Embed Size (px)
Citation preview

9782804175559
ISBN : 9782804175559
REDDYMECConc
eptio
n gr
aphi
que
: Prim
o&Pr
imo
Méc
an
iqu
e d
es m
ilie
ux
co
nti
nu
s In
trod
uct
ion
au
x p
rin
cip
es e
t a
pp
lica
tion
sa
J.N. R
eddy
Mécanique des milieux continus
Introduction aux principes et applications
a J.N. Reddy
sciences del’ingénieur
scie
nces
de
l’ing
énie
ur
Mécanique des milieux continus
Introduction auxprincipes et applications
a J . N . R e d d y
sciences del’ingénieur
Vous avez entre vos mains une introduction à la physique des milieux continuset à ses applications dans des domaines aussi variés que le transfert thermique,la mécanique des fluides ou l'élasticité.
Ce livre offre aux étudiants de premier cycle scientifique ou en première annéed'école d'ingénieur un aperçu panoramique et unifié des multiples applications dela mécanique des milieux continus. On peut l’aborder sans une maîtrise préalabledes outils mathématiques nécessaires à une étude approfondie de ce domaine.
L'ouvrage de J.N. Reddy se distingue par sa volonté :• de réduire autant que possible le formalisme mathématique ;• d’insister sur les principes physiques sous-jacents ;•de faire découvrir les notions fondamentales du transfert thermique, de la théorie
de l'élasticité, de la mécanique des fluides, etc. ;•de montrer l'importance des principes de conservation (de l'énergie, etc.) qui
reviennent comme un leitmotiv ;• d’offrir de nombreux exemples variés et détaillés.
L'objectif de l'auteur est que cet ouvrage « prépare les élèves-ingénieurs et lesétudiants en science à des cours plus avancés dans les domaines traditionnelsaussi bien que dans d’autres émergents comme les biotechnologies, les nano-technologies, les systèmes énergétiques et la mécanique numérique. »
Traduction de l’édition américaine
Anna Cuprjak, ancienne élève du Collège de formation de professeurs de français et
de l'Institut d'Études Ibériques et Ibéro-américaines de l'Université de Varsovie, est
traductrice indépendante.
Révision scientifique
Loïc Villain, Docteur en Physique Théorique de l'Université Paris VII, dans le domaine des
objets astrophysiques compacts, est Maître de Conférences à l'Université François Rabelais
de Tours et chercheur au LMPT (Laboratoire de Mathématiques et Physique Théorique).
REDDYMEC_17X24_V2_Mise en page 2 17/01/13 11:02 Page1


Mécanique des milieux continus
Introduction aux principes et applications

Dans la collection « Sciences de l’ingénieur »
ALEXANDER, SADIKU, Analyse des circuits électriques
BEER, JOHNSTON, BENEDETTI, TREMBLAY, Mécanique pour ingénieur. Vol. 1 Statique
BEER, JOHNSTON, COLLET, MAYER, Mécanique pour ingénieur. Vol. 2 Dynamique
BOLES, CENGEL, LACROIX, Thermodynamique. Une approche pragmatique
GHASEM, HENDA, Bilans matière et énergétique pour l’ingénierie chimique. Principes et applications pratiques
WELTNER, WEBER, SCHUSTER, GROSJEAN, Mathématiques pour physiciens et ingénieurs

a J . N . R e d d y
sciences del’ingénieur
Mécanique des milieux continus
Introduction aux principes et applications
Traduction de l’édition américiane par Anna Cuprjak
Révision scientifique de Loïc Villain

© Groupe De Boeck s.a., 2013 Rue des Minimes 39, B-1000 Bruxelles
Pour la traduction et l’adaptation française Tous droits réservés pour tous pays. Il est interdit, sauf accord préalable et écrit de l’éditeur, de reproduire (notamment par photocopie) partiellement ou totalement le présent ouvrage, de le stocker dans une banque de données ou de le communiquer au public, sous quelque forme et de quelque manière que ce soit. Imprimé en Belgique
Dépôt légal : Bibliothèque nationale, Paris : février 2013 Bibliothèque royale de Belgique, Bruxelles : 2013/0074/072 ISBN 978-2-8041-7555-9
Pour toute information sur notre fonds et les nouveautés dans votre domaine de spécialisation, consultez notre site web : www.deboeck.com
Ouvrage original
Principles of continuum mechanics. A Study of Conservation Principles with Applications by J.N. Reddy. Copyright © J.N. Reddy 2010. Cambridge University Press. All Rights Reserved.

ii
“reddyFR” — 2012/11/16 — 18:36 — page v — #1 ii
ii
ii
Même l’esprit le plus brillant, quand il a été éduqué depuis sa plustendre enfance selon certaines superstitions, jamais il ne pourra, de-venu mature, examiner sincèrement, sans passion et en pleine con-science un élément ou une circonstance qui pourrait jeter le doute surla validité de ces superstitions.
Mark Twain
Le fait qu’une opinion est largement tenue ne prouve en rien qu’ellene soit pas complètement absurde. Et même, vu la bêtise de la plupartdes hommes, une opinion largement répandue a plus de chances d’êtresotte que sensée.
Bertrand Russell
Le désir d’approbation et de reconnaissance est sain, mais celui d’êtrereconnu comme étant meilleur, plus fort ou plus intelligent qu’unautre mène facilement à une adaptation psychologique excessivementégoïste qui peut devenir nuisible à l’individu comme à la communauté.
Albert Einstein
v

ii
“reddyFR” — 2012/11/16 — 18:36 — page vi — #2 ii
ii
ii
vi

ii
“reddyFR” — 2012/11/16 — 18:36 — page vii — #3 ii
ii
ii
Table des matières
Avant-propos xi
1 Introduction 11.1 Mécanique des milieux continus . . . . . . . . . . . . . . . . . 11.2 Objectif de l’étude . . . . . . . . . . . . . . . . . . . . . . . . 81.3 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Vecteurs et Tenseurs 112.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Définition d’un vecteur . . . . . . . . . . . . . . . . . . . . . . 112.3 Algèbre des vecteurs . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1 Vecteur unitaire . . . . . . . . . . . . . . . . . . . . . 132.3.2 Vecteur nul . . . . . . . . . . . . . . . . . . . . . . . . 132.3.3 Addition de vecteurs . . . . . . . . . . . . . . . . . . . 142.3.4 Multiplication d’un vecteur par un scalaire . . . . . . 142.3.5 Produit scalaire de vecteurs . . . . . . . . . . . . . . . 162.3.6 Produit vectoriel . . . . . . . . . . . . . . . . . . . . . 172.3.7 Produits triples de vecteurs . . . . . . . . . . . . . . . 202.3.8 Surface plane et vecteur . . . . . . . . . . . . . . . . . 222.3.9 Composantes d’un vecteur . . . . . . . . . . . . . . . . 24
2.4 Notation indicielle et convention de sommation . . . . . . . . 272.4.1 Convention de sommation . . . . . . . . . . . . . . . . 272.4.2 Indice muet . . . . . . . . . . . . . . . . . . . . . . . . 282.4.3 Indice libre . . . . . . . . . . . . . . . . . . . . . . . . 282.4.4 Symboles de Kronecker et de permutation . . . . . . . 292.4.5 Loi de transformation . . . . . . . . . . . . . . . . . . 32
2.5 Théorie des matrices . . . . . . . . . . . . . . . . . . . . . . . 352.5.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . 352.5.2 Addition de matrices et multiplication par un scalaire 362.5.3 Matrice transposée, symétrique et antisymétrique . . . 372.5.4 Multiplication de matrices . . . . . . . . . . . . . . . . 382.5.5 Inverse et déterminant d’une matrice . . . . . . . . . . 41
2.6 Calcul vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . 452.6.1 Opérateur nabla . . . . . . . . . . . . . . . . . . . . . 452.6.2 Divergence et rotationnel d’un vecteur . . . . . . . . . 472.6.3 Coordonnées cylindriques et sphériques . . . . . . . . 492.6.4 Théorèmes du gradient, de Green–Ostrogradski et du
rotationnel . . . . . . . . . . . . . . . . . . . . . . . . 522.7 Tenseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.7.1 Dyades . . . . . . . . . . . . . . . . . . . . . . . . . . 522.7.2 Composantes d’une dyade . . . . . . . . . . . . . . . . 542.7.3 Transformation des composantes d’une dyade . . . . . 56
vii

ii
“reddyFR” — 2012/11/16 — 18:36 — page viii — #4 ii
ii
ii
TABLE DES MATIÈRES
2.7.4 Calcul tensoriel . . . . . . . . . . . . . . . . . . . . . . 562.8 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3 Cinématique d’un milieu continu 633.1 Déformation et configuration . . . . . . . . . . . . . . . . . . 633.2 Déformations conventionnelles ou nominales . . . . . . . . . . 64
3.2.1 Déformation normale . . . . . . . . . . . . . . . . . . . 643.2.2 Déformation de glissement . . . . . . . . . . . . . . . . 65
3.3 Cinématique d’un milieu continu solide . . . . . . . . . . . . . 693.3.1 Configurations d’un milieu continu . . . . . . . . . . . 693.3.2 Descriptions matérielles et spatiales . . . . . . . . . . 703.3.3 Champ de déplacement . . . . . . . . . . . . . . . . . 74
3.4 Analyse des déformations . . . . . . . . . . . . . . . . . . . . 763.4.1 ∗ Tenseur gradient de la transformation . . . . . . . . . 763.4.2 ∗ Divers types de déformations . . . . . . . . . . . . . . 79
3.4.2.1 Dilatation pure . . . . . . . . . . . . . . . . . 793.4.2.2 Extension simple . . . . . . . . . . . . . . . . 803.4.2.3 Cisaillement simple . . . . . . . . . . . . . . 803.4.2.4 Déformation hétérogène . . . . . . . . . . . . 81
3.4.3 Tenseur des déformations de Green–Lagrange . . . . . 813.4.4 Tenseur des déformations infinitésimal . . . . . . . . . 863.4.5 Valeurs principales et plans principaux de déformation 89
3.5 Tenseurs des taux de déformation et tourbillon . . . . . . . . 913.5.1 Tenseur gradient de vitesse . . . . . . . . . . . . . . . 913.5.2 Tenseur des taux de déformation . . . . . . . . . . . . 923.5.3 Tenseur des taux de rotation et vecteur tourbillon . . 92
3.6 Équations de compatibilité . . . . . . . . . . . . . . . . . . . 953.7 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4 Vecteurs contrainte et tenseurs des contraintes 1054.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1054.2 Vecteur contrainte, tenseur des contraintes et formule de Cau-
chy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064.3 Transformation des composantes et contraintes principales . . 115
4.3.1 Transformation des composantes . . . . . . . . . . . . 1154.3.2 Contraintes principales et plans principaux . . . . . . 117
4.4 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
5 Conservation de la masse, de la quantité de mouvement etde l’énergie 1255.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1255.2 Conservation de la masse . . . . . . . . . . . . . . . . . . . . 126
5.2.1 Discussion préliminaire . . . . . . . . . . . . . . . . . 126
viii

