Embed Size (px)
Citation preview
49
Conception globale du système d'embrayage et de sa commande Dipl.-Ing. Matthias Zink
Dipl.-Ing. René Shead
Introduction Les innovations technologiques et les exigences croissantes de la clientèle en matière de confort nécessitent une conception des systèmes dans leur globalité, ce qui est également le cas pour l'embrayage et sa commande. A cela s’ajoutent les attentes de l’industrie automobile qui recherche, dans ce domaine également, des fournisseurs de systèmes en mesure de proposer une optimisation bien pensée de la chaîne fonctionnelle des composants.
LuK a entrepris une approche théorique du processus de débrayage-embrayage prenant en compte le comportement et les effets dynamiques du système, et de l’améliorer dans son ensemble, depuis la pédale de débrayage jusqu’à l’entrée de la boîte de vitesses.
Dans cet exposé, nous allons étudier les différents composants du système impliqués dans la transmission de l’effort, et montrer comment on peut réduire l’effort de commande et améliorer le comportement au décollage du véhicule par la correction et l’harmonisation des différents paramètres en présence.
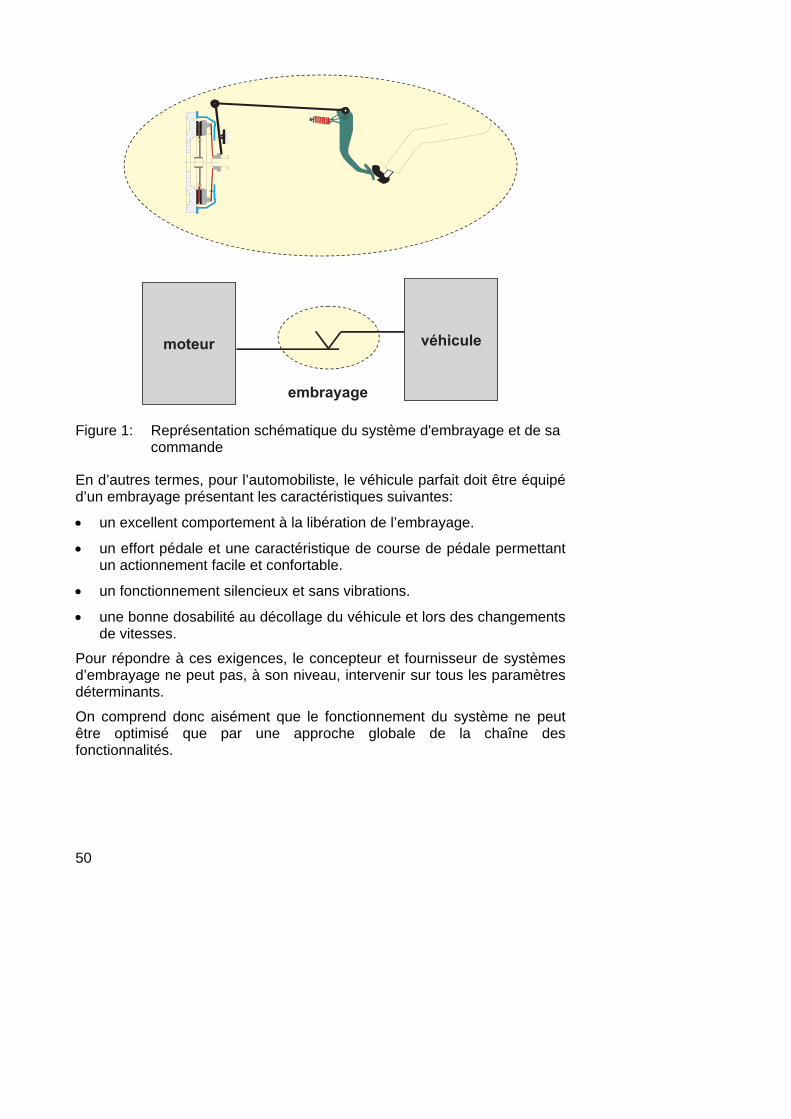
Objectif général de recherche En matière de systèmes d’embrayage, le constructeur est censé pouvoir proposer, en intervenant sur les paramètres de l’embrayage, une solution idéale se traduisant par un maximum de confort au niveau de la pédale de commande (fig. 1).
50
� � � � � �
� � � � � �
� � � � � � �
Figure 1: Représentation schématique du système d'embrayage et de sa commande
En d’autres termes, pour l’automobiliste, le véhicule parfait doit être équipé d’un embrayage présentant les caractéristiques suivantes:
• un excellent comportement à la libération de l’embrayage.
• un effort pédale et une caractéristique de course de pédale permettant un actionnement facile et confortable.
• un fonctionnement silencieux et sans vibrations.
• une bonne dosabilité au décollage du véhicule et lors des changements de vitesses.
Pour répondre à ces exigences, le concepteur et fournisseur de systèmes d’embrayage ne peut pas, à son niveau, intervenir sur tous les paramètres déterminants.
On comprend donc aisément que le fonctionnement du système ne peut être optimisé que par une approche globale de la chaîne des fonctionnalités.
51
Figure 2: Approche traditionnelle du système de débrayage chez les fabricants
Un excellent fonctionnement de l’ensemble du système d’embrayage n’est possible que si les différentes fonctions de ce système sont harmonisées en conséquence, et si l’on tient compte également des effets induits par le moteur et le châssis.
Cette approche du système doit permettre au client de l’industrie automobile de l’appréhender dans sa globalité, ce qui était jusqu’ici difficile du fait de la dispersion des responsabilités entre les différents fournisseurs respectivement chargés du moteur, de la boîte de vitesses et du châssis.
Figure 3: Approche du système de débrayage proposée par LuK
Il s’agit, dans ce qui va suivre, d’intervenir à l’intérieur du système de débrayage, traditionnellement considéré comme une “boîte noire” inviolable, afin de mieux exploiter le potentiel de l’embrayage et de sa commande, et d’optimiser ainsi l’ensemble du système.
LuK a donc, il y a quelques années, confié cette tâche à une équipe de cinq ingénieurs qui ont recensé une série de nouveaux effets. Dans le
boîte noire
52
résumé qui suit, nous vous proposons de passer en revue les principaux paramètres exerçant une influence sur l’ensemble du système.
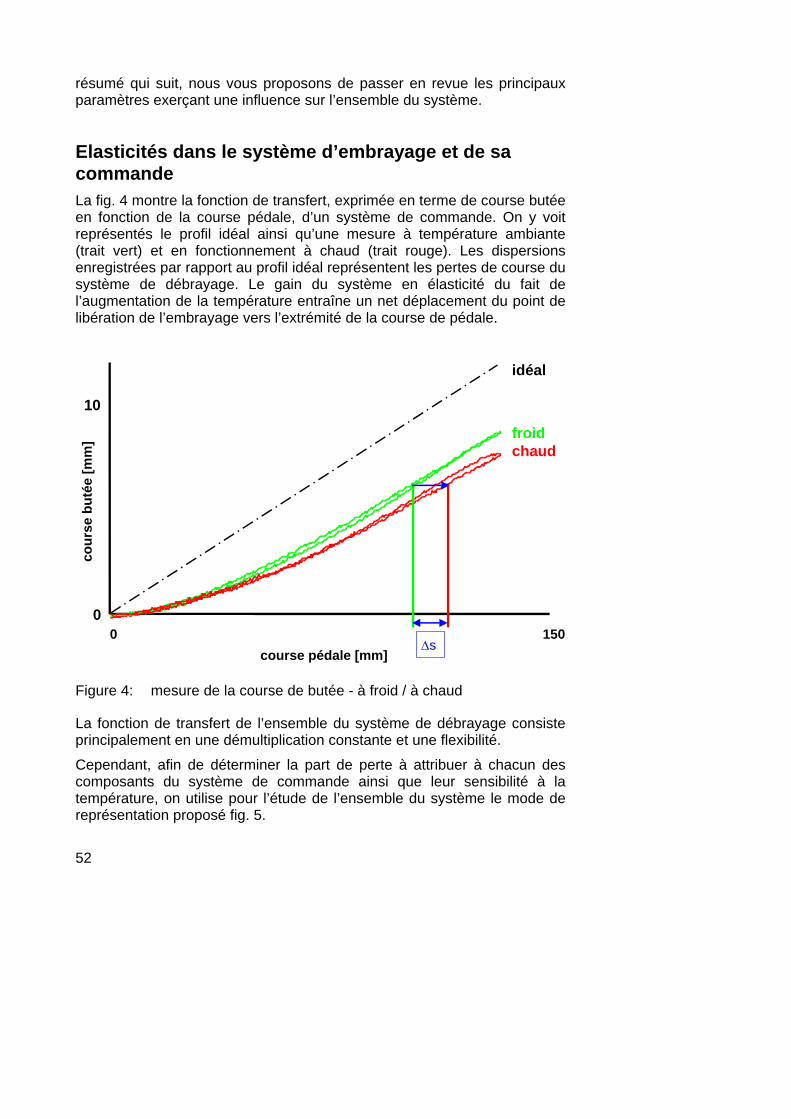
Elasticités dans le système d’embrayage et de sa commande La fig. 4 montre la fonction de transfert, exprimée en terme de course butée en fonction de la course pédale, d’un système de commande. On y voit représentés le profil idéal ainsi qu’une mesure à température ambiante (trait vert) et en fonctionnement à chaud (trait rouge). Les dispersions enregistrées par rapport au profil idéal représentent les pertes de course du système de débrayage. Le gain du système en élasticité du fait de l’augmentation de la température entraîne un net déplacement du point de libération de l’embrayage vers l’extrémité de la course de pédale.
