Embed Size (px)
Citation preview
MMaasstteerr MMEECCAANNIIQQUUEE,, MMAATTEERRIIAAUUXX,, SSTTRRUUCCTTUURREESS,, PPRROOCCEEDDEESS
MMeennttiioonn SSCCIIEENNCCEESS PPOOUURR LL’’IINNGGEENNIIEEUURR
CONCEPTS FONDAMENTAUX
DE LA
MECANIQUE DE LA RUPTURE
Abderrahim ZEGHLOUL
22001166--22001177

Sommaire
Chapitre I – Introduction 1
Chapitre 2 – Elasticité plane en variables complexes 15
Chapitre 3 – Concentration de contraintes près des entailles 36
Chapitre 4 – Intensification des contraintes à l’extrémité des fissures 73
Chapitre 5 – Mécanique linéaire de la rupture en fatigue des matériaux 119
Chapitre 6 – Mécanique non linéaire de la rupture 143
1
Chapitre I Introduction
La rupture est un problème auquel l’homme devra faire face aussi longtemps qu’il
construira des édifices ou fabriquera des structures. Ce problème est de plus en plus
crucial avec le développement, lié aux progrès technologiques, de structures complexes.
Les avancées dans la connaissance de la mécanique de la rupture permettent aujourd’hui
et plus précisément depuis le milieu du 20e siècle, de mieux prévenir le risque de
rupture.
Cependant, beaucoup de mécanismes de rupture sont encore mal connus notamment
lorsqu’on utilise de nouveaux matériaux ou de nouveaux procédés. Le coût des ruptures
catastrophiques représente, d’après les études économiques réalisées depuis le début des
années 80, près de 4% du PNB dans les pays industriels développés. On peut réduire ce
coût d’environ 30% en appliquant correctement les concepts connus de la mécanique de
la rupture et de 25% supplémentaires en développant davantage la recherche dans le
domaine de la rupture.
On distingue deux catégories de rupture des structures :
- celle provenant d’une négligence dans la conception, dans la construction ou dans
l’utilisation de la structure,
- et celle liée à l’utilisation d’un nouveau matériau ou d’un nouveau procédé, qui peut
provoquer une rupture inattendue.
Dans le premier cas, le risque de rupture peut être évité dès lors que la structure est bien
dimensionnée avec un choix de matériaux adaptés, et les chargements correctement
évalués.
Dans le deuxième cas, la prévention de la rupture est plus délicate. Lorsque le
concepteur utilise un nouveau matériau ou un nouveau procédé, il ne maîtrise pas
forcément tous les facteurs car la mise en œuvre de nouvelles techniques, bien qu’elle
procure des avantages, conduit inévitablement à des problèmes potentiels.
Ce sont peut-être les « bateaux de la liberté » (Liberty ship) de la seconde guerre
mondiale qui illustrent le mieux le second cas de rupture. Ces bateaux, dont la coque
était assemblée par soudage (et non plus par rivetage), coûtaient moins chers et étaient
plus rapidement fabriqués que leurs prédécesseurs. Ce changement de procédé de
fabrication qui constituait un progrès indéniable, conduisait cependant à des ruptures
catastrophiques développées dans les joints de soudure. Aujourd’hui, la plupart des
bateaux sont assemblés par soudage mais le progrès des connaissances et l’utilisation
des doubles coques en aciers plus adaptées, permettent de mieux maîtriser ce risque de
rupture.
L’utilisation des matériaux polymères procure, dans certaines applications, un avantage
par rapport à d’autres matériaux. Toutefois, cette utilisation peut aussi conduire au
deuxième cas de rupture. Par exemple, les conduites en polyéthylène utilisées pour le
2
transport du gaz naturel, facilitent les opérations de maintenance puisque l’intervention
sur ces conduites est opérée sur une faible longueur : on pince le tuyau de part et d’autre
de la zone d’intervention et ainsi, on provoque localement l’arrêt de l’écoulement du
gaz, sans qu’il soit nécessaire d’arrêter tout le système. Cependant, ce nouveau procédé
qui réduit incontestablement le coût de la maintenance, peut engendrer une rupture du
type 2. En effet, des fuites de gaz qui conduisaient parfois à des endommagements
importants apparaissaient régulièrement sur ces conduites. L’examen des zones de fuite
a montré que des fissures se développaient dans la partie pincée de la conduite ; ces
fissures initialement situées à l’intérieur de la paroi se propageaient sous l’effet de la
pression du gaz pour ensuite traverser la paroi et donc conduire à des fuites de gaz. Ces
accidents ne remettaient pas en cause le nouveau procédé de pinçage des conduites de
polyéthylène : l’utilisation de nouvelles nuances de polyéthylène, de densité plus faible,
réduisît ce risque de rupture.
Certaines ruptures catastrophiques sont à la fois de type 1 et 2. Par exemple, l’accident
survenu en 1986 sur la navette spatiale Challenger – l’engin explosa avec des passagers
à bord – fut provoqué parce qu'un joint de bague dans l’un des propulseurs a mal réagi à
la baisse de température liée à l’altitude. Les technologies nouvelles utilisées pour la
conception de la navette pouvaient en effet conduire à des défaillances de type 2.
Cependant, certains ingénieurs souhaitaient retarder le lancement de la navette : ils
suspectaient un problème potentiel dans les joints de bague avec risque de rupture (de
type 1 dans ce cas).
Durant les dernières décennies, le développement de la mécanique de la rupture a
incontestablement conduit à une meilleure fiabilité des structures. Il est difficile d’en
donner une estimation en termes de coût et surtout de vies humaines sauvées. Lorsque
les concepts de la mécanique de la rupture sont correctement appliqués, le type 1 de
rupture peut être évité et la fréquence des ruptures de type 2 est aussi réduite.
I.1 Aperçu historique sur la rupture
Eviter la rupture n’est pas en soi une idée nouvelle : les concepteurs des structures de
l’Egypte des pharaons ou ceux de l’empire romain nous ont laissé des édifices que l’on
peut encore contempler (pyramides, ponts …). Les matériaux utilisés avant la révolution
industrielle étaient cependant limités pour l’essentiel au bois de construction, à la pierre
ou à la brique et au mortier. La brique et le mortier sont relativement fragiles lorsqu’ils
sont utilisés en traction. Pour ces raisons, toutes ces structures anciennes (pyramides,
ponts romains…) qui ont su résister au temps, étaient chargées en compression - en fait,
toutes les structures de l’époque précédant la révolution industrielle étaient conçues
pour des chargements en compression. Il a fallu attendre la révolution industrielle au
début du 19e siècle, avec l’utilisation de l’acier, pour pouvoir enfin concevoir des
structures capables de résister à des charges de traction. La comparaison des anciens
ponts romains avec les ponts modernes de structure métallique montre bien que les
premiers étaient effectivement chargés en compression alors que les seconds le sont
plutôt en traction.
3
L’utilisation de nouveaux matériaux ductiles (acier et autres alliages métalliques) pour
des chargements en traction conduisit cependant à quelques problèmes. Des ruptures se
produisaient parfois pour des niveaux de charges bien inférieurs à la limite d’élasticité.
Dans un premier temps, ces risques de rupture ont été réduits en surdimensionnant les
structures. Mais cette solution devint insatisfaisante compte tenu des nécessités d’une
part d’alléger de plus en plus les structures, et d’autre part de réduire les coûts. La
recherche en mécanique de la rupture devait donc être développée.
Les premiers essais de rupture ont été menés par Léonard de Vinci (1452-1519) bien
avant la révolution industrielle : il a montré que la résistance à la traction d’un fil de fer
variait inversement avec la longueur de ce fil. Ce résultat suggérait déjà que les défauts
contenus dans le matériau contrôlaient la résistance de celui-ci : plus le volume est
important (fil de fer long) plus la probabilité de présence de fissure est importante.
Cette interprétation qualitative fût précisée plus tard en 1920 par Griffith qui établit une
relation directe entre la taille du défaut et la contrainte de rupture. S’appuyant sur les
travaux d’Inglis, Griffith appliqua l’analyse des contraintes autour d’un trou elliptique à
la propagation instable d’une fissure. Il formula ainsi à partir du premier principe de la
thermodynamique, une théorie de la rupture : un défaut devient instable et conduit à la
rupture lorsque la variation d’énergie liée à une propagation du défaut atteint l’énergie
spécifique du matériau. Cette théorie prédit correctement la relation entre la contrainte
de rupture et la taille du défaut dans les matériaux fragiles. Cependant, dans les
matériaux ductiles et notamment dans les alliages métalliques, l’avancée d’un défaut
s’accompagne d’une importante dissipation d’énergie due à la plastification qui se
développe à l’extrémité d’une fissure, énergie dont la théorie de Griffith ne tient pas
compte (puisqu’elle ne considère que l’énergie de création de surface). Il a fallu attendre
les travaux d’Irwin en 1948 pour que l’approche de Griffith soit applicable aux
matériaux ductiles : Irwin inclut dans le bilan énergétique, l’énergie due à la
plastification.
La mécanique de la rupture passa du stade de curiosité scientifique à celui d’une
discipline scientifique largement utilisée dans l’ingénierie de la construction, après
l’expérience des bateaux de la liberté. Le principe de conception de ces bateaux avec
une coque entièrement soudée remporta un grand succès jusqu’au jour où l’un de ces
navires se fissura en deux parties dans les eaux froides entre la Sibérie et l’Alaska. Une
dizaine d’autres navires sur les 2700 en service, subirent ensuite le même sort. Les
analyses des causes de rupture montraient que celles-ci provenaient de la combinaison
de trois paramètres :
- les joints de soudures contenaient des fissures,
- la plupart de ces fissures qui conduisaient à la rupture, se développaient à partir de
zones de forte concentration de contrainte,
- l’acier de construction utilisé pour ces bateaux, qui convenait pour les assemblages
par rivetage (puisqu’il n’y avait pas de risque pour une fissure de traverser toute la
coque), avait une faible ténacité.
4
Dès l’instant où la cause des ruptures était clairement identifiée, des plaques en acier de
meilleure ténacité furent fixes près des zones de forte concentration des contraintes pour
arrêter la propagation des fissures. On développa ensuite des aciers de forte ténacité et
on améliora le procédé de soudage ; c’est dans ces années après guerre qu’un groupe de
chercheurs dirigé par Irwin étudia en détail le problème de la rupture au laboratoire
national de recherche de la marine américaine.
Irwin considéra que les outils fondamentaux pour étudier la rupture existaient et proposa
en 1948, une extension de l’approche de Griffith aux matériaux ductiles en y incluant le
terme de dissipation d’énergie due à l’écoulement plastique près des extrémités d’une
fissure. Il développa ensuite en 1956 le concept de taux de restitution d’énergie à partir
toujours de la théorie de Griffith mais sous une forme facilement exploitable par les
concepteurs de structures. En 1957, s’appuyant sur les travaux de Westergaard sur
l’analyse des champs de déplacements et de contraintes élastiques près de l’extrémité
d’une fissure sous chargement donné, Irwin montra que ces déplacements et ces
contraintes pouvaient être décrits à l’aide d’un paramètre unique défini en liaison avec
le taux de restitution d’énergie. Ce paramètre issu de la mécanique linéaire de la rupture,
est le facteur d’intensité des contraintes (FIC).
Les nouveaux concepts de la mécanique de la rupture furent ensuite utilisés pour
montrer que la plupart des ruptures dans les fuselages d’avions étaient dues à des
fissures de fatigue qui atteignaient une taille critique (accidents avions Comet en 1954).
Ces fissures prenaient naissance près des hublots dans les coins qui constituent des
zones de forte concentration des contraintes. Les ruptures qui se produisaient dans les
essieux d’engins roulants ou encore dans les rotors des turbines à vapeur furent aussi
expliquées grâce à l’application de ces nouveaux concepts. Le concept de FIC fut
également utilisé par Paris et Erdogan pour décrire la propagation des fissures de
fatigue : les courbes de propagation de ces fissures remplacèrent peu à peu les courbes
d’endurance ; ce qui permit une meilleure prédiction des durées de vie des structures.
La période entre 1960 et 1980 vit une intensification des recherches sur la rupture avec
deux écoles concurrentes. D’un coté, les tenants de l’approche par la mécanique linéaire
de la rupture et de l’autre, les partisans de la plastification développée à l’extrémité
d’une fissure. La mécanique linéaire de la rupture cesse d’être valable lorsqu’une
plastification importante précède la rupture. Pour tenir compte de l’effet de cette
plastification sur les champs de contraintes et de déplacements à l’extrémité d’une
fissure, plusieurs auteurs (Irwin, Dugdale et Barenblatt …) proposèrent une « correction
de zone plastique » : la taille de la fissure est alors augmentée de cette zone plastique
pour retrouver les champs de contraintes élastiques décrits par le FIC.
Wells, un des représentants de la deuxième école, proposa en 1961 le déplacement à
fond de fissure - ou CTOD « Crack Tip Opening Displacement » - comme paramètre
alternatif dans le cas de plastification importante (comme par exemple, pour les
matériaux très ductiles), à la mécanique linéaire de la rupture et plus précisément au
concept de FIC. Plus tard, Hutchinson, Rice et Rosengren (HRR) développèrent un
nouveau paramètre appelé intégrale J pour mieux décrire la répartition des contraintes
dans les zones plastifiées (champ HRR). Begley et Landes caractérisèrent la ténacité à
5
l’aide du paramètre J et développèrent une procédure standard pour l’utilisation de cette
intégrale dans des cas pratiques. Shih et Hutchinson proposèrent également une
méthodologie pour utiliser l’intégrale J non seulement pour décrire la ténacité mais
aussi pour la relier à la taille du défaut et au champ des contraintes appliquées. Shih
établit par la suite la relation existant entre l’intégrale J et le CTOD.
Si les recherches en mécanique de la rupture sont restées centrées entre 1960 et 1980 sur
l’effet de la plastification, elles se sont ensuite orientées vers l’étude des comportements
viscoplastique et/ou viscoélastique. Le premier type de comportement se rencontre à
température élevée, lorsque les phénomènes de fluage deviennent importants, alors que
le second type caractérise les matériaux polymères - de plus en plus utilisés dans
l’industrie. L’apparition des nouveaux matériaux composites nécessita également
l’utilisation des concepts de la mécanique linéaire de la rupture pour la description du
comportement de ces matériaux.
Plus récemment, de nouvelles approches tentent de relier le comportement local à
l’échelle microscopique au comportement global lors de la rupture d’un matériau. Ces
approches micro-macro deviennent parfois nécessaires lorsqu’on atteint les limites
d’utilisation des approches plus classiques.
I.2 Utilisation de la mécanique de la rupture en conception
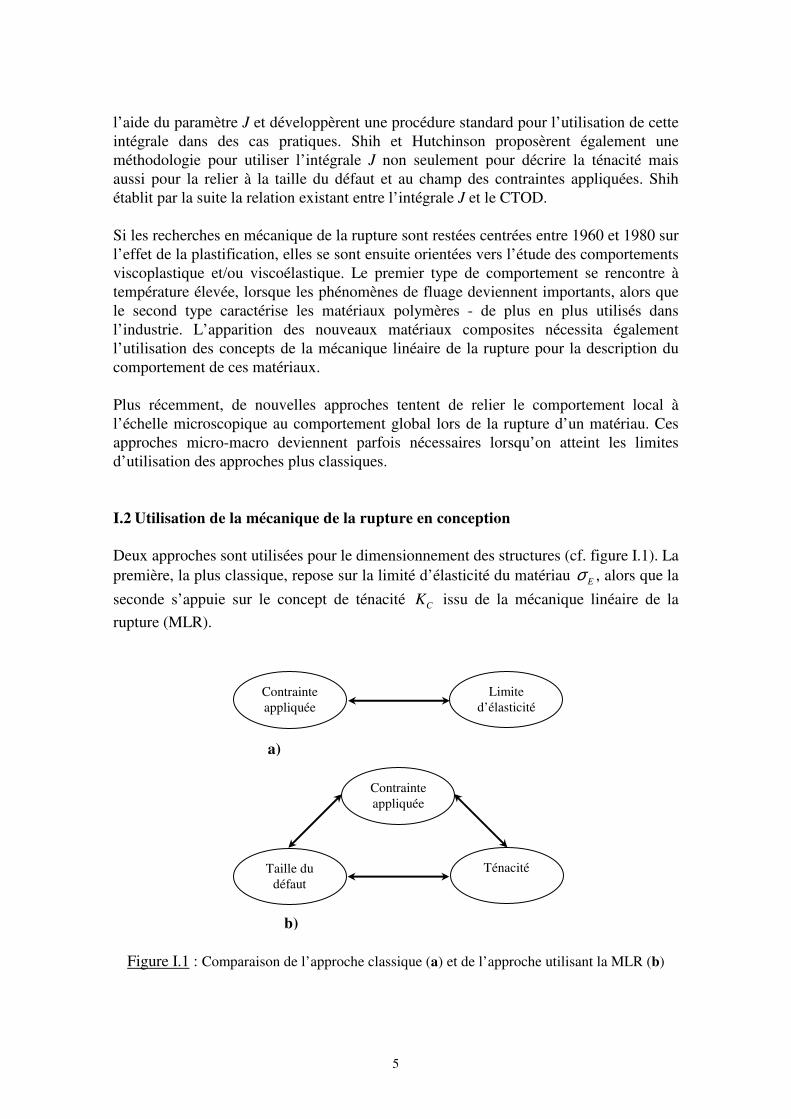
Deux approches sont utilisées pour le dimensionnement des structures (cf. figure I.1). La
première, la plus classique, repose sur la limité d’élasticité du matériau Eσ , alors que la
seconde s’appuie sur le concept de ténacité CK issu de la mécanique linéaire de la
rupture (MLR).
Figure I.1 : Comparaison de l’approche classique (a) et de l’approche utilisant la MLR (b)
Contrainte
appliquée
Limite
d’élasticité
a)
b)
Taille du
défaut
Ténacité
Contrainte
appliquée
6
Dans le premier cas, les structures sont dimensionnées pour que les contraintes
appliquées σ restent inférieures à la limité d’élasticité ( Eσ σ< ). Un coefficient de
sécurité est en général introduit pour prévenir tout risque de rupture fragile ( Eσ ασ<
avec 1α < ). Cette approche, qui est entièrement décrite par les deux variables σ et Eσ ,
fait donc abstraction de l’existence d’éventuels défauts sous forme de microfissures par
exemple.
L’approche basée sur la mécanique linéaire de la rupture est en revanche à trois
variables : la contrainte appliquée σ , la ténacité CK (qui remplace la limité d’élasticité)
et une nouvelle variable attachée cette fois-ci à la taille du défaut. Pour cette même
approche, deux études alternatives sont possibles : l’une utilise un critère d’énergie (cf.
I.2.1) et l’autre le concept d’intensité des contraintes critique (cf. I.2.2). Ces deux études
sont, sous certaines conditions, équivalentes.
Dans les deux prochaines sections, nous présentons brièvement ces deux études
alternatives pour ensuite, en préciser les hypothèses et en exposer les calculs.
I.2.1 Critère d’Energie
L’approche énergétique est basée sur le postulat suivant : l’extension d’une fissure qui
conduit à la rupture se produit lorsque l’énergie fournie est suffisante pour vaincre la
résistance du matériau. Cette résistance se compose de l’énergie de création de surface,
de l’énergie de plastification de l’extrémité de la fissure, et éventuellement d’autres
types d’énergies dissipatives associées à la propagation d’une fissure.
Griffith fut le premier à proposer un critère d’énergie pour la rupture des matériaux
fragiles, critère ensuite étendu aux matériaux ductiles par d’autres auteurs (dont Irwin et
Orowan).
L’énergie de Griffith notée G (qu’on appelle aussi taux de restitution d’énergie), est
définie en liaison avec la variation d’énergie par unité de surface fissurée, associée à la
propagation d’une fissure dans un matériau linéaire élastique. La rupture se produit
lorsque G atteint une valeur critique CG . Cette valeur est en fait une mesure de la
ténacité du matériau.
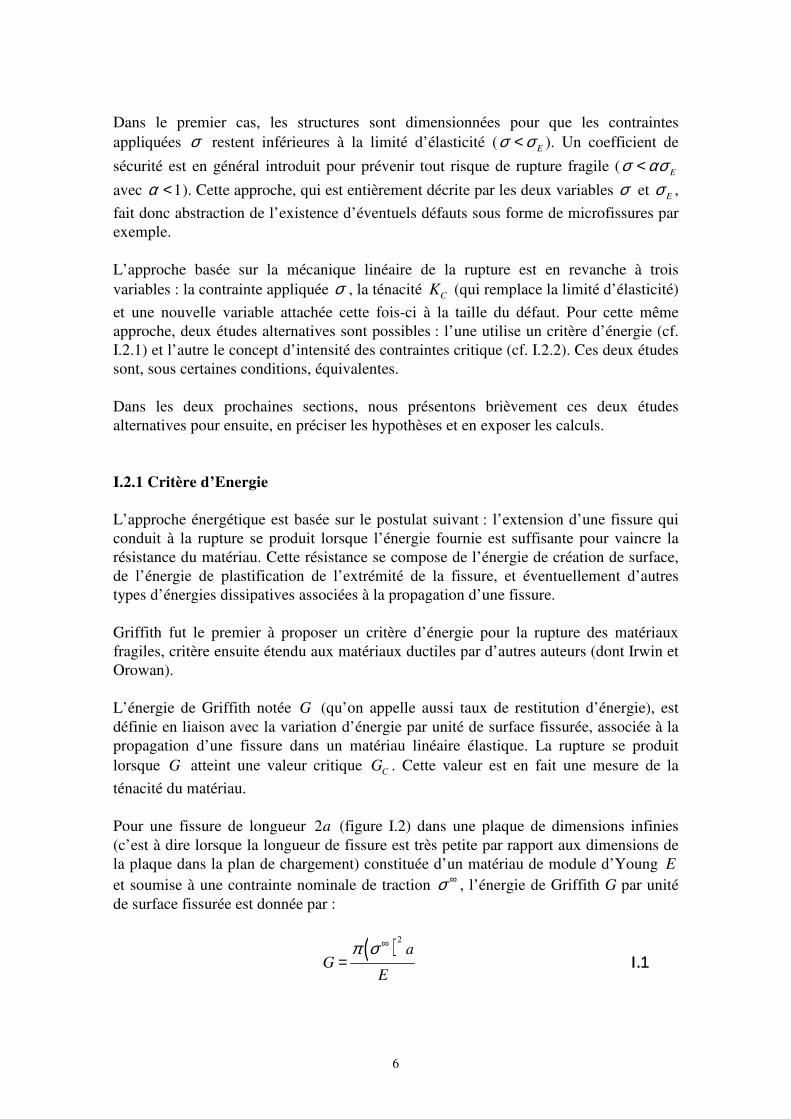
Pour une fissure de longueur 2a (figure I.2) dans une plaque de dimensions infinies
(c’est à dire lorsque la longueur de fissure est très petite par rapport aux dimensions de
la plaque dans la plan de chargement) constituée d’un matériau de module d’Young E
et soumise à une contrainte nominale de traction σ ∞, l’énergie de Griffith G par unité
de surface fissurée est donnée par :
( )2
aG
E
π σ ∞
= Ι.1
7
Figure I.2 : Fissure traversante de longueur 2a dans une plaque infinie
La rupture se produit lorsque la contrainte appliquée σ ∞, devenue trop grande, atteint
une certaine valeur Rσ . Par conséquent, si CG désigne la valeur critique de l’énergie
obtenue pour la contrainte appliquée Rσ , la relation précédente donne la formule :
Ga
EC
R=πσ 2
Ι.2
Notons que pour une valeur fixée de CG , la contrainte à rupture Rσ varie avec 1/ a ;
de même, si les valeurs CG et σ ∞ sont fixées, la longueur de défaut critique Ca à
laquelle la rupture se produit, est donnée par :
( )2
CC
EGa
π σ ∞= Ι.3
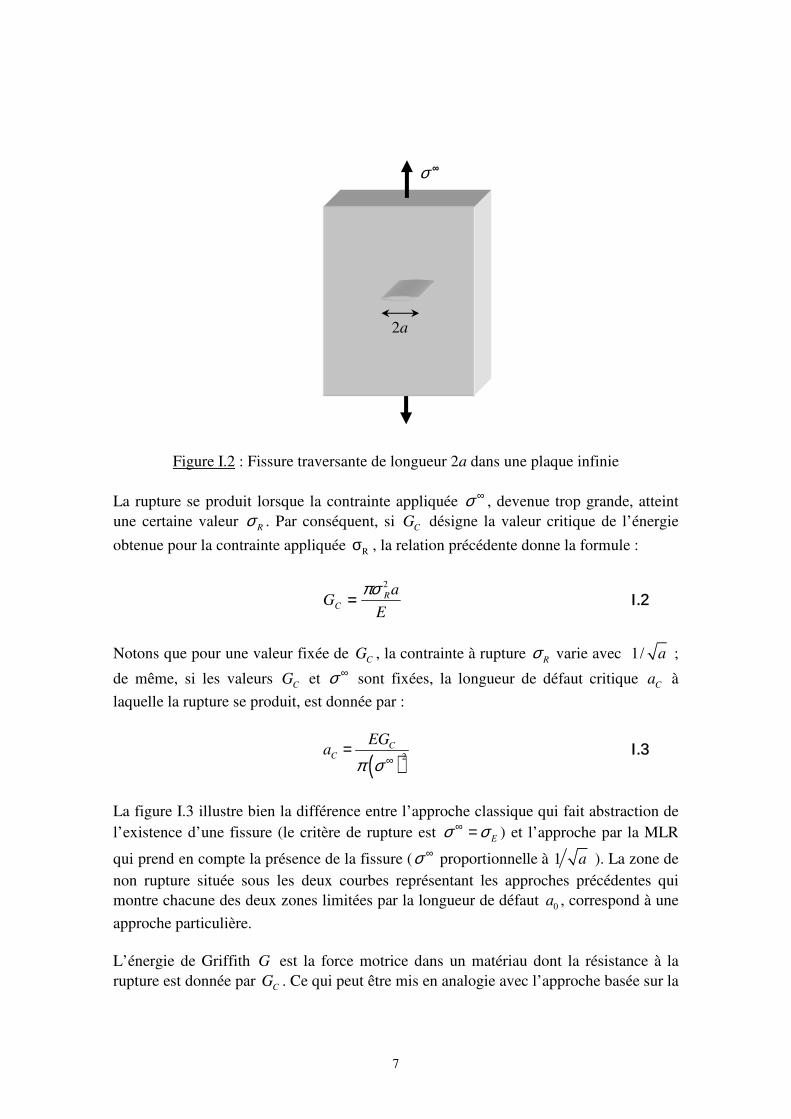
La figure I.3 illustre bien la différence entre l’approche classique qui fait abstraction de
l’existence d’une fissure (le critère de rupture est Eσ σ∞ = ) et l’approche par la MLR
qui prend en compte la présence de la fissure ( proportionnelle à 1 aσ ∞ ). La zone de
non rupture située sous les deux courbes représentant les approches précédentes qui
montre chacune des deux zones limitées par la longueur de défaut 0a , correspond à une
approche particulière.
L’énergie de Griffith G est la force motrice dans un matériau dont la résistance à la
rupture est donnée par CG . Ce qui peut être mis en analogie avec l’approche basée sur la
2a
σ ∞
8
limite d’élasticité où la contrainte joue le rôle de force motrice dans un matériau dont la
résistance à la déformation plastique est donnée par la limite d’élasticité Eσ .
Figure I.3 : Comparaison entre l’approche classique et celle de la MLR.
Cette analogie illustre aussi le concept de similitude. La limite d’élasticité d’un
matériau, mesurée à partir d’essais sur des éprouvettes de laboratoire, est indépendante
de la taille des éprouvettes et peut donc être utilisée pour des structures de tailles
différentes dès lors que le matériau est raisonnablement homogène. Ce principe de
similitude est l’une des hypothèses fondamentales de la mécanique de la rupture : la
ténacité d’un matériau (mesurée par CG ) est indépendante de la taille et de la géométrie
de la structure fissurée. Cette hypothèse de similitude reste valable tant que le
comportement du matériau demeure linéaire élastique.
I.2.2 Concept d’intensité des contraintes
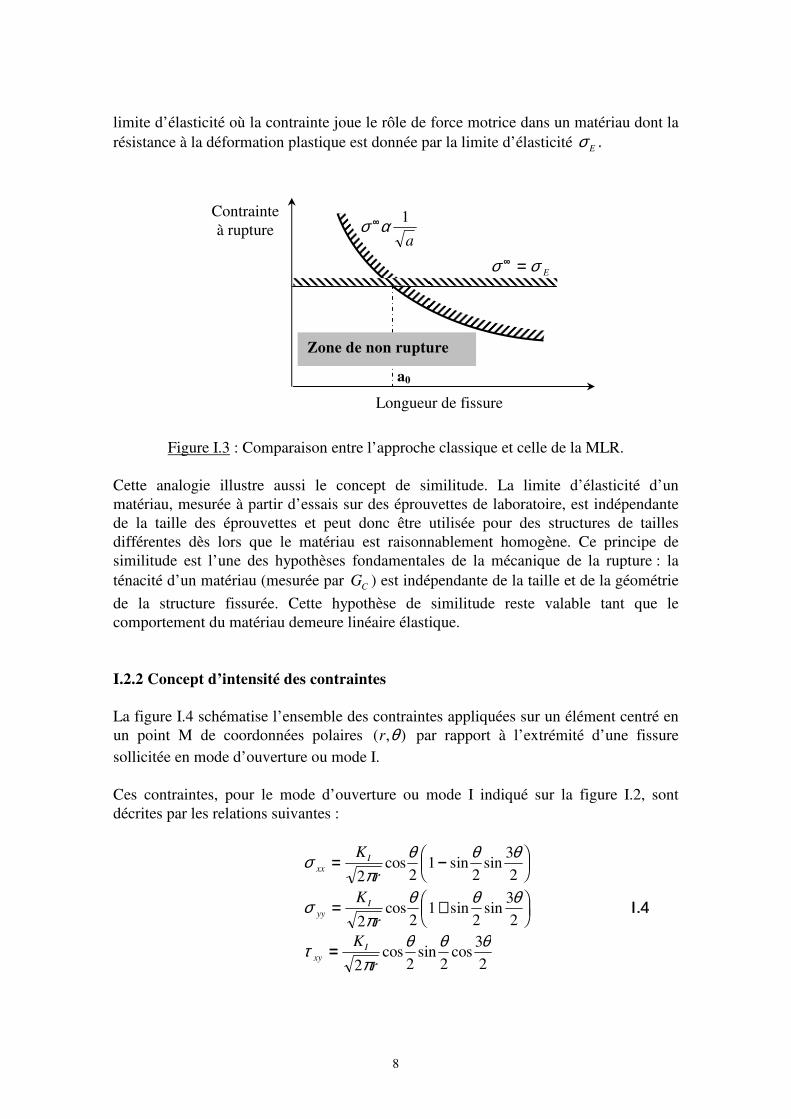
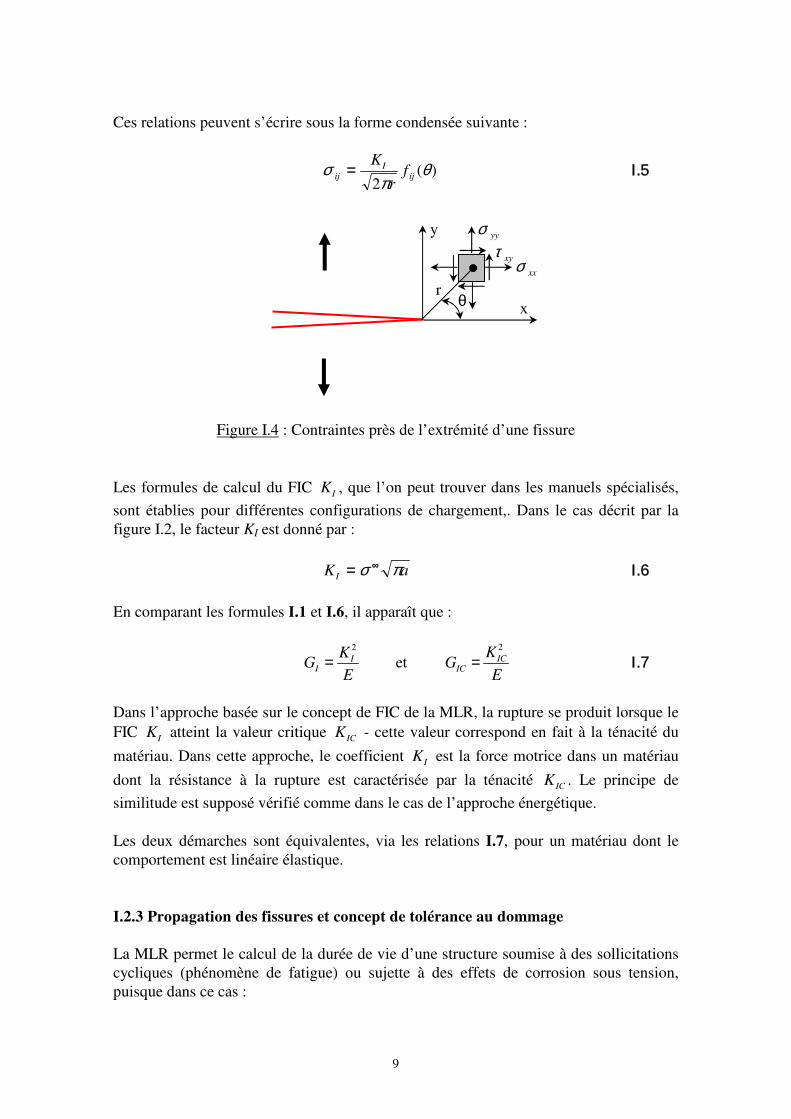
La figure I.4 schématise l’ensemble des contraintes appliquées sur un élément centré en
un point M de coordonnées polaires ( , )r θ par rapport à l’extrémité d’une fissure
sollicitée en mode d’ouverture ou mode I.
Ces contraintes, pour le mode d’ouverture ou mode I indiqué sur la figure I.2, sont
décrites par les relations suivantes :
σπ
θ θ θxx
IK
r= −FHG
IKJ2 2
12
3
2cos sin sin
σπ
θ θ θyy
IK
r= +FHG
IKJ2 2
12
3
2cos sin sin Ι.4
τπ
θ θ θxy
IK
r=
2 2 2
3
2cos sin cos
Longueur de fissure
Contrainte
à rupture
Zone de non rupture
σ σ∞ = E
σ α∞ 1
a
a0
9
Ces relations peuvent s’écrire sous la forme condensée suivante :
σπ
θij
I
ij
K
rf=
2( ) Ι.5
Figure I.4 : Contraintes près de l’extrémité d’une fissure
Les formules de calcul du FIC IK , que l’on peut trouver dans les manuels spécialisés,
sont établies pour différentes configurations de chargement,. Dans le cas décrit par la
figure I.2, le facteur KI est donné par :
K aI = ∞σ π Ι.6 En comparant les formules I.1 et I.6, il apparaît que :
2
II
KG
E= et
2
ICIC
KG
E= Ι.7
Dans l’approche basée sur le concept de FIC de la MLR, la rupture se produit lorsque le
FIC IK atteint la valeur critique ICK - cette valeur correspond en fait à la ténacité du
matériau. Dans cette approche, le coefficient IK est la force motrice dans un matériau
dont la résistance à la rupture est caractérisée par la ténacité ICK . Le principe de
similitude est supposé vérifié comme dans le cas de l’approche énergétique.
Les deux démarches sont équivalentes, via les relations I.7, pour un matériau dont le
comportement est linéaire élastique.
I.2.3 Propagation des fissures et concept de tolérance au dommage
La MLR permet le calcul de la durée de vie d’une structure soumise à des sollicitations
cycliques (phénomène de fatigue) ou sujette à des effets de corrosion sous tension,
puisque dans ce cas :
σ xx
σ yy
τ xy
x
y
θ r
10
- la vitesse de propagation des fissures est caractérisée par un paramètre tel que le
FIC,
- et la taille critique de défaut à ne pas dépasser est directement liée à la ténacité
du matériau.
Par exemple, pour la fissuration par fatigue des alliages métalliques, la propagation de
fissure da/dN est généralement représentée par la relation empirique de Paris :
da
dNC K
m= ∆b g Ι.8
où C et m sont des constantes du matériau, et K∆ l’amplitude du facteur d’intensité
des contraintes.
Parce que les structures contiennent inévitablement des défauts de type fissure, défauts
en général inhérents aux procédés même de fabrication des composants, leurs
dimensions sont choisies de sorte que ces défauts ne puissent atteindre la taille critique
conduisant à la rupture brutale : il s’agit du concept de tolérance au dommage. La MLR
fournit les outils nécessaires pour déterminer cette taille critique (relation I.3) et suivre
la propagation de la fissure (relation I.8).
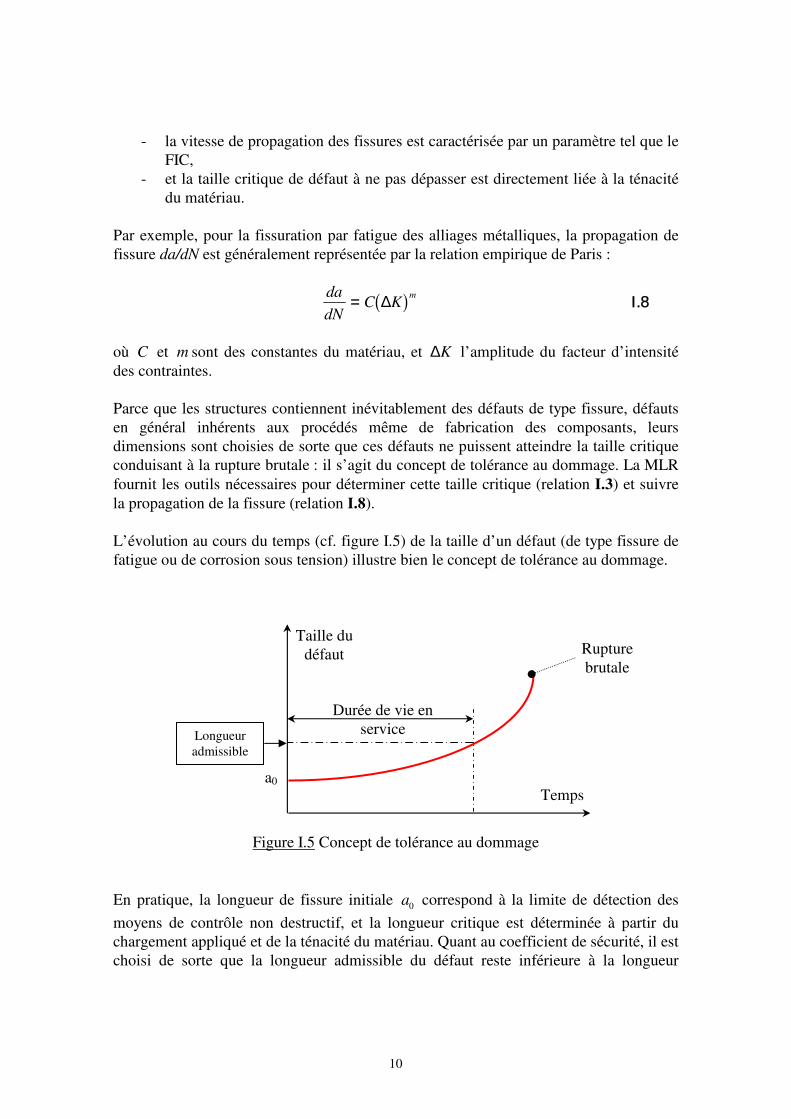
L’évolution au cours du temps (cf. figure I.5) de la taille d’un défaut (de type fissure de
fatigue ou de corrosion sous tension) illustre bien le concept de tolérance au dommage.
Figure I.5 Concept de tolérance au dommage
En pratique, la longueur de fissure initiale 0a correspond à la limite de détection des
moyens de contrôle non destructif, et la longueur critique est déterminée à partir du
chargement appliqué et de la ténacité du matériau. Quant au coefficient de sécurité, il est
choisi de sorte que la longueur admissible du défaut reste inférieure à la longueur
Temps
Taille du
défaut
Durée de vie en
service
Rupture
brutale
a0
Longueur
admissible
11
critique. La durée de vie de la structure est alors déterminée en calculant le temps
nécessaire pour que la longueur de défaut passe de 0a à la longueur admissible.
I.3 Influence des propriétés des matériaux sur la rupture
En mécanique de la rupture, le choix du concept varie selon le comportement physique
du matériau.
La classification usuelle de ces concepts est la suivante :
-La mécanique linéaire de la rupture (MLR) pour les matériaux dont le
comportement est essentiellement linéaire élastique, tels les alliages d’aluminium
à précipitation durcissante, les aciers à haute limite élastique, les céramiques…
-La mécanique élastoplastique de la rupture (MEPR), pour les matériaux ductiles
tels les aciers à faible ou moyenne résistance, les inox ou aciers austénitiques, les
alliages de cuivre…
-La mécanique dynamique de la rupture (MDR), linéaire ou non linéaire, pour les
métaux sollicités à grandes vitesses de déformation – dans ces conditions, le
comportement peut aussi être viscoplastique.
- La mécanique viscoélastique de la rupture (MVER), essentiellement pour les
polymères sollicités à des températures au dessous de la température de transition
vitreuse.
- La mécanique viscoplastique de la rupture (MVPR) pour les polymères au dessus
de la température de transition ou encore les métaux et les céramiques sollicités à
haute température.
Remarques
1/ Si le temps n’agit pas en MLR et en MEPR, il intervient explicitement en
MDR, MVER et MVPR.
2/ La MEPR, la MDR, la MVER et la MVPR sont souvent regroupées dans le
domaine élargi de la mécanique non linéaire de la rupture (MNLR).
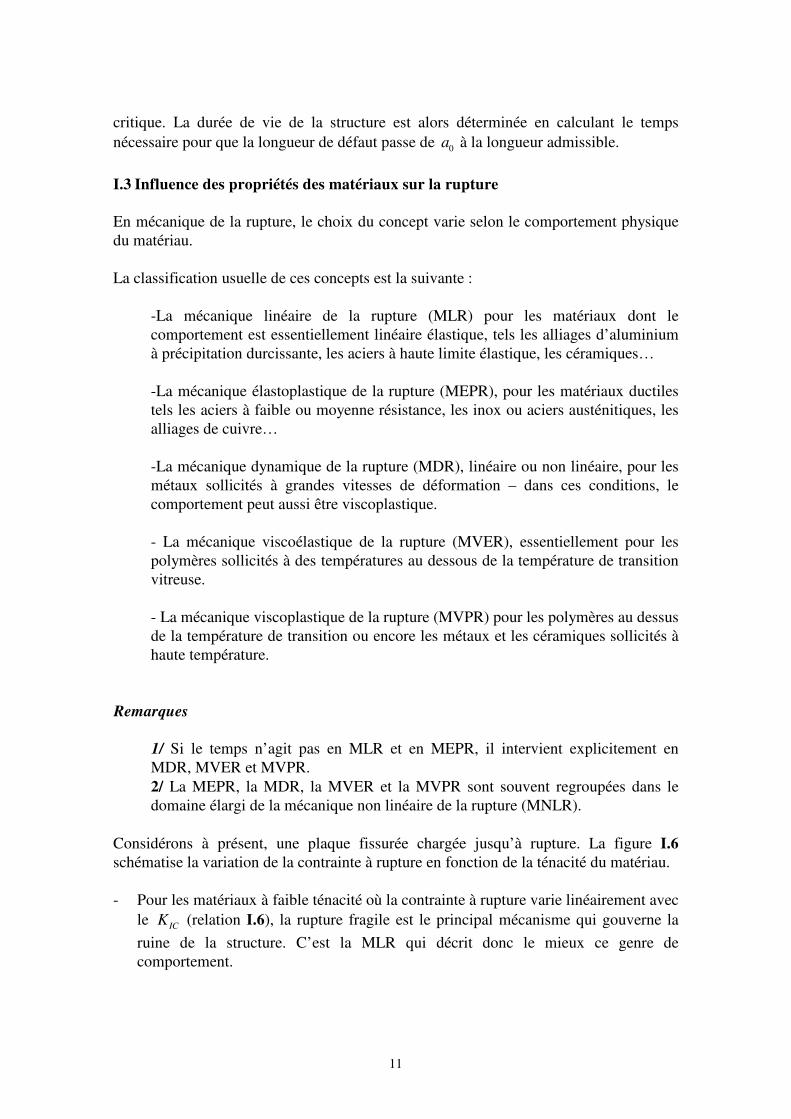
Considérons à présent, une plaque fissurée chargée jusqu’à rupture. La figure I.6
schématise la variation de la contrainte à rupture en fonction de la ténacité du matériau.
- Pour les matériaux à faible ténacité où la contrainte à rupture varie linéairement avec
le ICK (relation I.6), la rupture fragile est le principal mécanisme qui gouverne la
ruine de la structure. C’est la MLR qui décrit donc le mieux ce genre de
comportement.
12
- Pour les matériaux à très haute ténacité, la MLR n’est plus valable puisque les
propriétés d’écoulement du matériau gouvernent le mécanisme de rupture. Une
simple analyse de chargement limite permet alors de dimensionner les structures.
- Pour les matériaux à ténacité intermédiaire, la MNLR est souvent appliquée.
Figure I.6 : Comportement en fonction de la ténacité
I.4 Analyse dimensionnelle en mécanique de la rupture
L’analyse dimensionnelle est un outil important pour l’étude de la mécanique de la
rupture.
Pour décrire cette approche, nous considérons les configurations de chargement
représentées sur la figure I.7, où les différentes géométries de structures fissurées sont
soumises à la même contrainte σ ∞ loin de la fissure. Comme il s’agit de problèmes
plans, l’épaisseur des structures n’intervient pas.
- La figure I.7a représente une fissure de bord de très petite dimension par rapport
à celles de la plaque : le problème est donc traité comme un problème en milieu
infini. La plaque est conçue dans un matériau dont le comportement est linéaire
élastique, de module d’Young E et de coefficient de Poisson υ .
- La taille a de la fissure de la figure I.7b n’est plus négligeable : la largeur L de
l’éprouvette devient une variable additionnelle.
- Le cas de la figure I.7c se présente sous la même configuration de chargement
que le cas I.7b mais cette fois-ci, avec un matériau élastoplastique (élastique
plastique parfait). Deux autres variables doivent être considérées : la limite
d’élasticité Eσ du matériau et la taille pr de la zone plastifiée qui se forme à
l’extrémité de la fissure.
2a
σ ∞
MLR MNLR
Analyse de
chargement
limite
Ténacité KIC
Contrainte
à rupture
13
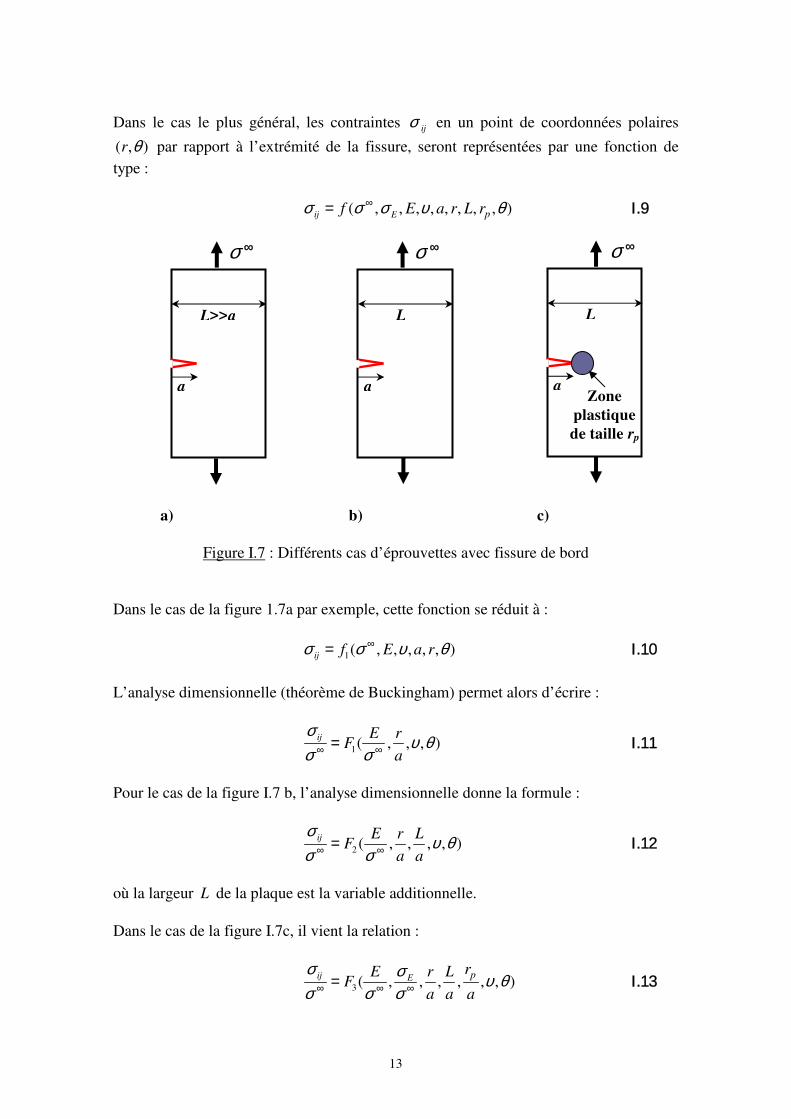
Dans le cas le plus général, les contraintes σ ij en un point de coordonnées polaires
( , )r θ par rapport à l’extrémité de la fissure, seront représentées par une fonction de
type :
( , , , , , , , , )ij E pf E a r L rσ σ σ υ θ∞= Ι.9
a) b) c)
Figure I.7 : Différents cas d’éprouvettes avec fissure de bord
Dans le cas de la figure 1.7a par exemple, cette fonction se réduit à :
1( , , , , , )ij f E a rσ σ υ θ∞= Ι.10
L’analyse dimensionnelle (théorème de Buckingham) permet alors d’écrire :
1( , , , )ij E r
Fa
συ θ
σ σ∞ ∞= Ι.11
Pour le cas de la figure I.7 b, l’analyse dimensionnelle donne la formule :
2 ( , , , , )ij E r L
Fa a
συ θ
σ σ∞ ∞= Ι.12
où la largeur L de la plaque est la variable additionnelle.
Dans le cas de la figure I.7c, il vient la relation :
3( , , , , , , )ij E prE r L
Fa a a
σ σ υ θσ σ σ∞ ∞ ∞= Ι.13
a
L>>a
σ ∞
a
L
σ ∞
a
L
Zone
plastique
de taille rp
σ ∞

14
où σ E et pr sont les deux autres variables additionnelles.
La relation I.12 correspond à un comportement élastique linéaire du matériau pour
lequel la MLR s’applique. Si L a>> , autrement dit si la taille de la fissure est faible par
rapport à la largeur L de l’éprouvette, il n’y a plus d’effet de bord et L n’est plus
considérée comme une dimension caractéristique : on retrouve alors la relation I.11.
La relation I.13 correspond à un comportement élastique plastique parfait décrit par la
MLNR. Lorsque la taille de la zone plastifiée est négligeable par rapport à la longueur
de la fissure ( )pr a<< et que la contrainte appliquée est faible par rapport à la limite
d’élasticité du matériau ( )Eσ σ ∞>> , on retrouve la relation I.12. Ce qui était prévisible
puisque c’est précisément dans ces conditions ( , )Epr a σ σ∞<< << que la MLR
s’applique.
15
Chapitre II Elasticité plane en variables complexes
II.1 Introduction
Lorsqu'on étudie l'équilibre d'un solide élastique soumis à des forces ou des
déplacements sur sa surface, et à des forces de volume, on cherche à déterminer en
chaque point les contraintes et les déformations. Ces grandeurs s’expriment dans le cas
d’un solide par des tenseurs que l’on écrit sous forme matricielle. Ceux-ci sont
déterminés à partir des différentes relations qui lient les contraintes, les déformations et
les déplacements.
Cette démarche conduit à un système d'équations aux dérivées partielles qu'il s’agit
d'intégrer en tenant compte des conditions aux limites exprimées en termes de force
et/ou de déplacements sur la surface du matériau solide.
Les différentes relations dont on dispose sont les équations statiques exprimant
l’équilibre en volume et en surface, les équations géométriques définissant les
déformations et celles exprimant la compatibilité de ces déformations, et enfin les
équations de comportement données par la loi linéaire de Hooke pour la plupart des
matériaux métalliques sollicités dans le domaine élastique.
II.2 Equations de l’élasticité
II.2.1 Equations statiques
a- Equilibre en volume
0div fσ→
+ =� �
Cette égalité vectorielle s’écrit dans le système des coordonnées cartésiennes que l’on
considérera dans toute la suite :
, 0ij j ifσ + = II.1
avec ( )ijσ σ= le tenseur des contraintes en un point quelconque du solide étudié ;
f�
la densité des forces de volume caractérisant le poids du matériau, ...

16
b- Equilibre sur les surfaces (conditions aux limites)
( , ) ( )T P n F P=� ��
ou ij j in Fσ = II.2
( ) ( )u P U P=��
ou i iu U= II.3
avec
( , )T P n� �
le vecteur contrainte en un point P de la surface du solide et n�
la normale
extérieure en P ;
( )F P�
la densité superficielle des forces appliquées sur la surface considérée ;
( )u P�
le champ des déplacements en un point quelconque du solide ;
( )U P�
le déplacement imposé au point P de la surface.
II.2.2 Equations géométriques
a- Définition des déformations (dans l’hypothèse des petites perturbations)
ε = +→ →1
2( )grad u grad u
t
ou , ,
1( )
2ij i j j iu uε = + II.4
( )ij
ε ε= est le tenseur des déformations en un point quelconque du solide.
b- Equations de compatibilité
, , , , 0ik jl jl ik jk il il jkε ε ε ε+ − − = II.5
Six équations obtenues par permutation circulaire des indices ( ) (1212), (1213)ijkl = .
II.2.3 Equations physiques de comportement (Loi de Hooke)
σ µε λ= +2 eI
ou 2ij ij ijeσ µε λ δ= + II.6
avec ( )ijσ σ= le tenseur des contraintes, ( )ij
I δ= la matrice unité ( 1, 0ii ijδ δ= = pour
i j≠ ), e la trace du tenseur ε des déformations c'est-à-dire la somme des termes
diagonaux de ε ( ,trace kk k ke uε ε= = = ), λ le coefficient de Lamé et µ le module de
cisaillement du matériau.
Inversement, pour exprimer les déformations en fonction des contraintes, on utilise la
relation :

17
1ij ij ijs
E E
υ υε σ δ+= − II.7
avec s kk= =trace σ σ , E le module d'Young et υ le coefficient de Poisson du
matériau.
Les coefficients λ et µ sont reliés à E et υ par les relations suivantes :
µυ
=+E
2 1( ) et
(1 )(1 2 )
Eυλυ υ
=+ −
II.8
Les relations I.8 sont établies en partant de la relation I.7 :
1ij ij ijs
e E
υ υε σ δ+= − , soit 1
31 2
kk kk
Ee s s s e
E E
υ υε συ
+= = − ⇒ = =−
I.7 devient alors ε υ σ υυ
δij ij ijE E
Ee= + −
−1
1 2.
soit :
�2
1 (1 )(1 2 )ij ij ij
E Ee
µ λ
υσ ε δυ υ υ
= ++ + −
�������
, d'où les relations I.8.
La combinaison de ces différentes équations permet de résoudre un problème
d'élasticité, en termes de contraintes ou de déplacements ; cela dépendra principalement
de la manière dont sont exprimées les conditions aux limites (forces ou déplacements).
La recherche d'une solution en termes de déplacements par exemple, conduit aux
équations de Lamé-Navier qui s'obtiennent en introduisant l'expression des
déplacements II.4 dans la loi de comportement II.6, soit :
, , ,( )ij i j j i k k iju u uσ µ λ δ= + +
ce qui donne dans la relation II.1 :
µ λ δ( ), ( ),, , ,u u j u j fi j j i k k ij i+ + + = 0
µ λ( ) ( ), , ,u u u fi jj j ij k ki i+ + + = 0
soit ( ) , ,λ µ µ+ + + =u u fj ji i jj i 0
que l'on peut écrire également :
( ) 0i i
i
eu f
x
∂λ µ µ∂
+ + ∆ + = II.9

18
où 2 2 2
2 2 2
1 2 3x x x
∂ ∂ ∂∂ ∂ ∂
∆ = + +i i ii qui peut s’écrire aussi
2 2 2
2 2 2x y z
∂ ∂ ∂∂ ∂ ∂
∆ = + +i i ii , est le laplacien
et e ujj j j= =ε , la trace du tenseur ε .
Les relations II.9 sont appelées équations de Lamé-Navier ; elles permettent de résoudre
un problème d’élasticité en termes de déplacements.
Les relations permettant de trouver la solution en termes de contraintes vont être
établies au paragraphe suivant qui traite des états plans en élasticité.
II.3 Etats Plans en Elasticité
Un état est dit plan si l'un des axes de référence est principal. On examinera deux cas
principaux : état de contraintes planes ou état de déformations planes.
II.3.1 Etat de contraintes planes
L'état élastique d'un solide est un état de contraintes planes (par rapport au plan x,y),
si on a en tout point M du matériau :
( , , )
0
( ) 0
0 0 0
xx xy
x y z xy yyM
σ σσ σ σ
=
� � � ( , )x yσ σ= ne dépend que de x et y.
C'est sensiblement l'état que l'on rencontre dans les structures minces planes, telles que
des plaques chargées dans leur plan.
Dans ces conditions, on a trace x ys σ σ σ= = + , et la loi de Hooke II.7 donne pour les
composantes non nulles du tenseur des déformations :
( )
( )
( )
( )
112
1
112
1
12
( ) 2 ( )1
xx xx yyxx xx yy
yy yy xxyy yy xx
xy xyxy xy
zz xx yy zz xx yy
E
E
E
E
µε σ υσε σ υσ υ
µε σ υσε σ υσ υυ µε σε σ
υ υε σ σ µε σ συ
= −= − + = −= − + ⇔ + ==
= − + = − + +
II.10a

19
II.3.2 Etat de déformations planes
Un solide élastique est en état de déformations planes, si on a en tout point M du
matériau :
( , , )
0
( ) 0
0 0 0
xx xy
x y z xy yyM
ε εε ε ε
=
� � � ε ε= ( , )x y
Cet état de déformations planes existe dans les structures épaisses planes chargées dans
leur plan.
Comme la déformation zz
ε est nulle, on a d’après la loi de Hooke
1( ) 0zz xx yy zz
E
υ σ υ σ σ σ+ − + + = soit ( )zz xx yyσ υ σ σ= + et donc s xx yy= + +( )( )1 υ σ σ .
Les composantes non nulles du tenseur des déformations sont alors données par :
( )
( )
1(1 ) 2 (1 )
1(1 ) 2 (1 )
12
xx xx yy xx xx yy
yy yy xx yy yy xx
xyxy xy
E
E
E
υε υ σ υσ µε υ σ υσ
υε υ σ υσ µε υ σ υσ
υ µ σε σ
+ = − − = − − + = − − ⇔ = − −
+ ==
II.10b
II.3.3 Equations des états plans
Les relations de l'élasticité (Equilibre, loi de Hooke et compatibilité des déformations)
se simplifient dans le cas des états plans. Elles prennent une forme relativement simple
avec l’introduction du concept de fonction de contrainte appelée fonction d’Airy.
Conditions d'équilibre
0xyxx X
x y
∂σ∂σ∂ ∂
+ + =
II.11
0xy yy
Yx y
∂σ ∂σ∂ ∂
+ + =
où X et Y sont les composantes i
f de la densité des forces de volume f�
.

