Embed Size (px)
Citation preview

A. DERARDJA, K. S. AOUBID et W. BENABBAS 8
CHAP. II LES SYSTEMES OPTIQUES II. 1 Introduction
Toute surface au contact de laquelle la lumière subit une réflexion ou une réfraction définie un système optique. Un système est dioptrique s’il est constitué seulement de dioptres,
catoptrique s’il est constitué seulement de miroirs et catadioptrique s’il est composé de
l’association des deux. Le système est dit centré s’il possède un axe de symétrie de révolution appelé axe principal ou
axe optique. Les centres de toutes les surfaces le formant sont traversés par cet axe. En conséquence, les surfaces planes sont perpendiculaires à cet axe. II. 2 Le Miroir Plan
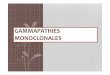
Le miroir plan est une surface plane réfléchissante qui donne, par réflexion, l’image
d’un objet considéré. Tous les rayons issus de la source réelle A se réfléchissent en suivant la loi de Descartes et semblent provenir du point A’ image, symétrique de A par rapport au
miroir. A’ est une image virtuelle (Fig. 1).
Figure 1
𝑖 = 𝑖′ 𝑡𝑔𝑖 = 𝑡𝑔𝑖′ ⇒ 𝐻𝐼
𝐻𝐴=
𝐻𝐼
𝐻𝐴′ ⇒ 𝐻𝐴 = 𝐻𝐴′
La déviation D du rayon incident après réflexion est donnée par : 𝐷 = 𝜋 − 2𝑖 Remarque : A travers un miroir plan, si le point objet A est réel, son image A’ est virtuelle et
inversement. II. 3 Le Dioptre Plan
Le dioptre plan est une surface plane séparant deux milieux transparents, homogènes et d’indices de réfraction différents et qui forme par réfraction l’image d’un objet donné. Figure 2 La construction géométrique de l’image A’ d’un objet A à travers le dioptre plan obéit à la loi de Descartes :
A H A’
D M i i'
n1
n2 r
A
A H I
D
i
n1<n2

A. DERARDJA, K. S. AOUBID et W. BENABBAS 9
𝑛1𝑠𝑖𝑛𝑖 = 𝑛2𝑠𝑖𝑛𝑟 𝑛1 < 𝑛2 ⇒ 𝑖 > 𝑟
𝑡𝑔𝑖 =𝐻𝐼
𝐻𝐴 𝑒𝑡 𝑡𝑔𝑟 =
𝐻𝐼
𝐻𝐴′
𝐻𝐴′ = 𝐻𝐴𝑡𝑔𝑖
𝑡𝑔𝑟= 𝐻𝐴
(𝑠𝑖𝑛𝑖)(𝑐𝑜𝑠𝑟)
(𝑠𝑖𝑛𝑟)(𝑐𝑜𝑠𝑖)= 𝐻𝐴
𝑛2
𝑛1
𝑐𝑜𝑠𝑟
𝑐𝑜𝑠𝑖
Dans les conditions de Gauss, les angles i et r sont faibles d’où :
𝑐𝑜𝑠𝑖 ≃ 𝑐𝑜𝑠𝑟 = 1 ⟹ 𝐻𝐴′ = 𝐻𝐴𝑛2
𝑛1
L’objet et l’image sont toujours situés du même coté dans un même plan ; ils sont donc de nature différente. La déviation D du rayon incident après réfraction est donnée par : 𝐷 = 𝑖 − 𝑟 II. 3. 1 Influence de la réfringence des milieux
a) Réfraction limite : Si un rayon lumineux passe du milieu le moins réfringent au milieu le plus réfringent c'est-à-dire :
𝑛1 < 𝑛2 ⟹ 𝑖 > 𝑟
Avec un angle d’incidence |𝑖| ≤𝜋
2 ;
seule la réfraction est possible (fig. 3). A la limite, l’angle d’incidence prend la valeur (
𝜋
2) et la réfraction est limitée par l’angle de
réfraction 𝜆, déterminé par : sin 𝜆 =
𝑛1
𝑛2
En conséquence : pour − 𝜋
2≤ 𝑖 ≤ +
𝜋
2 ⟹ −𝜆 ≤ 𝑟 ≤ 𝜆
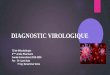
b) Incidence limite-réflexion totale :
Si un rayon passe du milieu le plus réfringent au milieu le moins réfringent c'est-à-dire :
𝑛1 > 𝑛2 ⟹ 𝑖 < 𝑟
Figure 3
𝑖 =𝜋
2
n1
n2 r
I 𝜆
π
π
i

