Embed Size (px)
Citation preview

Elevationdependent motion compensation for frequencydomain bistatic SAR image synthesis
Hubert M.J. CantalloubeDépartement ÉlectroMagnétisme et Radar
Office National d'Études et Recherche AérospatialesPalaiseau, France
Gerhard KriegerDeutsches Zentrum für Luft und Raumfahrt
(Germany)
Abstract—While numerically more efficient, frequency domain SAR image synthesis is less easily adaptable to the irregular real airborne trajectories than timedomain image synthesis. Trajectory nonlinearities have another consequence: The image focusing depends on the terrain elevation, hence motion compensation for irregular trajectories on mountainous areas must take into account terrain elevation data.
Bistatic SAR processing is elevationdependent even if the trajectory are perfectly linear (with the exception of the case where both aircrafts follow the same flight line). Terrain elevation can only be ignored at distance very large with respect to the elevation fluctuations, which is only the case in airborne bistatic SAR imaging when the area flown over is extremely flat.
We describe here how the monostatic elevationdependent motion compensation for k algorithm is adapted to bistatic k synthesis algorithm.
Keywordscomponent; SAR image synthesis; multistatic radar; motioncompensation
I. INTRODUCTION
Motion compensation of monostatic SAR frequencydomain processing described in [1] may either take into account terrain elevation (DEM input data) or model ground as an horizontal plane. This processing, however, used the local tangent plane to the terrain surface while performing the critical “azimuth migration” step (which corrects the first order motion effects under wideband assumptions). The method described in [1] is routinely used at the French Aerospace Labs (ONERA) in processing high (10 cm) resolution SAR images acquired with the RAMSES experimental airborne radar.
Processing of high resolution SAR images acquired in mountainous areas, in which the aircraft trajectory is significantly distorted due to the important air turbulence conditions when flying close (and sometimes below) the crest line, required an improvement of the algorithms. Indeed, due to the high resolution, the angle of integration is large, but the approximation of the terrain surface by its tangent plane is not valid on such an angular sector.
The solution implemented was to use the aperture spanning test points used in compensating the second and higher order motion compensation terms, in order to evaluate a residual linear component of the phase. The basic principle of our motion compensation is that this linear component should have been canceled by the prior azimuth migration (which is a wide band process). The new approach is to feed this linear component residual into a control loop (similar to the one used in the control loop described in [1]) thus constraining the linear phase residual (that will, at this point in the algorithm, be processed under narrowband assumption) to be marginal. This processing yields images as the example in [2].
Since our lab is involved in bistatic SAR experimentation since the 2001 first joint experiment with DLR, and future bistatic acquisition campaigns are planned to focus on higher resolution (at X and Kuband) or lower frequencies (at L, P and VHF bands) in which the relative bandwidth is important, it was important to adapt our frequencydomain processor to bistatic case [3]. Hence the better elevationdependent focusing developed for mountainous areas should be adapted to bistatic processing either.
II.MONOSTATIC FREQUENCY DOMAIN ELEVATIONDEPENDENT MOCOMP
A. Frequencydomain processing principle
Frequencydomain processing can be easily visualized if one replace the true forthandback propagation of radio waves by a oneway propagation at half the light velocity. Indeed, a given point in the signal 2D spectrum (corresponding to a pure transmit frequency within the transmitted bandwidth and a pure Doppler frequency in the pulse repetition “slowtime” axis) corresponds in imaged space to a set of conical waves around the trajectory axis. If the trajectory were a perfect line, the conical waves when mapped to the cylindrical coordinates (the “slant range” coordinates) would be a pure space frequency, therefore a given point in the 2D signal spectrum corresponds to some point in the image spectrum (Fig. 1).
