Embed Size (px)
Citation preview
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE TOULOUSE
4ème Année RT
_________
CANAUX DE TRANSMISSIONS BRUITES
SUPPORT DE COURS ENONCE DE TRAVAUX DIRIGES
Alexandre Boyer [email protected]
http://lesia.insa-toulouse.fr/~a_boyer

Canaux de transmissions bruités Octobre 2010
A. Boyer 2
TABLE DES MATIERES
Introduction..................................................................................................................... 3 A. Caractéristiques des canaux de transmission ............................................................. 6 B. Origine des perturbations et leurs effets sur le canal de transmission ..................... 17 C. Limitations et modèles des canaux de transmission ................................................ 35 D. Techniques de fiabilisation d’un canal de transmission par codage de canal.......... 46 E. Techniques de fiabilisation d’un canal de transmission sur la couche physique ..... 55 F. Régénération d’un signal .......................................................................................... 73 Conclusion - Planification d’une transmission numérique........................................... 84 Références..................................................................................................................... 86 Annexe A – Rappel sur les unités................................................................................. 87 Annexe B – Produits d’intermodulation pour une non-linéarité d’ordre 3................... 89 Annexe C – Démonstration du premier critère de Nyquist .......................................... 92 Annexe D – Filtre en cosinus surélevé ......................................................................... 93 Annexe E – Fonction d’erreur de Gauss complémentaire ERFC................................. 95 Annexe F – Glossaire.................................................................................................... 96 Travaux Dirigés ............................................................................................................ 97
Canaux de transmissions bruités Octobre 2010
A. Boyer 3
Introduction
Le rôle d’un système de télécommunications est de transmettre à distance des informations d’un émetteur à un ou plusieurs récepteurs au travers d’un canal de manière fiable et à coût réduit. Dans un système de transmission numérique, une suite finie de symboles représente l’information. Celle-ci est transmise sur le canal de transmission par un signal « réel » ou analogique. Ce signal peut prendre une infinité de valeurs différentes et est ainsi soumis à différentes formes de perturbations et d’interférences, pouvant conduire à des erreurs d’interprétations du signal recueilli par le récepteur. Le rôle de l’ingénieur en télécommunications est donc de s’assurer que le récepteur pourra recevoir le message émis par l’émetteur sans aucune erreur, par un dimensionnement judicieux du canal de transmission et par la mise en place de techniques le rendant plus robuste.
Rappel historique :
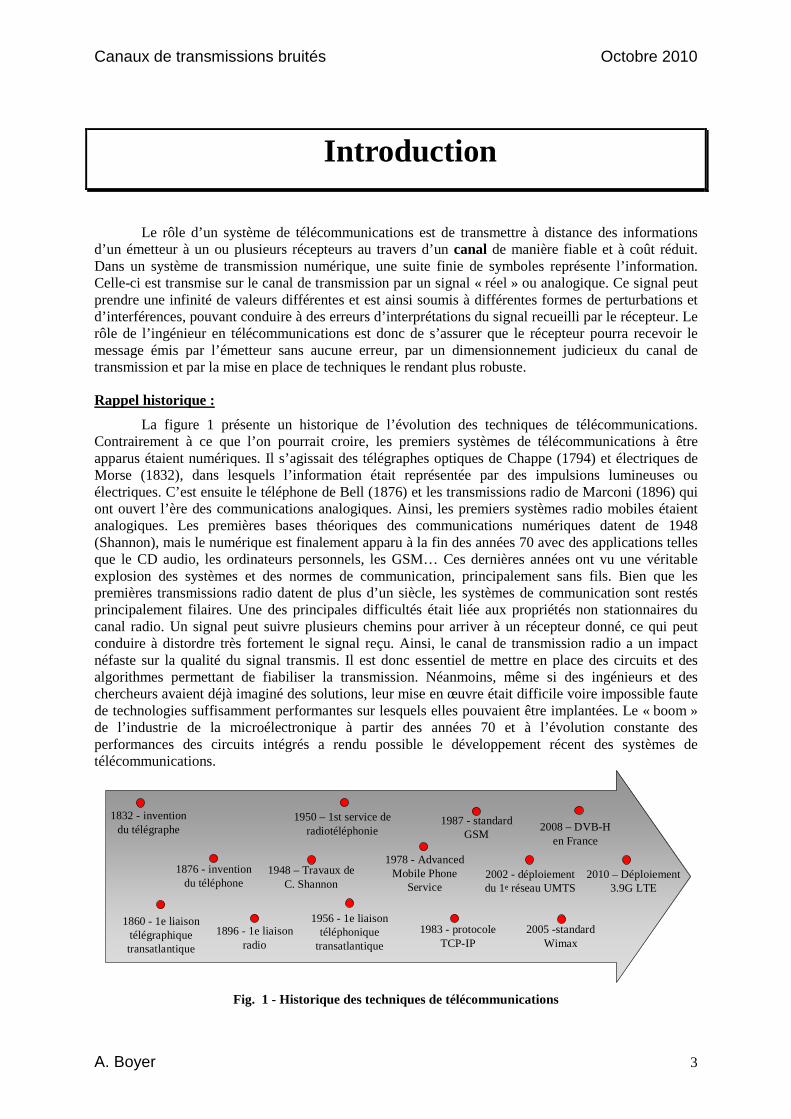
La figure 1 présente un historique de l’évolution des techniques de télécommunications. Contrairement à ce que l’on pourrait croire, les premiers systèmes de télécommunications à être apparus étaient numériques. Il s’agissait des télégraphes optiques de Chappe (1794) et électriques de Morse (1832), dans lesquels l’information était représentée par des impulsions lumineuses ou électriques. C’est ensuite le téléphone de Bell (1876) et les transmissions radio de Marconi (1896) qui ont ouvert l’ère des communications analogiques. Ainsi, les premiers systèmes radio mobiles étaient analogiques. Les premières bases théoriques des communications numériques datent de 1948 (Shannon), mais le numérique est finalement apparu à la fin des années 70 avec des applications telles que le CD audio, les ordinateurs personnels, les GSM… Ces dernières années ont vu une véritable explosion des systèmes et des normes de communication, principalement sans fils. Bien que les premières transmissions radio datent de plus d’un siècle, les systèmes de communication sont restés principalement filaires. Une des principales difficultés était liée aux propriétés non stationnaires du canal radio. Un signal peut suivre plusieurs chemins pour arriver à un récepteur donné, ce qui peut conduire à distordre très fortement le signal reçu. Ainsi, le canal de transmission radio a un impact néfaste sur la qualité du signal transmis. Il est donc essentiel de mettre en place des circuits et des algorithmes permettant de fiabiliser la transmission. Néanmoins, même si des ingénieurs et des chercheurs avaient déjà imaginé des solutions, leur mise en œuvre était difficile voire impossible faute de technologies suffisamment performantes sur lesquels elles pouvaient être implantées. Le « boom » de l’industrie de la microélectronique à partir des années 70 et à l’évolution constante des performances des circuits intégrés a rendu possible le développement récent des systèmes de télécommunications.
1987 - standard GSM
2005 -standard Wimax
1896 - 1e liaison radio
1950 – 1st service de radiotéléphonie
1978 - AdvancedMobile Phone
Service
1956 - 1e liaison téléphonique
transatlantique
1832 - invention du télégraphe
2002 - déploiement du 1e réseau UMTS
1876 - invention du téléphone
1983 - protocole TCP-IP
1860 - 1e liaison télégraphique transatlantique
1948 – Travaux de C. Shannon
2008 – DVB-H en France
2010 – Déploiement 3.9G LTE
Fig. 1 - Historique des techniques de télécommunications
Canaux de transmissions bruités Octobre 2010
A. Boyer 4
Analogique vs numérique :
Les signaux numériques présentent certains avantages par rapport aux signaux analogiques. Le principal avantage est la vulnérabilité moindre du signal numérique aux perturbations extérieures par rapport à un signal analogique. En effet, il est plus difficile d’entraîner la modification d’un bit dans un signal numérique que de perturber sérieusement un signal analogique de quelques dizaines de millivolts. Le deuxième avantage est qu’il est possible de manipuler un signal numérique et de le soumettre à différents traitements (image, son, vidéo….). Celui-ci peut être compressé pour améliorer le débit d’informations, des codes détecteurs ou correcteurs d’erreur peuvent lui être ajoutés, le rendant plus robuste aux perturbations extérieures. Néanmoins, la mise au point d’un système numérique est plus complexe que celle d’un système analogique au point de vue systèmes électroniques mais aussi au niveau des algorithmes à développer. La complexité se traduit aussi en terme de coût. L’avènement des systèmes numériques s’est ainsi fait en parallèle de celle de l’évolution des circuits intégrés.
Problématique du cours de canaux de transmission bruités
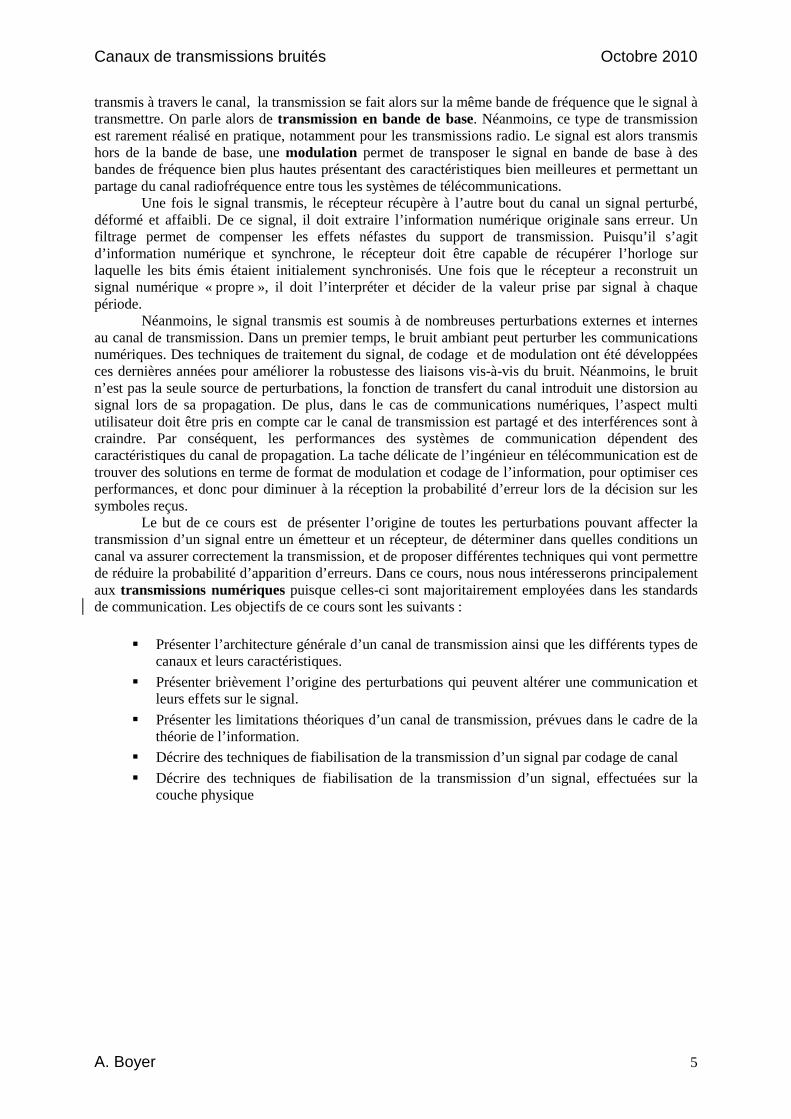
Le rôle de tout système de communication est d’assurer que le récepteur comprenne l’intégralité des messages transmis par l’émetteur, quel que soit la compression, le format ou le type des données, mais aussi les perturbations induites sur le canal de transmission et son effet parasite. La figure 6 présente un schéma général un canal de transmission.
10011 … E(t) R(t) 0 ou 1 ?
source D é cision Support de transmission
Filtre r é cepteur
é chantillonneur
Filtre é metteur
Canal de transmission BRUIT
Fig. 6 - Schéma d’un canal de transmission numérique
Le transfert de l’information nécessite une source de données, traduites dans un système compréhensible par l’émetteur et le récepteur (codage, format, compression préalablement définis). Le canal proprement dit représente le lien ou le support de transport de l’information entre les 2 entités communicantes, mais il comprend aussi les dispositifs en entrée et en sortie du support de transmission qui vont aider à l‘émission, à la réception et à l’extraction correcte des données numériques. Pour envoyer le signal à travers le canal, la source a besoin d’un système d’adaptation (physique pour mettre en forme le signal, logiciel pour le protocole de dialogue). Le signal peut être directement
Fig. 2 – Télégraphe de Morse Fig. 3 - Téléphone de Bell
Fig. 4 – Radio de Marconi Fig. 5 – Claude Shannon
Canaux de transmissions bruités Octobre 2010
A. Boyer 5
transmis à travers le canal, la transmission se fait alors sur la même bande de fréquence que le signal à transmettre. On parle alors de transmission en bande de base. Néanmoins, ce type de transmission est rarement réalisé en pratique, notamment pour les transmissions radio. Le signal est alors transmis hors de la bande de base, une modulation permet de transposer le signal en bande de base à des bandes de fréquence bien plus hautes présentant des caractéristiques bien meilleures et permettant un partage du canal radiofréquence entre tous les systèmes de télécommunications.
Une fois le signal transmis, le récepteur récupère à l’autre bout du canal un signal perturbé, déformé et affaibli. De ce signal, il doit extraire l’information numérique originale sans erreur. Un filtrage permet de compenser les effets néfastes du support de transmission. Puisqu’il s’agit d’information numérique et synchrone, le récepteur doit être capable de récupérer l’horloge sur laquelle les bits émis étaient initialement synchronisés. Une fois que le récepteur a reconstruit un signal numérique « propre », il doit l’interpréter et décider de la valeur prise par signal à chaque période.
Néanmoins, le signal transmis est soumis à de nombreuses perturbations externes et internes au canal de transmission. Dans un premier temps, le bruit ambiant peut perturber les communications numériques. Des techniques de traitement du signal, de codage et de modulation ont été développées ces dernières années pour améliorer la robustesse des liaisons vis-à-vis du bruit. Néanmoins, le bruit n’est pas la seule source de perturbations, la fonction de transfert du canal introduit une distorsion au signal lors de sa propagation. De plus, dans le cas de communications numériques, l’aspect multi utilisateur doit être pris en compte car le canal de transmission est partagé et des interférences sont à craindre. Par conséquent, les performances des systèmes de communication dépendent des caractéristiques du canal de propagation. La tache délicate de l’ingénieur en télécommunication est de trouver des solutions en terme de format de modulation et codage de l’information, pour optimiser ces performances, et donc pour diminuer à la réception la probabilité d’erreur lors de la décision sur les symboles reçus.
Le but de ce cours est de présenter l’origine de toutes les perturbations pouvant affecter la transmission d’un signal entre un émetteur et un récepteur, de déterminer dans quelles conditions un canal va assurer correctement la transmission, et de proposer différentes techniques qui vont permettre de réduire la probabilité d’apparition d’erreurs. Dans ce cours, nous nous intéresserons principalement aux transmissions numériques puisque celles-ci sont majoritairement employées dans les standards de communication. Les objectifs de ce cours sont les suivants :
Présenter l’architecture générale d’un canal de transmission ainsi que les différents types de canaux et leurs caractéristiques.
Présenter brièvement l’origine des perturbations qui peuvent altérer une communication et leurs effets sur le signal.
Présenter les limitations théoriques d’un canal de transmission, prévues dans le cadre de la théorie de l’information.
Décrire des techniques de fiabilisation de la transmission d’un signal par codage de canal
Décrire des techniques de fiabilisation de la transmission d’un signal, effectuées sur la couche physique
Canaux de transmissions bruités Octobre 2010
A. Boyer 6
A. Caractéristiques des canaux de
transmission
Dans ce chapitre, nous allons dans un premier temps présenter l’architecture générale d’un canal de transmission numérique et décrire brièvement les différents blocs le constituant. Dans un deuxième temps, nous décrirons les principaux supports de transmissions numériques employés de nos jours ainsi que leurs principales caractéristiques.
I. Architecture général d’un canal de transmission
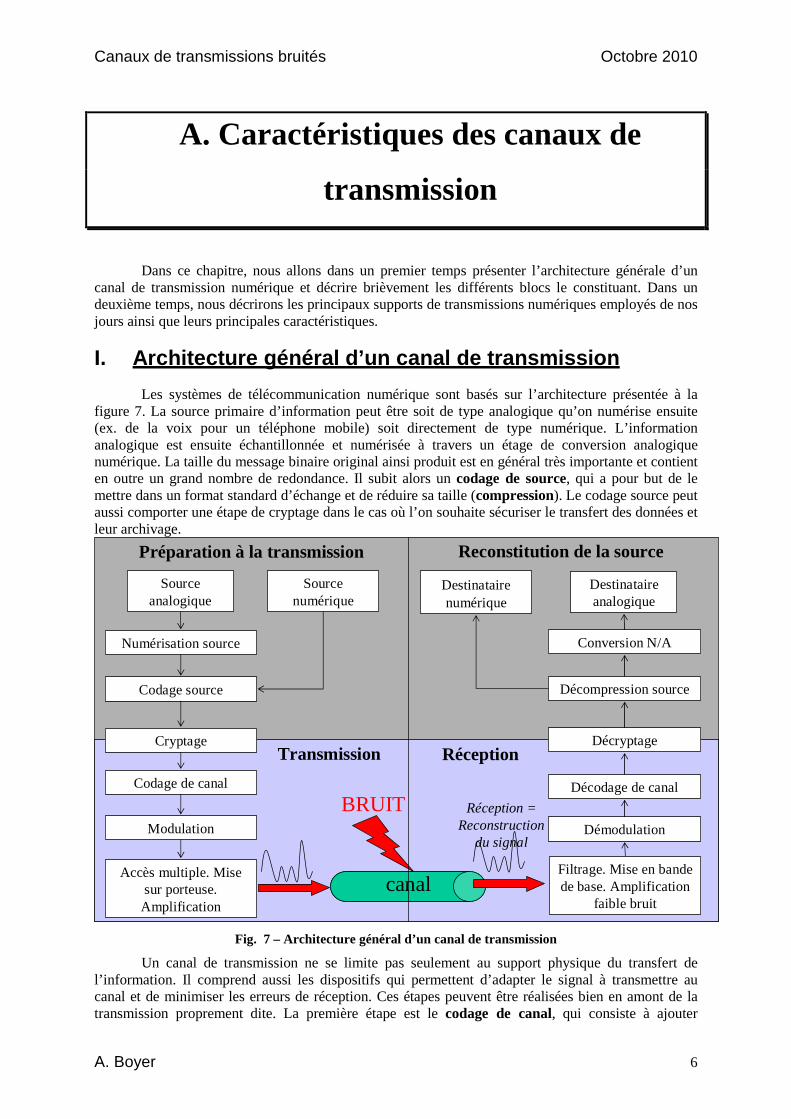
Les systèmes de télécommunication numérique sont basés sur l’architecture présentée à la figure 7. La source primaire d’information peut être soit de type analogique qu’on numérise ensuite (ex. de la voix pour un téléphone mobile) soit directement de type numérique. L’information analogique est ensuite échantillonnée et numérisée à travers un étage de conversion analogique numérique. La taille du message binaire original ainsi produit est en général très importante et contient en outre un grand nombre de redondance. Il subit alors un codage de source, qui a pour but de le mettre dans un format standard d’échange et de réduire sa taille (compression). Le codage source peut aussi comporter une étape de cryptage dans le cas où l’on souhaite sécuriser le transfert des données et leur archivage.
Source analogique
Numérisation source
Codage source
Cryptage
Codage de canal
Modulation
Accès multiple. Mise sur porteuse. Amplification
Source numérique
canalcanalFiltrage. Mise en bande de base. Amplification
faible bruit
Démodulation
Décodage de canal
Décryptage
Décompression source
Conversion N/A
Destinataire analogique
Destinatairenumérique
Préparation à la transmission
Transmission
BRUIT Réception = Reconstruction
du signal
Réception
Reconstitution de la source
Fig. 7 – Architecture général d’un canal de transmission
Un canal de transmission ne se limite pas seulement au support physique du transfert de l’information. Il comprend aussi les dispositifs qui permettent d’adapter le signal à transmettre au canal et de minimiser les erreurs de réception. Ces étapes peuvent être réalisées bien en amont de la transmission proprement dite. La première étape est le codage de canal, qui consiste à ajouter
Canaux de transmissions bruités Octobre 2010
A. Boyer 7
volontairement de la redondance au signal afin de le protéger contre les différentes perturbations. On retrouve par exemple l’ajout de codes détecteurs ou correcteurs d’erreurs. Le codage de canal est réalisé uniquement en bande de base.
Une fois que ces symboles ont été ajoutés au signal numérique, celui-ci est modulé afin de transformer le signal informatif en un signal physique capable de transiter sur le canal de transmission utilisé. Le signal est alors transposé de sa bande de base à une bande de fréquence bien plus haute. La technique de modulation est choisie en fonction de la nature du canal, de son utilisation et du débit. Des techniques d’accès multiples ou de multiplexage peuvent être employées afin de partager un même canal entre différents utilisateurs et d’optimiser son utilisation, mais aussi de réduire l’influence des parasites. Suivant la technique employée, le multiplexage peut être effectué dans ou hors bande de base.
Une fois le signal à émettre mis en forme (modulé, filtré, amplifié), il peut être transmis à travers le canal de transmission. A travers ce cours, on supposera que le signal émis est vierge de tout parasite puisque toutes les précautions ont été prises afin d’assurer la qualité du signal émis. Le passage de l’information à travers le canal est critique. Le signal subit l’atténuation et les déformations inhérentes au canal ainsi que les différentes perturbations extérieures qui se couplent sur le canal. Le canal n’est pas le seul responsable de l’ajout de bruit au signal utile puisque l’ensemble des circuits de réception et de régénération du signal ajoute une part non négligeable de bruit. En outre, le bruit n’est pas le seul problème. Le canal présente certains défauts intrinsèques (inertie aux changements temporels, atténuation, …) qui limite la quantité d’information qu’on peut faire passer à travers le canal. A partir de la théorie de l’information (chapitre C), il est possible de prédire les performances limites théoriques d’un canal de transmission.
Le récepteur reçoit le plus souvent un signal faible, bruité et distordu qu’il va falloir reconstruire avant de l’interpréter. La première étape de la réception consiste à filtrer le signal et à l’amplifier afin de l’extraire du bruit ambiant et des interférences. Une étape de démodulation suit afin d’extraire le signal utile et de le ramener en bande de base. Différentes étapes de régénération permettent ensuite de reformer un signal numérique d’une qualité suffisante pour être traité par un circuit électronique. L’opération de décodage de canal suit, afin de vérifier que le signal reçu n’est pas erroné et enlever l’ensemble des symboles rajoutés lors du codage du canal. En cas de détection d’erreur, des demandes de retransmission peuvent être prévues suivant le protocole employé. Le signal numérique qu’on cherchait à transmettre peut enfin être envoyé au destinataire. Si la qualité du canal et les techniques de fiabilisation de la transmission étaient suffisants, le destinataire ne devrait faire aucune erreur d’interprétation et retrouver le signal original.
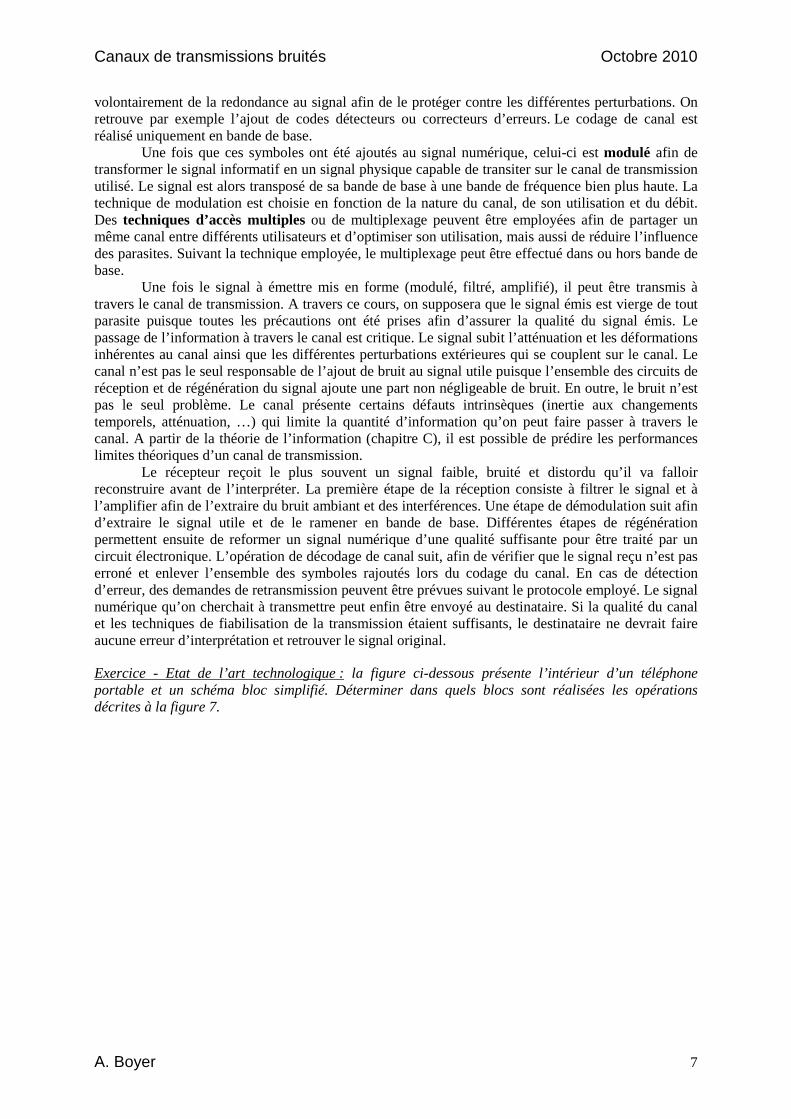
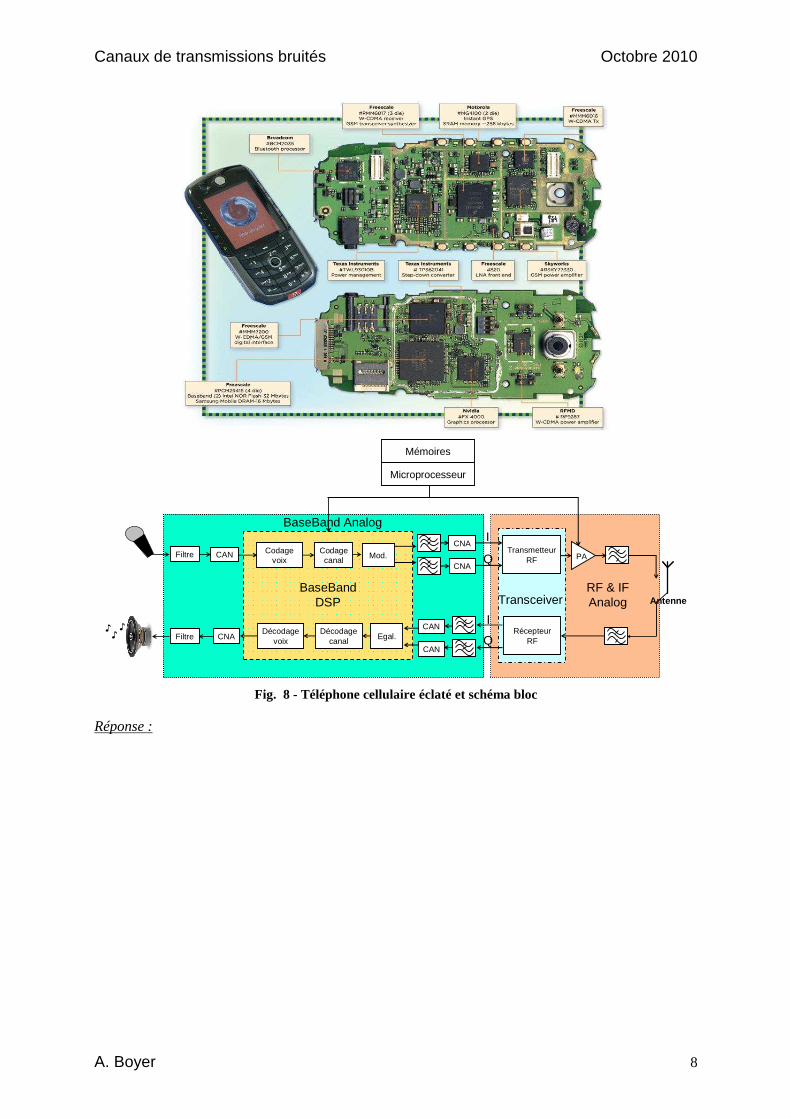
Exercice - Etat de l’art technologique : la figure ci-dessous présente l’intérieur d’un téléphone portable et un schéma bloc simplifié. Déterminer dans quels blocs sont réalisées les opérations décrites à la figure 7.
Canaux de transmissions bruités Octobre 2010
A. Boyer 8
BaseBandDSP
CAN
CNA
Filtre Codage voix
Décodage voix
Codage canal
Décodage canalFiltre Egal.
Mod.
CNA
CNA
CAN
CAN
BaseBand Analog
Récepteur RF
Transmetteur RF PA
Transceiver AntenneRF & IF Analog
Microprocesseur
Mémoires
I
Q
Q
I
Fig. 8 - Téléphone cellulaire éclaté et schéma bloc
Réponse :
Canaux de transmissions bruités Octobre 2010
A. Boyer 9
II. Les différents types de canaux de transmission
Une transmission d’information se fait toujours à distance, un support physique assure le lien entre la source et le destinataire. Dans cette partie, nous allons présenter les principaux supports couramment utilisés comme média de transmission.
1. Communication électrique filaire L’information est véhiculée par un « signal électrique », c’est à dire une onde
électromagnétique se propageant à travers un câble métallique. On trouve deux catégories de lignes de transmission utilisées en télécommunications :
câble bifilaire, de bande passante faible et réservé pour les transmissions à bas débit (inférieur à 2 Mbits/s pour le réseau téléphonique). Il s’agit le plus souvent de paires bifilaires torsadées afin de réduire la surface de couplage aux perturbations extérieures.
câble coaxial, de bande passante plus importante et qui permet de réaliser des transmissions avec un débit relativement élevé (jusqu'à 565 Mbits/s sur le réseau téléphonique). Le câble coaxial est notamment utilisé pour connecter les centraux téléphoniques entre lesquels transite un grand nombre de communications. Son avantage par rapport au câble bifilaire est d’être blindé, réduisant ainsi le couplage des perturbations électromagnétiques, et de présenter un milieu de propagation quasi uniforme le long de la ligne.
La principale caractéristique d’un câble est son impédance caractéristique. Celle-ci est définie par les dimensions géométriques de la ligne et le milieu de propagation de l’onde électromagnétique le long de la ligne (constante diélectrique de l’isolant). Cette impédance ne représente pas une impédance au sens classique électrique du terme, il s’agit en fait du rapport du champ électrique sur le champ magnétique de l’onde se propageant dans le câble (équation 1). La valeur de l’impédance caractéristique d’un câble dépend de ses caractéristiques géométriques et du milieu de propagation (permittivité diélectrique de l’isolant séparant les deux conducteurs du câble).
( ) ( )
( )m/A
m/Vc H
EZ =Ω (Équation 1)
La connaissance de l’impédance caractéristique est fondamentale car elle va permettre de déterminer la valeur optimale à donner à la charge terminale Zload de la ligne pour assurer la meilleure transmission du signal. Une ligne est dite adaptée si on vérifie l’égalité suivante : c loadZ Z= . Dans le
cas d’une ligne adaptée, toute l’énergie de l’onde incidente est fournie à la charge terminale. Par
Canaux de transmissions bruités Octobre 2010
A. Boyer 10
contre, toute rupture d’impédance conduit à la réflexion d’une partie de l’onde incidente, à la manière d’un changement de milieu pour une onde lumineuse. L’amplitude de cette onde réfléchie est d’autant plus grande que la désadaptation est importante, comme le montre l’équation 2:
Cload
Cload
inc
refl
ZZ
ZZ
V
V
+−
==Γ (Équation 2)
Où Γ est le coefficient de réflexion, Vinc et Vrefl l’amplitude en tension des ondes incidentes et réfléchies. L’onde présente le long de la ligne de transmission est la combinaison des ondes incidentes et réfléchies.
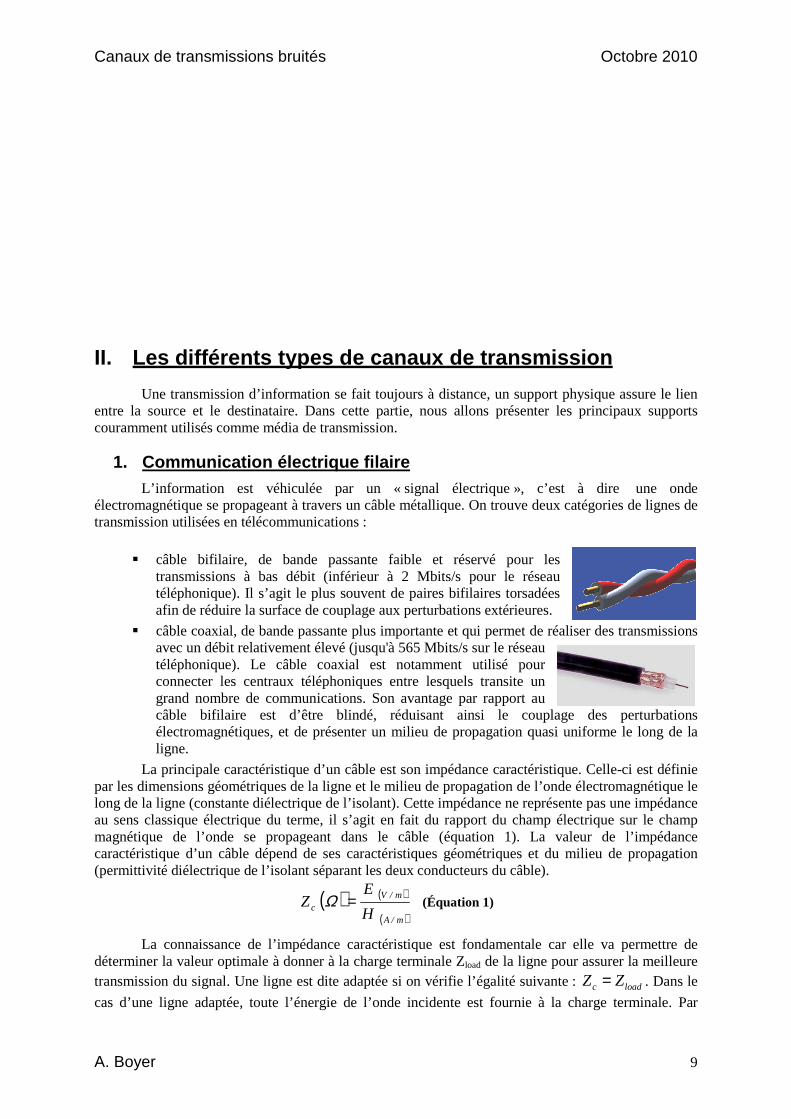
Que se passe t-il alors si la condition d’adaptation n’est pas respectée ? Pour répondre à cette question, il faut considérer les effets liés à la propagation de l’onde électromagnétique le long du câble, qui vont dépendre du rapport entre la longueur du câble et la longueur d’onde du signal transmis. La longueur d’onde dans le vide d’une onde est liée à sa fréquence par l’équation suivante, où c est la vitesse de la lumière (3.108 m/s) :
f
c=λ (Équation 3)
Pour de faibles fréquences, la longueur d’onde est largement plus grande que la longueur de la ligne de transmission, l’onde est quasiment constante en tout point de la ligne, quel que soit l’impédance de charge (fig. 9). Par contre, si la longueur d’onde devient inférieure à la longueur de la ligne, l’amplitude de l’onde n’est plus constante le long de la ligne, et présente des minima et maxima régulièrement espacés.
x
V inc
0 L
L << λ
câble
L’amplitude de l’ondeest quasi constante sur
toute la ligne
onde
x
Vinc
0 L
L >> λ
câble
L’amplitude de l’onden’est pas constante le
long de la ligne
onde
Fig. 9 – Propagation d’une onde le long d’une ligne de transmission en fonction de sa longueur d’onde
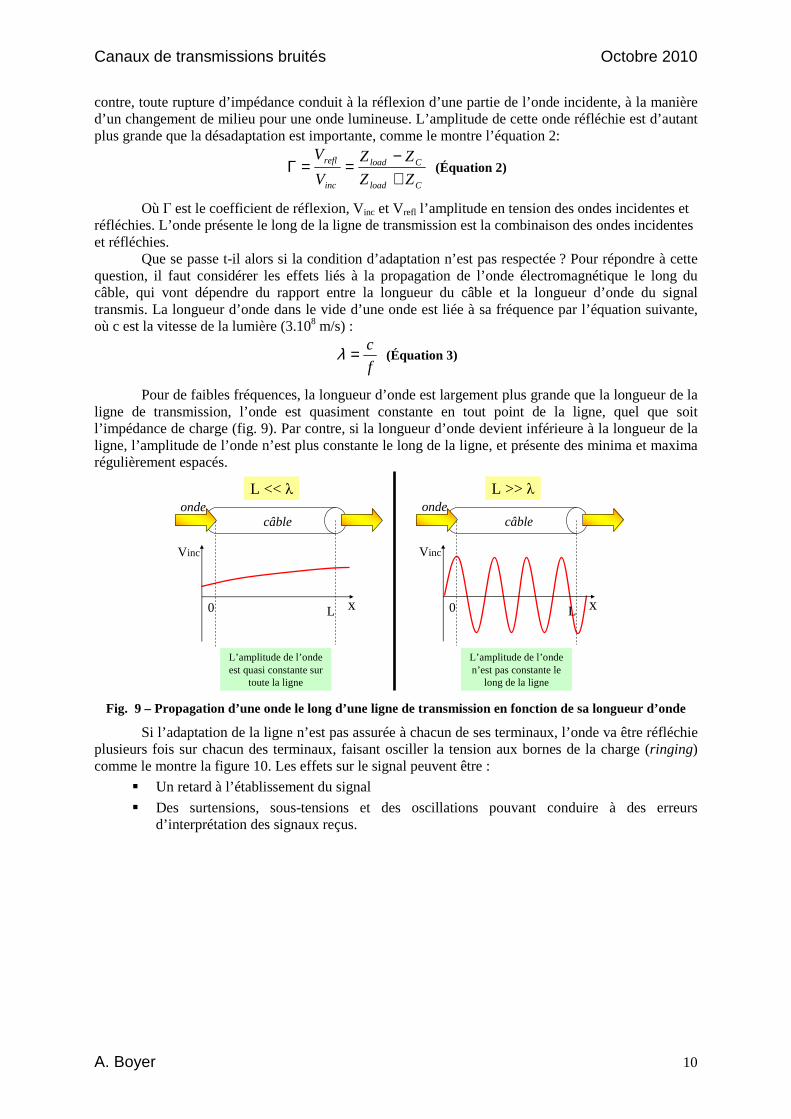
Si l’adaptation de la ligne n’est pas assurée à chacun de ses terminaux, l’onde va être réfléchie plusieurs fois sur chacun des terminaux, faisant osciller la tension aux bornes de la charge (ringing) comme le montre la figure 10. Les effets sur le signal peuvent être :
Un retard à l’établissement du signal
Des surtensions, sous-tensions et des oscillations pouvant conduire à des erreurs d’interprétation des signaux reçus.
Canaux de transmissions bruités Octobre 2010
A. Boyer 11
x=0
x
Vincident
Vréfléchi Vload
Câble d’impédance caractéristique Zc
Vin
Iin
Vload
temps
Vin
temps
Si Zload ≠ Zc
Fig. 10 - Effet de la désadaptation d’impédance sur le signal transmis
Exercice – Problème d’adaptation de ligne : soit un câble téléphonique de 1 mètre utilisé pour transmettre un signal binaire de fréquence F. A partir de quelle fréquence F faut-il prendre en compte les effets de propagation de l’onde électromagnétique.
Réponse :
Un autre paramètre essentiel est l’atténuation du câble liée aux différentes pertes (ex : les
pertes dans le diélectrique). Cette atténuation augmente en général avec la fréquence. Un câble coaxial standard présente des pertes typiques de 0.3 dB/m à 100 MHz et 1 dB/m à 1 GHz. Cette atténuation limite l’utilisation de communications filaires pour de longues distances.
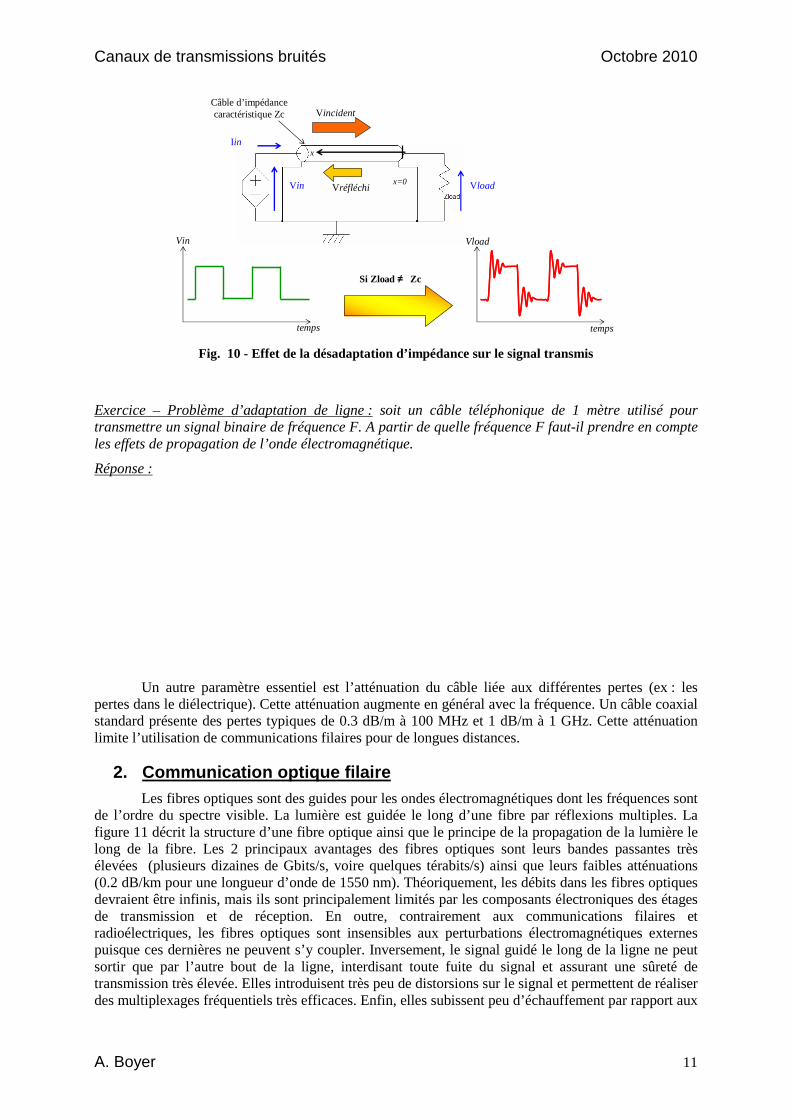
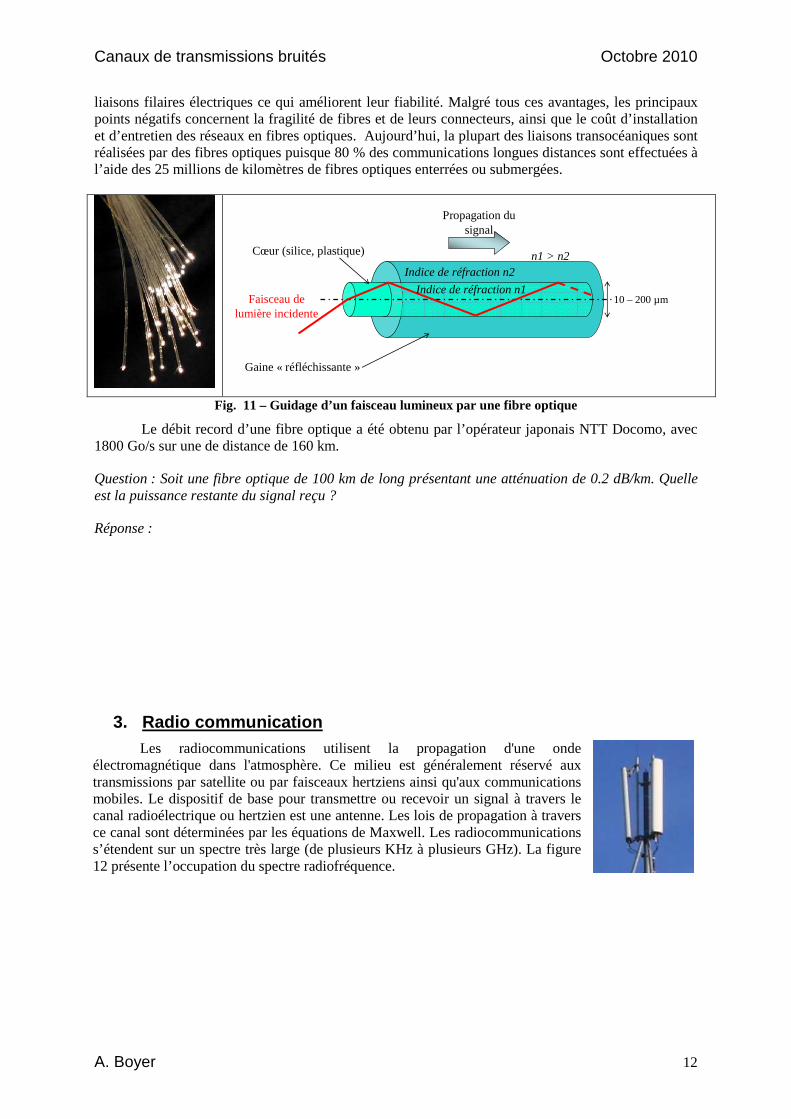
2. Communication optique filaire Les fibres optiques sont des guides pour les ondes électromagnétiques dont les fréquences sont
de l’ordre du spectre visible. La lumière est guidée le long d’une fibre par réflexions multiples. La figure 11 décrit la structure d’une fibre optique ainsi que le principe de la propagation de la lumière le long de la fibre. Les 2 principaux avantages des fibres optiques sont leurs bandes passantes très élevées (plusieurs dizaines de Gbits/s, voire quelques térabits/s) ainsi que leurs faibles atténuations (0.2 dB/km pour une longueur d’onde de 1550 nm). Théoriquement, les débits dans les fibres optiques devraient être infinis, mais ils sont principalement limités par les composants électroniques des étages de transmission et de réception. En outre, contrairement aux communications filaires et radioélectriques, les fibres optiques sont insensibles aux perturbations électromagnétiques externes puisque ces dernières ne peuvent s’y coupler. Inversement, le signal guidé le long de la ligne ne peut sortir que par l’autre bout de la ligne, interdisant toute fuite du signal et assurant une sûreté de transmission très élevée. Elles introduisent très peu de distorsions sur le signal et permettent de réaliser des multiplexages fréquentiels très efficaces. Enfin, elles subissent peu d’échauffement par rapport aux
Canaux de transmissions bruités Octobre 2010
A. Boyer 12
liaisons filaires électriques ce qui améliorent leur fiabilité. Malgré tous ces avantages, les principaux points négatifs concernent la fragilité de fibres et de leurs connecteurs, ainsi que le coût d’installation et d’entretien des réseaux en fibres optiques. Aujourd’hui, la plupart des liaisons transocéaniques sont réalisées par des fibres optiques puisque 80 % des communications longues distances sont effectuées à l’aide des 25 millions de kilomètres de fibres optiques enterrées ou submergées.
Propagation du signal
Cœur (silice, plastique)
Gaine « réfléchissante »
Indice de réfraction n1
Indice de réfraction n2n1 > n2
10 – 200 µmFaisceau de lumière incidente
Fig. 11 – Guidage d’un faisceau lumineux par une fibre optique
Le débit record d’une fibre optique a été obtenu par l’opérateur japonais NTT Docomo, avec 1800 Go/s sur une de distance de 160 km.
Question : Soit une fibre optique de 100 km de long présentant une atténuation de 0.2 dB/km. Quelle est la puissance restante du signal reçu ?
Réponse :
3. Radio communication Les radiocommunications utilisent la propagation d'une onde
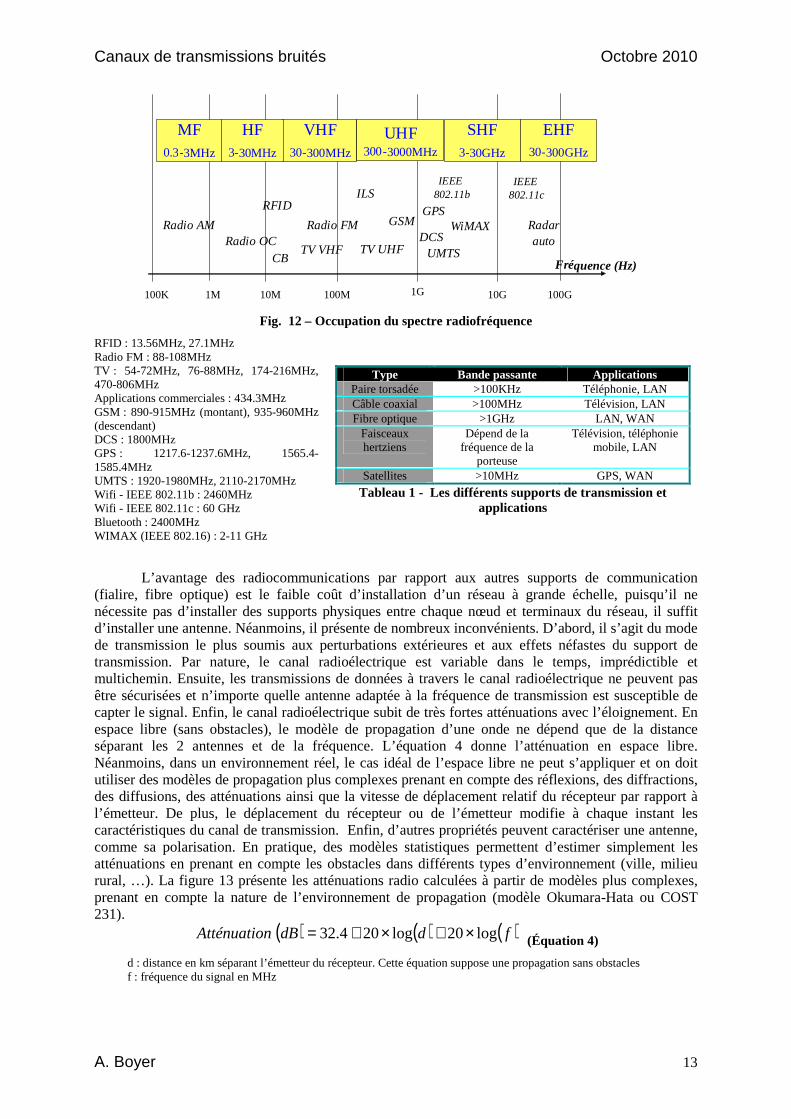
électromagnétique dans l'atmosphère. Ce milieu est généralement réservé aux transmissions par satellite ou par faisceaux hertziens ainsi qu'aux communications mobiles. Le dispositif de base pour transmettre ou recevoir un signal à travers le canal radioélectrique ou hertzien est une antenne. Les lois de propagation à travers ce canal sont déterminées par les équations de Maxwell. Les radiocommunications s’étendent sur un spectre très large (de plusieurs KHz à plusieurs GHz). La figure 12 présente l’occupation du spectre radiofréquence.
Canaux de transmissions bruités Octobre 2010
A. Boyer 13
Fr é quence (Hz)
100K 1M 10M 100M 1G 10G 100G
Radio AM Radio OC
CB TV VHF
Radio FM RFID
TV UHF
ILS
GSM GPS
DCS UMTS
Radar auto
IEEE 802.11b
VHF 30 - 300MHz
UHF 300 - 3000MHz
SHF 3 - 30GHz
EHF 30 - 300GHz
HF 3 - 30MHz
MF 0.3 - 3MHz
WiMAX
IEEE 802.11c
Fig. 12 – Occupation du spectre radiofréquence
RFID : 13.56MHz, 27.1MHz Radio FM : 88-108MHz TV : 54-72MHz, 76-88MHz, 174-216MHz, 470-806MHz Applications commerciales : 434.3MHz GSM : 890-915MHz (montant), 935-960MHz (descendant) DCS : 1800MHz GPS : 1217.6-1237.6MHz, 1565.4-1585.4MHz UMTS : 1920-1980MHz, 2110-2170MHz Wifi - IEEE 802.11b : 2460MHz Wifi - IEEE 802.11c : 60 GHz Bluetooth : 2400MHz WIMAX (IEEE 802.16) : 2-11 GHz
Type Bande passante Applications Paire torsadée >100KHz Téléphonie, LAN Câble coaxial >100MHz Télévision, LAN Fibre optique >1GHz LAN, WAN
Faisceaux hertziens
Dépend de la fréquence de la
porteuse
Télévision, téléphonie mobile, LAN
Satellites >10MHz GPS, WAN
Tableau 1 - Les différents supports de transmission et applications
L’avantage des radiocommunications par rapport aux autres supports de communication
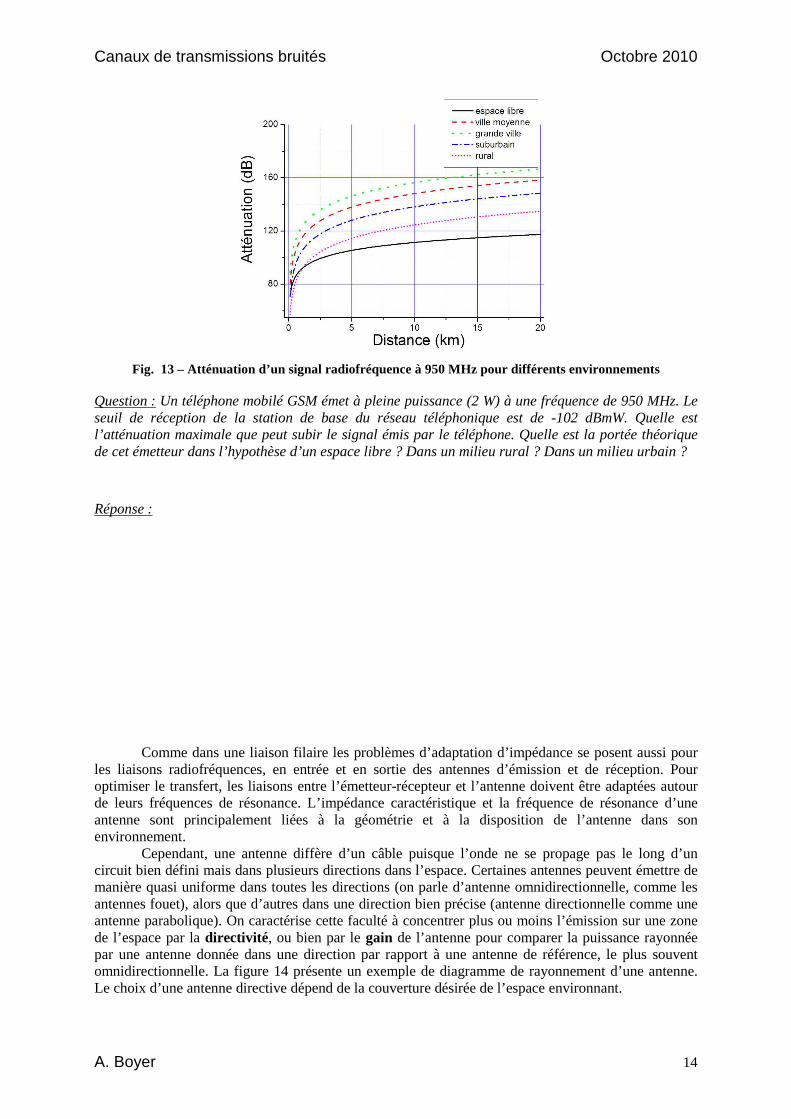
(fialire, fibre optique) est le faible coût d’installation d’un réseau à grande échelle, puisqu’il ne nécessite pas d’installer des supports physiques entre chaque nœud et terminaux du réseau, il suffit d’installer une antenne. Néanmoins, il présente de nombreux inconvénients. D’abord, il s’agit du mode de transmission le plus soumis aux perturbations extérieures et aux effets néfastes du support de transmission. Par nature, le canal radioélectrique est variable dans le temps, imprédictible et multichemin. Ensuite, les transmissions de données à travers le canal radioélectrique ne peuvent pas être sécurisées et n’importe quelle antenne adaptée à la fréquence de transmission est susceptible de capter le signal. Enfin, le canal radioélectrique subit de très fortes atténuations avec l’éloignement. En espace libre (sans obstacles), le modèle de propagation d’une onde ne dépend que de la distance séparant les 2 antennes et de la fréquence. L’équation 4 donne l’atténuation en espace libre. Néanmoins, dans un environnement réel, le cas idéal de l’espace libre ne peut s’appliquer et on doit utiliser des modèles de propagation plus complexes prenant en compte des réflexions, des diffractions, des diffusions, des atténuations ainsi que la vitesse de déplacement relatif du récepteur par rapport à l’émetteur. De plus, le déplacement du récepteur ou de l’émetteur modifie à chaque instant les caractéristiques du canal de transmission. Enfin, d’autres propriétés peuvent caractériser une antenne, comme sa polarisation. En pratique, des modèles statistiques permettent d’estimer simplement les atténuations en prenant en compte les obstacles dans différents types d’environnement (ville, milieu rural, …). La figure 13 présente les atténuations radio calculées à partir de modèles plus complexes, prenant en compte la nature de l’environnement de propagation (modèle Okumara-Hata ou COST 231).
( ) ( ) ( )fddBnAtténuatio log20log204.32 ×+×+= (Équation 4)
d : distance en km séparant l’émetteur du récepteur. Cette équation suppose une propagation sans obstacles f : fréquence du signal en MHz
Canaux de transmissions bruités Octobre 2010
A. Boyer 14
Fig. 13 – Atténuation d’un signal radiofréquence à 950 MHz pour différents environnements
Question : Un téléphone mobilé GSM émet à pleine puissance (2 W) à une fréquence de 950 MHz. Le seuil de réception de la station de base du réseau téléphonique est de -102 dBmW. Quelle est l’atténuation maximale que peut subir le signal émis par le téléphone. Quelle est la portée théorique de cet émetteur dans l’hypothèse d’un espace libre ? Dans un milieu rural ? Dans un milieu urbain ?
Réponse :
Comme dans une liaison filaire les problèmes d’adaptation d’impédance se posent aussi pour
les liaisons radiofréquences, en entrée et en sortie des antennes d’émission et de réception. Pour optimiser le transfert, les liaisons entre l’émetteur-récepteur et l’antenne doivent être adaptées autour de leurs fréquences de résonance. L’impédance caractéristique et la fréquence de résonance d’une antenne sont principalement liées à la géométrie et à la disposition de l’antenne dans son environnement.
Cependant, une antenne diffère d’un câble puisque l’onde ne se propage pas le long d’un circuit bien défini mais dans plusieurs directions dans l’espace. Certaines antennes peuvent émettre de manière quasi uniforme dans toutes les directions (on parle d’antenne omnidirectionnelle, comme les antennes fouet), alors que d’autres dans une direction bien précise (antenne directionnelle comme une antenne parabolique). On caractérise cette faculté à concentrer plus ou moins l’émission sur une zone de l’espace par la directivité , ou bien par le gain de l’antenne pour comparer la puissance rayonnée par une antenne donnée dans une direction par rapport à une antenne de référence, le plus souvent omnidirectionnelle. La figure 14 présente un exemple de diagramme de rayonnement d’une antenne. Le choix d’une antenne directive dépend de la couverture désirée de l’espace environnant.
Canaux de transmissions bruités Octobre 2010
A. Boyer 15
Fig. 14 – Diagramme de rayonnement d’une antenne log périodique
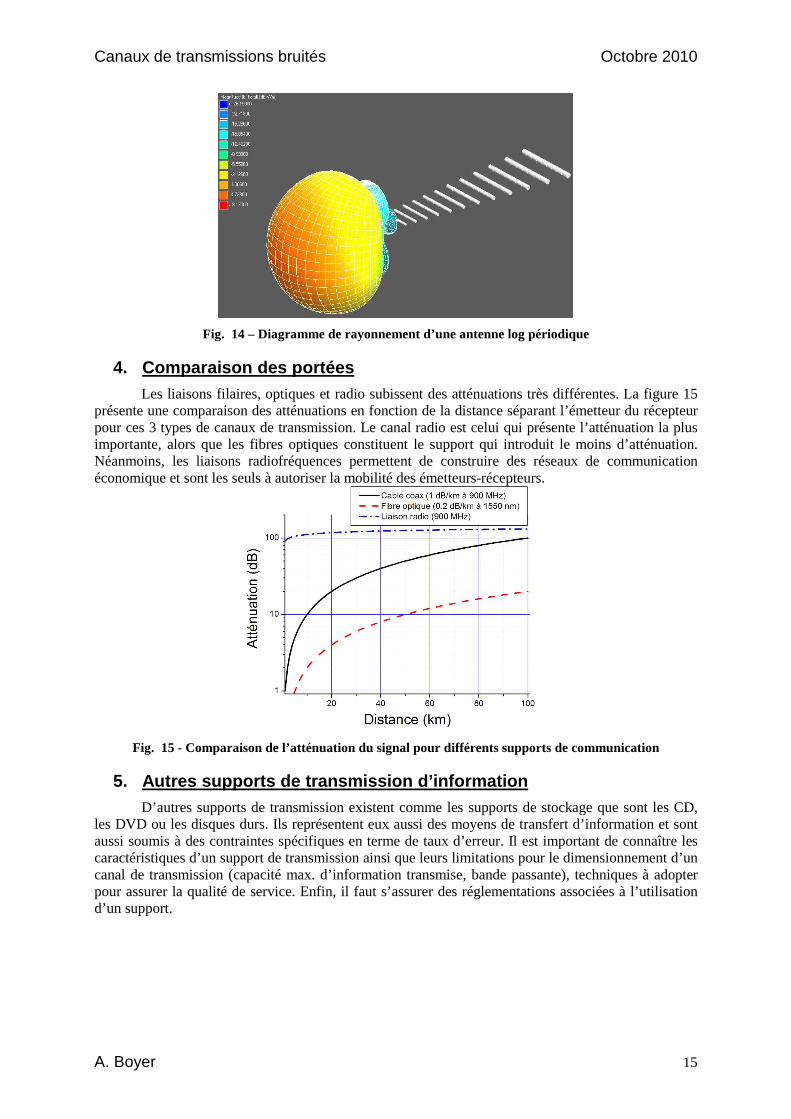
4. Comparaison des portées Les liaisons filaires, optiques et radio subissent des atténuations très différentes. La figure 15
présente une comparaison des atténuations en fonction de la distance séparant l’émetteur du récepteur pour ces 3 types de canaux de transmission. Le canal radio est celui qui présente l’atténuation la plus importante, alors que les fibres optiques constituent le support qui introduit le moins d’atténuation. Néanmoins, les liaisons radiofréquences permettent de construire des réseaux de communication économique et sont les seuls à autoriser la mobilité des émetteurs-récepteurs.
Fig. 15 - Comparaison de l’atténuation du signal pour différents supports de communication
5. Autres supports de transmission d’information D’autres supports de transmission existent comme les supports de stockage que sont les CD,
les DVD ou les disques durs. Ils représentent eux aussi des moyens de transfert d’information et sont aussi soumis à des contraintes spécifiques en terme de taux d’erreur. Il est important de connaître les caractéristiques d’un support de transmission ainsi que leurs limitations pour le dimensionnement d’un canal de transmission (capacité max. d’information transmise, bande passante), techniques à adopter pour assurer la qualité de service. Enfin, il faut s’assurer des réglementations associées à l’utilisation d’un support.
Canaux de transmissions bruités Octobre 2010
A. Boyer 16
III. Ce qu’il faut retenir
⇒ Un canal de transmission n’est pas simplement composé du support de transmission, mais aussi de l’ensemble des dispositifs qui permettent d’adapter le signal à transmettre au canal et de minimiser les erreurs de réception.
⇒ Afin de résister aux perturbations induites par le support de transmission, un signal à transmettre subit en général des opérations de codage de source, de codage de canal, de modulation, de mise en forme …. Il subit les opérations inverses en réception.
⇒ Lors de la transmission à travers le canal, le signal subit les atténuations et les déformations propres au canal, ainsi que le bruit provenant de perturbateurs externes. En outre, les émetteurs et récepteurs du canal contribue à générer des perturbations qui dégradent le signal.
⇒ Les défauts du canal de transmission et les perturbations externes vont limiter la quantité d’information qui peut passer à travers le canal et affecter la qualité du signal.
⇒ Un récepteur reçoit en général un signal faible, bruité et distordu. Il doit être en mesure de le reconstruire puis de l’interpréter afin de retrouver le signal d’origine.
⇒ Les transmissions d’informations se font en général par liaison filaire (câble électrique ou fibre optique) ou par liaison hertzienne (ou sans fils). Cette dernière est la plus sensible aux perturbations externes et dont l’environnement de propagation est le plus difficile à modéliser.
Canaux de transmissions bruités Octobre 2010
A. Boyer 17
B. Origine des perturbations et leurs
effets sur le canal de transmission
Les perturbations que subissent les canaux de transmission ont de nombreuses origines. Chacun a un effet propre sur le canal mais tous sont en mesure de dégrader le signal et d’empêcher le récepteur d’interpréter correctement le signal reçu. Dans cette partie, nous allons passer en revue l’ensemble des perturbations qui peuvent altérer une communication numérique et décrire leurs effets.
I. Bruit lié aux équipements électroniques
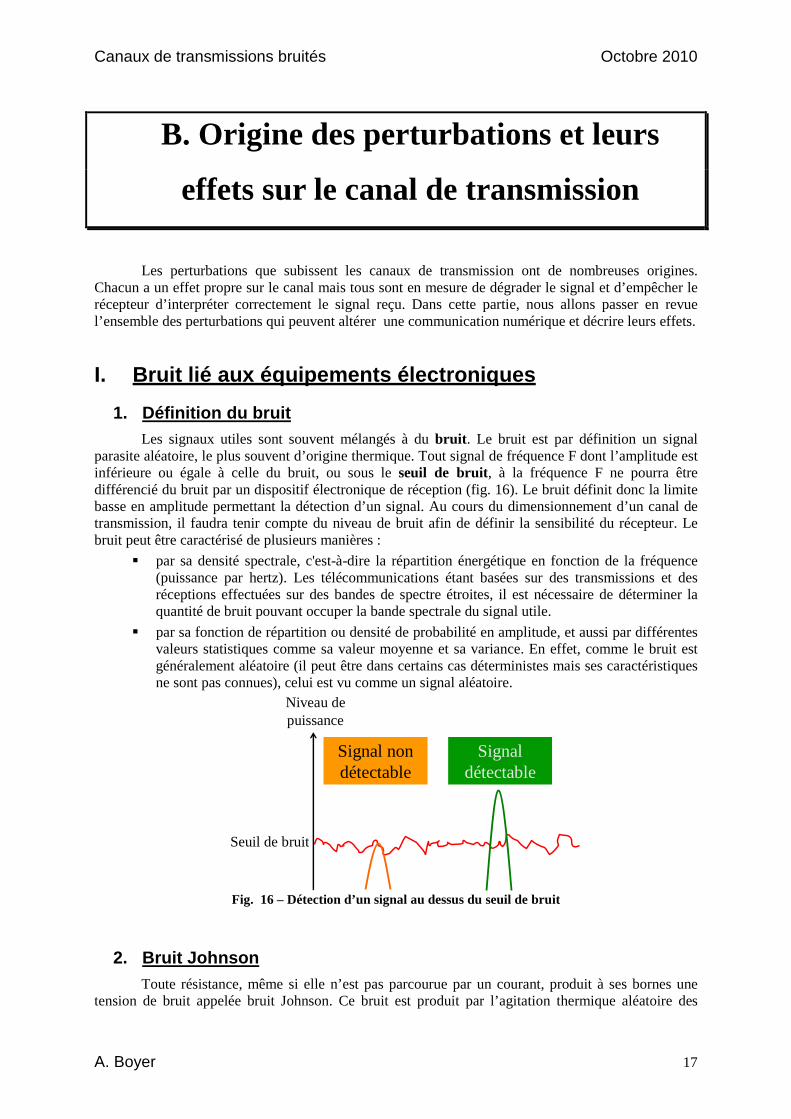
1. Définition du bruit Les signaux utiles sont souvent mélangés à du bruit . Le bruit est par définition un signal
parasite aléatoire, le plus souvent d’origine thermique. Tout signal de fréquence F dont l’amplitude est inférieure ou égale à celle du bruit, ou sous le seuil de bruit, à la fréquence F ne pourra être différencié du bruit par un dispositif électronique de réception (fig. 16). Le bruit définit donc la limite basse en amplitude permettant la détection d’un signal. Au cours du dimensionnement d’un canal de transmission, il faudra tenir compte du niveau de bruit afin de définir la sensibilité du récepteur. Le bruit peut être caractérisé de plusieurs manières :
par sa densité spectrale, c'est-à-dire la répartition énergétique en fonction de la fréquence (puissance par hertz). Les télécommunications étant basées sur des transmissions et des réceptions effectuées sur des bandes de spectre étroites, il est nécessaire de déterminer la quantité de bruit pouvant occuper la bande spectrale du signal utile.
par sa fonction de répartition ou densité de probabilité en amplitude, et aussi par différentes valeurs statistiques comme sa valeur moyenne et sa variance. En effet, comme le bruit est généralement aléatoire (il peut être dans certains cas déterministes mais ses caractéristiques ne sont pas connues), celui est vu comme un signal aléatoire.
Niveau de puissance
Seuil de bruit
Signal détectable
Signal non détectable
Fig. 16 – Détection d’un signal au dessus du seuil de bruit
2. Bruit Johnson Toute résistance, même si elle n’est pas parcourue par un courant, produit à ses bornes une
tension de bruit appelée bruit Johnson. Ce bruit est produit par l’agitation thermique aléatoire des
Canaux de transmissions bruités Octobre 2010
A. Boyer 18
électrons. Ce bruit possède un spectre plat, c’est à dire que la puissance du bruit est constante avec la fréquence. On parle alors de bruit blanc. Son amplitude dépend de la valeur de la résistance et de la température ambiante. La tension efficace de bruit aux bornes d’une résistance R peut se calculer à l’aide de l’équation 5, la densité spectrale de bruit à l’aide de l’équation 6.
4 TRbruitV k B= (Équation 5)
24 TR ( / )bruitDSP k V Hz= (Équation 6)
R = résistance du conducteur (Ohm) k=1.38x10-23 Joule/°K, constante de Boltzmann T= température du matériau (°K) B=largeur de bande (Hz)
Comme le bruit est un phénomène aléatoire, l’amplitude du bruit Johnson est imprévisible
mais suit une loi gaussienne.
3. Bruit de grenaille Un courant électrique peut être comparé à un flux de charges discrètes de charges constantes.
Contrairement à l’écoulement d’un fluide, un courant est composé d’éléments finis qui connaissent des fluctuations statistiques. La fluctuation du courant est donnée par l’équation 7 :
2bruitI qIB= (Équation 7)
q=1.6x10-19 C charge d’un électron I= amplitude du courant continu (A) B=largeur de bande (Hz)
Les fluctuations relatives du courant sont d’autant plus importantes que le courant est faible.
Comme le bruit Johnson, il s’agit d’un bruit blanc gaussien. Cette formule est particulièrement valable dans une jonction PN, mais surestime le bruit de grenaille dans un conducteur métallique.
4. Bruit en 1/f ou bruit de scintillement Alors que les bruits Johnson et de grenaille sont des phénomènes irréductibles liés à des
phénomènes physiques, les composants réels ont une source de bruit supplémentaire ayant plusieurs origines liées à leur fabrication (nature du matériau, résistif par exemple). Ainsi, les résistances sont affectées de variations de résistance proportionnelles au courant qui les traversent produisant des fluctuations de tension à leurs bornes. Le spectre de ce bruit suit à peu près une loi en 1/f, sa densité de puissance est donc divisée par 10 à chaque décade de fréquence. On appelle aussi ce bruit le bruit rose.
5. Bruit thermique Comme nous venons de le voir, le bruit est essentiellement d’origine thermique et son
amplitude dépend de la fréquence. Il est beaucoup plus important en basse fréquence qu’en haute fréquence à cause du bruit de scintillement, mais il a tendance à se stabiliser en haute fréquence. En considérant que le bruit est constant sur la bande de fréquence visée (ce qui est généralement le cas puisque les bandes de fréquence allouées aux transmissions sont limitées), la formule suivante est proposée afin de déterminer de manière simple l’amplitude du bruit d’origine thermique aux bornes d’un dispositif de réception.
( ) ( )kTBlog10dBWN = (Équation 8)
N : amplitude du bruit k : constante de Boltzmann (k=1.38e-23 J/K) T : température (K) B : bande de fréquence (Hz)

