Embed Size (px)
Citation preview

Etude de courbures, loxodromies et
geodesiques
KRICHENE Walid

1. Motivations :
Les navigateurs ont longtemps cru que la course la plus courte entre deuxports etait celle a cap constant puisque d’une part, elle correspond sur lescartes qu’on utilisait au segment reliant les deux points, et que c’etait d’autrepart le chemin le plus facile a suivre. La trajectoire qu’ils suivaient est uneLoxodromie. En 1530, Pedro Nunez Salaciense prouve que le chemin le pluscourt est l’arc de grand cercle.
Naviguer selon la geodesique peut s’averer plus aventageux en termes deduree de parcours. Cependant, une loxodromie est nettement plus facile asuivre. Les navigateurs (et aviateurs) optent donc pour des arcs successifsde loxodromie approchant une orthodromie.
Cet article propose de demontrer le Theorema Egregium du a Gauss, dontdecoule un resultat important : une projection continue de la sphere (priveed’un point) sur un plan ne peut pas etre a la fois conforme et equivalente.Une etude detaillee de la projection stereographique montrera les limitationsqui en resultent en cartographie, et permettra de reconnaıtre ou de tracer lesloxodromies et geodesiques simplement a partir de proprietes geometriques.Un programme que j’ai ecrit en Ocaml permettra egalement de visualiser lesresultats de la deuxieme partie de l’etude (defomation des aires par les appli-cations conformes, proprietes geometriques de la projection stereographiqueet comparaison loxodromie/geodesique)
2. Theorema Egregium :
2.1. Preliminaires : Dans cette section, on se place dans R3 muni desa structure euclidienne (eventuellement affine). Le produit scalaire est note :
(. | .) : R3×R3 → R+
(x, y) 7−→ (x | y)

2. THEOREMA EGREGIUM : 3
2.1.1. Surface reguliere. Une surface reguliere S est une partie de R3
telle que ∀p ∈ S, ∃ un voisinage ouvert de p : V ⊂ R3, un ouvert U ⊂ R2
contenant (0, 0), et une application x : U → V ∩ S (parametrage local de lasurface S au point p) verifiant :
– x(0, 0) = p– x est de classe C∞
– x est un homeomorphisme
– ∀u ∈ U, dx(u) est injective. Mat(dx(u)) =
∂1x1 ∂2x1
∂1x2 ∂2x2
∂1x3 ∂2x3
(∂i designe
la derivee partielle selon ui ou (u1, u2) est une base de U , les deriveespartielles etant prises au point u).
2.1.2. Plan tangent, application de Gauss et orientabilite : Soit S unesurface reguliere parametree localement en p par x : U → S.
Definition. Le plan tangent a S en q = x(u) (ou u ∈ U) est le sousespace
Tq(S) = vect(∂1x(u), ∂2x(u)) = dx(u)(R2).
Tq(S) est bien de dimension 2 puisque dx(u) est injective ((∂1x(u), ∂2x(u))est une famille libre).
Proposition. Tq(S) est l’ensemble des vecteurs tangents aux courbesparametrees de S.Tq(S) =
{w ∈ R3/∃α : [−ε, ε] → S courbe parametree C
∞de S telle que α(0) = q et α′(0) = w
}.
Demonstration. Soit α une telle courbe et w = α′(0). β = x−1 ◦ α :[−ε, ε] → U est de classe C
∞et on a x = α ◦ β−1 donc
dx(u)(β′(0)) = α′(β−1(u))1
β′(β−1(u))β′(0) = α′(0)
1
β′(0)β′(0) = w
donc w ∈ Tq(S). Reciproquement, soit w = dx(u)(v) ∈ Tq(S). Alors on aw = α′(0) ou
α : [−ε, ε] → S
t 7→ x(u + tv)
�
Application de Gauss : L’application de Gauss
N : x(U) → S2
q = x(u) 7→ ∂1x ∧ ∂2x
‖ ∂1x ∧ ∂2x ‖(u)

2. THEOREMA EGREGIUM : 4
est bien definie sur x(U) par liberte de la famille (∂1x(u), ∂2x(u)). (S2 estla sphere unite de R3, N(q) est un vecteur unitaire normal a S en p). L’ap-plication de Gauss induit une orientation locale de S par une orientation deson plan tangent : si u ∈ U , q = x(u), alors Tq(S) est oriente par N(q) :(v1, v2) est une base directe de Tq(S) ssi (v1, v2, N(q)) est une base directede R3.
Remarque : L’orientaion locale de S est toujours possible (S etant reguliere),mais elle depend du parametrage. S est dite orientable (globalement) si∃(Si)i∈I tel que S = ∪i∈ISi ((Si)i∈I est un recouvrement de S), ∀i ∈ I,∃xi : Ui → Si un parametrage local de S, ∀(i, j) ∈ I2,∀p = xi(u) ∈ Si ∩ Sj,jθ(i,j)
(u) > 0 ou θ(i,j) = x−1j ◦ xi : Ui → Uj et j designe le jacobien.
Cela revient a dire que le reparametrage en un point appartenant a deuxparties de S conserve le sens du vecteur normal. En effet, on a xi = xj ◦θ(i,j)
donc dxi(u) = dxj(θ(i,j)(u)) ◦ dθ(i,j)(u) donc Ni(p) = Nj(p)jθ(i,j)
(p)
|jθ(i,j)(p)| (ou p =
xi(u)j ◦ θ(i,j)(u)) donc le vecteur normal en p est conserve si jθ(i,j)(u) > 0.
Exemple : La sphere unite S2 est orientable.En effet, la projection stereographique (cf 3.4) donne un parametrage
de la sphere privee d’un pole. On dispose donc d’un recouvrement de S2
par deux parties dont l’intersection est connexe (S2 privee de 2 points).p → jθ(1,2)
(p) est continue et ne s’annulle pas sur ce connexe, et garde donc un
signe constant, donc, quitte a remplacer x1 par x′1 : (u1, u2) 7−→ x1(u2, u1),jθ(1,2)
> 0.Dans la suite S designera une surface reguliere orientee, et x : U →
S un parametrage local en un point p ∈ S coherent avec l’orientation.(u1, u2) designera une base de U , on lui associera la base (∂1x, ∂2x)p =(∂u1x(0, 0), ∂u2x(0, 0)) du plan tangent Tp(S).
2.1.3. Aire d’une region bornee d’une surface reguliere : Soit R = x(Q) ⊂S une region bornee de S (ou Q ⊂ U). L’aire de R est par definition
A(R) =
∫Q
‖∂1x ∧ ∂2x‖du1du2
On peut montrer que cette definition est equivalente a une definition geometriqueplus intuitive de l’aire : si
(Pi = (Rj
i )1≤j≤ni
)i∈N est une suite de partitions
de R, croissante au sens de la finesse et telle que (µi) = (maxjdiam(Rji ))
converge vers 0, alors A(R) = limi→∞
∑1≤j≤ni
A(Rj
i
)ou Rj
i est la projection de
Rji sur le plan tangent en un point arbitraire de Rj
i .

