Embed Size (px)
Citation preview
Commité de Suivi de Thèse (CST)
Ecole Doctorale : Information, Structures et Systèmes
Contributions à la commande adaptative non linéaire des robots parallèles
?? Friday Oct. 3rd, 2014
Bennehar Moussab Doctorant en 2ème année de thèse
Cadre: Projet ANR ARROW
Directeur de thèse : François Pierrot Encadrant : Ahmed Chemori
Outline of the Presentation
?? Context and Problematic of the Thesis
State of the Art on Dynamics and Control of Mechanical Manipulators
Adaptive Compensation of Parametric Uncertainties
Solution 1: Extended DCAL Control
Solution 2: Adaptive RISE Control
Adaptive Compensation of Nonparametric Uncertainties
Solution 1: L1 Adaptive Control
Solution 2: L1 Adaptive Control with Feedforward
Conclusion and Future Work ?? Plan ne correpond pas à la barre
Context and Problematic of the Thesis
Context State of the Art Parametric Nonparametric Thesis Progress
Parallel Manipulators Parallel VS Serial Issues and Challenges
Parallel Manipulators Parallel VS Serial Applications Issues and Challenges
1
Context State of the Art Parametric Nonparametric Thesis Progress
End-effector
Base
Base
End-effector
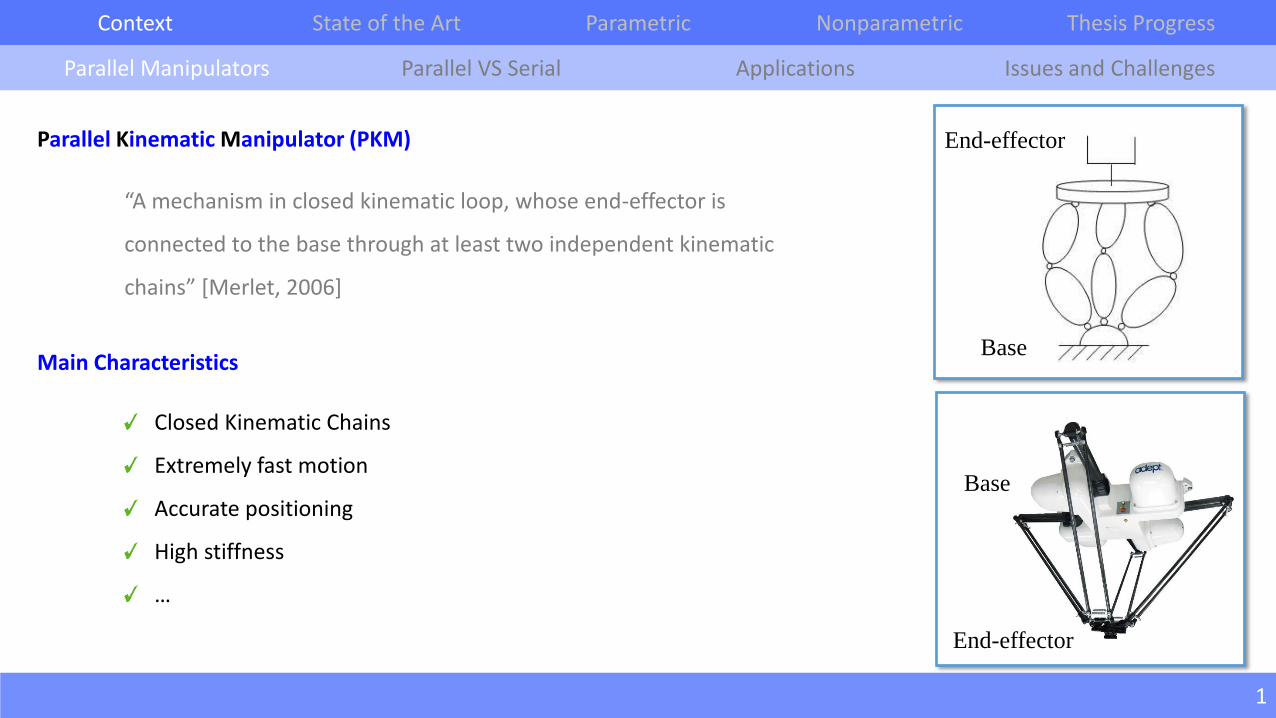
Parallel Kinematic Manipulator (PKM)
“A mechanism in closed kinematic loop, whose end-effector is
connected to the base through at least two independent kinematic
chains” [Merlet, 2006]
Main Characteristics
Closed Kinematic Chains
Extremely fast motion
Accurate positioning
High stiffness
…
Parallel Manipulators Parallel VS Serial Applications Issues and Challenges
2
Context State of the Art Parametric Nonparametric Thesis Progress
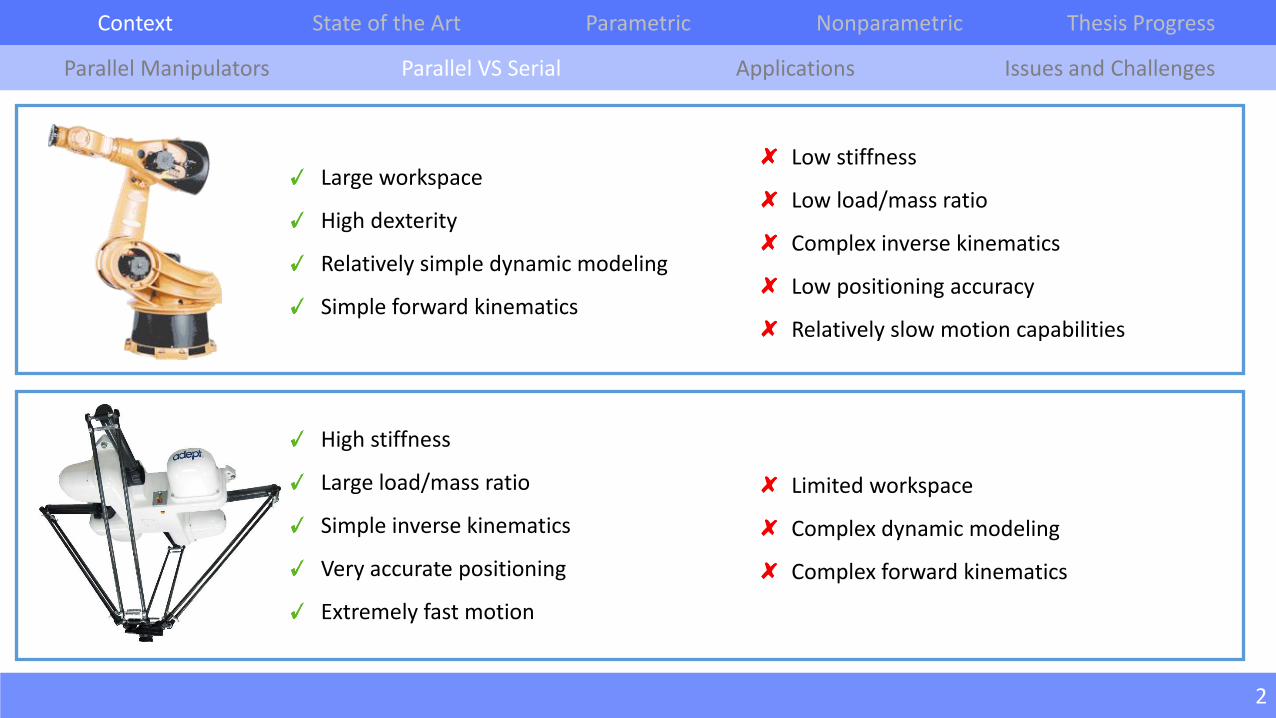
Large workspace
High dexterity
Relatively simple dynamic modeling
Simple forward kinematics
Low stiffness
Low load/mass ratio
Complex inverse kinematics
Low positioning accuracy
Relatively slow motion capabilities
High stiffness
Large load/mass ratio
Simple inverse kinematics
Very accurate positioning
Extremely fast motion
Limited workspace
Complex dynamic modeling
Complex forward kinematics
Parallel Manipulators Parallel VS Serial Applications Issues and Challenges
3
Context State of the Art Parametric Nonparametric Thesis Progress
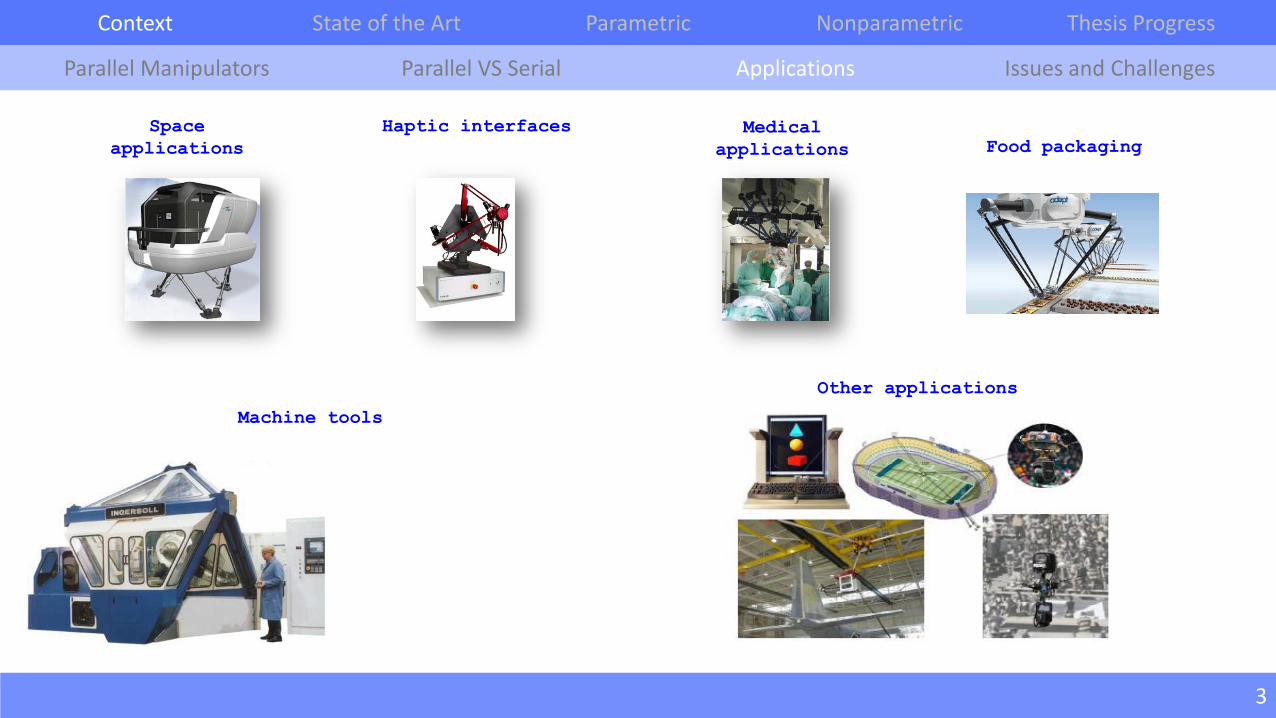
Space
applications
Haptic interfaces Medical
applications Food packaging
Other applications
Machine tools
Parallel Manipulators Parallel VS Serial Applications Issues and Challenges
4
Context State of the Art Parametric Nonparametric Thesis Progress
