Embed Size (px)
Citation preview
Université du Québec à Chicoutimi
MODULE D’INGÉNIERIE
GÉNIE MÉCANIQUE
6GIN333 – PROJET DE CONCEPTION EN INGÉNIERIE
Rapport final
Table multifonctionnelle pour motoneige
# Projet : 2011-225
Préparé par :
Gauthier Maxime (Gaum18018401)
Perron Sébastien (Pers13088702)
Pour :
Mohamed Bouazara
Date :
18/04/2011
CONSEILLER : Mohamed Bouazara, Ph.D., ing
COORDONNATEUR : Jacques Paradis
2
Table des matières
Table des matières .............................................................................................................................. 2
Table des figures .................................................................................................................................. 3
1.0 Introduction .................................................................................................................................... 4
2.0 Présentation du projet ................................................................................................................ 5
2.1 Description de l’équipe de travail ................................................................................ 5
2.2 Problématique et état de l’art reliés au projet ........................................................ 5
2.3 Objectifs du projet .............................................................................................................. 5
3.0 Aspects techniques et éléments de conception relatif au projet ................................ 6
3.1 Recherche bibliographique ............................................................................................. 6
Roulettes ............................................................................................................................ 6
Chariot de transport...................................................................................................... 7
Table élévatrice ............................................................................................................... 7
Support élévateur .......................................................................................................... 8
Support élévateur sur roue ........................................................................................ 8
3.2 Méthodologie utilisée ........................................................................................................ 9
3.3 Éléments de conception ................................................................................................. 11
3.3.1 Système de levage ............................................................................................. 12
3.3.2 Système de pivot ............................................................................................... 19
3.3.3 Roues ...................................................................................................................... 24
3.3.4 Base ........................................................................................................................ 26
3.3.5 Bras de levage pour chenille ......................................................................... 28
3.3.6 Sécurité ................................................................................................................. 28
3.3.7 Mise en plan......................................................................................................... 29
4.0 Bilan des activités ....................................................................................................................... 30
4.1 Arrimage formation pratique/universitaire .......................................................... 30
4.2 Travail d’équipe ................................................................................................................. 30
4.3 Respect de l’échéancier ............................................................................................................ 31
4.4 Analyse et discussion ...................................................................................................... 32
5.0 Conclusion ..................................................................................................................................... 33
6.0 Référence ....................................................................................................................................... 35
Annexe A : Fiches techniques ........................................................................................................ 36
Annexe B : Dessins techniques ..................................................................................................... 41
Mise en plan ............................................................................................................................... 41
Nomenclature ............................................................................................................................ 49
3
Table des figures
Figure 1: Roulettes ................................................................................................................................. 6
Figure 2: Chariot de transport ........................................................................................................... 7
Figure 3-Table élévatrice ..................................................................................................................... 7
Figure 4: Support élévateur ................................................................................................................ 8
Figure 5-Support élévateur sur roue ............................................................................................... 8
Figure 6: Support de la position haute ........................................................................................ 11
Figure 7: Support de la position basse ........................................................................................ 11
Figure 8: DCL de la Plate forme de levage .................................................................................. 12
Figure 9: DCL du bras de pivot ....................................................................................................... 13
Figure 10-Contrainte de la barre transversale ......................................................................... 15
Figure 11-Facteur de sécurité de la barre transversale ........................................................ 16
Figure 12-Facteurs de sécurité pour la fixation du treuil 2 ................................................. 17
Figure 13-Contraintes pour la fixation du treuil 3 .................................................................. 17
Figure 14-Facteurs de sécurité pour la fixation du treuil 3 ................................................. 17
Figure 15-Contraintes pour la fixation du treuil 4 .................................................................. 18
Figure 16-Facteurs de sécurité pour la fixation du treuil 4 ................................................. 18
Figure 17-Contraintes du bras de levage 2 ................................................................................ 23
Figure 18-Facteurs de sécurité pour le bras de levage 2...................................................... 23
Figure 19:DCL profile du support à la position basse............................................................ 24
Figure 20:DCL élévation du support à la position haute ...................................................... 24
Figure 21:DCL élévation du support à la position basse ...................................................... 25
Figure 22-Facteurs de sécurité de l’attache des roues avant.............................................. 26
Figure 23-Facteurs de sécurité de l’attache des roues arrière ........................................... 26
Figure 24-Distribution des contraintes de l’attache .............................................................. 27
Figure 25-Distribution des facteurs de sécurités de l’attache ............................................ 27
Figure 26-DCL sécurité ...................................................................................................................... 28
Figure 27-Diagramme de Gant........................................................................................................ 31
Figure 28:Treuil .................................................................................................................................... 36
Figure 29:Roue ...................................................................................................................................... 37
Figure 30:HSS rectangulaire ............................................................................................................ 37
Figure 31:Vis bras de pivot .............................................................................................................. 38
Figure 32:Plaque .................................................................................................................................. 38
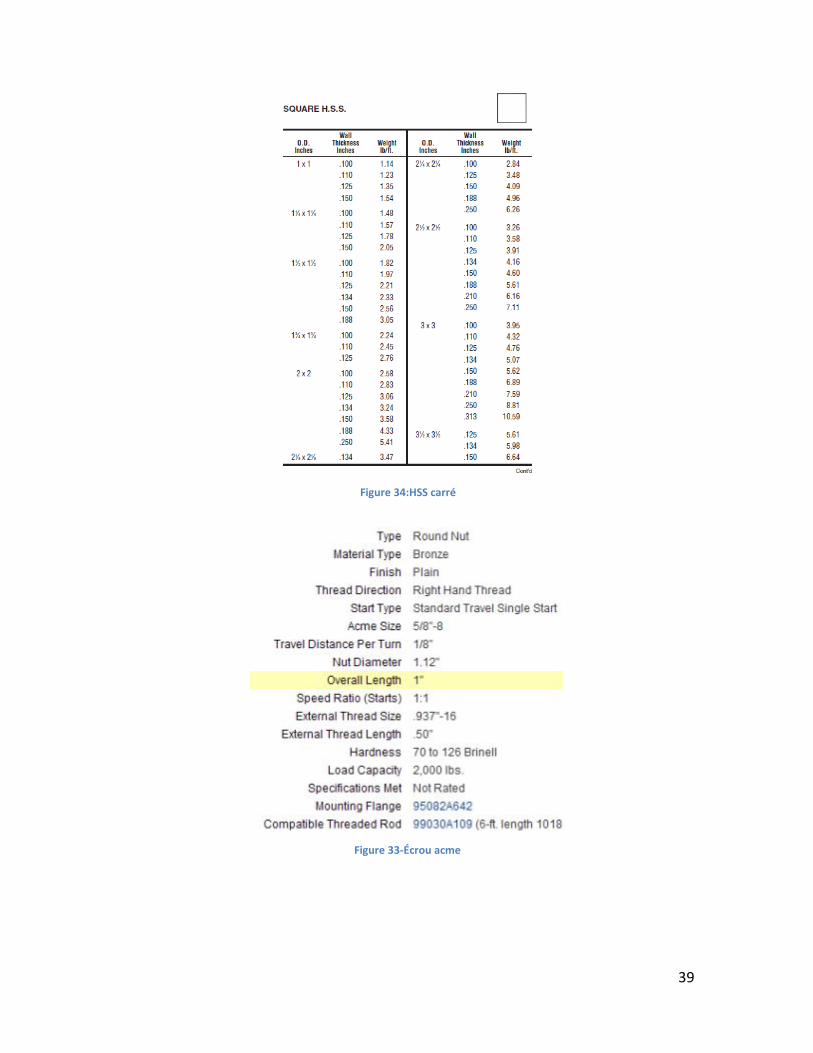
Figure 33-Écrou acme ........................................................................................................................ 39
Figure 34:HSS carré ............................................................................................................................ 39
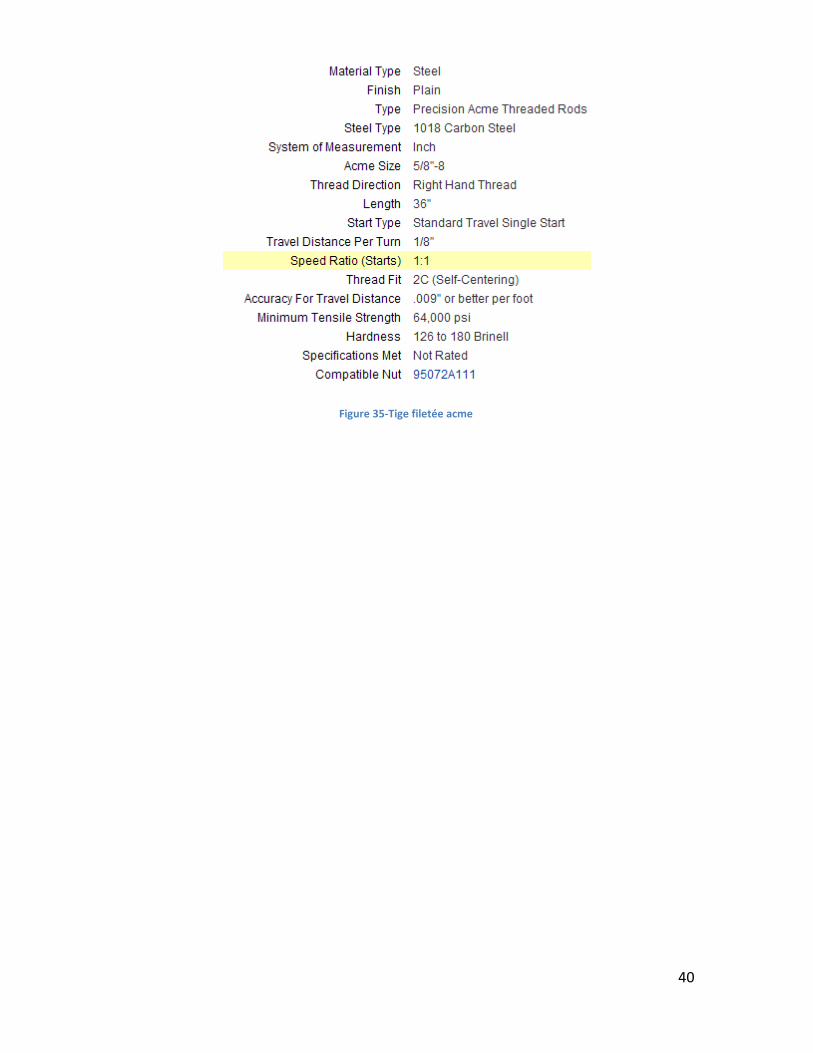
Figure 35-Tige filetée acme ............................................................................................................. 40
4
1.0 Introduction
Le présent projet vise à satisfaire les besoins d’un des membres de l’équipe. Maxime Gauthier, le promoteur, est un adepte de la motoneige de montagne. Il désire avoir un équipement de levage qui va satisfaire tous ses besoins d’entretien, de déplacement et de remisage. Étant propriétaire d’une Summit 2009 163’’, Maxime désire que cet équipement puisse servir dans son garage ou dans sa remorque fermée lorsqu’il est à la montagne. Il désire également mettre cette invention sur le marché pour les concessionnaires et l’auto-construction. Les différents éléments présentés dans ce rapport permettront à un lecteur externe de comprendre les différentes étapes permettant la réalisation de ce nouveau concept. Tout d’abord, le lecteur sera en mesure de comprendre tout les éléments justifiant le design de cet équipement. Il aura également tous les éléments techniques pour fabriquer cet appareil de levage.
Tout d’abord, le projet sera présenté de façon générale. L’équipe qui à effectuée le projet sera décrite. La problématique justifiant la réalisation d’un tel support sera également expliquée. Il est important de bien comprendre cette partie puisque la compréhension du design en dépend. Les objectifs guidant la conception de cet équipement seront aussi mis en évidence. Cette partie expliquera comment ceux-ci ont évolué au fur et à mesure de la progression du projet. Le lecteur pourra donc savoir si les membres de l’équipe ont su bien déterminer les objectifs. Avoir des objectifs réalistes permet de bien se concentrer sur ceux-ci et d’arriver à un résultat d’une certaine qualité.
Ensuite, les aspects techniques et les éléments de conception reliés au projet seront énumérés. La conception de chacun des systèmes composant l’appareil de levage sera exposée. Il sera possible dans cette partie de connaître tous les détails de la conception de ces différents systèmes.
De plus, le lecteur pourra connaître le bilan que font les membres du projet après l’avoir effectué. Ce bilan concernera quatre différents éléments. La comparaison entre les compétences académiques et celles apprises au cours de ce projet seront exposées. La façon de voir le travail d’équipe sera démontrée. L’évolution du diagramme de Gant du projet sera expliquée et une critique de la démarche de réalisation du projet sera faite.
Finalement, la fin du rapport présentera les recommandations et les aspects inachevés du projet. Le lecteur sera informé en lisant la fin du rapport sur les documents techniques du projet et sur les dessins techniques du projet.
5
2.0 Présentation du projet
2.1 Description de l’équipe de travail
L’équipe de travail qui à participée à la réalisation de ce projet est composée de deux
étudiants inscrits au baccalauréat en génie mécanique de l’Université du Québec à
Chicoutimi. Sébastien Perron et Maxime Gauthier sont deux étudiants de troisième
année et ont tous les deux un bagage de connaissances pratiques. Maxime Gauthier est
un mécanicien industriel de formation qui a œuvré dans le domaine un certain temps.
Tandis que Sébastien Perron est un technicien en génie mécanique diplômé et
possédant une expérience de travail dans le domaine. Cette équipe possède tous les
outils pour parvenir à réaliser un projet de cette envergure. Cette équipe est conseillée
par le professeur Mohamed Bouazara du département des sciences appliquées de
l’uqac.
2.2 Problématique et état de l’art reliés au projet
Pratiquer le sport de la motoneige amène obligatoirement à entretenir, remiser ou
déplacer sa motoneige. Une motoneige est un véhicule pouvant atteindre les 450 kilos
et la manipulation dans un espace restreint est difficile. De plus, entretenir ce genre de
véhicule n’est pas ergonomique étant donné sa faible hauteur. Plusieurs solutions
existent mais aucune ne peut combler ces trois exigences en même temps.
2.3 Objectifs du projet
L’objectif est de concevoir un système de levage pouvant servir à entretenir, remiser et
déplacer sa motoneige. Les objectifs énumérés ci-dessous sont les mêmes que ceux
prévus en début de projet. Le promoteur désire pouvoir mettre ce nouveau concept
disponible pour les concessionnaires et pour l’auto-construction.
Premièrement, il sera possible avec ce nouveau concept de déboulonner la suspension
sans aucuns autres équipements de levage. La chenille sera ainsi accessible pour être
remplacée. De plus, le système de glissière sera accessible pour l’entretien et les
vérifications de routine. Le reste de la motoneige sera également à hauteur d’homme.
Deuxièmement, la suspension de la motoneige pourra être complètement détendue lors
du remisage. Ceci aura pour effet d’allonger la durée de vie de celle-ci.
Troisièmement, déplacer la motoneige deviendra aisé. Il sera possible de la faire rouler
dans toutes les directions et ceci sans aucun effort.
Finalement, la sécurité ainsi que la stabilité seront omniprésentes lors de ses trois
applications. La durabilité sera aussi une qualité du futur support.
6
3.0 Aspects techniques et éléments de conception relatif au projet
3.1 Recherche bibliographique
Cette recherche sur les solutions existantes servira à justifier le projet en cours. En effet,
Il ne serait pas convenable de concevoir un support pour motoneige déjà existant.
Plusieurs supports existants seront ainsi présentés dans cette recherche. Il sera ainsi
possible d’apprendre où se les procurer, leurs fonctionnent, leurs désavantages et la
façon dont le nouveau support cherchera à régler ces problèmes.
