Embed Size (px)
DESCRIPTION
Travail de maturité 2006. Représentation numérique de l'orbite de satellites artificiels autour de la Terre et du mouvement de précession de celle-ci dans un cas où seuls interviennent le satellite et la Terre.
Citation preview

Gymnase Auguste PiccardAnnée 2006-2007
Jonas Vautherin 3MS2
ETUDE DU MOUVEMENT DE PRÉCESSION DU PLAN DE L’ORBITE DES SATELLITES ARTIFICIELS
Novembre 2006


Table des matières
Introduction...................................................................................................................1Première partie : Les satellites artificiels....................................................................2
Les débuts du satellite artificiel en bref..............................................................................2Les satellites artificiels dans notre société..........................................................................3La structure d’un satellite....................................................................................................3Les différentes orbites...........................................................................................................4
L’orbite basse...................................................................................................................................4L’orbite d’attente.............................................................................................................................4L’orbite de transfert.........................................................................................................................4L’orbite de transfert de Hohmann....................................................................................................5L’orbite de rebut..............................................................................................................................5L’orbite héliosynchrone...................................................................................................................5L’orbite géosynchrone.....................................................................................................................5L’orbite géostationnaire...................................................................................................................6L’orbite phasée.................................................................................................................................6L’orbite polaire................................................................................................................................7L’orbite équatoriale..........................................................................................................................7
Les lanceurs...........................................................................................................................7Les changements d’orbite.....................................................................................................8
Changements d’orbite en vue d’atteindre la position finale lors d’un lancement............................9Correction de la dérive de l’orbite due au phénomène de la précession........................................10
Deuxième partie : l’aspect purement physique du problème..................................12Calculs dans le cas d’une sphère parfaite......................................................................................12Calculs pour s’approcher du cas réel.............................................................................................13
Troisième partie : élaboration et utilisation du programme...................................19Programme à 2 dimensions, utilisant les listes.................................................................19
Algorithme du programme (commenté) :......................................................................................19Résultats obtenus en exécutant le code sur Mathematica :............................................................20
Programme à 2 dimensions, utilisant les lois de Kepler..................................................21Algorithme du programme (commenté) :......................................................................................21Résultats obtenus en exécutant le code sur Mathematica :............................................................22
Programme final, à trois dimensions................................................................................24Algorithme (commenté) de la première cellule :...........................................................................24Algorithme (commenté) de la deuxième cellule :..........................................................................27Résultats (commentés) affichés par Mathematica :.......................................................................27
Prise de mesures..................................................................................................................28Tableau et graphique des résultats - angle fixe (45°) et altitude variable.....................33Tableau et graphique des résultats - angle fixe (20°) et altitude variable.....................35Tableau et graphique des résultats - altitude fixe (20 [km]) et angle variable..............37Tableau et graphique des résultats - altitude fixe (600 [km]) et angle variable............39Tableau et graphique des résultats - altitude fixe (36 000 [km]) et angle variable.......41Interprétation des résultats................................................................................................43
Retour à la réalité........................................................................................................45Conclusion....................................................................................................................47Annexes........................................................................................................................48Bibliographie................................................................................................................52Remerciements............................................................................................................54


Introduction
Les satellites artificiels font, depuis plusieurs années déjà, partie de notre quotidien ; les
médias, les télécommunications, le positionnement (avec le si célèbre système GPS
notamment), l’observation de notre planète sont autant d’éléments qui, bien que récents dans
notre histoire, semblent aujourd’hui ordinaires et habituels. Mais derrière la facilité
d’utilisation de beaucoup de nos appareils se cache une réalité un peu plus complexe que ce
que l’on pourrait imaginer. D’une part faut-il, avant que ces appareils ne les utilisent pour
fonctionner, placer nos satellites artificiels sur l’orbite appropriée, mais encore faut-il les y
maintenir afin de pouvoir les utiliser convenablement. Et là interviennent certains facteurs
comme l’attraction de la Lune, du Soleil, ou encore de la Terre. Nous traiterons ici
principalement de ce dernier facteur. En effet, notre planète n’étant pas totalement sphérique –
et cela pour une différence de longueur entre ses axes de seulement 20 kilomètres – elle a
tendance à faire « dévier » les satellites de leur trajectoire, ce qui induit un mouvement de
précession du plan de l’orbite de ces satellites. En fait, à la manière d’une toupie en rotation,
les plans des orbites ont tendance à pivoter sur un axe, en l’occurrence l’axe Nord-Sud de la
Terre. L’objet de ce travail est donc de s’intéresser d’un peu plus près aux satellites artificiels
et à la gestion de ceux-ci et de leurs mouvements, ainsi que comprendre ce phénomène de
précession engendré par la Terre. Puis de pouvoir réaliser un petit script permettant, à l’aide
du logiciel Mathematica, de dessiner le plus précisément possible l’orbite d’un satellite à
partir de certaines conditions initiales et comparer les mesures obtenues à la réalité pour
finalement en tirer quelques conclusions.

Première partie : Les satellites artificiels
Les débuts du satellite artificiel en bref
Le premier lancement d’un satellite artificiel, Spoutnik, par l’ex-URSS, date de 1957.
Celui-ci ne mesure alors que 58 centimètres de diamètre et pèse 83.6 kilogrammes. Nous
sommes en pleine guerre froide et ce lancement marquera le début de la course à l’espace
entre les Etats-Unis d’Amérique et l’Union Soviétique. S’ensuit une avancée technologique
extraordinaire dans ce domaine : désireux de se montrer supérieur à l’adversaire autant
militairement que technologiquement, chacun des deux rivaux investira des sommes
colossales dans le développement de sa technique, pour arriver au premier pas sur la Lune en
Juillet 1969.
Photo 1 : Spoutnik 11 Photo 2 : Autre vue de Spoutnik 12
La course à la technologie spatiale sera alors terminée en ce qui concerne la guerre froide,
mais les recherches ne s’arrêteront pas là bien sûr. Et cette rapide évolution aura été très
bénéfique pour les satellites artificiels – ce qui nous intéresse dans ce dossier. La mise en
orbite d’un satellite sera simplifiée par les progrès effectués au fil du temps et l’on pourra
utiliser de plus en plus aisément les satellites pour diverses utilisations dans le domaine
public. Ainsi, de la petite centaine de kilos que pesait Spoutnik 1, les lanceurs ont vite évolué
et nous sommes aujourd’hui capables d’envoyer des satellites dont la masse s’exprime en
tonnes, par exemple pour envoyer les modules de la célèbre station spatiale internationale.
1 Image tirée du site : http://www.cnes.fr/automne_modules_files/standard/public/ p443_73deffd36fde4245e3c473170 1160e13spoutnik_p.jpg2 Image tirée du site : http://arnaudel.club.fr/Payekhali/Spoutnik.jpg

Les satellites artificiels dans notre société
L’utilisation des satellites artificiels a tant évolué durant les dernières décennies qu’elle fait
maintenant partie de la vie de tous les jours. A un tel point que la société actuelle en est
littéralement devenue dépendante. Car non seulement il existe des satellites d’observation
militaire, mais d’autres sont destinés à un usage scientifique, pour observer l’environnement
terrestre, ou alors d’autres planètes ou corps. Notamment le télescope Hubble qui est en orbite
autour de notre planète. D’autres encore sont utilisés dans la communication (téléphone,
télévision, Internet, médias), ou pour le positionnement, par exemple dans le système GPS3 ou
le futur système européen Galiléo. Différents types de prises de vue existent aussi. Un satellite
peut faire des relevés infrarouges, optiques, ultraviolets ou autres, et est utilisé dans des
domaines variés.
La structure d’un satellite
Il est généralement admis qu’un satellite est constitué de deux parties, qu’on appellera des
« modules ». Le premier est le module dit « de service », ou la plate-forme, et le second le
module « utile », ou charge utile.
Le module de service regroupe ce qui est utile au satellite directement et non
obligatoirement au déroulement de la mission ; le carburant, le(s) moteur(s)4, le système de
communication permettant de contrôler le satellite depuis la Terre ou de corriger son orbite,
les panneaux solaires, sont autant d’éléments qui ne seront pas utilisés pour accomplir une
mission directement, mais pour permettre au module utile de le faire. Car la réussite de la
mission dépend aussi de la mise en orbite du satellite, et le moteur est donc indispensable
pour cela, dans le cas d’un satellite placé en orbite d’attente, entre autres. Ou alors, suivant
l’orbite, le satellite aura tendance à dévier plus ou moins de sa trajectoire et il faudra donc la
corriger à intervalles réguliers.
Le module utile, quant à lui, regroupe les appareils permettant d’effectuer les mesures,
relevés, observations, photographies pour lesquels la mission a été créée. Ce module varie
donc plus facilement selon le type de satellite que le module de service. Des caméras, radars
et/ou antennes feront donc partie de cette fameuse charge utile.
3 Global Positioning System 4 Il peut y avoir plus d’un moteur suivant le type de satellite et la méthode de mise en orbite.

