Ministre de lEnseignement Technique Et de la formation
Professionnelle Institut Pdagogique National de lEnseignement
Technique et Professionnel
Rpublique de Cte dIvoireUnion-Discipline-Travail
ECOLE DE FORMATION INITIALE
Anne acadmique : 2006 - 2007
OBJECTIF INTERMEDIAIRE :ETUDIER LES PRINCIPAUX SYSTEMES DE
TRANSFORMATION DE MOUVEMENTS.
PROFESSEUR STAGIAIRE :
ENCADREURS:
KOUAME KOUAKOU.M. PLP Construction Mcanique
M. GBONGUE Psychopdagogie M.BAMBA DOH Psychopdagogie
M. AKRE S. Gnie Mcanique. M. SIBIRI Gnie Mcanique
1
SOMMAIREAVANT PROPOS.. 3 REMERCIEMENTS. 4 INTRODUCTION.. .5
PREMIERE PARTIE:ANALYSE DE LA SEQUENCE DE FORMATION1-PERTINENCE
DE LOBJECTIF INTERMEDIAIRE (OI)... ... 7 2-JUSTIFICATION DU
DECOUPAGE DE LOI. . 8 3-JUSTIFICATION DE LORGANISATION DES LECONS
ENTRE-ELLES ........12 4-JUSTIFICATION DE LA CONCEPTION DES
SITUATIONS DAPPRENTISSAGE..13 5-JUSTIFICATION DU CONTENU DE LOUTIL
DEVALUATION......14
DEUXIEME PARTIE:PREPARATION DES LEONSLEONS ENTIEREMENT PREPAREES
TITRE : SYSTEME VIS-ECROU.........17 TITRE : SYSTEME
PIGNON-CREMAILLERE... 31 LEONS A PRESENTATION SIMPLIFIEE TITRE :
SYSTEME BIELLE-MANIVELLE.. 41 TITRE : EXCENTRIQUES.... 52 TITRE :
CAMES..... 62
TROISIEME PARTIE:EVALUATION DE LOBJECTIF
INTERMEDIAIREEVALUATION..............................................................................................................................71
CORRIGE DE LEVALUATION...77
CONCLUSION.80
BIBLIOGRAPHIE..81
2
AVANT PROPOSCre le 26 dcembre 1975, lInstitut Pdagogique
National de lEnseignement Technique et Professionnel (IPNETP), est
spcialis dans la formation des formateurs de lenseignement
technique et professionnel dans les diffrents emplois suivants : -
Lemploi dInstructeurs de Formation Professionnelle de Base
(IFPB).-
Lemploi de Professeurs des Centres de Formation Professionnelle
(PCFP). Lemploi de Professeurs des Lyces Professionnels. Lemploi de
Professeurs Certifis de lEnseignement Technique et Professionnel
(PETP).
La formation de ces corps de mtier est organise en modules : -Le
module 1 : il concerne la formation thorique dans la spcialit, ce
qui permet dacqurir des connaissances scientifiques et techniques
de base. -Le module 2 : cest le module des acquisitions des savoirs
faire et des expriences professionnelles. Il requiert un stage de
perfectionnement des connaissances, soutenu par un dossier
technique. -Le module 3 : module de formation pdagogique thorique,
il a pour objectif lacquisition des aptitudes psychopdagogiques.
-Le module 4 : il consiste en un stage pratique qui met le
stagiaire en situation relle denseignement dans un tablissement.
Cette formation est base sur la Pdagogie Par Objectifs (PPO) qui
accorde une importance particulire aux procdures dvaluation et de
re-mdiation. Les stagiaires de lIPNETP en fin de formation de
module 3, ayant bnfici de cette formation, doivent laborer un
dossier pdagogique qui leur permet non seulement de faire la
synthse des connaissances reues mais aussi de trouver un tremplin
pour affronter avec plus dassurance le terrain professionnel et de
prparer le futur formateur la mise en place dun ensemble de
progression dans un tablissement o cela fait dfaut.
3
REMERCIEMENTSCe projet nest pas seulement le fait dun effort
personnel, mais dune parfaite entente avec les professeurs. Cest
pourquoi je voudrais leur exprimer ma gratitude en leur consacrant
une partie de ce projet. Aussi mes remerciements vont lendroit de :
Mes parents pour leur soutien tant financier que moral et
particulirement ma mre KOUAKOU AYA. Mes professeurs de classe. Tous
mes amis et toutes les personnes que je nai pu citer et dont laide
ma t si chre.
Merci tous.
4
INTRODUCTIONLe dveloppement industriel de notre pays exige la
formation de techniciens qualifis dans les domaines commerciaux
mais surtout industriels. Cest dans cette optique que lIPNETP forme
des professeurs, qui seront capables de former des techniciens
comptents. Au nombre de ces techniciens, figurent les techniciens
en Gnie Mcanique qui peuvent tre des agents de bureau dtudes.
Ceux-ci doivent tre mesure de concevoir des mcanismes aptes remplir
une ou plusieurs fonctions. Cest pour cette raison quils sont forms
en technologie de construction. Ils sont ainsi amens dans leur
formation "Etudier les principaux systmes de transformation de
mouvements". Ceci correspond notre objectif intermdiaire. Cet
objectif, extrait de lobjectif gnral "concevoir un systme
mcanique", sera trait dans ce dossier pdagogique. Pour mieux
laborer ce dossier, nous avons jug bon de le subdiviser en trois
parties : Une premire partie qui est consacre lanalyse de la
squence o le lecteur trouvera la pertinence de lobjectif
intermdiaire (OI), le dcoupage de lOI, la justification de
lorganisation des leons entre elles, la justification de la
conception des situations dapprentissage et enfin la justification
du contenu de loutil dvaluation de lOI. Une deuxime partie qui a
port sur la prparation des diffrentes leons. Dans cette partie,
nous aurons les leons entirement prpares et les leons prsentation
simplifie. Enfin, une troisime partie qui est rserve loutil
dvaluation de lobjectif intermdiaire.
5
PREMIERE PARTIE :
ANALYSE DE LA SEQUENCE DE FORMATION
6
1-PERTINENCE DE LOBJECTIF INTERMEDIAIRELEtat a pour vocation la
formation de toute personne physique afin dacqurir une formation.
Raison pour laquelle des centres professionnels et des lyces
techniques ont vu le jour. Le stagiaire mcanicien issu de ces
centres doit tre capable de concevoir un systme mcanique. Ceci
constitue notre Objectif Gnral (OG). Pour que cet objectif gnral
soit atteint, plusieurs tches sont matriser notamment : - Etudier
les solutions technologiques de guidages. - Etudier les systmes de
transmission de puissance entre arbres en prolongement. - Etudier
les systmes de transmission de puissance entre arbres non en
prolongement. - Etudier les principaux systmes de transformation de
mouvements Toutes ces tches dfinissent des objectifs atteindre
(OI). Lun de ces OI, intitul "Etudier les principaux systmes de
transformation de mouvements", a retenu notre attention. Cet OI
sadresse aux lves des classes de Tle E, F1 et de 3imeanne BT
mcanique ou lectromcanique. Ltude des systmes de transformation de
mouvements, dveloppera chez le futur technicien des attitudes
nouvelles et des connaissances approfondies. Face un mcanisme ayant
en son sein un systme de transformation de mouvements, il
comprendra aisment son fonctionnement. Dans sa fonction, Il aura
effectuer les tches telles que : - Choisir une solution
technologique convenable dans une conception ncessitant une
transformation de mouvements. - Etudier et vrifier le bon
fonctionnement des systmes de transformation de mouvements. -
Assurer la maintenance de ces systmes.
7
2-DECOUPAGE DE LOBJECTIF INTERMEDIAIRE La prsente squence de
formation qui porte sur ltude des principaux systmes de
transformation de mouvements est conforme celui des tablissements
chargs de former les techniciens dont la plupart devront prendre
une place importante dans le tissu industriel de notre pays. Elle
vise particulirement les lves des classes de Tle E, F1 et de
3imeanne BT mcanique ou lectromcanique. Pour une meilleure
comprhension de la squence de formation qui leur est destine, les
apprenants doivent possder au pralable un certain nombre de
connaissances parmi lesquelles : - Lire un dessin technique et des
schmas. - Matriser le vocabulaire technique. - Identifier les
diffrentes liaisons. - Identifier les mouvements de rotation et de
translation. - Identifier les caractristiques dun engrenage. -
Identifier une vis et un crou. Toutes ces connaissances constituent
un ensemble de pr-requis. A la fin de cette squence, lapprenant
doit tre capable : 1- Didentifier les principales solutions
technologiques de transformation de mouvement par systme vis crou.
