Embed Size (px)
DESCRIPTION
pid n
Citation preview

7/21/2019 Corr 4518
http://slidepdf.com/reader/full/corr-4518 1/1
FONCTION DE TRANSFERT
Exo 4518 1 2003-12-30
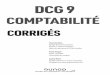
Exercice 4.5.18 On a mesuré la réponse indicielle d'un système:
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
A Relever les valeurs de gain K , du dépassement D1 et du temps de réponse t r .
B Déterminer la fonction de transfert de ce système, approximé à un deuxième ordre.
C Comment faudrait-il modifier ce système pour obtenir un dépassement réduit à 10 % sans
modifier le temps de réponse.
Corrigé 4.5.18 A On identifie une valeur asymptotique de 1,1. Comme il s'agit d'une réponse
indicielle (amplitude du signal d'entrée vaut 1), le gain statique du système est K = 1,1. On
trace les horizontales à ±5 % de 1,1.
On relève sur le graphique un temps de réponse t r ≅ 0,65 [s].
On relève sur le graphique un dépassement D1 ≅ 52 [%]. (3 pts)
B On "calcule" l'amortissement δ et la pulsation naturelle ω 0.
Fig. 4.15: D1 ≅ 0,52 → δ ≅ 0,2
Fig. 4.18: δ ≅ 0,2 → ω 0 t r ≅ 13,8 → ω 0 ≅ 21,2 [s –1] (3 pts)
On injecte ces valeurs dans la fonction de transfert typique (4.37).
G s
s s
( ),
,=
+ +− −
11
1 19 10 2 2 103 2 3 (1 pt)
C On devrait augmenter le facteur d'amortissement jusqu'à δ ≅ 0,6. Pour ne pas changer le
temps de réponse, si on approxime t r ≅ 3/δ ω 0, la pulsation ω 0 doit être réduite dans une même
proportion. (2 pts)
Si on prend la valeur exacte du temps de réponse selon la fig. 4.18, le calcul devient beaucoup
plus complexe, mais l'idée reste la même. On peut opérer par approximations successives à
partir de l'approximation ci-dessus, puis en vérifiant par la figure 4.18. (1 pt)
Temps étudiant 10' TOTAL 10 pts




![3e2 corr la gestion d'un projet et la recherche de ...techno.saintemarie.free.fr/corr/3_corr/3_corr_e2.pdf · - la roue [1] autour de l'axe a ; - les pédales [2] autour des axes](https://img.pdfslide.fr/doc/110x75/5b9bbd7f09d3f2d6288b6409/3e2-corr-la-gestion-dun-projet-et-la-recherche-de-la-roue-1-autour.jpg)