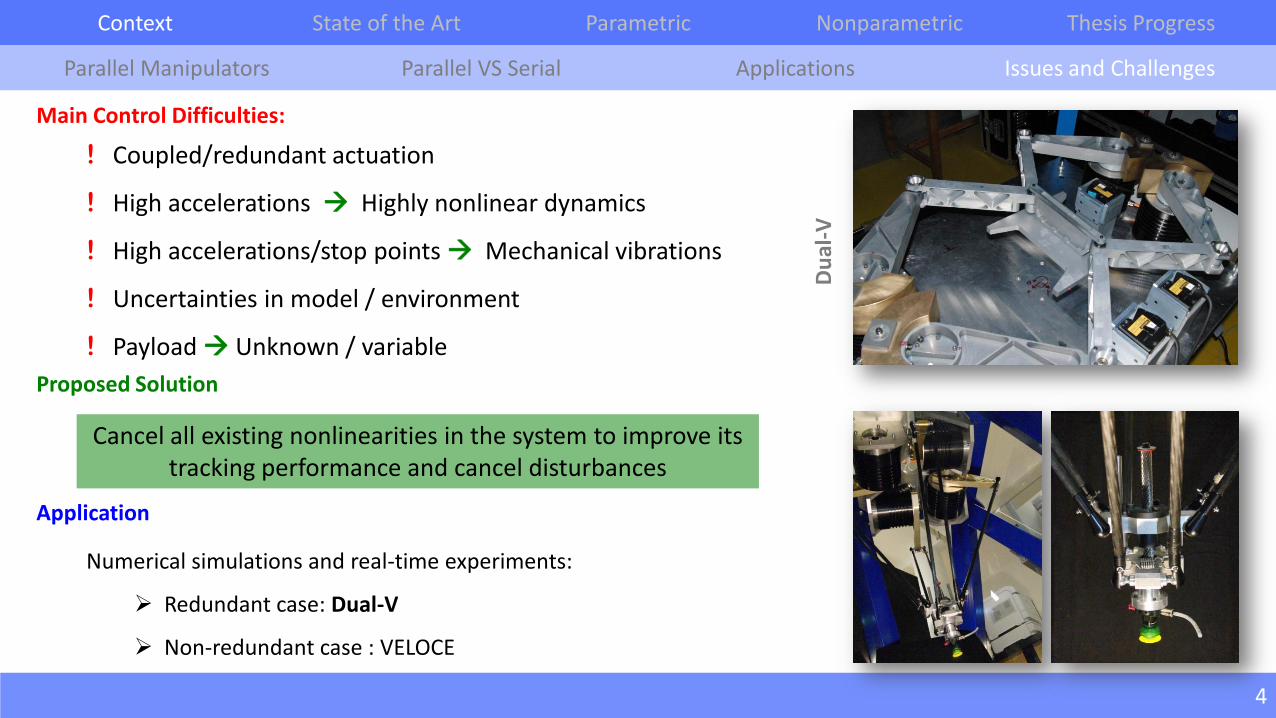
! Coupled/redundant actuation
! High accelerations Highly nonlinear dynamics
! High accelerations/stop points Mechanical vibrations
! Uncertainties in model / environment
! Payload Unknown / variable
Main Control Difficulties:
Proposed Solution
Cancel all existing nonlinearities in the system to improve its tracking performance and cancel disturbances
Application
Numerical simulations and real-time experiments:
Redundant case: Dual-V
Non-redundant case : VELOCE
Du
al-V
Kinematic Control Fixed Model-based Control Adaptive Control Other Control
State of the Art on Control of Mechanical Manipulators
Context State of the Art Parametric Nonparametric Thesis Progress
Kinematic Control Fixed Model-based Control Adaptive Control Others
5
Context State of the Art Parametric Nonparametric Thesis Progress
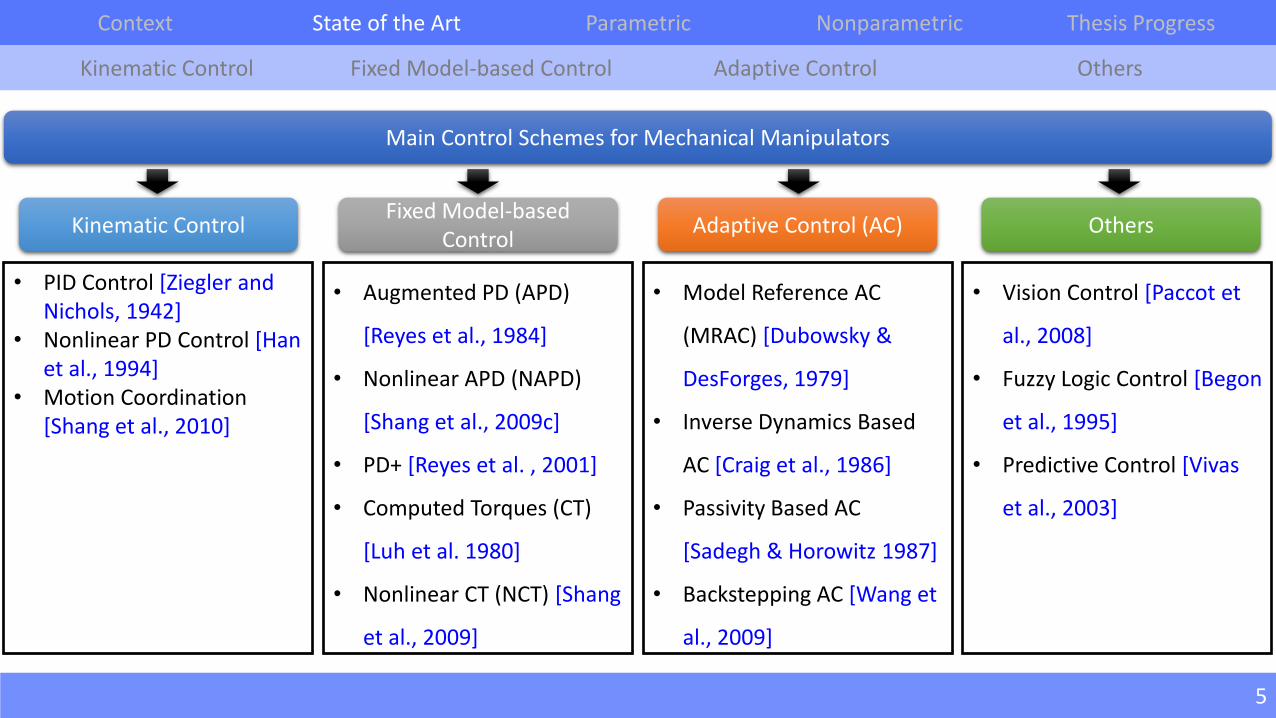
Main Control Schemes for Mechanical Manipulators
Kinematic Control Fixed Model-based
Control Adaptive Control (AC) Others
• PID Control [Ziegler and Nichols, 1942]
• Nonlinear PD Control [Han et al., 1994]
• Motion Coordination [Shang et al., 2010]
• Augmented PD (APD)
[Reyes et al., 1984]
• Nonlinear APD (NAPD)
[Shang et al., 2009c]
• PD+ [Reyes et al. , 2001]
• Computed Torques (CT)
[Luh et al. 1980]
• Nonlinear CT (NCT) [Shang
et al., 2009]
• Model Reference AC
(MRAC) [Dubowsky &
DesForges, 1979]
• Inverse Dynamics Based
AC [Craig et al., 1986]
• Passivity Based AC
[Sadegh & Horowitz 1987]
• Backstepping AC [Wang et
al., 2009]
• Vision Control [Paccot et
al., 2008]
• Fuzzy Logic Control [Begon
et al., 1995]
• Predictive Control [Vivas
et al., 2003]
Kinematic Control Fixed Model-based Control Adaptive Control Others
6
Context State of the Art Parametric Nonparametric Thesis Progress
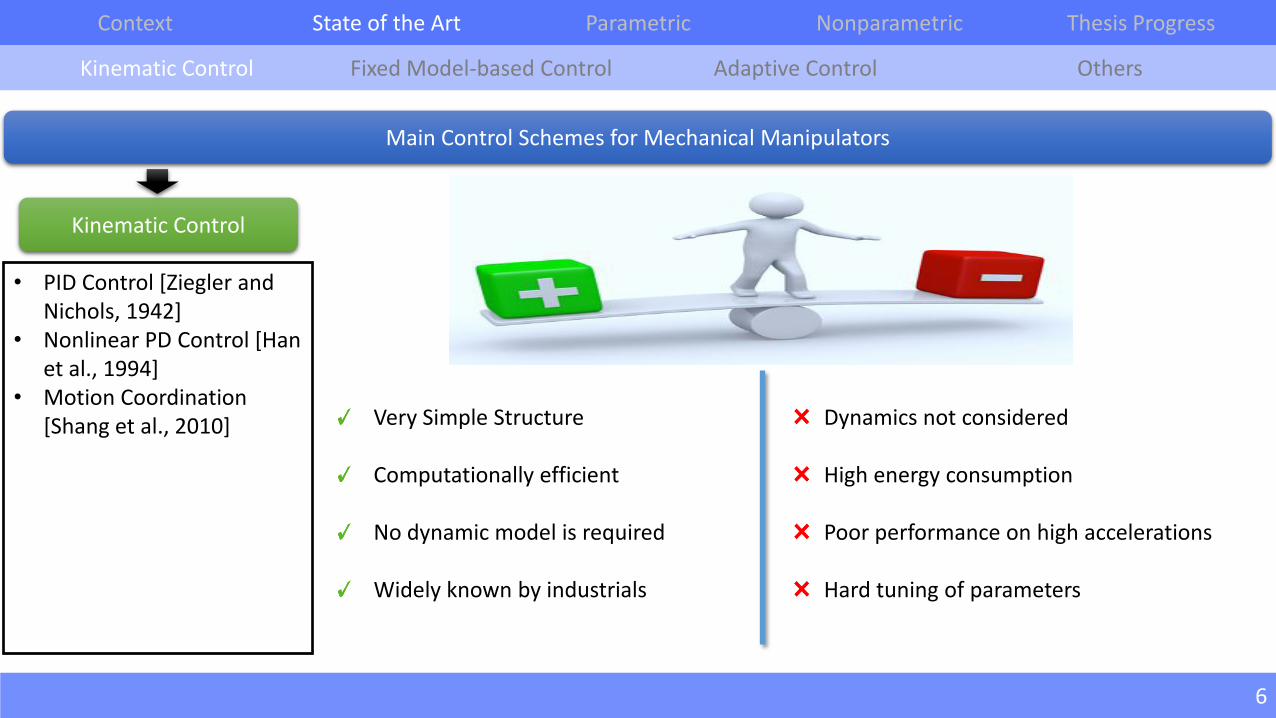
Main Control Schemes for Mechanical Manipulators
Kinematic Control
• PID Control [Ziegler and Nichols, 1942]
• Nonlinear PD Control [Han et al., 1994]
• Motion Coordination [Shang et al., 2010] Very Simple Structure
Computationally efficient
No dynamic model is required
Widely known by industrials
Dynamics not considered
High energy consumption
Poor performance on high accelerations
Hard tuning of parameters
Kinematic Control Fixed Model-based Control Adaptive Control Others
7
Context State of the Art Parametric Nonparametric Thesis Progress
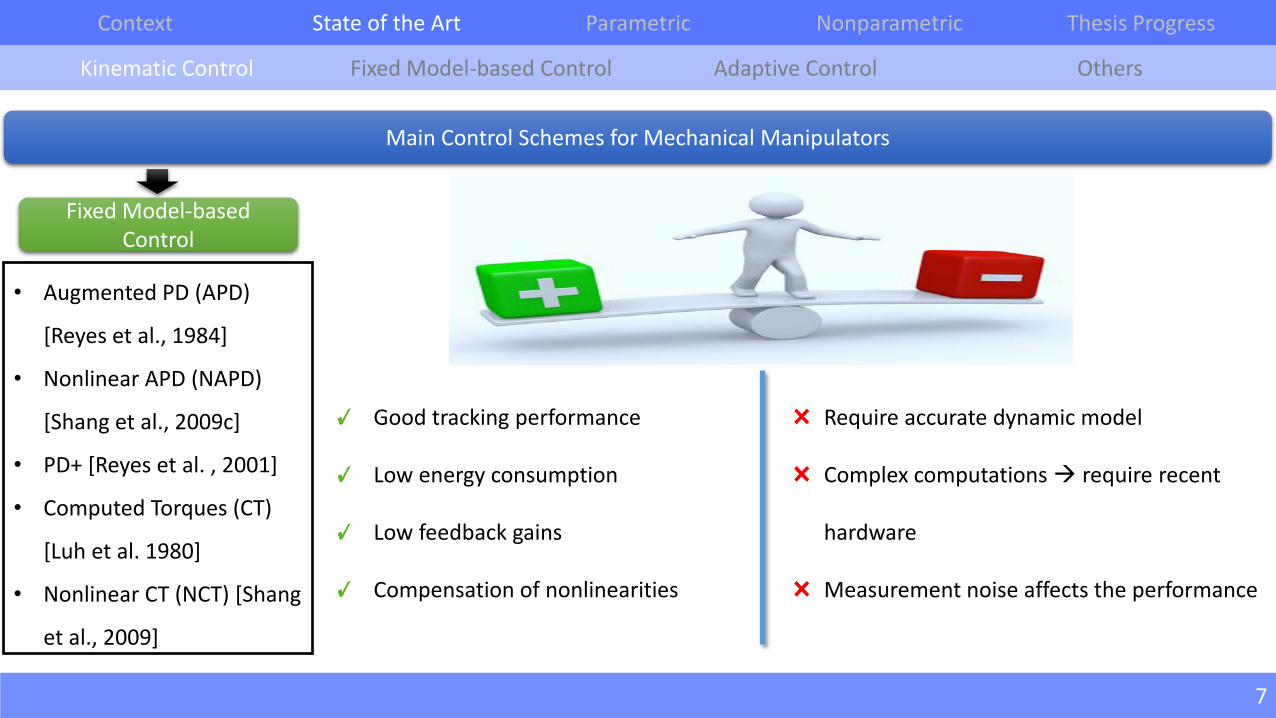
Main Control Schemes for Mechanical Manipulators
• Augmented PD (APD)
