Embed Size (px)
Citation preview
Juliette Godard & Camille Schembri
Introduction
Chirurgie thoracique ouverte : la thoracotomie
Chirurgie thoracique vidéo-assistée (VATS)
Chirurgie thoracique robot-assistée (RATS)
Etude médico-économique RATS vs VATS
Lobectomie pulmonaire : en 1ère intention en cas de cancer bronchique de stade précoce
Morbi-mortalité moins élevée qu’avec la pneumonectomie
Technique d’origine : thoracotomie
Alternative : thoracoscopie
Latérale ou postéro-latérale
Section musculaire
Ecartement costal
Douleurs post-opératoires invalidantes
Longue durée de séjour
Plusieurs indications :◦ Résections pulmonaires de tumeurs malignes :
cancer pulmonaire de stade précoce
◦ Pneumothorax (pleurodèse)
◦ Nodules pulmonaires ou pleuraux (biopsie-exérèse)
◦ Implantation de valves aortiques
Chirurgie mini-invasive◦ Réduction des douleurs post-opératoires
◦ Récupération fonctionnelle plus précoce
EFFETS INDESIRABLES
- Hémorragies
- Perforation d’organe
- Etirements des racines nerveuses , œdème, syndrome des loges ( souvent dus à une durée d’intervention prolongée )
CONTRE-INDICATIONS
- Troubles hémostatiques
- Grossesse
- Pathologies cardio-pulmonaires graves
Déroulement de l’intervention :
◦ AG
◦ Patient en décubitus latéral
◦ Incisions de 1cm (trocarts) et 1 incision de 5mm (caméra)
◦ Mise en place des trocarts
◦ Exposition du champ opératoire : libération des adhérences, éclairage de la cavité thoracique
◦ Exérèse parenchymateuse avec dissection, ligatures et sections
◦ Extraction de la pièce d’exérèse
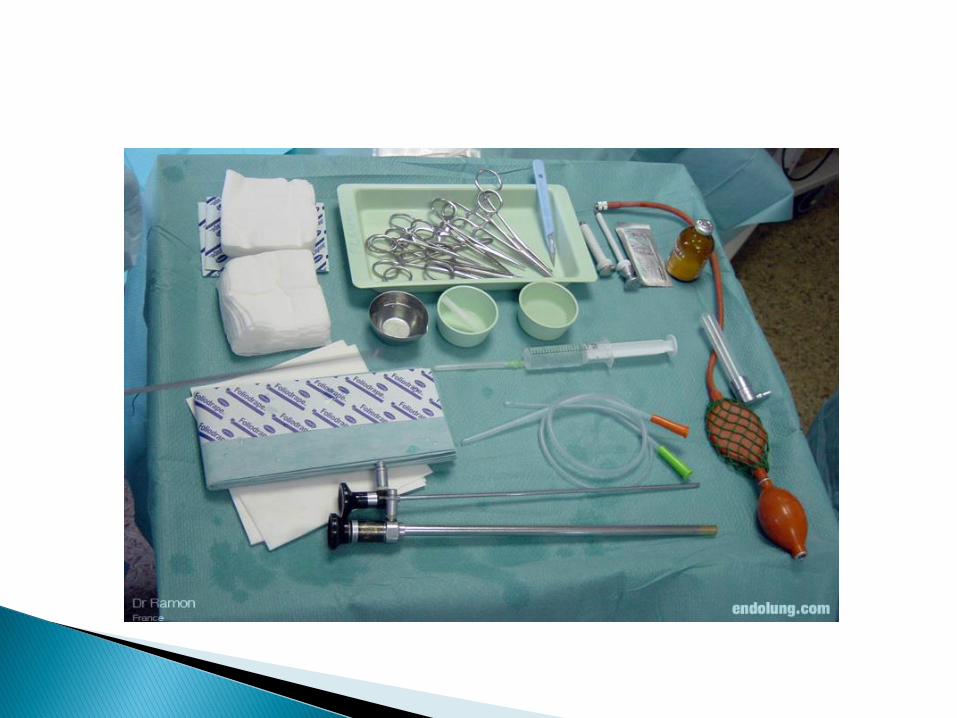
Evacuation des épanchements (gaz, sang, liquide)
Systèmes non numérisés (Thoraseal) :◦ Pas de quantification des fuites
◦ Système aspiration mural : limite les mouvements du patient
Systèmes numérisés (Thopaz) :◦ Quantification digitale des fuites en temps réel
◦ Mesure de la pression intra-pleurale
◦ Mobilité du patient
IC (plateau)
