Embed Size (px)
Citation preview
Les Réseaux Neuro-Flous
Yann MORERE
17 mai 2001

2
c 98 Yann MORERE le 17 mai 2001 à 08h 24

Résumé
Les réseaux de neuro-�ous ont connu un essor considérable. Un résumé sur tout ce qu'ilfaut savoir sur les réseau de neuro-�ous contenu dans ces pages. Après une introduction àla logique �oue, on détaillera les di�érents modèles d'identi�cation �oue et de commandes�oue. On terminera par une présentation des réseaux neuro-�ous et de leurs principesd'apprentissage ainsi que leurs avantages.

Table des matières
1 Réseaux de Neurones et Systèmes Flous 61.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 La Théorie Floue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Théorie Floue au XXème Siècle . . . . . . . . . . . . . . . . . . . 71.2.2 Degré d'Appartenance et Probabilité . . . . . . . . . . . . . . . . 81.2.3 Dé�nitions de Notions sur les Ensembles Flous . . . . . . . . . . . 8
1.2.3.1 Dé�nition d'un Ensemble Flou . . . . . . . . . . . . . . 81.2.3.2 Support d'un Ensemble Flou . . . . . . . . . . . . . . . 81.2.3.3 Noyau d'un Ensemble Flou . . . . . . . . . . . . . . . . 91.2.3.4 Hauteur d'un Ensemble Flou . . . . . . . . . . . . . . . 91.2.3.5 Cardinal d'un Ensemble Flou . . . . . . . . . . . . . . . 9
1.2.4 Opérations sur les Ensembles Flous . . . . . . . . . . . . . . . . . 91.2.4.1 Égalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.4.2 Inclusion . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4.3 Intersection . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4.4 Union . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4.5 Propriétés de l'Union et l'Intersection . . . . . . . . . . . 101.2.4.6 Complément d'un Sous-Ensemble Flou . . . . . . . . . . 101.2.4.7 Propriétés du Complément d'un Sous-Ensemble Flou . . 111.2.4.8 Propriétés des Opérateurs sur les Ensembles Flous . . . 11
1.2.5 Coupe de Niveau � ou �-coupe . . . . . . . . . . . . . . . . . . . 111.2.6 Sous-Ensembles Flous Convexes . . . . . . . . . . . . . . . . . . . 111.2.7 Produit Cartésien de Sous-Ensemble Flou . . . . . . . . . . . . . 121.2.8 Projection d'un Sous-Ensemble Flou . . . . . . . . . . . . . . . . 121.2.9 Normes et Conormes Triangulaires . . . . . . . . . . . . . . . . . 12
1.2.9.1 Dé�nition des Normes et Conormes Triangulaires . . . . 121.3 Les Variables Linguistiques et Propositions Floue . . . . . . . . . . . . . 13
1.3.1 Les Variables Linguistiques . . . . . . . . . . . . . . . . . . . . . . 131.3.2 Propositions Floues . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.2.1 Propositions Floues Élémentaires . . . . . . . . . . . . . 141.3.2.2 Propositions Floues Générales . . . . . . . . . . . . . . . 141.3.2.3 Distribution de Possibilité Associée à une Proposition Floue 14
1.3.3 Raisonnement en Logique Floue . . . . . . . . . . . . . . . . . . . 151.3.3.1 Implication Floue . . . . . . . . . . . . . . . . . . . . . . 151.3.3.2 Modus Ponens Généralisé . . . . . . . . . . . . . . . . . 15
1.4 La Commande Floue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.4.2 Caractéristiques de la Commande Floue . . . . . . . . . . . . . . 16

TABLE DES MATIÈRES 3
1.4.3 Le Contrôleur Flou . . . . . . . . . . . . . . . . . . . . . . . . . . 161.4.4 Principe de la Commande Floue . . . . . . . . . . . . . . . . . . . 17
1.4.4.1 Formalisation . . . . . . . . . . . . . . . . . . . . . . . . 171.4.4.2 La Commande Floue, un Approximateur Universel . . . 17
1.4.5 Méthodes de Calcul de la Commande . . . . . . . . . . . . . . . . 181.4.5.1 Méthode Logique . . . . . . . . . . . . . . . . . . . . . . 181.4.5.2 Méthode de Mandani et de Larsen . . . . . . . . . . . . 191.4.5.3 Méthode par Interpolation . . . . . . . . . . . . . . . . . 191.4.5.4 Méthode de Takagi et Sugeno . . . . . . . . . . . . . . . 20
1.5 Apprentissage des Systèmes Flous . . . . . . . . . . . . . . . . . . . . . . 211.5.1 introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.5.2 Apprentissage de Systèmes Flou par Rétropropagation . . . . . . 22
1.5.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 221.5.2.2 Rétropropagation pour les Systèmes Flous . . . . . . . . 221.5.2.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5.3 Moindres Carrés Orthogonaux pour les Systèmes Flous . . . . . . 231.5.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 231.5.3.2 Du Système Flou à la Série de Fonctions à Base Floue . 231.5.3.3 Apprentissage par Moindres Carrés Orthogonaux . . . . 241.5.3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.5.4 Apprentissage par Base de Règles Floues . . . . . . . . . . . . . . 261.5.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 261.5.4.2 Création des Règles Floues avec les Données Numériques 261.5.4.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.5.5 Apprentissage de Système Flou par Agrégation avec le Plus ProcheVoisin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.5.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 281.5.5.2 Système Flou Optimal . . . . . . . . . . . . . . . . . . . 281.5.5.3 Système Flou Optimal Adaptatif . . . . . . . . . . . . . 281.5.5.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.6 Logique Floue et Réseaux de Neurones . . . . . . . . . . . . . . . . . . . 301.6.1 Méthodes Neuro-Floues . . . . . . . . . . . . . . . . . . . . . . . 30
1.6.1.1 Première Méthode . . . . . . . . . . . . . . . . . . . . . 301.6.1.2 Seconde Méthode . . . . . . . . . . . . . . . . . . . . . . 311.6.1.3 Troisième Méthode . . . . . . . . . . . . . . . . . . . . . 31
1.7 Système Flou Adaptatif et Réseau de Neurones . . . . . . . . . . . . . . 311.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311.7.2 Perceptron et Système Flou Adaptatif . . . . . . . . . . . . . . . 32
1.7.2.1 Algorithme . . . . . . . . . . . . . . . . . . . . . . . . . 331.7.2.2 Avantages et Inconvénients . . . . . . . . . . . . . . . . 33
1.7.3 Réseau à Fonctions à Base Radiale et Système Flou Adaptatif . . 341.7.3.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8 Commande Floue Adaptative à Stabilité Indirecte de Systèmes Non-Linéaires 351.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351.8.2 Les di�érents Types de Commandes Floues . . . . . . . . . . . . . 35
1.8.2.1 Commande Floue Adaptative . . . . . . . . . . . . . . . 351.8.2.2 Commande Adaptative Floue Directe et Indirecte . . . . 361.8.2.3 Types de Commande �oue Adaptative . . . . . . . . . . 36
L.A.M.I.H. c 98 Yann MORERE

4 TABLE DES MATIÈRES
1.8.3 Conception de Régulateur Flou Adaptatif Indirect basé sur l'ap-proche de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . 371.8.3.1 Méthode de Lyapunov . . . . . . . . . . . . . . . . . . . 371.8.3.2 Application à l'Automatique dans le Cas d'un Système
Libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371.8.3.3 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . 381.8.3.4 Application à l'Automatique dans le Cas Général . . . . 381.8.3.5 Application à la Conception de Régulateurs Flous . . . . 391.8.3.6 Synthèse de Régulateur Flou d'après Wang . . . . . . . 401.8.3.7 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . 44
c 98 Yann MORERE le 17 mai 2001 à 08h 24

Table des �gures
1.1 Exemple de variable linguistique (V;X; TV ) utilisé pour décrire la surfaced'un appartement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
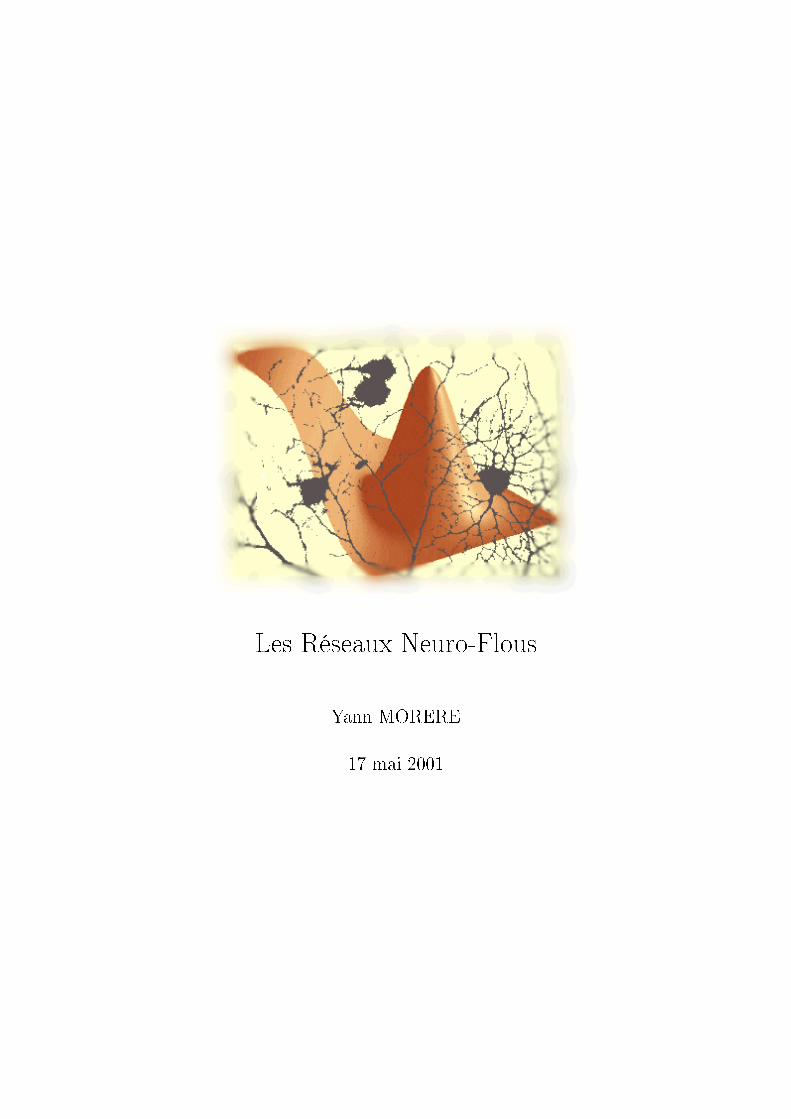
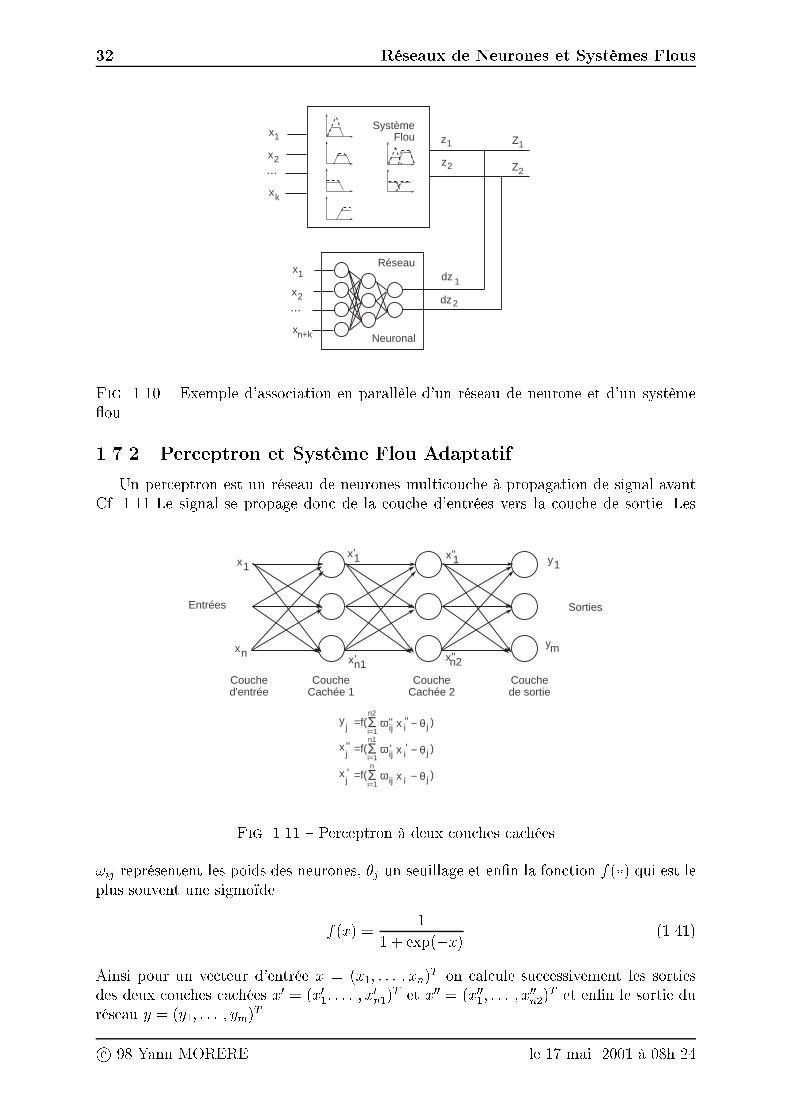
1.2 Con�guration générale d'un contrôleur �ou . . . . . . . . . . . . . . . . . 161.3 Schéma d'un régulateur �ou basé sur le raisonnement �ou par inférences 171.4 Représentation graphique de la méthode de Mandani . . . . . . . . . . . 201.5 Représentation de la méthode de Takagi & Sugeno . . . . . . . . . . . . . 211.6 Modélisation neuronale d'un système �ou . . . . . . . . . . . . . . . . . . 221.7 Partitions des variables d'entrée et de sorties en régions �oues . . . . . . 271.8 Exemple de réseau de neurones pour la commande �oue . . . . . . . . . . 301.9 Exemple d'association en série d'un réseau de neurone et d'un système �ou 311.10 Exemple d'association en parallèle d'un réseau de neurone et d'un système
�ou . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.11 Perceptron à deux couches cachées . . . . . . . . . . . . . . . . . . . . . 321.12 Réseau à Fonctions à Base Radiale . . . . . . . . . . . . . . . . . . . . . 341.13 Domaine de stabilité du système . . . . . . . . . . . . . . . . . . . . . . . 391.14 Schéma d'un système complexe contrôlé par régulateur �ou . . . . . . . . 401.15 Schéma complet de la commande adaptative �oue indirecte . . . . . . . . 44

