Embed Size (px)
Citation preview

CAsar MACCHI Ing6nieur principal de
l 'Armement *
GI~NI~RALISATIONS DE S Y S T ~ E S DE DI~TECTION DE SIGNAUX CERTAINS
par
Odile MACCHI et Attach6e de recherches
au C.N.R.S. **
Pierre-Yves ARQUES Maitre de conf6rences ***
A V A N T - P R O P O S
Nous prdsentons ici deux articles sur un m~me probl~me : d~tection de la prdsence d'un signal ddterministe d retard aldatoire dans un interualle d'obseruation fixd, d l'aide d'une antenne d plusieurs entrdes. Ces articles dlabords inddpendamment l 'un de l'autre, abordent le probldme Fun auec une optique numdrique, et l'autre analogique. Tous deux aboutissent
un rdcepteur optimal agant la structure suivante : filtrage d'antenne d l'entrde, traitement non lindaire instantan~, integration. Dans le premier cas le signal est recherchd unique- ment dans une direction fixe. De plus le caractdre numdrique du rdcepteur optimal permet la rdalisation sur ordinateur, et la possibilit~ d'auto-adaptation du filtrage d'antenne aux propridtds statistiques des bruits re~us. Le deuxidme article traite, par vote analogique, un probl~me un peu different o5 la direction mdme du signal est inconnue. I I e n r~sulte une complexitd plus grande du r~cepteur optimal. Cependant, dans le cas particulier o~ la direction du signal est connue, les rdsultats des deux articles coincident.
D E T E C T I O N O P T I M A L E A D A P T I V E D ' U N S I G N A L V E C T O R I E L
D E T E M P S D ' A R R 1 V I ~ E I N C O N N U
p a r
C 6 s a r M A C C H I e t O d i l e M A C C H I
Ing6nieur pr incipal de l 'Armement * Attach6e de recherches au CNRS **
R~:SUMI~. - - L'ob/et de cet article esl de rdsoudre un probldme du radar et du sonar acti/. Les auteurs dtudient la d~lection optimale du point de rue statistique d'un signal dt bande dtroite, arrivant dans une direction connue sur K captears, comporlant une incerlilude de phase el de temps d'arrivde. ! ls supposent que les s ignaux issus des capteurs sont dchantillonnds, el monlrent que le rdcepteur comporte une batterie de filtres numdriques, suivie d'une opdration non lindaire et d'une inNgration. Le rdcepteur proposd est capable de s'adapter & la statistique
des bruits recus. E n outre, il est rdalisable s u r ordinaleur.
PLAN. - - �9 1 : Introduction. 2 : Position du probldme. �9 3 : Rapport de oraisemblance. �9 4 : Structure du rdcepleur optimal. �9 5 : Rdcepteur optimal adaptatif. �9 6 : Conclusion. 2 annexes. Bibliographie (11 r6f . ) .
i . I N T B O D U G T I O N
L ' u n de s p r o b l 6 m e s f o n d a m e n t a u x pos~s p a r l ' u t i l i -
s a t i o n d u r a d a r e t d u s o n a r a c t i f e s t la d ~ t e c t l o n d ' u n
s i g n a l de f o r m e e t de d i r e c t i o n c o n n u e s , m a i s d o n t l a
d a t e d ' a r r i v 6 e e s t i n c o n n u e , h l ' a i d e de s y s t d m e s d e
r 6 c e p t i o n p o s s 6 d a n t p l u s i e u r s c a p t e u r s . L a t h 6 o r i e
s t a t i s t i q u e de l a d 6 t e c t i o n a 6t6 a p p l i q u 6 e h ce P r o -
b l 6 m e p a r l ' u n des a u t e u r s [1] , d a n s le cas d ' u n s e u l
c a p t e u r . N o u s g 6 n 6 r a l i s o n s les r 6 s u l t a t s o b t e n u s ,
d ' u n e p a r t e n les 6 t e n d a n t a u ca s de p l u s i e u r s c a p -
* Service technique des Constructions et armes navales. ** Laboratoi re d '6 tude des ph6nom~nes a16atoires, Fac~lt6 des sciences Orsay.
*** Laboratoi re t ra i tement du signal, Universit6 de Rennes.
- - 363 - -

2 / 8 C. MACCHI:, O. MACCHI ET P. A R Q U E S [ANNAt.ES I) ES TI~:LI~COMMUNICATIONS
teurs, et d ' au t r e p a r t en r e n d a n t le r6cepteur capable de s ' adap t e r aux propri6t6s s ta t i s t iques des brui ts re~us sur chacun des capteurs . Ces propri6t6s n ' 6 t a n t g6n~ra lement pas s tables au cours du temps, par t icu- l i6rement en acous t ique sous-marine , il est n6cessaire que le syst6me de r6cept ion, pour rester opt imal , puisse s ' adap te r en pe rmanence aux var ia t ions des propri6t6s s ta t i s t iques des bru i t s regus. Dans l '6 ta t actuel dc la t echn ique , le filtrage adap ta t i f n6cessite l ' u t i l i sa t ion de filtres num6r iques . Ainsi , en g6n6ral, la raise en oeuvre d ' u n r6cepteur adap ta t i f c o m p o r t a n t des filtrages suppose u n 6chant i l lonnage des s ignaux issus de chaeun des capteurs .
Nous supposons connue la direct ion du signal d6tecter. Cette hypoth~se , qui se ra t tache h la pr6- fo rmat ion de voies, a pour effet de pe rmet t r e que les s ignaux re~us sur c h a c u n des capteurs soient iden- t iques. La s t ruc tu re du r6cepteur pr6c6dent se t rans- pose a is6ment au cas off les s ignaux re~;us ne sera ient pas ident iques .
2. P O S I T I O N D U P R O B L I ~ . M E
La fonction m(t) est connue , et sa t rausform6e de Four ier a son suppor t compris dans [ - - f , + [], avec [ ~ Vc. En i n t r o d u i s a n t les fonct ions certaines :
! m(t) cos 2 ~ v c t , 0 < t <~ ~:, (4.c) So(l) t 0 , ailleurs,
i re(t) sin 27zvd, 0 < t ~< z , (4.s) Ss(t) = 0 , ailleurs,
le signal So(t) peu t s '6erire :
(5) So(l) = Se(/) eos qb - - Ss(t) s i n ~ .
