Embed Size (px)
Citation preview

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 1
ANNEE : 1999/2000
GROUPE : E.E.A.
NUMERO DE PFE : A1103
AUTEURS : Johann LOAECStéphane LE HIR
TITRE : Etude et correction du mouvement saccadé d’un mobile àempattement large.
ENCADREMENT : M. Georges IMBERT
RESUME : Le laboratoire d’automatisme cherche à étudier lecomportement saccadé, ou, « en crabe » d’une maquettesimulant un pont roulant ou tout autre système demanutention à empattement large, en vue d’une correctionélectronique.
Ce projet conduira à :
! Préparer les expérimentations sur maquette par laconnaissance des divers outils du laboratoire.
! Etablir un modèle représentatif du processus mécaniqueet concevoir une correction à apporter à la commande.
! Implanter cette correction sur une carte d’axeindustrielle.
MOTS-CLES : Manutention, compensation, saccadé.
Partie à remplir par le professeur responsable du Projet.
ACCESSIBILITE DE CE RAPPORT
LIBRE CONFIDENTIELPendant …. an(s)
Date : …/…/… Nom du signataire : Signature :

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 2
REMERCIEMENTS.
Nous tenons tout particulièrement à remercier M. IMBERT, directeur du PFE,pour son encadrement constant, son aide et ses conseils avisés tout au long de l’année.
Nous souhaitons également témoigner de notre gratitude envers l’ensemble dulaboratoire d’automatisme pour son dynamisme, son enthousiasme et sa sympathie,ayant agrémenté le travail d’une bonne humeur permanente.
Un merci particulier à M. POIRON, professeur d’automatisme à l’ENSAM d’Angers, pour ses renseignements précieux ainsi qu’à M. SENICOURT pour nous avoirpermis d’utiliser le matériel de métrologie du laboratoire d’ énergétique.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 3
SOMMAIRE.
Introduction. .......................................................................................................... 4
Enoncé du problème.............................................................................................. 6
Modélisation de la maquette et simulation............................................................ 7
I- Objectif de la simulation ............................................................................................................... 7
II- Mécanique du système ................................................................................................................. 7A/ Première approche...................................................................................................................................... 7B/ Différents éléments..................................................................................................................................... 8
III- Modélisation Simulink.............................................................................................................. 12A/ Conventions d’écriture ............................................................................................................................. 12B/ La commande ........................................................................................................................................... 12C/ Les patins.................................................................................................................................................. 13D/ La traverse................................................................................................................................................ 17E/ Modélisation entière ................................................................................................................................. 17
IV- Recherche de la valeur des coefficients ................................................................................... 18
V- Simulation ................................................................................................................................... 20A/ Influences des paramètres ........................................................................................................................ 20B/ Correction proportionnelle ....................................................................................................................... 24
Mise en œuvre de la correction. .......................................................................... 26
I - Présentation du matériel. ........................................................................................................... 26A/ La maquette du pont roulant..................................................................................................................... 26B/ L’ asservissement initial de la maquette................................................................................................... 27C/ L’asservissement de vitesse...................................................................................................................... 28
II- Présentation des techniques de correction. .............................................................................. 29A/ Correction par filtres anti-résonants. ........................................................................................................ 29B/ Correction active par filtres anti-résonants............................................................................................... 29C/ Correction active par retour linéaire......................................................................................................... 30
III- Mise en œuvre de la correction................................................................................................ 32A/ Correction par filtres analogiques. ........................................................................................................... 32B/ Correction par filtres numériques. ............................................................................................................ 36C/ Essais menés............................................................................................................................................. 40
Conclusion........................................................................................................... 48
Bibliographie. ...................................................................................................... 49

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 4
INTRODUCTION.
Aujourd'hui encore, les ponts roulants et les outils de convoyage sont présentsdans le milieu industriel. Le transport de matériel demeure en effet délicat dès que lesdimensions et les masses à déplacer deviennent importantes. Leur emploi pouvant êtretrès divers il en existe une multitude, du treuil à la grue, en passant par le portique et lepont roulant. Les ponts roulants sont le plus souvent destinés à la préhension et autransport des charges lourdes et encombrantes.
Photo d’un pont roulantPhoto d’un portique
Leur taille et leurs caractéristiques techniques en font des outils coûteux. C'estpourquoi beaucoup d'études leur ont déjà été consacrées dans le but d'améliorer leurcapacité et leur précision tout en diminuant leur prix.
L'un des problèmes majeur de ce genre d'appareil est l’apparition de vibrationsinduisant un manque de précision. En effet, la traverse mobile supportant la charge sedéplace naturellement par un mouvement dit "en crabe", ce qui signifie que lesextrémités de la traverse avance par saccades non-synchronisées sur chacun de sesrails respectifs. Ce problème a, bien entendu, été résolu il y a longtemps. Ce fut unesolution mécanique qui fut retenue. Pour mettre en mouvement la traverse, on utilisedes moteurs synchronisés en rotation à chacune de ses extrémités. Cependant onconçoit que l’ajout d’un moteur ne favorise ni la légèreté du système, ni une économied’argent. L’objet de notre étude consiste donc à étudier le comportement saccadéd’une maquette simulant un pont roulant ou tout autre système similaire à empattementlarge, en vue d’une correction du mouvement "en crabe" à moindre coût.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 5
La correction active des vibrations d'un système est une méthode nouvelle etprometteuse car elle a fait ses preuves à plusieurs reprises. Avec ce type de correction,il ne s'agit plus de faire disparaître les sources de vibrations (frottements, élasticité,…)dans un système mais d'y amortir les vibrations présentes. C'est une approchetotalement différente, qui consiste alors à asservir un structure mécanique en ymesurant ses vibrations et en injectant dans la commande moteur, un "signalantivibratoire" conséquent. Cette solution devient une alternative à l’adoption d’unmoteur supplémentaire, cependant, son champ d’application ne se restreint pas auxponts roulants.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 6
ENONCE DU PROBLEME.
Lorsqu’un pont roulant se déplace sur ses rails, son mouvement est très souventsaccadé. Il l’est d’autant plus que la charge soulevée n’est pas centrée, que les cheminsde roulement ne sont pas bien parallèles et coplanaires, que le frottement au niveau ducontact est important et que le châssis est large en comparaison de sa longueur.
Le principe du broutement est le suivant :
! Le patin le plus avancé freine et coince sur le chemin de roulement.! Le deuxième patin rattrape alors son retard, dépasse l’autre et coince à
son tour.! Le processus se renouvèle et engendre le mouvement « en crabe ».
Ce mouvement est très néfaste pour les ponts roulants. Il engendre en effet desvibrations et donc une précision dégradée, une usure accrue au niveau des contacts,ainsi que des accoups non souhaités pour l’ensemble moteur-réducteur. De plus,comme ces efforts sont oscillants, il apparaît un risque non négligeable de rupture parfatigue, d'où une durée de vie réduite. Il apparaît donc très important de pouvoircorriger ce mouvement saccadé.
La solution la plus répandue consiste à motoriser la traverse par deux moteurs(hydrauliques ou électriques), placés de part et d’autre du chariot et synchronisés demanière à ce qu’ils aient la même vitesse de rotation. Ainsi le pont roulant est contraintà suivre l’axe théorique des chemins de roulement. Dans le cas du pont roulant, lasolution des deux moteurs permet, certes, d'inhiber toutes les vibrations dues aumouvement en crabe mais n'atténue en rien les vibrations causées par les moteurs, pardéfaut de planéité des rails, par vibration inertielle,…
La correction du mouvement saccadé d’un pont roulant peut aussi se faire par unecommande dite active, qui consiste à modifier la loi de commande en fonction del’apparition ou non du phénomène. L’intérêt de cette correction est le coût de mise enœuvre plus faible que celui de l’ajout d’un deuxième moteur synchronisé.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 7
MODELISATION DE LA MAQUETTE ET SIMULATION
I- Objectif de la simulation
Rappel : La correction active consiste à générer des anti-vibrations dans une structuredans le but d’y annihiler les vibrations présentes. Le problème est donc de déterminerles caractéristiques des anti-vibrations adéquates.
Les objectifs de la modélisation :" Déterminer l’influence des caractéristiques physiques de la structure." Etudier et tester différents correcteurs.
II- Mécanique du système
A/ Première approche
D’après les observations effectuées lors du fonctionnement de la maquette dans desessais préliminaires, il s’avère qu’un grand nombre de caractéristiques physiquesinflue sur la nature des vibrations.
! Le frottement sec (ou solide) des glissières.! L’élasticité de la traverse.! La vitesse d’avance! Les caractéristiques du moteur! Le couple de retour issu des glissières! etc.…
Frottements
Caractéristiques dumoteur
Position dupoint detraction
Elasticité