Canaux de transmissions bruités Octobre 2010
A. Boyer 19
La formule précédente permet d’évaluer le seuil ou plancher de bruit dû à l’agitation thermique ambiante.
Question : calculer la densité spectrale du bruit à température ambiante (27°c) à l’aide de la formule précédente.
Réponse :
6. Bruit d’un circuit actif et facteur de bruit Les circuits actifs sont constitués de nombreux éléments capables de générer du bruit
(transistors, diodes…). Ainsi, les amplificateurs introduisent une part non négligeable de bruit dans les récepteurs. Un modèle équivalent de bruit ramené en entrée est donné pour représenter le bruit d’un amplificateur. Il contient :
Une manière courante de caractériser le bruit interne par un système électronique est le facteur de bruit ou Noise Figure. Celui-ci est égal au rapport entre la puissance de bruit mesuré en sortie sur la puissance de bruit mesuré en entrée d’un système électronique (équation 9). Il indique donc la quantité de bruit ajouté par le système électronique.
( ) ( ) ( )dBNdBmNdBNFN
NNF inout
in
out −=⇒= (Équation 9)
Lorsque plusieurs systèmes électroniques sont cascadés, le facteur de bruit du système complet va dépendre des facteurs de bruit NFi de tous les éléments et de leurs gains Gi. Il peut se calculer à partir de la relation de Friis (équation 10).
1e élément 2e élément Ne élément
G1
NF1
G2
NF2
GN
NFN
NoutNin
12121
3
1
21 ...
1...
11
−
−++
−+
−+==
N
N
in
out
GGG
NF
GG
NF
G
NFNF
N
NNF (Équation 10)
Remarque : les circuits passifs génèrent aussi du bruit. En effet, une résistance génère du bruit Johnson. Le facteur de bruit d’un dispositif passif est lié à son atténuation L par la formule ci-dessous.
LNFpassif
1= (Équation 11)
7. Bruit d’une antenne Dans un système de transmission radio, les performances en termes de sensibilité du récepteur
dépendent non seulement de celles des circuits électroniques, mais aussi de l’antenne qui contribue à ajouter du bruit au signal. L’antenne possède une résistance de perte et présente donc une source de tension de bruit de Johnson, qui dépend fortement de la température de l’antenne. Une antenne est aussi une source de bruit à cause de sa fonction première : capturer des ondes électromagnétiques. En
Canaux de transmissions bruités Octobre 2010
A. Boyer 20
effet, une antenne est susceptible de capter l’ensemble des signaux parasites produits par son environnement (interférences électromagnétiques, bruit thermique).
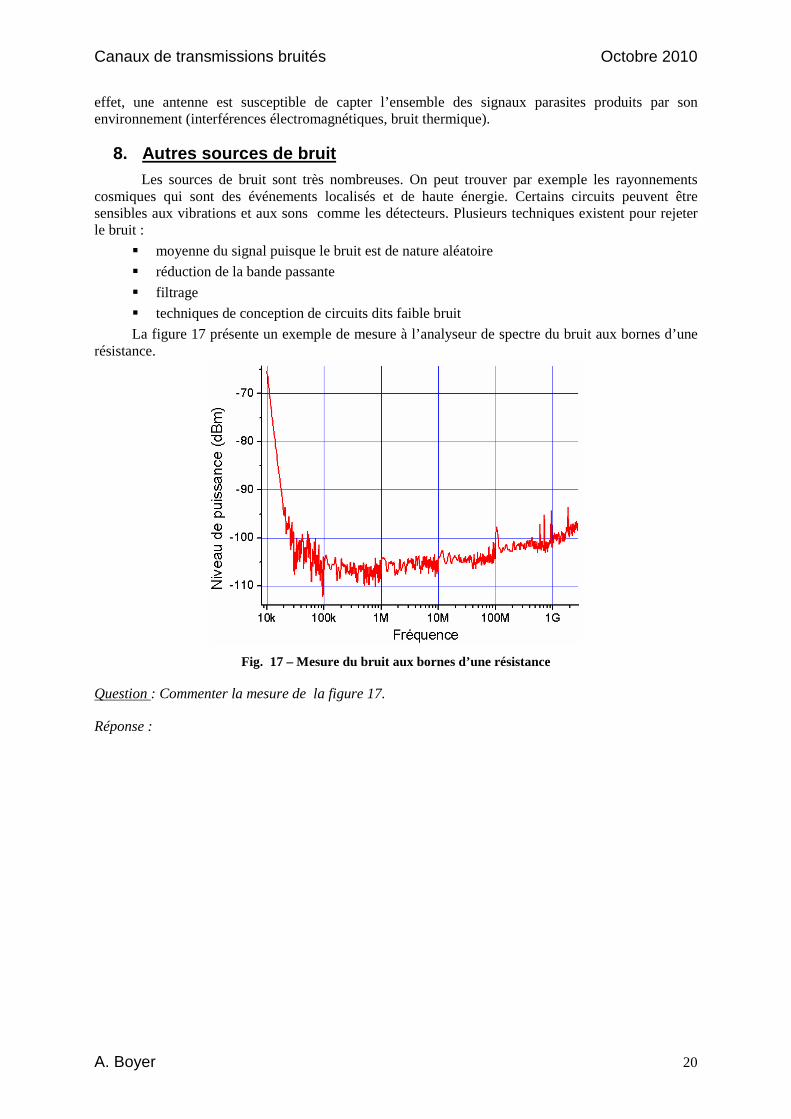
8. Autres sources de bruit Les sources de bruit sont très nombreuses. On peut trouver par exemple les rayonnements
cosmiques qui sont des événements localisés et de haute énergie. Certains circuits peuvent être sensibles aux vibrations et aux sons comme les détecteurs. Plusieurs techniques existent pour rejeter le bruit :
moyenne du signal puisque le bruit est de nature aléatoire
réduction de la bande passante
filtrage
techniques de conception de circuits dits faible bruit
La figure 17 présente un exemple de mesure à l’analyseur de spectre du bruit aux bornes d’une résistance.
Fig. 17 – Mesure du bruit aux bornes d’une résistance
Question : Commenter la mesure de la figure 17.
Réponse :
Canaux de transmissions bruités Octobre 2010
A. Boyer 21
II. Rapport signal sur bruit
1. Définition Connaître la puissance du bruit N n’a un intérêt que si on peut la comparer à celle du signal Ps
et en déduire son impact sur la dégradation du signal. C’est pourquoi on utilise généralement un rapport de puissance appelé rapport signal sur bruit (Signal Noise Ratio) :
N
PSNR nomS= (Équation 12)
Le rapport signal sur bruit se rapporte toujours au niveau nominal du signal. Le plus souvent, celui-ci est exprimé en dB (équation 13). Voir Annexe A pour les conversions entre les échelles linéaires et les échelles logarithmiques (dB).
( )
×=
N
PdBSNR nomSlog10 (Équation 13)
Celui-ci va donc permettre d’apprécier la qualité d’un signal et déterminer la sensibilité d’un dispositif pour une densité spectrale du bruit donnée. Le rapport signal à bruit est une donnée surtout intéressante pour des signaux analogiques, puisqu’il va permettre d’estimer la dégradation subit par ce dernier. En effet, plus le rapport signal à bruit est faible, plus le signal est dégradé par le bruit et plus il sera difficile de supprimer l’influence du bruit sur le signal. Il est nécessaire de garantir un rapport signal à bruit important pour s’assurer que le signal reçu reste une « copie fidèle » du signal transmis. Ci-dessous, voici 4 exemples de contraintes en terme de SNR, les 3 premières correspondent à des transmissions analogiques, la dernière à une transmission numérique.
Exemple de SNR :
Téléphonie classique : SNR ≥ 50dB (B=3.1 KHz), bruit à peine perceptible, bruit à 30dB très gênant.
Transmission de musique : SNR ≥ 47dB (B=15 KHz), plus sévère que les exigences en téléphonie puisque largeur de bande plus grande.
Transmission de télévision : SNR ≥ 52dB (B=5 MHz)
Système GSM : SNR ≥ 8dB (B=200KHz), le bruit thermique étant de -120dBm à 290°K, le premier étage d’amplification ajoutant un bruit de 10dB, la sensibilité du récepteur est de -102dBm (63pW) ! Cette sensibilité permet de garantir un taux d’erreur binaire d’au plus 1 pour 100 bits.
2. Cas d’un signal numérique - Rapport signal à bru it par bit Les signaux numériques sont sensibles au bruit, mais ne sont pas aussi sensibles que les
signaux analogiques. Contrairement à un signal analogique, la qualité d’un signal numérique ne se mesure pas à la distorsion du signal, mais à la possibilité pour un circuit digital de détecter correctement l’état binaire transmis. Alors que la principale contrainte d’une communication analogique est le rapport signal à bruit qui est directement relié à la distorsion du signal, celle d’une communication numérique est le taux d’erreur binaire (cf. VI.5).
Alors que les exigences en termes de rapport signal à bruit pour les transmissions analogiques sont très élevées (plusieurs dizaines de dB !), celles-ci sont beaucoup plus faibles pour des communications numériques. Les niveaux de bruit nécessaires pour induire une erreur binaire doivent être très grand et du même ordre que l’amplitude du signal. En général, il est possible de recevoir un signal numérique avec une qualité acceptable avec un rapport signal à bruit légèrement négatif !
Canaux de transmissions bruités Octobre 2010
A. Boyer 22
Ainsi, le rapport signal sur bruit n’est pas la meilleure métrique pour qualifier la qualité d’un signal numérique. On préfère employer un rapport signal à bruit normalisé appelé rapport signal à bruit par bit noté Eb/No. Il s’agit du rapport entre l’énergie véhiculée par un bit Eb et la densité spectrale en puissance du bruit No. Comme nous le verrons plus tard, cette grandeur est directement reliée au taux d’erreur binaire, et fixer une contrainte en termes de taux d’erreur binaire revient à fixer une contrainte sur le rapport Eb/No.
Le rapport signal à bruit et le rapport signal à bruit par bit sont reliés par l’équation 14.
B
F
N
E
N
S b
o
b ×= (Équation 14)
S : puissance du signal (W) N : puissance du bruit (W) Eb : énergie par bit (W.s/bit) No : densité spectrale de bruit (W/Hz) Fb : débit binaire (bits/s)
B : bande passante du canal de transmission (Hz)
III. Distorsions non linéaires des circuits électro niques
Les circuits électroniques actifs sont souvent modélisés par des lois linéaires, alors que leur comportement est purement non linéaire. Celui-ci est négligé afin de faciliter la prédiction de leur comportement (par ex, en utilisant des fonctions de transfert). Ces effets liés au comportement intrinsèque des composants et à leurs imperfections vont dégrader les performances du système en modifiant certains paramètres tels que le gain des étages d’amplification ou en créant des signaux parasites. Les effets non linéaires sont difficiles à modéliser et, en général, ils sont modélisés à l’aide de série de développement limité à l’ordre 2 ou 3. Les lois non linéaires apparaissent alors comme des polynômes d’ordre 2 ou 3 (ces calculs sont présentés à l’annexe B), enrichissant le spectre du signal de sortie de nouvelles composantes spectrales. On dit alors que les signaux d’entrée et de sortie de dispositifs non linéaires ne sont plus isomorphes. On distingue plus particulièrement deux types de distorsions :
La distorsion harmonique
La distorsion d’intermodulation
1. Distorsions harmoniques La distorsion harmonique est due, en cas d’excitation par une sinusoïdale pure de fréquence
fo, à la création de composantes aux fréquences harmoniques k×fo, où k est un entier. Le spectre en sortie du dispositif non linéaire est enrichi en nouvelles composantes spectrales. Pour caractériser la distorsion spectrale, on utilise les notions de taux de distorsion. Le taux de distorsion de l’harmonique k , notée dk, prend en compte l’apparition de nouvelles composantes spectrales :
( )1
% kk
Aamplitude harmonique kd
amplitude du fondamental A= = (Équation 15)
Le taux de distorsion harmonique global d caractérise la distorsion totale du signal. Il s’agit
du rapport des valeurs efficaces du signal de sortie sans la composante fondamentale sur celui avec fondamentales :
∑∑
∑∞+
=
∞+
=
+∞
= −==
1
2
2
1
1
2
2
2
1
kk
kk
kk
A
A
A
Ad (Équation 16)
Canaux de transmissions bruités Octobre 2010
A. Boyer 23
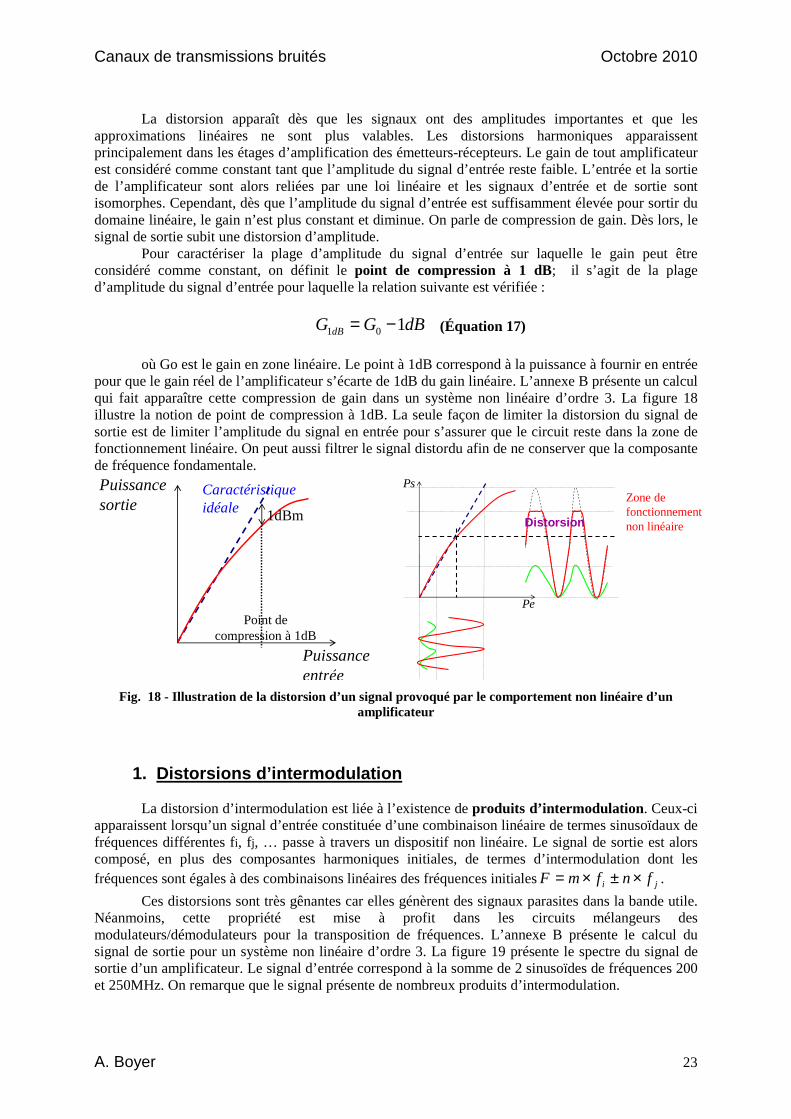
La distorsion apparaît dès que les signaux ont des amplitudes importantes et que les
approximations linéaires ne sont plus valables. Les distorsions harmoniques apparaissent principalement dans les étages d’amplification des émetteurs-récepteurs. Le gain de tout amplificateur est considéré comme constant tant que l’amplitude du signal d’entrée reste faible. L’entrée et la sortie de l’amplificateur sont alors reliées par une loi linéaire et les signaux d’entrée et de sortie sont isomorphes. Cependant, dès que l’amplitude du signal d’entrée est suffisamment élevée pour sortir du domaine linéaire, le gain n’est plus constant et diminue. On parle de compression de gain. Dès lors, le signal de sortie subit une distorsion d’amplitude.
Pour caractériser la plage d’amplitude du signal d’entrée sur laquelle le gain peut être considéré comme constant, on définit le point de compression à 1 dB; il s’agit de la plage d’amplitude du signal d’entrée pour laquelle la relation suivante est vérifiée :
1 0 1dBG G dB= − (Équation 17)
où Go est le gain en zone linéaire. Le point à 1dB correspond à la puissance à fournir en entrée
pour que le gain réel de l’amplificateur s’écarte de 1dB du gain linéaire. L’annexe B présente un calcul qui fait apparaître cette compression de gain dans un système non linéaire d’ordre 3. La figure 18 illustre la notion de point de compression à 1dB. La seule façon de limiter la distorsion du signal de sortie est de limiter l’amplitude du signal en entrée pour s’assurer que le circuit reste dans la zone de fonctionnement linéaire. On peut aussi filtrer le signal distordu afin de ne conserver que la composante de fréquence fondamentale. Puissance sortie
1dBm
Caractéristique idéale
Point de compression à 1dB
Puissance entrée
Pe
PsZone de fonctionnement non linéaireDistorsion
Fig. 18 - Illustration de la distorsion d’un signal provoqué par le comportement non linéaire d’un amplificateur
1. Distorsions d’intermodulation
La distorsion d’intermodulation est liée à l’existence de produits d’intermodulation . Ceux-ci apparaissent lorsqu’un signal d’entrée constituée d’une combinaison linéaire de termes sinusoïdaux de fréquences différentes fi, fj, … passe à travers un dispositif non linéaire. Le signal de sortie est alors composé, en plus des composantes harmoniques initiales, de termes d’intermodulation dont les fréquences sont égales à des combinaisons linéaires des fréquences initiales ji fnfmF ×±×= .
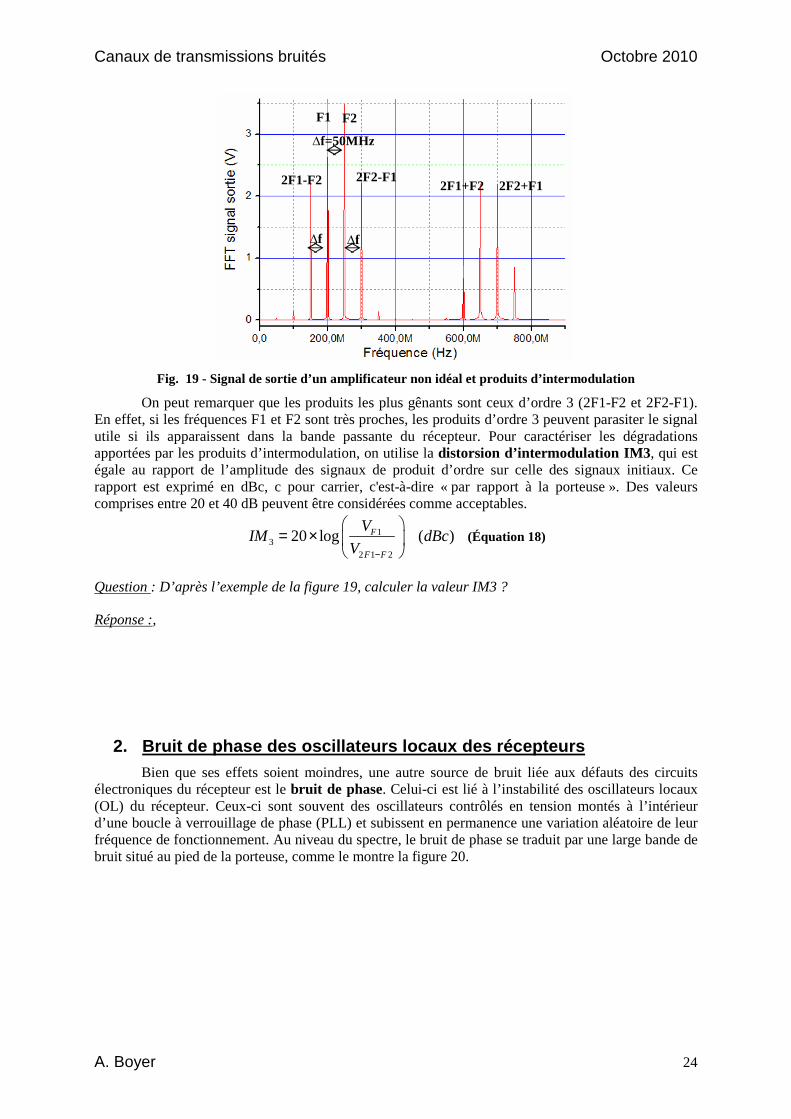
Ces distorsions sont très gênantes car elles génèrent des signaux parasites dans la bande utile. Néanmoins, cette propriété est mise à profit dans les circuits mélangeurs des modulateurs/démodulateurs pour la transposition de fréquences. L’annexe B présente le calcul du signal de sortie pour un système non linéaire d’ordre 3. La figure 19 présente le spectre du signal de sortie d’un amplificateur. Le signal d’entrée correspond à la somme de 2 sinusoïdes de fréquences 200 et 250MHz. On remarque que le signal présente de nombreux produits d’intermodulation.
Canaux de transmissions bruités Octobre 2010
A. Boyer 24
Fig. 19 - Signal de sortie d’un amplificateur non idéal et produits d’intermodulation
On peut remarquer que les produits les plus gênants sont ceux d’ordre 3 (2F1-F2 et 2F2-F1). En effet, si les fréquences F1 et F2 sont très proches, les produits d’ordre 3 peuvent parasiter le signal utile si ils apparaissent dans la bande passante du récepteur. Pour caractériser les dégradations apportées par les produits d’intermodulation, on utilise la distorsion d’intermodulation IM3 , qui est égale au rapport de l’amplitude des signaux de produit d’ordre sur celle des signaux initiaux. Ce rapport est exprimé en dBc, c pour carrier, c'est-à-dire « par rapport à la porteuse ». Des valeurs comprises entre 20 et 40 dB peuvent être considérées comme acceptables.
13
2 1 2
20 log ( )F
F F
VIM dBc
V −
= ×
(Équation 18)
Question : D’après l’exemple de la figure 19, calculer la valeur IM3 ?
Réponse :,
2. Bruit de phase des oscillateurs locaux des récep teurs Bien que ses effets soient moindres, une autre source de bruit liée aux défauts des circuits
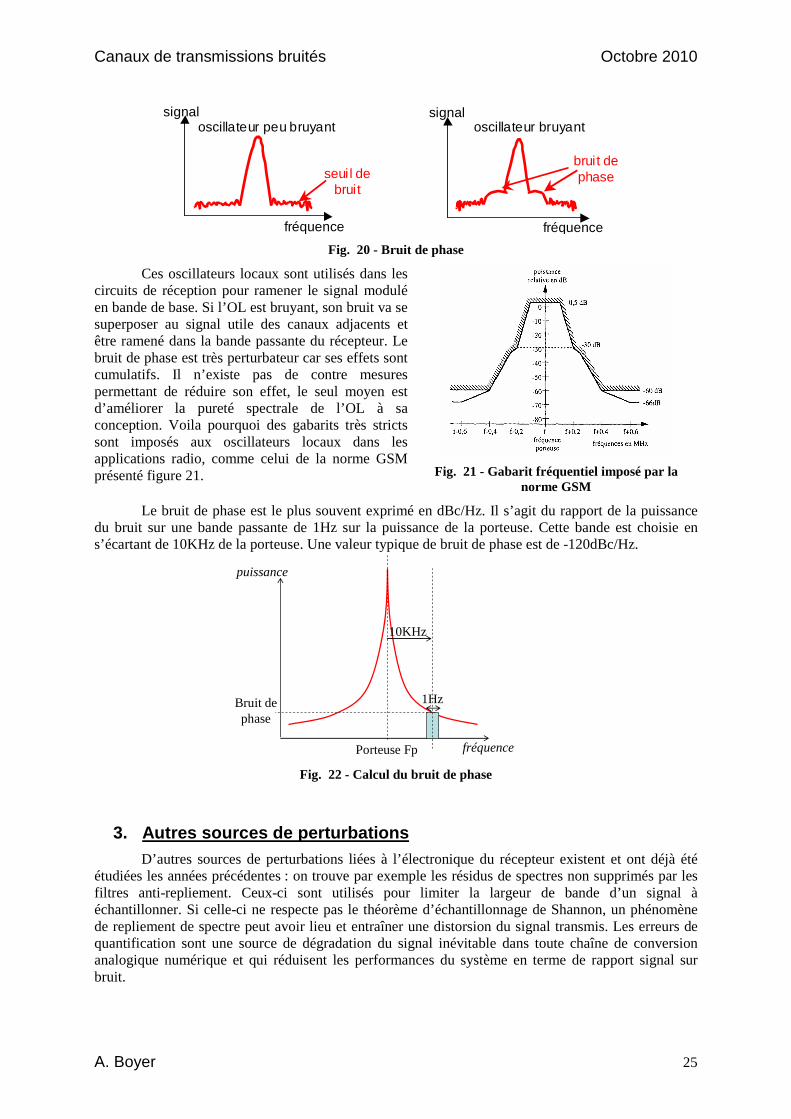
électroniques du récepteur est le bruit de phase. Celui-ci est lié à l’instabilité des oscillateurs locaux (OL) du récepteur. Ceux-ci sont souvent des oscillateurs contrôlés en tension montés à l’intérieur d’une boucle à verrouillage de phase (PLL) et subissent en permanence une variation aléatoire de leur fréquence de fonctionnement. Au niveau du spectre, le bruit de phase se traduit par une large bande de bruit situé au pied de la porteuse, comme le montre la figure 20.
F1 F2
2F2-F1 2F1-F2 2F1+F2 2F2+F1
∆f=50MHz
∆f ∆f
Canaux de transmissions bruités Octobre 2010
A. Boyer 25
fréquence
signal
fréquence
signal oscillateur peu bruyant oscillateur bruyant
bruit de phase seui l de
bruit
Fig. 20 - Bruit de phase
Ces oscillateurs locaux sont utilisés dans les circuits de réception pour ramener le signal modulé en bande de base. Si l’OL est bruyant, son bruit va se superposer au signal utile des canaux adjacents et être ramené dans la bande passante du récepteur. Le bruit de phase est très perturbateur car ses effets sont cumulatifs. Il n’existe pas de contre mesures permettant de réduire son effet, le seul moyen est d’améliorer la pureté spectrale de l’OL à sa conception. Voila pourquoi des gabarits très stricts sont imposés aux oscillateurs locaux dans les applications radio, comme celui de la norme GSM présenté figure 21.
Fig. 21 - Gabarit fréquentiel imposé par la norme GSM
Le bruit de phase est le plus souvent exprimé en dBc/Hz. Il s’agit du rapport de la puissance du bruit sur une bande passante de 1Hz sur la puissance de la porteuse. Cette bande est choisie en s’écartant de 10KHz de la porteuse. Une valeur typique de bruit de phase est de -120dBc/Hz.
Porteuse Fp fréquence
puissance
10KHz
1HzBruit de phase
Fig. 22 - Calcul du bruit de phase
3. Autres sources de perturbations D’autres sources de perturbations liées à l’électronique du récepteur existent et ont déjà été
étudiées les années précédentes : on trouve par exemple les résidus de spectres non supprimés par les filtres anti-repliement. Ceux-ci sont utilisés pour limiter la largeur de bande d’un signal à échantillonner. Si celle-ci ne respecte pas le théorème d’échantillonnage de Shannon, un phénomène de repliement de spectre peut avoir lieu et entraîner une distorsion du signal transmis. Les erreurs de quantification sont une source de dégradation du signal inévitable dans toute chaîne de conversion analogique numérique et qui réduisent les performances du système en terme de rapport signal sur bruit.
Canaux de transmissions bruités Octobre 2010
A. Boyer 26
IV. Perturbations induites par le support de transm ission
1. Communications filaires Les câbles, s’ils ne sont pas blindés, peuvent coupler un grand nombre de perturbations
électromagnétiques qui se superposent au signal utile et réduisent le rapport signal à bruit. De plus, les ruptures d’adaptation existant le long d’un câble ont tendance à ralentir et déformer le signal. L’atténuation d’un câble réduit non seulement l’amplitude du signal et mais contribue aussi à l’étaler dans le temps. Un autre problème se pose dans le cas de câbles placés à proximité les uns des autres : la diaphonie. Elle est due à la proximité de chacun des câbles qui fait se coupler mutuellement les 2 signaux présents sur chacun des 2 câbles (création de couplages inductifs et capacitifs entre les câbles). Si une ligne sensible est placée trop près d’une ligne sur laquelle un signal rapide est véhiculé, le signal rapide se couplera sur la ligne sensible par diaphonie et parasitera le signal sensible.
2. Propagation hertzienne Un canal radio représente le médium le plus soumis aux perturbations. Dans la réalité, un
espace libre dégagé de tout obstacle et aux propriétés uniformes est un cas purement idéal. Les ondes incidentes peuvent subir les différents effets d’un environnement non idéal :
Des réflexions multiples qui deviennent complexes aux fréquences radio UHF car les irrégularités des obstacles sont à l’origine de différences de phase entre les différents rayons réfléchies. Ces réflexions multiples créent différents trajets, de longueurs variées, entre l’émetteur et le récepteur entraînant un étalement temporel. On parle de propagation multi trajet .
Des diffusions, c'est-à-dire des réflexions pour lesquelles il n’existe aucune direction privilégiée. Elles sont provoquées par exemple par des gouttelettes d’eau en suspension
Des diffractions qui interviennent dès que les dimensions des obstacles deviennent comparables à la longueur d’onde. Ce problème est majeur pour les ondes UHF.
Des absorptions par l’eau et les gaz de l’atmosphère, l’atténuation variant avec la fréquence
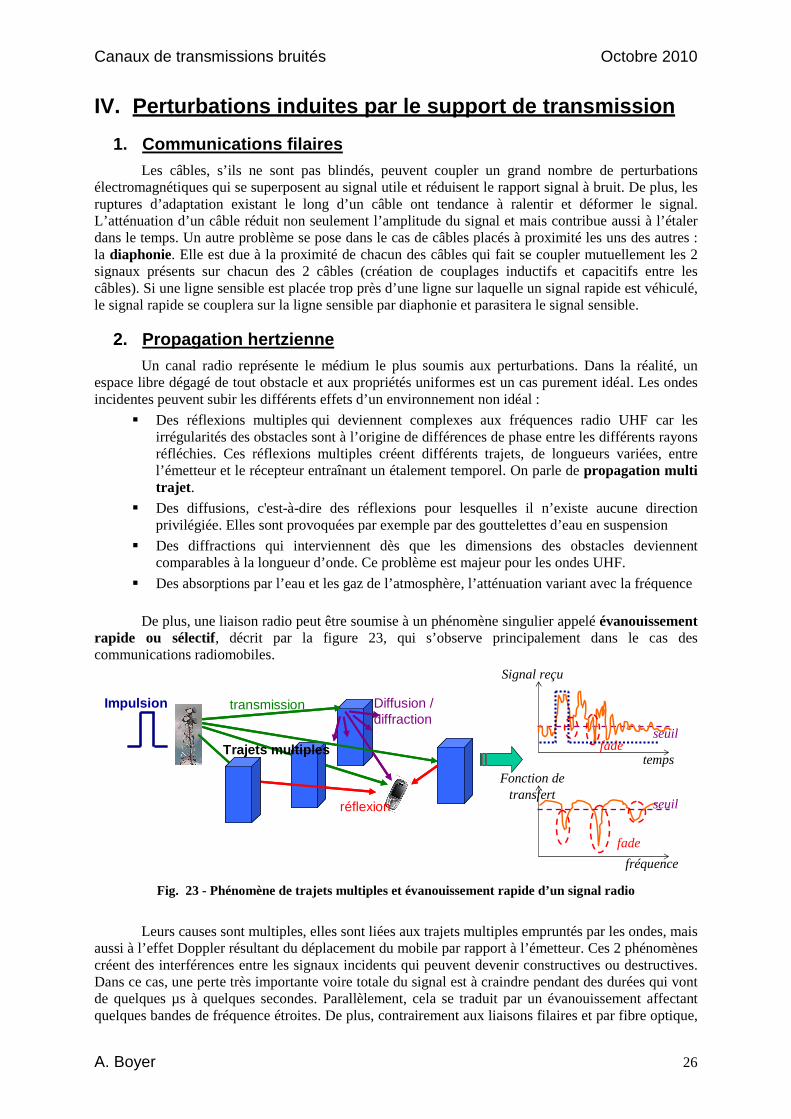
De plus, une liaison radio peut être soumise à un phénomène singulier appelé évanouissement
rapide ou sélectif, décrit par la figure 23, qui s’observe principalement dans le cas des communications radiomobiles.
transmission Diffusion / diffraction
réflexion
temps
Signal reçu
seuilTrajets multiples
fréquence
Fonction de transfert
seuil
fade
Impulsion
fade
Fig. 23 - Phénomène de trajets multiples et évanouissement rapide d’un signal radio
Leurs causes sont multiples, elles sont liées aux trajets multiples empruntés par les ondes, mais
aussi à l’effet Doppler résultant du déplacement du mobile par rapport à l’émetteur. Ces 2 phénomènes créent des interférences entre les signaux incidents qui peuvent devenir constructives ou destructives. Dans ce cas, une perte très importante voire totale du signal est à craindre pendant des durées qui vont de quelques µs à quelques secondes. Parallèlement, cela se traduit par un évanouissement affectant quelques bandes de fréquence étroites. De plus, contrairement aux liaisons filaires et par fibre optique,
Canaux de transmissions bruités Octobre 2010
A. Boyer 27
une liaison radio est un canal dont les caractéristiques ne sont pas stationnaires dans le temps. Par conséquent, ce phénomène est un des problèmes les plus sérieux en télécommunications car les atténuations sont importantes, difficile à modéliser et à combattre efficacement.
V. Brouillage ou interférences
Le terme brouillage ou interférences signifie qu’un signal parasite de puissance non négligeable émis à la même fréquence que le signal utile peut perturber la transmission sur le canal, en dégradant le rapport signal à bruit ou en introduisant des distorsions. On trouve 2 types d’interférences :
L’interférence due à la présence simultanée d’autres utilisateurs soit sur le même canal de transmission (mauvais duplex, interférences entre utilisateurs), soit sur des canaux adjacents (la largeur de bande du canal adjacent ne respecte pas les contraintes fixées).
Le brouillage intentionnel (activité militaire, volonté de perturber une communication gênante). La technique revient à placer à proximité de l’utilisateur une source haute puissance et de la faire émettre à la fréquence du canal. Seules les communications radio peuvent être brouillées, les communications par fibre optique restent inviolables.
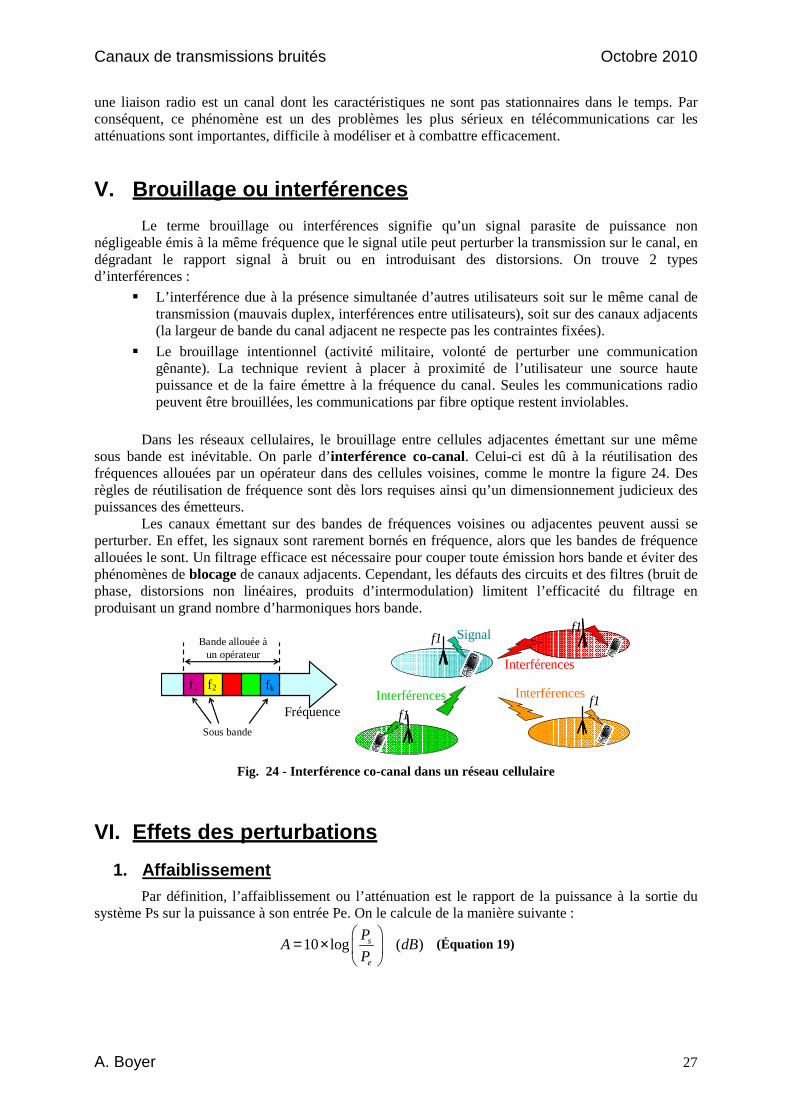
Dans les réseaux cellulaires, le brouillage entre cellules adjacentes émettant sur une même
sous bande est inévitable. On parle d’interférence co-canal. Celui-ci est dû à la réutilisation des fréquences allouées par un opérateur dans des cellules voisines, comme le montre la figure 24. Des règles de réutilisation de fréquence sont dès lors requises ainsi qu’un dimensionnement judicieux des puissances des émetteurs.
Les canaux émettant sur des bandes de fréquences voisines ou adjacentes peuvent aussi se perturber. En effet, les signaux sont rarement bornés en fréquence, alors que les bandes de fréquence allouées le sont. Un filtrage efficace est nécessaire pour couper toute émission hors bande et éviter des phénomènes de blocage de canaux adjacents. Cependant, les défauts des circuits et des filtres (bruit de phase, distorsions non linéaires, produits d’intermodulation) limitent l’efficacité du filtrage en produisant un grand nombre d’harmoniques hors bande.
Signal
Interférences
InterférencesInterférences
f1f1
f1f1
f1 f2 fk
Fréquence
Bande allouée àun opérateur
Sous bande
Fig. 24 - Interférence co-canal dans un réseau cellulaire
VI. Effets des perturbations
1. Affaiblissement Par définition, l’affaiblissement ou l’atténuation est le rapport de la puissance à la sortie du
système Ps sur la puissance à son entrée Pe. On le calcule de la manière suivante :
10 log ( )s
e
PA dB
P
= ×
(Équation 19)

