Embed Size (px)
Citation preview

Estimation de la migrationd'une pollution accidentelledans un projet routierà l'aide des réseauxde neurones artifTciels
L'évaluation de la profondeur de la zorr,e contaminée Den fonction du temps et de la quantité de polluant injectéedans un sol Q après une pollution routière accidentelleest essentielle pour étudier le risque de contaminationde la ressource en eau souterraine et pour concevoirdes plans d'intervention. Cet article présente uneméthode pour estimer D et Q en utilisant les réseauxde neurones artificiels. Une base de données est produiteà partir de cas simulés en utilisant un modèle paréléments finis. Plusieurs modèles de réseaux de neuronesartificiels par rétropropagation de l'erreur sont évaluéspar leur capacité à généraliser la simulation surdes données indépendantes. Leur comportement estégalement comparé à un modèle plus classiquede régression multilinéaire. Les réseaux de neuronesmontrent une très bonne aptitude à simuler les évolutionsdeDetQ.La méthodologie proposée est appliquée à l'analysedu risque de pollution par le trichloréthylène des eauxsouterraines le long de l'axe d'un projet routier dansle Nord de la France.
Mots-clés : eau, hydrocarbure, NAPL, non saturé,pollution accidentelle, réseaux de neurones artificiels,route, trichloréthylène.
E. EL TABACH
l. SHAHROU..R
, Laborato,ire'de NI é c aniquede Li,Ile tUh[R CJVRS 8107)
Université des Scién ceset Technologies de LiIIe
(U STL), P olytech'Lilleayenue Paul-Lang,e@I 59,65,5,ViLherteùve'dAscq
Ed#,El-T4bach@p*tW
L1u.rertLLàirtcelof @PO,W
I s a m . S h ah r o u r @p O rr1;ir#:
Hennmai,Itat*rï:ffiffi
Kânsas Sfafgylit fir, Dept.
,ea4146@l<sù. edu
l{Dlft ; Les discussions surcet article sonf sççsptéesjusqu'au '1.*' mars 2006.
l'slIEl5lull.$llÉ,
IPlut(oIL| {r,| ]tll-ot<
49REVUE FRANçAISE DE GEOTECHNIQUE
N" 1123e trimestre 2005
E stimating the migrationof an accidental pollutionin a highway project using artificialneural networks
Accurate estimation of depth of contaminated zone D and thequantity of pollutant injected into a soil Q after an accidentalpollution occurred in road transport is essential to asses the riskof water resources contamination. This paper presents a methodfor estimating D and Q after an accidentai pollutant dischargeat the soil surface. First a database is generated from simulatedcases using a finite element model. For each case, D and Q arecomputed as a function of the most related parameters.Different feedforward artificial neural networks with errorbackpropagation are trained and tested using subsets of thedatabase, and the abiiity of these networks to generalize onindependent simulated data are validated on another subsetof the database. Their behavior is compared and analyzed withregard to more common multilinear regression approximationtool. The proposed method is used to analyze the risk fora DNAPL pollution of groundwater resources concernedby a road project in the north of France.
Key words; accidental poilution, artificial neural network,hydrocarbons, NAPL, numerical model, road, trichloroethylene,unsaturated. water.

Elntroduction
Les accidents routiers impliquant le déversement dematières toxiques ou dangereuses au cours de leurtransport peuvent poser de graves problèmes environ-nementaux. Les hydrocarbures et les solvants chlorés(qui sont des liquides non miscibles avec l'eau, appelésnon aqueous phase liquids, ou NAPL, dans la littératureanglo-saxonne) sont parmi les matières transportées lesplus dangereuses. Ces produits ont des effets variablesselon la quantité et la nature du produit déversé et lasensibilité du milieu récepteur. Les produits plusdenses que l'eau (DNAPL) posent des problèmesmajeurs car ils migrent plus profondément sous l'effetde la gravité et le volume de produit non piégé dans lazone non saturée du sol peut atteindre la nappe phréa-tique et la contaminer. L'impact d'un projet routier surl'environnement doit ainsi être étudié avec attentiondans le but, d'une part, d'optimiser son tracé lors de laphase de conception en fonction de diversescontraintes, dont la vulnérabilité des zones traversées àla pollution accidentelle et, d'autre part, pour élaborerun plan d'intervention en cas d'accident mettant en jeuune pollution.
Les zones vulnérables à la pollution le long du tracéroutier peuvent s'étendre sur plusieurs kilomètres. Surcette distance, Ia topographie , Ia géologie et les pro-priétés du sol peuvent varier dans une large mesure.De nombreux modèles numériques permettant desimuler le transfert des NAPL dans les sols non saturésexistent (par exemple Guarnaccia et al., 1,997 ; Katyal etal., 1991). Basés sur une description précise des méca-nismes régissant le transfert (écoulement multipha-sique, échanges entre phases, transport du polluantdilué dans les phases liquide et gazeuse), ces logicielssupposent la connaissance de paramètres nombreuxdans une zone hétérogène, et ils exigent des efforts decalcul importants.
L'approche proposée dans cet article vise à limiterle recours à ces modèles et repose sur l'estimation del'évolution de la contamination du sol à l'aide desréseaux de neurones artificiels. Ces réseaux sontconstruits sur une base de données obtenue par simu-lations numériques .La capacité de différents réseaux àgénéraliser la simulation à l'ensemble de la zoned'étud e a été évaluée, analysée et comparée à une tech-nique plus classique, à savoir la régression linéairemultiple. Le réseau optimal a été employé pour prévoirla profondeur de Ia zone contaminée dans le cas étu-dié, concernant le déversement accidentel de trichloré-thylène le long de l'axe d'un projet routier dans le Nordde la France.
EProblème étudié - Méthodologie
ffiPrésentation du cas étudié
Le projet routier concerne le passag e à 2 x 2 voiesde la RNz entre Avesnes-sur-Helpe et Maubeuge (envi-ron 20 kilomètres) dans le département du Nord. Glo-
balement orienté N-S, le projet traverse une vallée prèsde Bachant, où des captages importants d'eau potablesont localisés.
