Embed Size (px)
Citation preview

الجمهورية الجزائرية الديمقراطية الشعبيةRépublique Algérienne Démocratique et Populaire
وزارة التعليم العالي و البحث العلميMinistère de l’Enseignement Supérieur et de la Recherche Scientifique
Université Larbi Ben M’hidi Oum-El-Bouaghi
Faculté des Sciences et Sciences Appliquées
Département de Génie Mécanique
Filière : Génie Mécanique
Option : Construction Mécanique
Mémoire de Fin d'Etudes
En vue de l’obtention du diplôme :
MASTER
Conception et Modélisation d'un Robot
Marcheur Quadrupède
Présenté par :
Mihoubi Abdelfetah
Soutenu le : 28 Juin 2018
Encadreur : Aissaoui Abderrahmane
Année universitaire : 2017 / 2018

1
Dédicaces Je dédie ce modeste travail à : Mes parents qui m’ont
permet d’être ce que je suis.
Toute la famille Toute
La promotion
Tous mais amis

2
Remerciements
Je remercie « ALLAH » de m' avoir donné le courage
ainsi que la force pour pouvoir achever ce modeste travail.
J'exprime toute ma reconnaissance à mon encadreur Monsieur : Aissaoui
Abderrahmane pour ses conseils pertinents, son soutient moral et scientifique
constant et les facilités qu’il m' a accordées.
Je tiens à remercier également le président et les membres de jury de ma
soutenance qui n’ont pas hésités pour examiner le contenu de cet ouvrage.
Qu’ils trouvent ici le témoignage de mes profonds respects.
Je remercie mes amis, toute la famille du département de mécanique de
l’université Larbi ben M'hidi d’Oum El Bouaghi , qu’ils trouvent ici l’expression
de ma profonde sympathie.
Enfin que tous ceux, d’une manière ou d’une autre, ont contribué à la réalisation
de ce travail trouvent ici, l’expression sincères de ma reconnaissance et ma
gratitude.

3
Sommaire :
Introduction Générale.. …………………………………………………………………………………………………………………….8
Chapitre I : Etude bibliographique sur les robots quadrupèdes………………………………………………………… 11
I.1. Introduction : ………………………………………………………………………………………………………………………… 11
I.2. Les bras manipulateurs : …………………………………………………………………………………………………….. 11
I.3. Les robots mobiles: ……………………………………………………………………………………………………………….. 11
I.3.1. Robots à roues : ………………………………………………………………………………………………………………… 12
I.3.2. Robots à chenilles : ................................................................................................. 12
I.3.3. Robots volants : ....................................................................................................... 13
I.3.4. Robots sous-marins : ............................................................................................... 13
I.4. Robots marcheurs : 14
I.4.1. Les robots monopèdes : ........................................................................................... 14
I.4.2.Les robots bipèdes : .................................................................................................. 14
I.4.3. Les robots quadrupèdes : ......................................................................................... 15
I.5.4. Les robots hexapodes : ............................................................................................ 15
I.5. Description des robots quadrupèdes : 16
I.5.1. L’inspiration biologique : ........................................................................................ 16
I.5.1. La structure de robot quadrupède : .......................................................................... 16
I.6. La marche animale quadrupède: 18
I.6.1. La marche normale : ................................................................................................ 18
I.7. Les diagrammes de la marche quadrupède : 20
I.7.1. La marche latérale : ................................................................................................. 20
I.7.2. La marche diagonale : .............................................................................................. 20
I.8. Les robots quadrupèdes réalisés: 21
I.8.1. Le robot TITAN : .................................................................................................... 21
I.8.1.1. La chaine cinématique : ........................................................................................ 21
I.8.2. Le robot oscillator : ................................................................................................ 22
I.8.2.1. La marche du robot oscillator : ............................................................................. 23
I.8.3. Le robot Dochiba : ................................................................................................... 23
I.8.3.1. La marche du robot Dochiba : .............................................................................. 24
I.8.4. Le Robot Tohoko : ................................................................................................... 24
I.7.5. Le robot quadrupède de Boston Dynamics :............................................................ 25

4
I.8. Conclusion : ……………………………………………………………………………………………………………….. 26
Chapitre II : Modélisation du robot quadrupède……………………………………………………………………………… 27
I.1. Introduction : …………………………………………………………………………………………………………………. 27
II. Modèle géométrique : …………………………………………………………………………………………………….. 27
II.2. Modèle géométrique direct :...................................................................................... 27
II.2.1. Définition ............................................................................................................... 27
II.2.2. Méthode de calcul du Modèle Géométrique Direct : ............................................. 27
II.2.3.Application de Modèles Géométrique Direct : ....................................................... 29
II.2.3.1.La chaine cinématique de la patte : ...................................................................... 29
II.2.3.4. .Tableau de Dénavit- Hartenberg : ...................................................................... 31
II.3.1.4.Matrices des transformations partielles : .............................................................. 31
II.2.3.5. Calcul du Modèle Géométrique Direct : ............................................................. 32
II.2.3.6. Model Géométrique Direct : .............................................................................. 32
II.3.8.MGD de robot complet : ......................................................................................... 34
II.3 Model géométrique inverse (MGI) : .......................................................................... 35
II.3.1.Définition : .............................................................................................................. 35
II.3.2.Méthode de Paul pour calculer le MGI : ................................................................. 35
II.3.3. Application du MGI : ............................................................................................. 36
II.3.3.1.Calcul Ѳ1 : ........................................................................................................... 36
II.3.3.2.Calcul de ......................................................................................................... 36
.......................................................................................................................................... 36
II.3.3.4.Application numérique de MGI : ......................................................................... 38
II.2.3.5. MGI robot complet : ............................................................................................ 41
II.3. Modèle cinématique : 42
II.4.1. Modèle Cinématique Direct (MCD) : .................................................................... 42
III.4.2. Définition : ............................................................................................................ 42
II.4.3. Méthode de calcul de matrice J : ............................................................................ 42
II.4.4. Application de calcul de J : .................................................................................. 43
II.5.Model Cinématique Inverse : ..................................................................................... 44
II.5.1.Définition : .............................................................................................................. 44
II.5.2.Valeur de J-1 : ........................................................................................................... 44
II.5.3.Calcul des positions singulières : ........................................................................... 44
II.6. Conclusion : ……………………………………………………………………………………………………………………… 45
Chapitre III : Conception du robot quadrupède………………………………………………………………………….. 46
III.1. Introduction : …………………………………………………………………………………………………………………. 46

5
III.2. Conception du robot :…………………………………………………………………………………………………….. 46
III.2.1. Conception des différentes pièces : ................................................................ 46
III.2.2. Conception du modèle 3D du quadrupède : ................................................. 49
III.3. Animation de la marche sous solidworks :……………………………………………………………………….. 49
III.3.1. Les étapes de animation : ................................................................................ 49
III.3.2. Résultat de l'animation de la marche du quadrupède : ................................... 52
III.4. Conclusion : 53
Conclusion général………………………………………………………………………………… 54
Référence bibliographiques……………………………………………………………………………55
Résumé ……………………………………………………………………………………………… 56

