Embed Size (px)
Citation preview

8103343
EMCS-STActionneur intégré
81033432019-07[8103347]
Description | Mise enservice

Traduction de la notice originale
2 Festo — EMCS-ST — 2019-07
3Festo — EMCS-ST — 2019-07
1 À propos de ce document............................................................................................. 6
1.1 Documents applicables................................................................................................ 6
1.2 Version du produit........................................................................................................ 6
1.3 Étiquette produit.......................................................................................................... 7
1.4 Normes indiquées........................................................................................................ 7
2 Sécurité........................................................................................................................ 8
2.1 Instructions de sécurité................................................................................................ 8
2.2 Usage normal............................................................................................................... 8
2.2.1 Domaines d’application.......................................................................................... 8
2.3 Qualification du personnel qualifié............................................................................... 8
2.4 Homologations et certifications.................................................................................... 8
3 Informations complémentaires................................................................................... 9
4 Service après-vente..................................................................................................... 9
5 Vue d'ensemble du produit......................................................................................... 9
5.1 Fonction.........................................................................................................................9
5.2 Fourniture..................................................................................................................... 9
5.3 Présentation du système.............................................................................................. 10
5.4 Structure du produit..................................................................................................... 11
6 Éléments d'affichage et de commande (IHM)............................................................. 11
6.1 Vue d'ensemble............................................................................................................ 11
6.2 Priorité de commande.................................................................................................. 12
6.3 Menu IHM..................................................................................................................... 12
7 Transport et stockage.................................................................................................. 14
8 Montage...................................................................................................................... 14
8.1 Sécurité......................................................................................................................... 14
8.2 Distances de montage.................................................................................................. 14
8.3 Montage....................................................................................................................... 14
9 Installation.................................................................................................................. 15
9.1 Sécurité......................................................................................................................... 15
9.2 Remarques pour une installation conforme CEM.......................................................... 15
9.3 Raccordement à la terre fonctionnelle (FE) et à la terre de protection (PE).................... 16
9.4 Variantes de raccordement........................................................................................... 16
9.4.1 Schéma de raccordement : mode DIO (entrées/sorties numériques)..................... 17
9.4.2 Schéma de raccordement : mode IO-Link............................................................... 18
9.4.3 Schéma de raccordement : mode IO-Link avec adaptateur.....................................19
9.5 Interfaces électriques................................................................................................... 20
9.5.1 Raccord [Logic] : entrées/sorties numériques (DIO), alimentation en tension lo-gique
.. 21
9.5.2 Raccord [Logic] : IO-Link (LK)..................................................................................24
9.5.3 Raccord [Power] : alimentation électrique.............................................................. 25
Table des matières
10 Mise en service.............................................................................................................26
10.1 Mise en service « Mode DIO (entrées/sorties numériques) »........................................26
10.2 Mise en service « Mode IO-Link »..................................................................................27
11 Système d'entraînement.............................................................................................. 28
11.1 Dimensions et unités.....................................................................................................28
11.1.1 Unités de base et unités utilisateur....................................................................... 28
11.1.2 Système de mesure de référence........................................................................... 28
11.2 Contrôleur..................................................................................................................... 31
11.2.1 Micrologiciel.......................................................................................................... 31
11.2.2 Réglages d'usine................................................................................................... 31
11.2.3 Comportement au démarrage................................................................................ 31
11.2.4 Comportement à la mise hors circuit...................................................................... 32
11.2.5 Redémarrage......................................................................................................... 34
11.2.6 Priorité de commande............................................................................................ 46
11.3 Modes de fonctionnement.............................................................................................49
11.3.1 Changement d'état dynamique.............................................................................. 49
11.3.2 Mise en référence.................................................................................................. 49
11.3.2.1 Fonction................................................................................................................. 50
11.3.2.2 Paramètres............................................................................................................ 51
11.3.2.3 Synchronisation..................................................................................................... 52
11.3.3 Mode End-to-End simple........................................................................................ 58
11.3.3.1 Fonction................................................................................................................. 58
11.3.3.2 Paramètres............................................................................................................ 59
11.3.3.3 Synchronisation..................................................................................................... 59
11.3.4 Mode End-to-End avec fonction presse.................................................................. 66
11.3.4.1 Fonction................................................................................................................. 66
11.3.4.2 Paramètres............................................................................................................ 68
11.3.4.3 Synchronisation..................................................................................................... 68
11.3.5 Fonction manuel (Demo)........................................................................................ 74
11.3.5.1 Fonction................................................................................................................. 74
11.3.5.2 Paramètres............................................................................................................ 74
11.3.5.3 Synchronisation..................................................................................................... 75
12 Maintenance et entretien............................................................................................. 76
13 Diagnostic et dysfonctionnements............................................................................... 76
13.1 Diagnostic via les témoins LED...................................................................................... 76
13.1.1 Témoin LED « C/Q » (état de la communication et de l'appareil)............................76
13.1.2 Témoin LED « Menu »............................................................................................ 77
13.1.3 Témoin LED « Parameter ».................................................................................... 78
13.2 Messages de diagnostic................................................................................................ 78
13.2.1 Acquitter les erreurs.............................................................................................. 78
4 Festo — EMCS-ST — 2019-07
13.2.2 Messages de diagnostic et dépannage................................................................... 79
13.3 Réparation.................................................................................................................... 81
14 IO-Link..........................................................................................................................81
14.1 Fichier de description d'appareil IODD......................................................................... 81
14.2 Paramètres IO-Link....................................................................................................... 81
14.2.1 Paramètres d'identification.....................................................................................82
14.2.2 Données de processus............................................................................................83
14.2.3 Données d'appareil.................................................................................................86
14.2.4 Paramètres système............................................................................................... 89
15 Démontage.................................................................................................................. 91
16 Élimination.................................................................................................................. 92
17 Caractéristiques techniques........................................................................................ 92
17.1 Caractéristiques techniques générales......................................................................... 92
17.2 Caractéristiques techniques électriques....................................................................... 95
17.2.1 Alimentation électrique...........................................................................................95
17.2.2 Entrées numériques (DI)......................................................................................... 96
17.2.3 Sorties numériques (DO)........................................................................................ 97
17.2.4 IO-Link.................................................................................................................... 98
17.2.5 Moteur (intégré)......................................................................................................99
17.2.6 Codeur angulaire (intégré)...................................................................................... 99
17.2.7 Capteur de température (intégré)........................................................................... 99
5Festo — EMCS-ST — 2019-07
1 À propos de ce document
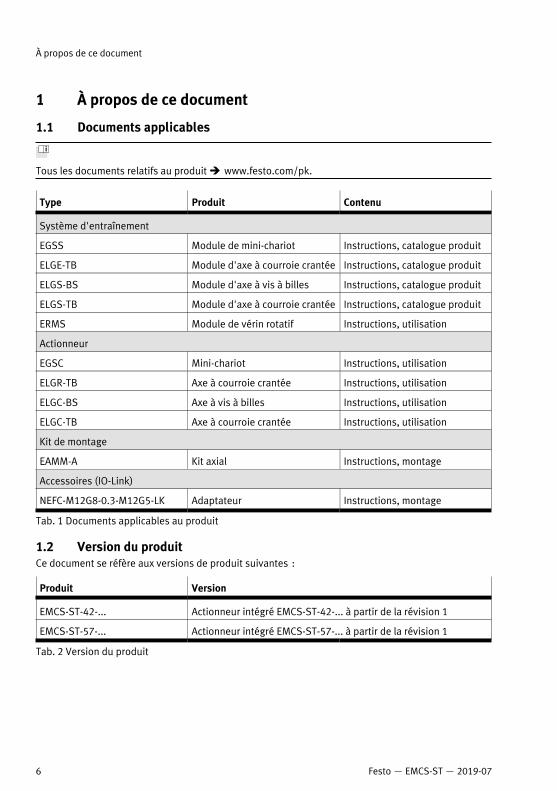
1.1 Documents applicables
Tous les documents relatifs au produit è www.festo.com/pk.
Type Produit Contenu
Système d'entraînement
EGSS Module de mini-chariot Instructions, catalogue produit
ELGE-TB Module d'axe à courroie crantée Instructions, catalogue produit
ELGS-BS Module d'axe à vis à billes Instructions, catalogue produit
ELGS-TB Module d'axe à courroie crantée Instructions, catalogue produit
ERMS Module de vérin rotatif Instructions, utilisation
Actionneur
EGSC Mini-chariot Instructions, utilisation
ELGR-TB Axe à courroie crantée Instructions, utilisation
ELGC-BS Axe à vis à billes Instructions, utilisation
ELGC-TB Axe à courroie crantée Instructions, utilisation
Kit de montage
EAMM-A Kit axial Instructions, montage
Accessoires (IO-Link)
NEFC-M12G8-0.3-M12G5-LK Adaptateur Instructions, montage
Tab. 1 Documents applicables au produit
1.2 Version du produitCe document se réfère aux versions de produit suivantes :
Produit Version
EMCS-ST-42-... Actionneur intégré EMCS-ST-42-... à partir de la révision 1
EMCS-ST-57-... Actionneur intégré EMCS-ST-57-... à partir de la révision 1
Tab. 2 Version du produit
À propos de ce document
Festo — EMCS-ST — 2019-076
1.3 Étiquette produit
1 Étiquette produit(informations sur les produits, certifications, symboled'avertissement)
Fig. 1 Étiquette produit
Symbole d'avertissement
Symboled'avertisse-ment
Signification
Attention ! Surface chaudeLes parties métalliques du boîtier de l'appareil peuvent atteindre des températuresélevées pendant le fonctionnement. En cas d'erreur, risque de surcharge des compo-sants internes.
Tab. 3 Symbole d'avertissement
1.4 Normes indiquées
Version
IEC 60204-1:2005+AMD1:2008 CSV EN 61800-5-1:2016-08
CEI 61131-2:2013 EN 60034-1:2011-02
EN 61800-2:2016 EN 60204-1:2006+A1:2009+AC:2010
Tab. 4 Normes indiquées dans le document
À propos de ce document
7Festo — EMCS-ST — 2019-07
2 Sécurité
2.1 Instructions de sécurité– Utiliser le produit uniquement dans un état fonctionnel irréprochable.– Utiliser le produit uniquement dans son état d'origine sans y apporter de modifications non auto-
risées.– Ne pas réparer le produit. Remplacer immédiatement tout produit défectueux.– Tenir compte des marquages sur le produit.– Ne jamais retirer ou raccorder le connecteur si le produit est sous tension.– N'utiliser ce produit qu'à l'état monté et si toutes les mesures de protection nécessaires ont été
prises è EN 60204-1.– Avant de travailler sur le produit : couper les alimentations électriques, contrôler l'absence de
tension et sécuriser l'alimentation contre toute remise en marche.– Stocker le produit dans un emplacement frais, sec, à l'abri des UV et de la corrosion. Veiller à ce
que les périodes de stockage restent courtes.
2.2 Usage normalConformément à son usage normal, l'actionneur intégré EMCS-ST s'utilise pour entraîner les action-neurs raccordés. L'électronique intégrée permet de régler la position, la vitesse ou la force/le couple.Conformément à son usage normal, le fonctionnement de l'actionneur intégré EMCS-ST ne nécessiteaucune butée externe.
2.2.1 Domaines d’applicationL’appareil est destiné à être utilisé dans le domaine industriel. Des mesures d'antiparasitage sontéventuellement nécessaires en cas d'utilisation en dehors des environnements industriels, p. ex. enzones résidentielles, commerciales ou mixtes.
2.3 Qualification du personnel qualifiéMise en place, mise en service, maintenance et démontage uniquement par un personnel qualifié. Lepersonnel qualifié doit être familiarisé avec l'installation de systèmes de commande mécatroniques.
2.4 Homologations et certificationsCertification CE (conformité)En liaison avec le marquage CE apposé sur le produit, les directives CE et les normes énumérées ci-dessous dans la déclaration de conformité è conformité www.festo.com/sp s'appliquent.– Directive CEM UE– Directive RoHS UE
Certification KCNuméro KC : R-R-FTO-KC-2018-1082
Certification RCM
Sécurité
8 Festo — EMCS-ST — 2019-07
3 Informations complémentaires– Accessoires è www.festo.com/catalogue– Pièces de rechange è www.festo.com/spareparts
4 Service après-ventePour toute question d'ordre technique, se mettre en relation avec l'interlocuteur Festo le plus procheè www.festo.com.
5 Vue d'ensemble du produit
5.1 FonctionLes composants suivants sont intégrés dans l'actionneur intégré EMCS-ST pour toutes les variantes deproduits :– moteur pas à pas pour l'entraînement des actionneurs raccordée– codeur de détection de la position actuelle– électronique pour le conditionnement en tension du circuit intermédiaire– étage de sortie pour la commande du moteur– hacheur de freinage pour réduire l'énergie génératrice du moteur.– capteurs de température pour la surveillance de la température de l'étage de sortieL'actionneur intégré EMCS-ST dispose de connexions séparées pour l'alimentation de la tension lo-gique et de la tension d'alimentation. Pour toutes les variantes de produits, la tension d'alimentation(24 V DC) doit être fournie directement via un bloc d'alimentation TBTS.La tension logique (24 V DC) est fournie comme suit :– Mode DIO (entrées/sorties numériques) : via un bloc d'alimentation TBTS– Mode IO-Link : via le maître IO-LinkPour toutes les variantes de produits, la commande peut s'effectuer via des entrées/sorties numé-riques (DIO) ou via IO-Link (LK) au niveau du raccord [Logic].
5.2 FournitureLes composants suivants sont compris dans la fourniture :– Système d'entraînement avec actionneur intégré EMCS-ST– Instructions du système d'entraînement– Adaptateur pour le mode IO-Link (accessoires en option) è www.festo.com/catalogue
Informations complémentaires
9Festo — EMCS-ST — 2019-07
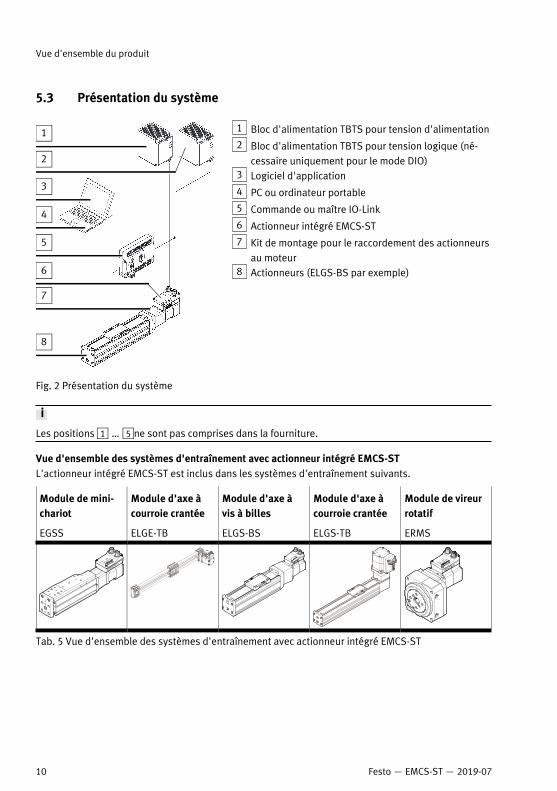
5.3 Présentation du système
1 Bloc d'alimentation TBTS pour tension d'alimentation
2 Bloc d'alimentation TBTS pour tension logique (né-cessaire uniquement pour le mode DIO)
3 Logiciel d'application
4 PC ou ordinateur portable
5 Commande ou maître IO-Link
6 Actionneur intégré EMCS-ST
7 Kit de montage pour le raccordement des actionneursau moteur
8 Actionneurs (ELGS-BS par exemple)
Fig. 2 Présentation du système
Les positions 1 … 5ne sont pas comprises dans la fourniture.
Vue d'ensemble des systèmes d'entraînement avec actionneur intégré EMCS-STL'actionneur intégré EMCS-ST est inclus dans les systèmes d'entraînement suivants.
Module de mini-chariot
Module d'axe àcourroie crantée
Module d'axe àvis à billes
Module d'axe àcourroie crantée
Module de vireurrotatif
EGSS ELGE-TB ELGS-BS ELGS-TB ERMS
Tab. 5 Vue d'ensemble des systèmes d'entraînement avec actionneur intégré EMCS-ST
Vue d'ensemble du produit
10 Festo — EMCS-ST — 2019-07
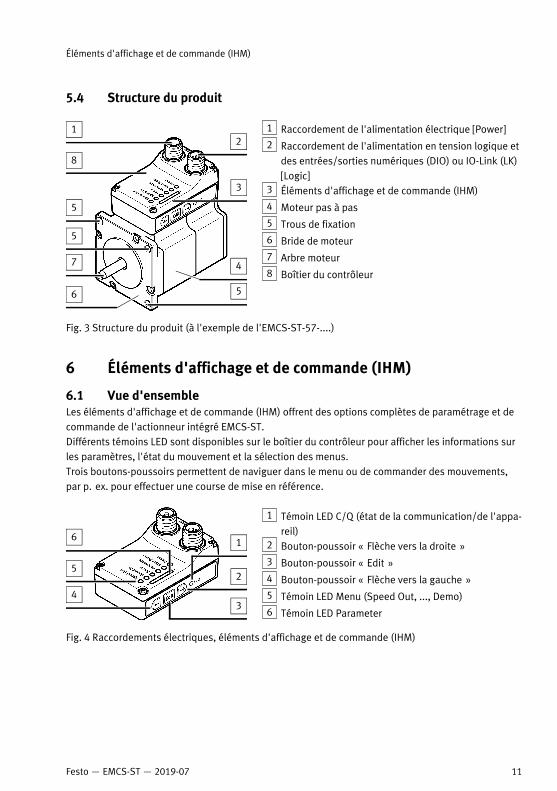
5.4 Structure du produit
1 Raccordement de l'alimentation électrique [Power]
2 Raccordement de l'alimentation en tension logique etdes entrées/sorties numériques (DIO) ou IO-Link (LK)[Logic]
3 Éléments d'affichage et de commande (IHM)
4 Moteur pas à pas
5 Trous de fixation
6 Bride de moteur
7 Arbre moteur
8 Boîtier du contrôleur
Fig. 3 Structure du produit (à l'exemple de l'EMCS-ST-57-....)
6 Éléments d'affichage et de commande (IHM)
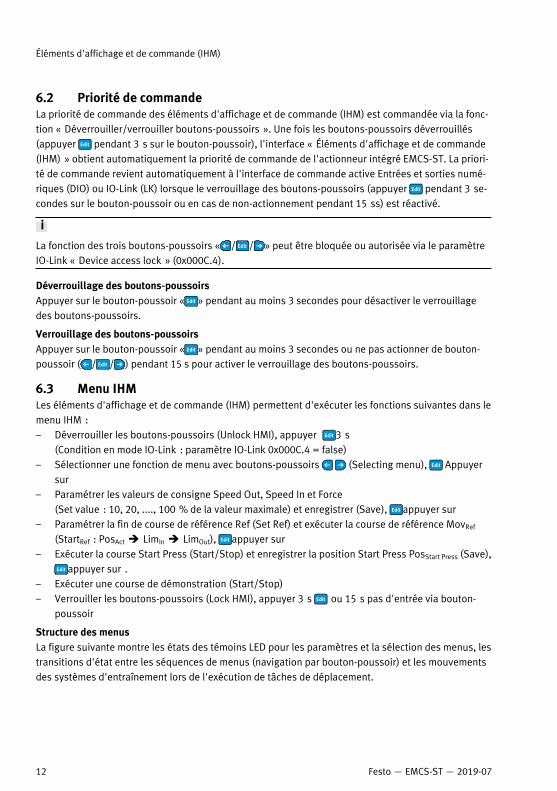
6.1 Vue d'ensembleLes éléments d'affichage et de commande (IHM) offrent des options complètes de paramétrage et decommande de l'actionneur intégré EMCS-ST.Différents témoins LED sont disponibles sur le boîtier du contrôleur pour afficher les informations surles paramètres, l'état du mouvement et la sélection des menus.Trois boutons-poussoirs permettent de naviguer dans le menu ou de commander des mouvements,par p. ex. pour effectuer une course de mise en référence.
1 Témoin LED C/Q (état de la communication/de l'appa-reil)
2 Bouton-poussoir « Flèche vers la droite »
3 Bouton-poussoir « Edit »
4 Bouton-poussoir « Flèche vers la gauche »
5 Témoin LED Menu (Speed Out, ..., Demo)
6 Témoin LED Parameter
Fig. 4 Raccordements électriques, éléments d'affichage et de commande (IHM)
Éléments d'affichage et de commande (IHM)
11Festo — EMCS-ST — 2019-07
6.2 Priorité de commandeLa priorité de commande des éléments d'affichage et de commande (IHM) est commandée via la fonc-tion « Déverrouiller/verrouiller boutons-poussoirs ». Une fois les boutons-poussoirs déverrouillés(appuyer pendant 3 s sur le bouton-poussoir), l'interface « Éléments d'affichage et de commande(IHM) » obtient automatiquement la priorité de commande de l'actionneur intégré EMCS-ST. La priori-té de commande revient automatiquement à l'interface de commande active Entrées et sorties numé-riques (DIO) ou IO-Link (LK) lorsque le verrouillage des boutons-poussoirs (appuyer pendant 3 se-condes sur le bouton-poussoir ou en cas de non-actionnement pendant 15 ss) est réactivé.
La fonction des trois boutons-poussoirs « / / » peut être bloquée ou autorisée via le paramètreIO-Link « Device access lock » (0x000C.4).
Déverrouillage des boutons-poussoirsAppuyer sur le bouton-poussoir « » pendant au moins 3 secondes pour désactiver le verrouillagedes boutons-poussoirs.
Verrouillage des boutons-poussoirsAppuyer sur le bouton-poussoir « » pendant au moins 3 secondes ou ne pas actionner de bouton-poussoir ( / / ) pendant 15 s pour activer le verrouillage des boutons-poussoirs.
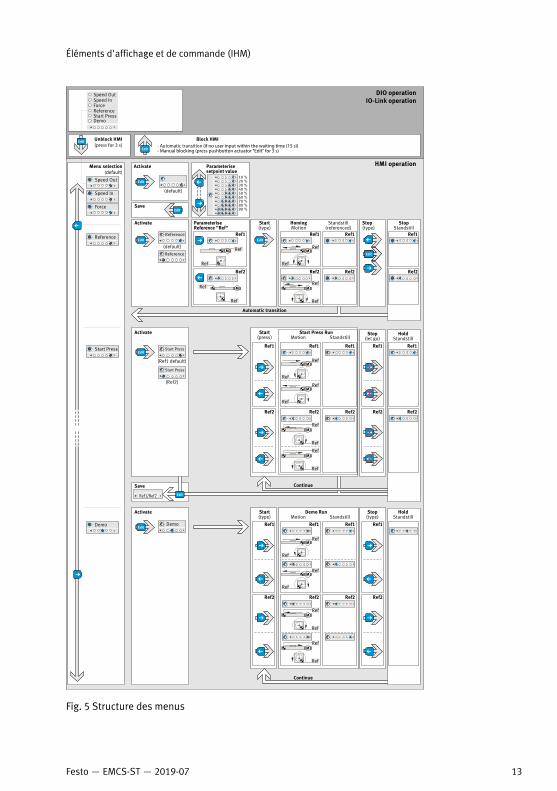
6.3 Menu IHMLes éléments d'affichage et de commande (IHM) permettent d'exécuter les fonctions suivantes dans lemenu IHM :– Déverrouiller les boutons-poussoirs (Unlock HMI), appuyer 3 s
(Condition en mode IO-Link : paramètre IO-Link 0x000C.4 = false)– Sélectionner une fonction de menu avec boutons-poussoirs (Selecting menu), Appuyer
sur– Paramétrer les valeurs de consigne Speed Out, Speed In et Force
(Set value : 10, 20, ...., 100 % de la valeur maximale) et enregistrer (Save), appuyer sur – Paramétrer la fin de course de référence Ref (Set Ref) et exécuter la course de référence MovRef
(StartRef : PosAct è LimIn è LimOut), appuyer sur – Exécuter la course Start Press (Start/Stop) et enregistrer la position Start Press PosStart Press (Save),
appuyer sur .– Exécuter une course de démonstration (Start/Stop)– Verrouiller les boutons-poussoirs (Lock HMI), appuyer 3 s ou 15 s pas d'entrée via bouton-
poussoir
Structure des menusLa figure suivante montre les états des témoins LED pour les paramètres et la sélection des menus, lestransitions d'état entre les séquences de menus (navigation par bouton-poussoir) et les mouvementsdes systèmes d'entraînement lors de l'exécution de tâches de déplacement.
