Embed Size (px)
Citation preview

HEIG-Vd Laboratoire de régulation numérique
Laboratoire de régulation numérique
Sustentation magnétique
Table des matières1 Introduction 2
2 Description et analyse théorique 22.1 Équation du mouvement . . . . . . . . . . . . . . . . . . . . . . . 22.2 Champ de force . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Capteur de position . . . . . . . . . . . . . . . . . . . . . . . . . . 42.4 Bobine et régulateur de courant . . . . . . . . . . . . . . . . . . . 42.5 Système à régler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Mesure des paramètres du système 53.1 Câblage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2 Capteur de position . . . . . . . . . . . . . . . . . . . . . . . . . 53.3 Champ de force de la bobine . . . . . . . . . . . . . . . . . . . . . 63.4 Bobine et régulateur de courant . . . . . . . . . . . . . . . . . . . 7
4 Description du système complet 8
5 Synthèse et essai du régulateur PID 95.1 Régulateur Gc(s) . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.1.1 Synthèse du régulateur . . . . . . . . . . . . . . . . . . . 95.1.2 Essai du régulateur . . . . . . . . . . . . . . . . . . . . . . 11
6 Tableaux de mesures 116.A Capteur de position . . . . . . . . . . . . . . . . . . . . . . . . . . 116.B Force due au courant, avec z0 ±∆ comme paramètre . . . . . . . 126.C Force due à la hauteur, avec I = I0 . . . . . . . . . . . . . . . . . 12
7 Code MATLAB 127.A sp00.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127.B pid.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Sustentation magnétique, v.1.1 1 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
1 Introduction
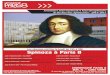
Cette expérience a pour but de montrer qu’il est possible, par les techniquesde la régulation automatique, de stabiliser un système naturellement instable :ici, une sphère attirée par un électro-aimant (figure 5.1 page 42). Elle illustreaussi la modélisation de systèmes non-linéaires et l’emploi d’un régulateur PID.
2 Description et analyse théorique
zF(z,i)
mg
Bobine
LampeLentillePhototransistor
Sphère métallique
u(t)
i(t)Convertisseur tension-courant
Fig. 1 – Schéma technologique de la sustentation magnétique.
Lorsque la sphère est placée dans les lignes de champ de l’électro-aimant, elleest attirée par celui-ci. Pour un courant donné, il existe un point d’équilibre oùla force exercée par le champ magnétique sur la sphère compense son poids. Sile corps bouge un peu et se rapproche du noyau, la force magnétique augmente,ce qui a pour effet de l’attirer encore plus et, pour finir, la sphère vient se collercontre la bobine. Inversément, si la sphère s’éloigne du noyau, la force d’attractiondiminue et elle tombe de plus en plus. On voit donc que l’on a affaire à un systèmeinstable.
2.1 Équation du mouvement
Admettant que le circuit magnétique est à symétrie axiale et qu’il n’y a pasde forces radiales, on peut se contenter de décrire le mouvement de la sphère lelong de l’axe Oz dirigé vers le bas (figure 5.1 page 42).
Sustentation magnétique, v.1.1 2 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Soit F (i, z) la force magnétique dirigée vers le haut et m·g le poids de la sphère(figure 5.1). Le mouvement de celle-ci est alors décrit par l’équation suivante :
m · z(t) = m · g − F (i, z)
2.2 Champ de force
La force magnétique dépend de la position de la sphère et du courant dans labobine. On peut montrer qu’elle vaut [?] :
F (i, z) = A · i2(1 + z
a
)2
Il est évident que cette relation est non-linéaire. Mais, considérant que i(t) etz(t) représentent de faibles variations autour du point de fonctionnement désignépar Q0 = (I0, Z0) pris comme origine, la force magnétique peut être linéarisée etdécrite par :
F (i, z) = F (I0, Z0)+∂F
∂i
∣∣∣∣Q0
· i(t) +∂F
∂z
∣∣∣∣Q0
· z(t)
= F0+Ki · i(t) −Kz · z(t)
avecKi =
∂F
∂i
∣∣∣∣Q0
Kz =∂F
∂z
∣∣∣∣Q0
Ces coefficients correspondent aux pentes du champ de force F (i, z) par rapportà i et z.
