Embed Size (px)
Citation preview

Coordination Scientifique
Maurice ARONFlorence BOILLOTJean-Patrick LEBACQUE
Modélisation du trafic
Actes du groupe de travail 2001
Actes INRETS n˚ 90Mai 2004

Conformément à la note du 04/07/2014 de la direction générale de l'Ifsttar précisant la politique dediffusion des ouvrages parus dans les collections éditées par l'Institut, la reproduction de cet ouvrage estautorisée selon les termes de la licence CC BY-NC-ND. Cette licence autorise la redistribution noncommerciale de copies identiques à l’original. Dans ce cadre, cet ouvrage peut être copié, distribué etcommuniqué par tous moyens et sous tous formats.
(CC BY-NC-ND 4.0)
Attribution — Vous devez créditer l'Oeuvre et intégrer un lien vers la licence. Vous devez indiquer cesinformations par tous les moyens possibles mais vous ne pouvez pas suggérer que l'Ifsttar voussoutient ou soutient la façon dont vous avez utilisé son Oeuvre.
Pas d’Utilisation Commerciale — Vous n'êtes pas autoriser à faire un usage commercial de cetteOeuvre, tout ou partie du matériel la composant.
Pas de modifications — Dans le cas où vous effectuez une adaptation, que vous transformez, oucréez à partir du matériel composant l'Oeuvre originale (par exemple, une traduction, etc.), vousn'êtes pas autorisé à distribuer ou mettre à disposition l'Oeuvre modifiée.
Le patrimoine scientifique de l'Ifsttar
Le libre accès à l'information scientifique est aujourd'hui devenu essentiel pour favoriser la circulation dusavoir et pour contribuer à l'innovation et au développement socio-économique. Pour que les résultats desrecherches soient plus largement diffusés, lus et utilisés pour de nouveaux travaux, l’Ifsttar a entrepris lanumérisation et la mise en ligne de son fonds documentaire. Ainsi, en complément des ouvragesdisponibles à la vente, certaines références des collections de l'INRETS et du LCPC sont dès à présentmises à disposition en téléchargement gratuit selon les termes de la licence Creative Commons CCBY-NC-ND.
Le service Politique éditoriale scientifique et technique de l'Ifsttar diffuse différentes collections qui sontle reflet des recherches menées par l'institut :
• Les collections de l'INRETS, Actes• Les collections de l'INRETS, Outils et Méthodes• Les collections de l'INRETS, Recherches• Les collections de l'INRETS, Synthèses• Les collections du LCPC, Actes• Les collections du LCPC, Etudes et recherches des laboratoires des ponts et chaussées• Les collections du LCPC, Rapport de recherche des laboratoires des ponts et chaussées• Les collections du LCPC, Techniques et méthodes des laboratoires des ponts et chaussées, Guide
technique• Les collections du LCPC, Techniques et méthodes des laboratoires des ponts et chaussées, Méthode
d'essai
www.ifsttar.fr
Institut Français des Sciences et Techniques des Réseaux,de l'Aménagement et des Transports14-20 Boulevard Newton, Cité Descartes, Champs sur MarneF-77447 Marne la Vallée Cedex 2
Contact : [email protected]

Coordination scientifique :
Florence Boillot, chargée de recherches à l’[email protected]
Jean-Patrick Lebacque, Ingénieur en chef des Ponts et Chaussé[email protected]
Les Unités de recherche :
Laboratoire Génie des Réseaux de Transport et Informatique (INRETS-GRETIA)Avancée, 2, avenue du Général Malleret-Joinville94114 ARCUEIL CEDEX – Tél. : 33 (0)1 47 40 71 00
Auteurs des communications :
Cécile Appert (ENS-Paris), Jean-Michel Auberlet (INRETS-CIR), Ruth Bergel (INRETS-DERA), Brigitte Cambon de Lavalette (INRETS-LPC),Alexis Champion (SRILOG, Université de Valencienne et INRETS-CIR), MédhiDanech-Pajouh (INRETS-GRETIA), Alexandre Depire (INRETS-DERA),Stéphane Espié (INRETS-CIR), Fabien Leurent (SETRA), Sébastien Poitrenaud (CNRS, Université Paris VIII), Ludger Santen (Universitéde Saarlandes-Allemagne), Véronique Sauvadet (INRETS-GRETIA)
Institut National de Recherche sur les Transports et leur Sécurité
Service des publications : 2, avenue du Général Malleret-Joinville94114 ARCUEIL CEDEX Tél. : 33 (0)1 47 40 70 74 – Fax : 01 45 47 56 06www.inrets.fr
© Les collections de l’INRETSN° ISBN 2-85782-582-X N° ISSN 0769-0266
En application du code de la propriété intellectuelle, l’INRETS interdit toute reproduction intégrale ou partielle duprésent ouvrage par quelque procédé que ce soit, sous réserve des exceptions légales
Maurice Aron, chargé de recherche à l’INRETS-GRETIA

Fiche bibliographiqueUR (1er auteur) Projet N° Actes INRETS N° 90INRETS/GRETIA
Titre
Sous-titre LangueActes du groupe de travail 2001 F
Auteur(s) Rattachement ext.Maurice Aron, Florence Boillot, Jean-Patrick Lebacque INRETS/GRETIA
INRETS/GRETIAENPC-DR & INRETS/GRETIA
Nom adresse financeur, co-éditeur N° contrat, conv.
Date de publicationMai 2004
Remarques
RésuméCes actes regroupent 8 articles du groupe de travail « Modèles de trafic » pour 2001 :– Les modèle d’automates cellulaires appliqués au trafic sont des modèles microscopiques dis-
crets. Ces modèles peuvent être résolus par le calcul analytique (dans les cas simples) ou parsimulation. C. Appert et L. Santen (ENS) montrent en particulier l’émergence d’une « méta »sta-bilité lorsque le temps de réaction après l’arrêt dépasse un certain seuil.
– S. Espié (INRETS) présente les simulations (avec le simulateur ARCHISIM) de trois applica-tions télématiques : la régulation d’accès sur autoroute, la régulation adaptative de vitesse, ladétection d’incidents. Il esquisse ensuite la simulation d’un réseau à forte densité.
– Le temps pour qu’un véhicule rapide rattrape un véhicule lent dans un goulot, suit une loi fonc-tion des lois d’arrivées et des vitesses. F. Leurent en déduit la probabilité de transition d’un étatmarkovien rapide vers l’état lent. Il traite aussi les dépassements et croisements.
– F. Leurent (SETRA) calcule explicitement la loi de probabilité du temps de parcours en sup-posant constantes les seules allures des conducteurs (hypothèse plus faible que celle de vitessesconstantes de Wardrop). Le calibrage est possible avec des véhicules flottants.
– V. Sauvadet et M. Danech-Pajouh (INRETS) calculent le niveau de confiance a priori d’uneprévision ou d’une simulation du trafic à partir d’un historique et à partir de l’incertitude sur lesdonnées d’entrée, qu’ils font varier pour obtenir une « prévision d’ensemble ».
– Brigitte Cambon de Lavalette (INRETS) et Sébastien Poitrenaud (CNRS, PARIS VIII) ont cher-ché à comprendre le processus mental d’interprétation des messages « temps de parcours » etleurs incidences sur les critères et décisions des usagers quant au choix des voies rapides urbaines.
– Pour F. Leurent, un usager surestime la variabilité du temps de trajet, il choisit donc subjecti-vement son heure de départ et son itinéraire. Son « apprentissage » est bayésien : ses connais-sances progressent par l’observation, éventuellement par une information dynamique.
– Ruth Bergel et Alexandre Depire (INRETS-DERA) relient les séries mensuelles d’accidents etde tués sur routes nationales et autoroutes concédées, au débit (transformé par la transformationnon linéaire de Box-Cox) et à quatre variables météorologiques.
Mots clésAutomate cellulaire, prévision, simulation, temps de parcours, bayésien
Nb de pages Prix Bibliographie158 15,24 € oui
Actes INRETS n° 90 3
Modélisation du trafic

Publication data formUR (1st author) Projet N° INRETS proceedingsINRETS/GRETIA N° 90
TitleTraffic modelisation
Subtitle LanguageProceedings of the Traffic Group, 2001 F
Author(s) AffiliationMaurice Aron, Florence Boillot, Jean-Patrick Lebacque INRETS/GRETIA
INRETS/GRETIAENPC-DR & INRETS/GRETIA
Sponsor, co-editor, name and address Contract, conv. N°
Publication dateMay 2004
Notes
SummaryThese proceedings gather 8 papers of the working group on Traffic Models for the year 2001.– The cellular automat models applied to traffic are discrete microscopic models, intermediate
between microscopic and macroscopic models. They may be solved by analytic calculation (in thesimple cases) or by simulation. C. Appert and L. Santen (ENS) show the emergence of “metasta-bility” when reaction time after stopping exceeds above a threshold.
– S. Espié (INRETS) presents the simulation results (with the microscopic model ARCHISIM) ofthree telematics applications : ramp metering, adaptive cruise control, automatic incident detec-tion. Then, he outlines the simulation of a high density network.
– The time required by a fast vehicle to catch up a slow one in a bottleneck follows a probabili-ty law related to the arrival laws and to speeds. F. Leurent derives the transition probability of themarkovian state « fast » to « slow ». He also deals with overtaking and crossing.
– F. Leurent explicitly computes the travel times, assuming constant only the rank of the speedamong other drivers (weaker that than the “constant speed” assumed by Wardrop). This probabi-listic model deals with bottlenecks ; it may be calibrated using floating vehicles.
– V. Sauvadet and M. Danech-Pajouh (INRETS) derive the a priori confidence level of a forecastor of a simulation from the uncertainty of the input data and from an historic data file. They use theMETEO-France technique of « prévision d’ensemble » by varying the input data.
– Brigitte Cambon de Lavalette (INRETS) and Sébastien Poitrenaud (CNRS, PARIS VIII) try tounderstand the mental process of the interpretation of the journey time messages ; then theyassess their impact on the criteria and decisions of drivers for road choice/assignment.
– For F. Leurent, a user overvalues the travel time variability, thus selects subjectively his depar-ture time and his route ; his learning process is considered as « bayesian » : his a priori knowled-ge is improved by his observations, and, if present, by dynamic information.
– Ruth Bergel & Alexandre Depire (INRETS-DERA) calibrate four models linking the monthlyseries of accidents and fatalities occurring on national roads and motorways, to the traffic volume(using the non-linear Box-Cox transformation) and to four meteorological variables.
Key wordsCellular automat, forecasting, simulation, travel time Bayesian
Nb of pages Price Bibliography158 15.24 € yes
4 Actes INRETS n° 90

Table des matières
A. Modélisation de l’écoulementIntroduction d’un temps de réaction dans un modèle simplifié de trafic :émergence de la métastabilitéCécile APPERT, Ludger SANTEN 9
B. Modélisation probabilisteUn modèle probabiliste pour les interactions entre véhicules et les temps de parcoursFabien LEURENT 27
Propriétés statistiques du temps d’itinéraire, et généralisation de deux formules de WardropFabien LEURENT 61
C. Etudes statistiques du trafic appliquées à la sécurité routièreForme fonctionnelle d’un modèle mensuel agrégé de risque routierRuth BERGEL, Alexandre DEPIRE 83
D. Evaluation à partir de modèles de simulationBehavioral Road Traffic Simulation with ARCHISIMAlexis CHAMPION, Stéphane ESPIE, Jean-Michel AUBERLET 105
Une méthode d’évaluation a priori des résultats issus de modèles de simulation et de prévision du traficMehdi DANECH-PAJOUH, Véronique SAUVADET 117
E. Impact de l’information routièreL’information dynamique sur les temps de parcours : position statistique, effet sur le choix d’horaire, mécanisme d’apprentissageFabien LEURENT 129
Incidences de l’information « temps de parcours » sur les décisions adoptées par les usagers des voies rapides urbainesBrigitte CAMBON DE LAVALETTE, Sébastien POITRENAUD 149
Actes INRETS n° 90 5


Actes INRETS n° 90 7
A. Modélisation de l’écoulement


Actes INRETS n° 90 9
Introduction d’un temps de réaction dans un modèle simplifié de trafic
Introduction d’un temps de réaction dans un modèle simplifié de trafic :
émergence de la métastabilité
Cécile Appert1 et Ludger Santen2
1 CNRS-Labo. de Physique Statistique, Ecole Normale Supérieure, 24, rue Lhomond, F-75231 Paris Cedex 05, [email protected] Fachrichtung Theoretische Physik, Univ. d. Saarlandes Postfach 151150 – Gebaeude 38, 66041 Saarbruecken, [email protected]
Résumé
Nous présentons un modèle de transport très simple dans lequel les véhiculesont un certain délai de réaction après l’arrêt. Cette caractéristique rend lesystème métastable et permet l’émergence de structures complexes d’embou-teillages. Nous évoquons des résultats expérimentaux permettant de faire le lienavec des situations de trafic routier réel. L’étude présentée ici nous permet demettre en évidence le caractère fondamental de la métastabilité et de lastochasticité des modèles appliqués au trafic.
Mots clés : modèle, automate cellulaire, temps de réaction, métastabilité,stochasticité
1. Introduction
Depuis une dizaine d’années, de nouvelles approches basées sur lesautomates cellulaires se sont développées pour l’étude du trafic routier. Cemouvement a été principalement initié lorsque Nagel et Schreckenberg [1] ontproposé un modèle à temps, espace et vitesses discrets, chaque cellule spatialepouvant être occupée ou non par un véhicule. Les voitures avancent eninteragissant entre elles selon des règles simples qui permettent une grandevitesse de simulation. Depuis, plusieurs variantes de ce modèle ont été propo-sées, en vue d’une modélisation de plus en plus réaliste du trafic [2-9]. Le travailque nous présentons ici se situe dans une perspective un peu différente. Nous

Modélisation du trafic
10 Actes INRETS n° 90
nous sommes délibérément intéressés à une version très simplifiée d’automatecellulaire, appelée TASEP (Totally Symmetric Exclusion Process), qui se trouveêtre considérée dans le domaine de la physique statistique comme un archétypedes modèles de transport hors équilibre, et à ce titre a largement été étudiéeanalytiquement et numériquement [10-13]. On connaît par exemple la solutionexacte en régime stationnaire, i.e. on peut donner la probabilité d’avoir n’importequelle configuration microscopique dans le système, ce qui est très rare pour unsystème hors équilibre.
Partant de ce modèle très bien connu, nous avons voulu étudier l’effet del’introduction dans le modèle d’un temps de réaction des conducteurs. Cettemodification qui peut paraître a priori anodine transforme en fait profondémentla nature des phases observées. Nous allons en particulier mettre en évidenceque ce temps de réaction est intimement lié à l’émergence de la métastabilitédans le système. Nous étudierons d’abord le système en conditions aux limitespériodiques, pour caractériser la dynamique intrinsèque du système. Ensuite,nous considérerons des conditions aux limites ouvertes. Les taux d’injection etde retrait de véhicules aux deux extrémités du système induisent alorsdiverses phases dans le système. Nous étudierons l’ensemble du diagrammede phase.
2. Le modèle TASEP
On considère des particules se déplaçant sur une chaîne unidimensionnellede longueur L (nous gardons dans ce paragraphe la dénomination habituelleen physique statistique qui parle plutôt de particules que de véhicules !). Achaque pas de temps, chaque particule saute à la cellule voisine sur sa droiteavec une probabilité p si celle-ci est vide. Ce modèle peut être vu comme unevariante du modèle de Nagel et Schreckenberg [1], avec une vitesse maximaleνmax = 1.
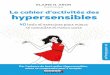
C’est la seule valeur de νmax pour laquelle on ait une solution exacte [11].Avec des conditions aux limites périodiques, on obtient le diagramme fondamen-tal de la figure 1. La dynamique parallèle inclut déjà naturellement dans le modèleun temps de réaction des conducteurs.
Pour les conditions aux limites ouvertes, les particules sont injectées dansla 1ère cellule avec une probabilité α. Une particule se trouvant sur la dernièrecellule sort du système avec probabilité β. Cela peut être vu comme unereprésentation d’un tronçon d’autoroute, à l’extrémité duquel se trouve unecause de perturbation (rampe d’accès, resserrement, intersection...). Alors,selon les valeurs de α et β, trois régimes d’écoulement peuvent être observés(fig. 2). Pour un faible taux d’injection et un fort taux de sortie, l’écoulementest libre. Si au contraire on injecte beaucoup de particules en ayant un faibletaux de sortie, tout le système est envahi par un embouteillage. Ces deuxphases sont séparées par une transition du premier ordre sur la ligne α = β.

Actes INRETS n° 90 11
Introduction d’un temps de réaction dans un modèle simplifié de trafic
La valeur de la densité moyenne – et donc du flux – est imposée dans lepremier cas par la valeur de α et dans le second cas par celle de β. Dans la3e phase, le facteur limitant n’est plus l’entrée ou la sortie mais la chaîne elle-même. Le flux a alors sa valeur maximale. Cette dernière phase est dite decourant maximum (MC).
Figure 1 : Diagramme fondamental pour le modèle TASEP en dynamique parallèle, avec une probabilité d’avancée p = 0,75. La prédiction champ
moyen est également indiquée.
MC
0 1
1
LD
HD
β
α
Figure 2 : Diagramme de phase schématique pour le modèle TASEP, comportant une phase d’écoulement libre (LD), une phase embouteillée
(HD) et une phase de courant maximum (MC).

Modélisation du trafic
12 Actes INRETS n° 90
3. Introduction d’un temps de réaction
On définit pour chaque véhicule une variable supplémentaire, la vitesse, quiprend la valeur 0 ou 1. Cette vitesse est définie comme la distance parcourue parla voiture au pas de temps précédent. En particulier, une voiture qui a dû s’arrêterderrière un autre véhicule au pas de temps précédent a donc vu sa vitesseredescendre à zéro. Au pas de temps suivant, chaque particule avance à lacellule voisine sur sa droite si celle-ci est vide, avec une probabilité q(ν) quidépend maintenant de sa vitesse :
q(0) = q0 (1)q(1) = 1 (2)
Cette règle est appliquée à tous les véhicules en parallèle (voir fig. 3). Pourq0 = 1, on retrouve le modèle TASEP. On peut voir ce modèle comme un casparticulier du modèle VDR introduit récemment par Barlovic et al. [3].
4. Système avec conditions aux limites périodiques
La figure 4 donne le diagramme fondamental obtenu tant numériquementqu’analytiquement pour des conditions aux limites périodiques. La structure de cediagramme nous sera utile pour comprendre le comportement en conditions auxlimites ouvertes.
La forme de ce diagramme fondamental peut être aisément comprise. Pourles densités 0 ≤ ρ ≤ 0,5 et une condition initiale adéquate (toutes les vitesses à 1et au moins une cellule vide devant chaque véhicule), les voitures avancent de
q0
1 L
11
Figure 3 : Règles d’évolution pour le modèle avec temps de réaction.
Les disques rayés correspondent à une vitesse nulle, et les disques blancs à une vitesse unité. Les particules sont représentées au début d’un pas de temps (pourtour du disque en trait continu) et au début du pas de temps
suivant (pourtour en pointillés).

Actes INRETS n° 90 13
Introduction d’un temps de réaction dans un modèle simplifié de trafic
façon déterministe avec une vitesse 1. Le flux est alors simplement donné parJ = ρ. Dans ce cas, un embouteillage ne peut pas se former spontanément.
Pour les densités supérieures à 0,5, le nombre de voitures dépasse celui descellules vides, i.e. on ne peut pas éviter que certains véhicules soient stoppés etque des bouchons se forment. D’après les simulations, on a coexistence d’ununique embouteillage compact et d’une zone d’écoulement libre. La densité dansla zone d’écoulement libre est déterminée par la fréquence avec laquelle lesvéhicules quittent le bouchon. La voiture en tête du bouchon met un tempstypique pour se détacher. La densité correspondante vaut alorsρlibre = 1/(T + 1) = q0/(1 + q0). Les longueurs respectives de l’embouteillage et dela zone d’écoulement libre sont déterminées par la conservation du nombre departicules
(3)
On en déduit le nombre de particules en mouvement et le flux. Ce secondrégime peut aussi être observé pour des densités comprises entre ρlibre ≤ ρ ≤ 0,5si la condition initiale comporte déjà un embouteillage. En résumé, le fluxs’exprime en fonction de la densité par
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1J( )
homogeneouscondensed
asymptotic
ρLes cercles vides donnent les résultats de simulations initialisées avec toutes les vitesses des véhicules à 1 et au moins une cellule vide entre les voitures.
Les cercles pleins ont été obtenus en commençant la simulation avec un agrégat compact de véhicules. Ces résultats sont comparés à notre
prédiction pour L →→→→ ∞∞∞∞ (ligne continue).
Figure 4 : Flux en fonction de la densité pour des conditions aux limites périodiques avec q0 = 0,25 et L = 1 000.
T q01–=

Modélisation du trafic
14 Actes INRETS n° 90
Dans la région intermédiaire ρlibre ≤ ρ ≤ 0,5, les deux solutions coexistent.Pour des systèmes finis, il est possible que l’embouteillage présent initialementse dissolve. En ce sens, on peut dire que l’embouteillage est métastable.Cependant, dans la limite thermodynamique, n’importe quelle configurationaléatoire conduit à un état embouteillé.
5. Système avec conditions aux limites ouvertes
Les conditions aux limites ouvertes sont mises en œuvre de la façonsuivante : si la première cellule à gauche est vide, un véhicule de vitesse 1 estinjecté avec la probabilité α. A l’autre extrémité, les voitures quittent la chaîneavec une probabilité β quelle que soit leur vitesse.
A L et q0 constants, les valeurs de α et β déterminent le comportement dusystème. Tout d’abord, on peut remarquer que pour β = 1, la seule composantestochastique provient de l’injection. On retrouve donc le modèle TASEP détermi-niste (q = 1) pour lequel le flux est connu exactement : J(α) = α/(1 + α) [11], etcela pour toute valeur de α. En fait, ce résultat peut être étendu à toute la phasebasse densité (écoulement libre), car dans cette phase le flux est contrôlé parl’injection. On s’attend à trouver cette phase pour un petit α et grand β.
Cela est confirmé par la comparaison avec les simulations directes. Sur lafigure 5, les résultats sont donnés pour le cas déterministe β = 1 (l’accord est obtenupour toute valeur de α), mais aussi pour une valeur intermédiaire β = 0,5. On observebien que pour les valeurs suffisamment faibles de α, le flux est donné par J(α).
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1
J()
simuestimate
α
α
Figure 5 : Comparaison entre l’estimation du flux J(α) et les résultats numériques.
La simulation a été réalisée avec un système de longueur L = 500 et pour q0 = 0,25. On a choisi comme probabilités de sortie ββββ = 1 et ββββ = 0,5.

Actes INRETS n° 90 15
Introduction d’un temps de réaction dans un modèle simplifié de trafic
Il est important de noter que pour notre modèle, aucun embouteillage ne peutse former spontanément dans les zones d’écoulement libre, comme cela a déjàété mentionné pour les conditions aux limites périodiques. Par contre, desembouteillages peuvent se former à la sortie si β < 1. Plus précisément, dans laphase d’écoulement libre et si β < 1, des embouteillages sont effectivementformés à l’extrémité droite du système. Mais ils se détachent rapidement de celle-ci et se dissolvent en quelques pas de temps. La densité moyenne sur le derniersite L vaut ρL = J(α)/β, alors que la densité en volume est égale à ρb(α) = J(α)(tant qu’une particule n’a pas rencontré d’embouteillage, sa vitesse vaut 1).
Pour de grandes valeurs de α et β << 1, on s’attend plutôt à être dans unephase haute densité. Si on a un embouteillage compact à la sortie du système, etsi une particule vient de sortir, le temps nécessaire pour que la suivante sorte àson tour est la somme (i) du temps moyen nécessaire pour que la deuxièmeparticule saute du site L – 1 au site L, à savoir TJ = 1/q0, et (ii) du temps d’attenteTL = 1/β pour que cette particule quitte le dernier site L. Alors le flux (contrôlé parla sortie) vaut
(4)
Ce scénario simple ne peut être observé que si l’on a un embouteillage compacten permanence à la sortie du système, i.e. pour α ≈ 1 et β << 1. Sinon, pour desvaleurs plus grandes de β, il n’est pas impossible que l’embouteillage se décolle dela frontière droite, suite à l’introduction du temps de réaction au redémarrage. Leflux de sortie est alors déterminé par la fréquence à laquelle les voituress’échappent de l’embouteillage, comme nous allons le calculer maintenant.
La distance temporelle t entre deux véhicules successifs s’étant échappés del’embouteillage est donnée par la distribution Ph(t) = q0(1 – q0)t–1 où t ≥ 1.Calculons maintenant le temps typique entre l’arrivée au site L d’une particule (autemps 0) et l’arrivée en ce même site de la particule qui la suit (au temps T). Deuxscénarios sont possibles (cf. fig. 6) :
• la deuxième particule arrive au site L – 1 avant que la première particule aitquitté le système,
• la première voiture est déjà sortie du système quand la deuxième arrive,c’est-à-dire que celle-ci atteint le dernier site sans être bloquée par levéhicule qui la précède.
On peut remarquer qu’il serait également possible que plus de deuxparticules s’arrêtent à la sortie, si les premières mettaient trop de temps àsortir. Cela correspond à la nucléation d’un nouvel embouteillage, et on estramené au cas précédent (flux d’un embouteillage compact à la sortie). Ici,nous ne nous intéressons donc qu’au cas où il n’y a pas d’embouteillagelocalisé à la sortie.
La probabilité pour que le deuxième véhicule soit bloqué s’il arrive en L – 1au temps t est égale à la probabilité pour que le premier véhicule n’ait pas

Modélisation du trafic
16 Actes INRETS n° 90
encore quitté le système au bout de ce même temps t, à savoir Pb(t) = (1 – β)t.De même, la probabilité pour que le second véhicule ne soit pas bloqué vaut
La valeur moyenne de T peut alors s’exprimer comme
(5)
Ce temps est l’inverse du flux moyen à travers la sortie du système. Il est àremarquer que l’on retrouve exactement la même valeur qu’en (4). Alors,lorsqu’on a alternance entre des configurations avec un embouteillage localisé à
x
t
Figure 6 : Représentation schématique du diagramme spatio-temporel obtenu lorsqu’un embouteillage (zone grise) se détache de la sortie (à droite).
Les particules quittant l’embouteillage sont représentées par des points noirs. Leurs trajectoires sont visualisées par une ligne pour pouvoir les
suivre plus facilement. Certaines particules sortent du système sans avoir rencontré d’autre particule, d’autres sont arrêtées par la particule
précédente lorsque celle-ci met trop longtemps à sortir.

Actes INRETS n° 90 17
Introduction d’un temps de réaction dans un modèle simplifié de trafic
la sortie, ou en train de se décoller du bord, le flux reste toujours égal à J(β). Cettevaleur du flux sera observée tant que le système est contrôlé par la sortie, i.e. enprésence d’embouteillages. La figure 7 confirme l’accord avec les simulationsnumériques. Pour β proche de 1, un certain écart apparaît. C’est un effet de taillefinie dû au fait que pour des petits systèmes, il peut arriver que le système soitpendant un moment vide de tout embouteillage, car la durée nécessaire pourqu’un embouteillage remonte à travers tout le système peut être inférieure à ladurée entre deux nucléations d’embouteillages à la sortie. Le flux est alorsmomentanément déterminé par la probabilité d’entrée α.
Dans la phase haute densité, où le système est envahi par les embouteillages,on peut plutôt voir la sortie comme nucléant des zones d’écoulement libre au seind’un embouteillage compact. Ces zones libres sont typiquement composées d’unseul trou lorsque β < q0, et d’un ensemble de trous et particules en mouvementlorsque β > q0. Elles remontent l’écoulement, de même que les embouteillagescompacts qui les séparent. Sur un diagramme spatio-temporel, cela se traduit parune structure en bandes (cf. fig. 9). Aussi longtemps que l’effet de la frontièregauche ne se fait pas sentir, les flux moyens à l’entrée et à la sortie d’unembouteillage sont égaux, et la largeur de celui-ci obéit à une marche aléatoirenon biaisée. Il y a donc une probabilité non nulle pour que cette largeur s’annule.L’embouteillage disparaît, et les deux zones libres voisines fusionnent. Aucuneformation spontanée d’embouteillages ne pouvant avoir lieu dans un écoulement
0
0.1
0.2
0.3
0.4
0 0.2 0.4 0.6 0.8 1
J()
simuestimate
β
β
Figure 7 : Comparaison entre l’estimation du flux J(β) et les résultats numériques.
La simulation a été réalisée avec un système de longueur L = 500 et pour q0 = 0,25. On a choisi comme probabilité d’entrée α = 0,5. L’accord est obtenu pour des valeurs suffisamment petites de β. Les simulations
réalisées pour plusieurs tailles de systèmes indiquent que les déviations pour β proche de 1 sont dues à des effets de taille finie.

Modélisation du trafic
18 Actes INRETS n° 90
libre, ces zones ne pourront plus se séparer. A cause du mouvement détermi-niste des véhicules en mouvement, les zones d’écoulement libre ont une largeurstrictement constante dans le temps – si on considère la largeur prise dans ladirection x = t dans le diagramme spatio-temporel. Lors d’une coalescence, cesdeux largeurs s’additionnent. Les particules en excès provenant de l’embou-teillage défunt sont réparties entre les embouteillages voisins, qui s’en trouventgrossis d’autant. Ainsi, alors qu’on remonte l’écoulement, la largeur des bandesaugmente. La densité moyenne (moyenne d’ensemble ou temporelle) restenéanmoins constante et égale à la densité sur le dernier site ρ(L) = J(β)/β.
Lorsque les embouteillages arrivent près de l’entrée du système, ils vontsoudainement croître ou se rétracter selon la valeur de α, amenant à unevariation de la densité localisée près de l’entrée. Cet effet de bord n’étant pasessentiel à notre propos, nous laissons le lecteur intéressé se reporter à [14]. Ilest à noter cependant que ce phénomène se délocalise sur l’ensemble dusystème lorsque l’on approche de la ligne de transition β(α).
L’écoulement stationnaire est contrôlé par α ou β selon que J(α) est inférieurou supérieur à J(β). La transition entre les deux états a lieu lorsque les deux fluxJ(α) et J(β) sont égaux, i.e. pour
(6)
On obtient donc le diagramme de phase de la figure 8. Ce diagramme estexact pour les systèmes de taille infinie. Les effets de taille finie mentionnés ci-dessus ont lieu dans la phase hante densité pour β proche de 1 [14].
SP
0 1
1
LDβ
α
Figure 8 : Diagramme de phase pour q0 = 0,25.
La ligne en trait plein indique la transition entre la phase d’écoulement libre (LD) et la phase d’écoulement en bandes (SP). Sur la ligne α = q0,
le profil de densité est constant.

Actes INRETS n° 90 19
Introduction d’un temps de réaction dans un modèle simplifié de trafic
6. Remarques à propos de mesures de trafic
Il n’est évidemment pas question avec un modèle aussi simple que celui decet article de faire de véritables comparaisons avec des écoulements réels. Noussouhaiterions plutôt illustrer comment le simple fait d’avoir ajouté un temps deréaction et donc de la métastabilité permet de retrouver certaines caractéristiquesde l’écoulement. Cela nous semble donc un ingrédient essentiel qui devraitapparaître dans les modèles plus complexes.
Les mesures de B. Kerner présentées dans [16] ont été obtenues grâce à desdétecteurs placés sur une autoroute en amont d’une perturbation (ici une ramped’accès). On voit des séries de petits embouteillages se former au niveau de larampe, puis remonter l’écoulement. Au fur et à mesure de cette remontée, lesembouteillages sont de moins en moins nombreux et de plus en plus larges. Onobserve donc là aussi un phénomène de coalescence et croissance de domainesen amont du lieu de formation des embouteillages. Bien sûr, les causes de cephénomène de coalescence peuvent être plus diverses que le simple temps deréaction des chauffeurs. Par exemple, l’adaptation de la vitesse des chauffeurs enfonction de la distance libre devant eux peut aussi jouer un rôle, etc. D’autre part,la fenêtre temporelle et spatiale sur laquelle on dispose de données ne nouspermet pas de comparer les exposants de croissance de ces domaines avec ceuxde notre modèle. Néanmoins, ces mesures illustrent que le phénomène, loin d’êtreune simple curiosité de laboratoire, se rencontre en écoulement réel et notreapproche permet de le relier à un comportement microscopique de façon simple.
Une grandeur souvent mesurée en trafic est le diagramme fondamentaldonnant le flux de véhicules en fonction de la densité. Ces diagrammes ne sontpas tout à fait de même nature que ceux présentés au début de cet article(fig. 1, 4), car il s’agit plutôt de grandeurs moyennées sur une certaine durée(typiquement une minute). La figure 10 en donne un exemple, et montrecomment la durée des moyennes affecte l’allure du diagramme.
Pour se rapprocher des conditions expérimentales, nous avons simulé dansnos simulations un détecteur localisé sur la chaîne et qui moyenne les donnéessur des intervalles de temps fixes. Nous avons pris une chaîne de longueurL = 100 et une probabilité de redémarrage après arrêt q0 = 0,25. Pour présenterdes résultats dimensionnés, nous avons choisi un pas de temps de 0,45 s et unetaille de cellule de 7,5 mètres, correspondant à l’espace occupé par un véhiculearrêté dans un embouteillage, distance inter-véhiculaire incluse. Alors la vitessede remontée des embouteillages dans notre modèle est de 15 km/h, ce qui esttout à fait réaliste.
Bien que notre modèle soit extrêmement simple, il capture déjà la structurestochastique du diagramme fondamental expérimental (v. fig. 11), alors qued’autres modèles plus complexes peinent à la reproduire. Soulignons que c’estcette stochasticité qui est responsable de la coalescence des embouteillages,tant en trafic réel que dans nos simulations. Il y a donc là un ingrédientfondamental qui est naturellement présent dans les modèles de type automatescellulaires.

Modélisation du trafic
20 Actes INRETS n° 90
x
t
Figure 9 : Diagramme spatio-temporel obtenu pour α = 0,1, β = 0,1, q0 = 0,4.
Chaque pixel noir correspond à un véhicule.

Actes INRETS n° 90 21
Introduction d’un temps de réaction dans un modèle simplifié de trafic
0
500
1000
1500
2000D1 Middle Lane, t=1min
0% 20% 40% 60%1000
Flo
w J
[veh
/h]
0 20 40 60 80 100Density [veh/km]
0
500
1000
1500
2000
D1 Middle Lane, t=5min
ρ
∆
∆
Figure 10 : Diagramme fondamental obtenu en moyennant sur 1 (en haut) ou 5 (en bas) minutes.
L’occupation relative est calculée en utilisant la densité maximale pendant la période de mesure, à savoir ρmax = 140 véh./km. Extrait de [15].
0 50 100density (vehicle/km)
0
1000
2000
3000
flu
x j (
veh
icle
/ho
ur)
ρ
Figure 11 : Diagramme fondamental obtenu avec le modèle présenté dans cet article, avec des moyennes sur une minute.