Chapitre 1
Réseaux de Neurones et Systèmes Flous
1.1 Introduction
La théorie des réseaux de neurones et des systèmes �ous ont été développée depuisplusieurs année. Mais la plupart du temps dans des domaines séparés et di�érents. Depuispeu les chercheurs utilisent ces techniques conjointement dans domaines qui ne touchentni le �ou ni les réseaux de neurones. Ils utilisent donc les réseaux de neurones et la théorie�oue d'un manière uni�ée. Au départ ces techniques sont utilisées pour le calcul élémen-taire, algèbre linéaire et la probabilité, elles sont alors utilisées dans des techniques pluscomplexes comme le traitement du signal, procédés aléatoires ainsi que pour l'identi�ca-tion et la commande de système complexes.
Les systèmes á base de réseaux de neurones et de logique �oue font de bons approxi-mateurs de fonctions á partir de données d'échantillons.
Mais ils apportent une chose en plus par rapport á l'approche statistique : ils n'ont pasbesoin de connaissance a priori sur le fonctionnement interne du système. Les systèmes�ous et neuronaux n'ont pas besoin de modèle mathématique. Ce sont de purs estimateurs.
Les systèmes neuronaux et �ous sont des estimateurs numériques et des systèmesdynamiques. La théorie neuronal noie dans la sémantique mathématiques des systèmesdynamiques, la commande adaptative et les statistiques. La théorie �oue, elle, se che-vauche avec ces sémantiques et en plus avec les probabilités, la logique mathématiques etles théorie de mesure.
En général les systèmes neuronaux et �ous sont utilisés pour améliorer les perfor-mances des systèmes réels.
1.2 La Théorie Floue
La théorie des ensembles �ous est une théorie mathématiques qui permet de modé-liser des notions vagues du langage naturel pour pallier l'inadéquation de la théorie desensembles classiques dans ce domaine. En e�et cette dernière dé�nit de façon abrupteune frontière entre deux catégories d'éléments : ceux qui appartiennent à l'ensemble etceux qui sont à l'extérieur.
Contrairement la logique �oue á sa base considère que tout est a�aire de degrés. Enlogique �oue rien n'est manichéen. Tout peut être coder en niveau de gris. Elle donneun interprétation déterministe des probabilités et de la stochastique. Mathématiquementen logique �oue, les variables �oues sont multivaluées et possède une multivalance (on

1.2 La Théorie Floue 7
peut pendre comme exemple la vérité, le mensonge et la valeur qui correspond au cas ouon ne sais rien) Le degrés de cette valeur indéterminée correspond á la multivaluationde la variable �oue. Par exemple dans une approche �oue la paradoxe correspond á lavaleur intermédiaire entre les deux valeurs antithétiques. Il s'agit ici d'un paradoxe a 2dimensions (2 valeurs antithétiques) mais on peut imaginer de créer des points médiantsentre plusieurs valeurs antithétiques (> 2).
1.2.1 Théorie Floue au XXème Siècle
Les paradoxes logiques et le principe d'incertitude d'Heisenberg ont permis le déve-loppement de la logique �oue dans les années 1920 et 1930. A cette époque les théoristesquantiques avaient introduit l'incertitude d'un système bivalent en la valeur médianede cette bivalence. La deuxième étape fût l'énoncé de l'incertitude comme une suite dedi�érents degrés d'incertitude bornés par les valeur bivalente de la relation.
Le logicien polonais Jan Lukasiewicz a développé un système multivalué composé de3 valeurs au début des années 30. Ensuite Lukasiewicz a étendue le champ des valeurs def0; 1=2; 1g á tous les rationnels compris en [0; 1]
En 1930, le philosophe quantique Max Black a appliqué cette logique continue dupoint de vue des composants á des ensembles d'éléments. Historiquement il a crée lespremières fonctions d'appartenance d'un ensemble �ou.
En 1965 Lofti Zadeh a publié l'article "Fuzzy Sets" qui développe la théorie d'en-sembles multivalués et qui introduit le terme �ou dans la littérature scienti�que.
Zadeh a donc étendu la fonction indicateur bivalent IA d'un sous-ensemble non-�ouA de X
IA(x) =
�1 si x 2 A0 si x 62 A
(1.1)
en une fonction indicateur multivaluée ou fonction d'appartenance mA : X ! [0; 1].On peut donc combiner ces ensembles �ous avec l'opérateur "point" des fonctions indi-cateurs
IA\B(x) = min (IA(x); IB(x)) (1.2)
IA[B(x) = max (IA(x); IB(x)) (1.3)
IAc(x) = 1� IA(x) (1.4)
A � B ssi IA(x) � IB(x) pour tout x 2 X (1.5)
La valeur d'appartenance mA(x) mesure le degrés avec lequel l'élément x appartientá l'ensemble A.
mA(x) = degr�es(x 2 A) (1.6)
L.A.M.I.H. c 98 Yann MORERE

8 Réseaux de Neurones et Systèmes Flous
1.2.2 Degré d'Appartenance et Probabilité
Ce sont deux notions qu'il ne faut pas confondre étant di�érente par nature. Ce sontdans les deux cas des nombres réels pris dans l'intervalle fermé [0; 1] et mesure tous lesdeux une incertitude mais avec des objectifs di�érents.
� Le degrés d'appartenance mesure l'incertitude ou la croyance par rapport à unenotion vague. Cette mesure indique suivant l'univers du discours considéré et lesconventions adoptées, l'appartenance à des degrés divers des individus aux sous-ensembles considérés.
� La probabilité est associée à la notion d'événement. C'est la mesure associée àl'occurrence d'un événement. Les chances de réalisation de cette événement dépenddirectement de la valeur attribuée à la probabilité correspondante.
On note la valeur d'appartenance d'un sous-ensemble A á un ensemble B parS(A;B) = Degr�es(A � B). La théorie des sous-ensemble o�re un environnement d'en-semble théorique uni�ée. Par exemple si l'ensemble A n'est composé que de l'ensemble dessingletons fxig alors l'appartenance de fxig dans B est la valeur d'appartenance mB(xi).
Le comportement aléatoire équivaut á l'incertitude que l'on a lorsque l'on a un en-semble non-�ou B qui est partiellement contenu dans l'un de ses sous-ensembles non-�ousA. On a donc S(A;B) = 1 car A est un sous-ensemble de B. Mais on a aussi S(B;A)non nul car B est une partie de
A et 0 < S(B;A) < 1 (1.7)
La théorie des ensembles classiques interdit l'inégalité stricte dans 1.7. En e�et soit chaqueensemble est une partie de l'autre ou alors ils sont disjoints. La théorie des ensembles �ousl'autorise tout à fait.
1.2.3 Dé�nitions de Notions sur les Ensembles Flous
1.2.3.1 Dé�nition d'un Ensemble Flou
Dé�nition 1.2.1: Soit un univers X, on dé�nit un ensemble �ou A dans X parl'application de �A de X dans l'intervalle [0; 1]. A tout élément x 2 X on associe lavaleur �A(x) telle que
0 � �A � 1 (�A : X ! [0; 1])
L'application �A est appelée fonction d'appartenance de l'ensemble �ou A.� �A(x) = 0; x n'appartient pas à A.� �A(x) = 1; x appartient à A il satisfait pleinement la propriété A.� �A 6= 0; 1 alors �A(x) est une valeur intermédiaire entre 0 et 1. x appartient àl'ensemble �ou A. On dit que x 2 A avec le degrés �A(x)
1.2.3.2 Support d'un Ensemble Flou
Dé�nition 1.2.2: Soit un ensemble �ou A dans l'univers X, le support de A notésupp(A) est un sous-ensemble ordinaire de X dont chacun des éléments à une degrésd'appartenance non nul, par rapport a A.
supp(A) = fx 2 X;�A(x) 6= 0g
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.2 La Théorie Floue 9
1.2.3.3 Noyau d'un Ensemble Flou
Dé�nition 1.2.3: Le noyau d'un ensemble �ou A de X est un sous-ensemble ordinairede X dont chaque élément a un degrés d'appartenance égal à 1.
Ker(A) = fx 2 X;�A(x) = 1g
Lorsque le noyau n'est pas vide Ker(A) 6= ;, on dit que l'ensemble �ou A est normal ounormalisé.
1.2.3.4 Hauteur d'un Ensemble Flou
Dé�nition 1.2.4: La hauteur d'un ensemble �ou A dans X est la valeur maximumde la fonction d'appartenance : C'est la plus grand degrés d'appartenance de A.
H(A) = max (�A(x); x 2 X)
1.2.3.5 Cardinal d'un Ensemble Flou
Dé�nition 1.2.5: Le cardinal d'un ensemble �ou A de support �ni est égal à lasomme des degrés d'appartenance des éléments de ce support :
Card(A) =X
x2supp(A)
�A(x) on note aussi jAj
Dans le cas d'un support in�ni on a :
Card(A) =
ZX
�A(x)dm(x) avec
ZX
dm(x) = 1
Le cardinal d'un ensemble �ou A de support �ni peut être dé�ni comme un ensemble�ou appelé nombre �ou. Ce cardinal est noté FCard(A) et vaut :
FCard(A) =X
i2supp(A)
frac�ii aussi not�e kAk
1.2.4 Opérations sur les Ensembles Flous
Les opérations sur les ensembles �ous sont des extensions des opérations connues surles ensembles classiques.
1.2.4.1 Égalité
Dé�nition 1.2.6: Soit deux ensembles �ous A et B dans un univers X. On dit queA et B sont égaux (A = B) si leurs fonctions d'appartenance ont la même valeur en toutpoint x de X :
�A(x) = �B(x)8x 2 X:Si9xtelque�A(x) 6= �B(x)) A 6= B
L.A.M.I.H. c 98 Yann MORERE

10 Réseaux de Neurones et Systèmes Flous
1.2.4.2 Inclusion
Dé�nition 1.2.7: Soit deux ensembles �ous A et B dans un univers X. On dit queA est inclus dans B noté A � B si leurs fonctions d'appartenance sont telles que :
8x 2 X;�A(x) � �B(x)
L'inclusion dé�nit une relation d'ordre.
1.2.4.3 Intersection
Dé�nition 1.2.8: L'intersection de deux sous-ensembles �ous A et B de X est lasous-ensemble de X qui contient tous les éléments x de X appartenant à la fois à A etB. L'intersection de deux sous-ensemble �ous A et B (A \B) de X est le sous-ensemble�ou C tel que :
8x 2 X;�C(x) = min (�A(x); �B(x))
1.2.4.4 Union
Dé�nition 1.2.9: L'union de deux sous-ensemble �ous A et B de X est le sous-ensemble �ou de X qui contient tous les éléments appartenant ou bien à A ou bien à B.L'union de deux sous-ensemble �ous A et B (A[B) de X est le sous-ensemble �ou D deX tel que :
8x 2 X;�C(x) = max (�A(x); �B(x))
1.2.4.5 Propriétés de l'Union et l'Intersection
Propriété 1.2.1: 8AetBdeX� associativité de \ et [� commutativité de \ et [� A \X = A;A \ ; = ;� A [ ; = A;A [X = X� A [ B � A � A \B� A \ (B0 [ B00) = (A \B0) [ (A \B00)� A [ (B0 \ B00) = (A [B0) \ (A [B00)� jAj+ jBj = jA \ Bj+ jA [Bj
1.2.4.6 Complément d'un Sous-Ensemble Flou
Dé�nition 1.2.10: Soit un sous-ensemble �ou A de X, son complément est le sous-ensemble contenant tous le x n'appartenant pas à A. Le complément AC d'un sous-ensemble �ou A de X est dé�nit comme le sous-ensemble �ou de X de fonction d'appar-tenance :
8x 2 X;�AC(x) = 1� �A(x)
On peut énoncés les propriétés suivantes AC \ A 6= ; et AC [ A 6= X
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.2 La Théorie Floue 11
1.2.4.7 Propriétés du Complément d'un Sous-Ensemble Flou
Propriété 1.2.2: 8AetBdeX� Loi de Morgan : (A \ B)C = AC [BC ; (A [ B)C = AC \BC
��AC�C
= A� ;C = X� XC = ;� jAj+ jACj = jXj
��supp(AC)
�C= Ker(A)
��Ker(AC)
�C= supp(A)
1.2.4.8 Propriétés des Opérateurs sur les Ensembles Flous
Propriété 1.2.3: Les choix des opérateur min pour l'intersection, max pour l'union,compl�ementation�a1 pour le complément permet de préserver le structure de la théorieclassique des ensembles.
1.2.5 Coupe de Niveau � ou �-coupe
Dé�nition 1.2.11: Une coupe de niveau � ou �-coupe de l'ensemble �ou A pour unevaleur donnée � 2 [0; 1] est le sous-ensemble classique A� de X dé�nit par
A� = fx;�A(x) � �g
On appelle �-niveau une �-coupe telle que �A(x) = � pour tout x 2 A� Et on noteA� = fx;�A(x) = �g On peut en déduire que A0 = supp(A) et A1 = Ker(A).
On peut montrer qu'un ensemble �ou A peut être représenté par C(A) l'ensemble detoutes ses �-coupes.
Propriétés des �-coupes Propriété 1.2.4: Les �-coupes de A sont des parties non-�oues de X emboitées par rapport à la valeur du niveau �, si �0 � � alors A� � A�0 .
Les �-coupes des sous-ensembles �ous véri�ent :� (A \ B)� = A� \ B�
� (A [ B)� = A� [ B�
� si A � B alors A� � B�
1.2.6 Sous-Ensembles Flous Convexes
� Dé�nition 1.2.12: Un sous-ensemble �ou A de X des nombres réels est convexes,si pour tout couple d'éléments a et b de X, et pour tout nombre � de [0; 1] lafonction d'appartenance A véri�e :
�A(�a+ (1� �)b) � min (�A(a); �A(b))
� Dé�nition 1.2.13:Un sous-ensemble �ou A deR est convexe si toutes ses �-coupesA� sont convexes, c-à-d si, pour tout élément a et b de A� et pour tout nombre �de [0; 1]; x = �a+ (1� �)b appartient aussi à A�
� Dé�nition 1.2.14:Si A et B sont deux sous-ensemble �ous convexes de R alorsleur intersection est convexe.
L.A.M.I.H. c 98 Yann MORERE