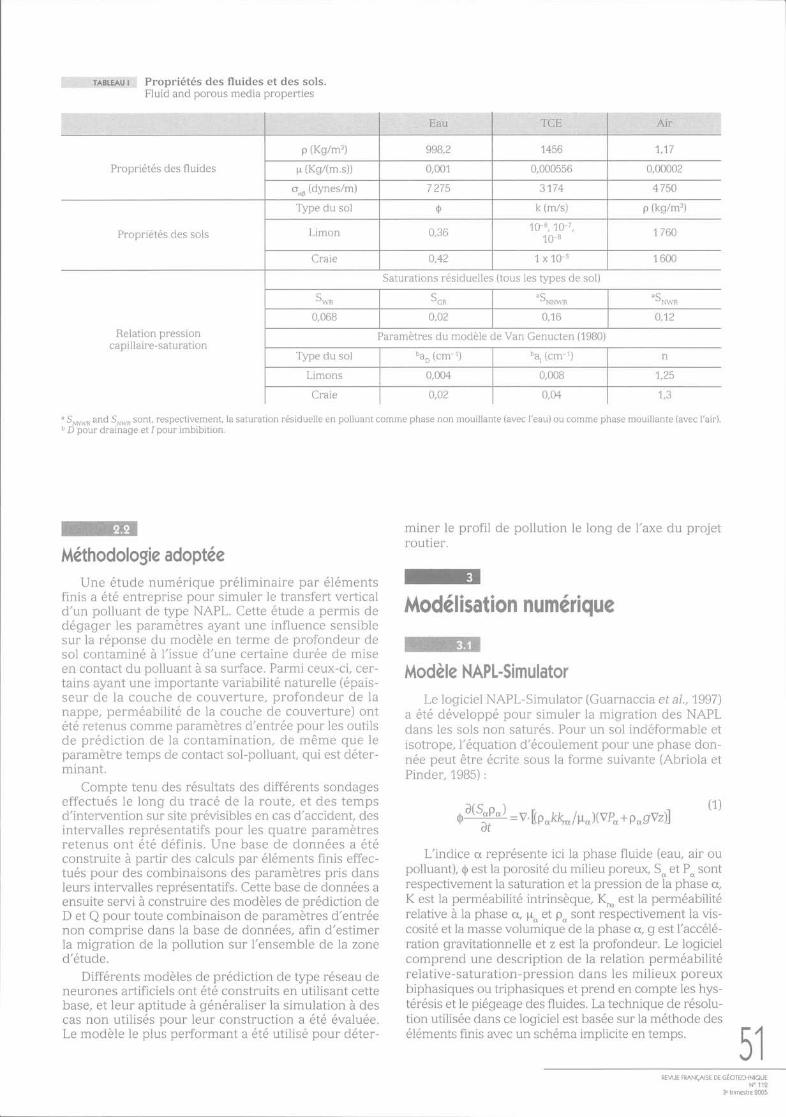
Dans ce secteur, des études géologiques et hydro-géologiques ont été réalisées, qui ont montré que letracé envisagé repose sur une couche de calcaires car-bonifères fracturés protégée par une épaisseur de 5 à15 mètres de limons, sables limoneux et argiles limo-neuses, et que la nappe d'eau exploitée se trouve à uneprofondeur variant de 5 à 25 mètres, à l'intérieur descalcaires fracturés (Fig. 1).Une série de sondages etd'essais a été effectuée : 26 sondages à la tarière, 5 son-dages carottés, 20 piézomètres et 6 essais au pressio-mètre. Ces sondages ont donné des indications sur laprofondeur de la couche de couverture limoneuse. Lespiézomètres ont permis de suiwe les variations de pro-fondeur de la nappe sur une période d'environ deuxans (septembre 2000 à avril 2002). En outre, des essaisde perméabilité rn situ et au laboratoire ont été effec-tués, et la perméabilité mesurée varie entre B x 10-10 et5 x 10-i m/s selon la teneur en argile. Les courbes derétention de Ia couche de couverture limoneuse ont étéégalement mesurées sur les cinq échantillons carottésen utilisant la méthode de l'extracteur à plaque, et lesparamètres de la relation de Van Genuchten (1980) ontété déterminés en laboratoire (voir Tableau I).
La figure 1 montre également les zones en déblai eten remblai. Dans les zones en déblai le terrassement dela couche protectrice de couverture limoneuse peutaugmenter la vulnérabilité de l'aquifère sous jacentpendant la phase de construction, mais ces zonesseront protégées en phase d'exploitation (plate-formeétanche, bassins de rétention imperméables, dispositifsde collecte des effluents pollués). Par contre, dans lestronçons en remblai, il y a risque pour les véhicules dequitter accidentellement la route et de se retrouver auniveau du terrain naturel, menaçant ainsi les ressourcesd'eaux souterraines dans les zones vulnérables. Lamigration des polluants dans les sols limoneux de lacouche de couverture de l'aquifère doit par conséquentêtre soigneusement analysée dans les zones où le profilest en remblai.
170
;.go6 160o
150
140
- - Terrain naturel initial.
-Route.-----Niveau haut de l'aquifère.-'-- Nappe (Septembre 2000).
0 500 1000 1500 2000 2500 3000 3500 4000
Distances cumulées à partir de la limite sud de la zone vulnérable (m).
$$*W$*t*l+iti$$-tl]$.$Èfiffi$ Coupe verticale de l'axe de la route.Cross-section along the axis of the highwayproject.
I,r/
50REVUE FRANçAISE DE GEOTECHNIQUEN" i123e trimestre 9005
Propriétés des fluides 0,00002
4750
p (kg/m3)
Propriétés des sols 1760
1 600
Saturations résiduelles (tous les types de sol)
"St*.0,1,2
Relation pressioncapillaire- saturation
Paramètres du modèle de Van Genucten (1980)
1,25
Craie 0,02 0,04 1,,3
" SNNWÀ and SMF sont, respectivement, la saturation résiduelle en polluant comme phase non mouillante (avec l'eau) ou comme phase mouillante (avec I'air).b D pour drainage et l pour imbibition.