Modélisation du trafic
22 Actes INRETS n° 90
7. ConclusionLe but de cet article est, à travers l’étude d’un modèle de transport
extrêmement simple, de mettre en évidence quelques caractéristiques fonda-mentales pour la simulation du trafic routier. Il s’agit essentiellement de (i) lastochasticité et de (ii) la métastabilité. La métastabilité (dont la structure à deuxbranches du diagramme fondamental est une signature) permet l’émergencespontanée de structures relativement complexes d’embouteillages, avec coexis-tence simultanée de plusieurs embouteillages. Grâce au caractère stochastiquedu modèle, il apparaît un phénomène de coalescence au cours de la remontéedes embouteillages en amont de la perturbation. Bien que nous ne visions pas àune description réaliste du trafic réel, ce phénomène peut être relié à des étudesexpérimentales mettant en évidence l’existence d’embouteillages parallèles surles autoroutes [16, 17].
Remerciements : Nous remercions Robert Barlovic, Andreas Schadschnei-der, et J. Krug pour les discussions que nous avons pu avoir avec eux. L. S.a bénéficié du soutien de la Deutsche Forschungsgemeinschaft, bourseNo. SA864/1-1.
Bibliographie
[1] Nagel K. and Schreckenberg M. (1992).- A cellular automaton model forfreeway traffic. J. Phys. I, 2, 2221-2229.
[2] Chowdhury D., Santen L. and Schadschneider A. (2000).- Statistical physicsof vehicular traffic and some related systems. Phys. Reports, 329, 199.
[3] Barlovic R., Santen L., Schadschneider A. and Schreckenberg M. (1998).-Metastable states in cellular automata for traffic flow. Eur. Phys. J. B, 5,793.
[4] Brilon W. and Wu N. (1999).- In Traffic and Mobility, M. Schreckenberg,W. Brilon, F. Huber and H. Wallentowitz, editors, Berlin: Springer.
[5] Emmerich H. and Rank E. (1997).- Physica A, 234, 676.
[6] Helbing D. and Schreckenberg M. (1999).- Phys. Rev. E, 59, R2505.
[7] Knospe W., Santen L., Schadschneider A. and Schreckenberg M. (2000).-Towards a realistic microscopic description of highway traffic. J. Phys.A: Math. Gen., 33, L477.
[8] Kerner B.S., Klenov S.L. and Wolf D.E. (2002).- Preprint condmat/0206370.
[9] Helbing D. (2001). – Rev. Mod. Phys., 73, 1067.
[10] Derrida B., Evans M.R., Hakim V. and Pasquier V. (1993).- J. Phys. A, 26,1493.
[11] Evans M.R., Rajewsky N. and Speer E.R. (1999).- J. Stat. Phys., 95, 45; deGier J. and Nienhuis B., Phys. Rev. E, 59, 4899.

Actes INRETS n° 90 23
Introduction d’un temps de réaction dans un modèle simplifié de trafic
[12] Kolomeisky A.B., Schütz G.M., Kolomeisky E.B. and Straley J.P. (1998).-Phase diagram of one-dimensional driven lattice gases with openboundaries. J. Phys. A: Math. Gen., 31, 6911.
[13] Santen L. and Appert C. (2002).- The asymmetric exclusion processrevisited: Fluctuations and dynamics in the domain wall picture. J. Stat.Phys., 106, 187-199.
[14] Appert C. and Santen L. (2001).- Boundary induced phase transitions indriven lattice gases with meta-stable states. Phys. Rev. Lett., 86, 2498-2501.
[15] Neubert L., Santen L., Schadschneider A. and Schreckenberg M. (1999).-Phys. Rev. E, 60, 6480.
[16] Kerner B.S. in TGF (1999); Kerner B.S. and Rehborn H. (1996).- Phys. Rev.E, 53, R4275.
[17] Kerner B.S. and Rehborn H. (1996).- Experimental features and characteris-tics of traffic jams. Phys. Rev. E, 53, R1297-R1300.


Actes INRETS n° 90 25
B. Modélisation probabiliste


Actes INRETS n° 90 27
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
Un modèle probabilistepour les interactions entre véhicules
et les temps de parcours
F. Leurent
SETRA, 46 avenue Briand, BP 100, 92225 Bagneux Cedex.Courriel : [email protected]
Résumé
Nous donnons un modèle probabiliste des situations et des événements detrafic sur une route, en traitant un cas simple à deux classes de mobiles, lesrapides (voitures) et les lents (camions), par sens de circulation. Grâce à unmodèle markovien à deux états, nous obtenons des formules analytiques pourles taux de transition entre états de vitesse, et pour le temps de parcours enmoyenne et en variance.
Ces formules permettent de traiter des situations variées : en topologie deroute (un ou deux sens, une ou plusieurs voies) et en structure de trafic, avecplusieurs classes de vitesse libre dans chaque sens de circulation.
1. Introduction
La circulation des mobiles sur une route est connue et analysée selon troisapproches complémentaires : d’abord l’approche expérimentale basée sur desmesures ; ensuite par des simulations informatiques ; enfin par des modèlesthéoriques, qui formalisent des hypothèses et des propriétés logiques. Enparticulier les modèles dits désagrégés se concentrent sur un mobile indivi-duel afin de déduire, par agrégation statistique, des conséquences globales :ainsi le modèle de distribution des vitesses individuelles conduit aux formulesde Wardrop (Wardrop, 1952, 1954), tandis que le modèle des alluresindividuelles ajoute la variabilité de la vitesse le long d’une trajectoire(Leurent, 2001).

Modélisation du trafic
28 Actes INRETS n° 90
Pour affiner l’analyse et mieux comprendre la circulation des mobiles sur uneroute, la solution naturelle est de désagréger encore davantage, en explicitant auniveau microscopique l’environnement de trafic d’un mobile particulier. Cetteapproche est classique en théorie des files d’attente : les « arrivées » analoguesaux mobiles sont décrites conjointement, une arrivée peut retarder le service desautres arrivées etc. La théorie des files d’attente est utilisée intensivement pourmodéliser les carrefours et les jonctions, autrement dit les nœuds du réseau detransport : cf. TRB (1997) pour un inventaire des travaux en ce sens. Enrevanche, concernant les arcs du réseau de transport, les contributions probabi-listes se réduisent à quelques articles déjà anciens. Les pionniers ont été Schuhl(1955) côté français, Kometani (1955) côté japonais, et Winsten (1956) côtéaméricain. Tanner (1958, 1961) et Yeo (1964) ont développé les modèles les plusaboutis, en traitant rigoureusement les interactions entre un véhicule rapide etdes pelotons lents en sens direct, face à des pelotons en sens opposé. Cesarticles utilisent non pas un modèle markovien d’état mais un modèle « parbonds », où le véhicule rapide progresse d’un peloton lent au « suivant ». Lesrésultats portent sur la vitesse moyenne du véhicule rapide, et sont valables enrégime stationnaire pour un temps très long, par ergodicité1. En France,P. LeBreton a travaillé indépendamment sur ce sujet au début des années 1970.
Cet article développe un modèle probabiliste explicite des situations et desévénements de trafic sur une route, pour plusieurs situation simple avec deuxclasses de mobiles par sens de circulation : les rapides (voitures) et les lents(camions). Les situations considérées sont variées : une ou plusieurs voies, unou deux sens de circulation, davantage de classes de mobiles et de relationsentre les classes.
Nous considérons une seule route, qui comporte entre deux points uneimpossibilité de dépasser : cela force une voiture à ralentir si elle rattrape uncamion. D’où le nom de modèle de goulot spatial.
Nous appelons conflits ces relations, car les mobiles se partagent l’espacede circulation, les plus lents infligent des retards aux plus rapides. Les conditionstypiques de conflit sont le rattrapage d’un mobile lent par un mobile rapide, doncune gêne avant, en une position où le dépassement est impossible en raisond’un goulot ou d’une gêne en face ou d’une gêne arrière ou d’une gêne avantmultiple qui bloque toutes les voies de circulation. Ainsi, quand la route comportedeux voies ou plus, un retard nécessite la combinaison de plusieurs causes degêne.
Le traitement repose sur trois principes : primo l’analyse microscopique,désagrégée de chaque mobile ; secundo la représentation probabiliste de
1 En comparaison, notre article présente un modèle markovien, qui porte sur les probabilités desétats donc non seulement la moyenne mais aussi la variance, et il est valable en régime stationnaireou transitoire pour une distance quelconque (éventuellement infinie). De plus les probabilités desétats permettent de formuler les intensités réduites des classes de mobiles, et donc de traiter des casplus complexes que les routes à deux voies et deux sens.

Actes INRETS n° 90 29
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
l’environnement de trafic ; tertio la distance, la position comme paramètreprincipal. La clef est un modèle d’état pour chaque mobile selon sa classe : unétat libre et un ou plusieurs états contraints. On passe d’un état à l’autre par unetransition dont la probabilité dépend de l’environnement de trafic. Il s’agit doncd’un modèle probabiliste markovien. Nous le rattachons au modèle des alluresindividuelles, avec une fonction de covariance exponentielle pour les tempsunitaires locaux d’un même mobile.
Le corps de l’article se compose de 8 parties. La partie 2 définit les classes,les vitesses, les types de gêne et les situations de conflit. La partie 3 donnel’analyse physique et l’analyse probabiliste du rattrapage, du croisement, dudépassement et du rabattement ; nous relions leurs probabilités d’occurrence auxparamètres de trafic.
La partie 4 adapte le formalisme du modèle markovien états-transitions auxtrajectoires individuelles, en fonction de la position. Dans le cas à deux états,nous établissons des formules macroscopiques pour la moyenne et la variancedu temps de parcours local ou bipolaire. Ce modèle d’état constitue un casd’application du modèle des allures individuelles.
Les parties 5 à 8 appliquent le modèle à plusieurs types de voies : les routesà une voie sont traitées en partie 5. Ensuite nous abordons les routes à deuxvoies : conflits par gêne avant et en face sur une route à deux sens en partie 6,conflits par gêne avant et arrière sur une route à sens unique en partie 7. Lapartie 8 considère les routes à trois voies et deux sens, avec un couplage desdeux sens traités de façon symétrique.
La partie 9 conclut : nous résumons les contributions, nous indiquons leurportée et nous proposons des pistes de recherche.
2. Classes, états de lenteur, gênes et conflits
Nous définissons successivement les classes de mobiles, les états de lenteur,les types de gêne et les situations de conflit.
2.1 Classes de mobiles
Une classe de mobiles est un ensemble de mobiles qui circulent sur unemême route dans la même direction, avec une même préférence individuelle pourla vitesse, autrement dit une même allure.
On caractérise une classe i de mobiles par le temps unitaire de son état libre,noté τi et appelé lenteur libre, ou allure libre par abus de langage.
Les arrivées des mobiles de classe i forment un flux d’intensité λi. En généralnous supposons que ce flux est poissonnien pour bénéficier des propriétésmarkoviennes.
Enfin nous considérons la longueur individuelle d’un mobile, notée i pour laclasse i, et aussi la distance minimale de sécurité pour suivre un mobile circulant

Modélisation du trafic
30 Actes INRETS n° 90
à la lenteur τi, notée mi. L’extension spatiale d’un mobile de classe i circulant enétat libre est donc = i + mi.
2.2 Etats de lenteur ; les transitions entre états
Nous définissons la lenteur d’un mobile comme son temps par unité dedistance, donc l’inverse de sa vitesse.
Quand un mobile M de classe B rattrape un mobile plus lent, donc un pelotonemmené par un mobile de classe A avec τA > τB, s’il ne peut le dépasser il ralentitpour le suivre : alors son état de lenteur est τA et non τB.
A chaque instant et en chaque position s, le mobile M est dans un état delenteur eM(s). Si le mobile est libre, il est dans l’état naturel τB de sa classe B.Sinon le mobile est contraint avec eM(s) = τA > τB.
Nous relions l’état individuel de lenteur à la position sur la route, notée parune abscisse curviligne s. Hors dépassement nous supposons que le mobilecircule sur la voie de droite.
Une transition entre états survient si une contrainte apparaît ou disparaît, doncà une position particulière. Alors le mobile passe d’un état à un autre : d’un étatlibre à un état contraint ou inversement, ou d’un état contraint à un autre étatcontraint.
2.3 Types de gênes
Un mobile M de classe B subit une gêne avant à l’instant t si sa position sM(t)approche celle d’un mobile plus lent A circulant dans la même direction, à lalenteur τA ≥ τM.
La gêne avant se produit à droite et à gauche si toutes les voies du sens decirculation sont localement occupées par des mobiles plus lents que M.
Réciproquement le mobile subit une gêne arrière si sa position est approchéepar celle d’un mobile plus rapide D circulant dans la même direction à une vitessesupérieure donc τM > τD, et qui le double ce qui l’empêche de dépasser untroisième mobile plus lent.
Enfin le mobile subit une gêne en face en une position s proche de celle d’unmobile C circulant en sens opposé et occupant la voie d’un éventuel dépasse-ment par M.
2.4 Situations de conflit, évaluation du retard
Sur une route à une voie, il est impossible de dépasser, donc une gêne avantimplique une situation de conflit pour le mobile courant M de classe B. Pour unedistance élémentaire ds, la gêne provoque un temps de parcours τA ds, donc unretard (τA – τB) ds par rapport à l’état libre τB du mobile.
Sur une route à deux voies ou plus, une gêne avant n’implique pasnécessairement une situation de conflit pour le mobile. Pour cela elle doit se
i′

Actes INRETS n° 90 31
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
combiner, selon le type de route, à une gêne en face, ou derrière, ou avant àgauche.
Dressons la liste des situations de conflit :
• Gêne avant pour une route à une voie.
• Gêne avant et en face pour une route à deux sens, donc à deux voies ouplus.
• Gêne avant et derrière pour des routes à deux voies, à sens unique ou non.
• Gêne avant multiple pour une route à plusieurs voies, à sens unique ou non.
Ces situations contraignent l’état local eM(s) du mobile M, par opposition à lasituation libre. La tension infligée se mesure par la différence τA – τB entre l’étatralenti et l’état libre. Le retard r est le produit de cette tension par la distancecontrainte δ, soit r = (τA – τB)δ.
2.5 Principes d’analyse
Les trois principes originaux : analyse désagrégée de chaque mobile, repré-sentation probabiliste de l’environnement et indexation par la position, secombinent en deux étapes.
Première étape, la probabilité d’occurrence des gênes et des conflits. Pourchaque type de gêne, on calcule une probabilité d’occurrence entre la positioncourante et une position future donnée, donc en fonction de la position relative.La probabilité d’occurrence d’un conflit par combinaison de plusieurs gênes, sousl’hypothèse d’indépendance des facteurs de gêne, est le produit des probabilitésd’occurrence des facteurs. Dans un état donné, la probabilité d’occurrence duconflit ou la probabilité de disparition déterminent les transitions vers l’étatsuivant.
Seconde étape, réduire autant que possible le nombre d’états, donc le nombrede vitesses, donc le nombre de classes. Le nombre de classes doit suffire àreprésenter l’essentiel des aspects physiques : pour une route à deux voies il fautau moins trois classes, deux en sens direct pour représenter la gêne devant, etune classe en sens opposé ou par l’arrière pour représenter la gêne en face ou
B
C
ADSens direct
Sens opposé
Vecteur vitesse de B
Figure 1 : Mobiles en interaction.

Modélisation du trafic
32 Actes INRETS n° 90
arrière. La classe importante est alors la classe rapide en sens direct, qui subitles gênes et surtout les retards. Pour cette classe, deux états suffisent : libre oucontraint. L’état contraint correspond au suivi proche d’un mobile lent, et àl’attente d’un créneau de dépassement.
A l’évidence, plus la topologie est complexe, plus les états sont nombreux : lenombre de voies de circulation, et leur affectation aux sens de trafic, sont desparamètres primordiaux.
3. Rattrapage, croisement, dépassement et rabattement
En probabilisant l’analyse physique du rattrapage et du croisement, nousmesurons leur probabilité d’occurrence en fonction d’un incrément de distance(§ 3.1 à 3.3). Nous indiquons l’effet des longueurs individuelles (§ 3.4), puis nousanalysons les conditions de dépassement (§ 3.5). Pour une analyse des condi-tions de rabattement (cf. Leurent, 2001, § 10B.6).
3.1 Rattraper un mobile lent
Considérons un mobile particulier, appelé mobile courant, passant au point sà l’instant t, à une lenteur τB. Il rattrape un mobile plus lent de classe A, passé ens à l’instant t – θ à la lenteur τA > τB au point s + x* qui vérifie la conditiont + τBx* = t – θ + τAx*, donc
x* = θ/(τA – τB) sous la condition τA – τB.
Si nous connaissons la fonction de répartition Fθ de la durée θ écoulée aupoint s depuis le passage du dernier mobile lent, nous en déduisons la fonction
t
Position
Trajectoire de B Temps
t-θ
s+x*s
Trajectoire de A
Figure 2 : Le rattrapage avant.

Actes INRETS n° 90 33
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
de répartition Xst de la position relative de rattrapage x*. L’identité des deuxévénements x* ≤ L = θ ≤ (τA – τB)L entraîne l’égalité de leurs probabilitésrespectives, Xst(L) = Fθ[(τA – τB)L].
Si les arrivées de lenteur τA sont poissonniennes, la durée écoulée θ est unevariable aléatoire (VA) exponentielle de paramètre l’intensité λA du flux, donc
Ainsi la position relative de rattrapage est une VA exponentielle, de paramètreρBA = λA(τA – τB).
Le cas d’une distribution de lenteurs est traité dans Leurent (2001, § 10.B.2).
3.2 Rattrapage par un mobile plus rapide
Le mobile courant de lenteur τB passe à l’instant t au point s. Un mobile declasse D plus rapide, de lenteur τD < τB, passe en s à un instant ultérieur , etrattrape le mobile courant au point s + x* tel que donc
sous la condition .
Si nous connaissons la fonction de répartition de la durée résiduelleavant passage en s du mobile rapide, nous déduisons la fonction de répartition
de la position relative de rattrapage x*.
L’identité des deux événements x* ≤ L = ≤ (τB – τD)L entraîne l’égalitéde leurs probabilités respectives,
t θ+
τB τD>
Fθ θ
Xst
θ
t
Position
Trajectoire de D
Temps
t+θ
s
Trajectoire de B
s+L
θ
01 Pr
Fonction derépartition de θ
θ limite durattrapage
avant L
Figure 3 : Le rattrapage arrière et sa probabilité.

Modélisation du trafic
34 Actes INRETS n° 90
Si les arrivées de lenteur τD sont poissonniennes, la durée résiduelle estune variable aléatoire (VA) exponentielle de paramètre l’intensité λD du fluxrapide, donc
Ainsi la position relative du rattrapage arrière est encore une VA exponen-tielle, de paramètre
Le cas d’une distribution de lenteurs est traité dans Leurent (2001, § 10.B.3).
3.3 Le croisement
Le mobile courant M de lenteur libre τB passe à l’instant t au point s. Un mobilede classe C circulant en sens contraire à la lenteur τC, passe en s à un instantultérieur , et croise M au point s + x* tel que τBx* = – τCx*, donc
Si nous connaissons la fonction de répartition de la durée résiduelleavant passage en s du mobile C, nous déduisons la fonction de répartition de la position relative de rattrapage x*.
L’identité des deux événements x* ≤ L = θ ≤ (τB + τC)L entraîne l’égalité deleurs probabilités respectives,
Si les arrivées de lenteur τ sont poissonniennes, la durée résiduelle est uneVA exponentielle de paramètre l’intensité λC du flux, donc
Ainsi la position relative de croisement est également une VA exponentielle,de paramètre
Le cas d’une distribution de lenteurs est traité dans Leurent (2001, § 10.B.4).
3.4 Sur les longueurs individuelles (optionnel)
3.4.1 Convention de localisation
Jusqu’à présent nous n’avons pas précisé l’extension spatiale des mobiles,leurs longueurs individuelles.
Nous posons la convention suivante : la position du mobile correspond àson extrémité avant. A l’instant t, le mobile localisé au point s occupe sa voie decirculation sur l’intervalle ]s – – m, s] en sens direct (ou [s, s + + m [ en sensopposé), avec la longueur individuelle du mobile et m une distance de sécuritéqui dépend de l’état courant de vitesse. Posons ′ = + m.
θ
t θ+ θ
Fθ
θXst
θ

Actes INRETS n° 90 35
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
3.4.2 Effet sur le rattrapage avant
On considère qu’un mobile rapide B rattrape un mobile lent A dès l’instant t′où . En convenant que x* = sB(t′) – sB(t) est la position relativedu rattrapage, elle est caractérisée par donc
Ainsi non nulle pour certaines valeurs de Lnégatives et proches de 0.
Le mélange de plusieurs lenteurs cause une distribution de l’argument avec un effet final composite pour les valeurs faibles de L mais
simple pour les valeurs supérieures (précisément, distribution exponentielle au-
delà de ).
3.4.3 Effet sur le rattrapage arrière
Le mobile lent B est rattrapé par un mobile rapide D dès l’instant t′ où En convenant encore que x* = sB(t′) – sB(t) est la position
relative du rattrapage, on la caractérise par donc
Ainsi Là encore le mélange de plusieurs vites-ses rapides cause une distribution de l’argument
3.4.4 Effet sur le croisement
Aucun effet sur le croisement du prochain mobile en face : une distance desécurité n’est pas nécessaire tant que les mobiles ne circulent pas sur la même voie !
Cependant la longueur individuelle du précédent mobile en face C′ peutretarder un éventuel changement de voie de M, si
3.4.5 Effet sur les arrivées et les pelotons
L’hypothèse de longueurs individuelles non nulles contredit l’hypothèsed’arrivées poissonniennes car, sur n files de circulation, m > n mobiles i delongueur i > 0 et de temps unitaire τi ne peuvent se succéder qu’à un certainrythme, nécessairement fini.
Chaque mobile utilise une file pendant ti = i τi. Pour l’ensemble des files, letemps minimum d’occupation est t* = mini ti, c’est un temps d’attente pour lesm – n mobiles pas encore servis. En notant ν le nombre de services dans ladurée t*, Prv > n = 0 ce qui contredit l’hypothèse poissonnienne.
Si l’on néglige la longueur des mobiles et les distances de sécurité, alors lespelotons n’ont pas d’extension spatiale, leur longueur totale est nulle ou réduiteà la longueur du mobile de tête. Dans ce cas le nombre de mobiles dans lepeloton ne conditionne pas les probabilités de rattrapage et de croisement.

Modélisation du trafic
36 Actes INRETS n° 90
3.5 Créneaux de dépassement
3.5.1 Occurrence du prochain conflit
Connaissant l’occurrence de chaque cause de gêne, il reste à établirl’occurrence des conflits qui combinent plusieurs causes. Il est difficile deformuler précisément un événement de cumul de plusieurs causes jusqu’à x*,car chaque cause peut avoir plusieurs occurrences, et chaque occurrence peutprovoquer un conflit.
Le principe d’analyse est de hiérarchiser les causes de gêne, pour révélerprogressivement les situations de conflit, et formuler l’occurrence du prochainconflit.
La première cause est évidemment la position relative du mobile lent A quiprécède le mobile courant M en sens direct.
La deuxième cause est la nature de la route, qui détermine les conflitspossibles. Ainsi, pour une route à deux sens et deux voies, avec deux classes Aet B en sens direct et une classe C en sens opposé, le principal conflit concerneB quand C l’empêche de dépasser A.
Si M est ralenti, il peut demeurer dans cet état en raison non seulement de lagêne en face, mais aussi de la gêne derrière par un autre mobile B de mêmeclasse que M mais non ralenti.
Pour simplifier l’analyse, on traite uniquement le cas où M approche du mobilelent A : cela suffit pour caractériser les transitions entre l’état libre τB et l’étatralenti τA sur une distance élémentaire ds.
Enfin une propriété importante est l’indépendance entre les causes de gêne :le mobile courant M sépare les mobiles précédents des mobiles suivants doncassure leur indépendance. De même les mobiles en sens direct derrière M etceux en face devant M ont des arrivées indépendantes.
3.5.2 Créneau pour l'état libre
Supposons que juste avant le dépassement, à l’instant initial t0, le point arrièrede M se trouve à une distance LB du point arrière de A. A l’instant final dudépassement, les positions respectives sont inversées, et le point arrière de Mprécède celui de A de LA.
Entre les deux instants le mobile lent A franchit une distance δA en un tempsτAδA, tandis que M franchit une distance δ en un temps τBδ.
Le dépassement se termine dès que δ ≥ δΑ + LB + LA, donc dès l’instantt = t0 + ∆t tel que ∆t/τB ≥ ∆t/τA + LB + LA, soit

Actes INRETS n° 90 37
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
et donc
Cette valeur limite définit le créneau de dépassement pour l’état libre. On peutlui ajouter un terme pour représenter une marge frontale de sécurité, ainsique l’occupation de la file de dépassement : on retient pour la suite LA = A + mA,LB = B + mB et avec une marge de sécurité arrièrecertainement plus petite que mC.
Au total, pour le mobile M en état libre, le créneau de dépassement est
La probabilité de disposer d’une distance libre en face qui dépasse cette limite est
Dans ce cas M ne subit pas de retard puisqu’il circule à sa vitesse libre.
3.5.3 Créneau pour l'état ralenti
Supposons maintenant que M se trouve ralenti par un mobile lent A, et qu’iltente de le dépasser. Il faut préciser le schéma cinématique de M pour accéléreret atteindre sa vitesse libre naturelle.
,BC′
mC′
t+∆t*
Position
Trajectoire de B
Temps
t
s+x*s
Trajectoire de A
?A
?B
Trajectoire de C
δA δBA
Trajectoire limite d’un C
Figure 4 : Créneau pour l’état libre.

Modélisation du trafic
38 Actes INRETS n° 90
Parmi diverses variantes, nous pouvons supposer que M accélère uniformémentde vA à vB. De t0 à t = t0 + ∆t, M franchit δ = vA∆t + aB(∆t)2 / 2, et il dépasse A si
donc si
cela sans notion de limite de vitesse.
Si M limite sa vitesse à vB, le passage de vA à vB nécessite une durée de∆t1 = (vB – vA)/aB.
Si ∆t1 ≥ ∆t* alors le temps de dépassement est ∆t*.
Si ∆t1 ≤ ∆t* alors pendant la durée ∆t = ∆t1 + ∆t2 le mobile M franchit et il dépasse A si
Comme , l’inégalité pré-cédente équivaut à
et donc à
t + ∆ t *
Position
Trajectoire de B
Temps
t
s + x * s
Trajectoire de A
l A
l B
Trajectoire d’un C
δ δ BA
∆ t 1 Limite pour C
Figure 5 : Trajectoire depuis l’état ralenti.

Actes INRETS n° 90 39
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
En trafic routier, des valeurs « minimales » de LA et LB sont 15 et 10 mrespectivement (en incluant les distances de sécurité) : pour a = .8 m/s2, ∆t* ≈ 8 svaleur minimale, qui augmente avec la taille LA du mobile lent (peloton lent siaccumulation). Pour vB = 120 km/h et vA = 90 km/h, alors ∆t1 = 10 s. Commecette valeur est proche de la valeur minimale de ∆t*, pour la suite nous faisonsl’approximation que ∆t1 ≤ ∆t* et donc que le temps minimum de dépassement est
Comme précédemment nous pouvons ajouter un terme qui représente àla fois une marge frontale de sécurité et un recouvrement éventuel entre M et ledernier mobile en face.
Au total, pour le mobile M, le créneau de dépassement depuis l’état ralenti est
Ce créneau est disponible avec une probabilité
3.5.4 Créneaux et rattrapage arrière
Le mobile M ne peut dépasser un mobile lent A que s’il dispose d’un créneauδBA ou sur la file de dépassement, vis-à-vis du croisement par un mobile Cen sens opposé comme du rattrapage par un mobile D plus rapide venu del’arrière.
En état libre, la disponibilité du créneau δBA vis-à-vis d’un mobile D plus rapidevenu de l’arrière a une probabilité
En état ralenti, la probabilité est
3.5.5 Temps supplémentaire d’un dépassement, hors attente
Un dépassement opéré en état libre ne coûte pas de temps de parcourssupplémentaire à M, puisque celui-ci ne ralentit pas (sauf effet minime deschangements de voie).
Un dépassement depuis l’état ralenti coûte un temps d’attente égal à (τA – τB)fois la distance parcourue en suivant A, plus un temps spécifique hors attente,
CB′
δBA′

Modélisation du trafic
40 Actes INRETS n° 90
égal à la différence entre le temps transitoire T pour revenir à la vitesse libre, etτB fois la distance transitoire D franchie pendant T.
Le passage de l’état libre à l’état ralenti est implicitement pris en compte ensupposant une vitesse vB jusqu’en puis une vitesse vA. L’état final deM, en position et en temps, est identique quelle que soit la décélération.
Nous évaluons le temps transitoire en supposant que M plafonne sa vitesseà . Même si le dépassement dure ∆t* ≤ ∆t1, il faut T = ∆t1 pour retrouver lavitesse libre. Si le dépassement dure plus que ∆t1, de même T = ∆t1. Le surcoûten temps est T – τBD avec D = ∆d1 la distance parcourue pendant ∆t1, qui vaut
Aussi
4 Modèle états-transitions pour le temps de parcours
Connaissant les occurrences des gênes et aussi des conflits, nous pouvonsmodéliser l’évolution de l’état d’un mobile en fonction de sa position. Pour un petitincrément ds de position, la probabilité de changer d’état est proportionnelle à ds,l’état du mobile est donc un modèle markovien à états et transitions.
Nous rappelons les principes du modèle markovien états-transitions, enadaptant la présentation classique pour remplacer le temps par la position. Nousdétaillons les calculs dans le cas de deux états, pour établir les propriétés dutemps de parcours, local ou bipolaire : cela en moyenne, variance et covariance.
4.1 Principes du modèle états-transitions
Un système M est markovien si son évolution dans le temps dépenduniquement de l’état présent eM(t) et d’aléas futurs ωt+∆t, encore inconnus àl’instant t. A défaut de connaître précisément le prochain aléa et son effet, onconnaît la structure probabiliste des aléas potentiels, donc la probabilité destransitions vers les autres états possibles.
4.1.1 Modèle états-transitions selon la distance
Notons (ei)i=1...n les n états possibles pour le système M. En un point s, l’étatlocal eM(s) est une variable qui prend sa valeur dans l’un de ces états.
Cas routier. Pour une route à deux voies, deux sens et deux classes d’allureen sens direct, la classe lente A a un seul état de lenteur τA, tandis que la classerapide B a deux états possibles τB et τA.
Au point s on connaît la structure probabiliste des aléas, ou plutôt celle deleurs effets sur l’évolution entre s et s + ∆s de l’état local eM, selon la valeurparticulière de eM(s).
τB1–

Actes INRETS n° 90 41
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
Précisément, on connaît la probabilité de transition pij(s, s + ∆s), probabilité depasser de l’état ei au point s à l’état ej au point s + ∆s. On appelle matrice detransition de s à s + ∆s la matrice Ps,s+∆s = [pij(s, s + ∆s)]i,j=1...n.
Si l’évolution du système est régulière, la matrice P vérifie les équa-tions d’évolution de Chapman-Kolmogorov (C-K) : l’équation « en avant »
et l’équation « en arrière » en fonction de la
matrice des taux de transition Qs de termes qij(s) pour i ≠ j définis comme suit
et avec :
Autrement dit,
Cas routier. Le taux de transition est le quotient de la probabilité de changerd’état sur l’intervalle ]s, s + ds] par l’incrément de distance ds.
La solution pratique pour déterminer Ps,u donc pour connaître la structure del’évolution du système, est de déterminer Qs et d’intégrer l’équation de C-K.
Le système est homogène si la matrice Qs = Q ne dépend pas de s, et alorsPs,u = eQ(u–s).
Un système markovien homogène est en régime stationnaire si la distribu-tion de probabilité des états ne varie pas, i.e. πu = πsPs,u = πs = η. Comme∂πu /∂u = πs∂Ps,u /∂u = (πsPs,u) Qu = πsQu, si πu = η alors ηQ = 0 condition carac-téristique.
4.1.2 Cas homogène à deux états
Quand le système markovien est homogène à deux états seulement, lamatrice des taux de transition se réduit à avec α = q12 et β = q21.
La probabilité stationnaire est η = [η1 η2] avec ηQ = 0 donc et
On calcule que avec γ = e–(α+β)∆s.
4.2 Propriétés du temps de parcours
4.2.1 Temps local
Au niveau local d’un point s, soit πs = [p ] avec = 1 – p une distribution deprobabilité entre les états (τ1, τ2).

Modélisation du trafic
42 Actes INRETS n° 90
Le temps unitaire local est uneVA avec ξ une VA deBernoulli 0-1, donc ses moments valent
•
•
- Le temps unitaire en s + ∆s, conditionnellement à πs, a pour distribution
en notant et p′ = p – β′.
4.2.2 Fonction de covariance spatiale des lenteurs
Par la formule des probabilités totales, on en déduit
= .
Par soustraction de E[τsπs]E[τs+∆sπs], nous obtenons la fonction de cova-riance spatiale pour le processus des lenteurs locales de la classe B :
.
C’est une fonction exponentielle qui dépend du point s via la probabilité p del’état τ1 en ce point.
4.2.3 Temps bipolaire
Considérons maintenant le temps bipolaire sur un intervalle[s, s + L[.
Le temps bipolaire moyen, connaissant πs = [p 1 – p], est
On obtient la variance par une double intégration, cf. le modèle des alluresindividuelles :

Actes INRETS n° 90 43
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
avec et Ici :
• avec γz = e–(α+β)z
et pr = β′ + p′γr–s.
•
Il vient ainsi une formule explicite pour la variance de tL sachant πs :
En régime stationnaire, p′ = 0 donc
5. Routes à voie unique
Soit une route à une seule voie de circulation donc impossibilité de dépasser.Nous traitons le cas à deux classes pour préciser la covariance spatiale deslenteurs locales, et retrouver les propriétés du temps de parcours, local oubipolaire. cf. Leurent, 2001, chapitres 9 et 10 pour un modèle plus poussé etnotamment le cas à n classes.
5.1 Le cas de deux classes
Nous revenons au modèle de goulot spatial à deux classes : la classe B desmobiles rapides (voitures) et la classe A des mobiles lents (camions).
5.1.1 Probabilité et taux de transition
D’après le § 3.1, pour un véhicule rapide, le taux de rattrapage d’un véhiculelent est le paramètre ρ = λA(τA – τB). Donc
Pour la suite on note γ = e–ρL.
5.1.2 Moyenne et covariance du temps unitaire
Soient une position s et [p 1 – p] une distribution de probabilité entre les états(τA, τB) pour un mobile rapide B (voiture) au point s.

