Embed Size (px)
Citation preview
Conception de systèmes de commande relatifs à la sécurité
Partie 1
INRS-IET/SSA J. BAUDOIN, J-P. BELLO
CARSAT N-P - Rdv de la prévention – juin 2014
CARSAT N-P - Rdv de la prévention – juin 2014 2
Un système de commande de sécurité ? quand ? pourquoi ? Contexte réglementaire et normatif La norme NF EN ISO 13849-1
Présentation NS 302 : "Aborder la norme NF EN ISO 13849-1 via la
conception d'une fonction de sécurité basique"
Point sur les apports et limites du logiciel SISTEMA
Sommaire
CARSAT N-P - Rdv de la prévention – juin 2014 3
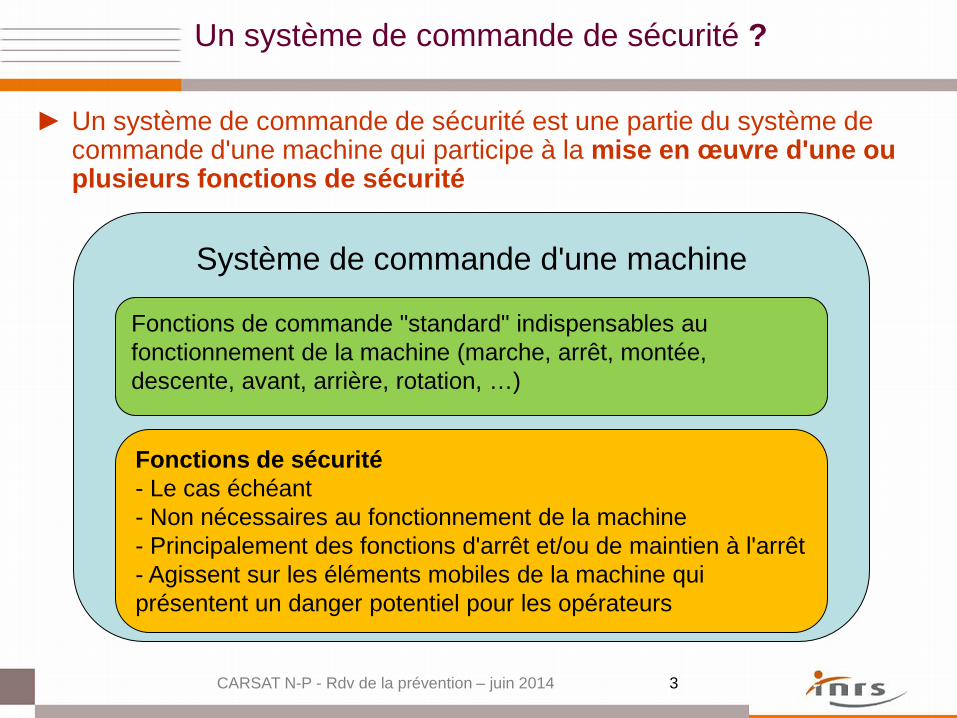
► Un système de commande de sécurité est une partie du système de commande d'une machine qui participe à la mise en œuvre d'une ou plusieurs fonctions de sécurité
Système de commande d'une machine
Fonctions de commande "standard" indispensables au fonctionnement de la machine (marche, arrêt, montée, descente, avant, arrière, rotation, …)
Fonctions de sécurité - Le cas échéant - Non nécessaires au fonctionnement de la machine - Principalement des fonctions d'arrêt et/ou de maintien à l'arrêt - Agissent sur les éléments mobiles de la machine qui présentent un danger potentiel pour les opérateurs
Un système de commande de sécurité ?
CARSAT N-P - Rdv de la prévention – juin 2014 4
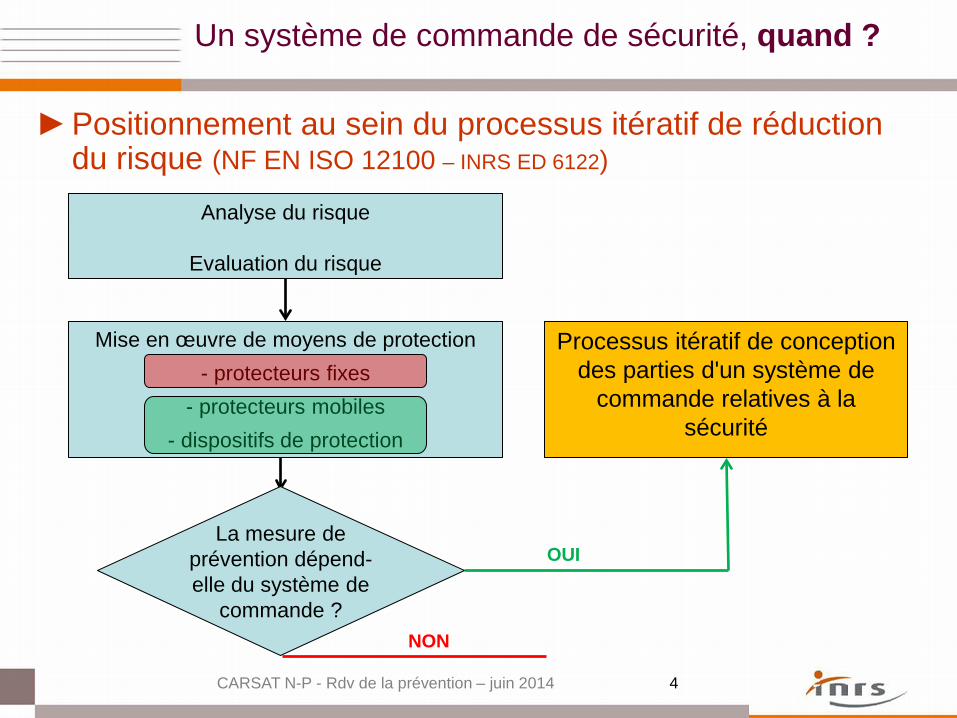
Un système de commande de sécurité, quand ?
►Positionnement au sein du processus itératif de réduction
du risque (NF EN ISO 12100 – INRS ED 6122)
Analyse du risque
Evaluation du risque
La mesure de prévention dépend-elle du système de
commande ?
Mise en œuvre de moyens de protection - protecteurs fixes
- protecteurs mobiles - dispositifs de protection
Processus itératif de conception des parties d'un système de
commande relatives à la sécurité
OUI
NON

CARSAT N-P - Rdv de la prévention – juin 2014 5
Un système de commande de sécurité, quand ?
