Embed Size (px)
Citation preview
55
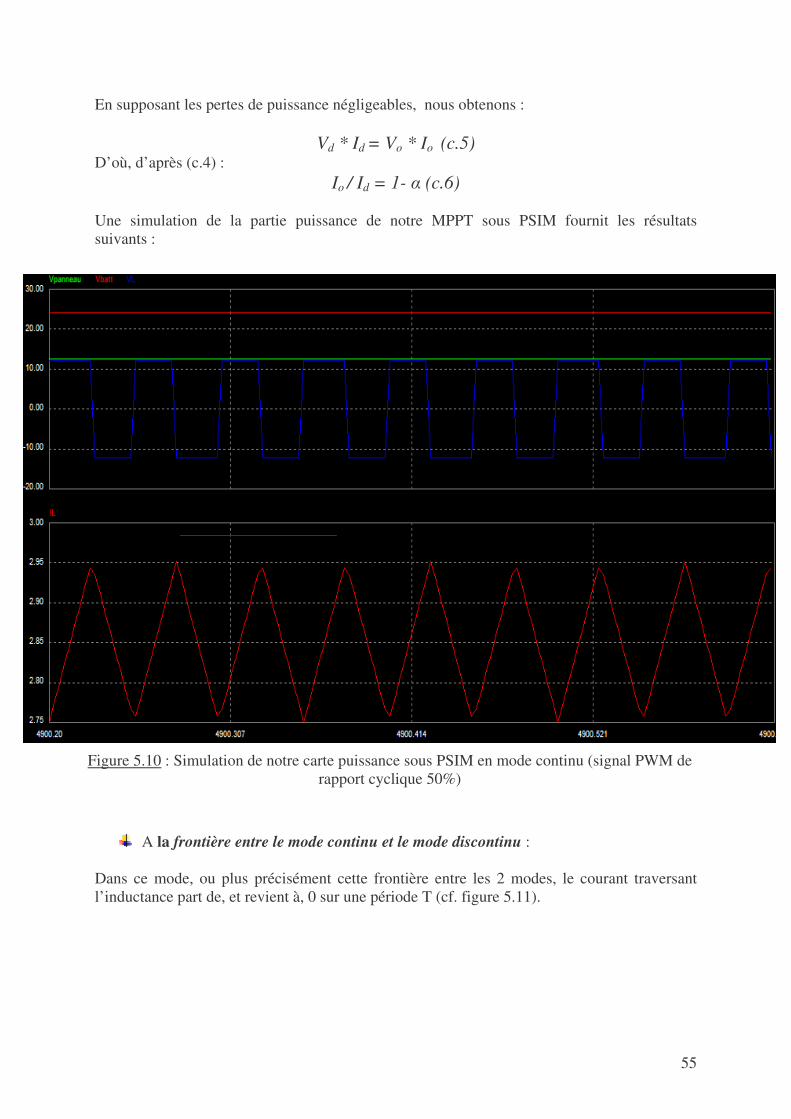
En supposant les pertes de puissance négligeables, nous obtenons :
Vd * Id = Vo * Io (c.5)D’où, d’après (c.4) :
Io / Id = 1- � (c.6)
Une simulation de la partie puissance de notre MPPT sous PSIM fournit les résultats
suivants :
Figure 5.10 : Simulation de notre carte puissance sous PSIM en mode continu (signal PWM de
rapport cyclique 50%)
A la frontière entre le mode continu et le mode discontinu :
Dans ce mode, ou plus précisément cette frontière entre les 2 modes, le courant traversant
l’inductance part de, et revient à, 0 sur une période T (cf. figure 5.11).
56
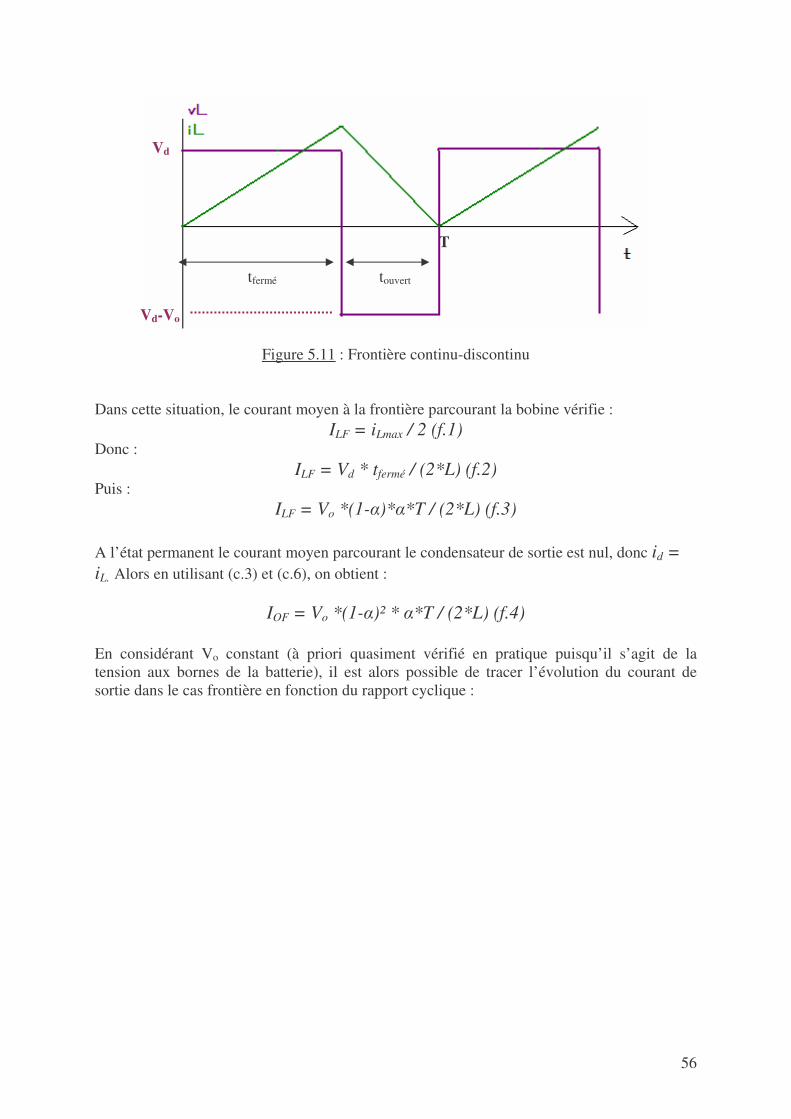
Figure 5.11 : Frontière continu-discontinu
Dans cette situation, le courant moyen à la frontière parcourant la bobine vérifie :
ILF = iLmax / 2 (f.1)Donc :
ILF = Vd * tfermé / (2*L) (f.2)Puis :
ILF = Vo *(1-�)*�*T / (2*L) (f.3)
A l’état permanent le courant moyen parcourant le condensateur de sortie est nul, donc id =
iL. Alors en utilisant (c.3) et (c.6), on obtient :
IOF = Vo *(1-�)² * �*T / (2*L) (f.4)
En considérant Vo constant (à priori quasiment vérifié en pratique puisqu’il s’agit de la
tension aux bornes de la batterie), il est alors possible de tracer l’évolution du courant de
sortie dans le cas frontière en fonction du rapport cyclique :
T
tfermé touvert
Vd
Vd-Vo
57
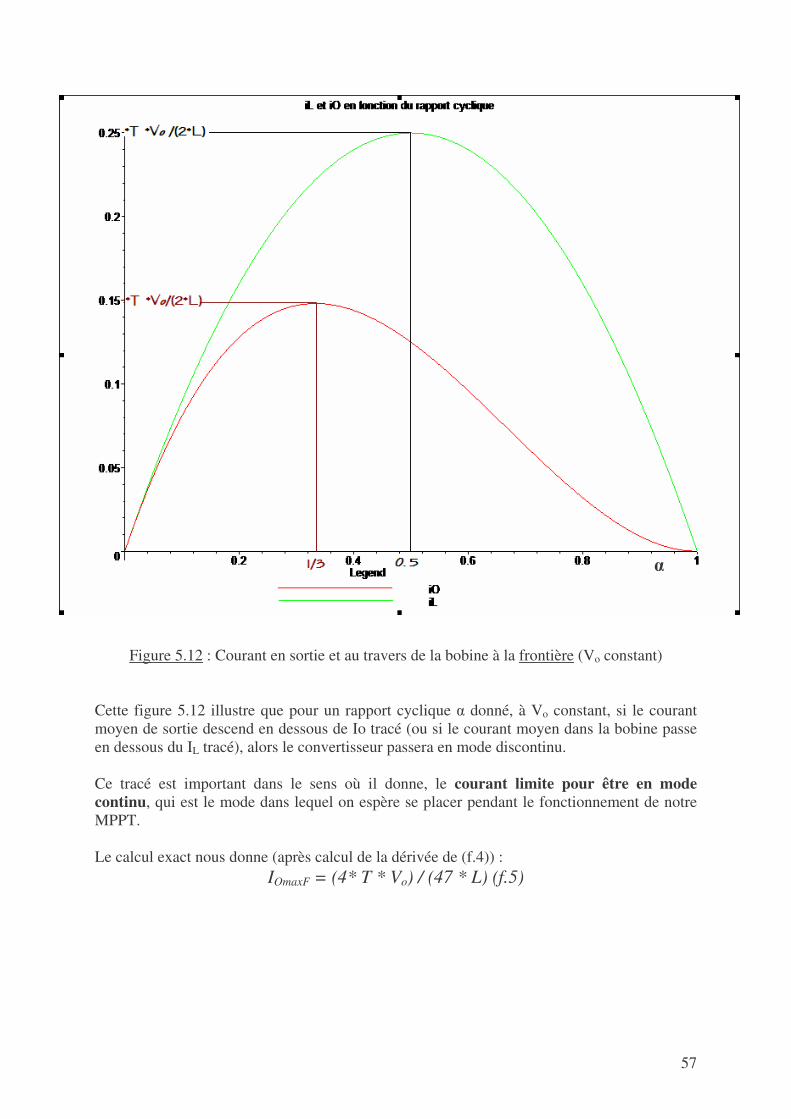
Figure 5.12 : Courant en sortie et au travers de la bobine à la frontière (Vo constant)
Cette figure 5.12 illustre que pour un rapport cyclique � donné, à Vo constant, si le courant
moyen de sortie descend en dessous de Io tracé (ou si le courant moyen dans la bobine passe
en dessous du IL tracé), alors le convertisseur passera en mode discontinu.
Ce tracé est important dans le sens où il donne, le courant limite pour être en mode
continu, qui est le mode dans lequel on espère se placer pendant le fonctionnement de notre
MPPT.
Le calcul exact nous donne (après calcul de la dérivée de (f.4)) :
IOmaxF = (4* T * Vo) / (47 * L) (f.5)
�
58
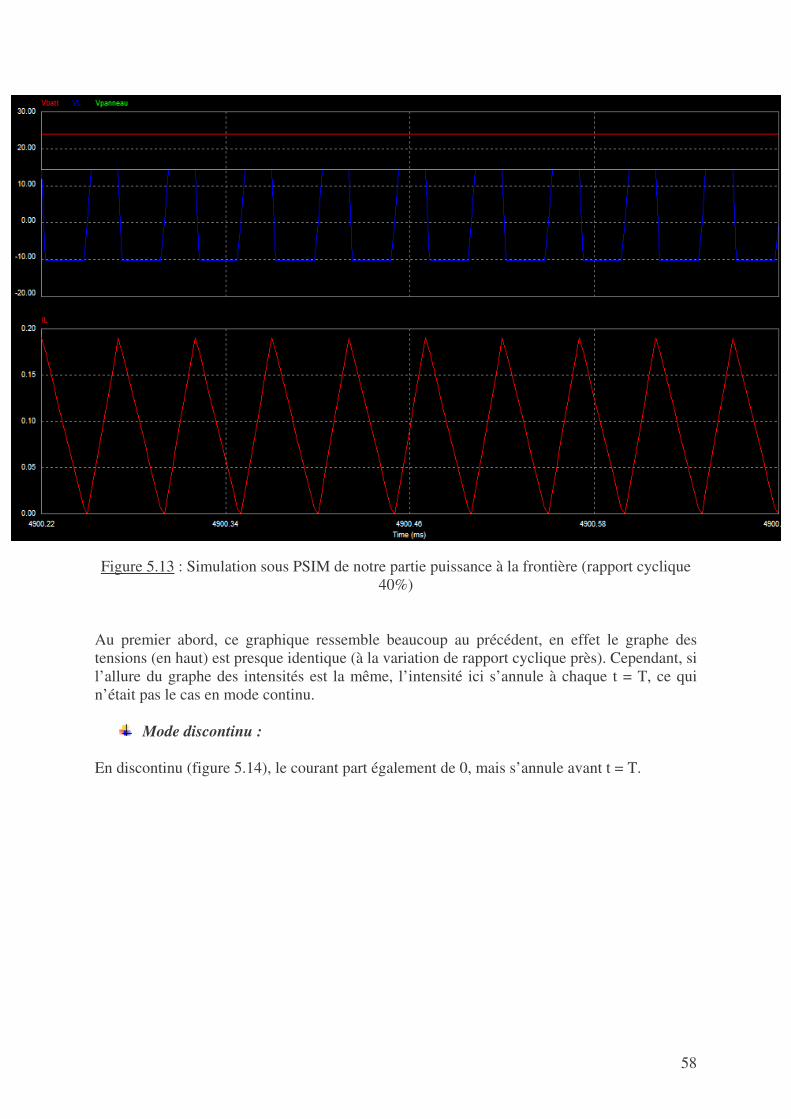
Figure 5.13 : Simulation sous PSIM de notre partie puissance à la frontière (rapport cyclique
40%)
Au premier abord, ce graphique ressemble beaucoup au précédent, en effet le graphe des
tensions (en haut) est presque identique (à la variation de rapport cyclique près). Cependant, si
l’allure du graphe des intensités est la même, l’intensité ici s’annule à chaque t = T, ce qui
n’était pas le cas en mode continu.
Mode discontinu :
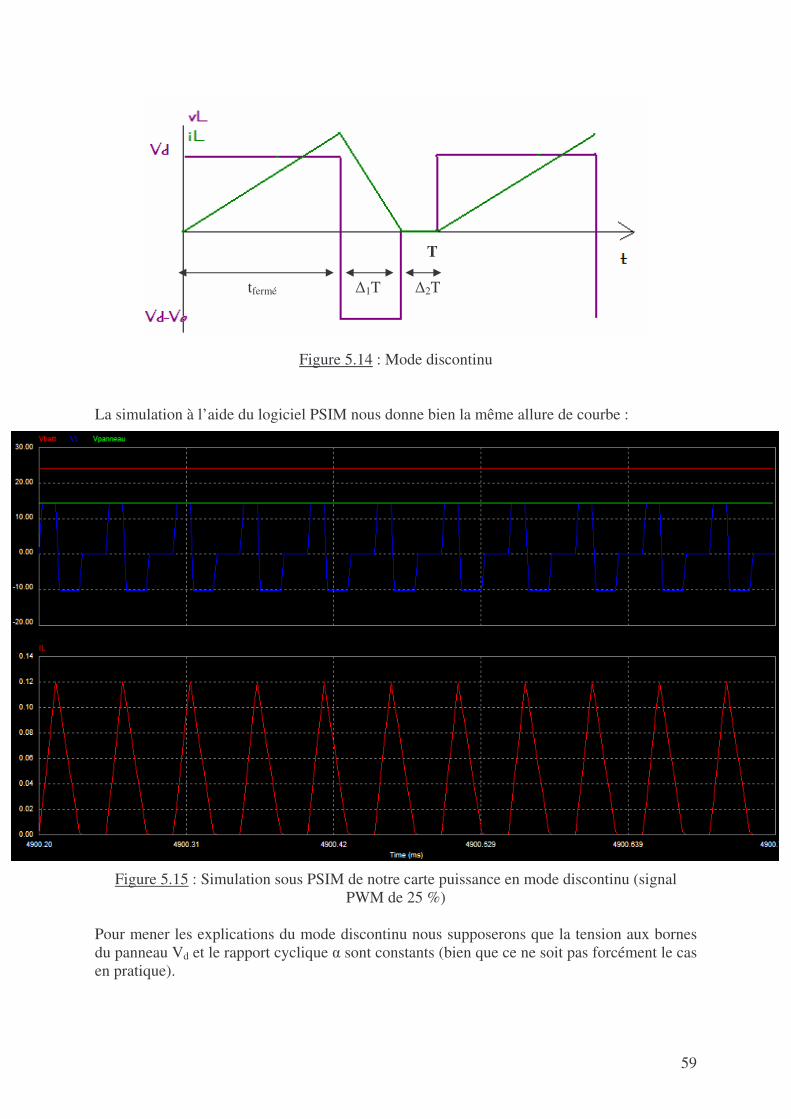
En discontinu (figure 5.14), le courant part également de 0, mais s’annule avant t = T.
59
Figure 5.14 : Mode discontinu
La simulation à l’aide du logiciel PSIM nous donne bien la même allure de courbe :
Figure 5.15 : Simulation sous PSIM de notre carte puissance en mode discontinu (signal
PWM de 25 %)
Pour mener les explications du mode discontinu nous supposerons que la tension aux bornes
du panneau Vd et le rapport cyclique � sont constants (bien que ce ne soit pas forcément le cas
en pratique).