20
Equations de compatibilité
22 2
2 22 0
yyxx xx
y x x y
εε ε∂∂ ∂+ − =∂ ∂ ∂ ∂
II.12 2 2 2
2 20zz zz zz
x y x y
ε ε ε∂ ∂ ∂= = =∂ ∂ ∂ ∂
La première équation de compatibilité peut être réécrite en termes de contraintes en
introduisant les relations II.10a ou II.10b selon qu’on ait en présence d’un état de
contraintes ou de déformations planes et en utilisant ensuite les relations d’équilibre
II.11. On aboutit alors à une relation unique intégrant toutes les équations de l’élasticité
(équilibre, comportement et compatibilité).
a- Etat de contraintes planes
( ) ( )22 2
2 22(1 )
xy
xx yy yy xxy x x y
σσ υσ σ υσ υ
∂∂ ∂− + − = +∂ ∂ ∂ ∂
soit en introduisant le laplacien 2 2
2 2x y
∂ ∂∂ ∂
∆ = +i ii pour les états plans
2 2 22 2
2 2 2 22(1 )
yy yy xyxx xxxx yy
x y y x x y
σ σ σσ σσ υ σ υ υ∂ ∂ ∂∂ ∂∆ − − + ∆ − − = +
∂ ∂ ∂ ∂ ∂ ∂
( )2 22
2 2(1 ) 2(1 )
yy xyxxxx yy
x y x y
σ σσσ σ υ υ ∂ ∂∂∆ + − + + = + ∂ ∂ ∂ ∂
en utilisant les relations II.11
2 2 22
2 2
yy xy xyxx X Y
x y x y x x y y
σ σ σσ ∂ ∂ ∂∂ ∂ ∂+ = − − − −∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
, on obtient
après simplification :
( ) (1 ) 0xx yy
X Y
x yσ σ υ ∂ ∂∆ + + + + = ∂ ∂
II.13a
b- Etat de déformations planes
( ) ( )22 2
2 2(1 ) (1 ) 2
xy
xx yy yy xxy x x y
συ σ υσ υ σ υσ
∂∂ ∂− − + − − =∂ ∂ ∂ ∂
2 2 22 2
2 2 2 2(1 ) (1 ) 2
yy yy xyxx xxxx yy
x y y x x y
σ σ σσ συ σ υ υ σ υ ∂ ∂ ∂ ∂ ∂− ∆ − − + − ∆ − − = ∂ ∂ ∂ ∂ ∂ ∂

21
( )2 22
2 2(1 ) 2
yy xyxxxx yy
x y x y
σ σσυ σ σ ∂ ∂∂− ∆ + − + = ∂ ∂ ∂ ∂
en utilisant les relations II.11
2 2 22
2 2
yy xy xyxx X Y
x y x y x x y y
σ σ σσ ∂ ∂ ∂∂ ∂ ∂+ = − − − −∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
, on obtient
après simplification :
( ) 10
1xx yy
X Y
x yσ σ
υ ∂ ∂∆ + + + = − ∂ ∂
II.13b
II.4 Résolution des états plans par la méthode d’Airy
Les relations II.13a et II.13b permettent de résoudre les problèmes d’élasticité plane en
termes de contraintes. Celles-ci sont les inconnues, alors que les composantes X et Y des
forces de volume sont les données. La méthode d’Airy utilisée pour cette résolution
considère que les forces de volume dérivent d’un potentiel, c'est-à-dire qu’il existe une
fonction ( , )V x y tel que :
f grad V= −�������
soit V
Xx
∂= −∂
et V
Yy
∂= −∂
Dans ces conditions, les équations d’équilibre II.11 s’écrivent :
( ) 0xy
xx Vx y
∂σ∂ σ∂ ∂
− + =
( ) 0xy
yy Vy x
∂σ∂ σ∂ ∂
− + =
Ces deux relations sont toujours vérifiées si on pose :
xx
GV
yσ ∂− =
∂ et xy
G
xσ ∂= −
∂
yy
HV
xσ ∂− =
∂ et xy
H
yσ ∂= −
∂
Les deux expressions de xyσ impliquent que G H
x y
∂ ∂=∂ ∂
, ce qui est toujours vrai si :
AG
y
∂=∂
et A
Hx
∂=∂
soit en définitive :

22
2
2xx
AV
yσ ∂− =
∂
2
2yy
AV
xσ ∂− =
∂ II.14
2
xy
A
x yσ ∂= −
∂ ∂
La fonction de contrainte ( , )A A x y= est appelée fonction d’Airy.
En reportant les relations II.14 dans II.13a et II.13b respectivement, on obtient :
( )2 2
2 22 (1 ) 0
V VA V
x yυ ∂ ∂∆ ∆ + + + − − = ∂ ∂
soit
( ) (1 ) 0A Vυ∆ ∆ + − ∆ = II.15a
et
( )2 2
2 2
12 0
1
V VA V
x yυ ∂ ∂∆ ∆ + + − − = − ∂ ∂
soit
1 2( ) 0
1A V
υυ
−∆ ∆ + ∆ =−
II.15b
Les forces de volume sont en général soit négligées (structures dont le poids intervient
peu sur les contraintes mises en jeu) auquel cas 0V = , soit correspondent aux forces de
la pesanteur dans les structures pesantes (ponts, barrage…), qui s’expriment par :
f gρ=� �
où ρ est la masse volumique du milieu considéré et
g�
est l’accélération de la pesanteur.
En choisissant un repère de calcul tel que l’axe y�
soit la verticale ascendante par
exemple, on a alors :
f gy grad Vρ= − = −������� �
d’où
0( )V V y gy Vρ= = + et 0V∆ =
Dans ces conditions, les égalités II.15a et II.15b se réduisent à une relation unique :
( ) 0A∆ ∆ = II.16

23
Une fonction dont le laplacien est nul est dite harmonique et une fonction dont le
laplacien du laplacien est nul est dite bi harmonique.
La relation II.16 montre que la résolution d’un problème d’élasticité plane revient à
trouver une fonction d’Airy ( , )A A x y= bi harmonique.
Les polynômes de degré inférieur ou égal à trois sont des exemples de fonctions bi
harmoniques simples. Les polynômes de degré trois permettent de résoudre les
problèmes où les contraintes sont des fonctions linéaires de x et ou de y, comme celles
qui existent dans une poutre chargée en flexion simple par exemple.
II.5 Expression de la fonction d’Airy en variables complexes
II.5.1 Définition et propriétés des fonctions analytiques
Les fonctions algébriques, trigonométriques, exponentielles, logarithmiques … peuvent
être formées avec la variable complexe z, de la même manière qu’avec une variable
réelle. De telles fonctions sont appelées fonctions analytiques.
Si ( )f z est une fonction analytique :
( )f z iα β= + avec z x iy= + et ( , ) Re ( )
( , ) Im ( )
x y f z
x y f z
α αβ β
= = = =
• Le conjugué de ( )f z est noté :
( ) ( )f z f z iα β= = −
• La différentielle de ( )f z par rapport à z est définie par :
'( )df f f
f z idz x y
∂ ∂= = = −∂ ∂
Comme ( )f z iα β= + , la propriété précédente entraîne :
i ix x y y
α β α β∂ ∂ ∂ ∂+ = − +∂ ∂ ∂ ∂
soit
x y
α β∂ ∂=∂ ∂
(1)
y x
α β∂ ∂= −∂ ∂
(2)

24
Les conditions (1) et (2) sont appelées conditions de Riemann-Cauchy.
En calculant simultanément (1) (2)
x y
∂ ∂+∂ ∂
et (1) (2)
y x
∂ ∂−∂ ∂
, on obtient :
0α β∆ = ∆ =
Les parties réelle et imaginaire d’une fonction analytique sont donc harmoniques.
Inversement, toute fonction harmonique peut être considérée comme partie réelle ou
imaginaire d’une fonction analytique.
• Si ( )f z est une fonction analytique, ses dérivées et ses primitives successives le sont
aussi.
Exemples de fonctions analytiques
Les fonctions inz
e , nz et ln z sont analytiques. Leurs parties réelle et imaginaire qui
sont des fonctions harmoniques, peuvent être déterminées.
• ( )( ) inz in x iyf z e e += =
inzdfine
dz= , ( )in x iyf df
inex dz
+∂ = =∂
et ( )in x iyf dfne i
y dz
+∂ = − =∂
( )( ) cos sininz inx ny nyf z e e e e nx i nx− −= = = +
Les fonctions harmoniques associées sont cosnye nx− et sinnye nx− .
En échangeant n en –n, on voit que cosnye nx et sinnye nx sont également harmoniques.
Il en résulte que :
sinh sinny nx , cosh sinny nx , sinh cosny nx et cosh cosny nx , obtenues par
combinaison linéaire des fonctions harmoniques précédentes, sont également
harmoniques. Les fonctions sinh et cosh , appelés respectivement sinus et
cosinus hyperboliques, sont définies par :
sinh2
ny nye eny
−−= et cosh2
ny nye eny
−+=
• ( )( )nnf z z x iy= = +

25
1ndfnz
dz
−= , ( ) 1nf dfn x iy
x dz
−∂ = + =∂
et ( ) 1nf dfin x iy i
y dz
−∂ = + =∂
( )( ) (cos sin )n
n i n in nf z z re r e r n i nθ θ θ θ= = = = +
Les fonctions harmoniques associées sont cosnr nθ et sinnr nθ . Les fonctions
cosnr nθ− et sinnr nθ− sont également harmoniques.
Le laplacien en coordonnées polaires est donné par 2 2
2 2 2
1 1
r r r r θ∂ ∂ ∂∆ = + +∂ ∂ ∂i i i
i
• ( )( ) ln lnf z z x iy= = +
1df
dz z= ,
1f df
x x iy dz
∂ = =∂ +
et f i df
iy x iy dz
∂ = =∂ +
( )( ) ln ln lnif z z re r iθ θ= = = +
Les fonctions harmoniques associées sont ln r et θ .
II.5.2 Expression de la fonction d’Airy
Lorsque ( , )A x y est une fonction d’Airy associée à un problème d’élasticité plane, elle
vérifie la condition [I.16], soit :
( ) 0A∆ ∆ =
• Si on pose ( , )A P x y∆ = , la relation ( ) 0A∆ ∆ = impose 0P∆ = , donc ( , )P x y est une
fonction harmonique et on peut alors lui associer une fonction analytique que l’on
définit comme suit :
( )f z P iQ= +
avec ( , )P x y et ( , )Q x y vérifiant les conditions de Riemann-Cauchy, soit :
P Q
x y
∂ ∂=∂ ∂
et P Q
y x
∂ ∂= −∂ ∂
Lorsqu’on connaît par exemple ( , )P x y , ( , )Q x y se calcule facilement via les
conditions précédentes :
P PQ dQ dx dy
y x
∂ ∂= = − + ∂ ∂ ∫ ∫
26
• Si de plus on pose 1
( ) ( )4
z f z dz p iqϕ = = +∫ , ( )zϕ est alors analytique puisque
l’intégrale d’une fonction analytique l’est aussi.
Les parties réelle et imaginaire de ( )zϕ sont telles que :
0p q∆ = ∆ = avec 4 4p q
P Ax y
∂ ∂= = = ∆∂ ∂
.
• Montrons à présent que la fonction 1( , ) ( , )p x y A x y xp yq= − − est harmonique :
1p A p qp x y
x x x x
∂ ∂ ∂ ∂= − − −∂ ∂ ∂ ∂
, 2 2 2 2
1
2 2 2 22
p A p p qx y
x x x x x
∂ ∂ ∂ ∂ ∂= − − −∂ ∂ ∂ ∂ ∂
1p A p qx q y
y y y y
∂ ∂ ∂ ∂= − − −∂ ∂ ∂ ∂
, 2 2 2 2
1
2 2 2 22
p A p q qx y
y y y y y
∂ ∂ ∂ ∂ ∂= − − −∂ ∂ ∂ ∂ ∂
1p A x p∆ = ∆ − ∆ y y− ∆ 2 0
P
p qA P
x y
∂ ∂− + = ∆ − = ∂ ∂ �����
1( , )p x y étant harmonique, on peut lui associer une fonction analytique ( )zχ telle que :
1 1( )z p iqχ = +
La fonction de contrainte d’Airy peut alors s’écrire en utilisant l’expression
1 ( , )p A x y xp yq= − − :
1( , )A x y p xp yq= + +
ou encore en utilisant les fonctions analytiques ( )zϕ et ( )zχ introduites plus haut :
[ ]( , ) Re ( ) ( )A x y z z zϕ χ= + II.17a
ou
[ ]1( , ) ( ) ( ) ( ) ( )
2A z z z z z z z zϕ ϕ χ χ= + + + II.17b
Les fonctions analytiques ( )zϕ et ( )zχ sont appelées potentiels complexes.

27
Lorsqu’on passe du couple des variables ( , )x y aux couples de variables ( , )z z avec
2
z zx
+= et 2
z zy
i
−= , les dérivations par rapport à z et z sont données par :
1
2
x yi
z x z y z x y
∂ ∂ ∂ ∂ ∂ ∂ ∂= + = − ∂ ∂ ∂ ∂ ∂ ∂ ∂
i i i i i
1
2
x yi
z x z y z x y
∂ ∂ ∂ ∂ ∂ ∂ ∂= + = + ∂ ∂ ∂ ∂ ∂ ∂ ∂
i i i i i
II.6 Expression des contraintes
Lorsqu’on néglige les forces de volume, les relations II.14 deviennent :
2
2xx
A
yσ ∂=
∂,
2
2yy
A
xσ ∂=
∂ et
2
xy
A
x yσ ∂= −
∂ ∂
soit 2 2
2 2yy xx
A AA
x yσ σ ∂ ∂+ = + = ∆
∂ ∂ II.18a
2 2 2
2 22 2yy xx xy
A A Ai i
x y x yσ σ σ ∂ ∂ ∂− + = − −
∂ ∂ ∂ ∂ II.18b
La relation II.18a peut aussi s’écrire :
2 2
2 2yy xx
A A A A A Ai i i
x y x x y y x yσ σ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ = + = − + − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
2
4yy xx
A A Ai i
x y x y z zσ σ ∂ ∂ ∂ ∂ ∂+ = + − = ∂ ∂ ∂ ∂ ∂ ∂
soit compte tenu de l’expression II.17b d la fonction d’Airy :
( ) [ ]2 '( ) '( ) 4Re '( )yy xx z z zσ σ ϕ ϕ ϕ+ = + = II.19a
La relation II.18b peut également s’exprimer à partir des dérivées des potentiels
complexes ( )zϕ et ( )zχ :
2 2 2 2
2 2 22 2 4yy xx xy
A A A A A Ai i i i
x y x y x y x y zσ σ σ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂− + = − − = − − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
soit compte tenu de II.17b :

28
[ ]2 2 ''( ) ''( )yy xx xyi z z zσ σ σ ϕ χ− + = + II.19b
On peut tirer de II.19a et II.19b, d’autres relations qui s’avèrent parfois utiles :
'( ) '( ) ''( ) ''( )xx xyi z z z z zσ σ ϕ ϕ ϕ χ− = + − −
'( ) '( ) ''( ) ''( )yy xyi z z z z zσ σ ϕ ϕ ϕ χ+ = + + +
II.7 Expression des déplacements
Les déplacements sont déterminés par intégration des déformations. Ce calcul est
effectué pour les deux états plans étudiés.
a- Etat de déformations planes ( 0xz yz zzε ε ε= = = )
On utilise les relations II.10b qui s’écrivent :
( )2 (1 ) (1 )xx xx yy xx yy yyµε υ σ υσ υ σ σ σ= − − = − + −
( )2 (1 ) (1 )yy yy xx xx yy xxµε υ σ υσ υ σ σ σ= − − = − + −
soit 2 2
2 22 2 (1 ) 4(1 )x
xx
u A p AA
x x x xµε µ υ υ∂ ∂ ∂ ∂= = − ∆ − = − −
∂ ∂ ∂ ∂
2 2
2 22 2 (1 ) 4(1 )
y
yy
u A q AA
y y y yµε µ υ υ
∂ ∂ ∂ ∂= = − ∆ − = − −∂ ∂ ∂ ∂
ce qui donne après intégration :
2 4(1 ) ( )x
Au p y
xµ υ α∂= − − +
∂
2 4(1 ) ( )y
Au q x
yµ υ β∂= − − +
∂
Les constantes d’intégration ( )yα et ( )xβ n’interviennent pas dans le calcul des
déformations : elles correspondent à des déplacements rigides d’ensemble dont on ne
tiendra pas compte dans la suite. On peut dans ces conditions écrire :
( ) ( )2 4(1 ) 4(1 ) ( ) 2x y
A A Au iu p iq i z
x y zµ υ υ ϕ ∂ ∂ ∂+ = − + − + = − − ∂ ∂ ∂
soit
( )2 (3 4 ) ( ) '( ) '( )x yu iu z z z zµ υ ϕ ϕ χ+ = − − − II.20a

29
a- Etat de contraintes planes ( 0xz yz zzσ σ σ= = = )
On utilise les relations II.10a qui s’écrivent :
( ) ( )1 12
1 1xx xx yy xx yy yyµε σ υσ σ σ σ
υ υ= − = + −
+ +
( ) ( )1 12
1 1yy yy xx xx yy xxµε σ υσ σ σ σ
υ υ= − = + −
+ +
soit 2 2
2 2
1 42 2
1 1
xxx
u A p AA
x x x xµε µ
υ υ∂ ∂ ∂ ∂= = ∆ − = −∂ + ∂ + ∂ ∂
2 2
2 2
1 42 2
1 1
y
yy
u A q AA
y y y yµε µ
υ υ∂ ∂ ∂ ∂= = ∆ − = −∂ + ∂ + ∂ ∂
ce qui donne après intégration et regroupement :
( ) 4 42 ( ) 2 ( ) ( ) '( ) '( )
1 1x y
Au iu z z z z z z
zµ ϕ ϕ ϕ ϕ χ
υ υ∂+ = − = − − −
+ ∂ +
soit
( ) 32 ( ) '( ) '( )
1x yu iu z z z z
υµ ϕ ϕ χυ
−+ = − −+
II.20b
Les relations II.20a et II.20b sont généralement regroupées en une seule relation :
( )2 ( ) '( ) '( )x yu iu z z z zµ κϕ ϕ χ+ = − − II.20c
avec
3 4κ υ= − pour un état de déformations planes
3
1
υκυ
−=+
pour un état de contraintes planes
II.8 Expression du torseur des efforts
Considérons un arc BC orienté de B vers C dans une plaque (figure II.1 ci-dessous où
(x,y) est le plan de la plaque).
• Le vecteur contrainte au point P, centré sur l'élément d'arc ds de normale
( )n→
: cos ,sinα α sera noté T P n→ →
, . Ses composantes ( )X Yn n, sont définies par :
( )T P n n X Yn n
→ → →
= =, ,σ

30
Figure II.1
soit ααασασσ
ααασασσ
sin,cos,sincos..
sin,cos,sincos..
xxxyyxy
t
n
xyyyyx
t
n
nyY
nxX
Α+Α−=+==
Α−Α=+==��
��
Comme cosα =dy
ds et sinα = −
dx
ds, les expressions de X n et Yn deviennent :
Xd
ds yn =
∂∂
Α et Y
d
ds xn = −
∂∂
Α II.21
• La résultante par unité d'épaisseur ( )F X Y→
: , sur l'arc BC, est donnée par :
∫
=→→→ C
BdsnPTF ,
soit
C
nB
X X ds= ∫ et C
nB
Y Y ds= ∫
d'où
( )C
B
C
B
C
B
C
Bnn
zi
yi
xi
xi
yddsiYXiYX
Α−=
Α+Α−=
Α−Α=+=+ ∫∫ ∂∂
∂∂
∂∂
∂∂
∂∂
2
soit finalement, compte tenu de l'expression II.17b de Α :
( ) ( ) ( )' 'C
B
X iY i z z z zϕ ϕ χ + = − + +
II.22
• Le moment résultant par unité d'épaisseur en un point O, des efforts s’exerçant sur
l'arc BC, s'écrit :
),0,0(, MdsnPTOPMC
B=
∧= ∫→→→→
avec

31
( ) ∫∫
Α−
Α−=−=C
B
C
Bnn
yyd
xxddsyXxYM
∂∂
∂∂
soit en intégrant par partie :
[ ]M xx
yyB
C
B
C
= − +
Α
Α Α∂∂
∂∂
Le second terme de M peut aussi s'écrire :
( )
( ) ( ) ( ){ }
Re
Re 2
Re ' '
x y x iy ix y x y
zz
z z z z z
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂∂
ϕ ϕ χ
Α Α Α Α+ = + −
Α=
= + +
et l'expression de M devient alors, compte tenu de l'expression II.17b de Α :
( ) ( ) ( )Re ' 'C
BM z z z z z zχ χ ϕ = − − II.23
II.9 Changement de repère
Désignons par 3( ; , , )O x y x� � �
le repère plan des coordonnées cartésiennes, et par
3( ; , , )M xα β�� �
un repère associé à des coordonnées curvilignes ( , )α β . La figure II.2
montre ces deux repères que l’on choisit orthonormés.
Le vecteur déplacement ( )u M�
a pour composantes dans chacun des repères :
3 3( ) x yu M u x u y u x= + +� � � �
3 3( )u M u u u xα βα β= + +��� �
En exprimant α� et β�
en fonction de x�
et de y�
dans la deuxième relation ci-dessus, il
vient :
3 3( ) (cos sin ) ( sin cos )u M u x y u x y u xα βθ θ θ θ= + + − + +� � � � � �
En comparant la relation ci-dessus à l’expression du vecteur déplacement ( )u M�
dans le
repère 3( ; , , )O x y x� � �
, il apparaît que :

32
cos sinxu u uα βθ θ= −
sin cosyu u uα βθ θ= +
soit
( )(cos sin ) (cos sin ) i
x yu iu u i iu i u iu e θα β α βθ θ θ θ+ = + + + = +
Figure II.2
La relation II.20c exprimant les composantes du déplacement en fonction des potentiels
complexes ( )zϕ et ( )zχ , devient donc :
( ) ( )2 ( ) '( ) '( )iu iu e z z z zθα βµ κϕ ϕ χ−+ = − − II.24
Le changement de repère de 3( ; , , )O x y x� � �
à 3( ; , , )M xα β�� �
est caractérisé par la matrice de
passage suivante :
cos sin 0
: sin cos 0
0 0 1
P
θ θθ θ
−
On peut remarquer que, s’agissant des composantes du vecteur déplacement, on a bien
3 3( , , ) ( , , )
( ) ( )x y x xu M P u M α β= ⋅ �� � � � �� �
.
La matrice P caractérise le passage d’un repère orthonormé direct à un autre repère
orthonormé direct. C’est une matrice orthogonale, c'est-à-dire telle que :
det 1P = et 1 tP P− =
Considérons maintenant le vecteur contrainte ( , )T M n� �
qui s’exerce en un point M situé
sur un pourtour quelconque de normale extérieure n�
. On a alors :
M
y�
( )u M�
α�
β�
constanteα =
constanteβ =
O x�
θ
θ
3x�

33
3 3( , , ) ( , , )
( , ) ( , )x y x xT M n P T M n α β= ⋅ �� � � � �
� �� �
Ce vecteur s’exprime en fonction du tenseur des contraintes σ , dans les deux repères
considérés, par :
3 3 3( , , ) ( , , ) ( , , )( , ) x y x x y x x y xT M n nσ= ⋅� � � � � � � � �
� � � (1)
3 3 3( , , ) ( , , ) ( , , )( , )
x x xT M n nα β α β α βσ= ⋅� � �� � �� � �
� � � (2)
La relation (2) ci-dessus peut être réécrite dans le repère 3( ; , , )O x y x� � �
en utilisant la
matrice de passage P :
3 33 3
1 1
( , , ) ( , , )( , , ) ( , , )( , ) ( , ) x y x x y xx x
T M n P T M n P nα β α βσ− −= ⋅ = ⋅ ⋅� �� � � � � �� �� �
� �� � �
soit
3 33
1
( , , ) ( , , )( , , )( , ) x y x x y xx
T M n P P nα βσ −= ⋅ ⋅ ⋅�� � � � � �� �
� � �
En comparant la relation ci-dessus à la relation (1), il apparaît que :
3 3
1
( , , ) ( , , )x y x xP Pα βσ σ −= ⋅ ⋅�� � � � � (3)
avec 3( , , )
3
0
0
0 0
xx xy
x y x xy yy
σ σσ σ σ
σ
=
� � � et 3( , , )
3
0
0
0 0
x
αα αβ
αφ ββα β
σ σσ σ σ
σ
=
�� �
Le développement de la relation (3) donne :
2 2cos sin 2 sin cosxx αα ββ αβσ σ θ σ θ σ θ θ= + −
2 2sin cos 2 sin cosyy αα ββ αβσ σ θ σ θ σ θ θ= + +
( ) 2 2cos sin (cos sin )xy αα ββ αβσ σ σ θ θ σ θ θ= − + −
On a d’une part :
xx yy αα ββσ σ σ σ+ = +
et d’autre part, en utilisant les identités sin 2 2sin cosθ θ θ= , 2 2cos 2 cos sinθ θ θ= − ,
2 1 cos 2cos
2
θθ += et 2 1 cos 2sin
2
θθ −= , les expressions précédentes des composantes
xxσ , yyσ et xyσ , deviennent :

34
1 cos 2 1 cos 2sin 2
2 2xx αα ββ αβ
θ θσ σ σ σ θ+ −= + −
1 cos 2 1 cos 2sin 2
2 2yy αα ββ αβ
θ θσ σ σ σ θ− += + +
( ) sin 2cos 2
2xy αα ββ αβ
θσ σ σ σ θ= − +
d’où
2 (cos 2 sin 2 ) (cos 2 sin 2 )
2 (cos 2 sin 2 )
yy xx xyi i i
i i
ββ αα
αβ
σ σ σ σ θ θ σ θ θσ θ θ
− + = − − −
+ −
soit
( ) 22 2 i
yy xx xyi i e θββ αα αβσ σ σ σ σ σ −− + = − +
Les relations II.19a et II.19b exprimant les composantes du tenseur des contraintes en
fonction des potentiels complexes ( )zϕ et ( )zχ , deviennent donc :
[ ]4 Re '( )xx yy zαα ββσ σ σ σ ϕ+ = + = II.25a
[ ]22 2 ''( ) ''( )ii e z z zθββ αα αβσ σ σ ϕ χ− + = + II.26b
Remarque
Aux coordonnées ( , )x y , on associe le complexe z x iy= + ; et de même aux
coordonnées ( , )α β , on peut associer le complexe iζ α β= + . Comme
( , )x x α β= et ( , )y y α β= , on a donc :
z f= ( )ζ et '( )dz
fd
ζζ
=
On montre facilement que '( ) '( ) if f e θζ ζ= , autrement dit, l’argument de '( )f ζ
est égal à l’angle θ que font entre eux les deux repères associés respectivement
aux coordonnées ( , )x y et ( , )α β .
arg '( ) arg arg ( ), ( ),f dz d u M x u Mζ ζ α θ= − = − =�� � �
Donc, on a bien '( ) '( ) if f e θζ ζ= et de même pour le conjugué
'( ) '( ) if f e θζ ζ −= , ce qui permet d’écrire :
2'( )
'( )
ife
f
θζζ
= II.27

35
Résumé des principaux résultats du chapitre
La résolution d’un problème d’élasticité plane se ramène à la recherche d’une fonction
de contrainte, appelée fonction d’Airy A, qui est bi harmonique, c'est-à-dire telle que
( ) 0A∆ ∆ = .
L’expression de cette fonction de contrainte, à partir des potentiels complexes ( )zϕ et
( )zχ , est donnée par :
[ ] [ ]1( , ) Re ( ) ( ) ( ) ( ) ( ) ( )
2A x y z z z z z z z z zϕ χ ϕ ϕ χ χ= + = + + +
La recherche de la fonction d’Airy revient donc à trouver ces potentiels complexes. Les
composantes du tenseur des contraintes et du vecteur déplacement sont alors
déterminées par les relations suivantes :
- dans un repère de cordonnées cartésiennes ( , )x y
( ) [ ]2 '( ) '( ) 4Re '( )yy xx z z zσ σ ϕ ϕ ϕ+ = + =
[ ]2 2 ''( ) ''( )yy xx xyi z z zσ σ σ ϕ χ− + = +
( )2 ( ) '( ) '( )x yu iu z z z zµ κϕ ϕ χ+ = − −
- dans un repère associé à d’autres coordonnées ( , )α β , et faisant un angle θ
par rapport au précédent
( ) [ ]2 '( ) '( ) 4Re '( )z z zββ αασ σ ϕ ϕ ϕ+ = + =
[ ]22 2 ''( ) ''( )ii e z z zθββ αα αβσ σ σ ϕ χ− + = +
( ) [ ]2 ( ) '( ) '( )iu iu e z z z zθα βµ κϕ ϕ χ−+ = − −
avec 3 4κ υ= − ou 3
1
υκυ
−=+
selon qu’on est en présence d’un état de déformations
planes ou d’un état de contraintes planes.
36
Chapitre III Concentration des contraintes près des entailles
III.1 Introduction
Les calculs de dimensionnement des structures sont principalement basés sur la théorie
de l’élasticité. Lorsque la limite d’élasticité est dépassée, des déformations plastiques se
développent, ce qui nécessite l’utilisation des théories plus compliquées de la plasticité.
Cependant, la fatigue des matériaux ou encore la corrosion sous tension, se produisent
le plus souvent à des niveaux de contrainte relativement bas où la théorie de l’élasticité
est applicable.
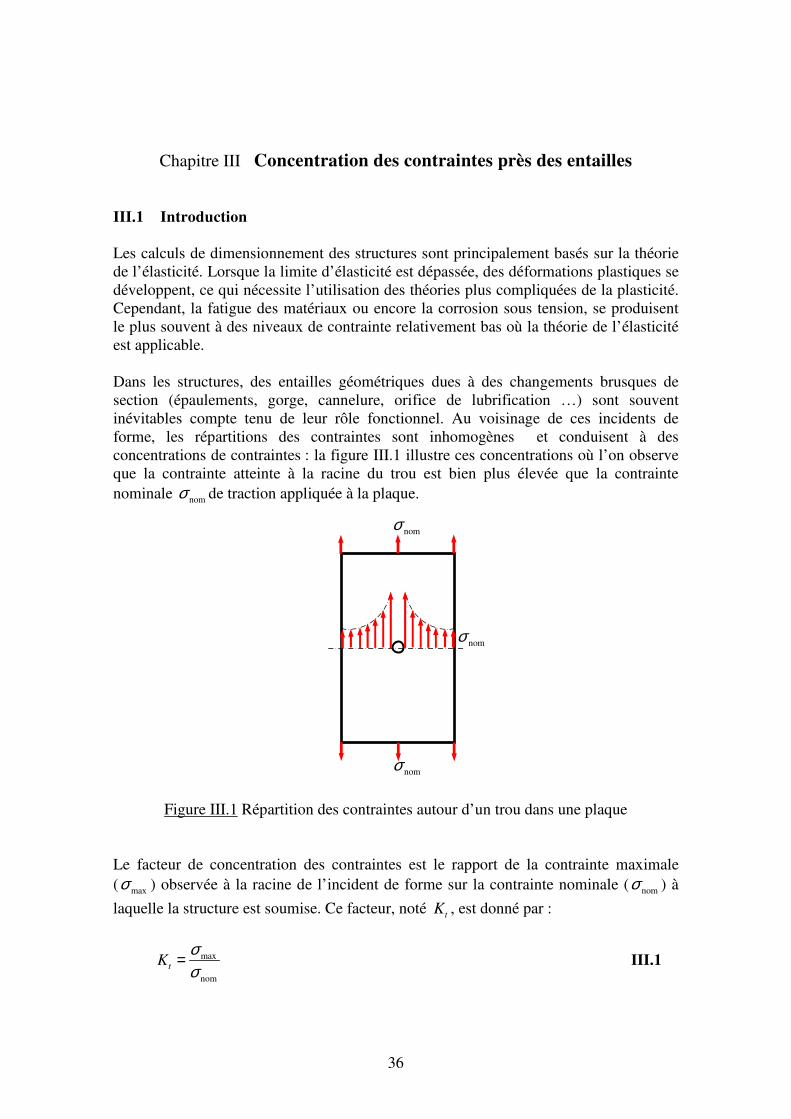
Dans les structures, des entailles géométriques dues à des changements brusques de
section (épaulements, gorge, cannelure, orifice de lubrification …) sont souvent
inévitables compte tenu de leur rôle fonctionnel. Au voisinage de ces incidents de
forme, les répartitions des contraintes sont inhomogènes et conduisent à des
concentrations de contraintes : la figure III.1 illustre ces concentrations où l’on observe
que la contrainte atteinte à la racine du trou est bien plus élevée que la contrainte
nominale nomσ de traction appliquée à la plaque.
Figure III.1 Répartition des contraintes autour d’un trou dans une plaque
Le facteur de concentration des contraintes est le rapport de la contrainte maximale
( maxσ ) observée à la racine de l’incident de forme sur la contrainte nominale ( nomσ ) à
laquelle la structure est soumise. Ce facteur, noté tK , est donné par :
max
nom
tKσσ
= III.1
nomσ
nomσ
nomσ
37
La sévérité de la concentration de contraintes dépend de la géométrie et de la
configuration de l’entaille. Lorsqu’on conçoit une structure, on cherche à réduire autant
que possible les concentrations de contraintes pour éviter notamment les problèmes de
rupture par fatigue. Ce chapitre traite des différents aspects des concentrations des
contraintes et des effets de la géométrie sur le facteur tK : c’est l’une des questions
fondamentales pour le dimensionnement en fatigue des structures. Le chapitre
commence par la détermination théorique de ce facteur en s’appuyant sur les résultats
du chapitre précédent.
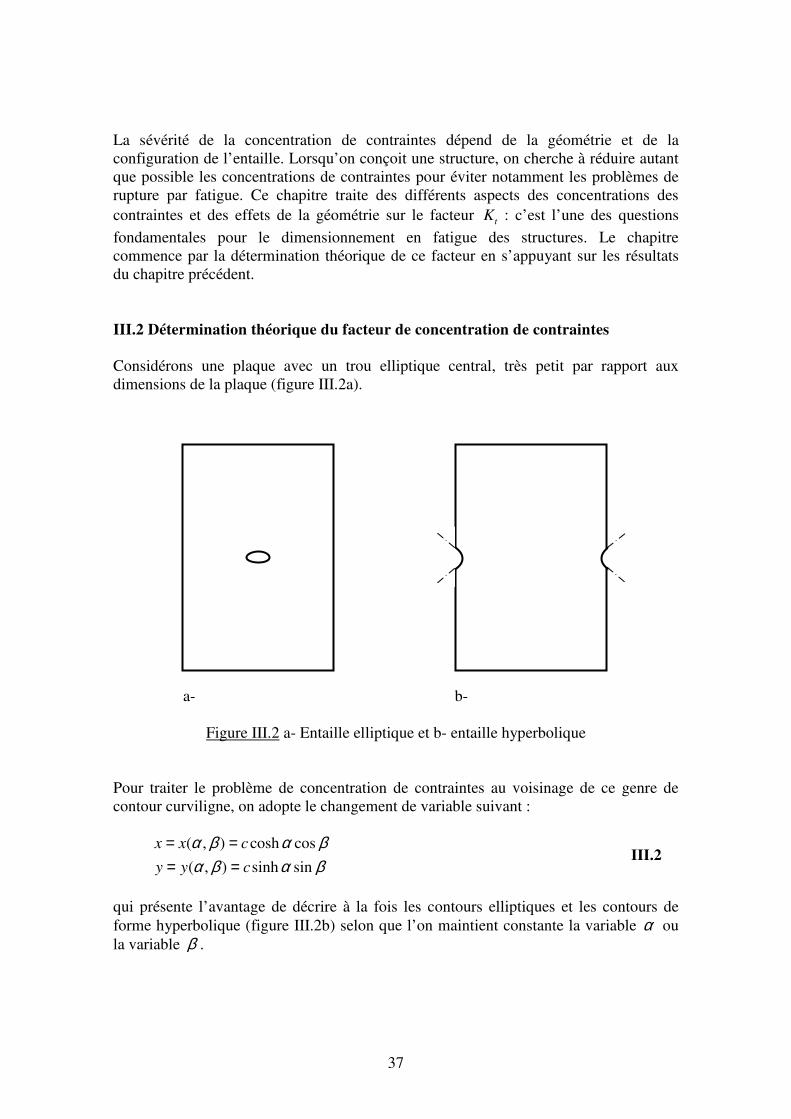
III.2 Détermination théorique du facteur de concentration de contraintes
Considérons une plaque avec un trou elliptique central, très petit par rapport aux
dimensions de la plaque (figure III.2a).
a- b-
Figure III.2 a- Entaille elliptique et b- entaille hyperbolique
Pour traiter le problème de concentration de contraintes au voisinage de ce genre de
contour curviligne, on adopte le changement de variable suivant :
( , ) cosh cos
( , ) sinh sin
x x c
y y c
α β α βα β α β
= == =
III.2
qui présente l’avantage de décrire à la fois les contours elliptiques et les contours de
forme hyperbolique (figure III.2b) selon que l’on maintient constante la variable α ou
la variable β .
38
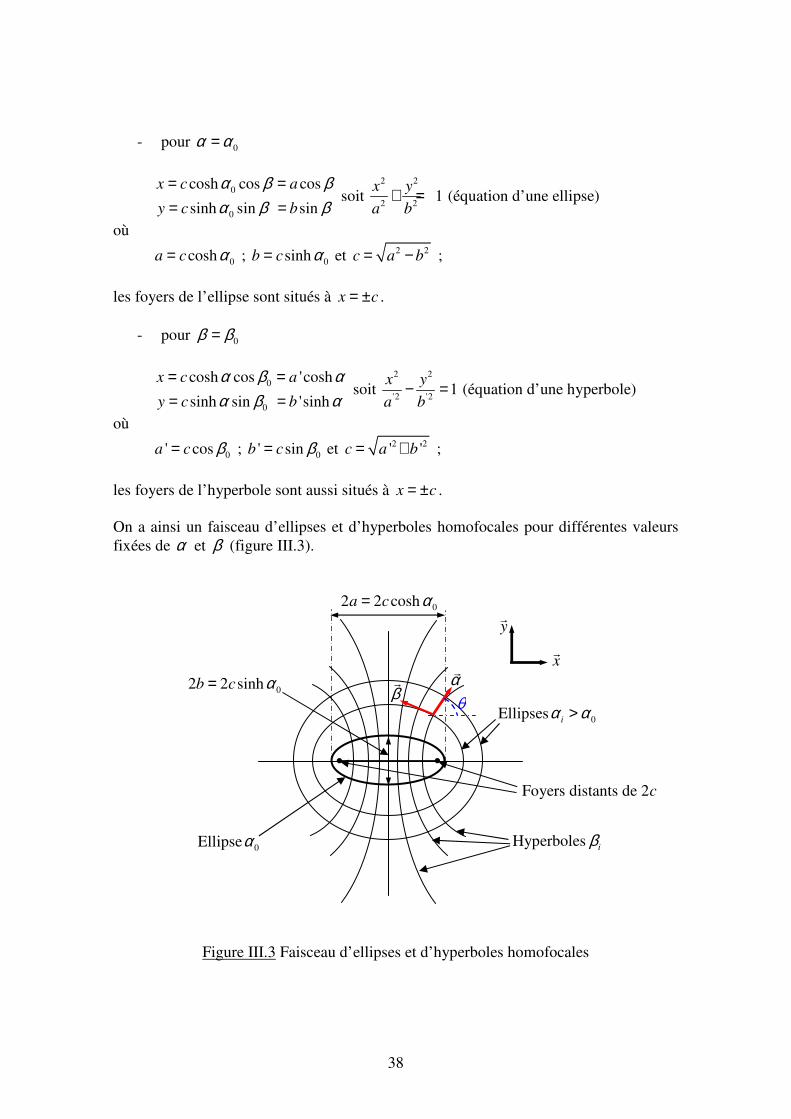
- pour 0α α=
0
0
cosh cos cos
sinh sin sin
x c a
y c b
α β βα β β
= == =
soit 2 2
2 21
x y
a b+ = (équation d’une ellipse)
où
0cosha c α= ; 0sinhb c α= et 2 2c a b= − ;
les foyers de l’ellipse sont situés à x c= ± .
- pour 0β β=
0
0
cosh cos 'cosh
sinh sin 'sinh
x c a
y c b
α β αα β α
= == =
soit 2 2
'2 '21
x y
a b− = (équation d’une hyperbole)
où
0' cosa c β= ; 0' sinb c β= et 2 2' 'c a b= + ;
les foyers de l’hyperbole sont aussi situés à x c= ± .
On a ainsi un faisceau d’ellipses et d’hyperboles homofocales pour différentes valeurs
fixées de α et β (figure III.3).
Figure III.3 Faisceau d’ellipses et d’hyperboles homofocales
Ellipse 0α
Ellipses 0iα α>
Hyperboles iβ
02 2 cosha c α=
02 2 sinhb c α= α� β�
x�
y�
Foyers distants de 2c
θ
39
A partir des relations III.2, on définit le complexe :
( )cosh cos sinh sin cosh( )z x iy c i c iα β α β α β= + = + = +
soit
cosh ( )z c fζ ζ= = ; cosh ( )z c fζ ζ= =
et
'( ) sinhdz
f cd
ζ ζζ
= = ; 1
sinh
d
dz c
ζζ
=
La relation II.27 établie dans le chapitre précédent permet d’écrire :
2 '( ) sinh
'( ) sinh
i fe
f
θ ζ ζζ ζ
= = où θ est l’angle �( , )x α��
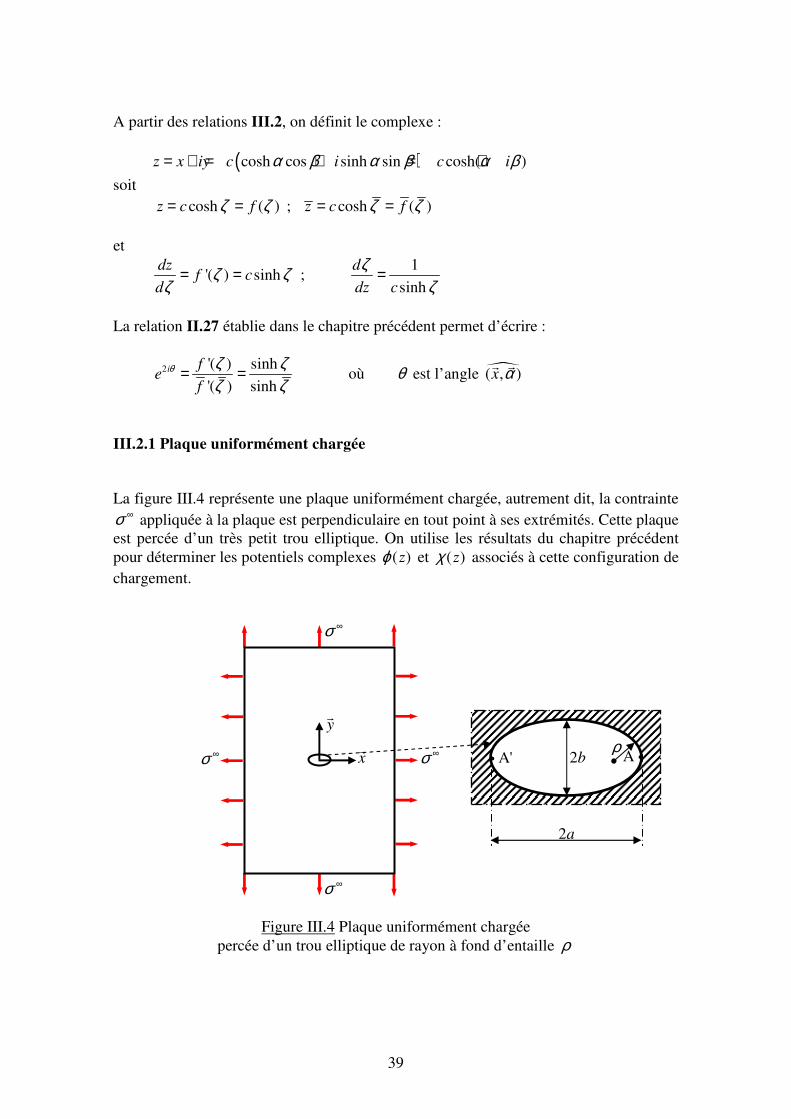
III.2.1 Plaque uniformément chargée
La figure III.4 représente une plaque uniformément chargée, autrement dit, la contrainte
σ ∞ appliquée à la plaque est perpendiculaire en tout point à ses extrémités. Cette plaque
est percée d’un très petit trou elliptique. On utilise les résultats du chapitre précédent
pour déterminer les potentiels complexes ( )zϕ et ( )zχ associés à cette configuration de
chargement.
Figure III.4 Plaque uniformément chargée
percée d’un trou elliptique de rayon à fond d’entaille ρ
σ ∞
σ ∞
σ ∞ σ ∞ A i A'i 2b
2a
ρ x�
y�

40
• Les conditions limites aux bords de la plaque, c'est-à-dire à l’infini compte tenu de la
taille importante de la plaque comparée à celle du trou elliptique, sont données par :
x yσ σ σ∞ ∞ ∞= = et 0xyσ ∞ =
Ce qui, dans les relations II.19a et II.19b du chapitre précédent, conduit à :
[ ]2 4Re '( )y x zσ σ σ ϕ∞ ∞ ∞∞
+ = =
et
( )2 0 2 ''( ) ''( )y x xyi z z zσ σ σ ϕ χ∞ ∞ ∞∞
− + = = +
On a donc pour z grand : [ ]
( )2 Re '( )
''( ) ''( ) 0
z
z z z
ϕ σϕ χ
∞∞
∞
= + =
III.3a
• Les conditions limites aux extrémités du trou elliptique, c'est-à-dire pour 0α α= , sont
données par :
) )0 0
0α αβα α α ασ σ
= == = quelque soit β ,
soit, compte tenu des relations [I.22a] et [I.22b] du chapitre précédent :
) [ ] ( )000
4Re '( ) 2 '( ) '( )z z zβ α αα αα ασ ϕ ϕ ϕ
==== = + et
) ( )00
22 ''( ) ''( )ie z z zθβ α αα α
σ ϕ χ==
= +
d’où
( ) ( )0 0
2'( ) '( ) ''( ) ''( ) 0iz z e z z zθα α α αϕ ϕ ϕ χ
= =+ − + = III.3b
Il s’agit donc maintenant de trouver les fonctions analytiques ( )zϕ et ( )zχ satisfaisant
les conditions limites III.3a et III.3b.
Comme, par raison de continuité, les composantes des contraintes doivent être
périodiques et de période 2π par rapport à β , les solutions ( )zϕ et ( )zχ doivent avoir
des formes qui engendrent cette périodicité. De telles formes sont :
sinh sinh cos cosh sinn n n i n nζ α β α β= +
cosh cosh cos sinh sinn n n i n nζ α β α β= +
On pourra vérifier que les parties réelles et imaginaires de ces fonctions analytiques
sont harmoniques.
De plus, les fonctions ( )zϕ et ( )zχ n’intervenant que par leur dérivées, on peut
adjoindre aux formes précédentes la fonction Aζ où A est une constante réelle ou
complexe. Par ailleurs, les contraintes devant rester finies loin de l’entaille (c'est-à-dire

41
à l’infini), l’entier n doit rester inférieur à un ( 1n ≤ ) pour ( )zϕ et inférieur à deux
( 2n ≤ ) pour ( )zχ . Les solutions ont donc la forme générale suivante :
0 1 2
0 1 2 3 4
cosh
( ) sinh cosh
( ) sinh cosh sinh 2 cosh 2
z c
z A A A
z B B B B B
ζϕ ζ ζ ζ
χ ζ ζ ζ ζ ζ
= = + + = + + + +
III.4
Dans le cas de la plaque chargée uniformément et percée d’une petite entaille elliptique,
les solutions ( )zϕ et ( )zχ ont été proposées par KOLOSOFF en 1913. Seuls les termes
1A et 0B sont non nuls, et cet auteur présente les solutions sous la forme :
( ) sinhz Acϕ ζ= ( 1A Ac= ) réel
2( )z Bcχ ζ= (2
0B Bc= ) réel
Les calculs des dérivées de ces fonctions analytiques donnent :
cosh cosh'( )
sinh sinh
Acz A
c
ζ ζϕζ ζ
= = ; 3
''( )sinh
Az
cϕ
ζ= − ;
3
cosh''( )
sinh
Az z
ζϕζ
= −
'( )sinh
Bczχ
ζ= ;
3
cosh''( )
sinh
Bz
ζχζ
= −
• Comme )coth 1αζ→∞
= , [ ]Re '( )z Aϕ ∞ = et ( )''( ) ''( ) 0z z zϕ χ ∞+ = , les conditions
limites [II.3a] à l’infini conduisent à :
2A
σ ∞
=
• Au bord du trou elliptique, on a 0α α= , d’où 0 iζ α β= + , 02ζ ζ α+ = ou
02ζ α ζ= − , les conditions limites [II.3b] deviennent :
3 3
cosh cosh sinh cosh cosh0
sinh sinh sinh sinh sinhA A B
ζ ζ ζ ζ ζζ ζ ζ ζ ζ
+ + + =
( )2
cosh sinh sinh cosh 1cosh cosh 0
sinh sinh sinh sinhA A B
ζ ζ ζ ζ ζ ζζ ζ ζ ζ
+ + + =
� �0 0
2
2 2
1sinh sinh cosh cosh 0
sinh sinhA B
α α ζ
ζ ζ ζ ζ ζζ ζ −
⋅ + + + =
soit
[ ]0 0 0sinh sinh 2 cosh 2 cosh sinh 2 sinh cosh 0A Bζ α α ζ α ζ ζ⋅ + − + =

42
D’où finalement ( )0cosh 2 cosh 0A Bα ζ+ = et donc :
0 0cosh 2 cosh 22
B Aσα α
∞
= − = −
Les potentiels complexes ont alors pour expressions :
( ) sinh2
cz
σϕ ζ∞
= et 2
0cosh 2( )
2
cz
σ αχ ζ∞
= −
La contrainte maximale max
βσ est atteinte à l’extrémité A (ou A’) de l’entaille (figure 4),
c'est-à-dire pour 0α α= et 0β = en A, soit 0ζ α= . Comme la contrainte )0
α α ασ=
est
nulle, la valeur de max
βσ peut être calculée directement :
[ ]0
max 0
0
cosh4 Re '( ) 2 2
sinh
az
bβ ζ α
ασ ϕ σ σα
∞ ∞=
= = =
Le facteur de concentration des contraintes tK est quant à lui donné par :
max
max
nom
2t
aK
b
βσσσ σ ∞= = = III.5a
Le rayon ρ à fond d’une entaille elliptique de grand axe a et de petit axe b
s’exprimant par 2b aρ = , le facteur tK peut aussi s’écrire :
2tKa
ρ= III.5b
Pour un trou circulaire, le facteur tK vaut 2 et il tend vers l’infini lorsque b a<< ou
lorsque ρ tend vers 0, ce qui suggère que les contraintes sont infinies à l’extrémité
d’une fissure dans un matériau élastique.
III.2.2 Plaque percée d’un trou elliptique sollicitée en traction simple
• Les conditions limites aux bords de la plaque (figure III.5), sont données par :
yσ σ∞ ∞= et 0x xyσ σ∞ ∞= =
Ce qui, dans les relations II.19a et II.19b du chapitre précédent, conduit à :
43
[ ]4Re '( )y zσ σ ϕ∞ ∞∞
= =
et
( )2 ''( ) ''( )y z z zσ ϕ χ σ∞ ∞∞
= + =
On a donc pour z grand : [ ]
( )4Re '( )
''( ) ''( )
z
z z z
ϕ σϕ χ σ
∞∞
∞∞
= + =
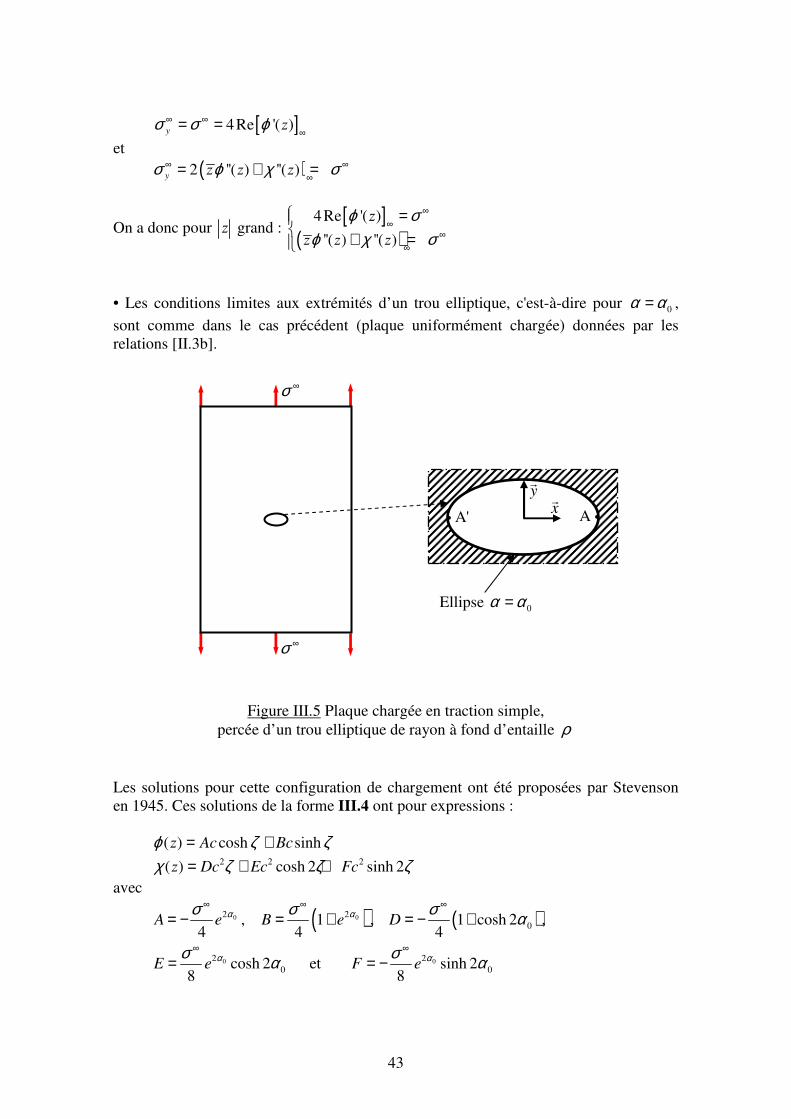
• Les conditions limites aux extrémités d’un trou elliptique, c'est-à-dire pour 0α α= ,
sont comme dans le cas précédent (plaque uniformément chargée) données par les
relations [II.3b].
Figure III.5 Plaque chargée en traction simple,
percée d’un trou elliptique de rayon à fond d’entaille ρ
Les solutions pour cette configuration de chargement ont été proposées par Stevenson
en 1945. Ces solutions de la forme III.4 ont pour expressions :
( ) cosh sinhz Ac Bcϕ ζ ζ= + 2 2 2( ) cosh 2 sinh 2z Dc Ec Fcχ ζ ζ ζ= + +
avec
02
4A e
ασ ∞
= − , ( )021
4B e
ασ ∞
= + , ( )01 cosh 24
Dσ α
∞
= − + ,
02
0cosh 28
E eασ α
∞
= et 02
0sinh 28
F eασ α
∞
= −
σ ∞
σ ∞
A i A'i
Ellipse 0α α=
x�
y�

44
La contrainte maximale max
βσ , atteinte à l’extrémité A de l’entaille (figure III.5) pour
0ζ α= , est calculée comme dans le cas précédent :
[ ]0
max 0
0
cosh4 Re '( ) 4
sinhz A Bβ ζ α
ασ ϕα=
= = +
soit
( )0 02 2max 0
0
cosh1
sinhe e
α αβ
ασ σα
∞ = − + +
02max 0 0 0
0 0
cosh sinh cosh
sinh sinhe
αβ
α α ασ σα α
∞ −= +
0
max 0 0 0
0 0 0
cosh 2cosh sinh
sinh sinh sinh
eα
βα α ασ σ σ
α α α∞ ∞ += + =
d’où finalement :
max 1 2a
bβσ σ ∞ = +
et le facteur de concentration des contraintes est alors donné par :
1 2t
aK
b= + III.6a
ou encore en fonction du rayon à fond d’entaille ρ :
1 2tKa
ρ= + III.6b
Pour un trou circulaire, le facteur tK vaut 3 et lorsque l’entaille tend vers la fissure
(b a<< ou 0ρ → ), les contraintes sont infinies.
La contrainte au point A est maximale ( )( ) 1 2A a bβσ σ ∞= + ; au point B (figure
III.6a), on a 0α α= et 2β π= d’où 0 2B iζ α π= + :
[ ]( ) 4 Re '( )B
B zβ ζσ ϕ=
cosh( ) 4 Re
sinh
B
B
B A Bβζσζ
= +
avec
( )( )
0 0
0 0
cosh cosh 2 sinh
sinh sinh 2 cosh
B
B
i i
i i
ζ α π αζ α π α
= + = = + =
d’où
45
( )0 0 02 2 20 0 0 0
0 0 0
( ) sinh sinh cosh sinh1
cosh cosh cosh
Be e e
β α α ασ α α α ασ α α α∞
−= − + + = +
0
0 0
0 0
( ) sinh cosh1
cosh cosh
B eα
βσ α ασ α α∞
− += = − = −
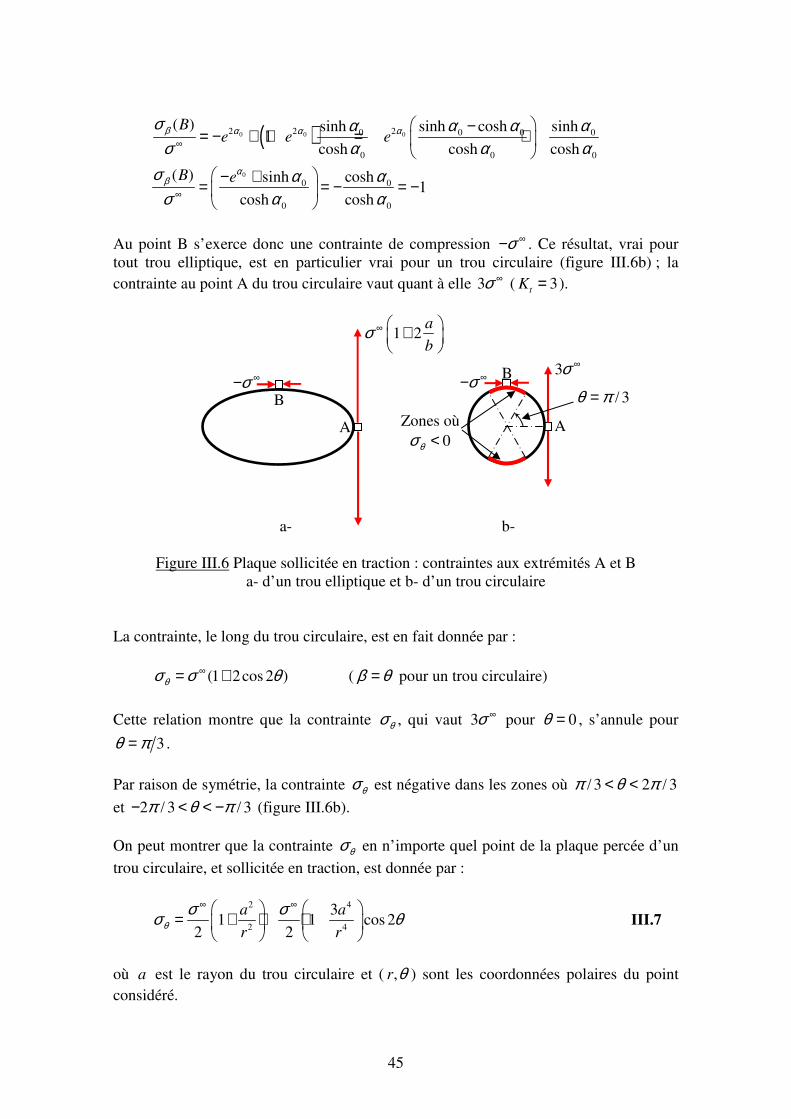
Au point B s’exerce donc une contrainte de compression σ ∞− . Ce résultat, vrai pour
tout trou elliptique, est en particulier vrai pour un trou circulaire (figure III.6b) ; la
contrainte au point A du trou circulaire vaut quant à elle 3σ ∞ ( 3tK = ).
a- b-
Figure III.6 Plaque sollicitée en traction : contraintes aux extrémités A et B
a- d’un trou elliptique et b- d’un trou circulaire
La contrainte, le long du trou circulaire, est en fait donnée par :
(1 2cos 2 )θσ σ θ∞= + ( β θ= pour un trou circulaire)
Cette relation montre que la contrainte θσ , qui vaut 3σ ∞ pour 0θ = , s’annule pour
3θ π= .
Par raison de symétrie, la contrainte θσ est négative dans les zones où / 3 2 / 3π θ π< <
et 2 / 3 / 3π θ π− < < − (figure III.6b).
On peut montrer que la contrainte θσ en n’importe quel point de la plaque percée d’un
trou circulaire, et sollicitée en traction, est donnée par :
2 4
2 4
31 1 cos 2
2 2
a a
r rθ
σ σσ θ∞ ∞
= + + +
III.7
où a est le rayon du trou circulaire et ( ,r θ ) sont les coordonnées polaires du point
considéré.
B
A
σ ∞− σ ∞−
1 2a
bσ ∞ +
3σ ∞
A
B
/ 3θ π=
Zones où
0θσ <