► Exemple ►Analyse/évaluation du risque
► Identification des éléments mobiles potentiellement dangereux
► Identification des différentes phases de vie et modes de fonctionnement de la machine
► Identification des interventions de(s) l’opérateur(s) : fréquence, durée, …
► …

CARSAT N-P - Rdv de la prévention – juin 2014 6
Un système de commande de sécurité, quand ?
► Exemple ►Analyse/évaluation du risque
►Mise en œuvre de moyens de protections
► Protecteurs fixes
► Protecteurs mobiles avec dispositif de verrouillage ou barrière immatérielle
►Identification des moyens de protections mettant en œuvre le circuit de commande de la machine ►Conception d'une partie de système de commande relative à la sécurité
► Vitesse réduite avec cde à action maintenue
CARSAT N-P - Rdv de la prévention – juin 2014 7
Un système de commande de sécurité, pourquoi ?
►Quid d'une défaillance du système de commande qui gère
une fonction de sécurité ►Réalisation d'une fonction de sécurité. Dans l'exemple précédent :
Arrêt et maintien à l'arrêt de tous les axes du robot en cas de franchissement de la barrière immatérielle.
►Que se passe-t-il en cas de défaillance d'un élément ou d'une partie du circuit de commande qui gère cette fonction ?
Perte de la fonction de sécurité ?
Situation dangereuse !
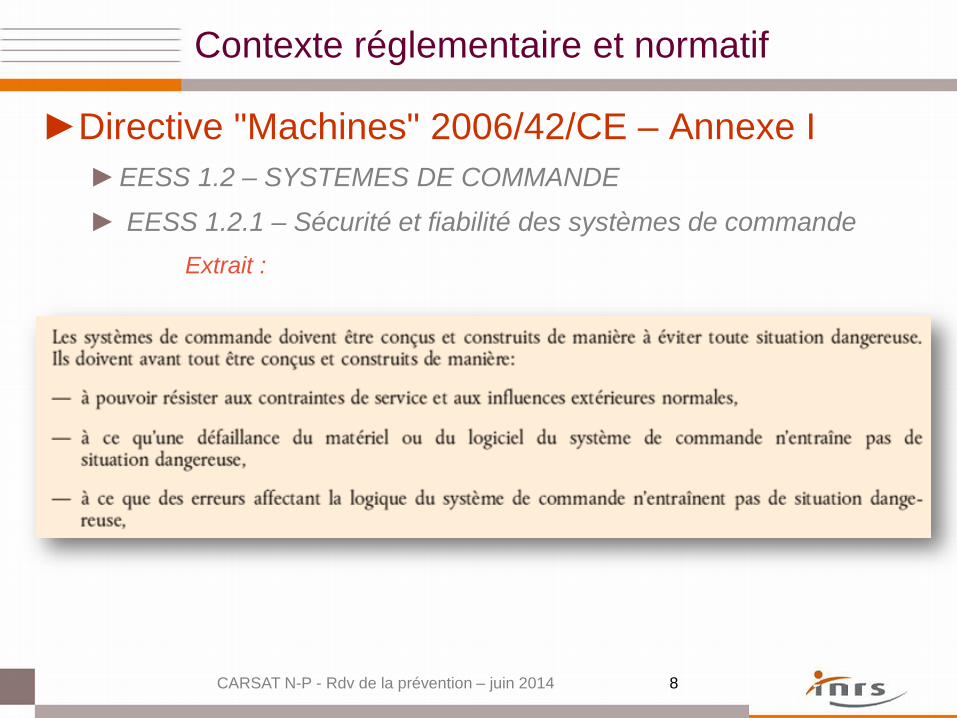
►Directive "Machines" 2006/42/CE – Annexe I ►EESS 1.2 – SYSTEMES DE COMMANDE
► EESS 1.2.1 – Sécurité et fiabilité des systèmes de commande Extrait :
Contexte réglementaire et normatif
CARSAT N-P - Rdv de la prévention – juin 2014 8

►Référentiels normatifs Actuellement, deux référentiels cohabitent pour traiter des systèmes de commande de sécurité des machines
►NF EN 62061 : Sécurité des machines - Sécurité fonctionnelle des systèmes de commande électriques, électroniques et électroniques programmables relatifs à la sécurité
►NF EN ISO 13849-1 et 2 : Sécurité des machines – Parties des systèmes de commande relatives à la sécurité
►Partie 1 : Principes généraux de conception
►Partie 2 : Validation
Remplace la NF EN 954-1
A terme, un seul référentiel sera utilisé !
Contexte réglementaire et normatif
CARSAT N-P - Rdv de la prévention – juin 2014 9
INRS - NS 305
►Champ d'application ► Conception et intégration des parties des systèmes de commande
relatives à la sécurité (SRP/CS)
► Tous types de machines et d'énergies utilisés (électrique, hydraulique, pneumatique, mécanique, etc.)