[Reyes et al., 1984]
• Nonlinear APD (NAPD)
[Shang et al., 2009c]
• PD+ [Reyes et al. , 2001]
• Computed Torques (CT)
[Luh et al. 1980]
• Nonlinear CT (NCT) [Shang
et al., 2009]
Good tracking performance
Low energy consumption
Low feedback gains
Compensation of nonlinearities
Require accurate dynamic model
Complex computations require recent
hardware
Measurement noise affects the performance
Fixed Model-based Control
Kinematic Control Fixed Model-based Control Adaptive Control Others
8
Context State of the Art Parametric Nonparametric Thesis Progress
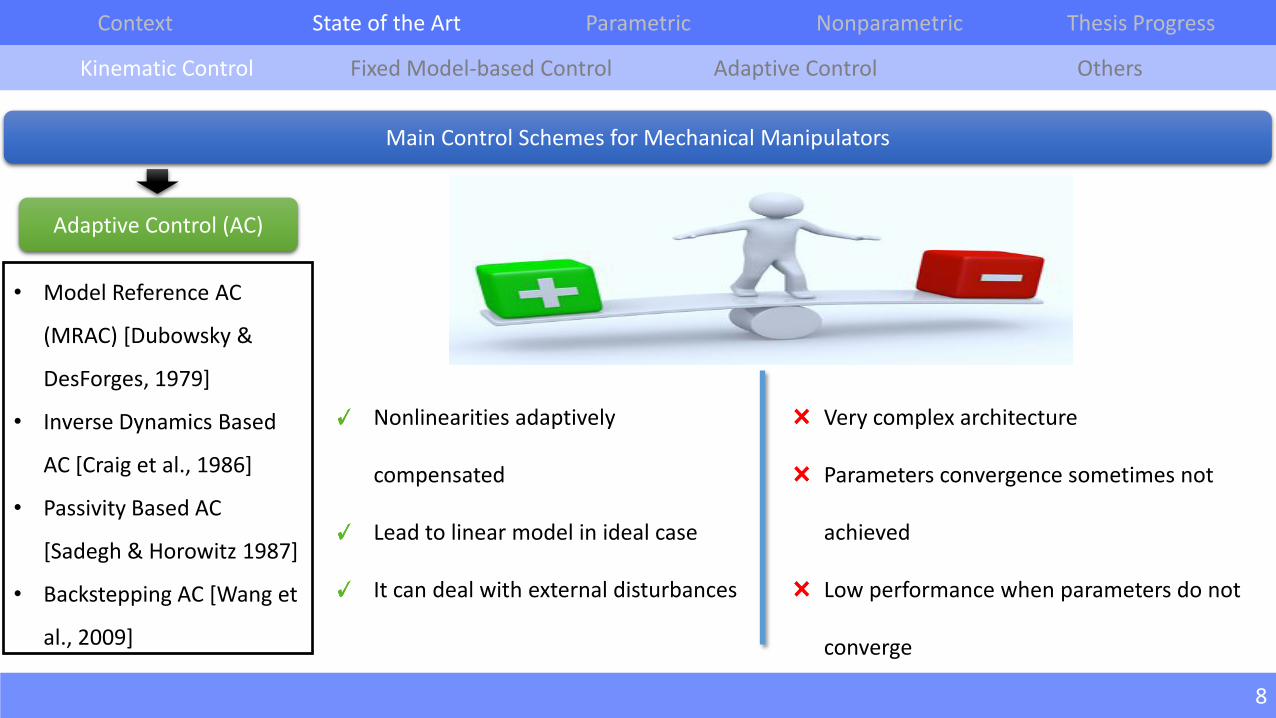
Main Control Schemes for Mechanical Manipulators
• Model Reference AC
(MRAC) [Dubowsky &
DesForges, 1979]
• Inverse Dynamics Based
AC [Craig et al., 1986]
• Passivity Based AC
[Sadegh & Horowitz 1987]
• Backstepping AC [Wang et
al., 2009]
Nonlinearities adaptively
compensated
Lead to linear model in ideal case
It can deal with external disturbances
Very complex architecture
Parameters convergence sometimes not
achieved
Low performance when parameters do not
converge
Adaptive Control (AC)
Dynamics Parameterization Extended DCAL Adaptive RISE Shortcomings and Issues
Adaptive Compensation of Parametric Uncertainties
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
9
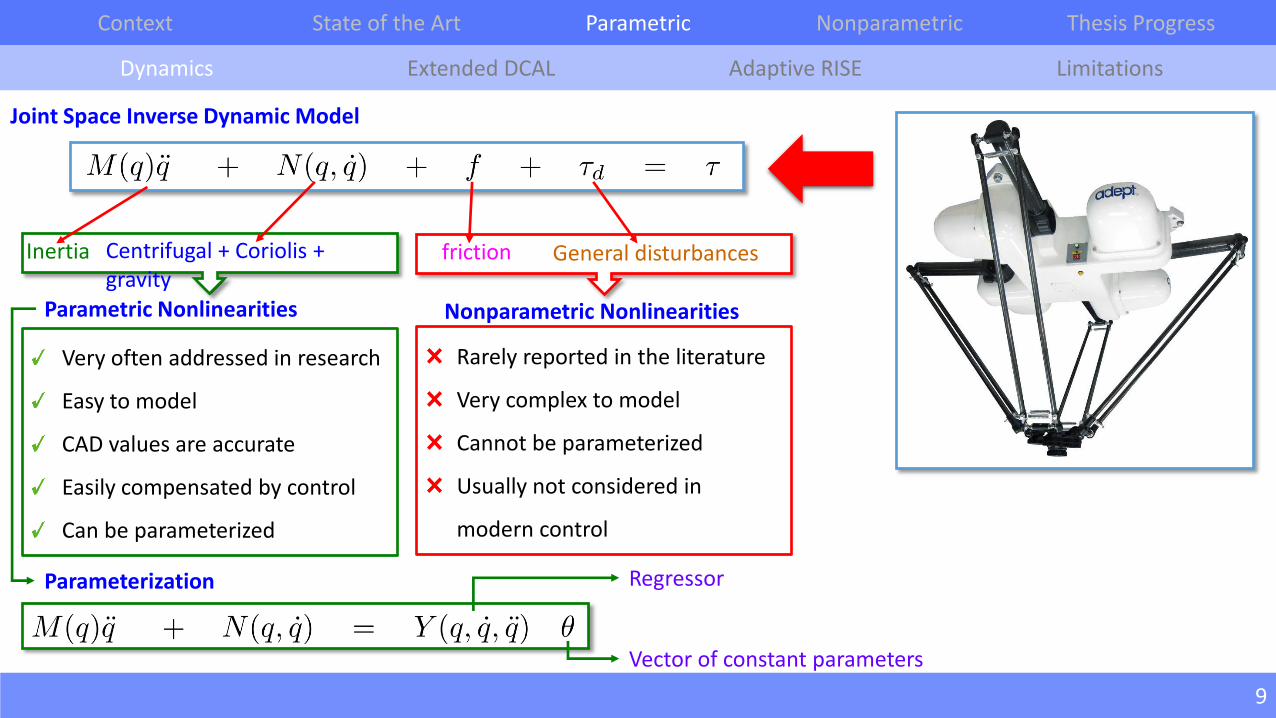
Joint Space Inverse Dynamic Model
Inertia Centrifugal + Coriolis + gravity
friction General disturbances
Very often addressed in research
Easy to model
CAD values are accurate
Easily compensated by control
Can be parameterized
Rarely reported in the literature
Very complex to model
Cannot be parameterized
Usually not considered in
modern control
Parametric Nonlinearities Nonparametric Nonlinearities
Parameterization Regressor
Vector of constant parameters
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
10
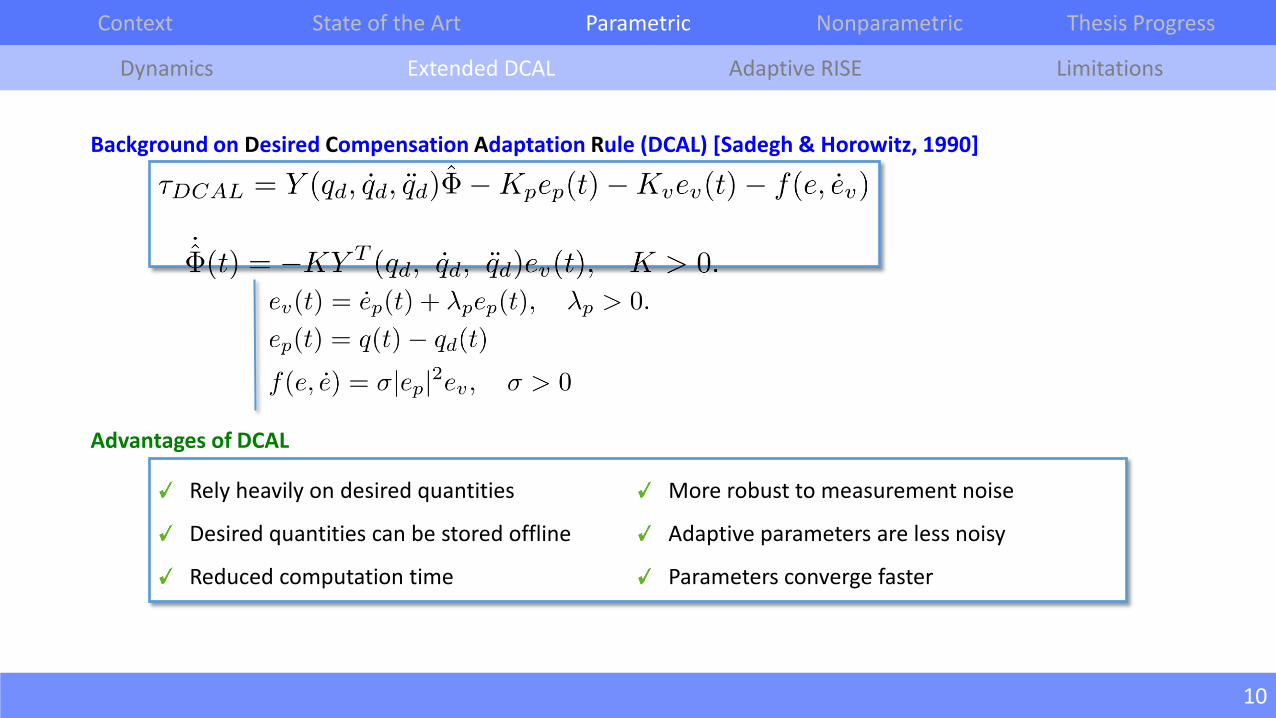
Background on Desired Compensation Adaptation Rule (DCAL) [Sadegh & Horowitz, 1990]
Rely heavily on desired quantities
Desired quantities can be stored offline
Reduced computation time
More robust to measurement noise
Adaptive parameters are less noisy
Parameters converge faster
Advantages of DCAL
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
11
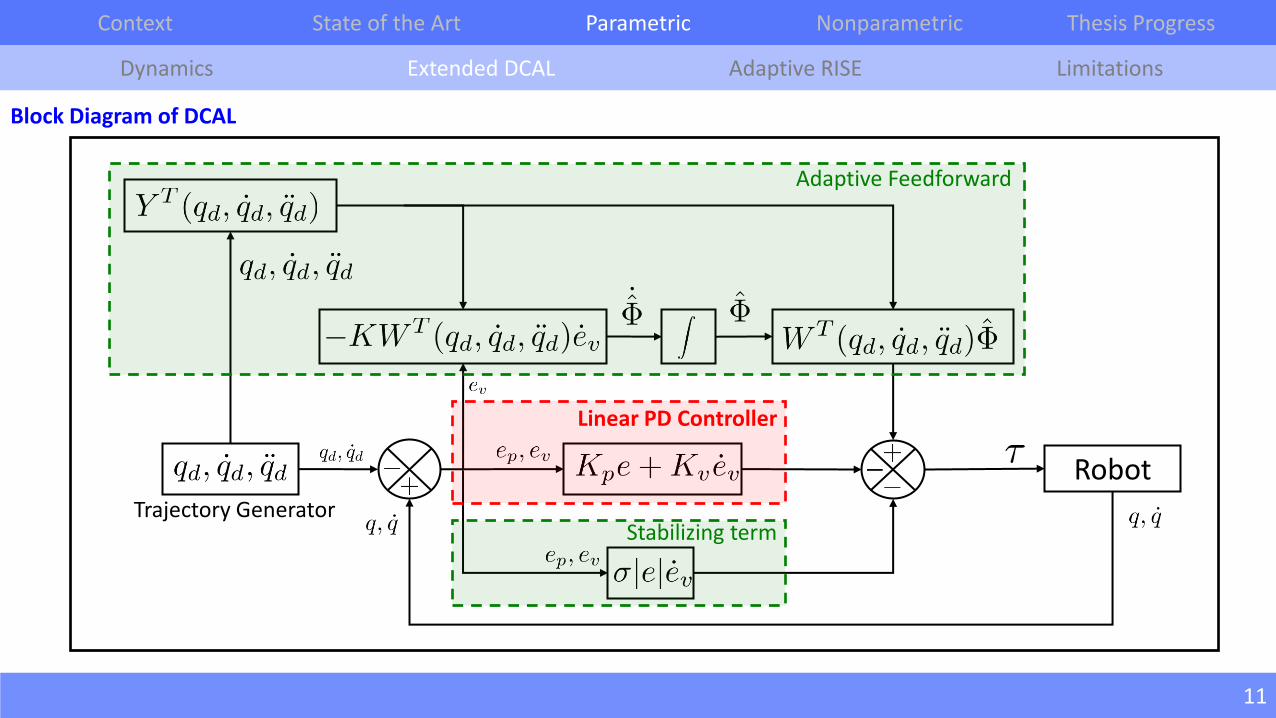
Block Diagram of DCAL
Robot
Adaptive Feedforward
Stabilizing term Trajectory Generator
Linear PD Controller
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
12
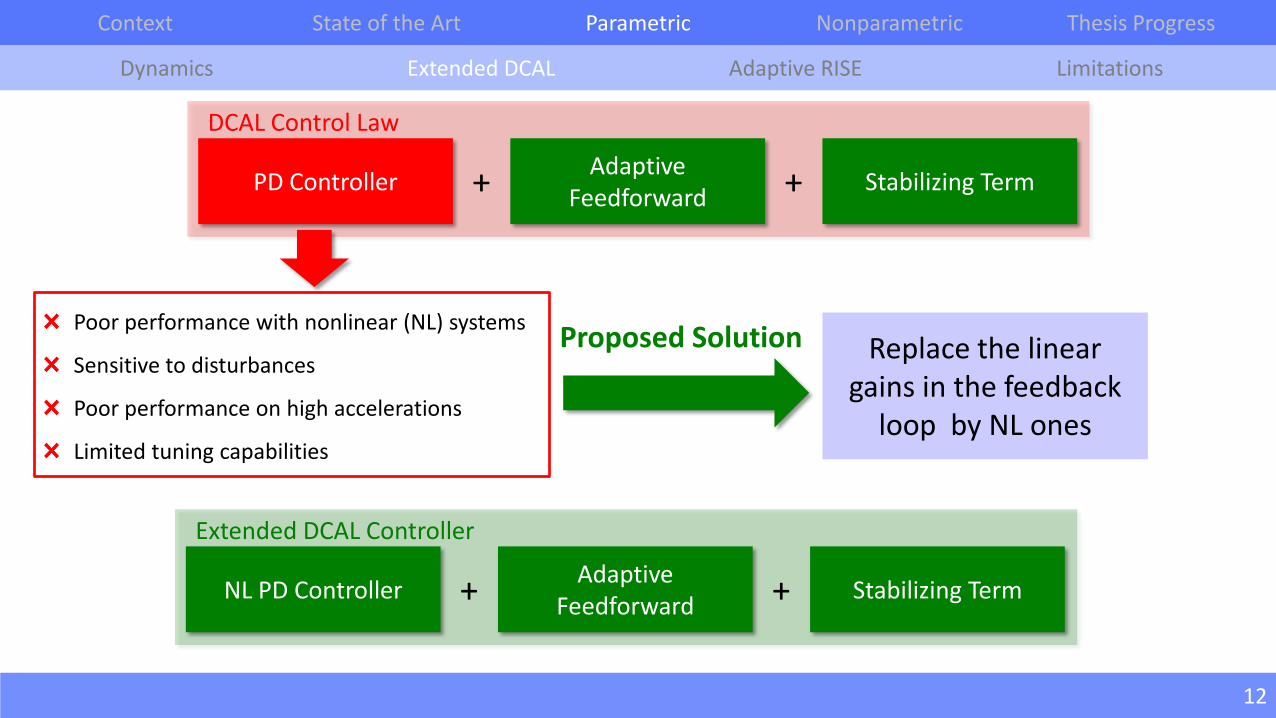
PD Controller Adaptive