Les brui ts B~(t) son t des fone t ions al6atoires cen- tr6es, c on j o i n t e me n t gauss iennes et s ta t ionnaires .
Dans le b u t de p e r m e t t r e une d6teet ion par ealeu- la teur num6r ique , les divers s ignaux sont 6ehanti l- lonn6s avee un pas d ' 6ehan t i l l onnage de A seeondes, h par t i r de t = A inelus ; de telle sorte qu 'h t o u t pro- eessus veetoriel de eomposan tes ft(t) . . . . . fK(t), est assoei6 le veeteur des 6ehant i l lons de ses composantes , d6fini par :
---~T (6) l = fl(A), f1(2 A) . . . . . f1(cr A), f2(A) .. . . . f2(~A) . . . . .
fK(A) ... . . fK(0r A) ,
L ' obse rva t i on est const i tu6e par u n processus al6a- toire vectoriel de d imens ion K, don t les composantes sont K fonct ions al6atoires Xl(t) , X2(t ) . . . . , XK(/) ; ees K s ignaux XKt) son t ceux recueillis par K eapteurs diff6rents, et sont observ6s sur u n in terval le de temps fix6 (0, T), d u r a n t lequel le signal est a t t e n d u .
Deux s i tua t ions exclusives sont possibles ent re les- quelles on doi t ehoisir au vu de l ' observa t ion . Ces s i tuat ions , appel6es 36 0 et 361 , son t ainsi d6finies :
i 3(~0: Xi(/) = Bt(t), 0 < t ~< T; i = 1, 2 .... , K,
(1) J C ~ : X d t ) = B K t ) + S a , o ( t ) , O < t ~ T ; i = 1,2 ..... K.
Le signal Sa,| suppos6 iden t ique pour les K cap- teurs, est l '6cho a r r i v a n t d ' u n e direct ion eonnue, l ' i n s t a n t a, d ' u n s ignal 6mis par l ' obse rva t eu r lui- m~me, et d o n t la forme est connue. L ' i n s t a n t d 'arr i - v6e a e s t i n c o n n u dans (0, T). Nous supposons que c 'est une var iab le al6atoire, don t la loi x(a) est connue. Un cas p ra t ique , i n t6 re s san t et f r6quent , est celui pour lequel la phase des s ignaux regus est elle aussi inconnue . La cause de cette i nd6 t e rmina t i on r6side, par e x e m p l e , dans les ins tabi l i t6s des oseil lateurs l '6mission et ~ la r6cept ion, et dans la m6connaissance des condi t ions de p ropaga t ion . L~ encore, nous suppo- sons que cet te phase r est une var iable al6atoire que nous p renons 6quipar t ie ent re 0 et 2 7r. A jou tons que le signal est ~ b a n d e 6 t r o i t e , de largeur 2 [, au tou r d ' une f r6quence e o n n u e vc, et qu ' i l dure u n temps z. Ces hypotheses se t r a d u i s e n t de la mani~re su ivan te pour le s ignal :
(2) s~ ,o ( t ) = s o ( t - a),
( m(t) c o s ( 2 r ~ v d + ~) , 0 < t ~< v < T, (3) So(t) =
0 ailleurs.
off ~ est la par t ie ent ibre de T]A. Ainsi sont d6finis
les veeteurs obse rva t ion X , et b r u i t B, don t la matr ice de corr61ation de t ype (K~, K~) est :
(7) R = E t B B ,
et le vecteur signal Sa,o ainsi que ses composantes
en quadra tu res Sa, c et S a , s .
On sait que la d6tec t ion est opt imale , au sens oO elle maximal ise la p robab i l i t6 de d6tection [2] pour une probabi l i t6 de fausse a la rme donn6e, si elle se fai t en eomparan t ~ u n seuil le r a p p o r t de vra i semblance : celui-ci est un r6sum6 exhaus t i f pour le probl~me de la d6teetion. Nous al lons l ' e x a m i n e r dans les hypo- th6ses pr6c6dentes pour une observa t ion const i tu6e
par le vecteur X.
3. B A P P O B T D E V B A I S E M B L A N C E
Dans l 'hypothbse J6 o la densi t6 de probabi l i t6 de --> X est :
--> 1 1 - - > v - - > (8) p0(X) ~ exp - - ~ - X R -1 X ,
oh A~ d6pend de cr et de R. E n pr6sence d ' u n signal __>
Sa,o(t), la densit6 de p robab i l i t6 de X v a u t :
(9)
--+ 1 I 1 - - ~ --+ - - > I pa(X)= ~ Ea,~ exp -- --ff ( X - - Sa,~) r R - t ( X - - Sa,~) �9
- - 364 - -

t . 26. ,~o, 9-10, 1971] D I R E C T I O N D ' U N S I G N A L I N C O N N U 2 ~ / ~
Eu t e n a n t compte de la sym6tr ie de R, le rappor t de vra isemblance :
PI(X) s -__>
Po(X)
peu t doric s'6erire :
l V--->T ---> 1 -->T - -+ �9 ) (10) s Ea, o t expL X R -1 Sa '~ -- 2 Sa'q~ R-1 S a ' r i"
qui devieut , en p o s a n t :
(11) Qa,o = R -1 Sa,q, ,
,j E~T--~ 1-->T ] (12) s Ea,o exp �9 Qa,r - ~ Sa,o . Qa,e ! .
D6finissons encore les vec teurs :
Qa,e = R -1 S a , c , (13)
i - + --> Q a , s = R -1 S a , s .
Conform6ment /~ (5), (12) dev ien t alors :
[--->- T ----~ - -~ '/' ----> (14) ~ = Ea ~'expt I X Qa,cCOS(D X . Q a , s s i n a ) -
1 -->T - -~ --~T - - ~ 1 --->T ---> -2- (Sa'c" Qa,c e os2 (I) + Sa,s . Qa,s sin2 (I)) + ~ (Sa,c. Qa,s +
-+ T --+ ] i S~,s.Qa,~) eosq~ s inO ~ .