2. THEOREMA EGREGIUM : 5
2.2. Les deux formes fondamentales :2.2.1. Premiere forme fondamentale : On dispose d’un produit scalaire
induit sur le plan tangent Tp(S) par le produit scalaire de R3. On lui associela forme quadratique
Ip : Tp(S) → R+
w 7→ (w | w) =‖ w ‖2
de forme polaire
ϕIp : Tp(S)× Tp(S) → R
(w1, w2) 7→ (w1 | w2)
Ip est la premiere forme fondamentale de S au point p.On pose
Mat(∂1x,∂2x)(ϕIp) =
(Ep Fp
Fp Gp
)ou
Ep = (∂1x | ∂1x)p
Fp = (∂1x | ∂2x)p(1)
Gp = (∂2x | ∂2x)p
On dispose ainsi des applications de classe C∞
: E : p → Ep, F : p → Fp etG : p → Gp.
Remarque : Ip est definie, donc ∀p ∈ x(U), EpGp − F 2p 6= 0. Nous pou-
vons ecrire de maniere generique EG− F 2 6= 0.
2.2.2. Seconde forme fondamentale : la differentielle de l’application deGauss. L’application de Gauss est definie sur S en entier (puisque S estorientable).
N : S → S2
La differentielle de N en p :dN(p) : Tp(S) → TN(p)(S2) = Tp(S) est un
endomorphisme de Tp(S). (ici les plans tangents sont consideres comme plansvectoriels, aussi a-t-on TN(p)(S
2) = Tp(S)). On a en particulier pour toutecourbe parametree α inscrite dans S, (N ◦ α)′(0) = dNp(α
′(0)).
Proposition. dNp est un endomorphisme autoadjoint.
Demonstration. Il suffit de montrer que (dNp(∂1x) | ∂2x) = (∂1x |dNp(∂2x)) ce qui equivault a (∂1N(p) | ∂2x) = (∂1x | ∂2N(p)) (par exemple

2. THEOREMA EGREGIUM : 6
dNp(∂1x) = dNp(α′(0)) = (N ◦ α)′(0) = ∂1N(p) d’apres la remarque ci-
dessus, ou α : t 7→ x(u + tu1)). Or on a (par definition de N)
(N(p) | ∂1x) = 0
(N(p) | ∂2x) = 0
d’ou en differentiant la premiere par rapport a u2 et la deuxieme par rapporta u1 :
(∂2N(p) | ∂1x) + (N(p) | ∂12x) = 0
(∂1N(p) | ∂2x) + (N(p) | ∂21x) = 0(2)
donc (∂1N(p) | ∂2x) = (∂2N(p) | ∂1x).
�
On pose pour la suite
Mat(∂1x,∂2x)dNp =
(a11 a12
a21 a22
)qui n’est pas forcement symetrique, a moins que (∂1x, ∂2x) soit orthonormee.
Seconde forme fondamentale et courbure : On associe a l’endomorphismeautoadjoint dNp la forme quadratique
II p : Tp(S) → Rv 7−→ −(dNp(v) | v)
de forme polaire
ϕIIp : Tp(S)× Tp(S) → R
(v1, v2) 7→ −(dNp(v1) | v2)
On pose
Mat(∂1x,∂2x)(ϕIIp ) =
(ep fp
fp gp
)ou
ep = −(dNp(∂1x) | ∂1x) = (N(p) | ∂11x)
fp = −(dNp(∂1x) | ∂2x) = −(dNp(∂2x) | ∂1x) = (N(p) | ∂12x)
gp = −(dNp(∂2x) | ∂2x) = (N(p) | ∂22x)(3)
en utilisant les egalites ??.

2. THEOREMA EGREGIUM : 7
Definition. Courbure normale : Soit α : ]−ε, ε[ → S une courbe declasse C
∞parametree par abscisse curviligne inscrite dans S telle que α(0) =
p. La courbure normale de α en p est par definition :
kn = k.(N(p) | n)
ou k est la courbure de α en p et n est le vecteur normal unitaire a α en p.
On a alors : la restriction de N a la courbe α
N : ]−ε, ε[ → S2
s 7→ N ◦ α(s)
verifie (N(s) | α′(s)) = 0 donc (en derivant) (N(s) | α′′(s)) = −(N ′(s) |α′(s)) d’ou
II p(α′(0)) =
def−(dNp(α
′(0)) | α′(0)) = −(N ′(0) | α′(0)) = (N(p) | α′′(0)) = kn
On en deduit que ∀v ∈ Tp(S), II p(v) est la courbure normale de toute courbeα : ]−ε, ε[ → S une courbe de classe C
∞inscrite dans S verifiant α(0) = p
et α′(0)‖v.
Proposition. ∃(e1, e2) une base orthonormee de Tp(S) telle que Mat(e1,e2)dNp =(k1 00 k2
)ou k1 = sup
‖v‖=1
II p(v) et k2 = inf‖v‖=1
II p(v). k1 et k2 sont les cour-
bures principales de S en p, e1 et e2 sont les directions principales.
Demonstration. La restriction a la sphere unite de II p : v 7−→ −(dNp(v) |v) est continue sur un compact donc est bornee et atteint ses bornes. Posonsalors k1 = sup
‖v‖=1
II p(v) = II p(v0) et q la forme quadratique definie par
q(v) = k1‖v‖2 − II p(v) = k1‖v‖2 + (dNp(v) | v)
de forme polaire
ϕ : (v1, v2) 7→ k1(v1 | v2) + (dNp(v1) | v2) = (dNp(v1) + k1v1 | v2)
q est positive (∀v ∈ Tp(S) on a II p(v‖v‖) ≤ k1 soit II p(v) ≤ k1‖v‖2 soit
q(v) ≥ 0) non definie (q(v0) = 0) donc degeneree. Donc ∃e1 ∈ Tp(S) tel que∀v ∈ Tp(S), ϕ : (e1, v) = 0 = (dNp(e1) + k1e1 | v2) d’ou dNp(e1) = −k1e1.
Re2 = (Re1)⊥est stable par dNp donc ∃k2 ∈ R tel que dNp(e2) = −k2e2.
Montrons alors que k2 = inf‖v‖=1
II p(v). Soit v ∈ Tp(S) tel que ‖ v ‖= 1.

