Embed Size (px)
Citation preview

PC/PC*20/21 LycéeSCHWEITZERMulhouse
COMPOSITIONDEMOUVEMENTS-EXERCICES
1. Rameuretmarcheur:Unrameurpartd’unpointAsurunfleuvepourallerjusqu’àunpointBavantdereveniraupointA.Lefleuvecouleàlavitessev0parrapportàlaberge,etlerameuravanceàvitesseVparrapportaufleuve.Surlaberge,unmarcheursuitlemêmeparcours,àlavitesseVparrapportausol.LequeldesdeuxestderetourenAlepremier?2. Trajectoired’unavionenprésencedeventlatéral(CCPPC2020):Un avion doit se déplacer en ligne droite d’un point A vers unpointBsituésà lamêmealtitudeparrapportausol. Ilsubitunvent contraire constant de vecteur vitesse 𝑣! qui fait un angleφ _avec la trajectoire AB comme indiqué sur la figure. L’avionvole à une vitesse constante𝑉! par rapport à l’air. Le vecteurvitesseassocié,𝑉!faitunangleθ aveclarouteausolAB.1) À quelle condition entre Va, vv, φ et θ, l’avion peut-il sedéplacerenlignedroitedeAversB?2) Calculer l’angle de correction θ que le pilote doit imposer àsonavionlorsqueφ _=20°,sachantquevv=56km·h-1etVa=445km·h-1.3) L’avion doit faire un aller-retour entre les deux points A et B, distants ded= 500 km dans lesmêmesconditionsdevent.CalculerladuréeTdutrajetaller-retourennégligeantladuréedudemi-tour.CompareràladuréeT’decemêmetrajetenl’absencedevent.Commenter.
3. Billesurunebarreenrotation:Unebilledemassempeutcoulissersansfrottementssurunetigehorizontaletournantaveclavitesseangulaireωconstanteautourd’unaxeverticalfixe.1) Définirunréférentielabsoluetunréférentielrelatif,yassocierdeuxrepères.2) Ecrirel’expressiondelapositiondelabilledanslesdeuxrepèresdéfinis.3) Ecrirel’expressiondelavitesserelativedelabille,puiscalculersavitesseabsolue.4) Ecrirel’expressiondel’accélérationrelativedelabille,puiscalculersonaccélérationabsolue.5) Reprendrel’exerciceavecunetigeinclinéed’unangleαparrapportàlaverticale.
4. Entrainementauxfortesgravités:AquellevitessedoittournerunecentrifugeusederayonR=10mpourreproduireuneaccélérationde9g?Dequeltyped’accélérations’agit-il?
5. ManègeduPalaisdelaDécouverte:JosephetLeardsetrouventsurunmanègequitourneàvitesseangulaireωconstante.Auninstantt=0,Joseph,situésurlebordenunpointAlanceuneballeversLeard,situéenB.1) Faireunschémaetdéfinirlesréférentielsenprésence.Associerdesrepères.2) Aprèssonlancement,laballegardeunevitessehorizontalededirectionconstanteetdenormeconstante.Dansquelréférentiel?3) Dessinerlesvecteursvitesseabsolue,vitessed’entrainementetvitesserelativedelaballe.4) PourJoseph,laballepart-elleversladroiteouverslagauchedeLeard?https://www.youtube.com/watch?v=Q5W35CO7DCk

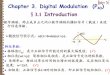
PC/PC*20/21 LycéeSCHWEITZERMulhouse6. Manège(ConcoursDeug16):Unmanègeestforméd’unplateau(S)liéenO1àunebarreOO1(figure).