$i.liii [$rtÈt Propriétés des fluides et des sols.Fluid and porous media properties
WMéthodologie adoptée
IJne étude numérique préliminaire par élémentsfinis a été entreprise pour simuler le transfert verticald'un polluant de type NAPL. Cette étude a permis dedégager les paramètres ayant une influence sensiblesur la réponse du modèle en terme de profondeur desol contaminé à l'issue d'une certaine durée de miseen contact du polluant à sa surface. Parmi ceux-ci, cer-tains ayant une importante variabilité naturelle (épais-seur de la couche de couverture, profondeur de lanappe, perméabilité de la couche de couverture) ontété retenus comme paramètres d'entrée pour les outilsde prédiction de la contamination, de même que leparamètre temps de contact sol-polluant, qui est déter-minant.
Compte tenu des résultats des différents sondageseffectués le long du tracé de la route, et des tempsd'intervention sur site prévisibles en cas d'accident, desintervalles représentatifs pour les quatre paramètresretenus ont éte définis. Une base de données a étéconstruite à partir des calculs par éléments finis effec-tués pour des combinaisons des paramètres pris dansleurs intervalles représentatifs. Cette base de données aensuite servi à construire des modèles de prédiction deD et Q pour toute combinaison de paramètres d'entréenon comprise dans la base de données, afin d'estimerla migration de la pollution sur l'ensemble de Ia zoned'étude.
Différents modèles de prédiction de type réseau deneurones artificiels ont été construits en utilisant cettebase, et leur aptitude à généraliser la simulation à descas non utilisés pour leur construction a été évaluée.Le modèle le plus performant a été utilisé pour déter-
miner le profil de pollution le long de I'axe du projetroutier.
EModél isation num érique
WModèle NAPL-Simulator
Le logiciel NAPl-Simulator (Guarnaccia et aI., 1997)a été développé pour simuler la migration des NAPLdans les sols non saturés. Pour un sol indéformable etisotrope, I'équation d'écoulement pour une phase don-née peut être écrite sous la forme suivante (Abriola etPinder, 1985) :
^ô(soPo) -v [p"kÇ ltr*XvP, +p*gYfl*af-
L'indice ct représente ici la phase fluide (eau, air oupolluant), Q est la porosité du milieu poreux, S., et P., sontrespectivement la saturation et la pression de la phase o,,
K est la perméabilité intrinsèque, K.., est la perméabilitérelative à la phase o, Fo et po sont respectivement la vis-cosité et la masse volumique de la phase cr, g est l'ac célé-ration gravitationnelle et z est la profondeur. Le logicielcomprend une description de la relation perméabilitérelative-saturation-pression dans les milieux poreuxbiphasiques ou triphasiques et prend en compte les hys-térésis et le piégeage des fluides . La technique de résolu-tion utilisée dans ce logiciel est basée sur la méthode deséléments finis avec un schéma implicite en temps.
1,,17
REVUE FRANçAISE DE GEOTECHNIQUEN'112
3e trimestre 2005
(1)
51
p (Kgim3)
p (Ks/(m.s))
o*u (dvnes/m)
Type du sol k (m/s)
Limon
1 x 10-5
aÇ"NNWR
Type du sol bao (cm-1) ba, (cm-1)
Limons
WCas de référence
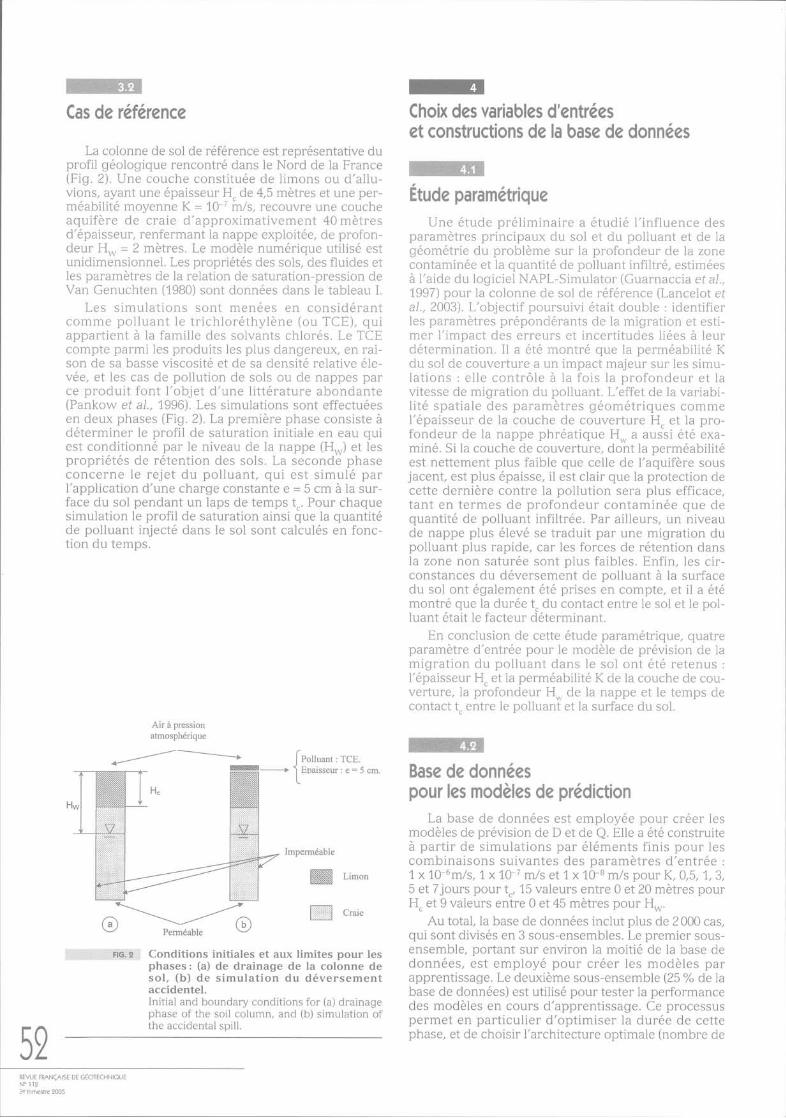
La colonne de sol de référence est représentative duprofil géologique rencontré dans le Nord de la France(Fig. 2). Une couche constituée de limons ou d'allu-vions, ayant une épaisseur H. de 4,5 mètres et une per-méabilité moyenne K - 10-7 m/s, recouvre une coucheaquifère de craie d'approximativement 40 mètresd'épaisseur, renfermant la nappe exploitée, de profon-deur Hw - 2 mètres. Le modèle numérique utilisé estunidimensionnel. Les propriétés des sols, des fluides etles paramètres de Ia rèlation de saturation-pression deVan Genuchten (1980) sont données dans le tableau I.