0
10
0 150course pédale [mm]
cour
se b
utée
[mm
] froidchaud
Δs
idéal
Figure 4: mesure de la course de butée - à froid / à chaud
La fonction de transfert de l’ensemble du système de débrayage consiste principalement en une démultiplication constante et une flexibilité.
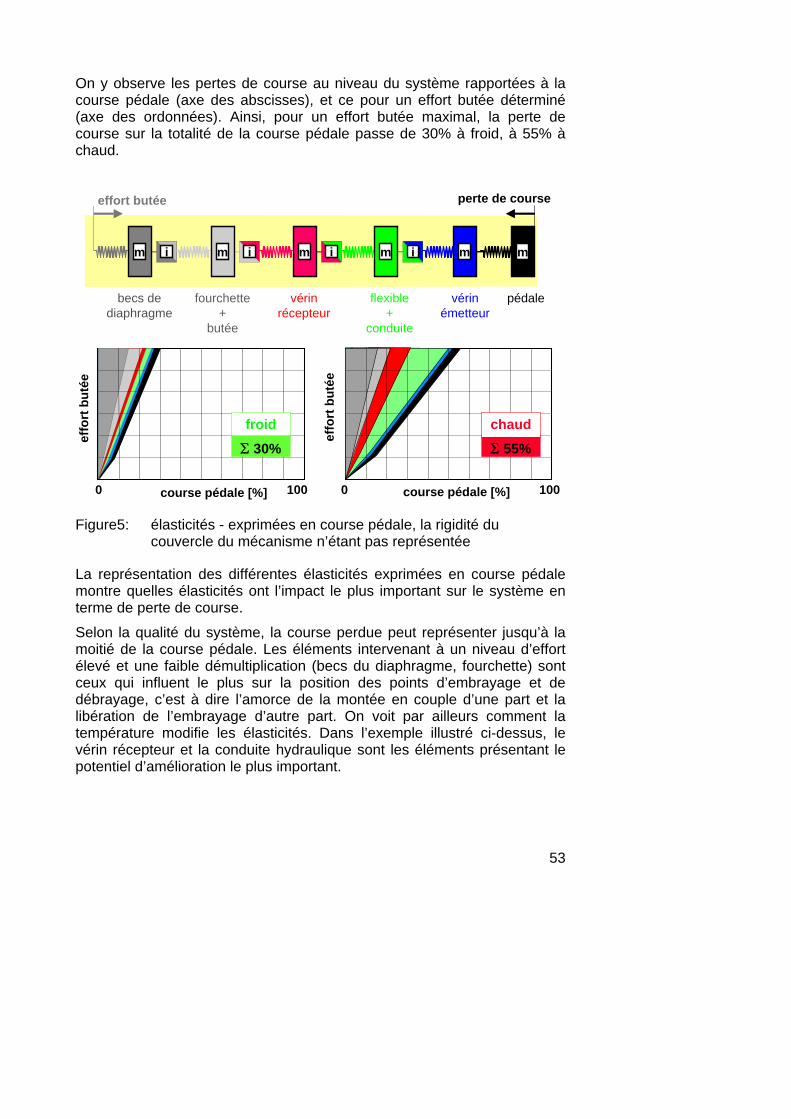
Cependant, afin de déterminer la part de perte à attribuer à chacun des composants du système de commande ainsi que leur sensibilité à la température, on utilise pour l’étude de l’ensemble du système le mode de représentation proposé fig. 5.
53
On y observe les pertes de course au niveau du système rapportées à la course pédale (axe des abscisses), et ce pour un effort butée déterminé (axe des ordonnées). Ainsi, pour un effort butée maximal, la perte de course sur la totalité de la course pédale passe de 30% à froid, à 55% à chaud.
flexible+
conduite
vérinrécepteur
vérinémetteur
pédalefourchette+
butée
becs dediaphragme
perte de courseeffort butée
m i m i m i m i m m
course pédale [%]
effo
rt b
utée
course pédale [%]0 100 0 100
Σ 55%
effo
rt b
utée
froid
Σ 30%
chaud
Figure5: élasticités - exprimées en course pédale, la rigidité du couvercle du mécanisme n’étant pas représentée
La représentation des différentes élasticités exprimées en course pédale montre quelles élasticités ont l’impact le plus important sur le système en terme de perte de course.
Selon la qualité du système, la course perdue peut représenter jusqu’à la moitié de la course pédale. Les éléments intervenant à un niveau d’effort élevé et une faible démultiplication (becs du diaphragme, fourchette) sont ceux qui influent le plus sur la position des points d’embrayage et de débrayage, c’est à dire l’amorce de la montée en couple d’une part et la libération de l’embrayage d’autre part. On voit par ailleurs comment la température modifie les élasticités. Dans l’exemple illustré ci-dessus, le vérin récepteur et la conduite hydraulique sont les éléments présentant le potentiel d’amélioration le plus important.
54
Ce mode de représentation permet également une évaluation intéressante des différentes élasticités des systèmes mécaniques, semi-hydrauliques ou tout hydrauliques.
Ce type d’étude comparative peut également être appliqué aux frottements survenant dans l’ensemble du système. La synthèse des observations effectuées lors des deux études permet d’analyser l’impact des hystérésis d’effort et de course.
Comportement vibratoire du système d’embrayage et de sa commande La multitude de termes utilisée pour désigner les vibrations à la pédale ainsi que les bruits générés par la commande d’embrayage (par exemple “Eak-noise”, “Whoop” (roucoulement), fourmillement ... etc.) démontrent la complexité du système et son implication en terme d’excitations et de modes de propagation des vibrations.
Exemples d’excitations vibratoires dans le système d’embrayage et de sa commande:
• Vibrations axiales et de flexion provenant du vilebrequin et du volant moteur.
• Positionnement oblique de la butée.
• Vibrations provenant du groupe motopropulseur (GMP).
• Défaut d´alignement de la boîte de vitesses.
• Désaxage du système de commande.
Afin d’appréhender le système vibratoire dans son ensemble, d’en isoler les différents paramètres et de modéliser, puis de mettre en pratique les solutions adéquates, LuK a conçu un modèle vibratoire représentant l’ensemble du système.
55
volantmoteur
becspédale
plateaude pression
vérinrécepteur
1m
vilebrequin
i i
couvercle
conduite hydraulique
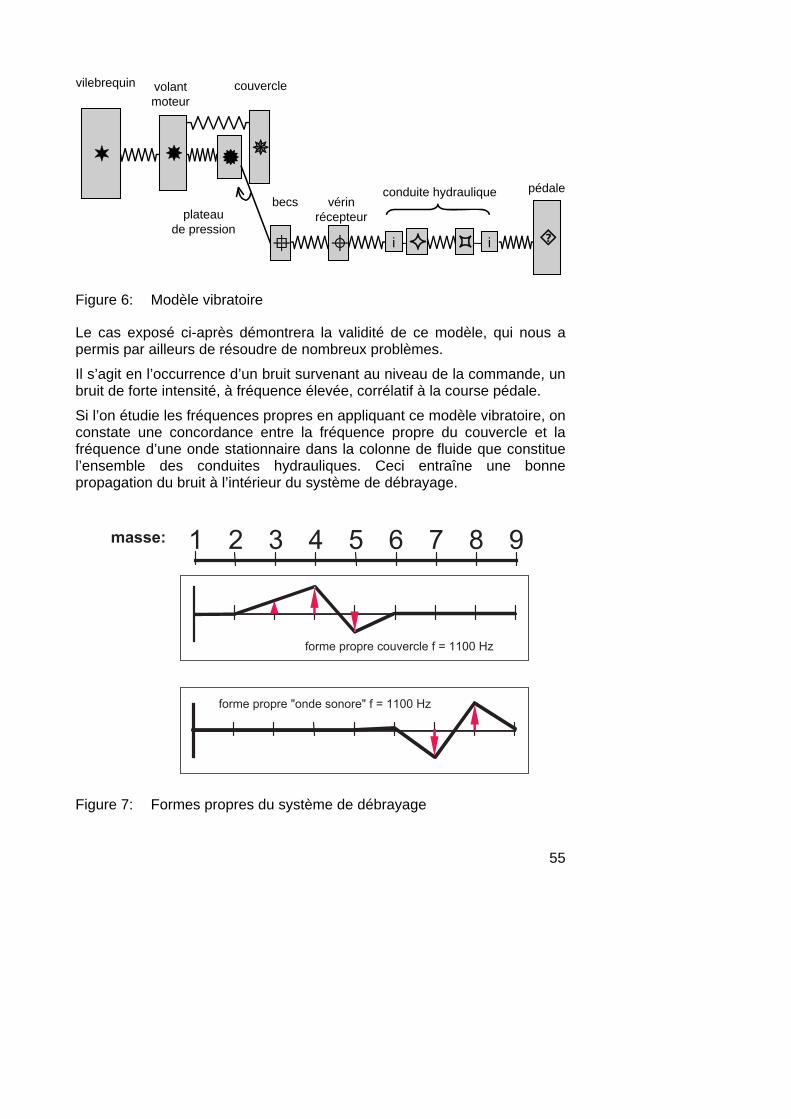
Figure 6: Modèle vibratoire
Le cas exposé ci-après démontrera la validité de ce modèle, qui nous a permis par ailleurs de résoudre de nombreux problèmes.
