Embed Size (px)
Citation preview

FFOORRMMAATTIIOONN MMooddee dd''eemmppllooii PPSS9922
Ed.0701/PPO/VR

Page 2 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Toute représentation ou reproduction intégrale ou partielle, Faite sans le consentement de RoboBAT est illicite.
(loi du 11 mars 1957, alinéa 1er de l’article 40)
RoboBAT 2, rue Lavoisier
Montbonnot Zirst 38334 Saint-Ismier Cedex
tel : 04 76 41 80 82 fax : 04 76 41 97 03
web : http//www.robobat.com
e-mail : [email protected]

FORMATION – Mode d'emploi PS92 Page 3
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
TABLE DES MATIERES
1 LE CALCUL SUIVANT LES PS92 DANS ROBOT MILLENNIUM................................................................. 5
1.1 ORGANIGRAMME DES OPERATIONS A SUIVRE......................................................................................................5 1.2 LA DECLARATION ET LE PARAMETRAGE DES ANALYSES MODALES...................................................................... 5
1.2.1 La déclaration et le paramétrage des analyses modales sans prise en compte des efforts statiques.......... 5 1.2.2 La déclaration et le paramétrage des analyses modales avec prise en compte des efforts statiques....... 11
1.3 LA DECLARATION DES MASSES.......................................................................................................................... 13 1.3.1 La déclaration des masses par transformation des chargements statiques .............................................. 13 1.3.2 La déclaration des masses ajoutées .......................................................................................................... 14
1.4 L'EXPLOITATION DES RESULTATS DES CAS D’ANALYSE MODALE ....................................................................... 16 1.4.1 Le tableau de résultats .............................................................................................................................. 16 1.4.2 Visualisation graphique des différents modes propres de vibration ......................................................... 18
1.5 LA DECLARATION ET LE PARAMETRAGE DES ANALYSES SISMIQUES ET DES COMBINAISONS SISMIQUES............ 19 1.5.1 Définition automatique des cas sismiques et des combinaisons sismiques ............................................... 23 1.5.2 Définition du vecteur directeur de séisme pour un cas d’analyse sismique.............................................. 25
1.6 EXPLOITATION DES RESULTATS DES CAS D’ANALYSE SISMIQUE........................................................................ 25 1.6.1 Les tableaux de résultats........................................................................................................................... 25 1.6.2 Visualisation graphique des résultats ....................................................................................................... 28 1.6.3 Signature des réponses quadratiques ....................................................................................................... 28
1.7 DECLARATION MANUELLE DES COMBINAISONS SISMIQUES............................................................................... 29 1.8 DECLARATION DES PONDERATIONS................................................................................................................... 31 1.9 TRANSFORMATION DES FORCES PSEUDO-STATIQUES EN CHARGES.................................................................... 33
2 LES ELEMENTS IMPORTANTS DES PS92 ..................................................................................................... 35
2.1 DEFINITION DE L’ACTION SISMIQUE................................................................................................................... 35 2.1.1 Définition des spectres de réponse............................................................................................................ 35 2.1.2 Définition des spectres normalisés ........................................................................................................... 35 2.1.3 Définition de l’accélération nominale ...................................................................................................... 38 2.1.4 Définition des types de sites ......................................................................................................................38 2.1.5 Définition de la classe de protection de l’ouvrage ................................................................................... 39 2.1.6 Définition du coefficient correctif d’amortissement.................................................................................. 40 2.1.7 Définition du coefficient d’amplification topographique.......................................................................... 41 2.1.8 Définition du coefficient de comportement ............................................................................................... 41 2.1.9 Définition des zones de sismicité .............................................................................................................. 42
2.2 AUTRES ASPECTS REGLEMENTAIRES NECESSAIRES A LA MODELISATION ........................................................... 49 2.2.1 Discrétisation des masses ......................................................................................................................... 49 2.2.2 Masses à prendre en compte dans les calculs........................................................................................... 49 2.2.3 Nombre de modes à retenir pour les calculs............................................................................................. 50 2.2.4 Définition des combinaisons accidentelles ............................................................................................... 50
3 RAPPELS THEORIQUES SUR LE CALCUL PARASISMIQUE ................................................................... 51
3.1 L’EQUATION DU MOUVEMENT POUR UNE STRUCTURE SOUMISE A UNE EXCITATION SISMIQUE A SA BASE.......... 51 3.2 CALCUL DES MODES PROPRES DE VIBRATION DE LA STRUCTURE........................................................................ 51 3.3 LE DECOUPLAGE DE L’EQUATION GENERALE DU MOUVEMENT.......................................................................... 52 3.4 CALCUL DE LA REPONSE TEMPORELLE DE LA STRUCTURE................................................................................. 53 3.5 CALCUL DES REPONSES SPECTRALES D’UNE STRUCTURE................................................................................... 54
3.5.1 Calcul de la réponse de la structure pour chaque mode........................................................................... 54 3.5.2 Calcul de la réponse totale de la structure ............................................................................................... 55
4 BIBLIOGRAPHIE ................................................................................................................................................. 62

Page 4 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61

FORMATION – Mode d'emploi PS92 Page 5
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1 Le calcul suivant les PS92 dans ROBOT MILLENNIUM
1.1 Organigramme des opérations à suivre Cet organigramme présente les différentes opérations et contrôles à effectuer dans ROBOT Millennium pour mener correctement le calcul d’une structure suivant les PS92.
1.2 La déclaration et le paramétrage des analyses m odales 1.2.1 La déclaration et le paramétrage des analyses modales sans prise en compte des
efforts statiques La déclaration et le paramètrage des analyses modales décrites ci-dessus permettent la recherche des réponses dynamiques d'un système à plusieurs degrés de liberté dynamiques non amorti en vibrations libres en considérant un état de contrainte nul dans tous les éléments de la structure en écrivant l'équation suivante:
0=+rer
XKXM &&
où
eK est la matrice de raideur élastique de la structure
Pour résoudre cette équation, la solution doit satisfaire à la relation suivante:
0][ 2 =Φ− MKe
ω ou bien
0]det[ 2 =− MKe
ω

Page 6 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Afin de déclarer une analyse modale, vous devez
cliquer sur l’icône pour faire appaître la boite de dialogue de définition des options de calcul:
Vous devez cliquer sur le bouton pour faire appaître la boite de dialogue suivante: Vous devez choisir l’analyse modale comme type d’analyse en cliquant le bouton d’option et entrer le nom que vous voulez donner à l’analyse modale.
Après avoir cliqué sur le bouton , la boîte de dialogue qui permet de définir tous les paramètres de l’analyse modale apparaît:
♦ Vous devez choisir le mode d’analyse retenu pour l’analyse modale :

FORMATION – Mode d'emploi PS92 Page 7
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
� Le mode d’analyse modale est un mode de calcul exact qui permet de recherche les modes dans l’ordre décroissant des périodes de vibration propre.
� Le mode d’analyse sismique est un mode de calcul exact qui permet de rechercher les modes de vibration propre de la structure les plus prepondérants en pourcentage de masses participantes.
� Le mode d’analyse sismique pseudomodale est un mode de calcul approximatif mais scientifiquement justifié qui permet de rechercher les modes de vibration propre de la structure les plus prépondérants en pourcentage de masses participantes.
Ce mode d'analyse permet d'augmenter de façon importante le pourcentage de masses participantes par rapport aux modes d'analyse modale ou sismique et permet ainsi d'éviter le calcul du mode résiduel ou la majoration de toutes les variables d'intérêt (forces, déplacements, contraintes, etc.) demandé par les PS92. L'approximation des résultats diminue avec l'augmentation du nombre de modes recherchés.
♦ Vous devez choisir la méthode de calcul retenue pour l’analyse modale :
� La méthode d'itération sur le sous-espace par blocs est une méthode de calcul précise qui est identique à la méthode d'itération sur le sous-espace hormis que les modes convergés sont supprimés du sous-espace au fur et à mesure des différentes itérations.
� La méthode d’itération sur le sous-espace est une méthode de calcul précise. Toutefois, cette méthode demande un temps de calcul très important sourtout si le nombre de degrés de liberté dynamiques et le nombre demandé de modes sont très important. Vous pouvez choisir cette méthode uniquement si vous avez choisi le mode d’analyse modale. � La méthode de Lanczos est une méthode de calcul qui permet de
trouver rapidement les modes de vibration sourtout si le nombre de degrés de liberté dynamiques est très important.
� La méthode de réduction de la base est une méthode qui permet de simplifier le modèle de calcul dynamique par rapport au modèle de calcul statique en choisissant les degrés de liberté dynamiques à prendre en compte.
Le choix de ces degrés de liberté dynamiques se fait en cliquant sur le
bouton pour faire apparaître la boite de dialogue suivante:
Cette boite de dialogue permet de sélectionner les nœuds et les degrés de liberté dynamiques à retenir. Vous pouvez choisir cette méthode uniquement si vous avez choisi le mode d’analyse modale.

Page 8 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
♦ Vous devez choisir le type de matrice des masses retenu pour l’analyse modale :
� Le type de matrice des masses cohérentes permet d’obtenir une matrice
complète des masses. La matrice des masses cohérentes permet de prendre en compte de façon complète les énergies cinétiques translatoires et rotatoires.
� Le type de matrice des masses concentrées avec rotations permet d’obtenir une matrice des masses diagonale. La matrice des masses concentrées avec rotations permet de prendre en compte de façon complète les énergies cinétiques translatoires et de façon partielle les énergies cinétiques rotatoires.
� Le type de matrice des masses concentrées sans rotations permet d’obtenir une matrice des masses diagonale. La matrice des masses concentrées sans rotations permet de prendre en compte de façon complète les énergies cinétiques translatoires et de négliger totalement les énergies cinétiques rotatoires.
♦ Vous devez choisir les paramètres retenus pour l’analyse modale :
� Choisissez le nombre de modes de vibration à rechercher. Si vous fixez
une limite en fréquence, en pulsation, en période ou en pourcentage de masses participantes, ce nombre correspond au nombre maximum de modes à rechercher.
� Choisissez la tolérance. Cette tolérance correspond à la précision de calcul que vous voulez obtenir.
� Choisissez le nombre d’itérations maximum que vous admettez pour trouver le nombre de modes de vibration propre recherchés.
Remarque: lors du calcul, si au bout du nombre d’itérations choisi, la tolérance recherchée n’a pas été atteinte, le message suivant apparaît:
Vous pouvez continuer la recherche des modes avec la tolérance demandée
en cliquant sur les boutons ou . � Choisissez le type d’amortissement à prendre en compte dans les
analyses sismiques; Il existe deux solutions:
� La première solution consiste à donner une valeur unique d’amortissement pour tous les modes. Dans ce cas, il suffit de rentrer la valeur de cette amortissement dans le champs de saisie.
� La deuxième solution consiste à prendre en compte les valeurs
d’amortissement modaux calculées en fonction de la valeur d’amortissement des matériaux (voir boite de dialogue de définition des matériaux dans les préférences de l’affaire), des appuis élastiques et des compatibilités de nœud intégrés dans la structure et de l’énergie de déformation de chaque mode. Pour activer cette possibilité, il sufffit de cocher la case .