12 Réseaux de Neurones et Systèmes Flous
1.2.7 Produit Cartésien de Sous-Ensemble Flou
Dé�nition 1.2.15: Soit des sous-ensembles �ous A1; A2; � � � ; Ar respectivement dé�-nis sur X1; X2; � � � ; Xr, on dé�nit leur produit cartésien A = A1 �A2 � � � � �Ar, commeun sous-ensemble �ou de X de fonction d'appartenance :
8 x = (x1; x2; � � � ; xr) 2 X; �A(x) = min (�A1(x1); � � � ; �Ar(xr))
1.2.8 Projection d'un Sous-Ensemble Flou
Dé�nition 1.2.16: Soit un sous-ensemble �ou A dé�ni sur un univers X1 � X2,produit cartésien des deux sous-ensembles de références X1 et X2.La projection sur X1 du sous-ensemble �ou A de X1 � X2 est le sous-ensemble �ouProjX1(A) de X1, dont la fonction d'appartenance est dé�nie par :
8 x1 2 X1; �ProgX1(A)(x1) = max
x22X2
�A ((x1; x2)) :
1.2.9 Normes et Conormes Triangulaires
On peut remplacer les opérations usuelles sur les sous-ensembles �ous (intersection,union : : : ) par d'autres opérateurs que le min;max et complément à 1.
1.2.9.1 Dé�nition des Normes et Conormes Triangulaires
Dé�nition 1.2.17: Une norme triangulaire (t-norme) est une fonction T :
[0; 1]� [0; 1]! [0; 1]
qui véri�e pour tout u; v et w de [0; 1]:� T (u; v) = T (v; u) (Commutativité)� T (u; T (v; w)) = T (T (u; v); w) (Associativité)� T (u; v) � T (w; t) si u � w et v � t (Isotonie)� T (u; 1) = u (Élément neutre 1)
Cas particulier : L'opérateur T = min est une norme triangulaire.Dé�nition 1.2.18: Une conorme triangulaire (t-conorme) est une fonction ?:
[0; 1]� [0; 1]! [0; 1]
qui véri�e pour tout u; v et w de [0; 1]:� ?(u; v) = ?(v; u) (Commutativité)� ? (u;?(v; w)) = ? (?(u; v); w) (Associativité)� ?(u; v) � ?(w; t) si u � w et v � t (Isotonie)� ?(u; 0) = u (Élément neutre 0)
Cas particulier : L'opérateur ? = max est une conorme triangulaire.Propriété 1.2.5: Toute t-normes T et toutes t-conormes ? véri�ent:
T (0; 0) = 0; T (1; 1) = 1; ?(0; 0) = 0; ?(1; 1) = 1
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.3 Les Variables Linguistiques et Propositions Floue 13
1.3 Les Variables Linguistiques et Propositions Floue
1.3.1 Les Variables Linguistiques
Une variable linguistiques sert à modéliser les connaissances imprécises ou vagues surune variable dont la valeur précise peut être inconnue.
Dé�nition 1.3.1: Une variable linguistique est un triplé (V;X; TV ) dans lequel V estune variable dé�nie sur un ensemble X. L'ensemble TV = fA1; A2; : : :g, �ni ou in�ni,contient des sous-ensembles �ous normalisé de X, utilisables pour caractériser V (Cf.�gure 1.1).
fonctions d'appartenance
Minuscule Petite Moyenne Grande Immense
X20 30 5053 60 80 90 110 120
0,3
1
V=surface, X=R , T ={Minuscule, Petite, Moyenne, Grande, Immense}+v
Fig. 1.1 � Exemple de variable linguistique (V;X; TV ) utilisé pour décrire la surface d'unappartement
Toutes les descriptions imprécises d'une même variable V ne peuvent être décritespar la liste TV . Il faut donc à partir de ces données de bases, construire des caractérisa-tions intermédiaires à l'aide de modi�cateurs qui atténuent ou renforcent une descriptiondonnée.
Dé�nition 1.3.2: Un modi�cateur linguistique est un opérateur mod qui permet àpartir de toute caractérisation �oue de A de V , de produire une nouvelle caractérisation�oue mod(A). Si la fonction d'appartenance de A est fA, celle de mod(A) est fmod(A) =tmod(fA), obtenue par l'intermédiaire d'une transformation mathématique tmod attachéeà mod.
La dé�nition d'un modi�cateur linguistique est générale et ne correspond pas néces-sairement à une faible variation autour de la quali�cation initiale A. Mais l'intérêt d'unmodi�cateur est de pouvoir engendrer des caractérisations voisines les unes de autres.Ces modi�cateur peuvent a�aiblir ou renforcer une caractérisation.
Dé�nition 1.3.3: Un modi�cateur linguistique mod est dit restrictif si la transfor-mation associée véri�e :
8u 2 [0; 1] tmod(u) � u:
Un modi�cateur simple mis en évidence par L.A. ZADEH est dé�ni par tmod(u) = u2.Ce modi�cateur préserve le support et le noyau du sous-ensemble �ou et ne modi�e lafonction d'appartenance de A sur les partie de X où elle est strictement comprise entre0 et 1.Un modi�cateur restrictif renforce la caractérisation à laquelle il est appliqué c-à-dSupp (mod(A)) � Supp(A).
L.A.M.I.H. c 98 Yann MORERE

14 Réseaux de Neurones et Systèmes Flous
Dé�nition 1.3.4: Un modi�cateur linguistique mod est dit expansif si la transfor-mation associée véri�e :
8u 2 [0; 1] tmod(u) � u:
Un modi�cateur simple mis en évidence par L.A. ZADEH est dé�ni par tmod(u) = u1=2.Ce modi�cateur préserve le support et le noyau du sous-ensemble �ou et ne modi�e lafonction d'appartenance de A sur les partie de X où elle est strictement comprise entre0 et 1.Un modi�cateur restrictif a�aiblit la caractérisation à laquelle il est appliqué c-à-dSupp (mod(A)) � Supp(A).
1.3.2 Propositions Floues
1.3.2.1 Propositions Floues Élémentaires
Dé�nition 1.3.5: Étant donné une ensemble L de variables linguistiques et un en-semble M de modi�cateurs, une proposition �oue élémentaire est dé�nie à partir d'unevariable linguistique (V;X; TV ) de L par la quali�cation "V est A", où A est une carac-térisation �oue appartenant à TV ou à M(TV ).
1.3.2.2 Propositions Floues Générales
Dé�nition 1.3.6: Une proposition �oue générale est obtenue par l'utilisationconjointe de propositions �oues élémentaires.
On peut construire des propositions �oues par conjonction, disjonction ou implicationportant sur des propositions �oues quelconques.
Dé�nition 1.3.7: Une règle �oue est une proposition �oue de la forme "si p alors q"utilisant une implication entre deux propositions �oues quelconques p et q
Les règles �oues les plus utilisées sont de la forme "Si V est A et U est B et : : : alorsW est C", où "V est A","U est B", : : : sont les prémisses de la règle et "W est C" saconclusion.
1.3.2.3 Distribution de Possibilité Associée à une Proposition Floue
Dé�nition 1.3.8: Étant donnée une proposition �oue élémentaire "V est A", ladistribution de possibilité �V;A qui lui est associée est dé�nie sur X à partir de la fonctiond'appartenance fA de A par :
8x 2 X �V;A(x) = fA(x)
�V;A ainsi dé�nie est une distribution de possibilité.Dé�nition 1.3.9: Un quanti�cateur �ou est un sous-ensemble �ou Q de l'ensemble
R des nombres réels qui décrit un nombre de cas approximatif, ou un sous-ensemble �oude [0; 1] qui décrit une proportion approximative.
Dé�nition 1.3.10: Soit un quanti�cateur �ou Q, de fonction d'appartenance fQ.Une proposition quanti�ée est de la forme "QW est B", pour une proposition �oue "Qest B" dé�nie à partir d'une variable linguistique (W;X; TW ). La valeur de vérité de laproposition �oue quanti�ée "QW est B" est égale à la valeur de fQ(p).
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.3 Les Variables Linguistiques et Propositions Floue 15
1.3.3 Raisonnement en Logique Floue
La logique �oue permet le traitement souple de connaissances imprécises ou incer-taines, ce qui serait impossible avec le logique classique.
La première tentative pour assouplir la logique classique vient de Lukasiewicz. C'estune logique à trois valeurs de vérité :
� 0 pour le faux� 1 pour le vrai� 1=2 pour le douteD'autres logiques multivalentes ont ensuite été développées.On peut considérer que la logique �oue est une extension de la logique classique. Les
propositions sont des propositions �oues dé�nies à partir d'un ensemble L de variableslinguistiques (V;X; TV ) et d'un ensemble M de modi�cateurs. Leurs valeurs de véritéappartient à tout l'intervalle [0; 1] et elle est fournie par la fonction d'appartenance de lacaractérisation �oue utilisée dans la proposition �oue.
1.3.3.1 Implication Floue
Dé�nition 1.3.11: L'implication �oue entre deux propositions �oues élémentaires "Vest A" et "W est B" est une proposition �oue concernant le couple de variables (V;W ),dont la valeur de vérité est donnée par la fonction d'appartenance fR d'une relation �oueR entre X et Y dé�nie, pour tout (x; y) de X � Y par :
fR(x; y) = � (fa(x); fb(y)) pour une fonction � de [0; 1]� [0; 1]! [0; 1]
1.3.3.2 Modus Ponens Généralisé
Le modus ponens de la logique classique ne permet d'obtenir une conclusion à la seulecondition que la proposition soit exactement véri�ée. Il convient donc d'adapter cetteforme de raisonnement à nos ensembles �ous. Il convient donc d'utiliser le modus ponensgénéralisé énoncé sous la forme :
Règles �oue (R1) si V est A alors W est BFonction d'appartenance fA fB
Fait observé V est A0
Fonction d'appartenance fA0
Conclusion W est B0
Fonction d'appartenance fB0
Tab. 1.1 � Condition d'utilisation du modus ponens généralisé
Dé�nition 1.3.12: En présence d'une règle de la forme "si V est A alors W estB", et d'une observation de la forme "V est A0", la conclusion dé�nie par le modusponens généralisé est la proposition �oue "W est B0", B0 ayant la fonction d'appartenancesuivante :
8y 2 Y fB0 = supx2XT (fA0(x); fR(x; y))
pour une t-norme T qui est un opérateur de modus ponens généralisé.
L.A.M.I.H. c 98 Yann MORERE

