Embed Size (px)
Citation preview

1
DYNAMIQUE - RÉFÉRENTIELS NON GALILÉENS - corrigé des exercices I. Force d’inertie d’entraînement a. • Le plateau, en translation verticale sinusoïdale, a une accélération non nulle par rapport au sol ; dans la mesure où on peut considérer que le référentiel lié au sol est galiléen, celui lié au plateau est forcément non galiléen. b. • Le plateau a une accélération dʼentraînement (algébrique) : ae = z•• = -ω2A cos(ωt). ◊ remarque : en translation, lʼaccélération dʼentraînement est la même en tout point du référentiel et il n'y a pas d'accélération complémentaire. • Par rapport au référentiel Rʼ du plateau, le principe fondamental de la dynamique peut sʼécrire (algé-briquement, selon lʼaxe Oz vertical) : maʼ = - P + R +
!
fe où
!
fe = -mae = mω2A cos(ωt) et où R est la réac-tion du plateau. • Tant que le point reste au contact du plateau : aʼ = 0 et R ≥ 0, cʼest-à-dire : mg - mω2A cos(ωt) ≥ 0 dont on déduit :
!
g"2A
≥ cos(ωt). Pour que cette relation soit vérifiée à tout instant t, donc même quand le
cosinus est maximum, il faut que :
!
g"2A
≥ 1, cʼest-à-dire : ω ≤ ω1 =
!
gA
.
c. • On obtient : ω1 = 14 rad.s-1 ; cela correspond à une fréquence N1 =
!
"12#
≈ 2,2 Hz (l'ordre de
grandeur est facile à vérifier expérimentalement). II. Moment cinétique par rapport à un référentiel non galiléen 1. • Par rapport à Rʼ non galiléen, le principe fondamental de la dynamique sʼécrit : m
!
" a =
!
P +
!
T +
!
fe avec : ◊ le poids
!
P = m
!
g ; ◊ la tension du fil
!
T = -T
!
ur ; ◊ la force dʼinertie dʼentraînement
!
fe = -m
!
ae . ◊ remarque : pour une translation, la force dʼinertie complémentaire est nulle. • Lʼéquilibre “relatif” (
!
" a =
!
0 par rapport à Rʼ) correspond à :
!
P +
!
T +
!
fe =
!
0 . La projection de cette équation sur la direction de
!
u" perpendiculaire à
!
ur donne :
P sin(α) - m ae cos(α) = 0 dʼoù on tire : tan(α) =
!
aeg
.
• Mais on peut aussi considérer la dynamique de rotation :
!
" # O • =
!
M" O (
!
P) +
!
M" O (
!
T) +
!
M" O (
!
fe ) qui pour lʼéquilibre donne : ℓ
!
ur × (-mg
!
uz -T
!
ur - mae
!
ux ) =
!
0 . Par suite : -mℓ
!
uy [g sin(α) - ae cos(α)] =
!
0
et donc de même : tan(α) =
!
aeg
.
2. • Lʼétude pour θ quelconque est plus simple avec la rotation :
!
" # O =
!
" O M ⨯�m
!
v = mℓ2
!
ur ⨯
!
ur • où le mouvement de rotation donne :
!
ur • =
!
"⨯
!
ur avec
!
" = θ•
!
uy dʼoù on déduit :
!
" # O = mℓ2θ•
!
uy . • Lʼéquation du mouvement est alors : mℓ2θ•• = -mℓ.[g sin(θ) - ae cos(θ)]. Mais puisquʼon étudie les
oscillations au voisinage de θ = α, on peut utiliser la propriété de lʼéquilibre “relatif” : tan(α) =
!
aeg
qui
donne : ℓ θ•• = -
!
gcos "( )
[sin(θ)cos(α) - sin(α)cos(θ)] = -
!
gcos "( )
sin(θ - α).

2
• On peut alors poser β = θ - α pour simplifier les notations ; on obtient ainsi : β•• + ω2sin(β) = 0 avec
ω2 =
!
g!.cos "( )
=
!
g2 + ae2
!. Pour les petites oscillations on a donc : β•• + ω2β ≈ 0 dont les solutions sont
de la forme : β = B cos(ωt + φ) où B et φ sont des constantes dʼintégration (déterminées dʼaprès les condi-tions initiales) et avec une période : T =
!