FORMATION – Mode d'emploi PS92 Page 9
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
♦ Vous pouvez définir une limite en fréquence, en période ou en pulsation afin de limiter la recherche du nombre de modes de vibration propre de la structure :
� Pour fixer cette limite, il suffit de cocher la case et
ensuite de cliquer sur le bouton pour faire apparaître la boite de dialogue suivante dans laquelle vous définissez le type de limite et la valeur de cette limite
Vous pouvez fixer une de ces limites uniquement si vous avez choisi le mode d’analyse modale. Si le nombre de modes de vibration choisi dans les paramètres ne permet pas d’atteindre la limite fixée, le message suivant apparaît :
Le message indique le nombre de modes nécessaire pour atteindre la limite fixée.
Si vous cliquez sur le bouton , les modes manquants pour atteindre la limite fixée sont recherchés.
Si vous cliquez sur le bouton , les modes manquants pour atteindre la limite fixée ne sont pas recherchés et le logiciel donne les résultats uniquement pour le nombre de modes demandé dans les paramètres

Page 10 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
♦ Vous pouvez définir un pourcentage minimum de masses participantes afin de vérifier que le nombre de modes de vibration propre demandé dans le paramètres, est suffissant pour atteindre ce pourcentage :
� Pour fixer cette limite, il suffit de cocher la bouton pour
activer le champs de saisie dans lequel vous rentrez la valeur du pourcentage de masses participantes.
� Si vous avez choisi le mode d’analyse modale et si le pourcentage de
masses participantes n’a pas été atteint dans toutes les directions pour le nombre de modes propres choisi dans les paramètres, le message suivant apparaît :
Vous pouvez continuer les calculs en cliquant sur les boutons
ou . � Si vous avez choisi le mode d’analyse sismique ou pseudo-sismique, le
logiciel recherche le nombre de modes de vibration propre qui permet l’intégration du pourcentage de masses participantes dans une des directions pour les structures 2D ou dans deux des directions pour les structures 3D.
♦ Vous pouvez négliger le masse propre de la structure en cochant cette option. Par
conséquent, si vous ne cochez pas cette option, la masse propre de la structure est prise en compte automatiquement dans l'analyse modale.
♦ Vous pouvez vérifier que tous les modes trouvés lors de l’analyse sont bien les premiers modes vous
devez cocher la case . Vous pouvez choisir cette méthode uniquement si vous avez choisi le mode d’analyse modale. Si vous avez activé cette option et si les modes trouvés ne sont pas les premiers, automatiquement le logiciel diminue la tolérance définie dans les paramètres et relance les calculs afin de trouver les premiers modes de vibration propre.
Lorsque vous avez défini tous les paramètres de l'analyse modale, le bouton vous permet de les valider. Toutefois, les données permettant l'obtention de résultats corrects ne sont pas encore toutes définies; en effet, il faut également définir toutes les masses à prendre en compte dans l'analyse modale. Il existe deux manières pour définir les masses :
• la première consiste à transformer les chargements statiques en masses, • la seconde consiste à définir des masses ajoutées.

FORMATION – Mode d'emploi PS92 Page 11
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.2.2 La déclaration et le paramétrage des analyses modales avec prise en compte des efforts statiques
Pour rechercher des réponses dynamiques, on peut également pendre en compte un état de contrainte non nul dans les éléments en l'écrivant l'équation suivante:
0)( =++rer
XKKXM σ&&
où
eK est la matrice de raideur élastique de la structure.
σK est la matrice de raideur géométrique de la structure qui tient de l'état de contrainte des
éléments dû au chargement statique de la structure. Pour résoudre cette équation, la solution doit satisfaire à la relation suivante:
0])[( 2 =Φ−+ MKKe
ωσ ou bien
0])det[( 2 =−+ MKKe
ωσ
Pour activer la prise en compte l'état de contrainte des éléments de la structure dans une analyse modale, vous devez sélectionner le cas d'analyse modale qui vous intéresse dans la boite de dialogue de définition des options de calcul. Ensuite, vous devez cliquer sur le bouton
pour faire apparaître la boite de dialogue suivante: Remarque : Vous pouvez prendre en compte les efforts statiques pour des structures ou les éléments sont fortement comprimés ou tendus (pylônes haubanés par exemple)
Après avoir activer le bouton d'option
, vous devez sélectionner à l'aide de la liste déroulante
, le cas simple ou la combinaison dans lequel sont incluses toutes les charges qui vont définir l'état de contrainte des éléments.

Page 12 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir cliqué sur le bouton , la boîte de dialogue qui permet de définir tous les paramètres de l’analyse modale apparaît:
♦ En plus des paramètres utilisés pour une analyse modale "classique", vous devez éventuellement
choisir le type de non-linéarité à considérer pour l’analyse modale:
� L'analyse non-linéaire permet de prendre en compte la matrice de
raideur géométrique avec les termes non-linéaires du 1er ordre (prise en compte des pertes ou des gains de raideur dues aux efforts normaux).
� L'analyse Pdelta activée systématiquement avec l'analyse non linéaire permet de prendre en compte la matrice de raideur géométrique avec les termes non-linéaires du 1er ordre et d'ordres supérieurs (par exemple, prise en compte des pertes ou des gains de raideur dues à l'allongement des fibres neutres sous chargement transversal).
Après avoir choisi le type de non-linéarité à considérer, vous pouvez définir les paramètres du calcul non-linéaire en cliquant sur le bouton
.
Dès que la structure comporte des éléments à comportement non-linéaire (barres travaillant seulement à la traction ou à la compression, câbles, etc.), le logiciel prend en compte automatiquement l'état de contrainte des éléments calculé à partir du cas simple ou de la combinaison précédant l'analyse modale; par conséquent, afin de pouvoir maîtriser et sélectionner le cas simple ou la combinaison qui sera considéré pour la détermination de l'état de contrainte des éléments, il est préférable d'imposer au logiciel une analyse modale avec la prise en compte des efforts statiques pour ce type de structure.

FORMATION – Mode d'emploi PS92 Page 13
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.3 La déclaration des masses 1.3.1 La déclaration des masses par transformation des chargements statiques
Pour transformer des chargements statiques en masses, vous devez cliquez sur l'onglet dans la boite de dialogue de définition des options de calcul pour faire apparaître la feuille suivante:
♦ Dans le champ de saisie , vous devez sélectionner les cas de chargement dans lesquels sont contenues les charges à convertir en masses.
♦ A l'aide de la liste déroulante , vous devez choisir la direction de conversion afin de convertir uniquement les charges déclarées suivant cette direction en masses.
♦ Dans le champ de saisie , vous devez préciser le coefficient qui permet de définir la quantité de charges à convertir en masses.
♦ A l'aide des cases à cocher , vous devez sélectionner les directions dans lesquelles vous voulez déclarer les masses.
♦ A l'aide de la liste déroulante , vous devez choisir le cas d'analyse dynamique (modale ou harmonique) dans lequel vous voulez déclarer les masses. La sélection de dans la liste déroulante signifie que les masses générées sont déclarées dans tous les cas d'analyse dynamique (modale ou harmonique) définis dans l'affaire.
Pour valider tous les paramètres de conversion des chargements statiques en masses, vous devez cliquez
sur le bouton .

Page 14 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.3.2 La déclaration des masses ajoutées Vous pouvez déclarer des masses ajoutées aux cas d'analyse dynamique (modale ou harmonique) à l'aide :
- de la boite de dialogue de définition des charges et des masses,
- ou du tableau de définition des masses.
1.3.2.1 Utilisation de boite de dialogue de définit ion des charges et des masses
L'icône ou l'item situé sous le menu déroulant vous permet d'afficher la boite de dialogue de définition des charges et des masses:
Pour activer les icônes et permettant respectivement la déclaration de masses nodales et des masses réparties sur barres, il faut choisir un cas d'analyse dynamique (modal ou harmonique) à l'aide
de la boite de sélection des cas .
Après avoir cliqué sur les icônes et , les boites de dialogue suivantes apparaissent:
La case à cocher permet d'ajouter les masses déclarées à tous les cas d'analyse dynamique (modale ou harmonique). Après avoir défini les masses et éventuellement les inerties de masse dans les différentes directions, vous
devez cliquer sur le bouton et appliquer les caractéristiques massiques aux nœuds ou aux barres.

FORMATION – Mode d'emploi PS92 Page 15
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.3.2.2 Utilisation du tableau de définition des ma sses
L'item situé sous le menu déroulant
vous permet d'afficher le tableau de définition des masses:
Les masses générées par le processus de conversion des chargements statiques sont marquées dans le tableau de définition des masses par le symbole CNV dans le champ MEMO. Par conséquent, il est déconseillé de changer la valeur du champ MEMO comportant le symbole CNV car cette modification entraînerait la duplication des masses. Pour déclarer de nouvelles masses ajoutées dans ce tableau, vous devez cliquer dans le champs
correspondant à la colonne et à la ligne pour sélectionner à l'aide de la liste déroulante, le cas d'analyse dynamique (modale ou harmonique) dans lequel vous souhaitez ajouté des masses:
La sélection du cas dans la liste déroulante, vous permet d'ajouter les masses déclarées à l'ensemble des cas d'analyse dynamique (modale ou harmonique).
Ensuite, vous devez cliquer sur le champs correspondant à la colonne et à la nouvelle ligne générée précédemment pour sélectionner à l'aide de la liste déroulante, le type de masses que vous voulez déclarer :
Pour terminer la déclaration de nouvelles masses, vous devez remplir le champs correspondant à la liste des nœuds, des barres ou des panneaux sur lesquels vous voulez ajouter des masses et vous devez également remplir les champs correspondant à la valeur des masses à ajouter dans les différentes directions.

Page 16 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.4 L'exploitation des résultats des cas d’analyse modale Il existe 2 manières pour exploitater les résultats des analyses modales:
- la première consiste à utiliser le tableau de résultats spécificique aux analyses modales,
- la seconde consiste à visualiser graphiquement les différents modes propres de vibration.
1.4.1 Le tableau de résultats
L'icône ou l'item situé sous le menu déroulant et vous permet d'afficher le tableau de résultats spécifiques aux analyses modales:
A l'aide de la boite de sélection des cas vous pouvez choisir le cas d'analyse modale pour lequel les résultats vous intéressent.
A l'aide de la boite de sélection des modes ou de l'icône se situant devant la boite de sélection des modes, vous pouvez choisir le mode ou les modes pour lesquels les résultats vous intéressent. La commande située sous le menu contextuel (appelé avec le bouton droit de la souris) ou sous le menu déroulant vous permet d'afficher la boite de dialogue de sélection des colonnes que vous voulez visualiser: ♦ L'onglet vous permet d'afficher les valeurs suivantes :
� La valeur propre notée i
λ des différents modes propres de
vibration de la structure. Ces valeurs propres sont calculées à partir de l'équation 0]det[ =− MK
iλ .
� La fréquence propre notée i
f des différents modes propres de
vibration de la structure.
� La période propre notée i
T des différents modes propres de
vibration de la structure. � La pulsation propre notée
iω des différents modes propres de
vibration de la structure. � La précision de calcul des différentes valeurs propres.
� L'amortissement modal iξ des différents modes propres de la structure qui est pris en compte dans les réponses des analyses sismiques.
� L'énergie potentielle des différents modes propres de la structure.

FORMATION – Mode d'emploi PS92 Page 17
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Les différentes grandeursi
λ ,i
f ,i
T et i
ω peuvent être mises en relation
par:
( )i
ii
iii m
kT
f ==
== 22
2 22 ωππλ
i
ii
i
ii m
kT
f ππω
πλ
21
21
2====
i
i
iii
i km
fT πω
πλπ 2212 ====
i
i
iiii m
kT
f ==== ππλω 22
où
i
T
iiKk ΦΦ= est la raideur généralisée du mode n° i .
i
T
iiMm ΦΦ= est la masse généralisée du mode n° i .
♦ L'onglet vous permet d'afficher les valeurs suivantes:
� Les composantes UX, UY, UZ, RX, RY et RZ du vecteur propre des
différents modes propres de la structure.
Nota : Dans ROBOT Millennium, tous les vecteurs propres sont
normalisés pour obtenir une masse généralisée i
m égale à 1; par
conséquent, la raideur généralisée i
k est toujours égale à 2
iω .
� Si vous cochez la case , le logiciel multiplie les composantes du vecteur propre par un facteur qui permet d'obtenir la valeur 1 ou –1 pour la composante la plus grande en valeur absolue. Cette fonctionnalité permet d'afficher des valeurs significatives sans demander le format exponentiel.
♦ L'onglet vous permet d'afficher les valeurs suivantes:
� Les pourcentages de masses participantes notés uxT
uxi
MM
, uyT
uyi
MM
et
uzT
uzi
MM
suivant les directions UX, UY et UZ pour les différents modes
propres de vibration de la structure. Ces valeurs sont obtenues en cochant .

Page 18 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
� Le pourcentage de masses participantes notés uxT
i
k
uxk
M
M∑=1 , uy
T
i
k
uyk
M
M∑=1 et
uzT
uzk
MM∑ suivant les différentes directions UX, UY et UZ cumulé
avec les pourcentages de masses participantes de tous les modes précédents. Ces valeurs sont obtenues en cochant . Ce sont ces pourcentages cumulés de masses participantes qui permettent de vérifier que le nombre de modes demandés est suffisant pour faire une analyse sismique de la structure.
� Les masses totales notées uxTM , uy
TM et uzTM prises en compte
pour le calcul.
� Les coefficients de participation notés uxiΓ , uy
iΓ et uziΓ suivant les
directions UX, UY, et UZ pour les différents modes propres de vibration de la structure.
Les différentes grandeurs diriM et dir
iΓ peuvent être mises en relation
par ( )2diri
diriM Γ= .
1.4.2 Visualisation graphique des différents modes propres de vibration
Pour visualiser les différents modes de vibration, vous pouvez le bureau spécifique à l'affichage des résultats graphiques à l'aide de la boite de sélection
des bureaux . Vous pouvez également l'item situé sous le menu déroulant pour faire apparaître la boite de dialogue de gestion des diagrammes :
A l'aide de la boite de sélection des cas , vous pouvez choisir le cas d'analyse modale pour lequel les résultats vous intéressent. A l'aide de la boite de sélection des modes , vous pouvez choisir le mode pour lequel les résultats vous intéressent.

