Embed Size (px)
Citation preview
Dossier technique 2001 CHARLYROBOT page DT 1/19
DOSSIER TECHNIQUE
Dossier technique 2001 CHARLYROBOT page DT 2/19
SOMMAIRE : Présentation du système, installation p 3 Raccordement des axes p 4 Schéma fonctionnel du rack p 5 Schéma avance linéaire axe Y p 6 Schéma électrique d’une carte de commande d’axe p 7 Programmation en mode direct p 8 Programmation en mode mémoire p 9 Codes erreur du charlyrobot p 10 Récapitulatif des commandes BASIC p 11 Raccordement système / ordinateur p 14 Vis à billes p 15 Roulement linéaire à bille p 16 Moteurs pas à pas p 17 Motoréducteur pas à pas p 18 Fraiseuses – perceuses p 19
Dossier technique 2001 CHARLYROBOT page DT 3/19
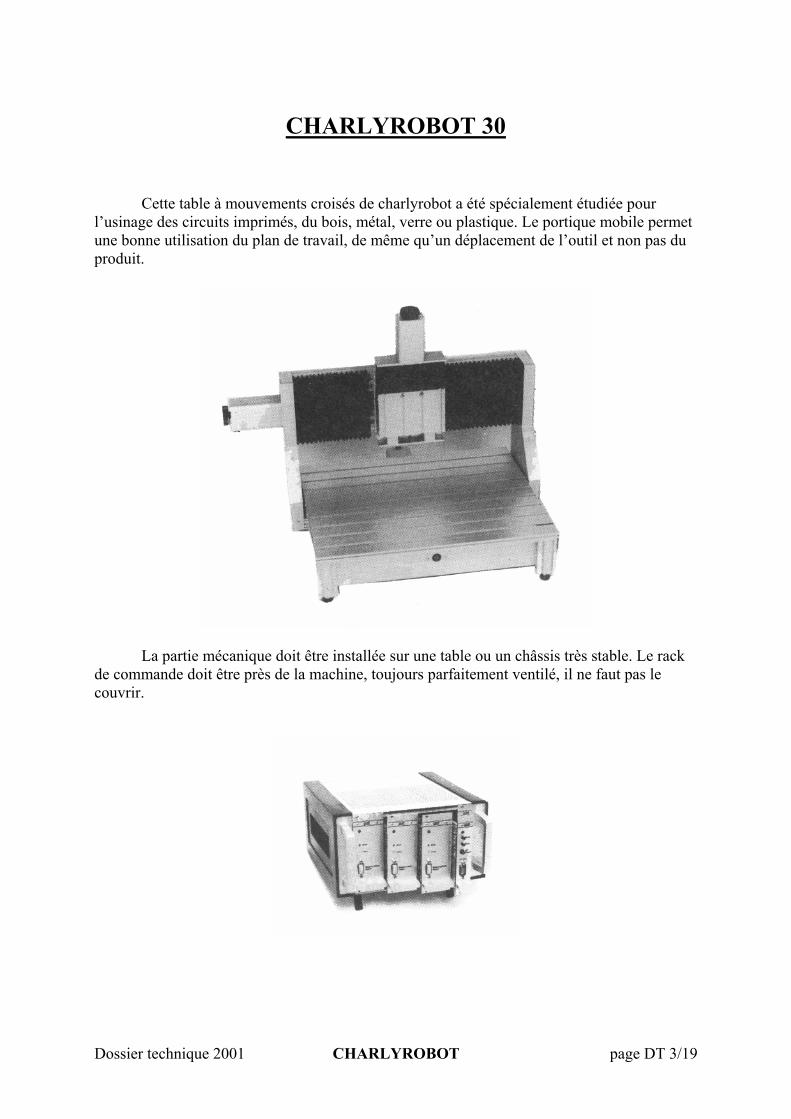
CHARLYROBOT 30 Cette table à mouvements croisés de charlyrobot a été spécialement étudiée pour l’usinage des circuits imprimés, du bois, métal, verre ou plastique. Le portique mobile permet une bonne utilisation du plan de travail, de même qu’un déplacement de l’outil et non pas du produit.
La partie mécanique doit être installée sur une table ou un châssis très stable. Le rack de commande doit être près de la machine, toujours parfaitement ventilé, il ne faut pas le couvrir.
Dossier technique 2001 CHARLYROBOT page DT 4/19
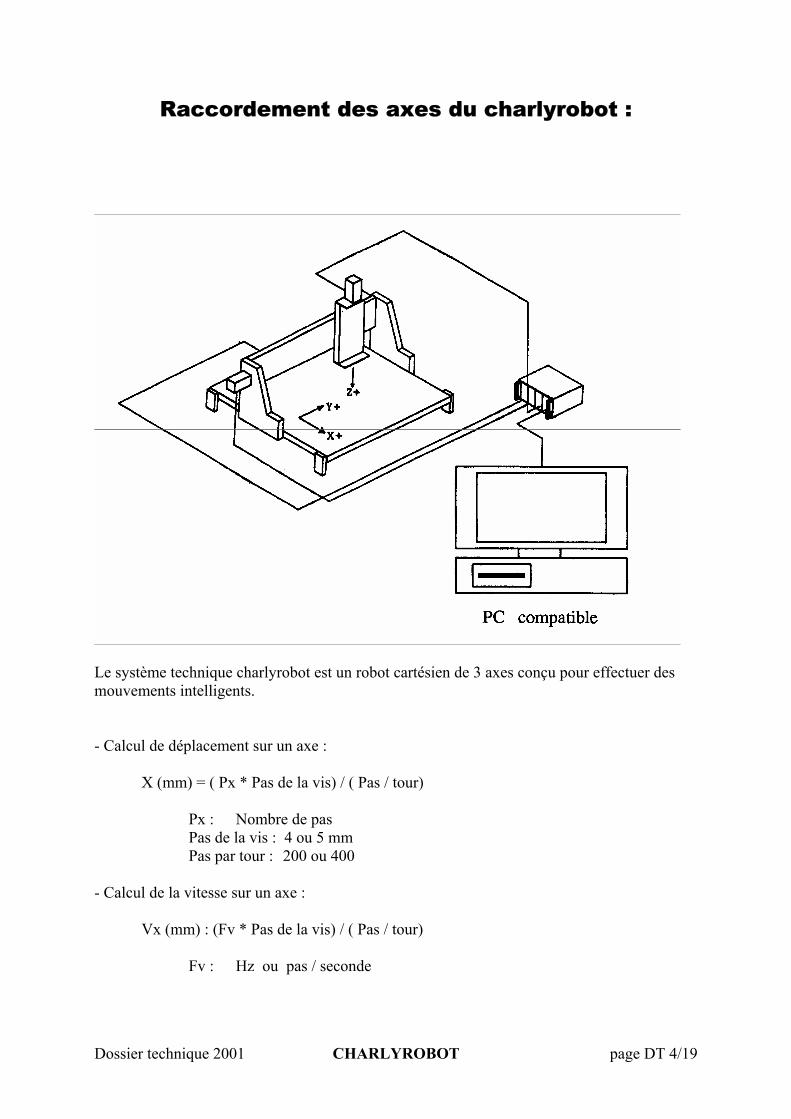