ii
“reddyFR” — 2012/11/16 — 18:36 — page ix — #5 ii
ii
ii
TABLE DES MATIÈRES
5.2.2 Conservation de la masse en description eulérienne . . 1275.2.3 Conservation de la masse en description lagrangienne 1325.2.4 Théorème de transport de Reynolds . . . . . . . . . . 134
5.3 Conservation de la quantité de mouvement et du momentcinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1355.3.1 Principe de conservation de la quantité de mouvement 1355.3.2 Principe de conservation du moment cinétique . . . . 152
5.4 Principes de la thermodynamique . . . . . . . . . . . . . . . . 1545.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . 1545.4.2 Conservation de l’énergie pour des écoulements uni-
dimensionnels . . . . . . . . . . . . . . . . . . . . . . . 1545.4.3 Équation de l’énergie pour un milieu continu tridi-
mensionnel . . . . . . . . . . . . . . . . . . . . . . . . 1585.5 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
6 Équations constitutives 1696.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1696.2 Solides élastiques . . . . . . . . . . . . . . . . . . . . . . . . . 170
6.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . 1706.2.2 Loi de Hooke généralisée pour matériaux orthotropes . 1716.2.3 Loi de Hooke généralisée pour matériaux isotropes . . 173
6.3 Équations constitutives de fluides . . . . . . . . . . . . . . . . 1776.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . 1776.3.2 Fluides parfaits . . . . . . . . . . . . . . . . . . . . . . 1776.3.3 Fluides incompressibles visqueux . . . . . . . . . . . . 178
6.4 Transfert thermique . . . . . . . . . . . . . . . . . . . . . . . 1796.4.1 Introduction générale . . . . . . . . . . . . . . . . . . 1796.4.2 Loi de conduction de la chaleur de Fourier . . . . . . . 1796.4.3 Loi du refroidissement de Newton . . . . . . . . . . . 1806.4.4 Loi de Stefan–Boltzmann . . . . . . . . . . . . . . . . 181
6.5 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
7 Applications en transfert thermique, mécanique des fluideset mécanique des solides 1857.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1857.2 Transfert thermique . . . . . . . . . . . . . . . . . . . . . . . 186
7.2.1 Équations d’évolution . . . . . . . . . . . . . . . . . . 1867.2.2 Solutions analytiques du transfert thermique unidi-
mensionnel . . . . . . . . . . . . . . . . . . . . . . . . 1897.2.2.1 Transfert thermique stationnaire dans une
ailette de refroidissement . . . . . . . . . . . 1897.2.2.2 Transfert thermique stationnaire dans une
barre isolée en surface . . . . . . . . . . . . . 1917.2.3 Conduction thermique axisymétrique dans un cylindre 192
ix

ii
“reddyFR” — 2012/11/16 — 18:36 — page x — #6 ii
ii
ii
TABLE DES MATIÈRES
7.2.4 Transfert thermique bidimensionnel . . . . . . . . . . 1947.3 Mécanique des fluides . . . . . . . . . . . . . . . . . . . . . . 196
7.3.1 Remarques préliminaires . . . . . . . . . . . . . . . . . 1967.3.2 Rappel des équations . . . . . . . . . . . . . . . . . . . 1977.3.3 Statique des fluides parfaits . . . . . . . . . . . . . . . 1987.3.4 Écoulement parallèle d’un fluide visqueux . . . . . . . 200
7.3.4.1 Écoulement stationnaire d’un fluide visqueuxincompressible entre deux plaques parallèles 200
7.3.4.2 Écoulement stationnaire d’un fluide visqueuxincompressible à travers un tuyau . . . . . . 201
7.3.5 Processus de diffusion . . . . . . . . . . . . . . . . . . 2047.4 Mécanique des solides . . . . . . . . . . . . . . . . . . . . . . 207
7.4.1 Équations d’évolution . . . . . . . . . . . . . . . . . . 2077.4.2 Analyse de barres . . . . . . . . . . . . . . . . . . . . 2107.4.3 Analyse de poutres . . . . . . . . . . . . . . . . . . . . 214
7.4.3.1 Principe de superposition . . . . . . . . . . . 2227.4.4 Analyse de problèmes d’élasticité plane . . . . . . . . 223
7.4.4.1 Déformation et contrainte planes . . . . . . . 2237.4.4.2 Déformation plane . . . . . . . . . . . . . . . 2237.4.4.3 Contrainte plane . . . . . . . . . . . . . . . . 2257.4.4.4 Méthodes de résolution . . . . . . . . . . . . 2267.4.4.5 Fonction de contrainte d’Airy . . . . . . . . . 230
7.5 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Éléments de correction 245
Références et suggestions de lecture 255
Index 257
x

ii
“reddyFR” — 2012/11/16 — 18:36 — page xi — #7 ii
ii
ii
Avant-propos
On ne peut pas enseigner quelque chose à quelqu’un, on ne peut que l’aider àle découvrir en lui-même.
Galilée
Cet ouvrage est une version simplifiée du livre du même auteur, An Intro-duction to Continuum Mechanics with Applications, publié par CambridgeUniversity Press (New York, 2008), prévu pour servir de manuel aux étu-diants de premier cycle scientifique et d’école d’ingénieur. Puisque la plupartdes technologies modernes ne reposent plus sur une discipline exclusive maissont devenues au contraire pluri-disciplinaires, les étudiants-ingénieurs de-vraient être formés à penser et à travailler dans de telles conditions. Enconséquence, il leur est nécessaire d’appréhender assez tôt les principes dela mécanique (i.e., les lois de la physique appliquées aux sciences et à dessystèmes technologiques) afin d’acquérir une connaissance approfondie desprincipes de base communs à toutes les disciplines et de devenir capables detravailler à l’interface de diverses branches des sciences et technologies. Unpremier cours sur les principes de la mécanique se doit de fournir une intro-duction aux concepts fondamentaux de contrainte et de déformation, ainsiqu’aux principes de conservation, et il doit préparer les élèves-ingénieurs etles étudiants en science à des cours plus avancés dans les domaines tradi-tionnels aussi bien que dans d’autres émergents comme les biotechnologies,les nanotechnologies, les systèmes énergétiques et la mécanique numérique.Les étudiants de premier cycle ayant suivi une telle formation peuvent ainsise lancer ensuite dans des études plus poussées traditionnelles (comme l’aé-rospatial, l’ingénierie civile, électrique ou mécanique ; la physique ; les ma-thématiques appliquées) ou interdisciplinaires (comme la bioingénierie, laphysique appliquée, les nanosciences, l’ingénierie biomoléculaire, etc.).
Il existe peu de livres sur les principes de la mécanique qui s’adressentavant tout aux étudiants de premier cycle d’ingénierie ou de science. Unegrande majorité des livres sur ce sujet sont écrits pour les étudiants dedeuxième cycle ou d’école d’ingénieur et ont tendance à être plus mathéma-tiques et trop avancés pour les étudiants de deuxième ou troisième annéedu premier cycle. Cet ouvrage présente les sujets de la mécanique des maté-riaux, de la mécanique des fluides et du transfert thermique sous un mêmepoint de vue à l’aide des principes de conservation de la mécanique. L’auteurespère que cet ouvrage, qu’il a essayé de garder le plus simple possible, aideraà présenter les concepts principaux de ces trois thèmes sous une structureunifiée.
Avec une brève discussion du concept de milieu continu dans le cha-pitre 1, les notions de vecteurs et de tenseurs sont résumées dans le cha-pitre 2. Puisque les mathématiques sont le langage analytique des sciences
xi

ii
“reddyFR” — 2012/11/16 — 18:36 — page xii — #8 ii
ii
ii
Avant-propos
appliquées et de l’ingénierie, il est nécessaire pour tout étudiant de se fa-miliariser avec les notations et les calculs vectoriels, matriciels et tensorielsqui sont omniprésents dans la description mathématique de phénomènesphysiques. Les lecteurs qui seraient familiers avec les thèmes de ce chapitrepeuvent le survoler ou passer au chapitre suivant. Dans le chapitre 3, onexamine le sujet de la cinématique, qui s’intéresse aux changements géomé-triques indépendamment des forces qui sont cause de la déformation. Ony introduit les grandeurs conventionnelles (nominales) et mathématiquespermettant de mesurer les déformations normales et de cisaillement. Dessystèmes unidimensionnels ainsi que des exemples simples de milieux conti-nus bidimensionnels servent ensuite à illustrer les mesures de déformationset de taux de déformation introduites. Dans le chapitre 4, les concepts devecteur contrainte et de tenseur des contraintes sont définis. C’est à ce pointque les lecteurs rencontrent ces entités qui exigent deux directions pour êtredécrites de manière univoque, à savoir le plan sur lequel elles sont mesuréeset la direction dans laquelle elles agissent. On obtient les lois de transforma-tion des composantes du tenseur des contraintes lors du passage d’une baseorthonormée à une autre et on décrit également les valeurs principales etles plans principaux (i.e., on s’intéresse aux problèmes des valeurs propresassociées au tenseur des contraintes).
Le chapitre 5 est consacré à l’obtention des équations qui gouvernentla mécanique à partir des principes de conservation de la mécanique desmilieux continus (ou des lois de la physique). On présente ainsi les principesde conservation de la masse, de la quantité de mouvement, du momentcinétique et de l’énergie pour des systèmes unidimensionnels ou des systèmestridimensionnels généraux. Les démonstrations sont formulées de manièreinvariante (i.e., indépendante d’un choix de système de coordonnées) à l’aidedes composantes. Les équations qui résultent de ces principes sont celles quirégissent les contraintes et les déformations de corps solides, les contrainteset les taux de déformation de fluides ainsi que le transfert thermique dansdes milieux solides. Ce chapitre forme par conséquent le cœur du cours.Dans le chapitre 6, on s’intéresse aux relations constitutives qui relient lesvariables cinématiques (masse volumique, température, déformation) auxvariables cinétiques (énergie interne, flux thermique, contraintes) pour desmatériaux élastiques, des fluides visqueux et dans le cas de la diffusion dela chaleur dans des solides.
Finalement, le chapitre 7 est consacré à l’application des équations dechamp dérivées dans le chapitre 5 et des modèles constitutifs présentés dansle chapitre 6 à des problèmes de conduction thermique dans des solides,de mécanique des fluides (pour des écoulements non visqueux ainsi quevisqueux incompressibles), de diffusion et de mécanique du solide (déforma-tion de barres ou de poutres et élasticité plane). On aboutit de cette façon àdes problèmes aux limites simples dont on étudie la résolution. Le matérielprésenté dans ce chapitre illustre la formulation analytique de problèmesphysiques à l’aide des équations qui résultent des principes de conservation.
Comme mentionné auparavant, cet ouvrage est une version abrégée pour
xii

ii
“reddyFR” — 2012/11/16 — 18:36 — page xiii — #9 ii
ii
ii
Avant-propos
étudiants de premier cycle et de début d’école d’ingénieur du livre An Intro-duction to Continuum Mechanics (Cambridge University Press, New York,2008). Les sujets abordés sont donc peu développés par rapport à ce qu’il enest dans le manuel pour étudiants de deuxième cycle. L’avantage principald’un cours reposant sur ce livre simplifié est de pouvoir présenter les équa-tions qui gouvernent différents phénomènes physiques d’un point de vueunifié, à savoir à l’aide des principes de conservation (ou de lois physiques),afin que les étudiants des premières années de science appliquée et d’ingénie-rie découvrent de cette manière la structure mathématique et les principesphysiques communs à divers domaines. Les lecteurs souhaitant approfondirles thèmes abordés peuvent consulter le livre sur la mécanique des milieuxcontinus de l’auteur ou les autres titres référencés en fin d’ouvrage.
L’auteur est heureux de reconnaître que ce manuscrit a été testé auprèsdes étudiants du premier cycle du College of Engineering à l’université TexasA&M ainsi que dans le « Engineering Science Programme » de l’universiténationale de Singapour. Les étudiants ont aimé, en général, le contenu etla simplicité avec laquelle les concepts sont introduits et expliqués. Ils ontégalement dit avoir trouvé ce sujet plus difficile que la plupart des thèmesabordés en premier cycle, mais ils l’ont également trouvé utile comme pré-requis aux cours du deuxième cycle d’ingénierie.
L’auteur souhaite remercier les docteurs Vinu et Ginu Unnikrishnanainsi que Madame Feifei Cheng pour leur aide dans la relecture de cemanuscrit au cours de sa préparation et de sa production. Cet ouvragecontient tant d’expressions mathématiques qu’il est presque impossible qu’iln’y ait pas de fautes de frappe ni d’autres types d’erreurs. L’auteur sou-haite remercier par avance celles et ceux qui seraient prêt(e)s à attirer sonattention sur des fautes de frappe et des erreurs à l’adresse é[email protected].
xiii