A. DERARDJA, K. S. AOUBID et W. BENABBAS 10
L’angle d’incidence 𝑖 varie jusqu’à la valeur
limite 𝑖0, pour laquelle l’angle de réfraction
prend la valeur 𝜋/2.
Au-delà de cette valeur, l’angle de réfraction n’existe plus et le rayon est alors réfléchi (fig.4).
L’angle 𝑖0 est appelé angle d’incidence limite.
0 ≤ 𝑖 ≤ +𝑖0 ⟹ 0 ≤ 𝑟 ≤𝜋
2
Si 𝑖 > 𝑖0, le rayon subit une réflexion totale. II. 4 Fibre optique
Une fibre optique est un fil fin formé de deux matériaux transparents. Le matériau ayant l’indice de réfraction le plus élevé constitue le cœur de la fibre, l’autre matériau en
constitue la gaine.
Généralement, les fibres optiques sont classées en deux catégories :
- Les fibres monomodes : ce sont les fibres qui ont un cœur très fin (de l’ordre de la
longueur d’onde du signal transmis) ; tel que le chemin de propagation est pratiquement directe. Le signal est donc très peu déformé.
- Les fibres multi-modes : les rayons lumineux peuvent suivre des trajets différents suivant l’angle d’incidence. Les rayons peuvent arriver au bout de la ligne à des instants différents.
Selon les propriétés du cœur de la fibre, on distingue deux types principaux de fibres
optiques : la fibre à saut d’indice et la fibre à gradient d’indice. II. 4. 1 La fibre à saut d’indice
C’est une fibre dont le cœur est constitué d’un matériau à indice de réfraction constant. Pour qu’un rayon lumineux soit canalisé à l’intérieur d’une fibre à saut d’indice par réflexion
(fig. 5), il faut que le rayon lumineux rencontre l’interface entre le cœur et la gaine avec un angle 𝑖1 tel que :
𝒔𝒊𝒏𝒊𝟏 ≥𝒏𝒈
𝒏𝒄
Figure 5 Où : 𝑛𝑔 est l’indice de réfraction de la gaine et 𝑛𝑐 celui du cœur.
Figure 4
i i1 r
ng
nc
𝑖 =𝜋
2
n1
n2 r
I
i0 i