2- De calculer la vitesse dune crmaillre. 3- De dterminer la course
dun coulisseau. 4 -De calculer la course des excentriques 5-
Dnoncer le principe de fonctionnement dune came. Partant de ces
habilets numres ci-dessus, lobjectif intermdiaire a t subdivis en 5
Objectifs Pdagogiques (OP) en vue dorienter les apprenants vers un
but prcis et aussi de faciliter lapprentissage. Ainsi, nous avons :
OP1 : laide de dessins dun systme vis crou, identifier les
principales solutions technologiques de transformation de
mouvements. OP2 : Etant donn un systme pignon crmaillre, calculer
la vitesse de la crmaillre. OP3 : Etant donn le schma dun systme
bielle manivelle, dterminer la course du coulisseau. OP4 : partir
dun schma de lexcentrique, calculer sa course. OP5 : A laide de
schmas des principaux types de cames, noncer le principe de
fonctionnement dune came. 8
.
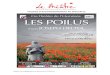
Objectif Gnral
CONCEVOIR UN SYSTEME MECANIQUE
Objectifs Intermdiaires
Etudier les solutions de transmission de puissance entre arbres
en prolongement
Etudier les solutions de transmission de puissance entre arbres
non en prolongement
Etudier les principaux systmes de transformation de
mouvements
Objectifs Pdagogiques
OP1
OP2
OP3
OP4
OP5
OP1 : laide de dessins dun systme vis crou, identifier les
principales solutions Technologiques de transformation de
mouvements. OP2 : Etant donn un systme pignon crmaillre, calculer
la vitesse de la Crmaillre. OP3 : Etant donn le schma dun systme
bielle manivelle, dterminer la course Du coulisseau. OP4 : partir
dun schma de lexcentrique, calculer sa course. OP5 : A laide de
schmas des principaux types de cames, noncer le principe de
Fonctionnement dune came. 9
TABLEAU RECAPITULATIF DES OP N Domaines
Objectifs pdagogiques
Titres
Taxonomiq ues
Niveaux taxonomiques
Micro Objectifs MO1 : Donner la fonction dun systme vis
crou.
Types dapprentissages Corps de connaissance Discrimination
Dur e
0 1
A laide de dessins dun systme vis crou, identifier les
principales solutions technologiques de transformation de
mouvements.
Systme vis crou
Cognitif
Comprhension
MO2 : Identifier les diffrents mouvements possibles de la vis et
de lcrou.
MO3 : Identifier les principales solutions Discrimination
technologiques de transformation de mouvement par systme vis crou.
MO1 : Donner la fonction dun systme pignon crmaillre. Corps de
connaissance
2h
0 2
Etant donn un systme pignon crmaillre, calculer la vitesse de la
crmaillre.
Systme pignon crmaillre
Cognitif
Application
MO2 : Identifier les lments constitutifs Discrimination dun
systme pignon crmaillre. MO2 : Calculer la vitesse de la Principe
crmaillre. MO1 : Donner la fonction dun systme bielle manivelle.
Corps de connaissance
1h30
Etant donn le schma dun 03 systme bielle manivelle, dterminer la
course du coulisseau.
Systme bielle manivelle
Cognitif
Application
MO2 : Identifier les lments constitutifs Discrimination dun
systme bielle manivelle. Corps de MO3 : Enoncer son principe de
connaissance fonctionnement. MO4 : Dterminer la course du
coulisseau.MoMO3
Principe
2h
10
TABLEAU RECAPITULATIF DES OP N Objectifs pdagogiques
TitresDomaines Taxonomiques Niveaux taxonomiques Micro Objectifs
Types dapprentissages
Dure
MO1 : Donner la fonction des Excentriques. MO2 : Dcrire les
excentriques A partir dun schma de lexcentrique, calculer sa
course. Excentriques MO3 : Enoncer le principe de fonctionnement.
MO4 : Dterminer la course des excentriques.
Corps de connaissance Corps de connaissance Corps de
connaissance Principe 1h30
04
Cognitif
Application
MO1 : Donner le rle des cames. MO2 : Identifier les principaux
types de cames. MO3 : Enoncer le principe de Fonctionnement dune
came.
Corps de connaissance Discriminant Corps de connaissance 2h
A laide de schmas des principaux types de cames, 05 noncer le
principe de fonctionnement dune came.
Les cames
Cognitif e
Connaissanc
11
12
3- JUSTIFICATION DE LORGANISATION DES LECONS ENTRE ELLES
Lobjectif intermdiaire retenu dans le cadre de notre dossier savoir
tudier les principaux systmes de transformation de mouvements est
subdivis en deux parties : - La premire partie est constitue de
trois (3) OP savoir OP1, OP2, OP3. Elle permet dtudier des systmes
transformant un mouvement de rotation continue en un mouvement de
translation et inversement. - La deuxime partie qui est constitue
de deux (2) OP savoir OP4, OP5, permet ltude des systmes dont la
transformation nest pas rversible. De ces OP, nous avons
successivement les diffrents titres des leons: systme vis crou,
systme pignon crmaillre, systme bielle manivelle, excentriques,
cames. Ces leons, traites dans les deux (2) parties, sont
indpendantes les unes des autres. Lordre des leons obit au souci de
faire apprendre llve, dans un premier temps, les systmes plus
familiers ou systmes dont les lments ont t dj abords dans la
formation pour atteindre progressivement dans un ordre croissant de
difficults les systmes moins familiers ou inconnus. Par ailleurs,
tous les OP sont du domaine cognitif et le temps allou chaque OP
est dfini dans le tableau rcapitulatif des objectifs
pdagogiques.
12
4- JUSTIFICATION DE LA CONCEPTION DES SITUATIONS DAPPRENTISSAGE
On ne saurait parler de squence de formation sans faire tat de la
situation dapprentissage. Cette dernire est la situation que vit la
classe pendant le droulement du cours. Elle se caractrise par les
moyens, les stratgies dutilisation de ces moyens et les stratgies
pdagogiques (dmarches, mthodes). Les moyens dont nous disposons
sont la fois humains et matriels. Les moyens humains : - Formateur
- Stagiaires (lves) Les moyens matriels : - la salle de dessin sera
le lieu dapprentissage - le tableau craie, principal support
pdagogique, est divis en quatre parties gales. La partie la plus
gauche recevra lO.P, les deux du milieu, le plan et le contenu, et
celle de lextrme droite servira de tableau brouillon. - le
rtroprojecteur, pour lexploitation collective, sera le plus indiqu
si ltablissement en dispose car il permet de focaliser lattention
des lves autour des mmes informations que le formateur livre en
leur faisant face. - le papier tableau - la calculatrice - les
documents lves (schma, dessin) -les objets rels (came, vis, crou,
tau dtabli, crmaillre pignon) En ce qui concerne la salle de
dessin, elle sera organise de manire disposer les tables et les
chaises face au tableau afin de permettre aux lves, ainsi assis, de
suivre le cours. Nous avons utilis, dans cette squence, la dmarche
inductive qui consiste partir dexemples particuliers pour aboutir
au gnral et la dmarche dductif contraire la prcdente. Ensuite nous
avons utilis la mthode interrogative pour mieux faire participer
les apprenants et pour certains apprentissages, la mthode
expositive qui est la communication des informations aux lves. Afin
de retenir lattention des lves, nous commencerons toujours nos
leons par un prambule motivant qui leur donnera lintrt de la leon
du jour et les amnera suivre attentivement le cours. Chaque leon
sera termine par une valuation formative pour vrifier si lobjectif
que nous nous sommes fix, a t atteint.
13
5- JUSTIFICATION DU CONTENU DE LOUTIL DEVALUATION DE LOI On
mesure pour valuer, et on value en vue de prendre une dcision.
Loutil dvaluation est donc un moyen de vrifier si lobjectif que
nous nous sommes fix est atteint. Ainsi, nous avons conu une
valuation formative et son corrig la fin de chaque apprentissage.
Cette valuation nous permet de connatre le niveau de comprhension
des apprenants et nous sert de guide pour leur nivellement. Nous
avons conu aussi une valuation sommative pour boucler cette squence
de formation. Celle-ci doit permettre, dans un premier temps, de
faire le bilan de la squence de formation et dans un second temps,
de vrifier si les apprenants ont intgr lensemble des connaissances
de ladite squence. De plus, cette valuation est note afin de
permettre au formateur de slectionner et de classer les apprenants.