Éléments d'affichage et de commande (IHM)
12 Festo — EMCS-ST — 2019-07
Reference
Speed OutSpeed InForceReferenceStart PressDemo
Start Press
Demo
Speed Out
Speed In
Force
(default)
(Ref1 default)
(default)
M Ref
Ref M
Ref
RefM
RefM
Ref
RefM
RefRef
M
Ref
Ref
RefM
RefRef
M
Ref
RefM
Ref
RefM
Ref
RefM
Ref
RefM
Ref
(Ref2)
Ref1/Ref2
Ref
Fig. 5 Structure des menus
Éléments d'affichage et de commande (IHM)
13Festo — EMCS-ST — 2019-07
7 Transport et stockage– Lors du transport et du stockage, protéger le produit contre des sollicitations non autorisées sui-
vantes :– contraintes mécaniques– températures non autorisées– humidité– atmosphères agressives
8 Montage
8.1 SécuritéAVERTISSEMENT !
Risque de blessure dû au mouvement inattendu de composants.A l'état hors tension, l'actionneur peut être déplacé librement. Ce qui peut provoquer des mouve-ments inattendus du système mécanique raccordé et écraser des parties du corps.• Amener les pièces mobiles du système mécanique en position sûre.
8.2 Distances de montageLes systèmes d'entraînement avec actionneur intégré EMCS-ST peuvent être montés en série. Lors dumontage en série des systèmes d'entraînement, il faut respecter une distance minimale afin que lachaleur dégagée en cours de service puisse être dissipée par un passage d'air suffisant.• Respecter une distance latérale minimale d'au moins 20 mm entre l'actionneur intégré EMCS-ST
et les composants voisins.
Spécifications de montage– Fixer le système d'entraînement à plat sur une surface de montage suffisamment stable.– Respecter les distances minimales et l'espace de montage pour garantir un passage d'air suffi-
sant. L'air ambiant doit pouvoir circuler librement autour de l'actionneur intégré EMCS-ST.– Tenir compte du dégagement nécessaire pour le raccordement des câbles (les câbles des raccords
[Logic] et [Power] peuvent être posés vers le haut (en ligne droite) ou vers le côté (coudé)).– Ne pas installer de composants sensibles à la température à proximité de l'actionneur intégré
EMCS-ST. L'actionneur intégré EMCS-ST peut devenir très chaud en cours de service.
8.3 Montage• Montage du produit è Instructions, montage de l'actionneur correspondant.
Transport et stockage
14 Festo — EMCS-ST — 2019-07
9 Installation
9.1 SécuritéAVERTISSEMENT !
Risque de blessure par choc électrique.• Pour l'alimentation électrique en basses tensions, utiliser exclusivement des circuits électriques
TBTS garantissant une isolation électrique fiable du réseau.• Respecter la norme IEC 60204-1/EN 60204-1.
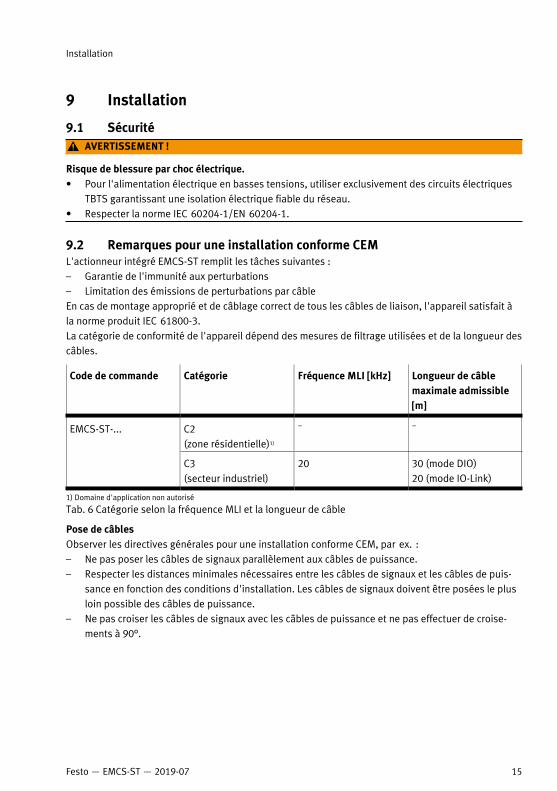
9.2 Remarques pour une installation conforme CEML'actionneur intégré EMCS-ST remplit les tâches suivantes :– Garantie de l'immunité aux perturbations– Limitation des émissions de perturbations par câbleEn cas de montage approprié et de câblage correct de tous les câbles de liaison, l'appareil satisfait àla norme produit IEC 61800-3.La catégorie de conformité de l'appareil dépend des mesures de filtrage utilisées et de la longueur descâbles.
Code de commande Catégorie Fréquence MLI [kHz] Longueur de câblemaximale admissible[m]
C2(zone résidentielle)1)
− −EMCS-ST-...
C3(secteur industriel)
20 30 (mode DIO)20 (mode IO-Link)
1) Domaine d'application non autorisé
Tab. 6 Catégorie selon la fréquence MLI et la longueur de câble
Pose de câblesObserver les directives générales pour une installation conforme CEM, par ex. :– Ne pas poser les câbles de signaux parallèlement aux câbles de puissance.– Respecter les distances minimales nécessaires entre les câbles de signaux et les câbles de puis-
sance en fonction des conditions d'installation. Les câbles de signaux doivent être posées le plusloin possible des câbles de puissance.
– Ne pas croiser les câbles de signaux avec les câbles de puissance et ne pas effectuer de croise-ments à 90°.
Installation
15Festo — EMCS-ST — 2019-07
9.3 Raccordement à la terre fonctionnelle (FE) et à la terre de protection (PE)
Lors du raccordement à la terre fonctionnelle (FE) et à la terre de protection (PE), respecter les pres-criptions de la norme EN 60204-1.
Mise à la terre fonctionnelle (FE)– Avant la mise en service, raccorder la mise à la terre fonctionnelle (FE) aux points suivants :
– EMCS-ST : raccord FE, broche 4 [Power]– Bloc d'alimentation TBTS : raccordement du bloc d'alimentation TBTS (le bloc d'alimentation
TBTS doit être relié à la terre de protection (PE))
Mise à la terre de protection (PE)– Avant la mise en service, raccorder la terre de protection (PE) à l'un des points suivants :
– Système d'entraînement : rainure profilée ou trou taraudé– Surface de montage ou bâti de montage : selon l'application
9.4 Variantes de raccordementLe raccordement de l'actionneur intégré EMCS-ST dépend du mode de commande « Mode DIO » (en-trées/sorties numériques) ou « Mode IO-Link » et des câbles de raccordement utilisés (avec ou sansadaptateur).
Installation
16 Festo — EMCS-ST — 2019-07
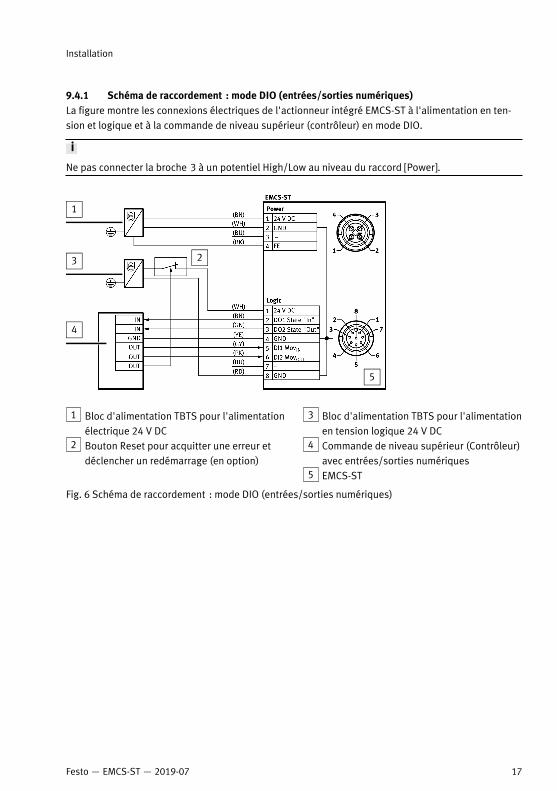
9.4.1 Schéma de raccordement : mode DIO (entrées/sorties numériques)La figure montre les connexions électriques de l'actionneur intégré EMCS-ST à l'alimentation en ten-sion et logique et à la commande de niveau supérieur (contrôleur) en mode DIO.
Ne pas connecter la broche 3 à un potentiel High/Low au niveau du raccord [Power].
1 Bloc d'alimentation TBTS pour l'alimentationélectrique 24 V DC
2 Bouton Reset pour acquitter une erreur etdéclencher un redémarrage (en option)
3 Bloc d'alimentation TBTS pour l'alimentationen tension logique 24 V DC
4 Commande de niveau supérieur (Contrôleur)avec entrées/sorties numériques
5 EMCS-ST
Fig. 6 Schéma de raccordement : mode DIO (entrées/sorties numériques)
Installation
17Festo — EMCS-ST — 2019-07
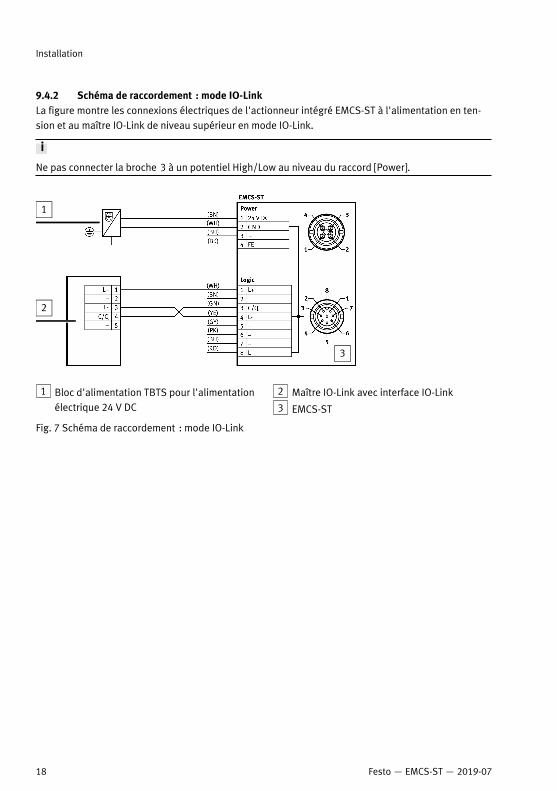
9.4.2 Schéma de raccordement : mode IO-LinkLa figure montre les connexions électriques de l'actionneur intégré EMCS-ST à l'alimentation en ten-sion et au maître IO-Link de niveau supérieur en mode IO-Link.
Ne pas connecter la broche 3 à un potentiel High/Low au niveau du raccord [Power].
1 Bloc d'alimentation TBTS pour l'alimentationélectrique 24 V DC
2 Maître IO-Link avec interface IO-Link
3 EMCS-ST
Fig. 7 Schéma de raccordement : mode IO-Link
Installation
18 Festo — EMCS-ST — 2019-07
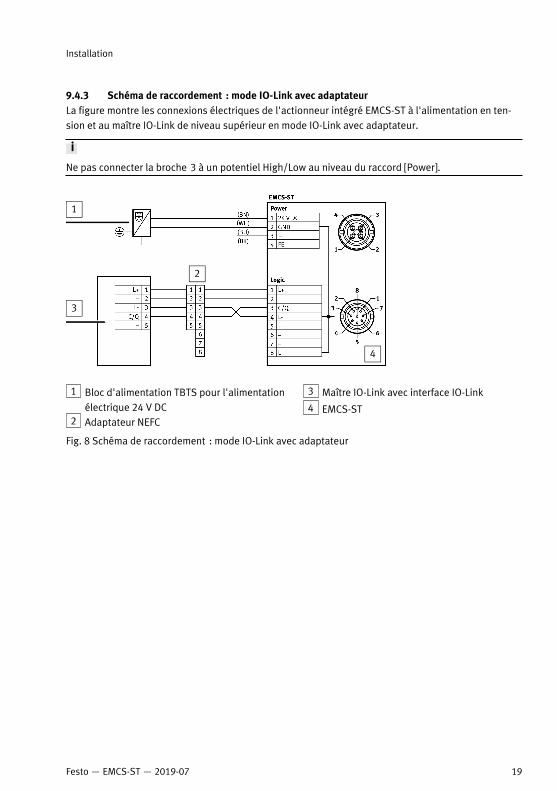
9.4.3 Schéma de raccordement : mode IO-Link avec adaptateurLa figure montre les connexions électriques de l'actionneur intégré EMCS-ST à l'alimentation en ten-sion et au maître IO-Link de niveau supérieur en mode IO-Link avec adaptateur.
Ne pas connecter la broche 3 à un potentiel High/Low au niveau du raccord [Power].
1 Bloc d'alimentation TBTS pour l'alimentationélectrique 24 V DC
2 Adaptateur NEFC
3 Maître IO-Link avec interface IO-Link
4 EMCS-ST
Fig. 8 Schéma de raccordement : mode IO-Link avec adaptateur
Installation
19Festo — EMCS-ST — 2019-07
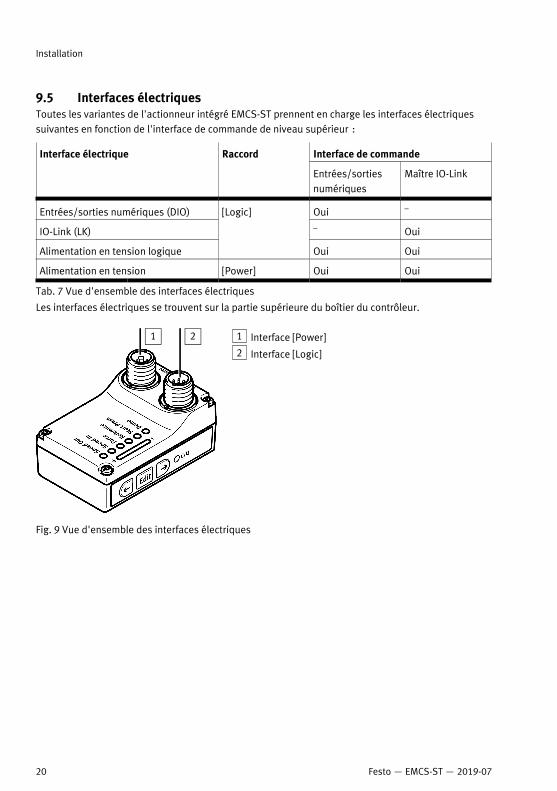
9.5 Interfaces électriquesToutes les variantes de l'actionneur intégré EMCS-ST prennent en charge les interfaces électriquessuivantes en fonction de l'interface de commande de niveau supérieur :
Interface de commandeInterface électrique Raccord
Entrées/sortiesnumériques
Maître IO-Link
Entrées/sorties numériques (DIO) Oui –
IO-Link (LK) – Oui
Alimentation en tension logique
[Logic]
Oui Oui
Alimentation en tension [Power] Oui Oui
Tab. 7 Vue d'ensemble des interfaces électriques
Les interfaces électriques se trouvent sur la partie supérieure du boîtier du contrôleur.
1 Interface [Power]
2 Interface [Logic]
Fig. 9 Vue d'ensemble des interfaces électriques
Installation
20 Festo — EMCS-ST — 2019-07
9.5.1 Raccord [Logic] : entrées/sorties numériques (DIO), alimentation en tension logique
Installation
21Festo — EMCS-ST — 2019-07
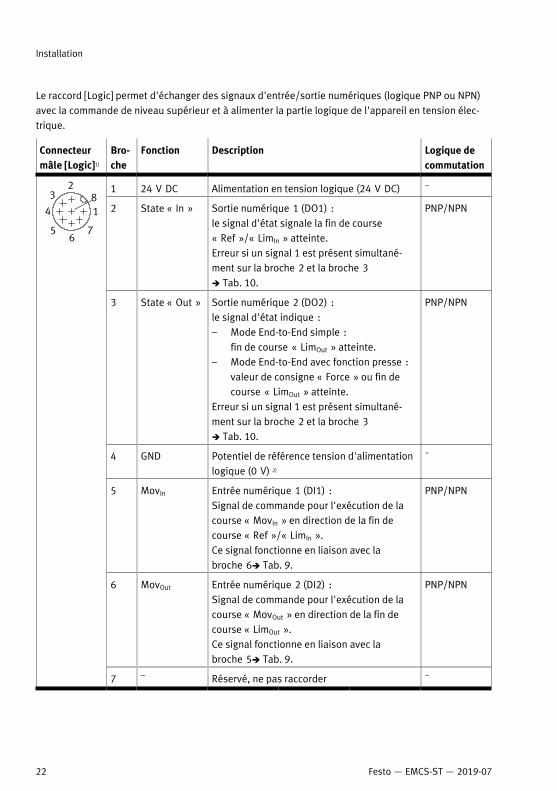
Le raccord [Logic] permet d'échanger des signaux d'entrée/sortie numériques (logique PNP ou NPN)avec la commande de niveau supérieur et à alimenter la partie logique de l'appareil en tension élec-trique.
Connecteurmâle [Logic]1)
Bro-che
Fonction Description Logique decommutation
1 24 V DC Alimentation en tension logique (24 V DC) −
2 State « In » Sortie numérique 1 (DO1) :le signal d'état signale la fin de course« Ref »/« LimIn » atteinte.Erreur si un signal 1 est présent simultané-ment sur la broche 2 et la broche 3è Tab. 10.
PNP/NPN
3 State « Out » Sortie numérique 2 (DO2) :le signal d'état indique :– Mode End-to-End simple :
fin de course « LimOut » atteinte.– Mode End-to-End avec fonction presse :
valeur de consigne « Force » ou fin decourse « LimOut » atteinte.
Erreur si un signal 1 est présent simultané-ment sur la broche 2 et la broche 3è Tab. 10.
PNP/NPN
4 GND Potentiel de référence tension d'alimentationlogique (0 V) 2)
−
5 MovIn Entrée numérique 1 (DI1) :Signal de commande pour l'exécution de lacourse « MovIn » en direction de la fin decourse « Ref »/« LimIn ».Ce signal fonctionne en liaison avec labroche 6è Tab. 9.
PNP/NPN
6 MovOut Entrée numérique 2 (DI2) :Signal de commande pour l'exécution de lacourse « MovOut » en direction de la fin decourse « LimOut ».Ce signal fonctionne en liaison avec labroche 5è Tab. 9.
PNP/NPN
7 – Réservé, ne pas raccorder −
Installation
22 Festo — EMCS-ST — 2019-07
Connecteurmâle [Logic]1)
Bro-che
Fonction Description Logique decommutation
8 GND Potentiel de référence alimentation en ten-sion logique (0 V)2)
−
1) M12x1, codage A, à 8 pôles2) Les broches 4 et 8 sont connectées en interne.
Tab. 8 Raccord [Logic] : entrées/sorties numériques (DIO), alimentation en tension logique
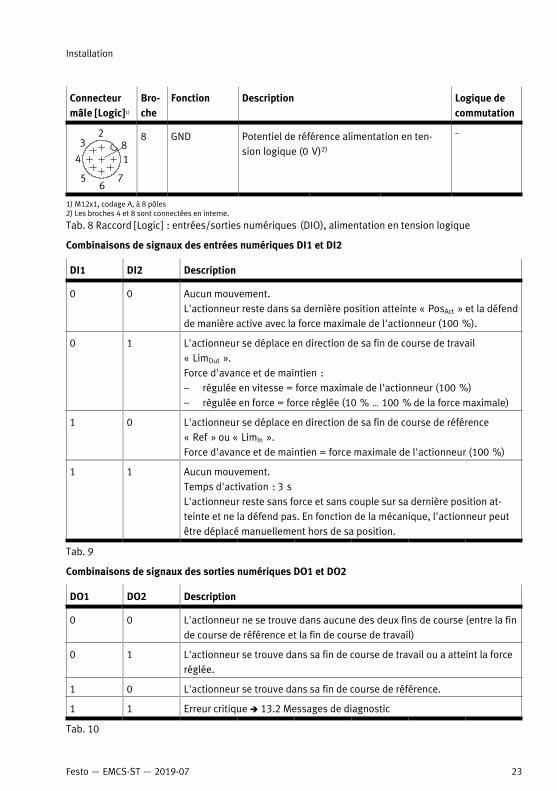
Combinaisons de signaux des entrées numériques DI1 et DI2
DI1 DI2 Description
0 0 Aucun mouvement.L'actionneur reste dans sa dernière position atteinte « PosAct » et la défendde manière active avec la force maximale de l'actionneur (100 %).
0 1 L'actionneur se déplace en direction de sa fin de course de travail« LimOut ».Force d'avance et de maintien :– régulée en vitesse = force maximale de l'actionneur (100 %)– régulée en force = force réglée (10 % … 100 % de la force maximale)
1 0 L'actionneur se déplace en direction de sa fin de course de référence« Ref » ou « LimIn ».Force d'avance et de maintien = force maximale de l'actionneur (100 %)
1 1 Aucun mouvement.Temps d'activation : 3 sL'actionneur reste sans force et sans couple sur sa dernière position at-teinte et ne la défend pas. En fonction de la mécanique, l'actionneur peutêtre déplacé manuellement hors de sa position.
Tab. 9
Combinaisons de signaux des sorties numériques DO1 et DO2
DO1 DO2 Description
0 0 L'actionneur ne se trouve dans aucune des deux fins de course (entre la finde course de référence et la fin de course de travail)
0 1 L'actionneur se trouve dans sa fin de course de travail ou a atteint la forceréglée.
1 0 L'actionneur se trouve dans sa fin de course de référence.
1 1 Erreur critique è 13.2 Messages de diagnostic
Tab. 10
Installation
23Festo — EMCS-ST — 2019-07
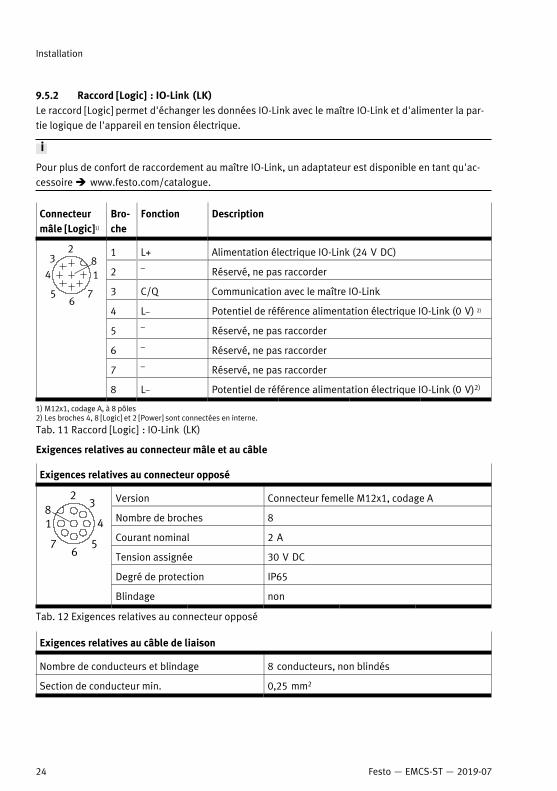
9.5.2 Raccord [Logic] : IO-Link (LK)Le raccord [Logic] permet d'échanger les données IO-Link avec le maître IO-Link et d'alimenter la par-tie logique de l'appareil en tension électrique.
Pour plus de confort de raccordement au maître IO-Link, un adaptateur est disponible en tant qu'ac-cessoire è www.festo.com/catalogue.
Connecteurmâle [Logic]1)
Bro-che
Fonction Description
1 L+ Alimentation électrique IO-Link (24 V DC)
2 – Réservé, ne pas raccorder
3 C/Q Communication avec le maître IO-Link
4 L– Potentiel de référence alimentation électrique IO-Link (0 V) 2)
5 – Réservé, ne pas raccorder
6 – Réservé, ne pas raccorder
7 – Réservé, ne pas raccorder
8 L– Potentiel de référence alimentation électrique IO-Link (0 V)2)
1) M12x1, codage A, à 8 pôles2) Les broches 4, 8 [Logic] et 2 [Power] sont connectées en interne.
Tab. 11 Raccord [Logic] : IO-Link (LK)
Exigences relatives au connecteur mâle et au câble
Exigences relatives au connecteur opposé
Version Connecteur femelle M12x1, codage A
Nombre de broches 8
Courant nominal 2 A
Tension assignée 30 V DC
Degré de protection IP65
Blindage non
Tab. 12 Exigences relatives au connecteur opposé
Exigences relatives au câble de liaison
Nombre de conducteurs et blindage 8 conducteurs, non blindés
Section de conducteur min. 0,25 mm2
Installation
24 Festo — EMCS-ST — 2019-07
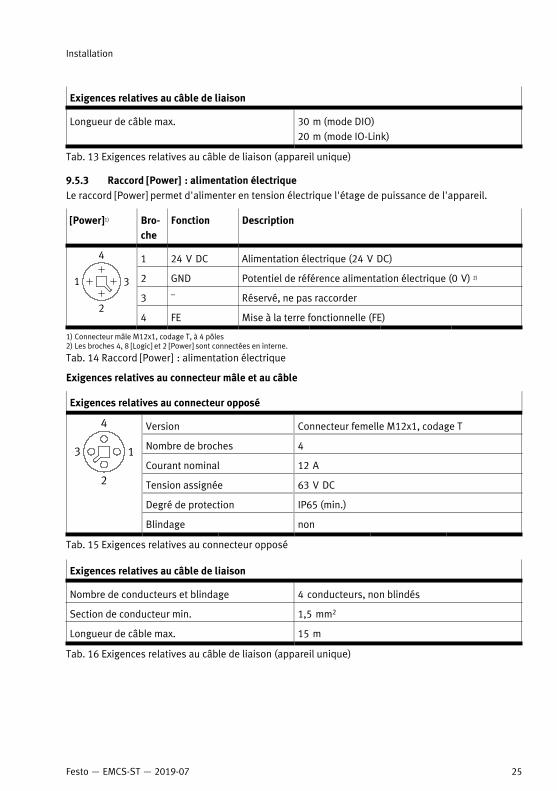
Exigences relatives au câble de liaison
Longueur de câble max. 30 m (mode DIO)20 m (mode IO-Link)
Tab. 13 Exigences relatives au câble de liaison (appareil unique)
9.5.3 Raccord [Power] : alimentation électriqueLe raccord [Power] permet d'alimenter en tension électrique l'étage de puissance de l'appareil.