T
tfermé �1T �2T

60
De même qu’en mode continu, l’intégrale de la tension aux bornes de la bobine est nulle sur
une période, ce qui nous donne :
Vd * tfermé + (Vd-Vo) * �1* T = 0 (d.1)Donc :
Vo/Vd = ( �1 + � )/ �1 (d.2)
Circuit 100% efficace (même équation que (c.5))
Io / Id = �1 /( � + �1 ) (d.3)
A partir de la figure 5.14, on obtient (calcul de la valeur moyenne de iL, aussi valeur moyenne
du courant en sorti en régime établi) :
Id = +
iLmax
d��
0
α T
t t
α T2
iLmax
d�
�
α T
( ) + α ∆1
T
− + + t
Tα ∆
1t
T ∆1
Après calcul, on obtient :
Id =1
2iLmax
( ) + α ∆1 (d.4)
De plus, à l’aide de la figure 5.14 et (*), on obtient :
iLmax * L / ( � * T ) = Vd (d.5)
Puis (d.5) et (d.4) donnent :
Id = Vd * � * T * ( � + �1 )/ (2*L) (d.6)
D’où (d.3):
Io = Vd * � * T * �1 / (2*L) (d.7)
En pratique, grâce à la partie commande du MPPT, � varie en fonction des variations
de la tension en sortie des panneaux solaires Vd, tandis que Vo est maintenue constante. Il
apparaît donc utile de tracer le rapport cyclique � comme une fonction du courant chargeant la
batterie pour différentes valeurs de gain de tension Vo / Vd.
A l’aide des équations (f.5), (d.3) et (d.7), on obtient :
max
4* **( 1)
47* *
O O O
O F d d
V I V
I V Vα = − (d.8)
Bien entendu, cette loi n’est valable que lorsque l’on est en mode discontinu, en mode
continu, en tenant compte de l’hypothèse de cette parte (Vd constant), le rapport Vd/Vo est
constant ! Nous pouvons observer cela sur le graphe suivant qui représente l’évolution de � en
fonction du rapport Io/IOmaxF, pour différentes valeurs du gain de tension au travers le
convertisseur statique (i.e. pour différentes valeurs de Vd/Vo).

61
Figure 5.16 : Evolution du rapport cyclique pour différents rapports Vd/Vo
5.1.2.3. Variations [11]
Tandis que les variations de tension aux bornes de la batterie seront à priori assez
faibles (i.e. �Vo de l’ordre de 1 à 2%), l’amplitude des oscillations du courant IL peuvent
atteindre 20% de la valeur moyenne. Ces variations sont importantes à connaître, car elles
sont directement liées à la valeur de l’inductance L. De plus, dans le cas où les variations
deviendraient trop importantes, il faudrait augmenter la taille du MOSFET afin qu’il supporte
les forts courants. Un tel changement coûterait plus cher, et causerait une augmentation de la
masse.
Variations du courant traversant la bobine iL :
Interrupteur ouvert :
diL / dt = Vd / L (o.1)Interrupteur fermé :
diL / dt = ( Vd - Vo ) / L (o.2)
Ainsi, l’intensité crête à crête s’exprime par :
ILcc = 2*�iL = Vd * �* T / L (o.3)
Nous pouvons donc exprimer L en fonction de l’amplitude des variations de iL :
L = Vd * �* T / ( 2*�iL ) (o.4)
62
Variations de la tension de sortie Vo :
La tension de sortie est la tension aux bornes du condensateur de sortie de capacité C.
Pour faire ce calcul, on suppose que toute l’intensité qui traverse la diode iD circule au travers
du condensateur de sortie, on obtient ainsi :
� Vo =� Q / C = Io * �* T / C (o.5)
A partir de l’équation (o.5), on retrouve bien que pour une importante capacité du
condensateur de sortie, on peut minimiser les variations de Vo.
5.1.3. Puissance consommée par le convertisseur Boost [11]
Les éléments qui causent une perte de puissance au sein du convertisseur sont la diode,
la bobine, le MOSFET, et les changements de position du MOSFET.
5.1.3.1. Diode
Dans le datasheet de la diode Schottky utilisée dans notre circuit, il est dit d’évaluer les
pertes : à l’aide du calcul suivant :
Pdiode = 0,42 * Imoy + 0,022 *IRMS ² (p.1)
5.1.3.2. Bobine
On sait qu’au travers de la bobine, la puissance dissipée peut être calculée à l’aide de :
PL = IL² *RL (p.2)
où RL est la résistance équivalente de la bobine
5.1.3.3. MOSFET
Pour le MOSFET lorsqu’il est passant :
PMOSFET = IL² * RDS * � (p.3)
où RDS est la résistance drain source du MOSFET
Bilan : lorsque le convertisseur statique conduit, les pertes de puissance qui y sont associées
sont données par (d’après (p.1), (p.2) et (p.3)) :
Pconduction = Pdiode + PL + PMOSFET (p.4)

63
Le MOSFET est aussi cause de pertes à chaque changement d’état. Il y a 4 états pour un
MOSFET (turn on, passant, turn off et bloquant). La puissance dissipée ainsi s’exprime :
• Pturn_on = Idso * Vdd * td * f + f *Ids * tr * [Vdd/2 + (Vds,sat - Vdd) / 3] (p.5)
où f est la fréquence d’alternance on/off
Vdd est la tension du drain
td le retard au turn on
Ids le courant « leakage » drain - source
tr temps de montée
Vds,sat tension de saturation drain – source
• Pturn_off = Ids * Vds,sat * ts * f + f *Ids * tf * Vdd / 6 (p.6)
où ts est le temps de stockage
• Ppassant = Ids * Vds,sat * tc * f (p.7)
où tc = �/f - td - tr est le temps où le MOSFET est passant
• Pbloquant = Vdd * to * f * Idso (p.8)
où to est le temps où le MOSFET est bloqué
Bilan : lorsque le MOSFET commute, les pertes de puissance qui y sont associées sont
données par (d’après (p.5), (p.6), (p.7) et (p.8)) :
Pcommutation = Pturn_on + Pturn_off + Ppassant + Pbloquant (p.9)
5.1.4. Détermination des composants de la carte puissance
Après avoir défini le type de circuit que nous allions réaliser (un circuit de type
« Boost » en ce qui nous concerne), avant de faire réaliser la carte, il fallait déterminer les
composants que nous allions utiliser, afin de prévoir les tensions, courants, etc.…mis en jeu.
De plus, suivant les types ou même marques des composants, les branchements pouvaient
différer. Dans cette partie, nous développerons uniquement les calculs des valeurs des
composants. En ce qui concerne le choix précis de ces composants, nous nous sommes fait
aidées par M. Marc Budinger. Pour plus de renseignements, reportez-vous en annexe, tous les
datasheets des composants utilisés sont fournis.
Déterminer les caractéristiques de la carte de puissance est une étape critique dans la
construction du MPPT. Certes, tout composant inadapté peut logiquement empêcher un
fonctionnement optimal de cette carte de puissance, mais surtout risque-t-il d’occasionner des
pertes bien plus importantes que les économies réalisées (en effet toute l’énergie finalement
stockée dans la batterie traverse le MPPT, qui constitue l’interface panneaux solaires /
batterie).
64
Dans tous les calculs qui vont suivre, le cas extrême sera envisagé. Nous supposerons
que le convertisseur est toujours efficace à 100% (comme nous l’avons fait dans l’étude
théorique préliminaire) :
Pin = Pout
Donc :
Vd * Id = Vo * Io
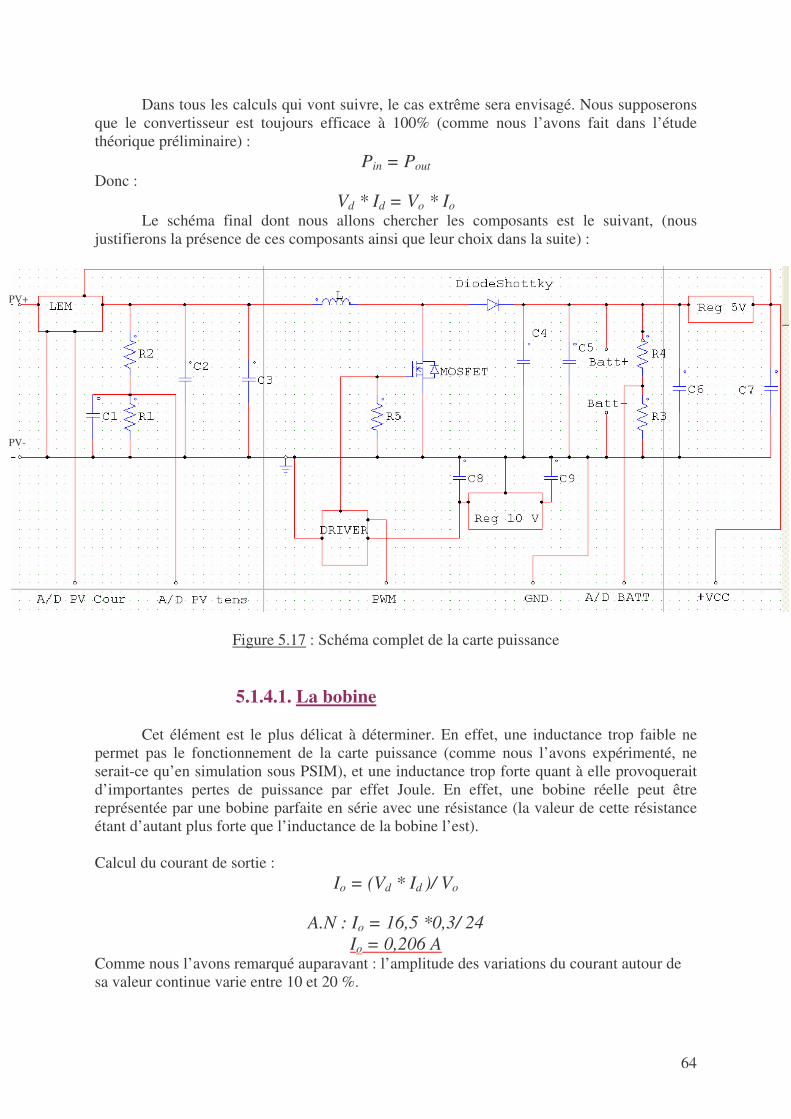
Le schéma final dont nous allons chercher les composants est le suivant, (nous
justifierons la présence de ces composants ainsi que leur choix dans la suite) :
Figure 5.17 : Schéma complet de la carte puissance
5.1.4.1. La bobine
Cet élément est le plus délicat à déterminer. En effet, une inductance trop faible ne
permet pas le fonctionnement de la carte puissance (comme nous l’avons expérimenté, ne
serait-ce qu’en simulation sous PSIM), et une inductance trop forte quant à elle provoquerait
d’importantes pertes de puissance par effet Joule. En effet, une bobine réelle peut être
représentée par une bobine parfaite en série avec une résistance (la valeur de cette résistance
étant d’autant plus forte que l’inductance de la bobine l’est).
Calcul du courant de sortie :
Io = (Vd * Id )/ Vo
A.N : Io = 16,5 *0,3/ 24
Io = 0,206 AComme nous l’avons remarqué auparavant : l’amplitude des variations du courant autour de
sa valeur continue varie entre 10 et 20 %.
PV+
PV-

65
En prenant 10 % (et en remarquant qu’en régime établi aucun courant ne circule dans le
condensateur de sortie), on peut estimer �iL :
�iL = Io * 0,1 = 20,6 mA.Finalement, comme :
L = Vd * �* T / ( 2*�iL ) (o.4)
Le rapport cyclique que l’on peut prévoir dans les conditions nominales (Vd = 16.5V et Vo =
24 V) se déduit de :
Vo / Vd = 1/(1-�) (c.4)
AN : � ~ 0,3125
Nous supposons que notre convertisseur statique fonctionne à la fréquence de 20 kHz (il
s’agit de la fréquence de commutation de l’interrupteur), cela implique que :
T = 10 µs
Ce qui nous permet de calculer la valeur minimale de L :
AN : L ~ 1,25 mH
Remarquons par ailleurs que la bobine doit être capable de supporter un courant de 0,3 A.
5.1.4.2. Condensateurs
Selon les conseils de M. Mouton et M. Budinger, il était nécessaire de placer 2 condensateurs
en sortie comme en entrée à la place de l’unique condensateur prévu dans la configuration de
base de notre convertisseur statique.
Il en fallait un de forte capacité et un de faible capacité afin d’être apte à filtrer les fortes et les
faibles fréquences. Le but du condensateur de sortie est en effet de filtrer les variations de
tension en sortie du convertisseur Boost.
Nous avons toujours : T = 10 µs, �=0,3125, et nous avons décidé que � Vo = 0,1* Vo
(soit 0,24 V).
De plus, d’après (o.5) nous savons que :
C = Io * � * T / � Vo
AN : C = 2, 68 µF.
Ainsi la capacité du condensateur équivalent à nos 2 condensateurs placés en parallèle en
sortie du boost doit valoir au minimum 2, 68 µF. Ceci est largement assuré puisque selon les
conseils que nous avions reçus, nous avions choisi un condensateur de capacité 1000 µF et un
autre de capacité 1 µF.
La capacité du condensateur équivalent à nos 2 condensateurs placés en parallèle est donc :
Ceq = 1000 + 1 = 1001 µF >>2, 68 µFNous avons fait les même choix de valeurs de capacité en entrée et en sortie.
66
Remarque : les branchements et capacités des autres condensateurs présents sur le circuit nous
ont été donnés par les datasheets des composants qui les nécessitaient (cf.annexes).
Bilan : C1 = 47 µF ; C2 = 1000 µF ; C3 = 1 µF ; C4 = 1000 µF ; C5 = 1 µF ; C6 = 0,22 µF ;
C7 = 0,1 µF ; C8 = 22 µF ; C9 = 0,33 µF
5.1.4.3. Diode Schottky
Le choix d’une diode est toujours un compromis entre la tension de claquage, la
vitesse de commutation, et la tension de seuil. Au niveau des pertes de puissance, plus la
tension de seuil est importante, plus ces pertes augmentent. De plus la diode se doit d’être
suffisamment rapide pour suivre les variations (parfois rapide) de l’interrupteur, sous peine de
limiter l’efficacité du convertisseur. Une tension de claquage de grande valeur absolue peut
aussi être utile dans le cas où la charge serait soudainement déconnectée de l’ensemble du
circuit (surtout si la charge est soumise à de fortes tensions).
Le modèle de diode que nous avons choisi permet un bon compromis :
• 45 V de tension de claquage (sachant que la tension de sortie est de 24 , la diode est à
priori à l’abri du claquage).
• 0,57 V de tension de seuil (nous avons choisi une diode de type Schottky afin d’avoir
justement une faible tension de seuil, ce qui permet de limiter la chute de tension).
Rappelons que la diode nous sert à la fois dans le convertisseur statique, mais aussi
sert de diode anti-retour entre les panneaux et la batterie : pour éviter que ce soit la
batterie qui « charge » les panneaux solaires et non l’inverse.
5.1.4.4. MOSFET
Nous avons choisi un MOSFET à canal N (PIP 3104 P) qui peut fonctionner avec des
tensions VDS jusqu’à 50 V, et des courant ID jusqu’à 8A. Sachant que dans la cas le plus
défavorable, au sein de notre convertisseur Boost, le MOSFET ne sera qu’à soumis à 24 V
entre le drain et la source et à un courant de l’ordre de quelques centaines de mA. Il a un
courant de fuite maximal de 100µA, ce qui est négligeable au vu des courants en jeu dans
notre montage, et une faible résistance en fonctionnement de 100 m� ( donc de résistance 10-4
fois plus faibles que les autres résistances du circuit).
5.1.4.5. Driver de MOSFET
Les signaux PWM en sortie du microcontrôleur ont pour but de déclencher
l’interrupteur MOS FET. Or si les courants sont de trop faible intensité ou encore si la tension
de sortie n’atteint pas exactement le seuil nécessaire à la commutation du MOSFET, le
montage devient totalement inefficace. C’est pourquoi on ajoute un driver de MOSFET entre
la sortie du microcontrôleur et le MOSFET, qui a pour but d’augmenter l’intensité
commandant le MOS FET. Nous avons choisi le driver EL 7212 CN.
5.1.4.6. Microcontrôleur
Nous avons choisi d’utiliser le microcontrôleur C167 de la marque Infineon dans le
cadre de notre PIP. Une fois encore les datasheets sont en annexe.
L’avantage indéniable du choix du C 167 est qu’il s’agit du microcontrôleur à partir duquel
nous avons été initiées à l’électronique numérique en début de 2eme année à l’ENSICA. Cela
67
nous simplifiait grandement la tache de la programmation (cf. partie commande). De plus,
initialement nous comptions utiliser le même microcontrôleur déjà présent dans le
Microtransat puisqu’il s’agit de celui commandant les mesures des capteurs. Cela semble à
priori possible puisque le PIP précédent a configuré le port correspondant au bus CAN (port
n° 4) alors que nous utiliserons le port 5 pour la conversion analogique/numérique, et le port 7
afin de créer un signal PWM (ou MLI en français). Cependant pour des raisons pratiques
(nous travaillons sur la programmation du microcontrôleur pendant les essais u bateau en
navigation !), ainsi que pour des raisons de performance, nous avons préféré retenir
l’utilisation d’un autre microcontrôleur.
Il est important de signaler que les choix de ce microcontrôleur n’est pas uniquement
fait « par défaut » ou « par simplicité », le C 167 d’Infineon convient parfaitement à notre
problème puisque possède plus des 3 voies nécessaires (une pour la mesure de la tension aux
bornes des panneaux, une pour l’intensité délivrée par ces mêmes panneaux, et une dernière
pour la mesure de la tension aux bornes de la batterie) sur le port relatif aux conversions
analogique/numérique, et également plusieurs voies (alors qu’une seule ne nous est
nécessaire) sur le port relatif aux signaux PWM. Ce microcontrôleur est donc peut-être
surdimensionné à l’heure actuelle par rapport à l’utilisation que nous en faisons, mais trouvera
certainement utilisation plus complète dans le développement du projet Microtransat !
Par ailleurs, pour la compilation de notre code en C, nous avons utilisé le logiciel Keil
µVision 2.
5.1.4.7. Régulateur de tension 1
Sachant que le microcontrôleur nécessite une alimentation de 5V, nous avons choisi
un régulateur de tension LM 7805 CT, dont les principales caractéristiques sont :
� Une tension d’entrée maximale de 35 V (ce qui est amplement suffisant puisque nous
placerons ce régulateur en sortie de la batterie de tension nominale 24 V)
� Une protection interne contre les courts circuits : ce système protège le système aval
(ici le microcontrôleur) en cas de court circuit.
� Une protection interne contre les surchauffes : ceci protègera le régulateur lui-même
d’une surchauffe en cas de court circuit dans le montage.
