Embed Size (px)
Citation preview

Enaction et Interfaces : Enaction et Interfaces : Corps propre et interactions perceptivesCorps propre et interactions perceptives
Charles Lenay
CostechConnaissances Organisation et Systèmes
Techniques EA 2223Groupe Suppléance
Perceptive
Paris 28 / 11 / 2007. Entretiens du nouveau monde industriel

PlanPlan
Contexte : Cognition et technique
Enaction et perception prothétisée
Perception : reconnaissance de formes
Valeurs émotionnelles
Communautés techniques

Contexte : Cognition et techniqueContexte : Cognition et techniqueCOSTECH - UTCCOSTECH - UTC
Comprendre comment les outils modifient, enrichissent ou constituent l’expérience humaine : philosophie, science et technique.
Etude de la technique Etude de la cognitionTechnologies cognitives Enaction, cognition situéeSuppléance perceptive Perception, Emotions Interfaces Interactions
Développement Technique
Expérimentation, Observation
Objectif : comprendre ce que la technique fait de l’homme

I.I. Enaction et perception prothétiséeEnaction et perception prothétiséeSuppléance perceptiveSuppléance perceptive
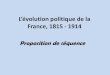
Tactile Vision Substitution Systems
Paul Bach y Rita
Camera
Matrix of 20 / 20stimulator
–Caméra immobile : discrimination très limitée
stimuli perçus à la surface de la peau.
–Caméra active : reconnaissance de forme spectaculaires
mise en extériorité d’objets perçus

Optacon

Seeing through the tongue… (Bach y Rita, 2001)
Tongue Display UnitTongue Display Unit

Genèse d’une modalité perceptive chez l’adulte
Psychophysiologie Phénoménologie 3éme personne 1ère personne
MéthodologieMéthodologie
Dispositifs minimalistes : - Perception distale - Reconnaissance de formes (Tactos) - Interactions perceptives
Puis contrôle de la complexification de la médiation technique.

II. Perception : reconnaissance de formes (Tactos)
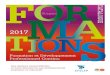
Principe méthodologique : dispositif de couplage minimal : situation de référence monocapteur

Graphics tablet
Computer
Tactile stimulator (vibrators)
Principe :

Expériences - RésultatsExpériences - Résultats
Capacité de reconnaissance de formes

Trajectoires perceptivesTrajectoires perceptives
Déploiement spatial et temporel de l’activité perceptive.
Enregistrement facile des « trajectoires perceptives »
Ici, aucune spatialité intrinsèque des input sensoriels
Etude des stratégies perceptives : modélisations, simulations, neurosciences
On observe l’activité concrète de constitution

Emergence de comportements stéréotypésEmergence de comportements stéréotypés
Microbalayage orthogonal au contour
Localisation
Suivi de contour Mais les sujets se perdent souvent : dérive
proprioceptive
Geste de constitution de la forme perçue Semblable au geste d’écriture

Enaction : perception active
action
sensation
Perception
Interface enactive
La constitution des percepts spatiaux est réalisée par la détermination d’une relation invariante entre : - les actions (mouvements des capteurs) - et les stimulations sensorielles
Ici, pas de perception sans action
Ce que nous percevons dépend de notre pouvoir d’agir. L’interface est une médiation technique qui modifie le corps propre

Définition des modalités perceptivesDéfinition des modalités perceptives Nature de la stimulation proximale ? Nature des aires cérébrales ? Dynamique sensorimotrice :
Définitions fonctionnelles Toucher :
Parallélisme des entrées sensorielles Actions de translation coïncidence spatiale et temporelle du point de perception et de l’objet perçu
(Tactos) Vision :
Parallélisme massif des entrées sensorielles Actions de translation et de rotation Interposition, immersion
Continuum perceptif et non essence des sens
Valeurs émotionnelles de la perception prothétisée Esthétique spécifique Etude de la genèse des valeurs… et de l’adoption sociale des techniques.