46
III.3 Gradient de contrainte le long de l’axe d’une entaille
• La formule III.7 montre que la variation de la contrainte θσ le long de l’axe du trou
circulaire, c'est-à-dire pour 0θ = (soit 0y = , r x= et yθσ σ= ), est donnée par :
) 2 4
0 1 31
2 2
y y a a
x x
σ
σ=
∞ = + +
III.8
Lorsque x est grand, )0y y
σ σ ∞
== et pour x a= , ) max
03y y
σ σ σ∞
== = .
• La relation équivalente à III.8 pour un trou elliptique est donnée par :
)0 ( )
1( )
y y N x
D x
σ
σ=
∞ = + III.9
avec
( )( )( ) ( )2 2 2 2 2( ) 2N x a a b x x c x c ab a b x= − − − − + −
( ) ( )2 2 2 2 2( )D x a b x c x c= − − −
2 2 2c a b= −
Lorsque x est grand, )0y y
σ σ ∞
== et pour x a= , ) max
01 2y y
a
bσ σ σ∞
=
= + =
.
La figure III.7 donne, à titre d’exemple, les variations de la contrainte )0y y
σ=
pour un
trou elliptique ( / 3, 7)ta b K= = et pour un trou circulaire ( 3tK = ). Cette figure montre
que la diminution de la contrainte est plus rapide dans le cas du trou elliptique1.
Le gradient de contrainte de )0y y
σ=
à la racine du trou ( x a= ), que l’on notera pour
simplifier l’écriture ( )/y x ad dxσ
=, est obtenu par différentiation de l’équation [II.8] ou
[II.9] pour, respectivement, le trou circulaire ou elliptique.
• Le calcul de ce gradient pour le trou circulaire donne :
2 4
3 5
6 7y
x ax a
d a a
dx x x a
σ σσ∞
∞
==
= − − = −
[II.10]
1 J. Schijve, « Fatigue of Structures and Materials », Kluwer Academic Publishers, 2001.
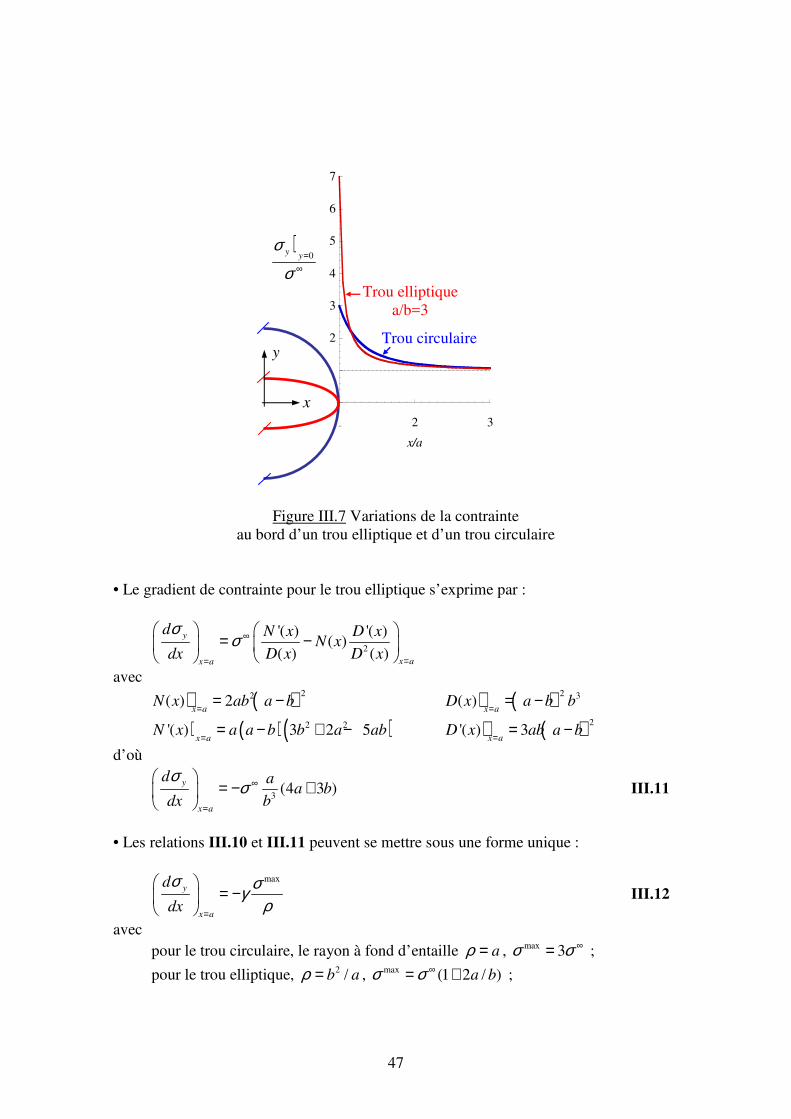
47
0
1
2
3
4
5
6
7
1 2 3
x/a
Figure III.7 Variations de la contrainte
au bord d’un trou elliptique et d’un trou circulaire
• Le gradient de contrainte pour le trou elliptique s’exprime par :
2
'( ) '( )( )
( ) ( )
y
x ax a
d N x D xN x
dx D x D x
σσ ∞
==
= −
avec
) ( )22( ) 2x a
N x ab a b=
= − ) ( )2 3( )x a
D x a b b=
= −
) ( )( )2 2'( ) 3 2 5x a
N x a a b b a ab=
= − + − ) ( )2'( ) 3
x aD x ab a b
== −
d’où
3(4 3 )
y
x a
d aa b
dx b
σσ ∞
=
= − +
III.11
• Les relations III.10 et III.11 peuvent se mettre sous une forme unique :
max
y
x a
d
dx
σ σγρ=
= −
III.12
avec
pour le trou circulaire, le rayon à fond d’entaille aρ = , max 3σ σ ∞= ;
pour le trou elliptique, 2 /b aρ = , max (1 2 / )a bσ σ ∞= + ;
x
y
)0y y
σ
σ=
∞
Trou circulaire
Trou elliptique
a/b=3

48
γ un coefficient de proportionnalité.
La relation III.12 indique que le gradient de contrainte est proportionnel à la contrainte
maximale et inversement proportionnel au rayon à fond d’entaille. On peut aisément
montrer, à partir des relations III.10 et III.11, que le coefficient de proportionnalité γ a
la même expression pour les deux géométries de trou :
12
tKγ = + III.13
Cette expression implique que 2 3γ< < .
Il apparaît que le facteur de concentration de contraintes n’a pas une grande influence
sur le coefficient de proportionnalité γ . Pour des entailles dont le tK est compris entre
2 et 5 (valeurs que l’on rencontre le plus souvent dans les structures en service), ce
coefficient varie entre 2,2 et 2,5.
Le gradient de contrainte à la racine d’une entaille donne une indication sur le volume
de matériau fortement sollicité.
Applications
• Donner une estimation de la distance δ le long de l’axe d’un trou circulaire de
diamètre 4mm, où la chute de la contrainte maximale est de 5%.
On peut déduire simplement la distance δ par linéarisation de la relation III.12 :
max max max0,95 1
23 2
y
x a
d
dx
σ σ σ σδ=
− = − = − +
d’où 48 mδ µ= ; dans un matériau dont la taille moyenne de grain 50gd mµ≈ , δ est
proche de la taille d’un grain.
• On dispose d’un matériau dont la taille moyenne de grain est 20gd mµ≈ . Déterminer
la contrainte moyenne dans trois grains adjacents à la racine d’une entaille elliptique
( 3 , 1 )a cm b cm= = dans une plaque sollicitée en traction ( 50MPaσ ∞ = ).
3,33mmρ = , 7tK = et max 350MPaσ = . On a en
linéarisant III.12 :
max max
1 12
7
y
gx a
d p
dx d
σ σ σρ=
= − = − +
gd

49
d’où
1
12 1, 29%
7
gdp
ρ = + =
La contrainte atteinte à l’extrémité du premier grain vaut max
1 1(1 )pσ σ= − , ce qui
donne une contrainte moyenne moy
1σ dans le premier grain :
maxmoy max1 11 1 347,8
2 2
pMPa
σ σσ σ+ = = − =
on adopte le même raisonnement pour les deux autres grains, ce qui donne :
2 1
212 2
7
gdp p
ρ = + =
et 3 13p p=
moy max12 1 3 343,3
2
pMPaσ σ = − =
moy max13 1 5 338,8
2
pMPaσ σ = − =
Les grains adjacents à la racine de l’entaille sont fortement sollicités, ce qui revêt une
grande importance pour la fatigue.
III.4 Gradient de contrainte le long du bord d’une entaille
Lorsque les structures sont conçues avec des entailles, l’amorçage des fissures de
fatigue se produit généralement en surface à fond d’entaille : l’état de surface (rugosité
de surface, présence ou non de rayures qui amplifient la concentration de la
contrainte…) a une forte influence sur cet amorçage. Aussi il est intéressant d’examiner
comment varie la contrainte, non pas uniquement le long de l’axe de l’entaille, mais
également le long du bord de celle-ci, surtout lorsque la présence de rayures n’est pas
exclue. La variation de la contrainte au bord d’un trou circulaire est illustrée sur la
figure III.8a où les lignes d’isocontraintes principales sont déterminées par calculs aux
éléments finis (un exemple de maillage est indiqué sur la figure III.8b). Ces lignes sont
à des niveaux correspondant à 90%, 80% et 50% de la contrainte maximale2. Ce
résultat, obtenu grâce au développement des moyens de calcul au début des années 80,
confirme qualitativement des mesures de contraintes par photo élasticité (figure III.9)
effectuées une dizaine d’années auparavant3. Il est intéressant de noter que la
diminution de la contrainte le long du bord de l’entaille est relativement moins rapide
que celle observée lorsqu’on se déplace le long de l’axe x en partant de la racine.
Comme l’amorçage des fissures se fait en surface, il apparaît donc que le gradient de
2 J. Schijve, « Stress gradients around notches », Fatigue of Engineering Materials and Structures, vol. 3,
325-338, 1981. 3 R.B. Heywood, « Designing by photo-elasticity », Pergamon Press, 1969.
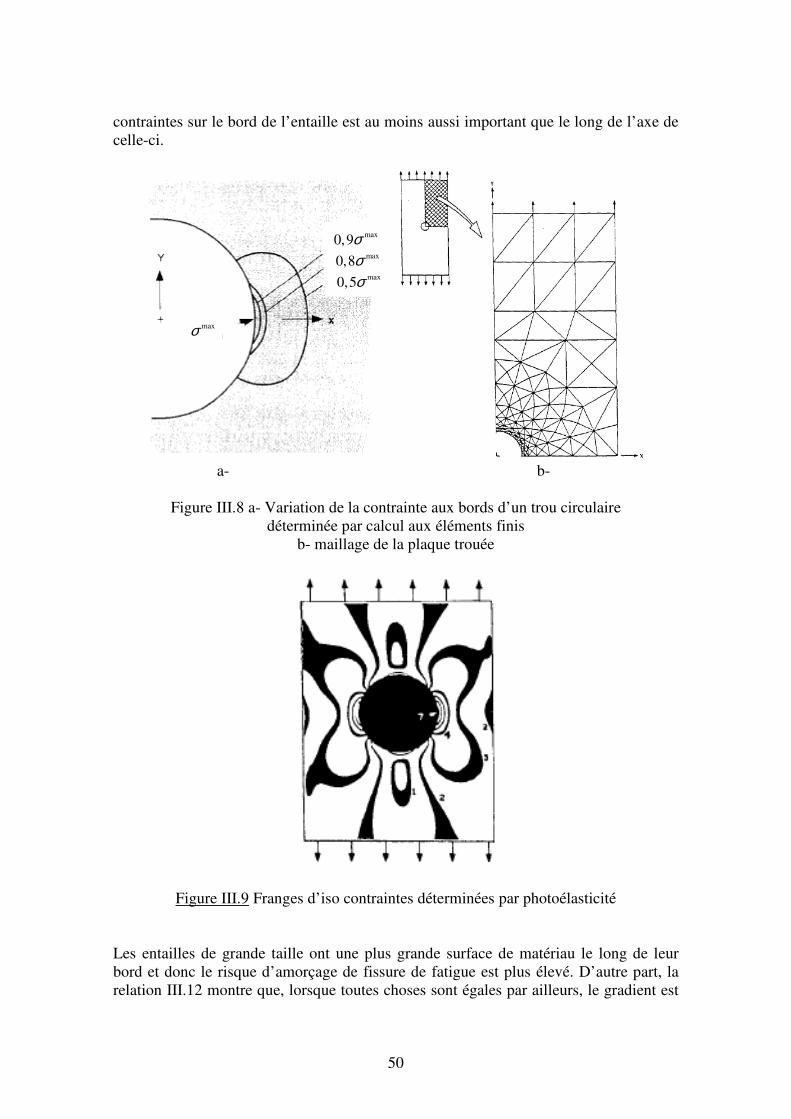
50
contraintes sur le bord de l’entaille est au moins aussi important que le long de l’axe de
celle-ci.
a- b-
Figure III.8 a- Variation de la contrainte aux bords d’un trou circulaire
déterminée par calcul aux éléments finis
b- maillage de la plaque trouée
Figure III.9 Franges d’iso contraintes déterminées par photoélasticité
Les entailles de grande taille ont une plus grande surface de matériau le long de leur
bord et donc le risque d’amorçage de fissure de fatigue est plus élevé. D’autre part, la
relation III.12 montre que, lorsque toutes choses sont égales par ailleurs, le gradient est
max0,5σ
max0,8σ
max0,9σ
maxσ
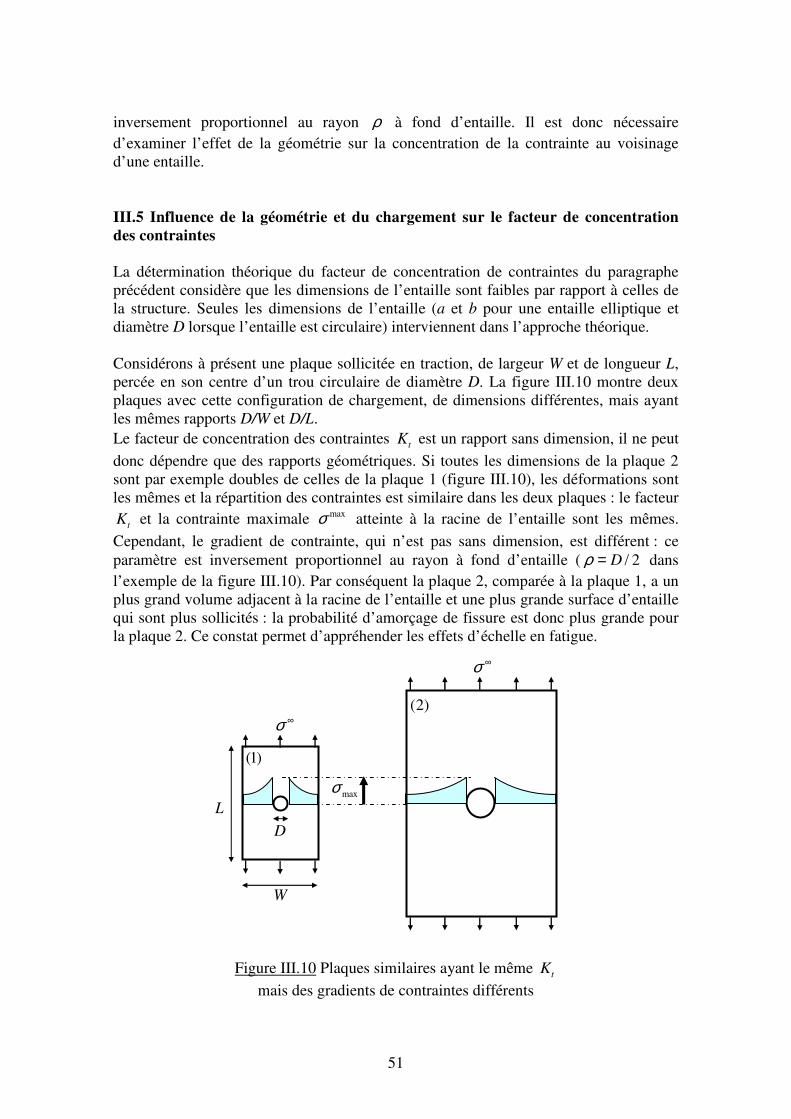
51
inversement proportionnel au rayon ρ à fond d’entaille. Il est donc nécessaire
d’examiner l’effet de la géométrie sur la concentration de la contrainte au voisinage
d’une entaille.
III.5 Influence de la géométrie et du chargement sur le facteur de concentration
des contraintes
La détermination théorique du facteur de concentration de contraintes du paragraphe
précédent considère que les dimensions de l’entaille sont faibles par rapport à celles de
la structure. Seules les dimensions de l’entaille (a et b pour une entaille elliptique et
diamètre D lorsque l’entaille est circulaire) interviennent dans l’approche théorique.
Considérons à présent une plaque sollicitée en traction, de largeur W et de longueur L,
percée en son centre d’un trou circulaire de diamètre D. La figure III.10 montre deux
plaques avec cette configuration de chargement, de dimensions différentes, mais ayant
les mêmes rapports D/W et D/L.
Le facteur de concentration des contraintes tK est un rapport sans dimension, il ne peut
donc dépendre que des rapports géométriques. Si toutes les dimensions de la plaque 2
sont par exemple doubles de celles de la plaque 1 (figure III.10), les déformations sont
les mêmes et la répartition des contraintes est similaire dans les deux plaques : le facteur
tK et la contrainte maximale maxσ atteinte à la racine de l’entaille sont les mêmes.
Cependant, le gradient de contrainte, qui n’est pas sans dimension, est différent : ce
paramètre est inversement proportionnel au rayon à fond d’entaille ( / 2Dρ = dans
l’exemple de la figure III.10). Par conséquent la plaque 2, comparée à la plaque 1, a un
plus grand volume adjacent à la racine de l’entaille et une plus grande surface d’entaille
qui sont plus sollicités : la probabilité d’amorçage de fissure est donc plus grande pour
la plaque 2. Ce constat permet d’appréhender les effets d’échelle en fatigue.
Figure III.10 Plaques similaires ayant le même tK
mais des gradients de contraintes différents
maxσ
σ ∞
σ ∞
D
W
L
(1)
(2)
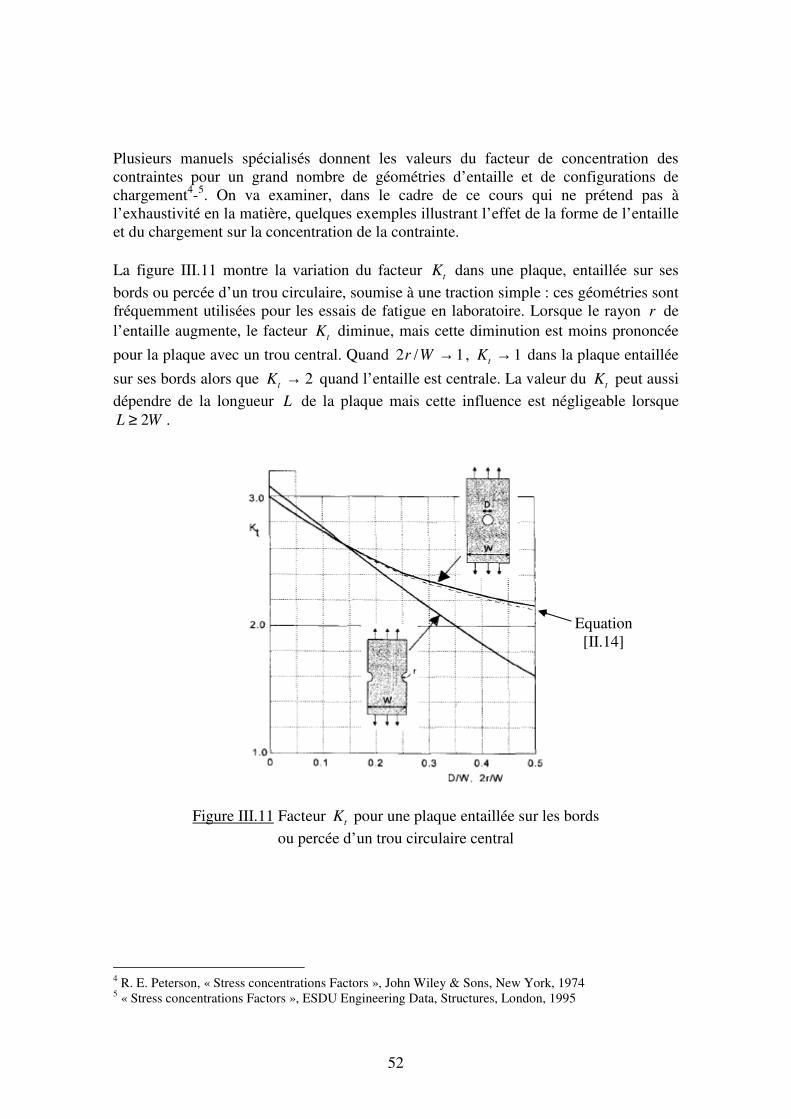
52
Plusieurs manuels spécialisés donnent les valeurs du facteur de concentration des
contraintes pour un grand nombre de géométries d’entaille et de configurations de
chargement4-
5. On va examiner, dans le cadre de ce cours qui ne prétend pas à
l’exhaustivité en la matière, quelques exemples illustrant l’effet de la forme de l’entaille
et du chargement sur la concentration de la contrainte.
La figure III.11 montre la variation du facteur tK dans une plaque, entaillée sur ses
bords ou percée d’un trou circulaire, soumise à une traction simple : ces géométries sont
fréquemment utilisées pour les essais de fatigue en laboratoire. Lorsque le rayon r de
l’entaille augmente, le facteur tK diminue, mais cette diminution est moins prononcée
pour la plaque avec un trou central. Quand 2 / 1r W → , 1tK → dans la plaque entaillée
sur ses bords alors que 2tK → quand l’entaille est centrale. La valeur du tK peut aussi
dépendre de la longueur L de la plaque mais cette influence est négligeable lorsque
2L W≥ .
Figure III.11 Facteur tK pour une plaque entaillée sur les bords
ou percée d’un trou circulaire central
4 R. E. Peterson, « Stress concentrations Factors », John Wiley & Sons, New York, 1974
5 « Stress concentrations Factors », ESDU Engineering Data, Structures, London, 1995
Equation
[II.14]

53
La variation de la courbe ( / )tK D W pour la plaque trouée au centre peut être décrite par
une relation polynomiale simple proposée par Heywood6 et donnant de façon assez
précise la valeur du facteur de concentration des contraintes :
3
2 1t
DK
W
= + −
III.14
Parmi les formules les plus connues permettant le calcul du tK , on peut citer les
formules de Neuber7 adaptées à des éléments de structures très courants, tels des arbres
avec gorge, ou épaulement, ou encore des plaques avec épaulement (figure III.12) :
2 2
11
1 1
t
p q
K
aK bK
= +
+
III.15
où 1 12
p
dK
r= + − et
1
2qK
r
D d
=
−
Les coefficients a et b ont pour valeurs, selon l’élément de structure et le type de
sollicitation :
a- Arbre avec gorge semi circulaire
Traction : 1,197a = 1,871b =
Flexion : 0,715a = 2b =
Torsion : 0,365a = 1b =
b- Arbre avec épaulement simple
Traction : 0,88a = 0,843b =
Flexion : 0,541a = 0,843b =
Torsion : 0,263a = 0,843b =
c- Arbre avec double épaulement
Si 2L d> , même valeur de a et b que le cas précédent
Sinon ( 2L d< ), même valeur de a et b mais en remplaçant dans la
relation [II.15] D par un diamètre équivalent, eqD , donné par :
0,3eqD d L= +
6 R.B. Heywood, « Designing against fatigue », Chapman and Hall, 1962
7 H. Neuber, « Theory of notch stresses », J. D. Edwards and A. Arbor eds., 1946
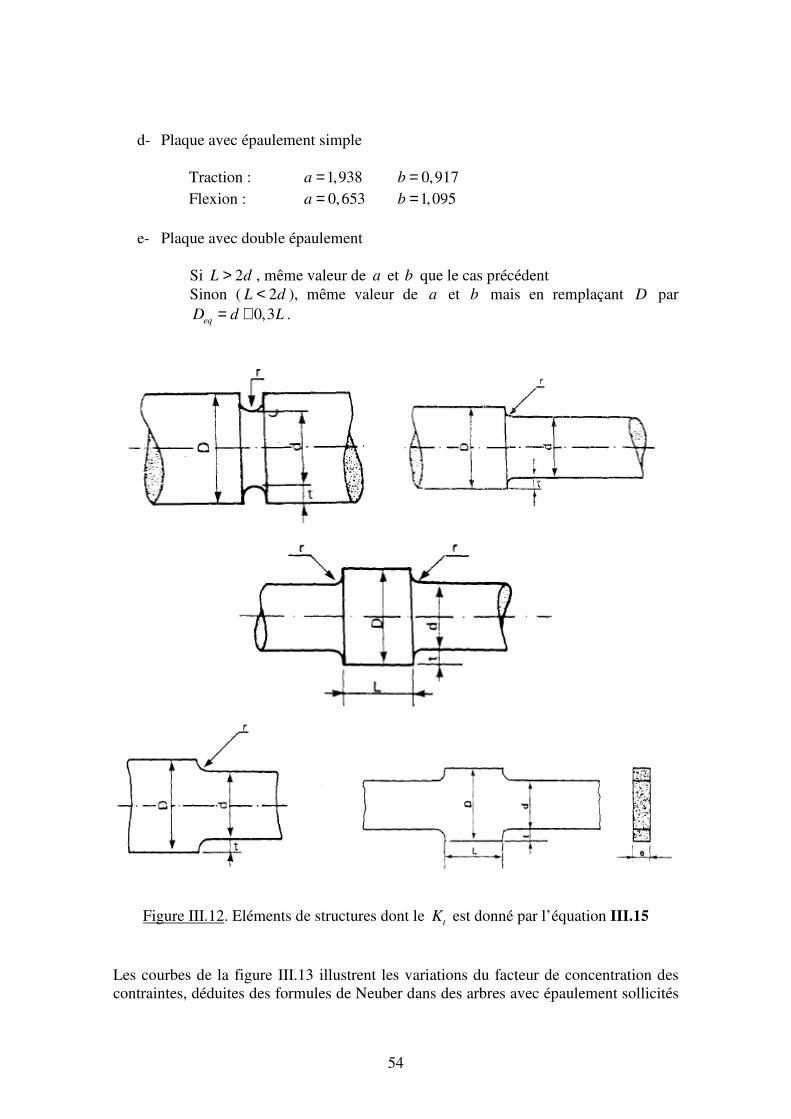
54
d- Plaque avec épaulement simple
Traction : 1,938a = 0,917b =
Flexion : 0,653a = 1,095b =
e- Plaque avec double épaulement
Si 2L d> , même valeur de a et b que le cas précédent
Sinon ( 2L d< ), même valeur de a et b mais en remplaçant D par
0,3eqD d L= + .
Figure III.12. Eléments de structures dont le tK est donné par l’équation III.15
Les courbes de la figure III.13 illustrent les variations du facteur de concentration des
contraintes, déduites des formules de Neuber dans des arbres avec épaulement sollicités
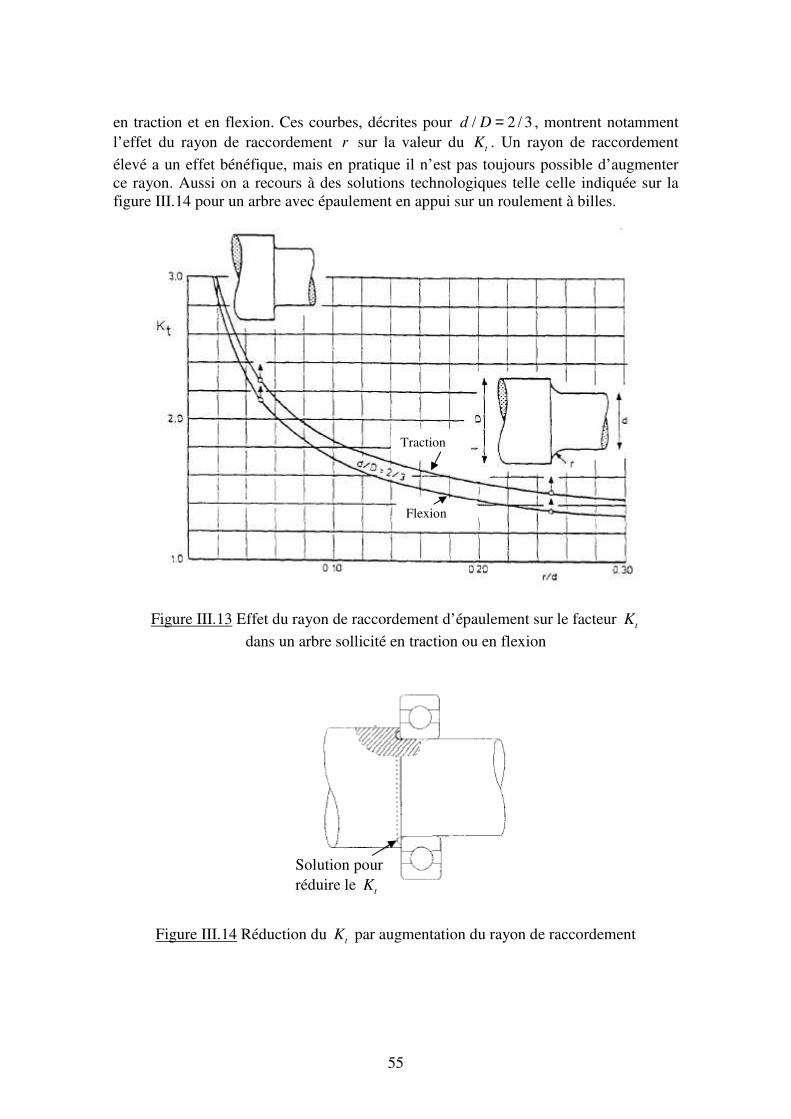
55
en traction et en flexion. Ces courbes, décrites pour / 2 / 3d D = , montrent notamment
l’effet du rayon de raccordement r sur la valeur du tK . Un rayon de raccordement
élevé a un effet bénéfique, mais en pratique il n’est pas toujours possible d’augmenter
ce rayon. Aussi on a recours à des solutions technologiques telle celle indiquée sur la
figure III.14 pour un arbre avec épaulement en appui sur un roulement à billes.
Figure III.13 Effet du rayon de raccordement d’épaulement sur le facteur tK
dans un arbre sollicité en traction ou en flexion
Figure III.14 Réduction du tK par augmentation du rayon de raccordement
Traction
Flexion
Solution pour
réduire le tK
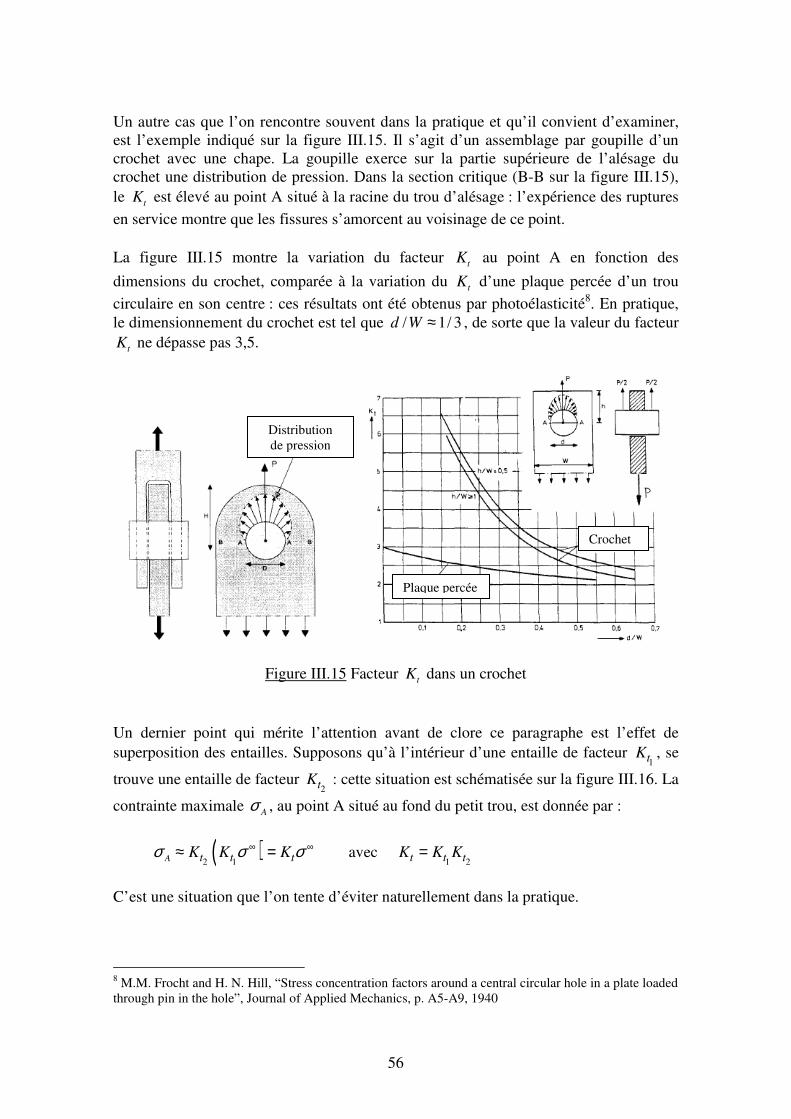
56
Un autre cas que l’on rencontre souvent dans la pratique et qu’il convient d’examiner,
est l’exemple indiqué sur la figure III.15. Il s’agit d’un assemblage par goupille d’un
crochet avec une chape. La goupille exerce sur la partie supérieure de l’alésage du
crochet une distribution de pression. Dans la section critique (B-B sur la figure III.15),
le tK est élevé au point A situé à la racine du trou d’alésage : l’expérience des ruptures
en service montre que les fissures s’amorcent au voisinage de ce point.
La figure III.15 montre la variation du facteur tK au point A en fonction des
dimensions du crochet, comparée à la variation du tK d’une plaque percée d’un trou
circulaire en son centre : ces résultats ont été obtenus par photoélasticité8. En pratique,
le dimensionnement du crochet est tel que / 1/ 3d W ≈ , de sorte que la valeur du facteur
tK ne dépasse pas 3,5.
Figure III.15 Facteur tK dans un crochet
Un dernier point qui mérite l’attention avant de clore ce paragraphe est l’effet de
superposition des entailles. Supposons qu’à l’intérieur d’une entaille de facteur 1t
K , se
trouve une entaille de facteur 2t
K : cette situation est schématisée sur la figure III.16. La
contrainte maximale Aσ , au point A situé au fond du petit trou, est donnée par :
( )2 1A t t tK K Kσ σ σ∞ ∞≈ = avec
1 2t t tK K K=
C’est une situation que l’on tente d’éviter naturellement dans la pratique.
8 M.M. Frocht and H. N. Hill, “Stress concentration factors around a central circular hole in a plate loaded
through pin in the hole”, Journal of Applied Mechanics, p. A5-A9, 1940
Distribution
de pression
Crochet
Plaque percée
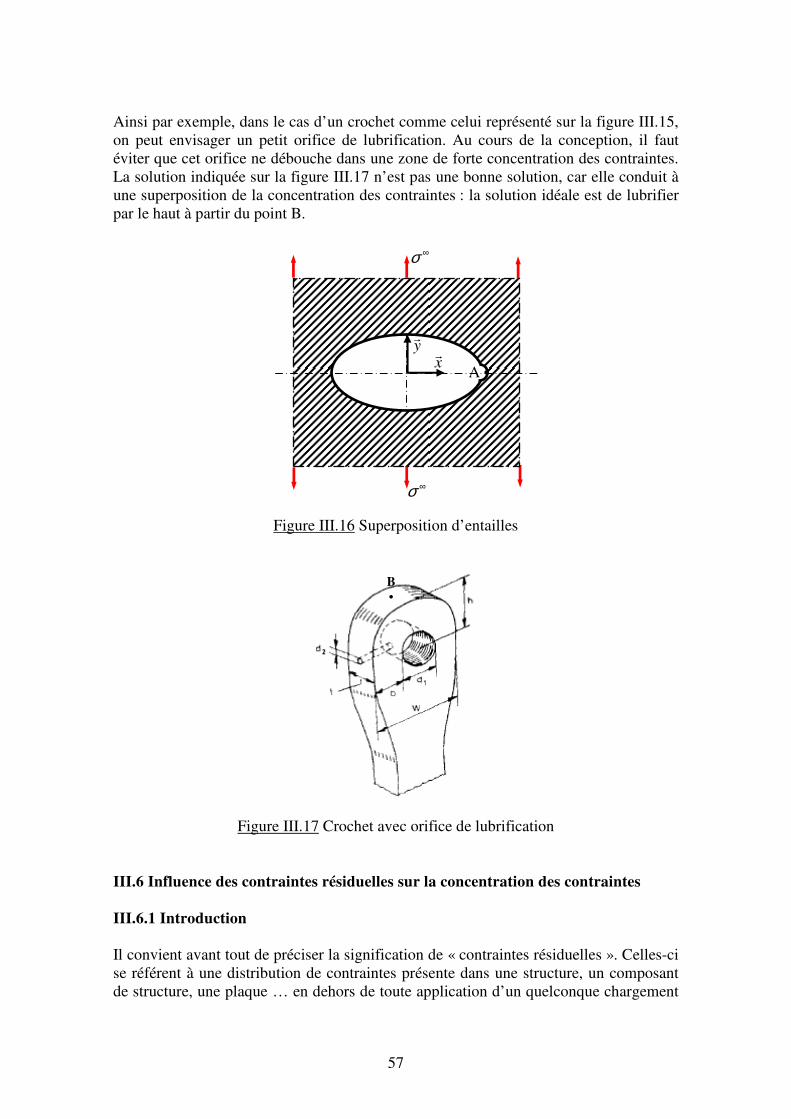
57
Ainsi par exemple, dans le cas d’un crochet comme celui représenté sur la figure III.15,
on peut envisager un petit orifice de lubrification. Au cours de la conception, il faut
éviter que cet orifice ne débouche dans une zone de forte concentration des contraintes.
La solution indiquée sur la figure III.17 n’est pas une bonne solution, car elle conduit à
une superposition de la concentration des contraintes : la solution idéale est de lubrifier
par le haut à partir du point B.
Figure III.16 Superposition d’entailles
Figure III.17 Crochet avec orifice de lubrification
III.6 Influence des contraintes résiduelles sur la concentration des contraintes
III.6.1 Introduction
Il convient avant tout de préciser la signification de « contraintes résiduelles ». Celles-ci
se référent à une distribution de contraintes présente dans une structure, un composant
de structure, une plaque … en dehors de toute application d’un quelconque chargement
σ ∞
σ ∞
x�
y�
A i
B
•
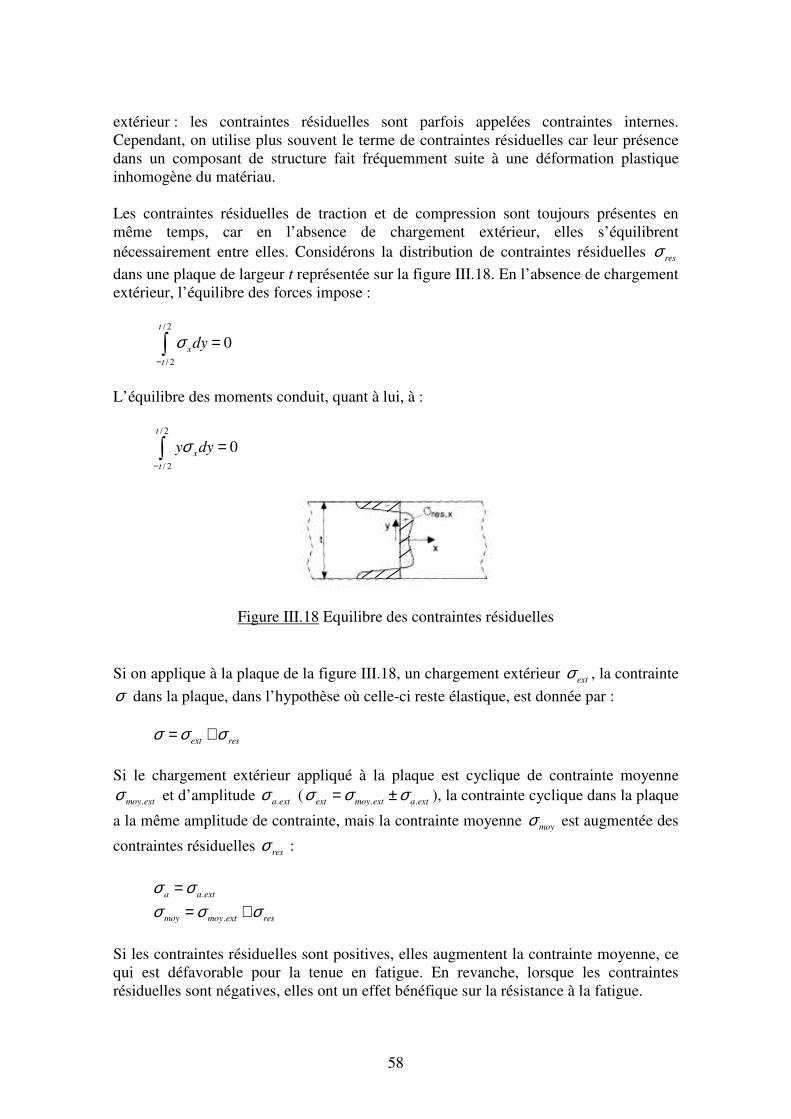
58
extérieur : les contraintes résiduelles sont parfois appelées contraintes internes.
Cependant, on utilise plus souvent le terme de contraintes résiduelles car leur présence
dans un composant de structure fait fréquemment suite à une déformation plastique
inhomogène du matériau.
Les contraintes résiduelles de traction et de compression sont toujours présentes en
même temps, car en l’absence de chargement extérieur, elles s’équilibrent
nécessairement entre elles. Considérons la distribution de contraintes résiduelles resσ
dans une plaque de largeur t représentée sur la figure III.18. En l’absence de chargement
extérieur, l’équilibre des forces impose :
/ 2
/ 2
0
t
x
t
dyσ−
=∫
L’équilibre des moments conduit, quant à lui, à :
/ 2
/ 2
0
t
x
t
y dyσ−
=∫
Figure III.18 Equilibre des contraintes résiduelles
Si on applique à la plaque de la figure III.18, un chargement extérieur extσ , la contrainte
σ dans la plaque, dans l’hypothèse où celle-ci reste élastique, est donnée par :
ext resσ σ σ= +
Si le chargement extérieur appliqué à la plaque est cyclique de contrainte moyenne
.moy extσ et d’amplitude .a extσ ( . .ext moy ext a extσ σ σ= ± ), la contrainte cyclique dans la plaque
a la même amplitude de contrainte, mais la contrainte moyenne moyσ est augmentée des
contraintes résiduelles resσ :
.a a extσ σ=
.moy moy ext resσ σ σ= +
Si les contraintes résiduelles sont positives, elles augmentent la contrainte moyenne, ce
qui est défavorable pour la tenue en fatigue. En revanche, lorsque les contraintes
résiduelles sont négatives, elles ont un effet bénéfique sur la résistance à la fatigue.
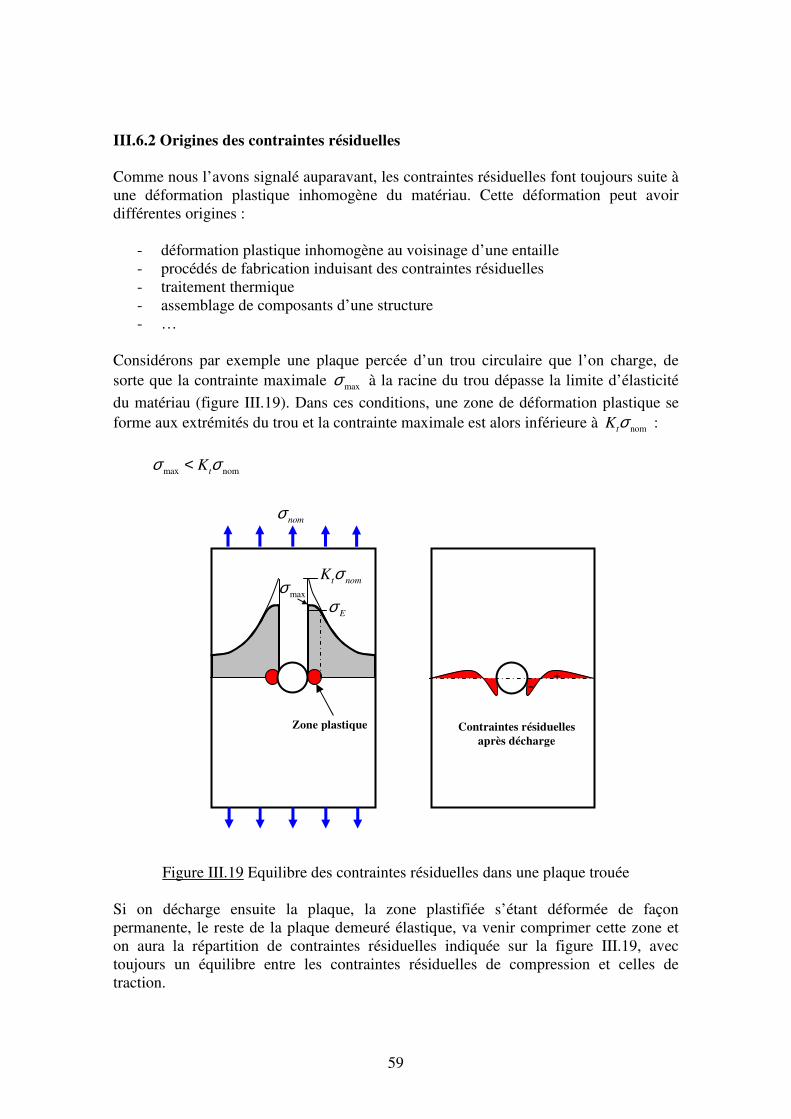
59
III.6.2 Origines des contraintes résiduelles
Comme nous l’avons signalé auparavant, les contraintes résiduelles font toujours suite à
une déformation plastique inhomogène du matériau. Cette déformation peut avoir
différentes origines :
- déformation plastique inhomogène au voisinage d’une entaille
- procédés de fabrication induisant des contraintes résiduelles
- traitement thermique
- assemblage de composants d’une structure
- …
Considérons par exemple une plaque percée d’un trou circulaire que l’on charge, de
sorte que la contrainte maximale maxσ à la racine du trou dépasse la limite d’élasticité
du matériau (figure III.19). Dans ces conditions, une zone de déformation plastique se
forme aux extrémités du trou et la contrainte maximale est alors inférieure à nomtK σ :
max nomtKσ σ<
Figure III.19 Equilibre des contraintes résiduelles dans une plaque trouée
Si on décharge ensuite la plaque, la zone plastifiée s’étant déformée de façon
permanente, le reste de la plaque demeuré élastique, va venir comprimer cette zone et
on aura la répartition de contraintes résiduelles indiquée sur la figure III.19, avec
toujours un équilibre entre les contraintes résiduelles de compression et celles de
traction.
Zone plastique
t nomK σ
Eσ maxσ
nomσ
+ -
Contraintes résiduelles
après décharge
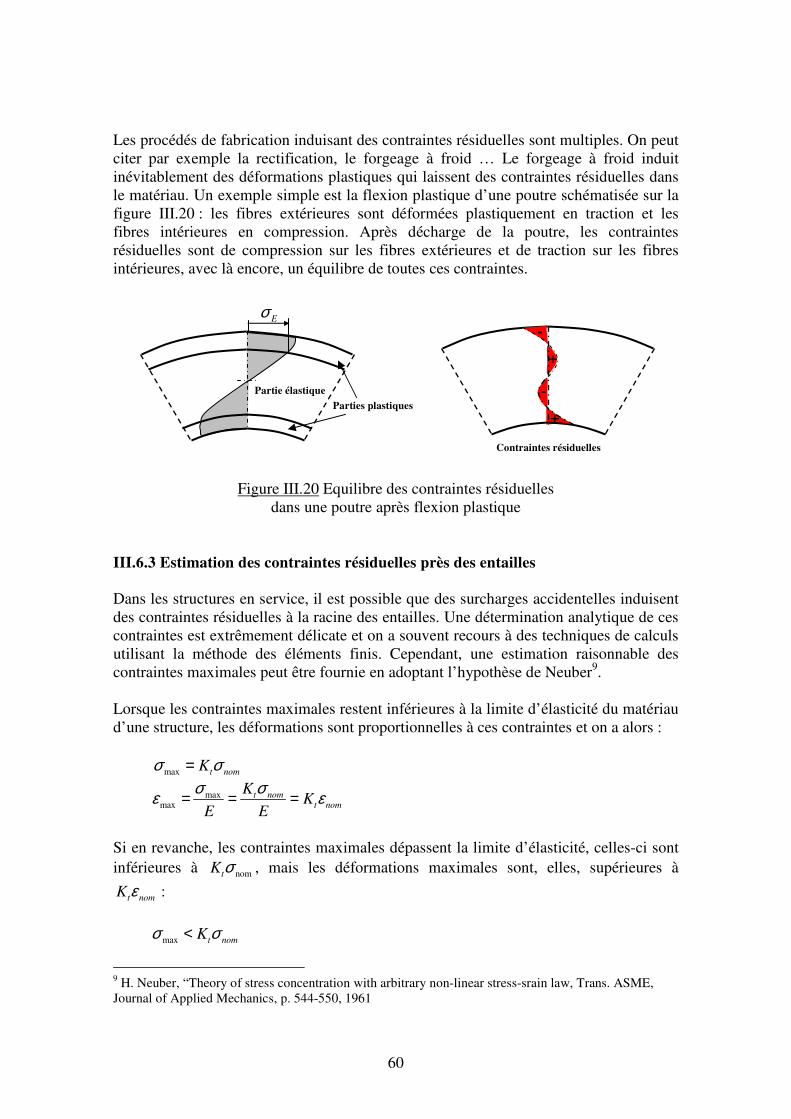
60
Les procédés de fabrication induisant des contraintes résiduelles sont multiples. On peut
citer par exemple la rectification, le forgeage à froid … Le forgeage à froid induit
inévitablement des déformations plastiques qui laissent des contraintes résiduelles dans
le matériau. Un exemple simple est la flexion plastique d’une poutre schématisée sur la
figure III.20 : les fibres extérieures sont déformées plastiquement en traction et les
fibres intérieures en compression. Après décharge de la poutre, les contraintes
résiduelles sont de compression sur les fibres extérieures et de traction sur les fibres
intérieures, avec là encore, un équilibre de toutes ces contraintes.
Figure III.20 Equilibre des contraintes résiduelles
dans une poutre après flexion plastique
III.6.3 Estimation des contraintes résiduelles près des entailles
Dans les structures en service, il est possible que des surcharges accidentelles induisent
des contraintes résiduelles à la racine des entailles. Une détermination analytique de ces
contraintes est extrêmement délicate et on a souvent recours à des techniques de calculs
utilisant la méthode des éléments finis. Cependant, une estimation raisonnable des
contraintes maximales peut être fournie en adoptant l’hypothèse de Neuber9.
Lorsque les contraintes maximales restent inférieures à la limite d’élasticité du matériau
d’une structure, les déformations sont proportionnelles à ces contraintes et on a alors :
max t nomKσ σ=
maxmax
t nomt nom
KK
E E
σ σε ε= = =
Si en revanche, les contraintes maximales dépassent la limite d’élasticité, celles-ci sont
inférieures à nomtK σ , mais les déformations maximales sont, elles, supérieures à
t nomK ε :
max t nomKσ σ<
9 H. Neuber, “Theory of stress concentration with arbitrary non-linear stress-srain law, Trans. ASME,
Journal of Applied Mechanics, p. 544-550, 1961
-
+
-
+
Contraintes résiduelles
Partie élastique
Parties plastiques
Eσ

61
max t nomKε ε>
La figure III.21 illustre les répartitions des contraintes et des déformations dans une
plaque trouée avec formation d’une zone plastifiée localisée au voisinage de la racine du
trou.
Figure III.21 Répartition des contraintes et des déformations dans une plaque trouée
avec plastification locale au voisinage de la racine du trou
L’hypothèse de Neuber consiste à admettre que lorsque la structure se plastifie
localement, le produit max maxσ ε reste égal au produit des mêmes valeurs maximales
atteintes en absence de plastification, soit :
2
max max t nom nomKσ ε σ ε⋅ = III.16
La diminution de maxσ en présence de plastification est donc compensée par
l’augmentation de maxε .
Neuber définit alors des facteurs de concentration plastiques Kσ et Kε par :
max
nom
tK Kσσσ
= < III.17a
Zone plastique
t nomK σ
Eσ maxσ
nomσ
t nomK ε
maxε
nomε

62
max
nom
tK Kεεε
= > III.17b
Le postulat de cet auteur conduit à la relation empirique :
2
tK K Kσ ε = III.18
Neuber a montré la validité de son postulat pour des arbres chargés en torsion avec
entailles hyperboliques. Son hypothèse est utilisée depuis pour donner, pour tout type
d’entaille, une estimation des contraintes résiduelles, qui reste raisonnable tant que la
plastification à la racine de l’entaille demeure modérée. En remplaçant dans la relation
III.16, nomε par nom Eσ , on obtient :
( )2
max max
t nomK
E
σσ ε⋅ = III.20
Le terme de droite de cette relation est connu. On détermine ensuite graphiquement la
valeur de maxσ à partir de la loi de comportement ( )σ σ ε= du matériau comme indiqué
sur la figure III.22. Au point A d’intersection des deux courbes ( )σ σ ε= et σ ε⋅ , maxσ
et maxε satisfont à la fois la relation de comportement et la relation III.20. En absence
de plastification, la contrainte maximale est donnée par le point B d’ordonnée t nomK σ .
La différence entre l’ordonnée Aσ du point A et celle du point B donne la contrainte
résiduelle resσ de compression :
res A B A t nomKσ σ σ σ σ= − = −
Figure III.22 Procédure de détermination graphique des contraintes maxσ et resσ
( )2
t nomK
E
σσ ε⋅ =
( )σ σ ε= nomtK σ
maxσ
resσ
maxε
σ
ε
63
A titre d’application, on peut calculer la contrainte au voisinage d’une entaille de
2,5tK = dans une plaque en acier chargée à 200nom MPaσ = . Le module d’Young de la
plaque est 3210 10E MPa= ⋅ , la limite d’élasticité est 300E MPaσ = et la loi de
comportement est bilinéaire avec un module plastique / 20plE E= .
La loi de comportement s’écrit :
300300
20
E
Eσ ε − = −
soit
( )2
300 300300 300
20 20
t nom
A A
A
KE E
E E E
σσ ε
σ = + − = + −
2 285 12500 0A Aσ σ− − = d’où 323,6A MPaσ =
et
500 176, 4res A MPaσ σ= − = −
C’est une contrainte résiduelle de compression très significative ( 0,6res Eσ σ≈ ).
Les facteurs de concentration plastiques valent respectivement :
nom
1,63AKσσ
σ= = et
2
3,83tKK
Kε
σ
= =
III.7 Facteur de concentration des contraintes dans des structures complexes
Les jonctions tubulaires des plateformes off shore sont des exemples de structures
complexes. Ces plateformes, nécessaires à l’exploitation des réserves d’hydrocarbures
en milieu marin (la figure III.23 montre un exemple de plateforme offshore), sont
constituées de tubes en raison du bon rapport résistance/poids, d’une meilleure tenue au
flambage et de la bonne résistance aux courants et marées de ces éléments. Les tubes de
ces structures sont soudés entre eux, constituant ainsi des jonctions tubulaires classées
selon leur forme en types T, Y, K… schématisés sur la figure III.24. Les intersections
complexes de ces jonctions représentent des discontinuités structurales conduisant à de
fortes concentrations des contraintes au voisinage des cordons de soudure.
L’étude de ces jonctions nécessite un paramétrage. La figure III.25 définit les notations
et les paramètres géométriques d’une jonction de type K qui correspond au cas le plus
général. Le manchon étant encastré à ses deux extrémités, les chargements
généralement appliqués à une jonction de type K pour le calcul du facteur de
concentration des contraintes sont représentés sur la figure III.26.
E
pE
σ ε⋅
σ ↑
ε→
300
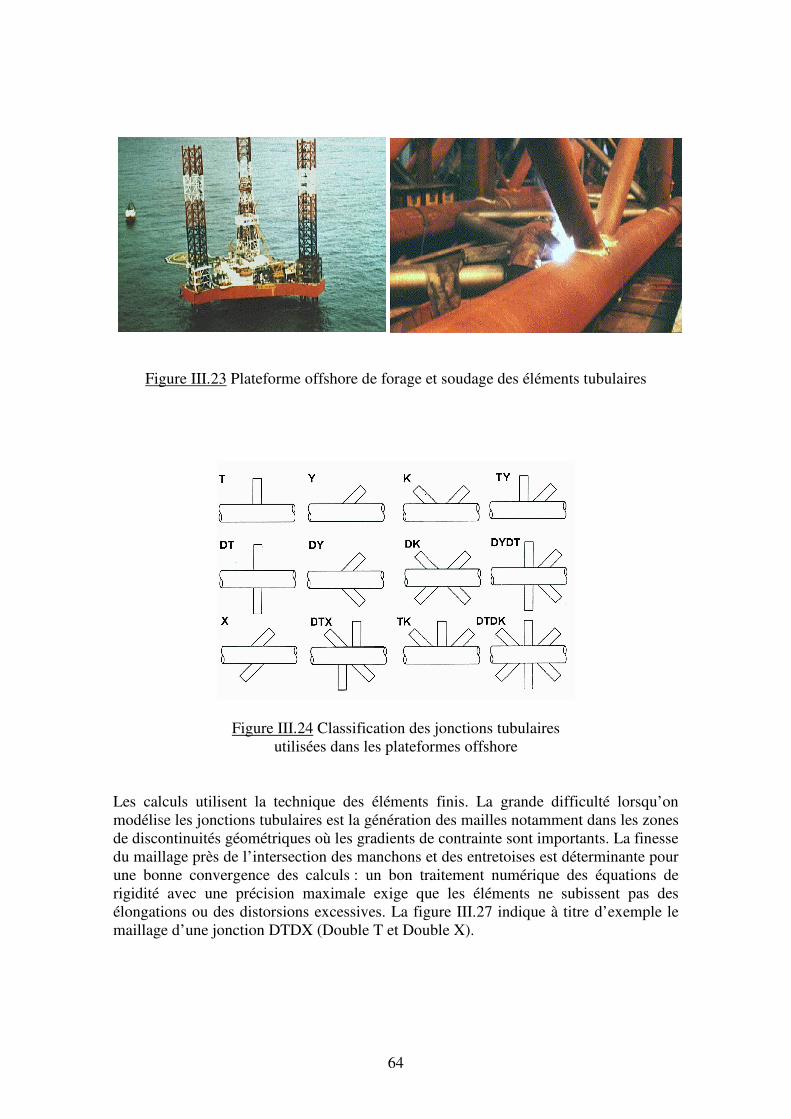
64
Figure III.23 Plateforme offshore de forage et soudage des éléments tubulaires
Figure III.24 Classification des jonctions tubulaires
utilisées dans les plateformes offshore
Les calculs utilisent la technique des éléments finis. La grande difficulté lorsqu’on
modélise les jonctions tubulaires est la génération des mailles notamment dans les zones
de discontinuités géométriques où les gradients de contrainte sont importants. La finesse
du maillage près de l’intersection des manchons et des entretoises est déterminante pour
une bonne convergence des calculs : un bon traitement numérique des équations de
rigidité avec une précision maximale exige que les éléments ne subissent pas des
élongations ou des distorsions excessives. La figure III.27 indique à titre d’exemple le
maillage d’une jonction DTDX (Double T et Double X).
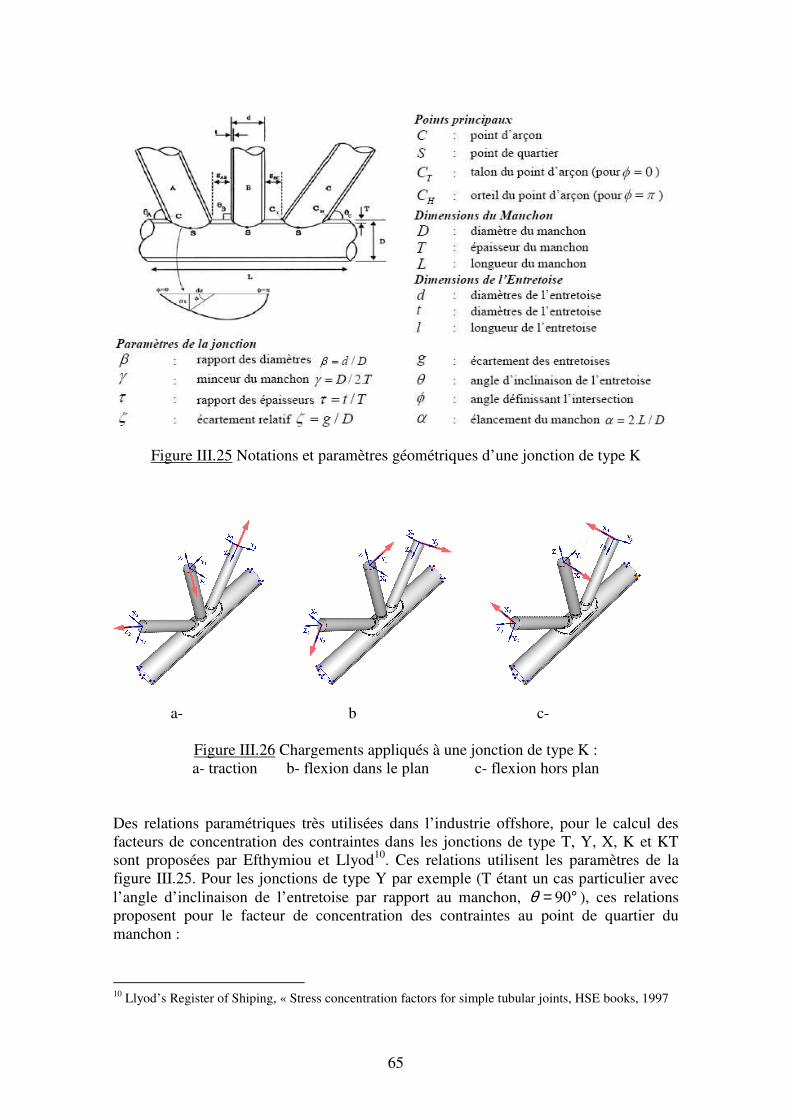
65
Figure III.25 Notations et paramètres géométriques d’une jonction de type K
a- b c-
Figure III.26 Chargements appliqués à une jonction de type K :
a- traction b- flexion dans le plan c- flexion hors plan
Des relations paramétriques très utilisées dans l’industrie offshore, pour le calcul des
facteurs de concentration des contraintes dans les jonctions de type T, Y, X, K et KT
sont proposées par Efthymiou et Llyod10
. Ces relations utilisent les paramètres de la
figure III.25. Pour les jonctions de type Y par exemple (T étant un cas particulier avec
l’angle d’inclinaison de l’entretoise par rapport au manchon, 90θ = ° ), ces relations
proposent pour le facteur de concentration des contraintes au point de quartier du
manchon :
10
Llyod’s Register of Shiping, « Stress concentration factors for simple tubular joints, HSE books, 1997

