Embed Size (px)
Citation preview
Université Paris-Dauphine
Lamsade
N˚ attribué par la bibliothèque
Thèse
présentée en première version en vue d’obtenir le grade deDocteur en Informatique
spécialité Programmation mathématique
par
Nabila REMLI
Robustesse en programmation linéaire
Date de soutenance le 17 Mars 2011 devant le jury composé de :
Mr. P. Michelon Professeur Université d´Avignon (Rapporteur)
Mme A. Thiele Associate Professor Lehigh University (Rapporteur)
Mme V. Gabrel Maître de conférences Université Paris-Dauphine (Directrice)
Mme C. Murat Maître de conférences Université Paris-Dauphine (Co-directrice)
Mr. M. Minoux Professeur Université Paris 6
Mr. A.R. Mahjoub Professeur Université Paris-Dauphine
Mr. J. Figueira Professeur École des mines de Nancy


L’université n’entend donner aucune approbation ni improbation aux opinions émises dans
les thèses : ces opinions doivent être considérées comme propres à leurs auteurs.

Table des matières
Table des matières v
Liste des figures ix
Liste des tableaux xi
Introduction générale 1
1 État de l’art et problématique 7
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1 Incertitudes sur les coefficients de la fonction objectif . . . . . . . 9
1.1.1 Critère du pire cas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.2 Critère de regret maximum . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Incertitudes portant sur la matrice des contraintes . . . . . . . . . 17
1.2.1 Approche de Soyster . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.2 Approche de Ben-Tal et Nimerovski . . . . . . . . . . . . . . . . . . . . 23
1.2.3 Approche de Bertsimas et Sim . . . . . . . . . . . . . . . . . . . . . . . 26
1.2.4 Approches multi-étapes . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.3 Incertitudes sur le second membre des contraintes . . . . . . . . . . 34
Conclusion et problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2 Programmes linéaires avec seconds membres incertains 43
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.1 Premier contexte décisionnel : des décisions robustes . . . . . . . . . 47
2.1.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . . . 48
2.1.2 Programmes linéaires avec contraintes d’égalité : modèle de pénalités . . 51
2.2 Second contexte décisionnel : pire et meilleur optimaux . . . . . . . 56
2.2.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . . . 56
2.2.2 Programmes linéaires avec contraintes d’égalité . . . . . . . . . . . . . 58
v

2.2.3 Programmes linéaires quelconques . . . . . . . . . . . . . . . . . . . . 64
2.3 Robustesse et dualité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.3.1 Critère du meilleur cas . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.3.2 Dualité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3 Calcul du pire optimum paramétrique 73
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . 76
3.1.1 Définition du pire optimum paramétrique . . . . . . . . . . . . . . . . 76
3.1.2 Reformulation en programme linéaire mixte . . . . . . . . . . . . . . . 79
3.2 Programmes linéaires avec contraintes d’égalité . . . . . . . . . . . 83
3.2.1 Identification du pire optimum paramétrique . . . . . . . . . . . . . . . 83
3.2.2 Reformulation en programme linéaire mixte . . . . . . . . . . . . . . . 85
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4 Problème de localisation et de transport robuste 89
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.1 Problème de localisation et de transport déterministe . . . . . . . . 92
4.2 Problème de localisation et de transport robuste . . . . . . . . . . . 93
4.2.1 Formulation de la version robuste . . . . . . . . . . . . . . . . . . . . . 93
4.2.2 Résolution du problème de localisation et de transport robuste . . . . . 97
4.2.3 Reformulation du problème de recours . . . . . . . . . . . . . . . . . . 100
4.3 Expérimentations numériques . . . . . . . . . . . . . . . . . . . . . . . . 105
4.3.1 Problème de recours . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.3.2 Problème de localisation et de transport robuste . . . . . . . . . . . . . 109
4.3.3 Autre contexte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5 Problème de gestion des stocks robuste 117
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.1 Définition du problème de gestion des stocks déterministe . . . . . . 120
5.2 Formulation robuste 1 : solution robuste de pire cas . . . . . . . . . 124
5.2.1 Modèle de pénalités . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.2.2 Solution de pire cas paramétrique : approche de Bertsimas et Thiele . . 129
5.3 Formulation robuste 2 : pire optimum . . . . . . . . . . . . . . . . . . . 135
vi

5.4 Formulation robuste 3 : approche robuste bi-étapes . . . . . . . . . . 139
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Conclusion générale 143
Bibliographie 147
vii


Liste des figures
1.1 Domaine des solutions réalisables du problème (P1c) . . . . . . . . . . . . 13
1.2 Domaine des solutions réalisables du problème (P2A) . . . . . . . . . . . 22
1.3 Domaine des solutions réalisables du problème P2A(Γ)BS . . . . . . . . . 29
2.1 Solution optimale suivant le critère du pire cas pour (P4b≥) . . . . . . . . 50
2.2 Solution optimale suivant le critère du pire cas pour (P5bp) . . . . . . . . . 55
2.3 Solution optimale suivant le critère du meilleur cas pour (P4b) . . . . . . 67
4.1 Résolution du problème de recours pour un exemple m=100 et n=250 :
a- Temps de résolution en fonction de Γ. b- Valeur de l’optimum en
fonction de Γ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.2 Résolution du problème de recours pour des tests n=500 : a- Temps
d’exécution en fonction de Γ. b- Saut d’intégrité en fonction de Γ. . . . . . 108
4.3 Résolution du problème de recours pour des tests n=1000 : a- Temps
d’exécution en fonction de Γ. b- Saut d’intégrité en fonction de Γ. . . . . . 109
4.4 Résolution du problème Trob(Γ) pour un test n = m = 50 : a- Valeur de
l’optimum en fonction de Γ. b- ∆OptMaxOpt en fonction de Γ . . . . . . . . . . 110
4.5 Variation relative des coûts en fonction de Γ pour un test n =
m = 35 : la courbe A représente la différence en pourcentage dev∗(Trob(Γ))−v∗(T2rob(Γ))
v∗(T2rob(Γ)) × 100 . La courbe B exprime la différence en pour-
centage de v∗(T2rob(n))−v∗(T2rob(Γ))v∗(T2rob(Γ)) × 100 . . . . . . . . . . . . . . . . . . . . . 114
ix


Liste des tableaux
4.1 Résultats des temps d’exécution du problème de recours . . . . . . . . . . 107
4.2 Temps d’exécution de la résolution du problème robuste Trob(Γ) . . . . . 111
4.3 Temps de résolution et nombre d’itérations pour la résolution de
T2rob(n/2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.4 Test n = m = 35 : résolution de T2rob(Γ) vs Trob(Γ) . . . . . . . . . . . . . . 113
5.1 Les coûts du problème (G1) . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.2 Les demandes du problème (G1) . . . . . . . . . . . . . . . . . . . . . . . . 125
5.3 La solution nominale du problème (G1) . . . . . . . . . . . . . . . . . . . . 126
5.4 Les valeurs des pénalités pt et qt relatives au problème (G1) . . . . . . . . 126
5.5 La solution de pire cas (upent , spen
t , xpent ) du problème (G1Rob1). . . . . . . 127
5.6 Les valeurs des pénalités p′t et q′t relatives au problème (G1) . . . . . . . . 127
5.7 La solution de pire cas (upen′t , spen′
t , xpen′t , ypen′
t ) du problème (G1Rob1). . 128
5.8 La valeur du pire optimum de GS1Rob(Γ) et le scénario de demande en
fonction de Γ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.9 La valeur du pire optimum de G1Rob2(Γ) et le scénario de demande en
fonction de Γ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
xi

Introduction générale
L’optimisation mathématique se heurte dans de nombreux cas au caractère incertain
des données du problème qu’elle se propose de résoudre. En effet, les incertitudes
liées aux problèmes vont impliquer des difficultés à établir un modèle exact. Ceci est le
cas, par exemple dans les problèmes d’optimisation de chaînes d’approvisionnement,
où la demande effective de produits et le rendement financier ne sont pas connus
avec précision. Dans cette situation, les valeurs exactes des paramètres du modèle
ne sont pas accessibles, et seules des estimations sont fournies. Plus généralement,
un grand nombre de problèmes d’optimisation, tels que les problèmes de gestion de
production, d’ordonnancement, de transport, d’allocation de ressources, et de gestion
des risques financiers exigent que les décisions soient prises en présence d’incerti-
tudes. L’incertitude dans ces problèmes peut toucher les prix des matières premières,
leur disponibilité et le niveau de la demande des clients. En ingénierie, les données
sont soumises à des erreurs de mesure ou d’arrondi qui constituent aussi des sources
d’incertitude dans les modèles d’optimisation.
Les difficultés à établir des modèles exacts rendent nécessaire l’établissement de
méthodologies qui tiennent compte de ces imprécisions dans le processus d’optimisa-
tion et offrent des solutions acceptables au problème posé. L’optimisation stochastique
s’est intéressée, dès les années 1950, à ce type de problématiques en se basant sur
des modèles probabilistes pour la représentation des imprécisions (une littérature
étendue y est consacrée, dont voici quelques références Birge et Louveaux (1997),
Prékopa (1995), Kall et Wallace (1994)). Cependant, dans de nombreux cas, l’optimi-
sation stochastique n’est pas applicable en raison de l’insuffisance d’information pour
l’élaboration des lois de probabilité. De plus, elle présente un inconvénient majeur,
celui de la taille très importante des problèmes qu’elle génère. On se trouve dès lors
confronté à des problèmes d’espace mémoire et de temps de calcul.
1
2 Introduction générale
L’optimisation robuste est une approche différente qui vise à apporter des solutions
aux problématiques liées à l’incertain, sans avoir recours à l’analyse probabiliste. Le
premier à avoir proposé des méthodes non probabilistes est Dantzig (1955). Depuis,
cette thématique a connu un regain d’intérêt et un développement rapide durant les
deux dernières décennies.
La mise en application des approches robustes nécessite d’identifier trois prin-
cipales composantes. La première est la représentation du modèle d’incertitude ; la
deuxième consiste à identifier les objectifs ainsi que le contexte décisionnel du pro-
blème et la troisième composante vise à déterminer le moyen ou la démarche à suivre
permettant d’atteindre les objectifs fixés.
Parmi les modèles d’incertitude non probabilistes relevés dans la littérature, citons
la modélisation par scénarios discrets, où les paramètres incertains sont représentés
par un ensemble fini de valeurs discrètes (voir par exemple les domaines d’applica-
tions de Yu et Yang (1998) et Deineko et Woeginger (2006)) ; la modélisation par des
intervalles continus, ou plus généralement par des ensembles convexes est, elle aussi,
très utilisée en optimisation robuste (à titre d’exemples, voir les travaux de Kouvelis et
Yu (1997), Bertsimas et Sim (2003) et Averbakh et Lebedev (2005)). La modélisation de
l’incertitude par des intervalles est celle que nous avons retenue tout au long de cette
thèse.
Après avoir établi le modèle d’incertitude, le décideur doit définir quel est l’objectif
visé, en terme de robustesse, compte tenu du contexte décisionnel du problème et
des incertitudes sur les données. Dans la littérature, la notion de solution robuste est
souvent emplyée. Nous observons, toutefois, qu’il n’y a pas de définition unique d’une
solution robuste et que celle-ci diffère selon les auteurs et les contextes de décision.
En effet, selon Roy (2002) la robustesse est une aptitude à résister à des “à peu près” ou
à des “zones d’ignorance” afin de se protéger d’impacts jugés regrettables. Daniel et Salazar
(2006) quant à eux qualifient une solution de robuste si sa valeur ne change pas de
façon “significative” lorsque le vecteur de décision est légèrement perturbé. Par ailleurs, une
solution robuste est définie par Gabrel et Murat (2007) comme étant une solution qui
doit être “acceptable” dans un grand nombre de scénarios et qui ne soit jamais “trop mauvai-
se”. Ces définitions nécessitent d’être adaptées au contexte décisionnel du problème
incertain. Par exemple, une solution robuste peut refléter une notion de stabilité dans
Introduction générale 3
un système (voir Rosenblatt et L. (1987)), ou bien de flexibilité dans un contexte sé-
quentiel (voir Gupta et Rosenhead (1968), Rosenhead (1989) et Rosenhead et al. (1972)).
En dernier lieu, il faut définir les outils et les méthodologies pour répondre à la
préoccupation de la robustesse ainsi que leur mise en œuvre. Les critères issus de la
théorie de la décision ont été les premiers outils utilisés en robustesse, notamment le
critère du pire cas et le critère du regret maximum (voir Averbakh et Lebedev (2005)).
Il est important de noter la différence entre robustesse et analyse de sensibilité. En
effet, dans ce dernier contexte, une solution est déterminée pour un jeu de données
fixe (un scénario unique) et une étude a posteriori est réalisée dans le voisinage de
cette solution. Par contre, l’optimisation robuste conduit à considérer, a priori, plu-
sieurs scénarios et de rechercher des solutions, qui soient bonnes dans la totalité ou
la plupart des scénarios. Dans la construction de modèles robustes, les incertitudes
doivent être intégrées au processus de la décision et ne sont pas le résultat d’une
analyse a posteriori (voir Roy et al. (1982)).
Dans le cadre de ce travail de thèse, nous nous intéressons aux problèmes de
programmation linéaire dans lesquels certains coefficients sont incertains. Plus préci-
sément, notre intérêt se porte sur la prise en compte d’incertitudes affectant exclusi-
vement les coefficients du second membre. Cette problématique n’avait pas, à notre
connaissance, fait l’objet d’étude spécifique antérieure au commencement de cette
thèse. En effet, les problèmes incertains de programmation linéaire étudiés dans la
littérature se concentraient essentiellement autour des problèmes admettant : soient
des coûts incertains, soient des coefficients incertains dans la matrice des contraintes
(ou parfois conjointement avec le second membre).
Les problèmes que nous proposons de traiter se rencontrent dans de nombreuses
applications réelles. Citons, par exemple, les problèmes de transport avec demande
incertaine, des problèmes de flots avec des capacités incertaines, ou encore des pro-
blèmes de gestion de stock avec des demandes incertaines. Dans cette étude, nous
proposons de développer des outils permettant la prise en compte des incertitudes
afin de répondre à la préoccupation de la robustesse selon trois contextes différents.
4 Introduction générale
Dans le premier contexte, une décision doit être prise avant la réalisation de l’in-
certain. Un grand nombre d’applications s’inscrivent dans ce contexte de décision. Le
critère le plus adapté et le plus répandu dans ce contexte est le critère du pire cas. Ce
critère étant largement étudié dans la théorie de la décision, nous nous attacherons
ici à identifier les cas où son application est possible et à étudier la complexité des
problèmes engendrés. Par ailleurs, s’il apparaît des situations où son application est
peu pertinente, nous proposerons des alternatives.
Le deuxième contexte décisionnel développé dans notre étude est celui où le dé-
cideur est en phase de planification. Dans ce cas, l’objectif est l’évaluation des coûts
des solutions optimales selon les réalisations possibles des incertitudes. La prise de
décision se fait, quant à elle, en milieu déterministe, une fois les incertitudes levées.
Nous proposons ici de fournir au décideur des évaluations pertinentes suivant les scé-
narios envisagés et nous étudierons les problèmes engendrés (leur formulation et leur
complexité). Les évaluations recherchées par le décideur peuvent être très différentes
d’une application à l’autre. Nous nous intéresserons entre autre à l’évaluation la plus
favorable et la plus défavorable et proposerons d’autres évaluations plus flexibles.
Le dernier contexte décisionnel abordé dans ce manuscrit a été étudié récemment
dans la littérature et concerne la prise de décisions robustes en plusieurs étapes ; il
s’agit du contexte multi-étapes. Ce contexte a été introduit par Ben-Tal et al. (2004) pour
les programmes linéaires où l’incertitude est située dans la matrice des contraintes et
a été récemment étudié par Thiele et al. (2009) qui l’adoptent sur des problèmes avec
second membre incertain dans une approche robuste bi-étapes. Dans cette dernière,
nous considérons que l’espace de décision est séparé en deux parties : les variables de
la première partie doivent être décidées avant la réalisation des incertitudes, alors que
celles de la seconde partie sont décidées au moment de la divulgation des incertitudes.
Le travail réalisé selon ce contexte consiste à appliquer une approche bi-étapes sur
deux applications réelles : une première application traite d’un problème de localisa-
tion et de transport ; la seconde, concerne un problème de gestion de stock.
Le plan de la thèse est le suivant : au chapitre 1, un état de l’art sera abordé dé-
crivant les principales approches robustes existant dans la littérature et cela en fonc-
tion de l’emplacement de l’incertitude dans le programme linéaire. Tout d’abord, nous
traiterons les problèmes possédant des coûts incertains. Ensuite, nous aborderons les

Introduction générale 5
versions robustes de programmes linéaires admettant une matrice des contraintes in-
certaine. Enfin, nous introduirons notre problématique qui concerne les programmes
linéaires comportant un second membre incertain. Dans le chapitre 2, nous considérons
deux contextes décisionnels distincts pour lesquels nous répondrons à la préoccupa-
tion de la robustesse différemment : dans le premier contexte, il s’agira de calculer une
solution robuste de pire cas, et dans le second contexte nous calculerons l’évaluation
des valeurs du pire et du meilleur optima. En outre, nous montrerons que la nature
des contraintes du problème (que celles-ci soient des inégalités ou des égalités) influe
sur la complexité des versions robustes engendrées. Dans le chapitre 3, nous propose-
rons une généralisation du calcul du pire optimum et cela en étudiant une extension
pertinente de l’approche de Bertsimas et Sim (2004) sur le calcul de pire optimum.
Les problèmes contenant des contraintes d’inégalité ou d’égalité seront abordés sépa-
rément. Dans le chapitre 4, nous nous intéresserons à une approche robuste bi-étapes
pour traiter une première application d’un problème de localisation et de transport
avec demande incertaine. Ce problème est modélisé par un programme linéaire où les
incertitudes affectent certains coefficients du second membre de contraintes d’inégalité
du problème et nous ferons appel au résultats du chapitre 3. Enfin, dans le chapitre 5,
nous étudierons une seconde application d’un problème de gestion de stock avec de-
mande incertaine, que nous traiterons suivant plusieurs contextes de décision. Pour ce
faire, les versions robustes associées à ce problème doivent tenir compte du caractère
dynamique du problème ainsi que des incertitudes présentes dans le second membre
de contraintes d’égalité.

1État de l’art et problématique
Sommaire
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1 Incertitudes sur les coefficients de la fonction objectif . . . . . . . 9
1.1.1 Critère du pire cas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.2 Critère de regret maximum . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Incertitudes portant sur la matrice des contraintes . . . . . . . . . 17
1.2.1 Approche de Soyster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.2 Approche de Ben-Tal et Nimerovski . . . . . . . . . . . . . . . . . . . . . 23
1.2.3 Approche de Bertsimas et Sim . . . . . . . . . . . . . . . . . . . . . . . . 26
1.2.4 Approches multi-étapes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.3 Incertitudes sur le second membre des contraintes . . . . . . . . . . . 34
Conclusion et problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Dans ce chapitre est présenté un état de l’art des principales approches, dites ro-
bustes, traitant de programmes linéaires contenant des données incertaines ou
imprécises. Ce chapitre est divisé en trois parties : dans la première partie, sont abor-
dés les problèmes dont les coefficients de la fonction objectif sont incertains. Les ré-
sultats concernant l’application de critères issus de la théorie de la décision y seront
détaillés. La deuxième partie est consacrée aux problèmes affectés par des coefficients
incertains situés dans la matrice des contraintes. Nous aborderons quelques approches
robustes utilisées dans la littérature. Les avantages et inconvénients de chacune seront
discutés. Enfin, la dernière partie traite des programmes linéaires contenant un second
membre des contraintes incertain. Nous montrerons que les approches existantes dans
la littérature sont peu pertinentes, ce qui introduira la problématique de notre travail.
7

1.1. Incertitudes sur les coefficients de la fonction objectif 9
Introduction
Ce chapitre fait un état de l’art des principales approches robustes traitant de pro-
grammes linéaires en présence d’incertitude. Nous rappelons qu’il ne sera abordé
ici que le modèle d’incertitude décrit par des intervalles continus. Nous avons choisi
de séparer les résultats bibliographiques en fonction de l’emplacement des incerti-
tudes dans le programme linéaire. Tout d’abord, seront traités dans la section 1.1
les programmes linéaires admettant des coefficients de la fonction objectif incertains.
Les critères classiques du pire cas et du regret maximum y seront appliqués pour
trouver des solutions robustes. Dans la seconde partie de chapitre (section 1.2), notre
intérêt sera porté sur les approches robustes traitant de programmes linéaires où les
coefficients de la matrice des contraintes sont incertains. Nous verrons que pour être
robustes, les solutions recherchées doivent répondre à la préoccupation de réalisabilité
du problème. Enfin, le cas des incertitudes présentes dans le second membre des
contraintes, faisant l’objet de la problématique de cette thèse, sera discuté à la fin du
chapitre.
1.1 Incertitudes sur les coefficients de la fonction objectif
Considérons un programme linéaire avec des coefficients de coûts incertains, écrit sous
la forme générale suivante :
(Pc)
min cx
s.c. Ax ≤ b
où x est une matrice colonne de taille n qui représente les variables du problème.
La matrice des contraintes A est de taille m× n et le second membre des contraintes
b est une matrice colonne de taille m. Notons X = x ∈ Rn|Ax ≤ b le domaine
des solutions réalisables du problème (Pc) que nous supposons non vide et borné.
Le coût c est une matrice ligne de taille n. Elle constitue la part incertaine du problème.
Nous supposons que chaque coefficient incertain de c prend ses valeurs dans
un intervalle fermé, indépendamment des valeurs prises par les autres paramètres.
Formellement, notons Λ l’ensemble d’incertitude représenté par le produit cartésien
10 Chapitre 1. État de l’art et problématique
des intervalles [cj, cj], j = 1 . . . n, où cj ≤ cj.
Nous définissons un scénario comme étant une réalisation de l’incertitude dans le
domaine Λ et notons v∗(Pc) la valeur de l’optimum pour le scénario c fixé.
Dans la plupart des études, l’objectif est de déterminer une solution, qualifiée
de robuste, avant de connaître les vraies valeurs des paramètres incertains, avec la
seule indication que ces derniers varient dans un domaine d’incertitude préalablement
défini. Une solution robuste doit alors présenter une certaine “garantie” sur tous ou la
plupart des scénarios pouvant se réaliser.
Les critères issus de la théorie de la décision sont des mesures couramment em-
ployées pour la détermination de solutions robustes. Les deux principaux critères
rencontrés dans la littérature sont le critère du pire cas (appelé aussi robustesse ab-
solue) et le critère du regret maximum (ou déviation absolue). La définition et l’emploi
de ces deux critères sur le problème incertain (Pc) seront détaillés ci-après dans ce
chapitre. Moins étudié, le critère du regret relatif maximum (ou déviation relative) peut
être appliqué. Ce critère ne sera pas abordé dans ce manuscrit mais nous invitons le
lecteur à se rapporter aux travaux de Mausser et Laguna (1999b) qui l’emploient sur
les programmes linéaires incertains, et Averbakh (2000), Averbakh (2005), Zielinski
(2004) et Assavapokee et al. (2008) sur divers problèmes d’optimisation combinatoire.
D’autres mesures de robustesse ont vu le jour plus récemment, avec la particularité
de faire intervenir des seuils (à fixer par le décideur) et de déterminer un groupe de
solutions robustes (voir Kouvelis et al. (1992), Kalai (2006), Kalai et Lamboray (2007)
et Roy (2010)).
Nous allons, dans ce qui suit, donner le résultat de l’application des critères
classiques du pire cas et du critère du regret maximum sur le problème (Pc). Il en
découlera différents problèmes robustes dont nous donnerons la complexité et la
résolution.
1.1.1 Critère du pire cas
Le critère du pire cas peut être considéré comme étant le critère de référence en op-
timisation robuste, quand il s’agit de déterminer des solution avant la réalisation des

1.1. Incertitudes sur les coefficients de la fonction objectif 11
incertitudes. De manière générale, son application sur un problème incertain permet
de déterminer la solution optimale suivant le scénario le plus défavorable. La solution
ainsi obtenue est robuste car elle offre une garantie absolue à toutes les éventualités
pouvant se réaliser.
Parmi les auteurs qui se sont intéressés aux programmes linéaires incertains
s’écrivant sous la forme du problème (Pc) où c ∈ Λ, nous retrouvons les travaux de
Averbakh et Lebedev (2005), où les auteurs présentent -entres autres- le résultat de
l’application du critère du pire cas sur (Pc), qui se décrit comme suit.
Soit x une solution réalisable de (Pc), sa valeur selon le critère du pire cas, notée
vpir(x), se définit comme :
vpir(x) = maxc∈Λ
cx (1.1)
Suivant le critère du pire cas, il s’agit de déterminer, parmi toutes les solutions réali-
sables x ∈ X, celle qui minimise la valeur de vpir(x). Le problème de pire cas, noté
(Pc)pirCas, s’écrit :
(Pc)pirCas
minx∈X
maxc∈Λ
cx
Proposition 1.1 [Averbakh et Lebedev (2005)] L’application du critère du pire cas sur un
programme linéaire, dont les coefficients coûts sont incertains et appartiennent à des intervalles,
est un problème polynomial.
Démonstration. Par hypothèse, le polyèdre des solutions réalisables X est non vide et
borné ; il est donc possible, selon le théorème fort de dualité, de remplacer le pro-
blème de maximisation dans l’écriture de (Pc)pirCas par son dual. Nous obtenons la
formulation en programme linéaire suivante :
(Pc)pirCas
min cu− cv
s.c. u− v− x = 0
Ax ≤ b
u ≥ 0, v ≥ 0
qui est un problème polynomial.

12 Chapitre 1. État de l’art et problématique
Remarque 1.1 Dans le cas particulier où les variables x sont de signe constant, par exemple
supposons qu’elles soient positives, le problème (Pc)pirCas est équivalent à (Pc) :
(Pc)pirCas
min cx
s.c. Ax ≤ b
x ≥ 0
En effet, si les variables x sont non-négatives, nous remarquons que les pires valeurs des coef-
ficients de la fonction objectif pour le problème de minimisation (Pc) se déduisent directement
en affectant aux coûts les valeurs des bornes supérieures des intervalles auxquels elles appar-
tiennent.
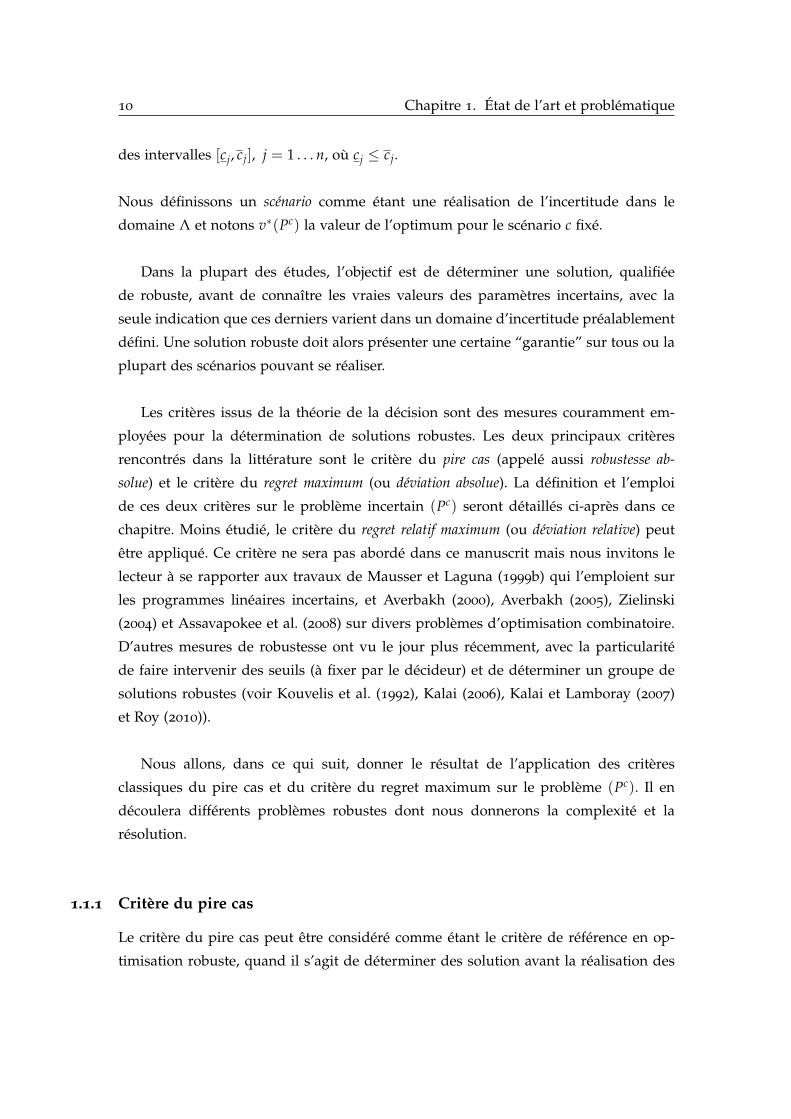
Exemple 1.1 Soit le programme linéaire (P1c) suivant :
(P1c)
min c1x1 + c2x2
s.c. − x1 + 3x2 ≤ 4
3x1 + 2x2 ≥ −4
− 5x1 + 2x2 ≥ −6
(1.2)
(1.3)
(1.4)
Les coefficients (c1, c2) de la fonction objectif sont incertains et peuvent prendre n’importe
quelle valeur dans les intervalles suivants : c1 ∈ [−3, 3] et c2 ∈ [1, 3].
Selon la proposition 1.1, la solution robuste selon le critère du pire cas pour le problème (P1c)
s’obtient par la résolution du programme linéaire (P1c)pirCas s’écrivant :
(P1c)pirCas
min 3u1 + 3u2 + 3v1 − v2
s.c. u1 − v1 − x1 = 0
u2 − v2 − x2 = 0
−x1 + 3x2 ≤ 4
3x1 + 2x2 ≥ −4
−5x1 + 2x2 ≥ −6
u1, u2, v1, v2 ≥ 0
La solution robuste selon le critère du pire cas est x∗pirCas = (0,−2) de valeur égale à −2. Elle
se réalise pour tous les scénarios (c1, 1) où c1 ∈ [−3, 3]. En adoptant la solution x∗pirCas, le
décideur est sûr de garantir un coût égal à −2 dans le pire cas. La figure 1.1 illustre le domaine
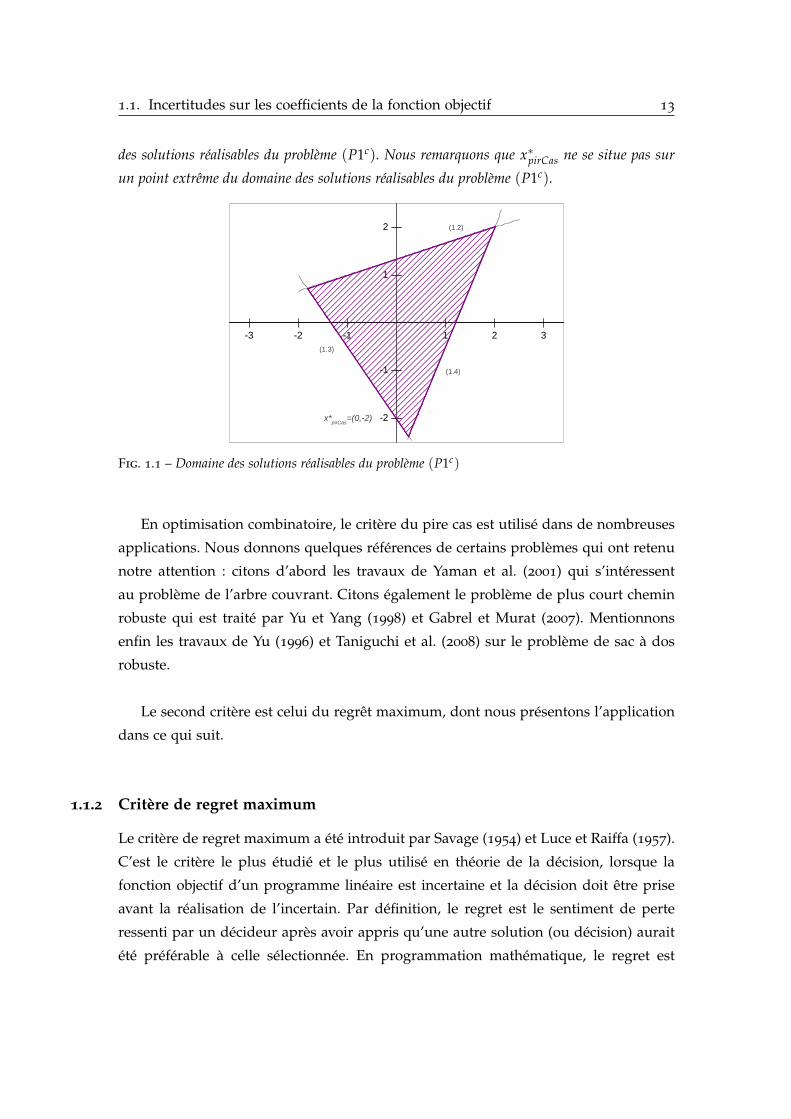
1.1. Incertitudes sur les coefficients de la fonction objectif 13
des solutions réalisables du problème (P1c). Nous remarquons que x∗pirCas ne se situe pas sur
un point extrême du domaine des solutions réalisables du problème (P1c).
- 3 - 2 - 1 1 2 3
- 2
- 1
1
2
( 1 . 3 )
( 1 . 4 )
( 1 . 2 )
x * p i r C a s = ( 0 , - 2 )
Fig. 1.1 – Domaine des solutions réalisables du problème (P1c)
En optimisation combinatoire, le critère du pire cas est utilisé dans de nombreuses
applications. Nous donnons quelques références de certains problèmes qui ont retenu
notre attention : citons d’abord les travaux de Yaman et al. (2001) qui s’intéressent
au problème de l’arbre couvrant. Citons également le problème de plus court chemin
robuste qui est traité par Yu et Yang (1998) et Gabrel et Murat (2007). Mentionnons
enfin les travaux de Yu (1996) et Taniguchi et al. (2008) sur le problème de sac à dos
robuste.
Le second critère est celui du regrêt maximum, dont nous présentons l’application
dans ce qui suit.
1.1.2 Critère de regret maximum
Le critère de regret maximum a été introduit par Savage (1954) et Luce et Raiffa (1957).
C’est le critère le plus étudié et le plus utilisé en théorie de la décision, lorsque la
fonction objectif d’un programme linéaire est incertaine et la décision doit être prise
avant la réalisation de l’incertain. Par définition, le regret est le sentiment de perte
ressenti par un décideur après avoir appris qu’une autre solution (ou décision) aurait
été préférable à celle sélectionnée. En programmation mathématique, le regret est

14 Chapitre 1. État de l’art et problématique
souvent associé à la notion de robustesse. En effet, la solution robuste obtenue par
l’application de ce critère est celle dont le plus grand écart par rapport aux valeurs
optimales sur tous les scénarios est le plus faible.
Plusieurs auteurs se sont intéressés à l’application du critère du regret maximum
sur un programme linéaire, dont les coefficients de la fonction objectif sont incertains.
Les premiers travaux sont ceux de Shimizu et Aiyoshi (1980) qui, comme nous le
verrons dans ce qui suit, proposent un algorithme pour résoudre ce problème robuste.
Tout d’abord, formalisons le problème : soit x une solution réalisable du problème
(Pc) pour un scénario fixé c, appartenant à l’ensemble d’incertitude Λ. Le regret, noté
r(x, c), associé à la solution x représente la différence entre la valeur de l’optimum
pour le scénario c et la constante cx, sa valeur est donc :
r(x, c) = (cx− cx∗)
où x∗ représente la solution optimale du problème (Pc) pour le scénario c. Le regret
maximum, noté R(x), associé à la solution x est celui qui réalise le maximum sur tous
les scénarios :
R(x) = maxc∈Λ
r(x, c)
La solution robuste suivant le critère du regret maximum est alors une solution dans
X qui minimise le regret maximum :
minx∈X
R(x)
Le problème du regret maximum, noté (Pc)reg, s’écrit donc :
(Pc)reg
minx∈X
maxc∈Λ
(cx− cx∗)
La solution optimale x∗reg de (Pc)reg est robuste car elle fournit au décideur une ga-
rantie relative dans le sens où, quand celui-ci la choisit, il sait que quel que soit le
scénario incertain qui se réalisera, l’écart maximum sur tous les scénarios par rapport
à la solution optimale sera le plus faible.
Théorème 1.1 [Averbakh et Lebedev (2005)] Le problème du regret maximum, lorsque les
coefficients de la fonction objectif varient dans des intervalles, est NP-difficile au sens fort. De

1.1. Incertitudes sur les coefficients de la fonction objectif 15
plus, les auteurs montrent que le calcul du regret maximum R(x), pour une solution réalisable
x, est NP-difficile au sens fort.
Résolution exacte
Shimizu et Aiyoshi (1980) proposent un algorithme de résolution exacte du problème
(Pc)reg. Les auteurs se basent sur le fait que le problème (Pc)reg peut s’écrire de manière
équivalente sous la forme d’un programme linéaire comme suit :
(Pc)reg
min r
s.c. r ≥ cx− cx∗ pour tout c ∈ Λ
x ∈ X
(1.5)
qui inclut une infinité de contraintes (1.5).
Afin de résoudre (Pc)reg de manière optimale, les auteurs considèrent initialement
un sous-ensemble de contraintes (1.5), qui sera augmenté à chaque itération, jusqu’à
l’obtention de la solution optimale. Soit donc C = c1, c2, ..., cl un sous-ensemble de
vecteurs coûts appartenant à Λ, et (Pc)′reg le problème relaxé engendré par C :
(Pc)′reg
min r
s.c. r ≥ ckx− ckxck , k = 1 . . . l
x ∈ X
(1.6)
où xck est la solution optimale pour le scénario ck, avec k = 1 . . . l.
Les contraintes (1.6) sont appelées des coupes de regret. Soit x la solution optimale de
(Pc)′reg et r le regret correspondant. La valeur de r représente une borne inférieure à la
valeur optimale du regret maximum. En effet, (Pc)′reg est le problème relaxé de (Pc)reg,
qui admet un nombre restreint de contraintes. Pour la même raison, notons que la
valeur du regret r est non décroissante au fur et à mesure que les coupes de regret
s’ajoutent au programme (Pc)′reg.
Il est clair que si la solution de regret r satisfait toutes les contraintes (1.5) alors elle est
optimale pour le problème (Pc)reg. Afin de tester cette condition, il suffit de calculer
le regret maximum de x dans l’ensemble Λ. Ceci passe par la résolution du problème