2"#
.
III. Mouvement par rapport à un référentiel non galiléen • On considère le mouvement par rapport au référentiel tournant Rʼ. Les forces dʼinertie sont dans le plan horizontal puisquʼelles sont perpendiculaires à
!
" :
!
fc = -2m
!
"⨯
!
" v et
!
fe = -m
!
"⨯(
!
"⨯
!
OM ) (pour
!
" constant). Par suite la composante verticale de la réaction de la circonférence compense le poids (ce sont les deux seules forces verticales et le mouvement est imposé dans le plan horizontal) ; on peut donc se limiter à une étude dans le plan horizontal en notant
!
F la composante horizontale de la réaction. • En coordonnées polaires de centre C, les forces sont :
!
F = Fr
!
" u r (perpendiculaire à la circonférence) ;
!
fc = -2m
!
" ⨯ (Rα•
!
u" ) = 2mRωα•
!
" u r ;
!
fe = -mω2
!
OM = mRω2 [sin(α)
!
u" - {1 + cos(α)}
!
" u r ]. • Le principe fondamental de la dynamique sʼécrit : m
!
" a =
!
F +
!
fe +
!
fc avec :
!
" a = Rα••
!
u" - Rα•2
!
" u r . • La projection sur
!
" u r donne Fr ; celle sur
!
u" donne lʼéquation différentielle du mouvement : mR α•• = -mω2R sin(α). On obtient ainsi une équation analogue à celle du pendule pesant : α•• + ω2 sin(α) = 0. IV. Chute par rapport à un référentiel tournant 1. • On peut chercher à résoudre le problème par rapport à Rʼ, où la relation fondamentale de la dyna-mique sʼécrit : m
!
" a =
!
P +
!
fe +
!
fc avec une force dʼinertie dʼentraînement :
!
fe = -m
!
"⨯(
!
"⨯
!
OM ) (compte tenu du fait que
!
" est constante), et une force dʼinertie complémentaire :
!
fc = -2m
!
"⨯
!
" v . • Cette équation est compliquée, mais sa projection verticale est simple car les forces dʼinertie sont horizontales (perpendiculaires à
!
" = ω
!
uz ) : mz•• = -mg dʼoù z• = -gt et z = -
!
12
gt2 (dʼaprès les condi-
tions initiales). On en déduit que le niveau du plancher, z = -h, est atteint à lʼinstant : t =
!
2hg
.
• Mais puisque lʼénoncé de la question (5) suggère de ne pas chercher à résoudre les équations par rapport à Rʼ, on peut résoudre le problème par rapport à R : m
!
a =
!
P avec une vitesse initiale horizontale
!
v0 = bω
!
" u y = bω
!
uy (en utilisant un repère fixe dont les axes Ox et Oy coïncident avec Oxʼ et Oyʼ à lʼinstant initial, instant du lâcher). • Le mouvement est donc parabolique par rapport à R, avec une accélération verticale z•• = -g, et on retrouve le résultat précédent.

3
2. • En résolvant par rapport à R, on obtient : x•• = 0 puis x• = 0 puis x = b (le mouvement se fait dans le plan déterminé par A,
!
P et
!
v0 ). On obtient de même : y•• = 0 puis y• = bω puis y = bωt. • Le changement de coordonnées correspond alors à : xʼ = x0 = x cos(ωt) + y sin(ωt) = b [cos(ωt) + ωt sin(ωt)] ; yʼ = y0 = -x sin(ωt) + y cos(ωt) = b [-sin(ωt) + ωt cos(ωt)] ;
avec t =
!
2hg
à lʼinstant où le plancher est atteint.
3. • Pour le plomb M, immobile par rapport à Rʼ :
!
T +
!
P +
!
fe =
!
0 et le fil est donc parallèle à
!
P +
!
fe . Or, la force dʼinertie est radiale (en coordonnées cylindriques) :
!
fe = -m
!
"⨯(
!
"⨯
!
OM ) = -mω2
!
