Embed Size (px)
Citation preview

Microjets synthétiques MMMS pour les contrôles d’écoulements aérodynamiques
L. Gimeno, A. Talbi, R. Viard, V. Preobrazhensky, A. Merlen, P. Pernod
Laboratoire Européen en Magnéto-acoustique Nonlinéaire de la matière condensée (LEMAC) : Institut d’Electronique, de Micro-électronique et de Nanotechnologie (IEMN, UMR CNRS 8520)
Ecole Centrale de Lille & Université des sciences et technologies de Lille, Cité scientifique, BP 60069, 59652 VILLENEUVE D’ASCQ CÉDEX
Résumé :
Cet article présente un dispositif générateur de microjets synthétiques axisymétriques micro-usiné à actionnement magnétodynamique destiné aux applications de contrôle actif d’écoulements. Une étude de simulation a été réalisée afin de prévoir les performances et définir les géométries du dispositif. La technique d’actionnement électromagnétique, permettant de fournir les forces nécessaires pour l’obtention des performances souhaitées, a été choisie. La fabrication de ce microsystème magnéto mécanique (MMMS) est brièvement décrite. L’encombrement d’un de ces dispositifs est inférieur au centimètre cube et sa consommation maximale est de 600 mW. Pour la géométrie choisie, le fonctionnement optimal se situe sur une plage de fréquences comprise entre 400 Hz et 700 Hz. Dans cette plage de fréquences, ce dispositif affiche des vitesses maximales comprises entre 25 m/s et 55 m/s.
Abstract :
This article presents an axisymmetric synthetic microjet generator for active flow control that has been designed, fabricated and characterized. Numerical simulations were performed in order to help in the definition of the geometrical design as well as to give an estimate of the device’s performances. Electromagnetic actuation, providing the necessary forces for the desired performances, is chosen. The fabrication process of this micro-magneto-mechanical system (MMMS) is briefly described as well. The size of the fabricated microdevice does not exceed one cm3 and its maximum consumption reaches 600 mW. Optimum working point is in the frequency range between 400 Hz and 700 Hz. For a 600 µm diameter outlet, the microjet reaches a maximum speeds ranging from 25 m/s to 55 m/s in the aforesaid frequency range.
Mots clefs :
MEMS, microactionneur, jet synthétique, contrôle actif d’écoulements.
1 Introduction Les jets synthétiques font partie des actionneurs fluidiques, au même titre que les jets pulsés. Dans les deux cas, il s’agit de générer des jets de fluide présentant une composante oscillatoire. Afin de générer un jet pulsé on alterne des phases de soufflage et d’obturation (d’un canal, d’un orifice,…) pour obtenir cette oscillation. Les jets synthétiques quand à eux sont générés par les interactions d’une série de tourbillons, créés par une alternance périodique de soufflage et d’aspiration de fluide à travers un orifice. Cette alternance est générée à l’aide d’un élément mobile (dans notre cas une membrane mise en vibration) créant des variations de volume dans une cavité dotée d’un orifice de sortie (figure 1). Les jets synthétiques ont un débit massique nul sur une période, contrairement aux jets pulsés. Ainsi, un jet synthétique est formé sans apport extérieur de fluide (pas besoin de conduites ni de réservoirs) et il permet une injection de quantité de mouvement au système sans apport net de masse. Ceci rend ce type d’actionneurs fluidiques très attractif pour leur utilisation dans des applications de contrôle actif d’écoulements.

FIG. 1 – Schéma de principe d’un dispositif générateur de jets synthétiques muni d’une membrane mobile.
Gauche : Demi-période d’éjection. Droite : Demi-période d’aspiration.
Les techniques d’usinage collectif découlant de la microélectronique permettent d’intégrer à la fois des fonctions mécaniques et électroniques sur un même dispositif appelé souvent MEMS. Un MEMS peut contenir sur une seule et même puce des capteurs, des actionneurs et des unités de traitement de signal, en fournissant ainsi des dispositifs intégrés performants et peu coûteux. Ces caractéristiques suscitent l’intérêt dans le domaine du contrôle actif d’écoulements en aérodynamique. Ceci a donné lieu à divers essais d’adaptation des MEMS pour ces applications. En effet, la réduction d’échelle offerte par les microtechnologies permet d’obtenir des dispositifs de faible encombrement, faible consommation, et avec des temps de réponse fournissant une adaptation aux échelles (spatiales et temporelles) mises en jeu dans les écoulements à contrôler [1].
En ce qui concerne les capteurs et les systèmes de traitement de signal, des solutions MEMS répondant aux besoins du contrôle d’écoulements en termes de résolution et de consommation existent déjà [2, 3]. Quand aux actionneurs MEMS, il en existe peu avec des performances intéressantes. Dans la catégorie des actionneurs fluidiques seuls des exemples de jets pulsés trouvent des applications dans des expériences de contrôle, comme la microvalve électrostatique de l’entreprise française FLOWDIT [4], l’actionneur électrostatique “Zip” du laboratoire FEMTO-ST de l’Université de Besançon [5], la microvalve piézoélectrique de BAE Systems [6], ou encore la microvalve à actionnement magnétique développée dans notre laboratoire Européen de magnéto acoustique non linéaire LEMAC [7, 8, 9, 10]. Les exemples existants d’actionneurs de type jet synthétique réalisés grâce aux microtechnologies [11, 12, 13, 14] présentent des performances insuffisantes pour les applications de contrôle d’écoulements. Dans ce papier, nous présenterons un nouveau concept de dispositifs générateurs de jets synthétiques micro-usinés avec un encombrement réduit et une faible consommation.