Modélisation du trafic
44 Actes INRETS n° 90
Le temps unitaire local au point s est une VA binaire τs = τA + ξ(τB – τA) avec ξune VA 0-1 de Bernoulli de moyenne 1 – p.
Par propagation, au point s + L le temps unitaire local est une VA binaire avec ladistribution de probabilité [1 – (1 – p)γ (1 – p)γ] entre les états (τA, τB). Il a pour moments
•
•
La probabilité stationnaire est [1 0] entre les états τA et τB : seul le régimetransitoire est intéressant.
On déduit du § 4.2.2 la covariance spatiale :
5.1.3 Moyenne et variance du temps bipolaire
Toujours en application du § 4.2.2, pour la classe rapide B nous obtenons lamoyenne du temps bipolaire tL depuis l’entrée s dans le goulot en état libre : alorsp = 0, β′ = 1, α′ = 0, p′ = – 1 et
De même pour la variance du temps bipolaire tL :
Quand la longueur L croît, toutes choses égales par ailleurs, la variancetend vers la limite donc l’écart-type du temps bipolaire tend vers l’inverse dudébit en camions.
6. Routes à deux voies et deux sens
Sur une route à deux voies et deux sens, les conflits surviennent par gêneavant et en face : typiquement, en sens direct un mobile rapide rattrape unmobile lent et ne le dépasse que quand le créneau en face suffit.
Nous modélisons le sens direct avec deux classes de mobiles : la classe lente Aet la classe rapide B. Celle-ci s’analyse avec un modèle à deux états. Horsrabattement, les taux de transition s’expriment directement en fonction desparamètres physiques du modèle : lenteurs, longueurs, accélération, intensités.
C’est pourquoi nous commençons par négliger le rabattement. Après uneapplication numérique, nous intégrons le rabattement : alors les probabilités
λA2–

Actes INRETS n° 90 45
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
stationnaires forment la solution d’un système d’équations, par couplaged’aspects microscopiques et macroscopiques.
6.1 Modèle hors rabattement
6.1.1 Position
Pour une route à deux voies et deux sens de circulation, les dépassementsn’ont lieu que si certains mobiles sont plus rapides que d’autres : nous distin-guons deux classes de mobiles en sens direct : classe A lente de lenteur τA,classe B rapide de lenteur libre τB. Alors le dépassement n’est difficile qu’enprésence de trafic en sens opposé : soit C la classe de mobiles en sens opposé,avec une lenteur moyenne τC. Les intensités des classes sont respectivement λA,λB et λC.
Sous ces hypothèses, la classe B a deux états de temps unitaire : un état libree1 = τB et un état contraint, ralenti e2 = τA.
6.1.2 Transitions
Deux transitions sont possibles pour un mobile M de classe B : de l’état libreà l’état ralenti, et réciproquement. Calculons leurs probabilités en fonction d’unedistance élémentaire ds.
De l’état libre à l’état ralenti, la transition est l’événement
= début de gêne avant de s à s + ds ∩ créneau en face insuffisant.
Comme ces deux événements sont indépendants, la probabilité de l’intersec-tion est le produit des probabilités. En divisant par PreM(s) = τB, cela donne
= Prgêne avant à s + ds | libre à s (δBA).
La probabilité que la gêne avant apparaisse de s à s + ds est Au total
donc
De l’état ralenti à l’état libre, la transition est l’événement
= fin de gêne avant de s à s + ds ∩ nouveau créneau en face suffisant.
Xst

Modélisation du trafic
46 Actes INRETS n° 90
Comme ces deux événements sont indépendants, la probabilité de l’intersec-tion est le produit des probabilités. En divisant par PreM(s) = τA, cela donne
= Prlibre à s + ds | gêne avant à s
La gêne avant disparaît de s à s + ds si un créneau en face insuffisant setermine dans cet intervalle, autrement dit si la longueur résiduelle jusqu’au mobileen face actuel s’annule. Cette longueur résiduelle est une distance de rattrapagex*, tronquée à créneau minimal en état ralenti. C’est une variable aléatoire
exponentielle de paramètre tronquée à , distribuée avec une densité
La probabilité de fin est ds fois la densité en 0, soit
Ainsi
Donc
En fait la distribution exponentielle tronquée ( , ) se rapporte à uncréneau insuffisant pour l’état ralenti, après le créneau initial qui force à ralentir.La distance jusqu’au croisement initial est exponentielle tronquée ( , δBA).Cela ne change pas fondamentalement le modèle.
6.1.3 Relations analytiques
Nous pouvons appliquer les formules du § 4 aux taux de transition α et β.
En régime stationnaire, la lenteur locale est une VA binaire distribuée entre τB
et τA avec les probabilités
Toujours en régime stationnaire, le temps bipolaire tL de s à s + L a pourvaleur moyenne
sachant que :
• ,
•
δBA′
ρAC δBA′
ρAC δBA′
ρBC

Actes INRETS n° 90 47
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
•
•
Cela montre l’effet des différents paramètres : les temps unitaires libres τB, τAet τC ; les intensités λA et λC ; les longueurs , et ; l’accélération a de laclasse B. Dans ce modèle hors rabattement, l’intensité λB de la classe rapiden’intervient pas.
Comme la classe B comporte une seule allure, la variance du temps bipolairene comporte pas de variance interallure et se réduit à la variance intraallure,évaluée au § 4.2 : dans le cas stationnaire,
Le rapport V[tL]/L2 tend vers 0 quand L augmente.
6.2 Application numérique (hors rabattement)
Pour des intensités de λA = 100 et λC = 800 véh/h ; des temps unitairesde τB = τC = .5 et τA = .7 mn/km, on calcule ρBA = 0,33, = 16 et
= 13,3 véh/km.
En prenant A = 10 m, B = C = 5 m, mA = mB = = 5 m, les créneauxvalent δBA = 102 m et = 244 m si a = 0,8 m/s2.
D’où α = .25/km et β = .33/km, E[τs] = .586 mn/km et σ[τs] = .099 mn/km.
Les tableaux suivants continuent l’application numérique en faisant varier lesintensités λA et λC, en véh/h. Ils montrent respectivement la moyenne et l’écart-type du temps unitaire, puis la moyenne et l’écart-type du temps bipolaire pour untrajet long de 20 km.
Tableau 1 : Temps local de la classe B: moyenne et écart-type (mn/km).
λC/λA 0 100 400 800 1 600
0 0,50
0,50
0,50
0,50
0,50
100 0,50
0,5030,025
0,5120,048
0,5230,064
0,5420,081
400 0,50
0,5220,063
0,5670,094
0,6000,100
0,6330,094
800 0,50
0,5860,099
0,6500,073
0,6720,070
0,6850,053
1 600 0,50
0,6920,039
0,6980,020
0,6990,014
0,6990,010
B′ A
′ C′
ρACρBC
mC′
δBA′

Modélisation du trafic
48 Actes INRETS n° 90
Chaque intensité fait croître le temps moyen ; elle fait croître puis décroîtrel’écart-type. Bien d’autres études de sensibilité sont possibles avec les13 paramètres du modèle.
6.3 Dépassements, transitions, rabattement et couplage
6.3.1 Intensité réduite et nombre de dépassements
Dans notre analyse du rabattement (Leurent, 2001, § 10.B.6), nous avonsutilisé une intensité réduite des mobiles B qui circulent sur la voie de gauche.Cette intensité réduite est l’intensité de base λB fois la proportion de distancepassée sur la voie de gauche, évaluée de la manière suivante :
• La lenteur moyenne de B est .
• Sur une longueur L, chaque mobile B dépasse des mobiles A en nombremoyen égal à
• Chaque dépassement de A par B nécessite sur la voie de gauche unedistance δBA ou selon l’état initial de B.
• On assimile ici = δBA, une justification étant que le modèle markoviennéglige la distance d’accélération de τA à τB.
• La distance totale sur la voie de gauche est .
• En divisant par L, il vient .
• Au total Ce raisonnement est valide si
Tableau 2 : Temps de la classe B: moyenne et écart-type (mn).
λC/λA 0 100 400 800 1 600
0 10,00
10,00
10,00
10,00
10,00
100 10,00
10,10,088
10,20,164
10,50,213
10,80,255
400 10,00
10,40,320
11,30,418
12,00,385
12,70,298
800 10,00
11,70,788
13,00,466
13,40,287
13,70,161
1 600 10,00
13,80,399
14,00,111
14,00,057
14,00,029
λB′
δBA′
δBA′
λB′
λB------ =

Actes INRETS n° 90 49
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
Nous obtenons également le nombre moyen de dépassements de mobiles Apar des mobiles B sur une longueur L pendant une durée H, égal à
6.3.2 Nombre de transitions (retour à l’état libre)
Dans le même ordre d’idées, nous pouvons dénombrer les transitions de l’étatτA à l’état τB pour un mobile M de classe B. En nous plaçant dans le modèle degêne avant et en face, chaque transition correspond à un croisement de B en étatralenti et C avec un créneau en face suffisant x > . Le nombre v decroisements ralentis jusqu’à la transition, incluant la transition mais pas lecroisement initial qui provoque le ralentissement, est une variable aléatoiregéométrique de paramètre
Le nombre total de croisements ralentis, hormis les croisements initiaux,est E[v]-1 fois le nombre de transitions TAB, et
Donc
Remarquons maintenant que est le nombre de croisements entre le flux Cet le flux de classe B en état ralenti τA, donc d’intensité réduite Ainsi
Ces nombres de transitions servent à évaluer les effets spécifiques d’accélé-ration et de décélération (coût de la consommation d’énergie, émissions depolluants et de bruit).
6.3.3 Modèle avec rabattement
L’explicitation du rabattement modifie les taux de transition α et β, quidépendent de l’occupation et de l’intensité réduite donc de la probabilitéstationnaire ηB/B, elle-même égale à β/(β + α). Les formules caractéristiques deα, β et ηB/B forment un système de conditions d’équilibre, dont la solutioncorrespond uniquement au cas stationnaire.
δBA′
NBC′
NBC′
Ωd′ λB
′

Modélisation du trafic
50 Actes INRETS n° 90
Il reste à préciser l’influence du rabattement sur α et β.
La transition de l’état libre à l’état ralenti devient l’événement
début gêne avant ∩ [créneau en face insuffisant
∪ (en face suffit ∩ rabattement insuffisant)].
Tandis que la transition de l’état ralenti à l’état libre devient l’événement
fin gêne avant ∩ en face suffit ∩ rabattement suffit.
Dans Leurent, 2001, § 10B.6 nous avons proposé une formule pour PrRabat-tement suffit. On peut se conserver α et modifier β en le multipliant par cetteprobabilité, soit
7. Route à deux voies en sens unique
Les routes à sens unique et à deux voies constituent un autre cas d’applica-tion du modèle à deux états : application plus élaborée, à deux classes« actives » de trafic et avec un couplage entre ces classes.
7.1 Modélisation
7.1.1 Les classes et leurs relations
Pour une route à sens unique et à deux voies, les contraintes n’ont lieuqu’avec au moins trois classes de mobiles en sens direct, notées A, B et D enordre de vitesse croissante. Un mobile A garde sa vitesse constante. Un mobile Bne change d’état que s’il rattrape un mobile A sans pouvoir le dépasser en raisond’une gêne arrière. Un mobile D est soit en état libre τD, soit en état ralenti τB,quand un mobile B occupe la voie de gauche.
On peut supposer que la classe A correspond à des camions lents, laclasse D à des voitures rapides, et la classe B à des camions rapides ou à desvoitures lentes.
Le modèle à deux états s’applique à chacune des classes B et D. Il fautcependant préciser la relation entre la classe B et la classe D en cas de conflit,précisément quand D rattrape B qui rattrape A. Nous supposons que B choisit dedépasser A, quitte à gêner D, dès que le créneau arrière dépasse un seuil χBD,éventuellement inférieur au créneau minimal qui garantit de ne pas gêner D.Ainsi, pour les distances arrière x ≥ χBD le mobile B choisit de dépasser A sansralentir, ce qui retarde D ; tandis que pour x < χBD le mobile B se laisse dépasserpar D avant de dépasser A.
Le seuil varie selon l’état de B, libre ou ralenti : on note respectivement χBD et.
δBA
χBD′

Actes INRETS n° 90 51
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
7.1.2 Transitions pour la classe B
Pour un mobile de classe B, une transition locale de l’état libre à l’état ralentisignifie le rattrapage d’un mobile A, de probabilité ρBAds, joint à un créneauarrière inférieur à χBD, de probabilité (χBD).
Donc
Une transition locale de l’état ralenti à l’état libre signifie la fin d’un créneauarrière insuffisant, de probabilité jointe au début d’uncréneau suffisant, de probabilité
Donc
Ces deux taux de transition sont valables hors rabattement, à modélisercomme au § 6.3. Ils font intervenir l’intensité λD du flux en mobiles rapides D. Enfait seuls comptent les mobiles D en état libre τD, d’intensité réduite
avec la probabilité de l’état libre pour la classe D.
7.1.3 Transitions pour la classe D
Pour un mobile de classe D, une transition locale de l’état libre τD à l’étatralenti τB signifie que D rattrape un mobile B qui dépasse un mobile A : le flux deces mobiles B a une intensité réduite précisée au paragraphe suivant. AlorsαD = .
Une transition locale de l’état ralenti τB à l’état libre τD signifie que le mobile Bqui gêne D achève de dépasser un mobile A et se rabat, ce qui nécessite uncréneau de rabattement suffisant. Ce créneau de rabattement est lié à laformation en pelotons, cf. § 6.3. En le négligeant, la probabilité est ρBAds pour unflux A poissonnien, donc βD = ρBA.
7.1.4 Couplage et équilibre stochastique
Intensité réduite. Les taux de transition de chaque classe B ou D dépendentde l’intensité réduite ou de l’autre classe. Pour la classe D, l’intensitéréduite est simplement = λDηD/D.
Pour la classe B, l’intensité réduite est l’intensité de base λB fois la proportionde distance passée sur la voie de gauche, évaluée comme au § 6.3.1 :
En fait le partage de la voie de gauche entre les classes B et D modifie ladistance bloquée δBA en δBA – χBD ou plus généralement en une fonctionR(δBA, χBD) avec 0 ≤ R(x, y) ≤ x et ∂R/∂x ≥ 0 et ∂R/∂y ≤ 0.
Au total, : l’ajout de D en indice del’intensité réduite marque la relation entre les deux classes. Ce raisonnement estvalide si
XBD
λB′ρDB
′
λD′ λB′λD′

Modélisation du trafic
52 Actes INRETS n° 90
Couplage des classes. Chaque mobile B ou D est un système markovien,système à l’équilibre stochastique en régime stationnaire. Les systèmes B et Dsont couplés l’un à l’autre par les équations caractéristiques des intensitésréduites. L’équilibre global du trafic signifie l’équilibre stochastique de chaqueclasse B et D, et la vérification des équations de couplage. Il s’exprimemathématiquement comme un système de 4 équations à 4 inconnues
:
•
• ,
•
•
On le ramène facilement à un système de deux équations à deux inconnuesηB/B et ηD/D.
7.1.5 Fonctions de temps de parcours
En supposant que A et B sont deux classes de camions, les débits en voitureset en camions sont xV = λD et xC = λA + λB.
Les temps moyens sont des fonctions τV = ηD/D τD + ηB/D τB et
Ces fonctions dépendent non seule-
ment de xV et xC, mais aussi du rapport λA/xC.
7.2 Application numérique (hors rabattement)
Appliquons le modèle à un exemple numérique qui figure les conflits entrecamions et voitures sur une chaussée d’autoroute à deux voies. Les classes Aet B correspondent aux camions lents et rapides, avec τA = 0,8 mn/km etτB = 0,6 mn/km et aB = 0,5 m/s2.
La classe D correspond à des voitures, avec τD = 0,5 mn/km et aD = 0,8 m/s2.On fixe des longueurs A = B = 10 m, D = 5 m, mA = mB = mD = 5 m.
Les créneaux de dépassement valent respectivement δBA = 145 m et = 290 m. On fixe des seuils de χBD = 40 m et = 60 m.
Les tableaux suivants montrent l’effet de λA et λB, en fixant λD = 1 000 véh/h,sur les temps unitaires de B et D, en moyenne et en écart-type. Pour les valeurschoisies, l’impact sur les temps unitaires moyens est important pour la classe Bet très faible pour la classe D.
L’impact sur l’écart-type local est réaliste pour la classe D des voitures : onobtient facilement σ = .04 ou .06 mn/km, proche de ce qui peut être mesuré(Leurent, 2001, chapitre 2). Pour la classe B, les valeurs obtenues sont élevéespour des camions : car nos hypothèses surestiment largement les débits decamions usuels, à des fins de démonstration.
δBA′ χBD
′

Actes INRETS n° 90 53
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
Pour mesurer la variabilité de la lenteur sur un long trajet, nous avons étudiéle rapport entre l’écart-type du temps bipolaire de la classe D et la distanceparcourue, pour plusieurs distances et plusieurs intensités λB, en fixantλA = 400 véh/h. La figure 6 montre la décroissance du rapport en fonction de lalongueur.
Quand la distance dépasse 5 km, le rapport baisse de moitié : pour la classe Ble résultat est inférieur à .03 mn/km, puis à .02 mn/km au-delà de 20 km. Celamontre que la variabilité intraallure du temps bipolaire ne peut à elle seuleexpliquer la variabilité des temps bipolaires individuels : conformément aumodèle des allures individuelles, sur une distance longue la variabilité interalluredomine.
Tableau 3 : Temps local de la classe B : moyenne et écart-type (mn/km).
λB/λA 0 100 400 800 1 600
0 0,6000
0,7770,064
0,7940,035
0,7970,025
0,7990,014
100 0,6000
0,7740,067
0,7930,036
0,7970,025
0,7980,018
400 0,6000
0,7540,084
0,7930,038
0,7970,026
0,7980,018
800 0,6000
0,6640,093
0,7910,041
0,7960,027
0,7980,019
1 600 0,6000
0,6230,063
0,7720,069
0,7950,030
0,7980,019
Tableau 4 : Temps local de la classe D : moyenne et écart-type (mn/km).
λB/λA 0 100 400 800 1 600
0 0,5000
0,5000
0,5000
0,5000
0,5000
100 0,5000
0,5020,015
0,5030,016
0,5000,006
0,5000,004
400 0,5000
0,5150,036
0,5030,016
0,5010,011
0,5000,008
800 0,5000
0,5510,050
0,5060,025
0,5030,017
0,5010,011
1 600 0,5000
0,5730,044
0,5290,045
0,5070,025
0,5030,017

Modélisation du trafic
54 Actes INRETS n° 90
8. Routes à deux sens et trois voies
Les éléments des parties précédentes se transposent aisément au cas d’uneroute à trois voies, dont la voie médiane sert aux deux sens de circulation.
Nous traitons ce cas avec un modèle à deux états pour chaque sens decirculation, avec un couplage entre les deux sens. Puis nous dénombrons lesconflits potentiels et les conflits réalisés entre les deux sens, pour le partage dela voie médiane. Enfin nous terminons par une application numérique.
8.1 Modélisation
8.1.1 Position
Pour analyser le partage de la voie médiane, nous modélisons deux classesde lenteur dans chaque sens de circulation : les conflits surgissent entre lesmobiles rapides des deux sens.
En sens direct, soit A la classe lente (camions) et B la classe rapide (voitures).
En sens opposé, soit C la classe lente (camions) et D la classe rapide(voitures).
Comme précédemment, nous notons i la longueur individuelle d’un mobile declasse i, mi la marge arrière de sécurité, λi l’intensité de la classe, dont le fluxd’arrivées est supposé poissonnien.
Figure 6 : Temps local de la classe D : moyenne et écart-type (mn/km).

Actes INRETS n° 90 55
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
8.1.2 Analyse du sens direct
En sens direct, les mobiles lents A conservent leur lenteur : état unique τA. Lesmobiles rapides B ont deux états de lenteur, l’état libre τB et l’état contraint τA. Ilssubissent des conflits par gêne avant et en face ; toute la question est decaractériser la gêne en face pour le sens direct.
Cette gêne en face provient des mobiles D qui dépassent des mobiles C : cesmobiles sont dans l’état τD, avec une intensité réduite , égale à l’intensité debase λD fois la proportion de distance passée sur la voie médiane. D’après le§ 6.3, l’intensité réduite vaut tant que cette expres-sion est comprise entre 0 et 1.
Connaissant ηD/D, il suffit d’appliquer le modèle de gêne avant et en face(§ 6.1).
8.1.3 Couplage des deux sens de circulation
On traite le sens opposé de manière symétrique, en échangeant les rôles deA et C, et de B et D. Connaissant ηB/B, il relève du modèle de gêne avant et enface.
Les deux sens de circulation sont couplés l’un à l’autre par les équationscaractéristiques des intensités réduites. L’équilibre global du trafic signifiel’équilibre stochastique de chaque classe A, B, C et D, et la vérification deséquations de couplage. Il s’exprime mathématiquement comme un système de4 équations à 4 inconnues , , ηB/B et ηD/D :
•
•
•
•
On en déduit aisément un système de 2 équations à 2 inconnues ηB/B et ηD/D.
8.2 Les nombres de conflits
En vue d’applications à la sécurité routière, dénombrons les conflits ponctuelsqui peuvent opposer deux mobiles rapides pour occuper la voie médiane.
8.2.1 Nombre de conflits potentiels
Un conflit potentiel est un croisement entre un mobile B et un mobile D.Calculons le nombre de ces croisements sur une longueur L et pendant unepériode H. Durant cette période, environ HλB mobiles B parcourent la longueur.
Chaque mobile B a une lenteur moyenne il part de 0 àt0 et arrive en L à t0 + L , en croisant tous les mobiles D passés par L det0 – L à t0 – L , donc un nombre
Le nombre total de croisements B-D est
λD′
λB′ λD′
τB′τD′ τB′

Modélisation du trafic
56 Actes INRETS n° 90
8.2.2 Nombre de conflits réalisés, selon la priorité
Un conflit B-D se réalise avec priorité à B si B occupe la voie médiane etcroise D ralenti par C, ou symétriquement avec priorité à D si D occupe la voiemédiane et croise B ralenti par A.
Pour les conflits réalisés avec priorité à B, on connaît les intensités des flux etleurs lenteurs : en sens direct flux et lenteur τB, ensens opposé flux et lenteur τC. D’où un nombre
Symétriquement
8.3 Application numérique (hors rabattement)
Paramètres. On fixe les intensités des camions, λA = 100 véh/h etλC = 400 véh/h ; le sens direct est moins chargé en camions que le sens opposé.
Les paramètres cinématiques sont les mêmes dans les deux sens :lenteurs τA = τC = 0,8 mn/km, τB = τD = 0,6 mn/km ; longueurs A = C = 10 m,B = D = 5 m ; des marges des accélé-rations aB = aD = 0,8 m/s2.
8.3.1 Temps de parcours
Les tableaux suivants montrent les variations du temps de parcours local,pour les classes B et D, en moyenne et en écart-type.
On constate quelques paradoxes :
• Le temps moyen d’une classe diminue en fonction de son intensité !
• Les voitures en sens direct sont plus influencées par les camions en sensopposé que par ceux en sens direct !
Tableau 5 : Temps local de la classe B : moyenne et écart-type (mn/km).
λB/λD 0 100 400 800 1 600
0 0,6000
0,6000
0,6000
0,6000
0,6000
100 0,6000
0,6010,010
0,6020,020
0,6040,030
0,6110,045
400 0,6000
0,6000,010
0,6020,020
0,6040,029
0,6110,045
800 0,6000
0,6000,010
0,6020,020
0,6040,029
0,6100,044
1 600 0,6000
0,6000,010
0,6020,020
0,6040,029
0,6100,044

Actes INRETS n° 90 57
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
L’explication tient au jeu des classes, qui exercent des influences mutuellesnon seulement directes, mais aussi indirectes. Ainsi une intensité C forte motivedes dépassements fréquents par la classe D, qui s’attribue souvent la voiemédiane, et gêne souvent B.
8.3.2 Nombres de conflits
Les tableaux 7 à 9 indiquent les nombres de conflits potentiels et réalisés, enfonction de λB et λD. La voie médiane est attribuée à la classe D plus souventqu’à la classe B, en raison de l’intensité en camions plus forte dans le sens de D.
Tableau 6 : Temps local de la classe D : moyenne et écart-type (mn/km).
λB/λD 0 100 400 800 1 600
0 0,6000
0,6000
0,6000
0,6000
0,6000
100 0,6000,010
0,6000,010
0,6000,010
0,6000,010
0,6000,010
400 0,6020,020
0,6020,020
0,6020,020
0,6020,019
0,6020,019
800 0,6040,028
0,6040,028
0,6040,028
0,6040,028
0,6040,027
1 600 0,6080,039
0,6080,039
0,6080,039
0,6080,039
0,6080,038
Tableau 7 : Conflits potentiels (par unité de temps et de longueur).
λB/λD 0 100 200 400 800 1 600
0 0 0 0 0 0 0
100 0 200 400 802 1 607 3 230
200 0 400 801 1 604 3 214 6 461
400 0 802 1 604 3 211 6 434 12 932
800 0 1 606 3 213 6 432 12 888 25 901
1 600 0 3 223 6 448 12 906 25 859 51 956

Modélisation du trafic
58 Actes INRETS n° 90
9. Conclusions
Dans le modèle des conflits, nous décrivons l’environnement individuel decirculation d’un mobile de manière discrète, microscopique. Cela permet d’appro-fondir considérablement l’analyse des phénomènes de trafic, grâce à desrésultats faciles à interpréter.
Les situations d’application sont variées : en topologie de route (un ou deuxsens, une ou plusieurs voies) et en structure de trafic, avec plusieurs classes devitesse libre dans chaque sens de circulation. Ainsi l’environnement individuel decirculation est décrit de manière microscopique et réaliste : les paramètres dumodèle incluent, pour chaque classe de mobiles : l’intensité du flot d’arrivées, lavitesse libre, la longueur individuelle, la distance de sécurité, l’accélération.
Grâce à un modèle états-transitions pour chaque classe de mobiles, nousavons obtenu des formules analytiques pour les taux de transition entre les étatsde lenteur, donc pour les probabilités de séjour dans chaque état, pour les temps
Tableau 8 : Conflits réalisés avec priorité à B (par heure et km).
λB/λD 0 100 200 400 800 1 600
0 0 0 0 0 0 0
100 0 0,0 0,0 0,1 0,2 0,3
200 0 0,1 0,2 0,3 0,7 1,2
400 0 0,3 0,7 1,4 2,7 5,0
800 0 1,4 2,8 5,5 10,8 20,3
1 600 0 5,7 11,4 22,6 44,0 82,8
Tableau 9 : Conflits réalisés avec priorité à D (par heure et km).
λB/λD 0 100 200 400 800 1 600
0 0 0 0 0 0 0
100 0 0,1 0,4 1,5 6,4 30,3
200 0 0,2 0,7 2,9 12,7 60,3
400 0 0,3 1,4 5,8 25,2 119,3
800 0 0,7 2,8 11,3 49,2 233,3
1 600 0 1,3 5,3 21,8 94,2 444,9

Actes INRETS n° 90 59
Un modèle probabiliste pour les interactions entre véhicules et les temps de parcours
de parcours locaux et bipolaires en moyenne et en variance. En dehors des casà une voie ou à deux voies et deux sens, les relations entre classes induisent descouplages macroscopiques, entre les systèmes d’équations analytiques particu-liers à chaque classe.
Bibliographie
Beckmann M.J., McGuire C.B. & Winsten C.B. (1956) Studies in the Economicsof Transportation. New Haven: Yale University Press.
Galin D. & Epstein B. (1974) Speeds and Delays on two-lane Roads wherePassing is possible at given points of the road. TransportationResearch, 8, 29-37.
Kometani E. (1955) On the theoretical solution of highway traffic capacity undermixed traffic. Mem. Fac. Engng Kyoto Univ., 17, 79-88.
LeBreton, P. (1972) Méthode d’évaluation de la gêne due aux Poids Lourds.Document de travail SETRA.
LeBreton P. (1978)Temps de parcours des véhicules sur itinéraire interurbain,Rapport Technique SETRA. SETRA, Bagneux.
Leurent F. (2001) Modèles Désagrégés du Trafic. Rapport INRETS Outils etMéthodes # 10. INRETS, Arcueil, France.
Leurent F. (2002) La capacité de circulation : modèle désagrégé et méthodes demesure. Rapport SETRA-INRETS en version provisoire. SETRA,Bagneux, France.
Liu H. et al. (1997).Schuhl A. (1955) Le calcul des probabilités et la circulation des véhicules sur une
chaussée à deux voies. Annales des Ponts et Chaussées, 125, 631-663.
SETRA (2001) Fonctions temps-débit sur les autoroutes interurbaines, rénova-tion des relations entre temps de parcours et débit pour la simulation dutrafic. Rapport technique. Auteurs : F. Leurent et T. Simonet.
Tanner J.C. (1958) A simplified model for delays in overtaking on a two-lane road.J. Stat. Soc. B 20, 408-414.
Tanner J.C. (1961) Delays on a two-lane road. J. Stat. Soc. B 23, 28-63.TRB (1997). – The Revised Monograph on Traffic Flow Theory (collective book).
Update of the Special Report # 175.Winsten C.B. (1956) Chapter 1 in Beckmann (1956).Yeo G.F. (1964) Traffic delays on a two-lane road. Biometrika 51, 11-15.


Actes INRETS n° 90 61
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
Propriétés statistiques du temps d'itinéraire, et généralisation
de deux formules de Wardrop
F. Leurent
SETRA, 46 avenue Briand, BP 100, 92225 Bagneux Cedex.Courriel : [email protected]
Résumé
En ingénierie du trafic, on utilise couramment des formules établies parl’ingénieur anglais Wardrop dans les années 1950 : notamment la formule entreles vitesses moyennes temporelle et spatiale, et la formule du véhicule flottant.
Ces deux formules résultent d’un modèle de distribution des vitesses parmiune population de déplacements : avec une vitesse fixée pour chaque déplace-ment considéré isolément.
Dans des articles précédents, nous avons modélisé à la fois la distribution desallures individuelles, et, pour chaque déplacement d’allure fixée, les variationslocales de la vitesse qui résultent des aléas de circulation.
Le présent article établit les propriétés statistiques des temps d’itinéraire dansce modèle des allures individuelles et des aléas de circulation. Nous montronsque ces propriétés relativisent les formules de Wardrop.
La formule des vitesses moyennes reste valable au niveau local. Nousdonnons des résultats originaux au niveau bipolaire d’un itinéraire : d’abord dansl’analyse d’une trajectoire individuelle, ensuite pour un ensemble de trajectoires.
Nous revisitons aussi la méthode du véhicule flottant, avec une nouvelleméthode d’estimation capable de révéler non seulement la moyenne mais encorel’écart-type des temps bipolaires.