� Un faible consommation de courant (8 mA) lorsque le régulateur ne fonctionne pas (ce
qui permet logiquement de diminuer la puissance consommée)
5.1.4.8. Régulateur de tension 2
Le driver de MOSFET que nous utilisons nécessite une alimentation en 10V, que nous
allons fournir grâce à un régulateur 10V BA 10 T. Voici ses caractéristiques :
� La tension d’entrée doit être inférieure à 25 V, ce qui, sauf surcharge des batteries,
sera vérifié. Il aurait peut-être été préférable de choisir un autre régulateur tolérant une
tension d’entrée plus importante, cependant au moment du choix de ce composant,
nous pensions encore avoir une seule batterie de 12V.
� Une protection interne contre les survoltages.
� Une protection interne contre les courts circuits : ce système protège le système aval
(ici le driver de MOS) en cas de court circuit.
� Une protection interne contre les surchauffes : ceci protègera le régulateur lui-même
d’une surchauffe en cas de court circuit dans le montage.

68
� Un faible consommation de courant (2,5 mA) lorsque le régulateur ne fonctionne pas
(ce qui permet logiquement de diminuer la puissance consommée)
5.1.4.9. Diviseurs de tension
Les tensions que nous devons mesurer afin de mettre en œuvre la partie commande de notre
MPPT sont bien plus importantes que celles pouvant être reçues par le microcontrôleur (en
effet celui-ci ne tolère pas de tension au-delà de 5V alors que les panneaux solaires peuvent
délivrer une tension de 16,5 V et les batteries 24V).
Nous avons donc calculé les rapports nécessaires et puis nous avons choisi les résistances
nécessaires pour réaliser ces rapports.
C’est ainsi que nous avons pour le diviseur de tension en sortie du panneau solaire :
R1 /(R1+R2) = 2,7 / ( 2,7 + 6,8 ) = 0, 284
=> Vsmax = 0,284 * 16,5 = 4, 68 V.Et pour la batterie :
R3/ (R3+R4) = 1 / ( 1 + 3,9 ) = 0, 204
� Vsbattmax = 0,204 * 24 = 4, 89 V.
Bilan : R1 = 2,7 k� ; R2 = 6,8 k� ; R3 = 1 k� ; R4 = 3,9 k� ; R5 = 6 k�
5.1.5. Réalisation de la carte
Figure 5.18 : Carte puissance réalisée
5.1.5.1. Organisation de la réalisation
69
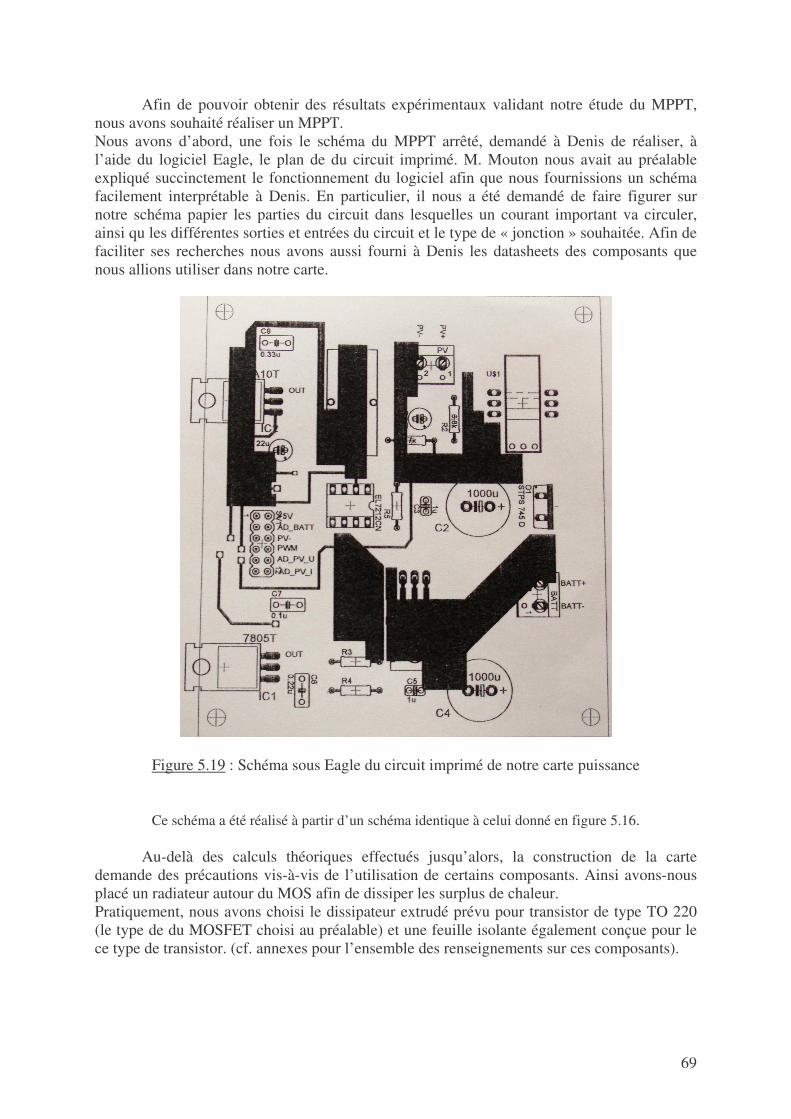
Afin de pouvoir obtenir des résultats expérimentaux validant notre étude du MPPT,
nous avons souhaité réaliser un MPPT.
Nous avons d’abord, une fois le schéma du MPPT arrêté, demandé à Denis de réaliser, à
l’aide du logiciel Eagle, le plan de du circuit imprimé. M. Mouton nous avait au préalable
expliqué succinctement le fonctionnement du logiciel afin que nous fournissions un schéma
facilement interprétable à Denis. En particulier, il nous a été demandé de faire figurer sur
notre schéma papier les parties du circuit dans lesquelles un courant important va circuler,
ainsi qu les différentes sorties et entrées du circuit et le type de « jonction » souhaitée. Afin de
faciliter ses recherches nous avons aussi fourni à Denis les datasheets des composants que
nous allions utiliser dans notre carte.
Figure 5.19 : Schéma sous Eagle du circuit imprimé de notre carte puissance
Ce schéma a été réalisé à partir d’un schéma identique à celui donné en figure 5.16.
Au-delà des calculs théoriques effectués jusqu’alors, la construction de la carte
demande des précautions vis-à-vis de l’utilisation de certains composants. Ainsi avons-nous
placé un radiateur autour du MOS afin de dissiper les surplus de chaleur.
Pratiquement, nous avons choisi le dissipateur extrudé prévu pour transistor de type TO 220
(le type de du MOSFET choisi au préalable) et une feuille isolante également conçue pour le
ce type de transistor. (cf. annexes pour l’ensemble des renseignements sur ces composants).

70
Après réception du circuit imprimé et du microcontrôleur Denis et Laura ont soudé les
différents composants pour terminer cette réalisation et obtenir la carte représentée en figure
5.20.
5.1.5.2. Reconnaissance des différentes parties de la carte
de puissance de notre MPPT
Figure 5.20 : Photo commentée de la carte puissance
Légende :
1 : Ensemble des entrées et sorties de la carte en lien avec le microcontrôleur
2 : Entrées panneau
3 : Entrées batterie
4 : MOSFET + radiateur
5 : Driver de MOSFET
6 : LEM : convertisseur courant - tension
7 : Diode Schottky
8 et 9 : Régulateurs de tension 10 et 5V
2
3
4
5
6
1
7
8
9
71
5.2. Partie commande
Etant donné notre choix de réaliser la partie commande en électronique numérique,
celle-ci est constituée du microcontrôleur dans le quel va être implémenté un algorithme.
Différents algorithmes de recherche du Point de Puissance Maximale peuvent être utilisés.
Les deux plus répandus sont la méthode « Perturbation et Observation » et l’algorithme
« Conductance Incrémentielle ».
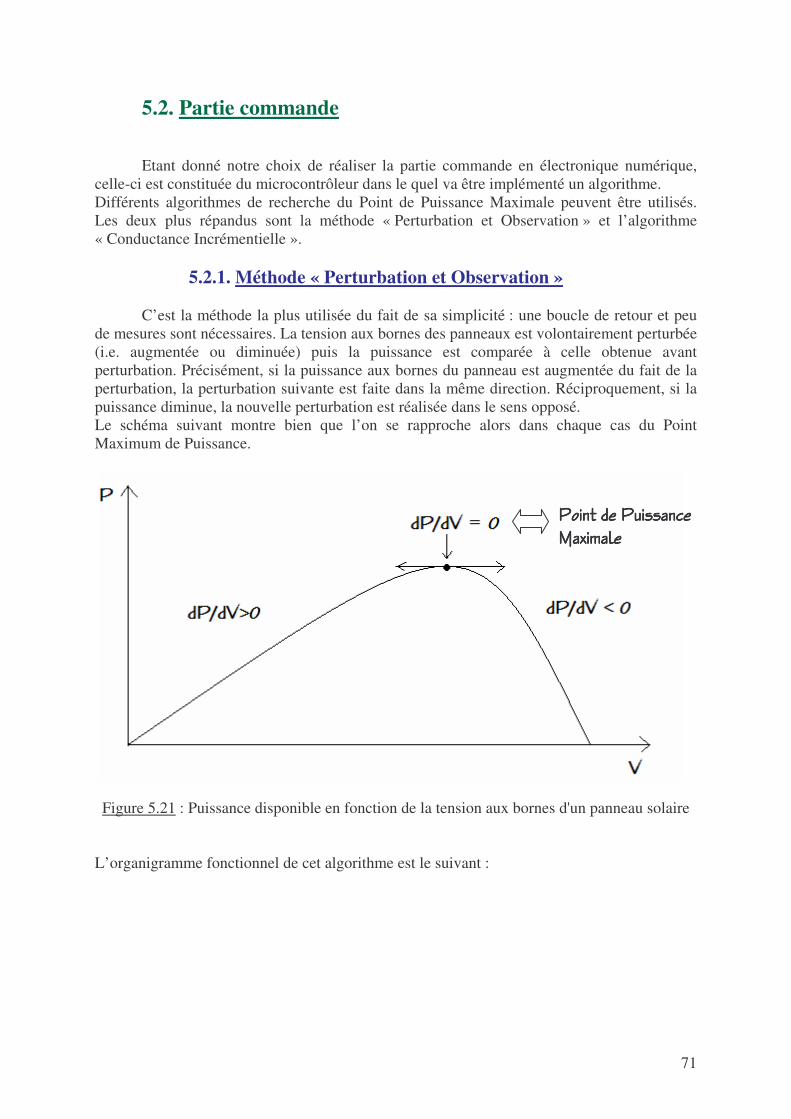
5.2.1. Méthode « Perturbation et Observation »
C’est la méthode la plus utilisée du fait de sa simplicité : une boucle de retour et peu
de mesures sont nécessaires. La tension aux bornes des panneaux est volontairement perturbée
(i.e. augmentée ou diminuée) puis la puissance est comparée à celle obtenue avant
perturbation. Précisément, si la puissance aux bornes du panneau est augmentée du fait de la
perturbation, la perturbation suivante est faite dans la même direction. Réciproquement, si la
puissance diminue, la nouvelle perturbation est réalisée dans le sens opposé.
Le schéma suivant montre bien que l’on se rapproche alors dans chaque cas du Point
Maximum de Puissance.
Figure 5.21 : Puissance disponible en fonction de la tension aux bornes d'un panneau solaire
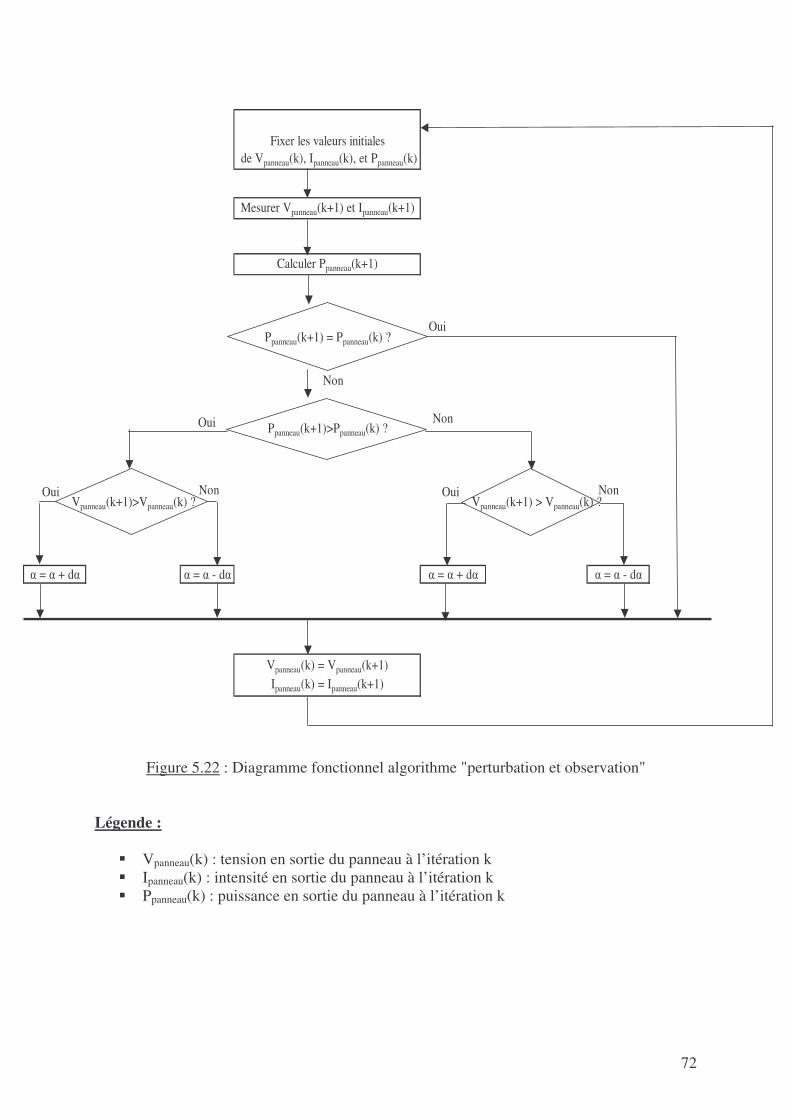
L’organigramme fonctionnel de cet algorithme est le suivant :
����������������������������������������������������������������
������� ������� ������� �����������
72
Fixer les valeurs initiales
de Vpanneau(k), Ipanneau(k), et Ppanneau(k)
Mesurer Vpanneau(k+1) et Ipanneau(k+1)
Calculer Ppanneau(k+1)
Ppanneau(k+1) = Ppanneau(k) ?
Ppanneau(k+1)>Ppanneau(k) ?
Vpanneau(k+1)>Vpanneau(k) ? Vpanneau(k+1) > Vpanneau(k) ?
� = � + d� � = � - d� � = � + d� � = � - d�
Vpanneau(k) = Vpanneau(k+1)
Ipanneau(k) = Ipanneau(k+1)
Non
Oui
Oui Oui
Non
Non
Non
Oui
Figure 5.22 : Diagramme fonctionnel algorithme "perturbation et observation"
Légende :
� Vpanneau(k) : tension en sortie du panneau à l’itération k
� Ipanneau(k) : intensité en sortie du panneau à l’itération k
� Ppanneau(k) : puissance en sortie du panneau à l’itération k

73
5.2.2. Méthode de la « Conductance Incrémentielle »
Nous allons dans cette méthode nous intéresser directement aux variations de la
puissance en fonction de la tension. La conductance est une grandeur physique relativement
connue : il s’agit du quotient de l’intensité par la tension (i.e. G=I/V ) La conductance
incrémentielle est beaucoup plus rarement définie, il s’agit du quotient de la variation, entre
deux instants, de l’intensité par celle de la tension (i.e. �G = dI / dV).
En comparant la conductance G à la conductance incrémentielle �G, nous allons chercher le
maximum de la courbe (cf. figure 5.21) en cherchant le point d’annulation de la dérivée de la
puissance.
Précisément la puissance en sortie de la source peut s’écrire :
P = I * V (com.1)D’où en dérivant :
dP/dV = I * dV/dV + V * dI / dV
dP/dV = I + V * dI / dV
Donc
(1/V) dP/dV = I/V + dI / dV
Soit
(1/V) dP/dV = G + �G (com.2)
En général, la tension issue de la source est positive, c’est pourquoi, nous pouvons déduire les
résultats clés de la méthode de la conductance incrémentielle.
dP/dV > 0 � G > - �G
dP/dV = 0 � G = - �G
dP/dV < 0 � G < - �G
Nous déduisons facilement les actions à faire dans les différent cas sur le schéma P=f(V).