Raccordement des axes du charlyrobot :
Le système technique charlyrobot est un robot cartésien de 3 axes conçu pour effectuer des mouvements intelligents. - Calcul de déplacement sur un axe : X (mm) = ( Px * Pas de la vis) / ( Pas / tour) Px : Nombre de pas Pas de la vis : 4 ou 5 mm Pas par tour : 200 ou 400 - Calcul de la vitesse sur un axe : Vx (mm) : (Fv * Pas de la vis) / ( Pas / tour) Fv : Hz ou pas / seconde
Dossier technique 2001 CHARLYROBOT page DT 5/19
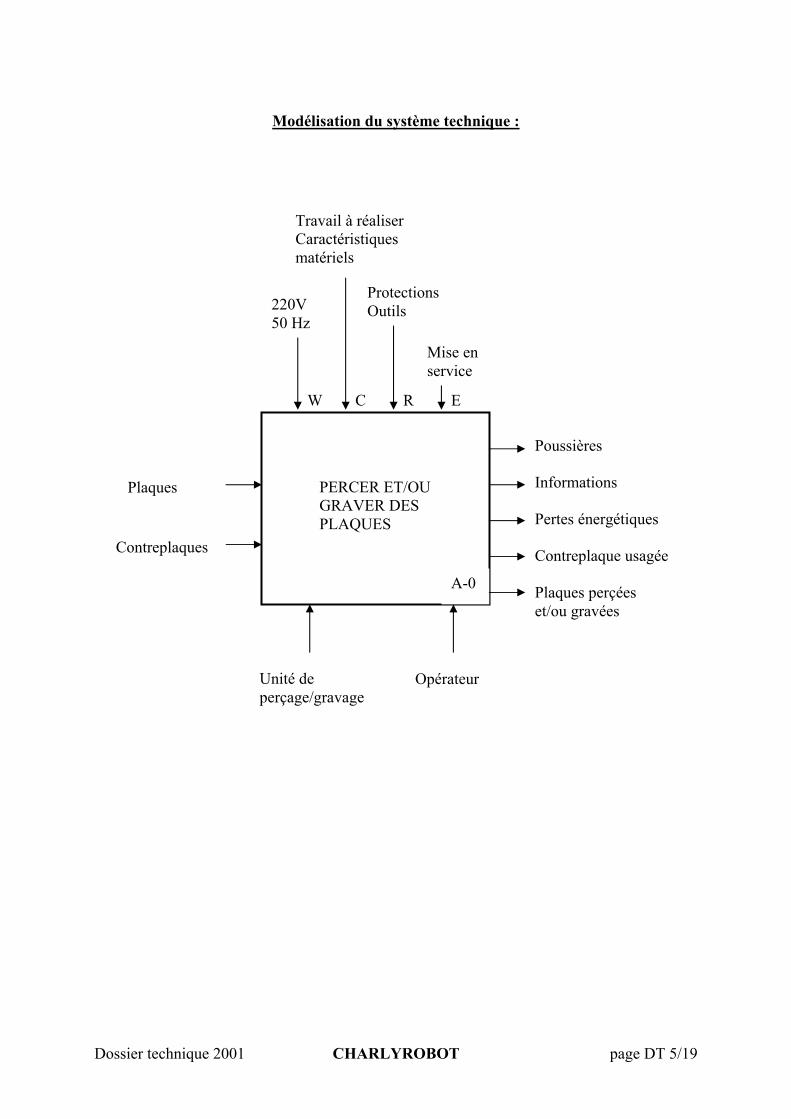
Modélisation du système technique :
PERCER ET/OU GRAVER DES PLAQUES
A-0
Plaques
Contreplaques
Poussières Informations Pertes énergétiques Contreplaque usagée Plaques perçées et/ou gravées
Unité de perçage/gravage
Opérateur
220V 50 Hz
Travail à réaliser Caractéristiques matériels
Protections Outils
Mise en service
W E R C
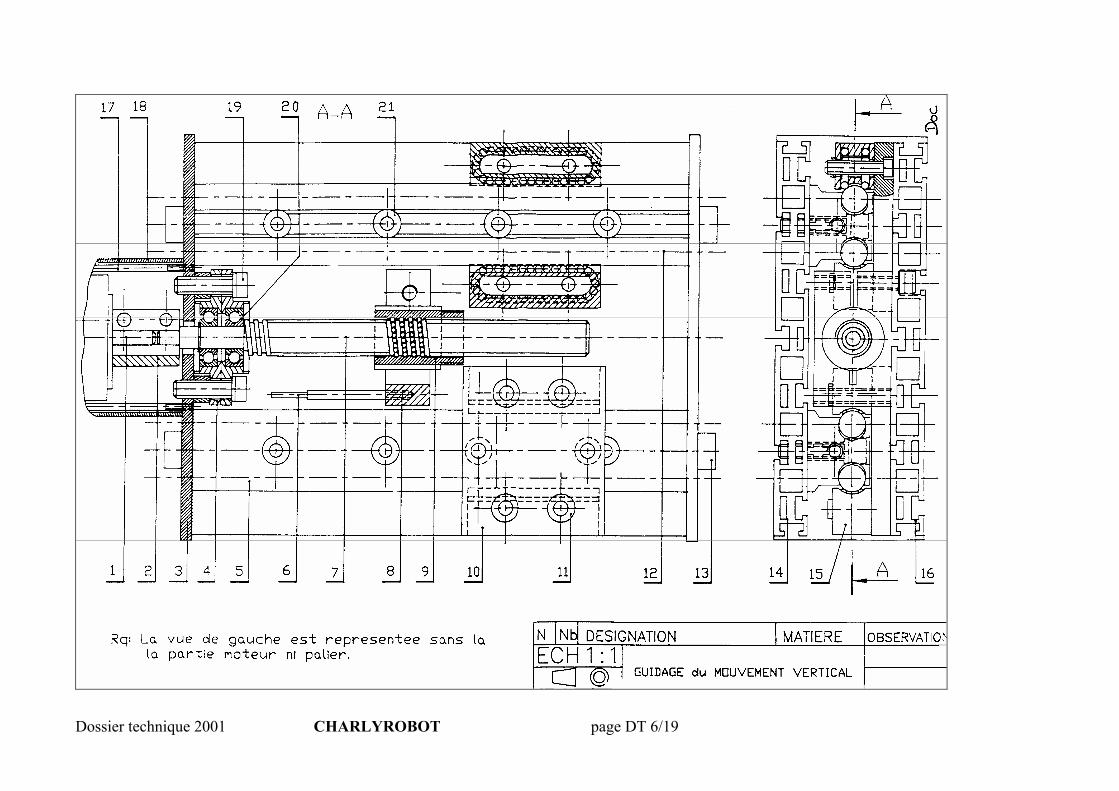
Dossier technique 2001 CHARLYROBOT page DT 6/19
Dossier technique 2001 CHARLYROBOT page DT 7/19
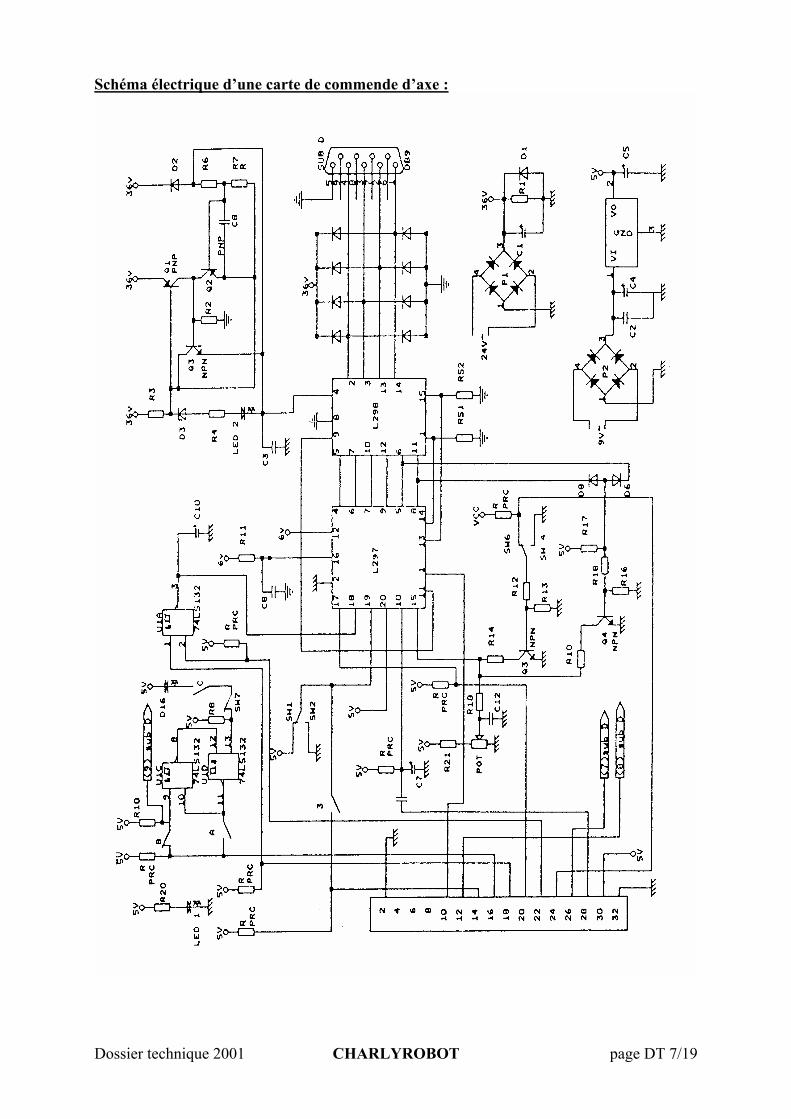
Schéma électrique d’une carte de commende d’axe :
Dossier technique 2001 CHARLYROBOT page DT 8/19
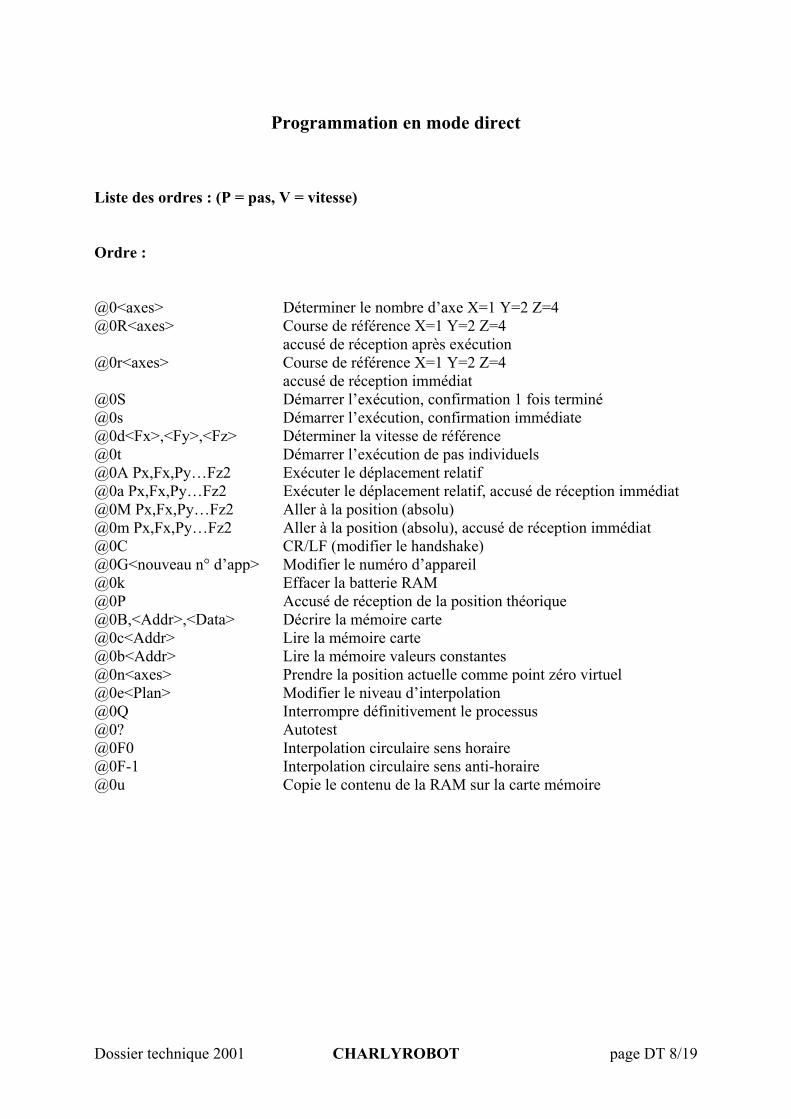
Programmation en mode direct Liste des ordres : (P = pas, V = vitesse) Ordre : @0<axes> Déterminer le nombre d’axe X=1 Y=2 Z=4 @0R<axes> Course de référence X=1 Y=2 Z=4 accusé de réception après