2. THEOREMA EGREGIUM : 8
Posons v = cos(θ)e1 + sin(θ)e2. On a alors 1
II p(v) = −(dNp(v) | v)
= (cos(θ)k1e1 + sin(θ)k2e2 | cos(θ)e1 + sin(θ)e2)
= k1cos2(θ) + k2sin
2(θ)
≥ k2(cos2(θ) + sin2(θ)) = k2
et on a II p(e2) = k2 donc k2est bien l’infimum de II p sur la sphere unite. �
Remarque : L’egalite kn = II p(v) = k1cos2(θ)+k2sin
2(θ) (formule d’Eu-ler) permet de calculer toutes les courbures normales en p connaissant lescourbures principales k1et k2.
Courbure de Gauss, courbure moyenne : Courbure de Gauss de S en p :
K = k1k2 = det dNp
Courbure moyenne de S en p :
H =k1 + k2
2= −1
2tr(aij)
2.3. Application de Gauss et courbures en coordonnees locales :
On chereche dans cette section a expliciter Mat(∂1x,∂2x)dNp =
(a11 a12
a21 a22
).
On verifie que
−(
ep fp
fp gp
)=
(a11 a12
a21 a22
) (Ep Fp
Fp Gp
)(on a par exemple −ep = (dNp(∂1x) | ∂1x) = (a11∂1x + a12∂2x | ∂1x) =a11Ep + a12Fp). D’ou(
a11 a12
a21 a22
)= −
(ep fp
fp gp
) (Ep Fp
Fp Gp
)−1
On en deduit les expressions des courbures :
K = det(aij) =eg − f 2
EG− F 2
H = −1
2tr(aij) =
1
2
eG− 2fF + gE
EG− F 2
1k1 ≥ k2 car k1 = maxSp(dNp) et k2 ∈ Sp(dNp)

2. THEOREMA EGREGIUM : 9
pour avoir les courbures principales k1 et k2, il suffit de remarquer que
{k1, k2} = Sp(dNp)
=
{k ∈ R/
∣∣∣∣ a11 + ki a12
a21 a22 + ki
∣∣∣∣ = 0
}=
{k ∈ R/k2 + k.tr(aij) + det(aij) = 0
}=
{k ∈ R/k2 − 2Hk + K = 0
}= H ±
√H2 −K
2.4. Isometries et applications conformes :
Definition. Isometrie : Soient S1 et S2 deux surfaces regulieres. Undiffeomorphisme ϕ : S1 → S2 est une isometrie si dϕ conserve le produitscalaire. ie si ∀p ∈ S,∀(w1, w2) ∈ Tp(S), (w1 | w2) = (dϕp(w1) | dϕp(w2)).
Remarquons que dϕ conserve le produit scalaire ssi il conserve la premiereforme fondamentale (ssi il conserve les coefficients de la premiere forme, a sa-voir E, F et G). En effet, si on a ∀p ∈ S,∀w ∈ Tp(S), Ip(w) = Iϕ(p)(dϕp(w))alors on a par polarisation ∀p ∈ S,∀(w1, w2) ∈ Tp(S),
(w1 | w2) =1
2(Ip(w1 + w2)− Ip(w1)− Ip(w2))
=1
2
(Iϕ(p) (dϕp(w1 + w2))− Iϕ(p) (dϕp(w1))− Iϕ(p) (dϕp(w2))
)= (dϕp(w1) | dϕp(w2))
Definition. Isometrie locale : Soit p ∈ S1 . Une application ϕ : S1 → S2
est une isometrie locale en p si ∃V ⊂ S1 un voisinage de p tel que ϕ/V soitune isometrie. S1 est localement isometrique a S2 si ∀p ∈ S1,∃ϕp : S1 →S2isometrie locale en p.
Proposition. Si x1 : U → S1 et x2 : U → S2 sont des parametragesverifiant : Ex1(u) = Ex2(u), Fx1(u) = Fx2(u) et Gx1(u) = Gx2(u), alors ϕ =x2 ◦ x−1
1 : x1(U) ⊂ S1 → S2 est une isometrie locale.
Demonstration. Soit p ∈ S1 et soit w ∈ Tp(S1). On sait (d’apres lacaracterisation du plan tangent en 2.1.2) qu’il existe une courbe parametree
α :]− ε, ε[ → S1
t 7→ x1(u1(t), u2(t))