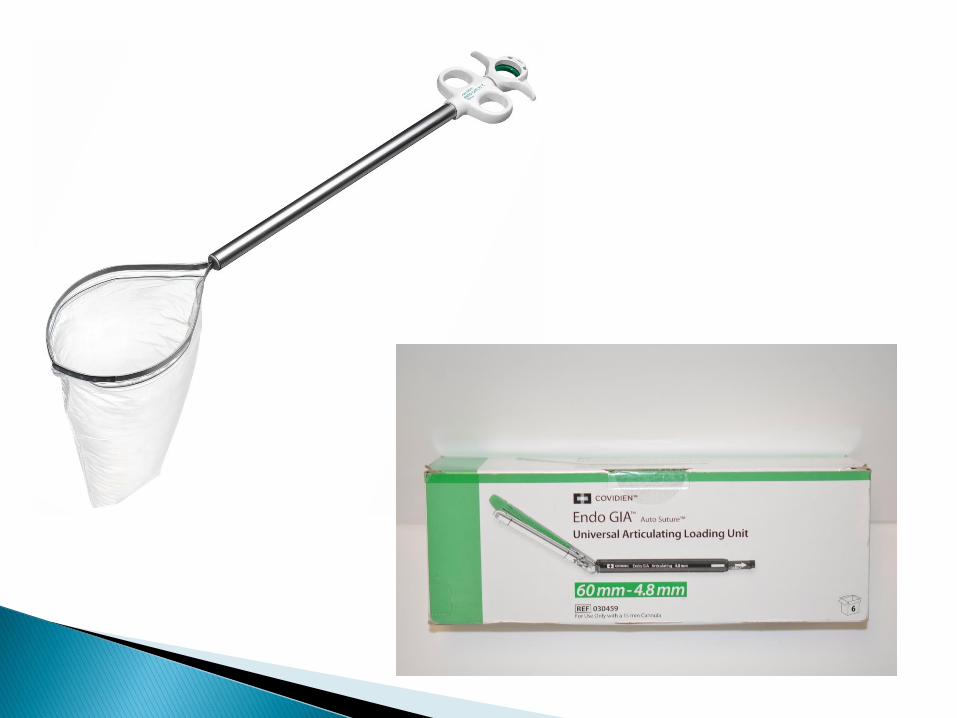
Dispositifs coelioscopiques UU :◦ 1 Agrafeuse et chargeurs
◦ 1 Pince
◦ 3 Trocarts de 12mm
◦ 1 Sac (Endocatch®)
Système de drainage (Thopaz)
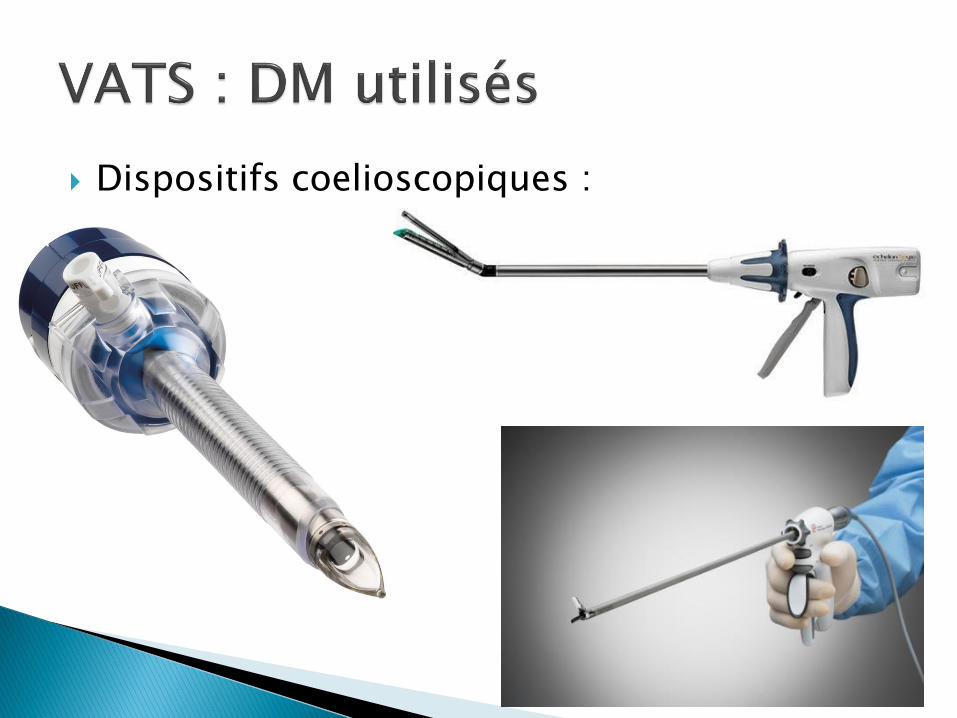
Dispositifs coelioscopiques :
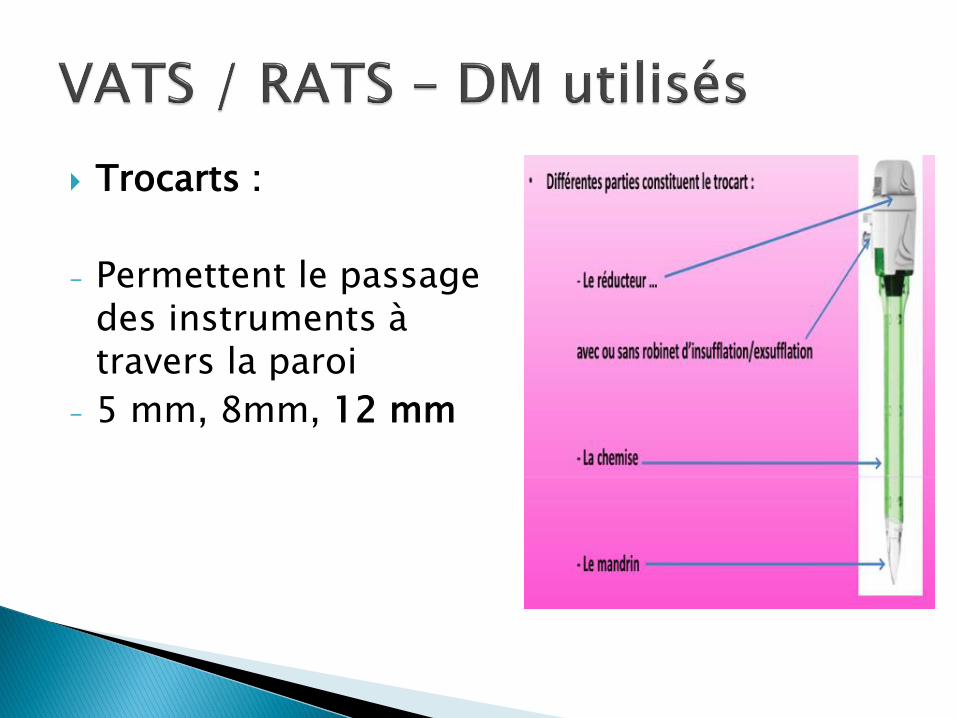
Trocarts :
- Permettent le passage des instruments à travers la paroi
- 5 mm, 8mm, 12 mm
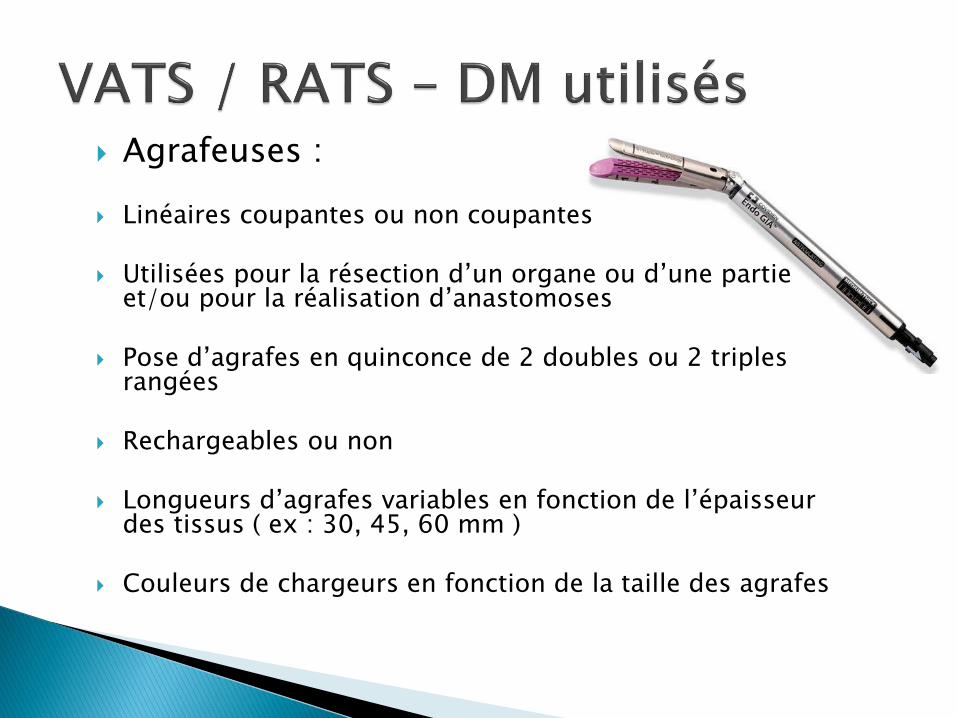
Agrafeuses :
Linéaires coupantes ou non coupantes
Utilisées pour la résection d’un organe ou d’une partie et/ou pour la réalisation d’anastomoses
Pose d’agrafes en quinconce de 2 doubles ou 2 triples rangées
Rechargeables ou non
Longueurs d’agrafes variables en fonction de l’épaisseur des tissus ( ex : 30, 45, 60 mm )
Couleurs de chargeurs en fonction de la taille des agrafes
Depuis 2013 À l’AP-HM : Da Vinci®
Commercialisé par la société Intuitive Surgical(monopole)
Programme de formation des chirurgiens