Il s’agit en l’occurrence d’un bruit survenant au niveau de la commande, un bruit de forte intensité, à fréquence élevée, corrélatif à la course pédale.
Si l’on étudie les fréquences propres en appliquant ce modèle vibratoire, on constate une concordance entre la fréquence propre du couvercle et la fréquence d’une onde stationnaire dans la colonne de fluide que constitue l’ensemble des conduites hydrauliques. Ceci entraîne une bonne propagation du bruit à l’intérieur du système de débrayage.
� � � � � �
� � � � � � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � � � � � � �
� � � � � � � �
Figure 7: Formes propres du système de débrayage
56
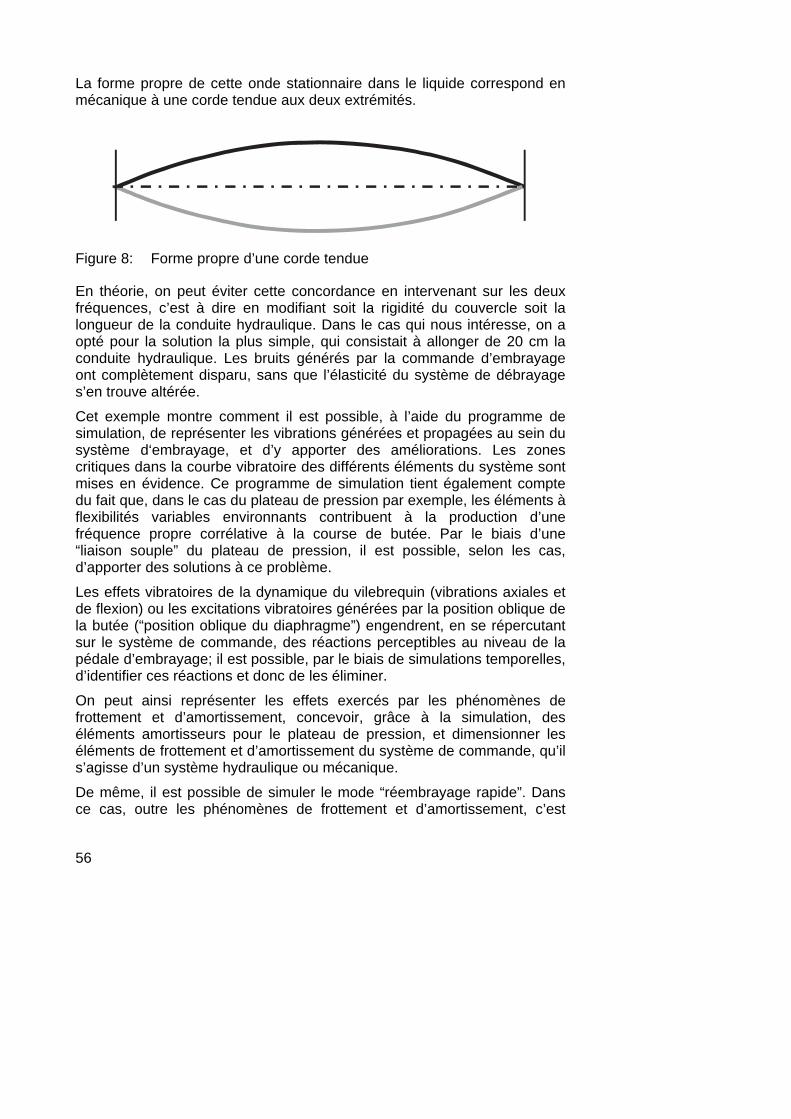
La forme propre de cette onde stationnaire dans le liquide correspond en mécanique à une corde tendue aux deux extrémités.
Figure 8: Forme propre d’une corde tendue
En théorie, on peut éviter cette concordance en intervenant sur les deux fréquences, c’est à dire en modifiant soit la rigidité du couvercle soit la longueur de la conduite hydraulique. Dans le cas qui nous intéresse, on a opté pour la solution la plus simple, qui consistait à allonger de 20 cm la conduite hydraulique. Les bruits générés par la commande d’embrayage ont complètement disparu, sans que l’élasticité du système de débrayage s’en trouve altérée.
Cet exemple montre comment il est possible, à l’aide du programme de simulation, de représenter les vibrations générées et propagées au sein du système d‘embrayage, et d’y apporter des améliorations. Les zones critiques dans la courbe vibratoire des différents éléments du système sont mises en évidence. Ce programme de simulation tient également compte du fait que, dans le cas du plateau de pression par exemple, les éléments à flexibilités variables environnants contribuent à la production d’une fréquence propre corrélative à la course de butée. Par le biais d’une “liaison souple” du plateau de pression, il est possible, selon les cas, d’apporter des solutions à ce problème.
Les effets vibratoires de la dynamique du vilebrequin (vibrations axiales et de flexion) ou les excitations vibratoires générées par la position oblique de la butée (“position oblique du diaphragme”) engendrent, en se répercutant sur le système de commande, des réactions perceptibles au niveau de la pédale d’embrayage; il est possible, par le biais de simulations temporelles, d’identifier ces réactions et donc de les éliminer.
On peut ainsi représenter les effets exercés par les phénomènes de frottement et d’amortissement, concevoir, grâce à la simulation, des éléments amortisseurs pour le plateau de pression, et dimensionner les éléments de frottement et d’amortissement du système de commande, qu’il s’agisse d’un système hydraulique ou mécanique.
De même, il est possible de simuler le mode “réembrayage rapide”. Dans ce cas, outre les phénomènes de frottement et d’amortissement, c’est
57
surtout l’équilibre entre les masses et les démultiplications au sein du système de débrayage qui jouent un rôle déterminant.
Dosabilité de l’embrayage au décollage du véhicule L’évolution des profils de conduite, du fait notamment de la part accrue des trajets urbains et des embouteillages, conjuguée aux changements très importants survenus dans la conception même des véhicules, entraîne dans de nombreux cas une évaluation négative du comportement de l’embrayage au décollage du véhicule, et ce particulièrement lorsque celui-ci s’effectue sans accélération.
Si l’on doit citer les évolutions qui, sur les véhicules d’aujourd’hui, ne facilitent pas la tâche lorsqu’il s’agit, au niveau de la conception de l’embrayage et du système de débrayage, d’optimiser la dosabilité de l’embrayage, retenons les observations suivantes:
• Les moteurs de faible volume, turbocompressés, atteignent des maxima de couples élevés, mais génèrent des couples relativement faibles au régime de ralenti.
• Des maxima de couples moteurs plus élevés impliquent des couples d’embrayage plus élevés de même que l’augmentation des efforts de butée.
• L’abaissement du régime au ralenti de même que la réduction des masses tournantes du moteur entraînent une diminution de l’énergie cinétique lors du décollage du véhicule.
• Les nouvelles technologies à injection (notamment sur les moteurs diesel) altèrent la stabilité du régime lors du décollage du véhicule.
• Les systèmes d’embrayage à réduction d’effort favorisent l’unification de sous-ensembles pour l’embrayage et le système de commande, avec de plus faibles démultiplications pour la commande.
• L’utilisation de plus petites démultiplications entraîne une augmentation de la masse effective du véhicule, ramenée à l’arbre primaire de la boîte de vitesses.
Une difficulté supplémentaire vient de ce que jusqu’à maintenant la classification des véhicules en la matière était essentiellement subjective et se bornait à distinguer entre les bons et les mauvais comportements au décollage. Ceci s’explique par l’absence de paramètres objectifs et de moyens suffisants pour effectuer les mesures et les simulations nécessaires à l’observation des phénomènes au décollage.