ii
“reddyFR” — 2012/11/16 — 18:36 — page xiv — #10 ii
ii
ii
Avant-propos
xiv

ii
“reddyFR” — 2012/11/16 — 18:36 — page 1 — #11 ii
ii
ii
Si j’ai appris une chose au coursde ma vie, c’est que toute notrescience, confrontée à la réalité,apparaît primitive et enfantine,et pourtant c’est ce que nouspossédons de plus précieux.
Albert Einstein 1Introduction
1.1 Mécanique des milieux continus
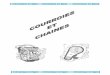
La matière est composée de molécules discrètes, qui elles-mêmes sont for-mées d’atomes. Un atome consiste en des électrons, des protons de chargeélectrique positive et des neutrons. Les électrons forment des liaisons chi-miques. Un exemple d’objet matériel inerte (c’est-à-dire dénué de vie) estun nanotube de carbone (NTC), qui consiste en des molécules de carboneorganisées selon un certain modèle géométrique et en équilibre les unes avecles autres, comme illustré par la figure 1.1.1.
Un autre exemple d’objet matériel est une cellule biologique, qui estl’unité fondamentale de tout organisme vivant. Il existe deux types de cel-lules : les procaryotes et les eucaryotes. Les cellules eucaryotes se trouvent engénéral dans les organismes multicellulaires et ont un noyau, contrairementaux cellules procaryotes. Structurellement, les cellules sont composées d’ungrand nombre de macromolécules ou de longues molécules. Dans une cellule,ces macromolécules consistent elles-mêmes en un grand nombre d’atomes etforment des structures particulières, comme des chromosomes et des mem-branes plasmiques. Il existe quatre types principaux de macromolécules :les glucides, les protéines, les lipides et les acides nucléiques. Pour soulignerla nature hiérarchique des structures formées par les macromolécules dansune cellule, analysons d’abord un chromosome.
Les chromosomes, qui sont les porteurs des traits héréditaires chez unindividu, se trouvent à l’intérieur du noyau de tous les eucaryotes. Chaquechromosome consiste en une seule macromolécule d’un acide nucléique ap-pelé acide désoxyribonucléique (ADN), chacune d’une largeur comprise entre2,2 et 2,4 nanomètres. Ces acides nucléiques sont eux-mêmes des arrange-ments particuliers de monomères appelés mononucléotides, chacun d’unelargeur de l’ordre de 0,3 à 0,33 nanomètre. Les briques qui constituent lesnucléotides sont, quant à elles, un groupement phosphate, une base azotéeet un sucre (glucide) organisés de manière spécifique. La nature hiérarchiqued’un chromosome est représentée sur la figure 1.1.2(a). Tout comme les chro-
1

ii
“reddyFR” — 2012/11/16 — 18:36 — page 2 — #12 ii
ii
ii
Chapitre 1 : Introduction
(a) (b)
FEUILLET DE GRAPHÈNE ENROULÉ EN TUBE
(m,m) / CHAISE
(n,0) / ZIG ZAG
CHIRAL
(m,n)
Figure 1.1.1 : Nanotubes de carbone (NTC) de chiralités diverses.
mosomes, toutes les structures présentes dans une cellule sont formées d’unecombinaison de macromolécules.
À l’échelle macroscopique, les cellules eucaryotes peuvent être diviséesen trois régions distinctes : un noyau, une membrane plasmique et un cyto-plasme où se trouvent diverses autres structures, comme on peut le voir surla figure 1.1.2(b). Le noyau, constitué des chromosomes et d’autres struc-tures protéïques, est le centre de contrôle de la cellule à laquelle il dicte sonfonctionnement. La membrane plasmique enveloppe la cellule et sépare lematériel extérieur de l’intérieur de la cellule. Elle est responsable du main-tien de l’intégrité de la cellule et agit également comme un ensemble decanaux pour le transport de molécules vers la cellule ou hors de celle-ci. Lamembrane de la cellule est faite d’une bicouche de phospholipides (macromo-lécules) dans laquelle sont incrustées des protéines transmembranaires. Larégion entre la membrane de la cellule et le noyau se nomme le cytoplasme,qui est constitué d’un fluide semblable à un gel appelé le cytosol, d’uncytosquelette et d’autres macromolécules. Le cytosquelette forme le cadrebiomécanique de la cellule et consiste en trois structures de macromoléculesprotéiques primaires : les filaments d’actine, les filaments intermédiaires etles microtubules. La croissance, le développement et la reproduction cellu-laires ont lieu dans le cytoplasme.
Les interactions entre les différents constituants de la cellule assurentsa cohésion structurelle. L’analyse de ces interactions afin de déterminercomment la cellule répond à un stimulus externe (mécanique, électriqueou chimique) se fait méthodiquement à l’aide de la mécanique cellulaire.
2

ii
“reddyFR” — 2012/11/16 — 18:36 — page 3 — #13 ii
ii
ii
1.1 Mécanique des milieux continus
Phosphate
Base azotée
ADN (2,2–2,4 nm)
(a)
Nucléotides (0,3–0,33 nm)
Microtubule
Membrane cellulaire
Cellule animale
Micro!laments
(b)
(c)
Membrane cellulaire
Cytoplasme
(contenu
de la cellule)
Filaments d’actine
Filaments intermédiairesMicrotubule
Noyau
Organites
Réseau de !laments d’actine
Cytosol – composant hétérogène du #uide
Cytosquelette – réseau de !laments interne à la cellule
Membrane
plasmique
Réticulum
endoplasmique
Ribosomes
Micro�laments
et �laments inter-
médiaires
Actine F
(Polymère)
Actine G
(Monomère)
Microtubule
glyco-
protéine
(extérieur de la cellule)
(cytoplasme)
protéine membranaire
cholestérol
phospho-
lipide
membrane
plasmique
Mitochondrie
Figure 1.1.2 : (a) Nature hiérarchique d’un chromosome ; (b) Structure globaled’une cellule ; (c) Structure macromoléculaire d’une cellule.
3

ii
“reddyFR” — 2012/11/16 — 18:36 — page 4 — #14 ii
ii
ii
Chapitre 1 : Introduction
Figure 1.1.3 : Endommagement progressif d’une artère en raison du dépôt departicules sur la paroi artérielle.
L’organisation structurelle des macromolécules primaires d’une cellule estreprésentée sur la figure 1.1.2(c).
L’étude de la matière au niveau moléculaire ou atomique est très utilepour la compréhension de nombreux phénomènes, mais les études à ceséchelles ne sont pas utiles pour résoudre des problèmes communs d’ingénie-rie. La compréhension obtenue au niveau moléculaire doit être rapportée àl’échelle macroscopique (i.e., à une échelle visible à l’œil nu) pour permettrel’étude de son comportement. L’élément central pour cette étude est l’hy-pothèse selon laquelle la nature discrète de la matière peut être négligée,à condition que les échelles de longueur en jeu soient grandes par rapportà celle de la structure moléculaire discrète. En conséquence, la matière, àdes échelles suffisamment grandes, peut être traitée comme un continuumdans lequel toutes les quantités physiques d’intérêt, notamment la massevolumique, sont continûment différentiables.
L’objet de la mécanique est l’étude du mouvement et des forces dans lessolides, les liquides ou les gaz et celle des déformations ou des flux de ces ma-tériaux. Dans ce cadre, on suppose, pour simplifier la description analytique,que la matière est distribuée continûment, sans lacunes ou espaces vides (i.e.,on ne tient pas compte de la structure moléculaire de la matière). Une tellehypothétique distribution continue de matière est nommée un continuum oumilieu continu. Concrètement, dans un milieu continu toutes les quantitéscomme la masse volumique, les déplacements, les vitesses, les contraintes,etc., varient continûment si bien que leurs dérivées spatiales sont définies etcontinues. L’hypothèse de continuité nous permet de réduire tout volume àun point, tout comme lorsque l’on passe à la limite pour définir une déri-vée, ce qui permet de donner une valeur à ces grandeurs en tout point. Parexemple, la masse volumique (masse par unité de volume) d’un matériauen un point est définie comme le rapport entre la masse ∆m du matériaucontenue dans un petit volume ∆V entourant le point dans la limite où∆V est de l’ordre de ϵ3, avec ϵ qui est une distance petite par rapport à la
4

ii
“reddyFR” — 2012/11/16 — 18:36 — page 5 — #15 ii
ii
ii
1.1 Mécanique des milieux continus
L
b
h
Figure 1.1.4 : Plongeoir dont l’extrémité gauche est fixe et dont la droite estlibre.
distance moyenne entre les molécules,
ρ = lim∆V →ϵ3
∆m∆V
, (1.1.1)
où l’on prend en fait la limite ϵ→ 0. L’étude mathématique de la mécaniqued’un tel milieu continu idéalisé s’appelle la mécanique des milieux continus.
Les ingénieurs et les scientifiques étudient les milieux continus pour com-prendre leur comportement dans les « conditions de fonctionnement » pourque les systèmes physiques conçus puissent fonctionner correctement et êtreproduits à un coût raisonnable. Par exemple, pour réparer ou remplacer uneartère humaine détériorée, il faut comprendre la fonction de l’artère originaleet les conditions qui ont mené à son endommagement. Une artère transportele sang du cœur vers différentes parties du corps. Des conditions telles qu’unepression artérielle élevée ou une augmentation du taux de cholestérol san-guin peuvent conduire au dépôt de particules sur la paroi artérielle, commele montre la figure 1.1.3. Avec le temps, l’accumulation de ces particulessur la paroi compliquent et restreint la circulation sanguine, menant à desmaladies cardiovasculaires. Un remède possible contre ces maladies est deréparer ou de remplacer la portion endommagée de l’artère, ce qui nécessiteégalement de comprendre la déformation et les contraintes provoquées dansla paroi artérielle par le flux sanguin. Cette compréhension permet ensuitede concevoir une prothèse vasculaire (i.e., une artère artificielle).
Les principaux objectifs de cet ouvrage sont (1) l’étude des lois de conser-vation de la mécanique des milieux continus et l’obtention des équations quidécrivent le mouvement et le comportement mécanique des matériaux, et(2) l’application de ces équations à des problèmes simples associés à desécoulements fluides, à la conduction thermique et à la déformation de corpssolides. Même si le premier de ces objectifs est important en soi, il est néces-saire de savoir mettre la description sous la forme d’équations pour acquérirune compréhension quantitative du comportement d’un système complexe.Cette compréhension quantitative est utile pour concevoir et produire de
5

ii
“reddyFR” — 2012/11/16 — 18:36 — page 6 — #16 ii
ii
ii
Chapitre 1 : Introduction
meilleurs produits. Des exemples typiques de problèmes d’ingénierie suffi-samment simples pour être traités dans ce cours sont décrits ci-dessous. Àce stade, le lecteur est invité à se contenter d’une compréhension intuitivedes concepts en jeu.
Problème 1 (Structure mécanique)
On souhaite concevoir un plongeoir permettant à un nageur de gagnerassez de vitesse pour des exercices de natation. Le plongeoir a une extrémitéfixe et une autre libre (voir la figure 1.1.4). La planche est initialement droiteet horizontale, de longueur L et de section transversale uniforme A = bh.
Le processus de conception consiste à sélectionner un matériau de mo-dule de Young E et de dimensions transverses b et h tels que le plongeoirpuisse supporter le poids P du nageur. Les critères de conception sont queles contraintes développées n’excèdent pas la contrainte maximale admis-sible et que le déplacement de l’extrémité libre n’excède pas une valeur pré-spécifiée δ. La conception préliminaire de tels systèmes repose en général surles équations de la mécanique des matériaux. La conception finale impliquel’utilisation d’équations plus sophistiquées, comme les équations de l’élasti-cité tridimensionnelles. Les équations de la théorie élémentaire des poutrespeuvent être utilisées pour trouver une relation entre le déplacement trans-versal (la flèche) δ de l’extrémité libre en fonction de la longueur L, desdimensions de la section transverse b et h, du module de Young E et dupoids P :
δ = 4PL3
Ebh3 . (1.1.2)
Étant données la flèche admissible δ et la charge P (le poids maximal pos-sible d’un nageur), on peut sélectionner le matériel (et donc le module deYoung E) ainsi que les dimensions L, b et h, qui sont également contraintespar les tailles usuellement produites par les fabricants. En plus du critèresur la flèche, il faut aussi vérifier que dans le plongeoir ne se développentpas des contraintes qui excèdent les contraintes admissibles des matériauxsélectionnés. L’analyse des équations pertinentes fournit au concepteur desalternatives pour sélectionner le matériel et les dimensions du plongeoir afind’obtenir une structure économique mais au fonctionnement fiable.
Problème 2 (Écoulement de fluides)
On souhaite mesurer la viscosité µ d’un lubrifiant utilisé dans des ma-chines tournantes pour éviter l’endommagement des parties en contact. Laviscosité, tout comme le module de Young des solides, est une propriété ma-térielle qui est utile dans le calcul de contraintes de cisaillement développéesentre un fluide et un corps solide.
Un tube capillaire est utilisé pour déterminer la viscosité d’un fluide viala formule
µ = πd4
128LP1 − P2
Q, (1.1.3)
6