A. DERARDJA, K. S. AOUBID et W. BENABBAS 11
II. 4. 1. 1 Ouverture numérique de la fibre (ON)
L’ouverture numérique est une mesure définissant l’angle maximal d’injection d’un
signal dans une fibre optique. Au-delà de cet angle, la fibre ne peut plus collecter la lumière. On considère une fibre optique, dont l’indice du cœur est 𝑛1 et l’indice de la gaine est 𝑛2, placée dans un milieu d’indice 𝑛0. Afin d’assurer la propagation du faisceau incident dans la
fibre il faut que (fig. 5) : 𝑠𝑖𝑛𝑖1 ≥
𝑛2
𝑛1
Comme : 𝑖1 =𝜋
2− 𝑟 ⟹ 𝑠𝑖𝑛 (
𝜋
2− 𝑟) ≥
𝑛2
𝑛1 ⟹ 𝑐𝑜𝑠𝑟 ≥
𝑛2
𝑛1
√1 − 𝑠𝑖𝑛2𝑟 ≥𝑛2
𝑛1 ⟹ 1 − 𝑠𝑖𝑛2𝑟 ≥ (
𝑛2
𝑛1)2
Aussi on a :
𝑛0𝑠𝑖𝑛𝑖 = 𝑛1𝑠𝑖𝑛𝑟 ⟹ 𝑠𝑖𝑛𝑟 =𝑛0
𝑛1𝑠𝑖𝑛𝑖
d’où :
1 − (𝑛0
𝑛1)2
𝑠𝑖𝑛2𝑖 ≥ (𝑛2
𝑛1)2
⟹ 𝑠𝑖𝑛2𝑖 ≤𝑛1
2 − 𝑛22
𝑛02
𝑠𝑖𝑛𝑖 ≤√𝑛1
2 − 𝑛22
𝑛0 ⟹ 𝑂𝑁 = 𝑠𝑖𝑛𝑖0 =
√𝑛12 − 𝑛2
2
𝑛02
Où 𝑖0 est l’angle maximal. II. 4. 2 Fibre à gradient d’indice
C’est une fibre dont le cœur est constitué d’un matériau à indice variable. L’indice
diminue progressivement en allant du centre du cœur vers les parois. La variation est
comprise entre 0,5 à 1% et elle est traduite mathématiquement par un gradient d’indice radial
dirigé vers l’axe.
𝑔𝑟𝑎𝑑⃗⃗⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ 𝑛 =𝑑(𝑛�⃗� )
𝑑𝑠 𝑒𝑡 𝑛(𝑟) = 𝑛1(1 − 𝛽𝑟2)
Dans ce cas le trajet lumineux obéit à l’équation : 𝑑2𝑟
𝑑𝑧2 = −2𝑛1𝛽𝑟 (𝛽 est une constante) Figure 6 . L’équation précédente a pour solution des sinusoïdes de période : 𝑝 = 2𝜋√2𝛽 II. 4. 2. 1 Ouverture numérique
L’ouverture numérique d’une fibre à gradient d’indice est donnée par :
𝑂𝑁 = √2𝑛1(𝑛1 − 𝑛2) où 𝑛1 est l’indice du cœur près de l’axe et 𝑛2 est celui de la gaine.
�⃗�
r
dr
dS
dz
Z

A. DERARDJA, K. S. AOUBID et W. BENABBAS 12
II. 4. 3 Applications médicales
La fibre optique est utilisée en médecine tant pour diagnostiquer que pour traiter certaines maladies. Pour le diagnostic, un câble comportant des fibres optiques transportent de la lumière à l’intérieur du corps. Cette lumière est réfléchie par les organes internes et elle est captée par un autre câble renfermant des fibres optiques et permettant de cheminer cette lumière vers le système d’imagerie vidéo. Il est donc possible de regarder en temps réel ce qui
se passe dans un organe cible.
L’endoscope et le fibroscope représentent un exemple d’application très connu en médecine.
Il sert à véhiculer l’image de la zone à explorer jusqu’à l’œil du médecin réalisant l’examen.
Quant au traitement, on injecte la lumière intense d’un laser dans une fibre optique qui le transporte à l’intérieur du corps humain où il interagira par effet thermique avec les tissus. II. 5 Le miroir sphérique
Toute surface sphérique réfléchissante est un miroir sphérique. L’axe optique passe
par le centre C du miroir et son sommet S. Il existe deux types de miroirs sphériques selon le signe du rayon de courbure 𝑆𝐶̅̅̅̅ (fig. 7)
Figure 7 II. 5. 1 Foyer d’un miroir sphérique
Le miroir sphérique admet un foyer présentant les propriétés suivantes :
-Tout rayon incident parallèle se réfléchit vers le foyer du miroir. -Tout rayon incident passant par le foyer se réfléchit parallèlement à l’axe du miroir.
Le foyer F est à mi-chemin entre le sommet S et le centre C du miroir sphérique tel que :
SF̅̅ ̅ =SC̅̅ ̅
2
Le foyer F est réel si le miroir est concave, virtuel si le miroir est convexe.
S C C S
S
Schéma du miroir concave
Schéma du miroir convexe
+
+
S C C S
𝑆𝐶̅̅̅̅ est négatif Miroir concave
𝑆𝐶̅̅̅̅ est positif Miroir convexe