58
Dans la plupart des cas, les problèmes de comportement au décollage sont globalement attribués à l’embrayage, du fait que celui-ci constitue le lien entre la “masse rotative du moteur” et la “masse inerte du véhicule”. L’exposé qui suit se propose cependant de mettre en évidence la diversité des facteurs à prendre en compte lors du décollage du véhicule, et de montrer comment il est possible, au moyen de mesures et de simulations, de les analyser et de les pondérer.
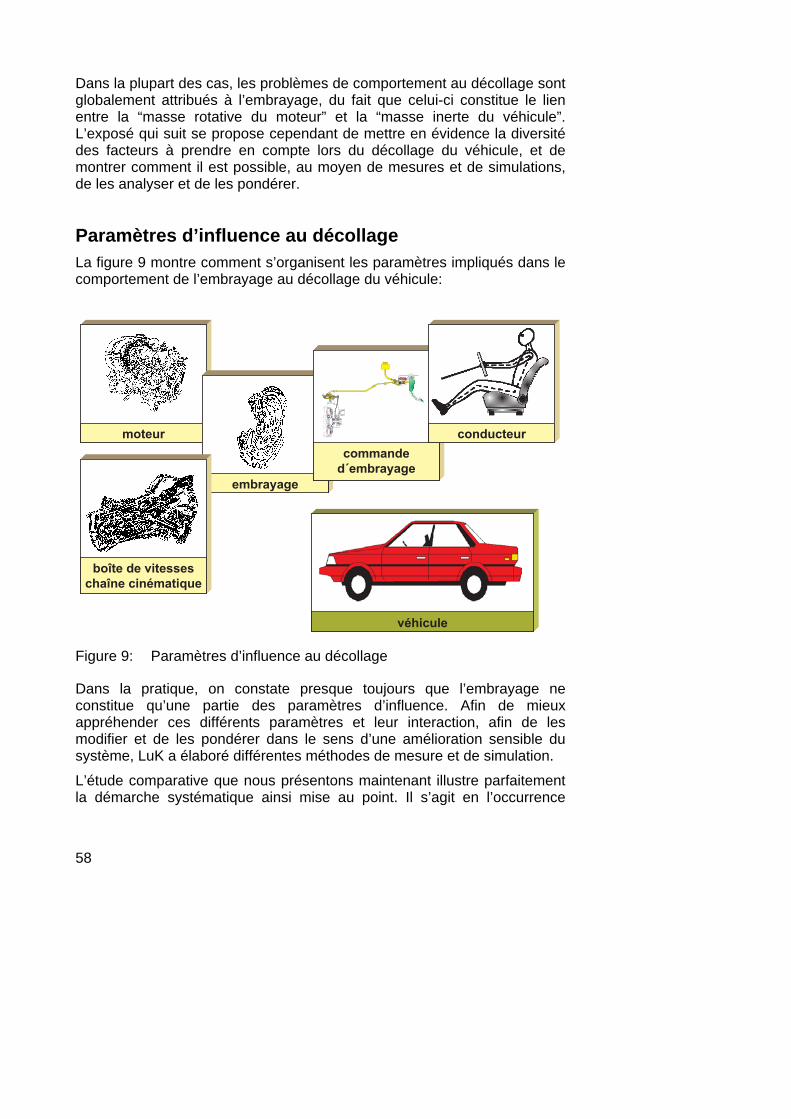
Paramètres d’influence au décollage La figure 9 montre comment s’organisent les paramètres impliqués dans le comportement de l’embrayage au décollage du véhicule:
� � � � � �
� � � � � �
� � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � �
� � � � � � �
� � � � � � � �
� � � � � � � � � �
� � � � � � �
Figure 9: Paramètres d’influence au décollage
Dans la pratique, on constate presque toujours que l’embrayage ne constitue qu’une partie des paramètres d’influence. Afin de mieux appréhender ces différents paramètres et leur interaction, afin de les modifier et de les pondérer dans le sens d’une amélioration sensible du système, LuK a élaboré différentes méthodes de mesure et de simulation.
L’étude comparative que nous présentons maintenant illustre parfaitement la démarche systématique ainsi mise au point. Il s’agit en l’occurrence
59
d’étudier le comportement au décollage de trois véhicules différents, de même cylindrée mais équipés de systèmes de commande différents.
On distingue pour chacun des trois véhicules A, B, et C les différents systèmes à prendre en compte (embrayage, commande, moteur, véhicule).
On étudie d’abord l’embrayage, ce qui correspond traditionnellement au champ d’activité d’un constructeur d’embrayages ainsi qu’à ses possibilités d’intervention sur le comportement au décollage.
150
0
300
600
0 3 6course butée [mm]
coup
le [N
m]
A B C
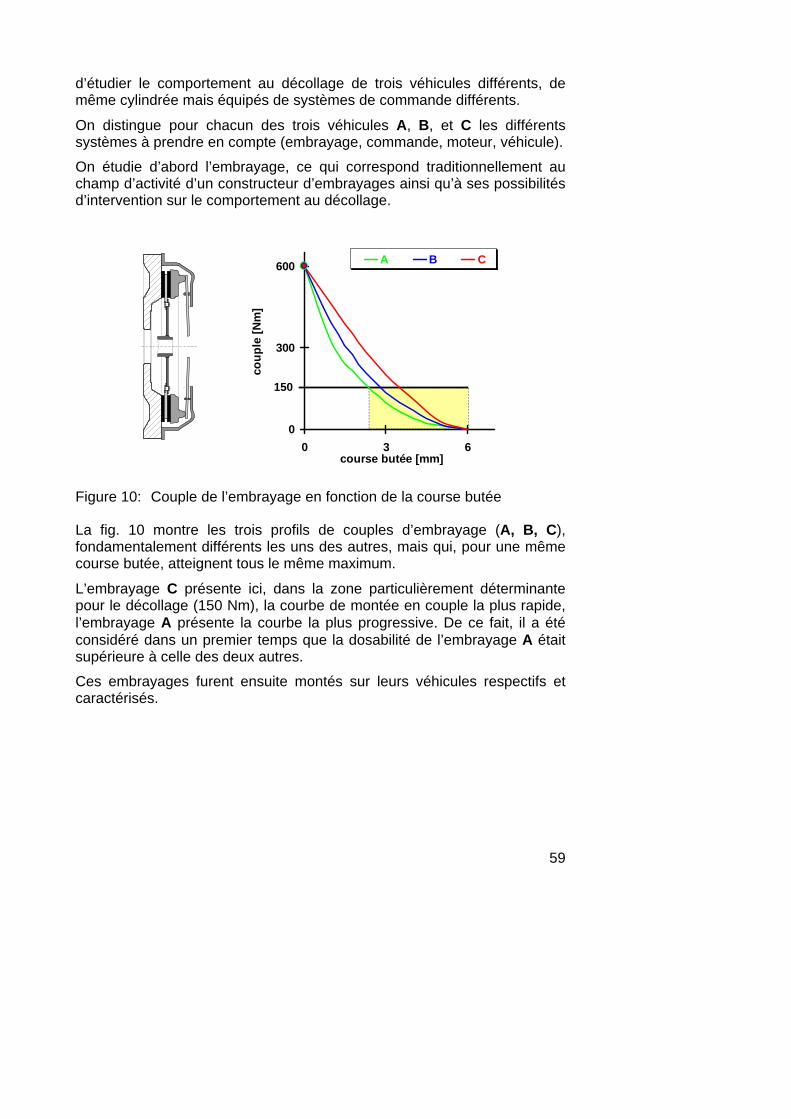
Figure 10: Couple de l’embrayage en fonction de la course butée
La fig. 10 montre les trois profils de couples d’embrayage (A, B, C), fondamentalement différents les uns des autres, mais qui, pour une même course butée, atteignent tous le même maximum.
L’embrayage C présente ici, dans la zone particulièrement déterminante pour le décollage (150 Nm), la courbe de montée en couple la plus rapide, l’embrayage A présente la courbe la plus progressive. De ce fait, il a été considéré dans un premier temps que la dosabilité de l’embrayage A était supérieure à celle des deux autres.
Ces embrayages furent ensuite montés sur leurs véhicules respectifs et caractérisés.