LO.I tant Etudier les principaux systme de transformation de
mouvements , lvaluation finale portera sur les acquis
technologiques des systmes tudis, sur la capacit des apprenants
identifier un mcanisme de transformation de mouvements partir de
dessin densemble et sur la comprhension du fonctionnement de ce
systme dans ce mcanisme. Ces diffrents aspects sont le rsum des
systmes de transformation de mouvements tudis. Et ils traduisent en
partie les aptitudes ncessaires que doivent avoir les apprenants
pour tre un technicien et intervenir aisment sur un mcanisme ayant
en son sein un systme de transformation de mouvements.
14
DEUXIEME PARTIE :
PREPARATION DES LEONS
15
LEONS ENTIEREMENT PREPAREES
16
FICHE DIDENTIFICATIONPROF: KOUAME PRENOMS : KOUAKOU MAURICE LEON
1 DUREE : 2h SPECIALITE : Construction Mcanique MATIERE :
Technologie de construction CLASSE : Tle F1
TITRE : SYSTEME VISECROU OBJECTIF PEDAGOGIQUE : A laide de
dessins dun systme vis crou, identifier les principales solutions
technologiques de transformation de mouvements. DOMAINE : Cognitif
TAXONOMIE : NIVEAU : Comprhension PREREQUIS : - identifier une
liaison hlicodale - identifier un mouvement de rotation et de
translation - identifier une vis - identifier un crou SUPPORTS : -
tableau craie - vis, crou, tau dtabli, Affiche de la bute rglable.
- document du rsum (1/2), document du tableau rcapitulatif (2/2) -
valuation - corrig de lvaluation BIBLIOGRAPHIE Andr Ricordeau,
Claude Corbet DOSSIER DE TECHNOLOGIE DE CONSTRUCTION Paris,
CASTEILLA, 1997 pages 112-114.
G. Lenormand, R. Migne
CONSTRUCTION MECANIQUE *ELEMENTS DE TECHNOLOGIE* Tome 4, Paris,
FOUCHER, 1969, page 9-11
NOBERT. M, PHILIPPE. R TECHNOLOGIE DE CONSTRUCTION MECANIQUE
Tome 2, Paris, DE LA CAPITELLE, 1985 pages 110-11717
FICHE DE DEROULEMENTETAPES MOTIVER PLAN DE LECON TITRE : SYSTEME
VISECROU
M.O 1 : Donner la fonction dun systme vis crou.
1- FONCTION
M.O 2 : Identifier les diffrents mouvements possibles de la vis
et de lcrou.
2- DIFFERENTS MOUVEMENTS
M.O 3 : Identifier les principales solutions techniques de
transformation de mouvements par systme vis crou.
3- PRINCIPALES SOLUTIONS 3.1 Rgle 3-2 Solutions technologiques
de transformation de mouvements
EVALUER
18
PREAMBULE MOTIVANTDure : 5 min P : Professeur E : Elve
P : Que voyez vous sur cette table ? E : Un tau dtabli. P : Quel
mouvement suis-je en train deffectuer ? E : Un mouvement de
rotation. P : Que remarquez-vous ? E : Une translation du mors
mobile. P : Quel est le phnomne qui permet partir dun mouvement de
rotation dobtenir un mouvement de translation ? E : Une
transformation de mouvement. P : Comment a-t-on effectu cette
transformation ? E : Pas de rponse P : Il existe aujourdhui,
plusieurs mcanismes qui assurent cette transformation parmi
lesquels nous avons le systme vis crou qui fera lobjet de notre
tude. Il vous faut donc connatre ses cas de transformation de
mouvements afin que vous soyez capables demployer convenablement un
systme vis crou dans une construction mcanique. Je fais lire et
expliquer lobjectif pdagogique. Je fais noter le titre.
19
FICHE TABLEAUOBJECTIF PEDAGOGIQUE A laide de dessins dun systme
vis crou, identifier les principales solutions technologiques de
transformation de mouvements.
SYSTEME VIS-ECROU1-FONCTION Transformer un mouvement de rotation
en un mouvement de translation et rciproquement. 2-DIFFERENTS
MOUVEMENTS 3-PRICIPALES SOLUTIONS 3-1 Rgle Si lon exerce lun des
quatre mouvements (Rv, Tv, Re, Te) dans le but dobtenir un second
mouvement de nature diffrente, il faut empcher les deux autres. 3-2
Principales solutions technologiques de transformation de mouvement
(Voir doc 2/2) Les 4 mouvements entre lcrou et la vis : Rv :
Rotation de la vis Tv : Translation de la vis Re : Rotation de
lcrou Te : Translation de lcrou
BROUILLON Papier tableau
20
FICHE DE STRATEGIEMICRO OBJECTIF : 1 DUREE : 15 min PRODUCTION
ELEVE 1. FONCTION Le systme vis crou permet de transformer un
mouvement de rotation en un mouvement de translation et
rciproquement.
Donner la fonction dun systme vis crou Type dapprentissage :
Corps de connaissance STRATEGIE Mthode : Interrogative Dmarche :
Inductive
CONTENU
SUPPORTS
Je prsente une vis et un crou aux lves. Et je procde par
questionnement pour amener les apprenants dcouvrir la fonction. Vis
Q.1 : Quel est le nom de cette pice ? Q.2 : Quel est le nom de
cette autre pice ? Puis, je prends un tau dtabli et nous
identifions ses lments constitutifs (la vis, lcrou, ). Ensuite je
tourne la vis et je continue mon questionnement. Q.3 : Quel est le
mouvement que jexerce sur la vis ? Q.4 : Quel mouvement de lcrou
obtient on ? Q.5 : A quoi sert alors un systme vis crou ? R.5 : Il
sert transformer un mouvement de rotation en un mouvement de
translation. R.3 : un mouvement de rotation R.1 : une vis R.2 : un
crou Ecrou
Etau dtabli
R.4 : un mouvement de translation
Tableau craie
Transition : Connaissant la fonction dun systme vis-crou, nous
allons voir les diffrents mouvements de la vis et de lcrou.
21
FICHE DE STRATEGIEMICRO OBJECTIF : 2 DUREE : 15m PRODUCTION
ELEVE
2-DIFFERENTS MOUVEMENTS Identifier les diffrents mouvements
FICHE DE STRATEGIE possibles OBJECTIF : lcrou. MICRO de la vis et
de DUREE : PRODUCTION ELEVE 3 60min Identifier les principales
Discrimination Type dapprentissage : solutions technologiques de
transformation de mouvements par systme vis-crou. STRATEGIE Type
dapprentissage : Discrimination Mthode : Interrogative STRATEGIE 3
PRINCIPALES SOLUTIONS 3-1 Rgle Les 4 mouvements entre mouvements Si
lon exerce lun des quatrelcrou et la vis : (Rv, Tv,Rotation dans le
but dobtenir un second Rv : Re, Te) de la vis mouvement de nature
diffrente, il faut empcher les Tv : Translation de la vis deux
autres. Re : Rotation de lcrou Remarque : Le mouvement entre la vis
et lcrou est un Te : Translation de lcrou mouvement hlicodal. Il
rsulte de la composition de deux mouvements simultans que sont la
rotation et la translation. CONTENU SUPPORTS
Dmarche Interrogative Mthode : : Inductive Je distribue des vis
et des crous aux lves. Je leur demande de bloquer lcrou et de
tourner la vis. Dmarche : Dductive Et je pose des questions aux
apprenants pour les amener faire ressortir les diffrents mouvements
possibles. Q.1 : Quels sont les mouvements de la vis, Je fais noter
la rgle, et je lexplique. si on immobilise lcrou ? Ensuite, je
demande aux lves de bloquer cette fois-ci la vis et de tourner
lcrou. Et je continue mon questionnement.
SUPPORTS Vis Affiche R.1 : un mouvement de rotation et un
mouvement de translation de la vis. Etau dtabli Ecrou Tableau
craie
Q.2 : Quels sont les mouvements de lcrou, Vis si on immobilise
la vis? Puis, je fais noter la remarque. R.2 : un mouvement de
rotation et un mouvement de translation Je fais dessiner le schma
dun systme de lcrou. vis-crou et je fais noter les diffrents Ecrou
mouvements possibles de lcrou et de la vis. Tableau craie
Transition : La connaissance des mouvements possibles de la vis
et de lcrou nous permettra, didentifier aisment les diffrentes
solutions technologiques de transformation de mouvements.