16 Réseaux de Neurones et Systèmes Flous
1.4 La Commande Floue
1.4.1 Introduction
Son principe a été introduit par Mandani et Assilian sur l'exemple d'une machineà vapeur expérimentale. Depuis ce a été exploité dans plusieurs domaines comme lacommande d'une usine d'eau chaude, échangeur de chaleur, régulation de vitesse d'unmoteur, four à ciment. La commande �oue a aussi été largement développée au Japon audébut des année 80.
1.4.2 Caractéristiques de la Commande Floue
Son but est de traiter les problèmes de commande de processus avec une approchedi�érente de l'automatique classique. Le plus souvent elle se sert de la connaissance desexperts du processus. La spéci�cité de la commande �oue réside dans les points suivants :
� La connaissance mathématique du fonctionnement du processus n'est pas néces-saire. C'est le savoir faire de l'opérateur qui est pris en compte.
� Des variables subjectives sont utilisables. Il est possible de modéliser les sens hu-mains.
L'intérêt de la commande �oue apparaît clairement dans le cas de système mal connuou di�cile à décrire. De même manière lorsque les variables sont décrites de façon impré-cise ou en langage naturel.
Intérêt de la commande �oue :� La commande est simple à réaliser, facilement adaptable aux conditions de fonction-nement. La plupart du temps un petit nombre de règle su�t à décrire le système.
� La coordination de plusieurs objectifs est possible ( système multivariable ).� Cette commande est reconnue comme robuste.
1.4.3 Le Contrôleur Flou
Le contrôleur �ou peut être considéré comme un système expert simple Cf. �gure1.2: La représentation des connaissances est basée sur les ensembles �ous dont les règlesfournissent directement les conclusions. L'interface avec le �ou assure la conversion desvariables linguistiques du système en variables �oues compréhensibles par le régulateur (Fuzzy�cation ). Le contrôleur �ou, grâce à sa base de règle génère alors la conclusion quisera rendu compréhensible pour le système par l'interface non �oue ( Défuzzy�cation ).
Base de Connaissance
Raisonnement Flou
Interface avec le non flouInterface avec le flou
Système commandéEtat duSystème
Commandenon floue
Fig. 1.2 � Con�guration générale d'un contrôleur �ou
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.4 La Commande Floue 17
Le contrôleur ( ou régulateur )�ou peut être représentée de la façon suivante ( Cf.�gure 1.3 ):
Fuzzyfication Défuzzyfication
12345123451234512345
Inférences :
Règles du type
Si e est E et e est E alors u est U∆ ∆ ∆∆
Entrées Sorties
Gains Gains
Choix de la méthodede défuzzification
Choix du "ET", de l'inférence et du"SINON" (T-normes, Lukasiewicz,...)
Nombre et forme desvariables linguistiques
des entrées
Nombre et forme desvariables linguistiques
des sorties
Fig. 1.3 � Schéma d'un régulateur �ou basé sur le raisonnement �ou par inférences
1.4.4 Principe de la Commande Floue
Le principe consiste à caractériser le mieux possibles les variables qui agissent sur leprocessus en fonction de tous les états du processus à commander et des avis et recom-mandations des experts.
1.4.4.1 Formalisation
Les connaissances du processus sont décrites à partir des variables linguistiques(V1; X1; T1); (V2; X2; T2) dé�nies sur un univers X1; X2 correspondant aux variables d'en-trées du processus.Les connaissances sont ensuite sous formes de règles de la forme :
� (R1) si V1 est A11 et V2 est A12 alors W est B1
� (R2) si V1 est A21 et V2 est A22 alors W est B2
ou les Aij sont des sous-ensembles �ous des univers Xi appartenant aux caractérisations�oues Ti et représentant une partition �oue des valeurs possibles des variables �ouesVi et ou les sous-ensembles �ous Bi des univers Yi appartenant aux caractérisations Twreprésentent les valeurs possibles prise par la variables �oue de sortie W .
On peut remarquer que la partition de l'univers est plus ou moins �n suivant le nombrede sous-ensembles �ous.
Avec la donnée de l'état du système (le plus souvent fournie par des capteurs) on dé-termine une caractérisation non �oue de la variable de commande en sortie du régulateur.
Cette réalisation se fait en trois étapes :
1. Pour chaque règle on utilise la caractérisation de l'état du système pour obtenir unrésultat intermédiaire.
2. Agrégation des résultats intermédiaires.
3. Déduction de l'action non �oue du résultat agrégé.
1.4.4.2 La Commande Floue, un Approximateur Universel
Plusieurs chercheurs ont montrés que la commande �oue peut être considéréecomme un approximateur universel [KOSKO, 1992a]. Alors pour une fonction W =f(V1; V2; : : : ; Vn) et un niveau d'approximation � il est possible de construire un ensemble�ni de règles R1; R2; : : : ; Rn du type
L.A.M.I.H. c 98 Yann MORERE

18 Réseaux de Neurones et Systèmes Flous
� (R1) si V1 est A11 et V2 est A12 alors W est B1
� (R2) si V1 est A21 et V2 est A22 alors W est B2
� etc.qui permet d'approcher f à � près, quand f est une fonction continue dé�nie sur un com-pact de dimension �nie. Le théorème suivant [WANG, 1995] montre que les systèmes �oussont capable d'approximer n'importe quelle fonction non-linéaire sur U avec n'importequel précision si U est compacte.
Théorème 1.4.1. Pour toute fonction continue réelle g sur un ensemble compact U �Rn et � arbitraire (assez petit), il existe un système �ou f de la forme :
f(x) =
PMl=1 �yl
�Qni=1 al;i exp
���xi��xl;i�l;i
�2��PM
l=1
�Qni=1 al;i exp
���xi��xl;i�l;i
�2�� (1.8)
tel que :
supx2U
jf(x)� g(x)j < �
où �yl; al;i et �l;i sont les paramètres ajustables du système �ou sous les contraintessuivantes : �yl 2 V; al;i 2 [0; 1]; �xl;i 2 Ui; et �l;i > 0.
On peut étendre ce théorème au cas discret.
1.4.5 Méthodes de Calcul de la Commande
Il existe plusieurs méthodes de calculs de la commande �oue de processus. La premièred'entre elle vient directement des méthodes d'inférence des systèmes experts.
1.4.5.1 Méthode Logique
Obtention du Résultat Intermédiaire La première étape consiste à e�ectuer unmodus ponens généralisé, donc de choisir l'une des implications �oues R. La partie condi-tion des règles étant complexe, ( plusieurs variables �oues V1; V2; : : : ) on doit choisir unopérateur de conjonction pour dé�nir le sous-ensemble �ou conjoint associé à la partie decondition de la règle Ri. Cette étape fournit une caractérisation �oue B0
i de la variablede commande Vi pour chaque Règle Ri.
Agrégation des Résultats Intermédiaires Chacune des règles Ri donnent une ca-ractérisation de la variable de commande W en présence d'une donnée d'entrée précise.Il faut faire la synthèse de ces caractérisations pour parvenir à une décision. Pour celaon choisit un opérateur d'agrégation pour obtenir une caractérisation �oue générale àpartir des résultats intermédiaires.Ces opérateurs sont le plus souvent la t-norme ( res-pectivement la t-conorme ) dé�nies par ZADEH, donnant un résultat agrégé de fonctiond'appartenance :
� 8 y 2 Y fA(B0
1;B0
2;:::)(y) = maxi=1;2;::: fB0
i(y)
respectivement� 8 y 2 Y fA(B0
1;B0
2;:::)(y) = mini=1;2;::: fB0
i(y)
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.4 La Commande Floue 19
Calcul du Résultat Non-Flou ou Défuzzi�cation Il faut maintenant déduire uneaction de commande du résultat agrégé �ou obtenu par l'opération précédente. Pourdéterminer cette valeur y0 plusieurs méthodes sont disponibles mais la plus courammentutilisée est la méthode du centre de gravité donnée par :
y0 =
RYfA(B0
1;B0
2;:::)(y) y dy
fA(B0
1;B0
2;:::)(y) dy
en continu et
y0 =
Pyj2Y
fA(B0
1;B0
2;:::)(yj) yjP
yj2YfA(B0
1;B0
2;:::)(yj)
en échantillonné.D'autres méthodes sont utilisables :� Le maximum, dans le cas où max(Y ) est réduit à un élément avec max(Y ) = fy0g
� Le maximum moyen y0 =
hPyj2max(Y ) yj
i
jmax(Y )j
� Le milieu des maxima y0 = (y0 + y00) =2 avec y0 et y00 respectivement le plus petit etle plus grand des éléments de max(Y )
� Le premier maximum y0
Certaines méthodes permettent de réaliser en même temps les étapes 2 et 3 en choi-sissant pour représentant de l'ensemble des résultats intermédiaires la moyenne pondéréedes représentants des résultats intermédiaires B0
i obtenus par chacune des règles Ri.� La méthode des hauteurs y0 = [
Pi yih(B
0i)] = [
Pi h(B
0i)]
� La méthode des aires y0 = [P
i yiS(B0i)] = [
Pi S(B
0i)]
1.4.5.2 Méthode de Mandani et de Larsen
Cette méthode est historiquement la première à avoir été proposée et est assez simpleà mettre en ÷uvre. Elles peuvent être regardée comme des méthodes logiques particulièresreposant sur le choix de la fonction d'agrégation
� la t-norme de ZADEH pour la méthode de Mandani� la t-norme probabiliste pour la méthode de LarsenAvec la méthode de Mandani le résultat intermédiaire est obtenu par
8 y 2 Y; fB0
1(y) = min [min (f11(x1); f12(x2)) ; f1(y)]
et par la méthode de Larsen
8 y 2 Y; fB0
1(y) = min [min (f11(x1):f12(x2)) :f1(y)]
1.4.5.3 Méthode par Interpolation
Cette méthode est complètement di�érente et est seulement utilisable dans le casoù les fonctions d'appartenance caractérisant les variables sont des fonctions monotones.Cette monotonie permet de procéder par interpolation entre les valeurs de Y obtenuesgrâce aux diverses règles Ri. Ainsi pour une observation telle que V1 = x01; V2 = x02 onutilise les valeurs suivantes :
�1 = min (f11(x1); f12(x2)) ; �2 = min (f21(x1); f22(x2)) : : :
et les points y1; y2; : : : tels que :
�1 = f1(y1); �2 = f2(y2); : : :
L.A.M.I.H. c 98 Yann MORERE

20 Réseaux de Neurones et Systèmes Flous
µTGTP E Z
-1 1 x20
min
ETSI TGx1
0
µTGTP E Z
-1 1 x1
EZx2 ALORS x =EZR
µTGTP E Z
-1 1 x20
OUSI EZx1
0
µTGTP E Z
-1 1 x1
TPx2 ALORS x =TPR
max
min
min
1234567890123456789012345678901234567890
0
µTGTP E Z
-1 1 xR
xR0
µTGTP E Z
-1 1
xR0
µTGTP E Z
-1 1
0.33
0.67
x =0.441
x =-0.672
0.67
0.33 0.33
123456789012341234567890123412345678901234123456789012341234567890123412345678901234
123456789012345678901234567890123456789012345678901234567890
max
µR2
(x )R
µR1
(x )R
µRES
(x )R
OU
Règle
Règle
Fig. 1.4 � Représentation graphique de la méthode de Mandani
1.4.5.4 Méthode de Takagi et Sugeno
La plupart des implications �oues utilisent des variables �oues avec fonctions d'appar-tenances monomodales. L'utilisation de l'agrégation par inférence des règles ne permetpas d'avoir de bon résultat dans la commande de système multivariable. Il faut alorsaugmenter considérablement le nombre de variables �oues et donc le nombre de règles.
L'implication �oue présentée par Takagi et Sugeno est basée sur la partition �oue del'ensemble des entrées. Dans chaque sous-ensemble �ou une équation linéaire lie les entréeset les sorties. La sortie non �oue de ce raisonnement �ou est donnée par l'agrégation desvaleurs �oues résultantes des règles utilisées par les entrées.
Forme des Règles Floues Utilisées par Takagi & Sugeno Soit �A(x) la fonctiond'appartenance à un sous-ensemble �ou A avec x 2 X univers du discours. On dé�nit lavaleur réelle de "x est A et y est B" par l'expression suivante :
jx est A et y est Bj = A(x) ^ B(y)
La règle �oue R est de la forme :
R : si f(x1 est A1; : : : ; xk est Ak) alors y = g(x1; : : : ; xk)
où� y est la variable de conclusion� x1; : : : ; xk Variables de prémices utilisées aussi dans la conclusion� A1; : : : ; Ak Ensembles �ous avec fonctions d'appartenances linéaires représentantun sous-espace �ou dans lequel la règle R peut être vue comme le raisonnement
� f fonction logique qui lie les propositions dans les prémices� g fonction qui calcule la valeur de y lorsque x1; : : : ; xk véri�ent les prémicesDans le cas de Takagi & Sugeno la règle R s'écrit :
Si x1 est A1 et : : : xk est Ak alors y = p0 + p1x1 + : : :+ pkxk
Ensuite la valeur réelle �nale de la sortie y inférée depuis n règles est calculée commela moyenne de tous les sorties de chaque règle yi avec les poids !i =
Q�i(x
0i ) avec �(x)
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.5 Apprentissage des Systèmes Flous 21
fonction d'appartenance du sous-ensemble �ou Ai :
y =
P!iyiP!i
L'approximation linéaire faite par les règles Ri prises séparément, avec le raisonnement�ou, ces équations linéaires liant entrées et sorties permettent de passer de façon continuede l'une des équations à l'autre. Ceci est aussi un moyen de réduire le nombre de règles.
Exemple d'Utilisation de Règles Floue T & S Soit les trois règles �oues suivantes :R1 Si x1 est petit1 et x2 est petit2 alors y = x1 + x2R2 Si x1 est grand1 alors y = 2� x1R2 Si x2 est grand2 alors y = 3� x2
R1
R2
R3
Règle Prémice Conclusion Valeur Réelle
0 16
petit petit
0 8
1 2
10 20
10 20
0.3750.25
0.2
0.375
grand1
grand2
y = 12 + 5 = 17
min(0.25,0.375)=0.25
y = 2 x 12 = 24
y = 3 x 5 = 15
0.2
0.375
x = 121 x = 52
Fig. 1.5 � Représentation de la méthode de Takagi & Sugeno
et les valeurs d'entrées x1 = 12; x2 = 5 alors la valeur résultante des inférences desrègles �oues est Cf. 1.5:
y =0:25� 17 + 0:2� 24 + 0:375� 15
0:25 + 0:2 + 0:375= 17:8
1.5 Apprentissage des Systèmes Flous
1.5.1 introduction
Pour tous les systèmes complexes qui utilisent des données numériques, la connaissancea priori du système par concertation avec les experts donne une bonne base pour ladé�nition du contrôleur �ou, mais il peut être très intéressant d'ajuster les paramètresde ce dernier a�n d'obtenir de meilleurs résultats. On parle alors d'apprentissage ouentraînement de systèmes �ous. La suite de cette section donne un série d'algorithmed'adaptation pour les systèmes �ous.
L.A.M.I.H. c 98 Yann MORERE

