Embed Size (px)
Citation preview

MAE 298, Lecture 8April 27, 2006
●●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ1 = 5314 to
++++
+
+++++
+++
++
++
++
++
+++
+
+
+
+ +++
++
++ ++
+++
++
oo oo
o o oo oo
o
o ooo
o
ooo
o
o
o
o
o
o
o
o o
o
●●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ2 = 1092 to
+
+ ++ +++
+
++
+
+++
++
++
o
o
o oo o
o
o
o
oo
o
o
o
o
oo
o
o
o
o
o
o
o
o
o o
o
o
oo
ooo
o
o
o
o
o
o
o
oo
o
o
oo o
o
o
o
o
o
o
oo
o●
●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ3 = 157 to
+++
++
++
++
+++
+++
++
++
+
+++
++
++
++
+
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
oo
oooo
o
o
o
oo
o
o o
o
o
o
o
o
o
“Spectral Methods, Sensor Nets andSelf-organization”

Last time: spectral methods, eigen-spectrum
• If two distinct graphs have the same eigen-spectrum, they arelikely isomorphic (esp for large graphs).
• Eigenvalues: degeneracy of λ = 1 tells us how manydisconnected components in the graph.

Summary: spectral methods, measures
• Mixing time (time to forget where the walk started)
• Relaxation time (related to mixing time, gives bounds)
• Cover time (time to occupy each node)
• Spectral gap: the largest mixing time, tmax = −1/ ln(λ2)
– the larger tmax the longer it takes for a random walk to coverthe graph.
– the larger tmax the more accurately a graph can bepartitioned into two pieces.

Applications: Wireless sensor networks
+
+
+
++
+
+
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ +
+
+
+
+
+
+
+
+
+
+
++
++
+
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
++
+
+
+
++
+
+
+
+ +
+
+
+
+
++
0 5 10 15 20 25
05
1015
2025
• Start with isolated sensor distributed at random.
• Is there a local way to build up global connectivity?
• Locality — why?

Locality
1. Locality ∼ distributed
2. Adapt quickly to changing environment
3. Minimal growth in overhead with increasing system size
4. “Self-organizing”

“self-organization”
• Not quantitatively defined.
• (Wikipedia:) Self-organization is a process in which the internalorganization of a system , normally an open system , increasesin complexity without being guided or managed by an outsidesource. Self-organizing systems typically (though not always)display emergent properties.

Beaconing

A geometric graph problem
One idea — percolation
Call the graph describing connectivity of nodes: GR

Is this a local algorithm?
(How to determine Rc?)

How to determine Rc?
●●
●●
●
●
●
●
●●
!
" #
$$$$
%
&
’
(
)
*+ ,,−
/
0
1
2
34
5
6
78
0 5 10 20
05
1020
R = 1.362
●●
●
●
●
●
●
●
0 5 10 20
05
1020
R = 2.724
●
●
●
●
●●
●●
●●●
●●
●
●●●
●●●●
●
●●
●
●
● ●●
●
●
●
●
●
●
●
●●
●
● ●
●●
●
● ●
●
●
●
●●
●
●
●
●●●
●●●●●●
●
●
●
●
●
●● ●●
●
●
●
0 5 10 20
05
1020
R = 4.904
Keep increasing until only one eigenvalue λ = 1

Percolation
Why is it bad?
• Farthest away node sets operating power for all
• Need to communicate this value Rc (critical operating range)
• Assumes wireless footprint a uniform disk
Why is in good?
• Guarantees full global connectivity. In the asymptotic limit(N → ∞) know how Rc scales with N . So for large N canuse theoretical estimate rather than λ = 1 construction.
• Want small range R to conserve power and also reduceinterference. Percolation is a “sweet spot” (full connectivity without too much interference).

Refining percolation graph GR
(also called the “unit disk graph”)
153
RNG & GGRelative Neighbor Graph (RNG)! An edge (u, v) exist if !w, d(u,v) " max(d(u, w), d(w, v)
Gabriel graph (GG)! An edge (u, v) exist, if no other
vertex w is present within the circle
2 2 2, : ( , ) ( , ) ( , )w u v d u v d u w d w v! # " $

154
Planarized Graph (Cont’d)
Original Unit Disk Graph
GG RNG
• Preserve connectivity of GR, but sparser (and also planar).
• There is an R-package that computes the disk, Gabriel andrelative neighbor graph given an input set of coordinates(http://rss.acs.unt.edu/Rdoc/library/spdep/html/graphneigh.html)