Canaux de transmissions bruités Octobre 2010
A. Boyer 28
1ln ( )
2s
e
PA Np
P
=
(Équation 20)
Suivant la base choisie pour le logarithme, le gain ou l’affaiblissement sont exprimés en décibel (dB) ou en néper (Np). Même si le néper est mathématiquement plus naturel que le décibel (dans la théorie des lignes, l’atténuation suit une loi exponentielle), l’usage du décibel est plus répandu. On passe d’une unité à l’autre à l’aide des 2 formules suivantes :
1 20 log( ) 8.68Np e dB dB= × = (Équation 21)
11 ln(10) 0.115
20dB Np Np= × = (Équation 22)
Pour la conversion en dB, reportez vous à l’annexe A.
2. Retard de transmission Le temps mis par une information pour parvenir de la source au destinataire peut être un
élément d’appréciation de la qualité de transmission. Il est dû essentiellement au temps de propagation des ondes électromagnétiques sur un fil ou dans l’espace libre, mais dans certains cas de transmission de données, il peut aussi être dû à des retards de commutation (commutation par blocs). L’équation 23 donne l’expression de la vitesse de propagation d’une onde électromagnétique dans un milieu homogène et sans pertes, l’équation 24 permet de calculer le retard dans une ligne.
rr
cv
µε ×= 0 (Équation 23)
co = vitesse de la lumière dans le vide = 3e8 m/s εr = constante diélectrique relative (par exemple 1 dans l’air, 11.6 dans le silicium) µr = perméabilité magnétique relative (= 1 dans les matériaux non magnétiques) v = vitesse de propagation du signal
v
LT
d= (Équation 24)
Td = retard L = longueur de la ligne
Le retard n’est pas critique dans une communication unilatérale (ex : télévision, fax, …), mais
le devient dès qu’une réponse est attendue dans l’autre sens (ex : conversation téléphonique). Pour des raisons physiologiques, le retard dans une conversation téléphonique devient sensible dès qu’il atteint 150ms et très pénible dès qu’il dépasse 400ms.
Question : Quel est le retard introduit par une ligne téléphonique entre 2 personnes situées à 1000 km ? Celui dans le cas d’une liaison par satellite géostationnaire ?
Réponse :

Canaux de transmissions bruités Octobre 2010
A. Boyer 29
3. Transmission conforme – Distorsions linéaires Même si la transmission conforme ne concerne que les transmissions analogiques, nous allons
quand même aborder ce point. Dans le cas d’une transmission analogique, l’information est contenue dans la forme du signal qui doit être sauvegardée à tout prix. Pour une transmission conforme, le signal reçu ne doit différer du signal émis que :
Par un facteur d’affaiblissement constant
Par un retard constant
Il en résulte que l’affaiblissement de la transmission est une constante indépendante de la
fréquence et que le déphasage doit être une fonction linéaire de la fréquence. Si les 2 conditions précédentes ne peuvent pas être satisfaites, des distorsions linéaires pourront apparaître. On parle en particulier de :
Distorsion d’affaiblissement si l’affaiblissement varie avec la fréquence
Distorsion de phase si le déphasage ne varie pas linéairement avec la fréquence, c'est-à-dire si le temps de propagation n’est pas constant.
Ainsi, l’effet de distorsions linéaires sur un signal sinusoïdal émis n’a pas de conséquence puisqu’en réception on récupère un signal sinusoïdal. Cependant tout autre signal voit sa forme et son spectre modifiés. Toutefois, aucune nouvelle composante fréquentielle n’apparaît, contrairement aux cas de distorsions non linéaires.
Remarque : distorsion de phase
Soit un signal dont le spectre est composé de 2 harmoniques de fréquences F1 et F2. Supposons que ce signal passe à travers un filtre qui ajoute un déphasage à chacune des harmoniques et par conséquent un retard ou temps de propagation au signal. Pour ne pas déformer le signal, il faut que le retard des 2 harmoniques soit identique. Pour un signal de période T et de fréquence f, déphasage Ф et temps de propagation τ sont liés par la relation suivante :
2 2T
fτ
π π ωΦ Φ Φ= × = = (Équation 25)
Si on veut que le retard soit indépendant de la fréquence, il faut que le déphasage soit une fonction linéaire de la fréquence, autrement dit un déphasage linéaire.
, tan2 2
k f ksi k f cons te
fτ
π π×Φ = × = = =
Cependant, pour une transmission numérique, la conformité n’est pas nécessaire ! En effet, le signal reçu étant échantillonné et régénéré avant que l’information numérique en soit extraite, la seule condition est que l’interférence entre symboles ou moments soit nulle.
4. Interférences inter symbole – diagramme de l’oei l Le phénomène d’interférence inter symbole (ISI ou IES) consiste en un chevauchement
partiel entre les symboles adjacents, comme le montre la figure 25. La valeur du symbole reçu à l’instant T est perturbée par les symboles reçus précédemment. Le symbole reçu peut alors être confondu avec un autre et introduire des erreurs d’interprétation par le récepteur. L’interférence inter symbole est la principale source d’erreur binaire dans les communications numériques.
temps temps
Signal à émettre
Signal reçu
transmission
Fig. 25 - Etalement d’un signal numérique après transmission
Canaux de transmissions bruités Octobre 2010
A. Boyer 30
Pour améliorer la fiabilité d’une communication numérique, il convient de minimiser le risque
d’apparition d’IES. Comme nous le verrons dans les chapitre C et F, la théorie de l’information prévoit que ces interférences apparaissent si les conditions de Nyquist ne sont pas respectées. Si ces conditions sont respectées, la probabilité qu’il existe de l’interférence inter-symbole tend vers 0.
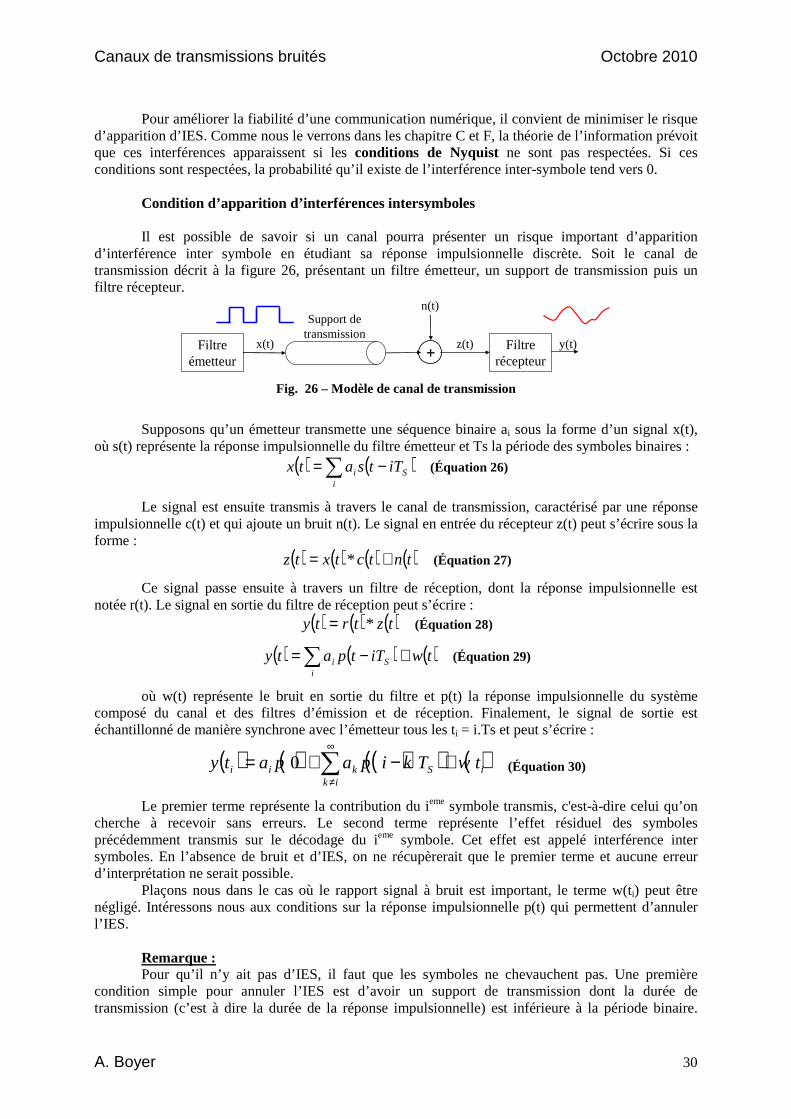
Condition d’apparition d’interférences intersymboles Il est possible de savoir si un canal pourra présenter un risque important d’apparition
d’interférence inter symbole en étudiant sa réponse impulsionnelle discrète. Soit le canal de transmission décrit à la figure 26, présentant un filtre émetteur, un support de transmission puis un filtre récepteur.
Filtreémetteur
Filtrerécepteur++
Support de transmission
x(t)
n(t)
z(t) y(t)
Fig. 26 – Modèle de canal de transmission
Supposons qu’un émetteur transmette une séquence binaire ai sous la forme d’un signal x(t),
où s(t) représente la réponse impulsionnelle du filtre émetteur et Ts la période des symboles binaires :
( ) ( )∑ −=i
Si iTtsatx (Équation 26)
Le signal est ensuite transmis à travers le canal de transmission, caractérisé par une réponse impulsionnelle c(t) et qui ajoute un bruit n(t). Le signal en entrée du récepteur z(t) peut s’écrire sous la forme :
( ) ( ) ( ) ( )tntctxtz += * (Équation 27)
Ce signal passe ensuite à travers un filtre de réception, dont la réponse impulsionnelle est notée r(t). Le signal en sortie du filtre de réception peut s’écrire :
( ) ( ) ( )tztrty *= (Équation 28)
( ) ( ) ( )twiTtpatyi
Si +−=∑ (Équation 29)
où w(t) représente le bruit en sortie du filtre et p(t) la réponse impulsionnelle du système composé du canal et des filtres d’émission et de réception. Finalement, le signal de sortie est échantillonné de manière synchrone avec l’émetteur tous les ti = i.Ts et peut s’écrire :
( ) ( ) ( )( ) ( )iik
Skii twTkipapaty +−+= ∑∞
≠
0 (Équation 30)
Le premier terme représente la contribution du ieme symbole transmis, c'est-à-dire celui qu’on cherche à recevoir sans erreurs. Le second terme représente l’effet résiduel des symboles précédemment transmis sur le décodage du ieme symbole. Cet effet est appelé interférence inter symboles. En l’absence de bruit et d’IES, on ne récupèrerait que le premier terme et aucune erreur d’interprétation ne serait possible.
Plaçons nous dans le cas où le rapport signal à bruit est important, le terme w(ti) peut être négligé. Intéressons nous aux conditions sur la réponse impulsionnelle p(t) qui permettent d’annuler l’IES.
Remarque : Pour qu’il n’y ait pas d’IES, il faut que les symboles ne chevauchent pas. Une première
condition simple pour annuler l’IES est d’avoir un support de transmission dont la durée de transmission (c’est à dire la durée de la réponse impulsionnelle) est inférieure à la période binaire.
Canaux de transmissions bruités Octobre 2010
A. Boyer 31
Cependant, cette condition est rarement rencontrée dans les systèmes de transmission. Ainsi, en raison des longueurs des câbles téléphoniques et des désadaptations, l’IES s’étale sur plusieurs millisecondes. Dans le cas d’un débit de symboles de 2400 Bauds, l’IES s’étale sur plusieurs dizaines de symboles.
A partir de l’équation 30, il est possible d’énoncer la condition sur p(t) pour laquelle l’IES
s’annule. Cette condition est appelée critère de Nyquist en temps :
( )( ) ( ) ( ) ...3,2,00
0SSSS TTTtpourtp
kipour
kipourpTkip ==⇔
≠=
=− (Équation 31)
Si cette condition est vérifiée, le signal en sortie du filtre de réception
s’écrit : ( ) ( )0paty ii = . Cette condition indique que tous les symboles doivent s’annuler aux instants
d’échantillonnage des autres symboles. Le filtre p(t), qui représente le canal en entier (filtre d’émission, support de transmission, filtre de réception) est dit canal de Nyquist s’il vérifie cette condition.
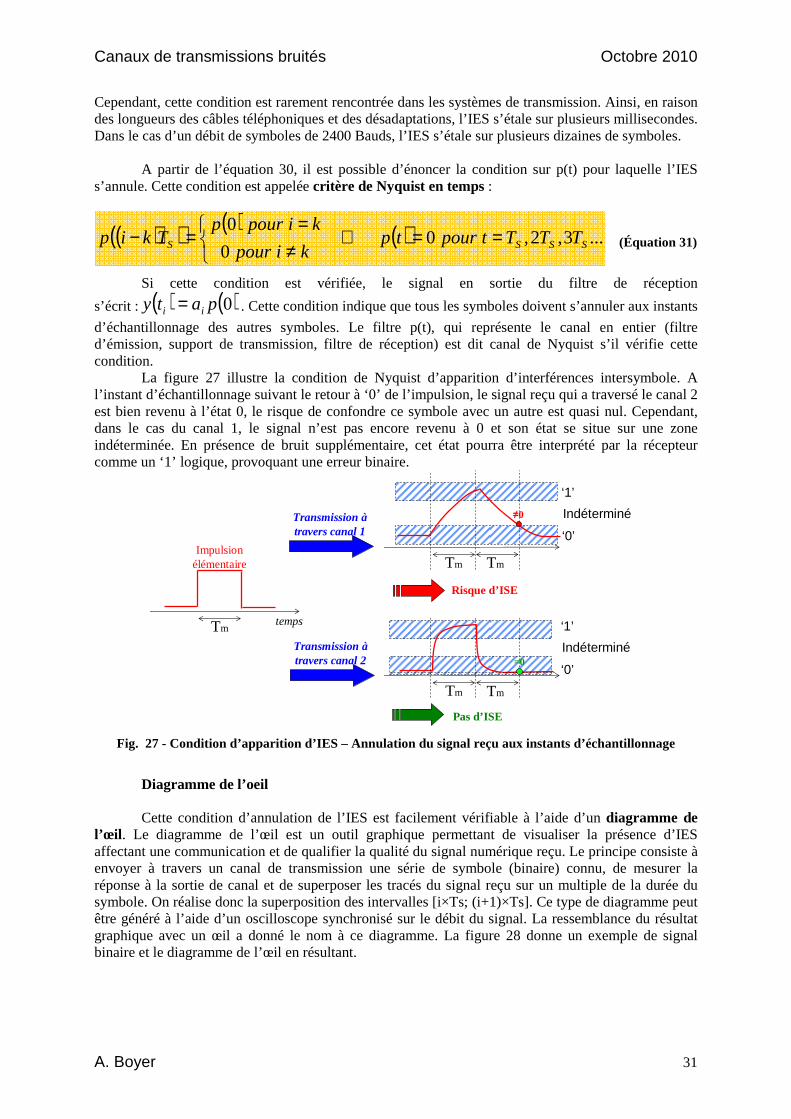
La figure 27 illustre la condition de Nyquist d’apparition d’interférences intersymbole. A l’instant d’échantillonnage suivant le retour à ‘0’ de l’impulsion, le signal reçu qui a traversé le canal 2 est bien revenu à l’état 0, le risque de confondre ce symbole avec un autre est quasi nul. Cependant, dans le cas du canal 1, le signal n’est pas encore revenu à 0 et son état se situe sur une zone indéterminée. En présence de bruit supplémentaire, cet état pourra être interprété par la récepteur comme un ‘1’ logique, provoquant une erreur binaire.
temps
Impulsion élémentaire
Transmission àtravers canal 1
Tm
Tm Tm
Risque d’ISE
Tm Tm
≠0
=0
Pas d’ISE
Transmission àtravers canal 2
‘1’
‘0’
Indéterminé
‘1’
‘0’
Indéterminé
Fig. 27 - Condition d’apparition d’IES – Annulation du signal reçu aux instants d’échantillonnage
Diagramme de l’oeil Cette condition d’annulation de l’IES est facilement vérifiable à l’aide d’un diagramme de
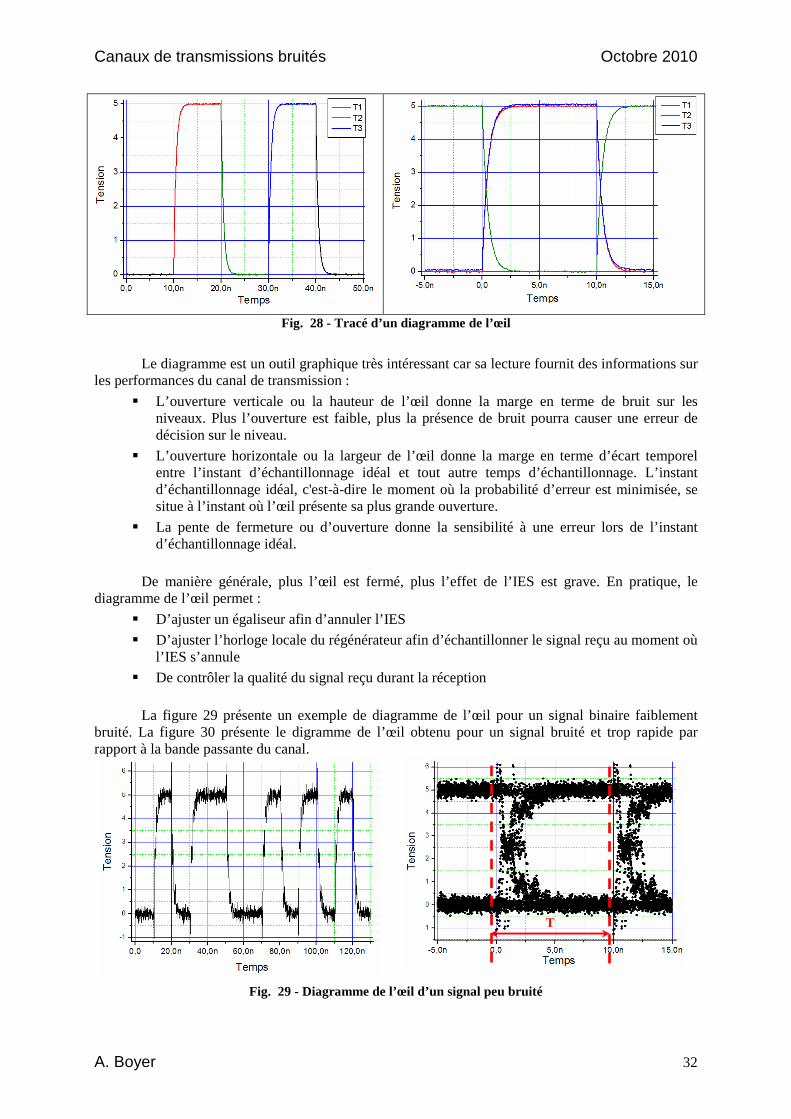
l’œil. Le diagramme de l’œil est un outil graphique permettant de visualiser la présence d’IES affectant une communication et de qualifier la qualité du signal numérique reçu. Le principe consiste à envoyer à travers un canal de transmission une série de symbole (binaire) connu, de mesurer la réponse à la sortie de canal et de superposer les tracés du signal reçu sur un multiple de la durée du symbole. On réalise donc la superposition des intervalles [i×Ts; (i+1)×Ts]. Ce type de diagramme peut être généré à l’aide d’un oscilloscope synchronisé sur le débit du signal. La ressemblance du résultat graphique avec un œil a donné le nom à ce diagramme. La figure 28 donne un exemple de signal binaire et le diagramme de l’œil en résultant.
Canaux de transmissions bruités Octobre 2010
A. Boyer 32
Fig. 28 - Tracé d’un diagramme de l’œil
Le diagramme est un outil graphique très intéressant car sa lecture fournit des informations sur
les performances du canal de transmission :
L’ouverture verticale ou la hauteur de l’œil donne la marge en terme de bruit sur les niveaux. Plus l’ouverture est faible, plus la présence de bruit pourra causer une erreur de décision sur le niveau.
L’ouverture horizontale ou la largeur de l’œil donne la marge en terme d’écart temporel entre l’instant d’échantillonnage idéal et tout autre temps d’échantillonnage. L’instant d’échantillonnage idéal, c'est-à-dire le moment où la probabilité d’erreur est minimisée, se situe à l’instant où l’œil présente sa plus grande ouverture.
La pente de fermeture ou d’ouverture donne la sensibilité à une erreur lors de l’instant d’échantillonnage idéal.
De manière générale, plus l’œil est fermé, plus l’effet de l’IES est grave. En pratique, le
diagramme de l’œil permet :
D’ajuster un égaliseur afin d’annuler l’IES
D’ajuster l’horloge locale du régénérateur afin d’échantillonner le signal reçu au moment où l’IES s’annule
De contrôler la qualité du signal reçu durant la réception
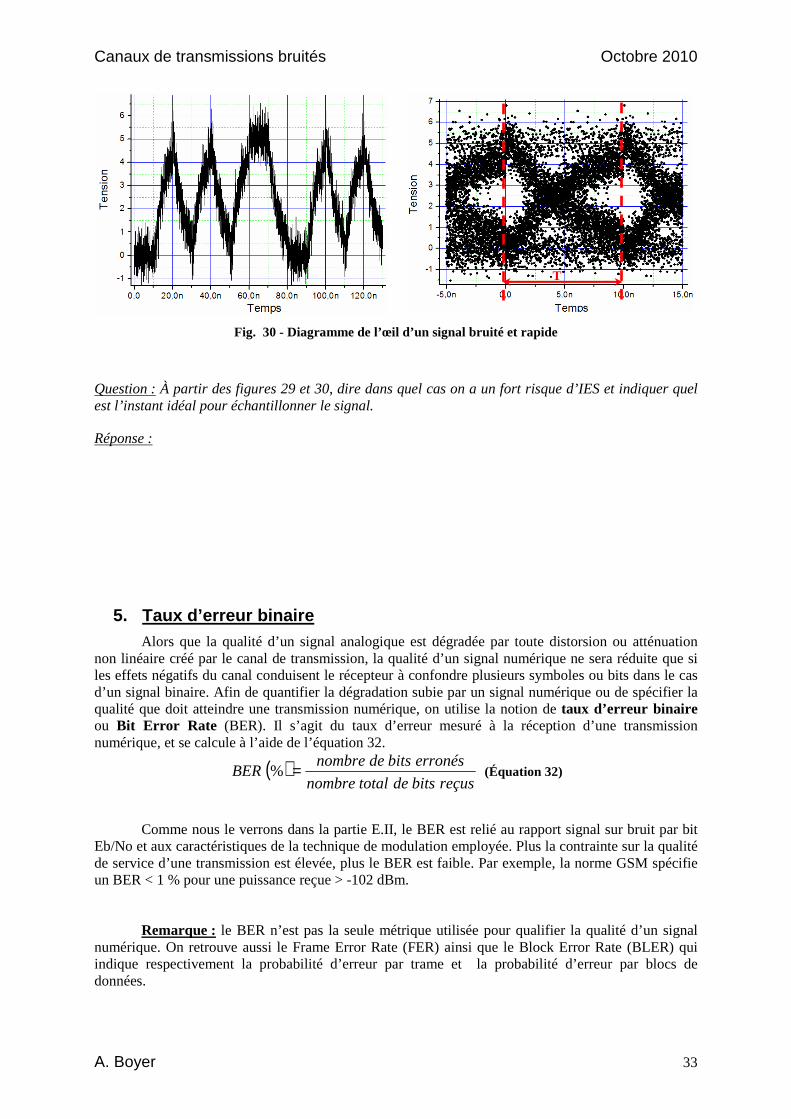
La figure 29 présente un exemple de diagramme de l’œil pour un signal binaire faiblement
bruité. La figure 30 présente le digramme de l’œil obtenu pour un signal bruité et trop rapide par rapport à la bande passante du canal.
Fig. 29 - Diagramme de l’œil d’un signal peu bruité
T
Canaux de transmissions bruités Octobre 2010
A. Boyer 33
Fig. 30 - Diagramme de l’œil d’un signal bruité et rapide
Question : À partir des figures 29 et 30, dire dans quel cas on a un fort risque d’IES et indiquer quel est l’instant idéal pour échantillonner le signal.
Réponse :
5. Taux d’erreur binaire Alors que la qualité d’un signal analogique est dégradée par toute distorsion ou atténuation
non linéaire créé par le canal de transmission, la qualité d’un signal numérique ne sera réduite que si les effets négatifs du canal conduisent le récepteur à confondre plusieurs symboles ou bits dans le cas d’un signal binaire. Afin de quantifier la dégradation subie par un signal numérique ou de spécifier la qualité que doit atteindre une transmission numérique, on utilise la notion de taux d’erreur binaire ou Bit Error Rate (BER). Il s’agit du taux d’erreur mesuré à la réception d’une transmission numérique, et se calcule à l’aide de l’équation 32.
( )reçusbitsdetotalnombre
erronésbitsdenombreBER =% (Équation 32)
Comme nous le verrons dans la partie E.II, le BER est relié au rapport signal sur bruit par bit
Eb/No et aux caractéristiques de la technique de modulation employée. Plus la contrainte sur la qualité de service d’une transmission est élevée, plus le BER est faible. Par exemple, la norme GSM spécifie un BER < 1 % pour une puissance reçue > -102 dBm.
Remarque : le BER n’est pas la seule métrique utilisée pour qualifier la qualité d’un signal
numérique. On retrouve aussi le Frame Error Rate (FER) ainsi que le Block Error Rate (BLER) qui indique respectivement la probabilité d’erreur par trame et la probabilité d’erreur par blocs de données.
T
Canaux de transmissions bruités Octobre 2010
A. Boyer 34
VII. Ce qu’il faut retenir
⇒ Le bruit est un signal aléatoire souvent d’origine thermique, qui fixe le seuil minimum de réception des systèmes électroniques. Le bruit couplé à un signal dépend de la bande passante du signal.
⇒ Tout système électronique présente des défauts qui dégradent le signal en lui ajoutant du bruit et en le distordant par des effets non linéaires.
⇒ On caractérise l’ajout de bruit par un système électronique par le facteur de bruit ou noise figure.
⇒ Le rapport signal à bruit définit le rapport minimum à respecter entre la puissance du signal sur la puissance du bruit afin de garantir une réception de qualité du signal.
⇒ Les signaux numériques sont plus robustes au bruit que les signaux analogiques, on préfère employer le rapport signal à bruit par bit noté Eb/No.
⇒ Le signal est aussi affecté par les défauts du support de transmission et les interférences provenant des autres canaux de transmission.
⇒ Les perturbations affectant le canal conduisent à affaiblir le signal, à le retarder et à le distordre.
⇒ Dans le cas d’un signal numérique, ces effets peuvent conduire à des interférences inter symboles, c'est-à-dire le chevauchement des symboles successifs, et donc à des erreurs d’interprétation.
⇒ Il est possible d’annuler l’interférence intersymbole d’un canal si il s’agit d’un canal de Nyquist, c’est àdire que sa réponse impulsionnelle respecte le critère de Nyquist dans le temps.
⇒ On mesure la qualité d’un signal analogique par le rapport signal sur bruit, celle d’un signal numérique par le taux d’erreur binaire (Bit Error Rate).
Canaux de transmissions bruités Octobre 2010
A. Boyer 35
C. Limitations et modèles des canaux de
transmission
Si il est en principe possible de transmettre n’importe quel type et n’importe quelle quantité
d’information à travers un canal quelconque, à condition d’y mettre le temps, et de mettre en œuvre des méthodes de traitement de signal (modulation, codage), le débit d’information transmissible en « temps réel » à travers un canal donné est strictement limité par ses caractéristiques propres. Dans le cas d’une transmission numérique, le récepteur doit pouvoir distinguer deux symboles successifs pour interpréter correctement le contenu du signal. Le canal doit donc disposer d’une certaine résolution en amplitude afin de distinguer deux états adjacents. Le bruit de fond va fixer la limite à la résolution en amplitude. Le récepteur dispose aussi d’une certaine résolution temporelle. Celles-ci sont prévues dans le cadre de la théorie de l’information définie par Shannon. Dans ce chapitre, nous allons présenter différents éléments de théorie de l’information afin de modéliser un canal et de déterminer sa capacité maximale à transmettre sans erreur un message numérique.
I. Théorie de l’information
Le but de ce cours n’est pas de présenter de manière exhaustive la théorie de l’information, mais de comprendre ce qu’elle apporte comme contraintes pour celui qui cherche à dimensionner un canal. La théorie de l’information a été proposée par Claude Shannon en 1948, qui cherchait à évaluer les performances optimales des systèmes de télécommunications en présence de perturbations de nature aléatoire. Ses travaux ont mis en évidence plusieurs résultats fondamentaux que nous pouvons résumer ainsi :
Shannon montre qu’il est possible de transmettre une information sans erreur quel que soit les perturbations ou le bruit de fond existants, à condition d’employer une représentation appropriée de l’information, c'est-à-dire en utilisant un codage approprié. Même si Shannon ne propose pas de codage permettant d’atteindre cette condition, il démontre que de tels codes existent et permettent de se rapprocher des conditions de transmission sans erreur.
Shannon fournit ensuite un ensemble de grandeurs permettant de quantifier l’information contenue dans un message.
Shannon donne une contrainte sur le débit d’informations transmises en fonction des caractéristiques du canal, et donne ainsi des limitations sur la bande passante du canal
Enfin, il donne une contrainte sur le nombre de valeurs différentes prise par un signal en fonction du rapport signal sur bruit.
II. Calcul de la quantité d’information d’un messag e binaire
Quantifier l’information contenue dans un message n’est pas trivial car l’information est une notion abstraite. L’information peut se définir ainsi : elle représente « l’effet de surprise » que possède un message. Il convient maintenant de mettre en équations cette définition.
Nous nous intéressons ici à l’information véhiculée par une source discrète ou numérique. Soit un message de k caractères appartenant à un alphabet composé de n caractères. L’information que

Canaux de transmissions bruités Octobre 2010
A. Boyer 36
contient un caractère dépend de sa probabilité d’apparition P. On peut calculer la quantité d’information I (exprimée en Shannon) contenu dans un caractère par la formule suivante :
( ) ( ) ( )( )
lnlog
lnn
PI sh P
n= − = − (Équation 33)
Nous allons nous placer dans le cas particulier de messages binaires. La quantité précédente devient :
( ) ( ) ( )2
lnlog
ln 2
PI sh P= − = − (Équation 34)
Ainsi, si P=1, la quantité d’information est nulle puisqu’on annule l’effet de surprise de l’apparition de ce caractère. Plus la probabilité d’apparition d’un caractère est faible, plus la quantité d’information est grande. Pour calculer la quantité d’information totale d’un message binaire, on utilise la notion de quantité d’information moyenne d’une source Itot :
( )21
logn
tot i ii
I kP P=
= −∑ (Équation 35)
La quantité d’information moyenne par caractère émis par la source est définie par l’entropie de la source notée H :
( )21
( / ) logn
i ii
H sh caractère P P=
= −∑ (Équation 36)
L’entropie sera maximum si le message est purement aléatoire, c'est-à-dire quand l’effet de surprise sera maximal. Pour traduire l’écart entre l’entropie d’une source et l’entropie maximale possible, on définit la redondance d’une source à l’aide de l’équation 37. Il s’agit d’une notion fondamentale pour le codage de source, nous y reviendrons.
max
(%) 1H
RH
= − (Équation 37)
III. Cadence de transmission de l’information dans un canal
La cadence de transmission de l’information dépend du nombre de caractères émis par unité
de temps. On définit le débit de moments •
M comme le nombre de symboles par unité de temps et il s’exprime en bauds. Un moment est un intervalle de temps au cours duquel un symbole élémentaire de l’information est transmis. Il peut s’agir d’un bit si on le considère comme symbole élémentaire, ou d’un groupe de bits si on considère que les symboles élémentaires du message sont composés de plusieurs bits. Dans une transmission numérique, chaque symbole reste constant durant une durée constante TM appelée la durée des moments. On calcule le débit de moments à l’aide de l’équation 38, qui est relié à la vitesse de variation des signaux sur un canal.
( )MT
BdM1=
• (Équation 38)
Dans le cas d’une information numérique, un symbole est codé à l’aide d’un certain nombre de bits. Le choix de ce nombre peut se calculer à l’aide de la quantité de décision D, qui dépend de la taille n de l’alphabet employé. Il faut par exemple 8 bits pour définir 256 niveaux de gris sur une image noir et blanc.
( )2( ) logD bits n= (Équation 39)
Le débit binaire de la source ou débit de la source est donc le produit du débit de moments (le nombre de symbole par unité de temps) par la quantité de décision (le nombre de bits pour coder un symbole).

Canaux de transmissions bruités Octobre 2010
A. Boyer 37
( ) ( )MT
nDMsbitsD 2log
/ =×=••
(Équation 40)
Plus le débit binaire sera important et plus la quantité d’information transmise sera importante.
Néanmoins, tout canal réel est limité à une valeur maximale de débit, appelée capacité du canal. La connaissance de cette capacité est fondamentale car elle va fixer des contraintes sur la bande passante du canal de transmission et sur le rapport signal à bruit minimal à respecter.
IV. Premier critère de Nyquist - Résolution dans le temps
Tout canal de transmission possède une certaine inertie et il n’est pas possible de faire varier les paramètres d’un signal (électrique, lumineux) à une vitesse infinie. De manière empirique, elle est limitée au moins par le temps de montée du signal Tr, ce qui va imposer une limite inférieure à la durée des moments TM, comme le montre la figure 31.
rrm T
MTT1
maxmin =⇔=•
(Équation 41)
Signal émis
Signal reçu
Tr=TM
Tr = temps de montée
TM = durée d’un moment
temps
Fig. 31 - Limitation temporelle de l’établissement d’un signal sur un canal
Si on ne respecte pas la condition précédente, il est possible que deux symboles consécutifs soient confondus, créant alors une interférence intersymbole. Le temps de montée d’un signal transmis dans un canal est lié à la bande passante de ce canal. Le canal de transmission doit donc présenter une bande passante minimale pour faire passer un signal sans risques d’interférences intersymboles.
Reprenons le critère de Nyquist pour déterminer cette condition sur la bande passante du canal. A partir de l’équation 30, le critère de Nyquist présenté à l’équation 31 peut aussi être énoncé dans le domaine fréquentiel en appliquant une transformée de Fourier sur la réponse impusionnelle discrète du canal de transmission. Le signal reçu échantillonné tous les t = Ts peut être vu comme un peigne de Dirac. La transformée de Fourier de l’égalité de l’équation 31 peut alors s’écrire :
( )( ) ( ) ( ) ( ) ( ) ( )
( ) ( )01
:
000
pT
kfkp
TFourierdeeTransformé
pkTtkppTkip
k SS
kS
kS
=
−
=−=−
∑
∑∑∞
−∞=
∞
−∞=
∞
−∞=
δ
δδ
( ) SSk
TpT
kfP 0=
−∑
+∞
−∞= (Équation 42)
La figure 32 présente une allure du spectre de la réponse impulsionnelle discrète du canal. Le
spectre présente le spectre de la réponse impulsionnelle du canal P(f), répété infiniment tous

Canaux de transmissions bruités Octobre 2010
A. Boyer 38
lesS
S TF
1= , où Fs est la fréquence d’échantillonnage du signal reçu. B représente la bande passante
du canal de transmission.
fréquence0
P(f)
ST
1
ST
2
ST
2−ST
1−2B
P(f-FS)P(f-FS)P(f+2FS) P(f-2FS)
Fig. 32 – Spectre de la réponse impulsionnelle discrète du canal de transmission
L’égalité de l’équation 42 n’est respectée que si le spectre est constant quelque soit la fréquence. Cette égalité ne peut être respectée que si toutes les répétitions de P(f) se chevauchent les unes les autres. Il est possible de montrer que cette condition peut être réalisé si :
BFT
B SS
221 <⇔> (Équation 43)
Cette condition est similaire à la condition de Nyquist, mais vue dans le domaine fréquentiel. Cette condition fixe la bande passante minimale que doit présenter un canal de transmission pour faire passer sans erreurs un message binaire avec un débit de symboles donné, ou inversement, le débit de symbole maximal pour un canal de bande passante donné.
On peut montrer que pour un canal idéal représenté par un filtre passe bas de largeur de bande B, le temps de montée et la largeur de bande et le temps de montée sont liés par la relation suivante (cf. annexe C) :
0.5rB T× = (Équation 44)
Cette condition permet d’énoncer le théorème de Nyquist (1928) : « Pour un canal passe-bas idéal de largeur de bande B, le passage dans le canal n’amène
aucune interférence entre moments si et seulement si : »
BTT
MMrM
×===≤••
211
min
max (Équation 45)
Ce théorème a surtout un intérêt théorique puisqu’il considère un canal passe-bas idéal, ce qui
est loin d’être représentatif d’un canal réel. Cependant, ce théorème donne une limite absolue à la rapidité d’une transmission dans un canal réel. Ainsi, en pratique, on prend souvent comme limite minimale pour la période d’un symbole la relation suivante : min 2M rT T= × .
En pratique, on retrouve la relation suivante pour un canal réel : 0.35 0.4rB T ou× = (Équation 46)
Cette relation permet d’énoncer le critère de Nyquist élargi :
BTT
MrM
×=×
=≤•
25.12
11
min
(Équation 47)
Cette relation empirique donne une limite en terme de débit dans les canaux de transmission usuels plus réaliste que celui prévu par le théorème de Nyquist. Elle signifie qu’on peut transmettre 1.25 Bd par Hertz de largeur de bande ou, inversement, qu’il faut consacrer 0.8Hz à chaque symbole que l’on souhaite transmettre. Le critère de Nyquist et le critère de Nyquist élargi fournissent des formules simples pour déterminer la bande passante nécessaire à donner à un canal de transmission pour autoriser un débit binaire donné. Le critère de Nyquist est aussi appelé critère de Nyquist en

Canaux de transmissions bruités Octobre 2010
A. Boyer 39
fréquence et permet de déterminer si une transmission numérique en bande de base peut se faire sans IES.
V. Résolution en amplitude
Indépendamment de l’inertie du canal, un autre phénomène vient dégrader la transmission : les perturbations et en particulier le bruit, qui se superposent au signal à l’intérieur du canal. Il en résulte que plus le nombre de symboles possibles est grand, plus il sera dur de les différencier. Puisque la puissance du signal est limitée, il n’est pas possible de disposer d’un nombre illimité de valeurs différentes codant un signal que l’on pourra différencier avec une probabilité d’erreur nulle. Dans l’hypothèse d’un bruit additif blanc gaussien et pour un rapport signal sur bruit S/N donné, Shannon a pu montrer que pour conserver une probabilité d’erreur d’interprétation des symboles quasi nulle, le nombre maximal d’états Nmax est donné par l’équation 48.
max 1S
NN
= + (Équation 48)
Néanmoins, il est impossible d’assurer une probabilité d’erreur nulle puisque cela signifierait qu’une erreur est un événement impossible. En présence de bruit aléatoire et pour un dispositif de transmission donné, une erreur est un événement toujours possible. On peut donc en déduire une quantité maximale de décision par moments :
max 2
1( ) log 1
2m
SD bits D
N ≤ = +
(Équation 49)
VI. Capacité d’un canal de transmission
Supposons qu’on dispose du canal de transmission comme celui présenté à la figure 33. Celui-ci présente une bande passante finie B et est soumis à diverses perturbations, qu’on modélise comme un bruit blanc gaussien (canal AWGN – voir VIII.2). Le récepteur au bout du canal impose une contrainte sur le rapport signal sur bruit.
Canal de transmission idéal de largeur de bande B
Bruit additif blanc et gaussien
sortie
S/N
Fig. 33 - Canal de transmission bruité
Comme nous l’avons vu dans les deux paragraphes précédents, il nous faut vérifier les deux
conditions suivantes :
le débit de moments doit respecter l’inégalité 45 ou 47 pour annuler l’interférence intersymbole
la quantité de décision par moments doit respecter l’inégalité 49 pour différencier en amplitude les différentes valeurs que peut prendre un moment.
A partir de ces deux conditions, il est possible de déduire la capacité C du canal, c’est à dire le
débit binaire maximal que peut transmettre le canal. Celle-ci est donnée par l’équation 50.
( )
+×=×==••
N
S1logBMDDs/bitsC 2maxmaxmmaxm (Équation 50)