Feedforward Stabilizing Term + +
DCAL Control Law
Replace the linear gains in the feedback
loop by NL ones
Proposed Solution Poor performance with nonlinear (NL) systems
Sensitive to disturbances
Poor performance on high accelerations
Limited tuning capabilities
NL PD Controller Adaptive
Feedforward Stabilizing Term + +
Extended DCAL Controller
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
13
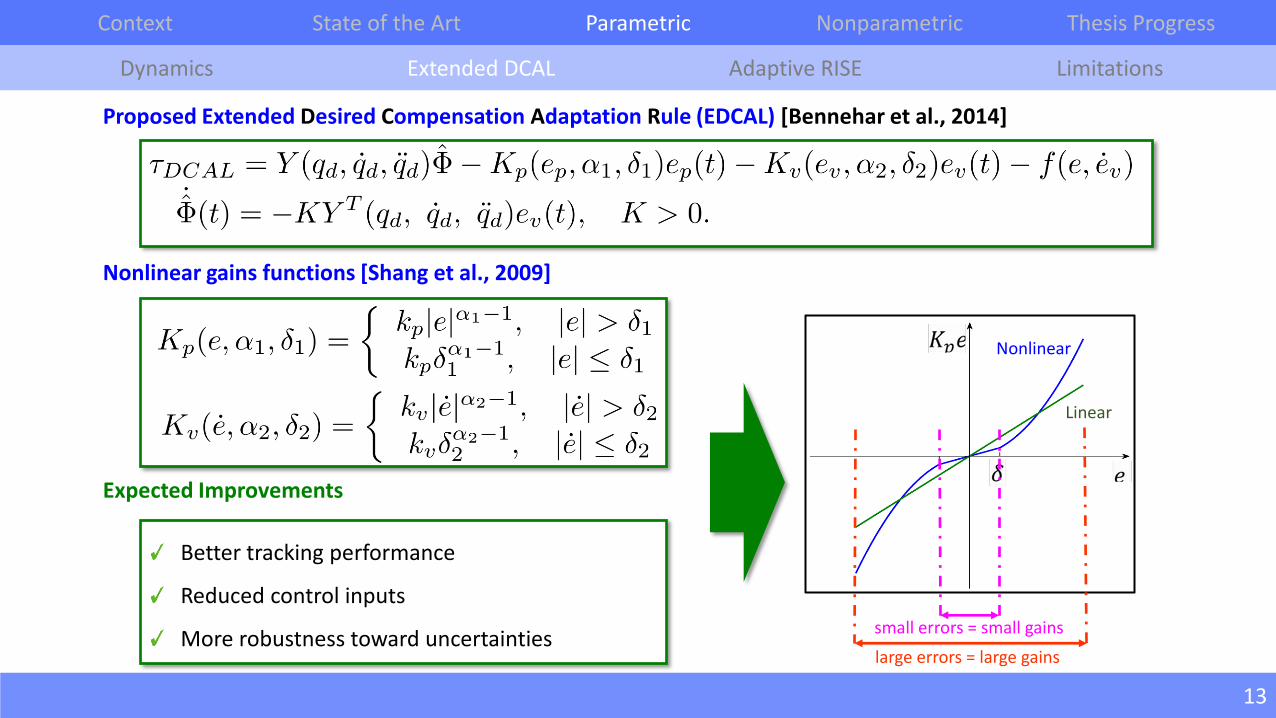
Proposed Extended Desired Compensation Adaptation Rule (EDCAL) [Bennehar et al., 2014]
Better tracking performance
Reduced control inputs
More robustness toward uncertainties
Expected Improvements
Nonlinear gains functions [Shang et al., 2009]
Linear
Nonlinear
small errors = small gains
large errors = large gains
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
14
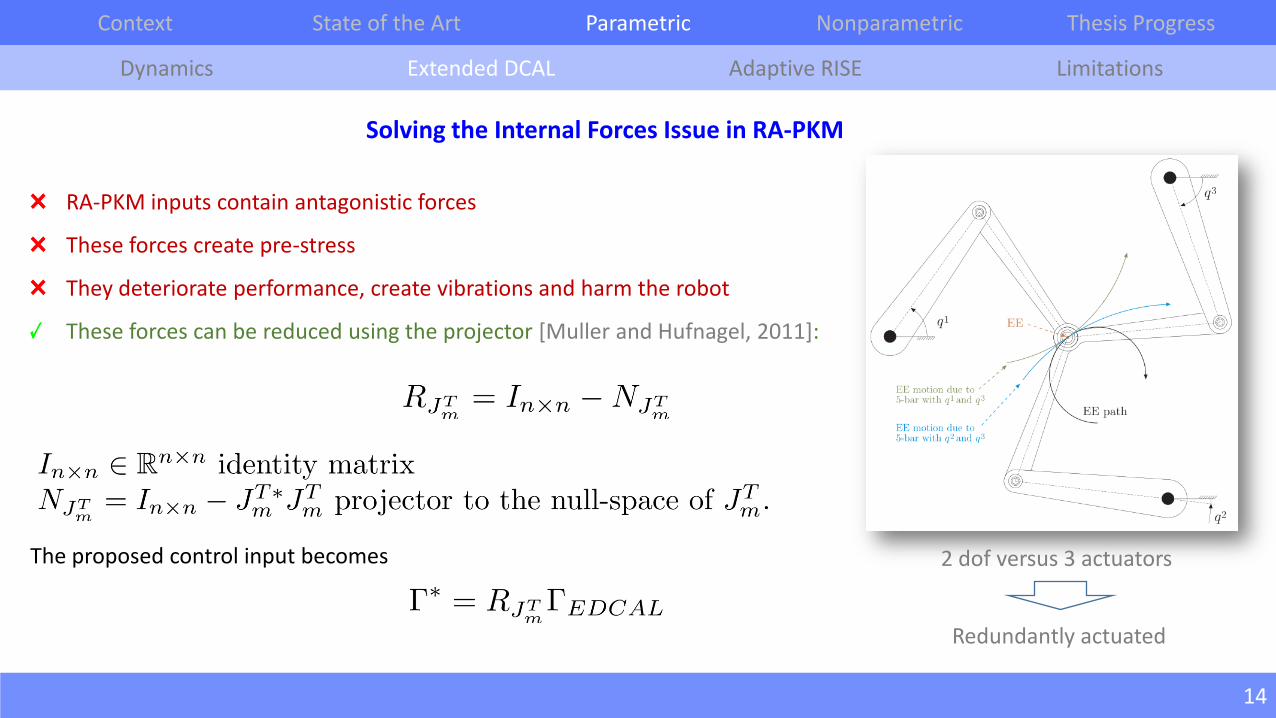
Solving the Internal Forces Issue in RA-PKM
RA-PKM inputs contain antagonistic forces
These forces create pre-stress
They deteriorate performance, create vibrations and harm the robot
These forces can be reduced using the projector [Muller and Hufnagel, 2011]:
The proposed control input becomes
Context State of the Art Parametric Nonparametric Thesis Progress
2 dof versus 3 actuators
Redundantly actuated
Dynamics Extended DCAL Adaptive RISE Limitations
15
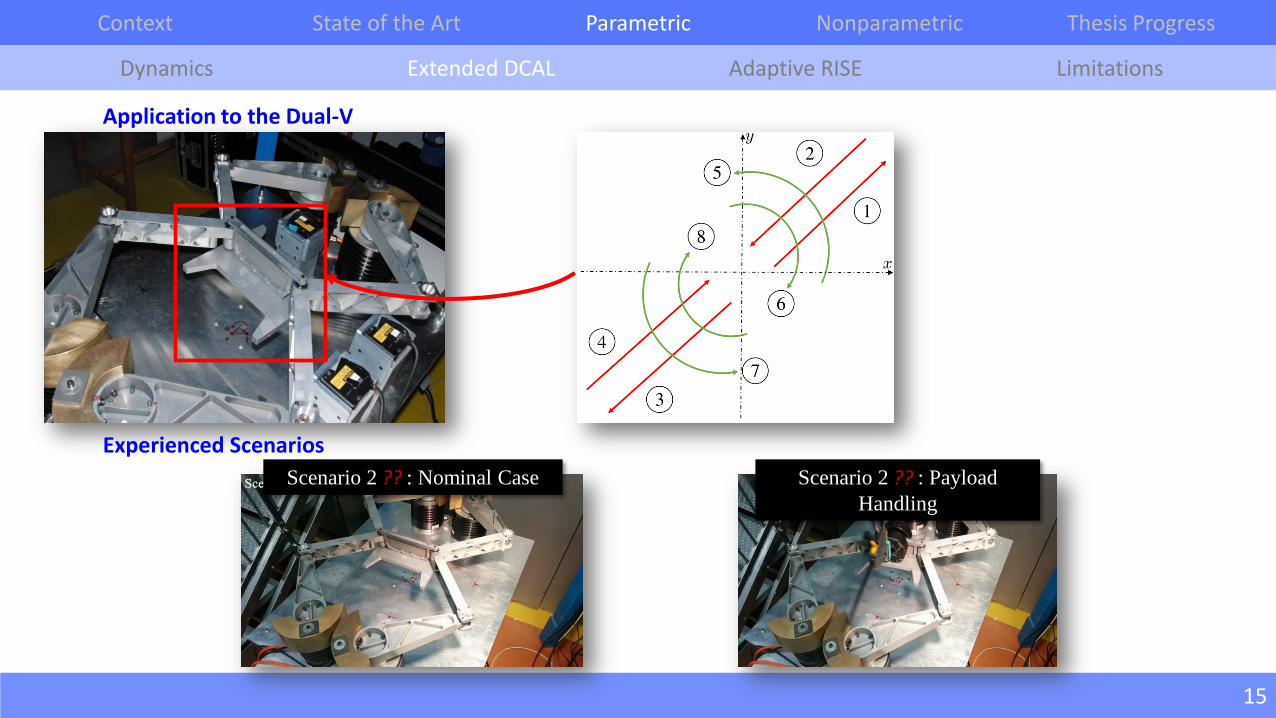
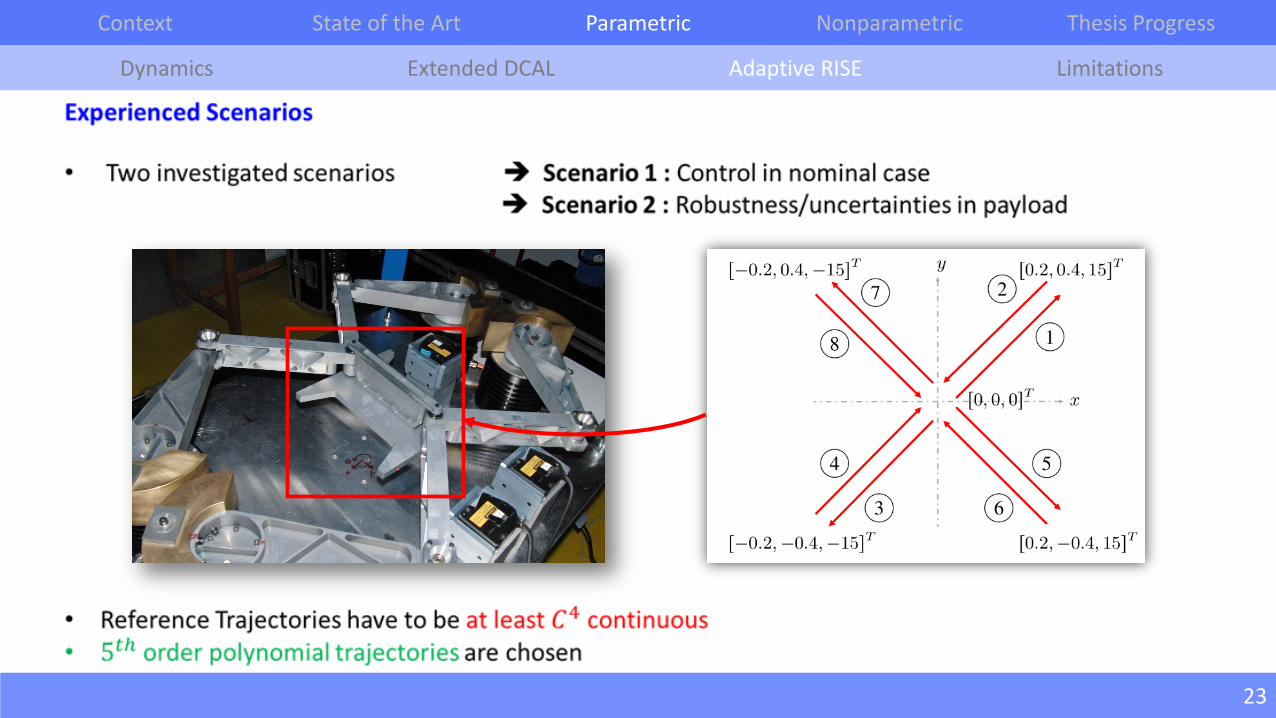
Application to the Dual-V
Experienced Scenarios
Scenario 2 ?? : Nominal Case Scenario 2 ?? : Payload
Handling
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
16
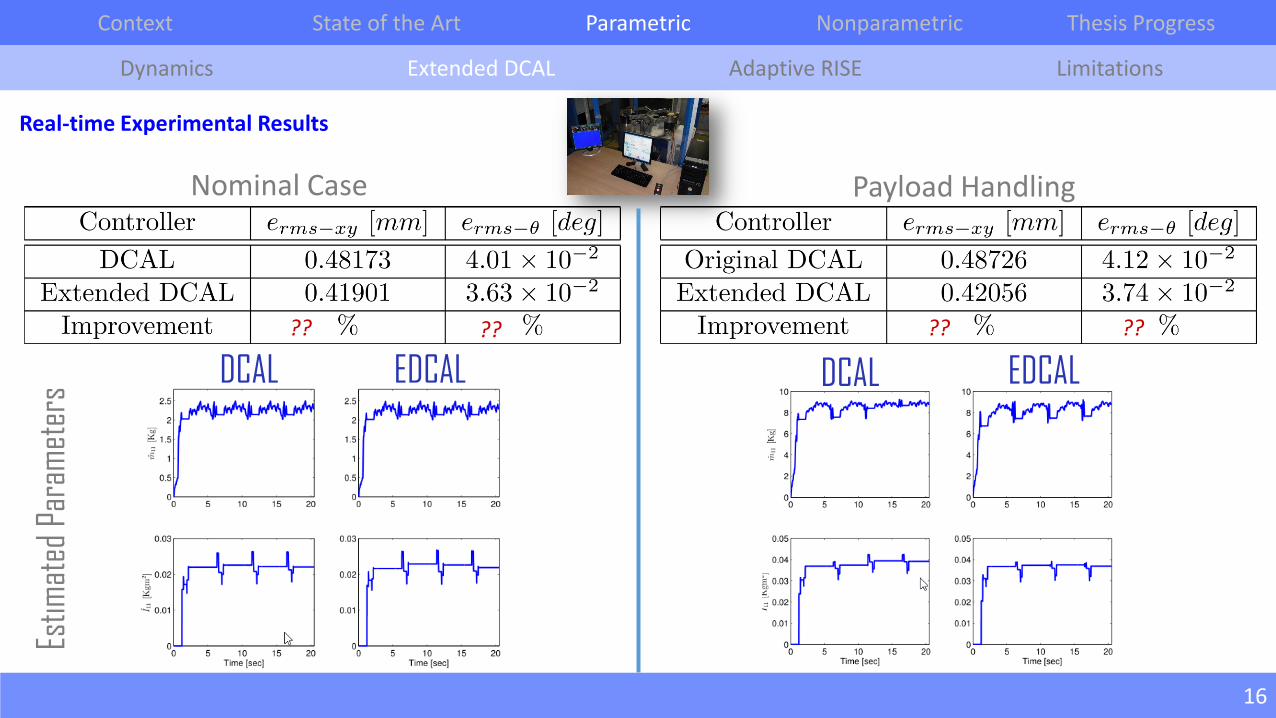
Real-time Experimental Results
Nominal Case Payload Handling
Estim
ated
Par
amet
ers
DCAL EDCAL DCAL EDCAL
Context State of the Art Parametric Nonparametric Thesis Progress
?? ?? ?? ??
Dynamics Extended DCAL Adaptive RISE Limitations
17
Conclusions
DCAL implemented in simulation/experiments on Dual-V
Overall performance could be improved by careful
choice/tuning of feedback gains
Constant gains replaced by NL ones EDCAL
EDCAL implemented on Dual-V
Results demonstrated the relevance of EDCAL
The feedback loop is essential in improving the
performance of the system
More sophisticated modern feedback strategies can be
investigated
Remarks for upcoming work
IROS’14, Chicago, Sep. 2014 ?? Ref
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
18
What is RISE ?
Robust Integral of the Sign of the Error
Non-model based feedback control strategy
Features a unique signum function
Why RISE ?
