Embed Size (px)
Citation preview
Ingenierie durable
Partie modelisation
Telecom – Physique – Strabourg
2eme annee
Universite de Strasbourg
Edouard [email protected]
http://eavr.u-strasbg.fr/~laroche/student
2012–2013

2
Table des matieres
1 Introduction 51.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Evolutions en terme de prodution d’energies . . . . . . . . . . . . . . . . . . 51.3 Discussion sur deux solutions de motorisation . . . . . . . . . . . . . . . . . 61.4 Contenu du cours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5 Exercices preliminaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Modelisation 92.1 Mecanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Euler-Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.1.2 Modeles algebro-differentiels . . . . . . . . . . . . . . . . . . . . . . . 122.1.3 Systemes flexibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.2 Modele electrique equivalent d’un batiment . . . . . . . . . . . . . . . 182.2.3 Modele elements finis . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Electricite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.2 Dipoles et generateurs . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4 Magnetostatique : Production de couple et de force . . . . . . . . . . . . . . 242.4.1 Bobine d’inductance (rappel) . . . . . . . . . . . . . . . . . . . . . . 242.4.2 Principe de la conversion electro-mecanique . . . . . . . . . . . . . . 242.4.3 Regime lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.4 Fonctionnement d’un moteur elementaire . . . . . . . . . . . . . . . . 262.4.5 Force produite par un aimant . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Machines electriques (moteurs et generateurs) . . . . . . . . . . . . . . . . . 282.5.1 Principe de fonctionnement . . . . . . . . . . . . . . . . . . . . . . . 282.5.2 La machine a courant continu . . . . . . . . . . . . . . . . . . . . . . 282.5.3 La machine synchrone . . . . . . . . . . . . . . . . . . . . . . . . . . 312.5.4 La machine asynchrone . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6 Electronique de puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.6.2 Les composants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.6.3 Pertes dans les composants . . . . . . . . . . . . . . . . . . . . . . . . 452.6.4 Le hacheur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.6.5 Hacheur abaisseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.6.6 L’onduleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3
4 TABLE DES MATIERES
2.6.7 Le redresseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.7 Fluidique : detendeur de gaz . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.7.1 Modele d’une chambre . . . . . . . . . . . . . . . . . . . . . . . . . . 532.7.2 Orifice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.7.3 Detendeur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.8 Pile a combustible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.8.2 Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.8.3 Modelisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Exemples de systemes 653.1 Installations autonomes avec batterie . . . . . . . . . . . . . . . . . . . . . . 653.2 Alimentation electrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.3 Stabilisateur cardiaque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.4 Objet manufacture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.5 Systeme de production . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.6 Delestage d’un systeme de chauffe . . . . . . . . . . . . . . . . . . . . . . . . 663.7 Charges adaptables a une production d’energie electrique renouvelables . . . 66
4 Lexique 67
5 References 695.1 Techniques de l’ingenieur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.2 Wikipedia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Chapitre 1
Introduction
1.1 Generalites
Les penuries annoncees d’energies fossiles ainsi que de certaines matieres premieres vontfortement faconner l’evolution du monde. Le concept de developpement durable (sustentabledevelopment en anglais) est une reponse possible, destinee a garantir un developpement surle long terme en anticipant les difficultes a venir, notamment en terme d’approvisionnementen energies et en matieres premieres, mais aussi de pollution.
La notion de developpement durable permet egalement de sortir de l’opposition entreeconomie et ecologie en montrant une voie pour un developpement soucieux du bien etre del’ensemble de la planete et non pas uniquement du consommateur.
La notion d’efficacite energetique est au cœur des problematiques du developpementdurable. L’efficacite energetique d’un produit ou d’une solution va au dela du rendement.Elle inclut egalement le cout energetique de sa production et de son recyclage.
1.2 Evolutions en terme de prodution d’energies
Nous nous orientons actuellement vers une production d’electricite integrant de nombreuxproducteurs dont une part importante a partir de sources d’energies renouvelables. Si cetteevolution est unanimement souhaitee, elle n’est pas sans poser de probleme. En effet, une desdifficultes de la gestion de l’energie electrique est que sa production doit etre constammentadaptee a la consommation, faute de quoi le systeme se met en defaillance 1. Dans les reseauxcentralises actuels, cette tache incombe aux operateurs nationaux (EDF en France). Pourles systemes fortement decentralises a venir, il reste encore a definir les regles permettant unbon fonctionnement du reseau. On parle de Smart Grid pour definir cette problematique.
La difficulte vient notamment du fait que les moyens de production photovoltaıques eteoliens, qui voient actuellement leur production augmenter fortement, ont une productionqui est fortement liee aux aleas climatiques. En cas d’obscurite et de panne de vent, ils’avere necessaire de disposer de moyens de production rapidement mobilisables. On pourraitenvisager de stocker le surplus d’energie produit lors des phases venteuses et ensoleillees.Certes, cette solution est deja mise en œuvre, par exemple par des station de pompage entre
1. Sur les problemes d’effondrement de reseaux (blackout en anglais), voir par exemple http:
//www.alternatives.areva.com/fr/article/alternatives/65 et http://en.wikipedia.org/wiki/
Northeast_Blackout_of_2003.
5
6 CHAPITRE 1. INTRODUCTION
deux lacs situes a des altitudes differentes, l’energie etant alors stockee sous forme d’energiepotentielle de pesanteur 2. On pourrait egalement imaginer de stocker l’energie electriquepar stockage massif d’hydrogene produit par electrolyse de l’eau. L’hydrogene etant ensuiteconvertible directement en electricite au moyen d’une pile a combustible.
Mais ces solutions sont couteuses. Actuellement, le moyen qui semble le plus approprieest la production d’electricite a partir d’energie fossile, notamment par des turbines a gaz.Dans ce cas de figure, chaque MW installe en energie renouvelable necessite l’installationd’autant de MW en energie conventionnelle. Pour un pays tres equipe avec de tels moyensde production, la transitions se fait relativement en douceur. Mais pour un pays comme laFrance largement domine par la production nucleaire, cela signifie d’installer de nouveauxmoyens de production qui ne sont pas justifies par une augmentation des besoins. En effet, lescentrales nucleaires ont des transitoires lents en ne peuvent adapter rapidement leur niveaude production.
1.3 Discussion sur deux solutions de motorisation
Une part importante de l’energie est depensee pour les deplacements. Actuellement, troistypes de motorisation sont possibles :
– par moteur thermique (ou moteur a explosion), la solution la plus repandue actuelle-ment,
– par moteur electrique, qui est limitee par l’autonomie ou l’encombrement des batteriesainsi que de leur temps de recharge
– par motorisation hybride, qui allie les avantages des deux solutions precedentes maisqui a l’inconvenient de presenter un cout plus important.
Que penser de ces solutions en terme d’efficacite energetique et de developpement durable ?
Commencons par analyser les rendements des solutions electrique et thermique en fonc-tionnement nominal. Le rendement du moteur thermique 3 est relativement faible, disons del’ordre de 40% 4, alors que les chaines de traction electriques (electronique de puissance +moteur) peuvent afficher des rendements bien meilleurs, superieurs a 80%. Mais l’energieelectrique est encore largement produite dans des centrales thermiques (conventionnelles ounucleaires) qui affichent des rendements de l’ordre de 33% 5. En terme d’efficacite energetique,la solution electrique serait donc inferieure a la solution thermique dans l’hypothese d’unregime permanent et d’une electricite produite a partir de centrales thermiques.
Toutefois, les solutions electrique et hybride ont l’avantage de permettre la recuperationde l’energie cinetique lors des phases de freinage (on parle de freinage dynamique), ce qui n’estpas possible avec une motorisation thermique. C’est ce qui permet a ces solutions d’afficherdes consommations en cycle urbain quasiment identiques aux consommations relevees surroute alors que pour les motorisations thermiques, la consommation a tendance a doubler.
2. Voir par exemple la station de pompage entre le lac blanc et le lac noir, situee dans les Vosges http:
//fr.wikipedia.org/wiki/Lac_Noir_(Vosges).3. Le rendement d’un moteur est le rapport entre la puissance mecanique delivree et la puissance ther-
mique du carburant.4. Selon http://fr.wikipedia.org/wiki/Moteur__explosion, “Le rendement maximum est pour les
moteurs automobiles modernes, de 35% environ pour les moteurs a allumage et de 45% pour les moteursDiesel. Les plus gros moteurs industriels depassent 50%.”
5. Chiffre avance sur http://fr.wikipedia.org/wiki/Centrale_nuclaire.
1.4. CONTENU DU COURS 7
Ainsi, pour des cycles urbains, les motorisations electriques et hybrides affichent une meilleureefficacite que les motorisations thermiques.
En terme de developpement durable, les vehicules electriques presentent l’avantage des’affranchir des energies fossiles. A ce titre, ils sont une solution d’avenir pour l’apres petrole.Mais il est aussi possible d’utiliser des moteurs thermiques a hydrogene et de produire del’hydrogene a partir de l’electricite. L’hydrogene presente en effet l’interet de mieux se stockerque l’electricite. Des solutions hybrides hydrogene + electrique sont egalement envisageables.
1.4 Contenu du cours
– Modelisation multiphysique : Edouard LAROCHE (7 seances, soit 12,25 h)– Identification et optimisation : Jacques GANGLOFF– Simulation : Jacques GANGLOFF (total : 22,6 h)– TP : Jacques GANGLOFF et Edouard LAROCHE (4 seances de 4 h)
1.5 Exercices preliminaires
Exercice 1 (Station de pompage du lac noir)La station de transfert d’energie par pompage du lac noir est composee de deux reservoirs :
– le reservoir basse altitude constitue du lac noir,– le reservoir haute altitude constitue du lac blanc et situe 120 m plus haut.
On suppose que les lac ont la meme superficie de 14 ha et une profondeur maximale utile de45 m. De plus, pour simplifier les calculs, on assimile les lacs a des reservoirs cylindriques.La puissance de turbinage est de 50 MW.
1. Determinez l’energie disponible.
2. Pendant combien de temps la centrale peut-elle fournir de l’energie a pleine puissance ?
Exercice 2 (Energie solaire)On considere que le rayonnement solaire a une puissance moyenne de 1000 W/m2 a lasurface de la terre ; on assimile la terre a une sphere de 40 000 km de circonference et onarrondit la population mondiale a 6 milliards de personnes.
1. Calculez la puissance recue par l’ensemble de la terre
2. En considerant que 1 % de la superficie est equipee de panneaux photo-voltaıques ayantun rendement de 10 %, determinez la production d’electricite.
3. Determinez la puissance disponible par habitant.
4. Concluez.

8 CHAPITRE 1. INTRODUCTION

Chapitre 2
Modelisation
2.1 Mecanique
2.1.1 Euler-Lagrange
Soit un systeme mecanique articule presentant n degres de liberte dont les positionsarticulaires sont notees qk, k = 1...n. Ces positions peuvent etre lineaires (en m) ou angulaires(en rad). On note q le vecteur des positions articulaires et q celui des vitesses. L’energiecinetique est notee Ec(q, q). L’energie potentielle est notee Ep(q). On appelle Lagrangien ladifference entre l’energie cinetique et l’energie potentielle : L(q, q) = Ec − Ep.
Les travaux d’Euler et de Lagrange au XIXeme siecle ont montre qu’en situation libre,c’est-a-dire sans l’effet de forces exterieures, l’evolution du systeme mecanique est regie parles equations d’Euler-Lagrange pour chacun de ses degres de liberte :
d
dt
∂L
∂qk− ∂L
∂qk= 0 (2.1)
pour k = 1...n.Dans le cas ou le keme degre de liberte est soumis a une force (si qk est une position
lineaire) ou un couple (si qk est une position angulaire), notee Γk, l’equation s’ecrit :
d
dt
∂L
∂qk− ∂L
∂qk= Γk (2.2)
Dans le cas ou des efforts exterieurs sont appliques, mais ne sont pas localises au niveaudes articulations, l’equation d’Euler-Lagrange s’ecrit :
d
dt
∂L
∂qk− ∂L
∂qk= Qk (2.3)
ou Qk est la contribution energetique de l’effort sur l’articulation k. Cette contribution peut
etre determinee par le principe de conservation de l’energie. Ainsi, soit φ(q) =
φxφyφz
la
position du point d’aplication de la force exterieure F =
FxFyFz
. Pour tout deplacement
9

10 CHAPITRE 2. MODELISATION
infinitesimal, l’egalite du travail de la force en son point d’application et comptabilise auniveau articulaire donne :
Fx δφx + Fy δφy + Fz δφz =n∑k=1
Qk δqk (2.4)
En notant J(q) = ∂φ∂q
le Jacobien de φ, on a δφ = J(q) δq, ce qui permet de recrire le termede gauche de l’equation precedente :
Fx δφx + Fy δφy + Fz δφz = FT δφ (2.5)
= FTJ(q) δq (2.6)
On obtient donc l’equation :FT J(q) δq = QT δq (2.7)
ou Q =
Q1...Qn
. Pour que la relation soit valable pour tout deplacement, il faut que :
Q = JT(q)F (2.8)
ce qui permet de determiner l’expression de Q en fonction de F . Dans le cas d’un momentet non plus d’une force, la demarche est identique. Le resultat est generalisable a un torseurassociant une force et un moment.
Exercice 3 (Vehicule)Soit un vehicule de masse m et equipee de quatre roues de rayon r et d’inertie J/4. On noteθ la position angulaire d’une roue et z la position lineaire du vehicule. On considere que deuxroues son actionnees avec un couple u/2.
1. Exprimez l’energie cinetique totale sous la forme 12Jeqθ
2.
2. Donnez les equations dynamiques du vehicule.
3. Donnez une representation d’etat du modele en considerant comme entree u et commesorties θ et z.
4. Donnez un schema-bloc permettant de simuler le systeme sous Matlab-Simulink (sup-posez que vous disposez de blocs integrateurs, sommateurs et gains).
Exercice 4 (Double pendule)On considere un double pendule compose de deux tiges de longueurs respectives l1 et l2 donton neglige la masse. A l’extremite de la seconde tige est placee une masse ponctuelle m. Ledouble pendule evolue dans un plan vertical. Les deux axes de rotation ont pour positionsrespectives q1 et q2. Par convention, on choisit la position d’equilibre stable correspondant aq1 = q2 = 0 dans un repere (O, x, y) dont l’origine est placee sur l’axe du premier axe etdont la verticale ascendante est donnee par l’axe y. La premiere articulation est actionneepar un actionneur dont on neglige l’inertie, fournissant un couple C. La seconde articulationest consideree comme etant libre.
1. Exprimez l’energie cinetique sous la forme qTM(q)q.
2. Determinez l’expression de l’energie potentielle Ep(q).

2.1. MECANIQUE 11
3. Donnez les equations dynamiques du pendule.
4. Donnez une representation d’etat du modele en considerant comme entree C et commesortie q.
5. Donnez un schema-bloc permettant de simuler le systeme sous Matlab-Simulink (sup-posez que vous disposez de blocs integrateurs, sommateurs, gains et de fonctions pro-grammables).
Correction
1. La position de l’extremite du pendule est :
xm = l1 sin(q1) + l2 sin(q1 + q2) (2.9)
ym = −l1 cos(q1)− l2 cos(q1 + q2) (2.10)
Par derivation, on en deduit sa vitesse :
xm = l1q1 cos(q1) + l2(q1 + q2) cos(q1 + q2) (2.11)
ym = l1q1 sin(q1) + l2(q1 + q2) sin(q1 + q2) (2.12)
Le carre de la vitesse s’ecrit alors v2 = (l21 + l22 + 2l1l2 cos(q2))q21 + l22q
22 + 2l2(l2 +
l1 cos(q2))q1q2. L’energie cinenique est Ec = 12mv2 ce qui s’ecrit Ec(q, q) = 1
2qTM(q)q
avec :
M(q) = m
[l21 + l22 + 2l1l2 cos(q2) l2 + l1 cos(q2)
l2 + l1 cos(q2) l22
]On notera m11, m22 et m12 = m21 les elements de cette matrice d’inertie.
2. Ep(q) = mgym = −mg(l1 cos(q1) + l2 cos(q1 + q2))
3. Le lagrangien s’ecrit L(q, q) = Ec(q2, q1, q2) − Ep(q1, q2). Concernant les derivees parrapport aux positions, on a :
∂Ep∂q1
= mg(l1 sin(q1) + l2 sin(q1 + q2)) (2.13)
∂Ep∂q2
= mgl2 sin(q1 + q2) (2.14)
∂Ec∂q2
= −ml1l2q1(q1 + q2) sin(q2) (2.15)
Pour les derivees par rapport aux vitesses, on obtient :
∂Ec∂q1
= m11(q2) q1 +m12(q2) q2 (2.16)
∂Ec∂q2
= m12(q2) q1 +m22 q2 (2.17)
d
dt
(∂Ec∂q1
)= m11(q) q1 +m12(q) q2 −ml1l2 sin(q2) q2(2q1 + q2) (2.18)
d
dt
(∂Ec∂q2
)= m12(q) q1 +m22 q2 −ml1l2 sin(q2) q1q2 (2.19)

12 CHAPITRE 2. MODELISATION
Les equations d’Euler-Lagrange ddt
(∂L∂qk
)− ∂L
∂qk= Γk s’ecrivent alors :
m11(q2)q1 +m12(q2)q2 = f1(q, q) + C (2.20)
m12(q2)q1 +m22q2 = f2(q, q) (2.21)
avec :
f1(q, q) = ml1l2 sin(q2) q2(2q1 + q2)−mg(l1 sin(q1) + l2 sin(q1 + q2)) (2.22)
f2(q, q) = −ml1l2 sin(q2) q21 −mgl2 sin(q1 + q2) (2.23)
4. Le modele s’ecrit encore M(q2) q = f(q, q) + BC avec B =
[10
]. Comme la matrice
d’inertie est inversible, ce modele s’ecrit q = M−1(q2)(f(q, q)+BC). En notant x =
]le vecteur d’etat, l’equation d’etat s’ecrit x = φ(x,C) avec :
φ(x,C) =
[q
M−1(q2) (f(q, q) +BC)
]5. Schema-bloc permettant de simuler le systeme sous Matlab-Simulink : cf. correction
en cours.
2.1.2 Modeles algebro-differentiels
Les modeles les plus classiques sont decrit par des equations aux derivees ordinaires(ODE). Toutefois, en complement des equations differentielles, la modelisation physiqueaboutit souvent a des equations algebriques, c’est-a-dire a des contraintes entre les variablesd’etat. On parle alors de modele ADE ou encore de modele descripteur. A titre indicatif,on traitera en cours la modelisation d’un vehicule. Sous Matlab, les modeles de la formesuivantes :
Ex = Ax+Bu (2.24)
y = Cx+Du (2.25)
se definissent avec Sys = dss(A,B,C,D,E).
Exercice 5 (Modele ADE d’un vehicule)
1. Ecrivez l’equation de la dynamique pour la masse en translation en supposant qu’elleest deplacee sous l’effet d’une force F .
2. Ecrivez l’equation de la dynamique pour les inerties en rotation en supposant qu’elleest entrainee par un couple u/2.
3. Donnez les contrainte liant les variables z et θ.
4. Donnez les contrainte liant les variables F et u.
5. Donnez un modele descripteur du vehicule sous la forme d’un systeme d’equationsalgebro-diffrentielles.

2.1. MECANIQUE 13
2.1.3 Systemes flexibles
Un systeme mecanique articule peut presenter des flexibilites correspondant a des defor-mations de certains de ses elements. On se contentera ici des deformations elastiques reversi-bles, correspondant au fonctionnement non destructif d’un systeme. On distingue deux typesde deformations.
Articulation flexible
Ces flexibilutes localisees au niveau des articulations sont dues par exemple a l’elasticitede la transmission du couple de l’actionneur 1. Considerons l’articulation n k. Dans l’equationd’Euler-Lagrange, nous avons suppose qu’un couple Γk etait applique par un actionneur.Qu’en est-il de ce couple ? Dans le cas d’une transmission de raideur Kk, le couple appliqueest proportionnel entre l’ecart de position entre la position qk de la charge et la position qmkdu moteur :
Γk = Kk(qmk − qk) (2.26)
La position du moteur, quand a elle, est determinee par la relation fondamentalle de ladynamique :
Jmkqmk = −Kk(qmk − qk) + Γmk (2.27)
ou Jmk est l’inertie du moteur de l’axe k et Γmk est son couple. Le couple −Kk(qmk − qk)correspond a la contre-reaction de la raideur sur le moteur.
On peut egalement tenir compte d’un modele visco-elestique de la transmission ; le couples’ecrit alors :
Γk = Kk(qmk − qk) + fk(qmk − qk) (2.28)
Si en plus, on tient compte d’un couple de frottement fluide au niveau de l’actionneur, decoefficient fmk, on obtient l’equation du moteur suivante :
Jmkqmk = −Kk(qmk − qk)− fk(qmk − qk)− fmkqmk + Γmk (2.29)
Dans le cas ou un reducteur de rapport Nk est present, les relations deviennent :
Γk = Kk(qmk/Nk − qk) + fk(qmk/Nk − qk) (2.30)
Jmkqmk = −Kk/Nk(qmk/Nk − qk)− fk/Nk(qmk/Nk − qk)− fmkqmk + Γmk (2.31)
Ce modele correspond au cas ou le reducteur est considere comme place en amont (cotemoteur) et la flexibilite comme place du cote aval (cote articulation). L’intertie Jmk estl’inertie de l’ensemble moteur+reducteur, vue du cote moteur. On observe que l’ordre dumodele est augmente de 2 par articulation concernee.
1. Les reducteurs de type harmonic drive sont connus pour introduire des flexibilites dans la transmission.Une presentation de ce type de reducteur est disponible sur http://en.wikipedia.org/wiki/Harmonic_
drive.

14 CHAPITRE 2. MODELISATION
Segment flexible
Dans le cas ou certains segments d’un systeme mecanique presentent des deformationselastiques, il est possible d’ecrire les equations de la dynamique en decrivant les deformationscomme une somme de deformations elementaires et en considerant des coordonnees articu-laires pour chacune de ces deformations. Dans le cadre de ce cours, nous nous contentons detraiter un exemple simple ; plus de tetails peuvent etre trouves dans la litterature [1, 2].
Exemple 1 : bras flexible. Considerons un bras de longueur l en rotation autour d’unaxe vertical et se deplacant dans un plan horizontal (O,x,y) ou O est l’intersection de l’axede rotation avec le plan dans lequel se deplace le bras. On note θ la position angulaire dubras. Par convention, θ = 0 correspond a l’extremite du bras en (x = l, y = 0) dans le casou il n’y a pas de deformation. A l’extremite du bras est placee une masse m. On negligerala masse du bras. Au niveau de l’axe de rotation, un actionneur applique un couple C.
Considerons que le bras est sujet a un champ de deformation transverse v(x). Ainsi, apartir de la position au repos, un point de coordonnees (x, y = 0, z = 0) se retrouve en(x, y, z = 0) ou :
x = x− 1
2
∫ x
0
v′2(ξ)dξ (2.32)
y = v(x) (2.33)
Par exemple, pour une deformation d’allure polynomiale de la forme v(x) = V x2, on obtient :
x = x− 2
3V 2x3 (2.34)
y = V x2 (2.35)
Choisissons une base polynomiale pour les deformation. Le premier terme de la deformationest en x2 car l’encastrement en x = 0 impose v′(0) = 0. Ainsi, la decomposition s’ecrit :
v(x, t) =n∑k=1
Vk(t)xk+1 (2.36)
ou Vk est la coordonnee articulaire correspondant au mode keme mode de deformation. Decette maniere, on separe les variations en fonction du temps t des variations en fonction del’espace x.
Les coordonnees articulaires sont maintenant :
q =
θV1...Vn
(2.37)
L’equation d’Euler-Lagrange reste valable en considerant chacun des degres de liberte de q.Dans la suite des calculs, on se limitera a n = 1, soit un mode flexible qui s’ajoute au
mode rigide. Pour θ = 0, la position d’un point (x, y = 0, z = 0) se retrouve en (x, y, z = 0)ou :
x(x, t) = x− 2
3V 2
1 (t)x3 (2.38)
y(x, t) = V1(t)x2 (2.39)

2.1. MECANIQUE 15
En negligeant la masse de la tige, l’energie cinetique se reduit a celle de la masse m placee al’extremite de la tige. En tenant compte de la rotation θ, la position de la masse est donneepar : [
xmym
]= R(θ)
[x(l, t)y(l, t)
](2.40)
ou R(θ) est la matrice de rotation :
R(θ) =
[cos(θ) − sin(θ)sin(θ) cos(θ)
](2.41)
On note que RT(θ) = R(−θ) = R−1(θ) et que ddθ
(R(θ)) = R(θ + π2).
Apres quelques lignes de calcul, on determine le carre du module de la vitesse de lamasse :
x2m + y2
m = x2
+ y2
+ θ2(x2 + y2) + 2θ(x y − y x) (2.42)
= V 21 (l4 +
16
9V1l
6) + 2θV1(l3 +2
3V 2
1 l5) (2.43)
+θ2(l2 − 1
3V 2
1 l4 +
4
9V 4
1 l6) (2.44)
L’energie cinetique s’ecrit alors sous la forme Ec = 12qTM(q) q avec :
M(q) = m
[l2 − 1
3V 2
1 l4 + 4
9V 4
1 l6 l3 + 2
3V 2
1 l5
l3 + 23V 2
1 l5 l4 + 16
9V1l
6
](2.45)
L’energie potentielle doit tenir compte de l’energie potentielle de deformation. Celle-ciest proportionnelle au module de Young E du materieux et au moment quadratique 2 Iz parrapport a l’axe z :
Ep =1
2
∫ l
0
EIz
(d2v(x, t)
dx2
)2
dx (2.46)
Dans le cas present, on obtient : Ep = EIzlV , soit Ep = LTq avec L =
[0
EIzl
].
Le Lagrangien s’ecrit alors L(q, q) = 12qTM(q) q + LTq. Et l’equation d’Euler-Lagrange
s’ecrit :
M(q)q +2∑
k=1
∂M
∂qkqkq −
1
2
2∑k=1
qT∂M
∂qkq + L = Γ (2.47)
ou
Γ =
[C0
]Exercice 6 (Modele d’un bras flexible)L’equation du bras flexible peut se mettre sous la forme :
M(q)q = F (q, q) + Γ
1. Determinez F (q, q).
2. Determinez une representation d’etat du systeme.
2. Il s’agit de l’integrale sur la section S du segment dans le plan (y, z) : Iz =∫∫
Sy2dS.