FORMATION – Mode d'emploi PS92 Page 19
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir sélectionner le cas d'analyse modale et le mode, vous devez cliquer sur l'onglet dans la boite de dialogue de gestion des diagrammes: Après avoir cocher la case à cocher , vous devez cliquer sur le bouton pour afficher le mode propre demandé. Pour afficher les autres modes, vous devez utiliser la boite de sélection des modes .
1.5 La déclaration et le paramétrage des analyses s ismiques et des combinaisons sismiques
Afin de déterminer, de façon réaliste, les déplacements, les efforts internes et les réactions d'appui qui peuvent apparaître lors d'un séisme, Il est rappelé que la démarche de calcul dans ROBOT Millennium consiste à déclarer :
- 3 analyses sismiques correspondantes à chacune des 3 directions de l'espace (2 horizontales et 1 verticale).
- les combinaisons purement sismiques des réponses obtenues avec les 3 analyses sismiques.
- Les combinaisons accidentelles des combinaisons purement sismiques et des réponses des cas de charges statiques de différentes natures (permanente, exploitation, neige…).
Afin de déclarer les analyses et les combinaisons sismiques, vous devez cliquer sur l’icône pour faire appaître la boite de dialogue de définition des options de calcul :

Page 20 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Vous devez cliquer sur le bouton pour faire appaître la boite de dialogue suivante :
Vous devez choisir l’analyse sismique comme type d’analyse en cliquant le bouton d’option , choisir
le règlement parasismique PS92 à l'aide de la liste déroulante et entrer le nom que vous voulez donner à l’analyse sismique.
Après avoir cliqué sur le bouton , la boîte de dialogue qui permet de définir tous les paramètres de l’analyse sismique suivant les règles PS92 apparaît:
♦ Vous devez choisir la zone de sismicité:
Les zones de sismicité sont fixées par voie de décret. Dans l'ANNEXE A, vous trouverez la carte PS92 où sont déclarées les zones de sismicité par département.
♦ Vous devez choisir la classe de protection de l'ouvrage :

FORMATION – Mode d'emploi PS92 Page 21
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Les ouvrages sont répartis en classes de risque par voie d'arrêté :
� Classe A: Les ouvrages dont la défaillance ne représente qu’un risque minime pour les personnes ou l’activité économique; Pour ces ouvrages, les règles PS92 n'ont pas lieu d 'être appliquées .
� Classe B : Les ouvrages et installations offrant un risque dit « courant » pour les personnes. � Classe C : Les ouvrages représentant un risque élevé pour les personnes en raison de leur
fréquentation ou de leur importance socio-économique. � Classe D : Les ouvrages et installations dont la sécurité est primordiale pour les besoins de la
sécurité civile, de l’ordre public, de la Défense et de la survie de la région. ♦ Vous devez choisir la classe de site :
La classification du site dépend de la nature, des caractéristéristiques et l’épaisseur des différentes couches de sols se trouvant sous l’ouvrage à calculer : Seule une étude géotechnique du site permet donc de préciser la classe su site S0, S1 , S2 ou S3. ♦ Vous devez préciser le type de spectre retenu pour le calcul :
� Le choix du spectre de réponse élastique signifie que la structure
conserve un comportement élastique pendant toute la durée du séisme; par conséquent, cela signifie que la pérennité du bâtiment tant au niveau de sa résistance que de sa fonction sera statistiquement assuré après un séisme majeur.
� Le choix du spectre de réponse de dimensionnement signifie que la
structure peut subir des déformations se situant dans le domaine post-élastique; par conséquent, cela signifie qu’on admet des désordres structuraux mineurs ou non structuraux dans le bâtiment tout en garantissant statiquement le non effondrement de celui-ci afin de permettre la protection et l’évacuation des personnes. Le choix de ce type de spectre implique de définir la valeur du coefficient de comportement.
♦ Vous devez préciser la direction :
Le choix de la direction correspond au choix des composantes definies dans les règles PS92. � Si vous choisissez la composante horizontale, ROBOT retient le
spectre de réponse normalisé défini à l’article 5.232 des règles PS92 pour faire le calcul.
� Si vous choisissez la composante verticale, ROBOT retient le
spectre de réponse normalisé défini à l’article 5.233 des règles PS92 pour faire le calcul.

Page 22 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
♦ Vous devez préciser les paramètres complémentaires :
� La valeur correspondante à définit le coefficient
d’amplification topographique τ défini au paragraphe 5.24 des règles PS92.
� Lorsque que vous avez retenu le spectre de réponse de
dimensionnement, vous devez préciser le coefficient de comportement qpour l’ensemble de la structure. Ce coefficient de comportement est fonction de la nature des matériaux constitutifs, du type de construction, des possibilités de redistribution d’efforts dans la structure et des capacités de déformation des éléments dans le domaine post-élastique.
� Les déplacements obtenus sont égaux à ceux calculés pour le
modèle élastique fictif à partir du spectre de réponse de dimensionnement.
� Les forces et les sollicitations de calcul sont obtenues en divisant les forces et les sollicitations calculées pour le modèle élastique fictif à partir du spectre de réponse de dimensionnement par le coefficient de comportement qou
'q déterminé suivant l’article 6.33 des règles PS92.
♦ Vous pouvez filtrer les modes à prendre en compte dans les cas d’analyse sismique :
Lorsque vous cliquez sur ce bouton, la boite de dialogue de filtrage des modes apparait :
� Si vous choisissez de rendre le filtre inactif, cela signifie que tous les modes propres calculés dans le cas d’analyse modale seront pris en compte dans le cas d’analyse sismique.
� Si vous choisissez d’activer le filtre en pourcentage de masses
participantes, cela signifie que tous les modes qui font participer
des pourcentages de masses uxT
i
k
uxk
M
M∑=1 , uy
T
i
k
uyk
M
M∑=1 et uz
T
uzk
MM∑ plus
faibles que le pourcentage indiqué par l’utilisateur seront négligés dans le cas d’analyse sismique.
� Si vous choisissez d’activer le filtre par liste des modes, cela
signifie que seuls les modes listés seront pris en compte dans le cas d’analyse sismique.

FORMATION – Mode d'emploi PS92 Page 23
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir défini tous les paramètres qui permettent de définir le spectre de réponse )(TR utilisé pour faire
le calcul, vous devez cliquer sur le bouton pour faire apparaître la boite de dialogue de définition des vecteurs directeurs du séisme :
Cette boite de dialogue permet de définir: - l’ensemble des cas sismiques et des
combinaisons sismiques demandés par les règles PS92.
- le vecteur directeur d’un cas sismique.
1.5.1 Définition automatique des cas sismiques et d es combinaisons sismiques Pour définir les 3 cas sismiques élémentaires suivant les différentes directions de l’espace (suivant l’axe global X, suivant l’axe global Y et suivant l’axe global Z), vous devez : ♦ Préciser le vecteur directeur de séisme:
Toutes les composantes du vecteur directeur doivent égales à 1.
♦ Décomposer le vecteur directeur de séisme et choisir le type de combinaisons que vous voulez générer:

Page 24 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
� La décomposition du vecteur directeur suivant les axes globaux X, Y et Z sera effectuée en cochant
La case . � Si vous souhaitez générer l’ensemble des combinaisons de Newmark des réponses obtenues pour
les différents cas sismiques, vous devez : � cocher les cases , et ,
� définir la valeur des coefficients et ,
� sélectionner, dans la liste déroulante , le type de combinaisons quadratiques des réponses obtenues pour les différents modes de chaque cas sismique que vous souhaitez prendre en compte.
Ces combinaisons de Newmark correspondent aux combinaisons linéaires pondérées décrites dans les règles PS92 :
Groupe 1 : ZYX SSSS µλ ±±+=
Groupe 2 : ZYX SSSS µλ ±±+=
Groupe 3 : ZYX SSSS ±±+= µλ Seule la moitié des combinaisons est générée car lorsque vous utilisez le système de pondération, ROBOT Millennium se charge de prendre en compte l’ensemble des réponses S± .
� Si vous souhaitez générer l’ensemble des combinaisons quadratiques des réponses obtenues pour
les différents cas sismiques, vous devez : � cocher la case ,
� définir la valeur des coefficients , et , � cocher la case pour générer des combinaisons quadratiques signées,
� sélectionner, dans la liste déroulante , le type de combinaisons quadratiques des réponses obtenues pour les différents modes de chaque cas sismique que vous souhaitez prendre en compte.
La combinaison quadratique non signée est définie par la formule suivante :
222ZZYYXX SRSRSRS ⋅+⋅+⋅+=
Les combinaisons quadratiques signées sont définies par la formule suivante :
Z
ZZ
Y
YY
X
XX
Z
ZZ
Y
YY
X
XX
SSR
SSR
SSR
SSR
SSR
SSRsigneS
333333 ⋅±⋅±⋅⋅
⋅±⋅±⋅+=
Dans les 2 cas, seule la moitié des combinaisons est générée car lorsque vous utilisez le système de pondération, ROBOT Millennium se charge de prendre en compte l’ensemble des réponses S± .

FORMATION – Mode d'emploi PS92 Page 25
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir cliqué sur le bouton de la boite de dialogue de définition du vecteur directeur et sur
le bouton de la boîte de dialogue de paramètrage de l’analyse sismique suivant les règles PS92, vous voyez apparaître tous les cas d’analyse sismique et toutes les combinaisons sismiques nécessaire à la justification de la structure suivant les règles PS92 :
1.5.2 Définition du vecteur directeur de séisme pou r un cas d’analyse sismique ♦ Vous devez définir le vecteur directeur de séisme:
Vous devez définir chaque composante sur les axes X, Y et Z du vecteur directeur. Un attention particulière doit être apportée à la définition de ce vecteur directeur car sa norme doit être égale à 1 soit :
1222 =++ ZYX DDD
Si vous ne voulez pas chercher la valeur de chaque composante permettant d’obtenir un vecteur directeur normalisé, vous pouvez cocher la case pour demander l’utilisation des composantes normalisées se trouvant à droite des composantes définies par l’utilisateur.
1.6 Exploitation des résultats des cas d’analyse si smique 1.6.1 Les tableaux de résultats
1.6.1.1 Le tableau de résultats spectraux
L'icône ou l'item situé sous le
menu déroulant et ,
vous permet d'afficher le tableau de résultats spécifiques aux analyses sismiques et spectrales:
A l'aide de la boite de sélection des cas , vous pouvez choisir le cas d'analyse modale pour lequel les résultats vous intéressent.

Page 26 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
A l'aide de la boite de sélection des modes ou de l'icône se situant devant la boite de sélection des modes, vous pouvez choisir le mode ou les modes pour lesquels les résultats vous intéressent. La commande située sous le menu contextuel (appelé avec le bouton droit de la souris) ou sous le menu déroulant vous permet d'afficher la boite de dialogue de sélection des colonnes que vous voulez visualiser: ♦ L'onglet vous permet d'afficher les valeurs suivantes:
� La pulsation propre notée
iω des différents modes propres
de vibration de la structure.
� L'amortissement modal noté iξ des différents modes propres de la structure qui est pris en compte dans les réponses des analyses sismiques.
� Le coefficient de participation moyen noté giΓ des différents modes de vibration de la structure.
♦ L'onglet vous permet d'afficher les valeurs suivantes:
� Le coefficient spectral noté ),( iiaS ξω des différents modes propres de vibration de la structure.
� Le coefficient de participation spectrale noté uxsiΓ , uy
siΓ et uzsiΓ
suivant les différentes directions UX, UY et UZ des différents modes propres de vibration de la structure.
� Le coefficient de modes spectraux noté uxsiSa , uy
siSa et uzsiSa
suivant les différentes directions UX, UY et UZ des différents modes propres de vibration de la structure.