Comme la force F0 compense le poids m · g de la sphère, l’équation du mou-vement de la sphère s’écrit finalement :
m · z(t) = −Ki · i(t) + Kz · z(t)
Autour du point de travail Q0, le fonctionnement du système est alors décrit parle schéma de la figure 5.2 page 43.
−Ki Σ
+
+ 1
m·s2
Kz
i(t) −F (t) z(t)
Fig. 2 – Schéma fonctionnel représentant l’action du champ de force sur la sphère(fichier source).
Sustentation magnétique, v.1.1 3 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
2.3 Capteur de position
Le capteur délivre une tension uz(t) dépendant de la position z(t) de la sphère.Autour du point de travail, on peut le décrire par la relation statique :
uz(t) = Kc · z(t)
2.4 Bobine et régulateur de courant
Le régulateur de courant est chargé d’imposer un courant dans la bobinesuivant la tension de commande présente à son entrée. Il s’agit donc d’un conver-tisseur tension-courant commandé par une tension variant de 0 à 10 [V]. L’élé-ment central de ce convertisseur est constitué d’un transistor de commutationcommandé par un comparateur à hystérèse (figure 5.3 page 44).
L’état conducteur est présent quand le courant dans la bobine est inférieurà la consigne. Dès lors, le courant augmente dans la bobine jusqu’à atteindre leseuil supérieur du comparateur qui entraîne le blocage du transistor.
Fig. 3 – Comparateur à hystérèse et commande du transistor.
Le circuit magnétique est composé de la bobine L ≈ 2 [H], R ≈ 100 [Ω] et d’unediode de roue libre. Il s’agit donc d’un système du premier ordre commandé parun comparateur.
Lors d’un saut de consigne, la commande applique toute la tension à la chargejusqu’à ce que la sortie atteigne la consigne puis la commutation entre en fonctionet le courant est maintenu dans les limites de l’hystérèse.
On a ainsi affaire à un système dynamique non-linéaire dont le temps demontée est d’autant plus court que le courant soutiré est faible. Ceci apportel’avantage d’un temps de montée plus faible que celui imposé par la bobine.
2.5 Système à régler
Le système complet est donc représenté par les paramètres suivants
Sustentation magnétique, v.1.1 4 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Ka
1+s·Ta
−Ki Σ
+
+ 1
m·s2
Kz
Kc
u(t) i(t) uc(t)−F (t)
z(t)
Fig. 4 – Schéma fonctionnel du système complet (fichier source).
– le gain Ka de l’amplificateur de courant,– la constante de temps Ta d’établissement du courant,– les coefficients Ki et Kz de la force magnétique,– la masse m de la sphère,– le gain Kc du capteur de position.
Le schéma fonctionnel correspondant est donné à la figure 5.4.
3 Mesure des paramètres du systèmeL’obtention des paramètres se fait en mesurant la caractéristique du capteur
de position, le champ de force magnétique et l’évolution temporelle du courant.1. La position réelle de la sphère est mesurée à l’aide de la réglette en veillant
à éliminer l’erreur de parallaxe à l’aide du miroir placé derrière la réglette.2. La force F (i, z) se mesure en chargeant la sphère à l’aide de masselottes
non magnétiques et en variant le courant de la bobine et la position de lasphère.
3. La source de courant est commandée par une tension à raison de 1[AV
]. De
plus, le boîtier électronique fournit une image de celui-ci par l’intermédiaired’un convertisseur courant-tension qui délivre une tension de 10
[VA
].
4. Une fois les mesures effectuées, vous pourrez mettre en valeur vos résultatsen vous inspirant de la démarche utilisée dans le document [?]. Vous trou-verez en annexe un tableau servant au relevé des mesures. N’oubliez pas denoter le numéro de la maquette et celui du boîtier utilisés.
3.1 Câblage
La figure 5.5 page 46 montre le câblage qu’il faut effectuer avant de démarrerle programme RTPWatch.