Modélisation du trafic
62 Actes INRETS n° 90
1. Introduction
1.1 Contexte
L’ingénierie du trafic s’est développée dès les années 1900 pour planifier etexploiter les réseaux de transport : dans les années 1920 sont apparus descongrès et des revues pour partager les connaissances. Certaines questionsbasiques, en particulier le dimensionnement des routes et des carrefours, ontrapidement donné lieu à des tâches spécialisées : compter le trafic, mesurer letemps de parcours par des techniques économes en moyens, modéliser lesattentes aux jonctions, modéliser les choix d’itinéraire.
En 1952, l’ingénieur anglais Wardrop a synthétisé les connaissances del’époque dans un article fameux : Some theoretical aspects of road trafficresearch, qui comporte aussi des contributions originales : l’application au traficde l’équation des ondes (p. 363) reprise ensuite par Lighthill et Whitham (1955),les principes d’affectation aux itinéraires selon l’optimum individuel et l’optimumcollectif, la formule entre les vitesses moyennes de temps et d’espace. Peu après(1954), Wardrop a développé la méthode du véhicule « flottant » (dans le trafic)afin de mesurer le débit ou la vitesse moyenne.
Figure 1 : Les contributions de Wardrop.
1.2 Objectif : l’analyse des temps d'itinéraire
La formule des vitesses moyennes et la méthode du véhicule flottantdemeurent couramment utilisées en ingénierie du trafic. Elles résultent d’unmodèle de distribution des vitesses parmi une population de déplacements par
Distributions en temps et en espace des vitessesEquation de conservationRelation entre les moyennes
fs(v) ∝ fT(v)/v
q = k S
= (1 + / )
Intensité des dépassements
Formation des files d’attente, formule des ondes de choc
Affectation du trafic Optimum individuelOptimum du système
Véhicule flottant
Capacités des routes, des carrefours plans et giratoires
v
vT vS σS2 vS
2

Actes INRETS n° 90 63
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
un itinéraire : chaque déplacement, considéré isolément, garde une vitesseconstante.
Dans des travaux antérieurs, nous avons approfondi le sujet en explicitant lesvariations locales de la vitesse dans chaque déplacement d’allure fixée, l’allureétant définie comme la préférence individuelle pour une vitesse de croisière :c’est le modèle des allures individuelles et des aléas de circulation (Leurent,2001). L’objectif du présent article est de tirer les conséquences de notre modèlesur les formules usuelles dues à Wardrop ; et, plus largement, d’établir lespropriétés statistiques du temps d’itinéraire.
1.3 Méthode : la modélisation probabiliste
Nous utilisons la théorie des probabilités, autrement dit la science del’agrégation, afin de modéliser :
• L’agrégation des points le long d’une trajectoire, et la composition desvitesses locales en un temps de parcours « bipolaire » (d’une extrémité àl’autre).
• Pour une trajectoire potentielle, qui représente un ensemble de trajectoiresindividuelles possibles, la diversité des aléas de circulation, et leur influenced’abord sur les vitesses locales puis sur le temps bipolaire.
• Dans une population de déplacements, la diversité des « mobiles » : leurclasse (ex. type de véhicule), leur préférence pour la vitesse que nousappelons l’allure individuelle de circulation, l’état macroscopique de trafic.
Nous combinons ces sources de diversité, de variabilité, et nous en hiérarchi-sons les effets au niveau tant local que bipolaire.
1.4 Plan
La suite de l’article est en trois parties principales, qui traitent respectivement :les aspects internes à un déplacement (§ 2), les aspects collectifs dans unepopulation de déplacements (§ 3) et la méthode du véhicule flottant (§ 4).
2. Analyse d’une trajectoire
Nous analysons la trajectoire d’un mobile individuel en deux étapes :
• D’abord, pour une trajectoire réalisée, nous décrivons la diversité desvitesses locales de manière probabiliste (§ 2.1).
• Puis, pour une trajectoire potentielle, nous modélisons la vitesse en un pointcomme une variable aléatoire, compte tenu des aléas de circulation (§ 2.2).
Comme chaque aléa de circulation influence un élément de distance et passeulement un point, nous modélisons ensuite la liaison entre les variablesaléatoires « vitesses locales » des différents points, par un processus stochasti-

Modélisation du trafic
64 Actes INRETS n° 90
que indexé à la fois par la position, l’allure de circulation et l’état macroscopiquede trafic (§ 2.3).
Finalement nous donnons un modèle markovien du mobile en circulation,avec deux états de vitesse, ce qui concrétise le processus (§ 2.4).
2.1 Les vitesses au cours d’une trajectoire
Soit une section S de longueur L, parcourue par un mobile. La trajectoire dumobile est l’ensemble des couples (instant t, position s) dont la position sappartient à la section S, soit s ∈ [0, L].
La vitesse instantanée du mobile se rapporte à la fois à la position et àl’instant : on peut analyser sa distribution statistique pour la population despositions, ou pour la population des instants.
2.1.1 Vitesses pour la population des positions
Notons la fonction de répartition cumulée des vitesses selon les positions ; la densité ; la moyenne ; la variance.
2.1.2 Vitesses pour la population des instants
Notons la fonction de répartition cumulée des vitesses selon les instants ; la densité ; la moyenne ; la variance.
2.1.3 Relations entre les deux distributions « trajectorielles » des vitesses
Si la vitesse du mobile varie suffisamment lentement, elle présente unecertaine continuité : sur une distance courte ds elle tend à se conserver.
Cette hypothèse de continuité locale a la conséquence suivante : un état devitesse compris entre [v, v + dv] au point s, donc qui a la probabilité (v)dv dansla population des positions, contribue pendant une durée ds/v à la population desinstants : donc
Notons la constante de proportionnalité telle que . Comme ce
sont des densités de probabilité, en intégrant il vient . En intégrant
après multiplication par v, il vient . Au total, la vitesse moyenne desinstants est égale à l’inverse de la lenteur moyenne des positions,
.
On en déduit les mêmes propriétés formelles que pour les distributions localesau § 3.1.3, en intervertissant les références T et S.
FSfS vS σvS
2
FTfT vT σvT
2
fS
K

Actes INRETS n° 90 65
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
2.1.4 Conséquences macroscopiques
Au cours de la trajectoire, on peut mesurer des caractères macroscopiquessur l’ensemble des positions ou l’ensemble des instants :
• Durée totale , car chaque élément ds est parcouru en temps ds/vs
à la vitesse locale vs.
• Donc lenteur moyenne .
• Vitesse moyenne selon les instants, .
• Vitesse moyenne selon les positions, .
• Variance des vitesses selon les instants,
.
• Variance des vitesses locales, .
• Variance des lenteurs locales,
.
Selon les positions, la lenteur locale τs = 1/vs est plus significative que lavitesse locale.
2.2 Aspects aléatoires dans une trajectoire
Dans ce qui précède, le formalisme probabiliste est une simple reformulationde l’agrégation des éléments de distance (ou de temps) en la longueur totale (oula durée), pour une trajectoire réalisée. Plus profondément, pour une trajectoirepotentielle donc incomplètement connue, nous modélisons la vitesse en chaquepoint par une variable aléatoire, compte tenu des aléas de circulation.
2.2.1 Description statistique de la vitesse en un point
Une « trajectoire potentielle » signifie un ensemble, une population de situa-tions possibles : une situation particulière de cet ensemble résulte d’une influenceextérieure non contrôlée, que dans notre cas nous appelons un « aléa decirculation » noté ω. Alors la situation potentielle correspond à un ensemble Ωd’aléas ω.
Sur l’ensemble Ω, en un point s particulier de la section S, nous considéronsla distribution de la vitesse locale Vs, avec
• Une fonction de répartition cumulée .
• Une fonction de densité .
Fs
fs

Modélisation du trafic
66 Actes INRETS n° 90
• Une moyenne .
• Une variance .
Au § 2.4 nous donnons un exemple avec deux états de vitesse respective-ment rapide et lent, pour un mobile d’allure rapide qui serait épisodiquementralenti par des mobiles lents.
2.2.2 La lenteur locale
Plus significatif, nous considérons aussi la distribution de la lenteur localeτs = 1/Vs, avec
• Une fonction de répartition cumulée Gs.
• Une fonction de densité gs.
• Une moyenne .
• Une variance .
2.23 Lien avec une trajectoire réalisée
Une trajectoire réalisée, en chaque point s, présente une vitesse locale vs quiréalise la variable Vs. Nous avons considéré au § 2.1 la distribution des vs selons ∈ S.
Ajoutons deux hypothèses :
• L’homogénéité « spatiale » des différents points s de la section, avec alorsune même distribution .
• L’ergodicité de chaque trajectoire, i.e. une trajectoire réalisée donne unéchantillon suffisamment grand de l’ensemble des vitesses locales possi-bles.
Dans ces conditions, la distribution réalisée tend vers la distributioncommune , d’autant plus que la section S est plus longue.
Même sans les hypothèses d’homogénéité et d’ergodicité, on peut encorerelier une trajectoire potentielle à un ensemble I de trajectoires réalisées i : enchaque point s l’ensemble des vitesses locales [vs(i)]i∈Ι est un échantillon de lavariable Vs.
2.2.4 Lien avec la population des instants
La liaison entre les vitesses considérées selon les positions ou selon lesinstants, est valable pour une trajectoire réalisée « suffisamment continue ». Pourune trajectoire potentielle, même « suffisamment continue », un problème sepose : la diversité des trajectoires induit une diversité des temps de parcours pourarriver jusqu’en chaque point s.
Illustrons cela : entre deux trajectoires de durées différentes, commentmélanger les deux populations des instants, en les unissant sans pondération cequi avantage la durée la plus forte, ou en pondérant par l’inverse de la durée ?
vs
σVs2
τs
στs2
Fs
FSFs

Actes INRETS n° 90 67
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
Pour éviter ce problème il suffit de traiter principalement la population despositions, et de considérer la population des instants seulement pour unetrajectoire réalisée.
2.3 Le processus spatial des lenteurs locales
Au cours d’un déplacement, un aléa de circulation, même bref, s’étend à lafois dans le temps et dans l’espace, il n’est pas ponctuel. C’est pourquoi, entredeux positions voisines, les fluctuations des vitesses locales sont mutuellementliées. Afin de préciser cette liaison, nous modélisons de manière collective lesvariables aléatoires τs = 1/Vs, par le processus stochastique des lenteurs locales(τs)s∈S.
2.3.1 Formalisme
Le processus stochastique (τs)s∈S à index s ∈ S est une famille de variablesaléatoires τs relatives chacune à un point s particulier. On le caractérise par :
• Localement, la fonction de répartition Gs, la moyenne et la variance .
• La fonction de covariance spatiale, qui à deux points s et u de S associeχs(u – s) = cov[τs ; τu]. En particulier χs(0) = .
2.3.2 Facteurs de conditionnement
Le processus stochastique se rapporte :
• à une section S,
• à certaines conditions temporelles,
• à des conditions sur le mobile : sa classe, son allure individuelle decirculation, notée α, qui est la préférence individuelle pour la rapidité,
• à un état macroscopique de trafic, noté M, qui résume les conditions decirculation mesurables par un observateur extérieur : débit par classe demobiles, vitesse moyenne du flot etc.
Pour marquer ces dépendances, on peut expliciter τsαM et χsαM.
2.3.3. Conséquences pour le temps bipolaire
Pour la section S, le temps bipolaire est la somme des lenteurs locales, soit
.
C’est une variable aléatoire, dont les caractères se déduisent de ceux duprocessus grâce à la linéarité de l’intégration (cf. Leurent, 2001, chapitre 8) :
• en moyenne ;
• en variance
τs σs2
σs2

Modélisation du trafic
68 Actes INRETS n° 90
2.3.4 Propriétés asymptotiques (pour une section longue)
Sur une section longue, les aléas de circulation rencontrés successivement aucours d’une même trajectoire tendent à se compenser mutuellement : la durée detrajectoire tS se rapproche de la moyenne E[tS], au sens que le rapporttS – E[tS]/E[tS] tend vers 0 d’autant plus que la section est plus longue.
C’est l’hypothèse d’ergodicité, que l’on traduit formellement par une fonctionde covariance χs(δ) qui diminue rapidement quand l’argument δ augmente. Alorsla variance V[tS] est bornée par une fonction linéaire de la longueur de section L.
Conséquence concrète : sur une section longue, pour des conditions macros-copiques fixées, la variance totale des temps bipolaires dans une population dedéplacements, dépend surtout de la diversité des mobiles (classes, allures), maispeu des aléas de circulation. On peut approcher l’écart-type des temps bipolairespar une fonction linéaire de L si la section est homogène, et on peut ledécomposer additivement en fonction des écarts-types par sous-sections elles-mêmes suffisamment longues.
2.4 Le modèle à deux états
Donnons maintenant un modèle probabiliste du trafic, qui concrétise assezsimplement les considérations précédentes.
2.4.1 Hypothèses
Sur une section de route, dans un sens de circulation, on considère deuxclasses de mobiles : les mobiles lents de classe A (camions) et les mobilesrapides de classe B (voitures), de vitesse libre respective vA et vB. Les débits sontλA et λB.
Les mobiles lents ont une vitesse constante, tandis que les mobiles rapidesont deux états de vitesse vB ou vA, selon qu’ils sont libres ou en suivi derrière unmobile lent (dans l’attente d’une possibilité de dépasser).
Le modèle à deux états porte sur chaque mobile rapide, pour lequel onsuppose :
• l’indépendance par rapport aux autres mobiles rapides ;
• si le mobile est libre en un point s, alors l’intervalle qui le sépare du prochainmobile lent (précisément, entre l’avant du rapide et l’arrière du lent) est unevariable exponentielle, à une marge de sécurité près ;
• que le changement d’état est instantané.
Sous ces hypothèses, on caractérise les changements d’état de vitesse demanière probabiliste, par des taux de transition :
• de l’état libre à l’état ralenti, le taux de transition α tel que

Actes INRETS n° 90 69
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
• de l’état ralenti à l’état libre, le taux de transition β tel que
Les taux α et β sont des fonctions de l’état macroscopique de trafic, donc desparamètres vA, vB, λA, λB, des longueurs individuelles, des marges de sécurité,et des capacités d’accélération et de freinage : cf. le modèle des conflits (Leurent,2001, chapitre 10) pour une analyse détaillée, avec des résultats pour le régimestationnaire et le régime transitoire.
2.4.2 Conséquences en régime stationnaire
Le régime est stationnaire lorsque, pour des conditions macroscopiquesfixées, en chaque point s l’état de lenteur τs du mobile rapide est distribué entreles états 1/vB ou 1/vA avec les probabilités stationnaires :
•
•
Cela caractérise la distribution de probabilité pour la variable aléatoire τs, avecen conséquence :
• en moyenne .
• en variance .
On calcule aussi la fonction de covariance spatiale, qui est une fonctionexponentielle :
.
2.4.3 Distribution selon les instants
Au lieu de considérer les taux de transition par élément de distance ds, nouspouvons les rapporter à l’élément de temps dt, avec
• car alors dt = ds/vB 1,
• .
1 On obtient ce résultat en détaillant le taux de transition, et en identifiant ensuite à αvB. Pour relierdirectement α’ et αvB il faudrait une hypothèse supplémentaire de « continuité » de la vitesse.

Modélisation du trafic
70 Actes INRETS n° 90
On en déduit la distribution de probabilité pour la vitesse instantanée Vt, enrégime stationnaire :
•
•
Les moments de la vitesse instantanée sont :
• en moyenne ,
• en variance .
Evidemment ces résultats se généralisent à tout nombre d’états de vitesse ;donc, dans le cas markovien, la relation entre les distributions d’espace et detemps est valable non seulement pour chaque trajectoire, mais aussi pour tout lerégime stationnaire :2
pour tout état i.
2.4.4 Conséquences pour le temps bipolaire
En régime stationnaire, on obtient :
• en moyenne,
• en variance.
2.5 Bilan
Nous avons analysé de manière statistique la distribution des vitesses localesdans une trajectoire, et la relation entre les populations des positions et desinstants.
La position est le facteur clef pour modéliser les aléas de circulation et leurinfluence sur le temps bipolaire. La variabilité de celui-ci, sur section longue,résulte surtout des différences entre individus et peu des aléas de circulation.Cette relation entre échelle locale et échelle bipolaire est une contributionoriginale, de même que le modèle markovien pour le trafic.
2 La formule suivante est valable pour des densités discrètes de probabilité.

Actes INRETS n° 90 71
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
3. Analyse d’un ensemble de déplacements
Dans une population de déplacements, typiquement l’ensemble des trajectoi-res sur une section S pendant une période donnée, on peut distinguer plusieursgroupes : par classe de mobiles, par allure de circulation, par état macroscopiquede trafic.
Nous fixons ici l’état macroscopique, et nous conservons les autres sourcesde variabilité : nous notons uniquement
• l’allure α pour la classe et l’allure ;
• les aléas de circulation ω.
Nous commençons par caractériser les distributions des vitesses en temps eten espace, pour un observateur extérieur, et par montrer leur caractère local(§ 3.1). Puis nous les relions aux distributions trajectorielles de la partie précé-dente (§ 3.2). Finalement nous imputons les variabilités des lenteurs locales oudes temps bipolaires, aux allures et aux aléas (§ 3.3).
3.1 Distributions locales des vitesses, en temps ou en espace
Nous qualifions « d’externes » les vitesses telles qu’un observateur extérieurpeut les mesurer, au bord de la route.
3.1.1 Population des instants de passage
En un point s d’une route, pour une période donnée, les passages desmobiles d’un certain type forment une population statistique, appelée la popula-tion externe temporelle. Leurs vitesses instantanées sont un caractère statisti-que, une variable aléatoire.
Cette variable aléatoire est conditionnée par deux facteurs :
• La distribution des paramètres individuels α des mobiles, représentée avecune fonction de répartition A.
• L’état macroscopique M pendant la période.
Ces facteurs influent sur la répartition des vitesses instantanées : en particu-lier un trafic fort réduit la moyenne, et réduit aussi l’écart-type en resserrantl’éventail des vitesses.
A position s, structure (α) et état M fixés, notons FTs la fonction de répartitioncumulée des vitesses instantanées pour la population temporelle des passages,fTs la densité, vTs la moyenne, et la variance.
3.1.2 Population « spatiale » des couples (position, instant)
Considérons un petit intervalle [s, s + ds] de la route, et les couples (position,instant) associés à chaque mobile présent dans l’intervalle pendant une périodedonnée. Ces couples forment une population statistique, appelée la populationexterne spatiale. La vitesse du mobile constitue un caractère statistique de
σTs2

Modélisation du trafic
72 Actes INRETS n° 90
chaque couple, une variable aléatoire, encore conditionnée par la structure (α) etpar l’état M.
Nous notons FSs la fonction de répartition cumulée des vitesses spatiales, fSsla densité, vSs la moyenne, et la variance.
3.1.3 Relations entre les deux distributions
En supposant que chaque mobile i garde sa vitesse vi constante surl’intervalle [s, s + ds], il contribue pendant une durée ds/vi à la population spatiale,
donc d’autant plus longtemps qu’il est plus lent : ainsi .
Notons K la constante de proportionnalité telle que .
Comme ce sont des densités de probabilité, en intégrant il vient ETs[1/v] = K. Enmultipliant par v puis en intégrant, on obtient aussi 1 = K ESs[v] : au total
.
Soit un exposant n. En multipliant la relation de base par vn puis en intégrant,il vient
.
Le cas n = 2 donne , appelée la formulede Wardrop entre la vitesse moyenne temporelle et la vitesse moyenne spatiale.
L’hypothèse de vitesse constante pour chaque mobile sur la distance ds,limite ces relations à une portée locale.
3.1.4 Conséquences macroscopiques
Soit q le débit au point s (pour la catégorie étudiée). Pendant la durée H de lapériode, il passe un nombre qH de mobiles. Le nombre de ces mobiles dont lavitesse est comprise entre v et v + dv s’élève à qHfTs(v)dv.
Sur l’intervalle [s, s + ds], à un instant donné, soit k la concentration spatialeen mobiles, donc kds le nombre de mobiles présents. Le nombre de ces mobilesdont la vitesse est comprise entre v et v + dv s’élève à k ds fSs(v)dv. Pendant H,la durée totale de séjour passée dans l’intervalle par les mobiles dans cettetranche de vitesse est donc Hk ds fSs(v)dv.
Comme chaque passage en s à vitesse v provoque un séjour de durée ds/vsur l’intervalle [s, s + ds], on vérifie qHfTs(v) dvds/v = Hk ds fSs(v) dv, donc aussiqfTs(v) = kvfSs(v) après simplification, et après intégration q = kvSs.
C’est pourquoi on appelle aussi vSs la vitesse moyenne du flot, égale à q/k.
σSs2

Actes INRETS n° 90 73
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
3.2 Relation entre les distributions trajectorielles et externes
Au § 3.1 nous avons rappelé la relation entre la densité
temporelle et la densité spatiale des vitesses externes, en un point donné et pourune classe de mobiles.
Au § 2.1 nous avons donné une relation « renversée » entre
la densité temporelle et la densité spatiale des vitesses trajectorielles, au longd’une trajectoire pour un mobile donné.
Il reste à expliquer la correspondance entre les distributions externes et lesdistributions trajectorielles.
Restreignons-nous à une seule classe de mobiles pour toutes ces distribu-tions.
3.2.1 Interception en un point
Chaque passage d’un mobile, au point de mesure s, correspond à un instantpour un observateur, mais à une position pour le mobile. Donc la densité externetemporelle fTs correspond à la densité trajectorielle spatiale .
En conséquence :
• La vitesse trajectorielle en moyenne d’espace, , équivaut à la moyenne
temporelle externe .
• La variance équivaut à la variance temporelle externe .
3.2.2 Interception à un instant
Sur un intervalle [s, s + ds], un examen à l’instant t correspond à unedistribution externe spatiale, et pour les trajectoires à une vitesse instantanée,donc à la distribution trajectorielle temporelle. Donc fSs correspond à .
En conséquence :
• La moyenne équivaut à la moyenne spatiale externe .
• La variance équivaut à la variance spatiale externe .
3.2.3 Au total
Ces relations entre les distributions trajectorielles et externes, justifient lesrelations formelles respectives fTs ∝ vfSs côté externe, et ∝ côté trajecto-riel.
fS
vs
vTs
σVs2 σTs
2
f t
vt vSs
σVt2 σss
2
f s vf t

Modélisation du trafic
74 Actes INRETS n° 90
Nous en déduisons une méthode pour analyser la variance temporelle desvitesses externes locales d’un groupe de déplacements, en la décomposant entrela variance intra-individu et la variance inter-individus :
• La variance externe locale pour une allure α est . On peut la
mesurer sur une section homogène car alors la variance
réalisée : pour le calcul on recueille , dont on déduit puis
.
• La variance intra-individu est la moyenne des variances externes locales sur
l’ensemble des allures, i.e. . On l’estime par un échan-
tillon de taille I, avec .
• La variance inter-individus est la différence entre la variance temporelletotale (mesure directe) et la variance intra-individu .
3.3 Du niveau local au niveau bipolaire
3.3.1 Niveau local
Au niveau local, chaque allure α a une lenteur locale τsα dont la moyenne décroît avec l’allure. En moyenne sur toutes les allures et toutes les lenteurs dechaque allure, en notant par un indice A l’agrégation selon les allures,
Les variations de lenteur particulières à l’allure α ont une variance V[tsαα]notée En ajoutant les variations entre les différentes allures, il vient
D’où la relation entre les dispersions relatives γX = σX/E[X] :
3.3.2 Niveau bipolaire
Au niveau bipolaire, on montre que grâce àl’hypothèse d’ergodicité. Comme cela implique que
f T α( ) f S α( )
σvS α( )2
σTs2 σTsA
2
τsα
χsα 0( ).

Actes INRETS n° 90 75
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
3.3.3 Relations entre les deux niveaux, local et bipolaire
En reliant les deux niveaux, nous obtenons la relation entreles dispersions relatives des deux distributions temporelles, respectivementlocale (γ1/ν) et bipolaire (γL).
Ainsi le modèle des allures individuelles distingue bien le niveau local duniveau bipolaire.
3.3.4 Evidence empirique
Pour les VL sur autoroute interurbaine (cf. Leurent, 2001, § 8.A4), γT = 11 %,γL = 8 % et vS = 130 km/h = 2,2 km/mn. Nous en déduisons (0) ≈ (0,03 mn/km)2 : cet ordre de grandeur est confirmé par le modèle microscopique du § 2.4(cf. Leurent, 2001, § 10).
4. Sur la méthode du véhicule flottant
Un véhicule flottant (VF) est un véhicule qui circule dans un flot de trafic afind’en mesurer la vitesse moyenne d’espace. La méthode du véhicule flottant a étédéveloppée par Wardrop et Charlesworth (1954), elle est largement utilisée.
Dans cette partie, grâce à l’analyse désagrégée du trafic, nous étendons laméthode et ses hypothèses, et nous élargissons ses conditions d’application, saportée, ses résultats : nous développons en particulier un estimateur du maxi-mum de vraisemblance pour la distribution des vitesses.
Nous commençons par rappeler son principe et son application courante(§ 4.1). Puis nous proposons d’autres formes d’application, afin d’estimer nonseulement la vitesse moyenne d’espace, mais encore les distributions temporelleet spatiale des vitesses (§ 4.2). Ensuite nous discutons les hypothèses de laméthode, et nous proposons une mesure sommaire de précision pour la vitessemoyenne estimée (§ 4.3).
Le modèle des allures individuelles implique que le véhicule flottant mesure ladistribution des vitesses trajectorielles moyennes, et non des vitesses instanta-nées (§ 4.4). Le modèle de goulot spatial invalide la méthode du véhicule flottantpour des routes à voie unique (§ 4.5). Enfin le modèle des conflits permet uneutilisation très puissante de la méthode, grâce à un estimateur du maximum devraisemblance pour la distribution des vitesses (§ 4.6).
4.1 Principe
Soit une section de route de longueur L. On considère un sens de circulation,de débit q, concentration k, répartition temporelle des vitesses FT et répartitionspatiale FS, vitesse moyenne spatiale vS.
Le véhicule flottant parcourt la section à la vitesse u ; de t0 à t1 = t0 + L/u. Ilrattrape les véhicules moins rapides de vitesse v < u, partis entre t1 – L/v et t0 :
χ

Modélisation du trafic
76 Actes INRETS n° 90
ces véhicules sont en nombre t0 – (t1 – L/v) = L(v–1 – u–1) fois l’intensité qfT(v)dv,donc qL(v–1 – u–1) fT(v)dv.
Au total le VF rattrape un nombre de véhicules
Il est lui-même rattrapé par les véhicules plus rapides partis entre t0 et t1 – L/v,en nombre qL(u–1 – v–1) fT(v)dv pour chaque vitesse v > u.
Le nombre total de rattrapants est
.
La différence des deux décomptes est .
4.2 Application usuelle et variantes
Si le véhicule flottant ajuste sa vitesse u pour que n+ = n–, alors u = vS : c’estl’application usuelle.
Une variante est de mesurer q par un second observateur, et de fixer u a
priori : on obtient alors le temps moyen . On peut ainsi mesurer
le temps moyen d’une classe de véhicules lents (ou au contraire rapides) : si levéhicule flottant circule plus vite que les camions, il rattrape camions pendantson parcours, ce qui correspond à
.
Autre variante : on peut spécifier les répartitions FT et FS comme des fonctionsstandard de la vitesse et d’un vecteur Θ de paramètres. Alors des mesurespermettent d’estimer Θ, donc de caractériser les distributions.
Nous recommandons d’utiliser une distribution log-normale LN(a, b) des
vitesses spatiales. Dans ce cas et . De plusles vitesses temporelles suivent une distribution log-normale LN(a + b2, b)(3),
avec donc γT = γS. On vérifie bien que conformé-
ment à la formule de Wardrop puisque dans ce cas .
3 En effet .
n+ n–– qL 1u--- 1
vS------–
=
nC–

Actes INRETS n° 90 77
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
Alors un VF à la vitesse ui dépasse véhicules, ce qui
donne un point d’observation sur q, a et b.
Avec un nombre de points I ≥ 3, on résout le problème et on obtient nonseulement vS mais aussi γS et toute la distribution des vitesses4.
Au § 4.6, nous donnons un estimateur du maximum de vraisemblance pourestimer Θ et q : une mesure par véhicule flottant et un comptage local peuventsuffire !
4.3 Hypothèses et précision
La méthode suppose que la section de route est homogène, avec partout lamême distribution spatiale des vitesses, le même trafic.
Sa validité nécessite une taille d’échantillon n = n+ + n– suffisante, donc une
longueur suffisante. Si u ≈ vS alors car
q/vS = k la concentration et par une approximation dans le cas log-normal.
En notant σS l’écart-type de la distribution spatiale des vitesses, l’approxima-tion gaussienne est valide si n ≥ 30 ou si γS = σS/vS << 1 (vérifié notamment pourles VL). On peut alors estimer la vraie moyenne vS par intervalle de confiance, de
forme avec la moyenne estimée et le fractile d’ordre
1 – α/2 d’une variable de Student à n degrés de liberté.
Rappelons que σS est lié à l’écart-type des temps bipolaires, σP = Lσ, par
l’approximation donc σS ≈
4.3.1 Application numérique
Un véhicule flottant parcourt une longueur L = 20 km à la vitesse u = 75 km/h.Il dépasse n– = 19 véhicules et il est lui-même dépassé par n+ = 13 véhicules. Unobservateur extérieur compte le débit q = 800 véh/h.
La vitesse moyenne prédite est = 72,9483283 km/h.
En supposant σS = 13,5 km/h, comme n = n+ + n– = 32, un intervalle deconfiance à 95 % pour la vraie vitesse moyenne vS est [67,3, 78,6] km/h.
4 La solution à I véhicules flottants peut s’implémenter avec un seul véhicule et I capteurs dans le casd’une section homogène très longue, partagée en I arcs i de longueurs Li encore importantes,équipés chacun d’un capteur. Par homogénéité, FT et FS sont communes aux arcs. Le véhiculeparcourt chaque arc à une vitesse particulière ui, tandis que le capteur de l’arc mesure le débit localqi. Les I mesures remplacent les I parcours.
vs tα 2⁄n[ ]
σvS2

Modélisation du trafic
78 Actes INRETS n° 90
Cette mesure de précision est sommaire, car l’écart type σS correspond à lapopulation spatiale des vitesses, qui n’est pas identique à la population desvitesses des mobiles rencontrés (celle-ci est le mélange de la distributiontronquée des vitesses sur [0, u] et de celle sur [u, ∞ [, en proportions respectives
et 1 – p avec les notations du § 4.6. Dans le cas log-normal, avec
les formules des moments tronqués d’ordre 1 et 2, on calcule facilement lamoyenne et la variance du mélange).
4.4 Enseignements du modèle des allures individuelles
La preuve de Wardrop nécessite que chaque véhicule conserve sa vitesse v.D’après les modèle des allures individuelles, les vitesses peuvent varier locale-ment au cours de chaque trajectoire individuelle.
Cela ne compromet pas la méthode, à condition d’en renouvelerl’interprétation : il faut interpréter FT et FS comme les répartitions de la vitesse« moyenne harmonique par trajectoire », notées = 1/τα. En effet l’hypothèsed’ergodicité spatiale assure que chaque véhicule d’allure α a une vitessemoyenne harmonique de trajectoire proche de 1/τα si la longueur L estsuffisamment grande.
4.5 Enseignements du modèle de goulot spatial
Sur un goulot à voie unique, un mobile ne peut ni dépasser ni se laisserdépasser. Tant qu’il est isolé, il mesure son propre temps de parcours libre. Dèsqu’il rejoint un autre mobile, il mesure le temps de parcours du peloton.
Dans ce cas, fréquent en milieu urbain, le véhicule flottant devient un véhiculesuiveur. Son temps de parcours a une portée individuelle, et non collective.
Il importe de déduire les goulots d’un itinéraire mesuré par véhicule flottant.Pour connaître la distribution du temps de parcours du goulot, un modèleprobabiliste est meilleur que des mesures, car la variance est élevée et difficile àcontrôler (elle dépend des arrivées des camions).
La solution astucieuse est de mesurer la position et l’instant du premierrattrapage dans le goulot. Par différence avec la position et l’instant d’entrée, oncalcule une vitesse individuelle de voiture libre. Ensuite, par différence avec laposition et l’instant de sortie, on calcule une vitesse individuelle de camion. Ilreste à combiner ces éléments avec une mesure exogène du débit en camions,pour inférer le temps de parcours en moyenne et en variance.
4.6 Enseignements du modèle des conflits
Soit une route sans restriction au dépassement. Faisons l’hypothèse que lesflots d’arrivées des véhicules, respectivement moins rapides ou plus rapides quele véhicule flottant, sont poissonniens. D’après les formules du rattrapage
pρ–
ρ– ρ++-------------------=
vα

Actes INRETS n° 90 79
Propriétés statistiques du temps d'itinéraire, et généralisation de deux formules de Wardrop
(Leurent, 2001, § 10.B), nous connaissons leurs intensités spatiales en fonctionde u, q, et des fonctions de répartition FT et FS :
• pour les véhicules moins rapides,
• pour les véhicules plus rapides.
Sur une distance L, le nombre n– (resp. n+) est une VA de Poisson d’intensitéρ–L (resp. ρ+L). En supposant l’indépendance des deux flots, le couple (n–, n+) apour densité de probabilité
.
En fonction des paramètres Θ de FT et FS, la log-vraisemblance d’une mesure(n–, n+) est
.
Nous pouvons estimer Θ et q en maximisant la log-vraisemblance Λ. Il suffitde sommer les log-vraisemblances pour ajouter des mesures indépendantes, parvéhicule flottant, ou la mesure du débit q d’après N véhicules comptés pendantune durée H. Sous l’hypothèse poissonnienne, la densité du comptage este–qH(qH)N/N !, donc on ajoute – qH + N ln(qH) à la log-vraisemblance.
On peut construire des intervalles de confiance pour Θ, basés sur la normalitéasymptotique de l’estimateur du maximum de vraisemblance, et ensuite propagerl’incertitude d’estimation jusque sur les moments des vitesses.
4.6.1 Application numérique
Reprenons les valeurs précédentes et supposons que la population« spatiale » des vitesses soit distribuée LN(a, b). La maximisation numérique deΛ par rapport à a et b donne :
• = 4,27,
• = 0,18.
On en déduit, par report et calcul d’incertitude, que
• pour la moyenne = 72,948327 km/h, avec un intervalle deconfiance à 95 % de [69,3 ; 76,7] km/h.
• pour l’écart-type = 13,5 km/h, avec un intervalle de
confiance à 95 % de [8,7 ; 18,4] km/h.
a
b
vS ea+b2/2=
σS vS b2( )exp 1–=

Modélisation du trafic
80 Actes INRETS n° 90
Remarquer que la moyenne est très proche de la formule déterministeappliquée au § 4.3. L’intervalle de la moyenne est plus étroit que celui construitau § 4.3 pour la même valeur d’écart-type.
5. Conclusions
Jusqu’à présent l’analyse statistique des vitesses instantanées et des tempsd’itinéraires, restait subordonnée à l’hypothèse des « vitesses constantes partrajectoire », développée par Wardrop qui en a tiré des formules fameuses. Nousavons renouvelé et approfondi cette analyse, en modélisant de plus les fluctua-tions de vitesse au cours d’une trajectoire, et en remplaçant l’hypothèse deWardrop par l’hypothèse des allures individuelles : que chaque mobile conserveson allure, qui est une préférence individuelle pour la rapidité.
Cet approfondissement a pour conséquences :
• Au niveau d’une trajectoire, l’explicitation de deux distributions des vitesses,respectivement selon les positions ou selon les instants, reliées par la mêmerelation formelle que les vitesses externes temporelles ou spatiales chezWardrop.
• Au niveau local, la variabilité des vitesses résulte non seulement de ladiversité des allures, mais encore des aléas de circulation.
• Pour une population de trajectoires avec des allures variées, la variabilitédes temps bipolaires dépend à la fois de la variété des allures et de celledes aléas de circulation. La part relative des allures domine d’autant plusque la longueur est plus grande.
Pour obtenir ces résultats, nous avons développé considérablement lamodélisation probabiliste du trafic au niveau individuel, avec le processus spatialdes lenteurs locales, et un modèle microscopique d’états qui le concrétise. Lemodèle microscopique nous a permis de renouveler également la méthode duvéhicule flottant.
BibliographieLeurent F. (2001).- Modèles Désagrégés du Trafic. Rapport INRETS Outils et
Méthodes # 10. INRETS, Arcueil, France.Leurent F. (2002).- Probabilistic Properties of Path Travel Times. Bari, Italy.Lighthill M.H. and Whitham G.B. (1955) On kinematic waves. I – Flood movement
in long rivers. II – A theory of traffic flow on long crowded roads. Proc.Royal Society, A229, 281-316 and 317-345.
Wardrop J.G. (1952).- Some theoretical aspects of road traffic research. Proc.Inst. Civil Engrs I, 325-378.
Wardrop J.G. & Charlesworth (1954).- A method of estimating speed and flow oftraffic from a moving vehicle. Proc. Institution of Civil Engineers, 312,pp. 158 et sq.

Actes INRETS n° 90 81
C. Etudes statistiques du trafic appliquées à la sécurité routière


Actes INRETS n° 90 83
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Ruth Bergel1, Alexandre Depire2
1 INRETS-DERA.2 ISUP, INRETS-DERA.
Résumé
Ce texte présente un modèle explicatif de l’évolution des nombres mensuelsd’accidents corporels et de tués sur les routes nationales et les autoroutes françai-ses. Deux facteurs de risque sont pris en compte : l’exposition au risque, mesuréepar une variable principale de trafic, et le facteur climatique, mesuré par des variablessecondaires relatives à la température, à l’occurrence de gel et à la pluie.
Un modèle avec transformation logarithmique de l’endogène et transformationde Box-cox sur l’exogène principale a été établi sur la période 1975-1993, puissur la période étendue 1975-1998. Des tests de comparaison de la spécificationinitiale à deux cas particuliers ont été réalisés, et les réponses à ces tests sontles mêmes sur la période 1975-1993 et sur la période 1975-1998.
Il ressort qu’il n’y a pas de différence significative entre le modèle avectransformation de Box-Cox sur l’exogène principale et le modèle avec transfor-mation logarithmique sur l’exogène principale, de sorte que l’on peut pour desraisons de parcimonie retenir cette seconde spécification, largement utilisée.
Toutefois, l’utilisation de la forme fonctionnelle optimale permet de s’affranchirde l’hypothèse d’une élasticité constante au trafic, et de prendre en comptecertains effets de saturation relativement au trafic.
Mots-clés
Risque routier, exposition au risque, accidents, tués, trafic, routes nationales,autoroutes, climat, température, gel, pluie, Box-Cox.
1. Introduction
Depuis le début des années 1980, le suivi temporel des statistiques mensuel-les d’accidents corporels et de victimes (tués, blessés graves et légers) de la

Modélisation du trafic
84 Actes INRETS n° 90
circulation routière ne se limite plus à l’approche descriptive traditionnelle, desimple constat, mais vise à quantifier l’influence des facteurs explicatifs de lafréquence et de la gravité des accidents (Lassarre, 1994). A des modèlesdescriptifs ont succédé des modèles à variables explicatives ou exogènes,construits sur la base d’une formulation économique plus riche, avec unespécification économétrique plus élaborée.
Cette évolution des modèles s’inscrit dans le cadre d’une approche systémi-que de l’insécurité routière, qui consiste à appréhender le système de sécuritéroutière dans sa globalité en prenant en compte l’ensemble des déterminants durisque routier. Un ensemble de variables associées à des facteurs de risque ontémergé, grâce à un grand nombre de modèles sur données agrégées, dévelop-pés sur coupes transversales et sur séries temporelles à périodicité annuelle etmensuelle (Hakim et al. 1991). Dans cet ensemble, les variables associées àl’exposition au risque occupent la première place.
En modélisant la tendance annuelle du taux de tués (nombre de tués parvéhicule-kilomètre) comme une fonction exponentielle décroissante du temps,Koornstra et Oppe (1990), mettent en évidence l’importance du trafic commeindicateur d’exposition au risque, et son effet multiplicatif sur le nombre de tués1.La plupart des modèles agrégés, explicatifs des nombres mensuels d’accidentscorporels et de victimes de la circulation routière de la plupart des pays européens,utilisent le trafic mensuel (voire une proxy du trafic telle que la consommation decarburant lorsque celui-ci n’est pas connu) comme mesure de l’exposition aurisque, et lui attribuent un effet multiplicatif (COST 329, 2003 à venir).
La forme la plus complexe de modèle explicatif du risque routier est due àGaudry (1984), qui propose une représentation structurée du système desécurité routière avec un modèle sur données mensuelles agrégées, qui estexplicatif, à trois niveaux et à forme fonctionnelle plus générale que celle desmodèles précédents.
Les trois niveaux considérés sont ceux de l’exposition au risque, du risqued’accident et de la gravité de l’accident. En utilisant notamment une transforma-tion de Box-Cox sur les variables, il autorise des effets non strictementmultiplicatifs entre les variables explicatives et la variable à expliquer.
2. Problématique
Nous nous intéressons aux deux niveaux de risque routier (risque d’accidentet gravité de l’accident) et nous proposons un modèle explicatif des nombres
1 Le modèle proposé pour le taux de tués a ensuite été suivi d’une formulation plusgénérale, dans laquelle le nombre de tués est une fonction directe du trafic. De manièresimilaire, la modélisation du taux d’accidents (nombre d’accidents corporels par véhicule-kilomètre) a fait place à une modélisation directe du nombre d’accidents par une fonctiondu trafic ; cette formulation trouve d’ailleurs sa principale justification dans les résultats desétudes microscopiques d’accidents.