16 Chapitre 1. État de l’art et problématique
esclave, noté (CMR) (candidate maximum regret), suivant :
(CMR)
Rmax(x) = max cx− cx
s.c. x ∈ X
c ∈ Λ
(1.7)
Par conséquent, si Rmax(x) = r alors x est la solution optimale du problème (Pc)reg,
sinon la solution (c, xc) obtenue par la résolution du problème (CMR) ne vérifie pas
toutes les contraintes (1.5). Dans ce cas, la nouvelle contrainte :
r ≥ cx− cxc
est ajoutée au problème (Pc)′reg. Ainsi, la taille de l’ensemble C croît itérativement
jusqu’à ce que le critère d’arrêt soit vérifié.
En utilisant (Pc)′reg et (CMR) pour générer des solutions candidates et des coupes de
regret, on obtient l’algorithme suivant qui minimise le regret maximum :
Algorithme 1 : Algorithme pour le calcul du regret maximum
Étape 0 : Initialiser : poser r := 0 et choisir un x ∈ XÉtape 1 : Résoudre (CMR) et trouver c et Rmax(x). Si Rmax(x) ≤ r alors fin, xminimise le regret maximum ; sinon aller à l’étape 2
Étape 2 : Ajouter la coupe r ≥ cx− cxc au problème (Pc)′reg
Étape 3 : Résoudre (Pc)′reg et trouver r et x. Actualiser la valeur de r et aller àl’étape 1
Convergence de l’algorithme : [Shimizu et Aiyoshi (1980)] L’algorithme 1 converge
vers la solution qui minimise le regret maximum en un nombre fini d’itérations.
La résolution du problème (CMR) à l’étape 1 est la partie la plus coûteuse en temps
de calcul. En effet, rappelons que ce problème est NP-difficile au sens fort (Averbakh
et Lebedev (2005)). Plusieurs travaux ont été menés pour résoudre le problème (CMR)
de manière efficace (afin d’en réduire les temps de calcul). Dans une première étude,
Inuiguchi et Sakawa (1995) caractérisent les solutions optimales du problème (CMR)
ainsi que des scénarios de pire cas. Puis, en exploitant ces propriétés, ces mêmes
auteurs reformulent et résolvent le problème en utilisant un algorithme de branch and
bound (voir Inuiguchi et Sakawa (1996)). D’autres améliorations sont apportées par
1.2. Incertitudes portant sur la matrice des contraintes 17
Mausser et Laguna (1998; 1999a) qui suggèrent, respectivement, une formulation en
programme linéaire mixte et une heuristique pour la résolution du problème (CRM),
réduisant ainsi les temps de calcul.
En optimisation combinatoire, le critère du regret maximum a largement été utilisé
pour répondre à la préoccupation de la robustesse. Tout d’abord, nous citons le pro-
blème de l’arbre couvrant qui a été traité par Yaman et al. (2001), Averbakh et Lebedev
(2004), Montemanni et Gambardella (2005) et Montemanni (2006). La complexité de
ce problème est donnée par Aron et Van Hentenryck (2004), et une formulation en
nombres entiers est proposée par Yaman et al. (2001). Ensuite, concernant le problème
de plus court chemin robuste suivant le même critère, nous pouvons noter les travaux
d’Averbakh et Lebedev (2004), Karasan et al. (2001), Kasperski et Zielinski (2006), Mon-
temanni et Gambardella (2004) et Montemanni et al. (2004). Dans Averbakh (2004),
il est question du problème d’allocation de ressources robuste, et dans Deineko et
Woeginger (2006) est traité le problème d’affectation robuste. De plus, Montemanni
et al. (2005) s’intéressent au problème de voyageur de commerce robuste. D’autres
versions robustes selon le critère du regret maximum de divers problèmes d’optimisa-
tion combinatoire ont été étudiés, comme par exemple : Aissi (2005), Aissi et al. (2007),
Assavapokee et al. (2008), Averbakh (2000), Averbakh (2001) et Escoffier et al. (2008).
Dans la première partie de cet état de l’art, nous avons traité des programmes li-
néaires dont les coefficients de la fonction objectif sont incertains. Nous avons présenté
les résultats de complexité et approches de résolution des versions robustes obtenues
par l’application des critères classiques de la théorie de la décision. Dans la partie sui-
vante seront exposées les principales approches utilisées pour déterminer des solutions
robustes lorsque les coefficients de la matrice des contraintes sont incertains.
1.2 Incertitudes portant sur la matrice des contraintes
Dans un programme linéaire, considérer que les incertitudes portent sur les coeffi-
cients de la matrice des contraintes revient à considérer que le domaine des solutions
réalisables est incertain. La préoccupation de la réalisabilité est donc une considération
centrale lors de la recherche de solutions robustes pour ce problème incertain. Nous
verrons dans ce qui suit, comment chacune des approches présentées définit une

18 Chapitre 1. État de l’art et problématique
solution robuste et de quelle manière la réalisabilité du problème est prise en compte.
Commençons, tout d’abord, par formaliser le problème. Soit le programme linéaire
(PA) s’écrivant sous la forme suivante :
(PA)
min cx
s.c. Ax ≤ b
x ≥ 0
où x est une matrice colonne de taille n qui représente les variables du problème. Le
coût c est une matrice ligne de taille n, la matrice A des contraintes de taille m× n et
le second membre b est une matrice colonne de taille m. Supposons que l’incertitude
porte uniquement sur les coefficients de la matrice des contraintes A et que le domaine
réalisable est non vide, quelle que soit la réalisation de l’incertitude.
L’ensemble d’incertitude adopté pour modéliser les coefficients de la matrice A
est un modèle par intervalles, que nous définissons de la manière suivante : pour tout
i = 1 . . . m et j = 1 . . . n, le paramètre aij appartient à [aij− aij, aij + aij], où aij représente
la valeur nominale du coefficient aij et aij (avec aij ≥ 0) sa déviation maximale. En
d’autres termes,
aij = aij + aijξij (1.8)
avec
ξij ∈ [−1, 1] (1.9)
Dans la littérature, il est possible de séparer les approches robustes en deux familles
selon le contexte décisionnel auquel appartient le problème (PA) :
1. Contexte statique : il s’agit de prendre une décision (une solution robuste) avant
toute réalisation de l’incertitude de façon irrémédiable. Dans ce contexte, nous
présenterons trois approches robustes : l’approche de Soyster (1973), l’approche
de Ben-Tal et Nimerovski (1999) et l’approche de Bertsimas et Sim (2004) ;
2. Contexte multi-étapes : ici l’espace de décision est divisé en plusieurs groupes,
de telle sorte que les décisions de chaque groupe peuvent être prises au fur

1.2. Incertitudes portant sur la matrice des contraintes 19
et à mesure que l’incertitude est levée. Nous présenterons l’approche bi-étapes
introduite par Ben-Tal et Nimerovski (1999).
Commençons donc par formaliser les trois approches utilisables dans le contexte sta-
tique.
1.2.1 Approche de Soyster
L’approche de Soyster (1973) (voir aussi les développements de Soyster (1979), Falk
(1976) et Singh (1982)) est l’une des premières approches référencées dans la littérature
pour la détermination de solutions robustes au problème (PA). Son principe rejoint
celui du critère du pire cas décrit précédemment, où la solution doit, pour être quali-
fiée de robuste, être acceptable (réalisable) quel que soit le scénario qui se réalise.
La version robuste, notée (PA)Soyster, associée au problème (PA) selon cette approche
où les incertitudes sont définis par (1.8) et (1.9) s’écrit alors :
(PA)Soyster
min
n∑
j=1cjxj
s.c.n∑
j=1(aij + aijξij)xj ≤ bi ∀ ξij ∈ [−1, 1] i = 1 . . . m
xj ≥ 0 j = 1 . . . n
qui revient à résoudre :
(PA)Soyster
min
n∑
j=1cjxj
s.c.n∑
j=1aijxj + max
ξij∈[−1,1]aijξijxj ≤ bi i = 1 . . . m
xj ≥ 0 j = 1 . . . n
Dans notre cas, puisque les variables xj, j = 1 . . . n sont non négatives, et que les
coefficients sont indépendants, la version robuste de (PA) selon l’approche de Soyster
correspond au programme linéaire suivant :
(PA)Soyster
min
n∑
j=1cjxj
s.c.n∑
j=1(aij + aij)xj ≤ bi i = 1 . . . m
xj ≥ 0 j = 1 . . . n

20 Chapitre 1. État de l’art et problématique
Remarque 1.2 Notons que nous n’avons présenté ici qu’une adaptation des travaux de Soyster
à la modélisation des incertitudes par des intervalles. En effet, dans la version d’origine présentée
par Soyster (1973), les incertitudes sont modélisées par des ensembles convexes définis sur les
colonnes de la matrice A. C’est à dire que chaque colonne Aj appartient à un ensemble convexe
Kj, le but étant de calculer des solutions robustes de pire cas.
Remarque 1.3 La complexité des versions robustes associées au problème (PA) selon l’ap-
proche de Soyster (1973), dépend de la difficulté de calculer un maximum sur le domaine d’in-
certitude. Dans le cas d’incertitudes modélisées par des intervalles continus ou des polyèdres le
problème est polynomial (voir Ben-Tal et Nimerovski (2002)).
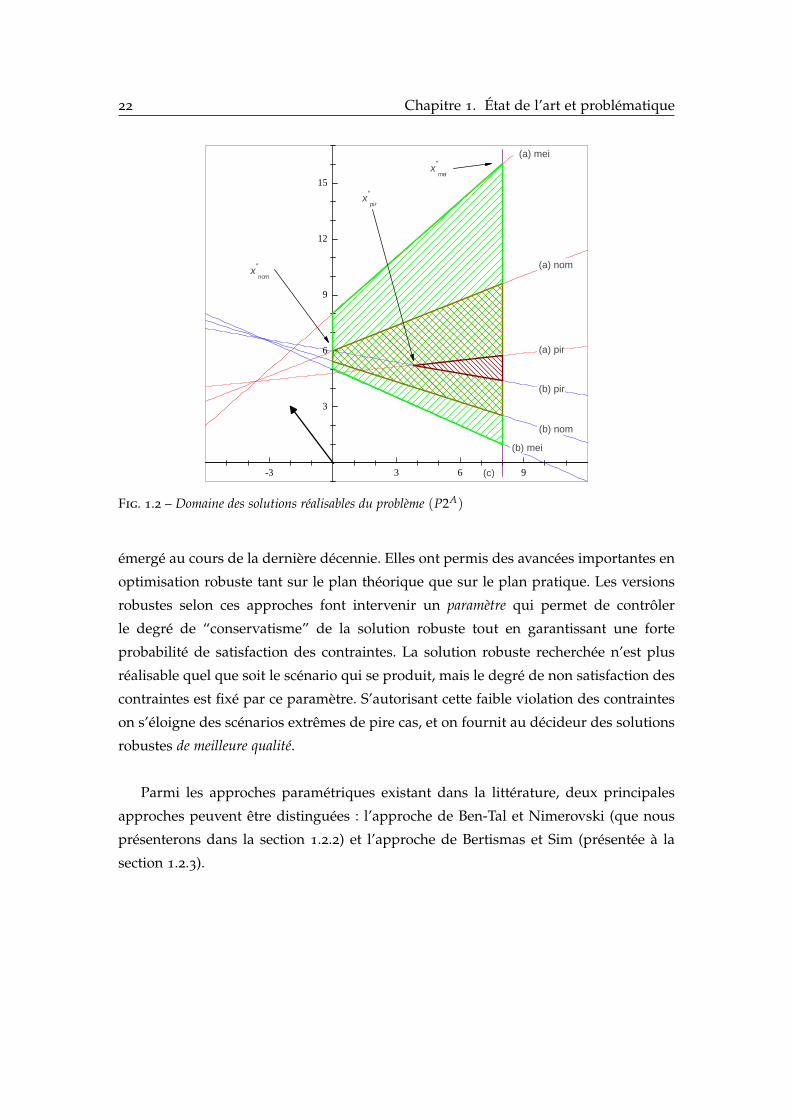
Exemple 1.2 Considérons le programme linéaire incertain (P2A) suivant :
(P2A)
max −2x1 + 3x2
s.c. a11x1 + a12x2 ≤ 120 (a)
a21x1 + a22x2 ≥ 30 (b)
x1 ≤ 8 (c)
x1, x2 ≥ 0
où les coefficients de la matrice des contraintes sont décrits par les intervalles continus suivants :
a11 ∈ [−15,−3], a12 ∈ [15, 25], a21 ∈ [1, 3] et a22 ∈ [5, 6]. Les valeurs nominales de ces coef-
ficients ainsi que les déviations sont respectivement : a11 = −9, a12 = 20, a21 = 2, a22 = 5.5
et a11 = 6, a12 = 5, a21 = 1, a22 = 0.5.
La version robuste selon l’approche de Soyster, notée (P2A)Soyster, associée au problème (P2A)
s’écrit :
(P2A)Soyster
max −2x1 + 3x2
s.c. −3x1 + 25x2 ≤ 120 (a)pir
x1 + 5x2 ≥ 30 (b)pir
x1 ≤ 8 (c)
x1, x2 ≥ 0
La solution optimale de (P2A)Soyster est égale à x∗pir = (3.75, 5.25). Sa valeur est égale à 8.25.
Elle correspond à la solution robuste de pire cas pour le problème incertain (PA).
Sur la figure 1.2 est illustrée la variation du domaine des solutions réalisables du problème
(P2A) en fonction des valeurs prises par les coefficients de la matrice A. Il y est notamment

1.2. Incertitudes portant sur la matrice des contraintes 21
illustré les domaines des solutions réalisables de trois valeurs de scénarios différents, définis
comme suit :
– le scénario de pire cas : relatif aux contraintes du problème (P2A)Soyster. Le domaine
réalisable suivant ce scénario est délimité par les droites (a)pir et (b)pir et (c) de la figure
1.2.
– le scénario nominal : correspondant au programme linéaire où tous les coefficients sont
égaux aux valeurs nominales. Le domaine réalisable suivant ce scénario est donné par les
droites (a)nom et (b)nom, (c) et x1 ≥ 0 de la figure 1.2.
– un troisième scénario, qu’on appellera scénario de meilleur cas : (par opposition au
scénario de pire cas), celui où les coefficients prennent les valeurs des intervalles qui
forment le plus grand domaine de solutions réalisables possible. Le domaine réalisable
suivant ce scénario est donné par les droites (a)mei et (b)mei, (c) et x1 ≥ 0 de la figure
1.2. Ce scénario est peu pertinent en robustesse mais il est considéré ici afin de comparer
les différentes solutions.
Les solutions optimales suivant ces trois scénarios sont très différentes (puisqu’elles résultent
de domaines réalisables différents) et sont -pris dans cet ordre- de valeurs croissantes. En effet,
x∗pir = (3.75, 5.25) est de valeur 8.25, x∗nom = (0, 6) est de valeur 18 et x∗mei = (8, 16) de
valeur 32.
L’approche robuste de Soyster (1973) est une approche de pire cas destinée à la
détermination d’une solution robuste avant la réalisation de l’incertain. Cette solution
est une garantie absolue contre tout scénario pouvant se réaliser, et va être décidée
sur la base du scénario le plus défavorable, celui définissant le plus petit domaine
réalisable.
Cependant, ces solutions robustes peuvent être jugées trop pessimistes et sont sou-
vent qualifiées de solutions “conservatives” dans la littérature. En effet, ne disposant
d’aucune information sur la probabilité d’occurrence des scénarios (nous supposons
seulement qu’ils sont tous équiprobables), il est clair pour certains décideurs que la
décision basée sur le cas le plus défavorable ne sera pas toujours satisfaisante. Son
coût peut être inutilement élevée alors qu’il n’y a que peu de chance qu’elle se réalise.
Pour pallier les inconvénients de l’approche de Soyster, de nouvelles approches ont
22 Chapitre 1. État de l’art et problématique
- 3 3 6 9
3
6
9
1 2
1 5
( c )( b ) m e i
( b ) n o m
( b ) p i r
( a ) p i r
( a ) n o mx *n o m
x *p i r
x *m e i
( a ) m e i
Fig. 1.2 – Domaine des solutions réalisables du problème (P2A)
émergé au cours de la dernière décennie. Elles ont permis des avancées importantes en
optimisation robuste tant sur le plan théorique que sur le plan pratique. Les versions
robustes selon ces approches font intervenir un paramètre qui permet de contrôler
le degré de “conservatisme” de la solution robuste tout en garantissant une forte
probabilité de satisfaction des contraintes. La solution robuste recherchée n’est plus
réalisable quel que soit le scénario qui se produit, mais le degré de non satisfaction des
contraintes est fixé par ce paramètre. S’autorisant cette faible violation des contraintes
on s’éloigne des scénarios extrêmes de pire cas, et on fournit au décideur des solutions
robustes de meilleure qualité.
Parmi les approches paramétriques existant dans la littérature, deux principales
approches peuvent être distinguées : l’approche de Ben-Tal et Nimerovski (que nous
présenterons dans la section 1.2.2) et l’approche de Bertismas et Sim (présentée à la
section 1.2.3).

1.2. Incertitudes portant sur la matrice des contraintes 23
1.2.2 Approche de Ben-Tal et Nimerovski
L’approche de Ben-Tal et Nimerovski (1999; 2000) (parallèlement introduite par
El Ghaoui et Lebret (1997) et El Ghaoui et al. (1998)) consiste à chercher des solutions
robustes moins conservatives que les solutions de pire cas, et cela en utilisant un
domaine d’incertitude qui exclut les valeurs extrêmes des intervalles en autorisant une
faible violation des contraintess.
En effet, la modélisation proposée ne situe plus les scénarios sur les extrémités des
intervalles, mais sur les bords d’ellipsoïdes inscrits dans les intervalles de variation.
Pour ce faire, les auteurs imposent, pour toute contrainte i, i = 1 . . . m du programme
linéaire incertain (PA), que les déviations maximales sur une même contrainte i appar-
tiennent à un ellipsoïde défini par :
Ξi(Ωi) = ξij ∈ Rn|
√√√√ n
∑j=1
ξ2ij ≤ Ωi; ξij ∈ [−1, 1] (1.10)
avec Ωi ≥ 0, pour tout i = 1 . . . m.
Ce modèle d’incertitude est souvent nommé dans littérature par modèle en ligne, du fait
qu’un paramètre Ωi soit défini pour chaque contrainte i.
Selon l’approche de Ben-Tal et Nimerovski (1999), la version robuste du problème (PA)
consiste à se placer dans le pire cas dans le domaine s’écrit Ξi(Ωi) et s’écrit :
PA(Ω)BenTal
min
n∑
j=1cjxj
s.c.n∑
j=1aijxj + max
ξ∈Ξi(Ωi)
n∑
j=1aijξijxj ≤ bi i = 1 . . . m
xj ≥ 0 j = 1 . . . n
où Ω représente le vecteur des paramètres (Ω1, . . . , Ωm). Il est possible de simplifier le
problème en employant le lemme suivant.
Lemme 1.1 [Babonneau et al. (2010)] Soit p un réel (avec p > 1), et soit q tel que 1p + 1
q = 1.

24 Chapitre 1. État de l’art et problématique
Pour tout vecteur d ∈ Rn et un réel positif k, nous avons :
max||ξ||p≤k
dTξ = k||d||q
Il découle du Lemme 1.1 que le problème PA(Ω)BenTal est équivalent à :
PA(Ω)BenTal
minn∑
j=1cjxj
s.c.n∑
j=1aijxj + Ωi
√n∑
j=1a2
ijx2j ≤ bi i = 1 . . . m
xj ≥ 0 j = 1 . . . n
qui revient au problème quadratique suivant :
PA(Ω)BenTal
minn∑
j=1cjxj
s.c.n∑
j=1aijxj + Ωizi ≤ bi i = 1 . . . m
n∑
j=1a2
ijx2j ≤ z2
i i = 1 . . . m
zi ≥ 0 i = 1 . . . m
xj ≥ 0 j = 1 . . . n
Le problème robuste PA(Ω)BenTal est non linéaire mais de type conique quadratique.
Il existe diverses méthodes pour le résoudre que nous ne développerons pas dans ce
manuscrit (le lecteur peut se rapporter aux travaux de Ben-Tal et Zibulevsky (1995)
par exemple).
La solution du problème PA(Ω)BenTal est robuste tout en étant moins conservative
que la solution de pire cas de Soyster. En effet, il est possible de contrôler le risque de
non satisfaction des contraintes en modifiant la valeur des paramètres Ωi qui condi-
tionnent le degré de conservatisme des contraintes i. Plus sa valeur est grande, plus
la solution est robuste (proche du pire cas). En supposant que les variables aléatoires
ξij sont uniformément distribuées dans [−1, 1], Ben-Tal et al. (2009) montrent que
la probabilité de violation de la contrainte i ne dépasse pas exp(−Ω2i
2 ). Les auteurs
fournissent ainsi un outil fort (qui ne dépend pas de la taille du problème) pour fixer
la valeur du paramètre de robustesse Ωi avec peu d’hypothèses sur les incertitudes.
Il existe donc un compromis entre la robustesse de la solution, à décider avant la

1.2. Incertitudes portant sur la matrice des contraintes 25
connaissance des incertitudes, et le risque que celle-ci n’appartienne pas au domaine
réalisable prévu par le modèle.
Exemple 1.3 Reprenons l’exemple précédent du problème (P2A). En posant Ω1 = Ω2 = 0.8,
la version robuste selon le modèle de BenTal s’écrit sous la forme du programme quadratique :
P2A(Ω)BenTal
max −2x1 + 3x2
s.c. −9x1 + 20x2 + 0.8z1 ≤ 120
2x1 + 5.5x2 − 0.8z2 ≥ 30
36x21 + 25x2
2 − z21 ≤ 0
x21 + 0.25x2
2 − z22 ≤ 0
x1 ≤ 8
x1, x2, z1, z2 ≥ 0
La solution robuste est x∗BenTal = (1.25, 5.43) et est de valeur égale à 13.80, qui est meilleure
que la valeur de la solution de pire cas de Soyster (qui vaut 8.25).
Il est à noter que, pour les valeurs de Ω1 = Ω2 = 0.8 choisies dans cet exemple, la probabilité de
violation des contraintes est très élevée (autour de 0,77). Dans cet exemple, la taille de l’instance
permet une représentation du domaine des solutions réalisables dans le plan mais est trop faible
pour être pertinente en robustesse.
Dans la littérature, plusieurs applications de problèmes réels empruntent la for-
mulation robuste de Ben-Tal et Nimerovski. Citons, à titre d’exemple, Ben-Tal et
Nimerovski (2002) qui traitent du problème robuste de conception d’antennes, Gold-
farb et Iyengar (2003) qui s’intéressent à la selection de portefeuilles robuste, et
Babonneau et al. (2010) à la planification énergétique et environnementale.
En parallèle, des études théoriques ont été menées pour améliorer le calcul de la
probabilité de non satisfaction des contraintes en fonction des paramètres Ω. Ainsi,
Babonneau et al. (2010) réduisent cette probabilité à exp(−Ω2i
1.5 ). Par ailleurs, ces mêmes
auteurs proposent un autre modèle paramétrique, qui a l’avantage de rester linéaire
dans sa version robuste en approximant l’éllipsoïde par l’intersection d’une boule de
norme infinie et d’une autre boule de norme 1 (modèle non détaillé ici). Enfin, Bertsi-
mas et al. (2004) généralisent l’approche de Ben-Tal et Nimerovski à une modélisation

26 Chapitre 1. État de l’art et problématique
paramétrique suivant une norme quelconque.
1.2.3 Approche de Bertsimas et Sim
La troisième approche présentée dans ce manuscrit pour le calcul des solutions ro-
bustes au problème (PA) est l’approche paramétrique de Bertsimas et Sim (2004).
Cette approche permet aussi de chercher des solutions robustes en évitant le scéna-
rio extrêmes de pire cas. Son principe est le suivant : les auteurs stipulent que dans la
réalité les paramètres incertains n’atteignent jamais -ou très exceptionnellement- leurs
pires valeurs simultanément, et que seule une partie d’entre eux dévie des valeurs
nominales. Les auteurs traduisent cette idée par l’introduction de paramètres Γi pour
chacune des contraintes i, i = 1 . . . m, qui représentent la somme des déviations to-
tales par rapport aux valeurs nominales de tous les coefficients incertains de la même
contrainte i. L’ensemble d’incertitude noté Φi(Γi) est alors :
Φi(Γi) = ξij ∈ Rn|n
∑j=1|ξij| ≤ Γi ; −1 ≤ ξij ≤ 1 (1.11)
Tout comme dans l’approche de Ben-Tal et Nimerovski, le modèle d’incertitude utilisé
dans cette approche est aussi un modèle en ligne.
La version robuste associée à (PA) selon cette approche s’écrit :
PA(Γ)BS
min
n∑
j=1cjxj
s.c.n∑
j=1aijxj + max
ξ∈Φi(Γi)
n∑
j=1aijξijxj ≤ bi i = 1 . . . m
xj ≥ 0 j = 1 . . . n
Ainsi, pour une contrainte i, la valeur de Γi permet de contrôler la déviation totale
des paramètres incertains de leur valeur nominale. Notons que Γi n’est pas nécessai-
rement un entier mais prend des valeurs dans l’intervalle [0, n]. Par exemple, si Γi = 0
aucune déviation n’est autorisée sur les coefficients de la ieme contrainte et celle-ci est
équivalente à la contrainte nominale. Par contre, si Γi = n tous les paramètres sont
susceptibles de dévier, et l’on revient à la formulation pire cas de Soyster 1.2.1.
Attachons-nous à résoudre le problème PA(Γ)BS. Il est possible de simplifier ce dernier

1.2. Incertitudes portant sur la matrice des contraintes 27
en le linéarisant. Il suffit pour cela de remarquer que les variables xj, ainsi que les va-
leurs de aij sont non négatives. Ceci nous permet dans un premier temps de remarquer
que la valeur du
maxξ∈Φi(Γi)
n
∑j=1
aijξijxj (1.12)
pour un vecteur x fixé est atteinte pour des valeurs non négatives des variables ξij.
Ceci a pour conséquence la suppression des valeurs absolues dans la formulation du
domaine d’incertitude, qui devient alors :
Φi(Γi) = ξij ∈ Rn|n
∑j=1
ξij ≤ Γi ; 0 ≤ ξij ≤ 1 (1.13)
Dans un second temps, en rappelant que le problème incertain admet une solution
optimale finie quelles que soient les valeurs des incertitudes sur A, nous pouvons
remplacer le sous-problème de maximisation (1.12) par son dual dans l’écriture de
PA(Γ)BS, selon le théorème fort de dualité. Le problème robuste est alors équivalent au
programme linéaire suivant :
PA(Γ)BS
minn∑
j=1cjxj
s.c.n∑
j=1aijxj + πiΓi +
n∑
j=1λij ≤ bi i = 1 . . . m
πi + λij ≥ aijxj i = 1 . . . m, j = 1 . . . n
xj ≥ 0 j = 1 . . . n
πi ≥ 0 i = 1 . . . m
λij ≥ 0 i = 1 . . . m, j = 1 . . . n
où πi, λij correspondent aux variables du problème dual de (1.12).
Les auteurs évaluent le degré de non satisfaction des contraintes à exp(− Γ2i
2n ) (en
supposant que les variables aléatoires ξ sont uniformément distribuées dans [−1, 1]).
Nous remarquons qu’étant donné que cette probabilité dépend de la taille du problème
(plus précisément, du nombre de coefficients incertains dans une même contrainte),
cette approche devient pertinente (apporte un gain significatif par rapport à l’approche
de Soyster) quand la valeur de n est élevée. Par exemple, pour garantir une satisfaction
des contraintes avec une probabilité égale à 99%, si n = 100 alors Γ doit être supérieur

28 Chapitre 1. État de l’art et problématique
ou égal à 30. Enfin, l’approche de Bertsimas et Sim (2004) a l’avantage de garder la
linéarité du problème dans sa version robuste.
En optimisation combinatoire, Bertsimas et Sim (2003) donnent, selon la même ap-
proche, les versions robustes de plusieurs problèmes d’optimisation dans les réseaux.
Ces versions étant de même complexité que les problèmes associés.
Exemple 1.4 Revenons à l’exemple précédent. Suivant le modèle de Bertsimas et Sim la ver-
sion robuste associée au problème (P2A), notée P2A(Γ)BS, est la suivante :
P2A(Γ)BS
max −2x1 + 3x2
s.c. −9x1 + 20x2 + π1 + λ11 + λ12 ≤ 120
2x1 + 5.5x2 − π2 − λ21 − λ22 ≥ 30
π1 + λ11 − 6x1 ≥ 0
π1 + λ12 − 5x2 ≥ 0
π2 + λ21 − x1 ≥ 0
π2 + λ22 − 0.5x2 ≥ 0
x1 ≤ 8
x1, x2, π1, π2, λ11, λ12, λ21, λ22 ≥ 0
En choisissant les valeurs de Γ1 = Γ2 = 1, la solution robuste est x∗BS = (1.58, 5.37) et
est de valeur égale à 12.95, avec π∗1 = 1.59, π∗2 = 9.47, λ∗11 = 0, λ∗12 = 1.10, λ∗21 = 0,
λ∗22 = 17.37. Il est possible de retrouver le scénario qui correspond à cette solution. En effet,
en remarquant que λ∗12 > 0 et λ∗22 > 0, nous déduisons que les contraintes correspondantes
dans le problème dual sont saturées (d’après le théorème des écarts complémentaires). Ceci nous
permet d’identifier le scénario comme étant égal à a11 = −9, a12 = 25, a21 = 2 et a22 = 5. Le
domaine de solutions réalisables lui correspondant est représenté sur la figure 1.3.
Tout comme l’approche (1.2.2) de Ben-Tal et Nimerovski, la solution robuste x∗BS possède une
meilleure évaluation que celle obtenue par l’approche pire cas de Soyster 1.2.1. Elle est aussi,
pour cet exemple, moins bonne que la solution robuste x∗BenTal .
Notons enfin que la probabilité de violation des contraintes pour les valeurs de Γ1 = Γ2 = 1
est assez élevée (elle approche 0.78). Tout comme l’exemple 1.3, la taille du problème est ici trop
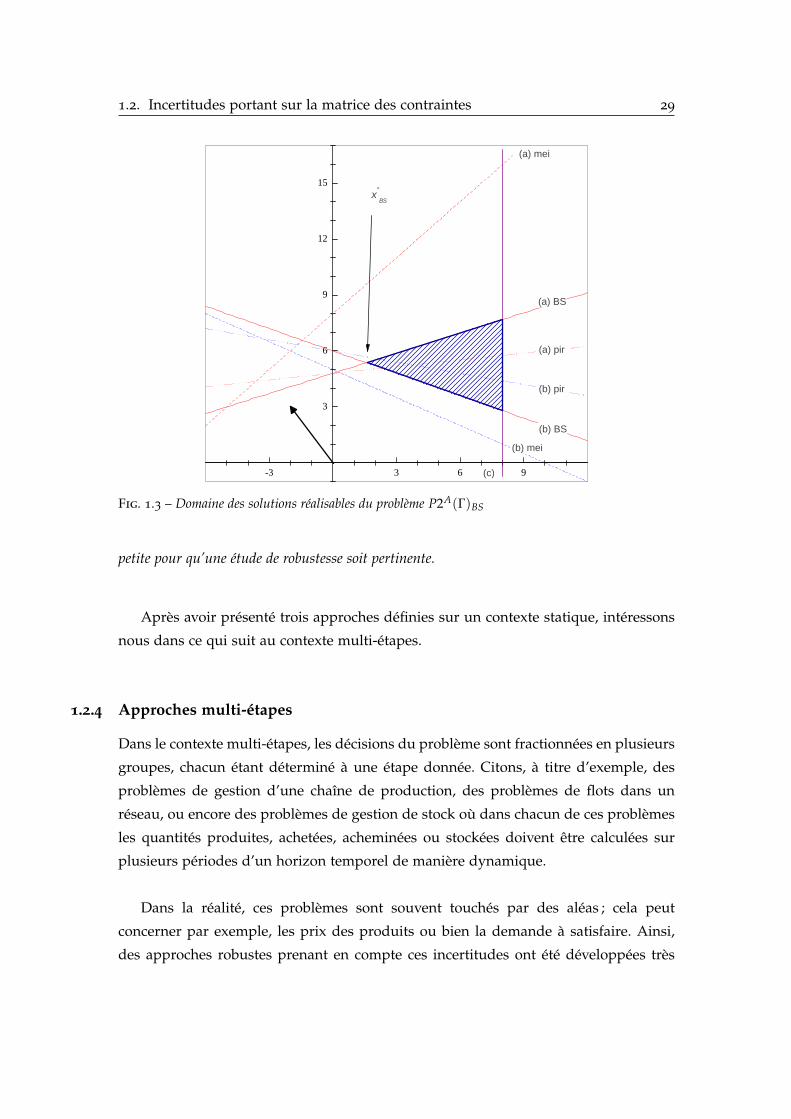
1.2. Incertitudes portant sur la matrice des contraintes 29
- 3 3 6 9
3
6
9
1 2
1 5
( a ) B S
( c )( b ) m e i
( b ) B S
( b ) p i r
( a ) p i r
x *B S
( a ) m e i
Fig. 1.3 – Domaine des solutions réalisables du problème P2A(Γ)BS
petite pour qu’une étude de robustesse soit pertinente.
Après avoir présenté trois approches définies sur un contexte statique, intéressons
nous dans ce qui suit au contexte multi-étapes.
1.2.4 Approches multi-étapes
Dans le contexte multi-étapes, les décisions du problème sont fractionnées en plusieurs
groupes, chacun étant déterminé à une étape donnée. Citons, à titre d’exemple, des
problèmes de gestion d’une chaîne de production, des problèmes de flots dans un
réseau, ou encore des problèmes de gestion de stock où dans chacun de ces problèmes
les quantités produites, achetées, acheminées ou stockées doivent être calculées sur
plusieurs périodes d’un horizon temporel de manière dynamique.
Dans la réalité, ces problèmes sont souvent touchés par des aléas ; cela peut
concerner par exemple, les prix des produits ou bien la demande à satisfaire. Ainsi,
des approches robustes prenant en compte ces incertitudes ont été développées très

30 Chapitre 1. État de l’art et problématique
récemment ; elles proposent des solutions robustes adaptées au contexte multi-étapes
de ces problématiques.
En optimisation robuste, les approches multi-étapes ont été introduites de manière
générales par Ben-Tal et al. (2004) et Minoux (2009b). Les auteurs s’intéressent à la prise
de décision en deux étapes sur des programmes linéaires admettant des domaines
réalisables incertains. Il s’agit dans cette approche de distinguer deux groupes disjoints
de variables, tels que les valeurs des variables du premier groupe sont déterminées
avant que l’incertitude ne soit levée, alors que les valeurs des variables du second
groupe, nommées variables de recours ou d’ajustement, sont calculées après connaissance
des incertitudes.
Les approches robustes bi-étapes sont fortement inspirées de l’optimisation sto-
chastique. En effet, en optimisation stochastique les incertitudes sont décrites par
des lois de probabilités, et l’objectif est de décider des variables “here and now”
(ou de première étape) en utilisant l’espérance mathématique de toutes les décisions
de recours. Les variables “wait and see” (ou de seconde étape) sont, quant à elles,
déterminées après la réalisation des incertitudes. Ce raisonnement est étendu à l’opti-
misation robuste où, bien qu’aucune probabilité ne soit disponible sur les coefficients
incertains, les décisions de la première étape sont définies telles qu’il existe toujours
un recours à la seconde étape. Le problème de recours est dans ce cas basé sur la pire
évaluation du problème compte tenu des incertitudes.
Intéressons nous à la formulation mathématique d’un modèle robuste à deux
étapes. Considérons un programme linéaire (PR) dont les variables sont séparées en
deux groupes distincts x et y. Les variables du premier groupe x sont décidées en pré-
sence d’incertitude, et celles du second groupe y le sont, une fois l’incetitude levée (il
s’agit des variables de recours). Appliquons dans ce qui suit l’approche bi-étapes au
programme linéaire (PR) qui s’écrit :
(PR)
min cx
s.c. Ax + Ry ≤ b
x, y ≥ 0
où x est une matrice colonne de dimension n1 et y est une matrice colonne de dimen-
sion n2. La matrice A est de taille m× n1, et la matrice R, nommée matrice de recours,

1.2. Incertitudes portant sur la matrice des contraintes 31
est de taille m× n2. Les coûts c et le second membre des contraintes b sont respecti-
vement une matrice ligne de taille n1 et une matrice colonne de taille m. Ces derniers
sont supposés certains, l’incertitude ne portant que sur les coefficients des matrices
A et R. Afin de simplifier l’écriture du problème robuste, la notation matricielle est
employée.
L’incertitude sur les matrices A et R est décrite comme suit :
A = A + Aξ (1.14)
et
R = R + Rξ (1.15)
où A, A et R, R sont des matrices de taille respectivement m × n1 et m × n2. Elles
contiennent les valeurs nominales et les déviations associées aux coefficients des
matrices A et R respectivement. Les incertitudes ξ appartiennent à un ensemble
d’incertitude Ψ quelconque (fixe ou paramétrique). Le problème (PR) est supposé
réalisable pour tout (A, R) incertain dans Ψ.
La version robuste bi-étapes associée à (PR), notée (PR)BiE, consiste à déterminer la
solution de première étape x telle que pour toute réalisation du couple (A, R), il existe
un recours y ≥ 0 (à la seconde étape) gardant le problème réalisable. Le problème
robuste est alors le suivant :
(PR)BiE
min cx
s.c. ∀(A, R) ∈ Ψ , ∃y ≥ 0 : Ax + Ry ≤ b
x ≥ 0
D’un point de vue de complexité, Guslitser (2002) démontre que le problème
(PR)BiE est NP-difficile dans le cas d’incertitudes décrites par un polytope. Il devient
facile (polynomial) dans deux cas :
– quand dans leur modélisation, les incertitudes dans chaque contrainte sont in-
dépendantes (modèle d’incertitude en lignes). Dans ce cas, Ben-Tal et al. (2004)
montrent que le problème (PR)BiE est équivalent à la version robuste mono-étape
de Soyster.
– quand le recours est fixe (la matrice R est certaine, ie R ≡ R) et que l’incertitude

32 Chapitre 1. État de l’art et problématique
est décrite par l’enveloppe convexe de scénarios discrets (résultat prouvé par
Guslitser (2002) pour des problèmes linéaires, et Takeda et al. (2004) généralisent
ce résultat pour des problèmes non linéaires).
Revenons à la formulation du problème (PR)BiE. Afin de simplifier et résoudre ce
problème, Ben-Tal et al. (2004) proposent la relaxation suivante.
Règle de décision linéaire
Dans l’écriture du problème (PR)BiE, on remarque que les variables de recours y dé-
pendent non seulement des variables de décision x mais aussi des incertitudes. Ben-Tal
et al. (2004) choisissent de se restreindre à une relation linéaire entre la réalisation des
incertitudes et les variables de recours. En imposant cette règle de décision linéaire,
les auteurs s’assurent de l’existence d’un recours quelle que soit l’incertitude, et donc
de résoudre une relaxation du problème robuste.
Formellement, suivant cette règle de décision, les variables y s’écrivent :
y = y + Dξ (1.16)
où ξ appartiennent au domaine d’incertitude Ψ. La matrice colonne y et la matrice
D, de taille respectivement n2 et n2 × n1, représentent les nouvelles variables du
problème de recours.
De plus, les auteurs considèrent un recours fixe, c’est-à-dire un recours qui ne dépend
pas des incertitudes. Dans ce cas, la matrice R = R et R ≡ 0 dans l’expression 1.15.
Suivant les hypothèses décrites ci-avant, le problème robuste bi-étapes suivant la règle
de décision linéaire , noté (PR)BiEA, se formule comme suit :
(PR)BiEA
min cx
s.c. Ax + Aξx + RDξ + Ry ≤ b ∀ξ ∈ Ψ
x, y, D ≥ 0
Dans ce cas, toutes les variables du problème sont à déterminer en même temps et le
problème (PR)BiEA est équivalent à une formulation de pire cas de Soyster (voir 1.2.1)

1.2. Incertitudes portant sur la matrice des contraintes 33
qui s’écrit :
(PR)BiEA
min cx
s.c. maxξ∈ΨAξx + RDξ+ Ry + Ax ≤ b
x, y, D ≥ 0
Il est possible de modéliser les incertitudes dans Ψ par n’importe quel ensemble d’in-
certitude (fixe ou paramétrique). On rappelle néanmoins que cette approche est plus
pertinente que l’approche de Soyster si cet ensemble permet une dépendance en co-
lonnes des incertitudes (Ben-Tal et al. (2004)).
Remarque 1.4 Dans le cas où le recours est variable, la règle de décision linéaire ne garantit
pas la polynomialité du problème robuste. En effet, il a été montré que le problème est dans le
cas général NP-difficile (voir Ben-Tal et al. (2004)).
Se plaçant dans un contexte bi-étapes, l’approche robuste présentée dans cette
section a été utilisée dans de nombreuses applications de problèmes réels. La règle de
décision linéaire est souvent utilisée dans les formulations robustes de ces problèmes.
Citons par exemple, Ben-Tal et al. (2000; 2003) qui l’appliquent respectivement à un
problème de gestion de portefeuilles multi-étapes et un problème de gestion de pro-
duction multi-étapes. Par ailleurs, Babonneau et al. (2010) s’intéressent au problème de
la planification énergétique et environnementale dans un contexte bi-étapes et Erera
et al. (2009) suivent cette approche pour un problème de disponibilité de véhicules
partagés robuste. Chen et al. (2008) tentent de leur côté d’étendre la règle de décision
linéaire, en définissant d’autres règles de décision (comme la règle de décision linéaire
déviée). D’autres références d’applications sont regroupées dans les résumés de Bert-
simas et Thiele et Bertsimas et al. (2007).
Dans la dernière partie de ce chapitre, nous nous intéressons aux problèmes se
modélisant sous forme de programmes linéaires dans lesquels l’incertitudes portent
exclusivement sur le second membre des contraintes. Nous présenterons quelques
résultats de la littérature et exposerons la problématique étudiée dans cette thèse.