Canaux de transmissions bruités Octobre 2010
A. Boyer 40
Cette capacité définit la limite maximum pour le débit binaire que peut supporter le canal. Une transmission binaire peut se faire théoriquement avec une probabilité d’erreur quasi nulle si le débit binaire respecte la condition suivante :
CD m ≤•
(Équation 51)
Si cette condition n’est pas respectée, un risque d’apparition d’interférences entre symboles est à craindre. Cependant, en pratique, on constate que la probabilité d’erreur ne peut pas tendre totalement vers 0 et il n’est pas possible de la réduire autant qu’on le voudrait. Dans le cas d’une transmission numérique, même en respectant la condition précédente, plus la contrainte en terme de taux d’erreur binaire est faible, plus il faudra réduire le débit binaire. On peut représenter géométriquement cette condition à l’aide de la figure 34. Le message à transmettre est modélisé
comme un parallélépipède rectangle de section •D et de longueur T (durée du message).
MessageCanal
T
D C
B
log2(1+S/N)
•M
•D
Fig. 34 - Illustration de la capacité d’un canal de transmission
Question : Discuter de l’interchangeabilité de la largeur de bande B et du rapport S/N.
Réponse :
VII. Sensibilité d’un récepteur
Une des principales contraintes d’un récepteur concerne sa sensibilité ou seuil de réception, c'est-à-dire le niveau de puissance minimal du signal d’entrée pour que celui-ci soit détecté. La sensibilité d’un récepteur dépend non seulement du niveau de bruit en entrée du signal, mais aussi du rapport signal à bruit minimal à respecter pour une application donnée et des marges compensant les pertes additionnelles dues à l’implémentation physique du récepteur. La sensibilité d’un récepteur peut se calculer à l’aide de la formule suivante :
( ) pertesSNRbruitdeseuildBWésensibilit min ++= (Équation 52)
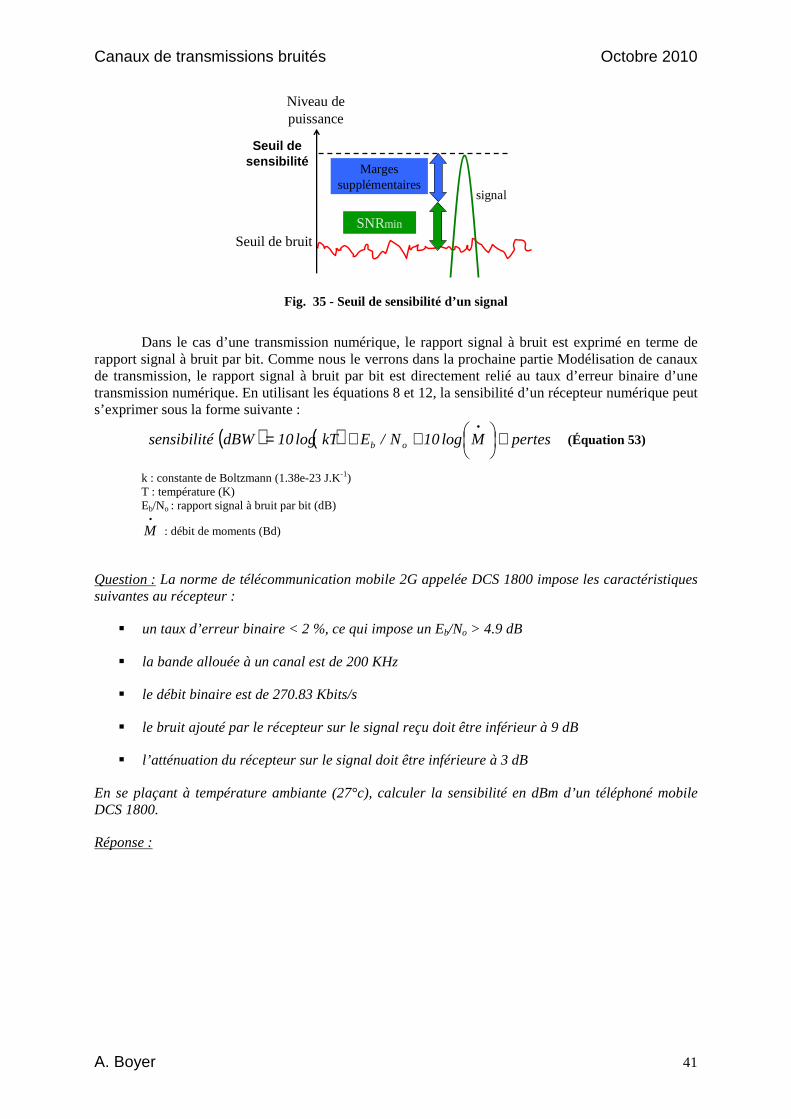
Canaux de transmissions bruités Octobre 2010
A. Boyer 41
Seuil de bruitSNRmin
Niveau de puissance
Marges supplémentaires
signal
Seuil de sensibilité
Fig. 35 - Seuil de sensibilité d’un signal
Dans le cas d’une transmission numérique, le rapport signal à bruit est exprimé en terme de
rapport signal à bruit par bit. Comme nous le verrons dans la prochaine partie Modélisation de canaux de transmission, le rapport signal à bruit par bit est directement relié au taux d’erreur binaire d’une transmission numérique. En utilisant les équations 8 et 12, la sensibilité d’un récepteur numérique peut s’exprimer sous la forme suivante :
( ) ( ) pertesMlog10N/EkTlog10dBWésensibilit ob +
++=•
(Équation 53)
k : constante de Boltzmann (1.38e-23 J.K-1) T : température (K) Eb/No : rapport signal à bruit par bit (dB)
•
M : débit de moments (Bd)
Question : La norme de télécommunication mobile 2G appelée DCS 1800 impose les caractéristiques suivantes au récepteur :
un taux d’erreur binaire < 2 %, ce qui impose un Eb/No > 4.9 dB
la bande allouée à un canal est de 200 KHz
le débit binaire est de 270.83 Kbits/s
le bruit ajouté par le récepteur sur le signal reçu doit être inférieur à 9 dB
l’atténuation du récepteur sur le signal doit être inférieure à 3 dB
En se plaçant à température ambiante (27°c), calculer la sensibilité en dBm d’un téléphoné mobile DCS 1800.
Réponse :
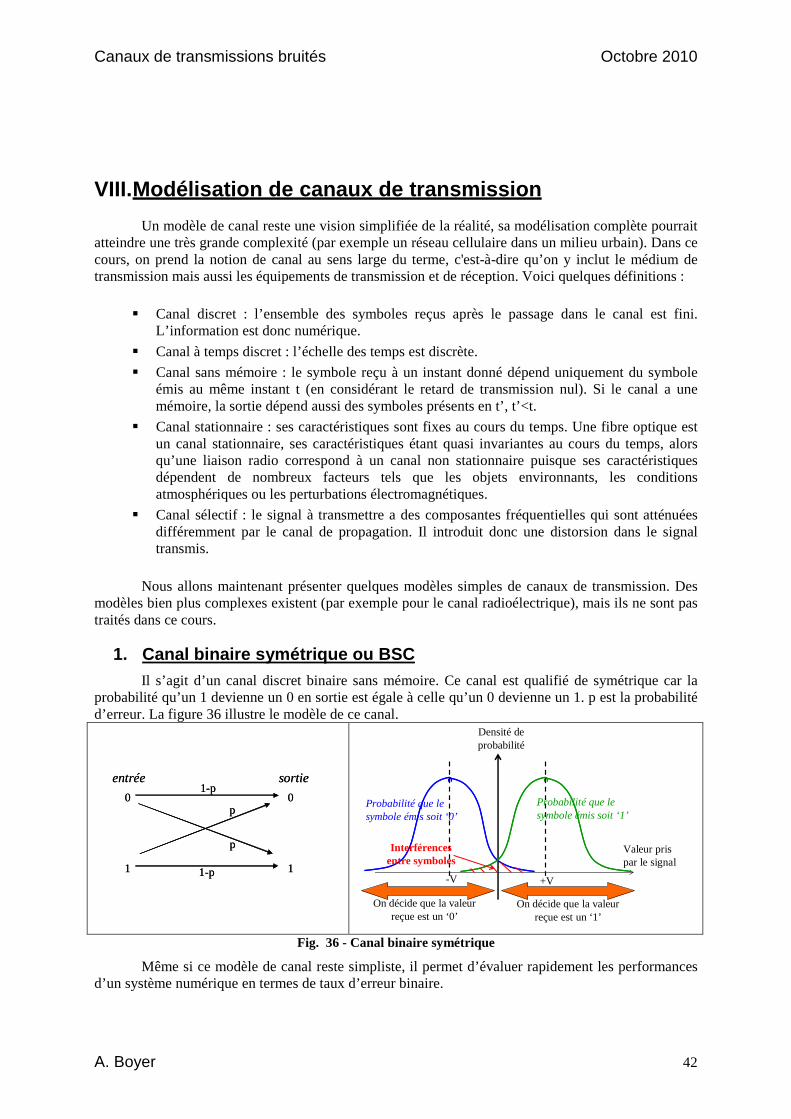
Canaux de transmissions bruités Octobre 2010
A. Boyer 42
VIII. Modélisation de canaux de transmission
Un modèle de canal reste une vision simplifiée de la réalité, sa modélisation complète pourrait atteindre une très grande complexité (par exemple un réseau cellulaire dans un milieu urbain). Dans ce cours, on prend la notion de canal au sens large du terme, c'est-à-dire qu’on y inclut le médium de transmission mais aussi les équipements de transmission et de réception. Voici quelques définitions :
Canal discret : l’ensemble des symboles reçus après le passage dans le canal est fini. L’information est donc numérique.
Canal à temps discret : l’échelle des temps est discrète.
Canal sans mémoire : le symbole reçu à un instant donné dépend uniquement du symbole émis au même instant t (en considérant le retard de transmission nul). Si le canal a une mémoire, la sortie dépend aussi des symboles présents en t’, t’<t.
Canal stationnaire : ses caractéristiques sont fixes au cours du temps. Une fibre optique est un canal stationnaire, ses caractéristiques étant quasi invariantes au cours du temps, alors qu’une liaison radio correspond à un canal non stationnaire puisque ses caractéristiques dépendent de nombreux facteurs tels que les objets environnants, les conditions atmosphériques ou les perturbations électromagnétiques.
Canal sélectif : le signal à transmettre a des composantes fréquentielles qui sont atténuées différemment par le canal de propagation. Il introduit donc une distorsion dans le signal transmis.
Nous allons maintenant présenter quelques modèles simples de canaux de transmission. Des
modèles bien plus complexes existent (par exemple pour le canal radioélectrique), mais ils ne sont pas traités dans ce cours.
1. Canal binaire symétrique ou BSC Il s’agit d’un canal discret binaire sans mémoire. Ce canal est qualifié de symétrique car la
probabilité qu’un 1 devienne un 0 en sortie est égale à celle qu’un 0 devienne un 1. p est la probabilité d’erreur. La figure 36 illustre le modèle de ce canal.
0 0
entrée sortie
1 1
p
p
1-p
1-p
0 0
entrée sortie
1 1
p
p
1-p
1-p
Valeur pris par le signal
+V-V
Densité de probabilité
Probabilité que le symbole émis soit ‘0’
Probabilité que le symbole émis soit ‘1’
On décide que la valeur reçue est un ‘0’
On décide que la valeur reçue est un ‘1’
Interférences entre symboles
Fig. 36 - Canal binaire symétrique
Même si ce modèle de canal reste simpliste, il permet d’évaluer rapidement les performances d’un système numérique en termes de taux d’erreur binaire.
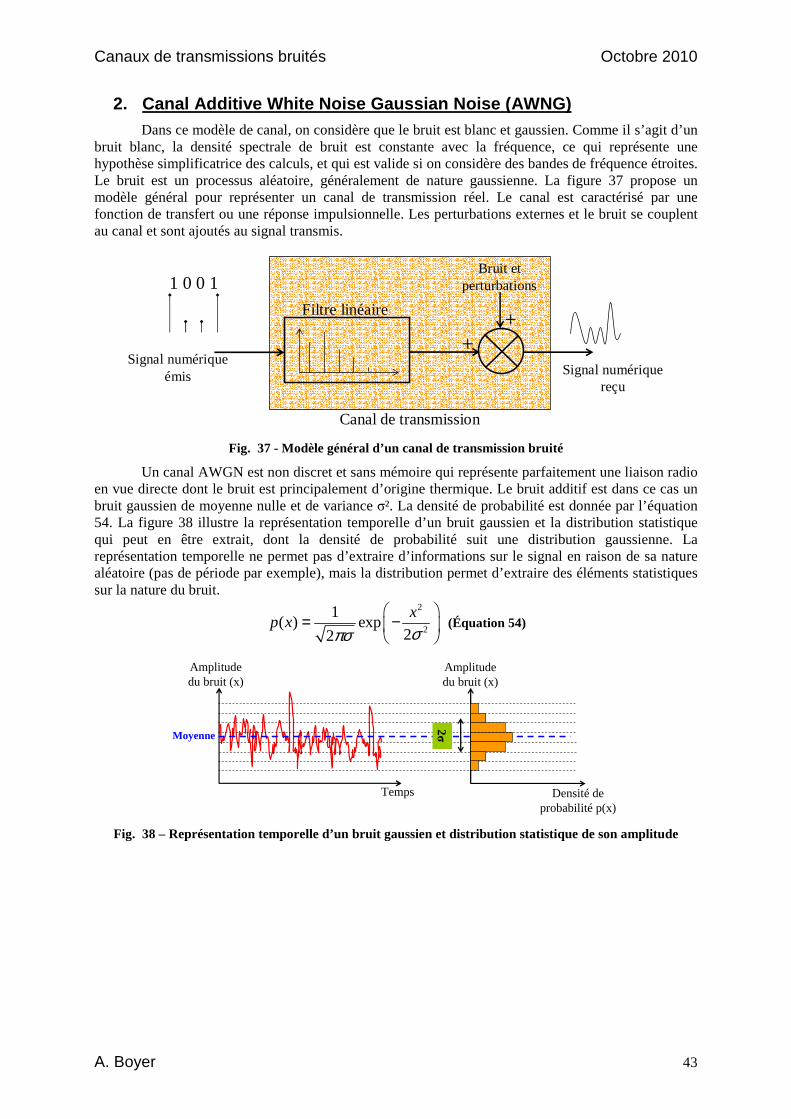
Canaux de transmissions bruités Octobre 2010
A. Boyer 43
2. Canal Additive White Noise Gaussian Noise (AWNG) Dans ce modèle de canal, on considère que le bruit est blanc et gaussien. Comme il s’agit d’un
bruit blanc, la densité spectrale de bruit est constante avec la fréquence, ce qui représente une hypothèse simplificatrice des calculs, et qui est valide si on considère des bandes de fréquence étroites. Le bruit est un processus aléatoire, généralement de nature gaussienne. La figure 37 propose un modèle général pour représenter un canal de transmission réel. Le canal est caractérisé par une fonction de transfert ou une réponse impulsionnelle. Les perturbations externes et le bruit se couplent au canal et sont ajoutés au signal transmis.
Signal numérique émis Signal numérique
reçu
Bruit et perturbations
Canal de transmission
Filtre linéaire
++
1 0 0 1
Fig. 37 - Modèle général d’un canal de transmission bruité
Un canal AWGN est non discret et sans mémoire qui représente parfaitement une liaison radio en vue directe dont le bruit est principalement d’origine thermique. Le bruit additif est dans ce cas un bruit gaussien de moyenne nulle et de variance σ². La densité de probabilité est donnée par l’équation 54. La figure 38 illustre la représentation temporelle d’un bruit gaussien et la distribution statistique qui peut en être extrait, dont la densité de probabilité suit une distribution gaussienne. La représentation temporelle ne permet pas d’extraire d’informations sur le signal en raison de sa nature aléatoire (pas de période par exemple), mais la distribution permet d’extraire des éléments statistiques sur la nature du bruit.
2
2
1( ) exp
22
xp x
σπσ
= −
(Équation 54)
Temps
Moyenne
Amplitude du bruit (x)
2σ
Densité de probabilité p(x)
Amplitude du bruit (x)
Fig. 38 – Représentation temporelle d’un bruit gaussien et distribution statistique de son amplitude
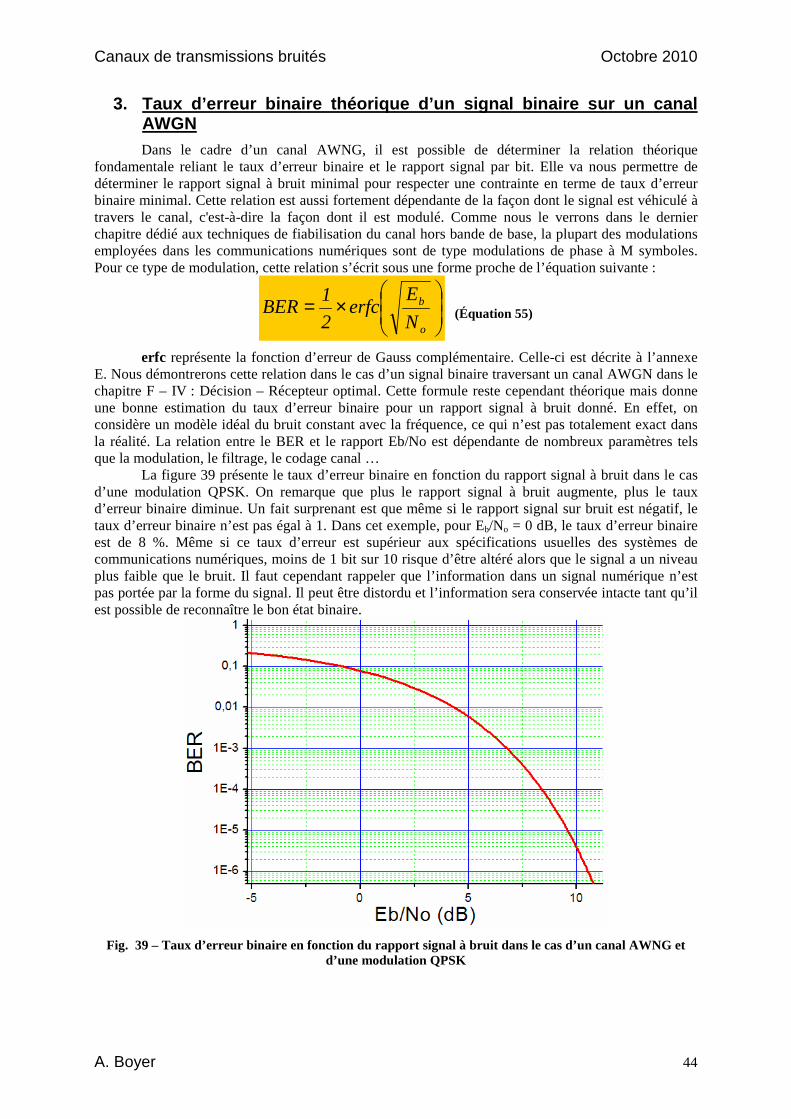
Canaux de transmissions bruités Octobre 2010
A. Boyer 44
3. Taux d’erreur binaire théorique d’un signal bina ire sur un canal AWGN Dans le cadre d’un canal AWNG, il est possible de déterminer la relation théorique
fondamentale reliant le taux d’erreur binaire et le rapport signal par bit. Elle va nous permettre de déterminer le rapport signal à bruit minimal pour respecter une contrainte en terme de taux d’erreur binaire minimal. Cette relation est aussi fortement dépendante de la façon dont le signal est véhiculé à travers le canal, c'est-à-dire la façon dont il est modulé. Comme nous le verrons dans le dernier chapitre dédié aux techniques de fiabilisation du canal hors bande de base, la plupart des modulations employées dans les communications numériques sont de type modulations de phase à M symboles. Pour ce type de modulation, cette relation s’écrit sous une forme proche de l’équation suivante :
×=
o
b
N
Eerfc
2
1BER (Équation 55)
erfc représente la fonction d’erreur de Gauss complémentaire. Celle-ci est décrite à l’annexe E. Nous démontrerons cette relation dans le cas d’un signal binaire traversant un canal AWGN dans le chapitre F – IV : Décision – Récepteur optimal. Cette formule reste cependant théorique mais donne une bonne estimation du taux d’erreur binaire pour un rapport signal à bruit donné. En effet, on considère un modèle idéal du bruit constant avec la fréquence, ce qui n’est pas totalement exact dans la réalité. La relation entre le BER et le rapport Eb/No est dépendante de nombreux paramètres tels que la modulation, le filtrage, le codage canal …
La figure 39 présente le taux d’erreur binaire en fonction du rapport signal à bruit dans le cas d’une modulation QPSK. On remarque que plus le rapport signal à bruit augmente, plus le taux d’erreur binaire diminue. Un fait surprenant est que même si le rapport signal sur bruit est négatif, le taux d’erreur binaire n’est pas égal à 1. Dans cet exemple, pour Eb/No = 0 dB, le taux d’erreur binaire est de 8 %. Même si ce taux d’erreur est supérieur aux spécifications usuelles des systèmes de communications numériques, moins de 1 bit sur 10 risque d’être altéré alors que le signal a un niveau plus faible que le bruit. Il faut cependant rappeler que l’information dans un signal numérique n’est pas portée par la forme du signal. Il peut être distordu et l’information sera conservée intacte tant qu’il est possible de reconnaître le bon état binaire.
Fig. 39 – Taux d’erreur binaire en fonction du rapport signal à bruit dans le cas d’un canal AWNG et d’une modulation QPSK
Canaux de transmissions bruités Octobre 2010
A. Boyer 45
Question : Un signal numérique de débit = 12 Kbits/s est modulé en QPSK. Le signal en bande de base présente une bande passante de 200 KHz. Calculer le rapport signal à bruit nécessaire pour garantir un BER < 0.1 %.
Réponse :
4. Canal de Rayleigh Dans les liaisons radiomobiles, les canaux de transmission évoluent en fonction du temps à
cause des déplacements aléatoires des entités communicantes et l’existence d’obstacles entre l’émetteur et le récepteur. Il peut en résulter que le signal émis suit plusieurs trajets avant d’arriver au récepteur, conduisant à une variabilité importante du signal reçu due à l’addition de plusieurs signaux déphasés. Lorsque le débit de transmission est suffisamment faible, chaque symbole ne se superpose qu’avec lui-même, au moins sur une portion significative de sa durée. Un canal de Rayleigh permet de prendre en compte ces effets : réflexions multiples, évanouissements, fluctuations à grande et petite échelle et effet Doppler. L’amplitude et la phase du signal reçu apparaissent comme des variables aléatoires qui suivent une loi de Rayleigh (équation 56). Ce modèle est particulièrement adapté à une représentation statistique d’un canal radiomobile.
−=2
2
2
2
2exp)(
σσxx
xp (Équation 56)
IX. Ce qu’il faut retenir
⇒ Le débit de données transmissibles en temps réel à travers un canal de transmission est limité par ses caractéristiques propres. Le récepteur doit être en mesure de distinguer deux symboles successifs. Il doit disposer d’une résolution suffisante en amplitude (liée au bruit) et en temps (lié à l’inertie du canal).
⇒ Dans le cadre de la théorie de l’information, le théorème de Nyquist définit le débit de moments maximal admissible dans un canal idéal.
⇒ La capacité d’un canal définit le débit binaire maximal que peut transmettre un canal afin de garantir une interférence inter symboles quasi nulle. La capacité dépend de la bande passante du canal et du rapport signal à bruit.
⇒ On définit le seuil de réception ou de sensibilité d’un récepteur comme le niveau de puissance minimale pour que le signal soit détecté et correctement interprété. Le seuil de sensibilité est lié au seuil de bruit et au rapport signal à bruit minimum.
⇒ Afin de déterminer les capacités des canaux et les seuils de sensibilité en entrée des récepteurs, il est nécessaire de modéliser les canaux de transmission.
⇒ Ces modèles sont capables de prédire les performances des canaux telles que les réponses temporelles et fréquentielles. Ils fournissent aussi les caractéristiques du bruit.
⇒ Le modèle le plus courant est le modèle dit Additive White Noise Gaussian. Dans le cadre de ce modèle, une relation entre le taux d’erreur binaire et le rapport Eb/No peut être calculé à l’aide de la fonction erfc.
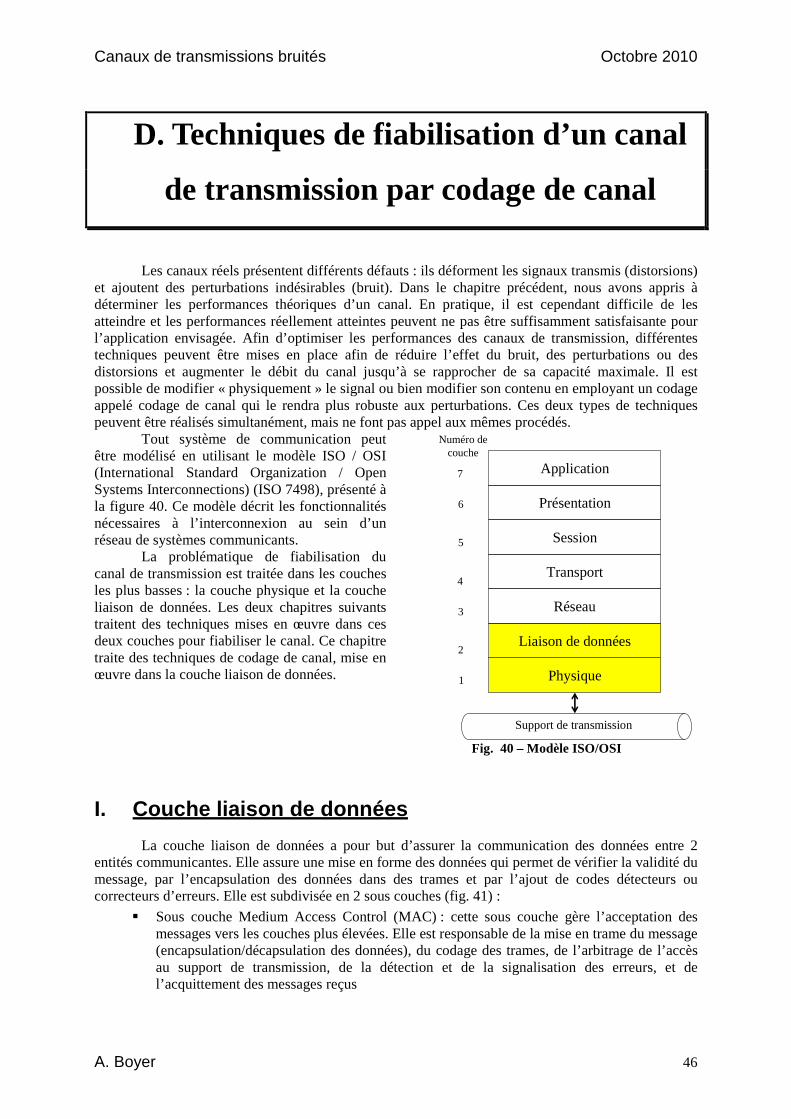
Canaux de transmissions bruités Octobre 2010
A. Boyer 46
D. Techniques de fiabilisation d’un canal
de transmission par codage de canal
Les canaux réels présentent différents défauts : ils déforment les signaux transmis (distorsions) et ajoutent des perturbations indésirables (bruit). Dans le chapitre précédent, nous avons appris à déterminer les performances théoriques d’un canal. En pratique, il est cependant difficile de les atteindre et les performances réellement atteintes peuvent ne pas être suffisamment satisfaisante pour l’application envisagée. Afin d’optimiser les performances des canaux de transmission, différentes techniques peuvent être mises en place afin de réduire l’effet du bruit, des perturbations ou des distorsions et augmenter le débit du canal jusqu’à se rapprocher de sa capacité maximale. Il est possible de modifier « physiquement » le signal ou bien modifier son contenu en employant un codage appelé codage de canal qui le rendra plus robuste aux perturbations. Ces deux types de techniques peuvent être réalisés simultanément, mais ne font pas appel aux mêmes procédés.
Tout système de communication peut être modélisé en utilisant le modèle ISO / OSI (International Standard Organization / Open Systems Interconnections) (ISO 7498), présenté à la figure 40. Ce modèle décrit les fonctionnalités nécessaires à l’interconnexion au sein d’un réseau de systèmes communicants.
La problématique de fiabilisation du canal de transmission est traitée dans les couches les plus basses : la couche physique et la couche liaison de données. Les deux chapitres suivants traitent des techniques mises en œuvre dans ces deux couches pour fiabiliser le canal. Ce chapitre traite des techniques de codage de canal, mise en œuvre dans la couche liaison de données.
Physique
Liaison de données
Réseau
Transport
Session
Présentation
Application
Numéro de couche
1
2
3
4
5
6
7
Support de transmission
Fig. 40 – Modèle ISO/OSI
I. Couche liaison de données
La couche liaison de données a pour but d’assurer la communication des données entre 2 entités communicantes. Elle assure une mise en forme des données qui permet de vérifier la validité du message, par l’encapsulation des données dans des trames et par l’ajout de codes détecteurs ou correcteurs d’erreurs. Elle est subdivisée en 2 sous couches (fig. 41) :
Sous couche Medium Access Control (MAC) : cette sous couche gère l’acceptation des messages vers les couches plus élevées. Elle est responsable de la mise en trame du message (encapsulation/décapsulation des données), du codage des trames, de l’arbitrage de l’accès au support de transmission, de la détection et de la signalisation des erreurs, et de l’acquittement des messages reçus
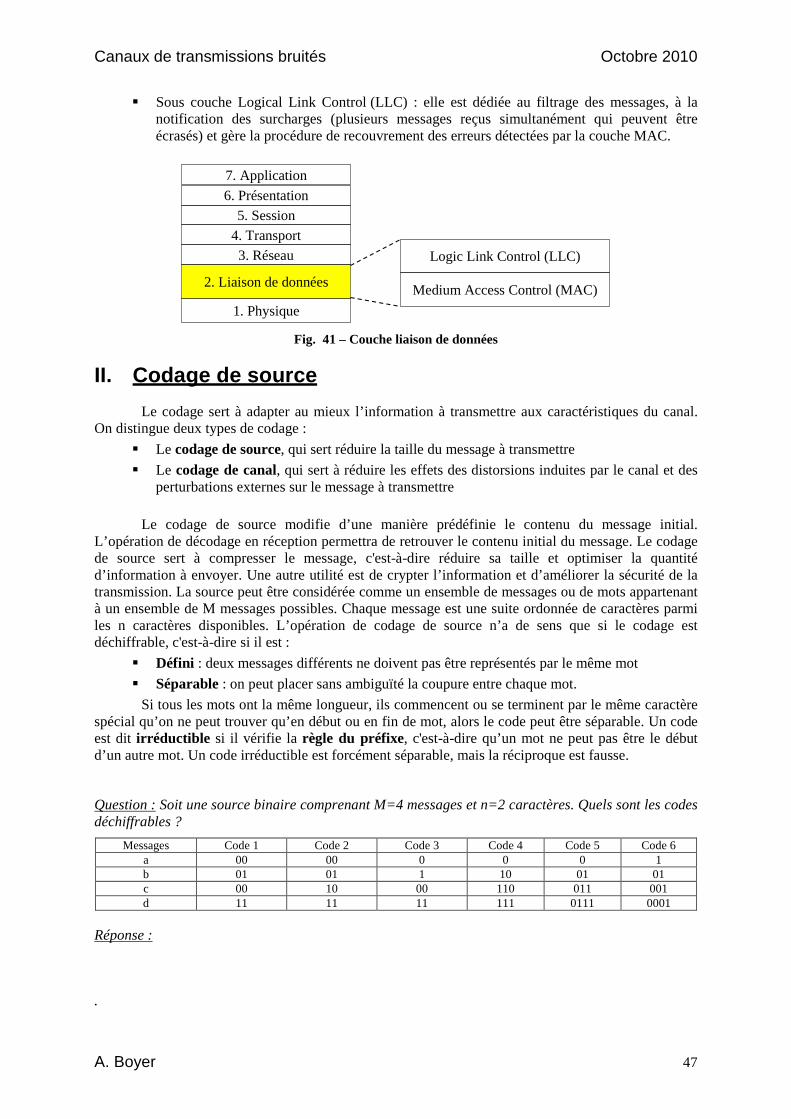
Canaux de transmissions bruités Octobre 2010
A. Boyer 47
Sous couche Logical Link Control (LLC) : elle est dédiée au filtrage des messages, à la notification des surcharges (plusieurs messages reçus simultanément qui peuvent être écrasés) et gère la procédure de recouvrement des erreurs détectées par la couche MAC.
1. Physique
2. Liaison de données
3. Réseau
4. Transport
5. Session
6. Présentation
7. Application
Logic Link Control (LLC)
Medium Access Control (MAC)
Fig. 41 – Couche liaison de données
II. Codage de source
Le codage sert à adapter au mieux l’information à transmettre aux caractéristiques du canal. On distingue deux types de codage :
Le codage de source, qui sert réduire la taille du message à transmettre
Le codage de canal, qui sert à réduire les effets des distorsions induites par le canal et des perturbations externes sur le message à transmettre
Le codage de source modifie d’une manière prédéfinie le contenu du message initial.
L’opération de décodage en réception permettra de retrouver le contenu initial du message. Le codage de source sert à compresser le message, c'est-à-dire réduire sa taille et optimiser la quantité d’information à envoyer. Une autre utilité est de crypter l’information et d’améliorer la sécurité de la transmission. La source peut être considérée comme un ensemble de messages ou de mots appartenant à un ensemble de M messages possibles. Chaque message est une suite ordonnée de caractères parmi les n caractères disponibles. L’opération de codage de source n’a de sens que si le codage est déchiffrable, c'est-à-dire si il est :
Défini : deux messages différents ne doivent pas être représentés par le même mot
Séparable : on peut placer sans ambiguïté la coupure entre chaque mot.
Si tous les mots ont la même longueur, ils commencent ou se terminent par le même caractère spécial qu’on ne peut trouver qu’en début ou en fin de mot, alors le code peut être séparable. Un code est dit irréductible si il vérifie la règle du préfixe, c'est-à-dire qu’un mot ne peut pas être le début d’un autre mot. Un code irréductible est forcément séparable, mais la réciproque est fausse.
Question : Soit une source binaire comprenant M=4 messages et n=2 caractères. Quels sont les codes déchiffrables ?
Messages Code 1 Code 2 Code 3 Code 4 Code 5 Code 6 a 00 00 0 0 0 1 b 01 01 1 10 01 01 c 00 10 00 110 011 001 d 11 11 11 111 0111 0001
Réponse :
.
Canaux de transmissions bruités Octobre 2010
A. Boyer 48
On définit la longueur moyenne L des messages de la source comme le nombre moyen de caractères par message. On peut la calculer en connaissant la probabilité d’apparition Pi et la longueur Li en caractères du message i, à l’aide de l’équation suivante 57.
( )1
M
i ii
L caractères P L=
= ×∑ (Équation 57)
Le codage de source consiste à représenter les différents messages de façon à minimiser L. Cependant, Shannon a montré qu’il existe une limite inférieure à cette longueur. Elle est donnée à l’aide du premier théorème de Shannon ou théorème de codage de source qui s’applique uniquement aux sources sans mémoire :
( )min2log
HL L
n≥ = (Équation 58)
On peut définir l’efficacité η d’un code déchiffrable pour une source sans mémoire à l’aide de l’équation 59. On peut aussi définir la redondance d’un code (équation 60). Le but du codage est d’augmenter l’efficacité du codage ou de diminuer sa redondance.
( ) min%L
Lη =
(Équation 59)
( )% 1R η= − (Équation 60)
Cependant, le codage de source doit se faire en connaissant le débit de moments qu’on souhaite faire passer à travers le canal. En effet, la vitesse à laquelle la source transmet des données à l’étage d’émission des moments dans le canal ne doit pas être trop importante si on cherche à faire une transmission en continu ou transmission en temps réel, comme le montre la figure 42.
SourceSourceInformation EmetteurEmetteurCanal
Codage source Codage canal
Modulation, …
•
cD mD•
Fig. 42 - Transmission en temps réel
Si •
CD représente le débit de caractères fournit par la source et mD•
le débit de moments émis
à travers le canal, pour réaliser une transmission en temps réel, il faut vérifier la condition énoncée dans l’équation 61. Si cette inégalité n’est pas respectée, la source devra fournir les données de manière discontinue de manière à ce que l’émetteur puisse émettre toutes les données fournies par la source sans en perdre.
mc DD••
≤ (Équation 61)
III. Codage/décodage d’un canal – Codes correcteur d’erreur
On désigne par codage de canal la transformation à appliquer aux symboles à transmettre pour les protéger des perturbations rencontrées durant la transmission. Contrairement au codage de source, le codage de canal consiste à ajouter de la redondance au message à transmettre, comme l’ajout code détecteur ou correcteur d’erreur pour les transmissions numériques. Il existe 2 stratégies de codage de canal :
Détection d’erreurs dans le message reçu et demande de retransmission à l’aide d’un meilleur protocole (Automatic Repeat reQuest). Cette technique nécessite une voie de retour