6
Liste des Figures :
Figure I.1 : Bras manipulateur………………………………………………………………………………………………………… 11
Figure I.2 : les robot mobile a roues………………………………………………………………………………………………… 12
Figure I.3 : robots à chenilles………………………………………………………………………………………………………… 12
Figure I.4 : les robots volants. ………………………………………………………………………………………………………… 13
Figure I.5 : Robot sous-marin . ………………………………………………………………………………………………………… 13
Figure I.6 : Robot monopède . ………………………………………………………………………………………………………… 14
Figure I.7 : Robots bipèdes. ………………………………………………………………………………………………………… 14
Figure I.8 : Robot quadrupède Big Dog de Boston Dynamics…………………………………………………………… 15
Figure I.9 : Robot Hamlet. ………………………………………………………………………………………………………… 15
Figure I- 10 : Photo et squelette d'un cheval ……………………………………………………………………………………16
Figure I.11 : Les robots quadrupèdes…………………………………………………………………………………………… 16
Figure I-12 : Comparaison de la patte de robot Big Dog et celle du chien …………………………………….. 17
Figure I.13 : Le guépard et son homologue robot. ………………………………………………………………………….17
Figure I.14 : Les phases de la marche normale d'une vache …………………………………………………………….18
Figure I.15 : Les phases de la marche de cheval ………………………………………………………………………………18
Figure I- 16 : le trotte du cheval …………………………………………………………………………………………………….19
Figure I.17 : la saut du cheval. ………………………………………………………………………………………………………..19
Figure I.18 : la trotte de chameau …………………………………………………………………………………………………..19
Figure I.19 : Présentation la marches latérale . ……………………………………………………………………………….20
Figure I.20 : Présentation la marche diagonale ……………………………………………………………………………….20
Figure I.21 : Robot TITAN et son model CAO. ……………………………………………………………………………………21
Figure I.22 : La chaine cinématique du robot TITAN. ……………………………………………………………………….21
Figure I.34 : Robot de Boston Dynamics…………………………………………………………………………………………… 26
Figure II-1. Robot à structure ouverte simple………………………………………………………………………………….. 28
Figure II-2 :Paramètres géométriques dans le cas d'une structure ouverte simple…………………………… 28
Figure.II-3 : la chain cinématique de la patte …………………………………………………………………………………..29
Figure.II.4: la patte de Robot ………………………………………………………………………………………………………….29
Figure.II.5 : cœur et la patte de Robot ……………………………………………………………………………………………..30
Figure.II.6: Posture d’une patte MGD ………………………………………………………………………………………………33
Figure II.7:(a,b,c) :la variation des angles Ѳ1et Ѳ2 et Ѳ3 ………………………………………………………………..33
Figure II.8 : l’espace de travaille dans l’espace figure II.9 : l’espace de travaille dans le plan ….34
Figure II.10 : posture de quadrupède ……………………………………………………………………………………………34

7
Figure.II.11 : (a,b,c,d) présenter les solutions de MGI…………………………………………………………………….. 38
Figure.II.12 : Configuration de patte au MGI……………………………………………………………………………….. 39
Figure II.13 : la trajectoire linéaire………………………………………………………………………………………………… 40
Figure II.14: la trajectoire circulaire……………………………………………………………………………………………… 40
Figure II.15 : Trajectoir quelquone………………………………………………………………………………………………… 41
Figure II.16 : posture de quadrupède…………………………………………………………………………………………… 41
Figure.II.17 :la première position singulière…………………………………………………………………………………… 44
Figure.II.18: la deuxième position singulier……………………………………………………………………………………. 45
Figure III.1 :Pièce d’articulation…………………………………………………………………………………………………………47
Figure III.2 : Les pieces des fixation…………………………………………………………………………………………… 47
FigureIII.3 : les pieces pour assurer le mouvement………………………………………………………………………….
Erreur ! Signet non défini.
Figure III.4 les pièces de cœur…………………………………………………………………………………………………………
Erreur ! Signet non défini.
Figure III.5 :Pièce detrajectoire………………………………………………………………………………………………………… 49
Figure III.6 : LE ROBOT 3D …………………………………………………………………………………………………………49
FigureIII..7 reglage le temps de moteur …………………………………………………………………………………………50
FigureIII.8 : le calcul des moteur ……………………………………………………………………………………………………..51
Figure III.9 :La numérotation des moteurs ……………………………………………………………………………………….51
Figure III.10 : Séquence de la marche latérale montrant les différant occupée par les 4 pattes ………..52
Figure III.11 : Séquence de la marche montrant les différant occupée par les 4 pattes………………….. 53

8
Liste des Tableaux :
Tableau II.1: Repérage du robot complet …………………..…………………………….30
Tableau II.2 : Paramètres de Dénavit- Hartenberg……………………………………… 31

9
Introduction Générale
La robotique est l'ensemble des techniques permettant la conception et la réalisation des
machines automatiques ou des robots. Cette discipline concerne l’ensemble des domaines
scientifiques et industriels en rapport avec la conception et la réalisation des robots . Dans le
domaine industriel, la robotique produit des automates réalisant des fonctions précises sur des
chaînes de montage, outre industrie, elle produit aussi des engins capables de se mouvoir
dans différents milieux : dangereux (pollués, radioactifs...), aérien, sous-marins, spatiaux…
On classe les robots en deux catégories principales : les robots à base fixe ou bras
manipulateurs et les robots mobiles.
Parmi les robots mobiles, on s'intéresse aux robots marcheurs qui utilisent leurs pattes comme
moyens de locomotion. Ils peuvent être très différents par leur forme et par le nombre de leurs
pattes. Il existe des robots à deux pattes (bipèdes), à quatre pattes (quadrupèdes), des robots à
six pattes (hexapodes), des robots à huit pattes (octopodes) et d'autres à plusieurs pattes. Ces
robots marcheurs présentent l’avantage d’une meilleure mobilité dans des terrains
encombrants en raison de l’intermittence du contact pied/sol.
Les domaines d’application de ce type de robots sont très variés: de l’intervention en
milieux hostiles et l'accès aux sites difficiles jusqu’aux applications domestiques en passant
par les taches d’assistance et de service,
L'idée de concevoir des robots marcheurs quadrupèdes(à quatre pattes) vient de
l’inspiration biologique en imitant les animaux à quatre pattes :cheval, vache, chien, chèvre
chameau, guépard, etc. A travers cette inspiration, les chercheurs bio-roboticiens veulent
progressivement concevoir des robots marcheurs présentant les meilleurs caractéristiques
remarquées chez ces animaux , à savoir :
la meilleure structures en termes de forme et de mobilité,
les bonnes capacités de déplacement en termes de modes de marche, de vitesse et
d'adaptation de postures aux milieux dans lesquels ils marchent ,