The mapping from the signal spectrum position to image spectrum position, is the well known Stolt interpolation. Figure 2 gives a short geometrical justification of its formulation, one
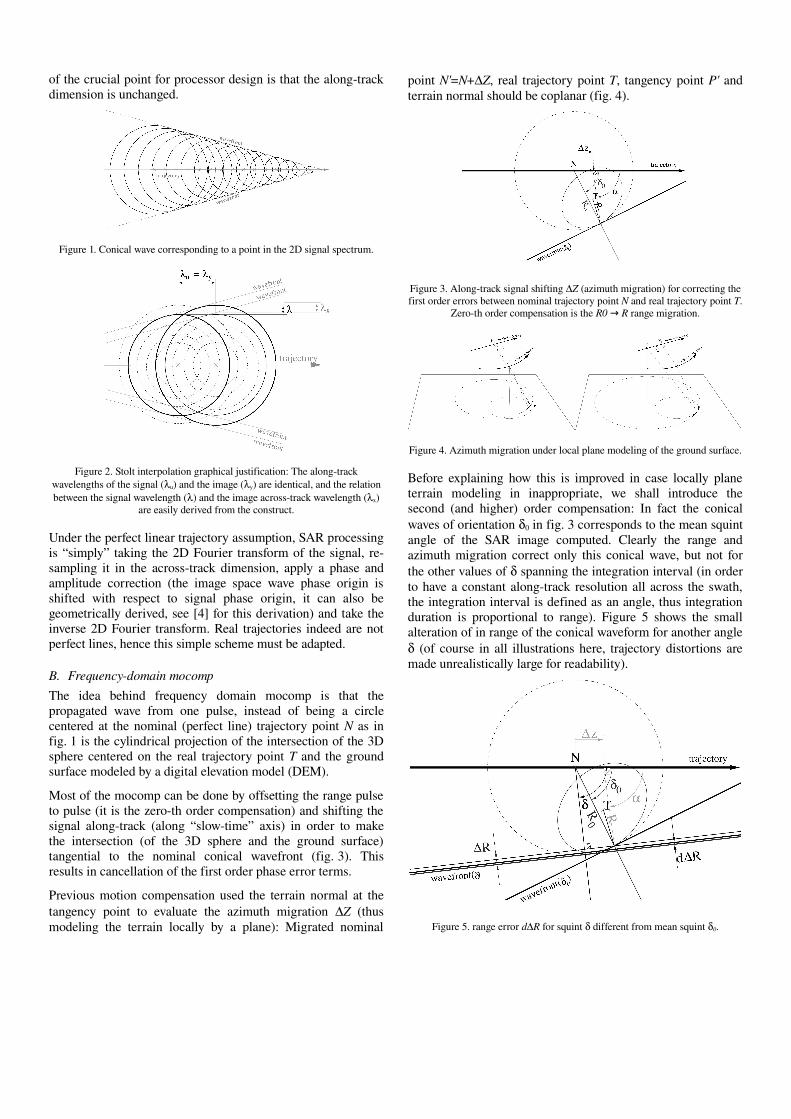
of the crucial point for processor design is that the alongtrack dimension is unchanged.
Figure 1. Conical wave corresponding to a point in the 2D signal spectrum.
Figure 2. Stolt interpolation graphical justification: The alongtrack wavelengths of the signal (u) and the image (y) are identical, and the relation between the signal wavelength () and the image acrosstrack wavelength (x)
are easily derived from the construct.
Under the perfect linear trajectory assumption, SAR processing is “simply” taking the 2D Fourier transform of the signal, resampling it in the acrosstrack dimension, apply a phase and amplitude correction (the image space wave phase origin is shifted with respect to signal phase origin, it can also be geometrically derived, see [4] for this derivation) and take the inverse 2D Fourier transform. Real trajectories indeed are not perfect lines, hence this simple scheme must be adapted.
B. Frequencydomain mocompThe idea behind frequency domain mocomp is that the propagated wave from one pulse, instead of being a circle centered at the nominal (perfect line) trajectory point N as in fig. 1 is the cylindrical projection of the intersection of the 3D sphere centered on the real trajectory point T and the ground surface modeled by a digital elevation model (DEM).
Most of the mocomp can be done by offsetting the range pulse to pulse (it is the zeroth order compensation) and shifting the signal alongtrack (along “slowtime” axis) in order to make the intersection (of the 3D sphere and the ground surface) tangential to the nominal conical wavefront (fig. 3). This results in cancellation of the first order phase error terms.
Previous motion compensation used the terrain normal at the tangency point to evaluate the azimuth migration Z (thus modeling the terrain locally by a plane): Migrated nominal
point N'=N+Z, real trajectory point T, tangency point P' and terrain normal should be coplanar (fig. 4).
Figure 3. Alongtrack signal shifting Z (azimuth migration) for correcting the first order errors between nominal trajectory point N and real trajectory point T.
Zeroth order compensation is the R0 → R range migration.
Figure 4. Azimuth migration under local plane modeling of the ground surface.