Les quatre te rmes Sa,c. Qa ,c , . . . , Sa,s . Qa,c sont 6tu- di6s en annexe B ; les conclusions sont les suivantes :
--~-T ~ - ~ T ~ - - > T (15) Sa,c. Qa,c = Sa,s . Qa,s = Sa,~. Qa,* ,
-~ T ~ ---~ T (16) Sa,c. Qa,s = Sa ,s . Qa,c = O .
Ainsi (14) dev ien t :
~, [ ---> T ---~ -~ T -----> (17) ~=Ea r . exp l X . Qa c cos(i) - - X . Qa,s sin(1) -
' t L ' 1 -*T ---~ ] t
~ s~,~. Q~,~ i "
Puisque ~ est 6quipar t ie ent re 0 et 2r~, il v ien t :
,/ [- 1 -~T ---> ~ _ _ _ 2 _ (18) s exp Sa,c . Qa,c | •
V / ~ + - T ~ --~T--~ � 9 +
(x i L 'annexe B m o n t r e 6ga lement que :
--->T - - +
(19) Sa,c . Qa,c = 9
est i n d 6 p e n d a n t de a. I1 v i e n t donc :
V / ~ T - - - > -->T--~ - � 9 (20) oi,0Lx/(x + (x
4 . S T R U C T U R E D U R ~ C E P T E U R O P T I M A L
4 . 1 . G 6 n 6 r a l i t 6 a .
Nous cons ta tons que le r6eepteur op t imal qui cons t ru i t la q u a n t i t 6 s compor te d ' abord une par t ie
l in6aire, celle qui calcule : ~/'-----~
(21) ~ Yc(a) = X . Q a , c , ----> T---->
Ys(a) = X . Q a , s ,
et qui est caract6ris6e par 2 K ~ coefficients var iables avec a. Ces coefficients sont les coordonn6es des vec-
---> ~ ----> - - +
t eurs Qa,c et Qa,s �9 Les vecteurs Qa,c et Qa,s sont 6tu- di6s en d6tail dans l ' a n n e x e A.
Le r6cepteur comporte eusu i te un t r a i t e m e n t non
l in6aire i n s t a n t a n 6 fou rn i s san t Io[~/Yc~(a) + Ys~(a)] ; enf in il effectue une in t6gra t ion de sortie co r re spondan t
la m o y e u n e sur les i n s t an t s d 'a r r iv6e possibles a.
Seule la premiere pa t t i e de ce r6eepteur , c 'est-h-dire la par t ie l in6aire qui effectue les quan t i t6 s (21), fai t
i n t e rven i r , sous la forme des vec teurs Qa,c et Q a , s , les connaissances que nous avons de la forme du signal , et de la statistique des bru i t s . Nous pouvons dire que le t r a i t e m e n t l in6aire est la par t ie certaine du r6cepteur , en ce sens qu ' i l subs i s te ra i t seul si la phase (I) et l ' i n s t a n t d 'a r r iv6e a du signal 6 ta ient connus .
Au contraire , l ' op6ra t ion non l in6aire sans m6moire,
I0(%/~c2(a) + Ys2(a)), puis l ' i n t6g ra t i on par r appor t /~ a, ef fectuent une sorte de mesure 6nerg6t ique bien adapt6e h la d6tect ion de s ignaux al6atoires, et corres- p o n d a n t h not re ignorance de la phase et de l ' i n s t a n t d 'ar r iv6e. E n ce s e n s n o u s pouvons dire que c 'est la par t ie aldatoDe du r6cepteur.
4 . 2 . F i l t r a g e o p t i m a l d ' a n t e n n e .
Nous allons m a i n t e n a n t voir c o m m e n t la no t ion classique de filtrage d ' a n t e n n e [3, 4[ s ' i n t r o d u i t dans la par t ie l in~aire de not re r6cepteur . Pour cela, nous m o n t r o n s en annexe A, que la var iab le :
Y/(a) = X . Q a , t , l ~ ( c , s ) , ___>
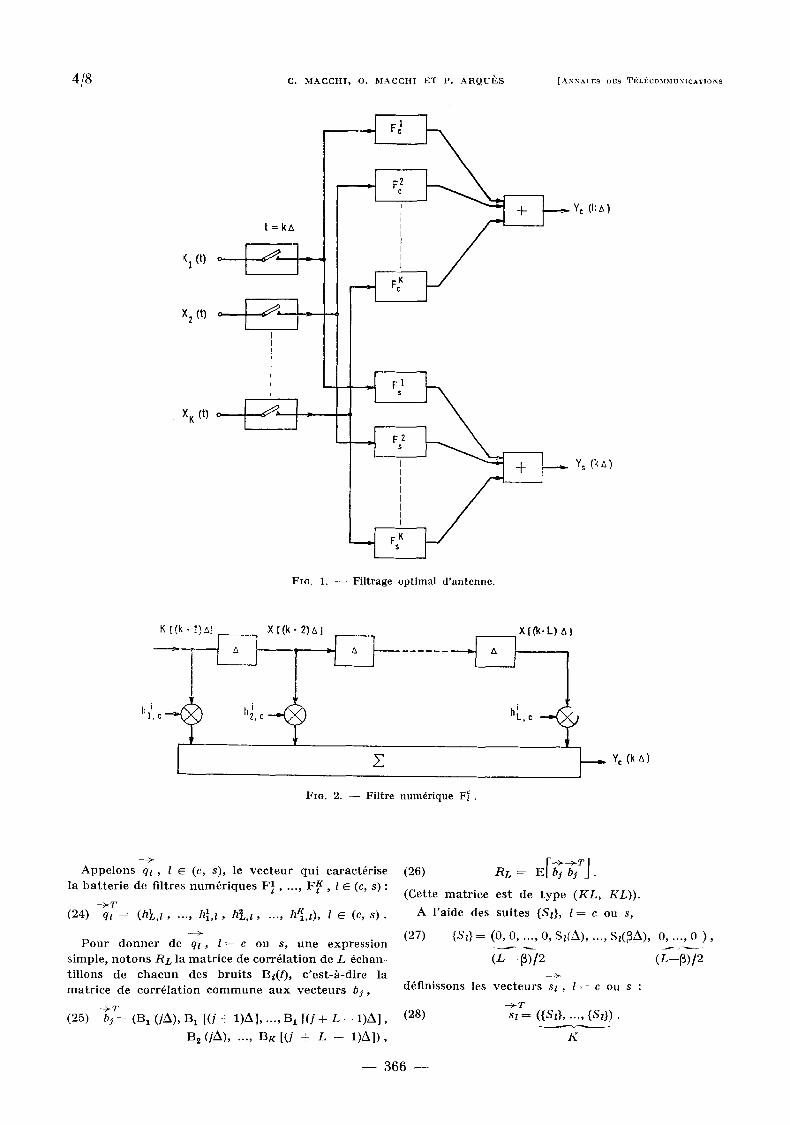
o b t e n u e h par t i r de X par u n t r a i t e m e n t l in6aire a pr ior i var iab le avec le temps , est en fair la sortie d ' u n fi l trage d ' a n t e n n e homogbne. Pa r le t e rme filtrage d ' a n t e n n e , nous d6signons une ba t t e r i e de K filtres, d o n t chacun t ra i te une entr6e, et d o n t les sorties sont add i t ionn6es [3]. La figure 1 d6cri t cette ba t t e r i e de filtres F~, i r (1, 2 . . . . . K), l 6 t a n t 6gal ~ c ou ~ s sui- r a n t la voie en q u a d r a t u r e consid6r6e.