FORMATION – Mode d'emploi PS92 Page 27
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.6.1.2 Le tableau des forces pseudostatiques et de s accélérations nodales L'item situé sous le menu déroulant et , vous permet d'afficher le tableau des forces forces pseudostatatiques et des accélérations nodales:
A l'aide de la boite de sélection des cas , vous pouvez choisir le cas d'analyse modale pour lequel les résultats vous intéressent.
A l'aide de la boite de sélection des modes ou de l'icône se situant devant la boite de sélection des modes, vous pouvez choisir les modes et les combinaisons quadratiques (SRSS, CQC, 10% ou 2SM) pour lesquels les résultats vous intéressent. La commande située sous le menu contextuel (appelé avec le bouton droit de la souris) ou sous le menu déroulant vous permet d'afficher la boite de dialogue de sélection des colonnes que vous voulez visualiser: ♦ L'onglet vous permet d'afficher les valeurs suivantes:
� Les composantes FX, FY, FZ, MX, MY et MZ des forces
nodales pseudostatiques des différents modes propres de vibration de la structure. Ces forces nodales pseudostatiques sont obtenues suivant la formulation :
iiigii MSaF ΦΓ= ),( ξω � Les composantes GX, GY, GZ, TX, TY et TZ des
accélérations nodales des différents modes propres de vibration de la structure. Ces accélérations nodales sont obtenues suivant la formulation :
iiigii SaA ΦΓ= ),( ξω

Page 28 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
1.6.1.3 Les autres tableaux de résultats Tous les autres tableaux (Réactions, Déplacements, Flèches, Efforts, Contraintes, etc…) peuvent être utilisés pour l’exploitation des résultats des cas d’analyse sismique ou spectrale. Toutefois, vous pouvez choisir les modes et les combinaisons quadratiques (SRSS, CQC, 10% ou 2SM) pour lesquels les résultats
vous intéressent à l'aide de la boite de sélection des modes ou de l'icône se situant devant la boite de sélection des modes. 1.6.2 Visualisation graphique des résultats Pour les cas d’analyse sismique ou spectrale, les efforts, les déplacements , les contraintes et les réactions peuvent être visualisés graphiquement avec toutes les fonctionnalités utilisées pour les cas d’analyse statique. Toutefois, vous pouvez choisir les modes et les combinaisons quadratiques (SRSS, CQC, 10% ou 2SM) pour lesquels les résultats vous intéressent à l'aide de la boite de sélection des modes
ou de l'icône se situant devant la boite de sélection des modes. 1.6.3 Signature des réponses quadratiques Pour un cas d’analyse sismique ou spectrale, lorsque la majorité de la réponse quadratique (SRSS, CQC, 10% ou 2SM) provient de la réponse d’un mode dominant, vous pouvez affecter les signes de la réponse du mode dominant à la réponse quadratique.
Pour déclarer un mode dominant sur un cas d’analyse sismique ou spectrale, vous devez
cliquer sur l’icône pour faire appaître la boite de dialogue de définition des options de calcul :
Ensuite, vous devez cliquez sur l'onglet dans cette boite de dialogue
pour faire apparaître la feuille suivante :
Dans cette feuille, vous devez cliquez sur le numéro du cas à signer , entrer le
numéro du mode dominant et cliquez sur le bouton pour valider la défintion :

FORMATION – Mode d'emploi PS92 Page 29
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Il est important de signaler les remarques suivantes :
• La signature d’une réponse quadratique n’est pas toujours envisageable du fait de la présence de plusieurs modes qui contribuent largement et de manière identique à la réponse quadratique.
• Le mode dominant n’est pas forcément unique pour l’ensemble de la structure. Il peut être nécessaire de changer le mode dominant suivant la partie de la structure examinée. Par conséquent, l’édition des résultats et le dimensionnement de chaque partie de la structure doivent être effectués après avoir scrupuleusement recherché le mode dominant adéquat.
1.7 Déclaration manuelle des combinaisons sismiques
Vous pouvez générer manuellement des combinaisons sismiques en cliquant sur l'icône ou l'item situé sous le menu déroulant pour faire apparaître la boite de dialogue de définition
des paramètres d’une combinaisons:

Page 30 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir précisé le numéro, le nom et le type de la combinaison à définir : ♦ Vous devez définir le type de réponse quadratique:
Vous devez choisir le type de réponse quadratique des cas d’analyse sismique ou spectrale qui sera inclus dans la combinaison à définir
♦ Vous devez définir la nature:
Vous devez choisir la nature de la combinaison à définir. Si vous définissez une combinaison incluant uniquement les réponses des cas d’analyse sismique ou spectrale et que vous souhaitez utiliser cette combinaison dans le système de pondération, il faut obligatoirement affecter la nature
à la combinaison à définir.
♦ Vous devez choisir si vous désirez définir une combinaison linéaire ou quadratique:
Si cette option est désactiver, vous définirez une combinaison linéaire. Si vous activez cette option, vous définirez une combinaison quadratique non
signée du type ∑ ⋅+= 2kk SRS .
Si vous souhaitez définir une combinaison quadratique signé du type
∑∑ ⋅⋅
⋅+=k
kk
k
kk
SSR
SSRsigneS
33
, vous devez, dans un premier temps,
définir une combinaison quadratique non signé comme indiqué ci-dessus et ensuite appeler la boite de dialogue des options de calcul :
Après avoir sélectionné la combinaison à modifier, vous devez cliquez sur le
bouton pour cocher l’option dans la boite de dialogue suivante :

FORMATION – Mode d'emploi PS92 Page 31
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Après avoir cliquez sur le bouton de la boite de dialogue de définition des paramètres d’une combinaison, vous devez choisir les cas et leur coefficient à inclure dans la nouvelle combinaison générée à l’aide de la boite de dialogue suivante :
1.8 Déclaration des pondérations
Après avoir défini les cas d’analyse sismique ou spectrale et les combinaisons sismiques de Newmark ou quadratiques, vous pouvez utilisé le système de pondérations pour générer toutes les combinaisons accidentelles sismiques règlementaires.
L'icône ou l'item situé sous le menu déroulant vous permet d’afficher la boite de dialogue de définition des pondérations:
♦ L’onglet permet de définir les cas et les combinaisons sismiques à prendre en compte:

Page 32 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Vous devez cocher les cas et les combinaisons sismiques à prendre en compte dans le système de pondérations. Il faut absolument cocher toutes les combinaisons sismiques mais il n’est pas nécessaire de cocher les cas d’analyse sismique ou spectrale car leur réponse est moins importante que celle des combinaisons sismiques. ♦ L’onglet permet de définir les types de combinaisons à générer:
Vous devez cochez les types de combinaisons que le système de pondérations doit générer. En particulier, pour générer les combinaisons accidentelles sismiques règlementaires, vous devez cocher l’option . ♦ L’onglet permet de définir les groupes de cas par nature de charge :
Vous devez vérifier que pour la nature de charge sismique, il existe bien un groupe defini avec toutes les combinaisons sismiques et l’opérateur OU EXCLUSIF.
En cas d’utilisation du système de pondération simplifié, il est recommandé de définir autant de groupes que de combinaisons sismiques, avec une combinaison sismique dans chaque groupe pour générer correctement les combinaisons accidentelles sismiques règlementaires.

FORMATION – Mode d'emploi PS92 Page 33
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
♦ L’onglet permet de définir les règles d’application des différents groupes :
Par nature de charge, vous devez préciser les groupes de cas et les relations définissant les règles de simultanéité d’application de ces groupes qui seront à prendre en compte dans la génération des combinaisons règlementaires. En particulier, afin de générer les combinaisons accidentelles sismiques règlementaires, vous devez définir le groupe ou les groupes incluant les combinaisons sismiques dans la partie correspondante à la définition des relations. Toutes les relations entre les différents groupes sismiques doivent utilisées l’opérateur OU EXCLUSIF.
1.9 Transformation des forces pseudo-statiques en c harges La commande permettant de transformer les forces pseudostatiques en charges est accessible à partir du tableau des forces pseudostatiques :
La commande située sous le menu contextuel (appelé avec le bouton droit de la souris) vous permet d'afficher la boite de dialogue suivante :

Page 34 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
� La boite de sélection permet de sélectionner le cas d’analyse sismique ou spectrale dans lequel le logiciel doit récupérer les forces pseudo-statiques à transformer en charges.
� La boite de sélection permet de sélectionner le mode ou la combinaison quadratique (SRSS, CQC, 10% ou 2SM) pour lequel les forces pseudo-statiques sont à transformer en charges
� La case à cocher
permet de remplacer le cas sélectionné d’analyse sismique ou spectrale par un cas d’analyse statique. Si cette option n’est pas coché, le logiciel crée un nouveau cas d’analyse statique dans lequel seront générés tous les charges correspondantes aux forces pseudo-statique.
Lorsque la structure contient la définition de relâchements, il est déconseillé d’utiliser cette fonctionnalité si le calcul est lancé avec l’algorithme DSC activé (voir les préférences d’affaire). En effet, les charges générées sur les nœuds de calcul (non définis par l’utilisateur) ne pourront pas être prise en compte. Dans ce cas, il est conseillé de remplacer les relâchements par des nœuds compatibles.

FORMATION – Mode d'emploi PS92 Page 35
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2 Les éléments IMPORTANTS des PS92
2.1 Définition de l’action sismique
Les actions sismiques sont définies soit par des spectres de réponse )(TR . 2.1.1 Définition des spectres de réponse
2.1.1.1 Les spectres de dimensionnement Les spectres de dimensionnement peuvent être utilisés dans le cas où les possibilités de redistribution des efforts dans la structure et les capacités de déformation des éléments dans le domaine post-élastique sont pris en compte. Les déplacements de la structure sont calculés directement à partir de des spectres de dimensionnement. Les forces et sollicitations sont obtenus en divisant les forces et sollicitations calculées à partir à partir de
ces spectres de dimensionnement par un coefficient de comportement q .
Ils sont définis par : τρ⋅⋅⋅= )()( TRaTR DN
Na étant l’accélération nominale dépendant de la zone de sismicité et de la classe de protection de l’ouvrage.
)(TRD étant l’ordonnée du spectre de dimensionnement normalisé dépendant de la classe de site et de la période. ρ étant le coefficient correctif d’amortissement dépendant de la nature des matériaux constituant la
structure.
τ étant le coefficient lié à la topographie.
2.1.1.2 Les spectres élastiques Les spectres élastiques peuvent être utilisés que dans le cas où la structure conserve un comportement élastique pendant toute la durée du séisme.
Ils sont définis par : τρ⋅⋅⋅= )()( TRaTR EN
)(TRE étant l’ordonnée du spectre de dimensionnement normalisé dépendant de la classe de site et de la période. 2.1.2 Définition des spectres normalisés
2.1.2.1 Les spectres de dimensionnement normalisés
La forme générale des spectres de dimensionnement normalisés est décrite par la figure ci-après :

Page 36 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
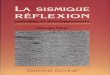
2.1.2.1.1 Pour les composantes horizontales Les spectres de dimensionnement décrits ci-dessous sont donnés pour un amortissement relatif de 5%
Valeurs caractéristiques Type de site TB(s) TC(s) TD(s) RM
S0 0,15 0,30 2,67 2,50
S1 0,20 0,40 3,20 2,50
S2 0,30 0,60 3,85 2,25
S2 0,45 0,90 4,44 2,00
Définition analytique de RD(T) Type
de site Branche A’C
Branche CD’
Branche D’E’
S0 2,50 1,12/T2/3 2,99/T5/3
S1 2,50 1,36/T2/3 4,34/T5/3
S2 2,25 1,60/T2/3 6,16/T5/3
S3 2,00 1,86/T2/3 8,29/T5/3
RD(T) pour les composantes horizontales
0.00
0.50
1.00
1.50
2.00
2.50
3.00
0 0.5 1 1.5 2 2.5
T en [s]
(S1)D(S0)D
(S2)D (S3)D
T=0.30 T=0.40 T=0.60 T=0.90
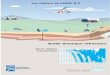
2.1.2.1.2 Pour la composante verticale
Les spectres de dimensionnement décrits ci-dessous sont donnés pour un amortissement relatif de 5% et inclut l’affinité de rapport de 0,70 demandée dans les PS92
Valeurs caractéristiques Type de site TB(s) TC(s) TD(s) RM
S0 0,15 0,30 2,67 1,75
S1 0,20 0,40 3,20 1,75
S2 0,30 0,47 3,20 1,57
S3 0,45 0,56 3,20 1,40
Définition analytique de RD(T) Type
de site Branche A’C
Branche CD’
Branche D’E’
S0 1,75 0,78/T2/3 2,09/T5/3
S1 1,75 0,95/T2/3 3,04/T5/3
S2 1,57 0,95/T2/3 3,04/T5/3
S3 1,40 0,95/T2/3 3,04/T5/3
RD(T) pour la composante verticale
0,00
0,50
1,00
1,50
2,00
2,50
0 0,5 1 1,5 2 2,5T en [s](S'0)D
(S'1)D, (S'2)D et (S'3) D
T=0.30 T=0.40 T=0.60 T=0.90