►Méthodologie ► Spécifier une (des) fonction(s) de sécurité (Objectif à atteindre)
►Exigences fonctionnelles
►Exigences d'intégrité de sécurité (niveau de performance requis PLr)
Contribution du circuit de commande à la réduction du risque
► Concevoir et/ou intégrer une (des) SRP/CS
► Evaluer le niveau de performance PL atteint (pour la partie matérielle)
► Effectuer les tests fonctionnels
La norme NF EN ISO 13849
CARSAT N-P - Rdv de la prévention – juin 2014 10
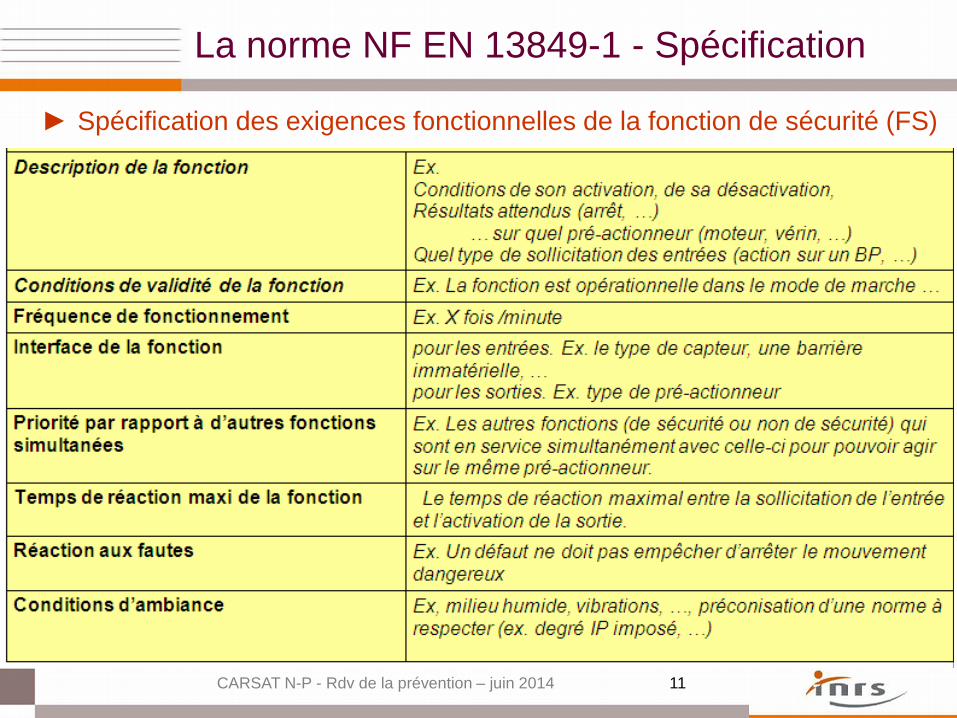
► Spécification des exigences fonctionnelles de la fonction de sécurité (FS)
La norme NF EN 13849-1 - Spécification
CARSAT N-P - Rdv de la prévention – juin 2014 11

►Définir le niveau de performance de sécurité requis PLr pour la fonction de sécurité
►Exigence formalisée dans une norme de type "C" Exemple pour la norme de conception des robots ISO 10218-1 : 2011
La norme NF EN 13849-1 – PLr
CARSAT N-P - Rdv de la prévention – juin 2014 12
Risque important Risque faible
PLa PLb
PLc PLd PLe
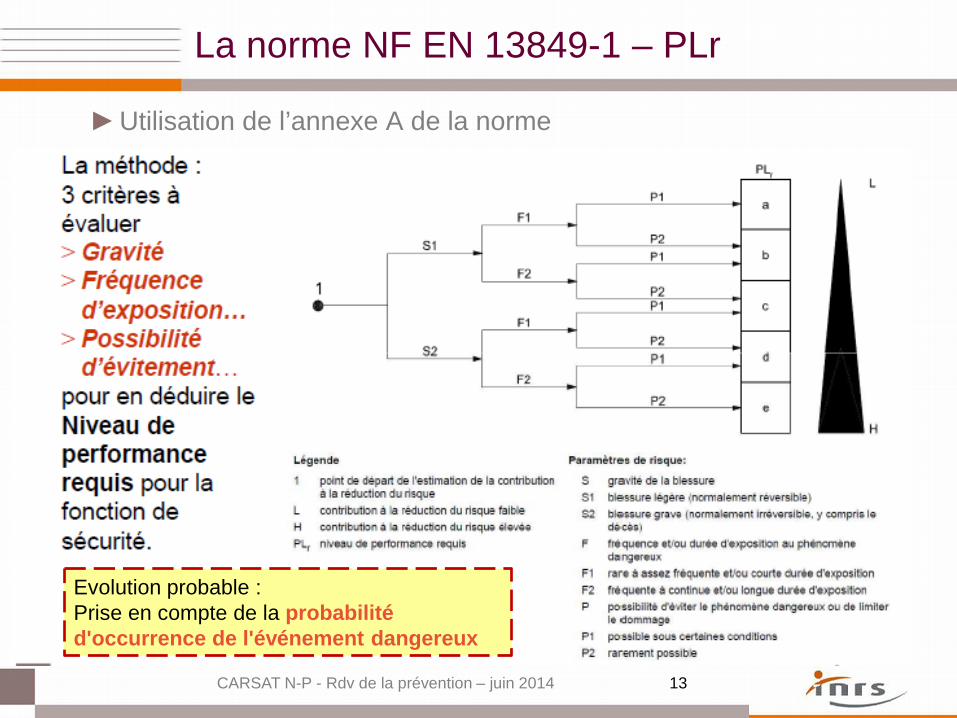
►Utilisation de l’annexe A de la norme
La norme NF EN 13849-1 – PLr
Evolution probable : Prise en compte de la probabilité d'occurrence de l'événement dangereux
CARSAT N-P - Rdv de la prévention – juin 2014 13
14
EC2011-001 - Exemples didactiques de fonctions de sécurité de faible complexité
Origine > Besoin des PME, TPE qui conçoivent des machines intégrant seulement une ou
quelques fonctions de sécurité basiques (arrêt d'urgence, protecteur mobile, …) > Peu de formation, des référentiels techniques pas ou peu connus et mal maitrisés
Objectif > Se donner les moyens de guider les concepteurs devant réaliser de telles fonctions
de sécurité Méthode