Actes INRETS n° 90 85
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
d’accidents corporels et de tués, établi sur données mensuelles et sur longuepériode sur les routes nationales et les autoroutes françaises, les deux réseauxsur lesquels le trafic mensuel est mesuré. Nous ne retenons ici qu’un petitnombre de facteurs exogènes : l’exposition au risque et le facteur climatique, quiapparaît significatif du risque routier sur une base mensuelle (Fidstrom et al.,1995, et de manière plus générale : Gaudry, Lassarre, 2000).
Les deux indicateurs modélisés, représentatifs du risque d’accident et de sagravité sont les nombres mensuels d’accidents corporels et de tués, définissur un réseau donné. Pour chacun de ces indicateurs, les variables explicativesretenues sont d’une part le volume de trafic mensuel enregistré sur le réseau, etd’autre part trois variables météorologiques – la température journalière maxi-male, l’occurrence journalière de gel et la hauteur journalière de pluie -, agrégéesou moyennées par mois et sur l’ensemble du territoire.
Dans la spécification que nous retenons, décrite dans l’équation 1, la variableendogène subit une transformation logarithmique2 et s’exprime comme combinai-son linéaire d’une variable principale de trafic subissant une transformation deBox-Cox de paramètre λ et de variables météorologiques secondaires. Cettespécification générale comporte les deux cas particuliers : λ = 0 et λ = 1,correspondant aux équations 2 et 3, et nous chercherons à déterminer si laspécification générale diffère significativement de l’un et de l’autre de ces deuxcas particuliers. Dans tous les cas, les variables secondaires ont un effet linéairesur le logarithme de la variable endogène.
Rappelons la transformation de Box-Cox Tλ de paramètre λ (Box, Cox, 1964)définie par :
et les trois équations considérées :
Équation 1 : Modèle général
Équation 2 : Cas particulier λ = 0
2 Notons que seule l’ exogène principale subit la transformation Tλ. Nous ne cherchonspas à estimer le paramètre de Box-Cox pour l’endogène Y, car cela nécessite de fairel’hypothèse que pour toute valeur de λ, Yλ est une variable gaussienne.

Modélisation du trafic
86 Actes INRETS n° 90
Équation 3 : Cas particulier λ = 1
où φ(B) est un polynôme en B représentant la dynamique du processus corrigédes effets exogènes, et ut un bruit blanc,
avec : pour Y le nombre d’accidents corporels ou de tués sur un réseaudonné,pour X1 la variable principale représentant le trafic sur le même réseau,pour Xj j = 2,...,J + 1 les J variables secondaires représentant lamétéorologie.
Le plan que nous retenons est le suivant. Nous décrivons d’abord la base dedonnées utilisée. Nous exposons ensuite la méthode employée pour estimer leparamètre de Box-Cox de la variable principale, sur une période initiale fixée à1975-1993, puis la manière de réaliser des tests d’hypothèse sur ce paramètre ;nous exposons aussi la démarche retenue pour juger de la stabilité des résultatspar extension de la période d’étude à 1973-1998. Nous interprétons enfin lesrésultats obtenus.
3. La base de données
La base de données est constituée de séries chronologiques mensuelles,entre 1975 et 1998, relatives aux indicateurs de risque (les statistiques d’acci-dents et de tués), à une mesure d’exposition au risque (le volume de trafic), et aufacteur climatique agrégé sur la France entière.
Les deux réseaux principaux considérés sont les routes nationales et lesautoroutes (ensemble des autoroutes concédées et non concédées). Afin demieux mettre en évidence les différences entre ces deux types de réseaux, nousretenons également le sous-réseau autoroutier concédé, sur lequel s’effectuemaintenant la majeure partie du trafic autoroutier.
Les données agrégées de l’année 1998, pour les indicateurs de risque etd’exposition au risque, sont données dans le tableau 1. Les graphiques del’ensemble des échantillons de données utilisés sont donnés en annexe.
3.1 Indicateurs de risque
Les nombres d’accidents corporels et de tués, mesurés sur routes nationales,sur autoroutes et sur autoroutes concédées (ACCRN, ACCA et ACCAC d’unepart, TUERN, TUEA et TUEAC d’autre part) sont fournis par le bulletin d’analysedes accidents de la circulation routière (BAAC). Est comptabilisé comme accidentcorporel celui qui génère au moins une victime (tué, blessé grave ou blesséléger), et comme tué la victime qui décède dans un délai de six jours à compterde l’accident.

Actes INRETS n° 90 87
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
3.2 Exposition au risque
Les indicateurs de mesure de l’exposition au risque sont les trafics – oukilométrages ou parcours – effectués par l’ensemble des véhicules circulant surroutes nationales, sur autoroutes et sur autoroutes concédées (PARN, PAAU etPAAC), mesurés en centaines de millions de véhicules-kilomètres à partir decompteurs magnétiques (source : système national de recueil de données). Il s’agitde séries agrégées, qui ne permettent pas de distinguer le type de véhicule circulant.
3.3 Facteur climatique
Les variables météorologiques retenues ici pour modéliser l’influence desconditions climatiques sur les indicateurs de risque sont relatives à la température,à l’occurrence de gel et à la pluie. De fait, si la pluie est un facteur de risque connu,la température et l’occurrence de gel, qui traduit un froid prolongé, ont un effet surla mobilité, et donc de manière indirecte sur les indicateurs agrégés retenus.
Les variables mensuelles retenues mesurent la température maximale dujour, l’occurrence journalière de gel (présence/absence de température maximaledu jour négative) et la hauteur journalière de pluie, agrégées ou moyennées surle mois. Les variables journalières retenues sont elles-mêmes des moyennes dedonnées journalières observées en une centaine de stations météorologiquesréparties sur le territoire national.
Tableau 1 : Les données de 1998
Routes nationales
Auto-routesconcé-dées
Auto-routes
nonconcé-dées
Réseau national
Routessecon-daires
Agglomé-rations
France entière
Accidentsmoy. Mensuelle% France entière
11 807984
9,49 %
2 426202
1,95 %
3 484290
2,80 %
17 7171 476
14,24 %
36 2783 023
29,17 %
70 3925 866
56,59 %
124 38710 366
Tuésmoy. Mensuelle% France entière
1 928161
22,85 %
34128
4,04 %
13011
1,54 %
2 399200
28,43 %
4 373364
51,83 %
1 665139
19,73 %
8 437703
Trafic (10*8 veh-km)moy. Mensuelle% France entière
886,2873,86
595,1550
373,8131,15
1 855,24154,6
environ 1/3
Longeur du réseau (km) 24 000 6 646 2 117 32 763
Source : ONISR/SETRA.Nota :Les données relatives aux routes secondaires, aux agglomérations et à la France entière sontdonnées à titre indicatif.

Modélisation du trafic
88 Actes INRETS n° 90
4. Recherche du paramètre de Box-Cox
Le but de cette partie est d’exposer la méthode employée pour estimer leparamètre λ de Box-Cox du modèle général, décrit dans l’équation 1. Lescoefficients des variables exogènes secondaires et les paramètres de la dynami-que sont estimés dans le même temps.
La difficulté de cette formulation est l’estimation non linéaire du paramètre deBox-Cox. Les procédures classiques disponibles dans les logiciels courants nepermettent pas d’obtenir facilement une estimation, en effet d’une part certainesestiment des paramètres dans un cadre non linéaire (procédure NLIN dans SAS)mais ne sont pas adaptées à la modélisation des séries temporelles, d’autress’emploient dans un cadre temporel (procédure ARIMA) mais ne permettent pasde paramétrer une transformation des variables exogènes.
Dans cette partie, nous faisons l’hypothèse que pour tout indicateur et sur toutréseau, le logarithme de l’indicateur modélisé, conditionnellement aux variablesexogènes, suit une loi approximativement normale. Nous utilisons dans l’algo-rithme d’estimation exposé maintenant la procédure AUTOREG dans SAS,appropriée pour estimer un modèle de régression linéaire avec résidus auto-corrélés (cf. Brockwell et Davis, 1998).
4.1 Algorithme d’estimation
Pour estimer le paramètre de la transformation de Box-Cox, pour chaqueexogène principale, nous allons procéder par discrétisation selon une grille devaleurs, ainsi le paramètre λ va successivement parcourir l’intervalle [– 4 ; + 4]avec un pas δ.
Nous détaillons l’algorithme utilisé.
La difficulté réside dans la non linéarité du modèle en λ, elle est contournéeen fixant la valeur du paramètre.
En pratique, on fixe un pas δ (0,08 afin d’échantillonner l’intervalle sur100 valeurs) puis on applique l’algorithme suivant pour le iième pas :
1. Application de la transformation avec λi ;
2. Estimation par le maximum de vraisemblance du modèle ARMAX dont
l’exogène principale est ,
3. Calcul d’une fonction objectif, ici la somme des carrés des résidus ;
4. Retour à la phase 1, en prenant λi+1 = λi + δ tant que λi+1 < λmax.
Une fois la procédure achevée, on retient la valeur du paramètre associée àla plus petite des 100 valeurs prises par la fonction objectif.
Au final, pour le modèle retenu, les tests usuels sur les résidus sont effectués :tests d’indépendance (test des up and down), de bruit blanc (test utilisant la

Actes INRETS n° 90 89
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
statistique de Shapiro-Wilk), de normalité (test de Fisher), et sont dans l’ensem-ble satisfaisants, voir tableau 2a ; en particulier, l’hypothèse de non autocorréla-tion (test de Ljung-Box) a été validée.
4.2 Résultats
Les résultats commentés ci-après sont donnés dans les tableaux 2a et 2b.
Le paramètre de Box-Cox relatif au trafic est négatif dans tous les cas : – 0,28,– 0,04 et – 0,28 pour les accidents sur autoroutes, sur autoroutes concédées etsur routes nationales, et – 0,36, – 0,36 et – 1,33 pour les tués respectivement.Certaines estimations sont égales à la précision de calcul près, qui est de ± 0,04,et cette égalité apparente résulte du choix fait pour le pas. Une précision plusgrande n’a pas été jugée utile pour notre problématique.
Dans tous les cas, le coefficient β relatif à l’exogène principale est significati-vement différent de 0, alors que les paramètres relatifs aux variables secondairesne sont pas toujours significatifs au seuil habituel. Ainsi sur les vingt-quatreparamètres des équations de risque et de gravité, seize le sont au seuil de 95 % (t-ratio > 2), quatre à un seuil compris entre 70 % et 95 % (1 < t-ratio < 2) etquatre sont non significatifs (t-ratio < 1).
Les variables climatiques ont néanmoins été systématiquement conservéespour des raisons de commodité.
L’interprétation des paramètres sera abordée dans les paragraphes 7 et 8.
5. Tests d’hypothèse
Cette partie présente l’outil nécessaire pour répondre à la question suivante :le modèle fourni par l’équation 1 est-il significativement différent du modèle fournipar l’équation 2 (ou du modèle fourni par l’équation 3) ?
L’approche retenue consiste à comparer la vraisemblance de deux modèlesemboîtés (Enders, 1995) : on cherche à savoir s’ils différent significativement.Les modèles des équations 2 et 3 sont de fait deux cas particuliers du modèle del’équation 1, dans la mesure où la valeur du paramètre est fixée à 0 puis à 1.
La statistique utile est la quantité suivante :
avec : Vu la vraisemblance du modèle où λ a été estimé (unrestricted),
Vr la vraisemblance du modèle où λ a été fixé, à 0 ou à 1 (restricted).
Le test appartient à la famille des tests de rapport de vraisemblance.
La statistique G suit, sous l’hypothèse H0 (λ = 0 ou λ = 1), une distribution duχ2 centré à d degrés de liberté. Le nombre d de contraintes est ici égal à 1.

Modélisation du trafic
90 Actes INRETS n° 90
Tableau 2a : Nombres d’accidents corporels – Modèles avec forme fonctionnelle optimale pour l’exogène principale, sur 1975-1993
Autoroutes Autoroutesconcédées Routes nationales
DynamiqueA(1) - 0,41 - 0,27 - 0,47
*** *** ***A(2) - 0,21
***A(12) - 0,37 - 0,38 - 0,55
*** *** ***A(14) 0,24
***0,24
***0,24
***
Exogènes (*)Trafic autoroutes 1,181309
***- 0,28
0,51/0,46/0,36Trafic autoroutes concédées 0,465353
***- 0,04
0,43/0,42/0,41
Trafic routes nationales 1,812546***
- 0,280,61/0,59/0,55
Hauteur de pluie 0,000076***
0,000083***
0,000065***
Jours de gel 0,008152***
0,014245***
0,001493*
Température été 0,001517***
0,003130***
0,000213*
Température hiver 0,001858***
0,003006***
0,000602**
Qualité du modèleLog vraisemblance 221,775 170,166 286,009SSE 1,882 2,935 1,053R2 52,1 % 68,6 % 33,1 %
Tests sur les résidusEchantillonnage accepté rejeté acceptéP-value 0,30 0,01 0,56Normalité accepté accepté rejetéP-value 0,39 0,54 0,004Bruit blanc accepté accepté acceptéP-value 0,06 0,61 0,14
Test de comparaisonH0 : lambda = 0 contre H1 : lambda<>0 LV0 = 221,371 LV0 = 170,118 LV0 = 285,942
H0 acceptée H0 acceptée H0 acceptéeH0 : da = 1 contre H1 : lambda<>1 LV0 = 214,893 LV0 = 161,642 LV0 = 284,857
H0 rejetée H0 rejetée H0 acceptée
Les tableaux 2a et 2b contiennent :– pour la dynamique et les exogènes secondaires : le paramètre et sa significativité,– pour l’exogène principale : le paramètre, sa significativité, la valeur de λ et les élasticités, en moyenneannuelle en 1975, 1984 et 1993 en gras.Significativité : * (t-ratio < 1),** (1 < t-ratio < 2), *** (t-ratio > 2).

Actes INRETS n° 90 91
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Les résultats obtenus sont présentés dans la partie basse des tableaux 2aet 2b.
Tableau 2b : Nombres de tués – Modèles avec forme fonctionnelle optimale pour l’exogène principale, sur 1975-1993
Autoroutes Autoroutesconcédées Routes nationales
DynamiqueA(1) - 0,34
***A(2) - 0,33
***A(12) - 0,20 - 0,19 - 0,40
*** *** ***A(14) 0,10
**
Exogènes (*)Trafic autoroutes 1,604658
***- 0,36
0,55/0,44/0,05Trafic autoroutes concédées 1,347338
***- 0,36
0,60/0,46/0,36Trafic routes nationales 164,155522
***- 1,33
0,95/0,82/0,64Hauteur de pluie 0,000003
*0,0000001
*0,000080
***Jours de gel 0,010105
**0,014493
**0,006577
**Température été 0,003344
***0,004139
***0,000038
*Température hiver 0,003944
***0,004475
***0,001063
***
Qualité du modèleLog vraisemblance 2,801 - 65,111 170,851SSE 12,997 23,544 2,917R2 46,0% 45,5% 27,0%
Tests sur les résidusEchantillonnage rejeté accepté rejetéP-value 0,02 0,12 0,04Normalité accepté accepté acceptéP-value 0,88 0,92 0,34Bruit blanc accepté accepté acceptéP-value 0,07 0,64 0,10
Test de comparaisonH0 : lambda = 0 contre H1 : lambda<>0 LV0 = 2,562 LV0 = - 65,416 LV0 = 169,615
H0 acceptée H0 acceptée H0 acceptéeH0 : lambda = 1 contre H1 : lambda<>1 LV0 = - 0,35616 LV0 = - 69,242 LV0 = 167,475
H0 rejetée H0 rejetée H0 rejetée

Modélisation du trafic
92 Actes INRETS n° 90
Pour tous les indicateurs, le modèle de l’équation 1 n’est pas significativementdifférent du modèle de l’équation 2 qui ne peut donc être rejeté (l’hypothèse H0est acceptée).
A l’inverse, il y a dans cinq cas sur six des différences significatives entrele modèle de l’équation 1 et le modèle de l’équation 3 (l’hypothèse H0 estrejetée).
6. Stabilité des résultats
Nous avons présenté dans la partie précédente la méthode employée pourobtenir la valeur du paramètre de Box-Cox permettant de lier de manièreoptimale les endogènes que sont les indicateurs de risque et de gravité del’accident à leur principal déterminant.
Le modèle a été estimé sur une période plus longue (1975-1998), voirtableaux 3a et 3b. On peut s’interroger sur la stabilité de ces résultats sur unepériode étendue, où stabilité signifie :
- la stabilité de la valeur du paramètre de Box-Cox correspondant à lavariable principale ;
- la stabilité des estimations des paramètres des autres variables,
- la stabilité en terme de réponse aux tests de comparaison de modèles.
Les résultats obtenus, qui ressortent de l’ensemble des tableaux 2a à 3b, sontmaintenant commentés.
Pour le paramètre de Box-Cox pour lequel on n’a pas calculé d’intervalle deconfiance, ni réalisé de test de stabilité, les estimations passent de – 0,28 à – 0,36, de – 0,04 à – 0,28 et de – 0,28 à – 0,53 pour les nombres d’accidents surautoroutes, autoroutes concédées et sur routes nationales. Pour les nombres detués, elles passent de – 0,36 à – 1,98, de – 0,36 à – 1,17 et de – 1,33 à – 1,25respectivement.
Pour les paramètres des variables secondaires, on a deux estimations pour lemême paramètre, sur la période initiale et sur la période étendue, et on considèrequ’il y a stabilité si l’estimation 1 est incluse dans l’intervalle de confiance à 95 %de l’estimation 2, et inversement. On constate que tous les paramètres, et celaquel que soit l’indicateur modélisé, sont stables au cours du temps.
Enfin, pour la stabilité de la réponse aux tests de comparaison, les testsd’hypothèse λ = 0 obtiennent tous la même réponse positive (l’hypothèse estacceptée), comme sur la période initiale, et les tests d’hypothèse λ = 1 obtiennenttous une réponse négative (l’hypothèse est rejetée), alors que ce n’était le casque 5 fois sur 6 sur la période initiale.
Par conséquent, on peut juger comme stables les résultats obtenus dans lesparties précédentes, à l’exception de l’estimation du paramètre de Box-Cox surla stabiblité de laquelle on ne peut pas se prononcer.

Actes INRETS n° 90 93
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Tableau 3a : Nombres d’accidents corporels - Modèles avec forme fonctionnelle optimale pour l’exogène principale, sur 1975-1998
Autoroutes Autoroutesconcédées Routes nationales
DynamiqueA(1) - 0,41 - 0,26 - 0,49
*** *** ***A(2) - 0,18
***A(12) - 0,43 - 0,49 - 0,54
*** *** ***A(14) 0,21 0,17 0,21
*** *** ***
Exogènes (*)Trafic autoroutes 1,450242
***- 0,36
0,50/0,38/0,29Trafic autoroutes concédées 0,841966
***- 0,28
0,45/0,35/0,28Trafic routes nationales 4,737984
***- 0,53
0,62/0,57/0,49Hauteur de pluie 0,000103
***0,000105
***0,000069
***Jours de gel 0,010644
***0,014605
***0,001354
*Température été 0,001639
***0,003032
***0,000120
*Température hiver 0,001911
***0,002767
***0,000456
**
Qualité du modèleLog vraisemblance 278,806 215,670 358,918SSE 2,402 3,711 1,295R2 46,00% 53,50% 32,0%
Tests sur les résidusEchantillonnage accepté rejeté acceptéP-value 0,56 0,05 0,44Normalité accepté accepté rejetéP-value 0,44 0,98 0,0004Bruit blanc accepté accepté rejetéP-value 0,05 0,29 0,01
Test de comparaisonH0 : lambda = 0 contre H1 : lambda<>0 LV0 = 277,828 LV0 = 210,009 LV0 = 358,536
H0 acceptée H0 acceptée H0 acceptéeH0 : lambda = 1 contre H1 : lambda<>1 LV0 = 272,507 LV0 = 202,566 LV0 = 356,324
H0 rejetée H0 rejetée H0 rejetée
Les tableaux 3a et 3b contiennent :,pour la dynamique et les exogènes secondaires : le paramètre et sa significativité,pour l’exogène principale : le paramètre, sa significativité, la valeur de λ et les élasticités, en moyenneannuelle en 1975, 1986 et 1998 en gras.Significativité : * (t-ratio < 1),** (1 < t-ratio < 2), *** (t-ratio > 2).

Modélisation du trafic
94 Actes INRETS n° 90
Tableau 3b : Nombres de tués - Modèles avec forme fonctionnelle optimale pour l’exogène principale, sur 1975-1998
Autoroutes Autoroutes Concédées Routes nationales
DynamiqueA(1) - 0,34
***A(2) - 0,29
***A(12) - 0,25 - 0,21 - 0,40
*** *** ***A(14) - 0,14
***0,03
*
Exogènes (*)Trafic autoroutes 273,149373
***- 1,98
0,79/0,18/0,05
Trafic autoroutes concédées 10,277121***
- 1,170,71/0,25/0,11
Trafic routes nationales 120,725051***
- 1,250,96/0,76/0,55
Hauteur de pluie 0,000041*
0,000048*
0,000081***
Jours de gel 0,013871**
0,015804**
0,007500***
Température été 0,003604***
0,004382***
0,000534**
Température hiver 0,003845***
0,004506***
0,001325***
Qualité du modèleLog vraisemblance - 7,7464 - 82,679 202,032SSE 17,731 29,678 3,940R2 28,6% 39,3% 24,4%
Tests sur les résidusEchantillonnage accepté accepté acceptéP-value 0,89 0,66 0,10Normalité accepté accepté rejetéP-value 0,54 0,95 0,03Bruit blanc accepté accepté rejetéP-value 0,15 0,46 0,003
Test de comparaisonH0 : lambda = 0 contre H1 : lambda<>0 LV0 = - 10,1102 LV0 = - 83,582 LV0 = 200,447
H0 acceptée H0 acceptée H0 acceptéeH0 : lambda = 1 contre H1 : lambda<>1 LV0 = - 12,872 LV0 = - 87,870 LV0 = 197,591
H0 rejetée H0 rejetée H0 rejetée

Actes INRETS n° 90 95
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
7. Interprétation de la forme fonctionnelle
Nous allons successivement présenter les propriétés de la spécificationretenue en terme de lien entre endogène et exogène principale et de fonctiond’élasticité, dans le cas général puis dans le cas de son application aux nombresd’accidents corporels et de tués sur les deux réseaux considérés.
7.1 Lien entre endogène et exogène principale
Le graphique de la figure 1 présente quelques formes de la fonction
pour les valeurs de λ suivantes : – 2, 0, 0,5 et 2, avec β positif.
Dans le cas où le paramètre λ est négatif, les courbes obtenues sontcroissantes lorsque β est positif, décroissantes lorsque β est négatif, et possè-dent une asymptote : lorsque X → ∞, Y → – β/λ.
Dans notre spécification décrite dans l’équation 1 où la variable endogènesubit une transformation logarithmique, la courbe correspondante possède égale-ment une asymptote : à météorologie constante, lorsque X → ∞, log Y → – β/λ etdonc Y → exp(– β/λ). Ceci s’interprète comme un effet de saturation, qui n’existepas dans un modèle à élasticité constante (cas où λ = 0).
7.2. Fonction d’élasticité
On rappelle que l’élasticité εY|X de l’endogène Y par rapport à l’exogène X estdéfinie par
Dans le modèle général, l’élasticité de l’endogène par rapport à l’exogèneprincipale X, à météorologie constante, est donnée par :
avec pour cas particuliers :
- εY|X = β dans le cas où λ = 0 ;
- εY|X = βX dans le cas où λ = 1.
Le graphique de la figure 2 présente quelques formes de la fonction Y = Xλ,pour les valeurs de λ suivantes : – 2, 0, 0,5 et 2, avec β positif.
Lorsque le paramètre λ est négatif, l’élasticité décroît vers 0, alors qu’elle estconstante ou croissante sinon. Ceci vaut dans le cas β positif.

Modélisation du trafic
96 Actes INRETS n° 90
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
0,1 1,1 2,1
X
Y
X(-2)
X(0)=log
X(1/2)
X(2)
Figure 1 : Formes de la fonction de Box-Cox, pour différentes valeurs de λ(β > 0)
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0,1 1,1 2,1
X
Lambda = 0
Lambda = 0,5
Lambda = 2Lambda = -2
Figure 2 : Formes de l’élasticité, de Y par rapport à X, pour différentes valeurs de λ(β > 0)

Actes INRETS n° 90 97
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Lorsque le paramètre λ est négatif et β négatif, l’élasticité croît vers 0, alorsqu’elle est constante ou décroissante sinon.
7.3. Résultats
Les modèles avec forme fonctionnelle optimale fournissent dans tous les cas,sur la période initiale et sur la période étendue, une estimation négative duparamètre de Box-Cox. La courbe correspondant à l’équation 1 est croissanteavec le trafic, et possède une asymptote. Un effet de saturation des nombresd’accidents et de tués relativement au trafic apparaît au voisinage de l’asymptote,pour des valeurs petites de λ et des valeurs élevées du trafic.
Les élasticités des nombres d’accidents et de tués au trafic sont positives etinférieures à 1, et on retrouve là les ordres de grandeur habituellement proposés,sur données françaises agrégées et sur données étrangères (cf. COST 329,2003 à venir).
Dans tous les cas, elles sont décroissantes vers 0, lorsque le trafic augmente.A titre d’exemple d’amplitude atteinte sur la période, l’élasticité des nombres detués au trafic, sur les routes nationales, diminue en moyenne annuelle, de 1 en1975 à 0,55 en 1998, mais à l’intérieur d’une même année elle varie aussi : en1998 par exemple, elle est de 0,44 en été lorsque le trafic prend les valeurs lesplus élevées, et de 0,72 en hiver.
8. Effets des variables climatiques
Les effets climatiques pris en compte dans le modèle sont des effets directssur les 6 indicateurs modélisés, à niveau de trafic donné. Ils mettent en évidenceune variation du risque routier, qu’il s’agisse du risque d’accident ou du risqued’être tué, à nombre de véhicules-kilomètres inchangé.
La pluie et l’occurrence de gel, qui réduisent la mobilité, ont néanmoins uneffet direct positif (c’est-à-dire un effet d’augmentation) sur les indicateurs derisque d’accident et de gravité. La pluie a un effet statistiquement significatif, auseuil habituel de 95 % (t-ratio > 2) pour 4 indicateurs sur les 6 : 100 mmadditionnels de hauteur de pluie dans le mois induisent une augmentation de0,4 % à 1 % des indicateurs mensuels. L’occurrence de gel a un effet significatifou moyennement significatif au seuil de 70 % (t-ratio > 1) pour 5 indicateurs surles 6 : 1 jour de gel additionnel dans le mois induit une augmentation compriseentre 1,1 % et 1,6 % des indicateurs sur les autoroutes, et de l’ordre de 0,1 %seulement sur les routes nationales.
Enfin, la température moyenne a un effet très significatif, et particulièrementélevé sur les autoroutes concédées. Les paramètres relatifs à la températuremaximale sont tous significatifs au seuil habituel sur ce réseau : 1 degréadditionnel de température dans le mois induit une augmentation de l’ordre de3 % des nombres d’accidents, et de l’ordre de 4 % des nombres de tués, que cesoit en été (avril à septembre) ou en hiver (octobre à mars). Sur l’ensemble des

Modélisation du trafic
98 Actes INRETS n° 90
autoroutes, ces augmentations sont moins importantes, et sont de l’ordre de 2 %seulement pour les nombres d’accidents. Sur les routes nationales, l’effet de latempérature est sensiblement atténué, et plus significatif en hiver qu’en été,l’impact correspondant étant compris entre 0,5 % et 1,3 % en hiver selonl’indicateur considéré.
9. Conclusion
Nous avons mis en œuvre un modèle explicatif du risque routier à deuxniveaux (risque d’accident et gravité de l’accident) sur les routes nationales et lesautoroutes françaises. Les indicateurs modélisés sont les nombres mensuelsd’accidents corporels et de tués. Les variables explicatives retenues sont d’unepart le trafic enregistré sur le réseau, variable principale, et d’autre part desvariables météorologiques secondaires.
Un modèle avec transformation logarithmique de l’endogène et transformationde Box-Cox sur l’exogène principale a été établi sur la période 1975-1993. Destests de comparaison de la spécification initiale à deux cas particuliers ont étéréalisés, et les réponses à ces tests sont les mêmes sur la période 1975-1993 etsur la période 1975-1998.
Il n’y a pas de différence significative entre le modèle avec transformation deBox-Cox sur l’exogène principale et le modèle avec transformation logarithmiquesur l’exogène principale, de sorte que l’on peut pour des raisons de parcimonieretenir cette seconde spécification, très largement utilisée. Ce constat s’appliquepour tous les indicateurs modélisés, qu’il s’agisse de risque d’accident ou de sagravité, sur les deux réseaux considérés.
Toutefois, l’utilisation de la forme fonctionnelle optimale permet de s’affranchirde l’hypothèse d’une élasticité constante au trafic, et de prendre en comptecertains effets de saturation relativement au trafic. On peut la préférer danscertains cas même si elle ne s’impose pas « statistiquement ».
10. Remerciements
Les auteurs remercient Jean Chapelon, Secrétaire Général de l’ONISR, etMarie-Claire de Franclieu, conseiller technique de la DSCR, pour leur soutienfinancier à cette recherche. Ils sont redevables à Colette Decamme et MaryseLagache de l’ONISR, et à Evelyne Durand et Patrick Le Breton du SETRA pourleur contribution à la constitution de la base de données. Les données météoro-logiques ont été founies par Météo-France, dans le cadre de la convention qui lieMétéo-France et l’INRETS.
Les auteurs remercient tout particulièrement Bernard Girard, Maître deConférence à l’Université Paris-1 Panthéon-Sorbonne, pour son conseil scientifi-que.

Actes INRETS n° 90 99
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
Bibliographie
Bergel R., Depire A. (2000).- Modélisation multivariée des indicateurs d’insécuritéroutière. Rapport de convention DSCR/INRETS n˚ 98001.
Box G.E.P., Cox D.R. (1964).- « An analysis of transformation ». Journal of theRoyal Statistical Society, B(2) :211-243.
Brockwell P.J., Davis R.A. (1998).- Introduction to Time Series and Forecasting,Springer Verlag.
COST 329 (2003).- Models for traffic and safety development and interventions,European Commission, Directorate General for Transport, Brussels,final report of the Action, à venir.
Enders W. (1995).- Applied econometric time series, Wiley.Fridstrom L. et al. (1995).- « Measuring the contribution of randomness, expo-
sure, weather, and daylight to the variation in road accident counts »,Accident Analysis & Prevention, Vol. 27 n˚ 1 pp. 1-20.
Gaudry M. (1984).- DRAG, un modèle de la Demande Routière, des Accidents etde leur Gravité, appliqué au Québec de 1956 à 1982, Publication 359,Centre de Recherche sur les Transports, Université de Montréal.
Gaudry M., Lassarre S. (2000).- Structural Road Accident Models - TheInternational DRAG Family, Pergamon.
Hakim S., Hakkert S., Hocherman I., Shefert D. (1991) « A critical Review ofmacro models for road accidents ». Accident Analysis & Prevention,Vol. 23, n˚ 5, pp. 379-400.
Koornstra, Oppe S. (1990).- « A mathematical theory for related long termdevelopments of road traffic and fatalities ». Transportation and TrafficTheory.
Lassarre S. (1994).- Cadrage méthodologique d’une modélisation pour un suivide l’insécurité routière, Synthèse INRETS, n˚ 26, Arcueil.