Canaux de transmissions bruités Octobre 2010
A. Boyer 49
(si cela est autorisé) et créé des risques de congestion du canal si la perturbation est trop forte.
Détection d’erreurs et correction en réception (Forward Error Coding). Cette technique introduit de la redondance dans le message initial, mais les circuits et les algorithmes à implémenter sont plus complexes.
Cette dernière technique est couramment employée dans la plupart des systèmes de
télécommunications numériques. Elle consiste à ajouter en fin de trames plusieurs bits, appelés bits de redondance, dépendants du contenu d’une ou plusieurs trames afin de les protéger contre les erreurs de décisions du récepteur. En réception, un traitement de ces bits supplémentaires permet de détecter les erreurs voire pour certains codes de restaurer les symboles d’origine. La gestion de la détection d’erreur est décrite dans le protocole de la transmission.
L’ajout d’un code correcteur d’erreur est limité par la capacité du canal. En effet, des séquences trop longues ne peuvent pas être ajoutées sans réduire le débit de données utiles. Pour quantifier la redondance ajoutée à un message, on emploie le terme de rendement de code ou taux de codage R :
codeMessage
K bits
Message codé
N bitscode
Message
K bits
Message codé
N bits
On définit parfois un code de la manière suivante : pour le code ci-dessus, on parle de code (k,n,t), avec k le nombre de bits du message à coder, n le nombre de bits du message codé et t le nombre de bits erronés qui pourront être détectés ou corrigés.
Quelques définitions :
Un code est dit systématique si on retrouve dans le message codé le message non codé à l’identique. Dans le cas où le message initial est de longueur K bits et la longueur du message codé est de N bits, les N-K bits sont des bits de parité. Dans ce cas, le rendement est élevé, supérieur en général à 0.7. En pratique, on parle d’un faible rendement si il est inférieur à 0.4.
Le codage entraîne un surdébit qui se traduit soit par une diminution du débit utile soit par une augmentation du débit transmis sur le canal et par conséquent d’une augmentation de la bande passante ou de la puissance émise pour accroître la capacité. On peut lier le débit avant codage Dc avec le débit après codage Db à l’aide du rendement, comme le montre l’équation 62.
R
DD b
C =•
(Équation 62)
Même si le codage de canal augmente la redondance et diminue le débit utile d’information, il améliore globalement le système de transmission puisqu’il apporte une protection au message transmis. Afin de quantifier cette amélioration, on utilise le gain de codage, qui représente la différence en dB entre les rapports signal/bruit respectifs du système codé et non codé qui permettent d’atteindre le même taux d’erreur. Comme le montre la figure 43, pour une limite en terme de taux d’erreur binaire, la contrainte en terme de rapport signal sur bruit sera plus faible pour un message auquel on a ajouté un code correcteur d’erreur (message 2) par rapport au message non codé (message 1). Le gain de codage représente la différence de rapport signal à bruit entre ces 2 techniques pour atteindre la même performance en terme de taux d’erreur binaire.
Eb/No
Taux d’erreur binaire
12
Gain de codage
Fig. 43 - Gain de codage
KR
N=
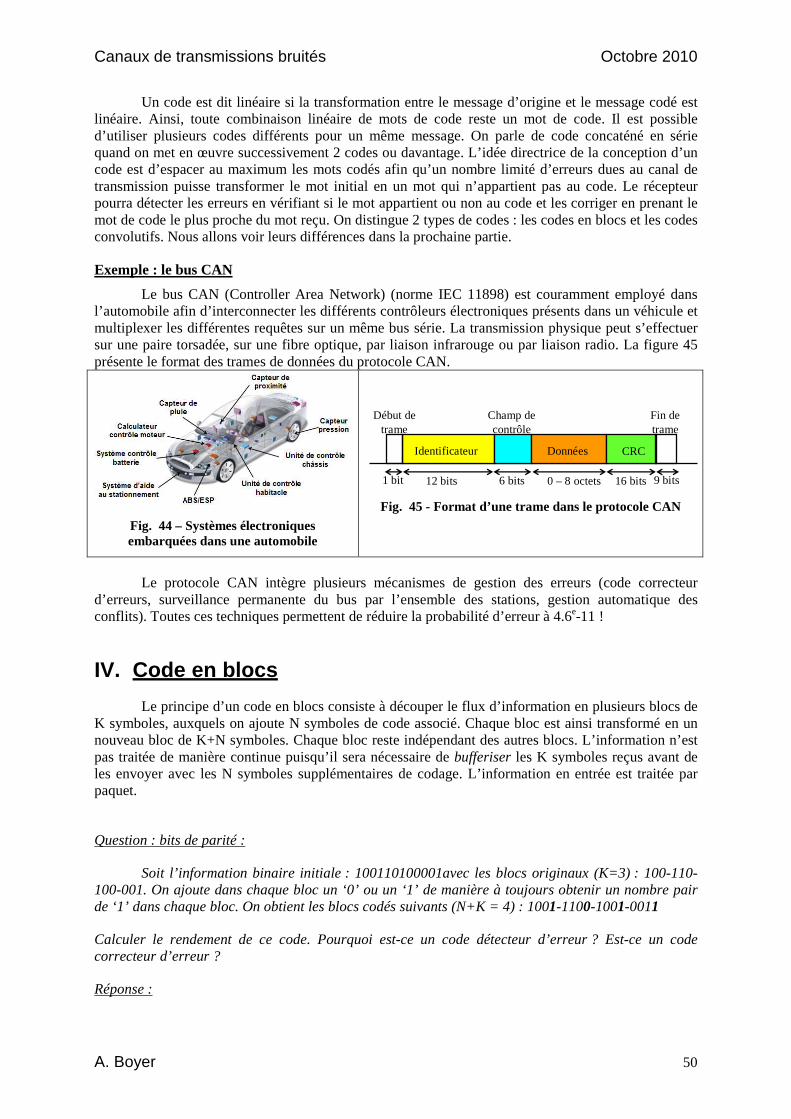
Canaux de transmissions bruités Octobre 2010
A. Boyer 50
Un code est dit linéaire si la transformation entre le message d’origine et le message codé est linéaire. Ainsi, toute combinaison linéaire de mots de code reste un mot de code. Il est possible d’utiliser plusieurs codes différents pour un même message. On parle de code concaténé en série quand on met en œuvre successivement 2 codes ou davantage. L’idée directrice de la conception d’un code est d’espacer au maximum les mots codés afin qu’un nombre limité d’erreurs dues au canal de transmission puisse transformer le mot initial en un mot qui n’appartient pas au code. Le récepteur pourra détecter les erreurs en vérifiant si le mot appartient ou non au code et les corriger en prenant le mot de code le plus proche du mot reçu. On distingue 2 types de codes : les codes en blocs et les codes convolutifs. Nous allons voir leurs différences dans la prochaine partie.
Exemple : le bus CAN
Le bus CAN (Controller Area Network) (norme IEC 11898) est couramment employé dans l’automobile afin d’interconnecter les différents contrôleurs électroniques présents dans un véhicule et multiplexer les différentes requêtes sur un même bus série. La transmission physique peut s’effectuer sur une paire torsadée, sur une fibre optique, par liaison infrarouge ou par liaison radio. La figure 45 présente le format des trames de données du protocole CAN.
Fig. 44 – Systèmes électroniques embarquées dans une automobile
Identificateur
Champ de contrôle
Données CRC
Début de trame
Fin de trame
12 bits 6 bits 0 – 8 octets 16 bits1 bit 9 bits
Fig. 45 - Format d’une trame dans le protocole CAN
Le protocole CAN intègre plusieurs mécanismes de gestion des erreurs (code correcteur
d’erreurs, surveillance permanente du bus par l’ensemble des stations, gestion automatique des conflits). Toutes ces techniques permettent de réduire la probabilité d’erreur à 4.6e-11 !
IV. Code en blocs
Le principe d’un code en blocs consiste à découper le flux d’information en plusieurs blocs de K symboles, auxquels on ajoute N symboles de code associé. Chaque bloc est ainsi transformé en un nouveau bloc de K+N symboles. Chaque bloc reste indépendant des autres blocs. L’information n’est pas traitée de manière continue puisqu’il sera nécessaire de bufferiser les K symboles reçus avant de les envoyer avec les N symboles supplémentaires de codage. L’information en entrée est traitée par paquet.
Question : bits de parité :
Soit l’information binaire initiale : 100110100001avec les blocs originaux (K=3) : 100-110-100-001. On ajoute dans chaque bloc un ‘0’ ou un ‘1’ de manière à toujours obtenir un nombre pair de ‘1’ dans chaque bloc. On obtient les blocs codés suivants (N+K = 4) : 1001-1100-1001-0011
Calculer le rendement de ce code. Pourquoi est-ce un code détecteur d’erreur ? Est-ce un code correcteur d’erreur ?
Réponse :
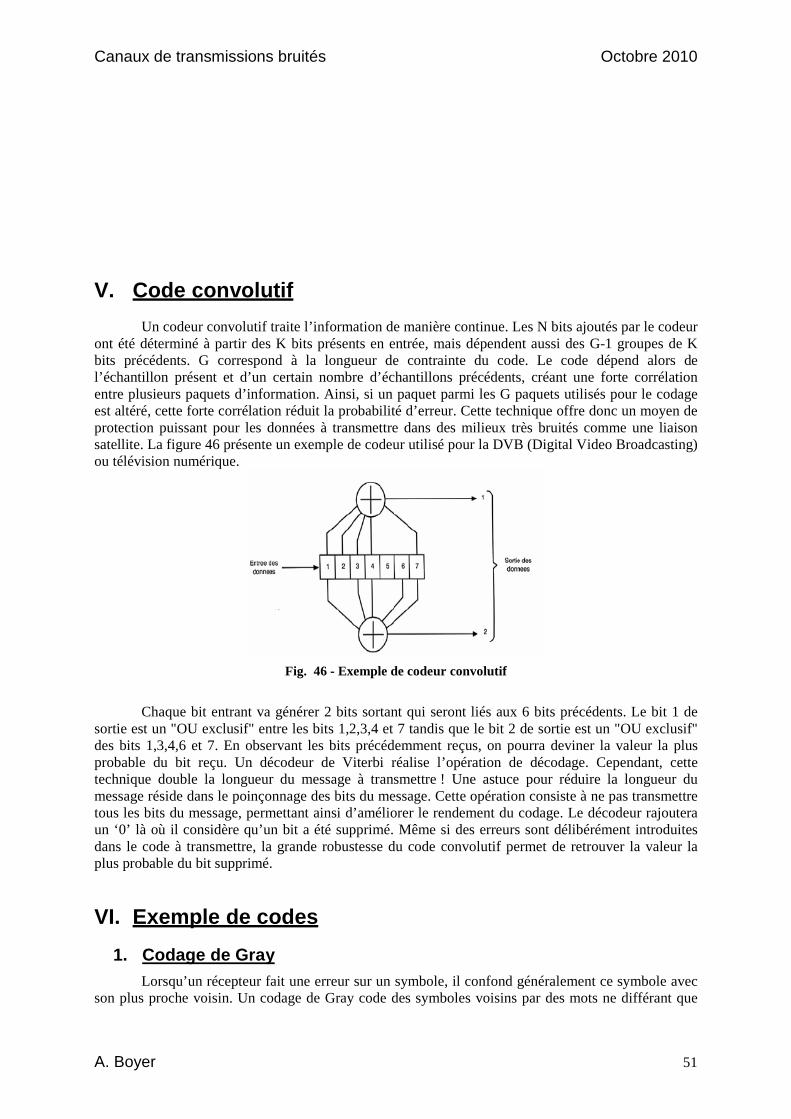
Canaux de transmissions bruités Octobre 2010
A. Boyer 51
V. Code convolutif
Un codeur convolutif traite l’information de manière continue. Les N bits ajoutés par le codeur ont été déterminé à partir des K bits présents en entrée, mais dépendent aussi des G-1 groupes de K bits précédents. G correspond à la longueur de contrainte du code. Le code dépend alors de l’échantillon présent et d’un certain nombre d’échantillons précédents, créant une forte corrélation entre plusieurs paquets d’information. Ainsi, si un paquet parmi les G paquets utilisés pour le codage est altéré, cette forte corrélation réduit la probabilité d’erreur. Cette technique offre donc un moyen de protection puissant pour les données à transmettre dans des milieux très bruités comme une liaison satellite. La figure 46 présente un exemple de codeur utilisé pour la DVB (Digital Video Broadcasting) ou télévision numérique.
Fig. 46 - Exemple de codeur convolutif
Chaque bit entrant va générer 2 bits sortant qui seront liés aux 6 bits précédents. Le bit 1 de
sortie est un "OU exclusif" entre les bits 1,2,3,4 et 7 tandis que le bit 2 de sortie est un "OU exclusif" des bits 1,3,4,6 et 7. En observant les bits précédemment reçus, on pourra deviner la valeur la plus probable du bit reçu. Un décodeur de Viterbi réalise l’opération de décodage. Cependant, cette technique double la longueur du message à transmettre ! Une astuce pour réduire la longueur du message réside dans le poinçonnage des bits du message. Cette opération consiste à ne pas transmettre tous les bits du message, permettant ainsi d’améliorer le rendement du codage. Le décodeur rajoutera un ‘0’ là où il considère qu’un bit a été supprimé. Même si des erreurs sont délibérément introduites dans le code à transmettre, la grande robustesse du code convolutif permet de retrouver la valeur la plus probable du bit supprimé.
VI. Exemple de codes
1. Codage de Gray Lorsqu’un récepteur fait une erreur sur un symbole, il confond généralement ce symbole avec
son plus proche voisin. Un codage de Gray code des symboles voisins par des mots ne différant que
Canaux de transmissions bruités Octobre 2010
A. Boyer 52
d’un bit. Ainsi, une confusion d’un des deux symboles n’introduira une erreur que sur un seul bit. Le codage de Gray peut se construire de la manière suivante :
Soit une suite d’entiers appartenant à l’intervalle [0,N-1]. Ils peuvent être codés sur k bits bi
tels que 1 2 1kN − = − . Pour un entier n donné de cet intervalle, le code de Gray 1 2 0...k ka a a− − du mot
binaire naturel 1 2 0...k kb b b− − s’écrit :
[ ]1 1
1 0, 2k k
i i i
a b
a b b i k− −
+
== ⊕ ∀ ∈ −
Exemple : Codage de Gray de nombre entier naturel
Nombre entier Codage binaire classique Codage de Gray 0 0000 0000 1 0001 0001 2 0010 0011 3 0011 0010 4 0100 0110 5 0101 1110 6 0110 1100 7 0111 0100
2. Codage de Reed Solomon Le codage de Reed Solomon est un code en bloc détecteur et correcteur d’erreur. Celui-ci est
notamment utilisé dans la norme DVB. Il est noté RS(188,204,t=8).
Question : Que signifie la notation RS(188,204,t=8) ?
Réponse :
Ce code consiste à ajouter des octets redondants valant soit la somme soit la somme pondérée
des différents octets présents dans le message. Pour comprendre ce code, appliquons le à un message composé de 3 octets, par exemple le suivant : 12 15 34. On ajoute 2 octets de redondances. Le premier est égal à la somme des 3 octets, le second à la somme pondéré par le rang de chaque octet des 3 octets :
Premier octet de redondance : 12+15+34 = 51
Deuxième octet de redondance : 12×1+15×2+34×3 = 114
Le message codé devient donc : 12 15 34 51 114. Imaginons qu’on transmette ce message, qu’un des octets ait été perturbé et qu’on récupère le message suivant : 18 15 34 51 114. Si on refait la somme des 3 octets et la somme pondérée, on peut détecter une erreur :
18+15+34 = 57 18×1+15×2+34×3 = 120 La différence des sommes simples (celle reçue et celle recalculée) donne la valeur de l’erreur :
57-51 = 6. Celle des différences pondérées divisées par l’erreur donne le rang de l’erreur :
Codage de Gray
bk- ak-
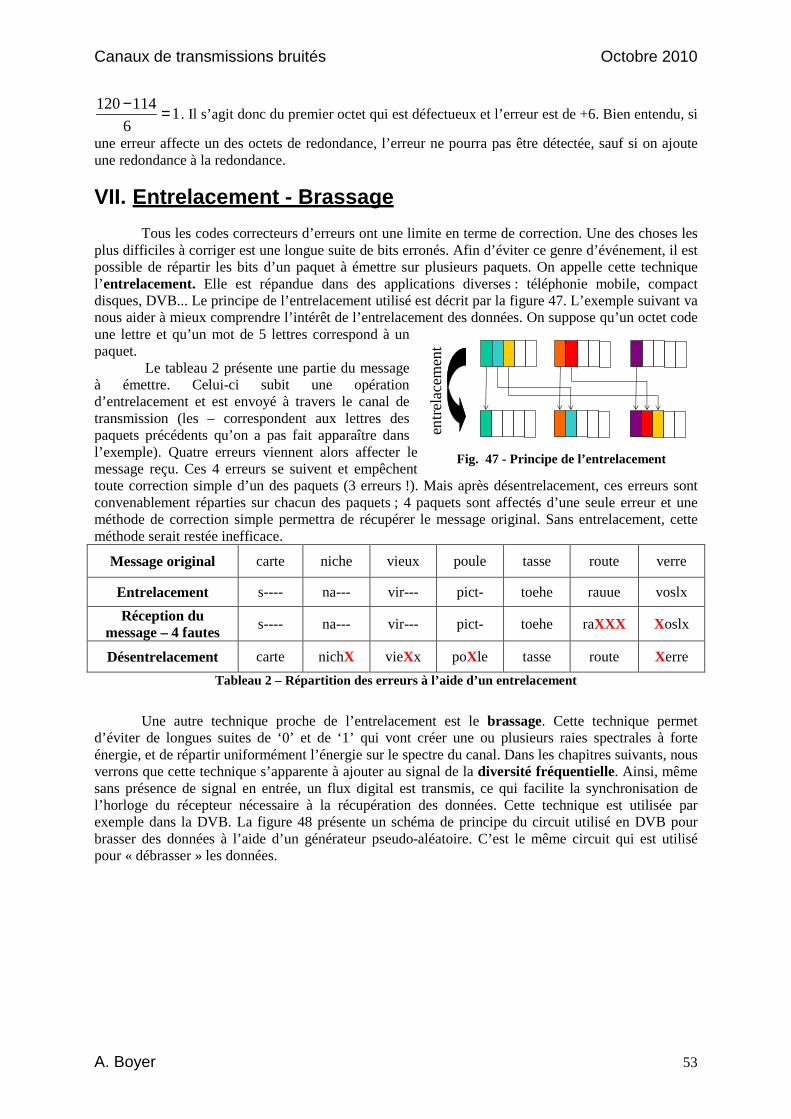
Canaux de transmissions bruités Octobre 2010
A. Boyer 53
120 1141
6
− = . Il s’agit donc du premier octet qui est défectueux et l’erreur est de +6. Bien entendu, si
une erreur affecte un des octets de redondance, l’erreur ne pourra pas être détectée, sauf si on ajoute une redondance à la redondance.
VII. Entrelacement - Brassage
Tous les codes correcteurs d’erreurs ont une limite en terme de correction. Une des choses les plus difficiles à corriger est une longue suite de bits erronés. Afin d’éviter ce genre d’événement, il est possible de répartir les bits d’un paquet à émettre sur plusieurs paquets. On appelle cette technique l’ entrelacement. Elle est répandue dans des applications diverses : téléphonie mobile, compact disques, DVB... Le principe de l’entrelacement utilisé est décrit par la figure 47. L’exemple suivant va nous aider à mieux comprendre l’intérêt de l’entrelacement des données. On suppose qu’un octet code une lettre et qu’un mot de 5 lettres correspond à un paquet.
Le tableau 2 présente une partie du message à émettre. Celui-ci subit une opération d’entrelacement et est envoyé à travers le canal de transmission (les – correspondent aux lettres des paquets précédents qu’on a pas fait apparaître dans l’exemple). Quatre erreurs viennent alors affecter le message reçu. Ces 4 erreurs se suivent et empêchent toute correction simple d’un des paquets (3 erreurs !). Mais après désentrelacement, ces erreurs sont convenablement réparties sur chacun des paquets ; 4 paquets sont affectés d’une seule erreur et une méthode de correction simple permettra de récupérer le message original. Sans entrelacement, cette méthode serait restée inefficace.
Message original carte niche vieux poule tasse route verre
Entrelacement s---- na--- vir--- pict- toehe rauue voslx
Réception du message – 4 fautes
s---- na--- vir--- pict- toehe raXXX Xoslx
Désentrelacement carte nichX vieXx poXle tasse route Xerre
Tableau 2 – Répartition des erreurs à l’aide d’un entrelacement
Une autre technique proche de l’entrelacement est le brassage. Cette technique permet
d’éviter de longues suites de ‘0’ et de ‘1’ qui vont créer une ou plusieurs raies spectrales à forte énergie, et de répartir uniformément l’énergie sur le spectre du canal. Dans les chapitres suivants, nous verrons que cette technique s’apparente à ajouter au signal de la diversité fréquentielle. Ainsi, même sans présence de signal en entrée, un flux digital est transmis, ce qui facilite la synchronisation de l’horloge du récepteur nécessaire à la récupération des données. Cette technique est utilisée par exemple dans la DVB. La figure 48 présente un schéma de principe du circuit utilisé en DVB pour brasser des données à l’aide d’un générateur pseudo-aléatoire. C’est le même circuit qui est utilisé pour « débrasser » les données.
Fig. 47 - Principe de l’entrelacement
entr
elac
emen
t
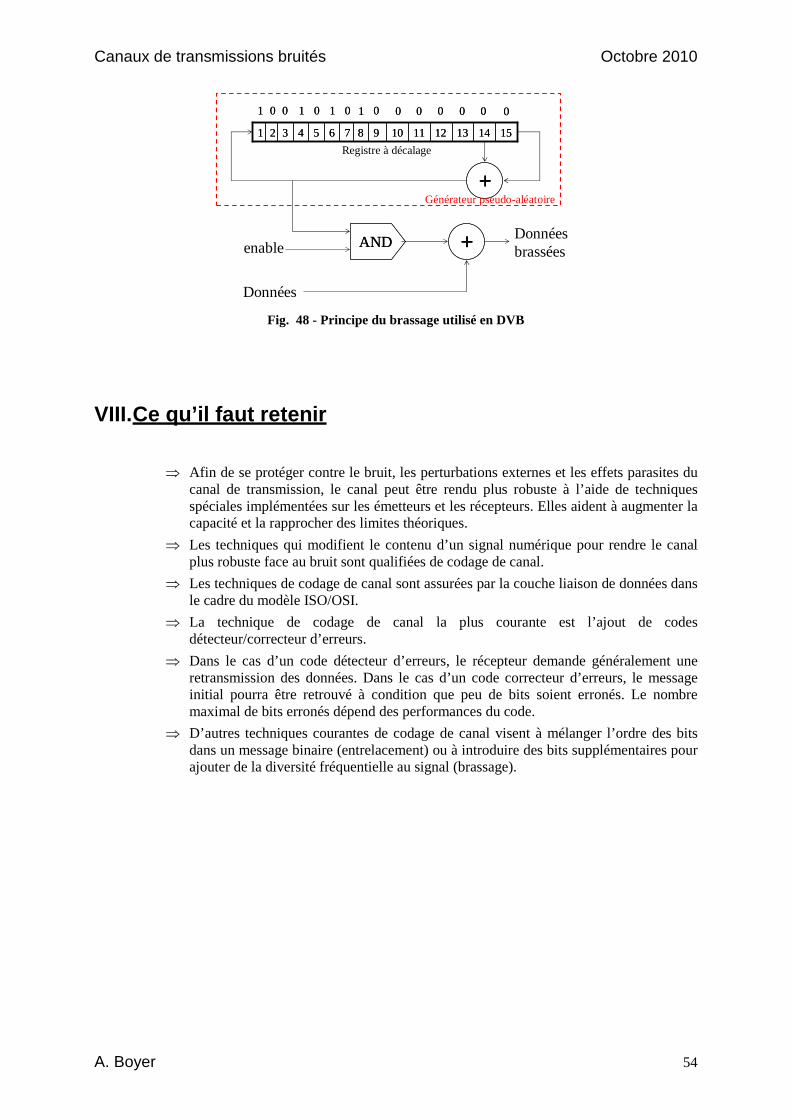
Canaux de transmissions bruités Octobre 2010
A. Boyer 54
151413121110987654321 151413121110987654321
1 0 0 1 0 0 0 0 0 0 0 0 01 11 0 0 1 0 0 0 0 0 0 0 0 01 1
ANDAND
++
++enable
Données
Données brassées
Registre à décalage
Générateur pseudo-aléatoire
Fig. 48 - Principe du brassage utilisé en DVB
VIII. Ce qu’il faut retenir
⇒ Afin de se protéger contre le bruit, les perturbations externes et les effets parasites du canal de transmission, le canal peut être rendu plus robuste à l’aide de techniques spéciales implémentées sur les émetteurs et les récepteurs. Elles aident à augmenter la capacité et la rapprocher des limites théoriques.
⇒ Les techniques qui modifient le contenu d’un signal numérique pour rendre le canal plus robuste face au bruit sont qualifiées de codage de canal.
⇒ Les techniques de codage de canal sont assurées par la couche liaison de données dans le cadre du modèle ISO/OSI.
⇒ La technique de codage de canal la plus courante est l’ajout de codes détecteur/correcteur d’erreurs.
⇒ Dans le cas d’un code détecteur d’erreurs, le récepteur demande généralement une retransmission des données. Dans le cas d’un code correcteur d’erreurs, le message initial pourra être retrouvé à condition que peu de bits soient erronés. Le nombre maximal de bits erronés dépend des performances du code.
⇒ D’autres techniques courantes de codage de canal visent à mélanger l’ordre des bits dans un message binaire (entrelacement) ou à introduire des bits supplémentaires pour ajouter de la diversité fréquentielle au signal (brassage).
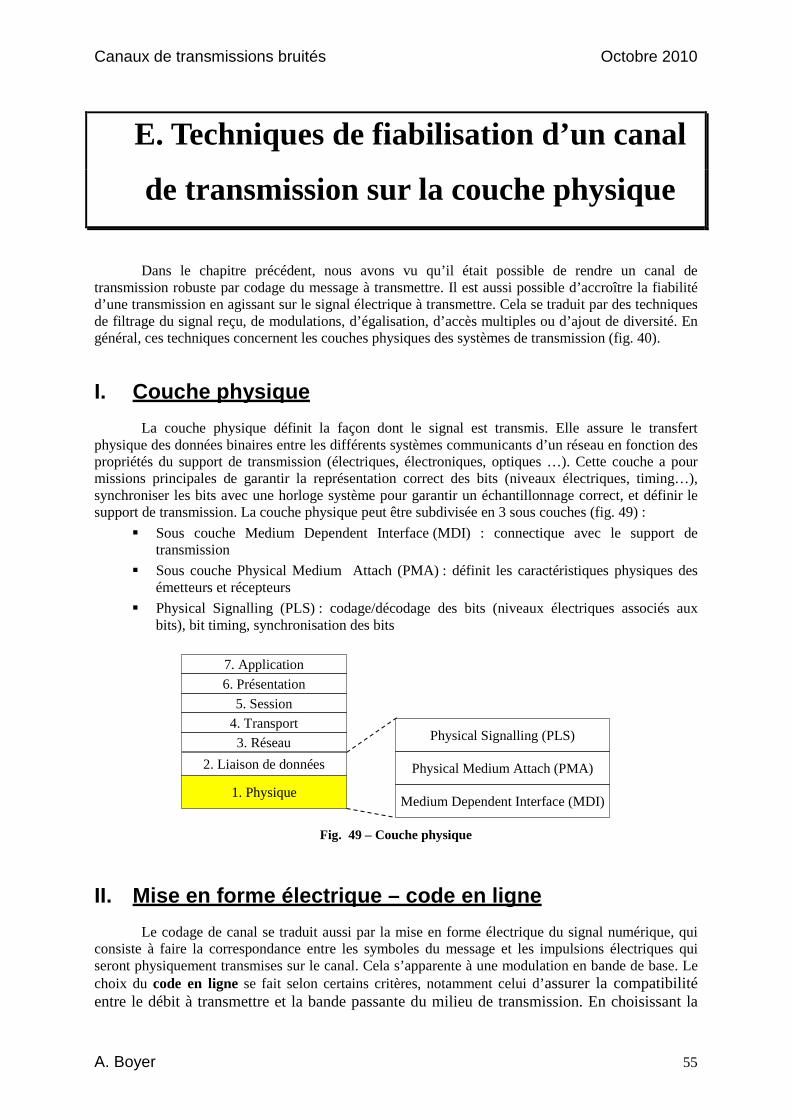
Canaux de transmissions bruités Octobre 2010
A. Boyer 55
E. Techniques de fiabilisation d’un canal
de transmission sur la couche physique
Dans le chapitre précédent, nous avons vu qu’il était possible de rendre un canal de transmission robuste par codage du message à transmettre. Il est aussi possible d’accroître la fiabilité d’une transmission en agissant sur le signal électrique à transmettre. Cela se traduit par des techniques de filtrage du signal reçu, de modulations, d’égalisation, d’accès multiples ou d’ajout de diversité. En général, ces techniques concernent les couches physiques des systèmes de transmission (fig. 40).
I. Couche physique
La couche physique définit la façon dont le signal est transmis. Elle assure le transfert physique des données binaires entre les différents systèmes communicants d’un réseau en fonction des propriétés du support de transmission (électriques, électroniques, optiques …). Cette couche a pour missions principales de garantir la représentation correct des bits (niveaux électriques, timing…), synchroniser les bits avec une horloge système pour garantir un échantillonnage correct, et définir le support de transmission. La couche physique peut être subdivisée en 3 sous couches (fig. 49) :
Sous couche Medium Dependent Interface (MDI) : connectique avec le support de transmission
Sous couche Physical Medium Attach (PMA) : définit les caractéristiques physiques des émetteurs et récepteurs
Physical Signalling (PLS) : codage/décodage des bits (niveaux électriques associés aux bits), bit timing, synchronisation des bits
2. Liaison de données
1. Physique
3. Réseau
4. Transport
5. Session
6. Présentation
7. Application
Physical Medium Attach (PMA)
Medium Dependent Interface (MDI)
Physical Signalling (PLS)
Fig. 49 – Couche physique
II. Mise en forme électrique – code en ligne
Le codage de canal se traduit aussi par la mise en forme électrique du signal numérique, qui consiste à faire la correspondance entre les symboles du message et les impulsions électriques qui seront physiquement transmises sur le canal. Cela s’apparente à une modulation en bande de base. Le choix du code en ligne se fait selon certains critères, notamment celui d’assurer la compatibilité entre le débit à transmettre et la bande passante du milieu de transmission. En choisissant la
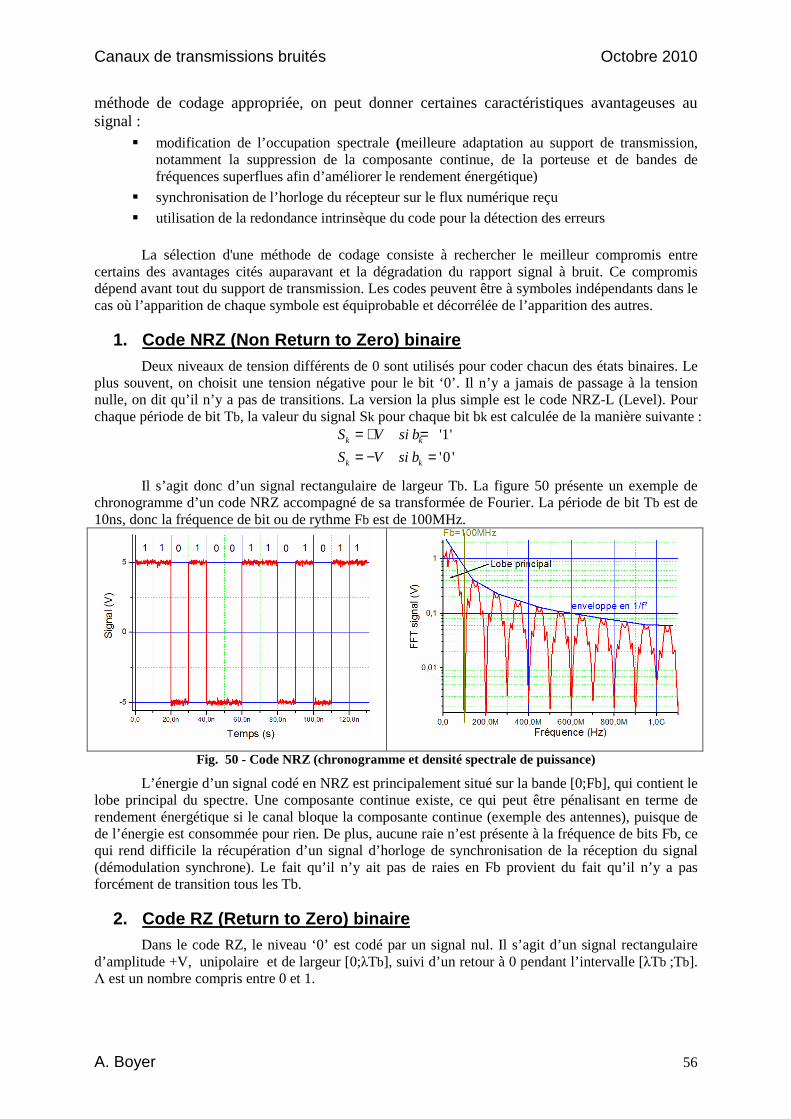
Canaux de transmissions bruités Octobre 2010
A. Boyer 56
méthode de codage appropriée, on peut donner certaines caractéristiques avantageuses au signal :
modification de l’occupation spectrale (meilleure adaptation au support de transmission, notamment la suppression de la composante continue, de la porteuse et de bandes de fréquences superflues afin d’améliorer le rendement énergétique)
synchronisation de l’horloge du récepteur sur le flux numérique reçu
utilisation de la redondance intrinsèque du code pour la détection des erreurs La sélection d'une méthode de codage consiste à rechercher le meilleur compromis entre
certains des avantages cités auparavant et la dégradation du rapport signal à bruit. Ce compromis dépend avant tout du support de transmission. Les codes peuvent être à symboles indépendants dans le cas où l’apparition de chaque symbole est équiprobable et décorrélée de l’apparition des autres.
1. Code NRZ (Non Return to Zero) binaire Deux niveaux de tension différents de 0 sont utilisés pour coder chacun des états binaires. Le
plus souvent, on choisit une tension négative pour le bit ‘0’. Il n’y a jamais de passage à la tension nulle, on dit qu’il n’y a pas de transitions. La version la plus simple est le code NRZ-L (Level). Pour chaque période de bit Tb, la valeur du signal Sk pour chaque bit bk est calculée de la manière suivante :
'1'
'0 'k k
k k
S V si b
S V si b
= + == − =
Il s’agit donc d’un signal rectangulaire de largeur Tb. La figure 50 présente un exemple de chronogramme d’un code NRZ accompagné de sa transformée de Fourier. La période de bit Tb est de 10ns, donc la fréquence de bit ou de rythme Fb est de 100MHz.
Fig. 50 - Code NRZ (chronogramme et densité spectrale de puissance)
L’énergie d’un signal codé en NRZ est principalement situé sur la bande [0;Fb], qui contient le lobe principal du spectre. Une composante continue existe, ce qui peut être pénalisant en terme de rendement énergétique si le canal bloque la composante continue (exemple des antennes), puisque de de l’énergie est consommée pour rien. De plus, aucune raie n’est présente à la fréquence de bits Fb, ce qui rend difficile la récupération d’un signal d’horloge de synchronisation de la réception du signal (démodulation synchrone). Le fait qu’il n’y ait pas de raies en Fb provient du fait qu’il n’y a pas forcément de transition tous les Tb.
2. Code RZ (Return to Zero) binaire Dans le code RZ, le niveau ‘0’ est codé par un signal nul. Il s’agit d’un signal rectangulaire
d’amplitude +V, unipolaire et de largeur [0;λTb], suivi d’un retour à 0 pendant l’intervalle [λTb ;Tb]. Λ est un nombre compris entre 0 et 1.
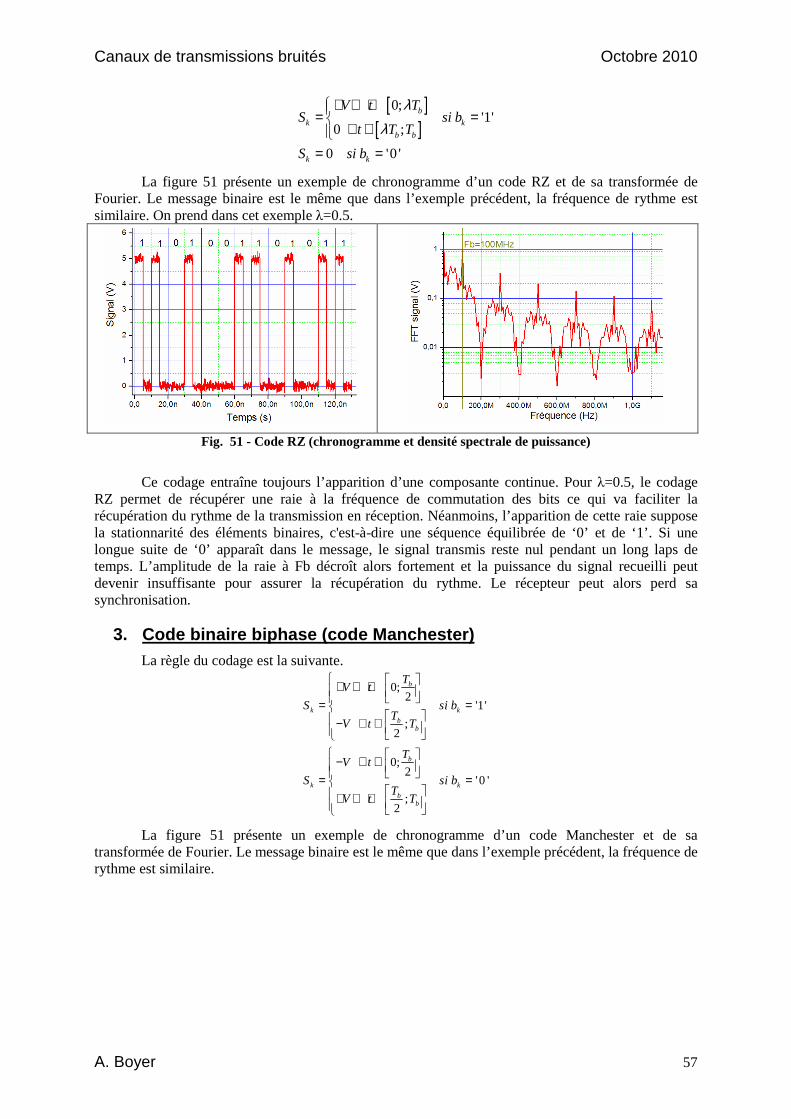
Canaux de transmissions bruités Octobre 2010
A. Boyer 57
[ ][ ]
0;'1'
0 ;
0 '0 '
b
k k
b b
k k
V t TS si b
t T T
S si b
λλ
+ ∀ ∈= =∀ ∈
= =
La figure 51 présente un exemple de chronogramme d’un code RZ et de sa transformée de Fourier. Le message binaire est le même que dans l’exemple précédent, la fréquence de rythme est similaire. On prend dans cet exemple λ=0.5.
Fig. 51 - Code RZ (chronogramme et densité spectrale de puissance)
Ce codage entraîne toujours l’apparition d’une composante continue. Pour λ=0.5, le codage
RZ permet de récupérer une raie à la fréquence de commutation des bits ce qui va faciliter la récupération du rythme de la transmission en réception. Néanmoins, l’apparition de cette raie suppose la stationnarité des éléments binaires, c'est-à-dire une séquence équilibrée de ‘0’ et de ‘1’. Si une longue suite de ‘0’ apparaît dans le message, le signal transmis reste nul pendant un long laps de temps. L’amplitude de la raie à Fb décroît alors fortement et la puissance du signal recueilli peut devenir insuffisante pour assurer la récupération du rythme. Le récepteur peut alors perd sa synchronisation.
3. Code binaire biphase (code Manchester) La règle du codage est la suivante.
0;2
'1'
;2
0;2
'0 '
;2
b
k k
bb
b
k k
bb
TV t
S si bT
V t T
TV t
S si bT
V t T
+ ∀ ∈ = =
− ∀ ∈
− ∀ ∈ = =
+ ∀ ∈
La figure 51 présente un exemple de chronogramme d’un code Manchester et de sa transformée de Fourier. Le message binaire est le même que dans l’exemple précédent, la fréquence de rythme est similaire.
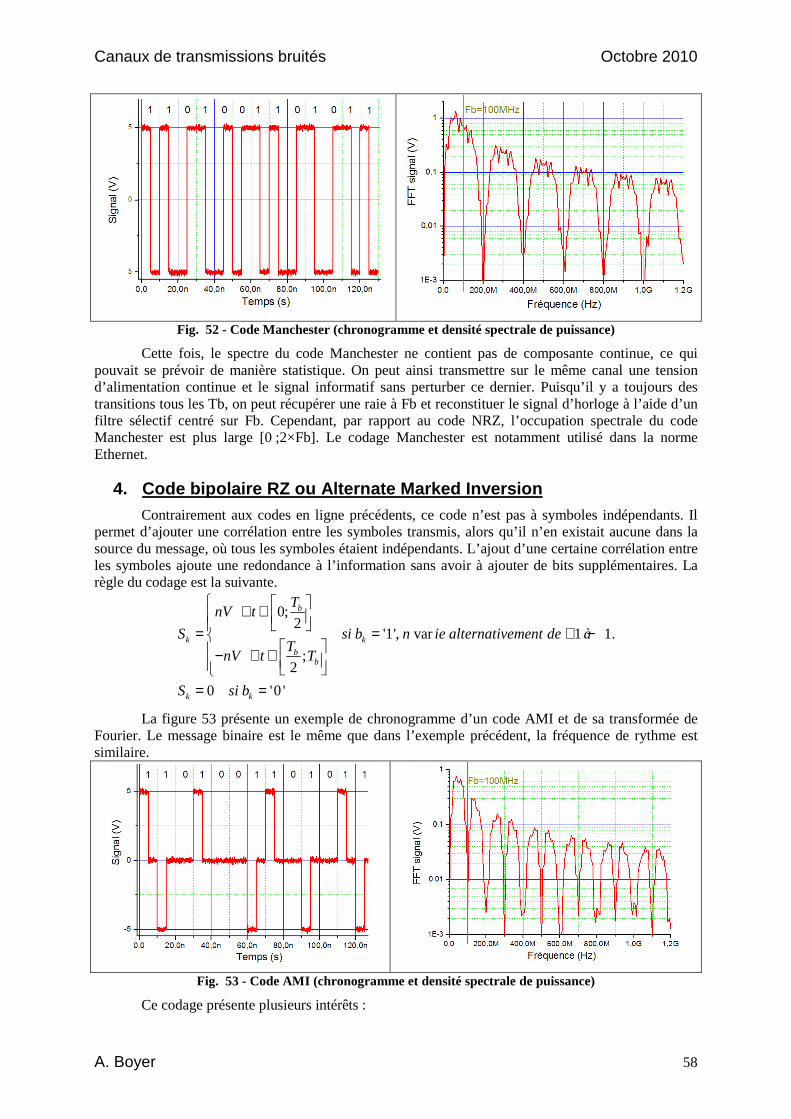
Canaux de transmissions bruités Octobre 2010
A. Boyer 58
Fig. 52 - Code Manchester (chronogramme et densité spectrale de puissance)
Cette fois, le spectre du code Manchester ne contient pas de composante continue, ce qui pouvait se prévoir de manière statistique. On peut ainsi transmettre sur le même canal une tension d’alimentation continue et le signal informatif sans perturber ce dernier. Puisqu’il y a toujours des transitions tous les Tb, on peut récupérer une raie à Fb et reconstituer le signal d’horloge à l’aide d’un filtre sélectif centré sur Fb. Cependant, par rapport au code NRZ, l’occupation spectrale du code Manchester est plus large [0 ;2×Fb]. Le codage Manchester est notamment utilisé dans la norme Ethernet.
4. Code bipolaire RZ ou Alternate Marked Inversion Contrairement aux codes en ligne précédents, ce code n’est pas à symboles indépendants. Il
permet d’ajouter une corrélation entre les symboles transmis, alors qu’il n’en existait aucune dans la source du message, où tous les symboles étaient indépendants. L’ajout d’une certaine corrélation entre les symboles ajoute une redondance à l’information sans avoir à ajouter de bits supplémentaires. La règle du codage est la suivante.
0;2
'1', var 1 1.
;2
0 '0 '
b
k k
bb
k k
TnV t
S si b n ie alternativement de àT
nV t T
S si b
∀ ∈ = = + − − ∀ ∈
= =
La figure 53 présente un exemple de chronogramme d’un code AMI et de sa transformée de Fourier. Le message binaire est le même que dans l’exemple précédent, la fréquence de rythme est similaire.
Fig. 53 - Code AMI (chronogramme et densité spectrale de puissance)
Ce codage présente plusieurs intérêts :
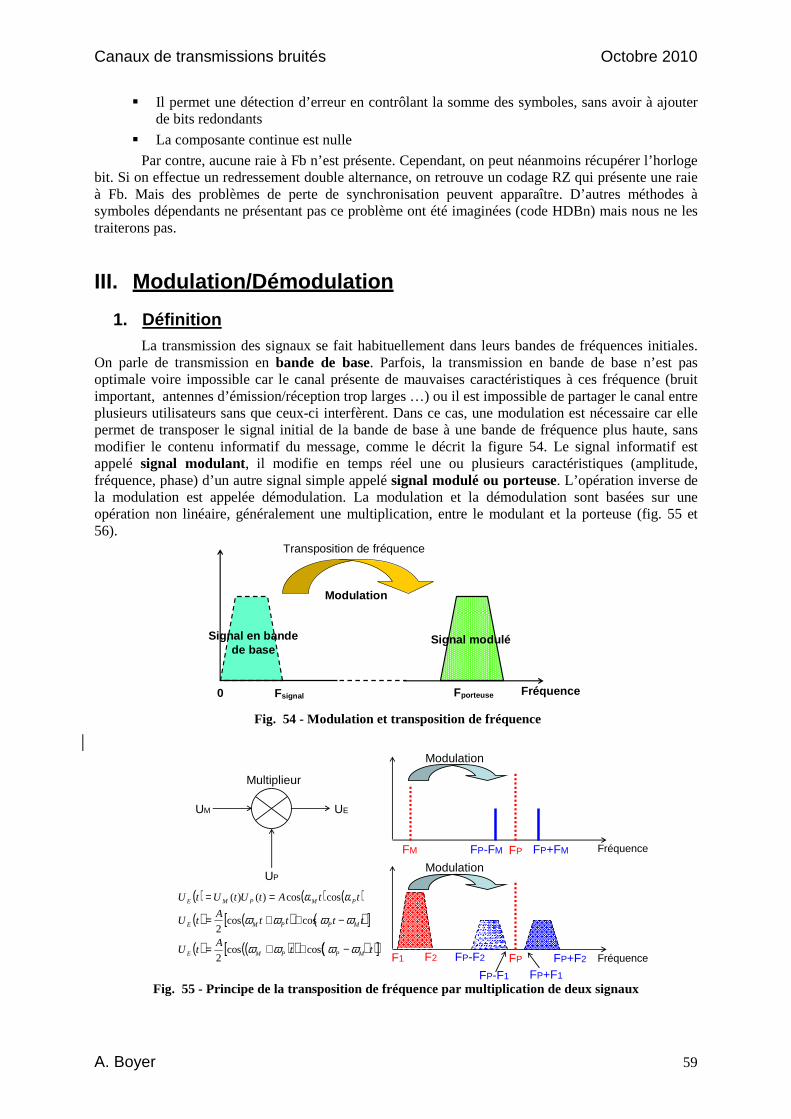
Canaux de transmissions bruités Octobre 2010
A. Boyer 59
Il permet une détection d’erreur en contrôlant la somme des symboles, sans avoir à ajouter de bits redondants
La composante continue est nulle
Par contre, aucune raie à Fb n’est présente. Cependant, on peut néanmoins récupérer l’horloge bit. Si on effectue un redressement double alternance, on retrouve un codage RZ qui présente une raie à Fb. Mais des problèmes de perte de synchronisation peuvent apparaître. D’autres méthodes à symboles dépendants ne présentant pas ce problème ont été imaginées (code HDBn) mais nous ne les traiterons pas.
III. Modulation/Démodulation
1. Définition La transmission des signaux se fait habituellement dans leurs bandes de fréquences initiales.
On parle de transmission en bande de base. Parfois, la transmission en bande de base n’est pas optimale voire impossible car le canal présente de mauvaises caractéristiques à ces fréquence (bruit important, antennes d’émission/réception trop larges …) ou il est impossible de partager le canal entre plusieurs utilisateurs sans que ceux-ci interfèrent. Dans ce cas, une modulation est nécessaire car elle permet de transposer le signal initial de la bande de base à une bande de fréquence plus haute, sans modifier le contenu informatif du message, comme le décrit la figure 54. Le signal informatif est appelé signal modulant, il modifie en temps réel une ou plusieurs caractéristiques (amplitude, fréquence, phase) d’un autre signal simple appelé signal modulé ou porteuse. L’opération inverse de la modulation est appelée démodulation. La modulation et la démodulation sont basées sur une opération non linéaire, généralement une multiplication, entre le modulant et la porteuse (fig. 55 et 56).
Fréquence
Transposition de fréquence
Modulation
Signal en bande de base
Signal modulé
0 Fsignal Fporteuse
Fig. 54 - Modulation et transposition de fréquence
UM
UP
UE
FréquenceFPFM FP-FM FP+FM
Multiplieur
Modulation
FréquenceFP
Modulation
F1 F2 FP-F2 FP+F2
FP-F1 FP+F1
( ) ( ) ( )( ) ( ) ( )[ ]
( ) ( )( ) ( )( )[ ]ttA
tU
ttttA
tU
ttAtUtUtU
MPPME
MPPME
PMPME
ωωωω
ωωωω
ωω
−++=
−++=
==
coscos2
coscos2
coscos)()(
Fig. 55 - Principe de la transposition de fréquence par multiplication de deux signaux
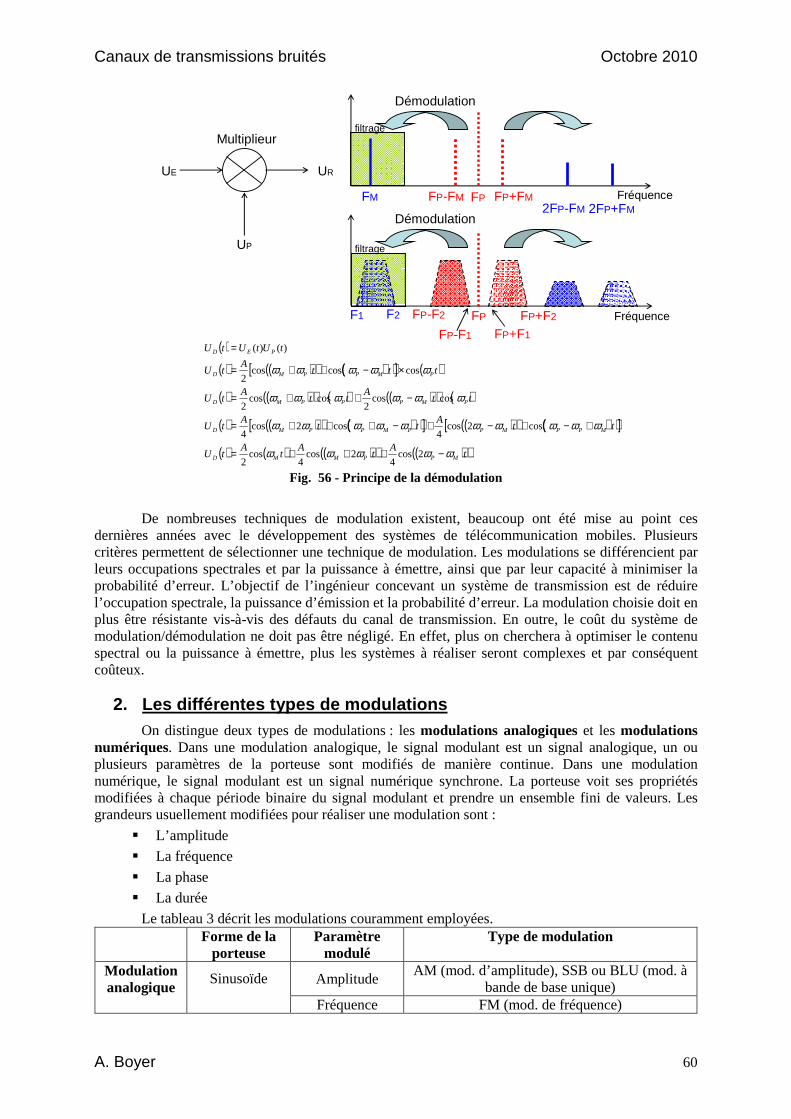
Canaux de transmissions bruités Octobre 2010
A. Boyer 60
UE
UP
UR
FréquenceFPFM FP-FM FP+FM
Multiplieur
Démodulation
FréquenceFPF1 F2 FP-F2 FP+F2
FP-F1 FP+F1
2FP-FM 2FP+FM
filtrage
filtrage
Démodulation
( )( ) ( )( ) ( )( )[ ] ( )
( ) ( )( ) ( ) ( )( ) ( )
( ) ( )( ) ( )( )[ ] ( )( ) ( )( )[ ]
( ) ( ) ( )( ) ( )( )tAt
At
AtU
ttA
ttA
tU
ttA
ttA
tU
tttA
tU
tUtUtU
MPPMMD
MPPMPPMPPMD
PMPPPMD
PMPPMD
PED
ωωωωω
ωωωωωωωωωω
ωωωωωω
ωωωωω
−+++=
+−+−+−+++=
−++=
×−++=
=
2cos4
2cos4
cos2
cos2cos4
cos2cos4
coscos2
coscos2
coscoscos2
)()(
Fig. 56 - Principe de la démodulation
De nombreuses techniques de modulation existent, beaucoup ont été mise au point ces
dernières années avec le développement des systèmes de télécommunication mobiles. Plusieurs critères permettent de sélectionner une technique de modulation. Les modulations se différencient par leurs occupations spectrales et par la puissance à émettre, ainsi que par leur capacité à minimiser la probabilité d’erreur. L’objectif de l’ingénieur concevant un système de transmission est de réduire l’occupation spectrale, la puissance d’émission et la probabilité d’erreur. La modulation choisie doit en plus être résistante vis-à-vis des défauts du canal de transmission. En outre, le coût du système de modulation/démodulation ne doit pas être négligé. En effet, plus on cherchera à optimiser le contenu spectral ou la puissance à émettre, plus les systèmes à réaliser seront complexes et par conséquent coûteux.
2. Les différentes types de modulations On distingue deux types de modulations : les modulations analogiques et les modulations
numériques. Dans une modulation analogique, le signal modulant est un signal analogique, un ou plusieurs paramètres de la porteuse sont modifiés de manière continue. Dans une modulation numérique, le signal modulant est un signal numérique synchrone. La porteuse voit ses propriétés modifiées à chaque période binaire du signal modulant et prendre un ensemble fini de valeurs. Les grandeurs usuellement modifiées pour réaliser une modulation sont :
L’amplitude
La fréquence
La phase
La durée
Le tableau 3 décrit les modulations couramment employées. Forme de la
porteuse Paramètre
modulé Type de modulation
Amplitude AM (mod. d’amplitude), SSB ou BLU (mod. à
bande de base unique) Modulation analogique
Sinusoïde
Fréquence FM (mod. de fréquence)
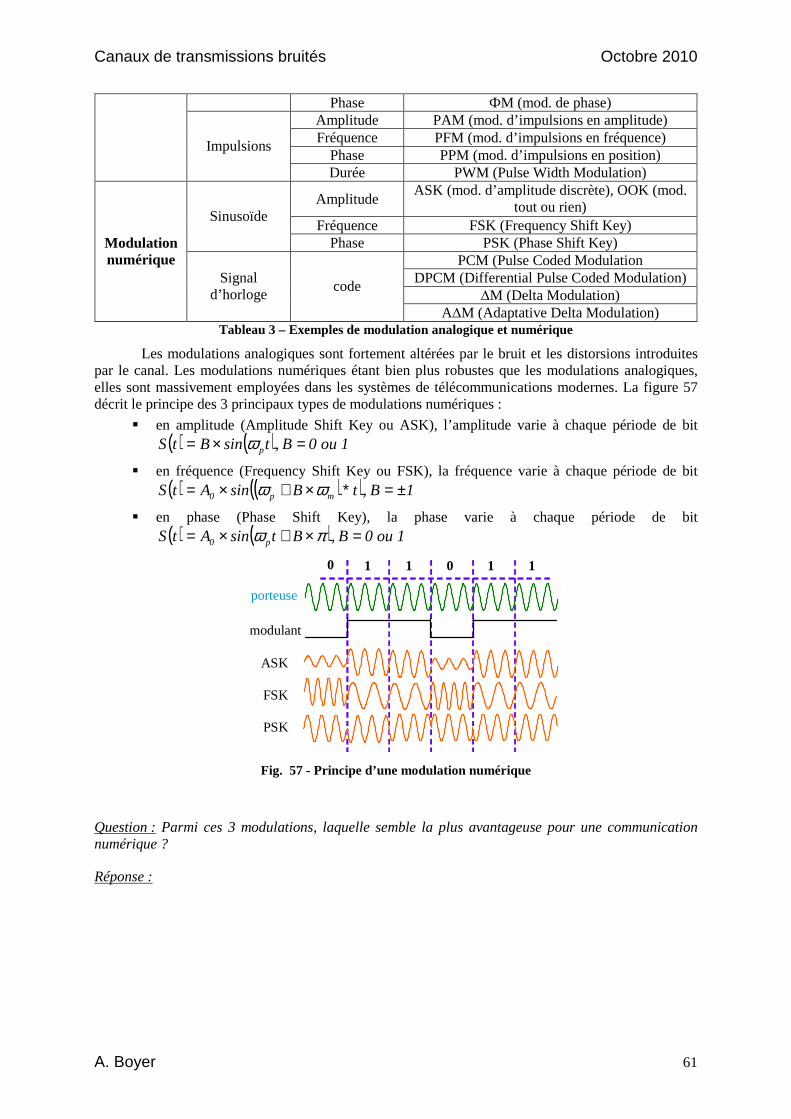
Canaux de transmissions bruités Octobre 2010
A. Boyer 61
Phase ФM (mod. de phase) Amplitude PAM (mod. d’impulsions en amplitude) Fréquence PFM (mod. d’impulsions en fréquence)
Phase PPM (mod. d’impulsions en position) Impulsions
Durée PWM (Pulse Width Modulation)
Amplitude ASK (mod. d’amplitude discrète), OOK (mod.
tout ou rien) Fréquence FSK (Frequency Shift Key)
Sinusoïde
Phase PSK (Phase Shift Key) PCM (Pulse Coded Modulation
DPCM (Differential Pulse Coded Modulation) ∆M (Delta Modulation)
Modulation numérique
Signal d’horloge
code
A∆M (Adaptative Delta Modulation) Tableau 3 – Exemples de modulation analogique et numérique
Les modulations analogiques sont fortement altérées par le bruit et les distorsions introduites par le canal. Les modulations numériques étant bien plus robustes que les modulations analogiques, elles sont massivement employées dans les systèmes de télécommunications modernes. La figure 57 décrit le principe des 3 principaux types de modulations numériques :
en amplitude (Amplitude Shift Key ou ASK), l’amplitude varie à chaque période de bit ( ) ( ) 1ou0B,tsinBtS p =×= ω
en fréquence (Frequency Shift Key ou FSK), la fréquence varie à chaque période de bit ( ) ( )( ) 1B,tBsinAtS mp0 ±=∗×+×= ωω
en phase (Phase Shift Key), la phase varie à chaque période de bit ( ) ( ) 1ou0B,BtsinAtS p0 =×+×= πω
10 1 0 1 1
porteuse
modulant
ASK
FSK
PSK
Fig. 57 - Principe d’une modulation numérique
Question : Parmi ces 3 modulations, laquelle semble la plus avantageuse pour une communication numérique ?
Réponse :
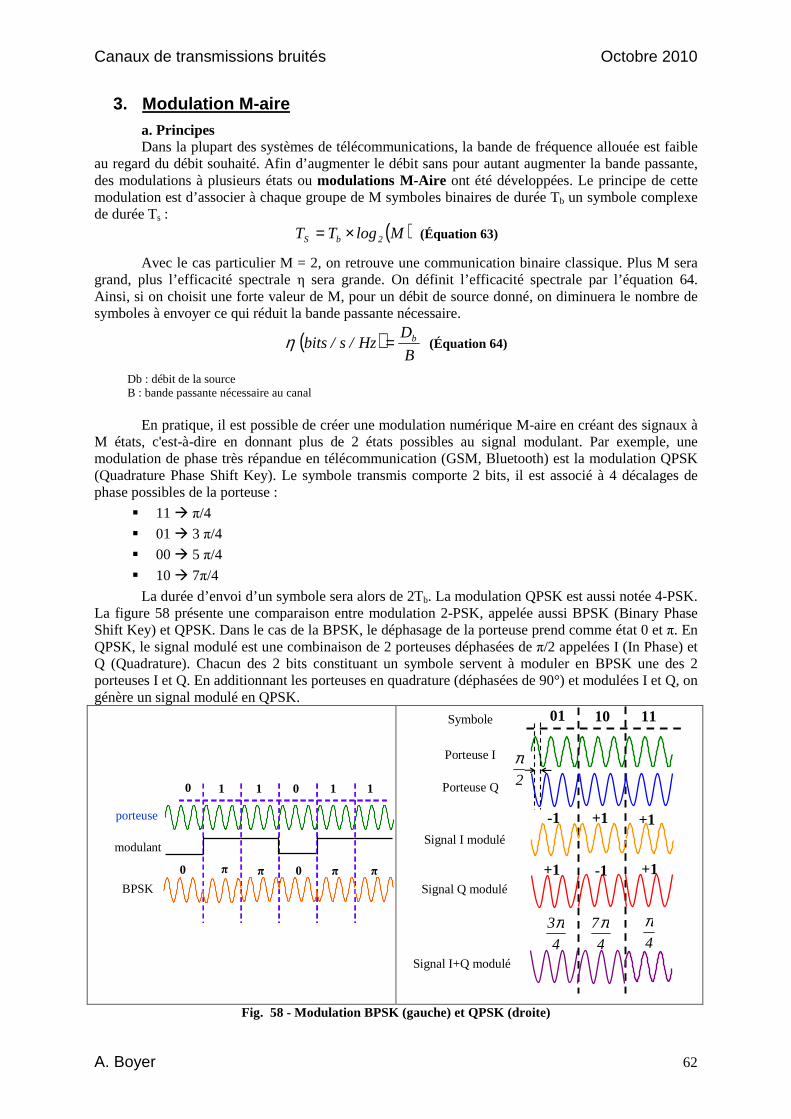
Canaux de transmissions bruités Octobre 2010
A. Boyer 62
3. Modulation M-aire a. Principes Dans la plupart des systèmes de télécommunications, la bande de fréquence allouée est faible
au regard du débit souhaité. Afin d’augmenter le débit sans pour autant augmenter la bande passante, des modulations à plusieurs états ou modulations M-Aire ont été développées. Le principe de cette modulation est d’associer à chaque groupe de M symboles binaires de durée Tb un symbole complexe de durée Ts :
( )MlogTT 2bS ×= (Équation 63)
Avec le cas particulier M = 2, on retrouve une communication binaire classique. Plus M sera grand, plus l’efficacité spectrale η sera grande. On définit l’efficacité spectrale par l’équation 64. Ainsi, si on choisit une forte valeur de M, pour un débit de source donné, on diminuera le nombre de symboles à envoyer ce qui réduit la bande passante nécessaire.
( )B
DHz/s/bits b=η (Équation 64)
Db : débit de la source B : bande passante nécessaire au canal
En pratique, il est possible de créer une modulation numérique M-aire en créant des signaux à
M états, c'est-à-dire en donnant plus de 2 états possibles au signal modulant. Par exemple, une modulation de phase très répandue en télécommunication (GSM, Bluetooth) est la modulation QPSK (Quadrature Phase Shift Key). Le symbole transmis comporte 2 bits, il est associé à 4 décalages de phase possibles de la porteuse :
11 π/4
01 3 π/4
00 5 π/4
10 7π/4
La durée d’envoi d’un symbole sera alors de 2Tb. La modulation QPSK est aussi notée 4-PSK. La figure 58 présente une comparaison entre modulation 2-PSK, appelée aussi BPSK (Binary Phase Shift Key) et QPSK. Dans le cas de la BPSK, le déphasage de la porteuse prend comme état 0 et π. En QPSK, le signal modulé est une combinaison de 2 porteuses déphasées de π/2 appelées I (In Phase) et Q (Quadrature). Chacun des 2 bits constituant un symbole servent à moduler en BPSK une des 2 porteuses I et Q. En additionnant les porteuses en quadrature (déphasées de 90°) et modulées I et Q, on génère un signal modulé en QPSK.
10 1 0 1 1
porteuse
modulant
BPSK
0 0π π π π
1001 11
Porteuse I
Signal I modulé
Porteuse Q
Symbole
Signal Q modulé
2
π
+1
-1 +1
-1
+1
+1
Signal I+Q modulé
4
3π4
7π4
π
Fig. 58 - Modulation BPSK (gauche) et QPSK (droite)
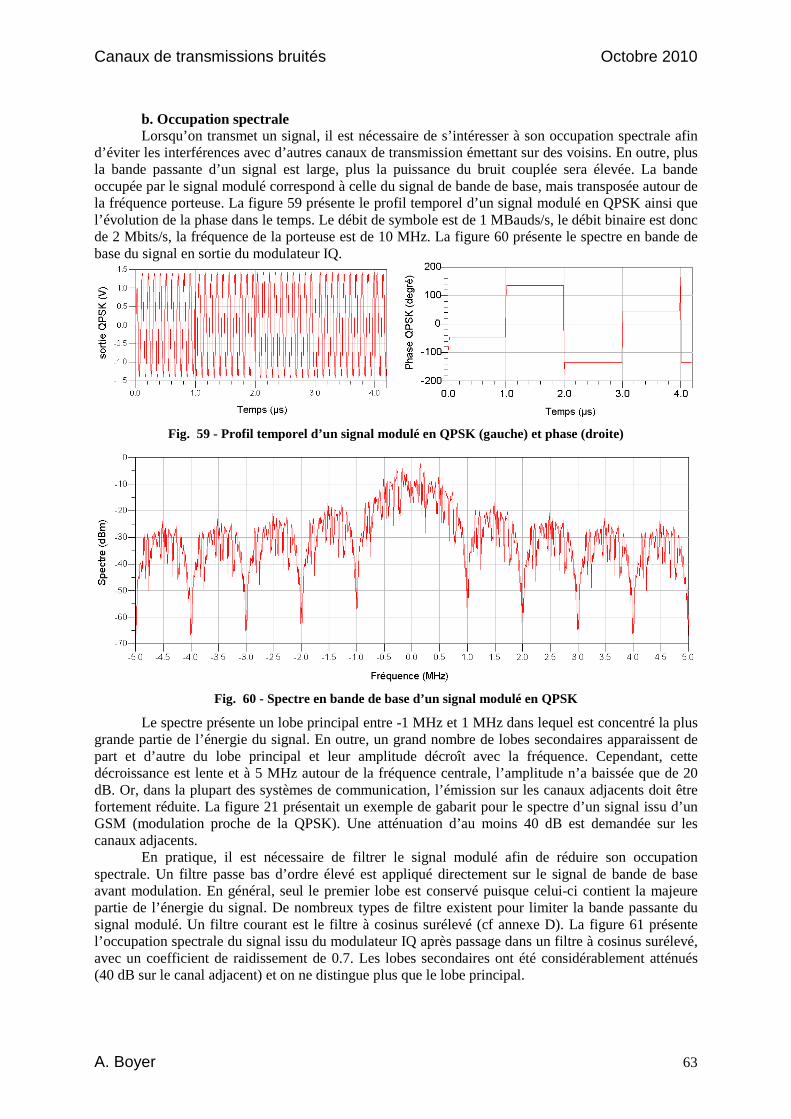
Canaux de transmissions bruités Octobre 2010
A. Boyer 63
b. Occupation spectrale Lorsqu’on transmet un signal, il est nécessaire de s’intéresser à son occupation spectrale afin
d’éviter les interférences avec d’autres canaux de transmission émettant sur des voisins. En outre, plus la bande passante d’un signal est large, plus la puissance du bruit couplée sera élevée. La bande occupée par le signal modulé correspond à celle du signal de bande de base, mais transposée autour de la fréquence porteuse. La figure 59 présente le profil temporel d’un signal modulé en QPSK ainsi que l’évolution de la phase dans le temps. Le débit de symbole est de 1 MBauds/s, le débit binaire est donc de 2 Mbits/s, la fréquence de la porteuse est de 10 MHz. La figure 60 présente le spectre en bande de base du signal en sortie du modulateur IQ.
Fig. 59 - Profil temporel d’un signal modulé en QPSK (gauche) et phase (droite)
Fig. 60 - Spectre en bande de base d’un signal modulé en QPSK
Le spectre présente un lobe principal entre -1 MHz et 1 MHz dans lequel est concentré la plus grande partie de l’énergie du signal. En outre, un grand nombre de lobes secondaires apparaissent de part et d’autre du lobe principal et leur amplitude décroît avec la fréquence. Cependant, cette décroissance est lente et à 5 MHz autour de la fréquence centrale, l’amplitude n’a baissée que de 20 dB. Or, dans la plupart des systèmes de communication, l’émission sur les canaux adjacents doit être fortement réduite. La figure 21 présentait un exemple de gabarit pour le spectre d’un signal issu d’un GSM (modulation proche de la QPSK). Une atténuation d’au moins 40 dB est demandée sur les canaux adjacents.
En pratique, il est nécessaire de filtrer le signal modulé afin de réduire son occupation spectrale. Un filtre passe bas d’ordre élevé est appliqué directement sur le signal de bande de base avant modulation. En général, seul le premier lobe est conservé puisque celui-ci contient la majeure partie de l’énergie du signal. De nombreux types de filtre existent pour limiter la bande passante du signal modulé. Un filtre courant est le filtre à cosinus surélevé (cf annexe D). La figure 61 présente l’occupation spectrale du signal issu du modulateur IQ après passage dans un filtre à cosinus surélevé, avec un coefficient de raidissement de 0.7. Les lobes secondaires ont été considérablement atténués (40 dB sur le canal adjacent) et on ne distingue plus que le lobe principal.
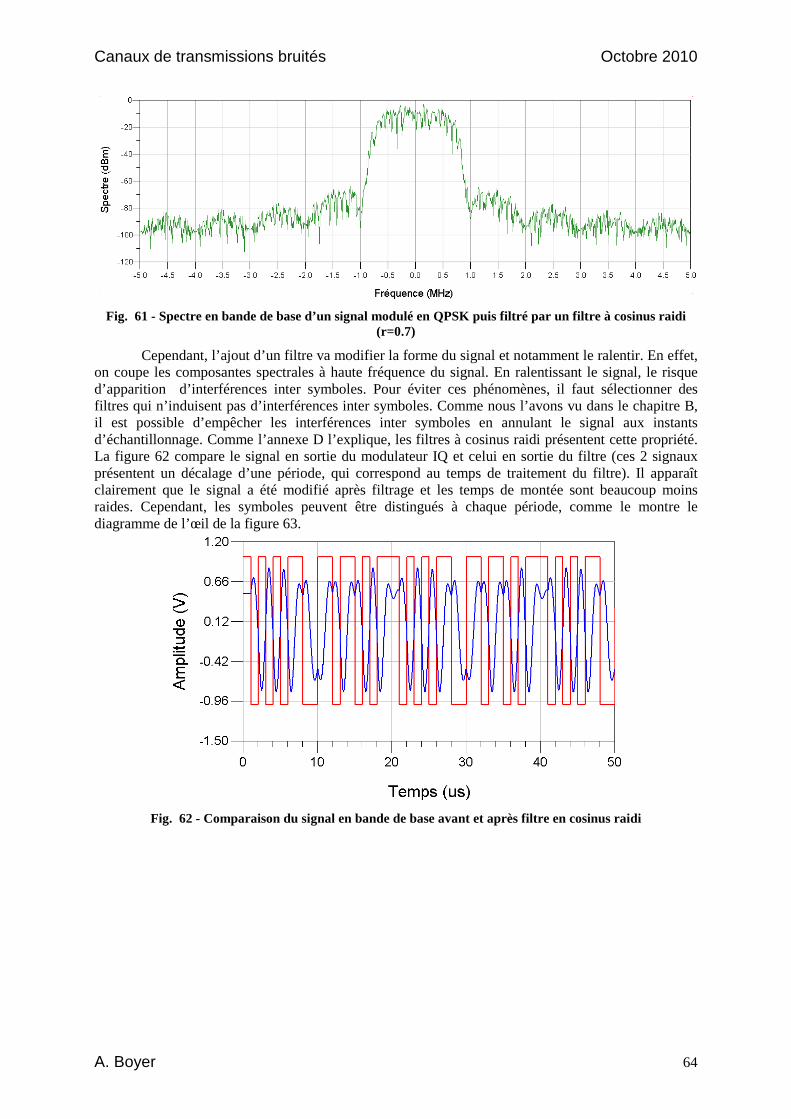
Canaux de transmissions bruités Octobre 2010
A. Boyer 64
Fig. 61 - Spectre en bande de base d’un signal modulé en QPSK puis filtré par un filtre à cosinus raidi (r=0.7)
Cependant, l’ajout d’un filtre va modifier la forme du signal et notamment le ralentir. En effet, on coupe les composantes spectrales à haute fréquence du signal. En ralentissant le signal, le risque d’apparition d’interférences inter symboles. Pour éviter ces phénomènes, il faut sélectionner des filtres qui n’induisent pas d’interférences inter symboles. Comme nous l’avons vu dans le chapitre B, il est possible d’empêcher les interférences inter symboles en annulant le signal aux instants d’échantillonnage. Comme l’annexe D l’explique, les filtres à cosinus raidi présentent cette propriété. La figure 62 compare le signal en sortie du modulateur IQ et celui en sortie du filtre (ces 2 signaux présentent un décalage d’une période, qui correspond au temps de traitement du filtre). Il apparaît clairement que le signal a été modifié après filtrage et les temps de montée sont beaucoup moins raides. Cependant, les symboles peuvent être distingués à chaque période, comme le montre le diagramme de l’œil de la figure 63.
Fig. 62 - Comparaison du signal en bande de base avant et après filtre en cosinus raidi
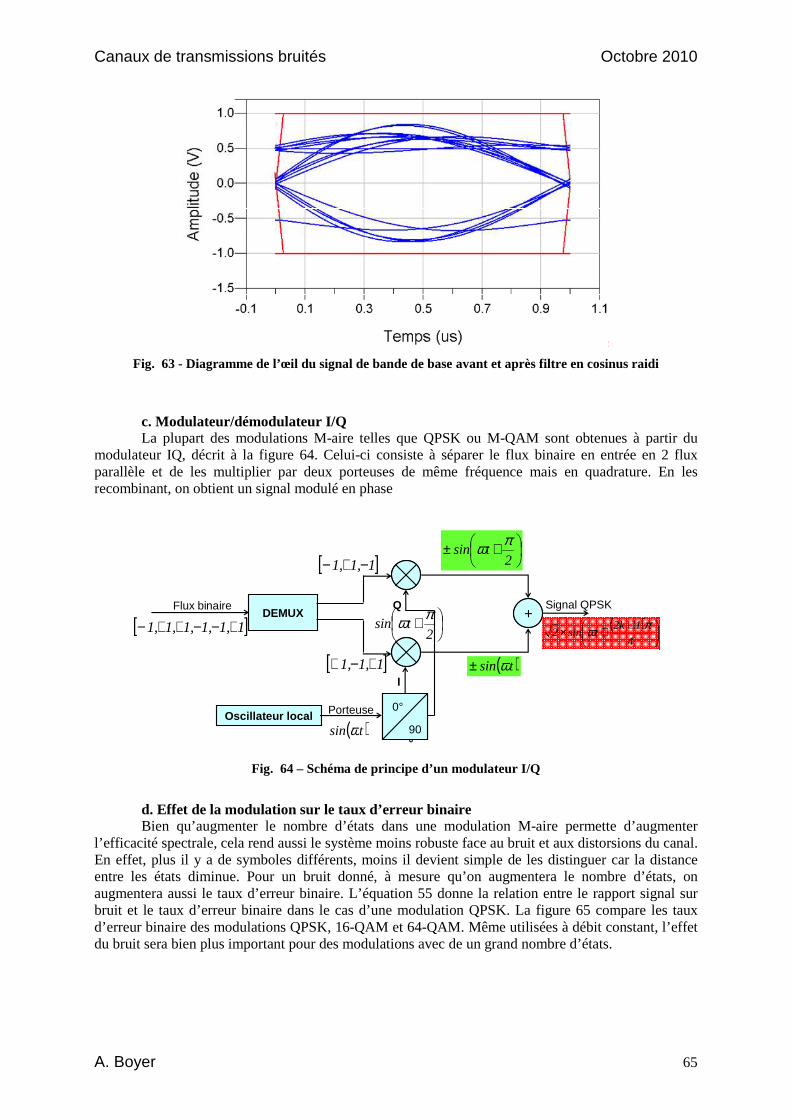
Canaux de transmissions bruités Octobre 2010
A. Boyer 65
Fig. 63 - Diagramme de l’œil du signal de bande de base avant et après filtre en cosinus raidi
c. Modulateur/démodulateur I/Q La plupart des modulations M-aire telles que QPSK ou M-QAM sont obtenues à partir du
modulateur IQ, décrit à la figure 64. Celui-ci consiste à séparer le flux binaire en entrée en 2 flux parallèle et de les multiplier par deux porteuses de même fréquence mais en quadrature. En les recombinant, on obtient un signal modulé en phase
Oscillateur local0°
90°
0°
90°
Porteuse
I
QDEMUX
Flux binaire++
[ ]1,1,1,1,1,1 +−−++−
[ ]1,1,1 −+−
[ ]1,1,1 +−+
( )tsin ω
+2
tsinπω
( )tsin ω±
+±2
tsinπω
Signal QPSK
( )
++×4
1k2tsin2
πω
Fig. 64 – Schéma de principe d’un modulateur I/Q
d. Effet de la modulation sur le taux d’erreur binaire Bien qu’augmenter le nombre d’états dans une modulation M-aire permette d’augmenter
l’efficacité spectrale, cela rend aussi le système moins robuste face au bruit et aux distorsions du canal. En effet, plus il y a de symboles différents, moins il devient simple de les distinguer car la distance entre les états diminue. Pour un bruit donné, à mesure qu’on augmentera le nombre d’états, on augmentera aussi le taux d’erreur binaire. L’équation 55 donne la relation entre le rapport signal sur bruit et le taux d’erreur binaire dans le cas d’une modulation QPSK. La figure 65 compare les taux d’erreur binaire des modulations QPSK, 16-QAM et 64-QAM. Même utilisées à débit constant, l’effet du bruit sera bien plus important pour des modulations avec de un grand nombre d’états.
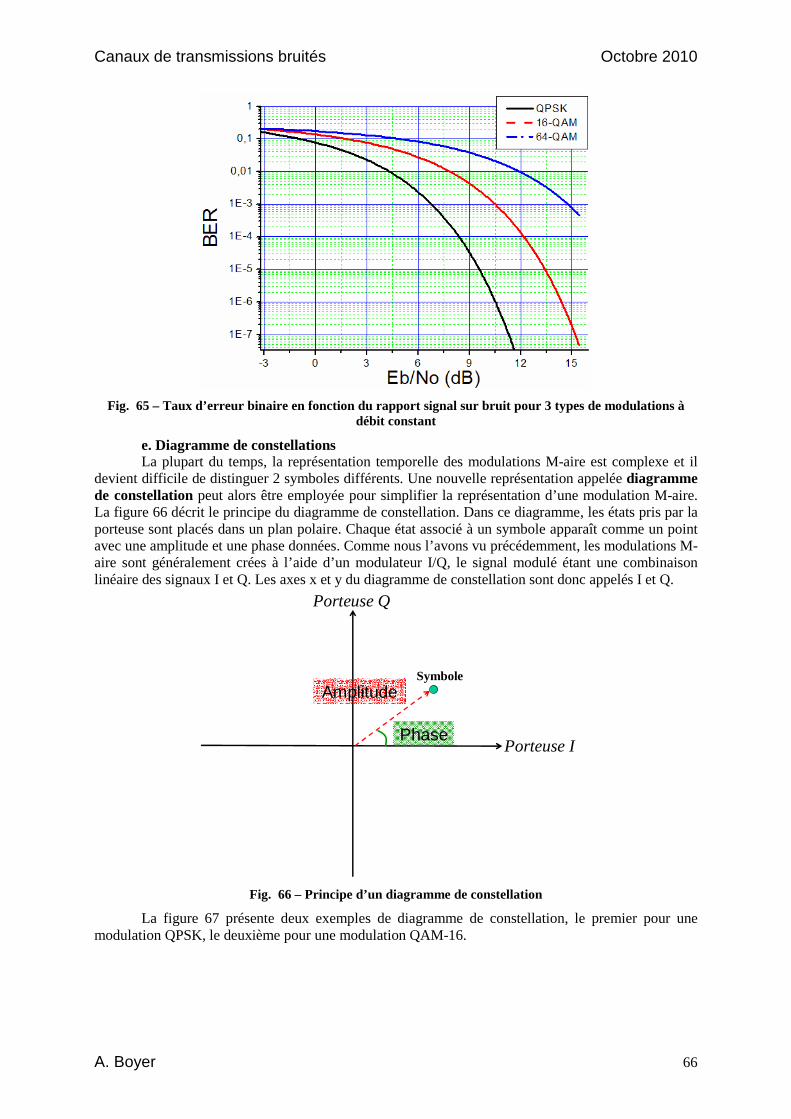
Canaux de transmissions bruités Octobre 2010
A. Boyer 66
Fig. 65 – Taux d’erreur binaire en fonction du rapport signal sur bruit pour 3 types de modulations à débit constant
e. Diagramme de constellations La plupart du temps, la représentation temporelle des modulations M-aire est complexe et il
devient difficile de distinguer 2 symboles différents. Une nouvelle représentation appelée diagramme de constellation peut alors être employée pour simplifier la représentation d’une modulation M-aire. La figure 66 décrit le principe du diagramme de constellation. Dans ce diagramme, les états pris par la porteuse sont placés dans un plan polaire. Chaque état associé à un symbole apparaît comme un point avec une amplitude et une phase données. Comme nous l’avons vu précédemment, les modulations M-aire sont généralement crées à l’aide d’un modulateur I/Q, le signal modulé étant une combinaison linéaire des signaux I et Q. Les axes x et y du diagramme de constellation sont donc appelés I et Q.
Porteuse I
Porteuse Q
SymboleAmplitude
Phase
Fig. 66 – Principe d’un diagramme de constellation
La figure 67 présente deux exemples de diagramme de constellation, le premier pour une modulation QPSK, le deuxième pour une modulation QAM-16.
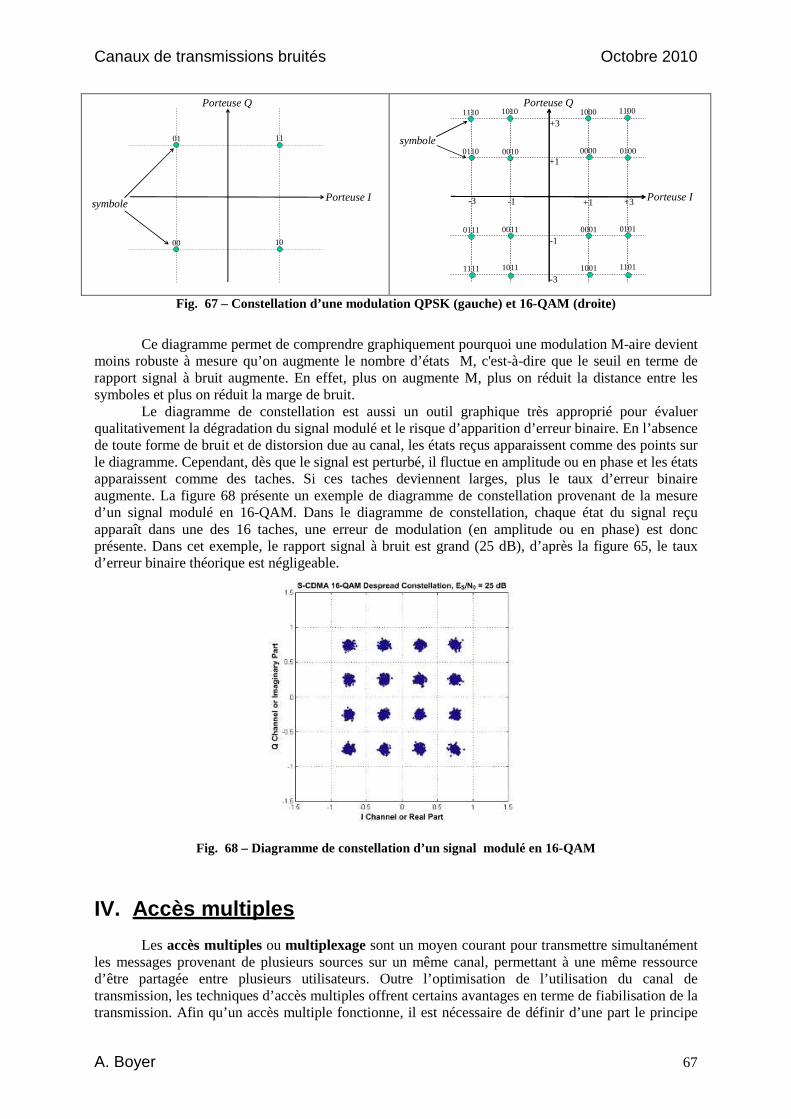
Canaux de transmissions bruités Octobre 2010
A. Boyer 67
Porteuse I
Porteuse Q
11
10
01
00
symbole
Porteuse I
Porteuse Q
0000 0100
11001000
01010001
11011001
0110 0010
10101110
00110111
10111111
+1
+1
-1
-1
+3
+3
-3
-3
symbole
Fig. 67 – Constellation d’une modulation QPSK (gauche) et 16-QAM (droite)
Ce diagramme permet de comprendre graphiquement pourquoi une modulation M-aire devient
moins robuste à mesure qu’on augmente le nombre d’états M, c'est-à-dire que le seuil en terme de rapport signal à bruit augmente. En effet, plus on augmente M, plus on réduit la distance entre les symboles et plus on réduit la marge de bruit.
Le diagramme de constellation est aussi un outil graphique très approprié pour évaluer qualitativement la dégradation du signal modulé et le risque d’apparition d’erreur binaire. En l’absence de toute forme de bruit et de distorsion due au canal, les états reçus apparaissent comme des points sur le diagramme. Cependant, dès que le signal est perturbé, il fluctue en amplitude ou en phase et les états apparaissent comme des taches. Si ces taches deviennent larges, plus le taux d’erreur binaire augmente. La figure 68 présente un exemple de diagramme de constellation provenant de la mesure d’un signal modulé en 16-QAM. Dans le diagramme de constellation, chaque état du signal reçu apparaît dans une des 16 taches, une erreur de modulation (en amplitude ou en phase) est donc présente. Dans cet exemple, le rapport signal à bruit est grand (25 dB), d’après la figure 65, le taux d’erreur binaire théorique est négligeable.
Fig. 68 – Diagramme de constellation d’un signal modulé en 16-QAM
IV. Accès multiples
Les accès multiples ou multiplexage sont un moyen courant pour transmettre simultanément les messages provenant de plusieurs sources sur un même canal, permettant à une même ressource d’être partagée entre plusieurs utilisateurs. Outre l’optimisation de l’utilisation du canal de transmission, les techniques d’accès multiples offrent certains avantages en terme de fiabilisation de la transmission. Afin qu’un accès multiple fonctionne, il est nécessaire de définir d’une part le principe
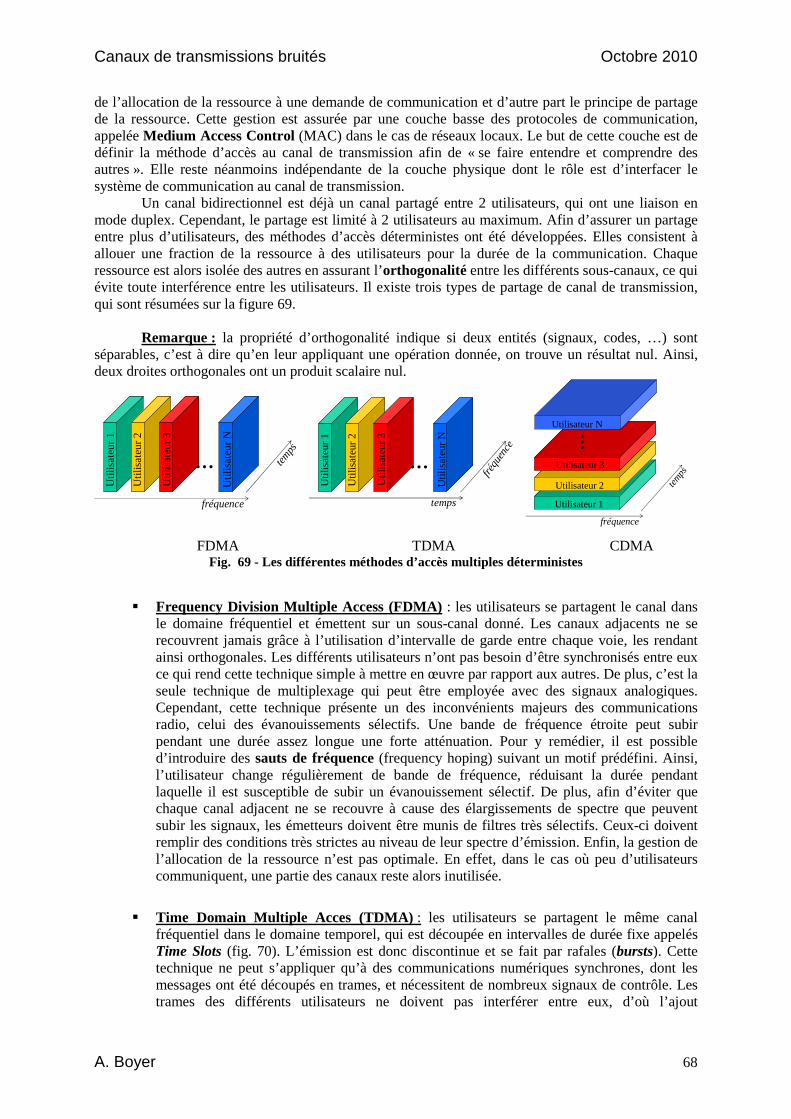
Canaux de transmissions bruités Octobre 2010
A. Boyer 68
de l’allocation de la ressource à une demande de communication et d’autre part le principe de partage de la ressource. Cette gestion est assurée par une couche basse des protocoles de communication, appelée Medium Access Control (MAC) dans le cas de réseaux locaux. Le but de cette couche est de définir la méthode d’accès au canal de transmission afin de « se faire entendre et comprendre des autres ». Elle reste néanmoins indépendante de la couche physique dont le rôle est d’interfacer le système de communication au canal de transmission.
Un canal bidirectionnel est déjà un canal partagé entre 2 utilisateurs, qui ont une liaison en mode duplex. Cependant, le partage est limité à 2 utilisateurs au maximum. Afin d’assurer un partage entre plus d’utilisateurs, des méthodes d’accès déterministes ont été développées. Elles consistent à allouer une fraction de la ressource à des utilisateurs pour la durée de la communication. Chaque ressource est alors isolée des autres en assurant l’orthogonalité entre les différents sous-canaux, ce qui évite toute interférence entre les utilisateurs. Il existe trois types de partage de canal de transmission, qui sont résumées sur la figure 69.
Remarque : la propriété d’orthogonalité indique si deux entités (signaux, codes, …) sont
séparables, c’est à dire qu’en leur appliquant une opération donnée, on trouve un résultat nul. Ainsi, deux droites orthogonales ont un produit scalaire nul.
Util
isa
teur
1
Util
isa
teur
2
Util
isa
teu
r 3
Util
isa
teur
N
fréquence
tem
ps
…
Util
isa
teur
1
Util
isa
teur
2
Util
isa
teu
r 3
Util
isa
teur
N
fréqu
ence
temps
…
Utilisateur 1
fréquence
temps
Utilisateur 2
Utilisateur 3
Utilisateur N
…
FDMA TDMA CDMA Fig. 69 - Les différentes méthodes d’accès multiples déterministes
Frequency Division Multiple Access (FDMA) : les utilisateurs se partagent le canal dans le domaine fréquentiel et émettent sur un sous-canal donné. Les canaux adjacents ne se recouvrent jamais grâce à l’utilisation d’intervalle de garde entre chaque voie, les rendant ainsi orthogonales. Les différents utilisateurs n’ont pas besoin d’être synchronisés entre eux ce qui rend cette technique simple à mettre en œuvre par rapport aux autres. De plus, c’est la seule technique de multiplexage qui peut être employée avec des signaux analogiques. Cependant, cette technique présente un des inconvénients majeurs des communications radio, celui des évanouissements sélectifs. Une bande de fréquence étroite peut subir pendant une durée assez longue une forte atténuation. Pour y remédier, il est possible d’introduire des sauts de fréquence (frequency hoping) suivant un motif prédéfini. Ainsi, l’utilisateur change régulièrement de bande de fréquence, réduisant la durée pendant laquelle il est susceptible de subir un évanouissement sélectif. De plus, afin d’éviter que chaque canal adjacent ne se recouvre à cause des élargissements de spectre que peuvent subir les signaux, les émetteurs doivent être munis de filtres très sélectifs. Ceux-ci doivent remplir des conditions très strictes au niveau de leur spectre d’émission. Enfin, la gestion de l’allocation de la ressource n’est pas optimale. En effet, dans le cas où peu d’utilisateurs communiquent, une partie des canaux reste alors inutilisée.
Time Domain Multiple Acces (TDMA) : les utilisateurs se partagent le même canal fréquentiel dans le domaine temporel, qui est découpée en intervalles de durée fixe appelés Time Slots (fig. 70). L’émission est donc discontinue et se fait par rafales (bursts). Cette technique ne peut s’appliquer qu’à des communications numériques synchrones, dont les messages ont été découpés en trames, et nécessitent de nombreux signaux de contrôle. Les trames des différents utilisateurs ne doivent pas interférer entre eux, d’où l’ajout
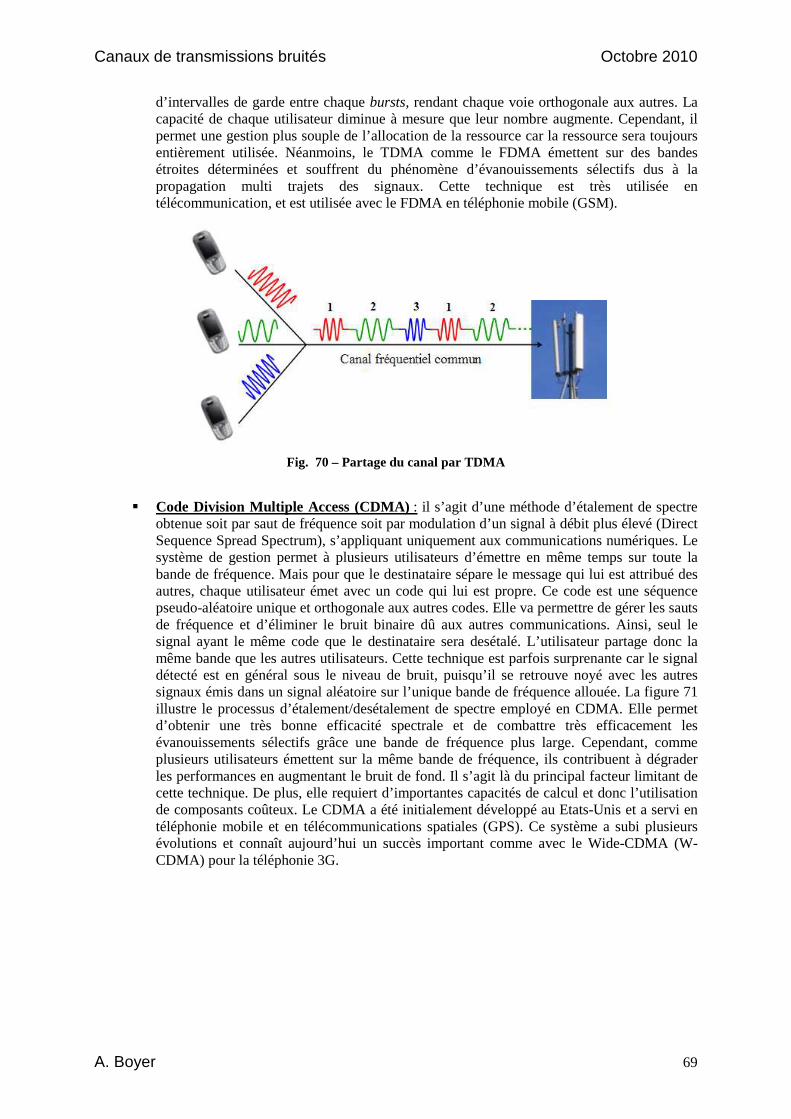
Canaux de transmissions bruités Octobre 2010
A. Boyer 69
d’intervalles de garde entre chaque bursts, rendant chaque voie orthogonale aux autres. La capacité de chaque utilisateur diminue à mesure que leur nombre augmente. Cependant, il permet une gestion plus souple de l’allocation de la ressource car la ressource sera toujours entièrement utilisée. Néanmoins, le TDMA comme le FDMA émettent sur des bandes étroites déterminées et souffrent du phénomène d’évanouissements sélectifs dus à la propagation multi trajets des signaux. Cette technique est très utilisée en télécommunication, et est utilisée avec le FDMA en téléphonie mobile (GSM).
Fig. 70 – Partage du canal par TDMA
Code Division Multiple Access (CDMA) : il s’agit d’une méthode d’étalement de spectre obtenue soit par saut de fréquence soit par modulation d’un signal à débit plus élevé (Direct Sequence Spread Spectrum), s’appliquant uniquement aux communications numériques. Le système de gestion permet à plusieurs utilisateurs d’émettre en même temps sur toute la bande de fréquence. Mais pour que le destinataire sépare le message qui lui est attribué des autres, chaque utilisateur émet avec un code qui lui est propre. Ce code est une séquence pseudo-aléatoire unique et orthogonale aux autres codes. Elle va permettre de gérer les sauts de fréquence et d’éliminer le bruit binaire dû aux autres communications. Ainsi, seul le signal ayant le même code que le destinataire sera desétalé. L’utilisateur partage donc la même bande que les autres utilisateurs. Cette technique est parfois surprenante car le signal détecté est en général sous le niveau de bruit, puisqu’il se retrouve noyé avec les autres signaux émis dans un signal aléatoire sur l’unique bande de fréquence allouée. La figure 71 illustre le processus d’étalement/desétalement de spectre employé en CDMA. Elle permet d’obtenir une très bonne efficacité spectrale et de combattre très efficacement les évanouissements sélectifs grâce une bande de fréquence plus large. Cependant, comme plusieurs utilisateurs émettent sur la même bande de fréquence, ils contribuent à dégrader les performances en augmentant le bruit de fond. Il s’agit là du principal facteur limitant de cette technique. De plus, elle requiert d’importantes capacités de calcul et donc l’utilisation de composants coûteux. Le CDMA a été initialement développé au Etats-Unis et a servi en téléphonie mobile et en télécommunications spatiales (GPS). Ce système a subi plusieurs évolutions et connaît aujourd’hui un succès important comme avec le Wide-CDMA (W-CDMA) pour la téléphonie 3G.
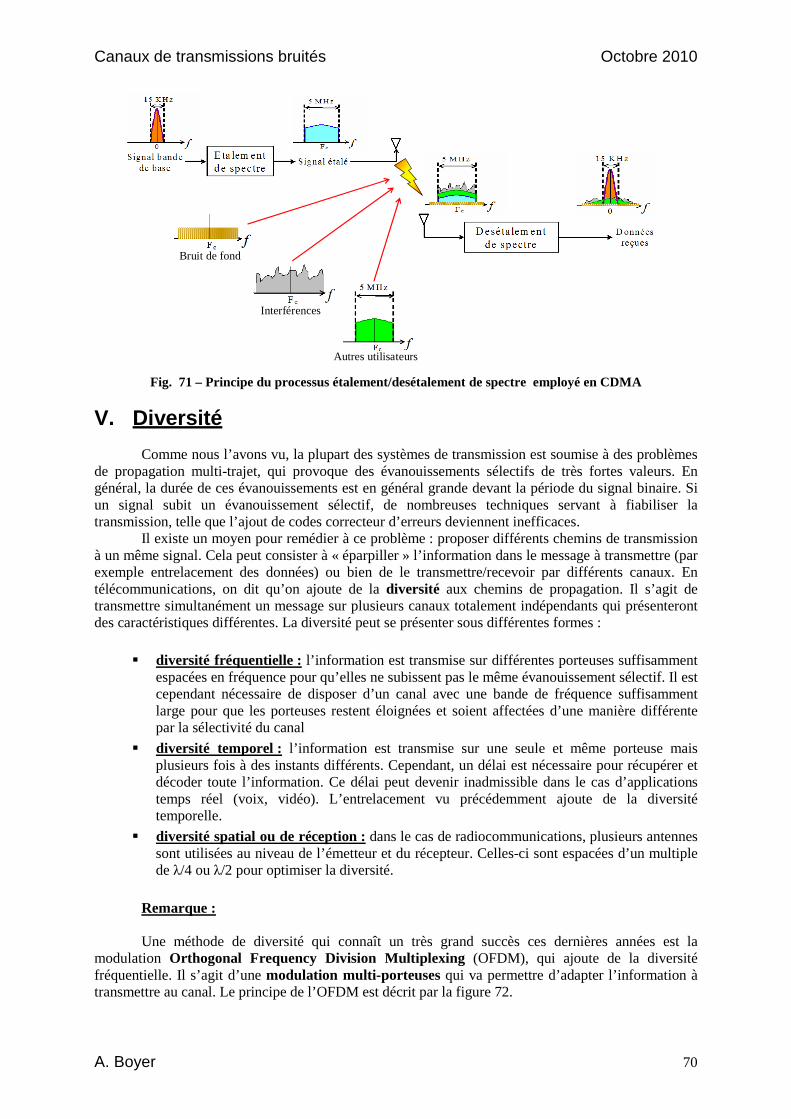
Canaux de transmissions bruités Octobre 2010
A. Boyer 70
Bruit de fond
Interférences
Autres utilisateurs
Fig. 71 – Principe du processus étalement/desétalement de spectre employé en CDMA
V. Diversité
Comme nous l’avons vu, la plupart des systèmes de transmission est soumise à des problèmes de propagation multi-trajet, qui provoque des évanouissements sélectifs de très fortes valeurs. En général, la durée de ces évanouissements est en général grande devant la période du signal binaire. Si un signal subit un évanouissement sélectif, de nombreuses techniques servant à fiabiliser la transmission, telle que l’ajout de codes correcteur d’erreurs deviennent inefficaces.
Il existe un moyen pour remédier à ce problème : proposer différents chemins de transmission à un même signal. Cela peut consister à « éparpiller » l’information dans le message à transmettre (par exemple entrelacement des données) ou bien de le transmettre/recevoir par différents canaux. En télécommunications, on dit qu’on ajoute de la diversité aux chemins de propagation. Il s’agit de transmettre simultanément un message sur plusieurs canaux totalement indépendants qui présenteront des caractéristiques différentes. La diversité peut se présenter sous différentes formes :
diversité fréquentielle : l’information est transmise sur différentes porteuses suffisamment espacées en fréquence pour qu’elles ne subissent pas le même évanouissement sélectif. Il est cependant nécessaire de disposer d’un canal avec une bande de fréquence suffisamment large pour que les porteuses restent éloignées et soient affectées d’une manière différente par la sélectivité du canal
diversité temporel : l’information est transmise sur une seule et même porteuse mais plusieurs fois à des instants différents. Cependant, un délai est nécessaire pour récupérer et décoder toute l’information. Ce délai peut devenir inadmissible dans le cas d’applications temps réel (voix, vidéo). L’entrelacement vu précédemment ajoute de la diversité temporelle.
diversité spatial ou de réception : dans le cas de radiocommunications, plusieurs antennes sont utilisées au niveau de l’émetteur et du récepteur. Celles-ci sont espacées d’un multiple de λ/4 ou λ/2 pour optimiser la diversité.
Remarque : Une méthode de diversité qui connaît un très grand succès ces dernières années est la
modulation Orthogonal Frequency Division Multiplexing (OFDM), qui ajoute de la diversité fréquentielle. Il s’agit d’une modulation multi-porteuses qui va permettre d’adapter l’information à transmettre au canal. Le principe de l’OFDM est décrit par la figure 72.
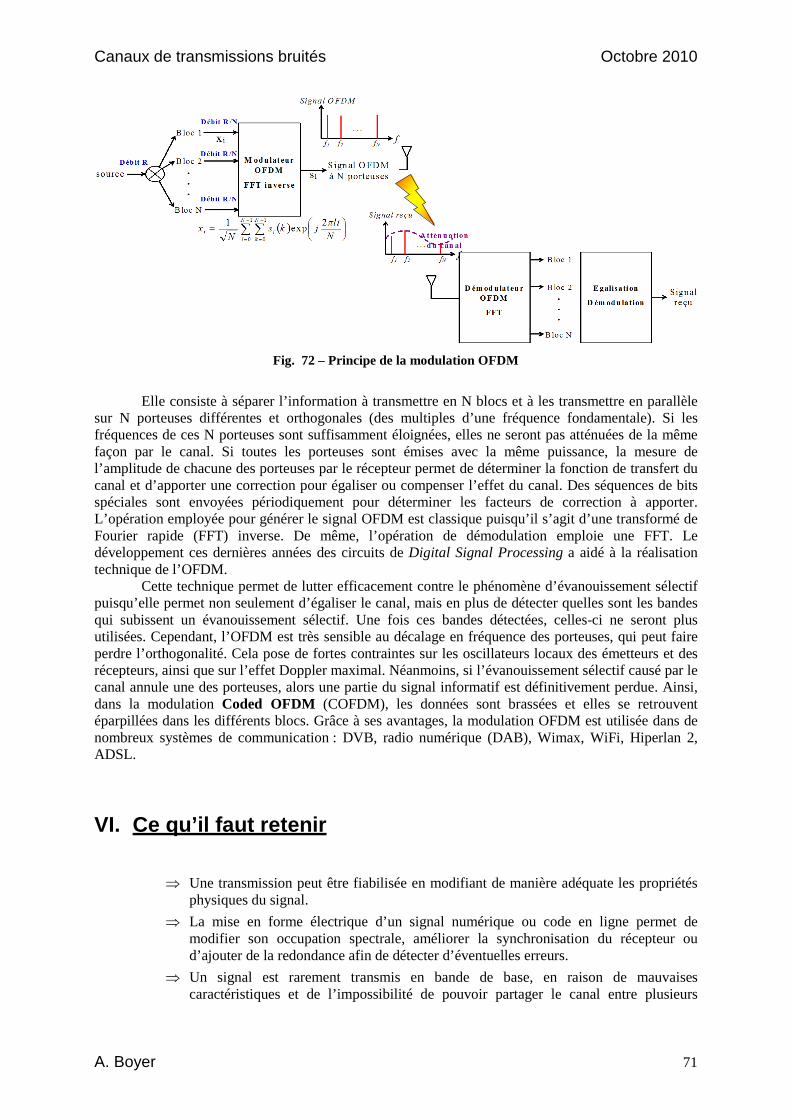
Canaux de transmissions bruités Octobre 2010
A. Boyer 71
Fig. 72 – Principe de la modulation OFDM
Elle consiste à séparer l’information à transmettre en N blocs et à les transmettre en parallèle
sur N porteuses différentes et orthogonales (des multiples d’une fréquence fondamentale). Si les fréquences de ces N porteuses sont suffisamment éloignées, elles ne seront pas atténuées de la même façon par le canal. Si toutes les porteuses sont émises avec la même puissance, la mesure de l’amplitude de chacune des porteuses par le récepteur permet de déterminer la fonction de transfert du canal et d’apporter une correction pour égaliser ou compenser l’effet du canal. Des séquences de bits spéciales sont envoyées périodiquement pour déterminer les facteurs de correction à apporter. L’opération employée pour générer le signal OFDM est classique puisqu’il s’agit d’une transformé de Fourier rapide (FFT) inverse. De même, l’opération de démodulation emploie une FFT. Le développement ces dernières années des circuits de Digital Signal Processing a aidé à la réalisation technique de l’OFDM.
Cette technique permet de lutter efficacement contre le phénomène d’évanouissement sélectif puisqu’elle permet non seulement d’égaliser le canal, mais en plus de détecter quelles sont les bandes qui subissent un évanouissement sélectif. Une fois ces bandes détectées, celles-ci ne seront plus utilisées. Cependant, l’OFDM est très sensible au décalage en fréquence des porteuses, qui peut faire perdre l’orthogonalité. Cela pose de fortes contraintes sur les oscillateurs locaux des émetteurs et des récepteurs, ainsi que sur l’effet Doppler maximal. Néanmoins, si l’évanouissement sélectif causé par le canal annule une des porteuses, alors une partie du signal informatif est définitivement perdue. Ainsi, dans la modulation Coded OFDM (COFDM), les données sont brassées et elles se retrouvent éparpillées dans les différents blocs. Grâce à ses avantages, la modulation OFDM est utilisée dans de nombreux systèmes de communication : DVB, radio numérique (DAB), Wimax, WiFi, Hiperlan 2, ADSL.
VI. Ce qu’il faut retenir
⇒ Une transmission peut être fiabilisée en modifiant de manière adéquate les propriétés physiques du signal.
⇒ La mise en forme électrique d’un signal numérique ou code en ligne permet de modifier son occupation spectrale, améliorer la synchronisation du récepteur ou d’ajouter de la redondance afin de détecter d’éventuelles erreurs.
⇒ Un signal est rarement transmis en bande de base, en raison de mauvaises caractéristiques et de l’impossibilité de pouvoir partager le canal entre plusieurs
Canaux de transmissions bruités Octobre 2010
A. Boyer 72
utilisateurs. La modulation consiste à transposer le signal de bande de base autour d’une nouvelle fréquence appelée porteuse.
⇒ Le signal informatif de bande de base est appelé signal modulant. Il modifie une ou plusieurs caractéristiques (amplitude, fréquence, phase, durée) de la porteuse.
⇒ On distingue les modulations numériques des modulations analogiques par la nature du modulant. Les modulations numériques sont les plus robustes face au bruit. Les modulations numériques de phase sont très courantes dans les applications télécoms en raison de leur grande robustesse.
⇒ Une modulation numérique M-aire consiste à moduler à l’aide d’un symbole composé de plusieurs bits. Elle présente l’avantage d’accroître l’efficacité spectrale d’une modulation, c'est-à-dire le nombre de bits transmis pour une bande passante donnée.
⇒ Les modulations M-aires les plus courantes en télécommunications sont les modulations QPSK et M-QAM.
⇒ Pour un rapport signal à bruit Eb/No donné, le taux d’erreur binaire dépend de la modulation. Il a tendance à augmenter avec M dans une modulation M-aire.
⇒ Les techniques d’accès multiples sont courantes en télécommunications afin de partager le canal entre plusieurs utilisateurs. Le canal peut être partagé en fréquence, dans le temps ou selon des codes. Ces techniques offrent différents avantages en termes d’optimisation de l’utilisation du canal et de robustesse face au bruit.
⇒ L’ajout de diversité consiste à diversifier les canaux empruntés par le signal (plusieurs fréquences, à différents instants, plusieurs chemins de propagation) et ainsi le rendre plus robuste face au bruit.
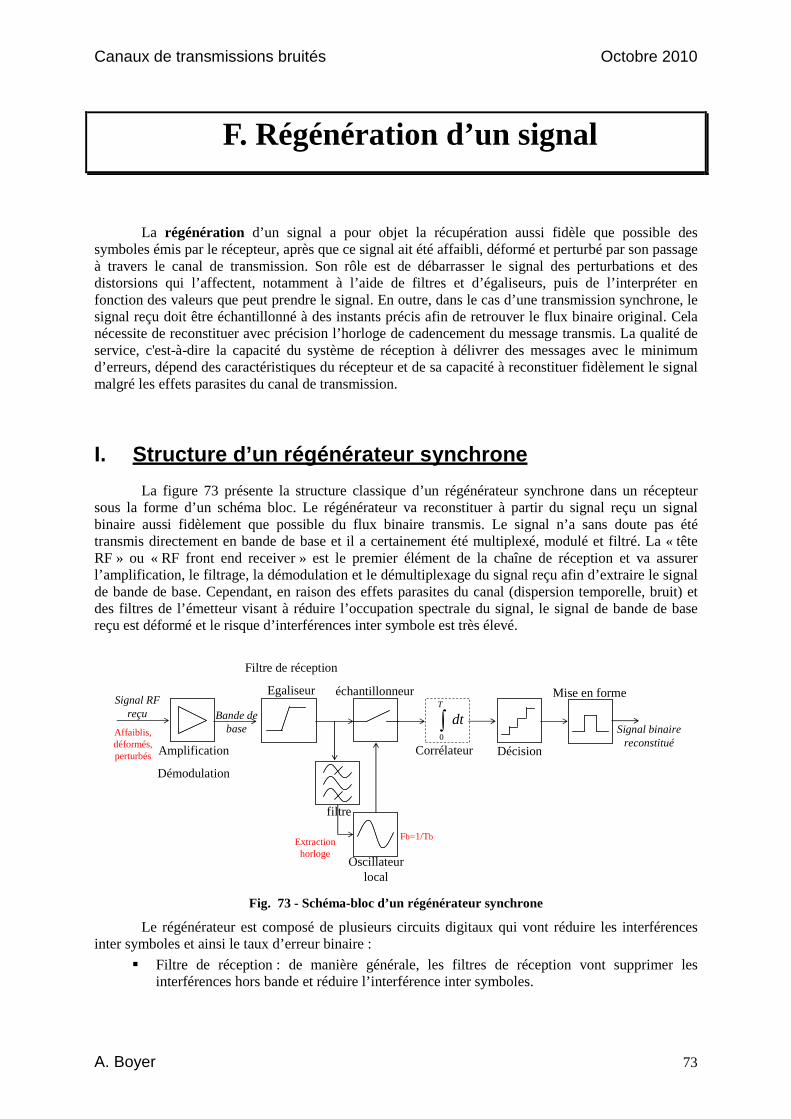
Canaux de transmissions bruités Octobre 2010
A. Boyer 73
F. Régénération d’un signal
La régénération d’un signal a pour objet la récupération aussi fidèle que possible des
symboles émis par le récepteur, après que ce signal ait été affaibli, déformé et perturbé par son passage à travers le canal de transmission. Son rôle est de débarrasser le signal des perturbations et des distorsions qui l’affectent, notamment à l’aide de filtres et d’égaliseurs, puis de l’interpréter en fonction des valeurs que peut prendre le signal. En outre, dans le cas d’une transmission synchrone, le signal reçu doit être échantillonné à des instants précis afin de retrouver le flux binaire original. Cela nécessite de reconstituer avec précision l’horloge de cadencement du message transmis. La qualité de service, c'est-à-dire la capacité du système de réception à délivrer des messages avec le minimum d’erreurs, dépend des caractéristiques du récepteur et de sa capacité à reconstituer fidèlement le signal malgré les effets parasites du canal de transmission.
I. Structure d’un régénérateur synchrone
La figure 73 présente la structure classique d’un régénérateur synchrone dans un récepteur sous la forme d’un schéma bloc. Le régénérateur va reconstituer à partir du signal reçu un signal binaire aussi fidèlement que possible du flux binaire transmis. Le signal n’a sans doute pas été transmis directement en bande de base et il a certainement été multiplexé, modulé et filtré. La « tête RF » ou « RF front end receiver » est le premier élément de la chaîne de réception et va assurer l’amplification, le filtrage, la démodulation et le démultiplexage du signal reçu afin d’extraire le signal de bande de base. Cependant, en raison des effets parasites du canal (dispersion temporelle, bruit) et des filtres de l’émetteur visant à réduire l’occupation spectrale du signal, le signal de bande de base reçu est déformé et le risque d’interférences inter symbole est très élevé.
Signal RF reçu
Affaiblis, déformés, perturbés
Filtre de réception
Egaliseur
Amplification
Démodulation
Extraction horloge
filtre
Oscillateur local
échantillonneur
Décision
Mise en forme
Fb=1/Tb
Signal binaire reconstitué
Bande de base ∫
T
dt0
Corrélateur
Fig. 73 - Schéma-bloc d’un régénérateur synchrone
Le régénérateur est composé de plusieurs circuits digitaux qui vont réduire les interférences inter symboles et ainsi le taux d’erreur binaire :
Filtre de réception : de manière générale, les filtres de réception vont supprimer les interférences hors bande et réduire l’interférence inter symboles.
Canaux de transmissions bruités Octobre 2010
A. Boyer 74
Egaliseur : un égaliseur est un filtre de réception particulier qui vise à compenser les effets parasites du canal et annuler l’IES.
Corrélateur : les messages binaires sont parfois codés (CDMA par exemple). Certains codes possèdent des propriétés de corrélation. En exploitant ces propriétés, il est possible d’améliorer la détection du signal pour un SNR donné. La corrélation consiste en général à multiplier le signal reçu par le code original puis à l’intégrer dans le temps sur une période donnée. S’il existe une corrélation entre le code initial et le code qui nous a servi à multiplier, alors il existe une forte corrélation entre ces signaux et le résultat de l’intégration donnera un signal de forte amplitude. Sinon, la corrélation sera faible et le résultat de l’intégration quasi nul.
Détection : une fois le signal binaire reconstitué, il est nécessaire de l’interpréter, c'est-à-dire reconnaître la valeur prise par chaque symbole parmi les M valeurs possibles. Un détecteur à seuil effectue cette opération de discrimination, le choix des valeurs des seuils est faite afin de minimiser la probabilité d’erreur.
Echantillonnage : les signaux digitaux doivent être échantillonnés à chaque période, et à des instants précis de chaque période, là où l’influence du bruit et de l’IES sera minimale.
Extraction de l’horloge : les signaux digitaux sont généralement transmis sans l’horloge de cadencement du flux binaire. Or, celle-ci est indispensable pour échantillonner correctement le signal reçu. Le récepteur connaît certes par défaut la fréquence du signal binaire reçu, donc il est capable de générer un signal d’horloge de même fréquence. Cependant, celui-ci doit aussi être en phase avec le signal reçu. L’extraction de l’horloge va permettre de synchroniser l’horloge créée par un oscillateur local sur le signal binaire reçu.
II. Egalisation
Comme nous l’avons vu dans les chapitres précédents, la transmission d’un signal numérique à travers le système constitué par le canal de transmission et les filtres d’émission et de réception conduit à l’ajout de bruit (dégradation du rapport signal à bruit) et à une déformation due aux limitations de la bande passante du canal et à sa dispersion (qui provoque le phénomène d’interférences inter symboles). La présence inévitable de bruit et d’interférences inter symboles introduit des erreurs dans le dispositif de décision. La conception des filtres d’émission et de réception vise à réduire le bruit et l’IES.
Dans la plupart des systèmes de télécommunications, le rapport signal à bruit reste suffisamment élevé pour que le fonctionnement soit plus limité par l’IES que par le bruit. Un égaliseur est un filtre dont le butest d’annuler l’IES provoqué par le canal en annulant ses effets parasites. Les critères de Nyquist fixent les conditions pour lesquelles l’interférence intersymbole peut être éliminée (équations 31 et 43). Si la réponse impulsionnelle ou la réponse fréquentielle d’un filtre ou d’un canal respecte les critères de Nyquist, l’IES peut être annulé. L’égaliseur est donc conçu afin que l’ensemble canal de transmission + égaliseur forme un filtre de Nyquist.
1. Principe de l’égalisation En principe, si le canal est parfaitement connue, il est possible en théorie de minimiser voire
d’annuler l’IES à l’aide de filtre d’émission et de réception, de telle sorte que la chaîne complète de transmission forme un canal de Nyquist. En pratique, on ne connaît que très rarement les caractéristiques du canal, tout au plus que les caractéristiques moyennes. L’exemple type est le canal hertzien, qui est fortement non stationnaire. En outre, il peut exister des imperfections dans les filtres. Ces différents effets conduisent à maintenir une IES résiduelle et variable dans le temps qu’il faut compenser. L’égaliseur va se charger de cette opération.
En bande de base, si les filtres d’émission et de réception forment un filtre de Nyquist, le rôle de l’égaliseur sera de compenser l’effet du canal :
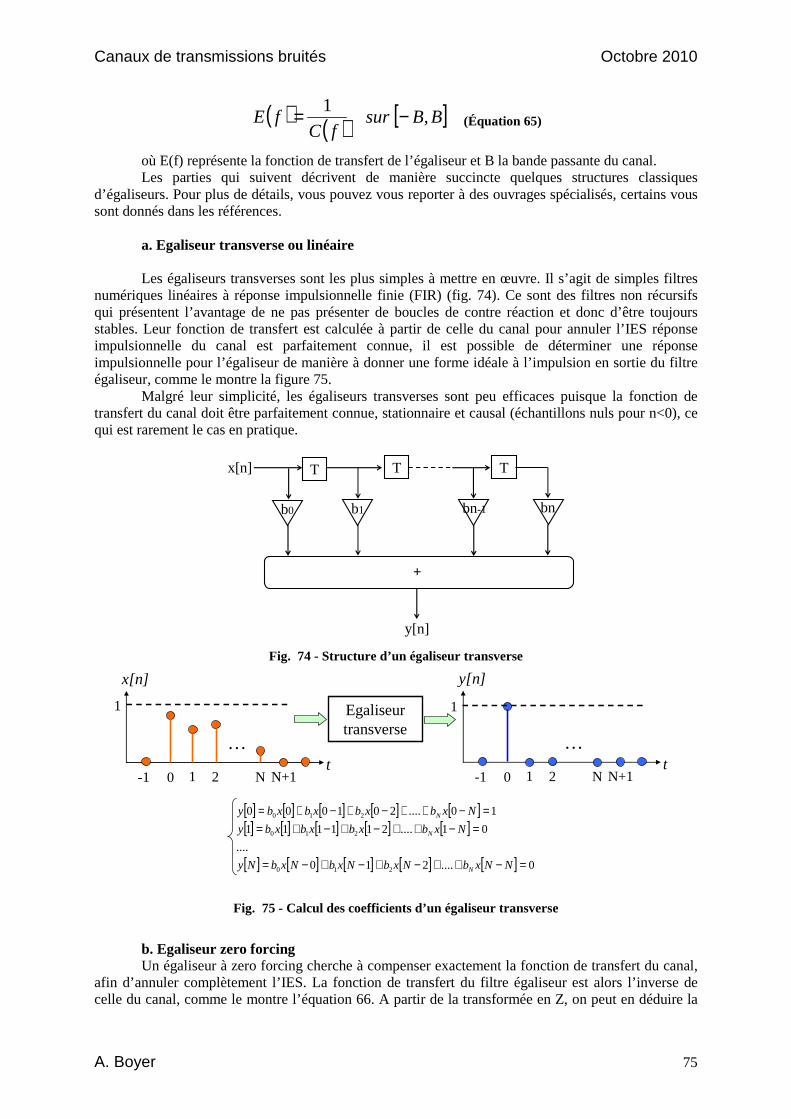
Canaux de transmissions bruités Octobre 2010
A. Boyer 75
( ) ( ) [ ]BBsurfC
fE ,1 −= (Équation 65)
où E(f) représente la fonction de transfert de l’égaliseur et B la bande passante du canal. Les parties qui suivent décrivent de manière succincte quelques structures classiques
d’égaliseurs. Pour plus de détails, vous pouvez vous reporter à des ouvrages spécialisés, certains vous sont donnés dans les références.
a. Egaliseur transverse ou linéaire Les égaliseurs transverses sont les plus simples à mettre en œuvre. Il s’agit de simples filtres
numériques linéaires à réponse impulsionnelle finie (FIR) (fig. 74). Ce sont des filtres non récursifs qui présentent l’avantage de ne pas présenter de boucles de contre réaction et donc d’être toujours stables. Leur fonction de transfert est calculée à partir de celle du canal pour annuler l’IES réponse impulsionnelle du canal est parfaitement connue, il est possible de déterminer une réponse impulsionnelle pour l’égaliseur de manière à donner une forme idéale à l’impulsion en sortie du filtre égaliseur, comme le montre la figure 75.
Malgré leur simplicité, les égaliseurs transverses sont peu efficaces puisque la fonction de transfert du canal doit être parfaitement connue, stationnaire et causal (échantillons nuls pour n<0), ce qui est rarement le cas en pratique.
T T T
b0 b1 bn-1 bn
+
x[n]
y[n]
Fig. 74 - Structure d’un égaliseur transverse
t
x[n]
-1 0 1 2 N N+1
…t
y[n]
-1 0 1 2 N N+1
…
Egaliseur transverse
1 1
[ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] 0....210
....
01....211111
10....201000
210
210
210
=−++−+−+−=
=−++−+−+==−++−+−+=
NNxbNxbNxbNxbNy
Nxbxbxbxby
Nxbxbxbxby
N
N
N
Fig. 75 - Calcul des coefficients d’un égaliseur transverse
b. Egaliseur zero forcing Un égaliseur à zero forcing cherche à compenser exactement la fonction de transfert du canal,
afin d’annuler complètement l’IES. La fonction de transfert du filtre égaliseur est alors l’inverse de celle du canal, comme le montre l’équation 66. A partir de la transformée en Z, on peut en déduire la
Canaux de transmissions bruités Octobre 2010
A. Boyer 76
réponse impulsionnelle du filtre, connaissant celle du canal. M représente l’ordre du filtre et R un retard afin de prendre en compte une partie non causale de la réponse du canal.
( ) ( ) ( ) ( ) ( )∑−
=
−=−⇔=1
0
1 M
i
RninciezC
zE δ (Équation 66)
Ce filtre présente néanmoins plusieurs défauts. Le premier concerne le risque d’instabilité. En effet, si C(z) présente des zéros de module supérieur à 1, alors E(z) possède des pôles instables. En outre, comme les canaux ont généralement des comportements de type passe bas, ce type d’égaliseur est généralement un filtre de type passe haut. Si le bruit est large bande, alors il s’ensuit une nette dégradation du rapport signal à bruit en sortie du filtre. Enfin, ce type d’égaliseur est statique et n’est pas utilisable pour un canal non stationnaire. Il nécessite une estimation préalable de la réponse impulsionnelle du canal.
c. Egaliseur à maximum de vraisemblance La présence d’IES est caractéristique d’une mémoire dans le signal lié à un canal imparfait.
Comme il existe une interdépendance entre les symboles reçus, il est possible de reconstituer la séquence de symboles transmis en maximisant la vraisemblance d’apparition du symbole. Cela se fait en général en utilisant un algorithme de Viterbi. Celui-ci permet de sélectionner dans un treillis le chemin de métrique le plus faible.
L’algorithme de Viterbi ne peut s’applique que sur un signal avec un bruit blanc superposé. L’égaliseur à maximum de vraisemblance est sans doute celui qui affiche les meilleures performances, mais c’est aussi le plus complexe. Il ne s’applique qu’à des séquences binaires courtes. Comme les autres égaliseurs, il nécessite aussi une estimation préalable de la réponse impulsionnelle du canal.
d. Egaliseur adaptatif Tous les égaliseurs précédents souffrent du défaut de considérer le canal stationnaire. En
pratique, les paramètres de l’égaliseur peuvent être remis à jour régulièrement, grâce à l’utilisation de séquence d’apprentissage. Mais la période de remise à jour doit être suffisamment faible et rien n’empêche le canal de se modifier entre deux remises à jour.
Les égaliseurs adaptatifs résolvent le double problème de méconnaissance du canal et d’évolution dans le temps du canal. Les égaliseurs adaptatifs basés sur l’algorithme de gradient stochastique sont parmi simples au niveau implémentation, stable et peu couteux. Cette approche vise à minimiser l’erreur quadratique entre les séquences d’entrée et de sortie de l’égaliseur, les coefficients du filtre étant modifiés au cours du temps. Néanmoins, les performances de ce type d’égaliseur peuvent être limitées dans le cas de variations brutales du canal.
Il existe beaucoup d’autres techniques d’égalisation beaucoup plus avancées parmi lesquelles les égaliseurs récursifs à retour de décision et les égaliseurs autodidactes.
2. Estimation du canal En pratique, les caractéristiques du canal ne sont jamais parfaitement connues, ce qui peut
limiter l’efficacité de certaines méthodes d’égalisation, qui supposent un canal stationnaire et requièrent une estimation de la fonction de transfert ou la réponse impulsionnelle du canal.
Il est alors nécessaire de réactualiser régulièrement l’estimation de la fonction de transfert du canal et remettre à jour les paramètres de l’égaliseur. En pratique, la plupart des systèmes de télécommunications émettent sous la forme de bursts (ou de manière intermittente), ce qui autorise l’insertion de trames supplémentaires et spécifiques entre chaque burst. Ces séquences, appelées séquences d’apprentissage, sont connues par le système et vont permettre d’identifier la fonction de transfert du canal à un instant T. Elles doivent présenter de fortes propriétés d’autocorrélation (proche d’un Dirac). En effet, si on appelle d(t) la séquence d’apprentissage, le signal reçu peut s’écrire sous la forme :
( ) ( ) ( ) ( )tntctdty += *
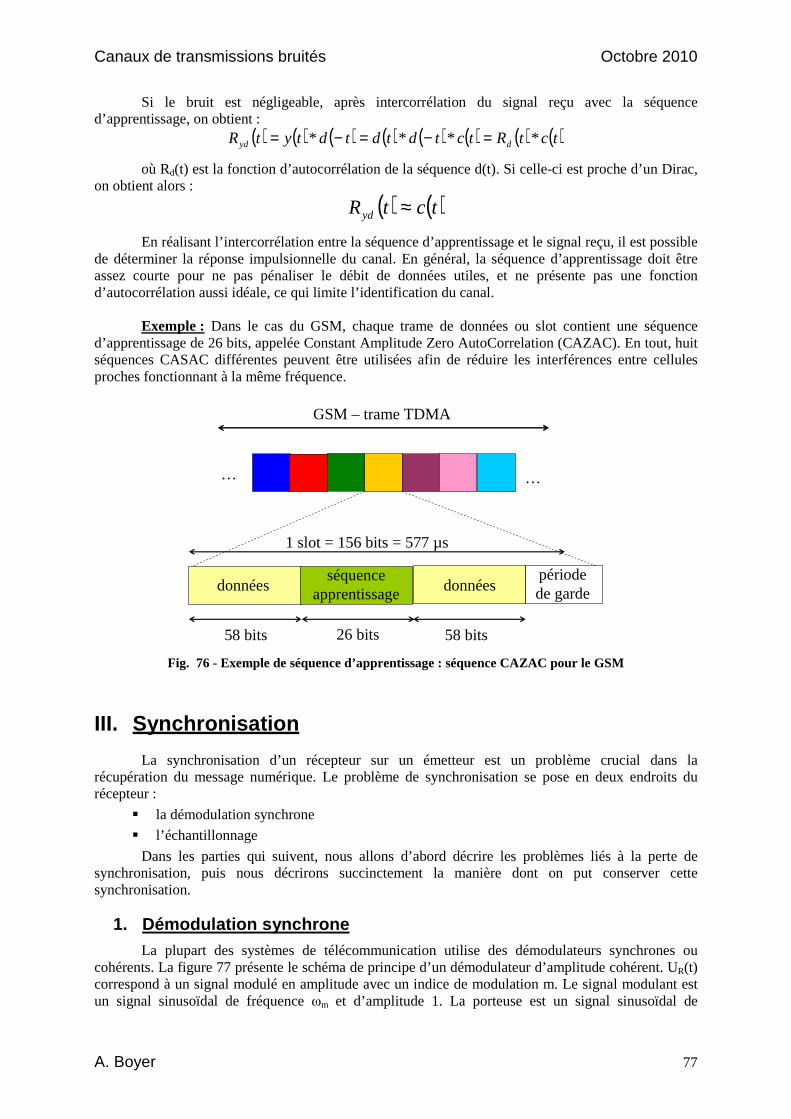
Canaux de transmissions bruités Octobre 2010
A. Boyer 77
Si le bruit est négligeable, après intercorrélation du signal reçu avec la séquence d’apprentissage, on obtient :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )tctRtctdtdtdtytR dyd **** =−=−=
où Rd(t) est la fonction d’autocorrélation de la séquence d(t). Si celle-ci est proche d’un Dirac, on obtient alors :
( ) ( )tctRyd ≈
En réalisant l’intercorrélation entre la séquence d’apprentissage et le signal reçu, il est possible de déterminer la réponse impulsionnelle du canal. En général, la séquence d’apprentissage doit être assez courte pour ne pas pénaliser le débit de données utiles, et ne présente pas une fonction d’autocorrélation aussi idéale, ce qui limite l’identification du canal.
Exemple : Dans le cas du GSM, chaque trame de données ou slot contient une séquence
d’apprentissage de 26 bits, appelée Constant Amplitude Zero AutoCorrelation (CAZAC). En tout, huit séquences CASAC différentes peuvent être utilisées afin de réduire les interférences entre cellules proches fonctionnant à la même fréquence.
… …
GSM – trame TDMA
1 slot = 156 bits = 577 µs
données donnéesséquence
apprentissagepériode de garde
58 bits 58 bits26 bits
Fig. 76 - Exemple de séquence d’apprentissage : séquence CAZAC pour le GSM
III. Synchronisation
La synchronisation d’un récepteur sur un émetteur est un problème crucial dans la récupération du message numérique. Le problème de synchronisation se pose en deux endroits du récepteur :
la démodulation synchrone
l’échantillonnage
Dans les parties qui suivent, nous allons d’abord décrire les problèmes liés à la perte de synchronisation, puis nous décrirons succinctement la manière dont on put conserver cette synchronisation.
1. Démodulation synchrone La plupart des systèmes de télécommunication utilise des démodulateurs synchrones ou
cohérents. La figure 77 présente le schéma de principe d’un démodulateur d’amplitude cohérent. UR(t) correspond à un signal modulé en amplitude avec un indice de modulation m. Le signal modulant est un signal sinusoïdal de fréquence ωm et d’amplitude 1. La porteuse est un signal sinusoïdal de