Les simulations sont menées en considérantcomme polluant le trichloréthylène (ou TCE), quiappartient à la famille des solvants chlorés. Le TCEcompte parmi les produits les plus dangereux, en rai-son de sa basse viscosité et de sa densité relative éle-vée, et les cas de pollution de sols ou de nappes parce produit font l'objet d'une littérature abondante(Pankow et al., 1996). Les simulations sont effectuéesen deux phases (Fig.2). La première phase consiste àdéterminer le profil de saturation initiale en eau quiest conditionné par le niveau de la nappe (H*) et lespropriétés de rétention des sols . La seconde phaseconcerne le rejet du polluant, qui est simulé parl'application d'une charge constante e = 5 cm à la sur-face du sol pendant un laps de temps t.. Pour chaquesimulation le profil de saturation ainsi que la quantitéde polluant injecté dans Ie sol sont calculés en fonc-tion du temps.
Air à pressionatmosphérique
,---/-.-.-----t{ lEæ_ )'
EChoix des variables d'entréeset constructions de la base de données
-
Étude paramétrique
Une étude préliminaire a étudié l'influence desparamètres principaux du sol et du polluant et de lagéométrie du problème sur la profondeur de la zonecontaminée et la quantité de polluant infiltré, estiméesà l'aide du logiciel NAPl-Simulator (Guarnaccia et al.,1997) pour la colonne de sol de référence (Lancelot eta1.,2003). L'objectif poursuivi était double : identifierles paramètres prépondérants de la migration et esti-mer l'impact des erreurs et incertitudes liées à leurdétermination. Il a été montré que la perméabilité Kdu sol de couverture a un impact majeur sur les simu-lations : elle contrôle à la fois la profondeur et lavitesse de migration du polluant. L'effet de la variabi-lité spatiale des paramètres géométriques commel'épaisseur de la couche de couverture H" et la pro-fondeur de la nappe phréatique H* a aussi été exa-miné. Si la couche de couverture, dont la perméabilitéest nettement plus faible que celle de l'aquifère sousjacent, est plus épaisse, il est clair que Ia protection decette dernière contre Ia pollution sera plus efficace,tant en termes de profondeur contaminée que dequantité de polluant infiltrée. Par ailleurs, un niveaude nappe plus élevé se traduit par une migration dupolluant plus rapide, car les forces de rétention dansla zone non saturée sont plus faibles. Enfin, les cir-constances du déversement de nolluant à Ia surfacedu sol ont également été prises èn compte, et il a étémontré que la durée t. du contact entre le sol et le pol-luant était le facteur ciéterminant.
En conclusion de cette étude paramétrique, quatreparamètre d'entrée pour le modèle de prévision de lamigration du polluant dans le sol ont été retenus :
l'épaisseur H. et la perméabilité K de la couche de cou-verture, la profondeur H* de Ia nappe et le temps decontact t. entre Ie polluant et Ia surface du sol.
rcBase de donnéespour les modèles de prédiction
La base de données est employée pour créer lesmodèles de prévision de D et de Q. Elle a été construiteà partir de simulations par éléments finis pour lescombinaisons suivantes des paramètres d'entrée :
1 x 10-6m/s, 1x1O-7 m,/s et 1 x 10-8 m,/s pour K,0,5, 1,3,5 et Tjours pour t", 15 valeurs entre 0 et 20 mètres pourH" et 9 valeurs entre 0 et 45 mètres pour H-.
Au total, la base de données inclut pius de 2 000 cas,qui sont divisés en 3 sous-ensembles. Le premier sous-ensemble, portant sur environ la moitié de la base dedonnées, est employé pour créer les modèles parapprentissage. Le deuxième sous-ensemble {25% delabase de données) est utilisé pour tester la performancedes modèles en cours d'apprentissage. Ce processuspermet en particulier d'optimiser Ia durée de cettephase, et de choisir l'architecture optimale (nombre de
[eoU.r*t : TCE.
lEoaisseur : e:5 cm.
Hc
Imperméable
N Limon
r=i-iïil
l::::::::::i:::i:i:il Craiet11.1. iii.1'l
'sl$$$Èi$$$$$lil'liiisii ÏÈi*ï$iiii Conditions initiales et aux limites pour lesphases: (a) de drainage de la colonne desol, (b) de simulation du déversementaccidentel.Initial and boundary conditions for (a) drainagephase of the soil column, and (b) simulation ofthe accidental spill.
52REVUE FRANçAIsE oe cÉorEcsNreuEN' 1123e trimestre 2005

neurones ( cachés l). Le troisième sous-ensemble estenfin utilisé pour valider les modèles de prévision surdes cas a vierges ).
On notera que K intervient par son logarithme dansla base de données de manière à ne pas faire intervenirdes ordres de grandeur trop hétérogènes dans les don-nées. De même chaque paramètre d'entrée et de sortiea été normalisé relativement à ses valeurs minimum etmaximum, ce qui permet, en disposant d'un ensemblede données plus homogène, un meilleur apprentissagedu réseau.
EModèles deprédictionde la migration de la contamination
WModèles de régressionlinéai re multiple (RLM)
A partir de la base de données de cas de migrationde polluant, il s'agit de généraliser l'estimation de cettemigration pour tout point de la zone d'étude, donc pourtoute combinaison des paramètres d'entrée. Le moyenle plus simple d'effectuer cette estimation est de procé-der par régression linéaire sur les 4 paramètresd'entrée.
