Embed Size (px)
Citation preview

MEC8470
Fonction de contrainte entre les degrés de
liberté MPC
⊲ MPC
Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
1 / 46

MEC8470
Raison d’être des Multi Point Constraints (MPC)
MPC
⊲ Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
2 / 46
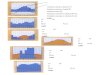
Il y a des situations où l’on désire imposer une relation, ou une“contrainte” entre certains degrés de liberté d’un élément.
Par exemple, si l’on voulait qu’une poutre (dans le plan) ait unerigidité infinie en flexion dans le plan xy
R1z
R2z
1 2Position initiale
Position finale
x
yT2y
T1y
x̄
Figure 1: Illustration du mode de déformation d’une poutreinfiniment rigide en flexion dans le plan xy. La poutre peut s’étirer
et tourner dans l’espace.
on imposerait R1z = R2z. Mais est-ce que cela est suffisant ?

MEC8470
Raison d’être des Multi Point Constraints (MPC)
MPC
⊲ Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
3 / 46
→ On verra plus tard que la flèche dans un élément de poutre estdonnée par:
v(x̄) = a0 + a1x̄+ a2x̄2 + a3x̄
3 (1)
où x̄ est la coordonnée x locale.→ La rotation est donnée par:
θ(x̄) =d
dx̄v(x̄) = a1 + 2a2x̄+ 3a3x̄
2 (2)
→ Les ai sont des inconnues, que l’on va appeler plus tard degrésde liberté généralisés.
R1z
R2z
1 2Position initiale
Position finale
x
yT2y
T1y
x̄

MEC8470
Raison d’être des Multi Point Constraints (MPC)
MPC
⊲ Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
4 / 46
Avec ces informations en tête, on pourrait envisager la situationsuivante:
1
2
Position initiale
Position finale
x
y
R1z
R2z
Dans ce cas là, on aurait bien R1z = R2z = θ mais la poutrepourrait présenter une courbure.
Il faut donc spécifier aussi la valeur de l’angle θ.

MEC8470
Raison d’être des Multi Point Constraints (MPC)
MPC
⊲ Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
5 / 46
Par une analyse géométrique ou mathématique, on peut voir que lapoutre demeurera droite si et seulement si:
T2y − T1y
L= tan θ (3)
1 2Position initiale
Position finale
x
yT2y
T1y
T2y − T1y
L
θ
θ
x̄
Figure 2: Détermination des contraintes à imposer aux degrés deliberté d’une poutre pour la rendre infiniment rigide en flexion

MEC8470
Raison d’être des Multi Point Constraints (MPC)
MPC
⊲ Introduction
Commande MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
6 / 46
Si on développe tan θ en série de Taylor on a:
tan θ = θ +θ3
3+
2
15θ5 +O
[
θ6]
≈ θ pour θ ≪ 1
(4)
Comme on travaille en petits déplacements, cette approximation estvalable.
On aura donc, au final, la relation suivante:
R1z = R2z =T2y − T1y
L(5)
Il faut donc que le programme (i.e. NASTRAN) impose cettecontrainte dans la matrice de rigidité globale du système.

MEC8470
La commande MPC de NASTRAN
MPC
Introduction
⊲Commande
MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
7 / 46
La commande MPC de NASTRAN permet à l’utilisateur d’entrer lesrelations entre les degrés de liberté.
Avant de passer à la définition de cette commande, il faut introduirele concept de degré de liberté maître et degré de liberté esclave:
→ Un degré de liberté esclave est un degré de liberté dont lavaleur numérique est imposée par une fonction de contraintecomme on vient de voir
→ Un degré de liberté maître est un degré de liberté duquel undegré de liberté esclave dépend
On exprimera généralement la fonction de contrainte de la manièresuivante:
DL1A1 +M∑
m=2
DLmAm = 0 (6)
où DL1 est un degré de liberté esclave, DLm un degré de libertémaître et les A1 et Am sont des coefficients.
Il doit être noté qu’il existe d’autres formes de contraintes mais nousne les aborderons pas dans ce cours.