Les différentes orbites
Selon l’utilisation que l’on veut en faire, un satellite devra être placé sur une orbite choisie.
Il y a différents moyens de mettre un satellite en orbite, selon le type de celle-ci. Il faudra
même parfois user de manœuvres telles que placer le satellite sur une orbite elliptique
temporaire avant de l’envoyer sur son orbite définitive.
On trouve donc une multitude d’orbites distinctes, notamment :
L’orbite basse
L’orbite d’attente
L’orbite de transfert
L’orbite de transfert de Hohmann
L’orbite de rebut
L’orbite héliosynchrone
L’orbite géosynchrone
L’orbite géostationnaire
L’orbite phasée
L’orbite polaire
L’orbite équatoriale
L’orbite basse
L’orbite basse est constituée par les orbites se situant entre 350 et 1400 kilomètres
d’altitude. Les missions habitées se sont en général déroulées sur cette orbite. Elle est aussi
utilisée notamment pour les satellites de positionnement et météorologique.
L’orbite d’attente
L’orbite d’attente est l’orbite sur laquelle est placé temporairement un satellite, par
exemple autour d’une planète, attendant le moment adéquat pour quitter cette orbite pour
continuer la mission.
L’orbite de transfert
L’orbite de transfert apparaît dans le cas d’un satellite qui devra passer par plusieurs
orbites avant d’être sur l’orbite finale. Elle est l’orbite dans laquelle se trouve le satellite avant
d’être envoyé sur l’orbite visée. Dans le cas d’un satellite géostationnaire, il faut
nécessairement passer par cette orbite de transfert, qui se situe entre 200 et 36000 kilomètres
d’altitude.

L’orbite de transfert de Hohmann
Cette orbite est une orbite de transfert particulière, choisie pour consommer un minimum
d’énergie durant le transfert. C’est aussi le cas ou le trajet est le plus lent et il est donc utilisé
dans le cas d’un rendez-vous (pour joindre deux satellites par exemple dans le cas d’une
station spatiale). Pour des raisons évidentes d’économie d’énergie, cette orbite de transfert est
la plus couramment utilisée lors de la mise en orbite de satellites artificiels.
L’orbite de rebut
Cette orbite est celle dans laquelle est placé un satellite en fin de vie opérationnelle. Elle
est utilisée pour libérer de l’espace dans les altitudes où se trouvent les satellites encore actifs,
afin de réduire les risques d’une éventuelle collision. Mais on ne met pas toujours les satellites
en orbite de rebut ; on peut en effet les faire redescendre dans l’atmosphère, où ils se
désintégreront. Mais, suivant les cas, il faudra une poussée bien plus grande pour faire
redescendre le satellite de l’orbite que pour le placer sur une orbite de rebut, plus haute.
L’orbite héliosynchrone
C’est une orbite dont l’angle formé entre le plan de l’orbite et la direction de la Terre au
Soleil reste constant. Cela permet d’avoir un satellite qui passe toujours à la même heure au
dessus d’un point, et peut être utile pour les satellites d’observation. On peut en effet faire des
photos en gardant la même luminosité. On utilise ce type d’orbite pour les satellites
météorologiques par exemple.
L’orbite géosynchrone
Un satellite en orbite géosynchrone se déplace dans le même sens que le sens de rotation
de la Terre, et son temps de révolution est égal à la période de révolution de celle-ci. Il se
situe à une altitude d’environs 36000 kilomètres.
L’orbite géostationnaire

Photo 3 : Un satellite GPS5 Photo 4 : Un satellite GPS6
L’orbite géostationnaire est un cas particulier de l’orbite géosynchrone. Le satellite tourne
dans le même sens de rotation que la Terre, et sa période orbitale est aussi de 23h56min. Mais
cette fois-ci, le satellite restera toujours au-dessus du même point terrestre. En fait, il
apparaîtra immobile pour une observation provenant de la Terre. Cette orbite est très utilisée
pour les satellites de communication. En effet, il suffit à une antenne d’être dirigée toujours
dans la même direction vers le ciel pour capter ce qui est diffusé par le satellite, que ce soit
une émission télévisée ou autre. L’antenne pourra donc être fixe, ce qui est indispensable pour
ce genre de système.
L’orbite phasée
Un satellite en orbite phasée repassera régulièrement sur une même trace au sol, après un
certain nombre de révolutions. C’est le cas des satellites du système GPS, notamment.
Image 1 : Représentation de la constellation du système GPS7
L’orbite polaire
L’orbite polaire se situe généralement assez bas, à environ 700 kilomètres d’altitude, et
désigne une orbite dont le satellite passe par les régions des pôles de la planète ou du corps
autour duquel il est en orbite à chaque révolution. Cette orbite est utilisée entre autres pour les
satellites d’observation.
5 Image tirée du site : http://www.corecharacter.com/uploads/satellite%20gps-thumb.jpg6 Image tirée du site : http://www.ne.jp/asahi/home/akari/satellite/gps-sat.jpg7 Image tirée du site : http://static.howstuffworks.com/gif/gps-3.jpg

L’orbite équatoriale
C’est le nom donné à l’orbite dont le plan est égal au plan de l’équateur.
Il est à noter que différentes orbites peuvent être combinées. Les satellites en orbite
géostationnaire sont généralement également en orbite équatoriale, ce qui est logiquement le
moment où ils subissent le moins l’effet de la précession. L’orbite peut aussi être phasée et
héliosynchrone. Il y a donc diverses possibilités pour utiliser les caractéristiques des différents
types d’orbite.
Les lanceurs
Avant de prétendre placer un satellite en orbite autour de la Terre ou d’une autre planète, il
faut lui donner les moyens de sortir de l’atmosphère. Cela demande une poussée bien plus
grande que pour manœuvrer un satellite dans le vide. C’est pour cela donc qu’on utilise les
lanceurs. Ce sont eux qui vont mettre le satellite sur sa première orbite, et même parfois aussi
lui donner l’impulsion nécessaire à se placer sur l’orbite de transfert, dans le cas par exemple
des lanceurs européens Ariane. Le lanceur russe le plus commun est Soyouz, qui a été utilisé
pour l’envoi de Spoutnik 1 en 1957, ainsi que pour permettre Youri Gagarine d’accomplir la
mission qui le fera entrer dans l’histoire.
Photo 5 : Lanceur russe Soyouz8
8 Image tirée du site : http://www.cieletespace.fr/media/Soyouz_240800_1280.jpg

Photo 6 : Décollage du lanceur européen Ariane9
Les USA utilisent notamment la navette spatiale pour mettre leurs satellites sur orbite. La
base de lancement pour l’Europe se situe en Guyane française, Cap Canaveral en Floride et
Vanderberg en Californie pour les Etats-Unis d’Amérique, et la Russie effectue ses
lancements depuis des bases situées au Kazakhstan ainsi qu’en Sibérie. Les bases de
lancements sont généralement situées le plus près possible de l’équateur, pour bénéficier au
maximum de la vitesse de rotation terrestre.
Les changements d’orbite
Que ce soit lors du lancement du satellite, ou après que celui-ci a été placé sur son orbite
finale, des changements d’orbite sont nécessaires, à différents moments et durant toute la
durée de vie du satellite en question. Ces deux cas forment deux parties distinctes, à savoir :
Changements d’orbite en vue d’atteindre la position finale lors d’un lancement
Correction de la dérive de l’orbite due au phénomène de la précession
9 Image tirée du site : http://iusti.polytech.univ-mrs.fr/~smash/media/ariane/ariane.jpg

Changements d’orbite en vue d’atteindre la position finale lors d’un lancement
Au moment de la mise en orbite, il est généralement nécessaire de passer par des orbites
intermédiaires, dites « de transfert », avant d’atteindre la situation finale du satellite,
typiquement dans le cas d’un satellite géostationnaire. Effectivement, il est impossible dans ce
dernier cas de placer directement le satellite sur la bonne orbite et, par surcroît, au bon endroit
sur cette orbite. Car il ne faut pas oublier que le satellite géostationnaire restera toujours, pour
un observateur terrestre, au « même endroit » dans le ciel par rapport à la Terre. Et cette
position est choisie par le client qui désire placer son satellite sur orbite en un endroit bien
précis, et ne peut donc pas être laissée au hasard. On commence par placer le satellite en
orbite basse, directement après le lancement, puis on le déplace sur l’orbite de transfert.
L’orbite de transfert de Hohmann est très utile à ce propos, car elle est en fait l’orbite qui
permet de faire les manœuvres à moindre coût énergétique, ce qui n’est pas négligeable. Dans
la pratique, il y a différentes méthodes pour passer de l’orbite basse à l’orbite de transfert.
Certains utilisent directement le dernier étage du lanceur pour effectuer le changement
d’orbite – c’est le cas du lanceur Ariane – et d’autres utilisent des satellites dotés d’un
deuxième moteur dit « de périgée » à cet effet – ce qui est le cas des satellites américains.
Afin d’être précis dans le placement final, on place d’abord le satellite sur une orbite
intermédiaire, elliptique, et dont l’apogée se situe sur l’orbite géostationnaire désirée. Ce
dernier détail est impératif, tout comme pour le passage d’orbite basse à orbite de transfert : le
satellite repassera indubitablement par l’endroit où a été réalisée la manœuvre et c’est
pourquoi cet endroit doit se trouver sur l’orbite que l’on veut atteindre. Dans le cas contraire,
une autre correction serait simplement nécessaire pour atteindre l’orbite en question.
Dessin 1 : Représentation de la mise en orbite d’un
satellite en plusieurs étapes10
10 Image tirée du site : http://artemmis.univ-mrs.fr/cybermeca/formcont/mecaspa/COURS_SA/MANOEUVR/ manoeuvr.htm