FORMATION – Mode d'emploi PS92 Page 37
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
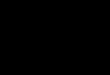
2.1.2.2 Les spectres élastiques normalisés La forme générale des spectres de dimensionnement normalisés est décrite par la figure ci-dessous :
2.1.2.2.1 Pour les composantes horizontales
Les spectres de dimensionnement décrits ci-dessous sont donnés pour un amortissement relatif de 5%
Valeurs caractéristiques Type de site TB(s) TC(s) TD(s) RA RM
S0 0,15 0,30 2,67 1.00 2,50
S1 0,20 0,40 3,20 1.00 2,50
S2 0,30 0,60 3,85 0.90 2,25
S2 0,45 0,90 4,44 0.80 2,00
Définition analytique de RE(T) Type de site Branche
AB Branche
BC Branche
CD Branche
DE
S0 1+10T 2,50 0,75/T 2,0/T2
S1 1+7,5T 2,50 1,00/T 3,2/T2
S2 0,9+4,5T 2,25 1,35/T 5,2/T2
S3 0,8+8T/3 2,00 1,80/T 8,0/T2
RE(T) pour les composantes horizontales
0,00
0,50
1,00
1,50
2,00
2,50
3,00
0 0,5 1 1,5 2 2,5T en [s](S1)E(S0)E
(S2)E (S3)E

Page 38 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.1.2.2.2 Pour la composante verticale Les spectres de dimensionnement décrits ci-dessous sont donnés pour un amortissement relatif de 5% et inclut l’affinité de rapport de 0,70 demandée dans les PS92.
Valeurs caractéristiques Type de site TB(s) TC(s) TD(s) RA RM
S0 0,15 0,30 2,67 0,70 1.75
S1 0,20 0,40 3,20 0,70 1.75
S2 0,30 0,44 3,85 0,63 1,57
S2 0,45 0,50 4,44 0,56 1,40
Définition analytique de RE(T) Type
de site Branche AB
Branche BC
Branche CD
Branche DE
S0 0,70+7,00T 1,75 0,52/T 1,40/T2
S1 0,70+5,25T 1,75 0,70/T 2,24/T2
S2 0,63+3,15T 1,57 0,70/T 2,24/T2
S3 0,56+1,86T 1,40 0,70/T 2,24/T2
RE(T) pour la composante verticale
0,00
0,50
1,00
1,50
2,00
2,50
0 0,5 1 1,5 2 2,5T en [s]
(S'0)E
(S'1)E, (S'2)E et (S'3)E
2.1.3 Définition de l’accélération nominale La valeur de l’accélération nominale en m/s² est donnée par le tableau suivant :
Classe d'ouvrage Zone de sismicité
A B C D 0 / / / / Ia / 1,0 1,5 2,0 Ib / 1,5 2,0 2,5 II / 2,5 3,0 3,5 II / 3,5 4,0 4,5
Suivant les PS92, pour tous les ouvrages à risque normal se trouvant en zone de sismicité 0 et tous les ouvrage défini en classe de protection A, aucun calcul de justification n’est nécessaire. 2.1.4 Définition des types de sites
La classification des types de sites est donnée par le tableau suivant :
Sites S0 site rocheux sol de groupe a en épaisseur inférieure à 15 m
Sites S1 sol du groupe a en épaisseur supérieure à 15 m sol du groupe b en épaisseur inférieure à 15 m
Sites S2 sol du groupe b en épaisseur supérieure à 15 m et 50 m. sol du groupe c en épaisseur inférieure à 10 m
Sites S3 sol du groupe b en épaisseur supérieure à 50 m sol du groupe c en épaisseur inférieure à 10 et 100 m

FORMATION – Mode d'emploi PS92 Page 39
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
La classification des groupes de sols est donnée par le tableau suivant :
Sols du groupe a Sols de résistance bonne et très bonne (par exemple sables et graviers compacts, marnes ou argiles raides fortement consolidées)
Sols du groupe b Sol de résistance moyenne (par exemple roches altérées, sables et graviers moyennement compacte, marnes ou argiles de raideur moyenne)
Sols du groupe c Sol de faible résistance ( par exemple sables ou graviers lâches, argiles molles, craies altérées, vases)
Compte tenu des informations requises, il est souhaitable de procéder à une étude géotechnique qui permettra de définir le type de site. Cette étude permettra également de déterminer le risque de liquéfaction des sols et la présence de failles actives sur le lieu d’implantation du projet, facteurs qui peuvent remettre en cause la totalité le projet. 2.1.5 Définition de la classe de protection de l’ou vrage A titre informatif, les PS92 définit les classes de protection des ouvrages comme suit :
Définition
Les ouvrages dont la défaillance ne représente qu’un risque minime pour les personnes ou l’activité économique.
Classe A
Exemples
Perrons et escaliers posés à même le sol, murs de clôture de moins de 1.80 m de hauteur ; constructions agricoles à usage principal de logement de cheptel vif, de remisage du matériel et des récoltes dans les exploitations individuelles ;constructions en simples rez-de-chaussée à usage de garage ou d’atelier privé, etc.
Définition
Les ouvrages et installations offrant un risque dit « courant » pour les personnes. Classe B
Exemples
Habitations, bureaux, locaux à usage commercial, atelier, usines, garages à usage collectif, etc.
Définition
Les ouvrages représentant un risque élevé pour les personnes ou en raison de leur fréquentation ou de leur importance socio-économique.
Classe C
Exemples
Etablissements d’enseignement, stades, salles de spectacles, halls de voyageurs, et d’une façon générale, Etablissements Recevant du Public (ERP) de 1ère, 2ème et 3ème catégories ; musées ; centres de production ou de distribution d’énergie, etc.
Définition
Les ouvrages et installations dont la sécurité est primordiale pour les besoins de la Sécurité Civile, de l’ordre public, de la Défense et de la survie de la région. Classe D
Exemples
Hôpitaux, casernes, garages d’ambulances, dépôts de matériel de lutte contre l’incendie, etc., musées et bibliothèques abritant des œuvres majeures ou des collections irremplaçables, etc.

Page 40 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.1.6 Définition du coefficient correctif d’amortis sement
Il est défini par :
4.05
= ξρ
ξ étant l’amortissement relatif ou la fraction d’amortissement critique de la structure. Hormis l’utilisation de dispositifs mécaniques, l’amortissement relatif doit être limitée à :
%30%2 ≤≤ξ
2.1.6.1 Structures constituées d’un matériau unique
Dans ce cas, la valeur de l’amortissement relatif ξ est la même pour tous les modes et est donnée dans le tableau suivant en fonction du tableau .
Matériaux Pourcentage d'amortissement Critique en %
Acier soudé 2 Acier boulonné 4 Béton non armé 3 Béton armé et/ou chaîné 4 Béton précontraint 2 Bois lamellé-collé 4 Bois boulonné 4 Bois cloué 5 Maçonnerie armée 6 Maçonnerie chaînée 5
2.1.6.2 Structures composites ou constitutuées de p lusieurs matériaux
Dans ce cas, la valeur de l’amortissement relatif iξ est égale, pour chacun des modes considérés à :
E
Em
mm
i
∑=
ξξ
E étant l’énergie élastique de la structure, associé à la déformée modale considérée,
mξ étant l’amortissement relatif de chaque matériau,
mE étant la part d’énergie élastique, associée à la déformée modale considérée, emmagasinée dans chacun des matériaux.

FORMATION – Mode d'emploi PS92 Page 41
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.1.7 Définition du coefficient d’amplification top ographique
Ce coefficient multiplicateur τ à pour but d’amplifier des spectres de réponse des ouvrages situés en rebord de crête. I et i sont les valeurs de la tangente de pente. H , a , b et c sont des grandeurs exprimées en mètres.
Si mH 10≥ et 3/Ii ≤ , alors le coefficient maxτ prend la valeur :
1max =τ pour 40,0≤−iI
)4,0(8,01max −−+= iIτ pour 90,040,0 ≤−≤ iI
4,1max =τ pour 90,0≥−iI
3/Ha =
)4
10;20( += HIMinib
4/Hc= En aval du point A et en amont du point D, la valeur de τ prend la valeur 1.
2.1.8 Définition du coefficient de comportement Associé à l’utilisation du spectre de dimensionnement, la valeur du coefficient de comportement q est à définir en fonction de la classe de régularité de la structure et des matériaux la constituant (voir les PS92) Lorsque la valeur du coefficient de comportement q n’est pas justifiée par une méthode de vérification de
compatibilité de déformation, et lorsque la période du mode de vibration fondamental est inférieur à BT , la valeur q à prendre en compte est à remplacer par :
⋅−⋅−
⋅=
qTT
q
B
ρρ
5,211
5,2'
Le coefficient de comportement relatif à la composante verticale du séisme doit être pris égal à :
2;1max q

Page 42 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.1.9 Définition des zones de sismicité
2.1.9.1 La carte PS92

FORMATION – Mode d'emploi PS92 Page 43
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.1.9.2 Définition des zones de sismicité par dépar tement et par canton 01 - AIN Arrondissement de Belley: - zone IB: Belley, Champagne en Valromey, Seyssel, Virieu le
Grand - zone IA: Hauteville-Lompnes, Lhuis, Saint-Rambert-en-Bugey - zone 0: les autres cantons Arrondissement de Bourg-en-Bresse: - zone 0: en totalité Arrondissement de Gex: - zone IB: en totalité Arrondissement de Nantua: - zone IB: Bellegarde sur Valserine - zone IA: Brenod, Nantua, Oyonnax (tous les cantons) - zone 0: les autres cantons 02 - AISNE - zone 0: la totalité du département 03 - ALLIER - zone 0: la totalité du département: 04 - ALPES DE HAUTE PROVENCE Arrondissement de Barcelonnette: - zone IB : en totalité Arrondissement de Castellane: - zone II: Entrevaux - zone IB: les autres cantons Arrondissement de Dignes: - zone II: les Mées, Valensole - zone IB: les autres cantons Arrondissement de Forcalquier: - zone II: Manosque (tous les cantons), Peyruis - zone IB: Forcalquier, Reillanne, Saint Etienne, Sisteron,
Turriers, Volonne - zone IA: les autres cantons 05 - HAUTES ALPES Arrondissement de Briançon: - zone IB: Aiguilles, l'Argentière-la-Bessée, Briançon (tous les
cantons), Guillestre - zone IA: les autres cantons Arrondissement de Gap: - zone IB: Chorges, Embrun, Savines-le-Lac - zone IA: La Bâtie-Neuve, Gap (tous les cantons), Laragne-
montéglin, Orcières, Ribiers, Tallard - zone 0: les autres cantons 06 - ALPES-MARITIMES Arrondissement de Grasse: - zone II: Cagnes-sur-mer (tous les cantons), Carros,
Coursegoules, Vence - zone IB: les autres cantons Arrondissement de Nice: - zone II: en totalité 07- ARDECHE Arrondissement de Largentière: - zone 0 : en totalité Arrondissement de Privas: - zone IA: Bourg-Saint-Andéol, Rochemaure, Viviers
- zone 0: les autres cantons Arrondissement de Tournons: - zone 0 : en totalité 08 - ARDENNES - zone 0: la totalité du département 09 - ARIEGE Arrondissement de Foix: - zone IB: Ax-les-Thermes, les Cabannes, Quérigut, Tarascon-sur-
Ariège, Vicdessos - zone IA: les autres cantons Arrondissement de Pamiers: - zone IA: le Mas d'Azil, Varilhes - zone 0: les autres cantons Arrondissement de Saint-Girons: - zone IB: Castillon en Couserans, Massat, Oust, Saint-Girons,
Saint-Lizier - zone lA: les autres cantons 10 - AUBE - zone 0: la totalité du département 11 - AUDE Arrondissement de Carcassonne: - zone IA: Mouthoumet - zone 0: les autres cantons Arrondissement de Limoux: - zone IB: Axat - zone IA: Belcaire, Couiza, Quillan - zone 0: l es autres cantons Arrondissement de Narbonne: - zone IB: Tuchan - zone IA: Durban-Corbières, Sigean - zone 0: les autres cantons 12 - AVEYRON - zone 0: la totalité du département 13 - BOUCHES-DU-RHONE Arrondissement d'Aix-en-Provence: - zone II: Lambesc, Peyrolles-en-provence, Salon-de-Provence - zone IB: Aix-en-Provence( tous les cantons), Trets - zone IA: les autres cantons Arrondissement d'Arles: - zone IB: Eyguières, Orgon - zone IA: Arles (canton est), Châteaurenard, Saint-Rémy-de-
Provence - zone 0: les autres cantons Arrondissement d'Istres: - zone IB: Berre-l'étang, Istres - zone lA: Martigues, Marignane - zone 0: les autres cantons Arrondissement de Marseille: - zone lA: Roquevaire - zone 0: les autres cantons