Canaux de transmissions bruités Octobre 2010
A. Boyer 78
fréquence ωP et d’amplitude AP. La démodulation cohérente consiste à multiplier le signal reçu avec un signal identique en fréquence et en phase au signal porteur afin de transposer en fréquence le signal. Après un filtrage passe bas, seul le signal de bande de base est conservé. Le principal avantage de la démodulation cohérente est de réduire l’influence du bruit sur le signal démodulé. Grace au filtrage, seul le bruit superposé au signal modulé est ramené en bande de base.
UR
UP
US UD(t)
Reconstitution porteuse
( ) ( ) ( )
( ) ( ) ( )( ) ( )( )( ) ( )
( ) ( ) ( )( ) ( ) ( )( ) ( )
( ) ( )( ) ( )( ) ( )[ ] ( )( ) ( )[ ]ttBmA
ttBmA
tBA
tU
ttBmA
ttBmA
tBAtU
tBttmA
tAtU
tBtUtU
MMPP
MMPP
PP
S
PMPP
PMPP
PPS
PMPMPP
PPS
PRS
ωωωωωωω
ωωωωωωω
ωωωωωω
ω
cos2cos4
cos2cos4
2cos12
coscos2
coscos2
cos
coscoscos2
cos
cos
2
++++−++=
++−+=
×
++−+=
×=
( ) ( ) ( )( )tmBA
tBmABA
tUfiltrageAprès MP
MPP
S ωω cos12
cos22
: +=+= (Équation 67)
Fig. 77 - Démodulateur d’amplitude cohérent
Néanmoins, la démodulation synchrone nécessite de pouvoir reconstituer la porteuse sans erreur de phase. Tout déphasage entre la porteuse reconstituée et la porteuse originale dégradera le signal démodulé, comme le montre la démonstration ci-dessous. Reprenons l’exemple précédent de signal modulé en amplitude. Supposons que la porteuse reconstruite par le récepteur présente un décalage de phase φ(t) avec le signal reçu, ce décalage pouvant varier dans le temps. En notant φ ce déphasage, on récupère après filtrage le signal suivant :
( ) ( ) ( )( ) ( )( )( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( )( ) ( )
( ) ( )[ ] ( )( ) ( )[ ] ( )( ) ( )[ ]ϕωϕωωϕωϕωωϕϕω
ϕωωωϕωωωϕωω
ϕωωωωωω
+++++−++−+++=
++++−++=
+×
++−+=
ttBmA
ttBmA
tBA
tU
ttBmA
ttBmA
ttBAtU
tBttmA
tAtU
MMPP
MMPP
PP
S
PMPP
PMPP
PPPS
PMPMPP
PPS
cos2cos4
cos2cos4
cos2cos2
coscos2
coscos2
coscos
coscoscos2
cos
( ) ( ) ( )[ ]
( ) ( )
( ) ( ) ( )( )tmtBA
tU
tBmABA
tU
ttBmABA
tUfiltrageAprès
MP
S
MPP
S
MMPP
S
ωϕ
ϕωϕ
ϕωϕωϕ
cos1cos2
coscos2
cos2
coscos4
cos2
:
+=
+=
++−+=
(Équation 68)
L’amplitude du signal démodulé dépend du décalage de phase entre la porteuse reconstituée et le signal reçu, conduisant à modifier l’enveloppe du signal reçu et à le dégrader. La seule manière de retrouver le signal d’origine est soit d’avoir un décalage de phase constant. Dans le cas où ce déphasage est nul, on retrouve le signal de l’équation 67.
Cet exemple pourrait s’appliquer à tout type de démodulation et démontre l’importance de la synchronisation du récepteur sur la porteuse du signal reçu pour que la démodulation n’introduise pas d’erreurs.