16 CHAPITRE 2. MODELISATION
Cas general. Cette methode est generalisable pour des systemes a plusieurs articulations.Elle est implantee dans la boite a outils Dynaflex pour Maple [3], ainsi que dans MapleSim,l’interface de simulation multiphysique de Maple.
Exemple 2 : cable deformable. Les cables peuvent aboutir a de nombreux modelessuivant que l’on tient compte ou non de leur masse, de leur elasticite et de leurs allurenon-rectiligne. Dans l’exemple ci-dessous, nous montrons comment la methode des “modessupposes” permet de decrire les variations temporelles de l’allure d’un cable deformable maisdont l’elongation est negligees.
Pour les besoins de l’expose, on se limitera a un cable de longueur l fixe. L’origine ducable est un point fixe de coordonnees (0,0) dans le plan (x, y). La position initiale ducable est consideree comme horizontale selon l’axe (0,x). La direction (0,y) forme la verticaleascendante. On note m la masse du cable et ρ sa masse lineıque. A l’autre extremite, lecable est soumis a une force ~F de coordonnees (Fx, Fy). Le modele dynamique ci-dessous sedeveloppe facilement a l’aide d’un logiciel de calcul formel.
Geometrie, cinematique et energies. La position d’un point de coordonnees (x, y =0) se decale selon (δx, δy) pour se retrouver a une position (X(x), Y (x)) avec X(x) = x+δx(x)et Y (x) = δy(x). On se limite a des petites deformations selon deux modes : δy(x) = V1x +V2x
2 ou V1 et V2 sont deux coordonnees generalisees. Comme on considere le cable n’est pas
etirable, la deformation δx(x) peut etre determine par : δx(x) = −12
∫ x0
dδxdx
2dx = −x
6(3V 2
1 +6V1V2x+ 4V 2
2 x2).
En considerant les variations en fonction du temps de V1(t) et de V2(t), la vitesse du point(X, Y ) est (X, Y ) ou X = ∂X
∂V1V1 + ∂X
∂V2V2. On note v2 = X2 +Y 2 le carre de la vitesse du point
(X, Y ). On obtient v2 = (−(1/6)x(6V1 +6V2x)V1−(1/6)x(6V1x+8V2x2)V2)2 +(xV1 +x2V2)2.
L’energie cinetique se calcule avec Ec = 12ρ∫ l
0v2dx et se met sous la forme :
Ec =1
2V TM(V )V (2.48)
ou la matrice d’inertie peut se calculer formellement a partir de 2Ec de la maniere suivante :– le coefficient M11 est obtenu en remplacant V1 par 1 et V2 par 0 ;– le coefficient M22 est obtenu en remplacant V1 par 0 et V2 par 1 ;– le coefficient M12 = M21 est obtenu en retranchant M11V1 + M22V2 a 2Ec puis en
remplacant V1 et V2 par 1.On obtient M11 = (1/630)ρl3(210+126l2V 2
2 +315lV1V2+210V 21 ), M22 = (1/630)ρl3(160V 2
2 l4+
280V2l3V1 + 126l2 + 126l2V 2
1 ) et M12 = (2/9)ρl6V 22 + (7/15)ρl5V1V2 + (1/4)ρl4 + (1/4)ρl4V 2
1 .
Determination du modele dynamique. On neglige les effets de la pesanteur pourne considerer que les effets inertiels. L’equation d’Euler-Lagrange s’ecrit donc d
dt∂Ec∂V− ∂Ec
∂V=
QF ou Q est la matrice des actions.Commencons par determiner la matrice des actions Q. Elle reflete la puissance fournie
au systeme par les forces exterieures. La puissance fournie par la force ~F est P = ~F · ~vl ou
~vl est la vitesse de l’extremite du cable : ~vl =(∂X(l)∂V1
V1 + ∂X(l)∂V2
V2; ∂Y (l)∂V1
V1 + ∂Y (l)∂V2
V2
). Cette
expression se reecrit sous la forme QF avec Q =
[−lV1 − l2V2 l−l2V1 − 4
3l3V2 l2
].

2.2. THERMIQUE 17
A partir de l’expression (2.48) de l’energie cinetique, on obtient ∂Ec∂V
= M(V ) V . En
notant Mc = M(V ) V le vecteur des moments cinetiques, on obtient une equation d’etat
Mc = ∂Ec∂V
+ QF ou ∂Ec∂V
=
[∂Ec∂V1∂Ec∂V2
]et ∂Ec
∂Vk= 1
2V T ∂M(V )
∂VkV . Une autre equation d’etat est
obtenue avec V = M−1Mc. Ainsi, un modele d’etat est obtenu avec comme etat
[Mc
V
], c’est-
a-dire les moments cinetiques et les variables de deformation. Ce modele est nettement plus
simple a ecrire que celui consistant a prendre comme etat
[VV
].
Le calcul des forces de Coriolis s’ecrit ∂Ec∂V
=
[C1
C2
]avec C1 = V1((1/630)V1ρl
3(315lV 2 +
420V1)+V2((7/15)ρl5V2+(1/2)ρl4V1))+V2(V1((7/15)ρl5V2+(1/2)ρl4V1)+(1/630)V2ρl3(280V2l
3+252l2V1)) et C2 = V1((1/630)V1ρl
3(252l2V2 + 315lV1) + V2((4/9)ρl6V2 + (7/15)ρl5V1)) +V2(V1((4/9)ρl6V2 + (7/15)ρl5V1) + (1/630)V2ρl
3(320V2l4 + 280l3V1)).
Un terme de dissipation peut etre ajoute a la premiere equation, donnant par exempleMc = ∂Ec
∂V+ QF − fV dans une version simple. Pour etre plus precis, on pourrait calculer
une dissipation repartie sur l’ensemble du cable.
2.2 Thermique
2.2.1 Generalites
La conduction est donnee par loi de Fourrier 3 φ = λ−−→grad(T ) ou φ est la densite de
flux thermique (W/m2) et λ est la conductivite thermique (W/m/K). En regime perma-nent stationnaire et pour un materiau uniforme, le gradient devient uniforme et la loi sesimplifie en φ = λ∆T
eou ∆T est la difference de temperature entre les deux extremites de
la paroie et e est l’epaisseur de la paroi. Le flux thermique a travers une portion de sur-face S est Φ = φS, ce qui donne ∆T = RΦ ou la resistance est donnee par R = e
λS. Pour
un type de paroi donnee, on donne le coefficient h des pertes par unite de surface et parKelvin h = λ/e (en W/m2/K). On a alors Φ = hS∆T . Le calcul de la resistance globalepour une piece ou une installation se fait en utilisant les lois d’association serie et paralleles,comme pour les resistances electriques. Pour un batiment, on distingue les deperdition parconduction a travers les parois (DBP pour deperditions de base par transmission a traversles parois) des pertes par circulation de l’air (DBR pour deperditions de base par renouvel-lement de l’air). Les details des calculs peuvent etre trouves dans de nombreux documents ;voir par exemple http://www.thermexcel.com/french/ressourc/deperdit.htm. Des va-leurs numeriques de conductivite thermique sont donnees dans http://fr.wikipedia.org/wiki/Conductivite_thermique (ajouter un accent a conductivite pour avoir le bon lien).
La loi d’evolution de la temperature est donnee par l’equation generale de la conduction
3. Selon http://fr.wikipedia.org/wiki/Joseph_Fourier, “Jean Baptiste Joseph Fourier, ne le 21mars 1768 a Auxerre et mort le 16 mai 1830 a Paris, est un mathematicien et physicien francais, connu pourses travaux sur la decomposition de fonctions periodiques en series trigonometriques convergentes appeleesseries de Fourier et leur application au probleme de la propagation de la chaleur”. La loi de Fourier a eteetablie mathematiquement par Jean-Baptiste Biot en 1804 puis experimentalement par Fourier en 1822(http://fr.wikipedia.org/wiki/Conduction_thermique#Loi_de_Fourier).

18 CHAPITRE 2. MODELISATION
type de cloison conductivitevitre avec double vitrage 3 W/m2/K
mur exterieur isole 0.57 W/m2/K (1.75 m2.K/W)mur interieur, sol et plafonds 1 W/m2/K
Table 2.1 – Conductivite pour differentes parties d’une habitation
de la chaleur :
λ∆T + P = ρc∂T/∂t (2.49)
ou ∆T est le Laplacien 4 de T , P (W/m3) est la production de chaleur au sein du materiau,ρ (kg/m3) est la masse volumique et c (J.kg−1.K−1) est la chaleur specifique. On definit aussiD = λ/(ρc) (m2/s) le coefficient de diffusivite thermique (ou coefficient de diffusion).
Le rayonnement joue egalement un role important dans le bilan thermique d’un batiment.La puissance de rayonnement P est donnee par la loi de Stefan Boltzmann P = εσST 4 (ε :emissivite comprise entre 0 et 1, S : surface, σ = 5.7 × 10−8W.m−2.K−4 : constante deBoltzmann). Des valeurs numeriques d’emissivite des materiaux sont disponibles sur http:
//www.x86-secret.com/articles/divers/stt/stt-4.htm.
Exercice 7 (Modele thermique simplifie d’une piece)Une piece est organisee de la maniere suivante :
– un plancher de 30 m2
– un plafond de 30 m2
– une hauteur de 2.40 m– 4 m2 de fenetres, equipees de double vitrage simple, donnant sur l’exterieur– 40 % des murs internes a l’appartement, comprenant une porte de 2 m2 de surface– 40 % des murs en contact avec l’exterieur– 20 % des murs mitoyens avec un autre appartement
On cherche a dimensionner la puissance de chauffe necessaire au maintien d’une temperaturede confort de 20 C dans les conditions extremes suivantes : appartements voisin peu chauffes(12 C), temperature exterieure de -10 C. On negligera les effets de ventilation.
1. Determinez la resistance de chacune des parties de l’appartement.
2. Determinez la puissance de chauffe necessaire
2.2.2 Modele electrique equivalent d’un batiment
Analogie electrique
Considerons un volume de temperature homogene T (t), de capacite thermique constanteCT et recevant un flux d’energie de puissance Q(t). La conservation de l’energie s’ecrit :
CTdT (t)
dt= Q(t) (2.50)
4. Le Laplacien est donne par ∆T = ∂2T/∂x2+∂2T/∂y2+∂2T/∂z2. Il s’ecrit aussi comme la compositiondu gradient et de la divergence.

2.2. THERMIQUE 19
grandeur thermique grandeur electrique
temperature T (K) tension u (V)capacite CT (W.s/K) capacite C (F)resistance RT (W/K) resistance R (Omega)
puissance Q (W) courant i (A)
Table 2.2 – Analogie electrique pour la thermique
On peut faire une analogie avec l’equation d’un condensateur C du(t)dt
= i(t) ou C est lacapacite du condensateur, u(t) est la tension a ses bornes et i(t) est le courant parcourantle condensateur.
Les echanges thermiques a travers une paroi de resistance thermique R donnent lieu aun flux Q(t) = 1
R(T1(t) − T2(t)) ou T1 et T2 sont les temperatures de part et d’autre de la
paroi. L’analogie electrique se fait a travers la loi d’Ohm i(t) = 1R
(u1 − u2). Le tableau 2.2donne un recapitulatif de l’analogie electrique.
Modele R3C2 d’une piece
Le modele R3C2 5 est couramment utilise pour modeliser l’evolution de la temperatured’un piece (voir figure 2.1). Il s’appuie sur les hypotheses suivantes :
– l’air de la piece est a une temperature homogene Ti– les parois entourant la piece sont a une temperature homogene Ts.
On note Cair la capacite thermique de l’air de la piece et Cs celui des murs. Puis on prenden compte les echanges d’energie suivants :
– l’air de la piece est chauffe par une source Qch
– les murs sont chauffes par un rayonnement solaire de puissance Qs
– le flux de chaleur entre les murs et l’air interieur se fait a travers une resistance Ris
– le flux de chaleur entre les murs et l’exterieur se fait a travers une resistance Rse
– les fuites de chaleur entre l’air de la piece et l’air exterieur se fait a travers une resistanceRie
Par ailleurs, la temperature exterieure est imposee. Le modele correspondant est composede trois resistances, deux condensateurs, deux generateurs de courant et un generateur detension (pour Te).
Exercice 8 (Modele R3C2 d’une piece)On considere le modele R3C2 d’une piece presente ci-dessus.
1. Donnez les equations d’etat du modele
2. Le chauffage se fait par soufflage d’un air chaud a la temperature Tc avec un debitvolumique Qc. Comment faut-il modifier la puissance de chauffe dans l’hypothese ouun debit d’air identique, a la temperature Ti, quitte la piece ?
5. Voir par exemple le travail de A. Gigon de EDF R&D, intitule “Identifiabilite d’un modele ther-mique de batiment muni de sa regulation”, disponible sur http://www.see.asso.fr/htdocs/upload/1855_Alexendra_GIGON.pdf.

20 CHAPITRE 2. MODELISATION
Cair
Text
Ti
TextQch
Rie
Cs
RseRis
Qs
Ts
Figure 2.1 – Modele thermique R3C2 d’une piece
2.2.3 Modele elements finis
Une facon d’aborder les systemes geres par des equations aux derivees partielles est depasser par un modele aux elements finis ou par au modele aux differences finies. L’exerciceci-dessous donne un exemple de modele de type elements-finis pour un probleme de diffusiona une dimension.
Exercice 9 (Modele elements finis a une dimension)On considere une paroi homogene d’epaisseur L (on choisira z ∈ [0;L]) et de coefficientde diffusivite thermique D. On suppose que la temperature est imposee aux deux bouts dumateriau et on souhaite determiner un modele d’etat permettant de determiner l’evolutiondu profile de temperature ainsi que les flux d’energie aux extremites de la barre. Pour cela,on propose de decomposer la barre en n elements de longueurs δ = L/n. On notera Tk latemperature a la position zk = kδ pour k = 0, ..., n. On prendra comme valeurs numeriquesL =0,5 m, λ = 0,57 W.m−2.K−1, ρ = 1000 kg.m−2 et c = 100 J.kg−1.K−1.
1. Montrez que l’equation de la chaleur se simplifie en ∂T/∂t = D∂2T/∂z2
2. Pour k ∈ [1;n − 1], montrez que l’on peut approcher ∂2T (zk, t)/∂z2 par (T (zk−1, t) −
2T (zk, t) + T (zk+1, t))/δ2.
3. En notant x(t) =[T1(t) ... Tn−1(t)
]Tet u(t) =
[T0(t) Tn(t)
]T, donnez le modele
discretise sous la forme dx(t)/dt = Ax(t) +Bu(t).
4. En notant y(t) le vecteur a deux composantes contenant les flux de chaleur en entreeet en sortie, determinez l’equation de mesure y(t) = Cx(t) +Du(t).
5. Implantez le modele et simulez le 6. Vous pourrez prendre comme temperature initialeune temperature uniforme egale a 0 . La temperature interieure sera consideree commeconstante egale a 19 et la temperature exterieure varie de maniere sinusoıdale autourde 0 avec une periodicite de 24 h et une amplitude crete-a-crete de 10 .
6. Vous pouvez implanter le modele a temps continu sous Simulink ou alors obtenir un modele a temps-discret equivalent et simuler ce dernier sous Matlab.
2.3. ELECTRICITE 21
2.3 Electricite
2.3.1 Generalites
Les signaux electriques sont la tension, notee u(t) ou v(t) (unite le Volt, note V) et lecourant note i(t) ou j(t) (unite l’ampere, note A). On travaille egalement sur la puissancep(t) = u(t) × i(t) (unite le Watt, note W=VA). Afin de presenter des definitions pourtout type de signal, on utilisera le signal x(t) qui prendra la place de n’importe quel signalelectrique.
La puissance p(t) est la derivee de l’energie electrique We(t) (en Joule, note J = Ws)recue par le dipole :
p(t) =dWe(t)
dt(2.51)
Propriete 1 (Conservation de l’energie) L’energie absorbee par un systeme est egale ala somme de l’energie qu’il a dissipee et de l’energie qu’il a emmagasinee.
Pour un signal x(t) periodique de periode T , on definit la valeur moyenne et la valeurefficace.
Propriete 2 (Calcul de la valeur moyenne)
〈x〉 =1
T
∫T
x(t)dt (2.52)
Propriete 3 (Calcul de la valeur efficace)
Xeff =√〈x2(t)〉 (2.53)
Remarque 1 (Valeur RMS = valeur efficace)La valeur efficace est la racine carree de la moyenne du carre du signal, ce qui se dit enanglais root mean square et donne les initiales RMS couramment utilisees.
Propriete 4 (Valeur efficace nulle)Un signal qui a une valeur efficace nulle est nul a tout instant.
Definition 1 (Regime continu)Le regime continu est caracterise par des valeurs moyennes non nulles. Dans ce cas, c’estaux valeurs moyennes des signaux que l’on s’interesse.
Definition 2 (Regime alternatif)Le regime alternatif est caracterise par des valeurs moyennes nulles. Dans ce cas, c’est auxvaleurs efficaces que l’on s’interesse.
Definition 3 (Puissance moyenne)On appelle puissance moyenne ou puissance active la valeur moyenne de la puissance :
P = 〈p(t)〉 . (2.54)

22 CHAPITRE 2. MODELISATION
Definition 4 (Puissance apparente)La puissance apparente S (unite VA) est definie comme le produit des valeurs efficaces de latension et du courant :
S = UeffIeff (2.55)
La puissance apparente est superieure ou egale a la puissance moyenne. Le facteur depuissance Fp caracterise le rapport entre ces deux grandeurs :
FP =P
S(2.56)
Avec les conventions adequates, Fp est positif et on a 0 ≤ Fp ≤ 1. Un facteur de puissanceproche de 1 (0,9 par exemple) correspond a une bonne utilisation de l’electricite alors qu’unfacteur de puissance nul ou tres faible correspond a de la tension et du courant avec pas oupeu d’echange d’energie.
Exercice 10 (Valeur moyenne et efficace d’un creneau)On considere le signal x(t) periodique de periode T egal a E sur [0 ; αT [ et a −E sur [αT ;T [ avec 0 < α < 1. Determinez la valeur moyenne et la valeur efficace de ce signal.
Exercice 11 (Valeur moyenne d’une sinusoıde redressee)On considere le signal x(t) periodique de periode T/2 egal a X cos(ωt) sur [−T/4 ; T/4].Determinez sa valeur moyenne.
Exercice 12 (Valeur efficace d’une sinusoıde)Determinez la valeur efficace de x(t) = X cos(ωt).
Exercice 13 (Puissance en sinusoıdal)Un dipole a a ses bornes la tension u(t) = U cos(ωt) et est parcouru par le courant i(t) =I sin(ωt− φ). Determinez sa puissance moyenne.
2.3.2 Dipoles et generateurs
Conventions
En convention recepteur, la puissance calculee est la puissance fournie par le circuit etabsorbee par le dipole. Elle est globalement positive pour une charge et negative pour ungenerateur. En convention generateur, la puissance calculee est la puissance fournie par ledipole au circuit. Elle est globalement positive pour un generateur et negative pour unecharge. Les conventions peuvent etre choisies arbitrairement. Les lois de comportement desdipoles changent de signe suivant la convention choisie ; il est donc preferable de choisir laconvention appropriee (recepteur pour une charge et generateur pour une source).
Resistance
Certains dipoles electriques ont la propriete d’avoir un signal de courant proportionnelau signal de tension a tout instant. On appelle resistance (note R, d’unite l’Ohm Ω=V/A)le coefficient de proportionnalite tel que u(t) = Ri(t) pour tout t. Notons qu’il s’agit d’unepropriete mathematique qui, pour un systeme physique, ne correspondra qu’a une approxi-mation de la realite, valable dans un certain domaine. Les dipoles couramment modelises

2.3. ELECTRICITE 23
par une resistance sont les rheostats (chauffage) et les lampes (du moins les ampoules afilament). En convention recepteur, la resistance est positive.
De maniere evidente, on montre que la loi de proportionnalite reste valable pour lesvaleurs moyennes et efficaces (〈u〉 = R 〈i〉 et Ueff = RIeff , cf. exercice 14).
La puissance s’ecrit p(t) = u(t)i(t) = Ri2(t) = 1Ru2(t). La puissance moyenne s’ecrit
P = R 〈i2(t)〉 = RI2eff ou P = 1
R〈u2(t)〉 = 1
RU2eff . On comprend maintenant la notion de
“valeur efficace” : il s’agit de la valeur du courant (ou de la tension) qui, s’il traversait uneresistance, produirait le meme echauffement.
Un cable cylindrique de section uniforme S (en m2) et de longueur l (en m), composed’un materiau de conductivite σ (en Ω−1m−1) a comme resistance :
R =l
σS. (2.57)
On utilise egalement la resistivite ρ = 1/σ (en Ωm). Les materiaux les plus conducteurs sontle cuivre et l’aluminium ; leur conductivite est de l’ordre de 108 Ω−1m−1.
Exercice 14 Montrez que 〈u〉 = R 〈i〉 et que Ueff = RIeff pour des signaux periodiquesquelconques.
Inductance
Certains dıpoles electriques ont la propriete d’avoir une tension proportionnelle a laderivee du courant. On appelle inductance (notee L, d’unite le Henry, H=Vs/A) ce coeffi-
cient de proportionnalite tel que u(t) = Ldi(t)dt
. Les bobinages electriques sont modelises enpremiere approximation par une telle inductance 7. En convention recepteur, l’inductance estpositive.
La puissance instantanee s’ecrit p(t) = u(t) i(t) = Ldi(t)dti(t). La quantite d’energie
transferee entre les instants t0 et t est :∫ t
t0
p(τ)dτ =
∫ t
t0
Ldi(τ)
dti(τ)dτ (2.58)
=
[1
2Li2(τ)
]τ=t
τ=t0
(2.59)
=1
2Li2(t)− 1
2Li2(t0) (2.60)
En considerant qu’a t0 le courant est nul (i(t0) = 0) et que cela correspond a un niveaud’energie nul, on observe que l’energie transmise est WL(t) = 1
2Li2(t). Cette energie n’est
pas dissipee comme c’etait le cas pour la resistance ; elle est stockee et peut etre libereepar une diminution de i(t). Remarquons que le courant dans une inductance ne peut etrediscontinu (cela correspondrait a une tension infinie) ; place dans un circuit, une inductancea donc tendance a lisser le courant la traversant. En regime continu constant, l’inductancese comporte comme un court-circuit.
7. Ce modele n’est pas valable en basse frequence et en regime continu ou l’effet de la resistance du circuitest preponderant.