Page 44 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
14 - CALVADOS Arrondissement de Bayeux: - zone 0 : en totalité Arrondissement de Caen: - zone IA: Bourguebus, Bretteville-sur-Laize, Cabourg, Caen (tous
les cantons), Creully, Douvres-la-délivrande, Evrecy, Ouistreham, Tilly-sur-seulles, Troarn
- zone 0: les autres cantons Arrondissement de Lisieux: - zone 0 : en totalité Arrondissement de Vire: - zone 0 : en totalité 15 - CANTAL Arrondissement d'Aurillac: - zone 0 : en totalité Arrondissement de Mauriac: - zone 0 : en totalité Arrondissement de Saint-Flour: - zone IA: Massiac - zone 0: les autres cantons 16 - CHARENTE - zone 0: la totalité du département 17 - CHARENTE MARITIME Arrondissement de Jonzac: - zone 0 : en totalité Arrondissement de Rochefort: - zone IA: Le château d'Oléron, Marennes, Rochefort (tous les
cantons), Saint-Agnant, Saint Pierre d'Oléron, La tremblade
- zone 0: les autres cantons Arrondissement de La Rochelle: - zone 0: en totalité Arrondissement de Saintes: - zone 0: en totalité Arrondissement de Saint Jean d'Angély: - zone 0: en totalité 18 - CHER - zone 0: la totalité du département 19 - CORREZE - zone 0: la totalité du département 20A - CORSE DU SUD - zone 0: la totalité du département 20B - CORSE DU NORD - zone 0: la totalité du département 21 - COTE D'OR - zone 0: la totalité du département 22 - COTE D'ARMOR - zone 0: la totalité du département 23 - CREUSE - zone 0: la totalité du département 24 - DORDOGNE - zone 0: la totalité du département
25- DOUBS Arrondissement de Besançon: - zone IA: Pierrefontaine-les-Varans - zone 0: les autres cantons Arrondissement de Montbéliard: - zone IB: Audincourt, Etupes, Hérimoncourt, Maiche,
Montbéliard (tous les cantons), Pont-de-Roide, Saint-Hippolyte, Sochaux-Grand-Charmont, Valentigney
- zone IA: les autres cantons Arrondissement de Pontarlier: - zone IA: Morteau, Mouthe, Pontarlier - zone 0: les autres cantons 26 - DROME Arrondissement de Die: - zone IB: La Chapelle-en-Vercors - zone IA: Châtillon en diois, Die - zone 0: les autres cantons Arrondissement de Nyons: - zone IB: Pierrelatte, Saint-Paul-Trois-Châteaux - zone IA: Buis-les- Baronnies, Grignan, Nyons - zone 0: les autres cantons Arrondissement de Valence: - zone IB: Montélimar (tous les cantons) - zone IA: Dieulefit, Marsanne, Saint-Jean de Royans - zone 0: les autres cantons 27 - EURE - zone 0: la totalité du département 28 - EURE-ET-LOIRE - zone 0: la totalité du département 29 - FINISTERE - zone 0: la totalité du département 30 - GARD Arrondissement d'Alès: - zone 0: en totalité Arrondissement de Nîmes: - zone IA: Bagnols-sur-Cèze, Pont Saint Esprit, Roquemaure,
Villeneuve lès Avignon - zone 0: les autres cantons Arrondissement du Vigan: - zone 0: en totalité 31 - HAUTE-GARONNE Arrondissement de Muret: - zone 0: en totalité Arrondissement de Saint-Gaudens: - zone IB: Aspect, Bagnères-de-Luchon, Barbazan, Montréjeau,
Saint-Beat - zone IA: Boulogne-sur-Gesse, Saint-Gaudens, Salies sur salat - zone 0: les autres cantons Arrondissement de Toulouse: - zone 0: en totalité 32 - GERS Arrondissement d'Auch: - zone 0: en totalité
Arrondissement de Codom: - zone 0: en totalité Arrondissement de Mirande: - zone IA: Masseube, Miélan

FORMATION – Mode d'emploi PS92 Page 45
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
- zone 0: les autres cantons 33 - GIRONDE - zone 0: la totalité du département 34 - HERAULT - zone 0: la totalité du département 35 - ILLE-ET-VILAINE - zone 0: la totalité du département 36 -INDRE - zone 0: la totalité du département 37 - INDRE-ET-LOIRE Arrondissement de Chinon: - zone IA: Chinon, l'Ile Bouchard, Richelieu, Sainte-Maure-de-
Touraine - zone 0: les autres cantons Arrondissement de Tours: - zone 0: en totalité Arrondissement de Loches: - zone 0 : en totalité 38 - ISERE Arrondissement de Grenoble: - zone IB: Allevard, Clelles, Domène, Echirolles (tous les
cantons), Eybens, Fontaine-sassenage, Fontaine, Seyssinet, Goncelin, Grenoble (tous les cantons), Meylan, Monestier de Clermont, La Mure, Rives, Saint-Égrève, Saint-Ismier, Saint Laurent du Pont, Saint Martin d'Hères (tous les cantons), Le Touvet, Tullins, Vif, Villard-de-Lans, Vizille, Voiron
- zone IA: Le Bourg d'Oisans, Corps, Mens, Pont en Royans, Saint Etienne de Saint Geoirs, Saint-Marcellin, Valbonnais, Vinay
- zone 0: les autres cantons Arrondissement de la Tour du Pin: - zone IB: le pont de Beauvoisin, Saint Geoire en Valdaine, Virieu - zone IA: Bourgoin-Jallieu, Le grand Lemps, Morestel, La tour du
Pin - zone 0: les autres cantons Arrondissement de Vienne: - zone 0: en totalité 39 - JURA Arrondissement de Dôle: - zone 0: en totalité Arrondissement de Lons le Saunier: - zone 0: en totalité Arrondissement de Saint-Claude: - zone IA: Les Bouchoux, Morez, Saint-Claude - zone 0: les autres cantons 40 - LANDES - zone 0: la totalité du département 41 - LOIR-ET-CHER - zone 0: la totalité du département 42 - LOIRE - zone 0: la totalité du département
43 - HAUTE-LOIRE Arrondissement de Brioude: - zone IA : Blesle - zone 0: les autres cantons Arrondissement du Puy: - zone 0: en totalité Arrondissement d'Yssingeaux: - zone 0: en totalité 44 - LOIRE-ATLANTIQUE Arrondissement de Chateaubriand: - zone 0: en totalité Arrondissement de Nantes: - zone IA: Machecoul, Saint-Philbert-de-Grand-Lieu - zone 0: les autres cantons Arrondissement de Saint-Nazaire: - zone IA: Bourgneuf-en-Retz - zone 0: les autres cantons Arrondissement d'Ancenis: - zone 0: en totalité 45 - LOIRET - zone 0: la totalité du département 46 - LOT - zone 0: la totalité du département 47 - LOT-ET-GARONNE - zone 0: la totalité du département 48 - LOZERE - zone 0: la totalité du département 49 - MAINE-ET-LOIRE - zone 0: la totalité du département 50 - MANCHE - zone 0: la totalité du département 51 - MARNE - zone 0: la totalité du département 52 - HAUTE-MARNE - zone 0: la totalité du département 53 - MAYENNE - zone 0: la totalité du département 54 - MEURTHE-ET-MOSELLE - zone 0: la totalité du département 55 - MEUSE - zone 0: la totalité du département 56 - MORBIHAN - zone 0: la totalité du département 57 - MOSELLE - zone 0: la totalité du département 58 - NIEVRE - zone 0: la totalité du département 59 - NORD - zone 0: la totalité du département

Page 46 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
60 - OISE - zone 0: la totalité du département 61 - ORNE - zone 0: la totalité du département 62 - PAS-DE-CALAIS - zone 0: la totalité du département 63 – PUY DE DOME Arrondissement d'Ambert - zone 0: en totalité Arrondissement de Clermont-Ferrand: - zone IB: Aubière; Beaumont, Chamalières, Clermont-Ferrand
(tous les cantons), Cournon d'Auvergne, Gerzat, Pont du Château, Royat, Saint-Amant-Tallende, Vertaizon, Veyre-monton
- zone IA: Billom, Rochefort Montagne, Saint-Dier D'Auvergne, Vic le Comte
- zone 0: les autres cantons Arrondissement d'Issoire - zone IA: Ardes, Besse et Saint-Anastaise, Champeix, Issoire,
Saint-Germain-Lembron - zone 0: les autres cantons Arrondissement de Riom - zone IB: Ennezat, Riom (tous les cantons) - zone IA: Aigueperse, Combronde, Manzat, Pontgibaud, Randan - zone 0: les autres cantons Arrondissement de Thiers - zone IA: Courpière, Lezoux, Maringues, Thiers - zone 0: les autres cantons 64 - PYRENEES-ATLANTIQUES Arrondissement de Bayonne - zone IA : Iholdy, Saint-Étienne-de-Baïgorry, Saint-Jean-Pied-de-
Port - zone 0: les autres cantons Arrondissement d'Oloron-Sainte-Marie - zone II : Arudy, Laruns - zone IB: Accous, Aramits, Lasseube, Oloron-Sainte-Marie (tous
les cantons), Tardets-Sorholus - zone IA: Mauléon-Licharre, Monein, Navarrenx - zone 0: les autres cantons Arrondissement de Pau: - zone II: Nay-Bourdettes (tous les cantons) - zone IB: Jurançon, Pau (tous les cantons), Pontacq - zone IA : Billère, Lescar, Montaner, Morlaas - zone 0: les autres cantons 65 - HAUTES-PYRENEES Arrondissement d'Argelès-Gazost - zone II: Argelès-Gazost, Aucun, Lourdes (tous les cantons),
Saint-Pré de Bigorre - zone IB: les autres cantons Arrondissement de Bagnères de Bigorre - zone II: Arreau, Bagnères-de-Bigorre, la Barthe-de-Neste,
Campan - zone IB: les autres cantons Arrondissement de Tarbes - zone IB: Aureilhan, Bordères-sur-l'échez, Galan, Laloubère,
Ossun, Pouyastruc, Séméac, Tarbes (tous les cantons), Tournay, Trie-sur-Baïse
- zone IA: Castelnau-Magnoac, Rabastens-de-Bigorre, Vic-en-Bigorre
- zone 0: les autres cantons
66- PYRENEES-ORIENTALES Arrondissement de Céret : - zone II: Arles-sur-Tech, Prats-de-Mollo-la-Preste - zone IB: les autres cantons Arrondissement de Perpignan: - zone IB : en totalité Arrondissement de Prades: - zone II: Mont Louis, Olette, Saillagouse - zone IB: les autres cantons 67 - BAS-RHIN Arrondissement d'Haguenau: - zone IB: Bischwiller - zone IA: Haguenau - zone 0: Ies autres cantons Arrondissement de Molsheim: - zone IA: Molsheim, Rosheim, Wasselonne - zone 0: les autres cantons Arrondissement de Saverne: - zone 0: en totalité Arrondissement de Sélestat-Erstein: - zone IB : Benfeld, Erstein, Marckohlsheim - zone IA: les autres cantons Arrondissement de Strasbourg-Campagne: - zone IB: Bischheim, Brumath, Geispolsheim, Illkirch-
Graffenstaden, Mundolsheim, Schiltigheim - zone IA: les autres cantons Arrondissement de Wissembourg: - zone IB: Lauterbourg, Seltz - zone IA: les autres cantons Arrondissement de Strasbourg-ville: - zone IB : en totalité 68 - HAUT-RHIN Arrondissement d'Altkirch: - zone II : Altkirch, Ferrette, Hirsingue - zone IB: les autres cantons Arrondissement de Colmar: - zone IB: en totalité Arrondissement de Guebwiller: - zone IB: en totalité Arrondissement de Mulhouse: - zone II: Habsheim, Huningue, Sierentz - zone IB: les autres cantons Arrondissement de Ribeauvillé: - zone IB: Kaysersberg - zone IA: les autres cantons Arrondissement de Thann: - zone IB : en totalité 69 - RHONE - zone 0: la totalité du département 70 - HAUTE-SAONE Arrondissement de Lure: - zone IB: Faucogney-et-la-mer, Héricourt (tous les cantons) - zone IA: Champagney, Lure (tous les cantons), Luxeuil Bains,
Melisey, Saint-Loup-sur-Semouse, Saint-Sauveur, Villersexel
- zone 0: les autres cantons