34 Chapitre 1. État de l’art et problématique
1.3 Incertitudes sur le second membre des contraintes
Quand ces travaux de thèse ont débuté, les problèmes linéaires traités dans le cadre de
l’optimisation robuste étaient des problèmes contenant de l’incertitude sur les coeffi-
cients de la fonction objectif, la matrice des contraintes ou la matrice des contraintes et
le second membre. Dans ce dernier cas, les incertitudes portant sur les coefficients du
second membre étaient conjointement traitées avec celles portant sur les coefficients de
la matrice des contraintes, en suivant les approches présentées dans les sections pré-
cédentes de ce chapitre (par exemple l’approche (1.2.3) de Bertsimas et Sim). Si l’on se
propose de traiter un programme linéaire avec des incertitudes portant exclusivement
sur le second membre, il est nécessaire de savoir si ces méthodes sont pertinentes pour
la détermination de solutions robustes.
Afin de traiter ces problèmes, une première approche assez naturelle concerne l’uti-
lisation de la dualité pour transférer l’incertitude se situant dans le second membre
des contraintes aux coefficients de la fonction objectif. Comme cela sera développé ci-
après, nous montrerons que cette possibilité se révèle inadaptée pour la détermination
de solutions robustes au problème incertain en question. De plus, nous allons montrer
que l’utilisation des approches paramétriques dans un contexte statique, comme par
exemple l’approche de Bertsimas et Sim (voir section 1.2) est tout aussi insatisfaisant.
Avant d’aborder ces approches, formulons le problème incertain. Soit (Pb) le pro-
gramme linéaire suivant :
(Pb)
min cx
s.c. Ax ≥ b
x ≥ 0
où x est une matrice colonne de taille n représentant les variables du problème, c est
une matrice ligne de taille n, A est une matrice de taille m× n et le second membre
b est une matrice colonne de taille m. Les coefficients de b sont incertains. Le modèle
d’incertitude est le modèle par intervalles.
Utilisation de la dualité
Le dual d’un programme linéaire (primal) dont le second membre des contraintes est
incertain est un programme linéaire où seuls les coefficients de la fonction objectif sont

1.3. Incertitudes sur le second membre des contraintes 35
incertains. Il semblerait alors pertinent, via la théorie de la dualité, d’exploiter le résul-
tat obtenu pour le cas d’incertitudes sur les coefficients de la fonction objectif. En effet,
afin de déterminer des solutions robustes au problème primal, une approche serait
dans un premier temps d’appliquer un des critères de la décision, comme par exemple
le critère du pire cas (voir section (1.1)), au problème dual. Puis dans un second temps,
retrouver les solutions robustes du problème primal, et cela en exploitant de nouveau
la dualité. Toutefois, cette approche n’est pas concluante comme le montre l’exemple
suivant.
Exemple 1.5 Soit le programme linéaire incertain (P3b) :
(P3b)
min 3x1 + x2
s.c. x1 + x2 ≥ b1
x1 − x2 ≥ b2
x1 ≥ 0, x2 ≥ 0
où les coefficients du second membre varient dans les intervalles suivants b1 ∈ [4, 5] et
b2 ∈ [1, 3].
Tout d’abord, notons que, pour toute valeur de second membre b dans les intervalles correspon-
dant, le problème (P3b) est réalisable, et son optimum est fini. Par conséquent, et d’après le
théorème fort de la dualité, le problème dual admet lui aussi un optimum fini. Il s’écrit :
(D)
max b1y1 + b2y2
s.c. y1 + y2 ≤ 3
y1 − y2 ≤ 1
y1 ≥ 0, y2 ≥ 0
où les coefficients de la fonction objectif b1 et b2 sont incertains, appartenant respectivement
aux intervalles [4, 5] et [1, 3].
Le problème résultant de l’application du critère du pire cas au problème (D) est un problème
facile (voir la proposition (1.1)). Étant donné que les variables du problème sont non négatives,
il suffit d’associer aux paramètres incertains les plus petites valeurs des intervalles. La solution
robuste de pire cas est alors y∗pirCas = (2, 1). Elle est de valeur égale à 9 et est réalisée sous le
scénario bpirCas = (4, 1).

36 Chapitre 1. État de l’art et problématique
Remplaçons ce scénario dans le problème primal :
(P3b)pirCas
min 3x1 + x2
s.c. x1 + x2 ≥ 4
x1 − x2 ≥ 1
x1 ≥ 0, x2 ≥ 0
La solution optimale x∗ = (5/2, 3/2) est de valeur égale à 9.
Nous observons que la solution x∗ associée au scénario bpirCas = (4, 1) ne correspond pas à la
solution du pire cas pour (P3b). En effet, cette solution n’est réalisable que sur le seul scénario
bpirCas, et il est clair que si elle est choisie avant de connaître la réalisation de l’incertitude, elle
sera non réalisable sur la quasi totalité des scénarios (sauf un seul, égal à bpirCas). Elle ne peut
donc être qualifiée de robuste.
Comme on le voit sur cet exemple, la dualité ne peut être exploitée de cette manière
pour déterminer des solutions robustes au problème incertain. Plus généralement, Mi-
noux (2007a; 2009b) a montré que le problème issu de l’application du critère du
pire cas sur le problème primal était différent de celui obtenu par l’application du
même critère sur le problème dual. Nous reviendrons sur ces problématiques et nous
développerons cette relation de dualité plus en détails au chapitre 2 de ce manuscrit.
Utilisation de l’approche paramétrique de Bertsimas et Sim
La deuxième alternative pour traiter le problème (Pb) est d’utiliser les approches
présentées à la section 1.2 du chapitre courant. Intéressons-nous à l’approche paramé-
trique de Bertsimas et Sim (voir section (1.2.3)) appliquée au problème (Pb).
Rappelons que selon cette approche, les coefficients du second membre sont modélisés
par des intervalles composés d’une valeur nominale autour de laquelle une déviation
est permise. Dans ce cas, tout bi, i = 1 . . . m appartient à l’intervalle [bi − bi, bi + bi], où
bi représente la valeur nominale du coefficient bi et bi sa déviation. Le décideur doit
fixer un budget d’incertitude pour chaque contrainte, l’objectif étant de déterminer des
solutions robustes dans ce budget, autorisant ainsi une faible violation des contraintes.
Construisons la version robuste du problème (Pb) selon cette approche. Nous intro-

1.3. Incertitudes sur le second membre des contraintes 37
duisons pour ce faire un vecteur Γ de taille m où chaque composante représente le
budget d’incertitude de la ieme contrainte, pour i = 1 . . . m. Nous remarquons que, ne
disposant que d’un seul coefficient incertain par contrainte, le budget d’incertitude Γi
(i = 1 . . . m) n’excède pas 1, et donc Γi ∈ [0, 1]. Ceci implique que la version robuste de
(Pb) se déduit aisément et s’écrit :
Pb(Γ)BS
min cx
s.c. Ax ≥ b + Γb
x ≥ 0
Nous observons que cette approche conduit à décider sur la base d’un scénario unique
induit par les valeurs de Γi. Par conséquent, l’application directe de cette approche sur
le problème incertain (Pb) est peu pertinente.
Nous nous proposons dans le chapitre 3 d’adapter l’approche de Bertsimas et Sim
au problème incertain (Pb) en considérant non plus un budget d’incertitude par
contrainte (modèle d’incertitude en ligne), mais un budget commun à l’ensemble des
coefficients incertains du second membre (modèle d’incertitude colonne).
Approches multi-étapes
Nous nous intéressons dans cette dernière section aux approches robustes pour le trai-
tement de (Pb) placé dans un contexte multi-étapes. Durant ces dernières années les
approches robustes multi-étapes, et notamment des approches bi-étapes, ont suscité
un fort engouement pour la résolution d’applications réelles. Citons à titre d’exemple
les travaux de Minoux (2007a;b; 2009b) pour des problèmes d’ordonnancement et Mi-
noux (2008) pour un problème de gestion de stock. Atamtürk et Zhang (2007) traitent
quant à eux d’un problème de dimensionnement de réseaux et Solyali et al. (2010)
s’intéressant à un problème de tournées de véhicules.
Nous présentons brièvement l’approche robuste bi-étapes, suivie par Thiele et al.
(2009), qui vise à calculer des solutions robustes d’un programme linéaire incertain
particulier, où une partie des coefficients du second membre des contraintes sont
incertains.

38 Chapitre 1. État de l’art et problématique
Définissons le problème. Soit un programme linéaire (H) suivant :
(H)
min cx
s.c. Ax = b
A′x ≥ b′
où x est une matrice colonne de taille n représentant les variables du problème, c est
une matrice ligne de taille n, les matrices A et A′ de taille respectivement m × n et
m′ × n, et b et b′ sont des matrices colonnes de taille respectivement m et m′. Nous
supposons que le domaine des solutions réalisables de (H) est non vide, et que l’opti-
mum est atteint en une valeur finie.
Les auteurs s’intéressent à la prise de décision robuste quand les coefficients du second
membre b sont incertains. Pour ce faire, ils adoptent une approche bi-étapes et cela en
ajoutant de nouvelles variables : les variables de recours y. Celles-ci ont pour rôle de
mesurer le degré de violation des contraintes d’égalité à l’aide de pénalités reportées
dans la fonction objectif. Le problème qu’ils proposent de résoudre est le suivant :
(H′)
min cx + py
s.c. Ax + Ry = b
A′x ≥ b′
y ≥ 0
où y est une matrice colonne de taille l, p est une matrice ligne de pénalités de taille l
et R représente la matrice de recours, de taille m× l. Ici, le recours est supposé fixe (R
ne dépend pas des incertitudes).
Soit le domaine d’incertitude Ψ dans lequel varient les valeurs des coefficients incer-
tains de b. La version robuste bi-étapes (H′)BiE consiste à déterminer les décisions de
première étape x telles que quelle que soit l’incertitude dans le domaine Ψ, un recours
y est possible à la seconde étape. Il s’écrit alors :
(H′)BiE
min cx + maxb∈Ψ
minRy=b−Ax, y≥0
py
s.c. A′x ≥ b′
Le problème (H′)BiE est un problème de type min-max-min, qui est dans le cas général

1.3. Incertitudes sur le second membre des contraintes 39
difficile à résoudre. Afin de le simplifier, les auteurs supposent l’existence d’un recours
complet, où pour tout vecteur x réalisable (de première étape) le problème de recours
admet une solution finie. En d’autres termes, le problème de minimisation suivant :
minRy=b−Ax, y≥0
py (1.17)
est réalisable et admet un optimum fini pour tout b ∈ Ψ. Sa valeur peut donc être
substituée par la valeur du problème dual (selon le théorème fort de la dualité). Par
conséquent, le problème (H′)BiE est équivalent à : min cx + maxb∈Ψ, Rtu≤pt
(b− Ax)tu
s.c. A′x ≥ b′
où u sont les variables du problème dual de (1.17).
Dans le cas où le domaine incertain Ψ est un polyèdre, les auteurs montrent que le
problème (H′)BiE est un problème d’optimisation convexe, et emploient l’algorithme
proposé par Kelley (1960) pour le résoudre. Cet algorithme se base sur une procédure
de génération de contraintes dont nous verrons le détail au chapitre 4.
Conclusion et problématique
Nous avons présenté dans ce chapitre les principaux résultats bibliographiques relatifs
à la prise en compte d’incertitude affectant les coefficients de programmes linéaires.
Nous nous sommes limités à la modélisation de ces incertitudes par des intervalles
continus. Trois cas ont été distingués : un premier cas où les incertitudes portent sur la
fonction objectif, un deuxième cas où elles portent sur la matrice des contraintes, et en-
fin le cas où les incertitudes concernent uniquement le second membre des contraintes.
Dans le premier cas de figure, nous avons détaillé les résultats de l’application des
critères issus de la théorie de la décision, et dressé un panorama non exhaustif des
travaux qui ont été menés sur le sujet. Le contexte de décision dans lequel s’inscrivent
la plupart des approches existantes est celui où la décision doit être prise en présence
d’incertitude. Le premier critère que nous avons abordé est le critère du pire cas qui
vise à se prémunir contre la pire éventualité. Pour la modélisation des incertitudes par
40 Chapitre 1. État de l’art et problématique
intervalles, ce problème est facile. Le critère du pire cas est particulièrement adapté
lorsque le décideur est averse au risque, notamment dans les domaines d’application
touchant par exemple au nucléaire, à la santé ou à l’environnement. Cependant, la
solution robuste de pire cas peut être jugée trop conservative (car ne prend aucun
risque) et peut se révéler trop coûteuse.
Parmi les autres critères pouvant être appliqués lorsque l’incertitude porte sur
les coefficients de la fonction objectif, le critère du regret maximum propose une
solution robuste moins conservative que la solution de pire cas. Ce critère est utile
lorsqu’une prise de risque est acceptable par le décideur et est souvent employé dans
le domaine de la finance où les investisseurs souhaitent avoir le moins de regret quand
ils prennent leurs décisions.
Dans le deuxième cas de figure (incertitude portant sur la matrice des contraintes),
le domaine réalisable est affecté par l’incertitude. Ainsi, la détermination de solutions
robustes sera étroitement liée à la réalisabilité du problème. Nous avons séparé les
approches de la littérature en deux familles, selon le contexte décisionnel. Dans le
contexte statique, il s’agit de prendre une décision avant que l’incertitude ne se réalise.
Le second contexte, quant à lui, englobe les approches multi-étapes, où la solution
robuste se construit en plusieurs étapes, et ceci au fur et à mesure que l’incertitude est
levée.
Trois approches ont été exposées dans le contexte statique. La première approche,
celle de Soyster, est une approche de pire cas. La solution robuste recherchée est réali-
sable pour tous les scénarios pouvant se réaliser. Les deux approches de Ben-Tal et al.
et celle de Bertsimas et Sim visent à accepter une part de risque, et cela en autorisant
une faible violation des contraintes, dans le but de déterminer des solutions robustes
moins conservatives que la solution de Soyster.
Dans un contexte multi-étapes, de nouvelles approches robustes ont vu le jour au
cours de ces quelques dernières années, qui s’inspirent de l’optimisation stochastique.
Elles sont employées lorsque l’information sur les coefficients incertains peut être
révélée sur plusieurs étapes. Ces approches possèdent l’avantage d’être flexibles, mais
l’inconvénient d’engendrer des modèles souvent difficiles à résoudre.

1.3. Incertitudes sur le second membre des contraintes 41
Enfin, dans le dernier cas de figure (incertitudes portant exclusivement sur le se-
cond membre des contraintes), peu de travaux avaient été réalisés au moment où cette
thèse a débuté. Nous avons mis en évidence la nécessité d’adapter et de développer
des méthodologies propres pour répondre à la préoccupation de la robustesse pour ce
type de problème, et cela en distinguant les contextes de décision.
Le contexte général de ce travail de thèse est le traitement robuste des programmes
linéaires où les coefficients du second membre des contraintes sont incertains (que
nous modéliserons à l’aide d’intervalles continus). Dans le chapitre suivant, nous dis-
tinguerons deux contextes décisionnels pour lesquels nous construirons les versions
robustes aux problèmes incertains.

2Programmes linéaires avec
incertitudes sur le second membre
des contraintes
Sommaire
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.1 Premier contexte décisionnel : des décisions robustes . . . . . . . . . 47
2.1.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . . . . 48
2.1.2 Programmes linéaires avec contraintes d’égalité : modèle de pénalités . 51
2.2 Second contexte décisionnel : pire et meilleur optimaux . . . . . . . 56
2.2.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . . . . 56
2.2.2 Programmes linéaires avec contraintes d’égalité . . . . . . . . . . . . . . 58
2.2.3 Programmes linéaires quelconques . . . . . . . . . . . . . . . . . . . . . . 64
2.3 Robustesse et dualité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.3.1 Critère du meilleur cas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.3.2 Dualité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Dans ce chapitre, il sera question de programmes linéaires dans lesquels l’incerti-
tude porte exclusivement sur les coefficients du second membre des contraintes.
Nous séparons notre étude selon le contexte décisionnel du problème. Dans le premier
contexte, une décision doit être prise avant la réalisation de l’incertain. Nous cher-
chons alors une solution dont la réalisabilité ne sera pas perturbée par la réalisation
43

44 Chapitre 2. Programmes linéaires avec seconds membres incertains
de l’incertain. Dans le second contexte, nous considérons que l’incertitude sera levée
au moment de la prise de décision. Dans un cadre prévisionnel, notre intérêt est alors
porté sur l’évaluation d’une solution optimale selon les différentes réalisations pos-
sibles de l’incertitude. Par ailleurs, nous nous attachons à l’emploi de la dualité en
robustesse pour ces mêmes problèmes, avec une approche pire cas.
45
Introduction
Dans ce chapitre, nous nous intéressons à la prise en compte d’incertitudes affectant
exclusivement les coefficients du second membre des contraintes d’un programme li-
néaire. Se plaçant dans un contexte statique, il s’agit de définir des méthodologies
spécifiques qui répondent à la préoccupation de la robustesse pour ces problèmes.
Pour ce faire, nous distinguerons deux contextes décisionnels différents.
– Dans le premier contexte, nous considérons qu’une décision doit être prise avant
la réalisation de l’incertain. Pour illustrer cela, prenons l’exemple d’un problème
de gestion de stockage de marchandises où le décideur doit approvisionner ses
centres de stockage une seule fois dans une période donnée, dans le but de
satisfaire toutes les demandes à venir tout au long de cette période. Au moment
de la prise de décision des quantités à stocker, les demandes des clients ne sont
pas connues. Le décideur souhaite alors adopter une politique (ou solution) qui
permettrait de satisfaire toutes les demandes, quel que soit le scénario qui se
réalisera.
– Nous définissons un second contexte où l’incertitude est levée avant la prise de
décision. Ainsi, pour une réalisation donnée, le décideur sait calculer la solu-
tion optimale du problème, qui serait alors déterministe. La préoccupation de
la robustesse est alors différente. En effet, dans une phase de planification, le
décideur peut s’intéresser au coût engendré par les différentes décisions qu’il
pourrait prendre selon les scénarios qui se réalisent. Par exemple, considérons
un centre de production de marchandises, où les produits sont manufacturés
à la demande. Ici, tant que les clients n’effectuent pas de commande, aucune
marchandise n’est produite. Dans ce cas, le décideur attend la réalisation de la
demande pour prendre sa décision (achat de matières premières, transport, . . . ).
En revanche, dans une phase de planification, pour des considérations budgé-
taires par exemple, le décideur peut s’intéresser à la fourchette de variation de
ses coûts en fonction des scénarios éventuels de la demande à venir, notamment
le pire scénario, celui engendrant le coût le plus élevé, et le meilleur scénario,
celui engendrant le coût le plus faible (correspondant respectivement à la plus
forte demande et la plus faible demande).
Dans la première section de ce chapitre, nous traiterons du premier contexte de
décision. Dans ce contexte, l’objectif est de décider avant la réalisation de l’incertain
46 Chapitre 2. Programmes linéaires avec seconds membres incertains
tout en se prémunissant contre tout scénario pouvant se réaliser, et donc le pire d’entre
eux. Nous nous attacherons alors au calcul de solutions robustes de pire cas. Selon la
définition de Soyster (1973) (voir la section 1.2.1 du chapitre 1), ces solutions doivent
être réalisables quel que soit le scénario qui se produit.
Nous montrerons dans la section 2.1.1 que le calcul de ces solutions, associé à un
problème admettant des contraintes d’inégalité exclusivement, est un problème facile.
En revanche, quand le problème incertain contient des contraintes d’égalité, ce calcul
n’est plus pertinent. En effet, chaque scénario définissant un ensemble unique de
solutions réalisables, il s’en suit que pour toute solution, il existe au moins un scénario
pour lequel cette solution n’est pas réalisable, et il n’existe pas de solution réalisable
sur tous les scénarios. Il n’y a donc pas de décision de pire cas, puisqu’il n’est pas
possible de discriminer une solution d’une autre. Dans ce cas, le décideur est obligé
de choisir une solution puis de constater la violation des contraintes.
Néanmoins, dans certains contextes décisionnels, il est possible de mesurer le
coût engendré par la non réalisabilité d’une solution sur un scénario donné. C’est le
cas dans l’exemple du problème de gestion de stock, où l’équilibrage entre offre et
demande est souvent exprimé par des égalités. Lorsque la demande des clients est
incertaine (affectant ainsi le second membre des contraintes du modèle), le décideur
ne peut pas choisir, avant la réalisation de la demande, une solution de pire cas lui
garantissant de satisfaire la demande quelle qu’elle soit. Il est alors courant pour
ce type de problème, face à une situation de rupture de stocks, que le décideur ait
recours à un marché extérieur pour se procurer des marchandises et ceci en payant
des pénalités conséquentes. Le cas contraire peut aussi se dérouler, le décideur se
retrouvant avec un surplus de marchandises à stocker au prix fort chez un concurrent.
Ici, la non réalisation des contraintes d’égalité est aussi quantifiée par des pénalités.
Dans la section 2.1.2, nous faisons appel à ce type de modèle, nommé modèle de
pénalités, qui permet de mesurer par des pénalités le coût de la non satisfaction d’une
contrainte d’égalité. Il devient alors possible de discriminer chaque solution sur n’im-
porte quel scénario. Dans ce cas, la détermination d’une solution robuste de pire cas
est possible. Elle correspondra à la solution qui minimise le coût total plus les pénalités.
Dans le second contexte de décision, abordé dans la deuxième section du chapitre,
2.1. Premier contexte décisionnel : des décisions robustes 47
nous nous intéressons aux valeurs de l’optimum du problème incertain en fonction
des scénarios qui se présentent. Ici, l’objectif est de fournir au décideur des indicateurs
concernant l’intervalle de variation de la valeur de l’optimum. Cet intervalle s’obtient
par le calcul de deux valeurs extrêmes : la valeur du meilleur optimum et celle du
pire optimum. Les deux scénarios extrêmes qui leurs sont associés sont aussi source
d’information pour le décideur. Par ailleurs, l’évaluation du pire optimum sera d’une
importance primordiale, comme nous le verrons par la suite, lors de la détermination
d’une solution robuste dans un contexte multi-étapes. Nous reviendrons plus en dé-
tails, au chapitre 4 de ce manuscrit, sur le calcul de cette solution, notamment pour le
problème de localisation et de transport robuste.
Enfin, dans la dernière section, nous reviendrons sur les relations de dualité abor-
dées à la section 1.3 du chapitre précèdent. Nous ferons le lien entre l’emploi du critère
du pire cas appliqué à des problèmes contenant des incertitudes sur les coefficients du
second membre des contraintes d’une part, et leurs problèmes duaux qui contiennent
des incertitudes sur la fonction objectif d’autre part. Pour ce faire, nous utiliserons un
autre critère, le critère du meilleur cas. Une partie de ces travaux ont été publiés dans
Gabrel et al. (2008) et Gabrel et al. (2010a).
2.1 Premier contexte décisionnel : des décisions robustes
Dans cette section, il est question de la détermination de décisions robustes pour des
programmes linéaires dont le second membre des contraintes est incertain. Nous nous
situons dans un contexte décisionnel où la décision doit être prise avant la réalisation
de l’incertain. Dans ce cas, nous cherchons des solutions robustes qui, selon l’approche
de Soyster (1973) (voir la section 1.2.1), doivent être des solutions réalisables quel que
soit le scénario qui se produit.
La détermination de telles solutions dépend de la nature des contraintes du
problème. En effet, nous rappelons que lorsque le problème admet des contraintes
d’égalité, il n’existe pas de solution réalisable sur tous les scénarios. Nous séparons
alors notre étude en deux parties : nous traiterons en premier les programmes linéaires
contenant des contraintes d’inégalité, puis nous emploierons un modèle de pénalités

48 Chapitre 2. Programmes linéaires avec seconds membres incertains
pour traiter les programmes linéaires avec contraintes d’égalité.
2.1.1 Programmes linéaires avec contraintes d’inégalité
Soit le problème linéaire (Pb≥) suivant :
(Pb≥)
min cx
s.c. Ax ≥ b(2.1)
où x une matrice colonne de taille n représentant les variables du problème, c est une
matrice ligne de taille n, la matrice des contraintes A est de dimension m × n et de
rang égal à m, et le second membre b est une matrice colonne de taille m.
Nous supposons que pour toute contrainte i, i = 1 . . . m, le coefficient incertain
bi appartient à l’intervalle [bi, bi] (avec bi ≤ bi). Notons B le produit cartésien des
intervalles [bi, bi], pour i = 1 . . . m.
Tout d’abord, énonçons quelques définitions. Pour tout scénario b dans B nous défi-
nissons l’ensemble :
Xb≥ = x ∈ Rn : Ax ≥ b (2.2)
comme étant le domaine des solutions réalisables de (Pb≥). Nous supposerons que le
polyèdre Xb≥ est non vide pour tout b.
Par ailleurs, pour tout vecteur x de Rn, nous définissons la valeur de x pour le pro-
blème Pb≥(x), notée v≥(b, x), comme suit :
v≥(b, x) =
cx si x ∈ Xb
≥
+∞ sinon(2.3)
De plus, nous faisons l’hypothèse que la solution optimale de (Pb≥) pour un scénario b
fixé dans B est de valeur finie. Cette valeur est notée v∗(Pb≥).
Enfin, soit X≥ l’ensemble des solutions réalisables résultant de l’intersection des do-
maines réalisables sur tous les scénarios b et X≥ l’ensemble des solutions réalisables

2.1. Premier contexte décisionnel : des décisions robustes 49
de (Pb≥) pour au moins un scénario b. Formellement, ces ensembles correspondent à :
X≥ =⋂
b∈BXb≥ (2.4)
et
X≥ =⋃
b∈BXb≥ (2.5)
Il est clair que l’ensemble X≥ est non vide. En effet, pour tout vecteur b fixé dans B, le
domaine des solutions Xb≥ est par hypothèse non vide. L’union de tous les domaines
est par conséquent non vide. Plus précisément, X≥ représente le plus grand domaine
de solutions réalisables et coïncide avec Xb≥.
Par ailleurs, l’ensemble X≥ est lui aussi non vide. En effet, étant donné les contraintes
d’inégalité de (Pb≥), il est clair que le polyèdre Xb
≥ est inclus dans tout autre polyèdre
Xb≥ où b ∈ B. Puisque Xb
≥ est non vide, il s’en suit que X≥ est aussi non vide. Les deux
domaines se confondent et représentent le plus petit domaine de solutions réalisables
associé au problème (Pb≥).
Après avoir défini le domaine d’incertitude du problème, calculons une solution
robuste de pire cas associée au problème (Pb≥). Il s’agit de déterminer la solution qui
possède la meilleure évaluation dans le scénario de pire cas. Le problème robuste, noté
(Pb≥)pirCas, s’écrit :
(Pb≥)pirCas
minx∈X≥
maxb∈B
v≥(b, x) (2.6)
où v≥(b, x) est défini par (2.3).
Soit x une solution appartenant à X≥. Nous observons que l’évaluation de x est
constante quel que soit le scénario b ∈ B. Par conséquent, la pire évaluation de x
est égale à :
maxb∈B
v≥(b, x) = cx (2.7)
Par ailleurs, la pire évaluation de toute autre solution qui n’appartient pas à X≥ est

50 Chapitre 2. Programmes linéaires avec seconds membres incertains
égale à +∞ (car elle est non réalisable sur le scénario b). Par conséquent, la solution
robuste selon le critère du pire cas (qui minimise (2.7)) appartient nécessairement à
X≥.
En rappelant que X≥ n’est autre que Xb≥, nous déduisons que la solution robuste de
pire cas de (Pb≥) s’obtient par la résolution du programme linéaire admettant le plus
petit domaine réalisable :
(Pb≥)pirCas ≡ (Pb
≥)
min cx
s.c. Ax ≥ b
Exemple 2.1 Soit le programme linéaire suivant :
(P4b≥)
min 5x1 − 5x2
s.c. 2x1 + x2 ≥ b1
x1 − 2x2 ≥ −b2
x1 ≤ 6
x1 ≥ 0 ; x2 ≥ 0
où les coefficients b1 et b2 du second membre des contraintes sont incertains et appartiennent
aux intervalles suivants : b1 ∈ [6, 10] et b2 ∈ [4, 8].
2 4 6
2
4
6 b 1 = 6
b 1 = 1 0b 2 = 8
x p i r C a s
b 2 = 4
Fig. 2.1 – Solution optimale suivant le critère du pire cas pour (P4b≥)

2.1. Premier contexte décisionnel : des décisions robustes 51
La solution robuste de pire cas est égale à x∗pirCas = (16/5, 18/5) et sa valeur est égale à
−2. Elle est obtenue pour le scénario b1 = 10 et b2 = 4 définissant le plus petit domaine de
solutions réalisables, comme illustré dans figure (2.1)).
2.1.2 Programmes linéaires avec contraintes d’égalité : modèle de pénalités
Dans cette section, nous nous intéressons aux programmes linéaires dans lesquels les
contraintes sont exclusivement des égalités. En premier, nous montrerons (à l’aide d’un
exemple) que la détermination d’une solution robuste réalisable sur tous les scénarios
est non pertinente. Puis, nous proposerons un modèle, dit modèle de pénalités, pour
lequel il sera possible de décider de solutions robustes de pire cas.
Soit un programme linéaire de minimisation contenant exclusivement des
contraintes d’égalité, qu’on notera (Pb=) :
(Pb=)
min cx
s.c. Ax = b
x ≥ 0
sachant que x est une matrice colonne de taille n des variables du problème, la matrice
ligne c est de taille n, la matrice des contraintes A est de dimension m× n et le second
membre b est une matrice colonne de taille m. Cette dernière est incertaine : chaque
coefficient bi de la ieme contrainte varie dans l’intervalle [bi, bi] (avec bi ≤ bi), i = 1 . . . m.
Notons B le produit cartésien des intervalles [bi, bi], pour i = 1 . . . m.
Pour tout scénario b dans B, notons :
Xb= = x ∈ Rn : Ax = b, x ≥ 0 (2.8)
comme étant le domaine des solutions réalisables de (Pb=). Le polyèdre Xb
= est supposé
non vide pour tout vecteur b. De plus, notons v∗(Pb=) la valeur (que nous supposons
finie) de l’optimum du problème (Pb=) pour un scénario b fixé dans B.
Par ailleurs, pour tout vecteur x de Rn, nous définissons la valeur de x pour le pro-

52 Chapitre 2. Programmes linéaires avec seconds membres incertains
blème Pb=(x), notée v=(b, x), comme suit :
v=(b, x) =
cx si x ∈ Xb
=
+∞ sinon(2.9)
Enfin, nous définissons X= l’ensemble des solutions réalisables de (Pb=) pour au moins
un scénario b :
X= =⋃
b∈BXb
= (2.10)
Remarque 2.1 Il est clair que X= est non vide. En revanche, l’ensemble défini par l’intersec-
tion des domaines de solutions réalisables sur tous les scénarios est quant à lui vide.
Afin d’illustrer la spécificité de (Pb=) par rapport à (Pb
≥) considérons l’exemple
suivant. Soit le problème incertain (P5b) :
(P5b)
min 5x1 − 10x2
s.c. x1 + 2x2 = b1
−x1 + 2x2 = b2
x1 ≥ 0 ; x2 ≥ 0
où les contraintes sont des égalités et le second membre est incertain avec b1 ∈ [9, 14]
et b2 ∈ [2, 8].
L’ensemble, noté X(P5b), représentant l’union de toutes les solutions réalisables,
s’écrit :
X(P5b) = (x1, x2) ∈ R+ ×R+ : 9 ≤ x1 + 2x2 ≤ 14, 2 ≤ −x1 + 2x2 ≤ 8
Soit x′ = (x′1, x′2) = (2, 4) une solution réalisable de X(P5b). Nous remarquons que
cette solution est réalisable sur un seul scénario : b′1 = 10 et b′2 = 6. Il s’en suit que la
pire évaluation de x′ sur tous les scénarios possibles est :
maxb∈B
v=(b, x′) = +∞
Cette observation étant valide pour toute solution dans X(P5b), il n’est plus possible
de discriminer une solution d’une autre solution. La décision de pire cas qu’on choi-

2.1. Premier contexte décisionnel : des décisions robustes 53
sirait, avant la réalisation des incertitudes, pour se prémunir contre tous les scénarios
possibles n’existe pas.
Dans ce qui suit, nous proposons une alternative qu’il est possible d’employer dans
certains contextes de décisions. Dans cette approche l’objectif est de limiter la distance
à la réalisabilité d’une solution et cela en intégrant dans le modèle des pénalités de
violation des contraintes. Supposons, en effet, que la non satisfaction d’une contrainte
d’égalité puisse être traduite par un surcoût connu, que le décideur accepte de payer.
Il est alors possible d’évaluer le coût d’une solution (son coût réel auquel s’ajoutent
des pénalités) sur tous les scénarios et par conséquent il devient envisageable de
déterminer la décision la “moins irréalisable”.
Formellement, nous employons un modèle, dit de pénalités, où la non satisfaction
de toute contrainte i, i = 1 . . . m du problème initial (Pb=) est mesurée par une nouvelle
variable ei, i = 1 . . . m telle que :
ei = (n
∑j=1
aijxj − bi) (2.11)
et l’évaluation d’une solution x ∈ X= pour le scénario b est définie par :
vbp(x) =
n
∑j=1
cjxj +m
∑i=1
max(piei , −qiei) (2.12)
où pi et qi sont des pénalités positives relatives à ei ≥ 0 et ei ≤ 0 respectivement.
La pire évaluation de la solution x sur tous les scénarios n’est plus infinie mais se
calcule comme suit :