[Power]1) Bro-che
Fonction Description
1 24 V DC Alimentation électrique (24 V DC)
2 GND Potentiel de référence alimentation électrique (0 V) 2)
3 – Réservé, ne pas raccorder
4 FE Mise à la terre fonctionnelle (FE)
1) Connecteur mâle M12x1, codage T, à 4 pôles2) Les broches 4, 8 [Logic] et 2 [Power] sont connectées en interne.
Tab. 14 Raccord [Power] : alimentation électrique
Exigences relatives au connecteur mâle et au câble
Exigences relatives au connecteur opposé
Version Connecteur femelle M12x1, codage T
Nombre de broches 4
Courant nominal 12 A
Tension assignée 63 V DC
Degré de protection IP65 (min.)
Blindage non
Tab. 15 Exigences relatives au connecteur opposé
Exigences relatives au câble de liaison
Nombre de conducteurs et blindage 4 conducteurs, non blindés
Section de conducteur min. 1,5 mm2
Longueur de câble max. 15 m
Tab. 16 Exigences relatives au câble de liaison (appareil unique)
Installation
25Festo — EMCS-ST — 2019-07
10 Mise en service
10.1 Mise en service « Mode DIO (entrées/sorties numériques) »Préparation :1. Contrôler le montage de l'actionneur.2. Contrôler le câblage des alimentations électriques [Power], [Logic] et des entrées/sorties numé-
riques « DIO » [Logic].
AVERTISSEMENT !
Risque de blessure dû au mouvement inattendu de composants.Au démarrage de la course de mise en référence, l'actionneur est bri_èvement mis hors tension. Cequi peut provoquer des mouvements inattendus du système mécanique raccordé et écraser des par-ties du corps.• Amener les pièces mobiles du système mécanique raccordé en position sûre.
Exécution :1. Activer la tension d'alimentation.2. Activer la tension logique.3. Attendre l'initialisation jusqu'à ce que la LED « C/Q » s'allume en jaune.4. Sélectionner la fin de course de référence « Ref » via le menu « Reference » de l'interface IHM et
lancer la course de mise en référence (uniquement nécessaire en cas de divergence par rapport auréglage d'usine de la fin de course de référence « Ref » en cas de modification de la plage utile).
La mise en référence permet d'assimiler la position Start Press « PosStart Press » à la plage utile dé-terminée.
5. Paramétrer les modes de fonctionnement via l'interface IHM :paramètres de base pour le mode End-to-End simple, le mode End-to-End avec fonction presse oule fonction manuel (Demo)– Vitesse « Speed Out »– Vitesse « Speed In »Paramètres supplémentaires pour le mode End-to-End avec fonction presse– Force « Force »– Position Start Press « PosStart Press » (point de référence fin de course de référence « Ref »)
Ensuite, l'EMCS-ST est en ordre de marche et l'application peut être commandée via l'interface decommande DIO (entrées/sorties numériques). Lors de la première tâche de déplacement et aprèschaque redémarrage, la position de la fin de course de référence « Ref » est réinitialisée (indépen-damment de la tâche de déplacement en cours, l'actionneur se déplace d'abord en fin de course de ré-férence « Ref » avant d'exécuter la tâche de déplacement concrète), la LED « C/Q » est allumée envert.
Mise en service
26 Festo — EMCS-ST — 2019-07
10.2 Mise en service « Mode IO-Link »Préparation :1. Contrôler le montage de l'actionneur.2. Contrôler le câblage des alimentations électriques [Power] et de l'interface IO-Link [Logic].3. Installer le logiciel d'application.4. Ouvrir le fichier IODD dans le logiciel d'application è www.festo.com/sp.
AVERTISSEMENT !
Risque de blessure dû au mouvement inattendu de composants.Au démarrage de la course de mise en référence, l'actionneur est bri_èvement mis hors tension. Cequi peut provoquer des mouvements inattendus du système mécanique raccordé et écraser des par-ties du corps.• Amener les pièces mobiles du système mécanique raccordé en position sûre.
Exécution :1. Activer la tension d'alimentation.2. Activer la tension logique via le maître IO-Link.3. Attendre l'initialisation jusqu'à ce que la LED « C/Q » s'allume en jaune.4. Sélectionner la fin de course de référence « Ref » (0x0103.0: Reference) via les paramètres IO-
Link (interface IHM en option) et lancer la course de mise en référence (0x0104.0: Execute "Refe-rence" Movement) (uniquement nécessaire en cas de divergence par rapport au réglage d'usine« Fin de course de référence Ref » ou en cas de modification de la plage utile).
La mise en référence permet d'assimiler la position Start Press « PosStart Press » à la plage utile dé-terminée.
5. Paramétrer les modes de fonctionnement via l'interface IO-Link :paramètres de base pour le mode End-to-End simple, le mode End-to-End avec fonction presse oule fonction manuel (Demo)– 0x0100.0 : vitesse « Speed In »– 0x0101.0 : vitesse « Speed Out »Paramètres supplémentaires pour le mode End-to-End avec fonction presse– 0x0102.0 : force « Force »– 0x0105.0 : position Start Press « Start Press » (point de référence fin de course de référence
« Ref »)Ensuite, l'EMCS-ST est en ordre de marche et l'application peut être commandée via l'interface IO-Link.– MovIn : paramètre 0x0029.1 = true ou paramètre système 0x0002 (valeur 0xC8)– MovOut : paramètre 0x0029.2 = true ou paramètre système 0x0002 (valeur 0xC9)Lors de la première tâche de déplacement et après chaque redémarrage, la position de la fin de coursede référence « Ref » est réinitialisée (indépendamment de la tâche de déplacement en cours, l'action-neur se déplace d'abord en fin de course de référence « Ref » avant d'exécuter la tâche de déplace-ment concrète), la LED « C/Q » clignote en vert.
Mise en service
27Festo — EMCS-ST — 2019-07
11 Système d'entraînement
11.1 Dimensions et unités
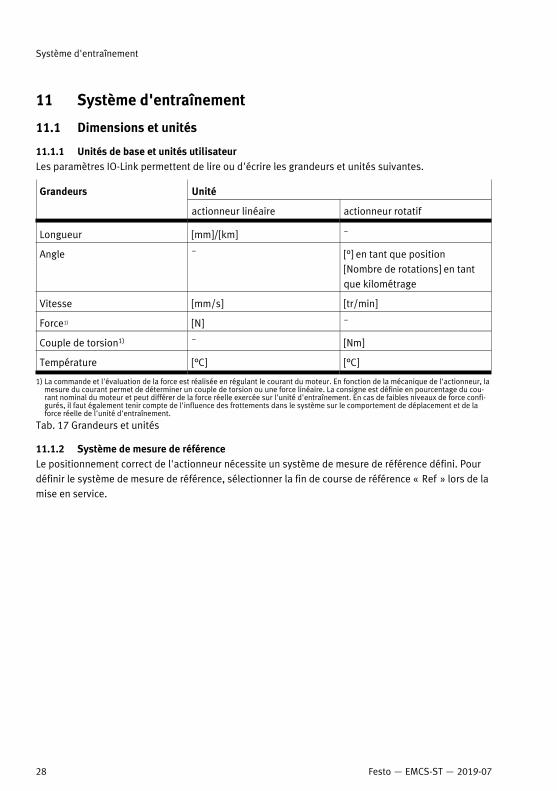
11.1.1 Unités de base et unités utilisateurLes paramètres IO-Link permettent de lire ou d'écrire les grandeurs et unités suivantes.
UnitéGrandeurs
actionneur linéaire actionneur rotatif
Longueur [mm]/[km] −
Angle − [°] en tant que position[Nombre de rotations] en tantque kilométrage
Vitesse [mm/s] [tr/min]
Force1) [N] −
Couple de torsion1) − [Nm]
Température [°C] [°C]
1) La commande et l'évaluation de la force est réalisée en régulant le courant du moteur. En fonction de la mécanique de l'actionneur, lamesure du courant permet de déterminer un couple de torsion ou une force linéaire. La consigne est définie en pourcentage du cou-rant nominal du moteur et peut différer de la force réelle exercée sur l'unité d'entraînement. En cas de faibles niveaux de force confi-gurés, il faut également tenir compte de l'influence des frottements dans le système sur le comportement de déplacement et de laforce réelle de l'unité d'entraînement.
Tab. 17 Grandeurs et unités
11.1.2 Système de mesure de référenceLe positionnement correct de l'actionneur nécessite un système de mesure de référence défini. Pourdéfinir le système de mesure de référence, sélectionner la fin de course de référence « Ref » lors de lamise en service.
Système d'entraînement
28 Festo — EMCS-ST — 2019-07
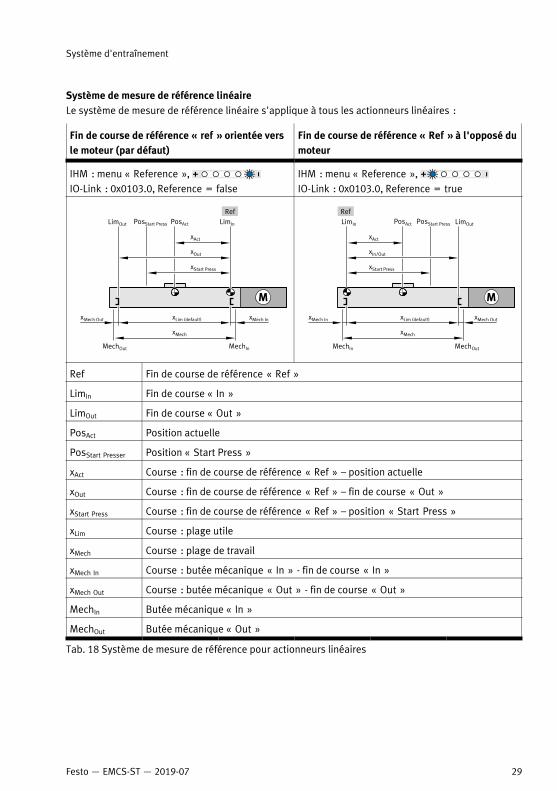
Système de mesure de référence linéaireLe système de mesure de référence linéaire s'applique à tous les actionneurs linéaires :
Fin de course de référence « ref » orientée versle moteur (par défaut)
Fin de course de référence « Ref » à l'opposé dumoteur
IHM : menu « Reference », IO-Link : 0x0103.0, Reference = false
IHM : menu « Reference », IO-Link : 0x0103.0, Reference = true
Ref Fin de course de référence « Ref »
LimIn Fin de course « In »
LimOut Fin de course « Out »
PosAct Position actuelle
PosStart Presser Position « Start Press »
xAct Course : fin de course de référence « Ref » – position actuelle
xOut Course : fin de course de référence « Ref » – fin de course « Out »
xStart Press Course : fin de course de référence « Ref » – position « Start Press »
xLim Course : plage utile
xMech Course : plage de travail
xMech In Course : butée mécanique « In » - fin de course « In »
xMech Out Course : butée mécanique « Out » - fin de course « Out »
MechIn Butée mécanique « In »
MechOut Butée mécanique « Out »
Tab. 18 Système de mesure de référence pour actionneurs linéaires
Système d'entraînement
29Festo — EMCS-ST — 2019-07
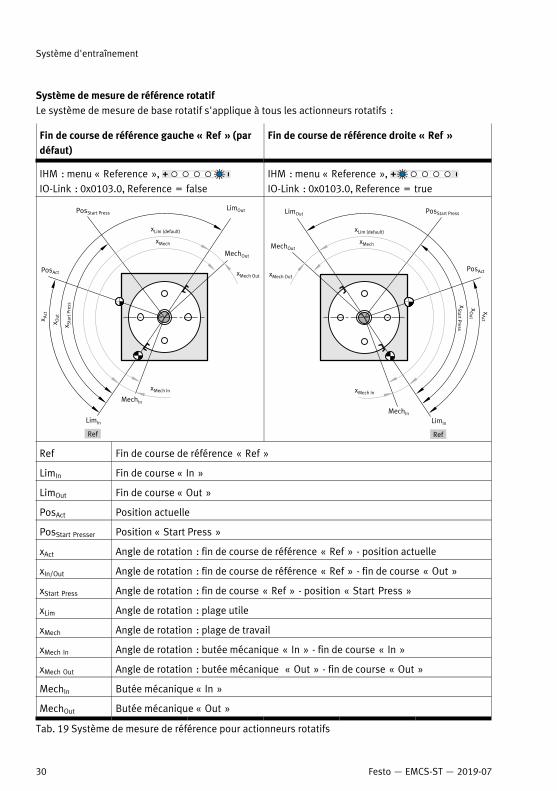
Système de mesure de référence rotatifLe système de mesure de base rotatif s'applique à tous les actionneurs rotatifs :
Fin de course de référence gauche « Ref » (pardéfaut)
Fin de course de référence droite « Ref »
IHM : menu « Reference », IO-Link : 0x0103.0, Reference = false
IHM : menu « Reference », IO-Link : 0x0103.0, Reference = true
Ref Fin de course de référence « Ref »
LimIn Fin de course « In »
LimOut Fin de course « Out »
PosAct Position actuelle
PosStart Presser Position « Start Press »
xAct Angle de rotation : fin de course de référence « Ref » - position actuelle
xIn/Out Angle de rotation : fin de course de référence « Ref » - fin de course « Out »
xStart Press Angle de rotation : fin de course « Ref » - position « Start Press »
xLim Angle de rotation : plage utile
xMech Angle de rotation : plage de travail
xMech In Angle de rotation : butée mécanique « In » - fin de course « In »
xMech Out Angle de rotation : butée mécanique « Out » - fin de course « Out »
MechIn Butée mécanique « In »
MechOut Butée mécanique « Out »
Tab. 19 Système de mesure de référence pour actionneurs rotatifs
Système d'entraînement
30 Festo — EMCS-ST — 2019-07
11.2 Contrôleur
11.2.1 MicrologicielLe micrologiciel est mis en œuvre à demeure dans l'EMCS-ST. Une mise à jour du micrologiciel n'estpas possible.
11.2.2 Réglages d'usineLes réglages d'usine de l'EMCS-ST peuvent être restaurés de deux manières :– Via le paramètre IO-Link « Restore factory settings » (è 0x0002, valeur 0x00CD)– En appuyant simultanément sur les trois boutons-poussoirs pendant au moins 10 secondes avec
tension logique présente (possible dans tous les modes de fonctionnement).Une fois les 10 secondes écoulées, les 6 témoins DEL des paramètres s'allument et la tension lo-gique doit être désactivée et réactivée.
Après la restauration des réglages d'usine, une mise en référence de l'actionneur s'avère nécessaireè 11.3.2 Mise en référence.
Lors de la restauration des réglages d'usine, les réglages suivants sont actifs :– Paramètre "Speed Out" : Niveau 1 (10 % de la valeur maximale)– Paramètre « Speed In » : niveau 1 (10 % de la valeur maximale)– Paramètre « Force » : niveau 1 (10 % de la valeur maximale)– Paramètre « Start Press » : valeur maximale possible de la mécanique concernée– Fin de course de référence è 11.3.2 Mise en référence :
– Actionneur linéaire : fin de course orientée vers le moteur, rentré– Actionneur rotatif : à gauche
– Paramètre « End Position Out » : valeur maximale possible de la mécanique concernée
11.2.3 Comportement au démarrageLe comportement au démarrage de l'EMCS-ST dépend des conditions suivantes :– Mise en service– Redémarrage (acquittement des erreurs)– Panne de la tension logique [Logic]– Panne d'électricité [Power]– Panne secteur [Logic], [Power]
Lors de l'activation des alimentations électriques, la tension d'alimentation [Power] doit être activéeavant la tension logique [Logic].
Système d'entraînement
31Festo — EMCS-ST — 2019-07
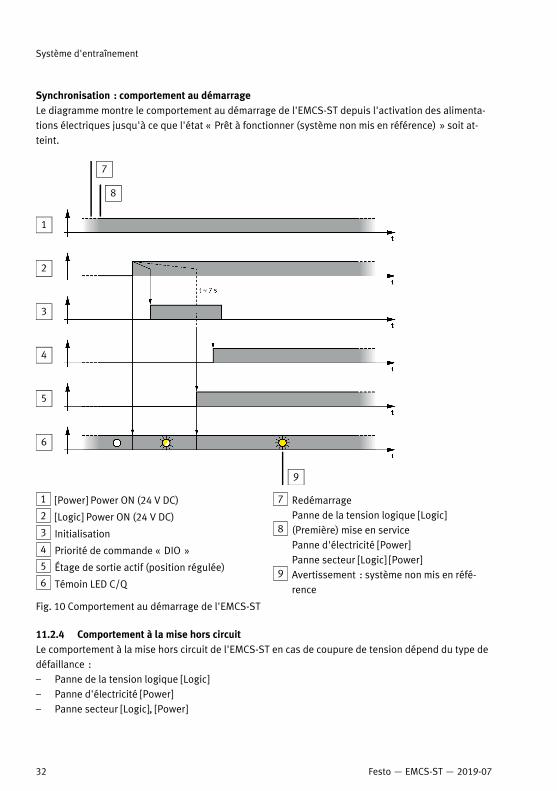
Synchronisation : comportement au démarrageLe diagramme montre le comportement au démarrage de l'EMCS-ST depuis l'activation des alimenta-tions électriques jusqu'à ce que l'état « Prêt à fonctionner (système non mis en référence) » soit at-teint.
1 [Power] Power ON (24 V DC)
2 [Logic] Power ON (24 V DC)
3 Initialisation
4 Priorité de commande « DIO »
5 Étage de sortie actif (position régulée)
6 Témoin LED C/Q
7 RedémarragePanne de la tension logique [Logic]
8 (Première) mise en servicePanne d'électricité [Power]Panne secteur [Logic] [Power]
9 Avertissement : système non mis en réfé-rence
Fig. 10 Comportement au démarrage de l'EMCS-ST
11.2.4 Comportement à la mise hors circuitLe comportement à la mise hors circuit de l'EMCS-ST en cas de coupure de tension dépend du type dedéfaillance :– Panne de la tension logique [Logic]– Panne d'électricité [Power]– Panne secteur [Logic], [Power]
Système d'entraînement
32 Festo — EMCS-ST — 2019-07
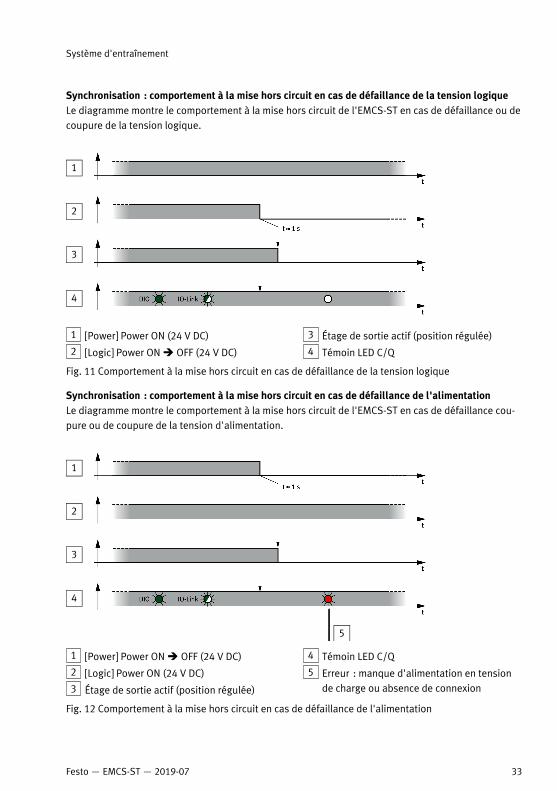
Synchronisation : comportement à la mise hors circuit en cas de défaillance de la tension logiqueLe diagramme montre le comportement à la mise hors circuit de l'EMCS-ST en cas de défaillance ou decoupure de la tension logique.
1 [Power] Power ON (24 V DC)
2 [Logic] Power ON è OFF (24 V DC)
3 Étage de sortie actif (position régulée)
4 Témoin LED C/Q
Fig. 11 Comportement à la mise hors circuit en cas de défaillance de la tension logique
Synchronisation : comportement à la mise hors circuit en cas de défaillance de l'alimentationLe diagramme montre le comportement à la mise hors circuit de l'EMCS-ST en cas de défaillance cou-pure ou de coupure de la tension d'alimentation.
1 [Power] Power ON è OFF (24 V DC)
2 [Logic] Power ON (24 V DC)
3 Étage de sortie actif (position régulée)
4 Témoin LED C/Q
5 Erreur : manque d'alimentation en tensionde charge ou absence de connexion
Fig. 12 Comportement à la mise hors circuit en cas de défaillance de l'alimentation
Système d'entraînement
33Festo — EMCS-ST — 2019-07
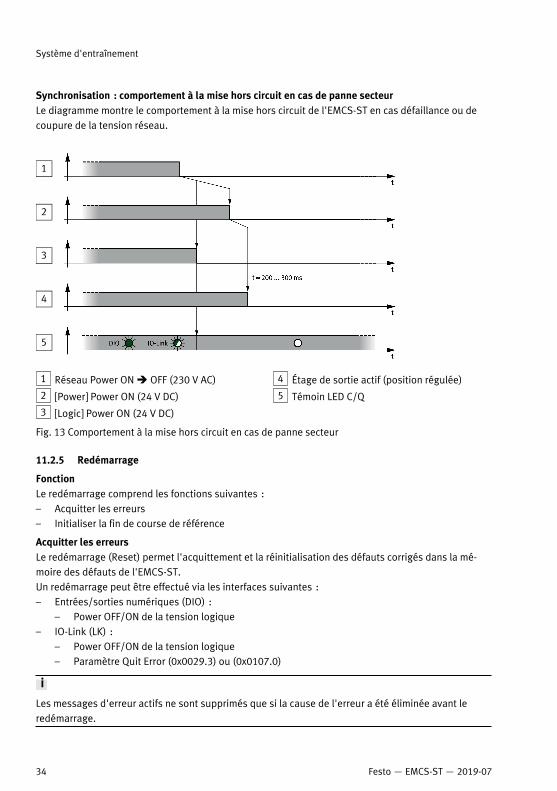
Synchronisation : comportement à la mise hors circuit en cas de panne secteurLe diagramme montre le comportement à la mise hors circuit de l'EMCS-ST en cas défaillance ou decoupure de la tension réseau.
1 Réseau Power ON è OFF (230 V AC)
2 [Power] Power ON (24 V DC)
3 [Logic] Power ON (24 V DC)
4 Étage de sortie actif (position régulée)
5 Témoin LED C/Q
Fig. 13 Comportement à la mise hors circuit en cas de panne secteur
11.2.5 Redémarrage
FonctionLe redémarrage comprend les fonctions suivantes :– Acquitter les erreurs– Initialiser la fin de course de référence
Acquitter les erreursLe redémarrage (Reset) permet l'acquittement et la réinitialisation des défauts corrigés dans la mé-moire des défauts de l'EMCS-ST.Un redémarrage peut être effectué via les interfaces suivantes :– Entrées/sorties numériques (DIO) :
– Power OFF/ON de la tension logique– IO-Link (LK) :
– Power OFF/ON de la tension logique– Paramètre Quit Error (0x0029.3) ou (0x0107.0)
Les messages d'erreur actifs ne sont supprimés que si la cause de l'erreur a été éliminée avant leredémarrage.