22
FICHE DE STRATEGIESTRATEGIE MICRO OBJECTIF : 3 CONTENU
PRODUCTION ELEVE 3-2 Cas de transformation de mouvements Je
continue mon questionnement. Identifier les principaux cas de Q.5 :
quelle case du tableau correspond trouve. R.5 : Rv Tv=1 / = 0 Rv =1
Rv =0 Rv=1,=1 RvRe=0, Te=0 transformation de mouvements par systme
la solutionVIS vis-crou. Je fais remplir le tableau en notant 1
dans la case concerne. Tv = 0 Tv = 0 Tv = 1 Tv = 1 ECROU Re = 0
Intressons nous maintenant la deuxime solution. 1 Type
dapprentissage :dessin de la bute rglable, Je procde Discrimination
Te= 0 En me basant sur le par questionnement en amenant, les lves
identifier la Re = 1 2 seconde solution. Te = 0 STRATEGIE Re = 0
Q.6 : Quel est le mouvement de la vis ? R.6 : Une rotation. 3 Te =
1 Re = 1 Q.7 : Quel mouvement obtient-on ? R.7: Une translation 4
Mthode : Interrogative Te = 1 R.8 : transformer la rotation de la
vis Q.8 : Que venons-nous de faire une fois de plus ? en une
translation de lcrou. Dmarche : Inductive Q.9 : Quels sont les
mouvements que nous empchons sur la bute rglable ? Observer le
dessin 2 du document 1/3. Intressons nous dabord auanalogie avec
lanous servant dun tau En procdant toujours par premier cas en bute
rglable, dtabli. cette autre solution. Ensuite je poursuis mon
jexplique Je tourne la vis de ce mcanisme et en mappuyant sur la
rgle, je questionnement. procde par questionnement pour amener les
lves identifier Q.10 : quelle case du tableau lune des principales
solutions. correspond cette autre solution trouve ? Je Sur remplir
une fois de mouvement exerce t-on 2 Q.1 : fais ltau dtabli,
quelplus le tableau en notant ? dans la case concerne. Q.2 : Quel
mouvement obtient-on de ltau dtabli? Puis nous nous intressons la
troisime solution. Q.3Je Que venons-nous alors de faire ? la vis
tout en tournant : demande aux lves dimmobiliser lcrou et je procde
aussi de la mme manire que dans la solution prcdente. Q.4 : Quels
sont les mouvements empchs sur ltau dtabli? Q.11 : Quel mouvement
exerce t-on lorsquon tourne lcrou ? Puis, je distribue le document
1/3 comportant les dessins des Q.12 : Quel mouvement obtient-on ?le
dessin 1 de ce document. principales solutions. Je fais observer En
procdant par analogie avec ltau dtabli, jexplique cette
transformation et je signifie aux lves que cest lune des Q.13 :
Quels sont les mouvements que nous empchons ? principales solutions
connatre. Ensuite, quelle case du tableau correspond cette aux lves
Q.14 : je distribue le document 2/2, je signifie troisime que :
-Rv=0, Tv=0, Re=0, Te=0 : mouvement impossible solution trouve ?
-Rv=1, Tv=1, Re=1, Te=1 : mouvement possible R.9: -rotation de
lcrou - translation de la vis CONTENU
R.10 : : rotation de laRe=0, Te=1 R.1 Rv=1, Tv=0 / vis. R.2:
translation de la vis. R.3 : transformer la rotation de la vis en
une translation de celle-ci. R.4: -rotation de lcrou - translation
de lcrou R.11 : Un mouvement de rotation R.12:Un mouvement de
translation R.13: -rotation de la vis - translation de la vis R.14
: Rv=0, Tv=0 / Re=1, Te=1
23
STRATEGIE Enfin nous nous intressons la quatrime solution. Je
fais observer le dessin 4 et je pose des questions pour amener les
apprenants dcouvrir la dernire la solution. Q.15 : Quel est le
mouvement de lcrou ? Q.16: Lcrou peut-il avoir un mouvement de
translation ? Q.17 : Pourquoi ne peut-il pas avoir un mouvement de
translation ? Q.18 : Quel est alors mouvement de la vis ? Q.19 :
Quels sont donc les mouvements empchs ?
CONTENU
R.15 : rotation R.16 : non R.17 : parce que lcrou est li en
translation avec le bti fixe R.18: translation R.19: -rotation de
la vis - translation de lcrou R.20 : Rv=0, Tv=1 / Re=1, Te=0
Q.20 : quelle case du tableau correspond cette solution ? Je
fais remplir encore le tableau en notant 4 dans la case
correspondante.
Synthse finale Q: Quels sont les aspects du cours que nous avons
abords aujourdhui ? R : rcapitulation
24
TABLEAU RECAPITULATIF DES PRINCIPALES SOLUTIONS
VIS ECROU Re = 0 Te = 0 Re = 1
Rv =0 Tv = 0
Rv =1 Tv = 0
Rv =0 Tv = 1
Rv =1 Tv = 1
impossible 1 2
Te = 0 Re = 0 3 Te = 1 Re = 1 4 Te = 1 possible
Prof stagiaire : K.K.M Ecole : L.T.A TECH. CONST
SYSTEME VIS-ECROUSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/2
25
EVALUATION
dure 10mn
1- Ecrivez oui dans la case qui correspond une solution
technologique tudier. N.B : Rv=0, Tv=0, Re=0, Te=0 : mouvement
impossible / Rv=1, Tv=1, Re=1, Te=1 : mouvement possible VIS ECROU
Re = 0 Te = 0 Re = 1 Te = 0 Re = 0 Te = 1 Re = 1 Te = 1 2-
Identifiez le type de cas utilis dans le dessin ci-dessous en
notant le chiffre 0 ou 1 qui convient dans les cases suivantes). Rv
=0 Rv =1 Rv =0 Rv =1
Tv = 0 Tv = 0
Tv = 1 Tv = 1
Re = Te = Rv = Tv =
26
Prof stagiaire : KOUAME K. M. Ecole : L.T.A TECH. CONST
SYSTEME VIS-ECROUSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/2
CORRIGE DE LEVALUATION1- Les principales solutions
technologiques sont : (8 points) N.B : Rv=0, Tv=0, Re=0, Te=0 :
mouvement impossible / Rv=1, Tv=1, Re=1, Te=1 : mouvement possible
VIS ECROU Re = 0 Te = 0 Re = 1 Te = 0 Re = 0 Te = 1 Re = 1 Te = 1
Rv =0 Rv =1 Rv =0 Rv =1
Tv = 0 Tv = 0
Tv = 1 Tv = 1 oui oui
oui oui
2- Le type de cas utilis est:
Re = Te = Rv = Tv =
0 0 1 1
Prof stagiaire : K.K.M. Ecole : L.T.A
SYSTEME VIS-ECROUSYSTEME
Classe : Tle F1 Date :
27
TECH. CONST
DE TRANSFORMATION DE MOUVEMENTS
Doc : 2/2
FICHE DIDENTIFICATIONNOM : KOUAME PRENOM : KOUAME MAURICE LECON
2 DUREE : 1h30 SPECIALITE : Construction Mcanique MATIERE :
Technologie de construction CLASSE : TLE F1
TITRE : SYSTEME PIGNON-CREMAILLERE OBJECTIF PEDAGOGIQUE : Etant
donn un systme pignon crmaillre, calculer la vitesse de la
crmaillre. TAXONOMIE : DOMAINE NIVEAU : Cognitif : Application
PREREQUIS : - connaitre un pignon et une crmaillre. - identifier
un mouvement de rotation et de translation.
SUPPORTS : - tableau craie - document de la reprsentation (1/1)
- systme pignon crmaillre - valuation - corrig de lvaluation
28
BIBLIOGRAPHIE
Andr RICORDEAU, Claude CORBET
DOSSIER DE TECHNOLOGIE DE CONSTRUCTION Paris, CASTEILLA, 1997
pages 89
Jean-Louis FANCHON
GUIDE DES SCIENCES ET TECHNOLOGIES INDUSTRIELLES Paris,
NATHAN/AFNOR, 2001 pages 344
FICHE DE DEROULEMENTETAPES PLAN DE LECON
29
MOTIVER
TITRE : SYSTEME PIGNONCREMAILLERE
M.O 1 : Donner la fonction dun systme pignon crmaillre.
1-FONCTION
2- ELEMENTS CONSTITUTIFS M.O 2 : Identifier les lments
constitutifs dun systme pignon crmaillre.
3- VITESSE DE LA CREMAILLERE M.O 3 : Calculer la vitesse de la
crmaillre.