Modélisation du trafic
100 Actes INRETS n° 90
Annexe
0
500
1000
1500
2000
2500
3000
3500
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
ACCAC
ACCRN
ACCA
Figure 3 : Nombre d’accidents (routes nationales, autoroutes, aut. concédées)
0
50
100
150
200
250
300
350
400
450
500
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
TUEAC
TUERN
TUEA
Figure 4 : Nombre de tués(routes nationales, autoroutes, aut. concédées)
0
50
100
150
200
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
janv
-00
janv
-01
PAAU
PAACN
PARN
Figure 5 : Trafic (routes nationales, autoroutes, aut. concédées) en millions de véhicules-kilomètres

Actes INRETS n° 90 101
Forme fonctionnelle d’un modèle mensuel agrégé de risque routier
0
50
100
150
200
250
300
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
Figure 6 : Température, en 0,1 ˚C
0
500
1000
1500
2000
2500
3000
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
Figure 7 : Hauteur de pluie, en mm
0
5
10
15
20
25
30
janv
-75
janv
-76
janv
-77
janv
-78
janv
-79
janv
-80
janv
-81
janv
-82
janv
-83
janv
-84
janv
-85
janv
-86
janv
-87
janv
-88
janv
-89
janv
-90
janv
-91
janv
-92
janv
-93
janv
-94
janv
-95
janv
-96
janv
-97
janv
-98
janv
-99
Figure 8 : Occurrence de gel, en nombre de jours


Actes INRETS n° 90 103
D. Evaluation à partir de modèlesde simulation


Actes INRETS n° 90 105
Behavioral Road Traffic Simulation with ARCHISIM
Behavioral Road Traffic Simulation with ARCHISIM
Alexis CHAMPION1,2,3, Stéphane ÉSPIÉ3, Jean-Michel AUBERLET3
1 SRILOG, 6 rue des Frères Caudron, F-78140 Vélizy-Villacoublay.2 LAMIH (UMR CNRS), Université de Valenciennes, F-59313 Valenciennes.3 INRETS, 2 avenue Général Malleret, Joinville, F-94110 Arcueil. [email protected]; [email protected]; [email protected]
Article déjà paru dans les Proceedings of the 2001 Summer ComputerSimulation Conference (SCSC), Orlando, Florida, USA (pp. 359-364) W.F. Waite,J. Celano (Ed.).
Key-words
Multi-agent systems, driving simulator.
1. Road traffic simulation with ARCHISIM
1.1 Road Traffic Simulation
Simulation modeling is an increasingly popular and effective tool for analyzinga wide variety of dynamical problems. Road traffic is an example of suchproblems.
Road traffic constitutes a dynamic problem associated with complex proc-esses. These processes are characterized by the interaction of the elements ofthe system: road users, infrastructures and operators. Traffic can be consideredas a supply and demand problem whose difficulty relies on two oppositepostulates. The offer responds to a collective use: the road network is dimen-sioned to allow a certain flow. The demand is individual: each driver wishes totravel under its conditions. Therefore the “traffic system” characteristics implystrong constraints for the modeling.
Different types of traffic simulation models exist [Lieberman and Rathi 1997].According to its granularity, a simulation model can be macroscopic or micro-scopic. A macroscopic model describes the traffic stream, which is representedin some aggregate manner by scalar values of flow rate, density and speed. Amicroscopic model considers all the vehicles as individuals and the fundamental

Modélisation du trafic
106 Actes INRETS n° 90
interactions take the form of mathematical formulas. All these traffic simulationmodels describe traffic in statistical formats.
1.2 ARCHISIM: A Behavioral Traffic Simulation Model
In addition to these models, the INRETS (French National Institute forResearch in Transportation and Safety) has done some research on road trafficsimulation based on the real driver behavior for more than ten years. TheINRETS’ ARCHISIM simulation tool makes use of a behavioral submodel fordriver decisions. The driver model results from in depth studies carried out indriving psychology for actual situations [Saad 1999]. Thus, the behaviors are notnormative. In ARCHISIM, traffic phenomena come from individual actions andinteractions of the various actors of the road situation [Espié 1999].
ARCHISIM is a behavioral simulation model and its implementation follows themultiagent principles. Within ARCHISIM, agents are simulated drivers in virtualvehicles and consist of three subsystems: perception, “interpretation – decision-making” and action. We focus on the “interpretation – decision-making” part. Eachagent has a model of its environment and interacts with the other agents (cars,trucks, trams...), the infrastructure (traffic lights) and the road. Each agent hasgoals and skills.
In opposition to works done in robotics [Reece and Shafer 1993], the agents’behavior is not normative. Each agent has its own attitude. The objective is notto build a robot able to drive automatically but to study the driver’s behavior andthe way in which the traffic phenomena occur. Within ARCHISIM, agents areautonomous and can potentially react to any situations. The “traffic system” canthen show a greater aptitude to organize and to coordinate itself.
The advantage of multi-agent models is that it offers a more open andinteractive system than classic models do [Champion et al. 1999]. Thus, it ispossible to dynamically modify simulation conditions (virtual drivers’ preferences,traffic lights control algorithms...). Indeed, ARCHISIM permits a better under-standing of the effects of such modifications on the traffic and an enhancementof the traffic model.
At INRETS, our ambition aims at making ARCHISIM an open tool for the studyof the “traffic system”. The modularity of the simulation architecture offers theopportunity to integrate various actors such as a scenario module, a 3D-imagingmodule, a data recorder module, etc. Moreover, ARCHISIM has been developedsuch that the traffic model can host a driving simulator. In this case, the humansubject in the driving simulator interacts with the traffic within the simulation model(Fig. 1). This step appears significant to us because it makes it possible to confrontthe new concepts with the final users while following an iterative process (Fig. 2).
ARCHISIM is a flexible tool for which a set of applications has been found:new road design, test scenarios (automatic incident detection, adaptive cruisecontrol), etc. In fact, any study relating to a modification of the “traffic system” andrequiring the use of simulated traffic situations.

Actes INRETS n° 90 107
Behavioral Road Traffic Simulation with ARCHISIM
The ARCHISIM traffic model has been validated for some highway situations[El Hadouaj 2000] and works are in progress to validate it for critical and urbansituations.
In this paper, we present four traffic simulation projects carried out withARCHISIM in partnership with private companies or civic institutes. The firstproject deals with new infrastructure concept testing. The next two projects relateto the evaluation of ATT (advanced transport telematics) systems. Finally, wepresent our new project, which deals with the evaluation of control strategies onhigh density networks.
2. Examples of traffic simulation projects
The first project we present has used together both the traffic simulation modeland the driving simulator. In this case, the driving simulator is used for identifyingdrivers’ behavior relating to a new concept. The two other projects have used
Figure 1: Examples of traffic situations simulated with ARCHISIM
Design new concept
Validate new concept: studies w/ driving simulator
Analyse driver behavior relatively to new concept
Model new driver behavior relatively to new conept
Traffic simulation w/ new concept
Analyse traffic behavior relatively to new concept
Figure 2: Study and simulation process

Modélisation du trafic
108 Actes INRETS n° 90
ARCHISIM as a stand-alone traffic simulation model and the assumptions relatedto the drivers’ behavior have been previously set. In all cases, simulation is usedto quantify traffic performance at both safety and capacity levels.
2.1 New Concept Evaluation
The investigation power of a driving simulator comes from its ability to let thevarious elements of the driver-vehicle-road environment interact. This tool isparticularly interesting for studying risky situations and situations involvingelements that do not exist yet. From a virtual model, driving simulation makes itpossible to study new road concepts by the means of their perception and theiracceptability by the road users. The project we now shortly describe involves newtypes of traffic lights for ramp metering (further information can be found in[Nouvier 2001]).
Ramp metering uses signal control of the on-ramp of a highway intersectionto limit the entry rate and timing of vehicles to the main flow. The benefits of rampmetering are a reduction in the occurrence and severity of flow breakdown. Themetering of flow on the ramp smoothes entry patterns to the main carriageway atcritical times. This marginally increases delay to vehicles on the ramp but shouldimprove the total network performance.
Ramp metering in a well-known technique, particularly in the United States. InEurope, a few interesting experiments have been conducted. Several countriesare now launching significant programs to spread this concept. In France, twodifferent methods are used: platoon insertion or insertion of a single vehicle at atime, this method being called the “drop by drop” method. This latter type ofregulation being new in France, it has been necessary to study its implementationby means of traffic simulation associated with a driving simulator.
The virtual road database includes an urban highway section and aninterchange with entry and exit lanes. Six different scenarios have beendeveloped. These scenarios relate to the four types of traffic lights (usual two andthree color traffic lights red/yellow/green or modified, green being replaced byblinking yellow) with short cycle (5 seconds) and two conditions of insertion(leader vehicle or follower vehicle). A hundred of subjects were involved in theexperiment. After an adaptation to simulator driving, each of them had to makethree journeys on an entry lane in different scenarios. An investigator wrote downthe behavior (hesitation, incomprehension...) and the spontaneous commentariesof each driver while driving. Moreover, after each journey, the investigatorinterviewed the drivers about safety and their acceptance of the concept.
The first qualitative results show that the understanding of the regulationsystem is not immediate, particularly during the initialization phase or when thesubject is leading. Some traffic lights are sometimes misinterpreted (red/blinking yellow). This experiment with driving simulation allowed to make anassessment of the envisioned solutions and to draw up an experiment in realconditions.

Actes INRETS n° 90 109
Behavioral Road Traffic Simulation with ARCHISIM
2.2 Vehicle Based ATT System Evaluation
The second project is a study carried out to assess large-scale ATT effectsinducted by vehicle based autonomous systems [Aron 1999]. Such systems aredeveloped to enhance the sensory performance of the driver. They operate usingcontrol and/or advice and operate independently purely within the vehicle. Thissection provides a description of the modeling approach used, objectives of theinvestigation and the key findings for the ATT system under consideration, whichis an Adaptive Cruise Control (ACC) system.
In an ACC system the control is based upon a sensor (usually a microwaveradar) which measures the distance to the preceding vehicle. The systemattempts to maintain a desired speed (controlled by the driver) by managing thegas pedal while observing a predefined headway between the vehicles. TheACC system studied is fully independent (no communication) and assume thatthe driver has control of the steering at all times. The first stages of deploymentof ACC are likely to target drivers seeking improved comfort and perceivedsafety from the system. The system will only operate in high speed highwaydriving conditions. It has been suggested that ACC will improve road capacity,reduce journey times and improve safety. The objectives of the ACC study areto identify those parameters within both the ACC algorithm and within the trafficstream.
There are conditions that must apply before a vehicle enters the ACC followingcontrol. It is assumed that if the ACC system can be used, it is used. Themaximum deceleration of the ACC equipped vehicle when under distance controlmode is limited to – 1.5 m/s2. The maximum acceleration under ACC is 1 m/s2.Experiments have been limited to target head-ways of 1.5 s and 1.2 s. Thesevalues have been determined by examining the upper and lower ends of anumber of typical following headways.
The study examined the effects of different penetration of ACC to trafficefficiency and stability on a simple 3-lane stretch of road. For a target headwayof 1.5 s, there is no notable effect on average journey time whereas the traveltime for a target headway of 1.2 s is reduced with up to 20% equipped and thenthe effect stabilises (Fig. 3). The modal headway for ARCHISIM is between 1.2 sand 1.4 s. The headway distribution is therefore not significantly altered when atarget headway of 1.5 is employed for ACC. However, a target headway of 1.2shifts the headway distribution to the lower end (Fig. 4).
The impact of ACC within ARCHISIM is an increase in short operatingheadways with a corresponding increase in larger gaps. This provides greaterlane changing opportunity and reduces delay for vehicles stuck behind slowervehicles in lanes one and two, reducing delay and increasing average journeytime. The results of the ACC modeling have been shown to be highly dependenton the baseline time headway distributions within the model. If it can be shownthat the benefits of ACC are highly dependent on the baseline headwaydistribution then the impact of ATT technologies and the variations in headway

Modélisation du trafic
110 Actes INRETS n° 90
distributions on existing networks will be important impact areas to decisionmakers.
Early indications are that the frequency of very short headways can bereduced with ACC. Low total time to collision can also be reduced. These findingsmay lead to a safety gain although the factors that cause accidents are not yetsufficiently well known to make this link definite. Currently the understanding ofhow drivers will use ACC systems and how non-ACC equipped drivers willinteract with the systems is undefined. Finally, it is important to state that thebenefits that have been shown from the ACC simulations to date are primarilycomfort based. This is a direct result of studying systems that are first to themarket. In the long term, once the technology is proven, it will be possible tooperate with higher desired speeds, shorter headways, externally controlledheadways and algorithms with a greater control range.
104
105
106
107
108
109
110
111
112
113
0% 10% 20% 40% 70%
Percentage equipped
Ave
rag
e jo
urn
ey t
ime
(sec
s)
6000 veh/hr maximum flow - ARCHISIM
5700 veh/hr maximum flow - ARCHISIM
5400 veh/hr maximum flow - ARCHISIM
Figure 3: Effect of ACC on average journey time for target headway 1.2 s
0
5
10
15
20
25
30
35
40
45
0.2 0.7 1.1 1.5 1.9 2.3 2.7 3.1 3.5 3.9 4.3 4.7 >5.0
Headway (secs)
Per
cen
tag
e
0% ACC equipped - ARCHISIM
70% ACC equipped - ARCHISIM
Figure 4: Time headway distribution for peak flow –target headway 1.2 2000 veh/hr/lane 0% and 70% equipped

Actes INRETS n° 90 111
Behavioral Road Traffic Simulation with ARCHISIM
2.3 Infrastructure Based ATT System Evaluation
The third project is a study carried out to assess large-scale ATT effectsinducted by infrastructure based systems. Such systems act to affect the behaviorof different groups of drivers by the provision of information and/or application ofcontrol at specific points on the road network. The ATT system under considera-tion in this section is an Automatic Incident Detection (AID) system
AID systems monitor traffic conditions on a highway and attempt to identifyabnormal road conditions that pertain to accidents or congestion. The action thatthe system then takes can vary significantly between systems. In all cases, thesystem is used to inform network monitors who can visually confirm the incidentand inform the emergency services. In some systems, the information concerningthe queues and local changes in recommended speed is communicated viavariable message signs. The principal benefits of AID are a reduction in durationof the incident and an increase in awareness of drivers approaching the incidentthat should reduce secondary conflicts.
The simplest AID system has been modeled. The objective of the modelingexercise was to determine the reduction in congestion and queue lengths thatwould be achieved by a 5-minute earlier clearing of an incident over a range ofdemand levels. While any reduction in congestion length implies a reduction inthe opportunities for secondary conflicts, no direct attempt was made to modelthe modification of driver behavior to information regarding the incident. Driverbehavior adaptations are not sufficiently well understood for any such modelingto be valid. Modeling was performed using ARCHISIM on a 3-lane and 4-laneroad without on-ramps. Two constant demand flow levels were applied for a one-hour simulation (low demand 1,200 veh/hour/lane and high demand 1,250 veh/hr/lane).
Figure 5 below shows the average speed in the section before that containingthe lane drop. The lane drop causes a flow breakdown with flows of 3,600 and3,750 vehicles per hour having to pass through a two-lane section. The reductionin duration of the speed drop with the reduced clearing time produced by the AIDsystem is clearly visible. Similar effects were found for the 4-lane scenario.However, because there are three lanes that are not blocked, there are moreopportunities for vehicles to change lane and avoid queuing near the incident.The effects are therefore not as severe as for the 3-lane scenario with any givenflow level per lane. It is important to note that while the reduction in average traveltime through the introduction of AID in the low flow scenario is small (5%), theimprovements afforded at the high flow scenario are significantly larger (17%).
Comparing the patterns of average journey times of vehicles over the low andhigh flow scenarios (Fig. 6) again highlights the increased benefits of AID. Thereduction in the duration of the flow breakdown, where average journey times areelevated, is only slightly (approximately one minute) above the 5 minute gain inearly detection for the low flow scenario. The reduction in congestion is three toseven minutes longer than the 5 minute gain in the high flow scenario. The

Modélisation du trafic
112 Actes INRETS n° 90
presence of the incident produced large numbers of short inter-vehiculardistances and low Time to Collision values. Incidents also increase lanechanging to avoid the queue. The reduction in the duration of the incident andassociated queuing reduced the occurrence of these low headway and time tocollision values. No behavioral shift is implied in this but it is a benefit of earlydetection.
As presented, ARCHISIM – like mathematical models – can be used forvarious traffic studies. But, unlike these models, ARCHISIM gives the possibilityto dynamically modify some simulation conditions and can host a drivingsimulator. However, a behavioral model does not only show advantages and
Figure 5: Average speed against time for high demand scenario(Cologne 3-lane site 665 to 100m before lane drop)
Figure 6: Average journey time against start time for journey –high flow 3-lane

Actes INRETS n° 90 113
Behavioral Road Traffic Simulation with ARCHISIM
some limitations exist. The first limitation is that the development of a tool suchas ARCHISIM is extremely costly because the driver behavior is not completelymodeled yet and its implementation is not trivial. The second limitation is thatbehavioral simulation needs more computing than mathematical simulationbecause the system is distributed and simulated vehicles are fully autonomous.Therefore, until now, the experiments and studies led with ARCHISIM havebeen mostly done for low-density road networks. Indeed, the number ofsimulated vehicles could not exceed one thousand while classic models canmanage several dozens thousand vehicles. To mitigate this gap, some currentworks conducted by INRETS and SRILOG – a company specialized in trafficstudies – aim at using ARCHISIM for traffic studies requiring high densitynetworks.
3. Towards hard density networks
We wish to conduct traffic study projects for high density networks for tworeasons. First, at SRILOG, we intend to conduct traffic studies with ARCHISIMbecause we have measured the potential of a behavioral simulation tool and thinkthat it would be more interesting, in some cases, to go for such a tool rather thana mathematical model based tool. Secondly, at INRETS, our will to validateARCHISIM for most situations urges us to work on innovative projects.
Hence, the project we present now is a test project, on which we are currentlyworking to validate ARCHISIM for traffic studies requiring the simulation of a high-density highway network. This traffic study conducted by means of the behavioralmodel ARCHISIM is the simulation of a real experiment conducted in 1999. Thisexperiment consisted in measuring and studying the impact of ramp metering ona 16 km 3-lane section of the highway 6 to Paris. On this site, place of frequentdisturbances during the morning rush hours, four over five ramps are equippedwith a regulation device including a detection system for flow breakdown on thelocal area network. The experiment, which concerned an evaluation of regulationdevices (regulation by fixed traffic lights cycle and adaptive regulation), showedthat the adaptive regulation gives best results and that route time decreases of15% with regard to the reference situation (without regulation).
The project stages for the simulation of this experiment are: 1) simulate thetraffic on the network without regulation and validate it with regard to thereference situation; 2) simulate the traffic with regulation by fixed traffic lightscycle; 3) simulate the traffic with adaptive regulation.
The work to be made for this project is:
1) Create the virtual roads network (the highway 6 section). Create the trafficdemand corresponding to the rush hours (from 6 am to 9.30 am). Verify the trafficvalidity by comparing the simulation data to the real data collected during theexperiment. In this project, up to vehicles 10,000 are to be considered at thesame time and this is our main obstacle. To overcome it, at least two solutions

Modélisation du trafic
114 Actes INRETS n° 90
are to be investigated. The first idea is that it is not necessary, for a traffic study,to use real time simulation. The second idea is that it is possible to savecomputation time by optimizing the algorithms related to the perception and theinterpretation of the simulated situation. Indeed the traffic almost immobility,bound to its high density, allows limiting the useful environment of each simulatedroad user.
2) Set up regulation strategies. This part does not really show any difficultybecause ARCHISIM is conceived to manage this type of systems.
3) Compare the data obtained from the simulations to the real experimentresults.
This project should allow us to validate ARCHISIM for traffic studies involvinghigh-density highway networks. Design, studies and coding are in progress andthe first results are encouraging. We hope to get the work done by the end of Julyand are looking forward for new projects.
4. Conclusion and perspectives
The results obtained with the behavioral road traffic simulation tool ARCHISIMallow to show the capacity of this type of non-mathematical model to answervarious projects. In this frame, ARCHISIM is validated and has been used forseveral years for simulations of highway networks requiring a high precision,flexibility or interactivity. Behavioral simulation allows henceforth being able topropose a large field of application for traffic studies.
After these first successes, we now try to meet a new challenge: conducttraffic studies related to high-density networks with a behavioral simulation tool. Ifthe test study reproducing a real experiment is decisive, we shall have then thepossibility of proposing ARCHISIM on a market today held by mathematics-basedsimulation tools.
Ultimately, our intention is to be able to conduct specific traffic studiesrequiring an important opening of the simulation tool and a high level of detail,whatever the network and the traffic density are. The perspectives of applicationare encouraging and, even if the work is still important and that of numerousunknowns persist, we intend to make ARCHISIM a commercial product before theend of next year.
5. Acknowledgment
The authors would like to thank Mr. Aron of INRETS, Mrs. Lancelin andTorjemane of SRILOG and Profs. Kolski and Mandiau of the LAMIH Lab at theUniversity of Valenciennes for their support.
This work was partly sponsored by ANRT through a research grant CIFRE.

Actes INRETS n° 90 115
Behavioral Road Traffic Simulation with ARCHISIM
Bibliographie
Aron M. and Espié S. (1999).- “DIATS Deployment of Interurban ATT TestScenarios.” Technical Report RO-96-SC.301. INRETS, Arcueil, France.
Champion, A., Mandiau R., Kolski C., Heidet A. and Kemeny A. (1999).- “Trafficgeneration with the SCANeR II simulator: towards a multi-agent archi-tecture”. In Proceedings of the Driving Simulation Conference’99 (Paris,France, Jul. 7-8). Renault, Guyancourt, France, 311-324.
El Hadouaj S., Espié S. and Drogoul A. (2000).- “To combine reactivity andanticipation: the case of conflicts resolution in a simulated road traffic”.In Proceedings of the MABS 2000 at ICMAS 2000 (Boston, USA,Jul. 10-14). Springer Verlag LNAI series.
Espié S. (1999).- “Vehicle-driven simulator versus traffic-driven simulator: theINRETS approach”. In Proceedings of the Driving Simulation Confer-ence’99 (Paris, France, Jul. 7-8). Renault, Guyancourt, France, 367-376.
Lieberman E. and Rathi A.K. (1997).- “Traffic simulation” in Traffic flow theory,Gartner and Messer, eds, Oak Ridge National Laboratory. http://www-cta.ornl.gov/cta/research/trb/tft.html
Reece D.A. et Shafer S.A. (1993).- “A computational model of driving forautonomous vehicles”. Transpn. Res.-1. Vol. 27A, No. 1, PergamonPress Ltd, 23-50.
Nouvier J., Duraz M. and Aillerie I. (2001).- “Evaluation on driving simulator ofnew solutions for the regulation of access to urban highways”. InProceedings of the Driving Simulation Conference 2001 (Sophia-Antipolis, France, Sept. 5-7). Renault, Guyancourt, France, Forthcom-ing.
Saad F. (1999).- “Analyses of drivers’ activity in real driving conditions: theoreticaland methodological issues”. In Proceedings of the First InternationnalDRiiVE workshop (Espoo, Finland, Jul. 21-23).


Actes INRETS n° 90 117
Une méthode d’évaluation a priori
Une méthode d’évaluation a priori des résultats issus de modèles
de simulation et de prévision du trafic
Mehdi Danech-Pajouh, Véronique Sauvadet
INRETS, GRETIA.
1. Introduction
L’évaluation a posteriori des résultats d’un modèle de prévision consiste à lescomparer avec les données réelles. Cette opération ne peut être faite qu’àl’échéance de l’horizon de la prévision. L’objectif de cet article est de proposerune méthode d’évaluation a priori afin de pouvoir attribuer aux valeurs préditesun certain degré de confiance. Dans cette démarche nous nous sommes inspirésdes travaux des météorologistes.
Aujourd’hui le moyen de prévision le plus sûr et le plus efficace en météorolo-gie est la prévision numérique, c’est-à-dire l’intégration temporelle d’un systèmed’équations aux dérivées partielles décrivant les grandes lois physiques del’atmosphère : lois de la thermodynamique et de la dynamique des fluides(Coiffier, 2000). Du caractère chaotique de l’écoulement atmosphérique et del’incertitude sur l’état actuel de l’atmosphère résulte rapidement une incertitudesur son état futur. Pour l’évaluation a priori des résultats de tels modèles, lesmétéorologues ont introduit la notion de « prévision d’ensemble » et construisentautour d’une valeur prédite un ensemble de prévisions. C’est l’analyse statistiquede cet ensemble qui permet alors de qualifier le degré d’incertitude de la prévisionmétéorologique, celle diffusée par les médias.
Dans l’étude présentée dans cet article, nous avons utilisé le concept deprévision d’ensemble pour procéder à une évaluation a priori des prévisions detrafic préparées un an à l’avance par le dispositif Bison Futé. Ce rapprochementn’est pas absurde, puisque l’effet de variables exogènes, telles que le comporte-ment de l’automobiliste (par exemple son degré d’obéissance aux conseils deBison futé), une grève, tous événements imprévisibles à l’horizon d’un an rendincertaine la prévision de l’état du trafic.
Nous proposons, aussi, d’appliquer cette approche d’évaluation aux résultatsprovenant des modèles de simulation du trafic.

Modélisation du trafic
118 Actes INRETS n° 90
2.1 Un court aperçu du nouveau modèle de prévision intégré au dispositif Bison Futé
Le dispositif Bison Futé est un outil d’information routière au service desusagers de la route. Il comporte plusieurs éléments, dont un noyau calculatoireayant pour but de prévoir l’état du trafic sur les grands axes routiers à l’horizond’un an. Ce noyau contient essentiellement un modèle de prévision, lequel a subides évolutions importantes depuis la création du dispositif, il y a vingt-cinq ans.La méthode d’évaluation proposée dans cet article s’intéresse à la dernièreévolution de ce modèle, à laquelle l’inrets a apporté sa contribution (Danech,2002).
Toute modélisation statistique est fondée, d’une part sur les connaissancesexistantes (l’historique disponible), d’autre part sur un certain nombre d’hypothè-ses. La première hypothèse consiste à admettre que dans des situationssemblables le comportement des usagers de la route est presque identique. Laseconde hypothèse concerne la formulation mathématique de la similarité descomportements : elle est prise comme fonction linéaire des variables calendaires(mois, type de jour, fête, congé scolaire, pont...) ainsi que les interactions d’ordredeux entre ces variables.
La seule modélisation calendaire ne permettant pas d’expliquer la tendanceannuelle du trafic, c’est plutôt au rapport des débits sur le TMJA (trafic moyenjournalier annuel), et non aux débits bruts, qu’est appliqué le modèle linéairechoisi. La méthode de prévision donne donc aux débits une structure multiplica-tive,
où un jour est caractérisé par sa date (jour j, mois m, année a),
TMJA (a) désigne le TMJA de l’année a,
q(j, m, a) les débits journaliers pour la date (j, m, a),
qr(j, m, a) les débits journaliers relatifs pour la même date.
Quant au processus de calcul des prévisions, il suit le schéma suivant :
– calcul des TMJA de l’historique ;
– prévision du trafic moyen journalier annuel de l’année b de prévisionTMJA*(b).(Pour cette prévision la méthode employée est du type Holt-Winters).
– calcul des débits relatifs de l’historique qr(j, m, a), tels que :
2. Premier champs d’application : les modèles de prévision

Actes INRETS n° 90 119
Une méthode d’évaluation a priori
– prévision des débits journaliers relatifs qr*(j, m, b) à la date (j ,m, b) ;(Le modèle de prévision appliquée ici est du type GLM).
– calcul des débits prédits q*(j, m, b), tels que :
Le caractère fortement agrégé du TMJA fait que sa prévision ne pose pas deproblème particulier. Par contre la prévision des débits journaliers relatifs faitappel à une modélisation relativement complexe, nous sommes donc intéressésà l’évaluation de celle-ci.
2.2 Construction d’un indice de confiance a priori
Les météorologues construisent autour d’une valeur prédite un ensemble deprévisions, soit en faisant tourner quelques dizaines fois leurs modèles sur desdonnées différant par des conditions initiales faiblement perturbées, soit en seréférant aux prévisions faites par le passé. Cette seconde solution, évidemmentbien moins coûteuse que la première, a été surnommée par les météorologuessystème du pauvre. Notre méthode s’en inspire.
Selon que l’ensemble des prévisions est homogène ou au contraire trèsdispersé et que la valeur prédite est bien ou mal positionnée au sein de cetensemble, on attribuera un indice de confiance plus ou moins élevé.
Nous allons construire cet ensemble de prévisions pour un débit journalierrelatif, qr*(j, m, b) prévu pour la date (j, m, b). Pour cela, nous allons utiliser lesdébits relatifs de l’historique, dont nous connaissons les valeurs réelles etestimées1.
Cette construction se fait en trois étapes.
La première consiste à sélectionner dans les variables calendaires les joursde l’historique les plus semblables à celui de la prévision, au sens des variablescalendaires. Cet ensemble, appelé ensemble des jours semblables, sera noté
. On ne peut cependant imposer trop de contraintes de ressemblance, car
l’ensemble ne contiendra pas suffisamment d’éléments.
Pour les jours de l’ensemble , on dispose des débits relatifs estimés. La
deuxième étape consiste alors à sélectionner les N jours, dont le débit relatifestimé est le plus proche du débit relatif prédit pour le jour j. Le sous-ensemble
ainsi crée sera noté . L’homogénéité calendaire de ce sous-ensemble doit
être vérifiée.
1 Un modèle de prévision prédit des valeurs n’appartenant pas à l’historique et il peut aussi estimercelles qui sont présentes dans l’historique.
Es1j
Es1j
Es1j
Es2j

Modélisation du trafic
120 Actes INRETS n° 90
Dans la troisième étape, on constitue l’ensemble de prévisions noté en
ajoutant au débit relatif prédit pour le jour j les débits relatifs réels de sous
ensemble .
Notons donc que si l’on s’appuie sur des estimations pour choisir les jours lesplus proches du jour j au sens de la prévision, ce sont des valeurs réelles qui sontretenues dans l’ensemble final, ce qui évite de conserver des erreurs. Or, lesrésidus sont le résultat d’erreurs indissociables, dont certaines sont dues à lamodélisation et d’autres à des événements exogènes, inaccessibles à l’échéancede la prévision. Par exemple, une forte erreur peut provenir du fait que les gensont cette fois-ci bien tenu compte des conseils de Bison futé et changé decomportement ou encore de conditions météorologiques défavorables... Nous nedevons en aucun cas tenir compte des contributions de ces erreurs exogènesdans la recherche de l’indice de confiance.
Pour que les statistiques calculées à partir de cet ensemble aient un sens, soneffectif (N + 1) ne doit pas être inférieur à trente.
Dans la démarche finale, on recherche la loi de distribution de l’ensemble ,
soit par une méthode empirique, soit par la méthode des noyaux de la statistiquenon paramétrique. En traçant son histogramme, on examine sa dispersion et onpositionne sur cet histogramme la prévision qr*(j). On en déduit un indice deconfiance permettant de qualifier (a priori) cette prévision2. Cet indice prend laforme d’une note entre un et quatre selon les caractéristiques du tableau 1 .
2 A la suite d’un modèle de régression multiple (comme celui employé par le nouveau modèle) onpeut aussi calculer un intervalle de confiance, mais celui-ci est fondé entièrement sur les résidus desestimations.
Tableau 1 : Critère d’attribution de l’indice de confiance a priori
1 Confiance nulle Prévision mal positionnée et/ou histogramme plat
2 Confiance faible Prévision bien positionnée, mais au moins deux classes équipro-bables loin l’une de l’autre sur l’histogramme (le nombre de véhicules en jeu)
3 Confiance moyenne Prévision bien positionnée et histogramme asymétrique mais non plat
4 Confiance élevée Prévision bien positionnée et histogramme proche d’une loi normale
Rpj
Es2j
Rpj

Actes INRETS n° 90 121
Une méthode d’évaluation a priori
2.2.1 Exemple d’un jour ordinaire
Cet exemple ainsi que le suivant sont fondés sur l’historique de la station SaintArnoult dans le sens Paris-Province.
On veut construire l’ensemble de prévisions pour le dimanche 27 septembre1998, qui est un jour ordinaire. Pour cela on applique le système du pauvre, avecpour historique tous les dimanches ordinaires du passé, c’est-à-dire des années
1987 à 1997. On obtient ce faisant un ensemble assez homogène du pointde vue calendaire, comprenant les dimanches des mois de septembre, octobre,décembre, mars, avril.
L’effectif de l’ensemble est de 50 jours, sa moyenne vaut 0,69, avec unécart type de 0,047.
Compte tenu de la forme classique de l’histogramme (Fig. 1), on remarque
que l’ensemble se disperse d’une manière assez homogène autour de la
valeur moyenne, donc également autour de la prévision, puisque les deuxvaleurs sont voisines. L’indice de confiance attribué est égal à 4. La confiance apriori en la prévision est bonne.
La valeur réelle du débit relatif pour ce jour 0,679 (23 600 véhicules) confirmecet indice.
Le signe + indique la position de la valeur prédite (0,69) sur l’histogramme
2.2.2 Exemple d’un jour exceptionnel
Pour le vendredi 7 août 1998, premier vendredi du mois d’août, pour lequel on
s’attend à beaucoup de départs en vacances, on cherche l’ensemble . Pour
sa construction, on a sélectionné dans l’historique les seuls vendredis exception-
Es2j
Rpj
0
2
4
6
8
10
12
14
<0,59 [0,59 ; 0,62] [0,62 ; 0,65] [0,65 ; 0,68] [0,68 ; 0,7] [0,7 ; 0,73]* [0,73 ; 0,76] >0,76
Classes
Fré
quen
ce
Figure 1 : Histogrammes de l’ensemble Rpj
Rpj
Es2j

Modélisation du trafic
122 Actes INRETS n° 90
nels des mois de juin à septembre (30 jours). La moyenne de l’ensemble final
vaut 1,97, tandis que la prévision issue du nouveau modèle pour ce jour est égaleà 1,87. On constate donc que la moyenne de l’ensemble diffère sensiblement dela valeur prédite, la différence étant d’environ 0,1, ce qui correspond à près de3 500 véhicules, valeur qui est significative.
La position du débit relatif prédit sur l’histogramme (Fig. 2) laisse à penserqu’il y a de fortes chances que l’on soit dans un cas de sous-estimation. En effet,en regardant de plus près les fréquences associées on a :
L’indice de confiance associé à cette prévision est donc de 2, à savoir unefaible confiance. Cet indice est d’ailleurs confirmé par la valeur réelle du débitrelatif 2,1 (72 700 véhicules), relativement éloignée de la valeur prédite.
Le signe + indique la position de la valeur prédite (1,87) sur l’histogramme
Néanmoins, la répartition de l’ensemble final n’est pas complètement
aléatoire. En considérant la moyenne comme nouvelle prévision, on peuts’attendre à corriger du moins en partie la sous-estimation sur la prévision. Ilsemble plus logique de s’attendre à un débit relatif voisin de 1,97 que de 1,87.
Les jours auxquels on attribue un faible indice de confiance (a priori), alorsque la prévision s’avère juste a posteriori sont souvent des jours où l’ensemble
n’avait pas une bonne homogénéité d’un point de vue calendaire. Il reste
Rpj
0
2
4
6
8
10
12
<1,54 [1,54 ; 1,69] [1,69 ; 1,85] [1,85 ; 2] [2 ; 2,15] >2,15
Classes
Fré
quen
ce
Figure 2 : Histogrammes de l’ensembleRpj
Rpj
Es2j

Actes INRETS n° 90 123
Une méthode d’évaluation a priori
que cette méthodologie d’évaluation a priori permet souvent de détecter les casde sous-estimation (ou de surestimation). Il est de plus rare qu’on arrive à unindice de confiance fort (égal à 4) et que la prévision s’avère réellementmauvaise.
3. Deuxième champ d’application : les modèles de simulation du trafic
3.1 Un court aperçu des modèles de simulation
Ces modèles permettent de donner une représentation simplifiée de la réalitésous forme de lois (c’est-à-dire de variables et de relations entre ces variables)et sont destinés aussi bien à améliorer la connaissance de cette réalité qu’à êtrepartie intégrante d’un processus de contrôle. L’objectif des modèles est alors detester des hypothèses d’évolution, d’évaluer des stratégies de commande oul’influence d’un paramètre sur le comportement d’ensemble. La simulation est unprocessus de résolution du modèle, c’est-à-dire le calcul des états successifs. Unmême modèle peut faire l’objet de divers modes de résolution, et un outil desimulation intègre éventuellement plusieurs modèles (CERTU, 2000).
A partir d’un ensemble de conditions initiales (état du réseau au début del’étude) et de conditions aux limites (demande en entrée du réseau, contraintesen sortie du réseau, incidents...) le modèle doit permettre de déterminerl’évolution des variables.
Il existe essentiellement trois grandes catégories de modèles en trafic :
– Modèles microscopiques : gèrent le trafic en individualisant chaque mobile
– Modèles macroscopiques : considèrent le trafic comme un écoulementcontinu. Les lois utilisées (dérivées de l’hydrodynamique) sont des équa-tions liant les variables entre elles et des lois de propagation. Le trafic estdonc représenté comme un flux homogène.
– Modèles mésoscopiques : intermédiaires entre la finesse des modèlesmicroscopiques et la généralisation des modèles macroscopiques. Ilsreprésentent le trafic sous forme de paquets de véhicules et traitentl’évolution de ces paquets individuellement.
3.2 Incertitude sur les données d’entrée
Les valeurs observées en trafic sont rarement très homogènes. Il y a deuxexplications à ceci. Tout d’abord il existe une erreur matérielle, due à l’éventuelmauvais fonctionnement des capteurs. De plus, les phénomènes que l’oncherche à mesurer sont, par eux-mêmes, bruités car il représente le comporte-ment d’usagers difficilement mesurable.
Dans le cas microscopique, la description du modèle doit s’accompagner d’unmodèle d’injection individuelle de véhicules fondé par exemple sur une loi de

Modélisation du trafic
124 Actes INRETS n° 90
distribution statistique. Les caractéristiques individuelles des véhicules, vitessedésirée, peuvent elles-mêmes faire l’objet d’une distribution. Une descriptionmicroscopique rend également nécessaire un modèle pour reproduire lesdépassements, les changements de file. L’existence d’un certain nombred’aspects stochastiques rend donc non représentatifs les résultats obtenus àpartir d’un seul calcul. Ils ne représentent en effet qu’une réalisation unique d’unphénomène aléatoire. La prise en compte de la distribution autour d’une valeurmoyenne ne peut être faite que si un nombre significatif de valeurs définit unensemble de conditions initiales (et non pas une seule).
La méconnaissance des données initiales influe donc sur les résultats de lasimulation. Il importe alors d’avoir une analyse critique des résultats par rapportaux données d’entrée. Ceci peut permettre de juger, qualitativement ou quantita-tivement, de la validité et de la portée des résultats.
3.3 Evaluation a priori via la méthode de « prévision d’ensemble »
3.3.1 Cas de simulation macroscopique
Dans la construction d’un outil de simulation, il existe plusieurs étapes :
1) On choisit un modèle pour décrire l’écoulement du trafic par un certainnombre d’équations liant les variables.
2) La phase de calibrage permet d’ajuster les paramètres du modèle auxcaractéristiques physiques du réseau. Ces deux étapes servent à construire lemodèle.
3) Il faut définir les conditions aux limites. Pour un modèle macroscopique lesconditions aux limites sont les valeurs du débit, de la vitesse, du taux d’occupa-tion au temps initial aux entrées et sorties du réseau.
4) La simulation s’effectue à partir des conditions aux limites et suit l’évolutiondu trafic dans le temps et l’espace.
En météorologie pour construire la prévision d’ensemble, les météorologuescherchent à intervenir dès la troisième étape. En effet, l’objectif n’est pas deremettre en cause le modèle (et ainsi d’intervenir dans la définition et le calibragedu modèle) mais plutôt de jouer sur les conditions aux limites afin d’envisagerplusieurs possibilités futures.
Dans le cas de la simulation du trafic, on propose de faire varier lesconditions limites, représentant l’incertitude sur l’état initial. Une fonction degénération de nombres aléatoires (un hasard maîtrisé) permet de reconstituerdes variables limites que ce soit le débit, la vitesse aux entrées et sorties duréseau. Les variables générées doivent être cohérentes avec les courbesfondamentales relatives à chaque entrée sortie. Ainsi au lieu d’un seul résultatnous en obtenons plusieurs qui forme un ensemble appelé ici « ensemblefinal ».