10
ainsi que leurs comportements intelligents en termes d'évitement d'obstacles et de
réactions aux situations aléatoires imprévues qu'ils rencontrent.
Ces travaux débutent toujours par la modélisation mathématique du robot qui fera l'objectif
du présent travail. Ce manuscrit se compose de trois chapitres :
Au premier chapitre on dresse une étude bibliographique pour avoir une idée globale
sur les robots marcheurs et spécialement sur les quadrupèdes .
est entamée au second chapitre, la modélisation de l'une de ses pattes, qui sera prise
comme étant un bras manipulateur à trois degrés de liberté et se généralise à toutes les
pattes articulées au corps.
Au troisième chapitre, on propose un modèle de Conception Assistée par Ordinateur
(CAO) de ce robot quadrupède ainsi que l'animation du mode de marche approprié .
Enfin une conclusion générale synthétisera ce travail et proposera ce qui viendra à sa suite.

11
Chapitre I : Etude bibliographique sur les robots quadrupèdes
I.1. Introduction :
L'utilisation des robots en générale joue un rôle très important dans le secteur
industriel et aussi de plus en plus dans les secteurs de services comme l'entretien, l'exploration
et la médecine.
Les structures, formes et fonctionnalités de ces robots doivent être adaptées à l’environnement
avec lequel ils interagissent. On peut classer les robots en deux catégories principales : les
robots à basefixe (Bras manipulateurs) et les robots mobiles.
I.2. Les bras manipulateurs :
Ces robots à base fixe(Figure I.1) peuvent être utilisés en industrie pour des tâches de tri,
d’assemblage, de soudage, de peinture ou plus récemment pour d’autres opérations exigeant
de la précision par exemple la chirurgie [1].
Figure I.1 : Bras manipulateur.
I.3. Les robots mobiles:
Un robot mobile [2] est un véhicule doté de moyens de locomotion qui lui
permettent de se déplacer. Suivant son degré d'autonomie, il peut être dote de
moyens de perception et de raisonnement. La classification des robots mobiles se

12
fait suivant plusieurs critères (degré d'autonomie, système de locomotion, énergie
utilisée ...), on en cite les :
I.3.1. Robots à roues :
La mobilité par roues (Figure I.2)est la structure mécanique la plus communément
appliquée. Cette technique assure selon l'agencement et les dimensions des roues un
déplacement dans toutes les directions avec une accélération et une vitesse
importantes .Le franchissement d'obstacles ou l'escalade de marches d'escaliers est
possible [2].
Figure I.2 : les robots mobiles à roues.
I.3.2. Robots à chenilles : L'utilisation des robots à chenilles (Figure I.3) présente l'avantage d'une bonne
adhérence au sol et d'une faculté de franchissement d'obstacles. L'utilisation est
orientée vers l'emploi sur sol accidenté ou de mauvaise qualité [2].
Figure I.3: robots à chenilles.

13
I.3.3. Robots volants :
Un drone (Figure I.4)désignent un aéronef sans pilote a bord peut avoir un
usage civil ou militaire. Les drones sont utilisés au profit des forces armées ou de
sécurités. L’idée d’usinage des robots volants est extraite des insectes volants
comme les abeilles [2].
Figure I.4: les robots volants.
I.3.4. Robots sous-marins :
Un robot sous-marin(Figure I.5)est un véhicule qui se déplace dans l'eau de manière
autonome [2].
Figure I.5 : Robot sous-marin .

14
I.4. Robots marcheurs : Les robots marcheurs peuvent être très différents par leur forme et par leur
nombre de leurs pattes. Selon ce nombre, ils peuvent être monopèdes , bipèdes,
quadrupèdes, hexapodes, octopodes ou à plusieurs pattes.
I.4.1. Les robots monopèdes : Le seul mouvement que ce robot à une seule jambe (Figure I.6) peut faire est de
sauter pour se déplacer car il n y'a qu'un seul point de contact avec le sol. La stabilité
dynamique du monopèdes est le point de préoccupation principale pour parvenir à
un équilibre entre le centre de gravité et la masse du corps[3].
Figure I.6: Robot monopède .
I.4.2.Les robots bipèdes : Les robots bipèdes (Figure I.7 ) sont aussi connus comme des robots humanoïdes
parce que les humains marchants aussi sur deux pieds et sont d’habitude les plus semblables à
l’homme. L’étude des robots bipèdes reste difficile vu qu’ils ne sont pas statiquement stables
comme leurs homologues quadrupèdes ou hexapodes [3].
Robot Leor. Robot Dobi .
Figure I.7 : Robots bipèdes.

15
I.4.3. Les robots quadrupèdes : Inspirés de la morphologie d'un animal à quatre pattes (Figure I.8), Ces quadrupèdes
déplacent chaque patte séparément . Il est plus délicat de faire avancer à la fois deux pattes
opposées, car le polygone de sustentation devient étroit . Ces robots sont plus stables que les
bipèdes [3].
Figure I.8 : Robot quadrupède Big Dog de Boston Dynamics.
I.4.4. Les robots hexapodes : Ce type se réfère aux robots d'inspiration biologique imitant les insectes. leur
locomotion est fondée sur l'alternance des trois pattes. Les robots hexapodes sont
considérés plus stables que les robots quadrupèdes et bipèdes [3].
Figure I.9 : Robot Hamlet.

16
I.5. Description des robots quadrupèdes :
I.5.1. L’inspiration biologique : La construction des robots quadrupèdes (Figure I.10) est issue de
l'inspiration biologique permettant d'imiter des animaux dotés de deux paires de
pattes. Le corps des animaux est formé par un certain nombre de segments disposés
à la suite les uns des autres (tête, thorax et abdomen). Chaque patte est constituée
de plusieurs segments.
Figure I- 10 : Photo et squelette d'un cheval
I.5.1.1.La structure de robot quadrupède :
La conception des robots quadrupèdes vient des animaux à quatre pattes (Figure
I.11 ), le robot Big Dog développé par Boston Dynamics et le robot de Aibo du
labo de recherche de Sony sont fondamentalement inspiré d’un chien .
Un chien Robot Big Dog Robot Aibo
Figure I.11 : Les robots quadrupèdes.

17
La Figure I.12 présente la conception de la patte du robot Big Dog
comparée à la patte d'un chien [4] .
Figure I-12 : Comparaison de la patte de robot Big Dog et celle du chien .
Dans Figure I.13 est présenté le guépard et son homologue robot.
Le guépard. Le robot guépard.
Figure I.13 : Le guépard et son homologue robot.

