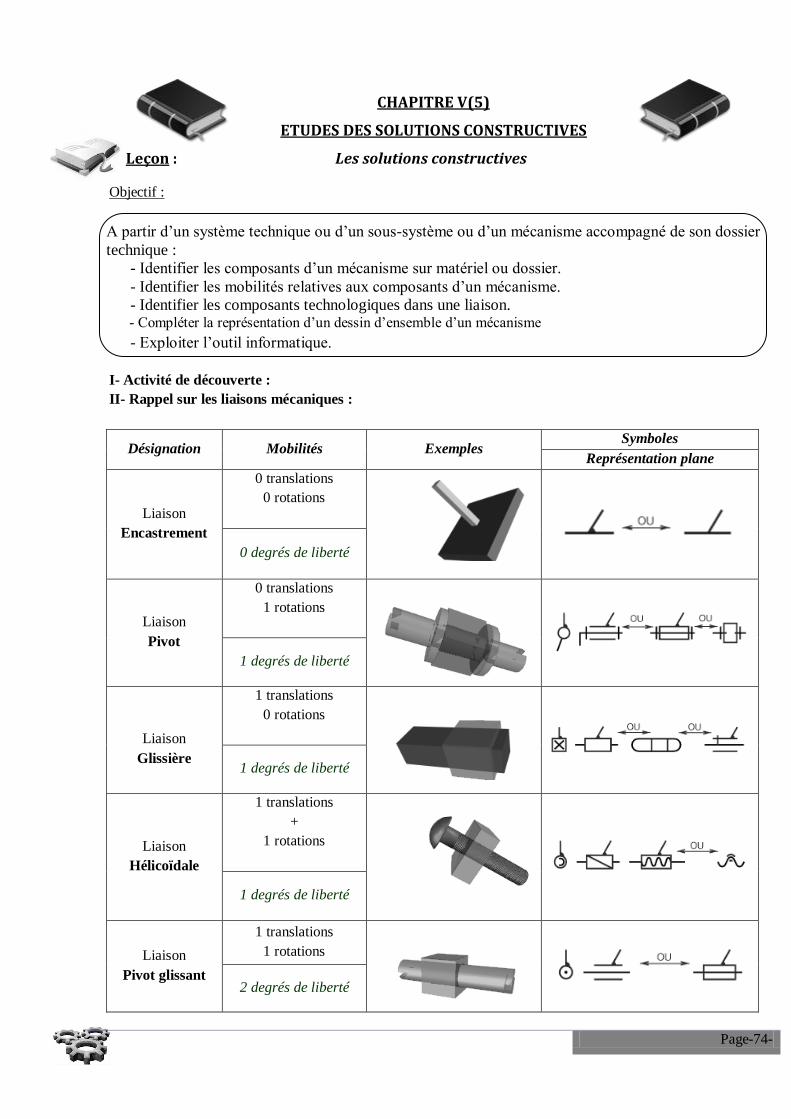
II- Rappel sur les liaisons mécaniques :
Désignation Mobilités Exemples Symboles
Représentation plane
Liaison
Encastrement
0 translations
0 rotations
0 degrés de liberté
Liaison
Pivot
0 translations
1 rotations
1 degrés de liberté
Liaison
Glissière
1 translations
0 rotations
1 degrés de liberté
Liaison
Hélicoïdale
1 translations
+
1 rotations
1 degrés de liberté
Liaison
Pivot glissant
1 translations
1 rotations
2 degrés de liberté
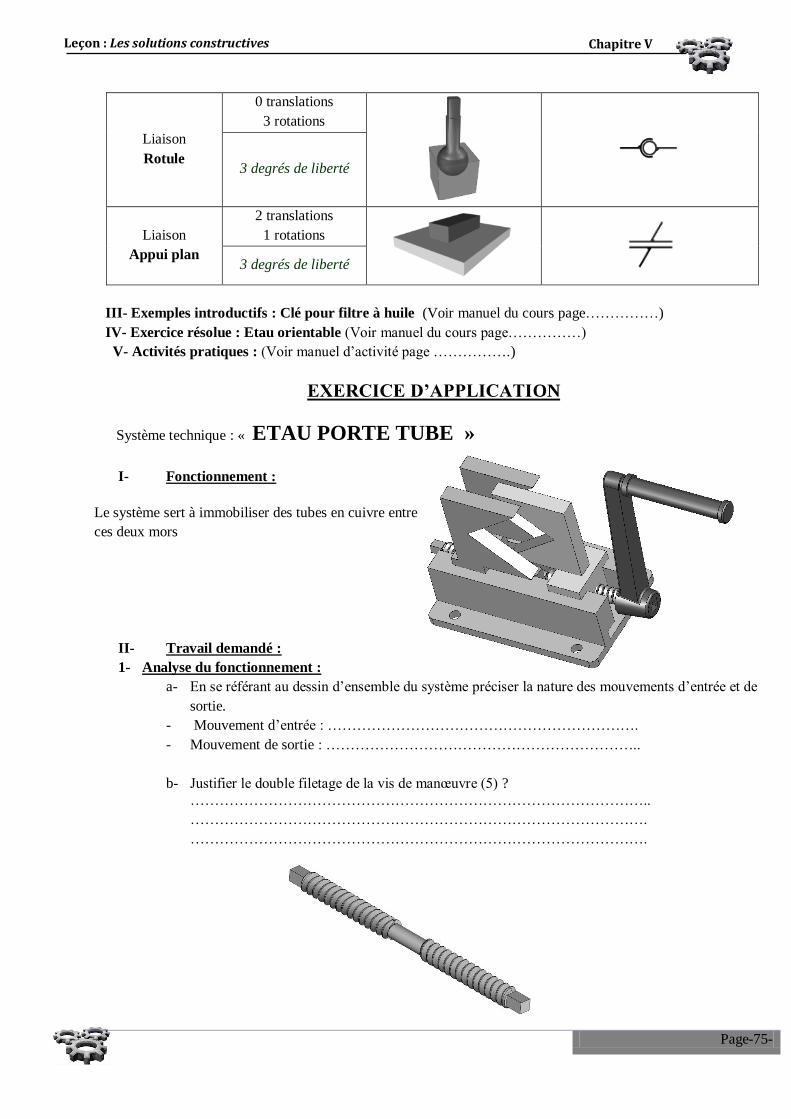
Page-75-
Liaison
Rotule
0 translations
3 rotations
3 degrés de liberté
Liaison
Appui plan
2 translations
1 rotations
3 degrés de liberté
III- Exemples introductifs : Clé pour filtre à huile (Voir manuel du cours page……………)
IV- Exercice résolue : Etau orientable (Voir manuel du cours page……………)
V- Activités pratiques : (Voir manuel d’activité page …………….)
EXERCICE D’APPLICATION
Système technique : « ETAU PORTE TUBE »
I- Fonctionnement :
Le système sert à immobiliser des tubes en cuivre entre
ces deux mors
II- Travail demandé :
1- Analyse du fonctionnement :
a- En se référant au dessin d’ensemble du système préciser la nature des mouvements d’entrée et de
sortie.
- Mouvement d’entrée : ……………………………………………………….
- Mouvement de sortie : ………………………………………………………..
b- Justifier le double filetage de la vis de manœuvre (5) ?
…………………………………………………………………………………..
………………………………………………………………………………….
………………………………………………………………………………….