Actes INRETS n° 90 125
Une méthode d’évaluation a priori
Dans le cas d’un réseau de taille importante, pour faciliter le travail, nousproposons de s’intéresser non plus aux résultats détaillés mais à certainsindicateurs globaux relatifs à la totalité du réseau (temps global passé, distanceglobale parcourue, temps de parcours moyen...).
3.3.2 Cas de simulation microscopique
Dans ce cas, le recours à la prévision d’ensemble peut s’expliquer, outre parles erreurs de mesure, par la présence du caractère stochastique de certainesvariables. Plusieurs variables d’entrée ont un comportement stochastique,notamment l’injection individuelle de véhicules fondée par exemple sur une loi dePoisson ayant pour paramètre l’inverse du débit. L’idée la plus simple estd’envisager de générer plusieurs fois la même loi ce qui peut donner des tempsd’arrivée différents.
On peut également, comme pour le cas macroscopique, faire varier le débit etla vitesse initiaux aléatoirement dans les limites que l’on connaît (notamment parrapport à l’erreur de mesure).
Remarque
Une autre façon de construire l’ensemble final consiste à utiliser les résultatsissus du même modèle et calculés sur un intervalle de temps antérieur au tempsde la simulation. Cette façon de procéder est la même que les météorologistesappellent « système du pauvre », celle évoquée plus haut.
3.3.3 Analyse statistique de l’ensemble final
Quelle que soit la méthode retenue, on obtient alors non plus un seul résultatmais un ensemble qu’il est nécessaire d’analyser. En premier lieu, même si lestrois variables essentielles du trafic ne sont pas indépendantes (de part laconstruction du modèle, elles doivent vérifier certaines équations), on peutdébuter l’analyse par une étude unidimensionnelle. Pour chaque variable ontrace l’histogramme associé à l’ensemble. La dispersion de l’histogramme peutmettre en évidence des cas d’aberration. De plus, on peut analyser les valeursde la moyenne, de l’écart type et du coefficient de variation. Il sera égalementpossible de donner des seuils critiques empiriques voire même de faire uneestimation non paramétrique de la densité pour chaque variable. L’analyse desdifférents histogrammes donne directement une première idée de la confiance àaccorder au résultat de contrôle.
Les variables étant liées les unes aux autres on ne peut s’en tenir à un regardunidimensionnel. Il est souhaitable de se placer aussi dans un espace à troisdimensions (débit, vitesse, taux d’occupation). Dans cet espace, il convient deregarder comment les résultats se ressemblent ou diffèrent des uns des autres.On peut aussi envisager une classification des résultats. Le nombre de situationsdivergentes de la situation envisagée donnera alors une idée de la qualité durésultat de contrôle. En phase finale, on peut s’inspirer du tableau 1 pour attribueraux résultats un indice de confiance.

Modélisation du trafic
126 Actes INRETS n° 90
4. Conclusion
Le concept d’évaluation a priori d’une prévision est fortement utiliséaujourd’hui en météorologie. Certes, il n’existe pas d’analogie directe entre lamétéorologie et le trafic. Par contre, l’approche de calcul de l’incertitude utiliséeen météorologie peut être transposable au trafic. C’est dans cette optique quenous avons étudié le modèle de prévision du dispositif Bison Futé.
Pour chaque jour, un ensemble de prévisions a été construit via le concept desystème du pauvre appliqué au débit journalier relatif. L’analyse statistique de cetensemble a permis alors d’associer à chaque prévision dite de contrôle un indicede confiance. Il convient de noter que cet indice n’est en aucun cas uneprobabilité mais un qualificatif de la prévision variant de un à quatre. De plus, laprévision d’ensemble permet aussi de tirer à priori d’autres renseignementsquantitatifs sur les valeurs prédites.
Certes, un modèle est toujours améliorable mais l’objectif ici était bien de faireune évaluation a priori des prévisions issues de ce modèle. Autrement dit dansce genre d’évaluation, il faut d’abord avoir une très grande confiance dans lemodèle lui-même. En effet, l’erreur doit essentiellement provenir de l’effet devariables exogènes non prévisibles et non pas d’un mauvais calibrage dumodèle. De plus, c’est le même modèle qui doit servir à la prévision et àl’estimation sur l’historique. Il semble alors très délicat et difficile d’appliquer cegenre de concept en temps réel où l’équation de prévision (type ARMA) estamenée à être modifiée (ne serait-ce que dans les valeurs des paramètres).
Nous avons tenté de montrer que cette approche peut s’appliquer à l’évalua-tion a priori des résultats issus des modèles de simulation. Certains phénomènespeuvent rendre incertain l’écoulement du trafic (erreur sur les mesures, présencede variables stochastiques...). Le recours au système du pauvre ou à la variationdes données initiales permet alors l’obtention d’un ensemble de résultats.L’analyse statistique de ce lui-ci donnera une idée a priori de la qualité du résultatà fournir aux exploitants.
Bibliographie
Certu (2000).- Simulation dynamique du trafic routier ; Collections du Certudossier 106, décembre.
Coiffier J. (2000).- Un demi-siècle de prévision numérique du temps, LaMétéorologie, 8e série, juin.
Danech-Pajouh M.- Les modèles de prévision du dispositif Bison futé et leurévolution, à paraître dans le n˚ 73 de la revue RTS.

Actes INRETS n° 90 127
E. Impact de l’information routière


Actes INRETS n° 90 129
L’information dynamique sur les temps de parcours…
L’information dynamiquesur les temps de parcours :
position statistique,effet sur le choix d’horaire, mécanisme d’apprentissage
F. Leurent
SETRA, 46 avenue Briand, BP 100, 92225 Bagneux Cedex.Courriel : [email protected]
Résumé
Depuis l’avènement des systèmes informatiques et de télécommunication, lesexploitants des réseaux de transport se sont équipés de systèmes d’informationqui mesurent en temps réel l’état du trafic. Une partie de cette informationdynamique peut aussi servir aux usagers, dans leur choix d’itinéraire ou d’horairede départ.
L’article a pour objectif de définir précisément l’information relative aux tempsde parcours, et de modéliser ses effets pour l’usager. Pour cela nous modélisonsle temps de parcours (objectif ou subjectif) comme une variable aléatoire, dont ladistribution est conditionnée par l’information dynamique.
L’article comprend trois parties :
1. des définitions pour le temps de parcours, sa variabilité, son conditionne-ment par des facteurs exogènes comme le niveau de trafic, et sa prédiction. Nousdistinguons nettement les aspects objectifs et les aspects subjectifs ;
2. un modèle de choix d’horaire de départ en fonction d’une certaineinformation. Nous formulons l’horaire de départ optimal en fonction de l’horairecible d’arrivée, de la distribution des temps de parcours, du péage marginal etdes coûts marginaux d’avance, de retard, d’origine et de transport ;
3. un modèle d’apprentissage de l’information par l’exploitant ou l’usager,fondé sur l’analyse bayésienne.

Modélisation du trafic
130 Actes INRETS n° 90
1. Temps objectif et temps subjectif
Nous traitons d’abord le temps objectif, tel que mesuré par un ingénieur outraité par un système d’exploitation : ce cas met en scène la variabilité, lescaractères aléatoires et l’incertitude objective.
Nous passons ensuite au temps subjectif, qui ajoute deux autres sourcesd’incertitude : spécificités de l’individu, et erreur de perception.
1.1 Connaissance objective du temps de parcours
Un temps objectif est une grandeur physique mesurable par des techniquesd’observation objectives, par opposition au temps subjectif perçu par un individu.
Avant la réalisation du déplacement, on ne connaît pas le temps comme unevaleur précise. On connaît au mieux la distribution statistique du temps, sastructure probabiliste, grâce à des observations passées ou à un transfert deconnaissance.
Dans la suite, nous nous attachons à traiter le temps de parcours de manièrestatistique, afin de révéler les dispersions (§ 1.1.1), les incertitudes et leur nature(§ 1.1.2), les possibilités de prévoir et de communiquer (§ 1.1.3).
1.1.1 Hypothèses et définitions
Par nature le temps de parcours tP est variable. Considérer tP comme unevariable aléatoire est déjà une hypothèse forte de régularité, un axiome destructure probabiliste.
Pour définir la VA tP, il faut préciser la population statistique desdéplacements : a priori un itinéraire unique dans un seul sens de circulation, uneclasse de mobiles et certaines conditions temporelles notamment l’horaire dedépart. On peut alors caractériser la structure de tP, grâce à sa fonction derépartition FP dans la population :
FP(x) = Pr tP ≤ x , d’où la moyenne τP et la variance .
On peut préciser la structure de tP en affinant la population de référence : parsegmentation (ex. des conditions temporelles ou de la classe de mobiles) ou plusgénéralement par un conditionnement, selon une autre VA observable Y. Dansce cas, on caractérise la fonction de répartition conditionnelle FP/
Y=y = PrtP ≤ x Y = y, d’où la moyenne conditionnelle τP/Y et la variance condi-
tionnelle .
Pour un temps de parcours, la variable Y englobe typiquement les débits parclasse sur les arcs de l’itinéraire à des périodes antérieures, les conditionstemporelles (jour ou nuit, météo) et même d’autres trafics sur le réseau (en avalou sur les itinéraires parallèles).
σP2
σP/Y2

Actes INRETS n° 90 131
L’information dynamique sur les temps de parcours…
1.1.2 Analyse d’incertitude pour un temps moyen prédit
En réalité la connaissance objective d’une distribution statistique empiriquen’est jamais parfaite : elle est soumise aux incertitudes de mesure et à uneincertitude de transfert temporel entre passé, présent et futur.
L’incertitude de mesure, par imprécision ou échantillon partiel, et l’erreur deformulation, limitent la connaissance de FP, τP et à , et entachéesd’erreur.
De même pour le conditionnement par Y : même en négligeant l’erreur demesure de Y, on dispose de moins d’observations empiriques par valeur Y = yque pour l’ensemble, donc les , et sont plus imprécises que leurshomologues globales.
La prédiction du temps moyen mh pour les mobiles circulant à une périodedonnée est soumise à trois sources d’incertitude :
• L’incertitude de réalisation εR = mh – τP/Y car les mobiles forment un échan-tillon de la population. En fonction de la variance individuelle et dunombre de mobiles n, la variance de εR est V[εR] = puisque mh estune moyenne empirique.
• L’incertitude de spécification εM = τP/Y – , qui englobe l’erreur de formu-lation et l’erreur d’estimation.
• Enfin l’incertitude d’anticipation εA = – , entre la vraie variable deconditionnement Y et la variable anticipée .
Typiquement on anticipe les volumes de trafic par arc et par période, quiconstituent le vecteur anticipé a priori, tandis que Y correspond aux mêmesgrandeurs mesurées a posteriori.
L’anticipation de Y par est d’autant plus fiable que εA est plus faible.
L’incertitude de prédiction est . Les trois com-posantes sont à peu près indépendantes (même si l’effectif n apparaît dans ),donc la variance se décompose en .
On peut approcher . La variance V[εM] est inaccessible saufinvestigation spéciale (modèle plus fin), mais réduite si le modèle est réaliste.
Pour V[εA], on approche et
dans le cas à une composante.
L’écart se mesure a posteriori, tandis que se calcule directement.
1.1.3 Communiquer la connaissance objective
Si l’exploitant d’un système dispose d’une connaissance objective approchée suffisamment précise, il peut la communiquer aux usagers en service ou
σP2 FP τP σP
2
FP/Y τP/Y σP/Y2
σh2
σh2 n⁄
τP/Y
τP/Y τP/Y
Y
Y
Y
Y
Y Y– ∇Yτ
τP/Y

Modélisation du trafic
132 Actes INRETS n° 90
potentiels par un instrument d’information, un média. Le média touche unecertaine population, pas nécessairement identique à la population de référencede . Par exemple, une information de temps moyen sur autoroute concernel’ensemble des véhicules ; elle sous-estime le temps des camions, et à l’intérieurd’une classe de mobiles elle néglige la dispersion des allures.
Cela soulève deux questions : quel temps moyen annoncer, et quellevariabilité annoncer ? A la première, la réponse actuelle est le temps moyen tousvéhicules, proche du temps moyen des voitures qui sont les plus nombreuses.
La seconde question n’est pas tranchée : aucune variabilité n’est encoreannoncée. Les deux réponses à privilégier sont l’une la variabilité du tempsmoyen ; l’autre celle des temps individuels, qui intègre en plus la dispersion destemps individuels. La forme à privilégier est l’annonce M ± αS, avec M lamoyenne, S l’écart-type, et α un coefficient compris entre 1 et 2.
1.2 Connaissance subjective du temps
Le temps subjectif est le temps ressenti par un individu. Quand celui-cimesure son temps de parcours à l’issue d’un déplacement, il connaît le tempsobjectif et adapte sa perception a posteriori. Mais avant un déplacement, donc apriori, l’individu estime la valeur possible du temps de manière subjective.
1.2.1 Distribution subjective du temps
La distribution subjective est la distribution de probabilité du temps de parcourstelle que ressentie a priori par l’individu. Elle peut différer de la distribution objective.
Une cause d’écart importante est la spécificité objective de l’individu, notam-ment son allure individuelle qui distingue son déplacement parmi la populationdes déplacements. C’est un facteur de conditionnement, déjà évoqué pour laconnaissance objective des temps.
L’autre cause d’écart est l’erreur de perception : l’individu, qui tire sonexpérience de parcours antérieurs, tend à amplifier les écarts à la moyenne,avances ou retards. De même que, dans le choix du mode de transport, l’individutend à surestimer les gains de temps procurés par le mode qu’il choisit.
Ainsi l’erreur de perception induit probablement une surestimation de l’écarttype. Elle induit aussi une surestimation de la moyenne, car par précautionl’individu prend une marge de temps et l’intègre au temps moyen en négligeantle reliquat éventuel.
Pour formaliser l’erreur de perception, nous marquons par un prime le tempsde parcours perçu a priori par l’individu : , avec une fonction de répartition ,une moyenne et une variance .
1.2.2 Relation avec le temps objectif
Probablement l’individu surestime les moments du temps de parcours : ≥ τP et ≥ σP. Pour bien comparer les distributions objective et subjective,
τP
τP′ FP
′
τP′ σP
′2
τP′ σP
′

Actes INRETS n° 90 133
L’information dynamique sur les temps de parcours…
il faut analyser la distribution conjointe de tP et . En l’absence d’informationexogène, on peut admettre l’indépendance de ces deux variables aléatoires.Mais une information exogène Y′ (restreinte par rapport à Y disponible pourl’exploitant) induit une corrélation positive, car probablement et varient dans le même sens selon Y′, et de même pour σP/Y′ et .
1.2.3 Fonction de coût subjectif
Dans un problème de choix discret d’une option parmi un nombre fixé, lafonction de coût mesure le coût d’une option en fonction de ses attributs en prix,en temps etc. Ainsi, pour l’individu i le coût généralisé de l’option k est unefonction Gk(i) = Pk + αi tk avec Pk le prix, tk le temps et αi l’arbitrage prix-temps del’individu. C’est une variable aléatoire puisque le temps est aléatoire.
La fonction de coût sert à évaluer les différentes options et à choisir celle decoût minimal. Elle intervient a priori, avant la réalisation du déplacement.
En réalité, même si l’individu n’effectue pas une évaluation quantitativeformalisée, son choix obéit à une fonction plus ou moins intuitive de coût, qu’unobservateur peut formuler. Il appartient à cet observateur de modéliser laperception subjective du temps, par deux moyens : le remplacement de tk objectifpar subjectif, ou la modulation de αi.
Le remplacement de tk par a l’avantage théorique d’expliciter la distributionsubjective, même si on ne la mesure pas.
La modulation de αi permet d’accorder les moyennes τP et , en modulantαi τP = . Mais cela ne suffit pas pour accorder les dispersions σP et , carla relation est plus complexe.
En pratique, un bon compromis est une fonction de coût
,
ce qui explicite à la fois la moyenne et la dispersion. Les effets subjectifs sontprésents dans les paramètres d’arbitrage αi et βi. Pour un individu donné, celaéquivaut à postuler les moments de la distribution subjective en fonction de ladistribution objective :
.
La distinction entre paramètres objectifs αi et subjectifs a une grandeimportance pratique pour la mesure des fonctions de coût : les subjectifss’appliquent aux techniques de préférences déclarées, tandis que les objectifss’appliquent aux techniques de préférences révélées.
2. Analyse du Choix d’horaire optimal
Les considérations précédentes sur la connaissance objective ou subjectivedu temps de parcours s’appliquent au choix d’horaire et d’itinéraire. Poursimplifier nous traitons ici uniquement le choix d’horaire.
tP′
τP/Y ′ τP/Y ′′
σP/Y ′′
tk′
tk′
τP′
αi′ τP
′ σP′
αi′

Modélisation du trafic
134 Actes INRETS n° 90
Nous en définissons les aspects (§ 2.1) et les coûts (§ 2.2). Ensuite nousanalysons le choix d’horaire comme le problème de minimiser le coût moyen dedéplacement (§ 2.3). En posant certaines hypothèses analytiques, nous obte-nons la solution mathématique du problème de choix (§ 2.4), avec une formuleexplicite dans un cas relativement simple. Alors nous pouvons discuter le rôled’une information statique a priori (§ 2.5) et celui de l’information dynamique(§ 2.6). Nous terminons par des commentaires (§ 2.7).
2.1 Aspects du choix d’horaire
Le déplacement est une transition depuis un état d’origine, avec un lieud’origine z et un horaire de départ h, vers un état de destination, avec un lieu dedestination z′ et un horaire d’arrivée h′.
Le temps de trajet est la différence entre l’horaire d’arrivée et l’horaire dedépart : on le note par th = h′ – h. L’horaire de départ est porté en indice pourmarquer le choix de l’individu. Après ce choix, le temps dépend d’autres facteurs :conditions de trafic, fluctuations aléatoires, qui dépendent peu ou pas del’individu.
A priori l’individu choisit h afin d’arriver en z′ à un horaire cible hC : la naturealéatoire du temps nécessite de distinguer entre hC et l’horaire d’arrivée effec-tif h′, constaté a posteriori.
Pour choisir un horaire de départ h parmi un ensemble H d’options, l’individuassocie un coût à chaque option et il choisit l’option de coût minimal. On noteGi(h) le coût généralisé de l’option h pour l’individu i.
2.2 Fonction de coût d’un horaire de départ
Pour préciser la fonction de coût G(h), ses paramètres et sa forme, examinonsd’abord le coût a posteriori, puis les aspects stochastiques.
A posteriori, le coût de transition de (z, h) à (z′, h′) est une fonction G(h, h′). Ilintègre le coût d’arriver à h′ soit CA(h′), le coût de transport proprement dit,CT(h, h′ – h) et le coût de quitter l’origine à h, noté CO(h).
Intuitivement CA est une fonction décroissante jusqu’à l’horaire cible hC puiscroissante. Le coût CT(h, th) croît avec th mais pas forcément avec h (notammenten cas de péage variable), tandis que CO(h) décroît avec h.
A horaire h fixé, est une fonctiondécroissante puis croissante de h′, ou uniquement croissante si la décroissanceinitiale du coût d’arrivée est compensée par les autres termes.
Exemple. Une fonction simple pour le coût à l’origine est CO(h) = Cte = αOhavec αO la valeur du temps à l’origine, qui mesure la valeur des activitéspossibles en z. Pour le coût de transport, avec αTle coût marginal du temps en cours de transport et Ph,h′ les frais monétaires decirculation.

Actes INRETS n° 90 135
L’information dynamique sur les temps de parcours…
On peut aussi décomposer avec δhj le temps passé enétat j.
Une fonction simple de coût à l’arrivée est, avec (x)+ = maxx, 0 et K uneconstante,
Le paramètre β′ est le coût marginal du temps en retard, et – β le coûtmarginal du temps en avance. Le changement de signe indique que l’individupeut mettre en valeur le temps en avance.
Cette spécification est très simplifiée : nous ne limitons pas les variations deCO ni de CA, ce qui est irréaliste en théorie mais ne pose pas de difficulté tant queles écarts entre h′ et hC restent faibles.
A priori le temps de transport est une VA th, conditionnelle à l’horaire de dé-part h. Par conséquent le coût de transition est aussi une VA conditionnelle à hqui tient deux rôles : variable de décision et variable de conditionnement.
Exemple. Nous pouvons spécifier th comme une VA exponentielle de
paramètre λh décalée de rh le temps minimal : alors le temps moyen est
et le temps médian . Alternativement, une VA gaussienne de moyenne
et variance .
Nous ne détaillons pas le conditionnement entre les VA th des horaires dedépart successifs : ce conditionnement impose pourtant la contrainte de non-dépassement : th ≤ ∆h + th+∆h pour ∆h ≥ 0, i.e. dans chaque situation possible sile mobile part avant il arrive plus tôt.
2.3 Problème de choix et fonction de coût moyen
L’individu choisit l’horaire de départ qui minimise le coût de transition : c’est unproblème d’optimisation stochastique. En l’absence d’information exogène, lemeilleur horaire est celui dont le coût moyen, espéré, est minimal.
La fonction de coût moyen est , elle combine lesaspects déterministes du coût et les aspects stochastiques du temps.
Evidemment la fonction de coût moyen est assez complexe. On calcule termeà terme :
• A l’origine, . On note pour la suite sa dérivée
. Si CO = Cte – αOh, alors O = – αO.
• Au cours du transport proprement dit, si alors
donc .
rh1λh------+
rh2ln
λh--------+
t h σh2
CO ∂CO ∂h⁄= C

Modélisation du trafic
136 Actes INRETS n° 90
• A l’arrivée, . On note sa dérivée
.
Le terme d’arrivée est le plus complexe. Des intermédiaires de calcul sont lafonction de répartition de th, Fh(x) = Pr(th ≤ x), et sa fonction primitive
, qui dépend du moment tronqué d’ordre 1 par la relation
.
Si , alors, en notant y = hC – h etx = th = h′ – h,
Dans le cas exponentiel décalé, il vient .
Dans le cas gaussien, avec Φ la
fonction de répartition d’une VA gaussienne réduite.
En injectant le détail des termes dans la formule générale du coût moyen
, nous obtenons lecoût moyen en fonction de h et de paramètres relatifs aux termes du coût, ou bienà la distribution statistique de th.
2.4 Solution du problème de choix
La solution du problème de choix est l’horaire de départ h* qui minimise .
Lorsque cette fonction est dérivable, la solution vérifie la condition d’optimalité
au premier ordre avec .
Le coût dépend de h directement et aussi via la distribution de th.
Pour des temps de parcours distribués exponentiels décalés, il vient
et
G h( )
∂G∂h------- 0=
CA

Actes INRETS n° 90 137
L’information dynamique sur les temps de parcours…
Comme
au total
Si λ est constant . En combinant aux autrestermes, la condition d’optimalité devient l’équation
On la résout sous la forme suivante, qui est explicite quand , , αT, β, β′
et aussi sont constants :
Cette formule intègre les effets des divers paramètres, depuis l’horaire ciblejusqu’aux paramètres de la distribution du temps de parcours, en passant par lepéage marginal et les coûts marginaux d’avance, de retard, d’origine, de
transport. La dérivée du temps moyen est un terme original, absent des autresmodèles de choix de déplacement.
Une condition de validité est que > – 1 : cela signifie que l’on arrive toujoursplus tôt en partant à h qu’à h + dh, cf. la condition de non dépassement. Il faut
également la positivité du numérateur dans le logarithme, soit :
quand = 0 cela signifie que le coût marginal de transport est inférieur à lasomme des valeurs du temps à l’origine et en avance.
Une autre condition économique intuitive est que β′ ≥ – , pour justifier le
déplacement. Alors, au moins pour ≥ 0 le numérateur est inférieur au dénomi-nateur dans le logarithme, donc h* ≤ hC – r : l’individu ajoute une marge deprécaution hC – r – h* ≥ 0 au temps minimal r.
L’horaire optimal décroît en fonction de r, β′, et . L’influence de αT
dépend du signe de , donc de la situation par rapport à la pointe de trafic : en
CO
CO
CO

Modélisation du trafic
138 Actes INRETS n° 90
montée vers la pointe ≥ 0 donc h* décroît avec αT, en descente depuis la pointe
≤ 0 donc h* croît avec αT : l’individu s’écarte d’autant plus de la pointe que soncoût marginal du temps de transport est plus élevé, toutes choses égales parailleurs1.
La formule explicite permet de calculer le coût moyen minimal * = (h*), lavariance du coût a posteriori V[G(h*, h* + th*) | h = h*] etc.
Enfin examinons le cas déterministe, sans variabilité. Alors le coût d’arrivée
est une fonction affine par morceaux
dont la dérivée présente un saut au point h = hC – r.La condition d’optimalité devient la disjonction des trois conditions :
•
•
•
2.5 Désagrégation et valeur de l’information statique
L’information statique consiste en la connaissance objective de la distributiondu temps de parcours. On peut la segmenter selon l’horaire de départ, auquel casil s’agit d’information statique désagrégée, par opposition à l’information statiqueagrégée.
L’information statique désagrégée permet à l’individu de rationaliser sonchoix, par rapport à une connaissance subjective désagrégée ou non. Si l’individudispose seulement d’une connaissance subjective avec et , il choisith′* d’après la fonction de coût subjectif moyen déduite de en remplaçantla distribution du temps. L’horaire « optimal » perçu h′* est probablement différentde h*, donc a posteriori ( h′*) ≥ (h*). La différence (h′*) – (h*) est lavaleur de l’information statique désagrégée relativement à la connaissancesubjective.
Si l’individu dispose seulement d’une information statique agrégée t, et σ2,il choisit probablement différent de h*, donc a posteriori ≥ (h*). Ladifférence – (h*) est la valeur de désagréger l’information statique.
Il n’existe pas de relation évidente entre (h′*) et : l’informationstatique agrégée ne domine pas nécessairement la connaissance subjective.Cependant, si en pratique le système varie faiblement au cours du temps, alorsla distribution agrégée est proche de chaque distribution agrégée donc estproche de h*, tandis que la connaissance subjective surestime largement σ2 donc
1 En particulier les coefficients β et β′. Mais entre deux individus avec αT1 > αT2, pour un motifprofessionnel certainement > .β1
′ β2′
G G
th′ t h
′ σh′2
G′ G
G G G G
th* G h*( ) G
G h*( ) G
G G h*( )
h*

Actes INRETS n° 90 139
L’information dynamique sur les temps de parcours…
h′* est plus éloigné de h* : alors l’information statique domine la connaissancesubjective.
2.6. Nature et valeur de l’information dynamique
L’information dynamique consiste en une variable exogène Y, typiquementune observation en temps réel ou différé, qui conditionne la distribution de th doncqui resserre l’éventail des possibilités : cf. § 1.1.
Conditionnellement à Y = y, le temps de trajet pour l’horaire de départ h est
une VA th/y de fonction de répartition Fh/y, moyenne h/y et variance .
D’après la décomposition de la variance totale, en moyenne sur lesvaleurs y de Y, ce qui montre le resserrement des possibilités.
Le conditionnement modifie la fonction de coût moyen, qui devient
Le problème de choix d’horaire ainsi conditionné a pour solution : le choixest adapté à l’information dynamique.
Le gain d’adaptation se mesure de la manière suivante : sachant Y = y,
donc
La différence est la valeur de l’information dynamique. Elle estd’autant plus grande que est plus faible, donc que la connaissance de Yprécise mieux les coûts.
Exemple. Au § 2.3 nous avons donné les éléments du coût moyen pour thgaussien de moyenne et variance . Nous pouvons modéliser le condition-nement par Y en supposant que le vecteur (th, Y) est gaussien2 : si Y est distribué
N(µY, ) alors, sachant Y = y, th/y est gaussien avec une moyenne
et une variance pour
χh = cov(th, Y) : la variance est réduite de / .
2.7 Discussion
Les définitions multiples sont nécessaires pour représenter avec réalisme lesrelations entre choix et information. En donnant des formes mathématiques
2 Une hypothèse plus réaliste est un vecteur (ln th, ln Y) gaussien : alors la variance peut croîtreavec y, ce qui est réaliste si Y représente le niveau de trafic.
t σh y⁄2
hy*
G* GY*–GY
*
t h σh2
σh/y2
σY2
χh2 σy
2

Modélisation du trafic
140 Actes INRETS n° 90
simples aux éléments du modèle, nous avons obtenu une formule analytiquepour l’horaire de départ optimal. Cette formule résume, concentre les effets desparamètres suivants : horaire cible d’arrivée, distribution du temps de trajet, coûtsmarginaux à l’origine, en transport et à l’arrivée.
La formule met en évidence la marge de précaution, ajoutée par l’individu autemps minimum pour compenser économiquement la variabilité du temps. Uneinformation désagrégée, ou mieux dynamique, permet d’adapter l’horaire optimal,donc la marge, au contexte particulier du trajet. D’où en moyenne un gain parréduction d’incertitude.
Même à information dynamique parfaite, il subsiste une incertitude non nulle :cf. les aléas de circulation dans le modèle des conflits (Leurent, 2001,chapitre 10). Cette incertitude résiduelle marque la limite physique des systè-mes d’information dynamique. Pour la mesurer, il importe de bien distinguer lescauses de variabilité : variations du temps moyen en fonction de l’état macrosco-pique, ou fluctuations résiduelles.
Enfin nous avons considéré la valeur individuelle de l’information désagrégéeou dynamique. Au niveau collectif, les économies de coût direct sont amplifiéespar des économies de coût externe, cf. (Leurent, 2001, § 13.D1). A ces valeursindividuelle et collective, il faut bien sûr retrancher le coût d’acquisition del’information pour l’individu, et le coût de production de l’information pour lacollectivité : c’est la limite économique de l’information dynamique.
3. Un modèle bayesien pour l’apprentissage de l’information
La connaissance du temps de parcours, sous la forme d’une distributionstatistique, est élaborée au fil du temps par l’acteur, usager ou exploitant. Dansun ensemble de situations « voisines » et donc répétitives, l’acteur observe laréalisation de la variable aléatoire « temps » : les observations constituent unéchantillon, que l’on peut exploiter par des méthodes statistiques rigoureuses oude manière intuitive, ce qui paraît plus plausible dans le cas des usagers.
Aussi existait-il précédemment deux approches pour modéliser l’apprentis-sage des temps et de l’information dynamique sur les temps :
1. les méthodes statistiques usuelles d’inférence : estimation de la moyenneet de l’écart-type pour la distribution du temps. C’est l’approche usuelle desexploitants de réseau et autres serveurs d’information. Evidemment il s’agit alorsde temps objectif ;
2. des méthodes basées sur la logique floue, i.e. sur un ensemble de règlesquantitatives pour formuler des variabilités et les combiner ; cf. la thèse deVincent Henn (2001) pour une revue de ces approches. Précisément, ondistingue deux types de variabilité en logique floue : l’incertitude d’ordre concep-tuel-perceptif, par opposition à l’imprécision numérique (ex. peu de chiffressignificatifs pour un nombre). Les chercheurs qui choisissent cette approche,souhaitent privilégier la capacité à représenter l’incertitude et l’imprécision.