Le satellite restera sur l’orbite de transfert le temps d’effectuer moins d’une dizaine de
révolutions autour de la Terre. On attend effectivement que la position du satellite lors du
passage à l’apogée de son orbite de transfert soit le plus proche possible de sa position finale
avant de commencer les manœuvres de changement d’orbite. Et c’est avant tout une question
pratique : plus on sera proche de la position finale, plus il sera facile de se placer sur celle-ci,
et on économisera ainsi certainement en énergie. Puis au moment voulu est appliquée une
poussée qui permettra au satellite de passer sur son orbite définitive, dans cet exemple l’orbite
géostationnaire (sur le schéma précédent, c’est l’ « orbite haute »11). C’est donc au moment où
l’orbite actuelle et l’orbite à atteindre se touchent que les manœuvres sont opérées.
Correction de la dérive de l’orbite due au phénomène de la précession
La non sphéricité de la Terre a tendance à provoquer une dérive de l’orbite initiale du
satellite. La Lune et le Soleil ont évidemment également un effet sur le satellite, mais la faible
distance qui sépare ce dernier de la Terre fait que ces deux astres ne jouent pas un grand rôle
dans le mouvement de précession des satellites, comme on peut le constater grâce aux calculs
et aux mesures effectuées dans le cadre de ce travail. Sans parler de l’effet des autres planètes
sur nos satellites artificiels. Celui-là est négligeable en comparaison avec le mouvement de
précession engendré par la non sphéricité de la Terre. Un autre phénomène produit un effet
sur le mouvement du satellite, les marées. En effet, les marées sont par exemple la cause du
lent ralentissement de la vitesse de rotation de la Terre, et ont donc aussi une influence –
négligeable – sur le mouvement du satellite. Il est certain que les orbites des satellites ont
tendance à dériver, et il est nécessaire de corriger les trajectoires afin de garder les satellites
dans l’orbite que requiert la mission pour laquelle ils ont été conçus.
Dessin 2
Suivant l’orbite, l’orbite du satellite peut varier de différentes façons. Dans le cas où
l’orbite dans laquelle se trouve le satellite ayant dérivé est dans le même plan que l’orbite
11 Voir Dessin 1

désirée12, alors on va appliquer une poussée (en rouge) dans la direction du satellite au point
commun entre les deux orbites. On se rapprochera alors de l’orbite désirée et il faudra peut-
être refaire une correction afin de se réajuster par la suite.
Mais il pourrait tout à fait arriver que l’orbite de dérive ne soit pas dans le plan de l’orbite
de base, ce qui ressemblerait alors au schéma présenté ci-dessous13. Cette fois-ci il y a deux
points de contact entre les deux orbites, et donc deux moments possibles pour faire la
manœuvre. On appliquera cette fois-ci la poussée « verticalement » par rapport au satellite, en
fonction de l’angle formé par les plans des deux orbites en question, soient l’orbite de dérive
et l’orbite désirée.
Dessin 3 : Orbite de dérive dans un plan différent
de l’orbite de base et représentation du moment
adéquat de la poussée exercée dans le but
d’effectuer une correction de trajectoire14
Il y a de multiples possibilités pour la dérive d’un satellite, et on pourrait imaginer
combiner les différents facteurs de cette déviation. Mais d’une manière générale, la manœuvre
est effectuée au point de contact entre l’orbite actuelle et celle qui devra être atteinte. Ces
manœuvres sont donc effectuées régulièrement, et ce pour toute la durée de vie active du
satellite. En fin de vie, on mettra le satellite dans une orbite de rebut, ou alors on le fera
retomber dans l’atmosphère, où il sera normalement détruit, ou alors traversera l’atmosphère
pour enfin retomber sur Terre.
12 Voir Dessin 213 Voir Dessin 314 Image tirée du site : http://artemmis.univ-mrs.fr/cybermeca/formcont/mecaspa/COURS_SA/MANOEUVR/ manoeuvr.htm

Deuxième partie : l’aspect purement physique du problème
Un certain nombre de calculs ont été nécessaires avant de pouvoir écrire le programme
permettant le dessin de l’orbite d’un satellite en fonction des différents paramètres. Ces
calculs sont exposés ici, avec des explications et dessins permettant de mieux comprendre le
raisonnement utilisé.
Afin de pouvoir l’utiliser dans le dessin sous forme de graphique de l’orbite d’un satellite,
il nous faut obtenir la formule de la force exercée sur le satellite par la Terre. Nous allons
donc commencer par le cas de la Terre imaginée comme une sphère parfaite, ce qui n’est bien
évidemment pas le cas en réalité.
Calculs dans le cas d’une sphère
Calcul de en imaginant la Terre parfaitement sphérique :
Par définition du travail et de l’énergie potentielle :
Nous prenons bien sur et
Nous pouvons donc en déduire :
Et si nous utilisons alors, de façon générale :
Nous avons maintenant :
et ; ;

Nous savons donc que la force dérive de l’énergie potentielle. Et nous pouvons aisément en
faire la preuve :
Nous pouvons donc maintenant calculer la force :
En fait :
Mais dans notre cas, on considère justement que la Terre n’est pas totalement sphérique. Nous
allons donc traiter du cas d’un corps quelconque15 afin d’obtenir la formule recherchée dans
notre situation.
Calculs pour s’approcher du cas réel
Nous allons pour cela utiliser à nouveau l’énergie potentielle de gravitation :
et donc ici
15 Voir Dessin 4

: Masse de la Terre
m : Masse du satellite
Dessin 4
Dans le cas d’un corps quelconque, l’énergie potentielle totale du corps dans le champ de
gravitation terrestre est :
Nous allons premièrement chercher à calculer , sachant que .
Commençons par le dénominateur :
Nous pouvons alors faire le calcul :
et ici x < 1
Selon le formulaire, le développement en série de vaut :

En remplaçant, on peut arriver à :
En ne retenant que les termes d’ordre 1 et 2 en , on obtient :
Nous pouvons à partir de là développer en plusieurs termes :
avec où
Le point 0 choisit est le centre de masse de la Terre (C.M)16. Donc car :
Car
Si la Terre était une sphère parfaite, les termes autres que seraient nuls. Puisqu’elle est
en fait un léger ellipsoïde, nous allons considérer l’approximation ci-dessous. Les termes
suivant dans la série sont tellement faibles qu’ils sont négligeables.
Nous désirons exprimer en termes des moments d’inertie principaux, étant Ia, Ib et Ic. Il
nous faut donc effectuer quelques calculs concernant ces moments d’inertie avant de pouvoir
continuer le calcul de .16 Il apparaît sur Dessin 4

Dessin 5
Moment d’inertie par rapport à l’axe i :
Moments d’inertie dans un ellipsoïde :
; ;
Image 2 :Représentation d’ un ellipsoïde et ses axes17
17 Image tirée du site : http://www.sciences.ch/htmlfr/geometrie/geometrieformes01.php

En projetant le vecteur r’i sur e3, on
obtient que ce vecteur vaut :
Et
Dessin 6
Donc
D’où et donc également
Et
Or nous connaissons la propriété suivante :
Et
Donc
Revenons au calcul de , mais posons tout d’abord :
et donc
Et reprenons maintenant :

Dessin 7 Dessin 8
Et nous avons
Puisque et que , alors :
, ou, sous la forme utilisée dans le programme :
avec