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 8
B/ Différents éléments
1°) Partie commande
Cf. les chapitre III de la partie « Mise en œuvre de la correction »
2°) Caractéristiques du moteur
Caractéristiques Valeurs numériquesVariables demodélisation
Référence Escap 34L11 (224E)Nature Moteur à courant
continuPuissance méc. Max. encontinu
18 W
FEM 3.5 V/1000trs/min FEM_moteurConstance de couple 33 mNm/A Const_moteurInertie du rotor 32 kgm².10-7 Inertie_moteurFrottement visqueux du rotor 0.01 Frot_moteur
3°) Ensemble réducteur/poulie/courroie
Hypothèse 1 : La déformation de l’ensemble est négligée (par rapport à celle de latraverse). On considère donc que les lois d’entrées/sorties sont linéaires.
Hypothèse 2 : Le jeu de l’arbre moteur est négligé pendant le fonctionnement normalde la maquette. Le couple moteur restant positif durant les essais il apparaît unphénomène de précontrainte de l’ensemble et donc disparition du jeu.
Caractéristiques mécaniques :• Le rapport de réduction : « coef_reduc »• Le rayon de la poulie : « rayon_poulie ».
Correction Moteur + réducteurAmpli
Capteur
ε
Filtre linéaireGrandeursreprésentativesdu phénomène
+_ +Vc ΩpoulieC

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 9
4°) La traverse
La traverse est le lien mécanique entre la courroie et les patins de la glissière. Elle estconstituée de deux lames d’acier verticales encastrées à leurs extrémités aux patins.
Hypothèse : Par souci de simplification, la traverse est considérée comme une poutre àsection rectangulaire. Cette hypothèse est forte, mais se justifie pour unepremière modélisation.
On peut désormais créer un modèle mécanique de la traverse.
La ligne moyenne caractérise le phénomène d’inclinaison de la traverse observépendant les essais préliminaires. Elle s’explique par l’excentration du point de tractionde la courroie (point A) et dans la différence de bras de levier (Lb < Lc).
Si l’on référence la position des glissières (point B et C) par rapport à la lignemoyenne, on peut considérer que l’on a à faire à deux lames souples de raideur kb etkc de part et d’autre du point de traction, de longueur Lb et Lc.
θA
Fa
Fb
Fc
C
BB’
C’kc
kb
XaLbLc
LXc’
Xc

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 10
Rappel des équations et des résultats pour le cas d’une seule lame souple :
5°) Les glissières
Chaque glissière du pont roulant est constituée d’un patin du type Vé long posé sur untube circulaire.
Il faut distinguer deux types de frottement sec :• Le frottement sec d’avance (lors du mouvement) : fav.• Le frottement d’adhérence (glissière à l’arrêt) : far.
Généralement, le frottement d’adhérent est supérieur à celui d’avance.
Deux autres phénomènes sont à prendre en compte dans notre modélisation :• Le couple qui tend à ramener la traverse perpendiculaire aux rails.• L’augmentation du frottement lorsque la traverse est perpendiculaire aux
rails.
3
3
3,
3,
L
IERaideurDonc
IE
LForceFlècheOr
Flèche
ForceRaideur
×=
×××=
=A
B (ou C)
FlècheRaideur k
Force
B’ (ou C’)
| vitesse |
Frottement sec
favfar

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 11
Les deux cas extrêmes sont les suivant (vue de dessus) :
L’expérience nous permet de connaître la forme des courbes : frottement etcouple de rappel en fonction de θ.
En résumé,Frottement (Vitesse, θ)Couple_retour (θ)
Angle θθθθ = 0, _ Frottement fort. _ Couple de retour nul.
Angle θθθθ > 0, _ Frottement faible. _ Couple de retourf
Ligne ou pointde contact
θθ
Frottement Couplede retour
Cretour
- Cretour
θ_lim_rad- θ_lim_rad
Frot. faible
Frot. fort
- θ_lim_rad θ_lim_rad

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 12
III- Modélisation Simulink
A/ Conventions d’écriture
1°) Titre des blocs
Deux exemples caractéristiques de titres debloc.Il comporte : Le nom du bloc, les entrées, lessorties ou parfois son équation associée.
2°) Nom des caractéristiques mécaniques
De même, les variables ont un format particulier. Elles sont généralementsuivies par la désignation du point associé (A, B, B’, C ou C’) écrit en minuscule. Cf. Exemple ci-dessous :
M_b Masse du patin associé au point B.k_b Raideur de la demi-traverse associé au point B.far_c Frottement à l’arrêt (adhérence) associé au point C.
3°) Nom des variables : Position, vitesse et accélération
Xa Position du point AXa. Vitesse du point AXa.. Accélération du point AXb’. Vitesse du point B’
B/ La commande

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 13
Remarque : La consigne de vitesse est générée en amont à l’aide des blocs décrient ci-dessous :
« Echelon » temps de déclenchement et amplitude« Rampe » Pente et ordonnée d’origine« Sinus, carré, triangle, bruit » Amplitude, fréquence et phase à l’origine
(cf. annexe 1 puis annexe 2 et 3).
C/ Les patins
1°) Analyse mécanique
Dans un premier temps, modélisons l’un des ensemble «patin et demi-traverseassociée ».
La similitude des deux systèmes mécaniques ci-dessus, nous permet desimplifier notre vision du phénomène. La modélisation de l’ensemble « demi-traverse+ patin » est donc identique à la modélisation d’une masse frottant sur le sol,frottement sec et d’adhérence, (et dans l’air, frottement visqueux) et tractée par unressort de raideur k.
2°) Algorithme de fonctionnement
L’algorithme de ce genre de système est le suivant :
Si ( Force de tension de ressort > Force d’adhérence du patin ),Phase d’avance (signal « phase » = 1)
Si ( Vitesse nulle ET Force du ressort < ou = Force d’adhérence du patin ),Phase d’arrêt (signal « phase » = 0)
Flèche
B(ou C)
Flèche
B’(ou C’)
A
B (ou C)
Raideurk
Force
B’ (ou C’)