66
Figure III.27 Maillage d’une jonction DTDX
- Efthymiou ( )2 1,1 1,6
1 1,11 3(2,12 2 ) sintK F β τ γ θ= ⋅ − − III.21a
- Lloyd ( ) 1,2 2
1 2,12 2 sintK F β βτγ θ= ⋅ − III.21b
avec
( )2 0,23 1,16 2,5
1
1 0,83 0,56 0,02 exp 0,21 pour 12
1 pour 12F
β β γ γ α α
α
− − − − − < = ≥
L’influence des paramètres , , , ,α γ τ β θ sur les valeurs du facteur tK pour un
chargement de traction d’une jonction est indiquée sur la figure III.28. Les courbes de
cette figure comparent les valeurs de tK données par les relations de Efthymiou et
Llyod à des résultats récents de calcul par éléments finis11
. Cette comparaison fait
apparaître que les relations empiriques III.21 donnent de bons résultats.
L’étude de l’influence de ces paramètres géométriques permet l’optimisation de leur
choix lors du dimensionnement des éléments tubulaires des structures off shore. Cette
influence est cependant caractérisée pour des chargements simples (traction, flexions
dans le plan de la jonction tubulaire ou hors plan). Les chargements réels sont bien plus
complexes, ce qui rend délicat le dimensionnement. Cette complexité est liée aux
changements aléatoires des forces dues aux vents et marées en pleine mer.
11
F. Ghanameh, D. Thevenet et A. Zeghloul, « Concentration de contraintes dans les jonctions tubulaires
de type T, Y et K, Congrès français de Mécanique, 2003
Zoom
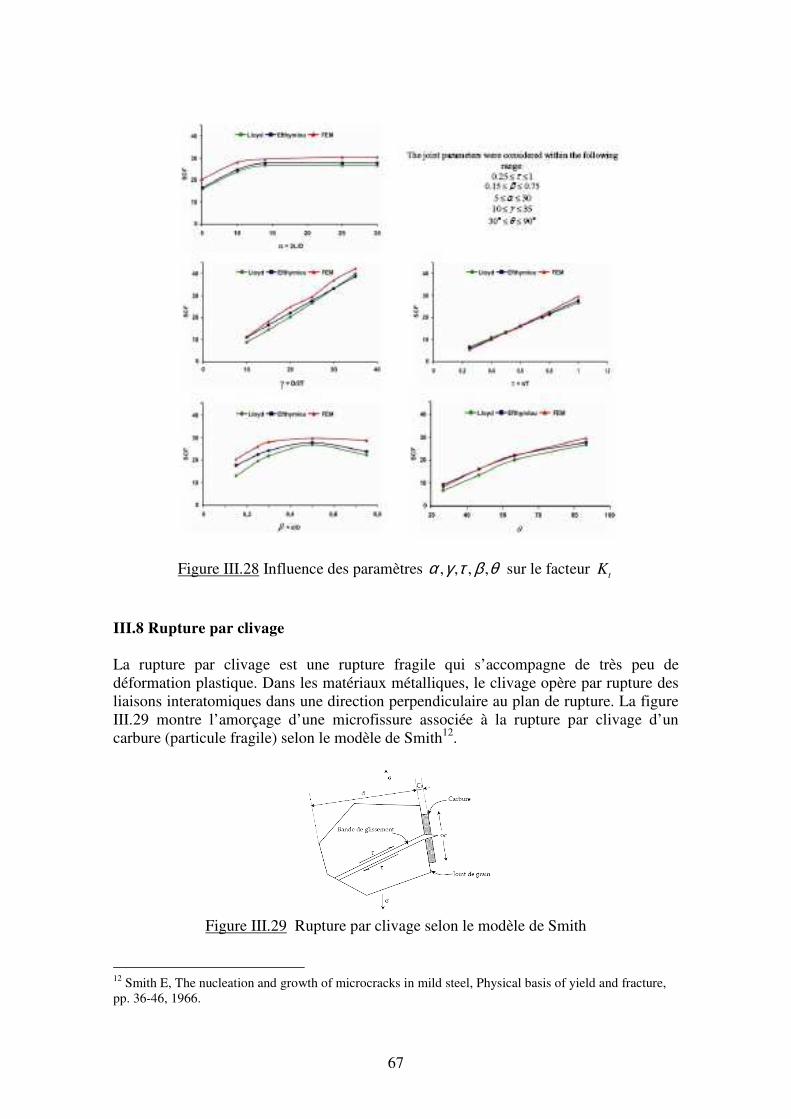
67
Figure III.28 Influence des paramètres , , , ,α γ τ β θ sur le facteur tK
III.8 Rupture par clivage
La rupture par clivage est une rupture fragile qui s’accompagne de très peu de
déformation plastique. Dans les matériaux métalliques, le clivage opère par rupture des
liaisons interatomiques dans une direction perpendiculaire au plan de rupture. La figure
III.29 montre l’amorçage d’une microfissure associée à la rupture par clivage d’un
carbure (particule fragile) selon le modèle de Smith12
.
Figure III.29 Rupture par clivage selon le modèle de Smith
12
Smith E, The nucleation and growth of microcracks in mild steel, Physical basis of yield and fracture,
pp. 36-46, 1966.
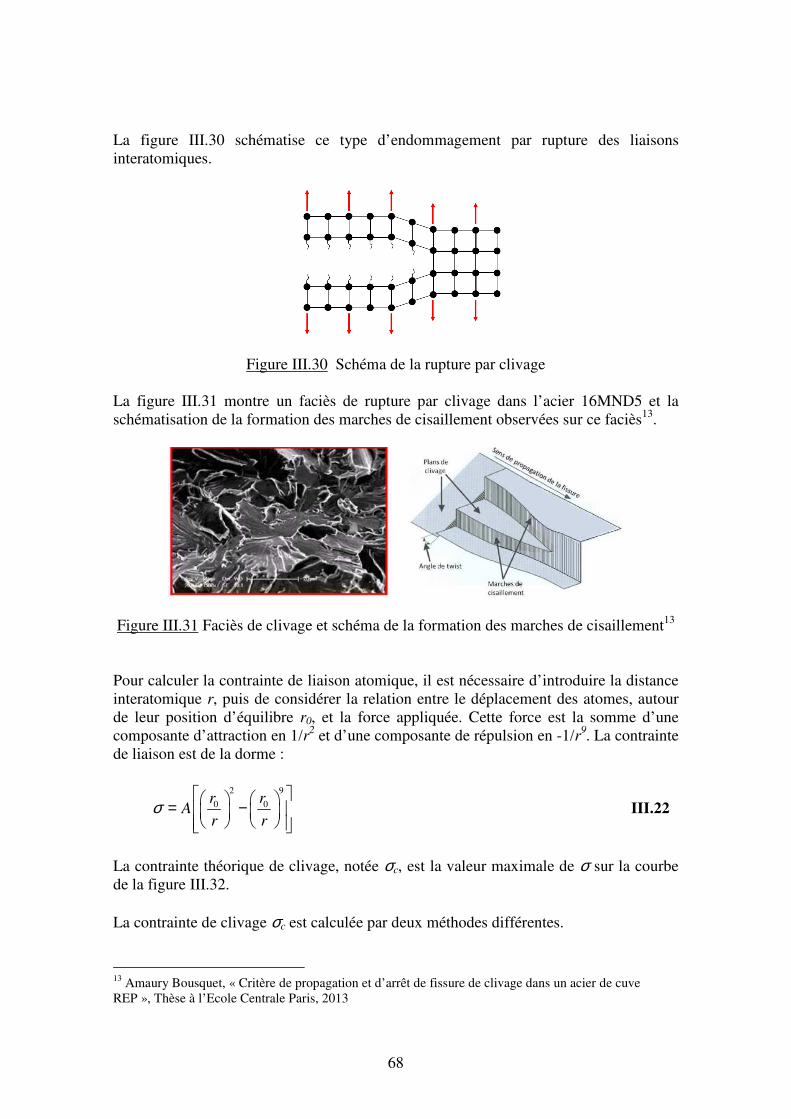
68
La figure III.30 schématise ce type d’endommagement par rupture des liaisons
interatomiques.
Figure III.30 Schéma de la rupture par clivage
La figure III.31 montre un faciès de rupture par clivage dans l’acier 16MND5 et la
schématisation de la formation des marches de cisaillement observées sur ce faciès13
.
Figure III.31 Faciès de clivage et schéma de la formation des marches de cisaillement13
Pour calculer la contrainte de liaison atomique, il est nécessaire d’introduire la distance
interatomique r, puis de considérer la relation entre le déplacement des atomes, autour
de leur position d’équilibre r0, et la force appliquée. Cette force est la somme d’une
composante d’attraction en 1/r2 et d’une composante de répulsion en -1/r
9. La contrainte
de liaison est de la dorme :
2 9
0 0r rA
r rσ
= −
III.22
La contrainte théorique de clivage, notée σc, est la valeur maximale de σ sur la courbe
de la figure III.32.
La contrainte de clivage σc est calculée par deux méthodes différentes.
13
Amaury Bousquet, « Critère de propagation et d’arrêt de fissure de clivage dans un acier de cuve
REP », Thèse à l’Ecole Centrale Paris, 2013
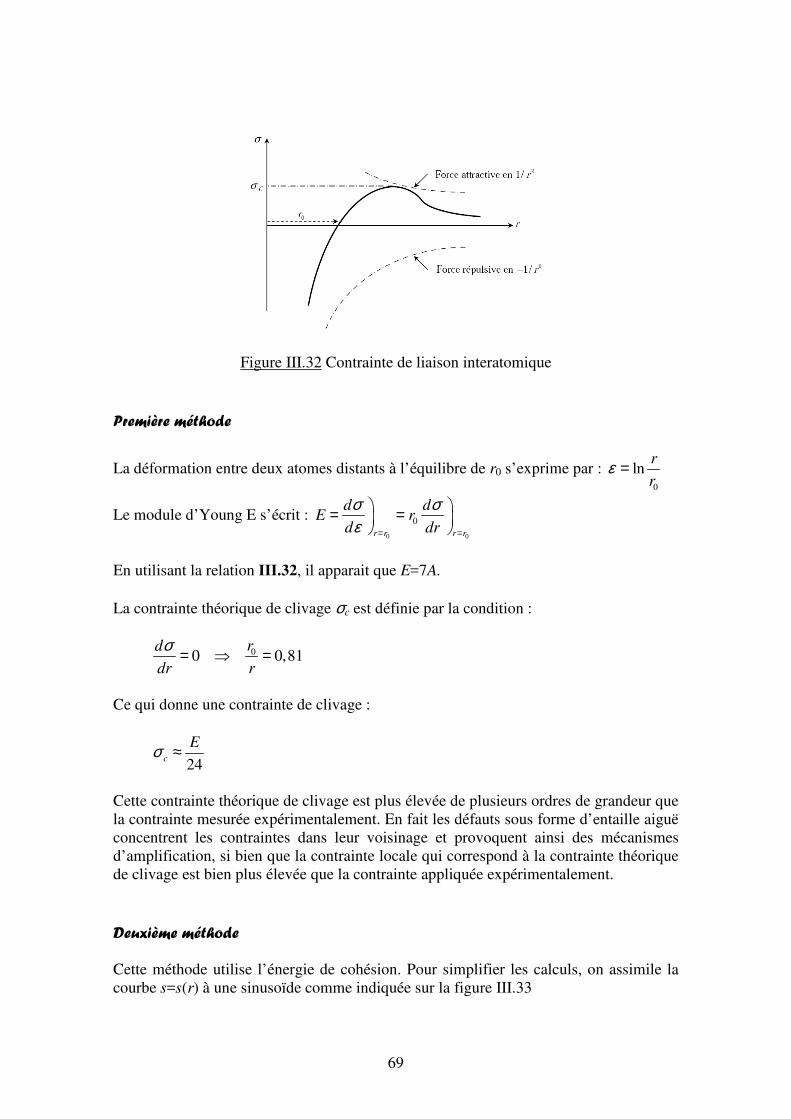
69
Figure III.32 Contrainte de liaison interatomique
Première méthode
La déformation entre deux atomes distants à l’équilibre de r0 s’exprime par : 0
lnr
rε =
Le module d’Young E s’écrit :
0 0
0
r r r r
d dE r
d dr
σ σε = =
= =
En utilisant la relation III.32, il apparait que E=7A.
La contrainte théorique de clivage σc est définie par la condition :
00 0,81rd
dr r
σ = ⇒ =
Ce qui donne une contrainte de clivage :
24c
Eσ ≈
Cette contrainte théorique de clivage est plus élevée de plusieurs ordres de grandeur que
la contrainte mesurée expérimentalement. En fait les défauts sous forme d’entaille aiguë
concentrent les contraintes dans leur voisinage et provoquent ainsi des mécanismes
d’amplification, si bien que la contrainte locale qui correspond à la contrainte théorique
de clivage est bien plus élevée que la contrainte appliquée expérimentalement.
Deuxième méthode
Cette méthode utilise l’énergie de cohésion. Pour simplifier les calculs, on assimile la
courbe s=s(r) à une sinusoïde comme indiquée sur la figure III.33
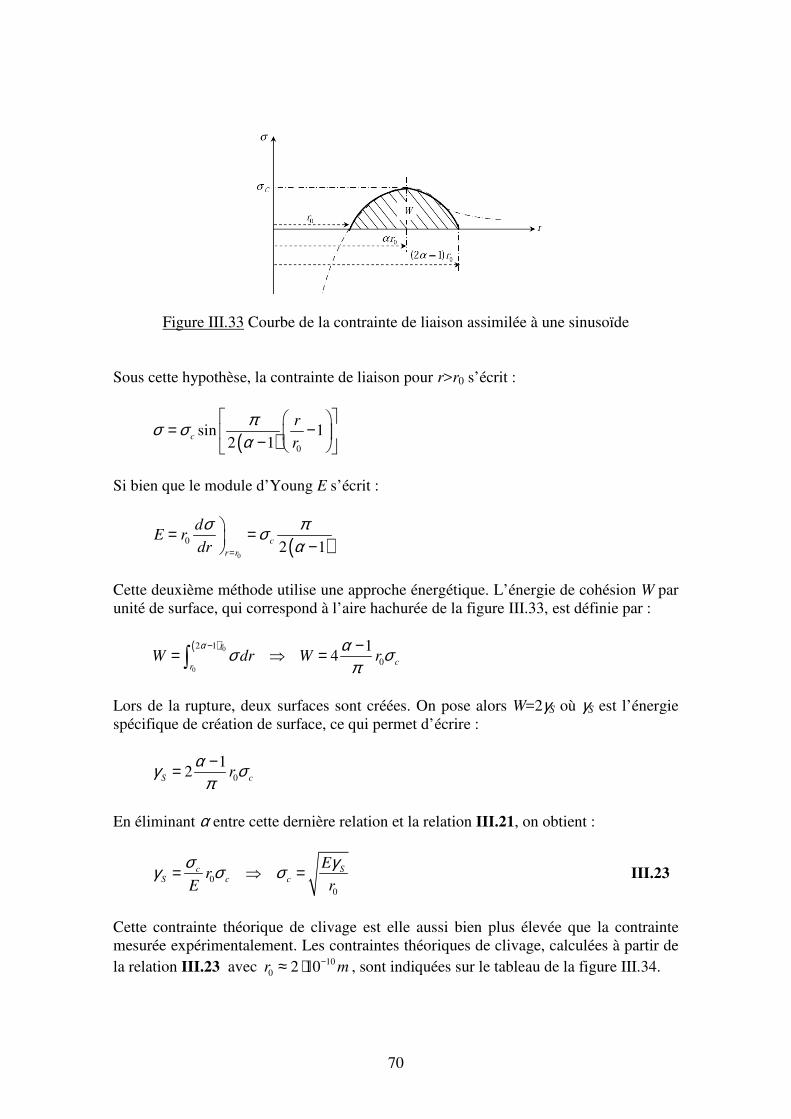
70
Figure III.33 Courbe de la contrainte de liaison assimilée à une sinusoïde
Sous cette hypothèse, la contrainte de liaison pour r>r0 s’écrit :
( ) 0
sin 12 1
c
r
r
πσ σα
= − −
Si bien que le module d’Young E s’écrit :
( )0
02 1
c
r r
dE r
dr
σ πσα=
= = −
Cette deuxième méthode utilise une approche énergétique. L’énergie de cohésion W par
unité de surface, qui correspond à l’aire hachurée de la figure III.33, est définie par :
( ) 0
0
2 1
0
14
r
cr
W dr W rα ασ σ
π− −= ⇒ =∫
Lors de la rupture, deux surfaces sont créées. On pose alors W=2γS où γS est l’énergie
spécifique de création de surface, ce qui permet d’écrire :
0
12S cr
αγ σπ−=
En éliminant α entre cette dernière relation et la relation III.21, on obtient :
0
0
c SS c c
Er
E r
σ γγ σ σ= ⇒ = III.23
Cette contrainte théorique de clivage est elle aussi bien plus élevée que la contrainte
mesurée expérimentalement. Les contraintes théoriques de clivage, calculées à partir de
la relation III.23 avec 10
0 2 10r m−≈ ⋅ , sont indiquées sur le tableau de la figure III.34.
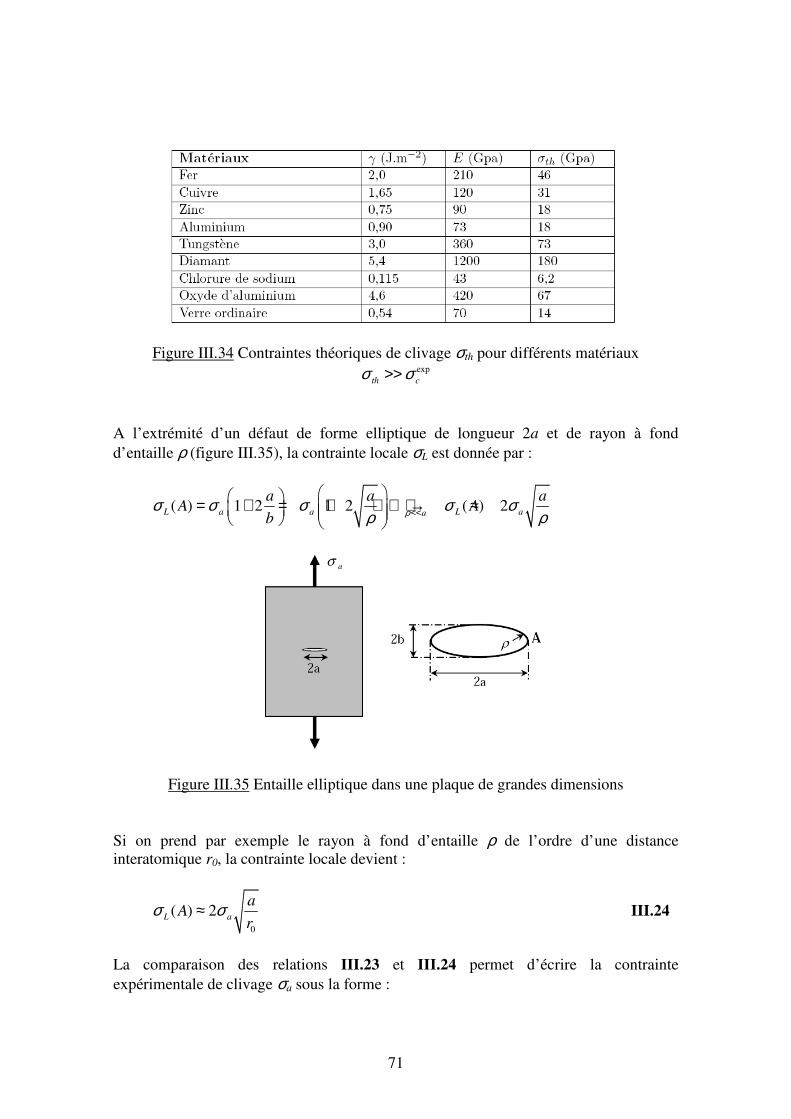
71
Figure III.34 Contraintes théoriques de clivage σth pour différents matériaux exp
th cσ σ>>
A l’extrémité d’un défaut de forme elliptique de longueur 2a et de rayon à fond
d’entaille ρ (figure III.35), la contrainte locale σL est donnée par :
( ) 1 2 1 2 ( ) 2L a a L aa
a a aA A
bρσ σ σ σ σ
ρ ρ<<
= + = + → ≈
Figure III.35 Entaille elliptique dans une plaque de grandes dimensions
Si on prend par exemple le rayon à fond d’entaille ρ de l’ordre d’une distance
interatomique r0, la contrainte locale devient :
0
( ) 2L a
aA
rσ σ≈ III.24
La comparaison des relations III.23 et III.24 permet d’écrire la contrainte
expérimentale de clivage σa sous la forme :

72
4
Sa
E
a
γσ ≈
Cette approximation est une estimation de la contrainte de rupture expérimentale par
clivage. Mais à l’échelle atomique, le milieu ne peut être considéré comme continu ;
des simulations numériques où les liaisons entre atomes sont modélisées par des ressorts
non linéaires, montrent que cette contrainte est de la forme :
1 avec 1
2
Sa
E
a
γσ β β≈ < <

73
Chapitre IV Intensification des contraintes près des fissures
IV.1 Introduction
La concentration des contraintes au voisinage d’une entaille, étudiée dans le chapitre
précédent, a permis d’introduire le facteur de concentration des contraintes tK , un
paramètre important pour caractériser la sévérité d’une entaille. Ce paramètre est défini
pour une plaque percée d’un trou de forme elliptique à partir des longueurs 2a et 2b
des petit axe et grand axe de l’ellipse, ou de a et du rayon à fond d’entaille 2 /b aρ = :
1 2t
aK
b= + ou 1 2t
aK
ρ= + IV.1
Une fissure peut être considérée comme une entaille elliptique très aplatie, c'est-à-dire
avec b a<< ou encore aρ << . Dans ces conditions, tK → ∞ et le concept de facteur
de concentration des contraintes ne peut alors décrire la répartition des contraintes à
l’extrémité d’une fissure. Il est donc nécessaire d’introduire un nouveau paramètre pour
caractériser cette répartition : s’appuyant sur les travaux de Westergaard1, Irwin
2
proposa le concept de Facteur d’Intensité des Contraintes (FIC). L’application du
concept de FIC à la description de la propagation des fissures est appelée communément
Mécanique Linéaire de La Rupture.
L’utilisation du FIC comme paramètre unique pour décrire la répartition des contraintes
au voisinage d’une fissure est justifiée par les similitudes que l’on peut observer entre
différentes fissures soumises à des contraintes de traction. La figure IV.1 montre des
clichés obtenus par la méthode photo-élastique pour trois fissures différentes dans une
plaque chargée en traction. Ces clichés montrent des franges très similaires, ce qui
suggère qu’il en est de même de la répartition des contraintes aux extrémités de ces
fissures.
Le concept de FIC est présenté dans ce chapitre. Pour la détermination théorique du
champ des contraintes et des déplacements à l’extrémité d’une fissure, on utilise
l’approche de Westergaard qui s’appuie sur la méthode de fonction d’Airy décrite par
les potentiels complexes étudiés au chapitre II.
L’approche de Westergaard considère une fissure dans un milieu infini et s’intéresse au
voisinage immédiat de l’extrémité d’une fissure. Les champs de contraintes et de
déplacements, valables uniquement dans ce voisinage immédiat, sont appelés champs
asymptotiques.
1 H.M. Westergaard, Bearing pressures and cracks, Journal of Applied Mechanics, p. A49-A53, 1939
2 G.R. Irwin, Analysis of Stresses and Strains near the end of a crack traversing a plate, , Journal of
Applied Mechanics, p. 361-364, 1957
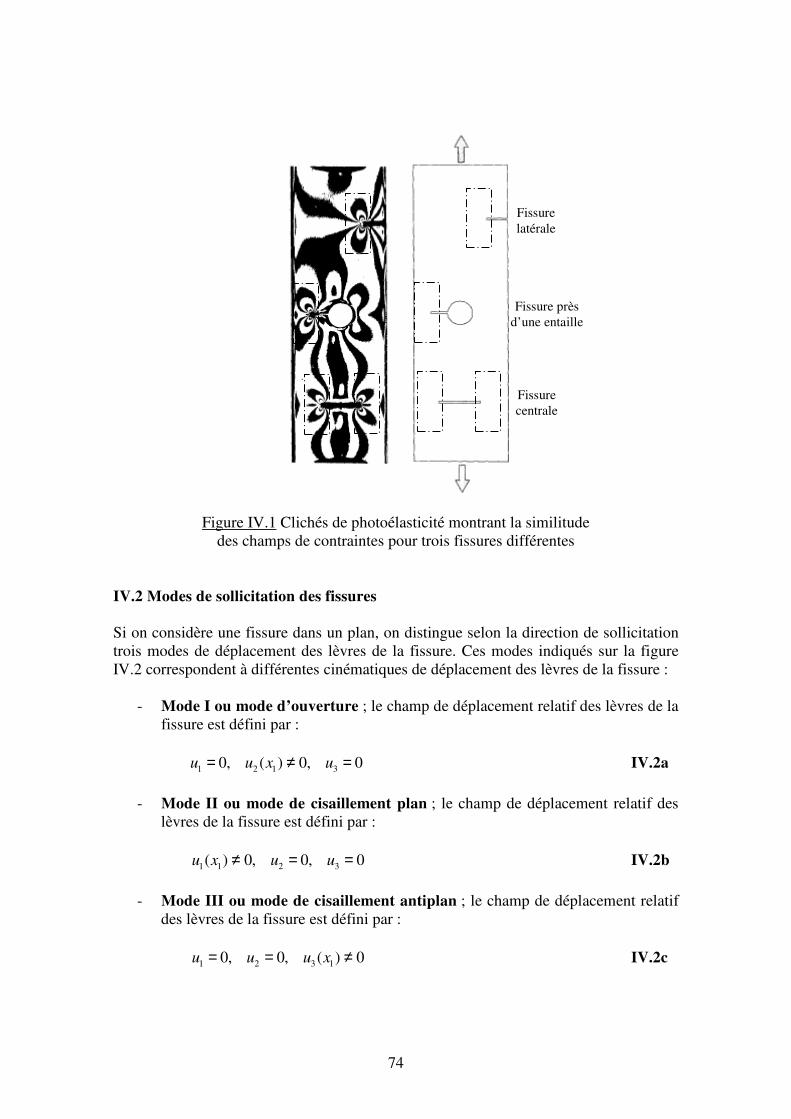
74
Figure IV.1 Clichés de photoélasticité montrant la similitude
des champs de contraintes pour trois fissures différentes
IV.2 Modes de sollicitation des fissures
Si on considère une fissure dans un plan, on distingue selon la direction de sollicitation
trois modes de déplacement des lèvres de la fissure. Ces modes indiqués sur la figure
IV.2 correspondent à différentes cinématiques de déplacement des lèvres de la fissure :
- Mode I ou mode d’ouverture ; le champ de déplacement relatif des lèvres de la
fissure est défini par :
1 2 1 30, ( ) 0, 0u u x u= ≠ = IV.2a
- Mode II ou mode de cisaillement plan ; le champ de déplacement relatif des
lèvres de la fissure est défini par :
1 1 2 3( ) 0, 0, 0u x u u≠ = = IV.2b
- Mode III ou mode de cisaillement antiplan ; le champ de déplacement relatif
des lèvres de la fissure est défini par :
1 2 3 10, 0, ( ) 0u u u x= = ≠ IV.2c
Fissure
latérale
Fissure
centrale
Fissure près
d’une entaille
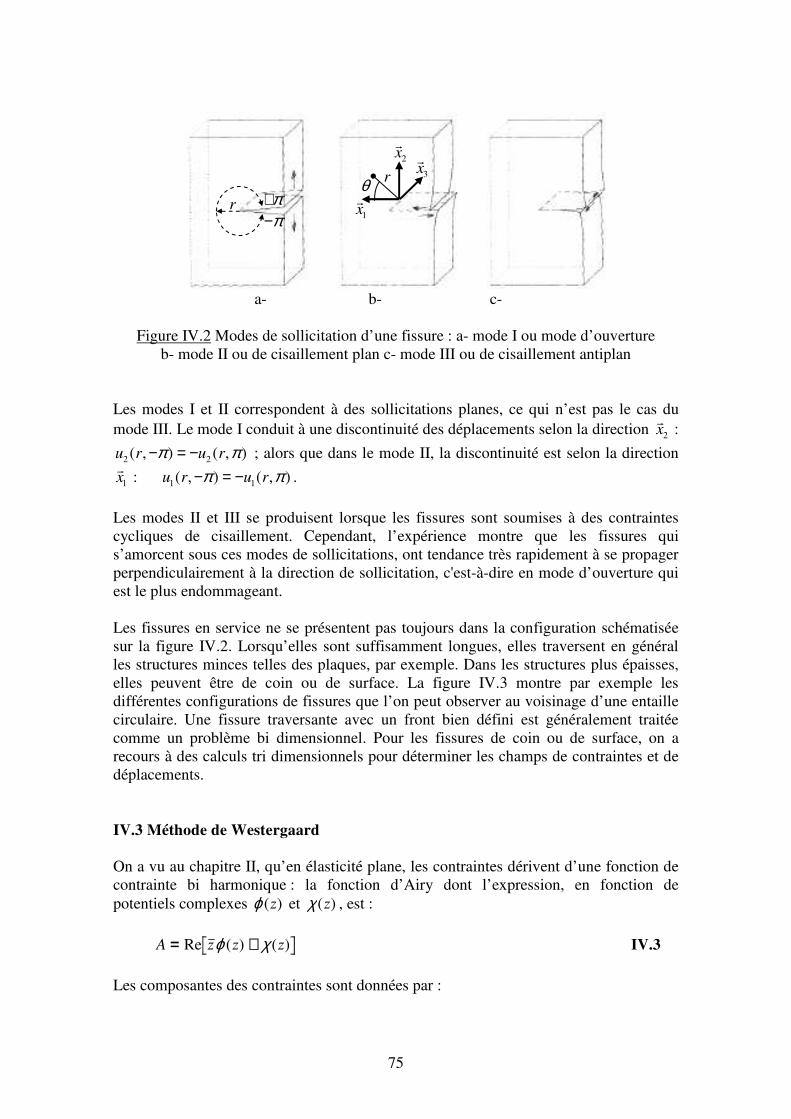
75
a- b- c-
Figure IV.2 Modes de sollicitation d’une fissure : a- mode I ou mode d’ouverture
b- mode II ou de cisaillement plan c- mode III ou de cisaillement antiplan
Les modes I et II correspondent à des sollicitations planes, ce qui n’est pas le cas du
mode III. Le mode I conduit à une discontinuité des déplacements selon la direction 2x�
:
2 2( , ) ( , )u r u rπ π− = − ; alors que dans le mode II, la discontinuité est selon la direction
1x�
: 1 1( , ) ( , )u r u rπ π− = − .
Les modes II et III se produisent lorsque les fissures sont soumises à des contraintes
cycliques de cisaillement. Cependant, l’expérience montre que les fissures qui
s’amorcent sous ces modes de sollicitations, ont tendance très rapidement à se propager
perpendiculairement à la direction de sollicitation, c'est-à-dire en mode d’ouverture qui
est le plus endommageant.
Les fissures en service ne se présentent pas toujours dans la configuration schématisée
sur la figure IV.2. Lorsqu’elles sont suffisamment longues, elles traversent en général
les structures minces telles des plaques, par exemple. Dans les structures plus épaisses,
elles peuvent être de coin ou de surface. La figure IV.3 montre par exemple les
différentes configurations de fissures que l’on peut observer au voisinage d’une entaille
circulaire. Une fissure traversante avec un front bien défini est généralement traitée
comme un problème bi dimensionnel. Pour les fissures de coin ou de surface, on a
recours à des calculs tri dimensionnels pour déterminer les champs de contraintes et de
déplacements.
IV.3 Méthode de Westergaard
On a vu au chapitre II, qu’en élasticité plane, les contraintes dérivent d’une fonction de
contrainte bi harmonique : la fonction d’Airy dont l’expression, en fonction de
potentiels complexes ϕ( )z et χ( )z , est :
A z z z= +Re ( ) ( )ϕ χ IV.3
Les composantes des contraintes sont données par :
1x�
2x�
3x�
θ
r
r π+
π−
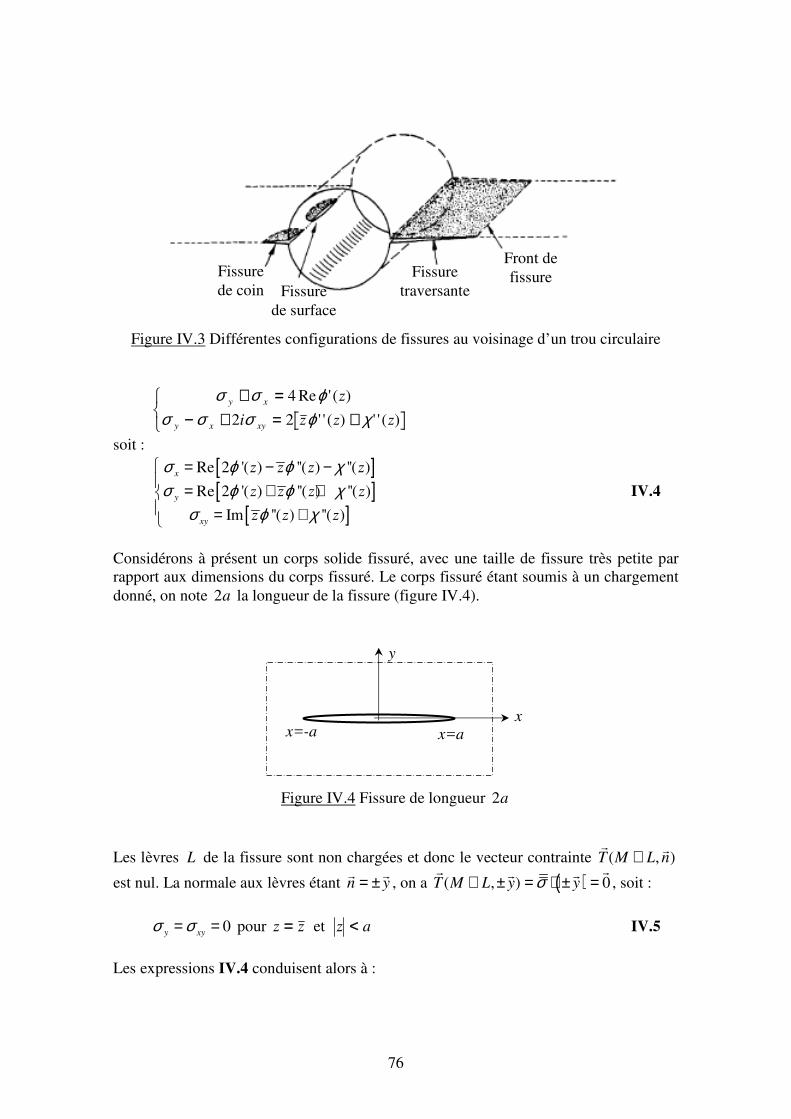
76
Figure IV.3 Différentes configurations de fissures au voisinage d’un trou circulaire
σ σ ϕσ σ σ ϕ χ
y x
y x xy
z
i z z z
+ =− + = +
RST4
2 2
Re '( )
' ' ( ) ' ' ( )
soit :
[ ][ ]
[ ]
Re 2 '( ) ''( ) ''( )
Re 2 '( ) ''( ) ''( )
Im ''( ) ''( )
x
y
xy
z z z z
z z z z
z z z
σ ϕ ϕ χσ ϕ ϕ χ
σ ϕ χ
= − − = + + = +
IV.4
Considérons à présent un corps solide fissuré, avec une taille de fissure très petite par
rapport aux dimensions du corps fissuré. Le corps fissuré étant soumis à un chargement
donné, on note 2a la longueur de la fissure (figure IV.4).
Figure IV.4 Fissure de longueur 2a
Les lèvres L de la fissure sont non chargées et donc le vecteur contrainte ( , )T M L n∈� �
est nul. La normale aux lèvres étant n y= ±� �, on a ( )( , ) 0T M L y yσ∈ ± = ⋅ ± =
�� � �, soit :
0y xyσ σ= = pour z z z a= < et IV.5
Les expressions IV.4 conduisent alors à :
Fissure
traversante
Front de
fissure Fissure
de coin Fissure
de surface
x=a x=-a x
y

77
Re '( ) ' ' ( ) ' ' ( )
Im ' ' ( ) ' ' ( )
2 0
0
ϕ ϕ χϕ χ
z z z z
z z z
+ + =+ =
RST
On en déduit donc que sur les lèvres L de la fissure :
2 '( ) ''( ) ''( ) est imaginaire pur
''( ) ''( ) est réel pur
z z z z
z z z
ϕ ϕ χϕ χ+ +
+
Soit Re( ' ( )) ' ' ( ) ' ' ( )2ϕ ϕ χz z z z= − − .
La fonction ( )zϕ peut alors être décomposée en deux fonctions 1( )zϕ et 2 ( )zϕ comme
suit :
1 2
2
2
' '' ''z
ϕ ϕϕ
ϕ ϕ χ
+ = = − −
avec ϕ
ϕ1
2
( )
( )
z
z
(et ses dérivées) imaginaires sur la fissure
(et ses dérivées) réelles sur la fissure
RST
En intégrant la relation ( )2 2'' '' ' ' ' 'z d zχ ϕ ϕ ϕ ϕ ϕ= − − = − + − , on obtient :
2 2 1' ' ( ) 2 ( )z d z d zχ ϕ ϕ ϕ ϕ ϕ ϕ ϕ ϕ= − + − = − + − = − +
d’où
χ ϕ ϕ( )z z dz= − + z 1 IV.6
Compte tenu de IV.6, les relations IV.3 et IV.4 deviennent :
A z z dz= − + zRe ϕ ϕ ϕ 1 IV.7
et
[ ][ ][ ]
1 2
1
2
Re ' 2 ' '' ''
Re ' '' ''
Im '' '' '
x
y
xy
z z
z z
z z
σ ϕ ϕ ϕ ϕσ ϕ ϕ ϕσ ϕ ϕ ϕ
= + − + = + − = − −
IV.8
En faisant z x iy z x iy= + = − et , les relations IV.7 et IV.8 deviennent :
A dz y y= + +zRe Im Imϕ ϕ ϕ1 1 2 IV.9
et
σ ϕ ϕ ϕ ϕσ ϕ ϕ ϕ
σ ϕ ϕ ϕ
x
y
xy
y y
y y
y y
= − + −= + +
= − − −
RS|
T|
Re ' Im ' ' Re ' Im ' '
Re ' Im ' ' Im ' '
Re ' ' Re ' ' Im '
1 1 2 2
1 1 2
1 2 2
2
IV.10

78
On peut donc considérer que le champ des contraintes σ est la superposition de deux
champs σ σ1 2 et dérivant de deux fonctions d’Airy :
1 1
2
Re Im
Im
I
II
A dz y
A y
ϕ ϕ
ϕ
= +
=
∫ ¨ IV.11
Le champ engendré par IA correspond en fait au mode I de sollicitation et celui
engendré par IIA au mode II. On confirmera a posteriori cette assertion après calcul des
déplacements et vérification des conditions limites sur les lèvres de la fissure.
La méthode de Westergaard consiste précisément à décomposer le déplacement que
subit la fissure en modes I et II de sollicitation.
Westergaard définit pour ces modes, les fonctions analytiques suivantes :
1( ) ' ( )IZ z zϕ= IV.12a
2( ) ' ( )IIZ z i zϕ= IV.12b
Pour tout chargement combinant à la fois le mode I et le mode II, la fonction de
Westergaard ( )Z z s’écrit :
1 2( ) ( ) ( ) ' ( ) ' ( )I IIZ z Z z Z z z i zϕ ϕ= + = +
Cet auteur note ensuite Z Z' , ' '… les dérivées successives de la fonction Z z( ) , et
Z Z, … ses primitives successives.
Avec ces notations, les deux fonctions d’Airy données par les relations IV.11
deviennent :
Re ImI I IA Z y Z= + IV.13a
2Im Im ReII II IIA y y iZ y Zϕ= = − = − ** IV.13b
La fonction d’Airy A a la dimension d’une force ; la fonction Z a donc la dimension
d’une contrainte pour assurer l’homogénéité de la relation IV.13a.
** Tout nombre complexe ℂ peut s’écrire sous la forme : Re Imi= +ℂ ℂ ℂ et Im Rei i= − +ℂ ℂ ℂ ,
d’où Re Imi = −ℂ ℂ et Im Rei =ℂ ℂ .

79
IV.4 Expressions des contraintes et des déplacements
Les expressions des contraintes se déduisent directement des relations IV.10 : elles
diffèrent selon le mode de sollicitation. Les expressions des déplacements différent
également en fonction du mode de sollicitation et selon qu’on est en présence d’un état
de déformations planes ou de contraintes planes.
La différence entre ces deux états est liée aux équations de comportement (relations
II.10a et II.10b du chapitre II) donnant les composantes du tenseur ε des déformations
en fonction de celles du tenseur σ des contraintes. On peut regrouper ces relations et
écrire la loi de Hooke sous la forme suivante :
( )( )
2 1 * *
2 1 * *
2
x x y
y y x
xy xy
µε υ σ υ σµε υ σ υ σ
µε σ
= − − = − − =
IV.14a
avec
* en déformations planes
* en contraintes planes 1
υ υυυ
υ
= = +
IV.14b
Avant d’effectuer les calculs, il convient de rappeler que pour toute fonction analytique
( )g z , on a :
Re Img i g i gα β= + = +
'dg g g
g idz x y
∂ ∂= = = −∂ ∂
d’où i ix x y y
α β α β∂ ∂ ∂ ∂+ = − +∂ ∂ ∂ ∂
Il s’ensuit donc que :
Re ' Re Im
Im ' Im Re
g g gx y
g g gx y
∂ ∂ = = ∂ ∂ ∂ ∂ = = − ∂ ∂
III.15
IV.4.1 Mode I d’ouverture
Expressions des contraintes
D’après la relation IV.10, les contraintes en mode I sont données par :

80
1 1
1 1
1
Re ' Im ''
Re ' Im ''
Re ''
x
y
xy
y
y
y
σ ϕ ϕσ ϕ ϕ
σ ϕ
= − = + = −
Soit compte tenu de la relation IV.12a :
σσ
σ
x I I
y I I
xy I
Z y Z
Z y Z
y Z
= −= +
= −
RS|
T|
Re Im '
Re Im '
Re '
IV.16
Expressions des déplacements
On a d’après la loi de Hooke et compte tenu de la relation IV.16 :
2 2 (1 *) * (1 2 *) Re Im 'xx x y I I
uZ y Z
xµε µ υ σ υ σ υ∂= = − − = − −
∂
Il vient alors compte tenu des règles de dérivation IV.15 :
2 (1 2 *) Re Imx I Iu Z y Zµ υ= − − IV.17
La déformation yε est donnée quant à elle par :
2 2 (1 *) * (1 2 *) Re Im 'y
y y x I I
uZ y Z
yµε µ υ σ υ σ υ
∂= = − − = − +
∂
Les règles de dérivation IV.15 permettent d’écrire :
Re ImI IZ Zy
∂=∂
et Im ' ReI IZ Zy
∂= −∂
( ) ( )Im ' Re Re Re ImI I I I Iy Z y Z Z y Z Zy y
∂ ∂= − + = − −∂ ∂
d’où
2 2(1 *) Im Rey I Iu Z y Zµ υ= − − IV.18
IV.4.2 Mode II de cisaillement plan
Expressions des contraintes
D’après la relation IV.10, les contraintes en mode II sont données par :

81
2 2
2
2 2
2Re ' Im ''
Im ''
Im ' Re ''
x
y
xy
y
y
y
σ ϕ ϕσ ϕ
σ ϕ ϕ
= − = = − −
Comme d’après la relation IV.12b 2' IIiZϕ = − , il vient :
2 Im Re '
Re '
Re Im '
x II II
y II
xy II II
Z y Z
y Z
Z y Z
σσ
σ
= + = − = −
IV.19
Expressions des déplacements
2 (1 *) * 2(1 *) Im Re 'x x y II IIZ y Zµε υ σ υ σ υ= − − = − +
d’où
2 2(1 *) Im Rex II IIu Z y Zµ υ= − + IV.20
et
( )2 (1 *) 2 *Im Re 'y y x II IIZ y Zµε υ σ υσ υ= − − = − +
avec
Im ReII IIZ Zy
∂= −∂
, Re ' ImII IIZ Zy
∂=∂
et ( )Re ' Im ReII II IIy Z y Z Zy
∂= +∂
d’où
( )2 (1 2 *) Re Imy II IIu Z y Zµ υ= − − + IV.21
IV.5 Expressions des contraintes et des déplacements à partir du facteur
d’intensité des contraintes
Il convient dans un premier temps de déterminer les fonctions analytiques IZ et IIZ
introduites par Westergaard. Considérons par exemple la fonction IZ (le raisonnement
est applicable au mode II aussi) et examinons les conditions limites au voisinage des
extrémités d’une petite fissure de longueur 2a sollicitée en mode I (figure IV.5).
Sur le plan de la fissure, c’est à dire pour y=0, on a d’après les relations IV.16 :
σ σσ
x y I
xy
Z= ==
RSTRe
0 IV.22a
Les lèvres de la fissure étant non chargées, les conditions limites (relation IV.5) sont :
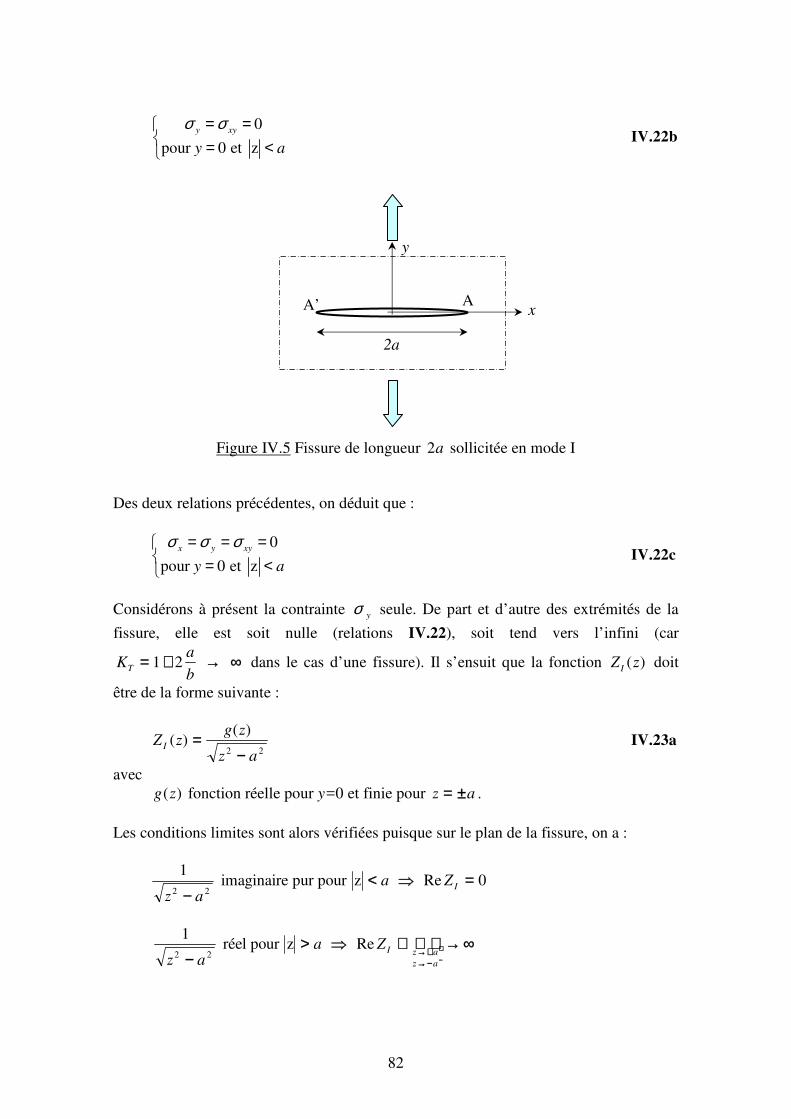
82
0
pour 0 et z
y xy
y a
σ σ= = = <
IV.22b
Figure IV.5 Fissure de longueur 2a sollicitée en mode I
Des deux relations précédentes, on déduit que :
0
pour 0 et z
x y xy
y a
σ σ σ= = = = <
IV.22c
Considérons à présent la contrainte σ y seule. De part et d’autre des extrémités de la
fissure, elle est soit nulle (relations IV.22), soit tend vers l’infini (car
Ka
bT = + → ∞1 2 dans le cas d’une fissure). Il s’ensuit que la fonction ( )IZ z doit
être de la forme suivante :
Z zg z
z aI ( )
( )=−2 2
IV.23a
avec
( )g z fonction réelle pour y=0 et finie pour z a= ± .
Les conditions limites sont alors vérifiées puisque sur le plan de la fissure, on a :
10
2 2z aa Z I
−< ⇒ = imaginaire pur pour z Re
1
2 2z aa Z I z a
z a−> ⇒ → ∞→+
→−
+
−
réel pour z Re
x
y
2a
A A’

83
Les extrémités A et A’ ( z a= ± ) de la fissure jouent des rôles identiques. On ne
considérera par la suite que l’extrémité A( z a= + ), en effectuant une translation de
repère (figure IV.6) avec pour origine A. Cette translation équivaut au changement de
variable suivant :
ζ = −z a
Un point M sera repéré par rapport à l’extrémité A par ire θζ = .
Figure IV.6 Repérage autour de l’extrémité A
La fonction de contrainte de Westergaard s’écrit alors :
Zg
gI ( )( )
( )ζ ζζ
ζ α α ζ α ζ= = + + +1
1 0 1 2
2 avec … IV.23b
Comme on cherche à déterminer les champs de contraintes et de déplacements au
voisinage immédiat de l’extrémité A de la fissure (champs asymptotiques), c’est à dire
lorsque ζ → 0 , la fonction ( )IZ ζ peut s’écrire :
0( ) IZαζζ
≈ IV.23c
Le facteur d’intensité des contraintes (FIC) que l’on note IK en mode I d’ouverture,
est défini par :
0 0lim 2 ( ) ( ) lim 2 ( ) 2I z a I IK z a Z z Zζπ πζ ζ πα→ →= − = = IV.24
Et dans ces conditions la relation IV.23c s’écrit :
x
y
2a
M (ζ )
r θ A

84
( ) 2
II
KZ ζ
πζ= IV.25a
Comme la fonction de Westergaard Z a la dimension d’une contrainte, le FIC IK aura
pour dimension une contrainte longueur⋅ .
L’unité usuelle pour le FIC est le MPa m .
• Pour le mode de cisaillement plan (mode II), la même démarche que précédemment
conduit à un résultat similaire au voisinage immédiat de l’extrémité de la fissure :
( ) 2
IIII
KZ ζ
πζ= IV.25b
avec IIK facteur d’intensité des contraintes en mode II (cisaillement plan).
Expressions des contraintes et des déformations
A partir des relations IV.25a (ou IV.25b) avec ire θζ = , on déduit :
Re cos22
II
KZ
r
θπ
= , Im sin22
II
KZ
r
θπ
= −
3/ 2
1' ( )
2 2
II
KZ ζ
πζ= − ,
1 3Re ' cos
2 22
II
KZ
r r
θπ
= − , 1 3
Im ' sin2 22
II
KZ
r r
θπ
=
1/ 2( ) 2 2
II
KZ ζ ζ
π= , Re ( ) 2 cos
2 2I I
rZ K
θζπ
= , Im ( ) 2 sin 2 2
I I
rZ K
θζπ
=
A partir de ces grandeurs et en notant que sin 2 sin cos2 2
y r rθ θθ= = , on calcule les
contraintes et les déplacements (schématisés sur la figure IV.17) en se servant des
relations IV.16 à IV.21. Les résultats sont résumés ci-dessous :
Figure IV.7 Contraintes et déplacements au voisinage de l’extrémité d’une fissure
σ xx
σ yy
τ xy
x
y
θ r
x
y
θ r
( )u M�
xu yu
fissure
85
Mode I
Contraintes
3cos 1 sin sin
2 2 22
3cos 1 sin sin
2 2 22
3cos sin cos
2 2 22
Ix
Iy
Ixy
K
r
K
r
K
r
θ θ θσπ
θ θ θσπ
θ θ θσπ
= −
= +
=
IV.26a
Déplacements
2
2
2cos 1 2 * sin
2 2 2
2sin 2(1 *) cos
2 2 2
Ix
Iy
K ru
K ru
θ θυµ π
θ θυµ π
= − +
= − −
IV.26b**
Mode II
Contraintes
3sin 2 cos cos
2 2 22
3sin cos cos
2 2 22
3cos 1 sin sin
2 2 22
IIx
IIy
IIxy
K
r
K
r
K
r
θ θ θσπ
θ θ θσπ
θ θ θσπ
= − +
=
= −
IV.26c
Déplacements
2
2
2sin 2(1 *) cos
2 2 2
2cos 1 2 * sin
2 2 2
IIx
IIy
K ru
K ru
θ θυµ π
θ θυµ π
= − +
= − −
IV.26d**
** *υ υ= ou *1
υυυ
=+
pour respectivement un état de déformations ou de contraintes planes.
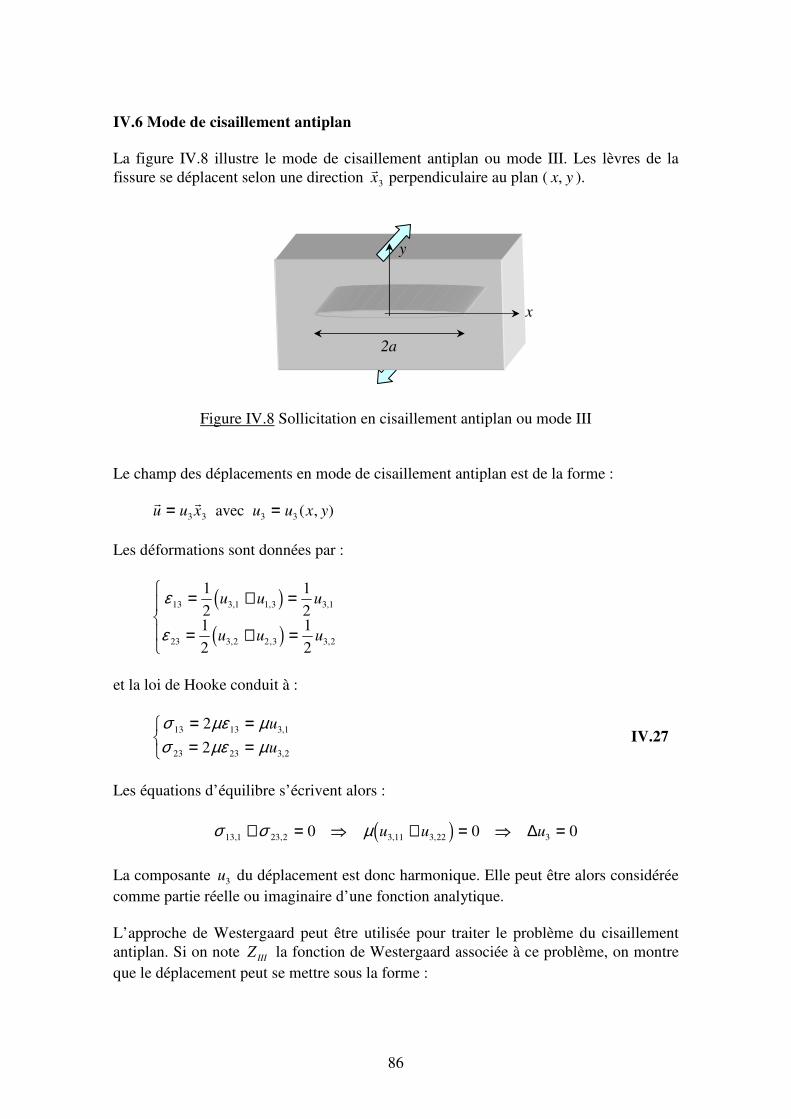
86
IV.6 Mode de cisaillement antiplan
La figure IV.8 illustre le mode de cisaillement antiplan ou mode III. Les lèvres de la
fissure se déplacent selon une direction �x3 perpendiculaire au plan ( ,x y ).
Figure IV.8 Sollicitation en cisaillement antiplan ou mode III
Le champ des déplacements en mode de cisaillement antiplan est de la forme :
� �u u x u u x y= =3 3 3 3 avec ( , )
Les déformations sont données par :
ε
ε
13 3 1 1 3 3 1
23 3 2 2 3 3 2
1
2
1
21
2
1
2
= + =
= + =
RS|
T|u u u
u u u
, , ,
, , ,
c hc h
et la loi de Hooke conduit à :
σ µε µσ µε µ
13 13 3 1
23 23 3 2
2
2
= == =
RSTu
u
,
,
IV.27
Les équations d’équilibre s’écrivent alors :
σ σ µ13 1 23 2 3 11 3 22 30 0 0, , , ,+ = ⇒ + = ⇒ =u u uc h ∆
La composante u3 du déplacement est donc harmonique. Elle peut être alors considérée
comme partie réelle ou imaginaire d’une fonction analytique.
L’approche de Westergaard peut être utilisée pour traiter le problème du cisaillement
antiplan. Si on note Z III la fonction de Westergaard associée à ce problème, on montre
que le déplacement peut se mettre sous la forme :
x
y
2a
87
u Z III3
1=µ
Im IV.28
Comme Z III est homogène à une contrainte, Z III est homogène à une
contrainte longueur⋅ , si bien que /IIIZ µ est homogène à une longueur donc pouvant
décrire un déplacement.
Des relations IV.27 et IV.28, on déduit :
σσ
13
23
==
RSTIm
Re
Z
Z
III
III
IV.29
La fonction Z III a la même forme que celles de IZ et IIZ données par les relations
IV.25 :
ZK
III
III=2πζ
IV.30
K III est le facteur d’intensité des contraintes en mode III.
Les contraintes et le déplacement s’écrivent compte tenu des relations IV.28 à IV.30 :
σπ
θ
σπ
θ
µ πθ
13
23
3
2 2
2 2
2
2
= −
=
=
R
S
|||
T
|||
K
rK
r
uK r
III
III
III
sin
cos
sin
IV.31
IV.7 Méthodes de calcul du facteur d’intensité des contraintes
Les relations IV.26 à IV.31 montrent que les champs des contraintes et des
déplacements sont décrits par un paramètre unique : le facteur d’intensité des
contraintes IK , IIK ou IIIK selon le mode de sollicitation. Il s’agit à présent de voir
comment ce paramètre s’exprime en fonction des données globales : géométrie
(longueur de la fissure et dimensions de la structure) et chargement appliqué à la
structure. Généralement, les expressions du Fic K ont la forme suivante :
aK a f
Wσ π =
III.32
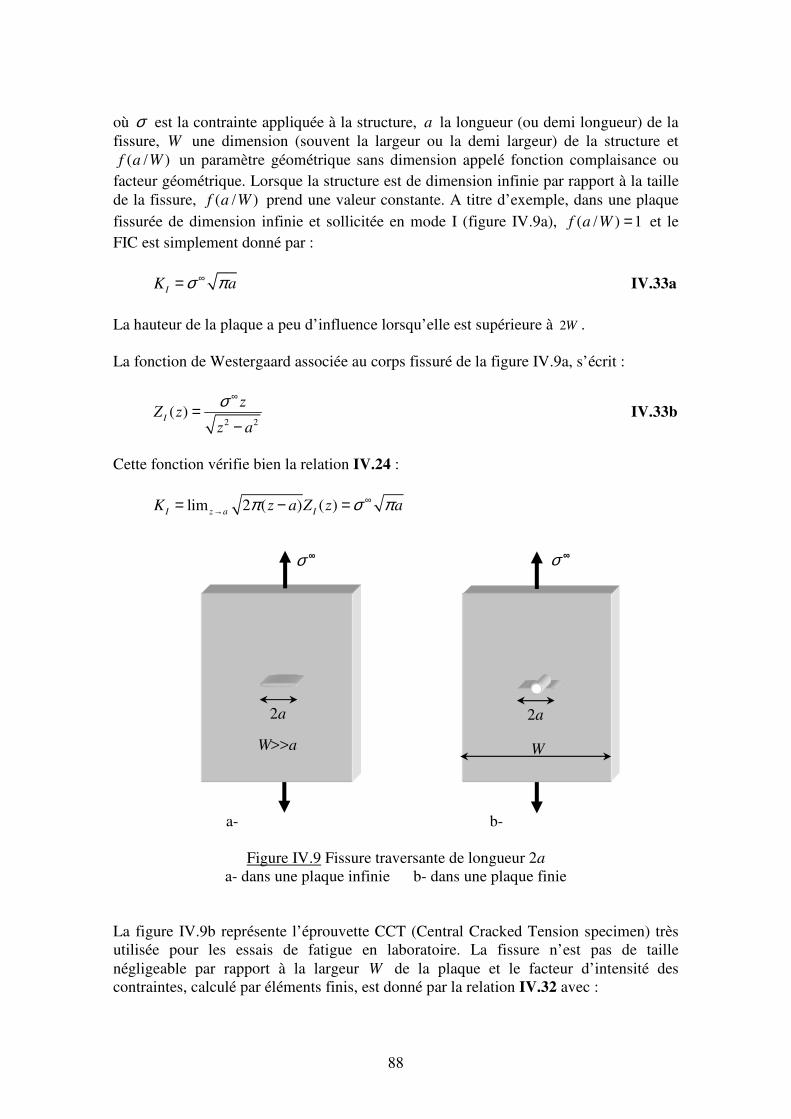
88
où σ est la contrainte appliquée à la structure, a la longueur (ou demi longueur) de la
fissure, W une dimension (souvent la largeur ou la demi largeur) de la structure et
( / )f a W un paramètre géométrique sans dimension appelé fonction complaisance ou
facteur géométrique. Lorsque la structure est de dimension infinie par rapport à la taille
de la fissure, ( / )f a W prend une valeur constante. A titre d’exemple, dans une plaque
fissurée de dimension infinie et sollicitée en mode I (figure IV.9a), ( / ) 1f a W = et le
FIC est simplement donné par :
IK aσ π∞= IV.33a
La hauteur de la plaque a peu d’influence lorsqu’elle est supérieure à 2W .
La fonction de Westergaard associée au corps fissuré de la figure IV.9a, s’écrit :
2 2( )I
zZ z
z a
σ ∞
=−
IV.33b
Cette fonction vérifie bien la relation IV.24 :
lim 2 ( ) ( )I z a IK z a Z z aπ σ π∞→= − =
a- b-
Figure IV.9 Fissure traversante de longueur 2a
a- dans une plaque infinie b- dans une plaque finie
La figure IV.9b représente l’éprouvette CCT (Central Cracked Tension specimen) très
utilisée pour les essais de fatigue en laboratoire. La fissure n’est pas de taille
négligeable par rapport à la largeur W de la plaque et le facteur d’intensité des
contraintes, calculé par éléments finis, est donné par la relation IV.32 avec :
σ ∞
2a
W
2a
σ ∞
W>>a