Système d'entraînement
34 Festo — EMCS-ST — 2019-07
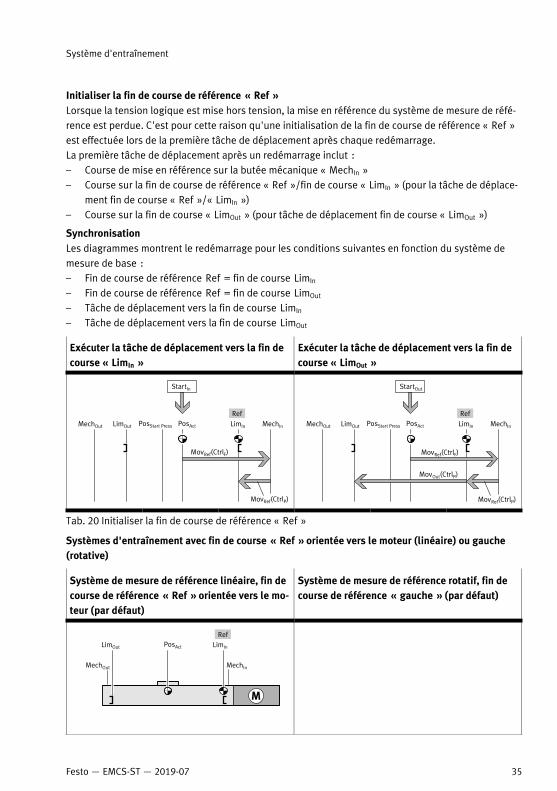
Initialiser la fin de course de référence « Ref »Lorsque la tension logique est mise hors tension, la mise en référence du système de mesure de réfé-rence est perdue. C'est pour cette raison qu'une initialisation de la fin de course de référence « Ref »est effectuée lors de la première tâche de déplacement après chaque redémarrage.La première tâche de déplacement après un redémarrage inclut :– Course de mise en référence sur la butée mécanique « MechIn »– Course sur la fin de course de référence « Ref »/fin de course « LimIn » (pour la tâche de déplace-
ment fin de course « Ref »/« LimIn »)– Course sur la fin de course « LimOut » (pour tâche de déplacement fin de course « LimOut »)
SynchronisationLes diagrammes montrent le redémarrage pour les conditions suivantes en fonction du système demesure de base :– Fin de course de référence Ref = fin de course LimIn
– Fin de course de référence Ref = fin de course LimOut
– Tâche de déplacement vers la fin de course LimIn
– Tâche de déplacement vers la fin de course LimOut
Exécuter la tâche de déplacement vers la fin decourse « LimIn »
Exécuter la tâche de déplacement vers la fin decourse « LimOut »
Tab. 20 Initialiser la fin de course de référence « Ref »
Systèmes d'entraînement avec fin de course « Ref » orientée vers le moteur (linéaire) ou gauche(rotative)
Système de mesure de référence linéaire, fin decourse de référence « Ref » orientée vers le mo-teur (par défaut)
Système de mesure de référence rotatif, fin decourse de référence « gauche » (par défaut)
Système d'entraînement
35Festo — EMCS-ST — 2019-07
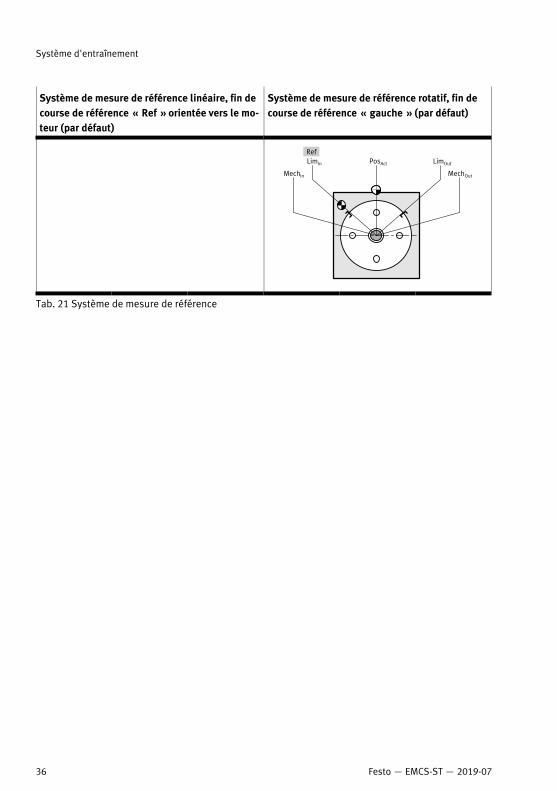
Système de mesure de référence linéaire, fin decourse de référence « Ref » orientée vers le mo-teur (par défaut)
Système de mesure de référence rotatif, fin decourse de référence « gauche » (par défaut)
Tab. 21 Système de mesure de référence
Système d'entraînement
36 Festo — EMCS-ST — 2019-07
Tâche de déplacement vers la fin de course LimIn avec fin de course de référence « Ref » orientéevers le moteur/gauche– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »
= 0– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ou
paramètre système 0x0002 (valeur 0x00C8 « Move In »)
Système d'entraînement
37Festo — EMCS-ST — 2019-07
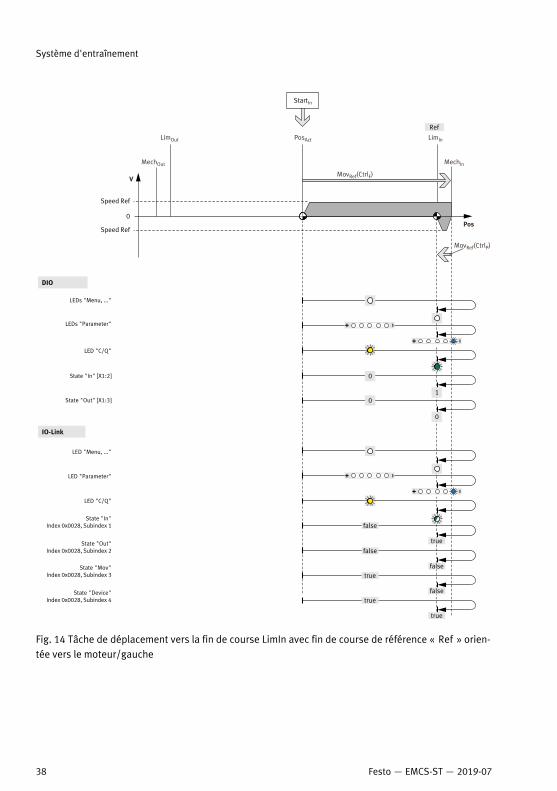
Fig. 14 Tâche de déplacement vers la fin de course LimIn avec fin de course de référence « Ref » orien-tée vers le moteur/gauche
Système d'entraînement
38 Festo — EMCS-ST — 2019-07
Tâche de déplacement vers la fin de course LimOut avec fin de course de référence « Ref » orientéevers le moteur/gauche– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »
= 0– Activation de la tâche de déplacement : IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false
ou paramètre système0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
39Festo — EMCS-ST — 2019-07
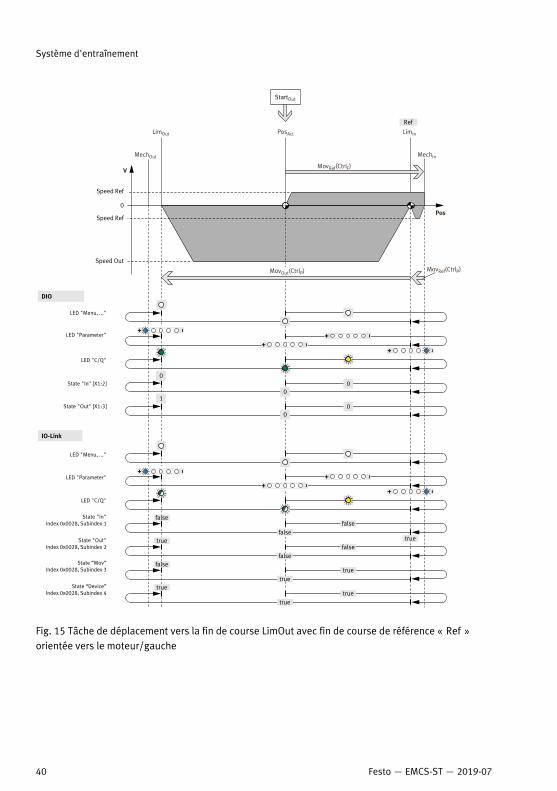
Fig. 15 Tâche de déplacement vers la fin de course LimOut avec fin de course de référence « Ref »orientée vers le moteur/gauche
Système d'entraînement
40 Festo — EMCS-ST — 2019-07
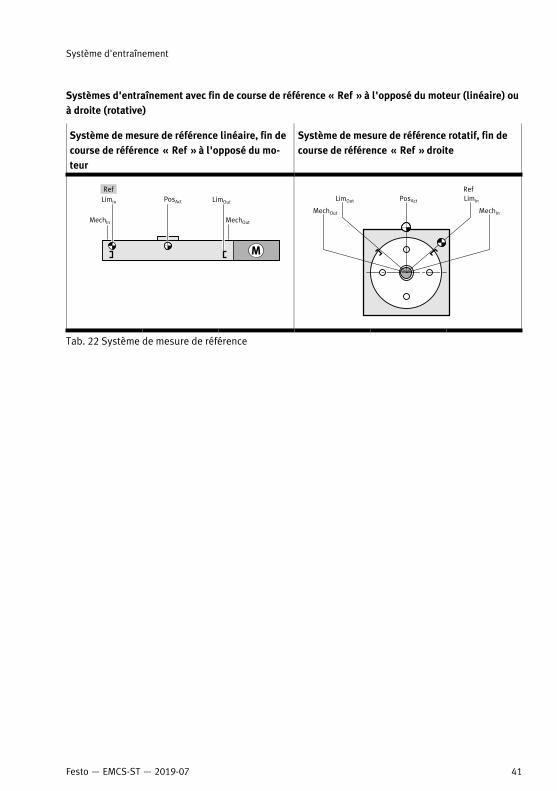
Systèmes d'entraînement avec fin de course de référence « Ref » à l'opposé du moteur (linéaire) ouà droite (rotative)
Système de mesure de référence linéaire, fin decourse de référence « Ref » à l'opposé du mo-teur
Système de mesure de référence rotatif, fin decourse de référence « Ref » droite
Tab. 22 Système de mesure de référence
Système d'entraînement
41Festo — EMCS-ST — 2019-07

Tâche de déplacement vers la fin de course LimIn avec fin de course de référence « Ref » à l'opposédu moteur/droite– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »
= 0– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ou
paramètre système 0x0002 (valeur 0x00C8 « Move In »)
Système d'entraînement
42 Festo — EMCS-ST — 2019-07
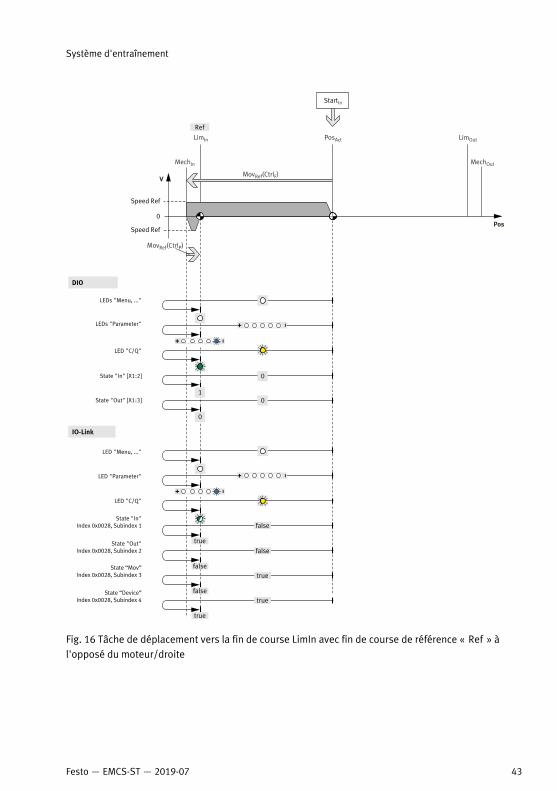
Fig. 16 Tâche de déplacement vers la fin de course LimIn avec fin de course de référence « Ref » àl'opposé du moteur/droite
Système d'entraînement
43Festo — EMCS-ST — 2019-07

Tâche de déplacement vers la fin de course LimOut avec la fin de course de référence « Ref » à l'op-posé du moteur/droite– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »
= 0– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ou
paramètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
44 Festo — EMCS-ST — 2019-07

Fig. 17 Tâche de déplacement vers la fin de course LimOut avec la fin de course de référence « Ref » àl'opposé du moteur/droite
Système d'entraînement
45Festo — EMCS-ST — 2019-07
11.2.6 Priorité de commande
FonctionLa priorité de commande indique quelle interface est autorisée à commander l'EMCS-ST.En cours de service, seule une des interfaces suivantes peut détenir la priorité de commande :– Entrées/sorties numériques (DIO) [Logic]– IO-Link (LK) [Logic]– Élément de commande et d'affichage (IHM)
L'élément d'affichage et de commande (IHM) a toujours une priorité plus élevée que l'interface decommande « entrées/sorties numériques (DIO) » ou « IO-Link (LK) » [Logic].Si le verrouillage des boutons-poussoirs est annulé, les instructions de déplacement entrantes sontbloquées et ne sont pas exécutées.
Priorité de commande « Entrées/sorties numériques (DIO) » ou « IO-Link (LK) »Après l'activation des alimentations électriques et l'initialisation de l'EMCS-ST, la priorité de com-mande est automatiquement affectée à l'interface de commande « Entrées/sorties numériques(DIO) ». La détection d'un maître IO-Link actif entraîne le passage automatique de la priorité de com-mande à l'interface de commande « IO-Link ». En cas d'interruption de la communication IO-Link, lapriorité de commande retourne automatiquement à l'interface de commande « Entrées/sorties numé-riques (DIO) ».
Système d'entraînement
46 Festo — EMCS-ST — 2019-07
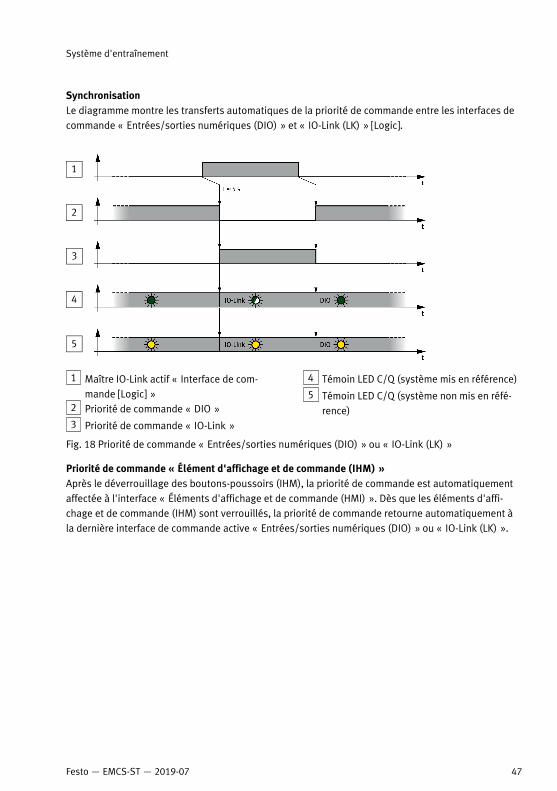
SynchronisationLe diagramme montre les transferts automatiques de la priorité de commande entre les interfaces decommande « Entrées/sorties numériques (DIO) » et « IO-Link (LK) » [Logic].
1 Maître IO-Link actif « Interface de com-mande [Logic] »
2 Priorité de commande « DIO »
3 Priorité de commande « IO-Link »
4 Témoin LED C/Q (système mis en référence)
5 Témoin LED C/Q (système non mis en réfé-rence)
Fig. 18 Priorité de commande « Entrées/sorties numériques (DIO) » ou « IO-Link (LK) »
Priorité de commande « Élément d'affichage et de commande (IHM) »Après le déverrouillage des boutons-poussoirs (IHM), la priorité de commande est automatiquementaffectée à l'interface « Éléments d'affichage et de commande (HMI) ». Dès que les éléments d'affi-chage et de commande (IHM) sont verrouillés, la priorité de commande retourne automatiquement àla dernière interface de commande active « Entrées/sorties numériques (DIO) » ou « IO-Link (LK) ».
Système d'entraînement
47Festo — EMCS-ST — 2019-07
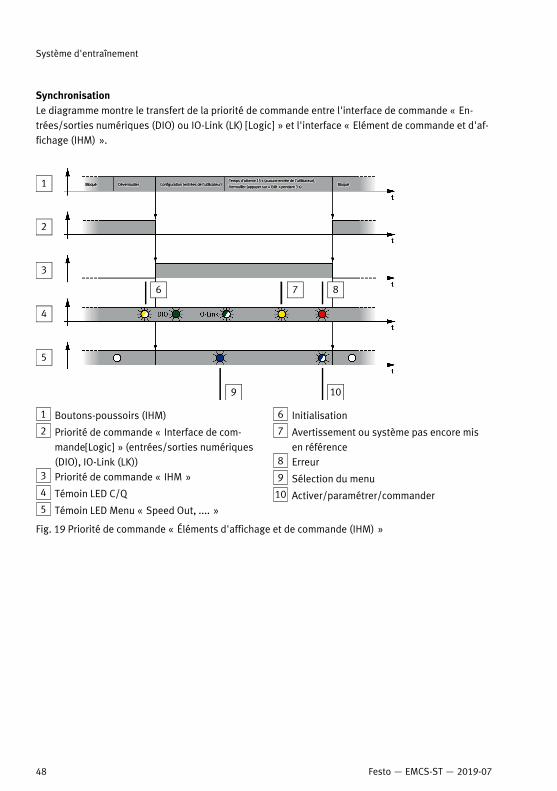
SynchronisationLe diagramme montre le transfert de la priorité de commande entre l'interface de commande « En-trées/sorties numériques (DIO) ou IO-Link (LK) [Logic] » et l'interface « Elément de commande et d'af-fichage (IHM) ».
1 Boutons-poussoirs (IHM)
2 Priorité de commande « Interface de com-mande[Logic] » (entrées/sorties numériques(DIO), IO-Link (LK))
3 Priorité de commande « IHM »
4 Témoin LED C/Q
5 Témoin LED Menu « Speed Out, .... »
6 Initialisation
7 Avertissement ou système pas encore misen référence
8 Erreur
9 Sélection du menu
10 Activer/paramétrer/commander
Fig. 19 Priorité de commande « Éléments d'affichage et de commande (IHM) »
Système d'entraînement
48 Festo — EMCS-ST — 2019-07
11.3 Modes de fonctionnement
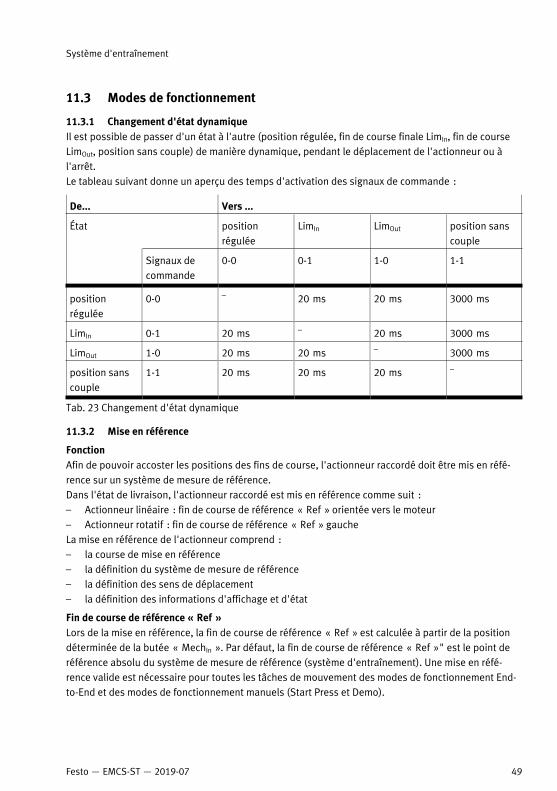
11.3.1 Changement d'état dynamiqueIl est possible de passer d'un état à l'autre (position régulée, fin de course finale LimIn, fin de courseLimOut, position sans couple) de manière dynamique, pendant le déplacement de l'actionneur ou àl'arrêt.Le tableau suivant donne un aperçu des temps d'activation des signaux de commande :
De... Vers ...
État positionrégulée
LimIn LimOut position sanscouple
Signaux decommande
0-0 0-1 1-0 1-1
positionrégulée
0-0 – 20 ms 20 ms 3000 ms
LimIn 0-1 20 ms – 20 ms 3000 ms
LimOut 1-0 20 ms 20 ms – 3000 ms
position sanscouple
1-1 20 ms 20 ms 20 ms –
Tab. 23 Changement d'état dynamique
11.3.2 Mise en référence
FonctionAfin de pouvoir accoster les positions des fins de course, l'actionneur raccordé doit être mis en réfé-rence sur un système de mesure de référence.Dans l'état de livraison, l'actionneur raccordé est mis en référence comme suit :– Actionneur linéaire : fin de course de référence « Ref » orientée vers le moteur– Actionneur rotatif : fin de course de référence « Ref » gaucheLa mise en référence de l'actionneur comprend :– la course de mise en référence– la définition du système de mesure de référence– la définition des sens de déplacement– la définition des informations d'affichage et d'état
Fin de course de référence « Ref »Lors de la mise en référence, la fin de course de référence « Ref » est calculée à partir de la positiondéterminée de la butée « MechIn ». Par défaut, la fin de course de référence « Ref »" est le point deréférence absolu du système de mesure de référence (système d'entraînement). Une mise en réfé-rence valide est nécessaire pour toutes les tâches de mouvement des modes de fonctionnement End-to-End et des modes de fonctionnement manuels (Start Press et Demo).
Système d'entraînement
49Festo — EMCS-ST — 2019-07
État de mise en référenceL'état de mise en référence change dans les cas suivants :– L'état est réinitialisé
– après une nouvelle mise en référence valide– après le remplacement de l'actionneur intégré
– L'état est activé– après une nouvelle mise en référence valide
Mise en référenceAvec le codeur monotour, le lien avec la fin de course de référence « Ref » dans le système de mesurede référence ne reste préservé de manière sûre que jusqu'à une interruption de la tension logique(p. ex. redémarrage, coupure de courant).
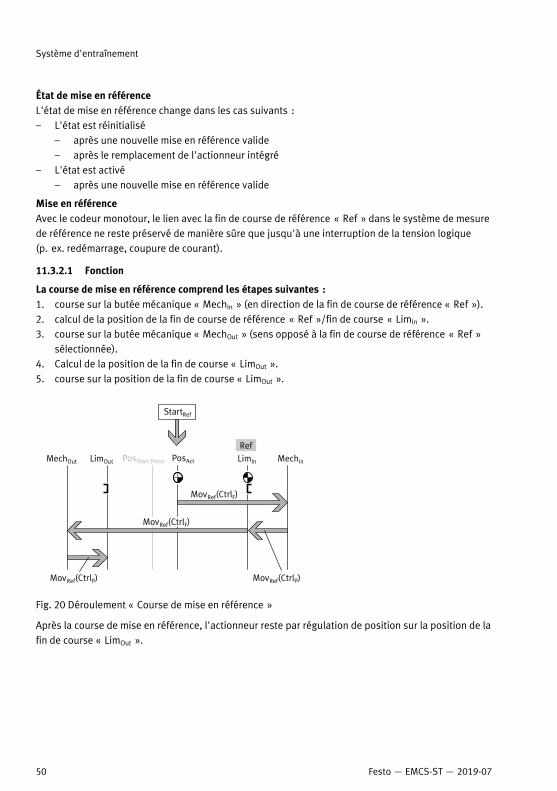
11.3.2.1 Fonction
La course de mise en référence comprend les étapes suivantes :1. course sur la butée mécanique « MechIn » (en direction de la fin de course de référence « Ref »).2. calcul de la position de la fin de course de référence « Ref »/fin de course « LimIn ».3. course sur la butée mécanique « MechOut » (sens opposé à la fin de course de référence « Ref »
sélectionnée).4. Calcul de la position de la fin de course « LimOut ».5. course sur la position de la fin de course « LimOut ».
Fig. 20 Déroulement « Course de mise en référence »
Après la course de mise en référence, l'actionneur reste par régulation de position sur la position de lafin de course « LimOut ».