Leçon : Les solutions constructives Chapitre V
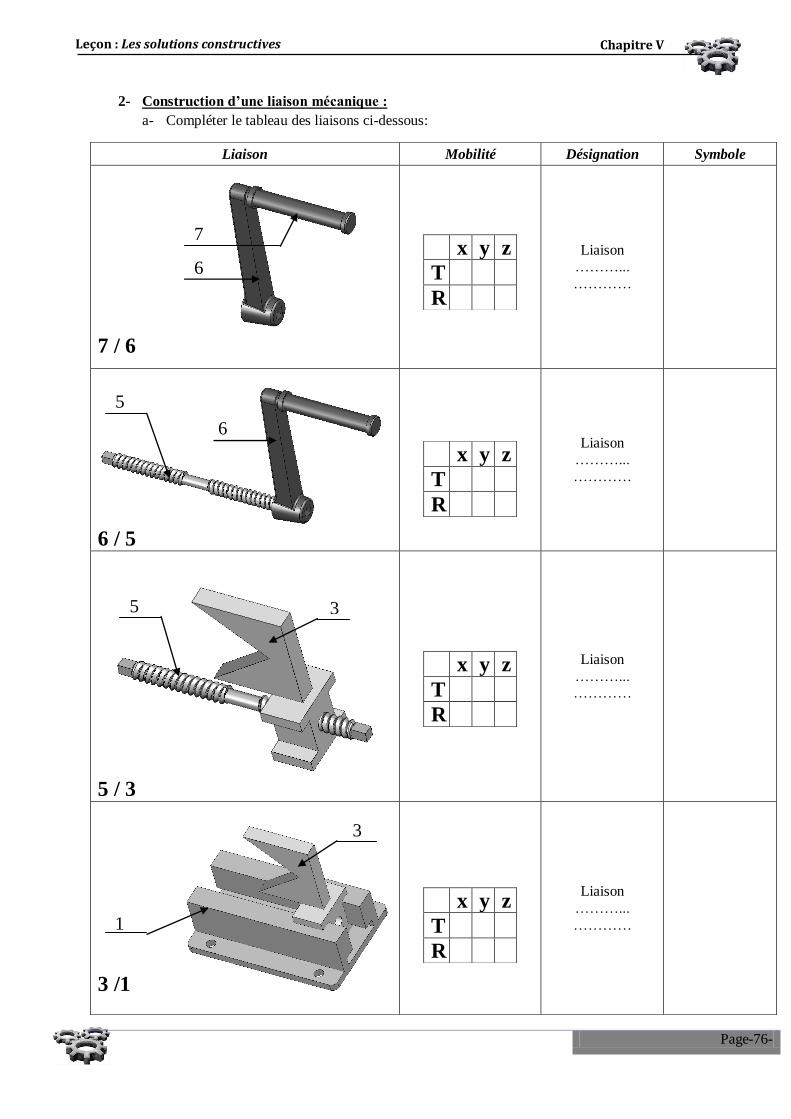
Page-76-
2- Construction d’une liaison mécanique :
a- Compléter le tableau des liaisons ci-dessous:
Liaison Mobilité Désignation Symbole
7 / 6
x y z
T
R
Liaison ………...
…………
6 / 5
x y z
T
R
Liaison ………...
…………
5 / 3
x y z
T
R
Liaison
………... …………
3 /1
x y z
T
R
Liaison
………...
…………
7
6
5
6
3 5
3
1
3
Leçon : Les solutions constructives Chapitre V
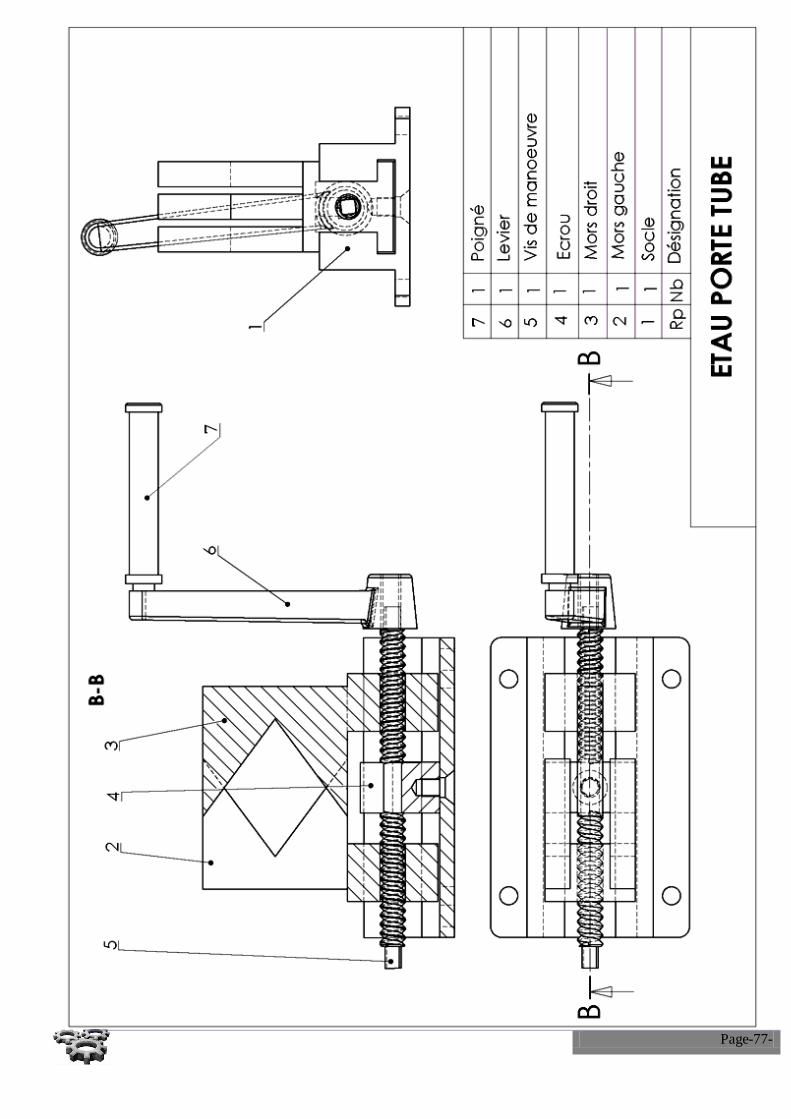
Page-77-
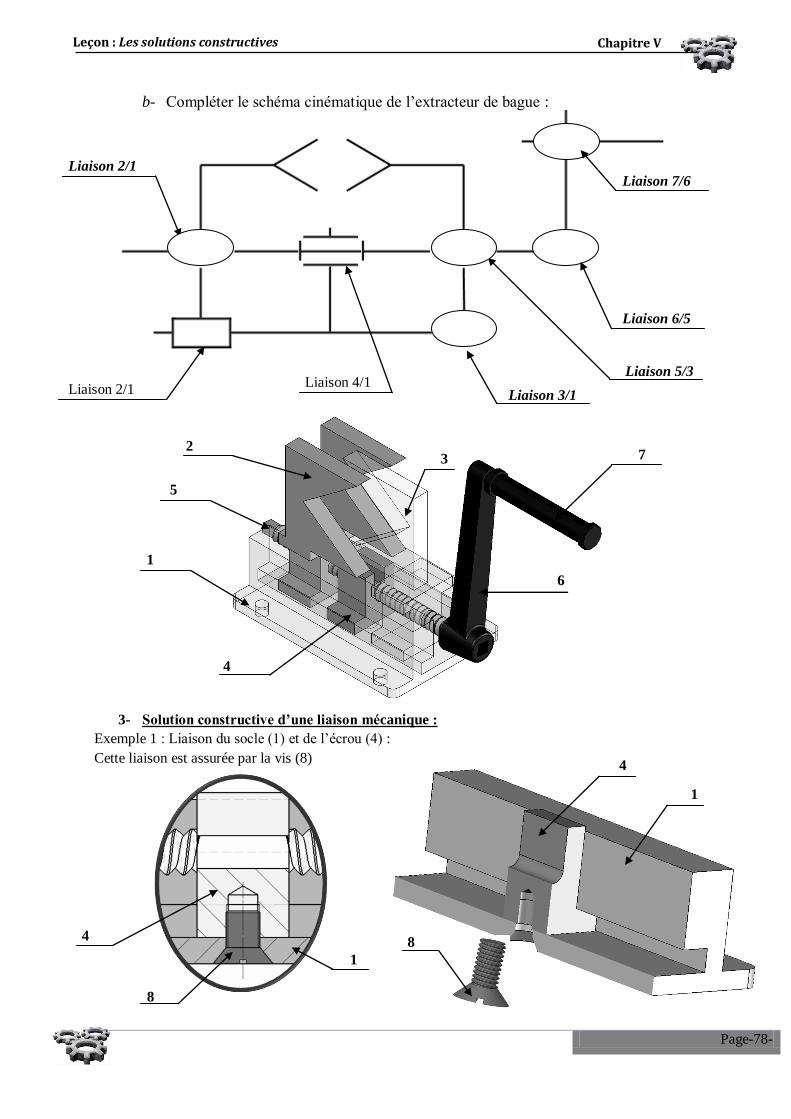
Page-78-
b- Compléter le schéma cinématique de l’extracteur de bague :
3- Solution constructive d’une liaison mécanique :
Exemple 1 : Liaison du socle (1) et de l’écrou (4) :
Cette liaison est assurée par la vis (8)
Liaison 3/1
Liaison 5/3
Liaison 2/1
Liaison 6/5
Liaison 7/6 Liaison 2/1
Liaison 4/1
4
1
5
2 3
6
7
4
1
4
8
1
8
Leçon : Les solutions constructives Chapitre V
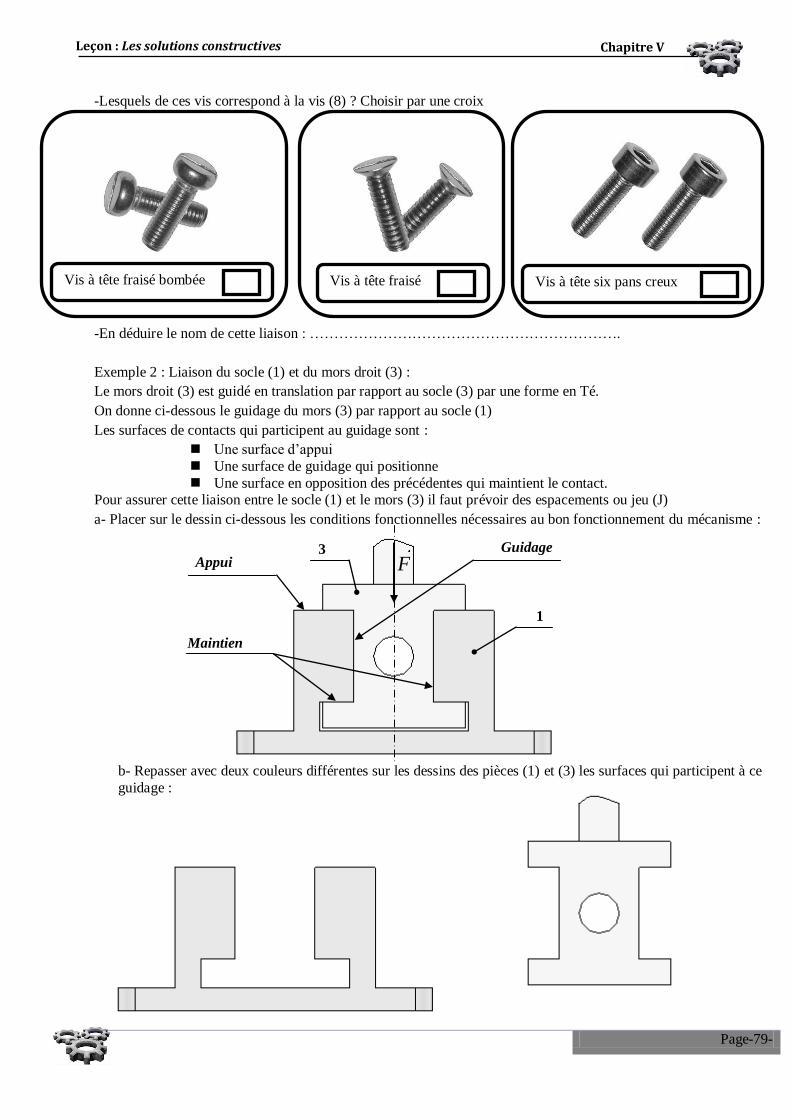
Page-79-
F
-Lesquels de ces vis correspond à la vis (8) ? Choisir par une croix
-En déduire le nom de cette liaison : ……………………………………………………….
Exemple 2 : Liaison du socle (1) et du mors droit (3) :
Le mors droit (3) est guidé en translation par rapport au socle (3) par une forme en Té.