> Fournir des outils sous forme de tableaux et graphes afin de simplifier la lecture et l'utilisation de la norme
> Traiter quelques fonctions de sécurité basiques en utilisant la "méthode simplifiée " préconisée par la norme 13849-1
> Fournir les détails de la conception et les commentaires pertinents Valorisations
> Publication d’une « Note Scientifique et technique » : NS 302 : Aborder la norme NF EN ISO 13849-1 via la conception d’une fonction de sécurité basique
> Communication au SIAS 2012 – Montréal (Safety of Industrial Automated Systems)
Présentation étude "13849-1" – NS 302
CARSAT N-P - Rdv de la prévention – juin 2014
15
PL : Les exigences de la norme 13849-1
CARSAT N-P - Rdv de la prévention – juin 2014
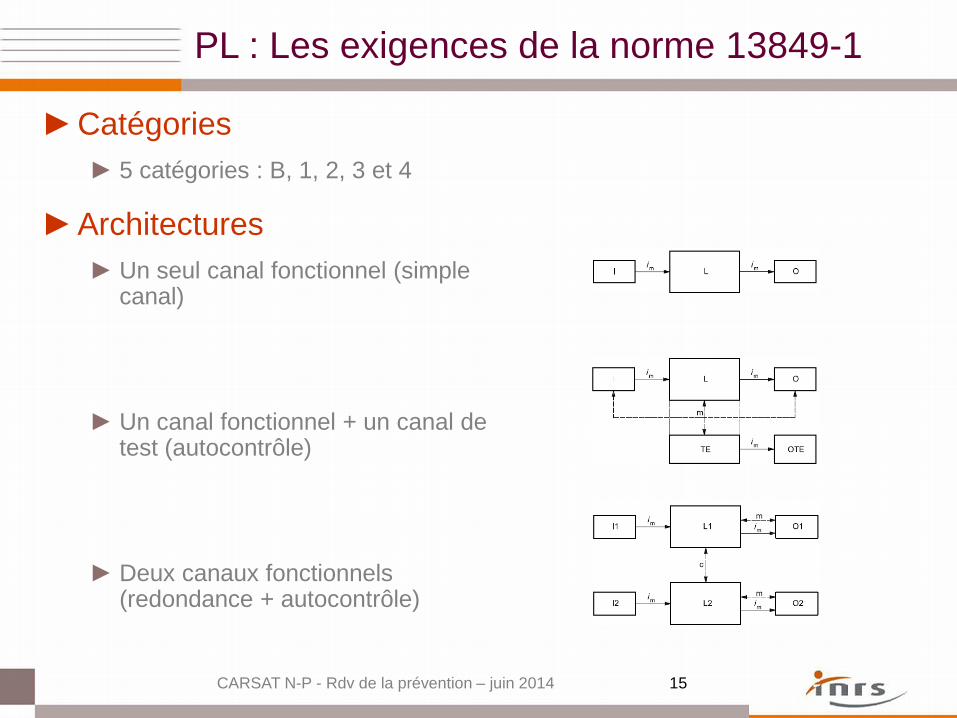
►Catégories ► 5 catégories : B, 1, 2, 3 et 4
►Architectures ► Un seul canal fonctionnel (simple
canal)
► Un canal fonctionnel + un canal de test (autocontrôle)
► Deux canaux fonctionnels (redondance + autocontrôle)
16
PL : Les exigences de la norme 13849-1
CARSAT N-P - Rdv de la prévention – juin 2014
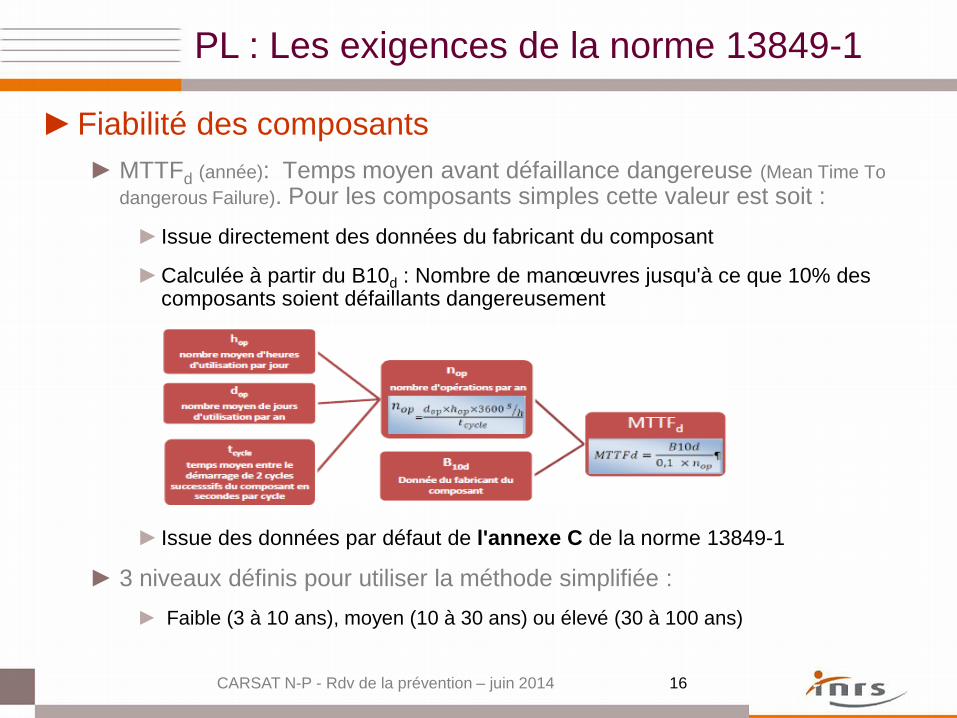
►Fiabilité des composants ► MTTFd (année): Temps moyen avant défaillance dangereuse (Mean Time To
dangerous Failure). Pour les composants simples cette valeur est soit : ► Issue directement des données du fabricant du composant
►Calculée à partir du B10d : Nombre de manœuvres jusqu'à ce que 10% des composants soient défaillants dangereusement
► Issue des données par défaut de l'annexe C de la norme 13849-1
► 3 niveaux définis pour utiliser la méthode simplifiée : ► Faible (3 à 10 ans), moyen (10 à 30 ans) ou élevé (30 à 100 ans)
17
PL : Les exigences de la norme 13849-1
CARSAT N-P - Rdv de la prévention – juin 2014