FORMATION – Mode d'emploi PS92 Page 47
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Arrondissement de Vesoul: - zone 0: en totalité 71 - SAONE-ET-LOIRE - zone 0: la totalité du département 72 - SARTHE - zone 0: la totalité du département 73 - SAVOIE Arrondissement d'Albertville: - zone IB: Albertville (tous les cantons), Beaufort, Bourg-Saint-
Maurice, Grésy sur Isère, Moutiers, Ugine - zone IA: les autres cantons Arrondissement de Chambéry: - zone IB: en totalité Arrondissement de Saint-Jean-de-Maurienne: - zone IB: Aiguebelle, La chambre, Saint-Jean-de-Maurienne - zone IA: les autres cantons 74 - HAUTE-SAVOIE Arrondissement d'Annecy: - zone IB: en totalité Arrondissement de Bonneville: - zone IB: Bonneville, Chamonix-Mont-Blanc, Cluses, La Roche
sur Foron, Saint Gervais les Bains, Saint-Jeoire, Sallanches, Samoëns, Scionzier
- zone IA: les autres cantons Arrondissement de Saint Julien en Genevois: - zone IB: en totalité Arrondissement de Thonon les Bains: - zone IB: Douvaine - zone IA: les autres cantons 75 - PARIS - zone 0: la totalité du département 76 - SEINE-MARITIME - zone 0: la totalité du département 77 - SEINE-ET-MARNE - zone 0: la totalité du département 78 - YVELINES - zone 0: la totalité du département 79 - DEUX-SEVRES Arrondissement de Bressuire: - zone lA: Thouars (1er canton) - zone 0: les autres cantons Arrondissement de Niort: - zone 0: en totalité Arrondissement de Parthenay: - zone IA: Airvault, Parthenay, Saint-Loup-Lamairé - zone 0: les autres cantons 80 - SOMME - Zone 0: la totalité du département 81 - TARN - zone 0: la totalité du département 82 - TARN-ET-GARONNE - zone 0: la totalité du département
83 - VAR Arrondissement de Draguignan - zone IB: Comps sur Artuby - zone IA: Callas, Draguignan, Fayence, Fréjus, Saint-Raphaël,
Salernes - zone 0: les autres cantons Arrondissement de Toulon: - zone 0: en totalité Arrondissement de Brignoles - zone IB: Aups, Rians - zone IA: Barjols, Saint-Maximin-la-Sainte-Baume , Tavernes - zone 0: les autres cantons 84 - VAUCLUSE Arrondissement d'Apt - zone IB: Apt, Bonnieux, Cadenet, Cavaillon, Pertuis - zone 0: les autres cantons Arrondissement d'Avignon - zone IA: en totalité Arrondissement de Carpentras - zone IA: en totalité 85 - VENDEE Arrondissement de Fontenay le Comte - zone 0: en totalité Arrondissement de la Roche sur Yon - zone 0: en totalité Arrondissement des Sables d'Olonnes - zone IA: Beauvoir-sur-mer, Challans - zone 0: les autres cantons 86 - VIENNE Arrondissement de Châtellerault - zone IA: Loudun, Moncontour, les Trois-Moutiers - zone 0: les autres cantons Arrondissement de Montmorillon - zone 0: en totalité Arrondissement de Poitiers - zone 0: en totalité 87 - HAUTE-VIENNE - zone 0: la totalité du département 88 - VOSGES Arrondissement d'Epinal - zone IB: Plombières-les-Bains, Remiremont - zone IA: Bruyères, Epinal (tous les cantons), Saulxures-sur-
Moselotte, Le Thillot, Xertigny - zone 0: les autres cantons Arrondissement de Neufchâteau - zone 0: en totalité Arrondissement de Saint-Dié - zone IA : Corcieux, Fraize, Gérardmer - zone 0: les autres cantons 89 - YONNE - zone 0: la totalité du département 90 - TERRITOIRE DE BELFORT - zone IB: la totalité du département 91 - ESSONNE - zone 0: la totalité du département

Page 48 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
92 - HAUTS-DE-SEINE - zone 0: la totalité du département 93 - SEINE-SAINT-DENIS - zone 0: la totalité du département 94 - VAL-DE-MARNE - zone 0: la totalité du département 95 - VAL D'OISE - zone 0: la totalité du département
OUTRE-MER 971 - GUADELOUPE - zone III: en totalité 972 - MARTINIQUE - zone III: en totalité 973 - GUYANE - zone 0: en totalité 974 - REUNION - zone 0: en totalité 975 - SAINT-PIERRE-ET-MIQUELON - zone 0: en totalité

FORMATION – Mode d'emploi PS92 Page 49
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
2.2 Autres aspects réglementaires nécessaires à la modélisation 2.2.1 Discrétisation des masses Les structures, les sols, ou les systèmes sols-structures, et les charges supportées, peuvent être décomposés en un certain nombre de solides élémentaires possédant chacun au regard du problème étudié le caractère de solide indéformable, et soumis à des liaisons appropriées. Chacun de ces solides peut lui-même être remplacé par un élément matériel quasi ponctuel de même centre de gravité que le solide, de mêmes propriétés d'inertie que ce dernier (masse, moments et produits d'inertie) et doté de degrés de liberté appropriés (translations et rotations). La décomposition du système et le choix des degrés de liberté doivent permettre la mise en évidence des déformations éventuellement préjudiciables à la sécurité de l'ouvrage et permettre en particulier l'identification des zones pouvant donner lieu à des concentrations de déformations ou à des déformations post-élastiques importantes.
Une bonne modélisation de la structure pour des calculs en statique linéaire n’est pas forcément une bonne modélisation pour des calculs dynamiques. Par exemple, la modélisation d’une poutre sur 2 appuis ayant principalement des masses réparties par une seule barre ne permettra pas de connaître son comportement dynamique avec suffisamment de précision, en particulier si les moments et produits d’inertie sont négligés. Le modèle de calcul devra comporter plusieurs nœuds intermédiaires pour obtenir des résultats corrects. 2.2.2 Masses à prendre en compte dans les calculs Les masses à prendre en compte pour la détermination des actions sismiques sont celles des charges permanentes et d'une fraction Φ des charges d'exploitation et de la charge de neige entrant dans les règles de combinaisons d'actions données dans l'article 8.1. Cette fraction Φ est donnée par le coefficient ci-dessous dit coefficient de masse partielle en fonction de la nature des charges et leur durée. En ce qui concerne les charges d'exploitation, il n'y a pas lieu d'opérer la dégression verticale ni la dégression horizontale prévue par la norme P 06-001. Les valeurs de Φ sont données par le tableau suivant :
Nature de charge Valeur de
Φ 0- Bâtiment d'habitation ou d'hébergement, bureaux et assimilés. 0,20 1- Halles divers, salles d'exposition, et autres locaux destinés principalement au transit des personnes. Salles de réunions, lieux de culte, salles et tribunes de sport, salles de danse et tout autre lieu avec places debout et utilisation périodique.
0,25
2- Salles de classe, restaurants, dortoirs, salles de réunions avec places assises. 0,40
3- Archives, entrepôts 0,80 4- Autres locaux non visés en 0, 1, 2 et 3. 0,65 5- Bâtiments industriels de catégorie a1. 1,00 6- Bâtiments industriels de catégorie a2. 0,00
Exploitation
7- Bâtiments industriels de catégorie a3. 0,65 8- Neige pour une altitude inférieur ou égale à 500 mètres 0,00 Neige 9- Neige pour une altitude supérieur à 500 mètres 0,30

Page 50 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Pour certains ouvrages, lorsque les masses sont réparties symétriquement par rapport au centre de torsion; il est préférable de considérer une répartition de masses dissymétrique par rapport au centre de torsion dans le modèle de calcul pour prendre en compte les effets du séisme dus aux modes de torsion. Cette répartition dissymétrique de masses peut correspondre à:
• une réalité physique des possibilités de chargement (cellules de silo, phase de mise en exploitation, etc.)
• une demande réglementaire (voir Article 6.624 des PS92 intitulé « prise en compte des torsions d’axe vertical »).
2.2.3 Nombre de modes à retenir pour les calculs
Dans chacune des directions d'excitation étudiées, le calcul des modes de vibration doit être poursuivi jusqu'à la fréquence de 33 hertz (période de 0,03 s). La suite des modes peut être interrompue si le
cumul des masses modales ∑ iM dans la direction de l'excitation considérée atteint 90 % de la
masse vibrante totale M du système; dans ce cas, les effets des modes non retenus peuvent être négligés. En aucun cas, le nombre de modes retenus ne doit être inférieur à 3. Si à la fréquence de 33 hertz (période de 0,03 s) le cumul des masses modales dans la direction de l'excitation n'atteint pas 90 % de la masse totale vibrante, il doit être tenu compte des modes négligés par toute méthode scientifiquement établie et sanctionnée par l'expérience; en particulier, il peut être
considéré un mode résiduel affecté d'une masse égale à la masse vibrante négligée ∑− iMM .
La suite des modes peut également être interrompue avant la fréquence de 33 hertz (période de 0,03
s) à condition que la somme des masses modales ∑ iM représente au moins 70 % de la masse
totale vibrante M ; dans ces conditions, le mode résiduel doit être calculé en appliquant au modèle l'accélération spectrale du dernier mode retenu, et en l'affectant du facteur multiplicateur défini ci-dessus. À défaut de procéder au calcul d'un mode résiduel, il faut majorer toutes les variables d'intérêt (forces, déplacements, contraintes...) obtenues par la combinaison des réponses modales par le facteur :
∑ iMM
2.2.4 Définition des combinaisons accidentelles Dans les cas les plus courants où interviennent essentiellement le poids mort, les charges d'exploitation et la neige, les combinaisons accidentelles de calcul à considérer sont :
S1u -G+0,8 Q+E+0,1 N S'1u -G+E+0,3 N S2u -G+E+0,2N+0,4Q
avec G : action du poids mort et des charges permanentes de longue durée Q : action des charges d’exploitation E : action du séisme N : action des charges de neige.

FORMATION – Mode d'emploi PS92 Page 51
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
3 Rappels théoriques sur le calcul parasismique
3.1 L’équation du mouvement pour une structure soum ise à une excitation sismique à sa base
En appliquant la deuxième Loi de Newton, on obtient l’équation générale du mouvement pour une structure soumise à une excitation sismique à sa base :
)( sXXMKXXC &&&&& +−=+ (1) soit
sXMKXXCXM &&&&& −=++ (2)
En posant ( )tDX srs γΦ=&& , on obtient
( )tDMKXXCXM sr γΦ−=++ &&& (3)
[ ]Tuzuyux dddD 0,0,0,,,= étant le vecteur directeur du séisme
et [ ]ΦΦΦΦΦΦ=Φ rz
rryr
rxr
uzr
uyr
uxrr ,,,,, étant la matrice des modes rigides définis par les degrés de liberté de
la base. Les composantes du mode rigide Φkr sont égales à 1 pour tous les degrés de liberté
correspondants à la direction “k" et à 0 pour les autres degrés de liberté.
3.2 calcul des modes propres de vibration de la str ucture
L’analyse modale consiste à rechercher une partie des pulsations propres ni ωωωω ,...,,...,, 21 et
les vecteurs propres ni ΦΦΦΦ ,...,,...,, 21 de vibration libre de la structure en négligeant les amortissements:
0=+KXXM && (4)
Les solutions iX à cette équation sont de la forme :
)sin( iiii tX ϕω +Φ= (5) L’équation (4) devient :
0)sin()( 2 =+Φ− iiii tMK ϕωω (6) Pour satisfaire à cette équation à tout instant t , il faut que :
0)( 2 =Φ− ii MK ω (7)
Pour que le système admette des valeurs non nulles de iΦ , il faut que :
0)det( 2 =− MK iω (8) Le développement de ce déterminant donne une équation de degré n en 2
iω qui est appelée l’équation des fréquences et qui donne n racines réelles correspondant aux n pulsations propres
ni ωωωω ,...,,...,, 21 du système.
L’équation (7) permet de déterminer les vecteurs propres ni ΦΦΦΦ ,...,,...,, 21 correspondant aux
pulsations propres ni ωωωω ,...,,...,, 21 .