Actes INRETS n° 90 141
L’information dynamique sur les temps de parcours…
Dans la suite de cette partie, nous développons une troisième approche,basée sur l’analyse bayésienne : ce cadre statistique permet de représenter uneconnaissance incertaine, ainsi que l’apport d’une information supplémentairepour augmenter cette connaissance.
Ainsi la troisième approche est médiane entre les deux premières : de naturestatistique, mais avec des capacités de représentation et des principes decombinaison, comparables à la logique floue3.
A notre avis, l’analyse bayésienne tire le meilleur parti des deux premièresapproches : bon pouvoir de représentation, et caractère statistique qui assure unlien solide et clair avec l’expérience et l’observation.
Nous présentons successivement :
1. les principes de l’analyse bayésienne, son application à la connaissanced’une proportion, d’une distribution et d’un modèle de régression ;
2. les utilisations possibles pour la connaissance des temps de parcours :formation de l’expérience, représentation de l’imprécision ;
3. la place de l’information dynamique, dans le cas d’un exploitant puis d’unusager.
3.1 Sur l’analyse bayésienne
3.1.1 Principes
Soient deux variables aléatoires X et Y. Une connaissance probabilisteexhaustive du couple (X, Y) consiste en la connaissance des PrX ∈ A ∩ Y ∈ Bpour tous les événements A et B relatifs à X et Y respectivement.
Les distributions individuelles de X et Y, les PrX ∈ A et PrY ∈ B, constituentune connaissance partielle, marginale, pour le couple (X, Y).
Un autre élément de connaissance probabiliste est l’information sur Yconditionnelle à X, i.e. les probabilités conditionnelles PrY ∈ B X ∈ A pour tousévénements A et B.
L’information marginale PrX ∈ A et l’information conditionnelle PrY ∈ B X ∈ Asont exhaustives, puisque PrX ∈ A ∩ Y ∈ B = PrY ∈ B X ∈ A PrX ∈ A.
En particulier elles révèlent l’autre distribution marginale PrY ∈ B grâce à larègle des causes totales, pour une partition d’événements As qui recouvrentl’ensemble des valeurs possibles de X sans se recouper :
3 Cette analogie du pouvoir de représentation a été démontrée dans des travaux de logiquethéorique.

Modélisation du trafic
142 Actes INRETS n° 90
Nous en déduisons également l’information sur X conditionnelle à Y, par larègle de Bayes
3.1.2 Connaissance bayésienne d’une proportion
Soit une proportion p, qui peut représenter la probabilité d’occurrence d’uncertain événement. Une connaissance incertaine de p se modélise par unedistribution de probabilité, d’autant plus concentrée autour d’une valeur « la plusplausible » que l’incertitude est plus faible.
La formule usuelle pour une distribution de probabilité adaptée à uneproportion, donc étendue entre 0 et 1, est la loi Beta-I à deux paramètres α et γ,qui admet la densité
avec une constante de normalisation
Les paramètres α et γ modulent la forme de la distribution, notamment sesmoments :
• pour la moyenne,
• pour la variance.
On utilise une telle distribution pour modéliser la connaissance a priori de laproportion.
Une observation consiste en la réalisation, ou non, de l’événement de probabi-lité p : c’est une variable aléatoire binaire y qui prend la valeur 0 en cas d’échecou 1 en cas de succès. La variable y a pour fonction de densité, sachant p :
• f(0) = Pry = 0 | p = 1 – p,
• f(1) = Pry = 1 | p = p,
soit f(y) = (1 – p)1–y py de manière générique. On en déduit la fonction devraisemblance de p sachant y, Prp | y = (1 – p)1–y py.
Figure 1 : Schéma de l’analyse bayésienne
PrX ∈ A Y ∈ B ∝ PrY ∈ B X ∈ A PrX ∈ A
Connaissancea posteriori
Information conditionnelle
Connaissancea priori

Actes INRETS n° 90 143
L’information dynamique sur les temps de parcours…
En combinant la connaissance a priori et la vraisemblance de l’observation,nous obtenons la connaissance a posteriori g(p | y) ∝ pα+y–1(1 – p)γ–y, qui estencore une distribution Beta-I, avec des paramètres modifiés
• α′ = α + y,
• γ′ = γ + 1– y.
Ces deux formules d’actualisation sont très simples, ce qui justifie l’emploi dela distribution. Graphiquement, la figure 2 montre la formation de l’expériencedans le cas où y = 1.
3.1.3 Connaissance bayésienne d’une distribution
La distribution statistique d’une variable t sur un intervalle réel, contientdavantage d’information qu’une simple proportion.
Le modèle le plus simple est une distribution gaussienne à la fois pour laconnaissance a priori, la vraisemblance d’observation et la connaissance aposteriori (cf. Judge et al., 1988). Il suffit alors de deux paramètres, la moyenne etl’écart-type, qui sont des nombres réels que des observations peuvent modifier.
Un modèle plus sophistiqué nous semble nécessaire pour la connaissance dela distribution : à savoir le modèle gaussien – gamma inverse, qui considère lavariable t comme gaussienne N(β, σ), mais avec
• une moyenne β elle-même distribuée en fonction de deuxhyper-paramètres µ, τ et de l’écart-type.
• un écart-type σ distribué gamma inverse à deux hyper-paramètres ν, θ.
Figure 2 : Connaissance d’une proportion : a priori (cloche de gauche),observé (segment), a posteriori (cloche de droite).

Modélisation du trafic
144 Actes INRETS n° 90
En fonction des quatre hyper-paramètres µ, τ, ν, θ, la variable t a pour moments
• E[t] = µ
•
Pour la composition de la fonction de densité, cf. Judge et al. (1988) oul’appendice.
Une observation y de t provient de la distribution N(β, σ), donc elle induit unevraisemblance
En combinant la connaissance a priori et la vraisemblance de l’observation,nous obtenons la connaissance a posteriori de la distribution, qui est encore unmodèle gaussien – gamma inverse dont les quatre hyper-paramètres vérifient :
• τ′ = τ + T,
• ν′ = ν + T,
• µ′ = (τµ + Ty)/(τ +T),
• θ′ = θ – τ′µ′2 + τµ2 + Ty2 + (T – 1)z2.
Ces formules sont données dans le cas de T valeurs observées4, de moyenney et de variance corrigée z2.
3.1.4 Connaissance bayésienne d’un modèle de régression
Un modèle de régression est une dépendance quantitative d’une variable ydite endogène, envers des variables xj appelées les facteurs exogènes.
La régression la plus simple a la forme linéaire suivante, en fonction decoefficients θj :
Cela sert à modéliser l’influence conjointe des facteurs exogènes, et de traiterde manière unifiée une grande diversité de cas particuliers.
On peut traiter la régression linéaire de manière bayésienne, en associant auxcoefficients θj une distribution gaussienne multivariée.
3.2 Application au temps de parcours
Nous considérons le temps de parcours comme une grandeur réellesoumise à des fluctuations, afin de lui appliquer l’analyse bayésienne d’unedistribution.
4 Pour des observations indépendantes.

Actes INRETS n° 90 145
L’information dynamique sur les temps de parcours…
3.2.1 La formation progressive de l’expérience
Pour appliquer la formation progressive de l’expérience, autant pour unusager que pour un exploitant, on applique le schéma « en boucle » :
1. connaissance a priori + observation ⇒ connaissance a posteriori, selon lesformules du § 3.1.3 ;
2. connaissance a posteriori ⇒ nouvelle connaissance a priori, par simplereport ; ce qui permet d’incorporer chacune des observations successives.
3.2.2 Ajout de l’imprécision
Si de plus la précision de l’observation est limitée, nous pouvons modéliserl’imprécision en supposant que la valeur observée y est la somme du temps réelx (pas observé) et d’une perturbation aléatoire ε de moyenne nulle et variance u2.
Dans ce cas l’usager perçoit la situation imprécise avec observation de y,comme un mélange de situations précises avec observation de x.
Dans le mélange, la proportion de chaque valeur x est la densité au point xd’une variable aléatoire gaussienne de moyenne y et variance u2.
Pour obtenir rapidement les conséquences d’une observation imprécise, ilsuffit de reprendre les formules d’actualisation des hyper-paramètres, et de lesmoyenner selon la distribution de l’imprécision ε. Alors seule la formule del’hyper-paramètre θ change : dans le cas à une observation (T = 1), elle devient
3.3. Place de l’information dynamique
3.3.1 Cas d’un exploitant
Pour un itinéraire donné, dans certaines conditions de période, un exploitantqui peut observer systématiquement le temps peut constituer progressivementune connaissance statistique.
Plus profondément, il peut observer conjointement le temps de parcours etcertains facteurs comme le niveau de trafic, et les exploiter avec un modèle derégression (cf. § 3.1.4). En situation de prévision, il peut alors fournir ladistribution statistique du temps conditionnel à ce facteur.
3.3.2 Cas d’un usager
Un usager sans accès à l’information de l’exploitant, utilise seulement sesobservations individuelles pour former son expérience du temps de parcours.Cette expérience correspond uniquement aux situations qu’il rencontre, donc ellene représente pas nécessairement une situation moyenne.
En supposant un usager « statisticien », on peut modéliser l’observationconjointe du temps et du trafic rencontré, ou encore l’observation conjointe dutemps et d’une information diffusée par l’exploitant.

Modélisation du trafic
146 Actes INRETS n° 90
Bibliographie
Henn V. (2001) Information routière et affectation dynamique : vers une modéli-sation floue. Thèse de l’Université de Saint-Etienne.
Judge G.G., Hill R.C., Griffith W.E., Lütkepohl H. & Lee T.C. (1988) Introductionto the Theory and Practice of Econometrics. Wiley, New York.
Leurent F. (2001) Modèles Désagrégés du Trafic. Rapport INRETS Outils etMéthodes # 10. INRETS, Arcueil, France.
Zerguini S. (1998) Variabilité des temps de parcours et incertitude des usagerssur le temps de déplacement. Congrès international francophone del’ATEC, Vincennes, janvier.
5. Appendice : connaissance bayésienne d’une distribution
Nous précisons ci-après le détail des calculs pour traiter une variable aléatoiregaussienne – gamma inverse, en analyse bayésienne.
5.1 Hypothèses de la distribution gaussienne – gamma inverse
Les densités de la variable aléatoire primaire notée t, et des variablessecondaires β et σ sont respectivement :
•
•
• σ ≈ Inverse – Gamma (ν, θ) :
•
Pour cette dernière, E[σ] = et
5.2 Conséquences
En fonction des quatre hyper-paramètres µ, τ, ν et θ, la VA t admet unedensité, une moyenne et une variance. La moyenne découle du théorème del’espérance totale :
E[t] = E[E[E[t | β, σ] | σ]] = E[E[µ | σ]] = µ.
Pour la variance, on applique le théorème de l’espérance totale à t2 :
E[t2] = E[E[E[t2 | β, σ] | σ]] = E[E[β2 + σ2 | σ]] = ,
donc

Actes INRETS n° 90 147
L’information dynamique sur les temps de parcours…
Pour la densité, on applique la règle des causes totales. Pour un T-upletd’observations indépendantes, de moyenne empirique y et de variance empiriquecorrigée z2, la distribution conditionnelle à β et σ admet la densité
avec r = T – 1
Soient τ′ = τ + T et :
alors
avec
L’intégration selon σ utilise la constante de normalisation de la distributioninverse-gamma :
avec ν′ = ν + T
Pour faciliter l’implémentation pratique des calculs, on peut définir troisconstantes auxiliaires
et

Modélisation du trafic
148 Actes INRETS n° 90
5.3 Formules d’actualisation des quatre hyper-paramètres
• τ′ = τ + T,
•
• ν′ = ν + T,
•

Actes INRETS n° 90 149
Incidences de l’information « temps de parcours »…
Incidences de l’information « temps de parcours » sur
les décisions adoptées par les usagers des voies rapides urbaines
Brigitte Cambon de LavaletteINRETS-LPCSébastien PoitrenaudLaboratoire CNRS ESA-7021 « Cognition & Activités Finalisées », Université Paris VIII.
Résumé
La présentation était destinée à exposer les résultats actuels d’une rechercheconcernant l’utilisation des messages « temps de parcours » annoncés sur lesPMV des voies rapides urbaines. Sa particularité est de chercher à comprendrel’impact de l’information « durée de parcours » à partir des processus mentauxqu’elle sollicite chez les individus, dans le courant de leur activité mentale, et nonà partir de la modélisation du trafic. L’objectif était de définir une méthodologiepermettant d’évaluer les comportements des usagers en réponse à cesmessages : l’activité mentale engagée et les moyens de l’analyser.
1. Introduction
La particularité des messages temps de parcours est qui informent lesusagers en temps réel sur l’état du trafic. Ils ne donnent pas d’ordres, ni mêmede conseils, comme c’est le cas avec la signalétique routière traditionnelle.Néanmoins, ils apportent à l’usager une information qui peut concerner unmeilleur acheminement de son itinéraire. Celui-ci est libre d’utiliser ou non. Lesusagers apprécient favorablement ce nouveau service.
Comme ils sont de forme alphanumérique, une autre caractéristique de cesmessages est leur obligatoire brièveté du fait des contraintes de l’affichage surPMV et du temps de lecture de l’usager. Le contenu doit en être synthétique. Dece fait, ces messages sont contraints d’éluder un certain nombre de connaissan-

Modélisation du trafic
150 Actes INRETS n° 90
ces que l’usager doit avoir en mémoire pour en comprendre la teneur. Pour enrestituer le sens, il doit établir des correspondances entre le contenu du messageet des éléments en mémoire résultant de son expérience passée. On comprendalors que l’utilisation de ces messages génère des processus cognitifs d’activa-tion mentale qui vont varier pour le moins selon que l’usager possède ou non lesprérequits nécessaires à son interprétation. A partir du contenu du message,l’usager doit inférer un autre contenu qui va être celui qui guidera son action.Dans le cas des messages indiquant les durées de parcours, le contenu désigneun lieu et une durée. Par exemple à Paris « P. Italie 7 mn.» ce qui signifie « si lesconditions de circulation ne changent pas, je vais mettre maintenant 7 minutespour atteindre la porte d’Italie », et cela sous entend éventuellement que la zoneest plus ou moins encombrée. Selon la signification qu’il lui donne, le conducteurpeut inférer ou non la présence d’un bouchon sur son itinéraire aval. Il a alors lapossibilité soit de quitter la voie sur laquelle il se trouve soit de maintenir sonitinéraire.
Selon la façon avec laquelle chacun organise ses déplacements, l’impact deces informations sur le comportement et la décision induite à la lecture dumessage peuvent entraîner des modifications de l’état du trafic et ainsi fairesurgir de nouveaux problèmes. C’est en quoi la connaissance des réactions desusagers à ces messages est un sujet de recherche intéressant pour l’ergonomieroutière du point de vue de l’adaptation de l’humain au système. Concernant lesmessages durée de parcours, la principale question est celle de la décisionadoptée à la lecture du message : en cas d’encombrement , décide-t-il dechanger d’itinéraire ou de patienter dans de meilleures conditions ? L’intérêt qu’ily a à analyser ce sujet est qu’une meilleure connaissance du processus peutéventuellement contribuer à apporter un meilleur éclairage sur des outils derégulation du trafic.
Selon les recherches faites sur l’écoulement du trafic, il semblerait que laseconde solution soit plus adoptée que la première (Cohen, S., & Hadj-Salem, H.,1996, et Jardin, P., & Laterrasse 1998) : les conducteurs se délestent peu àl’annonce des durées de parcours. Cependant, tous les usagers ne se comportentpas à l’identique. L’objectif de notre recherche a été d’identifier des catégoriesd’usager en fonction des décisions qu’ils prennent à partir de ces messages.
Dans la première partie de cette présentation, nous allons exposer l’analysede l’activité mentale sollicitée à la lecture de ces messages, c’est-à-dire lesinférences qu’ils en avancent, les différentes formes d’interprétation de soncontenu. Nous allons alors constater que tous les usagers ne peuvent secomporter de façon identique. Dans la seconde partie, les résultats d’uneapproche exploratoire seront exposés.
2. Processus mentaux d’interprétation des messages
Pour beaucoup, la brièveté des messages, un lieu, une durée, fait que leursignification semble évidente, induisant par là même directement l’action appro-

Actes INRETS n° 90 151
Incidences de l’information « temps de parcours »…
priée. Cela peut être le cas pour les individus ayant déjà élaboré leur proprereprésentation du dispositif. La notion de représentation est ici employée pourdésigner le modèle mental que l’individu, à partir de ses expériences, se fait deson environnement, des objets qu’il y rencontre et des interactions qu’il déve-loppe avec eux (M. Denis 1998 ; Tijus 2001 ; Richard, 1998). C’est une construc-tion mentale qui permet à l’individu de faire face aux exigences d’une tâcheparticulière.
A la lecture des messages sur les durées de parcours, comment cettereprésentation se construit-elle ? Notre hypothèse repose sur l’idée que, afind’interpréter correctement le message et décider de la conduite à adopter, leconducteur doit disposer d’un certain nombre de connaissances, et, selon l’étatde ces connaissances, mais aussi selon son intention d’atteindre le plusrapidement possible sa destination, il décidera soit de maintenir son itinéraire,soit d’en changer.
2.1 Les connaissances impliquées dans la compréhension du message.
2.1.1 Les connaissances de la toponymie et de la topographie des lieux.
Avec évidence, il est indispensable de connaître le nom des lieux indiqués surles panneaux, leurs positions dans l’espace, et leur situation par rapport àl’itinéraire poursuivi. Les usagers peu accoutumés à la toponymie d’une région,les touristes par exemple, ne sont probablement pas du tout concernés : ils nepeuvent décider d’une action sur cette base. De plus, il arrive que la terminologieen vigueur sur les PMV utilise une dénomination des voies qui n’est pas celle del’usager : les axes sont parfois désignés selon un code différent de celui employépar le public.
2.1.2 La connaissance des durées habituelle de parcours.
Pour que l’information permette à l’usager d’inférer l’état du trafic aval, il doitavoir en mémoire la connaissance de la durée de parcours en période de fluiditéafin de la comparer à la durée de parcours annoncée pour évaluer le degré decongestion. Si par exemple, il sait qu’un trajet se parcourt habituellement en5 minutes, la décision qu’il prendra devrait, on le suppose, varier si on lui signaleune durée de 10 minutes, ou bien de 40 minutes. Il faut donc avoir déjà fait leparcours concerné, évalué la durée nécessaire pour le parcourir, peut-être tenircompte des variations horaires dans la journée, avoir mémorisé toutes cesdonnées, pour attribuer une signification à la durée annoncée en termes de degréde congestion du trafic, et de là, décider ou non de modifier du projet initiald’itinéraire. Il y a donc une phase préalable dans la construction de la représen-tation mentale de l’individu au cours de laquelle il va établir des comparaisons,pour en inférer un état qualitatif de la circulation (plus ou moins encombrée). Enrevanche, les usagers occasionnels qui ne connaissent pas la durée habituellene devraient pas pouvoir inférer aussi bien que les autres la présence d’unbouchon.

Modélisation du trafic
152 Actes INRETS n° 90
2.1.3 La connaissance d’itinéraires alternatifs.
Dans la mesure où nous avons envisagé deux modalités d’action induites parles messages, changer d’itinéraire ou patienter, on conçoit aisément que ladécision de changer soit liée à la plus ou moins bonne connaissance du réseauet s’opérera d’autant plus facilement que l’usager a une représentation del’espace environnant et la connaissance de trajet lui permettant d’atteindre sadestination, c’est-à-dire qu’il aura déjà pu élaborer une carte mentale de l’espaceconcerné. De ce fait, la connaissance du réseau devrait interférer elle aussi avecla modalité décisionnelle adoptée et opérer une sélection entre les usagers selonleur expérience de l’espace : en l’absence de connaissance d’itinéraire derechange et des durées probables sur ces itinéraires, l’usager va-t-il prendre lerisque de chercher un autre parcours, et peut-être de perdre autant de temps ?Cela est peu probable et mériterait d’être étudié.
2.1.4 La confiance dans la fiabilité des messages sur les durées de parcours.
Pour que les usagers soient incités à agir à partir des messages, quelle quesoit l’issue de l’action, il semble indispensable qu’ils soient assurés du fait que ladurée annoncée représente bien la durée actuelle, en temps réel, du parcoursqu’ils vont effectuer. Ce qui constitue l’intérêt principal de la durée annoncée surles PMV est qu’elle résulte d’une évaluation en temps réel, qu’elle donne ainsiune image, un « instantané » de la situation actuelle. A ce sujet, plusieurséléments sont à considérer. Le premier est que le bien fondé de la signalisationroutière est bien souvent remis en question par les usagers qui s’y conformentd’une façon variable, en la réinterprétant souvent d’une façon personnelle.Ensuite, s’agissant d’une évaluation en temps réel, ils doivent avoir à l’esprit quecette évaluation résulte d’un système collecteur de données sur le trafic actuel dela circulation et non d’une valeur moyenne indiquant la durée moyenne duparcours. Il est donc impératif qu’ils aient construit une représentation mentaled’un système susceptible de produire des données fiables. Or, il n’y a pasd’information au public sur le fonctionnement réel du système PMV qu’ils ne sontpas supposés connaître. Par ailleurs, il est difficile d’inférer le fonctionnement réelde ses dispositifs sans avoir en mémoire un certain nombre de connaissancessur les technologies avancées, sur les capteurs notamment, et de « deviner »comment ça marche. Tous ces éléments font que la crédibilité de l’informationn’est pas acquise d’emblée.
2.2 L’intention
Dans la décision que l’usager adopte à la lecture du message, il nous asemblé nécessaire de tenir également compte de l’intention des usagers enmatière d’organisation des déplacements. En effet, il peut posséder les connais-sances requises pour interpréter correctement le message, mais suivant sonintention, il les utilisera ou pas. Cela revient à dire que l’intention organise l’action(Pacherie, 1993), exprimant ce que l’individu pense ou désire à propos de

Actes INRETS n° 90 153
Incidences de l’information « temps de parcours »…
l’organisation de son trajet. Il s’agit d’une disposition à agir d’une certaine façon,de ce que l’on peut voir comme un critère d’obtention du but qu’il s’est fixé.
Nous sommes intéressés par deux catégories d’intention : celle qui consiste àvouloir atteindre sa destination le plus rapidement possible et celle qui consiste àvouloir ménager son confort.
2.3 Conclusion : modélisation de l’activité mentale sollicitée
En conclusion, suivant la façon avec laquelle les usagers conçoivent lesdéplacements urbains, les intentions qui les animent dans ce but, suivant lesdiverses catégories de signification accordées aux messages, nous supposonsqu’ils auront l’intention :
• soit d’atteindre le plus rapidement possible leur destination, et désirer lefaire en utilisant tout ce qu’ils pensent leur permettre de réaliser cetteintention ; et alors, selon la signification donnée au message, ils l’utiliserontou non pour éviter les zones saturée.
• soit de ménager leur confort en faisant l’économie de ne pas chercher unautre itinéraire, et alors, suivant la signification donnée au message, ilspeuvent se trouver confortés ou non dans l’idée qu’ils peuvent patienter.
Le processus qui peut être schématisé de la façon suivante :
Cela implique que la décision adoptée, maintenir son itinéraire ou en changersi la durée de parcours paraît excessive, doit avoir un caractère rationnel, quipeut par exemple être énoncé sous la forme d’une proposition de la façonsuivante :
• si j’ai l’intention d’atteindre ma destination le plus rapidement possible
• que je juge le temps annoncé supérieur au temps habituel, que je sais quecette information est fiable, que ma connaissance du réseau m’indique unautre itinéraire possible
• alors je décide de changer d’itinéraire.
•
•
•
•
•
•
•
Figure 1 : Schématisation des processus mentaux impliqués

Modélisation du trafic
154 Actes INRETS n° 90
3. Comportements adoptés par les usagers à la lecture des messages : approche exploratoire
A partir de cette modélisation du comportement, une enquête exploratoire aété réalisée auprès des usagers du boulevard périphérique de Paris. La difficultérésidait cependant dans l’analyse des entretiens si l’on veut comprendre le liensémantique reliant les termes de la proposition. C’est la raison pour laquelle nousavons utilisé le programme STONE(Semantic Tree based Object Navigator andEditor) ) qui a en effet été développé afin de disposer d’un outil de manipulationde données arborescentes, mettant en pratique l’analyse hiérarchique despropriétés.
3.1 Méthodologie
Nous avons procédé par enquête auprès d’usagers habituels de cet axe,l’utilisant plusieurs fois par semaine depuis plusieurs années.
3.1.1 Les entretiens
18 automobilistes ont ainsi été interviewés. Les entretiens duraient 45 minutesenviron, et étaient réalisés selon la méthode semi-directive, sur les thèmessuivants :
1. La « pression temporelle » évoquée à partir des raisons de leur choixmodal en faveur de la voiture pour les déplacements urbains, et qui apparaissaitégalement à partir de l’exposé des motifs de leur passage par le BP.
2. L’évocation des différents itinéraires utilisés ce qui permettait d’amener lesujet à parler de la place occupée par les messages sur les durées de parcoursdans le choix de l’itinéraire.
3. Le récit d’itinéraire réel récent ce qui avait pour objectif de chercher àvérifier les allégations exposées précédemment.
4. Leur représentation du dispositif PMV avec temps de parcours.
3.1.2 Analyse des entretiens : le programme STONE
Les données issues des entretiens ont ensuite été analysées à l’aide dulogiciel STONE (Poitrenaud, 1998). Il permet d’articuler des données sur desplans successifs, ce qui a permis ici d’envisager pour chaque sujet la successiondes instances impliquées dans l’action : intention, connaissances, décision, sansavoir à les reconstituer arbitrairement à posteriori ; le lien entre elles apparaîtdirectement sur le graphe de Stone.
La plupart des systèmes de gestion de base de données codent les propriétésdes entités représentées à l’aide de la notion de couple attribut-valeur, dans destables ou relations : les colonnes représentent les différents attributs et les lignesles différentes entités sous la forme d’un vecteur de valeurs exclusives. Unensemble d’attributs munis chacun d’un ensemble de valeurs possibles constitueun type d’entité.

Actes INRETS n° 90 155
Incidences de l’information « temps de parcours »…
En revanche, dans une description Stone, il n’y a ni table, ni attribut, ni valeur,ni classes prédéfinies, mais des lignées de propriétés organisées de façonarborescente. Les objets décrits par ces propriétés sont munis d’un identificateurunique : c’est un système à objets nommés. Le schéma attribut valeur du modèlerelationnel peut être vu comme un cas particulier de description Stone danslequel la « profondeur » de la description est systématiquement de 3 : au premierniveau, on a les types d’objet (les différentes tables relationnelles) ; au deuxièmeniveau, les attributs ; et au troisième niveau, les valeurs des attributs.
Figure 2 : Graphe Stone représentant les modalités de la décision d’un sujet

Modélisation du trafic
156 Actes INRETS n° 90
La figure 2 ci-dessous présente la formalisation STONE des liens entre lesétats successifs impliqués, suite à l’information du PMV, dans la décision derester ou de quitter un itinéraire. Elle représente sous forme d’arborescence tousles motifs alternatifs qui composent le plan de l’action : l’intention inférée à partirdes raisons du choix (dans la figure : choix) pour la voiture (voiture,) ou pour lepassage par le BP (BP (confort ou simplification tache) ; les connaissances surla configuration du réseau (connaissances réseau) les indices (indices) à partirdesquels les sujets prennent leurs décisions ; les inférences (raisonnement)qu’ils établissent à partir du message affiché sur le PMV avant d’accéder au BP(action 1), puis quand ils sont déjà sur le BP et qu’un bouchon se forme soudain(action 2). Dans les 2 cas, la décision consiste soit à changer d’itinéraire pouréviter le bouchon, soit à rester dans le bouchon en organisant le délai de tempsperdu.
3.2 Résultats
Sur l’ensemble des sujets de l’échantillon, 5 privilégient d’arriver le plusrapidement possible à destination, et 13 le confort du déplacement. En présencede bouchons sur leurs itinéraires, que décident-ils de faire ? Nous avons observétrois types de comportement selon la décision de changer d’itinéraire, de resterdans les encombrements, ou rester dans un bouchon quand le report de temps,selon le PMV, n’est pas excessif.
• Les premiers (5 sujets) qui agissent donc dans le sens attendu, sontrébarbatifs à toute forme d’acceptation des bouchons ; ils changent d’itiné-raire avant de s’engager sur le BP si la durée leur paraît excessive ; ils sontfortement motivés par le désir d’atteindre le plus rapidement possible leurdestination (c’est la raison pour laquelle ils empruntent cette voie rapide, etpour la plupart, celle du choix de la voiture pour se déplacer) ; la décision dese délester est favorisée par le fait qu’ils ont en général une connaissanceétendue du réseau, des itinéraires « de secours », vers lesquels ils sedélestent dès que ça « bouchonne ». Et alors, la connaissance de la duréede l’immobilisation peut leur servir à éviter les zones encombrées.
• A l’opposé, se trouve le groupe de ceux sur lesquels le dispositif ne semblepas agir (7 sujets) : ils acceptent les bouchons avec une grande patience, etqui sont les plus nombreux parmi nos sujets. Ceux-là ne changent pasd’itinéraire quelque soient les durées annoncées à l’abord du BP ou sur leBP lui-même, préférant ménager le confort de leur trajet pour la plupart, ilsconnaissent peu d’autres trajets, et n’en cherchent pas. Ils semblent« économes » de leurs actions ; certains ont même l’habitude de partir enavance. L’information sur les durées de parcours les renforce dans leursconvictions que « de toute façon, c’est partout pareil... », et que ce n’est pasla peine de changer de trajet.
• Enfin, parmi eux, nous avons observé un sous-groupe de 3 conducteurs quiadoptent, pragmatiques, les comportements des deux précédents groupe.D’une part, comme le second groupe, ils n’ont pas l’intention d’aller vite,

Actes INRETS n° 90 157
Incidences de l’information « temps de parcours »…
mais s’ils passent par le BP, c’est parce que c’est plus rapide, comme lepremier groupe. Ils ne rentrent pas sur le BP encombré mais acceptent desreports de temps, non pas d’une façon inconditionnelle comme semblent lefaire les sujets du groupe précédent, mais dans une certaine marge qu’ilsprécisent en général. Ils ont une bonne connaissance du réseau, ce qui faitqu’ils pourraient changer d’itinéraire. Les PMV leur servent soit à éviter des’engager sur le BP encombré (la durée leur indique l’état du trafic au-delàdu champ visuel), soit, si le bouchon se forme quand ils s’y trouvent déjà, àpatienter pendant un certain temps.
Ces résultats ne sont pas représentatifs d’une population : le nombre desusagers interviewés est trop restreint. En outre, il s’agit d’usagers réguliers,connaissant les durées moyennes de parcours et la toponymie des lieux. Ilspermettent cependant de mettre en évidence plusieurs éléments particulièrementintéressants :
• L’idée assez commune selon laquelle les automobilistes cherchent àatteindre leur destination le plus rapidement possible ne correspond pas àtous les usagers. Bien au contraire, on trouve des usagers qui s’installentconfortablement dans les bouchons : on pourra téléphoner, bien écouter dela musique, etc. Comme le dit très clairement l’un d’eux : ... j’aime bienl’intimité de mon propre véhicule... c’est un lieu de vie j’écoute la musiqueque je veux. Je ne suis pas obligé de subir le contact des autres je peuxregarder le journal, je peux faire plein de choses dans une voiture... Ce n’estdonc pas un moment que tous les conducteurs vont chercher obligatoire-ment à écourter.
• Les conducteurs venant chaque jour de la banlieue éloignée ne connaissentpas forcement d’itinéraire alternatif : ils préfèrent maintenir leur route sur leboulevard périphérique plutôt que de perdre du temps sur un autre itinéraire,surtout depuis que les durées de trajets sont annoncées.
• La représentation du fonctionnement du dispositif producteur des messagesest bien souvent qu’il est assuré par des caméras qui « observent » le trafic,la qualité de l’information en serait donc moins bonne que celle des capteursqui évaluent le trafic en temps réel. La fiabilité accordée aux messages enest sans doute moins bonne.
4. Conclusion
Ces résultats font apparaître des éléments intéressants quant aux habitudesde trajet, comme la préférence pour son confort vs sa rapidité. Ils montrentégalement que les messages durées de parcours sont très utiles aux usagers quidésirent ménager leur confort, les rassurant sur l’issue de la situation, ce qui n’estpas le cas lorsque les messages annoncés sur les PMV sont « bouchon » ou àfortiori « accident » : dans ce cas ils changent d’itinéraire. Ceci suggère que lesmessages durées de parcours pourraient donc contribuer à un accroissement du

Modélisation du trafic
158 Actes INRETS n° 90
trafic. Une meilleure information du fonctionnement du dispositif permettrait peut-être d’améliorer la confiance dans la valeur du message.
S’agissant d’une recherche exploratoire, portant sur un nombre restreint desujets, les résultats ne peuvent cependant en être considérés comme représen-tatifs d’une population d’usagers. Nous ne savons pas comment se comportentles usagers occasionnels. L’enquête par entretiens que nous avons entreprise,devrait être prolongée de façon à s’assurer englober l’ensemble des catégoriesde sujets. Par exemple, les sujets que nous avons interviewés ne mettent pasradicalement en doute la fiabilité du dispositif. Or, des enquêtes d’opinions faitesà l’instigation des pouvoirs publics (DREIF, 1997), montrent que 10 % desusagers dénient toute forme d’intérêt à ces messages. Il aurait été intéressantd’avoir pu interviewer des représentants de cette opinion pour en comprendre lesraisons. Ensuite, une enquête extensive sur la répartition des différentescatégories d’usagers devrait être entreprise de façon à avoir une meilleurereprésentation de leurs motivations et de leurs comportements dans la circula-tion.
Bibliographie
Cohen S. & Hadj-Salem H. (1996) Évaluation comparative des affichages bou-chons et temps de parcours. L’expérience de la ville de Paris. RTS, 51.
Denis M. (1998) Vocabulaire des sciences cognitives, PUF, p. 345.DREIF, SIER (1997) Baromètre d’image des panneaux à message.Jardin P. & Laterrasse J. (1998) Méthode d’analyse de l’impact des informations
dynamiques des panneaux à message variables sur le comportementdes usagers franciliens. Congrès International de l’ATEC : Déplace-ments : l’ère de la gestion. Presses des Ponts et Chaussées eds.pp. 159-170.
Pacherie E. (1993) Naturaliser l’intentionnalité, PUF.Poitrenaud S. (1998) La représentation des Procédures chez l’opérateur :
description et mise en œuvre des savoir-faire. Thèse de Doctorat,Université de Paris VIII.
Richard J.F. (1998) Les activités mentales, Armand Colin.Tijus C. (2001) Introduction à la psychologie cognitive, Nathan Universités.
Imprimé en France – JOUVE, 11, bd Sébastopol, 75001 Paris N° 338199E – Dépôt légal : Juin 2004