On recherchera donc une approximation g dépen-dant linéairement des 4 vartables d'entrée X, :
Y - g (X) - g (Xr, ...,Xn) = ârX, + ... aën e)Ainsi D (modèle 1) et Q (modèle 2) sont exprimés en
fonction de log (K), H., Hw et t.. Les coefficients dumodèle sont déterminés par la méthode des moindrescarrés à partir du premier sous-ensemble de la base dedonnées, correspondant à la phase d'apprentissage. Laqualité de prédiction du modèle peut être estimée encalculant le coefficient de détermination n2 (équation10) sur les données du sous ensemble d'apprentissage,mais également sur le reste de la base de données, pourtester l'aptitude du modèle à généraliser sa prédiction.
Le tableau II résume les valeurs du coefficient dedétermination obtenues par régression multilinéairepour la profondeur contaminée D et la quantité de pol-luant injectée Q, sur l'ensemble de données correspon-dant à l'apprentissage (donc au calcul des coefficients
Phasede validation
de la régression, équati on 2) et sur des données n'ayantpas servi au cours de la phase d'apprentissage. Ontrouve des valeurs de R2 assez faibles (de l'ordre de 0,5à 0,6), notamment pour Q, en particulier pour les don-nées de validation. Un modèle linéaire sur les para-mètres d'entrée choisis ne constitue donc pas un outilde simulation satisfaisant.
WRéseaux de neurones artificiels
:.::r:::,:r:,iii;ii:i:i:i:i:iiii::::i:ii::i:i:::,i:::i:i::r;:::::ri:,:;i.:i:::::::;::l::l:;:r,:::.i::i::ri.i:i::iii;:::,i::::j.ij::ij::i:ji:i:::.::1..i:i:ij:j::i:ij::::i:j::i::j::.::ij: j;:: j /.. .;::i:::j .. . '::;::: : :r ::::r:.:::.::: :
i::iiiiliiiiiii.iliiiii:li:iiiiiiÏiiiiliiiiriiiiiii..rr ii .ii;-,i.i.ii',.iiit rii.';iir:i:ii
Construction des rëseaux
La structure et le fonctionnement des réseaux deneurones artificiels sont très documentés (par exempleFausett, 1994; Ripley,1,996 ; Najjar et al., 1.997 ; Maier etDandy, 2000). On se contentera ici d'une brève descrip-tion des RNA et de l'implémentation utilisée dans cetteétude.
Les réseaux de neurones artificiels sont constituésde cellules élémentaires de calcul (næuds ou neurones)interconnectés. Les réseaux les plus répandus sont lesperceptrons multicouches à rétropropagation del'erreur. L'architecture d'un tel réseau est schématiséesur la figure 3. Elle comporte 3 couches. La couched'entrée transmet les variations du phénomène modé-lisé au réseau, dont les réponses sont matérialiséesdans la couche de sortie. Une ou plusieurs couchesintermédiaires (ou cachées) sont interconnectées auxcouches d'entrée et de sortie. Le rôle de ces couchescachées est de permettre au réseau d'associer lesentrées données aux sorties également connues, lorsd'un processus d'apprentissage.Mathématiquement, uo réseau avec trois couches,, oùn est le nombre de næuds d'entrées, m le nombre denæuds cachés et k le nombre de næuds de sortie, estbasé sur I'équation suivante :
où S est une fonction de transfert, les facteurs W,o sontles poids des connexions entre les neurones"de lacouche cachée et de la couche de sortie, les W,, lespoids des connexions entre les neurones de la couched'entrée et ceux de la couche cachée, les O,, sont les
0,993
ot =rÉ wiox s[Ër'1,d
ffiÇoefficientsR2entrelesvaleursciblesetlesvaleursestiméespourlesdifférentsmodèles.R2 values between target and predicted outputs for ail models.
Phased'apprentissage
Phasede test 0,984
0,984
REVUE FRANçAIsE or cÉorEcuNtQUEN' 112
3e tnmestre 2005
530,577 0,350 0,950 0,981 0,947

Couche d'entrée.(n næuds)
Couche cachée. Couche de sortie.(m næuds) (p næuds)
W;
()T()
1-{
t-.C)
ô€Lr
(,)
O()
o
o
o
\o
oadO()LroU)
a)
L{
(.)
C)c.)
C)
-oC)
H()OC)
o
o
o
Rétropropagation et ajustementdes poids.
t, Y/zjL-
Yj
o
a
a
Sortie duneurone.
xn
Or
o
o
Or.
o
o
op
Tr
o
o
Tr
o
o
Tp
Ai=wi.Ë Llaxxi
Yj: s (A)
S : fonction sigmoïde.
ffiffi Architecture d'un réseau à 3 couches avec rétropropagation de I'erreur.Architecture of a typical multilayer backpropagation artificial neural network.
valeurs de sortie du réseau tandis que les X, symboli-sent les entrées
Dans la plupart des applications de ces réseaux lafonction de transfert utilisée est la fonction sigmoïdale(éq . 4). Elle est continue et différentiable, qualitésrequises dans le processus d'apprentissage des per-ceptrons multicouches.
Le processus d'apprentissage consiste en l'ajustementdes poids entre les couches afin de minimiser l'écartentre les sorties calculées par le réseau et les sortiescibles, connues. I1 repose sur une technigue de recherchede minimum dans l'espace de l'erreur globale en fonc-tion des poids constituant les paramètres du réseau. Lesdonnées dédiées à cette phase d'apprentissage sont pro-pagées de l'entrée à la sortie du réseau, et les erreursentre les valeurs en sortie et les valeurs cibles sontn rétropropagées ) en ajustant les poids de chaqueconnection d'après une règle d'apprentissa ge (delta-rule)afin de réduire l'erreur globale. Cet aller-retour est effec-tué pour tout cas de la base d'apprentissage, et répétéencore jusqu'à ce que les sorties simulées et les valeurs
| ll cibles du réèeau corncident, à une certaine tolérance près.)t+vl
REVUE FRANçAIsE DE cÉorscFtNtourN" 1123e trimestre 9005
L'erreur globale à minimiser fréquemment utiliséeest l'erreur quadratique moyenne (average squarederror, ASE), définie dans l'équation 5 :
AsE=+":"Ëf c- -on)' (5)
où Ooo et Too sont respectivement les valeurs simulées etréelles du'næud de sortie k pour le cas q, s est lenombre de cas, p est le nombre de næuds de sortie.