Système d'entraînement
50 Festo — EMCS-ST — 2019-07
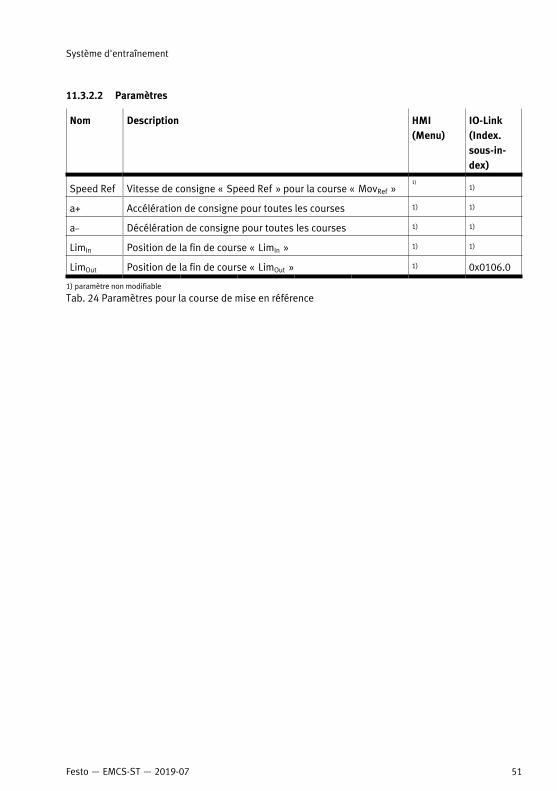
11.3.2.2 Paramètres
Nom Description HMI(Menu)
IO-Link(Index.sous-in-dex)
Speed Ref Vitesse de consigne « Speed Ref » pour la course « MovRef »1)
1)
a+ Accélération de consigne pour toutes les courses 1) 1)
a– Décélération de consigne pour toutes les courses 1) 1)
LimIn Position de la fin de course « LimIn » 1) 1)
LimOut Position de la fin de course « LimOut » 1) 0x0106.0
1) paramètre non modifiable
Tab. 24 Paramètres pour la course de mise en référence
Système d'entraînement
51Festo — EMCS-ST — 2019-07

11.3.2.3 Synchronisation
Système d'entraînement
52 Festo — EMCS-ST — 2019-07
Synchronisation : course de mise en référence avec fin de course de référence « Ref » orientée versle moteur ou gaucheLe diagramme montre la course de mise en référence « MovRef » de l'instruction « StartRef » jusqu'à ceque la fin de course « LimOut » soit atteinte avec fin de course de référence « Ref » orientée vers lemoteur ou gauche avec les données d'état en mode HIM et IO-Link.Activation de la course de mise en référence :– DIO : sélection d'une fin de course de référence « Ref » au point de menu « Reference » et enre-
gistrement de la valeur– IO-Link : sélection d'une fin de course de référence « Ref » (0x0103.0) et déclenchement d'une
course de mise en référence (0x0104.0)
Système d'entraînement
53Festo — EMCS-ST — 2019-07
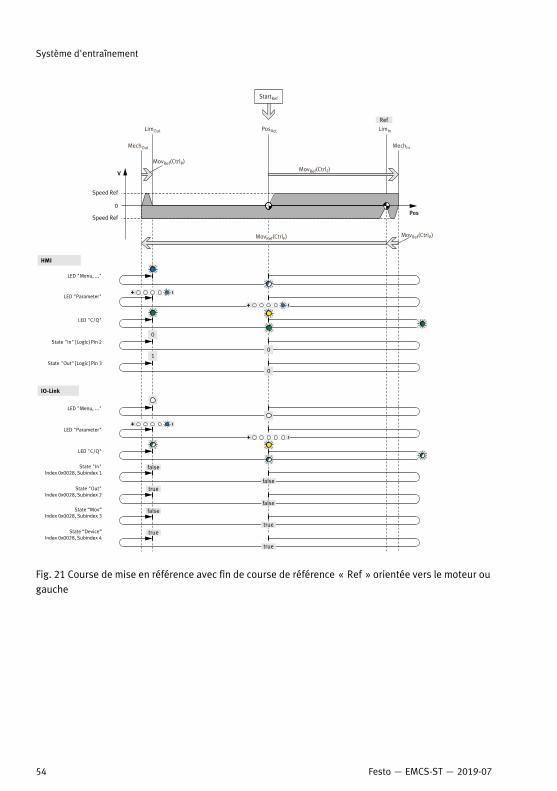
Fig. 21 Course de mise en référence avec fin de course de référence « Ref » orientée vers le moteur ougauche
Système d'entraînement
54 Festo — EMCS-ST — 2019-07
Synchronisation : course de mise en référence avec fin de course de référence « Ref » à l'opposé dumoteur ou droiteLe diagramme montre la course de mise en référence « MovRef » de l'instruction « StartRef » jusqu'à ceque la fin de course « LimOut » soit atteinte avec fin de course de référence « Ref » à l'opposé du mo-teur ou droite avec les données d'état en mode HIM et IO-Link.Activation de la course de mise en référence :– DIO : sélection d'une fin de course de référence « Ref » au point de menu « Reference » et enre-
gistrement de la valeur– IO-Link : sélection d'une fin de course de référence « Ref » (0x0103.0) et déclenchement d'une
course de mise en référence (0x0104.0)
Système d'entraînement
55Festo — EMCS-ST — 2019-07
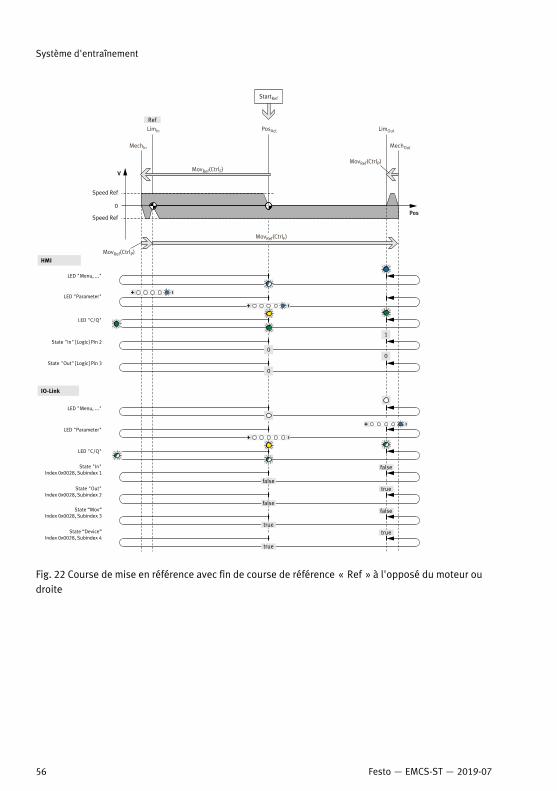
Fig. 22 Course de mise en référence avec fin de course de référence « Ref » à l'opposé du moteur oudroite
Système d'entraînement
56 Festo — EMCS-ST — 2019-07
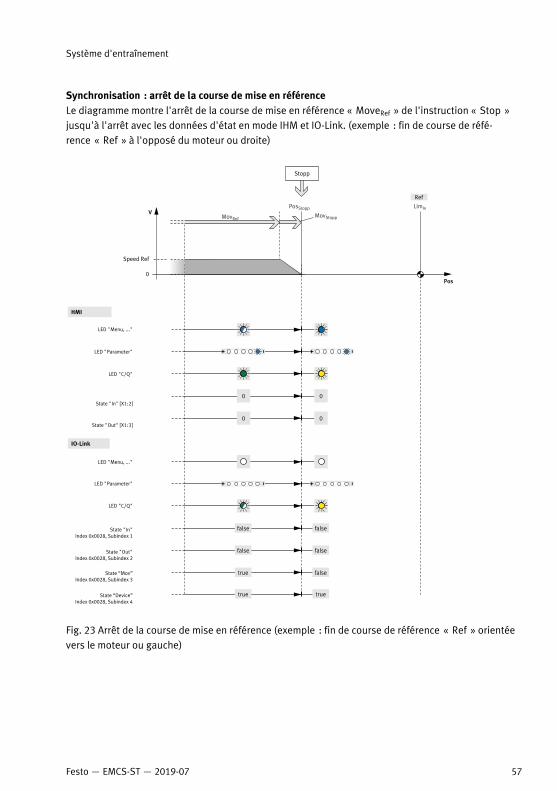
Synchronisation : arrêt de la course de mise en référenceLe diagramme montre l'arrêt de la course de mise en référence « MoveRef » de l'instruction « Stop »jusqu'à l'arrêt avec les données d'état en mode IHM et IO-Link. (exemple : fin de course de réfé-rence « Ref » à l'opposé du moteur ou droite)
Fig. 23 Arrêt de la course de mise en référence (exemple : fin de course de référence « Ref » orientéevers le moteur ou gauche)
Système d'entraînement
57Festo — EMCS-ST — 2019-07
11.3.3 Mode End-to-End simple
11.3.3.1 FonctionEn mode End-to-End simple, l'actionneur peut être déplacé sur les deux fins de course « LimIn/LimOut ». Avec l'EMCS-ST, le mode End-to-End simple se commande via l'interface de commande « En-trées/sorties numériques (DIO) » ou « IO-Link (LK) » [Logic]. Avec la consigne de départ sur l'inter-face de commande[Logic], l'actionneur est déplacé dans la fin de course spécifiée. Le sens de déplace-ment vers la fin de course dépend de la configuration de la fin de course de référence Ref. La consigned'arrêt permet de stopper l'actionneur à n'importe quelle position de la plage decourse/d'angle « xIn/Out ». La poursuite de la course s'effectue de nouveau via la consigne de départsur l'interface de commande. Dès que la fin de course « LimIn/LimOut » ou la positiond'arrêt « PosStopp » est atteinte, l'actionneur s'immobilise par régulation de position. La commande s'effectue via les interfaces suivantes :– Entrées/sorties numériques (DIO)
– Entrée numérique DI1, « MovIn » [Logic]– Entrée numérique DI2, « MovOut » [Logic]
– IO-Link (LK) è 14.2.2 Données de processus– Index 0x0029, sous-index 1, « MoveIn »– Index 0x0029, sous-index 2, « MoveOut »
Les instructions sont les suivantes :– StartIn : course régulée en vitesse « MovIn » dans la fin de course « LimIn (Ref) » (démarrer/pour-
suivre)– StartOut : course régulée en vitesse « MovOut » dans la fin de course « LimOut » (démarrer/pour-
suivre)– Arrêt : stopper la course
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
58 Festo — EMCS-ST — 2019-07
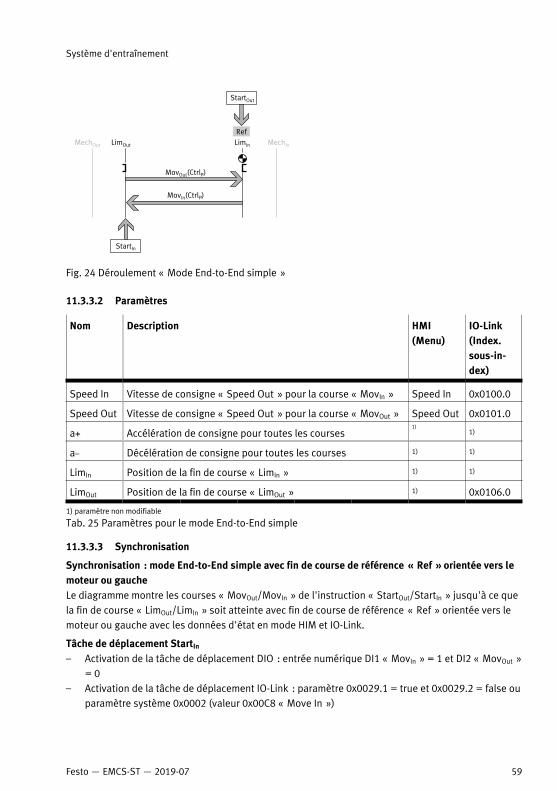
Fig. 24 Déroulement « Mode End-to-End simple »
11.3.3.2 Paramètres
Nom Description HMI(Menu)
IO-Link(Index.sous-in-dex)
Speed In Vitesse de consigne « Speed Out » pour la course « MovIn » Speed In 0x0100.0
Speed Out Vitesse de consigne « Speed Out » pour la course « MovOut » Speed Out 0x0101.0
a+ Accélération de consigne pour toutes les courses1)
1)
a– Décélération de consigne pour toutes les courses 1) 1)
LimIn Position de la fin de course « LimIn » 1) 1)
LimOut Position de la fin de course « LimOut » 1) 0x0106.0
1) paramètre non modifiable
Tab. 25 Paramètres pour le mode End-to-End simple
11.3.3.3 Synchronisation
Synchronisation : mode End-to-End simple avec fin de course de référence « Ref » orientée vers lemoteur ou gaucheLe diagramme montre les courses « MovOut/MovIn » de l'instruction « StartOut/StartIn » jusqu'à ce quela fin de course « LimOut/LimIn » soit atteinte avec fin de course de référence « Ref » orientée vers lemoteur ou gauche avec les données d'état en mode HIM et IO-Link.
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Système d'entraînement
59Festo — EMCS-ST — 2019-07
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
60 Festo — EMCS-ST — 2019-07
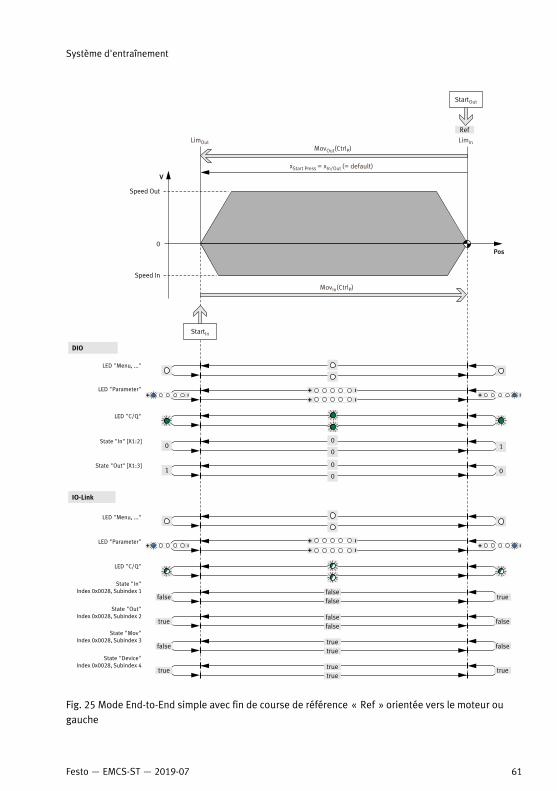
Fig. 25 Mode End-to-End simple avec fin de course de référence « Ref » orientée vers le moteur ougauche
Système d'entraînement
61Festo — EMCS-ST — 2019-07
Synchronisation : mode End-to-End simple avec fin de course de référence « Ref » à l'opposé dumoteur ou droiteLe diagramme montre les courses « MovOut/MovIn » de l'instruction « StartOut/StartIn » jusqu'à ce quela fin de course « LimOut/LimIn » soit atteinte avec fin de course de référence « Ref » à l'opposé dumoteur ou droite avec les données d'état en mode HIM et IO-Link.
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
62 Festo — EMCS-ST — 2019-07
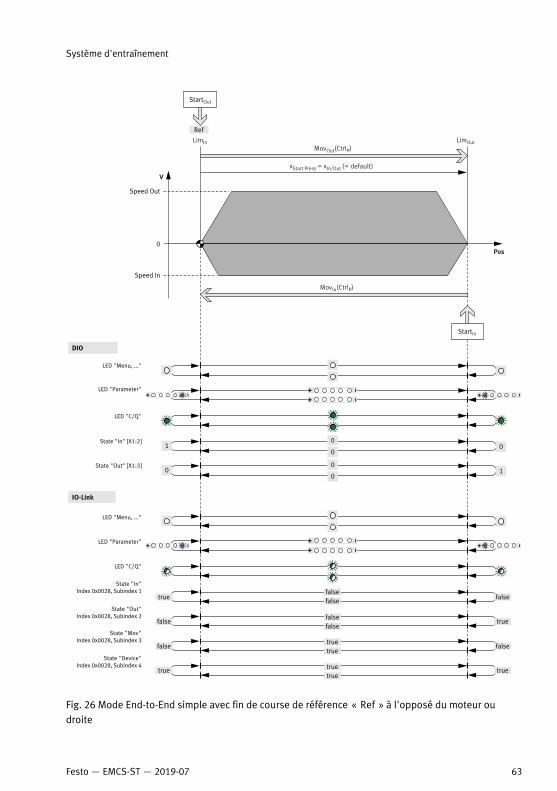
Fig. 26 Mode End-to-End simple avec fin de course de référence « Ref » à l'opposé du moteur oudroite
Système d'entraînement
63Festo — EMCS-ST — 2019-07
Synchronisation : stopper et poursuivre course End-to-End simpleLe diagramme montre l'arrêt et la poursuite des courses « MovOut » depuis la commande « StopOut »jusqu'à que la fin de course « LimOut » avec fin de course de référence « Ref » à l'opposé du moteurou droite avec les données d'état en mode DIO et IO-Link.
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Tâche de déplacement StopOut
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 0 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = false et 0x0029.2 = falseou paramètre système 0x0002 (valeur 0x00CA « Stop motion »)
Système d'entraînement
64 Festo — EMCS-ST — 2019-07

Fig. 27 Arrêt et reprise d'une course End-to-End simple (exemple : avec fin de course de réfé-rence « Ref » à l'opposé du moteur ou droite)
Système d'entraînement
65Festo — EMCS-ST — 2019-07
11.3.4 Mode End-to-End avec fonction presse
11.3.4.1 FonctionEn mode End-to-End avec fonction presse, l'actionneur peut être déplacé sur les deux fins decourse « LimIn/ LimOut ». Lors de la course sur la fin de course « LimOut », la vitesse est régulée jus-qu'à la position Start Press « PosStart Press », la course se poursuit ensuite avec régulation de la force.La fin de course « LimIn » est exclusivement accostée à vitesse régulée. Avec l'EMCS-ST, la commandedu mode End-to-End avec fonction presse s'effectue via l'interface de commande « Entrées/sor-ties numériques (DIO) » ou « IO-Link (LK) » [Logic]. Le sens de déplacement vers la fin de course dé-pend de la configuration de la fin de course de référence Ref. La consigne d'arrêt permet de stopperl'actionneur à n'importe quelle position de la plage de course/d'angle « xIn/Out ». La poursuite de lacourse s'effectue de nouveau via la consigne de départ sur l'interface de commande. Dès que la fin decourse « LimIn/LimOut » ou la position d'arrêt « PosStopp » est atteinte, l'actionneur s'immobilise parrégulation de position.La fonction presse est activée via la consigne « Start Press Position PosStart Press . fin decourse LimOut ». La consigne peut s'effectuée via les interfaces suivantes :– Éléments d'affichage et de commande (IHM) : menu « Start Press »– IO-Link (LK), données de processus acycliques : position « xStart Press », index 0x0105, sous-in-
dex 0La commande s'effectue via les interfaces suivantes :– Entrées/sorties numériques (DIO)
– Entrée numérique DI1, « MovIn » [Logic]– Entrée numérique DI2, « MovOut » [Logic]
– IO-Link (LK) è 14.2.2 Données de processus– Index 0x0029, sous-index 1, « MoveIn »– Index 0x0029, sous-index 2, « MoveOut »
Les instructions sont les suivantes :– StartIn : course régulée en vitesse et en force « MovIn » dans la fin de course « LimIn (Ref) » (dé-
marrer/poursuivre)– StartOut : course régulée en vitesse et en force « MovOut » dans la fin de course « LimOut » (démar-
rer/poursuivre)– StopIn/StoppOut : stopper la course
La commande et l'évaluation de la force s'effectue en régulant le courant moteur. En fonction de lamécanique de l'actionneur, la mesure du courant permet de déterminer un couple de torsion ou uneforce linéaire. La consigne est définie en pourcentage du courant nominal du moteur et peut différerde la force réelle exercée sur l'unité d'entraînement. En cas de faibles niveaux de force configurés, ilfaut également tenir compte de l'influence des frottements dans le système sur le comportement dedéplacement et de la force réelle de l'unité d'entraînement.
Système d'entraînement
66 Festo — EMCS-ST — 2019-07
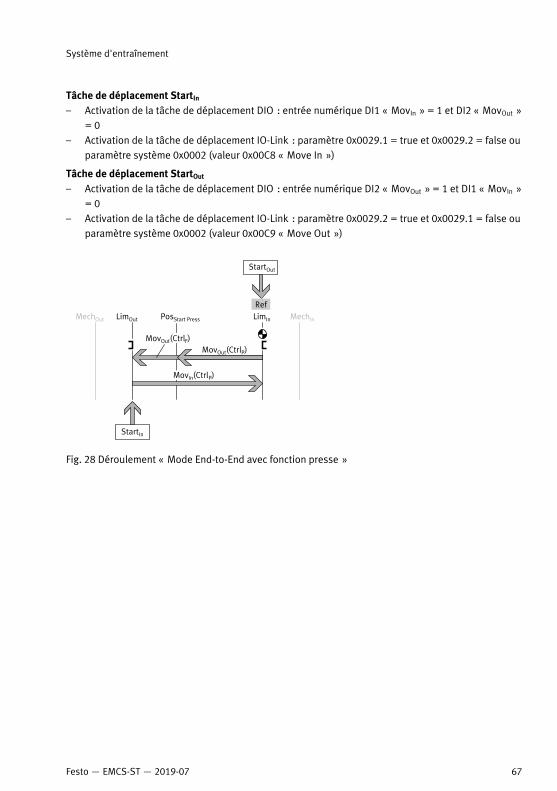
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Fig. 28 Déroulement « Mode End-to-End avec fonction presse »
Système d'entraînement
67Festo — EMCS-ST — 2019-07
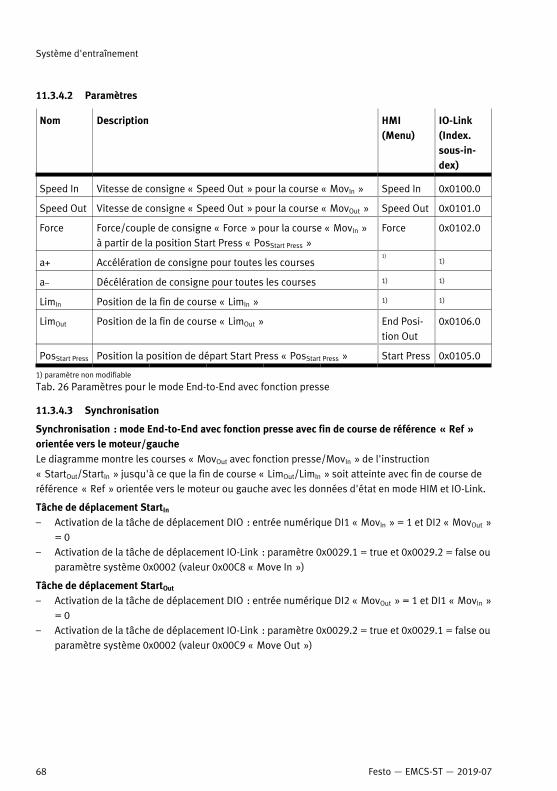
11.3.4.2 Paramètres
Nom Description HMI(Menu)
IO-Link(Index.sous-in-dex)
Speed In Vitesse de consigne « Speed Out » pour la course « MovIn » Speed In 0x0100.0
Speed Out Vitesse de consigne « Speed Out » pour la course « MovOut » Speed Out 0x0101.0
Force Force/couple de consigne « Force » pour la course « MovIn »à partir de la position Start Press « PosStart Press »
Force 0x0102.0
a+ Accélération de consigne pour toutes les courses1)
1)
a– Décélération de consigne pour toutes les courses 1) 1)
LimIn Position de la fin de course « LimIn » 1) 1)
LimOut Position de la fin de course « LimOut » End Posi-tion Out
0x0106.0
PosStart Press Position la position de départ Start Press « PosStart Press » Start Press 0x0105.0
1) paramètre non modifiable
Tab. 26 Paramètres pour le mode End-to-End avec fonction presse
11.3.4.3 Synchronisation
Synchronisation : mode End-to-End avec fonction presse avec fin de course de référence « Ref »orientée vers le moteur/gaucheLe diagramme montre les courses « MovOut avec fonction presse/MovIn » de l'instruction« StartOut/StartIn » jusqu'à ce que la fin de course « LimOut/LimIn » soit atteinte avec fin de course deréférence « Ref » orientée vers le moteur ou gauche avec les données d'état en mode HIM et IO-Link.
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
68 Festo — EMCS-ST — 2019-07
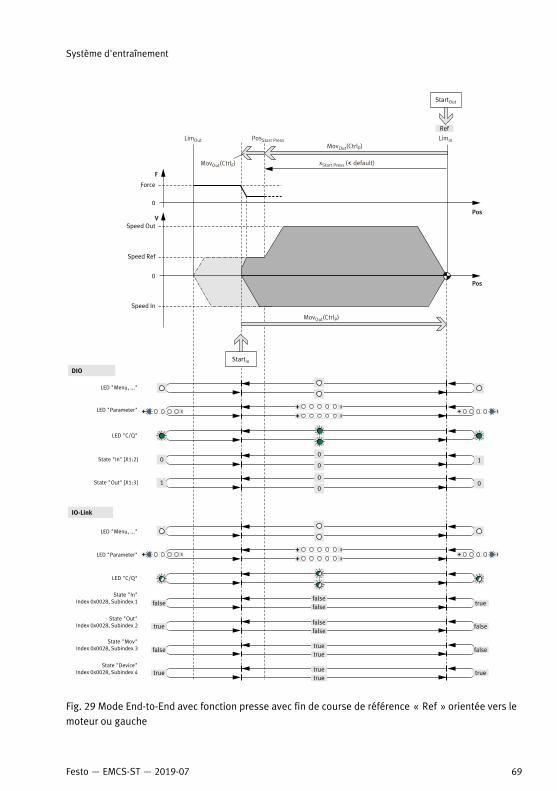
Fig. 29 Mode End-to-End avec fonction presse avec fin de course de référence « Ref » orientée vers lemoteur ou gauche
Système d'entraînement
69Festo — EMCS-ST — 2019-07
Synchronisation : mode End-to-End avec fonction presse avec fin de course de référence « Ref » àl'opposé du moteur ou droiteLe diagramme montre les courses « MovOut avec fonction presse/MovIn » de l'instruction« StartOut/StartIn » jusqu'à ce que la fin de course « LimOut/LimIn » soit atteinte avec fin de course deréférence « Ref » à l'opposé du moteur ou droite avec les données d'état en mode DIO et IO-Link.