Page 52 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Soit Φ la matrice de l’ensemble des vecteurs propres
[ ]ni ΦΦΦΦ=Φ ,...,,...,, 21 (9) Compte tenu des conditions d’orthogonalité, on a les propriétés suivantes :
iiTi mM =ΦΦ (10)
et
iiTi kK =ΦΦ (11)
im étant la masse généralisée du ième mode.
ik étant la raideur généralisée du ième mode. D’après (9), (10) et (11), on obtient
)( iT mDiaM =ΦΦ (12)
et
)( iT kDiaK =ΦΦ (13)
En pré-multipliant (7) par TiΦ , on obtient :
02 =ΦΦ−ΦΦ iTiii
Ti MK ω (14)
D’après (10) et (11), on peut écrire que :
i
ii m
k=2ω (15)
Dans ROBOT Millennium, les vecteurs propres sont normalisés afin d’obtenir :
1=im (16) Par conséquent
2iik ω= (17)
D’après (12) et (13), on obtient donc:
IDiaMT ==ΦΦ )1( (18)
et
)( 2i
T DiaK ω=ΦΦ (19)
3.3 Le découplage de l’équation générale du mouveme nt En posant ZX Φ= (20) L’équation (1) devient :
( )tDMZKZCZM sr γΦ−=Φ+Φ+Φ &&& (21) En pré-multipliant chaque terme de cette équation, on obtient :
( )tDMZKZCZM srTTTT γΦΦ−=ΦΦ+ΦΦ+ΦΦ &&& (22)
En admettant que
)( iT cDiaC =ΦΦ (23)

FORMATION – Mode d'emploi PS92 Page 53
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
ic étant l’amortissement généralisée du ième mode. D’après (12), (13) et (23), l’équation (22) peut s’écrire :
( )tDMZkDiaZcDiaZmDia srTiii γΦΦ−=++ )()()( &&& (24)
On peut découpler cette équation en n équations élémentaires de la forme :
( )tDMzkzczm srTiiiiiii γΦΦ−=++ &&& (25)
en posant
iiii mc ξω2= (26)
iξ étant l’amortissement relatif du ième mode.
En divisant chaque terme de (25) par im et d’après (15) et (26), on peut écrire que
( )tDmMzzz s
i
rTi
iiiiii γωξω ΦΦ−=++ 22 &&& (27)
ou
( )tDzzz siiiiiii γωξω Γ−=++ 22 &&& (28)
[ ]rzi
ryi
rxi
uzi
uyi
uxii ΓΓΓΓΓΓ=Γ ,,,,, étant le vecteur des coefficients de participation du i ème mode
D’après (12), dans ROBOT Millennium, on peut écrire :
( )tDMzzz srTiiiiiii γωξω ΦΦ−=++ 22 &&& (25)
On obtient donc :
rTii MΦΦ=Γ (26)
3.4 Calcul de la réponse temporelle de la structure L’intégrale de Duhamel permet de résoudre l’équation (27) et d’obtenir la réponse temporelle de
)(tzi&& :
∫ −Γ−= −−t
dit
s
di
ii dteDtz
0
)( )(sin)()( ττωτγωτξω
&& (27)
diω étant la pulsation amortie et étant égale à :
21 iidi ξωω −= (28)
D’après (20) et (27), la réponse temporelle de la structure par superposition modale est
∑∑==
=Φ=n
i
i
n
i
ii XzX11
(29)

Page 54 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
3.5 calcul des réponses spectrales d’une structure La recherche de la réponse temporelle étant lourde et fastidieuse, on utilise une méthode qui consiste à rechercher les réponses spectrales de la structure en évaluant pour chaque mode propre la valeur
maximum zi noté iz en fonction :
- de la pulsation propre de ce mode, - de l’amortissement relatif de ce mode, - des coefficients de participation de ce mode, - du spectre d’accélération ),( ξωSa ou du spectre de vitesse Sv( , )ω ξ ou du spectre de
déplacement Sd( , )ω ξ . ces 3 spectres sont liés par les relations suivantes :
ωξωξω ),(),( SvSa = (30)
2),(),( ωξωξω SdSa = (31) 3.5.1 Calcul de la réponse de la structure pour cha que mode Pour commencer, on détermine le vecteur des coefficients de participation spectrale
[ ]Trzsi
rysi
rxsi
uzsi
uysi
uxsisi ΓΓΓΓΓΓ=Γ ,,,,, qui est égal à :
Disi ⋅Γ=Γ (32)
[ ]Tuzuzi
uyuyi
uxuxisi DDD 0,0,0,,, ⋅Γ⋅Γ⋅Γ=Γ (33)
On peut également déterminer le vecteur des accélérations spectrales
[ ]Trzsi
rysi
rxsi
uzsi
uysi
uxsisi SaSaSaSaSaSaSa ,,,,,= qui est égal à :
DSaSaSa iiisiiisi ⋅Γ⋅=Γ⋅= ),(),( ξωξω (34)
[ ]Tuzuziii
uyuyiii
uxuxiiisi DSaDSaDSaSa 0,0,0,),(,),(,),( ⋅Γ⋅⋅Γ⋅⋅Γ⋅= ξωξωξω (35)
On détermine ensuite le coefficient global de participation giΓ qui peut être calculé de deux façons
différentes :
a) Le coefficient global de participation giΓ est la somme des modules des coefficients
spectraux de participation : uzsi
uysi
uxsigi Γ+Γ+Γ=Γ (36)
uzuz
iuyuy
iuxux
igi ddd ⋅Γ+⋅Γ+⋅Γ=Γ (37)
b) Le coefficient global de participation giΓ est la racine carré de la somme des coefficients
spectraux de participation au carré :
( ) ( ) ( )222 uzsi
uysi
uxsigi Γ+Γ+Γ=Γ (38)
( ) ( ) ( )222 uzuzi
uyuyi
uxuxigi DDD ⋅Γ+⋅Γ+⋅Γ=Γ (39)

FORMATION – Mode d'emploi PS92 Page 55
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
La valeur maximum de zi noté zi est alors égale à
2
),(
i
iigii
Saz
ωξωΓ= (40)
Et d’après (20), on obtient les déplacements maxima iX notés iX :
ii
iigiiii
SazX ΦΓ=Φ= 2),(
ωξω
(41)
On peut obtenir les forces statiques équivalentes maximales iF notées iF :
ii
iigiiiii KSaKzXKF ΦΓ=Φ==
2
),(ω
ξω (42)
D’après (7), on obtient :
iiigiiiii MSaMzF ΦΓ=Φ= ),(2 ξωω (43)
On en déduit donc les accélérations maximales iA notées iA :
iiigiiiii SazA ΦΓ=Φ= ),(2 ξωω 3.5.2 Calcul de la réponse totale de la structure
Pour rechercher le maximum du vecteur Xr noté Xr on ne peut pas appliquer la relation (29) qui
donnerait X Xr ii
n
==∑
1
car les vecteurs Xi n’ont pas lieu en même temps et l’orientation de ces
vecteurs est indéfini. Par conséquent, pour obtenir la réponse totale d’une structure, on combine les réponses modales Ri :
3.5.2.1 les combinaisons quadratiques complètes
∑∑= =
⋅⋅=±n
i
n
jjiijCQC
RRR1 1
β (44)
avec
( )( ) ( ) ( ) 222222
2/3
4141
8
ijjiijijjiij
ijjijiji
ij
ρξξρρξξρ
ρξρξξξβ
⋅+⋅++⋅⋅⋅⋅+−
⋅⋅+⋅⋅⋅= (45)
i
jij ω
ωρ = avec 1≤
ijρ sinon jiij
ρρ = (46)

Page 56 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
3.5.2.2 Les combinaisons quadratiques simples
∑=
±=n
iiSRSS
RR1
2 (47)
3.5.2.3 Les combinaisons quadratiques établies avec la méthode des 10%
∑∑ ⋅⋅±=n
i
n
jjiij
RRR α%10 (48)
avec
pour ji ≤ , si 1.0<−
i
ij
ωωω
, 1=ij
α sinon 0=ij
α (49)
pour ji > , si 1.0<−
j
ji
ωωω
, 1=ij
α sinon 0=ij
α (50)
3.5.2.4 Les combinaisons quadratiques établies avec la méthode des doubles sommes
∑∑ ⋅⋅±=n
i
n
jjiijSM
RRR ε2 (51)
avec
12
1
−
••
••
⋅−⋅−
+=iijj
ijij ωξωξ
ωωα (52)
21kkk
ξωω −=• (53)
kkk ωτξξ ⋅+=• 2 (54)
τ étant la durée du séisme correspondant à la durée des vibrations de forte amplitude

FORMATION – Mode d'emploi PS92 Page 57
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
EXEMPLE Il s’agit d’un portique 2D donc les caractéristiques géométriques sont indiquées ci-dessous : - Distance entre portique : 5 m
- Longueur totale du bâtiment : 50 m
- Appuis articulées
- Jarret :
Portique : l = 1,80 m
Plancher :l= 0,50 m
- Charges de toiture : multi-couche : 25 daN/m²
- Charges de plancher : charges permanentes : 200 daN/m²
charges d’exploitation : 250 daN/m²
- Charges climatiques : Région : Lot et Garonne (47)
Neige > 500 m
- Sismique : voir plus loin (spectre de dimensionnement , q = 1,00). a) Création de la structure : - création de la structure :
� barres.
� appuis.
� charges (Pp + Charge permanentes + exploitation + vent + neige + température).

Page 58 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
b) Déclaration de l’analyse Modale Cliquez sur le bouton « Option de calcul », « Définir un nouveau cas » puis OK. - Paramètre de l’analyse modale :

FORMATION – Mode d'emploi PS92 Page 59
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
- Transformation des charges en masses ajoutées Pour chaque cas (2= charges permanentes sans poids propre, 3= charges d’exploitation, 10 = neige) : - sélectionner le cas de charge. - choisir la direction de conversion (Z-). - indiquer le coefficient de conversion (suivant les cas). - direction de la masse (x et z). - cliquer sur Ajouter. - Lancer les calculs et ouvrez le tableau des résultats de l’analyse modale : Grâce au click droit sur le tableau puis COLONNE , sélectionner les options la fnêtre ci-dessous : Nous obtenons le tableau ci-dessous. Nous pouvons remarquer qu’au 7 mode (fréquence 23,89 Hz <33 Hz), nous obtenons une masse participante de 97,73% en X par contre 74,41% pour Z.
Puis cliquer sur OK

Page 60 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
En vertu de l’article 6.622 du PS 92,où doit obtenir plus de 90% tout en étant inférieur de coupure, nous majorerons lors du calcul sismique la direction sismique Z par un coefficient égal à : Conclusion : Le septième mode convient car il respecte en tout point l’article 6.622 du PS92. Nous vous allons vous donnez une astuce pour vérifier les résultats donné par ROBOT : Vérification de la masse totale mise en jeu : Masse mise en jeu : 16012.11 kg (voir tableau ci-dessus) Réaction totale : PP = 1733,61 daN Charges permanentes = 11128,90 daN Charges exploitation = 10000 x 0,20=2000 daN Charges neige = 2800 x 0,30=840 daN 15703,51 daN Soit en kg 15703,51/0,980665= 16013,12 kg OK - Déclaration du calcul sismique : Cliquez sur le bouton « Option de calcul », « Définir un nouveau cas », choisir Sismique ainsi que le règlement sismique puis OK
34314174
100,
.MM
i
==∑

FORMATION – Mode d'emploi PS92 Page 61
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
Définir les paramètres de l’analyse sismique ci-dessous : Puis Valider toutes les fenêtres, pour obtenir cela : - Générer les pondérations automatiques :
Directions principales
Combinaisons de Newmark, (combinaisons des Directions principales)
- Lancer les calculs des pondérations .
- Relancer les Calculs RDM.

Page 62 FORMATION – Mode d'emploi PS92
©RoboBAT, 2,rue Lavoisier, Montbonnot Zirst 38334 St-Ismier Cedex - France – Tél. : 04 76 41 80 82 Fax : 04 76 41 97 03 Internet-web : http ://www.robobat.com e-mail : [email protected]
©RoboBAT, Service Technique Tél. : 04 76 41 38 90 - Fax : 04 76 41 22 61
4 Bibliographie Règles de construction parasismique ; Règles PS applicable au bâtiments- PS92 Normes NF P 06-013 Editions EYROLLES Deuxième tirage 1998 Extraits tirés de Eléments de Génie Civil et de calcul dynamique des structures André FILIATRAULT Editions de l’Ecole Polytechnique de Montréal La construction en zone sismique Victor DAVIDOVICI Editions LE MONITEUR, Paris 1999 Le Manuel d’utilisation de ROBOT MILLENNIUM 14.00 Société ROBOBAT Edition Novembre 2000 Notes personnelles :
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................
....................................................................................................................................................................