18
I.6. La marche animale quadrupède:
Les types de marches utilisés par les animaux quadrupèdes diffèrent d'un
animal à un autre, on cite : la marche diagonale, la marche latérale et la marche
tripode.
I.6.1. La marche normale :
Nous remarquons qu'un pas de marche normale d'une vache (Figure I.14) comporte
la marche diagonale, la marche latérale et la marche tripode [5].
Figure I.14 : Les phases de la marche normale d'une vache
Pour un cheval le mode de marche(Figure I.15)le plus utilisé est le tripode[6] .
Figure I.15 : Les phases de la marche de cheval
La Figure I.16 montre une illustration du trotte qui est une démarche dans laquelle
les paires des pieds diagonalement opposée sont soulevées, balancées en avants et

19
placées de nouveau sur le terrain deux fois pendants chaque pas . Ce trotte illustre
une marche diagonale.
Figure I- 16 : le trotte du cheval
Si la vitesse de la marche augmente on passe à la course (Figure I.17 )où le contact
avec le sol sera avec une seule patte ou sans contact [5].
Figure I.17 : la saut du cheval.
Le trotte de chameau (Figure I.18 )montre une marche latérale où les deux
pattes latérales sont posées et soulevées à chaque fois pour un pas.
Figure I.18 : la trotte de chameau

20
I.7. Les diagrammes de la marche quadrupède :
I.7.1. La marche latérale :
Dans la Figure I.19 est présentée la marche latérale du robot quadrupède [7].
Figure I.19 : Présentation de la marche latérale.
I.7.2. La marche diagonale :
La FigureI.20 illustre la marche diagonale du robot quadrupède [7].
Figure I.20 : Présentation de la marche diagonale

21
I.8. Les robots quadrupèdes réalisés:
I.8.1. Le robot TITAN :
Ce robot (Figure I.21)de l'Université de Coombira est construit pour marcher en
terrain naturel [8] .
a b
Figure I.21 : a- Robot TITAN , b- son model CAO.
I.8.1.1. La chaine cinématique :
La chaine cinématique (Figure I.22) de chaque patte comporte 3 degré de liberté
rotoides, le premier segment est perpendiculaire aux deux autres segments.
.
Figure I.22 : La chaine cinématique du robot TITAN.

22
La Figure I.23 montre le modèle de marche du robot TITAN qui comporte une
phase de support sur trois pattes ensuite sur deux pattes et qui se répètent d'une
façon périodique jusqu’à la fin de cycle.
Figure I.23 : Diagramme de marche du robot TITAN.
I.8.2. Le robot Oscillator :
Le robot Oscillator (Figure I.24 )est un robot quadrupède de l'université de
Tohoku, du Japon[8] . Ce robot est fabriqué dans le but de traduire les modèles de
marche des quelques animaux quadrupèdes , en terme de mobilité et de vitesse. Il
peut marcher dans des conditions environnementales différentes. Il s'adapte
également aux changements en répartissant son poids et en modifiant sa vitesse de
marche.
Figure I.24 : Le robot Oscillator.

23
I.8.2.1. La marche du robot Oscillator : L’idée initiale de marche de ce robot (Figure I.25 )est inspirée de la
marche des animaux.
Figure I.25 : La marche de ce robot.
Dans le cas de la marche normale (Figure I.25 de gauche) : le nombre de
pattes en contact pendant un cycle débute par quatre , ensuite continue par deux et
trois d'une façon périodique jusqu'à la fin.
Dans le cas du trotte (Figure I.25 de droite )le robot s'appuie au début sur trois
pattes , ensuite il continue sur deux jusqu’à la fin de cycle .
I.8.3. Le robot Dochiba:
Développé par l'Université de Kyoto, ce robot(Figure I.26) quadrupède [9] ,
estréalisé pour marcher dans différent endroits.
c
Figure I.26 : Robot Dochiba. Figure I.27 : Schéma du robot.

24
I.8.3.1. La marche du robot Dochiba :
Dans le cas de la marche normale en tripode (Figure I.29 de gauche) : Il y a
toujours trois pattes en contact, alors que chaque patte est soulevée à tour de rôle
jusqu'a la fin de cycle.
Dans le cas du trotte en diagonale(Figure I.29 de droite )le robot s'appuie tout le
temps sur deux pattes en les changeant avec les deux autres périodiquement jusqu’à
la fin de cycle .
Figure I.29 : Les deux types de marche du robot Dochiba.
I.8.4. Le Robot Tohoko :
Dans son article [10] takechi et ses alliés de l'université de tohoko ont conçu un
robot quadrupède pour qu'il aie une grande capacité a résister aux perturbations
extérieures.
Figure I.30: Modèle du robot Tohoko . Figure I.31: La patte du robot Tohoko .

25
Figure I.32 : La marche du robot Tohoko.
Au départ le robot est en contact sur quatre pattes, ensuite il marche en tripode à
tour de rôle de chaque patte.
I.8.5. Le robot quadrupède de Boston Dynamics : Parmi les pionniers de la locomotion quadrupède au niveau mondial, on cite la firme
Boston Dynamics qui a réalisé plusieurs prototypes des robots quadrupèdes :
(LittleDog ,Big Dog, Spot, etc. Le robot Big Dog est un robot imitant la forme d'un
chien utilisé dans le domaine militaire.
Figure I.33: Le robot Big Dog de Boston Dynamics.
Enfin nous mentionnons les deux robots Spot Mini et Little Dog utilisés afin d'aider les
personnes dans leur vie.

26
Spot Mini Little Dog
Figure I.34: Robot de Boston Dynamics.
I.9. Conclusion :
Ce chapitre nous a permis de noter les points suivants concernant les
robots quadrupèdes :
la conception d'un robot quadrupède est issue de l'inspiration biologique ;
un robot quadrupède est constitué d'un corps et de quatre pattes identiques ;
En général la chaine cinématique de chaque patte comporte 3 degrés de liberté
rotoides ;
Il existe plusieurs modes de marche selon la synchronisation des mouvements
relatifs des pattes et du mouvement conséquent du corps ;
On présente au chapitre suivant la modélisation du robot quadrupède .