2. THEOREMA EGREGIUM : 10
telle que α′(0) = w. On a alors w = 1∂1x1 + u′2∂2x1. dϕp(w) est le vecteurtangent a la courbe
ϕ ◦ α :]− ε, ε[ → S2
t 7→ x2 ◦ x−11 ◦ x1(u1(t), u2(t)) = x2(u1(t), u2(t))
d’ou dϕp(w) = 1∂1x2 + u′2∂2x2. On en deduit que Ip(w) = Epu′2 + 2Fpu
′v′ +Gpv
′2 = Eϕ(p)u′2 + 2Fϕ(p)u
′v′ + Gϕ(p)v′2 = Iϕ(p)(dϕp(w)). �
Definition. Application conforme : Un diffeomorphisme ϕ : S1 → S2
est conforme si ∃λ : S1 → R+ de classe C∞ qui ne s’annulle pas sur S1 telleque ∀(w1, w2) ∈ Tp(S), (dϕp(w1) | dϕp(w2)) = λ2(p)(w1 | w2).
Interpretation geometrique : Une application conforme conserve les angles.En effet, soient α : ]−ε, ε[ → S1 et β : ]−ε, ε[ → S1deux courbes pa-rametees de S1 qui se coupent en p = α(0) = β(0) selon l’angle θ1 ∈]0, π[ defini par cos(θ1) = (α′(0)|β′(0))
‖α′(0)‖‖β′(0)‖). Les images par ϕ de ces courbes
se coupent en ϕ(p) = ϕ ◦ α(0) = ϕ ◦ β(0) selon l’angle θ2 defini par
cos(θ2) = (ϕ◦α′(0)|ϕ◦β′(0))‖ϕ◦α′(0)‖‖ϕ◦β′(0)‖ = λ2(p)(α′(0)|β′(0))
λ2(p)‖α′(0)‖‖β′(0)‖ = cos(θ1) (en remarquant que
‖ ϕ ◦ α′(0) ‖2= λ2(p) ‖ α′(0) ‖2).
2.5. Theorema Egregium : Remarquons d’abord que la premiere formefondamentale et les coefficients associes E, F et G sont invariants par isometrielocale. Il en est de meme pour toute propriete de S qui ne depend que deces coefficients. Une telle propriete est dite intrinseque.
Theorem. (K.F.Gauss)La courbure de Gauss est une propriete intrinseque, invariante par isometrie
locale.
Il suffit de montrer que K = eg−f2
EG−F 2 est fonction de E, F , G et de leursderivees successives (dans la suite, une telle fonction sera dite intrinsequeet ϕ designera une fonction intrinseque quelconque). On a d’apres ?? eg −f 2 = (N | ∂11x)(N | ∂22x) − (N | ∂12x)2. Il suffit donc de montrer que(N | ∂11x)(N | ∂22x)− (N | ∂12x)2 est une fonction intrinseque.
Lemma. ∀i, j, k ∈ {1, 2}3, (∂ijx | ∂kx) est une fonction intrinseque. Ona par exemple en derivant ?? : (∂11 | ∂1) = 1
2∂1E et (∂11 | ∂2) = ∂1F − 1
2∂2E.
Demonstration. Soit z = α∂1 + β∂2 + γN ∈ R3. on a
(z | ∂1) = αE + βF
(z | ∂2) = αF + βG

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :11
donc
α =1
F 2 − EG((z | ∂2)F − (z | ∂1)G)
β =1
F 2 − EG((z | ∂1)F − (z | ∂2)E)
et
(N | z)N = γN = z − α∂1 + β∂2
on a2 en particulier pour z = ∂11 : (N | ∂11)N = ∂11 + ϕ∂1 + ϕ∂2. On a dememe (N | ∂12)N = ∂12 + ϕ∂1 + ϕ∂2 et (N | ∂22)N = ∂22 + ϕ∂1 + ϕ∂2, d’ou(N | ∂11x)(N | ∂22x)− (N | ∂12x)2 = ∂11∂22−∂2
12 +ϕ. On a enfin en derivant?? : ∂11∂22 − ∂2
12 = −12(∂22E + ∂11G − 2∂12F ) qui est donc intrinseque, ce
qui acheve la demonstration. �
3. Projection continue de la sphere privee d’un pole sur un plan :
3.1. Definitions : S designera dans la suite une sphere de centre O etde rayon R privee d’un point P qu’on appellera pole. Π designera un plan.Un point M ∈ S sera repere par sa lattitude l et sa longitude L.M(l, L).Un point M ∈ Π sera repere par ses coordonnees cartesiennes M(x, y) oupolaires M(r, θ).
Definition. Une application p continue de S sur Π est une projectionde S sur Π. Dans la suite p designera une telle projection. p est dite conformesi elle conserve les angles, equivalente si elle conserve les rapports d’aires.
Une courbe reguliere de S est un ensemble de points C ⊂ S tel que ∃ϕ :[0, 1] → S de classe C∞ et verifiant ϕ([0, 1]) = C . Si de plus ϕ(0) = ϕ(1)alors C est dite fermee.
La longueur de C est par definition :
L(C) = supn∈N
{n∑
k=1
MkMk+1/(M1, ...,Mn) ∈ Cn}
Soit (A, B) ∈ S2. La distance entre A et B est par definition :
d(A, B) = inf{L(C)/(A, B) ⊂ C ⊂ S, C courbe reguliere}
Proposition. Soit (A, B) ∈ S2. Alors d(A, B) = acos( (−→OA|
−−→OB)
OA.OB).
2d’apres le lemme α et β sont des fonctions intrinseques