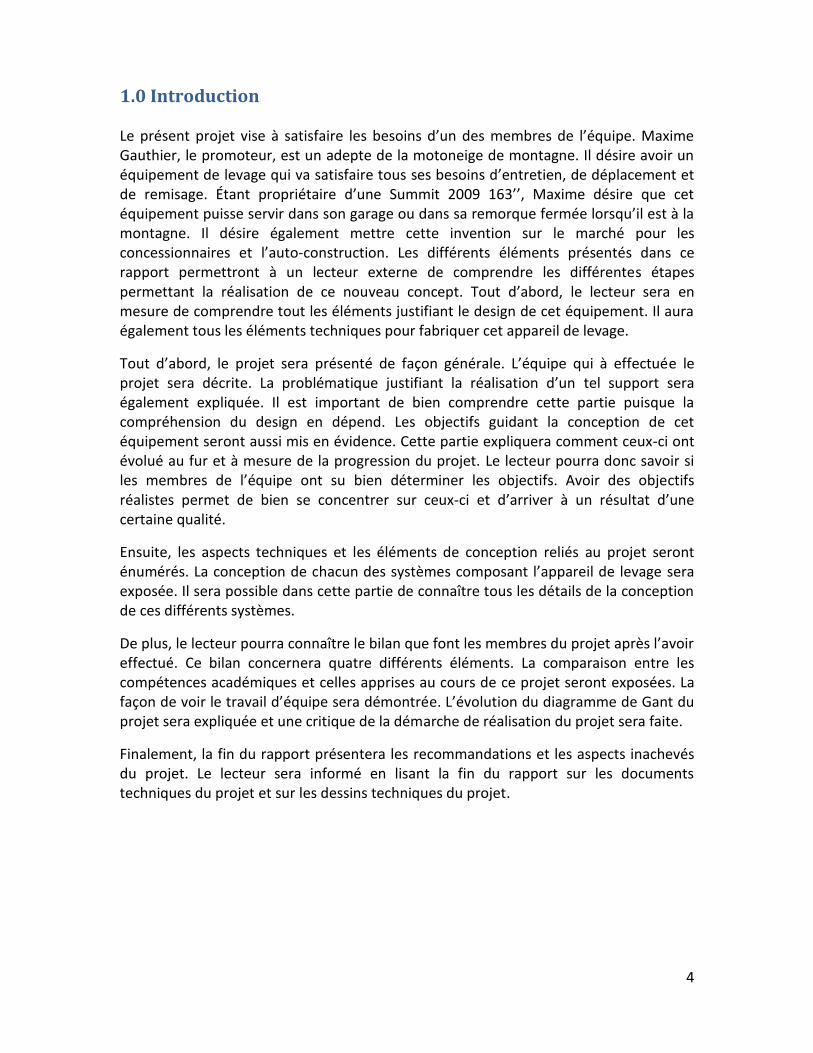
Roulettes
Ce chariot à roulettes représenté à la figure 1 est une solution très accessible. Trois
chariots sont nécessaires afin de pouvoir déplacer sa motoneige. On peut se les
procurer au coût de 10 $ chacune chez Canadian Tire identifié au numéro 46-0719-4. Le
fonctionnement n’est pas très compliqué. Il suffit de placer chaque chariot sous les skis
et la chenille de la motoneige. Cet exercice demeure ardu. Cette solutions est très
accessible mais donne lieu à plusieurs inconvénients. Elles permettent le déplacement
de la motoneige mais ne détendent pas la chenille lors du remisage. Elles ne rendent
pas accessible la chenille lors de l’entretient. Il est à considérer que la motoneige n’est
pas à une hauteur confortable pour l’entretient. La solidité des ces roulettes est
également très médiocre. Cette solution n’est pas à considérer puisque le support qui
sera modélisé résous tous les inconvénients que ces roulettes possèdes.
Figure 1: Roulettes

7
Chariot de transport
Ce chariot à roues représenté par la figure 2est une bonne solution pour le déplacement
d’une motoneige. On peut se le procurer pour un coût de 379,95 $ chez « Créations
J.P.L » situé à Louiseville au Québec. Ce chariot fonctionne simplement en le faisant
rouler par-dessus le siège de la motoneige et en attachant le crochet de celui-ci sur le
pare-chocs du véhicule. Ce chariot est seulement utile pour le déplacement de la
motoneige. On ne peut pas l’utiliser pour le remisage et l’entretien d’une motoneige. La
conception d’un nouveau support pour motoneige ce trouve à être justifié dans ce cas.
Table élévatrice
Cette table élévatrice représentée par la figure 3 est très utile pour le travail. On la
retrouve sur le site ‘’www.lespac.com’’ sous le numéro 22345758 pour la somme de
695$. La table se baisse complètement au sol pour permettre au véhicule d’y accéder.
Une fois sur la table le travailleur peut lever l’équipement à la hauteur voulue.
Cependant elle ne permet aucun transport ou déplacement. De plus, pour la motoneige
il est impossible de travailler sur la suspension arrière à moins d’avoir un second
équipement de levage. Le nouveau concept permettra de déplacer la motoneige et
rendra possible l’accès à la chenille pour son entretient.
Figure 2: Chariot de transport
Figure 3-Table élévatrice
8
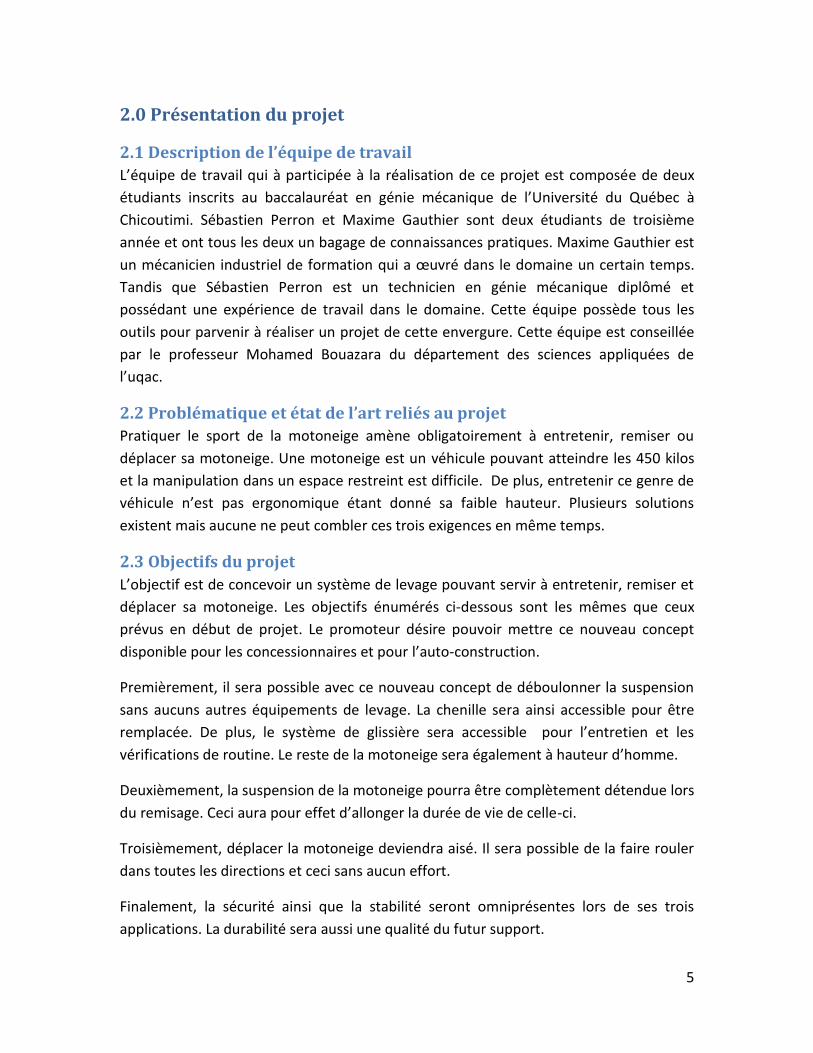
Support élévateur
Ce support élévateur représenté par la figure 4est une solution pratique pour élever une
motoneige. On peut se le procurer pour un coût de 299,99 $ chez Canadian Tire identifié
au numéro 26-7673-6. Il suffit de faire avancer sa motoneige au-dessus de ce support
pour que cette dernière soit élevée. La chenille et le reste de la motoneige se trouvent
alors à une hauteur agréable pour l’entretien. Malheureusement, l’absence de roulettes
rend impossible le déplacement de la motoneige une fois surélevée. Cette solution
comble les besoins du remisage et de l’entretien de la motoneige mais oublie celui du
déplacement.
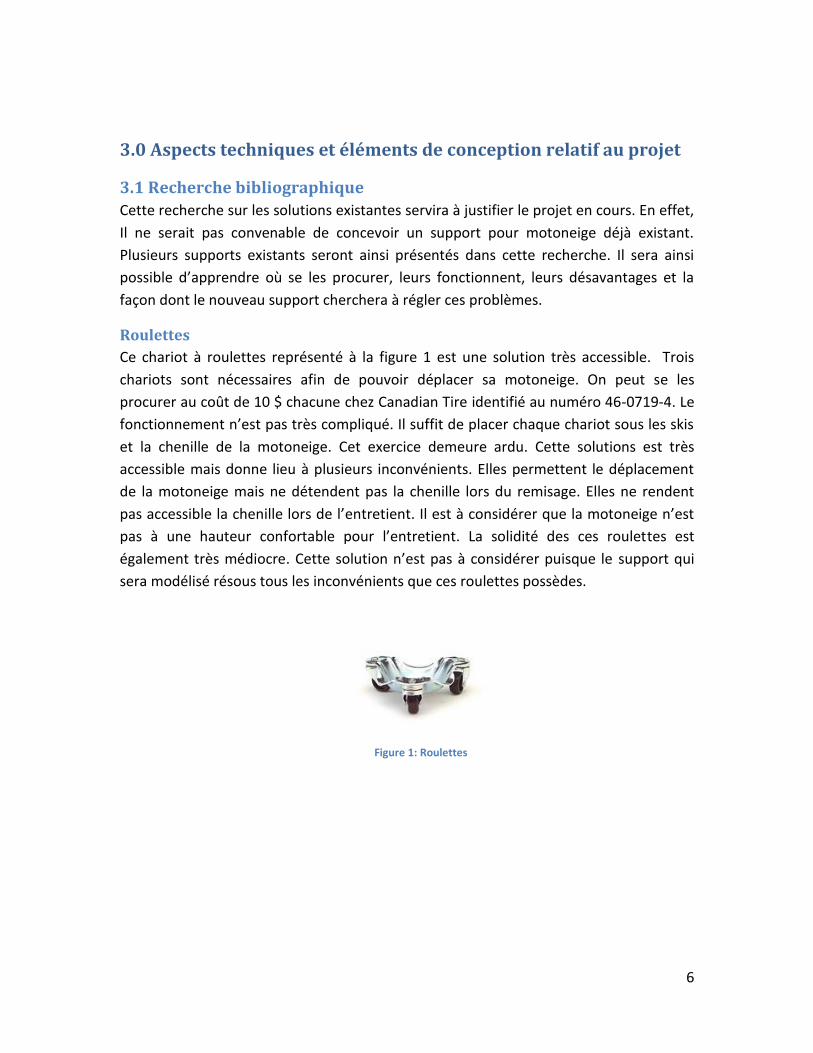
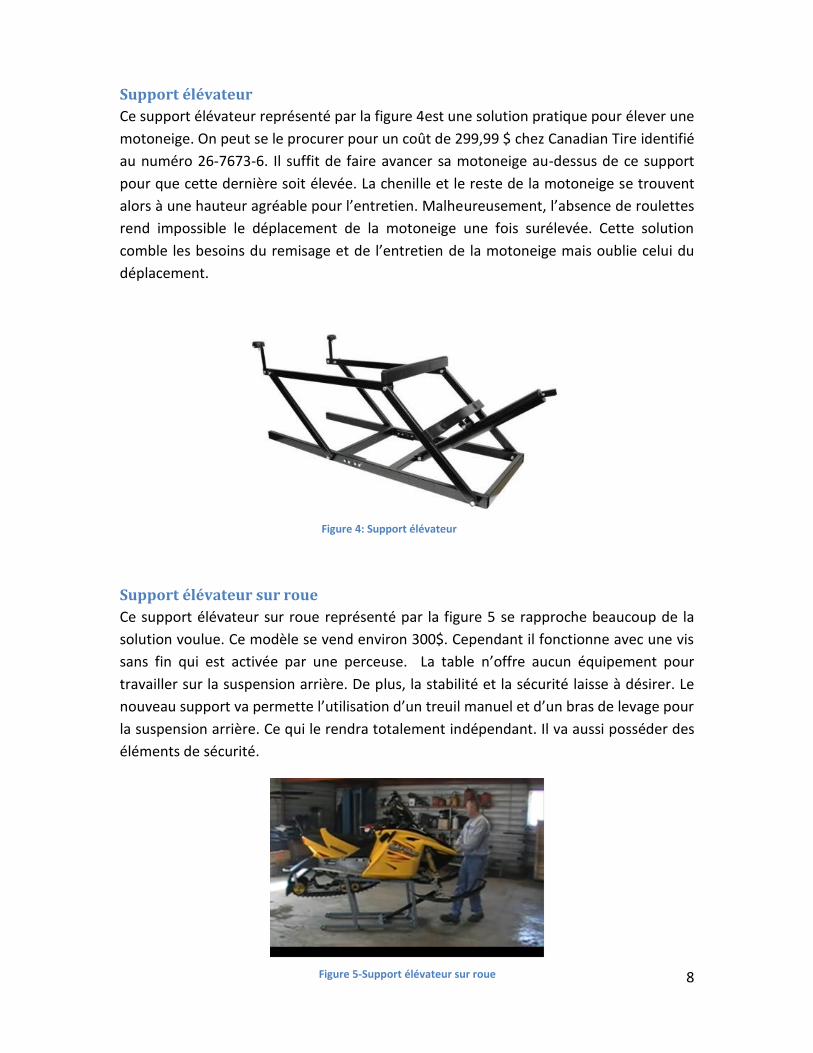
Support élévateur sur roue
Ce support élévateur sur roue représenté par la figure 5 se rapproche beaucoup de la
solution voulue. Ce modèle se vend environ 300$. Cependant il fonctionne avec une vis
sans fin qui est activée par une perceuse. La table n’offre aucun équipement pour
travailler sur la suspension arrière. De plus, la stabilité et la sécurité laisse à désirer. Le
nouveau support va permette l’utilisation d’un treuil manuel et d’un bras de levage pour
la suspension arrière. Ce qui le rendra totalement indépendant. Il va aussi posséder des
éléments de sécurité.
Figure 4: Support élévateur
Figure 5-Support élévateur sur roue
9
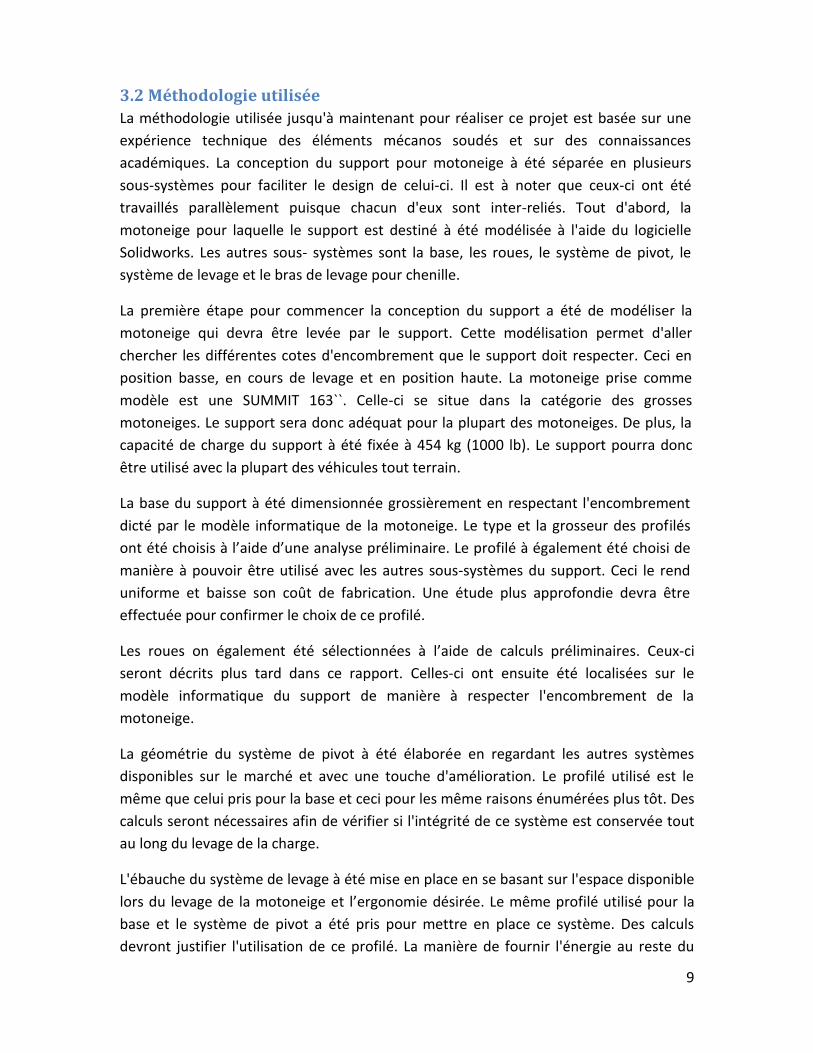
3.2 Méthodologie utilisée
La méthodologie utilisée jusqu'à maintenant pour réaliser ce projet est basée sur une
expérience technique des éléments mécanos soudés et sur des connaissances
académiques. La conception du support pour motoneige à été séparée en plusieurs
sous-systèmes pour faciliter le design de celui-ci. Il est à noter que ceux-ci ont été
travaillés parallèlement puisque chacun d'eux sont inter-reliés. Tout d'abord, la
motoneige pour laquelle le support est destiné à été modélisée à l'aide du logicielle
Solidworks. Les autres sous- systèmes sont la base, les roues, le système de pivot, le
système de levage et le bras de levage pour chenille.