►Diagnostic (autocontrole) ► DCavg (%): Couverture de diagnostic moyenne (Diagnostic Cover average)
►Valeur qui est fonction du type de mesures mises en œuvre pour assurer le diagnostic
►Une estimation de la DC est proposée en annexe E de la norme (parfaitement adaptée pour la majorité des cas)
►Une information du fabricant du composant est disponible pour certaines applications spécifiques (blocs logiques de sécurité, cartes d’entrées de composants de sécurité, …)
► 4 niveaux définis pour utiliser la méthode simplifiée : ► Nulle (< 60 %), faible (de 60 à 90 %), moyenne (de 90 à 99 %) ou élevée (≥ 99
%)
18
PL : Les exigences de la norme 13849-1
CARSAT N-P - Rdv de la prévention – juin 2014
►Prise en compte des défaillances de cause commune ► CCF : Défaillances de cause commune (Common cause failure)
►Définition : « Défaillances qui affectent plusieurs entités à partir d’un même événement et qui ne résultent pas les unes des autres »
►Applicable uniquement aux catégories 2, 3 et 4
► Notation des mesures mises en œuvre pour empêcher les CCF ►Utilisation de l’annexe F de la norme
►Notation de 0 à 100
►Un score minimum de 65 est nécessaire pour satisfaire les exigences de la norme

19
PL : Les exigences de la norme 13849-1
CARSAT N-P - Rdv de la prévention – juin 2014
►Prise en compte des défaillances systématiques ► Définition : « Défaillance associée de façon déterministe à une certaine cause,
ne pouvant être éliminée que par une modification de la conception ou du processus de fabrication, des procédures d’exploitation, de la documentation ou d’autres facteurs appropriés »
► Mesures à mettre en œuvre ►Utilisation de l’annexe G de la norme
►Choix des matériaux, composants utilisant des principes éprouvés