Before explaining how this is improved in case locally plane terrain modeling in inappropriate, we shall introduce the second (and higher) order compensation: In fact the conical waves of orientation 0 in fig. 3 corresponds to the mean squint angle of the SAR image computed. Clearly the range and azimuth migration correct only this conical wave, but not for the other values of spanning the integration interval (in order to have a constant alongtrack resolution all across the swath, the integration interval is defined as an angle, thus integration duration is proportional to range). Figure 5 shows the small alteration of in range of the conical waveform for another angle (of course in all illustrations here, trajectory distortions are made unrealistically large for readability).
Figure 5. range error dR for squint different from mean squint 0.
Unlike range and azimuth migrations that can be performed pulse per pulse (thus coping perfectly to the non stationarity of the trajectory deviations), and being done by re sampling in timedomain deals well with wide band signals, the compensation of the second and higher terms are done by phase corrections in the range×Doppler (R×ku) domain (there is an obvious relation between and ku). This has two major drawbacks: First, correcting a range error by a phase offset assumes the range correction is small and that the signal is narrowband. Next, the Doppler (ku) domain is not resolved in (slow) time hence the correction should be averaged on the processing bloc.
In practice, we may split the second order compensation along several overlapping subblocs, and split the bandwidth into subbands in order to enforce narrowband hypothesis. But this has a negative impact on the computation performance. Note that, as we use frequency agile waveforms, processing each agility separately saves memory usage and elegantly solves the rangeprocessing/radialvelocity coupling problem, thus the negative impact of subband processing is controversial. We also have the possibility to split the Doppler aperture in case the second order compensation is too strong, but it is generally less efficient.
The phase correction for varying ku is computed by evaluating dR for a set of squint angles N,...,0,...+N spanning the integration interval and interpolating the values with a 2Nth degree polynomials.
The reason why this works is that the second and higher order terms depends of the distance between nominal and real trajectory, which obviously evolves slowly, while the zeroth order compensation is sensitive to very small variations acrosstrack which require a pulsetopulse processing.
The improved motion compensation use the 2N+1 test points computed for the second order correction and use them to model in 3D space the intersection of the Tcentered sphere with the ground surface on fig. 4. Next, the azimuth migration Z is computed by canceling the mean slope of dR (instead of canceling its derivative at the 0 point as the previous method did). In order to save computing power requirements, this cancellation is done iteratively along “slowtime” by a controlloop similar to that used in computing the relationship of fig. 3. Parameter is an important input of the preprocessing of the signal because it is the true looking direction, and is involved in range compression (which may depend on Doppler), preintegration, azimut resampling etc.