24 CHAPITRE 2. MODELISATION
Capacite
La capacite est l’element dual de l’inductance : il suffit d’echanger les roles de la tensionet du courant. Ainsi, la capacite C correspond a une proportionnalite entre le courant etla derivee de la tension : i(t) = C du(t)
dt(unite : le Farad note F=As/V). Les condensateurs
sont des dipoles dont le modele classique est un condensateur. Tout comme l’inductance,la capacite stocke de l’energie : WC(t) = 1
2Cu2(t). La tension ne peut etre discontinue aux
bornes d’une capacite a moins d’un courant infini ; placee aux bornes d’un circuit, la capacitea donc tendance a diminuer les variations de tension a ses bornes. En convention recepteur, lacapacite est positive. En regime continu constant, la capacite se comporte comme un circuitouvert.
Sources
On distingue des sources de tension et de courant. Une source de tension a la proprieted’imposer la valeur de la tension a ses bornes quelque soit le courant qui la parcourt ; unetelle source ne peut etre mise en court-circuit sous risque de destruction. Une source decourant a la propriete d’imposer la valeur du courant la traversant, du moins tant que soncircuit n’est pas ouvert. Les sources peuvent etre continues (constante ou non), alternatives(sinusoıdales ou non).
Exercice 15Un condensateur de capacite C est traverse par un courant periodique de periode T et derapport cyclique α = 0, 75 egal a I sur [0 ; αT ] et egal a −I sur [αT ; T]. Le condensateur aune tension nulle a t = 0. On donne les valeurs numeriques suivantes : I = 10 A, C = 1 mFet T = 10 µs.
1. Determinez l’allure de la tension aux bornes du condensateur
2. Determinez le temps necessaire pour atteindre la tension de 20 V.
2.4 Magnetostatique : Production de couple et de force
2.4.1 Bobine d’inductance (rappel)
Soit un circuit magnetique entoure par un circuit electrique (voir figure 2.2). Le circuitest alimente par le courant i(t) et la tension a ses bornes est v(t). Dans l’hypothese d’unmateriau magnetique lineaire (en absence de saturation), le flux φ coupe par les spires estproportionnel au courant : φ(t) = Li(t) ou L est le coefficient d’auto-inductance (ou sim-plement inductance). En absence de perte, la tension aux bornes du circuit est donnee parla loi de Lenz : v(t) = dφ/dt = L di/dt . L’energie magnetique stockee est Wm. On peutl’ecrire comme une fonction du courant : Wm(i) = 1
2L i2(t) ; ou comme une fonction du flux :
Wm(φ) = φ2(t)/(2L). Ces deux fonctions Wm(i) et Wm(φ) representent la meme grandeurphysique mais different du point de vue mathematique.
2.4.2 Principe de la conversion electro-mecanique
Soit un systeme electromecanique comportant un degre de liberte en rotation et compor-tant un circuit electrique. Le circuit electrique est soumis a la tension u(t) et est traverse

2.4. MAGNETOSTATIQUE : PRODUCTION DE COUPLE ET DE FORCE 25
i(t)
v(t)
Figure 2.2 – Bobine d’inductance
par le courant i(t) en convention recepteur. On note φ le flux total le traversant. La partieen rotation est a la position angulaire θ et applique un couple C a une charge mecanique. Lesysteme recoit de la puissance electrique, fournit de la puissance mecanique et peut stockerde l’energie magnetique Wm. Le bilan de d’energie pendant un intervalle de duree dt donne :
dWm = uidt− CΩdt (2.61)
ou Ω = dθdt
. Avec u = dφdt
, on obtient :
dWm = idφ− Cdθ (2.62)
Supposons que l’energie magnetique puisse s’exprimer comme une fonction de φ et θ :Wm(φ, θ) ; cela revient a prendre φ et θ comme variables d’etat et a poser que Wm est unefonction d’etat. La derniere equation implique alors :
∂Wm(φ, θ)
∂φ= i (2.63)
∂Wm(φ, θ)
∂θ= −C (2.64)
La premiere de ces deux equations signifie que l’energie magnetique est l’integrale de idφ aθ constant. La seconde montre qu’un couple est produit par le systeme, correspondant a unevariation a flux constant de l’energie magnetique :
C = −∂Wm(φ, θ)
∂θ(2.65)
2.4.3 Regime lineaire
Dans le cas du regime lineaire (absence de saturation magnetique), le flux est proportion-nel au courant et on peut donc ecrire φ = L(θ) i ou l’inductance L depend ici de la position
du rotor. L’energie magnetique s’ecrit Wm = 12L(θ) i2 = φ2
2L(θ). Pour calculer le couple, c’est
la seconde expression qu’il faut considerer, c’est-a-dire Wm(φ, θ) = φ2
2L(θ). On obtient alors :
C =φ2
2L2(θ)
dL(θ)
dθ=i2
2
dL(θ)
dθ(2.66)
26 CHAPITRE 2. MODELISATION
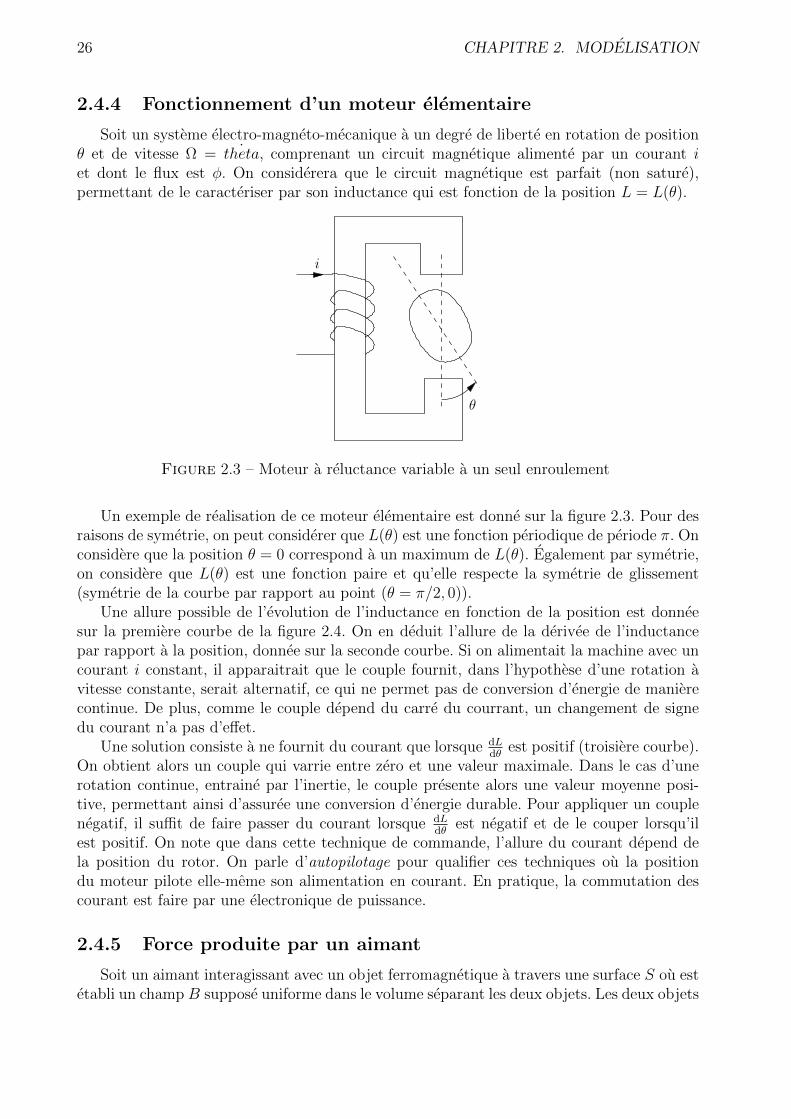
2.4.4 Fonctionnement d’un moteur elementaire
Soit un systeme electro-magneto-mecanique a un degre de liberte en rotation de positionθ et de vitesse Ω = ˙theta, comprenant un circuit magnetique alimente par un courant iet dont le flux est φ. On considerera que le circuit magnetique est parfait (non sature),permettant de le caracteriser par son inductance qui est fonction de la position L = L(θ).
i
θ
Figure 2.3 – Moteur a reluctance variable a un seul enroulement
Un exemple de realisation de ce moteur elementaire est donne sur la figure 2.3. Pour desraisons de symetrie, on peut considerer que L(θ) est une fonction periodique de periode π. Onconsidere que la position θ = 0 correspond a un maximum de L(θ). Egalement par symetrie,on considere que L(θ) est une fonction paire et qu’elle respecte la symetrie de glissement(symetrie de la courbe par rapport au point (θ = π/2, 0)).
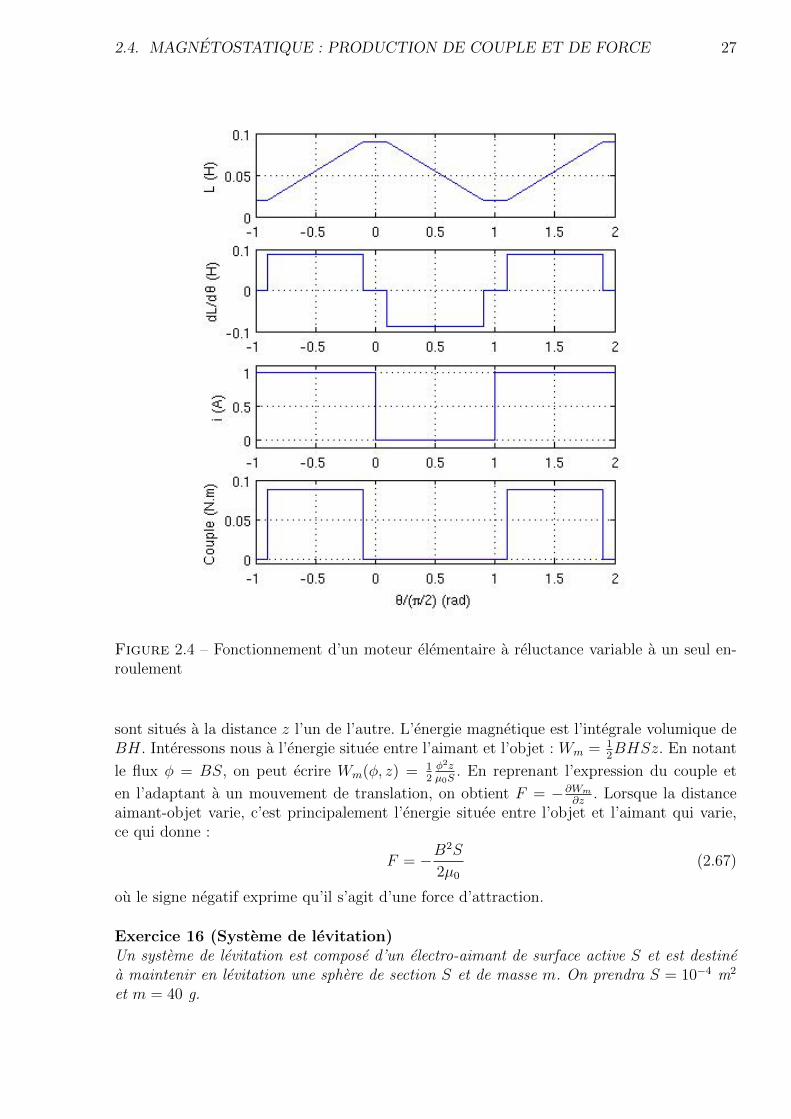
Une allure possible de l’evolution de l’inductance en fonction de la position est donneesur la premiere courbe de la figure 2.4. On en deduit l’allure de la derivee de l’inductancepar rapport a la position, donnee sur la seconde courbe. Si on alimentait la machine avec uncourant i constant, il apparaitrait que le couple fournit, dans l’hypothese d’une rotation avitesse constante, serait alternatif, ce qui ne permet pas de conversion d’energie de manierecontinue. De plus, comme le couple depend du carre du courrant, un changement de signedu courant n’a pas d’effet.
Une solution consiste a ne fournit du courant que lorsque dLdθ
est positif (troisiere courbe).On obtient alors un couple qui varrie entre zero et une valeur maximale. Dans le cas d’unerotation continue, entraine par l’inertie, le couple presente alors une valeur moyenne posi-tive, permettant ainsi d’assuree une conversion d’energie durable. Pour appliquer un couplenegatif, il suffit de faire passer du courant lorsque dL
dθest negatif et de le couper lorsqu’il
est positif. On note que dans cette technique de commande, l’allure du courant depend dela position du rotor. On parle d’autopilotage pour qualifier ces techniques ou la positiondu moteur pilote elle-meme son alimentation en courant. En pratique, la commutation descourant est faire par une electronique de puissance.
2.4.5 Force produite par un aimant
Soit un aimant interagissant avec un objet ferromagnetique a travers une surface S ou estetabli un champ B suppose uniforme dans le volume separant les deux objets. Les deux objets
2.4. MAGNETOSTATIQUE : PRODUCTION DE COUPLE ET DE FORCE 27
Figure 2.4 – Fonctionnement d’un moteur elementaire a reluctance variable a un seul en-roulement
sont situes a la distance z l’un de l’autre. L’energie magnetique est l’integrale volumique deBH. Interessons nous a l’energie situee entre l’aimant et l’objet : Wm = 1
2BHSz. En notant
le flux φ = BS, on peut ecrire Wm(φ, z) = 12φ2zµ0S
. En reprenant l’expression du couple et
en l’adaptant a un mouvement de translation, on obtient F = −∂Wm
∂z. Lorsque la distance
aimant-objet varie, c’est principalement l’energie situee entre l’objet et l’aimant qui varie,ce qui donne :
F = −B2S
2µ0
(2.67)
ou le signe negatif exprime qu’il s’agit d’une force d’attraction.
Exercice 16 (Systeme de levitation)Un systeme de levitation est compose d’un electro-aimant de surface active S et est destinea maintenir en levitation une sphere de section S et de masse m. On prendra S = 10−4 m2
et m = 40 g.
28 CHAPITRE 2. MODELISATION
– Determinez le champ B que doit produire l’aimant pour permettre de maintenir la billeen levitation.
2.5 Machines electriques (moteurs et generateurs)
Les actionneurs electriques sont de deux types : les actionneurs lineaires qui produisentdes mouvements de translation et les actionneurs rotatifs qui produisent des rotations parrapport a un axe. Ces derniers etant les plus courants, nous nous concentrerons sur leuretude. Par ailleurs, les principes de fonctionnement des actionneurs sont les memes pour lesactionneurs lineaires que pour les actionneurs rotatifs.
2.5.1 Principe de fonctionnement
Un actionneur est constitue de deux parties : le stator est la partie fixe. La partie mo-bile est nommee rotor. l’espace separant le stator du rotor est occupe par de l’air ; on lenomme entrefer. Sa largeur est generalement inferieure au millimetre. Pour comprendre lefonctionnement des machines electriques, on est amene a s’interesser de pres a ce qui se passedans l’entrefer. Cette partie etant a l’interface du stator et du rotor, c’est l’interaction deschamps magnetiques dans son espace qui est responsable de la production de couple. On faitgeneralement l’hypothese que le champ magnetique dans l’entrefer est radial. Supposons quela composante radiale du champ dans l’entrefer produit par le stator soit de la forme :
Bs(ξ) = Bmaxs cos(pξ − αs) (2.68)
Il s’agit d’un champ a 2p poles (p poles nord et p poles sud) a repartition spatiale sinusoıdalecale sur l’axe ξ = αs. Supposons que le rotor produise un champ de meme nature :
Br(ξ) = Bmaxr cos(pξ − αr) (2.69)
Les deux champs operent comme deux aimants et cherchent a se rapprocher. On peut faci-lement imaginer que le couple qu’appliquera le stator au rotor est de la forme :
C = Cmax sin(αs − αr) (2.70)
En effet, ce couple est nul des lors que les champs du rotor et du stator sont en phase ; ilest maximum pour un decalage d’un quart de periode. Lorsque c’est possible, on s’arrangerapour avoir αs = αr + π
2afin d’utiliser le moteur au maximum de son efficacite. Le couple
pourra etre regle avec les amplitudes des champs Bmaxs et Bmax
r .Pour une comparaison plus pointue sur les technologies d’actionneurs, vous pouvez consul-
ter l’article de A. Ben Hamed et B. Multon presente en 2007 aux Journees Nationalesde la Recherche en Robotique (http://jnrr07.u-strasbg.fr/actes/articles/16.pdf ethttp://jnrr07.u-strasbg.fr/actes/presentations/session7/Ben-ahmed.pdf).
2.5.2 La machine a courant continu
Le champ dans une machine a courant continu a la propriete d’etre statique avec αr = 0et αs = π
2. Le champ du rotor est realise soit par des aimants permanents (pour les puissances
inferieures au kW environ) soit par un bobinage dans lequel circule un courant appele courantd’excitation.

2.5. MACHINES ELECTRIQUES (MOTEURS ET GENERATEURS) 29
Principe et equations
Imaginons que le stator impose un champ constant sortant par un pole nord et entrantpar un pole sud, l’axe du champ etant dans la direction αs = 0. Notons Φs le flux de cechamp et S la surface sous un pole. Dans le cas ou ce champ est produit par un bobinage,il s’ecrit Φs = Lsis ou is est le courant d’excitation du stator et Ls est son inductance.
Considerons que le rotor est forme d’une seule spire de section S parcourue par un courantir et ayant une tension us a ses bornes. On adoptera la convention recepteur. Le flux totalφr qui traverse cette spire est la somme de deux flux :
– le flux auto-induit qui s’ecrit Lrir ou Lr est l’inductance de la spire,– le flux produit par l’excitation presente au stator ; celui-ci depend de la position res-
pective du rotor par rapport a la spire. En notant θ l’angle du rotor avec le statoret en faisant l’hypothese qu’il a une forme sinusoıdale, il s’ecrit Φs cos(θ) ou Φs estle flux d’excitation ou encore M(θ) is ou M(θ) = Ls cos(θ) est la mutuelle inductancesupposee varier de maniere sinusoıdale en fonction de la position.
On a donc φr = Φs cos(θ) + Lrir = M(θ) is + Lr ir. En notations vectorielles, la matrice desinductance s’ecrit alors :
L(θ) =
[Ls M(θ)M(θ) Lr
](2.71)
et la relation (2.66) donne C = isdMdθir, ce qui s’ecrit C = −isirLs sin(θ) ou encore C =
−Φsir sin(θ).La tension s’ecrit par la loi de Lenz ur = dφr
dtsoit ur = −Φs sin(θ)Ω + Lr
dirdt
. On peutdistinguer la force electromotrice induite par le champ du stator er = −Φs sin(θ)Ω. En tenant
compte de la resistance interne Rr de la spire, cela donne ur(t) = er(t) + Lrdir(t)
dt+Rrir(t).
Si le courant ir etait constant, le moteur ne tournerait pas longtemps et s’immobiliseraitdans la position de conjonction des champs du rotor et du stator θ = 0. Pour maintenir uncouple positif, il faut etre capable d’imposer un courant ir(t) qui est en permanence du signeoppose a sin(θ). Le systeme mecanique qui realise cette fonction se nomme le collecteur 8.Cette piece relie le courant d’alimentation continu a la spire par un contact glissant entredes lames de cuivre connectees a la spire et deux charbons par lesquels arrivent le courantd’alimentation i(t). Les equations s’ecrivent alors C = iΦs| sin(θ)| et e = Φs| sin(θ)|Ω.
Dans la pratique, le rotor est equipe de nombreuses spires ce qui permet de lisser le coupleet la force electromotrice. On conserve toutefois la dependance lineaire de la fem en fonctionde la vitesse Ω et du couple en fonction du courant. Les equations de l’induit 9 s’ecriventalors 10 :
e(t) = kΦsΩ(t) (2.72)
C(t) = kΦsi(t) (2.73)
u(t) = e(t) + Ldi(t)
dt+Ri(t) (2.74)
ou k est un coefficient sans unite dependant du bobinage du rotor, R est la resistance del’induit ; L est son inductance. On notera que les deux premieres equations lient les grandeurs
8. Le collecteur est une piece d’usure et les balais doivent etre changes au bout d’un certain temps. Deplus le contact glissant entre un balais et les lames du collecteur produit des etincelles. De ce fait, les moteursa courants continus sont exclus de certaines applications.
9. Par opposition au stator qui a le role d’inducteur ou encore d’excitation, le rotor d’un moteur a courantcontinu est qualifie d’induit.
10. Ces equations sont valables quelque soit le nombre de paires de poles de la machine.

30 CHAPITRE 2. MODELISATION
electriques, magnetiques et mecaniques alors que la troisieme equation, qui est une equationdifferentielle, ne concerne que les grandeurs electriques.
L’evolution de la vitesse est determinee par la relation fondamentale de la dynamique :
JdΩ
dt= C − Cr (2.75)
ou J est l’inertie du moteur et de l’ensemble des parties mobiles qui lui sont connectees (enKg.m2), Cr est la somme des couples resistants (en N.m) qui freinent le moteur en s’opposanteu couple moteur.
Differents types de moteurs
Moteur a aimants permanents. Le type de moteur a courant continu le plus repanduet notamment pour les petites puissances (< 1 kW) possede un stator equipe d’aimantspermanents. Dans ce cas, le flux Φ est constant et on peut reecrire les equations de la femet du couple en faisant apparaıtre la constante K = kΦ :
e(t) = KΩ(t) (2.76)
C(t) = Ki(t) (2.77)
Il apparaıt que la fem est rigidement liee a la vitesse et que le couple est lie au courant.
Moteur a rotor bobine. Pour les puissances plus importantes ou pour des applicationsparticulieres, on utilise des rotors bobines. L’excitation est alors realisee par un electro-aimant parcouru par un courant d’excitation ie.
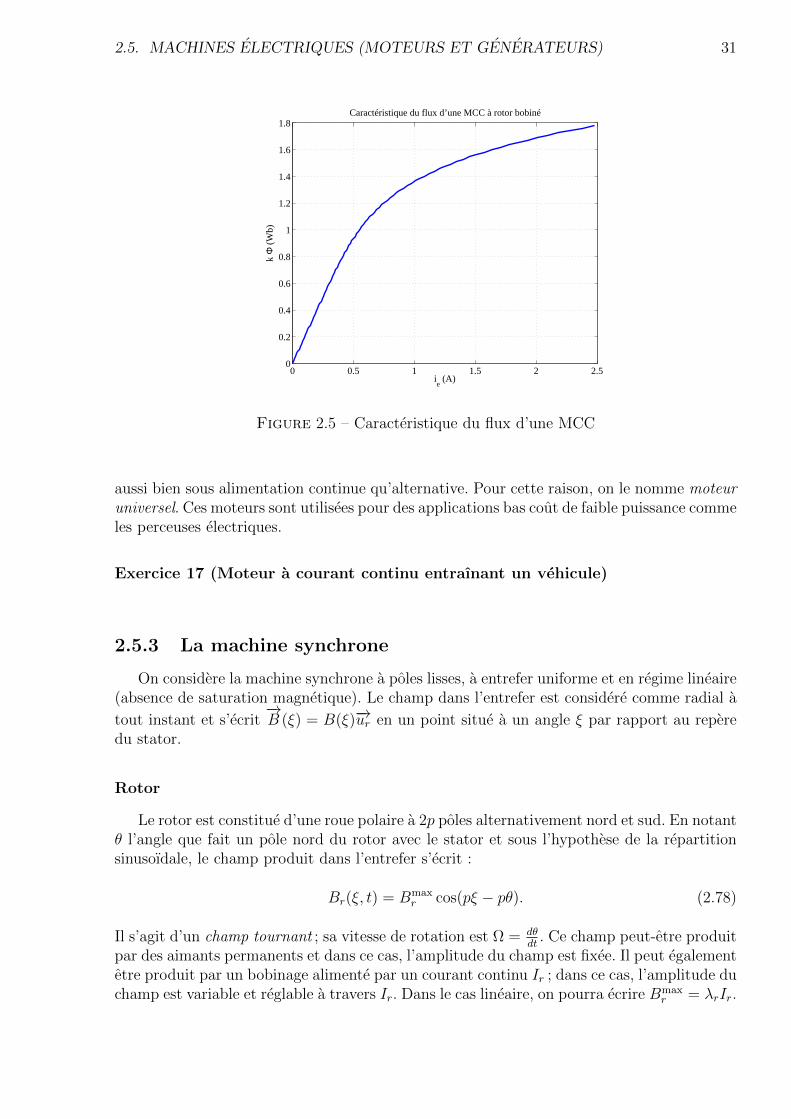
Interessons nous aux variations du flux en fonction du courant d’excitation. A defautde mesurer le flux, on peut estimer kΦ de la maniere suivante : on entraıne la machine acourant continu grace a une autre machine a une vitesse Ω. L’induit est maintenu ouvert desorte d’avoir i(t) = 0, ce qui fait que la tension est egale a la fem : u(t) = e(t). En mesurantla tension et la vitesse, on peut determiner kΦ = u
Ω. A titre d’exemple, une allure typique
est donnee sur la figure 2.5. Cette caracteristique a la meme allure que la courbe B(H) d’unmateriau magnetique. On observe une zone lineaire pour les faibles valeurs du courant ouon peut ecrire kΦ = Leie. Le coude de saturation apparaıt dans cet exemple aux alentour de0,75 A.
En tenant compte de la resistance Re du circuit d’excitation, l’equation de la tensions’ecrit : ue(t) = Reie(t) + dΦ
dtou ue(t) est la tension d’alimentation de l’inducteur. En regime
permanent, le courant se stabilise a ie = ueRe
. En regime lineaire, le regime transitoire peut
aussi s’ecrire : ue(t) = Reie(t) + Ledi(t)
dt.
Les moteurs a rotor bobine offrent differentes possibilites quant a l’alimentation du circuitd’excitation. On peut utiliser une alimentation independante permettant alors de regler leflux de maniere arbitraire. Si on ne dispose pas d’alimentation supplementaire a dedier al’excitation, il faut alors utiliser la meme alimentation que pour l’induit en le couplant soiten serie, soit en parallele.
Moteur universel. Considerons le cas du moteur a excitation serie non sature. Avecie(t) = i(t), son couple s’ecrit alors : C(t) = Lei
2(t). Ainsi, on observe que le couple estpositif quelque soit le signe du courant. Il s’agit donc d’un moteur capable de fonctionner
2.5. MACHINES ELECTRIQUES (MOTEURS ET GENERATEURS) 31
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Caractéristique du flux d’une MCC à rotor bobiné
ie (A)
k Φ
(W
b)
Figure 2.5 – Caracteristique du flux d’une MCC
aussi bien sous alimentation continue qu’alternative. Pour cette raison, on le nomme moteuruniversel. Ces moteurs sont utilisees pour des applications bas cout de faible puissance commeles perceuses electriques.
Exercice 17 (Moteur a courant continu entraınant un vehicule)
2.5.3 La machine synchrone
On considere la machine synchrone a poles lisses, a entrefer uniforme et en regime lineaire(absence de saturation magnetique). Le champ dans l’entrefer est considere comme radial a
tout instant et s’ecrit−→B (ξ) = B(ξ)−→ur en un point situe a un angle ξ par rapport au repere
du stator.
Rotor
Le rotor est constitue d’une roue polaire a 2p poles alternativement nord et sud. En notantθ l’angle que fait un pole nord du rotor avec le stator et sous l’hypothese de la repartitionsinusoıdale, le champ produit dans l’entrefer s’ecrit :
Br(ξ, t) = Bmaxr cos(pξ − pθ). (2.78)
Il s’agit d’un champ tournant ; sa vitesse de rotation est Ω = dθdt
. Ce champ peut-etre produitpar des aimants permanents et dans ce cas, l’amplitude du champ est fixee. Il peut egalementetre produit par un bobinage alimente par un courant continu Ir ; dans ce cas, l’amplitude duchamp est variable et reglable a travers Ir. Dans le cas lineaire, on pourra ecrire Bmax
r = λrIr.