Tâche de déplacement StartIn
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 1 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = true et 0x0029.2 = false ouparamètre système 0x0002 (valeur 0x00C8 « Move In »)
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Système d'entraînement
70 Festo — EMCS-ST — 2019-07
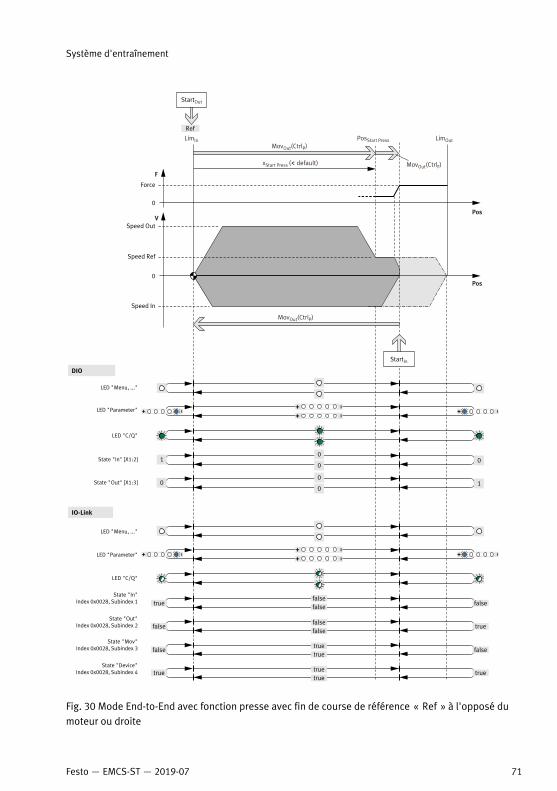
Fig. 30 Mode End-to-End avec fonction presse avec fin de course de référence « Ref » à l'opposé dumoteur ou droite
Système d'entraînement
71Festo — EMCS-ST — 2019-07
Synchronisation : arrêt et poursuite du mode End-to-End avec fonction presseLe diagramme montre l'arrêt et la poursuite des courses « MovOut avec fonction presse » depuis l'ins-truction « StopOut » jusqu'à que la fin de course « LimOut » avec fin de course de référence « Ref » àl'opposé du moteur ou droite avec les données d'état en mode DIO et IO-Link.
Tâche de déplacement StartOut
– Activation de la tâche de déplacement DIO : entrée numérique DI2 « MovOut » = 1 et DI1 « MovIn »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.2 = true et 0x0029.1 = false ouparamètre système 0x0002 (valeur 0x00C9 « Move Out »)
Tâche de déplacement StopOut
– Activation de la tâche de déplacement DIO : entrée numérique DI1 « MovIn » = 0 et DI2 « MovOut »= 0
– Activation de la tâche de déplacement IO-Link : paramètre 0x0029.1 = false et 0x0029.2 = falseou paramètre système 0x0002 (valeur 0x00CA « Stop Motion »)
Système d'entraînement
72 Festo — EMCS-ST — 2019-07
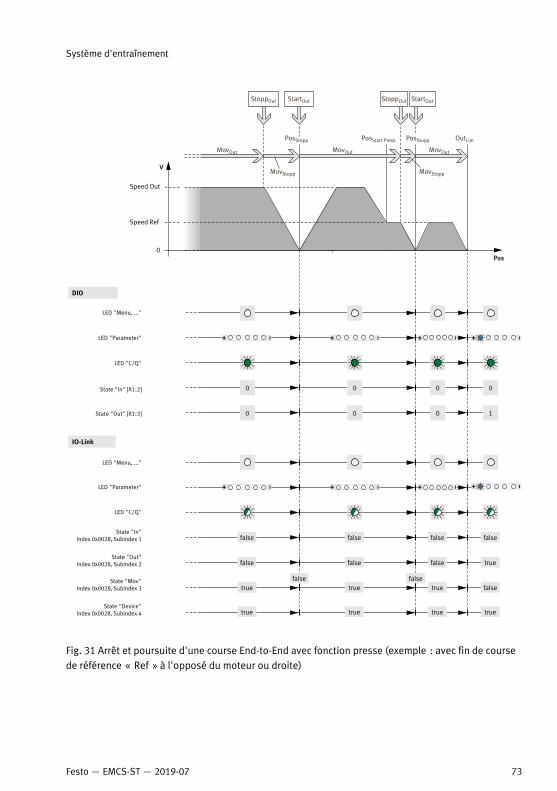
Fig. 31 Arrêt et poursuite d'une course End-to-End avec fonction presse (exemple : avec fin de coursede référence « Ref » à l'opposé du moteur ou droite)
Système d'entraînement
73Festo — EMCS-ST — 2019-07
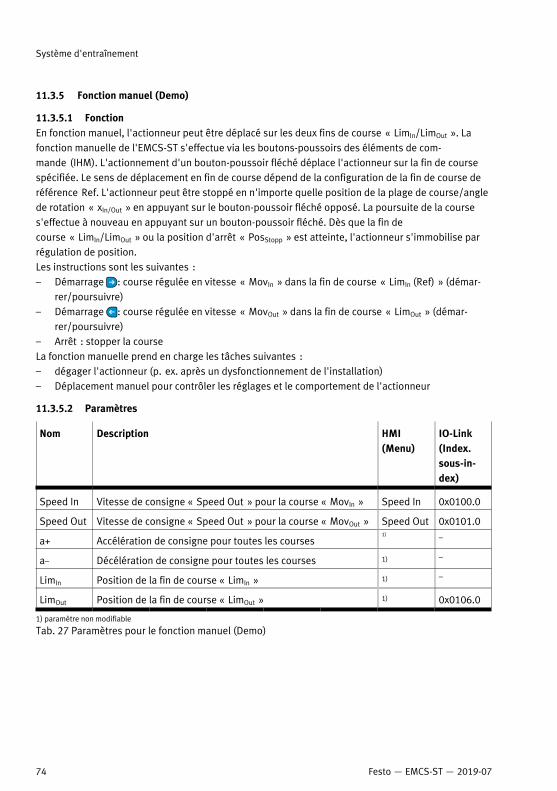
11.3.5 Fonction manuel (Demo)
11.3.5.1 FonctionEn fonction manuel, l'actionneur peut être déplacé sur les deux fins de course « LimIn/LimOut ». Lafonction manuelle de l'EMCS-ST s'effectue via les boutons-poussoirs des éléments de com-mande (IHM). L'actionnement d'un bouton-poussoir fléché déplace l'actionneur sur la fin de coursespécifiée. Le sens de déplacement en fin de course dépend de la configuration de la fin de course deréférence Ref. L'actionneur peut être stoppé en n'importe quelle position de la plage de course/anglede rotation « xIn/Out » en appuyant sur le bouton-poussoir fléché opposé. La poursuite de la courses'effectue à nouveau en appuyant sur un bouton-poussoir fléché. Dès que la fin decourse « LimIn/LimOut » ou la position d'arrêt « PosStopp » est atteinte, l'actionneur s'immobilise parrégulation de position.Les instructions sont les suivantes :– Démarrage : course régulée en vitesse « MovIn » dans la fin de course « LimIn (Ref) » (démar-
rer/poursuivre)– Démarrage : course régulée en vitesse « MovOut » dans la fin de course « LimOut » (démar-
rer/poursuivre)– Arrêt : stopper la courseLa fonction manuelle prend en charge les tâches suivantes :– dégager l'actionneur (p. ex. après un dysfonctionnement de l'installation) – Déplacement manuel pour contrôler les réglages et le comportement de l'actionneur
11.3.5.2 Paramètres
Nom Description HMI(Menu)
IO-Link(Index.sous-in-dex)
Speed In Vitesse de consigne « Speed Out » pour la course « MovIn » Speed In 0x0100.0
Speed Out Vitesse de consigne « Speed Out » pour la course « MovOut » Speed Out 0x0101.0
a+ Accélération de consigne pour toutes les courses1) –
a– Décélération de consigne pour toutes les courses 1) –
LimIn Position de la fin de course « LimIn » 1) –
LimOut Position de la fin de course « LimOut » 1) 0x0106.0
1) paramètre non modifiable
Tab. 27 Paramètres pour le fonction manuel (Demo)
Système d'entraînement
74 Festo — EMCS-ST — 2019-07
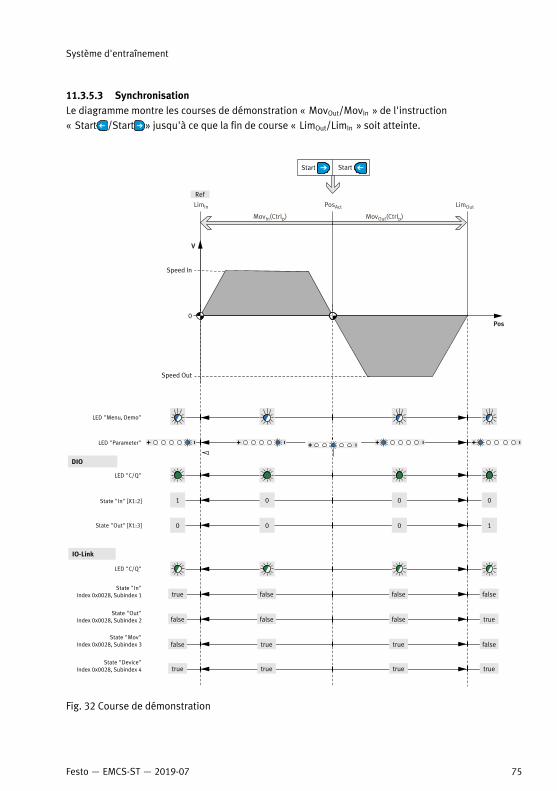
11.3.5.3 SynchronisationLe diagramme montre les courses de démonstration « MovOut/MovIn » de l'instruction« Start /Start » jusqu'à ce que la fin de course « LimOut/LimIn » soit atteinte.
Fig. 32 Course de démonstration
Système d'entraînement
75Festo — EMCS-ST — 2019-07
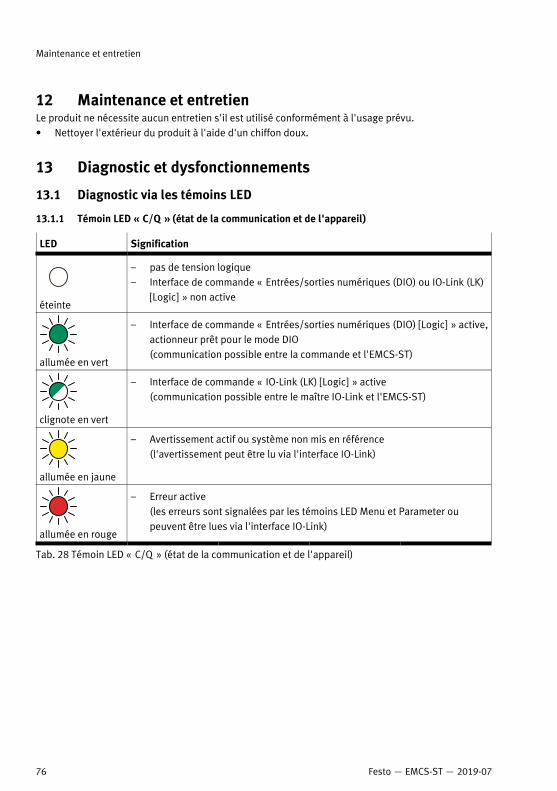
12 Maintenance et entretienLe produit ne nécessite aucun entretien s'il est utilisé conformément à l'usage prévu.• Nettoyer l'extérieur du produit à l'aide d'un chiffon doux.
13 Diagnostic et dysfonctionnements
13.1 Diagnostic via les témoins LED
13.1.1 Témoin LED « C/Q » (état de la communication et de l'appareil)
LED Signification
éteinte
– pas de tension logique– Interface de commande « Entrées/sorties numériques (DIO) ou IO-Link (LK)
[Logic] » non active
allumée en vert
– Interface de commande « Entrées/sorties numériques (DIO) [Logic] » active,actionneur prêt pour le mode DIO(communication possible entre la commande et l'EMCS-ST)
clignote en vert
– Interface de commande « IO-Link (LK) [Logic] » active(communication possible entre le maître IO-Link et l'EMCS-ST)
allumée en jaune
– Avertissement actif ou système non mis en référence(l'avertissement peut être lu via l'interface IO-Link)
allumée en rouge
– Erreur active(les erreurs sont signalées par les témoins LED Menu et Parameter oupeuvent être lues via l'interface IO-Link)
Tab. 28 Témoin LED « C/Q » (état de la communication et de l'appareil)
Maintenance et entretien
76 Festo — EMCS-ST — 2019-07
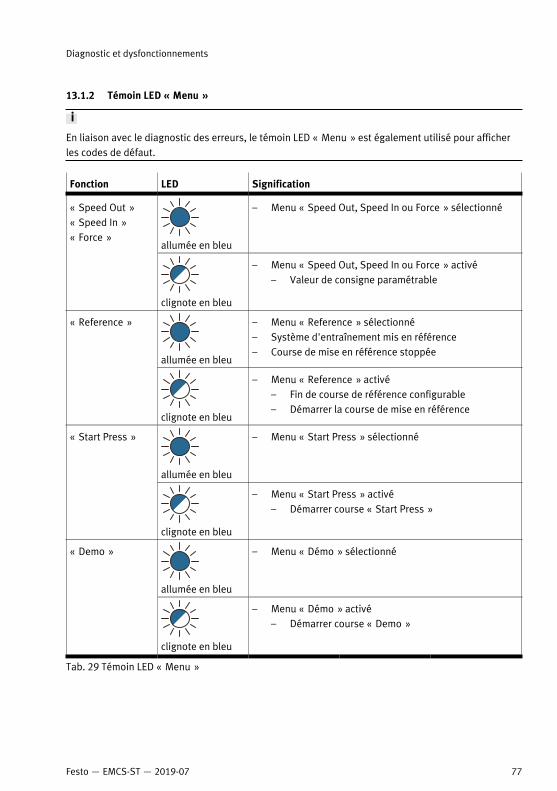
13.1.2 Témoin LED « Menu »
En liaison avec le diagnostic des erreurs, le témoin LED « Menu » est également utilisé pour afficherles codes de défaut.
Fonction LED Signification
allumée en bleu
– Menu « Speed Out, Speed In ou Force » sélectionné« Speed Out »« Speed In »« Force »
clignote en bleu
– Menu « Speed Out, Speed In ou Force » activé– Valeur de consigne paramétrable
allumée en bleu
– Menu « Reference » sélectionné– Système d'entraînement mis en référence– Course de mise en référence stoppée
« Reference »
clignote en bleu
– Menu « Reference » activé– Fin de course de référence configurable– Démarrer la course de mise en référence
allumée en bleu
– Menu « Start Press » sélectionné« Start Press »
clignote en bleu
– Menu « Start Press » activé– Démarrer course « Start Press »
allumée en bleu
– Menu « Démo » sélectionné« Demo »
clignote en bleu
– Menu « Démo » activé– Démarrer course « Demo »
Tab. 29 Témoin LED « Menu »
Diagnostic et dysfonctionnements
77Festo — EMCS-ST — 2019-07
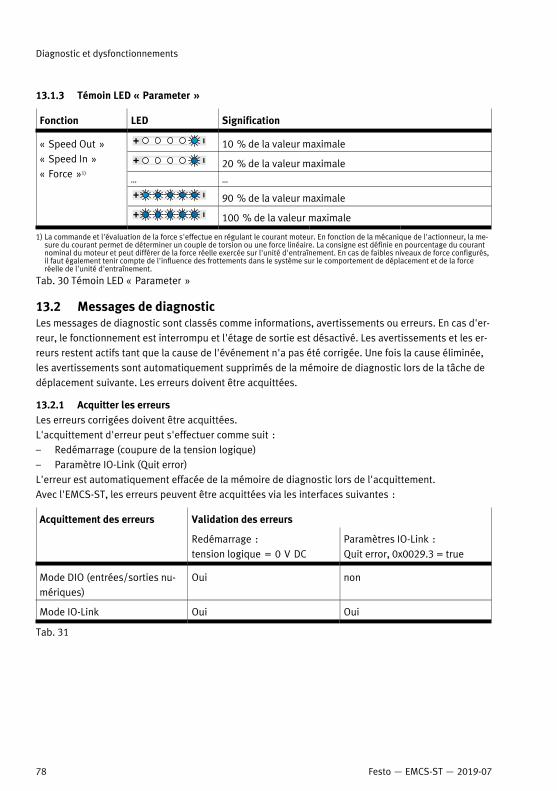
13.1.3 Témoin LED « Parameter »
Fonction LED Signification
10 % de la valeur maximale
20 % de la valeur maximale… …
90 % de la valeur maximale
« Speed Out »« Speed In »« Force »1)
100 % de la valeur maximale
1) La commande et l'évaluation de la force s'effectue en régulant le courant moteur. En fonction de la mécanique de l'actionneur, la me-sure du courant permet de déterminer un couple de torsion ou une force linéaire. La consigne est définie en pourcentage du courantnominal du moteur et peut différer de la force réelle exercée sur l'unité d'entraînement. En cas de faibles niveaux de force configurés,il faut également tenir compte de l'influence des frottements dans le système sur le comportement de déplacement et de la forceréelle de l'unité d'entraînement.
Tab. 30 Témoin LED « Parameter »
13.2 Messages de diagnosticLes messages de diagnostic sont classés comme informations, avertissements ou erreurs. En cas d'er-reur, le fonctionnement est interrompu et l'étage de sortie est désactivé. Les avertissements et les er-reurs restent actifs tant que la cause de l'événement n'a pas été corrigée. Une fois la cause éliminée,les avertissements sont automatiquement supprimés de la mémoire de diagnostic lors de la tâche dedéplacement suivante. Les erreurs doivent être acquittées.
13.2.1 Acquitter les erreursLes erreurs corrigées doivent être acquittées.L'acquittement d'erreur peut s'effectuer comme suit :– Redémarrage (coupure de la tension logique)– Paramètre IO-Link (Quit error)L'erreur est automatiquement effacée de la mémoire de diagnostic lors de l'acquittement.Avec l'EMCS-ST, les erreurs peuvent être acquittées via les interfaces suivantes :
Validation des erreursAcquittement des erreurs
Redémarrage :tension logique = 0 V DC
Paramètres IO-Link :Quit error, 0x0029.3 = true
Mode DIO (entrées/sorties nu-mériques)
Oui non
Mode IO-Link Oui Oui
Tab. 31
Diagnostic et dysfonctionnements
78 Festo — EMCS-ST — 2019-07
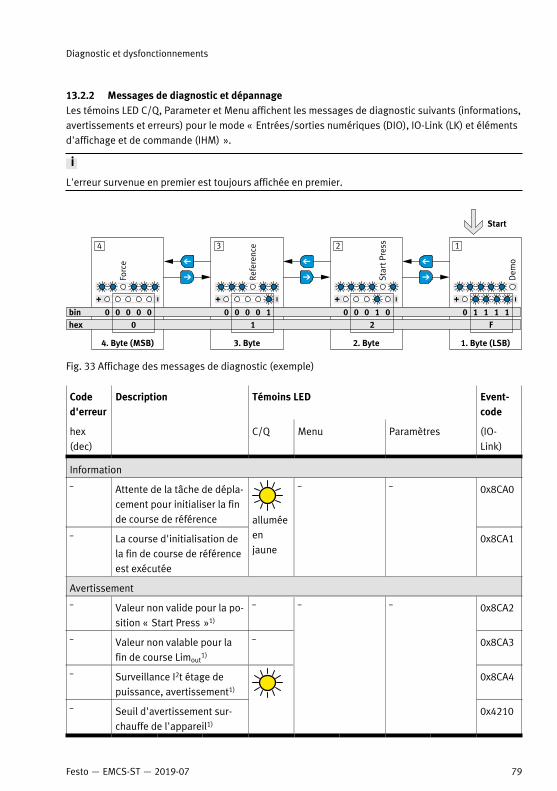
13.2.2 Messages de diagnostic et dépannageLes témoins LED C/Q, Parameter et Menu affichent les messages de diagnostic suivants (informations,avertissements et erreurs) pour le mode « Entrées/sorties numériques (DIO), IO-Link (LK) et élémentsd'affichage et de commande (IHM) ».
L'erreur survenue en premier est toujours affichée en premier.
Fig. 33 Affichage des messages de diagnostic (exemple)
Coded'erreur
Description Témoins LED Event-code
hex(dec)
C/Q Menu Paramètres (IO-Link)
Informationz Attente de la tâche de dépla-
cement pour initialiser la finde course de référence
0x8CA0
z La course d'initialisation dela fin de course de référenceest exécutée
alluméeenjaune
z z
0x8CA1
Avertissementz Valeur non valide pour la po-
sition « Start Press »1)
z 0x8CA2
z Valeur non valable pour lafin de course Limout
1)
z 0x8CA3
z Surveillance I2t étage depuissance, avertissement1)
0x8CA4
z Seuil d'avertissement sur-chauffe de l'appareil1)
z z
0x4210
Diagnostic et dysfonctionnements
79Festo — EMCS-ST — 2019-07
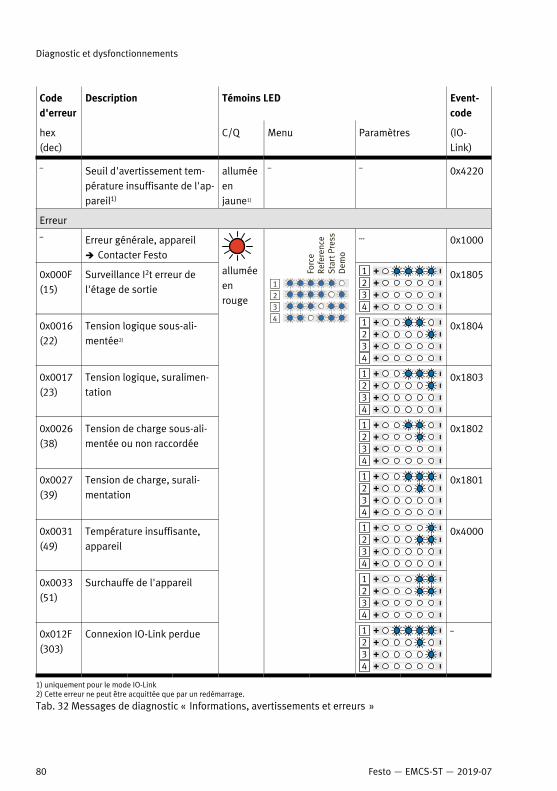
Coded'erreur
Description Témoins LED Event-code
hex(dec)
C/Q Menu Paramètres (IO-Link)
z Seuil d'avertissement tem-pérature insuffisante de l'ap-pareil1)
alluméeenjaune1)
z z 0x4220
Erreurz Erreur générale, appareil
è Contacter Festo
… 0x1000
0x000F(15)
Surveillance I2t erreur del'étage de sortie
0x1805
0x0016(22)
Tension logique sous-ali-mentée2)
0x1804
0x0017(23)
Tension logique, suralimen-tation
0x1803
0x0026(38)
Tension de charge sous-ali-mentée ou non raccordée
0x1802
0x0027(39)
Tension de charge, surali-mentation
0x1801
0x0031(49)
Température insuffisante,appareil
0x0033(51)
Surchauffe de l'appareil
0x4000
0x012F(303)
Connexion IO-Link perdue
alluméeenrouge
z
1) uniquement pour le mode IO-Link2) Cette erreur ne peut être acquittée que par un redémarrage.
Tab. 32 Messages de diagnostic « Informations, avertissements et erreurs »
Diagnostic et dysfonctionnements
80 Festo — EMCS-ST — 2019-07
13.3 RéparationLa réparation ou la remise en état du produit n’est pas autorisée. Si nécessaire, remplacer le produitcomplet.– En cas de défaut interne : remplacer le produit.– Envoyer le produit défectueux non modifié accompagné d'une description de l'erreur et du cas
d'utilisation, à des fins d'analyse à Festo.– Veuillez contacter votre interlocuteur Festo régional pour clarifier les modalités du retour.
14 IO-Link
14.1 Fichier de description d'appareil IODD
Le temps de démarrage de l'actionneur intégré EMCS-ST est de 1 s et diffère de la spécification IO-Link.
En fonction du système d'entraînement, des fichiers de description d'appareil (fichiers IODD) sont dis-ponibles pour configurer l'actionneur intégré EMCS-ST en mode IO-Link.