89
1/ 2 2 4
cos 1 0,1 0,96a a a a
fW W W W
π − = − + IV.34
Lorsque / 0a W → c'est-à-dire lorsque la plaque est très large, ( / ) 1f a W → et le FIC
IK est alors donné par la relation IV.33a.
Une autre éprouvette très utilisée pour les essais de fatigue est l’éprouvette CT
(Compact Tension specimen) représentée sur la figure IV.10a. Le FIC IK pour une
épaisseur d’éprouvette t , est donné par une relation de type IV.32 avec :
P
Wtσ ∞ =
et 2 3 4
3/ 2 1/ 2
2 0,866 4,64 13,32 14,72 5,6
1
a a a a a
W W W W Waf
W a a
W W
π
+ + − + − = −
IV.35
La figure IV.10b compare les variations de la fonction complaisance ( / )f a W des
éprouvettes CT et CCT. Dans l’éprouvette CT, une faible charge conduit à des valeurs
élevées du FIC IK ce qui est un avantage eu égard à la capacité des machines d’essai.
Cette éprouvette a une longueur de ligament ( 0W a− ) relativement importante : elle est
très utilisée dans l’étude de la propagation des fissures de fatigue et pour déterminer la
ténacité d’un matériau après pré fissuration de l’ordre de / 0,5a W ≈ .
Des manuels spécialisés donnent les expressions du FIC K en fonction du chargement
et des données géométriques pour de multiples configurations de fissures3,4,5
. Les
fonctions de complaisance ( / )f a W sont données à partir de relations empiriques de
type IV.34 ou IV.35. Elles sont généralement déterminées pour les plus anciennes par
photoélasticité, et depuis le développement des codes de calculs, par éléments finis. On
va citer quelques exemples les plus rencontrés dans la pratique.
Le FIC dans une plaque de grandes dimensions fissurée sur un bord (figure IV.11a) est
donné par :
1,12IK aσ π∞= IV.36
3 D.P. Rooke and D.J. Cartwright, Stress Intensity Factors, Her Majesty’s Stationnary Office, London,
1976 4 H. Tada, P.C. Paris and G.R Irwin, The Stress Analysis Handbook, 2
nd edition Paris Productions Inc.,
1985 5 Y. Murakawi, Stress Intensity Factors Handbook, Pergamon Press, Oxford, 1987
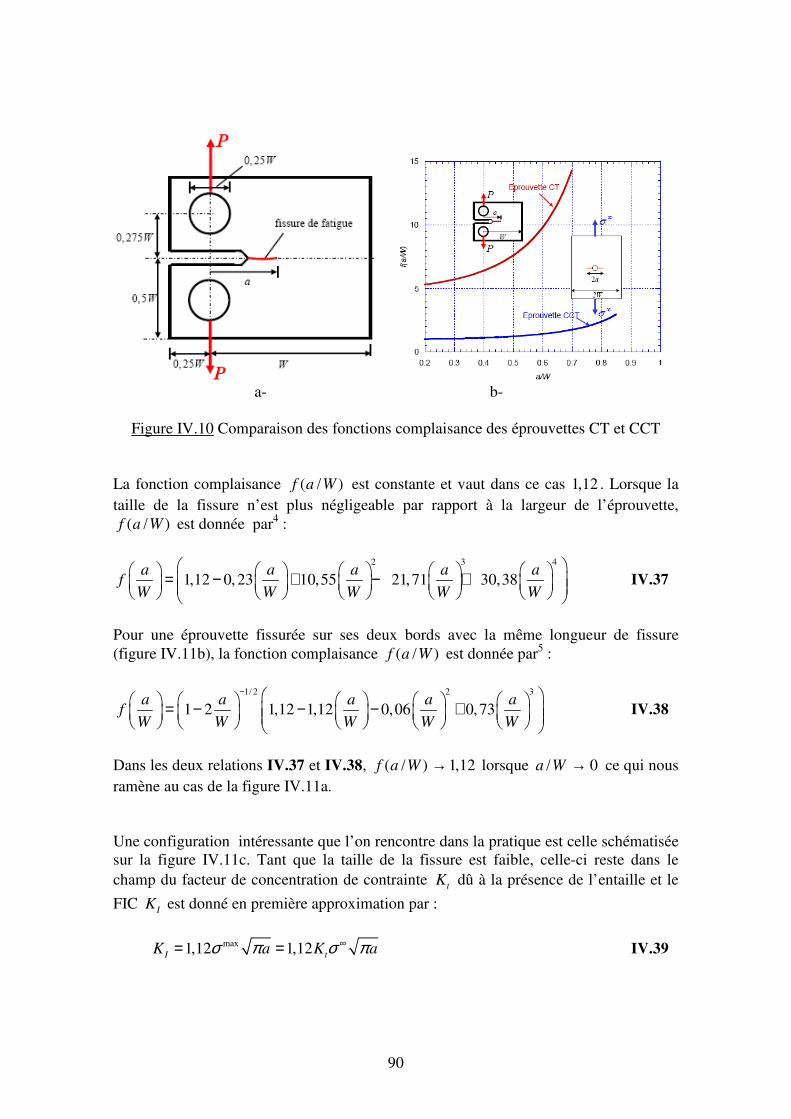
90
a- b-
Figure IV.10 Comparaison des fonctions complaisance des éprouvettes CT et CCT
La fonction complaisance ( / )f a W est constante et vaut dans ce cas 1,12 . Lorsque la
taille de la fissure n’est plus négligeable par rapport à la largeur de l’éprouvette,
( / )f a W est donnée par4 :
2 3 4
1,12 0, 23 10,55 21,71 30,38a a a a a
fW W W W W
= − + − + IV.37
Pour une éprouvette fissurée sur ses deux bords avec la même longueur de fissure
(figure IV.11b), la fonction complaisance ( / )f a W est donnée par5 :
1/ 2 2 3
1 2 1,12 1,12 0,06 0,73a a a a a
fW W W W W
− = − − − + IV.38
Dans les deux relations IV.37 et IV.38, ( / ) 1,12f a W → lorsque / 0a W → ce qui nous
ramène au cas de la figure IV.11a.
Une configuration intéressante que l’on rencontre dans la pratique est celle schématisée
sur la figure IV.11c. Tant que la taille de la fissure est faible, celle-ci reste dans le
champ du facteur de concentration de contrainte tK dû à la présence de l’entaille et le
FIC IK est donné en première approximation par :
max1,12 1,12I tK a K aσ π σ π∞= = IV.39
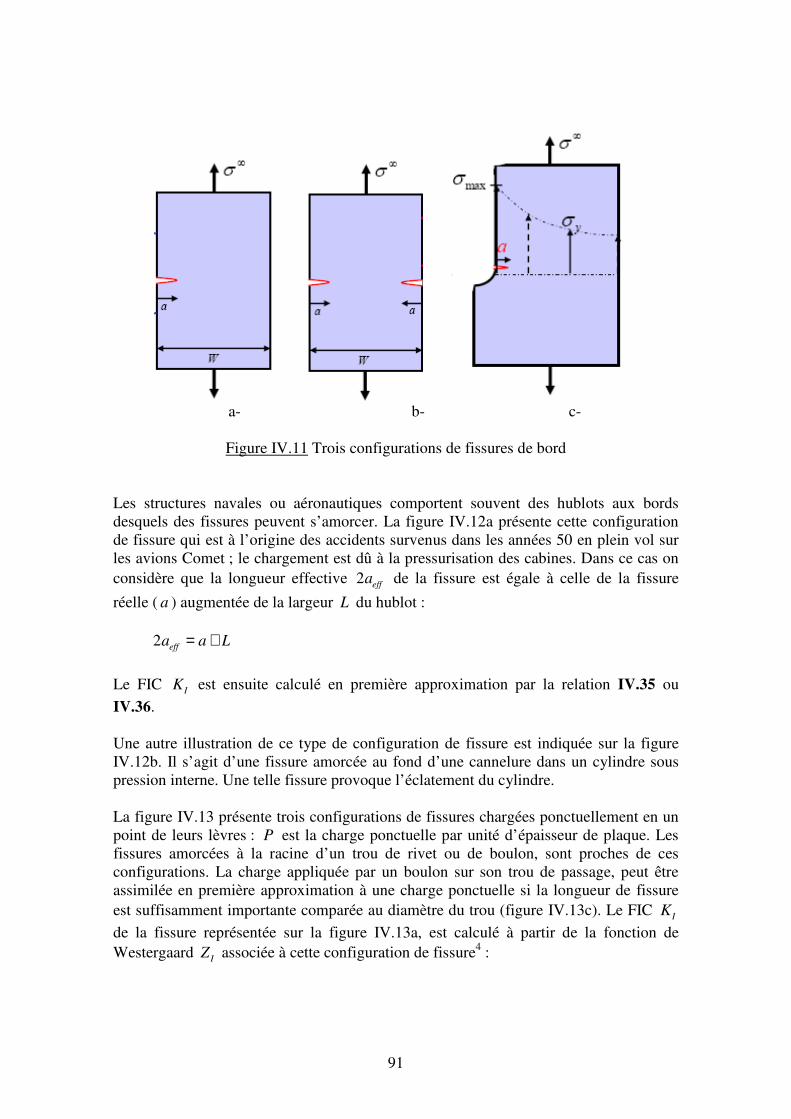
91
a- b- c-
Figure IV.11 Trois configurations de fissures de bord
Les structures navales ou aéronautiques comportent souvent des hublots aux bords
desquels des fissures peuvent s’amorcer. La figure IV.12a présente cette configuration
de fissure qui est à l’origine des accidents survenus dans les années 50 en plein vol sur
les avions Comet ; le chargement est dû à la pressurisation des cabines. Dans ce cas on
considère que la longueur effective 2 effa de la fissure est égale à celle de la fissure
réelle ( a ) augmentée de la largeur L du hublot :
2 effa a L= +
Le FIC IK est ensuite calculé en première approximation par la relation IV.35 ou
IV.36.
Une autre illustration de ce type de configuration de fissure est indiquée sur la figure
IV.12b. Il s’agit d’une fissure amorcée au fond d’une cannelure dans un cylindre sous
pression interne. Une telle fissure provoque l’éclatement du cylindre.
La figure IV.13 présente trois configurations de fissures chargées ponctuellement en un
point de leurs lèvres : P est la charge ponctuelle par unité d’épaisseur de plaque. Les
fissures amorcées à la racine d’un trou de rivet ou de boulon, sont proches de ces
configurations. La charge appliquée par un boulon sur son trou de passage, peut être
assimilée en première approximation à une charge ponctuelle si la longueur de fissure
est suffisamment importante comparée au diamètre du trou (figure IV.13c). Le FIC IK
de la fissure représentée sur la figure IV.13a, est calculé à partir de la fonction de
Westergaard IZ associée à cette configuration de fissure4 :
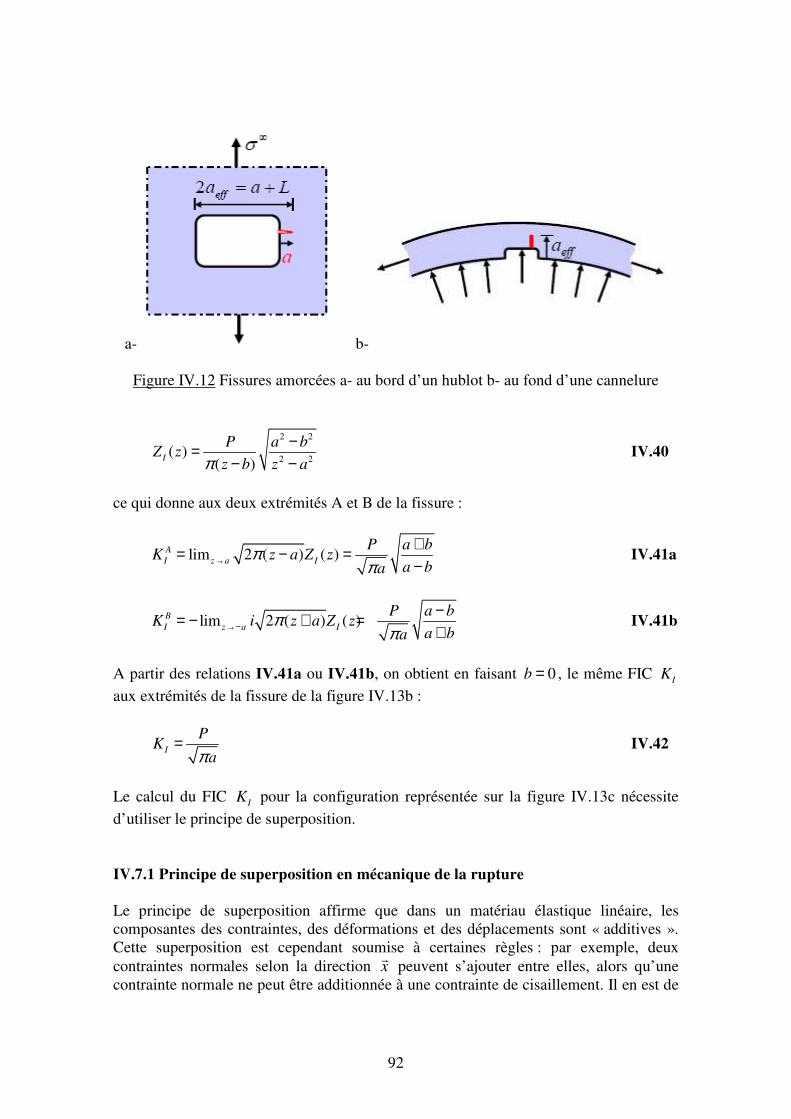
92
a- b-
Figure IV.12 Fissures amorcées a- au bord d’un hublot b- au fond d’une cannelure
2 2
2 2( )
( )I
P a bZ z
z b z aπ−=
− − IV.40
ce qui donne aux deux extrémités A et B de la fissure :
lim 2 ( ) ( )A
I z a I
P a bK z a Z z
a baπ
π→+= − =−
IV.41a
lim 2 ( ) ( )B
I z a I
P a bK i z a Z z
a baπ
π→−−= − + =+
IV.41b
A partir des relations IV.41a ou IV.41b, on obtient en faisant 0b = , le même FIC IK
aux extrémités de la fissure de la figure IV.13b :
I
PK
aπ= IV.42
Le calcul du FIC IK pour la configuration représentée sur la figure IV.13c nécessite
d’utiliser le principe de superposition.
IV.7.1 Principe de superposition en mécanique de la rupture
Le principe de superposition affirme que dans un matériau élastique linéaire, les
composantes des contraintes, des déformations et des déplacements sont « additives ».
Cette superposition est cependant soumise à certaines règles : par exemple, deux
contraintes normales selon la direction x�
peuvent s’ajouter entre elles, alors qu’une
contrainte normale ne peut être additionnée à une contrainte de cisaillement. Il en est de
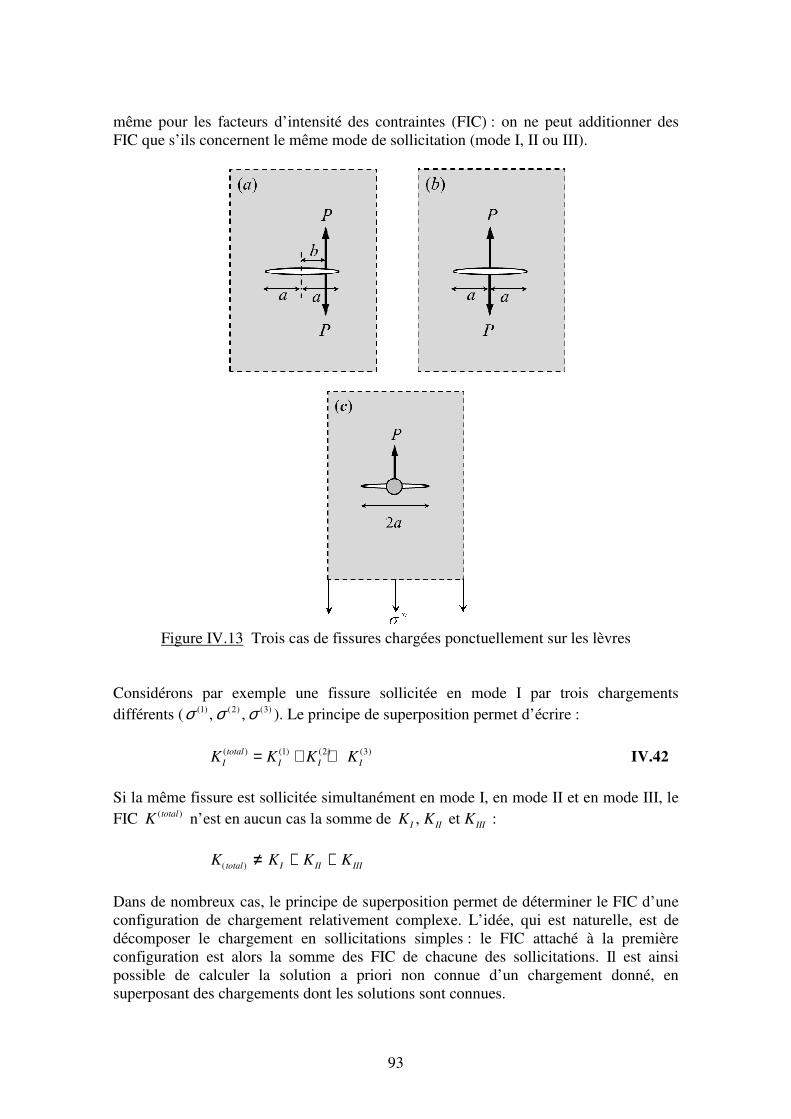
93
même pour les facteurs d’intensité des contraintes (FIC) : on ne peut additionner des
FIC que s’ils concernent le même mode de sollicitation (mode I, II ou III).
Figure IV.13 Trois cas de fissures chargées ponctuellement sur les lèvres
Considérons par exemple une fissure sollicitée en mode I par trois chargements
différents ( (1) (2) (3), ,σ σ σ ). Le principe de superposition permet d’écrire :
( ) (1) (2) (3)total
I I I IK K K K= + + IV.42
Si la même fissure est sollicitée simultanément en mode I, en mode II et en mode III, le
FIC ( )totalK n’est en aucun cas la somme de , et I II IIIK K K :
K K K Ktotal I II III( ) ≠ + +
Dans de nombreux cas, le principe de superposition permet de déterminer le FIC d’une
configuration de chargement relativement complexe. L’idée, qui est naturelle, est de
décomposer le chargement en sollicitations simples : le FIC attaché à la première
configuration est alors la somme des FIC de chacune des sollicitations. Il est ainsi
possible de calculer la solution a priori non connue d’un chargement donné, en
superposant des chargements dont les solutions sont connues.
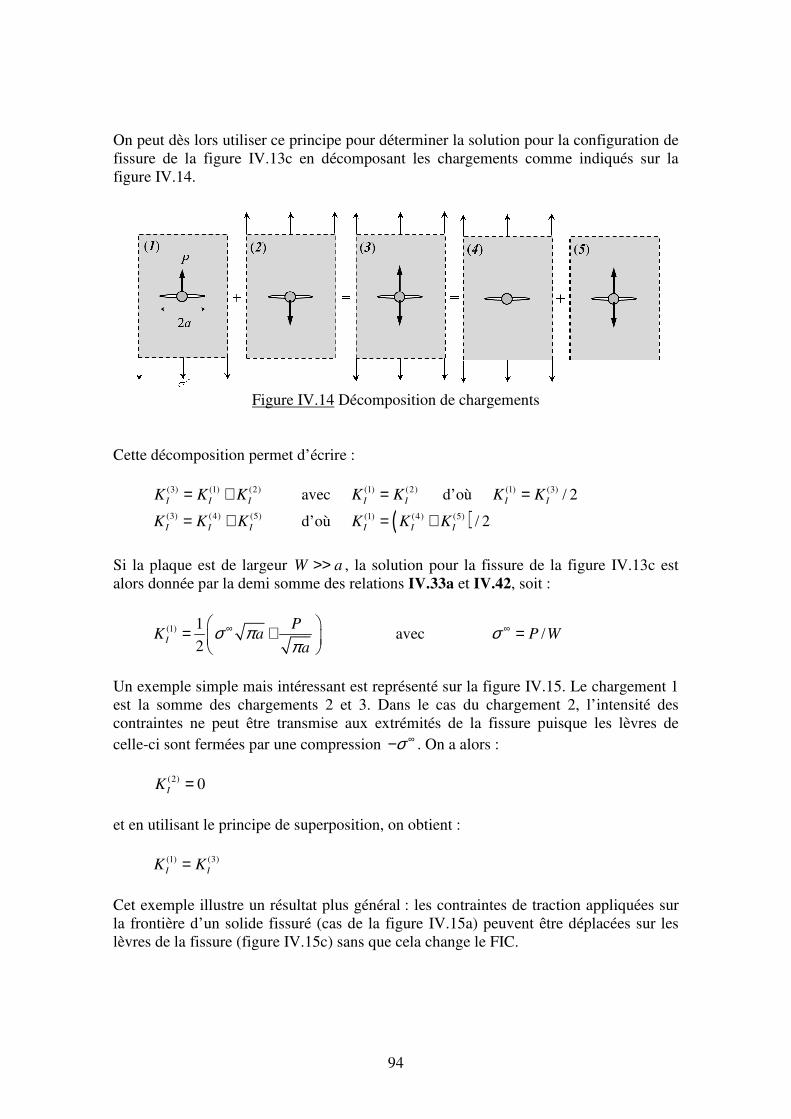
94
On peut dès lors utiliser ce principe pour déterminer la solution pour la configuration de
fissure de la figure IV.13c en décomposant les chargements comme indiqués sur la
figure IV.14.
Figure IV.14 Décomposition de chargements
Cette décomposition permet d’écrire :
(3) (1) (2)
I I IK K K= + avec (1) (2)
I IK K= d’où (1) (3) / 2I IK K=
(3) (4) (5)
I I IK K K= + d’où ( )(1) (4) (5) / 2I I IK K K= +
Si la plaque est de largeur W a>> , la solution pour la fissure de la figure IV.13c est
alors donnée par la demi somme des relations IV.33a et IV.42, soit :
(1) 1
2I
PK a
aσ π
π∞ = +
avec /P Wσ ∞ =
Un exemple simple mais intéressant est représenté sur la figure IV.15. Le chargement 1
est la somme des chargements 2 et 3. Dans le cas du chargement 2, l’intensité des
contraintes ne peut être transmise aux extrémités de la fissure puisque les lèvres de
celle-ci sont fermées par une compression σ ∞− . On a alors :
(2) 0IK =
et en utilisant le principe de superposition, on obtient :
(1) (3)
I IK K=
Cet exemple illustre un résultat plus général : les contraintes de traction appliquées sur
la frontière d’un solide fissuré (cas de la figure IV.15a) peuvent être déplacées sur les
lèvres de la fissure (figure IV.15c) sans que cela change le FIC.
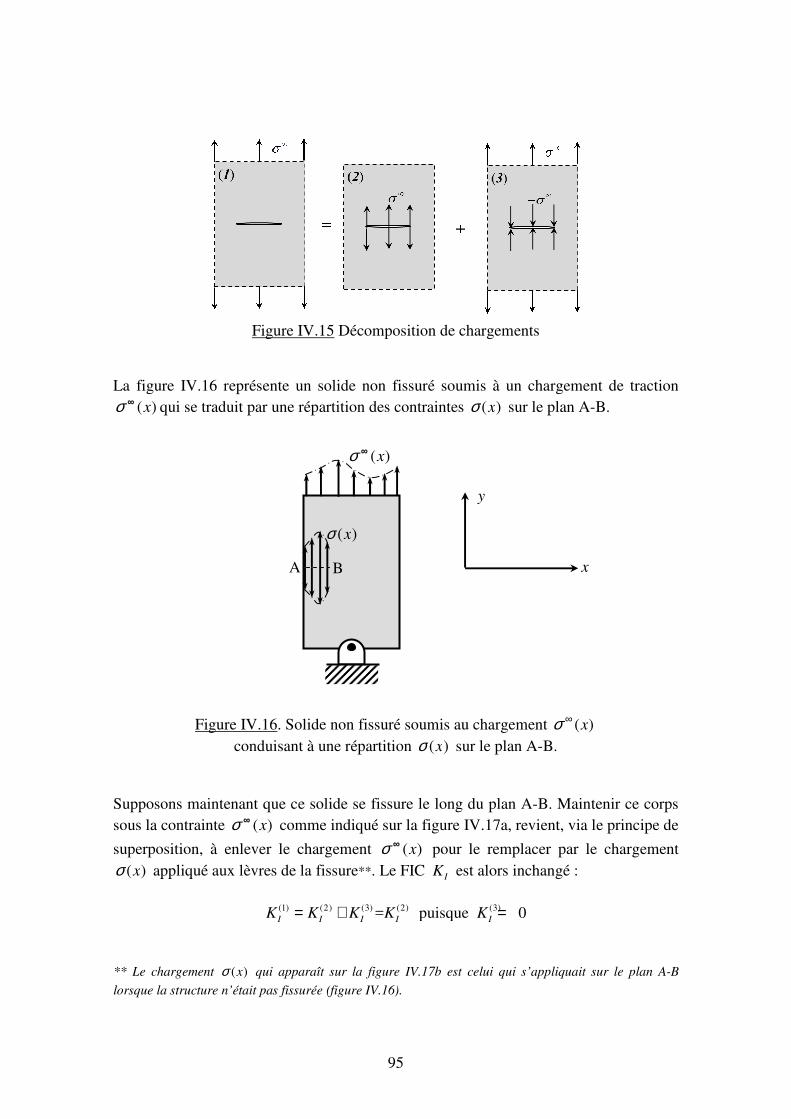
95
Figure IV.15 Décomposition de chargements
La figure IV.16 représente un solide non fissuré soumis à un chargement de traction
σ ∞ ( )x qui se traduit par une répartition des contraintes σ ( )x sur le plan A-B.
Figure IV.16. Solide non fissuré soumis au chargement ( )xσ ∞
conduisant à une répartition σ ( )x sur le plan A-B.
Supposons maintenant que ce solide se fissure le long du plan A-B. Maintenir ce corps
sous la contrainte σ ∞ ( )x comme indiqué sur la figure IV.17a, revient, via le principe de
superposition, à enlever le chargement σ ∞ ( )x pour le remplacer par le chargement
σ ( )x appliqué aux lèvres de la fissure**. Le FIC K I est alors inchangé :
(1) (2) (3) (2) (3)= puisque 0I I I I IK K K K K= + =
** Le chargement ( )xσ qui apparaît sur la figure IV.17b est celui qui s’appliquait sur le plan A-B
lorsque la structure n’était pas fissurée (figure IV.16).
σ ∞ ( )x
σ ( )x
A B x
y
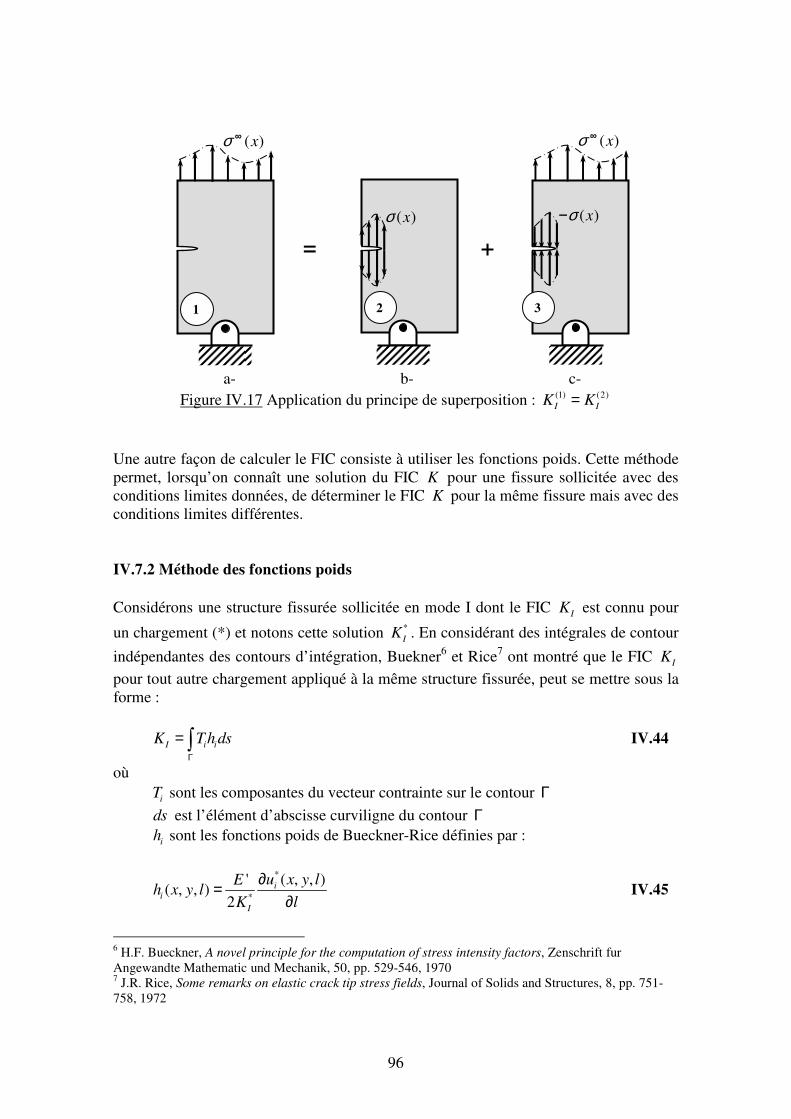
96
a- b- c-
Figure IV.17 Application du principe de superposition : (1) (2)
I IK K=
Une autre façon de calculer le FIC consiste à utiliser les fonctions poids. Cette méthode
permet, lorsqu’on connaît une solution du FIC K pour une fissure sollicitée avec des
conditions limites données, de déterminer le FIC K pour la même fissure mais avec des
conditions limites différentes.
IV.7.2 Méthode des fonctions poids
Considérons une structure fissurée sollicitée en mode I dont le FIC IK est connu pour
un chargement (*) et notons cette solution *
IK . En considérant des intégrales de contour
indépendantes des contours d’intégration, Buekner6 et Rice
7 ont montré que le FIC IK
pour tout autre chargement appliqué à la même structure fissurée, peut se mettre sous la
forme :
I i iK T h dsΓ
= ∫ IV.44
où
iT sont les composantes du vecteur contrainte sur le contour Γ
ds est l’élément d’abscisse curviligne du contour Γ
ih sont les fonctions poids de Bueckner-Rice définies par :
*
*
( , , )'( , , )
2
ii
I
u x y lEh x y l
K l
∂=∂
IV.45
6 H.F. Bueckner, A novel principle for the computation of stress intensity factors, Zenschrift fur
Angewandte Mathematic und Mechanik, 50, pp. 529-546, 1970 7 J.R. Rice, Some remarks on elastic crack tip stress fields, Journal of Solids and Structures, 8, pp. 751-
758, 1972
σ ∞ ( )x
σ ( )x
σ ∞ ( )x
−σ ( )x
1 2 3
= +
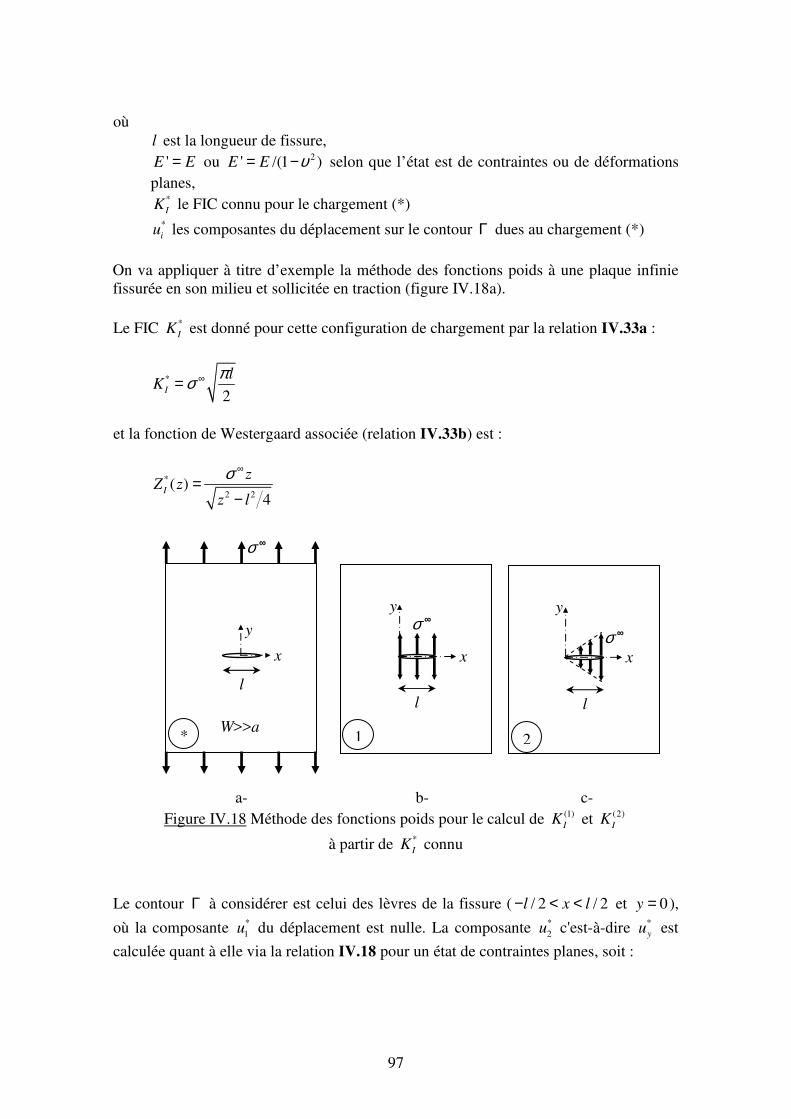
97
où
l est la longueur de fissure,
'E E= ou 2' /(1 )E E υ= − selon que l’état est de contraintes ou de déformations
planes, *
IK le FIC connu pour le chargement (*) *
iu les composantes du déplacement sur le contour Γ dues au chargement (*)
On va appliquer à titre d’exemple la méthode des fonctions poids à une plaque infinie
fissurée en son milieu et sollicitée en traction (figure IV.18a).
Le FIC *
IK est donné pour cette configuration de chargement par la relation IV.33a :
*
2I
lK
πσ ∞=
et la fonction de Westergaard associée (relation IV.33b) est :
*
2 2( )
4I
zZ z
z l
σ ∞
=−
a- b- c-
Figure IV.18 Méthode des fonctions poids pour le calcul de (1)
IK et (2)
IK
à partir de *
IK connu
Le contour Γ à considérer est celui des lèvres de la fissure ( / 2 / 2l x l− < < et 0y = ),
où la composante *
1u du déplacement est nulle. La composante *
2u c'est-à-dire *
yu est
calculée quant à elle via la relation IV.18 pour un état de contraintes planes, soit :
1
σ ∞
x
y
l
l
σ ∞
W>>a
x
y
* 2
σ ∞
x
y
l

98
* *
2
22 Im ( )
1Iu Z xµ
υ=
+ où * * 2 2( ) 4I IZ x Z dx x lσ ∞= = −∫
soit 2
* 2
2
2( ,0 , )
4
lu x l x
E
σ ∞± = ± −
selon qu’il s’agit du déplacement sur la lèvre supérieure ( 0y += ) ou sur la lèvre
inférieure ( 0y −= ).
En se plaçant sur le repère de la figure IV.18b (ce qui revient à changer x en / 2x l− ),
le déplacement *
2 ( ,0 , )u x l± s’écrit :
*
2
2( ,0 , ) ( )u x l x l x
E
σ ∞± = ± − d’où
*
2 ( ,0 , )u x l x
l E l x
σ± ∞∂ = ±∂ −
La relation IV.45 donne alors, compte tenu de l’expression de *
IK :
*
22 *
( ,0 , ) 1( ,0 , )
2 2I
u x lE xh x l
K l l xlπ
±± ∂ ±= ± =
∂ −
La composante 2T du vecteur contrainte s’écrit :
-chargement (1) de la figure IV.18b
2T σ ∞= sur la lèvre supérieure et 2T σ ∞= − sur la lèvre inférieure
-chargement (2) de la figure IV.18c
2
xT
lσ ∞= sur la lèvre supérieure et 2
xT
lσ ∞= − sur la lèvre inférieure
Les FIC (1)
IK et (2)
IK pour les deux chargements sont ensuite déterminés à l’aide de la
relation IV.44. On adopte pour le calcul le changement de variable 2sinx l θ= :
/ 2 / 2
(1) 2
0 0 0
2 2 2sin 2 (1 cos 2 )2 2 2
l
I
x l lK dx d d
l xl l l
π πσ σ σθ θ θ θπ π π
∞ ∞ ∞
= = = −−∫ ∫ ∫
d’où
(1)
2I
lK
πσ ∞=
et

99
/ 2
(2) 4
0 0
/ 2
0
2 2 2sin2 2
1 3 cos 4 2 2cos 2
2 2 22
l
I
x x lK dx d
l l xl l
ld
l
π
π
σ σ θ θπ π
σ θθ θπ
∞ ∞
∞
= =−
= − +
∫ ∫
∫
d’où
(2) 3
4 2I
lK
σ π∞
=
IV.7.3 Cas tridimensionnel
Les fissures traversantes avec un front bien défini (figure IV.3) ont une configuration
bidimensionnelle. Les méthodes indiquées précédemment permettent le calcul du FIC
dans un grand nombre de cas simples.
Lorsque les fissures ont un caractère tridimensionnel comme celles de surface ou de
coin (figure IV.3), le FIC K varie le long du front de fissure : sa détermination
nécessite le plus souvent des calculs par éléments finis.
Pour des fissures de surface de forme semi elliptique (figure IV.19a) dans des plaques
sollicitées en mode I, des formules empiriques permettant le calcul du FIC ont été
proposées par Raju et Newman8. Ces formules sont de la forme :
, , ,I S
a a cK aF
c t Wσ π ϕ∞ =
IV.46a
avec pour 1a
c≤
2 4
1 2 3 1 2 3 4S
a aF M M M f f f f
t t
= + +
où
1 1,13 0,09 /M a c= − ( )2 0,54 0,89 / 0,2 /M a c= − + +
24
3 0,5 1/(0,65 / ) 14(1 / )M a c a c= − + + −
( ) 1/ 21,65
1 1 1,464( / )f a c−
= + ( )( )22
2 1 0,1 0,35( / ) 1 sinf a t ϕ= + + −
1/ 2
3 cos2
c af
W t
π−
=
1/ 42
2 2
4 2sin cos
af
cϕ ϕ
= +
8 I.S. Raju and J.C. Newman, Stress intensity factors for a wide range of semi-elliptical surface cracks in
finite thickness plates, Engineering Fracture Mechanics, 11, pp. 817-829, 1979

100
a- b-
Figure IV.19 Fissures a- de surface b- de coin
Pour des fissures de coin (figure IV.19b) dans des plaques sollicitées en mode I, les
formules empiriques sont de même type9 :
, ,I C
a aK aF
c tσ π ϕ∞ =
IV.46b
avec pour 1a
c≤
2 4
1 2 3 1 2 3 4C
a aF M M M g g g g
t t
= + +
où
1 1,08 0,03 /M a c= − ( )2 0,44 1,06 / 0,3 /M a c= − − +
15
3 0,5 0,25 / 14,8(1 / )M a c a c= − + + −
( ) 1/ 21,65
1 1 1 1,464( / )g f a c−
= = + ( )( )32
2 1 0,08 0,4( / ) 1 sinf a t ϕ= + + −
( )( )32
2 1 0,08 0,15( / ) 1 cosf a t ϕ= + + −
1/ 42
2 2
4 4 2sin cos
ag f
cϕ ϕ
= = +
La figure IV.20 compare les FIC calculés par les formules IV.46 de Newman et Raju à
ceux obtenus par des calculs aux éléments finis plus récents10
, pour des fissures de coin
et de surface. Les relations empiriques IV.46 donnent des résultats tout à fait
acceptables. Elles sont largement utilisées dans les bureaux d’études.
9 I.S. Raju and J.C. Newman, Stress intensity factors for corner cracks, ASTM STP 677, pp. 411-430,
1979 10
A. El Malki Alaoui, Influence du chargement sur la propagation en fatigue de fissures courtes dans un
acier de construction navale, Thèse de doctorat - Université de Metz, février 2005.
t
W
2c
ϕ
c
a a
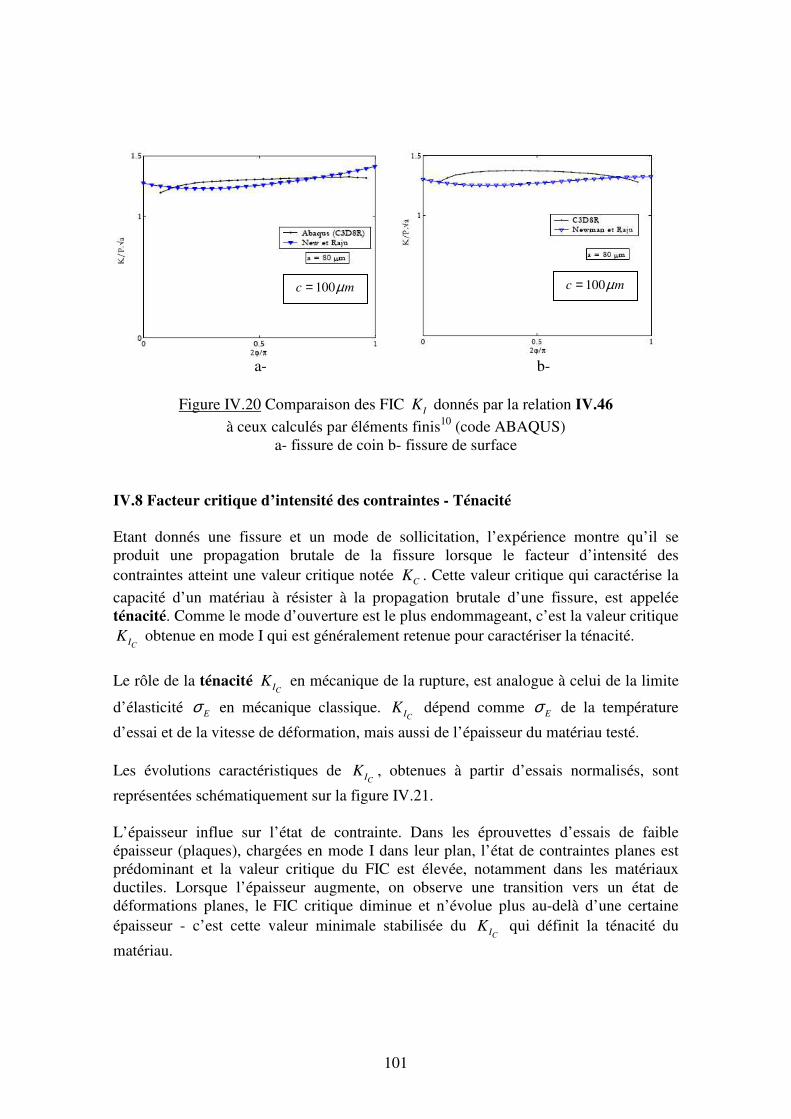
101
a- b-
Figure IV.20 Comparaison des FIC IK donnés par la relation IV.46
à ceux calculés par éléments finis10
(code ABAQUS)
a- fissure de coin b- fissure de surface
IV.8 Facteur critique d’intensité des contraintes - Ténacité
Etant donnés une fissure et un mode de sollicitation, l’expérience montre qu’il se
produit une propagation brutale de la fissure lorsque le facteur d’intensité des
contraintes atteint une valeur critique notée CK . Cette valeur critique qui caractérise la
capacité d’un matériau à résister à la propagation brutale d’une fissure, est appelée
ténacité. Comme le mode d’ouverture est le plus endommageant, c’est la valeur critique
CIK obtenue en mode I qui est généralement retenue pour caractériser la ténacité.
Le rôle de la ténacité CI
K en mécanique de la rupture, est analogue à celui de la limite
d’élasticité Eσ en mécanique classique. CI
K dépend comme Eσ de la température
d’essai et de la vitesse de déformation, mais aussi de l’épaisseur du matériau testé.
Les évolutions caractéristiques de CI
K , obtenues à partir d’essais normalisés, sont
représentées schématiquement sur la figure IV.21.
L’épaisseur influe sur l’état de contrainte. Dans les éprouvettes d’essais de faible
épaisseur (plaques), chargées en mode I dans leur plan, l’état de contraintes planes est
prédominant et la valeur critique du FIC est élevée, notamment dans les matériaux
ductiles. Lorsque l’épaisseur augmente, on observe une transition vers un état de
déformations planes, le FIC critique diminue et n’évolue plus au-delà d’une certaine
épaisseur - c’est cette valeur minimale stabilisée du CI
K qui définit la ténacité du
matériau.
100c mµ= 100c mµ=
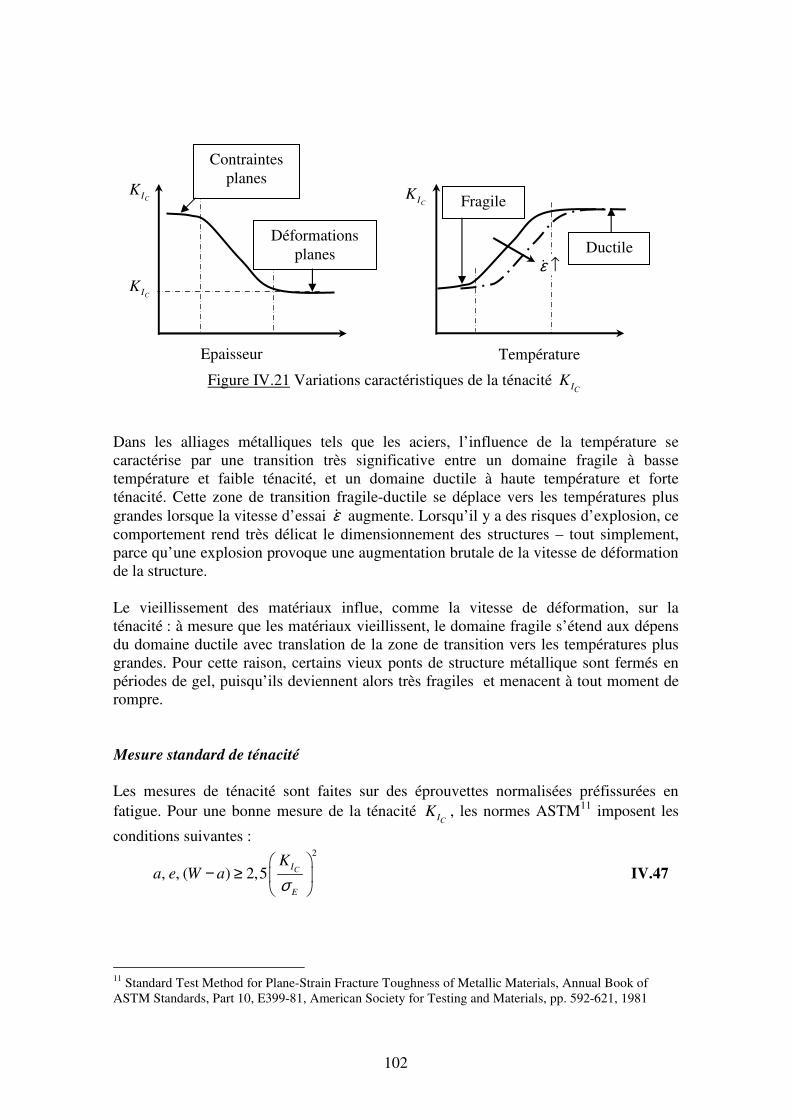
102
Figure IV.21 Variations caractéristiques de la ténacité CI
K
Dans les alliages métalliques tels que les aciers, l’influence de la température se
caractérise par une transition très significative entre un domaine fragile à basse
température et faible ténacité, et un domaine ductile à haute température et forte
ténacité. Cette zone de transition fragile-ductile se déplace vers les températures plus
grandes lorsque la vitesse d’essai ɺε augmente. Lorsqu’il y a des risques d’explosion, ce
comportement rend très délicat le dimensionnement des structures – tout simplement,
parce qu’une explosion provoque une augmentation brutale de la vitesse de déformation
de la structure.
Le vieillissement des matériaux influe, comme la vitesse de déformation, sur la
ténacité : à mesure que les matériaux vieillissent, le domaine fragile s’étend aux dépens
du domaine ductile avec translation de la zone de transition vers les températures plus
grandes. Pour cette raison, certains vieux ponts de structure métallique sont fermés en
périodes de gel, puisqu’ils deviennent alors très fragiles et menacent à tout moment de
rompre.
Mesure standard de ténacité
Les mesures de ténacité sont faites sur des éprouvettes normalisées préfissurées en
fatigue. Pour une bonne mesure de la ténacité CI
K , les normes ASTM11
imposent les
conditions suivantes : 2
, , ( ) 2,5 CI
E
Ka e W a
σ
− ≥
IV.47
11
Standard Test Method for Plane-Strain Fracture Toughness of Metallic Materials, Annual Book of
ASTM Standards, Part 10, E399-81, American Society for Testing and Materials, pp. 592-621, 1981
K IC
Epaisseur
K IC
Contraintes
planes
Déformations
planes
K IC
ɺε A
Température
Fragile
Ductile
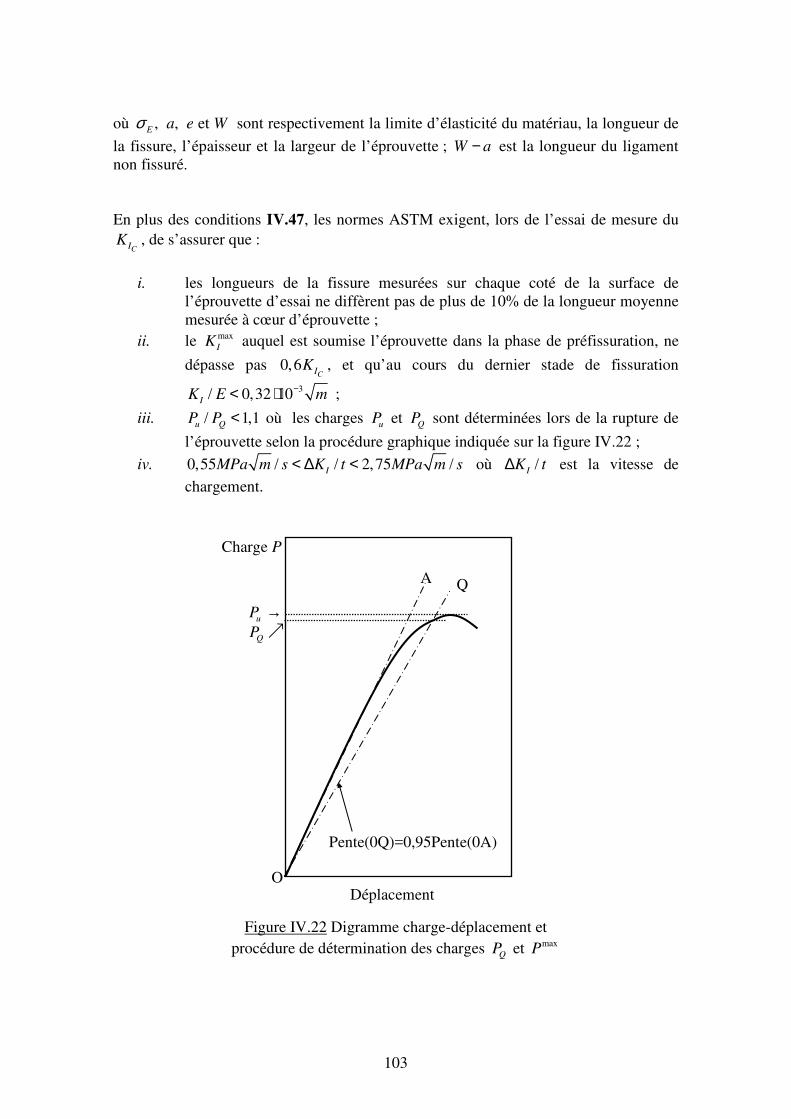
103
où , , et E a e Wσ sont respectivement la limite d’élasticité du matériau, la longueur de
la fissure, l’épaisseur et la largeur de l’éprouvette ; W a− est la longueur du ligament
non fissuré.
En plus des conditions IV.47, les normes ASTM exigent, lors de l’essai de mesure du
CIK , de s’assurer que :
i. les longueurs de la fissure mesurées sur chaque coté de la surface de
l’éprouvette d’essai ne diffèrent pas de plus de 10% de la longueur moyenne
mesurée à cœur d’éprouvette ;
ii. le max
IK auquel est soumise l’éprouvette dans la phase de préfissuration, ne
dépasse pas 0,6CI
K , et qu’au cours du dernier stade de fissuration
3/ 0,32 10IK E m−< ⋅ ;
iii. / 1,1u QP P < où les charges uP et QP sont déterminées lors de la rupture de
l’éprouvette selon la procédure graphique indiquée sur la figure IV.22 ;
iv. 0,55 / / 2,75 /IMPa m s K t MPa m s< ∆ < où /IK t∆ est la vitesse de
chargement.
Figure IV.22 Digramme charge-déplacement et
procédure de détermination des charges QP et maxP
Déplacement
Charge P
uP →
QP ր
O
A Q
Pente(0Q)=0,95Pente(0A)

104
Application de la méthode de détermination expérimentale de la ténacité CI
K
Une éprouvette de flexion trois points (figure IV.23) est testée conformément aux
recommandations de l’ASTM. 1200E MPaσ = et 210E GPa= sont les valeurs
respectives de la limite d’élasticité et du module d’Young du matériau. L’éprouvette est
chargée à une vitesse de 100 /kN mn . Elle est préfissurée en fatigue à max
1 45P kN= et
min 0P = . Les derniers cycles pour atteindre une longueur de fissure a telle que
/ 0,5a W ≈ , sont effectués à max
2 30P kN= . Les dimensions mesurées sont :
8W cm= 4e cm= 30L cm=
1 3,996a cm= 2 4,007a cm= 3 3,997a cm=
3,915gauche
surfacea cm= et 3,952droite
surfacea cm=
L est la distance entre les points d’appui de l’éprouvette et 1 2 3, ,a a a sont les longueurs
de fissure mesurées après rupture (figure IV.23) et gauche
surfacea , droite
surfacea sont les longueurs en
surface.
Figure IV.23 Eprouvette de flexion 3 points pour la mesure de CI
K
L’enregistrement du diagramme charge-déplacement (figure IV.22) a donné les valeurs
suivantes pour la charge ultime uP et la charge QP :
86uP kN= 80QP kN=
Le FIC IK pour l’éprouvette testée est calculé par la relation suivante :
Surface
fissurée 1a 2a
3a gauche
surfacea droite
surfacea
P
/ 2P / 2P a
L
W
e

105
3/ 2( / )I
PLK g a W
eW=
avec
( )2
3/ 2
3 / 1,99 ( / )(1 / )(2,15 3,93 / 2,7( / )( / )
2(1 2 / )(1 / )
a W a W a W a W a Wg a W
a W a W
− − − +=
+ −
Solution
• On calcule dans un premier temps moy 1 2 3( ) / 3a a a a= + + , soit moy 4a cm=
• On détermine ensuite moy
3/ 2
Q
Q
P L aK g
eW W
=
, avec
moy 1
2
a
W= , d’où
moy2,663
W
ag
=
et
3/ 2
80 0,32,663 70,6
0,04 (0,08 )Q
kN mK MPa m
m m
⋅= =⋅
• On vérifie toutes les conditions imposées par l’ASTM :
-
22
270,6, , ( ) 2,5 2,5 0,865 10 8,65
1200
Q
E
K MPa ma e W a m mm
MPaσ−
− ≥ = = ⋅ =
la condition IV.47 est vérifiée ;
- moy
moy
4 3,9150,02 0,1
4
gauche
surfacea a
a
− −= = < et moy
moy
4 3,9520,012 0,1
4
droite
surfacea a
a
− −= = <
la condition i. est vérifiée ;
- max
max 1
3/ 2 3/ 2
45 0,3( / ) 2,663 39,7 0,6
0,04 (0,08)I Q
P L kN mK g a W MPa m K
eW
⋅= = = <⋅
et
le dernier stade de propagation est effectué à max
2 30P kN= d’où
3 3
3/ 2
1 30 0,3 29,62,663 0,14 10 0,32 10
0,04 (0,08) 210000
IK kN m MPa mm m
E E MPa
− −⋅= = = ⋅ < ⋅⋅
la condition ii. est vérifiée ;
- 86
1,08 1,180
u
Q
P
P= = < la condition iii. est vérifiée ;
- 3/ 2
100 0,360
2,663 1,470,04 (0,08)
I
kN
K MPa ms
t s
⋅ ∆ = =∆ ⋅
soit 0,55 2,75IK MPa m
t s
∆< <∆
la condition iv. est vérifiée ;
106
• Les conditions de l’ASTM étant toutes vérifiées, on a donc :
70,6CI QK K MPa m= =
IV.9 Zone plastifiée À fond de fissure
Les contraintes au voisinage de l’extrémité d’une fissure données par les relations IV.26
pour les modes de sollicitation I et II, et IV.31 pour le mode III, sont inversement
proportionnelles à r . Le calcul en élasticité qui aboutit à cette singularité en 1/ r ,
prévoit donc qu’elles deviennent infinies lorsque 0r → . Or nous savons très bien que
dans les matériaux réels, les contraintes restent finies et qu’au-delà de la limite
d’élasticité Eσ du matériau, il se forme une zone plastifiée dont le contour peut être
déterminé.
IV.9.1 Longueur de la zone plastifiée dans le plan de la fissure
L’approche la plus simple est celle d’Irwin1. Cet auteur considère, en première
approximation, que le contour de la zone plastique correspond au lieu des points où les
contraintes atteignent la limite d’élasticité du matériau. Pour la détermination du rayon
rE pour lequel cette frontière coupe le plan d’une fissure en contraintes planes, il pose
σ σy E= où σ E est la limite d’élasticité en traction simple et yσ donnée par IV.26a en
mode I ; ce qui conduit à :
( , 0)2
Iy E
E
Kr
rσ θ σ
π= = =
d'où
rK
E
I
E
=FHGIKJ
1
2
2
π σ IV.48
Pour représenter la longueur rE (figure IV.24), on suppose que le comportement du
matériau est élastique-plastique parfait, pour ensuite tout simplement tronquer le champ
des contraintes à σ σy E= .
Cette analyse fait cependant abstraction des forces non transmises représentées par
l’aire hachurée de la figure IV.24. Pour tenir compte de ces forces, il convient d’assurer
l’équilibre entre les deux répartitions (élastique et élastoplastique) des contraintes.
Comme la taille rP de la zone plastique doit donc être supérieure au rayon rE , l’équilibre des forces entre les deux configurations conduit à :
σ σ σ σ σy E P yE
E P y
Edr r dr r dr
r
r
0 0
∞ ∞z z z= + ⇒ =. .
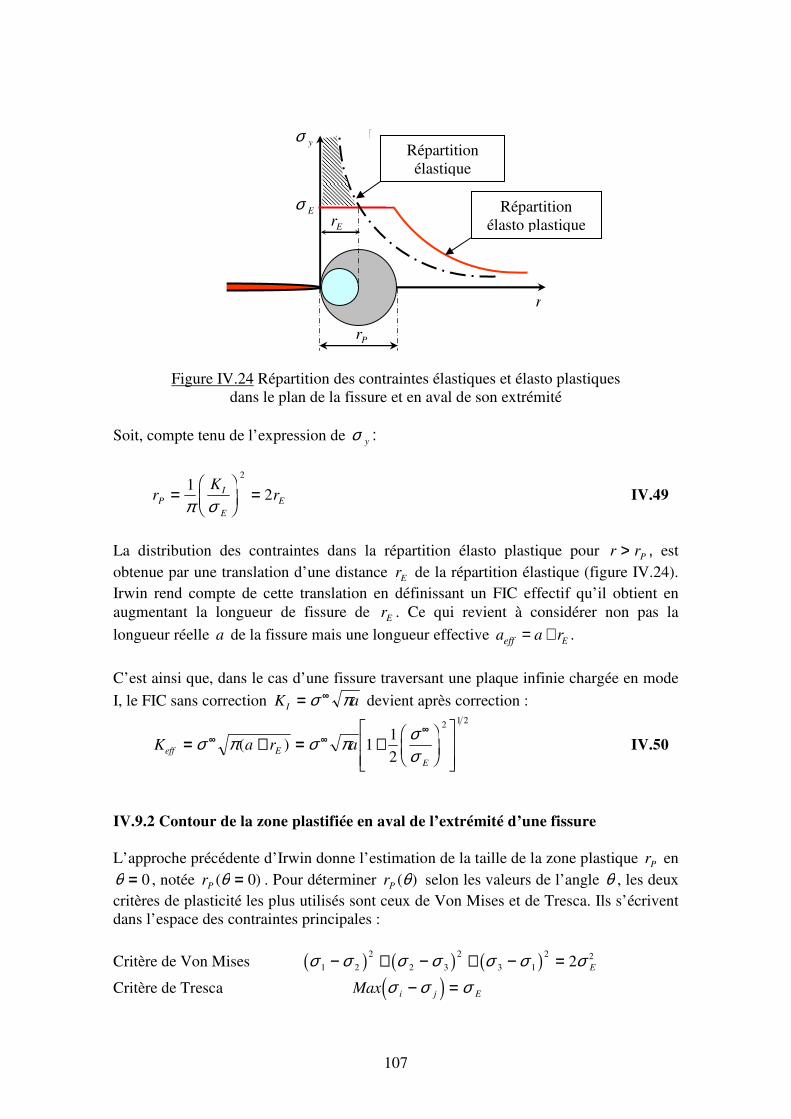
107
Figure IV.24 Répartition des contraintes élastiques et élasto plastiques
dans le plan de la fissure et en aval de son extrémité
Soit, compte tenu de l’expression de σ y :
rK
rP
I
E
E=FHGIKJ =1
2
2
π σ IV.49
La distribution des contraintes dans la répartition élasto plastique pour r rP> , est
obtenue par une translation d’une distance rE de la répartition élastique (figure IV.24).
Irwin rend compte de cette translation en définissant un FIC effectif qu’il obtient en
augmentant la longueur de fissure de rE . Ce qui revient à considérer non pas la
longueur réelle a de la fissure mais une longueur effective Eeffa a r= + .
C’est ainsi que, dans le cas d’une fissure traversant une plaque infinie chargée en mode
I, le FIC sans correction K aI = ∞σ π devient après correction :
K a r aeff E
E
= + = +FHGIKJ
LNMM
OQPP
∞ ∞∞
σ π σ π σσ
( ) 11
2
21 2
IV.50
IV.9.2 Contour de la zone plastifiée en aval de l’extrémité d’une fissure
L’approche précédente d’Irwin donne l’estimation de la taille de la zone plastique rP en
θ = 0 , notée rP ( )θ = 0 . Pour déterminer rP ( )θ selon les valeurs de l’angle θ , les deux
critères de plasticité les plus utilisés sont ceux de Von Mises et de Tresca. Ils s’écrivent
dans l’espace des contraintes principales :
Critère de Von Mises σ σ σ σ σ σ σ1 2
2
2 3
2
3 1
2 22− + − + − =b g b g b g E
Critère de Tresca Max i j Eσ σ σ− =d i
rE
rP
σ y
σ E
r
Répartition
élastique
Répartition
élasto plastique