EVALUER
PREAMBULE MOTIVANT
30
Dure : 5mn P : Professeur E : Elve Au cours prcdent, nous avons
tudi les systmes vis-crou. P : Dites-moi quels sont les principaux
mouvements de la vis et de lcrou ? E : Rv (rotation de la vis) ; Re
(rotation de lcrou) Tv (translation de la vis) ; Te (translation de
lcrou) De tout ce qui prcde, il ressort deux thmes principaux
savoir : translation, rotation. Je prsente aux lves un dessin
comportant une vis, un crou, un pignon et une crmaillre. P :
Quelles sont les lments quon peut assembler ? E:1 2 ; 3 4 P : Alors
comment appelle t-on le systme form par ces deux pices ? E : Pas de
rponse. Ce systme fera lobjet de notre tude aujourdhui. Je fais
lire et expliquer lobjectif pdagogique. Je fais noter le titre.
31
FICHE TABLEAU SYSTEME PIGNON-CREMAILLERE 1-FONCTIONApplication
1
BROUILLON
OBJECTIF PEDAGOGIQUE :
Etant donn un systme pignon crmaillre, calculer la vitesse de la
crmaillre.
Calculer la vitesse de la crmaillre Un systme pignon crmaillre
dun systme pignon crmaillre. permet de transformer un mouvement
Donnes : Z=17, m=2, N=1500 de rotation en un mouvement de Tr/mn
translation et rciproquement. 2-ELEMENTS CONSTITUTIFS .m.Z .N
Rponse : V= Nous distinguons : 60.103 -Le pignon 2 .17.1500 -La
crmaillre AN : V = 60.103 Exemple : Voir doc 1/1 V =2,67 m/s
Tableau brouillon
3-VITESSE DE LACREMAILLERE -Formule de la vitesse
Application 2 Calculez la vitesse de la crmaillre dun systme
pignon crmaillre. d =35 mm N =3000Tr/mm Reponses : V =
V=
.m.Z .N .d .N 3 = 60.10 60.103
N : Frquence de rotation (Tr/mn) Z : Nombre de dente du pignon M
: Module du pignon d : Diamtre primitif du pignon Remarque La
course (longueur du dplacement) de la crmaillre pour un tour de
rotation du pignon est gale : C = d avec d = mZ
.d .N 60.103
AN: V =
.35.3000 . 60.103
V = 5,49 m/s
32
MICRO OBJECTIF : 1
DUREE : 10mn
FICHE DE STRATEGIE FICHE DE STRATEGIE
PRODUCTION ELEVE
1- FONCTIONDonner la fonction dun systme pignon crmaillre Type
dapprentissage : Corps de connaissances STRATEGIE Mthode :
Interrogative Dmarche : Inductive Je prsente aux lves un systme
pignon crmaillre et un dessin du mme systme. Je procde alors par
questionnement pour amener les lves dcouvrir la fonction du systme
pignon crmaillre. Q.1 : Que voyez-vous ? Q.2 : Quel mouvement
suis-je en train deffectuer ? Q.3 Quavez vous remarqu ? R.3 : La
tige monte et descente Q.4 : Comment appelle t-on ce mouvement ?
Q.5 : Quelle est le phnomne qui permet partir dun mouvement de
rotation dobtenir un mouvement de translation ? Q.6 : A partir des
lments de rponse, quelle est la fonction dun systme pignon
crmaillre ? R.4 Un mouvement de translation R.5 : Une
transformation de mouvement R.6 : Un systme pignon crmaillre permet
de transformer un mouvement de rotation en un mouvement de
translation. Tableau craie R.1 : Un Systme pignon crmaillre R.2 :
Un mouvement de rotation Systme pignon crmaillre Affiche CONTENU
SUPPORTS Un systme pignon crmaillre permet de transformer un
mouvement de rotation en un mouvement de translation et
rciproquement.
Transition : Aprs avoir donn la fonction dun systme pignon
crmaillre, identifions maintenant ses lments constitutifs.
33
EVALUATION Dure : 10mn 1- Donnez la fonction dun systme pignon
crmaillre.
2- Calculez la vitesse de la crmaillre dun systme
pignon-crmaillre dont la frquence de rotation et les
caractristiques du pignon sont les suivantes: N= 3000 tr/min Z= 35
m= 2 .
3- Calculez la vitesse de la crmaillre dun systme
pignon-crmaillre dont la frquence de rotation et les
caractristiques du pignon sont les suivantes: N= 1500 tr/min d= 50
mm
Prof stagiaire : KKM Ecole : L.T.A TECH. CONST
SYSTEME PIGNON-CREMAILLERE SYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/2
34
CORRIGE DE LEVALUATION 1- La fonction dun systme
pignon-crmaillre est : Un systme pignon-crmaillre permet de
transformer un mouvement de rotation en un mouvement de translation
et rciproquement. 2-La vitesse de la crmaillre dun systme
pignon-crmaillre est: Donnes : N= 3000 tr/min Z= 35 m= 2 Rponse :
V= A.N : V= .m.Z .N 60.103 .2.35.3000 60.103
V= 11 m/s 3- La vitesse de la crmaillre dun systme
pignon-crmaillre est: Donnes : N= 1500 tr/min d= 50 mm Rponse : V=
A.N : V= .d .N 60.103
.50.1500 60.103
V= 4 m/sProf stagiaire : K.K.M Ecole : L.T.A TECH. CONST SYSTEME
PIGNON-CREMAILLERE SYSTEME DE TRANSFORMATION DE MOUVEMENTS Classe :
Tle F1 Date : Doc : 2/2
35
LEONS A PRESENTATION SIMPLIFIEE
36
FICHE DIDENTIFICATIONNOM : KOUAME PRENOM : KOUAKOU MAURICE
ETAPES LECON 3 DUREE : 2h MOTIVER SPECIALITE : Construction
Mcanique
FICHE DE DEROULEMENT MATIERE : Technologie de construction
PLAN DE LECON CLASSE : TLE F1 TITRE : SYSTEME BIELLE MANIVELLE
TITRE : SYSTEME BIELLE MANIVELLE OBJECTIF PEDAGOGIQUE : Etant donn
le schma dun systme bielle manivelle, dterminer la course du
coulisseau. M.O 1 : Donner la : 1- FONCTION TAXONOMIE fonction dun
systme DOMAINE : Cognitif bielle manivelle. NIVEAU : Application
PREREQUIS : - identifier le schma dune liaison - identifier un
mouvement de rotation - identifier un mouvement de translation 2-
ELEMENTS CONSTITUTIFS SUPPORTS : - tableau craie M.O 2 : Identifier
les diffrentsdes schmas (1/3), document 2/3, document des systmes -
document lments constitutifs dun systme bielle manivelle. drivs
(3/3) - valuation - corrig de lvaluation M.O 3 : Enoncer le
principe de fonctionnement dun systme bielle manivelle. G.
Lenormand, R. Migne 3- PRINCIPE DE FONCTIONNEMENT BIBLIOGRAPHIE
CONSTRUCTION MECANIQUE *ELEMENTS DE TECHNOLOGIE* M.O 4 :
Dterminer la course du coulisseau. 4- COURSE DU COULISSEAU Tome 4,
Paris, FOUCHER, 1969 page 27-59 NOBERT. M, PHILIPPE. R TECHNOLOGIE
DE CONSTRUCTION MECANIQUE Tome 2, Paris, DE LA CAPITELLE ,1985 page
118-133
Andr RICORDEAU, Claude CORBET DOSSIER DE TECHNOLOGIE DE
CONSTRUCTION EVALUER Paris, CASTEILLA, 1997 pages 116-117
FICHE DE STRATEGIEMICRO-OBJECTIF : 1 DUREE :15 min PRODUCTION
ELEVE37
Donner la fonction dun systme bielle manivelle. TYPE
DAPPRENTISSAGE : Corps de connaissance METHODE : Interrogative
1- FONCTION Le systme bielle manivelle permet de transformer un
mouvement circulaire (rotation) continu en un mouvement rectiligne
(translation) alternatif et rciproquement. Remarque : La
transformation inverse ne peut se faire qu la condition de caler un
volant (contrepoids) sur la manivelle (vilebrequin).
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
Je colle un schma dun systme bielle manivelle au tableau. En
utilisant ce schma, je procde par questionnement pour amener les
apprenants dcouvrir la fonction dun systme bielle manivelle.
Puis, je fais noter la remarque.
TRANSITION : Je leur parle de limportance de la connaissance des
lments constitutifs.