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 14
3°) Transposition en Simulink
a- Rappel et exemple Simulink(Exemple didactique en annexe 0)
b- Schéma primaire d’un patin(cf. annexe 8 : « Ressort+M »)
Simulink n’étant pas adapté pour les systèmes ayant plusieurs modes defonctionnement à gérer alternativement (ici les phases d’arrêt et d’avance), il estnécessaire de générer un signal «phase » pour commander l’un ou l’autre de ces étatsde fonctionnement.
Si l’on observe le schéma de l’annexe 8, on peut distinguer 6 zones.
! Zone 1 (détail en annexe 13)
Il se compose de 2 entrées (Xb’ et phase) et de 4 sorties (Xb, Xb., Xb.. etl’effort du ressort). Il calcule la position, la vitesse et l’accélération du patin.B ainsique l’effort du ressort. Ce bloc sera expliqué en détail dans le paragraphe c).
! Zone 2
Sa fonction est de calculer les conditions de passage d’une phase à l’autre. On ycalcule donc les conditions de passage Arrêt/Avance et Avance/Arrêt.
Condition de passage Arrêt/Avance :phase = 0 ET | k_b(Xb’-Xb) | > far_b*M_b*g(En français : phase d’arrêt ET effort du ressort supérieur à l’adhérence)
Condition de passage Avance/Arrêt :Phase = 1 ET | Xb. | < vitesse_mini ET | k_b(Xb’-Xb) | < far_b*M_b*g(en français : phase d’avance ET vitesse de B quasi nulle ET effort duressort inférieur à l’adhérence)
! Zone 3 (détail en annexe 10)
La phase est déterminée à l’aide d’une table de vérité à trois entrées :• Condition de passage Arrêt/Avance.• Condition de passage Avance/Arrêt.• Phase actuelle.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 15
ConditionAr/Av
ConditionAr/Av
PhaseActuelle*
Phase*( à t+1 )
0 0 0 00 0 1 10 1 0 00 1 1 01 0 0 11 0 1 11 1 0 11 1 1 1
* « 0 » correspond à la phase d’Arrêt et « 1 » à celle d’Avance.
! Zone 4 (détail en annexe 9)
La tolérance de calcul est par défaut de 10-3. Or, lors des changements de phase,les courbes ont des points anguleux. Au voisinage de ces points, la tolérance de calculest donc diminuer à 10-6.
Le bloc « Affinage » regroupe les fonctions d’affinage de calcul (cf. exemple enannexe 0). On affine le calcul dans au voisinage des changements de phase.Concrètement, lorsque la vitesse quasi nulle (patin prêt à s’arrêter) et lorsque la forcedu ressort est proche de la force d’adhérence (patin prêt à repartir).
! Zone 5 (détail en annexe 11 et 12)
C’est la zone permettant d’afficher les résultats des simulations. Les blocs« Graph » sont regroupés ainsi dans un souci de clarté et de fonctionnalité.
c- Modélisation des équations associées au Stick-slip(Zone 1 et détail en annexe 13)
Sur le schéma modélisant la phase d’avance (annexe 13), la boucle « Sum-f(u)-1/s-1/s-switch-Sum » traduit l’équation :
Xb.. = 1/M_b [k_b(Xb’-Xb) –fav_b*M_b*g*sgn(Xb.) – fvi_b*Xb.]
La boucle « Switch-Switch » modélise la phase d’arrêt du patin : Xb resteconstant.
Les connecteurs (Switch, Switch1 et Switch2) servent à sélectionner les sortiesde X, X. et X.. en fonction de la phase.
Si Phase = « 0 » (arrêt), X = Cte, X. = 0 et X.. = 0.Si Phase = « 1 » (avance), X, X. et X.. sont issus de la première boucle.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 16
Les blocs d’intégration, déjà vu dans l’exemple didactique (en annexe 0),permettent d’initialiser leur sortie à chaque changement de phase : Arrêt/Avance.
Le bloc « front montant » crée un Dirac à chaque front montant du signal« phase », donc à chaque passage Arrêt/Avance. Ces impulsions de Dirac servent àinitialiser (entrée Set) les intégrateurs.
Le bloc de déphasage situé en amont du bloc « Switch » a pour but de retarderde 0.1 ms le signal « phase ». Pour comprendre son utilité il faut savoir que le bloc« front montant » suivi des blocs d’intégration créent chacun des petits retards, ainsilorsque la phase change, les sorties des intégrateurs ne sont initialisées que quelquesmicro secondes après. C’est pour cela que l’on crée aussi un retard au niveau duSwitch, pour synchroniser le circuit.
Valeur d’initialisation1/s
Entrée
Set Sortie

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 17
D/ La traverse
Chaque demi traverse AB et AC est liés au niveau du point de traction (pointA). La ligne moyenne est inclinée d’un angle θ. Celui-ci évolue suivant les forces derésistance des patins (Fb et Fc), le couple de retour (Cretour) et le moment d’inertie dela traverse.
La transposition en langage Simulink est imprimée à l’annexe 5.
E/ Modélisation entière(Annexe 1)
La réunion de la partie commande avec celle de la traverse termine notremodélisation. Il reste désormais à choisir un signal de commande ( rampe, sinus,…) età régler les paramètres de simulation (Start time, Stop time,…).
Xa +Lb*tan θ
Xa -Lc*tan θ
kb
Mb
kc
Mc
Couplede retour
Inertie de la traverse
Ja*θ..=-Lb*Fb +Lc*Fc -C
C
Fc
Xb
Fb
Fa=Fb+Fc
θ
Xa
Xc
Fa

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 18
IV- Recherche de la valeur des coefficients(Données issues du bloc note « num_pont.txt »)
%-----------------------------------------------%% VALEURS NUMERIQUES %% Associées au fichier "pont2" %%-----------------------------------------------%
% Caractéristiques géométriques et physiquesg=9.81 g/m²
L=0.5 mL_b=0.23 mL_c=L-L_b
% Caractéristiques de la traverseM=2 kgJ_a=M*(L_b^2+L_c^2)/6E=210000 MPaIGz=5e-006 mm4
% Caractéristiques du patin BM_b=M/2k_b=(3*E*IGz)/(L_b^3) N/mfav_b=0.2far_b=0.25fvi_b=0
% Caractéristiques du patin CM_c=M/2k_c=(3*E*IGz)/(L_c^3) N/mfav_c=0.2far_c=0.25fvi_c=0
% Caractéristiques liées aux blocs fonctionnellespente_rampe=0.02 m/svitesse_mini=0.01 m/s
O_lim_deg=2 degO_lim_rad=O_lim_deg*3.14/180 radCretour=0.01*M*g N.m
coef_corr=0.1

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 19
% Commande et moteur
coef_reduc=88.5rayon_poulie=0.039 mgain_elec=2000
J_moteur=3.35frot_moteur=0.01const_moteur=20