III. Valeurs émotionnellesIII. Valeurs émotionnellesIII.1. Un étrange échecIII.1. Un étrange échec
Déception, rejet (ex : Optacon de Telesensory system)• Isolement, inutilité. Complétude existentielle du monde des aveugles.• Gène vis-à-vis du regard des autres : sentiment d’un appareillage monstrueux.• Absence de qualités émotionnelles
Reconnaître la nouveauté du vécu : le TVSS donne un genre de vision, mais pas la vision des autres
Dispositif de suppléance Dispositif de suppléance perceptiveperceptive
Système de substitution sensorielle

Problème des valeurs émotionnellesProblème des valeurs émotionnelles
Chaque nouvelle médiation technique offre à ses utilisateurs de nouveaux espaces d’action et de perception.
Comment sont constituées des valeurs émotionnelles attachées à ces nouveaux objets ?
Comment se constitue une esthétique spécifique de cette nouvelle modalité perceptive ?
Notre hypothèse : les valeurs émotionnelles apparaissent dans un jeu d’interactions perceptives dans une communauté d’utilisateurs partageant les mêmes interfaces techniques
Tout d’abord, comment, à travers l’usage d’un dispositif technique peut-on sentir la présence d’une autre sujet percevant ?
Les nouvelles prothèses doivent s’intégrer dans un système de sens partagé

III.2. III.2. Interactions perceptivesInteractions perceptives
Perception réciproque de l’activité perceptive d’autrui : "caresses distales"
Expérience préliminaire :

La perception d’autruiLa perception d’autrui
Comment reconnaît-on la présence d’autrui ? Réponses classiques
Phénoménologie : Husserl (5ième méditation cartésienne) : entrelacement Lieb – Körper et « saisie analogisante ».
Sciences cognitives : théorie de l’esprit, attribution d’intentionnalité
Critiques Phénoménologie : le Körper, corps objet, est déjà un « corps pour
autrui ». tension avec la notion même de constitution.
Sciences cognitives : autrui semble le résultat d’une inférence hypothétique.
Pourtant, dans notre expérience vécue, la reconnaissance d’autrui semble immédiate, perceptive et non pas cognitive.

Croisements perceptifsCroisements perceptifs
Reconnaissance d’autrui ? Non pas comme attribution
d’intentionnalité mais comme expérience perceptive
Comme perception réciproque de l’activité perceptive d’autrui : Hypothèse du croisement perceptif
Croisement perceptif en général : situation dans laquelle deux activités perceptives de même nature interagissent (croisement de regard, caresse).

Croisements perceptifs prothétisésCroisements perceptifs prothétisésLes croisements perceptifs peuvent prendre des formes très variées suivant les médiations techniques des intéractions : téléphone, internet, RV, suppléance perceptive,…
Les dispositifs techniques permettent une étude expérimentale d’un croisement perceptif épuré.

III.3. Paradigme expérimental minimaliste III.3. Paradigme expérimental minimaliste (Tactos)(Tactos)
10 paires de sujets Les participants sont placés (yeux bandés) dans des pièces séparées.
Sensation : un bit d’information (un seul stimulateur en tout ou rien) Action : déplacements droite / gauche sur une ligne En restreignant au maximum l’entrée sensorielle, on force un déploiement spatial
et temporel de l’activité perceptive
Tactos en réseau :

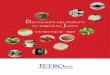
Dispositif expérimental Dispositif expérimental
Champ récepteur de A
Leurre fixeperceptible par A
Champ récepteur de B
Leurre fixeperceptible par B
Stimulateur tactile de A Stimulateur tactile de B
A l’aide de la souris, chacun déplace un champ récepteur dans un espace uni-dimensionnel (un tore). Plusieurs objets formés de pixels noirs sont placés dans cet espace. Quand le champ récepteur recouvre un pixel noir son stimulateur tactile est activé.

Dispositif expérimental- suiteDispositif expérimental- suite
Champ récepteur de ALeurre mobile perceptible par B
Leurre fixeperceptible par A
Leurre mobile perceptible par A
Champ récepteur de B
Leurre fixe perceptible par B
tactile stimulator of P1 tactile stimulator of P2
Un leurre mobile doit avoir un comportement aussi complexe que celui du champ récepteur du partenaire : il est attaché à ce champ récepteur.