Planar disk graphs =⇒ greedy routing
• What is greedy forward routing?
• Packets are discarded if there is no neighbor which is nearerto the destination node than the current node; otherwise,packets are forwarded to the neighbor which is nearest to thedestination node.
• Each node needs to know the locations of itself, its 1-hopneighbors and destination node.
• Pros: easy implement
• Cons: deliverability (stuck in local voids)

4
Examples
uw4
v
w1 w2 w3
w5 w6w6 is a local
minimum w.r.t. v

Theory versus realityWireless footprints
!!
!!!"
###$%%%%&
'((()
***+
,
-----.
!k!!
!!!
! ! !i
j
Monotonicity
1
Uniform-disk model Experimental[Ganesan, et. al., 2002]

Adaptive Power Topology control(Local algorithms to build connectivity)
• Percolation (Common power) neglects natural clustering.– Too much power consumption and unnecessary interference.– Misses certain paths which could optimize traffic.
• How to build up a connected network using only localinformation?– Moreover, want to avoid uniform disk requirement

Adaptive Power Topology control
• Adaptive power topology control (APTC)[Wattenhofer, Li, Bahl, and Wang. Infocom 2001]
[D’Souza, Ramanathan, and Temple Lang. Infocom 2003]
Each node individually increases power until it has a neighbor inevery θ sector around it:
Call the graph describing connectivity of nodes: Gθ

Sample topology
Topology control:
o
o
o
o
o
ooo
o
o
o
o
o
o
o
o
o
o
oo o
o
o
oo
oo
o
oo
o
oo
o
o
o
oo
o
oo
o
o
o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
oo o
o
o
o
o
oo
oo
o
oo
o
o
o
oo
0 5 10 20
05
1020
X
Yτ[min] = 118 to
o
ooo
o
o
o
o
o
o
o
oo o
oo
oo
o
o
ooo
o
o
o
o
o
o
oo
ooo
o
oo
o
o o
o
oo
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
o
o
ooo
oo
o
o
o
0 5 10 20
05
1020
XY
τ[med] = 335 to
o
o
o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
o
o
o oo
o
o
o
oo
o
oo
o
o
o
o
ooo
o
o
oo
oooo
o
oo
o
o
oo o
o
o
o oo
o
o
oo
o
ooo o
o
o
o
oo
o
o
o
0 5 10 20
05
1020
X
Y
τ[max] = 2920 to
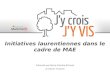
Percolation:
0 5 10 20
05
1020
+ +
+
+
+
++
+
+
+
+
+
++
+
++
+
++
o
o
o
o
ooo
o
o
o
o
o
o
o
oo o
oo
o
o
oo
o
o
o
o
o
o
oo
oo
o
o
o
o
oo
o
o
o
o
oo o
o
o
o
o
oo
o
o
o
o
o
R = 5.164
τ[min] = 183 to
0 5 10 20
05
1020
+
++
+
+
+
++
+
+
++
+ +
+++
+
+++
+
+++
+
+
++
++
+++
+
o
o
o
o
o
oo o
oo
o
o
o
o
o
o
o
o
o oooo
o
o
oo
o
o
oo
oo
o
o
o
o
oo
o
o
R = 4.727
τ[med] = 459 to
0 5 10 200
510
20 +
+
+
+
+
+
+
+
+
+
+
+
++
+
+
+
+
++
+
+
+
++ ++
++
+ ++
+
+
++ +
++
o
o
o
o
o
o
o
o
o
o
o oo
oo
o
o
oo
o
oo
o
o
o
o
o
o o
o
o
o
o
o
o
o
o
o
R = 4.524
τ[max] = 2590 to

Beyond the uniform disk model
[D’Souza, Galvin, Moore, Randall, IPSN 2006 ]
• Can use a local geometric θ-constraint to ensure full networkconnectivity, independent of wireless footprint!.
• Requires constraints on boundary nodes. (Carefully deployboundary nodes so can communicate, or else have hard-wired boundary channel; then interior nodes can be scatteredhaphazardly).

Proof overview
Theorem 1. If Gθ satisfies the θ-constraint at every internalnode with θ < π and all of the boundary nodes are known tobe connected, then Gθ is fully connected.
Proof: We need only show every internal node v has a path inGθ to some node on the boundary.