Stability of the system guaranteed
High order nonlinearities taken into account
MIMO systems supported
Large class of general disturbances assimilated
Very reasonable Hypotheses Xian et al., 2003 ?? Ref
Context State of the Art Parametric Nonparametric Thesis Progress

Dynamics Extended DCAL Adaptive RISE Limitations
19
Overview of Some Successful Applications
[Patre et al. 2008]
Direct-drive motor
[MacKunis et al. 2013]
Synthetic Jet Actuators
[Dupree e al. 2010]
Two-link robot
[Taktak-Meziou et al . 2014]
Hard Disk Drive
[Haibo et al. 2010]
Spacecraft Coordination
[Fischer et al. 2011]
Autonomous Underwater Vehicule
Context State of the Art Parametric Nonparametric Thesis Progress
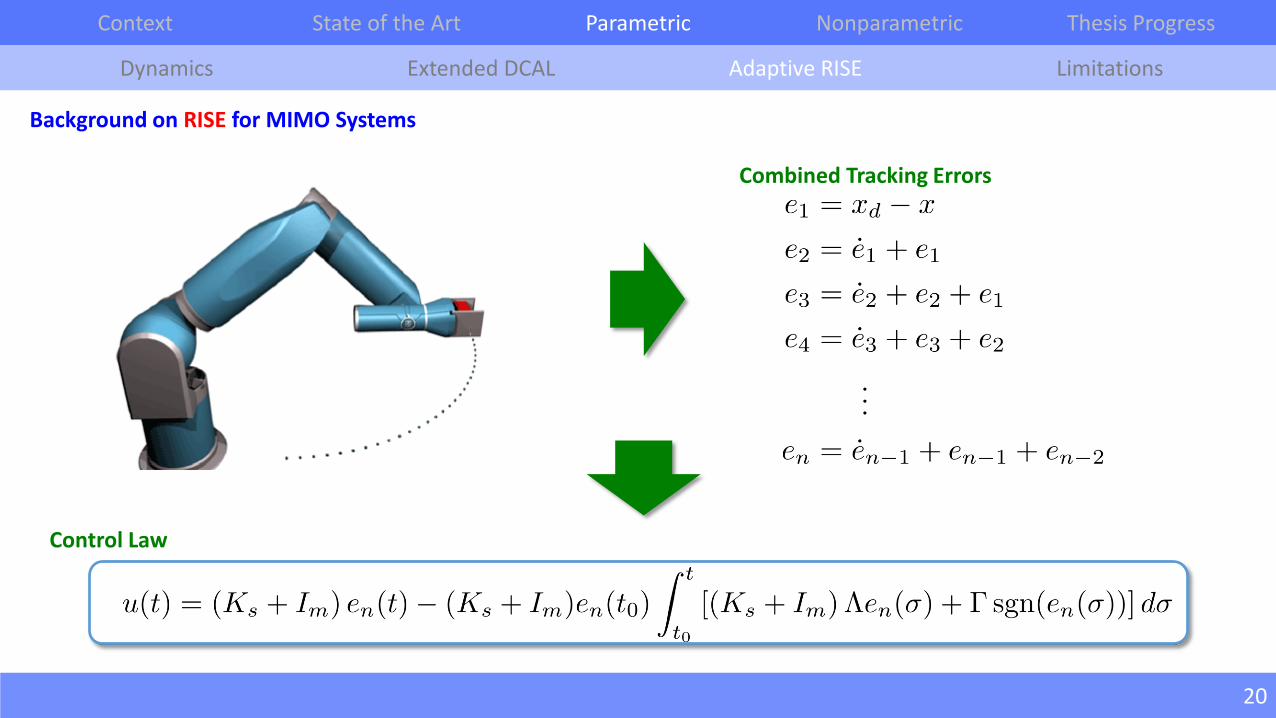
Combined Tracking Errors
Control Law
Dynamics Extended DCAL Adaptive RISE Limitations
20
Background on RISE for MIMO Systems
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
21
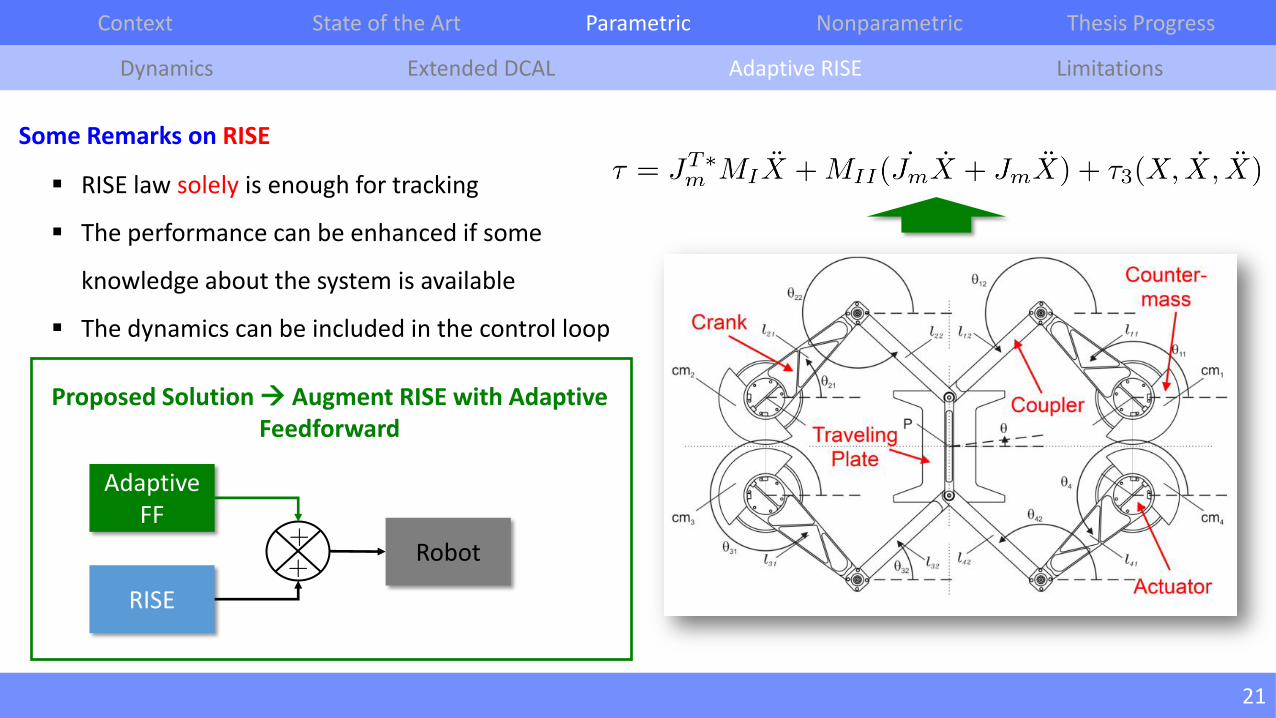
RISE law solely is enough for tracking
The performance can be enhanced if some
knowledge about the system is available
The dynamics can be included in the control loop
Some Remarks on RISE
Proposed Solution Augment RISE with Adaptive Feedforward
RISE
Adaptive FF
Robot
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
22
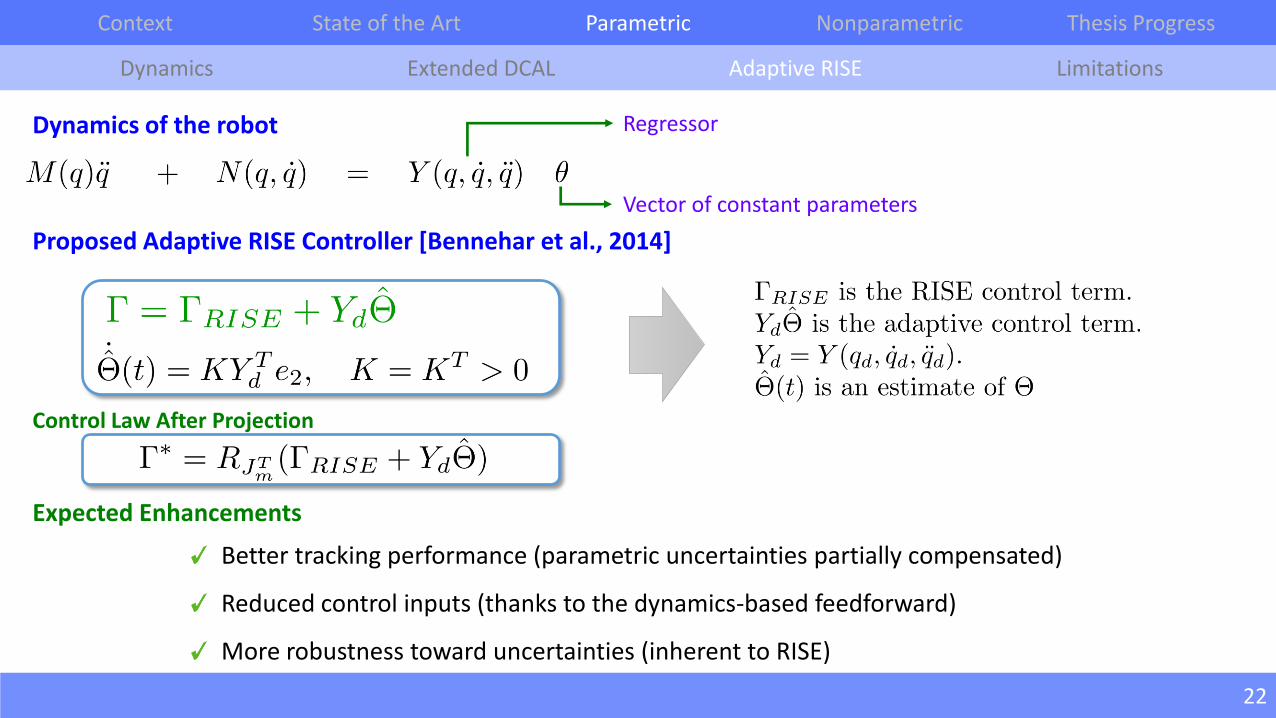
Dynamics of the robot Regressor
Vector of constant parameters
Proposed Adaptive RISE Controller [Bennehar et al., 2014]
Better tracking performance (parametric uncertainties partially compensated)
Reduced control inputs (thanks to the dynamics-based feedforward)
More robustness toward uncertainties (inherent to RISE)
Expected Enhancements
Control Law After Projection
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
23
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
24
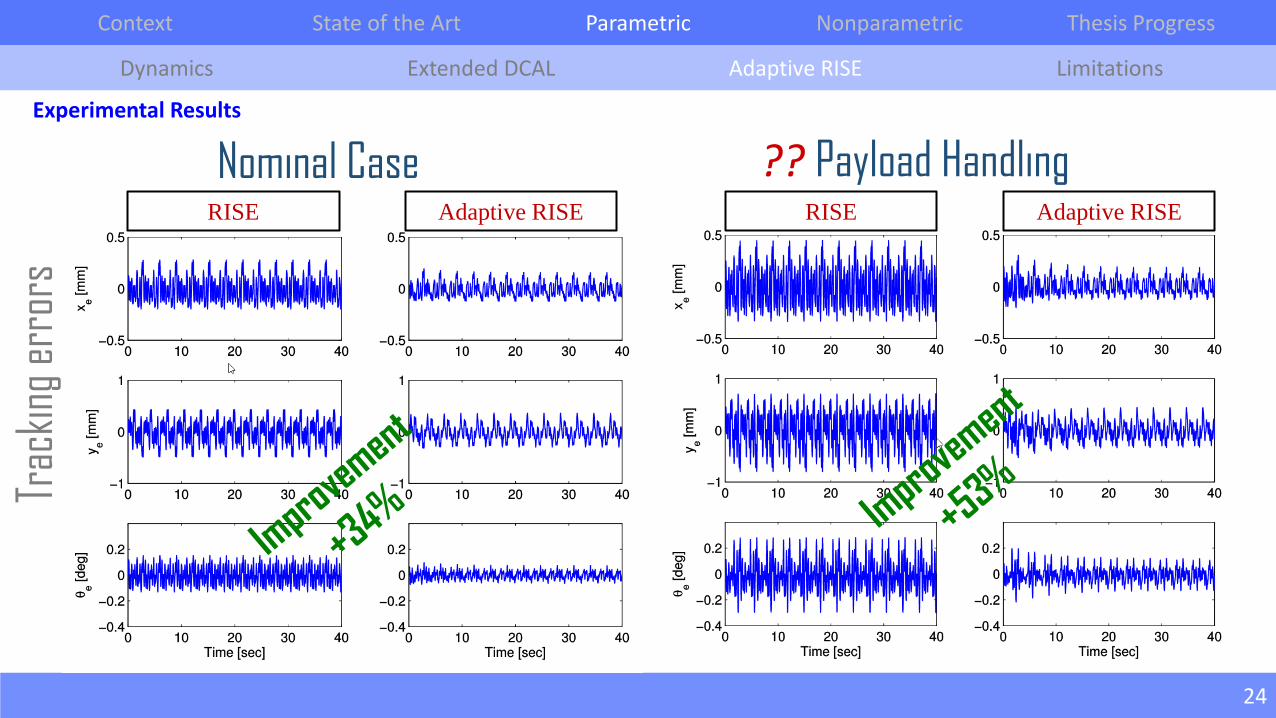
Experimental Results
Adaptive RISE RISE Adaptive RISE RISE
Trac
king
err
ors
Nominal Case ?? Payload Handling
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
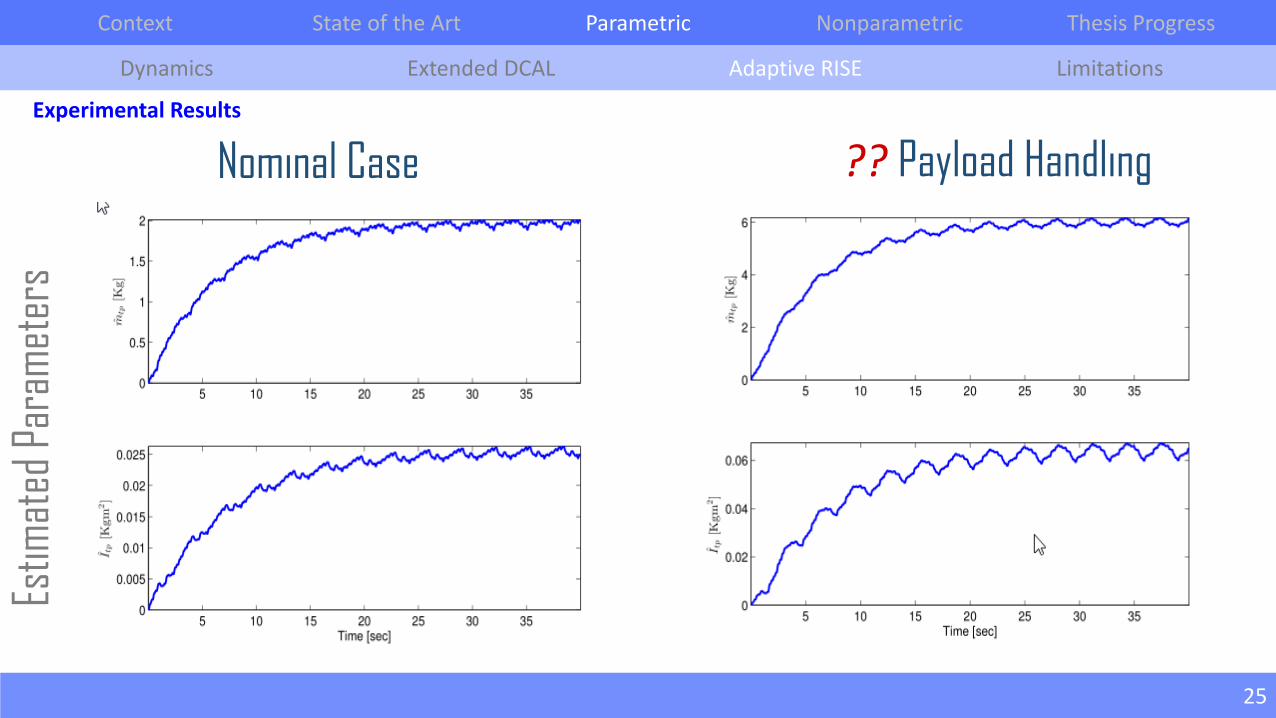
25
Experimental Results
Estim
ated
Par
amet
ers
Nominal Case ?? Payload Handling
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
26
Conclusions
RISE Implemented on the first time on PKMs
The performance of RISE is evaluated
RISE is augmented with adaptive FF
The adaptive FF compensates for some nonlinearities
Experiments on Dual-V demonstrated the relevance
of the proposed extension ?? IROS’14, Chicago, Sep. 2014
Context State of the Art Parametric Nonparametric Thesis Progress
Dynamics Extended DCAL Adaptive RISE Limitations
27
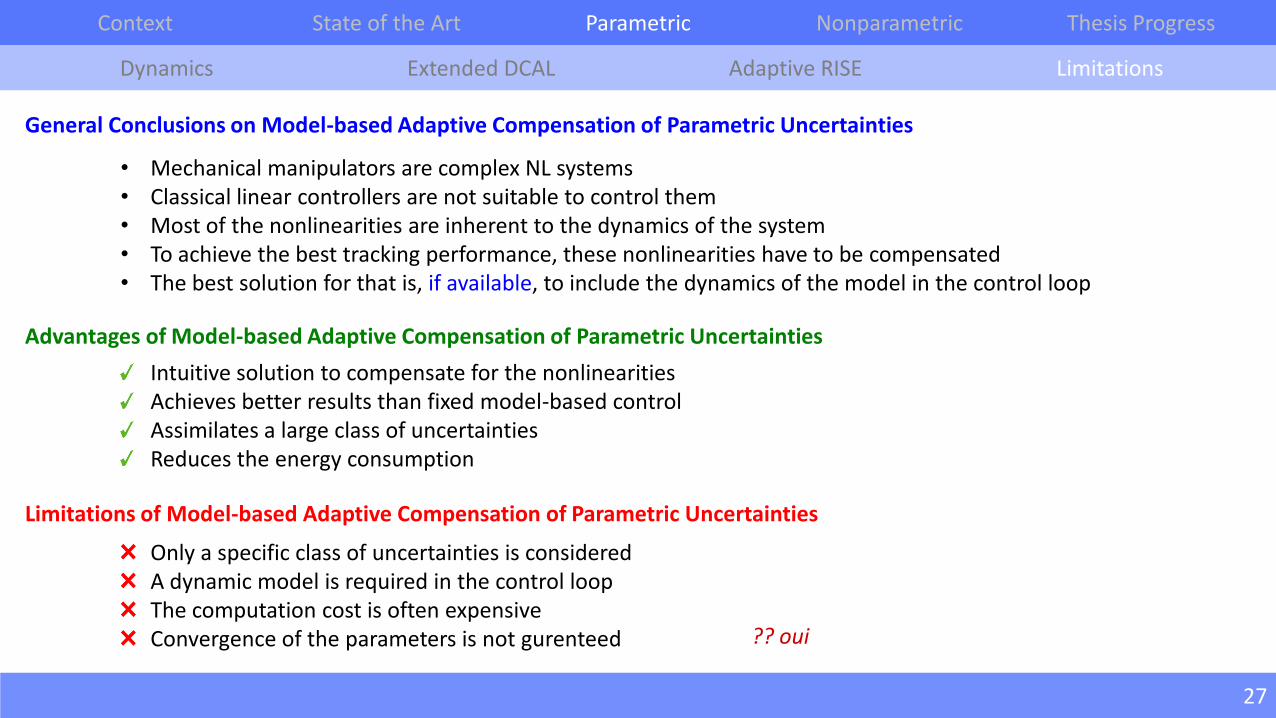
General Conclusions on Model-based Adaptive Compensation of Parametric Uncertainties
• Mechanical manipulators are complex NL systems • Classical linear controllers are not suitable to control them • Most of the nonlinearities are inherent to the dynamics of the system • To achieve the best tracking performance, these nonlinearities have to be compensated • The best solution for that is, if available, to include the dynamics of the model in the control loop
Advantages of Model-based Adaptive Compensation of Parametric Uncertainties
Intuitive solution to compensate for the nonlinearities Achieves better results than fixed model-based control Assimilates a large class of uncertainties Reduces the energy consumption
Limitations of Model-based Adaptive Compensation of Parametric Uncertainties
Only a specific class of uncertainties is considered A dynamic model is required in the control loop The computation cost is often expensive Convergence of the parameters is not gurenteed
Context State of the Art Parametric Nonparametric Thesis Progress
?? oui
Adaptive Compensation of Nonparametric Uncertainties
MRAC Limitations of MRAC L1 Adaptive Extended L1 Adaptive
Context State of the Art Parametric Nonparametric Thesis Progress
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
28
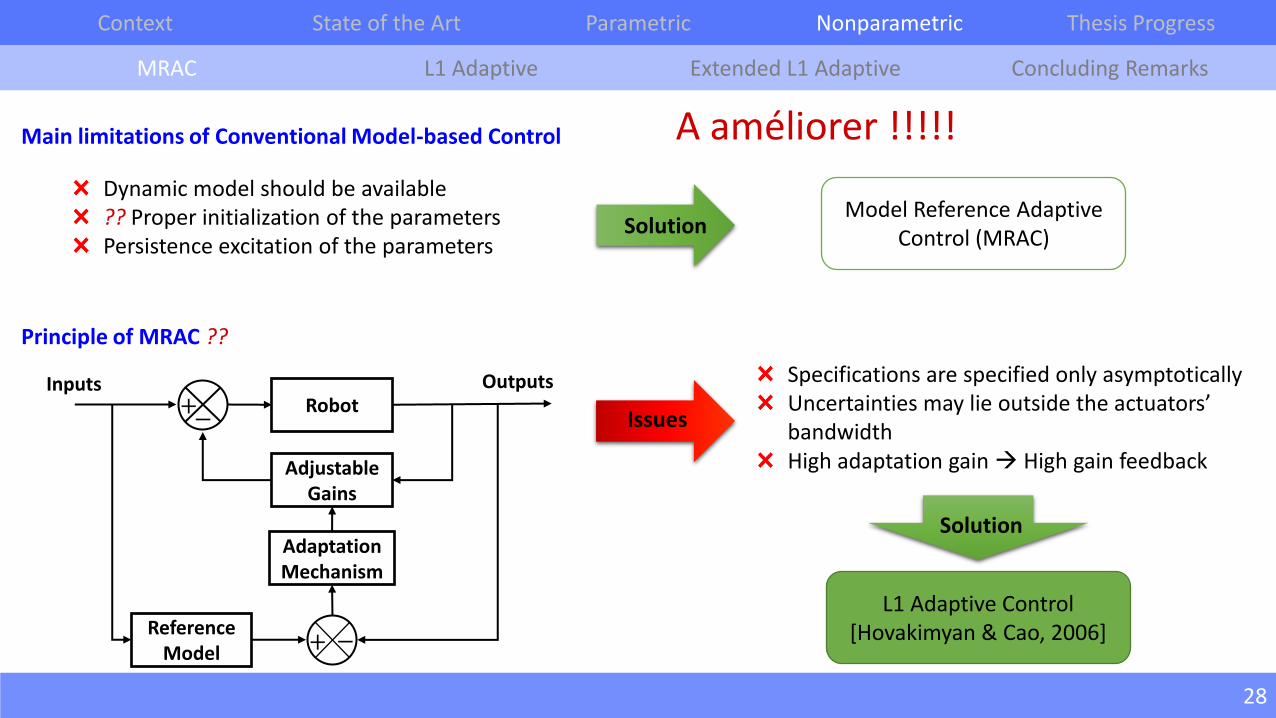
Main limitations of Conventional Model-based Control
Dynamic model should be available ?? Proper initialization of the parameters Persistence excitation of the parameters
Solution Model Reference Adaptive
Control (MRAC)
Principle of MRAC ??