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 20
V- Simulation
A/ Influences des paramètres
1°) Fiche de résultats(annexe 20)
Pour les fiches de résultats, les informations les plus importantes sontprésentées au travers de cinq fenêtres :
# Position de Xa, Xb et Xc (en haut à droite)# Angle θ (en dessous)# Couples exercés sur la traverse (en bas à droite)# Analyse spectrale de l’accélération Xb..# Analyse spectrale de l’accélération Xc..
2°) Critères d’évaluation
Les résultats sont mesurés dans l’intervalle de temps 6-10 secondes. Ceci pourêtre en régime permanent.
Amplitude de C
Zone d’analyse spectrale
Fondamental
Angle θmoyen

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 21
Cinq critères d’évaluation :• Amplitude de la position relative du point B par rapport au point A.• Amplitude de la position relative du point C par rapport au point A.• Fréquence du fondamental de l’accélération du point B• Fréquence du fondamental de l’accélération du point C• Angle θ moyen
3°) Protocole
♦ Les valeurs numériques sont celles mentionnées dans le chapitre IV).♦ La consigne de vitesse est un échelon.
Vitesse = 0.02 m/sLongueur = 0.2 mTemps = 10 s
Remarque : Les mesures sont faites dans l’intervalle 6-10 secondes.
♦ On fait varier indépendamment quatre caractéristiques mécaniques : Lefrottement, l’élasticité, la masse et l’excentricité du point de traction.
4°) Résultats
a- Variation du frottement (annexe 22 à 24)
Frottement fav = far =
0.10.125
0.20.25
0.30.375
0.40.5
B 13 11 10 28
Fréquence du fondamental (rad/s)
C 13 11 11 X
B 0.007 0.013 0.019 X
Amplitude de position relative (m)
C 0.008 0.015 0.024 X
Angle θ (rad) 0.01 0.02 0.03 X
temps
Consigne de vitesse

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 22
b- Variation de l’élasticité (annexe 25 à 26)
Raideur IGz =(10-6 kg.m²)
3 5 10
B 8 11 19
Fréquence du fondamental (rad/s)
C 15 11 19
B 0.017 0.013 0.004
Amplitude de position relative (m)
C 0.022 0.015 0.004
Angle θ (rad) 0.02 0.02 0.02
c- Variation de l’a masse (annexe 27 à 28)
Masse(kg)
1 2 5
B 18 11 7
Fréquence du fondamental (rad/s)
C 18 11 7
B 0.003 0.013 0.020
Amplitude de position relative (m)
C 0.003 0.015 0.030
Angle θ (rad) 0.02 0.02 0.01

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 23
d- Variation de l’excentricité (annexe 29 à 31)
Excentricité Lb/L = 0.49 0.46 0.42 0.36
B 11 11 29 11
Fréquence du fondamental (rad/s)
C 11 11 28 X
B 0.013 0.013 0.014 X
Amplitude de position relative (m)
C 0.013 0.015 0.019 X
Angle θ (rad) 0 0.02 0.04 X
e- Tableau récapitulatif
Fréquence dufondamental
Amplitude dela position Angle θ
Frottement Raideur ? Masse
Excentricité

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 24
B/ Correction proportionnelle
1°) Appliquée à un seul patin(Annexe 40 à 43)
Pour appréhender la correction par retour linéaire de l’accélération sur laconsigne de vitesse (ou ici, de la vitesse sur la consigne de position), nous allonsl’appliquer à un cas simple. Celui de l’ensemble « patin/demi-traverse » modélisé ci-dessous de deux manières similaires.
Consigne de position : Point B’Sortie : Point B
a- Schéma Simulink
b- Quatre simulations(annexe 40 à 43)
• Consigne de position au type « Rampe » sans correction• Consigne de position au type « Rampe » avec correction• Consigne de position au type « Dents de scie » sans correction• Consigne de position au type « Dents de scie » avec correction
BB’A
B
Raideurk
B’

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 25
c- Synthèse
Pour ce cas d’étude, la correction des vibrations est totale, l’effet d’amortissementvirtuel fonctionne comme un filtre passe-haut. L’erreur de traînage subsiste.
2°) Appliquée au pont
a- Schéma Simulink(Annexe 15)
b- Résultats(Annexe 32)
Point B Point CFréquence du fondamental (rad/s) 32 27Fréquence du secondaire (rad/s)Amplitude de position relative (m) 0.007 0.007
Angle θ (rad) 0.02
c- Synthèse
Comparaison les résultats des simulations sans correction et avec correction.
Point B Point C
Fréquence du fondamental (rad/s) 11 33 11 27
Amplitude de position relative (m) 0.013 0.007 0.015 0.007
Angle θ (rad) 0.02 0.02
* En souligné : résultats avec correction

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 26
MISE EN ŒUVRE DE LA CORRECTION.
I - Présentation du matériel.
A/ La maquette du pont roulant.
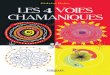
La maquette du pont roulant est représentée ci-dessous:
Elle se compose d’un châssis, de 2 rails et d’un chariot transversal qui translatesur ces rails par l’intermédiaire de 2 vés. Le chariot se déplace grâce à un système depoulies–courroie, entraîné par un moteur à courant continu avec variateur de vitesse etréducteur. Le bâti est réalisé en profilés assemblés, et ses caractéristiquesdimensionnelles sont les suivantes:
! 1 m de long! 60 cm de large! 20 cm de haut
Les vés sont réalisés par deux patins de frottement glissant sur deux tubes. La naturedu contact est donc métal sur métal.
Traverseconstituée dedeux lames
Maquette simulant le pont roulantGuidagepar vés
Systèmepoulie - courroie

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 27
B/ L’ asservissement initial de la maquette.
La maquette était dotée d’un asservissement en position dont la représentation enschéma bloc est la suivante :
Xin : Position initialeXf : Position finaleVm : Vitesse Max.γm : Accélération Max.Vc : Consigne de vitesse.Um : Tension amplifiée appliquée au moteurVg : Tension issue de la génératrice tachymétriqueXi : Position instantanée
Le moto-réducteur « ESCAP » s’accompagne d’un codeur optique, d’unegénératrice tachymétrique, et l’ensemble est piloté par une carte d’axe « FENWICK »programmable. C’est cette dernière qui assure l'asservissement en position du moteur.
Elle réalise la boucle d’asservissement en position grâce au retour du codeur optique,mais également la génération de la consigne. Un ordinateur nous permet decommander la valeur de la position initiale et finale, ainsi que la vitesse maximale,l’accélération maximale, la progressivité des évolutions, et différents gains... Laprogrammation est effectuée à partir du PC grâce au logiciel « CTERM» dans unlangage proche du Basic, pour effectuer des suites de commandes ou faire des relevés.
L’asservissement de vitesse, quant à lui, est assuré indépendamment de la carte d’axepar un circuit de commande « ESCAP ELD-3503 V4 » pour moteur à courant continu.Il utilise pour cela le signal issu de la génératrice tachymétrique.
Il faut souligner que la carte d’axe offre également la possibilité de commander lamaquette de façon manuelle, par un boîtier de commande distinct.
Vc
t
PCCarted’axe
Partiepuissance
Xin, Xf
Vm, γmVc
XiVg
Um
Mot
eur
+ré
duct
eur
Gén
é ta
chy
Cod
eur
opti
que