54 Chapitre 2. Programmes linéaires avec seconds membres incertains
maxb∈B
vbp(x) = max
b∈B
n
∑j=1
cjxj +m
∑i=1
max (piei , −qiei) (2.13)
=n
∑j=1
cjxj + maxb∈B
m
∑i=1
max(pi(n
∑j=1
aijxj − bi) , qi(bi −n
∑j=1
aijxj)) (2.14)
=n
∑j=1
cjxj +m
∑i=1
maxbi∈[bi ,bi ]
max(pi(n
∑j=1
aijxj − bi) , qi(bi −n
∑j=1
aijxj)) (2.15)
=n
∑j=1
cjxj +m
∑i=1
max (pi(n
∑j=1
aijxj − bi) , qi(bi −n
∑j=1
aijxj)) (2.16)
L’égalité (2.14) est vérifiée car les coûts du vecteur c sont certains, l’incertitude ne
portant que sur les coefficients du second membre b. L’égalité (2.15) est due au fait
que toutes les contraintes soient indépendantes (par hypothèse). Enfin, l’égalité (2.16)
est obtenue en rappelant que chaque coefficient du vecteur b appartient à un intervalle
unique, et que par conséquent le maximum pour chacun est atteint en une de ses
bornes.
Sachant évaluer toute solution sur n’importe quel scénario, nous pouvons calculer
la solution robuste de pire cas. Celle-ci s’obtient par la résolution du problème noté
(Pbp)pirCas qui s’écrit :
(Pbp)pirCas
minx≥0
maxb∈B
vbp(x)
Ce problème se simplifie en un programme linéaire comme suit :
(Pbp)pirCas
minn∑
j=1cjxj +
m∑
i=1yi
s.c. yi − pin∑
j=1aijxj ≥ −pibi i = 1 . . . m
yi + qin∑
j=1aijxj ≥ qibi i = 1 . . . m
xj ≥ 0 j = 1 . . . n
yi ≥ 0 i = 1 . . . m
Exemple 2.2 Reprenons maintenant le programme linéaire incertain (P5b=) que nous ne
pouvions traiter au préalable.
Nous considérons que la non satisfaction de chacune des contraintes d’égalité engendre les
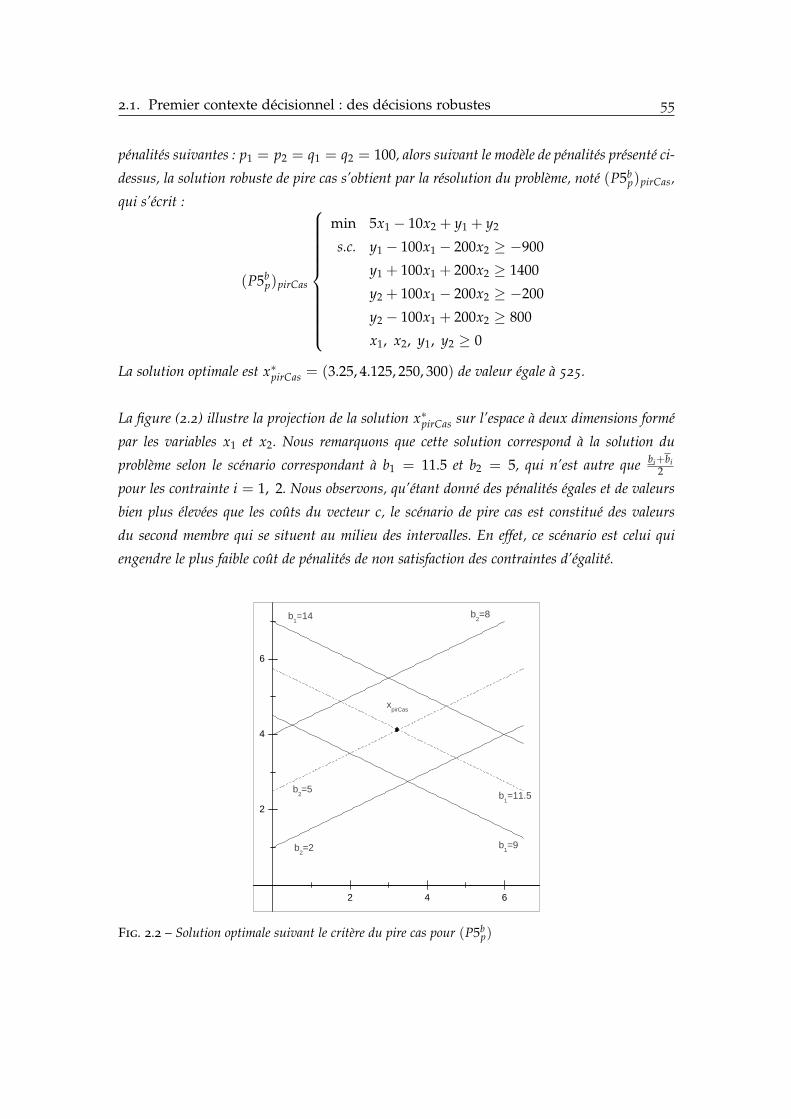
2.1. Premier contexte décisionnel : des décisions robustes 55
pénalités suivantes : p1 = p2 = q1 = q2 = 100, alors suivant le modèle de pénalités présenté ci-
dessus, la solution robuste de pire cas s’obtient par la résolution du problème, noté (P5bp)pirCas,
qui s’écrit :
(P5bp)pirCas
min 5x1 − 10x2 + y1 + y2
s.c. y1 − 100x1 − 200x2 ≥ −900
y1 + 100x1 + 200x2 ≥ 1400
y2 + 100x1 − 200x2 ≥ −200
y2 − 100x1 + 200x2 ≥ 800
x1, x2, y1, y2 ≥ 0
La solution optimale est x∗pirCas = (3.25, 4.125, 250, 300) de valeur égale à 525.
La figure (2.2) illustre la projection de la solution x∗pirCas sur l’espace à deux dimensions formé
par les variables x1 et x2. Nous remarquons que cette solution correspond à la solution du
problème selon le scénario correspondant à b1 = 11.5 et b2 = 5, qui n’est autre que bi+bi2
pour les contrainte i = 1, 2. Nous observons, qu’étant donné des pénalités égales et de valeurs
bien plus élevées que les coûts du vecteur c, le scénario de pire cas est constitué des valeurs
du second membre qui se situent au milieu des intervalles. En effet, ce scénario est celui qui
engendre le plus faible coût de pénalités de non satisfaction des contraintes d’égalité.
2 4 6
2
4
6
b 1 = 1 4
b 1 = 1 1 . 5
b 1 = 9
b 2 = 8
b 2 = 5
x p i r C a s
b 2 = 2
Fig. 2.2 – Solution optimale suivant le critère du pire cas pour (P5bp)
56 Chapitre 2. Programmes linéaires avec seconds membres incertains
2.2 Second contexte décisionnel : pire et meilleur optimaux
Nous considérons à présent des problèmes incertains s’inscrivant dans un autre
contexte de décision, où l’incertitude est levée au moment de la prise de décision.
Dans ce cas, le décideur est capable de choisir la meilleure solution étant donnée la
réalisation de l’aléa. Il n’y a pas lieu de déterminer de décision robuste de pire cas.
Cependant, afin de préparer la prise de décision à venir, notamment pour des besoins
de planification, il peut être profitable au décideur de calculer les coûts des différentes
solutions qu’il pourrait être amené à choisir. Nous proposons alors de calculer deux
valeurs extrêmes de l’optimum : la plus grande valeur, nommée pire optimum et la
plus petite, nommée meilleur optimum. Ainsi, nous exhiberons d’une part l’intervalle
de variation des valeurs des solutions optimales, et d’autre part les scénarios extrêmes
pouvant se réaliser.
Le calcul du pire et du meilleur optimum sont des notions relativement récentes
dans la littérature (voir Alefeld et Herzberger (1983), Mráz (1998), Chinneck et Rama-
dan (2000), Fiedler et al. (2006), Hladìk). Dans ces travaux, sont traités des programmes
linéaires dans lesquels tous les coefficients du problème sont potentiellement incer-
tains et représentés par des intervalles. Compte tenu de ces incertitudes, il s’agit de
calculer les deux valeurs extrêmes de l’optimum : la plus grande valeur et la plus pe-
tite valeur. Dans la section suivante, nous calculerons ces deux valeurs dans le cas de
programmes linéaires où seuls les coefficients du second membre sont incertains. Nous
étudierons également la complexité des problèmes engendrés. Nous commencerons
par traiter des problèmes contenant des contraintes d’inégalité, puis ceux contenant
des contraintes d’égalité et enfin nous généraliserons nos résultats à des problèmes
quelconques.
2.2.1 Programmes linéaires avec contraintes d’inégalité
Calcul du pire optimum
La valeur du pire optimum dans le cas du problème (Pb≥) est la plus grande évaluation
d’une solution optimale (dans le cas d’un problème de minimisation) parmi toutes les
solutions optimales selon les différents scénarios possibles. Son calcul s’obtient par la

2.2. Second contexte décisionnel : pire et meilleur optimaux 57
résolution du problème :
(Pb≥)pirOpt
maxb∈B
v∗(Pb≥)
où v∗(Pb≥) est la valeur de la solution optimale du problème (Pb
≥) lorsque le scénario b
est réalisé.
Proposition 2.1 Le calcul du pire optimum d’un programme linéaire avec des contraintes
d’inégalité, où le second membre des contraintes est incertain et appartenant à des intervalles
est un problème polynomial. Il est donné par la valeur de la solution optimale du programme
linéaire suivant :
(Pb≥)pirOpt ≡ (Pb
≥)
min cx
s.c. Ax ≥ b
Démonstration. Compte tenu du sens des contraintes dans (Pb≥), il est clair que le do-
maine réalisable Xb≥ pour le scénario b est inclus dans tout autre domaine réalisable Xb
≥,
où b est un scénario quelconque dans B. Par conséquent, la relation v∗(Pb≥) ≤ v∗(Pb
≥)
est vérifiée pour tout b ∈ B. Ceci implique que la valeur du pire optimum pour le
problème (Pb≥) est la valeur de la solution optimale du programme linéaire (Pb
≥).
Nous pouvons retrouver ce résultat en adoptant le raisonnement suivant. Rappe-
lons que, pour tout scénario b dans B, le problème (Pb≥) est réalisable, et son optimum
est atteint en une valeur finie. Selon le théorème fort de la dualité, il est possible de
remplacer le problème de minimisation dans l’écriture de (Pb≥)pirOpt par son dual. Nous
obtenons : maxb∈B
maxAty=ct, y≥0
bty
Ce problème se simplifie en remarquant que les variables y sont non négatives, et
revient à résoudre le programme linéaire suivant :max b
ty
s.c. Aty = ct
y ≥ 0
qui, en appliquant de nouveau le théorème fort de la dualité, est équivalent à :
(Pb≥)
min cx
s.c. Ax ≥ b

58 Chapitre 2. Programmes linéaires avec seconds membres incertains
Remarque 2.2 Le calcul d’une solution de pire cas pour (Pb≥) (voir section 2.1.1) coïncide
avec le calcul d’un pire optimum pour le même problème. En effet, pour le problème linéaire
incertain (Pb≥), la valeur de la solution robustes de pire cas est le pire optimum. Ces deux
problèmes sont équivalents au programme linéaire défini selon le scénario qui décrit le plus
petit domaine réalisable Xb≥.
Calcul du meilleur optimum
La valeur du meilleur optimum associé au problème (Pb≥) représente la valeur la plus
favorable (dans le cas d’une minimisation, c’est la plus faible) d’une solution opti-
male sur tous les scénarios b dans B. Cette valeur, associée à celle d’un pire optimum,
forment les bornes de l’intervalle de variation de l’optimum du problème incertain
(Pb≥). Le meilleur optimum se calcule comme suit :
(Pb≥)meiOpt
minb∈B
v∗(Pb≥)
Proposition 2.2 Le meilleur optimum pour le programme linéaire (Pb≥) correspond à la valeur
de la solution optimale du problème selon le scénario qui décrit le plus grand domaine réalisable.
Cette valeur s’obtient en résolvant le programme linéaire suivant :
(Pb≥)meiOpt
min cx
s.c. Ax ≥ b
Démonstration. Rappelons que le domaine réalisable Xb≥ pour tout scénario b ∈ B vé-
rifie Xb≥ ⊆ Xb
≥. Par conséquent, la relation v∗(Pb≥) ≥ v∗(Pb
≥) est vraie pour tout b ∈ B.
Il en résulte que la valeur du meilleur optimum s’obtient en résolvant le programme
linéaire (Pb≥).
2.2.2 Programmes linéaires avec contraintes d’égalité
Nous nous intéressons à présent aux programmes linéaires incertains dont les
contraintes sont des égalité. Notons tout d’abord que, pour le calcul du pire opti-
mum, la simple réécriture du problème en substituant les contraintes d’égalité par des
contraintes d’inégalité n’est pas satisfaisante. Illustrons cela par un exemple. Soit le

2.2. Second contexte décisionnel : pire et meilleur optimaux 59
programme linéaire incertain (P6b) suivant :
(P6b)
min x1 + 2x2
s.c x1 + x2 = b1
x1 − x2 ≥ b2
x1, x2 ≥ 0
où les coefficients b1 et b2 sont incertains et appartiennent respectivement aux inter-
valles [4, 6] et [0, 4].
Le problème (P6b) peut s’écrire de manière équivalente en un programme linéaire où
toutes les contraintes sont des inégalités, comme suit :
(P6′b)
min x1 + 2x2
s.c. x1 + x2 ≥ b1
x1 + x2 ≤ b1
x1 − x2 ≥ b2
x1, x2 ≥ 0
(2.17)
(2.18)
(2.19)
Les valeurs du second membre dans les deux contraintes (2.17) et (2.18) dans le
problème (P6′b) sont dépendantes. Si nous appliquons les résultats de la section (2.2.1),
alors le pire optimum se calcule selon le scénario décrivant le plus petit domaine de
solutions réalisables, à savoir :
(P6′b)pirOpt
min x1 + 2x2
s.c. x1 + x2 ≥ 6
x1 + x2 ≤ 4
x1 − x2 ≥ 4
x1, x2 ≥ 0
(2.20)
(2.21)
(2.22)
Or, le problème (P6′b)pirOpt admet un domaine de solutions réalisables vide, et ceci
à cause des contraintes (2.20) et (2.21) qui ne varient pas dans le même sens. En fait,
cette transformation n’est pas possible, car elle contredit les hypothèses de départ
sur l’indépendance des coefficients incertains. Il apparaît alors que la substitution des
contraintes d’égalité par des contraintes d’inégalité n’est pas pertinente quand il s’agit

60 Chapitre 2. Programmes linéaires avec seconds membres incertains
de calculer un pire optimum pour ce problème incertain.
Afin d’étudier la complexité des problèmes associés au calcul des valeurs du pire
optimum et du meilleur optimum pour (Pb=), nous distinguons deux cas :
– le cas où n = m et le rang de la matrice A est égal à n. Dans ce cas, le problème
(Pb=) admet une solution réalisable unique ;
– le cas où n > m avec le rang de la matrice A étant égal à m. Dans ce cas, le
domaine réalisable de (Pb=) est non borné. Nous supposons néanmoins que la
solution optimale est de valeur finie.
Examinons la valeur du pire optimum associé au problème (Pb=) selon ces deux
cas.
Calcul du pire optimum
La valeur d’un pire optimum pour le problème (Pb=) s’obtient par la résolution du
problème suivant :
(Pb=)pirOpt
maxb∈B
v∗(Pb=)
Cas 1 : Existence d’une solution réalisable unique
Proposition 2.3 Dans le cas où n = m et Rg(A) = n, le problème (Pb=)pirOpt peut être résolu
en temps polynomial.
Démonstration. Pour tout b ∈ B, le domaine Xb= étant non vide et ne contenant qu’une
seule solution réalisable x = A−1b, il suffit de remarquer que le problème (Pb=)pirOpt
est équivalent au programme linéaire :
(Pb=)pirOpt
max cA−1b
s.c. A−1b ≥ 0
b ≤ b ≤ b
qui est un problème polynomial.
Cas 2 : Existence de solutions optimales finies
Afin d’étudier la complexité de (Pb=)pirOpt dans le cas où le rang de la matrice A est
égal à m avec m < n, nous allons procéder de la manière suivante. Tout d’abord, le
lemme 2.1 ci-dessous établit la complexité du problème (QX) dans le cas où X est

2.2. Second contexte décisionnel : pire et meilleur optimaux 61
un domaine borné. Ensuite, le lemme 2.2 étend ce résultat au cas de domaine X′ non
borné. Enfin, le théorème 2.1 conclut sur la complexité du problème (Pb=)pirOpt.
Lemme 2.1 Le problème quadratique suivant est NP-difficile au sens fort :
(QX)
max cx
s.c. x ∈ X
c ≤ c ≤ c
(2.23)
où X ⊆ Rn est un polyèdre non vide et borné.
Démonstration. Soit le programme linéaire (Pc) où les coefficients de la fonction objectif
sont incertains et varient dans des intervalles :
(Pc)
max cu
s.c. ∆u ≤ β
où u est une matrice colonne de taille n représentant les variables, c est une matrice
ligne de taille n, ∆ est une matrice de taille m× n et b est une matrice colonne de taille
m. Pour tout j = 1 . . . n, le coefficient cj est incertain et appartient à l’intervalle [cj, cj].
Le domaine des solutions réalisables de (Pc) est supposé non vide et borné.
Soit u une solution réalisable du problème (Pc). La valeur du regret maximum associé
à cette solution, notée Rmax(u), est un problème NP-difficile (Théorème 1.1). Celui-ci
s’écrit :
Rmax(u) =
max c(v− u)
s.c. ∆v ≤ β
c ≤ c ≤ c
Posons x = v− u. Le problème devient :
Rmax(u) =
max cx
s.c. ∆x ≤ β− ∆u
c ≤ c ≤ c
Par ce changement de variables, nous avons construit à partir d’une instance du pro-
blème du regrêt maximum, une instance du problème (QX). En effet, définissons le

62 Chapitre 2. Programmes linéaires avec seconds membres incertains
polyèdre X comme étant :
X = x ∈ Rn : ∆x ≤ β− ∆u (2.24)
Nous obtenons :
Rmax(u) =
max cx
s.c. x ∈ X
c ≤ c ≤ c
Par conséquent, le problème (QX) est de même complexité que le calcul de la valeur
Rmax(u), qui est NP-difficile au sens fort.
Dans le lemme 2.2, nous étendons ce résultat au problème (QX′), où le domaine de
solutions réalisables X′ est non borné.
Lemme 2.2 Le problème quadratique suivant est NP-difficile au sens fort :
(QX′)
max cx
s.c. x ∈ X′
c ≤ c ≤ c
avec X′ ⊆ Rn est un polyèdre non vide et non borné.
Démonstration. A partir d’une instance du problème (QX), où X ⊆ Rn−1 construisons
l’instance suivante du problème (QX′) :
(IX′)
maxn−1∑
j=1cjxj − cnxn
s.c. (x1, . . . xn−1) ∈ X
xn ≥ 0
cj ≤ cj ≤ cj j = 1 . . . n− 1
0 ≤ cn ≤ M
où M > 0 est une constante positive.
Remarquons que, dans cette instance (IX′), le polyèdre X′ = (x1, . . . xn−1) ∈ X, x′n ≥0 est non vide (car X est non vide) et non borné.
Par ailleurs, si on note (x∗1 , . . . , x∗n−1) la solution optimale de (QX) alors la solution
optimale de (QX′) sera égale à (x∗1 , . . . , x∗n−1, 0). Par conséquent, le problème (QX′) est
au moins aussi difficile que le problème (QX).

2.2. Second contexte décisionnel : pire et meilleur optimaux 63
En utilisant les deux lemmes précédents, le théorème (2.1) donne la complexité du
problème (Pb=)pirOpt dans le cas général.
Théorème 2.1 Dans le cas où n > m et Rg(A) = m le calcul du pire optimum pour le
problème (Pb=) est un problème NP-difficile.
Démonstration. Le problème (Pb=)pirOpt s’écrit :
(Pb=)pirOpt
maxb∈B
v∗(Pb=)
Selon le théorème fort de la dualité, on peut réécrire le problème (Pb=)pirOpt comme
suit : maxb∈B
maxAty≤ct
bty
Ce dernier est équivalent au problème quadratique suivant :
(Q)
max bty
s.c. Aty ≤ ct
b ≤ b ≤ b
Dans les deux cas de figure où le domaine des solutions réalisables du problème
(Q) est borné ou non borné, nous déduisons des lemmes 2.1 et 2.2 que le problème
(Pb=)pirOpt est NP-difficile.
Calcul du meilleur optimum
La valeur du meilleur optimum pour le problème (Pb=) se calcule en résolvant le pro-
blème :
(Pb=)meiOpt
minb∈B
v∗(Pb=)
Proposition 2.4 Le problème (Pb=)meiOpt est polynomial.
En effet, la valeur du meilleur optimum est la valeur de la solution optimale du pro-
gramme linéaire :
(Pb=)meiOpt
min cx
s.c. Ax− b = 0
b ≤ b ≤ b
x ≥ 0
La preuve étant équivalente à celle de la recherche du meilleur optimum d’un pro-

64 Chapitre 2. Programmes linéaires avec seconds membres incertains
blème contenant des contraintes d’inégalité (voir la proposition (2.2)).
2.2.3 Programmes linéaires quelconques
Dans cette section, nous aborderons le calcul du pire optimum ainsi que celui du
meilleur optimum pour le cas général de programmes linéaires quelconques (admet-
tant des contraintes d’inégalité et d’égalité), dont le second membre des contraintes
est incertain.
Considérons les programmes linéaires suivants :
(Pb,b′)
min cx
s.c. Ax = b
A′x ≥ b′
où x une est matrice colonne des variables de taille n, c est une matrice ligne de Rn,
A et A′ sont des matrices respectivement de taille m1 × n et m2 × n, et b et b′ sont des
matrices colonnes de taille respectivement m1 et m2.
Supposons que pour toute contrainte i, i = 1 . . . m1 + m2 les coefficients bi (resp. b′i)
varient dans l’intervalle [bi, bi] (resp. [b′i, b′i]), avec bi ≤ bi (resp. b′i ≤ b
′i). Notons le
produit cartésien des intervalles [bi, bi] pour i = 1 . . . m1 (respectivement [b′i, b′i]) par B
(respectivement B′ pour i = m1 + 1 . . . m1 + m2).
Pour les vecteurs b et b′ fixés dans B et B′ respectivement, notons Xb,b′ le polyèdre des
solutions réalisables défini par :
Xb,b′ = x ∈ Rn : Ax = b, A′x ≥ b′ (2.25)
que nous supposons non vide. Enfin, nous supposons de plus que le problème (Pb,b′)
admet un optimum fini pour tout couple (b, b′) incertain, sa valeur est notée v∗(Pb,b′).

2.2. Second contexte décisionnel : pire et meilleur optimaux 65
Calcul du pire optimum
Le calcul du pire optimum s’écrit de la manière suivante :
(Pb,b′)pirOpt
max
b∈B, b′∈B′v∗(Pb,b′)
Pour les deux cas de figure présentés dans la section 2.2.2, étudions la complexité du
problème (Pb,b′)pirOpt.
Existence d’une solution réalisable unique
Proposition 2.5 Dans le cas où n = m1 et Rg(A) = n, le problème (Pb,b′)pirOpt est polyno-
mial.
Démonstration. Dans ce cas, le problème (Pb,b′)pirOpt est équivalent au programme li-
néaire suivant : max cA−1b
s.c. A′A−1b ≥ b′
b ≤ b ≤ b
Existence d’une solution optimale finie
Proposition 2.6 Dans le cas où n > m1 et Rg(A) = m1, le problème (Pb,b′)pirOpt est NP-
difficile au sens fort.
Démonstration. Il suffit de remarquer que dans le cas particulier où m2 = 0, le pro-
blème (Pb,b′)pirOpt revient à résoudre (Pb=)pirOpt qui est NP-difficile au sens fort (voir le
théorème (2.1)).
Calcul du meilleur optimum
Le problème du calcul de la meilleure solution optimale se formule comme suit :
(Pb,b′)pirOpt
min
b∈B, b′∈B′v∗(Pb,b′)
Proposition 2.7 Le problème (Pb,b′)meiOpt peut être résolu en un temps polynomial.
Démonstration. Le problème (Pb,b′)meiOpt se ramène au programme linéaire :
66 Chapitre 2. Programmes linéaires avec seconds membres incertains
(Pb,b′)meiOpt
min cx
s.c. Ax− b = 0
A′x ≥ b′
b ≤ b ≤ b
2.3 Robustesse et dualité
Après avoir étudié la résolution des programmes linéaires dans lesquels l’incertitude
porte sur le second membre des contraintes, nous revenons sur la réflexion initiée
par les travaux de Minoux (2007a; 2009b) concernant l’emploi de la dualité pour
traiter le problème incertain (Pb), avec une approche pire cas. Nous avons montré
dans le chapitre précédent (voir la section 1.3) que le problème qui consiste à dé-
terminer des solutions robustes de pire cas au problème (Pb) d’une part, et à son
problème dual d’autre part, n’étaient pas équivalents. Nous proposons dans ce qui
suit une alternative dans laquelle nous définirons un autre critère, nommé critère du
meilleur cas. Ce critère va nous servir à déterminer la relation existant entre une version
robuste de pire cas de (Pb) et la version équivalente associée au problème dual de (Pb).
Définissons tout d’abord ce critère, en étudiant le résultat de son application sur
les programmes linéaires incertains (Pb≥) (où les contraintes sont des inégalités). Nous
donnerons, à titre indicatif, le résultat de l’application de ce même critère sur (Pb=).
2.3.1 Critère du meilleur cas
Une solution selon le critère du meilleur cas correspond à la solution optimale selon
le scénario le plus favorable. Nous emploierons ensuite ce critère pour déterminer les
relations de dualité pour traiter le problème incertain (Pb).
Programmes linéaires avec contraintes d’inégalité
Soit le problème (Pb≥). La solution obtenue selon le critère du meilleur cas est définie
comme étant la solution possédant la plus petite évaluation sur tous les scénarios. Le
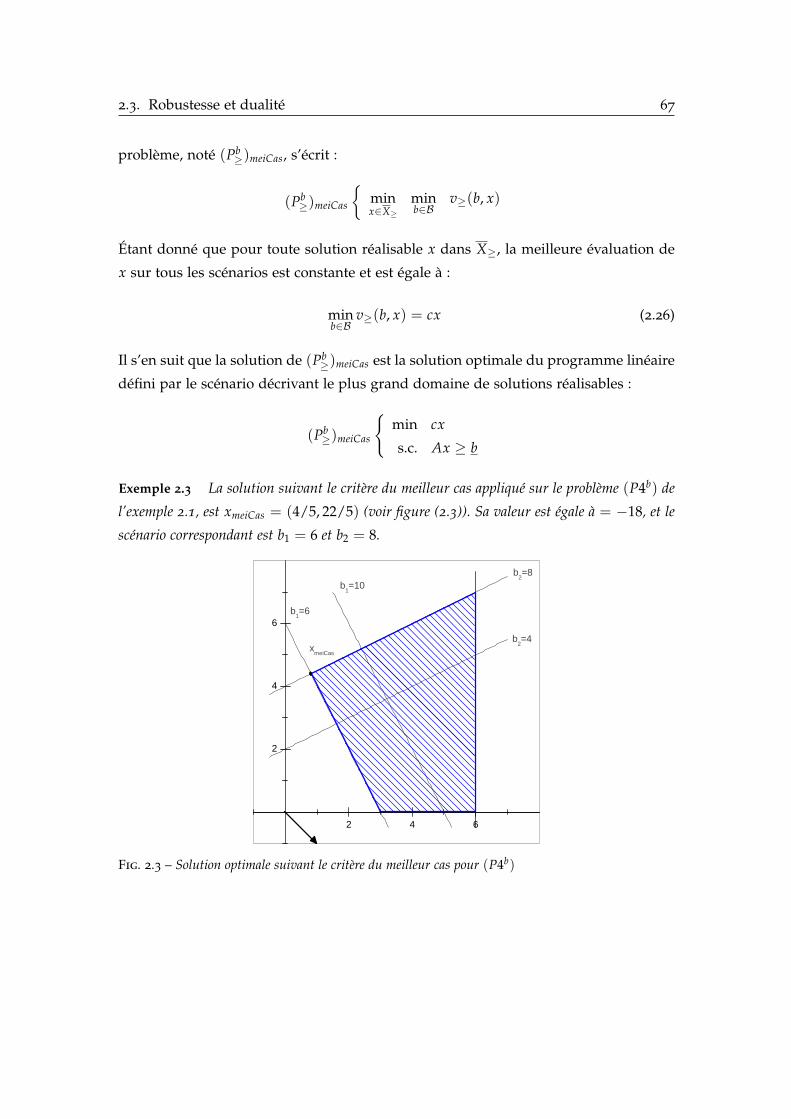
2.3. Robustesse et dualité 67
problème, noté (Pb≥)meiCas, s’écrit :
(Pb≥)meiCas
minx∈X≥
minb∈B
v≥(b, x)
Étant donné que pour toute solution réalisable x dans X≥, la meilleure évaluation de
x sur tous les scénarios est constante et est égale à :
minb∈B
v≥(b, x) = cx (2.26)
Il s’en suit que la solution de (Pb≥)meiCas est la solution optimale du programme linéaire
défini par le scénario décrivant le plus grand domaine de solutions réalisables :
(Pb≥)meiCas
min cx
s.c. Ax ≥ b
Exemple 2.3 La solution suivant le critère du meilleur cas appliqué sur le problème (P4b) de
l’exemple 2.1, est xmeiCas = (4/5, 22/5) (voir figure (2.3)). Sa valeur est égale à = −18, et le
scénario correspondant est b1 = 6 et b2 = 8.
2 4 6
2
4
6b 1 = 6
b 1 = 1 0b 2 = 8
x m e i C a sb 2 = 4
Fig. 2.3 – Solution optimale suivant le critère du meilleur cas pour (P4b)

68 Chapitre 2. Programmes linéaires avec seconds membres incertains
Programmes linéaires avec contraintes d’égalité
La solution optimale selon le critère du meilleur cas appliqué au problème (Pb=) est la
solution du problème, noté (Pb=)meiCas, suivant :
(Pb=)meiCas
minx∈X=
minb∈B
v=(b, x)
La meilleure évaluation d’une solution x ∈ X= étant égale à cx, le problème (Pb=)meiCas
est équivalent au programme :
(Pb=)meiCas
min cx
s.c. Ax− b = 0
b ≤ b ≤ b
x ≥ 0
Remarque 2.3 Le calcul de la solution selon le critère du meilleur cas associé au problème
(Pb) (de formulation générale quelconque) est un problème polynomial. Il revient à calculer le
meilleur optimum pour ce même programme.
2.3.2 Dualité
Nous avons vu que que la solution de pire cas du problème primal (Pb≥) ne correspond
pas à la solution de pire cas du problème dual. Nous allons montrer que cette dernière
correspond plutôt à la solution de meilleur cas. Pour ce faire, comparons le problème
dual de (Pb≥)meiCas obtenu ci-dessus avec le problème dual de la version de pire cas.
Soit (F) le problème dual de (Pb≥)meiCas, qui s’écrit :
(F)
max bty
s.c. Aty = ct
y ≥ 0
D’après le théorème fort de la dualité, nous avons :
v∗((Pb≥)meiCas) = v∗(F) (2.27)
où v∗((Pb≥)meiCas) (respectivement v∗(F)) représente la valeur de la solution optimale

2.3. Robustesse et dualité 69
du problème (Pb≥)meiCas (respectivement (F)).
Considérons à présent le problème, noté (Db), dual du problème (Pb≥). Il s’écrit :
(Db)
max bty
s.c. Aty = ct
y ≥ 0
Notons que l’incertitude concerne les coefficients de la fonction objectif de (Db).
Nous avons montré à la section 1.1.1 que calculer la solution robuste suivant le critère
du pire cas sur le problème (Db) est équivalent au programme linéaire où les coef-
ficients de la fonction objectif correspondent aux valeurs b (puisque le problème est
un problème de maximisation et que les variables sont non négatives). Le problème
(Db)pirCas s’écrit donc :
(Db)pirCas
max bty
s.c. Aty = ct
y ≥ 0
Or, ce dernier coïncide avec le problème (F). Nous déduisons alors que :
v∗((Pb≥)meiCas) = v∗((Db)pirCas) (2.28)
D’où la proposition suivante :
Proposition 2.8 Quand le second membre des contraintes est incertain, l’application du critère
du meilleur cas sur le problème primal revient à appliquer le critère du pire cas sur le problème
dual, et réciproquement.
En robustesse, appliquer un critère sur un problème primal ne revient donc pas
à appliquer ce même critère sur le problème dual, mais plutôt à appliquer le cri-
tère “dual”. Cette relation reste valable quand il s’agit de calculer la valeur d’un
pire optimum ou d’un meilleur optimum. Très récemment, quelques extensions ont
été réalisées dans le cadre de l’utilisation de la dualité en robustesse. Citons à titre
d’exemple, les travaux de Beck et Ben-Tal (2009) qui étendent ces résultats aux pro-
blèmes admettant des coefficients incertains situés dans la matrice des contraintes, ou
encore les travaux de Gabrel et Murat (2010) qui, en définissant des extensions des

70 Chapitre 2. Programmes linéaires avec seconds membres incertains
critères du pire cas et du meilleur cas, généralisent le résultat de la proposition 2.8.
La proposition (2.8) nous permet aussi de déterminer la complexité du problème
du calcul du meilleur optimum d’un programme linéaire où les coefficients de la
fonction objectif sont incertains.
Théorème 2.2 Soit le problème incertain suivant :
(Pc)
min cx
s.c. Ax ≥ b
où c est une matrice ligne de Rn, x est une matrice colonne de taille n, A est une matrice de
Rm×Rn et b une matrice colonne de Rm. Les coefficients de la fonction objectif sont incertains
et appartiennent, pour tout j = 1 . . . n, à un intervalle [cj, cj].
Le calcul du meilleur optimum associé au programme linéaire (Pc) est un problème NP-
difficile.
Démonstration. Afin de prouver le théorème (2.2), il suffit de construire le dual du
problème (Pc), noté (Dc=), et qui s’écrit :
(Dc=)
max bty
s.c. Aty = c
y ≥ 0
D’après le résultat de la section (2.2.2), le calcul de pire optimum associé au pro-
blème (Dc=), qui admet des contraintes d’égalité et un second membre incertain, est
un problème NP-difficile (hormis, dans le cas spécial d’existence d’une solution réa-
lisable unique, où ce problème est polynomial). Par conséquent, le calcul du meilleur
optimum associé au problème (Pc) est lui aussi un problème NP-difficile, les deux
problèmes étant équivalents d’après la proposition (2.8).
De manière générale, tout programme linéaire dont le second membre des
contraintes serait incertain et contenant des contraintes d’inégalité verra les variables
correspondantes dans le problème dual, restreintes en signe. Dans ce cas, les deux
problèmes (primal et dual) sont polynômiaux. Par contre, quand les contraintes dans
2.3. Robustesse et dualité 71
le primal sont des égalités, les variables correspondantes dans le problème dual sont
quelconques, et la recherche du pire optimum pour le primal et du meilleur optimum
pour son dual sont des problèmes NP-difficiles.
Conclusion
Dans ce chapitre, nous nous sommes intéressés aux programmes linéaires dans les-
quels les coefficients du second membre des contraintes sont incertains. Nous avons
considéré deux contextes décisionnels distincts, pour lesquels nous nous sommes
attachés à apporter au décideur des réponses adéquates et une information utile et
pertinente, pour réagir au mieux face aux aléas.
Dans le premier contexte, nous avons supposé qu’une décision doit être prise avant
toute réalisation de l’incertain. Les solutions recherchées doivent être réalisables quelle
que soit la réalisation de l’aléa, y compris dans le pire cas.
Le second contexte regroupe des problèmes pour lesquels aucune décision ne doit
être prise avant la réalisation de l’incertain. Nous nous sommes alors intéressés aux
valeurs du pire optimum et du meilleur optimum. Ces valeurs fournissent au déciceur
l’intervalle de variation de l’optimum, une indication intéressante dans une phase de
planification.
Par ailleurs, nous avons montré la nécessité de distinguer les approches en fonction
de la nature des contraintes. En effet, cette étude a montré que les problèmes contenant
exclusivement des contraintes d’inégalité sont des problèmes faciles, pour les deux
contextes de décision. En revanche, quand le problème admet des contraintes d’éga-
lité, se plaçant dans le premier contexte, il est impossible de déterminer une solution
réalisable pour tout scénario qui se présente. Le décideur est contraint de choisir une
solution puis de mesurer la violation des contraintes. Néanmoins, quand celui-ci sait
mesurer la non satisfaction des contraintes, il peut envisager de suivre un modèle de
pénalités permettant de prendre la décision la moins pénalisante. Enfin, concernant le
second contexte décisionnel, nous avons établi que le calcul du pire optimum est un
problème NP-difficile quand celui-ci contenait les contraintes d’égalité.

72 Chapitre 2. Programmes linéaires avec seconds membres incertains
Dans ce qui a été traité jusqu’à présent, nous avons admis que tous les coefficients
incertains pouvaient atteindre leur pire valeur simultanément. Or, ce scénario extrême
de pire cas est peu vraisemblable dans la réalité. Quand cela est envisageable par le
décideur, nous voulons exhiber un autre scénario, moins conservateur que le scénario
de pire cas. Inspirée de l’approche de Bertsimas et Sim (2004) (présentée à la section
1.2.3), nous proposons dans le prochain chapitre, une extension de cette approche
pour le calcul du pire optimum, nommé pire optimum paramétrique. Il s’agit dans cette
approche de fournir au décideur la valeur de l’optimum pour un scénario dans lequel
tous les coefficients ne sont pas à leur pire valeur. Dans la suite de ce travail, se
positionnant dans le second contexte décisionnel, nous nous attachons à raffiner le
calcul du pire optimum de (Pb) et cela en introduisant une paramétrisation appropriée.
3Calcul du pire optimum
paramétrique
Sommaire
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.1 Programmes linéaires avec contraintes d’inégalité . . . . . . . . . . 76
3.1.1 Définition du pire optimum paramétrique . . . . . . . . . . . . . . . . . 76
3.1.2 Reformulation en programme linéaire mixte . . . . . . . . . . . . . . . . 79
3.2 Programmes linéaires avec contraintes d’égalité . . . . . . . . . . . . 83
3.2.1 Identification du pire optimum paramétrique . . . . . . . . . . . . . . . 83
3.2.2 Reformulation en programme linéaire mixte . . . . . . . . . . . . . . . . 85
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Dans ce chapitre, nous présentons une extension de l’approche paramétrique ro-
buste de Bertsimas et Sim (2004) au calcul de la valeur du pire optimum d’un
programme linéaire comprenant un second membre des contraintes incertain. En re-
prenant le modèle d’incertitude proposé par ces auteurs, nous introduisons un para-
mètre qui contrôlera la déviation totale des valeurs nominales de tous les coefficients
incertains. Nous étudierons le problème résultant et nous proposerons une formulation
par programmation linéaire mixte.
73

75
Introduction
Dans ce chapitre nous nous plaçons dans le contexte décisionnel introduit au chapitre
précédent, dans lequel nous supposons que le décideur aura connaissance des incerti-
tudes au moment de prendre sa décision et souhaite, dans une phase de planification,
évaluer les coûts des solutions optimales selon les scénarios pouvant se réaliser.
Nous nous intéressons plus précisément à l’évaluation de l’optimum selon des
scénarios différents du scénario extrême de pire cas, jugé parfois trop conservateur
et peu réaliste. Nous supposons ici que le décideur accepte une part de risque en ne
considérant pas la totalité des scénarios pouvant se réaliser mais seulement une partie
d’entre eux.
Nous proposons alors une extension de l’approche de Bertsimas et Sim (2004) (voir
section 1.2.3) au calcul du pire optimum, qu’on nommera pire optimum paramétrique.
Modélisant les incertitudes par des intervalles dont la valeur médiane est la valeur
nominale, il s’agit dans cette approche de déterminer la valeur de l’optimum em-
ployant un modèle d’incertitude en colonne en non pas en ligne comme cela a été étudié
dans l’approche de Bertsimas et Sim (2004) (voir la section 1.3 du premier chapitre).
Nous considérons pour ce faire un budget d’incertitude unique et commun à tous les
coefficients du second membre des contraintes qui représente la déviation totale des
coefficients incertains de leurs valeurs nominales.
Ce chapitre est séparé en deux parties : nous traiterons dans la première partie
les problèmes dont les contraintes sont exclusivement des inégalités. Puis, dans la
seconde partie, nous aborderons les problèmes contenant des contraintes d’égalité.
Nous montrerons que dans les deux cas, le calcul du pire optimum paramétrique
n’est pas un problème facile et nous proposerons une reformulation du problème en
programme linéaire mixte.