Chacun des filtres num6r iques homog~nes F~ est caract6ris6 par L coefficients ( h L t , h ~ _ l l . . . . . h~ t). P a r d6f ini t ion, le filtre F 'c , par exemple, t r ans fo rme (Fig. 2) une suite d '6chan t i l lons X(kA) en une suite Yc(kA) d6finie par :
L
(22) Yc(kA) = Z h~,c X i ( k - - ] ) A ] . j = l
L ' e n t i e r L e s t pr6cis6 dans l ' a n n e x e A. Disoris seu- l e m e n t qu ' i l est du m6me ordre que ~ :
(23) ~ = 1 + par t ie ent ibre de x / A .
- - 365 - -
4/8 C. MACCHI, O. MACCHI ET P. ARQUES [ANXALES DES TEL#:COM.MUNtCATIONS
<1 (t)
X z (t)
X K (t)
t = k A
Yc (1~ zx)
Ys (kz~)
FIG. 1. - - Filtrage optimal d'antenne.
K [ (k - 1)51 -X [ (k - 2 ) a l
hi ? I 1,r h2, c'-~ ~
X [ ( k - L ) 6
Z
FIG. 2. - - Filtre num6rique F~.
I = u162 (k A) I
A p p e l o n s q z , l E (c, s) , le v e c t e u r qu i c a r a c t 6 r i s e
la b a t t e r i e de f i l t res n u m 6 r i q u e s F~ . . . . . F K , l ~ (c, s) :
--~T (24) ql = (h~,t . . . . . h~ , l , h~,l . . . . . hK13), l ~ (c, s ) .
P o u r d o n n e r de q t , l = c ou s, u n e e x p r e s s i o n
s i m p l e , n o t o n s R L la m a t r i c e de co r r61a t ion de L 6chan-
t i l l ons de c h a c u n des b r u i t s B~(t), c ' e s t - h - d i r e la
m a t r i c e de cor r61a t ion c o m m u n e a u x v e c t e u r s by,
-->-T (25) b j : (B I ( ] A ) , B 1 [ ( / + I ) A ] . . . . . B I [ ( ] + L - 1 ) A ] ,
B 2 (]A) . . . . . BK [(1 + L -- U A ] ) ,
F-~--~ T] (26) R L = E [ b j bj J .
(Ce t t e m a t r i c e e s t de t y p e ( K L , K L ) ) .
A l ' a ide des s u i t e s {St}, I = c ou s,
(27) {Sz} = (0, 0 . . . . . 0, Sz(A) . . . . , Sz(~A), 0 . . . . . 0 ) ,
( L - - ~)/2 (L--~) /2
d6f in i s sons les v e c t e u r s s t , l ~ c ou s :
-->T ( 2 8 ) sz = ( { S z } . . . . . (S t} ) .
K
- - 3 6 6 - -

t. 26, n. ~ 9-10, 19711 D I R E C T I O N D ' U N S I G N A L I N C O N N U 5 / 8
Alors nous m o n t r o n s en annexe A que les vecteurs qt cherchCs s o r t liCs par des relat ions analogues h (13),
aux vecteurs s~ :
(29) qc = R E 1 Sc ,
, q s = R E 1 Ss.
Les ~quat ions (29) aeh~ven t de d6erire le filtrage d ' a n t e n n e du r6cepteur opt imal .
4.3. R6cepteur optimal num6rique.
Pour pr6ciser le t r a i t e m e n t non linCaire du rCcepteur opt imal , appelons Y~(nA), l = c ou s, i ~ (1, 2 . . . . . K), la suite t ransformCe de X~(nA) h t ravers le flltre F~, e t d6finissons l ' en t i e r k associ6 A r i n s t a n t d 'arr iv6e a par :
(30) a < kA ~< a + A .
Sa loi de probabi l i t6 est :
f k ~ " 7:(a) da . (31) p(k) = J (/~--1)~
D'aprbs la forme (20) du r a p p o r t de vra isemblanee , nous pouvons prendre pour tes t s ta t i s t ique la quan t i t6 :
(32) s ~ p ( k ) X k = l
sur laquelle appa ra i t c l a i rement la s t ruc tu re reprC- sent6e sur la figure 3 pour le r6cepteur opt imal .
de la mat r i ce de corr61ation R L , c 'es t -h-dire la connaissance des fonct ions de corr61ation e t d ' i n t e r - corr61ation des b ru i t s B~(0, i = 1, 2, ..., K. Gr&ce h la m6thode d ' i t 6 ra t ion s tochast ique [5, 6], on p e u t mon-
t rer que, sans conna i t re ces fonct ions de corr61ation, il est possible de construi re les filtres F~ , p e n d a n t l ' i n t e r - valle de t emps qui pr6c~de r i n s t a n t z6ro, en u t i l i s a n t
--> une suite de vec teurs b t , ( ] = 1, 2 . . . . ), form6s avec L 6chant i l lons de ehacun des b ru i t s B~(t) (voir d6fi- n i t i on (25)). Pou r cela on m o n t r e que le vec t eu r -+ qz (l = c, s) qui caract6rise les K filtres n u m 6 r i q u e s F~, (i = 1 . . . . . K), est la l imite presque sfire d ' u n e
suite i tCrative de vecteurs q{ (] = 1, 2 . . . . ).