ii
“reddyFR” — 2012/11/16 — 18:36 — page 7 — #17 ii
ii
ii
1.1 Mécanique des milieux continus
Diamètre interne d
1P
2Px
r
)(rvx
L
Figure 1.1.5 : Mesure de la viscosité d’un fluide à l’aide d’un tube capillaire.
où d est le diamètre interne du tube capillaire, L est sa longueur, P1 et P2sont les pressions aux deux extrémités du tube (l’huile s’écoule d’un bout àl’autre, voir la figure 1.1.5), et Q est le débit volumique avec lequel l’huilesort du tube. Comme nous le verrons par la suite, l’équation (1.1.3) s’obtientà l’aide des principes de la mécanique des milieux continus.
Problème 3 (Transfert thermique dans des solides)
On souhaite déterminer la perte de chaleur à travers la paroi d’un four-neau. La paroi consiste typiquement en des couches de briques, de mortieret de parpaings (voir la figure 1.1.6). Chacun de ces matériaux contribuentdifféremment à la résistance thermique. La loi de la conductivité thermiquede Fourier,
q = −kdTdx, (1.1.4)
fournit une relation entre la densité de flux thermique q (le flux thermiquepar unité de surface) et le gradient de la température T . Ici k désigne laconductivité thermique du matériel, 1/k étant sa résistance thermique. Lesigne négatif dans l’équation (1.1.4) indique que la chaleur passe de la ré-gion de haute température vers celle de basse température. En utilisant leséquations de la mécanique des milieux continus, nous pouvons déterminerla perte d’énergie thermique quand les températures à l’intérieur et à l’ex-térieur du bâtiment sont connues. Un architecte peut sélectionner les maté-riaux ainsi que l’épaisseur des différents composants des murs pour réduirela perte de chaleur en assurant en même temps la résistance structurellenécessaire, ce qui est l’un des aspects de l’analyse des structures.
Les trois exemples précédents illustrent la nécessité d’étudier la réponsede matériaux à l’influence de facteurs externes. La réponse d’un matérielest déterminée par les lois de la physique et le comportement constitutifdu matériel. Cet ouvrage a pour objectif de décrire les principes physiqueset d’obtenir les équations qui déterminent la contrainte et la déformationde matériaux continus et ensuite de résoudre quelques problèmes simplesissus de différentes branches de l’ingénierie pour illustrer l’application desprincipes décrits et des équations obtenues.
7

ii
“reddyFR” — 2012/11/16 — 18:36 — page 8 — #18 ii
ii
ii
Chapitre 1 : Introduction
Four
Coupe
transversale
du mur
x
Figure 1.1.6 : Transfert thermique à travers la paroi composite d’un fourneau.
1.2 Objectif de l’étude
L’objectif principal de cet ouvrage, comme cela a déjà été mentionné, estdouble : (1) utiliser les principes physiques pour dériver les équations quidéterminent le mouvement et la réponse thermomécanique de matériauxet de systèmes, puis (2) appliquer ces équations à l’étude de problèmesspécifiques d’ingénierie et de science appliquée (élasticité linéarisée, trans-fert thermique, mécanique des fluides, etc.). Les équations qui gouvernentl’étude des déformations et des contraintes d’un matériel continu ne sontautres qu’une représentation analytique des lois globales de conservationde la masse, de la quantité de mouvement et de l’énergie, ainsi que de laréponse constitutive des milieux continus. Elles sont applicables à tous lesmatériaux qui peuvent être décrits comme un milieu continu. Adapter etrésoudre ces équations pour des problèmes particuliers constitue le corps del’analyse et de la conception d’ingénierie.
L’étude du mouvement et de la déformation d’un milieu continu (oud’un « corps » qui consiste en un matériel distribué continûment) peutgénéralement être décomposée en quatre catégories fondamentales :
(1) la cinématique ;(2) la dynamique (conservation de la quantité de mouvement et du mo-
ment cinétique) ;(3) la thermodynamique (premier et deuxième principes) ;(4) les équations constitutives.
La cinématique est l’étude des changements géométriques ou des déforma-tions d’un milieu continu, indépendamment des forces qui en sont respon-sables. La dynamique est l’étude de l’équilibre statique ou dynamique deforces et de moments qui agissent sur un milieu continu, à l’aide des prin-cipes de conservation de la quantité de mouvement et du moment cinétique.Cette étude mène aux équations du mouvement ainsi qu’aux symétries dutenseur des contraintes en l’absence de couples volumiques. Les principesde la thermodynamique portent sur la conservation de l’énergie et sur lesrelations entre la chaleur, le travail mécanique et les propriétés thermody-namiques du milieu continu. Les équations constitutives décrivent le com-portement thermomécanique du matériel formant le milieu continu et re-
8

ii
“reddyFR” — 2012/11/16 — 18:36 — page 9 — #19 ii
ii
ii
1.3 Résumé
lient les variables dépendantes introduites dans la description dynamiqueà celles introduites dans les descriptions cinématique et thermodynamique.Le tableau 1.2.1 fournit un bref résumé des relations entre les principes phy-siques, les équations associées et les grandeurs physiques impliquées danscelles-ci. Aux équations issues des principes physiques, il faut ajouter desconditions (imposées aux) limites des systèmes (et des conditions initiales sile phénomène dépend du temps) pour compléter la description analytique.
1.3 Résumé
Dans ce chapitre, le concept de milieu continu a été introduit en rapportavec les objectifs principaux de ce livre, à savoir, utiliser les principes dela mécanique pour dériver les équations qui gouvernent un milieu continuet présenter leur application à l’étude de problèmes qui surviennent dansl’ingénierie. L’étude des principes de la mécanique est généralement diviséeen quatre thèmes, résumés dans le tableau 1.2.1, qui sont abordés dans leschapitres 3 à 6, respectivement. La formulation mathématique des équationsqui gouvernent un milieu continu (i.e., le développement d’un modèle ma-thématique du phénomène physique) exige nécessairement l’utilisation devecteurs, de matrices et de tenseurs, des outils mathématiques qui facilitentla formulation analytique des lois de la nature. Par conséquent, il est utilede commencer par acquérir une certaine connaissance pratique de ces objetsmathématiques, ce à quoi est consacré le chapitre 2.
Beaucoup des concepts présentés ici sont identiques à ceux introduitssous toute vraisemblance dans des cours de premier cycle sur la mécaniquedes matériaux, le transfert thermique, la mécanique des fluides et la sciencedes matériaux. Ce cours replace ces sujets dans un même cadre mathé-matique et il peut ainsi exiger la connaissance d’outils mathématiques etde concepts que le lecteur n’aura pas nécessairement étudiés auparavant.Les lecteurs doivent donc être motivés et prêts à apprendre les nouveauxconcepts mathématiques introduits ici, puisque les mathématiques sont lalangue des ingénieurs. Ce sujet sert également d’introduction à de nombreuxcours de second cycle en école d’ingénieurs et en physique appliquée.
Même si cet ouvrage forme une introduction autonome aux principesde la mécanique des milieux continus, il existe plusieurs livres qui peuventpermettre d’approfondir ce sujet. Par exemple, le manuel d’un niveau desecond cycle du même auteur, An Introduction to Continuum Mechanicswith Applications (Cambridge University Press, New York, 2008), complètecelui-ci. Les lecteurs intéressés peuvent consulter d’autres titres listés dansla section « Références » à la fin de cet ouvrage.
Quand un scientifique éminent mais âgé déclare que quelque chose est possible,il a presque certainement raison. Quand il déclare que quelque chose est impossible,il a très probablement tort.
Arthur C. Clarke
9

ii
“reddyFR” — 2012/11/16 — 18:36 — page 10 — #20 ii
ii
ii
Chapitre 1 : Introduction
Tableau 1.2.1 : Les quatre principaux thèmes de la mécanique des milieux conti-nus, avec les principes physiques associés, les équations qui en résultent ainsi queles variables impliquées.
Sujet Principephysique
Équationsassociées
Variables impliquées
1.Cinématique Modificationsgéométriques
Relationdéplacement–déformation
Déplacement etdéformation
Relationvitesse–vitesse de
déformation
Vitesse et vitesse dedéformation
2. Dynamique Conservationde la quantitéde mouvement
Équations dumouvement
Contraintes, vitesses etforces
Conservationdu momentcinétique
Symétries dutenseur descontraintes
Contraintes
3. Thermo-dynamique
Premierprincipe
Équation del’énergie
Température, fluxthermique, contraintes,
source thermique etvitesses
Deuxièmeprincipe
Inégalité deClausius–Duhem
Température, fluxthermique et entropie
4. Équationsconstitutives(exemples)
Axiomesconstitutifs
Loi de Hooke Contraintes,déformations, flux
thermique ettempérature
Loi des fluidesnewtoniens
Contraintes, pression etvitesses
Loi de Fourier Flux thermique ettempérature
Équations d’état Masse volumique,pression et température
5. Conditionslimites
Tous lesprécédents
Relations entrevariables
cinématiques etdynamiques
Toutes les précédentes
10

ii
“reddyFR” — 2012/11/16 — 18:36 — page 11 — #21 ii
ii
ii
Aucune grande découverte n’ajamais été faite sans conjectureaudacieuse.
Isaac Newton 2Vecteurs et Tenseurs
2.1 Motivation
Afin d’obtenir les équations qui gouvernent un milieu continu, on cherchedes relations entre les diverses quantités qui décrivent son comportement parl’intermédiaire de lois physiques, comme les lois de Newton. Pour exprimerune loi de la nature, on introduit souvent un système de coordonnées dansun référentiel déterminé. La forme mathématique de la loi dépend alorsdu système de coordonnées choisi et elle peut paraître différente dans unautre système de coordonnées. Néanmoins, les lois physiques devraient êtreindépendantes du choix de coordonnées et l’on peut donc essayer de les re-présenter d’une façon qui ne dépende pas du système choisi 1. Un moyen dele faire est fourni par les objets appelés vecteurs et tenseurs. Quand la nota-tion vectorielle et tensorielle est utilisée, il n’est pas nécessaire d’introduireun système de coordonnées. En conséquence, l’utilisation de cette notationpour formuler les lois physiques les laisse invariantes et l’on peut ensuite lesexprimer dans n’importe quel système de coordonnées. En plus de rendrel’analyse plus simple et plus souple, l’étude de phénomènes physiques à l’aidede vecteurs et de tenseurs peut mener à une compréhension plus profondedu problème. Ce chapitre est consacré à l’algèbre et aux règles de calcul fai-sant intervenir les vecteurs et tenseurs physiques, qui sont nécessaires dansla suite de cet ouvrage.
2.2 Définition d’un vecteur
Les quantités rencontrées dans la description analytique de phénomènesphysiques peuvent être classifiées en deux groupes selon l’information né-cessaire pour les décrire complètement :
1. Pour résoudre les équations finales qui résultent de la loi physique on retournecependant toujours dans un système de coordonnées particulier.
11