La première étape pour commencer la conception du support a été de modéliser la
motoneige qui devra être levée par le support. Cette modélisation permet d'aller
chercher les différentes cotes d'encombrement que le support doit respecter. Ceci en
position basse, en cours de levage et en position haute. La motoneige prise comme
modèle est une SUMMIT 163``. Celle-ci se situe dans la catégorie des grosses
motoneiges. Le support sera donc adéquat pour la plupart des motoneiges. De plus, la
capacité de charge du support à été fixée à 454 kg (1000 lb). Le support pourra donc
être utilisé avec la plupart des véhicules tout terrain.
La base du support à été dimensionnée grossièrement en respectant l'encombrement
dicté par le modèle informatique de la motoneige. Le type et la grosseur des profilés
ont été choisis à l’aide d’une analyse préliminaire. Le profilé à également été choisi de
manière à pouvoir être utilisé avec les autres sous-systèmes du support. Ceci le rend
uniforme et baisse son coût de fabrication. Une étude plus approfondie devra être
effectuée pour confirmer le choix de ce profilé.
Les roues on également été sélectionnées à l’aide de calculs préliminaires. Ceux-ci
seront décrits plus tard dans ce rapport. Celles-ci ont ensuite été localisées sur le
modèle informatique du support de manière à respecter l'encombrement de la
motoneige.
La géométrie du système de pivot à été élaborée en regardant les autres systèmes
disponibles sur le marché et avec une touche d'amélioration. Le profilé utilisé est le
même que celui pris pour la base et ceci pour les même raisons énumérées plus tôt. Des
calculs seront nécessaires afin de vérifier si l'intégrité de ce système est conservée tout
au long du levage de la charge.
L'ébauche du système de levage à été mise en place en se basant sur l'espace disponible
lors du levage de la motoneige et l’ergonomie désirée. Le même profilé utilisé pour la
base et le système de pivot a été pris pour mettre en place ce système. Des calculs
devront justifier l'utilisation de ce profilé. La manière de fournir l'énergie au reste du

10
système afin de lever la motoneige à été choisie selon les exigences du promoteur. Son
dimensionnement est appuyé avec des calculs conventionnels.
La polyvalence du support est améliorée avec l'ajout d'un bras de levage pour la chenille
de la motoneige. Ce dernier à été conçu personnellement par le promoteur. Le dit
système à été conçu de manière à respecter les différentes cotes d'encombrement. Des
calculs devront être effectués pour justifier et affiner le dimensionnement du système.
Les différentes tâches qui devront être réalisées avant la fin de la conception du support
serviront à affiner ce dernier. Tous les calculs cités ci-dessus devront être faits. La
stabilité et la sécurité lors de l'utilisation du système devront être étudiées. Des
modifications devront être faites si cette étude le justifie. Les éléments du support jugés
critiques devront être étudiés à l'aide de la méthode des éléments finis. La mise en plan
pourra ainsi être réalisée pour ensuite passer à la fabrication du prototype de ce
système. Cependant, la fabrication sera effectuée dans le cadre de ce projet
académique si le temps le permet. Mais le promoteur aura quand même à sa disposition
tous les éléments nécessaires à la fabrication d'un équipement de levage respectant les
règles de l'ingénierie.
11
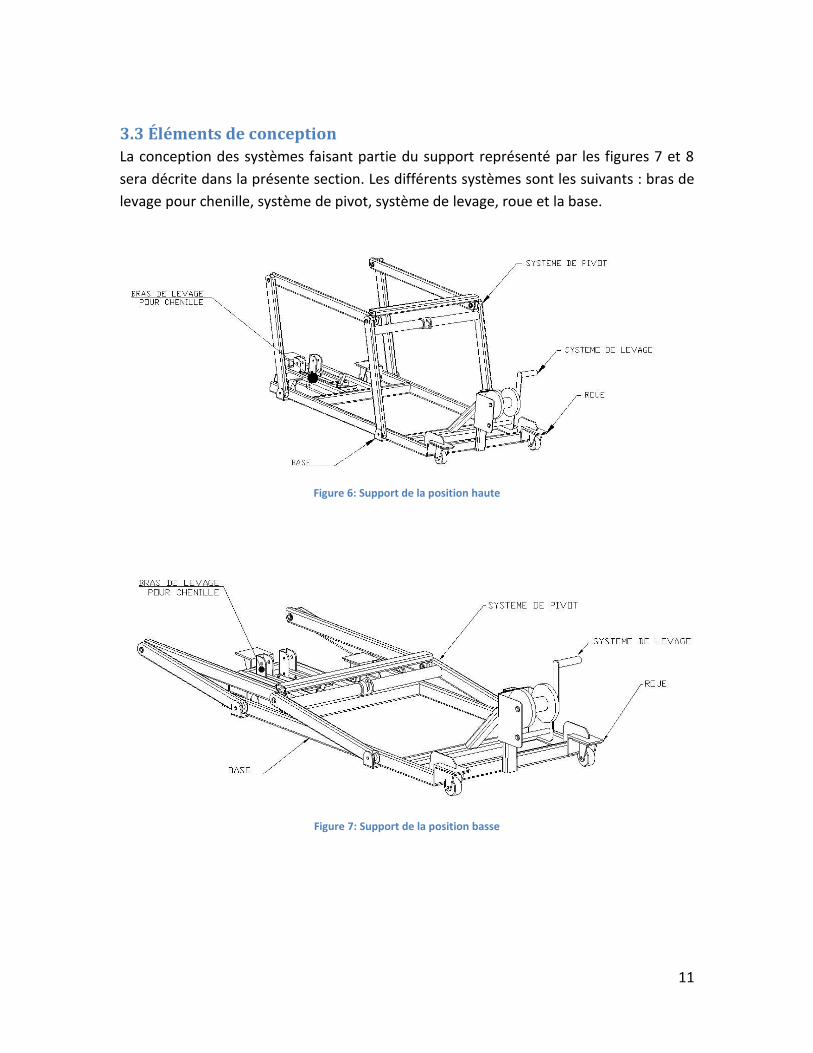
3.3 Éléments de conception
La conception des systèmes faisant partie du support représenté par les figures 7 et 8
sera décrite dans la présente section. Les différents systèmes sont les suivants : bras de
levage pour chenille, système de pivot, système de levage, roue et la base.
Figure 7: Support de la position basse
Figure 6: Support de la position haute
12
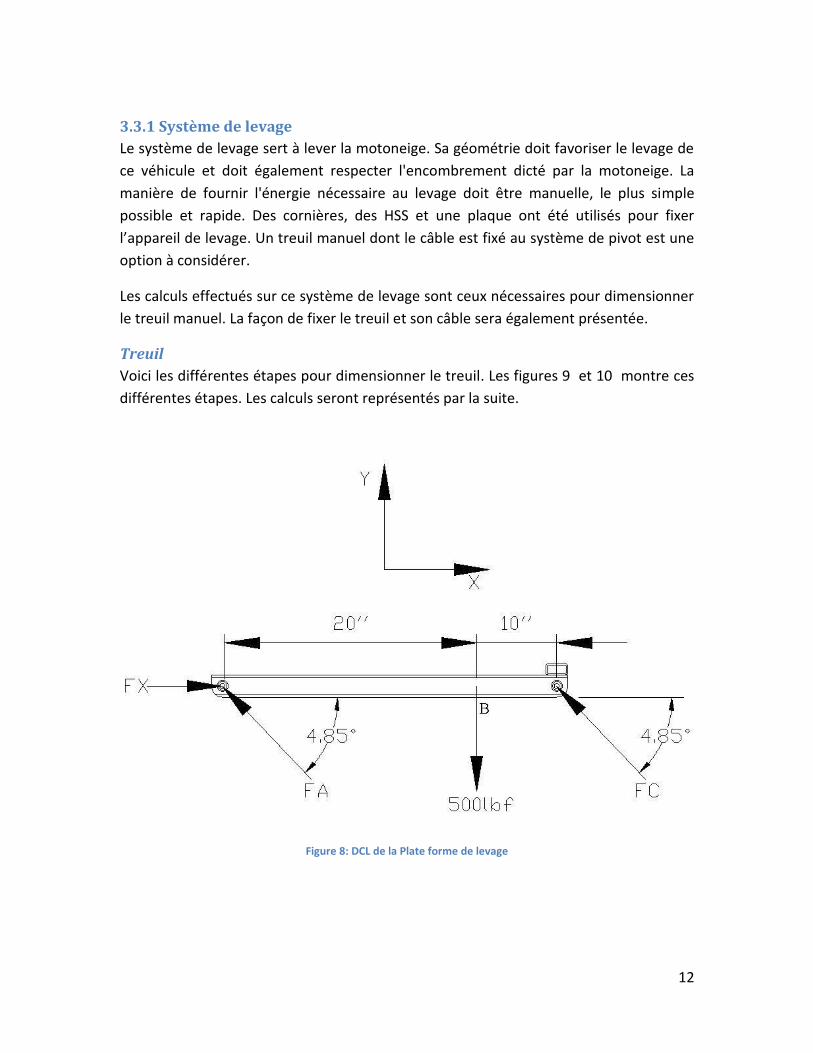
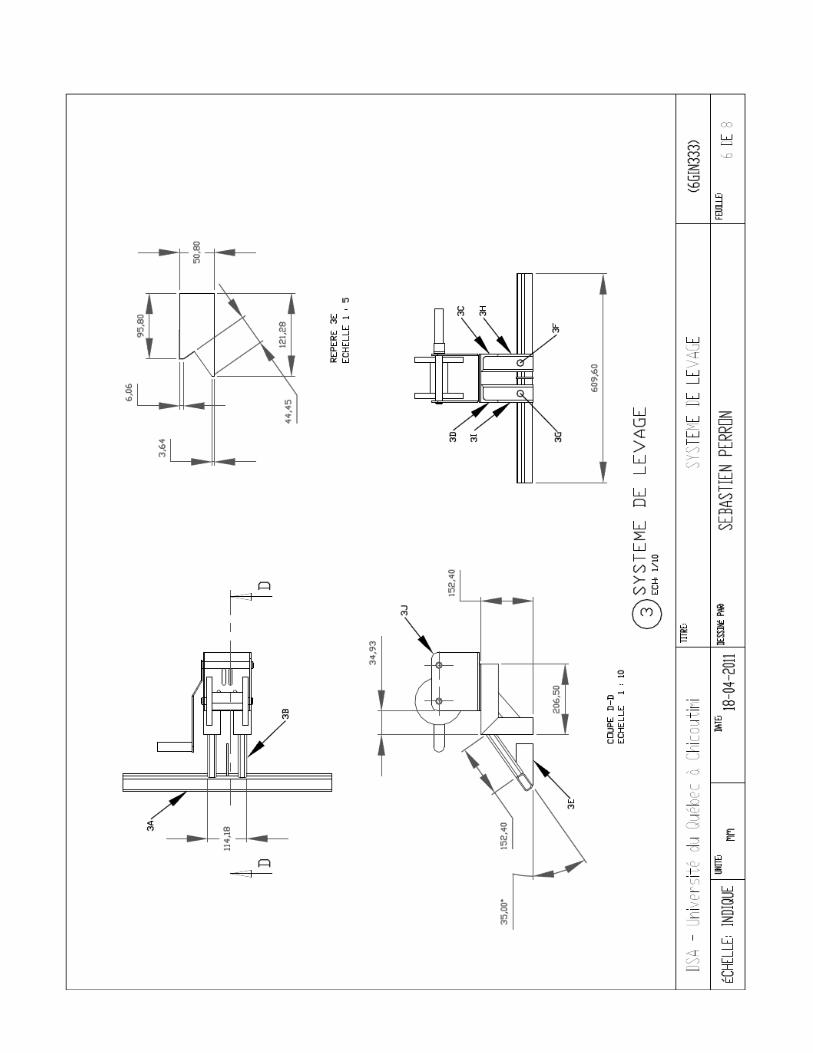
3.3.1 Système de levage
Le système de levage sert à lever la motoneige. Sa géométrie doit favoriser le levage de
ce véhicule et doit également respecter l'encombrement dicté par la motoneige. La
manière de fournir l'énergie nécessaire au levage doit être manuelle, le plus simple
possible et rapide. Des cornières, des HSS et une plaque ont été utilisés pour fixer
l’appareil de levage. Un treuil manuel dont le câble est fixé au système de pivot est une
option à considérer.
Les calculs effectués sur ce système de levage sont ceux nécessaires pour dimensionner
le treuil manuel. La façon de fixer le treuil et son câble sera également présentée.
Treuil
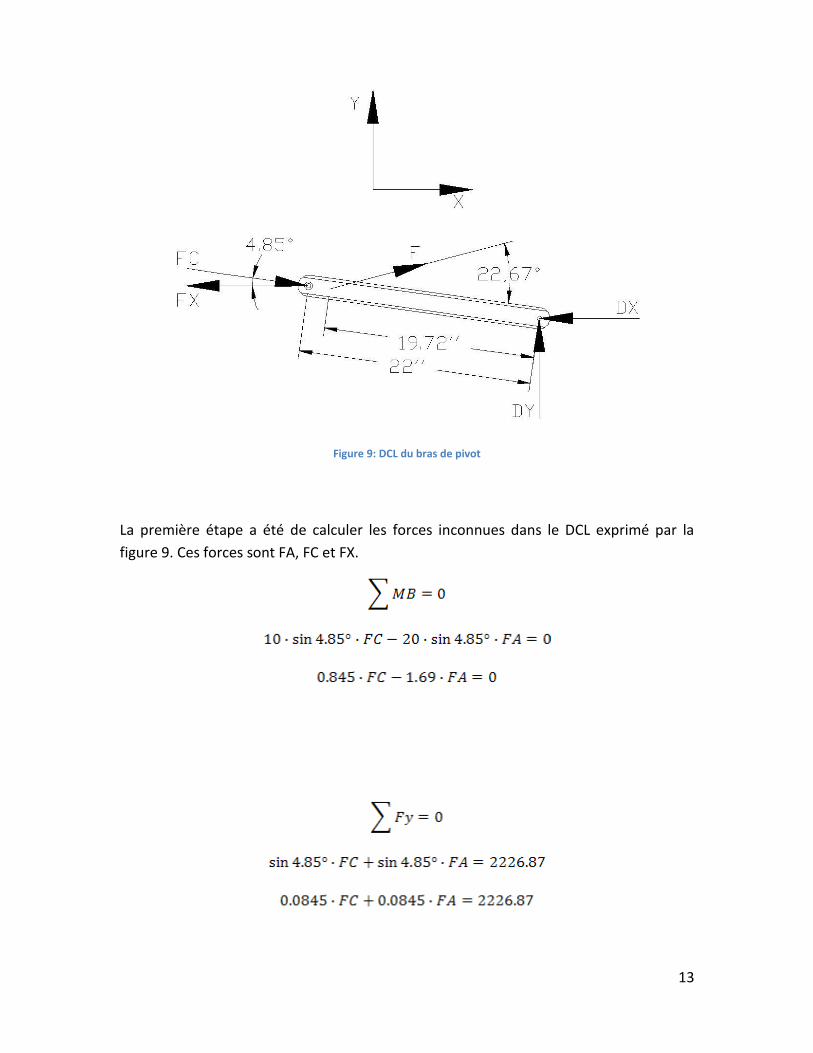
Voici les différentes étapes pour dimensionner le treuil. Les figures 9 et 10 montre ces
différentes étapes. Les calculs seront représentés par la suite.
Figure 8: DCL de la Plate forme de levage
13
Figure 9: DCL du bras de pivot
La première étape a été de calculer les forces inconnues dans le DCL exprimé par la
figure 9. Ces forces sont FA, FC et FX.

14
Il faut par la suite rapporter ces forces sur le DCL exprimé par la figure 10 et calculer la
force inconnue F.