MEC8470
La commande MPC de NASTRAN
MPC
Introduction
⊲Commande
MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
8 / 46
Sous cette forme, nos deux équations de contrainte précédentesdonneraient:
R1zL+ T1y − T2y = 0 (7)
R2zL+ T1y − T2y = 0 (8)
Quelques règles
→ N’importe quel Degré de Liberté (DL) peut être esclave→ Un DL ne peut être esclave que dans une équation→ Une condition cinématique ne peut être appliquée à un DL
esclave
Quand un DL devient esclave, il est “ sorti ” du système d’équations{f} = [K] {u}. C’est pourquoi il ne peut pas être utilisé par lasuite. On verra plus tard dans le cours comment ces fonctions decontraintes sont implémentées.

MEC8470
La commande MPC de NASTRAN - suite
MPC
Introduction
⊲Commande
MPC
Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
9 / 46
La syntaxe de la commande MPC est:
MPC, SID, G1, C1, A1, G2, C2, A2
, , G3, C3, A3, etc.
SID Le numéro associé à cette MPC
G1 Le numéro du noeud esclaveC1 Code du degré de liberté associé au noeud esclaveA1 Coefficient associé au degré de liberté esclaveGi≥2 Numéros des noeuds des degrés des liberté maîtresCi≥2 Codes des degrés de liberté associés aux noeuds maîtresAi≥2 Coefficients associés aux degrés de liberté maîtres
Dans la partie du “ Case Control Deck ” on doit entrer lacommande: MPC = SID pour activer les MPC qui ont le numéro SID.

MEC8470
Quelques exemples
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
10 / 46

MEC8470
Quelques exemples
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
11 / 46
Dans ce cas-ci, on a plusieurs possibilités (l’esclave est à gauche):
→ Le cas où l’on impose:
2000R21y = T21z − T17z (9a)
2000R17y = T21z − T17z (9b)
→ Ou encore:
R21y = R17y (10a)
2000R17y = T21z − T17z (10b)
→ Ou encore:
R21y = R17y (11a)
T17z = T21z − 2000R17y (11b)

MEC8470
Quelques exemples
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
12 / 46
→ Mais les équations suivantes ne seraient pas valides:
R17y = R21y (12a)
2000R17y = T21z − T17z (12b)
parce que le degré de liberté R17y est deux fois esclave.

MEC8470
Quelques exemples – suite
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
13 / 46
Attention !
→ Ce ne sont pas tous les codes de calcul qui acceptent “facilement ” qu’un degré de liberté soit maître dans uneéquation et esclave dans une autre.
→ Quand l’on utilise cette pratique et que l’on a plusieurs MPC, ilpeut arriver parfois que l’on crée des contraintes qui sontimpossibles physiquement.
→ Une bonne pratique, quand c’est possible, c’est d’éviterd’utiliser que des degrés de liberté soient maîtres et esclavesdans plusieurs MPC
On va donc préférer:
R21y = R17y
T17z = T21z − 2000R17y
à:
R21y = R17y
2000R17y = T21z − T17z

MEC8470
Quelques exemples
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
14 / 46
Donc, si l’on voulait coder les équations
2000R21y = T21z − T17z → 2000R21y − T21z + T17z = 0
2000R17y = T21z − T17z → 2000R17y − T21z + T17z = 0
Avec la syntaxe:
DL1A1 +M∑
m=2
DLmAm = 0
MPC, SID, G1, C1, A1, G2, C2, A2,
, , G3, C3, A3, etc.
on aurait:
MPC, 200, 21, 5, 2000.0, 21, 3, -1.0,
, , 17, 3, 1.0
MPC, 200, 17, 5, 2000.0, 21, 3, -1.0,
, , 17, 3, 1.0