Système d'entraînement Nom de fichier IODD
Linéaire
Module de mini-chariot EGSS Festo-EGSS-...-IODD1.1.xml
Module d'axe à vis à billes ELGS-BS Festo-ELGS-BS-...-IODD1.1.xml
Module d'axe à courroie crantée ELGE-TB Festo-ELGE-TB-...-IODD1.1.xml
Module d'axe à courroie crantée ELGS-TB Festo-ELGS-TB-...-IODD1.1.xml
Rotatif
Module de vérin rotatif ERMS Festo-ERMS-...-IODD1.1.xml
Tab. 33 Fichier de description d'appareil IODD
Les fichiers de description d'appareil actuels sont disponibles sur le portail d'assistance de Festoè www.festo.com/sp.
14.2 Paramètres IO-LinkLes groupes de paramètres suivants sont disponibles pour la configuration et le fonctionnement del'actionneur intégré dans un réseau IO-Link :– paramètres d'identification (ID, numéros de version, ....)– données de processus (commandes, informations d'état, ....)– données d'appareil (consignes et valeurs réelles, valeurs limites, ....)– paramètres système (fonctions de commande pour logiciel d'application, ....)
IO-Link
81Festo — EMCS-ST — 2019-07
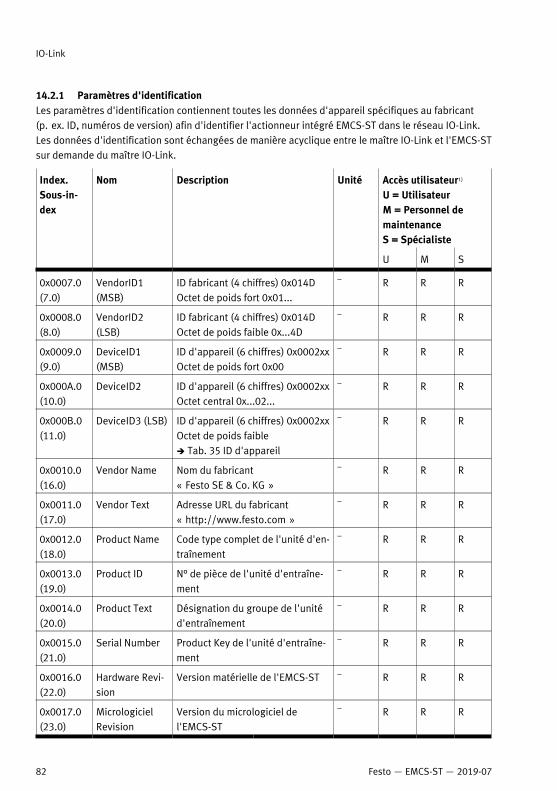
14.2.1 Paramètres d'identificationLes paramètres d'identification contiennent toutes les données d'appareil spécifiques au fabricant(p. ex. ID, numéros de version) afin d'identifier l'actionneur intégré EMCS-ST dans le réseau IO-Link.Les données d'identification sont échangées de manière acyclique entre le maître IO-Link et l'EMCS-STsur demande du maître IO-Link.
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x0007.0(7.0)
VendorID1(MSB)
ID fabricant (4 chiffres) 0x014DOctet de poids fort 0x01...
– R R R
0x0008.0(8.0)
VendorID2(LSB)
ID fabricant (4 chiffres) 0x014DOctet de poids faible 0x...4D
– R R R
0x0009.0(9.0)
DeviceID1(MSB)
ID d'appareil (6 chiffres) 0x0002xxOctet de poids fort 0x00
– R R R
0x000A.0(10.0)
DeviceID2 ID d'appareil (6 chiffres) 0x0002xxOctet central 0x...02...
– R R R
0x000B.0(11.0)
DeviceID3 (LSB) ID d'appareil (6 chiffres) 0x0002xxOctet de poids faibleè Tab. 35 ID d'appareil
– R R R
0x0010.0(16.0)
Vendor Name Nom du fabricant« Festo SE & Co. KG »
– R R R
0x0011.0(17.0)
Vendor Text Adresse URL du fabricant« http://www.festo.com »
– R R R
0x0012.0(18.0)
Product Name Code type complet de l'unité d'en-traînement
– R R R
0x0013.0(19.0)
Product ID N° de pièce de l'unité d'entraîne-ment
– R R R
0x0014.0(20.0)
Product Text Désignation du groupe de l'unitéd'entraînement
– R R R
0x0015.0(21.0)
Serial Number Product Key de l'unité d'entraîne-ment
– R R R
0x0016.0(22.0)
Hardware Revi-sion
Version matérielle de l'EMCS-ST – R R R
0x0017.0(23.0)
MicrologicielRevision
Version du micrologiciel del'EMCS-ST
– R R R
IO-Link
82 Festo — EMCS-ST — 2019-07
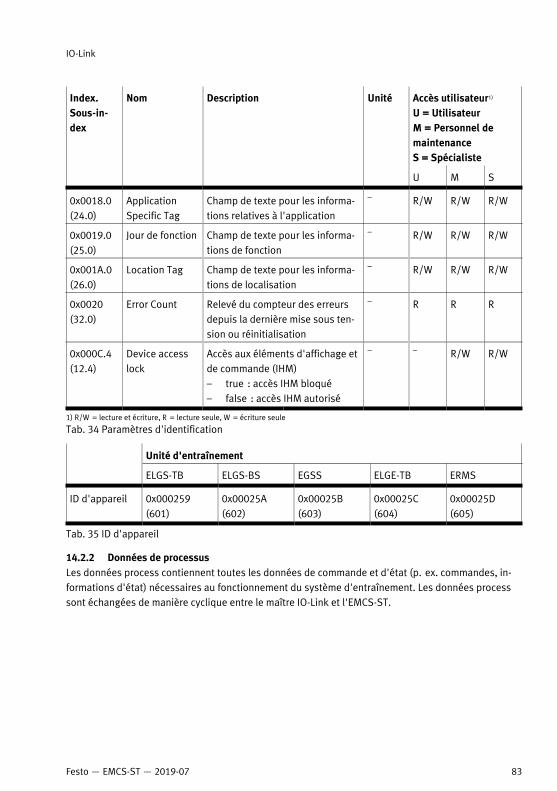
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x0018.0(24.0)
ApplicationSpecific Tag
Champ de texte pour les informa-tions relatives à l'application
– R/W R/W R/W
0x0019.0(25.0)
Jour de fonction Champ de texte pour les informa-tions de fonction
– R/W R/W R/W
0x001A.0(26.0)
Location Tag Champ de texte pour les informa-tions de localisation
– R/W R/W R/W
0x0020(32.0)
Error Count Relevé du compteur des erreursdepuis la dernière mise sous ten-sion ou réinitialisation
– R R R
0x000C.4(12.4)
Device accesslock
Accès aux éléments d'affichage etde commande (IHM)– true : accès IHM bloqué– false : accès IHM autorisé
– – R/W R/W
1) R/W = lecture et écriture, R = lecture seule, W = écriture seule
Tab. 34 Paramètres d'identification
Unité d'entraînement
ELGS-TB ELGS-BS EGSS ELGE-TB ERMS
ID d'appareil 0x000259(601)
0x00025A(602)
0x00025B(603)
0x00025C(604)
0x00025D(605)
Tab. 35 ID d'appareil
14.2.2 Données de processusLes données process contiennent toutes les données de commande et d'état (p. ex. commandes, in-formations d'état) nécessaires au fonctionnement du système d'entraînement. Les données processsont échangées de manière cyclique entre le maître IO-Link et l'EMCS-ST.
IO-Link
83Festo — EMCS-ST — 2019-07
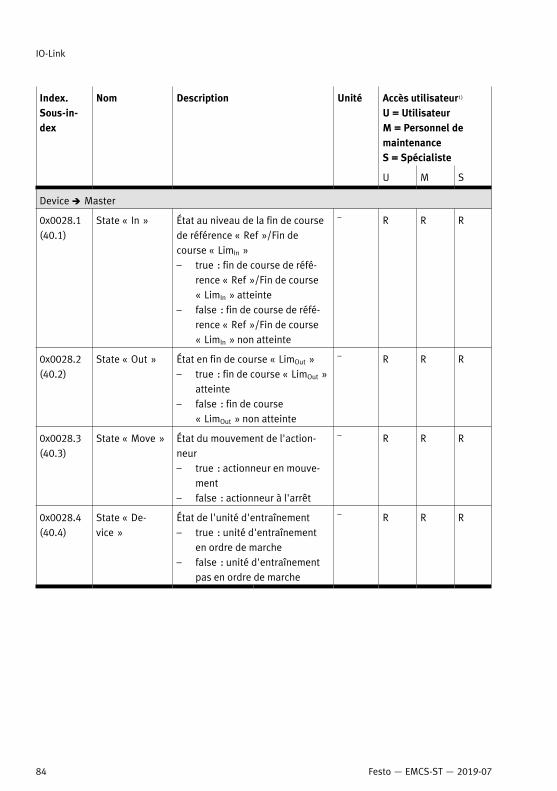
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
Device è Master
0x0028.1(40.1)
State « In » État au niveau de la fin de coursede référence « Ref »/Fin decourse « LimIn »– true : fin de course de réfé-
rence « Ref »/Fin de course« LimIn » atteinte
– false : fin de course de réfé-rence « Ref »/Fin de course« LimIn » non atteinte
– R R R
0x0028.2(40.2)
State « Out » État en fin de course « LimOut »– true : fin de course « LimOut »
atteinte– false : fin de course
« LimOut » non atteinte
– R R R
0x0028.3(40.3)
State « Move » État du mouvement de l'action-neur– true : actionneur en mouve-
ment– false : actionneur à l'arrêt
– R R R
0x0028.4(40.4)
State « De-vice »
État de l'unité d'entraînement– true : unité d'entraînement
en ordre de marche– false : unité d'entraînement
pas en ordre de marche
– R R R
IO-Link
84 Festo — EMCS-ST — 2019-07
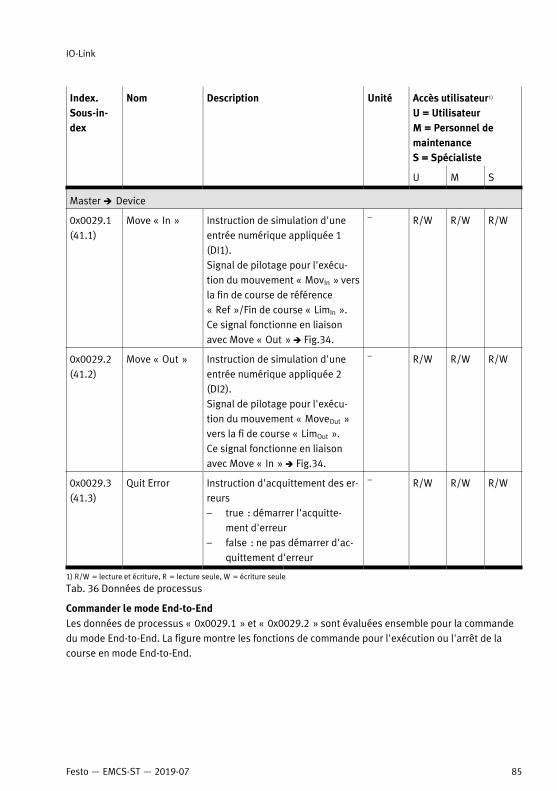
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
Master è Device
0x0029.1(41.1)
Move « In » Instruction de simulation d'uneentrée numérique appliquée 1(DI1).Signal de pilotage pour l'exécu-tion du mouvement « MovIn » versla fin de course de référence« Ref »/Fin de course « LimIn ».Ce signal fonctionne en liaisonavec Move « Out » è Fig.34.
– R/W R/W R/W
0x0029.2(41.2)
Move « Out » Instruction de simulation d'uneentrée numérique appliquée 2(DI2).Signal de pilotage pour l'exécu-tion du mouvement « MoveOut »vers la fi de course « LimOut ».Ce signal fonctionne en liaisonavec Move « In » è Fig.34.
– R/W R/W R/W
0x0029.3(41.3)
Quit Error Instruction d'acquittement des er-reurs– true : démarrer l'acquitte-
ment d'erreur– false : ne pas démarrer d'ac-
quittement d'erreur
– R/W R/W R/W
1) R/W = lecture et écriture, R = lecture seule, W = écriture seule
Tab. 36 Données de processus
Commander le mode End-to-EndLes données de processus « 0x0029.1 » et « 0x0029.2 » sont évaluées ensemble pour la commandedu mode End-to-End. La figure montre les fonctions de commande pour l'exécution ou l'arrêt de lacourse en mode End-to-End.
IO-Link
85Festo — EMCS-ST — 2019-07
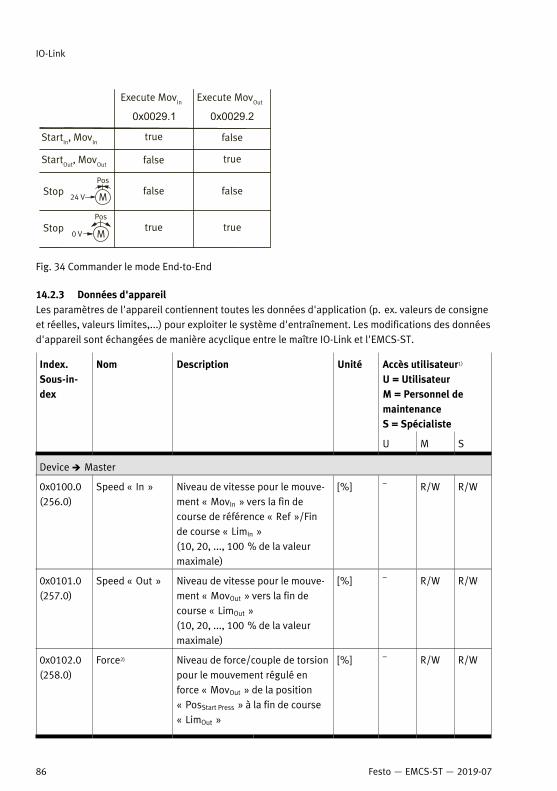
Fig. 34 Commander le mode End-to-End
14.2.3 Données d'appareilLes paramètres de l'appareil contiennent toutes les données d'application (p. ex. valeurs de consigneet réelles, valeurs limites,...) pour exploiter le système d'entraînement. Les modifications des donnéesd'appareil sont échangées de manière acyclique entre le maître IO-Link et l'EMCS-ST.
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
Device è Master
0x0100.0(256.0)
Speed « In » Niveau de vitesse pour le mouve-ment « MovIn » vers la fin decourse de référence « Ref »/Finde course « LimIn »(10, 20, ..., 100 % de la valeurmaximale)
[%] – R/W R/W
0x0101.0(257.0)
Speed « Out » Niveau de vitesse pour le mouve-ment « MovOut » vers la fin decourse « LimOut »(10, 20, ..., 100 % de la valeurmaximale)
[%] – R/W R/W
0x0102.0(258.0)
Force2) Niveau de force/couple de torsionpour le mouvement régulé enforce « MovOut » de la position« PosStart Press » à la fin de course« LimOut »
[%] – R/W R/W
IO-Link
86 Festo — EMCS-ST — 2019-07
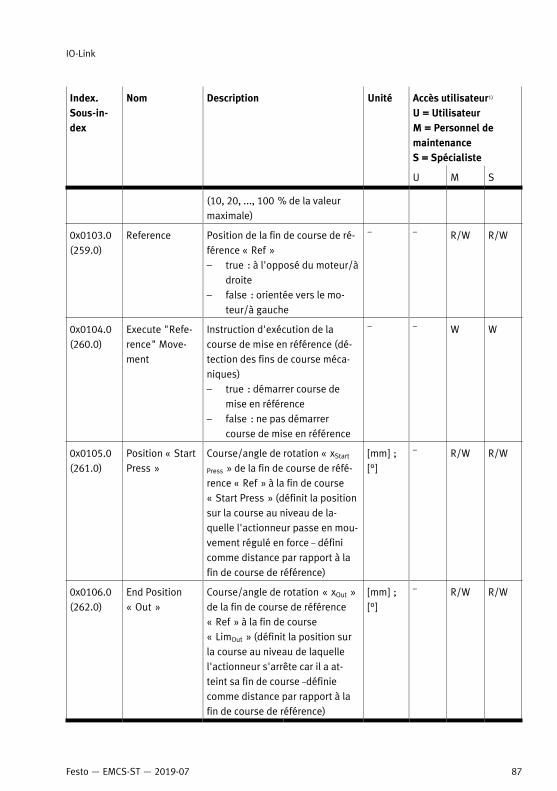
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
(10, 20, ..., 100 % de la valeurmaximale)
0x0103.0(259.0)
Reference Position de la fin de course de ré-férence « Ref »– true : à l'opposé du moteur/à
droite– false : orientée vers le mo-
teur/à gauche
– – R/W R/W
0x0104.0(260.0)
Execute "Refe-rence" Move-ment
Instruction d'exécution de lacourse de mise en référence (dé-tection des fins de course méca-niques)– true : démarrer course de
mise en référence– false : ne pas démarrer
course de mise en référence
– – W W
0x0105.0(261.0)
Position « StartPress »
Course/angle de rotation « xStart
Press » de la fin de course de réfé-rence « Ref » à la fin de course« Start Press » (définit la positionsur la course au niveau de la-quelle l'actionneur passe en mou-vement régulé en force – définicomme distance par rapport à lafin de course de référence)
[mm] ; [°]
– R/W R/W
0x0106.0(262.0)
End Position« Out »
Course/angle de rotation « xOut »de la fin de course de référence« Ref » à la fin de course« LimOut » (définit la position surla course au niveau de laquellel'actionneur s'arrête car il a at-teint sa fin de course –définiecomme distance par rapport à lafin de course de référence)
[mm] ; [°]
– R/W R/W
IO-Link
87Festo — EMCS-ST — 2019-07
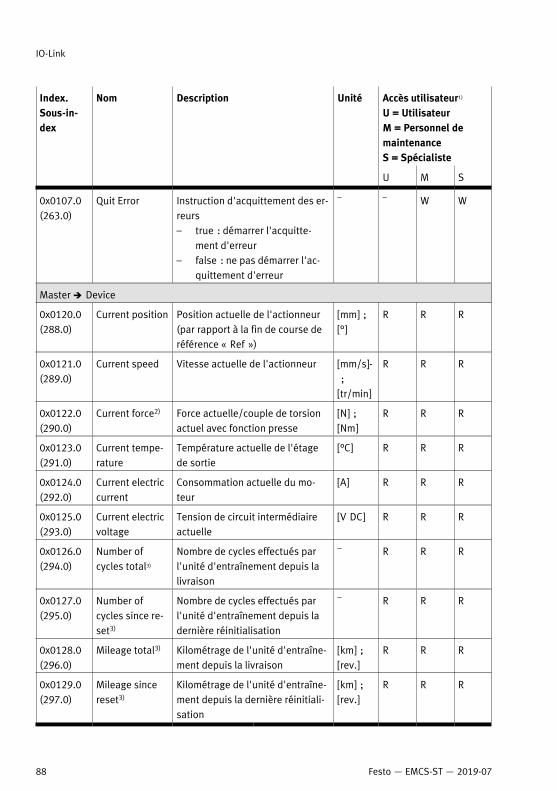
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x0107.0(263.0)
Quit Error Instruction d'acquittement des er-reurs– true : démarrer l'acquitte-
ment d'erreur– false : ne pas démarrer l'ac-
quittement d'erreur
– – W W
Master è Device
0x0120.0(288.0)
Current position Position actuelle de l'actionneur(par rapport à la fin de course deréférence « Ref »)
[mm] ; [°]
R R R
0x0121.0(289.0)
Current speed Vitesse actuelle de l'actionneur [mm/s]- ; [tr/min]
R R R
0x0122.0(290.0)
Current force2) Force actuelle/couple de torsionactuel avec fonction presse
[N] ; [Nm]
R R R
0x0123.0(291.0)
Current tempe-rature
Température actuelle de l'étagede sortie
[°C] R R R
0x0124.0(292.0)
Current electriccurrent
Consommation actuelle du mo-teur
[A] R R R
0x0125.0(293.0)
Current electricvoltage
Tension de circuit intermédiaireactuelle
[V DC] R R R
0x0126.0(294.0)
Number ofcycles total3)
Nombre de cycles effectués parl'unité d'entraînement depuis lalivraison
– R R R
0x0127.0(295.0)
Number ofcycles since re-set3)
Nombre de cycles effectués parl'unité d'entraînement depuis ladernière réinitialisation
– R R R
0x0128.0(296.0)
Mileage total3) Kilométrage de l'unité d'entraîne-ment depuis la livraison
[km] ; [rev.]
R R R
0x0129.0(297.0)
Mileage sincereset3)
Kilométrage de l'unité d'entraîne-ment depuis la dernière réinitiali-sation
[km] ; [rev.]
R R R
IO-Link
88 Festo — EMCS-ST — 2019-07
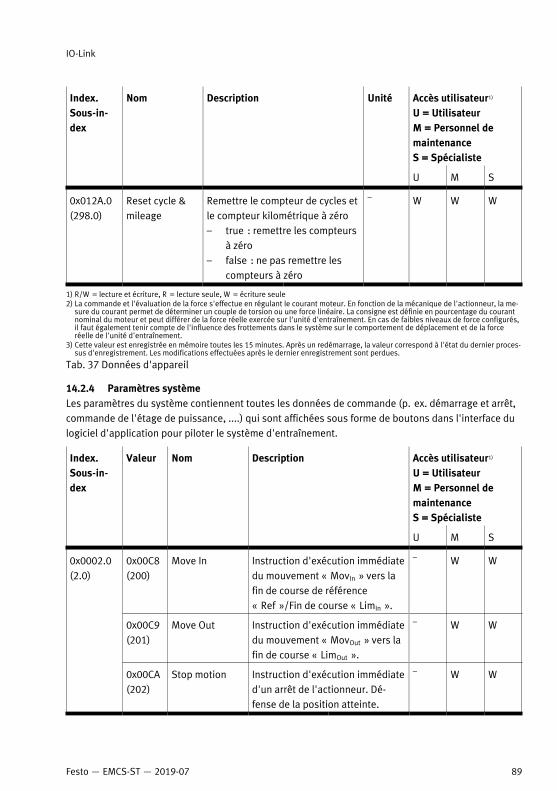
Index.Sous-in-dex
Nom Description Unité Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x012A.0(298.0)
Reset cycle &mileage
Remettre le compteur de cycles etle compteur kilométrique à zéro– true : remettre les compteurs
à zéro– false : ne pas remettre les
compteurs à zéro
– W W W
1) R/W = lecture et écriture, R = lecture seule, W = écriture seule2) La commande et l'évaluation de la force s'effectue en régulant le courant moteur. En fonction de la mécanique de l'actionneur, la me-
sure du courant permet de déterminer un couple de torsion ou une force linéaire. La consigne est définie en pourcentage du courantnominal du moteur et peut différer de la force réelle exercée sur l'unité d'entraînement. En cas de faibles niveaux de force configurés,il faut également tenir compte de l'influence des frottements dans le système sur le comportement de déplacement et de la forceréelle de l'unité d'entraînement.
3) Cette valeur est enregistrée en mémoire toutes les 15 minutes. Après un redémarrage, la valeur correspond à l'état du dernier proces-sus d'enregistrement. Les modifications effectuées après le dernier enregistrement sont perdues.
Tab. 37 Données d'appareil
14.2.4 Paramètres systèmeLes paramètres du système contiennent toutes les données de commande (p. ex. démarrage et arrêt,commande de l'étage de puissance, ....) qui sont affichées sous forme de boutons dans l'interface dulogiciel d'application pour piloter le système d'entraînement.
Index.Sous-in-dex
Valeur Nom Description Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x00C8(200)
Move In Instruction d'exécution immédiatedu mouvement « MovIn » vers lafin de course de référence« Ref »/Fin de course « LimIn ».
– W W
0x00C9(201)
Move Out Instruction d'exécution immédiatedu mouvement « MovOut » vers lafin de course « LimOut ».
– W W
0x0002.0(2.0)
0x00CA(202)
Stop motion Instruction d'exécution immédiated'un arrêt de l'actionneur. Dé-fense de la position atteinte.