3.2 Capteur de position
Pour ce point, il faut choisir le mode de travail Ident. du capteur de position(figure 5.6 page 47). Relevez la caractéristique statique du capteur en plaçant la
Sustentation magnétique, v.1.1 5 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Fig. 5 – Plan de câblage.
sphère de manière à avoir une tension Uz variant par saut d’environ 0.4 [V] ; parexemple : 9.8 [V], 9.2 [V], 7.8 [V], . . ., 1.3 [V]. Pour chacun de ces points, notezla position exacte et la valeur précise de la tension correspondante. Tracez lacaractéristique et déterminez le gain Kc du capteur à l’aide du fichier MATLABSP00.m.
3.3 Champ de force de la bobine
Pour ce point, il faut choisir le mode de travail Ident. du champ de forcede la bobine (figure 5.7 page 48). Appliquez le courant maximum à la bobineet placez la sphère vide sous l’anneau de positionnement, puis :
1. Choisissez un point de travail Z0 situé environ 8 [mm] au-dessous du maxi-mum de la caractéristique du capteur puis utilisez les masses en laiton pourvarier le poids total de la sphère ;
2. Diminuez lentement le courant et notez sa valeur lorsque la sphère tombe ;on a alors F (i, z) = m ·g avec m = ms+k ·ml et ms = 12.5 gr , ml = 4.5 gr ;
Sustentation magnétique, v.1.1 6 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Fig. 6 – Panneau correspondant au mode de travail Ident. du capteur deposition
3. Répétez ces mesures lorsque la sphère est 3 [mm] au-dessus et 3 [mm] au-dessous de Z0 ;
4. Tracez les 3 courbes du champ de force F (i) à l’aide du fichier MATLABSP00.m ; indiquez le point de travail choisi ;
5. A partir de ces courbes, tracez le champ de force F (z) ; indiquez la positiondu point de travail ;
6. Calculez les coefficients Ki et Kz pour le point de travail choisi.
3.4 Bobine et régulateur de courant
On a dit plus haut que le régulateur de courant associé à la bobine permetd’obtenir un temps de montée plus rapide que celui qui serait donné par unamplificateur linéaire. La démarche qui suit permet de le mettre en évidence.
La constante de temps Ta = LR
d’établissement du courant est fixée par l’in-ductance et la résistance de la bobine. Elle peut se mesurer en demandant aurégulateur de fournir le maximum de courant.
Pour ce point, il faut choisir le mode de travail Ident. de l’ampli. decourant (figure 5.8 page 49).
Ensuite :1. Appliquez au régulateur de courant un saut de tension de 10 [V] ;2. Modélisez cette réponse indicielle, par exemple à l’aide du logiciel MATLAB
identification.m ;3. Que valent la constante de temps Ta de la bobine et le temps de montée tm
de la réponse ?
Sustentation magnétique, v.1.1 7 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Fig. 7 – Panneau correspondant au mode de travail Ident. du champ de forcede la bobine.
4. Quel est le courant maximum que peut fournir ce régulateur ?Mesurez les réponses indicielles consécutives à des sauts de tension de 1 [V] et3 [V].
1. Que valent les temps de montée ?2. Observez les réponses obtenues par rapport au modèle précédent ; qu’est-ce
qui change ?
Vous venez de voir que le régulateur de courant conduit à une réponse rapide,non-linéaire dont le temps de montée est variable. Dans le but de le modéliserpar un système linéaire, calculez une constante de temps équivalente Ta pourl’établissement du courant sachant que pour un système d’ordre 1, le temps demontée Tm et la constante de temps τ sont reliés par la loi suivante :
Tm = τ · ln 9
4 Description du système completPour effectuer l’analyse du système complet, je vous propose d’appliquer à la
figure 5.4 l’algèbre des schémas en suivant la démarche ci-dessous :
1. Remplacez la boucle interne par une fonction de transfert équivalente ; ob-servez la présence d’un pôle réel positif ; quel est sa signification ?
2. Exprimez la fonction de transfert du système Uz(s)U(s)
dans la forme de Bode ;que vaut son gain Ka ? Quelles sont ses constantes de temps ?
3. Représentez les pôles du système dans le plan complexe.
Sustentation magnétique, v.1.1 8 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Fig. 8 – Panneau correspondant au mode de travail Ident. de l’ampli. decourant.