108
Après calculs, la forme de la zone plastique rP ( )θ est donnée en mode I par :
i. en contraintes planes
Von Mises rK
P
I
E
( ) cos sinθπσ
θ θ= FHGIKJ + F
HGIKJ
FHG
IKJ
2
2
2 2
2 21 3
2 IV.51a
Tresca
222
2( ) cos 1 sin
2 2 2
IP
E
Kr
θ θθπσ
= +
IV.51b
ii. en déformations planes
Von Mises rK
P
I
E
( ) cos sinθπσ
θ υ θ= FHGIKJ − + F
HGIKJ
FHG
IKJ
2
2
2 2 2
2 21 2 3
2b g IV.51c
Tresca
22
2
2
2
2
2
( ) cos 1 2 sin si 0 2 sin(1 2 )2 2 2
( ) sin ( ) pour 2 sin(1 2 )2
I
P
E
I
P
E
Kr Arc
Kr Arc
θ θθ υ θ υ
πσ
θ θ υ θ ππσ
= − + ≤ ≤ −
= − < ≤
IV.51d
La figure IV.25 visualise, pour υ = 0 3, , les formes des zones plastiques qui se forment
à l’extrémité d’une fissure sollicitée en mode I. L’étendue de la zone plastifiée est plus
importante en contraintes planes qu’en déformations planes, et ce pour les deux critères.
Le critère de Tresca conduit, en contraintes planes comme en déformations planes, à des
zones plastifiées légèrement plus étendues que celles prévues par le critère de Von
Mises. Les observations expérimentales des zones plastiques sont souvent plus proches
du critère de Tresca, notamment en contraintes planes.
Figure IV.25 Contours des zones plastiques en mode I,
en contraintes planes (CP) et en déformations planes (DP)
- trait continu : critère de Von Mises, - trait pointillé : critère de Tresca
-2
0
2
CP
DP
r
K
p
I
E
1
2
2
π σLNMOQP
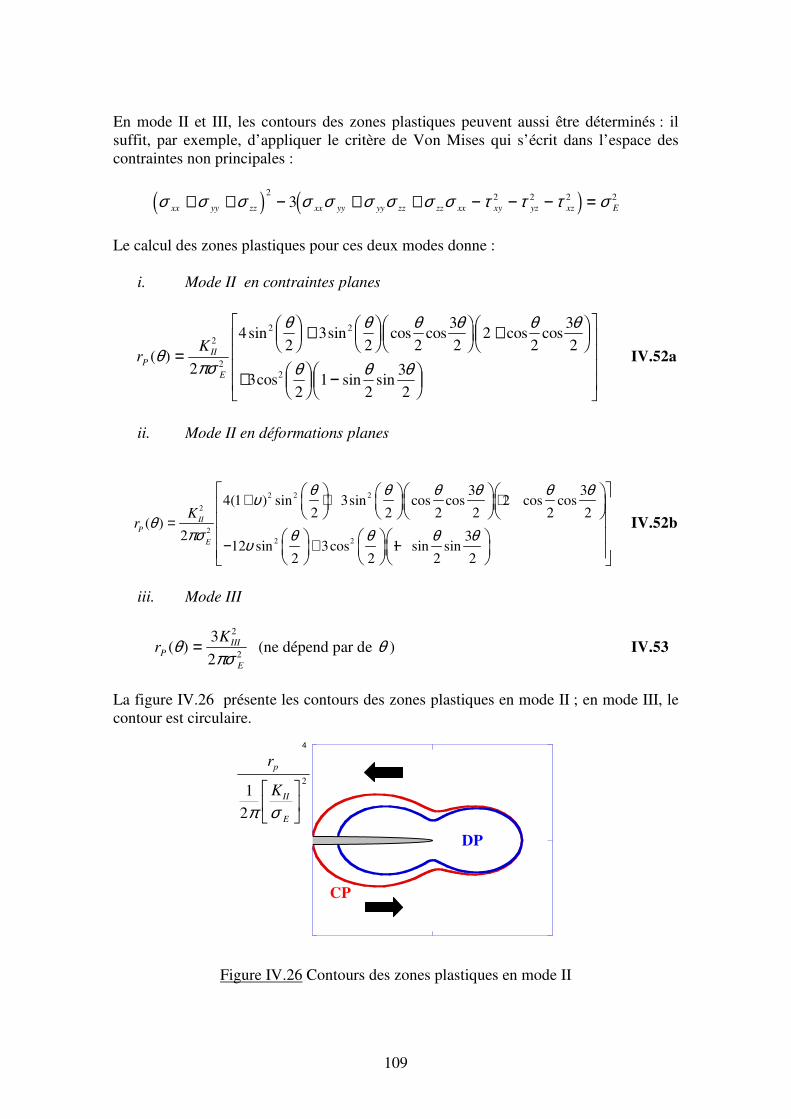
109
En mode II et III, les contours des zones plastiques peuvent aussi être déterminés : il
suffit, par exemple, d’appliquer le critère de Von Mises qui s’écrit dans l’espace des
contraintes non principales :
σ σ σ σ σ σ σ σ σ τ τ τ σxx yy zz xx yy yy zz zz xx xy yz xz E+ + − + + − − − =d i d i22 2 2 23
Le calcul des zones plastiques pour ces deux modes donne :
i. Mode II en contraintes planes
rK
P
II
E
( )
sin sin cos cos cos cos
cos sin sin
θπσ
θ θ θ θ θ θ
θ θ θ=
FHGIKJ + F
HGIKJFHG
IKJ +FHG
IKJ
+ FHGIKJ −FHG
IKJ
L
N
MMMM
O
Q
PPPP
2
2
2 2
22
42
32 2
3
22
2
3
2
32
12
3
2
IV.52a
ii. Mode II en déformations planes
2 2 2
2
2
2 2
3 34(1 ) sin 3sin cos cos 2 cos cos
2 2 2 2 2 2( )
2 312 sin 3cos 1 sin sin
2 2 2 2
II
P
E
Kr
θ θ θ θ θ θυθ
πσ θ θ θ θυ
+ + +=
− + −
IV.52b
iii. Mode III
rK
P
III
E
( )θπσ
=3
2
2
2 (ne dépend par de θ ) IV.53
La figure IV.26 présente les contours des zones plastiques en mode II ; en mode III, le
contour est circulaire.
Figure IV.26 Contours des zones plastiques en mode II
-4
0
4
0
r
K
p
II
E
1
2
2
π σLNMOQP
CP
DP
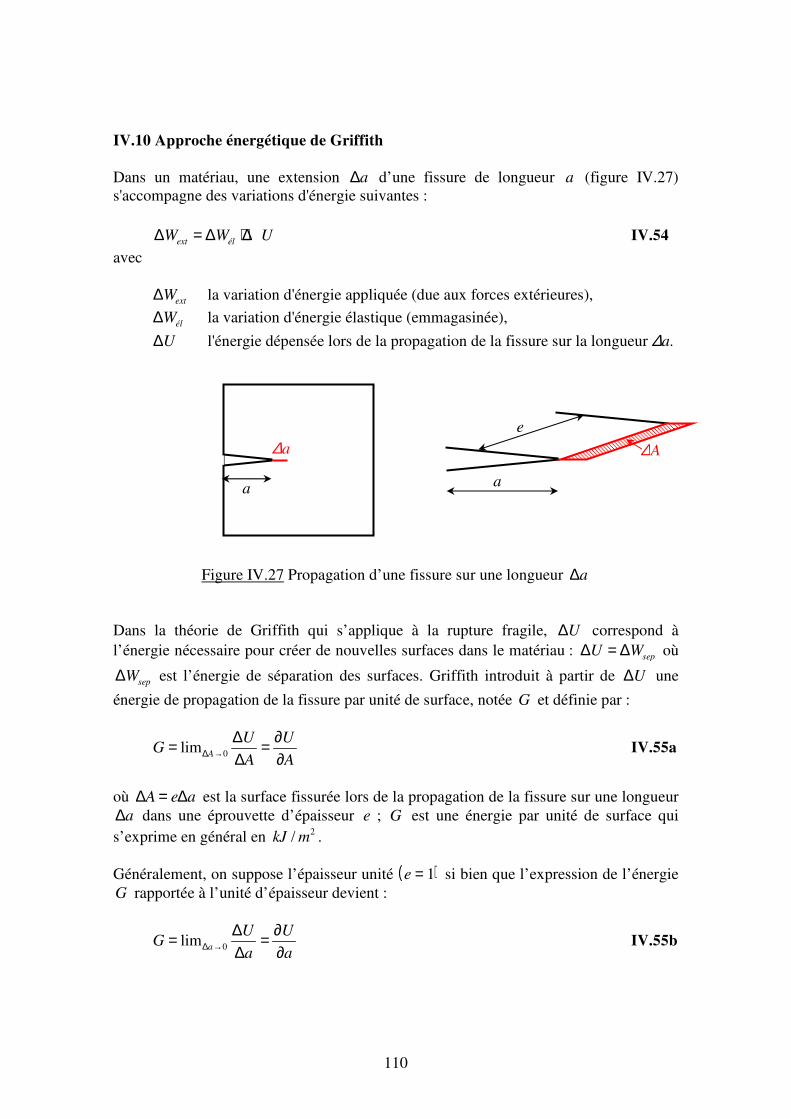
110
IV.10 Approche énergétique de Griffith
Dans un matériau, une extension a∆ d’une fissure de longueur a (figure IV.27)
s'accompagne des variations d'énergie suivantes :
ext élW W U∆ = ∆ + ∆ IV.54
avec
∆Wext la variation d'énergie appliquée (due aux forces extérieures),
élW∆ la variation d'énergie élastique (emmagasinée),
∆U l'énergie dépensée lors de la propagation de la fissure sur la longueur ∆a.
Figure IV.27 Propagation d’une fissure sur une longueur a∆
Dans la théorie de Griffith qui s’applique à la rupture fragile, U∆ correspond à
l’énergie nécessaire pour créer de nouvelles surfaces dans le matériau : sepU W∆ = ∆ où
sepW∆ est l’énergie de séparation des surfaces. Griffith introduit à partir de U∆ une
énergie de propagation de la fissure par unité de surface, notée G et définie par :
0lim A
U UG
A A∆ →
∆ ∂= =∆ ∂
IV.55a
où A e a∆ = ∆ est la surface fissurée lors de la propagation de la fissure sur une longueur
a∆ dans une éprouvette d’épaisseur e ; G est une énergie par unité de surface qui
s’exprime en général en 2/kJ m .
Généralement, on suppose l’épaisseur unité ( )e = 1 si bien que l’expression de l’énergie
G rapportée à l’unité d’épaisseur devient :
0lim a
U UG
a a∆ →
∆ ∂= =∆ ∂
IV.55b
a
∆a
a
∆A
e
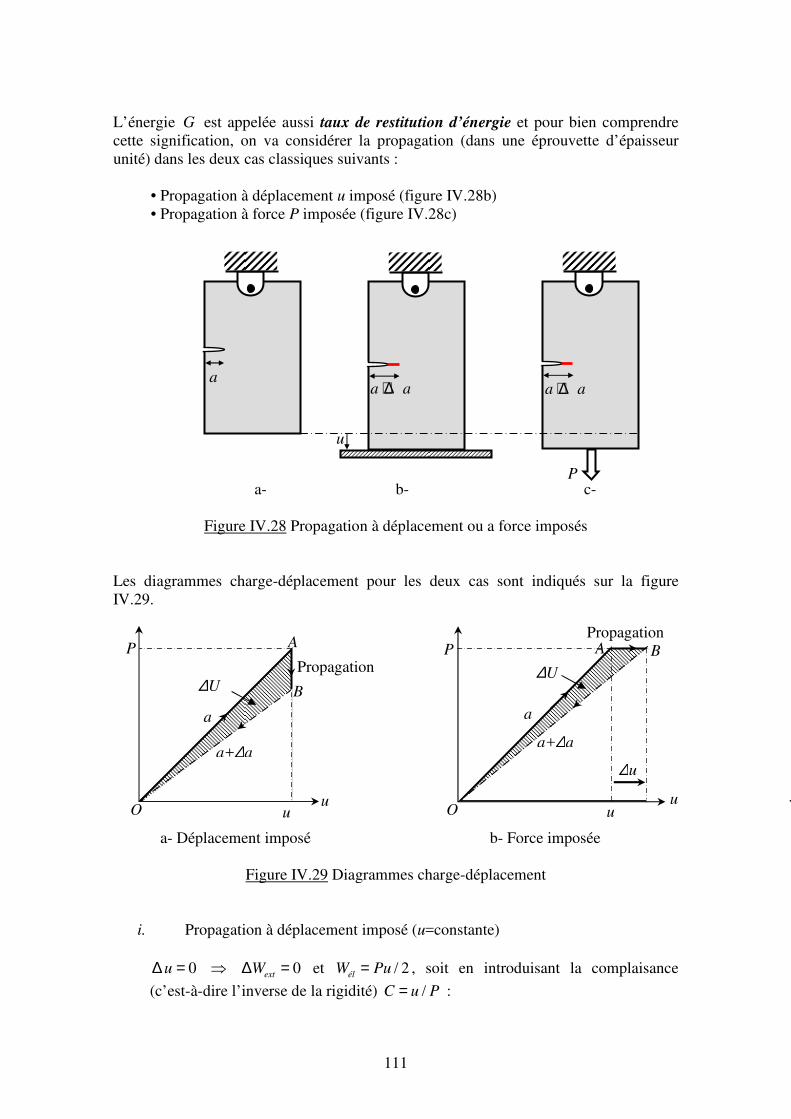
111
L’énergie G est appelée aussi taux de restitution d’énergie et pour bien comprendre
cette signification, on va considérer la propagation (dans une éprouvette d’épaisseur
unité) dans les deux cas classiques suivants :
• Propagation à déplacement u imposé (figure IV.28b)
• Propagation à force P imposée (figure IV.28c)
a- b- c-
Figure IV.28 Propagation à déplacement ou a force imposés
Les diagrammes charge-déplacement pour les deux cas sont indiqués sur la figure
IV.29.
a- Déplacement imposé b- Force imposée
Figure IV.29 Diagrammes charge-déplacement
i. Propagation à déplacement imposé (u=constante)
0 0extu W∆ = ⇒ ∆ = et / 2élW Pu= , soit en introduisant la complaisance
(c’est-à-dire l’inverse de la rigidité) /C u P= :
u
P
a a a+ ∆ a a+ ∆
P
O u u
Propagation
a
a+∆a
∆U
P
u
Propagation
u
∆u
a
a+∆a
∆U
O
A A
B
B

112
2
21
2 2él
uW CP
C= =
2
22él
u
u CW a
C a
∂∂
⇒ ∆ = − ∆
On constate dans ce cas que l'énergie élastique emmagasinée décroît.
Comme 0ext él élW U W U W∆ = = ∆ + ∆ ⇒ ∆ = −∆ et GU
aa=FHGIKJ→
lim∆
∆∆0
, soit :
2 2
22 2u u
u C P CG
C a a
∂ ∂∂ ∂
= =
IV.56a
ii. Propagation à force imposée (P=constante)
0 0u
PC
∆ = ⇒ ∆ =
, soit u C
u C
∆ ∆=
2. .ext
P
Pu CW P u C P a
C a
∂∂
∆ = ∆ = ∆ ≈ ∆
21
2 2él
PW Pu C= = d’où
2
2él
P
P CW a
a
∂∂
∆ = ∆
2
2ext él
P
P CU W W a
a
∂∂
∆ = ∆ − ∆ = ∆
, et l’énergie de Griffith s’écrit alors :
2
2P
P CG
a
∂∂
=
IV.56b
Les relations IV.26a et IV.26b peuvent se mettre sous une forme unique :
2
ou 2
u P
P CG
a
∂∂
=
IV.56c
ou encore, si l’épaisseur de l’éprouvette n’est pas égale à l’unité :
2
ou 2
u P
P CG
e a
∂∂
=
IV.56d
Il apparaît dans les deux cas examinés (déplacement ou charge imposés), que l’énergie
U∆ (figure IV.29) est égale à l’aire du triangle OAB : ( )U Aire OAB∆ = . Pour réaliser
ces cas de chargement, il faut une machine d’essai, soit de rigidité infinie pour imposer
un déplacement, soit de rigidité nulle ou de souplesse infinie pour imposer une force.
Ces cas correspondent donc à des conditions limites extrêmes. Dans la pratique des
essais réels, on est entre ces deux cas limites et le diagramme charge-déplacement
présente l’allure indiquée sur la figure IV.30a pour différentes longueurs ia de fissure.
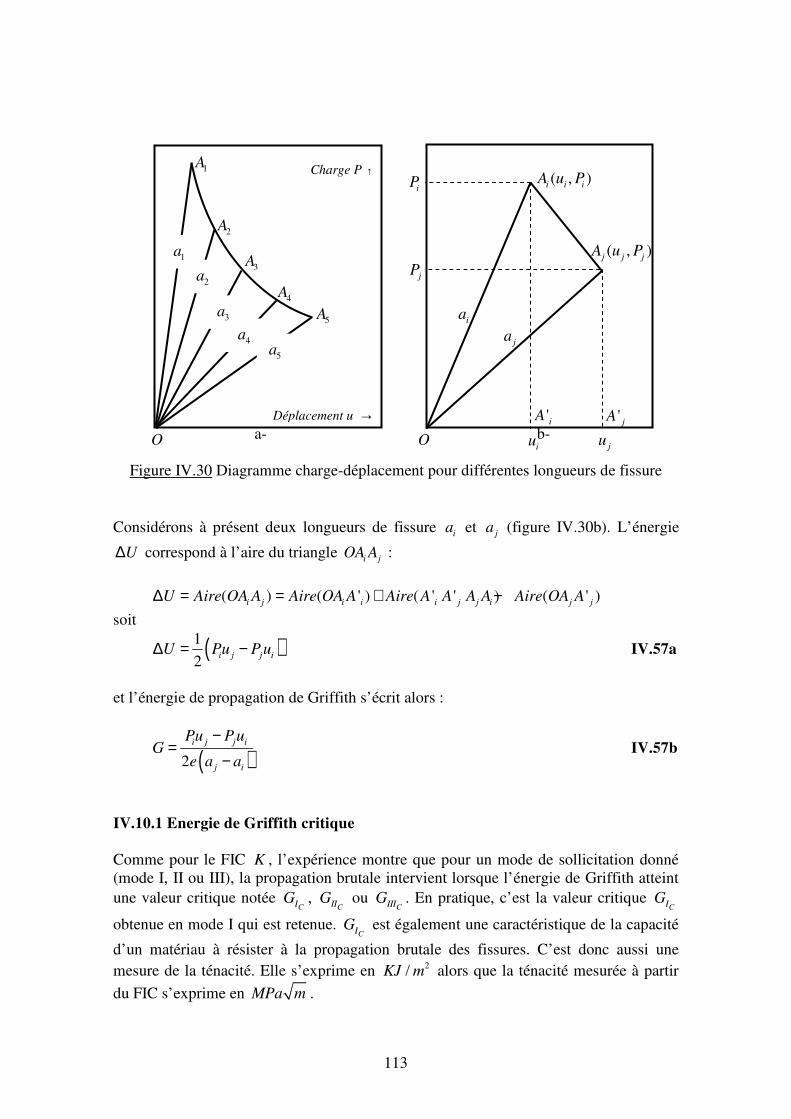
113
a- b-
Figure IV.30 Diagramme charge-déplacement pour différentes longueurs de fissure
Considérons à présent deux longueurs de fissure ia et ja (figure IV.30b). L’énergie
U∆ correspond à l’aire du triangle i jOA A :
( ) ( ' ) ( ' ' ) ( ' )i j i i i j j i j jU Aire OA A Aire OA A Aire A A A A Aire OA A∆ = = + −
soit
( )1
2i j j iU Pu P u∆ = − IV.57a
et l’énergie de propagation de Griffith s’écrit alors :
( )2
i j j i
j i
Pu P uG
e a a
−=
− IV.57b
IV.10.1 Energie de Griffith critique
Comme pour le FIC K , l’expérience montre que pour un mode de sollicitation donné
(mode I, II ou III), la propagation brutale intervient lorsque l’énergie de Griffith atteint
une valeur critique notée CI
G , CIIG ou
CIIIG . En pratique, c’est la valeur critique CI
G
obtenue en mode I qui est retenue. CI
G est également une caractéristique de la capacité
d’un matériau à résister à la propagation brutale des fissures. C’est donc aussi une
mesure de la ténacité. Elle s’exprime en 2/KJ m alors que la ténacité mesurée à partir
du FIC s’exprime en MPa m .
Déplacement u →
O
1A
1a
2a
4a
3a
5a
2A
3A
4A
5A
O
( , )i i iA u P
( , )j j jA u P
iP
jP
iu ju
'iA ' jA
ia
ja
Charge P ↑
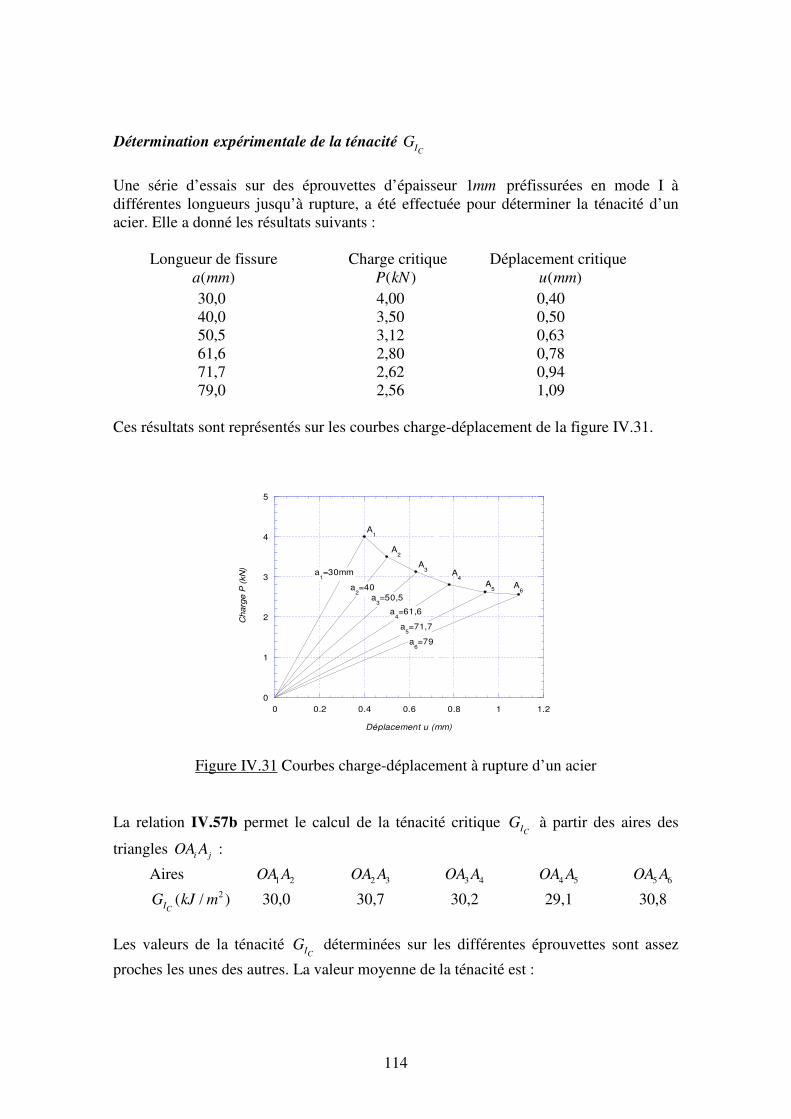
114
Détermination expérimentale de la ténacité CI
G
Une série d’essais sur des éprouvettes d’épaisseur 1mm préfissurées en mode I à
différentes longueurs jusqu’à rupture, a été effectuée pour déterminer la ténacité d’un
acier. Elle a donné les résultats suivants :
Longueur de fissure Charge critique Déplacement critique
( )a mm ( )P kN ( )u mm
30,0 4,00 0,40
40,0 3,50 0,50
50,5 3,12 0,63
61,6 2,80 0,78
71,7 2,62 0,94
79,0 2,56 1,09
Ces résultats sont représentés sur les courbes charge-déplacement de la figure IV.31.
0
1
2
3
4
5
0 0.2 0.4 0.6 0.8 1 1.2
Charg
e P
(kN
)
Déplacement u (mm)
A1
A2
A3 A
4A
5A
6
a1=30mm
a2=40
a3=50,5
a4=61,6
a5=71,7
a6=79
Figure IV.31 Courbes charge-déplacement à rupture d’un acier
La relation IV.57b permet le calcul de la ténacité critique CI
G à partir des aires des
triangles i jOA A :
Aires 1 2OA A 2 3OA A 3 4OA A 4 5OA A 5 6OA A
2( / )CI
G kJ m 30,0 30,7 30,2 29,1 30,8
Les valeurs de la ténacité CI
G déterminées sur les différentes éprouvettes sont assez
proches les unes des autres. La valeur moyenne de la ténacité est :

115
moy 230, 2 /5
C
C
I
I
GG kJ m= =∑
soit moy 230, 2 0,4 /CI
G kJ m= ±
Les valeurs de la complaisance en fonction de la longueur de fissure sont directement
déduites des données, soit :
a (mm) 30,0 40,0 50,5 61,6 71,7 79,0 7(10 / )C m N− 1,00 1,43 2,02 2,79 3,59 4,26
La ténacité CI
G peut être ensuite déterminée via la variation de la complaisance /dC da
par une relation de type IV.56. Il convient pour plus de précision de calculer des valeurs
moyennes de /dC da . Ces valeurs pour la longueur 3 50,5a mm= sont par exemple :
( )( )
7
6 1
3
2,02 1,43 10 /5,62 10
50,5 40 10
Gm NdC
Nda m
−− −
−
− = = ⋅ −
( )( )
7
6 1
3
2,79 2,02 10 /6,94 10
61,6 50,5 10
Dm NdC
Nda m
−− −
−
− = = ⋅ −
d’où moy 6 1
6 1(5,62 6,94)106, 28 10
2
dC NN
da
− −− −+ = = ⋅
et
( )23 2 6 1
2
3
3,12 10 6,43 1031,3 /
2 10CI
N NG kJ m
− − −
−
⋅ ⋅ ⋅= =
⋅
Les valeurs de la ténacité calculées par cette méthode sont :
a (mm) 30,0 40,0 50,5 61,6 71,7 79,0 2( / )
CIG kJ m 34,4 30,4 30,6 29,1 29,3 30,1
Si on excepte les premier et dernier points où /dC da n’a pu être moyennée, la valeur
moyenne de la ténacité est :
moy 229,9 /4
C
C
I
I
GG kJ m= =∑
soit moy 229,9 0,7 /CI
G kJ m= ±
Cette valeur est proche de celle déterminée par le calcul des aires i jOA A .
Les figures IV.32a et IV.32b donnent les variations de la complaisance C et de sa
dérivée /dC da en fonction de la longueur de fissure.
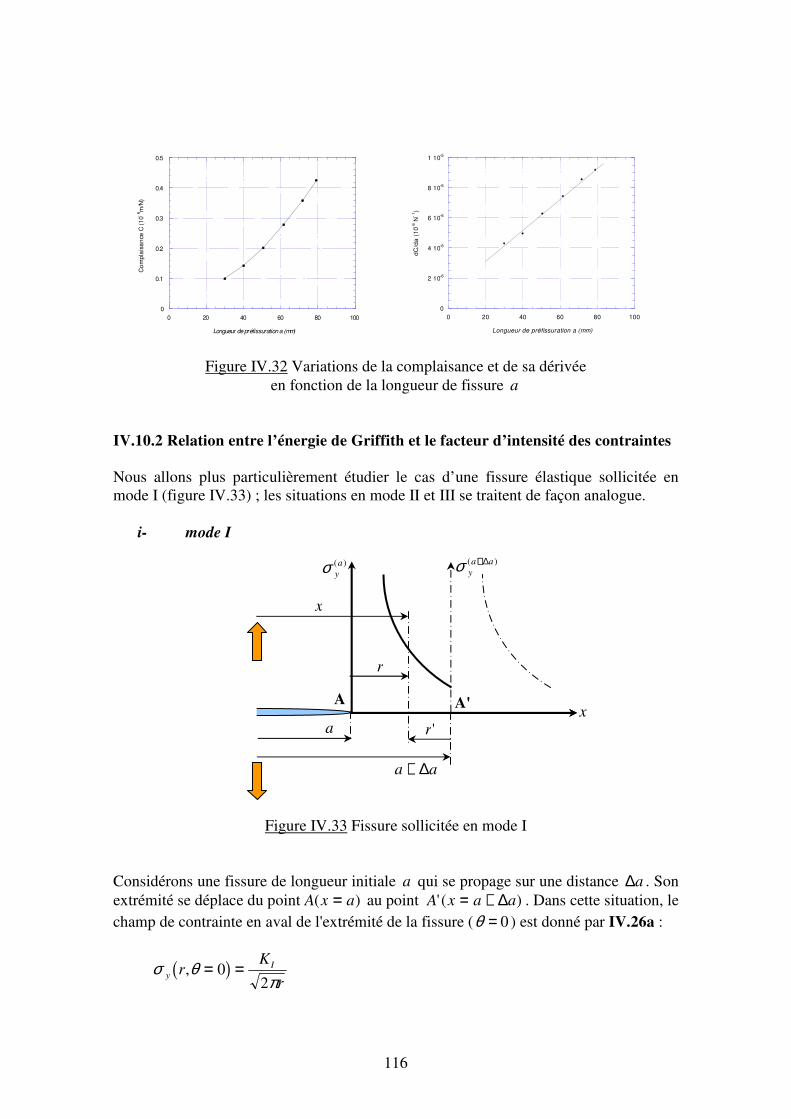
116
0
0.1
0.2
0.3
0.4
0.5
0 20 40 60 80 100
Co
mp
lais
an
ce C
(1
0- 6m
/N)
Longueur de préfissuration a (mm)
0
2 10-6
4 10-6
6 10-6
8 10-6
1 10-5
0 20 40 60 80 100
dC
/da
(1
0- 6 N
- 1)
Longueur de préfissuration a (mm)
Figure IV.32 Variations de la complaisance et de sa dérivée
en fonction de la longueur de fissure a
IV.10.2 Relation entre l’énergie de Griffith et le facteur d’intensité des contraintes
Nous allons plus particulièrement étudier le cas d’une fissure élastique sollicitée en
mode I (figure IV.33) ; les situations en mode II et III se traitent de façon analogue.
i- mode I
Figure IV.33 Fissure sollicitée en mode I
Considérons une fissure de longueur initiale a qui se propage sur une distance a∆ . Son
extrémité se déplace du point A x a( )= au point A x a a' ( )= + ∆ . Dans cette situation, le
champ de contrainte en aval de l'extrémité de la fissure ( 0θ = ) est donné par IV.26a :
σ θπy
IrK
r, = =0
2b g
A
σ y
a( )
x
σ y
a a( )+∆
A'
a
a a+ ∆
r
r '
x

117
alors que le champ des déplacements des lèvres en amont de l'extrémité de la fissure
( )θ π= s'écrit (relations IV.26b) selon les cas :
( ) ( )*
*
*
en déformations planes2
, 1 avec en contraintes planes
1
Iy
K ru r
υ υθ π υ υµ π υ
υ
== = −
= +
Pour déterminer le taux de restitution d'énergie ou énergie de Griffith G , il est plus
pratique de calculer le travail de régression de la fissure de la position A x a a' ( )= + ∆ à
la position A x a( )= , autrement dit de considérer le travail nécessaire pour refermer les
lèvres de la fissure.
Dans une structure d’épaisseur unité, la force appliquée aux lèvres d’une fissure est
σ y r edx r x ab g avec = − (figure IV.33).
Comme le déplacement d’un point d'abscisse x est u r a a xy (r' ) avec ' = + −∆ (figure
IV.33), le travail de régression s'écrit donc :
∆ ∆ ∆∆ ∆
W Ur u r
dxK v a a x
x adx
y y
a a
aI
a a
a
'( ) ( ' )
.*
= − = = − + −−+ +z z2
2
12σ
µ π(I)
� ���� ���
Pour calculer l’intégrale (I), on effectue le changement de variables suivant :
∆ ∆∆
a
x aX dx
dX
Xa
x a X
x a a X−= ⇒ = −
= ⇒ = ∞= + ⇒ =RST2 1
et
L'intégrale (I) devient alors Ι ∆= − −FHGIKJ
∞za XdX
X1
21 que l’on intègre par parties en
posant :
α α
β β
= − ⇒ =−
= − ⇒ =
RS||
T||
X ddX
X
ddX
X X
12 1
12
⇒ = −LNM
OQP
−−UVW
RS||
T||
∞
=
∞zΙ ∆aX
X
dX
X X
1
2 11
0
1
� �� �
d’où
Ι ∆ ∆= − − = −∞
a Arctg X a121
π
∆ ∆ ∆U WK
aI= − =−
'
*2 1
2µυc h
et 2 *
0
1
2
I
a
KUG Lim
a
υµΙ ∆ →
∆ −= = ∆ IV.58a

118
soit
- pour un état de déformations planes ( )*υ υ= :
( )2
DP 21II
KG
Eυ= − IV.58b
- pour un état de contraintes planes *
1
υυυ
= +
2CP II
KG
E= IV.58c
Des calculs analogues peuvent être effectués en modes II et III pour une fissure de longueur a se
propageant sur une distance a∆ .
ii- mode II
Les champs des contraintes en aval et des déplacements en amont de l'extrémité de la
fissure sont ceux existants en mode II. Ils s’écrivent d’après les relations IV.26 :
σ θπ
θ πµ π
υ
xy
II
x
II
rK
r
u rK r
,
, *
= =
= = −
RS||
T||
02
21
b g
b g c h
si bien que les calculs précédents conduisent à :
2
22
*
2
(1 ) en déformations planes
(1 )2
en contraintes planes
DP IIII
IIII
CP IIII
KG
K EG
KG
E
υυ
µ
= −= − ⇒
=
IV.59
iii- mode III
Cette fois-ci, les champs des contraintes en aval et des déplacements en amont de
l'extrémité de la fissure s’écrivent (relation IV.31) :
σ θπ
θ πµ π
yz
III
III
rK
r
u rK r
,
,
= =
= =
RS||
T||
02
23
b g
b g
si bien que l’énergie de Griffith en mode III est :
GK
III
III=2
2µ IV.60
119
Chapitre V Mécanique linéaire de la rupture en fatigue des matériaux
V.1 Introduction
La fatigue est la modification des propriétés des matériaux consécutive à l’application
de sollicitations cycliques. Elle produit en général des défaillances des structures qui
conduisent à la fissuration et à la ruine des matériaux. Les composants mécaniques tels
que les vilebrequins, les bielles, les pignons pour l’industrie automobile, les rails et
essieux pour l’industrie ferroviaire ou encore les trains d’atterrissage, les aubes de
turbines et de compresseurs pour l’industrie aéronautique, se détériorent souvent par
fatigue.
L’endommagement par fatigue, associé à plus de 50% des cas de défaillances des
systèmes mécaniques, se manifeste en général par l’amorçage et la propagation de
fissures.
Dans la pratique des procédures de caractérisation du phénomène de fatigue, la période
de l’amorçage (apparition de fissure) est traitée à l’aide d’essais sur des éprouvettes
lisses (parfois entaillées) et l’on détermine alors une durée de vie en fonction d’une
amplitude de contrainte ou de déformation.
La phase de propagation est quant à elle essentiellement étudiée à partir d’essais de
fatigue sur des éprouvettes entaillées, la vitesse de fissuration est ensuite décrite en
fonction de l’amplitude du facteur d’intensité des contraintes ∆K. C’est une des
applications majeures du concept de FIC.
V.2 Définitions des courbes d’endurance
V.2.1 Cycle de contrainte
Un cycle de contrainte est caractérisé par une amplitude de contrainte σ∆ et par une
contrainte moyenne mσ (figure V.1). On utilise souvent pour décrire les résultats de
fatigue l’amplitude de contrainte et le rapport, noté R , de la contrainte minimale sur la
contrainte maximale :
min
max1R
σσ
= <
( )max min max 1 Rσ σ σ σ∆ = − = −
max
1 R
σσ ∆=−
, min
1
R
R
σσ ∆=−
( )moy 1
2 1
R
Rσ σ+= ∆
−
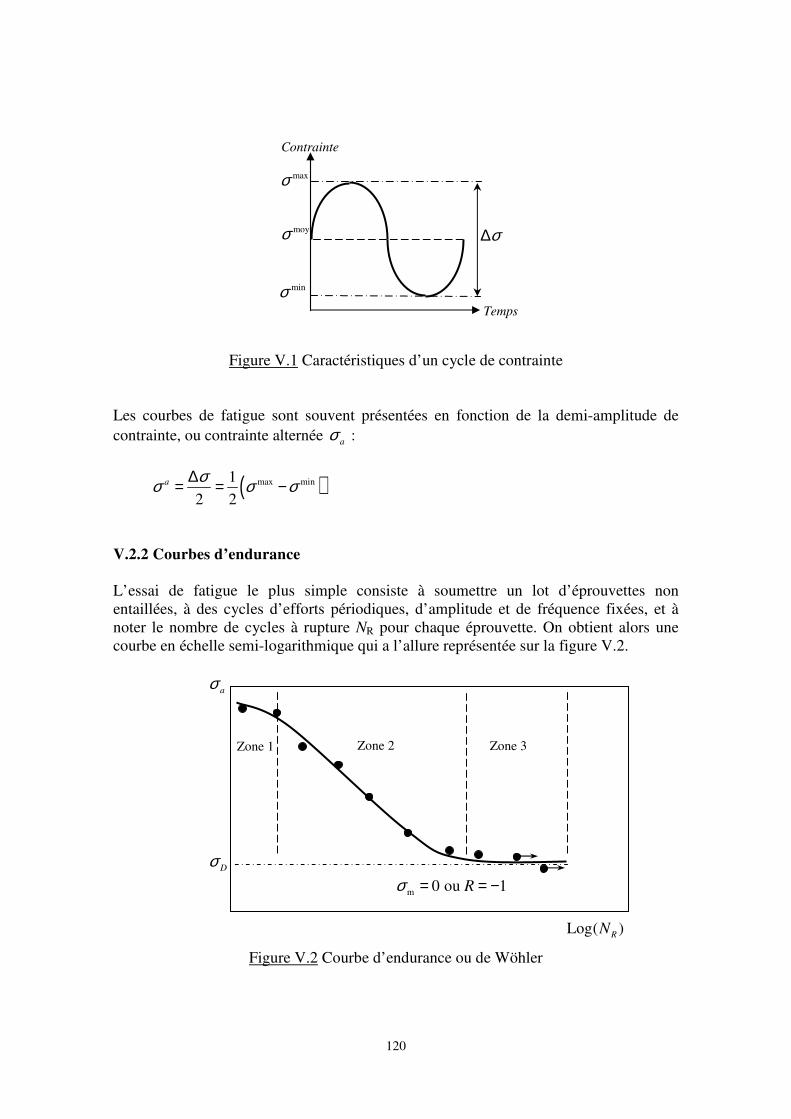
120
Figure V.1 Caractéristiques d’un cycle de contrainte
Les courbes de fatigue sont souvent présentées en fonction de la demi-amplitude de
contrainte, ou contrainte alternée aσ :
( )max min1
2 2
a σσ σ σ∆= = −
V.2.2 Courbes d’endurance
L’essai de fatigue le plus simple consiste à soumettre un lot d’éprouvettes non
entaillées, à des cycles d’efforts périodiques, d’amplitude et de fréquence fixées, et à
noter le nombre de cycles à rupture NR pour chaque éprouvette. On obtient alors une
courbe en échelle semi-logarithmique qui a l’allure représentée sur la figure V.2.
Figure V.2 Courbe d’endurance ou de Wöhler
aσ
Log( )RN
Zone 1 Zone 2 Zone 3
Dσ
m 0 ou 1Rσ = = −
Temps
Contrainte
σ∆
minσ
maxσ
moyσ

121
On peut distinguer sur cette courbe, connue sous les noms de courbe d’endurance, de
Wöhler ou encore courbe S-N (Stress - Number of cycles), trois domaines :
- une zone à faible nombre de cycles ou zone de fatigue oligocyclique (zone 1), sous
forte contrainte, où la rupture qui intervient après un faible nombre de cycles, est
précédée d’une déformation plastique significative ;
- une zone de fatigue ou d’endurance limitée (zone 2), où la rupture est atteinte après
un nombre de cycles plus important, nombre qui croît lorsque la contrainte décroît ;
- une zone d’endurance illimitée ou zone de sécurité (zone 3), sous faible contrainte,
pour laquelle la rupture ne se produit pas avant un nombre donné de cycles
généralement supérieur à 610 cycles pour les aciers et 710 cycles pour les alliages
légers.
i. Domaine de fatigue oligocyclique
Il est généralement admis que ce domaine (zone 1 de la figure V.2) correspond à des
contraintes élevées supérieures à la limite d’élasticité du matériau. Le nombre de cycles
à rupture s’étend d’une alternance à 104 cycles.
Sous l’effet de la sollicitation cyclique en déformation imposée, la courbe contrainte-
déformation prend la forme d’une boucle d’hystérésis ouverte qui se stabilise et se
ferme au bout d’un nombre de cycles, au cours duquel le matériau s’adapte aux
sollicitations cycliques ; la figue V.3 représente une boucle stabilisée. Cette
accommodation en fatigue peut se produire de deux manières : il y a durcissement ou
adoucissement suivant l’état initial du matériau. Souvent, pour des sollicitations
alternées, un matériau initialement écroui, s’adoucit en fatigue. Alors qu’inversement,
un matériau initialement, mou durcit.
Figure V.3 Courbe contrainte-déformation en fatigue oligocyclique
pε∆
tε∆
σ∆
1R = −

122
La figure V.4 est une illustration de ces deux types de comportement : lorsque
l’amplitude de contrainte cyclique augmente avec l’amplitude de la déformation, le
matériau durcit ; dans le cas contraire il s’adoucit. Cependant, on observe souvent dans
les deux cas une stabilisation de la réponse du matériau dès les premiers cycles. En
joignant les sommets des boucles stabilisées obtenues pour différentes valeurs de
déformation ε∆ imposée, on trace une courbe dite de traction cyclique qui caractérise
l’état stable des déformations sous sollicitations cycliques. Chacun des deux
comportements possibles d’un matériau est mis en évidence par la position de la courbe
de traction cyclique par rapport à la courbe de traction monotone comme le montre la
figure V.5.
Les lois empiriques les plus utilisées pour décrire la fatigue oligocyclique à température
ambiante, c'est-à-dire le nombre de cycles pour différentes déformations plastiques ou
totales imposées, sont :
- la loi de Manson-Coffin de résistance aux déformations plastiques :
( )' . 22
cp
f RNε
ε∆
=
où c est l’exposant de ductilité en fatigue et ε f
' le coefficient de ductilité en fatigue.
- la loi de Basquin de résistance aux déformations élastiques :
( )'
2 avec 2
bfeR e t pN
E
σε ε ε ε∆ = ∆ = ∆ − ∆
où b et σ f
' sont respectivement l’exposant et le coefficient de résistance à la fatigue.
On a pour les matériaux courants tels les aciers ou les alliages légers,
c b c≈ − ≈05 10. et .
ii. Zone d’endurance limitée
C’est le domaine (zone 2 de la figure V.2) de la fatigue habituellement considéré, où la
rupture apparaît après un nombre limité de cycles (compris entre 104 et 10
7), sans être
accompagnée d’une déformation plastique d’ensemble mesurable. Le nombre de cycles
à rupture RN croît quand l’amplitude de la contrainte cyclique aσ décroît. Parmi les
nombreuses expressions empiriques proposées pour relier RN à aσ pour des contraintes
a Dσ σ> , on peut citer celles de Weibull, Basquin ou Bastenaire :
( )Weibull .n
R a DN Aσ σ− = Basquin R n
a
AN
σ=
( )
Bastenairea DC
R
a D
eN B A
σ σ
σ σ
− −
+ =−
Les constantes n, A, B et C sont caractéristiques de l’alliage métallique et des conditions
d’essais.
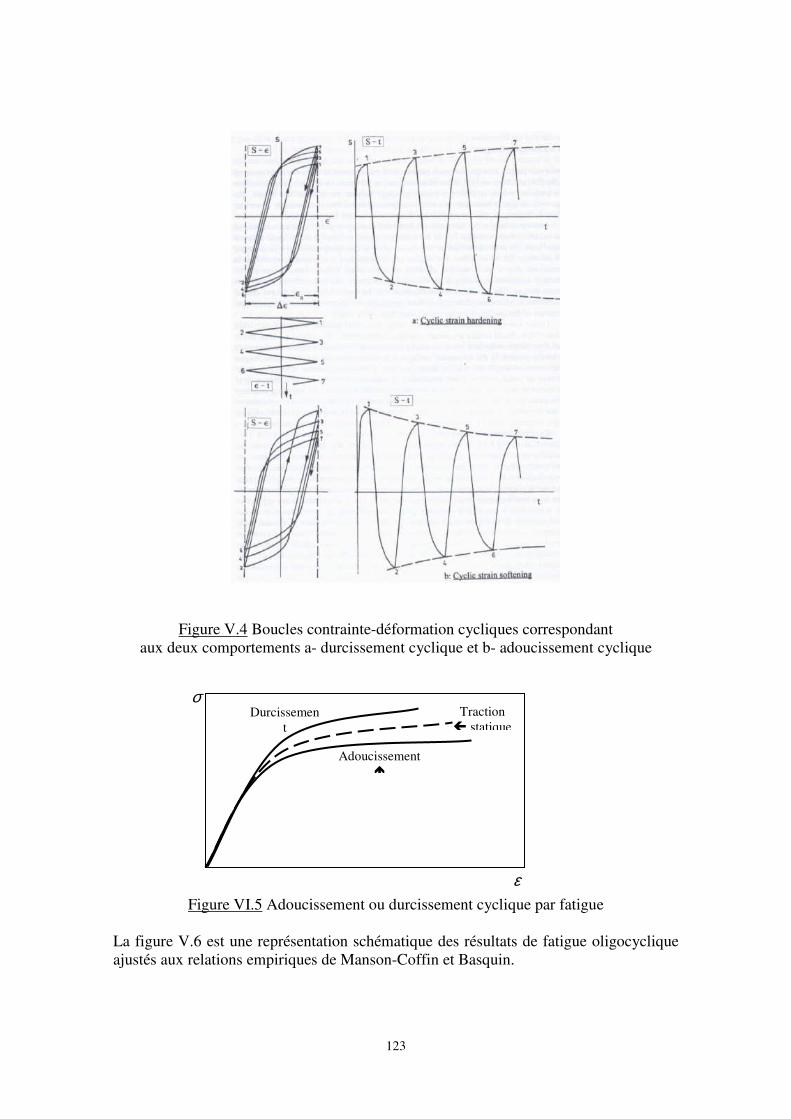
123
Figure V.4 Boucles contrainte-déformation cycliques correspondant
aux deux comportements a- durcissement cyclique et b- adoucissement cyclique
Figure VI.5 Adoucissement ou durcissement cyclique par fatigue
La figure V.6 est une représentation schématique des résultats de fatigue oligocyclique
ajustés aux relations empiriques de Manson-Coffin et Basquin.
Durcissemen
t
cyclique� Adoucissement
�
Traction
statique
σ
ε
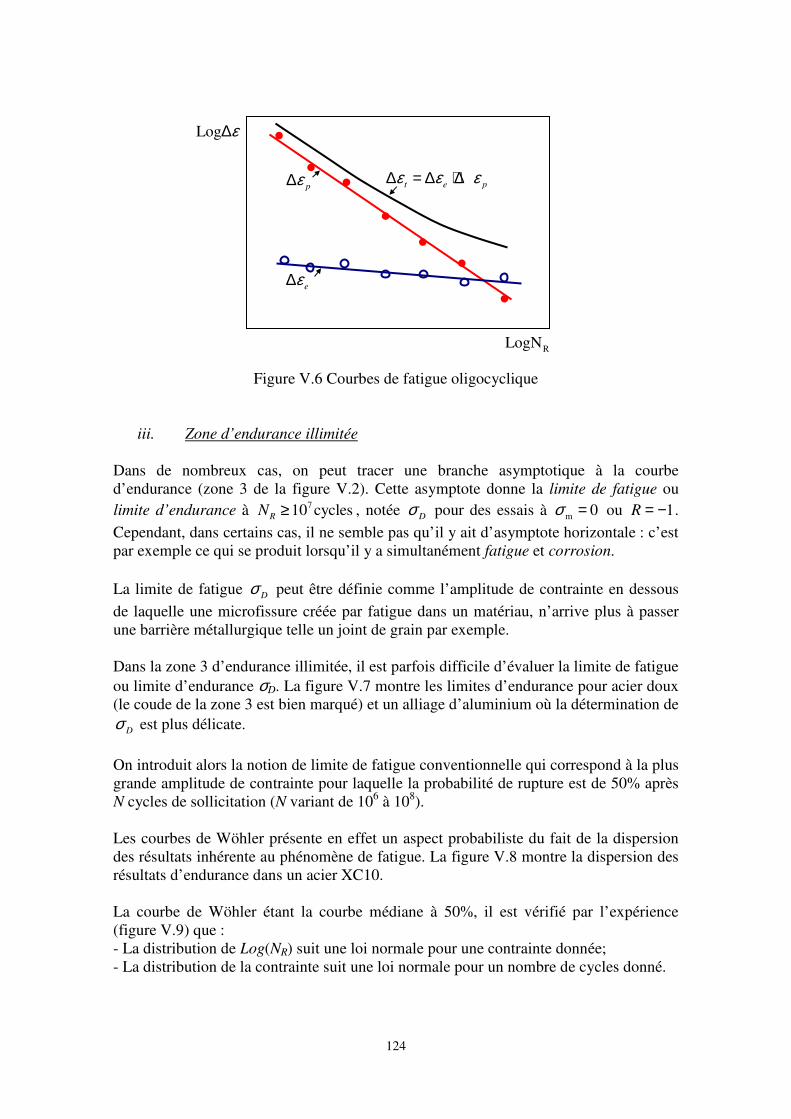
124
Figure V.6 Courbes de fatigue oligocyclique
iii. Zone d’endurance illimitée
Dans de nombreux cas, on peut tracer une branche asymptotique à la courbe
d’endurance (zone 3 de la figure V.2). Cette asymptote donne la limite de fatigue ou
limite d’endurance à 710 cyclesRN ≥ , notée Dσ pour des essais à m 0σ = ou 1R = − .
Cependant, dans certains cas, il ne semble pas qu’il y ait d’asymptote horizontale : c’est
par exemple ce qui se produit lorsqu’il y a simultanément fatigue et corrosion.
La limite de fatigue Dσ peut être définie comme l’amplitude de contrainte en dessous
de laquelle une microfissure créée par fatigue dans un matériau, n’arrive plus à passer
une barrière métallurgique telle un joint de grain par exemple.
Dans la zone 3 d’endurance illimitée, il est parfois difficile d’évaluer la limite de fatigue
ou limite d’endurance σD. La figure V.7 montre les limites d’endurance pour acier doux
(le coude de la zone 3 est bien marqué) et un alliage d’aluminium où la détermination de
Dσ est plus délicate.
On introduit alors la notion de limite de fatigue conventionnelle qui correspond à la plus
grande amplitude de contrainte pour laquelle la probabilité de rupture est de 50% après
N cycles de sollicitation (N variant de 106 à 10
8).
Les courbes de Wöhler présente en effet un aspect probabiliste du fait de la dispersion
des résultats inhérente au phénomène de fatigue. La figure V.8 montre la dispersion des
résultats d’endurance dans un acier XC10.
La courbe de Wöhler étant la courbe médiane à 50%, il est vérifié par l’expérience
(figure V.9) que :
- La distribution de Log(NR) suit une loi normale pour une contrainte donnée;
- La distribution de la contrainte suit une loi normale pour un nombre de cycles donné.
eε∆
pε∆ t e pε ε ε∆ = ∆ + ∆
Log ε∆
RLogN
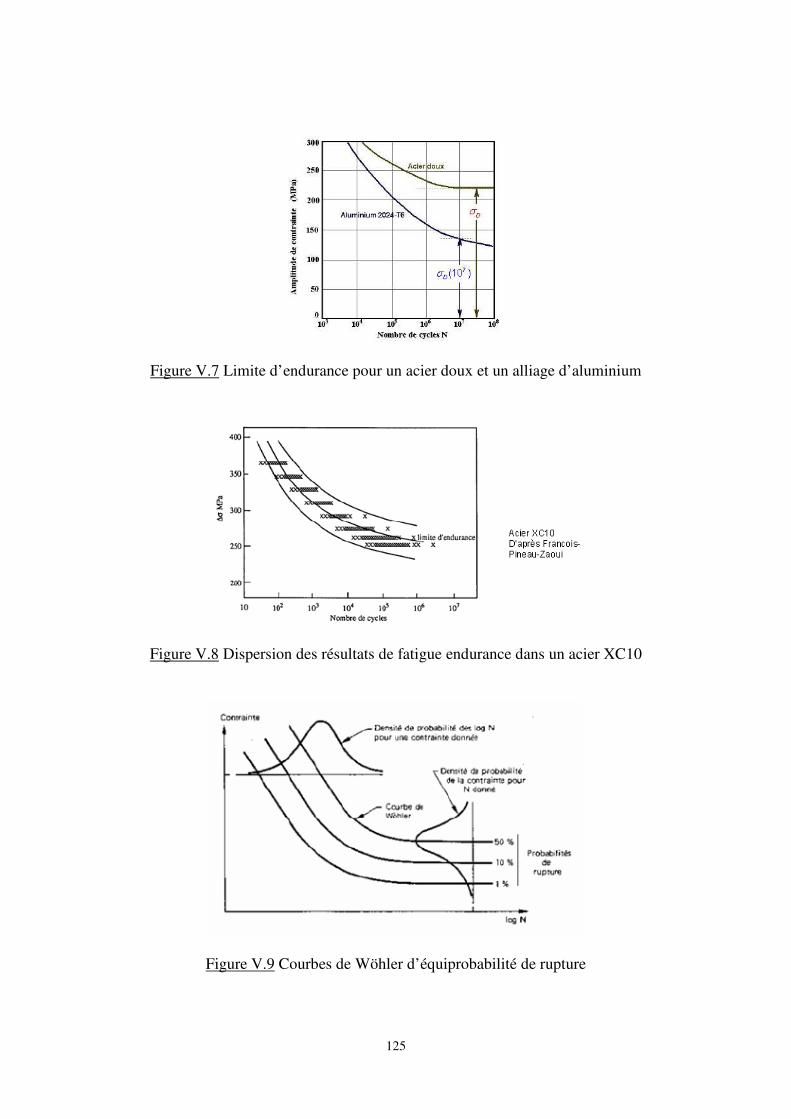
125
Figure V.7 Limite d’endurance pour un acier doux et un alliage d’aluminium
Figure V.8 Dispersion des résultats de fatigue endurance dans un acier XC10
Figure V.9 Courbes de Wöhler d’équiprobabilité de rupture
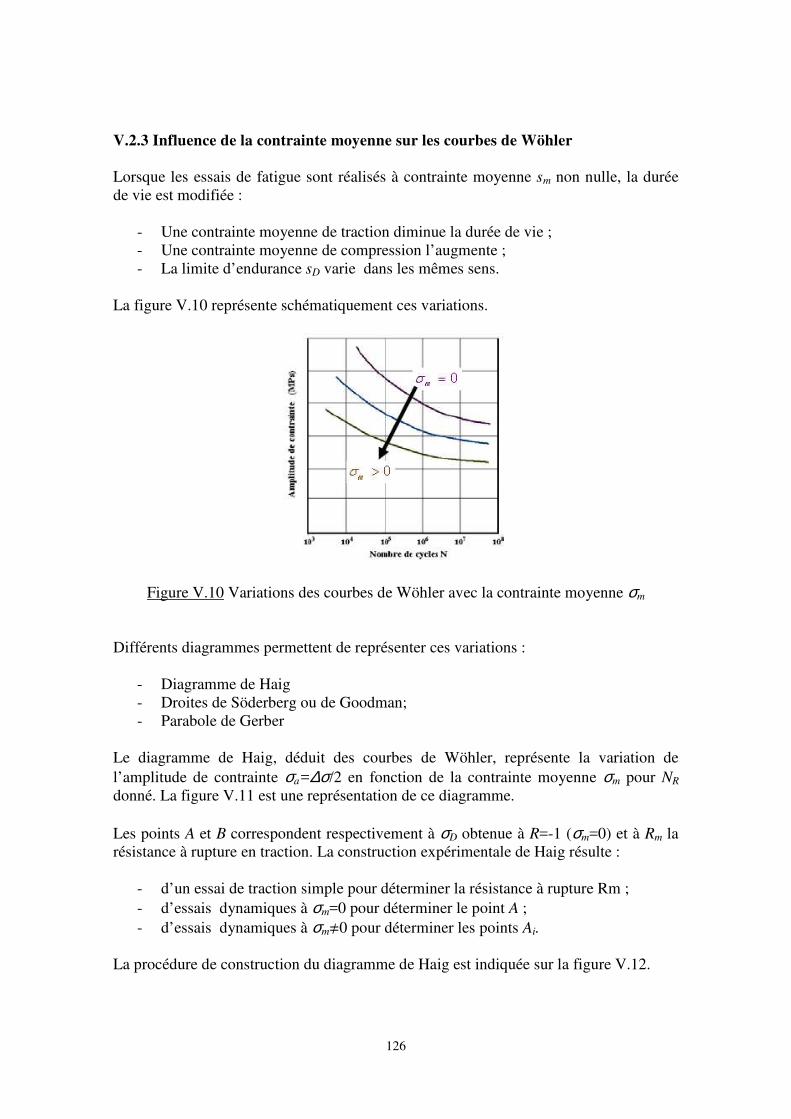
126
V.2.3 Influence de la contrainte moyenne sur les courbes de Wöhler
Lorsque les essais de fatigue sont réalisés à contrainte moyenne sm non nulle, la durée
de vie est modifiée :
- Une contrainte moyenne de traction diminue la durée de vie ;
- Une contrainte moyenne de compression l’augmente ;
- La limite d’endurance sD varie dans les mêmes sens.
La figure V.10 représente schématiquement ces variations.
Figure V.10 Variations des courbes de Wöhler avec la contrainte moyenne σm
Différents diagrammes permettent de représenter ces variations :
- Diagramme de Haig
- Droites de Söderberg ou de Goodman;
- Parabole de Gerber
Le diagramme de Haig, déduit des courbes de Wöhler, représente la variation de
l’amplitude de contrainte σa=∆σ/2 en fonction de la contrainte moyenne σm pour NR
donné. La figure V.11 est une représentation de ce diagramme.
Les points A et B correspondent respectivement à σD obtenue à R=-1 (σm=0) et à Rm la
résistance à rupture en traction. La construction expérimentale de Haig résulte :
- d’un essai de traction simple pour déterminer la résistance à rupture Rm ;
- d’essais dynamiques à σm=0 pour déterminer le point A ;
- d’essais dynamiques à σm∫0 pour déterminer les points Ai.
La procédure de construction du diagramme de Haig est indiquée sur la figure V.12.
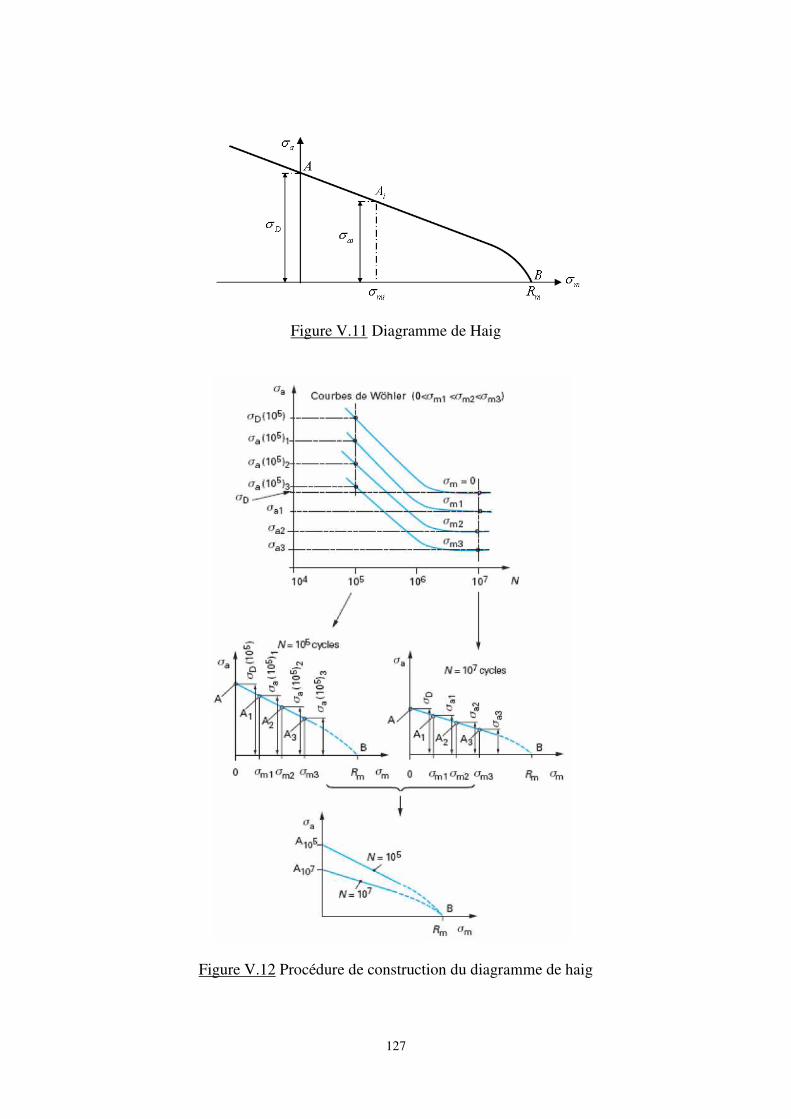
127
Figure V.11 Diagramme de Haig
Figure V.12 Procédure de construction du diagramme de haig
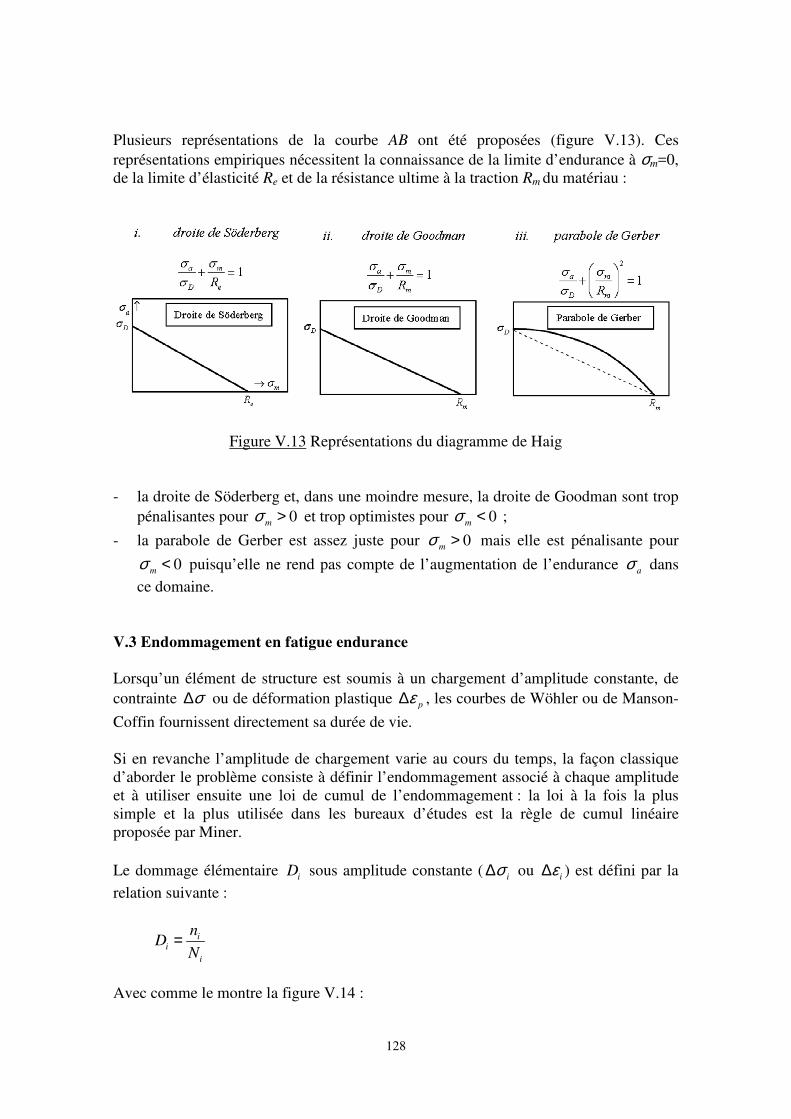
128
Plusieurs représentations de la courbe AB ont été proposées (figure V.13). Ces
représentations empiriques nécessitent la connaissance de la limite d’endurance à σm=0,
de la limite d’élasticité Re et de la résistance ultime à la traction Rm du matériau :
Figure V.13 Représentations du diagramme de Haig
- la droite de Söderberg et, dans une moindre mesure, la droite de Goodman sont trop
pénalisantes pour 0mσ > et trop optimistes pour 0mσ < ;
- la parabole de Gerber est assez juste pour 0mσ > mais elle est pénalisante pour
0mσ < puisqu’elle ne rend pas compte de l’augmentation de l’endurance aσ dans
ce domaine.
V.3 Endommagement en fatigue endurance
Lorsqu’un élément de structure est soumis à un chargement d’amplitude constante, de
contrainte σ∆ ou de déformation plastique pε∆ , les courbes de Wöhler ou de Manson-
Coffin fournissent directement sa durée de vie.
Si en revanche l’amplitude de chargement varie au cours du temps, la façon classique
d’aborder le problème consiste à définir l’endommagement associé à chaque amplitude
et à utiliser ensuite une loi de cumul de l’endommagement : la loi à la fois la plus
simple et la plus utilisée dans les bureaux d’études est la règle de cumul linéaire
proposée par Miner.
Le dommage élémentaire iD sous amplitude constante ( iσ∆ ou iε∆ ) est défini par la
relation suivante :
ii
i
nD
N=
Avec comme le montre la figure V.14 :