2 Dimensionnement du dispositif Le dessin des éléments qui constituent le dispositif générateur de jets synthétiques, à savoir la cavité, l’orifice de sortie et la membrane ont été faits en s’appuyant sur le critère de formation énoncé par R Holman et al. [15]. Ce critère repose sur le fait qu’il faut que le tourbillon généré pendant la demi-période d’éjection ait suffisamment d’énergie pour échapper à la demi-période d’aspiration pour que le jet soit formé en aval. Autrement dit, le rapport entre la vitesse d’éloignement du tourbillon d’éjection VE et la vitesse d’aspiration VA doit être supérieur à une constante de seuil qu’on appellera K. VA est supposée proportionnelle à la vitesse moyenne du jet Ū. VE est supposée proportionnelle à Γ/d où Γ est la circulation du tourbillon et d la dimension caractéristique de l’orifice de sortie. D’autre part, la circulation du tourbillon est de l’ordre de Ū²/ω, où ω=2πf. On obtient donc :
KSd
dUd
USr
KSrd
UUdV
V U
A
E ≥===≥=≈Γ
≈ 22
Re11νων
ωω (Eq. 1)
où Sr est le nombre de Strouhal, ReŪ le nombre de Reynolds, S le nombre de Stokes, et K la constante de seuil définie auparavant. Il faut donc que le nombre de Strouhal passe en dessous d’un seuil donné pour qu’il y ait formation du jet.
2.1 Choix de la géométrie du jet Deux configurations de jet ont été étudiées : axisymétrique et 2D. On parle de jet axisymétrique quand l’orifice de sortie est circulaire et de jet 2D quand l’orifice est une fente rectangulaire à grand rapport d’aspect. Les structures tourbillonnaires générées dans le premier cas sont des anneaux, tandis que dans le deuxième il s’agit de nappes tourbillonnaires. Le seuil de formation du jet n’est pas le même dans les deux cas. Il faut donc choisir entre un orifice circulaire ou une fente rectangulaire pour nos dispositifs.
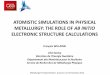
Des études expérimentales [15, 16] font état d’une constante de seuil inférieure pour les jets axisymétriques, de valeur 0.16, par rapport à celle des jets 2D, égale à 2. Afin de quantifier l’impact de cette différence dans le critère de formation des jets, nous avons réalisé des simulations en conditions de fluide incompressible et laminaire (code N-S du logiciel COMSOL, maillage structuré) pour les deux cas (figure 2). On a utilisé pour les deux simulations une géométrie équivalente avec des dimensions caractéristiques identiques (diamètre/largeur et épaisseur de l’orifice de sortie et de la cavité) et un même point de fonctionnement (500 Hz et 150 µm d’amplitude de déflexion de la membrane). En particulier, la dimension caractéristique de l’orifice de sortie (600 µm) et son épaisseur (400 µm) sont d’ores et déjà submillimétriques pour évaluer aussi l’impact de la réduction de l’échelle. Les simulations montrent que dans des conditions équivalentes et avec un orifice de dimensions submillimétriques, le jet 2D ne se forme pas, contrairement au jet axisymétrique. De plus, la vitesse maximale d’éjection pour le jet axisymétrique dans ces conditions est environ six fois supérieure à celle relevée sur le jet 2D. C’est pourquoi une géométrie axisymétrique a été choisie pour nos microjets synthétiques.
FIG. 2 – Superposition des résultats de simulation de la géométrie axisymétrique (gauche) et 2D (droite).