The important point is that both and the mean slope of dR do not need an extreme accuracy (as long as the zeroth order compensation is done for this very value) which justifies the use of slow numerical feedback loop.
III.BISTATIC FREQUENCY DOMAIN ELEVATIONDEPENDENT MOCOMP
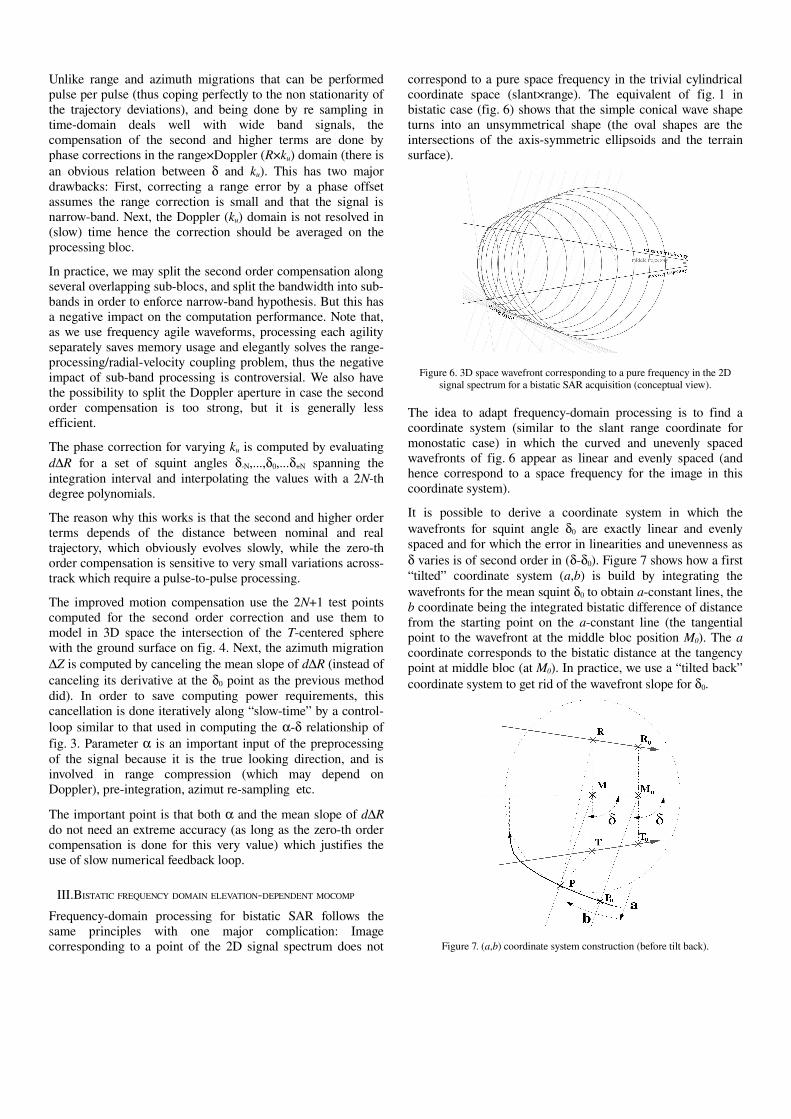
Frequencydomain processing for bistatic SAR follows the same principles with one major complication: Image corresponding to a point of the 2D signal spectrum does not
correspond to a pure space frequency in the trivial cylindrical coordinate space (slant×range). The equivalent of fig. 1 in bistatic case (fig. 6) shows that the simple conical wave shape turns into an unsymmetrical shape (the oval shapes are the intersections of the axissymmetric ellipsoids and the terrain surface).
Figure 6. 3D space wavefront corresponding to a pure frequency in the 2D signal spectrum for a bistatic SAR acquisition (conceptual view).
The idea to adapt frequencydomain processing is to find a coordinate system (similar to the slant range coordinate for monostatic case) in which the curved and unevenly spaced wavefronts of fig. 6 appear as linear and evenly spaced (and hence correspond to a space frequency for the image in this coordinate system).
It is possible to derive a coordinate system in which the wavefronts for squint angle 0 are exactly linear and evenly spaced and for which the error in linearities and unevenness as varies is of second order in (0). Figure 7 shows how a first “tilted” coordinate system (a,b) is build by integrating the wavefronts for the mean squint 0 to obtain aconstant lines, the b coordinate being the integrated bistatic difference of distance from the starting point on the aconstant line (the tangential point to the wavefront at the middle bloc position M0). The a coordinate corresponds to the bistatic distance at the tangency point at middle bloc (at M0). In practice, we use a “tilted back” coordinate system to get rid of the wavefront slope for 0.
Figure 7. (a,b) coordinate system construction (before tilt back).
By design, the signal frequencies in (k,ku) space are mapped to points in the 2D Fourier of the image in (a,b) coordinates, but only for a immediate neighborhood of 0. Figure 8 (the bistatic equivalent of fig. 2) shows that the Stolt interpolation is not singledimensional (i.e. while y=u in monostatic case, a≠u
in general in bistatic case).
Figure 8. Stolt interpolation graphical justification in the bistatic case: The alongtrack coordinates u and a are no more equivalent.
The fact that when differ from 0 the wavefronts in (a,b) becomes distorted is processed exactly as the second order motion compensation is processed in the monostatic case. In other words, our motion compensation scheme corrects both the deviations of the trajectories from the nominal straight lines, but also the intrinsics inexactitudes of the frequencydomain processing itself.