ii
“reddyFR” — 2012/11/16 — 18:36 — page 12 — #22 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
.
Origine du vecteur
êA A
êA
A=
.Norme (longueur)
du vecteur A
Figure 2.2.1 : Représentation géométrique d’un vecteur de l’espace.
Scalaires Non-scalairesMasse ForceTempérature MomentTemps ContrainteVolume AccélérationLongueur Déplacement
Les quantités scalaires sont décrites par un seul nombre. Les quantitésnon-scalaires ne sont pas uniquement décrites par une amplitude, mais aussipar une information supplémentaire, comme une direction. Les quantitésnon-scalaires qui obéissent à certaines règles (comme la règle d’addition duparallélogramme) s’appellent des vecteurs. Toutes les quantités non-scalairesne sont pas des vecteurs, à moins qu’elles suivent certaines règles qui serontexaminées par la suite.
Un vecteur physique est souvent représenté comme un segment droitorienté dont une extrémité a la forme d’une flèche, comme sur la figure 2.2.1.La longueur du segment indique la norme du vecteur et la flèche sa di-rection. Dans un texte manuscrit ou dactylographié, une notation usuelleconsiste à mettre une flèche au-dessus de la lettre qui indique le vecteur,par exemple A. Dans un texte imprimé, la lettre utilisée pour le vecteur esthabituellement représentée par une lettre en caractère gras, A, et ça serale cas dans la suite de cet ouvrage. La norme du vecteur A est alors notée|A|, ∥A∥, ou A. La norme d’un vecteur est un scalaire.
2.3 Algèbre des vecteurs
Dans cette section, nous décrivons les différentes règles du calcul vectorielet nous les interprétons physiquement. Pour commencer, nous introduisonsles notions de vecteur unitaire et de vecteur nul.
12

ii
“reddyFR” — 2012/11/16 — 18:36 — page 13 — #23 ii
ii
ii
2.3 Algèbre des vecteurs
+A
B
=
B
A
B + A
B
A
A + B
=
B
A
B + AA
B
(a) (b)
Figure 2.3.1 : (a) Addition de vecteurs ; (b) Loi du parallélogramme.
2.3.1 Vecteur unitaire
Un vecteur de longueur égale à l’unité s’appelle un vecteur unitaire. Levecteur unitaire colinéaire à A peut être défini comme suit :
eA = AA. (2.3.1)
Nous pouvons donc écrire
A = A eA . (2.3.2)
Ainsi, chaque vecteur peut être représenté comme le produit de sa normeet d’un vecteur unitaire. Un vecteur unitaire est utilisé pour indiquer unedirection. Il n’a aucune dimension physique. On note un vecteur unitairepar un « chapeau » (accent circonflexe) au-dessus de la lettre en caractèregras, e.
2.3.2 Vecteur nul
Un vecteur de norme nulle s’appelle un vecteur nul. Tous les vecteursnuls sont considérés comme égaux les uns aux autres indépendamment deleur direction. Notons qu’un zéro écrit normalement, 0, est un scalaire alorsqu’un zéro en caractère gras, 0, est le vecteur nul.
13

ii
“reddyFR” — 2012/11/16 — 18:36 — page 14 — #24 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
2.3.3 Addition de vecteursSi A, B et C sont trois vecteurs quelconques, il existe alors un vecteur
A+B, appelé la somme de A et B, tel que l’on ait les propriétés suivantes :
(1) A + B = B + A (propriété de commutativité).(2) (A + B) + C = A + (B + C) (propriété d’associativité).(3) Il existe un unique vecteur, 0, indépendant de A, tel que
A + 0 = A (existence du vecteur nul). (2.3.3)(4) Pour tout vecteur A, il existe un unique vecteur −A, qui dépend de
A, tel que A+(-A)=0 (existence du vecteur opposé).
L’addition de deux vecteurs est représentée sur la figure 2.3.1(a). Remar-quons que la propriété de commutativité est essentielle pour qu’une quantiténon-scalaire soit qualifiée de vectorielle. La combinaison des deux schémas dela figure 2.3.1(a) donne le parallélogramme représenté sur la figure 2.3.1(b)et caractérise la commutativité. Ainsi, nous dirons que les vecteurs s’ad-ditionnent selon la loi du parallélogramme. Le vecteur opposé −A possèdela même norme que A mais a un sens opposé. La soustraction de vecteurss’effectue selon le même principe. Pour former la différence A − B, nousécrirons
A−B = A + (−B) (2.3.4)et la soustraction se réduit à une addition.
Comme exemple de quantité non-scalaire qui possède une norme et unedirection mais qui n’obéit pas à la règle de commutativité, considérons unerotation d’angle fini. À cette rotation sont associées une amplitude θ et unedirection privilégiée qui est celle dans laquelle une vis au pas hélicoïdal droitavance quand on la tourne dans la direction de rotation, comme indiqué surla figure 2.3.2(a). Considérons à présent deux rotations différentes d’un blocrectangulaire, opérées dans un certain ordre. La première rotation se faitautour de l’axe z d’un angle θz = +90◦, et elle est suivie par la rotationd’angle θy = −90◦ autour de l’axe y. Cette séquence de rotations conduit à laposition finale indiquée sur la figure 2.3.2(b). Nous pouvons représenter cettepaire de rotations par R1 + R2, comme sur la figure 2.3.2(c). En inversantl’ordre des rotations, c’est-à-dire en faisant d’abord celle d’angle θy puiscelle d’angle θz, on obtient R2 + R1, dont le résultat ne coïncide pas aveccelui de R1 + R2. C’est la raison pour laquelle une rotation n’est pas unvecteur, même si elle a une direction et une amplitude.
2.3.4 Multiplication d’un vecteur par un scalaireSoient A et B des vecteurs et α et β des nombres réels (scalaires). Pour
tout vecteur A et tout nombre réel α, il existe un unique vecteur αA telque :
(1) α(βA) = (αβ)A (propriété d’associativité).
14

ii
“reddyFR” — 2012/11/16 — 18:36 — page 15 — #25 ii
ii
ii
2.3 Algèbre des vecteurs
R = θ n
A
AA
A
Rotation 1
+90° autour de l’axe z
A
x
yz
Rotation 2
-90° autour de l’axe y
Rotation 1
-90° autour de l’axe y
A
Rotation 2
+90° autour de l’axe zA
Position finale
Position finale
A
Définition de la direction
(pouce / flèche double)y
x^y
x
(a)
(b)
(c)
^
Figure 2.3.2 : (a) Sens de rotation privilégié ; (b) Rotation θz suivie par larotation θy ; (c) Rotation θy suivie par la rotation θz.
(2) (α+ β)A = αA + βA (distributivité pour l’addition scalaire).(3) α(A + B) = αA + αB (distributivité pour l’addition vectorielle).(4) 1 ·A = A · 1 = A, 0 ·A = 0. (2.3.5)
La figure 2.3.3 représente un vecteur A et ses multiples αA pour α > 1 et0 < α < 1.
Deux vecteurs A et B sont égaux si leurs normes sont égales, |A| = |B|,et si leurs directions le sont aussi. En conséquence, un vecteur n’est paschangé s’il est déplacé parallèlement à lui-même. Cela veut dire que la po-sition d’un vecteur dans l’espace, autrement dit le point à partir duquel lesegment est tracé (qui est aussi la position de l’extrémité sans flèche), peutêtre choisie arbitrairement. Cependant, dans certaines applications, la vé-ritable position d’un vecteur peut être importante, par exemple, s’il s’agitd’un couple ou d’une force agissant sur un corps. Un vecteur associé à un
15

ii
“reddyFR” — 2012/11/16 — 18:36 — page 16 — #26 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
A αA (α > 1)
αA (α < 1)
Figure 2.3.3 : Vecteur A quelconque et résultat de sa multiplication par un sca-laire.
point précis est nommé un vecteur lié ou un pointeur.Deux vecteurs A et B sont dits linéairement dépendants s’ils sont mul-
tiples scalaires l’un de l’autre, c’est-à-dire s’il existe des scalaires non-nulsc1 et c2, tels que c1A + c2B = 0. Si deux vecteurs sont linéairement dé-pendants, alors ils sont colinéaires. Si trois vecteurs A, B et C sont linéai-rement dépendants, alors ils sont coplanaires. Un ensemble de n vecteurs{A1,A2, . . . ,An} est dit linéairement dépendant s’il existe un ensemble den nombres c1, c2, . . . , cn tels que c1A1 + c2A2 + · · · + cnAn = 0, où tousles nombres ne sont pas nuls. Si cette expression ne peut pas être satisfaite,c’est-à-dire si tous les ci sont nuls, alors les vecteurs {A1,A2, . . . ,An} sontlinéairement indépendants.
2.3.5 Produit scalaire de vecteursQuand une force constante F agit sur une masse ponctuelle et la déplace
d’un vecteur déplacement d, comme représenté sur la figure 2.3.4(a), letravail fait par le vecteur force est défini par la projection de la force dans ladirection du déplacement [voir la figure 2.3.4(b)], multipliée par l’amplitudedu déplacement. Une telle opération peut être définie pour tout couple devecteurs. Comme le résultat du produit est un scalaire, on le nomme leproduit scalaire. On le note F · d ≡ (F,d), et il est défini par
F · d ≡ (F,d) = Fd cos θ, 0 ≤ θ ≤ π. (2.3.6)
Le produit scalaire est parfois aussi nommé produit interne.Quelques résultats simples découlent de la définition donnée par l’équa-
tion (2.3.6) :
(1) Puisque A ·B = B ·A, le produit scalaire est commutatif.(2) Si les vecteurs A et B sont perpendiculaires l’un à l’autre, alors
A ·B = AB cos(π/2) = 0. Inversement, si A ·B = 0, alors soit Aou B est le vecteur nul, soit A est perpendiculaire, ou orthogonal, àB.
(3) Si deux vecteurs A et B sont parallèles et dans la même direction,alors A ·B = AB cos 0 = AB, parce que cos 0 = 1. Ainsi, le produitscalaire d’un vecteur avec lui-même est égal au carré de sa norme :
A ·A = AA = A2. (2.3.7)
16

ii
“reddyFR” — 2012/11/16 — 18:36 — page 17 — #27 ii
ii
ii
2.3 Algèbre des vecteurs
F
θ
θ
d
Projection du vecteur Fsur le vecteur d
d
F
(a)
(b)
Figure 2.3.4 : (a) Représentation du travail effectué ; (b) Projection d’un vecteur.
(4) La projection orthogonale d’un vecteur A le long d’une direction quel-conque e est donnée par (A · e) e.
(5) Le produit scalaire est distributif :
A · (B + C) = (A ·B) + (A ·C). (2.3.8)
2.3.6 Produit vectorielExaminons le concept de moment dû à une force. Soit le moment par
rapport à un point O d’une force F agissant au point P , comme représentésur la figure 2.3.5(a).
Par définition, la norme du moment est donnée par
M = Fℓ, F = |F|, (2.3.9)
où ℓ est la distance perpendiculaire du point O à la force F (appelée lebras de levier). Si r désigne le vecteur OP et θ l’angle entre r et F, commereprésenté sur la figure 2.3.5(a), tel que 0 ≤ θ ≤ π, on a ℓ = r sin θ, et ainsi
M = Fr sin θ. (2.3.10)
P
F
O
+
r
O r
F
r F
θθ
∧
ℓ
(a) (b)
Figure 2.3.5 : (a) Représentation du moment d’une force ; (b) Direction de ro-tation.
17

ii
“reddyFR” — 2012/11/16 — 18:36 — page 18 — #28 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
r
F
êM
M
θ
Figure 2.3.6 : Axe de rotation.
Une direction peut maintenant être assignée au moment. En traçant lesvecteurs F et r depuis une origine commune O, on remarque que la rotationdue à F a tendance à amener r vers F, comme on peut l’observer sur lafigure 2.3.5(b). Choisissons à présent un axe de rotation perpendiculaire auplan formé par F et r, puis, le long de cet axe de rotation, une directionprivilégiée qui correspond à celle dans laquelle une vis droite avanceraitquand elle tourne dans la direction de rotation associée au moment (voir lafigure 2.3.6). Le long de cet axe de rotation, traçons un vecteur unitaire eM
qui représente par convention la direction du moment M. On a alors
M = M eM = Fr sin θ eM (2.3.11)= r ∧ F. (2.3.12)
Selon cette expression, M peut être considéré comme le résultat d’une opé-ration particulière entre les deux vecteurs F et r. Il s’agit du principe grâceauquel on peut définir un produit entre deux vecteurs quelconques. Puisquele résultat de ce produit est un vecteur, on le nomme produit vectoriel.
Le produit de deux vecteurs A et B est un vecteur C dont la norme estégale au produit des normes des vecteurs A et B multiplié par le sinus del’angle entre ces vecteurs et tel que 0 ≤ θ ≤ π. La direction du vecteur Cest précisée par la condition selon laquelle C est perpendiculaire au plandes vecteurs A et B, et pointe dans la direction dans laquelle une vis droiteavance quand elle tourne dans le sens qui rapproche A de B, comme repré-senté sur la figure 2.3.7.
Le produit vectoriel est souvent noté
C = A ∧B = AB sin(A,B) e = AB sin θ e, (2.3.13)
A ∧ B= - B∧A B∧A
A ∧ B
A
B
A
B
êC=A ∧BA sin
B sin θ
θ
θ θ
Figure 2.3.7 : Produit vectoriel.
18