Robot
Adjustable Gains
Adaptation Mechanism
Reference Model
Inputs Outputs
Issues
Specifications are specified only asymptotically Uncertainties may lie outside the actuators’ bandwidth High adaptation gain High gain feedback
Solution
L1 Adaptive Control [Hovakimyan & Cao, 2006]
Context State of the Art Parametric Nonparametric Thesis Progress
A améliorer !!!!!
29
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
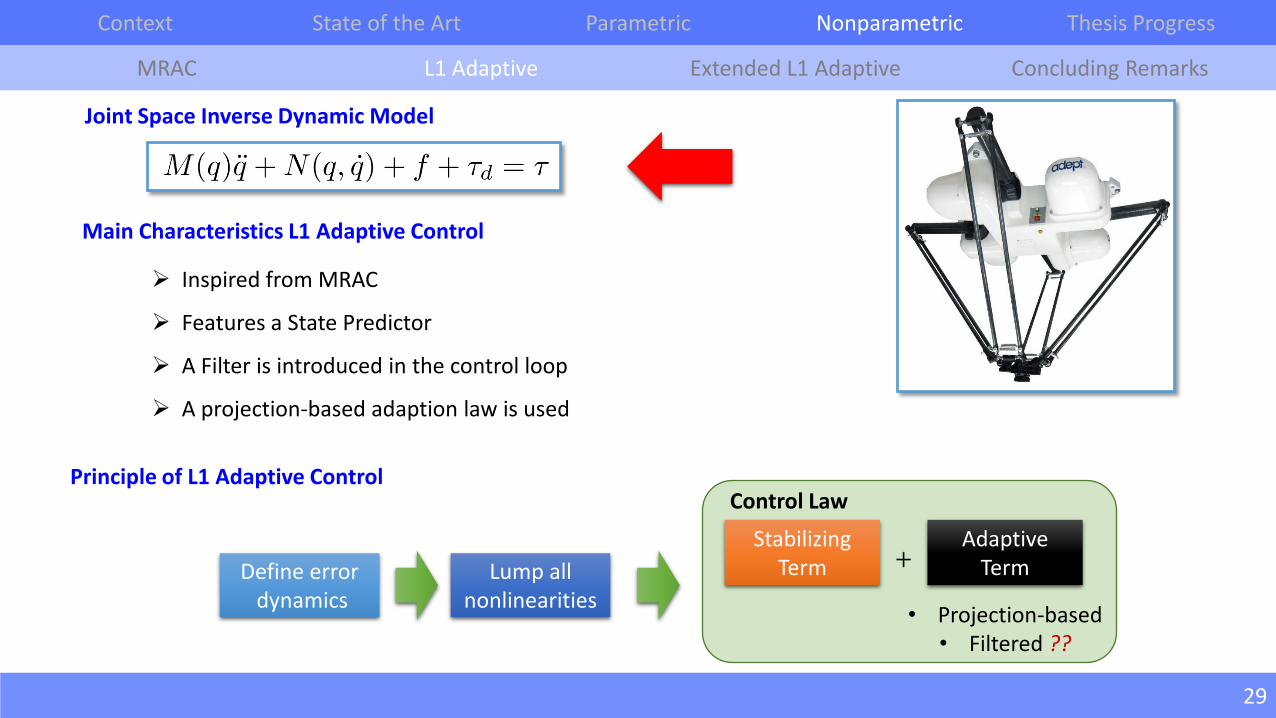
Joint Space Inverse Dynamic Model
Main Characteristics L1 Adaptive Control
Inspired from MRAC
Features a State Predictor
A Filter is introduced in the control loop
A projection-based adaption law is used
Principle of L1 Adaptive Control
Define error dynamics
Lump all nonlinearities
Stabilizing Term
Adaptive Term
• Projection-based • Filtered ??
Control Law
Context State of the Art Parametric Nonparametric Thesis Progress
30
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
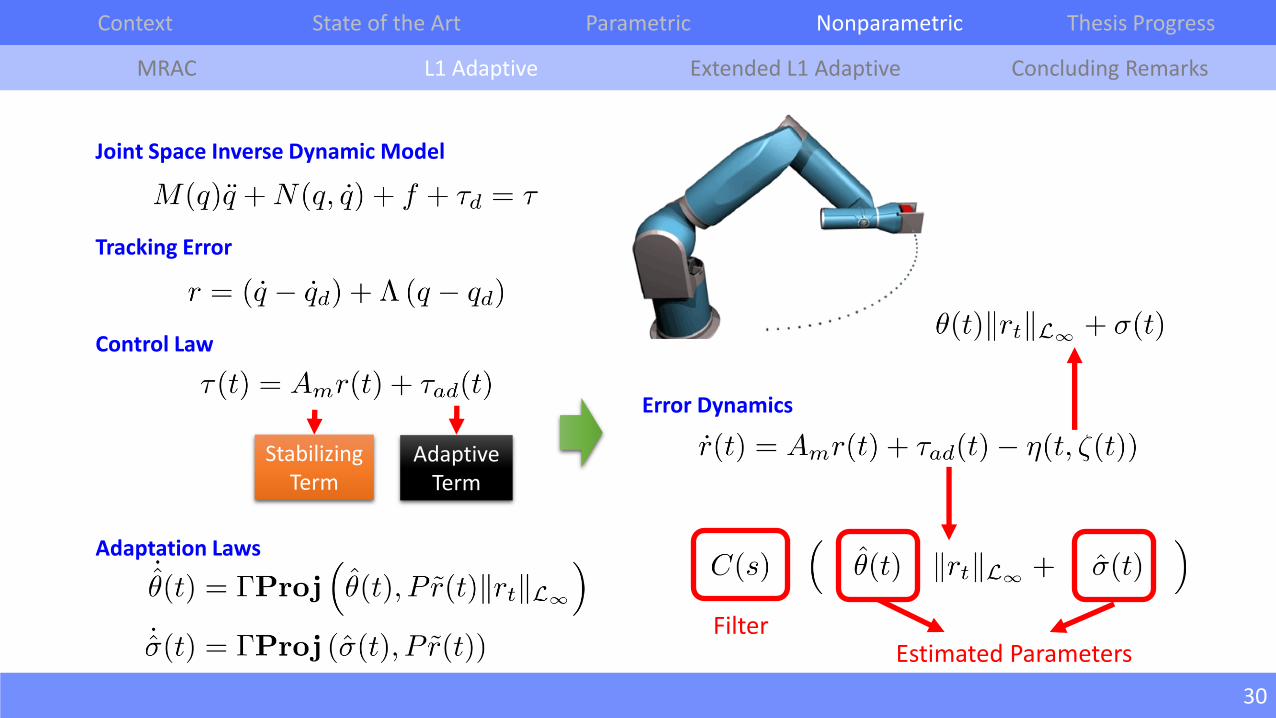
Joint Space Inverse Dynamic Model
Tracking Error
Control Law
Stabilizing Term
Adaptive Term
Error Dynamics
Filter Estimated Parameters
Adaptation Laws
Context State of the Art Parametric Nonparametric Thesis Progress
31
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
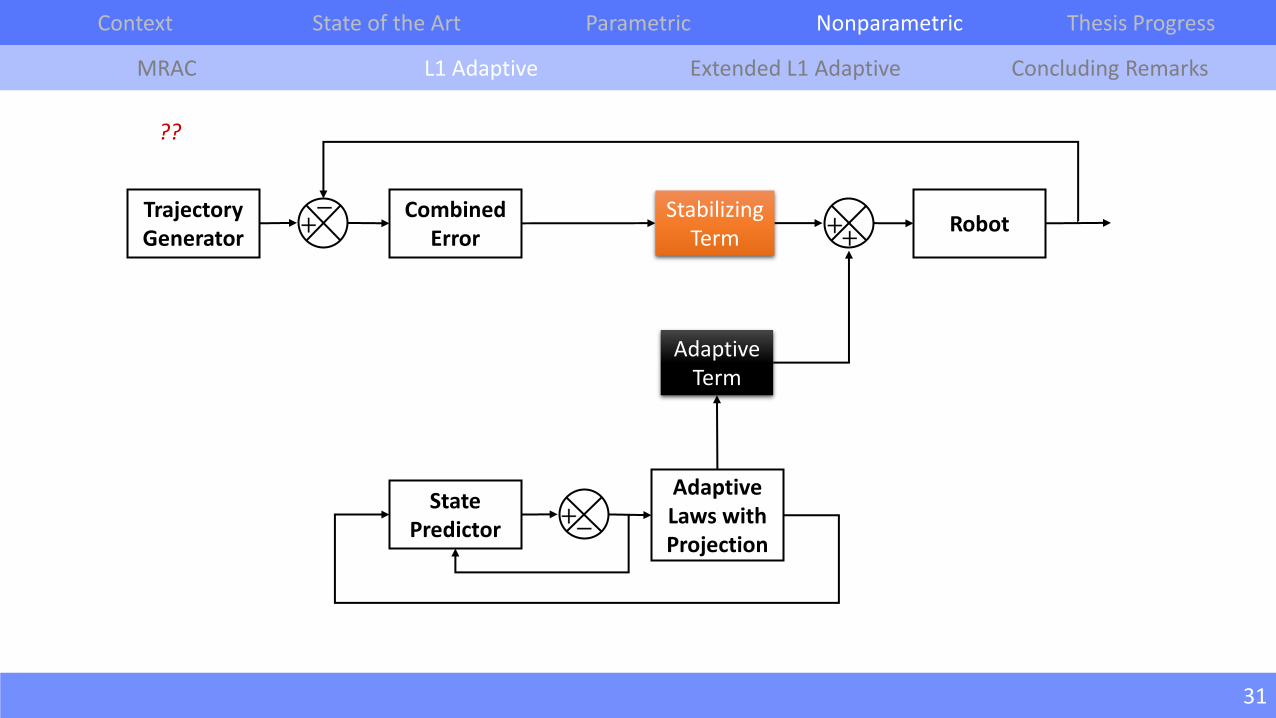
Trajectory Generator
Combined Error
Robot
Adaptive Laws with Projection
State Predictor
Stabilizing Term
Adaptive Term
Context State of the Art Parametric Nonparametric Thesis Progress
??