– W W
IO-Link
89Festo — EMCS-ST — 2019-07
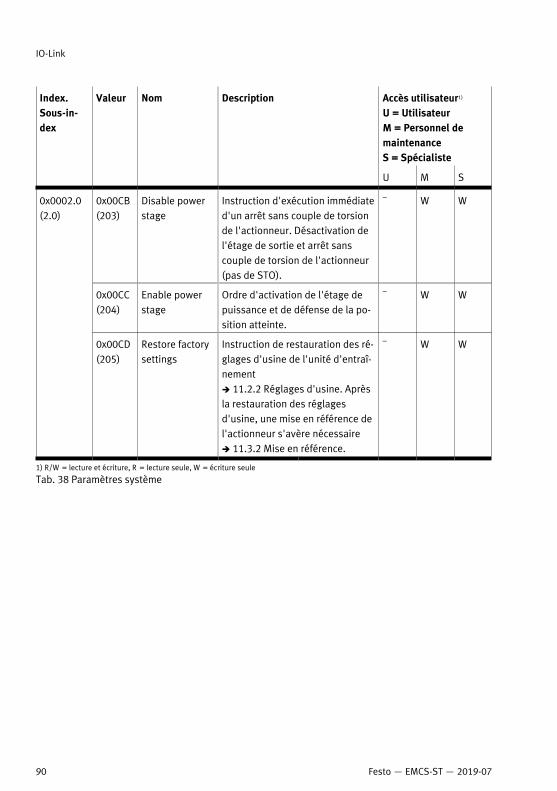
Index.Sous-in-dex
Valeur Nom Description Accès utilisateur1)
U = UtilisateurM = Personnel demaintenanceS = Spécialiste
U M S
0x00CB(203)
Disable powerstage
Instruction d'exécution immédiated'un arrêt sans couple de torsionde l'actionneur. Désactivation del'étage de sortie et arrêt sanscouple de torsion de l'actionneur(pas de STO).
– W W
0x00CC(204)
Enable powerstage
Ordre d'activation de l'étage depuissance et de défense de la po-sition atteinte.
– W W
0x0002.0(2.0)
0x00CD(205)
Restore factorysettings
Instruction de restauration des ré-glages d'usine de l'unité d'entraî-nementè 11.2.2 Réglages d'usine. Aprèsla restauration des réglagesd'usine, une mise en référence del'actionneur s'avère nécessaireè 11.3.2 Mise en référence.
– W W
1) R/W = lecture et écriture, R = lecture seule, W = écriture seule
Tab. 38 Paramètres système
IO-Link
90 Festo — EMCS-ST — 2019-07
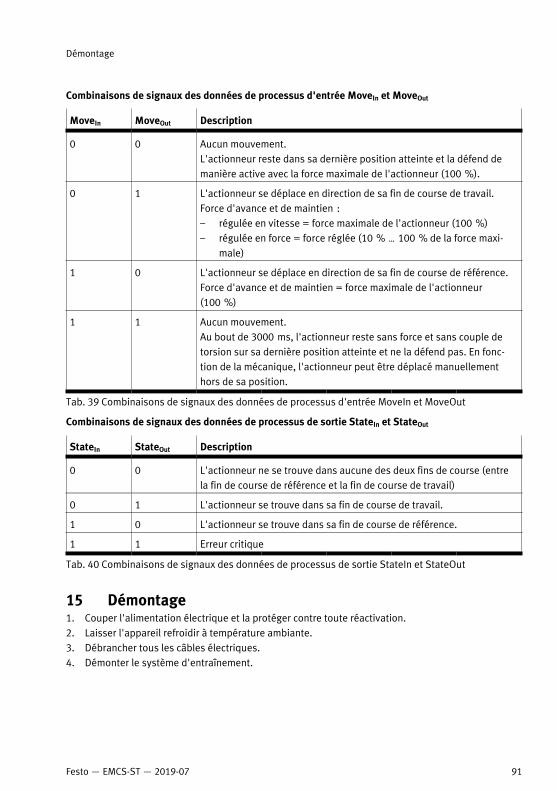
Combinaisons de signaux des données de processus d'entrée MoveIn et MoveOut
MoveIn MoveOut Description
0 0 Aucun mouvement.L'actionneur reste dans sa dernière position atteinte et la défend demanière active avec la force maximale de l'actionneur (100 %).
0 1 L'actionneur se déplace en direction de sa fin de course de travail.Force d'avance et de maintien :– régulée en vitesse = force maximale de l'actionneur (100 %)– régulée en force = force réglée (10 % … 100 % de la force maxi-
male)
1 0 L'actionneur se déplace en direction de sa fin de course de référence.Force d'avance et de maintien = force maximale de l'actionneur(100 %)
1 1 Aucun mouvement.Au bout de 3000 ms, l'actionneur reste sans force et sans couple detorsion sur sa dernière position atteinte et ne la défend pas. En fonc-tion de la mécanique, l'actionneur peut être déplacé manuellementhors de sa position.
Tab. 39 Combinaisons de signaux des données de processus d'entrée MoveIn et MoveOut
Combinaisons de signaux des données de processus de sortie StateIn et StateOut
StateIn StateOut Description
0 0 L'actionneur ne se trouve dans aucune des deux fins de course (entrela fin de course de référence et la fin de course de travail)
0 1 L'actionneur se trouve dans sa fin de course de travail.
1 0 L'actionneur se trouve dans sa fin de course de référence.
1 1 Erreur critique
Tab. 40 Combinaisons de signaux des données de processus de sortie StateIn et StateOut
15 Démontage1. Couper l'alimentation électrique et la protéger contre toute réactivation.2. Laisser l'appareil refroidir à température ambiante.3. Débrancher tous les câbles électriques.4. Démonter le système d'entraînement.
Démontage
91Festo — EMCS-ST — 2019-07
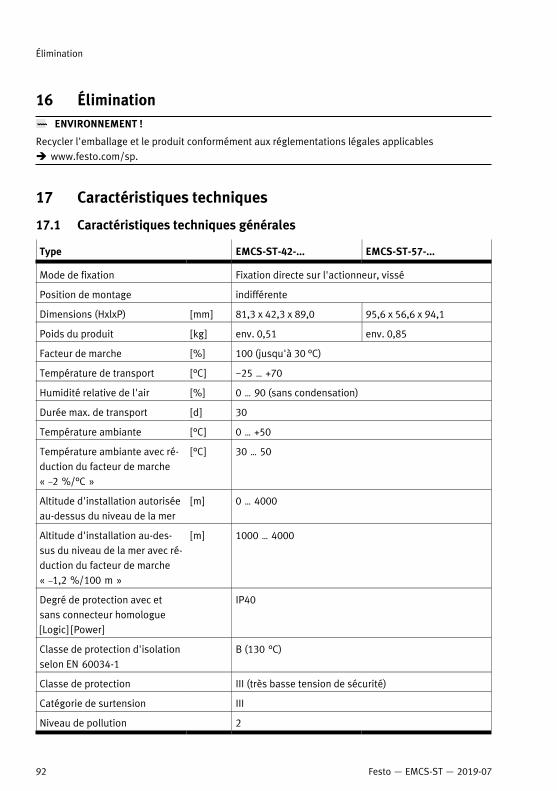
16 ÉliminationENVIRONNEMENT !
Recycler l'emballage et le produit conformément aux réglementations légales applicablesè www.festo.com/sp.
17 Caractéristiques techniques
17.1 Caractéristiques techniques générales
Type EMCS-ST-42-... EMCS-ST-57-...
Mode de fixation Fixation directe sur l'actionneur, vissé
Position de montage indifférente
Dimensions (HxlxP) [mm] 81,3 x 42,3 x 89,0 95,6 x 56,6 x 94,1
Poids du produit [kg] env. 0,51 env. 0,85
Facteur de marche [%] 100 (jusqu'à 30 °C)
Température de transport [°C] −25 … +70
Humidité relative de l'air [%] 0 … 90 (sans condensation)
Durée max. de transport [d] 30
Température ambiante [°C] 0 … +50
Température ambiante avec ré-duction du facteur de marche« –2 %/°C »
[°C] 30 … 50
Altitude d'installation autoriséeau-dessus du niveau de la mer
[m] 0 … 4000
Altitude d'installation au-des-sus du niveau de la mer avec ré-duction du facteur de marche« –1,2 %/100 m »
[m] 1000 … 4000
Degré de protection avec etsans connecteur homologue[Logic] [Power]
IP40
Classe de protection d'isolationselon EN 60034-1
B (130 °C)
Classe de protection III (très basse tension de sécurité)
Catégorie de surtension III
Niveau de pollution 2
Élimination
92 Festo — EMCS-ST — 2019-07
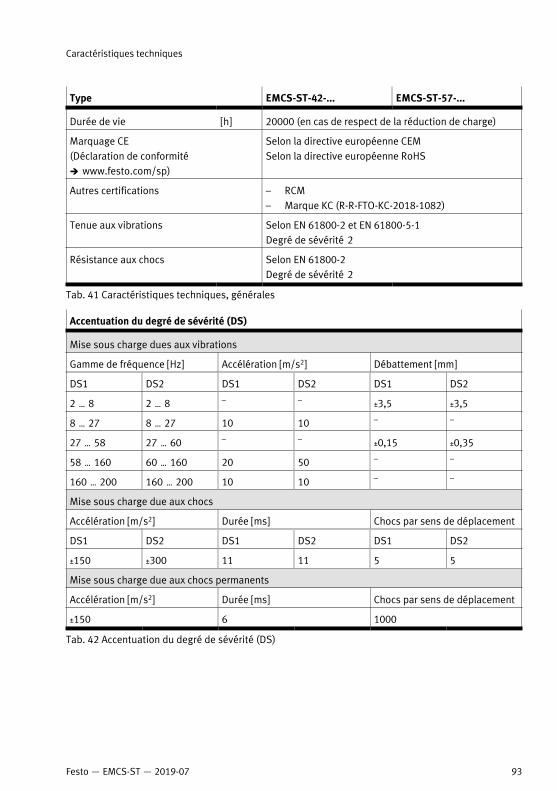
Type EMCS-ST-42-... EMCS-ST-57-...
Durée de vie [h] 20000 (en cas de respect de la réduction de charge)
Marquage CE(Déclaration de conformitéè www.festo.com/sp)
Selon la directive européenne CEMSelon la directive européenne RoHS
Autres certifications – RCM– Marque KC (R-R-FTO-KC-2018-1082)
Tenue aux vibrations Selon EN 61800-2 et EN 61800-5-1Degré de sévérité 2
Résistance aux chocs Selon EN 61800-2Degré de sévérité 2
Tab. 41 Caractéristiques techniques, générales
Accentuation du degré de sévérité (DS)
Mise sous charge dues aux vibrations
Gamme de fréquence [Hz] Accélération [m/s2] Débattement [mm]
DS1 DS2 DS1 DS2 DS1 DS2
2 … 8 2 … 8 – – ±3,5 ±3,5
8 … 27 8 … 27 10 10 – –
27 … 58 27 … 60 – – ±0,15 ±0,35
58 … 160 60 … 160 20 50 – –
160 … 200 160 … 200 10 10 – –
Mise sous charge due aux chocs
Accélération [m/s2] Durée [ms] Chocs par sens de déplacement
DS1 DS2 DS1 DS2 DS1 DS2
±150 ±300 11 11 5 5
Mise sous charge due aux chocs permanents
Accélération [m/s2] Durée [ms] Chocs par sens de déplacement
±150 6 1000
Tab. 42 Accentuation du degré de sévérité (DS)
Caractéristiques techniques
93Festo — EMCS-ST — 2019-07
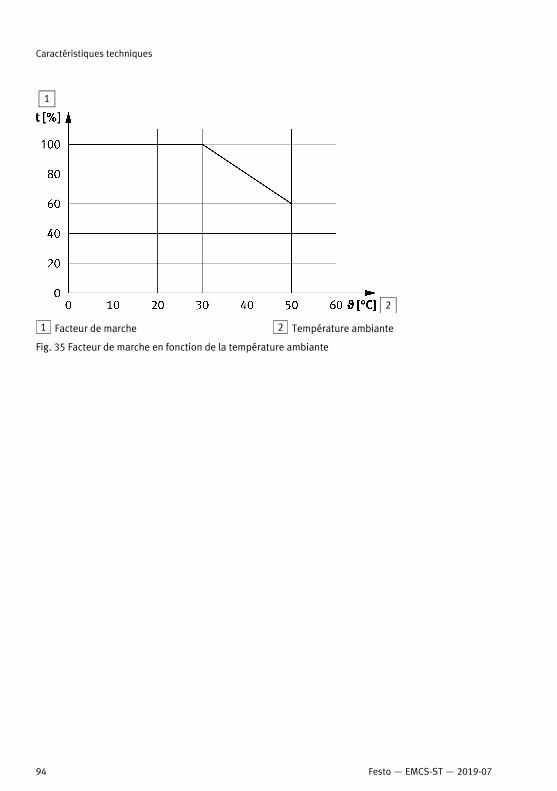
1 Facteur de marche 2 Température ambiante
Fig. 35 Facteur de marche en fonction de la température ambiante
Caractéristiques techniques
94 Festo — EMCS-ST — 2019-07
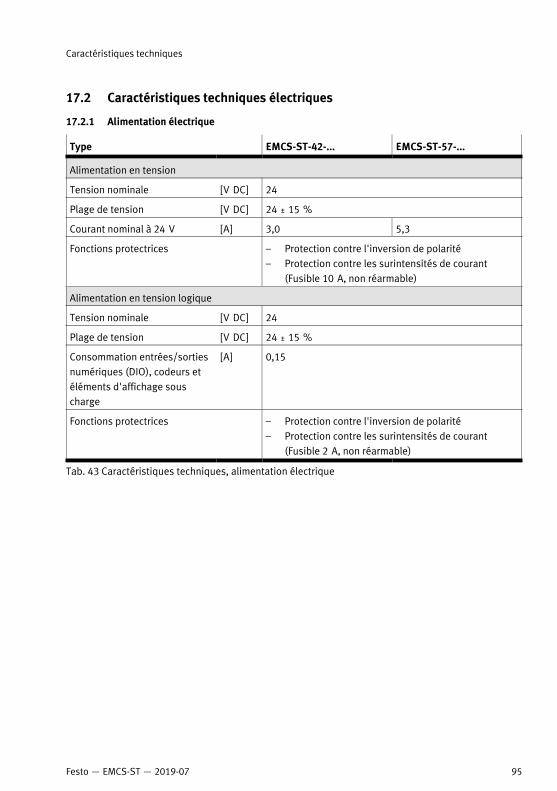
17.2 Caractéristiques techniques électriques
17.2.1 Alimentation électrique
Type EMCS-ST-42-... EMCS-ST-57-...
Alimentation en tension
Tension nominale [V DC] 24
Plage de tension [V DC] 24 ± 15 %
Courant nominal à 24 V [A] 3,0 5,3
Fonctions protectrices – Protection contre l'inversion de polarité– Protection contre les surintensités de courant
(Fusible 10 A, non réarmable)
Alimentation en tension logique
Tension nominale [V DC] 24
Plage de tension [V DC] 24 ± 15 %
Consommation entrées/sortiesnumériques (DIO), codeurs etéléments d'affichage souscharge
[A] 0,15
Fonctions protectrices – Protection contre l'inversion de polarité– Protection contre les surintensités de courant
(Fusible 2 A, non réarmable)
Tab. 43 Caractéristiques techniques, alimentation électrique
Caractéristiques techniques
95Festo — EMCS-ST — 2019-07
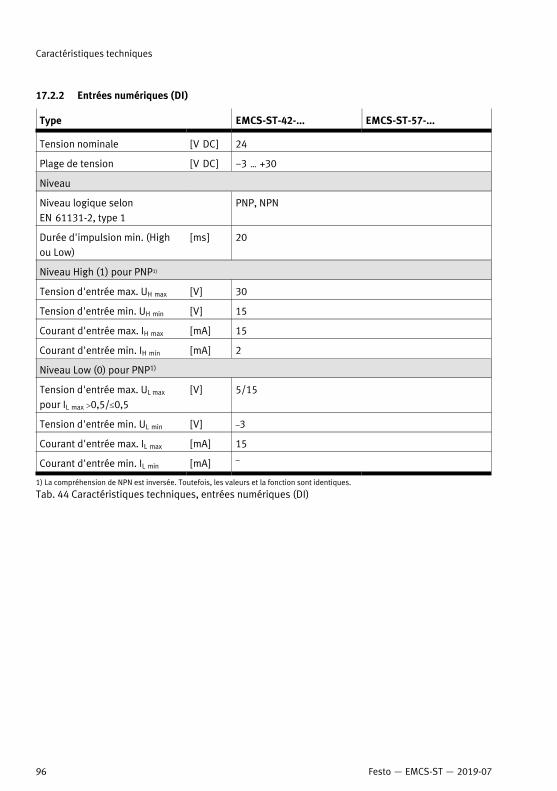
17.2.2 Entrées numériques (DI)
Type EMCS-ST-42-... EMCS-ST-57-...
Tension nominale [V DC] 24
Plage de tension [V DC] −3 … +30
Niveau
Niveau logique selonEN 61131-2, type 1
PNP, NPN
Durée d'impulsion min. (Highou Low)
[ms] 20
Niveau High (1) pour PNP1)
Tension d'entrée max. UH max [V] 30
Tension d'entrée min. UH min [V] 15
Courant d'entrée max. IH max [mA] 15
Courant d'entrée min. IH min [mA] 2
Niveau Low (0) pour PNP1)
Tension d'entrée max. UL max
pour IL max >0,5/£0,5[V] 5/15
Tension d'entrée min. UL min [V] –3
Courant d'entrée max. IL max [mA] 15
Courant d'entrée min. IL min [mA] –
1) La compréhension de NPN est inversée. Toutefois, les valeurs et la fonction sont identiques.
Tab. 44 Caractéristiques techniques, entrées numériques (DI)
Caractéristiques techniques
96 Festo — EMCS-ST — 2019-07
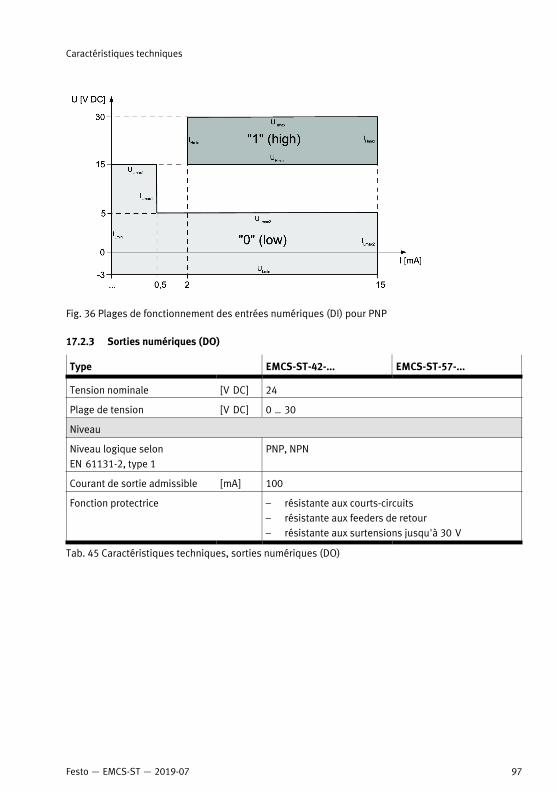
Fig. 36 Plages de fonctionnement des entrées numériques (DI) pour PNP
17.2.3 Sorties numériques (DO)
Type EMCS-ST-42-... EMCS-ST-57-...
Tension nominale [V DC] 24
Plage de tension [V DC] 0 … 30
Niveau
Niveau logique selonEN 61131-2, type 1
PNP, NPN
Courant de sortie admissible [mA] 100
Fonction protectrice – résistante aux courts-circuits– résistante aux feeders de retour– résistante aux surtensions jusqu'à 30 V
Tab. 45 Caractéristiques techniques, sorties numériques (DO)
Caractéristiques techniques
97Festo — EMCS-ST — 2019-07
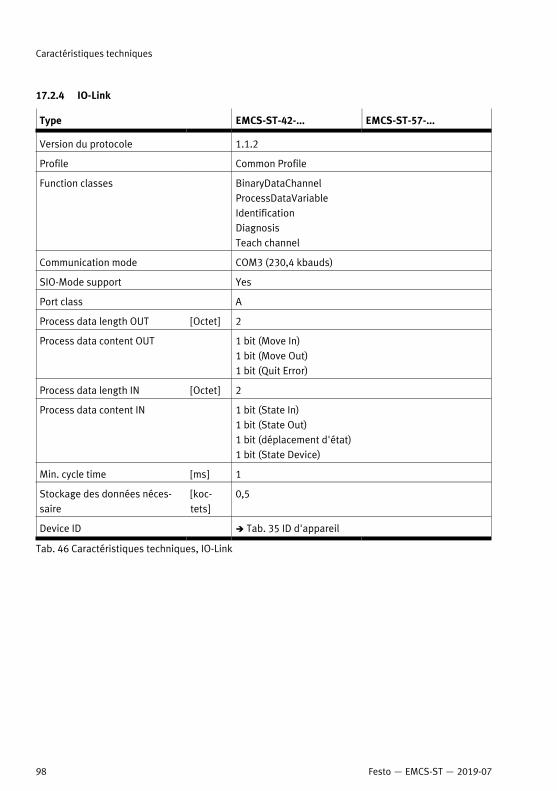
17.2.4 IO-Link
Type EMCS-ST-42-... EMCS-ST-57-...
Version du protocole 1.1.2
Profile Common Profile
Function classes BinaryDataChannelProcessDataVariableIdentificationDiagnosisTeach channel
Communication mode COM3 (230,4 kbauds)
SIO-Mode support Yes
Port class A
Process data length OUT [Octet] 2
Process data content OUT 1 bit (Move In)1 bit (Move Out)1 bit (Quit Error)
Process data length IN [Octet] 2
Process data content IN 1 bit (State In)1 bit (State Out)1 bit (déplacement d'état)1 bit (State Device)
Min. cycle time [ms] 1
Stockage des données néces-saire
[koc-tets]
0,5
Device ID è Tab. 35 ID d'appareil
Tab. 46 Caractéristiques techniques, IO-Link
Caractéristiques techniques
98 Festo — EMCS-ST — 2019-07
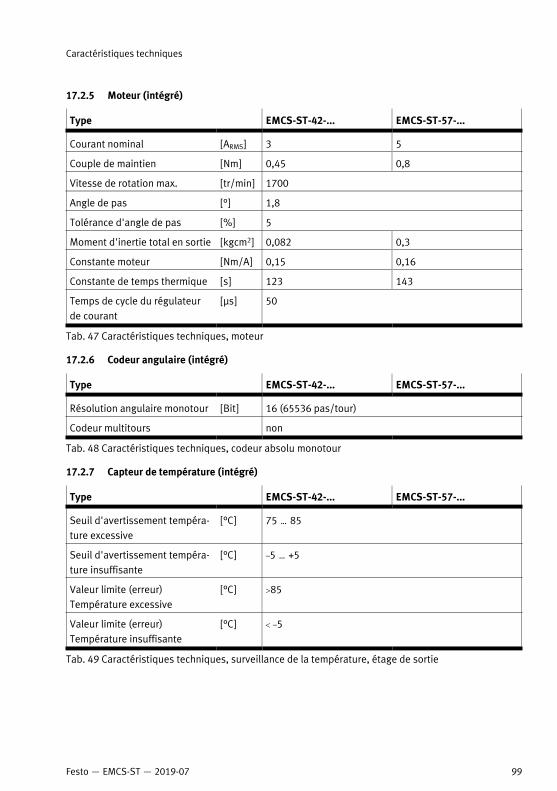
17.2.5 Moteur (intégré)
Type EMCS-ST-42-... EMCS-ST-57-...
Courant nominal [ARMS] 3 5
Couple de maintien [Nm] 0,45 0,8
Vitesse de rotation max. [tr/min] 1700
Angle de pas [°] 1,8
Tolérance d'angle de pas [%] 5
Moment d'inertie total en sortie [kgcm2] 0,082 0,3
Constante moteur [Nm/A] 0,15 0,16
Constante de temps thermique [s] 123 143
Temps de cycle du régulateurde courant
[μs] 50
Tab. 47 Caractéristiques techniques, moteur
17.2.6 Codeur angulaire (intégré)
Type EMCS-ST-42-... EMCS-ST-57-...
Résolution angulaire monotour [Bit] 16 (65536 pas/tour)
Codeur multitours non
Tab. 48 Caractéristiques techniques, codeur absolu monotour
17.2.7 Capteur de température (intégré)
Type EMCS-ST-42-... EMCS-ST-57-...
Seuil d'avertissement tempéra-ture excessive
[°C] 75 … 85
Seuil d'avertissement tempéra-ture insuffisante
[°C] –5 … +5
Valeur limite (erreur)Température excessive
[°C] >85
Valeur limite (erreur)Température insuffisante
[°C] < –5
Tab. 49 Caractéristiques techniques, surveillance de la température, étage de sortie
Caractéristiques techniques
99Festo — EMCS-ST — 2019-07

Toute communication ou reproduction de ce document, sousquelque forme que ce soit, et toute exploitation ou communica-tion de son contenu sont interdites, sauf autorisation écrite ex-presse. Tout manquement à cette règle est illicite et expose sonauteur au versement de dommages et intérêts. Tous droits réser-vés pour le cas de la délivrance d’un brevet, d’un modèle d’utilitéou d’un modèle de présentation.
Copyright:Festo SE & Co. KG Ruiter Straße 82 73734 Esslingen Allemagne
+49 711 347-0
www.festo.comInternet:
Phone:





