Si on peut en théorie approcher d'aussi près qu'onveut les valeurs cibles à condition d'augmenter suffi-samment le nombre de cycles d'apprentissage, il fautnoter que ceci se fait, à partir d'un certain nombre decycles, âu détriment de l'aptitude du réseau à générali-ser ses prédictions à des cas non utilisés au cours decette phase d'apprentissage, ce qui est pourtant le butpoursuivi. La technique de validation croisée (cross-validation) consiste alors à calculer l'erreur globaleASE simultanément sur les données d'apprentissageet sur des données de test,, indépendantes, jusqu'àatteindre le minimum de l'erreur sur ces données detest (Fig . 4). L'apprentissage est alors consid érécomme terminé.
(4)

ASE
Arrêt de I'apprentissage
Nombre de cycles d'apprentissage ou nombre denoeuds cachés
apprentissage
i1i:!ii:iiii;:ila1;,'iilr1:1;'i,t'i;"1"fiili! n\:i' Critère de convergence et architecture op-timale du réseau.Convergence criterion and optimum networkarchitecture.
100
80
60
40
20
020 40 60 80
Valeur réelle de D (cm).
100
80
60
40
20
020 40 60 80
Valeur réelle de D(cm).
L4t itt: t::.:itt:tlii::rj!) t:! t:r.t 4a:!::!4:/,:a.ta4:t:: : tit/.:: i.t ::tr't:tti: i:t::tt.t: ::t:ti
iittiirttttiti,l.iiitiiii;t;i..4ti)itiiti;titil.ttittit't:":i:ttitil'::"tiil:rtj1:"i)7i|ti
iittiliiiliiitttiii4iji!;litl.iti,iti;iitii, ltt itt,:' .i?ii;jj ,ii.lhi.]ilti:rttirr//lr:t:/4.:!a4t!t'4tarrjta4j:.:ai:!...,./j....ii..,...1..:ii....)ititt:ti:ii.4i:::tijrjttt li:it:t:aia:l:i:r'iLt+;/'4tr)tti;.ttii)i:.tt:t:.1:it:ttttii::ttiti
Architecture du réseôu optimal
La performance globale d'un réseau dépend dunombre de couches cachées et du nombre de næudsdans chaque couche cachée. Dans notre cas le réseaucomporte 3 couches (soit une couche cachée). Pourdéterminer le nombre optimal de neurones dans lacouche cachée, on peut, de la même façon que pour ladétermination du nombre optimal de cycles d'appren-tissage, procéder par validation croisée. On augmenteprogressivement le nombre de næuds dans la couchecachée en estimant à chaque fois l'erreur globale ASE(éq. 5) calculée pour le sous-ensemble de test de la basede données. Le nombre de næuds cachés pour lequelcette erreur globale ASE commence à croître est priscomme optimum (Fig. a).
Plusieurs formes d'architectures de réseau ont ététentées dans cette étude. Pour un réseau reliant lesvariables d'entrées {X' X2..., X,,} aux variables de sor-ties {O' O2..., Oo} et contenant une couche cachée avecm næuds, on note :
{O' Or, ..., Oo} = RNAn-m-p {X' X, x")
100
80
60
40
20
020 40
Valeur réelle
60 80
de D (cm).
ltlittilrt;friiri;iiniii:iiiiti'fÏiffiffiÏ Comparaison entre le s value s cibles et le svaleurs estimées de D pour les modèles 3(RNA à paramètre de sortie unique, çJraphea), 5 (RNA à 2 paramètres de sortie, grapheb) et 1 (régression multilinéaire, graphe c),phase de validation.Comparison between target and predictedvalues for D using single output BPNN model 1
(a), combined outputs BPNN model 3 (b) andmulti-linear regression model 4 (c) for validationphase.
(6)
ri-g,oooE
-0)l-oo-o{)ED'aoEool-5oo
cf)o6.(toE_q)
l-oo-o{)E+taoEoot-
=oo
-oôïtoEol-oo-o\oE
r|.,aoEool-:too
55REVUE FRANçAIsE or cÉorEcrNreuE
N' 1123e trimestre 2005
y : 0,9856*x
R2 : A,945
y : 0,9832*x
R2 : 0,950
y: 0,8924*x
R2 : 0,577
Il est possible d'estimer D et Q à partir de deuxréseaux séparés (modèles notés 3 et 4 respectivement,voir équations 7 et B), mais il est également possibled'estimer D et Q au sein du même réseau (modèle 5) enconsidérant deux næuds dans la couche de sortie(éq.9). Le calcul du nombre optimal de næuds cachésest de 29,32 et27 pour les modèles 3,4 et 5 respective-ment.
{D} = RNA4 ,r., {K,H., HW, t.} (modèle 3) (7)
{Q} : RNA4 ,r_, {K,H., HW,t,l (modèle 4) (B)
{D, Q} = RNA 4.27.2 {K, H., HW, t.} (modèle 5) (9)
Il faut noter que la prévision simultanée de plu-sieurs paramètres de sortie dans un même réseaun'exige pas nécessairement une plus grande com-plexité par rapport à des réseaux séparés. Dans notreexemple, le modèle 5 contient en effet moins de næudsdans la couche cachée que les autres modèles pourune erreur globale comparable. Physiquement, la pro-fondeur D de la zone contaminée et la quantité Q depolluant injecté étant liées, cette dépendance a étéidentifiée et prise en compte par le réseau de neuronesartificiels.