FICHE DE STRATEGIEMICRO-OBJECTIF : 2 DUREE : 15 min PRODUCTION
ELEVE38
Identifier les lments constitutifs dun systme bielle manivelle
TYPE DAPPRENTISSAGE : Corps de connaissance METHODE : expositive
DEMARCHE : Dductive
2- ELEMENTS CONSTITUTIFS Nous avons : 1 : Manivelle 2 : Bielle 3
: Coulisseau (piston) 4 : Glissire (chemise) B : Tte de bielle A :
Pied de bielle Exemple : voir doc 1/3
DESCRIPTION DE LA STRATEGIE
-Je distribue le document 1/3 comportant le schma 1 dun systme
bielle manivelle que nous allons exploiter. En utilisant le schma 1
du document 1/3, nous identifions les lments constitutifs dun
systme bielle manivelle. Puis, en utilisant le schma 2 dun
compresseur piston du mme document, un apprenant, lui seul, va
identifier les lments constitutifs dun systme bielle manivelle.
Ensuite, je distribue les documents 2/3 et 3/3 comme des supplments
dinformation.
-Je fais une transition pour passer au point suivant.
FICHE DE STRATEGIEMICRO-OBJECTIF : 3 DUREE :35 min PRODUCTION
ELEVE39
Enoncer le principe de fonctionnement dun systme bielle
manivelle. TYPE DAPPRENTISSAGE : Corps de connaissance
3- PRINCIPE DE FONCTIONNEMENT La manivelle est anime dun
mouvement de rotation. Ce mouvement de rotation est transform en un
mouvement de translation alternatif du coulisseau par la bielle. La
tte de la bielle est anime dun mouvement de rotation, tandis que le
pied de la bielle est anim dun mouvement de translation.
METHODE : Interrogative
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
-En mappuyant sur la fonction dun systme bielle manivelle, en
utilisant le schma 2 du document 1/3 et en procdant par
questionnement pour amener les apprenants faire ressortir le
principe de fonctionnement.
-Je fais une transition pour passer au dernier aspect.
40
FICHE DE STRATEGIEMICRO-OBJECTIF : 4 DUREE : 30 min PRODUCTION
ELEVE 4- COURSE DU COULISSEAU - Formule de la course La course : C=
2R = 2OB *La longueur du dplacement (course) : C *Rayon de la
manivelle : R - Application Le rayon de la manivelle sur le schma 2
du document 1/3: R=10 mm Donc la course : C = 2x10 C = 20 mm
Remarque : La variation du rayon (R) provoque la variation de la
course (C)
Dterminer la course du coulisseau.
TYPE DAPPRENTISSAGE : Principe METHODE : Interrogative DEMARCHE
: Inductive
DESCRIPTION DE LA STRATEGIE
En mappuyant sur le principe de fonctionnement et en utilisant
le schma 2 du document 1/3, je procde par questionnement pour
amener les apprenants dterminer la course du coulisseau.
Puis, je fais noter la remarque.
41
42
43
44
EVALUATION
dure10mn
1- Dterminez la course du coulisseau sur le schma du systme
bielle manivelle ci-dessous.
..............................................................................................................................................
..............................................................................................................................................
2- Compltez le texte ci-dessous dcrivant le principe de
fonctionnement dun systme bielle manivelle par les mots qui
conviennent. La manivelle est anime dun mouvement Ce mouvement de
rotation est ...en un mouvement de .. du coulisseau par . ..de la
bielle est anime dun mouvement de rotation, tandis que .de la
bielle est anim dun mouvement de translation.
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
SYSTEME BIELLE MANIVELLESYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/2
45
CORRIGE DE LEVALUATION 1- La course du coulisseau sur le schma
du systme bielle manivelle est : Rponse : C= 2xR C= 2x19 C= 38
mm
2-. Le principe de fonctionnement dun systme bielle manivelle
est : La manivelle est anime dun mouvement de rotation. Ce
mouvement de rotation est transform en un mouvement de translation
du coulisseau par la bielle. La tte de la bielle est anime dun
mouvement de rotation, tandis que le pied de la bielle est anim dun
mouvement de translation.
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST.
SYSTEME BIELLE MANIVELLESYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/2
46
FICHE DIDENTIFICATIONNOM : KOUAME PRENOM : KOUAKOU MAURICE LECON
4 DUREE : 1h30 SPECIALITE : Construction Mcanique MATIERE :
Technologie de construction CLASSE : TLE F1
TITRE : EXCENTRIQUES OBJECTIF PEDAGOGIQUE : A partir dun schma
de lexcentrique, calculer sa course. TAXONOMIE : DOMAINE : Cognitif
NIVEAU : Application
PREREQUIS : - identifier un systme bielle manivelle - identifier
un mouvement de rotation - identifier un mouvement de
translation
SUPPORTS :
- tableau craie - document 1/2, document de lexcentrique double
(2/2) - valuation - corrig de lvaluation BIBLIOGRAPHIE
G. Lenormand, R. Migne
CONSTRUCTION MECANIQUE *ELEMENTS DE TECHNOLOGIE* Tome 4, Paris,
FOUCHER, 1969 pages 60-64 TECHNOLOGIE DE CONSTRUCTION MECANIQUE
Tome 2, Paris, DE LA CAPITELLE ,1985 page 142-145
NOBERT. M, PHILIPPE. R
47
FICHE DE DEROULEMENTETAPES MOTIVER PLAN DE LECON TITRE :
EXCENTRIQUES
M.O 1 : Donner la fonction des excentriques.
1- FONCTION
M.O 2 : Dcrire lexcentrique.
2- DESCRIPTION
M.O 3 : Enoncer le principe de fonctionnement des
excentriques.
3- PRINCIPE DE FONCTIONNEMENT
M.O 4 : Calculer la course des excentriques.
4- COURSE DES EXCENTRIQUES
EVALUER
48
FICHE DE STRATEGIEMICRO-OBJECTIF : 1 DUREE : 10 min PRODUCTION
ELEVE 1- FONCTION Les excentriques permettent de transformer un
mouvement circulaire continu en un mouvement rectiligne alternatif.
N.B : La transformation inverse ne peut pas se faire en raison des
frottements importants dus au guidage des organes.
Donner la fonction des excentriques. TYPE DAPPRENTISSAGE : Corps
de connaissance METHODE : Interrogative DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
-Je mappuie sur les prrquis de la leon sur le systme bielle
manivelle pour amener les apprenants dcouvrir la fonction des
excentriques tout en procdant par questionnement.
- Je fais une transition pour passer au second point.
49
FICHE DE STRATEGIEMICRO-OBJECTIF : 2 DUREE : 15 min PRODUCTION
ELEVE 2- DESCRIPTION Dune manire gnrale, lexcentrique comporte un
disque circulaire (2) cal sur un arbre excentr (1) appel maneton.
Un collier (3) entoure le disque. Une barre excentrique (4) relie
le collier une tige (5) guide. (voir schma1)doc1/2. Remarque : Dans
certains mcanismes, le collier est remplac par un cadre
rectangulaire ou oblong dans lequel tourne le disque excentr qui
reste constamment tangente au cadre.
Identifier les lments constitutifs des excentriques. TYPE
DAPPRENTISSAGE : Corps de connaissance
METHODE : Interrogative
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
-Je colle une affiche comportant le schma des excentriques au
tableau. Et nous identifions les diffrentes parties des
excentriques. Ensuite par questionnement, jamne les apprenants
faire la description des excentriques. Puis, je distribue le
document 1/2, sur lequel il y a des schmas et un dessin des
excentriques aux lves et que nous allons exploiter. Enfin, je fais
noter la remarque. - J e fais une transition pour passer au point
suivant.
50
FICHE DE STRATEGIEMICRO-OBJECTIF : 3 DUREE : 20 min PRODUCTION
ELEVE 3- PRINCIPE DE FONCTIONNEMENT Enoncer le principe de
fonctionnement des excentriques. Le maneton (1) anim dun mouvement
circulaire continu entrane le disque (2) en rotation. Le centre (B)
du disque dcrit un cercle de centre (O) et de rayon (e) appel rayon
dexcentricit. Le disque entrane dans son mouvement le collier (3)
et la barre excentrique (4) fixs rigidement lun sur lautre, puis la
tige (5) qui, tant guide en translation, ne peut tre anime que dun
mouvement rectiligne alternatif. Remarques : - Dans certains
mcanismes, le maneton est fixe et le disque est entran en rotation
par un autre organe. - Lexcentrique a un rendement mdiocre (amlior
cependant par lemploi dun roulement intercal entre le disque et le
collier).
TYPE DAPPRENTISSAGE : Corps de connaissance
METHODE : Interrogative
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
-En mappuyant sur la fonction et la description des
excentriques, et en utilisant le schma 1 du document 1/2, jamne par
questionnement les apprenants faire ressortir le principe de
fonctionnement. Puis, je fais noter les remarques. - Je leur parle
de limportance de connatre la course et enfin on passe au point
suivant.