Utilisation mutualisée par les différentsservices en raison de son coût élevé
Indications : gynécologie, chirurgie urologique (prostatectomie), digestive, thoracique, endocrinienne, vasculaire…
Près de 3000 robots installés dans le monde et environ 70 en France
En 2011 : plus d’1 million d’interventions réalisées grâce au robot
Activités prévisionnelles à l’AP-HM :◦ Environ 250 interventions / an
◦ Réduction de 30% de la durée moyenne de séjour

La console :
- Chirurgien confortablement assis
- Tête immergée dans les lunettes de visionstéréoscopique à distance de la zone stériledu patient
- Pinces pouce index dirigent les manettes decontrôle situées sous le bloc de vision
- Gestes du chirurgien filtrés (antitremblement) et transmis aux instruments entemps réel
₋ Mise à l’échelle, filtration, conversion desmouvements des mains , poignets, doigtsdu chirurgien en mouvements précisd’instruments miniatures introduits dans lecorps du patient
₋ Plusieurs degrés de découplage des gestesen fonction de la finesse de l’acte
₋ Repositionnement et zoom de la caméra(dans toutes les directions) grâce à despédales sans retirer la tête de la console
La visualisation :
- Qualité d’imagine excellente bénéficiant de lahaute technologie d’optique
- Synchroniseur d’image, illuminateur à hauteintensité, grossissement de 1 à 10
- Vision 3D avec fonction d’agrandissementhaute performance
Les bras robotiques et les instruments :
₋ Colonne située au coté du patient
₋ 3 ou 4 bras robotisés
₋ Un bras porte la caméra, 3 autres portent lesinstruments
₋ Toute la gamme des instruments disponible(instruments Endowrist®)
₋ 6 à 7 degrés de liberté et articulations à 90°(imitant la fonctionnalité de la main et dupoignet)
₋ Pénétration dans le corps à travers des trocartsde 1-2 cm
Système sécurisé :
- Non programmable / pas de prise de décision demanière autonome : le chirurgien seul effectuedirectement chaque manœuvre chirurgicale
- Nombreux contrôles de sécurité