A. DERARDJA, K. S. AOUBID et W. BENABBAS 13
II. 5. 2 Relation de conjugaison à travers un miroir sphérique
La relation de conjugaison est établie en utilisant l’approximation de Gauss car le
miroir sphérique est approximativement stigmate. Pour un point objet A, l’image A’ du même point A est déterminée par :
1
SA′+
1
SA=
2
SC=
1
SF= ν
où 𝜈 représente la vergence du miroir sphérique. Remarques - Le miroir sphérique est convergent si sa vergence est négative, - Le miroir sphérique est divergent si sa vergence est positive.
II. 5. 3. Grandissement linéaire
On définit le grandissement linéaire comme étant le rapport des grandeurs image et objet ; tel que :
γ =A′B′
AB= −
SA′
SA=
CA′
CA
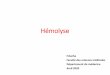
II. 5. 4 Constructions géométriques
Afin de construire l’image A’B’ d’un objet AB à travers un miroir sphérique, on utilise trois rayons lumineux (fig. 8) :
- Un rayon qui passe par le centre C et qui revient sur lui-même. - Un rayon qui tombe sur le sommet S du miroir avec un angle d’incidence i et qui est réfléchi
avec le même angle. - Un rayon qui arrive ou sort parallèle à l’axe optique et qui passe par le foyer du miroir.
Figure 8
Objet réel-Image réelle Objet réel-Image virtuelle
+ B
B’
A S A’ F C A C S
B
F
B’
A’

A. DERARDJA, K. S. AOUBID et W. BENABBAS 14
II. 6 Le dioptre sphérique Figure 9 On se donne un dioptre sphérique séparant deux milieux d’indices de réfraction différents n1 et n2 (fig. 9). Dans les triangles ICA et ICA’, on a :
𝛼 + 𝛽 + (𝜋 − 𝑖) = 𝜋 et 𝑟 + 𝛾 + (𝜋 − 𝛽) = 𝜋 En orientant les angles et en considérant leur signe, on aura :
+𝛼 − 𝛽 = 𝑖 et −𝛾 + 𝑟 + (𝜋 + 𝛽) = 𝜋
⟹ 𝑖 = 𝛼 − 𝛽 et 𝑟 = 𝛾 − 𝛽 Aussi :
tgα =IH
HA , tgβ =
IH
HC et tgγ =
IH
HA′
Dans les conditions de Gauss : 𝑡𝑔𝛼 ≃ 𝛼 , 𝑡𝑔𝛽 ≃ 𝛽 𝑒𝑡 𝑡𝑔𝛾 ≃ 𝛾 Comme : 𝑛1𝑠𝑖𝑛𝑖 = 𝑛2𝑠𝑖𝑛𝑟 𝑎𝑙𝑜𝑟𝑠 𝑛1𝑖 = 𝑛2𝑟
⟹ 𝑛1 (𝐼𝐻
𝐻𝐴−
𝐼𝐻
𝐻𝐶) = 𝑛2 (
𝐼𝐻
𝐻𝐴′−
𝐼𝐻
𝐻𝐶)
⟹
𝑛2
𝐻𝐴′−
𝑛1
𝐻𝐴=
𝑛2 − 𝑛1
𝐻𝐶
On suppose que H est confondu avec le sommet S du dioptre alors :
𝑛2
𝑆𝐴̅̅̅̅ ′−
𝑛1
𝑆𝐴̅̅̅̅=
𝑛2 − 𝑛1
𝑆𝐶̅̅̅̅
𝑛2−𝑛1
𝑆𝐶̅̅̅̅ représente la vergence 𝜈 du dioptre sphérique ; elle définit sa capacité de faire
converger ou diverger un rayon lumineux incident. II. 6. 1 Foyers du dioptre sphérique
Le dioptre sphérique est caractérisé par deux points particuliers appelés foyers : - Le foyer objet représente la position d’objet lorsque son image se forme à l’infini. La
distance focale objet, est alors, donnée par :
𝑆𝐹̅̅̅̅ =𝑛1
𝑛1 − 𝑛2𝑆𝐶̅̅̅̅
α β γ
n1 n2 I
A S H C A’
i r