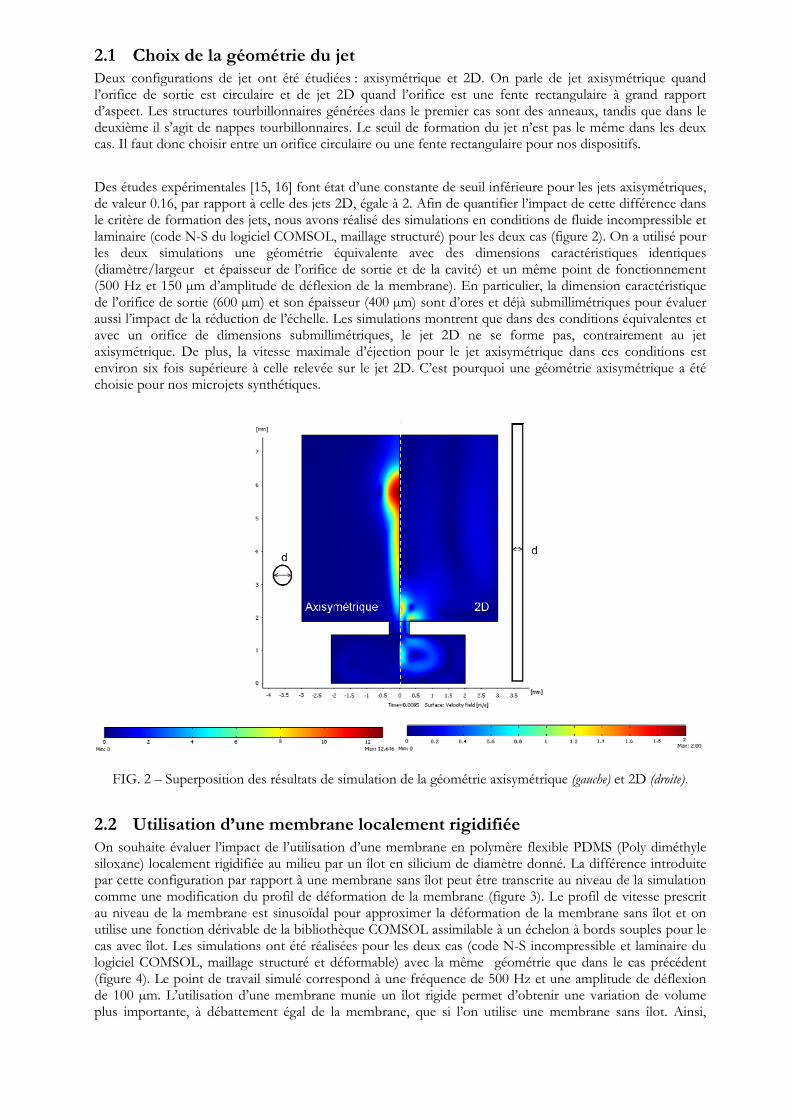
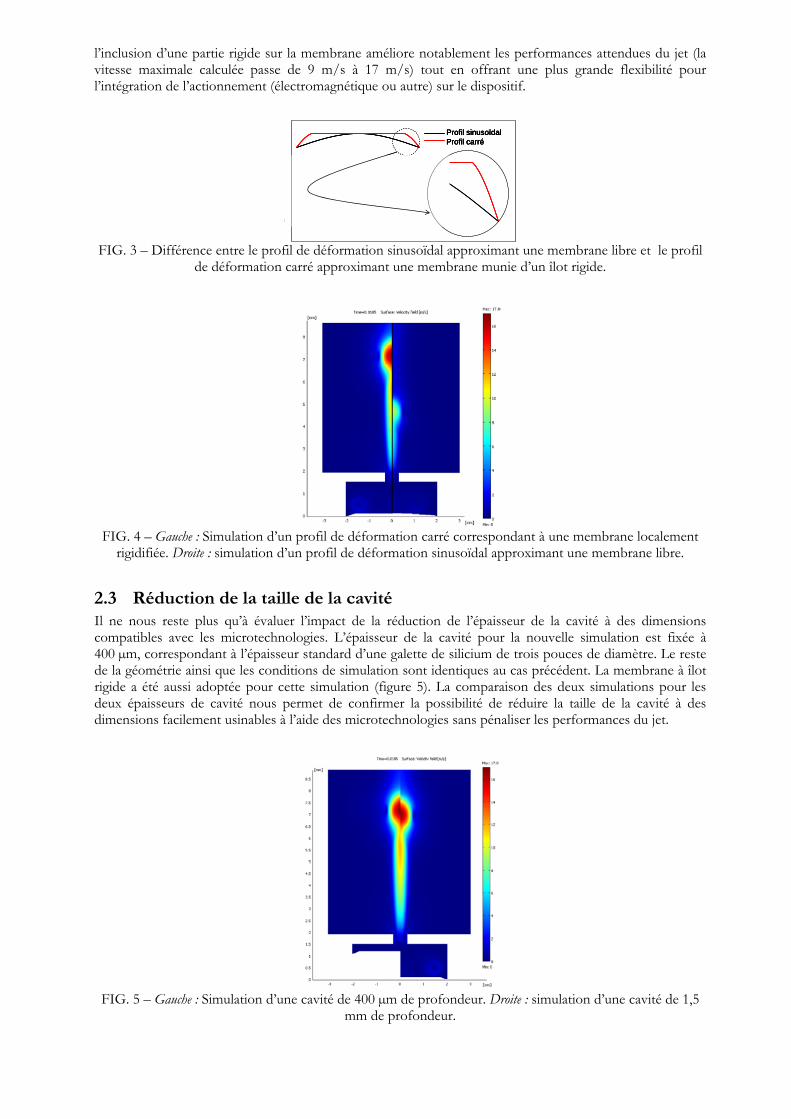
2.2 Utilisation d’une membrane localement rigidifiée On souhaite évaluer l’impact de l’utilisation d’une membrane en polymère flexible PDMS (Poly diméthyle siloxane) localement rigidifiée au milieu par un îlot en silicium de diamètre donné. La différence introduite par cette configuration par rapport à une membrane sans îlot peut être transcrite au niveau de la simulation comme une modification du profil de déformation de la membrane (figure 3). Le profil de vitesse prescrit au niveau de la membrane est sinusoïdal pour approximer la déformation de la membrane sans îlot et on utilise une fonction dérivable de la bibliothèque COMSOL assimilable à un échelon à bords souples pour le cas avec îlot. Les simulations ont été réalisées pour les deux cas (code N-S incompressible et laminaire du logiciel COMSOL, maillage structuré et déformable) avec la même géométrie que dans le cas précédent (figure 4). Le point de travail simulé correspond à une fréquence de 500 Hz et une amplitude de déflexion de 100 µm. L’utilisation d’une membrane munie un îlot rigide permet d’obtenir une variation de volume plus importante, à débattement égal de la membrane, que si l’on utilise une membrane sans îlot. Ainsi,
l’inclusion d’une partie rigide sur la membrane améliore notablement les performances attendues du jet (la vitesse maximale calculée passe de 9 m/s à 17 m/s) tout en offrant une plus grande flexibilité pour l’intégration de l’actionnement (électromagnétique ou autre) sur le dispositif.