27
Chapitre II : Modélisation du robot quadrupède
II.1. Introduction :
Modéliser un robot c’est définir son modèle mathématique afin de pourvoir
simuler les différentes positions occupées par son corps et ses pattes dans l’espace.
Cette modélisation concerne le calcul de modèle géométrique direct et inverse
et le modèle cinématique du robot à partir d’une chaine cinématique.
II. Modèle géométrique :
II.2. Modèle géométrique direct :
II.2.1. Définition
Le modèle géométrique direct (MGD) [11] est l'ensemble des relations qui
permettent d'exprimer la situation de l'organe terminal, c'est-à-dire les coordonnées
opérationnelles du robot, en fonction de ses coordonnées articulaires. Dans le cas
d'une chaîne ouverte simple, il peut être représenté par la matrice de
transformation0Tn
0Tn=0T11T2
2T3 ……….n-1Tn (II-1)
II.2.2. Méthode de calcul du Modèle Géométrique Direct :
Une structure ouverte [11] simple est composée de n+1 corps notés C0, C1,…, Cn et
de n articulations. Le corps C0 désigne la base du robot et le corps Cn le corps qui
porte l'organe terminal. L'articulation j connecte le corps Cjau corps Cj-1 (figure II-
1). La méthode de description est fondée sur les règles et conventions suivantes :
– les corps sont supposés parfaitement rigides. Ils sont connectés par des
articulations considérées comme idéales (pas de jeu mécanique, pas d'élasticité), soit
rotoïdes, soit prismatiques ;
– le repère Rj est lié au corps Cj ;

28
– l'axe zj est porté par l'axe de l'articulation j ;
– l'axe xj est porté par la perpendiculaire commune aux axes zj et zj+1. Si les axes zj
et zj+1 sont parallèles ou Colinéaires, le choix de xj n'est pas unique : des
considérations de symétrie ou de simplicité permettent alors un choix rationnel .
Le passage du repère Rj-1 au repère Rj s'exprime en fonction des quatre paramètres
géométriques suivants (figure II.2) :
• αj : angle entre les axes zj-1 et zj correspondant à une rotation autour de xj-1 ;
• dj : distance entre zj-1 et zj le long de xj-1 ;
• Ѳj : angle entre les axes xj-1 et xj correspondant à une rotation autour de zj ;
• rj : distance entre xj-1 et xj le long de zj.
Figure II.1 :Robot à structure ouverte simple
La variable articulaire qj associée à la jème articulation est soit qj, soit rj, selon que cette
articulation est detype rotoïde ou prismatique, ce qui se traduit par la relation :
qj=--jj + j rj(II-2)avec :
• j = 0 si l'articulation j est rotoïde ;
• j = 1 si l'articulation j est prismatique ;
• -j = 1 – j
Figure II.2 : Paramètres géométriques dans le cas d'une structure ouverte simple

29
La matrice de transformation homogène (4x4) définissant le repère Rj dans le repère Rj-1 est
donnée par:
j-1Tj = Rot(x, αj) Trans(x, dj) Rot(z, Ѳj) Trans(z, rj)
j-1Tj = (II-2)
Avec : cos(Ѳj)=cѲj, sin(Ѳj)=SѲj , cos(αj)=Cαj, sin(αj)=Cαj ,
II.2.3.Application de Modèles Géométrique Direct :
II.2.3.1.La chaine cinématique de la patte :
Figure II.3 : La chaine cinématique de la patte
Figure II.4 : la patte de Robot

30
La chaine cinématique de la patte comporte 3 degré de liberté, le premier segment est
perpendiculaire aux deux autres segments.
La première articulation est une rotation Ѳ1 sur l’axe Z1
La deuxième articulation (perpendiculaire à la première) comporte une rotation Ѳ2 sur
l’axe Z2 .
La troisième articulation (parallèle à la deuxième) compote une rotation Ѳ3 sur l’axe Z3 .
Les longueurs d2,d3 et d4 des trois segments correspondent respectivement aux
déplacement selon les axes X1, X2 et X3 .
Figure II.5 : Corps et patte du robot.
Tableau II.1: Repérage du robot complet.
Repère Lié a
),,( 0000 ZYXR repère atelier
),,( 1111 ZYXR première articulation de la patte liant la patte
au corps du robot
),,( 2222 ZYXR deuxième articulation de la patte
),,( 3333 ZYXR troisième articulation de la patte
),,( 4444 ZYXR bout de la patte du robot

31
II.2.3.4. .Tableau de Dénavit- Hartenberg :
Tableau II.2 : Paramètres de Dénavit- Hartenberg.
II.3.1.4.Matrices des transformations partielles :
Le calcul des matrices de transformation homogène sous Matlab nous donne :
la transformation entre les points R0 et R1 :
0T1=
la transformation entre les points R1 et R2 :
1T2=
la transformation entre les points R2et R3 :
2T3=
la transformation entre les points R3 et R4 :
3T4=
J αj Dj Ѳj rj
1 0 0 Ѳ1 0
2 π/2 d 2 Ѳ2 0
3 0 d 3 Ѳ3 0
4 0 d 4 0 0

32
II.2.3.5. Calcul du Modèle Géométrique Direct : Le calcul (sous Matlab) du modèle géométrique direct de la patte nous a fourni les
valeurs des vecteurs 0S4 ,0n4 ,
0a4 formant la matrice0T4et qui ont pour composantes :
Sx= c1c2c3 - c1s2s3
SY= c2c3s1 - s1s2s3
SZ= c2s3 + c3s2
nX= - c1c2s3 - c1c3s2
nY= - c2s1s3 - c3s1s2
nZ= c2c3 - s2s3,
aX= c1d2 + d4(c1c2c3 - c1s2s3) + c1c2d3
aY= d2s1 + d4(c2c3s1 - s1s2s3) + c2d3s1
az= d3s2 + d4(c2s3 + c3s2)
Les coordonnées cartésiennes ZYX PPP et , du pied de la patte en fonction des coordonnées
articulaires 321 et , :
px= c1d2 + d4(c1c2c3 - c1s2s3) + c1c2d3
py= d2s1 + d4(c2c3s1 - s1s2s3) + c2d3s1 (II-3)
Pz= d3s2 + d4(c2s3 + c3s2)
II.2.3.6. Model Géométrique Direct : Les valeurs données pour le calcul de MGD sont :
On obtient les valeurs suivantes pour les coordonnées opérationnelles :

33
Figure II.6: Posture d’une patte MGD
En faisant varier les angles de rotation Ѳ1 Ѳ2 et Ѳ3, on obtient :
a : 0<Ѳ1<2π b: 0<Ѳ2<2π
c) 0<Ѳ3<
c : 0<Ѳ3<2π
Figure II.7: Variation des angles Ѳ1, Ѳ2 et Ѳ3
0
5
10
15
20
25
-1-0.8
-0.6-0.4
-0.20
0.20.4
0.60.8
1
-30
-25
-20
-15
-10
-5
0
R1
R2
R3
R4
-40
-20
0
20
40
-40
-20
0
20
40-30
-25
-20
-15
-10
-5
0
-40
-200
2040
60
-1
-0.5
0
0.5
1-40
-20
0
20
40
-20
0
20
40
60
-1
-0.5
0
0.5
1-30
-20
-10
0
10
20
30

34
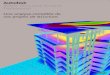
Figure II.8 : l’espace de travail dans le plan. Figure II.9 : l’espace de travail dans l’espace.
II.3.8.MGD de robot complet :
Figure II.10 : Une Posture droite du quadrupède.
-50
0
50
100
150
-10
0
10
20
30
40
50
-30
-20
-10
0
-100
-50
0
50
100
-100
-50
0
50
100-50
0
50
-50
0
50
100
-1
-0.5
0
0.5
1-50
0
50