(com.3)
74
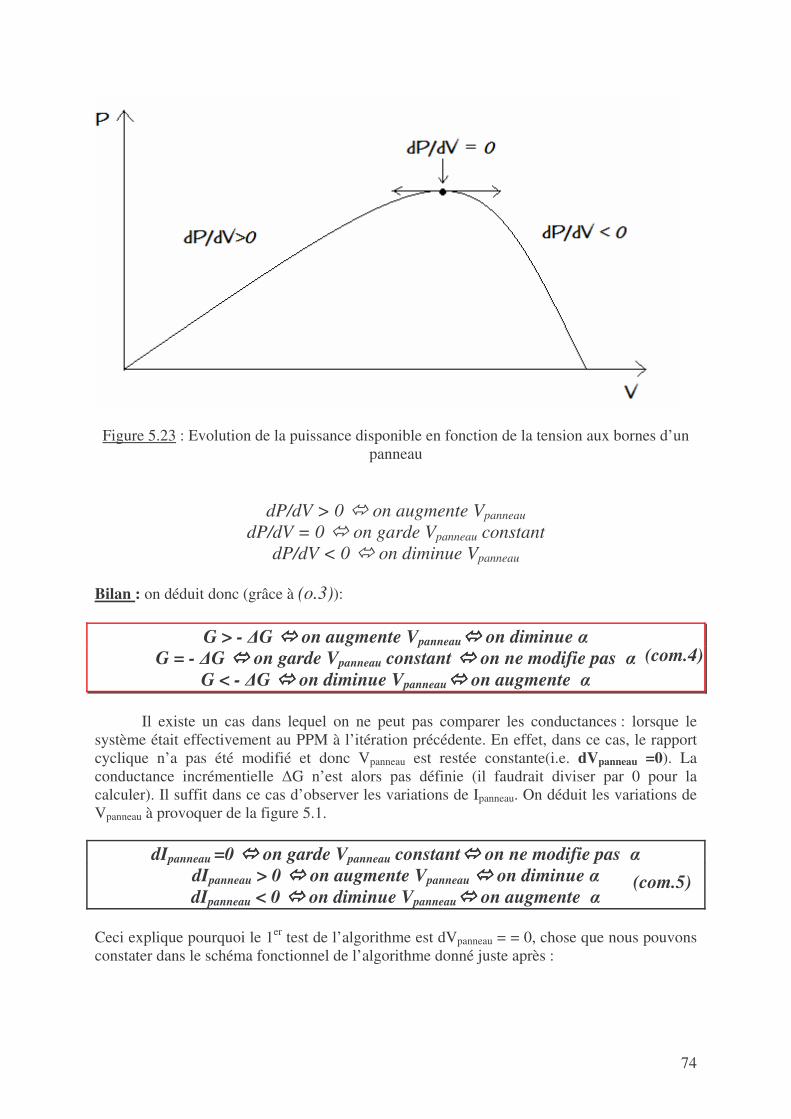
Figure 5.23 : Evolution de la puissance disponible en fonction de la tension aux bornes d’un
panneau
dP/dV > 0 � on augmente Vpanneau
dP/dV = 0 � on garde Vpanneau constant
dP/dV < 0 � on diminue Vpanneau
Bilan : on déduit donc (grâce à (o.3)):
G > - �G ���� on augmente Vpanneau���� on diminue �
G = - �G ���� on garde Vpanneau constant ���� on ne modifie pas �
G < - �G ���� on diminue Vpanneau���� on augmente �
Il existe un cas dans lequel on ne peut pas comparer les conductances : lorsque le
système était effectivement au PPM à l’itération précédente. En effet, dans ce cas, le rapport
cyclique n’a pas été modifié et donc Vpanneau est restée constante(i.e. dVpanneau =0). La
conductance incrémentielle �G n’est alors pas définie (il faudrait diviser par 0 pour la
calculer). Il suffit dans ce cas d’observer les variations de Ipanneau. On déduit les variations de
Vpanneau à provoquer de la figure 5.1.
dIpanneau =0 ���� on garde Vpanneau constant���� on ne modifie pas �
dIpanneau > 0 ���� on augmente Vpanneau ���� on diminue �
dIpanneau < 0 ���� on diminue Vpanneau���� on augmente �
Ceci explique pourquoi le 1er
test de l’algorithme est dVpanneau = = 0, chose que nous pouvons
constater dans le schéma fonctionnel de l’algorithme donné juste après :
(com.4)
(com.5)
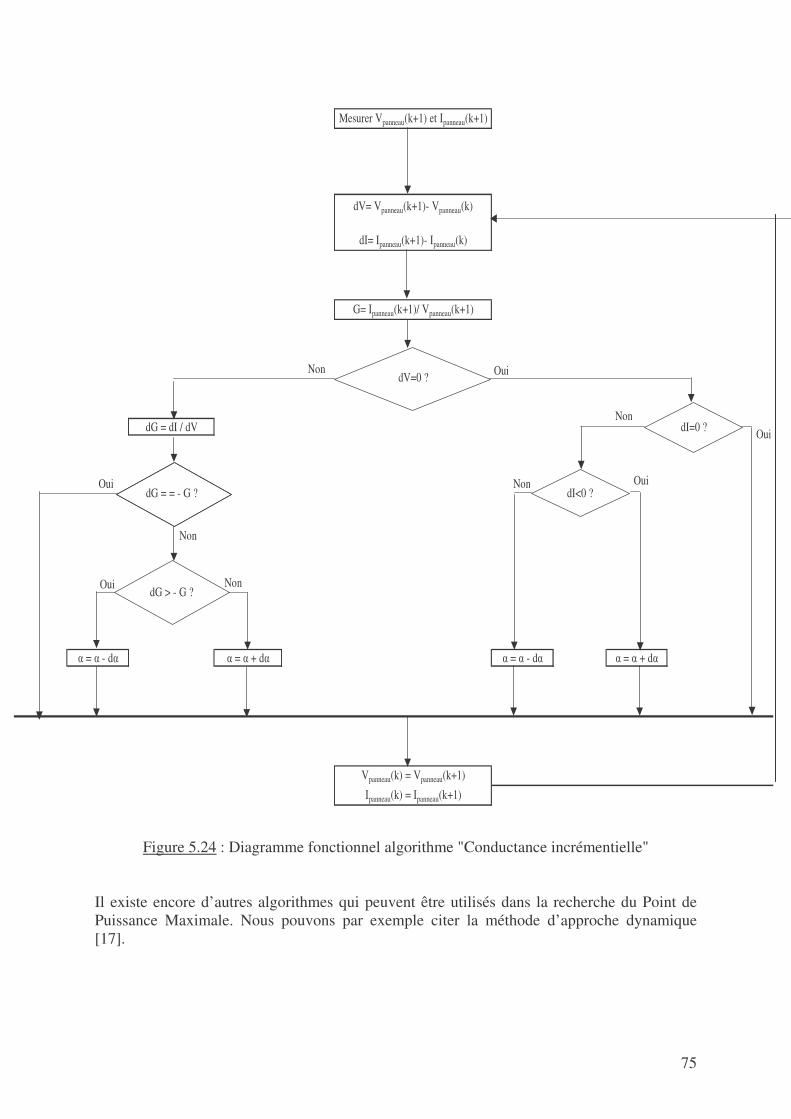
75
Mesurer Vpanneau(k+1) et Ipanneau(k+1)
dV= Vpanneau(k+1)- Vpanneau(k)
dI= Ipanneau(k+1)- Ipanneau(k)
G= Ipanneau(k+1)/ Vpanneau(k+1)
dV=0 ?
dG = dI / dV dI=0 ?
dG = = - G ? dI<0 ?
dG > - G ?
� = � - d� � = � + d� � = � - d� � = � + d�
Vpanneau(k) = Vpanneau(k+1)
Ipanneau(k) = Ipanneau(k+1)
Oui
Non
Non
Non
Non
Non
Oui
Oui
Oui
Oui
Figure 5.24 : Diagramme fonctionnel algorithme "Conductance incrémentielle"
Il existe encore d’autres algorithmes qui peuvent être utilisés dans la recherche du Point de
Puissance Maximale. Nous pouvons par exemple citer la méthode d’approche dynamique
[17].
76
5.2.3. Comparaison des deux algorithmes
La méthode de la conductance incrémentielle est souvent considérée comme plus
efficace [11 et e] car la méthode P&O est jugée trop lente à retrouver le nouveau point de
fonctionnement optimal. De plus, comme on applique continuellement de nouvelles
perturbations, le point de fonctionnement du système oscille autour du Point de Puissance
Maximale (PPM). En effet, de part le fonctionnement de l’algorithme, même lorsque le PPM
est atteint, le système est sans cesse de nouveau perturbé. Ces oscillations ont pour principale
conséquence une perte de puissance. Les pertes de puissance risquent d’être encore plus
importantes en cas de conditions météorologiques qui fluctuent rapidement (comme une
journée nuageuse avec éclaircies). [e] De telles conditions météorologiques sont un problème
pour la recherche du PPM quelque soit l’algorithme utilisé, en effet afin que celui-ci puisse
être efficace, il est nécessaire que le convertisseur statique fonctionne en régime établi avant
que de nouvelles perturbations soient effectuées.[f]
En outre, la méthode de la conductance incrémentielle est indépendante des
caractéristiques du panneau solaire, et ne dépend pas de composants électroniques, ce qui lui
confère une plus grande fiabilité. [e] Cette méthode n’est néanmoins pas exempte
d’inconvénients. Elle requiert par exemple un matériel plus complexe, et l’algorithme à
implémenter est lui-même plus compliqué. [f]
Cependant, certaines critiques commencent à s’élever selon lesquelles il serait possible
d’obtenir un aussi bon rendement (de puissance) à l’aide de la méthode P&O, il s’agirait
uniquement de savoir optimiser correctement cet algorithme. Malheureusement il n’existe à
l’heure actuelle aucune règle pour déterminer les valeurs optimales des paramètres de la
méthode P&O. [f]
5.2.4. Algorithme implémenté
L’algorithme effectivement implémenté est équivalent à celui présenté plus haut en
5.2.2, mais diffère néanmoins sur quelques points, c’est pourquoi nous avons trouvé judicieux
de présenter son schéma fonctionnel et d’expliquer les différences, avant de donner les codes
en C (en annexe), moins facilement interprétables malgré les commentaires. Par ailleurs, il est
important de souligner que ces codes sont quasiment une transcription totale des codes fournis
en annexe de la thèse [11].
Il y a deux différences notables entre l’algorithme que nous avons effectivement implémenté
et l’algorithme théorique de la conductance incrémentielle présenté plus haut :
1. Nous ne testerons pas l’absence de variation de la tension aux bornes du panneau. En
effet, pour dVpanneau>0, tester les variations de l’intensité ou la position relative des
conductances est équivalent, comme nous pouvons le voir dans le cas suivant :
�G > 0 � dIpanneau > 0
� - �G < 0
� G > - �G (car G est toujours positif)
Nous regrouperons donc les actions à réaliser dans les cas où dVpanneau > 0 et dVpanneau = 0.
2. Introduction d’une marge d’erreur entre G et �G.
77
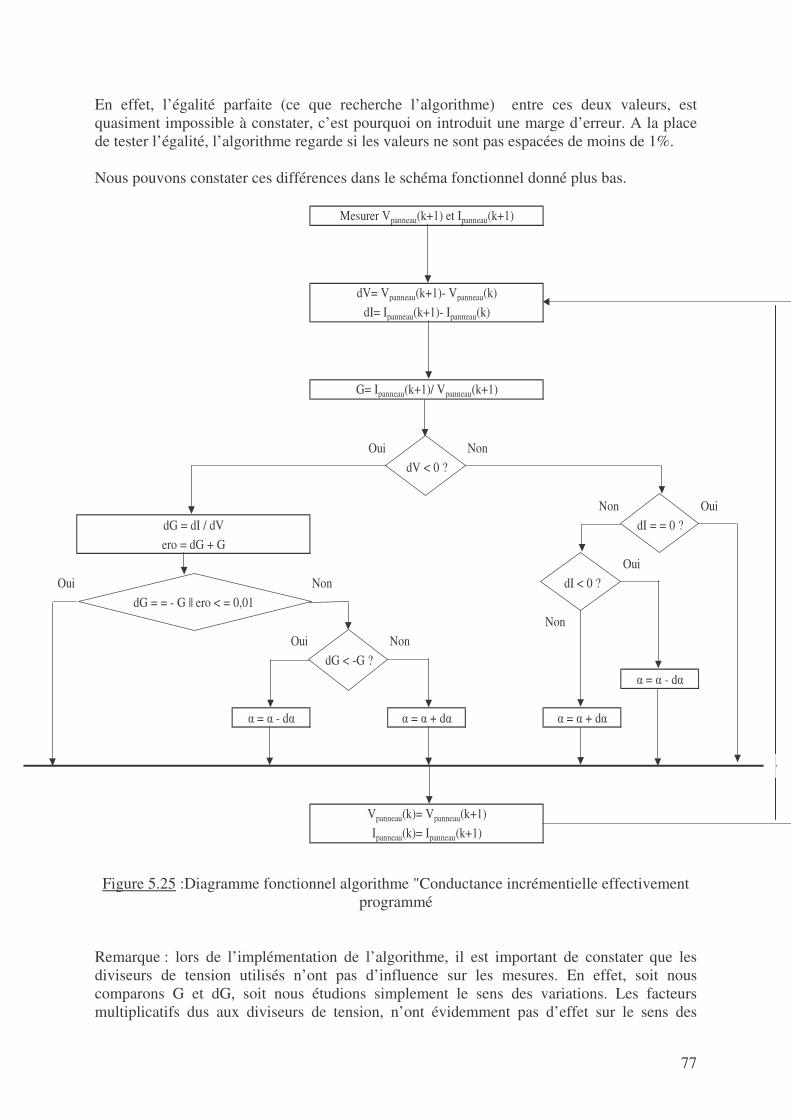
En effet, l’égalité parfaite (ce que recherche l’algorithme) entre ces deux valeurs, est
quasiment impossible à constater, c’est pourquoi on introduit une marge d’erreur. A la place
de tester l’égalité, l’algorithme regarde si les valeurs ne sont pas espacées de moins de 1%.
Nous pouvons constater ces différences dans le schéma fonctionnel donné plus bas.
Mesurer Vpanneau(k+1) et Ipanneau(k+1)
dV= Vpanneau(k+1)- Vpanneau(k)
dI= Ipanneau(k+1)- Ipanneau(k)
G= Ipanneau(k+1)/ Vpanneau(k+1)
Oui Non
dV < 0 ?
Non Oui
dG = dI / dV dI = = 0 ?
ero = dG + G
Oui
Oui Non dI < 0 ?
dG = = - G || ero < = 0,01
Non
Oui Non
dG < -G ?
� = � - d�
� = � - d� � = � + d� � = � + d�
Vpanneau(k)= Vpanneau(k+1)
Ipanneau(k)= Ipanneau(k+1)
Figure 5.25 :Diagramme fonctionnel algorithme "Conductance incrémentielle effectivement
programmé
Remarque : lors de l’implémentation de l’algorithme, il est important de constater que les
diviseurs de tension utilisés n’ont pas d’influence sur les mesures. En effet, soit nous
comparons G et dG, soit nous étudions simplement le sens des variations. Les facteurs
multiplicatifs dus aux diviseurs de tension, n’ont évidemment pas d’effet sur le sens des
78
variations. De plus si V’ = � * V et I’ = � * I, alors G’ et dG’ sont tous deux proportionnels à
G et dG respectivement mais avec le même facteur multiplicatif (� / �).
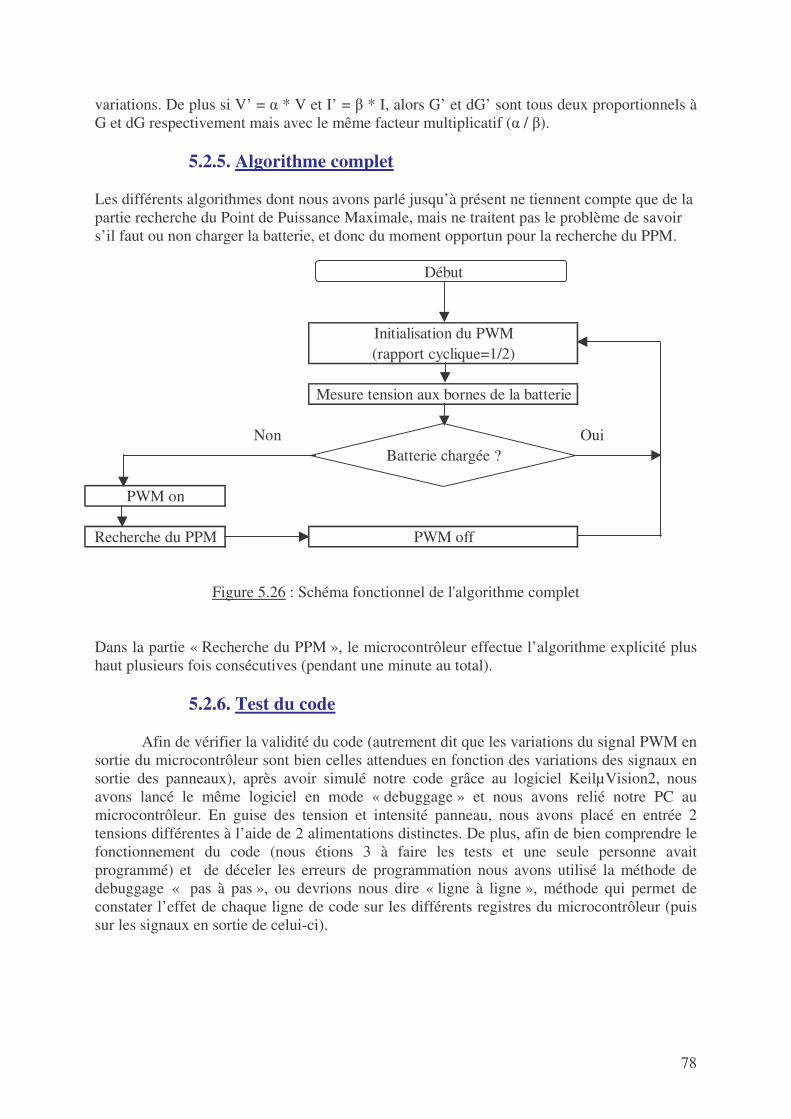
5.2.5. Algorithme complet
Les différents algorithmes dont nous avons parlé jusqu’à présent ne tiennent compte que de la
partie recherche du Point de Puissance Maximale, mais ne traitent pas le problème de savoir
s’il faut ou non charger la batterie, et donc du moment opportun pour la recherche du PPM.
Début
Initialisation du PWM
(rapport cyclique=1/2)
Mesure tension aux bornes de la batterie
Non Oui
Batterie chargée ?
PWM on
Recherche du PPM PWM off
Figure 5.26 : Schéma fonctionnel de l'algorithme complet
Dans la partie « Recherche du PPM », le microcontrôleur effectue l’algorithme explicité plus
haut plusieurs fois consécutives (pendant une minute au total).