Il faut par la suite additionner la force F pour connaître la tension dans le câble puisque
les DCL de la figure 9 et 10 ont été fait pour un côté. Ceci est possible étant donné que
le support est symétrique et que la force de 500 lbf est la moitié du poids de la
motoneige. Le poids de la plate-forme de levage a également été posée négligeable. Le
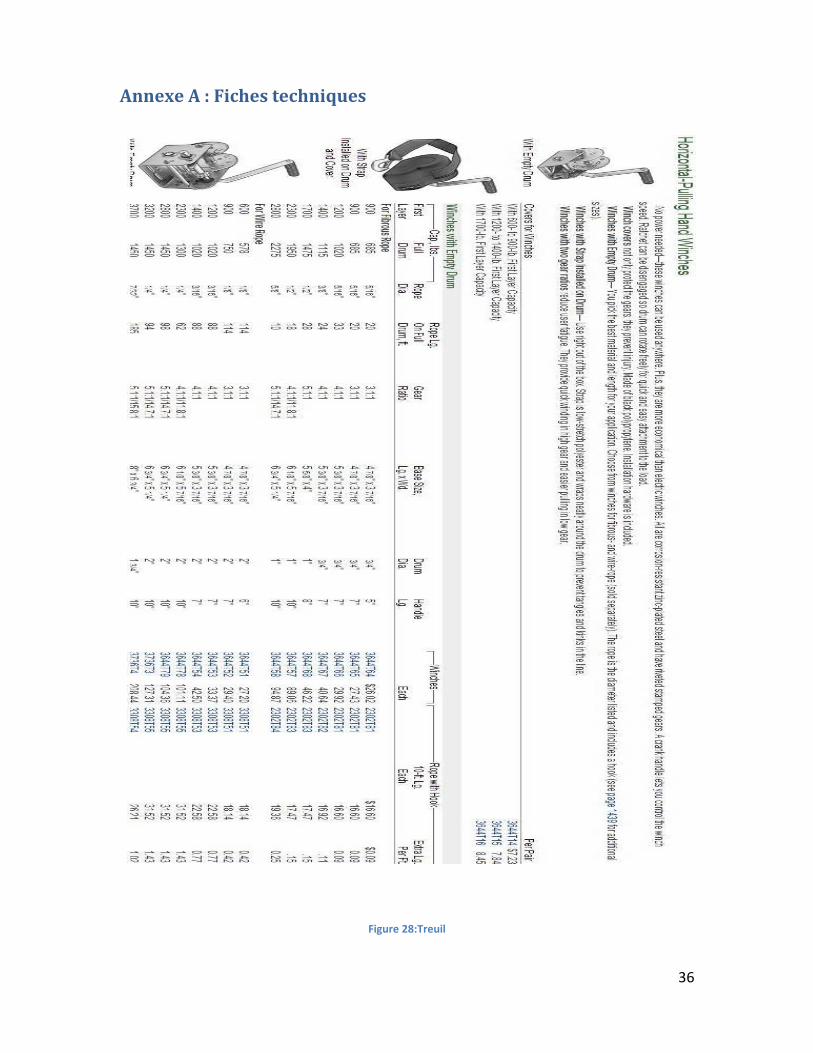
treuil choisit chez www.mcmaster.com est le #3644T79 avec une capacité de 2800 lbf.
Sa fiche technique est disponible en annexe.
Barre transversale pour levage
Contrainte en flexion
mNw
RaRM *772)
151286*2
5764115.0(*5764)
2
1(1max
Où R1 est la réaction à l’appui, a la distance minimale de l’œil, et w la charge répartie.
MpaI
yM203
003175.0*0194945.0*
0194945.0*7723
maxmax
15
7.1203
350.sF
Contrainte en cisaillement
28.685.27
)5.0*350(
85.27
)(
)(*
3
1*
4/*
57642
max
33
44
maxmax
max
Fs
Mpa
rr
rr
rr
V
NP
V
ie
ie
ie
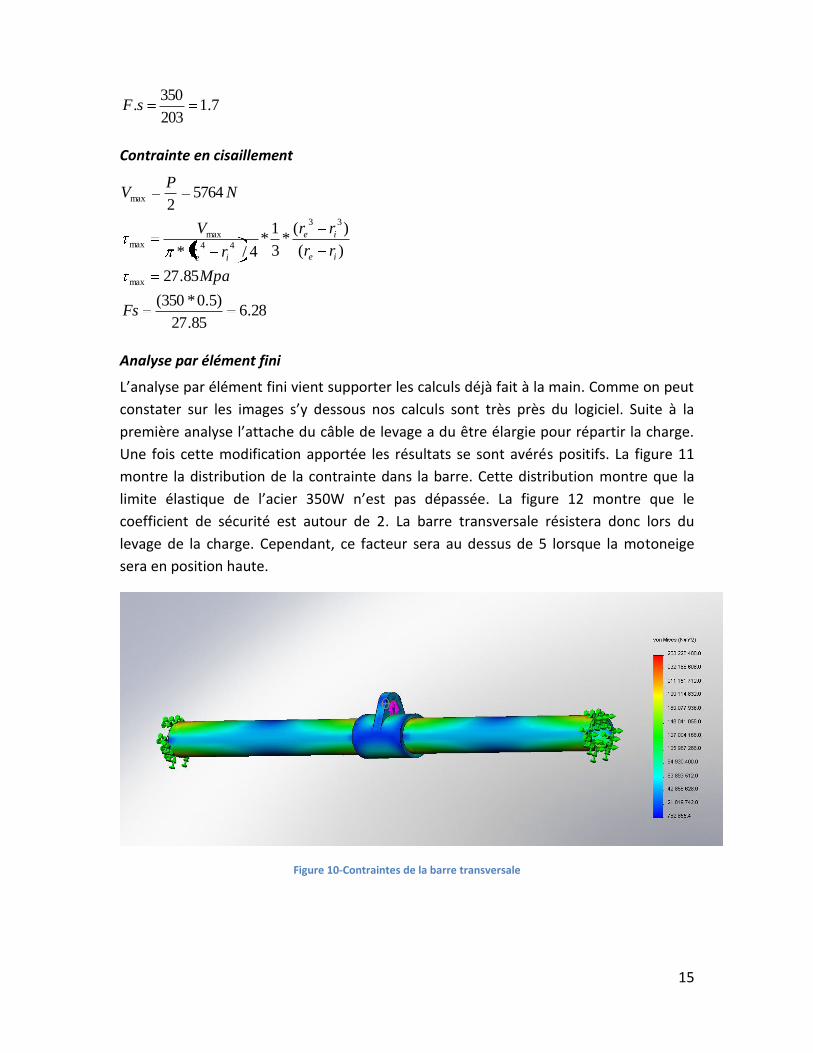
Analyse par élément fini
L’analyse par élément fini vient supporter les calculs déjà fait à la main. Comme on peut
constater sur les images s’y dessous nos calculs sont très près du logiciel. Suite à la
première analyse l’attache du câble de levage a du être élargie pour répartir la charge.
Une fois cette modification apportée les résultats se sont avérés positifs. La figure 11
montre la distribution de la contrainte dans la barre. Cette distribution montre que la
limite élastique de l’acier 350W n’est pas dépassée. La figure 12 montre que le
coefficient de sécurité est autour de 2. La barre transversale résistera donc lors du
levage de la charge. Cependant, ce facteur sera au dessus de 5 lorsque la motoneige
sera en position haute.
Figure 10-Contraintes de la barre transversale

16
Figure 11-Facteurs de sécurité de la barre transversale
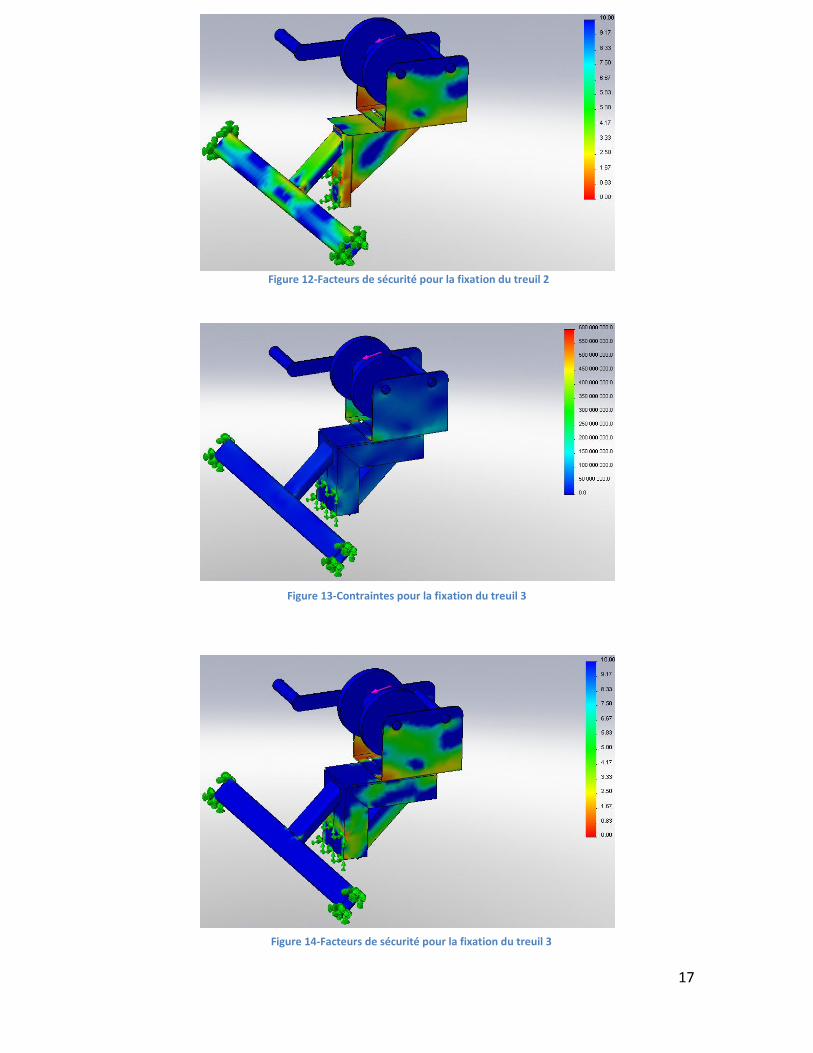
Fixation du treuil
Le premier concept pour fixer le treuil est visible sur la figure 7. Celui-ci ne respectait
pas les recommandations du manufacturier. Il conseil de positionner le treuil de façon à
ce que le câble soit parallèle à sa base lors de l’utilisation du treuil. Un autre concept
respectant les critères du manufacturier a donc été analysé à l’aide du logiciel
Solidwork. La figure 13 montre que les facteurs de sécurité sont mal distribués.
L’utilisation des matériaux n’est pas optimisée dans cette solution. De la matière se
trouve à des endroits non sollicités. Un nouveau concept sera nécessaire. La force
extérieure utilisée est la même qui a été utilisée pour l’analyse du bras transversal. Il est
à noter que l’échelle des contraintes est en Mpa. La figure 14 montre que le troisième
concept analysé distribue mieux la contrainte imposée par le levage de la charge. Le HSS
et les plaques du premier concept ont été remplacés par des cornières. Le facteur de
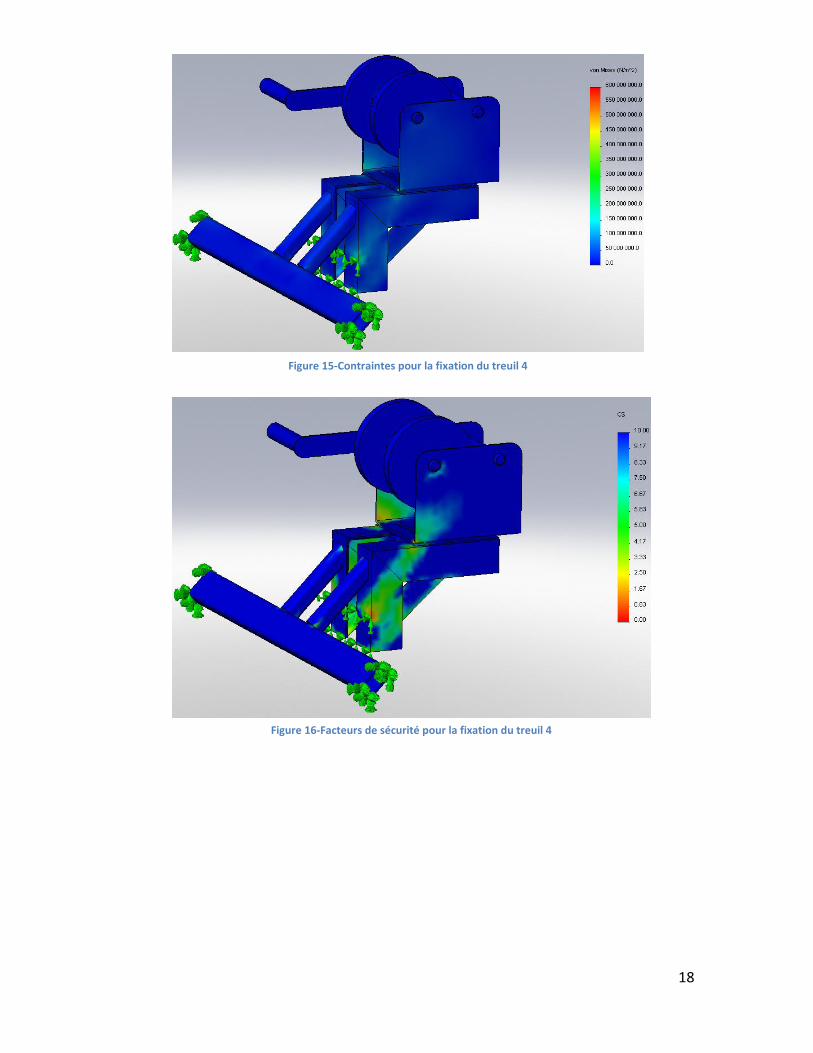
sécurité fixé à 5 semble également être respecté sur la figure 15. Mais un seul problème
persiste. Il y a une concentration de contraintes dans les coins du treuil. La façon dont le
treuil est fixé doit donc être révisée. Un troisième concept à donc été créé. Les figures
16 et 17 montrent l’analyse de ce dernier. Ce concept remplira sa tâche adéquatement
puisque les contraintes sont bien distribuées et que le facteur de sécurité de 5 est
respecté. Les détails de la version finale de la fixation du treuil sont disponibles à
l’annexe B
17
Figure 12-Facteurs de sécurité pour la fixation du treuil 2
Figure 13-Contraintes pour la fixation du treuil 3
Figure 14-Facteurs de sécurité pour la fixation du treuil 3
18
Figure 15-Contraintes pour la fixation du treuil 4
Figure 16-Facteurs de sécurité pour la fixation du treuil 4
19
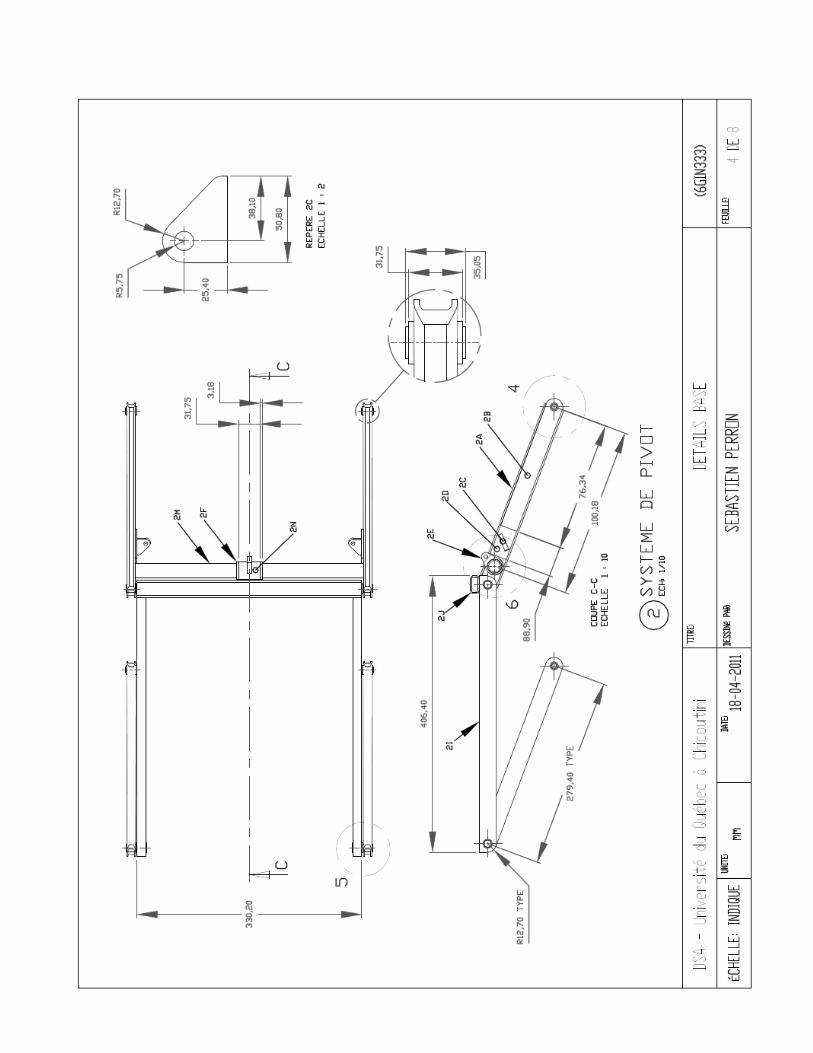
3.3.2 Système de pivot
Le système de pivot permet de faire le lien entre la position basse et haute de la
motoneige. Le système de levage vient également s'y attacher pour lever la motoneige.