32 CHAPITRE 2. MODELISATION
Stator
Le stator est consitue d’un ensemble de trois bobinages a 2p poles, places dans desencoches, note ‘a’, ‘b’ et ‘c’, regulierement espaces et orientes dans les directions ξ = 0,ξ = 2π
3pet ξ = 4π
3p, et respectivement parcourus par les courants ia(t), ib(t) et ic(t). Sous
l’hypothese du premier harmonique (hypothese de la repartition spatiale sinusoıdale deschamps), ils produisent respectivement dans l’entrefer trois champs de la forme :
Ba(ξ) = λsia(t) cos(pξ) (2.79)
Bb(ξ) = λsib(t) cos(pξ − 2π
3) (2.80)
Bc(ξ) = λsic(t) cos(pξ +2π
3) (2.81)
En absence de saturation (regime lineaire), le champ resultant est la somme des trois champs :
Bs(ξ, t) = λs
(ia(t) cos(pξ) + ib(t) cos(pξ − 2π
3) + ic(t) cos(pξ +
2π
3)
). (2.82)
Dans le cas d’une alimentation sinusoıdale avec :
ia(t) = Im cos(ωt+ α) (2.83)
ib(t) = Im cos(ωt+ α− 2π
3) (2.84)
ic(t) = Im cos(ωt+ α +2π
3) (2.85)
le champ resultant est alors :
Bs(ξ, t) =3
2λsIm cos(pξ − ωt− α). (2.86)
Il s’agit d’un champ tournant, de meme nature que celui produit par la roue du rotor. Savitesse de rotation ω
pest rigidement liee a la pulsation ω des courants. Ce resultat est connu
sous le nom de theoreme de Ferraris. En fonctionnement normal, les champs du stator et durotor tournent a la meme vitesse, ce qui donne la relation suivante :
Ω =ω
p. (2.87)
On dit qu’ils sont synchrones, d’ou le nom de la machine. Par la suite, on supposera que leschamps sont synchrones et que θ(t) = Ωt + θ0. En moteur l’obligation d’avoir des courantsdu stator en phase avec la position du rotor donne lieu au principe de l’autopilotage. C’est-a-dire que pour maintenir un couple constant dans la machine, il faut alimenter la stator avecdes courants dont la phase est determinee par la position du rotor. Ainsi, c’est la machineelle-meme qui pilote ses courants d’ou le terme d’autopilotage.
Force electromotrice induite
Soit une spire placee au stator et orientee selon l’angle mecanique β constituee d’unconducteur aller place a l’angle β − π
2pet d’un conducteur retour place a l’angle β + π
2p.
Le champ etant radial, il est pratique de considerer comme surface une portion de cylindre

2.5. MACHINES ELECTRIQUES (MOTEURS ET GENERATEURS) 33
delimitee par la spire, donnant ainsi−→dS = dS−→ur et
−→B−→dS = B×dS. Le champ etant uniforme
selon la longueur de la machine, on peut donc considerer des elements de surface qui sontdes portions de cylindre d’angle dξ, de longueur L et de surface RLdξ ou R est le rayonmoyen de l’entrefer. Calculons le flux produit par le champ du rotor dans cette spire :
φrβ(t) =
∫ ξ=β+ π2p
ξ=β− π2p
Br(ξ, t)RLdξ (2.88)
= RLBmaxr
∫ ξ=β+ π2p
ξ=β− π2p
cos(pξ − pθ)dξ (2.89)
=2RLBmax
r
pcos(pθ − pβ) (2.90)
De maniere analogue, le flux produit par le champ du stator s’ecrit :
φsβ(t) =2RLBmax
s
pcos(ωt+ α− pβ) (2.91)
Pour obtenir le flux dans les trois phases du stator, il suffit de considerer respectivementpβ = 0 pour la phase ‘a’, pβ = 2π
3pour la phase ‘b’et pβ = −2π
3pour la phase ‘c’, donnant
ainsi un systeme triphase equilibre de flux. Si on s’interesse desormais a la phase ‘a’, on peutnoter :
φra
= φmaxr exp(jpθ) (2.92)
ce qui signifie que le vecteur de Fresnel representatif du flux tourne avec la position du rotoret pour le flux produit par le stator :
φsa
= φmaxs exp(j(ωt+ α)). (2.93)
On remarque que le flux produit par le stator est en phase avec son propre courant. De plus,en regime lineaire (en absence de saturation magnetique), on peut considerer que l’amplitudedu flux est proportionnelle a l’amplitude Im du courant et ecrire φmax
s = Ls Im, d’ou :
φsa
= LsIa. (2.94)
ou Ia est le vecteur de Fresnel representatif de ia(t).
Le flux resultant φa est la somme des flux produits par le stator et le rotor (φa = φra
+φsa
).
La force electromotrice totale ea(t) s’ecrit en convention generateur ea = −dφadt
, soit envecteurs :
Ea = −jωφa
(2.95)
= −jω(φra
+ φsa
) (2.96)
= E0a − jLsωIa (2.97)
ou E0a est la force electromotrice a vide de la phase ‘a’.
34 CHAPITRE 2. MODELISATION
Modele de Behn-Eschenburg
En tenant compte du flux de fuites φfa
= LfaIa et de la chute de tension resistive RsIaou Lfa et Rs sont respectivement l’inductance des fuites et la resistance d’induit du stator,on obtient :
V sa = Ea − jLsωIa −RsIa. (2.98)
En notantXs = (Ls+Lfs)ω la reactance synchrone, on obtient le modele de Behn-Eschenburgpermettant de modeliser les machine synchrones a poles lisses en regime non sature :
V sa = E0a − jXsIa −RsIa. (2.99)
Dans ce modele, on considere la vitesse et la frequence comme contantes ; la force electromotricedepend donc uniquement du courant d’excitation : E0a = E0(Ir) ou Ir est le courant d’ex-citation pour un rotor bobine. Dans le cas d’un moteur a aimants, E0a est contant egal aE0.
Naturellement, cette etude faite pour la phase ‘a’ reste valable pour les autres phases.Il faudra donc considerer que chacune des phase de la machine synchrone est modeliseepar la mise en serie d’une f.e.m. sinusoıdale, d’une reactance synchrone et d’une resistance.Afin de simplifier les equations, on pourra etre amene a negliger la resistance de l’induit.On ne negligera cependant jamais la reactance synchrone qui est un parametre essentiel dela machine ; en effet, il represente la reaction magnetique d’induit, c’est-a-dire l’effet descourants d’induit sur le champ dans l’entrefer, phenomene fondamental dans les machinestournantes. Remarquons d’ailleurs que cette RMI n’est pas compensable alors que c’etait lecas pour le moteur a courant continu.
2.5.4 La machine asynchrone
On parle egalement de moteur a induction.
Constitution
Le stator d’un moteur asynchrone est identique a celui d’une machine synchrone. Il estdonc constitue d’un enroulement triphase a 2p poles qui, lorsqu’il est parcouru par descourants a la pulsation ω, cree un champ tournant a la vitesse ω
p.
Le rotor d’une machine asynchrones est une structure purement passive. Differentes tech-nologies sont disponibles.
Rotor a cage. C’est la technologie de loin la plus repandue. Le rotor est constitue d’unensemble de barres conductrices le plus souvent en aluminium et parfois en cuivre qui sontreliees entre elles a chaque extremite par un anneau de court-circuit. Ce systeme de conduc-teurs de courant est coule dans un empilage de toles magnetiques qui favoriseront le passagedu champ magnetique entre les conducteurs, permettant ainsi la creation de courants parinduction magnetique.
Rotor bobine. Le rotor peut-etre constitue d’une structure identique a celle du stator ;c’est-a-dire un systemes polyphase de conducteurs a 2p poles. En utilisation courante, cesconducteurs sont court-circuites.

2.5. MACHINES ELECTRIQUES (MOTEURS ET GENERATEURS) 35
Principe de fonctionnement
Afin d’expliquer plus simplement le fonctionnement, considerons le cas d’un rotor bobine.Les structures sont donc identiques au stator et au rotor ; on sait que la vitesse du champproduit par les courants est rigidement liee a leur pulsation.
Imaginons que le rotor tourne a la vitesse Ω. En se placant dans un referentiel lie aurotor, on voit le champ tournant circuler a la vitesse ω
p−Ω. Ce champ tournant donne donc
naissance au rotor a des fem et a des courants a la pulsation ωr ou ωrp
= ωp− Ω. Notons
ωr = gω ou g est appele glissement. On peut alors ecrire Ω = (1−g)ωp. Un glissement unitaire
correspond a l’arret ; un glissement nul correspond a une vitesse de rotation egale a la vitessedu champ tournant.
Les courants induits obeissent a la loi de Lenz, c’est-a-dire qu’il s’opposent aux variationsde champ. Dans quelle situation le rotor ne voit-il pas de variation de champ ? Uniquementlorsqu’il tourne a la meme vitesse que le champ tournant, c’est-a-dire pour un glissementnul. Dans ce cas precis, il n’y a pas de courant induit et donc pas de couple. Si la vitessedu rotor ralentit, devenant ainsi inferieure a celle du champ tournant, les courants induitsagissent de sorte de ramener le rotor a la vitesse de synchronisme. Ils vont ainsi produire uncouple positif. Au contraire, si la vitesse est superieure a la vitesse du champ tournant, lecouple produit par les courants induits est negatif. On peut donc postuler que le couple estde meme signe que le glissement.
Modele en regime permanent sinusoıdal
Modele du transformateur tournant. La machine asynchrone peut-etre considereecomme un transformateur particulier dans lequel les grandeurs du rotor sont a la pulsationgω. En notant V s et V r les tensions d’une phase du stator et du rotor ; Is et Ir les courants ;Rs et Rr les resistances ; Ls et Lr les inductances propres et M la mutuelle inductance, lesequations s’ecrivent :
V s = RsIs + jωφs
(2.100)
V r = RrIr + jgωφr
(2.101)
ou les flux s’ecrivent :
φs
= LsIs +MIr (2.102)
φr
= MIs + LrIr (2.103)
Le rotor etant court-circuite (V r = 0), l’equation de la tension du rotor s’ecrit alors endivisant par g :
0 =Rr
gIr + jωφ
r(2.104)
Les equations 2.100 et 2.102 a 2.104 sont celles d’un transformateur court-circuite au secon-daire dont la resistance du secondaire serait R2
g.
Les modeles classiquement developpes pour le transformateur sont valables. En ramenantl’ensemble des grandeurs au primaire du transformateur ideal, on obtient le schema equivalentrepresente sur la figure 2.6 ou Lm est l’inductance magnetisante ; Rf est la resistance despertes fer ; N2 est l’inductance totale des fuites ramenees au stator ; R2 est la resistancedu rotor ramenee au stator (R2 = Rr/m
2 ou m est le rapport de transformation). On a
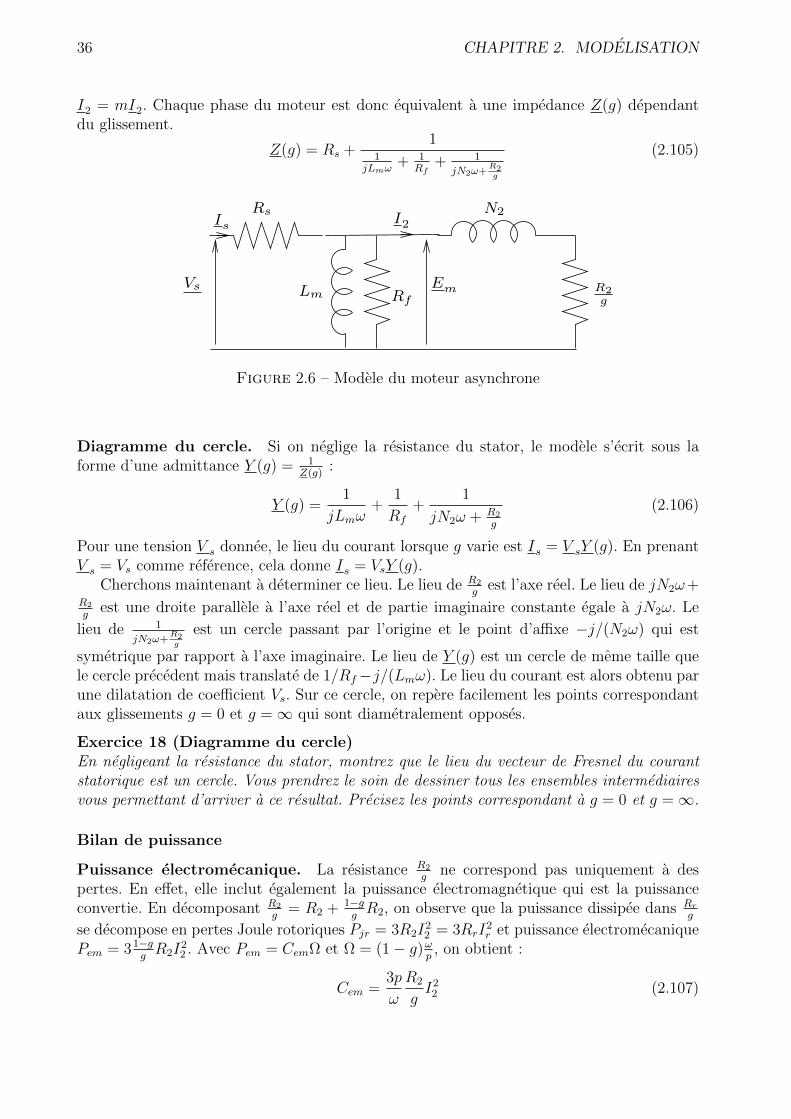
36 CHAPITRE 2. MODELISATION
I2 = mI2. Chaque phase du moteur est donc equivalent a une impedance Z(g) dependantdu glissement.
Z(g) = Rs +1
1jLmω
+ 1Rf
+ 1
jN2ω+R2g
(2.105)
R2gRf
Em
N2Is
Vs Lm
RsI2
Figure 2.6 – Modele du moteur asynchrone
Diagramme du cercle. Si on neglige la resistance du stator, le modele s’ecrit sous laforme d’une admittance Y (g) = 1
Z(g):
Y (g) =1
jLmω+
1
Rf
+1
jN2ω + R2
g
(2.106)
Pour une tension V s donnee, le lieu du courant lorsque g varie est Is = V sY (g). En prenantV s = Vs comme reference, cela donne Is = VsY (g).
Cherchons maintenant a determiner ce lieu. Le lieu de R2
gest l’axe reel. Le lieu de jN2ω+
R2
gest une droite parallele a l’axe reel et de partie imaginaire constante egale a jN2ω. Le
lieu de 1
jN2ω+R2g
est un cercle passant par l’origine et le point d’affixe −j/(N2ω) qui est
symetrique par rapport a l’axe imaginaire. Le lieu de Y (g) est un cercle de meme taille quele cercle precedent mais translate de 1/Rf−j/(Lmω). Le lieu du courant est alors obtenu parune dilatation de coefficient Vs. Sur ce cercle, on repere facilement les points correspondantaux glissements g = 0 et g =∞ qui sont diametralement opposes.
Exercice 18 (Diagramme du cercle)En negligeant la resistance du stator, montrez que le lieu du vecteur de Fresnel du courantstatorique est un cercle. Vous prendrez le soin de dessiner tous les ensembles intermediairesvous permettant d’arriver a ce resultat. Precisez les points correspondant a g = 0 et g =∞.
Bilan de puissance
Puissance electromecanique. La resistance R2
gne correspond pas uniquement a des
pertes. En effet, elle inclut egalement la puissance electromagnetique qui est la puissanceconvertie. En decomposant R2
g= R2 + 1−g
gR2, on observe que la puissance dissipee dans Rr
g
se decompose en pertes Joule rotoriques Pjr = 3R2I22 = 3RrI
2r et puissance electromecanique
Pem = 31−ggR2I
22 . Avec Pem = CemΩ et Ω = (1− g)ω
p, on obtient :
Cem =3p
ω
R2
gI2
2 (2.107)

