Embed Size (px)
Citation preview

1
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
Situation-problème : À partir des fonctions techniques relevant de la fonction générique TRAITER, faire le choix d’un nouveau microcontrôleur.
Pictogramme
Aux élèves des Sciences de l’Ingénieur
de Première
Sur les connaissances des
structures et des principes de
fonctionnement d’un système à
base de microcontrôleur
Activité
de
formation
CI10-I2-A1-DA
Permettre aux élèves d’identifier les différents constituants
matériels de la chaîne d’information et les fonctions
techniques réalisées, lister et caractériser les entrées et les
sorties, de relever les contraintes de compatibilités des
signaux échangés entre la carte µC et les périphériques.
A qui rend-il service ? Sur quoi agit-il ?
Dans quel but ?
Expression du besoin (Intérêt de l’activité)
Support utilisé
Consigne
Lorsque vous rencontrez , énoncez au
professeur vos résultats. Vous devez être
capable d’en faire une rapide description
et de justifier vos choix.
Destructeur d’aiguilles
ACQUERIR les informations
des capteurs
COMMUNIQUER
TRAITER
microcontrôleur Chaîne d’information
Réponse à la situation-problème

2
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
FP1
Ensemble d’injection
de produit
médicamenteux usagé
Corps et poussoir
de la seringue
Aiguille usagée
dans le bol de
récupération
Déroulement de l’activité
Identification des différents constituants matériels de la chaîne d’information et des fonctions
techniques utilisées.
Recensement des entrées et des sorties de la fonction TRAITER.
Caractérisation des entrées et des sorties de la fonction TRAITER.
Analyse de l’organisation fonctionnelle et définition d’un schéma bloc de la fonction TRAITER.
Analyse des contraintes de compatibilité des signaux échangés entre la fonction TRAITER et les
périphériques.
Pictogrammes
Observer Rechercher Internet Décrire Expliquer
Travail demandé
A. Identification des différents constituants matériels et des fonctions techniques
associés à la chaine d’information
Quelles sont les trois fonctions génériques qui constituent la chaîne d’information ?
A partir du développement de la fonction principale FP1 "Traiter une aiguille en toute
sécurité", indiquer sur le diagramme FAST, les fonctions techniques et les constituants
que l’on peut associer à la chaîne d’information.
FP1

3
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
Identifier sur le schéma structurel les constituants de chaque fonction technique, on se
limitera aux fonctions techniques associées à la chaîne d’information.
Convertir
l’énergie
disponible
Exemple
Résistances
Condensateurs
Transistors
Nom
encl
ature
des
com
po
sants
éle
ctro
niq
ues

4
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
B. Recensement des entrées et des sorties de la fonction TRAITER
La fonction TRAITER est réalisée par un microcontrôleur [IC5]. La communication à partir ou vers les
périphériques extérieurs s’effectue par l’intermédiaire de structures que l’on appelle des ports. On les
distingue généralement par des lettres : A, B, C.... En fonction du format (quartet, octet, mot), ces ports
auront plusieurs broches que l’on note par convention PA0, PA1.....PA7 ou PB0, PB1.....PB7 et qui
représentent respectivement la broche 0 du port A, la broche 1 du port A...... ou la broche 0 du port
B....
Il est possible, par programmation, de définir individuellement le sens de transfert de l’information
(entrée ou sortie) mais aussi la nature de l’information recueillie ou transmise (analogique ou logique).
Dans bien des cas, des fonctionnalités supplémentaire sont possibles telle que la fonction comparateur,
la fonction interruption... rendant la broche plus « intelligente » et permettant ainsi au processeur de se
libérer de certaines tâches.
Le recensement des entrées et des sorties est donc la première étape vers le choix du microcontrôleur.
Circuits intégrés
Diodes
Diode Electroluminescente : LED
Thermistance CTN
Barrière infrarouge

5
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
Sous forme d’un tableau, attribuer à chaque broche du microcontrôleur une fonction qui
explicitera son rôle dans le fonctionnement du système. Vous indiquerez pour chaque
broche s’il s’agit d’une entrée ou d’une sortie.
C. Caractérisation des entrées et des sorties de la fonction TRAITER
On entend par caractérisation la recherche de la nature (analogique, numérique ou logique) de chaque
broche en relation avec les périphériques ainsi que leurs caractéristiques électriques.
Définir un signal analogique, numérique ou logique.
Expliquer ou éventuellement interpréter la nature des broches en relation avec
l’environnement du microcontrôleur.
Rechercher dans la documentation constructeur d’un microcontrôleur (on prendra comme
exemple le PIC 16F688 MICROCHIP) les caractéristiques électriques des différentes
broches et cela en fonction de leur nature définie à la question précédente.
D. Analyse de l’organisation fonctionnelle de la fonction TRAITER
Cette organisation fonctionnelle est donnée par le constructeur du microcontrôleur.
Exemple du
microcontrôleur
PIC 16F688
Mémoire "Programme" de
type Flash
Mémoire RAM
Mémoire
EEPROM
Bus de données
Bus d’adresse
Ports
Bidirectionnels
Module de
transmission
série
2 Timer
Convertisseur
Analogique
Numérique
Comparateurs