HM (avec H projection de M sur lʼaxe), donc
!
T est dans le plan vertical passant par lʼaxe et contenant A, et donc M est aussi dans ce plan. Ceci correspond donc à : yʼ0 = 0. • Dans ce plan, lʼangle α du fil (cʼest-à-dire de
!
T) avec la verticale
est tel que : tan(α) =
!
feP
=
!
"2 # x 0g
; or tan(α) =
!
" x 0 # bh
donc : xʼ0 =
!
b
1" #2hg
.
4. • On obtient : x0 - xʼ0 = b.[cos(ωt) + ωt sin(ωt) -
!
1
1" #2hg
] ; y0 - yʼ0 = b.[-sin(ωt) + ωt cos(ωt)].
• Avec les développements limités : cos(φ) ≈ 1 -
!
12φ2 +
!
124
φ4 et sin(φ) ≈ φ -
!
16φ3 (où φ =
!
"2hg
),
puis :
!
11" #
≈ 1 + ψ + ψ2 (où ψ =
!
"2hg
=
!
12φ2), on obtient (après simplification) :
x0 - xʼ0 ≈ -
!
32
b.
!
"2hg
#
$ %
&
' (
2
; y0 - yʼ0 ≈ -
!
2 23
b.
!
"2hg
#
$ %
&
' (
3/ 2
.
5. • En utilisant les calculs déjà effectués, complétés par :
!
fc = -2m
!
"⨯
!
" v = 2mω(yʼ•
!
" u x - xʼ•
!
" u y ), on obtient : mxʼ•• = mω2xʼ + 2mωyʼ• ; myʼ•• = mω2yʼ - 2mωxʼ• ; mzʼ•• = -mg (déjà utilisé). ◊ remarque : la résolution des équations couplées : xʼ•• - 2ωyʼ• - ω2xʼ = 0 et yʼ•• + 2ωxʼ• - ω2yʼ = 0 n'est pas évidente (une “simple” substitution aboutit à une équation différentielle dʼordre quatre) ; elle est tout de même possible à l'aide du calcul matriciel ou de l'utilisation de la variable complexe Z = xʼ + iyʼ (aboutis-sant à l'équation différentielle Z•• + 2iω Z• - ω2 Z = 0). V. Force d’inertie complémentaire (“de Coriolis”) • La vitesse angulaire de rotation de la terre peut sʼécrire
!
" = ω
!
uz avec ω = 7,27.10-5 rad.s-1. La vitesse relative du train peut sʼécrire :
!
" v = vʼ
!
u" avec vʼ = 66,7 m.s-1. La force dʼinertie complémentaire est par suite :
!
fc = -2m
!
"⨯
!
" v = -2m ωvʼ
!
uz ⨯
!
u" = -2m ωvʼ sin(λ)
!
u" ; cʼest donc une force horizontale orien-tée vers lʼest. • Pour que la réaction soit rigoureusement perpendiculaire au plan des rails, il faudrait incliner ce dernier dʼun angle α tel que : tan(α) =
!
fcP
= 2
!
" # v g
sin(λ) = 8,1.10-4 cʼest-à-dire : α = 8,1.10-4 rad.
◊ remarque : ceci est négligeable car le moindre vent latéral cause un effet nettement supérieur.