Comparison to percolation scheme
0 5 10 20
05
1020
ooo
o
o
o
o
oo
o
oo
o oo
o
o
o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
oo
o
oo
o
oo
o
o oo
oo
oo
oo
o
o
o
oo
o
o
o
o
o
o
o
o
oo
o
o
o
o
oo
o
R = 7.513
τ[min] = 109 to
0 5 10 20
05
1020
o
o
o
oo
o
o
o
o
oo o
ooo
oo
o
o
o oo o
o
oo
o
o
oo
o
ooo
o
oo
oo
o
oo
o
o
o
o
o
oo
oo
o
o
oo
o
oo o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
o o
o
R = 4.61
τ[med] = 604 to
0 5 10 20
05
1020
o
o
o oo o
o
o
o
o
o
oo
oo
o
o
o
o
o
oo
o
o
o
o
o
o
o
oo
o
o
o o
o
oo
o
oo
o
o
o
oo
o
o
o
o
o
o
o o
oo
o
o
o
oo o
o
o
oo
o
o
o
o o
o
o
o
oo
o
R = 5.315
τ[max] = 5314 to
ooo
o
o
o
o
oo
o
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
oo
o
oo
o
oo
o
o oo
oo
o
oo
oo
o
o
o
oo
o
o
o
o
o
o
o
o
oo
o
o
o
o
oo
o
0 5 10 20
05
1020
X
Y
τ[min] = 135 to
o
o
o
oo
o
o
o
o
o
oo o
ooo
oo
o
o
o oo o
o
oo
o
o
oo
o
ooo
o
oo
oo
o
oo
o
o
o
o
o
oo
oo
o
o
oo
o
oo o
o
o
o
o
o
o
o
oo
o
o
o
o
o
o
o o
o
0 5 10 20
05
1020
X
Y
τ[med] = 316 to
o
o
o oo o
o
o
o
o
o
oo
oo
o
o
o
o
o
oo
o
o
o
o
o
o
o
oo
o
o
o o
o
oo
o
oo
o
o
o
oo
o
o
o
o
o
o
o o
oo
o
o
o
oo o
o
o
o
oo
o
o
o
o o
o
o
o
oo
o
0 5 10 20
05
1020
X
Y
τ[max] = 561 to

How to quantify “better”?
• Need performance metrics
• Direct measures: energy consumption
●
●●
●
●●
●
●●
●
●
●●
●
●
● ●●
●
●●
●
●●●
●●
● ●●
●
●
●
●
●●
●
●●
●
●
●
●●
●
●●
●
●
●
●●
●
●●
●
●
●●● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●●●
●
●
●●
● ●●
●
●
●
●
●●●
●
●
●
●
●●
●●
●
●●
●● ●●
●
●●
●
●
●●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●●
● ●●●
●
●
●● ●
●●
●
●
●
●● ●
●
●
●●
●●
●●
●●
●
●
●
●●
●
●
●
●
●●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●●●●
●●●
● ●
●
●
●
●●
●
●●
●●
●
●
●●
●
●●
●●
●●
●
●
●
●●
●●
●●●
●
●
●●●
●
●●
●
●
●●
●
●●
●
●
●
●
●●●
●
●
●
●
●●
● ●●
●
●●
●●
● ●
●
●
●
●●
●
●●
●
●
●●
●
●
●
●
●
●
●
●●
●
●●
●
●● ●
●
●
●
●
●
●●
●●
●
●●
●
●●
●
●●●●
●
●
●●
●●
●
●●
●● ●
●
●
●
●●
●
●●●
●
●
●
●
●
●●●
●
●
●●
●●●●
●●●● ●
●●
●● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●●●
●
●
●
●
●
●●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●●
●
●
● ●
●● ●
●
●
●●
●
●
●
●
●●
●
●
●●●
●●●
●
●
●
●
●●●
●●
●
●●
●●●
●
●●
●
●
●
●●
●
●●
●●●●
●
●●
●
●
●●
●
●●●
●
●
●●●●
●
●● ●●
●
●
●●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●● ●●●
●
●
●
●
●
●
●●
●
●●●
●
●
●●●● ●
●
●●
●● ●●●
●●
●●
●
●
●
●●●●
●
●●
●
●
● ●
●
●●
●
●
●
●
●
●
● ●
●●
●
●
●
●●
●
●
●
●
●●●●
●
●●
●
●●●●
●
●
●●
●●●●
●
●
●
●
● ●
●
●●
●
●●
●●
● ●
●
●●
●
●●
●●
●
●
●●
●
●●
●●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●●
●
●●
●
●
● ●
●
●
●
●●
●●●
●●
●
●●
●
●
●●
●
●
●
●
●
●●
●●
●
●●
●●
●
●
●
●●
●
●
●
●
●
●●●
●
●
●
●●
●
●
●
●
●●
●●
●●●
●●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
● ●
●●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●●
●
● ●●●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●●●
●
●
●●●
●
●
●●
●●
● ●
●
●
●
●●●
●
●
●
●● ●
●
●
●
●
●●
●●
●
●
●
●●
●
●●
●
●
●● ●
●
●
●
●
●
●●
●
●●
●
● ●●●
●
●● ●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●
●
●
●
● ●
●●
●
●
●
●
●
●●
●●●●
●
●
● ●
●●
●●
●
●
●
●●●●
● ●●●
●●
●
●●●
●
●
●
● ●●
●
●●●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●
●●
●
●
●
●●●
●
● ●●
●
●
●
●●
5000 10000 15000
5000
1000
015
000
Common power scheme, Pfixed
Ada
ptiv
e po
wer
sch
eme,
Pad
pOverall power requirements,
common versus adaptive power(assuming P falls off as R2.5)
∆Padp ∆Pfixed = 0.41