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :12
Remarque : Une application continue de la sphere unite sur un plan n’estpas bijective, car l’image de la sphere (compacte) par une telle applicationest compacte. Pour avoir une projection continue et bijective, on choisit deprojeter la sphere privee d’un pole.
3.2. Consequence du Theorema Egregium :
Proposition. p ne peut pas etre conforme et equivalente.
Demonstration. Supposons le contraire, par l’absurde. Une telle ap-plication p serait une isometrie de S sur Π. En effet, on a par definition d’uneapplication conforme : ∃λ : S → R+ de classe C∞ qui ne s’annulle pas surS telle que ∀m ∈ S, ∀(w1, w2) ∈ Tm(S), (dpm(w1) | dpm(w2)) = λ2(m)(w1 |w2). p est par ailleurs equivalente, donc ∀R = x(Q) ⊂ S region bornee deS (ou x : U = vect(u1, u2) → S est un parametrage local) A(R) = A(p(R))soit3∫
m∈Q
‖∂1x(m) ∧ ∂2x(m)‖ =
∫m∈Q
‖∂1p ◦ x(m) ∧ ∂2p ◦ x(m)‖
=
∫m∈Q
‖dpm(∂1x(m)) ∧ dpm(∂2x(m))‖
=
∫m∈Q
λ2(m)‖∂1x(m)) ∧ ∂2x(m))‖
D’ou λ = 1, car si ∃m0 ∈ S tel que λ(m0) 6= 1 (par exemple λ(m0) < 1)alors comme λ est continue, ∃R0 = x(Q0) ⊂ S un voisinage de m0 tel que∀m ∈ R0, λ(m) < 1. On aurait alors∫
m∈Q0
‖∂1x(m) ∧ ∂2x(m)‖ =
∫m∈Q0
λ2(m)‖∂1x(m)) ∧ ∂2x(m))‖
<
∫m∈Q0
‖∂1x(m) ∧ ∂2x(m)‖
ce qui est absurde, donc λ = 1. Donc dp conserve le produit scalaire, donc pet une isometrie.
Donc si m ∈ S, alors K(m ∈ S) = K(p(m) ∈ Π) ce qui est absurde, carles courbures de Gauss de la sphere et du plan valent respectivement 1 et0. �3
‖dpm(∂1x(m)) ∧ dpm(∂2x(m))‖ = ‖dpm(∂1x(m))‖‖dpm(∂2x(m))‖sin(θ)= λ(m)‖∂1x(m)‖λ(m)‖∂1x(m)‖sin(θ)= λ2(m)‖∂1x(m)) ∧ ∂2x(m))‖
car l’angle θ est conserve.

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :13
Remarque : Une carte de la terre ne peut donc pas etre a la foisconforme et equivalente. En aviation et en navigation, il est plus pratiqued’utiliser une carte conforme puisque les angles y sont conserves. Il seraitdonc interessant d’etudier les deformations de distances engendrees par uneprojection conforme (la projection stereographique par exemple)
3.3. Exemples et classification de quelques projections :3.3.1. Projections conformes :Projection cylindrique conforme (Mercator). Projection definie sur la
sphere privee de deux poles (P et P ′ = sO(P )) par : ∀M(l, L) ∈ S \{P, P ′},{p(M)} = [OM) ∩ C ou C est un cylindre tangent a S d’axe (PP ′). Lecylindre est deroule. On a alors p(M) = (R.L,R.tan(l))x,y
3.3.2. Projections equivalentes :Projection cylindrique equivalente (Lambert). ∀M(l, L) ∈ S \ {P, P ′},
{p(M)} = [M ′M)∩C ou M ′ est le projete orthogonal de M sur (PP ′) et Cest un cylindre tangent a S d’axe (PP ′). Le cylindre est deroule. On a alorsp(M) = (R.L,R.sin(l))x,y.

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :14
3.4. La projection stereographique : Soit Π un plan perpendiculairea (OP ). Posons d = d(O, Π). On definit la projection stereographique par
p : S → Π
M 7→ p(M) tel que {p(M)} = [PM) ∩ Π

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :15
On munit Π du repere orthonorme RΠ = (O′, i, j) ou O′ est le projeteorthogonal de O sur Π (O′ = p(P ′) et i est un vecteur directeur norme de lademi droite image du meridien (l = 0). On a alors p(M) = ((R+ d).tan(π
4−
l2), L)r,θ. (on a {M(l0, L0} = C(l = l0) ∩ C(L = L0) donc {p(M)} = D(r ≥
0, θ = l0) ∩ C(r = (R + d).tan(π4− l0
2)))
Proposition. La projection stereographique est conforme
Demonstration. Soit M ∈ S \ {P} et M ′ = p(M). Soit Q1(resp. Q2)le plan tangent a S en P (resp. en M). Soient D1et D2deux droites contenuesdans Q2 et passant par M . Soit {A} = D1∩Π et {B} = D2∩Π. on prolongep en
∼p : R3 \ {P} → R3
M 7−→ (PM) ∩ Π
. [MA) et [MB) sont tangents a S en M , leurs images par∼p sont [M ′A) et
[M ′B). Il suffit alors de montrer que ˆAMB = ˆAM ′B. Soit {C} = (AM)∩Q1
et {D} = (BM) ∩Q1. On a (PC) ‖ (AM ′). En effet : elles sont coplanaires(car (AC) et (M ′P ) sont secantes) et elles n’ont pas de points communscar Πet Q1 sont strictement paralleles. On a de meme (PD) ‖ (BM ′) et(AB) ‖ (CD). En considerant l’homothetie de centre M
h : A 7−→ C
B 7−→ D
M ′ 7−→ P
on conclut que ˆCPD = ˆAM ′B.

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :16
[DM) et [DN) sont tangentes a S et issues du meme point donc DM =DN . De meme, CM = CN . Les triangles CMD et CND sont donc isometriquesdonc ˆCMD = ˆCPD.
On a de plus ˆAMB = ˆCPD. D’ou ˆAMB = ˆAM ′B. �
Proposition. La projection stereographique est la restriction a S \{P}de l’inversion de l’espace de pole P et de rapport 2R.(R + d).
Demonstration. Soit M ∈ S et M ′ = p(M). Posons α = ˆP ′PM . Lestriangles PP ′M et PO′M ′ etant rectangles en M et O′ respectivement, ona cos(α) = PM
PP ′= PO′
PM ′ d’ou PM.PM ′ = PP ′.PO′ = 2R.(R + d). �

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :17
L’image par p de tout cercle ne passant pas par P est donc un cercle(en particulier l’image d’une geodesique est un cercle), et l’image de toutmeridien est une demi-droite issue de p(P ′) = O′ (l’image du meridien L =L0 est la demi-droite r ≥ 0, θ = L0). On peut obtenir le rayon du cercle imaged’un parallele : r = (R+ d).tan(π
4− l0
2). En effet, soit M ∈ parallele(l = l0),
M ′ = p(M) et H le projete orthogonal de M sur (PP ′). On a M ′O′
MH= PO′
PH
donc rR.sin(π
2−l0)
= d+RR(1+sin(l0))
donc r = (R + d) cos(l0)1+sin(l0)
= (R + d)2t
1+t2
1+ 1−t2
1+t2
=
(R + d).t ou t = tan(π4− l0
2).
Echelle le long d’un parallele : il s’agit du rapport des rayons du parallele
et de son cercle image :(R+d).tan(π
4− l0
2)
R.cos(l0)=
(R+d).tan(π4− l0
2)
R.2.sin(π4− l0
2).cos(π
4− l0
2)
= R+dR.(1+sin(l0))

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :18
Proposition. Dans le cas particulier ou d = 0 (Π est le plan equatorialde S), la symetrie par rapport a Π est transformee en l’inversion par rapportau cercle equateur.
Demonstration. Soit M1 ∈ S, M2 = sΠ(M1), N1 = p(M1), N2 =
p(M2) et {I} = (M1M2)∩Π. On cherche a montrer que−−→ON1.
−−→ON2 = R2. On
considere le cercle (N ′M1M2). La puissance de N1 par rapport a ce cercle
vaut N1O2 − R2. Elle vaut aussi
−−−→N1M1.
−−−→N1P
′ = (−−−→N1N2 +
−−−→N2M1).
−−−→N1N
′ =−−−→N1N2.
−−−→N1N
′ =−−−→N1N2.(
−−→N1O +
−−→ON ′) =
−−−→N1N2.
−−→N1O = N1O
2 −−−→ON1.
−−→ON2 d’ou
−−→ON1.
−−→ON2 = R2. �

3. PROJECTION CONTINUE DE LA SPHERE PRIVEE D’UN POLE SUR UN PLAN :19
Equation de l’image d’une loxodromie par la projection stereographique :Une loxodromie est par definition une courbe de S qui fait en tout pointun angle constant avec les paralleles. Or l’image par p d’un parallele (privedu pole) est une demi-droite d’origine O′ = p(P ′) et p est conforme, doncl’image d’une loxodromie par p est une courbe dont la tangente fait un angleconstant avec le vecteur radial u(θ) = cos(θ)i+sin(θ)j. Soit α(θ) = r(θ)u(θ)une courbe de Π en coordonnees polaires. On a α′(θ) = r′(θ)u(θ) + r(θ)v(θ)ou v(θ) = −sin(θ)i+cos(θ)j. On a alors α est l’image par p d’une loxodromie
ssi r′(θ)r(θ)
= a, a ∈ Rssi r(θ) = eaθ + b, (a, b) ∈ R2. Donc l’image par p d’une
loxodromie est une spirale logarithmique (et inversement)Application : La projection stereographique permet de visualiser quelques
proprietes du modele de la geometrie spherique (elliptique). Dans ce modele,les droites sont les grands cercles (intersection d’un plan contenant O avecS). Un triangle spherique est la reunion de trois arcs de grands cercles relianttrois points de S.
Proposition. La somme des angles d’un triangle spherique est stricte-ment superieure a pi.
Demonstration. Soit ABC un triangle spherique, A, B, C ∈ S. SoitΠ le plan tangent a S en A et pla projection stereographique sur Π de poleP = sO(A). On a p(A) = A. Posons B′ = p(B) et C ′ = p(C). On a alorsp((AB) \ {P}) = (AB′), p((AC) \ {P}) = (AC ′) et p(BC) est un cercle de

4. VISUALISATION DES RESULTATS : 20
centre A passant par B′ et C ′. Comme p est conforme, la somme des anglesde ABC est egale a la somme des angles de p(ABC) qui est strictementsuperieure a pi. �
4. Visualisation des resultats :
4.1. Projections 3d : Projections 3d est un programme que j’ai ecriten Ocaml afin de permettre une visualisation interactive des principauxresultats de cet expose. En voici le code :
#load "Graphics.cma" ; ;
let f=10. ; ;
let pi=4.*.atan 1. ; ;
let colors=[|0x000066 ;0xcccccc ;0xffccff ;0x99cc00 ;0x99cc00|] ; ;
let secondary colors=[|0xc1c1ff ;0xeeeeee ;0xff99ff ;0xe8ff9f ;0xe8ff9f|] ; ;
type global vars={mutable ph1 :float ;mutable ph2 :float ;mutable th1 :float ;mutable th2 :float ;
nb parall :int ;nb merid :int ;nb arcs :int ;
mode :string ;
mutable c :float ;mutable x t :float ;mutable y t :float ;
mutable x rot :float ;mutable y rot :float ;
mutable ecran vide :bool ;
mutable refx :int ;mutable refy :int ;
mutable current color :int ;mutable current color secondary :int} ; ;
let multiplie m1 m2 gv=
[|m1.(0).(0)*.m2.(0)+.m1.(0).(1)*.m2.(1)+.m1.(0).(2)*.m2.(2)+.(gv.x t) ;
m1.(1).(0)*.m2.(0)+.m1.(1).(1)*.m2.(1)+.m1.(1).(2)*.m2.(2)+.(gv.y t) ;
m1.(2).(0)*.m2.(0)+.m1.(2).(1)*.m2.(1)+.m1.(2).(2)*.m2.(2)|] ; ;
let rot matrice u1 u2=
[|[|(cos u2) ;0. ;(sin u2)|] ;