Profil sinusoïdalProfil carréProfil sinusoïdalProfil carréProfil sinusoïdalProfil carréProfil sinusoïdalProfil carré
FIG. 3 – Différence entre le profil de déformation sinusoïdal approximant une membrane libre et le profil
de déformation carré approximant une membrane munie d’un îlot rigide.
FIG. 4 – Gauche : Simulation d’un profil de déformation carré correspondant à une membrane localement
rigidifiée. Droite : simulation d’un profil de déformation sinusoïdal approximant une membrane libre.
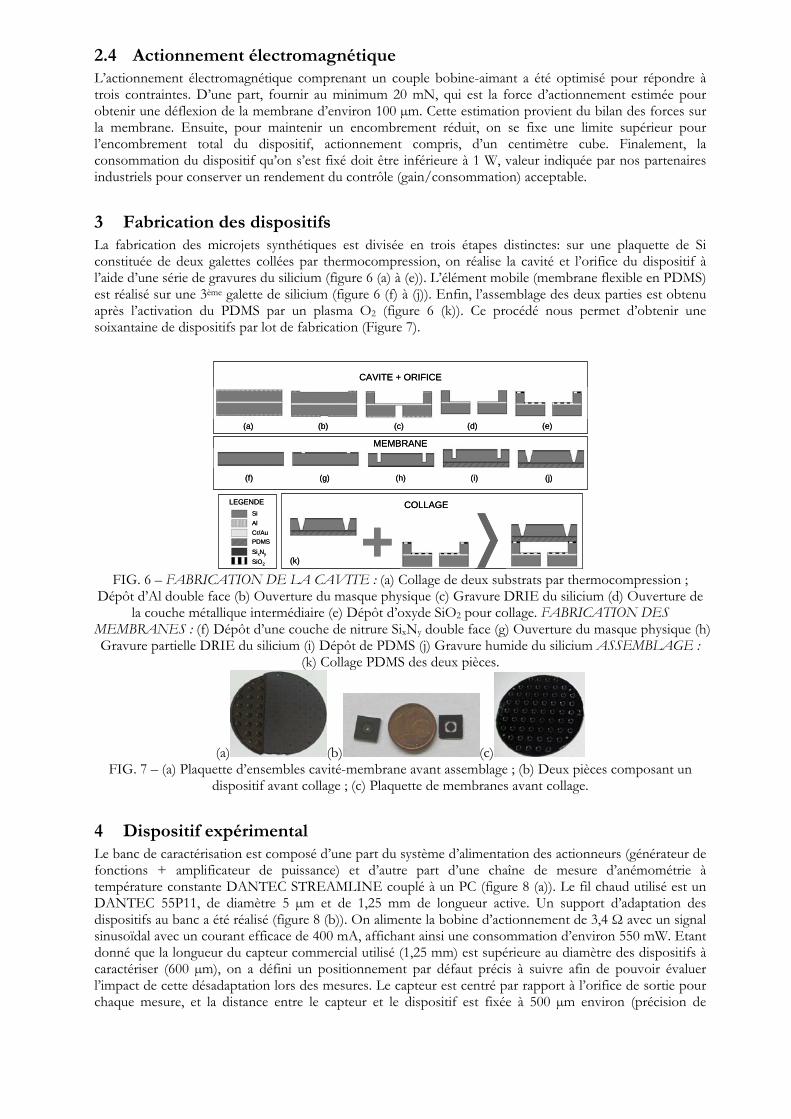
2.3 Réduction de la taille de la cavité Il ne nous reste plus qu’à évaluer l’impact de la réduction de l’épaisseur de la cavité à des dimensions compatibles avec les microtechnologies. L’épaisseur de la cavité pour la nouvelle simulation est fixée à 400 µm, correspondant à l’épaisseur standard d’une galette de silicium de trois pouces de diamètre. Le reste de la géométrie ainsi que les conditions de simulation sont identiques au cas précédent. La membrane à îlot rigide a été aussi adoptée pour cette simulation (figure 5). La comparaison des deux simulations pour les deux épaisseurs de cavité nous permet de confirmer la possibilité de réduire la taille de la cavité à des dimensions facilement usinables à l’aide des microtechnologies sans pénaliser les performances du jet.
FIG. 5 – Gauche : Simulation d’une cavité de 400 µm de profondeur. Droite : simulation d’une cavité de 1,5
mm de profondeur.
2.4 Actionnement électromagnétique L’actionnement électromagnétique comprenant un couple bobine-aimant a été optimisé pour répondre à trois contraintes. D’une part, fournir au minimum 20 mN, qui est la force d’actionnement estimée pour obtenir une déflexion de la membrane d’environ 100 µm. Cette estimation provient du bilan des forces sur la membrane. Ensuite, pour maintenir un encombrement réduit, on se fixe une limite supérieur pour l’encombrement total du dispositif, actionnement compris, d’un centimètre cube. Finalement, la consommation du dispositif qu’on s’est fixé doit être inférieure à 1 W, valeur indiquée par nos partenaires industriels pour conserver un rendement du contrôle (gain/consommation) acceptable.