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 28
C/ L’asservissement de vitesse.
La correction du mouvement saccadé agit sur la consigne de vitesse enmodifiant la loi de commande. De plus, comme nous cherchons à réduire lephénomène de mouvement saccadé en régime permanent, nous avons uniquementconservé l’asservissement de vitesse.
Vc : Consigne de vitesse.Um : Tension amplifiée appliquée au moteurVg : Tension issue de la génératrice tachymétrique
La consigne de vitesse est réalisée par un générateur de tension continue à gainvariable. La consigne est désormais sous forme de créneau dont on peut faire varier lavitesse la vitesse maximale. L’asservissement de vitesse obtenu est réalisé par lecircuit de commande « ESCAP ELD-3503 V4 » pour moteur à courant continu, utilisantle signal issu de la génératrice tachymétrique en retour. Cette simplification présenteplusieurs avantages :
! Simplification du montage.! Régulation de la commande plus simple car sans programmation.! Mesure plus juste car on est assuré de tenir compte des accélérations dues au
broutement en régime établi et non celles induites par l’asservissement deposition.
Générationde la
consigne
Partiepuissance
Vc
Vg
Um
Mot
eur
+ré
duct
eur
Gén
éta
chy
Vc
t

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 29
II- Présentation des techniques de correction.
Si, on considère souvent les systèmes mécaniques parfaitement rigides poursimplifier la modélisation, en pratique ils ne le sont jamais. De ces imperfectionsnaissent des vibrations qu’il nous appartient de corriger pour certaines applications.Quand ces vibrations sont négligeables on préfère souvent palier le problème enévitant simplement d’exciter le système aux fréquences propres. Cependant, dans denombreux cas cette technique n’est pas suffisante. Il faut alors mettre en œuvre unecorrection que l’on qualifie d’active.
A/ Correction par filtres anti-résonants.
Si le phénomène de vibrations est parfaitement maîtrisé, que les fréquences derésonance sont connues, il convient alors de placer des filtres anti-résonants encascade, avant la commande. Le schéma bloc de l’asservissement devient alors :
Mais une telle correction est très délicate à mettre en pratique. Un mauvais calageentre les fréquences de résonance du système et celles des filtres en amont rend eneffet la correction inefficace.
B/ Correction active par filtres anti-résonants.
Comme la configuration du système évolue (charge en haut, en bas, à droite ouà gauche) la correction doit être adaptée aux nouvelles résonances et, par conséquent,le filtre. Ainsi les coefficients de sa fonction de transfert ne seront pas fixes maisévolueront au cours du temps. L’asservissement devient alors :
Correction Filtre anti-résonant
Moteur + réducteurAmpli
Capteur
εεεε U Um C ΩΩΩΩVc
Vs
_

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 30
Bien qu’efficace ce procédé requiert cependant un traitement du signal pour identifierles résonances, ce qui augmente la complexité et le coût du montage. On lui préféreradonc souvent une autre technique ayant fait les preuves de son efficacité à de multiplesreprises, et qui consiste à lui substituer un filtre linéaire.
C/ Correction active par retour linéaire.
L’ensemble « Filtre anti-résonnant + Identification des résonances » estremplacé par un filtre linéaire, qui rajoute une composante à la tension de commandedu moteur de manière à amortir plus rapidement les vibrations. Certes ces vibrationsne sont pas supprimées, mais elles sont quand même amorties très rapidement.
En toute rigueur il s’agit d’introduire un effort proportionnel à la vitesse de rotation dumoteur qui augmente la viscosité du mécanisme. Le système mécanique est régi parl’équation issue du PFD :
Cmoteur = J.θ’’ + Cv. θ’ + K. θ
La viscosité naturelle du mécanisme est faible voire négligeable donc Cv estnégligeable. On introduit donc dans l’équation une viscosité artificielle du type –λ.θ’,afin d’amortir les vibrations. La nouvelle loi de commande se traduit par :
Cmoteur corrigé = Cmoteur – λ. θ’ = J. θ’’ + K. θ
Correction Filtre anti-résonant
Moteur + réducteurAmpli
Capteur
εεεε U Um C ΩΩΩΩVc
Vs
Identification desrésonances
Grandeursreprésentativesdu phénomène
_

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 31
L’asservissement peut alors se schématiser comme suit :
Correction Moteur + réducteurAmpli
Capteur
εεεε U Um C ΩΩΩΩVc
Vs
Filtrelinéaire
Usup
Grandeursreprésentativesdu phénomène
+_ +

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 32
III- Mise en œuvre de la correction.
Deux voies de solution ont été envisagées : la technologie analogique et latechnologie numérique.
A/ Correction par filtres analogiques.
Cette solution consiste à placer en retour des filtres analogiques linéaires dusecond ordre à coefficients réglables. Ces derniers ne nous limitent pas au premierordre et nous offrent la possibilité d’obtenir, par combinaison, n’importe quel filtrelinéaire. Leur fonction de transfert prend la forme :
Les coefficients a0, a1, a2, b0, b1 et b2 sont réglables.L’asservissement peut être représenté de la façon suivante :
Γ1 et Γ2 : accélérations aux deux extrémités de la traverse.Vc : consigne de vitesse.Um : tension amplifiée appliquée au moteur.Vg : tension issue de la génératrice tachymétrique.Usup1 et Usup2 : tensions supplémentaires ajoutées ou soustraites à Vc
Hfiltre(p) = b2p2 + b1p + b0
a2p2 + a1p + a0
Générationde la
consigne
amplipuissance
Vc
Vg
Um
Mot
eur
+ré
duct
eur
Gén
éta
chy
CarteFiltre 1
+
_+
+
+
Γ1
Γ2
Usup1
Usup2CarteFiltre 2
CarteSommateur

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 33
Le principe est le suivant :
A la tension de consigne s’ajoutent deux tensions algébriques (Usup1 et Usup2)représentatives de l’accélération aux extrémités de la traverse, afin de modifier laloi de commande et ainsi atténuer les vibrations.
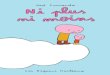
1°) Les accéléromètres.
Les accéléromètres placés aux extrémités de la traverse ont été de deux types.
Accéléromètres Brüel & Kjaer
type 4343
Câbles Brüel & Kjaer
type A0 0038
Accéléromètres FGP
type FA201-15 N°288
Amplificateurs de charge B & K
type 2635 à gauche (alimentation par pile)type 2624 à droite (alim B & K type 2805)

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 34
2°) La carte filtre.
La carte filtre produit un signal de sortie, résultat du traitement analogique d’unsignal prélevé à l’entrée, par un filtre d’ordre 2.
Entrée filtre Entrée différentielle
Réglage des signes, des coefficientset mise à zéro, par interrupteur.
Emplacement du bouchon , ou,liaison avec la carte de commandepour la mesure des coefficients.
Sortie du filtre après traitement.
b0
b1
b2
a0
a1
1a2
0
+
+
+
+
+
+
-
-
-
0
0
RAZ
Extinction des diodes de saturation.
Réglage descoefficients envaleur absolueparpotentiomètre.
Carte filtre

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 35
3°) La carte sommateur.
La carte sommateur effectue la sommation des deux signaux issus desaccéléromètres et celui de la consigne de vitesse.
Dans notre cas nous utilisons uniquement 3 entrées sur les 4, le gain variable k estdonc réglé sur 1/3, de manière à obtenir la loi d’entrée-sortie:
-15V
-
+
+15V
-15V
-
+
+15V
S ∈ [-10V,10V]Ei ∈ [-10V,10V]
R
R
R
R
kRR
R
13 i = 1
3
S = Σ Ei