Les aspects à respecter lors de la conception de ce système sont très importants. Le
profilé choisi doit résister à la charge dans les deux positions et tout au long du levage.
La géométrie du système doit en position basse favorisée le levage de la charge. Les
axes de rotation doivent être conçus adéquatement pour minimiser l'usure prématurée
des différentes membrures. Le même profilé rectangulaire utilisé dans les autres
systèmes devrait faire l'affaire. Tandis qu'un simple coussinet devrait faire l'affaire pour
les axes de rotation.
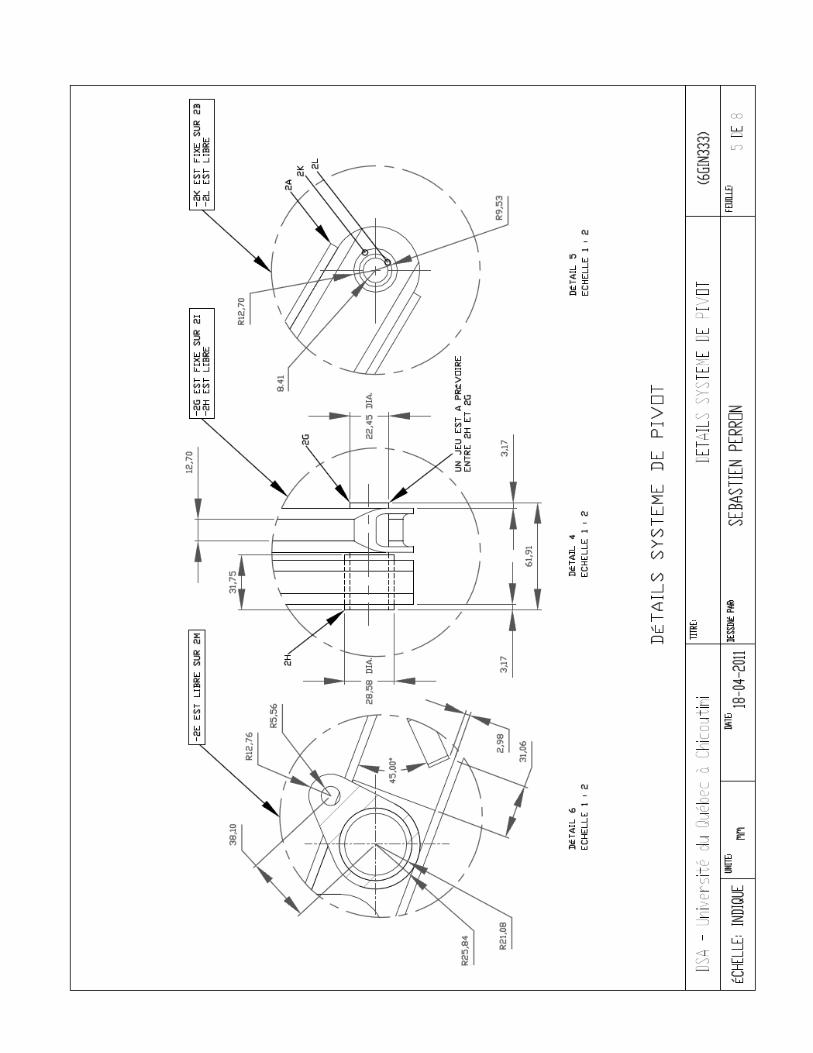
Différents calculs sont à effectuer pour ce système. Les contraintes dans les bras de
levage avant sont à déterminer étant donné qu’ils sont plus sollicités que ceux arrière.
Le cisaillement dans les coussinets des points C et la vis du point D de la figure 10 ont
aussi été calculés.
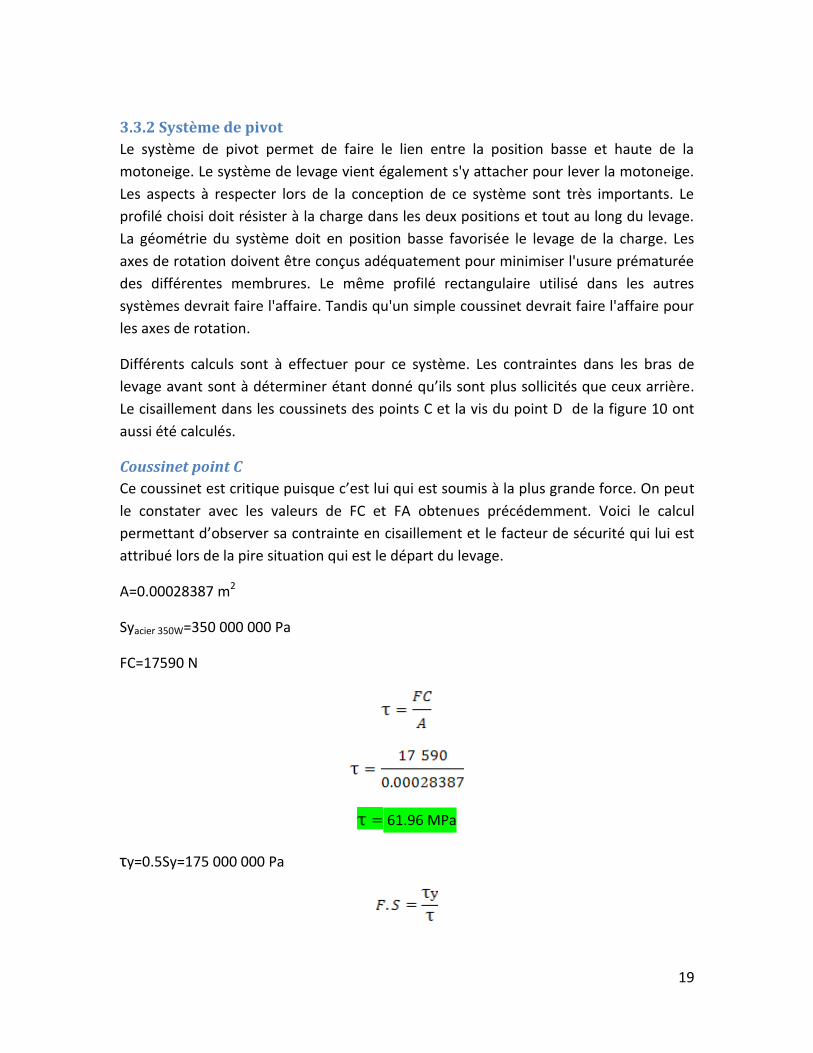
Coussinet point C
Ce coussinet est critique puisque c’est lui qui est soumis à la plus grande force. On peut
le constater avec les valeurs de FC et FA obtenues précédemment. Voici le calcul
permettant d’observer sa contrainte en cisaillement et le facteur de sécurité qui lui est
attribué lors de la pire situation qui est le départ du levage.
A=0.00028387 m2
Syacier 350W=350 000 000 Pa
FC=17590 N
61.96 MPa
τy=0.5Sy=175 000 000 Pa
20
Le facteur de sécurité ne respecte pas celui qui a été fixé à 5. Pour avoir un facteur de
sécurité de 5 attribué aux équipements de levage, il faut que le diamètre du coussinet
du point c soit augmenté.
Cependant, le diamètre maximal respectant l’espace disponible est de 22 mm. Le
facteur de sécurité associé à ce diamètre est donc le suivant :
46.277 MPa
21
Vis point D
Comme pour le coussinet du point C, la vis du point D est la plus sollicitée. Voici le calcul
montrant la contrainte ainsi que le facteur de sécurité attribué à cette vis. Ce calcul a
été fait lorsque le support commence à lever. Il est à noter que la vis est de moins en
moins sollicitée au fur et à mesure que le support s’élève.
A=0.00007123 m2
FC=17 590 N
123.473 MPa
Syvis sae grade 5 =586.05 MPa
Avec une vis d’un diamètre de 5/8 ‘’ ou 15.875 mm avec un grade SAE de 5, le facteur de
sécurité devrait augmenter.
A=0.00019793 m2
FC=17 590 N
44.435 MPa
22
Syvis sae grade 5 =586.05 MPa
Ce facteur de sécurité respecte donc celui attribué aux équipements de levage qui est
de 5.
Bras avant :
Flambement des bras avant :
Iy=0.040*106mm4 Aire=418mm2 E=210 Gpa
Ix=0.122*106mm4 Rotule-Rotule donc K=1
On va avoir le pire cas en Iy donc :
NLK
IEPcr 04.265501
)5588.*1(
10*040.0*10*210*
)*(
**2
692
2
2
Dans le cas du pire chargement on va obtenir Pmax= 17568.99 N
Facteur de sécurité pour le flambement : 98.1399.17568
245588
N
NFS
Charge en compression :
Mpam
N
A
F42
10*418
99.1756826
Facteur de sécurité pour la compression : 3.842
350
Mpa
MpaFS
Analyse par élément fini :
La première analyse sur les bras avant a révélée des faiblesses. Étant donné la position,
nous avons conclut qu’il était préférable d’ajouter des fers plats de 3/16 ‘’d’épaisseur de
chaque côté du profiler rectangulaire. On effectue l’analyse dans la position la plus
vulnérable. C'est-à-dire en position basse. C’est à cette position que les membrures sont
les plus sollicitées. À la deuxième analyse, les résultats se sont avérés positifs. La
moyenne des coefficients de sécurité sur notre pièce est d’environ 5. Les figures 17 et
18 montrent la répartition des contraintes et des facteurs de sécurité du deuxième
23
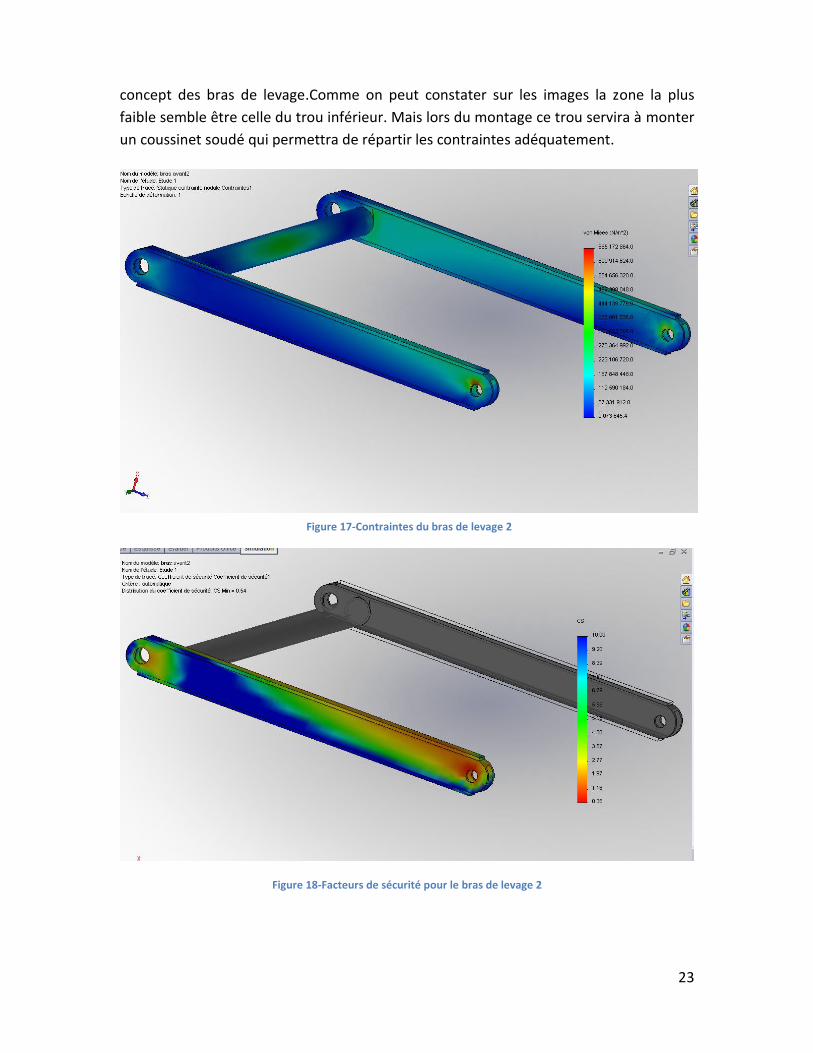
concept des bras de levage.Comme on peut constater sur les images la zone la plus
faible semble être celle du trou inférieur. Mais lors du montage ce trou servira à monter
un coussinet soudé qui permettra de répartir les contraintes adéquatement.
Figure 18-Facteurs de sécurité pour le bras de levage 2
Figure 17-Contraintes du bras de levage 2
24
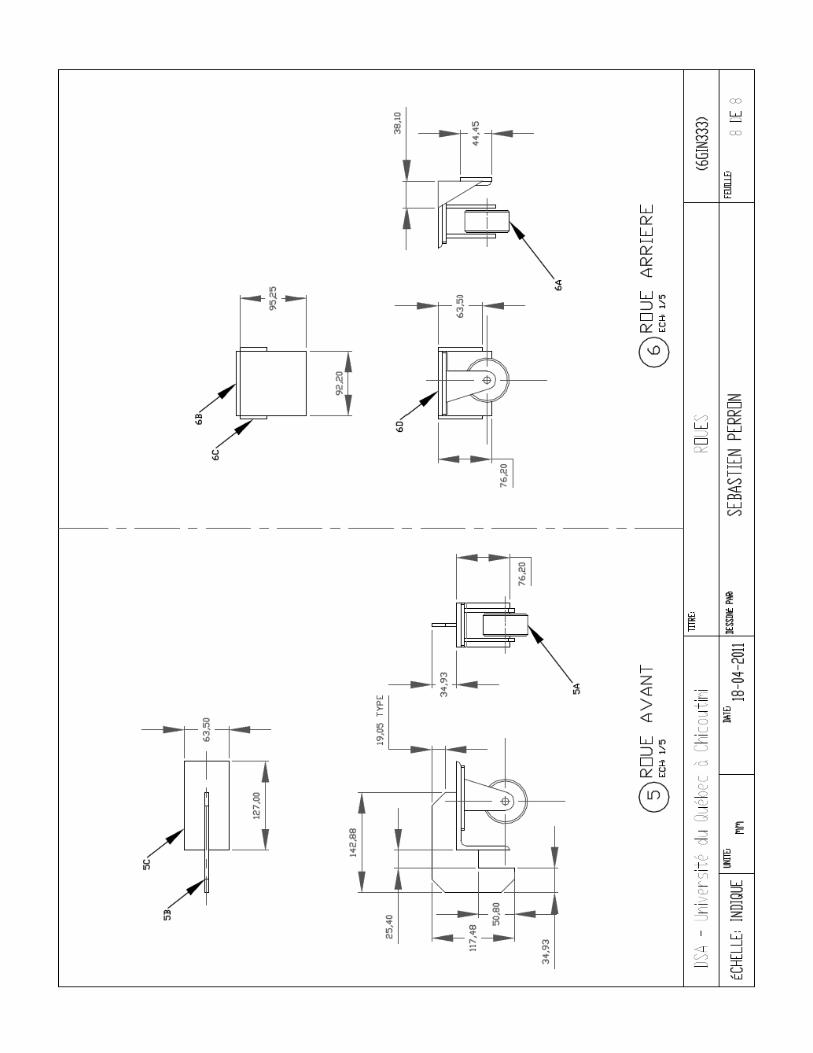
3.3.3 Roues
Les roues du support donnent la mobilité à cet appareil. Elles doivent être assez solides
tout au long de l'utilisation du support. Elles doivent résister à la charge que la
motoneige provoque sur le support lorsqu'il est en position basse et haute. L'enjeu est
de pouvoir sélectionner un type de roue assez solide ayant un profile bas. Elles devront
être incluses à l'intérieur de la base de manière à dépasser faiblement de celle-ci. Cela
afin de minimiser la force requise pour lever la motoneige. Cet aspect sera expliqué plus
tard. Des roues disponibles chez la plupart des distributeurs de quincaillerie comme le
site internet www.mcmaster.com devraient être adéquates.