22 Réseaux de Neurones et Systèmes Flous
1.5.2 Apprentissage de Systèmes Flou par Rétropropagation
1.5.2.1 Introduction
Au départ l'algorithme de rétropropagation était appliqué à l'adaptation des poidsdes réseaux de neurones arti�ciels multicouches. L'idée est donc de représenter le système�ou comme un réseau de neurones et de lui appliquer l'algorithme [WANG, 1995].
Avec la forme �oue de l'équation 1.8, on peut représenter le système �ou par un réseaude neurones à trois couches comme le montre la �gure 1.6.
x
µ
µ =exp[-(x-x ) / ]2 σ i2j
ij
.......
.......
zMz 1
.......
y 1 yM
f=a/b
f
.......
gi
j
x1xn
g g g g
couche 1
couche 3
couche 2
a b
Fig. 1.6 � Modélisation neuronale d'un système �ou
1.5.2.2 Rétropropagation pour les Systèmes Flous
Soit une paire d'entrées/sorties (xp; dp); xp 2 U � Rn ; dp 2 V � R. On doit alors
dé�nirr un système �ou f(x) du type 1.8 tel que
ep =1
2[f(xp)� dp]
2 (1.9)
soit minimisé.On suppose que M est connu et al;i = 1, le problème devient alors l'apprentissage des
paramètres �yl; �xl; �l;i qui minimise ep de 1.9. A�n d'ajuster les paramètres �yl; i on utilisela relation suivante :
�yl(k + 1) = �yl(k)� �@e
@�yl(k)jk (1.10)
où l = 1; 2; : : : ;M et k = 1; 2; : : : et � est le pas d'apprentissage.
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.5 Apprentissage des Systèmes Flous 23
D'après la �gure 1.6 on a f = a=b et a =PM
l=1 (�ylzl); b =PM
l=1 zl et zl =Qni=1 exp
���xi��xji�ji
�2�La loi d'adaptation devient alors :
�yl(k + 1) = �yl(k)� �f � d
bzl (1.11)
De la même façon on utilise les équations suivantes pour ajuster les paramètres de �xl;iet �l;i
�xl;i(k + 1) = �xl;i(k)� �f � d
b(�yl � f)zl
2(xi;p � �xl;i(k))2
�2l;i(k)(1.12)
��l;i(k + 1) = ��l;i(k)� �f � d
b(�yl � f)zl
2(xi;p � �xl;i(k))2
�3l;i(k)(1.13)
La mise à jour des paramètres �xl;i et ��l;i se font suivant les équations 1.12 et 1.13.
1.5.2.3 Conclusion
Cet algorithme peut être appliqué pour l'identi�cation de système non linéaire dy-namique. En e�et comme les systèmes �ous sont des approximateurs universelles et quel'on possède maintenant l'algorithme de rétropropagation, par analogie avec les réseauxde neurones arti�ciels il est possible comme ces derniers d'approximer n'importe quellesystème. L'intérêt par rapport au réseaux de neurones est que l'identi�cation �oue desparamètres à une signi�cation physique. Les �yl;i sont les centres des conclusions �oues.Les �xl;i et �l;i sont les centres et rayons des prémices �oues. De plus la construction d'unmodèle �oue initial est basé sur les connaissances des experts, ce qui permet d'intégrerdes données propres au système et donc lors de la phase d'apprentissage d'accélérer laconvergence de l'algorithme.
1.5.3 Moindres Carrés Orthogonaux pour les Systèmes Flous
1.5.3.1 Introduction
Le principal inconvénient de la rétropropagation du gradient de l'erreur est que l'al-gorithme peut se bloquer dans des minima locaux lors de la phase d'apprentissage et saconvergence est assez lente (si le pas de calcul est très petit). Ici On adapte le système �ouen le rendant équivalent à une série de fonctions à base �oue(FBF). Ce développementen série de FBFs permet d'utiliser l'algorithme des moindres carrés orthogonaux (OLS :Orthogonal Least Square)car le système est alors linéaire par rapport à ses paramètresajustables. Cet algorithme est plus rapide que la rétropropagation et ne nécessite qu'uneseule itération.
1.5.3.2 Du Système Flou à la Série de Fonctions à Base Floue
Soit le système �ou dé�nit par l'équation 1.8 on dé�nit une fonction à base �oue parla relation :
pi(x) =
Qni=1 �F j
i(xi)PM
j=1
Qni=1 �F j
i(xi)
; j = 1; 2; : : : ;M (1.14)
L.A.M.I.H. c 98 Yann MORERE

24 Réseaux de Neurones et Systèmes Flous
où �F ji(xi) = ai;j exp
��1
2
�xi��xi;j�i;j
�2�sont des fonctions d'appartenances gaussiennes. Le
système �ou s'écrit alors :
f(x) =MXj=1
pj(x)�j (1.15)
où les �j = �yj 2 R sont des constantes.D'après 1.14 le système �ou peut être vu comme non linéaire par rapport à ses pa-
ramètres �i;j; ai;j; �xi;j et alors on doit utiliser des algorithmes d'optimisation non linéairecomme la rétropropagation. Mais d'un autre côté si l'on �xe certains paramètres commeles centres et les rayons des fonctions FBFs on obtient un système linéaire par rapportà ses paramètres suivant l'équation 1.15. L'avantage de ce point de vue est qu'il permetd'utiliser l'algorithme des moindres carrés orthogonaux très puissant pour l'estimationdes paramètres.
1.5.3.3 Apprentissage par Moindres Carrés Orthogonaux
Le développement en fonction à bases �oues peut être vu comme un cas particulierd'un modèle de régresseur linéaire du type :
d(t) =MXj=1
pj(t)�j + e(t) (1.16)
où d(t) est la sortie du système, �j les paramètres réels du système �ou et pj(t) lesrégresseurs qui sont des fonctions �xées par rapport aux entrées x(t) et e(t) est l'erreurentre le système réel et le système identi�é.
Si l'on applique N paires d'entrées/sorties aux systèmes décrit dans l'équation 1.16on obtient la forme matricielle suivante
D = P�+ E (1.17)
où D = [d(1) : : : d(N)]T ; P = [p1 : : : pn] avec pi = [pi(1); : : : ; pi(N)]T ;� =[�1 : : : �N ]
T ; E = [e(1) : : : e(N)]T .A�n d'exécuter l'algorithme OLS sur notre équation 1.17, il faut commencer par �xer
les paramètres �i;j; ai;j et �xi;j dans les FBFs qui caractérisent pj(x).On choisit pour cela très simplement tous les ai;j = 1 car les fonctions d'appartenances
du système �ou sont supposées avoir la valeur maximale 1 en leurs centres.Les �xi;j centres des FBFs sont initialisées aux premières valeurs des entrées c-à-d
�xi;j = xi;0 et les rayons des FBFs sont initialisés aux valeurs �i;j = [max(xi;0(j); j =1; 2; : : : ; N) � min(xi;0(j); j = 1; 2; : : : ; N)]=MS où i = 1; 2; : : : ; n; j = 1; 2; : : : ; N etMS est le nombre de FBFs qui est le plus souvent dé�ni par les contraintes (M << N).
Ensuite après cette phase d'initialisation il su�t d'appliquer l'algorithme OLS poursélectionner les fonction FBFs les plus représentatives de N fonction FBFs déterminéespar la phase d'initialisation.
� A la première itération, pour 1 � i � N on calcul
!(i)1 = pi; g
(i)1 =
�!(i)1
�Td0 =
��!(i)1
�T!(i)1
�(1.18)
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.5 Apprentissage des Systèmes Flous 25
[err]i1 =�g(i)1
�2 �!(i)1
�T!(i)1 =�dT0 d0
�(1.19)
où pi = [pi(x0(1)); : : : ; pi(x0(N))]T et les pi(x0(t)) sont donné par la méthode dedétermination de FBF initiales. On cherche ensuite
[err]i11 = max�[err]i1; 1 � i � N
�(1.20)
et on sélectionne
!1 = !i11 = pi1 ; g1 = gi11 (1.21)
� A l'étape k avec 2 � k � Ms, pour 1 � i � N; i 6= i1; : : : ; i 6= ik�1 on calcul
�(i)jk = !Tj pi=
�!Tj !j
�; 1 � j � k (1.22)
!(i)k = pi �
k�1Xj=1
�(i)jk!j; g
(i)k =
�!(i)k
�Td0=
��!(i)k
�T!(i)k
�(1.23)
[err](i)k =
�g(i)k
�2 �!(i)k
�T �!(i)k
�=�dT0 d0
�(1.24)
On cherche alors
[err]ikk = max�[err]
(i)k ; 1 � i � N; i 6= i1; : : : ; i 6= ik�1
�(1.25)
et on sélectionne
!k = !(ik)k ; gk = g
(ik)k (1.26)
On résout le système triangulaire suivant
A(MS)�(MS) = g(MS) (1.27)
où
A(MS) =
2666664
1 �(i2)12 �
(i3)13 : : : �
(iMS)
1Ms
0 1 �(i3)23 : : : �
(iMS)
2Ms
: : : : : : : : : : : : : : :
0 0 : : : 1 �(iMS
)
MS�1 MS
0 0 0 : : : 1
3777775 (1.28)
avec
g(MS) = [g1; : : : ; gMS]T ; �(MS) = [�
(MS)1 ; : : : ;�
(MS)MS
]T (1.29)
Le développement en FBF �nal est donné par
f(x) =
MSXj=1
pij (x)�(MS) (1.30)
où pij (x) est le sous ensemble �nal des FBFs séléctionnées par l'algorithme OLS.
L.A.M.I.H. c 98 Yann MORERE

26 Réseaux de Neurones et Systèmes Flous
1.5.3.4 Conclusion
On peut donc représenter un système �ou comme un combinaison linéaire de fonc-tions à bases �oues et avec l'algorithme des moindres carrés orthogonaux déterminer uncontrôleur e�cace.
1.5.4 Apprentissage par Base de Règles Floues
1.5.4.1 Introduction
Ici l'algorithme développé consiste à dé�nir un système �oue adaptatif basé sur despaires de données d'entrées/sorties et des règles �oues linguistiques de type "Si-Alors".L'idée principale consiste à générer des règles �oues à partir des paires d'entrées/sortieset de les combiner avec les règles linguistiques dans un base de règle.
1.5.4.2 Création des Règles Floues avec les Données Numériques
La tâche consiste donc à transformer des données numériques en données �oues sous laformes de règles. L'approche de transformation des données se décompose en cinq étapes.
Étape 1: Division des espaces d'entrées et de sorties en régions �ouesOn suppose que l'on peut bornés les domaines d'appartenance des variables d'entrées
et sorties sur des intervalles du types [x�i ; x+i ] pour les entrées et [y
�i ; y
+i ] pour les sorties.
On divise alors chacun des ces intervalles en 2N + 1 régions (N peut être di�érent pourchaque variable) Cf. �gure 1.7.
Le choix de la fonction d'appartenance autres que des triangles est tout à fait possible.Étape 2: Création des règles �oues à partir des données Tout d'abord il faut
déterminer les valeurs d'appartenance de chaque variable d'entrées x(i)1 ; x(i)2 ; : : : ; x(i)n et desorties y(i)1 ; y
(i)2 ; : : : ; y
(i)n dans chaque région.
Ensuite on �xe pour variable xi; yj ont la région qui lui correspond le mieux en termede valeur d'appartenance.
Finalement on obtient un règle pour chaque paire d'entrée/sortie du type :Règle 1 : Si x1 est A1 et x2 est B1 Alors y est U1.Étape 3: Détermination de la valeur d'appartenance de chaque règle Comme
chaque paire de données entraîne la création de d'une règle il est fort probable que desrègles contradictoires apparaissent, il faut donc créer une sorte de compétition entre lesrègles en leur a�ectant une valeur d'appartenance. Cette valeur d'appartenance est dé�niede la manière suivante : Pour une règle R1 du type "Si x1 est A et x2 est B Alors y estC" on à la valeur suivante :
D(R1) = �A(x1)�B(x2)�C(y)
Lorsque deux règles rentrent en concurrence on choisit celle qui possède la plus grandevaleur d'appartenance.
Étape 4: Création de la base de règle combinée Il faut donc maintenant remplirle tableau de la bas de règle : pour cela il faut maintenant prendre en compte les règleslinguistiques décrites par les experts (ce type de règle possède aussi une valeur d'appar-tenance qui ici serait plus une valeur de croyance aux dires des experts). Si pour unemême conclusion deux règles entre en concurrence (celle crée par les donnée numériqueset celle extraite des dires des experts ) on choisit celle qui possède la plus grande valeursd'appartenance.
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.5 Apprentissage des Systèmes Flous 27
µ (x )i1.0
0.0x
ix i+
x i-
µ (y )i1.0
0.0y iy i
+y
i-
Fig. 1.7 � Partitions des variables d'entrée et de sorties en régions �oues
On voit bien ici que les deux types d'information sont codées dans la même base derègle.
Étape 5: Création d'une cartographie basée sur la base de règle A�n de dé-terminer la valeur réelle de la sortie du système �oue on utilise la défuzzi�cation suivante :
� Premièrement pour une paires de données d'entrées/sorties, on combine les prémicesde la règle i en utilisant le produit pour obtenir le degrés d'appartenance de lasortie �iOi = �Ii1(x1)�Ii2(x2)où Oi représente la région de la sortie de la règle i et I ijreprésente les régions des des entrées de la règles i pour le je composant.
� La formule de défuzzi�cation est un moyenne centrée :
y =
PMi=1 �
iOi�yiPM
i=1 �iOi
où �yi représente le centre de la région Oi.
1.5.4.3 Conclusion
Cette procédure en cinq étapes peut être facilement étendue au cas multivariable. Aveccette méthode il est possible de codé ensemble sous la forme d'un système �ou uniquedes données di�érentes. L'avantage principale de cette méthode est la simplicité de miseen ÷uvre
L.A.M.I.H. c 98 Yann MORERE