exécution @0r<axes> Course de référence X=1 Y=2 Z=4 accusé de réception immédiat @0S Démarrer l’exécution, confirmation 1 fois terminé @0s Démarrer l’exécution, confirmation immédiate @0d<Fx>,<Fy>,<Fz> Déterminer la vitesse de référence @0t Démarrer l’exécution de pas individuels @0A Px,Fx,Py…Fz2 Exécuter le déplacement relatif @0a Px,Fx,Py…Fz2 Exécuter le déplacement relatif, accusé de réception immédiat @0M Px,Fx,Py…Fz2 Aller à la position (absolu) @0m Px,Fx,Py…Fz2 Aller à la position (absolu), accusé de réception immédiat @0C CR/LF (modifier le handshake) @0G<nouveau n° d’app> Modifier le numéro d’appareil @0k Effacer la batterie RAM @0P Accusé de réception de la position théorique @0B,<Addr>,<Data> Décrire la mémoire carte @0c<Addr> Lire la mémoire carte @0b<Addr> Lire la mémoire valeurs constantes @0n<axes> Prendre la position actuelle comme point zéro virtuel @0e<Plan> Modifier le niveau d’interpolation @0Q Interrompre définitivement le processus @0? Autotest @0F0 Interpolation circulaire sens horaire @0F-1 Interpolation circulaire sens anti-horaire @0u Copie le contenu de la RAM sur la carte mémoire
Dossier technique 2001 CHARLYROBOT page DT 9/19
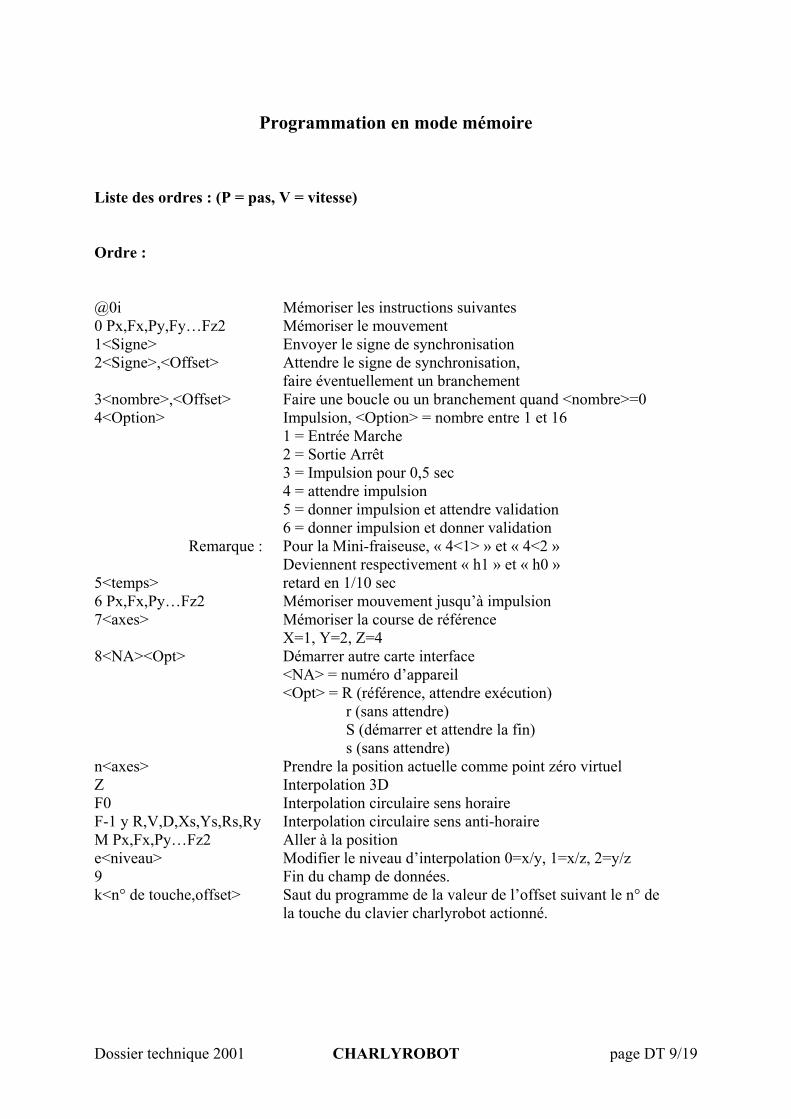