5.2.6. Test du code
Afin de vérifier la validité du code (autrement dit que les variations du signal PWM en
sortie du microcontrôleur sont bien celles attendues en fonction des variations des signaux en
sortie des panneaux), après avoir simulé notre code grâce au logiciel KeilµVision2, nous
avons lancé le même logiciel en mode « debuggage » et nous avons relié notre PC au
microcontrôleur. En guise des tension et intensité panneau, nous avons placé en entrée 2
tensions différentes à l’aide de 2 alimentations distinctes. De plus, afin de bien comprendre le
fonctionnement du code (nous étions 3 à faire les tests et une seule personne avait
programmé) et de déceler les erreurs de programmation nous avons utilisé la méthode de
debuggage « pas à pas », ou devrions nous dire « ligne à ligne », méthode qui permet de
constater l’effet de chaque ligne de code sur les différents registres du microcontrôleur (puis
sur les signaux en sortie de celui-ci).
79
Figure 5.27 : Branchement de la carte du microcontrôleur pour les tests programmation
Résultats :
Nous avons donc pu vérifier que l’ensemble de l’algorithme était à priori correctement
programmé, puisque il était possible de le compiler. Néanmoins, nous n’avons pu tester que
l’algorithme de conductance incrémentielle, et non le programme global car nous ne savions
pas utiliser la mesure de la tension aux bornes de la batterie, ni programmer les fonctions
« delay » qui ont pour but de faire attendre le programme un temps donné.
80
6. LE DIMENSIONNEMENT DU SYSTEME
6.1. La démarche
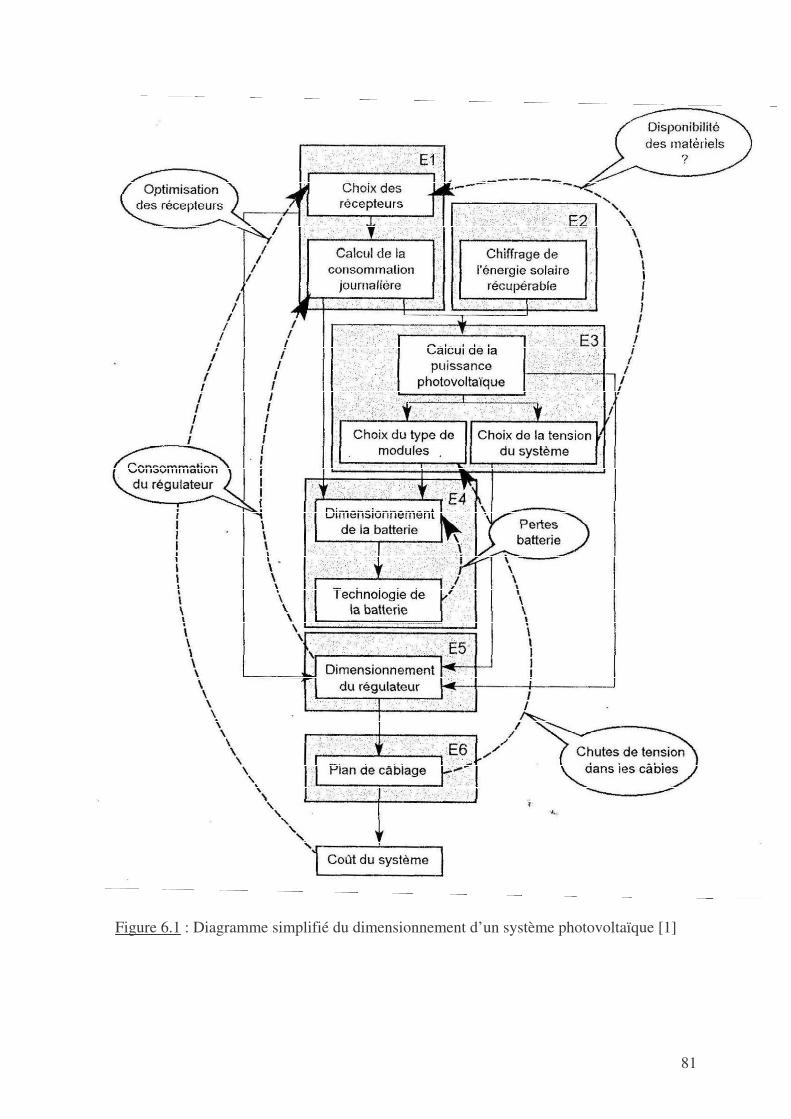
Tout ce que nous avons décrit au chapitre 2 n’est que théorique. Or le
dimensionnement réel du système est plus complexe car il y de nombreux paramètres
supplémentaires à prendre en compte et de multiples choix de technologie possibles. Chaque
étape du dimensionnement doit toujours rechercher la solution optimale et doit donc être
réalisée par bouclage avec les autres étapes. Le diagramme présenté sur la figure 3.1 résume
la marche à suivre pour dimensionner le système que nous voulons mettre en place. Voici les
différentes étapes à mettre en œuvre :
- Etape 1 : Détermination de nos besoins : tension, puissance et durée
d’utilisation des appareils,
- Etape 2 : Estimation de l’énergie solaire récupérable en fonction de
la situation géographique,
- Etape 3 : Définition du module photovoltaïque : tension de
fonctionnement, technologie utilisée, puissance totale,
- Etape 4 : Définition de la capacité et du choix de la batterie,
- Etape 5 : Choix du régulateur,
- Etape 6 : Plan de câblage : sections des câbles, …
81
Figure 6.1 : Diagramme simplifié du dimensionnement d’un système photovoltaïque [1]
82
6.2. L’évaluation de nos besoins (Etape 1)
Cette étape concerne tous les capteurs qui vont devoir fonctionner grâce à l’énergie
que va leur apporter la batterie. Cette énergie étant en courant continu, l’idéal est que ces
capteurs fonctionnent eux aussi en continu. Par chance, c’est le cas pour tous ceux dont nous
avons besoin et que nous allons utiliser.
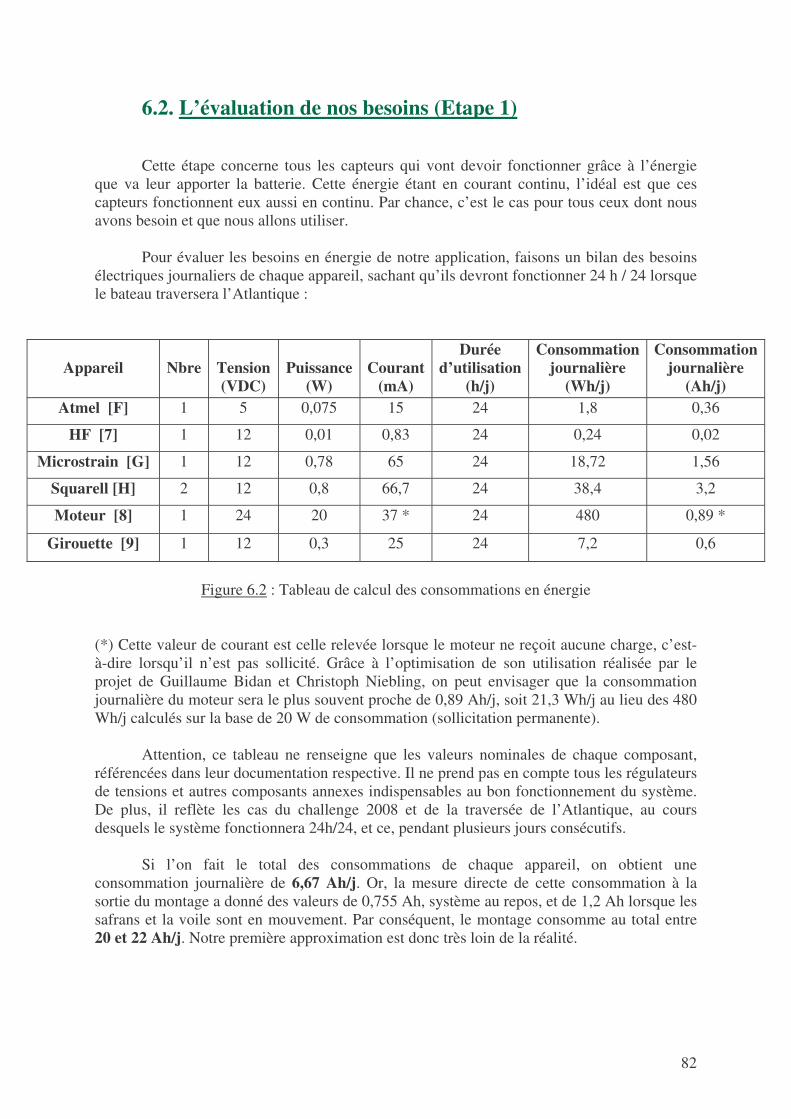
Pour évaluer les besoins en énergie de notre application, faisons un bilan des besoins
électriques journaliers de chaque appareil, sachant qu’ils devront fonctionner 24 h / 24 lorsque
le bateau traversera l’Atlantique :
Appareil Nbre Tension
(VDC)
Puissance
(W)
Courant
(mA)
Durée
d’utilisation
(h/j)
Consommation
journalière
(Wh/j)
Consommation
journalière
(Ah/j)
Atmel [F] 1 5 0,075 15 24 1,8 0,36
HF [7] 1 12 0,01 0,83 24 0,24 0,02
Microstrain [G] 1 12 0,78 65 24 18,72 1,56
Squarell [H] 2 12 0,8 66,7 24 38,4 3,2
Moteur [8] 1 24 20 37 * 24 480 0,89 *
Girouette [9] 1 12 0,3 25 24 7,2 0,6
Figure 6.2 : Tableau de calcul des consommations en énergie
(*) Cette valeur de courant est celle relevée lorsque le moteur ne reçoit aucune charge, c’est-
à-dire lorsqu’il n’est pas sollicité. Grâce à l’optimisation de son utilisation réalisée par le
projet de Guillaume Bidan et Christoph Niebling, on peut envisager que la consommation
journalière du moteur sera le plus souvent proche de 0,89 Ah/j, soit 21,3 Wh/j au lieu des 480
Wh/j calculés sur la base de 20 W de consommation (sollicitation permanente).
Attention, ce tableau ne renseigne que les valeurs nominales de chaque composant,
référencées dans leur documentation respective. Il ne prend pas en compte tous les régulateurs
de tensions et autres composants annexes indispensables au bon fonctionnement du système.
De plus, il reflète les cas du challenge 2008 et de la traversée de l’Atlantique, au cours
desquels le système fonctionnera 24h/24, et ce, pendant plusieurs jours consécutifs.
Si l’on fait le total des consommations de chaque appareil, on obtient une
consommation journalière de 6,67 Ah/j. Or, la mesure directe de cette consommation à la
sortie du montage a donné des valeurs de 0,755 Ah, système au repos, et de 1,2 Ah lorsque les
safrans et la voile sont en mouvement. Par conséquent, le montage consomme au total entre
20 et 22 Ah/j. Notre première approximation est donc très loin de la réalité.
83
6.3. L’énergie solaire récupérable (Etape 2)
6.3.1. L’orientation et l’inclinaison des panneaux
Afin de pouvoir récupérer le maximum d’énergie solaire, il est important de bien
placer les panneaux.
Dans notre cas, le bateau changeant sans arrêt de cap, l’orientation idéale des
panneaux vers l’équateur ne pourra ni être constante ni être réglée. Cependant, la répartition
que nous avons adoptée nous permet d’envisager une exposition au soleil pour au moins un
des deux côtés de la maquette et donc une récupération d’énergie minimale.
En ce qui concerne l’inclinaison des panneaux, une étude a démontré qu’en Europe,
elle est idéale lorsqu’elle est égale à la latitude du lieu augmentée de 10°. Ainsi, en France,
elle est de 60° par rapport à l’horizontale. [1] Les deux versants du bateau faisant chacun un
angle de 60° avec l’horizontale et en prenant en compte le tangage de celui-ci, l’inclinaison
moyenne des panneaux par rapport à l’horizontale reste très convenable.
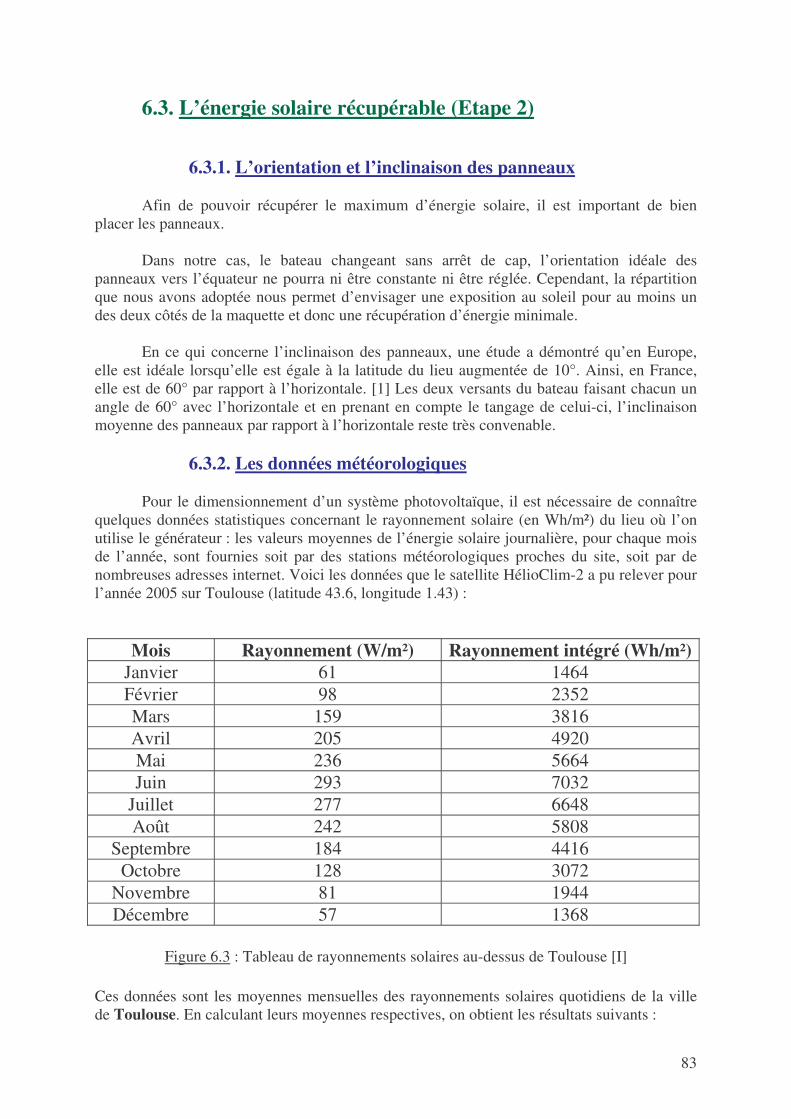
6.3.2. Les données météorologiques
Pour le dimensionnement d’un système photovoltaïque, il est nécessaire de connaître
quelques données statistiques concernant le rayonnement solaire (en Wh/m²) du lieu où l’on
utilise le générateur : les valeurs moyennes de l’énergie solaire journalière, pour chaque mois
de l’année, sont fournies soit par des stations météorologiques proches du site, soit par de
nombreuses adresses internet. Voici les données que le satellite HélioClim-2 a pu relever pour
l’année 2005 sur Toulouse (latitude 43.6, longitude 1.43) :
Mois Rayonnement (W/m²) Rayonnement intégré (Wh/m²)
Janvier 61 1464
Février 98 2352
Mars 159 3816
Avril 205 4920
Mai 236 5664
Juin 293 7032
Juillet 277 6648
Août 242 5808
Septembre 184 4416
Octobre 128 3072
Novembre 81 1944
Décembre 57 1368
Figure 6.3 : Tableau de rayonnements solaires au-dessus de Toulouse [I]
Ces données sont les moyennes mensuelles des rayonnements solaires quotidiens de la ville
de Toulouse. En calculant leurs moyennes respectives, on obtient les résultats suivants :
84
- Moyenne annuelle du rayonnement journalier = 168,4 W/m²/j
- Moyenne annuelle du rayonnement journalier intégré = 4042 Wh/m²/j
Il est important de noter que ces résultats ne seront utilisables que pour le challenge
2006. Les données météorologiques au niveau de la mer d’Irlande étant plus faibles, du fait de
la latitude du lieu et de l’ensoleillement moins important, nous avons refait les calculs de la
même manière afin d’avoir une idée générale de l’énergie solaire récupérable dans ce cas là et
nous avons obtenu les chiffres suivants :
- pour la ville de Llanon (Royaume-Uni, latitude 52.28, longitude -4.18)
moyenne annuelle du rayonnement solaire journalier = 161,4 W/m²/j
moyenne annuelle du rayonnement journalier intégré = 3873,6 Wh/m²/j [I]
- pour la ville de Wexford (Irlande, latitude, longitude)
moyenne annuelle du rayonnement solaire journalier = 162 W/m²/j
moyenne annuelle du rayonnement journalier intégré = 3888 Wh/m²/j [I]
Remarque : ces valeurs sont des moyennes annuelles. Pour un calcul plus précis de la
puissance du système pour le challenge 2006 et la traversée de la mer d’Irlande, il sera plus
judicieux de prendre les données de rayonnement correspondant aux périodes concernées.
6.4. La définition du module photovoltaïque (Etape 3)
6.4.1. Energie électrique produite par le module en une
journée
La batterie n’est qu’un composant qui permet de stocker l’énergie produite pour en
disposer en dehors des périodes de production photovoltaïque. Mais elle n’est pas une source
d’énergie en tant que telle. C’est pourquoi le module doit fournir toute l’énergie consommée
par le système, en prenant en compte les pertes à tous les niveaux.
La manière dont nous avons assemblé nos panneaux nous permet d’espérer atteindre
une puissance crête Pc d’environ 20 W. Le module va donc produire une énergie électrique
Eélec égale au produit de la puissance crête par le nombre N d’heures d’exposition aux
conditions STC : [1]
Eélec (Wh) = N (h) * Pc (Wc)
Mais, appliquer cette définition stricto sensu serait une grossière erreur. En effet, le
rayonnement est loin d’être constant pendant la période d’éclairement et à fortiori, il n’est pas
égal à 1000 W/m² en permanence. C’est pourquoi, afin d’estimer ce que produit le module
pendant une journée d’ensoleillement, on va d’abord assimiler l’énergie solaire au produit du
rayonnement 1000 W/m² aux conditions STC par un nombre d’heures équivalentes Ne : [1]
Esol (Wh/m²/j) = Ne (h/j) * 1000 (W/m²)
Ainsi, d’après les résultats du paragraphe 6.3, le rayonnement journalier du soleil est de 4042
Wh/m²/j sur Toulouse et de 3873,6 Wh/m²/j sur Llanon. [I] On en déduit que Ne (Toulouse) =
4,042 h/j et que Ne (Llanon) = 3,874 h/j.