6
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
La même broche peut avoir plusieurs fonctionnalités comme l’atteste les informations suivantes :
L’objectif de cette partie est de comprendre l’organisation de la structure interne de la fonction
TRAITER lorsqu’elle est réalisée par un microcontrôleur. Le PIC 16F688 constitue notre support de
recherche, il est représentatif des possibilités offertes par les structures actuelles.
Les documents de référence seront constitués pour l’essentiel du "Data
Sheet" du circuit PIC 16F688 mais également d’un document qui fait
autorité dans le monde des PIC : "La Programmation des PIC" par
Bigonoff.
1. L’architecture
Il existe deux architectures possibles selon que le bus d’instructions et le bus de données sont
séparés ou non. L’architecture HARVARD (bus séparés) à l’opposé de l’architecture VON
NEUMAN (bus commun) permet l’exécution des instructions codées en un seul mot sur 14 bits tout
en manipulant des données d’un format de 8 bits.
Quelle structure vous paraît-elle plus performante en terme de temps d’exécution ?
Quelle est l’architecture du PIC 16F688 ?

7
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
2. Les spécificités et les capacités des mémoires
a. La mémoire PROGRAMME
Le "Compteur Programme" [PC] contient l’adresse de la prochaine instruction à exécuter. Il
possède un format de 13 bits. Au démarrage du microcontrôleur, le contenu du "Compteur
Programme" est initialisé à une adresse contenue à l’adresse 0000h de la mémoire programme. Cet
emplacement mémoire qui contient l’adresse de départ du programme ou firmware est ce que l’on
appelle le Vecteur RESET.
Quelle est la taille maximale de la zone "Mémoire Programme" que peut adresser le
"Compteur Programme" ?
Quelle est en réalité la taille de la zone "Mémoire Programme" du PIC 16F688 ? Donner
l’adresse de départ et l’adresse de fin en code hexadécimal. Quels seront alors les éléments
binaires du "Compteur Programme" qui ne seront pas affectés ?
A chaque adresse, il correspond un mot de 14 bits, justifier l’information donnée par le
constructeur d’un espace mémoire de 4K x 14.
Cet espace mémoire est doté d’une technologie flash (C’est un type E2PROM que nous verrons plus
tard). C’est une mémoire à semi-conducteurs, non volatile et réinscriptible. Ces trois particularités
lui confèrent :
Rapidité, durabilité et faible consommation,
La pérennité des informations mémorisées lors de la mise hors tension,
La possibilité d’être réutilisable par une autre opération d’écriture.
Justifier l’emploi d’une technologie flash pour la "Mémoire Programme" dans le cadre de
notre utilisation.
Quelle est la capacité d’endurance en écriture de ce type de mémoire ?
Pendant combien de temps prévoit-on une parfaite rétention des informations enregistrées ?
b. La mémoire DONNÉES (Données volatiles)
Elle porte l’acronyme R.A.M. pour Random Access Memory (mémoire à accès direct) et se
caractérise par un accès rapide et une volatilité des informations lorsque la mémoire n’est plus
alimentée. Cet espace est donc réservé à la mémorisation des données temporaires.
Quelle est l’organisation de cet espace mémoire ? Vous expliquerez notamment le concept
de bank, le volume mémoire de chaque bank ainsi que l’organisation de leur contenu.
Quelle est la capacité totale de cette zone mémoire ?
Quelle capacité mémoire peut-on utiliser pour sauvegarder des données temporaires ?
Quel pourrait être l’intérêt de ce type de mémoire dans le cadre de l’utilisation du
destructeur d’aiguilles ?
c. La mémoire DONNÉES (Données non volatiles)
Elle porte l’acronyme E.E.P.R.O.M. ou E2PROM pour Electrically-Erasable Programmable
Read-Only Memory (mémoire morte effaçable électriquement et programmable). Elle permet
l’enregistrement d’informations qui doivent rester valide même lorsque l’énergie disparait.
Quelle est la capacité totale de cette zone mémoire ? Décrire son organisation.