3 Fabrication des dispositifs La fabrication des microjets synthétiques est divisée en trois étapes distinctes: sur une plaquette de Si constituée de deux galettes collées par thermocompression, on réalise la cavité et l’orifice du dispositif à l’aide d’une série de gravures du silicium (figure 6 (a) à (e)). L’élément mobile (membrane flexible en PDMS) est réalisé sur une 3ème galette de silicium (figure 6 (f) à (j)). Enfin, l’assemblage des deux parties est obtenu après l’activation du PDMS par un plasma O2 (figure 6 (k)). Ce procédé nous permet d’obtenir une soixantaine de dispositifs par lot de fabrication (Figure 7).
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
CAVITE + ORIFICE
MEMBRANE
SiAlCr/AuPDMSSixNy
SiO2
LEGENDE
(k)
COLLAGE
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
CAVITE + ORIFICE
MEMBRANE
SiAlCr/AuPDMSSixNy
SiO2
LEGENDE
(k)
COLLAGE
FIG. 6 – FABRICATION DE LA CAVITE : (a) Collage de deux substrats par thermocompression ;
Dépôt d’Al double face (b) Ouverture du masque physique (c) Gravure DRIE du silicium (d) Ouverture de la couche métallique intermédiaire (e) Dépôt d’oxyde SiO2 pour collage. FABRICATION DES
MEMBRANES : (f) Dépôt d’une couche de nitrure SixNy double face (g) Ouverture du masque physique (h) Gravure partielle DRIE du silicium (i) Dépôt de PDMS (j) Gravure humide du silicium ASSEMBLAGE :
(k) Collage PDMS des deux pièces.
(a) (b) (c) FIG. 7 – (a) Plaquette d’ensembles cavité-membrane avant assemblage ; (b) Deux pièces composant un
dispositif avant collage ; (c) Plaquette de membranes avant collage.
4 Dispositif expérimental Le banc de caractérisation est composé d’une part du système d’alimentation des actionneurs (générateur de fonctions + amplificateur de puissance) et d’autre part d’une chaîne de mesure d’anémométrie à température constante DANTEC STREAMLINE couplé à un PC (figure 8 (a)). Le fil chaud utilisé est un DANTEC 55P11, de diamètre 5 µm et de 1,25 mm de longueur active. Un support d’adaptation des dispositifs au banc a été réalisé (figure 8 (b)). On alimente la bobine d’actionnement de 3,4 Ω avec un signal sinusoïdal avec un courant efficace de 400 mA, affichant ainsi une consommation d’environ 550 mW. Etant donné que la longueur du capteur commercial utilisé (1,25 mm) est supérieure au diamètre des dispositifs à caractériser (600 µm), on a défini un positionnement par défaut précis à suivre afin de pouvoir évaluer l’impact de cette désadaptation lors des mesures. Le capteur est centré par rapport à l’orifice de sortie pour chaque mesure, et la distance entre le capteur et le dispositif est fixée à 500 µm environ (précision de
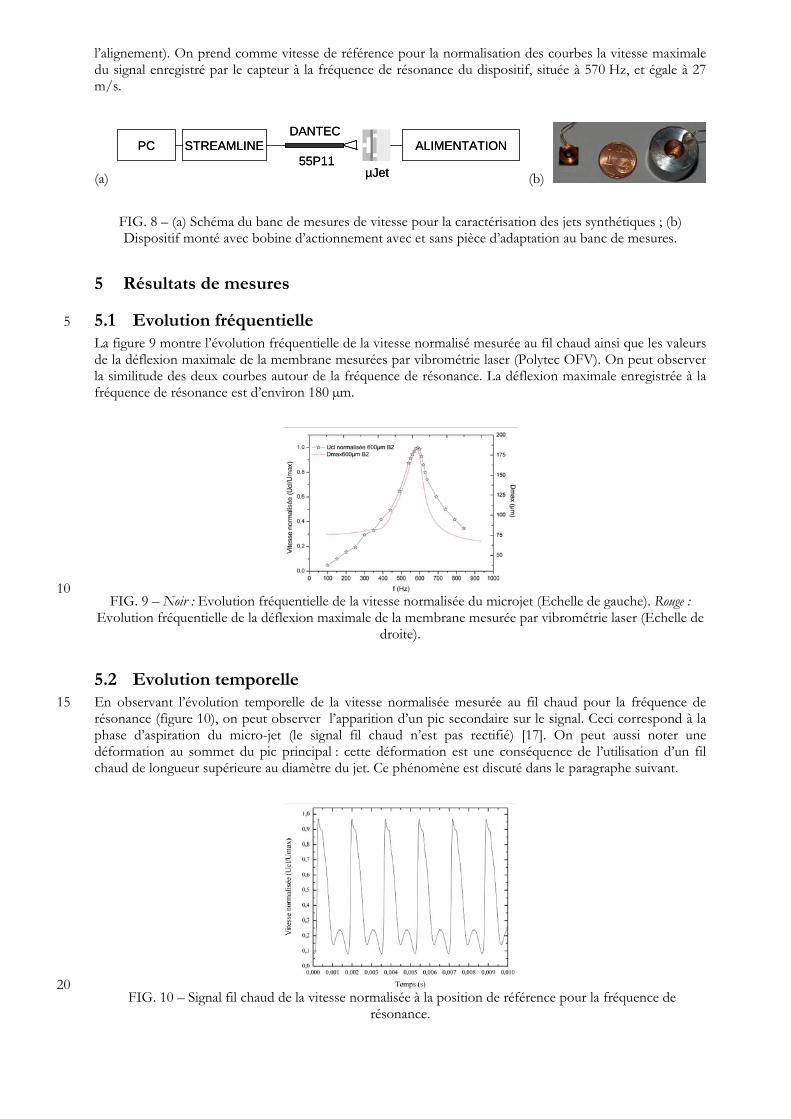
l’alignement). On prend comme vitesse de référence pour la normalisation des courbes la vitesse maximale du signal enregistré par le capteur à la fréquence de résonance du dispositif, située à 570 Hz, et égale à 27 m/s.