ii
“reddyFR” — 2012/11/16 — 18:36 — page 19 — #29 ii
ii
ii
2.3 Algèbre des vecteurs
où sin(A,B) est le sinus de l’angle entre les vecteurs A et B. Quand A = a eA
et B = b eB sont les vecteurs représentant les côtés d’un parallélogramme,avec a et b indiquant les longueurs des côtés, la norme du produit vecto-riel A ∧B représente la surface du parallélogramme, ab sin θ. Le vecteurunitaire e = eA ∧ eB est alors la normale à la surface plane. Ainsi, unesurface peut être représentée par un vecteur (voir la section 2.3.8 pour unediscussion plus approfondie).
La description de la vitesse d’un point d’un corps rigide en rotationest un exemple important de l’application géométrique et physique de lanotion de vecteur. Supposons qu’un corps rigide soit en rotation à la vitesseangulaire ω autour d’un axe et essayons de décrire la vitesse d’un point Pde ce solide, comme représenté sur la figure 2.3.8(a).
Soit v la vitesse du point P. Tout point du corps décrit un cercle qui setrouve dans un plan perpendiculaire à l’axe et dont le centre appartient àcelui-ci. Le rayon du cercle, a, est la distance entre l’axe et le point consi-déré. La norme de la vitesse est égale à ωa. La direction du vecteur v estperpendiculaire à a et à l’axe de rotation. En repérant la direction de lavitesse par le vecteur unitaire e, on peut écrire
v = ω a e. (2.3.14)
Soient O un point de référence sur l’axe de rotation et OP = r. On a alorsa = rsinθ, si bien que
v = ω r sin θ e. (2.3.15)
La vitesse angulaire est un vecteur parce qu’on peut lui attribuer une di-rection et une norme et qu’elle obéit à la loi du parallélogramme. On lanote ω et on représente sa direction comme pour une vis droite [voir lafigure 2.3.8(b)]. Si er est un vecteur unitaire de même direction que r, onconstate que
eω ∧ er = e sin θ. (2.3.16)
Avec ces relations, on av = ω ∧ r. (2.3.17)
OPr
aθ
ω
ω
ω
v
êω
(a) (b)
ê
Figure 2.3.8 : (a) Vitesse d’un point d’un solide rigide en rotation (b) Vecteurassocié à la vitesse angulaire.
19

ii
“reddyFR” — 2012/11/16 — 18:36 — page 20 — #30 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
Ainsi, la vitesse d’un point d’un corps rigide qui tourne autour d’un axe estdonnée par le produit vectoriel de ω et d’un vecteur position r tracé depuisn’importe quel point de référence sur l’axe de révolution.
De la définition du produit vectoriel, suivent plusieurs résultats simples :(1) Les produits A ∧B et B ∧A ne sont pas égaux. En fait, nous avons
A ∧B ≡ −B ∧A. (2.3.18)
Le produit vectoriel n’est donc pas commutatif et il faut par consé-quent préserver l’ordre des vecteurs quand des produits vectoriels sontimpliqués.
(2) Si deux vecteurs A et B sont parallèles l’un à l’autre, alors θ = π ou 0et sin θ = 0. Dans ce cas,
A ∧B = 0.
Inversement, si A∧B = 0, alors soit A ou B est nul, soit ce sont desvecteurs parallèles. Il résulte que le produit d’un vecteur avec lui-mêmeest nul, soit A ∧A = 0.
(3) La propriété de distributivité tient toujours, mais l’ordre des facteursdoit être maintenu :
(A + B) ∧C = (A ∧C) + (B ∧C). (2.3.19)
2.3.7 Produits triples de vecteursConsidérons à présent les divers produits de trois vecteurs :
A (B ·C), A · (B ∧C), A ∧ (B ∧C). (2.3.20)
Le produit A (B ·C) n’est autre que la multiplication du vecteur A par lescalaire B · C. Le produit A · (B ∧C), par contre, est un scalaire nomméproduit mixte. On peut voir que le produit A · (B ∧C), au signe algébriqueprès, est le volume du parallélépipède formé par les vecteurs A, B et C,comme représenté sur la figure 2.3.9.
Nous remarquons aussi les propriétés suivantes :(1) Les opérations scalaires et vectorielles peuvent être échangées sans
modification du résultat :
A ·B ∧C = A ∧B ·C ≡ [ABC]. (2.3.21)
(2) Une permutation cyclique de l’ordre des vecteurs laisse le résultatinchangé :
A ·B ∧C = C ·A ∧B = B ·C ∧A ≡ [ABC]. (2.3.22)
(3) Si l’ordre du cycle est modifié, le signe du résultat aussi :
A ·B ∧C = −A ·C ∧B = −C ·B ∧A = −B ·A ∧C. (2.3.23)
20

ii
“reddyFR” — 2012/11/16 — 18:36 — page 21 — #31 ii
ii
ii
2.3 Algèbre des vecteurs
B
A
CB∧C
Figure 2.3.9 : Le produit mixte A · (B ∧ C) est égal au volume du parallélépipède.
(4) Une condition nécessaire et suffisante pour que trois vecteurs, A,B,C,quelconques soient coplanaires est que A · (B ∧C) = 0. Remarquonsaussi que le produit mixte est nul si deux vecteurs quelconques coïn-cident.
Le double produit vectoriel A ∧ (B ∧C) est quant à lui un vecteur nor-mal au plan formé par A et (B ∧ C). Le vecteur (B ∧ C) étant en outreperpendiculaire au plan formé par B et C, cela implique que A ∧ (B ∧C)se trouve dans le plan formé par B et C et est perpendiculaire à A, commereprésenté sur la figure 2.3.10. Ainsi, A ∧ (B ∧C) peut être exprimé commeune combinaison linéaire de B et C :
A ∧ (B ∧C) = c1B + c2C. (2.3.24)
De la même façon, on pourrait écrire
(A ∧B) ∧C = d1A + d2B, (2.3.25)
ce qui signifie que les parenthèses ne peuvent être ni échangées ni suppri-mées. D’autre part, on peut montrer que
c1 = A ·C, c2 = −A ·B,
et donc queA ∧ (B ∧C) = (A ·C)B− (A ·B)C. (2.3.26)
C
B
A ∧(B∧C), perpendiculaire à A et à B∧C
B ∧ C
n1C
m1B
A
Figure 2.3.10 : Double produit vectoriel.
21

ii
“reddyFR” — 2012/11/16 — 18:36 — page 22 — #32 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
Exemple 2.3.1 :Soient A et B deux vecteurs quelconques dans l’espace. Exprimer levecteur A en fonction de ses composantes le long du vecteur B (c’est-à-direparallèle à lui) et perpendiculaire à celui-ci.
Solution :La composante de A le long de B est donnée par (A·eB), où eB = B/B est levecteur unitaire dans la direction de B. La composante de A perpendiculaireà B et appartenant au plan de A et B est donnée par le double produitvectoriel eB ∧ (A ∧ eB). Ainsi,
A = (A · eB)eB + eB ∧ (A ∧ eB).
Alternativement, en utilisant l’équation (2.3.26) avec A = C = eB etB = A, nous obtenons
eB ∧ (A ∧ eB) = A− (eB ·A)eB
soitA = (A · eB)eB + eB ∧ (A ∧ eB). (2.3.27)
2.3.8 Surface plane et vecteur
On a vu précédemment que la norme du vecteur C = A ∧ B est égaleà la surface du parallélogramme formé par les vecteurs A et B, commereprésenté sur la figure 2.3.11(a). En fait, le vecteur C peut être considérécomme représentant à la fois la norme et la direction du produit de A et B.Ainsi, une surface plane peut être vue comme possédant une direction enplus d’une aire, le caractère directionnel venant de la nécessité de spécifierune orientation du plan dans l’espace.
Il est usuel d’indiquer la direction d’une surface plane à l’aide d’un vec-teur unitaire normal au plan. Pour déterminer la direction de la normale, ondécide d’un sens de déplacement le long du contour de la frontière de la sur-face plane en question. La direction de la normale est prise par conventioncomme celle dans laquelle une vis droite avance si elle tourne dans le sens dudéplacement le long de la courbe limite ou du contour, comme représentésur la figure 2.3.11(b). Si n est le vecteur unitaire normal, la surface estnotée S = Sn.
La représentation d’un plan par un vecteur a de nombreux intérêts.L’exemple suivant illustre le fait que ce vecteur peut être utilisé pour déter-miner la surface d’un plan incliné en fonction de la surface projetée.
22

ii
“reddyFR” — 2012/11/16 — 18:36 — page 23 — #33 ii
ii
ii
2.3 Algèbre des vecteurs
C=A∧B
A
Bê
(a)
S
nS ˆS
n
(b)
Figure 2.3.11 : (a) Vecteur associé à une surface plane ; (b) Vecteur normalunitaire et sens de parcours.
Exemple 2.3.2 :(1) Déterminer la surface du plan obtenu en coupant un cylindre de sur-
face transversale S0 par un plan incliné dont la normale est n, commereprésenté sur la figure 2.3.12(a) ;
(2) Exprimer l’aire des côtés du tétraèdre obtenu à partir d’un cube (oud’un prisme) coupé par un plan incliné dont la normale est n, commereprésenté sur la figure 2.3.12(b). On exprimera le résultat en fonctionde la surface S du plan incliné.
Solution :
(1) Soit S, la surface du plan incliné, comme représenté sur la fi-gure 2.3.12(a). Pour commencer, exprimons les surfaces comme desvecteurs,
S0 = S0 n0 et S = S n.
Puisque S0 est la projection de S le long de n0 (si l’angle entre n etn0 est aigu, sinon il s’agit de son opposé),
S0 = S · n0 = Sn · n0. (2.3.28)
Le produit scalaire n · n0 est égal au cosinus de l’angle entre les deuxvecteurs unitaires normaux.
(2) Pour simplifier, commençons par indexer les côtés du cube par 1, 2 et3, puis les normales et les superficies par (n1, S1), (n2, S2) et (n3, S3),respectivement (autrement dit, Si est la superficie du plan perpendi-culaire au vecteur ni), comme représenté sur la figure 2.3.12(b). Nousavons alors
n1 = −e1, n2 = −e2, n3 = −e3 (2.3.29)
S1 = S n · e1 = Sn1, S2 = S n · e2 = Sn2, S3 = S n · e3 = Sn3(2.3.30)
23

ii
“reddyFR” — 2012/11/16 — 18:36 — page 24 — #34 ii
ii
ii
Chapitre 2 : Vecteurs et Tenseurs
2n
1n
n
1x
2x
3x
3n
1SS
2S
3S
(b)(a)
S
n
0S
0n
Figure 2.3.12 : Représentation vectorielle de la surface d’un plan incliné.
2.3.9 Composantes d’un vecteurJusqu’à présent, nous avons considéré une description géométrique des
vecteurs vus comme des segments orientés. Nous allons à présent nous lancerdans une description analytique des vecteurs et des opérations associéesavec cette description. La description analytique des vecteurs est utile, parexemple, pour exprimer les lois physiques de manière analytique. Elle reposesur la notion de composantes d’un vecteur.
Dans un espace tridimensionnel, un ensemble d’au plus trois vecteurslinéairement indépendants peut être trouvé. Soit un quelconque de ces en-sembles noté
e1, e2, e3. (2.3.31)
Cet ensemble se nomme une base. Une base est dite orthonormée si lesvecteurs sont unitaires et orthogonaux deux à deux. Pour distinguer la base(e1, e2, e3) qui n’est pas orthonormée d’une autre qui le serait, nous noteronsla base orthonormée par (e1, e2, e3), avec
e1 · e2 = 0, e2 · e3 = 0, e3 · e1 = 0,e1 · e1 = 1, e2 · e2 = 1, e3 · e3 = 1. (2.3.32)
Dans certains livres, les notations (i, j, k) ou (ex, ey, ez) sont utilisées au lieude (e1, e2, e3). Compte tenu de la discussion précédente au sujet des pro-duits vectoriels, on constate les relations suivantes qui résultent des produitsvectoriels des vecteurs de base :
e1 ∧ e1 = 0, e1 ∧ e2 = e3, e1 ∧ e3 = −e2,
e2 ∧ e1 = −e3, e2 ∧ e2 = 0, e2 ∧ e3 = e1, (2.3.33)e3 ∧ e1 = e2, e3 ∧ e2 = −e1, e3 ∧ e3 = 0.
24