8
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
Quelle est son adresse de début et son adresse de fin ?
Vérifier que l’écart entre ces deux adresses correspond à la capacité de la mémoire.
Quel pourrait être l’intérêt de ce type de mémoire dans le cadre de l’utilisation du
destructeur d’aiguilles ?
3. Les périphériques internes
Des fonctionnalités offertes par cette unité de traitement dépendront la souplesse d’utilisation de ce
microcontrôleur. Les technologies actuelles permettent de proposer des microcontrôleurs avec un
grand nombre de périphériques internes dédiés à la communication UART, I2C, SSI... y compris
l’interface USB. Le constructeur propose également de plus en plus souvent un module
d’hibernation pour réduire la consommation en énergie lors des phases de non utilisation, des
procédures de réveil synchronisées sur évènements... Dédiés auparavant à des opérations simples et
relativement lentes, les microcontrôleurs acquièrent maintenant une véritable puissance de calcul.
Dénombrer les principaux périphériques du microcontrôleur PIC 16F688.
Décrire rapidement leur rôle.
Quels sont ceux qui sont en adéquation avec les fonctionnalités recherchées dans le cadre de
l’utilisation du destructeur d’aiguilles ?
E. Analyse de certaines contraintes de compatibilité des signaux échangés
entre le microcontrôleur et les périphériques externes
1. Fonction Technique "Emettre des données sensorielles"
Le mode d’emploi de l’appareil prévoit après connexion de l’appareil au secteur 230V et fermeture
de l’interrupteur général, l’exécution d’un cycle de fermeture / ouverture des lames tandis que le
voyant multifonction est de couleur verte.
Lorsque la seringue est introduite verticalement et que l’embase est en butée, le voyant
multifonction s’allume en rouge et le mécanisme coupe l’embase de l’aiguille.
Ces deux informations, rouge et verte, sont issues d’un ensemble formé de deux diodes
électroluminescentes [DEL (en français) ou LED (light emitting diode)] relié au microcontrôleur
par un port.
Le terme diode désigne un composant formé de deux électrodes, polarisé (une électrode positive :
anode et une électrode négative : cathode). Le passage du courant ne peut s’effectuer que dans un
seul sens.
Il existe sur le marché des DEL de plusieurs couleurs y compris de couleur blanche.

9
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
Sonde
Stoptherme
Thermistance
A chaque couleur, la caractéristique courant-tension est différente.
La tension de seuil correspond à la tension à partir de laquelle des photons commencent à être émis.
Rechercher les valeurs approximatives des tensions de seuil pour les couleurs décrites
précédemment. Consigner ses valeurs dans un tableau dans lequel vous ajouterez les
couleurs ultraviolet et infrarouge (site http://www.led-fr.net)
Les diodes électroluminescentes requièrent une alimentation dont le rôle est de placer un point de
fonctionnement sur la caractéristique de la diode électroluminescente. Cette caractéristique est non
linéaire, une construction graphique est la plus appropriée.
Trois catégories de montage permettent une alimentation de la diode électroluminescente. On peut
les décrire selon trois diagrammes (site http://www.led-fr.net) :
Argumenter chaque solution et indiquer en le justifiant le meilleur choix technique.
Quelle solution est réalisée dans le cadre du destructeur d’aiguilles. Comment peut-on
justifier ce choix ?
En tenant compte du choix des résistances R15, R16 ou R17, montrer que les
caractéristiques électriques des sorties du microcontrôleur PIC 16F688 permettent un
fonctionnement correct des diodes électroluminescentes.
2. Fonction Contrainte "Assurer la protection thermique du moteur électrique"
Il existe plusieurs moyens pour assurer la protection thermique d’un moteur électrique
contre les surcharges consécutives. Citons l’utilisation du relais thermique qui se
déclenche en fonction de la valeur de la surintensité, la sonde "Stoptherme"
placée au cœur du bobinage du moteur dont le fonctionnement repose sur la
déformation d’un disque bimétallique qui fait office de contact et la thermistance,
résistance dont la valeur dépend de la température, mieux adaptée aux petits
moteurs. Cette dernière solution qui a été choisie pour protéger le moteur
électrique du destructeur d’aiguilles.

10
Cent
re d
’inté
rêt
: T
rait
emen
t d
e l’
info
rmat
ion
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105
Vale
ur
de la r
ésis
tance C
TN
1 Mill
iers
Température en °C
Variation de la résistance en fonction de la température
R
Il existe deux types de thermistance :
- à coefficient négatif [CTN] où la résistance diminue lorsque la température augmente,
- à coefficient positif [CTP] où la résistance augmente lorsque la température augmente.
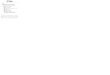
La représentation ci-dessous donne l’évolution de la valeur de la résistance CTN1 en fonction de la
température. Comme on peut facilement l’observer et le deviner par sa référence, elle a été choisie à
coefficient négatif.
La température limite à détecter est fixée à 52 °C.
Quelle sera la différente de potentiel sur l’entrée du microcontrôleur lorsque la température
du moteur atteindra la limite de température ?
Le microcontrôleur PIC 16F688 a-t-il la possibilité de lire cette information analogique et
d’en faire un traitement numérique ?
Si oui, quel sera le nombre numérique qu’il associera à la température limite ?
F. Réponse à la situation-problème
Vous êtes maintenant en mesure de justifier la possibilité ou non de remplacer l’actuel
microcontrôleur du système le ST62T60 par un microcontrôleur PIC 16F688.
En quelques lignes, proposer un argumentaire permettant de répondre à la situation-
problème.