(a)
PC ALIMENTATIONSTREAMLINEDANTEC
55P11µJet
PC ALIMENTATIONSTREAMLINEDANTEC
55P11µJet (b)
FIG. 8 – (a) Schéma du banc de mesures de vitesse pour la caractérisation des jets synthétiques ; (b) Dispositif monté avec bobine d’actionnement avec et sans pièce d’adaptation au banc de mesures.
5 Résultats de mesures
5.1 Evolution fréquentielle 5 La figure 9 montre l’évolution fréquentielle de la vitesse normalisé mesurée au fil chaud ainsi que les valeurs de la déflexion maximale de la membrane mesurées par vibrométrie laser (Polytec OFV). On peut observer la similitude des deux courbes autour de la fréquence de résonance. La déflexion maximale enregistrée à la fréquence de résonance est d’environ 180 µm.
10 FIG. 9 – Noir : Evolution fréquentielle de la vitesse normalisée du microjet (Echelle de gauche). Rouge :
Evolution fréquentielle de la déflexion maximale de la membrane mesurée par vibrométrie laser (Echelle de droite).
5.2 Evolution temporelle En observant l’évolution temporelle de la vitesse normalisée mesurée au fil chaud pour la fréquence de 15 résonance (figure 10), on peut observer l’apparition d’un pic secondaire sur le signal. Ceci correspond à la phase d’aspiration du micro-jet (le signal fil chaud n’est pas rectifié) [17]. On peut aussi noter une déformation au sommet du pic principal : cette déformation est une conséquence de l’utilisation d’un fil chaud de longueur supérieure au diamètre du jet. Ce phénomène est discuté dans le paragraphe suivant.
20 FIG. 10 – Signal fil chaud de la vitesse normalisée à la position de référence pour la fréquence de
résonance.
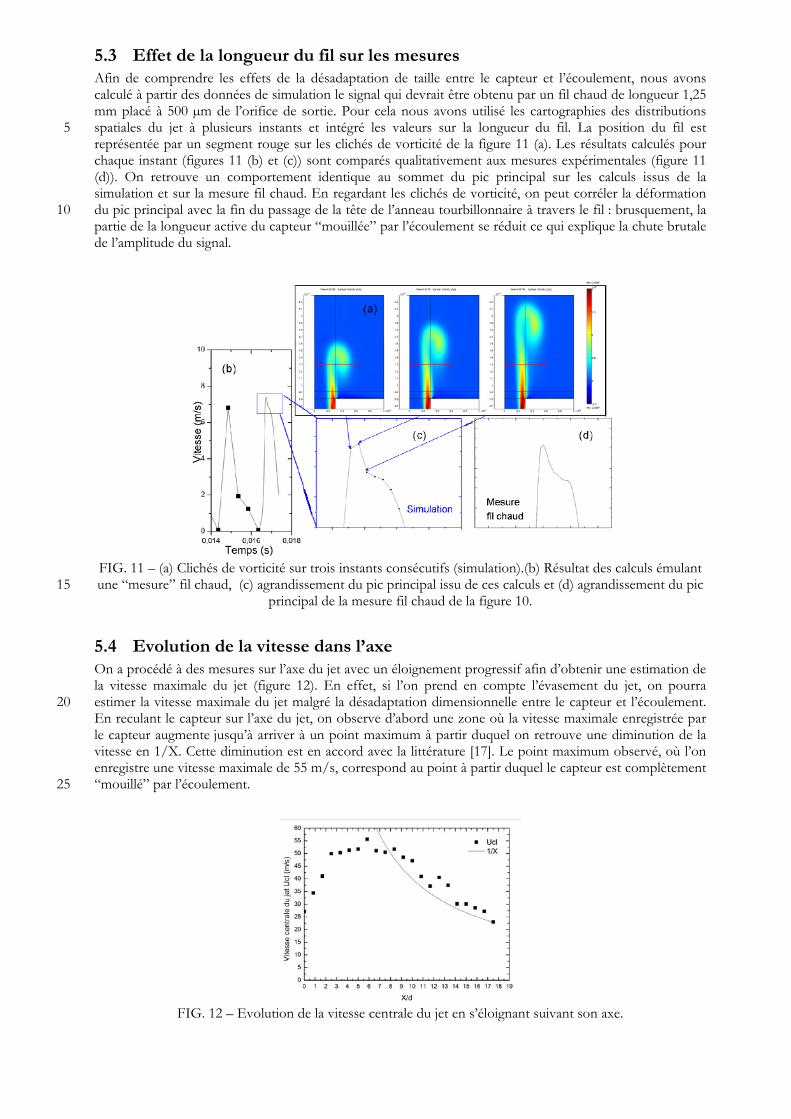
5.3 Effet de la longueur du fil sur les mesures Afin de comprendre les effets de la désadaptation de taille entre le capteur et l’écoulement, nous avons calculé à partir des données de simulation le signal qui devrait être obtenu par un fil chaud de longueur 1,25 mm placé à 500 µm de l’orifice de sortie. Pour cela nous avons utilisé les cartographies des distributions