On donne ci-dessous le guidage du mors (3) par rapport au socle (1)
Les surfaces de contacts qui participent au guidage sont :
Une surface d’appui
Une surface de guidage qui positionne
Une surface en opposition des précédentes qui maintient le contact. Pour assurer cette liaison entre le socle (1) et le mors (3) il faut prévoir des espacements ou jeu (J)
a- Placer sur le dessin ci-dessous les conditions fonctionnelles nécessaires au bon fonctionnement du mécanisme :
b- Repasser avec deux couleurs différentes sur les dessins des pièces (1) et (3) les surfaces qui participent à ce
guidage :
Vis à tête fraisé bombée Vis à tête fraisé Vis à tête six pans creux
3
1
Maintien
Guidage Appui
Leçon : Les solutions constructives Chapitre V
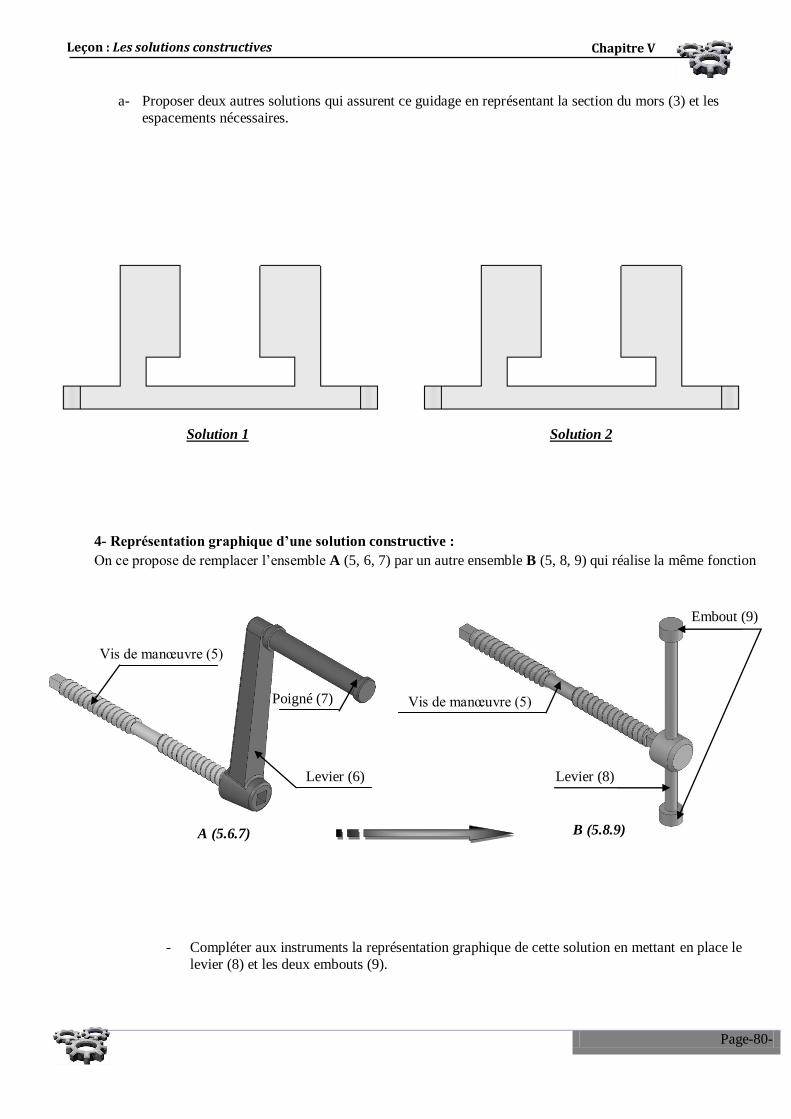
Page-80-
a- Proposer deux autres solutions qui assurent ce guidage en représentant la section du mors (3) et les
espacements nécessaires.
4- Représentation graphique d’une solution constructive :
On ce propose de remplacer l’ensemble A (5, 6, 7) par un autre ensemble B (5, 8, 9) qui réalise la même fonction
- Compléter aux instruments la représentation graphique de cette solution en mettant en place le
levier (8) et les deux embouts (9).