76 Chapitre 3. Calcul du pire optimum paramétrique
3.1 Programmes linéaires avec contraintes d’inégalité
3.1.1 Définition du pire optimum paramétrique
Rappelons que le programme linéaire incertain (Pb≥) s’écrit (voir le problème (2.1) au
chapitre 2) :
(Pb≥)
min cx
s.c. Ax ≥ b
Nous considérons que tout coefficient incertain bi, i = 1 . . . m appartient à l’inter-
valle [bi − bi, bi + bi] où bi représente la valeur nominale et bi une déviation positive.
Notons U le produit cartésien des intervalles [bi − bi, bi + bi], i = 1 . . . m et supposons
que pour tout b ∈ U le problème (Pb≥) est réalisable et la valeur de l’optimum, notée
v∗(Pb≥), est finie.
Comme nous l’avons vu au chapitre précédent, le calcul d’un pire optimum pour
le problème (Pb≥) est un problème polynomial. Il s’obtient par la résolution du pro-
gramme linéaire selon le scénario qui décrit le plus petit domaine réalisable. Cepen-
dant, ce scénario extrême peut paraître trop conservateur et peu représentatif de ce
qui pourrait réellement se réaliser. Le décideur aimerait connaître la valeur de l’opti-
mum selon un autre scénario, moins conservateur que le scénario de pire cas. Nous
proposons alors une extension de l’approche de Bertsimas et Sim (2004) au calcul du
pire optimum qui suppose que tous les paramètres incertains n’atteignent pas simul-
tanément leur pire valeur. Pour ce faire, nous introduisons le budget d’incertitude Γ
représentant la déviation totale sur toutes les contraintes des paramètres incertains par
rapport aux valeurs nominales. Le modèle d’incertitude employé, noté U (Γ), est un
modèle en colonne et le calcul du pire optimum paramétrique s’obtient par la résolu-
tion du problème, noté Pb≥(Γ), suivant :
Pb≥(Γ)
max
b∈U (Γ)minAx≥b
cx
où
U (Γ) = b ∈ Rm : bi = bi + zi bi, zi ∈ Z(Γ) (3.1)

3.1. Programmes linéaires avec contraintes d’inégalité 77
et
Z(Γ) = z ∈ Rm :m
∑i=1|zi| ≤ Γ, |zi| ≤ 1 (3.2)
Étant donné que le problème (Pb≥) comprend m contraintes, le paramètre Γ appartient
à l’intervalle [0, m]. Quand Γ vaut l’une des deux valeurs extrêmes 0 ou m, le problème
correspond respectivement au problème nominal et au problème du pire optimum.
Simplifions le problème Pb≥(Γ) en remarquant tout d’abord que les valeurs absolues
peuvent être supprimées du modèle d’incertitude (??). En effet, étant donné le sens des
contraintes d’inégalité, les valeurs du second membre qui ont un impact défavorable
sur le domaine réalisable sont supérieures ou égales aux valeurs nominales. Il s’en
suit qu’à l’optimum, les variables zi, i = 1, . . . , m sont nécessairement non négatives et
appartiennent donc à [0, 1].
Par ailleurs, en rappelant que le problème Pb≥(Γ) possède une solution finie pour tout
vecteur b ∈ U (Γ), il est possible, en utilisant le théorème fort de la dualité, de l’écrire
de la manière suivante :
Q(Γ)
max
m∑
i=1zi ≤ Γ
zi ∈ [0, 1] i = 1 . . . m
maxm∑
i=1aijyi = cj j = 1 . . . n
yi ≥ 0 i = 1 . . . m
m∑
i=1biyi +
m∑
i=1biyizi
qui revient au problème de maximisation suivant :
Q(Γ)
maxm∑
i=1biyi +
m∑
i=1biyizi
s.c.m∑
i=1aijyi = cj j = 1 . . . n
m∑
i=1zi ≤ Γ
0 ≤ zi ≤ 1 i = 1 . . . m
yi ≥ 0 i = 1 . . . m
où les variables y sont les variables du problème dual de (Pb≥).
Nous constatons que le calcul du pire optimum paramétrique Q(Γ) est un pro-
blème quadratique. Plus précisément, il s’identifie comme étant un problème bilinéaire
78 Chapitre 3. Calcul du pire optimum paramétrique
avec des contraintes linéaires. En effet, la fonction objectif est de forme quadratique
et se décrit sur deux groupes disjoints de variables (les variables y d’une part, et les
variables z d’autre part). Le problème est linéaire pour chacun des deux groupes de
variables quand l’autre est fixé. Ce problème a été prouvé NP-difficile (voir Floudas et
Parlados (1995) et Vavasis (1991)).
Par conséquent, le calcul du pire optimum paramétrique, où un budget d’incer-
titude unique et en colonne lie les coefficients du second membre est un problème
difficile (ce qui diffère du modèle d’incertitude d’origine de Bertismas et Sim qui est
en ligne et qui garde la complexité polynomial du programme linéaire incertain dans
sa version robuste).
Le problème Q(Γ) peut être résolu de façon exacte soit à l’aide de méthodes de
résolution exactes de problèmes bilinéaires, soit par la résolution d’une reformulation
en programme linéaire mixte. Intéressons nous, tout d’abord, à la résolution directe
du problème Q(Γ). Les premiers travaux de résolution exacte de problèmes bilinéaires
sont de Falk (1973) et Konno (1976) qui ont proposé un algorithme de coupe. Les
travaux de Sherali et Shetty (1980) apportent des améliorations à ces méthodes. Plus
récemment, Meyer (1997), Meyer et Jaumard (1998), Meyer (2000) proposent d’autres
développements pour ces mêmes méthodes. Bloemhof-Ruwaard et Hendrix (1996)
quant à eux s’intéressent à une application à un système de production.
Afin de résoudre le problème bilinéaire Q(Γ) nous avons adapté et implémenté
l’algorithme de minimisation concave donné par Gallo et Ülkücü (1977). Brièvement,
l’idée générale de cet algorithme est de plonger dans un cône l’un des deux domaines
de solutions réalisables (celui associé aux variables y ou celui associé aux variables z ;
nous avons choisi ce dernier), puis de réaliser des subdivisions successives sur ce cône
et de tester si la solution optimale s’y trouve. Ce processus est réitéré jusqu’à ce que
tout le domaine soit parcouru, déterminant ainsi la solution optimale. Nous n’allons
pas présenter en détails ce travail dans ce manuscrit pour les raisons suivantes :
– en dépit de l’existence d’une preuve de convergence de cet algorithme (voir Flou-
das et Parlados (1995), Meyer et Jaumard (1998)) nous avons été confronté au
cyclage dans la majorité des instances traitées. Nous n’avons, pour le moment,
pu trouver une autre alternative que de garder en mémoire toutes les solutions
visitées et de comparer à chaque itération la nouvelle solution avec toutes les

3.1. Programmes linéaires avec contraintes d’inégalité 79
précédentes. Bien sûr, cette manière de faire consomme du temps et de l’espace
mémoire, et est peu satisfaisante.
– même pour les instances pour lesquelles l’algorithme ne rencontre pas de cy-
clage, les instances pouvant être résolues sont relativement de petite taille (ne
dépassant pas une dizaine de variables), alors que notre intérêt porte sur la réso-
lution d’instances de taille plus importante.
Nous n’avons donc pas poursuivi notre étude dans ce sens, ouvrant ainsi des perspec-
tives d’un travail futur dans le sujet.
Nous nous sommes alors tournés vers une autre alternative pour résoudre le pro-
blème Q(Γ) qui consiste en une reformulation en programme linéaire mixte. Cela sera
développé dans la section suivante.
3.1.2 Reformulation en programme linéaire mixte
Rappelons que dans la formulation du problème Pb≥(Γ), le paramètre Γ est un réel
appartenant à l’intervalle [0, m]. Cependant, il s’avère qu’en se restreignant aux va-
leurs entières dans [0, m], il est possible de linéariser le problème bilinéaire Q(Γ) en
un programme linéaire mixte, comme le montre la proposition 3.1.
Proposition 3.1 Si la valeur du paramètre Γ est entière alors il existe une solution optimale
(y∗, z∗) de Q(Γ) telle que z∗i ∈ 0, 1, i = 1, . . . , m.
Démonstration. Définissons les deux polyèdres suivants :
Y = y ∈ Rm :m
∑i=1
aijyi = cj, j = 1 . . . n, y ≥ 0 (3.3)
et
Z ′(Γ) = z ∈ Rm :m
∑i=1
zi ≤ Γ, 0 ≤ zi ≤ 1, i = 1 . . . m (3.4)
Le problème Q(Γ) étant un problème bilinéaire alors s’il existe une solution optimale
finie pour le problème (ce qui est assuré ici, par hypothèse), alors il existe au moins
une solution optimale (y∗, z∗) telle que y∗ est un point extrême de Y et z∗ un point

80 Chapitre 3. Calcul du pire optimum paramétrique
extrême de Z ′(Γ) (voir Horst et Tuy (1996)). Ceci implique que si Γ est entier alors les
variables z∗ sont 0− 1.
D’après la proposition 3.1, il est clair que si Γ ∈N (Γ ≤ m), alors à l’optimum tout
coefficient du second membre bi, i = 1 . . . m, sera égal soit à la valeur nominale bi, soit
à la plus grande valeur bi + bi. Spécifiquement, Γ représente le nombre de coefficients
du second membre qui sont égaux à bi + bi.
Dans de nombreuses applications, cette contrainte d’intégrité n’est pas gênante.
Considérons l’exemple d’un problème de gestion de stocks sur un horizon temporel T
où il s’agit de définir les quantités à acheter et à stocker à chaque période t = 1 . . . T,
avec une demande à satisfaire qui serait incertaine. Il est naturel pour le décideur
d’attribuer une valeur entière à Γ, puisqu’elle représente ici le nombre de périodes où
les demandes dévient des valeurs nominales et sont égales aux pires valeurs.
Nous pouvons à présent linéariser le problème Q(Γ). En effet, étant donné que les
variables z sont binaires et apparaissent dans les produits yizi, i = 1 . . . m, de la fonction
objectif, alors suivant les techniques de linéarisation de Glover et Woolsey (1974) et
Glover (1975), chaque produit yizi peut être remplacé par une nouvelle variable ωi
telle que :
ωi =
yi si zi = 1
0 sinon(3.5)
Ajoutant les contraintes nécessaires pour garantir l’égalité (3.5), le problème Q(Γ) se
linéarise et devient le programme linéaire mixte, noté Q′(Γ), suivant :
Q′(Γ)
maxm∑
i=1biyi +
m∑
i=1biωi
s.c.m∑
i=1aijyi = cj j = 1 . . . n
m∑
i=1zi ≤ Γ
ωi ≤ yi i = 1 . . . m
ωi ≤ Mzi i = 1 . . . m
zi ∈ 0, 1 i = 1 . . . m
yi, ωi ≥ 0 i = 1 . . . m
3.1. Programmes linéaires avec contraintes d’inégalité 81
où M est une constante positive très grande.
Remarque 3.1 Dans le cas où Γ = m, le problème Q′(m) se simplifie en un programme
linéaire. En effet, on remarque qu’à l’optimum, toutes les variables z∗i = 1 et donc que bi =
bi + bi, i = 1 . . . m. Ceci rejoint le résultat du chapitre précédent (voir la section 2.2.1) du
calcul d’un pire optimum pour (Pb≥), qui est un problème polynomial.
En prenant un Γ entier nous passons d’un problème bilinéaire à un programme
linéaire mixte. Ce dernier, même s’il reste difficile dans le cas général, peut être résolu
de manière rapide à l’aide de solvers performants. L’efficacité des algorithmes utilisés
dépend de la valeur de M.
Afin de réduire le saut d’intégrité et d’accélérer la vitesse de résolution du pro-
blème, la constante M doit être la plus petite possible. Nous devons alors définir
des bornes pour les variables y. La formulation du problème Q′(Γ) présentée ici
est une formulation générique et les bornes que nous allons présenter le sont aussi.
Cependant, il est préférable de déterminer des bornes spécifiques à chaque type de
problème (ainsi, nous donnerons au chapitre 4 une borne spécifique pour le problème
de transport). Dans le cas général, nous pouvons poser les deux bornes suivantes (va-
lables uniquement si les valeurs de tous les coefficients bi, i = 1 . . . m sont strictement
positives).
Bornes pour M
Nous proposons de calculer deux bornes pour les variables y.
La première s’obtient comme suit : étant donné que les variables z sont des variables
binaires, alors pour toute solution réalisable (y, z, ω) du problème Q′(Γ) l’inégalité
suivante est vérifiée :
m
∑i=1
biyi +m
∑i=1
biyizi ≤m
∑i=1
biyi +m
∑i=1
biyi (3.6)
Par ailleurs, nous remarquons que la solution (y, 1l, ω) est réalisable pour Q′(m). Nous
avons donc :
m
∑i=1
biyi +m
∑i=1
biyi ≤m
∑i=1
biy∗i +m
∑i=1
biy∗i ≡ v∗(Q′(m)) (3.7)

82 Chapitre 3. Calcul du pire optimum paramétrique
où (y∗, 1l, ω∗) est la solution optimale du problème Q′(m) et v∗(Q′(m)) sa valeur à
l’optimum.
De (3.6) et (3.7) nous déduisons que :
m
∑i=1
(bi + bi)yi ≤ v∗(Q′(m)) (3.8)
Par conséquent, si les valeurs de bi + bi sont strictement positives pour tout i = 1 . . . m,
alors, nous déduisons de (3.8) que pour tout i = 1 . . . m les variables yi sont bornées
par les valeurs :
v∗(Q′(m))(bi + bi)
(3.9)
Examinons maintenant la seconde borne.
Pour toute solution réalisable (y, z, ω) de Q′(Γ), nous avons :
m
∑i=1
biyi +m
∑i=1
biyizi ≤ v∗(Q′(Γ)) (3.10)
où v∗(Q′(Γ)) représente la valeur de la solution optimale de Q′(Γ).
Par ailleurs, étant donné que les valeurs bi, yi, zi sont toutes non négatives pour i =
1, . . . , m, alors nous avons :
m
∑i=1
biyi ≤m
∑i=1
biyi +m
∑i=1
biyizi (3.11)
Nous déduisons de (3.10) et (3.11) que :
m
∑i=1
biyi ≤ v∗(Q′(Γ)) (3.12)
De plus, il est clair que v∗(Q′(Γ)) ≤ v∗(Q′(Γ + k)) pour tout k entier dans [1, m− Γ]
(la valeur de v∗(Q′(Γ)) est non décroissante quand la valeur de Γ augmente). Par

3.2. Programmes linéaires avec contraintes d’égalité 83
conséquent nous avons :
m
∑i=1
biyi ≤ v∗(Q′(Γ + k)) (3.13)
Si bi > 0 pour tout i = 1 . . . m, alors nous déduisons de (3.13) la borne suivante pour
les variables yi :
v∗(Q′(Γ + k))bi
(3.14)
Cette borne est la plus serrée quand k vaut 1.
Remarque 3.2 Ces deux bornes ne sont valables que si bi > 0 pour tout i = 1 . . . m, une
condition assez restrictive en général.
Nous passons à présent aux programmes linéaires admettant des contraintes
d’égalité exclusivement, pour lesquels nous allons proposer un moyen d’identifier le
scénario et de calculer la valeur du pire optimum paramétrique.
3.2 Programmes linéaires avec contraintes d’égalité
3.2.1 Identification du pire optimum paramétrique
Rappelons l’écriture du problème (Pb=) qui est un programme linéaire admettant des
contraintes d’égalité et dont le second membre des contraintes est incertain :
(Pb=)
min cx
s.c. Ax = b
x ≥ 0
Supposons que tout coefficient bi, pour i = 1 . . . m, appartient à l’intervalle
[bi − bi, bi + bi].
Selon la même approche, le calcul de la valeur du pire optimum paramétrique

84 Chapitre 3. Calcul du pire optimum paramétrique
s’obtient en résolvant le problème d’optimisation suivant :
Pb=(Γ)
max
b∈U (Γ)min
Ax=b, x≥0cx
où U (Γ) est défini par (3.1) et (3.2).
Puisque les contraintes de (Pb=) sont des égalités, le sens de déviation des seconds
membres qui détériore la valeur de l’optimum n’est pas connu a priori. La suppres-
sion des valeurs absolues n’est donc pas immédiate (comme cela fut le cas pour les
contraintes d’inégalité).
Afin de contourner cette difficulté, nous choisissons de remplacer les variables zi
pour tout i = 1 . . . m, par l’introduction de deux variables binaires z+i et z−i qui repré-
sentent un sens de déviation de la ieme contrainte. Selon cette formulation, le budget
d’incertitude Γ est un entier dans [0, m]. Le domaine d’incertitude est alors le suivant :
U ′(Γ) = b ∈ Rm : bi = bi + biz+i − biz−i ; z+
i , z−i ∈ Z′′(Γ) (3.15)
et
Z ′′(Γ) = z ∈ R2m :m
∑i=1
(z+i + z−i ) ≤ Γ; z+
i + z−i ≤ 1; z+i , z−i ∈ 0, 1 (3.16)
La valeur du pire optimum paramétrique s’obtient alors en résolvant le problème d’op-
timisation suivant :
Pb=(Γ)
max
m∑
i=1(z+
i + z−i ) ≤ Γ
z+i + z−i ≤ 1 i = 1 . . . m
z+i , z−i ∈ 0, 1 i = 1 . . . m
minn∑
j=1aijxj = bi + biz+
i − biz−i i = 1 . . . m
xj ≥ 0 j = 1 . . . n
n∑
j=1cjxj
En employant le théorème fort de dualité, nous retrouvons le problème de maximisa-

3.2. Programmes linéaires avec contraintes d’égalité 85
tion suivant :
W(Γ)
maxm∑
i=1biyi +
m∑
i=1biyiz+
i −m∑
i=1biyiz−i
s.c.m∑
i=1aijyi ≤ cj j = 1 . . . n
m∑
i=1(z+
i + z−i ) ≤ Γ
z+i + z−i ≤ 1 i = 1 . . . m
z+i , z−i ∈ 0, 1 i = 1 . . . m
où les variables y sont les variables du problème dual du problème de minimisation
dans (Pb=).
Nous proposons dans ce qui suit une formulation de W(Γ) en programme linéaire
mixte.
3.2.2 Reformulation en programme linéaire mixte
Dans le problème W(Γ), les termes quadratiques apparaissant dans la fonction ob-
jectif sont formés d’une variable binaire et d’une variable continue (non restreinte en
signe). Selon Glover (1975) et Torres (1990), il est possible de linéariser le problème en
effectuant le changement de variables suivant :
– pour i = 1 . . . m, tout produit yiz+i est remplacé par la variable ω+
i telle que :
ω+i =
yi si z+
i = 1
0 sinon(3.17)
– de la même manière, pour tout i = 1 . . . m, le produit yiz−i est remplacé par la
variable ω−i telle que :
ω−i =
yi si z−i = 1
0 sinon(3.18)
Ce changement de variables est accompagné par les contraintes suivantes :

86 Chapitre 3. Calcul du pire optimum paramétrique
– pour tout i = 1 . . . m nous avons :
Lz+i ≤ ω+
i ≤ Uz+i
yi −U(1− z+i ) ≤ ω+
i ≤ yi − L(1− z+i )
(3.19)
– pour tout i = 1 . . . m nous avons :
Lz−i ≤ ω−i ≤ Uz−iyi −U(1− z−i ) ≤ ω−i ≤ yi − L(1− z−i )
(3.20)
où L et U avec L ≤ U représentent des bornes inférieure et supérieure pour les
variables y qui sont à définir.
Le problème quadratique W(Γ) devient alors le programme linéaire mixte W ′(Γ)
suivant :
W ′(Γ)
maxm∑
i=1biyi +
m∑
i=1biω
+i −
m∑
i=1biω
−i
s.c.m∑
i=1aijyi ≤ cj j = 1 . . . n
m∑
i=1(z+
i + z−i ) ≤ Γ
z+i + z−i ≤ 1 i = 1 . . . m
Lz+i ≤ ω+
i ≤ Uz+i i = 1 . . . m
yi −U(1− z+i ) ≤ ω+
i ≤ yi − L(1− z+i ) i = 1 . . . m
Lz−i ≤ ω−i ≤ Uz−i i = 1 . . . m
yi −U(1− z−i ) ≤ ω−i ≤ yi − L(1− z−i ) i = 1 . . . m
z+i , z−i ∈ 0, 1 i = 1 . . . m
Le calcul de la valeur du pire optimum paramétrique, valeur de la solution opti-
male de W ′(Γ), (Γ ∈ N) est un problème difficile. Ceci est valable même dans le cas
où Γ = m, rejoignant ainsi le résultat du calcul du pire optimum de (Pb=), dont nous
avons prouvé la NP-difficulté à la section 2.2.2.
Conclusion
Dans ce chapitre nous avons proposé une extension de l’approche de Bertsimas et
Sim (2004) au calcul du pire optimum d’un programme linéaire où les incertitudes
3.2. Programmes linéaires avec contraintes d’égalité 87
affectent exclusivement le second membre des contraintes. Nous avons pour ce faire
paramétré le calcul du pire optimum par un budget d’incertitude unique commun à
toutes les contraintes.
De cette étude, nous avons établi que ce problème est dans le cas général un pro-
blème difficile et nous avons proposé une relaxation en programme linéaire mixte. Ceci
montre qu’en robustesse la prise en compte d’un budget d’incertitudes en colonnes
conduit à des problèmes plus difficiles que ceux issus de modèles d’incertitudes en
lignes. Très récemment, plusieurs auteurs emploient ce modèle d’incertitude pour
représenter les incertitudes sur des coefficients du second membre dans diverses
applications : Minoux (2007b;a) étudie un problème d’ordonnancement PERT robuste,
Atamtürk et Zhang (2007) et Minoux (2010) s’intéressent à des problèmes de dimen-
sionnement de réseaux et Minoux (2009a) traite d’un problème de flot dans un réseau.
Dans la suite de ce travail, nous changeons de contexte de décision et nous nous
plaçons dans un contexte bi-étapes dans lequel nous abordons une application du
problème de localisation et de transport robuste avec une demande incertaine. Comme
nous le détaillerons dans le chapitre suivant, le calcul du pire optimum paramétrique
sera d’une importance centrale dans la recherche des solutions robustes à ce problème.
En effet, adoptant un modèle d’incertitude paramétré par le budget d’incertitude décrit
dans le chapitre 3, nous montrerons que le problème de recours n’est autre que le
problème du pire optimum paramétrique.


4Application : Problème de
localisation et de transport
robuste bi-étapes
Sommaire
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.1 Problème de localisation et de transport déterministe . . . . . . . . 92
4.2 Problème de localisation et de transport robuste . . . . . . . . . . . 93
4.2.1 Formulation de la version robuste . . . . . . . . . . . . . . . . . . . . . . 93
4.2.2 Résolution du problème de localisation et de transport robuste . . . . . 97
4.2.3 Reformulation du problème de recours . . . . . . . . . . . . . . . . . . . 100
4.3 Expérimentations numériques . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.3.1 Problème de recours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.3.2 Problème de localisation et de transport robuste . . . . . . . . . . . . . . 109
4.3.3 Autre contexte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Dans ce chapitre, nous présentons une application du problème de localisation et
transport, où les demandes des clients sont incertaines. Afin de déterminer des
solutions robustes à ce problème, nous empruntons une approche robuste bi-étapes,
adaptée au contexte décisionnel du problème. Grâce à une borne très serrée établie
pour le problème de transport, nous exposerons les résultats de tests numériques réa-
lisés sur des instances de grande taille du problème.
89

91
Introduction
Ce chapitre traite du problème de localisation et de transport comportant des de-
mandes incertaines.
Le problème que nous abordons s’inscrit dans un contexte bi-étapes, et com-
prend des incertitudes modélisées dans le second membre des contraintes. Afin de
déterminer des solutions robustes, nous emploierons l’approche robuste bi-étapes
de Thiele et al. (2009) (présentée à la section 1.3). Pour rappel, selon cette approche,
les variables sont divisées en deux groupes distincts tels qu’une partie des variables
doit être décidée avant la réalisation de l’aléa, alors que la seconde partie est décidée
après divulgation des demandes. Étant données les incertitudes sur les demandes, il
s’agit de calculer une décision robuste de première étape, qui pour notre problème
correspond à la localisation, tout en garantissant l’existence d’un recours à la seconde
étape, représenté par le transport.
Selon cette approche, notre objectif est de construire la version robuste du pro-
blème de localisation et de transport puis de la résoudre de manière exacte. Nous
utiliserons, pour ce faire, un algorithme qui se base sur une procédure de génération
de contraintes (Kelley (1960)). Nous montrerons qu’une étape clé de cet algorithme
réside dans le calcul d’un pire optimum paramétrique (présenté au chapitre 3) associé
au problème de transport. De plus, ce calcul faisant intervenir une constante de grande
valeur, notre contribution sera de déterminer une borne serrée à cette constante. Ceci
nous permettra de résoudre des instances de grande taille du problème. Une version
synthétique de ce travail est présenté dans Gabrel et al. (2010b).
Le chapitre est structuré comme suit : dans la section 4.1, le problème de loca-
lisation et de transport déterministe sera décrit. Puis, une formulation robuste du
problème comportant une demande incertaine sera abordée à la section 4.2. Tout
d’abord, le contexte décisionnel du problème sera donné à la section 4.2.1 et la for-
mulation mathématique de la version robuste sera construite. Ensuite, un algorithme
de résolution de ce problème sera présenté dans la section 4.2.2. Enfin, dans la section
4.3, les résultats des tests expérimentaux qui ont été menés seront exposés.

92 Chapitre 4. Problème de localisation et de transport robuste
4.1 Problème de localisation et de transport déterministe
Considérons le problème de localisation et de transport suivant : une marchandise doit
être transportée de m entrepôts (ou sources) potentiels vers n clients. Les entrepôts
sont de capacités maximales égales à Ci pour tout i = 1, . . . , m. Les demandes des
clients sont notées β j, j = 1, . . . , n. Nous supposons que le problème est réalisable,
dans le sens où la somme totale des capacités est supérieure ou égale à la somme des
demandes. Divers coûts sont considérés : en premier lieu, les coûts fixes de construc-
tion des entrepôts sont notés par fi, i = 1 . . . m. Ensuite, les coûts variables de stockage
dans une source i, i = 1 . . . m, sont notés di. Enfin, les coûts unitaires d’acheminement
de marchandise d’une source i vers un client j sont notés µij. L’objectif visé est de
déterminer les entrepôts à construire (modélisés par les variables binaires ri), ainsi que
les quantités stockées dans chacun (modélisées par les variables yi) et les quantités à
acheminer des sources vers les clients (représentées par les variables tij) tels que les
coûts totaux soient minimum.
Le problème de localisation et de transport déterministe, noté (T), se formule alors
comme le programme linéaire mixte suivant :
(T)
minm
∑i=1
diyi +m
∑i=1
firi +m
∑i=1
n
∑j=1
µijtij
s.c.n
∑j=1
tij ≤ yi i = 1 . . . m
m
∑i=1
tij ≥ β j j = 1 . . . n
yi ≤ Ciri i = 1 . . . m
ri ∈ 0, 1, yi, tij ≥ 0 i = 1 . . . m, j = 1 . . . n
(4.1)
(4.2)
(4.3)
Les contraintes (4.1) et (4.2) sont les contraintes classiques relatives au transport, à
savoir que les quantités soustraites d’une source n’excèdent pas le niveau de stock
existant, et les quantités acheminées vers les clients sont suffisantes pour satisfaire les
demandes de ces derniers. Enfin, les contraintes (4.3) expriment, quant à elles, le fait
que pour une source ouverte, les quantités à stocker ne dépassent pas la capacité de la
source.
4.2. Problème de localisation et de transport robuste 93
4.2 Problème de localisation et de transport robuste
4.2.1 Formulation de la version robuste
Considérons le cas où le décideur souhaite construire des entrepôts de stockage sur
un certain nombre de sites, y stocker des marchandises, puis déterminer le routage de
celles-ci vers les clients. Il est rare qu’au moment de la construction des entrepôts, le
décideur connaisse les valeurs effectives des demandes ; il ne dispose en général que
d’estimations. Nous désirons prendre en compte cette incertitude sur les demandes
lors de la prise de décision sur le choix de la construction des entrepôts.
Dans ce qui suit, nous définirons précisément le contexte décisionnel du problème,
ainsi que le modèle d’incertitude associé aux demandes, puis nous exposerons la
formulation mathématique du problème robuste.
Contexte de décision
Le décideur procède en deux étapes : dans la première étape, les emplacements doivent
être choisis et les marchandises doivent être disposées dans les entrepôts correspon-
dant ; puis, dans la seconde étape, le routage de ces marchandises doit être décidé, et
ceci une fois que la demande des clients est connue. Ce problème de localisation et de
transport incertain s’inscrit donc dans un contexte bi-étapes.
De plus, nous admettrons une contrainte supplémentaire à la description du pro-
blème : à savoir que le décideur est dans l’obligation de satisfaire toutes les demandes
des clients quand elles se présentent. Il doit par conséquent garantir une quantité
suffisante de marchandises en stock prêtes à être acheminées.
Afin de formuler le problème, attachons-nous à décrire le domaine d’incertitude
qui modélisera les demandes des clients.
Modèle d’incertitude
La demande de chaque client est modélisée par un intervalle construit à partir d’une
valeur nominale autour de laquelle nous autorisons une déviation. Formellement,

94 Chapitre 4. Problème de localisation et de transport robuste
suivant les notations du chapitre précédent, la demande β j du jeme client, pour tout
j = 1 . . . n, appartient à l’intervalle [βj − β j, βj + β j], où βj ≥ 0 représente la valeur
nominale de la demande et β j ≥ 0 sa déviation maximale.
Notons le problème (Tβ) correspondant à une instance du problème de localisa-
tion et de transport pour un vecteur β donné. Nous supposons que le domaine des
solutions réalisables pour tout problème (Tβ) est non vide. De plus, notons v∗(Tβ) la
valeur de la solution optimale du problème, que nous supposons finie.
Si le décideur voulait se prémunir du pire scénario de la demande, il lui suffirait de
résoudre la version déterministe du problème en prenant les plus grandes demandes.
Par conséquent, d’après le résultat de la section 2.1.1, le problème (Tβ)pirCas s’écrit :
(Tβ)pirCas
minm∑
i=1diyi +
m∑
i=1firi +
m∑
i=1
n∑
j=1µijtij
s.c.n∑
j=1tij ≤ yi i = 1 . . . m
m∑
i=1tij ≥ βj + β j j = 1 . . . n
yi ≤ Ciri i = 1 . . . m
ri ∈ 0, 1, yi, tij ≥ 0 i = 1 . . . m, j = 1 . . . n
La solution obtenue est robuste, car le décideur s’assure de satisfaire la demande
quand elle se présente, puisqu’il décide sur la base du scénario définissant les plus
fortes demandes.
Cependant, le décideur souhaite dimensionner ses entrepôts selon un scénario
moins conservateur que le scénario de pire cas (qui reste peu vraisemblable dans la
réalité) et cela en supposant que certaines demandes ne soient pas toutes les pires.
Rappelons cependant que le décideur doit impérativement prévoir assez de capacité
de stockage pour satisfaire toutes les demandes quand elles se présentent, y compris
les pires. Ces problèmes sont souvent rencontrés par des fournisseurs d’énergie qui
doivent installer des entrepôts de capacités capables de supporter une forte demande
mais désirent construire et stocker l’énergie selon un scénario plus réaliste et moins
extrême que celui du pire cas.
Nous proposons pour ce faire une modélisation des incertitudes selon le modèle

4.2. Problème de localisation et de transport robuste 95
paramétrique décrit au chapitre 3, à savoir qu’un budget d’incertitude Γ est considéré
pour représenter le nombre de demandes déviant des valeurs nominales. Ici, la valeur
de Γ est comprise entre 0 et n. Ces deux valeurs décrivent les scénarios extrêmes
suivants : dans le cas où Γ = 0 toutes les demandes sont égales aux valeurs nominales,
et dans le cas où Γ = n toutes les demandes sont à leur maximum. Le décideur peut
ainsi modifier la valeur de Γ selon ses prévisions et déterminer une solution robuste
dans le budget d’incertitude qu’il s’autorise.
Formulation mathématique du problème robuste
Appliquons au problème incertain (Tβ) l’approche robuste bi-étapes, présentée dans la
section 1.3. En rappelant que le décideur doit définir les emplacements des entrepôts
ainsi que leur dimensionnement avant que les demandes ne soient connues, nous
définissons les variables ri et yi, i = 1 . . . m comme étant les variables de première
étape. L’acheminement des marchandises se faisant après divulgation des demandes,
les variables tij représentent alors les variables de recours ou de seconde étape.
Le problème de localisation et de transport robuste bi-étapes consiste à détermi-
ner le coût minimum de la localisation et du dimensionnement des entrepôts de telle
sorte que quelles que soient les demandes formulées, il existe un routage de coût mi-
nimum assurant la satisfaction de ces demandes. La formulation du problème robuste
bi-étapes, notée TRob(Γ), est la suivante :
TRob(Γ)
min
yi≤Ciri , i=1...mm∑
i=1yi≥B
yi≥0, ri∈0,1
(m∑
i=1diyi +
m∑
i=1firi+ max
β∈UT (Γ)min
n∑
j=1tij≤yi , i=1...m
m∑
i=1tij≥β j , j=1...n
tij≥0, i=1...m, j=1...n
m∑
i=1
n∑
j=1µijtij)
où
B =n
∑j=1
(βj + β j) (4.4)
et le domaine d’incertitude paramétrique UT (Γ) est défini par :
UT (Γ) = β ∈ Rn : β j = βj + zj β j, j = 1 . . . n, z ∈ Z(Γ) (4.5)

96 Chapitre 4. Problème de localisation et de transport robuste
avec
ZT (Γ) = z ∈ Rn :n
∑j=1
zj ≤ Γ, 0 ≤ zj ≤ 1, j = 1 . . . n (4.6)
La contraintem∑
i=1yi ≥ B, où B est donné par (4.4), exprime le fait que le décideur,
une fois les demandes connues, doit pouvoir satisfaire ses clients. Le recours est ainsi
considéré complet, dans le sens où pour toute solution (y, r), le problème de transport
possède une solution finie, quelles que soient les demandes qui se réalisent, même
dans les cas où elles excèdent les prévisions et atteignent leur maximum.
Avantages d’une telle approche
Comme nous l’avons souligné auparavant, dans une approche classique de pire cas
toutes les décisions relatives à la localisation, au dimensionnement et au routage sont
prises sur la base des plus fortes demandes. Ainsi, la quantité de marchandises stockée
dans tous les entrepôts sera égale à la quantité nécessaire pour satisfaire ces demandes
maximales. La localisation et l’acheminement seront également optimisés de manière
à satisfaire cette pire demande.
Dans le cas de l’approche bi-étapes que nous traitons ici, la satisfaction de la
demande reste une condition qui doit être remplie dans tous les cas. Aussi, la somme
des quantités stockées sera la même que dans l’approche pire cas. Cependant, la locali-
sation et le dimensionnement des entrepôts seront optimisés en fonction des scénarios
de la demande. La valeur de cette demande est pilotée par le budget d’incertitude Γ
fixé par le décideur.
Il est alors clair que les solutions apportées par cette approche sont différentes de
celles apportées par une approche pire cas classique. Nous montrerons dans la section
4.3.2 qu’un gain important est réalisé avec cette approche bi-étapes comparativement
à une approche pire cas.

4.2. Problème de localisation et de transport robuste 97
4.2.2 Résolution du problème de localisation et de transport robuste
Nous proposons à présent une résolution exacte du problème robuste TRob(Γ). Tout
d’abord, identifions le problème de recours comme étant le problème d’optimisation,
noté R(y, Γ), suivant :
R(y, Γ)
maxn∑
j=1zj≤Γ
0≤zj≤1, j=1...n
minn∑
j=1tij≤yi , i=1...m
m∑
i=1tij≥βj+β jzj, j=1...n
tij≥0, i=1...m, j=1...n
m∑
i=1
n∑
j=1µijtij
Nous remarquons qu’il s’agit du problème de recherche du pire optimum paramé-
trique (étudié au chapitre 3) associé au problème classique de transport avec les
capacités y fixées et une déviation totale égale à Γ. La résolution du problème robuste
TRob(Γ) va être intimement liée à la résolution de ce problème de recours.
Par hypothèse, le problème de transport est réalisable, et l’optimum est atteint en une
valeur finie, quelles que soient les capacités y (satisfaisant les contraintes du problème)
et quel que soit le budget d’incertitude Γ. Par conséquent, d’après le théorème fort de
la dualité, le problème de recours est équivalent au problème suivant :
Q(y, Γ)
max −m∑
i=1yiui +
n∑
j=1βjvj +
n∑
j=1β jvjzj
s.c. vj − ui ≤ µij i = 1 . . . m, j = 1 . . . nn∑
j=1zj ≤ Γ
0 ≤ zj ≤ 1 j = 1 . . . n
ui, vj ≥ 0 i = 1 . . . m, j = 1 . . . n
où ui, vj pour tout i = 1 . . . m, j = 1 . . . n représentent les variables du problème dual
du problème de transport. Le problème Q(y, Γ) est un problème quadratique. Il est
possible de le linéariser en un programme linéaire mixte, comme cela a été montré au
chapitre 3. Nous proposons par la suite de détailler le calcul d’une borne très serrée
permettant une résolution rapide de ce problème.
Revenons au problème de localisation et de transport robuste Trob(Γ). Ce problème

98 Chapitre 4. Problème de localisation et de transport robuste
peut s’écrire de manière équivalent comme suit :
Trob(Γ)
minm∑
i=1diyi +
m∑
i=1firi + v∗(Q(y, Γ))
s.c. yi ≤ Ciri i = 1 . . . mm∑
i=1yi ≥ B
yi ≥ 0, ri ∈ 0, 1 i = 1 . . . m
où v∗(Q(y, Γ)) est égale à la valeur d’une solution optimale de Q(y, Γ).
Comme suggéré par Thiele et al. (2009) dans le cas général, nous adaptons dans ce
qui suit, l’algorithme de génération de contraintes proposé par Kelley (1960) pour
résoudre le problème Trob(Γ).
Remarquons, tout d’abord, que l’optimum du problème Q(y, Γ) se réalise en un
point extrême du domaine des solutions réalisables. Par conséquent, il est possible de
reformuler le problème robuste Trob(Γ) comme suit :
Trob(Γ)
minm∑
i=1diyi +
m∑
i=1firi + α
s.c. α ≥ −m∑
i=1yius
i +n∑
j=1βjv
sj +
n∑
j=1β jvs
j zsj s = 1 . . . S
m∑
i=1yi ≥ B
yi ≤ Ciri i = 1 . . . m
α, yi ≥ 0, ri ∈ 0, 1 i = 1 . . . m
où S représente l’ensemble des points extrêmes du problème de recours Q(y, Γ), pour
un vecteur y fixé et un budget d’incertitude Γ.
L’idée générale de l’algorithme est la suivante : initialement, un sous-ensemble de
points extrêmes de S est considéré et une version relaxée du problème Trob(Γ), nommée
problème maître, est résolue. La solution optimale est notée (y∗, r∗). Il s’agit du problème
de première étape, relatif à la localisation. Les valeurs de y∗ sont ensuite fixées dans
le problème de recours correspondant au transport et nommé problème esclave, afin de
vérifier son optimalité. Si tel n’est pas le cas, une contrainte est ajoutée au problème
maître. Cette procédure est réitérée jusqu’à vérification du critère d’arrêt et obtention
de la solution optimale. Le critère d’arrêt étant défini par l’égalité de deux bornes

4.2. Problème de localisation et de transport robuste 99
(une borne supérieure U et une borne inférieure L). Formellement l’algorithme est le
suivant :
Algorithme 2 : Algorithme de Kelley pour la résolution de Trob(Γ)
Étape 0 : Initialisation :Définir T1
rob(Γ) contenant un seul point extrême (u0, v0, z0) avec u0 = v0 = z0 = 0.Poser L← −∞, U ← +∞ et k← 1. Aller à l’Étape 1.Étape 1 :Résoudre le problème maître
Tkrob(Γ)
minm∑
i=1diyi +
m∑
i=1firi + α
s.c. α ≥ −m∑
i=1yiul
i +n∑
j=1βjv
lj +
n∑
j=1β jvl
jzlj l = 0 . . . k− 1
m∑
i=1yi ≥ B
yi ≤ Ciri i = 1 . . . myi ≥ 0, ri ∈ 0, 1 i = 1 . . . m
Noter par (yk, rk, αk) sa solution optimale.
Mettre à jour la valeur de la borne L←m∑
i=1diyk
i +m∑
i=1firk
i + αk, et aller à l’Étape 2.
Étape 2 :Pour les capacités fixées à yk, résoudre le problème de recours Q(yk, Γ) et noter sasolution (uk, vk, zk).
Poser U ← minU,m∑
i=1diyk
i +m∑
i=1firk
i −m∑
i=1yk
i uki +
n∑
j=1βjv
kj +
n∑
j=1β jvk
j zkj .
Si U = L AlorsRetourner (yk, rk, αk), qui représente la solution robuste de Trob(Γ)
Sinonaller à l’Étape 3
Fin SiÉtape 3 :Ajouter la contrainte
α ≥ −m
∑i=1
yiuki +
n
∑j=1
βjvkj +
n
∑j=1
β jvkj zk
j
au problème maître Tkrob(Γ), k← k + 1 et aller à l’Étape 1.