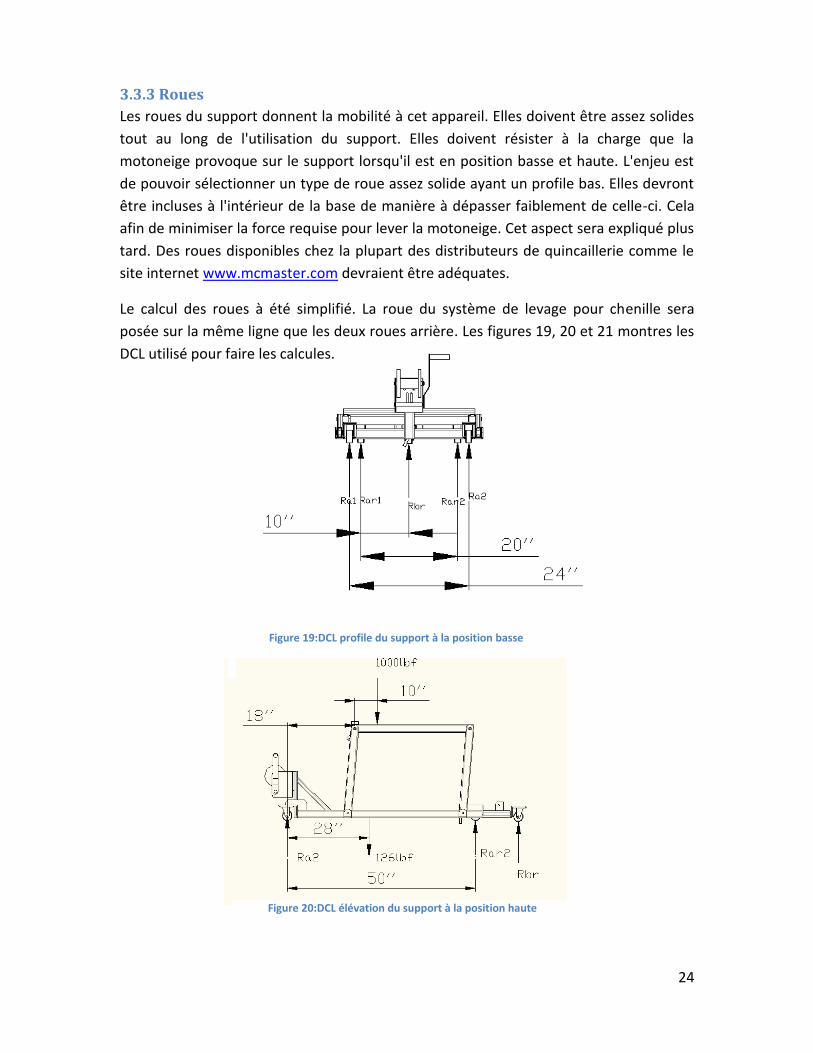
Le calcul des roues à été simplifié. La roue du système de levage pour chenille sera
posée sur la même ligne que les deux roues arrière. Les figures 19, 20 et 21 montres les
DCL utilisé pour faire les calcules.
Figure 19:DCL profile du support à la position basse
Figure 20:DCL élévation du support à la position haute
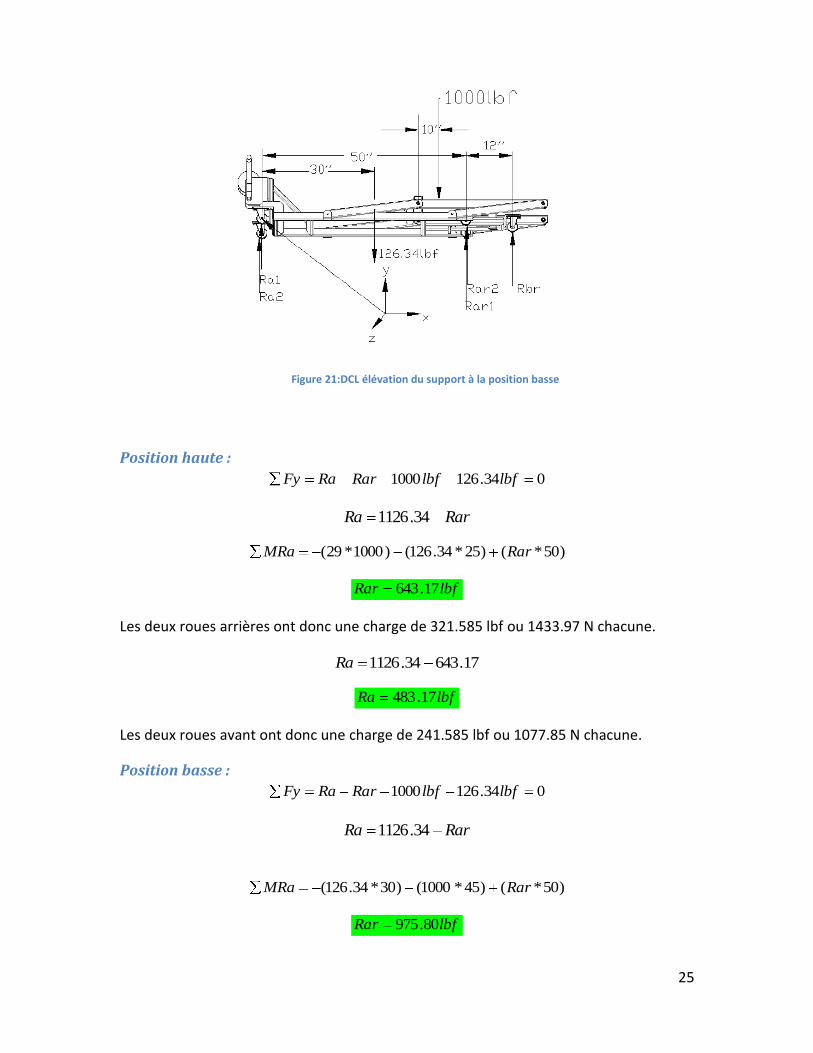
25
Position haute :
034.1261000 lbflbfRarRaFy
RarRa 34.1126
)50*()25*34.126()1000*29( RarMRa
lbfRar 17.643
Les deux roues arrières ont donc une charge de 321.585 lbf ou 1433.97 N chacune.
17.64334.1126Ra
lbfRa 17.483
Les deux roues avant ont donc une charge de 241.585 lbf ou 1077.85 N chacune.
Position basse :
034.1261000 lbflbfRarRaFy
RarRa 34.1126
)50*()45*1000()30*34.126( RarMRa
lbfRar 80.975
Figure 21:DCL élévation du support à la position basse
26
80.97534.1126Ra
lbfRa 54.150
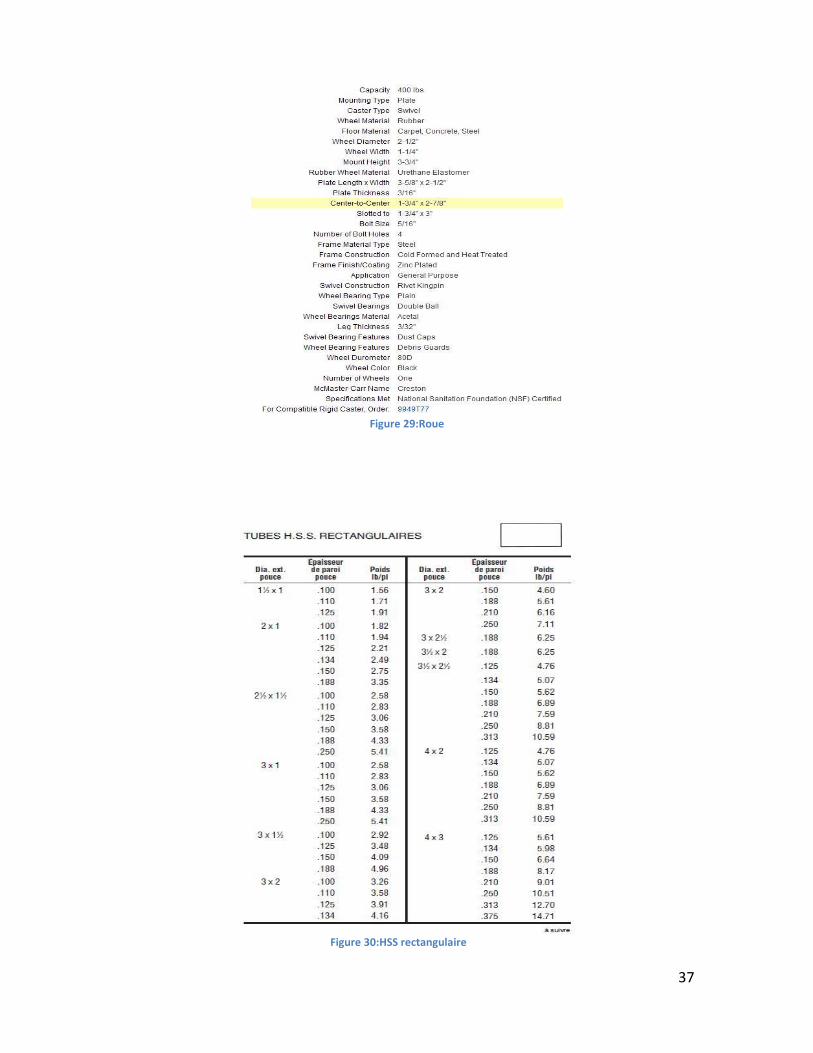
Cette fois les roues arrières supporteront 487.9 lbf ou 2175.59 N chacune. Les roues
sélectionnées on une capacité de 400 lbf. La roue du système de levage pour chenille
supportera le 87.9 lbf de plus que doit supporter les roues arrières. Ceci est illustré dans
le calcul précédant. Tandis que celle d’en avant supporteront 75.27 lbf ou 335.63 N
chacune.
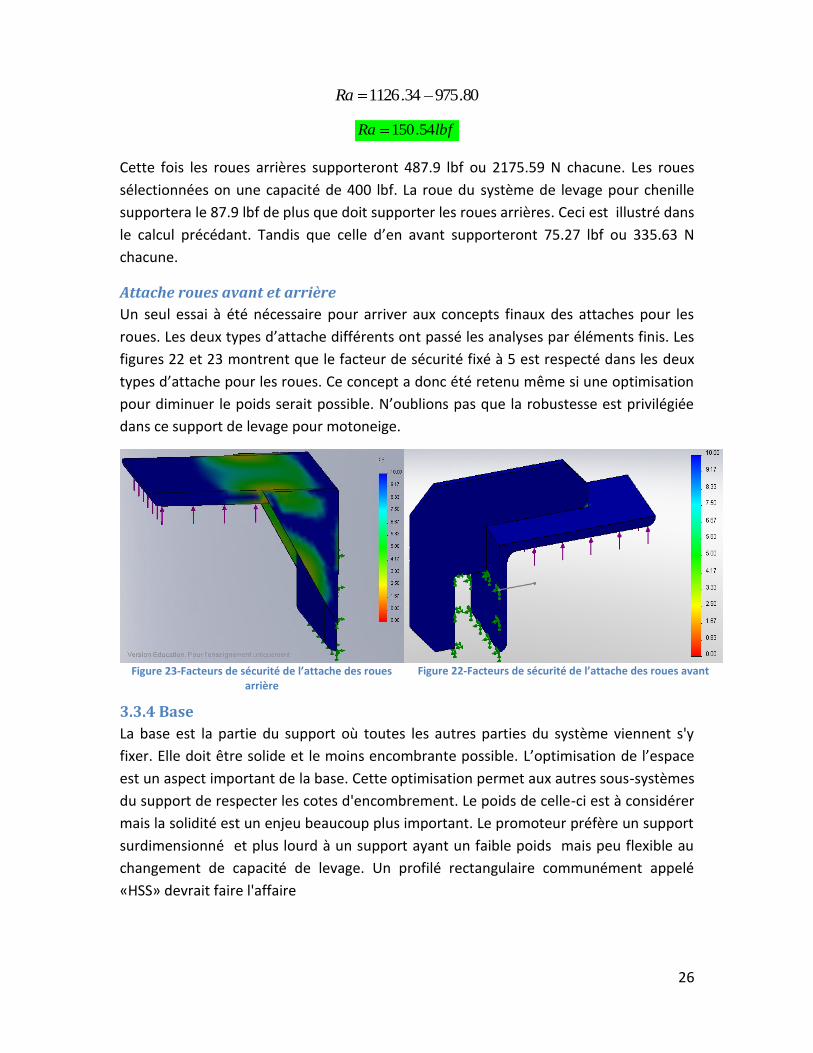
Attache roues avant et arrière
Un seul essai à été nécessaire pour arriver aux concepts finaux des attaches pour les
roues. Les deux types d’attache différents ont passé les analyses par éléments finis. Les
figures 22 et 23 montrent que le facteur de sécurité fixé à 5 est respecté dans les deux
types d’attache pour les roues. Ce concept a donc été retenu même si une optimisation
pour diminuer le poids serait possible. N’oublions pas que la robustesse est privilégiée
dans ce support de levage pour motoneige.
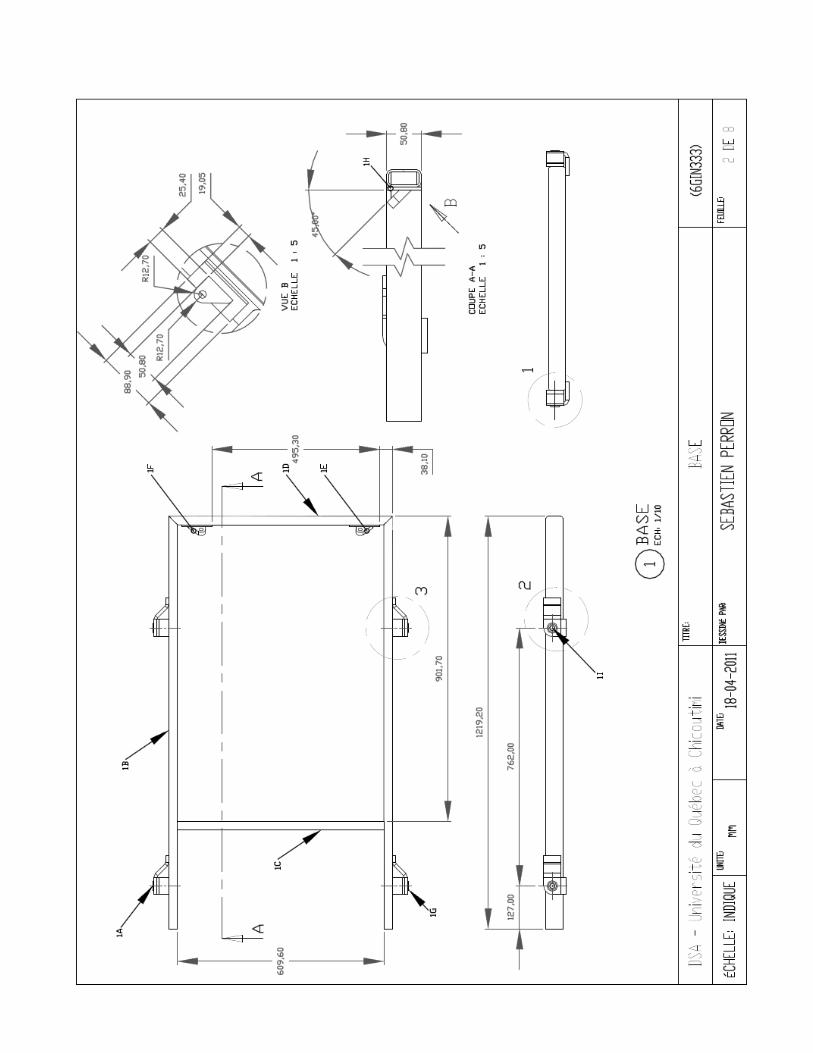
3.3.4 Base
La base est la partie du support où toutes les autres parties du système viennent s'y
fixer. Elle doit être solide et le moins encombrante possible. L’optimisation de l’espace
est un aspect important de la base. Cette optimisation permet aux autres sous-systèmes
du support de respecter les cotes d'encombrement. Le poids de celle-ci est à considérer
mais la solidité est un enjeu beaucoup plus important. Le promoteur préfère un support
surdimensionné et plus lourd à un support ayant un faible poids mais peu flexible au
changement de capacité de levage. Un profilé rectangulaire communément appelé
«HSS» devrait faire l'affaire
Figure 23-Facteurs de sécurité de l’attache des roues arrière
Figure 22-Facteurs de sécurité de l’attache des roues avant
27
Le dimensionnement de l’attache reliant le bras de pivot à la base sera présenté dans
cette partie. Les autres profilés de la base ont été posés assez résistant pour soutenir les
autres parties du support. Les profilés formant la base sont les mêmes que ceux formant
les bras de levage. Les bras de levage avant sont les plus sollicités et ceux-ci résistent
bien lors du levage de la motoneige. Les HSS formant la base devraient donc bien
résister. Mais leurs épaisseurs de paroi pourraient être augmentées si une étude
ultérieure l’exigerait. Cette modification est très simple et n’impliquerait aucun autre
changement dans le support.