85
On va alors pouvoir calculer la production réelle du module pendant une journée en
appliquant la nouvelle formule : [1]
Eélec (Wh/j) = Ne (h/j) * Pc (Wc)
On obtient donc les résultats suivants :
- pour Toulouse : Eélec = 80,84 Wh/j
- pour Llanon : Eélec = 77,48 Wh/j
Mais ils ne tiennent pas compte des pertes inhérentes à tous systèmes dans les conditions
réelles.
Remarque : les résultats que nous avons trouvés sont des résultats moyens sur l’année. Ils sont
valables pour une étude globale du système et sont données pour avoir un ordre de grandeur
de l’énergie électrique que l’on peut produire. Pour les challenges, les valeurs devront être
ajustées en fonction de la période de l’année à laquelle se feront les courses.
6.4.2. Prise en compte des pertes électriques
Ces pertes peuvent avoir de nombreuses origines différentes et affecter certains
paramètres du système.
6.4.2.1. Les différents types de pertes [2]
• L’inexactitude de la puissance nominale :
La puissance réelle produite par un panneau peut être différente de celle affichée sur la
documentation du constructeur.
• La salissure des panneaux :
Elle aura surtout lieu en mer, à cause de la salinité de l’eau qui risque de faire de taches sur les
panneaux.
• Les pertes en ligne :
Ce sont les chutes de tension qui se produisent entre la sortie du module et l’entrée de la
batterie. Celles-ci sont dues, d’une part, aux câbles selon leur longueur, leur section et le
courant transporté, et d’autre part, à la chute de tension lorsque la température augmente.
• Les pertes d’éclairement :
L’éclairement en début et en fin de journée étant faible, la tension fournie reste insuffisante
pour charger la batterie.
• Les pertes d’énergie dues aux batteries :
Il ne faut pas oublier que l’efficacité énergétique d’une batterie, rapport entre l’énergie
restituée et l’énergie reçue, n’est jamais parfaite et que son rendement n’est pas de 100 %.
6.4.2.2. Estimation des pertes
Parmi les pertes citées ci-dessus, beaucoup peuvent être réduites à leur minimum.
86
C’est le cas pour les pertes en ligne contre lesquelles on luttera par un câblage adéquat
(câbles les plus courts et les plus fins possibles) et par une température abaissée par l’air
marin. De plus, l’emploi du régulateur MPPT, dont la fonction est de réaliser un accord de
tension entre les panneau et la batterie en s’ajustant sur le point de puissance maximale,
évitera complètement les pertes en tension. Par ailleurs, les panneaux que nous avons utilisés
étant en silicium amorphe, ils réagiront mieux aux faibles expositions et seront insensibles
aux pertes d’éclairement.
Une remarque importante : toutes les pertes en ligne et les pertes d’éclairement ne
concernent que la tension. On estime quelles sont de 0,5 V dans les câbles et d’environ 1,5 V
à cause de l’échauffement [1]. Ainsi, en règle générale, nous retiendrons que les panneaux
photovoltaïques devant alimenter un système de tension nominale 12 V doivent avoirune tension au point de puissance maximale comprise entre 15 et 16 V (ce qui est le cas
pour notre système).
En ce qui concerne les pertes en courant, elles sont essentiellement introduites par les
salissures et l’efficacité de la batterie. Sachant que les salissures pourront être enlevées
régulièrement et donc seront minimisées, nous n’en avons pas tenu compte (efficacité de 1).
Quant aux batteries au plomb, on peut estimer que leur efficacité est de l’ordre de 0,9. [1] [3]
Toutes ces pertes sont chiffrées à travers un coefficient de pertes en courant Cp qui, pour notre
système est de 1×0,9 = 0,9.
6.4.2.3. Calcul de la puissance photovoltaïque du module
Le besoin journalier en énergie du système est défini par la formule suivante : [2]
Bj (Ah/j) = Ne (h/j) × Im (A) × Cp
On peut grâce à elle estimer le courant Im à la puissance maximale STC du module
photovoltaïque pour un besoin énergétique donné et en déduire la puissance photovoltaïque
nécessaire à l’application. Nous allons le faire pour les conditions requises pour les deux
challenges.
Dans un premier temps, examinons le cas du challenge 2006. Les données que nous
avons calculées au paragraphe 3.3.1 sont annuelles. Essayons d’être un peu plus précis et
mettons nous dans les conditions climatiques de Saint-Nicolas de la Grave au mois de juin.
Les relevés météorologiques de HélioClim 2 nous ont fournies une moyenne du rayonnement
journalier de 7333 Wh/m²/j (moyenne entre le 1er
et le 15 juin 2004). [I] On calcule donc :
Im = 21 / ( 7,333 × 0,9 ) = 3,18 A
A partir de cette intensité, on va pouvoir en déduire la puissance crête que le module va
devoir fournir au minimum, sachant que le système de capteurs à alimenter fonctionne sous
12 V :
Pphotovoltaïque = 12 × 3,18 � 38,2 Wc
87
Examinons maintenant le cas de la traversée de la mer d’Irlande. Les relevés
météorologiques nous donnent un rayonnement journalier entre le 1er
et le 30 juin 2004 de
5574 Wh/m²/j. [I] On a donc un courant Im de puissance maximale égal à :
Im = 21 / ( 5,574 × 0,9 ) = 4,2 A
On obtient donc une puissance photovoltaïque minimale du système de :
Pphotovoltaïque = 12 × 4,2 � 50,2 Wc
On se rend bien compte que les panneaux que nous avons pris pour faire cette étude
ont une puissance très inférieure à celle nécessaire pour rendre l’application totalement
autonome. Pour y remédier, sachant que nous les avons branché tous les quatre en parallèle, il
faudrait acheter de nouveaux panneaux ayant une puissance nominale évaluée à environ50 / 4 = 12,25 W. Nous avons donc fait des recherches pour trouver tous les modules qui
présentent cette caractéristique sur le marché et qui sont susceptibles de s’adapter aux
dimensions de la coque du voilier (cf. annexe). La plupart d’entre eux sont en silicium
cristallin car son rendement est plus important. Libre à ceux qui reprendront le projet l’année
prochaine de choisir un des types de panneaux que nous avons retenus, voire de faire des
recherches plus poussées, ne fonction des technologies désirées.
6.5. Le dimensionnement du stockage et du régulateur
(Etapes 4 et 5)
6.5.1. Le dimensionnement de la batterie
Nous rappelons que la batterie est un moyen de stockage énergétique « tampon », qui
permet de palier aux problèmes engendrés par les variations climatiques (mauvais temps,
nuages, …) et par les horaires d’utilisation (fonctionnement nocturne, tombée de la nuit, …).
C’est pourquoi elle est un élément essentiel au bon fonctionnement du système.
Son dimensionnement est donc primordial. Toutefois, à l’heure actuelle, nous
disposons de deux batteries de 7 Ah chacune, qui, mises en parallèle, débitent 14 Ah. Ceci est
tout à fait suffisant pour assurer une autonomie énergétique totale du voilier pour l’épreuve du
challenge 2006. Mais ce n’est pas suffisant pour une navigation du voilier de trois ou quatre
jours, en autonomie complète, comme il est prévu de le faire pour la traversée de la mer
d’Irlande.
Calculons donc la capacité que devrait avoir la batterie dans les conditions de
navigation les plus défavorables pour cette traversée. Dans ces conditions, le voilier doit
pouvoir être autonome pendant quatre jours, avec une absence d’éclairement (on considèrera
que les panneaux ne fonctionnent pas).
On appelle Nja , nombre de jours d’autonomie sans apport solaire, la durée pendant laquelle la
batterie doit être capable d’alimenter seule le système. Cette durée nous permet de calculer la
capacité nécessaire de la batterie par la formule suivante : [1]
Cn (Ah) = Nja (j) × Bj (Ah/j)
88
Pour une durée d’autonomie sans apport solaire de quatre jours et un besoin journalier de 21
Ah/j, cette capacité est de 84 Ah. Mais cette capacité n’est pas la capacité nominale inscrite
sur les caractéristiques des batteries. Pour obtenir cette dernière, il faut prendre en compte la
température et la profondeur de décharge.
6.5.1.1. Profondeur de décharge
En pratique, pour une durée de 4 jours d’autonomie, on applique un coefficient de
profondeur de décharge PD de 0,7 à 0,8 selon les modèles de batterie. Dans notre cas, pour
des batteries au plomb, on prendra PD = 0,7. [1][5]
6.5.1.2. Effet de la température
Dans le paragraphe dédié à la batterie, nous avons vu que les réactions chimiques de
charge et de décharge sont ralenties par le froid, ce qui implique une baisse de la capacité de
la batterie.
Cependant, compte tenu des conditions de navigation envisagée pour la traversée de la mer
d’Irlande, la température à l’intérieur du bateau ne devrait pas passer en dessous de 25°C.
Ainsi, le coefficient réducteur de la capacité par la température RT peut être considéré
comme optimal, c’est-à-dire égal à 1.
6.5.1.3. Calcul de la capacité nominale
En tenant compte des deux coefficients réducteurs que nous avons calculés
précédemment, on peut calculer la capacité nominale comme suit : [1]
TD
n
RP
CC
×=
Après calcul, on trouve une capacité de 120 Ah soit 60 Ah par batterie puisque nous aurons
deux batteries branchées en parallèle.
Mais attention, ce cas de figure est très peu envisageable. A cela, deux raisons
essentielles :
- la traversée étant prévue pour l’été 2007, l’éclairement ne pourra jamais être nul
pendant quatre jours de suite.
- même avec un très faible éclairement, les panneaux au silicium amorphe
récupèreront toujours une quantité d’énergie minimale.
Pour toutes ces raisons, la capacité que nous venons de calculer est beaucoup trop pessimiste.
Mais elle doit quand même être prise en compte dans le cas d’une panne du module
photovoltaïque, si l’on veut éviter tout manque d’énergie.
6.5.2. Le dimensionnement du régulateur de charge
La technologie de régulateur MPPT que nous avons choisie est sans doute la meilleure
pour ce genre de système. En effet, ce type de régulateur optimise la charge de la batterie en
recherchant en permanence le point de puissance maximale. De plus, il stoppe la charge
89
lorsque celle-ci est terminée. Enfin, il empêche tout retour de courant dans les panneaux grâce
à la diode Schottky.
Par ailleurs, il a été dimensionné pour alimenter l’ensemble des capteurs avec une
tension nominale de 12 V continue et il pourra supporter sans problème le courant maximal
fourni par le module photovoltaïque dans des conditions idéales d’éclairement.
6.6. Le plan du câblage (Etape 6)
Dans cette dernière partie, nous allons étudier le câblage de l’ensemble {module-
régulateur-batteries}.
Pour cela, il faut prendre en compte deux facteurs :
- les possibilités de chutes de tension dues essentiellement à la longueur et à la section
des câbles,
- les diamètres des câbles dont nous disposons.
Pour palier à ce premier problème, il est primordial de réduire au maximum la
longueur des câbles lors de l’assemblage des différents ensembles, et notamment lors de la
fixation des panneaux sur le voilier.
Quant au second problème, le courant circulant dans notre système étant faible, la
section des fils peut rester petite. De plus, les pistes de la carte électronique du régulateur de
charge ont été dimensionnées à partir du même raisonnement.
90
7. CONCLUSION
Comme nous venons de vous le détailler, la partie théorique, concernant l’électronique
et le système photovoltaïque, a été entièrement réalisée.
Nous avons de plus réalisé le schéma de la carte du convertisseur statique, la création du
circuit imprimé et le montage et la soudure des différents composants, nous avons également
programmé le microcontrôleur réalisant la partie commande du MPPT. Tous ces composants
ont été simulés et nous espérons faire des expériences avant le challenge avec deux panneaux
situés sur le même flanc du bateau, les batteries et le MPPT.
Dans le futur, quelques modifications seront à apporter au niveau du choix des