MEC8470
Quelques exemples
MPC
Introduction
Commande MPC
⊲ Exemples
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
15 / 46
→ On doit imposer: T21x = T17x
→ Qui donne, dans le langage MPC :T21x − T17x = 0
Au final, on aura la commande suivante:
MPC, 100, 21, 1, 1.0, 17, 1, -1.0

MEC8470
L’élément rigide RBE2
MPC
⊲ RBE2
Introduction
RBE2
Syntaxe
Syntaxe
Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
16 / 46

MEC8470
Introduction
MPC
RBE2
⊲ Introduction
RBE2
Syntaxe
Syntaxe
Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
17 / 46
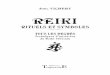
Il y a certaines circonstances où l’on veut introduire un lien rigideentre 2 ou plusieurs noeuds:
→ Si l’on veut connecter deux poutres l’une par-dessus l’autre etque les éléments de poutre ne partagent pas tous les noeuds
→ Simuler un lien très rigide entre divers composantes d’unepièce, par exemple:
(a) Stiffened Plate Structure (b) Stiffened Plate Model
(c) Edge View Showing Grid Locations
1
23
4
5
6
7
8
RBE2
RBE2
RBE2
3 5
8
2
CBAR
Figure 3: Lien rigide entre un raidisseur et un panneau
– Dans ce cas, des degrés de liberté d’un noeud (esclave) sontentièrement définis par ceux d’un autre (maître)

MEC8470
L’élément RBE2 de NASTRAN
MPC
RBE2
Introduction
⊲ RBE2
Syntaxe
Syntaxe
Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
18 / 46
→ NASTRAN offre un élément particulier qui offre cettefonctionnalité: l’élément rigide de barreau droit RBE2
→ Cet élément fait en sorte que la distance entre 2 noeudsdemeure constante
→ L’élément impose aussi que les rotations aux 2 noeuds soientles mêmes
Si l’on considère la figure suivante:
Figure 4: Schématisation d’unélément rigide
On aura:
~θe = ~θM
~De = ~DM + ~θM ×−−−−→GMGe
si l’on fait l’hypothèse que lesdéplacements sont petits.

MEC8470
La syntaxe de l’élément RBE2 de NASTRAN
MPC
RBE2
Introduction
RBE2
⊲ Syntaxe
Syntaxe
Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
19 / 46
~θe = ~θM
~De = ~DM + ~θM ×−−−−→GMGe
(13)
→ A l’interne, NASTRAN va générer les commandes MPC pourdéfinir ~θe et ~De
La syntaxe de cet élément est la suivante:
RBE2, EID, GN, CN, GM1, GM2, ... etc
EID Le numéro associé à cet élémentGN Le numéro du noeud maîtreCN Les numéros des degrés de liberté qui sont impliqués dans ce
lien rigideGMi Les numéros des noeuds esclaves

MEC8470
La syntaxe de l’élément RBE2 de NASTRAN
MPC
RBE2
Introduction
RBE2
Syntaxe
⊲ Syntaxe
Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
20 / 46
→ L’équation (13) a le potentiel de conduire aux équationssuivantes
123456
T ex
T ey
T ez
Rex
Rey
Rez
======
TMx +RM
y Lz −RMz Ly
TMy +RM
z Lx −RMx Lz
TMz +RM
x Ly −RMy Lx
RMx
RMy
RMz
(14)
où T ei et TM
i sont une translation en x, y ou z du noeudesclave ou maître, respectivement, R est une rotation et Li est
une composante x, y ou z de−−−−→GMGe.
→ Les numéros entrés dans le champ CN de la commande RBE2
activent les équations correspondantes. Par exemple, lacommande
RBE2, 1, 1, 25, 2
ferait en sorte que le noeud 1 soit maître, le noeud 2 esclave etque les équations 2 et 5 soient codées par le biais de MPC.