5 Synthèse et essai du régulateur PIDGénéralement, on utilise un régulateur pour imposer les performances en
asservissement (stabilisation d’un système et annulation l’erreur statique parexemple, figure 5.9 page 50). On pense donc souvent à un régulateur PI. Es-quissez le lieu des pôles et montrez que ce régulateur ne permet pas d’obtenir lastabilité en boucle fermée.
Il faut donc utiliser un régulateur contenant une action dérivée, permettant destabiliser la sphère. Utilisez le lieu des pôles pour montrer qu’un régulateur PIDconvient effectivement. Le nouveau système ainsi créé est stable en boucle fermée.La recherche des paramètres des régulateurs reste classique : on commence parcompenser le pôle le plus lent, puis on recherche le gain du régulateur conduisantà la réponse indicielle souhaitée.
Maintenant 2 approches s’offrent à vous pour calculer les régulateurs :
1. L’approche numérique : vous utilisez intensivement MATLAB pour effectuertous les calculs. Pas de problème si vos idées sont claires ; cependant, lerisque est grand que vous perdiez la vue d’ensemble ;
2. L’approche analytique : vous vous mettez devant une feuille blanche et vouscalculez les diverses fonctions de transfert. Cela ne vous prendra pas plusde temps que l’approche numérique et vous connaîtrez mieux le système.
5.1 Régulateur Gc(s)
5.1.1 Synthèse du régulateur
Ce régulateur doit stabiliser la sphère et annuler l’erreur statique. La fonction
Sustentation magnétique, v.1.1 9 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
-SW ( s ) G c ( s ) G a ( s )U ( s )E ( s )
R E G U L A T E U R
S Y S T E M EA R E G L E R
V ( s )
Y ( s )
i m a g e _ 0 3 . e p s
Fig. 9 – Asservissement par régulateur PID.
Se ( t ) u ( t )++ K p
s T d1 + s a T d
1s T i
+
Fig. 10 – Schéma fonctionnel d’un régulateur PID réalisable.
de transfert d’un régulateur PID réalisable est :
Gc(s) =U(s)
E(s)= Kp ·
(1 + s · (Ti + a · Td) + s2 · (a · Td · Ti + Td · Ti)
s · Ti · (1 + s · a · Td · Ti)
)1. Quelle est la fonction de transfert en boucle fermée ?
2. Quelle valeur choisissez-vous pour Td et Ti ?
3. Déterminer Kp de manière à ce que la réponse indicielle en boucle ferméesoit oscillatoire optimal.
4. Simulez ce système en boucle fermle avec MATLAB et tracer les signaux decommande et de sortie ;
5. Que valent l’erreur statique et les temps de montée Tm et de réglage Treg ?
Sustentation magnétique, v.1.1 10 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
5.1.2 Essai du régulateur
Une fois terminée la synthèse du régulateur, vérifiez son fonctionnement. Pource faire :
1. Choisissez le mode de travail Régulation et introduisez les paramètres durégulateurs PID ;
Fig. 11 – Panneau correspondant au mode de travail Régulation.
2. Choisissez une consigne se situant au centre du capteur ;
3. Présentez la sphère en la descendant depuis la bobine ;
4. Enregistrez les réponses indicielles positive et négative ;
5. Mesurez l’erreur statique, le temps de montée Tm et le temps de réglageTreg.
6 Tableaux de mesures
6.A Capteur de position
Uc [V]
y [mm]z [mm]
On notera que la réglette permet de mesurer la hauteur y et que l’analyse sefait avec z = Ymax − y. N’oubliez pas de relever la valeur Ymax.
Sustentation magnétique, v.1.1 11 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
6.B Force due au courant, avec z0 ±∆ comme paramètre
∆ [mm] = z0 −∆ [mm] z0 [mm] z0 + ∆ [mm]
n F [mN] I [mA] I [mA] I [mA]
0 1231 1632 2053 2464 2875 329
6.C Force due à la hauteur, avec I = I0
I0 [mA] = z0 −∆ [mm] z0 [mm] z0 + ∆ [mm]
x [mm]F [mN]
Les valeurs de ce troisième tableau proviennent des courbes du champ de forcemesuré au § 5.A.2 page 52.