- En cas de panne : doté d’un mode d’extinctionsécurisé qui permet au chirurgien de garder lecontrôle de la procédure
Bénéfices pour le praticien :
- Meilleure précision des gestes
- Vision 3D
- Meilleure ergonomie (travail assis)
- Réduction de la fatigue
- Outil pédagogique
Bénéfices pour le patient :
- Moins de douleurs post opératoires- Avantage esthétique- Moins de complications post opératoires- Diminution de la durée d’hospitalisation et de
la consommation de soins- Temps de convalescence et d’arrêt de travail
plus court- Aucune majoration tarifaire, ni dépassement
d’honoraire
Limites :
- Coût élevé (2.3 millions €)
- Formation longue des chirurgiens et du personnel
- Grande taille du robot : besoin de locaux adaptés
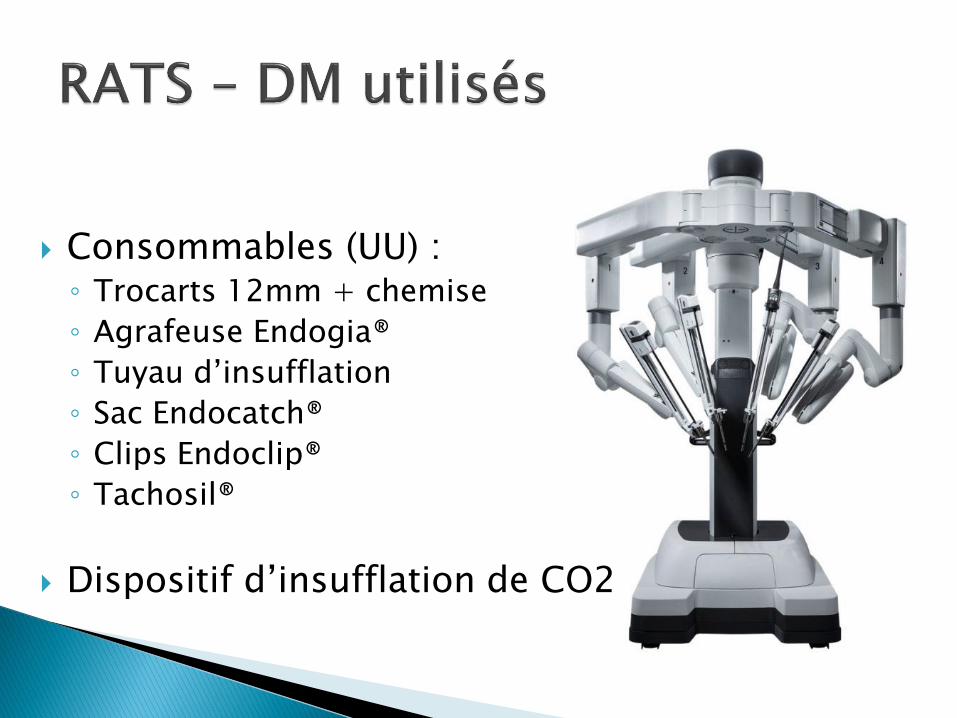
Consommables (UU) :◦ Trocarts 12mm + chemise
◦ Agrafeuse Endogia®
◦ Tuyau d’insufflation
◦ Sac Endocatch®
◦ Clips Endoclip®
◦ Tachosil®
Dispositif d’insufflation de CO2