Programmation en mode mémoire Liste des ordres : (P = pas, V = vitesse) Ordre : @0i Mémoriser les instructions suivantes 0 Px,Fx,Py,Fy…Fz2 Mémoriser le mouvement 1<Signe> Envoyer le signe de synchronisation 2<Signe>,<Offset> Attendre le signe de synchronisation,
faire éventuellement un branchement 3<nombre>,<Offset> Faire une boucle ou un branchement quand <nombre>=0 4<Option> Impulsion, <Option> = nombre entre 1 et 16 1 = Entrée Marche 2 = Sortie Arrêt 3 = Impulsion pour 0,5 sec 4 = attendre impulsion 5 = donner impulsion et attendre validation 6 = donner impulsion et donner validation Remarque : Pour la Mini-fraiseuse, « 4<1> » et « 4<2 » Deviennent respectivement « h1 » et « h0 » 5<temps> retard en 1/10 sec 6 Px,Fx,Py…Fz2 Mémoriser mouvement jusqu’à impulsion 7<axes> Mémoriser la course de référence X=1, Y=2, Z=4 8<NA><Opt> Démarrer autre carte interface <NA> = numéro d’appareil <Opt> = R (référence, attendre exécution) r (sans attendre) S (démarrer et attendre la fin) s (sans attendre) n<axes> Prendre la position actuelle comme point zéro virtuel Z Interpolation 3D F0 Interpolation circulaire sens horaire F-1 y R,V,D,Xs,Ys,Rs,Ry Interpolation circulaire sens anti-horaire M Px,Fx,Py…Fz2 Aller à la position e<niveau> Modifier le niveau d’interpolation 0=x/y, 1=x/z, 2=y/z 9 Fin du champ de données. k<n° de touche,offset> Saut du programme de la valeur de l’offset suivant le n° de la touche du clavier charlyrobot actionné.