Canaux de transmissions bruités Octobre 2010
A. Boyer 79
2. Echantillonnage synchrone Comme nous l’avons vu dans les chapitres précédents, l’échantillonnage doit se faire à des
instants précis, là où l’influence de l’IES est la plus faible. Il est donc indispensable que le rythme du signal binaire de bande de base soit récupéré correctement.
Si le récepteur est parfaitement synchroniser avec la porteuse et avec le flux binaire, le signal reçu et échantillonné peut s’écrire sous la forme suivante :
( ) ( ) ( ) ( )tnkTtpakTytyk
k +−== ∑ (Équation 69)
où p(t) représente la réponse impulsionnelle des signaux en entrée du récepteur, T la période du signal binaire, ak l’amplitude prise par chaque symbole et n(t) le bruit additionnel. En présence d’un asynchronisme entre la porteuse reconstituée par le récepteur et la porteuse du signal, une erreur de
démodulation notée )(tie ξ− apparaît qui vient modifier l’enveloppe du signal reçu, où ξ(t) représente l’erreur de phase. En présence d’un asynchronisme entre le rythme du signal reçu et l’horloge binaire reconstitué, un retard noté T.ετ = , où ε une fraction de cette période. Le signal reçu et échantillonné en présence de ces asynchronismes peut s’écrire sous la forme :
( ) ( ) ( )tnkTtpaekTyk
kti +−−= ∑− τξ )( (Équation 70)
Les systèmes de synchronisation doivent donc correctement récupérer la porteuse afin d’annuler l’erreur de phase, et correctement récupérer le rythme afin d’annuler le retard sur les instants d’échantillonnage optimaux.
De nombreuses structures existent pour correctement récupérer la synchronisation avec un signal, qui sortent du cadre de ce cours. En pratique, le signal est reconstitué à partir d’un oscillateur local, la fréquence du signal étant à priori connu. Afin d’être en phase ou en rythme avec le signal reçu, l’oscillateur local est asservi par un système analogique ou numérique, qui corrige en temps réel la phase de l’oscillateur local en fonction des décalages de phase avec le signal reçu. Ce type d’asservissement est assuré par une boucle à verrouillage de phase ou Phase Locked Loop (PLL).
IV. Décision – Récepteur optimal
Le signal obtenu en sortie d’un canal de transmission est une version déformée, déphasée et perturbée par du bruit, du signal émis. Le problème du récepteur est de démoduler le signal reçu puis de décider de l’affectation des symboles reçus à l’un des symboles composant l’alphabet de départ. Cette étape est appelée décision. Celle-ci doit être effectuée de manière à minimiser le risque de mauvaise détection du signal. Ainsi, dans chaque récepteur, une règle de décision est élaborée, ainsi qu’une structure du récepteur. Des performances en termes de taux d’erreur binaire seront associées à cette règle et à cette structure, dans le cadre d’un canal et d’un bruit donné. Si la règle de décision et la structure du récepteur permettent de minimiser le risque d’erreur, on parle de récepteur optimal.
Dans cette partie, nous allons chercher à déterminer la règle de décision optimale dans le cas d’un signal binaire (ou un signal BPSK) traversant un canal AWGN, puis nous déterminerons les performances en terme de taux d’erreur binaire. Ce type de raisonnement pourra être étendu à des signaux à M états, mais cela dépasse le cadre de ce cours.
1. Seuil de décision pour un signal binaire travers ant un canal AWGN La figure 78 décrit le positionnement du problème. Un signal x(t) émis en bande de base
traverse un canal AWGN caractérisé par un bruit blanc gaussien d’écart type σ et arrive en entrée du récepteur. Après avoir été filtré, égalisé et échantillonné avec une période Te (on suppose que le récepteur est parfaitement synchronisé avec le signal reçu), le signal yk arrive en entrée d’un comparateur à seuil, qui va déterminer quel est l’état binaire pris par le symbole reçu. Le but du problème est de déterminer le seuil λ0 du comparateur à seuil qui va minimiser l’erreur d’interprétation du message binaire. A cause du bruit ajouté par le canal, la probabilité d’une erreur d’interprétation n’est pas nulle.
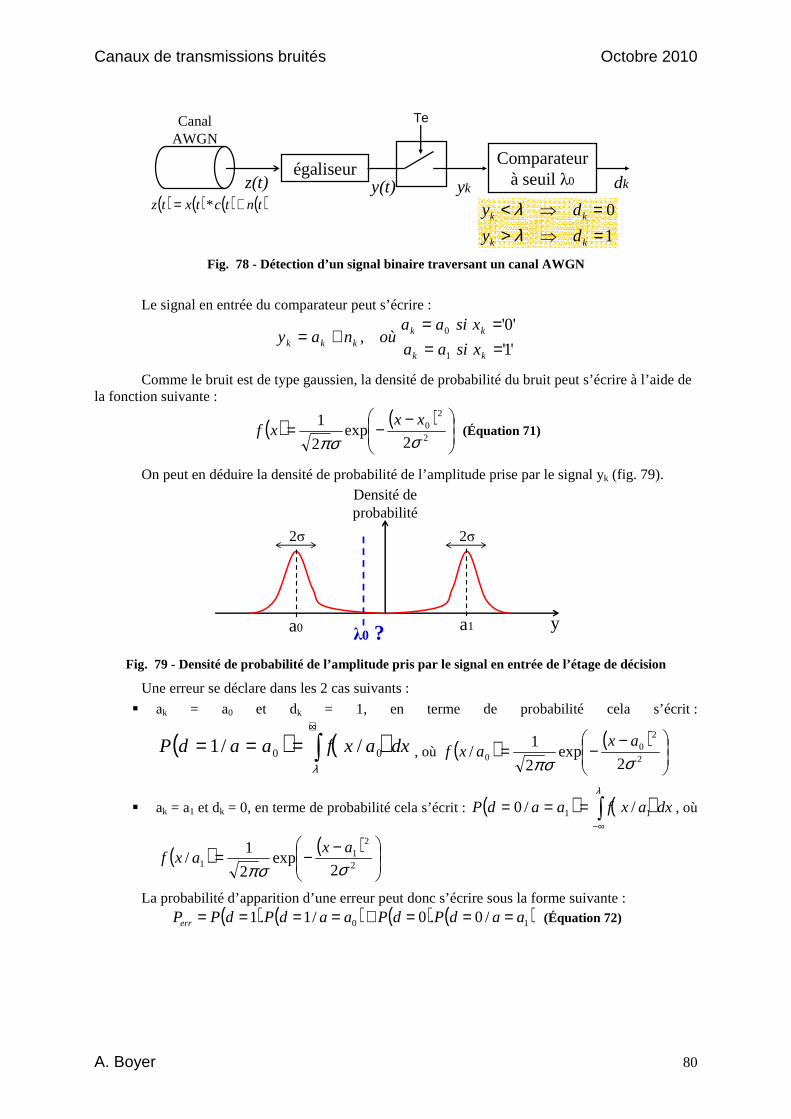
Canaux de transmissions bruités Octobre 2010
A. Boyer 80
égaliseurComparateur
à seuil λ0
Canal AWGN
z(t) y(t) yk dk
( ) ( ) ( ) ( )tntctxtz += *
1
0
=⇒>=⇒<
kk
kk
dy
dy
λλ
Te
Fig. 78 - Détection d’un signal binaire traversant un canal AWGN
Le signal en entrée du comparateur peut s’écrire :
'1'
'0',
1
0
====
+=kk
kkkkk xsiaa
xsiaaoùnay
Comme le bruit est de type gaussien, la densité de probabilité du bruit peut s’écrire à l’aide de la fonction suivante :
( ) ( )
−−=
2
20
2exp
2
1
σσπxx
xf (Équation 71)
On peut en déduire la densité de probabilité de l’amplitude prise par le signal yk (fig. 79).
y
Densité de probabilité
a0 a1
2σ 2σ
λ0 ?
Fig. 79 - Densité de probabilité de l’amplitude pris par le signal en entrée de l’étage de décision
Une erreur se déclare dans les 2 cas suivants :
ak = a0 et dk = 1, en terme de probabilité cela s’écrit :
( ) ( )∫+∞
===λ
dxaxfaadP 00 //1 , où ( ) ( )
−−=
2
20
0 2exp
2
1/
σσπax
axf
ak = a1 et dk = 0, en terme de probabilité cela s’écrit : ( ) ( )∫∞−
===λ
dxaxfaadP 11 //0 , où
( ) ( )
−−=
2
21
1 2exp
2
1/
σσπax
axf
La probabilité d’apparition d’une erreur peut donc s’écrire sous la forme suivante : ( ) ( ) ( ) ( )10 /0.0/1.1 aadPdPaadPdPPerr ===+==== (Équation 72)

Canaux de transmissions bruités Octobre 2010
A. Boyer 81
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )∫∫
∫∫
∞−∞−
∞−
+∞
=+
−==
=+==
00
0
0
10
10
/.0/1.1
/.0/.1
λλ
λ
λ
dxaxfdPdxaxfdPP
dxaxfdPdxaxfdPP
err
err
( ) ( ) ( ) ( ) ( )[ ]∫∞−
=−=+==0
01 /.1/.01λ
dxaxfdPaxfdPdPPerr (Équation 73)
Nous cherchons à déterminer λ0 pour minimiser l’erreur, c'est-à-dire ( ) 00 =λλd
dPerr . Cela est
possible si le contenu de l’intégrale est annulé. ( ) ( ) ( ) ( )
( )( )
( )( )
( )
( )
( )( ) ( ) ( )( )( )( )
( )2
20
21
2100
2
200
21022
2
210
2
200
10
00
01
21
0log
2
1
1
0log
2exp
2exp
/
/
1
0
0/.1/.0
σσλ
λλσ
σλ
σλ
λλ
aaaa
dP
dP
aadP
dP
a
a
axf
axf
dP
dP
axfdPaxfdP
−+
−=
==
−−−=
==
−−
−−
===
===
==−=
( )( )
==
−+
+=
1
0log
2 210
210
0 dP
dP
aa
aa σλ (Équation 74)
Si les 2 états binaires sont équiprobables, on détermine le seuil de décision suivant :
2
100
aa +=λ (Équation 75)
Ce résultat assez intuitif montre que le récepteur optimal possède le seuil de décision à mi distance entre les amplitudes liées aux 2 états binaires.
2. Taux d’erreur binaire théorique d’un signal bina ire sur un canal AWGN Dans le cas du récepteur optimal avec le seuil de décision calculé précédemment, il est
possible de déterminer les performances en terme de probabilité d’erreur. Le seuil de détection est à mi distance des niveaux a0 et a1. L’apparition des symboles binaires ‘0’ et ‘1’ est équiprobable. En repartant de la probabilité d’apparition d’une erreur de l’équation 72, on peut la réécrire sous la forme suivante :
( ) ( ) ( ) ( )
( ) ( )∫∫∞−
∞+
+=
===+====0
0
10
10
/2
1/
2
1
/0.0/1.1λ
λ
dxaxfdxaxfP
aadPdPaadPdPP
err
err
En analysant l’équation précédente (fig. 80) et en exploitant les propriétés de symétrie d’une fonction gaussienne, on peut écrire :
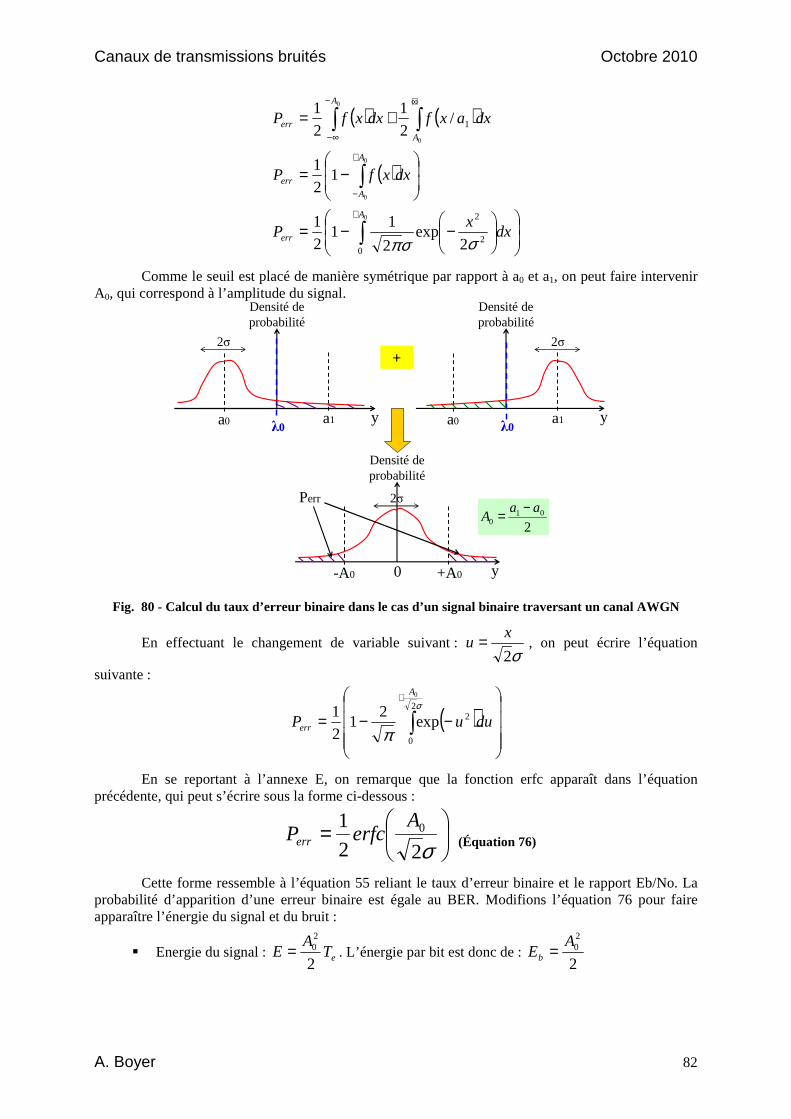
Canaux de transmissions bruités Octobre 2010
A. Boyer 82
( ) ( )
( )
−−=
−=
+=
∫
∫
∫∫
+
+
−
+∞−
∞−
0
0
0
0
0
02
2
1
2exp
2
11
2
1
12
1
/2
1
2
1
A
err
A
A
err
A
A
err
dxx
P
dxxfP
dxaxfdxxfP
σσπ
Comme le seuil est placé de manière symétrique par rapport à a0 et a1, on peut faire intervenir A0, qui correspond à l’amplitude du signal.
y
Densité de probabilité
a0 a1λ0
y
Densité de probabilité
a0 a1λ0
+
y
Densité de probabilité
-A0 0
2σ 2σ
2σPerr
+A0
201
0
aaA
−=
Fig. 80 - Calcul du taux d’erreur binaire dans le cas d’un signal binaire traversant un canal AWGN
En effectuant le changement de variable suivant : σ2
xu = , on peut écrire l’équation
suivante :
( )
−−= ∫
+σ
π
2
0
2
0
exp2
12
1A
err duuP
En se reportant à l’annexe E, on remarque que la fonction erfc apparaît dans l’équation précédente, qui peut s’écrire sous la forme ci-dessous :
=σ22
1 0AerfcPerr (Équation 76)
Cette forme ressemble à l’équation 55 reliant le taux d’erreur binaire et le rapport Eb/No. La probabilité d’apparition d’une erreur binaire est égale au BER. Modifions l’équation 76 pour faire apparaître l’énergie du signal et du bruit :
Energie du signal : eTA
E2
20= . L’énergie par bit est donc de :
2
20A
Eb =
Canaux de transmissions bruités Octobre 2010
A. Boyer 83
Energie du bruit : eTN 2σ= . Pour chaque période binaire, l’énergie du bruit est donc de : 2
0 σ=N
L’équation 76 peut donc s’écrire sous la forme suivante :
=
02
1
N
EerfcP b
err (Équation 77)
On retrouve l’équation 46 qui permettait de relier le taux d’erreur binaire au rapport signal à bruit. Cette relation dépend fortement du type de récepteur et du type de signal. La relation précédente est vérifiée dans le cas d’un récepteur optimal pour un signal binaire ou modulé en BPSK. Dans le cas d’une modulation M-aire, le raisonnement et la relation entre le BER et Eb/No restent similaires. Comme cela a été expliqué dans les chapitres précédents, l’utilisation de code de canal modifie aussi cette relation.
V. Ce qu’il faut retenir
⇒ Après le passage à travers le canal, le récepteur a pour rôle de régénérer le signal.
⇒ Cela correspond à supprimer les perturbations et distorsions qui affectent le signal (filtrage et égalisation), puis de l’interpréter correctement (décision). Dans le cas d’un signal numérique synchrone, le récepteur doit se synchroniser sur le signal reçu.
⇒ Dans la plupart des transmissions numériques, l’interférence inter symboles est plus problématique que le bruit. L’émetteur et le récepteur contiennent des filtres qui doivent limiter l’interférence inter symboles.
⇒ Les critères de Nyquist définissent les conditions d’annulation de l’interférence inter symboles dans un filtre ou dans un canal.
⇒ Un égaliseur est un bloc du récepteur spécifiquement dédié à l’annulation de l’interférence inter symboles, en compense l’effet du canal.
⇒ La plupart des égaliseurs font appel à des séquences d’apprentissage incluses dans les trames transmises. Elles permettent d’estimer régulièrement la réponse impulsionnelle du canal pour remettre à jour les propriétés de l’égaliseur.
⇒ La synchronisation de la démodulation avec la porteuse et de l’échantillonnage avec le signal binaire reçu sont requises pour éviter les erreurs d’interprétation du signal. Le récepteur doit être capable de récupérer la phase et le rythme du signal reçu.
⇒ Le seuil de décision d’un récepteur est choisi afin de minimiser le taux d’erreur binaire. Dans le cas d’un canal AWGN, il est possible de déterminer les performances en terme de taux d’erreur binaire connaissant le rapport signal à bruit.
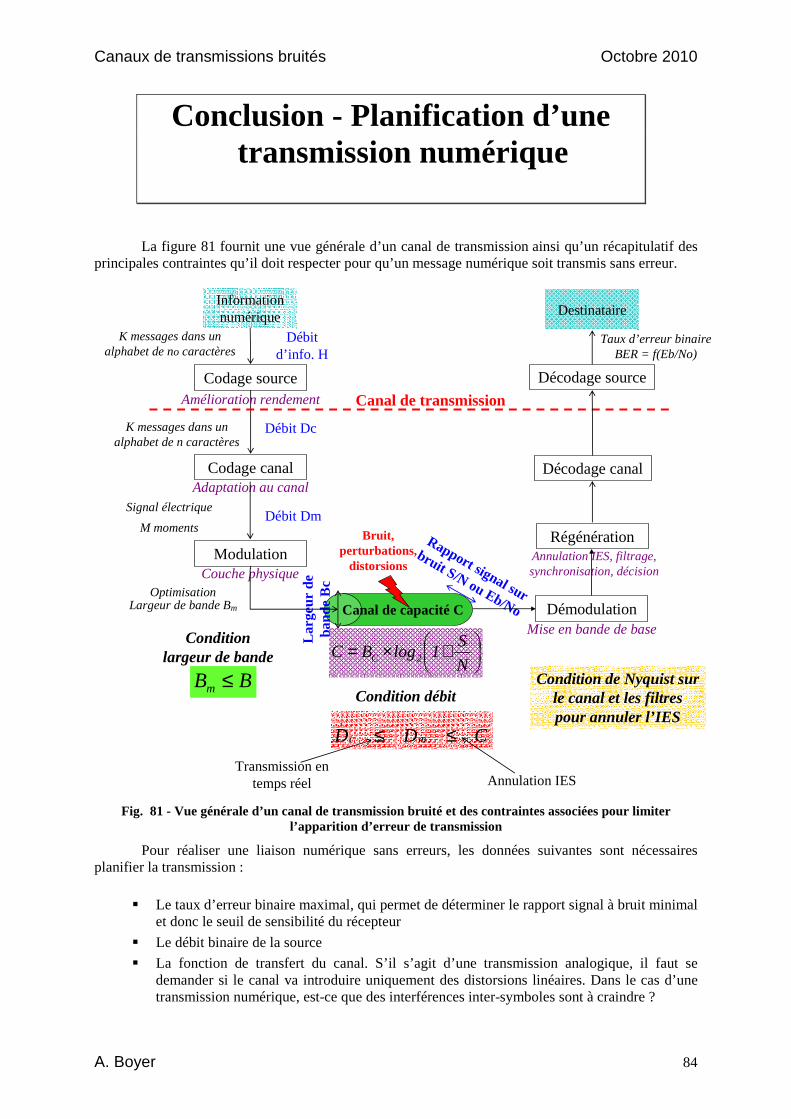
Canaux de transmissions bruités Octobre 2010
A. Boyer 84
La figure 81 fournit une vue générale d’un canal de transmission ainsi qu’un récapitulatif des
principales contraintes qu’il doit respecter pour qu’un message numérique soit transmis sans erreur.
Information numérique
Codage source
Codage canal
K messages dans un alphabet de no caractères
K messages dans un alphabet de n caractères
Signal électrique
M moments
Débit Dc
Débit Dm
Débit d’info. H
Canal de capacité C
Bruit, perturbations,
distorsions
Larg
eur
de
band
e B
c
Rapport signal sur
bruit S/N ou Eb/No
RégénérationAnnulation IES, filtrage, synchronisation, décision
Décodage canal
Décodage source
Destinataire
Adaptation au canal
Amélioration rendement Canal de transmission
. .
c mD D C≤ ≤Transmission en
temps réel Annulation IES
ModulationCouche physique
Optimisation Largeur de bande Bm
BBm ≤
DémodulationMise en bande de base
Condition largeur de bande
Condition débit
Taux d’erreur binaire BER = f(Eb/No)
+×=N
S1logBC 2C
Condition de Nyquist sur le canal et les filtres pour annuler l’IES
Fig. 81 - Vue générale d’un canal de transmission bruité et des contraintes associées pour limiter l’apparition d’erreur de transmission
Pour réaliser une liaison numérique sans erreurs, les données suivantes sont nécessaires planifier la transmission :
Le taux d’erreur binaire maximal, qui permet de déterminer le rapport signal à bruit minimal et donc le seuil de sensibilité du récepteur
Le débit binaire de la source
La fonction de transfert du canal. S’il s’agit d’une transmission analogique, il faut se demander si le canal va introduire uniquement des distorsions linéaires. Dans le cas d’une transmission numérique, est-ce que des interférences inter-symboles sont à craindre ?
Conclusion - Planification d’une transmission numérique
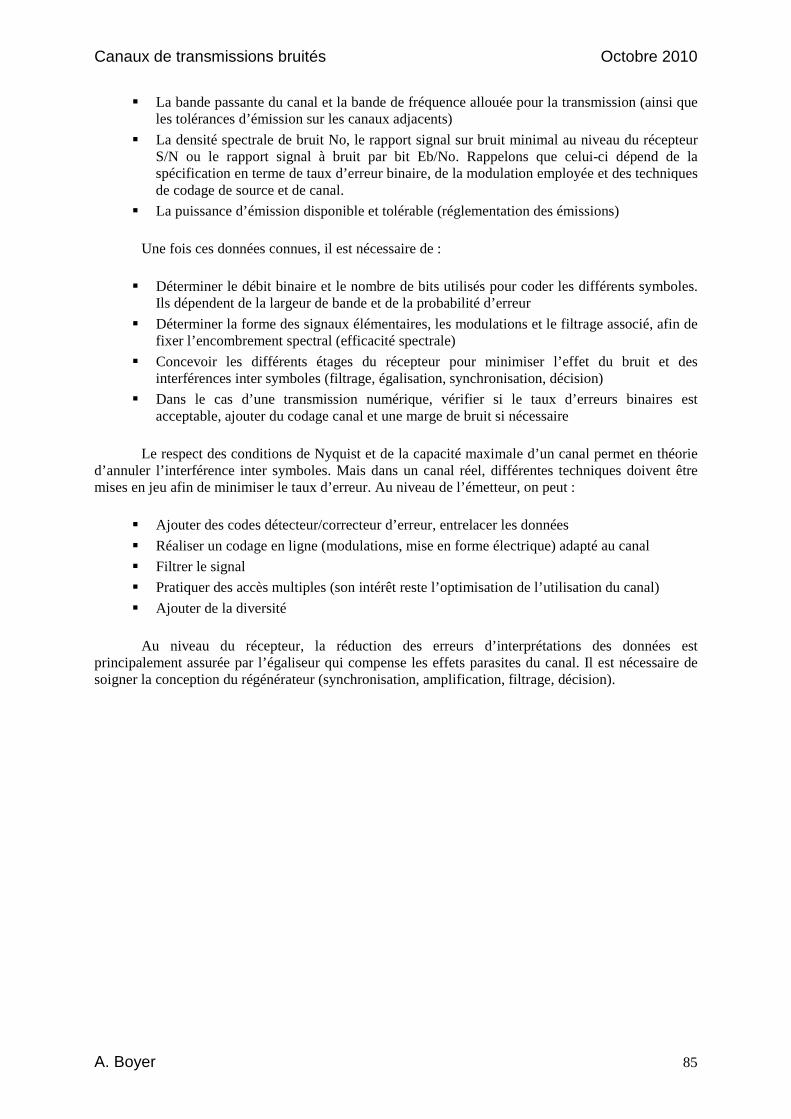
Canaux de transmissions bruités Octobre 2010
A. Boyer 85
La bande passante du canal et la bande de fréquence allouée pour la transmission (ainsi que les tolérances d’émission sur les canaux adjacents)
La densité spectrale de bruit No, le rapport signal sur bruit minimal au niveau du récepteur S/N ou le rapport signal à bruit par bit Eb/No. Rappelons que celui-ci dépend de la spécification en terme de taux d’erreur binaire, de la modulation employée et des techniques de codage de source et de canal.
La puissance d’émission disponible et tolérable (réglementation des émissions)
Une fois ces données connues, il est nécessaire de :
Déterminer le débit binaire et le nombre de bits utilisés pour coder les différents symboles. Ils dépendent de la largeur de bande et de la probabilité d’erreur
Déterminer la forme des signaux élémentaires, les modulations et le filtrage associé, afin de fixer l’encombrement spectral (efficacité spectrale)
Concevoir les différents étages du récepteur pour minimiser l’effet du bruit et des interférences inter symboles (filtrage, égalisation, synchronisation, décision)
Dans le cas d’une transmission numérique, vérifier si le taux d’erreurs binaires est acceptable, ajouter du codage canal et une marge de bruit si nécessaire
Le respect des conditions de Nyquist et de la capacité maximale d’un canal permet en théorie
d’annuler l’interférence inter symboles. Mais dans un canal réel, différentes techniques doivent être mises en jeu afin de minimiser le taux d’erreur. Au niveau de l’émetteur, on peut :
Ajouter des codes détecteur/correcteur d’erreur, entrelacer les données
Réaliser un codage en ligne (modulations, mise en forme électrique) adapté au canal
Filtrer le signal
Pratiquer des accès multiples (son intérêt reste l’optimisation de l’utilisation du canal)
Ajouter de la diversité
Au niveau du récepteur, la réduction des erreurs d’interprétations des données est
principalement assurée par l’égaliseur qui compense les effets parasites du canal. Il est nécessaire de soigner la conception du régénérateur (synchronisation, amplification, filtrage, décision).