Solution 1 Solution 2
Embout (9)
Levier (8)
Vis de manœuvre (5)
A (5.6.7) B (5.8.9)
Vis de manœuvre (5)
Poigné (7)
Levier (6)
Leçon : Les solutions constructives Chapitre V
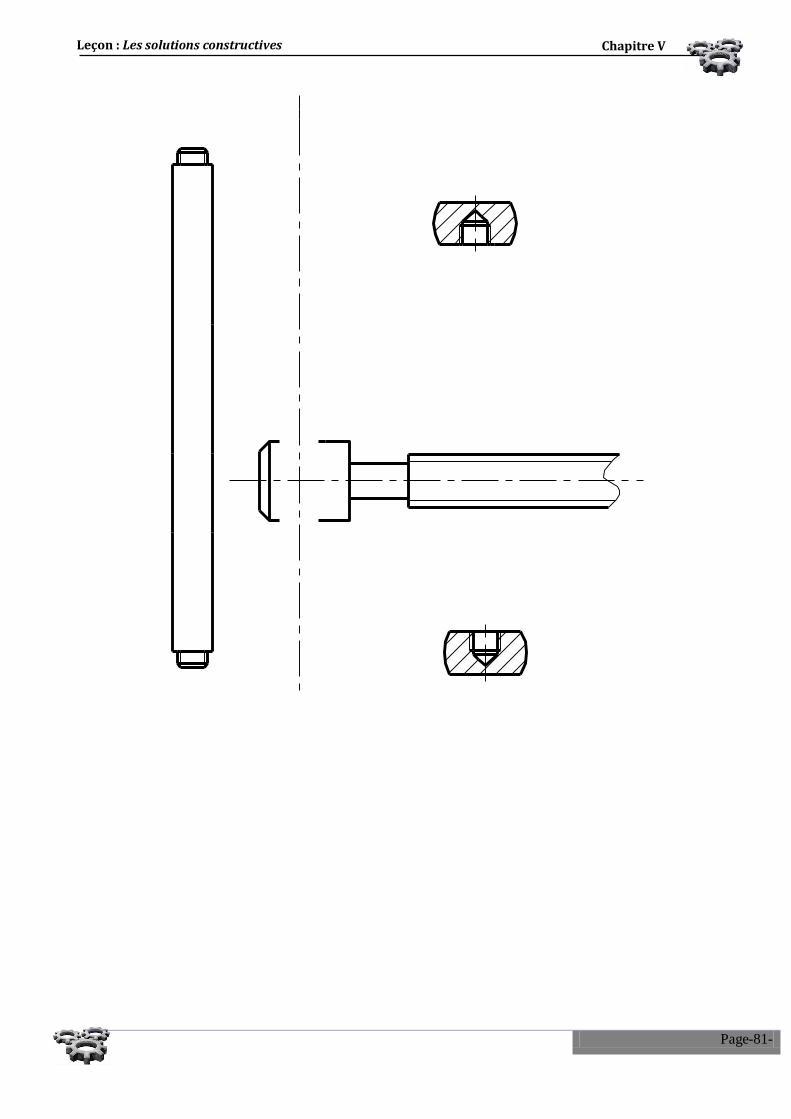
Page-81-
Leçon : Les solutions constructives Chapitre V
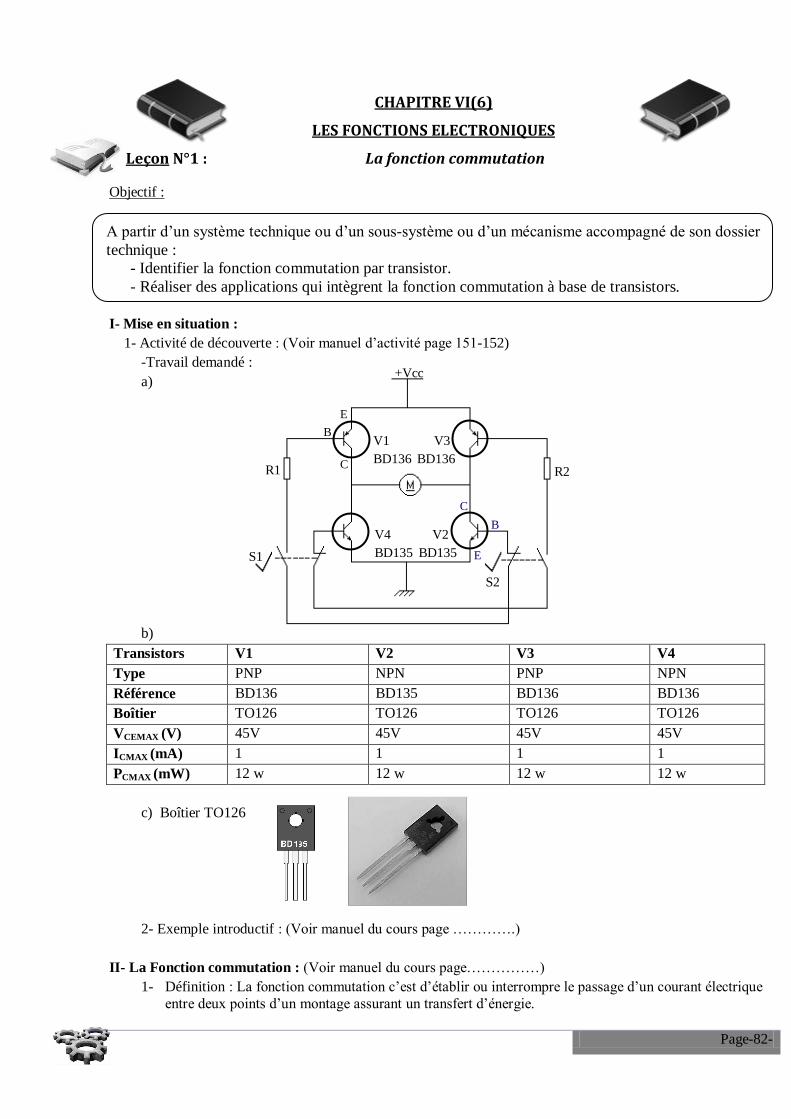
Page-82-
CHAPITRE VI(6)
LES FONCTIONS ELECTRONIQUES
Leçon N°1 : La fonction commutation
Objectif :
A partir d’un système technique ou d’un sous-système ou d’un mécanisme accompagné de son dossier
technique :
- Identifier la fonction commutation par transistor.
- Réaliser des applications qui intègrent la fonction commutation à base de transistors.
I- Mise en situation :
1- Activité de découverte : (Voir manuel d’activité page 151-152)
-Travail demandé :
a)
b)
Transistors V1 V2 V3 V4
Type PNP NPN PNP NPN
Référence BD136 BD135 BD136 BD136
Boîtier TO126 TO126 TO126 TO126
VCEMAX (V) 45V 45V 45V 45V
ICMAX (mA) 1 1 1 1
PCMAX (mW) 12 w 12 w 12 w 12 w
c) Boîtier TO126
2- Exemple introductif : (Voir manuel du cours page ………….)
II- La Fonction commutation : (Voir manuel du cours page……………)
1- Définition : La fonction commutation c’est d’établir ou interrompre le passage d’un courant électrique
entre deux points d’un montage assurant un transfert d’énergie.
+Vcc
V3
BD136
V1
BD136
V2
BD135
V4
BD135
R2 R1
S1
S2
B
E
C
B
E
C
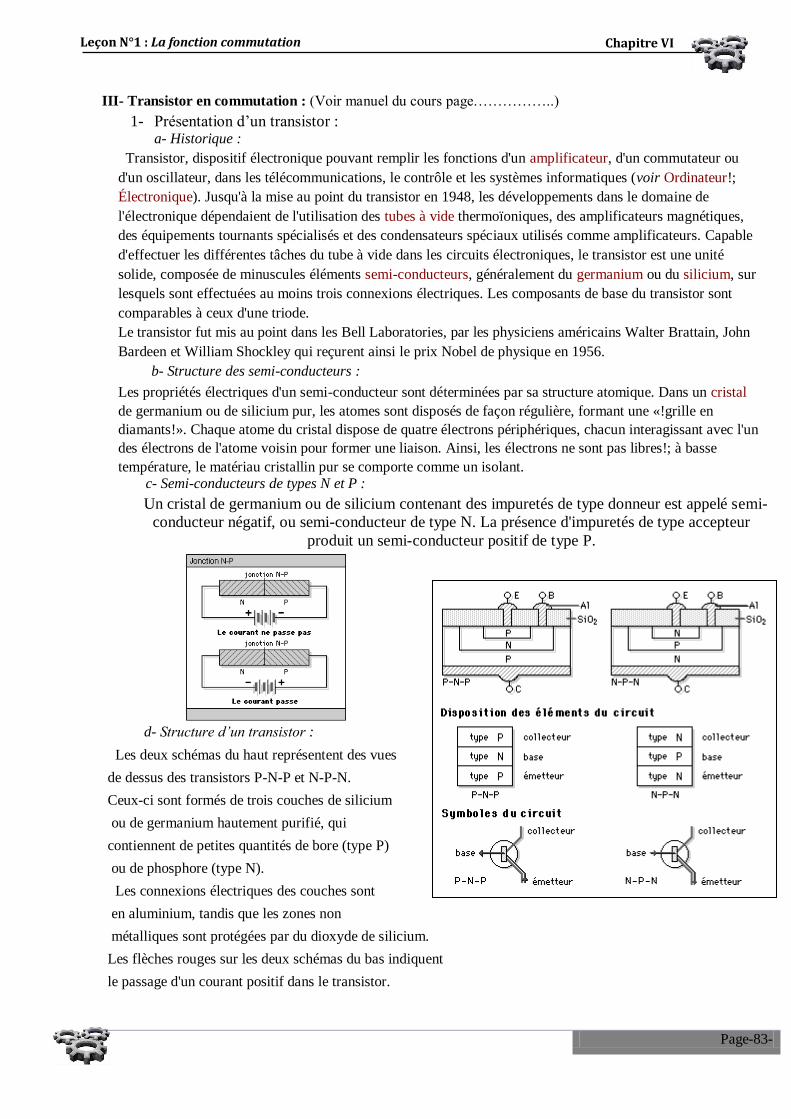
Page-83-
III- Transistor en commutation : (Voir manuel du cours page……………..)