129
in le nombre de cycles effectué à l’amplitude iσ∆ ou iε∆
iN le nombre de cycles à rupture correspondant (déduit de la courbe de Wöhler
ou de celle de Manson-Coffin)
Figure V.14 Définition de l’endommagement élémentaire /i i iD n N=
La règle de cumul linéaire de Miner suppose que l’endommagement total est la somme
algébrique des endommagements élémentaires. L’endommagement total D est donné
par :
ii
i i i
nD D
N= =∑ ∑ La rupture se produit lorsque 1D = .
L'expérience montre que la sommation des fractions de durée vie /i in N dépend de
l'histoire du chargement. Pour des amplitudes (de contrainte ou de déformation
plastique) décroissantes / 1i in N <∑ au moment où la rupture intervient, alors que pour
les niveaux croissants / 1i in N >∑ à la rupture.
La règle de Miner bien que peu précise dans certains cas ( 20%± ), est néanmoins très
utilisée en calcul de structure à cause de sa simplicité.
V.4 Courbes de fissuration par fatigue
Le paragraphe précédent a abordé essentiellement l’amorçage qui englobe la
propagation de microfissures : c’est un phénomène qui se produit essentiellement en
surface. Le présent paragraphe traite de la propagation au-delà de la phase d’amorçage
lorsque les fissures pénètrent à l’intérieur du matériau.
Dans quelles conditions la propagation des fissures de fatigue présente un intérêt ? Les
spectres de charge subis par les structures en service peuvent contenir des contraintes de
niveau supérieur à la limite de fatigue et provoquer donc la propagation des fissures. Par
2
iσ∆
aσ
Log( )RN
Dσ
in iN
Courbe de Wöhler Log ε∆
RLogN
iε∆
in iN
Courbe de Manson-Coffin
130
ailleurs certaines structures contiennent des fissures inhérentes aux procédés de
fabrication, et la maîtrise de leur propagation devient alors importante pour l’intégrité
de la structure. C’est ce qu’on appelle le concept de tolérance au dommage qui peut
s’énoncer ainsi : puisque certaines structures contiennent inévitablement des fissures,
leur dimensionnement et/ou leur durée de vie doivent être tels que ces fissures
n’atteignent pas une taille critique conduisant à la rupture brutale. C’est notamment le
cas des structures aéronautiques : les avions par exemple, où des fissures sont présentes
un peu partout dans le carénage, ont une durée de vie limitée. Ils sont régulièrement
inspectés à des périodes fixées par la vitesse de propagation des fissures, de sorte que
les tailles de celles-ci ne deviennent pas critiques.
La présence de fissures dans les structures est donc tolérée. Lorsque la sécurité n’est pas
essentielle comme par exemple les essieux des roues de tracteur qui rompent le plus
souvent en fatigue, on remplace alors l’essieu quand il est hors usage. Mais lorsque ce
n’est pas le cas, comme par exemple les réservoirs sous pression qui peuvent exploser et
provoquer des catastrophes, il faut des inspections régulières pour éviter la rupture
brutale.
Essai de fissuration par fatigue
Un essai de propagation de fissure de fatigue peut être conduit sur une simple plaque
percée d’un trou central prolongé d’entailles aigues pour faciliter l’amorçage (zoom de
la figure V.15). Si W est la largeur de la plaque, des bonnes conditions d’essai exigent
que son épaisseur soit environ égale à / 20W , le diamètre du trou central de l’ordre de
/ 30W et la longueur initiale 02a (trou et entailles) d’environ /10W . Ce type
d’éprouvette est appelé éprouvette CCT.
La photo sur la figure V.15 montre le dispositif de fixation de l’éprouvette CCT entre
les mors de la machine de fatigue. La longueur de fissure est mesurée régulièrement à
l’aide de méthodes optique ou électrique.
Pour décrire la progression des fissures, on peut représenter la longueur a en fonction
du nombre de cycles N subi par l’éprouvette d’essai (figure V.16), ou la vitesse de
fissuration /da dN en fonction de a (figure V.17), ou encore /da dN en fonction de
l’amplitude de l’intensité des contraintes K∆ (figure V.18).
La figure V.16 représente deux essais sur des éprouvette CCT ( 100W mm= ) sollicitées
à des niveaux de chargements cycliques différents mais à même rapport de charge : la
progression de fissure est tout naturellement plus rapide à l’amplitude de contrainte, 1σ ,
la plus forte. L’essai à amplitude 2 1σ σ< , conduit à une rupture de l’éprouvette pour un
nombre de cycles plus élevé.
La figure V.17 représente la variation de la vitesse de propagation /da dN en fonction
de la longueur de fissure a . Cette vitesse est plus élevée à l’amplitude de contrainte
1 2σ σ> .
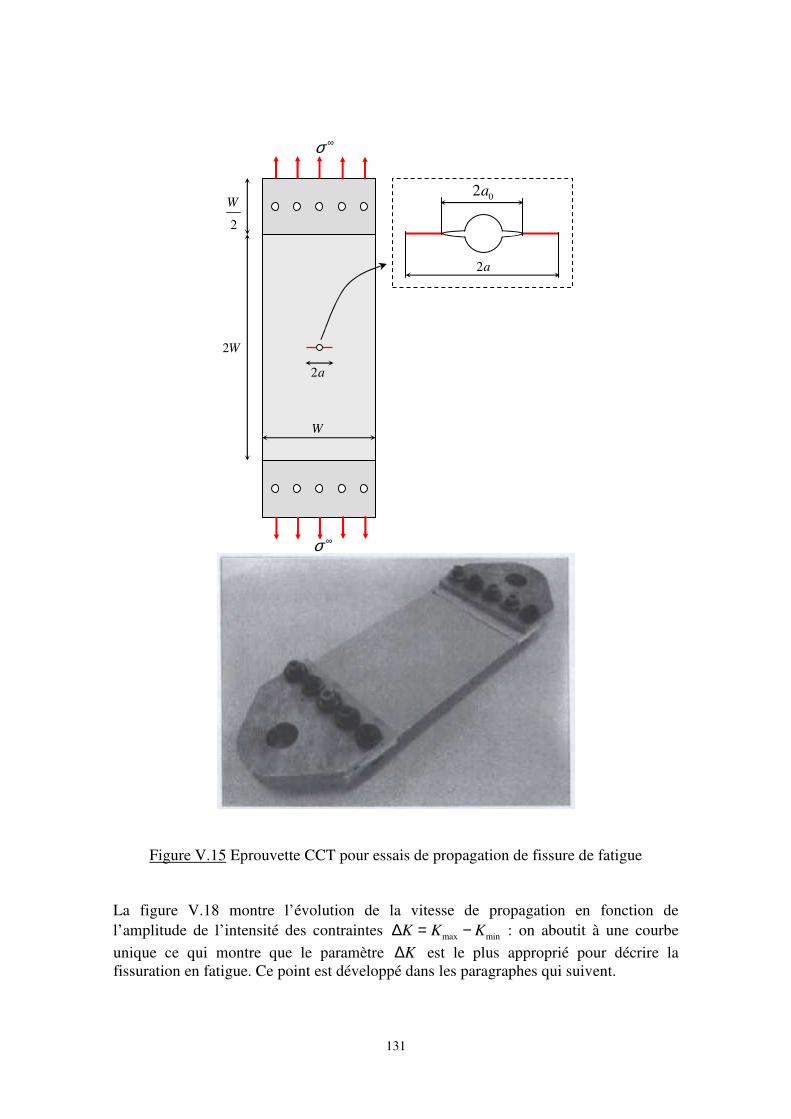
131
Figure V.15 Eprouvette CCT pour essais de propagation de fissure de fatigue
La figure V.18 montre l’évolution de la vitesse de propagation en fonction de
l’amplitude de l’intensité des contraintes max minK K K∆ = − : on aboutit à une courbe
unique ce qui montre que le paramètre K∆ est le plus approprié pour décrire la
fissuration en fatigue. Ce point est développé dans les paragraphes qui suivent.
W
2
W
2W
2a
σ ∞
σ ∞
2a
02a
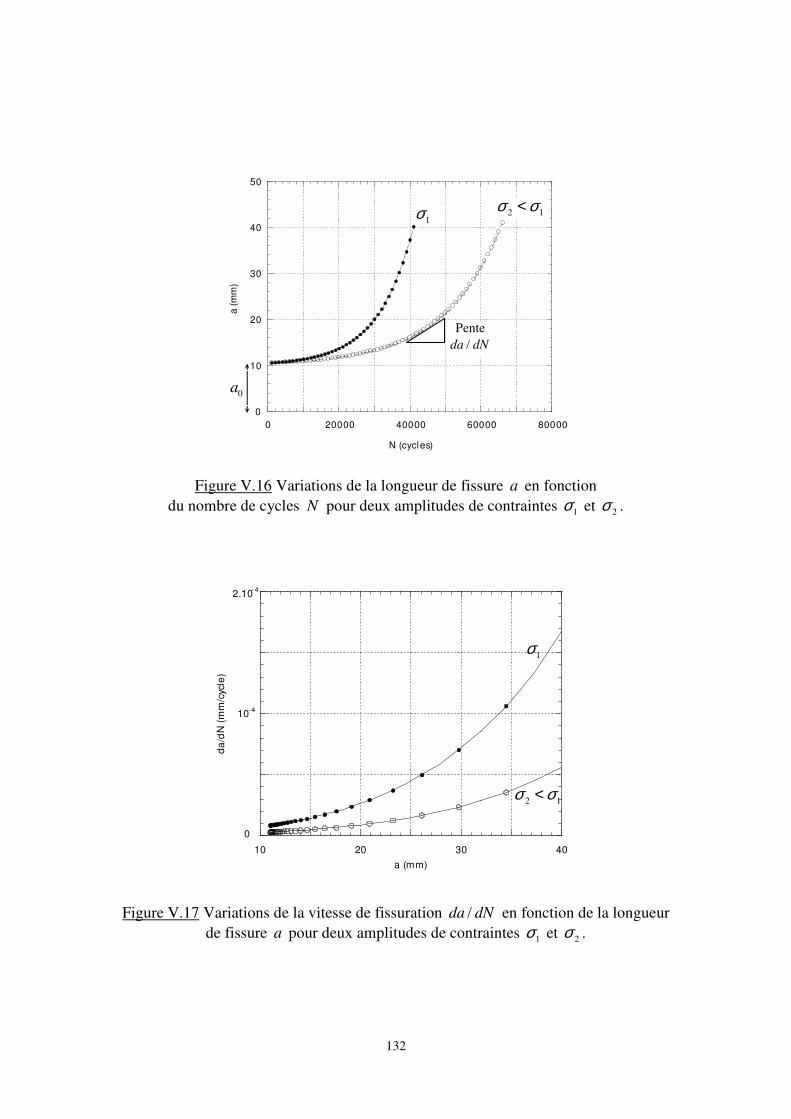
132
0
10
20
30
40
50
0 20000 40000 60000 80000
a (
mm
)
N (cycles)
Figure V.16 Variations de la longueur de fissure a en fonction
du nombre de cycles N pour deux amplitudes de contraintes 1σ et 2σ .
10 20 30 40
da
/dN
(m
m/c
ycle
)
a (mm)
0
10-4
2.10-4
Figure V.17 Variations de la vitesse de fissuration /da dN en fonction de la longueur
de fissure a pour deux amplitudes de contraintes 1σ et 2σ .
Pente
/da dN
1σ 2 1σ σ<
0a
1σ
2 1σ σ<
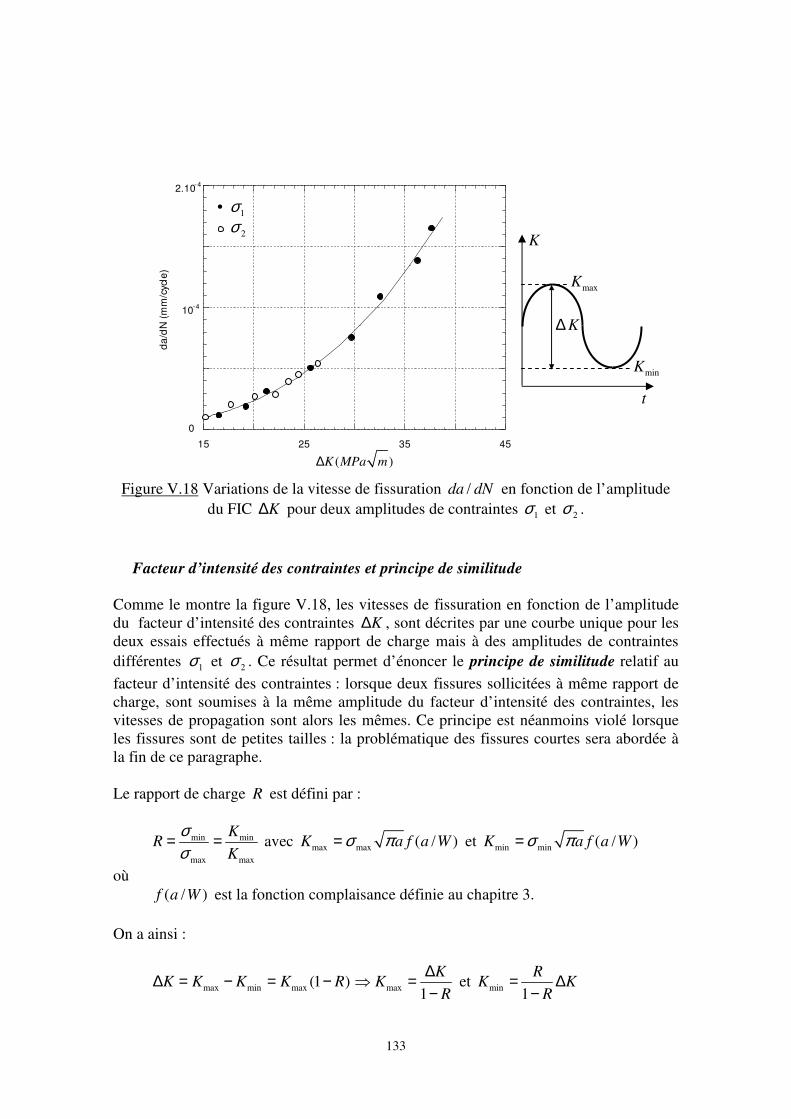
133
15 25 35 45
da
/dN
(m
m/c
ycle
)
∆Κ (MPa.m1 /2
)
0
10-4
2.10-4
Figure V.18 Variations de la vitesse de fissuration /da dN en fonction de l’amplitude
du FIC K∆ pour deux amplitudes de contraintes 1σ et 2σ .
Facteur d’intensité des contraintes et principe de similitude
Comme le montre la figure V.18, les vitesses de fissuration en fonction de l’amplitude
du facteur d’intensité des contraintes K∆ , sont décrites par une courbe unique pour les
deux essais effectués à même rapport de charge mais à des amplitudes de contraintes
différentes 1σ et 2σ . Ce résultat permet d’énoncer le principe de similitude relatif au
facteur d’intensité des contraintes : lorsque deux fissures sollicitées à même rapport de
charge, sont soumises à la même amplitude du facteur d’intensité des contraintes, les
vitesses de propagation sont alors les mêmes. Ce principe est néanmoins violé lorsque
les fissures sont de petites tailles : la problématique des fissures courtes sera abordée à
la fin de ce paragraphe.
Le rapport de charge R est défini par :
min min
max max
KR
K
σσ
= = avec max max ( / )K a f a Wσ π= et min min ( / )K a f a Wσ π=
où
( / )f a W est la fonction complaisance définie au chapitre 3.
On a ainsi :
max min max (1 )K K K K R∆ = − = − max1
KK
R
∆⇒ =
− et min
1
RK K
R= ∆
−
( )K MPa m∆
1σ•
2σ
minK
maxK
K∆
t
K

134
On peut donc écrire :
max min( , )da
f K KdN
= V.1
ou
( , )da
f K RdN
= ∆ V.2
En général, une courbe de fissuration comme celle de la figure V.18 est représentée en
échelle bi-logarithmique ( )log( / ) log( )da dN K− ∆ . La courbe V.19 montre un exemple
de courbes de fissuration obtenues sur un alliage d’aluminium1. Celles-ci sont issues
d’essais sur éprouvettes CCT, sollicitées avec deux rapports de charge R et deux
amplitudes de contrainte pour chaque valeur de R . Ces résultats montrent bien que les
courbes de fissuration dépendent du rapport de charge comme le prévoit la relation V.2 ;
à même K∆ , la vitesse de propagation /da dN croit avec R , autrement dit /da dN est
plus rapide lorsque mσ , le niveau moyen de la contrainte cyclique, augmente.
Figure V.19 Courbes /da dN K− ∆ à deux rapports de charge
et pour deux niveaux de contraintes à chaque rapport
1 J. Schijve, Fatigue of Structures and Materials, Kluwer Academic Publishers, 2001
( )MPaσ∆

135
Courbes de fissuration en fatigue
La figure V.19 montre des courbes de fissurations partielles. L’allure d’une courbe de
fissuration (ou courbe de propagation en fatigue) complète est indiquée sur la figure
V.20. Ce type de courbe est obtenu pour un rapport de charge R fixé ; on observe un
déplacement de la courbe vers la gauche, lorsque R augmente.
Pour un matériau donné, on distingue généralement trois domaines dans la courbe de
propagation par fatigue :
- Le domaine � des faibles vitesses, obtenu par des essais à K∆ décroissant : cette
procédure permet de déterminer la valeur seuil de l’amplitude du FIC, seuilK∆ , en
dessous de laquelle, une fissure, présente dans un matériau, ne se propage plus.
Compte tenu de la procédure, la longueur de fissure est relativement longue lorsque
le seuilK∆ est atteint. La connaissance de seuilK∆ est d’une grande importance pour
les structures nécessitant une grande fiabilité. Elle varie avec le rapport de charge R
et le milieu environnant. La relation empirique de Klesnil et Lukas2, la plus utilisée
pour décrire ces variations, est de la forme :
( ) 01seuilK R Kγ∆ = − ∆ V.3
où ∆K0 est la valeur seuil pour 0R = . L’exposant γ est compris entre 0 et 1 : il est
proche de 1 lorsque l’essai de fatigue est conduit dans des environnements agressifs
et proche de 0 pour des milieux inertes tel que le vide, ou tout environnement
gazeux dont les molécules ne d’adsorbent pas sur les surfaces fraîchement créées
lors de la fissuration.
- Le domaine � des vitesses moyennes, obtenu par des essais à K∆ croissant : la
vitesse de fissuration dans ce domaine est le plus souvent décrite par la relation
empirique de Paris :
da
dNC K
m= ∆b g V.4
C et m sont des constantes qui dépendent du matériau, du milieu environnant et du
rapport de charge R .
- Le domaine � des vitesses très élevées où les valeurs de maxK se rapprochent de la
ténacité CK du matériau.
L’influence du rapport de charge R sur l’ensemble de la courbe de fissuration est
schématisée sur la figure V.20b.
2 M. Klesnil and Lukas, The influence of strength and stress history on growth and stabilization of fatigue
cracks, Engineering Fracture Mechanics, 4, pp. 77-92, 1972
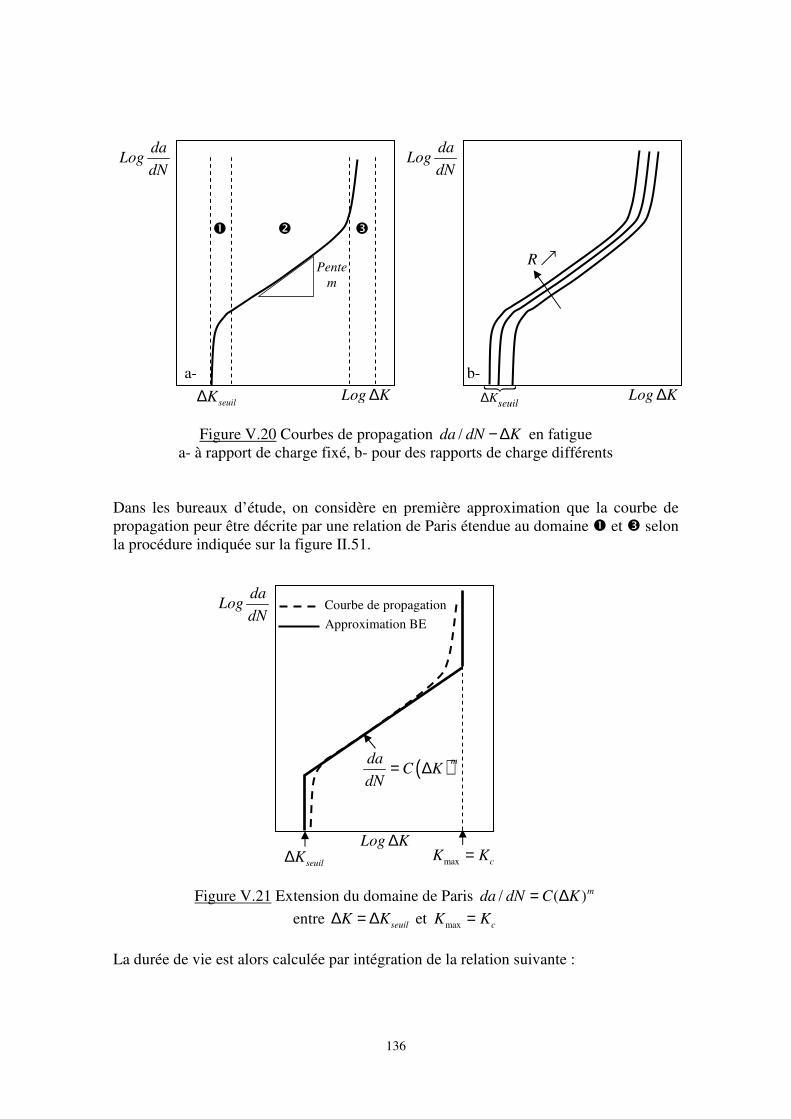
136
Figure V.20 Courbes de propagation /da dN K− ∆ en fatigue
a- à rapport de charge fixé, b- pour des rapports de charge différents
Dans les bureaux d’étude, on considère en première approximation que la courbe de
propagation peur être décrite par une relation de Paris étendue au domaine � et � selon
la procédure indiquée sur la figure II.51.
Figure V.21 Extension du domaine de Paris / ( )mda dN C K= ∆
entre seuilK K∆ = ∆ et max cK K=
La durée de vie est alors calculée par intégration de la relation suivante :
� � �
daLog
dN
Pente
m
Log K∆ seuilK∆
daLog
dN
Log K∆ �
seuilK∆
Rր
a- b-
daLog
dN
Log K∆
seuilK∆ max cK K=
( )mdaC K
dN= ∆
Courbe de propagation
Approximation BE

137
0
ca
f ma
daN
C K=
∆∫ V.5
avec les longueurs 0a et ca déterminées à partir des égalités suivantes :
0 0( / )seuilK a f a Wσ π∆ = ∆ et max ( / )c c cK a f a Wσ π=
V.5 Cumul de l’endommagement en propagation
Lorsqu’un élément de structure fissuré est soumis à un chargement d’amplitude de
contrainte constante σ∆ , la durée de vie est calculé par une relation de type V.5 où
l’amplitude de l’intensité des contraintes K∆ dépend de la longueur fissurée.
Si l’élément est soumis à un spectre de charge comportant plusieurs amplitudes iσ∆ , on
procède de la façon suivante :
- On calcule l’accroissement de longueur de fissure ia∆ dû à chaque amplitude iσ∆
appliquée pendant iN∆ cycles, soit :
( ) ( )( )/mm
i i i i i i ia C K N C a f a W Nσ π∆ = ∆ ∆ = ∆ ∆
Le nombre de cycle spectreN∆ subis pendant une période du spectre de charge et
l’accroissement de longueur de fissure spectrea∆ correspondant, sont donnés par :
spectre i
i
N N∆ = ∆∑
spectre i
i
a a∆ = ∆∑
L’accroissement de longueur de fissure spectrea∆ reste en général faible par rapport à la
longueur de fissure a , si bien que l’on peut déterminer la vitesse moyenne / spectreda dN
sur le spectre de charge :
( )( )spectre
spectre
/
/N
m
i i i
i ispectre
i i
i i
a C a f a W Na
da dNN N
σ π∆ ∆ ∆∆= = =
∆ ∆ ∆
∑ ∑
∑ ∑
soit
( )( )
/ /
m
i imi
spectre
i
i
N
da dN C a f a WN
σπ
∆ ∆ = ∆
∑
∑

138
Ce calcul repose sur l’utilisation d’une loi de cumul linéaire (de type Miner) des
accroissements élémentaires ia∆ de fissure.
- On calcule ensuite la durée de vie en nombre de spectres ( spectreN ) en intégrant une
relation de type V.5.
Lorsque le spectre de chargement n’est pas décomposable en cycles à σ∆ fixée, on
utilise une approche, proposée par Barsom3, qui consiste à relier la vitesse de
propagation /da dN à une amplitude du facteur d’intensité des contraintes mSK∆
moyennée (moyenne des carrés des contraintes) sur une période du spectre de SN
cycles :
( )/mS mSK a f a Wσ π∆ = ∆
où max min
mS mS mSσ σ σ∆ = −
avec
max 2
max
1
1 SN
mS
iSNσ σ
=
= ∑
et
min 2
min
1
1 SN
mS
iSNσ σ
=
= ∑ ,
On détermine, à partir de ces contraintes, mSR le rapport de charge moyen sur le
spectre : min
max
mSmS
mS
Rσσ
=
La vitesse est alors déterminée par une relation de type Paris :
( )m
mS
daC K
dN= ∆
La durée de vie est ensuite calculée par intégration d’une relation de type IV.20.
V.6 Effet de fermeture de fissure
On a vu au chapitre 4, que le fond de fissure se plastifie. Lorsqu’une fissure de fatigue
se propage, elle entraîne avec elle la zone plastifiée qui se forme à son extrémité. Il se
forme ainsi au fur et à mesure que la fissure progresse, un sillage plastique autour de la
3 J.M. Barsom, ASTM STP 595, p. 217, 1976
maxσ
minσ
σ ↑
SN
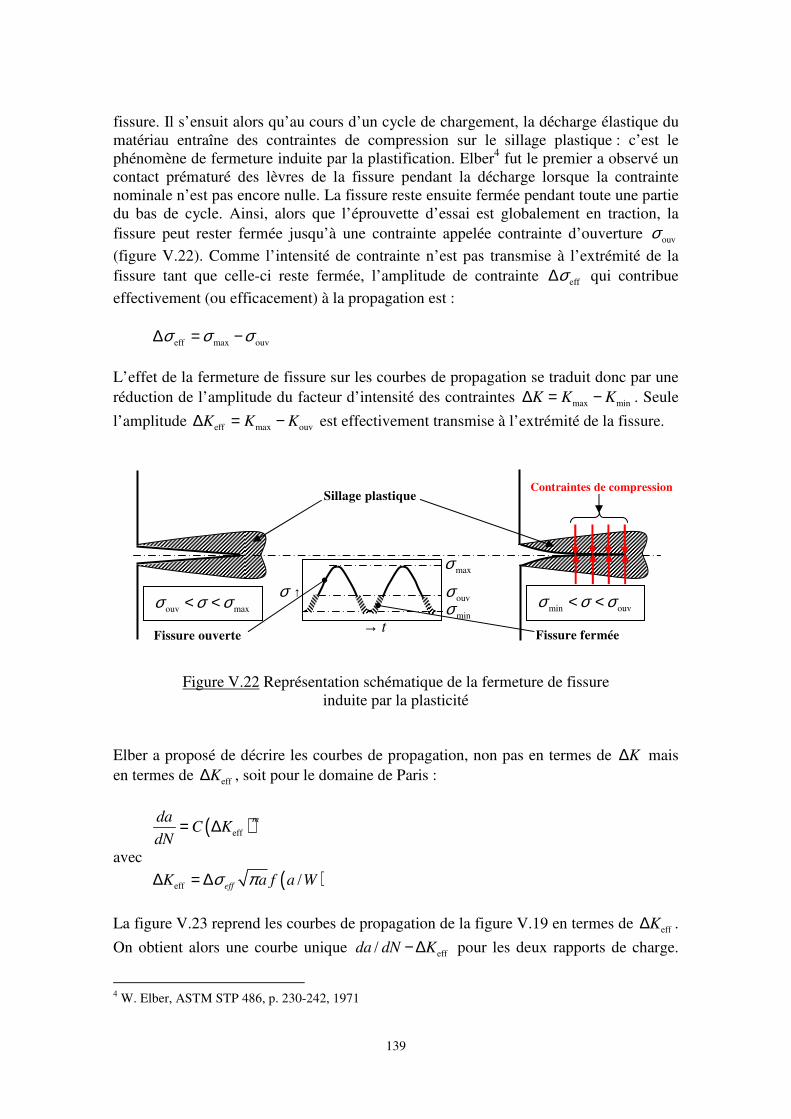
139
fissure. Il s’ensuit alors qu’au cours d’un cycle de chargement, la décharge élastique du
matériau entraîne des contraintes de compression sur le sillage plastique : c’est le
phénomène de fermeture induite par la plastification. Elber4 fut le premier a observé un
contact prématuré des lèvres de la fissure pendant la décharge lorsque la contrainte
nominale n’est pas encore nulle. La fissure reste ensuite fermée pendant toute une partie
du bas de cycle. Ainsi, alors que l’éprouvette d’essai est globalement en traction, la
fissure peut rester fermée jusqu’à une contrainte appelée contrainte d’ouverture ouvσ
(figure V.22). Comme l’intensité de contrainte n’est pas transmise à l’extrémité de la
fissure tant que celle-ci reste fermée, l’amplitude de contrainte effσ∆ qui contribue
effectivement (ou efficacement) à la propagation est :
eff max ouvσ σ σ∆ = −
L’effet de la fermeture de fissure sur les courbes de propagation se traduit donc par une
réduction de l’amplitude du facteur d’intensité des contraintes max minK K K∆ = − . Seule
l’amplitude eff max ouvK K K∆ = − est effectivement transmise à l’extrémité de la fissure.
Figure V.22 Représentation schématique de la fermeture de fissure
induite par la plasticité
Elber a proposé de décrire les courbes de propagation, non pas en termes de K∆ mais
en termes de effK∆ , soit pour le domaine de Paris :
( )eff
mdaC K
dN= ∆
avec
( )eff /effK a f a Wσ π∆ = ∆
La figure V.23 reprend les courbes de propagation de la figure V.19 en termes de effK∆ .
On obtient alors une courbe unique eff/da dN K− ∆ pour les deux rapports de charge.
4 W. Elber, ASTM STP 486, p. 230-242, 1971
t→
σ ↑
maxσ
minσ ouvσ
ouv maxσ σ σ< <
Fissure ouverte Fissure fermée
Sillage plastique Contraintes de compression
min ouvσ σ σ< <
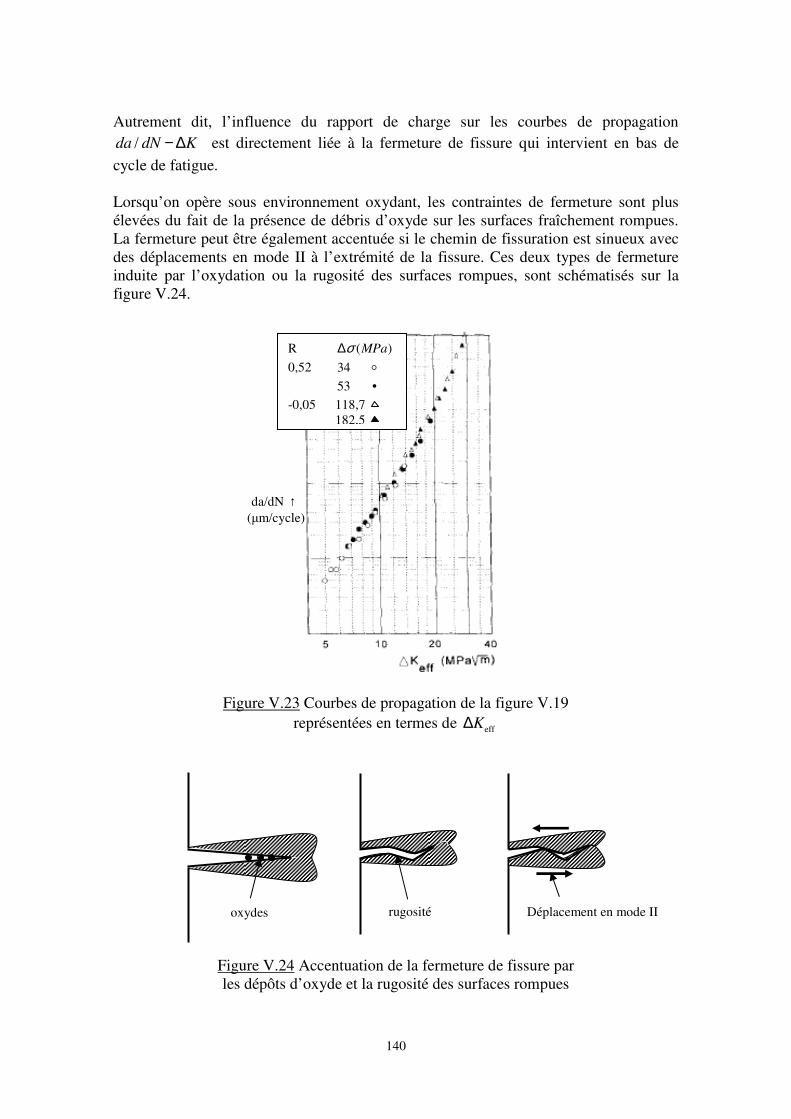
140
Autrement dit, l’influence du rapport de charge sur les courbes de propagation
/da dN K− ∆ est directement liée à la fermeture de fissure qui intervient en bas de
cycle de fatigue.
Lorsqu’on opère sous environnement oxydant, les contraintes de fermeture sont plus
élevées du fait de la présence de débris d’oxyde sur les surfaces fraîchement rompues.
La fermeture peut être également accentuée si le chemin de fissuration est sinueux avec
des déplacements en mode II à l’extrémité de la fissure. Ces deux types de fermeture
induite par l’oxydation ou la rugosité des surfaces rompues, sont schématisés sur la
figure V.24.
Figure V.23 Courbes de propagation de la figure V.19
représentées en termes de effK∆
Figure V.24 Accentuation de la fermeture de fissure par
les dépôts d’oxyde et la rugosité des surfaces rompues
R ( )MPaσ∆
0,52 34 �
53 •
-0,05 118,7
182,5
da/dN ↑
(μm/cycle)
oxydes rugosité Déplacement en mode II

141
Le développement de toutes ces fermetures (plasticité, oxydation des surfaces rompues
et ou déplacements en mode II) est lié à l’existence d’un sillage plastique. L’évolution
du paramètre ( )ouv ouv /K a f a Wσ π= , est représentée schématiquement en fonction de
la longueur de fissure sur la figure V.25. Il apparaît qu’en dessous d’une taille de fissure
0a (et donc d’une longueur de sillage plastique), on observe une diminution de ouvK . La
longueur 0a ainsi déterminée, est de 1 à 2 mm selon les matériaux.
Figure V.25 Evolution de la fermeture en fonction de la longueur de fissure
V.7 Propagation des fissures courtes
L’examen de la figure V.25, montre qu’une fissure dont la longueur est inférieure à 0a
(que l’on appelle fissure courte) a une intensité de contrainte effectivement transmise à
son extrémité plus élevée comparée à celle d’une fissure de longueur supérieure à 0a
(fissure longue) et soumise au même chargement. Ce résultat met en défaut le concept
de similitude en mécanique de la rupture, selon lequel deux fissures de tailles différentes
soumises au même chargement K R∆ − dans un système matériau-environnement
donné, auront la même propagation dès lors que seuilK K∆ > ∆ . Or l’expérience montre
que les fissures courtes se propagent non seulement plus vite mais parfois à des niveaux
d’intensité des contraintes inférieurs à seuilK∆ . Ce seuil de non fissuration est déterminé
selon une méthodologie de décroissance par paliers du K∆ qui conduit à des fissures
dont la longueur est de plusieurs millimètres, autrement dit des fissures longues. La
figure V.26 présente schématiquement le comportement en propagation des fissures
courtes de fatigue comparé en termes de K∆ à celui des fissures longues. Pour le calcul
des durées de vie en bureau d’études (BE), on utilise en général une loi type Paris pour
les fissures longues ( )/FL
da dN et une pour les fissures courtes ( )/FC
da dN tronquée à
( ). max
FLFL
seuil eff ouv seuilK K K∆ = − (figure V.26).
La propagation des fissures courtes se situe en fait dans un domaine intermédiaire entre
l’amorçage des toutes petites fissures de la taille d’un grain et le domaine de
ouvK ↑
a → 0a
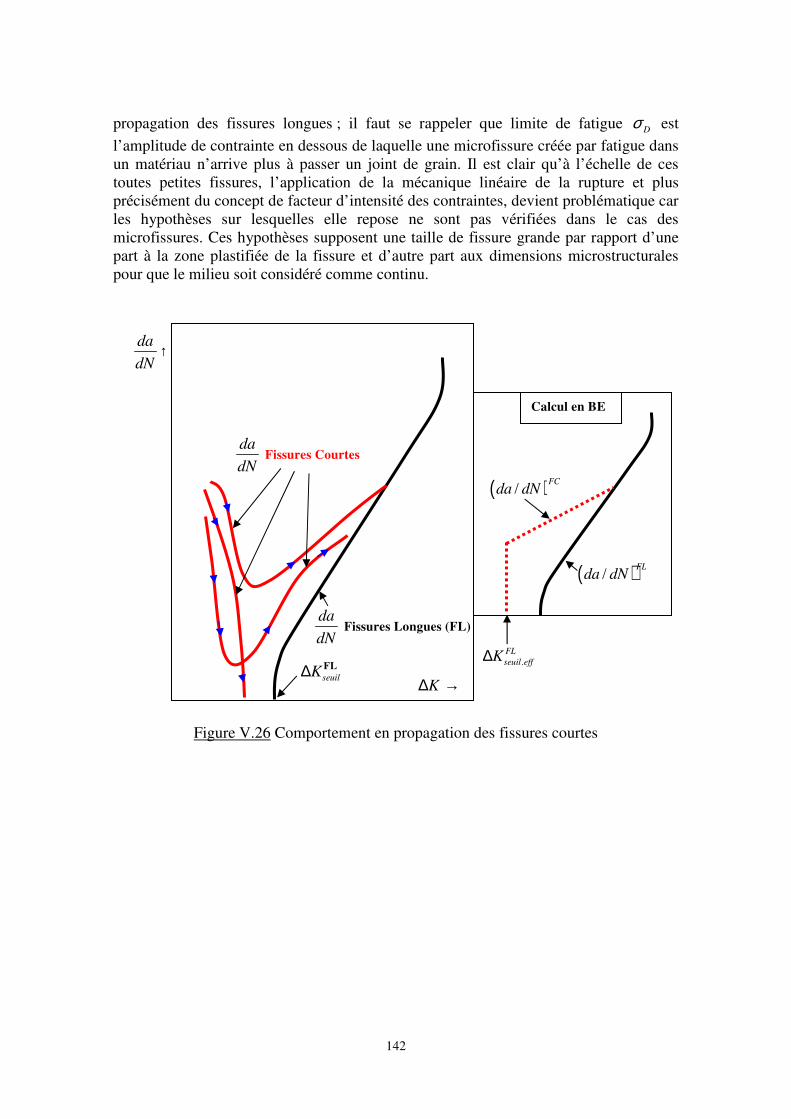
142
propagation des fissures longues ; il faut se rappeler que limite de fatigue Dσ est
l’amplitude de contrainte en dessous de laquelle une microfissure créée par fatigue dans
un matériau n’arrive plus à passer un joint de grain. Il est clair qu’à l’échelle de ces
toutes petites fissures, l’application de la mécanique linéaire de la rupture et plus
précisément du concept de facteur d’intensité des contraintes, devient problématique car
les hypothèses sur lesquelles elle repose ne sont pas vérifiées dans le cas des
microfissures. Ces hypothèses supposent une taille de fissure grande par rapport d’une
part à la zone plastifiée de la fissure et d’autre part aux dimensions microstructurales
pour que le milieu soit considéré comme continu.
Figure V.26 Comportement en propagation des fissures courtes
da
dN↑
K∆ →
da
dN Fissures Longues (FL)
seuilK∆ FL
da
dN Fissures Courtes
( )/FL
da dN
( )/FC
da dN
.
FL
seuil effK∆
Calcul en BE
143
Chapitre VI Mécanique non linéaire de la rupture
VI.1 Introduction
La mécanique linéaire de la rupture (MLR) demeure une approche valable tant que le
comportement du matériau est élastique et linéaire, mais aussi lorsque la plastification à
fond de fissure reste confinée dans une zone de faible taille par rapport aux dimensions
des fissures et de celles de la structure fissurée. Il est quasiment impossible dans
beaucoup de matériaux de respecter les deux conditions précédentes et de décrire le
comportement avec la MLR. Une approche alternative s’avère nécessaire pour ces
matériaux.
La mécanique élasto-plastique de la rupture (MEPR) ou mécanique non linéaire de la
rupture (MNLR) s’applique aux matériaux ductiles lorsque le comportement reste
toutefois indépendant du temps (pas d’effets dynamiques ou de viscosité, absence de
fluage…).
Comme pour la MLR, où deux paramètres équivalents (K et G) peuvent être utilisés
comme critère de rupture, deux paramètres caractéristiques de la MEPR sont présentés
dans ce chapitre. Nous verrons que ces deux paramètres - le déplacement à fond de
fissure ou CTOD (Crack Tip Opening Displacement) et l’intégrale de contour notée J -
sont aussi équivalents entre eux. Ils décrivent tous les deux, les conditions à l’extrémité
d’une fissure (champs de contraintes et de déplacements) et peuvent être utilisés comme
critère de rupture. Les valeurs critiques de J et du CTOD conduisent à des valeurs de la
ténacité des matériaux à peu près indépendantes de la géométrie des structures, même
lorsque la plastification à l’extrémité des fissures est importante. On verra également
dans quelles conditions on atteint les limites de ces approches à paramètre descriptif
unique (J ou CTOD).
VI.2 Ecartement à fond de fissure (CTOD)
On s’est rendu compte dès le début des années 60, qu’il était difficile de caractériser
avec la seule MLR, la ténacité de certains matériaux tels que les aciers de structure. Les
matériaux étaient élaborés en recherchant une plus forte ténacité mais les concepts
existants de la MLR (K ou G) n’étaient plus applicables à cette classe de matériaux
comme l’ont montré les essais expérimentaux de Wells1. L’émoussement de l’extrémité
des fissures fut la principale observation expérimentale de Wells. La figure VI.1 illustre
la différence de comportement entre une fissure élastique et une fissure dont l’extrémité
s’émousse du fait de l’écoulement plastique.
1 A. A. Wells, « Unstable crack propagation in metals : Cleavage and fast fracture ». Proceedings of the
crack propagation symposium, vol. 1 , Paper 84, UK, 1961
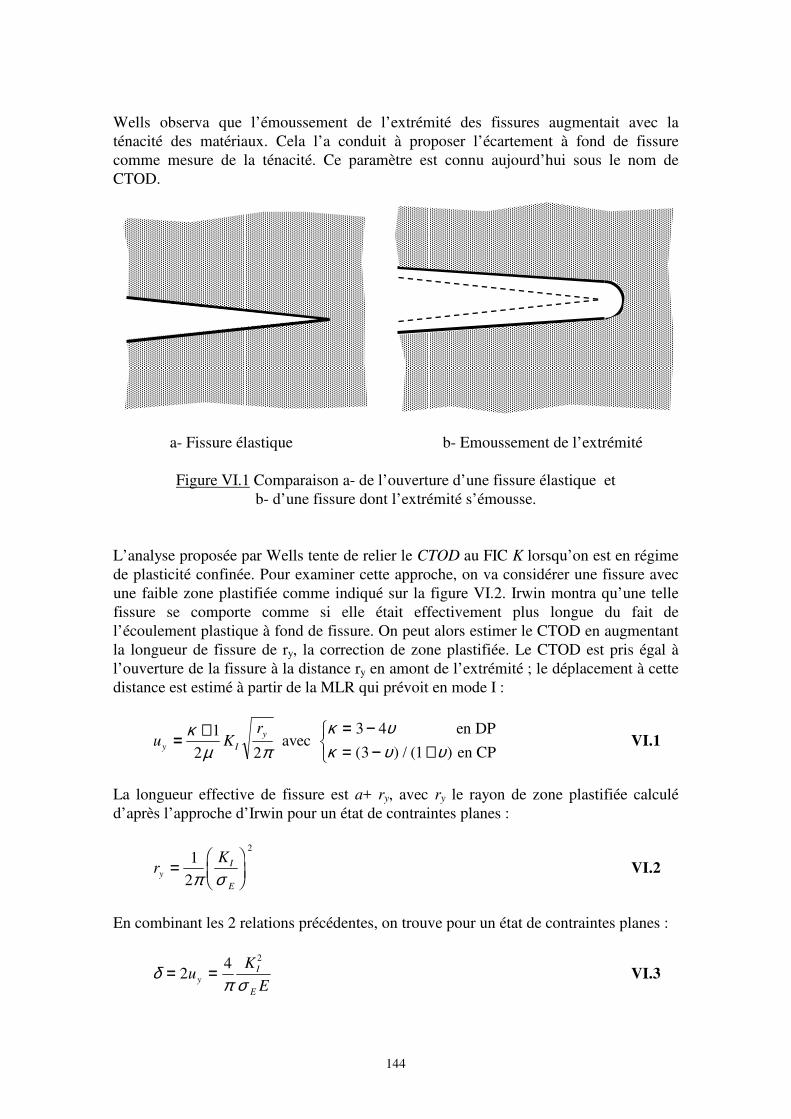
144
Wells observa que l’émoussement de l’extrémité des fissures augmentait avec la
ténacité des matériaux. Cela l’a conduit à proposer l’écartement à fond de fissure
comme mesure de la ténacité. Ce paramètre est connu aujourd’hui sous le nom de
CTOD.
a- Fissure élastique b- Emoussement de l’extrémité
Figure VI.1 Comparaison a- de l’ouverture d’une fissure élastique et
b- d’une fissure dont l’extrémité s’émousse.
L’analyse proposée par Wells tente de relier le CTOD au FIC K lorsqu’on est en régime
de plasticité confinée. Pour examiner cette approche, on va considérer une fissure avec
une faible zone plastifiée comme indiqué sur la figure VI.2. Irwin montra qu’une telle
fissure se comporte comme si elle était effectivement plus longue du fait de
l’écoulement plastique à fond de fissure. On peut alors estimer le CTOD en augmentant
la longueur de fissure de ry, la correction de zone plastifiée. Le CTOD est pris égal à
l’ouverture de la fissure à la distance ry en amont de l’extrémité ; le déplacement à cette
distance est estimé à partir de la MLR qui prévoit en mode I :
u Kr
y I
y= + = −= − +RST
κµ π
κ υκ υ υ
1
2 2
3 4
3 1 avec
en DP
en CP( ) / ( ) VI.1
La longueur effective de fissure est a+ ry, avec ry le rayon de zone plastifiée calculé
d’après l’approche d’Irwin pour un état de contraintes planes :
rK
y
I
E
=FHGIKJ
1
2
2
π σ VI.2
En combinant les 2 relations précédentes, on trouve pour un état de contraintes planes :
δπ σ
= =24
2
uK
Ey
I
E
VI.3
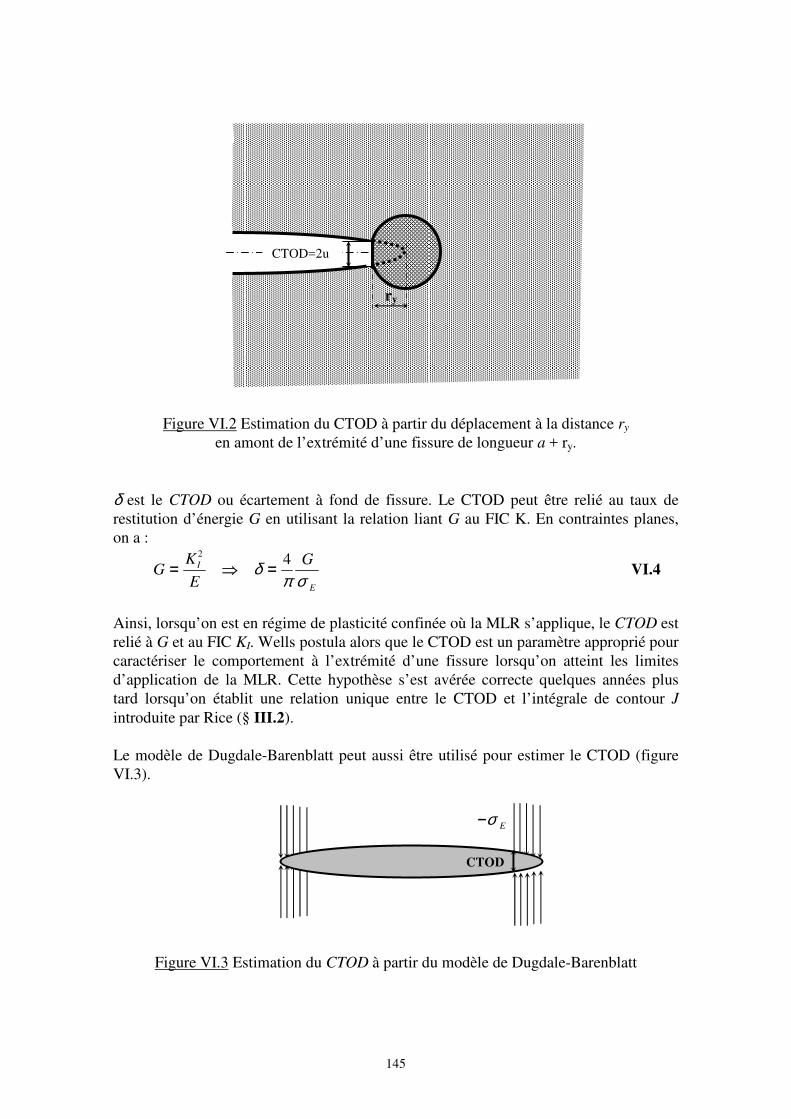
145
Figure VI.2 Estimation du CTOD à partir du déplacement à la distance ry
en amont de l’extrémité d’une fissure de longueur a + ry.
δ est le CTOD ou écartement à fond de fissure. Le CTOD peut être relié au taux de
restitution d’énergie G en utilisant la relation liant G au FIC K. En contraintes planes,
on a :
GK
E
GI
E
= ⇒ =2
4δπ σ
VI.4
Ainsi, lorsqu’on est en régime de plasticité confinée où la MLR s’applique, le CTOD est
relié à G et au FIC KI. Wells postula alors que le CTOD est un paramètre approprié pour
caractériser le comportement à l’extrémité d’une fissure lorsqu’on atteint les limites
d’application de la MLR. Cette hypothèse s’est avérée correcte quelques années plus
tard lorsqu’on établit une relation unique entre le CTOD et l’intégrale de contour J
introduite par Rice (§ III.2).
Le modèle de Dugdale-Barenblatt peut aussi être utilisé pour estimer le CTOD (figure
VI.3).
Figure VI.3 Estimation du CTOD à partir du modèle de Dugdale-Barenblatt
CTOD=2u
ry
−σ E
CTOD