MEC8470
Exemple: une plaque rigide
MPC
RBE2
Introduction
RBE2
Syntaxe
Syntaxe
⊲ Exemple
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
21 / 46
Soit la membrane suivante (i.e. ne reprend pas d’effort de flexion).Si l’on veut simuler une membrane rigide , on aura par exemple:
40
41
42
43
Figure 5: Simulation d’une membrane infiniment rigide en extension
RBE2, 101, 40, 12, 41, 42, 43

MEC8470
Méthodes pour augmenter la rigidité en
torsion d’une section du bouclier
anti-radiation
MPC
RBE2
⊲ Rigid. Torsion
Rappel
Rigidité ∞
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
22 / 46

MEC8470
Rappel
MPC
RBE2
Rigid. Torsion
⊲ Rappel
Rigidité ∞
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
23 / 46
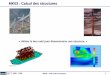
→ On a vu qu’il y a une zone du bouclier anti-radiation (TP1) quiest très sollicitée en torsion
→ Pour le moment, on a rajouté des diagonales de manière àreprendre une partie des efforts reliés à la torsion
→ On va aussi souder des plaques (plus tard dans la session)
Plaque
13 12
2021
13 12
2021
Diagonales
Flux de
cisaillement
→ On se demande maintenant quel gain en rigidité (i.e.diminution de la flèche au noeud 27) pouvons-nous espérer deces modifications
→ Pour ce faire, nous allons simuler une rigidité infinie en torsiond’une zone du bouclier anti-radiation
→ Cette opération sera réalisée à l’aide de la commande MPC quel’on vient de voir.

MEC8470
Estimation des performances optimales
MPC
RBE2
Rigid. Torsion
Rappel
⊲ Rigidité ∞
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
24 / 46
→ Afin d’avoir une idée de la diminution maximale de la flèche parla rigidification en torsion de cette zone sensible, on va étudierle cas d’un quadrilatère infiniment rigide en torsion.
– Comment ?– En donnant une très grande constante de torsion dans la
commande PBAR?
⊲ NON !!! Ne jamais entrer des nombres astronomiquespour simuler des comportements extrêmes (on verrapourquoi plus tard dans le cours)
– Avec la commande MPC ?
⊲ Oui

MEC8470
Estimation des performances optimales
MPC
RBE2
Rigid. Torsion
Rappel
⊲ Rigidité ∞
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
25 / 46
→ Afin de simuler une rigidité infinie en torsion, nous allons faireen sorte que les noeuds 12, 13, 20 et 21 demeurent dans lemême plan.
→ Pour ce faire, nous allons imposer que les rotations autour de x
des segments 12 – 13 et 20 – 21 soient égales.
12
20
13
21
→ On devra imposer la relation suivante:
θx =T13z − T12z
L12−13
=T21z − T20z
L20−21
(15)
→ On devra écrire les commandes MPC correspondantes

MEC8470
Degrés de liberté fixes – Commande SPC1
MPC
RBE2
Rigid. Torsion
⊲ DL Fixes
Explications
Exemple
Chargement
Sym. et Asym.
Comb. charg.
26 / 46

MEC8470
Explications de la commande SPC1
MPC
RBE2
Rigid. Torsion
DL Fixes
⊲ Explications
Exemple
Chargement
Sym. et Asym.
Comb. charg.
27 / 46
La commande SPC1 sert exclusivement à bloquer, ou fixer à 0, desdegrés de liberté. Elle a la syntaxe suivante:
SPC1, SID, C, G1, G2, G3, G4, G5,
, G6, etc.
SID Le numéro associé à cet ensemble de conditions limitesC Code des degrés de liberté fixés à 0Gi Numéro des noeuds qui doivent être bloqués
→ On peut utiliser le même SID pour plusieurs commandes SPC1→ Les commandes SPC1 sont activées par la commande SPC =
SID qui doit être présente dans la section “ case control deck ”→ Sert généralement à imposer des conditions limites tandis que
la case PSPC de la commande GRID sert plutôt à spécifier lesdegrés de liberté qui ne sont pas actifs dans le modèle
→ Le champ PSPC (commande GRID) est toujours actif dans lemodèle tandis que la commande SPC1 peut être désactivée àcertaines étapes du calcul (on verra plus tard comment)