Troisième partie : élaboration et utilisation du programme
Avant de pouvoir créer le script nécessaire à obtenir des mesures au sujet du problème de
la précession des satellites, il a fallu se familiariser avec le logiciel, Mathematica, et apprendre
à l’utiliser convenablement. Deux programmes ont donc été préparés avant d’obtenir celui qui
permettrait d’obtenir les mesures voulues. Le premier utilisant des listes pour faire les calculs,
n’ayant pas beaucoup de rapports avec le programme final, et le deuxième utilisant les
équations différentielles. Ces deux ont été prévus pour travailler à deux dimensions, alors que
le dernier inclus la troisième dimension.
Programme à 2 dimensions, utilisant les listes.
Le premier programme représente une vision très simplifiée du mouvement des satellites,
et on considère notamment que la Terre est parfaitement sphérique. Il consiste à calculer une
suite de points en calculant pour différentes valeurs du temps t les positions x et y sur notre
système d’axe. Ces points sont introduits dans un tableau pour être ensuite affichés sur le
graphique, dessinant alors l’orbite du satellite.
Algorithme du programme (commenté) :
//On commence par définir les valeurs initiales :
G=6.67256*10^-11;
M=5.9742*10^24;
x=6.97*10^6;
y=0;
Vx=0;
Vy=Sqrt[G*M/x];
//Nombre de fois que sera faite la boucle, réglé afin d’obtenir une ellipse
imax=2440;
//Temps
t=100 ;

//On définit la suite d’opérations à effectuer pour calculer un point, chaque fois par
rapport à la valeur précédente. C’est en fait un raisonnement par récurrence.
Do [ax=-(G*M*x)/Sqrt[x^2+y^2]^3; ay=-(G*M*y)/Sqrt[x^2+y^2]^3; Vx=Vx+ax*t;
Vy=Vy+ay*t; x=x+Vx*t; y=y+Vy*t; x=x+Vx*t+(1/2)*ax*t^2; y=y+Vy*t+(1/2)*ay*t^2;
k[i]=x; w[i]=y, {i,1,imax}]
//On affiche les points calculés précédemment
ListPlot[Table[{k[i],w[i]},{i,1,imax}]]
Résultats obtenus en exécutant ce code sur Mathematica :
-2 108 -1.5 108 -1 108 -5 107
-4 107
-3 107
-2 107
-1 107
1 107
2 107
3 107
Graphique 1 : Résultat obtenu en utilisant strictement le code écrit plus haut
-3 108 -2.5 108 -2 108 -1.5 108 -1 108 -5 107
-2 107
2 107
4 107
6 107
Graphique 2 : Résultat obtenu en faisant varier certaines conditions initiales telles que le y.

Programme à 2 dimensions, utilisant les lois de Kepler.
Le second programme consiste à accomplir la même tâche que le premier, mais cette fois-
ci en utilisant les équations différentielles, de façon à pouvoir se familiariser avec la méthode
qui sera utilisée dans le programme final, à trois dimensions. C’est d’ailleurs pour cela que le
programme ci-dessous comporte déjà la troisième dimension : une distance d3 a déjà été
définie, un Vz aussi, et notre vecteur r est définit à trois composantes, pour ne citer que ces
exemples. Nous travaillons à nouveau en considérant que la Terre est une sphère, ce qui sera
transformé dans le programme final.
Algorithme du programme (commenté) :
//On commence par définir les valeurs initiales :
//Constante de gravitation universelle :
G=6.67256*10^-11
//Masse de la Terre
M=5.9742*10^24
//Distances du satellite au départ, sur les axes x, y, z respectivement
d1=6970000
d2=0
d3=0
//Vitesses de départ selon x, y, z respectivement
Vx=0
Vy=Sqrt[G*M/6970000]
Vz=0
//Temps maximum (secondes)
tmax=5800
//On définit les conditions initiales :
//On commence par créer un tableau avec 3 champs, qui représente notre vecteur r
r[t_]:=Table[y[i][t],{i,1,3}]

//On associe les valeurs initiales à ce vecteur r. Donc y[1][0] est notre composante x de r,
soit d1. La vitesse étant la dérivée de la position, y[1]’[0] est donc définie comme la
vitesse Vx.
condini={y[1][0]==d1, y[2][0]==d2, y[3][0]==d3, y[1]'[0]==Vx, y[2]'[0]==Vy,
y[3]'[0]==Vz}
//On crée nos fonctions f1, f2 et f3, f3 n’étant pas utilisée dans ce programme car on
travaille à 2 dimensions.
f1[x_,y_,z_]:=-G*M*x/Sqrt[x^2+y^2+z^2]^3
f2[x_,y_,z_]:=-G*M*y/Sqrt[x^2+y^2+z^2]^3
f3[x_,y_,z_]:=-G*M*z/Sqrt[x^2+y^2+z^2]^3
//On pose les équations différentielles ; on utilise en fait F = ma, mais ici le m est
simplifié car il apparaît aussi dans le calcul de F. Donc on a y[i]’’[t] qui est en fait
l’accélération a, et la fonction fi est le terme de F18, mais sans le m puisqu’on l’a
simplifié.
equation={y[1]''[t]==f1[y[1][t],y[2][t],y[3][t]], y[2]''[t]==f2[y[1][t],
y[2][t],y[3][t]],y[3]''[t]==f3[y[1][t],y[2][t],y[3][t]]}
//On va ici utiliser ces données pour afficher le résultat. On joint les conditions initiales
(condini) à l’équation (equation) et NDSolve permet en fait de calculer une équation
différentielle. On fait donc les calculs pour t variant 0 à tmax (définit dans les valeurs
initiales)
sol=NDSolve[Join[condini,equation], {y[1][t],y[2][t],y[3][t]}, {t,0,tmax}]
//Il suffit maintenant d’afficher le graphique des résultats, avec la fonction
ParametricPlot[ ]
ParametricPlot[Evaluate[{y[1][t],y[2][t]}/.sol],{t,0,tmax},AspectRatio->Automatic]
Résultats (commentés) obtenus en exécutant ce code sur Mathematica :
//Le logiciel commence par afficher les valeurs initiales définies au début. On peut décider de ne pas les afficher en terminant la définition par un point-virgule.6.67256 1011
5.9742 1024
18 Voir calcul de F dans la théorie physique

6970000 0 0 0 7562.58 0 5800 //Les conditions initiales sont réécrites, en remplaçant les variables par les valeurs numériquesy10 6970000, y20 0, y30 0, y10 0, y20 7562.58, y30 0 //L’équation différencielle est écrite, en utilisant les valeurs numériques dans les fonctionsy1t
3.98632 1014 y1ty1t2 y2t2 y3t232 ,y2t
3.98632 1014 y2ty1t2 y2t2 y3t232 , y3t 3.98632 1014 y3ty1t2 y2t2 y3t232
{{y[1][t]->InterpolatingFunction[{{0.,5800.}},<>][t], y[2][t]->InterpolatingFunction[{{0.,5800.}},<>][t], y[3][t]->InterpolatingFunction[{{0.,5800.}},<>][t]}}
//Le graphique est alors affiché
-6 106
-4 106
-2 106
2 106
4 106
6 106
-6 106
-4 106
-2 106
2 106
4 106
6 106
Graphique 3 : Résultat obtenu en utilisant strictement le code écrit plus haut

Programme final, à trois dimensions.
Le code ci-dessous ressemble passablement à celui du deuxième programme exposé. Car
d’une manière générale la même méthode est utilisée. De nouvelles variables sont introduites,
comme les axes de la Terre ou le deuxième terme des fonctions, étant celui qui génère la
précession. On notera aussi l’utilisation d’un angle alpha, qui est en fait l’angle sous lequel est
envoyé le satellite par rapport au plan YZ. On le fera varier durant la prise de mesure afin
d’étudier l’évolution du mouvement avec différents angles de lancement.
Ce programme est constitué de deux sous parties, deux « cellules ». La première calculant
le résultat de l’équation différentielle, un peu de la même manière que le programme à deux
dimensions. Puis la deuxième, qui est utilisée pour l’affichage du graphique. On introduit un
angle qui est en fait l’angle sous lequel est affiché le plan de l’orbite. Car bien que le calcul
soit effectué à trois dimensions, on affiche le graphique sur un plan. Cet angle sera très utile
pour faire les mesures, et son utilité sera expliquée plus loin19. L’intérêt de cette deuxième
cellule est purement un gain de temps. Le calcul le plus long étant pour l’équation
différentielle, une fois la solution calculée on récupère les données dans cette seconde cellule
et l’affichage du graphique est très rapide car il n’y a pas besoin de refaire ces calculs pour
faire varier l’angle , ce qui est plus confortable à utiliser.
Algorithme (commenté) de la première cellule :
//On définit les valeurs initiales
//Dans ce programme interviennent la longueur des axes de la Terre
a=6.378140*10^6;
b=6.378140*10^6;
c=6.356777*10^6;
//Constante de gravitation universelle
G=6.67256*10^-11;
//Masse de la Terre
M=5.9742*10^24;
//Définition des moments d’inertie des axes x, y, z respectivement
19 Voir partie Prise de mesures