51
FICHE DE STRATEGIEMICRO-OBJECTIF : 4 DUREE : 25 min PRODUCTION
ELEVE 4- COURSE Calculer la course des excentriques. -Formule de la
course TYPE DAPPRENTISSAGE : Principe C= 2e = 2OB *Course : C
*Excentricit : e METHODE : Interrogative -Application Lexcentricit
sur le schma 1du document 1/2: e = 8 mm Donc la course : C = 2x 8 =
16 mm Remarque : -Plus simple que la bielle manivelle pour de
faibles courses. -On peut obtenir facilement une course rglable
laide dun systme dexcentrique double. DESCRIPTION DE LA
STRATEGIE
DEMARCHE : Inductive
En mappuyant sur le principe de fonctionnement et en utilisant
une fois de plus le schma 1 du document 1 /2, je procde par
questionnement pour amener les apprenants calculer la course. Je
distribue le document 2 /2 comme supplment dinformation. Puis, je
fais noter les remarques.
52
53
54
EVALUATION Dure : 5min 1- Ecrivez les noms des parties repres
sur le schma de lexcentrique ci-dessous.
1: 2: 3: 4: 5:
2- Calculez la course de lexcentrique sur le schma ci-dessus...
.. ..
Prof stagiaire: K.KM. Ecole : L.T.A TECH. CONST.
EXCENTRIQUES SYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/255
CORRIGE DE LEVALUATION
1- Les noms des parties repres sur le schma de lexcentrique sont
:
12345-
Disque Maneton Collier Barre excentrique Tige
2- La course de lexcentrique sur le schma est : Rponse : C = 2OB
C = 2x 14 C = 28 mm
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EXCENTRIQUES SYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/2
56
FICHE DIDENTIFICATION
57
NOM : KOUAME PRENOM : KOUAKOU MAURICE
SPECIALITE : Construction Mcanique MATIERE : Technologie de
construction
LECON 5
DUREE : 2h
CLASSE : TLE F1
TITRE : LES CAMES OBJECTIF PEDAGOGIQUE : A laide de schmas des
principaux types de cames, Enoncer le principe de fonctionnement
dune came. TAXONOMIE : DOMAINE : Cognitif NIVEAU : Connaissance
PREREQUIS : - identifier le schma dune liaison - identifier un
mouvement de rotation - identifier un mouvement de translation
SUPPORTS : - tableau craie - document de schmas des cames (1/1) -
cames - valuation - corrig de lvaluation - maquette de came
BIBLIOGRAPHIE G. Lenormand, R. Migne CONSTRUCTION MECANIQUE
*ELEMENTS DE TECHNOLOGIE* Tome 4, Paris, FOUCHER, 1969 pages 60-64
NOBERT. M, PHILIPPE. R TECHNOLOGIE DE CONSTRUCTION MECANIQUE Tome
2, Paris, DE LA CAPITELLE ,1985 page 142-145 Andr RICORDEAU, Claude
CORBET DOSSIER DE TECHNOLOGIE DE CONSTRUCTION Paris, CASTEILLA
,1997 page 116-117
FICHE DE DEROULEMENT58
ETAPES MOTIVER
PLAN DE LECON TITRE : EXCENTRIQUES
M.O 1 : Donner le rle dune came
1- ROLE
M.O 2 : Identifier les principaux types de Cames.
2- PRINCIPAUX TYPES DE CAMES
M.O 3 : Enoncer le principe de fonctionnement dune came.
3- PRINCIPE DE FONCTIONNEMENT
EVALUER
59
MICRO-OBJECTIF : 1 Donner le rle dune came.
FICHE DE STRATEGIE DUREE : 20 min PRODUCTION ELEVE 1- ROLE Une
came est un solide anim dun mouvement de rotation continu qui
communique une tige guide en translation un mouvement rectiligne
alternative avec des positions prcises.
TYPE DAPPRENTISSAGE : Corps de connaissance METHODE :
Interrogative DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE -En utilisant la maquette dune came,
je procde par questionnement pour amener les apprenants dcouvrir le
rle dune came.
- Je fais une transition pour passer au second point.
60
FICHE DE STRATEGIE MICRO-OBJECTIF : 2 DUREE : 30 min PRODUCTION
ELEVE 2- PRINCIPAUX TYPES DE CAMES Nous avons trois principaux
types : -Cames disques -Cames rainures : Rainure creuse sur la
surface latrale dun cylindre Rainure creuse dans la base dun
disque. -Cames tambour : Partie active sur le rebord de la base dun
cylindre. Partie active sur le rebord de la base dun cne.
Identifier les principaux types de cames.
TYPE DAPPRENTISSAGE : discrimination
METHODE : Interrogative
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE -Je distribue le document (1/1), en
mappuyant sur les figures gomtriques, je procde par questionnement
pour amener les apprenants identifier les principaux types de
cames
- Je fais une transition pour passer au point suivant.
61
FICHE DE STRATEGIE MICRO-OBJECTIF : 3 DUREE : 45min PRODUCTION
ELEVE 3- PRINCIPE DE FONCTIONNEMENT La came est fixe sur larbre
moteur .Sa forme est choisir en vu du mouvement obtenir; la tige
guide en translation sappui sur le contour ou dans la rainure de la
came .La rotation celle-ci provoque le dplacement de la tige. NB :
Le maintient du contact de la tige sur la came est assur par un
effort presseur provoqu par un ressort ou le poids de lensemble
tige est command.
Enoncer le principe de fonctionnement dune came. TYPE
DAPPRENTISSAGE : Corps de connaissance METHODE : Interrogative
DEMARCHE : Inductive
DESCRIPTION DE LA STRATEGIE
-En mappuyant sur la fonction et en utilisant la maquette et le
document (1/1), je pose des questions aux apprenants afin quils
puissent noncer le principe de fonctionnement.
Puis, je fais noter les remarques.
62
63
EVALUATION Dure : 10min 1-Donner le rle des cames. . 2-Ecrivez
le nom de chaque type de cames ci-dessous.u tige galetu
u 3
t ig e g a let 3
tige
3
..
.......
u tige galet
tige galet
u
.
3-Compltez le texte ci-dessous dcrivant le principe de
fonctionnement des principaux types de cames. Les cames qui ont des
formes trs varies, sont fixes sur larbre moteur et dont la forme
est choisie en vue du mouvement obtenir ; une tige guide en sappuie
sur ou dans de la came ; la rotation de celle-ci dtermine le.. de
la tige et de lorgane command. N.B : Le maintient de contact de le
tige sur la came est assur par..ou de la tige et de lorgane
command. Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EXCENTRIQUES SYSTEME DE TRANSFORMATION DE MOUVEMENTS Classe : Tle
F1 Date : Doc : 2/2
3 3
..
64
CORRIGE DE LEVALUATION 1-Le rle ou la fonction des cames est :
Une came est un solide anim dun mouvement circulaire continu qui
communique une tige guide (rcepteur) un mouvement rectiligne
alternatif avec des positions prcises.
2- Les noms des parties repres sur le dessin sont : a : Cames
rainures : Rainure creuse sur la surface latrale dun cylindre. b :
Cames tambour dont la partie actif le rebord de la base dun cne c :
Cames tambour dont la partie active est le rebord de la base dun
cylindre. d : Cames disques. e : Cames rainures creuses dans la
base dun disque. 3-Le principe de fonctionnement des principaux
types de cames est : Les cames qui ont des formes trs varies, sont
fixes sur larbre moteur et dont la forme est choisie en vue du
mouvement obtenir ; une tige guide en translation sappui sur le
contour ou dans la rainure de la came, la rotation de celle-ci
dtermine le dplacement de la tige. NB : Le maintient du contact de
la tige sur la came est assur par un ressort ou le poids de la tige
et de la pice commande.
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EXCENTRIQUES SYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/2
65
TROISIEME PARTIE :
EVALUATION DE LOBJECTIF INTERMEDIAIRE
66
A- CONNAISSANCE TECHNOLOGIQUE 1- Citez les principaux systmes de
transformation de mouvements. Et donnez leur fonction ou leur rle.
Dure : 2 heures (3 points)
.. .. .. .. .. .. .. ..
2- Combien y a- t-il de principales solutions technologiques de
systme vis- crou ? (3 points) Et reprsentez les schmatiquement.
.
3- Dterminez la vitesse de la crmaillre dun systme pignon
crmaillre. Donnes du pignon : *Nombre de dents: Z= 56 *Frquence de
rotation : N= 625 tr/min *Module : m= 2
(2 points)
.. .. .
4- Quels sont les principaux types de cames ?
(1 point)
.. .. .. .. ..