MEC8470
Utilisation de la commande SPC1 dans le cadre du TP1
MPC
RBE2
Rigid. Torsion
DL Fixes
Explications
⊲ Exemple
Chargement
Sym. et Asym.
Comb. charg.
28 / 46
Dans le TP1, on a les commandes suivantes:
CEND
.
.
SPC = 100
.
.
BEGIN BULK
.
.
SPC1 , 100, 156, 27, 33, 43
SPC1 , 100, 3, 11, 14
→ On crée l’ensemble de conditions aux limites nommé 100
→ La commande SPC est bien présente dans le case control decket indique que l’on utilise le SPC1 numéro 100
→ Tx, Ry et Rz sont bloqués aux noeuds 27, 33 et 43→ Tz est bloquée au noeuds 11 et 14

MEC8470
Chargement d’un modèle
MPC
RBE2
Rigid. Torsion
DL Fixes
⊲ Chargement
Introduction
Force et Moment
GRAV
LOAD
Exemple TP1
Sym. et Asym.
Comb. charg.
29 / 46

MEC8470
Introduction
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
⊲ Introduction
Force et Moment
GRAV
LOAD
Exemple TP1
Sym. et Asym.
Comb. charg.
30 / 46
Il y a plusieurs manières d’imposer un chargement sur un modèle:
→ Forces et moments concentrés (i.e. appliqués à un noeud)→ Charges linéairement distribuées→ Pression→ Gravité, accélération, forces de volume→ Déplacements→ Combinaison linéaire de tous ces chargements
Comme pour les commandes MPC et SPC1, une commande doit êtreprésente dans le case control deck pour activer le chargement. Ondevra absolument introduire la commande LOAD = SID où SID estle numéro qui identifie le chargement.

MEC8470
Les commandes Force et Moment
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Introduction
⊲ Force et Moment
GRAV
LOAD
Exemple TP1
Sym. et Asym.
Comb. charg.
31 / 46
Les forces ~f et moments ~m sont représentés dans NASTRAN de lamanière suivante:
~f = F ~N ~m = M ~N
où F et M sont les magnitudes des forces ou moments et ~N est unvecteur, pas nécessairement unitaire. On aura donc la commande:
FORCE, SID, G, CID, F, N1, N2, N3
MOMENT, SID, G, CID, M, N1, N2, N3
SID Le numéro associé à cet ensemble de chargementG Noeud où est appliqué la force ou le momentCID Système de coordonnées dans lequel le vecteur est expriméF, M Magnitude du vecteur
Ni Composantes du vecteur ~N exprimées dans le CID

MEC8470
La commande GRAV
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Introduction
Force et Moment
⊲ GRAV
LOAD
Exemple TP1
Sym. et Asym.
Comb. charg.
32 / 46
Cette commande sert à spécifier l’accélération gravitationnelle pourque le programme traduise en forces la masse du matériau structuralainsi que la masse non structurale (commandes MAT1 et PBAR).
L’accélération est définie par:
~a = A ~N
où A est une magnitude et ~N un vecteur d’orientation. Lacommande GRAV s’écrit:
GRAV, SID, CID, A, N1, N2, N3, MB
SID Le numéro associé à cet ensembleCID Système de coordonnées dans lequel le vecteur est expriméA Magnitude du vecteur
Ni Composantes du vecteur ~N exprimées dans le CID
MB Paramètre avancé qui n’est pas utilisé dans ce cours