28 Réseaux de Neurones et Systèmes Flous
1.5.5 Apprentissage de Système Flou par Agrégation avec le Plus
Proche Voisin
1.5.5.1 Introduction
Cette méthode permet la con�guration d'un système �ou de façon optimal par l'ap-prentissage de ces paires d'entrées/sorties à n'importe quel degrés d'acuité. L'idée est trèssimple, au départ on considère le système �ou composé d'autant de règle �oue qu'il y ade paires d'entrées-sorties.
Ensuite il faut agrégé les données échantillonnées entre elles par la méthodes des plusproches voisins. Il su�t ensuite de choisir le meilleur des systèmes �ous pour ce groupede données. On appelle cela aussi système �ou adaptatif.
1.5.5.2 Système Flou Optimal
On suppose que pour N paires d'entrées/sorties (avec N assez petit), on peutconstruire un système �oue qui copie les paires d'entrées/sorties à la précision �. Cesystème �ou est donné par l'équation 1.31 :
f(x) =
PNl=1 yl exp
�� jx��xlj
�2
2�
PNl=1 exp
�� jx��xlj
�2
2� (1.31)
Il est à noter que � est un paramètre que l'on peut faire varier. Si � est très petitalors l'erreur jf(x)l � ylj devient très petite, mais alors la fonction f(x) devient trèschaotique. Il faut donc choisir � avec en vue le problème de minimisation de l'erreur etde généralisation.
On peut remarquer que f(x) est une fonction de régression non-linéaire qui permetune interpolation douce entre les données d'entrées/sorties.
1.5.5.3 Système Flou Optimal Adaptatif
On a pu voir que le système �ou optimal utilise une règle pour chaque paire d'en-trée/sortie. Ceci devient impraticable lorsque les données deviennent nombreuses. Ilconvient alors d'utiliser les techniques d'agrégation de données et chaque groupe de don-nées sera représenté par une règle bien choisie.
Méthode d'Agrégation� On commence avec la première paire d'entrée/sortie (x1; y1), on �xe le centre dugroupe x1;0 en x1 et on �xe A1(1) = y1 et B1(1) = 1. On choisit un rayon r.
� On suppose que lorsque l'on choisit la kepaire d'entrée/sortie il y a déjà M groupede données de créés avec M centres x1;0; x2;0; x3;0; : : : ; xM;0. Il faut alors calculerla distance de xk à tous les centres des groupes par jxk � xl;0j; l = 1; 2; : : : ;M eton considère la plus petite distance jxk � xlk;0j qui corresponds au groupe le plusproche de xk et celui dont le centre est xlk;0.
1. Si jxk�xlk;0j > r,on �xe xk comme un nouveau centre de groupe xM+1;0, et on�xe AM+1(k) = yk; BM+1(k) = 1 et on conserve Al(k) = Al(k � 1); Bl(k) =Bl(k � 1) pour l = 1; 2; : : : ;M
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.5 Apprentissage des Systèmes Flous 29
2. Si jxk � xlk;0j � r on calcul de la manière suivante :
Alk(k) = Alk(k � 1) + yk (1.32)
Blk(k) = Blk(k � 1) + 1 (1.33)
et on �xe
Al(k) = Al(k � 1) (1.34)
Bl(k) = Bl(k � 1) (1.35)
pour l = 1; 2; : : : ;M avec l 6= lk.
� Le système �ou à l'étape k est calculer de la manière suivante :
fk(x) =
PMl=1Al(k) exp
��jx�xl;0j
�2
2�
PMl=1Bl(k) exp
��jx�xl;0j
�2
2� (1.36)
si xk ne crée pas de nouveau groupe. Si xk crée un nouveau groupe alorsM de vientM + 1 dans 1.36.
On peut remarquer que le rayon r est la variable qui permet de régler la complexitédu système �ou. Plus r est petit plus il y a de groupes et donc de règles �oues.
On peut aussi voir que l'apprentissage de fait autant au niveau des paramètres quesur la structure : en e�et la principale caractéristique est la possibilité d'ajouter des règlespuisque l'on ajoute des groupes.
Il est possible d'ajouter un facteur d'oubli au équations des coe�cients A et B1.32,1.33,1.34,1.35. Ceci peut être très pratique dans le cas d'un système �ou est uti-lisé pour modéliser un système variant dans le temps.
les équations 1.32,1.33,1.34,1.35 deviennent alors :
Alk(k) =� � 1
�Alk(k � 1) +
1
�yk (1.37)
Blk(k) =� � 1
�Blk(k � 1) +
1
�(1.38)
et on �xe alors
Al(k) =� � 1
�Al(k � 1) (1.39)
Bl(k) =� � 1
�Bl(k � 1) (1.40)
où � peut être considérer comme une constante temporelle d'une fonction de retardexponentiel.
L.A.M.I.H. c 98 Yann MORERE

30 Réseaux de Neurones et Systèmes Flous
1.5.5.4 Conclusion
Il est donc possible de construire un système �ou performant grâce à cette algorithme.Ce type de système �ou adaptatif est utilisé pour construire des régulateurs de systèmesnon-linéaires dynamiques.
1.6 Logique Floue et Réseaux de Neurones
L'utilisation conjointe des réseaux de neurones et de la logique �oue permet de tireravantage des deux méthodes. Les capacités d'apprentissage de la première et la lisibilitéet la souplesse de la seconde.
Diverses associations de ces deux méthodes ont été développées de puis 1988 et sontle plus souvent orientées vers la commandes de systèmes complexes et les problèmes declassi�cation.
1.6.1 Méthodes Neuro-Floues
1.6.1.1 Première Méthode
L'une des premières méthodes est le codage du système d'inférences �oues sous laforme d'un réseau de neurone multicouche dans lequel les poids correspondent aux pa-ramètres du système. L'architecture du réseau dépend du type de règle et des méthodesd'inférence, d'agrégation et de défuzzi�cation choisies (Cf. �gure 1.8).
x1
x2
fA11
fA1n
fA21
fA2n
...
...
et
et
et
agrégation
W1
iW
pW
W
......
Fig. 1.8 � Exemple de réseau de neurones pour la commande �oue
D'après la �gure 1.8 pour des règles de la formes "si V1 est A1i et V2 est A2i alorsW = wi", on a un réseau de neurones qui admet pour entrée les valeurs x1 et x2 prises parles variables V1 et V2 et dont les deux couches cachées correspondent respectivement aucalcul de la valeur des fonctions d'appartenance A1i pour l'entrée x1 et A2i pour l'entrée x2et à celui de la valeur prise par la conjonction des conditions de chaque règle utilisant unopérateur adéquat. Les fonctions d'appartenance sont considérées comme des paramètres,ajustées par les poids entrant dans la première couche cachée. Les conclusions Wi desrègles sont également des paramètres ajustables par l'intermédiaire des poids associés àla dernière couche.
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.7 Système Flou Adaptatif et Réseau de Neurones 31
1.6.1.2 Seconde Méthode
Cette seconde approche consiste à utiliser les réseaux de neurones pour remplacerchacune des composantes d'un système de commande �oue. Ces réseaux servent d'ap-prentissage des fonctions d'appartenance, au calcul de l'inférence à la réalisation de laphase d'agrégation et de défuzzi�cation. Ils peuvent réaliser l'extraction des règles �ouesen analysant la corrélation qui existe entre les entrées et les sorties du réseau de neurones.Ces approches permettent de résoudre deux problèmes important de la logique �oue :
� Détermination des fonction d'appartenance� Adaptation a l'environnement du système
1.6.1.3 Troisième Méthode
Elle utilise des réseaux de neurones et des systèmes �ous associés en série ou enparallèle. Plusieurs variantes d'utilisation sont possibles :
� Le réseau de neurones fonctionne en amont du système �ou. Les variables d'entréesdu système �ou sont déterminées à partir des sorties du réseau de neurones (dans lecas où elles ne sont pas mesurables directement) Cf. �gure 1.9 ou encore un réseaude neurones e�ectue une tâche de classi�cation ou de reconnaissances de formes,qui est suivit d'un système �ou d'aide à la décision.
� Un réseau de neurones qui fonctionne en aval du système �ou, dans le but d'ajusterles sortie d'un système de commande �oue à de nouvelles connaissances obtenues,les variables de sortie étant les erreurs sur les variable de sortie du système �ou Cf.�gure 1.10
Réseau
Neuronal
SystèmeFlou Z1
Z2
y2
y1x2
y1'
yk'
...
x1
...
xk
Fig. 1.9 � Exemple d'association en série d'un réseau de neurone et d'un système �ou
1.7 Système Flou Adaptatif et Réseau de Neurones
1.7.1 Introduction
Les systèmes �ous et les réseaux de neurones ont le même objectif, tous les deuxtentent de modéliser le fonctionnement du cerveau humain. Mais il y une nuance entreles deux. Les réseaux de neurones tentent de modéliser l'architecture du cerveau en créantun modélisation de l'entité du cerveau : le neurone. Les systèmes �ous eux modélisent lecerveau par son mode de fonctionnement (apprentissage et déduction).
L.A.M.I.H. c 98 Yann MORERE
32 Réseaux de Neurones et Systèmes Flous
Réseau
Neuronal
SystèmeFlou
z2
x2
x1
...
xn+k
x2
x1
...
xk
Z1
Z2
z1
dz 1
dz2
Fig. 1.10 � Exemple d'association en parallèle d'un réseau de neurone et d'un système�ou
1.7.2 Perceptron et Système Flou Adaptatif
Un perceptron est un réseau de neurones multicouche à propagation de signal avantCf. 1.11 Le signal se propage donc de la couche d'entrées vers la couche de sortie. Les
Couchede sortie
Couched'entrée
CoucheCachée 1
CoucheCachée 2
x1
xn
x1'
xn1'
x 1''
xn2''ym
y1
Entrées Sorties
yj =f(Σ
i=1
n2
ωij'' x ''i − θj )
xj =f(Σ
i=1
n1
ωij' − θj )'' x '
i
xj =f(Σ
i=1
n
ωij − θj )' x i
Fig. 1.11 � Perceptron à deux couches cachées
!ij représentent les poids des neurones, �j un seuillage et en�n la fonction f(�) qui est leplus souvent une sigmoïde.
f(x) =1
1 + exp(�x)(1.41)
Ainsi pour un vecteur d'entrée x = (x1; : : : ; xn)T on calcule successivement les sorties
des deux couches cachées x0 = (x01; : : : ; x0n1)
T et x00 = (x001; : : : ; x00n2)
T et en�n le sortie duréseau y = (y1; : : : ; ym)
T
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.7 Système Flou Adaptatif et Réseau de Neurones 33
Si on utilise des données d'entrées/sorties pour l'apprentissage du réseau de neurones,il est alors possible d'utiliser l'algorithme de rétropropagation du gradient de l'erreur a�nde minimiser une erreur quadratique.
A chaque couple entrée/sortie, une erreur est calculée, le gradient, ou pente, de l'erreurest déterminé. Ensuite les poids et les biais sont modi�és en ligne sur le réseau. On réitèreces calculs jusqu'à l'obtention du critère d'arrêt.
1.7.2.1 Algorithme
1. Initialisation des poids !qij à des petites valeurs aléatoires
2. Présentation d'une entrée xk et de la sortie désirée dk.
3. Calcul de la sortie actuelle par propagation à travers les couches par y[q]j =
f�P
i ![q]ji � y
[q�1]i
�où f est la fonction de transfert du neurone et [q] la qecouche
du réseau.
4. Accumulation des erreurs en sortie � =P
k
�dk � y
[s]k
�Où dk est la sortie désirée
associée au vecteur d'entrée xk. Où y[s]k est la sortie obtenue sur la dernière couche
au temps t. � est l'erreur cumulée pour k présentations de couples (xk; dk).
5. Rétropropagation du gradient de l'erreur (�) depuis la dernière couche vers la pre-mière couche� F Pour chaque cellule de sortie �[s]i = �
�di � y
[s]i
�� f 0�p[s]i
�� F Pour chaque cellule cachée �[q]i = �
Pk �
[q+1]k � !ki � f
0��[p]i
�6. Mise à jour des poids selon la règle : �![q]
ij = � ���[q]k � x[q]j
�où � est le coe�cient
d'apprentissage compris dans l'intervalle [0; 1].
7. Retour à 2 tant qu'il y a des couples à présenter.
Choix du critère à minimiserDans le cas de la rétropropagation de l'erreur, le critère à minimiser est une erreur qua-
dratique. L'application de l'algorithme du gradient nécessité la dérivabilité de la fonction
de transfert. Le critère de minimisation d'erreur est le suivant � =P
k
�dk � y
[s]k
�21.7.2.2 Avantages et Inconvénients
Avantages Ce fût un des premiers algorithmes développés pour l'apprentissage desréseaux de neurones multicouches de type feedforward. Il permet de pallier une carencede l'algorithme du perceptron qui est incapable de modi�er les poids des couches cachées[DAVALO et NAÏM, 1993]. L'implémentation informatique ne présente pas de di�cultés.Il a surtout permis de sortir le connexionnisme de l'impasse que représente l'apprentissagedes réseaux de types feedforward multicouches en permettant la modi�cation des poidsdes couches cachées.
Inconvénients En ce qui concerne l'algorithme
� L'algorithme de rétro-propagation du gradient de l'erreur suit la descente du gra-dient de l'erreur : un minimum local peut rapidement bloquer la recherche desoptima globaux.
L.A.M.I.H. c 98 Yann MORERE