Canaux de transmissions bruités Octobre 2010
A. Boyer 86
Références
⇒ Geneviève Baudoin, « Radiocommunications Numériques – Tome 1 : Principes, Modélisation et simulation », Dunod collection Technique et Ingénierie, ISBN 978-2-10-050514-2, 2002.
⇒ Yvon Mori, « Electronique pour le Traitement du Signal – Volume IV – Techniques de Modulation », Hermès Science, ISBN 2-7462-1342-7, 2006
⇒ Yvon Mori, « Electronique pour le Traitement du Signal – Volume V – Théorie de l’Information et du Codage », Hermès Science, ISBN 2-7462-1343-5, 2006
⇒ Guillaume Vivier, Khaldoun Al Agha, Guy Pujolle, Bruno Vidal « Réseaux de mobiles & Réseaux sans fil », Eyrolles, 2-212-11018-9, 2001.
⇒ Xavier Lagrange, Philippe Godlewski, Sami Tabbane, « Réseaux GSM-DCS – Des Principes à la Norme, 4e édition revue et augmentée », Hermes Sciences collection Réseaux et Télécommunications, ISBN 2746200287, 1999.
⇒ H. Holma, A. Toskala, « WCDMA for UMTS – HSPA Evolution and LTE – 4th Edition», Wiley, 2007, 550 pp
⇒ P. Degauque, A. Zeddam, « Compatibilité Electromagnétique 2 – Des Concepts de Base aux Applications », Hermes Science, ISBN 978-2-7462-1664-8, 2007
⇒ Lawrence E. Larson, « RF and Microwave Circuit Design for Wireless Communications », Artech House Publisher, ISBN 0-89006-818-6, 1997
⇒ D. Paret, « Réseaux Multiplexés pour Systèmes Embarqués », Dunod, série EEA, ISBN 2-10-005267-5, 2005

Canaux de transmissions bruités Octobre 2010
A. Boyer 87
Annexe A – Rappel sur les unités
Pour le dimensionnement d’un canal, on doit prendre en compte l’ensemble des gains et des pertes présentes sur le canal, afin de déterminer la puissance minimale à mettre en entrée de l’émetteur pour que le récepteur détecte un signal. On parle alors d’un bilan de puissance. Afin de faire ce bilan, on préfère utiliser des unités en dB afin de remplacer multiplication et division par des additions et des soustractions. Le passage en dB correspond au rapport d’une grandeur (puissance, tension …) avec une grandeur de référence, placé sur une échelle logarithmique (équations 78 et 79). Dans le cas où il s’agit d’un rapport de puissance, on utilise l’équation 78. Dans le cas où il s’agit d’un rapport en tension, on utilise l’équation 79.
( ) ( )
==
0
1log10log10P
PxdBX (Équation 78)
( ) ( )
==
0
1log20log20V
VxdBX (Équation 79)
L’intérêt d’une représentation logarithmique réside dans la possibilité d’additionner les affaiblissements et les gains au lieu de multiplier les rapports de puissance. De plus, elle permet de représenter une très grande dynamique au niveau des amplitudes.
En pratique, on indique parfois l’unité des grandeurs du rapport. Il n’est pas rare de trouver des dBV, des dBmW, des dBV/m … Il s’agit toujours de nombres sans unité, mais correspondant à un rapport entre 2 grandeurs exprimées dans l’unité qui est ajoutée au dB. Par exemple, les équations 80 et 81 donnent les formules de calcul de rapports exprimés en dBV et dBW.
( ) 20 log1
VV dBV
V = ×
(Équation 80)
( )
×=
W
PdBWP
1log10 (Équation 81)
1
0.1
0.01
0.001
10
100
1000
Volts
0
-20
-40
-60
20
40
60
dBV
1
0.1
0.01
0.001
10
100
1000
Watts
0
-10
-20
-30
10
20
30
dBW
En télécommunications, les signaux reçus sont en général très faibles et les microvolts (µV) et milliwatts (mW) sont les unités les plus courantes. Il est courant de rencontrer des rapports exprimés en dBµV et dBmW ou dBm (équations 82 et 83).
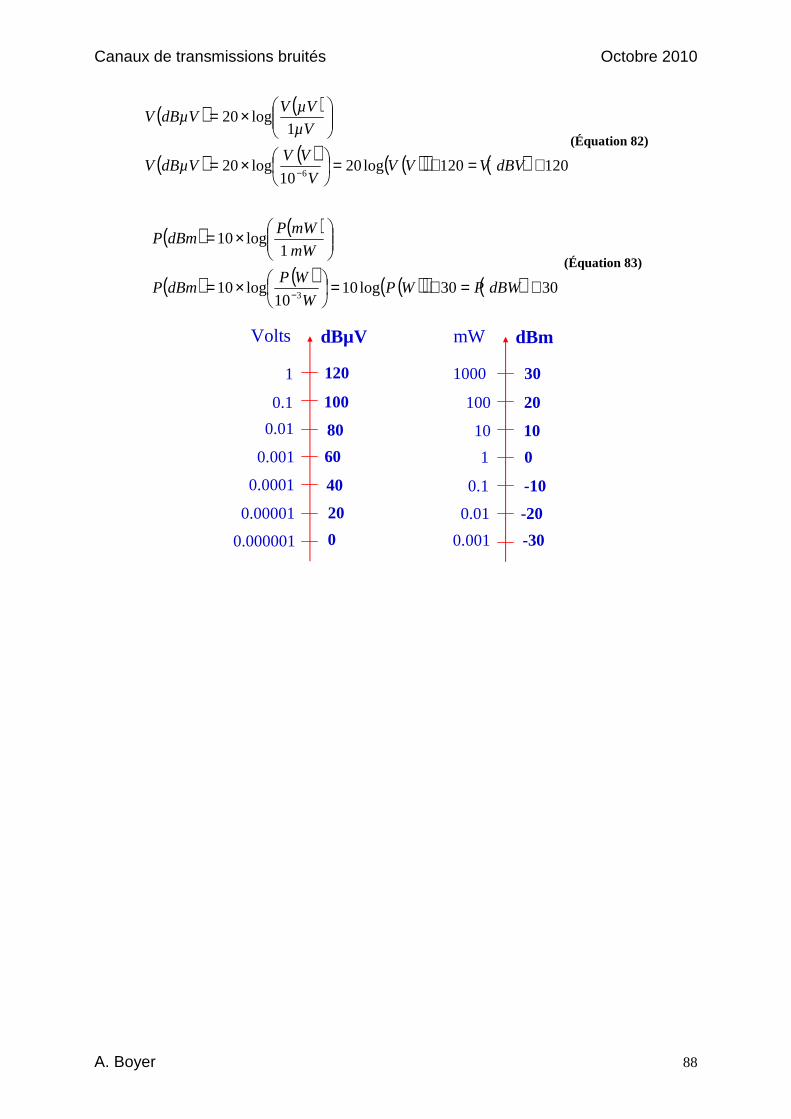
Canaux de transmissions bruités Octobre 2010
A. Boyer 88
( ) ( )
( ) ( ) ( )( ) ( ) 120120log2010
log20
1log20
6+=+=
×=
×=
− dBVVVVV
VVdBµVV
µV
µVVdBµVV
(Équation 82)
( ) ( )
( ) ( ) ( )( ) ( ) 3030log1010
log10
1log10
3+=+=
×=
×=
− dBWPWPW
WPdBmP
mW
mWPdBmP
(Équation 83)
1
0.1
0.01
0.001
Volts
60
40
20
0
80
100
120
dBµV
1
0.1
0.01
0.001
10
100
1000
mW
0
-10
-20
-30
10
20
30
dBm
0.0001
0.00001
0.000001

Canaux de transmissions bruités Octobre 2010
A. Boyer 89
Annexe B – Produits d’intermodulation
pour une non-linéarité d’ordre 3
Pour expliquer l’apparition de ces produits d’intermodulation, on peut représenter la fonction de transfert du système (par exemple un mélangeur) par un polynôme du 3e ordre (on se limite à cet ordre pour diminuer la complexité du calcul) :
2 31 2 3( ) ( ) ( ) ( )
es e eV t V t V t V tα α α= + + (Équation 84)
où Ve et Vs sont respectivement les tensions d’entrée et de sortie du système, α1 est le gain linéaire du système. Supposons le cas simplifié suivant : le signal d’entrée est constitué de 2 porteuses sinusoïdales. Le signal de sortie devient :
( ) ( ) ( )2 3
1 1 1 2 1 2 1 1 2 1 3 1 1 2 1( ) cos cos cos cos cos cossV t A t A t A t A t A t A tα ω ω α ω ω α ω ω= + + + + + (Équation 85)
( )
( ) ( )
( ) ( )
1
1 2
1
1 1 1 2 1
1 2 1 22 21 22 2 1 2
3 3
1 1 2 2
23 2 2 1 2 1 2
22 1 1
( ) cos cos
cos cos1 cos2 1 cos22
2 2 2
3cos cos3 3cos cos34 4
3 3 3cos cos(2 ) cos(2 )
2 4 4
3cos
2
sV t A t A t
t tt tA A A A
A At t t t
A A t t t
A A
α ω ω
ω ω ω ωω ωα
ω ω ω ω
α ω ω ω ω ω
ω
= +
+ + − + ++ + +
+ + +
+ + + − + +
+ 2 1 2 1
3 3cos(2 ) cos(2 )
4 4t t tω ω ω ω
+ − + +
(Équation 86)
Ce développement fait apparaître plusieurs raies à différentes fréquences harmoniques et non harmoniques. Le tableau 4 présente les amplitudes des raies jusqu’à l’ordre 3.
Fréquence 1ω 1
3 23 3 1 2
1 1 1
3 3cos
4 4
A A AA t
α αα ω
+ + Ordre 1
Fréquence 2ω 2
3 23 3 2 1
1 2 2
3 3cos
4 4
A A AA t
α αα ω
+ +
Ordre 2 Fréquence 1 2ω ω± ( ) ( )2 1 2 1 2 2 1 2 1 2cos cosA A t A A tα ω ω α ω ω+ + −
Fréquence 1 22ω ω± ( ) ( )2 2
3 1 2 3 1 21 2 1 2
3 3cos 2 cos 2
4 4
A A A At t
α αω ω ω ω+ + − Ordre 3
Fréquence 2 12ω ω± ( ) ( )
2 23 2 1 3 2 1
2 1 2 1
3 3cos 2 cos 2
4 4
A A A At t
α αω ω ω ω+ + −
….. Tableau 4 - Amplitudes des différentes composantes spectrales d’un signal résultant du produit
d’intermodulation de deux signaux sinusoïdaux
Prenons le cas d’un amplificateur de tension de gain 10. La figure 82 présente sa caractéristique de gain. Il présente une forte saturation à partir de 0.7V.
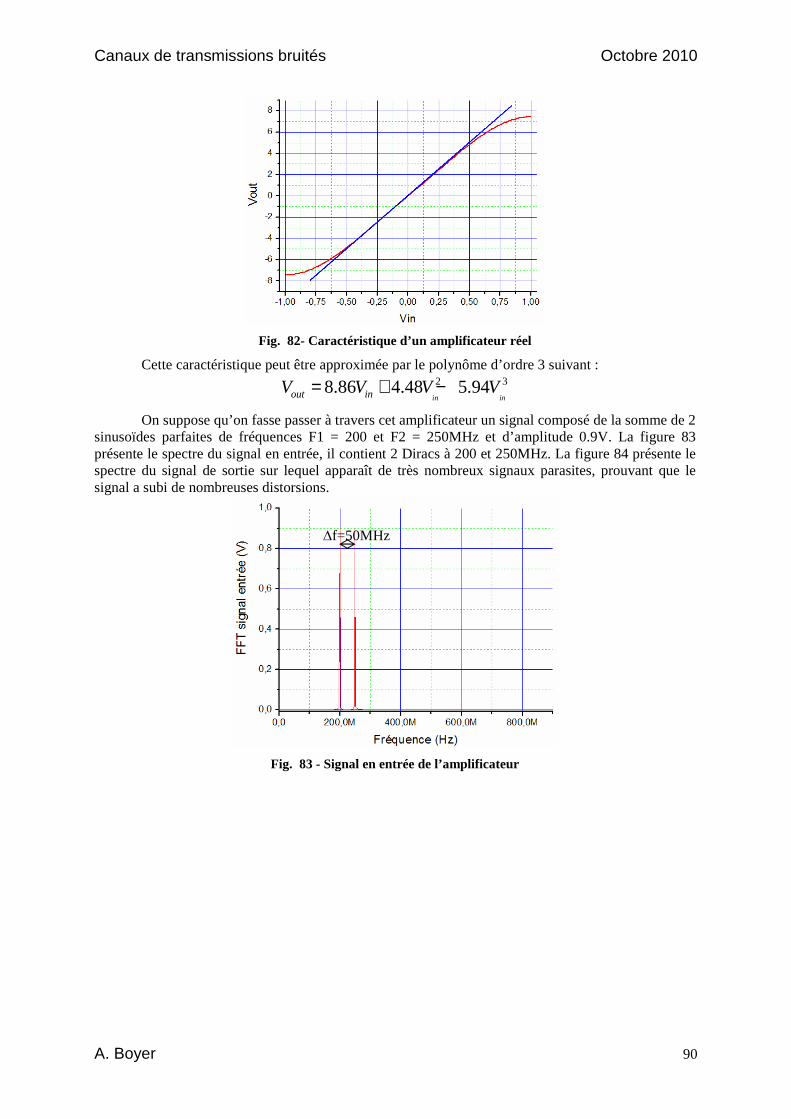
Canaux de transmissions bruités Octobre 2010
A. Boyer 90
Fig. 82- Caractéristique d’un amplificateur réel
Cette caractéristique peut être approximée par le polynôme d’ordre 3 suivant : 2 38.86 4.48 5.94
in inout inV V V V= + −
On suppose qu’on fasse passer à travers cet amplificateur un signal composé de la somme de 2 sinusoïdes parfaites de fréquences F1 = 200 et F2 = 250MHz et d’amplitude 0.9V. La figure 83 présente le spectre du signal en entrée, il contient 2 Diracs à 200 et 250MHz. La figure 84 présente le spectre du signal de sortie sur lequel apparaît de très nombreux signaux parasites, prouvant que le signal a subi de nombreuses distorsions.
Fig. 83 - Signal en entrée de l’amplificateur
∆f=50MHz
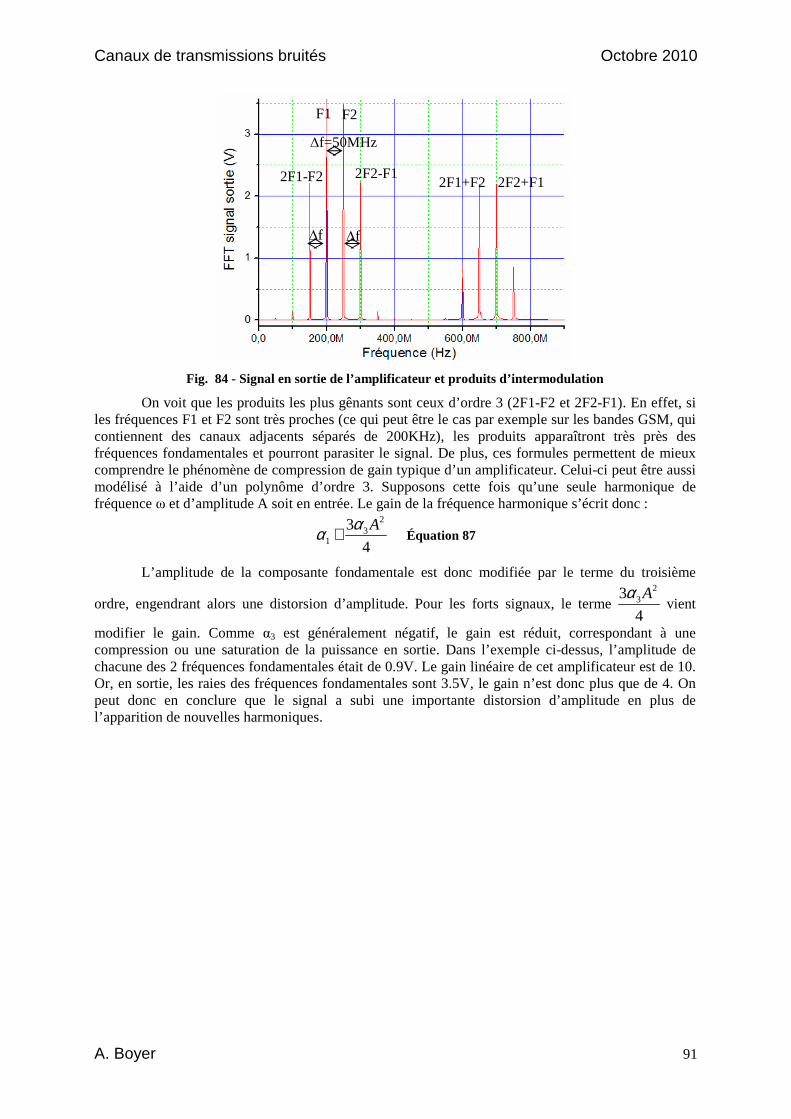
Canaux de transmissions bruités Octobre 2010
A. Boyer 91
Fig. 84 - Signal en sortie de l’amplificateur et produits d’intermodulation
On voit que les produits les plus gênants sont ceux d’ordre 3 (2F1-F2 et 2F2-F1). En effet, si les fréquences F1 et F2 sont très proches (ce qui peut être le cas par exemple sur les bandes GSM, qui contiennent des canaux adjacents séparés de 200KHz), les produits apparaîtront très près des fréquences fondamentales et pourront parasiter le signal. De plus, ces formules permettent de mieux comprendre le phénomène de compression de gain typique d’un amplificateur. Celui-ci peut être aussi modélisé à l’aide d’un polynôme d’ordre 3. Supposons cette fois qu’une seule harmonique de fréquence ω et d’amplitude A soit en entrée. Le gain de la fréquence harmonique s’écrit donc :
23
1
3
4
Aαα + Équation 87
L’amplitude de la composante fondamentale est donc modifiée par le terme du troisième
ordre, engendrant alors une distorsion d’amplitude. Pour les forts signaux, le terme 2
33
4
Aα vient
modifier le gain. Comme α3 est généralement négatif, le gain est réduit, correspondant à une compression ou une saturation de la puissance en sortie. Dans l’exemple ci-dessus, l’amplitude de chacune des 2 fréquences fondamentales était de 0.9V. Le gain linéaire de cet amplificateur est de 10. Or, en sortie, les raies des fréquences fondamentales sont 3.5V, le gain n’est donc plus que de 4. On peut donc en conclure que le signal a subi une importante distorsion d’amplitude en plus de l’apparition de nouvelles harmoniques.
F1 F2
2F2-F1 2F1-F2 2F1+F2 2F2+F1
∆f=50MHz
∆f ∆f
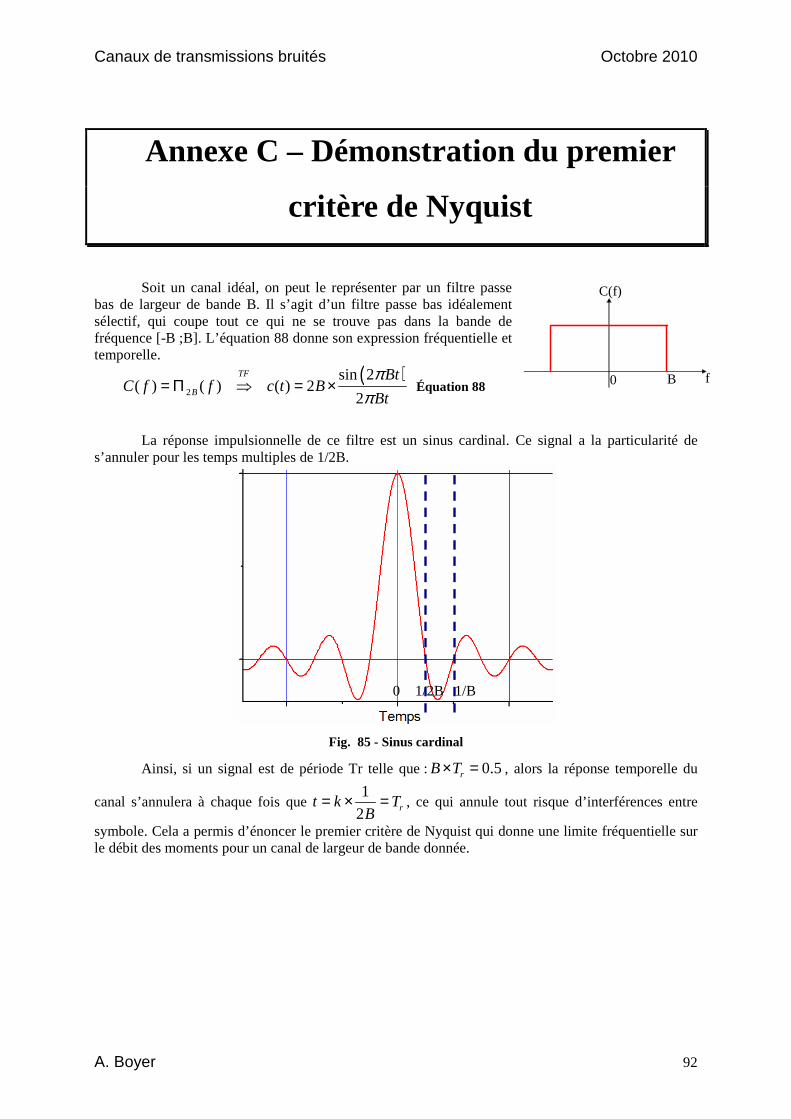
Canaux de transmissions bruités Octobre 2010
A. Boyer 92
Annexe C – Démonstration du premier
critère de Nyquist
Soit un canal idéal, on peut le représenter par un filtre passe bas de largeur de bande B. Il s’agit d’un filtre passe bas idéalement sélectif, qui coupe tout ce qui ne se trouve pas dans la bande de fréquence [-B ;B]. L’équation 88 donne son expression fréquentielle et temporelle.
( )2
sin 2( ) ( ) ( ) 2
2
TF
B
BtC f f c t B
Bt
ππ
= Π ⇒ = × Équation 88
La réponse impulsionnelle de ce filtre est un sinus cardinal. Ce signal a la particularité de
s’annuler pour les temps multiples de 1/2B.
Fig. 85 - Sinus cardinal
Ainsi, si un signal est de période Tr telle que : 0.5rB T× = , alors la réponse temporelle du
canal s’annulera à chaque fois que 1
2 rt k TB
= × = , ce qui annule tout risque d’interférences entre
symbole. Cela a permis d’énoncer le premier critère de Nyquist qui donne une limite fréquentielle sur le débit des moments pour un canal de largeur de bande donnée.
C(f)
f0 B
0 1/2B 1/B
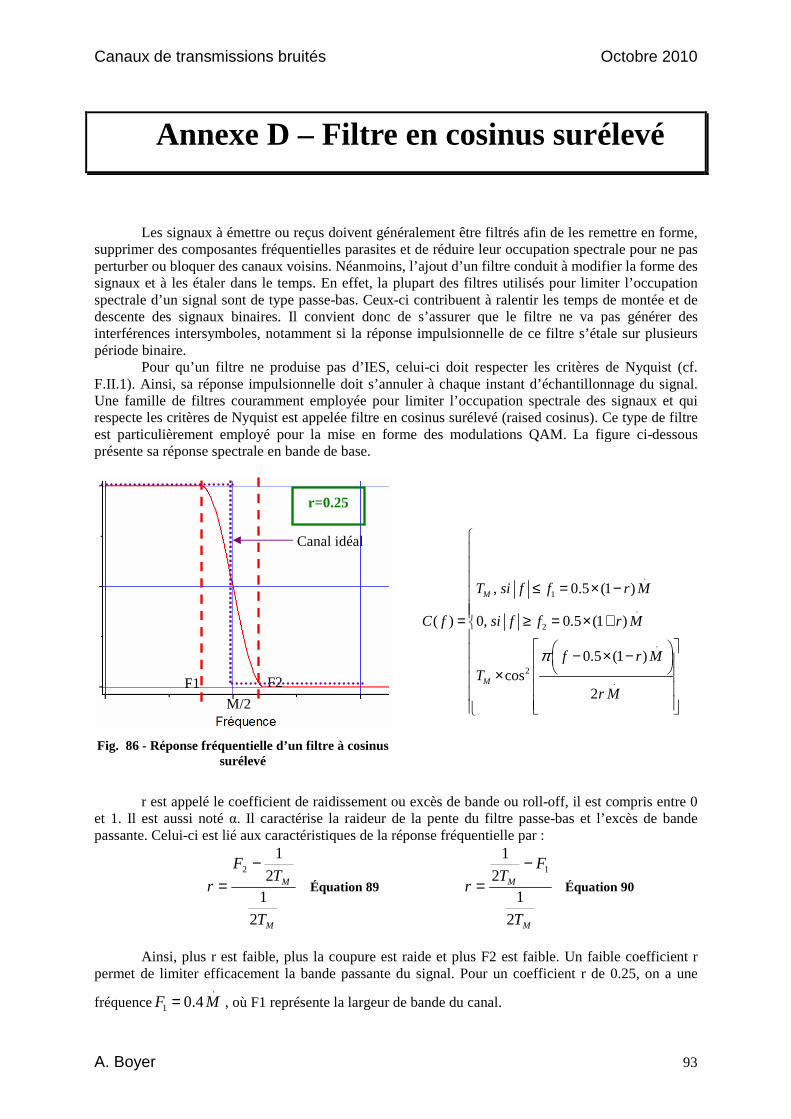
Canaux de transmissions bruités Octobre 2010
A. Boyer 93
Annexe D – Filtre en cosinus surélevé
Les signaux à émettre ou reçus doivent généralement être filtrés afin de les remettre en forme,
supprimer des composantes fréquentielles parasites et de réduire leur occupation spectrale pour ne pas perturber ou bloquer des canaux voisins. Néanmoins, l’ajout d’un filtre conduit à modifier la forme des signaux et à les étaler dans le temps. En effet, la plupart des filtres utilisés pour limiter l’occupation spectrale d’un signal sont de type passe-bas. Ceux-ci contribuent à ralentir les temps de montée et de descente des signaux binaires. Il convient donc de s’assurer que le filtre ne va pas générer des interférences intersymboles, notamment si la réponse impulsionnelle de ce filtre s’étale sur plusieurs période binaire.
Pour qu’un filtre ne produise pas d’IES, celui-ci doit respecter les critères de Nyquist (cf. F.II.1). Ainsi, sa réponse impulsionnelle doit s’annuler à chaque instant d’échantillonnage du signal. Une famille de filtres couramment employée pour limiter l’occupation spectrale des signaux et qui respecte les critères de Nyquist est appelée filtre en cosinus surélevé (raised cosinus). Ce type de filtre est particulièrement employé pour la mise en forme des modulations QAM. La figure ci-dessous présente sa réponse spectrale en bande de base.
Fig. 86 - Réponse fréquentielle d’un filtre à cosinus surélevé
.
1
.
2
.
2.
, 0.5 (1 )
( ) 0, 0.5 (1 )
0.5 (1 )cos
2
M
M
T si f f r M
C f si f f r M
f r MT
r M
π
≤ = × −= ≥ = × +
− × − ×
r est appelé le coefficient de raidissement ou excès de bande ou roll-off, il est compris entre 0
et 1. Il est aussi noté α. Il caractérise la raideur de la pente du filtre passe-bas et l’excès de bande passante. Celui-ci est lié aux caractéristiques de la réponse fréquentielle par :
M
M
T
TF
r
2
12
12 −
= Équation 89
M
M
T
FT
r
2
12
11−
= Équation 90
Ainsi, plus r est faible, plus la coupure est raide et plus F2 est faible. Un faible coefficient r
permet de limiter efficacement la bande passante du signal. Pour un coefficient r de 0.25, on a une
fréquence.
1 0.4F M= , où F1 représente la largeur de bande du canal.
M/2
F1 F2
r=0.25
Canal idéal
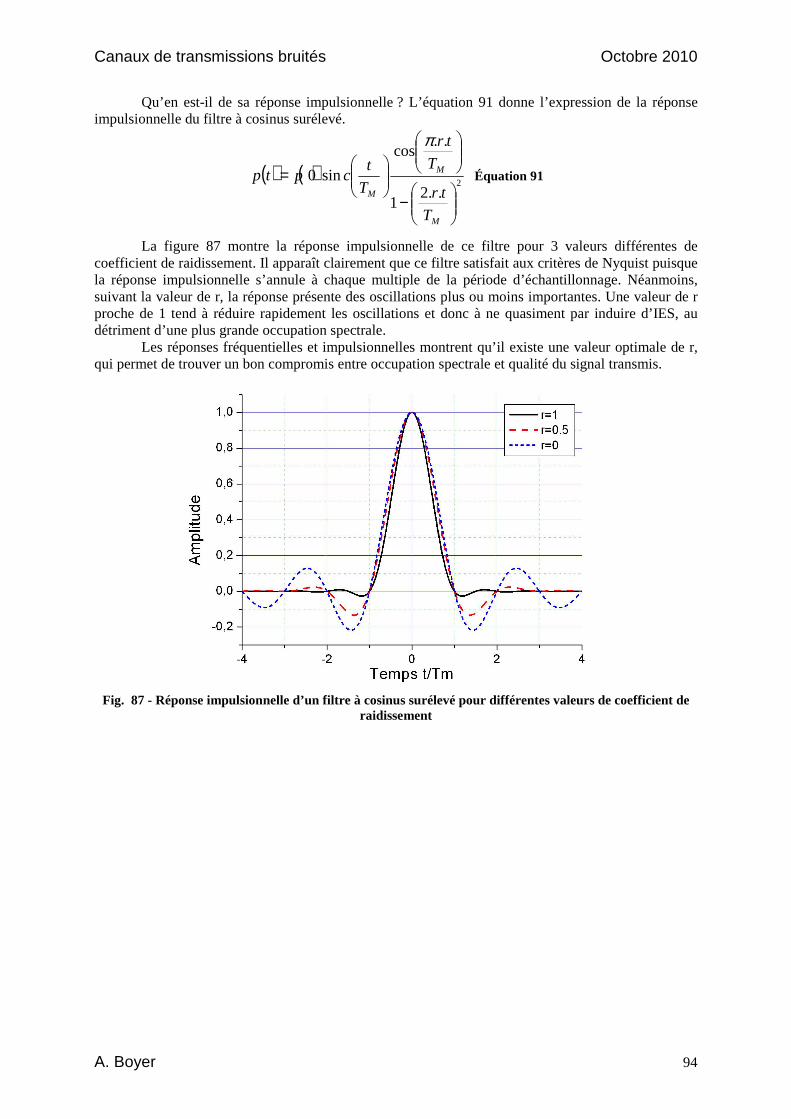
Canaux de transmissions bruités Octobre 2010
A. Boyer 94
Qu’en est-il de sa réponse impulsionnelle ? L’équation 91 donne l’expression de la réponse impulsionnelle du filtre à cosinus surélevé.
( ) ( )2
..21
..cos
sin0
−
=
M
M
M
T
tr
T
tr
T
tcptp
π
Équation 91
La figure 87 montre la réponse impulsionnelle de ce filtre pour 3 valeurs différentes de coefficient de raidissement. Il apparaît clairement que ce filtre satisfait aux critères de Nyquist puisque la réponse impulsionnelle s’annule à chaque multiple de la période d’échantillonnage. Néanmoins, suivant la valeur de r, la réponse présente des oscillations plus ou moins importantes. Une valeur de r proche de 1 tend à réduire rapidement les oscillations et donc à ne quasiment par induire d’IES, au détriment d’une plus grande occupation spectrale.
Les réponses fréquentielles et impulsionnelles montrent qu’il existe une valeur optimale de r, qui permet de trouver un bon compromis entre occupation spectrale et qualité du signal transmis.
Fig. 87 - Réponse impulsionnelle d’un filtre à cosinus surélevé pour différentes valeurs de coefficient de raidissement
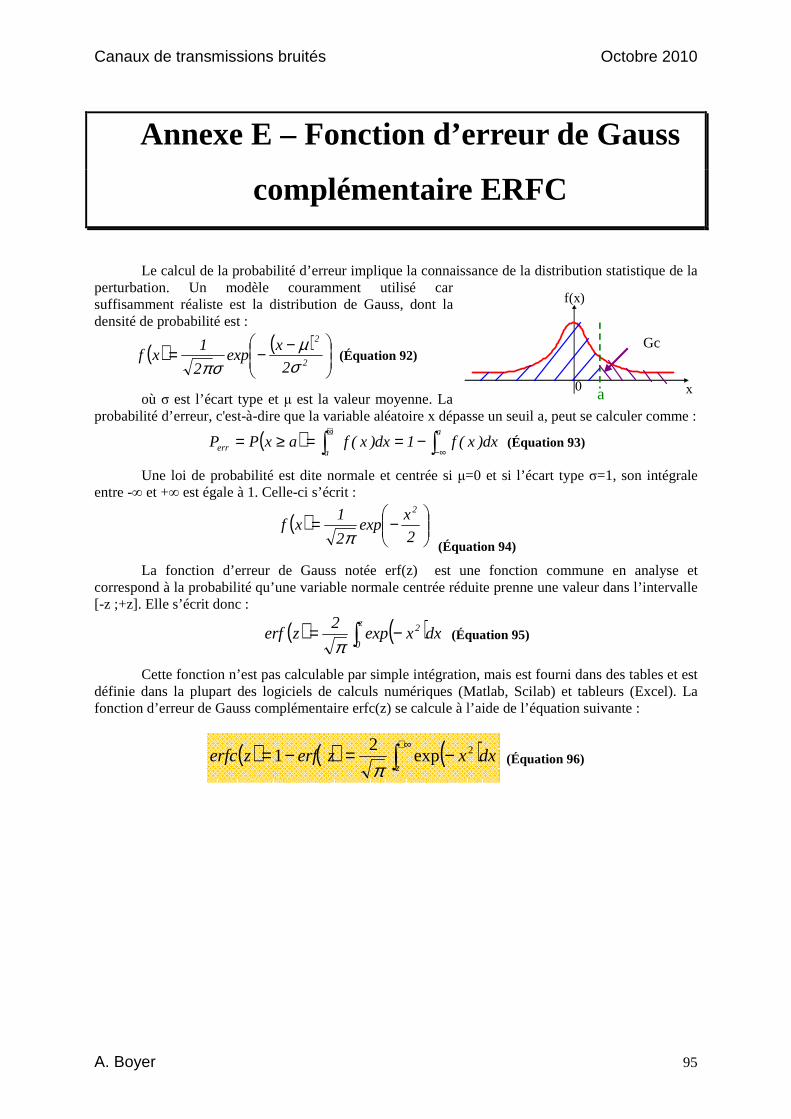
Canaux de transmissions bruités Octobre 2010
A. Boyer 95
Annexe E – Fonction d’erreur de Gauss
complémentaire ERFC
Le calcul de la probabilité d’erreur implique la connaissance de la distribution statistique de la perturbation. Un modèle couramment utilisé car suffisamment réaliste est la distribution de Gauss, dont la densité de probabilité est :
( ) ( )
−−=2
2
2
xexp
2
1xf
σµ
σπ (Équation 92)
où σ est l’écart type et µ est la valeur moyenne. La probabilité d’erreur, c'est-à-dire que la variable aléatoire x dépasse un seuil a, peut se calculer comme :
( ) ∫∫ ∞−
+∞−==≥=
a
aerr dx)x(f1dx)x(faxPP (Équation 93)
Une loi de probabilité est dite normale et centrée si µ=0 et si l’écart type σ=1, son intégrale entre -∞ et +∞ est égale à 1. Celle-ci s’écrit :
( )
−=
2
xexp
2
1xf
2
π (Équation 94)
La fonction d’erreur de Gauss notée erf(z) est une fonction commune en analyse et correspond à la probabilité qu’une variable normale centrée réduite prenne une valeur dans l’intervalle [-z ;+z]. Elle s’écrit donc :
( ) ( )dxxexp2
zerfz
0
2
∫ −=π
(Équation 95)
Cette fonction n’est pas calculable par simple intégration, mais est fourni dans des tables et est définie dans la plupart des logiciels de calculs numériques (Matlab, Scilab) et tableurs (Excel). La fonction d’erreur de Gauss complémentaire erfc(z) se calcule à l’aide de l’équation suivante :
( ) ( ) ( )dxxzerfzerfcz∫
∞+−=−= 2exp
21
π (Équation 96)
Gc
f(x)
x0 a
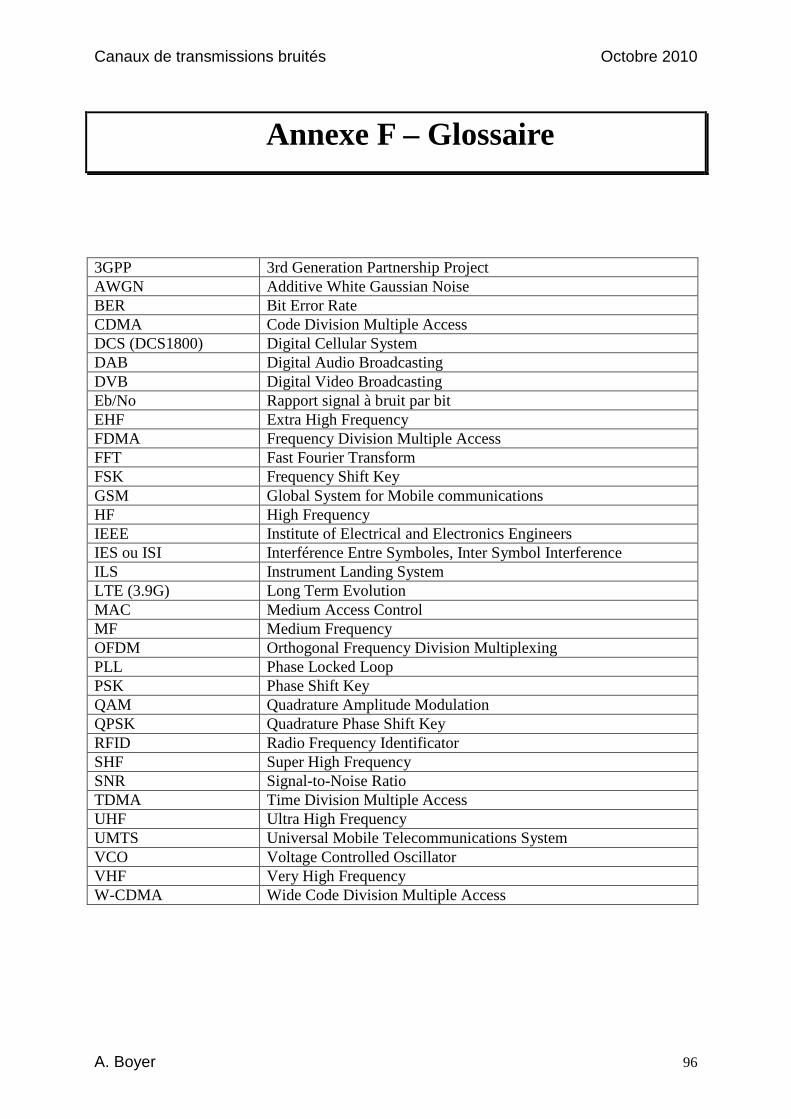
Canaux de transmissions bruités Octobre 2010
A. Boyer 96
Annexe F – Glossaire
3GPP 3rd Generation Partnership Project AWGN Additive White Gaussian Noise BER Bit Error Rate CDMA Code Division Multiple Access DCS (DCS1800) Digital Cellular System DAB Digital Audio Broadcasting DVB Digital Video Broadcasting Eb/No Rapport signal à bruit par bit EHF Extra High Frequency FDMA Frequency Division Multiple Access FFT Fast Fourier Transform FSK Frequency Shift Key GSM Global System for Mobile communications HF High Frequency IEEE Institute of Electrical and Electronics Engineers IES ou ISI Interférence Entre Symboles, Inter Symbol Interference ILS Instrument Landing System LTE (3.9G) Long Term Evolution MAC Medium Access Control MF Medium Frequency OFDM Orthogonal Frequency Division Multiplexing PLL Phase Locked Loop PSK Phase Shift Key QAM Quadrature Amplitude Modulation QPSK Quadrature Phase Shift Key RFID Radio Frequency Identificator SHF Super High Frequency SNR Signal-to-Noise Ratio TDMA Time Division Multiple Access UHF Ultra High Frequency UMTS Universal Mobile Telecommunications System VCO Voltage Controlled Oscillator VHF Very High Frequency W-CDMA Wide Code Division Multiple Access
Canaux de transmissions bruités Octobre 2010
A. Boyer 97
Travaux Dirigés
Canaux de transmissions bruités Octobre 2010
A. Boyer 98
NOTIONS DE BASE
1. BRUIT DE FOND Calculer le niveau absolu de bruit thermique obtenu pour une température ambiante de 25° C,
dans le cas :
d’une voie téléphonique
d’une transmission de musique
d’une transmission de télévision
Quelle est la puissance minimale que doit avoir le signal transmis pour assurer un rapport
signal à bruit d’au moins 50 dB ?
2. DISTORSION DE SIGNAUX SINUSOÏDAUX PAR UN OPERATEUR QUADRATIQUE
Déterminer les taux de distorsion harmonique, la forme temporelle et le spectre du signal de sortie d’un opérateur quadratique, lorsque le signal d’entrée est :
purement sinusoïdal
la somme de 2 termes sinusoïdaux
A quelles applications pourraient servir un opérateur quadratique
3. MESURE DE L’ INFORMATION - IMAGE TV Une image TV haute résolution en noir et blanc comporte environ 2 106 pixels et 256 niveaux
de gris. La fréquence de renouvellement est de 32 images par seconde. On suppose que les pixels sont indépendants les uns des autres et que les niveaux de gris sont équiprobables.
1. Evaluer le débit d’information de cette émission de télévision. 2. Quelle est la bande passante nécessaire pour transmettre le signal afin d’assurer une
réception de qualité ? (le rapport signal à bruit minimum pour assurer une réception de qualité est de 10 dB)
4. MULTIPLEX PCM Cinq signaux de télémétrie d'une largeur de bande de 1 kHz doivent être transmis en multiplex
PCM. L'erreur maximale tolérée sur la quantification est de 0,5% de leur valeur crête. Ils sont échantillonnés à 20% au-dessus de la fréquence de Nyquist. La synchronisation et le tramage demandent un supplément de bits de 0,5%. Déterminer le débit minimal de la liaison et la bande passante requise pour la transmission du signal multiplexé.
Canaux de transmissions bruités Octobre 2010
A. Boyer 99
5. CANAL AVEC BRUIT BLANC ADDITIF GAUSSIEN Un signal analogique de 4 kHz de largeur de bande est échantillonné à 1,25 fois la fréquence
de Nyquist, chaque échantillon étant quantifié sur 256 niveaux équiprobables. On suppose que les échantillons sont statistiquement indépendants.
1. Quel est le débit d’informations de la source ? 2. Peut-on transmettre sans erreur les signaux de cette source sur un canal avec bruit blanc
additif gaussien centré de 10 kHz de bande passante et présentant un rapport signal sur bruit de 20 dB ?
3. Calculer le SNR requis pour assurer une transmission sans erreur dans les conditions précédentes.
4. Calculer la bande passante requise pour acheminer sans erreur les signaux de la source considérée sur un canal avec bruit blanc additif gaussien centré de SNR 20 dB.
6. DIAPHONIE DANS UN DEMODULATEUR I/Q On considère une modulation QPSK. On s’intéresse à l’effet d’une désynchronisation entre le
signal modulé reçu et la porteuse reconstituée par le récepteur. 1. En reprenant le modulateur I/Q présenté à la figure 57, proposez le schéma de principe d’un
démodulateur I/Q. Calculer les expressions théoriques des signaux modulés et démodulés. 2. Soit φ(t) le déphasage instantané entre le signal modulé reçu et la porteuse reconstituée par
le récepteur. Quel est l’impact sur les signaux démodulés ? 3. On note distorsion le rapport entre le signal parasite généré par le déphasage sur le signal
voulu. Quelle est la tolérance sur le déphasage pour que la distorsion soit inférieure à -40 dB ?
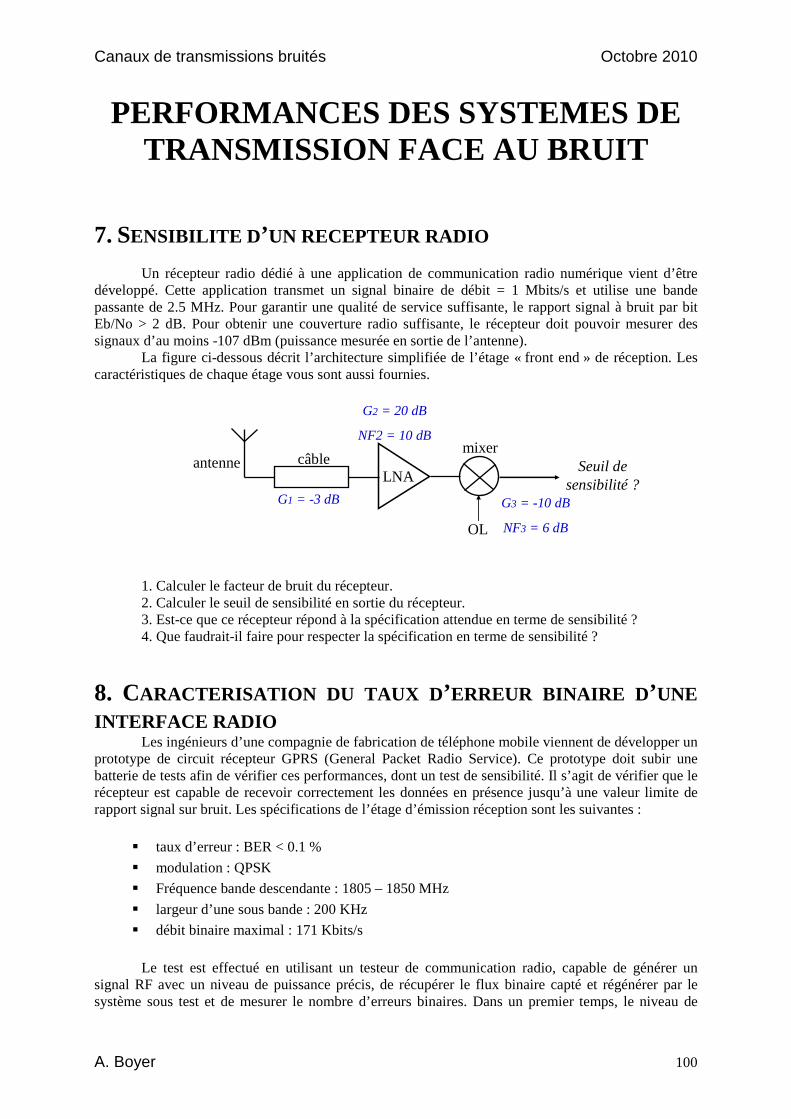
Canaux de transmissions bruités Octobre 2010
A. Boyer 100
PERFORMANCES DES SYSTEMES DE TRANSMISSION FACE AU BRUIT
7. SENSIBILITE D ’UN RECEPTEUR RADIO Un récepteur radio dédié à une application de communication radio numérique vient d’être
développé. Cette application transmet un signal binaire de débit = 1 Mbits/s et utilise une bande passante de 2.5 MHz. Pour garantir une qualité de service suffisante, le rapport signal à bruit par bit Eb/No > 2 dB. Pour obtenir une couverture radio suffisante, le récepteur doit pouvoir mesurer des signaux d’au moins -107 dBm (puissance mesurée en sortie de l’antenne).
La figure ci-dessous décrit l’architecture simplifiée de l’étage « front end » de réception. Les caractéristiques de chaque étage vous sont aussi fournies.
LNAantenne câble
mixer
OL
G1 = -3 dB
G2 = 20 dB
NF2 = 10 dB
G3 = -10 dB
NF3 = 6 dB
Seuil de sensibilité ?
1. Calculer le facteur de bruit du récepteur. 2. Calculer le seuil de sensibilité en sortie du récepteur. 3. Est-ce que ce récepteur répond à la spécification attendue en terme de sensibilité ? 4. Que faudrait-il faire pour respecter la spécification en terme de sensibilité ?
8. CARACTERISATION DU TAUX D ’ERREUR BINAIRE D ’UNE INTERFACE RADIO
Les ingénieurs d’une compagnie de fabrication de téléphone mobile viennent de développer un prototype de circuit récepteur GPRS (General Packet Radio Service). Ce prototype doit subir une batterie de tests afin de vérifier ces performances, dont un test de sensibilité. Il s’agit de vérifier que le récepteur est capable de recevoir correctement les données en présence jusqu’à une valeur limite de rapport signal sur bruit. Les spécifications de l’étage d’émission réception sont les suivantes :
taux d’erreur : BER < 0.1 %
modulation : QPSK
Fréquence bande descendante : 1805 – 1850 MHz
largeur d’une sous bande : 200 KHz
débit binaire maximal : 171 Kbits/s
Le test est effectué en utilisant un testeur de communication radio, capable de générer un
signal RF avec un niveau de puissance précis, de récupérer le flux binaire capté et régénérer par le système sous test et de mesurer le nombre d’erreurs binaires. Dans un premier temps, le niveau de
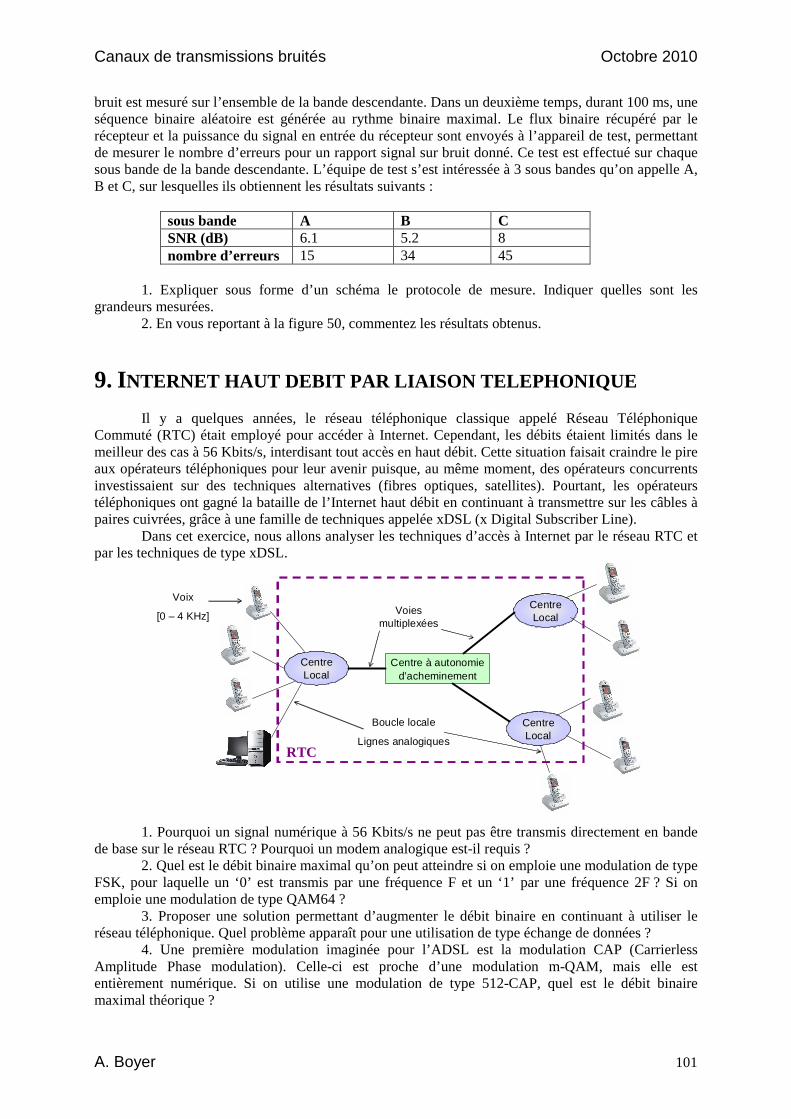
Canaux de transmissions bruités Octobre 2010
A. Boyer 101
bruit est mesuré sur l’ensemble de la bande descendante. Dans un deuxième temps, durant 100 ms, une séquence binaire aléatoire est générée au rythme binaire maximal. Le flux binaire récupéré par le récepteur et la puissance du signal en entrée du récepteur sont envoyés à l’appareil de test, permettant de mesurer le nombre d’erreurs pour un rapport signal sur bruit donné. Ce test est effectué sur chaque sous bande de la bande descendante. L’équipe de test s’est intéressée à 3 sous bandes qu’on appelle A, B et C, sur lesquelles ils obtiennent les résultats suivants :
sous bande A B C SNR (dB) 6.1 5.2 8 nombre d’erreurs 15 34 45
1. Expliquer sous forme d’un schéma le protocole de mesure. Indiquer quelles sont les
grandeurs mesurées. 2. En vous reportant à la figure 50, commentez les résultats obtenus.
9. INTERNET HAUT DEBIT PAR LIAISON TELEPHONIQUE Il y a quelques années, le réseau téléphonique classique appelé Réseau Téléphonique
Commuté (RTC) était employé pour accéder à Internet. Cependant, les débits étaient limités dans le meilleur des cas à 56 Kbits/s, interdisant tout accès en haut débit. Cette situation faisait craindre le pire aux opérateurs téléphoniques pour leur avenir puisque, au même moment, des opérateurs concurrents investissaient sur des techniques alternatives (fibres optiques, satellites). Pourtant, les opérateurs téléphoniques ont gagné la bataille de l’Internet haut débit en continuant à transmettre sur les câbles à paires cuivrées, grâce à une famille de techniques appelée xDSL (x Digital Subscriber Line).
Dans cet exercice, nous allons analyser les techniques d’accès à Internet par le réseau RTC et par les techniques de type xDSL.
Centre LocalCentre Local
Centre Local
Centre Local
Centre LocalCentre Local
Centre à autonomie d’acheminement
RTC
Voies multiplexées
Boucle locale
Lignes analogiques
Voix
[0 – 4 KHz]
1. Pourquoi un signal numérique à 56 Kbits/s ne peut pas être transmis directement en bande de base sur le réseau RTC ? Pourquoi un modem analogique est-il requis ?
2. Quel est le débit binaire maximal qu’on peut atteindre si on emploie une modulation de type FSK, pour laquelle un ‘0’ est transmis par une fréquence F et un ‘1’ par une fréquence 2F ? Si on emploie une modulation de type QAM64 ?
3. Proposer une solution permettant d’augmenter le débit binaire en continuant à utiliser le réseau téléphonique. Quel problème apparaît pour une utilisation de type échange de données ?
4. Une première modulation imaginée pour l’ADSL est la modulation CAP (Carrierless Amplitude Phase modulation). Celle-ci est proche d’une modulation m-QAM, mais elle est entièrement numérique. Si on utilise une modulation de type 512-CAP, quel est le débit binaire maximal théorique ?
Canaux de transmissions bruités Octobre 2010
A. Boyer 102
5. Quelles sont les conséquences de l’ajout de bruit sur le signal ? Comment maintenir une qualité de service constante ?
6. Pour surmonter les problèmes de la modulation CAP, une autre modulation appelée Discrete Multi-Tone a été proposée. Elle est aussi basée sur une modulation m-QAM, mais la bande allouée est subdivisée en canaux de 4.3 KHz de largeur, 250 sous-canaux sont réservés au signal ADSL. Si une modulation de type QAM sur 15 bits est employée, quel est le débit maximal théorique ? Quel est l’avantage de cette technique de modulation par rapport à la modulation CAP en terme de robustesse au bruit ?
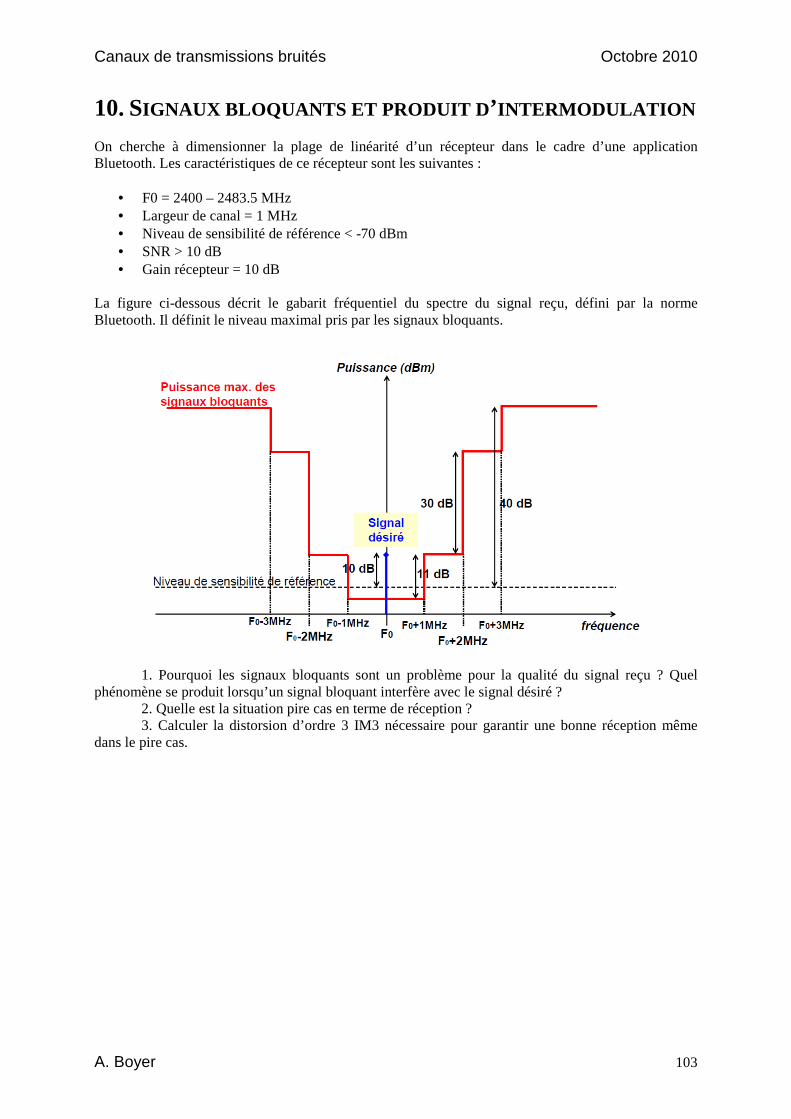
Canaux de transmissions bruités Octobre 2010
A. Boyer 103
10. SIGNAUX BLOQUANTS ET PRODUIT D ’ INTERMODULATION On cherche à dimensionner la plage de linéarité d’un récepteur dans le cadre d’une application Bluetooth. Les caractéristiques de ce récepteur sont les suivantes :
• F0 = 2400 – 2483.5 MHz • Largeur de canal = 1 MHz • Niveau de sensibilité de référence < -70 dBm • SNR > 10 dB • Gain récepteur = 10 dB
La figure ci-dessous décrit le gabarit fréquentiel du spectre du signal reçu, défini par la norme Bluetooth. Il définit le niveau maximal pris par les signaux bloquants.
1. Pourquoi les signaux bloquants sont un problème pour la qualité du signal reçu ? Quel phénomène se produit lorsqu’un signal bloquant interfère avec le signal désiré ?
2. Quelle est la situation pire cas en terme de réception ? 3. Calculer la distorsion d’ordre 3 IM3 nécessaire pour garantir une bonne réception même
dans le pire cas.