ExpérienceExpérience
Les sujets sont seulement informés de l’existence de leurres fixes et mobiles, ainsi que de la présence du champ récepteur de leur partenaire.
Il n’y a pas de différence de forme ou de comportement entre leurre mobile et champ récepteur.
Les sujets doivent cliquer quand ils pensent avoir rencontré leur partenaire.
Les trajectoires, les stimulations sensorielles et les clics sont enregistrés.

RésultatsRésultats
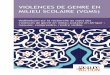
Distribution de la fréquence des clics en fonction de la distance entre les deux participants
Per
cent
age
of c
licks
pe
r pi
xel
Distance between the 2 participants’ avatars (pixels)
Per
cent
age
of c
licks
pe
r pi
xel
Distance between the 2 participants’ avatars (pixels)
63% de la distribution dans l’interval ± 30 pixels. Petit pic à 50 pixels correspondant au leurre mobile.
Champ récepteur Leurre mobile Leurre fixe
Pourcentage de clics
65.9 % ± 3.9 23.0 % ± 10.4 11.0 % ± 8.9
Pourcentage de stimuli
52.2 % ± 15.2 15.2 % ± 6.2 32.7 % ± 11.8
Ratio clics / stimuli
1.26 1.51 0.33

DiscussionDiscussion Les sujets reconnaissent quand ils rencontrent leur partenaire…
… bien qu’il n’y ait absolument aucune différence de comportement objectif entre leur champ récepteur et le leurre mobile.
Si les participant réussissent la tâche perceptive, c’est essentiellement parce qu’ils réussissent à se trouver plus souvent face à face.
Fre
qu
en
cy (
Pe
rcen
tagep
erp
ixel)
Distance between the 2 participants’ avatars (pixels)
Overall frequency
Clicks
Fre
qu
en
cy (
Pe
rcen
tagep
erp
ixel)
Distance between the 2 participants’ avatars (pixels)
Overall frequency
Clicks
Attracteur de la dynamique collective : les activités perceptives s’attirent l’une l’autre, comme des regards sont fixés l’un par l’autre.
En dépit de la pauvreté sensorielle, la situation de croisement perceptif est ressentie comme plus riche et intéressante que la perception d’un objet passif.

IV. Communautés techniquesIV. Communautés techniques
• Problème : on ne perçoit jamais ce qui donne à percevoir. Ni sa rétine, ni ses mouvements oculaires, ni son aire cérébrale V1, ni ses lunettes,...
Tenir – Outil attaché Voir à travers l'outil
Manipuler – Outil séparé Voir – modifier l'outil
déposer saisir
Constitué
Constituant• Les deux moments de l’outil :
• Or le problème, c’est de reconnaître sa prothèse portée, attachée.• Par les croisements perceptifs, je peux assumer ma prothèse comme j’assume mon visage.• La médiation peut être à la fois oubliée (parce que intégrée) et expressive (parce que assumée)

Matrice de 16 stimulateurs piezoelectriques
Matrice de 16 capteurs de pression
Ex : « Caresse distale » Caresse distale » Systèmes de contrôle multi-points distribués spatialement
Design d’interaction etDesign d’interaction etDesign de dispositifs d’interactionsDesign de dispositifs d’interactions

Internet tactileInternet tactile
Portail web permettant desapplications ludiques, pédagogiques etd’interactions tactiles : - espaces de lecture et écriture de courbes
géométriques, - messagerie instantanée intégrant des
fonctionnalités tactiles, - caresse distale, - téléchargement d’applications tactiles
développées à partir de TACTOS (mots croisés, jeux,…)
Terminal braille utilisé par les personnes aveugles

Design d’espaces d’interactionDesign d’espaces d’interaction
Modules d’interaction tactile :
Smileys tactiles (petites configurations tactiles dynamiques
exprimant des émotions)
Espaces partagés qu’un utilisateur peut explorer tactilement pour percevoir un contenu ou rencontrer d’autres utilisateurs.

Merci de votre attention.