ii
“reddyFR” — 2012/11/16 — 18:36 — page 25 — #35 ii
ii
ii
2.3 Algèbre des vecteurs
e1
A A
e3
e2
(a) (b)
1 1eA
1 1êA
3 3eA
2 2eA
3ê
1ê
2ê
3 3êA
2 2êA
Figure 2.3.13 : Composantes d’un vecteur (a) dans une base quelconque oblique,et (b) dans une base cartésienne.
Par ailleurs, du fait de la définition de la notion d’indépendance linéaire,on peut écrire tout vecteur de l’espace tridimensionnel comme une combi-naison linéaire des vecteurs de base :
A = Axex +Ayey +Azez = A1e1 +A2e2 +A3e3. (2.3.34)
Les vecteurs A1e1, A2e2 et A3e3 sont appelés les composantes vectoriellesde A, alors que A1, A2 et A3 sont ses composantes scalaires associées avecla base (e1, e2, e3), toutes ces grandeurs étant illustrées sur la figure 2.3.13.
Quand la base est orthonormale, A1, A2 et A3 sont les composantes phy-siques du vecteur A, c’est-à-dire que ces composantes ont la même dimensionphysique ou unité que le vecteur. Un vecteur multiplié par un scalaire est unvecteur dont les composantes sont les multiples de celles du vecteur initial :
αA = (αA1)e1 + (αA2)e2 + (αA3)e3. (2.3.35)
Deux vecteurs sont égaux si et seulement si leurs composantes sont égalesdeux à deux. Autrement dit, A = B implique A1 = B1, A2 = B2 et A3 = B3.
Les opérations d’addition de vecteurs, de produit scalaire et de produitvectoriel peuvent être exprimées en fonction des composantes cartésiennescomme indiqué ci-dessous.
Addition de vecteurs. La somme des vecteurs A et B est le vecteur C dontles composantes sont la somme des composantes respectives des vecteurs Aet B :
A + B =(A1e1 +A2e2 +A3e3
)+
(B1e1 +B2e2 +B3e3
)= (A1 +B1)e1 + (A2 +B2)e2 + (A3 +B3)e3
≡ C1e1 + C2e2 + C3e3 = C, (2.3.36)
avec C1 = A1 +B1, C2 = A2 +B2 et C3 = A3 +B3.
Produit scalaire de vecteurs. Le produit scalaire des vecteurs A et B est lescalaire
A ·B =(A1e1 +A2e2 +A3e3
)·(B1e1 +B2e2 +B3e3
)= A1B1 +A2B2 +A3B3, (2.3.37)
25

ii
“reddyFR” — 2012/11/16 — 18:36 — page 257 — #267 ii
ii
ii
Index
accélération de la pesanteur, 155ailette de refroidissement, 186, 188–190Airy (fonction de contrainte d’), 230–232allongement (taux de), 92analytique (solution), 189, 194angulaire
déplacement, 75, 138vitesse, 19, 236
anisotrope, 169, 175antisymétrique
matrice, 38tenseur, 57, 91
applicationinverse, 69, 77de la transformation, 69, 79
axisymétriqueconduction de la chaleur, 192écoulement, 202géométrie, 88transfert thermique, 188
barotrope, 178base, 24
cartésienne, 32, 115changement de, 31, 35, 115orthonormée, 24–34
Bernoulli (équation de), 164biaxial (état de déformation), 103bidimensionnel (transfert thermique), 194biharmonique
équation, 230opérateur, 230
biomécanique, 2
calcultensoriel, 56vectoriel, 12
caractéristiqueéquation, 89valeur, 89vecteur, 89
cartésien(nes)base, 32, 115composantes, 25, 45–50, 54, 115coordonnées, 30, 45–50, 69, 109
Cauchyformule de, 106, 111, 148tenseur des contraintes de, 111
champ de déplacement, 74, 95, 223changement de base, 31, 35, 115cinématique, 8, 10, 63, 76, 169
variable, 169cinématiquement infinitésimal(e), 149–151cinétique
énergie, voir énergie cinétique
moment, voir moment cinétiquecisaillement
contrainte de, 111, 155, 174, 203essai de, 171simple, 78, 80, 172taux de, 92
Clausius–Duhem (inégalité de), 10coefficient
de convection, 180, 188d’échanges superficiels, 180, 187, 188d’énergie cinétique, 155de Poisson, 172, 173de raideur, 173de transmission thermique, 180, 188
cofacteur, 44colinéaires (vecteurs), 16comatrice, 44compatibilité
conditions de, 97, 209équations de, 96, 226
composante(s)cartésiennes, 25, 45–50, 54, 115normale, 111physiques, 25scalaires, 25tangentielle, 111
composée (dérivée), 45, 72, 126composite (matériau), 8, 188, 213conditions de compatibilité, 97, 209conduction, 179, 186
chaleur (de la), 179axisymétrique, 192
électrique, 204thermique, 7, 179, 192
conductivité thermique, 7, 179, 186, 187tenseur de, 180
configuration, 63, 66, 69, 132courante, 69, 79déformée, 65, 69, 79, 106de référence, 70, 81
conservationde l’énergie, 8, 125, 154, 185de la masse, 8, 125–134, 207du moment cinétique, 8, 125, 152de la quantité de mouvement, 8, 125,
135, 148constante
des gaz parfaits, 178d’ingénierie, 171, 182de Lamé, 182
constitutives (équations), 8, 169–183, 226continu (milieu), 4continuité (équation de), 126–134, 197, 200–
202, 209continuum, 4
257

ii
“reddyFR” — 2012/11/16 — 18:36 — page 258 — #268 ii
ii
ii
INDEX
contracté (double-produit), 55contrainte(s)
d’Airy (fonction de), 230–232de cisaillement, 111, 155, 174, 203déformation(s) (relation), 171, 208, 225dyadique, 110énergie de, 159état de, 105, 109, 118, 149normale, 108, 111, 117–119, 172, 174,
179plane, 223–226principale, 118transformation des, 115vecteur, 106–118, 148visqueuse, 178
contrôlesurface de, 129–132, 152volume de, 129–132, 147, 152
convection, 158, 179, 204coefficient de, 180, 188
conventiond’Einstein, 27de sommation, 27
conventionnelledéformation, 64déformation de cisaillement, 87
coordonnéescartésiennes, 30, 45–50, 69, 109cylindriques, 49, 51, 88, 92, 201eulériennes, 126matérielles, 69, 71, 75, 86, 126orthogonales, 49spatiales, 70, 73, 86, 126sphériques, 49, 51
coplanaires (vecteurs), 16, 21cosinus directeur, 47Couette (écoulement de), 200couplées (équations), 223couples (volumiques), 8, 153, 159courant (densité de), 193courante (configuration), 69, 79cylindriques (coordonnées), 49, 51, 88, 92,
201
déformation(s), 4, 7, 8, 63, 76, 79, 91, 208,213
de cisaillement conventionnelle, 87contraintes (relation), 171, 208, 225conventionnelle, 64déplacements (relation), 96, 208, 215énergie de, 173état de, 90, 169de glissement, 65hétérogène, 81, 84homogène, 77, 79, 80infinitésimale, 68, 86, 149, 151, 171,
209isochore, 79
plane, 223–226principale, 90taux de, 91, 169, 178tenseur des, 82–87, 100vitesse de, voir taux de déformation
déformée (configuration), 65, 69, 79, 106densité de courant, 193dépendance linéaire, 16, 43déplacement(s)
angulaire, 75, 138champ de, 74, 95, 223infinitésimal, 45
dérivéecomposée, 45, 72, 126directionnelle, 45lagrangienne, 126matérielle, 71, 126normale, 47particulaire, 71, 126
descriptioneulérienne, 71–76, 196lagrangienne, 70, 75, 86, 132matérielle, 70, 75, 132spatiale, 71–76, 196
déterminant d’une matrice, 41deuxième
ordre (tenseur), 29, 46, 52–57, 77, 82principe (thermodynamique), 154
diagonale, 35dilatation
principale, 79pure, 79thermique, 170, 209uniforme, 79
directeur (cosinus), 47direction (principale), 90directionnelle (dérivée), 45dissipation
fonction de, 160, 180visqueuse, 180, 196
distance infinitésimale, 33divergence, 45, 47, 52, 129, 148double-produit contracté, 55dyade, 53dyadique
contrainte, 110tenseur, 53, 110
dynamique, 10variable, 10, 169
échanges superficiels (coefficient d’), 180,187, 188
écoulementaxisymétrique, 202de Couette, 200irrotationnel, 93parallèle, 200de Poiseuille, 201
258

ii
“reddyFR” — 2012/11/16 — 18:36 — page 259 — #269 ii
ii
ii
INDEX
effort, 64, 105circonférentiel, 114normal, 144tranchant, 144
Einstein (convention d’), 27élasticité, 6, 169, 207, 223–226
linéaire, 8, 171, 208, 209module d’, 144, 171, 182non-linéaire, 171
élastique(s)énergie de contrainte, 159milieu, 171solide, 170
électromagnétiqueforce, 110, 147rayonnement, 181
élément de matière infinitésimal, 76énergie
cinétique, 154–159coefficient d’, 155
conservation de l’, 8, 125, 154, 185de contrainte élastique, 159de déformation, 173équation de l’, 10, 154–161, 197interne, 154–161interne spécifique, 159potentielle, 155
équation(s)algébrique, 89de Bernoulli, 164biharmonique, 230caractéristique, 89de compatibilité, 96, 226constitutives, 8, 169–183, 226de continuité, 126–134, 197, 200–202,
209aux dérivées partielles couplées, 223de l’énergie, 10, 154–161, 197d’équilibre, 149, 208, 225d’état, 10de Navier–Stokes, 185, 197–203de Poisson, 185, 194de Saint-Venant, 96
équilibreénergétique, 158, 180, 186–188équations d’, 149, 208, 225
essaide cisaillement, 171de traction, 171
étatde contrainte, 105, 109, 118, 149de déformation, 90, 169
biaxial, 103équation d’, 10thermodynamique, 177
étirement, 69homogène, 100
Euler (méthode explicite d’), 167
Euler-Bernoulli (théorie d’), 69, 216, 222eulérien(nes)
coordonnées, 126description, 71–76, 196
exacte (solution), 185, 198extension simple, 80
fluage, 170fluide, 6, 177, 196
incompressible, 130, 179, 200–203jet de, 135newtonien, 10, 170, 177non visqueux, 179, 198non-newtonien, 177parfait, 178visqueux, 178, 200–203
flux, 52, 128flux–divergence, voir Green–Ostrogradskifonction
de contrainte d’Airy, 230–232de dissipation, 160, 180
force, 105électromagnétique, 110, 147extérieure, 135moment d’une, 17–18surfacique, 147, 148volumique, 110, 147
forme (thermodynamique), 160formule de Cauchy, 106, 111, 148Fourier (loi de), 7, 179, 187, 194
gaz parfait, 178glissement, 65
infinitésimal, 64unitaire, 64
gradient, 45, 52tenseur, voir tenseur gradientthéorème du, 52de vitesse, voir tenseur gradient
Green–Lagrange (tenseur de), 82–87, 100Green–Ostrogradski (théorème de), 52, 129
hétérogène, 3, 81, 169homogène, 77, 79, 169
déformation, 77, 79, 80étirement, 100mouvement, 77, 79
hookéen (solide), 169–177Hooke (loi de), 10, 171–177, 185
généralisée, 171, 174
idéal (fluide), 178incompressible
fluide, 130, 179, 200–203milieu, 130, 161
indépendance linéaire, 16, 24, 97indice
libre, 28
259