7 Code MATLAB
7.A sp00.m
% sp mag I0 = 185 mA, Y0 = 95 mmclose a l l ; clear a l l ; format compact ;% capteur de po s i t i ony=[99 96 93 92 91 89 87 84 82 8 1 ] ;Uy=[9 8 7 .5 7 6 .5 6 5 4 3 2 ] ;y f =80:100;c f=polyf it (y ,Uy, 1 )Uyf=polyval ( c f , y f ) ;plot (y ,Uy, ’ o ’ , yf , Uyf ) ; grid ;xlabel ( ’ Po s i t i on [mm] ’ ) ; ylabel ( ’ Ucapteur [V] ’ ) ;t i t l e ( ’ CapteurdeSpMag06 ’ ) ;text ( 8 2 . 2 , 7 . 5 , [ ’K_c= ’ num2str( c f (1 )∗1000 ,3 ) ’ [V/m] ’ ] ) ;% poin t s de mesure Y0 = 95 mm +/− 3 mm, Ymax = 107 mmm = 12.5 e−3; ml = 4 .2 e−3; g = 9 . 8 1 ;F0 = m∗g ; I0 = 0 . 1 8 5 ;Ymax = 107e−3;z = Ymax − [ 98 95 92 ]∗1 e−3;z0 = z ( 2 ) ;% F( i ) @ z constantFp5 = 1e−3∗[0 122 .6 163 .8 205 .0 246 .2 2 8 7 . 4 ] ;Ip5 = 1e−3∗[0 160 183 210 218 2 2 7 ] ;Fp0 = 1e−3∗[0 122 .6 163 .8 205 .0 246 .2 2 8 7 . 4 ] ;Ip0 = 1e−3∗[0 185 220 246 260 2 7 5 ] ;Fm5 = 1e−3∗[0 122 .6 163 .8 205 .0 246 .2 2 8 7 . 4 ] ;Im5 = 1e−3∗[0 210 273 298 325 3 6 0 ] ;figure ;plot ( Im5 ,Fm5, ’ x ’ , Ip0 , Fp0 , ’ o ’ , Ip5 , Fp5 , ’ x ’ ) ;
Sustentation magnétique, v.1.1 12 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
axis ( [ 0 380 0 300 ]∗1 e−3); hold on ;xlabel ( ’ Courant [A] ’ ) ; ylabel ( ’ Force [N] ’ ) ;t i t l e ( ’Champde f o r c e F( z , I ) , z=12 , 17 , 22 [mm] ’ ) ;% ajus tage de parabo l e sI f =(1:350)∗1 e−3;cp5=polyf it ( Ip5 , Fp5 , 2 ) ;Fp5=polyval ( cp5 , I f ) ;cm5=polyf it ( Im5 ,Fm5, 2 ) ;Fm5=polyval (cm5 , I f ) ;cp0=polyf it ( Ip0 , Fp0 , 2 ) ;Fp0=polyval ( cp0 , I f ) ;plot ( I f ,Fm5, I f , Fp0 , I f , Fp5 ) ;plot ( [ 0 0 . 2 ] , [ F0 F0 ] , [ I0 I0 ] , [ 0 0 . 1 5 ] ) ; grid ;Kith = 2∗F0/ I0Kimes =polyval ( [ 2∗ cp0 (1 ) cp0 ( 2 ) ] , I0 )text ( 0 . 0 5 5 , 0 . 1 2 7 , [ ’K_i= ’ num2str(Kimes , 3 ) ’ [N/A] ’ ] ) ;% F( z ) @ I = I0 = 300mAFz(1)=polyval ( cp5 , I0 ) ;Fz(2)=polyval ( cp0 , I0 ) ;Fz(3)=polyval (cm5 , I0 ) ;
% ajus tage en 1/(1+z/a)^2)Finv = 1 . / Fz ;z f=1e−3∗ (8 :20) ;c f=polyf it ( z , Finv , 2 ) ;Fzf=1 . / polyval ( c f , z f ) ;figure ;plot ( z ∗1000 ,Fz , ’ o ’ , z f ∗1000 , Fzf ) ;hold on ; grid ;t i t l e ( ’ Force F( z ) @ I=I0 =170 [mA] ’ ) ;xlabel ( ’ Distance [mm] ’ ) ; ylabel ( ’ Force [N] ’ ) ;plot ( [ 8 1 3 ] , [ F0 F0 ] , [ z0 z0 ]∗1000 , [ 0 0 . 1 5 ] ) ;% ca l c u l de Kz e t du parametre anum = polyval ( [ 2∗ c f (1 ) c f ( 2 ) ] , z0 )den = (polyval ( c f , z0 ) )^2 ;Kz = num/denKzmax = 2∗m∗g/z0a = 2∗F0/Kz − z0text ( 9 , 0 . 0 7 , [ ’K_z= ’ num2str(Kz , 3 ) ’ [N/m] ’ ] ) ;% ca l c u l de Lo = L(0)−L( i n f )Lo = 2∗a∗F0∗((1+ z0/a )/ I0 )^2