A. DERARDJA, K. S. AOUBID et W. BENABBAS 15
- Le foyer image représente la position de l’image lorsque l’objet est placé à l’infini. La
distance focale image, est alors, donnée par :
𝑆𝐹̅̅̅̅ =𝑛2
𝑛2 − 𝑛1𝑆𝐶̅̅̅̅
II. 6. 2 Nature du dioptre sphérique
Le dioptre sphérique peut être soit convergent soit divergent ; il est convergent si : - Son centre C se situe dans le milieu le plus réfringent. - Ses foyers objet et image sont réels (𝑆𝐹̅̅̅̅ < 0 𝑒𝑡 𝑆𝐹′̅̅ ̅̅ > 0. - Sa vergence 𝜈 est positive. Et il est divergent si : - Son centre C se situe dans le milieu le moins réfringent. - Ses foyers objet et image sont virtuels (𝑆𝐹̅̅̅̅ > 0 𝑒𝑡 𝑆𝐹′̅̅ ̅̅ < 0. - Sa vergence 𝜈 est négative. II. 6. 3 Grandissement linéaire
La taille de l’image A’B’ d’un objet AB est déterminée par le calcul du grandissement
linéaire 𝛾 :
𝛾 =𝐴′𝐵′̅̅ ̅̅ ̅̅
𝐴𝐵̅̅ ̅̅ =𝑛1
𝑛2
𝑆𝐴′̅̅ ̅̅̅
𝐴𝐵̅̅ ̅̅
Le signe de 𝛾 détermine la nature de l’image 𝐴′𝐵′ d’un objet 𝐴𝐵.
- Si 𝛾 est positif, l’objet et l’image sont de nature différente. - Si 𝛾 est négatif alors l’objet et l’image sont de même nature. II. 6. 4 Constructions géométriques
a) Dioptre convergent
Figure 10
n1 n2
B’
F’ A’
Objet réel Image réelle
B
A F S C
n1 n2
Objet virtuel Image réelle
B’ B’
F S C A A’
A F’

A. DERARDJA, K. S. AOUBID et W. BENABBAS 16
b) Dioptre divergent
Figure 11 II. 7 Les lentilles minces
Une lentille est constituée d’une matière transparente délimitée par deux faces, dont
l’une au moins est sphérique. On distingue, de par la forme des faces, les types de lentilles
suivantes :
Figure 12 II.7. 1 Relation de conjugaison
On assimilera une lentille à l’association de deux dioptres sphériques respectivement
de sommet S1 et S2 et on place un point objet A sur l’axe en avant du premier dioptre (fig. 13).
Figure 13
Comme : 𝑛2
𝑆1𝐴′̅̅ ̅̅ ̅̅−
𝑛1
𝑆1𝐴̅̅ ̅̅ ̅=
𝑛2−𝑛1
𝑆1𝐶1̅̅ ̅̅ ̅̅ ̅ et 𝑛1
𝑆2𝐴′′̅̅ ̅̅ ̅̅ ̅−
𝑛2
𝑆2𝐴′̅̅ ̅̅ ̅̅=
𝑛1−𝑛2
𝑆2𝐶2̅̅ ̅̅ ̅̅ ̅, L’association des deux
dioptres se traduit par :
𝑛2
𝑆1𝐴′̅̅ ̅̅ ̅̅ −𝑛1
𝑆1𝐴̅̅ ̅̅ ̅ +𝑛1
𝑆2𝐴′′̅̅ ̅̅ ̅̅ ̅ −𝑛2
𝑆2𝐴′̅̅ ̅̅ ̅̅ =𝑛2 − 𝑛1
𝑆1𝐶1̅̅ ̅̅ ̅̅ +
𝑛1 − 𝑛2
𝑆2𝐶2̅̅ ̅̅ ̅̅
La lentille considérée est mince ⟹ 𝑆1𝑆2 = 𝑒, 𝑆1𝑆2 ≪ 𝑅1 𝑒𝑡 𝑆1𝑆2 ≪ 𝑅2 ⟹ 𝑆1 ≅ 𝑆2 ≅ 𝑆
n1 n2 n1
A’ A C2 S1 S2 C1 A’’
Objet réel Image virtuelle
n1 n2 B
B’
F’ A A’ S C F
Plan concave Biconcave Ménisque divergent Plan convexe Biconvexe Ménisque convergent
Lentilles convergentes Lentilles divergentes