I1=(M*(b^2+c^2))/5;
I2=(M*(a^2+c^2))/5;
I3=(M*(a^2+b^2))/5;
//Distances du satellite au départ, sur les axes x, y, z respectivement
d1=6970000;
d2=0;
d3=0;
//Angle de depart du satellite, par rapport au plan YZ, en degrés
alphadeg=40
//Transformation de l’angle en radians, pour les calculs
alpha=alphadeg*Pi/180;
//Vitesse de départ du satellite, suivie de ses composantes sur x, y, z respectivement
Vsat=Sqrt[G*M/d1];
Vx=0;
Vy=Vsat*Cos[alpha];
Vz=Vsat*Sin[alpha];
//Temps pour une période du satellite
t0=2*Pi*d1/Vsat
//Temps maximum, exprimé en fonction du nombre de périodes
tmax=200*t0;
//On définit les conditions initiales :
//On commence par créer un tableau avec 3 champs, qui représente notre vecteur r
r[t_]:=Table[y[i][t],{i,1,3}]
//On associe les valeurs initiales à ce vecteur r. Donc y[1][0] est notre composante x de r,
soit d1. La vitesse étant la dérivée de la position, y[1]’[0] est donc définie comme la
vitesse Vx.

condini={y[1][0]==d1, y[2][0]==d2, y[3][0]==d3, y[1]'[0]==Vx, y[2]'[0]==Vy,
y[3]'[0]==Vz};
//On crée nos fonctions f1, f2 et f3, et cette fois-ci la formule de la force tient compte de
la précession
f1[x_,y_,z_]:= -G*M*x/Sqrt[x^2+y^2+z^2]^3 - (3/2)G(I3-I1)x/Sqrt[x^2+y^2+z^2]^5 +
(15/2)G(I3-I1)x*z^2/Sqrt[x^2+y^2+z^2]^7
f2[x_,y_,z_]:= -G*M*y/Sqrt[x^2+y^2+z^2]^3 - (3/2)G(I3-I1)y/Sqrt[x^2+y^2+z^2]^5 +
(15/2)G(I3-I1)y*z^2/Sqrt[x^2+y^2+z^2]^7
f3[x_,y_,z_]:= -G*M*z/Sqrt[x^2+y^2+z^2]^3 - (9/2)G(I3-I1)z/Sqrt[x^2+y^2+z^2]^5 +
(15/2)G(I3-I1)z^3/Sqrt[x^2+y^2+z^2]^7
//On pose les équations différentielles ; on utilise en fait F = ma, mais ici le m est
simplifié car il apparaît aussi dans le calcul de F. Donc on a y[i]’’[t] qui est en fait
l’accélération a, et la fonction fi est le terme de F20, mais sans le m puisqu’on l’a
simplifié. On utilise ici la même équation que dans le programme à deux dimensions.
equation={y[1]''[t]==f1[y[1][t],y[2][t],y[3][t]], y[2]''[t]==f2[y[1][t],
y[2][t],y[3][t]],y[3]''[t]==f3[y[1][t],y[2][t],y[3][t]]};
//Calcul du résultat de l’équation différentielle
sol=NDSolve[Join[condini,equation], {y[1][t],y[2][t],y[3][t]}, {t,0,tmax},WorkingPrecision-
>18, MaxSteps->150000]
//Il est à noter que nous n’affichons pas les résultats, mais ils sont utilisés dans la
deuxième cellule, expliquée plus bas.
Algorithme (commenté) de la deuxième cellule :
//On affiche la valeur de en degrés, pour faciliter la lecture des résultats et ne pas
avoir à toujours chercher dans la cellule 1. D’autre part, cela permet de vérifier
facilement si les valeurs de la première cellule ont bien été reprises, on ne sait jamais.
alphadeg
20 Voir calcul de F dans la théorie physique

//On définit un qui sera en fait l’angle de vue sous lequel on affiche l’orbite
thetadeg=19.5
//On transforme en radians pour l’utiliser dans les calculs
theta=thetadeg*Pi/180;
//Indice de la période (on pourra ainsi définir quelle période on veut afficher)
iper=50
//On affiche le résultat expérimental à l’aide d’une règle de proportionnalité
result=N[360*iper/thetadeg]
//On affiche le résultat selon la formule théorique. Cette ligne n’a été utilisée que pour la
première approche du programme, pour se rendre compte de l’efficacité et le tester. Elle
a ensuite été supprimée pour la prise de mesures, afin de ne pas l’influencer.
theoresult = (2*M*d1^2)/(3(I3-I1)Cos[alpha])
//On affiche le résultat sous forme de graphique, selon le nouveau plan choisit pour voir
l’orbite, étant « Sin[theta]*y[1][t]+Cos[theta]*y[2][t] »
ParametricPlot[Evaluate[{Sin[theta]*y[1][t]+Cos[theta]*y[2][t],y[3][t]}/.sol],{t,(iper-
1)*t0,iper*t0},AspectRatio->Automatic]
Résultats (commentés) affichés par Mathematica :
//Angle , en degrés
40
//Angle , en degrés
19.5
//Indice de la période
50
//Résultat obtenu par calcul (nombre de périodes pour faire une précession de 360°)
923.077

//Résultat théorique, permettant une comparaison directement sur le programme
777.02
//Affichage du graphique
-4 106
-2 106
2 106
4 106
-4 106
-2 106
2 106
4 106
Graphique 4 : Résultat obtenu en utilisant strictement le code écrit plus haut
Prise de mesures
Il faut d'abord noter que le graphique dessiné par le programme ne comprend que les points
nécessaires à afficher entièrement la période voulue, soit la dernière du calcul. Ainsi si l’on a
effectué les calculs pour 50 périodes, alors l’orbite dessinée correspond bel et bien à cette
50ème période.
D’autre part, différentes variables ont été insérées dans le programme dans le but de
pouvoir faire varier facilement les divers éléments du calcul, tels que l’angle de lancement
et l’altitude du satellite. Afin de pouvoir les regrouper et les analyser, chaque prise de mesure
concernait la variation d’un seul des paramètres à la fois.

Dessin 9 : Représentation d’une orbite autour d’un corps supposé être la Terre
L’angle est donc l’angle de lancement du satellite, ou alors l’angle formé par la normale
au plan de l’orbite et l’équateur21.
L’objectif du programme était de pouvoir mesurer le nombre de périodes que devait faire
le satellite pour effectuer une précession complète22. Mais la puissance de calcul nécessaire à
faire les calculs pour plusieurs milliers de périodes suivant les conditions initiales étant
indisponible, il a fallu s’adapter. En effet, Mathematica ne pouvait faire de tels calculs
directement. Il a donc fallu réduire ce nombre de périodes23, et introduire un angle qui
permettait de faire « tourner » la vue de l’orbite.
21 Comme affiché sur Dessin 922 Est considérée comme complète une précession de 360°23 Les calculs ont été faits pour un nombre de périodes ne dépassant pas 200

-4106 -2106 2106 4106
-4106
-2106
2106
4106
Graphique 5 : Affichage de l’orbite sans utiliser l’angle
Dessin 10 : Représentation en trois dimensions de ce qui arrive quand l’utilisateur utilise
l’angle . L’utilisateur est donc au bout du « trait » entre les axes X et Z et voit l’orbite
« par la tranche ».
Dessin 11 : Représentation en deux dimensions de

l’angle par rapport au plan d’une orbite étudiée,
vue par les axes x et yz.
Ainsi pouvait-on faire varier cet angle afin de voir l’orbite depuis un point de vue étant sur
le plan de celle-ci, donc « par la tranche »24. Cet angle et représenté sur un modèle à trois
dimensions sur le Dessin 10 et à deux dimensions sur le Dessin 11, avec les axes pour
permettre de mieux se représenter la situation. L’angle étant l’angle entre le plan
d’affichage « d’origine »25, donc celui qu’aurait affiché le programme sans tourner la vue, et
le plan par lequel on voit l’orbite par la tranche, une simple règle de proportionnalité
permettait alors de rechercher le nombre de périodes nécessaires à effectuer une précession
complète.
-4106 -2106 2106 4106
-4106
-2106
2106
4106
Graphique 6 : Affichage par la tranche en ayant fait varier
Ce nombre de périodes peut-être calculé de la manière suivante :
Ce résultat étant directement affiché par le programme en dessus du graphique26, la prise de
mesure consistait donc à faire varier pour arriver à un graphique se rapprochant d’une
droite27 et relever directement le nombre de périodes nécessaire à l’accomplissement de la
précession complète avec les conditions initiales utilisées pour la mesure en question.
24 Voir Graphique 625 Voir Graphique 526 Voir Image 327 Voir Graphique 6

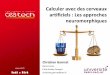
Image 3 : Capture d’écran légendée de l’affichage des résultats par le programme
L’image ci-dessus représente les résultats tels qu’ils sont affichés par le programme, avec
la légende en rouge. Lorsque l’on veut faire varier l’altitude du satellite, il est nécessaire de
récupérer cette altitude dans la première cellule, car c’est dans ces calculs-là qu’elle
intervient.