MEC8470
La commande LOAD
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Introduction
Force et Moment
GRAV
⊲ LOAD
Exemple TP1
Sym. et Asym.
Comb. charg.
33 / 46
Une fois les vecteurs de force, moment et d’accélération créés, onpeut créer un ensemble qui englobe toutes ces charges auquel onattribuera un numéro SID.
Par la suite, pour que le programme prenne en compte ces vecteursdans l’analyse, on devra spécifier dans le case control deck: LOAD =
SID, où encore une fois SID est le numéro de l’ensemble descharges. On aura que:
LOAD = S∑
SiLi
où:
LOAD, SID, S, S1, L1, S2, L2, S3, L3,
, S4, L4, etc...
SID Le numéro associé à cet ensembleS Le facteur de pondération globalSi Facteur de pondération associé au chargement iLi Numéro du chargement i

MEC8470
Exemple du TP1
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Introduction
Force et Moment
GRAV
LOAD
⊲ Exemple TP1
Sym. et Asym.
Comb. charg.
34 / 46
...
LOAD = 200
...
BEGIN BULK
...
FORCE , 201, 22, , 13.0+3, 0.0, 0.0, -1.0
MOMENT, 201, 22, , 2.041+6, 0.0, 1.0, 0.0
...
FORCE , 202, 25, , 6.50+3, 0.0, 0.0, -1.0
MOMENT, 202, 25, , 1.020+6, 1.0, 0.0, 0.0
...
GRAV , 203, , 9810.0, 0.0, 0.0, -1.0
...
LOAD , 200, 1.0, 1.0, 201, 1.0, 202, 1.0, 203
→ Les forces et moments sont exprimés dans le repère global ici→ On a 2 ensembles de fores et moments 201 et 202 et un
ensemble pour l’accélération gravitationnelle 203
→ On a crée le chargement 200 qui est une combinaison linéairedes groupes de forces, moments et accélérations 201, 202 et203

MEC8470
Les conditions de symétrie et
d’anti-symétrie
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
⊲ Sym. et Asym.
Symétrie
Anti-symétrie
Conclusion
Comb. charg.
35 / 46

MEC8470
Les conditions de symétrie
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
⊲ Symétrie
Anti-symétrie
Conclusion
Comb. charg.
36 / 46
DéfinitionLe chargement, la géométrie et les conditions aux rives d’une
structure font en sorte que le champ de déplacement présente une
symétrie par rapport à au moins un plan.
Considérons les problèmes suivants
Figure 6: Illustration des conditions de symétrie

MEC8470
Les conditions de symétrie - suite
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
⊲ Symétrie
Anti-symétrie
Conclusion
Comb. charg.
37 / 46
→ Pour la rotation en x, c’est un peu moins direct...→ On peut considérer le problème suivant:
Plan desymétrie
Figure 7: Illustration des conditions de symétrie
→ On peut voir sur la figure que les couples de torsion qui sontdans le même sens entraînent une rotation en x au plan desymétrie
→ Donc, Rx 6= 0

MEC8470
Les conditions d’anti-symétrie
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Symétrie
⊲ Anti-symétrie
Conclusion
Comb. charg.
38 / 46
DéfinitionProblème symétrique où le chargement d’un côté du plan de
symétrie a été inversé.
Considérons les problèmes suivants
Figure 8: Illustration de conditions d’anti-symétrie

MEC8470
Les conditions d’anti-symétrie
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Symétrie
⊲ Anti-symétrie
Conclusion
Comb. charg.
39 / 46
→ Pour la rotation en x, c’est un peu moins direct...
Plan dʼanti-symétrie
Figure 9: Illustration de conditions d’anti-symétrie
→ Les couples de torsion vont engendrer des rotations de mêmemagnitude, mais de sens opposés aux endroits où ils sontappliqués.
→ L’angle de rotation Rx va passer linéairement de +θ à −θ d’unpoint d’application du couple à l’autre
→ Comme le plan d’anti-symétrie se trouve à la mi-distance, onaura Rx = 0