Power Control:Cross-Layer Design Issues
• Physical Layer– Power control affects quality of signal
• Link Layer– Power control affects number of clients sharing channel
• Network Layer– Power control affects topology/routing
• Transport Layer– Power control changes interference, which causes
congestion• Application/OS Layer
– Power control affects energy consumption
The “protocol stack”

In general, networks layered
• Social networks
• → Email networks
• → Data networks
• → Protocol networks
• → Physical networks

Approximating interference
State transition matrix:
Mii = (ki − 1)/ki, for diagonal elements.
Mij = 1/(ki − 1)ki, if an edge exists between i and j.

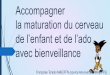
Network self-discovery time(Using mixing time as a proxy)
τ = −1/ ln(λ2)

●●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ1 = 5314 to
++++
+
+++++
+++
++
++
++
++
+++
+
+
+
+ +++
++
++ ++
+++
++
oo oo
o o oo oo
o
o ooo
o
ooo
o
o
o
o
o
o
o
o o
o
●●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ2 = 1092 to
+
+ ++ +++
+
++
+
+++
++
++
o
o
o oo o
o
o
o
oo
o
o
o
o
oo
o
o
o
o
o
o
o
o
o o
o
o
oo
ooo
o
o
o
o
o
o
o
oo
o
o
oo o
o
o
o
o
o
o
oo
o●
●
●
●
● ●
●●
●●
● ●
●●
●●
●●
●
●
●●
●
●
● ●●
●●
●
● ●
●
●● ●
●
●
●
●
●
●● ●●
●
●
●
●
●
●●●
●●
●
●●
●
●
●
●●
● ●● ●
●●●
●●
●
●●
● ●
●
0 5 10 20
05
1020
X
Y
Timescale, τ3 = 157 to
+++
++
++
++
+++
+++
++
++
+
+++
++
++
++
+
o
o
o
o
o
oo
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
oo
oooo
o
o
o
oo
o
o o
o
o
o
o
o
o

Comparison of timescales
− 1 ln(λ)
Den
sity
0 1000 2000 3000 4000 5000
0.00
000.
0010
0.00
200.
0030
− 1 ln(λ), compared to exponential density of Common Power Adaptive power
− 1 ln(λ)
Den
sity
0 1000 2000 3000 4000 5000
0.00
000.
0010
0.00
200.
0030
Common power− 1 ln(λ) and exponential density