Tableau des résultats et graphique pour mesures effectuées en faisant varier l’altitude du satellite, pour un angle de lancement de 45°
Alpha [°] Resultat Rtheorique Theta [°] Theta théorique [°] Rayon (sat) [m] Altitude (sat) [km] Indice de période45 708.661 707.517 25.4 25.441 6390000 20 5045 731.707 732.086 24.6 24.587 6500000 130 5045 756.303 754.785 23.8 23.848 6600000 230 5045 777.538 777.831 23.15 23.141 6700000 330 5045 802.139 801.223 22.44 22.466 6800000 430 5045 825.688 824.961 21.8 21.819 6900000 530 5045 847.059 849.046 21.25 21.200 7000000 630 5045 873.786 873.478 20.6 20.607 7100000 730 5045 895.522 898.257 20.1 20.039 7200000 830 5045 927.835 923.381 19.4 19.494 7300000 930 5045 947.368 948.853 19 18.970 7400000 1030 5045 972.973 974.671 18.5 18.468 7500000 1130 5045 1000 1000.84 18 17.985 7600000 1230 5045 1028.57 1027.35 17.5 17.521 7700000 1330 5045 1052.63 1054.2 17.1 17.075 7800000 1430 5045 1084.34 1081.41 16.6 16.645 7900000 1530 5045 1111.11 1108.96 16.2 16.231 8000000 1630 5045 1739.13 1732.75 10.35 10.388 10000000 3630 5045 3870.97 3898.68 4.65 4.617 15000000 8630 5045 6923.08 6930.99 2.6 2.597 20000000 13630 5045 10909.1 10829.7 1.65 1.662 25000000 18630 5045 15652.2 15594.7 1.15 1.154 30000000 23630 5045 21176.5 21226.2 0.85 0.848 35000000 28630 5045 31578.9 31106.6 0.57 0.579 42370000 36000 50

Nombre de périodes pour une précession complète en fonction de l'altitude, pour un angle de 45°
0
5000
10000
15000
20000
25000
30000
35000
0 10000 20000 30000 40000
Rayon (sat) [m]
No
mb
re d
e p
éri
od
es
Théorique
Expérimentale
Graphique 7

Tableau des résultats et graphique pour mesures effectuées en faisant varier l’altitude du satellite, pour un angle de lancement de 20°
Alpha [°] Resultat Rtheorique Theta [°] Theta théorique [°] Rayon (sat) [m] Altitude (sat) [km] Indice de période20 534.125 532.398 33.7 33.809 6390000 20 5020 553.846 550.885 32.5 32.675 6500000 130 5020 571.429 567.966 31.5 31.692 6600000 230 5020 588.235 585.308 30.6 30.753 6700000 330 5020 603.015 602.910 29.85 29.855 6800000 430 5020 622.837 620.773 28.9 28.996 6900000 530 5020 642.857 638.897 28 28.174 7000000 630 5020 654.545 657.281 27.5 27.386 7100000 730 5020 679.245 675.927 26.5 26.630 7200000 830 5020 697.674 694.833 25.8 25.906 7300000 930 5020 717.131 714.000 25.1 25.210 7400000 1030 5020 737.705 733.427 24.4 24.542 7500000 1130 5020 756.303 753.116 23.8 23.901 7600000 1230 5020 775.862 773.065 23.2 23.284 7700000 1330 5020 798.226 793.275 22.55 22.691 7800000 1430 5020 818.182 813.746 22 22.120 7900000 1530 5020 839.161 834.477 21.45 21.570 8000000 1630 5020 1309.09 1303.871 13.75 13.805 10000000 3630 5020 2931.6 2933.709 6.14 6.136 15000000 8630 5020 5217.39 5215.483 3.45 3.451 20000000 13630 5020 8000 8149.193 2.25 2.209 25000000 18630 5020 12000 11734.837 1.5 1.534 30000000 23630 5020 16363.6 15972.418 1.1 1.127 35000000 28630 5020 23684.2 23407.309 0.76 0.769 42370000 36000 50

Nombre de périodes nécessaires à une précession complète en fonction de l'altitude pour un angle de 20°
0,000
5000,000
10000,000
15000,000
20000,000
25000,000
0 10000 20000 30000 40000
Altitude [km]
No
mb
re d
e p
éri
od
es
Théorique
Expérimentale
Graphique 8

Tableau des résultats et graphique pour mesures effectuées en faisant varier l’angle de lancement du satellite, pour une altitude de 20 [km]
Alpha [°] Resultat Rtheorique Theta [°] Theta théorique [°] Rayon (sat) [m] Altitude (sat) [km] Indice de période2 503.637 500.595 35.74 35.957 6390000 20 503 504.202 500.977 35.7 35.930 6390000 20 504 504.202 501.512 35.7 35.891 6390000 20 505 504.909 502.201 35.65 35.842 6390000 20 5010 510.638 508.008 35.25 35.433 6390000 20 5015 520.984 517.939 34.55 34.753 6390000 20 5020 534.918 532.398 33.65 33.809 6390000 20 5025 554.7 552.009 32.45 32.608 6390000 20 5030 580.645 577.686 31 31.159 6390000 20 5035 613.288 610.742 29.35 29.472 6390000 20 5040 655.499 653.083 27.46 27.562 6390000 20 5045 709.22 707.517 25.38 25.441 6390000 20 5050 780.911 778.314 23.05 23.127 6390000 20 5055 874.636 872.230 20.58 20.637 6390000 20 5060 1002.79 1000.581 17.95 17.990 6390000 20 5065 1181.88 1183.788 15.23 15.205 6390000 20 5070 1463.41 1462.751 12.3 12.306 6390000 20 5075 1931.33 1932.973 9.32 9.312 6390000 20 5080 2884.62 2881.057 6.24 6.248 6390000 20 5085 5732.48 5740.188 3.14 3.136 6390000 20 5086 7171.31 7171.955 2.51 2.510 6390000 20 5087 9549.07 9559.209 1.885 1.883 6390000 20 5088 14342.6 14335.173 1.255 1.256 6390000 20 5089 28481 28665.979 0.63 0.628 6390000 20 50

Nombre de périodes nécessaires à une précession complète en fonction de alpha, altitude de 20 [km]
0,000
5000,000
10000,000
15000,000
20000,000
25000,000
30000,000
35000,000
0 20 40 60 80 100
alpha [°]
No
mb
re d
e p
ério
des
Théorique
Expérimentale
Graphique 9

Tableau des résultats et graphique pour mesures effectuées en faisant varier l’angle de lancement du satellite, pour une altitude de 600 [km]
Alpha [°] Resultat Rtheorique Theta [°] Theta théorique [°] Rayon (sat) [m] Altitude (sat) [km] Indice de période2 596.026 595.594 30.200 30.222 6970000 600 503 596.026 596.048 30.200 30.199 6970000 600 504 596.421 596.685 30.180 30.167 6970000 600 505 597.015 597.505 30.150 30.125 6970000 600 5010 604.636 604.414 29.770 29.781 6970000 600 5015 617.284 616.229 29.160 29.210 6970000 600 5020 633.803 633.432 28.400 28.417 6970000 600 5025 659.341 656.765 27.300 27.407 6970000 600 5030 689.655 687.314 26.100 26.189 6970000 600 5035 730.223 726.644 24.650 24.771 6970000 600 5040 779.221 777.020 23.100 23.165 6970000 600 5045 843.091 841.785 21.350 21.383 6970000 600 5050 927.835 926.016 19.400 19.438 6970000 600 5055 1040.46 1037.755 17.300 17.345 6970000 600 5060 1192.05 1190.463 15.100 15.120 6970000 600 5065 1411.76 1408.438 12.750 12.780 6970000 600 5070 1740.81 1740.341 10.340 10.343 6970000 600 5075 2301.79 2299.798 7.820 7.827 6970000 600 5080 3428.57 3427.802 5.250 5.251 6970000 600 5085 6831.12 6829.516 2.635 2.636 6970000 600 5086 8547.01 8532.994 2.106 2.109 6970000 600 5087 11356.5 11373.281 1.585 1.583 6970000 600 5088 17055.6 17055.591 1.055 1.055 6970000 600 5089 34106 34105.987 0.528 0.528 6970000 600 50

Nombre de périodes pour une précession complète en fonction de alpha, altitude de 600 [km]
0,000
5000,000
10000,000
15000,000
20000,000
25000,000
30000,000
35000,000
40000,000
0 20 40 60 80 100
alpha [°]
No
mb
re d
e p
ério
des
Théorique
Expérimentale
Graphique 10