35
II.3 Model géométrique inverse (MGI) :
II.3.1.Définition : On a vu que le modèle géométrique direct d'un robot [11] permet de calculer les coordonnées
opérationnelles donnant la situation de l'organe terminal en fonction des coordonnées
articulaires. Le problème inverse consiste à calculer les coordonnées articulaires
correspondant à une situation donnée de l'organe terminal. Lorsqu'elle existe, la forme
explicite qui donne toutes les solutions possibles (il y a rarement unicité de solution) constitue
ce que l'on appelle le modèle géométrique inverse (MGI).
II.3.2.Méthode de Paul pour calculer le MGI :
La variable articulaire correspondante à l’articulation rotoïde i est notée :
iiq (II-4)
La situation du bout de la patte est décrite par la matrice de transformation 0Tn déjà calculée
par le modèle géométrique direct :0Tn=0T11T2
2T3 ……….n-1T4n
La matrice 0U :
1000
Pans
Pans
Pans
UZZZZ
YYYY
XXXX
0 (II-5)
Le système d’équations qu’on doit résoudre est :
U0=0T11 T2 (Ѳ1)……n-1Tn(Ѳn) (II-6)
Pour trouver les solutions l’équation (II-6), on doit pré-multiplier successivement ses deux
membres par les matrices1j
jT pour j variant de 1 à n, opérations qui permettent d’isoler et
d’identifier l’une après l’autre les variables articulaires que l’on cherche.
La succession des équations permettant le calcul des angles des articulations Ѳi :

36
U0 =0T11T2
2T33T4
1T0 U0 =1T22T3
3T4 (II-7)
2T1U1 = 2T33T4
II.3.3. Application du MGI :
II.3.3.1.Calcul deѲ1 : En identifiant les éléments u1 pour trouver la solution de la première articulation de Ѳ1 avec
le matrice 2T4 qui ont été déjà calculés par le modèle géométrique direct :
C2(C1Px+s1py)+s2pz-d2c2=c3d4+d3 (1)
-s2(c1px+s1py)+c2pz+d2s2=s3d4 (2)(II-8)
S1px-c1py=0 (3
On utilise l’équation (3) pour calculer Ѳ1 :
Alors (II-9)
II.3.3.2.Calcul de
En écrivant les équations (1) et (2) sous la forme :
d4s3=s2(d2-c1px-s1py)+c2pz (II-10)
d4c3=c2(-d2+c1px+S1py)+s2pz-d3
du type 6 [11], tel que :
ws3=xc2+ys2+z1 (II-11)
wc3=xs2-yc2+z2
Avec :
y= d2-c1px-s1py
x=pz
z1=0
z2=-d3
w=d4

37
En élevant au carré et en faisant la somme de ces deux équations nous obtenons sur :
Ws2=x2(c22+s22)+y2(s22+c22)+z12+z22+2xc2z1+2ys2z1+2xs2z2-2yc2z2 (II-12)
on obtient :
w2=x2+y2+z12+z22+s2(2z1y+2z2x)+c2(2z1x-2z2y) (II-13)
On se ramène alors à une équation du type 2 de la forme
B1S B2C B3(II-14)
(II-15)
Alors :
B2CB3B1S(II-16)
Expression que l’on élève au carré :
B22C2B22 (1S2) B322B3B1SB12S2(II-17)
En fin obtient :
22
222
2
22
222
2
21
321132
21
321231
BB
BBBBBBC
BB
BBBBBBS
(II-18)
Avecdonc l’articulation Ѳ2 aura 2 solutions :
Ѳ2=ATAN2(s2,c2)(II-19)
II.3.3.3.Calcul deѲ3
Après avoir connu les deux solutions de Ѳ2on va chercher la solution de Ѳ3 a partir les
équations présedentsnt de type 6 on obtenir pour :
s3=
c3= (II-20)
Donc la solution de c’est une solution unique
S3,C3). (II-21)
Finalement le nombre de solutions totales du modèle géométrique inverse c’est 4 (2×2×1=4)

38
II.3.3.4.Application numérique de MGI : Après avoir calculé les solutions du modèle géométrique inverse nous avons obtenu 4
solutions et on doit choisir la bonne solution pour que la patte du robot soit fonctionnelle par
rapport à son corps.
En partant de la position opérationnelle obtenue au MGD, telle que :
Px=25 ,Py=0 et Pz=-30
En revanche, les résultat des angles que nous devons obtenir doivent être les mêmes
que ceux du MGD .
a b
c d
Figure II.11 : Les quatre solutions de MGI
05
1015
2025
-1
-0.5
0
0.5
1-30
-25
-20
-15
-10
-5
0
-10
0
10
20
30
-1
-0.5
0
0.5
1-30
-25
-20
-15
-10
-5
0
-10
0
10
20
30
0
5
10
15
20-30
-25
-20
-15
-10
-5
0
-10
0
10
20
30
0
5
10
15
20-30
-25
-20
-15
-10
-5
0

39
On choisit parmi ces configurations celle qui correspond a :
La première solution en
la première solution ( 1 ) en 2 : ),(2 222 CSATAN et
le seule solution en θ3 : ),(2 333 CSATAN
Figure II.12 : Configuration choisie pour la patte au MGI
Les résultats que nous avons obtenu dans le calcul des angles des articulations θ1 θ2 et
θ3, par le model géométrique inverse correspondent à ceux que nous avons trouvé dans le
model géométrique direct :
II.3.3.4.1. Suivi de courbes :
Nous donnons l’équation de la trajectoire linéaire à suivre :
X=2+2t, Y=3-4t , Z=0 .
05
1015
2025
-1
-0.5
0
0.5
1-30
-25
-20
-15
-10
-5
0

40
Figure II.13 : la trajectoire linéaire .
Nous donnons l’équation d'une trajectoire circulaire à la patte , telle que :
X=25+r cos(t); Y=r sin(t) ; Z=0
Figure II.14: La trajectoire circulaire.
-20
0
20
40
-10
-5
0
5
10-5
0
5
10
15
20
05
1015
2025
-10
0
10
20
30-30
-25
-20
-15
-10
-5
0

41
Pour une trajectoire quelconque dans l'espace de travail :
px=3t+7; py=2-2t; pz=-30;
Figure II.15 : Trajectoire quelconque
II.3.3.5. MGI robot complet :
Figure II.16 : posture de quadrupède
05
1015
2025
-10
-5
0
5
10-40
-30
-20
-10
0
-50
0
50
100
150
-10
0
10
20
30
40
50
-30
-20
-10
0