Ondéfinitlesréférentielssuivants:
• LeréférentielRterrestregaliléenrapportéaurepère 𝑂,𝑢! ,𝑢! ,𝑢! .• LeréférentielR’,liéàO1rapportéaurepèreorthonormédirect 𝑂!,𝑢!!,𝑢!!,𝑢!! telqueà
chaqueinstant𝑢!! = 𝑢! ,𝑢!! = 𝑢! , 𝑢!! = 𝑢! .LabarrerigideOO1aunelongueurL(L>R)etelletournelibrementautourdel’axe(O,𝑢! );l’anglederotationestθ.Ondéfinitunrepèrecylindriqueorthonormédirect𝑢! ,𝑢! ,𝑢!liéàlabarreOO1.Leplateau(S)estundisquehomogènedecentreO1etderayonR.Ilpeuttournerlibrementautourdel’axe(𝑂!,𝑢!! );l’anglederotationestφ.M0estunpointdelapériphérieduplateau;letraitO1M0tracésurlaplateaupermetderepérerl’anglederotationφparrapportà(𝑂!,𝑢!! ).Aladatet=0,θ=0etφ=0.1.QuelestlemouvementduréférentielR’parrapportauréférentielR?2.Déterminerlescomposantesdelavitesse𝑣(𝑂!)/𝑅 dupointO1parrapportàRdanslabase𝑢! ,𝑢! ,𝑢! ,puisdanslabase 𝑢! ,𝑢! ,𝑢! .3.Déterminerlevecteurrotation𝜔 de(S)parrapportàR’,puislavitesse𝑣(𝑀!)/𝑅′ dupointM0parrapportàR’danslabase 𝑢! ,𝑢! ,𝑢! .4.Endéduirelavitesse𝑣(𝑀!)/𝑅 dupointM0parrapportàR.5.Unorgane(nonreprésentésurlafigure)agitsurSpourimposeràchaqueinstantlarelationangulairesuivante:
R.φ=L.θa)Montrerquelespositionsangulairesθpourlesquelleslavitesse𝑣(𝑀!)/𝑅 estnullesonttellesque:
𝜃 =(2𝑛 + 1)𝜋𝐿𝑅 − 1
oùnestunentier.b)DanslecasparticulieroùL/R=3,déterminerlesdeuxplusfaiblesvaleurspositivesθ1etθ2deθtellesque𝑣(𝑀!)/𝑅 soitnulle.Représenterdanschaquecaslatige,leplateauetM0.6.a)Enappliquantlaloidecompositiondesaccélérations,calculerl’accélération𝑎(𝑀!)/𝑅 dupointM0parrapportàR,etsavaleurpourθ1etθ2.b)FaireunschémadelarésultantedesforcesexercéesurlepointM0danslespositionsθ1etθ2.
3/4
Exercice 3
Un manège est formé d’un plateau (S) lié en O1 à une barre OO1 (figure 2).
On définit les référentiels suivants : • Le référentiel terrestre 5 galiléen
rapporté au repère O, , ,x y zu u uG G G.
• Le référentiel 5b, lié rigidement à la barre OO1, rapporté au repère orthonormé direct O, , ,r xu u uθ
G G G ; ce référentiel se déduit de 5 par une rotation d’angle θ autour de l’axe (O, xu
G).
• Le référentiel 1
*0R , lié à O1, rapporté au repère orthonormé direct O1, 1xu
G, 1yuG , 1zu
G tel que, à
chaque instant : 1xuG
= xuG
; 1yuG = yu
G ; 1zuG = zu
G .
Le plateau (S) est un disque homogène, de centre O1 et de rayon R. Il peut tourner librement autour de l’axe (O1, 1xu
G). L’angle de rotation est ϕ.
Mo est un point de la périphérie du plateau. Le trait O1Mo, tracé sur le plateau, permet de repérer l’angle de rotation ϕ par rapport à (O1, 1yu
G ).
La barre rigide OO1 a une longueur L (L > R) et une masse négligeable. Elle peut tourner librement autour de l’axe (O, xu
G) ; l’angle de rotation est θ.
A la date t = 0, θ = 0 et ϕ = 0.
3.1 Comment appelle-t-on 1
*0R ? Décrire qualitativement son mouvement dans 5.
3.2 Déterminer les composantes, dans la base ruG ,uθ
G, xuG
, de la vitesse ( )1O /VG
5 et de
l’accélération ( )1O /aG 5 de O1 dans 5.
3.3 Déterminer les composantes, dans la base xuG
, yuG , zu
G , du vecteur rotation ΩG
de S dans 1
*0R
et de la vitesse *1
MooR
VG
de Mo dans 1
*0R .
3.4 A l’aide de la loi de composition des vitesses, déterminer les composantes, dans la base
, ,x y zu u uG G G, de la vitesse MoV
G5
de Mo dans 5.
Mo
zuG
xuG
yu
G
θ
uθ
G ru
G
K
O1
ϕ 1xu
G
1yuG
1zuG
Figure 2