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 36
B/ Correction par filtres numériques.
La correction numérique a biensûr la même vocation que la correctionanalogique. Cependant, cette technologie présenterait l’avantage d’assurer à elle seuleplusieurs fonctions : la réalisation des filtres numériques du second ordre (gamme defiltres plus large), les diverses sommations et conversions, mais aussi la génération dela consigne en amont de l’asservissement. On pourrait ainsi envisager divers types decommande (créneau, trapèze, rampe, consignes combinées,…) pour tester, parexemple, l’efficacité de la correction en régime transitoire
On peut regrouper en trois ensembles les diverses technologies présentes sur lemarché : la carte de commande d’axes, le circuit de contrôle de mouvement et lescartes dSPACE.
1°) la technologie numérique.
L'utilisation de la technologie numérique suppose l'emploi de convertisseursnumérique/analogique et analogique/numérique à l'intérieur de la boucled'asservissement.
Il est important de souligner qu’il est préférable d’utiliser une technologie dotée d'unmicroprocesseur interne pour éviter les problèmes de non-constance de la base detemps. Ainsi, il faut exclure d'emblée l'emploi de Labview et autres logicielséquivalents pour lesquels la base de temps est propre au système d'exploitationWindows, et qui ont à plusieurs reprises montré leurs limites dans ce domaine.
Vc
Mot
eur
+ré
duct
eur
Gén
éta
chy
+
_+
+
+
Γ1
Γ2
Usup1
Usup2
CNAPartie
puissanceGénération de
la consigne
Filtre2
Filtre1
CAN
Rôle de la carte

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 37
2°) les cartes de commande d'axes.
Dédiées à l'automatisation des mouvements dans plusieurs directions del'espace, les cartes de commande d'axes trouvent de multiples applications dans lacommande de moteurs à courant continu et pas à pas. Elles sont par exemple souventutilisées sur les lignes de production et sur les robots. Elles s'intègrent directement àl'intérieur d'un PC, à partir duquel on effectue la programmation, et attaquent levariateur à étage de puissance du moteur ou le circuit de puissance du montage.
Souvent utilisées en boucle ouverte pour la commande des moteurs pas à pas(commandés en nombre d'impulsions), les cartes d'axes proposent également une ouplusieurs entrées pour le codeur associé aux moteurs à courant continu. Dans les deuxcas l'asservissement obtenu leur permet de gérer des mouvements complexes, et mêmesynchronisés suivant les divers axes.
Elles offrent en général une large gamme de filtres pour la correction.
Filtres numériques de la carte Promo 7000
Elles sont équipées de filtres d'asservissement de position PID et coupe-bande:
Referenceposition
KPd ddt
Vff ddt
KPi ∫
KPpΣ Σ +
++
++
+
+
KVd ddt
Tff ddt
KVi ∫
KVpΣ Σ
+
++
+
+Σ
P- Tff
Adaptativefeedforward
Torquelimit
Outputcommand
DC 1 - n1Z-1 - n21 Z
-2
1 – d1Z-1 – d2Z
-2
Positionfeedback
Positionfeedback
ddt
+-
Correcteur PID
Anticipation devitesse
Filtre numériquedu second ordre
Anticipationd’accélération
Commande
Position
Sortie

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 38
" P: le gain proportionnel fournit la rigidité des servomécanismes." I : le gain intégral supprime l'erreur en régime permanent." D : le gain différentiel assure la stabilité du mécanisme.
Elles sont également munies de deux autres termes qui réduisent l'erreur de poursuite:
" L'anticipation de vitesse réduit l'erreur de poursuite due au gain différentielou à la boucle tachymétrique.
" L'anticipation d'accélération réduit l'erreur de poursuite due à l'inertie.
Pour les systèmes ayant une équation de commande très complexe, il existe parfois unfiltre optionnel de placement de pôles (la carte PMAC par exemple).
3°) circuit de contrôle de mouvement.
Le circuit de contrôle de mouvement Hewlett Packard assure à lui seul lecontrôle numérique d'un moteur à courant continu ou pas à pas. Il suffit d'unprocesseur hôte pour spécifier les commandes, d'un amplificateur et d'un moteur dotéd'un codeur incrémentiel pour mettre au point l'asservissement de ce moteur.
Le circuit HCTL-1000 propose pour l'asservissement quatre modes de commande:
" Commande de position." Commande proportionnelle de vitesse." Commande de profil trapézoïdal pour les déplacements point à point." Commande intégral de vitesse à partir de profils continus de vitesse faisant
appel à une accélération linéaire.
Processeurhôte
HCTL-1000 ampli8 bits
moteur
Codeurincrémentiel
temps
vitesse

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 39
L'asservissement de position (ou de vitesse) est obtenu par comparaison entre laposition réelle et la position mesurée. L'écart ainsi obtenu attaque un filtre numériqueparamétrable et fournit l'information à l'amplificateur sous forme d'un mot de 8 bits(port parallèle) ou d'un signal modulé en largeur d'impulsion (PWM).
4°) les cartes dSPACE.
Les produits dSPACE offre également une large gamme de solutions en matièrede calcul en temps réel. Elles trouvent de nombreuses applications dans le domaine dutraitement du signal, de l'automatique, de l'analyse des données et de la simulation.
Les cartes contrôleurs sont des produits mono-carte avec un processeur et desentrées/sorties sur le même circuit. Leurs performances, comparables aux cartes decommande d’axes, suffisent largement à la réalisation de l’asservissement, lagénération de consigne et la mise en œuvre de filtres numériques.
5°) tableau comparatif des caractéristiques techniques et commerciales desdiverses solutions.
Caractéristiques Cartes de commande d'axes Cartes dSPACEmodèle mini-PMAC Promo 7000 DSP 1102
fournisseur JEAMBRUN A2V Scientific Softwareprocesseur DSP56002 DSP DSP TI TMS320fréquence 20 MHz 60 MHz 60 MFlops
format bus ISA bus ISAenvironnement Win 95/98/NT Win 95/98/NT DOS
programmationcode
(logiciel)graphique(logiciel)
code(compilateur +
assembleur + linker C)nombre d'axes 2 4 -
entrées analogiques2
résolution 10 bits4 résolution 12 bits7 résolution 8 bits
4
sorties analogiques2
résolution 16 bits4
résolution 12 bits4
port 1 port série RS2321 port RS422/485
et RS232prix de la carte 13000 environprix du logiciel 3500
16000 au total 35000 au total
délai de livraison 5/6 semaines 5/6 semaines 5/6 semaines
divers
bibliothèqueadditionnelle
SFLIB31 pour lagénération de signaux
et pour les filtres