ii
“reddyFR” — 2012/11/16 — 18:36 — page 260 — #270 ii
ii
ii
INDEX
muet, 28indicielle (notation), 27, 29, 48, 76, 97infinitésimal(e), 64
cinématiquement, 149–151déformation, 68, 86, 149, 151, 171, 209déplacement, 45distance, 33élément de matière, 76glissement, 64surface, 52tenseur des déformations, 87volume, 52
ingénierie (constante d’), 171, 182interne
énergie, 154–161énergie spécifique, 159produit, 16
invariance (matérielle), 31, 170invariant(es), 11, 30, 150, 161inverse
application, 69, 77matrice, 41méthode, 226, 230
irréversible, 154irrotationnel (écoulement), 93isochore, 79isotherme, 178, 208isotrope, 88, 169, 173, 174, 178–180, 223,
224
jacobien, 77jet de fluide, 135
Kroneker (symbole de), 29, 55
lagrangiennedérivée, 126description, 70, 75, 86, 132
Lamé (constante de), 182laplacien, 47Leibnitz (règle de), 128Levi-Civita (symbole de), 29, 55libre (indice), 28linéaire
dépendance, 16, 43élasticité, 8, 171, 208, 209indépendance, 16, 24, 97
loi(s)de Fourier, 7, 179, 187, 194de Hooke, 10, 171–177, 185
généralisée, 171, 174de Newton, 11du parallélogramme, 14de refroidissement de Newton, 180de Stefan–Boltzmann, 181de transformation, 33, 115
masse, 8, 125, 126, 207
volumique, 4, 10, 70, 110, 127, 178matériau
composite, 8, 188, 213orthotrope, 171–175visqueux, 169
matérielle(s)coordonnées, 69, 71, 75, 86, 126dérivée, 71, 126description, 70, 75, 132invariance, 31, 170
matrice(s), 34–45antisymétrique, 38déterminant d’une, 41diagonale, 35inverse, 41mineur d’une, 44orthogonale, 40produit de, 38régulière, 41singulière, 41somme de, 36symétrique, 38trace d’une, 36transposée, 37
mécanique, 4cellulaire, 2des fluides, 8, 72, 196des milieux continus, 5du point, 154des solides, 69, 185
méthodeexplicite d’Euler, 167inverse, 226, 230des potentiels, 227semi-inverse, 227, 230variationnelle, 227
milieucontinu, 4élastique, 171incompressible, 130, 161
mineur (d’une matrice), 44mixte (produit), 21module
d’élasticité, 144, 171, 182de Young, 6, 144, 171, 172
momentfléchissant, 144d’une force, 17–18de la quantité de mouvement, 152
moment cinétique, 8, 152conservation du, 8, 125, 152
mouvement homogène, 77, 79muet (indice), 28
nabla, 45Navier–Stokes (équations de), 185, 197–203Newton
loi du refroidissement de, 180
260

ii
“reddyFR” — 2012/11/16 — 18:36 — page 261 — #271 ii
ii
ii
INDEX
lois de, 11newtonien (fluide), 10, 170, 177non visqueux
fluide, 198non visqueux (fluide), 179non-linéaire (élasticité), 171non-newtonien (fluide), 177normal(e)
composante, 111contrainte, 108, 111, 117–119, 172, 174,
179dérivée, 47effort, 144vecteur, 22
notation indicielle, 27, 29, 48, 76, 97nul (vecteur), 13numérique (solution), 167, 227
objectivité, 170opérateur
biharmonique, 230laplacien, 47nabla, 45
orthogonale(s)coordonnées, 49matrice, 40projection, 17, 58
orthotrope (matériau), 171–175
parallèle (écoulement), 200parallélogramme (loi du), 14parfait
fluide, 178gaz, 178
particulaire (dérivée), 71, 126pendule, 138permutation (symbole de), 29pesanteur (accélération de la), 155plan principal, 118plane
contrainte, 223–226déformation, 223–226
Poiseuille (écoulement de), 201Poisson
coefficient de, 172, 173effet, 172équation de, 185, 194
porte-à-faux (poutre en), 166, 220, 243potentiel(les)
énergie, 155méthode des, 227
poutre(s), 69, 141–146, 214–221en porte-à-faux, 166, 220, 243théorie des, 69, 216, 222
pré-facteur, 54premier
ordre (tenseur), 53, 55principe (thermodynamique), 154, 158
pression, 160, 164, 178, 179, 196, 198réservoir sous, 124, 175
primaire (variable), 181principal(e)
contrainte, 118déformation, 90dilatation, 79direction, 90plan, 118valeur, 118
principe(s)deuxième, voir deuxième principepremier, voir premier principede superposition, 171, 198, 222de la thermodynamique, 8, 154
processus irréversible, 154produit
contracté, voir double-produitinterne, 16mixte, 21scalaire, 16, 29, 47, 54vectoriel, 18, 20, 29, 47vectoriel (double), 21
projection orthogonale, 17, 58propre
valeur, 89, 118vecteur, 89, 118
pure (dilatation), 79
quantité de mouvement, 8, 125, 135, 148
raideur (coefficients de), 173rayonnement, 160, 179
électromagnétique, 181référence (configuration de), 70, 81refroidissement (ailette de), 186, 188–190règle de Leibnitz, 128régulière (matrice), 41relation
contraintes–déformations, 171, 208, 225déformations–contraintes, 171, 208, 225déformations–déplacements, 96, 208,
215réservoir (sous pression), 124, 175rotation
taux de (tenseur), 92vecteur, 93
rotationnel, 47, 51, 93théorème du, 52
Saint-Venant (équations de), 96scalaire
composante, 25produit, 16, 29, 47, 54
secondaire (variable), 181semi-inverse (méthode), 227, 230simple
cisaillement, 78, 80, 172
261

ii
“reddyFR” — 2012/11/16 — 18:36 — page 262 — #272 ii
ii
ii
INDEX
extension, 80singulière (matrice), 41solide(s), 69, 185
élastique, 170hookéen, 169–177
solutionanalytique, 189, 194approchée, 227exacte, 185, 198numérique, 167, 227
sommation (convention de), 27spatiale(s)
coordonnées, 70, 73, 86, 126description, 71–76, 196
spécifiqueénergie interne, 159volume, 161
sphériques (coordonnées), 49, 51Stefan–Boltzmann (loi de), 181superposition (principe de), 171, 198, 222surface
de contrôle, 129–132, 152infinitésimale, 52vecteur, 22, 106
surfacique (force), 147, 148symbole
de Kroneker, 29, 55de Levi-Civita, 29, 55de permutation, 29
symétriquematrice, 38tenseur, 55, 57, 82
tangentielle (composante), 111taux
d’allongement, 92de cisaillement, 92de déformation, 91, 169, 178de rotation, 92
température absolue, 178tenseur, 10, 11, 52–62
antisymétrique, 57, 91de conductivité thermique, 180des contraintes de Cauchy, 111des déformations infinitésimal, 87du deuxième ordre, 29, 46, 52–57, 77,
82dyadique, 53de Green–Lagrange, 82–87, 100orthogonal, 56du premier ordre, 53, 55symétrique, 55, 57, 82des taux de déformation, voir taux de
déformationdes taux de rotation, 92tourbillon, 92du troisième ordre, 55d’ordre zéro, 55
tenseur gradientde la transformation, 46, 76de vitesse, 46, 91
tensoriel (calcul), 56tétraédrique (volume), 109théorème
du gradient, 52de Green–Ostrogradski, 52, 129du rotationnel, 52
théoried’Euler–Bernoulli, 69, 216, 222des poutres, 6, 69, 216, 222
thermiquecoefficient de transmission, 180, 188conduction, 7, 179, 192conductivité, 7, 179, 186, 187dilatation, 170, 209transfert, 7, 154, 179, 185, 192, 204
thermodynamique, 8, 154deuxième principe, 154état, 177forme, 160premier principe, 154, 158principes, 8, 154
tourbillontenseur, 92vecteur, 93
trace d’une matrice, 36traction (essai de), 171transfert thermique, 7, 154, 179, 185, 192,
204axisymétrique, 188bidimensionnel, 194
transformationapplication de la, 69, 79des contraintes, 115loi de, 33, 115tenseur gradient de la, 46, 76
transmission thermique (coefficient de), 180,188
transposée d’une matrice, 37tumeur, 206
uniforme (dilatation), 79unitaire (vecteur), 13, 19, 22, 47, 106
valeurcaractéristique, 89, 118principale, 118propre, 89, 118
variablecinématique, 169dynamique, 10, 169primaire, 181secondaire, 181
variationnelle (méthode), 227vecteur(s), 9, 11–58
caractéristique, 89
262

ii
“reddyFR” — 2012/11/16 — 18:36 — page 263 — #273 ii
ii
ii
INDEX
colinéaires, 16composantes d’un, 24contrainte, 106–118, 148coplanaires, 16, 21flux d’un, 52, 128gradient, 45normal, 22nul, 13propre, 89, 118pseudo-, 93rotation, 93surface, 22, 106tourbillon, 93unitaire, 13, 19, 22, 47, 106vorticité, 93
vectorielcalcul, 12double produit, 21produit, 18, 20, 29, 47
viscosité, 6, 177, 198vitesse
angulaire, 19, 236de déformation, voir taux de déforma-
tiontenseur gradient de, 46, 91
volumede contrôle, 129–132, 147, 152infinitésimal, 52spécifique, 161tétraédrique, 109
volumique(s)couples, 8, 153, 159force, 110, 147masse, 4, 10, 70, 110, 127, 178
vorticité, 93
Young (module de), 6, 144, 171, 172
263


9782804175559
ISBN : 9782804175559
REDDYMECConc
eptio
n gr
aphi
que
: Prim
o&Pr
imo
Méc
an
iqu
e d
es m
ilie
ux
co
nti
nu
s In
trod
uct
ion
au
x p
rin
cip
es e
t a
pp
lica
tion
sa
J.N. R
eddy
Mécanique des milieux continus
Introduction aux principes et applications
a J.N. Reddy
sciences del’ingénieur
scie
nces
de
l’ing
énie
ur
Mécanique des milieux continus
Introduction auxprincipes et applications
a J . N . R e d d y
sciences del’ingénieur
Vous avez entre vos mains une introduction à la physique des milieux continuset à ses applications dans des domaines aussi variés que le transfert thermique,la mécanique des fluides ou l'élasticité.
Ce livre offre aux étudiants de premier cycle scientifique ou en première annéed'école d'ingénieur un aperçu panoramique et unifié des multiples applications dela mécanique des milieux continus. On peut l’aborder sans une maîtrise préalabledes outils mathématiques nécessaires à une étude approfondie de ce domaine.
L'ouvrage de J.N. Reddy se distingue par sa volonté :• de réduire autant que possible le formalisme mathématique ;• d’insister sur les principes physiques sous-jacents ;•de faire découvrir les notions fondamentales du transfert thermique, de la théorie
de l'élasticité, de la mécanique des fluides, etc. ;•de montrer l'importance des principes de conservation (de l'énergie, etc.) qui
reviennent comme un leitmotiv ;• d’offrir de nombreux exemples variés et détaillés.
L'objectif de l'auteur est que cet ouvrage « prépare les élèves-ingénieurs et lesétudiants en science à des cours plus avancés dans les domaines traditionnelsaussi bien que dans d’autres émergents comme les biotechnologies, les nano-technologies, les systèmes énergétiques et la mécanique numérique. »
Traduction de l’édition américaine
Anna Cuprjak, ancienne élève du Collège de formation de professeurs de français et
de l'Institut d'Études Ibériques et Ibéro-américaines de l'Université de Varsovie, est
traductrice indépendante.
Révision scientifique
Loïc Villain, Docteur en Physique Théorique de l'Université Paris VII, dans le domaine des
objets astrophysiques compacts, est Maître de Conférences à l'Université François Rabelais
de Tours et chercheur au LMPT (Laboratoire de Mathématiques et Physique Théorique).
REDDYMEC_17X24_V2_Mise en page 2 17/01/13 11:02 Page1