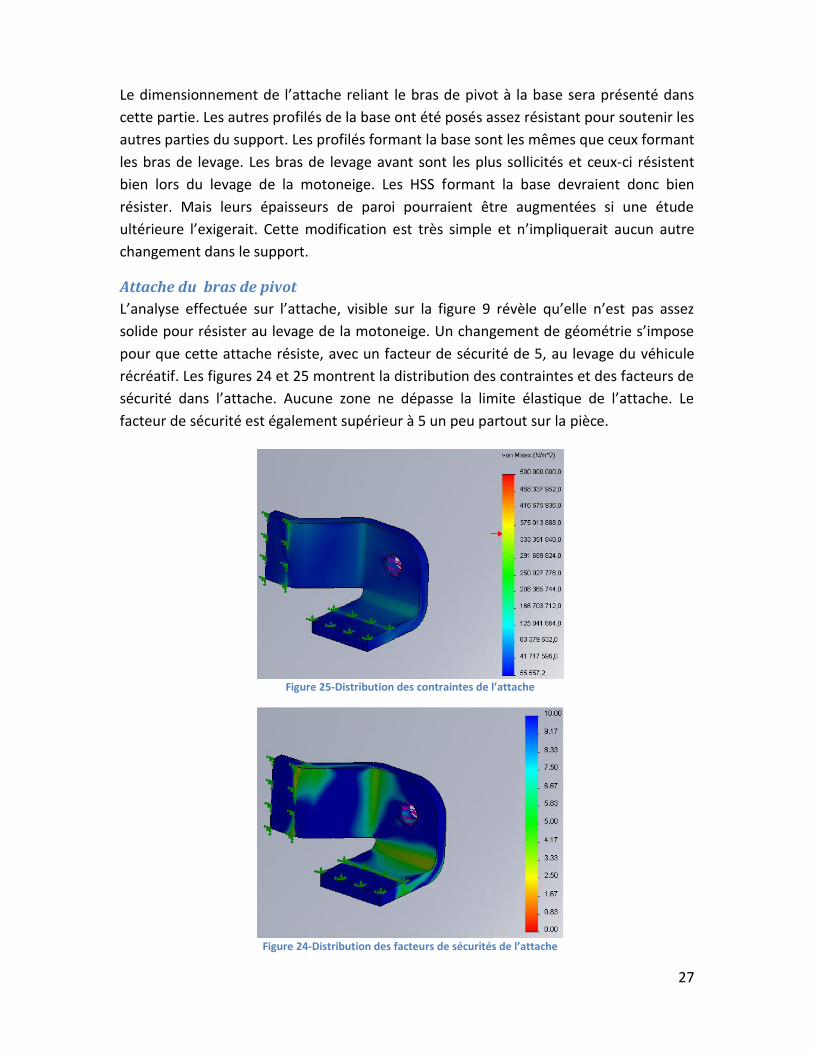
Attache du bras de pivot
L’analyse effectuée sur l’attache, visible sur la figure 9 révèle qu’elle n’est pas assez
solide pour résister au levage de la motoneige. Un changement de géométrie s’impose
pour que cette attache résiste, avec un facteur de sécurité de 5, au levage du véhicule
récréatif. Les figures 24 et 25 montrent la distribution des contraintes et des facteurs de
sécurité dans l’attache. Aucune zone ne dépasse la limite élastique de l’attache. Le
facteur de sécurité est également supérieur à 5 un peu partout sur la pièce.
Figure 25-Distribution des contraintes de l’attache
Figure 24-Distribution des facteurs de sécurités de l’attache

28
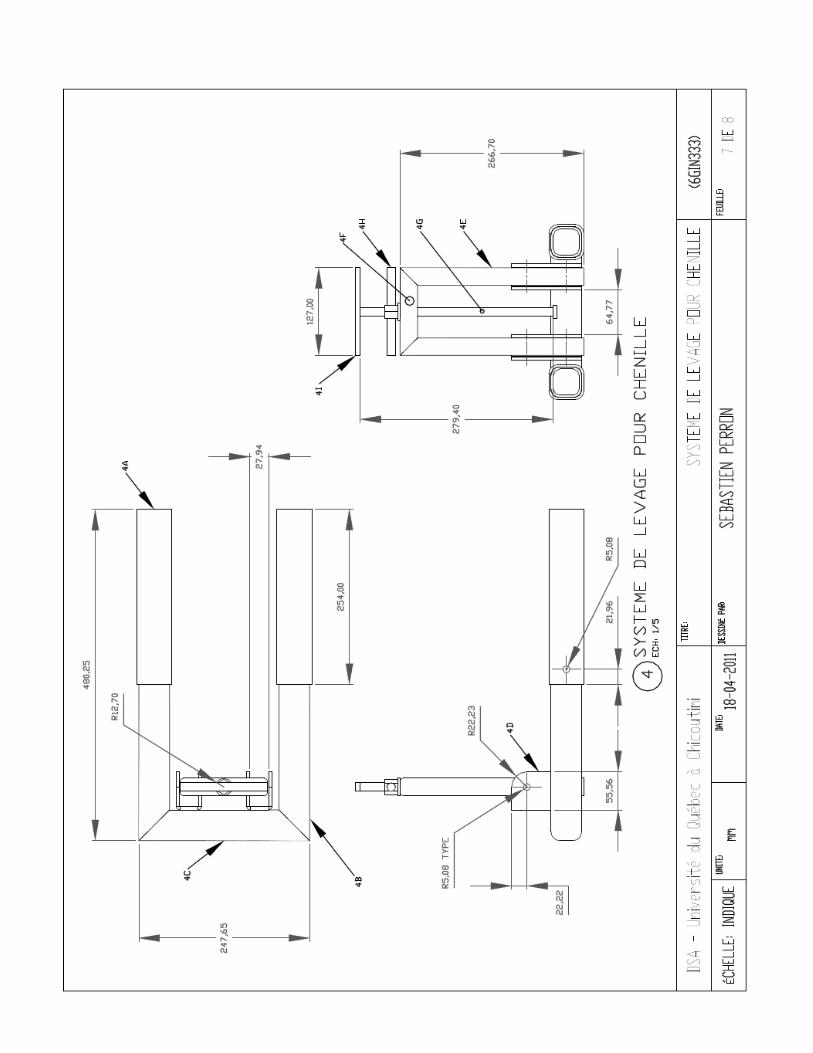
3.3.5 Bras de levage pour chenille
Le bras de levage pour chenille est la partie du support qui permet de détendre la
chenille de la motoneige une fois qu’elle est en position haute. Ce système doit
respecter l'espace disponible et ne doit pas venir en conflit avec la motoneige lorsqu'elle
vient se placer par-dessus le support. Ce système doit également être activé
manuellement. Un plus petit profilé que les autres devra être sélectionné afin de
diminuer l'espace nécessaire au système. Le fait d’être rétractable devrait permettre au
système de ne pas être en conflit avec la motoneige. Un montage tige filetée et écrous
devrait permettre de détendre efficacement la chenille du véhicule.
Ce système à été élaboré à l’aide des exigences du promoteur. Les profilés utilisés
résisteront amplement à une charge de 890 N. L’écrou et la tige résisteront également à
cette charge puisque la figure 33 indique que l’écrou possède une capacité de 2000 lbf
ou 8918 N.
3.3.6 Sécurité
Ces éléments sont tous ceux permettant de régler un problème de sécurité ou de
stabilité descellé après une étude du support. La stabilité du support en position haute
et en mouvement est à vérifier. Il doit également y avoir une façon de bloquer le
support une fois que la motoneige est en position haute. Ces calculs ont été faits et ils
affirment que le support sera sécuritaire en position haute et basse.
Sécurité en position haute :
Pour faire le calcul de la stabilité, le châssis a été placé en position haute. La force de
perturbation a été figurée à la hauteur du guidon. C’est à cette hauteur que le bras de
levier est le plus grand. Pour que la stabilité latérale soit compromise, il faut considérer
que les roues sont complètement fixes ou bloquer.
∑Fy= R1+R2-1126lbf
R1=1126-R2
∑M1= (R2*21)-(1126*10.5)
R2=563 lbf donc R1=563 lbf
Pour trouver la force perturbatrice il faut poser que R2=0.
Figure 26-DCL sécurité
29
∑Fy=1126-R1
R1=1126 lbf
∑M1=-(1126*10.5)+(Fp*50)
Fp=236.46 Lbf
Pour renverser la motoneige à partir de son guidon, il faudrait exercer une force de
236.46 lbf ou 1054 N. Ceci semble impossible à moins d’en avoir l’intention. Des câbles,
numérotés 7 sur la mise en plan en annexe, assureront le blocage du support en
position haute.
Stabilité en position basse
Si on regarde la figure 13 on peut constater que notre centre de masse est à l’intérieur
des roues avant et arrière. Donc le châssis n’a aucune chance de basculer vers l’arrière.
De plus la roue du système de levage pour chenille assure une sécurité de plus.
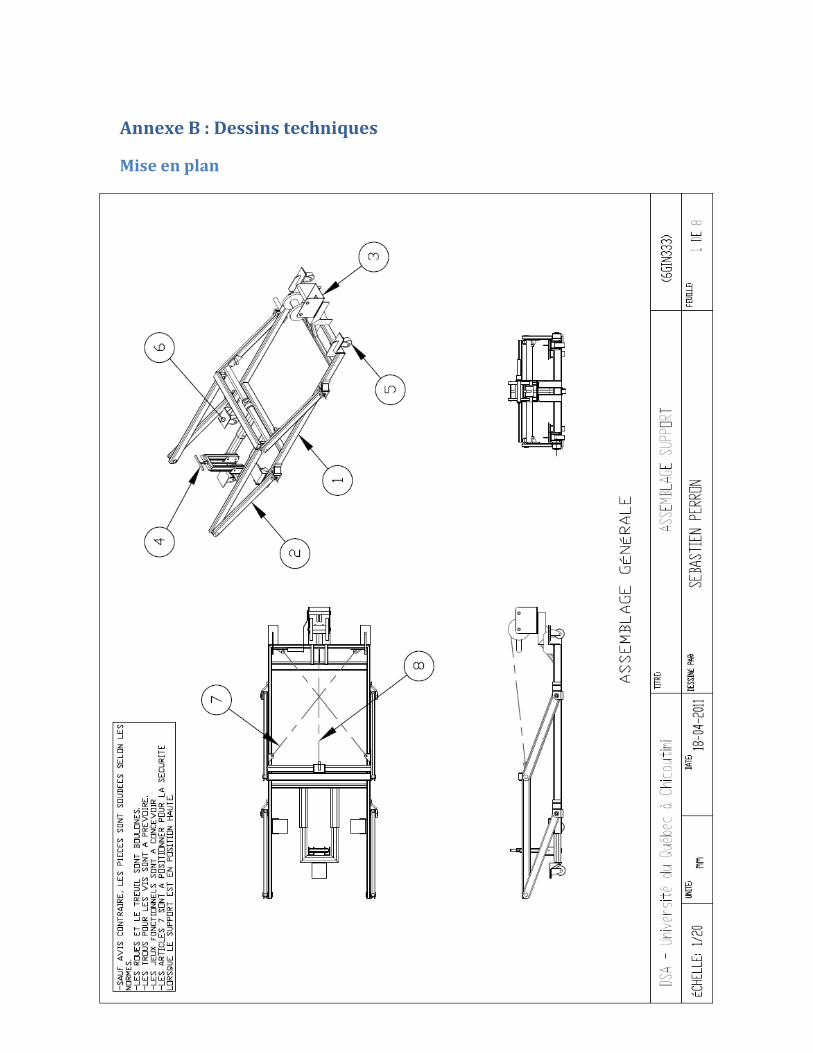
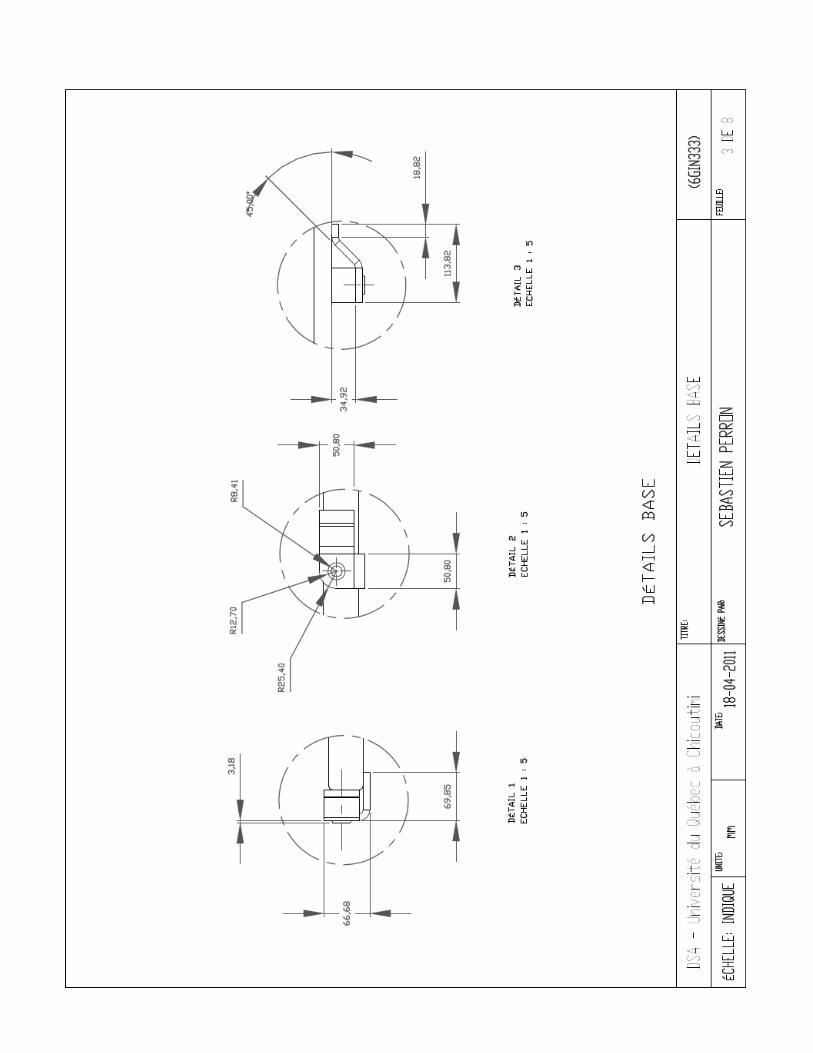
3.3.7 Mise en plan
La mise en plan est l'étape avant la fabrication du prototype. Elle permet de faciliter la
prise de mesure du support. Les dessins techniques devront respecter les règles de l'art.
Une bonne mise en plan permettra à n'importe quelle personne de comprendre et de
lire des informations au sujet du support. Celle-ci est disponible en annexe.

30
4.0 Bilan des activités
4.1 Arrimage formation pratique/universitaire
Ce projet à permit de faire le lien entre tous les différents cours académique. Il a fallu
utiliser plusieurs compétences à la fois pour réaliser les différentes tâches de
conception. Il a permis au membre de l’équipe d’explorer en profondeur le logiciel de
modélisation Solidwork. Plusieurs composantes des systèmes du nouveau support
demandaient à être analysées par élément fini pour vérifier leurs réactions aux
différentes charges et de modifier leurs géométries au besoin. Un projet trois crédits
comme celui-ci permet de bien se préparer aux réalités du marché du travail. Ce projet
permet de réaliser l’ampleur de gérer un projet. La charge de travail qu’exige un projet
trois crédits n’est rien comparativement à celle d’un vrai projet du marché. Ces projets
font appel la plupart du temps à plusieurs disciplines à la fois et nécessites plusieurs
personnes ressources. Un ingénieur peut même être en charge de plusieurs projets à la
fois.
4.2 Travail d’équipe
Tout c’est bien déroulé au niveau du travail d’équipe. Il faut dire que les deux membres
de l’équipe sont en contact depuis le début de leurs études universitaires et ils sont
habitués de travailler ensemble pour faire leurs nombreux devoirs. Ils ont également
une expérience sur le marché du travail ce qui leur donne une expérience du travail en
équipe.