MEC8470
Les conclusions
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Symétrie
Anti-symétrie
⊲ Conclusion
Comb. charg.
40 / 46
Symétrie Anti-symétrieTranslation ⊥ au plan = 0 Translation ⊥ au plan 6= 0Translations dans le plan 6= 0 Translations dans le plan = 0Rotation ⊥ au plan 6= 0 Rotation ⊥ au plan = 0Rotations dans le plan = 0 Rotations dans le plan 6= 0
→ Dans chaque cas, on doit bloquer trois degrés de liberté→ Un truc mnémotechnique est d’apprendre un cas (par exemple
la symétrie). On sait que pour l’autre cas (anti-symétrie), cesont les degrés de liberté qui n’ont pas été bloqués dans lepremier cas qui le sont dans le second

MEC8470
Combinaison de chargements
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
⊲ Comb. charg.
Commandes
Exemple
Résumé
41 / 46

MEC8470
Commandes NATRAN pour la combinaison de chargements
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
⊲ Commandes
Exemple
Résumé
42 / 46
Pour demander à NASTRAN de combiner plusieurs cas dechargements (LCi dans l’exemple que l’on vient de faire) on doitprocéder de la manière suivante:
1. Créer les cas de chargements avec la commande SUBCASE
2. Créer et identifier le(s) cas de chargements final(aux) (les LCFidans l’exemple précédent) avec la commande SUBCOM
3. A l’intérieur de la commande SUBCOM combiner les SUBCASEavec la commande SUBSEQ
→ SUBCOM =∑
aiSUBCASEi
→ Toutes ces commandes doivent être inscrites dans le casecontrol deck

MEC8470
Commandes NATRAN pour la combinaison de chargements
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
⊲ Commandes
Exemple
Résumé
43 / 46
La syntaxe de ces commandes est la suivante:
SUBCASE = n1
...
SUBCASE = n2
...
SUBCOM = N1
SUBSEQ = a11, a12
...
SUBCOM = N2
SUBSEQ = a21, a22
...
ni Le numéro du cas de chargement (LCi)Ni Le numéro du cas de chargement final (LCFi)aij Coefficient du LCFi associé au LCj
Règles de syntaxe:
→ ni < nj
→ Ni < Nj
→ Ni > {ni, nj, ..., nz}

MEC8470
Commandes NATRAN pour la combinaison de chargements
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
⊲ Commandes
Exemple
Résumé
44 / 46
Particularité
→ Dans ce cours, les SUBCASE doivent impérativement apparaîtreavant les SUBCOM
→ L’ordre dans lequel apparaît les SUBCASE est important:
– Il détermine l’ordre dans lequel apparaîtront les coefficientsdans la définition du SUBSEQ

MEC8470
Exemple d’application
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
Commandes
⊲ Exemple
Résumé
45 / 46
SUBCASE = 12
SUBTITLE = Dalles d’un seul côté
LOAD = 101
SPC = 201
SUBCASE = 48
SUBTITLE = Dalles des deux côtés
LOAD = 100
SPC = 254
SUBCOM = 50
SUBTITLE = Combinaison des deux cas de chargement
SUBSEQ = 1.0, -1.0
→ Le SUBCASE 12 est défini par le chargement 101 et lesconditions limites 201
→ Le SUBCASE 48 est défini par le chargement 100 et lesconditions limites 254
→ Le SUBCOM 50 est défini comme étant:
SUBCOM 50 = 1.0× (SUBCASE 12)− 1.0× (SUBCASE 48)

MEC8470
Exemple d’application
MPC
RBE2
Rigid. Torsion
DL Fixes
Chargement
Sym. et Asym.
Comb. charg.
Commandes
Exemple
⊲ Résumé
46 / 46
→ Lorsque le code de calcul combine des chargements, il effectueles opérations suivantes:
1. Il calcule les déplacements, les contraintes, lesdéformations, etc. pour chaque cas de chargementSUBCASE.
2. Il va additionner, avec les facteurs de pondération donnés àla commande SUBSEQ, les déplacements, contraintes,déformations, etc. de chaque cas de chargement.