60
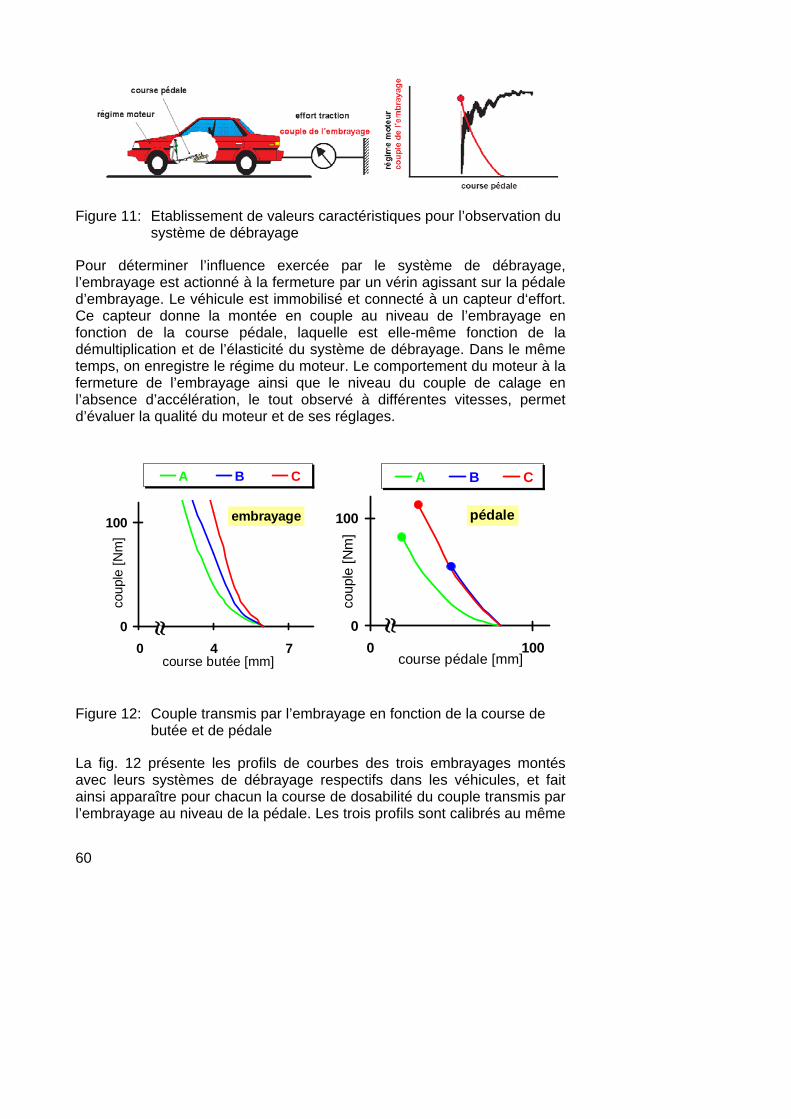
Figure 11: Etablissement de valeurs caractéristiques pour l’observation du système de débrayage
Pour déterminer l’influence exercée par le système de débrayage, l’embrayage est actionné à la fermeture par un vérin agissant sur la pédale d’embrayage. Le véhicule est immobilisé et connecté à un capteur d‘effort. Ce capteur donne la montée en couple au niveau de l’embrayage en fonction de la course pédale, laquelle est elle-même fonction de la démultiplication et de l’élasticité du système de débrayage. Dans le même temps, on enregistre le régime du moteur. Le comportement du moteur à la fermeture de l’embrayage ainsi que le niveau du couple de calage en l’absence d’accélération, le tout observé à différentes vitesses, permet d’évaluer la qualité du moteur et de ses réglages.
0
100
0 100course pédale [mm]
coup
le [N
m]
A B C
pédale
≈0
100
course butée [mm]
coup
le [N
m]
A B C
embrayage
4 70
≈
Figure 12: Couple transmis par l’embrayage en fonction de la course de butée et de pédale
La fig. 12 présente les profils de courbes des trois embrayages montés avec leurs systèmes de débrayage respectifs dans les véhicules, et fait ainsi apparaître pour chacun la course de dosabilité du couple transmis par l’embrayage au niveau de la pédale. Les trois profils sont calibrés au même
61
point de fonctionnement et présentent donc tous la même course pédale pour un couple égal à zéro. La courbe suit la course de pédale jusqu’au point où le couple, en l’absence d’accélération, provoque le calage du moteur. Cette valeur est représentée par un gros point.
Le système A est celui qui présente, rapporté à la course de pédale, le comportement le plus progressif en couple. Les profils des systèmes B et C sont pratiquement identiques du fait que, sur le véhicule C, la démultiplication au niveau du système de débrayage est plus importante.
Les systèmes B et C demandent donc le même effort au conducteur et au moteur, et ce bien que leurs embrayages respectifs soient, par rapport à la course butée, (Fig. 12), de conception fondamentalement différente.
C’est le niveau du couple de calage sans accélération qui renseigne sur l’influence exercée par le moteur. Le véhicule C présente sans accélération le couple moteur le plus élevé, sur le véhicule B on atteint à peine la moitié de cette valeur, ce dernier calera donc plus facilement au décollage.
� � � � � � � � ! " # � � # $ � # %� # % � � � � � & � � � �
Figure 13: mesures au décollage
Cela se trouve confirmé par un essai au décollage (fig. 13), pour lequel l’embrayage est également actionné à la fermeture par un vérin agissant sur la pédale d’embrayage, mais sans que le véhicule soit immobilisé. La vitesse maximale de fermeture de l’embrayage, mesurée au niveau de la pédale en mm/s, et qui est celle à laquelle le véhicule parvient encore à décoller en l´absence d´accélération, permet d’établir une valeur caractéristique, laquelle permet à son tour de comparer objectivement le comportement des véhicules au décollage.
D’après les études effectuées jusqu’ici chez LuK sur 20 véhicules différents, il faut, pour que l’évaluation subjective soit positive (note > 6),
62
que le niveau maximal de la vitesse d’embrayage soit d’au moins 25 mm/s. Lorsque ce niveau est plus élevé, le décollage du véhicule ne pose absolument aucun problème.
0
300
600
0 3 6course butée [mm]
coup
le [N
m]
A B C
embrayage
A B C
véhicule
25
v Pé
dale
[mm
/s]
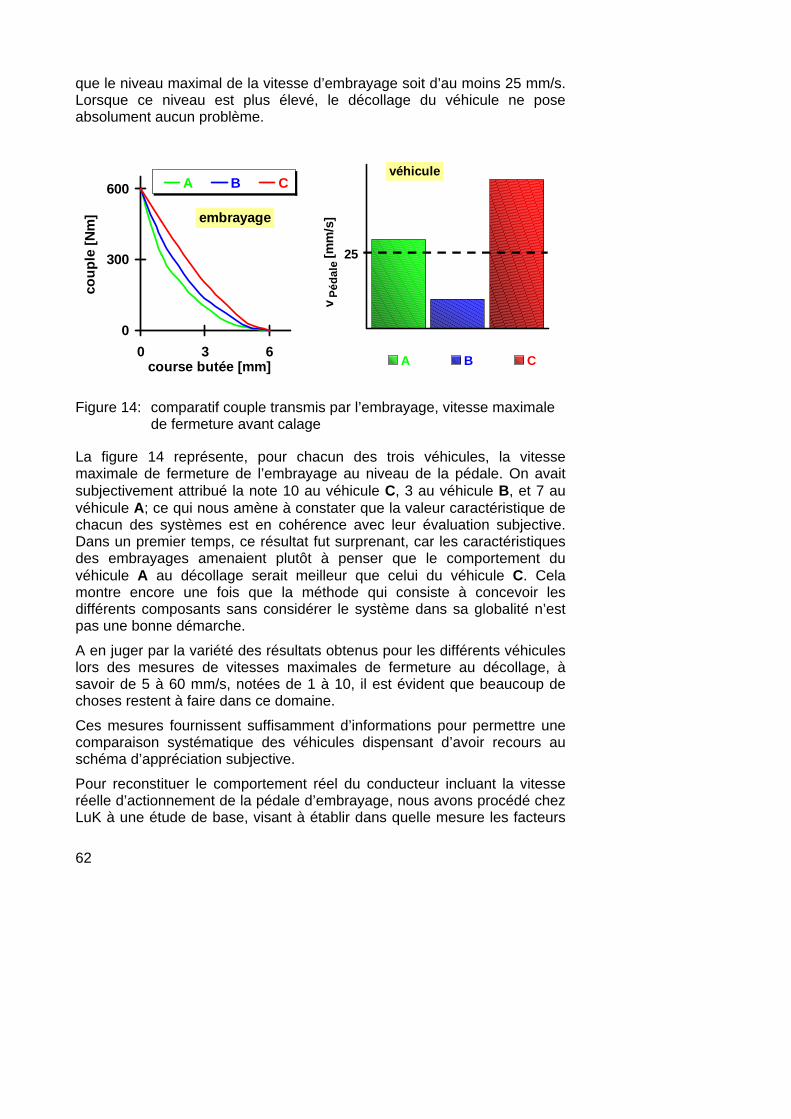
Figure 14: comparatif couple transmis par l’embrayage, vitesse maximale de fermeture avant calage
La figure 14 représente, pour chacun des trois véhicules, la vitesse maximale de fermeture de l’embrayage au niveau de la pédale. On avait subjectivement attribué la note 10 au véhicule C, 3 au véhicule B, et 7 au véhicule A; ce qui nous amène à constater que la valeur caractéristique de chacun des systèmes est en cohérence avec leur évaluation subjective. Dans un premier temps, ce résultat fut surprenant, car les caractéristiques des embrayages amenaient plutôt à penser que le comportement du véhicule A au décollage serait meilleur que celui du véhicule C. Cela montre encore une fois que la méthode qui consiste à concevoir les différents composants sans considérer le système dans sa globalité n’est pas une bonne démarche.