panneaux par rapport aux batteries, par rapport à la mise en parallèle de tous les panneaux et
au niveau de la technologie de la batterie lors de challenges demandant une autonomie plus
importante.
Nous espérons donc que ce rapport sera suffisamment exhaustif pour faciliter ces
changements à envisager.
91
8. ANNEXES
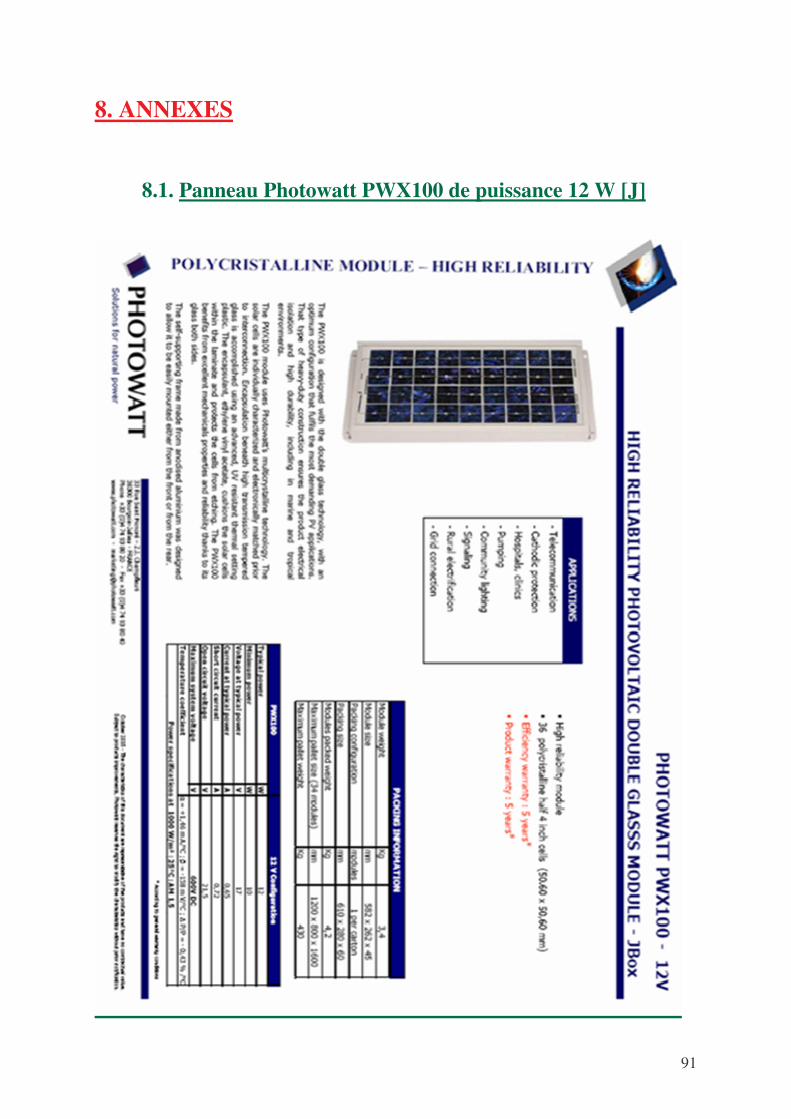
8.1. Panneau Photowatt PWX100 de puissance 12 W [J]

92
8.2. Panneau Héliotechnology H245 de puissance 20 W [K]
93
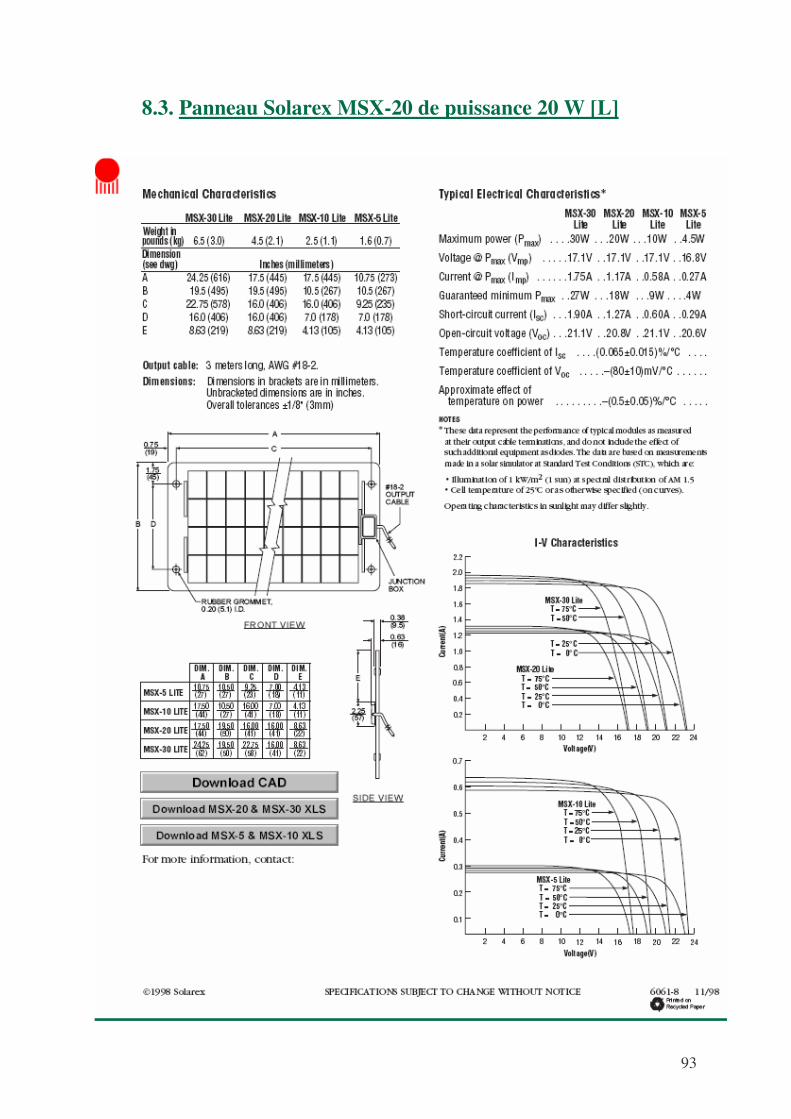
8.3. Panneau Solarex MSX-20 de puissance 20 W [L]
94
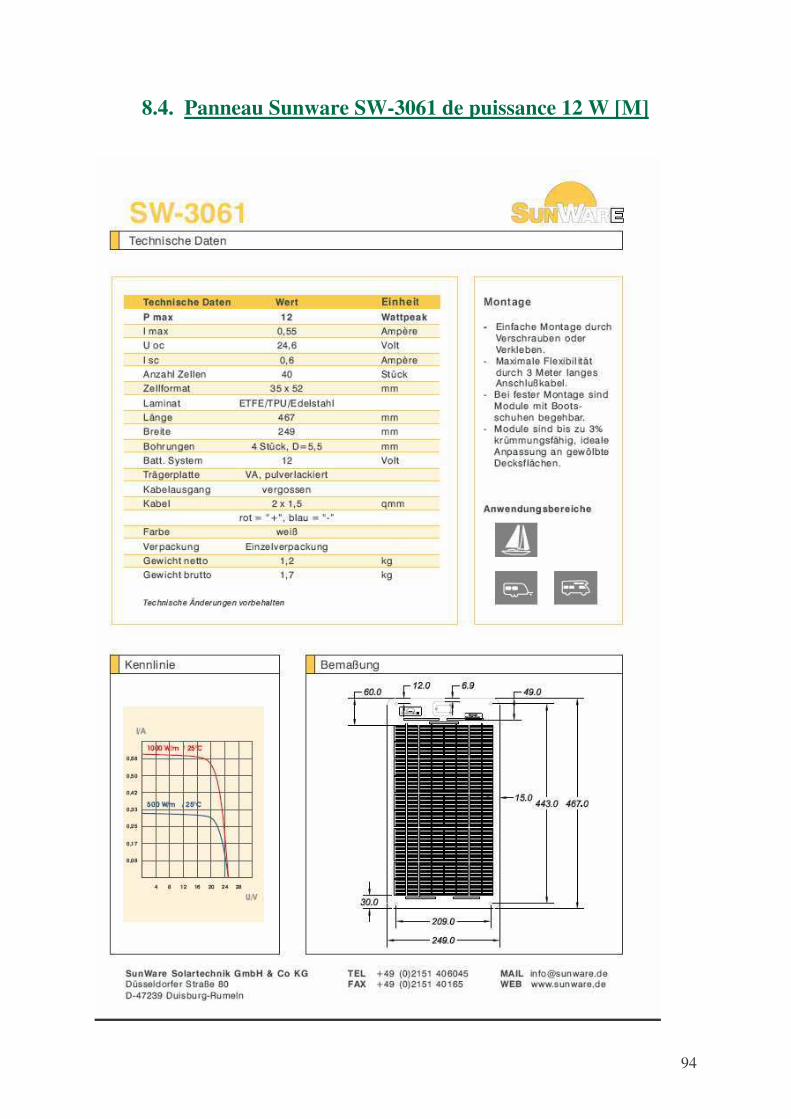
8.4. Panneau Sunware SW-3061 de puissance 12 W [M]
95
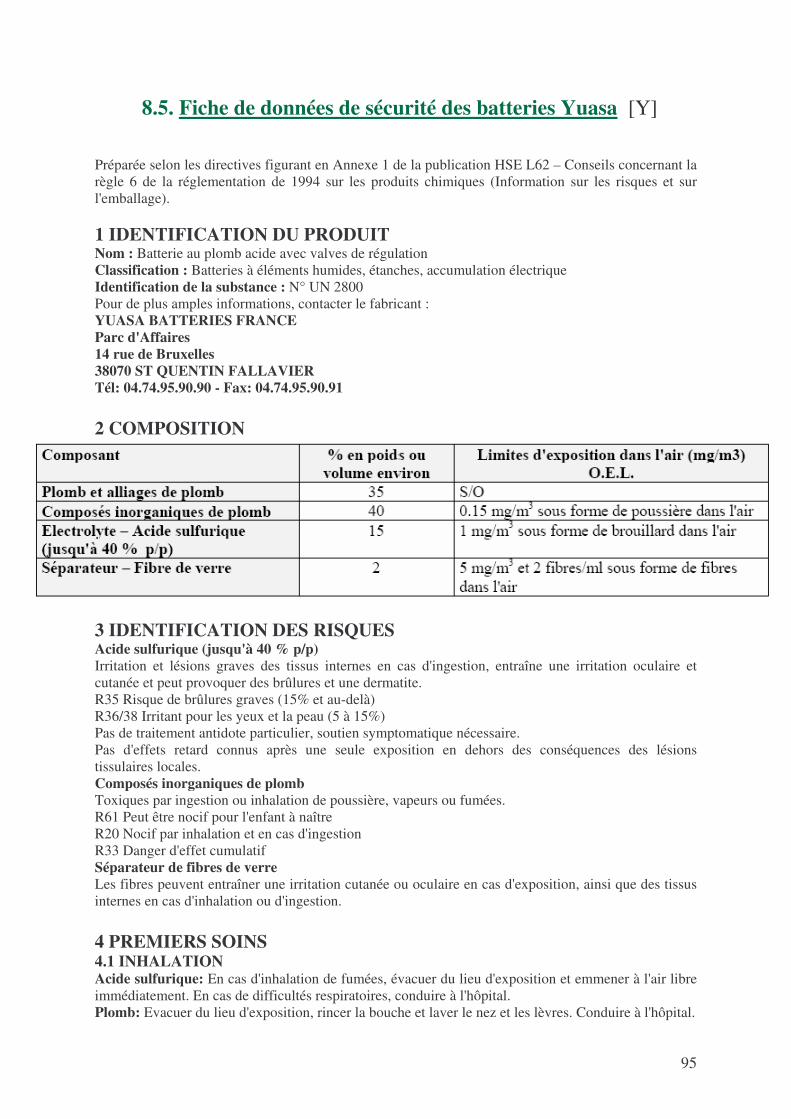
8.5. Fiche de données de sécurité des batteries Yuasa [Y]
Préparée selon les directives figurant en Annexe 1 de la publication HSE L62 – Conseils concernant la
règle 6 de la réglementation de 1994 sur les produits chimiques (Information sur les risques et sur
l'emballage).
1 IDENTIFICATION DU PRODUITNom : Batterie au plomb acide avec valves de régulation
Classification : Batteries à éléments humides, étanches, accumulation électrique
Identification de la substance : N° UN 2800
Pour de plus amples informations, contacter le fabricant :
YUASA BATTERIES FRANCE
Parc d'Affaires
14 rue de Bruxelles
38070 ST QUENTIN FALLAVIER
Tél: 04.74.95.90.90 - Fax: 04.74.95.90.91
2 COMPOSITION
3 IDENTIFICATION DES RISQUESAcide sulfurique (jusqu'à 40 % p/p)Irritation et lésions graves des tissus internes en cas d'ingestion, entraîne une irritation oculaire et
cutanée et peut provoquer des brûlures et une dermatite.
R35 Risque de brûlures graves (15% et au-delà)
R36/38 Irritant pour les yeux et la peau (5 à 15%)
Pas de traitement antidote particulier, soutien symptomatique nécessaire.
Pas d'effets retard connus après une seule exposition en dehors des conséquences des lésions
tissulaires locales.
Composés inorganiques de plombToxiques par ingestion ou inhalation de poussière, vapeurs ou fumées.
R61 Peut être nocif pour l'enfant à naître
R20 Nocif par inhalation et en cas d'ingestion
R33 Danger d'effet cumulatif
Séparateur de fibres de verreLes fibres peuvent entraîner une irritation cutanée ou oculaire en cas d'exposition, ainsi que des tissus
internes en cas d'inhalation ou d'ingestion.
4 PREMIERS SOINS4.1 INHALATIONAcide sulfurique: En cas d'inhalation de fumées, évacuer du lieu d'exposition et emmener à l'air libre
immédiatement. En cas de difficultés respiratoires, conduire à l'hôpital.
Plomb: Evacuer du lieu d'exposition, rincer la bouche et laver le nez et les lèvres. Conduire à l'hôpital.
96
Fibres de verre: Si des fibres ont été inhalées, emmener à l'air libre. Si l'irritation persiste, conduire à
l'hôpital.
4.2 INGESTIONAcide sulfurique: Rincer la bouche avec une grande quantité d'eau, ne pas laisser avaler.
Faire boire ensuite une grande quantité d'eau. NE PAS FAIRE VOMIR.
Conduire à l'hôpital immédiatement.
Composés de plomb: Conduire à l'hôpital immédiatement.
4.3 EXPOSITION OCULAIREAcide sulfurique: Rincer immédiatement avec une grande quantité d'eau pendant au moins 15
minutes, en maintenant l’œil ouvert si nécessaire. Conduire à l'hôpital.
Composés de plomb: Rincer immédiatement avec une grande quantité d'eau pendant au moins 15
minutes, en maintenant l’œil ouvert si nécessaire. Conduire à l'hôpital.
4.4 EXPOSITION CUTANEEAcide sulfurique: Laver la peau immédiatement avec une grande quantité d'eau pendant au moins 15
minutes. Retirer tous les vêtements contaminés, qui devront être lavés soigneusement avant de pouvoir
être réutilisés. Retirer et jeter les chaussures contaminées.
Composés de plomb: Laver la peau immédiatement à l'eau et du savon.
5 MESURE DE LUTTE CONTRE L'INCENDIELes batteries en cours de recharge peuvent émettre de l'hydrogène gaz qui est fortement inflammable
et forme des mélanges explosifs dans l'air entre 4% et 76% et inflammables par une étincelle de
n'importe quelle tension, en particulier venant des batteries elles-mêmes.
Les batteries en cours de recharge doivent être isolées de la source d'alimentation avant d'essayer
d'éteindre un feu. Pour ce faire, couper l'alimentation avant de débrancher les batteries de la source
d'alimentation.
Les batteries en cours d'utilisation font partie d'un circuit électrique. En conséquence, ne jamais utiliser
d'eau pour éteindre un feu.
Les batteries endommagées peuvent laisser apparaître la couleur (grise) des plaques négatives. Celles-
ci peuvent prendre feu si on les laisse sécher. Ces plaques peuvent être imbibées d'eau après avoir
déconnecté la batterie de tous les circuits électriques.
Types d'extincteurs à utiliser: CO2, Poudre inerte.
Produits de dégradation dangereux: Monoxyde de carbone, dioxyde de soufre, anhydride sulfurique,
fumée et vapeur de plomb, fumées toxiques provenant de la dégradation des matériaux formant le
boîtier de la batterie.
Précautions particulières: Utiliser un appareil respiratoire autonome et des vêtements de protection
totalement résistants aux acides.
6 MESURES EN CAS DE FUITE ACCIDENTELLECes batteries sont conçues de façon à ne pas présenter de fuites en conditions normales. Si toutefois
l'électrolyte venait à s'écouler d'une batterie pour quelque raison que ce soit, l'absorber avec du sable
sec, de la terre ou autre matériau inerte. Ne pas le laisser pénétrer dans les canalisations d'évacuation.
Si possible, neutraliser l'électrolyte qui fuit avec de la soude calcinée, du bicarbonate de sodium, de la
poudre de carbonate de sodium ou de calcium puis laver à grande eau. Recueillir les matériaux et les
placer dans un conteneur inerte étanche pour les mettre au rebut, voir la section 13.
Les matériaux à base de plomb exposés doivent être placés dans un conteneur étanche inerte pour être
mis au rebut, voir la section 13.
7 MANIPULATION ET STOCKAGEStocker les batteries dans un endroit frais et sec présentant une surface étanche. Les stocker dans un
endroit couvert, à l'abri des intempéries. Les protéger des détériorations physiques et d'une exposition
à des solvants organiques. Ne pas laisser d'objets métalliques entrer en contact avec les deux bornes en
même temps, sous peine d'entraîner une détérioration, de causer des blessures ou de provoquer une
étincelle, voir la section 5.

97
Les batteries de grande taille doivent être manipulées et déplacées en utilisant des moyens mécaniques,
afin de prévenir tout risque de blessure.
8 CONTROLE DE L'EXPOSITION / PROTECTION DU PERSONNELEn conditions normales, lorsqu'il n'y a aucune détérioration ni trace visible de dépôt liquide ou solide
sur les batteries, celles-ci peuvent être manipulées sans moyen supplémentaire de protection des
personnes. En cas de signes de détérioration ou de dépôts liquides ou solides, des gants en caoutchouc
et des vêtements résistants aux acides doivent être portés pour manipuler les batteries et les emballages
détériorés afin de se protéger contre les effets des électrolytes éventuellement présents. Si de grandes
quantités sont présentes, porter des lunettes protectrices contre la poussière et un masque anti-
poussière.
9 PROPRIETES PHYSIQUES ET CHIMIQUESLe produit non endommagé est un objet manufacturé contenu dans un boîtier en plastique inerte qui
brûle lorsqu'il est soumis à des températures élevées. Certains types de batteries sont fabriqués en
plastique ignifugé (FR), voir les caractéristiques techniques.
Les batteries en cours de recharge peuvent émettre de l'hydrogène qui est fortement inflammable et
forme des mélanges explosifs dans l'air, voir la section 5.
L'électrolyte est un liquide clair peu ou pas odorant, qui contient jusqu'à 40% d'acide sulfurique dans
de l'eau dans une batterie entièrement chargée. L'électrolyte qui fuit peut sécher pour former des taches
blanches ou de couleur différente, généralement verte ou marron si les métaux ont été attaqués, qui
peuvent être acides.
Dans les batteries endommagées, les plaques de plomb peuvent être grises ou marrons, avec plus ou
moins de blanc. Les matériaux gris peuvent s'enflammer si on les laisse sécher.
10 STABILITE ET REACTIVITELe produit non endommagé reste stable jusqu'à 60°C, voir la section 9.
11 INFORMATIONS TOXICOLOGIQUESAcide sulfurique: DL50 orale: 2140 mg/kg, CL50 chez le rat 0.51 mg/l par inhalation
Composés de plomb: Pas de données spécifiques
12 INFORMATIONS ECOLOGIQUESAcide sulfurique: Toxique pour les poissons et les algues. Des concentrations supérieures à 1.2
mg/l sous la forme d'acide sulfurique à 100% peuvent être mortelles pour les poissons. La baisse du
pH en dessous d'environ 5 provoquerait la mort de la faune aquatique.
Composés de plomb: Pas de données spécifiques
13 INFORMATIONS RELATIVES A LA MISE AU REBUTBatteries endommagées et intactes: Les stocker dans un conteneur inerte étanche et les envoyer à
une usine métallurgique pour recyclage. Les batteries doivent être traitées comme des déchets
spéciaux, c'est pourquoi il convient de contacter le fournisseur qui vous donnera les informations
nécessaires.
Electrolyte répandu absorbé: Le placer dans un conteneur inerte étanche. Le traiter comme un
déchet spécial. Contacter le fournisseur qui vous donnera les informations nécessaires.
14 INFORMATIONS RELATIVES AU TRANSPORTLes batteries VRLA (voir la section 1) fournies par Yuasa Batteries France sont EXEMPTEES des
exigences:
14.1 des réglementations sur les produits Dangereux IATA, 30éme édition, entrées en vigueur le
01/01/96 car elles satisfont la Clause Particulière ICAO A67 en tant que classe 8, Groupe III, UN N°
2800, Batteries à éléments humides, étanches, accumulation électrique
98
14.2 du Code Maritime international sur les produits dangereux (IMDG: International Maritime
Dangerous Goods) Amendement 27-94, qui intègre la Clause Particulière ICAO A67, en ce qui
concerne les conditions particulières. Les autres conditions générales appropriées s'appliquent.
14.3 de la Convention Européenne concernant le Transport International des Produits Dangereux par
la Route (ADR).
15 INFORMATIONS RELATIVES A LA REGLEMENTATIONLes batteries fournies par Yuasa Batteries France sont soumises à la réglementation 1994 sur les
Batteries et Accumulateurs (Contenant des Substances Dangereuses) et elles sont marquées
conformément aux exigences de la prescription 4.
16 AUTRES INFORMATIONSPour garantir l'utilisation en toute sécurité des Batteries VRLA fournies par Yuasa Batteries France,
les précautions suivantes doivent être prises:
16.1 Ne jamais installer les batteries dans une enceinte étanche aux gaz, car des gaz peuvent être émis
pendant l'utilisation.
16.2 Les batteries doivent toujours être rechargées sur un système de recharge régulé en tension en
assurant une aération appropriée, afin d'éviter l'accumulation de gaz inflammables. Contacter votre
fournisseur de batteries YUASA qui vous conseillera.
16.3 Ne jamais court-circuiter les bornes de la batterie car les étincelles et les arcs produits peuvent
blesser le personnel et constituent un risque d'incendie.
16.4 Ne pas recharger les batteries au-dessus de 50°C, ni décharger ou stocker au-dessus de 60°C.
16.5 Dans des conditions extrêmes de dysfonctionnement du matériel de recharge et/ou de
défaillance de la batterie, des conditions de haute tension et de températures élevées peuvent
se produire entraînant l'émission de sulfure d'hydrogène (H2S) toxique. Si vous le détectez à
son odeur d'oeuf pourri (à des concentrations extrêmement faibles), débrancher le matériel de
recharge, évacuer tout le personnel de la zone et bien aérer. Prendre conseil avant d'essayer de
recommencer à recharger.