Consid6rons les deux suites q/t, ( ] = 1, 2 . . . . ), l ~ c ou s, des vec teurs de t l ~t" engendr6s, h p a r t i r d ' u n vec teu r que lconque par l ' a lgo r i thme :
- - ) - ~ ---~ T ---~ ---)-
(33) q/t+1 = q{ + bjM bjM + sz), ] = 1, 2 . . . . .
off FI est u n n o m b r e r6el positif, et M u u en t ie r tel que, quels que soient les ent iers ] et k d is t inc ts ,
btM e t bkM son t s t a t i s t i q u e m e n t i nd6pendan t s .
On dCmontre [7] que, pour des ixl s a t i s f a i s a n t s :
co oo
(34) Z F t t = o o , Z ~z} < o o , j=l j=t
et dos b ru i t s B~(I) centrCs, s t a t ionna i res du second ordre et possCdant des m o m e n t s du qua t r i~me ordre
finis, la sui te des vec teurs q{, l = c, s, d6finie pa r (33), converge presque sf i rement vers la so lu t ion de
Capteur 1 X ~ (t)
x~(t) Capteur 2
Capteur Ko X K(t)
Filtrage
optimal
d'antenne
QOAO"ATEO I
H'.'.' H
Ys(kA) -] QUADRATEUR! -I
FIG. 3. - - R~cepteur optima] num6rique.
>H l :Z P (k- L 2--L~) . ~ seuil
< H o
5. R# .CEPTEUR OPTIMAL ADAPTATIF
La cons t ruc t i on des 2 K filtres F~ , I = c ou s, i ~ (1, 2 . . . . . K), suppose, d 'apr~s (29), la connaissance
(29) que nous cherchons h cons t ru i re :
(35) q / t ~ q z , l = c, s . p.i.
Nous d o n n o n s a insi une mCthode qui ut i l ise la durCe prCcCdant l ' i n t e rva l l e de d6tect ion pou r a da p t e r le
- - 367 - -

6 / 8 C. M A C C H I , O. M A C C H I E T P . A R Q U I ~ S [)kNNALES DES 'r~L/~COM,~tUN~CA'r~oNs
f l l t rage d ' a n t e n n e h l ' en t r6e du r6cep teur , h la s tat is- t i que des b ru i t s sur les diff6rents cap teurs .
R e m a r q u o n s que les s i m u l a t i o n s d ' a l g o r i t h m e r6a- lis~es sur o r d i n a t e u r on t t o u j o u r s converg6, b ien que
les vec t eu r s b; de (33) ne fussen t pas ind6pendan t s .
6. C O N C L U S I O N
Nous avons t rouv6 le r6cep teu r /~ entr6es mul t ip les , o p t i m a l an sens de la th6or ie s t a t i s t i q u e de ia d6cision, pou r d6 tec t e r un s ignal de t e m p s d ' a r r i v6e e t de phase inconnus , dans un b r u i t a d d i t i f gauss ien . Ce r6cepteur es t compos6 d ' u n f i l t rage d ' a n t e n n e , suivi d ' u n t ra i - t e m e n t non l in6aire, d ' u n e i n t 6 g r a t i o n e t d ' u n e compa- ra i son h u n seuil ; il t r a i t e les s i g n a u x re~us sous forme d ' 6chan t i l l ons dans le b u t d ' e t r e a d a p t a t i f . Nous avons donn6 un a lgo r i t hme qui p e r m e t au r6cep teu r d ' a d a p - t e r son f i l t rage d ' a n t e n n e a u x p ropr i6 t6s s t a t i s t iques des b r u i t s re~us, n o t a m m e n t lo r sque leurs propr i6t6s 6vo luen t l e n t e m e n t au cours du t e m p s .
U n in t6r~t i m p o r t a n t de ce r6cep teu r op t ima l , a d a p t a t i f , es t qu ' i l p e u t 6tre s imul6 a i s~ment sur o r d i n a t e u r , e t r6alis6 p a r des t e chn iques de t r a i t e m e n t num6r ique .
que y~i(v) e t y~(v) s e n t li6s p a r l '6gal i t6 :
I-> (A.4) y t i (v) -- A k=-Y~ Y ~ § "
Appe lons y~ ' (v) les K ~ so lu t ions de l ' 6qua t ion mat r ic ie l l e :
(A.5) [Y~'(u)] [Y~(U)] = [8~1],
lorsque de t [y~l(~)] =/= 0. Enf in d6signons p a r I"~j(nA), At n ~ Z, les coefficients de F o u r i e r de yH(v) :
(h .6) a ' ~ ' . ~,,~ (v) ~ - P,r
R e m a r q u o n s que d ' ap r6s [11], les F~;(nA) sen t r6els pou r t o u t n.
Posons encore :
F (nA) . . . In I .< (A.7) r~ j (nA) = I 0 In] > y ,
i et appe lons R~ la m a t r i c e d6dui te de R en r e m p l a g a n t chacun des 616ments P ~ ( n A ) de ce t te m a t r i c e p a r
y , Po.(nA).
A l ' a i de des n o t a t i o n s p r6c6dentes , nous pouvons 6noncer le th6or~me su ivan t .
Thd.ordme. - - Soien t p ~ e t P't~ r e s p e c t i v e m e n t les I
616ments des m a t r i c e s R - t e t R ~ ,
(A.8) R -~ = [pl/r Rx [p',g].