A en juger par la variété des résultats obtenus pour les différents véhicules lors des mesures de vitesses maximales de fermeture au décollage, à savoir de 5 à 60 mm/s, notées de 1 à 10, il est évident que beaucoup de choses restent à faire dans ce domaine.
Ces mesures fournissent suffisamment d’informations pour permettre une comparaison systématique des véhicules dispensant d’avoir recours au schéma d’appréciation subjective.
Pour reconstituer le comportement réel du conducteur incluant la vitesse réelle d’actionnement de la pédale d’embrayage, nous avons procédé chez LuK à une étude de base, visant à établir dans quelle mesure les facteurs
63
ergonomiques, et par là-même la caractéristique de l’effort pédale, ont une incidence sur le processus d’embrayage.
On se référera ici à l’expérience représentée ci-dessous (Fig. 15).
Figure 15: Etude ergonomique simple
Bien que dans les deux cas le même effort soit requis, la position assise représentée à gauche, permet, du point de vue du sujet lui-même, une économie d’effort par rapport au cas de figure proposé à droite. Cette considération d’ordre biomécanique nous a conduit, pour l’étude suivante, à déterminer comme paramètre fondamental nécessaire à l’actionnement du mécanisme non pas l’effort pédale au pied, mais le couple exercé au niveau de la hanche.
De ce fait, la jambe du conducteur est une partie du système de débrayage; le poids de la jambe s’exerce comme une précharge sur la pédale.
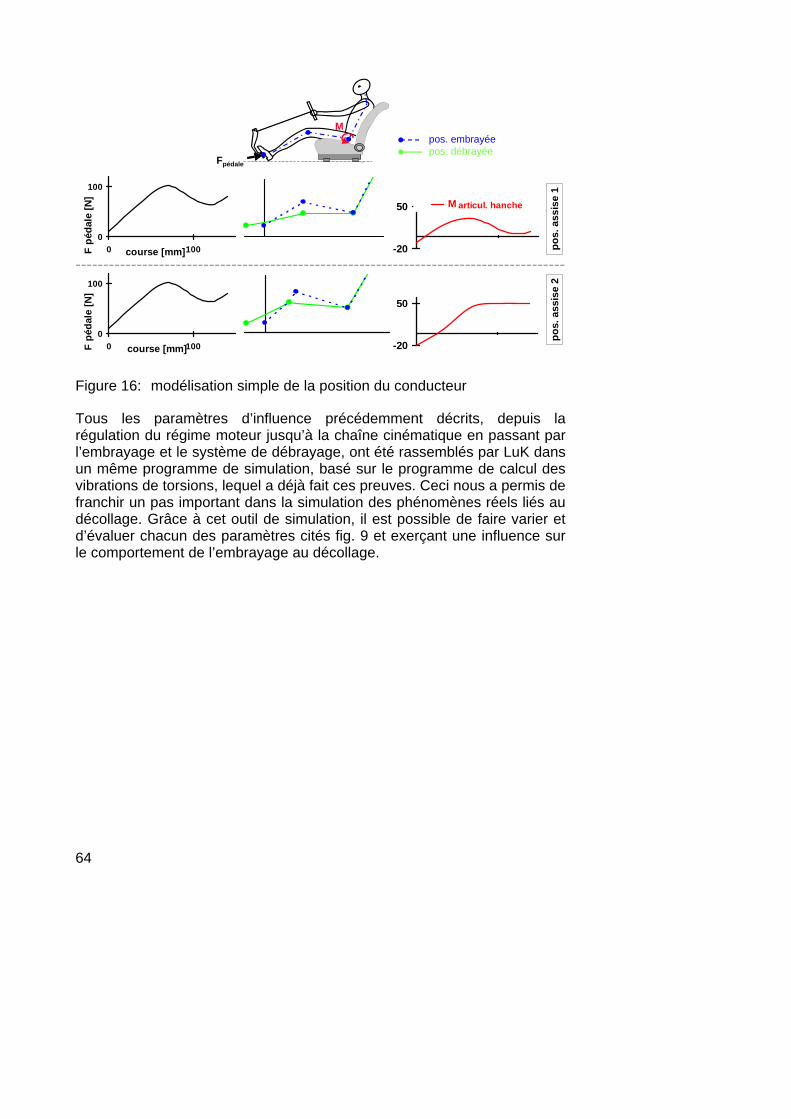
L’étude représentée figure 16 porte sur la position assise du conducteur. L’étude comparative de deux positions assises différentes montre dans quelle mesure, pour une même caractéristique d’effort pédale, le couple exercé est tributaire de facteurs ergonomiques. La position assise n°1 génère un ensellement important de la caractéristique du couple. On peut aisément supposer que le conducteur, du fait de ce gradient qui chute et remonte brusquement, a plus de mal à doser son action sur la pédale que dans le cas d’un profil de couple horizontal.
Il conviendra donc, à l’avenir, de tenir compte également de cette position assise du conducteur.
64
-20
50
-20
50 articul. hancheM
0
100
0 100F pé
dale
[N]
course [mm]
Fpédale
M
0
100
0 100F pé
dale
[N]
course [mm]
pos.
ass
ise
1po
s. a
ssis
e 2
pos. embrayéepos. débrayée
Figure 16: modélisation simple de la position du conducteur
Tous les paramètres d’influence précédemment décrits, depuis la régulation du régime moteur jusqu’à la chaîne cinématique en passant par l’embrayage et le système de débrayage, ont été rassemblés par LuK dans un même programme de simulation, basé sur le programme de calcul des vibrations de torsions, lequel a déjà fait ces preuves. Ceci nous a permis de franchir un pas important dans la simulation des phénomènes réels liés au décollage. Grâce à cet outil de simulation, il est possible de faire varier et d’évaluer chacun des paramètres cités fig. 9 et exerçant une influence sur le comportement de l’embrayage au décollage.
65
accouplement
régulateurdu régime
moteur véhicule
course butée
coup
le
course pédale
cour
se b
utée
temps
cour
se p
éd. moteur pas à pas
conducteur réel
M nmesure- e
filtrevitesse
caract.moteur
K Tn
RC
nconsigne
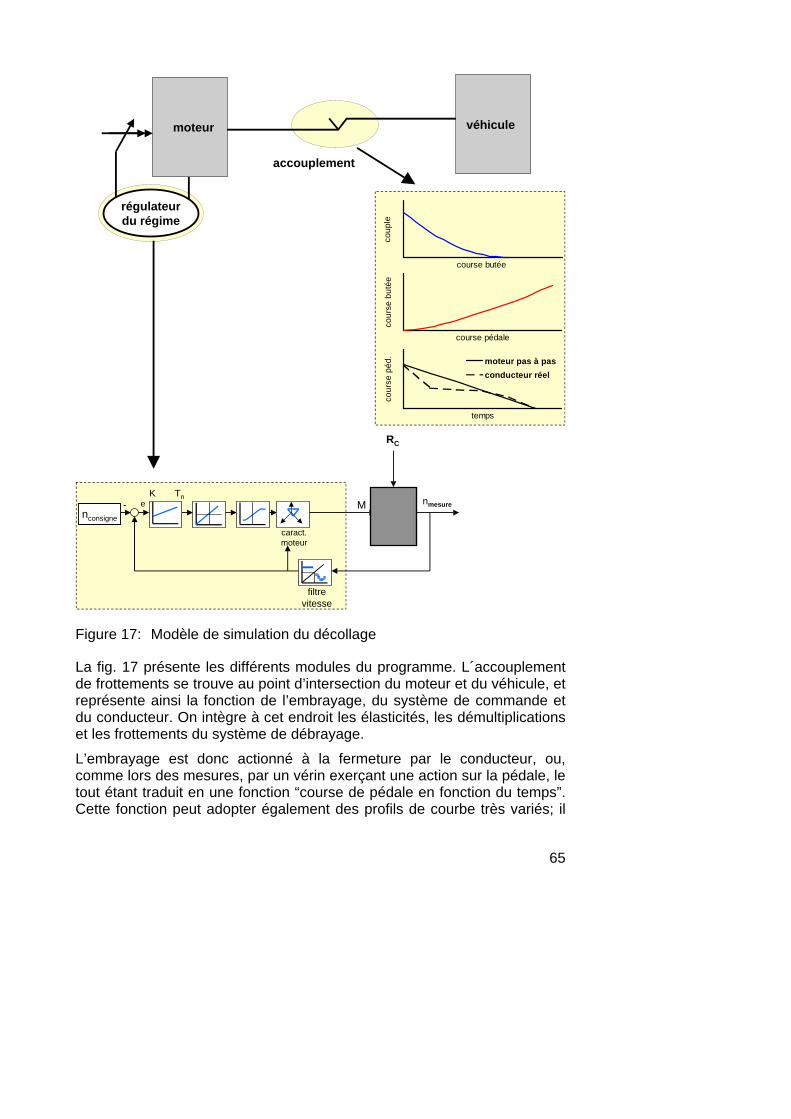
Figure 17: Modèle de simulation du décollage
La fig. 17 présente les différents modules du programme. L´accouplement de frottements se trouve au point d’intersection du moteur et du véhicule, et représente ainsi la fonction de l’embrayage, du système de commande et du conducteur. On intègre à cet endroit les élasticités, les démultiplications et les frottements du système de débrayage.