2.5. MACHINES ELECTRIQUES (MOTEURS ET GENERATEURS) 37
qui est bien de meme signe que le glissement.
La proportion entre les pertes Joule du rotor et la puissance electromecanique depend duglissement : Pem = 1−g
gPjr. Si on note P2 = Pem + Pjr la puissance echangee entre le stator
et le rotor, on a Pjr = gP2 et Pem = (1− g)P2.
Fonctionnement moteur. Le fonctionnement moteur correspond a g ≥ 0. Le moteurabsorbe l’energie electrique au stator Pa = 3VsIs cos(φs) et fournit l’energie mecanique Pu =CemΩ (on negligera les pertes mecaniques). Les pertes sont :
– les pertes Joule au stator Pjs = 3RsI2s ,
– les pertes fer Pf = 3E2m
Rf,
– les pertes Joule au rotor Pjr = 3RrI2r .
Le rendement est η = PuPa
. La conservation de l’energie permet d’ecrire Pa = Pu+Pjs+Pf+Pjr.
Si on ne tient compte que des pertes Joule au rotor, on obtient η = PemP2
= 1 − g. Il s’agitd’un rendement idealise ; on a donc en pratique η ≤ 1− g.
A titre d’illustration, le rendement d’une serie de moteurs asynchrones est donne sur lafigure 2.5.4. On observe que les pertes diminuent regulierement avec la puissance nominale.
Fonctionnement en generatrice. Le fonctionnement en generatrice correspond a g ≤0. La generatrice absorbe l’energie mecanique Pa = CemΩ et fournit l’energie electriquePu = 3VsIs cos(φs). Les pertes sont inchangees et le rendement s’ecrit toujours η = Pu
Paavec
Pa = Pu + Pjs + Pf + Pjr. Dans le cas ou ne tient compte que des pertes Joule au rotor, ona Pu = P2 et Pa = Pem d’ou η = 1
1−g . Dans la pratique, on a η ≤ 11−g
Expression du couple
Nous avons vu que le couple est de meme signe que le glissement. Cherchons desormaisa determiner une expression analytique du couple. Pour cela, nous allons negliger les pertesJoule du stator (Rs = 0) afin de simplifier les calculs. Le module du courant I2 est determinepar :
I22 =
V 2s(
Rrg
)2
+ (Nrω)2(2.108)
En remplacant dans l’equation 2.107, et en rearangeant l’expression, on obtient :
Cem =2Cmggm
+ gmg
. (2.109)
ou gm = R2
N2ωet Cm = 3pV 2
s
2N2ω2 . Il s’agit d’une fonction impaire qui presente un maximum pour(g, Cem) = (gm, Cm) et un minimum en (g, Cem) = (−gm,−Cm).
Sur la figure 2.8 est representee l’allure du couple pour une machine a une paire depoles d’une puissance nominale de 1,5 kW. On observe que le couple a l’arret (g = 0) estrelativement faible par rapport au couple maximal. Dans la pratique, la machine est utiliseesur une plage de glissement relativement faible entre −gm et gm. En dehors de cette plage,le rendement n’est plus acceptable.
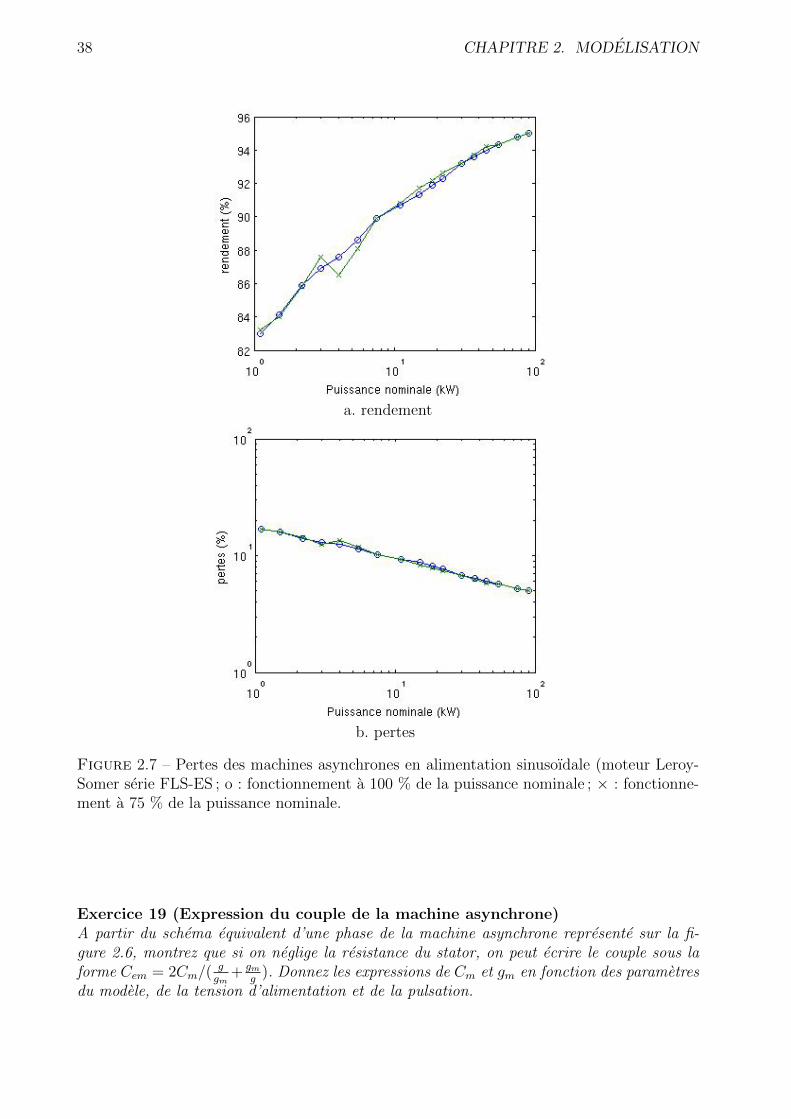
38 CHAPITRE 2. MODELISATION
a. rendement
b. pertes
Figure 2.7 – Pertes des machines asynchrones en alimentation sinusoıdale (moteur Leroy-Somer serie FLS-ES ; o : fonctionnement a 100 % de la puissance nominale ; × : fonctionne-ment a 75 % de la puissance nominale.
Exercice 19 (Expression du couple de la machine asynchrone)A partir du schema equivalent d’une phase de la machine asynchrone represente sur la fi-gure 2.6, montrez que si on neglige la resistance du stator, on peut ecrire le couple sous laforme Cem = 2Cm/(
ggm
+ gmg
). Donnez les expressions de Cm et gm en fonction des parametresdu modele, de la tension d’alimentation et de la pulsation.
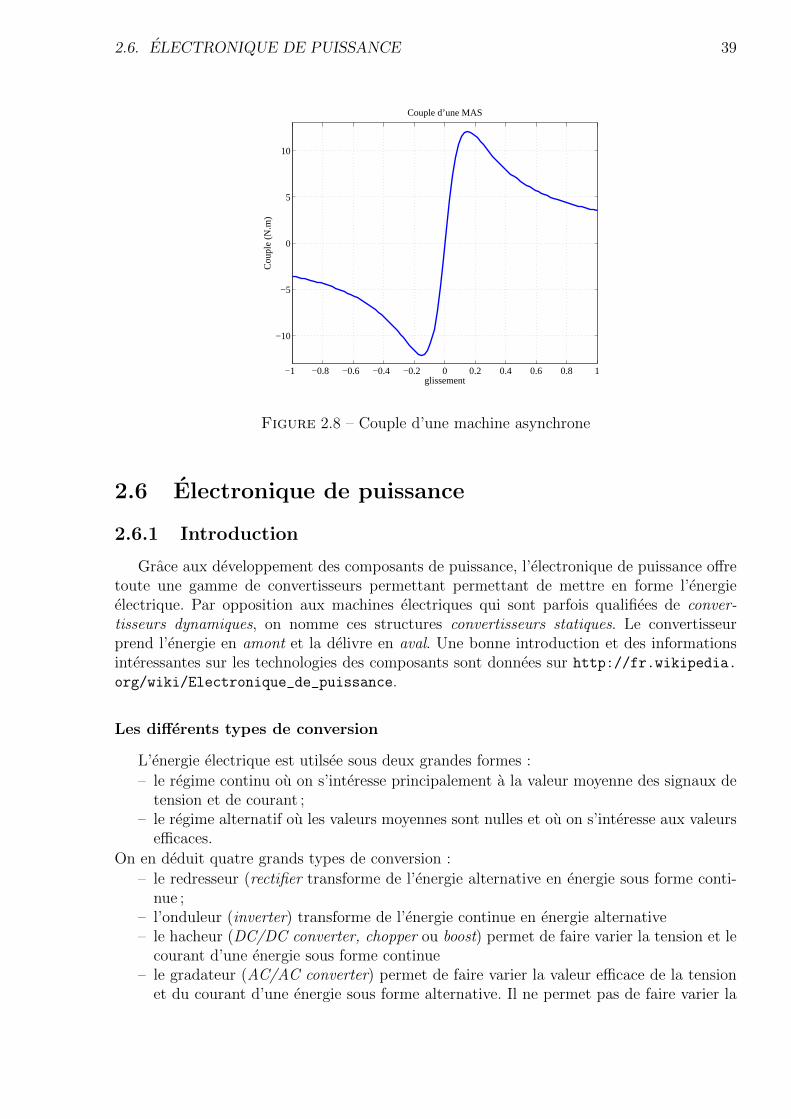
2.6. ELECTRONIQUE DE PUISSANCE 39
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−10
−5
0
5
10
Couple d’une MAS
glissement
Cou
ple
(N.m
)
Figure 2.8 – Couple d’une machine asynchrone
2.6 Electronique de puissance
2.6.1 Introduction
Grace aux developpement des composants de puissance, l’electronique de puissance offretoute une gamme de convertisseurs permettant permettant de mettre en forme l’energieelectrique. Par opposition aux machines electriques qui sont parfois qualifiees de conver-tisseurs dynamiques, on nomme ces structures convertisseurs statiques. Le convertisseurprend l’energie en amont et la delivre en aval. Une bonne introduction et des informationsinteressantes sur les technologies des composants sont donnees sur http://fr.wikipedia.
org/wiki/Electronique_de_puissance.
Les differents types de conversion
L’energie electrique est utilsee sous deux grandes formes :
– le regime continu ou on s’interesse principalement a la valeur moyenne des signaux detension et de courant ;
– le regime alternatif ou les valeurs moyennes sont nulles et ou on s’interesse aux valeursefficaces.
On en deduit quatre grands types de conversion :
– le redresseur (rectifier transforme de l’energie alternative en energie sous forme conti-nue ;
– l’onduleur (inverter) transforme de l’energie continue en energie alternative– le hacheur (DC/DC converter, chopper ou boost) permet de faire varier la tension et le
courant d’une energie sous forme continue– le gradateur (AC/AC converter) permet de faire varier la valeur efficace de la tension
et du courant d’une energie sous forme alternative. Il ne permet pas de faire varier la
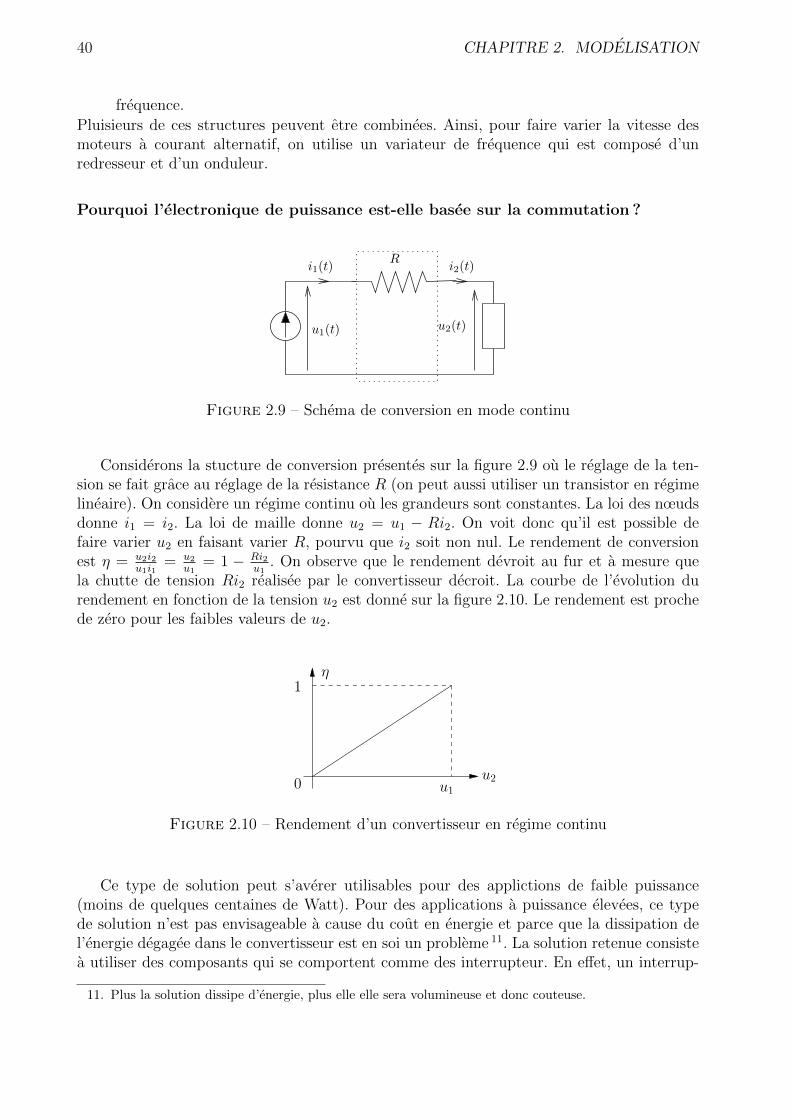
40 CHAPITRE 2. MODELISATION
frequence.
Pluisieurs de ces structures peuvent etre combinees. Ainsi, pour faire varier la vitesse desmoteurs a courant alternatif, on utilise un variateur de frequence qui est compose d’unredresseur et d’un onduleur.
Pourquoi l’electronique de puissance est-elle basee sur la commutation ?
u1(t)
i1(t)R
i2(t)
u2(t)
Figure 2.9 – Schema de conversion en mode continu
Considerons la stucture de conversion presentes sur la figure 2.9 ou le reglage de la ten-sion se fait grace au reglage de la resistance R (on peut aussi utiliser un transistor en regimelineaire). On considere un regime continu ou les grandeurs sont constantes. La loi des nœudsdonne i1 = i2. La loi de maille donne u2 = u1 − Ri2. On voit donc qu’il est possible defaire varier u2 en faisant varier R, pourvu que i2 soit non nul. Le rendement de conversionest η = u2i2
u1i1= u2
u1= 1 − Ri2
u1. On observe que le rendement devroit au fur et a mesure que
la chutte de tension Ri2 realisee par le convertisseur decroit. La courbe de l’evolution durendement en fonction de la tension u2 est donne sur la figure 2.10. Le rendement est prochede zero pour les faibles valeurs de u2.
u10
u2
η1
Figure 2.10 – Rendement d’un convertisseur en regime continu
Ce type de solution peut s’averer utilisables pour des applictions de faible puissance(moins de quelques centaines de Watt). Pour des applications a puissance elevees, ce typede solution n’est pas envisageable a cause du cout en energie et parce que la dissipation del’energie degagee dans le convertisseur est en soi un probleme 11. La solution retenue consistea utiliser des composants qui se comportent comme des interrupteur. En effet, un interrup-
11. Plus la solution dissipe d’energie, plus elle elle sera volumineuse et donc couteuse.
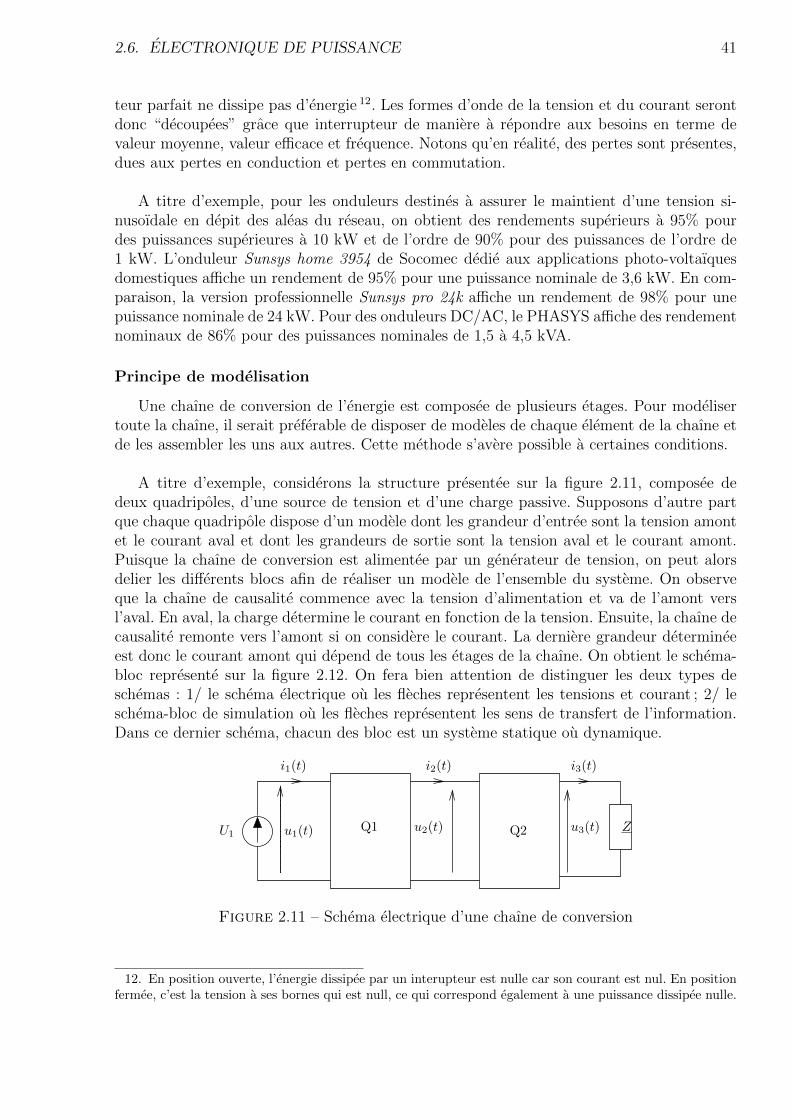
2.6. ELECTRONIQUE DE PUISSANCE 41
teur parfait ne dissipe pas d’energie 12. Les formes d’onde de la tension et du courant serontdonc “decoupees” grace que interrupteur de maniere a repondre aux besoins en terme devaleur moyenne, valeur efficace et frequence. Notons qu’en realite, des pertes sont presentes,dues aux pertes en conduction et pertes en commutation.
A titre d’exemple, pour les onduleurs destines a assurer le maintient d’une tension si-nusoıdale en depit des aleas du reseau, on obtient des rendements superieurs a 95% pourdes puissances superieures a 10 kW et de l’ordre de 90% pour des puissances de l’ordre de1 kW. L’onduleur Sunsys home 3954 de Socomec dedie aux applications photo-voltaıquesdomestiques affiche un rendement de 95% pour une puissance nominale de 3,6 kW. En com-paraison, la version professionnelle Sunsys pro 24k affiche un rendement de 98% pour unepuissance nominale de 24 kW. Pour des onduleurs DC/AC, le PHASYS affiche des rendementnominaux de 86% pour des puissances nominales de 1,5 a 4,5 kVA.
Principe de modelisation
Une chaıne de conversion de l’energie est composee de plusieurs etages. Pour modelisertoute la chaıne, il serait preferable de disposer de modeles de chaque element de la chaıne etde les assembler les uns aux autres. Cette methode s’avere possible a certaines conditions.
A titre d’exemple, considerons la structure presentee sur la figure 2.11, composee dedeux quadripoles, d’une source de tension et d’une charge passive. Supposons d’autre partque chaque quadripole dispose d’un modele dont les grandeur d’entree sont la tension amontet le courant aval et dont les grandeurs de sortie sont la tension aval et le courant amont.Puisque la chaıne de conversion est alimentee par un generateur de tension, on peut alorsdelier les differents blocs afin de realiser un modele de l’ensemble du systeme. On observeque la chaıne de causalite commence avec la tension d’alimentation et va de l’amont versl’aval. En aval, la charge determine le courant en fonction de la tension. Ensuite, la chaıne decausalite remonte vers l’amont si on considere le courant. La derniere grandeur determineeest donc le courant amont qui depend de tous les etages de la chaıne. On obtient le schema-bloc represente sur la figure 2.12. On fera bien attention de distinguer les deux types deschemas : 1/ le schema electrique ou les fleches representent les tensions et courant ; 2/ leschema-bloc de simulation ou les fleches representent les sens de transfert de l’information.Dans ce dernier schema, chacun des bloc est un systeme statique ou dynamique.
u1(t)
i1(t) i2(t)
u2(t)
i3(t)
Q1 Q2U1u3(t) Z
Figure 2.11 – Schema electrique d’une chaıne de conversion
12. En position ouverte, l’energie dissipee par un interupteur est nulle car son courant est nul. En positionfermee, c’est la tension a ses bornes qui est null, ce qui correspond egalement a une puissance dissipee nulle.
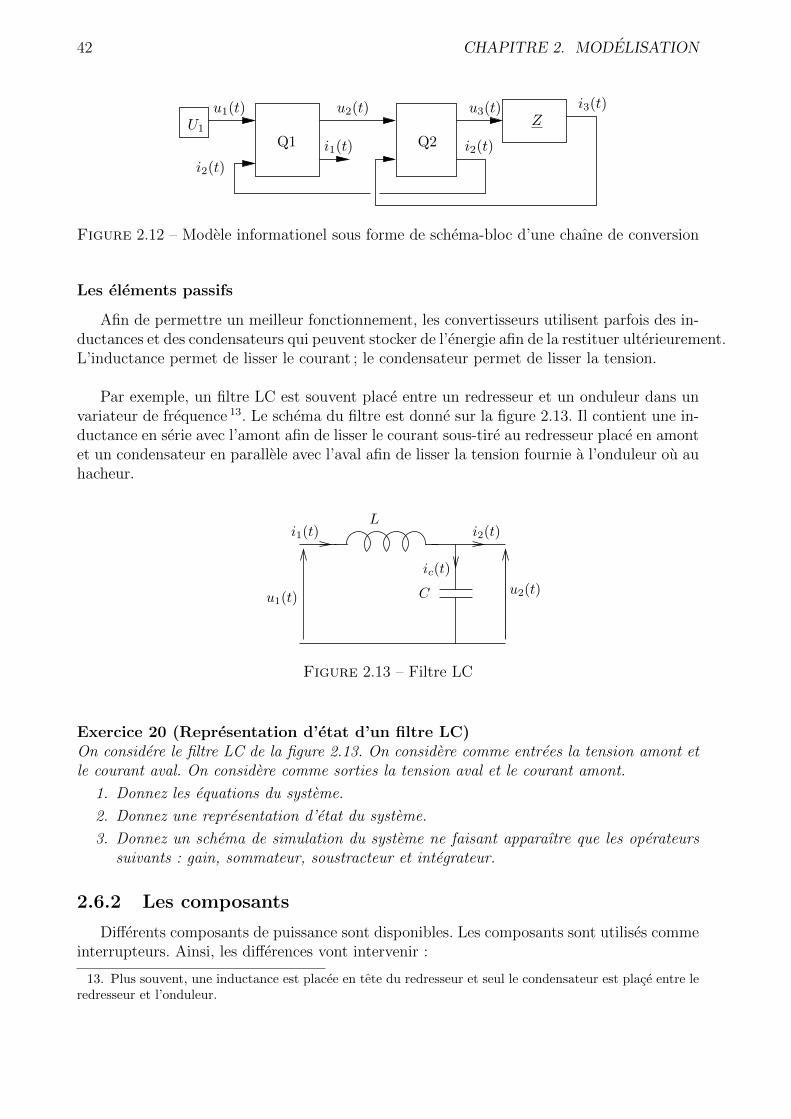
42 CHAPITRE 2. MODELISATION
u3(t)u1(t) u2(t)ZU1
Q1 Q2
i2(t)
i2(t)i1(t)
i3(t)
Figure 2.12 – Modele informationel sous forme de schema-bloc d’une chaıne de conversion
Les elements passifs
Afin de permettre un meilleur fonctionnement, les convertisseurs utilisent parfois des in-ductances et des condensateurs qui peuvent stocker de l’energie afin de la restituer ulterieurement.L’inductance permet de lisser le courant ; le condensateur permet de lisser la tension.
Par exemple, un filtre LC est souvent place entre un redresseur et un onduleur dans unvariateur de frequence 13. Le schema du filtre est donne sur la figure 2.13. Il contient une in-ductance en serie avec l’amont afin de lisser le courant sous-tire au redresseur place en amontet un condensateur en parallele avec l’aval afin de lisser la tension fournie a l’onduleur ou auhacheur.
u1(t)
i1(t) i2(t)
ic(t)
u2(t)
L
C
Figure 2.13 – Filtre LC
Exercice 20 (Representation d’etat d’un filtre LC)On considere le filtre LC de la figure 2.13. On considere comme entrees la tension amont etle courant aval. On considere comme sorties la tension aval et le courant amont.
1. Donnez les equations du systeme.
2. Donnez une representation d’etat du systeme.
3. Donnez un schema de simulation du systeme ne faisant apparaıtre que les operateurssuivants : gain, sommateur, soustracteur et integrateur.
2.6.2 Les composants
Differents composants de puissance sont disponibles. Les composants sont utilises commeinterrupteurs. Ainsi, les differences vont intervenir :
13. Plus souvent, une inductance est placee en tete du redresseur et seul le condensateur est place entre leredresseur et l’onduleur.
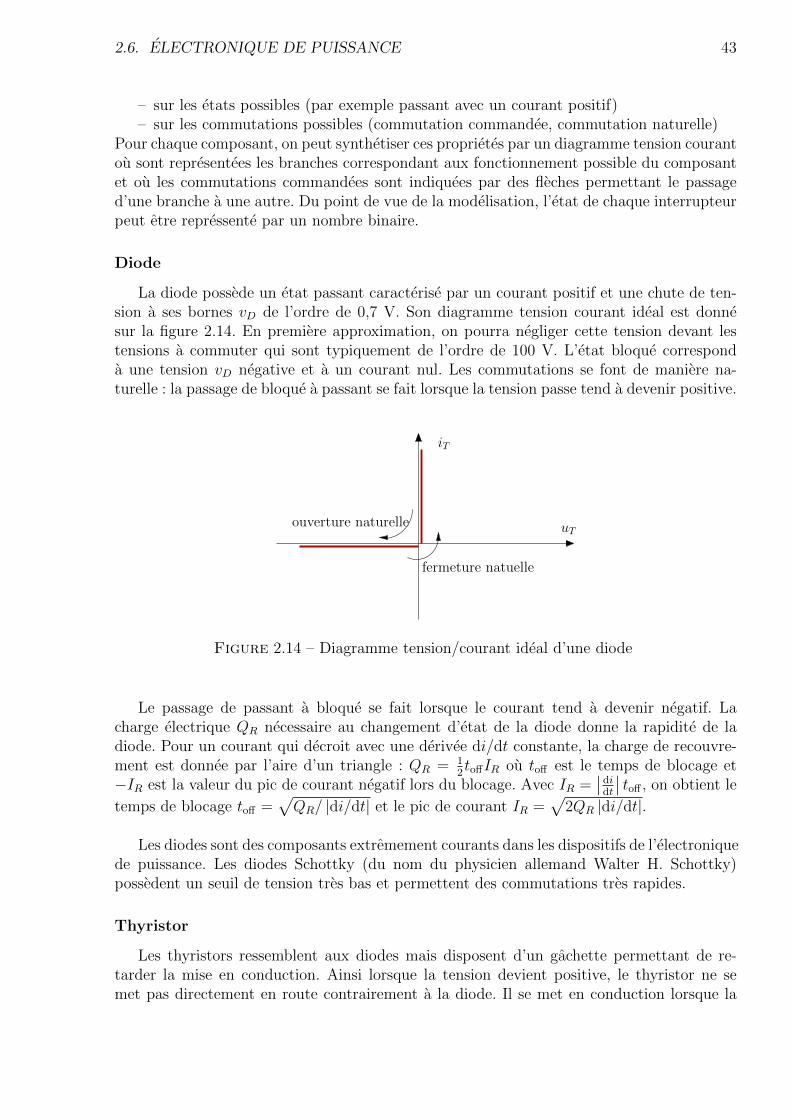
2.6. ELECTRONIQUE DE PUISSANCE 43
– sur les etats possibles (par exemple passant avec un courant positif)– sur les commutations possibles (commutation commandee, commutation naturelle)
Pour chaque composant, on peut synthetiser ces proprietes par un diagramme tension courantou sont representees les branches correspondant aux fonctionnement possible du composantet ou les commutations commandees sont indiquees par des fleches permettant le passaged’une branche a une autre. Du point de vue de la modelisation, l’etat de chaque interrupteurpeut etre repressente par un nombre binaire.
Diode
La diode possede un etat passant caracterise par un courant positif et une chute de ten-sion a ses bornes vD de l’ordre de 0,7 V. Son diagramme tension courant ideal est donnesur la figure 2.14. En premiere approximation, on pourra negliger cette tension devant lestensions a commuter qui sont typiquement de l’ordre de 100 V. L’etat bloque corresponda une tension vD negative et a un courant nul. Les commutations se font de maniere na-turelle : la passage de bloque a passant se fait lorsque la tension passe tend a devenir positive.
uT
iT
ouverture naturelle
fermeture natuelle
Figure 2.14 – Diagramme tension/courant ideal d’une diode
Le passage de passant a bloque se fait lorsque le courant tend a devenir negatif. Lacharge electrique QR necessaire au changement d’etat de la diode donne la rapidite de ladiode. Pour un courant qui decroit avec une derivee di/dt constante, la charge de recouvre-ment est donnee par l’aire d’un triangle : QR = 1
2toffIR ou toff est le temps de blocage et
−IR est la valeur du pic de courant negatif lors du blocage. Avec IR =∣∣di
dt
∣∣ toff , on obtient le
temps de blocage toff =√QR/ |di/dt| et le pic de courant IR =
√2QR |di/dt|.
Les diodes sont des composants extremement courants dans les dispositifs de l’electroniquede puissance. Les diodes Schottky (du nom du physicien allemand Walter H. Schottky)possedent un seuil de tension tres bas et permettent des commutations tres rapides.
Thyristor
Les thyristors ressemblent aux diodes mais disposent d’un gachette permettant de re-tarder la mise en conduction. Ainsi lorsque la tension devient positive, le thyristor ne semet pas directement en route contrairement a la diode. Il se met en conduction lorsque la
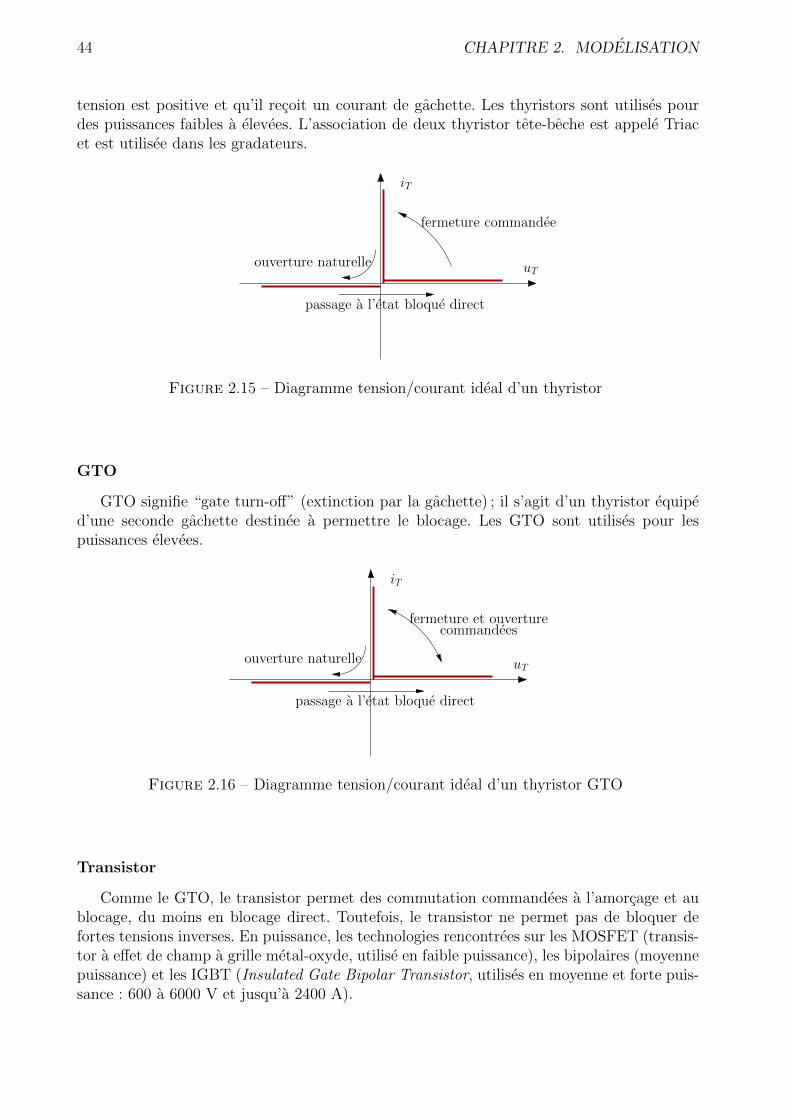
44 CHAPITRE 2. MODELISATION
tension est positive et qu’il recoit un courant de gachette. Les thyristors sont utilises pourdes puissances faibles a elevees. L’association de deux thyristor tete-beche est appele Triacet est utilisee dans les gradateurs.
uT
iT
ouverture naturelle
fermeture commandee
passage a l’etat bloque direct
Figure 2.15 – Diagramme tension/courant ideal d’un thyristor
GTO
GTO signifie “gate turn-off” (extinction par la gachette) ; il s’agit d’un thyristor equiped’une seconde gachette destinee a permettre le blocage. Les GTO sont utilises pour lespuissances elevees.
uT
iT
ouverture naturelle
passage a l’etat bloque direct
fermeture et ouverturecommandees
Figure 2.16 – Diagramme tension/courant ideal d’un thyristor GTO
Transistor
Comme le GTO, le transistor permet des commutation commandees a l’amorcage et aublocage, du moins en blocage direct. Toutefois, le transistor ne permet pas de bloquer defortes tensions inverses. En puissance, les technologies rencontrees sur les MOSFET (transis-tor a effet de champ a grille metal-oxyde, utilise en faible puissance), les bipolaires (moyennepuissance) et les IGBT (Insulated Gate Bipolar Transistor, utilises en moyenne et forte puis-sance : 600 a 6000 V et jusqu’a 2400 A).
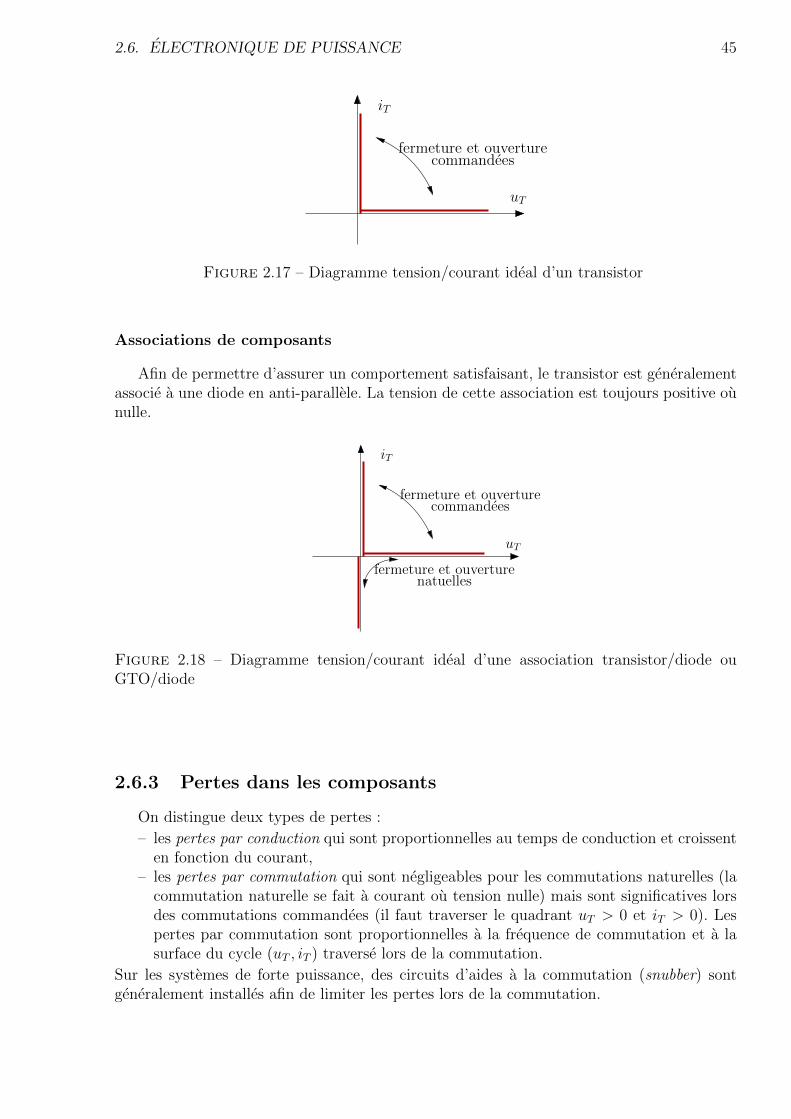
2.6. ELECTRONIQUE DE PUISSANCE 45
uT
iT
fermeture et ouverturecommandees
Figure 2.17 – Diagramme tension/courant ideal d’un transistor
Associations de composants
Afin de permettre d’assurer un comportement satisfaisant, le transistor est generalementassocie a une diode en anti-parallele. La tension de cette association est toujours positive ounulle.
iT
fermeture et ouverturecommandees
natuellesfermeture et ouverture
uT
Figure 2.18 – Diagramme tension/courant ideal d’une association transistor/diode ouGTO/diode
2.6.3 Pertes dans les composants
On distingue deux types de pertes :
– les pertes par conduction qui sont proportionnelles au temps de conduction et croissenten fonction du courant,
– les pertes par commutation qui sont negligeables pour les commutations naturelles (lacommutation naturelle se fait a courant ou tension nulle) mais sont significatives lorsdes commutations commandees (il faut traverser le quadrant uT > 0 et iT > 0). Lespertes par commutation sont proportionnelles a la frequence de commutation et a lasurface du cycle (uT , iT ) traverse lors de la commutation.
Sur les systemes de forte puissance, des circuits d’aides a la commutation (snubber) sontgeneralement installes afin de limiter les pertes lors de la commutation.
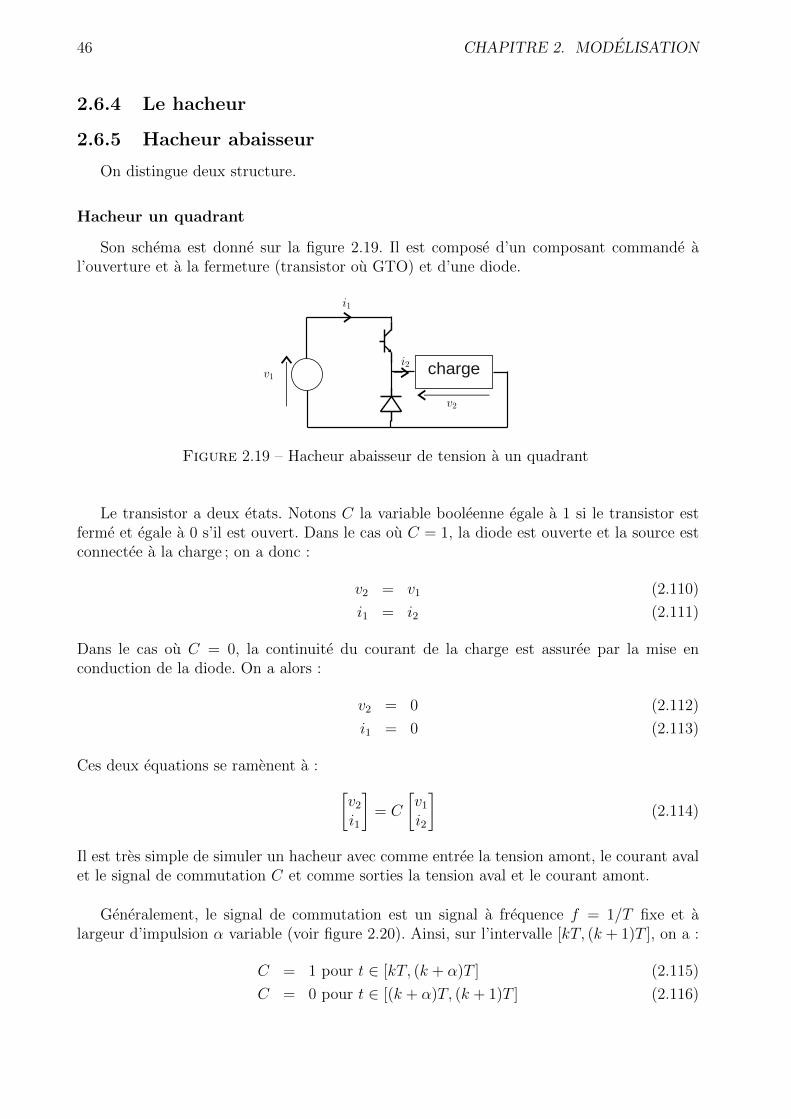
46 CHAPITRE 2. MODELISATION
2.6.4 Le hacheur
2.6.5 Hacheur abaisseur
On distingue deux structure.
Hacheur un quadrant
Son schema est donne sur la figure 2.19. Il est compose d’un composant commande al’ouverture et a la fermeture (transistor ou GTO) et d’une diode.
v1
i1
v2
i2
Figure 2.19 – Hacheur abaisseur de tension a un quadrant
Le transistor a deux etats. Notons C la variable booleenne egale a 1 si le transistor estferme et egale a 0 s’il est ouvert. Dans le cas ou C = 1, la diode est ouverte et la source estconnectee a la charge ; on a donc :
v2 = v1 (2.110)
i1 = i2 (2.111)
Dans le cas ou C = 0, la continuite du courant de la charge est assuree par la mise enconduction de la diode. On a alors :
v2 = 0 (2.112)
i1 = 0 (2.113)
Ces deux equations se ramenent a : [v2
i1
]= C
[v1
i2
](2.114)
Il est tres simple de simuler un hacheur avec comme entree la tension amont, le courant avalet le signal de commutation C et comme sorties la tension aval et le courant amont.
Generalement, le signal de commutation est un signal a frequence f = 1/T fixe et alargeur d’impulsion α variable (voir figure 2.20). Ainsi, sur l’intervalle [kT, (k + 1)T ], on a :
C = 1 pour t ∈ [kT, (k + α)T ] (2.115)
C = 0 pour t ∈ [(k + α)T, (k + 1)T ] (2.116)