42
II.4. Modèle cinématique :
II.4.1. Modèle Cinématique Direct (MCD) :
III.4.2. Définition :
Le modèle cinématique direct d’un robot [11] décrit les vitesses des coordonnées
opérationnelles en fonction des vitesses articulaires, il est noté :
q)q(JX (II-23)
Où )q(J désigne la matrice Jacobienne de dimension nm du mécanisme qui est fonction
de la variable articulaire q .
Cette matrice est à la base du calcul du modèle cinématique, elle facilite aussi le calcul des
singularités et la dimension de l’espace opérationnel accessible du robot.
II.4.3. Méthode de calcul de matrice J :
La matrice jacobienne est souvent exprimée dans le repère de base 0R que dans le repère de
l’organe terminal nR . D’une façon générale, projetée dans le repère iR , la matrice jacobienne
notée n
i J s’écrit :
n
i
n
i
nnn
i
nn
i
nn
ii
n
i
aa
LaaLaaJ
...
)(...)(
11
,,11111
(II-24)
En remarquant que :
)La(ALa n,k
k
k
k
k
i
n,k
i
k
i (II-25)
avec :
k
i A : matrice d’orientation de dimension )33( du repère kR dans le repère iR ,
Tnz
k
ny
k
nx
k
n
k
nk
T
k
k PPPPLa ,
ket 100

43
On calcule alors la ièmek colonne de la matrice Jacobienne, notée kn
i J ; , projetée dans le repère
iR par la formule :
n,...1k;n,...0ia
)nPsP(aJ
k
i
k
k
i
nx
k
k
i
ny
k
kk
i
k
k;n
i
(II-26)
II.4.4. Application de calcul de J : La matrice J dans notée cas est notée 1J4 elle correspond aux composants du torseur
cinématique :
4
1
4
1
Vavec :
4
1V : le vecteur vitesse de translation de bout de la patte .
4
1 : le vecteur vitesse de rotation de pied de la patte .
Alors :
,
3
,
2
,
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
)1,1(4
1
4
1
,4
1
,4
1
,4
1
,4
1
,4
1
JJJ
JJJ
JJJ
JJJ
JJJ
JJJ
V
V
V
X
X
X
X
X
X
Son calcul nous donne :
001
1-1-0
000
s2s3) - d4(c2c3d4s2s3 - c3d4) + c2(d3 0
00d2c2d3s2s3) - d4(c2c3
c3s2 d4(c2s3-c2(d4s3)-c3d4) +s2(d3 -0
4
1J
Donc le vecteur vitesse de translation vaut :
s2s3) - d4(c2c3d4s2s3 - c3d4) + c2(d3 0
00s2s3) - d4(c2c3 + c2d3 + d2
c3s2 d4(c2s3-c2(d4s3)-c3d4) +s2(d3 -0
4
1V

44
II.5.Model Cinématique Inverse :
II.5.1.Définition : Dans ce cas, la matrice jacobienne J est carrée [11] d'ordre n et son déterminant est non nul.
La méthode la plus générale consiste à calculer J-1, la matrice inverse de J, qui permet de
déterminer les vitesses articulaires grâce à la relation :
(II-27)
II.5.2.Valeur de J-1 :
d3d4s3
d3sin2 3) 2d4sin(-0
343
d3c2 3) 2d4cos(- d3s3
3 2sin(0
d3s3
3)2cos(
0d3c2)) )3 2 d4cos( (d2
10
1
sdd
j
II.5.3.Calcul des positions singulières : Ces positions correspondent à l'équation :
0)det( 4
1 j
Ce qui donne :
0)]324)433(2))(32cos(4
32322)[(32sin(4)]3221)(32cos(4)[342)433(2(
ssddcdcd
dcdcdddcddsdcdcds
3sin 0 et 2sin 0 (le segment d4 tendu) Figure (II.17)
.
Figure II.17 :la première position singulière.
0 1020 30
40 5060
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
0 10 20 30 40 50 60
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

45
3sin ±π et 2sin ±π (segment d4 replié surd3 )(Figure II.18)
Figure II.18: la deuxième position singulière .
II.6. Conclusion : On a étudié dans ce chapitre la modélisation du robot quadrupède en
calculant ses modèles géométrique direct et inverse le suivi d'une trajectoire ainsi
que le modèle cinématique direct et inverse.
On propose au prochain chapitre une conception pour ce robot quadrupède .
-20
-10
0
10
20
-1
-0.5
0
0.5
1-1
-0.5
0
0.5
1
-15 -10 -5 0 5 10 15
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

46
Chapitre III : Conception du robot quadrupède
III.1. Introduction :
La conception assistée par ordinateur, ou CAO, rassemble des outils informatiques (logiciels
et matériels) qui permettent de réaliser une modélisation géométrique d'un objet afin de
pouvoir simuler des tests en vue d'une fabrication.
La CAO offre une visibilité globale du comportement d'un objet avant qu'il n'existe, tant au
niveau de son aspect que de sa structure et de son fonctionnement. Les objets peuvent être
représentés en deux ou en trois dimensions (2D ou 3D). Leur apparence peut être filaire,
volumique, surfacique, elle peut aussi simuler la texture.
La CAO est très utilisée dans les industries mécaniques par les bureaux d'études pour
modéliser et évaluer le comportement de matériaux, la capacité d'assemblage et la fabrication
des pièces. Nous l'utiliserons ici pour concevoir notre robot quadrupède.
III.2. Conception du robot :
III.2.1. Conception des différentes pièces :
Dans solidworks nous concevons des pièces et des assemblages selon les étapes :
1) Ouvrir une nouvelle fenêtre pour créer nouvelle pièce.
2) Cliquez sur Esquisser, choisir les plans,
3) Choisir fonction.
4) Enregistre la pièce.
5) Ouvrir nouvelle fenêtre pour l’assemblage.
6) Assembler tous les pièces selon les contraintes fonctionnelles d'assemblage .
7) Assisté pour l’animation selon des contraintes de mouvement.

47
Pieces01 Pieces02 Pieces03 Pieces04
Figure III.1 :Pièces des articulations rotoides .
piece 5 piece 6 piece 7 piece 8 piece 9
Figure III.2 : Pièces de fixation .

48
Piece 10 Pièce 11
Pièce 12
Piece13 Piéce15
Piece14
Figure. III.3 : Pièces pour d'entrainement .
Pièce 17
Pièce 18
Figure III.4 : Pièces composant le corps du robot.
Piece15

49
Figure III.5 : Pièce modèle du terrain de marche.
III.2.2. Conception du modèle 3D du quadrupède :
Figure III.6 : Le modèle 3D du robot quadrupède .
III.3. Animation de la marche sous solidworks :
III.3.1. Les étapes de animation :
On utilise les études de mouvement d'animation pour simuler le mouvement des
assemblages pou cela on attribue un moteur pour déplacer le modèle.
1. Cliquez sur l'onglet Etude de mouvement 1.
(Situé au bas de la zone
graphique).