4. VISUALISATION DES RESULTATS : 21
[|-1.*.(sin u1)*.(sin u2) ;(cos u1) ;(sin u1)*.(cos u2)|] ;
[|-1.*.(sin u2)*.(cos u1) ;-1.*.(sin u1) ;(cos u1)*.(cos u2)|]|] ; ;
let spherique to cart e=
[|e.(0)*.(cos e.(2))*.(sin e.(1)) ;e.(0)*.(sin e.(2)) ;e.(0)*.(cos e.(2))*.(cos e.(1))|] ; ;
let spherique to cart light e=
[|(cos e.(1))*.(sin e.(0)) ;(sin e.(1)) ;(cos e.(1))*.(cos e.(0))|] ; ;
let polaire to cart e=
[|e.(0)*.(cos e.(1)) ;e.(0)*.(sin e.(1)) ;0.|] ; ;
let cart to cart e=
[|e.(0) ;e.(1) ;0.|] ; ;
let projection e gv=
if e.(2)<0. then Graphics.set color gv.current color secondary
else Graphics.set color gv.current color ;
((e.(0)/.(1.-.e.(2)/.f)),(e.(1)/.(1.-.e.(2)/.f))) ; ;
let affiche e coef rot gv=
let r matrice=rot matrice (coef rot*.(gv.x rot)) (coef rot*.(gv.y rot))
in let rec trace groupe l=
match l with
|[]->()
|h : :t->
let (x,y)=projection (multiplie r matrice h gv) gv
in Graphics.lineto ((int of float (gv.c*.x))+400) ((int of float (gv.c*.y))+400) ;
trace groupe t ;
in let rec itere l=
match l with
|[]->()
|[] : :tt->itere tt ;
|(h : :t) : :tt->
let (x0,y0)=projection (multiplie r matrice h gv) gv
in Graphics.moveto ((int of float (gv.c*.x0))+400) ((int of float (gv.c*.y0))+400) ;
trace groupe t ;
itere tt ;
in itere e ; ;
let creer cercle ()=
let rec itere n l=
match n with
|(-1)->l
|x when x<50->
itere (n-1) ([|-1.*.pi/.2.+.0.1 ;pi*.((float of int n)/.50.-.0.5)|] : :l) ;
|x when x<=100->
itere (n-1) ([|pi/.2.-.0.1 ;-1.*.pi*.((float of int n)/.50.-.1.5)|] : :l)
| ->l ;

4. VISUALISATION DES RESULTATS : 22
in [itere 100 []] ; ;
let creer parall gv=
let rec un parall i j ll=
match j with
|(-1)->ll
| ->un parall i (j-1) ([|2.*.pi*.(0.5-.(float of int j)/.100.) ;
pi*.(0.5-.(float of int i)/.(float of int gv.nb parall))|] : :ll)
in let rec itere i l=
match i with
|(-1)->l
| ->itere (i-1) ((un parall i 100 []) : :l)
in itere gv.nb parall [] ; ;
let creer merid gv=
let rec un merid i j ll=
match j with
|(-1)->ll
| ->un merid i (j-1) ([|(2.*.pi*.(0.5-.(float of int i)/.(float of int gv.nb merid))) ;
(pi*.(0.5-.(float of int j)/.100.))|] : :ll)
in let rec itere i l=
match i with
|(-1)->l
| ->itere (i-1) ((un merid i 100 []) : :l)
in itere gv.nb merid [] ; ;
let spherique to stereo e=
let ph=e.(0) in let th=e.(1)
in [|2.*.(tan (pi/.4.-.th/.2.)) ;ph|] ; ;
let spherique to mercator e=
let ph=e.(0) in let th=e.(1)
in [|ph ;tan th|] ; ;
let spherique to lambert e=
let ph=e.(0) in let th=e.(1)
in [|ph ;sin th|] ; ;
let stereo to spherique r t=
[|t ;pi/.2.-.2.*.atan(r/.2.)|] ; ;
let spherique to stereo2 e=
let ph=e.(0) in let th=e.(1)
in (2.*.(tan (pi/.4.-.th/.2.)),ph) ; ;
let creer loxo gv=
let (r1,t1)=(spherique to stereo2 [|gv.ph1 ;gv.th1|])
and (r2,t2)=(spherique to stereo2 [|gv.ph2 ;gv.th2|])
in let coef a=(log (r1/.r2))/.(t1-.t2)

4. VISUALISATION DES RESULTATS : 23
in let coef b=r1/.(exp (coef a*.t1))
in let rec itere n l=
match n with
|(-1)->()
| ->
let t=(float of int (n-1000))*.0.01 in let r=coef b*.exp(coef a*.t)
in itere (n-1) ((stereo to spherique r t) : :l) ;
in itere 2000 [] ; ;
let creer loxo light gv=
let (r1,t1)=(spherique to stereo2 [|gv.ph1 ;gv.th1|])
and (r2,t2)=(spherique to stereo2 [|gv.ph2 ;gv.th2|])
in let coef a=(log (r1/.r2))/.(t1-.t2)
in let coef b=r1/.(exp (coef a*.t1))
in let rec itere n l=
match n with
|(-1)->l
| ->
let t=gv.ph1+.((float of int n)/.200.)*.(gv.ph2-.gv.ph1)
in let r=coef b*.exp(coef a*.t)
in itere (n-1) ((stereo to spherique r t) : :l) ;
in itere 200 [] ; ;
let creer ortho gv=
let (a1,a2,b1,b2,c1,c2)=((sin gv.th1),(sin gv.th2),((cos gv.th1)*.(cos gv.ph1)),
((cos gv.th2)*.(cos gv.ph2)),(-1.*.(cos gv.th1)*.(sin gv.ph1)),(-1.*.(cos gv.th2)*.(sin gv.ph2)))
in let coef d=(c2-.c1*.a2/.a1)/.(b2-.b1*.a2/.a1)
in let coef c=c1/.a1-.coef d*.b1/.a1
in let rec itere n l=
match n with
|(-1)->l
| ->
let ph=2.*.pi*.float of int(n)/.1000.
in let th=(-1.)*.(atan ((coef d*.(cos ph)+.(sin ph))/.coef c))
in itere (n-1) ([|ph ;th|] : :l) ;
in itere 1000 [] ; ;
let creer ortho light gv=
let (a1,a2,b1,b2,c1,c2)=((sin gv.th1),(sin gv.th2),((cos gv.th1)*.(cos gv.ph1)),
((cos gv.th2)*.(cos gv.ph2)),(-1.*.(cos gv.th1)*.(sin gv.ph1)),(-1.*.(cos gv.th2)*.(sin gv.ph2)))
in let coef d=(c2-.c1*.a2/.a1)/.(b2-.b1*.a2/.a1)
in let coef c=c1/.a1-.coef d*.b1/.a1
in let rec itere n l=
match n with
|(-1)->l
| ->
let ph=gv.ph1+.(float of int(n)/.100.)*.(gv.ph2-.gv.ph1)
in let th=(-1.)*.(atan ((coef d*.(cos ph)+.(sin ph))/.coef c))
in itere (n-1) ([|ph ;th|] : :l) ;
in itere 100 [] ; ;