4
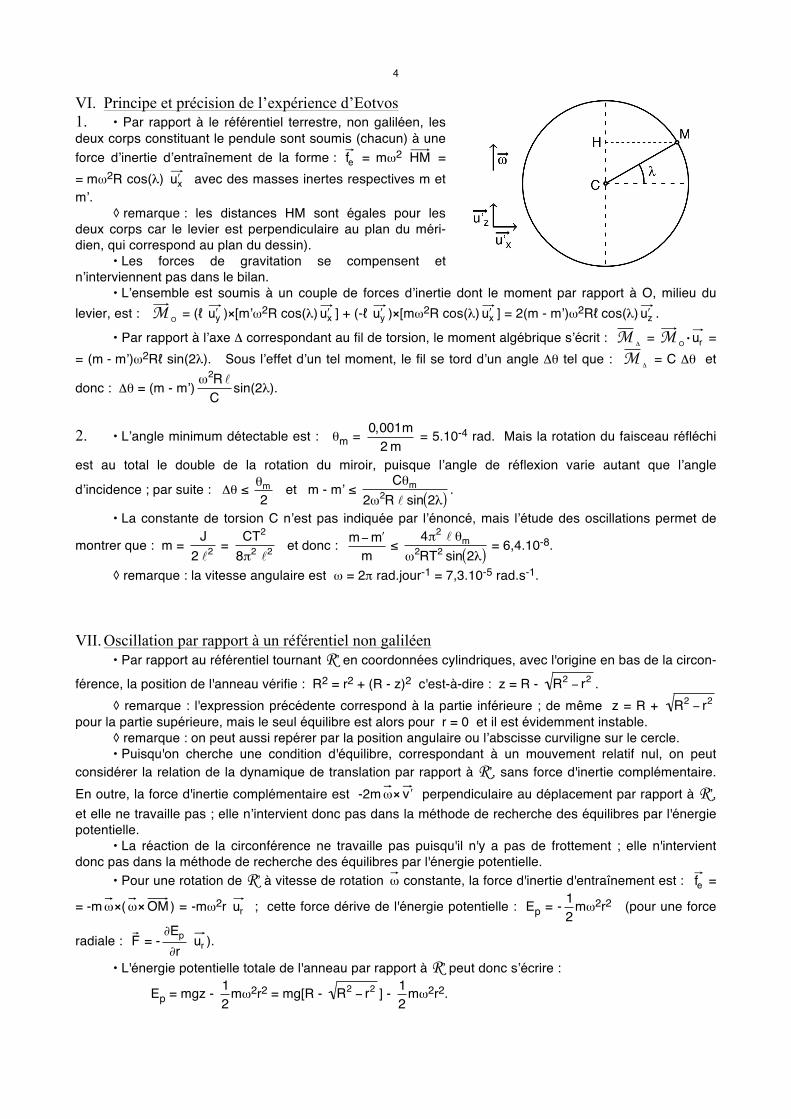
VI. Principe et précision de l’expérience d’Eotvos 1. • Par rapport à le référentiel terrestre, non galiléen, les deux corps constituant le pendule sont soumis (chacun) à une force dʼinertie dʼentraînement de la forme :
!
fe = mω2
!
HM = = mω2R cos(λ)
!
" u x avec des masses inertes respectives m et mʼ. ◊ remarque : les distances HM sont égales pour les deux corps car le levier est perpendiculaire au plan du méri-dien, qui correspond au plan du dessin). • Les forces de gravitation se compensent et nʼinterviennent pas dans le bilan. • Lʼensemble est soumis à un couple de forces dʼinertie dont le moment par rapport à O, milieu du levier, est :
!
M O = (ℓ
!
" u y )⨯[mʼω2R cos(λ)
!
" u x ] + (-ℓ
!
" u y )⨯[mω2R cos(λ)
!
" u x ] = 2(m - mʼ)ω2Rℓ cos(λ)
!
" u z .
• Par rapport à lʼaxe Δ correspondant au fil de torsion, le moment algébrique sʼécrit :
!
M" =
!
M O •
!
ur = = (m - mʼ)ω2Rℓ sin(2λ). Sous lʼeffet dʼun tel moment, le fil se tord dʼun angle Δθ tel que :
!
M" = C Δθ et
donc : Δθ = (m - mʼ)
!
"2R !C
sin(2λ).
2. • Lʼangle minimum détectable est : θm =
!
0,001m2m
= 5.10-4 rad. Mais la rotation du faisceau réfléchi
est au total le double de la rotation du miroir, puisque lʼangle de réflexion varie autant que lʼangle
dʼincidence ; par suite : Δθ ≤
!
"m2
et m - mʼ ≤
!
C"m2#2R ! sin 2$( )
.
• La constante de torsion C nʼest pas indiquée par lʼénoncé, mais lʼétude des oscillations permet de
montrer que : m =
!
J2 !2
=
!
CT2
8"2 !2 et donc :
!
m" # m m
≤
!
4"2 ! #m$2RT2 sin 2%( )
= 6,4.10-8.