1- Présentation d’un transistor : a- Historique :
Transistor, dispositif électronique pouvant remplir les fonctions d'un amplificateur, d'un commutateur ou
d'un oscillateur, dans les télécommunications, le contrôle et les systèmes informatiques (voir Ordinateur!;
Électronique). Jusqu'à la mise au point du transistor en 1948, les développements dans le domaine de
l'électronique dépendaient de l'utilisation des tubes à vide thermoïoniques, des amplificateurs magnétiques,
des équipements tournants spécialisés et des condensateurs spéciaux utilisés comme amplificateurs. Capable
d'effectuer les différentes tâches du tube à vide dans les circuits électroniques, le transistor est une unité
solide, composée de minuscules éléments semi-conducteurs, généralement du germanium ou du silicium, sur
lesquels sont effectuées au moins trois connexions électriques. Les composants de base du transistor sont
comparables à ceux d'une triode.
Le transistor fut mis au point dans les Bell Laboratories, par les physiciens américains Walter Brattain, John
Bardeen et William Shockley qui reçurent ainsi le prix Nobel de physique en 1956.
b- Structure des semi-conducteurs :
Les propriétés électriques d'un semi-conducteur sont déterminées par sa structure atomique. Dans un cristal
de germanium ou de silicium pur, les atomes sont disposés de façon régulière, formant une «!grille en
diamants!». Chaque atome du cristal dispose de quatre électrons périphériques, chacun interagissant avec l'un
des électrons de l'atome voisin pour former une liaison. Ainsi, les électrons ne sont pas libres!; à basse
température, le matériau cristallin pur se comporte comme un isolant. c- Semi-conducteurs de types N et P :
Un cristal de germanium ou de silicium contenant des impuretés de type donneur est appelé semi-
conducteur négatif, ou semi-conducteur de type N. La présence d'impuretés de type accepteur
produit un semi-conducteur positif de type P.
d- Structure d’un transistor :
Les deux schémas du haut représentent des vues
de dessus des transistors P-N-P et N-P-N.
Ceux-ci sont formés de trois couches de silicium
ou de germanium hautement purifié, qui
contiennent de petites quantités de bore (type P)
ou de phosphore (type N).
Les connexions électriques des couches sont
en aluminium, tandis que les zones non
métalliques sont protégées par du dioxyde de silicium.
Les flèches rouges sur les deux schémas du bas indiquent
le passage d'un courant positif dans le transistor.
Leçon N°1 : La fonction commutation Chapitre VI
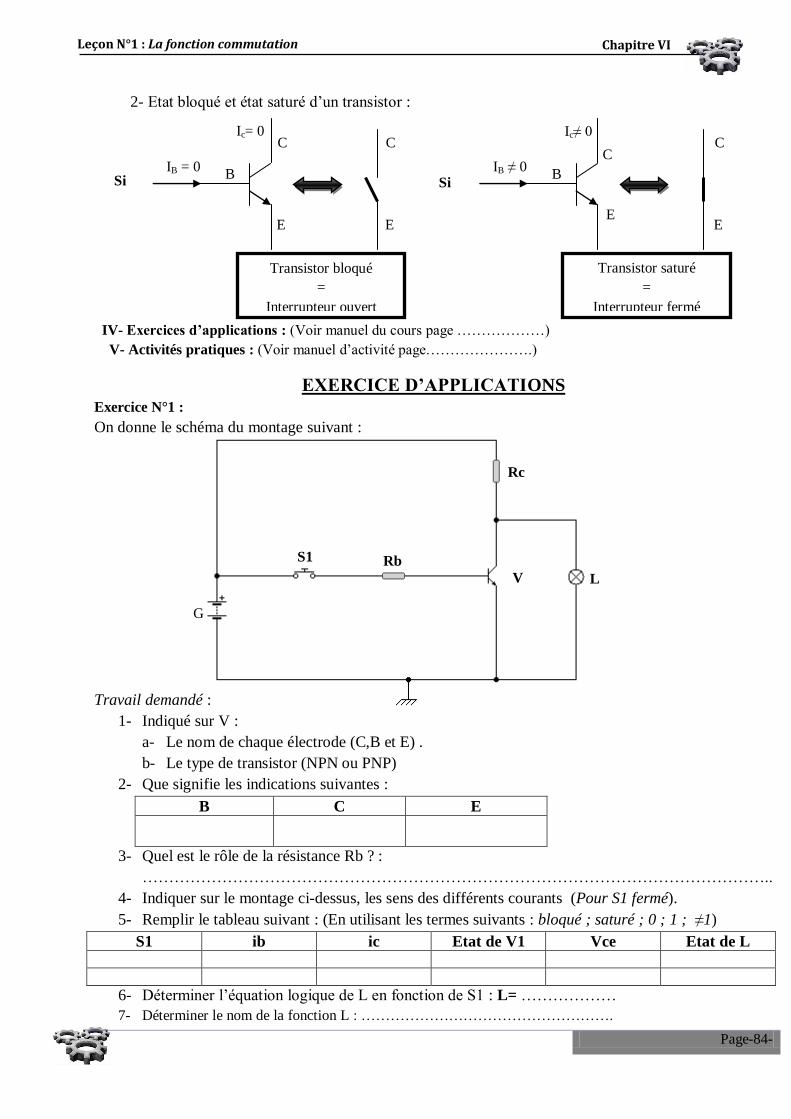
Page-84-
2- Etat bloqué et état saturé d’un transistor :
IV- Exercices d’applications : (Voir manuel du cours page ………………)
V- Activités pratiques : (Voir manuel d’activité page………………….)
EXERCICE D’APPLICATIONS
Exercice N°1 :
On donne le schéma du montage suivant :
Travail demandé :
1- Indiqué sur V :
a- Le nom de chaque électrode (C,B et E) .
b- Le type de transistor (NPN ou PNP)
2- Que signifie les indications suivantes :
B C E
3- Quel est le rôle de la résistance Rb ? :
………………………………………………………………………………………………………..
4- Indiquer sur le montage ci-dessus, les sens des différents courants (Pour S1 fermé).
5- Remplir le tableau suivant : (En utilisant les termes suivants : bloqué ; saturé ; 0 ; 1 ; ≠1)
S1 ib ic Etat de V1 Vce Etat de L
6- Déterminer l’équation logique de L en fonction de S1 : L= ………………
7- Déterminer le nom de la fonction L : …………………………………………….