►Respect des règles de mise en œuvre préconisés par les fabricants
►Respect des règles de l’art (respect des normes de conception ex: électrique 60204-1, hydraulique, pneumatique, …)
►Autres préconisations ► Périodicité des fonctions d’autocontrôle
► Réaction de la fonction en cas de défaillance
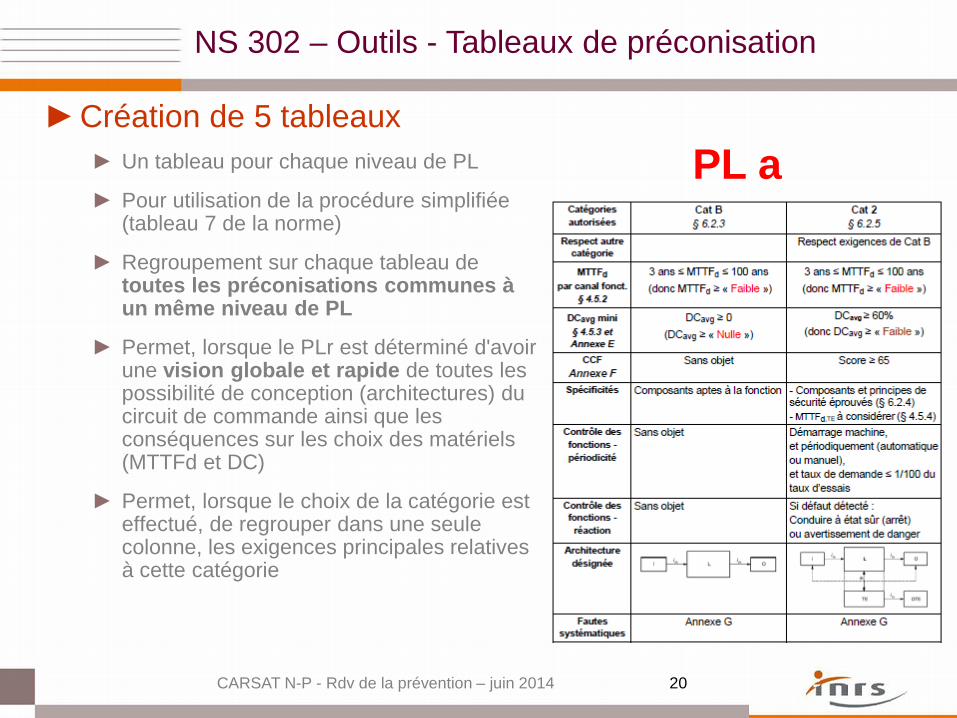
►Création de 5 tableaux ► Un tableau pour chaque niveau de PL
► Pour utilisation de la procédure simplifiée (tableau 7 de la norme)
► Regroupement sur chaque tableau de toutes les préconisations communes à un même niveau de PL
► Permet, lorsque le PLr est déterminé d'avoir une vision globale et rapide de toutes les possibilité de conception (architectures) du circuit de commande ainsi que les conséquences sur les choix des matériels (MTTFd et DC)
► Permet, lorsque le choix de la catégorie est effectué, de regrouper dans une seule colonne, les exigences principales relatives à cette catégorie
20
NS 302 – Outils - Tableaux de préconisation
CARSAT N-P - Rdv de la prévention – juin 2014
PL a
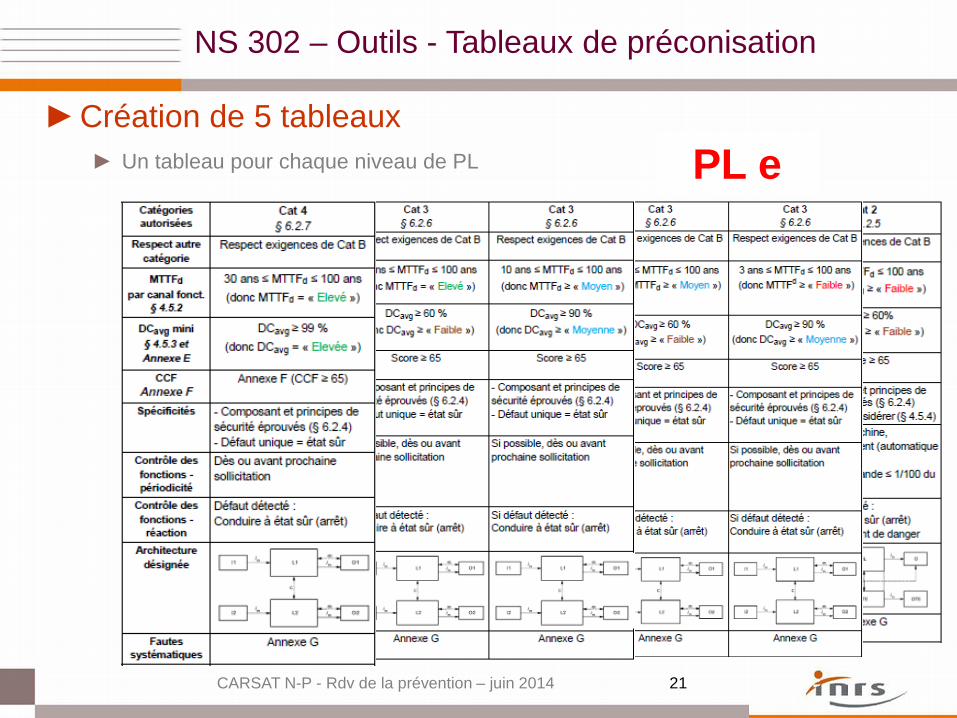
►Création de 5 tableaux ► Un tableau pour chaque niveau de PL
21
NS 302 – Outils - Tableaux de préconisation
CARSAT N-P - Rdv de la prévention – juin 2014
PL a PL b PL c PL d PL e
22
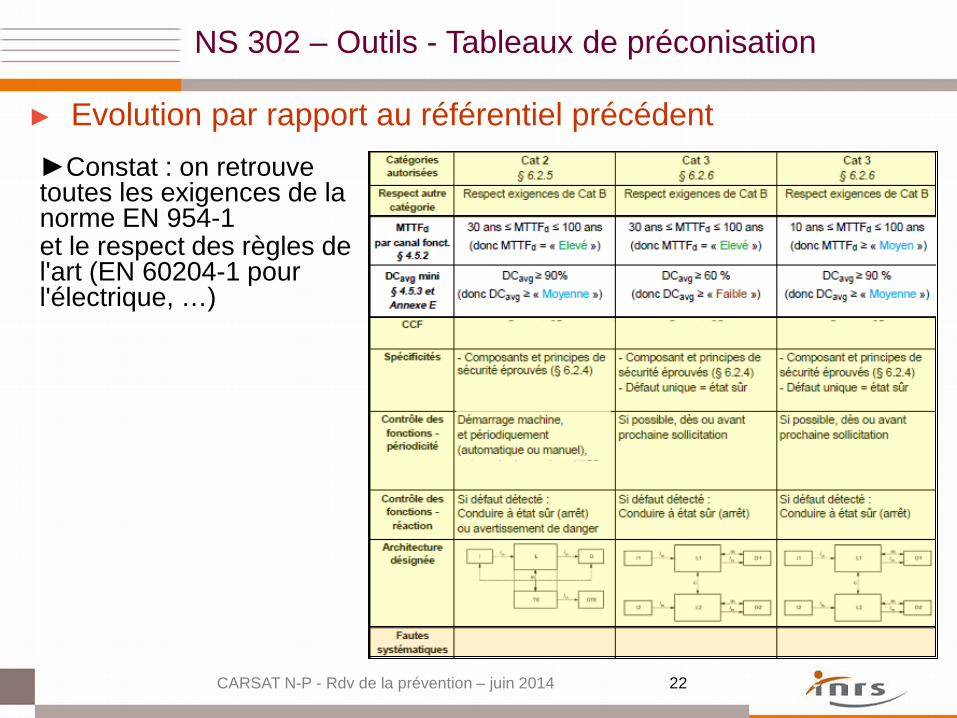
► Evolution par rapport au référentiel précédent
NS 302 – Outils - Tableaux de préconisation
►Constat : on retrouve toutes les exigences de la norme EN 954-1
CARSAT N-P - Rdv de la prévention – juin 2014
et le respect des règles de l'art (EN 60204-1 pour l'électrique, …)
23
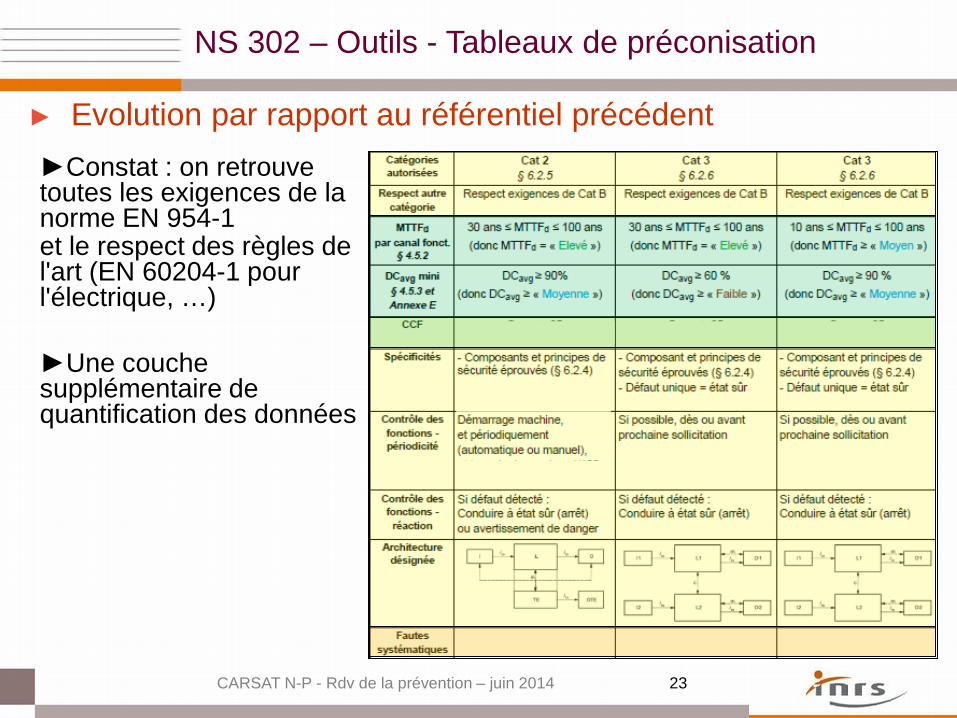
► Evolution par rapport au référentiel précédent
NS 302 – Outils - Tableaux de préconisation