◊ remarque : la vitesse angulaire est ω = 2π rad.jour-1 = 7,3.10-5 rad.s-1. VII. Oscillation par rapport à un référentiel non galiléen • Par rapport au référentiel tournant Rʼ en coordonnées cylindriques, avec l'origine en bas de la circon-
férence, la position de l'anneau vérifie : R2 = r2 + (R - z)2 c'est-à-dire : z = R -
!
R2 " r2 . ◊ remarque : l'expression précédente correspond à la partie inférieure ; de même z = R +
!
R2 " r2 pour la partie supérieure, mais le seul équilibre est alors pour r = 0 et il est évidemment instable. ◊ remarque : on peut aussi repérer par la position angulaire ou lʼabscisse curviligne sur le cercle. • Puisqu'on cherche une condition d'équilibre, correspondant à un mouvement relatif nul, on peut considérer la relation de la dynamique de translation par rapport à Rʼ, sans force d'inertie complémentaire. En outre, la force d'inertie complémentaire est -2m
!
"⨯
!
" v perpendiculaire au déplacement par rapport à Rʼ, et elle ne travaille pas ; elle nʼintervient donc pas dans la méthode de recherche des équilibres par l'énergie potentielle. • La réaction de la circonférence ne travaille pas puisqu'il n'y a pas de frottement ; elle n'intervient donc pas dans la méthode de recherche des équilibres par l'énergie potentielle. • Pour une rotation de Rʼ à vitesse de rotation
!
" constante, la force d'inertie d'entraînement est :
!
fe =
= -m
!
"⨯(
!
"⨯
!
OM ) = -mω2r
!
ur ; cette force dérive de l'énergie potentielle : Ep = -
!
12
mω2r2 (pour une force
radiale :
!
F = -
!
"Ep"r
!
ur ).
• L'énergie potentielle totale de l'anneau par rapport à Rʼ peut donc sʼécrire :
Ep = mgz -
!
12
mω2r2 = mg[R -
!
R2 " r2 ] -
!
12
mω2r2.

5
• Les positions d'équilibre correspondent à la condition :
!
"Ep"r
= 0 = -mr.[ω2 -
!
g
R2 " r2] d'où on
déduit : r = 0 ou r =
!
R2 "g#2$
% &
'
( ) 2
(si cette seconde valeur est entre 0 et R, c'est-à-dire si ω >
!
gR
).
◊ remarque : pour la partie supérieure, la condition d'équilibre est :
!
"Ep"r
= 0 = -mr.[ω2 +
!
g
R2 " r2]
d'où on déduit la seule solution : r = 0.
• L'équilibre pour r = 0 est stable si :
!
"2Ep"r2
= K = -m.[ω2 -
!
gR2
R2 " r2( )3/ 2] = m.(
!
gR
- ω2) > 0 c'est-à-dire
pour : ω <
!
gR
.
◊ remarque : on retrouve que, s'il n'y a pas équilibre stable pour r = 0, l'équilibre stable correspond à
l'autre solution : r =
!
R2 "g#2$
% &
'
( ) 2
.
◊ remarque : pour la partie supérieure, on vérifie que la condition d'équilibre stable est impossible :
!
"2Ep"r2
= K = -m (
!
gR
+ ω2) < 0.
• Si le coefficient K est positif (raideur de l'oscillateur), l'énergie potentielle est Ep ≈
!
12
Kr2 (compte
tenu de Ep0 = 0) et la période des petites oscillations est : T =
!
2" mK
=
!
2"gR#$2
.
◊ remarque : cela correspond à une pulsation ω0 telle que : ω02 =
!
Km
=
!
gR
- ω2.
◊ remarque : le calcul de la période suppose que Ec =
!
12
m r•2, ce qui est correct ici pour r ≈ 0, à
lʼordre dʼapproximation considéré, car : v = s• = Rθ• et r = R sin(θ) ≈ Rθ. VIII. Marées d'équinoxe 1.a. • Les forces de marée sont maximales lorsque le point considéré se trouve sur la droite passant par les centres de la Terre et du Soleil. Lorsque la Terre est au voisinage du solstice, l'alignement n'est jamais parfait pour un point situé sur l'équateur à cause de l'inclinaison de l'axe de rotation de la Terre. Les varia-tions sont d'allure sinusoïdale, avec une périodicité d'environ 12 h.