Dossier technique 2001 CHARLYROBOT page DT 10/19
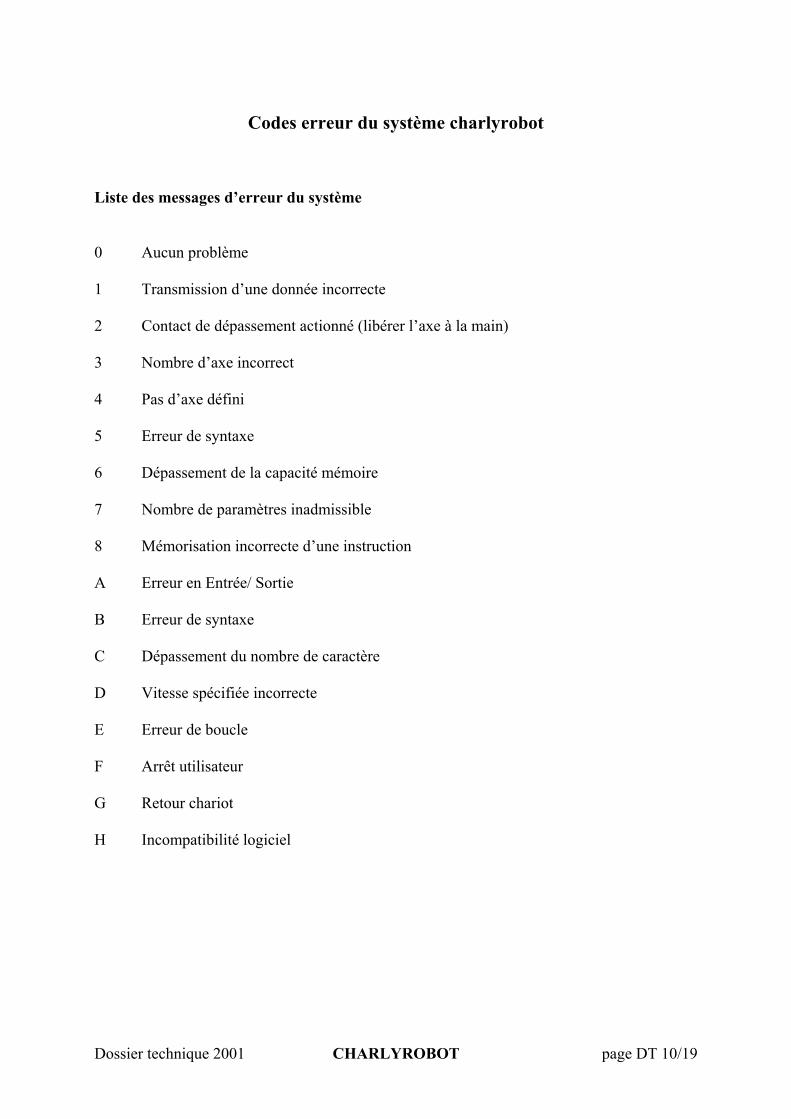
Codes erreur du système charlyrobot Liste des messages d’erreur du système 0 Aucun problème 1 Transmission d’une donnée incorrecte 2 Contact de dépassement actionné (libérer l’axe à la main) 3 Nombre d’axe incorrect 4 Pas d’axe défini 5 Erreur de syntaxe 6 Dépassement de la capacité mémoire 7 Nombre de paramètres inadmissible 8 Mémorisation incorrecte d’une instruction A Erreur en Entrée/ Sortie B Erreur de syntaxe C Dépassement du nombre de caractère D Vitesse spécifiée incorrecte E Erreur de boucle F Arrêt utilisateur G Retour chariot H Incompatibilité logiciel
Dossier technique 2001 CHARLYROBOT page DT 11/19
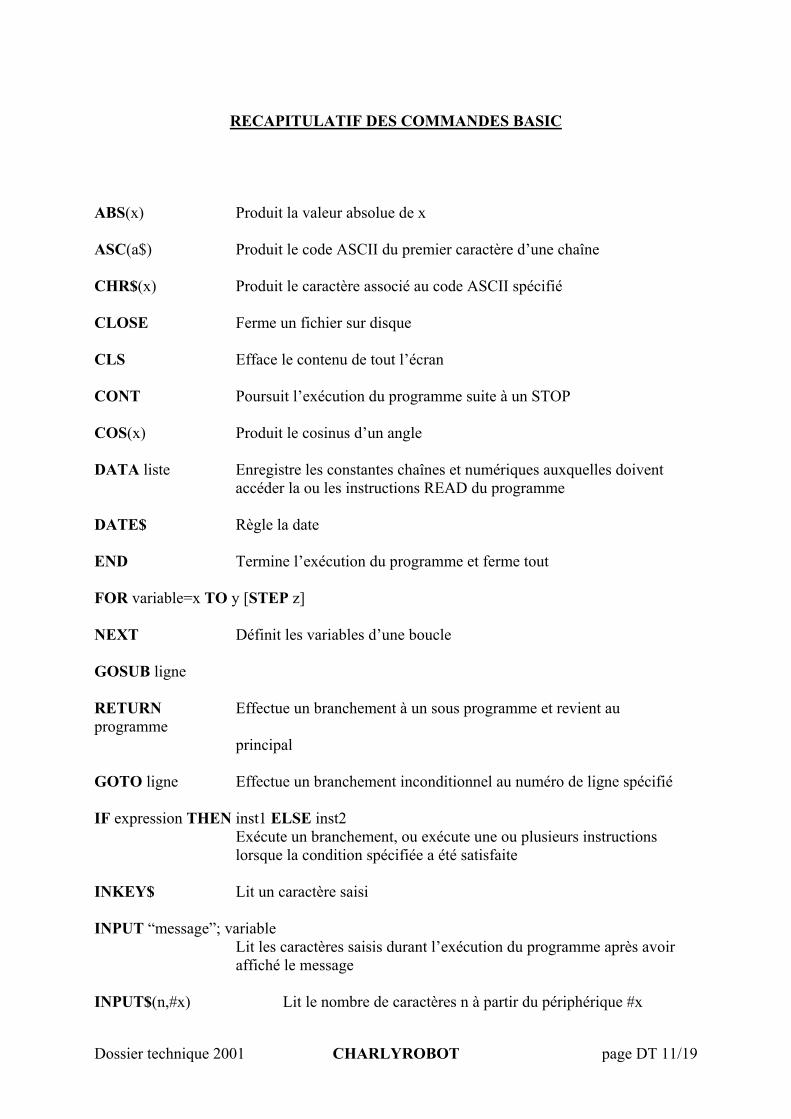
RECAPITULATIF DES COMMANDES BASIC ABS(x) Produit la valeur absolue de x ASC(a$) Produit le code ASCII du premier caractère d’une chaîne CHR$(x) Produit le caractère associé au code ASCII spécifié CLOSE Ferme un fichier sur disque CLS Efface le contenu de tout l’écran CONT Poursuit l’exécution du programme suite à un STOP COS(x) Produit le cosinus d’un angle DATA liste Enregistre les constantes chaînes et numériques auxquelles doivent