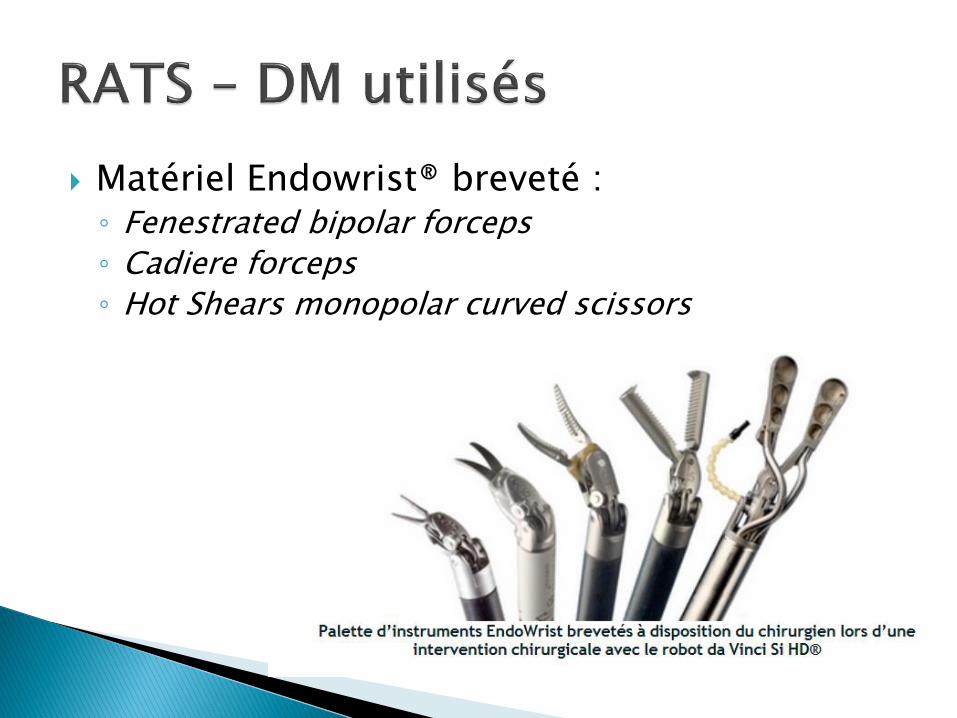
Matériel Endowrist® breveté :◦ Fenestrated bipolar forceps
◦ Cadiere forceps
◦ Hot Shears monopolar curved scissors
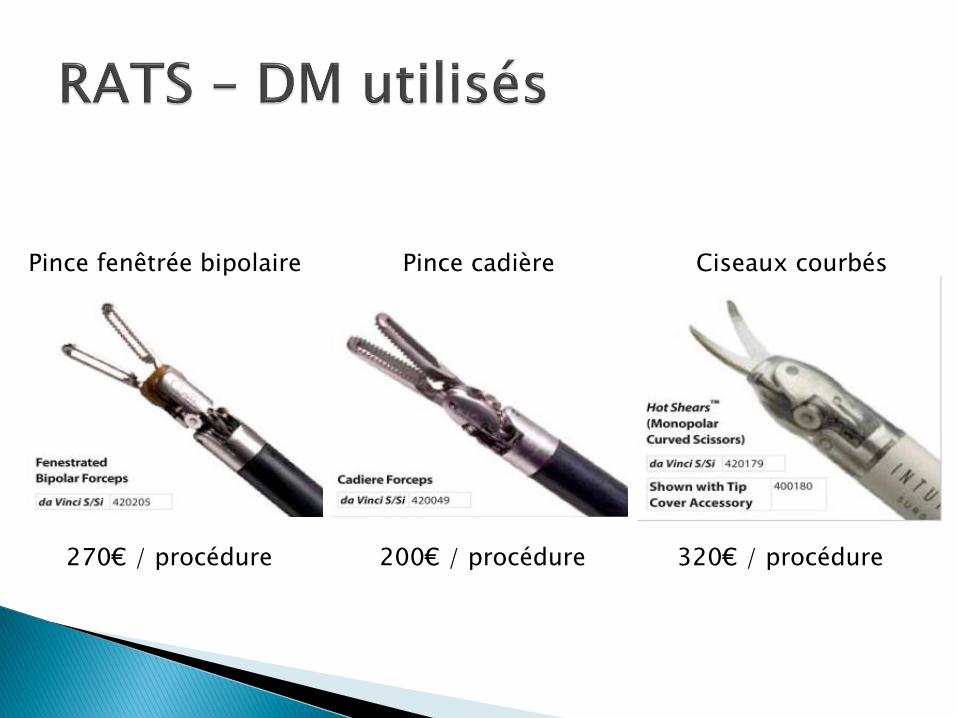
Pince fenêtrée bipolaire Pince cadière Ciseaux courbés
270€ / procédure 320€ / procédure200€ / procédure
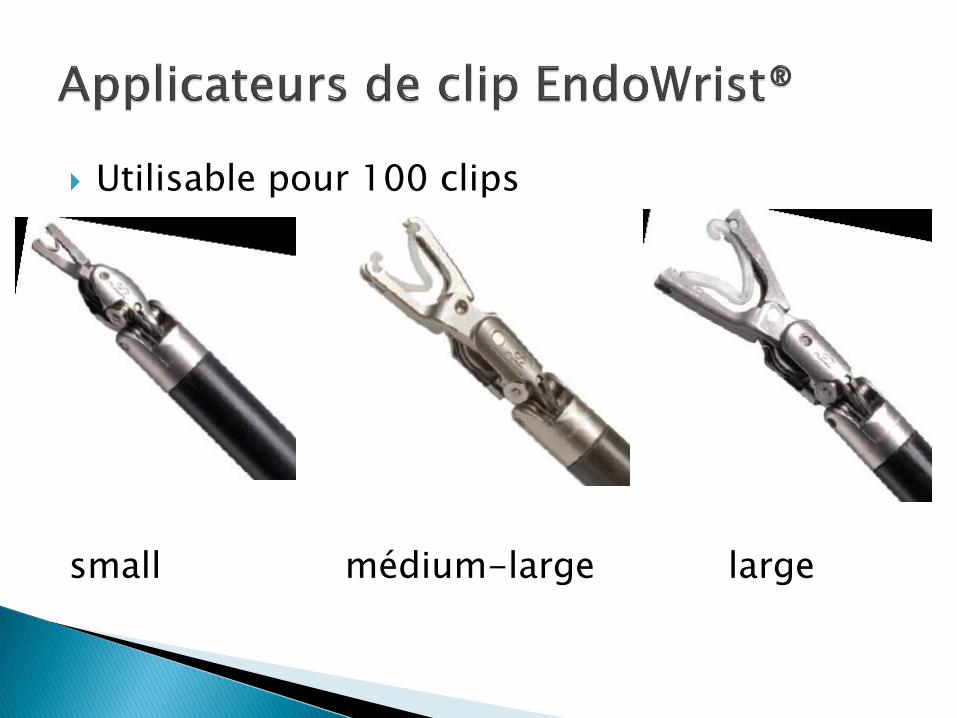
Utilisable pour 100 clips
small médium-large large
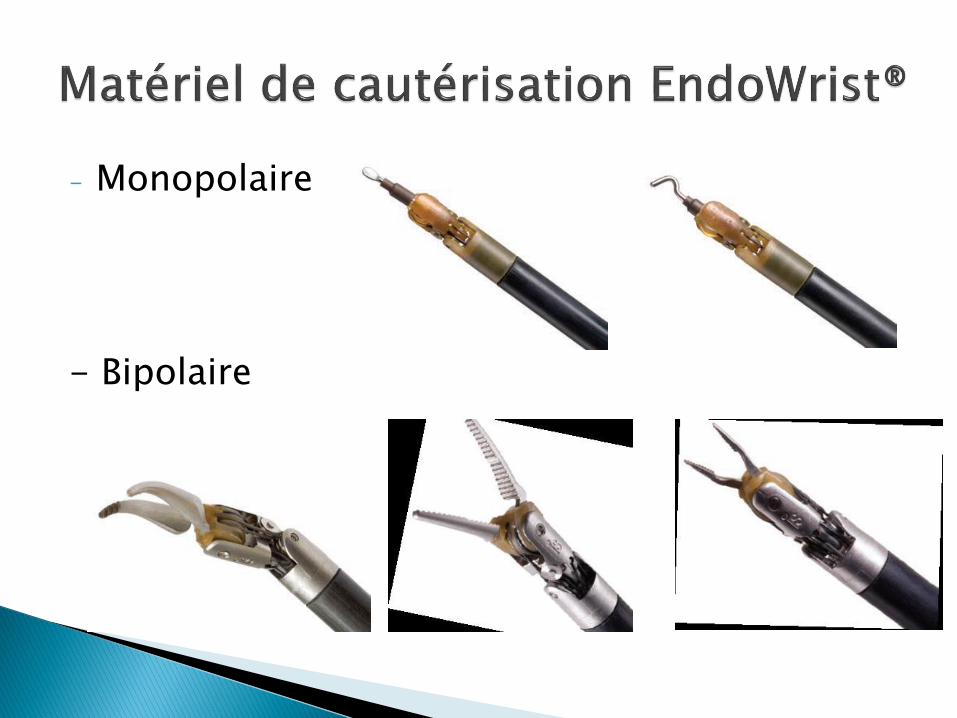
- Monopolaire
- Bipolaire
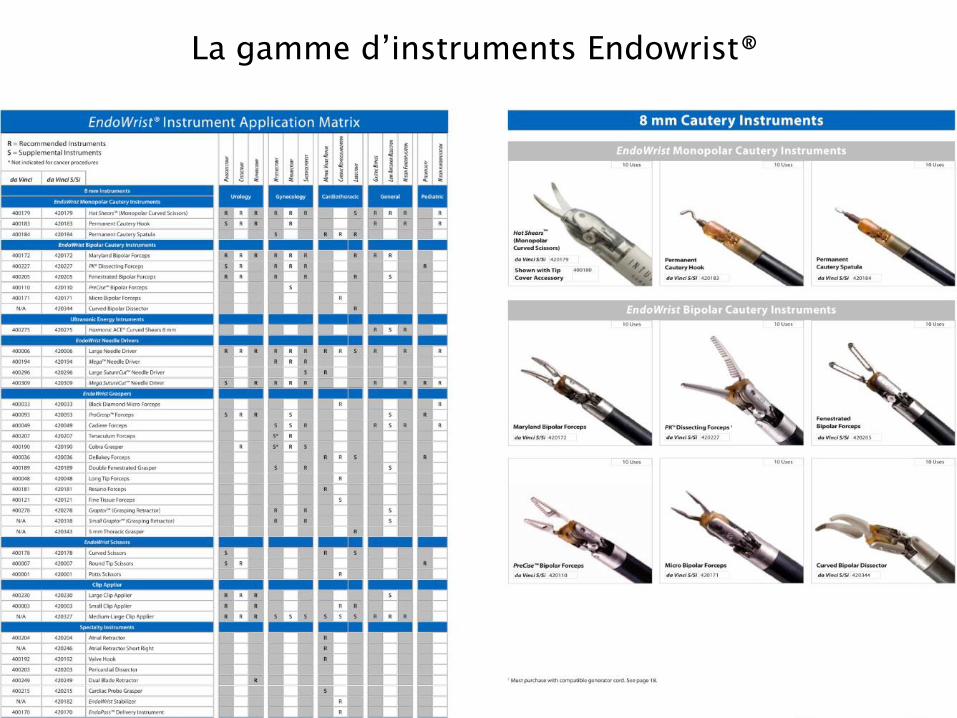
La gamme d’instruments Endowrist®
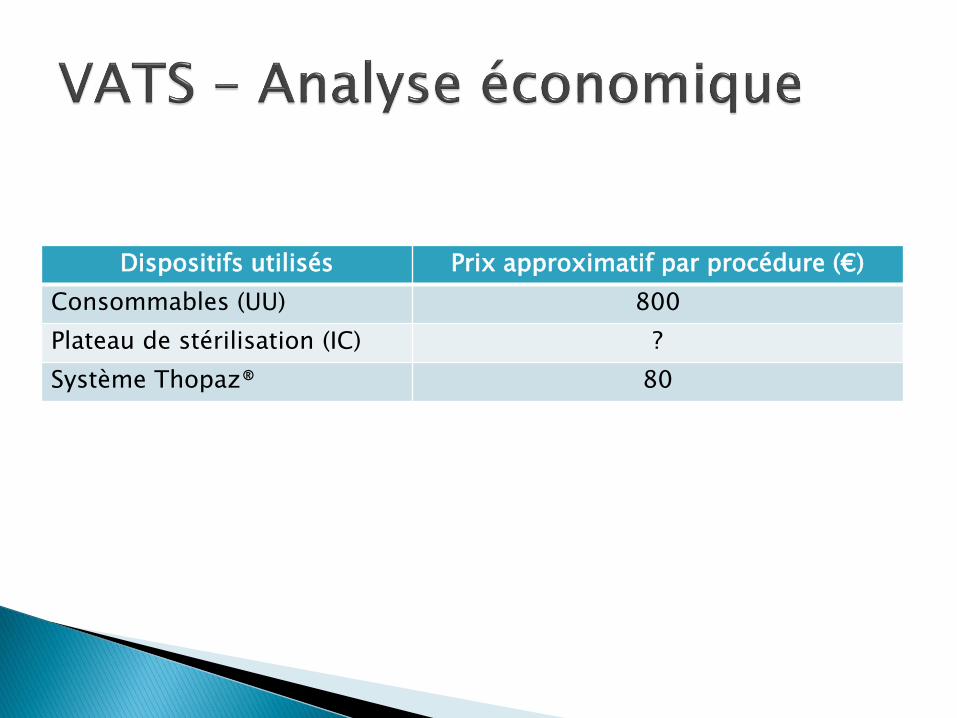
Dispositifs utilisés Prix approximatif par procédure (€)
Consommables (UU) 800
Plateau de stérilisation (IC) ?
Système Thopaz® 80
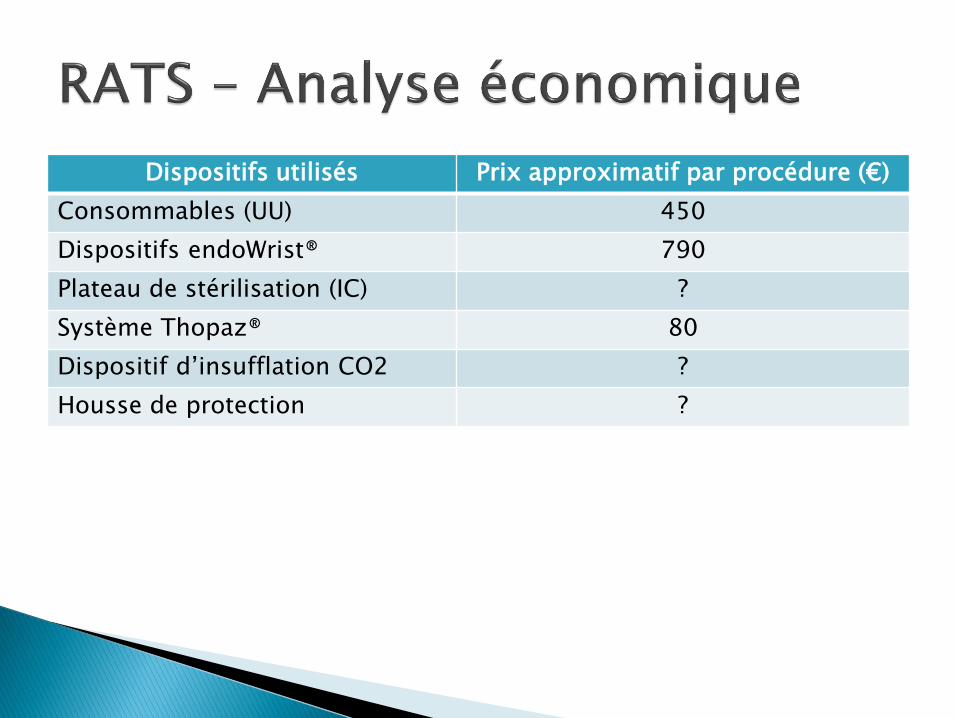
Dispositifs utilisés Prix approximatif par procédure (€)
Consommables (UU) 450
Dispositifs endoWrist® 790
Plateau de stérilisation (IC) ?
Système Thopaz® 80
Dispositif d’insufflation CO2 ?
Housse de protection ?