spatiales du jet à plusieurs instants et intégré les valeurs sur la longueur du fil. La position du fil est 5 représentée par un segment rouge sur les clichés de vorticité de la figure 11 (a). Les résultats calculés pour chaque instant (figures 11 (b) et (c)) sont comparés qualitativement aux mesures expérimentales (figure 11 (d)). On retrouve un comportement identique au sommet du pic principal sur les calculs issus de la simulation et sur la mesure fil chaud. En regardant les clichés de vorticité, on peut corréler la déformation du pic principal avec la fin du passage de la tête de l’anneau tourbillonnaire à travers le fil : brusquement, la 10 partie de la longueur active du capteur “mouillée” par l’écoulement se réduit ce qui explique la chute brutale de l’amplitude du signal.
FIG. 11 – (a) Clichés de vorticité sur trois instants consécutifs (simulation).(b) Résultat des calculs émulant une “mesure” fil chaud, (c) agrandissement du pic principal issu de ces calculs et (d) agrandissement du pic 15
principal de la mesure fil chaud de la figure 10.
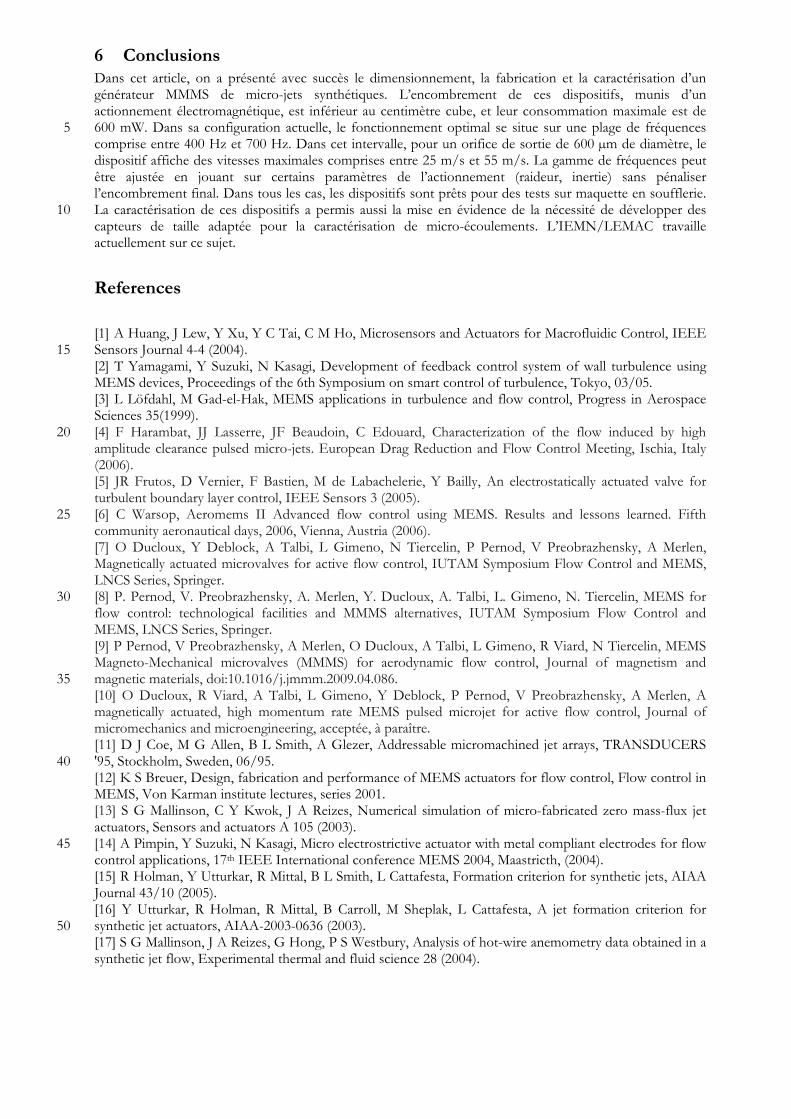
5.4 Evolution de la vitesse dans l’axe On a procédé à des mesures sur l’axe du jet avec un éloignement progressif afin d’obtenir une estimation de la vitesse maximale du jet (figure 12). En effet, si l’on prend en compte l’évasement du jet, on pourra estimer la vitesse maximale du jet malgré la désadaptation dimensionnelle entre le capteur et l’écoulement. 20 En reculant le capteur sur l’axe du jet, on observe d’abord une zone où la vitesse maximale enregistrée par le capteur augmente jusqu’à arriver à un point maximum à partir duquel on retrouve une diminution de la vitesse en 1/X. Cette diminution est en accord avec la littérature [17]. Le point maximum observé, où l’on enregistre une vitesse maximale de 55 m/s, correspond au point à partir duquel le capteur est complètement “mouillé” par l’écoulement. 25
FIG. 12 – Evolution de la vitesse centrale du jet en s’éloignant suivant son axe.