accéder la ou les instructions READ du programme DATE$ Règle la date END Termine l’exécution du programme et ferme tout FOR variable=x TO y [STEP z] NEXT Définit les variables d’une boucle GOSUB ligne RETURN Effectue un branchement à un sous programme et revient au programme principal GOTO ligne Effectue un branchement inconditionnel au numéro de ligne spécifié IF expression THEN inst1 ELSE inst2 Exécute un branchement, ou exécute une ou plusieurs instructions
lorsque la condition spécifiée a été satisfaite INKEY$ Lit un caractère saisi INPUT “message”; variable Lit les caractères saisis durant l’exécution du programme après avoir affiché le message INPUT$(n,#x) Lit le nombre de caractères n à partir du périphérique #x
Dossier technique 2001 CHARLYROBOT page DT 12/19
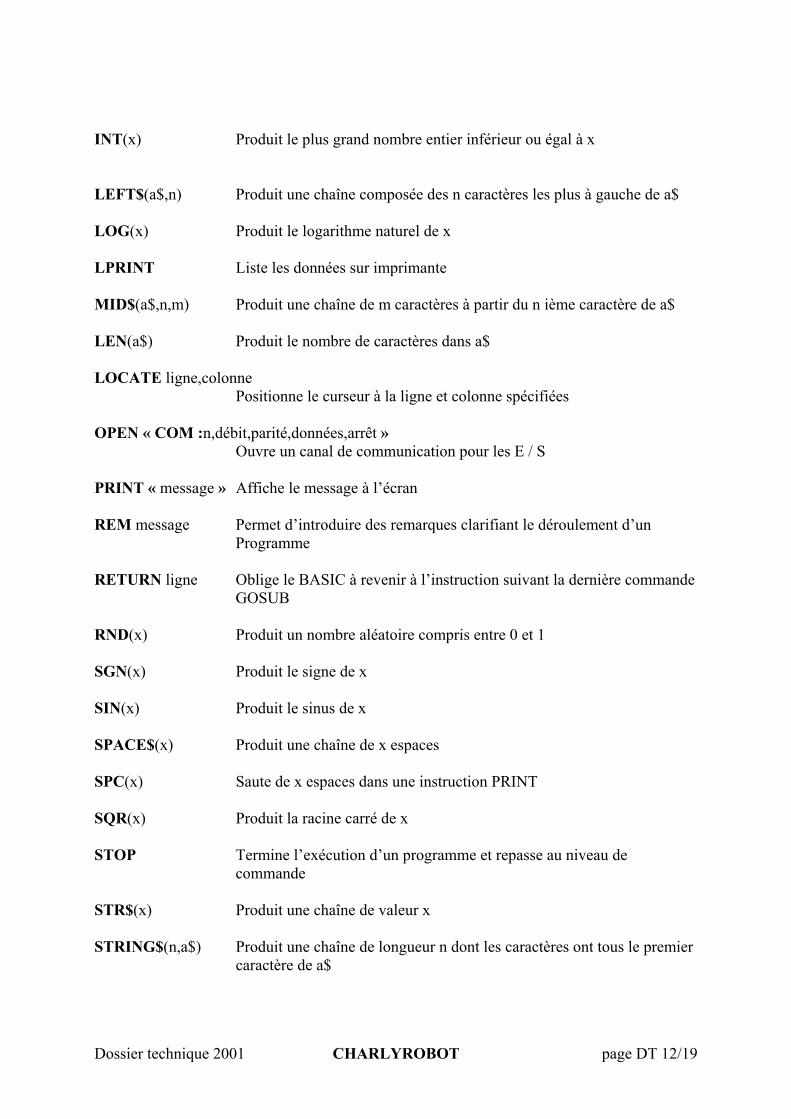
INT(x) Produit le plus grand nombre entier inférieur ou égal à x LEFT$(a$,n) Produit une chaîne composée des n caractères les plus à gauche de a$ LOG(x) Produit le logarithme naturel de x LPRINT Liste les données sur imprimante MID$(a$,n,m) Produit une chaîne de m caractères à partir du n ième caractère de a$ LEN(a$) Produit le nombre de caractères dans a$ LOCATE