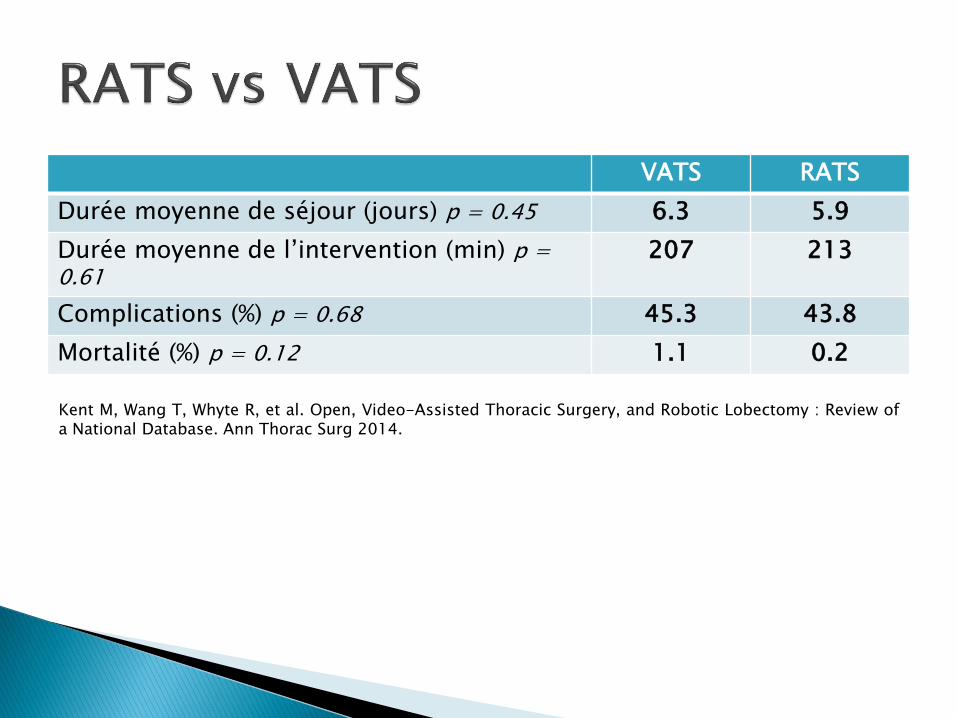
VATS RATS
Durée moyenne de séjour (jours) p = 0.45 6.3 5.9
Durée moyenne de l’intervention (min) p = 0.61
207 213
Complications (%) p = 0.68 45.3 43.8
Mortalité (%) p = 0.12 1.1 0.2
Kent M, Wang T, Whyte R, et al. Open, Video-Assisted Thoracic Surgery, and Robotic Lobectomy : Review ofa National Database. Ann Thorac Surg 2014.
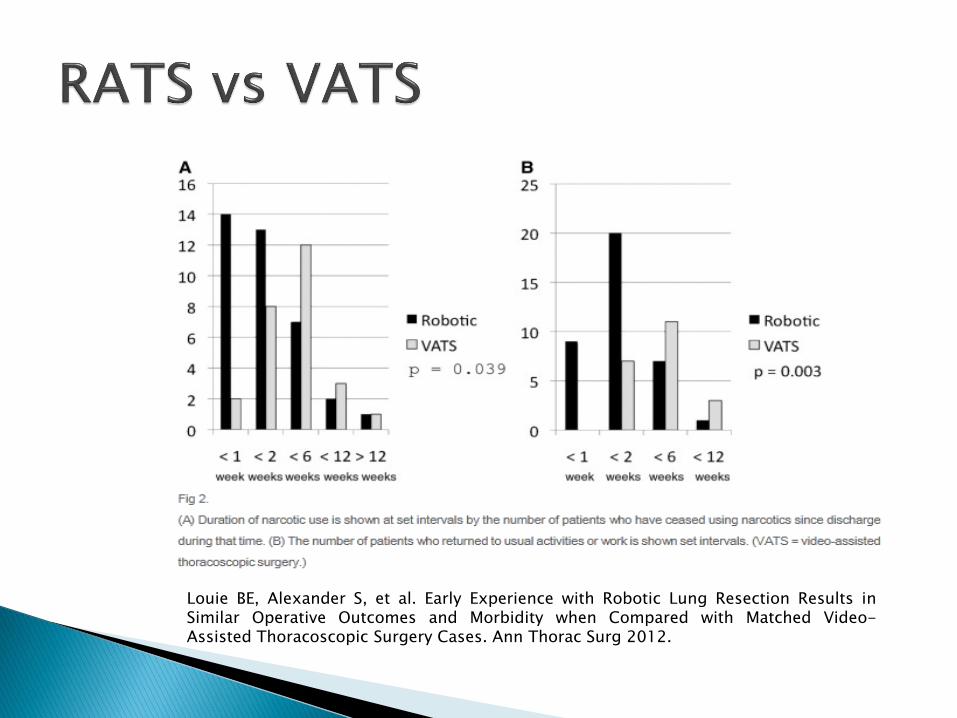
Louie BE, Alexander S, et al. Early Experience with Robotic Lung Resection Results inSimilar Operative Outcomes and Morbidity when Compared with Matched Video-Assisted Thoracoscopic Surgery Cases. Ann Thorac Surg 2012.
Innovation majeure, nombreux bénéficespour le patient et pour le chirurgien
Projet de 2ème robot, voire d’un « robotécole » en collaboration avec la faculté demédecine
Coût élevé : besoin d’évaluer la rentabilité àlong terme