IB = 0
Ic= 0 C
B
E
IB ≠ 0
Ic≠ 0
C
B
E
Transistor bloqué
=
Interrupteur ouvert
Transistor saturé
=
Interrupteur fermé
C
E
C
E
G
S1 Rb
Rc
L V
Si Si
Leçon N°1 : La fonction commutation Chapitre VI
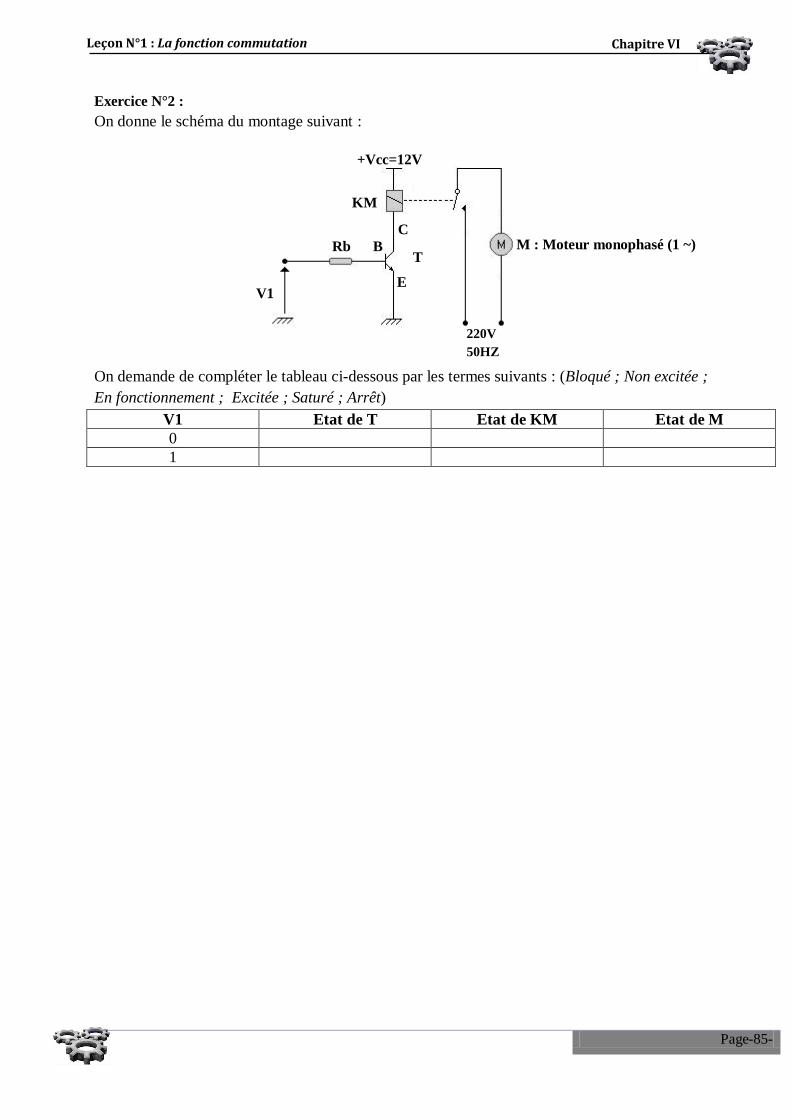
Page-85-
Exercice N°2 :
On donne le schéma du montage suivant :
On demande de compléter le tableau ci-dessous par les termes suivants : (Bloqué ; Non excitée ;
En fonctionnement ; Excitée ; Saturé ; Arrêt)
V1 Etat de T Etat de KM Etat de M
0
1
Rb
KM
T B
C
E V1
220V
50HZ
M : Moteur monophasé (1 ~)
+Vcc=12V
Leçon N°1 : La fonction commutation Chapitre VI
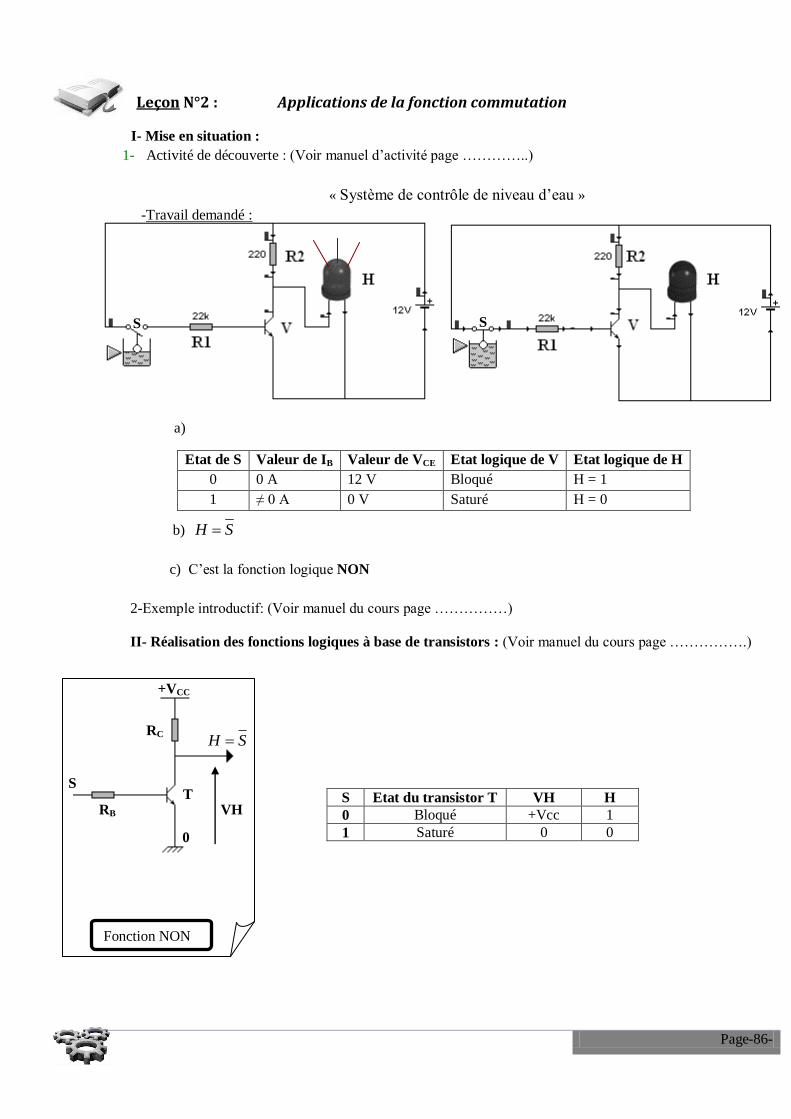
Page-86-
S
RC
RB
T
+VCC
0
H S
Leçon N°2 : Applications de la fonction commutation
I- Mise en situation :
1- Activité de découverte : (Voir manuel d’activité page …………..)
« Système de contrôle de niveau d’eau »
-Travail demandé :
a)
b) H S
c) C’est la fonction logique NON
2-Exemple introductif: (Voir manuel du cours page ……………)
II- Réalisation des fonctions logiques à base de transistors : (Voir manuel du cours page …………….)
S Etat du transistor T VH H
0 Bloqué +Vcc 1
1 Saturé 0 0
Etat de S Valeur de IB Valeur de VCE Etat logique de V Etat logique de H
0 0 A 12 V Bloqué H = 1
1 ≠ 0 A 0 V Saturé H = 0
S S
VH
Fonction NON
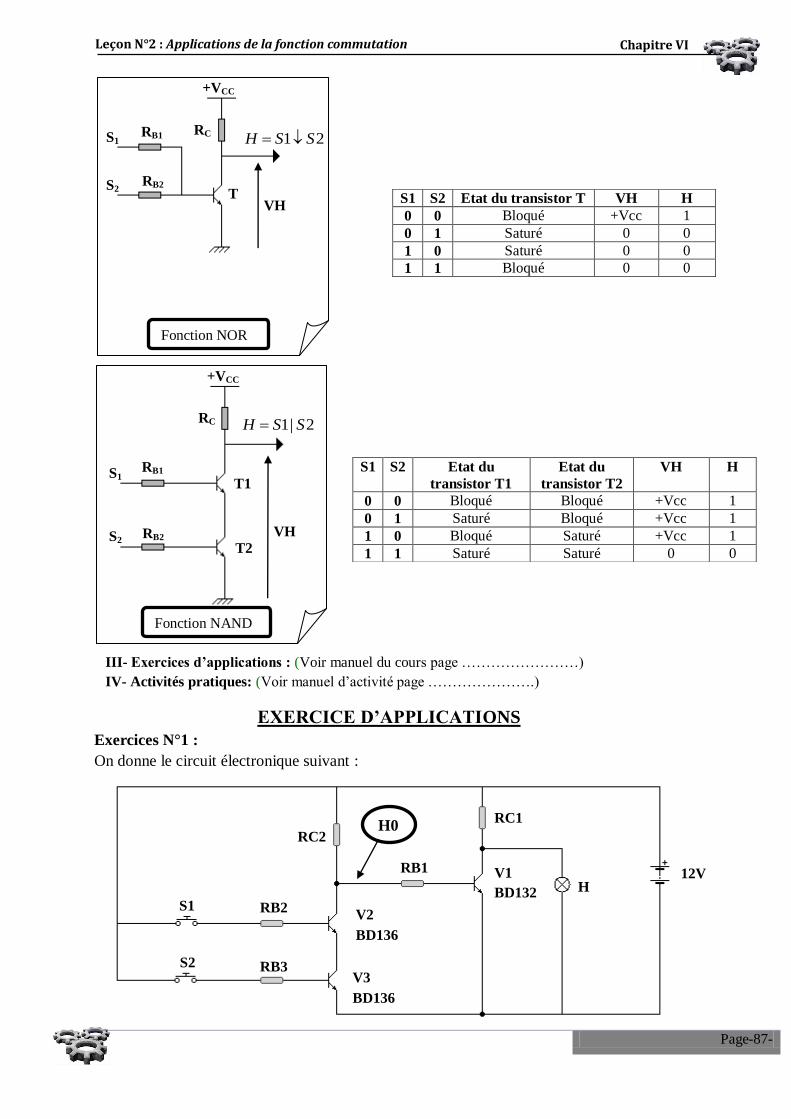
Page-87-
III- Exercices d’applications : (Voir manuel du cours page ……………………)
IV- Activités pratiques: (Voir manuel d’activité page ………………….)