32
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
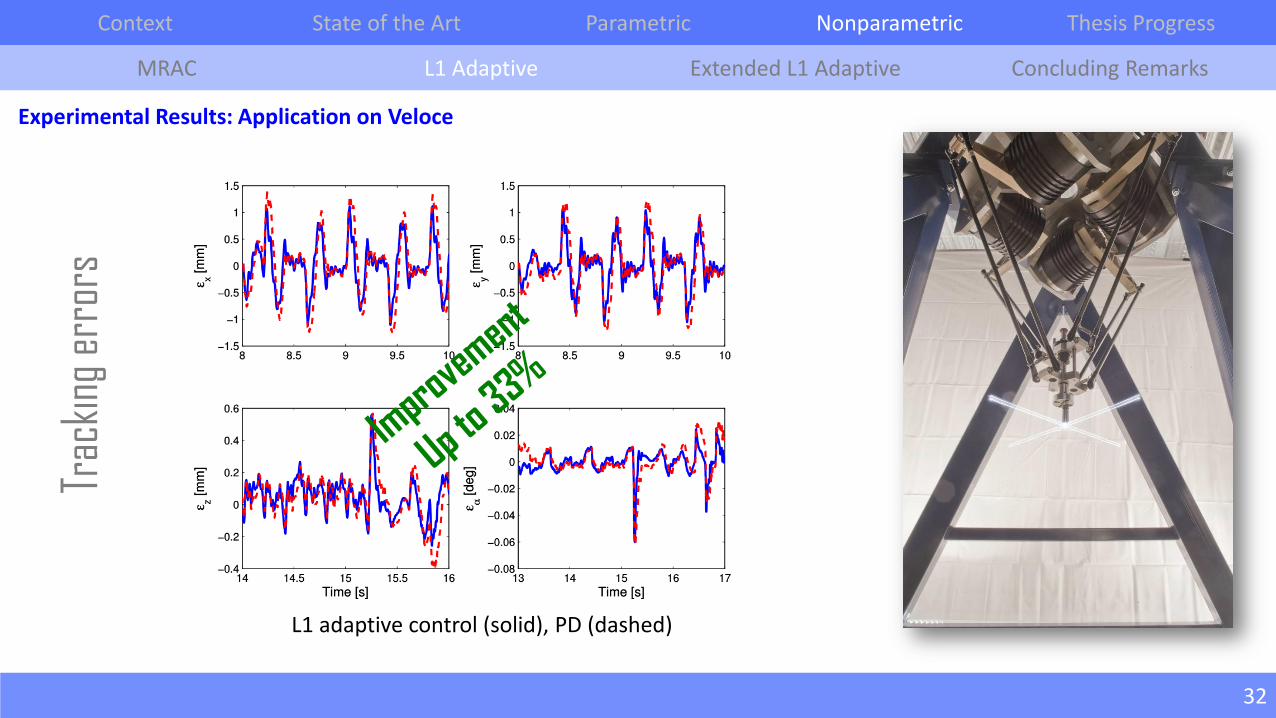
Experimental Results: Application on Veloce
L1 adaptive control (solid), PD (dashed)
Trac
king
err
ors
Context State of the Art Parametric Nonparametric Thesis Progress
33
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
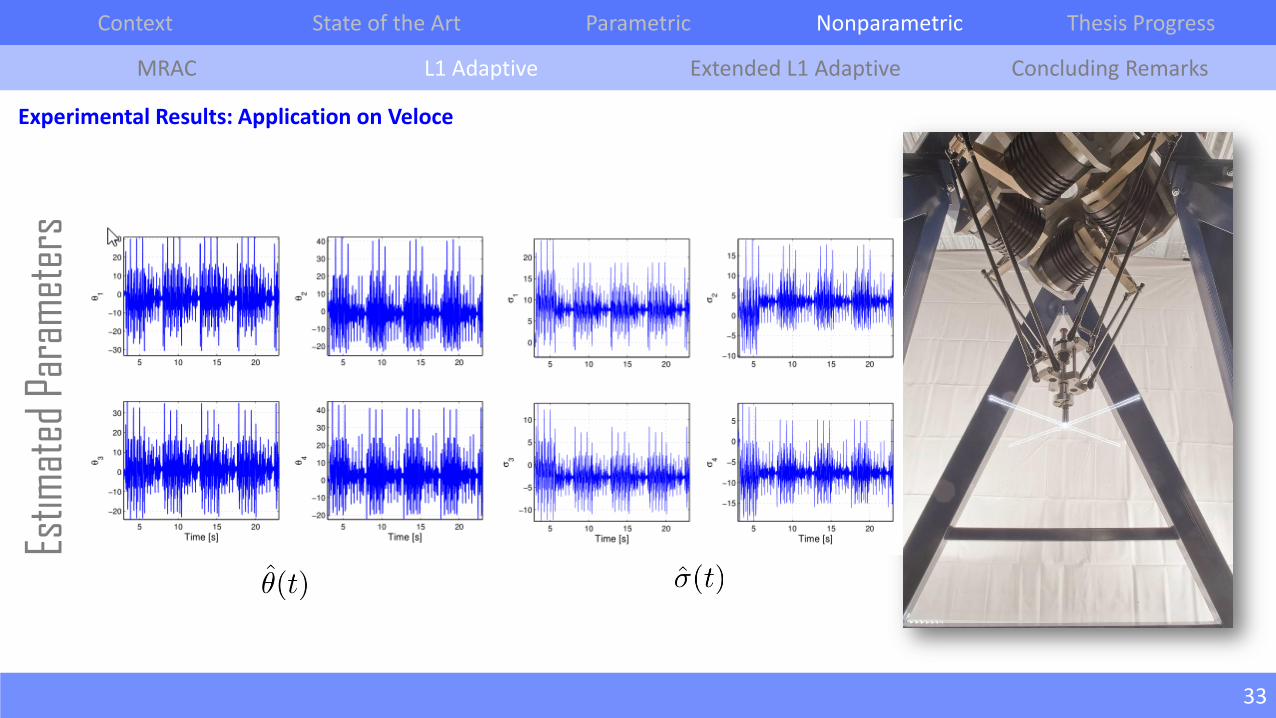
Experimental Results: Application on Veloce
Estim
ated
Par
amet
ers
Context State of the Art Parametric Nonparametric Thesis Progress
34
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
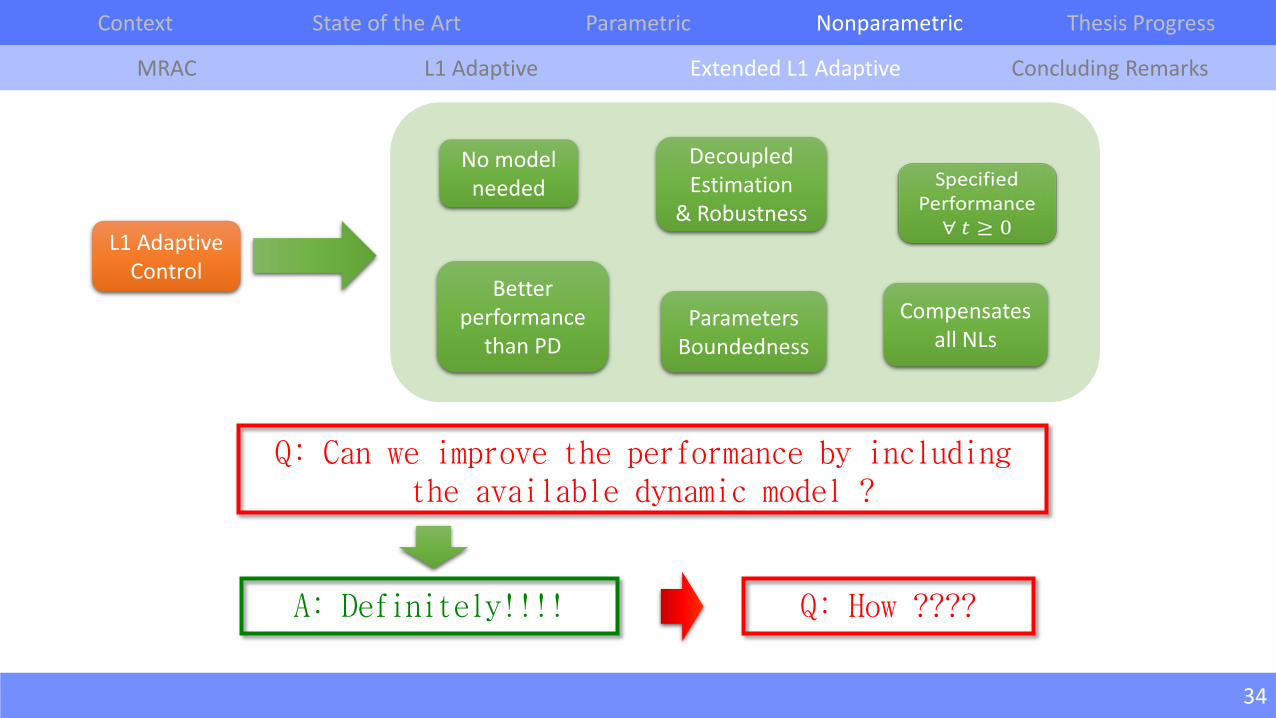
L1 Adaptive Control
No model needed
Decoupled Estimation
& Robustness
Parameters Boundedness
Better performance
than PD
Compensates all NLs
Q: Can we improve the performance by including the available dynamic model ?
A: Definitely!!!! Q: How ????
Context State of the Art Parametric Nonparametric Thesis Progress
35
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
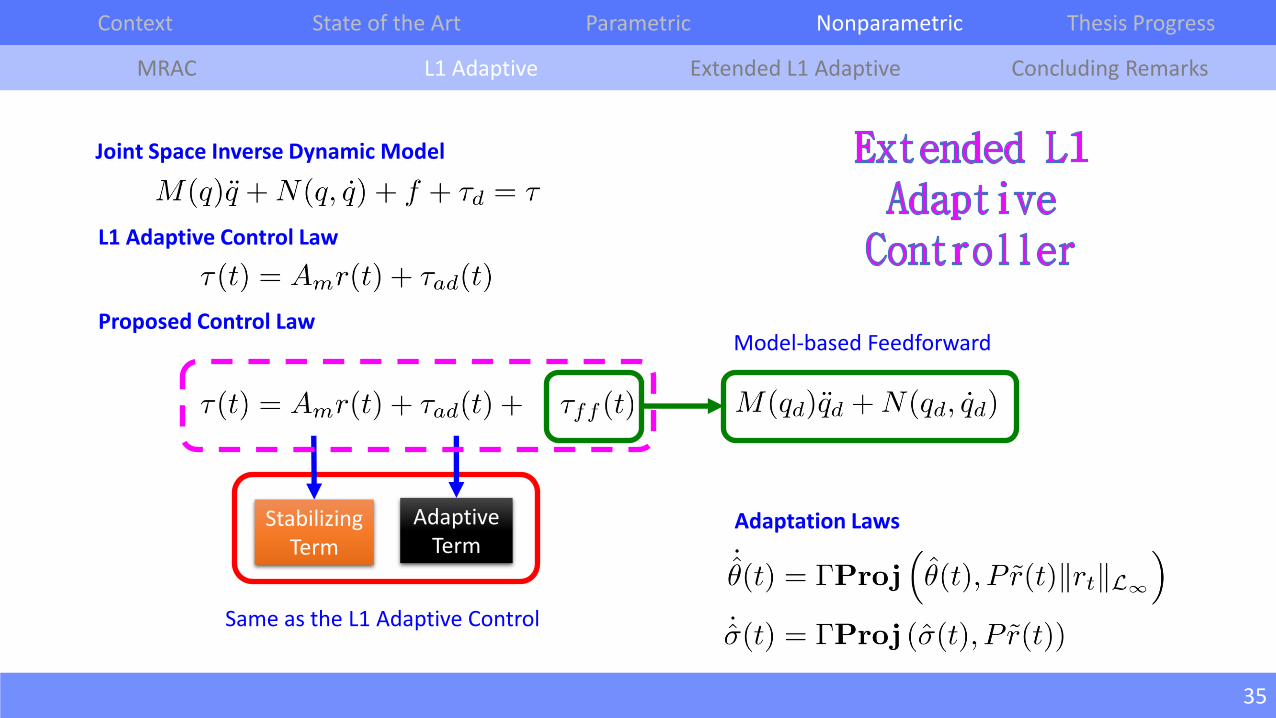
Joint Space Inverse Dynamic Model
L1 Adaptive Control Law
Stabilizing Term
Adaptive Term
Adaptation Laws
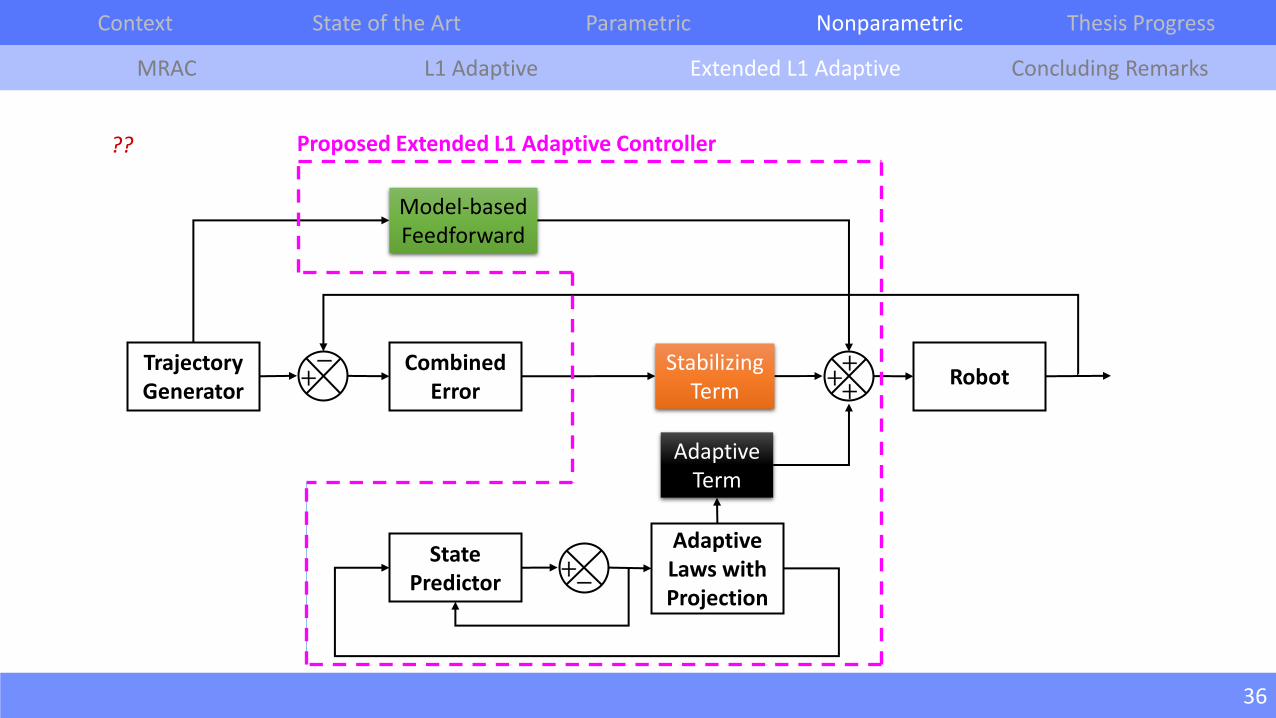
Proposed Control Law Model-based Feedforward
Same as the L1 Adaptive Control
Context State of the Art Parametric Nonparametric Thesis Progress
36
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
Trajectory Generator
Combined Error
Robot
Adaptive Laws with Projection
State Predictor
Stabilizing Term
Adaptive Term
Model-based Feedforward
Proposed Extended L1 Adaptive Controller
Context State of the Art Parametric Nonparametric Thesis Progress
??