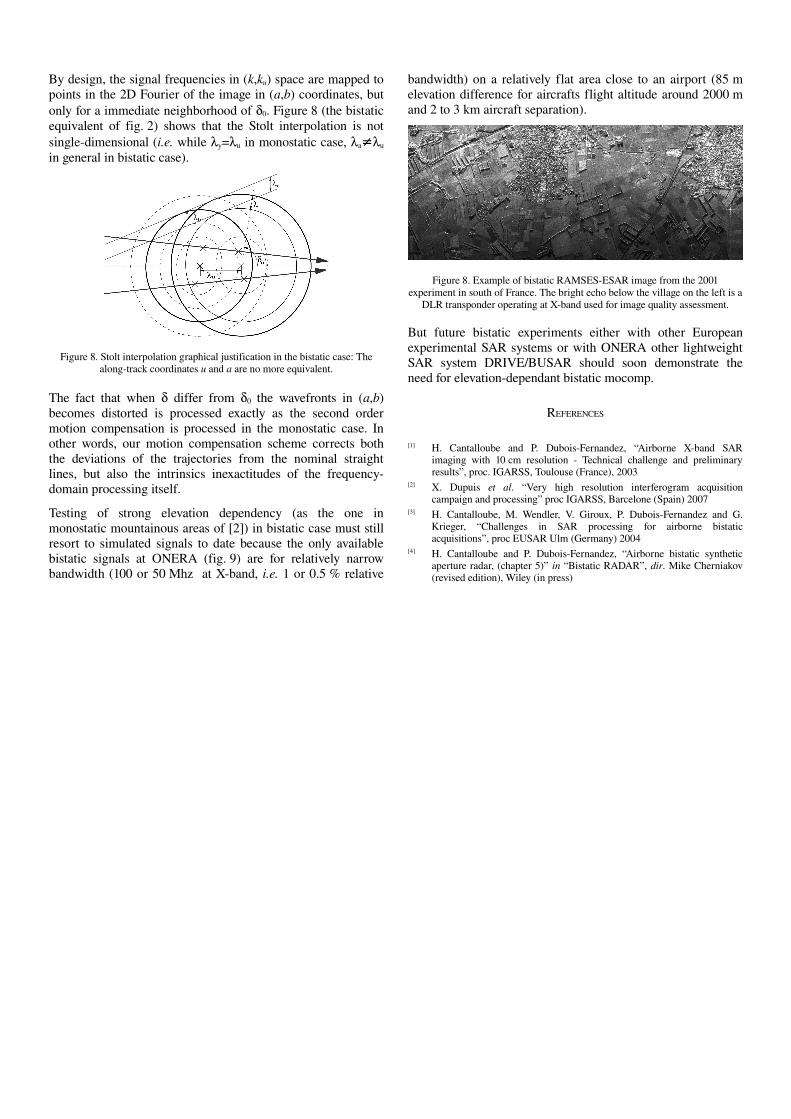
Testing of strong elevation dependency (as the one in monostatic mountainous areas of [2]) in bistatic case must still resort to simulated signals to date because the only available bistatic signals at ONERA (fig. 9) are for relatively narrow bandwidth (100 or 50 Mhz at Xband, i.e. 1 or 0.5 % relative
bandwidth) on a relatively flat area close to an airport (85 m elevation difference for aircrafts flight altitude around 2000 m and 2 to 3 km aircraft separation).
Figure 8. Example of bistatic RAMSESESAR image from the 2001 experiment in south of France. The bright echo below the village on the left is a
DLR transponder operating at Xband used for image quality assessment.
But future bistatic experiments either with other European experimental SAR systems or with ONERA other lightweight SAR system DRIVE/BUSAR should soon demonstrate the need for elevationdependant bistatic mocomp.
REFERENCES
[1] H. Cantalloube and P. DuboisFernandez, “Airborne Xband SAR imaging with 10 cm resolution Technical challenge and preliminary results”, proc. IGARSS, Toulouse (France), 2003
[2] X. Dupuis et al. “Very high resolution interferogram acquisition campaign and processing” proc IGARSS, Barcelone (Spain) 2007
[3] H. Cantalloube, M. Wendler, V. Giroux, P. DuboisFernandez and G. Krieger, “Challenges in SAR processing for airborne bistatic acquisitions”, proc EUSAR Ulm (Germany) 2004
[4] H. Cantalloube and P. DuboisFernandez, “Airborne bistatic synthetic aperture radar, (chapter 5)” in “Bistatic RADAR”, dir. Mike Cherniakov (revised edition), Wiley (in press)

![WORKERS’ COMPENSATION APPEALS BOARD …...WORKERS’ COMPENSATION APPEALS BOARD DIRECTORY 1 Laughlin, Falbo, Levy, &MoresiLLP ANAHEIM WORKERS’ COMPENSATION APPEALS BOARD [AHM]](https://img.pdfslide.fr/doc/110x75/5eaa700449f5fa538c64e567/workersa-compensation-appeals-board-workersa-compensation-appeals-board.jpg)






![Radio Frequency Identification [JePartage]](https://img.pdfslide.fr/doc/110x75/5a6533127f8b9a5b558b521d/radio-frequency-identification-jepartage.jpg)