7.B pid.m
clear a l l ; close a l l ; format compact ; clc ;% régu l a t eu r de courant
ka = 0 . 1 ;Ta=8e−3;numRc = ka ;denRc = [Ta 1 ] ;Rc = t f (numRc, denRc ) ;
% model du systeme completk i = 1 . 4 3 ;kx = 10 . 3 ;m = 12 .5 e−3;% bouc le in t e rneBi = t f ( 1 , [m 0 −kx ] ) ;kc = 376 ;Ga = minrea l (Rc∗ k i ∗kc∗Bi )figure , pzmap(Ga ) ;zoom ;t i t l e ( ’ PlandeSdeGa ’ ) ;figure ( gcf+1) , bode (Ga ) ;zoom ;
Sustentation magnétique, v.1.1 13 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
t i t l e ( ’BodedeGa ’ ) ;Gain_sys = dcgain (Ga)
% Régulateur PIDD = damp(Ga ) ;Tamax1 = D( 1 ) ;Tamax2 = 10 ;a = 0.01Td = 1/(Tamax1+Tamax2)Ti = 1/(Td∗Tamax1∗Tamax2)Gi = 1/TiKp = 0.54numGc = Kp∗ [ ( a∗Td∗Ti+Td∗Ti ) ( Ti+a∗Td) 1 ] ;denGc = [ a∗Td∗Ti Ti 0 ] ;Gc = t f (numGc, denGc )figure , bode (Gc)figure , pzmap(Gc)
% En bouc l e ouver teG0 = minrea l (Gc∗Ga)figure , r l o c u s (G0)Gw = minrea l (G0/(1+G0) )figure , pzmap(Gw)figure , s t ep (Gw)
Sustentation magnétique, v.1.1 14 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Références[1] Computer controlled systems, K. Åstrom, B.Wittenmark, 1990, Prentice-
Hall, bibliothèque eivd 40.122-03[2] System Identification, Theory for the User, Lennart Ljung, Prentice-Hall
information and system sciences series, Thomas Kailath Editor, 1987, bi-bliothèque eivd 40.162-27/02
[3] Modeling of Dynamic Systems, Lennart Ljung & Torkel Glad, Prentice-Hallinformation and system sciences series, Thomas Kailath Editor, 1994, biblio-thèque eivd 40.162-32
[4] Identifikation dynamischer Systeme, Rolf Iserman, Band I & II, Springer-Verlag, 1988, bibliothèque eivd 40.162-25/01 et 40.162-26/01
[5] Régulation numérique, Michel Etique, cours polycopié de l’école d’ingénieursdu canton de Vaud (eivd), 2003, http://iai.heig-vd.ch/~mee//labo_ra/sustentation_magnetique//node2.htm
Sustentation magnétique, v.1.1 15 MEE \sustentation_magnetique.tex\7 mai 2006

HEIG-Vd Laboratoire de régulation numérique
Version du docu-ment
Date Notes
v1.1 24 mars 2002v1.2 9 mars 2004v1.3 10 mars 2005
Tab. 1 – Versions publiées
Sustentation magnétique, v.1.1 16 MEE \sustentation_magnetique.tex\7 mai 2006