EXERCICE D’APPLICATIONS
Exercices N°1 :
On donne le circuit électronique suivant :
S1 S2 Etat du transistor T VH H
0 0 Bloqué +Vcc 1
0 1 Saturé 0 0
1 0 Saturé 0 0
1 1 Bloqué 0 0
S1 S2 Etat du
transistor T1
Etat du
transistor T2
VH H
0 0 Bloqué Bloqué +Vcc 1
0 1 Saturé Bloqué +Vcc 1
1 0 Bloqué Saturé +Vcc 1
1 1 Saturé Saturé 0 0
T
RC
+VCC
RB1
RB2
S1
S2
1 2H S S
Fonction NOR
VH
RB1
RB2
T1
T2
S1
S2
RC
+VCC
1| 2H S S
Fonction NAND
VH
S1
S2
RB2
RB3
RC2
RB1
RC1
V2
BD136
V3
BD136
V1
BD132 H 12V
H0
Leçon N°2 : Applications de la fonction commutation Chapitre VI
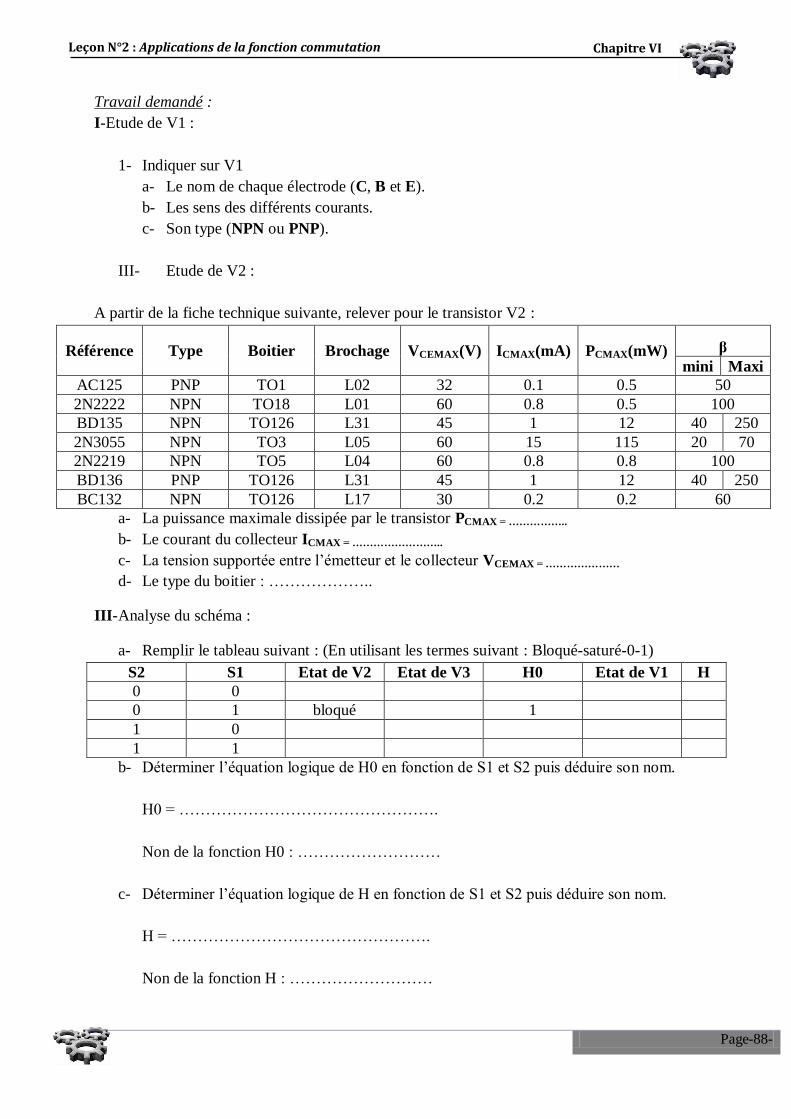
Page-88-
Travail demandé :
I-Etude de V1 :
1- Indiquer sur V1
a- Le nom de chaque électrode (C, B et E).
b- Les sens des différents courants.
c- Son type (NPN ou PNP).
III- Etude de V2 :
A partir de la fiche technique suivante, relever pour le transistor V2 :
Référence Type Boitier Brochage VCEMAX(V) ICMAX(mA) PCMAX(mW) ᵦ mini Maxi
AC125 PNP TO1 L02 32 0.1 0.5 50
2N2222 NPN TO18 L01 60 0.8 0.5 100
BD135 NPN TO126 L31 45 1 12 40 250
2N3055 NPN TO3 L05 60 15 115 20 70
2N2219 NPN TO5 L04 60 0.8 0.8 100
BD136 PNP TO126 L31 45 1 12 40 250
BC132 NPN TO126 L17 30 0.2 0.2 60
a- La puissance maximale dissipée par le transistor PCMAX = ……………..
b- Le courant du collecteur ICMAX = ……………………..
c- La tension supportée entre l’émetteur et le collecteur VCEMAX = …………………
d- Le type du boitier : ………………..
III-Analyse du schéma :
a- Remplir le tableau suivant : (En utilisant les termes suivant : Bloqué-saturé-0-1)
S2 S1 Etat de V2 Etat de V3 H0 Etat de V1 H
0 0
0 1 bloqué 1
1 0
1 1
b- Déterminer l’équation logique de H0 en fonction de S1 et S2 puis déduire son nom.
H0 = ………………………………………….
Non de la fonction H0 : ………………………
c- Déterminer l’équation logique de H en fonction de S1 et S2 puis déduire son nom.
H = ………………………………………….