Tableau des résultats et graphique pour mesures effectuées en faisant varier l’angle de lancement du satellite, pour une altitude de 36 000 [km]
Alpha [°] Resultat Rtheorique Theta [°] Theta théorique [°] Rayon (sat) [m] Altitude (sat) [km] Indice de période2 22500 22009.083 0.8 0.818 42370000 36000 503 23076.9 22025.862 0.78 0.817 42370000 36000 504 23376.6 22049.387 0.77 0.816 42370000 36000 505 23684.2 22079.696 0.76 0.815 42370000 36000 5010 23684.2 22334.995 0.76 0.806 42370000 36000 5015 23841.1 22771.599 0.755 0.790 42370000 36000 5020 23841.1 23407.309 0.755 0.769 42370000 36000 5025 24324.3 24269.543 0.74 0.742 42370000 36000 5030 24827.6 25398.419 0.725 0.709 42370000 36000 5035 27692.3 26851.762 0.65 0.670 42370000 36000 5040 29508.2 28713.316 0.61 0.627 42370000 36000 5045 30508.5 31106.583 0.59 0.579 42370000 36000 5050 33962.3 34219.197 0.53 0.526 42370000 36000 5055 39130.4 38348.291 0.46 0.469 42370000 36000 5060 45000 43991.352 0.4 0.409 42370000 36000 5065 52941.2 52046.203 0.34 0.346 42370000 36000 5070 64285.7 64311.054 0.28 0.280 42370000 36000 5075 83720.9 84984.766 0.215 0.212 42370000 36000 5080 128571 126668.050 0.14 0.142 42370000 36000 5085 300000 252372.079 0.06 0.071 42370000 36000 5086 300000 315320.928 0.06 0.057 42370000 36000 5087 360000 420278.478 0.05 0.043 42370000 36000 5088 600000 630257.685 0.03 0.029 42370000 36000 5089 1200000 1260323.388 0.015 0.014 42370000 36000 50

Nombre de périodes pour une précession complète en fonction de alpha, altitude de 36000 [km]
0,000
200000,000
400000,000
600000,000
800000,000
1000000,000
1200000,000
1400000,000
0 20 40 60 80 100
alpha [°]
No
mb
re d
e p
ério
des
Théorique
Expérimentale
Graphique 11

Interprétation des résultats
Plusieurs séries de mesures ont été effectuées, et les plus parlantes ont été classées et sont
affichées ci-dessus, avec un graphique associé à chaque groupe de mesures. Il faut
premièrement savoir que le nombre de périodes nécessaires à effectuer une précession de
360° est affiché sur l’axe des ordonnées, alors qu’apparaissent sur l’axe des abscisses tantôt
différents angles de lancement du satellite () et tantôt l’altitude du satellite28. Ce qui apparaît
donc dans les tableaux sous le nom de « Résultat » n’est autre que ce nombre de précessions
utilisé dans les graphiques, et le « Rthéorique » est la valeur théorique de ce nombre, afin de
permettre une comparaison. L’indice de la période indique le nombre de périodes utilisées
dans les calculs, les résultats en découlant par une règle de proportionnalité29. Car les calculs
devenant trop imprécis à la longue, il était impossible de calculer directement la position après
un certain nombre de périodes. On pourrait imaginer que cette méthode soit relativement
imprécise ; nous utilisons en effet des mesures basées sur cinquante périodes pour calculer un
résultat faisant intervenir jusqu’à plusieurs milliers de périodes parfois. Mais les tableaux
obtenus sont très encourageants à ce niveau-là : les incertitudes calculées en fonction des
moyennes des résultats théoriques et expérimentaux s’élèvent au alentours de 1.5% pour la
plupart des cas, avec une baisse de précision tout de même lors des calculs à très haute
altitude (36 000 [km]), où les incertitudes sont de l’ordre de 3%. Le problème étant qu’à haute
altitude, le phénomène de précession se fait de moins en moins ressentir et donc l’angle
utilisé devient très petit : il faut beaucoup de période pour que le plan de l’orbite « tourne »
très peu et ceci rend la tâche plus difficile, car un petit changement dans le choix de cet angle
amène un changement de parfois plusieurs dizaine voire plusieurs centaines de périodes. Or à
cette distance, il faut beaucoup de périodes pour qu’un changement très peu visible apparaisse
sur le graphique. Et donc on ne voit pas forcément distinctement la différence entre les orbites
dessinées pour deux angles très proches. Les résultats expérimentaux sont donc d’une
précision assez remarquable.
Ce qui ressort principalement de ces mesures, en dehors de la précision, est que le nombre
de périodes nécessaires à effectuer une précession complète varie en fonction de l’angle de
lancement et de l’altitude du satellite. Effectivement, on voit très bien qu’en maintenant
l’angle , plus l’altitude est élevée, plus ce nombre de périodes est grand. On passe donc
28 Par rapport à la surface de la Terre29 Expliquée dans la partie « Prise de mesures »

d’environ 700 périodes à 20 [km] d’altitude à plus de 30 000 périodes à 36 000 [km]
d’altitude. En toute logique, plus il faut de périodes pour achever la précession totale, plus
petite est la dérive entre chaque période, et donc moins forte est l’influence de la non
sphéricité de la Terre sur la trajectoire du satellite. En quelques sortes, on pourrait dire que la
Terre « paraît plus sphérique » de loin.
On peut voir dans les mesures présentées que j’ai choisi d’afficher les angles de 45° et 20°.
Le premier car c’est pour celui-là qu’il est le plus facile de travailler avec l’orbite dans le
logiciel au niveau notamment de la visibilité, et donc la précision est très bonne. Et le second
afin de montrer que l’évolution en fonction de l’altitude est similaire en variant l’angle. Donc
quel que soit l’angle fixe choisit, plus on est loin, moins le phénomène se fait sentir.
La seconde chose très significative au niveau des mesures est l’évolution du résultat par
rapport à l’angle de lancement du satellite. Plus cet angle est petit, plus l’orbite de départ du
satellite se rapproche du plan équatorial et donc moins cette précession se fait sentir. On peut
imager cette dernière phrase par le mouvement de la toupie citée précédemment : le moment
où le mouvement de la toupie paraît le plus stable est quand il est parallèle au sol. Lorsque
l’angle formé par le plan de la toupie et le sol devient plus grand, alors les mouvements le
sont aussi et la toupie parait ne plus être stabilisée.
Cette fois encore, il a fallu faire un choix dans la présentation des mesures et plusieurs
altitudes fixes ont été choisies. La première est trop basse pour un satellite donc peu concrète,
et la troisième concerne les satellites géostationnaires qui ne sont que très faiblement touchés
par ce problème. J’ai choisi ces deux altitudes pour exprimer un minimum et un maximum
afin de voir si l’évolution en fonction de l’angle de lancement était similaire suivant l’altitude
– et cela s’est confirmé. La deuxième, en revanche, est de 600 [km] et concerne une orbite
dite « basse ». Elle apparaît dans le but d’obtenir un très vague ordre de grandeur au sujet de
cette orbite utilisée par la grande majorité des satellites, à un certain moment de leur vie du
moins. Car même un satellite géostationnaire devra y passer temporairement. Mais il est très
difficile de se rendre compte du nombre de « tours » que devrait faire un satellite dans cette
orbite basse pour atteindre à nouveau la position de départ, car nous voyons que dans une
orbite à cette altitude, le résultat varie grosso modo entre 500 et 35 000 périodes, ce qui est
tout de même conséquent !
Il faut également noter que les deux propriétés de la variation du résultat, soient l’évolution
de l’angle et l’altitude du satellite, peuvent se combiner. Ainsi comprendra-t-on que l’effet

du phénomène étudié est le plus fort lorsque l’altitude du satellite est la plus basse possible et
que l’angle de lancement est le plus grand possible. Inversement, l’effet du problème étudié
(et il est important de le préciser30) sera le moins conséquent lorsque l’altitude sera la plus
haute possible et l’angle de lancement le plus faible possible, idéalement sur une orbite
équatoriale.
Nous finirons par confirmer les hypothèses annoncées plus haut par la formule théorique
de ce calcul bien précis, étant :
Cette formule exprime donc très bien que plus cos est petit (et donc que est grand), plus le
rapport est grand. De plus, plus le rayon est grand (donc plus l’altitude est grande, car le rayon
terrestre ne varie pas), plus le rapport est grand aussi. La formule va donc bel et bien dans le
sens des mesures.
Retour à la réalité
Cherchant à obtenir des informations se dirigeant plus dans le sens pratique que théorique
afin de connaître l’impact qu’a le phénomène de précession étudié sur la réalité des agences
spatiales, j’ai eu la chance de pouvoir m’adresser au Directeur du « Space Center » de l’EPFL
qui a bien voulu m’accorder une partie de son temps pour répondre à quelques questions à ce
propos. J’ai pu en faire ressortir ceci :
Premièrement, d’autres facteurs que la non sphéricité de la Terre entrent en jeu, tels que le
Soleil, la Lune, et l’atmosphère. Les deux premiers cités agiront principalement pour les
satellites à haute altitude, et le troisième aura un lien avec les satellites en orbite basse. Ainsi,
la Station Spatiale Internationale, pour donner un exemple concret, perd régulièrement de
l’altitude à cause de phénomènes liés à l’atmosphère. Il faut donc corriger la trajectoire de
temps en temps, et c’est en l’occurrence la mission de vaisseaux Russes que de lui faire
reprendre de l’altitude. Un satellite géostationnaire subissant donc des effets dus au Soleil et à
30 En effet, d’autres effets non négligeables interviennent à différentes altitudes et le mouvement réel n’est donc pas prévisible par ce simple programme, voir partie « Retour à la réalité »