L’embrayage est donc actionné à la fermeture par le conducteur, ou, comme lors des mesures, par un vérin exerçant une action sur la pédale, le tout étant traduit en une fonction “course de pédale en fonction du temps”. Cette fonction peut adopter également des profils de courbe très variés; il
66
est par exemple possible de faire apparaître l’influence des hystérésis d’effort et de course sur le comportement au décollage lorsqu’on inverse la direction du mouvement de la pédale.
La régulation du régime moteur peut s’effectuer de deux manières différentes; par le régulateur PI, respectivement PID, d’une part, ou par la cartographie réelle du moteur d’autre part. Dans ce cas, le régulateur est soumis à l’interdépendance de la position du papillon, du régime et du couple, telle que déterminée au niveau de la cartographie du moteur.
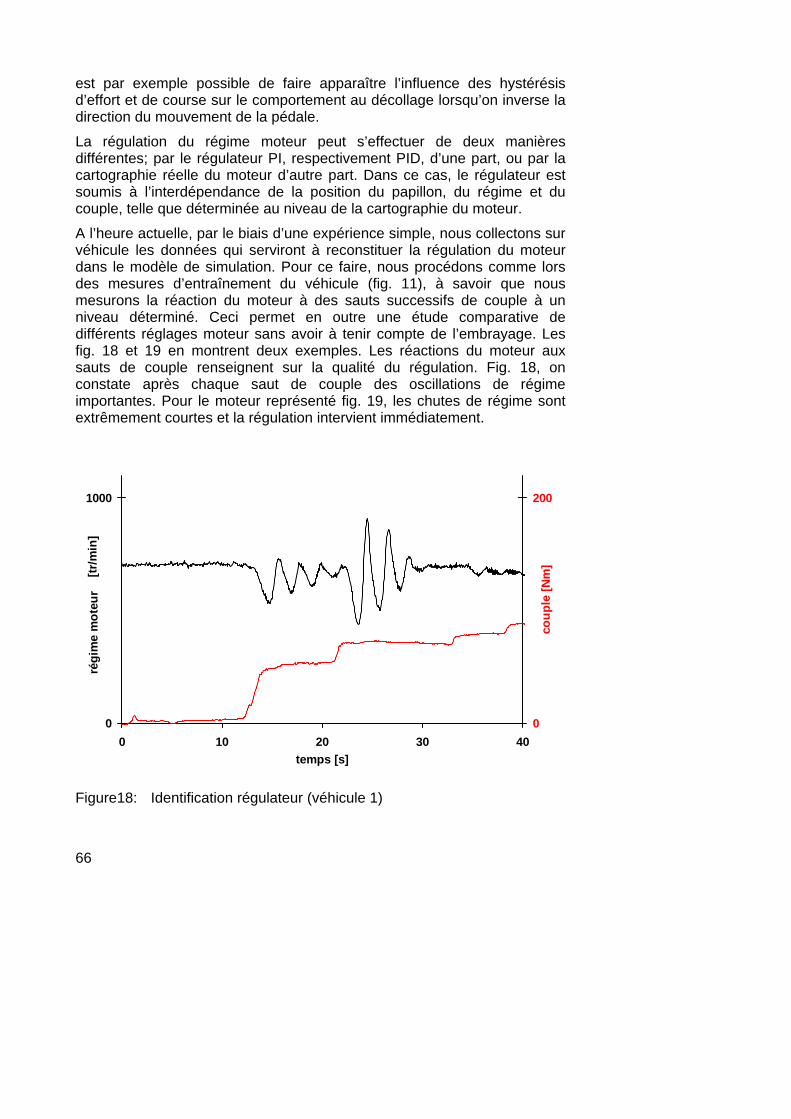
A l’heure actuelle, par le biais d’une expérience simple, nous collectons sur véhicule les données qui serviront à reconstituer la régulation du moteur dans le modèle de simulation. Pour ce faire, nous procédons comme lors des mesures d’entraînement du véhicule (fig. 11), à savoir que nous mesurons la réaction du moteur à des sauts successifs de couple à un niveau déterminé. Ceci permet en outre une étude comparative de différents réglages moteur sans avoir à tenir compte de l’embrayage. Les fig. 18 et 19 en montrent deux exemples. Les réactions du moteur aux sauts de couple renseignent sur la qualité du régulation. Fig. 18, on constate après chaque saut de couple des oscillations de régime importantes. Pour le moteur représenté fig. 19, les chutes de régime sont extrêmement courtes et la régulation intervient immédiatement.
0
1000
0 10 20 30 40temps [s]
régi
me
mot
eur
0
200
coup
le [N
m]
[tr/m
in]
Figure18: Identification régulateur (véhicule 1)
67
0
1000
0 10 20 30 40temps [s]
régi
me
mot
eur
0
200
coup
le [N
m]
[tr/m
in]
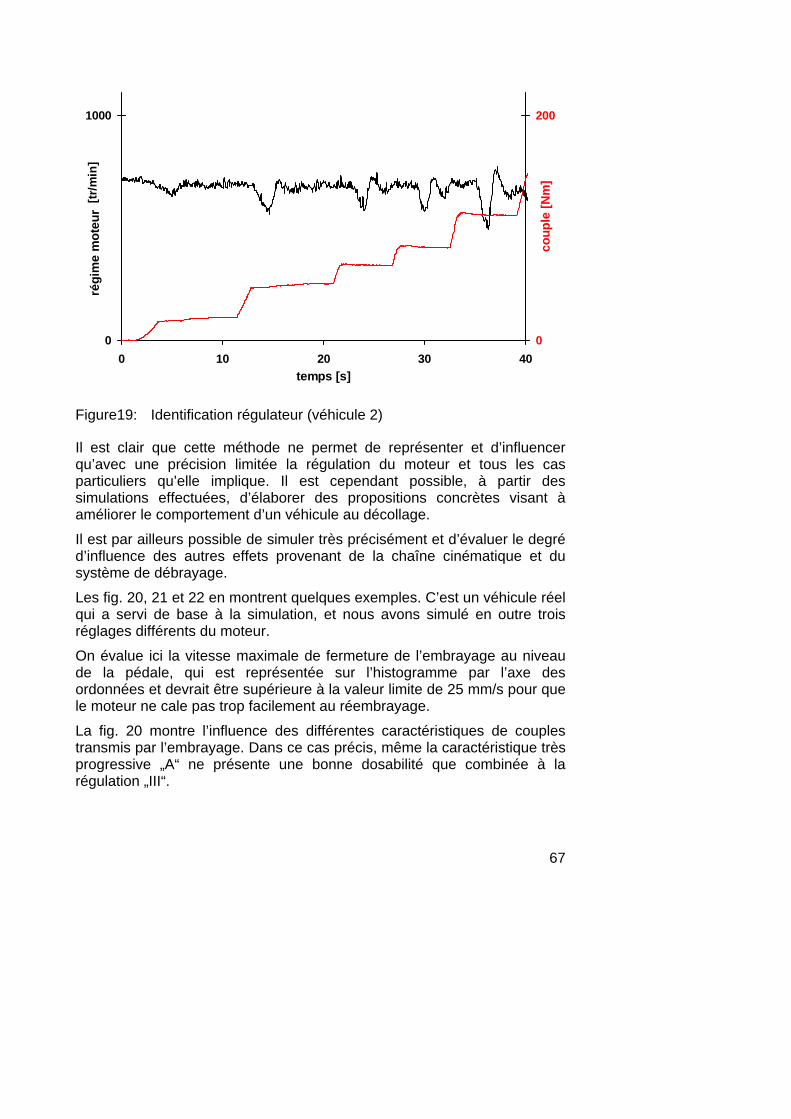
Figure19: Identification régulateur (véhicule 2)
Il est clair que cette méthode ne permet de représenter et d’influencer qu’avec une précision limitée la régulation du moteur et tous les cas particuliers qu’elle implique. Il est cependant possible, à partir des simulations effectuées, d’élaborer des propositions concrètes visant à améliorer le comportement d’un véhicule au décollage.
Il est par ailleurs possible de simuler très précisément et d’évaluer le degré d’influence des autres effets provenant de la chaîne cinématique et du système de débrayage.
Les fig. 20, 21 et 22 en montrent quelques exemples. C’est un véhicule réel qui a servi de base à la simulation, et nous avons simulé en outre trois réglages différents du moteur.