100 Chapitre 4. Problème de localisation et de transport robuste
Convergence de l’algorithme : [Kelley (1960)] il est clair que la valeur d’une solution
de (Tkrob(Γ)) à l’itération k, notée L, représente une borne inférieure à la valeur d’une
solution du problème robuste. En effet, Tkrob(Γ) ne contient qu’un sous-ensemble de
contraintes de Trob(Γ). À chaque itération, des contraintes sont ajoutées à Tkrob(Γ),
et ainsi la valeur de L est non décroissante. Par ailleurs, étant donné qu’à chaque
itération k, la solution (yk, rk, uk, vk, zk) est une solution réalisable de Trob(Γ), la borne
supérieure U consiste à prendre la valeur minimale de toutes les solutions réalisables
générées. De plus, le nombre de points extrêmes de S étant fini, nous déduisons de ce
qui précède que l’algorithme converge vers la solution optimale du problème.
Comme nous le voyons, cet algorithme se base sur l’optimisation itérative de deux
problèmes : d’une part, la résolution d’une version relaxée du problème, modélisée
par un programme linéaire mixte, et d’autre part, le problème de recours Q(yk, Γ), qui
est un problème quadratique. Il s’en suit que la résolution du problème robuste Trob(Γ)
dépend fortement de la résolution du problème de recours, bien plus difficile. Nous
utiliserons, dans ce qui suit, la reformulation présentée au chapitre 3 pour linéariser
ce dernier.
4.2.3 Reformulation du problème de recours
Il est naturel de supposer que le paramètre Γ prenne des valeurs entières dans l’inter-
valle [0, n]. Il représente ainsi le nombre de demandes que le décideur autorise à dévier
des valeurs nominales. Dans ce cas, le problème Q(y, Γ) est linéarisable (d’après la pro-
position 3.1 du chapitre 3), et peut se formuler comme un programme linéaire mixte
comme suit :
Q′(y, Γ)
max −m∑
i=1yiui +
n∑
j=1βjvj +
n∑
j=1β jωj
s.c. vj − ui ≤ µij i = 1 . . . m, j = 1 . . . nn∑
j=1zj ≤ Γ
ωj ≤ vj j = 1 . . . n
ωj ≤ Mzj j = 1 . . . n
zj ∈ 0, 1 j = 1 . . . n
ui, vj, ωj ≥ 0 j = 1 . . . n, i = 1 . . . m

4.2. Problème de localisation et de transport robuste 101
où M est une constante positive de grande valeur.
Afin de réduire le saut d’intégrité lors de la résolution du problème Q′(y, Γ), la valeur
de M doit être la plus serrée possible. Étant donné que les constantes du problème
ne sont pas toutes strictement positives, il n’est pas possible d’utiliser les deux bornes
définies à la section 3.1.2 du chapitre 3 (voir la remarque 3.2). Une borne spécifique
pour les variables v du problème doit être calculée. La proposition 4.1 fournit une
borne serrée pour les constantes M pour ce problème de transport.
Proposition 4.1 Dans le problème Q′(y, Γ) les valeurs de M peuvent être fixées spécifique-
ment pour chacune des variables vj comme suit :
Mj = v∗j (n)
où v∗j (n), j = 1, . . . , n, est la valeur dans la solution optimale des variables v du problème
Q′(y, n).
Afin de montrer cette proposition, montrons tout d’abord le théorème 4.1.
Théorème 4.1 Soit (D∗) le dual du problème classique de transport :
(D∗)
max −
m∑
i=1yiui +
n∑
j=1β jvj
s.c. −ui + vj ≤ µij i = 1 . . . m, j = 1 . . . n
ui, vj ≥ 0 i = 1 . . . m, j = 1 . . . n
Notons (u∗, v∗) la solution optimale de (D∗) et Z∗(u∗, v∗) sa valeur à l’optimum.
Considérons par ailleurs, une instance du problème de transport, telle que la demande du pre-
mier client soit égale à β1 − β1 avec β1 > 0. Le problème dual, noté (D′), d’une telle instance
est le programme linéaire :
(D′)
max −
m∑
i=1yiui + (β1 − β1)v1 +
n∑
j=2β jvj
s.c. −ui + vj ≤ µij i = 1 . . . m, j = 1 . . . n
ui, vj ≥ 0 i = 1 . . . m, j = 1 . . . n

102 Chapitre 4. Problème de localisation et de transport robuste
Alors, il existe au moins une solution optimale (u′, v′) de (D′) telle que u′ ≤ u∗ et v′ ≤ v∗.
Démonstration. Dans le cas trivial où (u∗, v∗) est optimale pour (D′), le théorème 4.1
est vérifié. Nous nous intéressons au cas contraire. Soit (u′, v′) une solution optimale
du problème (D′) qui ne satisfait pas le théorème 4.1, et définissons la solution (u′′, v′′)
comme suit :
u′′i = minu∗i , u′i pour tout i = 1 . . . m
v′′j = minv∗j , v′j pour tout j = 1 . . . n
Montrons que (u′′, v′′) est une solution optimale de (D′).
Tout d’abord, montrons que (u′′, v′′) est une solution réalisable. Par l’absurde, suppo-
sons qu’il existe un indice i1 et un indice j1 pour lesquels −u′′i1 + v′′j1 > µi1 j1 . Deux cas
de figure se distinguent :
– Si u′′i1 = u∗i1 alors
u∗i1 < −µi1 j1 + v′′j1 (4.7)
Par ailleurs, par définition on a v′′j1 ≤ v∗j1 , ce qui implique que :
− µi1 j1 + v′′j1 < −µi1 j1 + v∗j1 (4.8)
De (4.7) et (4.8) nous déduisons que u∗i1 < −µi1 j1 + v∗j1 , ce qui contredit la réalisa-
bilité de la solution (u∗, v∗).
– Si u′′i1 = u′i1 alors
u′i1 < −µi1 j1 + v′′j1 (4.9)
Par définition v′′j1 ≤ v′j1 et donc
− µi1 j1 + v′′j1 < −µi1 j1 + v′j1 (4.10)
De (4.9) et (4.10) nous déduisons que u′i1 < −µi1 j1 + v′j1 , ce qui contredit la réali-
sabilité de la solution (u′, v′).
Par conséquent, la solution (u′′, v′′) est réalisable.
Avant de prouver que (u′′, v′′) est optimale pour (D′), montrons que v′′1 = v′1. Par

4.2. Problème de localisation et de transport robuste 103
l’absurde, supposons que v′′1 = v∗1 (impliquant que v∗1 ≤ v′1). Étant donné que (u∗, v∗)
n’est pas optimale pour (D′) par hypothèse, alors :
Z′(u∗, v∗) < Z′(u′, v′) (4.11)
où Z′(u∗, v∗) (respectivement Z′(u′, v′)) est la valeur de la solution (u∗, v∗) (respecti-
vement (u′, v′)) pour le problème (D′). De plus, pour toute solution réalisable (u, v)
nous avons :Z′(u, v) = −
m∑
i=1yiui +
n∑
j=1β jvj − β1v1
Z∗(u, v) = −m∑
i=1yiui +
n∑
j=1β jvj
ce qui implique que :
Z′(u, v) = Z∗(u, v)− β1v1 (4.12)
De (4.11) et (4.12) on obtient
Z∗(u∗, v∗)− β1v∗1 < Z∗(u′, v′)− β1v′1 (4.13)
Z∗(u∗, v∗)− Z∗(u′, v′) < β1v∗1 − β1v′1 (4.14)
Si nous supposons que v∗1 ≤ v′1, alors β1v∗1 − β1v′1 ≤ 0. Par conséquent, (4.14) implique
que :
Z∗(u∗, v∗)− Z∗(u′, v′) < 0 (4.15)
ce qui contredit le fait que (u∗, v∗) soit optimale pour (D∗). Il est alors clair que v∗1 ≥ v′1et donc que
v′′1 = v′1 (4.16)
Montrons à présent que (u′′, v′′) est une solution optimale de (D′). Le coût de cette
solution est égal à :
Z′(u′′, v′′) = −m
∑i=1
yiu′′i + (β1 − β1)v′′1 +n
∑j=2
β jv′′j (4.17)

104 Chapitre 4. Problème de localisation et de transport robuste
Soit I ⊆ I le sous-ensemble d’indices de I = 1 . . . m tel que i ∈ I si u′′i = u′i, et donc
u′i ≤ u∗i . On définit J ⊆ J comme étant le sous-ensemble d’indices de J = 1 . . . n tel
que j ∈ J si v′′j = v′j, et donc v′j ≤ v∗j . La valeur de la solution (u′′, v′′) est égale à :
Z′(u′′, v′′) = − ∑i∈I
yiu′i + ∑j∈J\1
β jv′j + (β1 − β1)v′′1 − ∑i∈I\I
yiu∗i + ∑j∈J\J
β jv∗j
De (4.16), remplaçons v′′1 par v′1. Nous obtenons :
Z′(u′′, v′′) = − ∑i∈I
yiu′i + (β1 − β1)v′1 + ∑j∈J\1
β jv′j + ∑i∈I\I
yi(u′i − u∗i )− ∑j∈J\J
β j(v′j − v∗j )
= Z′(u′, v′) + ∑i∈I\I
yi(u′i − u∗)− ∑j∈J\J
β j(v′j − v∗j )
Si (u′′, v′′) n’est pas optimale pour (D′), alors la quantité :
A = ∑i∈I\I
yi(u′i − u∗i )− ∑j∈J\J
β j(v′j − v∗j ) (4.18)
doit être strictement négative. Montrons que cela conduit à une contradiction.
Pour ce faire, définissons une autre solution notée (u, v) comme suit :
ui = maxu∗i , u′i pour tout i = 1 . . . m
vj = maxv∗j , v′j pour tout j = 1 . . . n
Suivant le même raisonnement que celui employé pour la solution (u′′, v′′), il est facile
de montrer que la solution (u, v) est réalisable. La valeur de cette dernière pour le
problème (D∗) est égale à :
Z∗(u, v) = −m∑
i=1yiui +
n∑
j=1β jvj
= − ∑i∈I
yiu∗i − ∑i∈I\I
yiu′i + ∑j∈J
β jv∗j + ∑j∈J\J
β jv′j
= − ∑i∈I
yiu∗i + ∑j∈J
β jv∗j − ∑i∈I\I
yi(u′i − u∗i ) + ∑j∈J\J
β j(v′j − v∗j )
= Z∗(u∗, v∗)− ∑i∈I\I
yi(u′i − u∗i ) + ∑j∈J\J
β j(v′j − v∗j )
= Z∗(u∗, v∗)− A
Supposer que A < 0 contredit l’optimalité de la solution (u∗, v∗) pour (D∗). Par consé-
4.3. Expérimentations numériques 105
quent, A ≥ 0 et Z′(u′′, v′′) ≥ Z′(u′, v′). Plus précisément, A = 0 et la solution (u, v)
est optimale pour (D∗). En conclusion, nous avons construit la solution (u′′, v′′) qui est
réalisable et optimale pour (D′) et vérifie le théorème 4.1.
La proposition 4.1 se déduit directement du théorème 4.1. En premier lieu, nous re-
marquons qu’à l’optimum, les valeurs des variables u∗i et v∗j pour i = 1 . . . m, j = 1 . . . n
représentent des bornes supérieures pour les variables u et v respectivement dans
toutes les instances du problème de transport où une ou plusieurs demandes dé-
croissent. En second lieu, nous rappelons que pour la valeur de Γ = n, toutes les
demandes sont égales aux plus grandes valeurs βj + β j. Par conséquent, quand Γ
décroît, certaines d’entre elles vont aussi diminuer. Nous en déduisons que les valeurs
de v∗j (n), solution du problème Q′(y, n), représentent des bornes supérieures pour les
valeurs des variables v dans le problème Q′(y, Γ) où Γ ≤ n et Γ ∈N.
Remarque 4.1 Dans l’algorithme 2, les valeurs des bornes v∗(n) doivent être recalculées à
chaque itération. En effet, un nouveau vecteur yk est généré à chaque itération. Il s’en suit qu’à
l’étape 2 de l’algorithme, le problème de recours est résolu deux fois :
– une première fois, en posant Γ = n, afin d’obtenir les valeurs de v∗(n). Ce calcul se fait
rapidement, étant donné que Q′(yk, n) est un programme linéaire.
– en utilisant les valeurs de v∗(n), le problème Q′(yk, Γ) est résolu.
4.3 Expérimentations numériques
Nous exposons dans cette section les résultats expérimentaux réalisés sur la version
robuste du problème de localisation et de transport. L’objectif est de tester la vitesse
de convergence de l’algorithme de Kelley et la capacité d’un solver à résoudre le
problème de recours. Notre étude est séparée en deux parties : tout d’abord, en posant
les conditions adéquates de réalisabilité, nous traiterons uniquement le problème de
recours, en comparant la borne définie à la section 4.2.3 avec une borne de valeur
arbitrairement grande. La seconde partie est consacrée à la résolution du problème
robuste dans sa globalité.
106 Chapitre 4. Problème de localisation et de transport robuste
4.3.1 Problème de recours
Les données du problème
Les premières séries de tests ont été réalisées sur le problème de recours Q′(y, Γ), pour
des valeurs fixées de sources m et de demandes n, et différentes valeurs de Γ. Afin de se
rapprocher de la réalité, le nombre de clients est choisi plus grand que le nombre d’en-
trepôts. Toutes les autres données du problème sont générées aléatoirement comme
suit :
– les demandes : pour tout j = 1, . . . , n , la demande nominale βj est générée aléa-
toirement dans l’intervalle [10, 500], et les déviation β j = pjβj, où pj représente
le pourcentage de déviation maximale pour chaque demande j. Les valeurs de pj
sont générées dans [0.1, 0.5], ce qui assure des déviations strictement positives.
– Les capacités : les valeurs de capacités yi, i = 1 . . . m, sont obtenues en répar-
tissant équitablement la valeur totale des demandes maximales sur le nombre
d’entrepôts. Ainsi, le problème est réalisable.
– Les coûts de transport µij sont générés uniformément dans [1, 1000].
Résolution du problème de recours
Le problème Q′(y, Γ) est résolu à l’aide du solver CPLEX 11.2. Pour tout couple (n, m)
fixé, 10 instances ont été générées et résolues. En fixant le temps de résolution maximal
à 35 mn, nous montrons dans le tableau 4.1 les résultats regroupant le temps moyen
d’exécution, ainsi que le pourcentage des instances résolues dans le temps imparti, et
cela en comparant deux bornes de M différentes : la borne v∗(n) décrite à la section
4.2.3, et une borne de valeur arbitre grande. Pour les instances non résolues au bout
de 35 mn, nous considérons un temps d’exécution égal à 2100 s.
Les résultats reportés dans le tableau 4.1 montrent que les temps de résolution relatifs
à la résolution du problème de recours où M = v∗(n) sont nettement plus courts que
ceux obtenus par une borne arbitrairement grande, et cela pour toutes les instances
testées. De plus, nous remarquons que ce temps s’allonge quand Γ est compris entre
n/2 et 2n/3, comme le montre la figure 4.1.a. Ceci s’explique par la combinatoire
élevée autour des valeurs de n/2. Par ailleurs, la figure 4.1.b montre l’évolution de la
valeur de la fonction objectif en fonction de Γ pour un échantillon m = 100 et n = 250.
Nous obtenons une courbe concave où v∗(Q′(y, Γ)) augmente rapidement pour des
petites valeurs de Γ et qui s’aplatie quand Γ s’approche de n. En effet, pour des petites
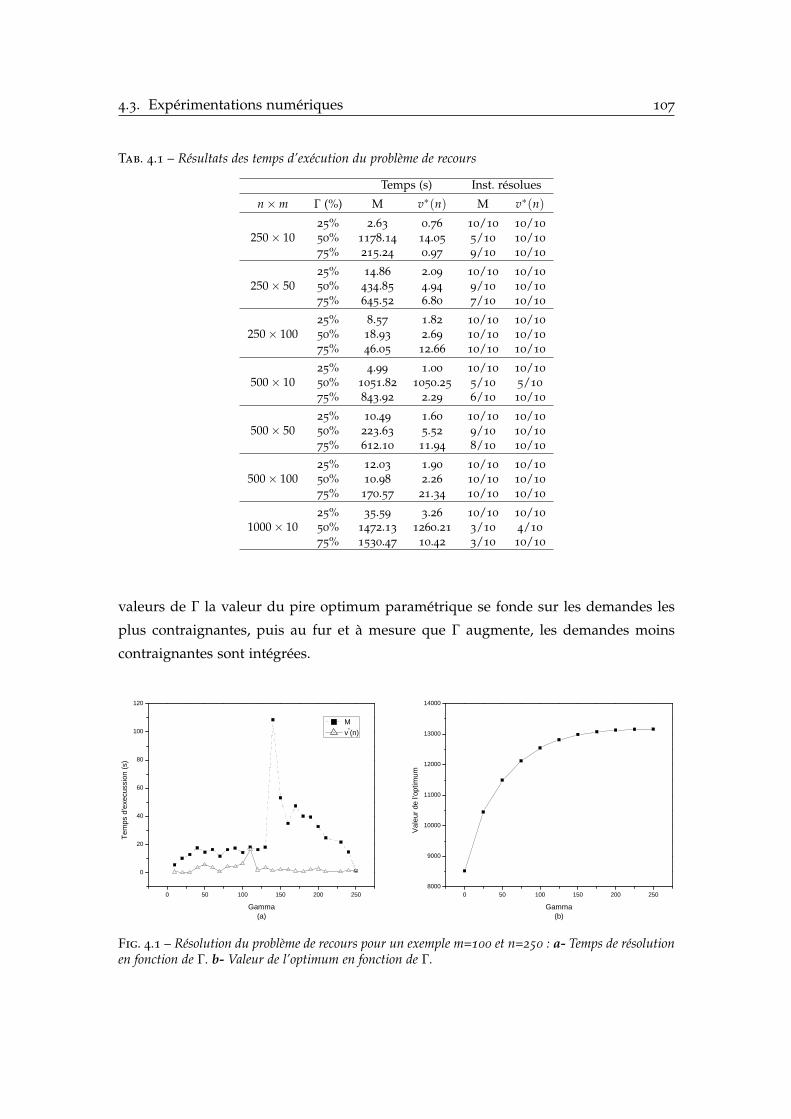
4.3. Expérimentations numériques 107
Tab. 4.1 – Résultats des temps d’exécution du problème de recours
Temps (s) Inst. résolues
n×m Γ (%) M v∗(n) M v∗(n)
25% 2.63 0.76 10/10 10/10
250× 10 50% 1178.14 14.05 5/10 10/10
75% 215.24 0.97 9/10 10/10
25% 14.86 2.09 10/10 10/10
250× 50 50% 434.85 4.94 9/10 10/10
75% 645.52 6.80 7/10 10/10
25% 8.57 1.82 10/10 10/10
250× 100 50% 18.93 2.69 10/10 10/10
75% 46.05 12.66 10/10 10/10
25% 4.99 1.00 10/10 10/10
500× 10 50% 1051.82 1050.25 5/10 5/10
75% 843.92 2.29 6/10 10/10
25% 10.49 1.60 10/10 10/10
500× 50 50% 223.63 5.52 9/10 10/10
75% 612.10 11.94 8/10 10/10
25% 12.03 1.90 10/10 10/10
500× 100 50% 10.98 2.26 10/10 10/10
75% 170.57 21.34 10/10 10/10
25% 35.59 3.26 10/10 10/10
1000× 10 50% 1472.13 1260.21 3/10 4/10
75% 1530.47 10.42 3/10 10/10
valeurs de Γ la valeur du pire optimum paramétrique se fonde sur les demandes les
plus contraignantes, puis au fur et à mesure que Γ augmente, les demandes moins
contraignantes sont intégrées.
0 5 0 1 0 0 1 5 0 2 0 0 2 5 0
0
2 0
4 0
6 0
8 0
1 0 0
1 2 0
0 5 0 1 0 0 1 5 0 2 0 0 2 5 08 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
1 2 0 0 0
1 3 0 0 0
1 4 0 0 0
Temp
s d’ex
ecus
sion (
s)
G a m m a( a )
M v * ( n )
Valeu
r de l
’optim
um
G a m m a( b )
Fig. 4.1 – Résolution du problème de recours pour un exemple m=100 et n=250 : a- Temps de résolutionen fonction de Γ. b- Valeur de l’optimum en fonction de Γ.

108 Chapitre 4. Problème de localisation et de transport robuste
Des tests supplémentaires ont été réalisés sur le problème de transport, utilisant les
bornes v∗(n), et cela dans le but de déterminer les tailles d’instances qu’il est possible
de résoudre dans un temps limité à une heure d’exécution. La figure 4.2 montre les
résultats obtenus pour un nombre de clients fixé à n = 500. Nous observons que
le temps de calcul augmente avec le nombre de sources m considéré. En effet, pour
m = 10, le problème est résolu en quelques secondes seulement. Une moyenne de 20
minutes est nécessaire pour résoudre les instances admettant m = 80 entrepôts et une
déviation totale égale à Γ = 60%, alors que le temps d’exécution approche une heure
quand m ∈ [300, 500] et Γ = 50%.
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0
0
5 0 0
1 0 0 0
1 5 0 0
2 0 0 0
2 5 0 0
3 0 0 0
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 00 , 0 00 , 0 10 , 0 20 , 0 30 , 0 40 , 0 50 , 0 60 , 0 70 , 0 80 , 0 90 , 1 00 , 1 10 , 1 20 , 1 30 , 1 40 , 1 5
G a m m a( a )
m = 1 0 m = 2 0 m = 3 0 m = 4 0 m = 5 0 m = 6 0 m = 7 0 m = 8 0 m = 9 0 m = 1 0 0 m = 2 0 0 m = 3 0 0 m = 4 0 0
G a m m a( b )
m = 1 0 m = 2 0 m = 3 0 m = 4 0 m = 5 0 m = 6 0 m = 7 0 m = 8 0 m = 9 0 m = 1 0 0 m = 2 0 0 m = 3 0 0 m = 4 0 0
Fig. 4.2 – Résolution du problème de recours pour des tests n=500 : a- Temps d’exécution en fonctionde Γ. b- Saut d’intégrité en fonction de Γ.
La figure 4.3.a illustre quant à elle les résultats relatifs à n = 1000 demandes incer-
taines. Nous observons que toutes les instances où m = 10 sont résolues en moins
d’une heure, quelle que soit la valeur de Γ entre 10% et 100%. Quand 100 ≤ m ≤ 500
le solver ne résout aucune instance en moins d’une heure pour Γ = 50%. Au delà de
m = 600 entrepôts, l’espace mémoire devient insuffisant.
De plus, nous avons calculé le saut d’intégrité entre la valeur de la solution exacte et la
valeur de la solution de la relaxation linéaire du problème de recours. Les figures 4.2.b
et 4.3.b illustrent ce rapport pour des instances correspondant à n = 500 et n = 1000
demandes respectivement. Nous remarquons que pour les deux séries de tests, le
saut d’intégrité est plus faible pour des petites valeurs de m, et atteint son maximum
quand Γ est autour de 20% de déviation totale. Par ailleurs, le coût supplémentaire
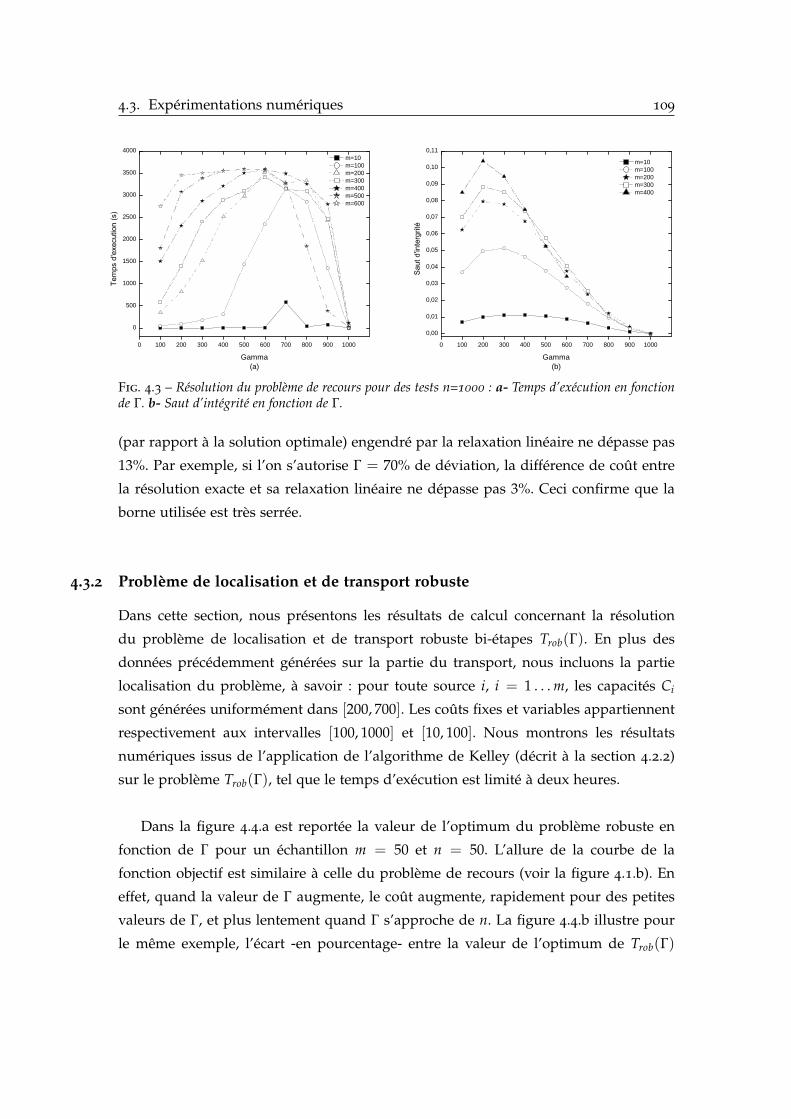
4.3. Expérimentations numériques 109
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0
0
5 0 0
1 0 0 0
1 5 0 0
2 0 0 0
2 5 0 0
3 0 0 0
3 5 0 0
4 0 0 0
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 00 , 0 0
0 , 0 1
0 , 0 2
0 , 0 3
0 , 0 4
0 , 0 5
0 , 0 6
0 , 0 7
0 , 0 8
0 , 0 9
0 , 1 0
0 , 1 1
G a m m a( a )
m = 1 0 m = 1 0 0 m = 2 0 0 m = 3 0 0 m = 4 0 0 m = 5 0 0 m = 6 0 0
G a m m a( b )
m = 1 0 m = 1 0 0 m = 2 0 0 m = 3 0 0 m = 4 0 0
Fig. 4.3 – Résolution du problème de recours pour des tests n=1000 : a- Temps d’exécution en fonctionde Γ. b- Saut d’intégrité en fonction de Γ.
(par rapport à la solution optimale) engendré par la relaxation linéaire ne dépasse pas
13%. Par exemple, si l’on s’autorise Γ = 70% de déviation, la différence de coût entre
la résolution exacte et sa relaxation linéaire ne dépasse pas 3%. Ceci confirme que la
borne utilisée est très serrée.
4.3.2 Problème de localisation et de transport robuste
Dans cette section, nous présentons les résultats de calcul concernant la résolution
du problème de localisation et de transport robuste bi-étapes Trob(Γ). En plus des
données précédemment générées sur la partie du transport, nous incluons la partie
localisation du problème, à savoir : pour toute source i, i = 1 . . . m, les capacités Ci
sont générées uniformément dans [200, 700]. Les coûts fixes et variables appartiennent
respectivement aux intervalles [100, 1000] et [10, 100]. Nous montrons les résultats
numériques issus de l’application de l’algorithme de Kelley (décrit à la section 4.2.2)
sur le problème Trob(Γ), tel que le temps d’exécution est limité à deux heures.
Dans la figure 4.4.a est reportée la valeur de l’optimum du problème robuste en
fonction de Γ pour un échantillon m = 50 et n = 50. L’allure de la courbe de la
fonction objectif est similaire à celle du problème de recours (voir la figure 4.1.b). En
effet, quand la valeur de Γ augmente, le coût augmente, rapidement pour des petites
valeurs de Γ, et plus lentement quand Γ s’approche de n. La figure 4.4.b illustre pour
le même exemple, l’écart -en pourcentage- entre la valeur de l’optimum de Trob(Γ)

110 Chapitre 4. Problème de localisation et de transport robuste
0 10 20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12
14
16
18
20
Delta
opt /
Max o
pt
Gamma(%)(b)
0 10 20 30 40 50 60 70 80 90 100
23
24
25
26
27
28
29
Valeu
r de l
'optim
um (
x 105 )
Gamma(%)(a)
Fig. 4.4 – Résolution du problème Trob(Γ) pour un test n = m = 50 : a- Valeur de l’optimum enfonction de Γ. b- ∆Opt
MaxOpt en fonction de Γ
et la solution de pire cas (pour le problème mono-étape où Γ = n) en fonction de Γ.
Nous remarquons que le décideur peut réaliser un gain significatif, jusqu’à 18% de
bénéfices, sur les coûts de transport par rapport à une approche classique de pire cas,
et cela tout en garantissant la réalisabilité du problème et la satisfaction des demandes
des clients, même les plus élevées. Ce gain est d’autant plus grand que Γ est petit. Ceci
montre la pertinence de notre approche.
Nous nous intéressons à présent au temps de résolution du problème robuste. Le
tableau 4.2 résume les résultats de plusieurs séries de tests, où le nombre de sources
et de clients ont été fixés respectivement à n = m = 10, 70, 100 et 150. Les résultats
montrent que pour n = m = 10, 50 ou 70, l’algorithme nécessite jusqu’à 20mn de
temps d’exécution. Pour des tailles d’instances n = m = 100 ce temps est plus long,
et dépasse les deux heures pour certaines valeurs de Γ. À partir de n = m = 150, ce
temps limite est atteint presque pour toutes les instances pour Γ ∈ [30%, 80%].
Par ailleurs, les colonnes 5 et 6 du tableau 4.2 montrent la proportion de temps
passé dans la résolution du problème maître et le problème esclave respectivement.
Les résultats confirment que la partie la plus coûteuse en temps dans l’algorithme
de Kelley est la résolution du problème de recours, notamment quand Γ est autour
de n/2. Enfin, nous remarquons que pour Γ = 100%, le problème de recours devient
un problème facile (en fait, équivalent à un programme linéaire), ce qui explique les
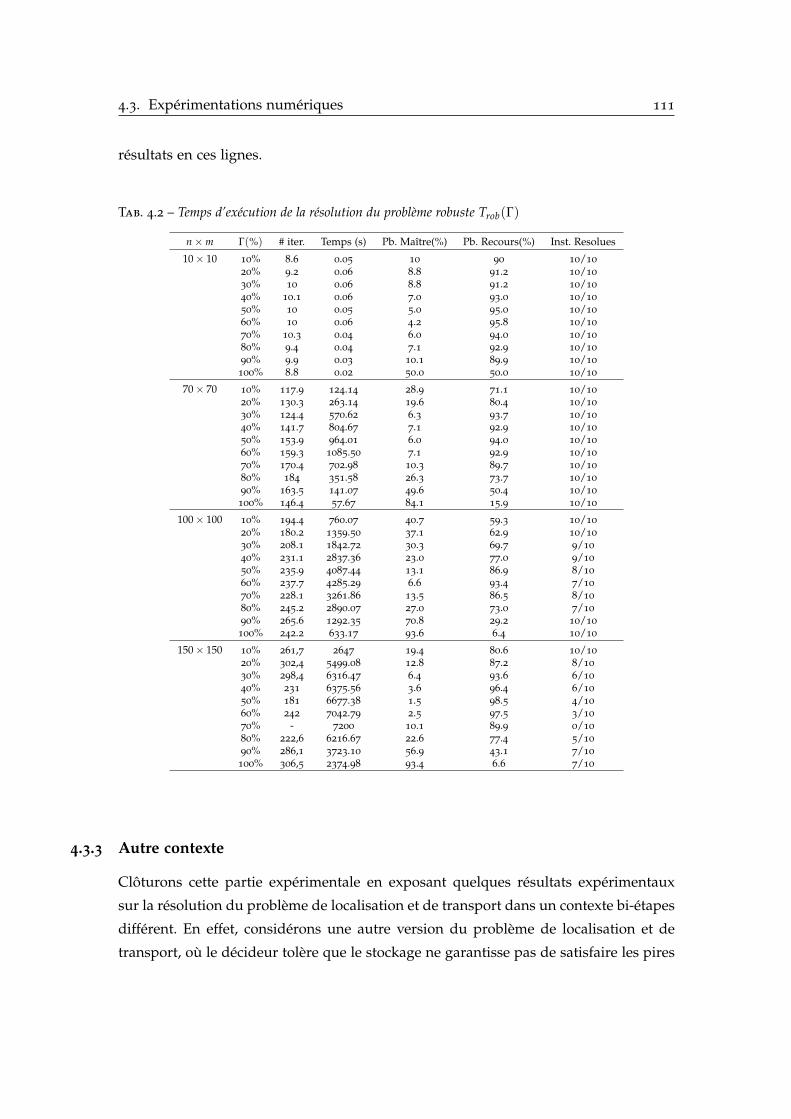
4.3. Expérimentations numériques 111
résultats en ces lignes.
Tab. 4.2 – Temps d’exécution de la résolution du problème robuste Trob(Γ)
n×m Γ(%) # iter. Temps (s) Pb. Maître(%) Pb. Recours(%) Inst. Resolues
10× 10 10% 8.6 0.05 10 90 10/10
20% 9.2 0.06 8.8 91.2 10/10
30% 10 0.06 8.8 91.2 10/10
40% 10.1 0.06 7.0 93.0 10/10
50% 10 0.05 5.0 95.0 10/10
60% 10 0.06 4.2 95.8 10/10
70% 10.3 0.04 6.0 94.0 10/10
80% 9.4 0.04 7.1 92.9 10/10
90% 9.9 0.03 10.1 89.9 10/10
100% 8.8 0.02 50.0 50.0 10/10
70× 70 10% 117.9 124.14 28.9 71.1 10/10
20% 130.3 263.14 19.6 80.4 10/10
30% 124.4 570.62 6.3 93.7 10/10
40% 141.7 804.67 7.1 92.9 10/10
50% 153.9 964.01 6.0 94.0 10/10
60% 159.3 1085.50 7.1 92.9 10/10
70% 170.4 702.98 10.3 89.7 10/10
80% 184 351.58 26.3 73.7 10/10
90% 163.5 141.07 49.6 50.4 10/10
100% 146.4 57.67 84.1 15.9 10/10
100× 100 10% 194.4 760.07 40.7 59.3 10/10
20% 180.2 1359.50 37.1 62.9 10/10
30% 208.1 1842.72 30.3 69.7 9/10
40% 231.1 2837.36 23.0 77.0 9/10
50% 235.9 4087.44 13.1 86.9 8/10
60% 237.7 4285.29 6.6 93.4 7/10
70% 228.1 3261.86 13.5 86.5 8/10
80% 245.2 2890.07 27.0 73.0 7/10
90% 265.6 1292.35 70.8 29.2 10/10
100% 242.2 633.17 93.6 6.4 10/10
150× 150 10% 261,7 2647 19.4 80.6 10/10
20% 302,4 5499.08 12.8 87.2 8/10
30% 298,4 6316.47 6.4 93.6 6/10
40% 231 6375.56 3.6 96.4 6/10
50% 181 6677.38 1.5 98.5 4/10
60% 242 7042.79 2.5 97.5 3/10
70% - 7200 10.1 89.9 0/10
80% 222,6 6216.67 22.6 77.4 5/10
90% 286,1 3723.10 56.9 43.1 7/10
100% 306,5 2374.98 93.4 6.6 7/10
4.3.3 Autre contexte
Clôturons cette partie expérimentale en exposant quelques résultats expérimentaux
sur la résolution du problème de localisation et de transport dans un contexte bi-étapes
différent. En effet, considérons une autre version du problème de localisation et de
transport, où le décideur tolère que le stockage ne garantisse pas de satisfaire les pires

112 Chapitre 4. Problème de localisation et de transport robuste
demandes et désire dimensionner les entrepôts tout comme l’acheminement selon la
valeur du paramètre Γ qu’il se fixe.
Dans ce cas, la formulation mathématique de la version robuste associée à ce pro-
blème, noté T2rob(Γ), reste inchangée, à l’exception de la contraintem∑
i=1yi ≥ B qui doit
être remplacée par la contrainte :
m
∑i=1
yi ≥ B (4.19)
où B =n∑
j=1βj + ∑
j∈ Jβ j avec J l’ensemble d’indices des Γ plus grandes déviations.
Nous observons que dans ce cas, les valeurs de v∗(n), données par la proposition
4.1, ne peuvent plus être utilisées comme bornes pour les variables v dans la formu-
lation du problème de recours. En effet, à cause de la contrainte (4.19), la résolution
du problème Q′(yk, n), nécessaire à la détermination de ces bornes à l’étape 2 de
l’algorithme (voir la remarque 4.1), ne peut se faire, le problème étant désormais non
réalisable.
Nous pouvons néanmoins énoncer quelques résultats de tests expérimentaux réa-
lisés sur des petites tailles d’instances et cela en choisissant une valeur arbitrairement
grande pour M. Les résultats de l’algorithme de Kelley sont les suivants :
Tab. 4.3 – Temps de résolution et nombre d’itérations pour la résolution de T2rob(n/2)
n×m # iter. Temps (s)
20× 20 5.2 1.40
30× 30 14 134
35× 35 17.1 1363
40× 40 19 4215
Le tableau 4.3 montre les résultats d’exécution de l’algorithme de Kelley sur le
problème T2rob(n/2), où Γ = n/2 (représentant les instances les plus difficiles), et où
la borne M associée au problème de recours est de valeur arbitrairement grande. Nous
constatons que les temps de calcul explosent rapidement dès lors qu’on dépasse le
nombre de 30 demandes incertaines. Ce temps atteint plus d’une heure de calcul pour

4.3. Expérimentations numériques 113
une taille relativement faible de 40 demandes incertaines. Notons que des instances du
problème Trob(Γ) de taille similaire sont résolues en quelques secondes (voir le tableau
4.4 sur une instance où n = m = 35). Ces résultats montrent clairement la nécessité
de définir une borne adéquate et serrée pour améliorer les temps de résolution de
T2rob(Γ).
Tab. 4.4 – Test n = m = 35 : résolution de T2rob(Γ) vs Trob(Γ)
T2rob(Γ) Trob(Γ)Γ(%) # iter. Temps (s) # iter. Temps (s)
10 40 76.90 22 1.79
20 43 1606.34 14 1.27
30 30 8010.29 9 1.26
40 22 7703.9 12 1.63
50 34 4216.17 12 1.44
60 25 777.14 25 3.52
70 22 186.52 26 3.36
80 31 32.96 25 2.51
90 35 12.16 31 2.23
100 23 0.46 16 0.43
Enfin, la figure 4.5 illustre pour le test précédent deux courbes qui, en fonction de
Γ, représentent :
– la courbe A : l’écart en pourcentage entre l’optimum de T2rob(Γ) et celui de
Trob(Γ) (du premier contexte de décision),
– la courbe B : l’écart en pourcentage entre l’optimum de T2rob(Γ) et celui du
scénario de pire cas T2rob(n).
Nous observons tout d’abord que pour les deux courbes, cette différence est d’autant
plus grande que Γ est faible. Elle se situe pour la première courbe entre 0% et 10%, et est
environ 3 fois plus grande pour la seconde courbe. Il s’en suit qu’à défaut de pouvoir
résoudre T2rob(Γ) de manière rapide, nous pouvons résoudre Trob(Γ) qui fournit dans
tous les cas de meilleurs résultats que le scénario de pire cas.