2.6. ELECTRONIQUE DE PUISSANCE 47
t
C(t)
1
0 αTh Th
Figure 2.20 – Signal de commutation a rapport-cyclique α
On pourra noter C = Ck pour preciser qu’il s’agit de la valeur sur l’intervalle [kT, (k+ 1)T ].En effet, le rapport-cyclique α = αk est amene a varier d’un intervalle a l’autre.
Dans l’hypothese ou v1 est constant, la valeur moyenne 〈v2〉T calculee sur l’intervalle[kT, (k + 1)T ] est egale αkv1. On observe ainsi que la valeur moyenne de v2 peut etre varieeentre 0 et v1. Pour assurer 〈v2〉T = v∗2 ou v∗2 est la valeur de reference de la tension, il fautappliquer α = v∗2/v1.
Compte-tenu des interrupteurs utilises, on a i2 ≤ 0. Ainsi, dans le plan (v2, i2), le fonc-tionnement ne se fait que pour v2 ≥ 0 et i2 = 0, ce qu’on appelle le premier quadrant. Si onalimente un moteur a courant continu avec ce hacheur, on ne pourra pas assurer de freinagedynamique ni de marche a vitesse negative.
Simulation du calcul d’un rapport-cyclique variable. En simulation, il est interessantde disposer d’un bloc dont la sortie est le signal C et dont l’entree est le rapport-cylique α.Ce systeme peut etre represente par un modele d’etat a temps discret a deux etats x1 etx2. Dans le premier etat, on stocke la valeur du signal C a sortir. Dans le second etat, onstocke la valeur du rapport-cyclique acquise a tk = kT . Ce systemes doit etre mis a jour auxintants α0T , T , T + α1T , 2T ... En notant Tj ces instants (T2k = kT et T2k+1 = kT + αkT ),les equations d’etat sont decrites dans l’algorithme 1. ou le signal de sortie est C(t) = x1(j)pour t ∈ [tj, tj+1[. Ce generateur de signaux peut etre implante sous Simulink sous la formed’une S-function a un parametre (T ) dont le code est donne ci-dessous.
Algorithm 1 Modele dynamique a temps discret du generateur de signal a rapport-cycliquevariableRequire: αEnsure: C % egal a 0 ou 1
if x1(j) = 0 thenx1(j + 1)← 1x2(j + 1)← αt(j + 1)← t(j) + αT
elsex1(j + 1)← 1t(j + 1)← t(j) + (1− x2(j))T
end ifC ← x1
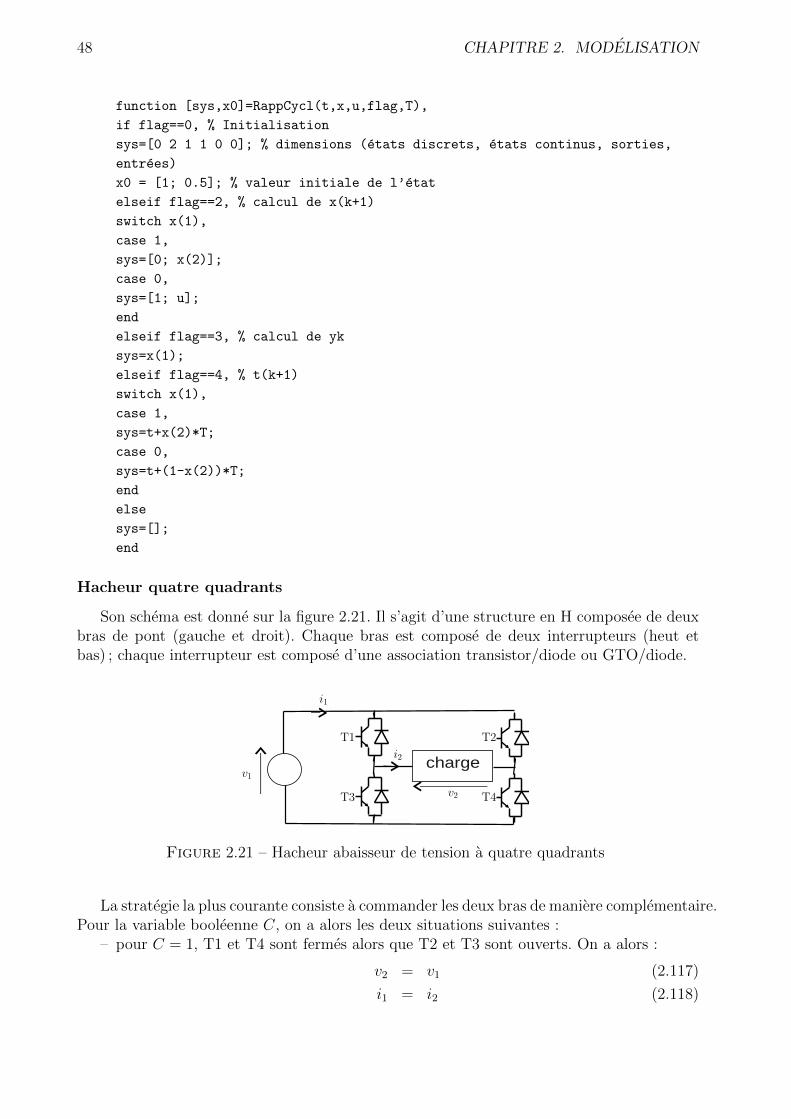
48 CHAPITRE 2. MODELISATION
function [sys,x0]=RappCycl(t,x,u,flag,T),
if flag==0, % Initialisation
sys=[0 2 1 1 0 0]; % dimensions (etats discrets, etats continus, sorties,
entrees)
x0 = [1; 0.5]; % valeur initiale de l’etat
elseif flag==2, % calcul de x(k+1)
switch x(1),
case 1,
sys=[0; x(2)];
case 0,
sys=[1; u];
end
elseif flag==3, % calcul de yk
sys=x(1);
elseif flag==4, % t(k+1)
switch x(1),
case 1,
sys=t+x(2)*T;
case 0,
sys=t+(1-x(2))*T;
end
else
sys=[];
end
Hacheur quatre quadrants
Son schema est donne sur la figure 2.21. Il s’agit d’une structure en H composee de deuxbras de pont (gauche et droit). Chaque bras est compose de deux interrupteurs (heut etbas) ; chaque interrupteur est compose d’une association transistor/diode ou GTO/diode.
v1
i1
T1
i2
v2
T2
T3 T4
Figure 2.21 – Hacheur abaisseur de tension a quatre quadrants
La strategie la plus courante consiste a commander les deux bras de maniere complementaire.Pour la variable booleenne C, on a alors les deux situations suivantes :
– pour C = 1, T1 et T4 sont fermes alors que T2 et T3 sont ouverts. On a alors :
v2 = v1 (2.117)
i1 = i2 (2.118)
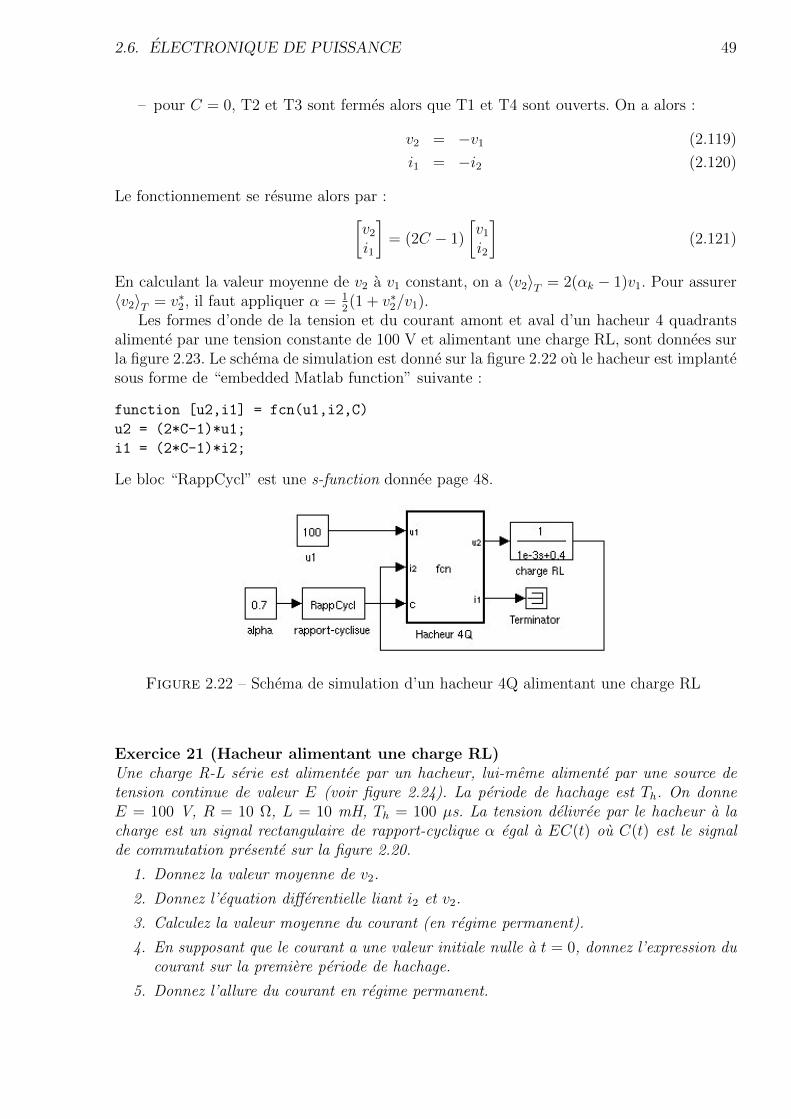
2.6. ELECTRONIQUE DE PUISSANCE 49
– pour C = 0, T2 et T3 sont fermes alors que T1 et T4 sont ouverts. On a alors :
v2 = −v1 (2.119)
i1 = −i2 (2.120)
Le fonctionnement se resume alors par :[v2
i1
]= (2C − 1)
[v1
i2
](2.121)
En calculant la valeur moyenne de v2 a v1 constant, on a 〈v2〉T = 2(αk − 1)v1. Pour assurer〈v2〉T = v∗2, il faut appliquer α = 1
2(1 + v∗2/v1).
Les formes d’onde de la tension et du courant amont et aval d’un hacheur 4 quadrantsalimente par une tension constante de 100 V et alimentant une charge RL, sont donnees surla figure 2.23. Le schema de simulation est donne sur la figure 2.22 ou le hacheur est implantesous forme de “embedded Matlab function” suivante :
function [u2,i1] = fcn(u1,i2,C)
u2 = (2*C-1)*u1;
i1 = (2*C-1)*i2;
Le bloc “RappCycl” est une s-function donnee page 48.
Figure 2.22 – Schema de simulation d’un hacheur 4Q alimentant une charge RL
Exercice 21 (Hacheur alimentant une charge RL)Une charge R-L serie est alimentee par un hacheur, lui-meme alimente par une source detension continue de valeur E (voir figure 2.24). La periode de hachage est Th. On donneE = 100 V, R = 10 Ω, L = 10 mH, Th = 100 µs. La tension delivree par le hacheur a lacharge est un signal rectangulaire de rapport-cyclique α egal a EC(t) ou C(t) est le signalde commutation presente sur la figure 2.20.
1. Donnez la valeur moyenne de v2.
2. Donnez l’equation differentielle liant i2 et v2.
3. Calculez la valeur moyenne du courant (en regime permanent).
4. En supposant que le courant a une valeur initiale nulle a t = 0, donnez l’expression ducourant sur la premiere periode de hachage.
5. Donnez l’allure du courant en regime permanent.
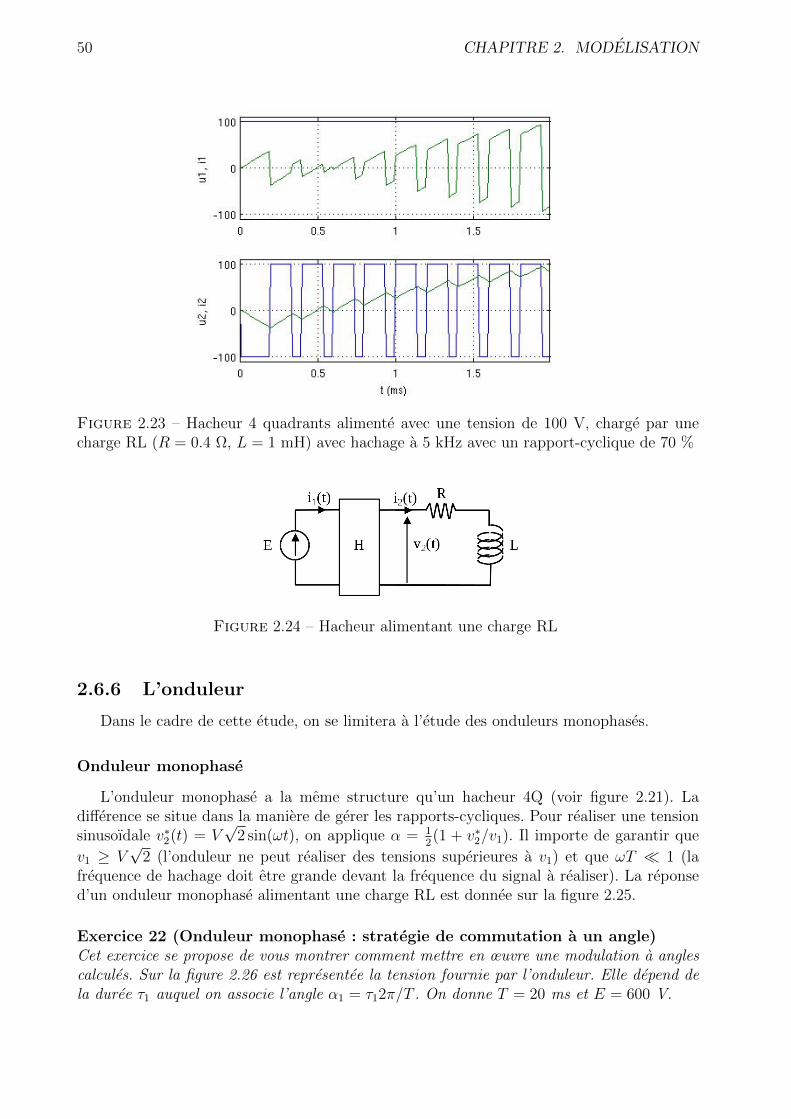
50 CHAPITRE 2. MODELISATION
Figure 2.23 – Hacheur 4 quadrants alimente avec une tension de 100 V, charge par unecharge RL (R = 0.4 Ω, L = 1 mH) avec hachage a 5 kHz avec un rapport-cyclique de 70 %
Figure 2.24 – Hacheur alimentant une charge RL
2.6.6 L’onduleur
Dans le cadre de cette etude, on se limitera a l’etude des onduleurs monophases.
Onduleur monophase
L’onduleur monophase a la meme structure qu’un hacheur 4Q (voir figure 2.21). Ladifference se situe dans la maniere de gerer les rapports-cycliques. Pour realiser une tensionsinusoıdale v∗2(t) = V
√2 sin(ωt), on applique α = 1
2(1 + v∗2/v1). Il importe de garantir que
v1 ≥ V√
2 (l’onduleur ne peut realiser des tensions superieures a v1) et que ωT 1 (lafrequence de hachage doit etre grande devant la frequence du signal a realiser). La reponsed’un onduleur monophase alimentant une charge RL est donnee sur la figure 2.25.
Exercice 22 (Onduleur monophase : strategie de commutation a un angle)Cet exercice se propose de vous montrer comment mettre en œuvre une modulation a anglescalcules. Sur la figure 2.26 est representee la tension fournie par l’onduleur. Elle depend dela duree τ1 auquel on associe l’angle α1 = τ12π/T . On donne T = 20 ms et E = 600 V.

2.6. ELECTRONIQUE DE PUISSANCE 51
Figure 2.25 – Onduleur monophase alimente avec une tension continue de 400 V, chargepar une charge RL (R = 1 Ω, L = 2 mH) avec hachage a 1 kHz
Figure 2.26 – Signaux de commutation de type plein onde a un angle
1. Determinez la valeur efficace du signal.
2. En vous appuyant sur les symetries, dites quels sont les termes de la serie de Fourierqui sont nuls.
3. Calculez l’expression generale des termes non-nuls de la serie de Fourier pour α1 quel-conque.
4. Determinez α1 permettant d’annuler l’harmonique de rang 3. On utilisera cette valeurdans l’ensemble des resultats demandes dans la suite.
5. Determinez la valeur efficace du fondamental et des harmoniques jusqu’au rang 11.
6. Determinez le taux d’harmoniques en tension.
L’onduleur alimente une charge inductive dont les caracteristiques nominales sont : U =400 V, I = 20 A, Fp = 0.8.
7 Determinez les valeurs de la resistance et l’inductance du modele RL serie equivalent.
8 Determinez la fonction de transfert entre la tension et le courant correspondante.
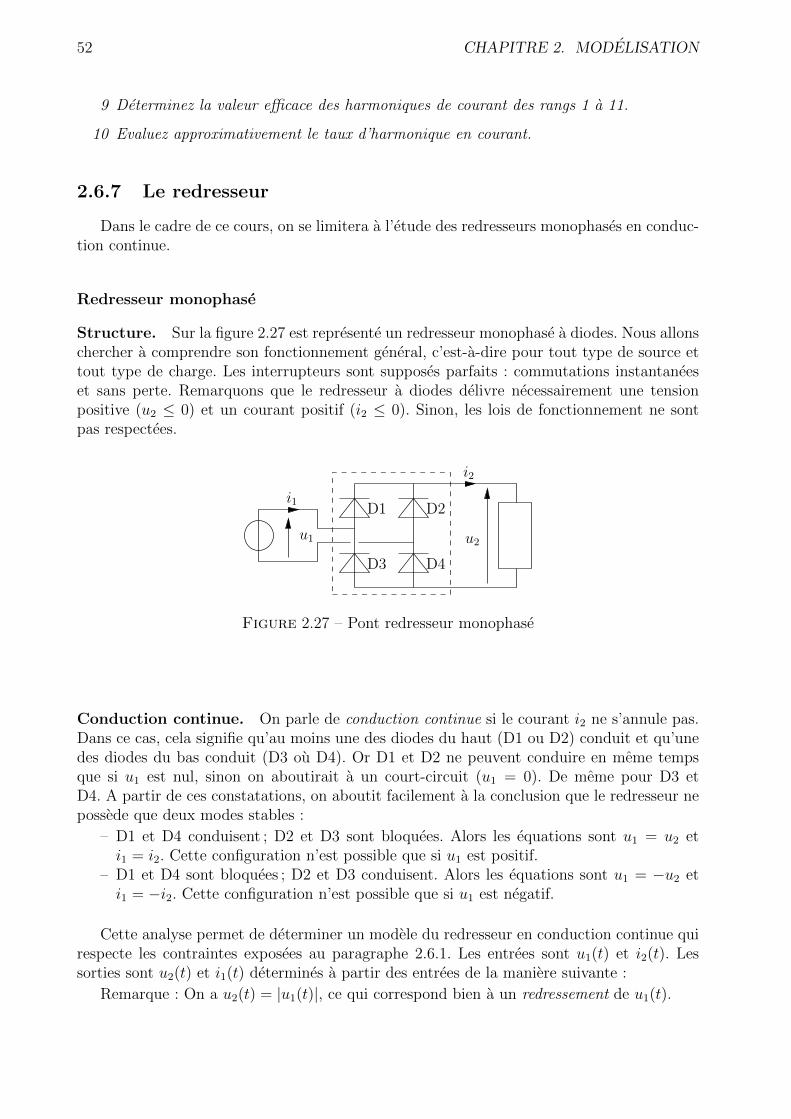
52 CHAPITRE 2. MODELISATION
9 Determinez la valeur efficace des harmoniques de courant des rangs 1 a 11.
10 Evaluez approximativement le taux d’harmonique en courant.
2.6.7 Le redresseur
Dans le cadre de ce cours, on se limitera a l’etude des redresseurs monophases en conduc-tion continue.
Redresseur monophase
Structure. Sur la figure 2.27 est represente un redresseur monophase a diodes. Nous allonschercher a comprendre son fonctionnement general, c’est-a-dire pour tout type de source ettout type de charge. Les interrupteurs sont supposes parfaits : commutations instantaneeset sans perte. Remarquons que le redresseur a diodes delivre necessairement une tensionpositive (u2 ≤ 0) et un courant positif (i2 ≤ 0). Sinon, les lois de fonctionnement ne sontpas respectees.
u2u1
i2
i1D1 D2
D4D3
Figure 2.27 – Pont redresseur monophase
Conduction continue. On parle de conduction continue si le courant i2 ne s’annule pas.Dans ce cas, cela signifie qu’au moins une des diodes du haut (D1 ou D2) conduit et qu’unedes diodes du bas conduit (D3 ou D4). Or D1 et D2 ne peuvent conduire en meme tempsque si u1 est nul, sinon on aboutirait a un court-circuit (u1 = 0). De meme pour D3 etD4. A partir de ces constatations, on aboutit facilement a la conclusion que le redresseur nepossede que deux modes stables :
– D1 et D4 conduisent ; D2 et D3 sont bloquees. Alors les equations sont u1 = u2 eti1 = i2. Cette configuration n’est possible que si u1 est positif.
– D1 et D4 sont bloquees ; D2 et D3 conduisent. Alors les equations sont u1 = −u2 eti1 = −i2. Cette configuration n’est possible que si u1 est negatif.
Cette analyse permet de determiner un modele du redresseur en conduction continue quirespecte les contraintes exposees au paragraphe 2.6.1. Les entrees sont u1(t) et i2(t). Lessorties sont u2(t) et i1(t) determines a partir des entrees de la maniere suivante :
Remarque : On a u2(t) = |u1(t)|, ce qui correspond bien a un redressement de u1(t).
2.7. FLUIDIQUE : DETENDEUR DE GAZ 53
Algorithm 2 Modele du redresseur PD2 en conduction continue
Require: u1(t), i2(t)Ensure: u2(t), i1(t)
if u1(t) ≥ 0 thenu2(t)← u1(t)i1(t)← i2(t)
elseu2(t)← −u1(t)i1(t)← −i2(t)
end if
2.7 Fluidique : detendeur de gaz
2.7.1 Modele d’une chambre
On considere une chambre de volume constant V (m3) contenant n moles d’un gaz a latemperature T (K), a la pression P (Pa) et echangeant de la matiere et de l’energie avec sonenvironnement.
Loi des gaz parfaits
La loi des gaz parfaits est une loi de comportement liant ces differentes grandeurs par larelation :
PV = nRT (2.122)
ou R = 8.314 J.K−1.mol−1 est la constante universelle des gaz parfaits (R = N .k ou N est lenombre d’Avogadro (6.022×1023 mol−1) et k est la constante de Boltzmann (1.38×1023 J/K).
Conservation de la matiere
Dans une chambre contenant une masse m de matiere, recevant un debit massiqued’entree qm,in et un debit massique de sortie qm,out, la conservation de la matiere s’ecrit :
dm
dt= qm,in − qm,out (2.123)
En notant M la masse molaire du gaz, on a qm,in = Mqin ou qin (mol/s) est le debit molaireentrant. De meme, qm,out = Mqout ou qout est le debit molaire sortant. En utlisant m = Mn,cette relation s’ecrit aussi :
dn
dt= qin − qout (2.124)
Conservation de l’energie
La variation de l’energie contenue dans une chambre de volume V constant est la sommedes flux d’energie echanges avec son environnement. L’energie contenue dans la chambres’ecrit CvnT ou Cv = R/(γ − 1) (J/K/mol) est la capacite calorifique molaire a volumeconstant du gaz avec γ = Cp/Cv ou Cp = Rγ/(γ − 1) est la capacite calorifique molaire apression constante. On peut distinguer :