►Constat : on retrouve toutes les exigences de la norme EN 954-1
CARSAT N-P - Rdv de la prévention – juin 2014
►Une couche supplémentaire de quantification des données
et le respect des règles de l'art (EN 60204-1 pour l'électrique, …)

►Modèle général de structure logique d'un SC/FS (circuit de commande de la fonction de sécurité)
►Cas le plus fréquent : Création de trois entités logiques
►Possibilité de décliner ces entités logiques en une ou plusieurs SRP/CS suivant le matériel envisagé
NS 302 – Conception d'un SC/FS
CARSAT N-P - Rdv de la prévention – juin 2014 24
CARSAT N-P - Rdv de la prévention – juin 2014 25
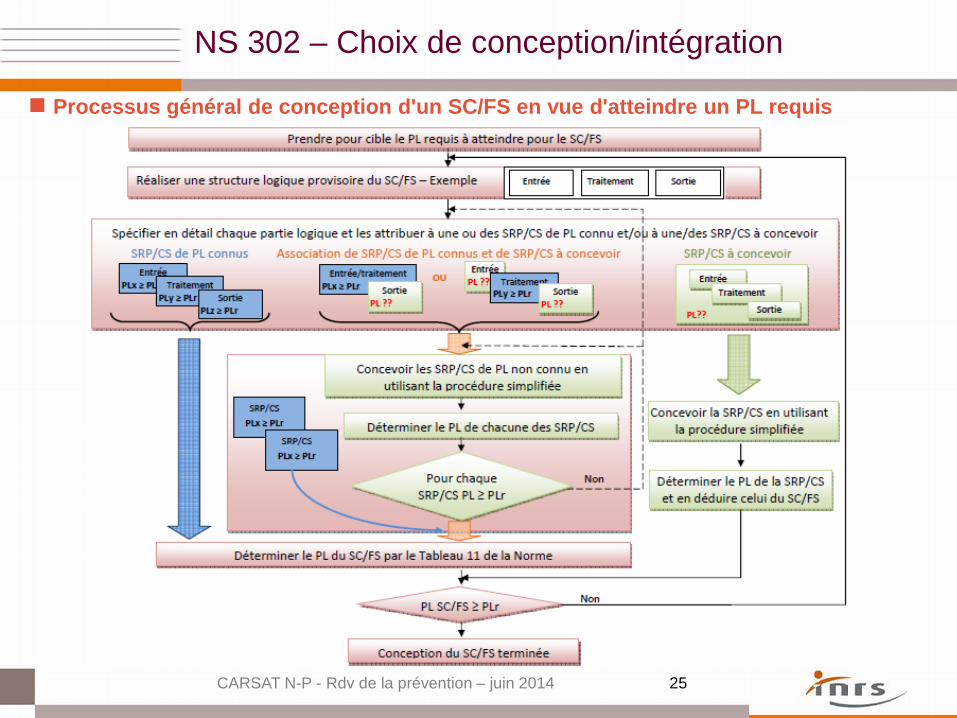
Processus général de conception d'un SC/FS en vue d'atteindre un PL requis
NS 302 – Choix de conception/intégration
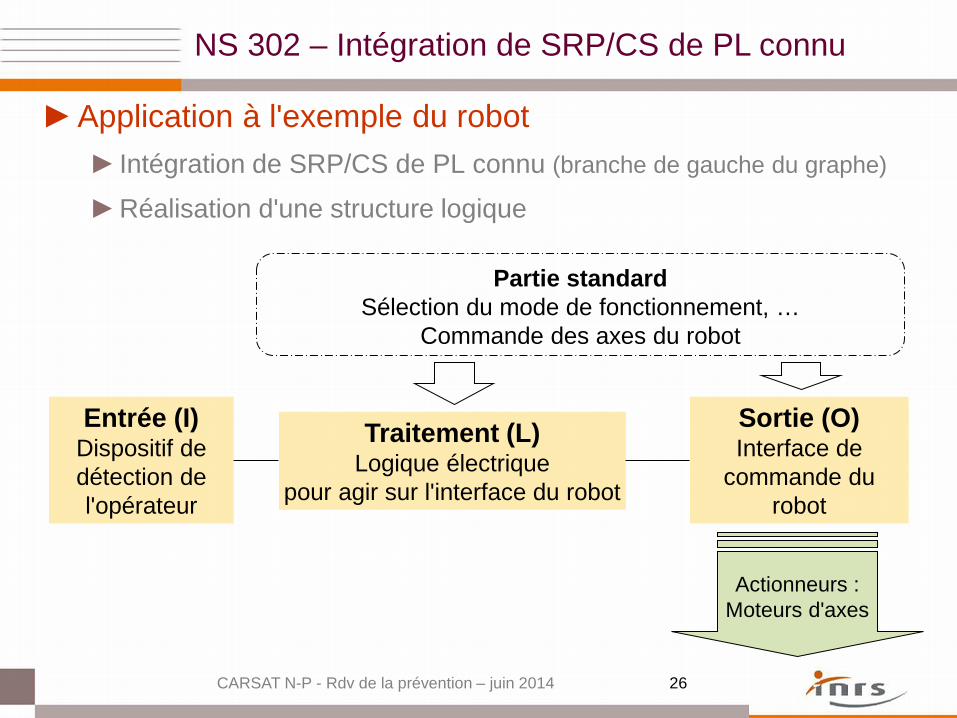
►Application à l'exemple du robot ► Intégration de SRP/CS de PL connu (branche de gauche du graphe)
►Réalisation d'une structure logique
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 26
Entrée (I) Dispositif de détection de l'opérateur
Sortie (O) Interface de
commande du robot
Traitement (L) Logique électrique
pour agir sur l'interface du robot
Actionneurs : Moteurs d'axes
Partie standard Sélection du mode de fonctionnement, …
Commande des axes du robot
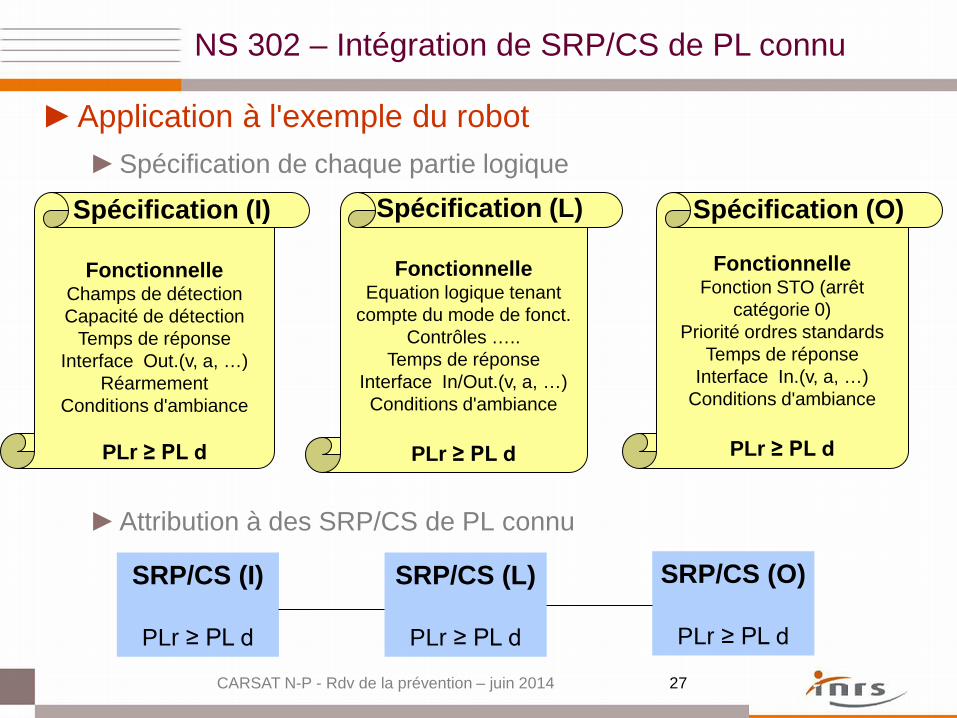
►Application à l'exemple du robot ►Spécification de chaque partie logique
►Attribution à des SRP/CS de PL connu
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 27
Spécification (I)
Fonctionnelle Champs de détection Capacité de détection
Temps de réponse Interface Out.(v, a, …)
Réarmement Conditions d'ambiance
PLr ≥ PL d
Spécification (L)
Fonctionnelle Equation logique tenant
compte du mode de fonct. Contrôles …..