WDiscussion sur la performancedes modèles
La performance des modèles peut être visualiséeen représentant graphiquement les valeurs simuléesen fonction des valeurs cibles. La distance des pointsainsi obtenus à la première bissectrice donne uneindication sur la façon dont le modèle se comporte.Ainsi, la figure 5 montre la comparaison entre lesvaleurs prévues par réseaux de neurones et les valeurscibles pour D, dans le cas du sous-ensemble de labase de données destiné à la validation, quand D estestimé en utilisant le modèle 3 (réseau avec D para-mètre de sortie unique, figure 5a), ou le modèle 5(réseau à sortie combinée D et Q, figure 5b). Sur lesmêmes graphiques la droite de régression passant parI'origine est également tracée et le coefficient dedétermination R2 pour cette ligne est calculé selonl'équation 10 :
R2=1,- tr, 9'
dans le tableau II. Par contre, comme signalé au para-graphe 6.1,,Ie modèle de régression multilinéaire neparvient pas à prévoir les variations de D et, surtout, dea de façon satisfaisante . La faible performance dumodèle linéaire ne doit pas étonner : les phénomènesphysiques représentés dans la base de données sontcomplexes et fortement non linéaires. Dans les réseauxde neurones artificiels, la non-linéarité est prise encompte par l'utilisation de fonctions de transfert nonlinéaires (éq. 5), et le degré de complexité peut êtrecontrôlé en variant le nombre de næuds dans la couchecachée. Les réseaux de neurones artificiels apparais-sent donc comme un outil valable de prévision de lamigration de la pollution dans le cas étudié.
EApplication I analyse du risquepour un dértersement accidentelde NAPL dans un proi et routier
Dans cette section, oD présente une application duréseau de neurones artificiel à l'estimation du risque depollution de la nappe par déversement accidentel dansle cadre du projet routier présenté dans le S 2.f .
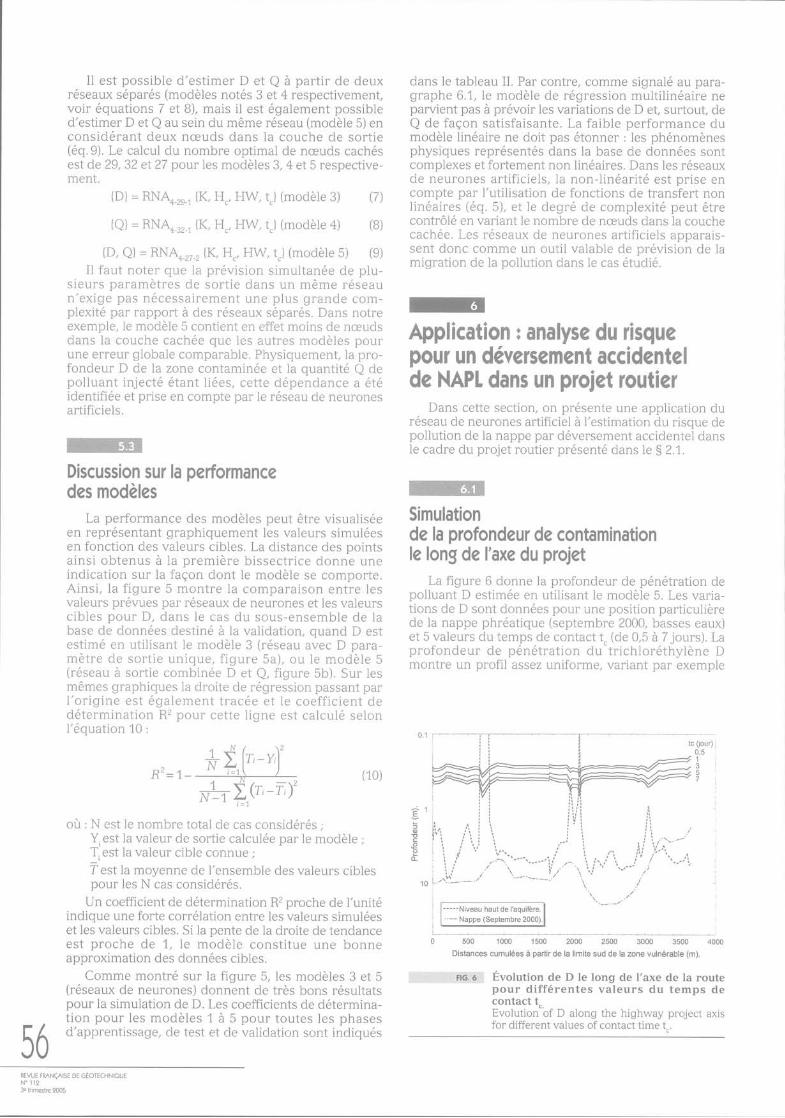
ffiSimulationde la profondeur de contaminationle long de l'axe du projet
La figure 6 donne la profondeur de pénétration depolluant D estimée en utilisant le modèle 5. Les varia-tions de D sont données pour une position particulièrede la nappe phréatique (septembre 2000, basses eaux)et 5 valeurs du temps de contact t. (de 0,5 à 7 jours). Laprofondeur de pénétration du trichloréthylène Dmontre un profil assez uniforme, variant par exemple
tc (jour) i0,5 ,1\{
NL^ 1
357(10)
#Tjt'-n)'où : N est le nombre total de cas considérés ;
Y, est la valeur de sortie calculée par le modèle ;T' est la valeur cible connue ;
T est la moyenne de l'ensemble des valeurs ciblespour les N cas considérés.
Un coefficient de détermination R2 proche de l'unitéindique une forte corrélation entre les valeurs simuléeset les valeurs cibles. Si la pente de la droite de tendanceest proche de 1, le modèle constitue une bonneapproximation des données cibles.
Comme montré sur Ia figure 5, les modèles 3 et 5(réseaux de neurones) donnent de très bons résultatspour la simulation de D. Les coefficients de détermina-tion pour les modèles 1à 5 pour toutes les phasesd'apprentissage, de test et de validation sont indiqués
-----Niveau haut de I'aquifère."-- Nappe (Septembre 2000).
0 500 1000 1500 2000 2500 3000 3500
Distances cumulées à partir de la limite sud de la zone vulnérable (m).
l!i11tj'itirl11t17ni"i1riZ':ttit;ffi'#t'ttfri Évolution de D le long de l'axe de Ia routepour différentes valeurs du temps decontact t..Evoiution of D along the highway project axisfor different values of contact time t^.
;. 1
cL:toroceot-È
10
5ôREVUE FRANçAIsE oE cÉorccuNteuEN" 1123e trimestre 9005

entre 0,2 à 0,3 mètre pour une période de contact de12 heures, qui est le délai moyen d'intervention estimépour un déversement routier accidentel (Martin etRoux, 1999). Des profondeurs plus importantes sontévidemment atteintes pour des temps de contact dupolluant à la surface du sol plus élevés (environ 0,5 mPourt.:Tjours).