5- Par quel moyen obtient-on facilement une course rglable des
excentriques ? (1 point) ...
67
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EVALUATIONSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/6
68
6- Quelle est la formule de la course des excentriques ?
(2 point)
..
..
7- Quels sont les lments constitutifs des excentriques ?
(2 points)
..
8- Comment peut-on faire varier la course du coulisseau dun
systme bielle manivelle ? (1 point)..
9- Identifiez le type de solutions technologiques utilis dans le
dessin ci-dessous en notant le chiffre 0 ou 1 qui convient dans les
cases suivantes. (5 points) Re = Te = Rv = Tv =
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EVALUATIONSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/6
69
70
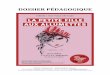
B- ETUDE DUNE POMPE COMPRESSEURLe dessin densemble reprsente une
pompe compresseur. 1 - FONCTIONNEMENT Un moteur lectrique de 1 KW
tourne 1500Tr/min et entrane en rotation larbre 4 du compresseur,
le piston (7) dans son mouvement refoule lair par le tuyau. 2 -
TRAVAIL DEMANDE ETUDE TECHNOLOGIQUE Ltude propose se limite au
systme de transformation de mouvements. 1- Quel est le systme de
transformation de mouvements utilis dans cette machine ? (2
points)
2- Identifiez ses lments constitutifs.
(4 points)
3- Expliquez comment se fait la transformation de mouvements
entre larbre du moteur et la bielle. (7 points).. . .. .. ..
4- Calculez la course du piston ? (voir le dessin densemble)
(7 points)
..
Prof stagiaire : K K M Ecole : L.T.A TECH. CONST
EVALUATIONSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 4/6
71
72
C- ETUDE DU DISPOSITIF DAVANCE DE TOURLe dessin densemble
reprsente un dispositif davance de Tour automatique.
1-FOCTIONNEMENT La came est fixe sur larbre moteur 2 et est anime
dun mouvement de rotation. La rotation de la came 3 entrane le
dplacement en translation de la tige 8 par lintermdiaire dun galet
4 .La tige entrane son tour le levier 11 qui provoque un mouvement
de translation du foret mont sur 21et li 11 par lintermdiaire 15.
2- TRAVAIL DEMANDE ETUDE TECHNOLOGIQUE Ltude propose se limite au
systme de transformation de mouvements.
1- Quel est le type de la came utilis ?
(5 points)
.
2- Quel est le rle de pice 11 ?
(5 points)
..
3- Expliquez comment se fait la transformation de mouvements
entre la came (3) et la pice (21). (10 points).. . .. .. .. ..
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST
EVALUATIONSYSTEME DE TRANSFORMATION DE MOUVEMENTS
Classe : Tle F1 Date : Doc : 6/6
73
A- CONNAISSANCE TECHNOLOGIQUE1- Le rle ou la fonction de chaque
principal systme de transformation de mouvements est : (3 points)
-Le systme vis crou permet de transformer un mouvement de rotation
en un mouvement de translation et rciproquement. -Le systme pignon
crmaillre permet de transformer un mouvement de rotation en un
mouvement de translation et rciproquement. -Le systme bielle
manivelle permet de transformer un mouvement circulaire (rotation)
continu en un mouvement rectiligne (translation) alternatif et
rciproquement -Les excentriques permettent de transformer un
mouvement circulaire continu en un mouvement rectiligne alternatif.
- La came est un solide anim dun mouvement circulaire continu qui
communique une tige guide (rcepteur) un mouvement rectiligne
alternatif avec des positions prcises. 2- Il y a quatre principales
solutions technologiques de systme vis- crou. Leurs reprsentations
schmatiques sont : (3 points)
SUN OI 1 LO T
SUN OI 2 LO T
SUN OI 3 LO T
S UN OI 4 LO T
3- La vitesse de la crmaillre dun systme pignon crmaillre est :
Donnes du pignon : *Nombre de dents: Z= 56 *Frquence de rotation :
N= 625 tr/min *Module : m= 2 Rponse : .m.Z .N V= 60.103 V= V= 3,7
m/s
(2 points)
Prof stagiaire : K.K.M. Ecole : L.T.A TECH. CONST.
CORRIGE DE LEVALUATIONSYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 1/3
74
4- Les principaux types de cames sont :
(1 point)
-Came rainure: Rainure creuse sur la surface latrale dun
cylindre -Came tambour dont la partie active est le rebord de la
base dun cne -Came tambour dont la partie active est le rebord de
la base dun cylindre -Came disque -Came rainure : Rainure creuse
dans la base dun disque. 5- On peut obtenir facilement une course
rglable laide dun systme dexcentrique double. (1 point) 6- La
formule de la course des excentriques est : C= 2e (2 point)
7- Les lments constitutifs des excentriques sont : (2 points) Un
disque circulaire, un collier, une barre excentrique et une tige.
8- On peut faire varier la course du coulisseau en faisant varier
le rayon de la manivelle (1 point) 9- Le type de solutions
technologiques utilis est : (5 points) Re = 0 Te = 1 Rv = 1 Tv =
0
Prof stagiaire : K.K.M Ecole : L.T.A TECH. CONST
CORRIGE DE LEVALUATIONSYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 2/3
75
B- ETUDE DUNE POMPE COMPRESSEURETUDE TECHNOLOGIQUE 1-Le systme
de transformation de mouvement utilis dans cette machine est le
systme bielle manivelle. (2 point) 2- Manivelle (4) Bielle (6)
Coulisseau ou piston (7) Glissire (30) (4points)
3-Le mouvement de rotation de larbre du moteur est transmis la
manivelle. (7points) Le mouvement de rotation de la manivelle sera
transform en un mouvement de translation alternatif du piston (7)
par la bielle. 4-La course du piston est : Rponse : C = 2xR
(7pionts)
A.N :
C = 2x7.5
C- ETUDE DU DISPOSITIF DAVANCE DE TOURETUDE TECHNOLOGIQUE 1- Le
type de came utilis est : Une came disque. 2- Le rle (11) est : La
pice (11) permet de maintenir le contact entre le coulisseau (8) et
la came (3). 3- La transformation de mouvements entre larbre (1) et
le chariot transversal se fait de la manire suivante : (10 points)
La came (3) est anime dun mouvement de rotation .Le coulisseau (8)
guid en translation et sappuyant sur le contour de la came, est
anim dun mouvement de translation. Ce dernier entrane dans son
dplacement la pice (21) par lintermdiaire du levier (11) et de la
pice (15). (5 points) (5 points)
Prof stagiaire : K.K.M Ecole : L.T.A TECH. CONST.
CORRIGE DE LEVALUATIONSYSTEME DE TRANSFORMATION DE
MOUVEMENTS
Classe : Tle F1 Date : Doc : 3/3
76
CONCLUSIONAu terme du prsent dossier pdagogique, il nous semble
ncessaire de rappeler quil a t labor partir de lobjectif
intermdiaire Etudier les principaux systmes de transformation de
mouvements qui dcoule de lobjectif gnral concevoir un systme
mcanique . Pour la ralisation de ce prsent dossier, nous avons eu
recours la participation de tous nos formateurs et aussi
utilisation dune documentation numre dans la bibliographie. Ce
travail na pas t sans difficult, cependant nous en tirons une
grande satisfaction. En effet, il nous a permis de faire des
recherches. Ces recherches ont abouti la slection dinformations
ncessaires pour la constitution dun cours. Aussi il faut dire que
ce dossier, a favoris la prise de conscience du travail prparatoire
trs immense qui prcde lanimation dune squence de formation. En
dfinitive, nous avons trouv cette initiative fort enrichissante car
elle nous a permis davoir une ide sur ce qui nous attend la fin de
notre formation. Cependant, nous navons pas la prtention de croire
que ce dossier est parfait. Cest pourquoi nous restons trs
attentifs toutes les critiques en vue dune amlioration.
77
BIBLIOGRAPHIE
G. Lenormand, R. Migne
CONSTRUCTION MECANIQUE *ELEMENTS DE TECHNOLOGIE* Tome 4, Paris,
FOUCHER, 1969
NOBERT. M, PHILIPPE. R TECHNOLOGIE DE CONSTRUCTION MECANIQUE
Tome 2, Paris, DE LA CAPITELLE, 1985
Andr RICORDEAU, Claude CORBET DOSSIER DE TECHNOLOGIE DE
CONSTRUCTION Paris, CASTEILLA, 1997
Jean-Louis FANCHON
GUIDE DES SCIENCES ET TECHNOLOGIES INDUSTRIELLES Paris,
NATHAN/AFNOR, 2001
78