Alors :
ANNEXE A
E t u d e de l ' inverae d 'une mat r i c e de corr61ation
(A.2)
P o u r la t ions (A.2)
(A.3)
L ' o b j e t de ce t te annexe es t d ' 6 t u d i e r le vec teu r :
(A.1) Qa = R -1 Sa
P o u r cela, nous u t i l i sons une p rop r i6 t6 de l ' inverse d ' u n e m a t r i c e de corr61ation, d6mon t r6e dans [8], que nous 6non~ons ici sous fo rme de th6or~me.
Dans ce b u t appe lons 1~,1(~), p o u r i, / = 1, 2 . . . . , K, les fonc t ions de corr61ation e t d ' in t e rcor r61a t ion des b ru i t s Bi(t), i ~ (1, 2 . . . . . K) , e t yz;(v) la t rans form~e de F o u r i e r de r i~(~) . D6signons , sous le nom de spec t r e repli6 de yt ;(~), la fonc t ion a y~j(v) p6r iodique, de p6r iode I / A don t les coefficients de F o u r i e r sont les r , l ( n A ) [9] :
+oo
f'~/2A F ~ n A ) = A | T~'(~) e + 2=i.,,,,• d,~.
d-q2a
sui te , no tons p lus s i m p l e m e n t les rela- l iant VS(~) e t p ~ n a ) .
y~(~) ~ -
R e m a r q u o n s , d ' ap rb s la f o rmu le de Poisson [10],
t ~'r > 0, Vb en t ie r > 0, 3 u n en t ie r y te l que,
(A.9) K~ pou r ~ = b § 2 y ,
( p z k - - Pz~) < r Vl e ( 1 , 2 . . . . . K~t),
! V y + m ~ < k <~ ( m + 1 ) ~ - - v , m ~(0 ,1 . . . . . K - - l ) .
Ce th6or~me f o u r n i t une a p p r o x i m a t i o n de chacune des colonnes k de la m a t r i c e R -x, pou r :
i y < k ~< ~ - - Y , (A.10) ~ § Y < k ~< 2 ~ - - y ,
t ( k - - 1 ) ~ + y < k ~< kct - - y .
D ' ap r~s ce th6or~me, pou r b en t ie r > 0 donn6, pou r t o u t r > 0, il ex is te un en t i e r y te l que chacun des 61dments Pzk, a p p a r t e n a n t a u x colonnes (A.10),
I est app roch6 p a r p~ h m i e u x que ~ .
P a r c o m m o d i t 6 de no t a t i on , on p e u t s u p p o s e r que [O, T], ~(a) e t p(k), (31), on t 6t6 d6finis de te l le sor te que :
p(k) = 0 pou r k ~< y , k > ~ - - y .
Ceci r e v i e n t h di re que l ' i n t e r v a l l e d ' o b s e r v a t i o n c o n t i e n t d e u x in t e rva l l e s de ga rde de l ongueu r yA, a u x d e u x ex t r6mi t6s de l ' i n t e r v a l l e de d6 tec t ion pro- p r e m e n t d i t , d u r a n t l eque l le s ignal p e u t a r r ive r .
Dans ces cond i t ions , les coordonn6es du v e c t e u r
s ignal S a qui d i f fe ren t de z6ro sa t i s fon t c e r t a i n e m e n t h (A.10). Ainsi les 616ments de R -1 qui i n t e r v i e n n e n t
- - 368

t. 26, n ~ 9-10, 1971] D I R E C T I O N D ' U N S I G N A L I N C O N N U 7/8
effect ivement dans le calcul de Qa sont les 616ments p;,~ des colonnes (A.10), qui son t approchds h mieu x que e par les p ~ . D6s lors q u ' u n e telle pr6cision est admise, dans le calcul de R -~ par exemple, il v i en t :
(A.11) Qa = R~ S a .
- + R e m a r q u o n s que le vec teur Qa ainsi ob t enu a au
plus L = ~ + 2 y eoordonn6es non nulles, alors que le
vecteur S a en a ~. Dans la mesure oh les y~xt(v) et les Ytla' (v) sont associgs h des dur6es de corr61ation du m 6 m e ordre de g randeur , ce qui est souven t le cas, l ' en t ie r y est de l 'o rdre de g r a n d e u r de ces dur6es de corr61ation. E n outre, si la dur6e ~ du signal est suppos6e grande devan t les dur6es de corr61ation des bru i t s BI (t), alors L e s t vo is in de [~.
Considgrons les K suites de ~ eoordonn6es qui
composent Qa, so ien t (Qa} t, {Qa} ~ . . . . . {Qa) ~ ; chaeune a au plus L coordonn6es non nulles. E n outre , puisque
! R v est s t a t i o n n a i r e e t que los s ignaux Sa se d6duisen t les uns des au t res pa r t r ans la t ion , on vo i t a l s6ment
que pour u n i n s t a n t t d 'a r r iv6e a = kA [(30)] donn6, chaeune de ces sui tes {Qa} ~ se d6dui t par ] d6calages de la suite co r r e spondan te pour a = (k - - ])A. Ainsi :
- - - ~ T
(A.12) Qa,o = ({On,c} t , (Qa,c} ~ . . . . . (Oa,c}x) ,
h ~ h ~ 0 ..... 0), (A.13) {Qa,c}~ = ( 0 ..... 0, L,c . . . . . 1,c,
rangs : 1, . . . ,k--1, k , . . . , k + L - - l , k+L,...,o~.
A cause de cet te s t ruc tu re part icul i6re du vec-
tour Qa,r le p r o d u i t sealaire X r . Qa,c s 'dcri t :
( A 1 4 ) O o , , = r:'_-, - h % x , . d = l 2
L'6gali t6 (A.14) nous condui t ~ d4finir les 2 K filtres num6r iques homog6nes F~ , l = c, s, i ~ (1, 2 . . . . . K), d e n t les coefficients s en t h~, t , h~L--1,t, ..., h~,t (cf. (22)).
E n m6me temps , nous voyons que lcs vecteurs qo
et qs qui les ca rac t6 r i sen t s en t donn6s par les 6qua- t ions (29).
ANNEXE B
Nous allons ddmontrer les relations :
--~- T ---->" - ~ - T ----~ ---~. T ----~
(15) Sa,oQa,c = Sa,sQ.,s = Sa,|174
(16) S a , c Q a , s = S a , s Q a , r = O ,
.--~ T -.--.~ (19) Sa.cQa,v = f),' i n d 6 p e n d a n t de a .