Risq ue de contaminationdes eaux souterraines
Le profil de la profondeur de pénétration de pol-luant le long de l'axe de la route est utile parce qu'ildonne une estimation de l'épaisseur de sol devantêtre traité ou enlevé après déversement du polluant,pour supprimer toute menace envers les eaux sou-terraines. Cependant une meilleure quantification durisque de pollution des eaux souterraines est obte-nue si la profondeur de contamination D est repré-sentée rapportée à I'épaisseur de la couche de cou-verture limoneuse H.. La figure 7 donne la variationdu rapport R : D/H. pour t. = 0,5 jour. On retrouveun risque de contamination très élevé dans les zonesen déblai, où l'épaisseur du sol de couverture a étéréduite, voire complètement enlevée. La menace estcependant limitée à la durée de la phase de construc-tion, durant laquelle toute mesure doit être prisepour éviter un déversement de polluant. Mais lessecteurs critiques sont les zones hachurées sur lafigure 7, qui correspondent aux zones en remblai, oùIe risque de mise en contact du polluant avec Iemilieu naturel persiste sur toute la durée de vie del'ouvrage. On note que dans ces zones en remblai, lefacteur R atteint 20 % au sud, contre environ 5 %ailleurs.
Cette étude simplifiée d'analyse du risque aide àidentifier les zones les plus vulnérables du projet rou-tier. Une analyse plus fine peut alors être conduite dansles zones affichant un facteur de risque R élevé, commel'étude de f influence du type de polluant ou de celle defacteurs météorologiques, et peut servir de base à desdispositions préventives ou des mesures curatives encas d'accident.
W
-ls-60ÇJor*
9+o1l
É.
500 1000 1500 2000 2500 3000 3500 4000
Distances cumulées à partir de la limite sud de la zone vulnérable (m).
Zones en remblai
Évolution du facteur de risque R le long del'axe du projet routier pour t. = 0,5 jour.Evolution of risk factor R along the highwayproject axis for t. = 0.5 day.
-
ConclusionCet article propose une approche basée sur les
réseaux de neurones artificiels pour l'évaluation de lacontamination d'un sol non saturé par déversementaccidentel de polluant. L'étude vise l'analyse du risquede contamination des ressources en eau par déverse-ment de polluants suite à un accident routier.
En l'absence des données de terrains sur la migra-tion de polluants dans les sols non saturés, une base dedonnées a été construite en utilisant une modélisationpar éléments finis. Cette base de données a été ensuiteutilisée pour calibrer le modèle ( réseaux de neu-rones ), qui a servi à établir le risque de pollution de lanappe dans une zone concernée par un projet routier.
L'étude réalisée montre que le modèle n réseaux deneurones )) constitue un outil fort intéressant pour lamodélisation du transfert de polluants dans les sols nonsaturés et pour l'étude d'impact de la construction desroutes sur le sol et les ressources en eau.
N
Abriola L.M., Pinder G.F. - A multiphaseapproach to the modeling of porousmedia contamination by organic com-pounds 1. Equation development. WaterResources Research 21, 1.985, p. 19-26.
Fausett L.V. - Fundamentals neural net-works: Architecture, algorithms, andapplications. Prentice-Hall, Inc., Engle-wood Cliffs, New Jersey, 1,994.
Guarnaccia J., Pinder G., Fishman M. -l/APt : Simulator documentation. EPA/600/R-97 /102, Environmental ProtectionAgency, lJnited States, 1,997 .
Katyal A.K., Kaluarachchi, Parker J.C. -Mofat: a two-dimensional finite elementprogram for multiphase flow and multi-comp onent tr ansp ort, pro gr am do cumen -
tation and user's guide. EPA/600/2-91,/020,Environmental Protection Agency, USA1,991.
Lancelot L., El Tabach E., Shahrour I. -Étude d'impact de la mise a 2 x 2 voies de1a Rl/ 2 entre Avesnes-sur-Helpes etMaubeuge sur Jes champs captants dusynclinal de Bachant : modéIisation destransferts de polluants. Rapport final à laDDE de Nord,2003.
Maier H.R., Dandy G.C. - Neural networksfor the prediction and forecasting ofwater resources variables : â reView ofmodeling issues and applications. Envi-ronmental Modelling & Software 15,2000, p.1,01.-1,24.
Martin J.-C.. Roux J.-C. - Pollutions acciden-telles routières ef autoroutières. Manuelset Méthodes 36, BRGM, France, 1999.
Najjar Y.M., Basheer I.A., Hajmeer M.N. -Computational neural networks for pre-dictive microbiology : i. Methodology.International Journal of Food Microbio-
lory 34, 1,997 , p. 27 -49.Pankow J.F., Stan Feenstra, Cherry J.4.,
Ryan M.C. - Dense Chlorinated So1-vents in Groundwater: Background andHistory of the Problem, Dense Chlorina-ted Soivenfs and other DÀIAPls inGroundwater. J.F. Pankow and J.A.Cherry (eds), Waterloo Press, Ontario,1 996.
Ripley B.D. - Pattern recognition and neu-ral networks, Cambridge UniversityPress, 1996, 403 p.
Van Genuchten M.T. A closed-formequation for the hydraulic conductivityof unsaturated soils, Soil Science Societyof America Journal 44, 1980, p. 892-898.
Zurada J.M. - Introduction to artificial neu-ral systems, West Publishlng Company,St. Paul ,1992.
57REVUE FRANçAISE DE GEOTECHNIQUE
N" 1123e trimestre 2005

![ffi; -J q#,# ffi'*r t i q';;'.ia-o ffi * dd*; q+ t6-drff +s-o €Rc-o-rcl {r&9414t_32483 ^ hariprakashrathi@yahoo.co.inff-te0, o-qq] +ss T'i{ qaTq fiffi{.dvgr - s+z ooeTSi ftrsr fuflTd](https://img.pdfslide.fr/doc/110x75/60c40bf87ff7de12a33d3034/ffi-j-q-ffir-t-i-qia-o-ffi-dd-q-t-6-drff-s-o-arc-o-rcl-r9414t32483.jpg)