ligne,colonne Positionne le curseur à la ligne et colonne spécifiées OPEN « COM :n,débit,parité,données,arrêt » Ouvre un canal de communication pour les E / S PRINT « message » Affiche le message à l’écran REM message Permet d’introduire des remarques clarifiant le déroulement d’un
Programme RETURN ligne Oblige le BASIC à revenir à l’instruction suivant la dernière commande
GOSUB RND(x) Produit un nombre aléatoire compris entre 0 et 1 SGN(x) Produit le signe de x SIN(x) Produit le sinus de x SPACE$(x) Produit une chaîne de x espaces SPC(x) Saute de x espaces dans une instruction PRINT SQR(x) Produit la racine carré de x STOP Termine l’exécution d’un programme et repasse au niveau de
commande STR$(x) Produit une chaîne de valeur x STRING$(n,a$) Produit une chaîne de longueur n dont les caractères ont tous le premier caractère de a$
Dossier technique 2001 CHARLYROBOT page DT 13/19
SWAP var1,var2 Permute les valeurs de deux variables TAB(x) Positionne le curseur au point x TAN(x) Produit la tangente de x TIME$ Règle l’heure TIMER Produit le nombre de secondes écoulées depuis minuit TRON Trace On. Suit l’exécution des instructions du programme TROFF Trace OFF. Annule l’effet de TRON VAL(a$) Trace OFF. Annule TRON WHILE expression Instruction1 Instruction2 WEND Exécute les instructions de la boucle tant que la condition spécifiée est