34 Réseaux de Neurones et Systèmes Flous
� L'algorithme de rétropropagation est gourmand en temps de calcul.� Importance du choix du coe�cient d'apprentissage, si le coe�cient est trop grandla dynamique du réseau va osciller autour de l'optimum, si il est trop petit, laconvergence est lente et elle va se faire piéger dans un minimum local.
� Les fonctions de transfert doivent être dérivables.
1.7.3 Réseau à Fonctions à Base Radiale et Système Flou Adap-
tatif
Basé sur une réalité biologique, Moody et Darken [MOODY et DARKEN, 1988] ontproposé un réseau de neurone nommé "Radial Basis Function Network (RBF Network)".
x1
xn
y1
y j
ym
ωij
Fig. 1.12 � Réseau à Fonctions à Base Radiale
Chaque sortie yi peut être calculée de deux manières :
yi =nXj=1
! � ijRj(x) (1.42)
la plus simple ou
yi =
Pnj=1 ! � ijRj(x)Pn
j=1Rj(x)(1.43)
qui donne une réponse normée avec Rj(x) tel que
Rj = exp
nXi=1
�(xi � ci;j)
2
�2i;j
!(1.44)
ou
Rj =1
1 + exp�Pn
i=1�(xi�ci;j)2
�2i;j
� (1.45)
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 35
Après avoir ecrit ces équations (1.10 et 1.43, il est très facile de se rendre compte dela similitude entre les réseaux RBF et les systèmes �ous dé�nit par Wang 1.8.
Mais ces deux approches sont di�érentes en ce sens que les réseaux RBF sont un casparticulier des systèmes �ous adaptatifs du fait des restrictions choisie par [WANG, 1995].
De plus les fonctions d'appartenance peuvent prendre di�érentes formes (gaussienne,triangulaire, trapézoïdale, ...) alors que dans un réseau RBF les fonctions de transfertssont toujours gaussiennes.
1.7.3.1 Conclusion
Bien que les deux approches soit di�érentes, l'une basée sur l'architecture du cerveauhumain et l'autre sur son mode de fonctionnement, les équations résultantes sont trèssemblables.
Mais on peut remarquer que les systèmes �ous comparés aux réseaux RBF sont plusgénéraux.
De plus les réseaux de neurones ne peuvent prendre intégrer facilement de la connais-sances linguistiques, ils sont basés sur un apprentissage des entrées/sorties.
1.8 Commande Floue Adaptative à Stabilité Indirecte
de Systèmes Non-Linéaires
1.8.1 Introduction
Lorsque les systèmes �ous développés précédemment sont utilisés comme régulateurson parle alors de régulateurs �ous. Ces régulateurs sont largement utilisés dans l'industrie[TANAKA et al., 1995]
La commande �oue possède des avantages indéniables. Dans le cas d'un modèle ma-thématique du système di�cile à obtenir, il est très pratique d'utiliser les informationsque l'on peut obtenir facilement (mesures numériques des variables utiles, descriptionlinguistiques du système par les experts humains). Par dé�nition le système �ou peutprendre en compte les deux types de données.
Cette approche ne nécessite pas de modèle mathématique du système.La commande �oue génère des régulateurs non-linéaires qui est en concordance avec
le fait qu'il sont des approximateurs universels. Il devient alors possible de construire unrégulateur �ou pour n'importe quel système non-linéaire.
La commande �oue est aussi simple à comprendre car elle reprend le langage humaindans ses dé�nitions de règles.
Ce type de commande reste simple à mettre en ÷uvre avec les ordinateur et calculateurdont nous disposons de nos jours ce qui contribue à en faire approche très bon marchépour les entreprise.
1.8.2 Les di�érents Types de Commandes Floues
1.8.2.1 Commande Floue Adaptative
Le plus souvent les régulateurs �ous sont utilisés dans des systèmes qui possèdes desvariations inconnues intrinsèques. L'objectif est donc de conserver de bonne performancedu système complet en adaptant le régulateur en fonction des variations du système.
L.A.M.I.H. c 98 Yann MORERE

36 Réseaux de Neurones et Systèmes Flous
La commande �oue adaptative se compose donc d'un régulateur �ou adaptatif (soitunique soit choisi parmi un groupe de régulateur en fonction de sa performance). La chosela plus importante qui di�érencie un régulateur �ou adaptatif et un régulateur adaptatifconventionnel est que le premier peut prendre en compte des données linguistiques. Cequi est très important lorsque le système possède des incertitudes que l'opérateur humainà appris à anticiper.
1.8.2.2 Commande Adaptative Floue Directe et Indirecte
D'après NARENDRA et PARTHASARATHY [NARENDRA et PARTHASARATHY,1990], les régulateurs �ous sont séparés en deux classes :
� Les régulateurs adaptatifs directs : ici les paramètres du régulateurs sont modi�ésen ligne a�n de minimiser l'erreur entre le modèle de référence et le système réel.Donc si le régulateur possède un système à base de logique �oue on parle alors derégulateur �ou adaptatif direct.
� Les régulateurs adaptatifs indirects : les paramètres du système réel sont estiméset le régulateur est choisi en supposant que les valeurs estimées du sont les vraisvaleurs du système réel. Si le modèle du procédé réel utilise un système à base delogique �oue on parle alors de régulateur �ou adaptatif indirect.
1.8.2.3 Types de Commande �oue Adaptative
Trouver un bon régulateur �ou dépend de la facilité de trouver les bons paramètresde celui-ci par les di�érentes méthodes d'apprentissage décrites précédemment.
Il est aisé de comprendre qu'il estplus simple de trouvé un régulateur �ou optimal(qui répond le mieux au critère de performance choisi) s'il est linéaire par rapport à cesparamètres ajustables. D'un autre coté un régulateurs �ou non-linéaire par rapport à cesparamètres sera beaucoup plus di�cile à trouver mais ses performances seront sans doutemeilleures.
On classe donc ces régulateurs �ous en deux types :� Les régulateurs �ous comprenant des systèmes �ous linéaires par rapport à leursparamètres ajustables sont dit �Régulateur Flou Adaptatif du Premier Type�.
� Les régulateurs �ous comprenant des systèmes �ous non-linéaires par rapport àleurs paramètres ajustables sont dit �Régulateur Flou Adaptatif du Second Type�.
Dans le cas du premier type de régulateur on utilise le système �ou décrit par l'équa-tion suivante :
f(x) =MXl=1
�l�l(x) = �T �(x) (1.46)
où � = (�1; : : : ; �M)T ; � = (�1(x); : : : ; �M(x))T ; �l(x) est n fonction à base �oue dé�niepar
�(x) =
Qni=1 �F l
i(xi)PM
l=1
Qni=1 �F l
i(xi)
(1.47)
�l sont les paramètres ajustables et �F lisont des fonctions d'appartenance données.
Dans le cas du second type de régulateur on utilise le système �ou décrit par l'équationsuivante
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 37
f(x) =
PMl=1 �yl
�Qni=1 al;i exp
���xi��xl;i�l;i
�2��PM
l=1
�Qni=1 al;i exp
���xi��xl;i�l;i
�2�� (1.48)
où �yl; �xl;i et �l;i sont les paramètres ajustables.On peut remarquer d'après les équations que les deux types de régulateurs �ous adap-
tatifs sont non-linéaires.
1.8.3 Conception de Régulateur Flou Adaptatif Indirect basé sur
l'approche de Lyapunov
1.8.3.1 Méthode de Lyapunov
La méthode de Lyapunov permet d'étudier la stabilité de systèmes complexes (régitpar des systèmes di�érentielles).
L'étude la stabilité des systèmes di�érentielle est énoncé de la manière suivante.
Théorème 1.8.1. Soit V (x) une fonction candidate de Lyapunov.
a) V (x) > 0; et 8x 6= 0; V (0) = 0
b) 9�(:); �(:) fonctions scalaires R(n) ! R continues telles que �(kxk) � V (x) �
�(kxk)
c) quand kxk ! 1 alors V (x)!1 fonction indé�niment croissante.
Si _V (x) < 0; 8x 2 Dn domaine de stabilité, la solution de su système di�érentiel estasymptotiquement stable.
1.8.3.2 Application à l'Automatique dans le Cas d'un Système Libre
En Continu Soit le système décrit par la représentation d'état suivante
_X = AX(t)
Il s'agit d'un système libre (pas de commande sur ce système la matrice B est nulle). SoitQ une matrice positive.
Théorème 1.8.2. Le système est stable si et seulement si 9P > 0; ATP + PA+Q = 0(Equation de Lyapunov).
De plus V (X) = XTPX est une fonction candidate de Lyapunov décroissante etR10XTQX dA = XT
(0)PX(0) avec �minkXk2 � XTPX � �maxkXk
2
En Discret Soit le système décrit par la représentation d'état suivante
X(k + 1) = AX(k)
Il s'agit d'un système libre (pas de commande sur ce système la matrice B est nulle). SoitQ une matrice positive.
L.A.M.I.H. c 98 Yann MORERE

38 Réseaux de Neurones et Systèmes Flous
Théorème 1.8.3. Le système est stable si et seulement si 9P > 0; ATPA� P +Q = 0(Equation de Lyapunov en discret).
De plus V (X) = XTPX est une fonction candidate de Lyapunov décroissante etP1i=0X
T (i)QX(i) = XT(0)PX(0) et �V devient
�V (X(k)) = V (X(k + 1))� V (X(k + 1))= X(k + 1)TPX(k + 1)�X(t)TPX(k)= XT (ATPA� P )X
1.8.3.3 Exemples
1. Soit l'équation di�érentielle suivante :
_x = �x +1
2sin x; avec x 2 R
Soit V (x) = 12kxk2 = 1
2xTx. On a alors
_V (x) = _xx = �x2 +1
2x sinx| {z }<x2| {z }
<0
La dérivée est donc strictement décroissante. La solution de l'équation est doncasymptotiquement stable.
2. Soit le système di�érentiel suivant :�_x1_x2
�=
�0 1�1 �1 + x21(t)
��x1x2
�
Soit V (x) = 12(x21 + x22). On a alors
_V (x) = x1 _x1 + x1 _x1= x1x2 � x1x2 + x22(x
21 � 1)| {z }<0?
Le domaine de stabilité Ds est tel que jx1j < 1
Le système est donc asymptotiquement stable si x(0) 2 Ds Cf. �gure 1.13.
1.8.3.4 Application à l'Automatique dans le Cas Général
Soit le système décrit par la représentation d'état suivante
_X = AX(t) +Bu(t)
. Soit Q � 0 et R > 0.Soit l'équation de Riccati : ATP + PA� PBR�1BTP +Q = 0
Théorème 1.8.4. Si les matrices A et B sont sous la forme commandable alors 9!P >0 = la loi u(t) = �R�1BTPX(t) stabilise le système en boucle fermée et minimise lecritère J =
R10XTQX + UTRU dt.
De plus V = XTPX est une fonction candidate de Lyapunov décroissante etR10XTQX dA = XT
(0)PX(0) avec �minkXk2 � XTPX � �maxkXk
2
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 39
123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901123456789012345678901
123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012123456789012345678901212345678901234567890121234567890123456789012
x1
x2
-1 1
Dn
Fig. 1.13 � Domaine de stabilité du système
1.8.3.5 Application à la Conception de Régulateurs Flous
Soit le système �ou décrit par les règles suivantes Ri : i 2 f1; : : : ; rg de la forme :
si z1(t) est Fi1 et : : : zp(t) est F
ip
Sa solution est décrite par le système suivant :�_X(t) = AiX(t) +Biu(t)Y (t) = Ci(t)
Et d'après la dé�nition des règles �oues on a !i (z(t)) =Qp
j=1 �F ij(zj(t)) d'où8><
>:_X(t) =
Pri=1 !i(z(t))(AiX(t)+Biu(t))Pr
i=1 !i(z(t))
Y (t) =Pr
i=1 !i(z(t))(CiX(t))Pri=1 !i(z(t))
(1.49)
Posons h(t) tel que 0 � hi (z(t)) =!i(z(t))Pri=1 !i(z(t))
� 1 etPr
i=1 hi (z(t)) = 1
le système devient alors�_X(t) =
Pri=1 hi (z(t)) (AiX(t) +Biu(t))
Y (t) =Pr
i=1 hi (z(t)) (CiX(t))(1.50)
Cas du système libre Soit le système libre décrit parPr
i=1 hi (z(t)) (AiX(t)) D'aprèsle théorème de Lyapunov soit V = XTPX on a alors
_V =rXi=1
hi (z(t))| {z }�0
[XT�ATi P + PAi
�X| {z }
8i;<0
]
Pour assurer la stabilité il faut donc trouver P telle que 8i; 9 P ;ATi P + PAi < 0
L.A.M.I.H. c 98 Yann MORERE