31
4.3 Respect de l’échéancier
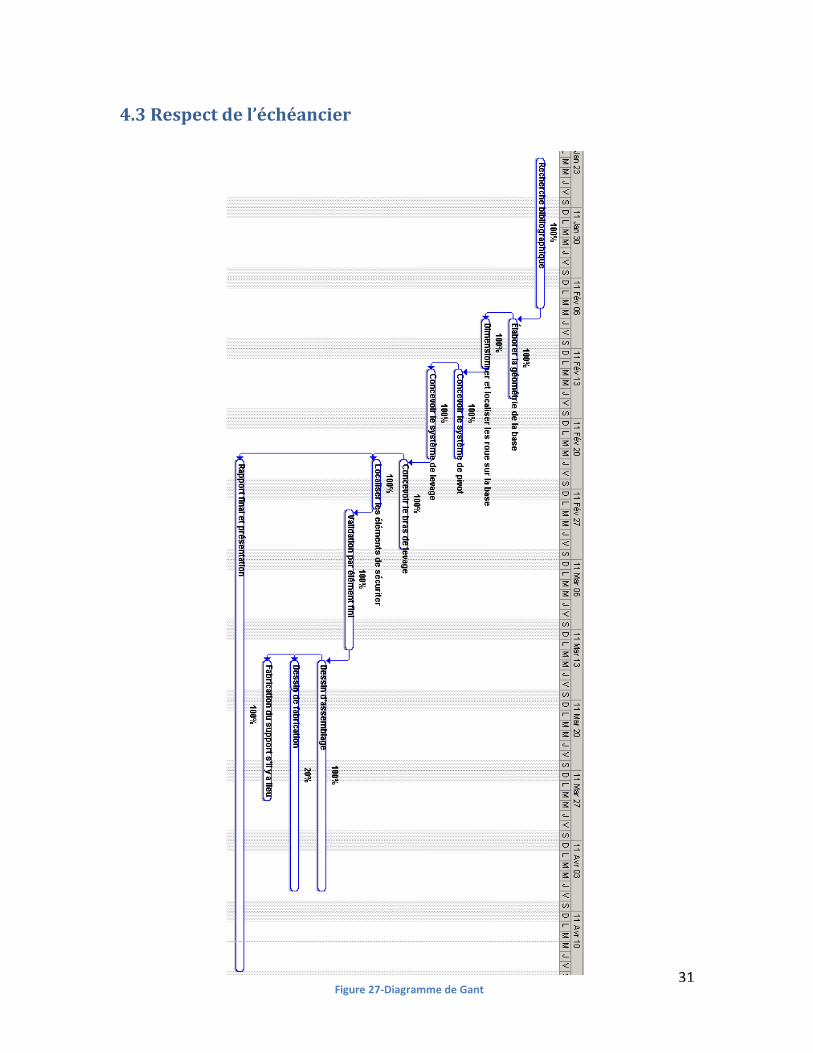
Figure 27-Diagramme de Gant

32
L’échéancier a été respecté tout au long du projet. Quelques petites modifications ont
été nécessaires. La seule tâche qui à été abandonnée en regardant le premier
échéancier est la fabrication du prototype. La figure 27 présente l’échéancier final.
4.4 Analyse et discussion
Une revue critique de la méthode utilisée pour effectuer le projet permet de dire que la
problématique reliée au projet à été bien abordée. Les objectifs ont bien été établis.
Une recherche bibliographique a été effectuée pour vérifier ce qui existait déjà et s’en
inspirer tout en justifiant l’élaboration d’un nouveau concept. Le support pour
motoneige a ensuite été divisé en plusieurs systèmes pour faciliter sa conception.
Chacun des systèmes a été modélisé et dimensionné. Des calculs conventionnels ont par
la suite été élaborés. Des analyses par éléments finis ont aussi été utilisées pour
dimensionner des éléments aux géométries compliquées. Le point fort du projet est la
façon dont il a été abordé et les points faibles sont la rigueur des analyses par éléments
finis et l’absence de prototype appuyant le concept.
33
5.0 Conclusion
Ce rapport présente tous les objectifs fixés au début par les membres de l’équipe. Ceux-
ci ont tous été respectés et il est possible de s’en apercevoir après une lecture
approfondie du rapport. Le support élévateur pour motoneige rend possible l’entretien
de la motoneige d’une façon ergonomique, le déplacement aisé de ce véhicule récréatif
et rend possible un remisage adéquat de celle-ci. Les objectifs ont bien été établis dès le
départ puisqu’ils n’ont pas changés au court du projet. L’équipe jeune et dynamique à
bien su cerner la problématique et concevoir un support répondant aux objectifs fixés.
Le support à été divisé en différents systèmes pour faciliter la gestion d’une telle
conception. Le rapport décrit la conception de la base, du système de pivot, du système
de levage, des roues et du bras de levage pour chenille. La base ce trouve à être
l’endroit ou tous les autres systèmes viennent se connecter. Le système de pivot sert à
faire le lien entre la position basse et haute de la motoneige. Tandis que le système de
levage permet de fournir l’énergie au système de pivot. Les roues permettent de
déplacer la motoneige lorsqu’elle est sur le support. Le bras de levage pour chenille est
l’élément du support qui le rend unique. Celui-ci permet de détendre la suspension du
véhicule pour permettre l’entretien sur la chenille.
Ce projet à permit de faire le lien entre tous les différents cours académique. Il a fallu
utiliser plusieurs compétences à la fois pour réaliser les différentes tâches de
conception. Chaque membre de l’équipe de travail a pu approfondir ses compétences
techniques. Un projet trois crédits comme celui-ci permet de bien se préparer aux
réalités du marché du travail. Ce projet permet de réaliser l’ampleur de la gestion d’un
projet sur le marché du travail. Il faut dire que les deux membres de l’équipe ont su bien
travailler en équipe. Ils ont été capables de respecter un échéancier bien élaboré. Ils ont
effectué la conception de ce support de la façon suivante. Chacun des systèmes on été
modélisé et dimensionné conjointement. Des calculs conventionnels et des analyses par
éléments finis ont été faits par la suite.
Finalement, il y a seulement deux éléments de conceptions à raffiner. La base du
support a été supposée suffisamment solide pour supporter les efforts appliqués par les
autres systèmes. Le système de levage pour chenille devra être le sujet d’une
prochaine étude de résistance à une charge. La validation de sa géométrie devra aussi
être faite lors de la fabrication d’un futur prototype. Malgré tout, l’équipe est confiante
qu’un prototype permettra de résoudre de façon définitive ces quelques détails. Tous
34
les documents nécessaires à un auto-constructeur seront présents en annexe du
présent document.
35
6.0 Référence
Machinery's Handbook (26th Edition), Oberg, E.; Jones, F.D.; Horton, H.L.; Ryffell, H.H. ©
2000 Industrial Press, 2640p.
Guide des sciences et technologie industrielles, Jean louis Fauchon, Natan éditeur, 592
p.
Shigleys Mechanical Engineering Design (9th Edition), Richard G. Budynas and J. Keith
Nisbett, Mcgraw-Hill , 1082p.
36
Annexe A : Fiches techniques
Figure 28:Treuil
37
Figure 29:Roue
Figure 30:HSS rectangulaire
38
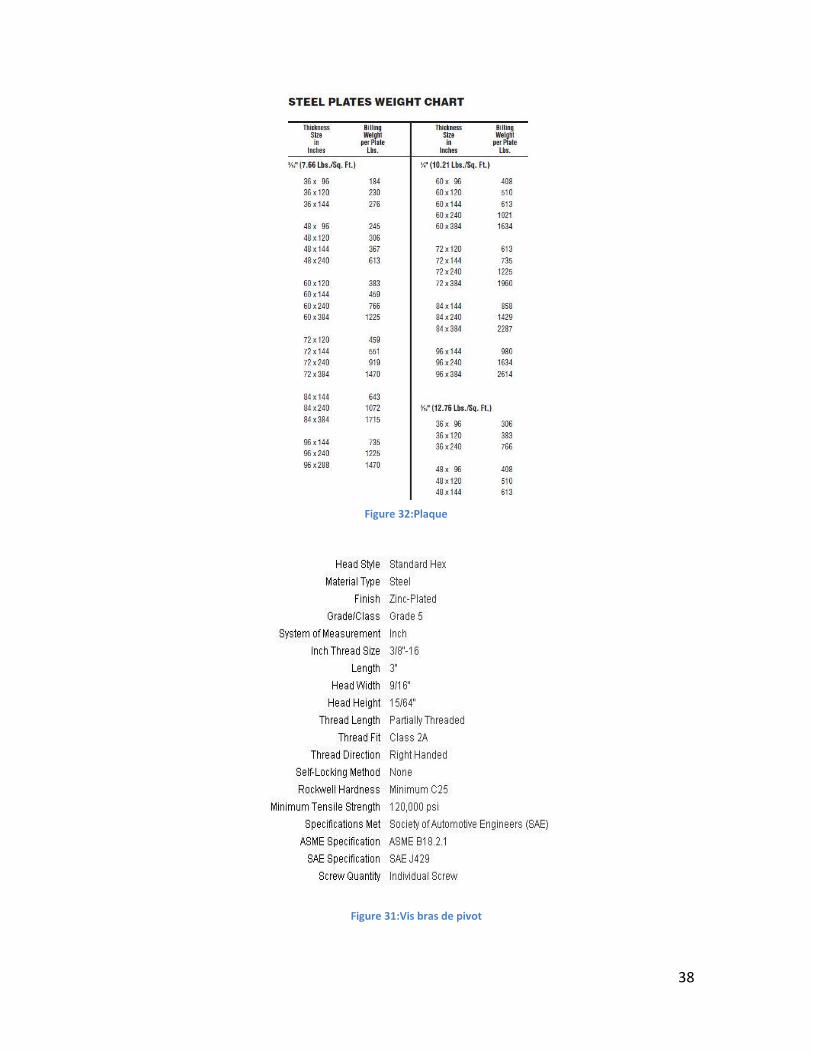
Figure 32:Plaque
Figure 31:Vis bras de pivot
39
Figure 34:HSS carré
Figure 33-Écrou acme
40
Figure 35-Tige filetée acme
41
Annexe B : Dessins techniques
Mise en plan
42
43
44
45
46
47
48
49
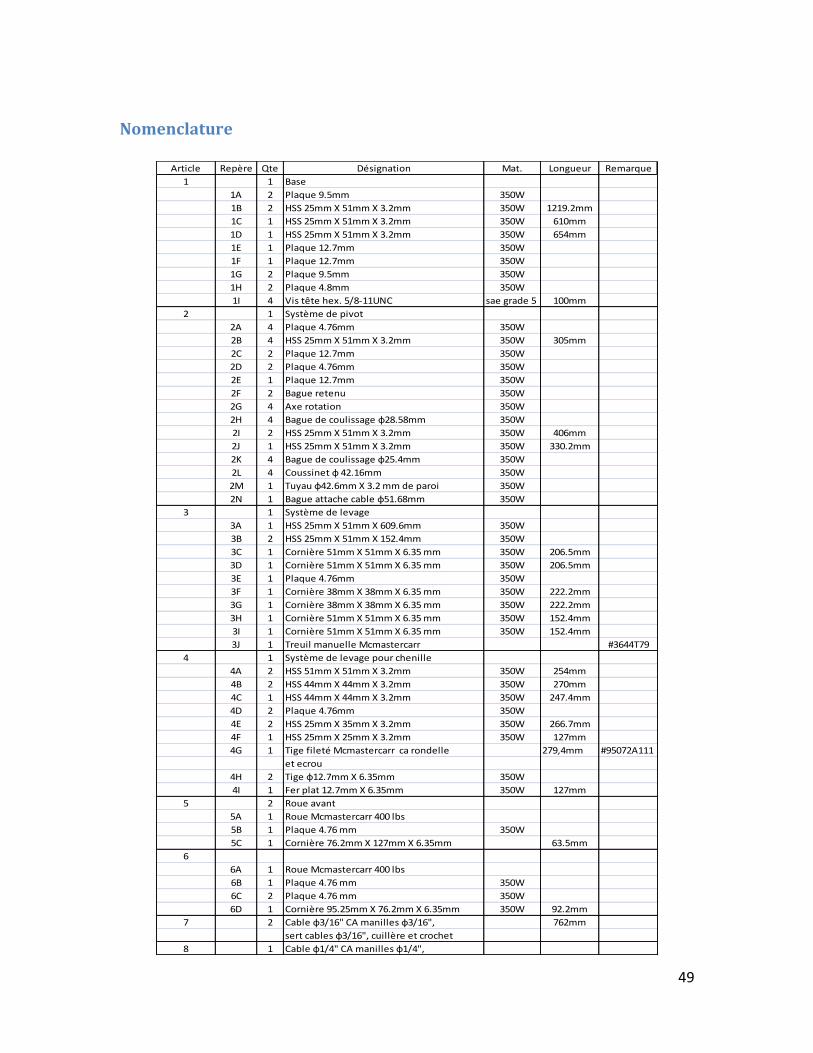
Nomenclature
Article Repère Qte Désignation Mat. Longueur Remarque
1 1 Base
1A 2 Plaque 9.5mm 350W
1B 2 HSS 25mm X 51mm X 3.2mm 350W 1219.2mm
1C 1 HSS 25mm X 51mm X 3.2mm 350W 610mm
1D 1 HSS 25mm X 51mm X 3.2mm 350W 654mm
1E 1 Plaque 12.7mm 350W
1F 1 Plaque 12.7mm 350W
1G 2 Plaque 9.5mm 350W
1H 2 Plaque 4.8mm 350W
1I 4 Vis tête hex. 5/8-11UNC sae grade 5 100mm
2 1 Système de pivot
2A 4 Plaque 4.76mm 350W
2B 4 HSS 25mm X 51mm X 3.2mm 350W 305mm
2C 2 Plaque 12.7mm 350W
2D 2 Plaque 4.76mm 350W
2E 1 Plaque 12.7mm 350W
2F 2 Bague retenu 350W
2G 4 Axe rotation 350W
2H 4 Bague de coulissage ф28.58mm 350W
2I 2 HSS 25mm X 51mm X 3.2mm 350W 406mm
2J 1 HSS 25mm X 51mm X 3.2mm 350W 330.2mm
2K 4 Bague de coulissage ф25.4mm 350W
2L 4 Coussinet ф 42.16mm 350W
2M 1 Tuyau ф42.6mm X 3.2 mm de paroi 350W
2N 1 Bague attache cable ф51.68mm 350W
3 1 Système de levage
3A 1 HSS 25mm X 51mm X 609.6mm 350W
3B 2 HSS 25mm X 51mm X 152.4mm 350W
3C 1 Cornière 51mm X 51mm X 6.35 mm 350W 206.5mm
3D 1 Cornière 51mm X 51mm X 6.35 mm 350W 206.5mm
3E 1 Plaque 4.76mm 350W
3F 1 Cornière 38mm X 38mm X 6.35 mm 350W 222.2mm
3G 1 Cornière 38mm X 38mm X 6.35 mm 350W 222.2mm
3H 1 Cornière 51mm X 51mm X 6.35 mm 350W 152.4mm
3I 1 Cornière 51mm X 51mm X 6.35 mm 350W 152.4mm
3J 1 Treuil manuelle Mcmastercarr #3644T79
4 1 Système de levage pour chenille
4A 2 HSS 51mm X 51mm X 3.2mm 350W 254mm
4B 2 HSS 44mm X 44mm X 3.2mm 350W 270mm
4C 1 HSS 44mm X 44mm X 3.2mm 350W 247.4mm
4D 2 Plaque 4.76mm 350W
4E 2 HSS 25mm X 35mm X 3.2mm 350W 266.7mm
4F 1 HSS 25mm X 25mm X 3.2mm 350W 127mm
4G 1 Tige fileté Mcmastercarr ca rondelle 279,4mm #95072A111
et ecrou
4H 2 Tige ф12.7mm X 6.35mm 350W
4I 1 Fer plat 12.7mm X 6.35mm 350W 127mm
5 2 Roue avant
5A 1 Roue Mcmastercarr 400 lbs
5B 1 Plaque 4.76 mm 350W
5C 1 Cornière 76.2mm X 127mm X 6.35mm 63.5mm
6
6A 1 Roue Mcmastercarr 400 lbs
6B 1 Plaque 4.76 mm 350W
6C 2 Plaque 4.76 mm 350W
6D 1 Cornière 95.25mm X 76.2mm X 6.35mm 350W 92.2mm
7 2 Cable ф3/16" CA manilles ф3/16", 762mm
sert cables ф3/16", cuillère et crochet
8 1 Cable ф1/4" CA manilles ф1/4",