E n a n n e x e A, nous avons 4tudi6 les vecteurs
Qa = R -z S a . E t nous avons mon t r6 que r o n peu t 6crire :
mon t r6 que l ' on p e u t 4crire :
(B.1) Q a = R ' S a ,
oh R ' est la ma t r i ce de corr61ation d ' u n vec teur [8].
- - > T N = (NI(A) . . . . . NI(~A) . . . . . Ng(A) , ..., NK(~A)) .
Le vec teur N correspond h K bru i t s s t a t ionna i res 6chant i l lonn6s N t (t), ..., Ng(i). Ainsi R ' est cons t i tu6c
par K ~ sous-matr ices carr6es d 'o rdre cr la mat r i ce Drn Y cor respondan t h la l igne m e t h la colonne ]. La mat r ice Din1 a elle-m~me pour 616ment (k, l) le coefficient :
( ~k~l j = Din,J((/ -- k)A), (B.2)
i D m , / ( z ) = E ( N m ( t ) N l ( t + v ) ) .
Soient U (resp. V) u n vec teu r r6el a y a n t a K coor- donndes, et c o r r e sponda n t h des s ignaux iden t iques
U(t) (resp. V(t)) sur les K capteurs . Soient U t . . . . . U~ et V z . . . . . V~ les a 6chant i l lons de U(t) et de V(t) respec t ivement . D 'apr6s la forme de R' et d 'apr6s
(B.2), on a :
-->-T R' --> K (B.3) U V = ~ UkDm,t((l -- k ) A ) V l .
m , j ~ l k, l=l
Nous ut i l i sons les s6ries de Four ie r ua (v ) , va(v) et d~m.t(v), de coefficients respectifs Uk , Vk et
Dmd(kA) :
(B.4) ua(v) = ~ Uk e -21~vkA , va(v) = ~ Yz e -2b :v /A , k = ! /=1
+ c o
(B.5) d~mj(v) = ~ Dm,/(kA) e -2i~vkA
On volt alors ais6ment que le coefficient :
Z Ulc Dm, t ( ( l - - k )A) Vl k,l=~
de (B.3) va u t , d 'apr~s le th6or6me de Parseva l :
(B.6) ~ Uk Din J ( ( / - - k)A) VI = k,l=l
A f + l / 2 A J--,12a ua(v) damt(V) v*(v) d r .
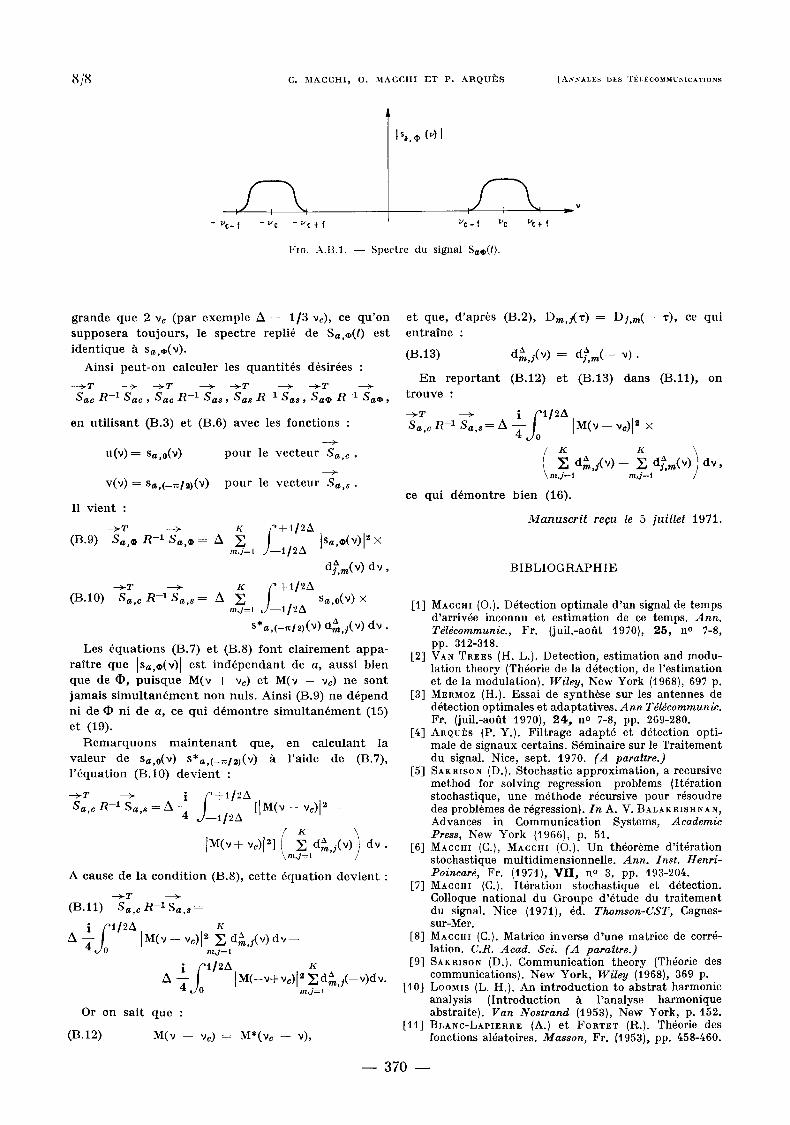
Nous savons que la sui te des 6chant i l lons a u x ins- t a n t s t = kA d ' u n e fonc t ion Y(t) de t ransform6e de Four ie r y(v), a pour s6rie de Four ie r le spectre replid ya (v) de y (v). Soit alors M(v) la t ransform6e de Four ie r du message m o d u l a n t m(t). Celle du s ignal Sa,| = m(t - - a) cos ( 2 ~ v c ( t - - a) + @) est :
(B.7) sa,| = (1/2) e -21rcva (el@M(v - - Vc) +
e--i@M(v A- vv)) �9
Puisque m(0 est ~ b a n d e f 6troite d e v a n t vc ,
(B.8) M(v - - vc ) = 0 p o u r v r [ v c - - 1, Vc + I I ,
de sorte que le s u p p o r t de sa,| est l ' i n t e rva l l e [-- vc - - f, vc § /] (voir figure A-B.1). D6s quc la fr6- quence d ' 6chan t i l l onnage I/A est 16g6rement p lus
- - 3 6 9 - -
(~/~ C. MACCHI~, O. MACCHI ET P. ARQUES [ANNALES DES TELECOMMUNICATIONS
- I.,C_ f - I , ' c - v C + f vc.f Vc vc+ f
Fie,. A.13.1. - - Spectre du signal Sa~(t ).