On évalue ici la vitesse maximale de fermeture de l’embrayage au niveau de la pédale, qui est représentée sur l’histogramme par l’axe des ordonnées et devrait être supérieure à la valeur limite de 25 mm/s pour que le moteur ne cale pas trop facilement au réembrayage.
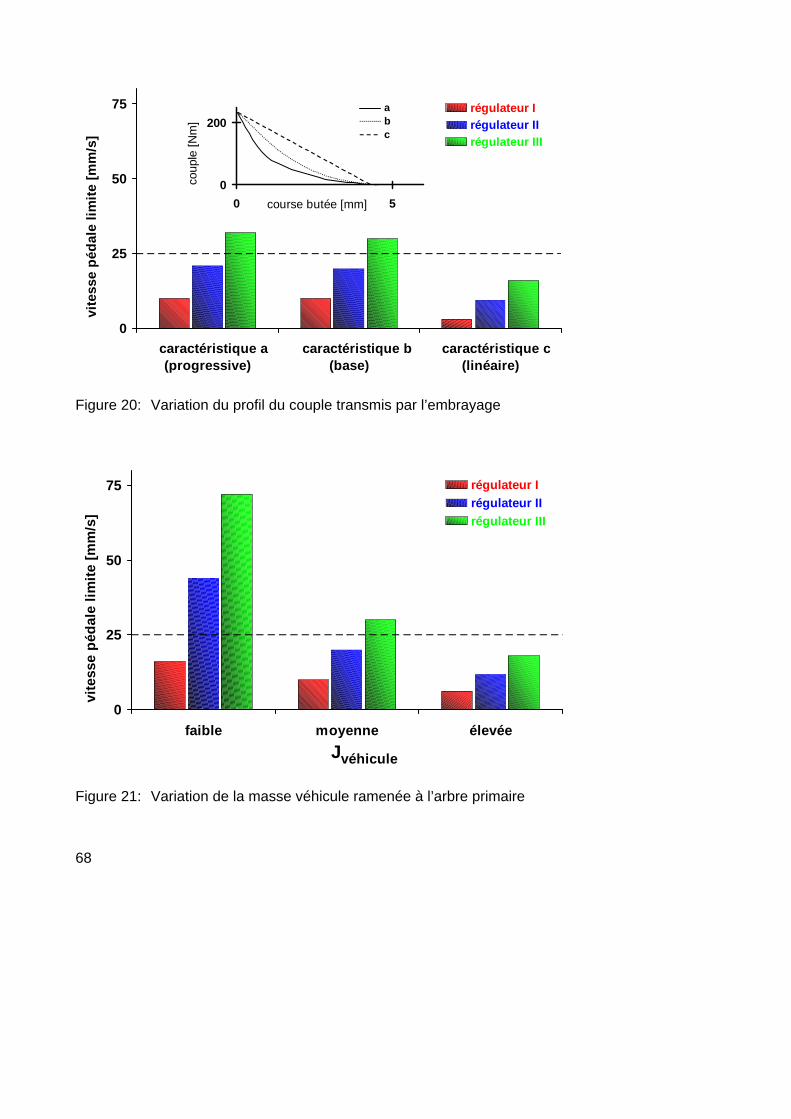
La fig. 20 montre l’influence des différentes caractéristiques de couples transmis par l’embrayage. Dans ce cas précis, même la caractéristique très progressive „A“ ne présente une bonne dosabilité que combinée à la régulation „III“.
68
0
25
50
75
caractéristique a (progressive)
caractéristique b (base)
caractéristique c (linéaire)
vite
sse
péda
le li
mite
[mm
/s]
régulateur Irégulateur IIrégulateur IIIGrenze
0
200
0 5course butée [mm]co
uple
[Nm
]
abc
Figure 20: Variation du profil du couple transmis par l’embrayage
0
25
50
75
faible moyenne élevée
vite
sse
péda
le li
mite
[mm
/s]
régulateur Irégulateur IIrégulateur IIIGrenze
véhiculeJ
Figure 21: Variation de la masse véhicule ramenée à l’arbre primaire
69
La fig. 21 montre l’influence exercée par la masse du véhicule réduite à l’arbre primaire de la boîte de vitesses. On convertit ici en masse tournante la masse de translation du véhicule intégrant la démultiplication de la boîte et du pont, de même que le rayon de roulement des pneus. Une petite démultiplication, qui induit une masse élevée du véhicule ramenée sur l'arbre primaire, entraînera nécessairement des problèmes au décollage si ce phénomène n’est pas compensé par d’autres paramètres.
0
25
50
75
faible moyenne élevée
vite
sse
péda
le li
mite
[mm
/s]
régulateur Irégulateur IIrégulateur IIIGrenze
moteurJ
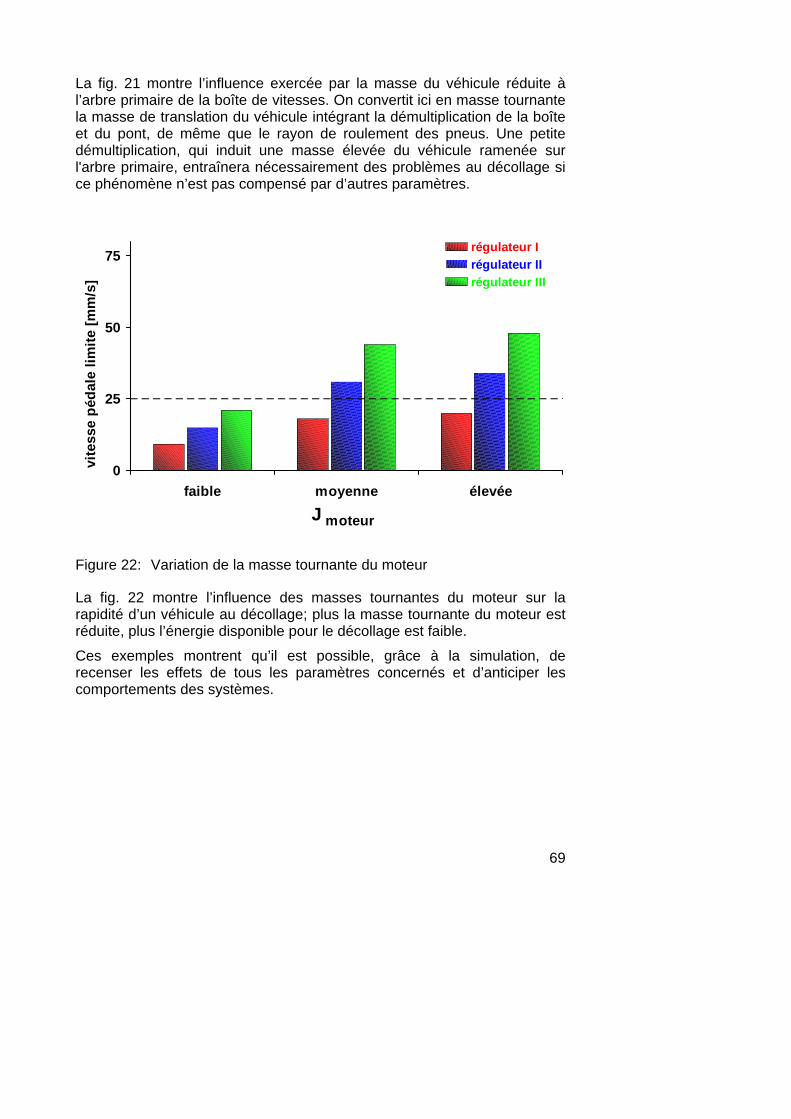
Figure 22: Variation de la masse tournante du moteur
La fig. 22 montre l’influence des masses tournantes du moteur sur la rapidité d’un véhicule au décollage; plus la masse tournante du moteur est réduite, plus l’énergie disponible pour le décollage est faible.
Ces exemples montrent qu’il est possible, grâce à la simulation, de recenser les effets de tous les paramètres concernés et d’anticiper les comportements des systèmes.
70
Résumé: A la lumière des expériences de ces dernières années, il nous est apparu évident qu’une stricte séparation entre embrayage et système de débrayage ne pouvait mener à une solution technique optimale.
Seule une étude précise de tous les éléments impliqués dans le flux d’efforts qui s’exercent au niveau du système d’embrayage-débrayage, accompagnée de la prise en compte de certaines données relatives au véhicule et au moteur, peut garantir un fonctionnement optimal de l’ensemble, de sorte qu’une conception globale du système s’impose pour ainsi dire d’elle-même.
C’est pourquoi il est souhaitable qu’à l’avenir les recherches en matière de systèmes d’embrayages, qu’il s’agisse d’optimiser ou d’innover, s’effectuent dans le cadre d’un management de projet, ce qui permettra de s’assurer que tous les éléments du système, embrayage et commande, soient conçus de manière à garantir un équilibre parfait de l’ensemble.