A. DERARDJA, K. S. AOUBID et W. BENABBAS 17
alors : 𝑛2
𝑆𝐴′̅̅ ̅̅ ̅ −𝑛1
𝑆𝐴̅̅̅̅+
𝑛1
𝑆𝐴′′̅̅ ̅̅ ̅ −𝑛2
𝑆𝐴′̅̅ ̅̅ =𝑛2 − 𝑛1
𝑆𝐶1̅̅ ̅̅ ̅ +
𝑛1 − 𝑛2
𝑆𝐶2̅̅ ̅̅ ̅
⟹ −𝑛1
𝑆𝐴̅̅̅̅+
𝑛1
𝑆𝐴′′̅̅ ̅̅ ̅=
𝑛2 − 𝑛1
𝑆𝐶1̅̅ ̅̅ ̅
+𝑛1 − 𝑛2
𝑆𝐶2̅̅ ̅̅ ̅
L’expression précedente s’écrit alors :
𝑛1
𝑆𝐴′′̅̅ ̅̅ ̅ −𝑛1
𝑆𝐴̅̅̅̅= (𝑛2 − 𝑛1) (
1
𝑆𝐶1̅̅ ̅̅ ̅ −
1
𝑆𝐶2̅̅ ̅̅ ̅)
1
𝑆𝐴′′̅̅ ̅̅ ̅−
1
𝑆𝐴̅̅̅̅= (
𝑛2
𝑛1− 1)(
1
𝑆𝐶1̅̅ ̅̅ ̅
−1
𝑆𝐶2̅̅ ̅̅ ̅
)
On définit la vergence de la lentille par :
𝜈 = (𝑛 − 1) (1
𝑆𝐶1̅̅ ̅̅ ̅
−1
𝑆𝐶2̅̅ ̅̅ ̅
) = (𝑛 − 1) (1
𝑅1̅̅ ̅
−1
𝑅2̅̅ ̅
)
II. 7. 2 Foyers d’une lentille Le foyer objet est donné par :
1
𝑂𝐹̅̅ ̅̅= −(𝑛 − 1) (
1
𝑅1̅̅ ̅
−1
𝑅2̅̅ ̅
)
et le foyer image est tel que :
1
𝑂𝐹′̅̅ ̅̅ ̅ = (𝑛 − 1) (1
𝑅1̅̅ ̅ −
1
𝑅2̅̅ ̅)
Donc : 𝑂𝐹̅̅ ̅̅ = −𝑂𝐹′̅̅ ̅̅ ̅ En considérant le centre O de la lentille, la formule de conjugaison devient :
1
𝑂𝐴′′̅̅ ̅̅ ̅̅ −1
𝑂𝐴̅̅ ̅̅ =1
𝑂𝐹′̅̅ ̅̅ ̅ = −1
𝑂𝐹
II. 7. 3 Nature d’une lentille
La vergence de la lentille a été définit par :
𝜈 = (𝑛 − 1) (1
𝑅1̅̅ ̅ −
1
𝑅2̅̅ ̅) =
1
𝑂𝐹′̅̅ ̅̅ ̅ = −1
𝑂𝐹̅̅ ̅̅
- La vergence de la lentille convergente est positive et ses foyers sont réels - La vergence de la lentille divergente est négative et ses foyers sont virtuels.
Lentille convergente Lentille divergente
O O

A. DERARDJA, K. S. AOUBID et W. BENABBAS 18
II. 7. 4 Grandissement linéaire
La taille de l’image et celle de l’objet sont liées par la relation du grandissement :
𝛾 =𝐴′𝐵′̅̅ ̅̅ ̅̅
𝐴𝐵̅̅ ̅̅ =𝑂𝐴′̅̅ ̅̅ ̅
𝑂𝐴̅̅ ̅̅
II. 7. 5 Constructions géométriques Lentille convergente
Figure 14 Lentille divergente
Figure 15
B’
A’
Objet réel Image réelle
B
A F O F’
Objet réel Image virtuelle
B B’
F’ A A’ O F