Comparison of timescales
● ●●
●●
●●●●
●
●
●
●
●
●
●●●●
● ●●●
●
●●●●
●●
●
● ●
●
●
●
●●●
●●●
●
●●●
●● ●
●
●
●● ●●●
●
● ●
●●
●●●
●●
●
●●
● ●●●
●●●●●
●●
●●
●
●●●
●
●●●
●● ●●
●
●
●●
●
●●
●
●●
●●●●
●
●●●●
●●
●●
●●●
●● ●
●●● ●
●●
●
●●●
●● ●
● ●●
●
●
●
●
●●●
●
●●
●●●
●
●● ● ●
●●
●
●●
●●● ●●
●
●●
●
●● ●
●
●
●●
●●
●●
●●●
●
●
●
●
●
●
●●● ●● ●●
●
●●●●
●●
●● ●●● ● ●
●
● ● ●●●●
●●●
●●●●●
●●●
●●
●●●
●●
●
●●
●●●
●● ●
●●
●●
●● ●
●●●●
●●
●
●● ●
●●●●● ●
● ●●
●●
●
●
●
●
●●● ●●●● ●
● ●
●
●
●●
●
●
●●● ●●
●
●
●
●●
●● ● ●
●
●
●
●●
●●
● ●
●
●
●●
●●
●
●
●
●●
●
●● ●●
●●
●●
● ●
●●
●●
●● ●●
●●
●●
●●●●
●
●
●●●
●●
●
●●●
●●
●●
●●●
●●●●
●●●
●
●
●
●●●
●
●
●●
●●
●
●
●●● ● ●
●● ●● ●
●●
●
●
●
●
●●
●●
●
●●
●
● ●● ●
●●● ●
●
●●
●
●●
●
●
●●●
●●●
●●
●
● ●●●
●
●●●
●● ●●●
●●
●
●●●
●
●
●●●
●
●●●
●●
●
●
●●
●●
●
●●
●●
●●
●●
●● ●●●
●
●●
●● ●
●●
●
●●
●
●● ●●●
●
●
●
● ●
●
●●
●
●●
●
●●
●
●
●
●
●
●●
●●
●●
●
●●
●
●● ●
●●
●●●
●
●●
●
●●
●●●●
●
●● ●
●●
●●
●●
●
●
● ●● ●
●
●●
●●
●
● ●●●●●
●●●
●●
●
●
●●
●●
●
●●
●
●
● ●●●●
●
●
●● ●●
●
●●●
●
●
●
●●●●●
● ●
●●●●
●
● ●●●
● ●●●
●
●●●
●●●●●
●●●
●●
●
●
●●
●●● ●●
●●●
●●●
●
●● ● ●● ●●●
●
●●
● ●●
●●●
●●
●
●●
●●●●
●●
●
●
● ●●●
●●
● ●● ●
●
●
●
●
● ●● ●●●
●●
●
●
●●●
●●● ●●● ●
●
●
●●
●
●●●
●
●
●●
●
●●●
●
●
●●●
● ●●●
●
●
●
●●●
●●
●●● ●
●
●
●
●●
●●
●
●●● ●
●
●●
●
●
●●
●●●
●
●● ●●
●
●
●
●
●
●
● ●●
●●●●● ●●●
●●
● ●
●●●●●
●●
●
●
●●●●●
●
●●●●
●
●● ●●
●●●
●
●
●
●
●●●●●
●
●
●
●
●●●●
●
●
●
● ●●●
●●
●
●●
●
●
●●●●
●●● ●
●
●●
●●
●
●● ●● ●●●
●
●●
●
● ●●
● ● ●●
●● ●●●
●●●
●
●
●●●●
●● ●●
●
●
●
●● ●
●●
● ●● ●
●
●
●●
●●
●●
●● ●
●●
●
●
●
●●●
●●
● ●
●●● ●●●
●●●
●● ●●●
●●
●
●
● ●
●
●●●
●
●
●●
●●
●
● ●● ●●
●
●
0 1000 2000 3000 4000 5000
010
0020
0030
0040
0050
00
Common power
Ada
ptiv
e po
wer
Scatterplot of timescalescommon versus adaptive power

Regimes for routing
Two timescales:
1. tinfo = −1/ ln(λ2)
2. tnetwork: time for network topology to change.
Routing:
• If tnetwork � tinfo, network essentially static during packetrouting, so build up routing information.
• If tnetwork � tinfo, any info on the network topology will beimmediately obsolete, so no routing strategy.
Is there a sharp threshold? Or even any way to bound thesebehaviors? (What routing protocols work best in which regimes?

Other pressing issues: Sensor networks
• Deployed networks: optimal sensor placement
• Gossip algorithms: spreading shared information quicklythrough local exchanges.



![EPREUVE DE Q.C.M. - Concours Spécial MAE · MAE-06 2 EPREUVE DE Q.C.M. - Concours Spécial MAE QUESTION N° 6 [S] L'hyper excitabilité cardiaque induite par la digoxine est favorisée](https://img.pdfslide.fr/doc/110x75/5b96170c09d3f27f5b8d7261/epreuve-de-qcm-concours-special-mae-06-2-epreuve-de-qcm-concours.jpg)