114 Chapitre 4. Problème de localisation et de transport robuste
0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 9 0 1 0 00
5
1 0
1 5
2 0
2 5
3 0
Varia
tion r
elative
des c
outs
(%)
G a m m a ( % )
A B
Fig. 4.5 – Variation relative des coûts en fonction de Γ pour un test n = m = 35 : la courbe A représentela différence en pourcentage de v∗(Trob(Γ))−v∗(T2rob(Γ))
v∗(T2rob(Γ)) × 100 . La courbe B exprime la différence en
pourcentage de v∗(T2rob(n))−v∗(T2rob(Γ))v∗(T2rob(Γ)) × 100 .
Conclusion
Dans ce chapitre nous nous sommes intéressés à la résolution d’un problème de
localisation et de transport comprenant des demandes incertaines. Nous avons intégré
ces incertitudes dans une formulation robuste du problème.
Nous avons construit puis résolu la version robuste avec une approche bi-étapes
adaptée. Grâce à une propriété du problème de transport que nous avons démontrée,
nous avons pu définir des bornes serrées pour les constantes de la formulation en
programme linéaire mixte du problème de recours, qui représente l’étape la plus
difficile de l’algorithme de résolution.
À notre connaissance, nous proposons ici la première étude approfondie traitant de
la détermination de ces bornes, et nous montrons par de multiples tests expérimentaux
l’importance de telles bornes dans le calcul des solutions optimales, notamment pour
la résolution d’instances de grande taille. En effet, dans les travaux antérieurs (voir
par exemple Atamtürk et Zhang (2007), Thiele et al. (2009)) les instances résolues par
des approches similaires sont de plus faibles tailles, s’arrêtant à quelques dizaines de
coefficients incertains seulement.
Aussi, nous avons présenté un second contexte de décision pour le problème de
localisation et de transport à la fin de ce chapitre, pour lequel nous n’avons pu pour
4.3. Expérimentations numériques 115
le moment déterminer une borne spécifique. Cette étude restant une perspective d’un
travail futur.
Dans le dernier chapitre de cette thèse, nous nous intéressons à une autre applica-
tion qui concerne un problème de gestion de stock robuste admettant des demandes
incertaines, que nous traiterons selon plusieurs contextes de décision.

5Application : Problème de gestion
des stocks robuste
Sommaire
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.1 Définition du problème de gestion des stocks déterministe . . . . . 120
5.2 Formulation robuste 1 : solution robuste de pire cas . . . . . . . . . . 124
5.2.1 Modèle de pénalités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.2.2 Solution de pire cas paramétrique : approche de Bertsimas et Thiele . . 129
5.3 Formulation robuste 2 : pire optimum . . . . . . . . . . . . . . . . . . . . 135
5.4 Formulation robuste 3 : approche robuste bi-étapes . . . . . . . . . . . 139
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Dans ce chapitre, nous présentons une seconde application de l’optimisation ro-
buste concernant un problème de gestion de stock avec demande incertaine. Ce
problème a été introduit lors de mon stage de Master. Les résultats que nous avions
obtenus n’avaient pas été concluants pour deux raisons principales : le manque de
résultats théoriques (que notre travail de thèse a maintenant comblé) et la mauvaise
identification de la préoccupation de robustesse vis-à-vis du contexte décisionnel. En
s’appuyant sur les résultats présentés dans les chapitres précédents, nous proposons
dans ce chapitre quatre formulations robustes pour ce problème, et cela suivant le
contexte de décision envisagé.
117

119
Introduction
Nous abordons dans le dernier chapitre de cette thèse une application d’un problème
de gestion de stock avec des demandes incertaines. Ce problème a été étudié lors de
mon stage de Master (voir Remli (2006)). Cependant, les résultats n’avaient été satis-
faisants. La mauvaise identification de la préoccupation de la robustesse du problème
(notamment le contexte de décision) en a été la cause principale. À ce jour, le contexte
décisionnel dans lequel s’inscrit ce problème incertain n’est pas clairement désigné et
c’est pour cette raison que nous allons envisager de le traiter selon trois contextes de
décision distincts. Chacun de ces contextes va mener à la formulation d’une version
robuste particulière du problème de gestion de stock.
Les travaux réalisés durant le stage de master ont constitué un point de départ à
nos recherches de thèse. En effet, les demandes incertaines du problème de gestion
de stock traité ici, apparaissent dans le second membre des contraintes d’égalité du
programme linéaire modélisant le problème. Ces recherches ont donc initié la réflexion
sur l’établissement d’approches robustes propres à des problèmes admettant des co-
efficients incertains, situés exclusivement sur le second membre des contraintes. Nous
allons, dans ce chapitre, exploiter les résultats des chapitres précédents pour prendre
en compte les incertitudes sur la demande du problème de gestion de stock considéré.
Nous proposons pour ce faire diverses versions robustes à adopter selon le contexte de
décision. Nous présenterons leurs différentes formulations ainsi que des extensions,
pouvant être menées dans des travaux futurs.
Ce chapitre se divise en quatre sections. Nous commencerons à la section 5.1 par
décrire le problème dans sa forme déterministe. Puis nous supposerons, à la section
5.2, que la demande est incertaine et nous nous attacherons à la détermination de
solutions robustes de pire cas. Le contexte de décision est alors celui d’un décideur
cherchant à définir un plan d’achat et de stockage sans connaître le niveau effectif de
la demande. Nous emploierons pour ce faire un modèle de pénalités adapté. Nous
calculerons, d’une part, les solutions robustes de pire cas, et d’autre part, les solutions
robustes selon l’approche de Bertsimas et Thiele (2006). À la section 5.3, nous nous
placerons dans un contexte décisionnel différent : le décideur définit un plan d’achat
et de stockage après que le niveau de la demande lui soit révélé. La politique optimale
est alors calculée en conséquence. Néanmoins, dans une phase de planification, nous
120 Chapitre 5. Problème de gestion des stocks robuste
proposerons d’évaluer les coûts engendrés par les différents scénarios de la demande
(notamment le pire scénario). Nous calculerons alors les valeurs du pire optimum et
le pire optimum paramétrique. Enfin, à la section 5.4, nous proposerons une version
robuste bi-étapes, dans un contexte se situant à mi-chemin entre les deux premiers,
où nous supposerons que le décideur connaît les demandes effectives sur un horizon
temporel proche et désire anticiper les décisions sur les demandes à venir, qu’il ne
connaît pas avec certitude.
5.1 Définition du problème de gestion des stocks déterministe
Pour des raisons de confidentialité, nous ne présentons ici qu’une version simplifiée
du problème abordé lors du stage de Master. Une version qui garde néanmoins toute
la complexité du problème, notamment pour les considérations de robustesse que
nous voulons aborder.
Soit le problème de gestion des stocks suivant : un plan d’achat et de stockage d’un
produit doit être décidé sur un horizon T. Les quantités achetées à chaque période t où
t = 1 . . . T, représentées par les variables ut, sont bornées par une quantité minimale à
acheter, notée U, et une quantité maximale U, avec 0 ≤ U < U. Ici, un contrat liant le
décideur à un fournisseur l’oblige à s’approvisionner dans une fourchette donnée. Le
niveau de stock à la fin de chaque période t, représenté par les variables xt, est aussi
borné par une quantité minimale X et une capacité maximale X, avec 0 ≤ X < X. Le
niveau de stock initial est connu et est égal à x0. Les demandes du client, notées dt,
doivent être satisfaites à chaque t, t = 1 . . . T. Pour ce faire, il est possible de réaliser un
achat, stocker ou déstocker du produit à tout instant t. Différents coûts sont considérés :
– les coûts d’achat du produit à chaque période t sont notés ct,
– les coûts relatifs au stockage ou au remplissage du stock à la période t, nommés
coût de stockage, sont notés cst,
– les coûts relatifs au déstockage ou au soutirage du stock à la période t, nommés
coût de déstockage, sont notés cdt. Notons que le maintien du produit en stock
n’engendre pas de coût.
L’objectif est de déterminer les quantités à acheter ut, à stocker st et à déstocker dst à
chaque période t dans l’horizon T tels que les coûts totaux soient minimum.

5.1. Définition du problème de gestion des stocks déterministe 121
Le problème de gestion de stock déterministe, noté (G), se formule comme le pro-
gramme linéaire suivant :
(G)
minT
∑t=1
ctut +T
∑t=1
cstst +T
∑t=1
cdtdst
s.c. ut + dst − st = dt t = 1 . . . T
xt = xt−1 + st − dst t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, dst ≥ 0 t = 1 . . . T
(5.1)
(5.2)
(5.3)
(5.4)
où x0 ≥ X est fixé.
Les égalités (5.1) décrivent les contraintes de satisfaction des demandes à chaque
période t, pour t = 1 . . . T. Ces contraintes sont des égalités strictes et expriment le fait
que les situations de surplus de produit ou de rupture de stock ne sont pas tolérées.
Les contraintes (5.2) expriment quant à elles le niveau de stock de chaque période t.
Ce dernier est égal au niveau de stock de la période précédente (soit à t− 1) auquel
s’ajoute ou se retranche la quantité stockée ou déstockée à la période t (il est clair qu’à
l’optimum et pour chaque t, les deux variables st et dst ne peuvent être strictement
positives en même temps). De plus, le niveau de stock est contraint par les contraintes
(5.3) qui représentent les bornes de niveau à respecter. Enfin, les contraintes (5.4) sont
des bornes sur les quantités d’approvisionnement à chaque période t.
Nous nous intéressons, dans ce qui suit, à la prise en compte d’incertitudes sur
les demandes du problème (G). En effet, considérons que les demandes dt à chaque
période t = 1 . . . T soient incertaines et appartiennent respectivement aux intervalles
[dt − dt, dt + dt], où dt représente la valeur nominale de la demande et dt la déviation

122 Chapitre 5. Problème de gestion des stocks robuste
maximale. Notons alors le problème incertain par (Gd) qui s’écrit comme suit :
(Gd)
minT
∑t=1
ctut +T
∑t=1
cstst +T
∑t=1
cdtdst
s.c. ut + dst − st = dt t = 1 . . . T
xt = xt−1 + st − dst t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, dst ≥ 0 t = 1 . . . T
(5.5)
(5.6)
(5.7)
(5.8)
où dt appartient à [dt − dt, dt + dt], pour tout t = 1 . . . T.
Avant de construire les différentes versions robustes associées au problème (Gd),
simplifions ce dernier. Nous remarquons que ce problème admet 2T contraintes d’éga-
lité, dont T avec un second membre incertain. Étant donné que les contraintes (5.6)
ne contiennent aucun élément incertain, nous pouvons par exemple supprimer les va-
riables dst du problème (Gd). Nous obtenons alors le problème équivalent suivant :
(G′d)
minT
∑t=1
ctut +T
∑t=1
(cst + cdt)st + cd1x0+
T−1
∑t=1
(cdt+1 − cdt)xt − cdTxT
s.c. ut + xt−1 − xt = dt t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st ≥ 0 t = 1 . . . T
(5.9)
Remarque 5.1 Il n’est pas pertinent de supprimer d’autres variables du problème (G′d) sur
la base des contraintes d’égalité (5.9) et cela car ces dernières admettent un second membre
incertain. En effet, si nous choisissons par exemple d’exprimer les variables ut de (G′d) en

5.1. Définition du problème de gestion des stocks déterministe 123
fonction des variables xt nous obtenons le problème suivant :
(G′′d)
min (cd1 − c1)x0 +T
∑t=1
(cst + cdt)st +T
∑t=1
cdtdt+
T−1
∑t=1
(cdt+1 − ct+1 − cdt + ct)xt + (cT − cdT)xT
s.c. xt−1 − xt + U ≥ dt t = 1 . . . T
xt−1 − xt + U ≤ dt t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
st ≥ 0 t = 1 . . . T
(5.10)
(5.11)
(5.12)
Or, étant donné que les demandes dt sont incertaines et interviennent dans la fonction objectif
(5.10) ainsi que dans les contraintes (5.11) et (5.12), alors dans toute version robuste du pro-
blème (G′′d) l’hypothèse selon laquelle tous les coefficients incertains doivent être indépendants
n’est plus respectée. Le problème (G′′d) n’est pas pertinent pour l’application de modèles de
robustesse présentés dans les chapitres précédents.
Dans ce qui suit, les versions robustes seront formulées à partir du problème (G′d).
Notons que la particularité de ce problème réside, d’une part, dans la définition des
incertitudes qui affectent une partie du second membre de contraintes d’égalité, et
d’autre part, dans le caractère dynamique de dépendance entre périodes dont il faut
tenir compte.
Nous considérons successivement trois contextes décisionnels :
– dans le premier contexte, qui est traité dans la section 5.2, il s’agit de définir un
plan d’achat et de stockage sans connaître le niveau réel de la demande. Des
solutions robustes dans un contexte statique sont recherchées.
– puis, dans la section 5.3, nous nous intéressons au contexte “opposé” dans lequel
la demande de chaque période est connue au moment de la prise de décision
concernant l’achat et le stockage. Nous cherchons alors à évaluer les coûts selon
différents scénarios en calculant la valeur du pire optimum,
– dans la dernière section, nous envisageons un contexte intermédiaire et plus
réaliste, où la demande est connue sur un horizon proche mais devient incertaine
124 Chapitre 5. Problème de gestion des stocks robuste
au-delà. Notre objectif est alors de construire une version robuste bi-étapes qui
permet de répondre à cette problématique.
5.2 Formulation robuste 1 : solution robuste de pire cas
Nous considérons le contexte décisionnel suivant : le décideur ne connaît pas les
demandes effectives des clients et doit décider d’un plan d’achat et de stockage sur
“toutes” les périodes t = 1 . . . T. La décision doit être prise en présence d’incertitudes.
5.2.1 Modèle de pénalités
Dans ce contexte, la solution de pire cas s’impose comme une décision robuste qui,
adoptée par le décideur avant la réalisation des demandes, lui permet de se prémunir
contre tous les scénarios possibles, y compris le pire d’entre eux.
En rappelant que le problème (G′d) admet des incertitudes situées dans le second
membre des contraintes d’égalité (5.9), nous constatons que la solution de pire cas
n’existe pas (d’après le résultat de la section 2.1.2 du chapitre 2).
Or, dans le problème considéré, le décideur connaît les coûts de la violation des
contraintes d’égalité (5.9), et par conséquent, il devient possible de déterminer des
solutions de pire cas en employant un modèle de pénalités (comme cela a été présenté
dans la section 2.1.2). En effet, dans le cas de rupture de stock, l’achat de marchandise
supplémentaire peut se faire sur un marché extérieur, et dans le cas où le stock est
saturé, le stockage du surplus de marchandise est possible chez un concurrent. La
solution de pire cas est alors celle dont le coût total minimise les coûts d’achat, de
stockage et des différentes pénalités (correspondant à des surcoûts.)
Notons pt le coût unitaire de la pénalité engendrée par le surplus de marchandises
à la période t et qt le coût unitaire de la pénalité de rupture de stock. Ces pénalités sont
effectives sur les quantités en surplus ou en déficit à chaque période t, représentées par
les variables suivantes :
et = ut + xt−1 − xt − dt (5.13)

5.2. Formulation robuste 1 : solution robuste de pire cas 125
avec et ≥ 0 correspondant à un surstockage, et et ≤ 0 correspondant à une rupture de
stock.
Selon les résultats de la section 2.1.2, la solution robuste de pire cas s’obtient en résol-
vant le programme linéaire, noté (GRob1). En effet, il suffit de construire le problème
(Pbp)pirCas donné dans la section 2.1.2 dans lequel nous considérons bt = dt + dt et
bt = dt − dt. Le problème (GRob1) s’écrit alors :
(GRob1)
minT∑
t=1ctut +
T∑
t=1(cst + cdt)st + cd1x0+
T−1∑
t=1(cdt+1 − cdt)xt − cdTxT +
T∑
t=1yt
s.c. yt − ptut − ptxt−1 + ptxt ≥ −ptdt + ptdt t = 1 . . . T
yt + qtut + qtxt−1 − qtxt ≥ qtdt + qtdt t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, yt ≥ 0 t = 1 . . . T
avec x0 ≥ X donné.
Exemple 5.1 Soit (G1) le problème de gestion de stock défini sur un horizon T = 4. Les
différentes constantes du problème relatives aux coûts et aux demandes sont données par le
tableau 5.1 et le tableau 5.2 respectivement.
Tab. 5.1 – Les coûts du problème (G1)
t = 1 t = 2 t = 3 t = 4
ct 10 21 40 30
cst 5 6 7 8
cdt 4 3 2 1
Tab. 5.2 – Les demandes du problème (G1)
t = 1 t = 2 t = 3 t = 4
dt 30 40 35 20
dt 10 10 5 10

126 Chapitre 5. Problème de gestion des stocks robuste
Les bornes sur les achats et le stockage sont les suivantes : U = 30, U = 100, X = 0, et
X = 180, et le stock initial est égal à x0 = 10.
Examinons tout d’abord la solution optimale du problème nominal où toutes les demandes sont
fixées aux valeurs nominales. Pour ce scénario la politique optimale d’achat et de stockage, notée
(unomt , snom
t , xnomt ), est reportée dans le tableau 5.3. Il s’agit d’acheter 35 unités à la première
période et de stocker 5 unités ; à la deuxième et troisième période, d’approvisionner 30 unités
aux deux périodes, et de déstocker 10 unités et 5 unités respectivement ; enfin, à la dernière
période d’acheter 30 unités et d’en stocker 10. Nous remarquons que pour cette solution un
stockage est réalisé à la première période (où le prix de stockage est le plus faible), alors que
la marchandise est déstockée sur les périodes 2 et 3. Par ailleurs, l’approvisionnement est au
minimum égal à 30 unités à chaque période, d’où le stock final égale à 10 unités. Enfin, le coût
total de cette politique est égal à 3225.
Tab. 5.3 – La solution nominale du problème (G1)
t = 1 t = 2 t = 3 t = 4
unomt 35 30 30 30
snomt 5 0 0 10
xnomt 15 5 0 10
Supposons à présent que les situations de rupture de stock ou de surplus soient envisageables
et cherchons la solution robuste de pire cas selon le modèle de pénalités. Nous considérons alors
que le décideur peut stocker l’excédent de produit au prix unitaire pt et acheter la quantité de
produit manquante au prix unitaire qt à chaque période t = 1 . . . 4. Ces pénalités sont reportées
dans le tableau 5.4.
Tab. 5.4 – Les valeurs des pénalités pt et qt relatives au problème (G1)
t = 1 t = 2 t = 3 t = 4
pt 200 100 50 70
qt 75 35 550 10
La politique optimale d’approvisionnement et de stockage selon le modèle de pénalités, notée
(upent , spen
t , xpent ), est reportée sur le tableau 5.5. Le décideur doit acheter 30 unités à toutes les

5.2. Formulation robuste 1 : solution robuste de pire cas 127
périodes. Il doit stocker 4.54 unités à la première période. À la deuxième et troisième période,
il doit déstocker 5.18 unités et 9.17 unités respectivement. À la dernière période, le stockage
est de 17.69 unités. Le coût de cette solution est nettement supérieur au coût de la solution
nominale (sans les pénalités) et est égal à 5469.38. En revanche, le coût de la solution nominale
suivant ce modèle de pénalités est de 9675 qui est largement supérieur à celui de la solution
(upent , spen
t , xpent ). Nous remarquons aussi que ces deux solutions sont très différentes. Ceci
s’explique par la disparité des coûts de surstockage ou de déficit de chaque période. En effet,
soit un second jeu de pénalités donné par des coûts de surplus p′t et des coûts de déficit q′t assez
proches pour t = 1 . . . T, comme reporté dans le tableau 5.6.
Tab. 5.5 – La solution de pire cas (upent , spen
t , xpent ) du problème (G1Rob1).
t = 1 t = 2 t = 3 t = 4
upent 30 30 30 30
spent 4.54 0 0 17.50
xpent 14.54 9.36 0.19 17.69
ypent 1100.91 518.52 458.33 175
Tab. 5.6 – Les valeurs des pénalités p′t et q′t relatives au problème (G1)
t = 1 t = 2 t = 3 t = 4
p′t 20 40 50 60
q′t 25 35 55 70
La politique optimale d’approvisionnement et de stockage pour ce second jeu de pénalités est
notée (upen′t , spen′
t , xpen′t ) et est reportée dans le tableau 5.7. Le décideur doit dans ce cas acheter
35.68 unités à la première période, et stocker 4.57 unités. À la deuxième et troisième période, la
quantité à acheter est de 30 unités chacune, et celle déstockée est de 9.33 unités et 5.24 unités
respectivement. À la dernière période, l’approvisionnement est de 30 unités et le stockage de
9.23 unités. Le coût de cette solution est égal à 4725.62.
Nous observons que la solution de pire cas (upen′t , spen′
t , xpen′t ) ne diffère que légèrement de
la solution nominale (unomt , snom
t , xnomt ) (le coût de la solution nominale pour ce modèle de
pénalités est proche de celui de la solution de pire cas et est ici égal à 4850). Ceci rejoint la
remarque faite dans l’exemple 2.2 du chapitre 2, dans laquelle nous avions observé que pour des

128 Chapitre 5. Problème de gestion des stocks robuste
Tab. 5.7 – La solution de pire cas (upen′t , spen′
t , xpen′t , ypen′
t ) du problème (G1Rob1).
t = 1 t = 2 t = 3 t = 4
upen′t 35.68 30 30 30
spen′t 4.57 0 0 9.23
xpen′t 14.57 5.24 0 9.23
ypen′t 222.22 373.33 261.90 646.15
valeurs de pénalités proches et élevées (par rapport aux autres coûts du problème), la solution de
pire cas selon le modèle de pénalités se rapprochait de la solution optimale selon le scénario no-
minal. Ceci s’explique par le modèle même de pénalités, où les coûts des pénalités imposées pour
limiter la non satisfaction de contraintes d’égalité sont les plus faibles quand les coûts de sursto-
ckage et de déficit s’équilibrent, donnant lieu à un scénario médian, proche du scénario nominal.
De plus, nous remarquons que les valeurs des variables ypent , tout comme celles de ypen′
t ,
sont strictement positives pour tout t. En effet, selon le contexte de décision considéré ici, où
le décideur souhaite adopter une politique d’achat et de stockage avant la connaissance des
demandes, les situations de rupture de stock ou de surplus de produit ne peuvent être évitées.
Enfin, il est possible à partir de la solution (upent , spen
t , xpent ) (respectivement
(upen′t , spen′
t , xpen′t )) et en utilisant les contraintes (5.1), de calculer le scénario de de-
mande correspondant à ces deux solutions de pire cas. Le scénario, noté dpen (respectivement
dpen′), correspond aux demandes dpen = (25.45, 35.18, 39.17, 12.50) (respectivement
dpen′ = (33.11, 39.33, 35.24, 20.77)). Nous observons qu’étant donné les pénalités appliquées
dans les deux situations de surplus de produit et de rupture de stock et pour la même raison
évoquée auparavant, alors le scénario de demande engendré n’est pas un scénario extrême.
Dans la section suivante, nous restons dans le même contexte décisionnel, dans
lequel la décision doit être prise avant la réalisation de l’incertitude, et nous voulons
construire une version robuste au problème de gestion de stock selon une approche
qui permet de nuancer le caractère extrême de la solution de pire cas. Pour ce faire,
nous suivrons l’approche de Bertsimas et Thiele (2006) qui n’est autre que l’adaptation
de l’approche de Bertsimas et Sim (2004) (présentée à la section 1.2.3) au problème de

5.2. Formulation robuste 1 : solution robuste de pire cas 129
gestion de stock. Nous présenterons dans ce qui suit la formulation robuste qui intègre
des pénalités adéquates ainsi que les budgets d’incertitudes sur la demande.
5.2.2 Solution de pire cas paramétrique : approche de Bertsimas et Thiele
Afin de décider d’une solution robuste, non plus sur un scénario unique, celui de
pire cas, mais sur un ensemble de scénarios délimité par un budget d’incertitude,
Bertsimas et Thiele (2006) ont proposé une approche dérivée de celle de Bertsimas
et Sim (présentée à la section 1.2.3 du premier chapitre) pour traiter un problème
similaire de gestion de stock.
Pour rappel, cette approche vise la détermination de solutions robustes moins
conservatives que la solution de pire cas et ceci en autorisant une faible violation des
contraintes. Elle est appliquée sur des programmes linéaires admettant une matrice
des contraintes incertaine et nécessite la définition d’un budget d’incertitude pour
chacune des contraintes.
Afin de construire la version robuste du problème incertain (G′d) selon cette ap-
proche, nous réécrivons ce dernier de manière appropriée. Pour ce faire, nous expri-
mons tout d’abord les contraintes (5.9) de manière équivalente comme suit :
x0 − xt +t
∑i=1
ui =t
∑i=1
di, t = 1 . . . T (5.14)
Ensuite, nous appliquons le modèle de pénalités présenté à la section précédente
avec :
et = x0 − xt +t
∑i=1
ui −t
∑i=1
di, t = 1 . . . T (5.15)
où et ≥ 0 correspondant à un surstockage, et et ≤ 0 correspondant à une rupture de
stock.

130 Chapitre 5. Problème de gestion des stocks robuste
Le nouveau problème incertain, noté (GSd), s’écrit alors :
(GSd)
minT
∑t=1
ctut +T
∑t=1
(cst + cdt)st + cd1x0+
T−1
∑t=1
(cdt+1 − cdt)xt − cdTxT +T
∑t=1
yt
s.c. yt ≥ pt(x0 − xt +t
∑i=1
ui −t
∑i=1
di) t = 1 . . . T
yt ≥ qt(xt − x0 −t
∑i=1
ui +t
∑i=1
di) t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, yt ≥ 0 t = 1 . . . T
(5.16)
(5.17)
Le problème (GSd) est un programme linéaire dans lequel les éléments incertains
sont situés dans les contraintes (5.16) et (5.17). Afin d’en tenir compte et de formuler la
version robuste selon l’approche de Bertsimas et Thiele (2006), nous introduisons les
paramètres Γt (non nécessairement entiers) qui représentent le budget d’incertitude
autorisé à la teme période. Le modèle d’incertitude considéré ici est un modèle en ligne,
où pour chacune des 2T contraintes incertaines (5.16) et (5.17), un vecteur Γt de taille t
est fixé par le décideur.

5.2. Formulation robuste 1 : solution robuste de pire cas 131
La formulation robuste, notée GSRob(Γ), s’écrit alors :
GSRob(Γ)
minT∑
t=1ctut +
T∑
t=1(cst + cdt)st + cd1x0 +
T−1∑
t=1(cdt+1 − cdt)xt−
cdTxT +T∑
t=1yt
s.c. yt − pt(x0 − xt +t
∑i=1
ui −t
∑i=1
di + maxt
∑i=1
zi≤Γt
0≤zi≤1, i=1...t
t
∑i=1
dizi) ≥ 0 t = 1 . . . T
yt − qt(−x0 + xt −t
∑i=1
ui +t
∑i=1
di + maxt
∑i=1
zi≤Γt
0≤zi≤1, i=1...t
t
∑i=1
dizi) ≥ 0 t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, yt ≥ 0 t = 1 . . . T
Linéarisons le problème GSRob(Γ). Notons (At) les problèmes auxiliaires qui
s’écrivent :
(At)
max
t∑
i=1dizi
s.c.t
∑i=1
zi ≤ Γt
0 ≤ zi ≤ 1 i = 1 . . . t
En utilisant le théorème fort de dualité, les problèmes (At) sont alors remplacés par
leurs duaux :
(DAt)
min Γtgt +
t∑
i=1rit
s.c. gt + rit ≥ di i = 1 . . . t
gt, rit ≥ 0 i = 1 . . . t

132 Chapitre 5. Problème de gestion des stocks robuste
Nous obtenons le programme linéaire suivant :
GSRob(Γ)
minT∑
t=1ctut +
T∑
t=1(cst + cdt)st + cd1x0+
T−1∑
t=1(cdt+1 − cdt)xt − cdTxT +
T∑
t=1yt
s.c. yt − pt(t
∑i=1
ui + Γtgt +t
∑i=1
rit − xt) ≥ pt(x0 −t
∑i=1
di) t = 1 . . . T
yt − qt(xt −t
∑i=1
ui + Γtgt +t
∑i=1
rit) ≥ qt(t
∑i=1
di − x0) t = 1 . . . T
xt−1 − xt + st ≥ 0 t = 1 . . . T
gt + rit ≥ di i = 1 . . . t, t = 1 . . . T
X ≤ xt ≤ X t = 1 . . . T
U ≤ ut ≤ U t = 1 . . . T
st, yt, gt, rit ≥ 0 i = 1 . . . t, t = 1 . . . T
Nous pointons, dans ce qui suit, les avantages et les limites de cette formulation
pour répondre à la préoccupation de la robustesse du problème posé :
1. Tout d’abord, le point fort de cette approche est qu’elle garde la linéarité du
problème dans cette version robuste. De plus, sa valeur représente une ap-
proximation linéaire par excès de la valeur du pire cas pour différents budgets
d’incertitudes.
2. Par contre, se pose le problème de la définition du budget d’incertitude pour
chacune des périodes t, t = 1 . . . t. En effet, si la définition du budget total
ΓT sur tout l’horizon T est facilement appréhendé par le décideur, la question
du choix des valeurs intermédiaires Γt pour chacune des périodes t reste pro-
blématique ? Il est clair que pour tout t, t = 1 . . . T nous avons les inégalités
Γt ≤ Γt+1 ≤ Γt + 1. Le décideur peut alors choisir le scénario (valeurs de Γt)
qui lui convient en respectant ces inégalités. Par exemple, soit un problème de
gestion de stock incertain défini sur un horizon T = 4. Si ΓT = 3, alors les
vecteurs suivants de Γ sont possibles : (1, 2, 3, 3), (0, 1, 2, 3), (0.5, 1.5, 2, 3),. . ..
Notons alors qu’en fixant les valeurs de Γt pour tout t, la flexibilité et la liberté
qu’offre l’approche de Bertsimas et Sim se verra lésée par la définition même
de ce scénario. En effet, l’attrait principal de cette approche est de permettre
aux coefficients de chaque contrainte de dévier des valeurs nominales, tant que
cela reste dans le budget considéré pour cette contrainte. Cette latitude n’est

5.2. Formulation robuste 1 : solution robuste de pire cas 133
plus effective dans GSRob(Γ) si l’on doit fixer pour chaque période t un budget
d’incertitude. Une façon de contourner cette restriction est de poser une valeur
unique de budget ΓT = Γt = Γ pour toutes les périodes (voir Solyali et al. (2010)).
Nous rappelons par ailleurs, que dans les travaux de Bertsimas et Thiele (2006),
les budgets d’incertitude ne sont pas fournis par le décideur mais sont calculés
en fonction de la probabilité de violation des contraintes autorisée (voir la section
1.2.3).
3. Par ailleurs, nous constatons que les budgets d’incertitude sont surévalués. Illus-
trons cela par l’exemple suivant : reprenons l’exemple précédent défini sur un
horizon T = 4 et examinons les problèmes auxiliaires engendrés par les dévia-
tions suivantes : d1 = 1, d2 = 3, d3 = 2, d4 = 2 où les budgets d’incertitude sont
fixés à Γ1 = Γ2 = Γ3 = Γ4 = 2. Les problèmes auxiliaires (A2) et (A3) associés
respectivement aux périodes t = 2 et t = 3 s’écrivent alors :
(A2)
max d1z1 + d2z2
s.c. z1 + z2 ≤ Γ2
z1 ≤ 1
z2 ≤ 1
z1, z2 ≥ 0
et
(A3)
max d1z1 + d2z2 + d3z3
s.c. z1 + z2 + z3 ≤ Γ3
z1 ≤ 1
z2 ≤ 1
z3 ≤ 1
z1, z2, z3 ≥ 0
À l’optimum, les solutions optimales des problèmes (A2) et (A3) sont respec-
tivement (1, 1) et (0, 1, 1). Nous constatons que la valeur de z∗1 diffère dans
les deux problèmes ! L’un considère que la demande à la première période est
à son maximum, et l’autre considère qu’elle reste égale à la valeur nominale.
Quelle valeur de z∗1 doit-on considérer ? En fait, la formulation robuste GSRob(Γ)
considère les deux cas de figure et est par conséquent sur-conservative.

134 Chapitre 5. Problème de gestion des stocks robuste
4. Le dernier point que nous voulons montrer réside dans l’emploi de la dualité
dans cette formulation. En effet, reprenons l’exemple précédent et écrivons les
problèmes duaux associés à (A2) et (A3) comme suit :
(DA2)
min Γ2g2 + r12 + r22
s.c. g2 + r12 ≥ d1
g2 + r22 ≥ d2
g2, r12, r22 ≥ 0
et
(DA3)
min Γ3g3 + r13 + r23 + r33
s.c. g3 + r13 ≥ d1
g3 + r23 ≥ d2
g3 + r33 ≥ d3
g3, r13, r23, r33 ≥ 0
Nous remarquons que les variables z1 et z2 sont présentes dans les deux pro-
blèmes (A2) et (A3), alors que les deux problèmes duaux (DA2) et (DA3) sont
sous cette formulation complètement indépendants ! La version robuste GSRob(Γ)
ne correspond pas au problème recherché, elle surévalue et contraint le problème.
En fait, les problèmes (DAt) sont plutôt les duaux des problèmes auxiliaires où
les variables de chaque période t sont indépendantes. Ils s’écrivent :
(A′t)
max
t∑
i=1dizt
i
s.c.t
∑i=1
zti ≤ Γt
0 ≤ zti ≤ 1 i = 1 . . . t
Dans ce cas, nous rejoignons la remarque précédente et constatons que les bud-
gets d’incertitude sur-évaluent le pire cas et cumulent les déviations de toutes les
périodes.
La version robuste GSRob(Γ) du problème de gestion de stock est par conséquent
trop conservative. La raison principale réside dans le caractère dynamique du pro-
blème (G′d), pour lequel le modèle d’incertitude considérant un budget en ligne n’est
pas adapté et cache implicitement une dépendance entre les contraintes. Un modèle
en colonne serait plus adapté, comme nous le montrerons dans les sections suivantes.