50
2. Cliquez sur Moteur (barre d'outils Motion Manager).
3. Dans le Proprety
Manager sélectionne:
- type de moteur (linéaire ou
circulaire).
- direction.
- type de mouvement (distance pour déplacement angulaire).
- et le temps.
- Cliquez sur.
Figure III.7 : Réglage du temps d'action du moteur.
4. Définir la durée et exécuter l'animation.
- Dans le Motion Manager, faites-glisser la clé et réglez-la sur 2 secondes pour
moteur 1
- Cliquez sur calculer Répète cette étapes pour réaléser la marche latérale et
diagonale.
- Dans la marche latérale on sélectionne les pattes 1-4 et 2-3 pour l’animation.
- la pâte 1 et 4 font un mouvement ensemble alors :
- le moteur 2 de la pâte 1 et 4 fait une rotation avec angle de 60°, la patte 1 dans le
sens anti horaire et pate 4 sens horaire, et fonctionne dans intervalle de 2 sec, 0sec-
2sec.
- Le moteur 1 de la pate 1et 4 fait une rotation avec un angle de 45°, la pate 1 dans
le sens anti horaire et la pate 4 dans le sens horaire et fonctionne dans intervalle de
2 sec, 2sec-4sec.

51
Numérotation des moteurs
Et les pates
- Après avoir défini le mouvement des tous les moteur on clique sur calculer pour
exécuter l’animation du robot quadrupède :
Figure III.8 : Le calcul des moteurs
Figure III.9 : La numérotation des pattes .

52
III.3.2. Résultat de l'animation de la marche du quadrupède :
Marche latérale :
Figure III.10 : Séquences de la marche latérale .

53
Marche diagonale :
Figure III.11 : Séquence dela marche diagonale montrant les différant occupée par les 4
pattes.
Figure III.11 : Séquences de la marche diagonale.
III.4. Conclusion :
La conception de robot quadrupède par CAO est faite a partir de la
conception des différentes pièces et leur assemblage. Ceci nous a permis aussi de
faire l'animation selon la synchronisation des mouvements des quatre pattes et du
corps pour montrer les deux modes de marche (latérale et diagonale) du robot
quadrupède.

54
Conclusion Générale
Notre travail consiste à modéliser et a concevoir un robot quadrupède, pour
cela , on a entamé dans le premier chapitre une étude bibliographique des robots
quadrupède ce qui nous a permis de constater qu’il existe plusieurs robots réalisés,
qui sont biologiquement inspirés et qui ont des chaines cinématiques comportant
en général trois degrés de liberté. Leurs modes de déplacements sont déduits de ceux
des animaux et peuvent généralement mener une marche normale tripode, diagonale
ou latérale selon la vitesse de déplacement voulue.
Ayant choisi une chaine cinématique pour notre robot quadrupède, On a
présenté au deuxième chapitre la modélisation géométrique directe et inverse pour
pouvoir suivre une courbe quelconque dans l'espace opérationnel. Ensuite on a
calculé les modèles cinématique direct et inverse .
Dans le chapitre trois on a proposé une conception de robot quadrupède par
CAO, cette dernière nous à permis aussi d’animer notre modèle 3D pour montre
comment ce quadrupède marche.
Cette étude nous à permis de découvrir des robots marcheurs et spécialement
les quadrupède en terme de méthodes de modélisation, de manières de conception et
des techniques de simulations de leurs modes de marche.
Les horizons restants ouverts pour la continuité de ce travail ,ilspeuvent
concerner l'élaboration d'un générateur de trajectoire et sa modélisation dynamique.

55
Références Bibliographiques
[1]H.DEMOVAU ,”Introduction a la Modélisation et aux Performances des Robots”, Ecole
d’ingenieurs centre de recherche, lille europegion, octobre 2007
[2]David Filliat , “ programme unite- GDR Robotique “,Université Numérique de
l’ingenerietechnologé, Avril 2012
[3]Dr. Pan Agathoklis,“ Autonomous Hexapod Robot’’, Université Of Vectoria,
Elect,499,2012
[4] Steve Taranovich, ’’BigDog Robot: a Sensor-Based enhancement of huedman
capabilities’’, EDN network, 13May 2013,
[5] Martin de lasa, “Dynamics Complliant Walking of
ScoteIIQuadrupéde“,départementElectrique and computer ingineeringmcgill,
UniversitéMonteréalCanada,juillé 2000.
[6] Edited by: Kordic, V.; Lazinica, A. &Merdan, “MCutting Edge Robotics“, ISBN 3-86611-
038-3, pp. 784, ARS/plV, Germany, July 2005
[7] Ir. M.J.C. Ronde , Dr. ir. M.J.G.,van de Molengraft.“ Simulating the "First steps" of a
Walking Hexapod Robot’’ TechnischeUniversiteit Eindhoven, Janvi, 2011.
[8] Hiroaki UCHIDA, Kenzo NONAMI, “Cad Based Trajectory Planning and
advancedMontion Control for Quadrupéde Locomotion Robot’’, Chiba University, Chiba,
Japan
/[9] DaiOwaki, Takeshi Kano,’’ Simple Robot Suggests Physical Interlimb Communication is
Essential For Quadruped Walking’’, Tohoku University.2013
[10] Shinya Aoiet Daiki Katayamaet. , “A stability-Based Mechanism For Hysteresis in The
Walk–Wrot Transition in Quadruped Locomotion’’. UniversityKyoto,japan 2013
[11]Wisama KHALIL, “ Bases de la Modélisation et de la Commode des Robots-
Manipulateurs de Type série “,Université d’ ingénierie et Technologie, 08 mai 2012.

56
Résumé :
Ce travail consiste à étudier la modélisation et la conception
d'un robot marcheur quadrupède . Dans le chapitre un on à dressé une
étude bibliographique sur les quadrupèdes , ensuite on a modélisé
géométriquement et cinématiquement ce robot au chapitre deux. Dans le
chapitre trois on a présenté la conception du modèle 3D de ce robot et
enfin l'animation de sa marche en deux modes (latéral, diagonal).
Mots clés : robot quadrupède , modélisation , conception.
Abstract :
This work studies the modeling and the conception of a walking
quadruped robot . In the chapter one we dressed a bibliographical study on
quadrupeds, then we modeled it geometrically and cinematically in the second
chapter. In the chapter three we presented the 3D conception model of this robot
and finally we animated its walking gait in two modes (side, diagonal).
Key words : Quadruped walking robot , modeling, conception .
ملخص :
بحثقمنا بدراسة الأولفي المحور . الأرجلرباعي ربوتلقد قمنا في هدا العمل بنمذجة وتصميم
ثم النمذجة الهندسية والحركية للروبوت في المحور . اوطريقة مشيه الأرجللروبوتات رباعية حول ا
وت وبعدها تفعيله للمشي بطريقة للروب الإبعادفي المحور الثالث فقمنا بتصميم نموذج ثلاثي أما. الثاني
وقطرية. جانبية
الكلمات المفتاحية :
تصميم. نمذجة. ربوت رباعي الأرجل