Temps de réponse Interface In/Out.(v, a, …) Conditions d'ambiance
PLr ≥ PL d
Spécification (O)
Fonctionnelle Fonction STO (arrêt
catégorie 0) Priorité ordres standards
Temps de réponse Interface In.(v, a, …)
Conditions d'ambiance
PLr ≥ PL d
SRP/CS (I)
PLr ≥ PL d
SRP/CS (L)
PLr ≥ PL d
SRP/CS (O)
PLr ≥ PL d
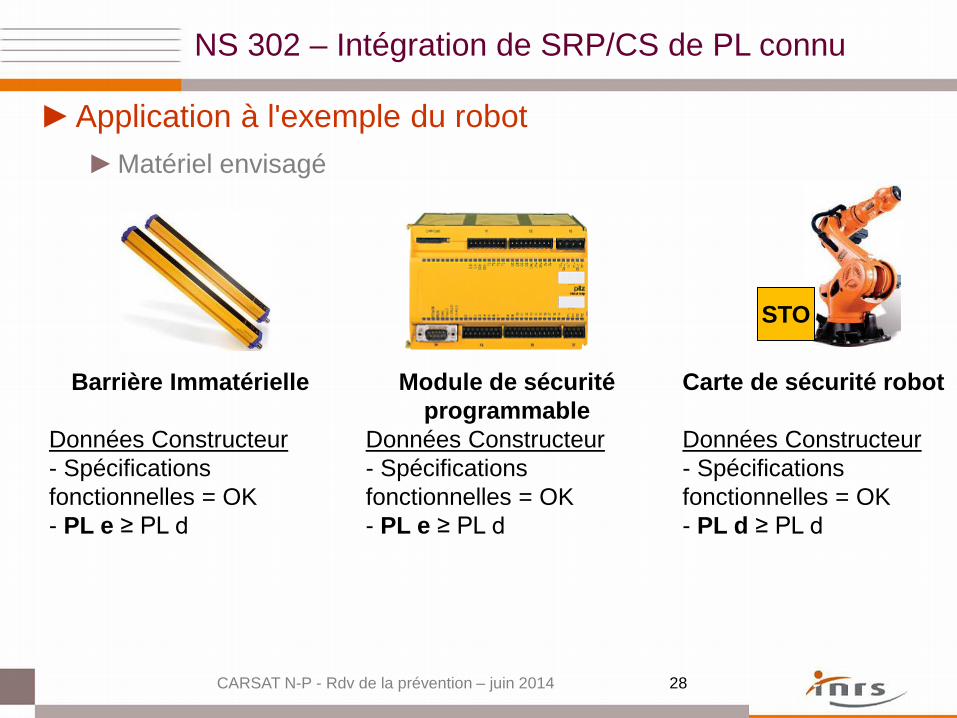
►Application à l'exemple du robot ►Matériel envisagé
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 28
STO
Barrière Immatérielle
Données Constructeur - Spécifications fonctionnelles = OK - PL e ≥ PL d
Module de sécurité programmable
Données Constructeur - Spécifications fonctionnelles = OK - PL e ≥ PL d
Carte de sécurité robot Données Constructeur - Spécifications fonctionnelles = OK - PL d ≥ PL d
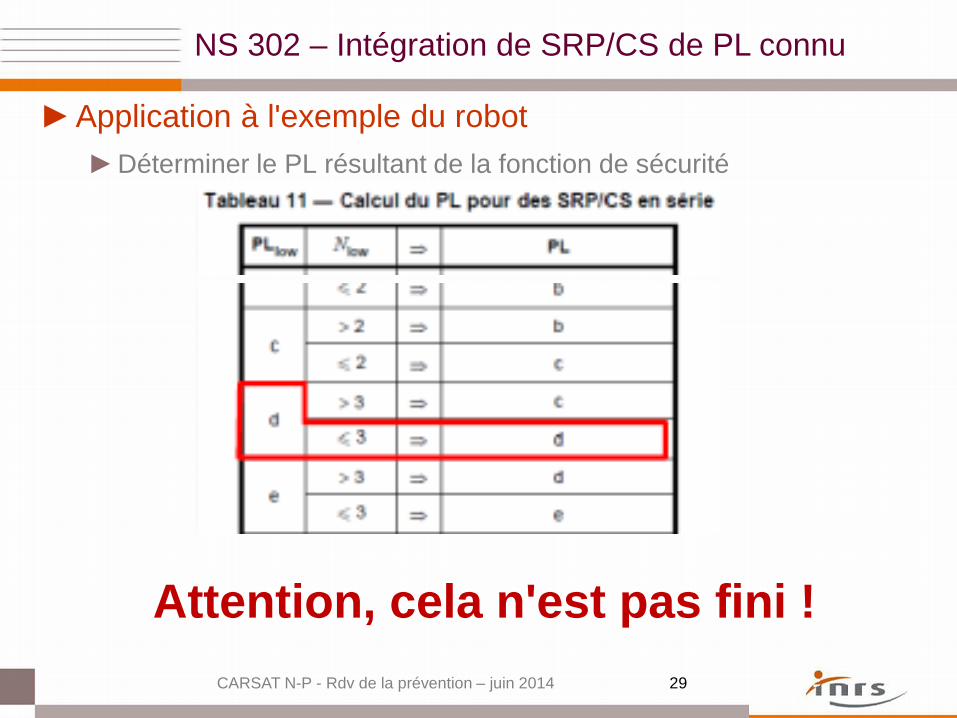
►Application à l'exemple du robot ►Déterminer le PL résultant de la fonction de sécurité
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 29
Attention, cela n'est pas fini !
►Application à l'exemple du robot ►Prendre en compte les mesures nécessaires pour couvrir les
défaillances systématiques
►Dans le cas de l'intégration de composants ►Respect des règles générales de mise en œuvre des composants définies
dans les notices des constructeurs (Protections correctement calibrées, charges admissibles sur les contacts de sorties, longueur et nature des câbles, protections environnementales, …)
►Respect des règles de l'art (EN 60204-1, …)
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 30

►Application à l'exemple du robot ►Appliquer les règles spécifiques de mise en œuvre des
composants ►Choix de câblage ou de paramétrage
►pour tenir compte des spécifications prévues et/ou des contraintes liées au niveau de performance revendiqué par le composant
►Programmation
NS 302 – Intégration de SRP/CS de PL connu
CARSAT N-P - Rdv de la prévention – juin 2014 31
Le niveau de performance de la partie matérielle n'est pas suffisant pour s'assurer du niveau de performance d'une
fonction de sécurité lorsqu'elle est assurée pour partie par du paramétrage ou de la programmation
Attention aux niveaux de performance revendiqués par les fournisseurs de composants qui dépendent du câblage ou du
paramétrage. Ex : PLr - Jusqu'à PLe

NS 302 – Conception d'une SRP/CS
CARSAT N-P - Rdv de la prévention – juin 2014 32
A suivre … Conception d'une SRP/CS





