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 40
CaractéristiquesCircuit de commande
de mouvementmodèle HCTL-1000
fournisseur Hewlett Packardhorloge 1 ou 2 MHz
commande position ou vitessefiltre numérique programmable
port de commande dumoteur
8 bits parallèlesou PWM
port entrée/sortie 8 bits parallèlescompteur de position 1 résolution 24 bitsalimentation unique 5V
divers compatible TTL
C/ Essais menés.
Avant de mettre en œuvre la correction, nous avons cherché à appréhenderl’influence de la vitesse de consigne sur le mouvement saccadé.
1°) Influence de la vitesse de consigne.
a- Protocole de l’essai.
Intuitivement il semblerait que la vitesse de consigne soit un paramètre influantsur le phénomène. Pour vérifier cette hypothèse nous avons alors effectué plusieursessais qui consistent à faire varier la consigne et mesurer les accélérations auxextrémités de la traverse.
Essai Vc1 3V2 6V3 9V
De cette série de mesures il apparaît indéniablement un défaut de nonrépétitivité des résultats. Afin de palier les dispersions de nos résultats, nous avonsmené une campagne d’essais et réaliser une étude statistique (cf. annexes 50).
Volts
t
4s
Vc Consigne
0

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 41
La série de mesures est représentée en annexe par un histogramme des effectifs. Lavaleur de la fréquence dominante des accélérations (Γ1 et Γ2) puis son amplitude sontportées sur l’axe des abscisses, en intervalles égaux. Sur chaque intervalle estconstruit un rectangle dont la surface est proportionnelle au nombre de mesurescompris dans l’intervalle. Comme tous les intervalles sont égaux, la hauteur desrectangles est proportionnelle au nombre de mesures par intervalle.
La surface totale de l’histogramme obtenu est par conséquent proportionnelle aunombre total de mesures. Pour que deux histogrammes puissent être facilementcomparés, il suffit de les normaliser en prenant, comme surface de chaque rectangle, lerapport :
f s’appelle la fréquence des résultats compris dans un intervalle et correspond aupourcentage de mesures compris dans l’intervalle considéré (cf. annexes 50).
f = nombre de mesures par intervallenombre d’essais total

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 42
0
0.1
0.2
0.3
0.4
0.5
0.6
0 -> 2 2 -> 4 4 -> 6 6 -> 8 8 -> 10 10 -> 12
Intervalles des fréquences propres (Hz)
Fré
qu
ence
s d
es r
ésu
ltat
s
Accélération 1
Accélération 2Consigne de vitesse3V
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0 -> 2 2 -> 4 4 -> 6 6 -> 8 8 -> 10 10 -> 12
Intervalles des fréquences propres (Hz)
Fré
qu
ence
s d
es r
ésu
ltat
s
Accélération 1
Accélération 2Consigne de vitesse 9V
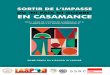
Consigne de vitesse de 3V
La dispersion des résultats esttrès forte pour le signal issu del’accélération 1. En effet, il y a presqueautant de mesures dans chacune desplages de fréquences.
Le signal de l’accéléromètre2 estquant à lui beaucoup plus constant.Environ 55% des résultats sontinférieurs à 2 Hz.
Consigne de vitesse de 6V
La dispersion des résultats est icibeaucoup plus faible pour les deuxaccéléromètres. Environ 66% desrésultats pour l’accéléromètre 1 et 68%pour l’accéléromètre 2 sont comprisentre 0 et 4Hz.
Consigne de vitesse de 9V
Il s’agit du cas de figure où larépétitivité des résultats est lameilleure. En effet, les mesuresrévèlent que 83% du temps pourl’accéléromètre 1 et 75% pourl’accéléromètre 2 la fréquence propredu signal est comprise entre 4 et 8 Hz.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0 -> 2 2 -> 4 4 -> 6 6 -> 8 8 -> 10 10 -> 12
Intervalles des fréquences propres (Hz)
Fré
qu
ence
s d
es r
ésu
ltat
sAccélération 1
Accélération 2Consigne de vitesse6V
b- Résultats obtenus pour la fréquence dominante.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 43
Consigne de vitesse 9V:
Les résultats sont très disparates. Lapopulation la plus fréquente estrencontrée pour la classe 0->10E-3avec 50% des résultats pourl'accéléromètre 1 et 33% pourl'accéléromètre 2.
Consigne de vitesse 6V:
La répétitivité des mesures est icinettement meilleure. En effet, 100%des résultats sont compris entre0>10E-3 en ce qui concernel'amplitude de la fréquence dominantede l’accélération 1, et 73% pourl’accélération 2.
Consigne de vitesse 3V:
Les mesures sont à nouveauconstantes pour l'amplitude de lafréquence dominante del’accélération 1 (100% sontcomprises entre 0->10E-3), enrevanche la répétitivité des résultatsest moins bonne pour l’accélération 2(80% pour la classe 0->10E-3).
0
0.1
0.2
0.3
0.4
0.5
0.6
0 -> 10E-3 10E-3 -> 20E-3 20E-3 -> 30E-3 30E-3 -> 40E-3 40E-3 -> 50E-3 50E-3 -> 60E-3
Intervalles d'amplitude
Fré
qu
ence
s d
es r
ésu
ltat
s
Accélération 1
Accélération 2Consigne de vitesse9V
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 -> 5E-3 5E-3 -> 10E-3 10E-3 -> 15E-3 15E-3 -> 20E-3 20E-3 -> 25E-3 25E-3 -> 30E-3
Intervalles d'amplitude
Fré
qu
ence
s d
es r
ésu
ltat
s
Accélération 1
Accélération 2
Consigne de vitesse6V
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 -> 4E-3 4E-3 -> 8E-3 8E-3 -> 12E-3 12E-3 -> 16E-3 16E-3 -> 20E-3 20E-3 -> 24E-3
Intervalles d'amplitude
Fré
qu
ence
des
rés
ult
ats
Accélération 1
Accélération 2Consigne de vitesse3V
Consigne de vitesse 9V:
Les résultats sont très disparates. Lapopulation la plus fréquente estrencontrée pour la classe 0->10-3 avec50% des résultats pour l’accéléromètre1 et 33% pour l’accéléromètre 2.
c- Résultats obtenus pour l’amplitude de cette fréquence.

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 44
d- Interprétation.
Les essais confirment notre hypothèse: la vitesse de consigne influe sur lephénomène de mouvement saccadé. Elle tend en effet à augmenter la fréquencedominante des accélérations aux extrémités de la traverse et son amplitude.
Les mesures ont également mis en évidence le problème de non répétitivité desrésultats. On constate cependant que la dispersion est plus faible pour une vitesse deconsigne supérieure à 3V. De plus, alors que la dispersion des résultats en ce quiconcerne la fréquence dominante des accélérations est plus faible pour une vitesse deconsigne de 9V, elle est moindre pour une vitesse de consigne de 6V en ce quiconcerne l'amplitude.
Notre critère de réduction du phénomène de mouvement en crabe est ladiminution de l'amplitude de la fréquence dominante. Afin de mieux évaluerl'influence de notre correction active sur le phénomène, ce critère nous conduit donc àmener les essais avec correction pour une vitesse de consigne de 6V.
Les essais sans correction nous montrent également que les spectres desaccélérations ne présentent pas tous une fréquence prépondérante. Certains seprésentent davantage sous forme d'un bruit.
Accélération FFT
Définition de bruit: "perturbation indésirable qui se superpose au signal dans unsystème de traitement de l'information."
Le spectre d'un bruit se traduit donc par un ensemble de pics d'amplitude plus oumoins importante, sur une plage de fréquence. On parle de "bruit blanc" lorsque lespectre du signal révèle la superposition de toutes les fréquences.
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0 5 10 15 20 25 30
f (Hz)
FF
T
FFT
-0.6
-0.4
-0.2
0
0.2
0.4
0 0.5 1 1.5 2 2.5 3 3.5
temps (s)
Vo
lts
Accélération+0.40
-0.40