la Lune nécessitera également une correction régulière dans sa trajectoire, même s’il se trouve
dans un plan équatorial.
Il existe aujourd’hui des modèles très précis représentant la réalité de la trajectoire des
satellites, ce qui permet d’anticiper un peu ces mouvements, mais on ne peut pas réellement
prévoir la trajectoire précise des satellites sur une longue durée. On connaît par contre très
précisément la position des satellites à chaque instant, et c’est ce qui est important. Car les
changements de trajectoire aux différents effets nommés ne sont pas un problème très
conséquent dans la pratique : Il n’y a généralement pas besoin de corriger les erreurs
immédiatement, et on attend bien souvent que l’erreur en question soit assez grande pour
nécessiter une correction. Cette correction est réalisée par une poussée venant d’un moteur
équipé sur le satellite, prévu à cet effet. Le moment de la poussée est bien évidemment calculé
à l’avance.
Ce qui est le plus difficile dans la gestion des satellites est non pas le mouvement de ceux-
ci, mais d’autres choses telles que l’orientation des panneaux solaires (dont dépend
énormément le satellite), ou le fait de devoir pointer une antenne sur un point situé sur Terre.
Mais quoi qu’il en soit, chaque satellite a une orbite bien définie en rapport avec sa
mission, et requiert donc des corrections de trajectoire régulières. On ne laisse jamais un
satellite suivre un mouvement de précession tel qu’il est décrit dans ce travail.
Photo 7 : Télescope spatial Hubble31
31 Image tirée du site : http://www.spacetelescope.org/about/img/hubble_in_orbit1.jpg

Conclusion
Il est certain que le modèle utilisé dans ce travail ne tient pas compte de tous les
événements existants et ne représente donc pas exactement les problèmes rencontrés par les
agences spatiales diverses. Et bien que ce phénomène ne soit aujourd’hui pas un très gros
problème, il donne tout de même une idée de l’influence de la Terre sur les trajectoires. Car
cette influence n’est pas négligeable, et il est très intéressant de constater l’effet engendré par
cette différence de longueur d’une vingtaine de kilomètres entre les axes de notre planète.
Il n’existe d’ailleurs pas de modèle assez précis pour pouvoir anticiper ces mouvements,
même pour les grandes agences, pour la simple et bonne raison que d’autres phénomènes que
la forme de la Terre – qu’ils soient plus ou moins éloignés de celle-ci – interviennent à leur
échelle dans les mouvements et qu’on ne peut pas tout prévoir. Mais on aura pu comprendre
que l’anticipation exacte des trajectoires n’est absolument pas vitale dans la gestion des
satellites artificiels en orbite autour de la Terre, car des corrections seraient de toutes façons
nécessaires à un moment donné. En quelques sortes, l’intérêt n’est pas de savoir quand une
déviation se fera sentir dans la trajectoire en cours, mais de pouvoir la corriger quand elle
arrivera, ce qui est une chose certaine.
Ce travail m’a de plus permis de m’intéresser plus précisément au domaine des satellites
artificiels, et les multiples façons de travailler – que ce soit pour la théorie concernant les
satellites eux-mêmes, la physique ou la partie plus expérimentale – le rendaient varié dans les
méthodes de travail, ce qui était agréable.

Annexes
Durant les recherches effectuées dans le cadre de mon travail de maturité, j’ai trouvé un
certain nombre d’images de satellites, principalement de la Station Spatiale Internationale ou
de la navette spatiale. N’ayant pu me résoudre à les abandonner, mais ne pouvant cependant
pas toutes les utiliser dans le dossier en lui-même, j’ai décidé d’en faire apparaître quelques-
unes dans cette partie annexe à mon travail.
Photo 8 : la navette spatiale en mission32
32 Image tirée du site : http://files.myopera.com/Mathilda/albums/42812/Espace%20-%20Photo%20-%20%5bNASA%5d%20La%20navette%20spatiale.jpg

Photo 9 : Navette spatiale américaine « Discovery » en préparation pour le lancement33
Photo 10 : Décollage de la navette spatiale américaine34
33 Image tirée du site : http://www.sciencepresse.qc.ca/clafleur/images/99pp-1432.jpg34 Image tirée du site : http://www.tms.org/pubs/journals/JOM/0402/launch.gif

Photo 11 : Décollage du lanceur européen Ariane35
Photo 12 : Décollage du lanceur européen Ariance36
35 Image tirée du site : http://membres.lycos.fr/jcboulay/astro/sommaire/astronautique/ariane/ariane_V504.jpg36 Image tirée du site : http://www.dutchspace.nl/uploadedImages/Products_and_Services/

Photo 13 : Télescope spatial Hubble37
Image 4 : Représentation de la Station Spatiale Internationale38
37 Image tirée du site : http://www.futura-sciences.com/img/hubble_telescope.jpg38 Image tirée du site : http://www.astrosurf.com/astrospace/images/ss/Satellite%2007.jpg

Bibliographie
CAPDEROU Michel, Satellites – Orbites et missions, Editions Springer, France 2003
Encyclopédie Universalis 11, 2006
Sites consultés :
Il est à noter que la dernière visite de la plupart des sites a été faite entre la fin du mois d’octobre et
durant le mois de novembre. Pour ceux dont ce n’est pas le cas, le mois de dernière visite est explicité.
Encyclopédie libre wikipédia :http://fr.wikipedia.org/
http://en.wikipedia.org/
http://www.educnet.education.fr/orbito/
http://www.astrosurf.com/lombry/
http://www.astrosurf.com/astrospace/
http://www.cnes.fr/
http://ceos.cnes.fr:8100/cdrom-00b/ceos1/satellit/spotsys/spot4/fr/orbite.htm
http://users.skynet.be/Yantar/
http://artemmis.univ-mrs.fr/cybermeca/Formcont/mecaspa/
http://www.univ-lemans.fr/enseignements/physique/02/meca/satellit.html (octobre 2006)
http://www.univ-perp.fr/fuseurop/lance_f.htm
http://www.univ-perp.fr/fuseurop/aria5_f.htm
http://www.sciences.univ-nantes.fr/physique/perso/gtulloue/Meca/Planetes/transfert.html
http://www.futura-sciences.com/comprendre/g/definition-orbite-satellite_722.php
http://www.futura-sciences.com/comprendre/g/definition-orbite-transfert-geostationary-tranfer-orbit-
gto_3605.php
http://www.ac-grenoble.fr/phychim/nouvpro/stage/satelli.html
http://capcomespace.net/dossiers/astronautique/mecanique_spatiale_3.htm
http://mp01.free.fr/satel/satel.htm
http://the-overtake.ifrance.com/part1.htm (octobre 2006)
http://perso.orange.fr/alexandre.schwenck/lor/lor.htm
http://www.lb.refer.org/sammuneh/ch1-2.htm
http://www.hq.nasa.gov/office/pao/History/sputnik/index.html
http://agirard.free.fr/gps.html
http://zebulon1er.free.fr/gps.htm
http://www.guidevtt.com/GPS/Le_GPS.php?page=chapitre5

http://www.volle.com/ENSPTT/gps.htm
http://www.transplanet.fr/technique/tech_gps.asp
http://209.85.129.104/search?q=cache:SOxz4E6RoXAJ:bgi.cnes.fr:8110/tutorial/t1/
tutorial1.pdf+correction+trajectoire+satellites+gps+%2B+precession&hl=fr&gl=ch&ct=clnk&cd=2
http://agirard.free.fr/gps.html
http://zebulon1er.free.fr/gps.htm
http://www.guidevtt.com/GPS/Le_GPS.php?page=chapitre5
http://www.volle.com/ENSPTT/gps.htm
http://www.transplanet.fr/technique/tech_gps.asp
http://209.85.129.104/search?q=cache:SOxz4E6RoXAJ:bgi.cnes.fr:8110/tutorial/t1/
tutorial1.pdf+correction+trajectoire+satellites+gps+%2B+precession&hl=fr&gl=ch&ct=clnk&cd=2
Ainsi que les liens en rapport ou découlant de ces sites web.
Images :
http://www.cnes.fr
http://arnaudel.club.fr
http://www.corecharacter.com
http://www.ne.jp
http://static.howstuffworks.com
http://www.cieletespace.fr
http://iusti.polytech.univ-mrs.fr
http://artemmis.univ-mrs.fr
http://www.sciences.ch
Image du titre :
http://www.sp6.vgj.pl/images/iss.bmp
Annexes :
http://files.myopera.com
http://www.sciencepresse.qc.ca
http://www.tms.org
http://membres.lycos.fr/jcboulay
http://www.dutchspace.nl
http://www.futura-sciences.com
http://www.astrosurf.com