1.b. • Lorsque la Terre est au voisinage de l'équinoxe, l'alignement est parfait dans les conditions de la marée haute. Les marées ont donc une amplitude plus grande.
6
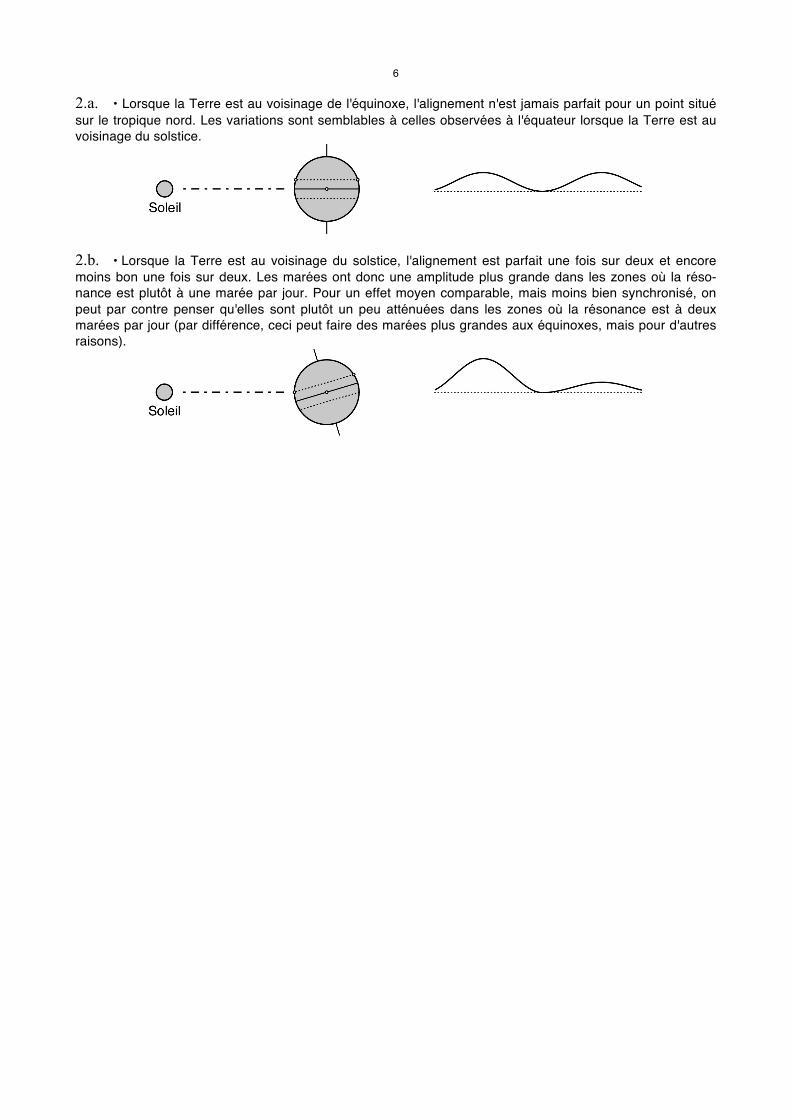
2.a. • Lorsque la Terre est au voisinage de l'équinoxe, l'alignement n'est jamais parfait pour un point situé sur le tropique nord. Les variations sont semblables à celles observées à l'équateur lorsque la Terre est au voisinage du solstice.
2.b. • Lorsque la Terre est au voisinage du solstice, l'alignement est parfait une fois sur deux et encore moins bon une fois sur deux. Les marées ont donc une amplitude plus grande dans les zones où la réso-nance est plutôt à une marée par jour. Pour un effet moyen comparable, mais moins bien synchronisé, on peut par contre penser qu'elles sont plutôt un peu atténuées dans les zones où la résonance est à deux marées par jour (par différence, ceci peut faire des marées plus grandes aux équinoxes, mais pour d'autres raisons).





