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 45
Le critère précédemment énoncé ne s'appliquant pas à tous les cas de figure, est doncrestrictif. Cette constatation nous conduit à considérer un autre critère pour évaluer lephénomène de mouvement en crabe, et de ce fait, mieux appréhender l'influence denotre correction : l’écart quadratique moyen. L'écart quadratique moyen desaccélérations est en effet représentatif du phénomène. On évalue l'écart quadratiquemoyen E d'une fonction continue f sur un intervalle de temps T par la relationsuivante:
Pour une variable discrète x, l’écart quadratique moyen s’exprime par :
Comme l'écart quadratique moyen des accélérations est indépendant de leur spectre, ilétend la validité du critère de réduction du phénomène à l'ensemble des mesures, ycompris celles dont le spectre ne possède pas de fréquence prépondérante.
2°) Essais avec correction proportionnelle.
a- Protocole de l’essai.
A l’origine nous prévoyions de déterminer les filtres par simulation sur lemodèle. Les résultats de la simulation sont arrivés tardivement c’est pourquoi nousavons opté pour une démarche de sensibilisation aux paramètres.
Nous avons donc organisé nos essais de manière à tester l’efficacité de la correctionproportionnelle en partant de la correction nulle jusqu’à la dégradation ducomportement de la maquette. L'essai consiste à mesurer l’accélération des extrémitésde la traverse pour diverses valeurs du gain de la correction proportionnelle. Les filtressont de la forme b2/a2.
L’atténuation du phénomène est assimilée à la diminution de l’amplitude de la raieprincipale du spectre des accélérations ainsi que celle de l’écart quadratique moyen deces accélérations.
0
T1T
f2(t) dtE =
E = Σ xi 21
n i = 1
n

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 46
b- Résultats avec correcteur proportionnel.
Pour les essais nous avons fait varier le gain b2/a2 de 0 à -2,5 par pas de 0,1. Lamesure de l'amplitude de la fréquence dominante des deux accélérations est reportéedans le tableau suivant:
Accélération 1 Accélération 2Valeur durapport -
b2/a2de la
correctionproportio
nnelle
Amplitudede la
fréquencedominante
Ecartquadratique
moyen
Fréquencedominante
(Hz)
Amplitudede la
fréquencedominante
Ecartquadratique
moyen
Fréquencedominante
(Hz)
-0,1 9E-2 0.359306328 4 10,8E-2 0.35861125 3.5-0,2 6,7E-2 0.36727485 4 7,3E-2 0.33363232 4-0,3 9,5E-2 0.31808864 3.5 11,4E-2 0.32675365 3.5-0,4 5,5E-2 0.27821442 3.5 6,3E-2 0.27735447 4-0,5 3,2E-2 0.34925909 4 3,2E-2 0.36833768 4-1 6E-2 0.29646876 3.5 6,9E-2 0.29646876 3.5
-1,7 1,85E-2 0.18153526 5.5 2,25E-2 0.17063033 5.5-1,8 1,8E-2 0.09696006 3.5 2,25E-2 0.12454603 4-1,9 0,32E-2 0.11633475 6 0,57E-2 0.14875101 6-2 0,54E-2 0.20516405 10 0,45E-2 0.27707407 7.5
-2,1 1,6E-2 0.21771459 4 2,7E-2 0.2969016 3.5-2,5 0,32 0.46271097 3.5 0,42 0.65434031 3.5
Ces essais révèlent une valeur optimale pour laquelle le phénomène demouvement saccadé est moindre. Le gain proportionnel des filtres sera donc régléà -1,9. Pour cette valeur du gain, on obtient les relevés suivants :
Accélération 1 Accélération 2
-0.45
-0.35
-0.25
-0.15
-0.05
0.05
0.15
0.25
0.35
0.45
0 0.5 1 1.5 2 2.5 3 3.5
temps (s)
Acc
élér
atio
n
Accélération
-0.55
-0.45
-0.35
-0.25
-0.15
-0.05
0.05
0.15
0.25
0.35
0.45
0 0.5 1 1.5 2 2.5 3 3.5
Temps (s)
Acc
élér
atio
n
Accélération
+0.25
-0.25
+0.25
-0.25

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 47
Lorsqu'on dépasse la valeur -2,5 la traverse avance par saccade brusque, comme si lacommande était un signal en créneau. Le mouvement devient brutal, ce qui n'est pasdu tout souhaitable.
c- synthèse des résultats.
Amplitude de lafréquencedominante
Ecartquadratique
moyenValeur du
gainAcc. 1 Acc. 2 Acc. 1 Acc. 2
0 9.10-2 11. 10-2 0,36 0.35-1,9 0,32.10-2 0.57.10-2 0,12 0,15

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 48
CONCLUSION
L’objectif de ce projet était d’évaluer l’influence d’une commande active sur lemouvement saccadé de la maquette du pont roulant en régime permanent. Lespremiers résultats sont très prometteurs. En effet, avec un simple correcteurproportionnel en retour nous avons montré une réduction du phénomène, c’est à direl’obtention d’un mouvement oscillant de la traverse plus rapide mais moins ample.
En toute légitimité nous pouvons donc penser qu’un filtre plus évolué permettraitd’obtenir un résultat au moins aussi bon. Pour y parvenir il reste à perfectionner lasimulation, afin de déterminer la forme et les coefficients du filtre qui atténueront defaçon optimale le phénomène de mouvement en crabe.
De plus, le laboratoire d’automatisme à fait l’acquisition au mois de mai de la carte decommande d’axes Promo 7000. Son utilisation dans le cadre de notre projetpermettrait d’étendre la gamme de filtres étudiés au non linéaire et évaluer l’influencede la correction en régime transitoire.
La dernière étape du projet consistera à valider cette étude sur l’engin de manutentionréel. Si cette validation montre des résultats physiques probants qui justifient l’emploide cette technique, il faudra tout de même en étudier l’aspect financier et répondre auxquestions: la correction du mouvement saccadé par la correction active est–elleavantageuse en terme d’argent par rapport à la solution qui consiste à adopter deuxmoteurs synchronisés ? Si oui, pour quelle gamme d’engins ? Peut-on l’étendre àd’autres applications ?

Etude et correction active du mouvement saccadé d’un mobile à empattement large.
20/06/00 Page 49
BIBLIOGRAPHIE.
[ONER] J.P. CHRETIEN La commande active des structures flexiblesD. ALAZARD DCSD à l’ONERA
[SUPA] S. VINCENT Etude de la complémentarité d’actionneurs pour lacommande active des structures flexibles.Thèse de doctorat, SUPAERO, 1996
[BRUN] B. BRUNETIERE Correction de l’élasticité au mouvement saccadéK. HACQUIN Rapport PFE 1998-99, ENSAM
[CHIN] F. CHICOT Compensation numérique de l’élasticitéN. JADAUD Rapport PFE 1996-97, ENSAM
[GICQ] G. GICQUEL Compensation de l’élasticité dans une grueJ.-C. TIERCELIN Rapport PFE 1995-96, ENSAM
[MOLI] S. MOLINA Compensation numériqueG. MONDRAGON Rapport PFE 1994-95, ENSAM