4. VISUALISATION DES RESULTATS : 24
let bouger n gv=
match n with
|1->let (x,y)=Graphics.mouse pos() in
Graphics.clear graph() ;
gv.ecran vide<-true ;
gv.x t<-gv.x t+.(float of int (x-(gv.refx))/.(gv.c)) ;
gv.y t<-gv.y t+.(float of int (y-(gv.refy))/.(gv.c)) ;
gv.refx<-x ;gv.refy<-y
|2->let (x,y)=Graphics.mouse pos() in
Graphics.clear graph() ;
gv.ecran vide<-true ;
gv.y rot<-gv.y rot+.((float of int (x-(gv.refx))/.100.)) ;
gv.x rot<-gv.x rot+.((float of int (y-(gv.refy))/.100.)) ;
gv.refx<-x ;gv.refy<-y
|3->let (x,y)=Graphics.mouse pos() in
Graphics.clear graph() ;
gv.ecran vide<-true ;
gv.c<-gv.c+.((float of int (y-(gv.refy)))*.2.) ;
gv.refx<-x ;gv.refy<-y
|0->let (x,y)=Graphics.mouse pos() in gv.refx<-x ;gv.refy<-y ;
| ->()
; ;
let rec dessiner l gv=
match l with
[]->gv.ecran vide<-false
|h : :t->let (coef rot,couleur,e)=h
in gv.current color<-colors.(couleur) ;
gv.current color secondary<-secondary colors.(couleur) ;
affiche e coef rot gv ;
dessiner t gv
; ;
let rec interaction n l gv=
bouger n gv ;
dessiner l gv ;
match Graphics.read key() with
| ’a’ -> interaction 1 l gv
| ’z’ -> interaction 2 l gv
| ’e’ -> interaction 3 l gv
| ’q’ -> ()
| -> interaction 1 l gv
; ;
let lancer gv=
let parall=creer parall gv
in let merid=creer merid gv
in let cercle=creer cercle ()
in let orth=[creer ortho light gv]

4. VISUALISATION DES RESULTATS : 25
in let lox=[creer loxo light gv]
in let trans f1 f2 target=List.map (List.map f1) (f2 target) ;
in let creer liste graphique f1 f2=
(1.,0,(trans f1 f2 terre)) : :
(0.,0,(trans f1 f2 cercle)) : :
(1.,1,(trans f1 f2 parall)) : :
(1.,1,(trans f1 f2 merid)) : :
(1.,2,(trans f1 f2 orth)) : :
(1.,3,(trans f1 f2 lox)) : :[]
in let liste graphique=(match gv.mode with
|"3d"->creer liste graphique spherique to cart light (fun x->x)
|"stereo"->creer liste graphique polaire to cart (List.map (List.map spherique to stereo))
|"mercator"->creer liste graphique cart to cart (List.map (List.map spherique to mercator))
|"lambert"->creer liste graphique cart to cart (List.map (List.map spherique to lambert))
| ->[])
in
Graphics.open graph "" ;
interaction 0 liste graphique gv ;
Graphics.close graph()
; ;
let gv0={ph1=0.05 ;ph2=2.45 ;th1=0.85 ;th2=0.7 ;nb parall=10 ;nb merid=10 ;nb arcs=2 ;
mode="3d" ;c=300. ;x t=0. ;y t=0. ;x rot=0. ;y rot=0. ;
ecran vide=true ;refx=0 ;refy=0 ;
current color=0x000000 ;current color secondary=0xcccccc} ; ;
lancer gv0 ; ;
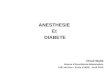
4.2. Visualisation des resultats : Le programme ”projections” quej’ai ecrit en Ocaml et dont le code est donne en annexe, permet de visuali-ser les resultats enonces ci-dessus. Le programme consiste a tracer, en 3D,en projection stereographique, de Lambert ou de Mercator, la loxodromieet la geodesique reliant deux points definis par l’utilisateur. L’interface duprogramme permet de faire tourner la figure obtenue et d’effectuer un zoom.
Loxodromie (en vert) et Geodesique (en rouge) Paris-Tokyo :

4. VISUALISATION DES RESULTATS : 26
Paris-Tokyo en projection de Mercator :
Paris-Tokyo en projection stereographique (d = 1)

4. VISUALISATION DES RESULTATS : 27
On voit ici en particulier la deformation d’aire par la projection. Ladeformation est plus visible pres du pole de la projection (choisi ici au poleSud)
Caire-Tokyo en projection stereographique (d = 0)
On voit ici que l’image par la projection stereographique de la geodesiqueCaire-Tokyo est un cercle. On verifie egalement que ce cercle passe parl’image de ces points par l’inversion par rapport au cercle equateur (ici d = 0)

Bibliographie
[1] Do Carmo, Manfredo P. “Differential Geometry of Curves and Surfaces”. PearsonEducation Asia Limited, 2004.
[2] Apery, Francois. “Aplanir la sphere”, La sphere sous toutes ses formes, Pour lascience, 12/2003. (Dossier hors-serie 41)
28











![P1RachisTronc140909.ppt [Mode de compatibilité]fra.lecomte.free.fr/P1RachisTronc140909.pdf · (Rachis) 34 vertèbres superposées C6-C7Æ pp 24 pièces osseuses 4 segments & 4 courbures:](https://img.pdfslide.fr/doc/110x75/5b9c87c209d3f2194e8c71ad/mode-de-compatibilitefralecomtefreefrp1rachistronc140909pdf-rachis.jpg)