vrai
Dossier technique 2001 CHARLYROBOT page DT 14/19
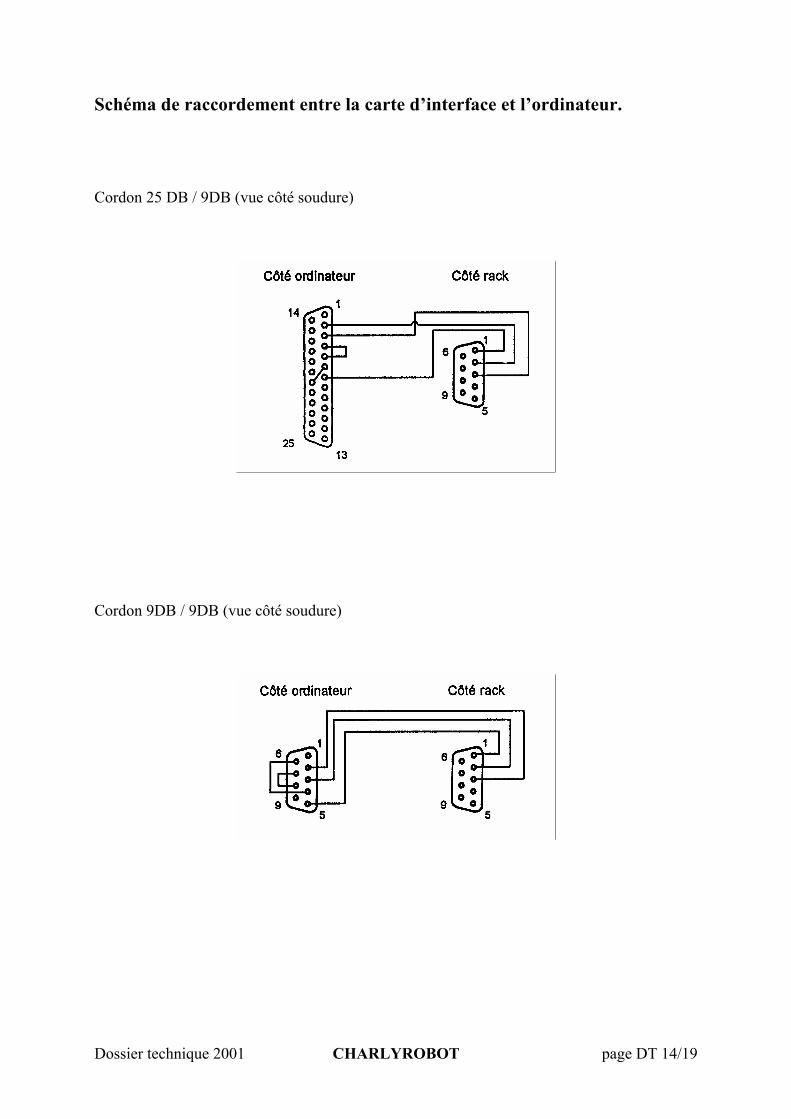
Schéma de raccordement entre la carte d’interface et l’ordinateur. Cordon 25 DB / 9DB (vue côté soudure)
Cordon 9DB / 9DB (vue côté soudure)
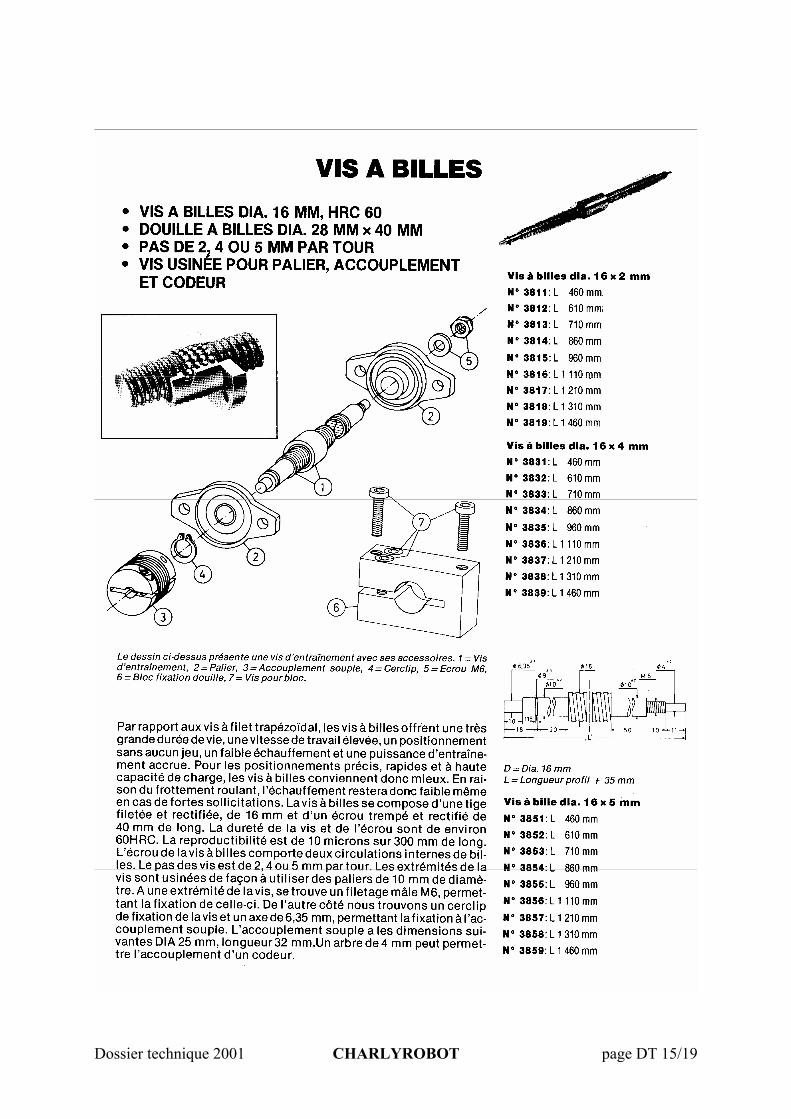
Dossier technique 2001 CHARLYROBOT page DT 15/19
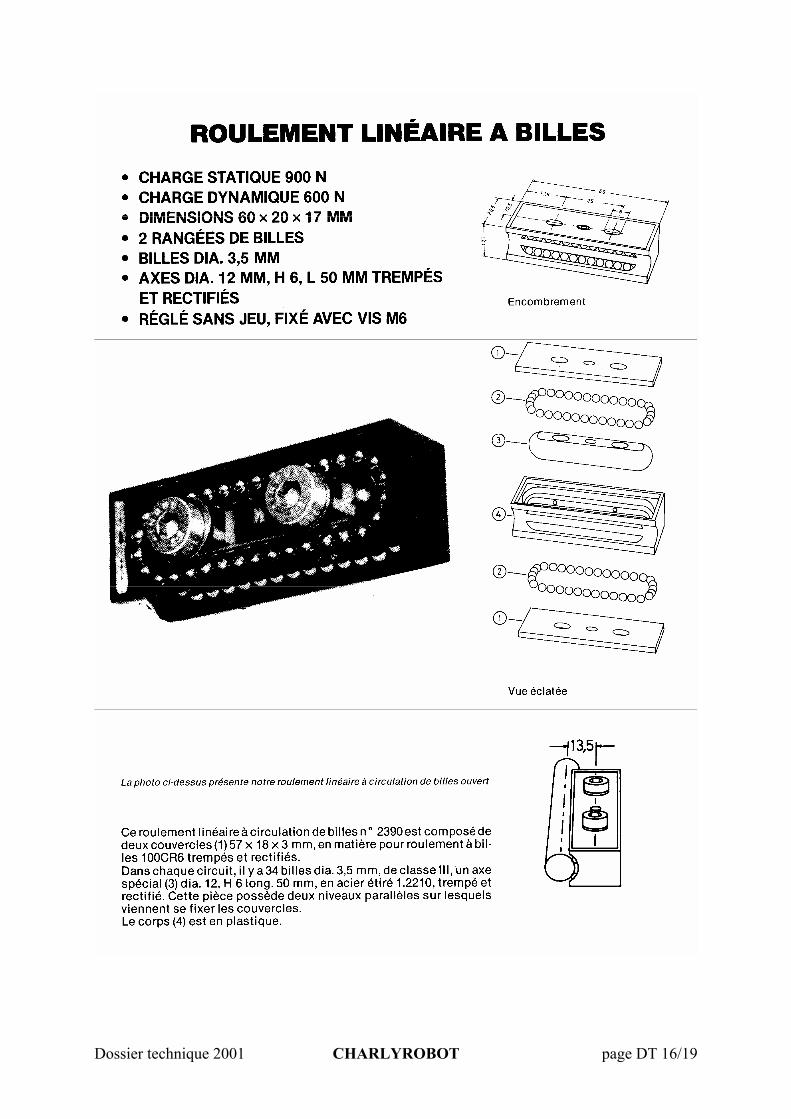
Dossier technique 2001 CHARLYROBOT page DT 16/19
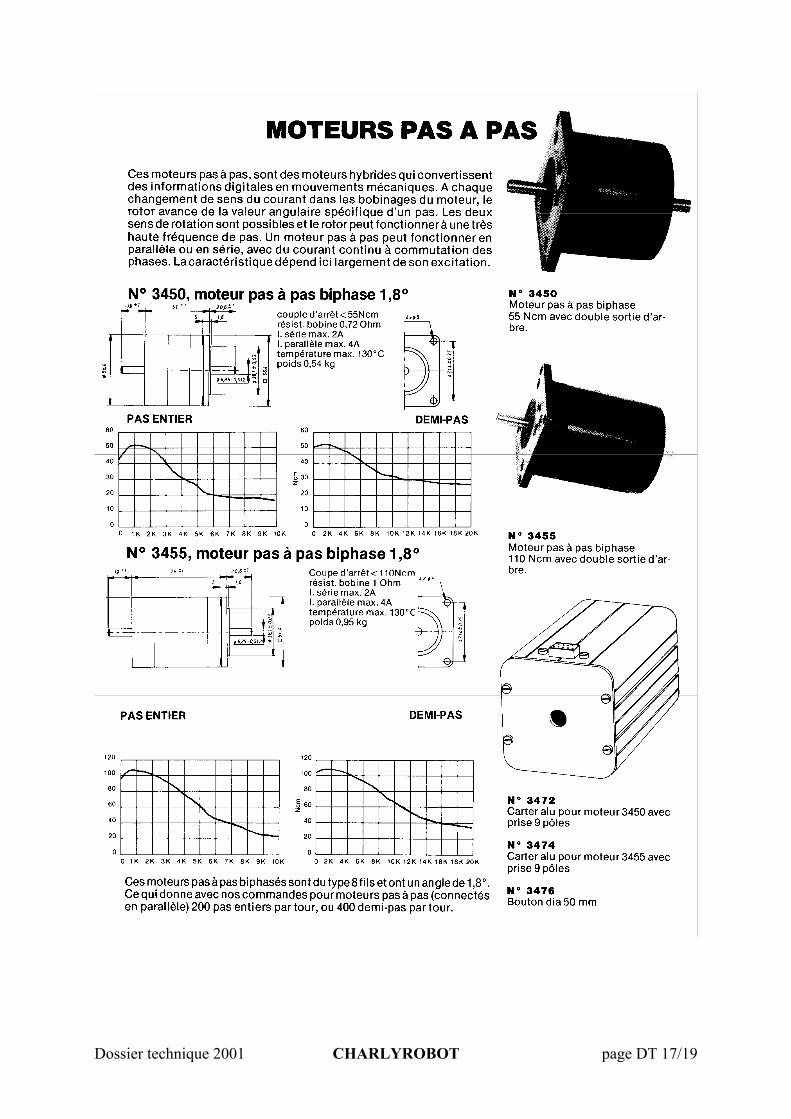
Dossier technique 2001 CHARLYROBOT page DT 17/19
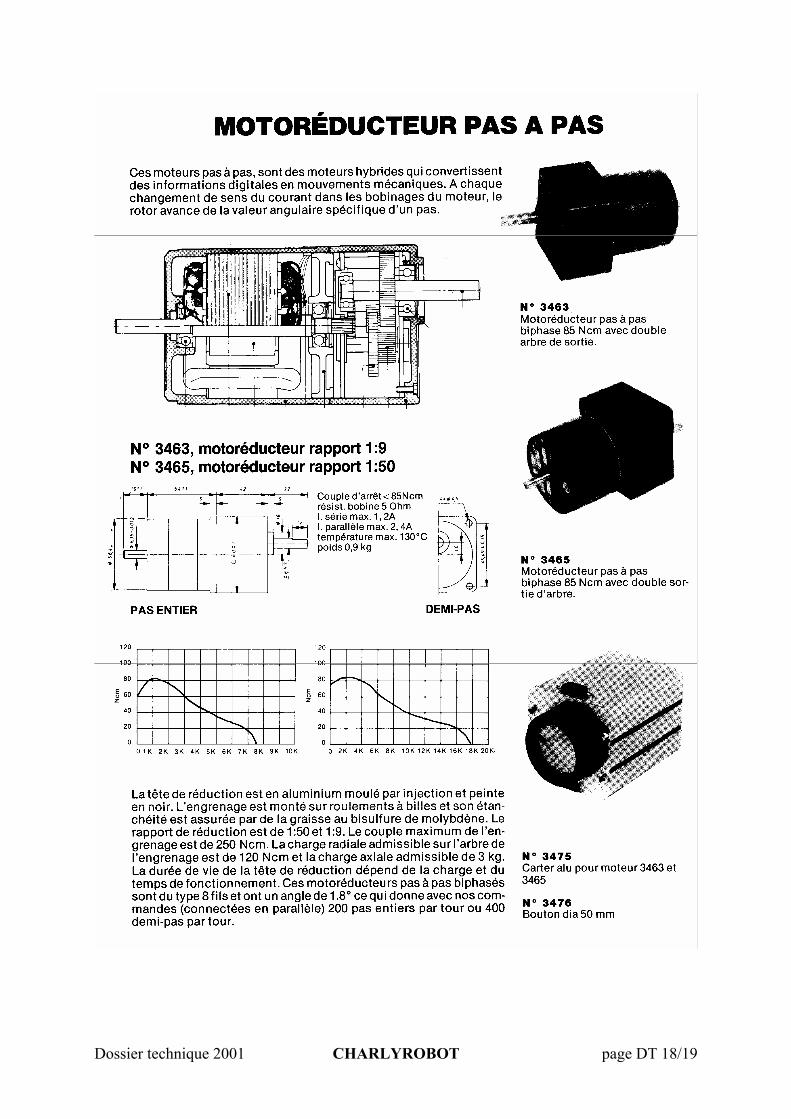
Dossier technique 2001 CHARLYROBOT page DT 18/19

Dossier technique 2001 CHARLYROBOT page DT 19/19
PERCEUSES – FRAISEUSES








![Man direction des collections département OLIVIER PY (1965 ......3 Maison Jean Vilar – libre-accès – [T PY O] Textes pour la jeunesse _____ La nuit au cirque.Besançon, Les Solitaires](https://img.pdfslide.fr/doc/110x75/610b0a50d507c058cd23c8d6/man-direction-des-collections-dpartement-olivier-py-1965-3-maison-jean.jpg)




