6 Conclusions Dans cet article, on a présenté avec succès le dimensionnement, la fabrication et la caractérisation d’un générateur MMMS de micro-jets synthétiques. L’encombrement de ces dispositifs, munis d’un actionnement électromagnétique, est inférieur au centimètre cube, et leur consommation maximale est de 600 mW. Dans sa configuration actuelle, le fonctionnement optimal se situe sur une plage de fréquences 5 comprise entre 400 Hz et 700 Hz. Dans cet intervalle, pour un orifice de sortie de 600 µm de diamètre, le dispositif affiche des vitesses maximales comprises entre 25 m/s et 55 m/s. La gamme de fréquences peut être ajustée en jouant sur certains paramètres de l’actionnement (raideur, inertie) sans pénaliser l’encombrement final. Dans tous les cas, les dispositifs sont prêts pour des tests sur maquette en soufflerie. La caractérisation de ces dispositifs a permis aussi la mise en évidence de la nécessité de développer des 10 capteurs de taille adaptée pour la caractérisation de micro-écoulements. L’IEMN/LEMAC travaille actuellement sur ce sujet.
References
[1] A Huang, J Lew, Y Xu, Y C Tai, C M Ho, Microsensors and Actuators for Macrofluidic Control, IEEE Sensors Journal 4-4 (2004). 15 [2] T Yamagami, Y Suzuki, N Kasagi, Development of feedback control system of wall turbulence using MEMS devices, Proceedings of the 6th Symposium on smart control of turbulence, Tokyo, 03/05. [3] L Löfdahl, M Gad-el-Hak, MEMS applications in turbulence and flow control, Progress in Aerospace Sciences 35(1999). [4] F Harambat, JJ Lasserre, JF Beaudoin, C Edouard, Characterization of the flow induced by high 20 amplitude clearance pulsed micro-jets. European Drag Reduction and Flow Control Meeting, Ischia, Italy (2006). [5] JR Frutos, D Vernier, F Bastien, M de Labachelerie, Y Bailly, An electrostatically actuated valve for turbulent boundary layer control, IEEE Sensors 3 (2005). [6] C Warsop, Aeromems II Advanced flow control using MEMS. Results and lessons learned. Fifth 25 community aeronautical days, 2006, Vienna, Austria (2006). [7] O Ducloux, Y Deblock, A Talbi, L Gimeno, N Tiercelin, P Pernod, V Preobrazhensky, A Merlen, Magnetically actuated microvalves for active flow control, IUTAM Symposium Flow Control and MEMS, LNCS Series, Springer. [8] P. Pernod, V. Preobrazhensky, A. Merlen, Y. Ducloux, A. Talbi, L. Gimeno, N. Tiercelin, MEMS for 30 flow control: technological facilities and MMMS alternatives, IUTAM Symposium Flow Control and MEMS, LNCS Series, Springer. [9] P Pernod, V Preobrazhensky, A Merlen, O Ducloux, A Talbi, L Gimeno, R Viard, N Tiercelin, MEMS Magneto-Mechanical microvalves (MMMS) for aerodynamic flow control, Journal of magnetism and magnetic materials, doi:10.1016/j.jmmm.2009.04.086. 35 [10] O Ducloux, R Viard, A Talbi, L Gimeno, Y Deblock, P Pernod, V Preobrazhensky, A Merlen, A magnetically actuated, high momentum rate MEMS pulsed microjet for active flow control, Journal of micromechanics and microengineering, acceptée, à paraître. [11] D J Coe, M G Allen, B L Smith, A Glezer, Addressable micromachined jet arrays, TRANSDUCERS '95, Stockholm, Sweden, 06/95. 40 [12] K S Breuer, Design, fabrication and performance of MEMS actuators for flow control, Flow control in MEMS, Von Karman institute lectures, series 2001. [13] S G Mallinson, C Y Kwok, J A Reizes, Numerical simulation of micro-fabricated zero mass-flux jet actuators, Sensors and actuators A 105 (2003). [14] A Pimpin, Y Suzuki, N Kasagi, Micro electrostrictive actuator with metal compliant electrodes for flow 45 control applications, 17th IEEE International conference MEMS 2004, Maastricth, (2004). [15] R Holman, Y Utturkar, R Mittal, B L Smith, L Cattafesta, Formation criterion for synthetic jets, AIAA Journal 43/10 (2005). [16] Y Utturkar, R Holman, R Mittal, B Carroll, M Sheplak, L Cattafesta, A jet formation criterion for synthetic jet actuators, AIAA-2003-0636 (2003). 50 [17] S G Mallinson, J A Reizes, G Hong, P S Westbury, Analysis of hot-wire anemometry data obtained in a synthetic jet flow, Experimental thermal and fluid science 28 (2004).