146
L’ouverture de la fissure au début de la zone où les contraintes de compression σE
s’exercent, correspond au CTOD δ dans ce modèle qui s’exprime par :
δ σπ
π σσ
= −FHGIKJ
FHG
IKJ
∞8
2
E
E
a
ELog cos VI.5
Le développement limité au voisinage de 0 de l’équation précédente donne :
cosπ σ
σπ σ
σπ σ
σ21
1
2 2
1
4 2
2 4∞ ∞ ∞FHGIKJ = −
FHGIKJ +FHGIKJ +
E E E
…
δ σπ
π σσ
π σσ σ
π σσ
=FHGIKJ +
FHGIKJ +
LNMM
OQPP
= +FHGIKJ +
LNMM
OQPP
∞ ∞ ∞8 1
2 2
1
12 21
1
6 2
2 4 2 2
E
E E
I
E E
a
E
K
E… …
En considérant uniquement le premier terme, on a :
δσ
=K
E
I
E
2
VI.6
La relation VI.6 diffère peu de la relation VI.3 (le terme 4/π est remplacé par 1).
Le modèle de Dugdale-Barenblatt suppose un état de contraintes planes et un matériau
élastique-plastique parfait c’est à dire sans consolidation. La relation plus générale entre
le CTOD δ et le FIC KI est de la forme :
δσ σ
= =K
m E
G
m
I
E E
2
VI.7
Où m est un coefficient sans dimension qui vaut à peu près 1 en contraintes planes et 2
en déformations planes.
Plusieurs définitions ont été proposées pour le CTOD. Les deux définitions les plus
communément utilisées sont représentées sur la figure VI.4. La première utilise le
déplacement à l’extrémité de la fissure initiale c’est à dire de longueur non corrigée
(figure VI.4a). La seconde définition, illustrée sur la figure VI.4b, considère le
déplacement à l’intersection des deux cotés d’un angle droit issu du fond de la fissure
émoussée. Cette dernière définition, couramment utilisée dans les calculs par la MEF, a
été suggérée par Rice. On peut noter que les deux définitions sont équivalentes lorsque
l’émoussement de l’extrémité de la fissure est de forme semi-circulaire.
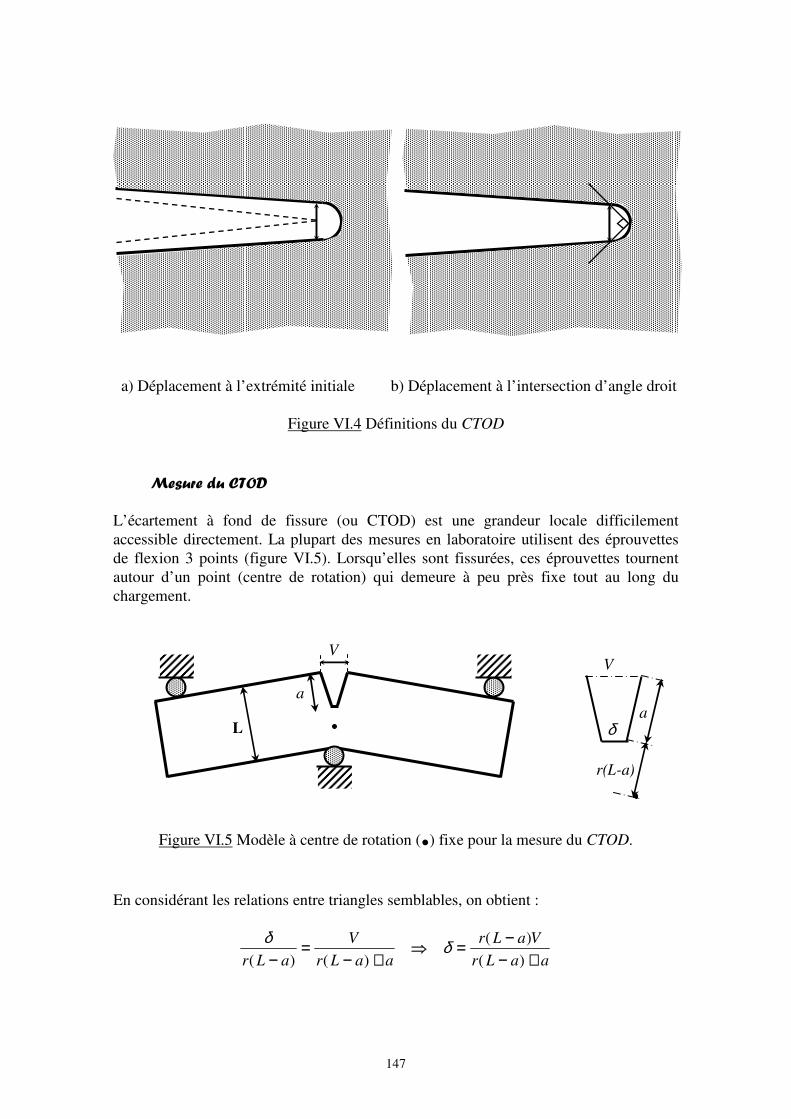
147
a) Déplacement à l’extrémité initiale b) Déplacement à l’intersection d’angle droit
Figure VI.4 Définitions du CTOD
Mesure du CTOD
L’écartement à fond de fissure (ou CTOD) est une grandeur locale difficilement
accessible directement. La plupart des mesures en laboratoire utilisent des éprouvettes
de flexion 3 points (figure VI.5). Lorsqu’elles sont fissurées, ces éprouvettes tournent
autour d’un point (centre de rotation) qui demeure à peu près fixe tout au long du
chargement.
Figure VI.5 Modèle à centre de rotation (.) fixe pour la mesure du CTOD.
En considérant les relations entre triangles semblables, on obtient :
δ δr L a
V
r L a a
r L a V
r L a a( ) ( )
( )
( )−=
− +⇒ = −
− +
L
a
V V
δ a
r(L-a)
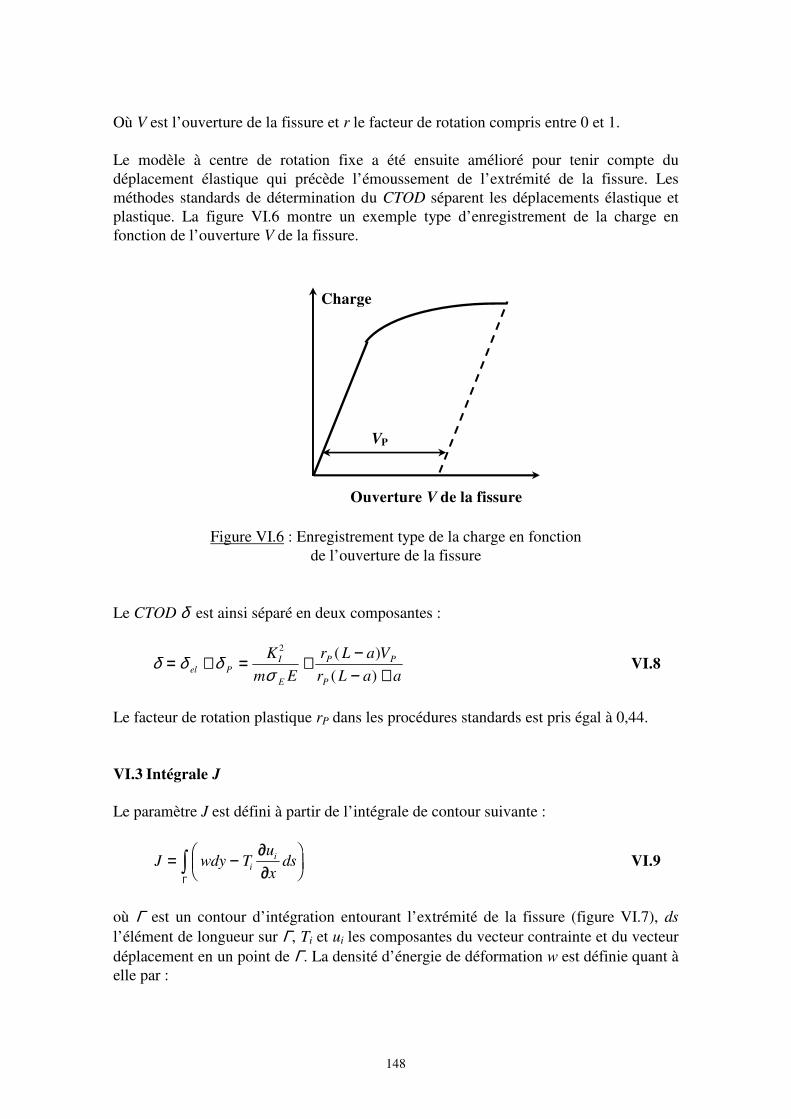
148
Où V est l’ouverture de la fissure et r le facteur de rotation compris entre 0 et 1.
Le modèle à centre de rotation fixe a été ensuite amélioré pour tenir compte du
déplacement élastique qui précède l’émoussement de l’extrémité de la fissure. Les
méthodes standards de détermination du CTOD séparent les déplacements élastique et
plastique. La figure VI.6 montre un exemple type d’enregistrement de la charge en
fonction de l’ouverture V de la fissure.
Figure VI.6 : Enregistrement type de la charge en fonction
de l’ouverture de la fissure
Le CTOD δ est ainsi séparé en deux composantes :
δ δ δσ
= + = +−− +el P
I
E
P P
P
K
m E
r L a V
r L a a
2 ( )
( ) VI.8
Le facteur de rotation plastique rP dans les procédures standards est pris égal à 0,44.
VI.3 Intégrale J
Le paramètre J est défini à partir de l’intégrale de contour suivante :
J wdy Tu
xdsi
i= −∂∂
FHG
IKJz
Γ
VI.9
où Γ est un contour d’intégration entourant l’extrémité de la fissure (figure VI.7), ds
l’élément de longueur sur Γ, Ti et ui les composantes du vecteur contrainte et du vecteur
déplacement en un point de Γ. La densité d’énergie de déformation w est définie quant à
elle par :
Ouverture V de la fissure
Charge
VP

149
w dij ij
ij= z σ εε
0 VI.10
où σij et εij sont les composantes des tenseurs de contraintes et de déformations au point
courant sur le contour Γ.
Figure VI.7 Contour arbitraire autour de l’extrémité d’une fissure
L’intégrale J correspond à l’énergie de Griffith dans un matériau élastique.
Rice a montré que l’intégrale J ne dépendait pas du contour d’intégration. Pour
démontrer cette indépendance, il évalue l’intégrale J le long d’un contour fermé Γ*
(figure VI.8) :
Figure VI.8 Contour fermé Γ* entourant la surface A*
J wdy Tu
xdsi
i**
= −∂∂
FHG
IKJz
Γ
Rice utilise ensuite le théorème de Stokes pour transformer l’intégrale de contour en
intégrale de surface :
x
y
Γ
Γ* A*

150
Jw
x x
u
xdxdy
j
ij
i
A
**
= ∂∂
− ∂∂
∂∂
FHG
IKJ
FHG
IKJz σ VI.11
où A* est la surface plane limitée par Γ*.
w étant un potentiel élastique, le premier terme de l’intégrale précédente peut s’écrire :
∂∂
= ∂∂
∂∂
=∂∂
= ∂∂
∂∂FHGIKJ + ∂
∂∂∂FHGIKJ
LNMM
OQPP
w
x
w
x x x
u
x x
u
xij
ij
ij
ij
ij
i
j
j
iεε
σε
σ1
2
Le tenseur des contraintes étant symétrique σ σij ji= , l’expression précédente peut se
transformer en :
∂∂
= ∂∂
∂∂FHGIKJ
w
x x
u
xij
j
iσ
Et compte tenu de l’équation d’équilibre ∂∂
=σ ij
jx0 , on a également :
∂∂
∂∂
FHG
IKJ = ∂
∂∂∂FHGIKJ = ∂
∂x
u
x x
u
x
w
xj
ij
i
ij
j
iσ σ
L’intégrale J* est donc nulle.
Considérons maintenant deux contours Γ1 et Γ2 autour de l’extrémité d’une fissure
(figure VI.9). On obtient un contour ferme en reliant les deux contours Γ1 et Γ2 par des
segments Γ3 et Γ4 le long des lèvres de la fissure. Dans ces conditions, on peut appliquer
le résultat précédent au contour fermé Γ= Γ1+ Γ2+ Γ3+ Γ4.
L’intégrale J sur le contour Γ est la somme des intégrales Ji sur les quatre contours Γi.
On a alors :
J J J J J= + + + =1 2 3 4 0
Comme le long de 3Γ et 4Γ les intégrales sont nulles ( iT et 0dy = ), on a :
1 2J J= −
Les deux intégrales sont opposées car les sens de parcours des contours sont inversés, et
donc l’intégrale J est bien indépendante du contour d’intégration entourant
l’extrémité de la fissure
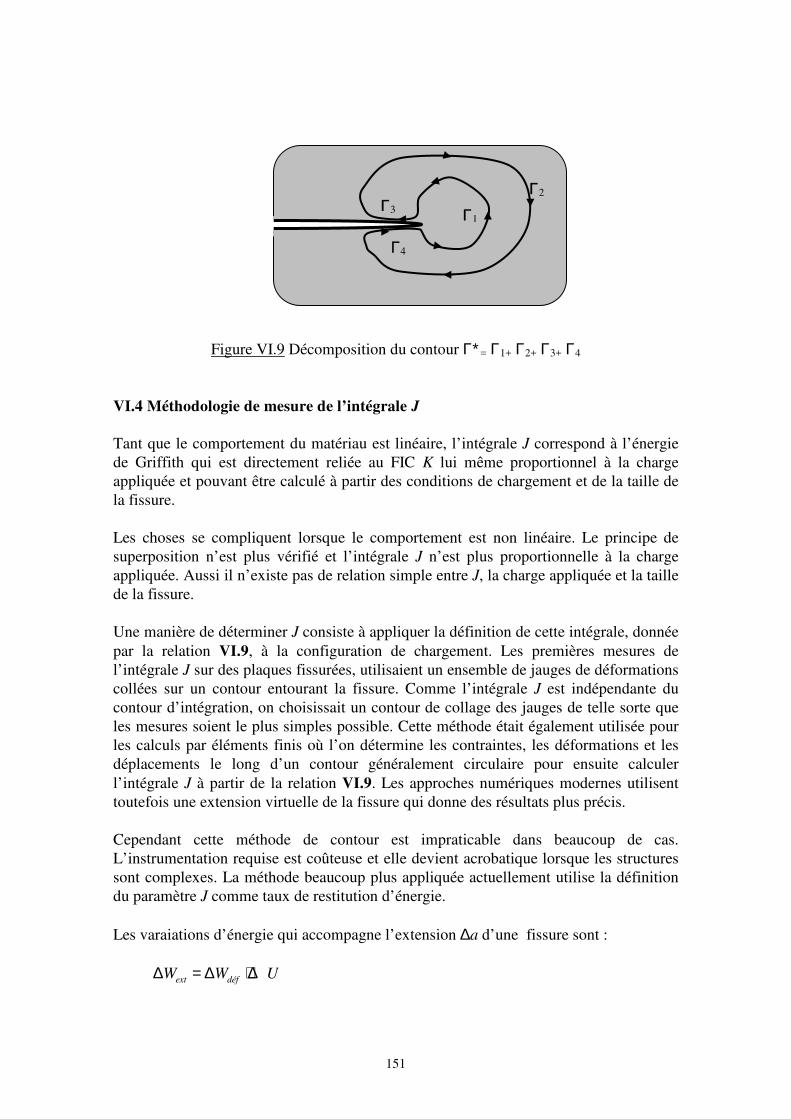
151
Figure VI.9 Décomposition du contour Γ∗= Γ1+ Γ2+ Γ3+ Γ4
VI.4 Méthodologie de mesure de l’intégrale J
Tant que le comportement du matériau est linéaire, l’intégrale J correspond à l’énergie
de Griffith qui est directement reliée au FIC K lui même proportionnel à la charge
appliquée et pouvant être calculé à partir des conditions de chargement et de la taille de
la fissure.
Les choses se compliquent lorsque le comportement est non linéaire. Le principe de
superposition n’est plus vérifié et l’intégrale J n’est plus proportionnelle à la charge
appliquée. Aussi il n’existe pas de relation simple entre J, la charge appliquée et la taille
de la fissure.
Une manière de déterminer J consiste à appliquer la définition de cette intégrale, donnée
par la relation VI.9, à la configuration de chargement. Les premières mesures de
l’intégrale J sur des plaques fissurées, utilisaient un ensemble de jauges de déformations
collées sur un contour entourant la fissure. Comme l’intégrale J est indépendante du
contour d’intégration, on choisissait un contour de collage des jauges de telle sorte que
les mesures soient le plus simples possible. Cette méthode était également utilisée pour
les calculs par éléments finis où l’on détermine les contraintes, les déformations et les
déplacements le long d’un contour généralement circulaire pour ensuite calculer
l’intégrale J à partir de la relation VI.9. Les approches numériques modernes utilisent
toutefois une extension virtuelle de la fissure qui donne des résultats plus précis.
Cependant cette méthode de contour est impraticable dans beaucoup de cas.
L’instrumentation requise est coûteuse et elle devient acrobatique lorsque les structures
sont complexes. La méthode beaucoup plus appliquée actuellement utilise la définition
du paramètre J comme taux de restitution d’énergie.
Les varaiations d’énergie qui accompagne l’extension ∆a d’une fissure sont :
ext défW W U∆ = ∆ + ∆
Γ1
Γ2 Γ3
Γ4

152
Où l'énergie ∆U dépensée lors de la fissuration sur la longueur ∆a, se compose de
l’énergie de séparation des surfaces ∆Wsép et de l’énergie de plastification ∆Wplas :
sép plasU W W∆ = ∆ + ∆
On a ainsi dans le cas d’une fissuration à déplacement imposé, la variation de F
schématisée sur la figure VI.10. Le cas du chargement à force imposée se traite tout
aussi simplement.
Figure VI.10 Variation de la force lors de la propagation, à déplacement imposé,
d’une fissure dans un matériau non linéaire.
L’aire hachurée de la figure VI.10 correspond à l’énergie de propagation ∆U, c’est à dire
la différence entre l’énergie fournie et l’énergie élastique restituée après propagation de
la fissure sur une longueur ∆a.
Le taux de restitution J est défini par l’énergie dépensée lors de la fissuration rapportée à
l’aire fissurée, i.e. l’énergie spécifique, soit :
0 0
1 1 1x x
x x x
U FJ Fdx dx
e a e a e a
∂ ∂ ∂ = = − = − ∂ ∂ ∫ ∫ VI.12
Le signe moins provient du fait que l’énergie U correspond à l’aire sous la courbe (F, x)
comptée négativement de sorte que lorsque la longueur de fissure augmente on a une
variation positive de cette énergie.
Dans le cas d’un matériau linéaire, J GK
E
I= =2
', où G est l’énergie de Griffith et E’=E
en contraintes planes ou 2' (1 )E E υ= − en déformations planes.
A partir d’une série d’éprouvettes de même géométrie et de même taille, on introduit
des fissures de différentes longueurs, obtenues généralement par essais de fatigue. Les
variations de la force appliquée F avec le déplacement ∆ sont ensuite enregistrées pour
les différentes longueurs de fissure. On trace à partir de ces enregistrements à ∆ fixé,
F
x
x
Propagation a
a+∆a
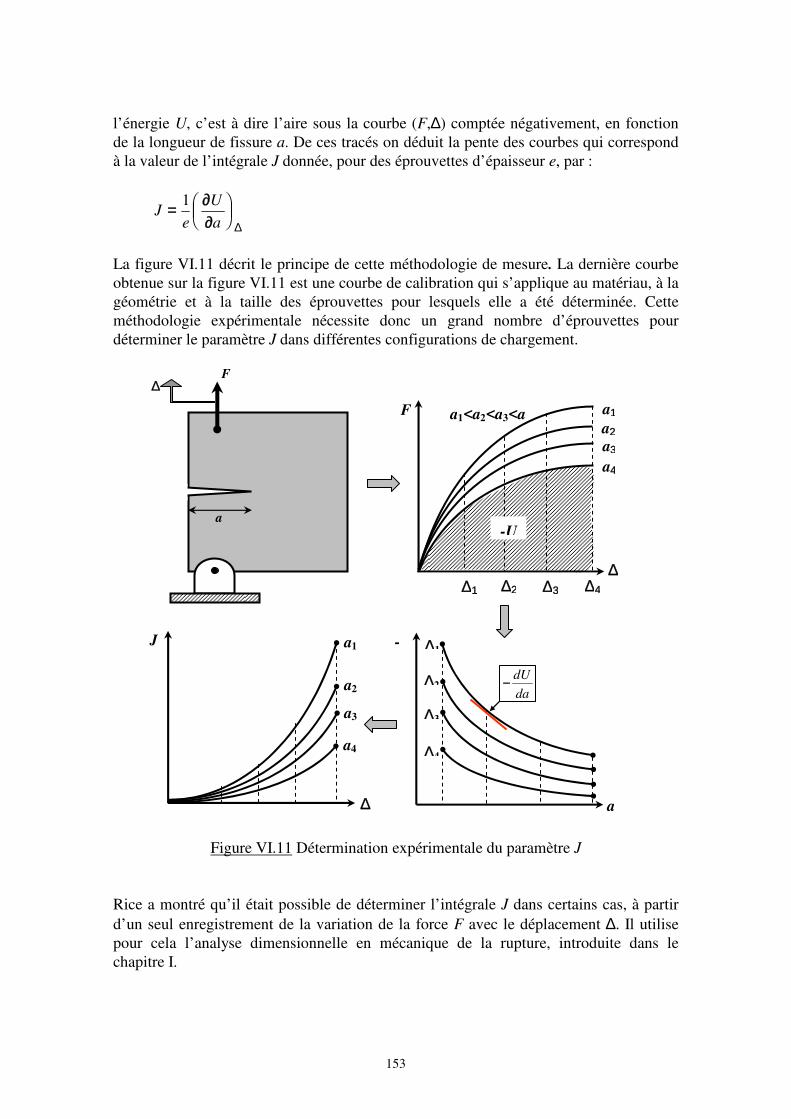
153
l’énergie U, c’est à dire l’aire sous la courbe (F,∆) comptée négativement, en fonction
de la longueur de fissure a. De ces tracés on déduit la pente des courbes qui correspond
à la valeur de l’intégrale J donnée, pour des éprouvettes d’épaisseur e, par :
Je
U
a= ∂
∂FHGIKJ
1
∆
La figure VI.11 décrit le principe de cette méthodologie de mesure. La dernière courbe
obtenue sur la figure VI.11 est une courbe de calibration qui s’applique au matériau, à la
géométrie et à la taille des éprouvettes pour lesquels elle a été déterminée. Cette
méthodologie expérimentale nécessite donc un grand nombre d’éprouvettes pour
déterminer le paramètre J dans différentes configurations de chargement.
Figure VI.11 Détermination expérimentale du paramètre J
Rice a montré qu’il était possible de déterminer l’intégrale J dans certains cas, à partir
d’un seul enregistrement de la variation de la force F avec le déplacement ∆. Il utilise
pour cela l’analyse dimensionnelle en mécanique de la rupture, introduite dans le
chapitre I.
∆
a
F
F
∆ ∆1 ∆2 ∆3 ∆4
a1 a2 a3 a4
a1<a2<a3<a
-U
a
- ∆1
∆2
∆3
∆4
−dU
da
a1
a2
a3
a4
∆
J
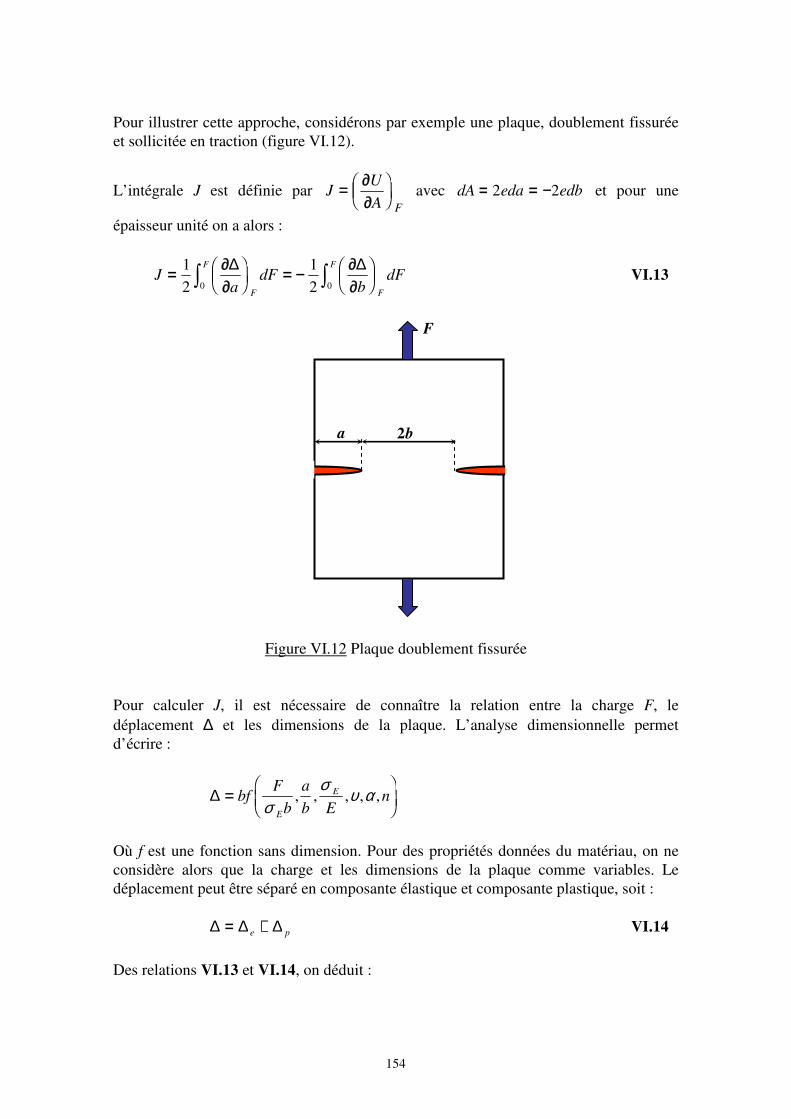
154
Pour illustrer cette approche, considérons par exemple une plaque, doublement fissurée
et sollicitée en traction (figure VI.12).
L’intégrale J est définie par JU
A F
= ∂∂FHGIKJ avec dA eda edb= = −2 2 et pour une
épaisseur unité on a alors :
Ja
dFb
dFF
F
F
F
= ∂∂FHGIKJ = − ∂
∂FHGIKJz z1
2
1
20 0
∆ ∆ VI.13
Figure VI.12 Plaque doublement fissurée
Pour calculer J, il est nécessaire de connaître la relation entre la charge F, le
déplacement ∆ et les dimensions de la plaque. L’analyse dimensionnelle permet
d’écrire :
∆ =FHG
IKJbf
F
b
a
b En
E
E
σσ υ α, , , , ,
Où f est une fonction sans dimension. Pour des propriétés données du matériau, on ne
considère alors que la charge et les dimensions de la plaque comme variables. Le
déplacement peut être séparé en composante élastique et composante plastique, soit :
∆ ∆ ∆= +e p VI.14
Des relations VI.13 et VI.14, on déduit :
F
a 2b

155
Jb b
dFK
E bdFe
F
p
F
FI p
F
F
= −∂∂FHGIKJ +
∂∂FHGIKJ
LNMM
OQPP
= −∂∂FHGIKJz z1
2
1
20
2
0
∆ ∆ ∆'
VI.15
Où EE
' =−1 2υ
en déformations planes et E’=E en contraintes planes.
Si la déformation plastique reste confinée dans le ligament non fissuré de longueur 2b -
entre les deux extrémités des fissures - on peut considérer que cette longueur est la seule
dimension qui influencera la composante plastique ∆p du déplacement. C’est une
hypothèse raisonnable à condition toutefois que la fissuration de la plaque soit
suffisamment profonde de sorte que les contraintes moyennes dans le ligament non
fissuré soient bien plus élevées que la contrainte appliquée. On peut alors utiliser
l’analyse dimensionnelle et écrire :
∆ p bHF
b= FHGIKJ
Une dérivation partielle de cette relation par rapport à la longueur du ligament non
fissuré et par rapport à la force F respectivement, donne :
∂∂FHGIKJ = FHG
IKJ − FHG
IKJ
∆ p
Fb
HF
bH
F
b
F
b' et
∂∂FHGIKJ = FHG
IKJ
∆ p
bF
HF
b'
Ce qui conduit à :
∂∂FHGIKJ = −
∂∂FHGIKJ
LNMM
OQPP
∆∆
∆p
F
p
p
bb b
FF
1 VI.16
En substituant VI.16 dans VI.15 et en intégrant par parties, on obtient :
JK
E bFd FI
p p
p= + −LNM
OQPz
2
0
1
22 ∆ ∆
∆
Précaution dans l’utilisation de l’intégrale
L’intégrale de contour J utilisée comme paramètre caractéristique de l’état de contrainte
au voisinage de l’extrémité d’une fissure dans les matériaux dont le comportement est
non linéaire, a connu un grand succès. Rice qui proposa ce paramètre, assimile le
comportement élasto-plastique à un comportement élastique non linéaire. L’approche de
Rice qui repose sur une telle hypothèse doit être utilisée avec précaution lorsqu’on a des
décharges élastiques par exemple. La figure VI.13 illustre la différence de
comportement entre un matériau élasto-plastique et un matériau élastique non linéaire.
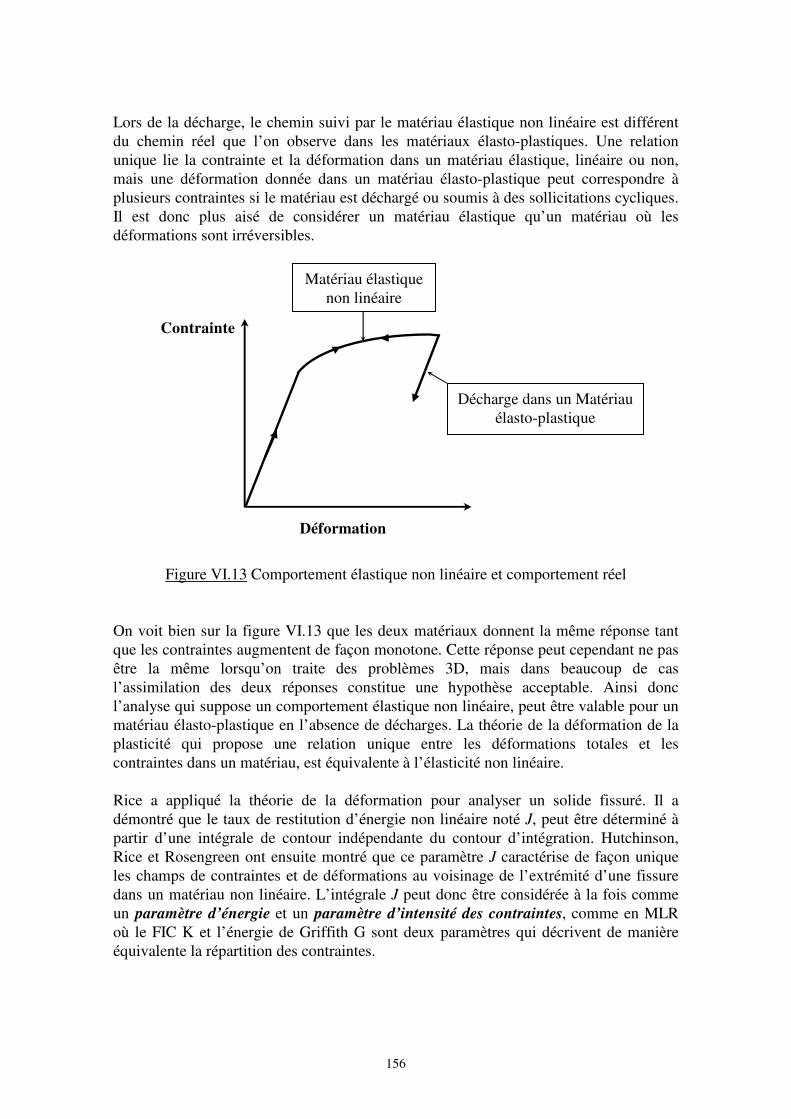
156
Lors de la décharge, le chemin suivi par le matériau élastique non linéaire est différent
du chemin réel que l’on observe dans les matériaux élasto-plastiques. Une relation
unique lie la contrainte et la déformation dans un matériau élastique, linéaire ou non,
mais une déformation donnée dans un matériau élasto-plastique peut correspondre à
plusieurs contraintes si le matériau est déchargé ou soumis à des sollicitations cycliques.
Il est donc plus aisé de considérer un matériau élastique qu’un matériau où les
déformations sont irréversibles.
Figure VI.13 Comportement élastique non linéaire et comportement réel
On voit bien sur la figure VI.13 que les deux matériaux donnent la même réponse tant
que les contraintes augmentent de façon monotone. Cette réponse peut cependant ne pas
être la même lorsqu’on traite des problèmes 3D, mais dans beaucoup de cas
l’assimilation des deux réponses constitue une hypothèse acceptable. Ainsi donc
l’analyse qui suppose un comportement élastique non linéaire, peut être valable pour un
matériau élasto-plastique en l’absence de décharges. La théorie de la déformation de la
plasticité qui propose une relation unique entre les déformations totales et les
contraintes dans un matériau, est équivalente à l’élasticité non linéaire.
Rice a appliqué la théorie de la déformation pour analyser un solide fissuré. Il a
démontré que le taux de restitution d’énergie non linéaire noté J, peut être déterminé à
partir d’une intégrale de contour indépendante du contour d’intégration. Hutchinson,
Rice et Rosengreen ont ensuite montré que ce paramètre J caractérise de façon unique
les champs de contraintes et de déformations au voisinage de l’extrémité d’une fissure
dans un matériau non linéaire. L’intégrale J peut donc être considérée à la fois comme
un paramètre d’énergie et un paramètre d’intensité des contraintes, comme en MLR
où le FIC K et l’énergie de Griffith G sont deux paramètres qui décrivent de manière
équivalente la répartition des contraintes.
Déformation
Contrainte
Décharge dans un Matériau
élasto-plastique
Matériau élastique
non linéaire

157
VI.5 J taux de restitution d’énergie non linéaire
Considérons un solide fissuré bidimensionnel limité par un contour Γ’ ; on notera A’ la
surface de ce solide (figure VI.14).
Figure VI.14 Solide fissuré soumis à un chargement extérieur Ti.
Dans des conditions quasi statiques et en l’absence des forces de volume, les énergies
mises en jeu sont :
'
'
avec
ext i i
ext def
def
A
W Tu ds
W W UW wdA
Γ
=
= + =
∫
∫ et w dij ij
ij= z σ εε
0
La variation d’énergie potentielle liée à une avancée virtuelle da de la fissure à Ti
constant le long de l’axe x, s’écrit :
La variation d’énergie de propagation U liée à une avancée virtuelle da de la fissure à Ti
constant le long de l’axe x, s’écrit :
' '
ii
A
dudU dwT ds dA
da da daΓ
= −∫ ∫
Lorsque la fissure progresse virtuellement de la quantité da, l’axe x est rétréci de la
même quantité ( 1x a∂ ∂ = − ), si bien que la dérivée par rapport à a s’écrit :
d
da a
x
a x a x= ∂
∂+ ∂
∂∂∂
= ∂∂
− ∂∂
et la variation de l’énergie de propagaion devient :
Γ’ A’
a
x
y Ti

158
' '
i ii
A
u udU w wT ds dA
da a x a xΓ
∂ ∂ ∂ ∂ = − − − ∂ ∂ ∂ ∂ ∫ ∫
avec
∂∂
= ∂∂
∂∂
= ∂∂
∂∂FHGIKJ
w
a
w
a x
u
aij
ij
ij
j
i
εε
σ
Le principe des travaux virtuels permet d’écrire :
' '
i ii ij
jA
u uT ds dA
a x aσ
Γ
∂ ∂∂ = ∂ ∂ ∂ ∫ ∫
L’énergie de propagation pourra alors s’exprimer par :
' '
ii
A
udU wdA T ds
da x xΓ
∂∂= −∂ ∂∫ ∫
En utilisant le théorème de Stokes, on peut à nouveau transformer l’intégrale de surface
en intégrale de contour ;
'
ix i
udUwn T ds
da xΓ
∂ = − ∂ ∫
Comme n ds dyx = , le taux de restitution d’énergie J aura finalement pour expression :
'
ii
udUJ wdy T ds
da xΓ
∂ = = − ∂ ∫
VI.6 L’intégrale J, paramètre d’intensité des contraintes
Hutchinson2, Rice et Rosengren
3 (HRR) ont montré que le paramètre J caractérise les
champs de contraintes et de déformations (champs HRR) à l’extrémité d’une fissure
dans un matériau non linéaire. Pour décrire la loi de comportement, ils utilisent la
relation de Ramberg-Osgood :
ε ε ε σ α σ σσ
= + = +FHGIKJe p
E
E
n
E E VI.17
2 Hutchinson, J.W., « Singular behavior at the end of a tensile crack tip in a hardening material », Journal
of the mechanics and physics of solids, vol. 16, 1968, p. 13-31. 3 Rice, J.R. and Rosengren, G.F., « Plastic strain deformation near a crack tip in a power-law hardening
material », Journal of the mechanics and physics of solids, vol. 16, 1968, p. 1-12.

159
où σE est la limite d’élasticité et n un exposant d’écrouissage supérieur à 1.
Hutchinson, Rice et Rosengren montrent que le produit contrainte.déformation varie
comme 1/r près de l’extrémité d’une fissure. Par ailleurs pour n=1, c’est à dire dans le
cas d’un matériau linéaire élastique, on doit retrouver une singularité en 1 / r prévue
par la MLR. Dans la zone très proche de l’extrémité de la fissure, les déformations
élastiques étant faibles comparées aux déformations plastiques, les deux conditions
précédentes entraînent :
σ
ε
ij
n
ij
n
n
kJ
r
kJ
r
= FHGIKJ
= FHGIKJ
R
S||
T||
+
+
1
1
1
2
1
VI.18
où k1 et k2 sont des constantes.
Les calculs plus précis montrent que le champ HRR donné par la relation précédente,
s’écrit :
σ σασ
σ θ
ε ασασ
ε θ
ij E
E n
n
ij
ij
E
E n
n
n
ij
EJ
I rn
E
EJ
I rn
=FHG
IKJ
=FHG
IKJ
R
S|||
T|||
+
+
2
1
1
2
1
~ ( , )
~ ( , )
VI.19
où In est une constante d’intégration qui dépend de n, ~ ~σ εij ij et des fonctions
addimensionnelles de n et θ.
L’intégrale J définit donc l’amplitude de la singularité HRR, comme le FIC K définit la
singularité 1 / r en MLR. On a ainsi en régime de plasticité confinée deux zones au
voisinage de l’extrémité d’une fissure dominées par des singularités : une singularité en
1 / r pour la zone élastique et une singularité en 1
1
1/ r n+ dans la zone plastifiée.
VI.7 Relations entre l’intégrale J et le CTOD
En mécanique linéaire de la rupture, la relation entre le CTOD δ et l’énergie de Griffith
G, est donnée par l’équation VI.7. Lorsque le comportement du matériau est linéaire
élastique, J=G, et le même type de relation existe donc entre J et δ :
J m E= σ δ VI.20

160
où m est une constante sans dimension qui dépend de l’état des contraintes et des
propriétés du matériau. La relation précédente est en fait vérifiée bien au delà des limites
de validité de la MLR.
Considérons par exemple le modèle de Dugdale-Barenblatt - figure VI.15 - dont le
chargement sur la zone plastifiée est représenté sur la figuré VI.15b. On peut choisir
pour le calcul de l’intégrale J le contour Γ indiqué sur cette figure.
Si la longueur ρ de la zone endommagée est grande devant le CTOD δ (ρ>>δ), le
premier terme de l’intégrale J (relation VI.9) est nul puisque dy ≈ 0 . La normale au
contour Γ étant �
y , l’intégrale J est alors donnée par :
Ju x
xdsE
y=∂
∂zσ( )
Γ
Figure VI.15 Modèle de Dugdale-Barenblatt
Si on prend l’origine du repère à l’extrémité de la zone endommagée, ce qui revient à
faire le changement de variable X=x-ρ, le déplacement uy ne dépend que de X à δ fixé
et l’intégrale J s’écrit :
J du X dE y E E= = =zz200
σ σ δ σ δδρ
( ) VI.21
Cette relation est similaire à la relation VI.6 établie précédemment en ne considérant
que le 1er
terme du développement limité de Log(cos). Une telle hypothèse n’a pas été
nécessaire pour obtenir la relation VI.21. Ainsi le modèle de Dugdale-Barenblatt,
appliqué à un matériau fissuré, dont le comportement est élastique plastique parfait,
sollicité en mode I et en contraintes planes, prévoit m=1 à la fois dans des conditions
élastiques et élastoplastiques.
On peut également montrer, à partir du champ de déplacement HRR qu’il existe une
relation du type J m E= σ δ entre le CTOD et l’intégrale J. Le champ de déplacement
prévu par l’approche HRR, est de la forme :
−σ E
CTOD
Γ
δ
x
ρ
X
2uy

161
uE
EJ
I rru ni
E
E n
n
n
i=FHG
IKJ
+ασασ
θ2
1~ ( , ) VI.22
En utilisant la procédure, proposée par Rice, de détermination du CTOD indiquée sur la
figure VI.16, il apparaît que :
δ π π2
= − ≈r u r u rx y* ( *, ) ( *, ) VI.23
La relation VI.22 peut aussi s’écrire :
uE
J
Ir u ni
En
E n
n
nn
i= FHGIKJFHGIKJ
+ ++ασ
σθ
1
1 1 1
1 ~ ( , )
Figure VI.16 Procédure de détermination du CTOD
En utilisant cette dernière relation dans VI.22 on obtient :
ασσ
θ θEn
E n
n
nn
x yE
J
Ir u n u n r
FHGIKJFHGIKJ + =
+ ++
1
1 1 1
1 ~ ( , ) ~ ( , ) *
La résolution de cette équation permet de déterminer r* :
rE
u n u nJ
I
En
x y
n
n
E n
* ~ ( , ) ~ ( , )= FHGIKJ +
+ασ θ θσ
11
Connaissant r* on détermine le CTOD δ π= 2u ry ( *, ) , soit :
uy
ux
r* δ
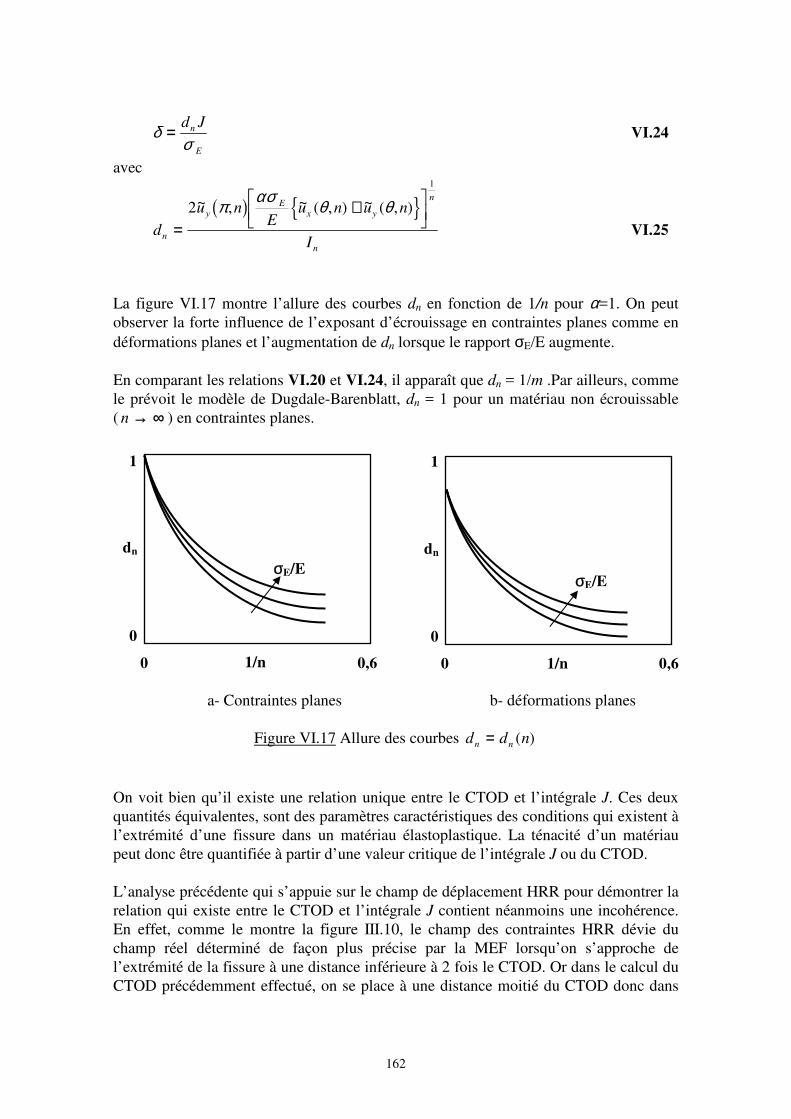
162
δσ
=d Jn
E
VI.24
avec
d
u nE
u n u n
In
y
E
x y
n
n
=+L
NMOQP2
1
~ , ~ ( , ) ~ ( , )π ασ θ θb g n s VI.25
La figure VI.17 montre l’allure des courbes dn en fonction de 1/n pour α=1. On peut
observer la forte influence de l’exposant d’écrouissage en contraintes planes comme en
déformations planes et l’augmentation de dn lorsque le rapport σE/E augmente.
En comparant les relations VI.20 et VI.24, il apparaît que dn = 1/m .Par ailleurs, comme
le prévoit le modèle de Dugdale-Barenblatt, dn = 1 pour un matériau non écrouissable
( n → ∞ ) en contraintes planes.
a- Contraintes planes b- déformations planes
Figure VI.17 Allure des courbes d d nn n= ( )
On voit bien qu’il existe une relation unique entre le CTOD et l’intégrale J. Ces deux
quantités équivalentes, sont des paramètres caractéristiques des conditions qui existent à
l’extrémité d’une fissure dans un matériau élastoplastique. La ténacité d’un matériau
peut donc être quantifiée à partir d’une valeur critique de l’intégrale J ou du CTOD.
L’analyse précédente qui s’appuie sur le champ de déplacement HRR pour démontrer la
relation qui existe entre le CTOD et l’intégrale J contient néanmoins une incohérence.
En effet, comme le montre la figure III.10, le champ des contraintes HRR dévie du
champ réel déterminé de façon plus précise par la MEF lorsqu’on s’approche de
l’extrémité de la fissure à une distance inférieure à 2 fois le CTOD. Or dans le calcul du
CTOD précédemment effectué, on se place à une distance moitié du CTOD donc dans
σE/E
dn
1/n
1
0
0 0,6
dn
1/n
1
0
0 0,6
σE/E σE/E
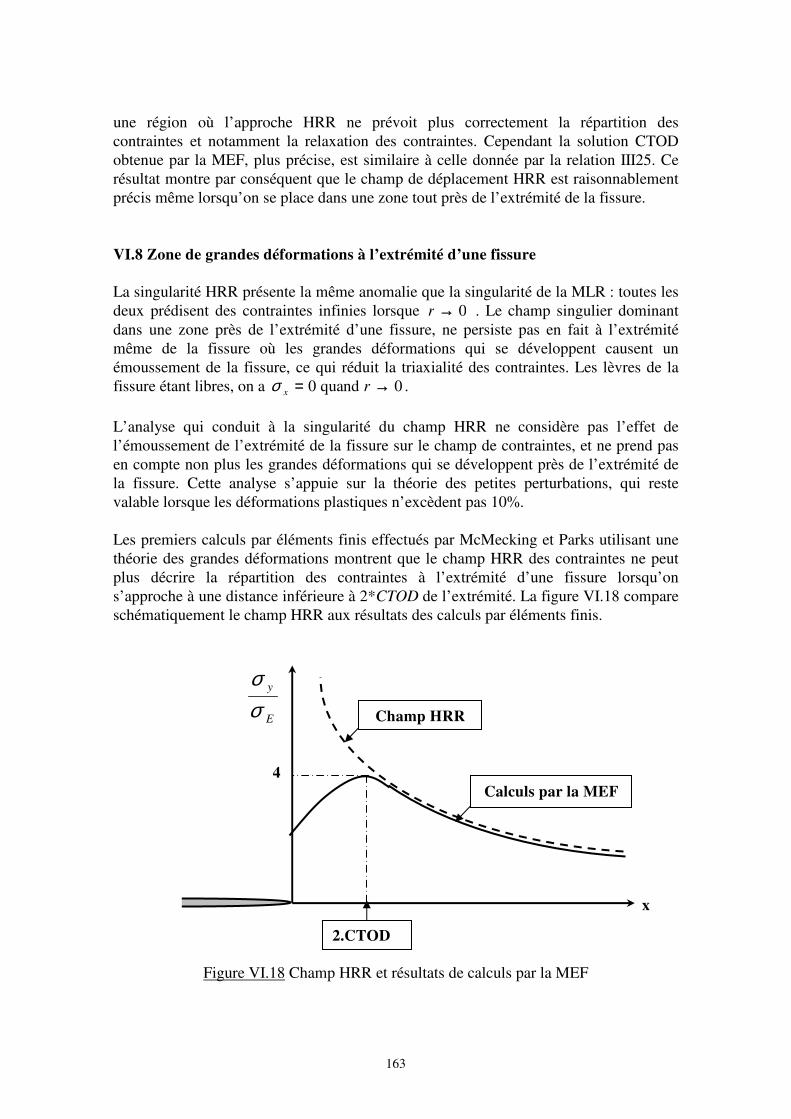
163
une région où l’approche HRR ne prévoit plus correctement la répartition des
contraintes et notamment la relaxation des contraintes. Cependant la solution CTOD
obtenue par la MEF, plus précise, est similaire à celle donnée par la relation III25. Ce
résultat montre par conséquent que le champ de déplacement HRR est raisonnablement
précis même lorsqu’on se place dans une zone tout près de l’extrémité de la fissure.
VI.8 Zone de grandes déformations à l’extrémité d’une fissure
La singularité HRR présente la même anomalie que la singularité de la MLR : toutes les
deux prédisent des contraintes infinies lorsque r → 0 . Le champ singulier dominant
dans une zone près de l’extrémité d’une fissure, ne persiste pas en fait à l’extrémité
même de la fissure où les grandes déformations qui se développent causent un
émoussement de la fissure, ce qui réduit la triaxialité des contraintes. Les lèvres de la
fissure étant libres, on a σ x r= →0 0 quand .
L’analyse qui conduit à la singularité du champ HRR ne considère pas l’effet de
l’émoussement de l’extrémité de la fissure sur le champ de contraintes, et ne prend pas
en compte non plus les grandes déformations qui se développent près de l’extrémité de
la fissure. Cette analyse s’appuie sur la théorie des petites perturbations, qui reste
valable lorsque les déformations plastiques n’excèdent pas 10%.
Les premiers calculs par éléments finis effectués par McMecking et Parks utilisant une
théorie des grandes déformations montrent que le champ HRR des contraintes ne peut
plus décrire la répartition des contraintes à l’extrémité d’une fissure lorsqu’on
s’approche à une distance inférieure à 2*CTOD de l’extrémité. La figure VI.18 compare
schématiquement le champ HRR aux résultats des calculs par éléments finis.
Figure VI.18 Champ HRR et résultats de calculs par la MEF
x
σσ
y
E
4
2.CTOD
Champ HRR
Calculs par la MEF
164
Cette défaillance du champ HRR à décrire la répartition des contraintes lorsqu’on est
trop près de l’extrémité d’une fissure conduit à se poser la même question sur cette
approche que sur les limites de la MLR lors du chapitre IV. Peut-on utiliser l’intégrale J
comme critère de rupture compte tenu de l’émoussement de l’extrémité d’une fissure ?
La réponse est similaire à celle du chapitre précédent. Tant qu’il existe une région
entourant l’extrémité de la fissure où le champ des contraintes est correctement décrit
par les équations VI.19, l’intégrale J caractérise de façon unique ce champ et peut alors
être utilisée pour quantifier la ténacité.
La figure VI.19 illustre l’effet de la plasticité sur la distribution des contraintes à
l’extrémité d’une fissure : pour la commodité de la présentation, on utilise une échelle
Log-Log et on norme la distance à l’extrémité de la fissure par une dimension
caractéristique L. L correspond à une dimension de la structure comme par exemple la
longueur du ligament non fissuré.
La figure VI.19a montre le cas de la plasticité confinée, où à la fois le FIC K et
l’intégrale J caractérisent les conditions à l’extrémité de la fissure. Au voisinage de la
fissure on rencontre successivement 3 zones à mesure que l’on s’approche de son
extrémité. Dans la première zone dominée par le FIC K issu de la MLR, la singularité
est en 1 r et la pente de la courbe de variation des contraintes est alors –1/2 en échelle
Log-Log.
La seconde zone qui correspond à la zone plastifiée qui se développe à l’extrémité d’une
fissure, est dominée par l’intégrale J, en admettant toutefois que le chargement reste
monotone et quasi statique. A l’intérieur de cette zone, la solution HRR est
raisonnablement valable pour beaucoup de matériaux et la pente de la courbe est alors
− +1 1( )n . Enfin la troisième zone correspond à la région des grandes déformations au
voisinage immédiat de l’extrémité de la fissure. La taille de cette zone est d’environ
deux fois le CTOD ce qui correspond à la limite de validité de la solution HRR (figure
VI.18).
En régime de plasticité confinée, le FIC K caractérise de façon unique les conditions au
voisinage de l’extrémité d’une fissure, même si la singularité en 1 r n’existe plus en
deçà d’une certaine distance. De la même manière, J caractérise la distribution des
contraintes dans la zone plastifiée tant que les déformations restent modérées, mais au
delà d’environ 10% de déformation on entre dans la zone des grandes déformations et
l’approche HRR atteint aussi ses limites.
La figure VI.19b illustre un exemple de conditions élastoplastiques où la zone dominée
par le FIC K a disparu alors que le paramètre J est encore applicable. A mesure que la
zone plastifiée se développe par rapport à la dimension caractéristique, la zone dominée
par le FIC K est envahie par la plastification et disparaît ensuite complètement. J comme
le CTOD sont des critères de rupture valables tant que la plastification demeure
modérée.
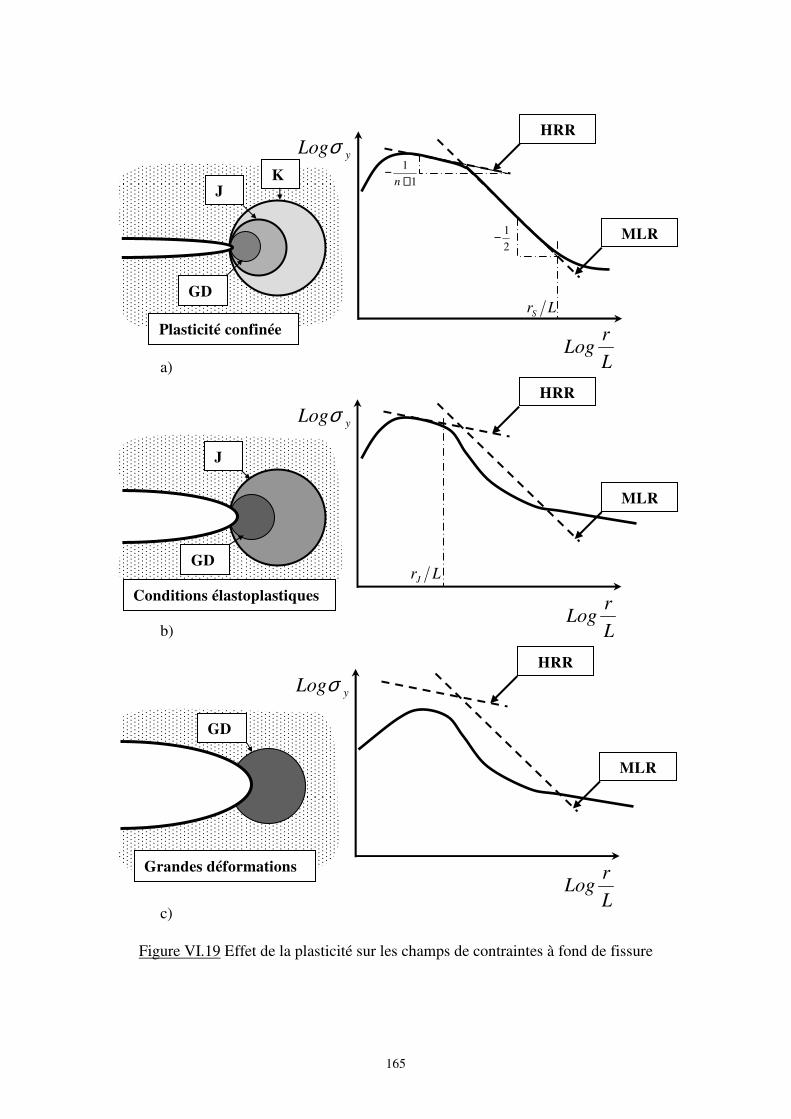
165
a)
b)
c)
Figure VI.19 Effet de la plasticité sur les champs de contraintes à fond de fissure
MLR
HRR
Log yσ
Logr
L
r LJ
Conditions élastoplastiques
J
GD
MLR
HRR
Log yσ
Logr
L
Grandes déformations
GD
Plasticité confinée
K J
GD
MLR − 1
2
HRR
−+1
1n
Log yσ
Logr
L
r LS

166
Lorsqu’on atteint le régime des grandes déformations (figure VI.19c), il n’y plus de
paramètre unique pour décrire les champs de contraintes, l’intégrale J dépend alors de la
taille et de la géométrie de la structure ; la zone dominée par J disparaît à son tour. On a
alors recours à d’autres approches comme la théorie des lignes de glissement.
VI.9 Théorie des lignes de glissement
La théorie des lignes de glissement découle de l’application de la théorie différentielle
de la plasticité.
Pour un état de déformations planes, on a :
ε ε εz
P
xz
P
yz
P= = = 0
et en appliquant les équations de Levy-Misès (équations du comportement avec υP=0.5),
on a :
σ σ σ σ σz x y xz yz= + = =1
20d i VI.26
et
σσ σ σ
σm
x y z
z=+ +
=3
VI.27
(σz est donc égale à la contrainte moyenne).
Le tracé du cercle de Mohr des contraintes dans le plan principal (x,y) donne (figure
VI.20) :
Figure VI.20 Construction de Mohr
σx σ
τ
σxy
−σxy
σy
Px
Py
Pα
Pβ
C
σm -2ϕ
-2ϕ
�
x
�
y
�α
�
β

167
Sur le cercle de Mohr, chaque point Pn (σ,τ) est représentatif de l’état de contrainte dans
une direction �
n . Pα et Pβ sont représentatifs de l’état de contrainte dans les directions �
�
α β et correspondantes aux directions de cisaillement maximum. Si sur le cercle de
Mohr, autrement dit dans le plan des contraintes on a l’angle CP CPx , α ϕb g = −2 ,dans le
plan physique on aura l’angle � �
x ,α ϕb g = .
Les lignes de glissement constituent un réseau de courbes orthogonales α et β tangentes
en tout point aux directions de cisaillement maximum �
�
β α et .
Comme on considère un solide rigide plastique parfait, le critère de Von Misès impose,
losqu’on atteint le seuil d’écoulement plastique, que le cercle de Mohr ait un rayon
constant égal à k E=σ2
.
L’état des contraintes est donc donné par :
σ σ ϕσ σ ϕ
σ ϕ
x m
y m
xy
k
k
k
= −= +
=
RS|
T|
sin
sin
cos
2
2
2
VI.28
En appliquant ce résultat à une surface libre (telle que les lèvres d’une fissure) tangente
à une direction �
x ' , on a :
σ σσσ
x E
y
x y
k'
'
' '
= ===
RS|
T|
2
0
0
VI.29
Les deux directions �
�
α β et (figure VI.21) sont orientées de 45° par rapport à la surface
libre.
Figure VI.21 Orintation des lignes de cisaillement maximum
�
α
�
β
σ
τ
�
x '�
y '
�
α�
β
Surface libre
45° -45°
�
x '
�
y '
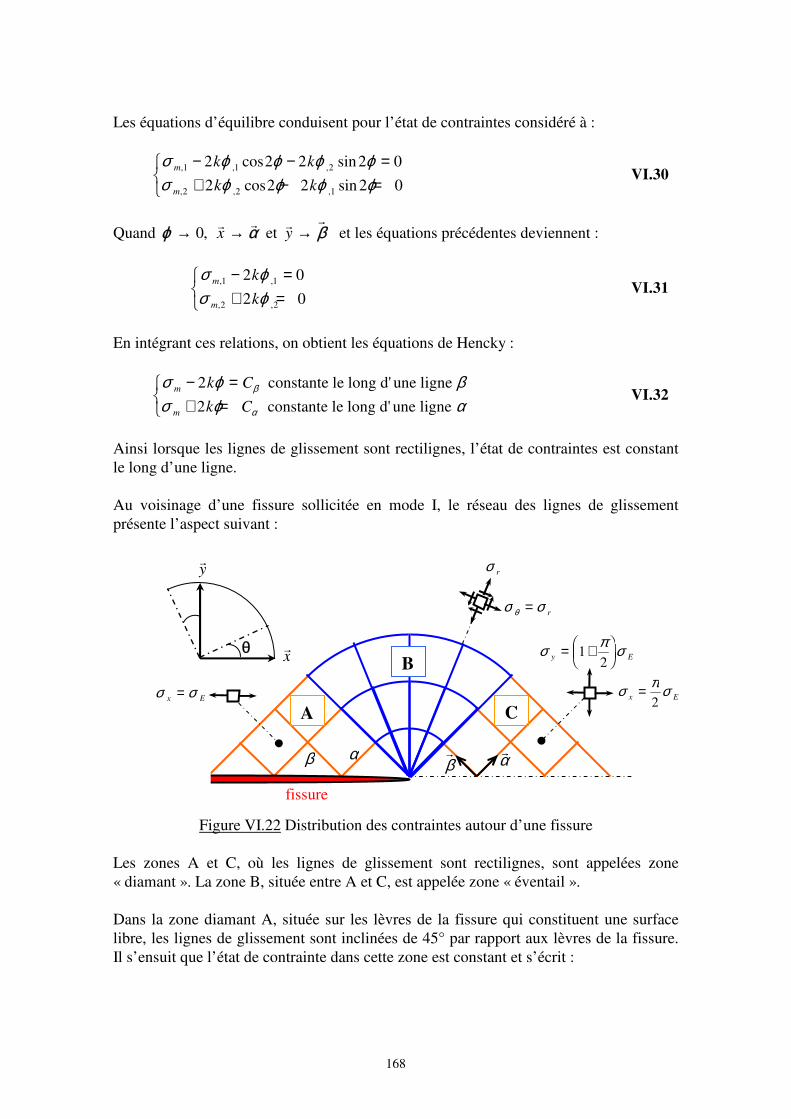
168
Les équations d’équilibre conduisent pour l’état de contraintes considéré à :
σ ϕ ϕ ϕ ϕσ ϕ ϕ ϕ ϕ
m
m
k k
k k
, , ,
, , ,
cos sin
cos sin
1 1 2
2 2 1
2 2 2 2 0
2 2 2 2 0
− − =+ − =
RST VI.30
Quand ϕ α β→ → →0,� � �
�
x y et et les équations précédentes deviennent :
σ ϕσ ϕ
m
m
k
k
, ,
, ,
1 1
2 2
2 0
2 0
− =+ =
RST VI.31
En intégrant ces relations, on obtient les équations de Hencky :
σ ϕ βσ ϕ α
β
α
m
m
k C
k C
− =+ =
RST2
2
constante le long d' une ligne
constante le long d' une ligne VI.32
Ainsi lorsque les lignes de glissement sont rectilignes, l’état de contraintes est constant
le long d’une ligne.
Au voisinage d’une fissure sollicitée en mode I, le réseau des lignes de glissement
présente l’aspect suivant :
Figure VI.22 Distribution des contraintes autour d’une fissure
Les zones A et C, où les lignes de glissement sont rectilignes, sont appelées zone
« diamant ». La zone B, située entre A et C, est appelée zone « éventail ».
Dans la zone diamant A, située sur les lèvres de la fissure qui constituent une surface
libre, les lignes de glissement sont inclinées de 45° par rapport aux lèvres de la fissure.
Il s’ensuit que l’état de contrainte dans cette zone est constant et s’écrit :
�
y
α
A C
B
�
α�
ββ
σ π σx E=2
σ π σy E= +FHGIKJ1
2
σ σx E=
σ r
σ σθ = r
fissure
θ �
x

169
σ σσ σ
π θ πx E
y xy
k= == =
RST≤ ≤
2
0 dans la zone A où
3
4 VI.33
Ainsi le long d’une ligne α de la zone A, 3 4 , m kϕ π σ= = et d’après les relations
précédentes :
σ ϕ π π παm k k C( )= + = +FHG
IKJ =3 4 2
3
41
3
2 dans la zone A
En appliquant ce résultat dans la 2e zone diamant C où 4ϕ π= , on a d’après les
mêmes relations :
C k kmαπ σ ϕ π π= +FHGIKJ = = +1
3
24 2
4( )
Soit
σ ϕ π πm k( )= = +4 1b g dans la zone C
L’état de contrainte est donc constant dans la zone C et s’exprime par :
σ π π π σ
σ π π π σ
σ
θ πx
y dans la zone C où 0
= + − = =
= + + = + = +FHGIKJ
=
R
S|||
T|||
≤ ≤
k k k
k k k
E
E
xy
( )
( ) ( )
12
1 2 12
04
VI.34
Dans la zone éventail B, l’état des contraintes n’est pas constant. On a dans la zone B :
ϕ θαβ θ
===RST
et
� �
�
�
e
e
r
Soit en se reportant au cercle de Mohr :
σ σ σ θ σθ θr m r k= = =( ) et
σ ϕ θ θ παm k C( )= + = FHGIKJ2 = k 1 +
3
2 dans la zone B
soit
σ θ π θm ( ) = k 1 +3
2 dans la zone B−F
HGIKJ2
�
α
ϕ θ=
�
β
B

170
Finalement l’état de contraintes dans la zone considérée est donné par :
σ σ π θ σ
σ σπ θ πθ
θ
r
E
r
Ek
= = + −FHG
IKJ
= =
RS||
T||
≤ ≤1
3
22
2
2
dans la zone B où 4
3
4 VI.35
Les relations VI.33 à VI.35 montrent que les contraintes au voisinage de l’extrémité
d’une fissure sont non singulières et ne dépendent que de θ.