40 Réseaux de Neurones et Systèmes Flous
RégulateurFlou Système
Fig. 1.14 � Schéma d'un système complexe contrôlé par régulateur �ou
Cas du système général Soit le système de la �gure 1.14 décrit par8<:
_X(t) =Pr
i=1 hi (z(t)) (AiX(t) +Biu(t))
U(t) = �Pr
i=1 hi (z(t)) (FiX(t))(1.51)
On a u(t) =Pr
i=1 hi (z(t)) (FiX(t))Donc _X devient :
_X =Pr
i=1 hi (z(t)) (AiX(t)� Bi
Pri=1 hi (z(t))Fi)X(t)
=Pr
i=1 hiAiX(t)�Pr
i=1 hiBi
Pri=1 hiFiX
=Pr
i=1
Prj=1 hihj (Ai � BiFi)X(t)
de plus onP
hi = 1 D'après Lyapunov il faut trouver P telle que :
8i; 8j 2 R; (Ai �BiFj)TP + P (Ai �BiFj) < 0
Mais _X peut s'écrire :
_X =Pr
i=1 h2i (Ai �BiFi)X(t) +
Prj>i hihj (Ai �BiFj + Aj � BjFi)X(t)
1.8.3.6 Synthèse de Régulateur Flou d'après Wang
Soit le système d'ordre n sous sa forme commandable :
_x1 = x2_x2 = x3
: : :_xn�2 = xn�1
_xn = f(x1; : : : ; xn) + g(x1; : : : ; xn)u; y = x1 (1.52)
ou la forme équivalente
x(n) = f(x; _x; : : : ; x(n�1)) + g(x; _x; : : : ; x(n�1))u; y = x (1.53)
où f et g sont des fonctions inconnues, u 2 R et y 2 R sont les entrées et les sorties dusystème. x = (x1; : : : ; xn)
T = (x1; : : : ; xn)T 2 R est le vecteur d'état du système supposé
mesurable.
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 41
Stabilité du régulateur On suppose aussi pour la commandabilité du système que8x 2 Uc � R
n ; g(x) 6= 0 et par commodité on prendra g(x) > 0; 8x 2 Uc région certainede controllabilité.
On doit maintenant déterminer une commande u = u(u j �) �oue et une loi d'adap-tation des paramètres du vecteur � telles que :
1. Le système en boucle fermée doit être asymptotiquement stable c-à-d que toutesles variables x(t); �(t) et u(x j �doivent être bornées.
2. L'erreur entre la sortie réelle et la sortie simulée, e = ym � y doit être minimisée.
Soit e = (e; _e; : : : ; en�1)T vecteur des dérivées n-ième et k = (kn; : : : ; k1)T 2 R tels
que toutes les racines du polynômes de stabilité h(s) = sn+ k1sn�1+ : : :+ kn soient dans
le demi-plan gauche.Si les fonction f et g sont connues alors la loi de commande est :
u =1
g(x)
��f(x) + y(n)m + kT e
�(1.54)
en remplaçant u de 1.54 dans 1.52 on obtient :
y(n) = �kT e� y(n)m e(n) + k1e(n�1) + : : :+ kne| {z }
e:kT
= 0 (1.55)
donc limt!1 e(t) = 0 qui est l'objectif de la commande.
Régulateur équivalent On remplace f et g inconnue par par les systèmes �ous f(x j �)et g(x j �) du types de 1.46 et 1.48.
f(x j �) et g(x j �) sont donc le la forme :
f(x j �f) = �f(x):�f
g(x j �g) = �g(x):�g
et la loi de commande devient :
uc =1
g(x j �)
h�f(x j �f ) + y(n)m + kT e
i(1.56)
En remplaçant uc de 1.56 dans 1.52 on obtient :
e(n) =y(n)m � f(x)�g(x j �g)� g(x)
g(x j �g):��f(x j �f ) + kT e+ y(n)m
�+ f(x j �f )� kT e� y(n)m
=� kT e+ f(x j �f )� f(x) +�g(x j �g)� g(x)
�uc
(1.57)
ou de façon équivalente on peut écrire
_e = �ce + bc
h�f(x j �f )� f(x)
�+�g(x j �g)� g(x)
�uc
i(1.58)
L.A.M.I.H. c 98 Yann MORERE

42 Réseaux de Neurones et Systèmes Flous
avec
�c =
266664
0 1 0 0 : : : 0 00 0 1 0 : : : 0 0: : : : : : : : : : : : l : : : : : : : : :0 0 0 0 : : : 0 1�kn �kn�1 : : : : : : : : : : : : �k1
377775 ; bc =
2664
0: : :01
3775 (1.59)
On sait alors que si �c est une matrice stable, alors 9P une matrice dé�nie positiveunique qui satisfait l'équation de Lyapunov :
�Tc P + P�c = �Q (1.60)
ou Q est une matrice dé�nie positive.Prenons V = eTPe la dérivée _V s'écrit d'après 1.58 donc :
_V = eT��Tc P + P�c
�e + 2eTPbc
�f(x j �f)� f(x)
�+�g(x j �g)� g(x)
�uc
= � eTQe| {z }<0 pour la stabilit�e
+2eTPbc
�f(x j �f)� f(x)
�+�g(x j �g)� g(x)
�uc| {z }
<0 ce qui est difficile �a assurer
Commande de supervision Pour simpli�er le problème on remplace u par u = uc+us.Le terme additionnel us est une commande forte dont le but est de forcer _V � 0 et enreprenant le calcul on obtient :
_e = �ce+ bc
h�f(x j �f)� f(x)
�+�g(x j �g)� g(x)
�uc � g(x)us
i(1.61)
de même _V devient :
_V = eT��Tc P + P�c
�e+ 2eTPbc
��f(x j �f)� f(x)
�+�g(x j �g)� g(x)
�uc � g(x)us
�� �eTQe+ 2jeTPbcj
�jf(x j �f )j+ jf(x)j
+jg(x j �g)ucj+ jg(x)ucj�� 2eTPbcg(x)us
(1.62)
Hypothèse On suppose qu'il existe fU(x); gU(x) et gL(x) telles que 8x 2 R; jf(x)j �fU(x); 0 < gL(x) � g(x) � gU(x) <1
On choisit alors us de la manière suivante :
us = I�1sign�eTPbc
� 1
gL(x)
h�jf(x j �f)j+ fU(x) + jg(x j �g)ucj+ jgU(x)ucj
�iavec us 6= 0 si Ve > �V c-à-d I�1 = 1 si Ve > �V et I�1 = 0 sinon.et d'après l'équation 1.62 on obtient :
_V � �eTQe+ 2jeTPbcjh�jf j+ jf j+ jgucj+ jgucj
�� g
gL
�jf j+ fU + jgucj+ jgUucj
�i� �eTQe < 0
(1.63)
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 43
Loi d'adaptation des paramètres du régulateur �ou On dé�nit les relations sui-vantes :
��f = argmin�f2f
�supx2Uc
jf(x j �f )� f(x)j
�(1.64)
��g = argmin�g2g
�supx2Uc
jg(x j �g)� g(x)j
�(1.65)
où f et g sont les espaces de contraintes de �fet �g dé�nit tels que
f = f�f : j�f j �Mfg (1.66)
g = f�g : j�gj �Mgg (1.67)
On dé�nit alors l'erreur d'approximation minimum par
! =�f(x j ��f)
�� f(x) +
�f(x j ��g)g(x)�
�uc (1.68)
On peut alors réécrire l'équation 1.61 :
_e =�ce+ bcg(x)us + bc
h�f(x j �f )� f(x j ��f)
�+�g(x j �g)� g(x j ��g)
�uc � !
� (1.69)
Si les systèmes �ous f et g sont choisi de la forme de 1.46 on peut écrire :
_e =�ce+ bcg(x)us + bc! + bc
h�Tf�(x) + �T
g�(x)uc
i(1.70)
où �f= �f � ��f et �
g= �g � ��g et �(x) est le vecteurs des fonctions à bases �oues.
On choisi alors la fonction candidate de Lyapunov V :
V = eTPe+1
1�Tf�f+
1
2�Tg�g
avec 1 > 0 et 2 > 0.
_V = �eT Qe + eT P bc
��Tf�(x) + �T
g�(x)uc + !
�+
2
1�Tf
_�f +2
2�Tg
_�g � 2eT P bc g(x) us
_V = �eT Qe �2eT P bc g(x) us| {z }<0
+ 2eT P bc !
+ 2�Tf
1
�_�f + 1 e
T P bc �(x)�
+ 2�Tg
1
�_�g + 1 e
T P bc �(x) uc
�
(1.71)
L.A.M.I.H. c 98 Yann MORERE
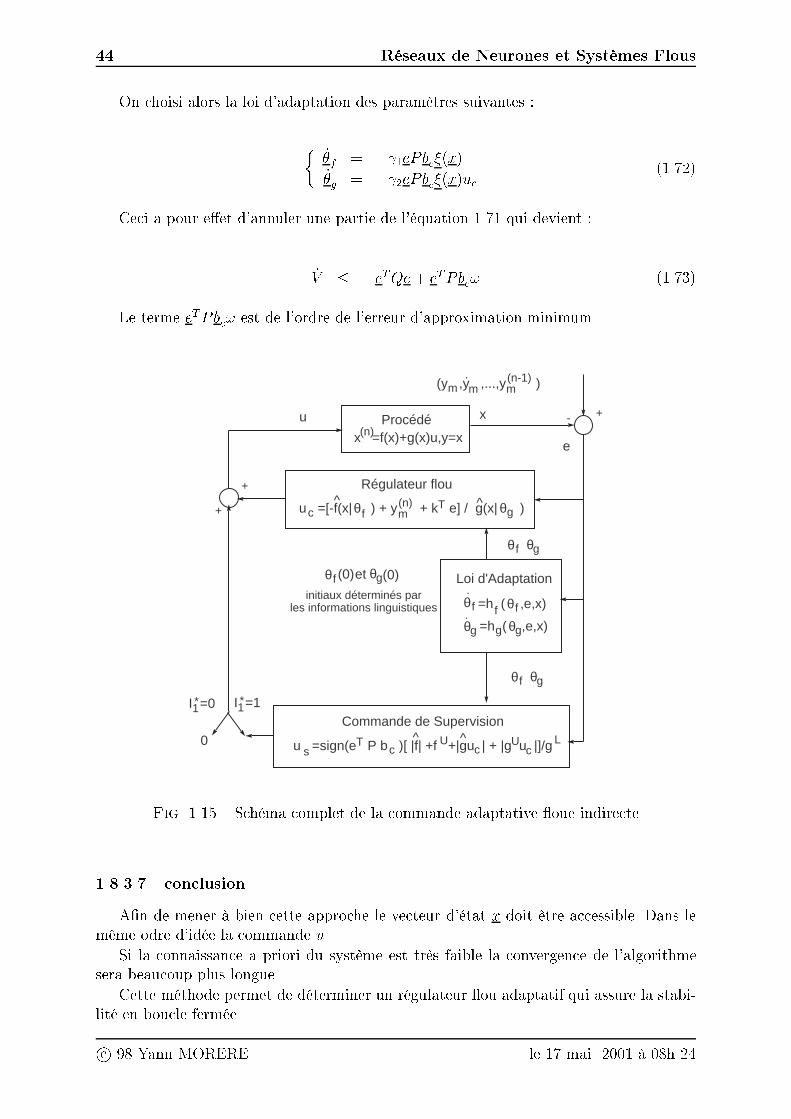
44 Réseaux de Neurones et Systèmes Flous
On choisi alors la loi d'adaptation des paramètres suivantes :
� _�f = � 1ePbc�(x)_�g = � 2ePbc�(x)uc
(1.72)
Ceci a pour e�et d'annuler une partie de l'équation 1.71 qui devient :
_V � �eTQe + eTPbc! (1.73)
Le terme eTPbc! est de l'ordre de l'erreur d'approximation minimum.
Procédéx =f(x)+g(x)u,y=x(n)
Régulateur flou
u =[-f(x| ) + y + k e] / g(x| )θ θ^ ^T(n)mf gc
Loi d'Adaptation
θf.
=h ( ,e,x)f θf
θg.
=h ( ,e,x)θg g
Commande de Supervision^
u =sign(e P b )[ |f| +f +|gu | + |g u |]/gsT
c^
c cU U L
θgθf
θgθf
θg(0)θf (0)et
(y ,y ,...,y ).
m m m(n-1)
initiaux déterminés parles informations linguistiques
+
+
+-
I =11*I =01
*
0
xu
e
Fig. 1.15 � Schéma complet de la commande adaptative �oue indirecte
1.8.3.7 conclusion
A�n de mener à bien cette approche le vecteur d'état x doit être accessible. Dans lemême odre d'idée la commande u.
Si la connaissance a priori du système est très faible la convergence de l'algorithmesera beaucoup plus longue.
Cette méthode permet de déterminer un régulateur �ou adaptatif qui assure la stabi-lité en boucle fermée.
c 98 Yann MORERE le 17 mai 2001 à 08h 24

1.8 Commande Floue Adaptative à Stabilité Indirecte de SystèmesNon-Linéaires 45
_V = eT��Tc P + P�c
�e + 2 eT Pbc
��f(x j �f )� f(x)
�+�g(x j �g)� g(x)
�uc � g(x)us
�
� � eT Qe + 2��eT Pbc�� ����f(x j �f)��� + jf(x)j
+��g(x j �g)uc�� + jg(x) ucj
�� 2 eT Pbc g(x) us
(1.74)
L.A.M.I.H. c 98 Yann MORERE

Bibliographie
[BERTOLD, 1994] M. R. BERTOLD. A time delay radial basis function network for pho-neme recognition. In Proceedings of the international conference on Neural Networks,Orlando, 1994. Intel Corporation, Santa Clara.
[BOUCHON-MEUNIER, 1995] B. BOUCHON-MEUNIER. La Logique Floue et ses ap-plications. Vie Arti�cielle. Addison-Wesley, 1995.
[DAVALO et NAÏM, 1993] E. DAVALO et P. NAÏM. Des Réseaux de Neurones. EY-ROLLES, 1993.
[HARP et SAMAD, 1992] S. HARP et T. SAMAD. Genetic synthesis of neural networkarchitecture. L. DAVIS. Van Nostrand Reinhold, New-York, 1992.
[KOSKO, 1992a] B. KOSKO. Fuzzy systems are universal approximators. In 1st Inter-national IEEE Conference on Fuzzy Systems, pages 1153�1162, 1992. San Diego.
[KOSKO, 1992b] B. KOSKO. Neural Networks and Fuzzy Systems : A Dynamical Ap-proach to Machnie Intelligence. Prentice Hall, 1992.
[MOODY et DARKEN, 1988] J. MOODY et C. DARKEN. Learning with localized re-ceptive �elds. In 1988 Connectionnist Models Summer School, Carnegie Mellon Uni-versity, 1988.
[NARENDRA et PARTHASARATHY, 1990] K. S NARENDRA et K. PARTHASARA-THY. Identi�cation and control using neural networks. In IEEE Transactions OnNeural Networks, volume 1, pages 4�27, 1990.
[ORR, ] M. J. L. ORR. Introduction to radial basis function networks.
[TANAKA et al., 1995] K. TANAKA, M. SANO, et H. WATANABE. Modeling andcontrol of carbon monoxide concentration using neuro-fuzzy technique. In IEEE Tran-sactions On Fuzzy Systems, volume 3, pages 271�279, 1995.
[TONG-TONG, 1992] J. R. TONG-TONG. La Logique Floue. Edition Hermès, 1992.
[UNAR et MURRAY-SMITH, ] M. ALI UNAR et D. J. MURRAY-SMITH. Radial basisfunction networks for ship steering control.
[WANG, 1995] L. X. WANG. Adaptative Fuzzy System And Control : Design And Sta-bility Analysis. PRENTICE HALL, 1995.