V
grande que 2 vc (pa r exemp le A = 1/3 Vc), ce qu 'on suppose ra t ou jou r s , le spec t re repli6 de Sa,| es t iden t ique h sa,r
Ainsi p e u t - o n ca lcu le r les quan t i t6 s d6sir6es :
--->-T - - ~ ---~T --->- -->T -----> -->-T ---> Sa~ R -~ Sac , Sac R -~ Sas , Sas R -~ Sas, Sa| R - t Sa|
en u t i l i s a n t (I3.3) e t (B.6) avec les fonc t ions :
u(v) = Sa,o(V) pou r le v e c t e u r S a w ,
v(v) = Sa,(-=/~)(~) p o u r le v e c t e u r Sa , s .
I1 v i e n t :
--->T --+ g ~ ' + I / 2 A (B.9) Sa,. t{ -1 Sa,.= A Z / ]$a,.('9)[ 2 x
m.j=l J - - l / 2 A d?,~(~) d , ,
-+T --+ I,: P + I/2A ( B . 1 0 ) Sa,c R - 1 Sa s = A ~u | Sa,0(V ) X
' m,g=l J - - I / 2 A
s % , ( l ~ t 2 ) ( v ) d ~ , ~ ( v ) d ,~ .
Los 6qua t ions (B.7) e t (B.8) fon t e l a i r e m e n t appa - r a i t r e que [sa,| es t i n d @ e n d a n t de a, aussi b ien que de (I), pu i sque M(v + vc) e t M(v - - vc) ne sont j ama i s s i m u l t a n 6 m e n t non nuls . Ainsi (B.9) ne d6pend ni de (I) ni de a, ee qui d6mon t r e s i m u l t a n 6 m e n t (15) et (19).
R e m a r q u o n s m a i n t e n a n t que, en c a l c u l a n t la va l eu r de Sa,o(v) S*a,(-=/2)(v) h l ' a ide de (B.7), l ' 6qua t ion (B.10) d e v i e n t :
--->T ~ i r + l ] 2 A
Saw R -1 Sa,s = A 4 |,.2--112A [IM(v - - vc)lz - - / K
A cause de la c o n d i t i o n (B.8), ce t te 6qua t ion d e v i e n t :
(B.11) S a , c R -1 Sa , s=
i K ~ I / 2 A [M(v - - Vc)lZ "~ dam,j(v) d v - -
A 4 - J o re.j=,
i f l / 2 A K
A -4Jo .,.j=,
Or on sa i t que :
(B.12) M(~ - - vc) = M*(vc - - v),
e t que, d ' apr6s (B.2), Din, j( ' : ) = Dl,m(-- v), ce qui en t ra ine :
(B.13) dam,i(v) = a di ,m(- - "~).
E n r e p o r t a n t (B.12) e t (B.13) dans (B.11), on t r ouve :
--->T i ( m , ' iM(v_ • Sa,o R -1 Sa,8 = A -4--Jo
dam,l( ~ ) - Z d m(V d~ , \ m,j=t m,j=l /
ce qui d6mont re b ien (16).
Manuscr i t recu le 5 ]uillet 1971.
B I B L I O G R A P H I E
[1] MACCHI (O.). D6tection optimale d 'un signal de temps d'arriv6e inconnu et est imation de ce temps. Ann. Tdldcommunic., Fr. (juil.-aoflt 1970), 25, n ~ 7-8, pp. 312-318.
[2] VAN TaEES (H. L.). Detection, estimation and modu- lation theory (Th6orie de la d6tection, de l 'est imation et de la modulation). Wiley, New York (1968), 697 p.
[3] MERMOZ (H.). Essai de synth6se sur les antennes de d6tection optimales et adapta t ives . Ann Tdldcommunic. Fr. (juil.-aofit 1970), 24 , n ~ 7-8, pp. 269-280.
[~] ARQU~S (P. Y.). Fi l t rage adapt6 et d6tection opti- male de signaux certains. S6minaire sur le Trai tement du signal. Nice, sept. 1970. (A parattre.)
[5] SAKalSON (D.). Stochast ic approximation, a recursive method for solving regression problems (It6ration stochastique, une mdthode rdcursive pour r6soudre des probl6mes de r6gression). In A. V. BALAKRISHrCAN, Advances in Communication Systems, Academic Press, New York (1966), p. 51.
[6] MACCHI (C.), MACCHX (O.). Un th6or6me d ' i t6rat ion stochastique multidimensionnelle. Ann. Inst. Henri- Poincard, Fr. (1971), V I I , n o 3, pp. t93-20&.
[7] MACCHI (C.). I tdrat ion stochastique et d6tection. Colloque national du Groupe d'6tude du t ra i tement du signal. Nice (197t), 6d. Thomson-CST, Cagnes- sur-Mer.
[8] MACCHI (C.). Matrice inverse d 'une matrice de corr6- lation. C.R. Acad. Sci. (A para~tre.)
[9] SAKRISON (D.). Communicat ion theory (Th6orie des communications). New York, Wiley (t968), 369 p.
[10] LooMis (L. H.). An in t roduct ion to abstra t harmonic analysis ( Introduct ion & l 'analyse harmonique abstraite). Van Nostrand (1953), New York, p. 152.
[11 ] B L A N C - L A P I E R R E (A.) e t FORTET (R . ) . T h 6 o r i e d e s fonctions aMatoires. Masson, Fr. (t953), pp. &58-~60.
- - 3 7 0 - -




