54 CHAPITRE 2. MODELISATION
– Jm = Cp(qinTin − qoutTout) : l’energie transportee par la matiere du fait de sa capacitecalorifique,
– Jth = kb(Tb−T ) : un flux thermique apporte par un bain thermostatique a la temperatureTb avec un coefficient de conduction kb.
On peut alors ecrire :d
dt(CvnT ) = Jm + Jth (2.125)
Modele d’etat
En choisissant comme variables d’etat le nombre de moles et la temperature, les equationss’ecrivent :
dT
dt=
1
N
(1
Cv(Jth + Jmat)− T (qin − qout)
)(2.126)
dN
dt= qin − qout (2.127)
P =RVNT (2.128)
permettant ainsi de determiner l’evolution de P , N et T en fonction de qin, qout, Tin et Tbain.Il s’agit d’un modele dynamique d’ordre deux non-lineaire avec non-linearites dans l’equationd’etat et dans l’equation de sortie.
Exercice 23 (Modele d’une chambre)A partir des differentes equations donnees ci-dessus, retrouvez le modele d’etat (2.126-2.128).
2.7.2 Orifice
On cherche a determiner le debit molaire qn qui se met en place entre l’amont a la pres-sion P1 et l’aval a la pression P2 < P1, ainsi que l’abaissement de la temperature concomitant.
La chute de temperature s’ecrit :
Tout = Tin
(PoutPin
) k−1k
(2.129)
Quant aux debits, on a qin = qout = q et T = Tin (temperature amont). On a en regimesubsonique (pr ≥ prlim) :
q = Cdsubρ
MS
√2γRTγ − 1
(p
2kr − p
k+1k
r
)(2.130)
et en regime critique (pr < prlim) :
q = Cdsoρ
MS
√γRT
(2
γ + 1
) k+1k−1
(2.131)
avec
pr =PoutPin
< 1 (2.132)
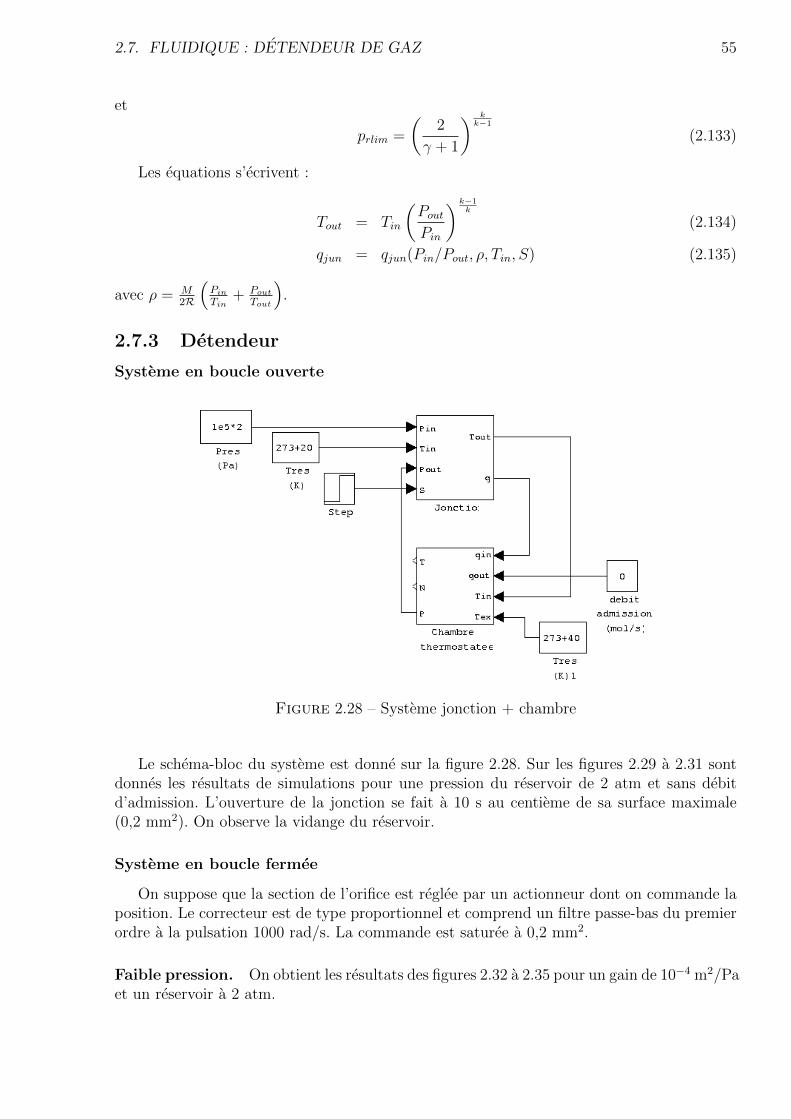
2.7. FLUIDIQUE : DETENDEUR DE GAZ 55
et
prlim =
(2
γ + 1
) kk−1
(2.133)
Les equations s’ecrivent :
Tout = Tin
(PoutPin
) k−1k
(2.134)
qjun = qjun(Pin/Pout, ρ, Tin, S) (2.135)
avec ρ = M2R
(PinTin
+ PoutTout
).
2.7.3 Detendeur
Systeme en boucle ouverte
Figure 2.28 – Systeme jonction + chambre
Le schema-bloc du systeme est donne sur la figure 2.28. Sur les figures 2.29 a 2.31 sontdonnes les resultats de simulations pour une pression du reservoir de 2 atm et sans debitd’admission. L’ouverture de la jonction se fait a 10 s au centieme de sa surface maximale(0,2 mm2). On observe la vidange du reservoir.
Systeme en boucle fermee
On suppose que la section de l’orifice est reglee par un actionneur dont on commande laposition. Le correcteur est de type proportionnel et comprend un filtre passe-bas du premierordre a la pulsation 1000 rad/s. La commande est saturee a 0,2 mm2.
Faible pression. On obtient les resultats des figures 2.32 a 2.35 pour un gain de 10−4 m2/Paet un reservoir a 2 atm.
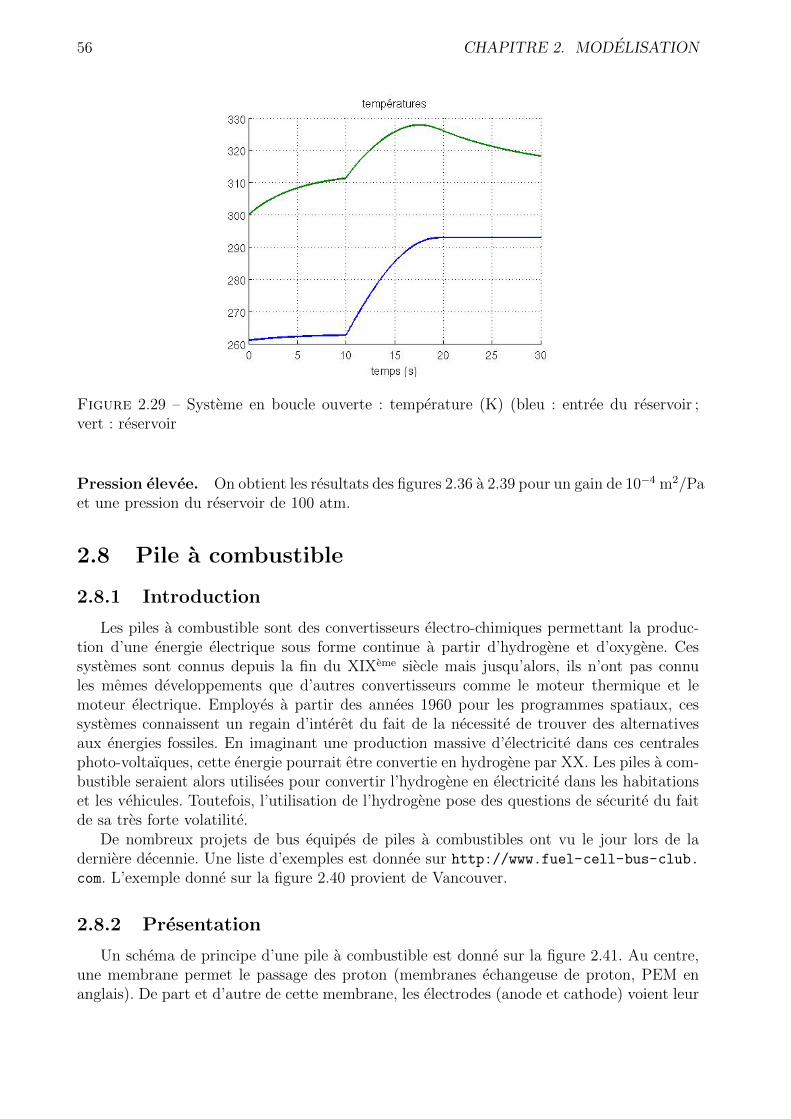
56 CHAPITRE 2. MODELISATION
Figure 2.29 – Systeme en boucle ouverte : temperature (K) (bleu : entree du reservoir ;vert : reservoir
Pression elevee. On obtient les resultats des figures 2.36 a 2.39 pour un gain de 10−4 m2/Paet une pression du reservoir de 100 atm.
2.8 Pile a combustible
2.8.1 Introduction
Les piles a combustible sont des convertisseurs electro-chimiques permettant la produc-tion d’une energie electrique sous forme continue a partir d’hydrogene et d’oxygene. Cessystemes sont connus depuis la fin du XIXeme siecle mais jusqu’alors, ils n’ont pas connules memes developpements que d’autres convertisseurs comme le moteur thermique et lemoteur electrique. Employes a partir des annees 1960 pour les programmes spatiaux, cessystemes connaissent un regain d’interet du fait de la necessite de trouver des alternativesaux energies fossiles. En imaginant une production massive d’electricite dans ces centralesphoto-voltaıques, cette energie pourrait etre convertie en hydrogene par XX. Les piles a com-bustible seraient alors utilisees pour convertir l’hydrogene en electricite dans les habitationset les vehicules. Toutefois, l’utilisation de l’hydrogene pose des questions de securite du faitde sa tres forte volatilite.
De nombreux projets de bus equipes de piles a combustibles ont vu le jour lors de laderniere decennie. Une liste d’exemples est donnee sur http://www.fuel-cell-bus-club.com. L’exemple donne sur la figure 2.40 provient de Vancouver.
2.8.2 Presentation
Un schema de principe d’une pile a combustible est donne sur la figure 2.41. Au centre,une membrane permet le passage des proton (membranes echangeuse de proton, PEM enanglais). De part et d’autre de cette membrane, les electrodes (anode et cathode) voient leur
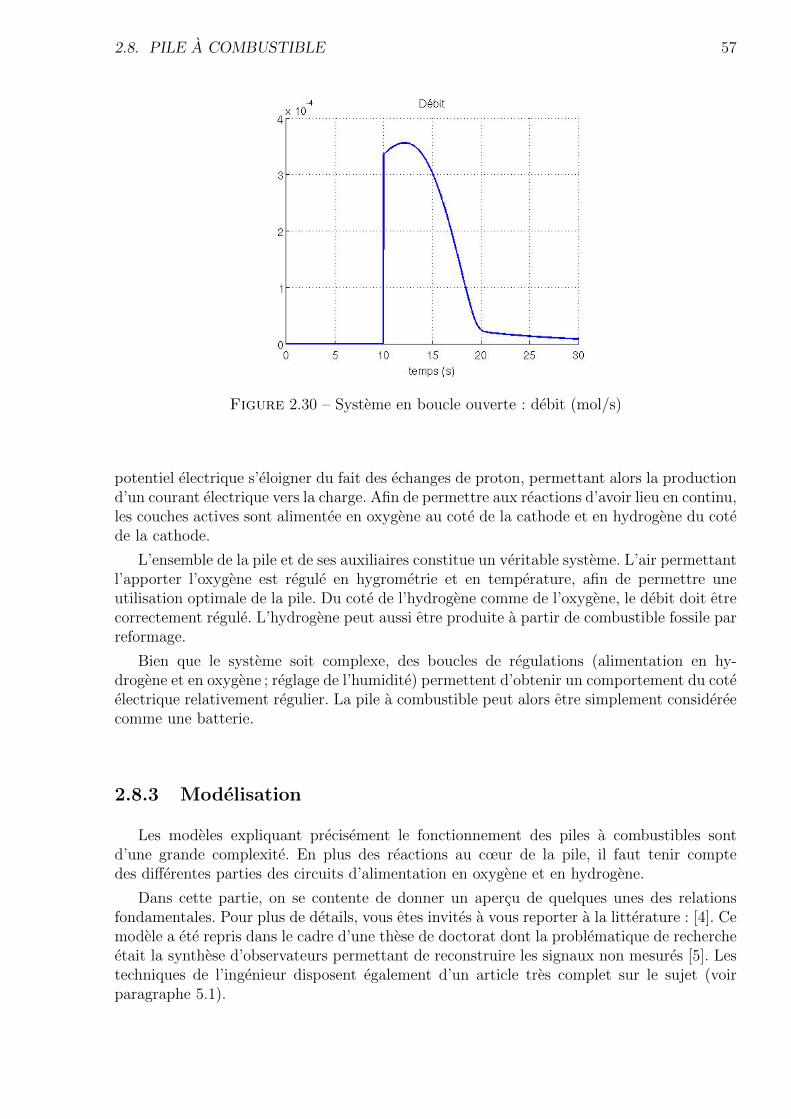
2.8. PILE A COMBUSTIBLE 57
Figure 2.30 – Systeme en boucle ouverte : debit (mol/s)
potentiel electrique s’eloigner du fait des echanges de proton, permettant alors la productiond’un courant electrique vers la charge. Afin de permettre aux reactions d’avoir lieu en continu,les couches actives sont alimentee en oxygene au cote de la cathode et en hydrogene du cotede la cathode.
L’ensemble de la pile et de ses auxiliaires constitue un veritable systeme. L’air permettantl’apporter l’oxygene est regule en hygrometrie et en temperature, afin de permettre uneutilisation optimale de la pile. Du cote de l’hydrogene comme de l’oxygene, le debit doit etrecorrectement regule. L’hydrogene peut aussi etre produite a partir de combustible fossile parreformage.
Bien que le systeme soit complexe, des boucles de regulations (alimentation en hy-drogene et en oxygene ; reglage de l’humidite) permettent d’obtenir un comportement du coteelectrique relativement regulier. La pile a combustible peut alors etre simplement considereecomme une batterie.
2.8.3 Modelisation
Les modeles expliquant precisement le fonctionnement des piles a combustibles sontd’une grande complexite. En plus des reactions au cœur de la pile, il faut tenir comptedes differentes parties des circuits d’alimentation en oxygene et en hydrogene.
Dans cette partie, on se contente de donner un apercu de quelques unes des relationsfondamentales. Pour plus de details, vous etes invites a vous reporter a la litterature : [4]. Cemodele a ete repris dans le cadre d’une these de doctorat dont la problematique de rechercheetait la synthese d’observateurs permettant de reconstruire les signaux non mesures [5]. Lestechniques de l’ingenieur disposent egalement d’un article tres complet sur le sujet (voirparagraphe 5.1).
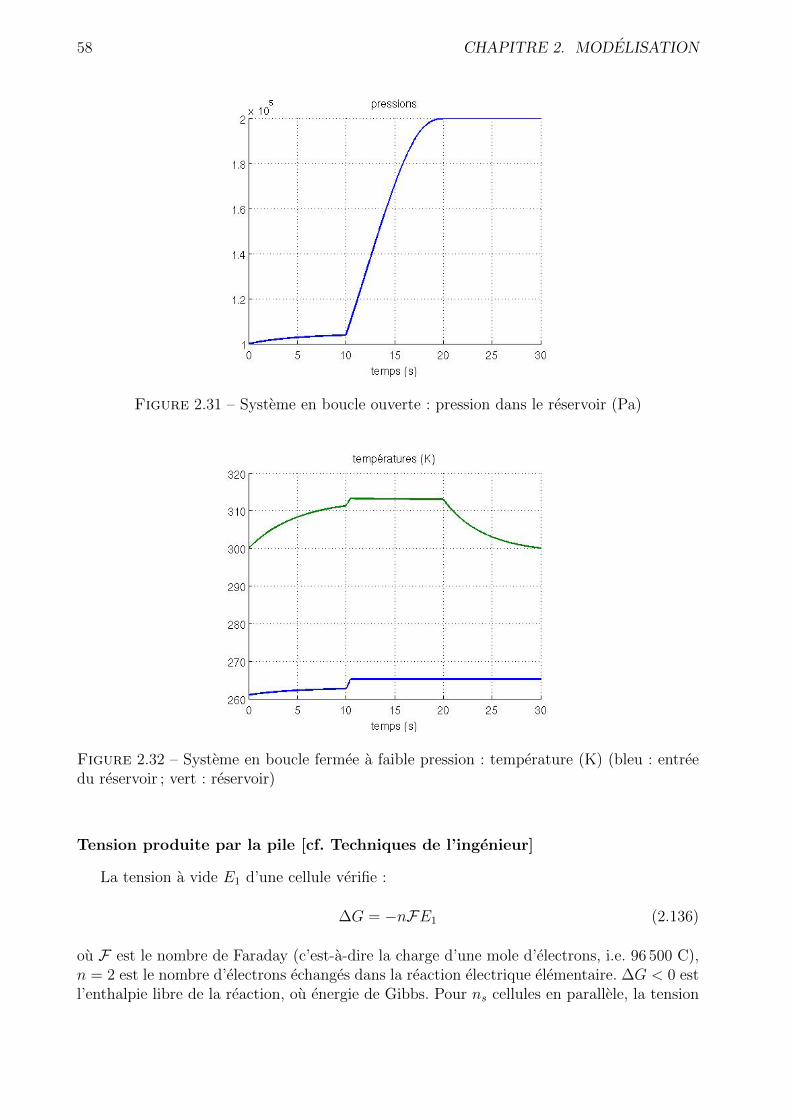
58 CHAPITRE 2. MODELISATION
Figure 2.31 – Systeme en boucle ouverte : pression dans le reservoir (Pa)
Figure 2.32 – Systeme en boucle fermee a faible pression : temperature (K) (bleu : entreedu reservoir ; vert : reservoir)
Tension produite par la pile [cf. Techniques de l’ingenieur]
La tension a vide E1 d’une cellule verifie :
∆G = −nFE1 (2.136)
ou F est le nombre de Faraday (c’est-a-dire la charge d’une mole d’electrons, i.e. 96 500 C),n = 2 est le nombre d’electrons echanges dans la reaction electrique elementaire. ∆G < 0 estl’enthalpie libre de la reaction, ou energie de Gibbs. Pour ns cellules en parallele, la tension
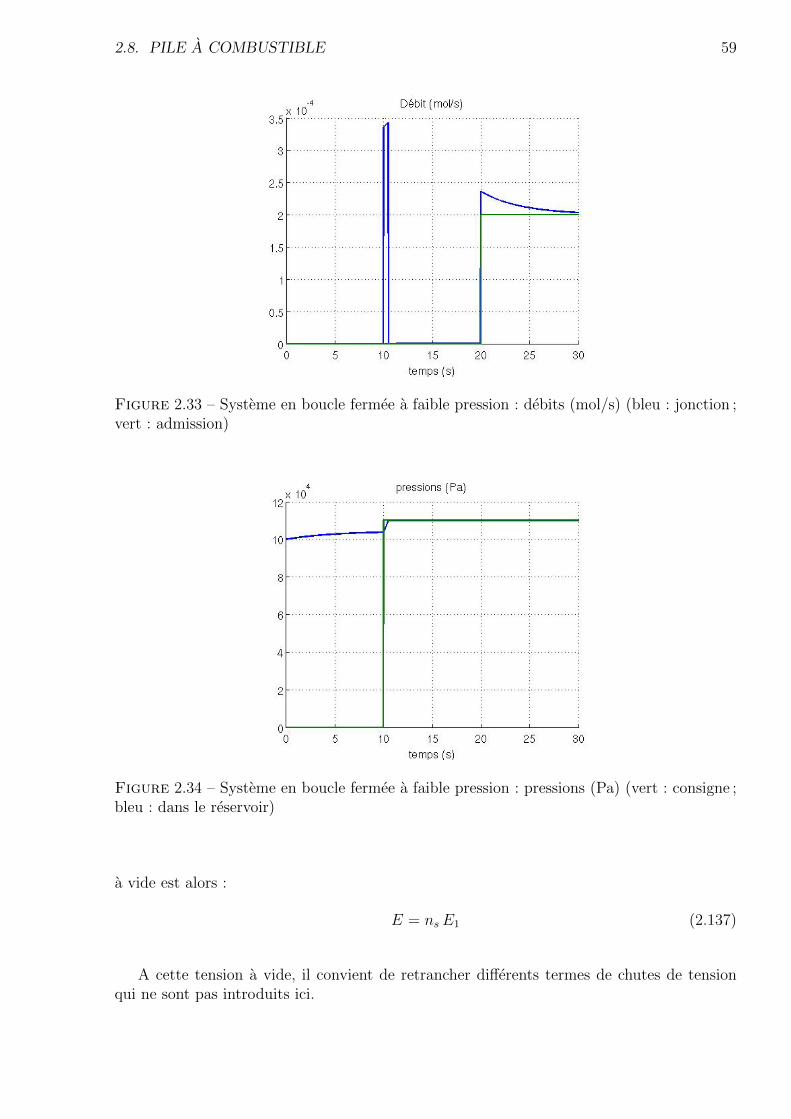
2.8. PILE A COMBUSTIBLE 59
Figure 2.33 – Systeme en boucle fermee a faible pression : debits (mol/s) (bleu : jonction ;vert : admission)
Figure 2.34 – Systeme en boucle fermee a faible pression : pressions (Pa) (vert : consigne ;bleu : dans le reservoir)
a vide est alors :
E = nsE1 (2.137)
A cette tension a vide, il convient de retrancher differents termes de chutes de tensionqui ne sont pas introduits ici.
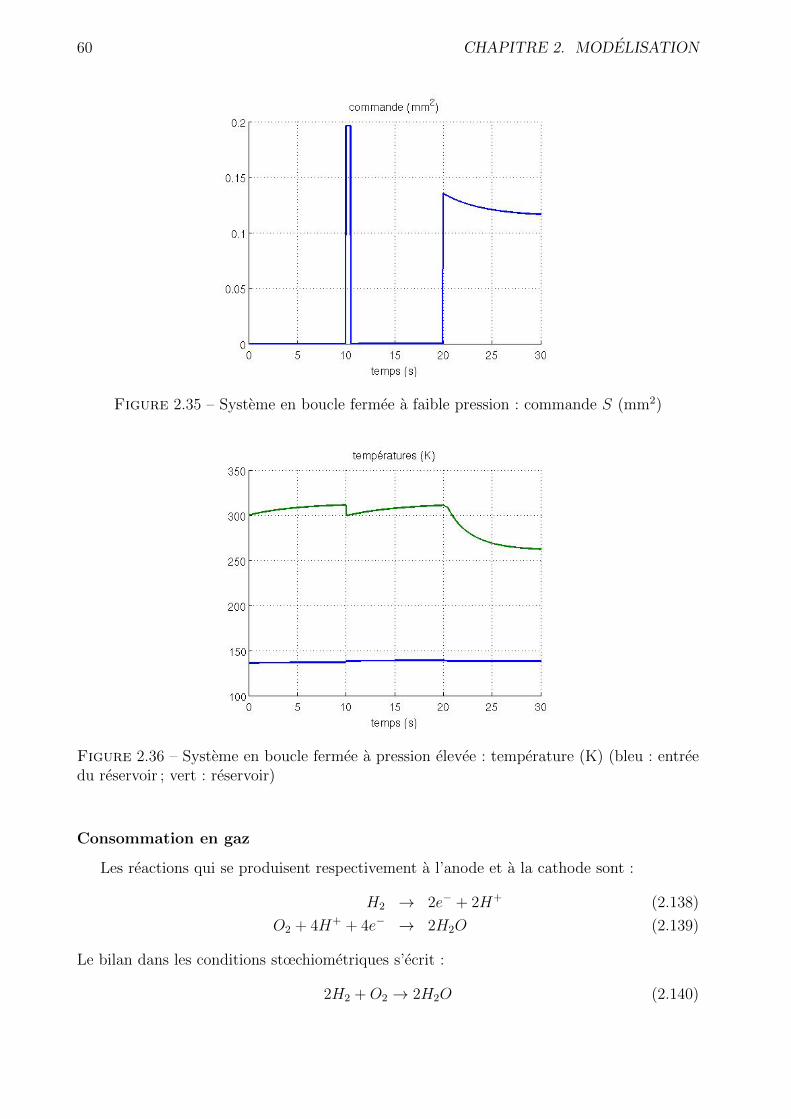
60 CHAPITRE 2. MODELISATION
Figure 2.35 – Systeme en boucle fermee a faible pression : commande S (mm2)
Figure 2.36 – Systeme en boucle fermee a pression elevee : temperature (K) (bleu : entreedu reservoir ; vert : reservoir)
Consommation en gaz
Les reactions qui se produisent respectivement a l’anode et a la cathode sont :
H2 → 2e− + 2H+ (2.138)
O2 + 4H+ + 4e− → 2H2O (2.139)
Le bilan dans les conditions stœchiometriques s’ecrit :
2H2 +O2 → 2H2O (2.140)
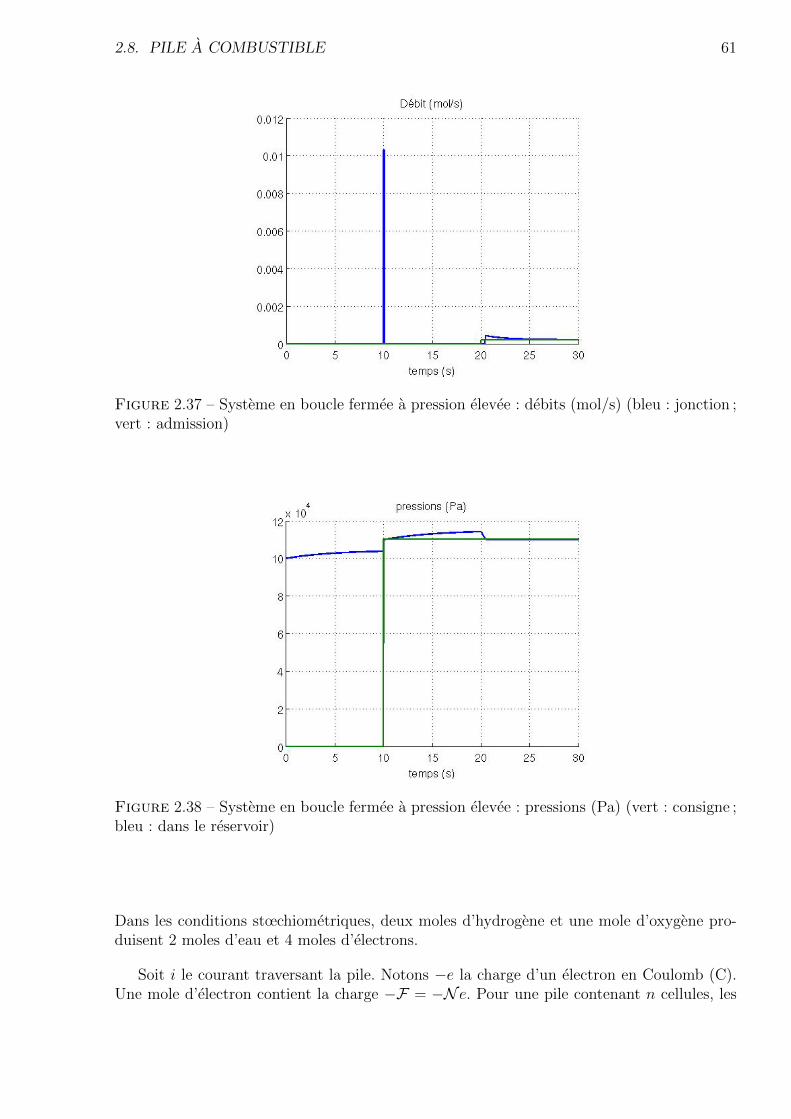
2.8. PILE A COMBUSTIBLE 61
Figure 2.37 – Systeme en boucle fermee a pression elevee : debits (mol/s) (bleu : jonction ;vert : admission)
Figure 2.38 – Systeme en boucle fermee a pression elevee : pressions (Pa) (vert : consigne ;bleu : dans le reservoir)
Dans les conditions stœchiometriques, deux moles d’hydrogene et une mole d’oxygene pro-duisent 2 moles d’eau et 4 moles d’electrons.
Soit i le courant traversant la pile. Notons −e la charge d’un electron en Coulomb (C).Une mole d’electron contient la charge −F = −N e. Pour une pile contenant n cellules, les
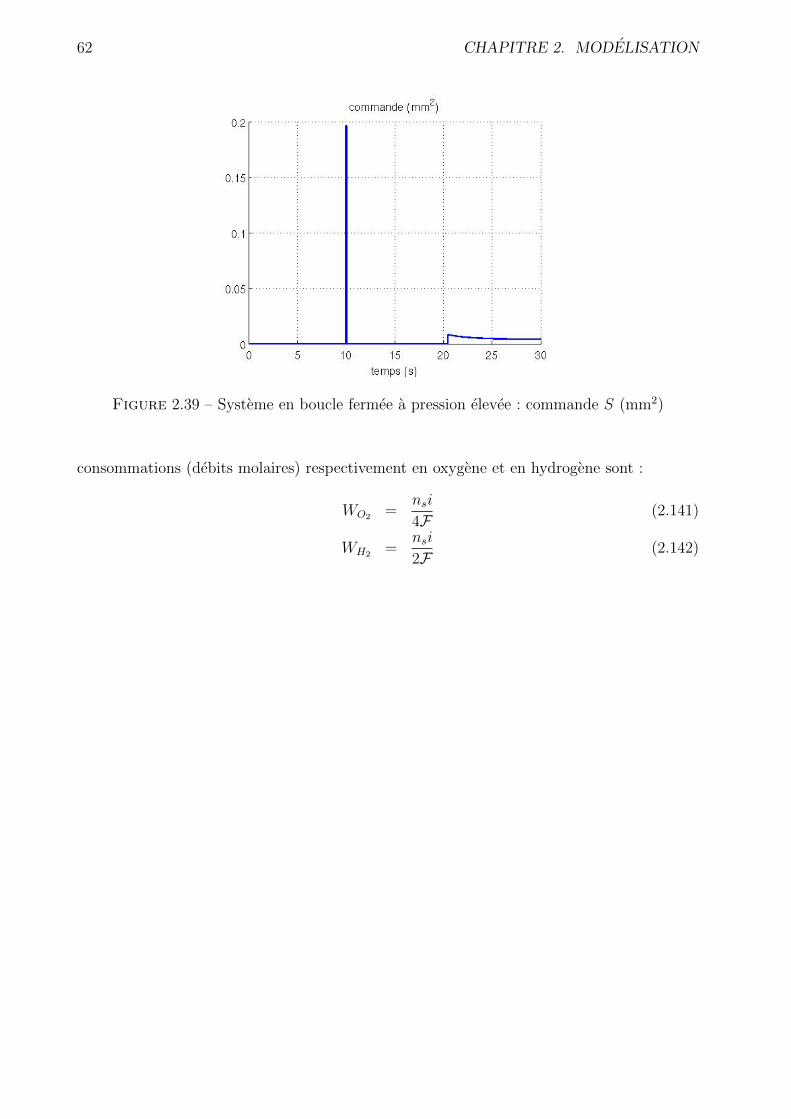
62 CHAPITRE 2. MODELISATION
Figure 2.39 – Systeme en boucle fermee a pression elevee : commande S (mm2)
consommations (debits molaires) respectivement en oxygene et en hydrogene sont :
WO2 =nsi
4F(2.141)
WH2 =nsi
2F(2.142)
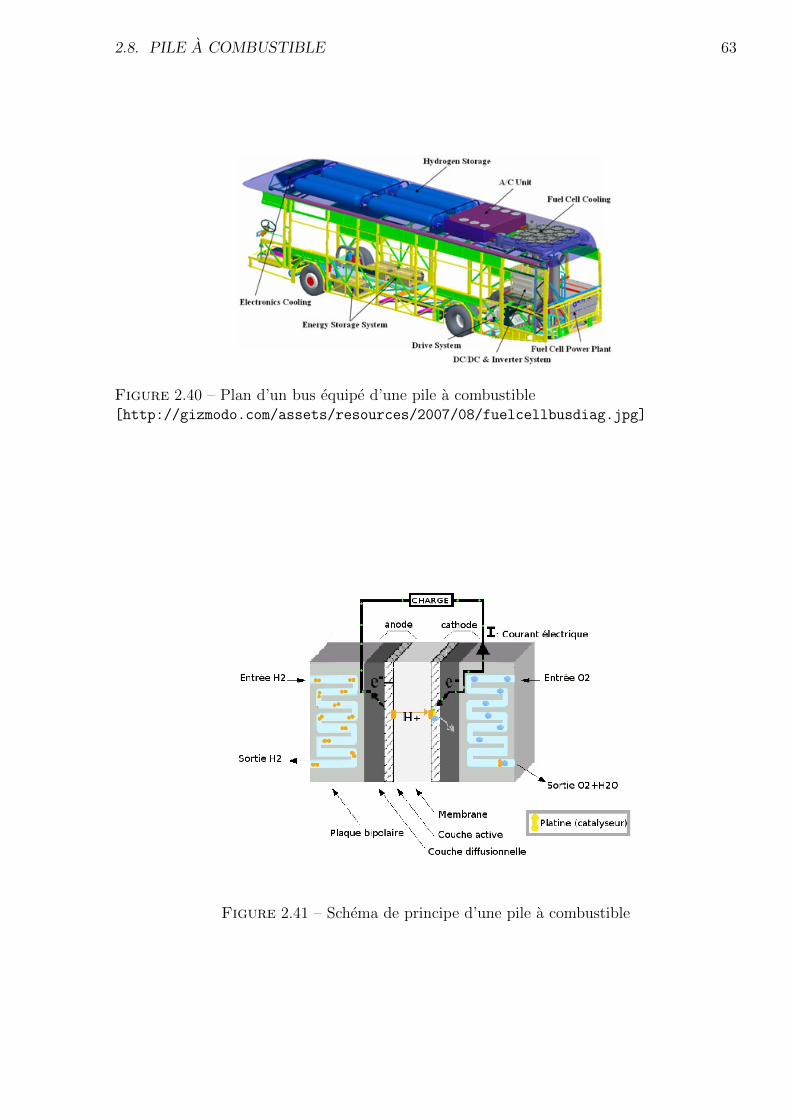
2.8. PILE A COMBUSTIBLE 63
Figure 2.40 – Plan d’un bus equipe d’une pile a combustible[http://gizmodo.com/assets/resources/2007/08/fuelcellbusdiag.jpg]
Figure 2.41 – Schema de principe d’une pile a combustible
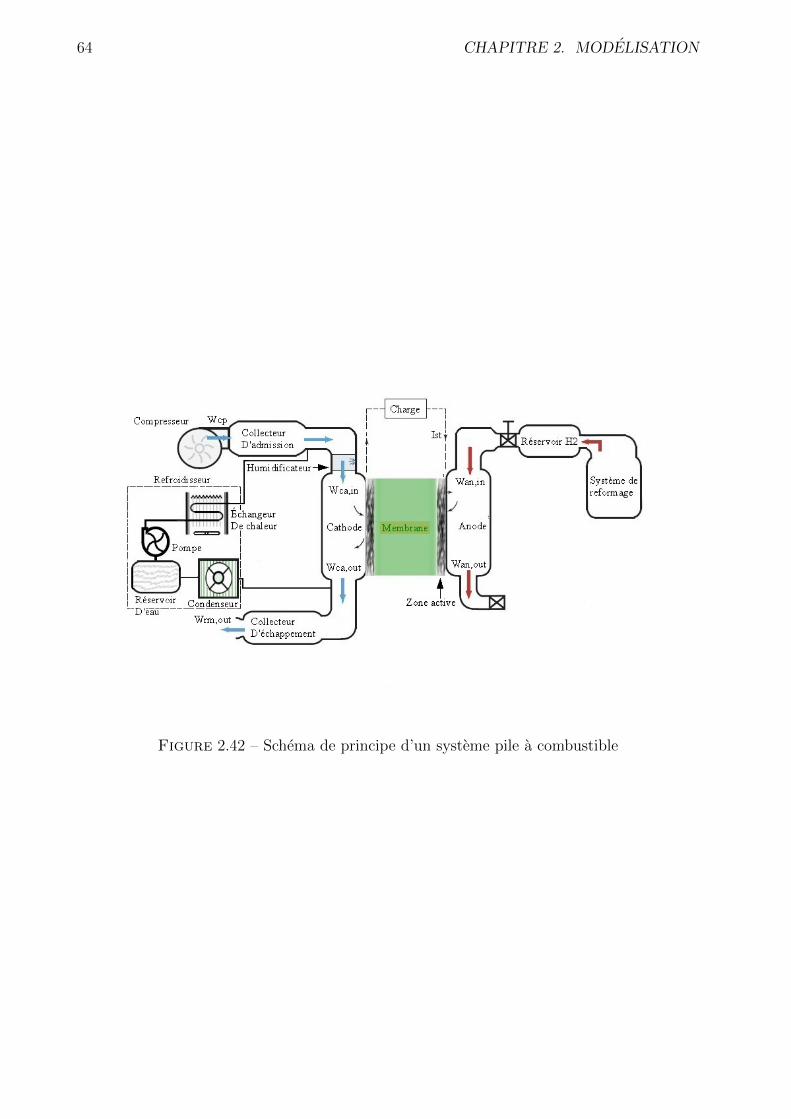
64 CHAPITRE 2. MODELISATION
Figure 2.42 – Schema de principe d’un systeme pile a combustible
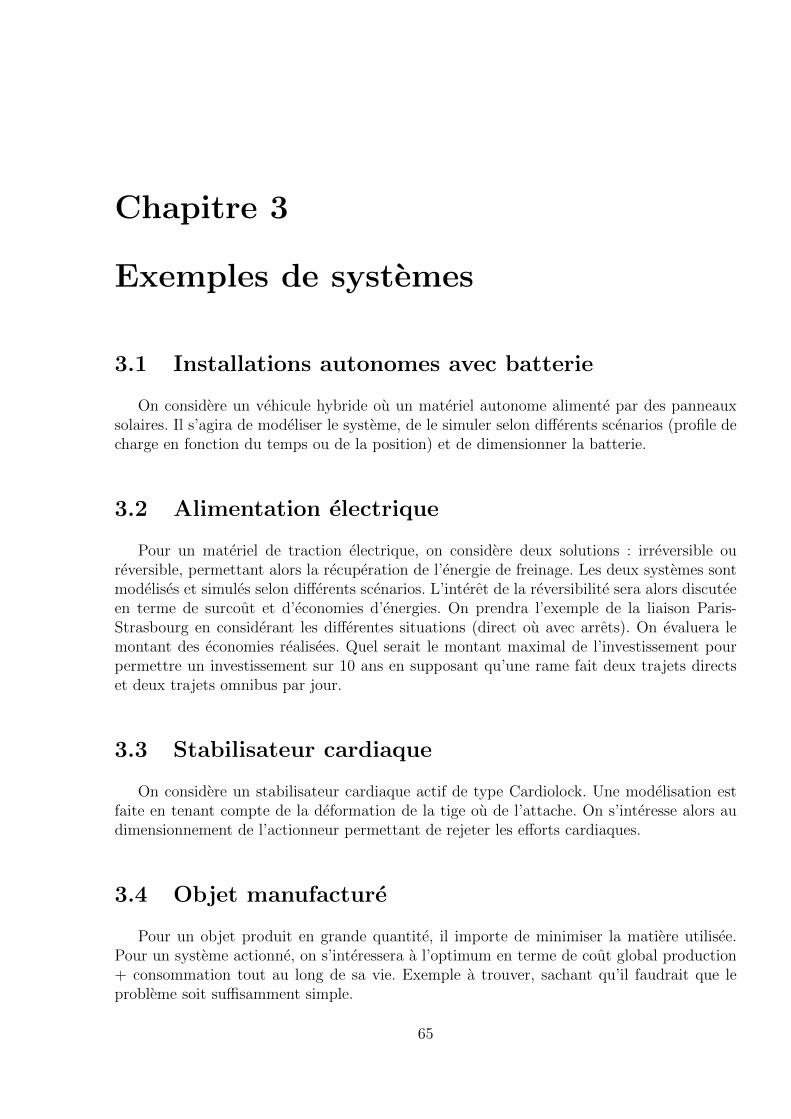
Chapitre 3
Exemples de systemes
3.1 Installations autonomes avec batterie
On considere un vehicule hybride ou un materiel autonome alimente par des panneauxsolaires. Il s’agira de modeliser le systeme, de le simuler selon differents scenarios (profile decharge en fonction du temps ou de la position) et de dimensionner la batterie.
3.2 Alimentation electrique
Pour un materiel de traction electrique, on considere deux solutions : irreversible oureversible, permettant alors la recuperation de l’energie de freinage. Les deux systemes sontmodelises et simules selon differents scenarios. L’interet de la reversibilite sera alors discuteeen terme de surcout et d’economies d’energies. On prendra l’exemple de la liaison Paris-Strasbourg en considerant les differentes situations (direct ou avec arrets). On evaluera lemontant des economies realisees. Quel serait le montant maximal de l’investissement pourpermettre un investissement sur 10 ans en supposant qu’une rame fait deux trajets directset deux trajets omnibus par jour.
3.3 Stabilisateur cardiaque
On considere un stabilisateur cardiaque actif de type Cardiolock. Une modelisation estfaite en tenant compte de la deformation de la tige ou de l’attache. On s’interesse alors audimensionnement de l’actionneur permettant de rejeter les efforts cardiaques.
3.4 Objet manufacture
Pour un objet produit en grande quantite, il importe de minimiser la matiere utilisee.Pour un systeme actionne, on s’interessera a l’optimum en terme de cout global production+ consommation tout au long de sa vie. Exemple a trouver, sachant qu’il faudrait que leprobleme soit suffisamment simple.
65
66 CHAPITRE 3. EXEMPLES DE SYSTEMES
3.5 Systeme de production
On cherche a reconcevoir une chaine de production afin d’optimiser le cout energetique.Par exemple, on travaillera sur les flux dans l’atelier. A partir d’une situation initiale, oncherchera a determiner un agencement optimal. Puis on quantifiera les economies realisees.
3.6 Delestage d’un systeme de chauffe
Afin de reduire le prix de l’abonnement en electricite, on souhaite installer un systemede delestage, permettant ainsi de limiter la consommation maximale. On part de releves detemperature, des commandes de chauffage et des temperatures exterieures. On identifie lesmodeles des differentes pieces. Puis on reflechit a differentes strategies de delestages (periodepar periode, ou strategies plus elaborees comme l’ecart maxi par rapport a la consigne). Letravail se fera sur des donnees obtenues en simulation pour une installation comportant 4chauffages. On synthetisera les resultats par une courbe donnant ma valeur efficace de l’ecartde temperature par rapport a la consigne en fonction de la puissance souscrite.
3.7 Charges adaptables a une production d’energie elec-
trique renouvelables
La gestion d’un reseau electrique consiste a assurer l’equalite entre l’offre et la demandea chaque instant. Generalement, c’est l’offre qui est adpatee en fonction des evolutions dela demande. Mais dans un contexte plausible de production massive d’energie electriquephotovoltaıque et eolienne, il s’avere utile de disposer de moyens de consommations quisoient adapatables en fonction des fluctuations de la production. On pourrait par exempleconsiderer le cas de la production de froid dans un hypermarche en s’inspirant des travauxde Hovgaard et al. (CDC 2010).