5.3. Formulation robuste 2 : pire optimum 135
Exemple 5.2 Reprenons l’exemple 5.1 et calculons les solutions robustes suivant le mo-
dèle employé ci-avant. Nous prenons des valeurs de Γt toutes égales pour les périodes t, que
nous faisons varier entre 0 et 4. Nous utilisons par ailleurs les pénalités du tableau 5.6. Le
tableau 5.8 présente les valeurs de l’optimum du problème robuste GS1Rob(Γ) en fonction de Γt.
Tab. 5.8 – La valeur du pire optimum de GS1Rob(Γ) et le scénario de demande en fonction de Γ.
Γt = 0 Γt = 1 Γt = 2 Γt = 3 Γt = 4
v∗(GS1Rob(Γ)) 3225 4986.71 6535.09 7442.95 7762.95
Nous remarquons que pour Γt = 0 pour tout t = 1 . . . 4, la valeur de l’optimum de GS1Rob(Γ)
correspond à la valeur de l’optimum du problème nominal (voir l’exemple 5.1). Nous observons
cependant que pour les autres valeurs de Γt le coût est croissant quand Γt augmente et dépasse
largement le coût engendré par la solution de pire cas selon le modèle de pénalités (G1Rob1)
(voir l’exemple 5.1). Ceci confirme que ce modèle est très conservateur. Les pénalités sont
cumulées plusieurs fois.
Nous avons montré dans cette section que selon ce contexte, le décideur peut
envisager un plan d’achat et de stockage avant la divulgation des demandes et cela en
rendant possible (et moyennant de fortes pénalités) les situations de rupture de stock
ou de surplus de produit. Nous envisageons dans la section suivante, un contexte
décisionnel totalement opposé : le décideur attend que la demande soit révélée pour
décider des quantités à acheter et à stocker.
5.3 Formulation robuste 2 : pire optimum
Dans cette section, nous considérons le contexte décisionnel suivant : nous supposons
que le décideur connaît la demande au début de chaque période t et peut décider
en conséquence de la politique optimale d’achat et de stockage. Toutes les données
du problème sont alors certaines au moment de la prise de décision. La recherche
d’une solution robuste de pire cas n’a pas lieu d’être. Néanmoins, dans une phase
de planification, le décideur peut vouloir anticiper les coûts d’achat et de stockage et
identifier les scénarios de la demande les plus défavorables dans un horizon T qu’il
136 Chapitre 5. Problème de gestion des stocks robuste
se fixe. Pour cela, nous proposons de calculer la valeur d’un pire optimum ou plus
généralement le pire optimum paramétrique.
Pour ce faire, nous considérons un budget d’incertitude Γ représentant le nombre de
périodes où la demande dévie des valeurs nominales sur l’horizon T. Ce paramètre est
défini sur le second membre des contraintes d’égalité (5.9) et est unique et commun à
toutes les demandes (il s’agit d’un modèle en colonne).
Selon la formulation de la section 3.2 du chapitre 3, nous calculons la valeur d’un pire
optimum du problème (G′d) que nous paramétrisons par la valeur de Γ. Ce dernier
est un entier appartenant à l’intervalle [0, T]. Pour les valeurs extrêmes de Γ = 0
(respectivement Γ = T), le problème correspond au problème nominal (respectivement
au pire optimum).
Le problème de pire optimum paramétrique, noté GRob2(Γ), se formule de la manière
suivante :
GRob2(Γ)
maxd∈UG(Γ)
min v∗(G′d)
où
UG(Γ) = d ∈ RT : dt = dt + dtz+t − dtz−t ; z+
t , z−t ∈ ZG(Γ) (5.18)
et
ZG(Γ) = z ∈ R2T :T
∑t=1
(z+t + z−t ) ≤ Γ, z+
t + z−t ≤ 1, z+t , z−t ∈ 0, 1 (5.19)
Ce qui revient à résoudre :
GRob2(Γ)
maxT∑
t=1(z+
t +z−t )≤Γ
z+t +z−t ≤1, t=1...T
z+t , z−t ∈0,1, t=1...T
minut+xt−1−xt=dt+z+
t dt−z−t dt , t=1...T
xt−1−xt+st≥0, t=1...T
X≤xt≤X, t=1...T
U≤ut≤U, t=1...T
st≥0, t=1...T
T∑
t=1ctut +
T∑
t=1(cst + cdt)st+
cd1x0 +T−1∑
t=1(cdt+1−
cdt)xt − cdTxT
Simplifions et linéarisons le problème GRob2(Γ). Tout d’abord, nous employons le théo-

5.3. Formulation robuste 2 : pire optimum 137
rème fort de dualité et nous obtenons le problème quadratique, noté GD(Γ), qui s’écrit :
GD(Γ)
cd1x0 + max (d1 − x0)α1 +T∑
t=2dtαt − x0µ1 − X
T∑
t=1βt + X
T∑
t=1γt−
UT∑
t=1δt + U
T∑
t=1θt +
T∑
t=1dtαtz+
t −T∑
t=1dtαtz−t
s.c. αt − δt + θt = ct t = 1 . . . T
µt ≤ cst + cdt t = 1 . . . T
αt+1 − αt − βt + µt+1 − µt + γt = cdt+1 − cdt t = 1 . . . T − 1
−αT − βT − µT + γT = −cdTT∑
t=1(z+
t + z−t ) ≤ Γ
z+t + z−t ≤ 1 t = 1 . . . T
z+t , z−t ∈ 0, 1 t = 1 . . . T
βt, δt, γt, θt, µt ≥ 0 t = 1 . . . T
Ensuite, le problème GD(Γ) peut être linéarisé (comme montré dans la section 3.2)
en remplaçant les produits de variables αtz+t (respectivement αtz−t ) par les variables
ω+t (respectivement ω−t ) et en ajoutant les contraintes adéquates. Le problème robuste
devient le programme linéaire mixte suivant :
GD′(Γ)
cd1x0 + max (d1 − x0)α1 +T∑
t=2dtαt − x0µ1 − X
T∑
t=1βt + X
T∑
t=1γt−
UT∑
t=1δt + U
T∑
t=1θt +
T∑
t=1dtω
+t −
T∑
t=1dtω
−t
s.c. αt − δt + θt = ct t = 1 . . . T
µt ≤ cst + cdt t = 1 . . . T
αt+1 − αt − βt + µt+1 − µt + γt = cdt+1 − cdt t = 1 . . . T − 1
−αT − βT − µT + γT = −cdTT∑
t=1(z+
t + z−t ) ≤ Γ
z+t + z−t ≤ 1 t = 1 . . . T
−Mz+t ≤ ω+
t ≤ Mz+t t = 1 . . . T
αt −M(1− z+t ) ≤ ω+
t ≤ αt + M(1− z+t ) t = 1 . . . T
−Mz−t ≤ ω−t ≤ Mz−t t = 1 . . . T
αt −M(1− z−t ) ≤ ω−t ≤ αt + M(1− z−t ) t = 1 . . . T
z+t , z−t ∈ 0, 1 t = 1 . . . T
βt, δt, γt, θt, µt ≥ 0 t = 1 . . . T

138 Chapitre 5. Problème de gestion des stocks robuste
où M est une constante de grande taille représentant des bornes pour les variables αt
qui sont à définir. Notons que pour pouvoir résoudre des instances de taille même
raisonnable, il faut déterminer des bornes serrées pour ces variables.
Remarque 5.2 Il est possible d’apporter quelques améliorations au calcul du pire optimum
paramétrique. En effet, selon la formulation de GD′(Γ), rien n’exclut qu’un pire scénario soit
donné, par exemple, par une demande très faible à la période t, une demande très élevée à t + 1,
puis de nouveau une demande très faible à période t + 2. Cette situation est peu vraisemblable
dans la réalité, où nous pouvons supposer que pour des périodes proches la demande va évoluer
dans la même sens. Cette considération peut alors être modélisée dans GD′(Γ), en posant les
dépendances adéquates entre les variables z+t et z−t .
Exemple 5.3 Reprenons le problème (G1) de l’exemple 5.1 et calculons le pire optimum para-
métrique en fonction des valeurs de Γ. Pour ce faire, nous résolvons le programme linéaire mixte
dans lequel nous avons posé une valeur arbitrairement grande pour la constante M. Le tableau
5.9 fournit les valeurs du pire optimum ainsi que le scénario de demande correspondant, noté
dt, et cela en fonction du budget d’incertitude Γ.
Tab. 5.9 – La valeur du pire optimum de G1Rob2(Γ) et le scénario de demande en fonction de Γ.
Γ = 0 Γ = 1 Γ = 2 Γ = 3 Γ = 4
v∗(G1Rob2(Γ)) 3225 3405 3505 3590 3670
d1 30 = d1 30 40 40 40d2 40 = d2 50 50 50 50d3 35 = d3 35 35 40 40d4 20 = d4 20 20 20 10
Quand Γ = 0, le scénario de la demande correspond au scénario nominal, dont la solution est
donnée dans le tableau 5.3 (voir l’exemple 5.1).
Nous déterminons pour Γ = 4 le pire scénario de la demande. La valeur de l’optimum pour le
problème (G1) est égale à 3670.
Nous remarquons que ce scénario ne correspond pas au scénario où les demandes sont toutes les
5.4. Formulation robuste 3 : approche robuste bi-étapes 139
plus grandes. Ceci s’explique par le fait que les incertitudes sont situées dans le second membre
des contraintes d’égalité du problème. Le pire optimum est alors engendré par le scénario
constitué, soit par de fortes demandes et donc par des quantités achetées et stockées élevées, ou
bien par de faibles demandes où le décideur est contraint d’acheter des quantités minimales à
chaque période.
Selon l’approche présentée dans cette section, le décideur est capable d’identifer,
dans une phase de planification, les scénarios de demandes les plus défavorables et
leur coût. Ainsi, il peut prévoir son budget en conséquence. Cependant, il ne peut
décider avant la réalisation des demandes. Dans ce sens, la solution calculée n’est pas
robuste puisque non réalisable pour d’autres valeurs de Γ. Dans la section suivante,
nous exposons une approche qui se situe dans un contexte à mi chemin entre les deux
contextes précédemment présentés : nous supposons qu’au moment de la prise de
décision, les demandes sur de proches périodes sont connues et deviennent incertaines
au-delà.
5.4 Formulation robuste 3 : approche robuste bi-étapes
Dans cette dernière section, nous exposons une formulation robuste bi-étapes pour
traiter le problème incertain (G′d) que nous plaçons dans le contexte (plus proche de
la réalité) qui suit : nous supposons que les demandes effectives qui s’exercent sur
un horizon proche sont connues et qu’elles deviennent incertaines sur les périodes
suivantes. Le décideur souhaite dans ce contexte emprunter un plan d’achat et de
stockage durant les périodes où les demandes sont connues, tel qu’il s’assure de
l’existence d’un recours sur les périodes restantes quand la demande se réalisera.
Dans ce cas, nous séparons l’horizon T en deux parties telles que :
– les demandes entre 1 et t sont connues et sont égales aux valeurs nominales dt,
– les demandes entre t + 1 et T sont incertaines et varient dans les intervalles [dt −dt, dt + dt].
La version robuste bi-étapes consiste à décider des variables de première étape qui
sont les achats et le stockage entre la période 1 et t (avant la réalisation des demandes)
tel qu’il existe un recours à adopter à la seconde étape (quand les demandes seront

140 Chapitre 5. Problème de gestion des stocks robuste
connues) d’approvisionnement et de stockage entre les périodes t + 1 et T.
Le problème bi-étapes s’écrit comme suit :
GRob3(Γ)
mint
∑t=1
ctut +t
∑t=1
(cst + cdt)st + cd1x0+
t−1∑
t=1(cdt+1 − cdt)xt − cdtxt + v∗(R(x, Γ))
s.c. ut + xt−1 − xt = dt t = 1 . . . t
xt−1 − xt + st ≥ 0 t = 1 . . . t
X ≤ xt ≤ X t = 1 . . . t
U ≤ ut ≤ U t = 1 . . . t
st ≥ 0 t = 1 . . . t
où v∗(R(x, Γ)) représente la valeur du problème de recours, noté R(x, Γ), suivant :
R(x, Γ)
maxT∑
t=t+1(z+
t +z−t )≤Γ
z+t +z−t ≤1, t=t+1...T
z+t , z−t ∈0,1, t=t+1...T
minut+xt−1−xt=dt+dtz+
t −dtz−t , t=1+t...T
xt−1−xt+st≥0, t=t+1...T
X≤xt≤X, t=t+1...T
U≤ut≤U, t=t+1...T
st≥0, t=t+1...T
cdt+1xt +T−1∑
t=t+1(cdt+1−
cdt)xt +T∑
t=t+1ctut+
T∑
t=t+1(cst + cdt)st − cdTxT
Pour un vecteur de stock x donné sur les périodes t ∈ [1, t] et une valeur du budget
d’incertitude Γ fixé dans [0, T − t], le problème R(x, Γ) correspond au calcul d’un pire
optimum sur les périodes entre t + 1 et T.
Nous laissons la résolution du problème GRob3(Γ) comme perspective. Dans un
premier temps, une étape de réécriture et de simplification du problème est nécessaire.
Dans un second temps, un algorithme de résolution efficace doit être développé,
passant notamment par la définition de bornes appropriées pour la résolution exacte
du problème de recours.
Il serait par ailleurs intéressant d’étudier une version robuste non pas bi-étapes
mais multi-étapes de notre problème (de manière dynamique pour chaque période
t = 1 . . . T) et cela en s’appuyant sur les travaux de Minoux (2008). L’auteur propose
en effet dans cette étude une version robuste multi-étapes d’un problème de gestion
de stock particulier où la demande ainsi que les prix de vente du produit de chaque
période sont sujets à incertitude. L’originalité de cette étude est, d’une part, la prise

5.4. Formulation robuste 3 : approche robuste bi-étapes 141
en compte dans le modèle d’incertitude de la corrélation qui peut exister entre ces
deux type d’incertitude et construisant ainsi un modèle plus riche et plus proche de
la réalité et, d’autre part, la formulation robuste multi-étapes du problème qui repose
sur la résolution d’un système récursif explorant un arbre de scénarios.
Conclusion
Dans ce dernier chapitre, nous nous sommes intéressés à un problème de gestion de
stock admettant des demandes incertaines, pour lequel nous avons exploré quatre
versions robustes, à adopter selon le contexte de décision.
Nous avons ainsi donné les différentes formulations robustes et ouvert plusieurs
perspectives de développement notamment pour la résolution efficace de ces pro-
blèmes. Citons par exemple, le calcul de bornes serrées pour les constantes du
problème du calcul du pire optimum, ou encore, un algorithme de résolution de
la formulation robuste bi-étapes. Des tests numériques restent aussi à mener pour
étudier les tailles d’instances des problèmes pouvant être résolues.
Par ailleurs, nous avons montré que le caractère dynamique du problème jouait
un rôle important lors de la construction des problèmes robustes et qu’un modèle
d’incertitude en ligne n’était pas pertinent pour le problème de gestion de stock.
Il apparaît enfin que l’identification du contexte de décision constitue une compo-
sante importante de la problématique de la robustesse. En effet, nous observons que
les formulations robustes diffèrent selon le contexte décisionnel. Ce dernier n’est pas
toujours aisément identifié. À titre d’exemple, nous rappelons que le contexte réel dans
lequel se situait le problème de gestion de stock traité dans Remli (2006) n’a pas été
clairement identifié. De plus, des trois contextes de décision présentés dans ce cha-
pitre, un autre contexte de décision pourrait être envisagé, dans lequel une seconde
approche bi-étapes serait employée. Elle consisterait à déterminer les bornes sur les
achats et le stockage dans une première étape, tel qu’il existe un recours sur l’ap-
provisionnement et le stockage à la seconde étape. Cette formulation robuste est une
perspective intéressante d’un travail futur.

Conclusion générale
De manière générale, l’étude de la robustesse pour des problèmes d’optimisation
permet la prise en compte d’incertitudes affectant certains de leurs coefficients. Elle
est employée pour décider en milieu incertain de manière statique ou en multi-étapes,
ou encore en phase de planification.
Tout au long de ce travail de thèse, nous nous sommes intéressés aux programmes
linéaires contenant des incertitudes situées dans le second membre des contraintes.
Après avoir fait, au premier chapitre, un tour d’horizon des principales études biblio-
graphiques concernant les versions robustes de problèmes de programmation linéaire
incertains, nous avons dans le deuxième chapitre introduit notre problématique et
réalisé notre étude selon deux contextes décisionnels différents :
– le premier contexte est le contexte classique de décision, où l’on doit décider
avant la réalisation des incertitudes. Nous avons dans ce cas cherché à détermi-
ner des solutions robustes de pire cas au problème incertain considéré. Nous
avons montré que si ce dernier comportait des contraintes d’inégalité seulement,
alors la solution robuste s’obtenait par la résolution du programme linéaire avec
le plus petit domaine de solutions réalisables (le problème est de complexité po-
lynomiale). En revanche, lorsque le problème contient des contraintes d’égalité,
la recherche d’une solution qui permet de se prémunir contre toute éventualité
n’a plus de sens. Nous avons alors proposé pour ces problèmes un modèle de
pénalités permettant de mesurer la non satisfaction des contraintes d’égalité.
De cette manière, une décision de pire cas peut être envisagée, minimisant les
surcoûts engendrés.
– le second contexte est un contexte de planification, où l’objectif est l’évaluation
des solutions optimales suivant les scénarios possibles. Nous avons alors cherché
à déterminer l’intervalle de variation de l’optimum en fonction des incertitudes
143
144 Conclusion générale
et cela en calculant les deux valeurs extrêmes du pire optimum et du meilleur
optimum. Ici aussi, quand le problème incertain comporte des contraintes d’in-
égalité, le pire et le meilleur optima sont des problèmes polynomiaux (corres-
pondant respectivement aux programmes linéaires définis sur le plus petit et le
plus grand domaine de solutions réalisables). Quand le problème contient des
contraintes d’égalité, le calcul du meilleur optimum reste un problème polyno-
mial, alors que nous avons montré que le calcul du pire optimum est un problème
NP-difficile.
L’évaluation du pire optimum étant réalisée suivant le pire scénario (un scénario
peu réaliste et trop conservateur pour certaines situations), nous nous sommes attelé,
au troisième chapitre, à proposer un calcul de la valeur de l’optimum en se basant sur
d’autres scénarios. Pour cela, nous avons étendu l’approche de Bertsimas et Sim (2004)
en paramétrisant le calcul du pire optimum par un budget d’incertitude commun à
tous les coefficients du second membre. Nous avons montré dans cette étude que les
problèmes engendrés par la considération de budgets d’incertitude en colonne était
bien plus difficiles que ceux engendrés par des budgets d’incertitude en ligne. En effet,
le problème du calcul du pire optimum paramétrique est un problème bilinéaire dans
sa forme générale. Nous avons en outre proposé une linéarisation en un programme
linéaire mixte.
Au chapitre 4, nous avons considéré un troisième contexte décisionnel : le contexte
multi-étapes, et nous nous sommes intéressés à une application du problème de lo-
calisation et de transport avec demandes incertaines. Nous avons formulé puis résolu
la version robuste bi-étapes associée à ces applications en utilisant un algorithme de
génération de contraintes adapté. De plus, les résultats expérimentaux réalisés sur ce
problème montrent que la borne que nous avons établie au problème de transport
permet la résolution d’instances de grande taille.
Le dernier chapitre de cette thèse traite d’une autre application, celle d’un pro-
blème de gestion de stock avec demande incertaine. Nous avons construit plusieurs
versions robustes à ce problème et cela suivant les trois contextes de décision définis
précédemment. Nous avons montré qu’elle a été l’influence sur les versions robustes
du caractère dynamique du problème et expliqué en quoi le modèle d’incertitude en
colonne était mieux adapté que le modèle d’incertitude en ligne.
Conclusion générale 145
Dans la continuité directe de notre travail de thèse, nous envisageons de :
– définir un algorithme de résolution adapté au problème bilinéaire engendré par
le calcul du pire optimum paramétrique pour le problème incertain (Pb) (pour
les deux cas de figure où le problème contient des contraintes d’inégalité ou
d’égalité).
– déterminer une borne serrée et spécifique au problème de localisation et de trans-
port, dans le cas où le dimensionnement, le stockage ainsi que le transport sont
conditionnés par le budget d’incertitude fixé par le décideur.
– réaliser une étude approfondie du problème de gestion de stock incertain, en
définissant des bornes serrées aux constantes du problème de recours, puis ef-
fectuer des tests numériques afin de comparer les solutions obtenues dans les
différents contextes de décisions.
– formuler et résoudre la version robuste bi-étapes du problème de gestion de stock
incertain dans lequel il s’agit de dimensionner les bornes des contrats d’approvi-
sionnement et de stockage.
– formuler et résoudre la version robuste multi-étapes du problème de gestion de
stock incertain où l’on doit décider de manière dynamique à chaque période
d’une décision robuste pour la période suivante.
De ce travail de thèse il ressort que l’identification du contexte décisionnel du pro-
blème reste une étape clé pour l’établissement d’une version robuste adéquate. Ainsi,
le décideur doit définir de manière précise les objectifs visés et les garanties désirées.
À ce stade, la modélisation des incertitudes doit traduire le plus fidèlement possible
ces aléas afin de se rapprocher de la réalité. Une tâche qui n’est pas aisée à cause
du peu d’information disponible. Des développements et raffinements des modèles
d’incertitudes existants sont encore nécessaires pour mieux traduire ces incertitudes et
répondre à la préoccupation de robustesse. Enfin, l’utilisation de modèles robustes in-
duit souvent des formulations de plus grande complexité que les problèmes d’origine.
Ceci implique le développement de méthodologies et d’approches spécifiques pour la
résolution de ces problèmes.

Bibliographie
H. Aissi. Approximation et résolution des versions min-max et min-max regret de pro-
blèmes d´optimisation combinatoire. PhD thesis, Université Paris-Dauphine, 2005. (Cité
page 17.)
H. Aissi, Bazgan C., et D. Vanderpooten. Min-max and min-max regret versions of
some combinatorial optimization problems : a survey. Univesité Paris Dauphine, An-
nales du LAMSADE, (7) :1–32, 2007. (Cité page 17.)
G. Alefeld et J. Herzberger. Introduction to Interval Computation. Academic Press Inc,
1983. (Cité page 56.)
I. D. Aron et P. Van Hentenryck. On the complexity of the robust spanning tree problem
with interval data. Operations Research Letters, 32(1) :36 – 40, 2004. (Cité page 17.)
T. Assavapokee, M. J. Realff, J. C. Ammons, et I-H. Hong. Scenario relaxation algo-
rithm for finite scenario-based min-max regret and min-max relative regret robust
optimization. Computers and Operations Research, 35(6) :2093 – 2102, 2008. Part Spe-
cial Issue : OR Applications in the Military and in Counter-Terrorism. (Cité pages 10
et 17.)
A. Atamtürk et M. Zhang. Two-stage robust network flow and design under demand
uncertainty. Operations Research, 55(4) :662 – 673, 2007. (Cité pages 37, 87 et 114.)
I. Averbakh. Minmax regret solutions for minimax optimization problems with uncer-
tainty. Operations Research Letters, 27(2) :57 – 65, 2000. (Cité pages 10 et 17.)
I. Averbakh. On the complexity of a class of combinatorial optimization problems with
uncertainty. Mathematical Programming, 90(3) :263–272, 2001. (Cité page 17.)
I. Averbakh. Minmax regret linear resource allocation problems. Operations Research
Letters, 32(2) :174–180, 2004. (Cité page 17.)
I. Averbakh. The minmax relative regret median problem on networks. INFORMS J.
on Computing, 17(4), 2005. (Cité page 10.)
147
148 Bibliographie
I. Averbakh et V. Lebedev. Interval data minmax regret network optimization problems.
Discrete Applied Mathematics, 138 :289–301, 2004. (Cité page 17.)
I. Averbakh et V. Lebedev. On the complexity of minmax regret linear programming.
European Journal of Operational Research, 160(1) :227–231, 2005. (Cité pages 2, 3, 11, 14
et 16.)
F. Babonneau, J.-P. Vial, et R. Apparigliato. Uncertainty and environmental deci-
sion making. volume 138 de International Series in Operations Research and Manage-
ment Science, Chapitre Robust Optimization for Environmental and Energy Planning,
pages 79–126. 2010. (Cité pages 23, 25 et 33.)
A. Beck et A Ben-Tal. Duality in robust optimization : Primal worst equals dual best.
Operation Rsearch Letters, 37(1) :1–6, 2009. (Cité page 69.)
A. Ben-Tal, L. El Ghaoui, et A. Nemirovski. Robust Optimization. Princeton Series in
Applied Mathematics. Princeton University Press, October 2009. (Cité page 24.)
A. Ben-Tal, B. Golany, A. Nemirovski, et J.-P. Vial. Supplier-retailer flexible commit-
ments contracts : A robust optimization approach. Rapport technique, Dept. of Ma-
nagement Studies, University of Geneva, 2003. (Cité page 33.)
A. Ben-Tal, A. Goryashko, E. Guslitzer, et A. Nimerovski. Adjustable robust solutions
of uncertain linear programs. Mathematical Programming, 99 :351–376, August 2004.
(Cité pages 4, 30, 31, 32 et 33.)
A. Ben-Tal, T. Margalit, et A. Nemirovski. Robust modeling of multi-stage portfolio
problems. Dans T. Terlsky H. Frenk, K. Roos et S. Zhang edition, éditeurs, High Per-
formance Optimization, pages 303–328. Kluwer Academic Publisher, Dordrecht, The
Netherlands, 2000. (Cité page 33.)
A. Ben-Tal et A. Nimerovski. Robust solutions of uncertain linear programs. Operations
Research Letters, 25 :1–13, 1999. (Cité pages 18, 19 et 23.)
A. Ben-Tal et A. Nimerovski. Robust solutions of linear programming problems conta-
minated with uncertain data. Mathematical Programming, 88 :411–224, 2000. (Cité
page 23.)
A. Ben-Tal et A. Nimerovski. Robust optimization - methodology and applications.
Mathematical Programming Series, February 2002. (Cité pages 20 et 25.)
Bibliographie 149
A. Ben-Tal et M. Zibulevsky. Penalty/barrier multiplier methods for convex program-
ming problems. SIAM Journal on Optimization, 7 :347–366, 1995. (Cité page 24.)
D. Bertsimas, D.B. Brown, et C. Caramanis. Theory and applications of robust optimi-
zation. 2007. (Cité page 33.)
D. Bertsimas, D. Pachamanova, et M. Sim. Robust linear optimization under general
norms. Operations Research Letters, 32 :510–516, 2004. (Cité page 25.)
D. Bertsimas et M. Sim. Robust discrete optimization and network flows. Mathematical
Programming Series B., 98 :49–71, 2003. (Cité pages 2 et 28.)
D. Bertsimas et M. Sim. The price of robustness. Operations Research, 52(1) :35–53, 2004.
(Cité pages 5, 18, 26, 28, 72, 75, 76, 86, 128 et 144.)
D. Bertsimas et A. Thiele. Robust and data-driven optimization : Modern decision-
making under uncertainty. Rapport technique. (Cité page 33.)
D. Bertsimas et A. Thiele. A Robust Optimization Approach to Inventory Theory.
Operations Research, 54(1) :150–168, 2006. (Cité pages 119, 128, 129, 130 et 133.)
J.R. Birge et F. Louveaux. Introduction to Stochastic Programming. Springer-Verlag, 1997.
(Cité page 1.)
J. M. Bloemhof-Ruwaard et E. M. T. Hendrix. Generalized bilinear programming :
An application in farm management. European Journal Of Operational Research, 90 :
102–114, 1996. (Cité page 78.)
X. Chen, M. Sim, P. Sun, et J. Zhang. A linear decision-based approximation approach
to stochastic programming. Operations Research, 56(2) :344–357, 2008. (Cité page 33.)
J.W. Chinneck et K. Ramadan. Linear programming with interval coefficients. The
Journal of the Operational Research Society, 51(2) :209–220, Feb. 2000. (Cité page 56.)
E. Daniel et A. Salazar. Robustness analysis : An information-based perspective. Euro-
pean Working Group : Multiple Criteria Decision Aiding, 3(14), 2006. (Cité page 2.)
G.B. Dantzig. Linear programming under uncertainty. Management Science, 1 :179–206,
1955. (Cité page 2.)
V. G. Deineko et G. J. Woeginger. On the robust assignment problem under a fixed
number of cost scenarios. Operations Research Letters, 34(2) :175 – 179, 2006. (Cité
pages 2 et 17.)
150 Bibliographie
L. El Ghaoui et H. Lebret. Robust solutions to least-squares problems with uncertain
data. SIAM Journal on Matrix Analysis and Applications, 18(4) :1035–1064, 1997. (Cité
page 23.)
L. El Ghaoui, F. Oustry, et H. Lebret. Robust solutions to uncertain semidefinite pro-
grams. SIAM Journal on Optimization, 9(1) :33–52, 1998. (Cité page 23.)
A. L. Erera, J. C. Morales, et M. Savelsbergh. Robust optimization for empty repositio-
ning problems. Operations Research, 57(2) :468–483, 2009. (Cité page 33.)
B. Escoffier, J. Monnot, et O. Spanjaard. Some tractable instances of interval data min-
max regret problems. Operations Research Letters, 36(4) :424 – 429, 2008. (Cité page 17.)
J. E. Falk. A linear max-min problem. Mathematical Programming, 5 :169–188, 1973. (Cité
page 78.)
J.E. Falk. Exact solutions to inexact linear programs. Operations Research, pages 783–787,
1976. (Cité page 19.)
M. Fiedler, J. Nedoma, J. Ramik, J. Rohn, et K. Zimmermann. Linear optimization
problems with inexact data. Chapitre Interval linear programming. New York :
Springer-Verlag, 2006. (Cité page 56.)
C. Floudas et P.M. Parlados. State of the art in global optimization. Chapitre Global
Optimization of separable concave functions under Linear Constraints with Totally
Unimodular Matices. Kluwer, Dordrecht- Boston- London, 1995. (Cité page 78.)
V. Gabrel et C. Murat. Robust shortest path problems. Annales du LAMSADE, Robust-
ness in OR-DA, (7) :71–94, 2007. (Cité pages 2 et 13.)
V. Gabrel et C. Murat. Robustness and duality in linear programming. Journal of the
Operational Research Society, 61 :1288–1296, 2010. (Cité page 69.)
V. Gabrel, C. Murat, et N. Remli. Best and worst optimum for linear programs with
interval right hand sides. Dans Le Thi Hoai An, Pascal Bouvry, et Pham Dinh Tao,
éditeurs, MCO, volume 14 de Communications in Computer and Information Science,
pages 126–134. Springer, 2008. ISBN 978-3-540-87476-8. (Cité page 47.)
V. Gabrel, C. Murat, et N. Remli. Linear programming with interval right hand sides.
International Transactions in Operational Research, 17(3) :397–408, 2010a. (Cité page 47.)
Bibliographie 151
V. Gabrel, C. Murat, N. Remli, et M. Lacroix. Recourse problem of the 2-stage robust
location transportation problem. Electronic Notes in Discrete Mathematics, 36 :167 –
174, 2010b. ISCO 2010 - International Symposium on Combinatorial Optimization.
(Cité page 91.)
G. Gallo et A. Ülkücü. Bilinear programming : an exact algorithm. Mathematical Pro-
gramming, 12 :173–194, 1977. (Cité page 78.)
F. Glover. Improved linear integer programming formulations of nonlinear integer
problems. Management Science, 22(4) :455–460, 1975. (Cité pages 80 et 85.)
F. Glover et E. Woolsey. Converting the 0-1 polynomial programming problem to a 0-1
linear program. Opererations Research, 22 :180–182, 1974. (Cité page 80.)
D. Goldfarb et G. Iyengar. Robust portfolio selection problems. Mathematics of Opera-
tions Research, 28(1) :1–38, 2003. (Cité page 25.)
S.K. Gupta et J. Rosenhead. Robustness in sequential investment decisions. Management
Science, 15(2) :18–29, 1968. (Cité page 3.)
E. Guslitser. Uncertainty-immunized solutions in linear programming. Rapport de
Master, The Technion-Israel Institute of Technology, 2002. (Cité pages 31 et 32.)
M. Hladìk. Optimal value range in interval linear programming. Fuzzy Optimization
and Decision Making. (Cité page 56.)
R. Horst et H. Tuy. Global optimization : deterministic approaches. Chapitre Special
Problems of Concave Minimization. Springer-Verlag Berlin Heidelberg New York,
1996. (Cité page 80.)
M. Inuiguchi et M. Sakawa. Minmax regret solution to linear programming problems
with an interval objective function. European Journal Of Operational Research, 86 :
526–536, 1995. (Cité page 16.)
M. Inuiguchi et M. Sakawa. Maximum regret analysis in linear programs with an
interval objective function. Dans Proceedings of IWSCI’96, pages 308–317, 1996. (Cité
page 16.)
R. Kalai. Une nouvelle approche de robustesse : application à quelques problèmes d optimisa-
tion. PhD thesis, LAMSADE, Université Paris-Dauphine, 2006. (Cité page 10.)
152 Bibliographie
R. Kalai et C. Lamboray. alpha-robustesse lexicographique : une relaxation de la beta-
robustesse. Annales du LAMSADE, Robustness in OR-DA, (7) :129–144, 2007. (Cité
page 10.)
P. Kall et S. Wallace. Stochastic Programming. John Wiley and Sons, 1994. (Cité page 1.)
O. E. Karasan, M. C. Pinar, et H. Yaman. The robust shortest path problem with interval
data. Rapport technique, Bilkent Univ., Dpt. of Industrial Engineering, 2001. (Cité
page 17.)
A. Kasperski et P. Zielinski. The robust shortest path problem in series-parallel mul-
tidigraphs with interval data. Operations Research Letters, 34(1) :69 – 76, 2006. (Cité
page 17.)
J. E. Kelley. The cutting-plane method for solving convex programs. Society for Industrial
and Applied Mathematics, 8(4) :703–712, 1960. (Cité pages 39, 91, 98 et 100.)
H. Konno. A cutting plane algorithm solving bilinear programs. Mathematical Program-
ming, 11 :14–27, 1976. (Cité page 78.)
P. Kouvelis, A. A. Kurawarwala, et G. J. Gutierrez. Algorithms for robust single and
multiple period layout planning for manufacturing systems. European Journal of Ope-
rational Research, 63(2) :287 – 303, 1992. (Cité page 10.)
P. Kouvelis et G. Yu. Robust discrete optimization and its applications. Kluwer Academic
Publishers, 1997. (Cité page 2.)
R.D. Luce et H. Raiffa. Games and decisions : Intoduction and critical survey. New
York : Wiley, 1957. (Cité page 13.)
HE. Mausser et M. Laguna. A new mixed integer formulation for the maximum regret
problem. International Transactions in Operational Research, 5(5) :398–403, 1998. (Cité
page 17.)
HE. Mausser et M. Laguna. A heuristic to minmax absolute regret for linear programs
with interval objective function coefficents. European Journal of Operational Research,
117 :157–174, 1999a. (Cité page 17.)
HE. Mausser et M. Laguna. Minimizing the maximum relative regret for linear pro-
grams with interval objective function coefficents. European Journal of Operational
Research, 50(10) :1063–1070, Oct. 1999b. (Cité page 10.)
Bibliographie 153
C. Meyer. On tuy’s 1964 cone splitting algorithm for concave minimization. Rapport
Technique G-97-48, Les Cahiers Du Gerad, 1997. (Cité page 78.)
C. Meyer. A simple finite cone covering algorithm for concave minimization. Journal of
Global Optimization, 18(4), 2000. (Cité page 78.)
C. Meyer et B. Jaumard. A new finite cone covering algorithm for concave minimiza-
tion. Rapport Technique G-98-70, Les Cahiers Du Gerad, 1998. (Cité page 78.)
M. Minoux. Duality, robustness, and 2-stage robust lp decision models. application to
robust pert scheduling. Annales du LAMSADE, Robustness in OR-DA, (7) :173–190,
2007a. (Cité pages 36, 37, 66 et 87.)
M. Minoux. Models and algorithms for robust pert scheduling with time-dependent
task durations. Vietnam Journal of Mathematics, 35(4) :387–398, 2007b. (Cité pages 37
et 87.)
M. Minoux. Solving some multistage robust decision problems with huge implicitly
defined scenario trees. Algorithmic Operations Research, 4(1) :1–18, 2008. (Cité pages 37
et 140.)
M. Minoux. On robust maximum flow with polyhedral uncertainty sets. Optimization
Letters, 3 :367–376, 2009a. (Cité page 87.)
M. Minoux. Robust linear programming with right hand side uncertainty, duality and
application. Encyclopedia of Optimization, pages 3317–3327, 2009b. (Cité pages 30, 36,
37 et 66.)
M. Minoux. Robust network optimization under polyhedral demand uncertainty is
np-hard. Discrete Applied Mathematics, 158(5) :597–603, 2010. (Cité page 87.)
R. Montemanni. A benders decomposition approach for the robust spanning tree pro-
blem with interval data. European Journal of Operational Research, 174(3) :1479–1490,
2006. (Cité page 17.)
R. Montemanni, J. Barta, et L.M . Gambardella. The robust traveling salesman pro-
blem with interval data. Rapport technique, Istituto Dalle Molle di Studi sull’Intel-
ligenza Artificiale (IDSIA-20-05), Galleria 2, CH-6928 Lugano-Manno, Switzerland,
2005. (Cité page 17.)
154 Bibliographie
R. Montemanni et L. Gambardella. An exact algorithm for the robust shortest path
problem with interval data. Computers and Operations Research, 31 :1667–1680, 2004.
(Cité page 17.)
R. Montemanni, L. Gambardella, et A.V. Donati. A branch and bound algorithm for
the robust shortest path problem with interval data. Operations Research Letters, 32 :
225–232, 2004. (Cité page 17.)
R. Montemanni et L. M. Gambardella. A branch and bound algorithm for the robust
spanning tree problem with interval data. European Journal of Operational Research,
161(3) :771 – 779, 2005. (Cité page 17.)
F. Mráz. Calculating the exact bounds of optimal values in lp with interval coefficients.
Annals of Operations Research, 81 :51–62, 1998. (Cité page 56.)
A. Prékopa. Stochastic Programming. Kluwer, 1995. (Cité page 1.)
N. Remli. Gestion des stockages gaziers. Rapport de Master, Université Paris-
Dauphine, 2006. (Cité pages 119 et 141.)
M. J. Rosenblatt et Lee H. L. A robustness approach to facilities design. International
Journal of Production Research, 25 :479–486, 1987. (Cité page 3.)
J. Rosenhead, M. Elton, et S. K. Gupta. Robustness and optimality as criteria for stra-
tegic decisions. Operational Research Quarterly (1970-1977), 23(4) :413–431, 1972. (Cité
page 3.)
M. J. Rosenhead. Rational analysis for a problematic world. Wiley, New York, 1989.
(Cité page 3.)
B. Roy. Robustesse de quoi, vis-à-vis de quoi, mais aussi robustesse pourquoi en aide
à la décision ? In Newsletters of the European Working Group «Multicriteria Aid for
Decisions», (6) :1–6, 2002. (Cité page 2.)
B. Roy. Robustness in operational research and decision aiding : A multi-faceted issue.
European Journal of Operational Research, 200(3) :629–638, 2010. (Cité page 10.)
B. Roy, M. Elton, et S. K. Gupta. A missing link in operational research decision aiding :
robustness analysis. Foundations of Computing and Decision Sciences, 23(3) :141–160,
1982. (Cité page 3.)
Bibliographie 155
L.J. Savage. The foundation of statistics. New York : Wiley, 1954. (Cité page 13.)
H. D. Sherali et C.M. Shetty. A finitely convergent algorithm for bilinear programming
problems using polar cuts and disjunctive face cuts. Mathematical Programming, 19 :
14–31, 1980. (Cité page 78.)
K. Shimizu et E. Aiyoshi. Necessary conditions for min-max problems and algorithm
by relaxation procedure. IEEE Transaction on Automatic control, Ac-25 :62–66, 1980.
(Cité pages 14, 15 et 16.)
C. Singh. Convex programming with set-inclusive constraints and its applications to
generalized linear and fractional programming. Journal of Optimization Theory and
Applications, 38(1) :33–42, 1982. (Cité page 19.)
O. Solyali, J.F. Cordeau, et G. Laporte. Robust inventory routing under demand uncer-
tainty. Rapport Technique 17, CIRRELT, 2010. (Cité pages 37 et 133.)
A. L. Soyster. Convex programming with set-inclusive constraints and applications
to inexact linear programming. Operations Research, 21(5) :1154–1157, October 1973.
(Cité pages 18, 19, 20, 21, 46 et 47.)
A. L. Soyster. Inexact linear programming with generalized resource sets. European
Journal of Operational Research, 3(4) :316–321, 1979. (Cité page 19.)
A. Takeda, S. Taguchi, et R. H. Tütüncü. Adjustable robust optimization models for
nonlinear multi-period optimization. Rapport Technique 04-CNA-013, Department
of Mathematical Sciences, Carnegie Mellon University, Pittsburgh, PA 15213, USA,
2004. (Cité page 32.)
F. Taniguchi, T. Yamada, et S. Kataoka. Heuristic and exact algorithms for the max-
min optimization of the multi-scenario knapsack problem. Computers and Operations
Research, 35(6), 2008. (Cité page 13.)
A. Thiele, T. Terry, et M. Epelman. Robust linear optimization with recourse. Rapport
technique, 2009. (Cité pages 4, 37, 91, 98 et 114.)
F. E. Torres. Linearization of mixed-integer products. Mathematical Programming, 49 :
427–428, 1990. (Cité page 85.)
Stephen A. Vavasis. Nonlinear optimization : complexity issues. Oxford University Press,
Inc., New York, NY, USA, 1991. (Cité page 78.)

H. Yaman, O. E. Karasan, et M. C. Pinar. The robust spanning tree problem with
interval data. Operations Research Letters, 29 :31–40, 2001. (Cité pages 13 et 17.)
G. Yu. On the max-min 0-1 knapsack problem with robust optimization applications.
Operations Research, 44(2) :407–415, 1996. (Cité page 13.)
G. Yu et J. Yang. On the robust shortest path problem. Computers and Operations
Research, 25(6) :457 – 468, 1998. (Cité pages 2 et 13.)
P. Zielinski. The computational complexity of the relative robust shortest path problem
with interval data. European Journal of Operational Research, 158(3) :570 – 576, 2004.
(Cité page 10.)

Résumé Dans cette thèse nous nous intéressons à la prise en compte d’incertitudesaffectant les coefficients de programmes linéaires. Plus précisément, nous traitonsles problèmes admettant un second membre des contraintes incertain. Notre étudevise à répondre à la préoccupation de robustesse pour ces problèmes et cela suivantleur contexte décisionnel. Nous considérons trois contextes de décision : le premierconcerne la prise de décision en présence d’incertitudes, le deuxième traite de l’éva-luation des coûts en fonction des aléas et cela dans une phase de planification et le troi-sième comporte des problématiques multi-étapes, où la décision robuste doit prendreen compte le caractère dynamique de ces problèmes. Pour chacun de ses contextes nousprésentons la formulation mathématique des problèmes engendrés, leur complexité etune approche de résolution. Nous nous intéressons également à deux applicationsréelles : le problème de localisation et de transport robuste comportant des demandesincertaines que nous traitons dans un contexte bi-étapes et, un problème de gestion destock admettant une demande incertaine abordé selon les trois contextes décisionnelsprécédents.
Mots-clés Robustesse, programmation linéaire, second membre incertain, optimisa-tion multi-étapes robuste, problème de localisation et de transport, problème de ges-tion de stock
Abstract In this thesis, we are interested in handling uncertainty in linear program-ming. Specifically, we address problems affected with uncertain right hand side. Ourstudy addresses the concern of robustness depending on the context of the decisionmaking. We consider three contexts : the first context concerns the decision makingunder uncertainty, the second context deals with cost estimates depending on un-certainties, to compute in a planning step, and the third context involves multi-stepproblems, where the robust decision must take into account the dynamic nature ofthese problems. For each one of the contexts we present the mathematical formulationof the problems, the complexity and an approach to resolution. We are also interestedin two real applications : the robust location transportation problem with uncertaindemands, a problem that we treat with a two-stage robust approach, and the inven-tory management problem with uncertain demands explored under the previous threecontexts.
Keywords Robustness, linear programming, uncertain right hand side, multi-stagerobust optimization, location transportation problem, inventory management problem





