37
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
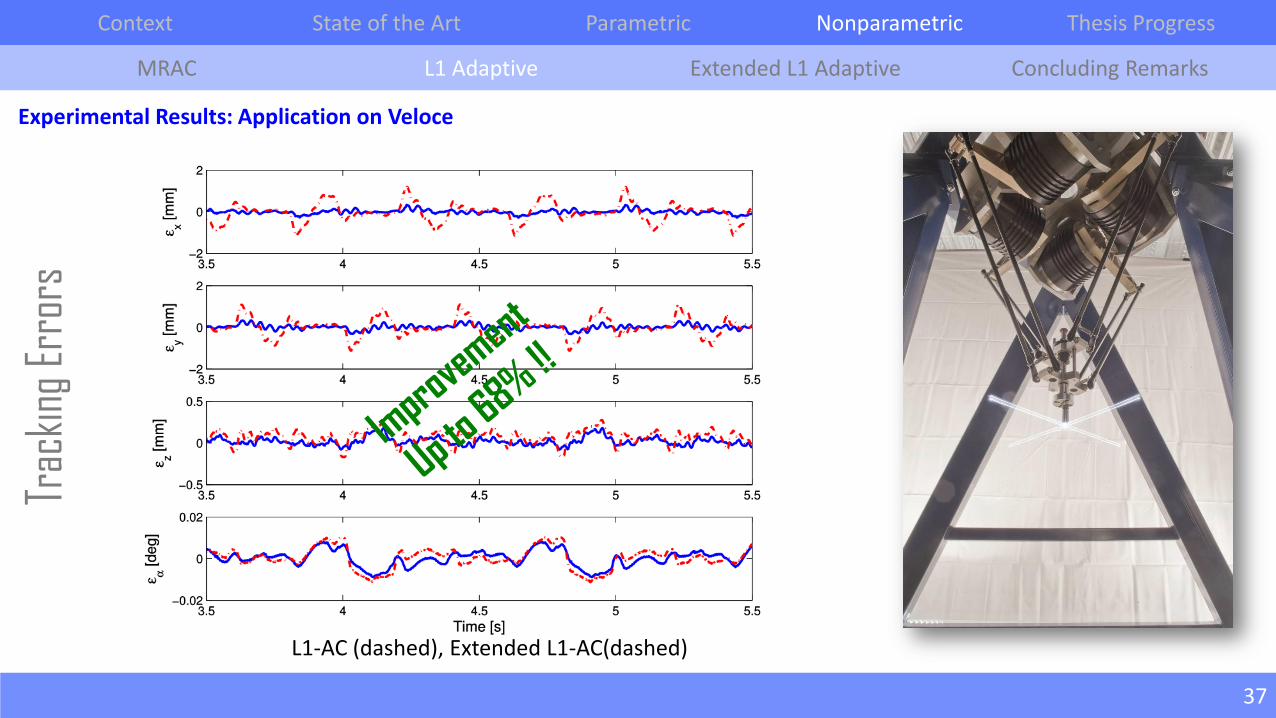
Experimental Results: Application on Veloce
Trac
king
Err
ors
L1-AC (dashed), Extended L1-AC(dashed)
Context State of the Art Parametric Nonparametric Thesis Progress
38
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
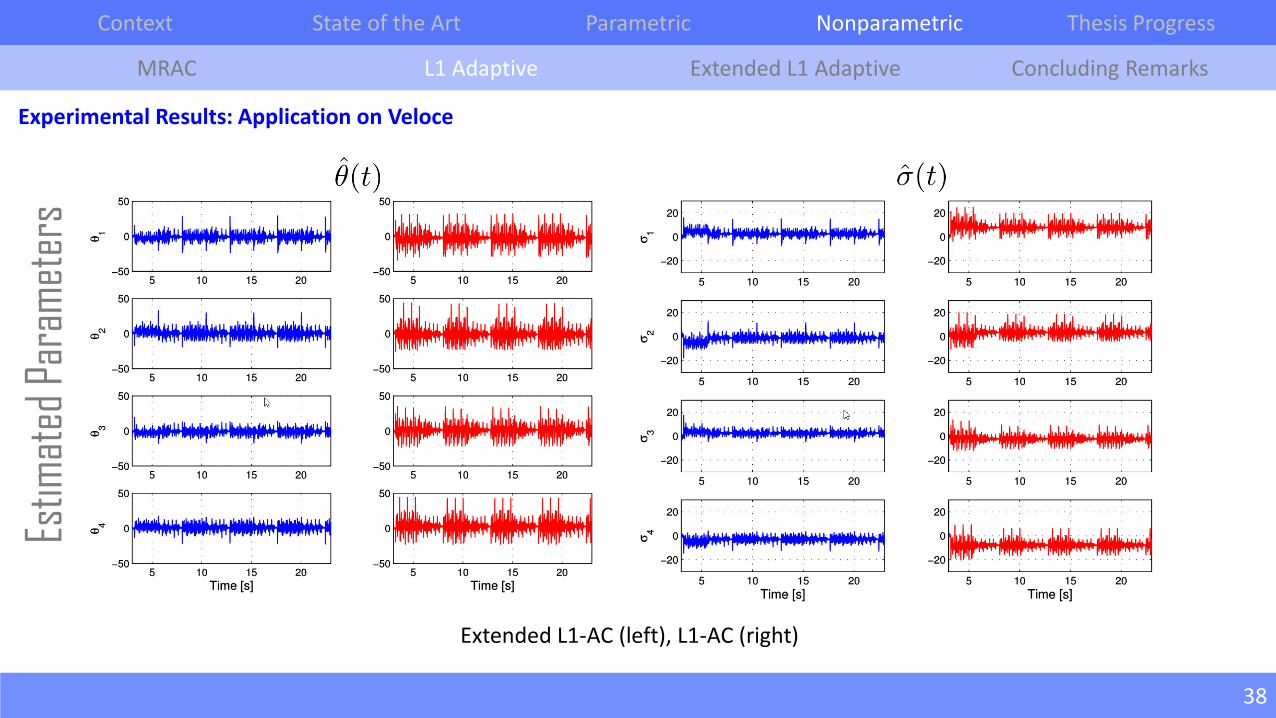
Experimental Results: Application on Veloce
Estim
ated
Par
amet
ers
Extended L1-AC (left), L1-AC (right)
Context State of the Art Parametric Nonparametric Thesis Progress
Context State of the Art Parametric Nonparametric Thesis Progress
39
MRAC L1 Adaptive Extended L1 Adaptive Concluding Remarks
Tackled Problems
• Trajectory tracking of PKMs
• Adaptive compensation of all uncertainties in the system
• Guarantee fast adaptation without hurting robustness
• Include dynamics in the control loop to improve performance
Difficulties
• Inherent high nonlinearities
• Parameters uncertainties/variations
• Guarantee fast adaptation without hurting robustness
Proposed Solution
• Extended L1 Adaptive Controller with Feedforward
?? Conclusions as previously presented
?? Pourquoi la photo
Progress of the Thesis ?? and Future Work
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
40
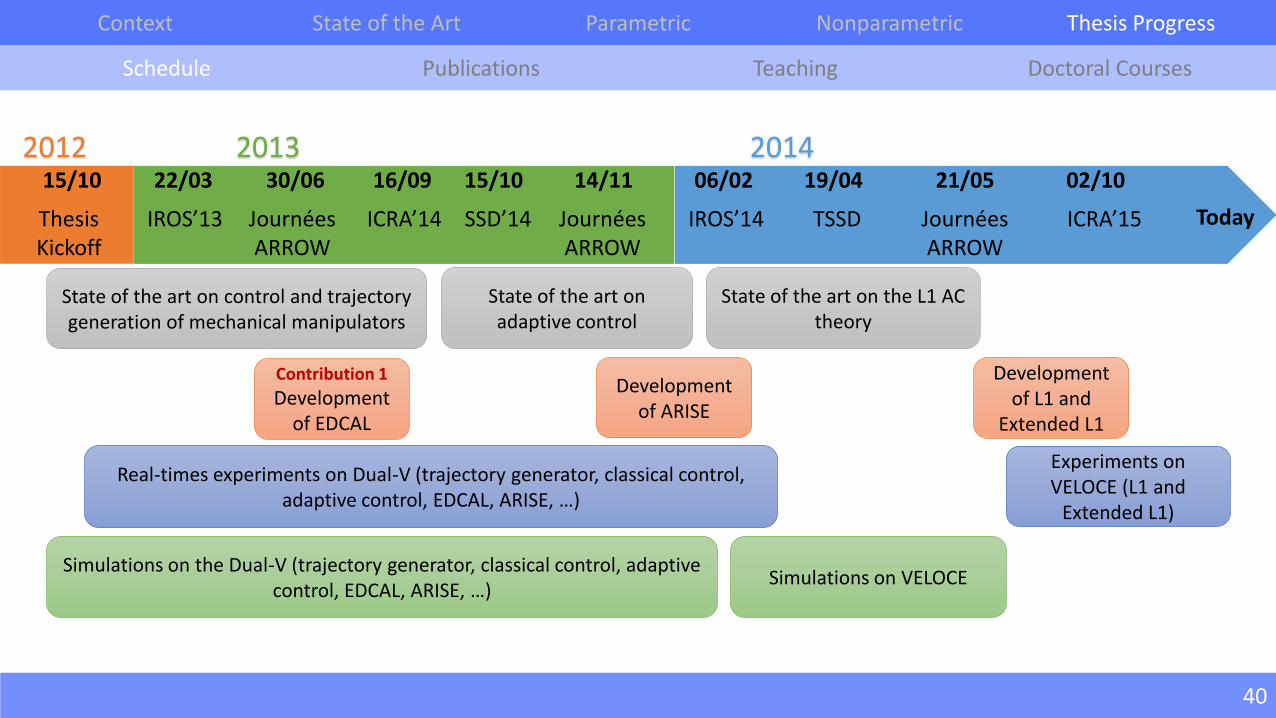
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
IROS’13 ICRA’14 IROS’14 ICRA’15
15/10 22/03 16/09 06/02 02/10
Today
15/10
SSD’14
19/04
TSSD
30/06 14/11
Journées ARROW
Journées ARROW
21/05
Journées ARROW
Thesis Kickoff
2014 2013 2012
State of the art on control and trajectory generation of mechanical manipulators
Real-times experiments on Dual-V (trajectory generator, classical control, adaptive control, EDCAL, ARISE, …)
Contribution 1
Development of EDCAL
Experiments on VELOCE (L1 and
Extended L1)
State of the art on the L1 AC theory
State of the art on adaptive control
Development of ARISE
Development of L1 and
Extended L1
Simulations on the Dual-V (trajectory generator, classical control, adaptive control, EDCAL, ARISE, …)
Simulations on VELOCE
41
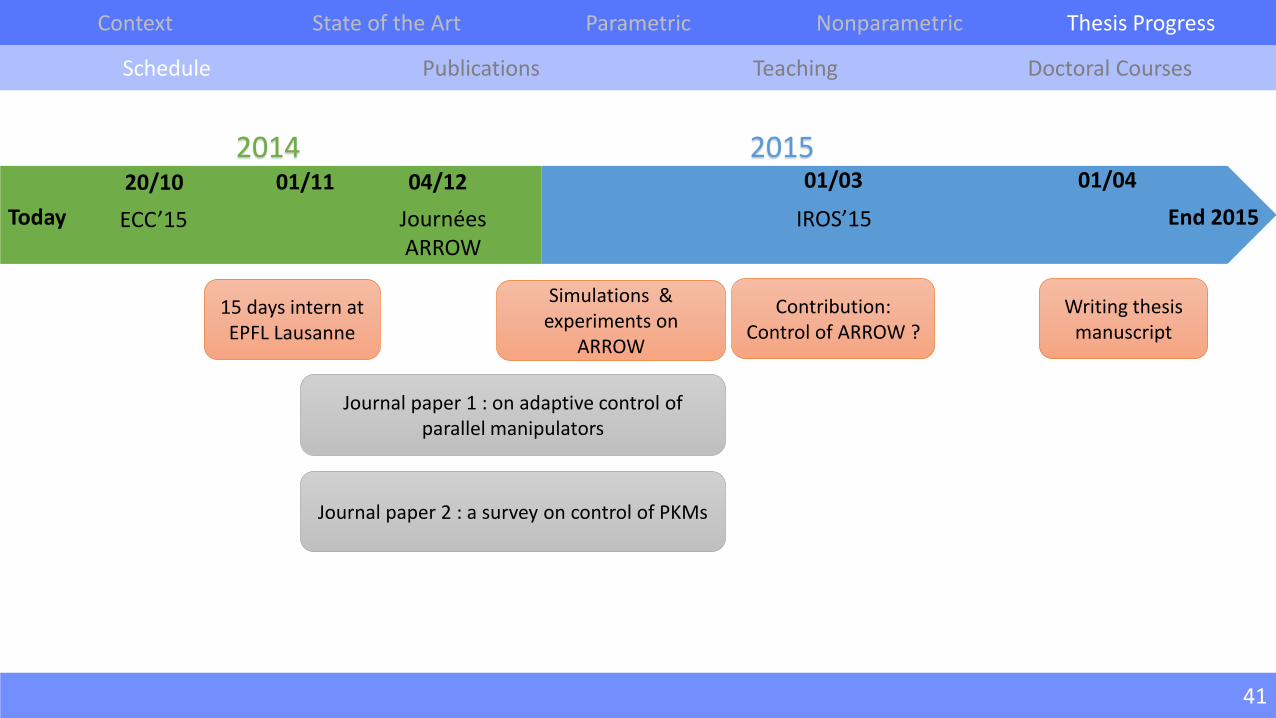
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
01/11
End 2015
2015 2014
Writing thesis manuscript
01/03
IROS’15
01/04
15 days intern at EPFL Lausanne
Contribution: Control of ARROW ?
Simulations & experiments on
ARROW
20/10
Today ECC’15
Journal paper 1 : on adaptive control of parallel manipulators
Journal paper 2 : a survey on control of PKMs
04/12
Journées ARROW
42
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
Journals
International Conferences ?? Ordre / Numéro [ ]
• ?? Bennehar M., Chemori A., Krut S. and Pierrot F., "Control of Redundantly Actuated PKMs for Closed-Shape Trajectories Tracking with Real-Time Experiments," in the International Journal “Transactions on Systems, Signals and Devices" (Issues on Systems, Analysis & Automatic Control). [Submitted]
• Bennehar M., Chemori A., Krut S. and Pierrot F., "Continuous Closed Form Trajectories Generation and Control of Redundantly Actuated Parallel Kinematic Manipulators," in Proc. IEEE International Multi-Conference on Systems, Signals & Devices (SSD'14), Barcelona, Spain, Feb. 2014.
• Bennehar M.; Chemori A.; Pierrot F., “A Novel RISE-Based Adaptive Feedforward Controller for Redundantly Actuated Parallel Manipulators,” IEEE/RSJ International Conference on Intelligent Robots and Systems ??(IROS’14), Sep. 2014.
• Bennehar M.; Chemori A.; Pierrot F., “A New Extension of Desired Compensation Adaptive Control and its Real-Time Application to Redundantly Actuated PKMs,” IEEE/RSJ International Conference on Intelligent Robots and Systems ??, Sep. 2014.
• Bennehar M.; Chemori A.; Pierrot F., “A Novel Application of L 1 Adaptive Control for PKMs: Design and Real-Time Experiments,” ?? S IEEE/RSJ International Conference on Robotics and Automation, May 2015. [Submitted]
• Bennehar M.; Chemori A.; Pierrot F., “Augmented Feedforward L 1 Adaptive Controller for PKMs with • Improved Tracking Performance,” ?? European Control Conference, Jul. 2015. [Submitted]
43
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
Academic Year 2013/2014
University of Montpellier 2
Science Faculty (FDS)
• 3rd year bachelor level:
Tutorials on Control of Linear
Systems.
• 3rd year bachelor level:
Practicals on System Control.
Academic Year 2012/2013
University of Montpellier 2
Science Faculty (FDS)
64 h
• 3rd year bachelor level:
Practicals on Control of Discrete
Systems.
• 3rd year bachelor level:
Practicals on System Control.
Academic Year 2014/2015
University of Montpellier 2
Science Faculty (FDS)
• Extended Teaching Contract
44
Schedule Publications Teaching Doctoral Courses
Context State of the Art Parametric Nonparametric Thesis Progress
English Courses [LIRMM, Montpellier]
20 hours
Predictive Control [EECI, Supelec, Paris]
21 hours
Nonlinear Systems [EECI, Supelec, Paris]
21 hours
Total: 62 hours
Refs biblio ??















![Outline - start [APNIC TRAINING WIKI] · Outline q Introduction to Apache httpd web server q Basic Compilation, ... • CentOS/Redhat/Fedora : yum install httpd •For win32 version,](https://img.pdfslide.fr/doc/110x75/5ea6e205349530659e0276e2/outline-start-apnic-training-wiki-outline-q-introduction-to-apache-httpd-web.jpg)