SERVICE TECHNIQUE 25/08/2005
99
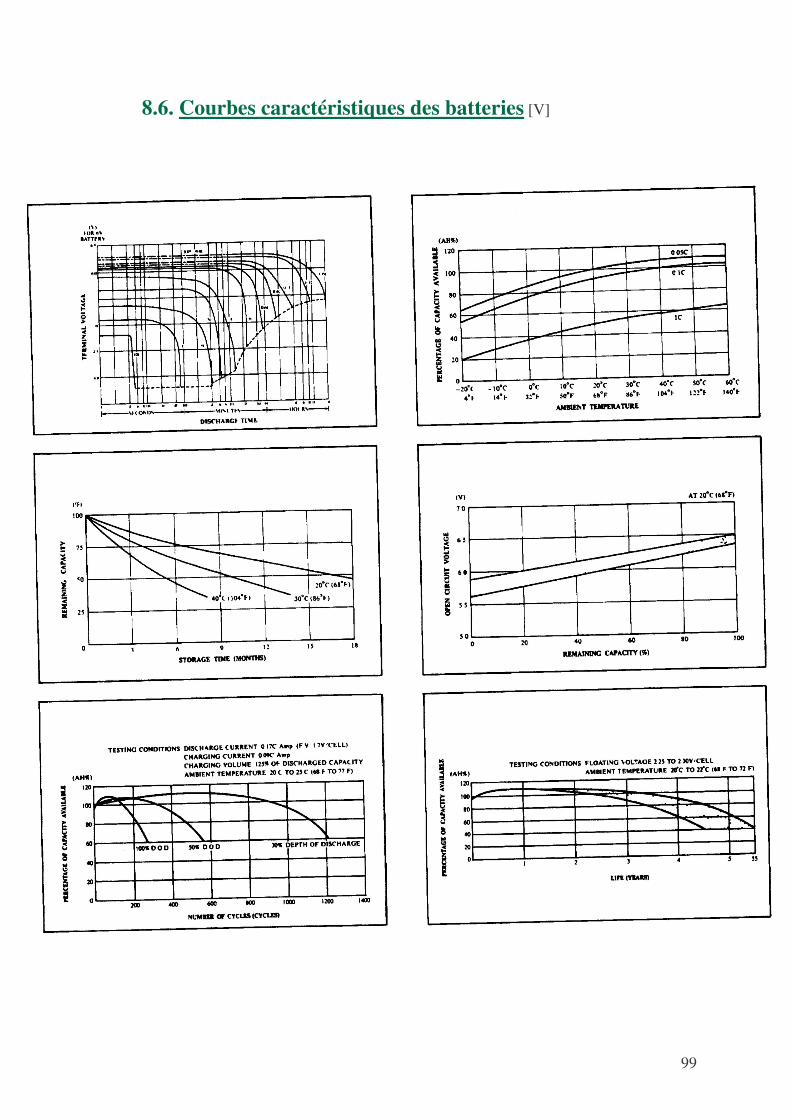
8.6. Courbes caractéristiques des batteries [V]
100
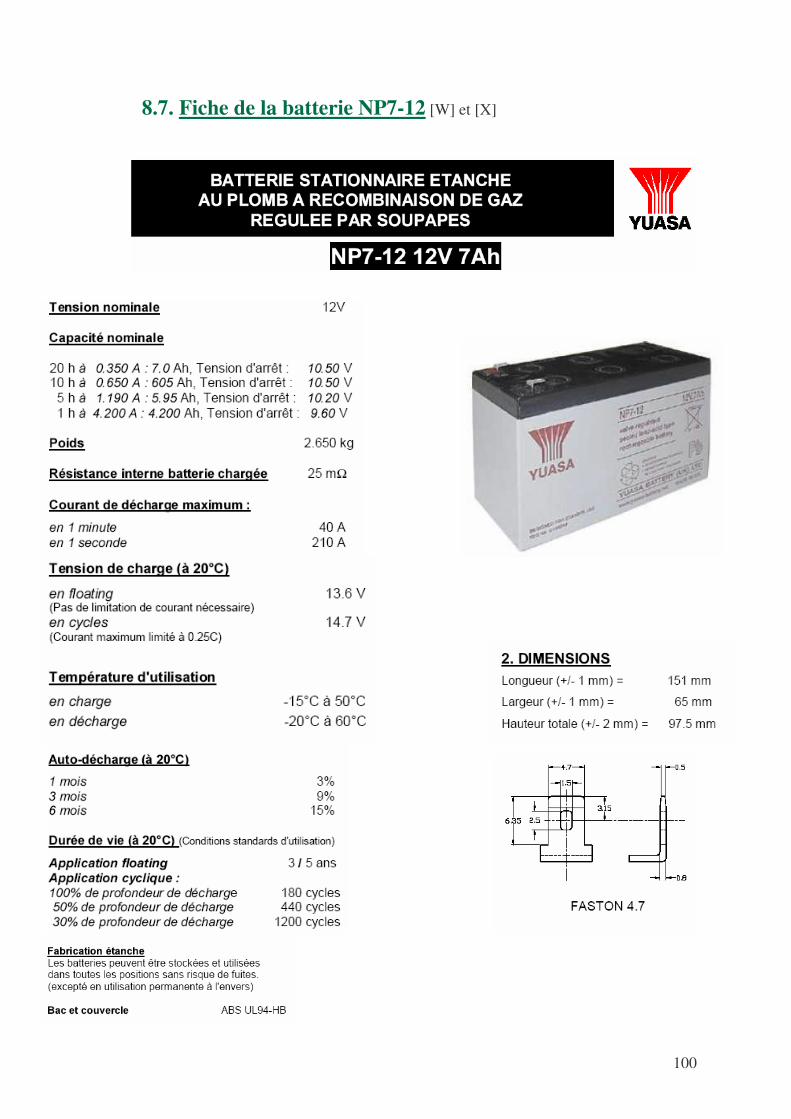
8.7. Fiche de la batterie NP7-12 [W] et [X]
101
8.8. Programme MPPT algorithme ConductanceIncrémentielle [12] [d] [13] [14]
/*********************************************************************PROGRAMME MPPT ALGORITHME CONDUCTANCE INCREMENTIELLE
*********************************************************************/
/* -------Including Files: ----------------------------------------- */
#include <REG167.H> /* Register defin for C167 */#include <INTRINS.H> /* Prototyping of specific Funktionen
for C176*/
#define num1 1012#define num2 1022
/*Declaration des variables et des constantes*/unsigned duty, mcount, ncount;float V_batt,Vin1,Vin2,Iin1,Iin2,G,dI,dV,dG,ero,dPW1;sbit P71=P7^1;sbit DP71=DP7^1;
/*--------------------------Initialisation du PWM-----------------------*/
void int_pwm (void){P71=0; /*Fonction XOR entre sorties PWM et valeurs initiales des brochesde sortie*/DP71=1; /*Broche 1 du port 7 en sortie*/PM1=1; /*Broche 1 crée un PWM centré*/
/*Initialisation du rapport cyclique (qu'on choisit arbitrairement de50%)*/PP1=500; /*Periode du PWM = 50 µs-théoriquemt il faudrait mettre 499*/PW1=250; /*Periode "haute" du PWM à l'état initial : rapport cycliqueinitial de 50%*/
PEN1=1; /*Signal de sortie dispo sur la broche 1*/PTR1=0; /*On ne démarre pas de suite le PWM-Timer 1*/PIE1=1; /*Autorisation des interruptions sur la voie 1*/
dPW1=50; /*Variation de PW1*/}
/*-----------Attente de 20 microsecondes----------------------------*/void delay_20us(void){
}
/*------------Attente de 100 ms--------------------------------------*/void delay_100ms(void){}
/*------------Attente de 200 ms---------------------------------------*/void delay_200ms(void){}
102
/*--------Augmentation du rapport cyclique-----------------------------*/void incduty(void){
/* Test : peut-on faire la modif voulue ?*/if(PW1-dPW1>0){PW1=PW1-dPW1;return;}
}
/*---------------Diminution du rapport cyclique------------------------*/void decduty(void){
/* Test : peut-on faire la modif voulue ?*/if(PW1+dPW1<PP1){PW1=PW1+dPW1;return;}
}
/*----------Demarrage conversion analogique/numerique-------------------*/void start_conv(void){
delay_20us();ADST=1; /*Lancement de la conversion*/while(ADBSY){} /*Tant que la conversion n'est pas finie : on ne fait
rien*/delay_100ms();
}
/*--------Recuperation tension aux bornes de la batterie----------------*/void get_mesure_batt(void){
V_batt=(ADDAT&0x3FF);/*Opération logique permet de ne récupérer queles bits ADRES du registre ADDAT*/
return;}
/*--------Recuperation tension initiale aux bornes des panneaux---------*/void get_Vin1(void){
Vin1=(ADDAT&0x3FF);/*Opération logique permet de ne récupérer que lesbits ADRES du registre ADDAT*/
return;}
/*-------Recuperation tension a l'instant suivant aux bornes des panneaux*/void get_Vin2(void){
Vin2=(ADDAT&0x3FF);/*Opération logique permet de ne récupérer que lesbits ADRES du registre ADDAT*/
return;}
/*------Recuperation courant initial issu des panneaux-------------------*/void get_Iin1(void){
Iin1=(ADDAT&0x3FF);/*Opération logique permet de ne récupérer que lesbits ADRES du registre ADDAT*/
return;}
/*------Recuperation courant a l'instant suivant issu des panneaux-------*/void get_Iin2(void){
103
Iin2=(ADDAT&0x3FF);/*Opération logique permet de ne récupérer que lesbits ADRES du registre ADDAT*/
return;}
/*--Test et reaction en fonction de la variation du courant issu despanneaux*/void testCourant(void){
/*Cas 1 : courant constant-> on ne fait rien !*/if (dI==0){return;}
/*Cas 2 : courant + important-> on augmente le rapport cyclique*/if (dI>0){incduty();return;}
/*Cas 3 : courant - important-> on diminue le rapport cyclique*/if (dI<0){decduty();return;}
}
/*-Test et reaction en fonction variation conductance et conductanceincrementielle-*/void testConductance(void){
/*Cas 1 : la conductance incrémentielle et la conductance (en valeurabsolue) different de moins de 1%*/
if ( dG == - G || ero <= 0.01){delay_100ms();return;}
/*Cas 2 : la conductance incrémentielle est inférieure à l'oppose dela conductance = dP/dV > 0*/
if ( dG < - G) {decduty();return;}
incduty();return;
}
/*------Conversion (en analogique ???) de la tension aux bornes de labatterie------*/void mesure_batt(void){
/*module de conversion batterie (voie 0) on*/ADCON=0x00;
/*on demarre la conversion*/start_conv();
/*on récupère la valeur de la tension aux bornes de la batterie*/get_mesure_batt();
}
104
/* ------ Programme principal -------------------------------------------*/void main (void){
again: /* Permet au programme de revenir à cet endroit du code s'iln'y a pas besoin de charger la batterie*/
int_pwm();/*Initialisation PWM*/mesure_batt();/*Mesure tension batterie*/
/*Test : la batterie a-t-elle besoin d'etre chargee ?*//*if ( V_batt>= num1 || V_batt<= num2) {
delay_200ms;goto again;}
/*Processus de charge de la batterie*/
PTR1=1; /*Lancement du PWM*/ADCON=0x01;/*module de conversion pour Vin1 (voie 1) on*/start_conv();/*on demarre la conversion*/get_Vin1();/*on récupère la valeur de la tension aux bornes du
panneau*/
ADCON=0x02;/*module de conversion pour Iin1 (voie 2) on*/start_conv();/*on demarre la conversion*/get_Iin1();/*on récupère la valeur de la tension aux bornes du
panneau*/
while (1) /*Boucle infinie */{char n;
for (n=0;n<256;n++){
ADCON=0x01;/*module de conversion pour Vin2 (voie1) on*/
start_conv();/*on demarre la conversion*/get_Vin2();/*on récupère la valeur de la tension aux
bornes du panneau*/
ADCON=0x02;/*module de conversion pour Iin2 (voie2) on*/
start_conv();/*on demarre la conversion*/get_Iin2();/*on récupère la valeur de la tension
aux bornes du panneau*/
G=Iin2/Vin2;dV=Vin2-Vin1;dI=Iin2-Iin1;
if (dV<0){dG=dI/dV;
105
ero = dG + G ; /*définition de la marged'erreur entre la conductance et la conductance incrémentielle*/
if (ero<0){ero=-ero;} /*On s'impose que la marge d'erreur
soit positive*/testConductance();goto swap;}
if (dV>=0){testCourant();}
swap :
Iin1=Iin2;Vin1=Vin2;
}
if (n==255){PTR1=0; /*Arret du signal PWM*/break;}/*Permet de sortir du while et de retourner mesurer la
tension de la batterie*/
}}/* -- Fin du programme ----------------------------------------------- */
106
9. BIBLIOGRAPHIE
[*] entretien avec M. Budinger.
Ouvrages
[1] Anne Labouret, Michel Villoz « Energie solaire photovoltaïque, le manuel du
professionnel », édition Dunod, 2003.
[2] Anne Labouret, Pascal Cumunel, Jean-Paul Braun, Benjamin Faraggi « Cellules solaires,
les bases de l’énergie photovoltaïque », édition ETSF.
[3] Luc Chancellier, Eric Laurent « L’électricité photovoltaïque », collection « Le point sur »,
1995.
[4] Alain Ricaud « Photopiles solaires, de la physique de la conversion photovoltaïque aux
filières, matériaux et procédés », édition Presses polytechniques et universitaires romandes,
1997.
[5] Jacques Bernard « Energie solaire, calculs et optimisation », édition Ellipses
[6] Bernard Equer « Energie solaire photovoltaïque, vol 1 et 2 », édition Ellipses
[7] Dépliant du module HF, présent dans le classeur des documentations mis à notre
disposition
[8] Dépliant du moteur, présent dans le classeur des documentations mis à notre disposition
[9] Dépliant de la girouette, présent dans le classeur des documentations mis à notre
disposition
[10] UNI-SOLAR, Solar Electric Module US-5, Owner’s Manual & Installation Guide
[11] Undergraduate thesis Solar Panel Maximum Power Point Tacker de NGuyen (Université
de Queensland, Australie)
Programmation microcontrôleur C167 :
[12] BE6 électronique numérique 2A ENSICA + correction
[13] datasheets du C167(le 1er concerne comment programmer le C 167 alors que le 2nd
donne les caractérsitiques électriques, mécaniques, thermiques, de ce composant électronique)
[14] datasheet du microcontrôleur utilisé dans la thèse (PIC16F87X)
Rapports de PIP précédents
[15] Julien Boyer, Marc Pirat « Microtransat », année 2004-2005
[16] Jérémy Duny, Paul Chaubet, Nicolas Leclert, Pierre Duval « Voiture solaire
radiocommandée », année 2004-2005
[17] Dossier Microtransat 2004
Sites internet
Pour les panneaux solaires
[A] http://www.pv-forum.net/fhtml/fze03.htm
107
[B] http://www.planete-sciences.org/midi-pyrenees/solaire/ProjetType/ProjetType.php
[C] http://www.lei.ucl.ac.be/~matagne/SOLAIRE/SEM02/S02P11.HTM
[D] http://www.uni-
solar.com/interior.asp?id=36&fragment=1&SearchType=ExactPhrase&terms=2004+technical
+brief
[E] http://www.uni-solar.com/uploadedFiles/0.4.1_us_sell_sheet_10-7-04_high_res.pdf
[F] http://www.atmel.com/dyn/products/product_card.asp?part_id=1930
[G] http://www.e3tam.com/temsilcilikler/ms/3dmgx1.htm
[H] http://www.squarell.com/Products.htm
[I] http://www.soda-is.com/fr/services/meteo_fran.html
[J] http://www.photowatt.com/
[K] http://www.heliostechnology.com/
[L] http://www.solarex.it/
[M] http://www.sunware.de/
Pour les batteries
[N] http://wiki.generationmp3.com/index.php/Batterie
[O] http://www.linternaute.com/hightech/batteries/types-batteries.shtml
[P] http://perso.wanadoo.fr/pl65/dossiers_techniq/solaire/batterie.htm
[Q] http://www.ni-cd.net/accusphp/theorie/chimie/plomb.php
[R] http://perso.wanadoo.fr/xcotton/electron/Notion_Accumulateur_Pb.pdf
[S] http://f5hts.free.fr/Les_batteries_plomb.htm
[T] http://www.ni-cd.net/accusphp/accueil/baba/plomb/charge.php
[U] http://perso.wanadoo.fr/f5zv/RADIO/RM/RM27/RM27B03.html
[V] http://www.yuasa-battery.net
[W] http://www.yuasa.fr/batterie_np_spec.htm#
[X] http://www.yuasa.fr/pdf/NP7-12.pdf
[Y] http://www.yuasa.fr/pdf/FICHE_DE_DONNEES_DE_SECURITE.pdf
[Z] http://www.yuasa.fr/environnement.htm
[a] http://europa.eu.int/scadplus/leg/fr/lvb/l21202.htm
Pour le MPPTConvertisseur statique :
[g] : http://www.ac-
creteil.fr/Lycees/94/larmandnogent/enseigne/ressources/techno/bourse%20cours/COURS/El%
E9ments%20constitutifs%20et%20synth%E8se%20des%20cvs.PDF
Etude MOSFET :
[b] http://www.eudil.fr/eudil/bbse/unip/unip800.htm (le plus pertinent)
[c] http://perso.wanadoo.fr/michel.hubin/physique/elec/chap_tr3.htm
Programmation en C :
[d] http://www-ipst.u-strasbg.fr/pat/program/tpc.htm(site très accessible !)
Algorithmes :
[e] : http://students.sabanciuniv.edu/~erhandernirok/class.html
[f] : http://www.dimec.unisa.it/leonardo_new/en/mppt.php
[h] : http://www.helioscar.com/faq.php?lng=fr
108
10. REMERCIEMENTS
Au cours de la réalisation de ce projet, nous avons reçu une aide précieuse et de
nombreux conseils de la part des enseignants-chercheurs et techniciens du Département
Avionique et Systèmes et nous les en remercions.
Nous tenons tout particulièrement à remercier Mr Yves BRIERES pour nous avoir
encadrées et conseillées tout au long de ce projet, Mr Bernard MOUTON pour son aide lors
de la réalisation de nos expériences à l’atelier, Mme Valérie POMMIER- BUDINGER pour
son aide lors de la programmation du microcontrôleur, ainsi que son mari pour l’aide apportée
au cours de la réalisation du MPPT, Mr Denis DESMAELE pour nous avoir aidé lors de la
réalisation de la carte.