Non de la fonction H : ………………………
Leçon N°2 : Applications de la fonction commutation Chapitre VI
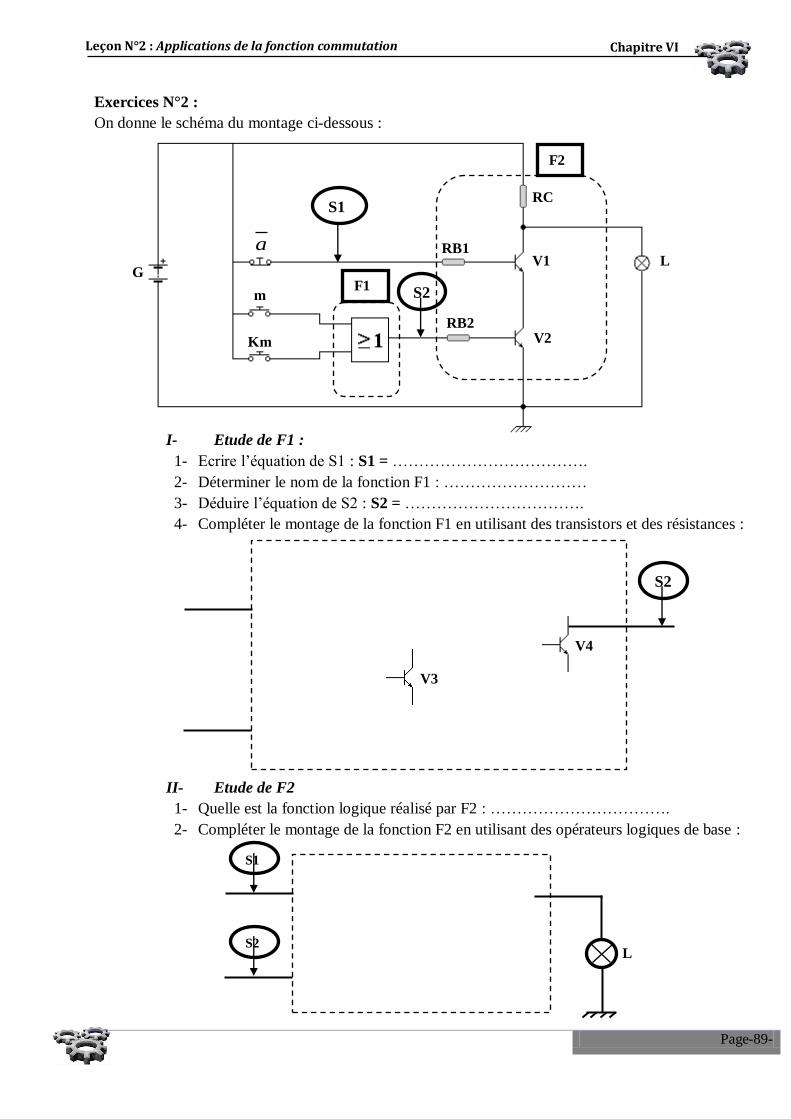
Page-89-
a
Exercices N°2 :
On donne le schéma du montage ci-dessous :
I- Etude de F1 :
1- Ecrire l’équation de S1 : S1 = ……………………………….
2- Déterminer le nom de la fonction F1 : ………………………
3- Déduire l’équation de S2 : S2 = …………………………….
4- Compléter le montage de la fonction F1 en utilisant des transistors et des résistances :
II- Etude de F2
1- Quelle est la fonction logique réalisé par F2 : …………………………….
2- Compléter le montage de la fonction F2 en utilisant des opérateurs logiques de base :
m
Km
RB2
RC
RB1 L
G
S1
V1
V2
F1
F2
S2
S2
V3
V4
S1
S2 L
Leçon N°2 : Applications de la fonction commutation Chapitre VI
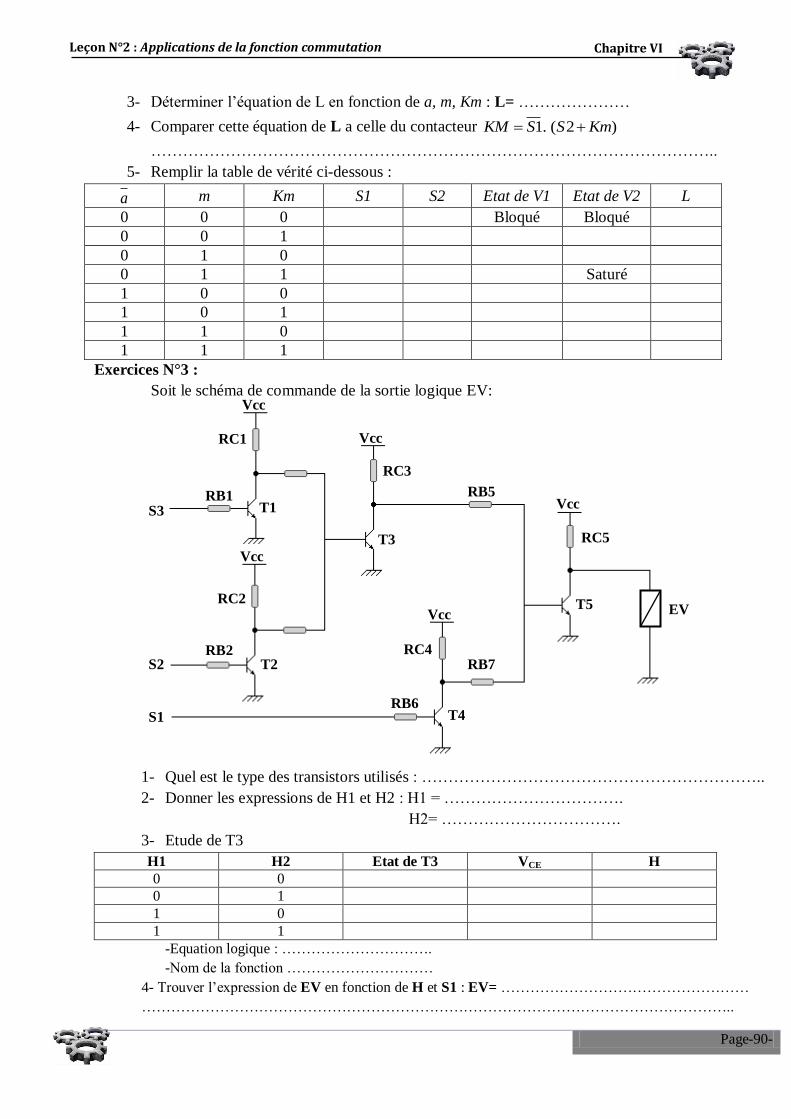
Page-90-
3- Déterminer l’équation de L en fonction de a, m, Km : L= …………………
4- Comparer cette équation de L a celle du contacteur 1. ( 2 )KM S S Km
……………………………………………………………………………………………..
5- Remplir la table de vérité ci-dessous :
a m Km S1 S2 Etat de V1 Etat de V2 L
0 0 0 Bloqué Bloqué
0 0 1
0 1 0
0 1 1 Saturé
1 0 0
1 0 1
1 1 0
1 1 1
Exercices N°3 :
Soit le schéma de commande de la sortie logique EV:
1- Quel est le type des transistors utilisés : ………………………………………………………..
2- Donner les expressions de H1 et H2 : H1 = …………………………….
H2= …………………………….
3- Etude de T3
H1 H2 Etat de T3 VCE H
0 0
0 1
1 0
1 1
-Equation logique : ………………………….
-Nom de la fonction …………………………
4- Trouver l’expression de EV en fonction de H et S1 : EV= ……………………………………………
…………………………………………………………………………………………………………..
S3
S2
S1
T1
T2
T3
T4
T5 EV
Vcc
Vcc
Vcc
Vcc
Vcc
RB1
RB2
RC1
RC2
RC3
RB5
RB7
RB6
RC5
RC4
Leçon N°2 : Applications de la fonction commutation Chapitre VI
Page-91-
********************* 1er
Trimestre **********************
CHAPITRE I CHAPITRE II
Analyse fonctionnelle d’un système technique Définition graphique d’un
produit
Leçon N°1 : la modélisation
d’un système technique (Rappel)
Leçon N°3 : GRAFCET
d’un point de vue système
Leçon N°5 :
GRAFCET d’un point de vue de la
partie commande
Exercice N°1
N°3
(page20 27)
Leçon N°1 : Le dessin d’ensemble (Rappels)
Leçon N°2 : L’analyse
descendante (SADT)
Exercice N°1N°5
(page 7 page 16)
Leçon N°4 : GRAFCET
d’un point de vue de la partie opérative
Leçon N°2 : La cotation
fonctionnelle
Exercice N°1 N°3
(page 41 page 45)
Leçon N°3 : Le dessin de
définition (Rappel)
Exercice N°1 N°2
(page 48 page 50)
********************* 2eme
Trimestre **********************
CHAPITRE III CHAPITRE IV
Comportement des matériaux Les fonctions logiques universelles
Leçon : Traction simple
Exercice (page 60 page 61)
Leçon N°1 : Rappel sur les fonctions logiques de base
Leçon N°2 : Les fonctions logiques universelles
Exercice N°1 N°2 (page 66 page 69)
Leçon N°3 : La fonction mémoire
Exercice N°1 N°2 (page 70 page 73)
********************* 3eme
Trimestre **********************
CHAPITRE V CHAPITRE VI
Etude des solutions constructives Les fonctions électroniques
Leçon : Les solutions constructives
Exercice
(page 75 page 81)
Leçon N°1 : La fonction commutation
Exercice N°1 N°2
(page 84 page 85) Leçon N°2 : Applications de la fonction commutation
Exercice N°1 N°3
(page 87 page 90)