Chapitre 4
Lexique
Convertisseur de frequence
La variation de vitesse d’un moteur a courant alternatif suppose de faire varier la frequencede sa tension d’alimentation. On appelle variateur de frequence ces produits. Ils sont generale-ment composes d’un etage de redressement (AC/DC converter) et d’un onduleur (DC/ACconverteur). Les variateurs pour moteurs a courant alternatif integrent un variateur defrequence.
Demarreur
Les moteurs asynchrones (ou moteur a induction) sont capables de demarrer seuls apartir d’un reseau alternatif. Cependant, lors de leur demarrage, ils absorbent des courantstres eleves, ce qui interdit generalement un demarrage direct. Le demarreur est un produitindustriel destine a permettre d’assurer le demarrage des moteurs asynchrones en respectantles contraintes de courant. Il est generalement compose d’un gradateur triphase, qui est unconvertisseur alternatif/alternatif ne modifiant pas la frequence. Une fois le moteur demarre,le gradateur est simplement court-circuite afin d’alimenter directement le moteur sans perte.
Freinage dynamique
Les moteurs electriques classiques (moteur a courant continu, moteur synchrone et moteurasynchrone) sont reversibles. Ainsi, ils peuvent etre utilises pour convertir l’energie cinetiqued’un vehicule en electricite et recharger ainsi ses batteries. Ainsi, l’energie cinetique n’estplus brulee au freinage, comme c’est le cas dans les vehicules classiques equipes de mo-teur thermique, mais est recuperee, permettant ainsi une meilleure efficacite energetique desvehicules electriques ou hybrides par rapport aux vehicules classiques. Pour permettre ausysteme electrique de recuperer l’energie de freinage, il faut aussi que le chaıne de conversionde l’energie electrique soit reversible, ce qui represente un certain surcout.
Moteur DC brushless
Un moteur DC brushless est en fait un moteur synchrone. Si on parle de moteur acourant continu sans balais, c’est pour bien preciser que le moteur synchrone (MS) est unmoteur sans balais ni collecteur, ce qui est un argument marketing car les balais sont deselements d’usure et represente une sources d’etincelles, ce qui interdit l’utilisation de moteura collecteurs dans des ambiances explosives. Mais le moteur synchrone est un moteur a
67

68 CHAPITRE 4. LEXIQUE
courant alternatif (AC). Si on le qualifie parfois de DC, c’est parce qu’on inclut l’onduleurqui sert a alimenter le moteur et qui est alimente en DC. Ainsi, l’ensemble onduleur + MSest equivalent a un moteur a courant continu sans balais. Dans certains cas, l’ensemble MS+ onduleur + systeme d’autopilotage est fourni dans un seul boitier, justifiant pleinement determe de DC brushless. C’est par exemple le cas de certains moteurs de ventilateurs utilisesdans les ordinateurs. Plus generalement, et pour les puissances plus elevees, l’onduleur etl’electronique de commande est delivree a part et compose le variateur.
Onduleur
Le terme “onduleur” recouvre plusieurs realites :– Dans le monde academique, il designe generalement un convertisseur statique permet-
tant de convertir de l’energie electrique sous forme continue en energie electrique sousforme alternative. En anglais, on parle de inverter ou de DC/AC converter. On re-trouve ce type d’onduleur dans les materiels destiner a delivrer une tension alternativea partir de la tension continue fournie par des panneaux solaires.
– Dans le monde industriel, il designe plus generalement un equipement destine a garantirla qualite de la tension delivree a des appareils sensibles en depit des coupures du reseau.Si cet onduleur comprend generalement un DC/AC converter, il ne se reduit pas a cettepartie. Il integre notamment des condensateurs ou batteries destinees a compenser lescoupures du reseau. On parle aussi d’Alimenation Sans Interruption (ASI)
Pompe a chaleur
Les pompes a chaleur sont des dispositifs thermodynamiques qui permettent d’echangerdes calories avec l’environnement exterieur (l’air de l’atmosphere ou le sol) afin de chauf-fer ou de refroidir une cible (piece d’habitation, chauffe-eau). L’echange des calories se faitgrace a un fluide caloriporteur qui circule en circuit ferme. Celui-ci est chauffe par com-pression et refroidit par detente. La performance energetique d’une pompe a chaleur estquantifiee par le coefficient operationnel de performance (COP) qui est le rapport entrel’energie thermique echangee avec la cible et l’energie electrique consommee par le compres-seur. Les systemes de pompes a chaleur les plus repandus sont certainement les systemes declimatisation reversibles qui sont qualifie de air/air (calories echangees entre l’air exterieuret l’air interieur). Il existe depuis peu des chauffe-eau thermodynamiques qui integrent unepompe a chaleur. Les refrigerateurs fonctionnent sur ce principe : la production entraıne laproduction de chaleur restituee a l’exterieur.
Variateur
Un variateur est un produit destine a assurer la variation de vitesse (ou de position) d’unactionneur electrique. Suivant les cas, son alimentation se fera en continu (plutot pour lespetites puissances) ou en alternatif, monophase ou triphase (generalement pour les puissanceelevees, typiquement superieures au kilo Watt).
Chapitre 5
References
5.1 Techniques de l’ingenieur
– J.C. Muller, Electricite photovoltaıque - Principes, Ref. BE8578, 2007– Conversion photovoltaıque : du rayonnement solaire a la cellule, D3935– M.C. Pera, D. Hissel, D. Candusso, J.M. Kauffmann, R. Glises, Piles a combustible
PEMFC et SOFC - Description et gestion du systeme, Reference BE8595, 2007– C. Sarrazin, Piles electriques - Presentation generale, Date de publication : 10 nov.
2001, Reference D3320– A. Degiovanni, Transmission de l’energie thermique - Conduction, Date de publication :
10 avr. 1999, Reference BE8200– G. Caillon, Accumulateurs portables, Date de publication : 10 mai 2001, Reference
E2140
5.2 Wikipedia
– Fuel cell buses : http://en.wikipedia.org/wiki/Fuel_cell_busJ.C.Muller
69

70 CHAPITRE 5. REFERENCES
Bibliographie
[1] P. Shi and J. McPhee, “Dynamics of flexible multibody systems using virtual work andlinear graph theory,” Multibody System Dynamics, vol. 4, no. 4, pp. 355–381, 2000.
[2] P. Shi, J. McPhee, and G.R. Heppler, “A deformation field for euler-bernouilli beamswith application to flexible multibody dynamics,” Multibody System Dynamics, vol. 5,no. 1, pp. 79–104, 2001.
[3] P. Shi and J. McPhee, DynaFlex Users’s Guide, Systems Design Engineering - Universityof Waterloo, http ://real.uwaterloo.ca/˜dynaflex/, 2002.
[4] J. T. Pukrushpan, A. Stefanopoulou, and H. Peng, Control of Fuel Cell Power Systems :Principles, Modeling, Analysis and Feedback Design, Springer, 2004.
[5] M. Benallouch, Observation des systemes non-lineires a entrees inconnues – applicationa la pile a combustible de type PEM, Ph.D. thesis, Universite de Strasbourg, 2009.
71